

Page 1
Operating Instructions for RX-5 M-LINK /
RX-7 M-LINK 2.4 GHz receivers
Page 11
Instructions for RX-5/7 M-LINK 2.4 GHz receivers # 985 5312 LA 30.09.2014 • Errors and omissions excepted! •
MULTIPLEX
! These operating instructions are an integral part
of the product, and contain important information
and safety notes. Please store them in a safe place,
where you can find them at any time, and pass
them on to the new owner if you sell the receiver.
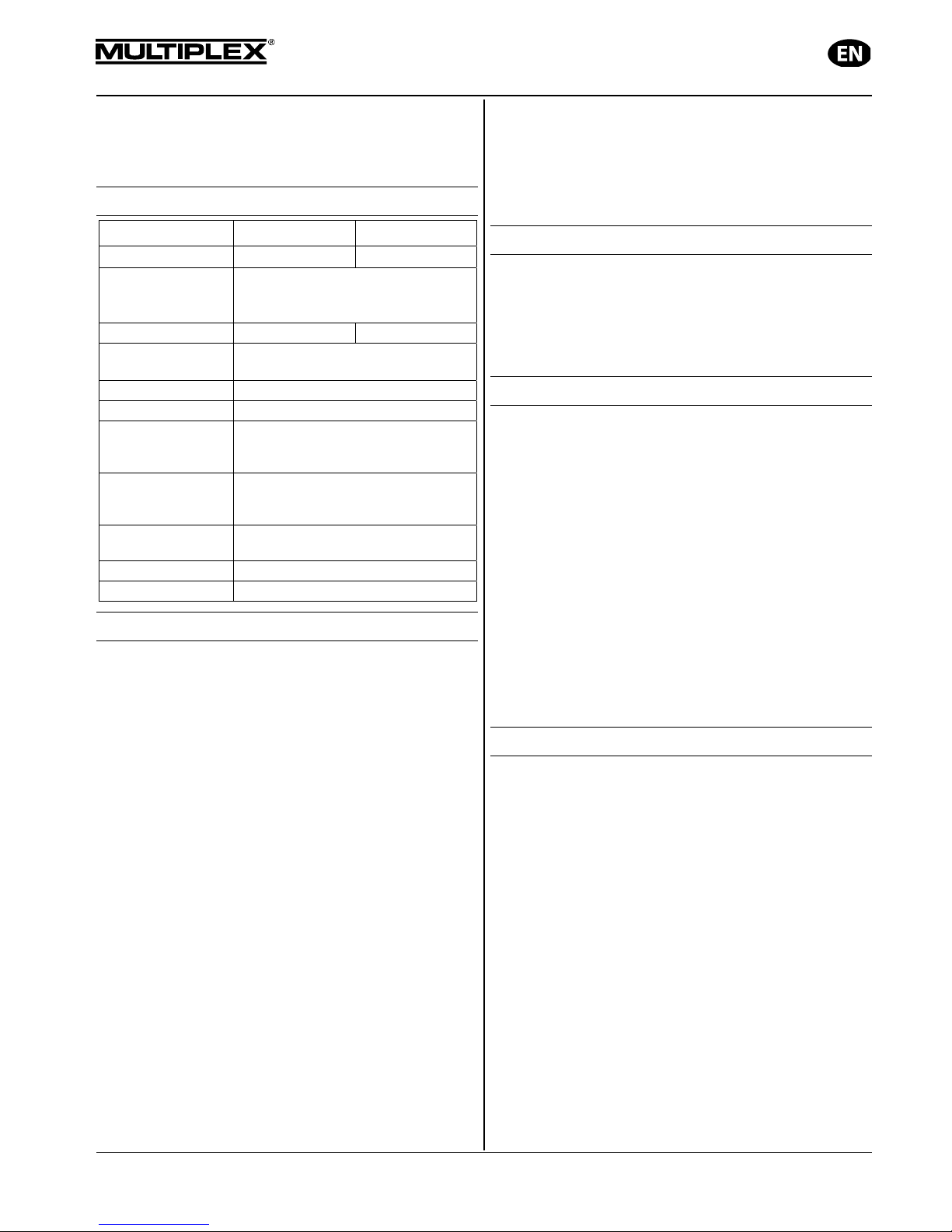
1. SPECIFICATION
RX-5 M-LINK
RX-7 M-LINK
Order No.
# 5 5817 # 5 5818
Reception system
2.4 GHz FHSS M-LINK
Frequency Hopping Spread Spectrum
MULTIPLEX-LINK
Servo channel count
5 7
Servo frame rate
Fast Response: 14 ms
Standard: 21 ms
Signal resolution
12-bit, 3872 steps
Current drain
Approx. 45 mA (excl. servos)
Aerial length
Total: approx. 20 cm,
of which feed cable approx. 17 cm and
active aerial section approx. 3 cm
Operating voltage
3.5 V … 9.0 V
4 - 6 NiCd / NiMH (NiXX) cells
2S LiPo / LiIo (LiXX)
Operating
temperature range
- 20 °C … + 55 °C
Weight
13 g
Dimensions
Approx. 54.0 x 22.5 x 11.5 mm
2. SPECIAL FEATURES
High-quality 5-channel / 7-channel receivers assembled
using the latest SMT methods, exploiting MULTIPLEX
2.4 GHz M-LINK technology.
Supplementary signal pre-amplification:
For maximum sensitivity and great range.
In-line connectors arranged on the front and back:
Ultra-compact dimensions: suitable for models with very little
internal space.
HOLD / FAIL-SAFE function.
Integral SET button and LED:
For binding, FAIL-SAFE programming, RESET and
displaying operating status information.
Telemetry / feedback channel capability:
Receiver battery voltage and connection quality
= standard features.
Integral sensor interface for connecting external sensor
modules via MSB (MULTIPLEX Sensor Bus).
Prepared for two-receiver operation:
Diversity lead (# 8 5070) required.
Prepared for serial servo output:
Servo outputs as sum signal – SRXL-MULTIPLEX.
The receiver’s first twelve channels are carried by a threecord lead (# 8 5070) via the receiver’s B/D socket, e.g. for
power supply / servo management systems, or for flybarless
systems in model helicopters.
Prepared for selecting one sensor address as “priority
address”:
The selected sensor value is updated at a faster rate than all
the other sensor values.
Integral error counter / data logger:
For voltage and signal errors.
Compatible with the MULTImate (# 8 2094).
Integral PC interface:
Carry out updates and adjustment using the MULTIPLEX
Launcher PC program in conjunction with the UNI USB PC
lead (# 8 5149).
3. SAFETY NOTES
! Please read the instructions before using the receiver.
! Use the receiver only for the intended applications
( 4.).
! Ensure the power supply is of adequate capacity ( 6.).
! Observe the installation notes ( 13.).
! Carry out regular range checks ( 14.).
4. APPLICATIONS
The RX-5 M-LINK and RX-7 M-LINK 2.4 GHz receivers (abbr eviated to RX-5/7 M-LINK in this document) are radio control
receivers intended exclusively for use in model sport. It is
prohibited to employ them for other purposes such as full -size
(people-carrying) vehicles or industrial installations.
Typical applications for RX-5 M-LINK and RX-7 M-LINK receivers:
Gliders and electric gliders up to about 2.50 m wingspan
Small to medium-sized RC helicopters with rotor diameters
up to about 1 m
Model aircraft with electric and I.C. power systems and
wingspans up to about 1.60 m
RC model cars
RC model boats
RX-5/7 M-LINK 2.4 GHz receivers can only be operated in
conjunction with transmitters which utilise MULTIPLEX MLINK transmission technology.
5. POWER SUPPLY
RX-5/7-DR M-LINK
receivers work within a broad range of voltages from 3.5 V … 9.0 V, i.e. they can be used with receiver
batteries consisting of four to six NiXX cells or 2S LiPo / 2S LiIo
(LiXX).
! Note: if you intend to use a five-cell or six-cell NiXX b attery,
or a 2S LiPo or 2S LiIo pack, it is essential to check that all the
servos, gyros and other components connected to the system
are approved for use with this higher operating voltage.
! Note: ensure that the power supply is adequate
A power supply system in good condition a nd of adequat e capacity for the specific application plays an indispens able role in the
safe operation of any model:
Use only high-quality receiver batteries of adequate capacity.
Balance and maintain them carefully, and charge them fully.
Ensure that all cables are of adequate conductor cross-
section. Keep all wiring as short as possible, and use the
absolute minimum of plug / socket connections.
Use high-quality switch harnesses exclusively.
Brief collapses in the power supply voltage (lasting a few
milli-seconds) have no adverse effect on the receiver. Longer
voltage collapses to below 3.5 V may cause a receiver r eset,
resulting in a brief interruption in reception. This may be due
to a receiver battery which is almost flat, too weak or
Page 2
Operating Instructions for RX-5 M-LINK /
RX-7 M-LINK 2.4 GHz receivers
Page 12
Instructions for RX-5/7 M-LINK 2.4 GHz receivers # 985 5312 LA 30.09.2014 • Errors and omissions excepted! •
MULTIPLEX
defective, cables of inadequate cross-section, poor-quality
connectors or an overloaded or defective BEC system.
6. RECEIVER CONNECTIONS
This receiver employs the UNI connector system, which is compatible with the connector systems used by most radio control
manufacturers (e.g. HiTEC, robbe/Futaba, Graupner/JR).
The receiver sockets are marked as follows:
1, 2, 3 … 5
(… 7)
Servo sockets, channels 1, 2, 3 … 5 (… 7).
Alternatively: receiver battery socket.
B
In the case of the RX-5 M-LINK:
Receiver battery socket
(can also be connected to servo sockets 1 … 5).
Duplicated for extra security: twice the conductor
cross-section, twice the number of contacts.
B/D
Receiver battery socket
(can also be connected to servo sockets 1 … 5
(… 7)).
Duplicated for extra security: twice the conductor
cross-section, twice the number of contacts.
Socket for PC or Diversity lead, for the serial
servo output lead (SRXL-MULTIPLEX), and for
the MULTImate.
S
Socket for external sensor module.
! When connecting the receiver battery, servos, speed
controllers, sensors ... it is essential to insert the connector
the correct way round. With other makes of component
always check the pin assignment (see symbols on the
receiver)!
7. FIRST USE, FUNCTIONS
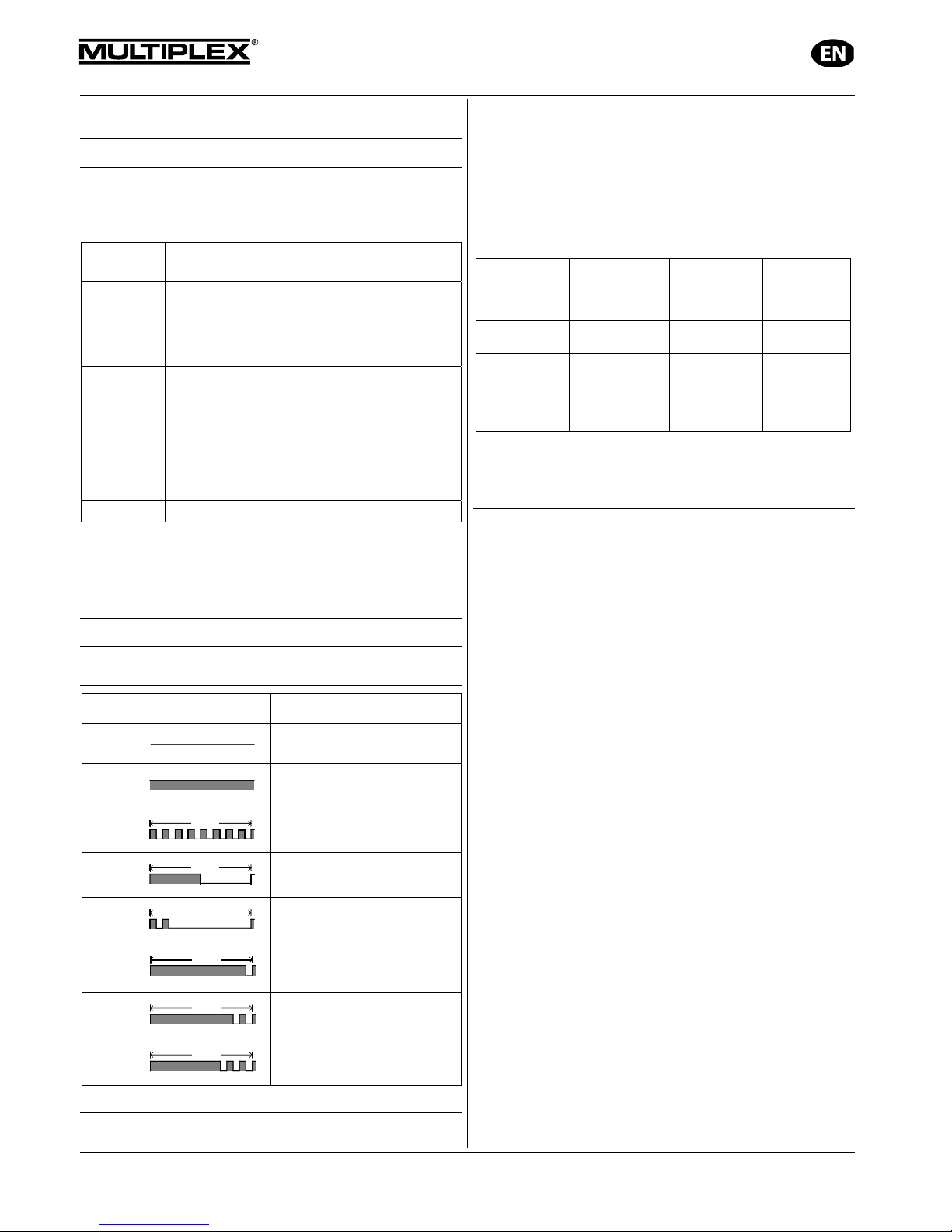
LED Codes
LED code Description
LED Code 0
LED OFF
Battery voltage too low
LED Code 1
LED ON
No reception
LED Code 2
1,6 sec
Binding procedure in progress
1,6 sec
LED Code 3
Normal receiving operation,
no errors
1,6 sec
LED Code 5
Confirmation signal
1 – 19 errors
20 – 49 errors
>= 50 errors
The functions of the SET button
Pressing the SET button on the top of the receiver when
switching on initiates the binding process.
In receive mode, the SET button can be used to trigger two additional functions. The function selected depends on the length of
the button-press:
1.
Save error counter or FAIL-SAFE settings
Press the SET button for 0.5 to 1 second.
2.
RESET receiver to factory default settings
Press the SET button for longer than ten seconds.
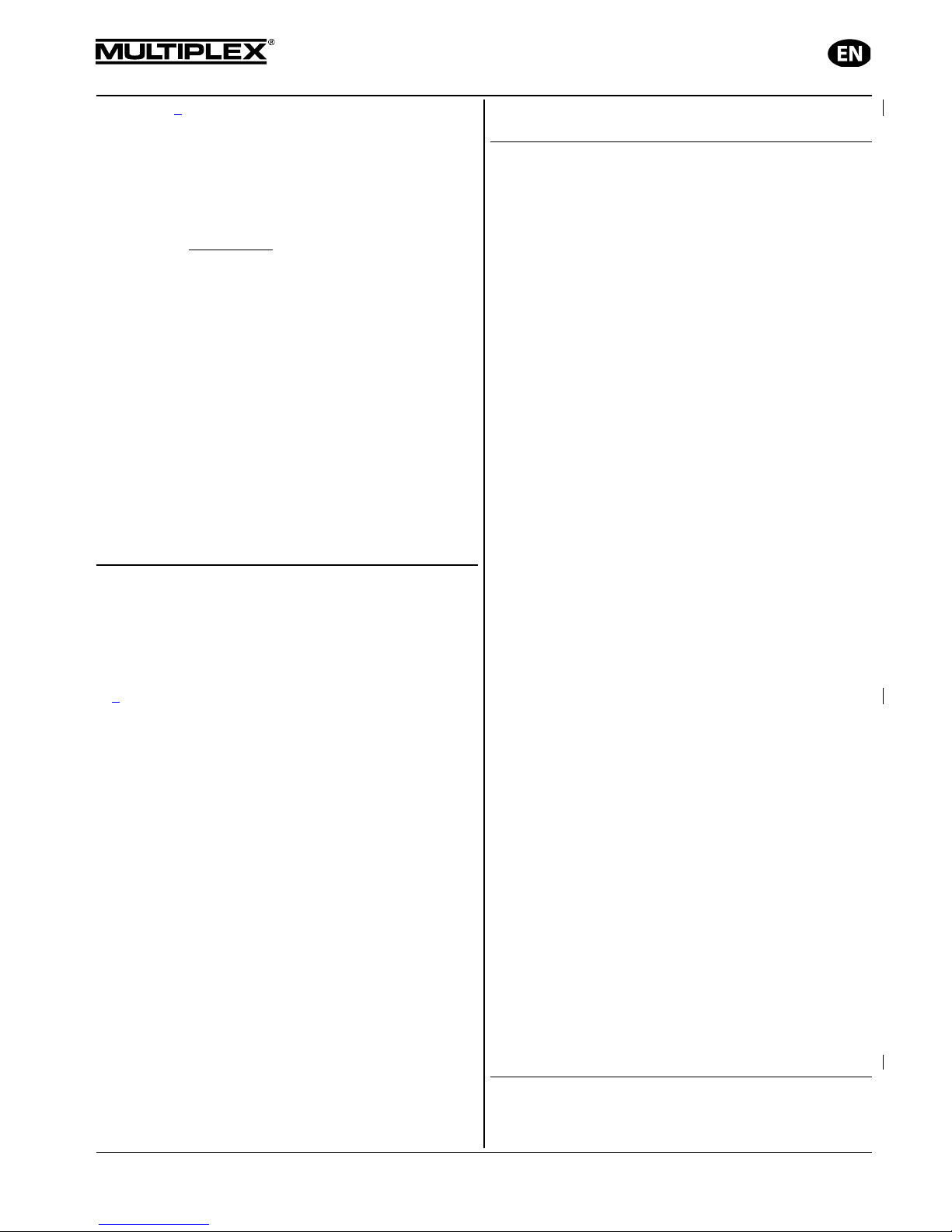
While the SET button is pressed, the LED indicates the length of
the button-press with time markers:
Press SET
button constantly for
< 2
seconds
2 to 10
seconds
> 10
seconds
LED
OFF ON OFF
Purpose
Save error
counter /
FAIL-SAFE
settings
RESET
to default
settings
!
Note:
When the Save process is complete, the LED flashes in confirmation (LED code 5).
Binding
The receiver must be set up to match the transmitter before the
system can work. This process is known as “binding”.
! Note:
The signal output to the servo sockets is switched off during the
binding procedure. This means that the servos are “soft”, and do
not move, while the motor connected to a modern electronic
speed controller remains OFF due to the lack of a signal. Ne vertheless, it is important to secure the model and keep well clear
of the power system.
The binding process is necessary in the following cases:
The first time the receiver is used.
After a receiver RESET.
After the transmitter setting for “Fast Response” has been
changed. For more information on this please refer to the
operating instructions supplied with your M-LINK transmitter
or M-LINK RF module.
After the transmitter setting for the transmitted frequency
range has been changed. For more information on this
please refer to the operating instructions supplied with your
transmitter or M-LINK RF module (“France mode”).
If the receiver is to be operated in conjunction with a different
M-LINK transmitter.
Sequence of the binding procedure
1. The first step is always to set the transmitter and receiver to
Binding mode:
Move the transmitter and the receiver aerial very close to
each other.
Switch the transmitter ON in binding mode.
(see the operating instructions supplied with your M-LINK
transmitter or M-LINK RF module).
Switch the RX-5/7 M-LINK receiver ON in binding mode:
Use a pointed object to press and hold the SET button
on the top of the receiver.
Switch the receiver ON, or connect the battery:
LED Code 6
1,6 sec
LED Code 7
1,6 sec
LED Code 8
1,6 sec
Page 3
Operating Instructions for RX-5 M-LINK /
RX-7 M-LINK 2.4 GHz receivers
Page 13
Instructions for RX-5/7 M-LINK 2.4 GHz receivers # 985 5312 LA 30.09.2014 • Errors and omissions excepted! •
MULTIPLEX
The binding procedure runs, the receiver LED
flashes at high frequency
(LED code 2).
Now release the SET button.
!
Note:
the binding process starts automatically when
the receiver is used for the first time, and after a RESET even if you have not pressed the SET button.
2. Once the transmitter and rec eiver are bound to each other,
both switch automatically to normal operation:
The LED on the receiver flashes slowly
(LED code 3).
! Note: in most cases the binding process only takes a few
seconds.
Binding: locating and correcting faults
Fault:
During the binding process the receiver LED continues to flash
at a high rate after several seconds.
Cause:
No M-LINK signal of adequate strength detected.
Remedy:
Reduce the distance between your transmitter and the
receiver aerial.
Ensure that your transmitter is switched ON in binding mode.
Repeat the binding procedure.
Switching the receiver ON and OFF
in normal operations
Sequence of switching ON and OFF
To switch the M-LINK RC system ON, please use this
procedure:
1. Switch the transmitter ON.
2. Switch the receiver ON.
The receiver LED flashes slowly and evenly
(LED code ):
An M-LINK signal is being received,
the RC system is ready for use.
To switch the M-LINK RC system OFF, please use this
procedure:
1. Switch the receiver OFF.
2. Now switch the transmitter OFF.
Locating and correcting faults when switching ON
Fault:
The receiver LED lights up constantly when switched on (LED
code 1 ), but does not flash.
Cause:
No M-LINK signal detected.
Remedy:
Is the transmitter switched on?
Is the transmitter generating an M-LINK signal?
Are the transmitter and receiver bound to each other?
Have you carried out a receiver RESET?
Have you made changes to the setting for “Fast Response”
or “France mode” ?
Error:
The receiver LED stays off after switching on
(LED code 0).
Cause:
The operating voltage (battery voltage) is too low.
Remedy:
Recharge the receiver battery or drive / flight battery.
HOLD and FAIL-SAFE
If no signal is picked up, or if the received data is corrupt, the
last valid information is passed on to the servos in order to
bridge the signal loss (HOLD mode).
If interference should occur and FAIL-SAFE has been invoked,
the servos (...) run to a previously defined position at the end of
the HOLD period. FAIL-SAFE mode ends as soon as error-free
signals are picked up again.
The factory default setting for the HOLD period is 0.75 seconds.
This period can be adjusted to meet personal requirements
using the
MULTImate
or the PC program
MULTIPLEX
Launcher
.
FAIL-SAFE is switched OFF in the receiver’s default state (as
delivered), and after a RESET. FAIL-SAFE is activated using the
SET button on the receiver, or - in the case of certain transmitters - “by radio”.
If you wish to disable FAIL-SAFE again, the receiver must be
reset to the default state (RESET). After a RESET you must
repeat the binding procedure!
! Note: always activate FAIL-SAFE!
For safety reasons we recommend that you always activate
FAIL-SAFE, and ensure that the selected FAIL-SAFE settings
will cause the model to take up as safe an attitude as possible
(e.g. motor idle / electric motor OFF, control surfaces neutral,
landing flaps deployed, tow-release open, …).
Selecting the FAIL-SAFE settings:
1. The receiver LED must not display any errors
(LED code 3).
If it does: switch the receiver OFF, then ON again.
2 Use your transmitter to move all the servos (and the speed
controller) to your preferred FAIL-SAFE positions. Press the
SET button briefly (0.5 to 1 second). The FAIL-SAFE positions are now stored for all servo channels, and the LED
flashes the confirmation signal (LED code 5).
Testing the FAIL-SAFE positions:
Move the sticks to positions other than the FAIL-SAFE settings,
and then switch the transmitter OFF: the servos should go into
HOLD mode briefly (0.75 seconds), and then move to the FAILSAFE positions which you previously selected.
The FAIL-SAFE positions must always be checked and updated
when necessary, e.g. when you install the receiver in a new
model.
! Checking the FAIL-SAFE function:
For testing the FAIL-SAFE function only, the receiver can be
operated with the transmitter switched off. Caution: if the FAILSAFE settings are incorrect, the motor could burst into life: injury
hazard!
After sixteen seconds in FAIL-SAFE mode no further signals are
sent to the servos (default setting; this period can be altered
using the
MULTImate
or the
MULTIPLEX Launcher
.
Analogue servos and some digital servos (see instructions) then
become “soft”, to avoid them being stalled. Modern speed controllers switch themselves off. However, some digital servos
remain “hard” and maintain their last position.
The FAIL-SAFE function can be activated and disabled servo by
servo using the
MULTImate
or the
MULTIPLEX Launcher
.
Example: throttle only to Idle / OFF, all other servos = HOLD.
RESET to factory default settings
The receiver settings can be reset to the factory default settings.
If you do this, all the settings you have entered, such as bindi ng
information, FAIL-SAFE settings ... are lost permanently.
Page 4

Operating Instructions for RX-5 M-LINK /
RX-7 M-LINK 2.4 GHz receivers
Page 14
Instructions for RX-5/7 M-LINK 2.4 GHz receivers # 985 5312 LA 30.09.2014 • Errors and omissions excepted! •
MULTIPLEX
Hold the SET button pressed in for at least ten seconds (as a
guide, the LED goes out when you press the button, comes on
again after two seconds, then off again after ten seconds).
When the RESET has been carried out, the LED displays the
confirmation signal (LED code 5), and the receiver switches to
binding mode.
!
Note:
it is not possible to carry out a RESET if the receiver is
in binding mode (LED flashing at high frequency).
Overview of the factory default settings and variable
set-up values
Parameter Default setting Set-up value can
be altered using
the MULTImate* or
MULTIPLEX
Launcher*
Low voltage
(error counter)
4.5 V Yes
HOLD period
0.75 seconds Yes
FAIL-SAFE period
16 seconds Yes
FAIL-SAFE
Off Can be activated
channel by channel
Receiver name
Internal ID Max. 12 characters
Address for receiver
battery voltage
0
Yes
Address for
connection quality
1 Yes
Two-receiver mode
On Yes
Servo outputs as
sum signal
= SRXL-MULTIPLEX
(serial servo output /
digital servo data)
Off Yes
One sensor address
as “Priority address”
= Address with Prio 1
Off Yes
* Refer to Chapter (
9.
) here.
Error counter
The receiver features two error counters: for low voltage and
signal errors.
The receiver LED indicates the sum of the seconds during which
errors were detected.
If errors are indicated, they can be saved (stored) after the
landing using the SET button, and read out again later (
9.
).
1.
Operating voltage errors
Examples: flat or faulty battery, inadequate cable crosssection, etc.
The counter registers voltage collapses below the threshold
of 4.5 V (threshold can be altered using the
MULTImate
or
the
MULTIPLEX Launcher
(
9.
)).
2.
Signal errors
The count contains instances of interference to the M-LINK
signal packet. For example, this could indicate problems in
the power supply, a defective aerial, etc.
Signal errors are recorded in virtually every flight. In most
cases the pilot does not notice them, but they are still picked
up by the extremely sensitive error counter.
After a few flights, and regular analysis of the error counter, you
will gain the experience required to render the error counter
genuinely helpful, enabling you to detect changes in good time,
and to locate indications of possible causes of interference.
!
Protracted voltage collapses below 3.5 V cause the receiver
to re-boot. If this occurs, the values for both error counters are
lost permanently.
!
If you press the SET button for the purpose of saving the
error count, the stored information is retained until the next time
you save the error count.
8. TELEMETRY / FEEDBACK CAPABILITY
The telemetry-capable
RX-5 M-LINK
and
RX-7 M-LINK
2.4 GHz
receivers offer a means of transmitting data from the model back
to the transmitter.
When these receivers are employed, the telemetric values for
“receiver battery voltage” and “connection quality” are transmitted
directly, i.e. they require no additional external sensors.
The receivers can also be used in conjunction with up to sixteen
external M-LINK sensors, which are connected to the “S” socket.
In this way a very wide variety of telemetry data can be “sent
back” to the pilot.
!
Note:
The possible methods of indicating telemetry data by visual
and / or audible means vary according to the M-LINK transmitter or RF module in use.
Examples of external M-LINK sensors are as follows:
Voltage sensor (# 8 5400).
Temperature sensor (# 8 5402).
Current sensor:
150 A (# 8 5405) or
35 A ((# 8 5403) or (8 5404)).
Rev count sensor:
Optical (# 8 5414) or magnetic (# 8 5415).
Vario / altitude sensor (# 8 5416).
GPS (# 8 5417).
For more information on connecting and operating the various
sensor types and their features (measurement range, addressing, warning threshold settings, display facilities for minimum,
average or maximum values, in some cases activation of a
second m easu rem ent channel, ...) please refer to the instructions
supplied with the sensors and / or the MULTImate.
9. MULTIMATE AND
MULTIPLEX LAUNCHER PC PROGRAM
All MULTIPLEX M-LINK receivers are based on modern microcontrollers (FLASH technology). In the case of most M-LINK
receiver types (see the operating instructions supplied with your
receiver) it is also possible to connect the unit to the MULTImate
(# 8 2094) and / or to a PC or notebook computer using t he PC
connecting lead (# 8 5149); the PC program MULTIPLEX
Launcher can then be used.
The MULTIPLEX Launcher PC program is available as a free
download from the MULTIPLEX website (www.multiplex-rc.de).
This program, and the MULTImate (V1.50 or higher), opens up
Page 5

Operating Instructions for RX-5 M-LINK /
RX-7 M-LINK 2.4 GHz receivers
Page 15
Instructions for RX-5/7 M-LINK 2.4 GHz receivers # 985 5312 LA 30.09.2014 • Errors and omissions excepted! •
MULTIPLEX
the following facilities:
Availability of expanded receiver options, such as freely
variable HOLD and FAIL-SAFE period, individual FAIL-SAFE
settings can be activated and adjusted channel by channel,
…
Error counter / error memory read-out:
The error count can be read out separately for signal error s
and operating voltage errors.
Unrestricted sensor address assignment for the receiver
battery voltage and for connection quality (0 - 15).
Receiver name assignment (max. 12 characters).
Switching the following options on and off: “Two-receiver
mode” ( 11.) and serial servo output (dig ital servo data /
SRXL-MULTIPLEX) ( 12.).
Setting one sensor address as “priority address”:
The selected sensor value is updated at a higher rate than all
the other sensor values ( 13.).
The MULTIPLEX Launcher also allows:
Firmware updates:
Keep your receiver up-to-date at all times.
!
Note:
We recommend that you update your MULTImate or the MULTIPLEX Launcher at regular intervals to ensure that you can
exploit all the current features of your receiver and the connected components generally.
10. TWO-RECEIVER MODE
What is known as “two-receiver mode” is possible with the
MULTIPLEX RX-5 M-LINK and RX-7 M-LINK 2.4 GHz M-LINK
receivers:
In this mode two M-LINK receivers are inter-connected using a
Diversity lead (# 8 5070).
With this arrangement a total of two or even three receive circuits operate in parallel:
The two or three receive circuits incorporated in the two receiver
cases pick up and analyse the signals (“double diversity” or
“triple diversity”). This type of diversity can also be described as
“two-receiver mode”.
Since the orientation of the two or three receiver aerials is
different, this arrangement provides a further improvement in
receive performance, since it minimises directional aerial effects.
This means that at least one receiver aerial has a “good view” of
the transmitter regardless of the model’s attitude. Two-receiver
mode therefore provides a wider safety margin.
!
Tip:
you can also inter-connect different types of M-LINK
receiver, provided that they are capable of two-receiver mode
(e.g. 1 x
RX-16-DR pro M-LINK
and 1 x
RX-5 M-LINK
).
Information concerning suitability for two-receiver mode can be
found in the operating instructi ons provided with the various
M-LINK receivers.
This is the procedure for re-activating two-receiver mod e:
!
Note:
M-LINK receivers are set to two-receiver mode by default. For
this reason you can skip steps 1. – 3. and go directly to step 4.
1. Re-activating using the MULTImate:
At the menu point “4-7 B/D output“ / “4-7 Ausgabe B/D“
(= output B/D) select the following option:
“MPX 2-Receiver“ / “MPX 2-Empfänger“
(= MPX Two-receiver mode).
Select the menu point:
“4-10 Send data“ / “4-10 Dat. senden“ (= Send data)
and hold the 3-D digi-adjuster pressed in:
the MULTImate displays the following:
“please wait…“ / “bitte warten…“ (= please wait).
Release the 3-D digi-adjuster:
When the send process is complete, the screen
displays “--> OK!“ (= complete!).
Disconnect the receiver, switch off the MULTImate.
2. Re-activating using the MULTIPLEX Launcher:
At “More settings Options…“ / “Weitere Einstellungen
Optionen…“ (= More settings Options) select the
following menu point:
“MULTIPLEX Two-Receiver-Mode“ / “MULTIPLEX ZweiEmpfänger-Betrieb“
(= MULTIPLEX two-receiver mode).
Click on the “Accept“ / “Übernehmen“ button
(= Accept).
Click on the “Send data“ / “Daten senden“ button
(= Send data).
Click on the “Close“ / “Beenden“ button
(= Finish).
Close MULTIPLEX Launcher, disconnect the receiver.
3. You may need to carry out the steps described under 1. or 2.
on the second M-LINK receiver in order to activate tworeceiver mode.
4. Inter-connect the two M-LINK receivers by the B/D sockets
using the three-cord Diversity lead (# 8 5070). Please refer to
the operating instruction supplied with the Diversity lead.
! Take care to connect the lead correctly, i.e. the connectors must be correctly orientated, and the pin assig nment must be compatible (see symbols on the receiver)!
11. SERIAL SERVO OUTPUT –
SRXL-MULTIPLEX
RX-5/7 M-LINK receivers offer the facility to use the servo outputs as a sum signal (serial servo output = SRXL-MULTIPLEX):
The receiver’s first twelve channels are carried by a three-core
lead (# 8 5070) via the receiver’s B/D socket.
Applications:
Power supply / servo management systems, or
Flybarless systems on model helicopters.
!
Note:
SRXL-MULTIPLEX is switched off by default on M-LINK recei-
vers, and can be activated using the MULTIPLEX MULTImate
or the MULTIPLEX Launcher PC program in conjunction with
the UNI USB PC lead (# 8 5149).
This is the procedure for activating serial servo output:
1. Activating using the MULTImate:
At the menu point “4-7 B/D output“ / “4-7 Ausgabe B/D“
(= Output B/D) select the following option:
“Digit. Servodata“ / “Dig. Servodaten“
(= Digital servo data).
Select the menu point:
“4-10 Send data“ / “4-10 Dat. senden“ (= Send data)
and hold the 3-D digi-adjuster pressed in:
The MULTImate screen displays:
“please wait…“ / “bitte warten…“ (= please wait).
Release the 3-D digi-adjuster:
Page 6

Operating Instructions for RX-5 M-LINK /
RX-7 M-LINK 2.4 GHz receivers
Page 16
Instructions for RX-5/7 M-LINK 2.4 GHz receivers # 985 5312 LA 30.09.2014 • Errors and omissions excepted! •
MULTIPLEX
When the Send process is complete, the screen
displays “--> OK!“ (= complete!).
Disconnect the receiver, switch off the MULTImate.
2. Activating using the MULTIPLEX Launcher:
At “More settings Options“ / “Weitere Einstellungen
Optionen…“ (= More settings Options) select the
following menu point:
“Digital servodata“ / “Digitale Servodaten“
(= Digital servo data).
Click on the “Accept“ / „Übernehmen“ button
(= Accept).
Click on the „Send data“ / “Daten senden“ button
(= Send data).
Click on the “Close“ / “Beenden“ button
(= Finish).
Close MULTIPLEX Launcher, disconnect the receiver.
3. Connect the three-core lea d (# 8 5070) to the receiver’s B/D
socket.
4. Connect the lead to the power supply / servo management
system, or to the flybarless system (see the operating
instructions supplied with these devices).
! Take care to connect the lead correctly, i.e. the connectors must be correctly orientated, and - especially
when using non-MULTIPLEX products - the pin assignment must be compatible. Be sure to check the symbols
on the M-LINK receiver, and on the non-MULTIPLEX
product if present. Refer to the operating instructions of
the non-MULTIPLEX device, and ask the manufacturer if
you are in any doubt!
12. SELECTING ONE SENSOR ADDRESS AS
“PRIORITY ADDRESS”
The telemetry-capable RX-5/7 M-LINK receivers permit the user
to define any one of the sensor addresses (0 … 15) as a “priority
address”:
This one selected sensor value is then updated at a higher rate
than all the other sensor values.
Typical application: “Vario”:
The audio output for climb and descent, and the associated onscreen display, are updated more frequently than the other
sensor values, and are therefore generated without delay.
!
Note:
The “Priority address” optio n is switched off by defa ult on M-LINK
receivers, and can be activated using the MULTIPLEX MULTI-
mate or the MULTIPLEX Launcher PC program in conjunction
with the UNI USB PC lead (# 8 5149).
This is the procedure for activating the priority address:
1. Activating using the MULTImate:
At the menu point “4-6 Sensor addr.“ / “4-6 Sensoradr.“
(= Sensor address) select the option:
“4-6 Prio address“ / “4-6 Prio Adresse“
(= Priority address).
Hold the 3-D digi-adjuster pressed in:
The MULTImate displays: “L 0“.
Release the 3-D digi-adjuster.
Press the 3-D digi-adjuster briefly, and select the priority
address (0 … 15).
Press the 3-D digi-adjuster briefly.
Switch to the menu:
“4-6 Go back …to RX M-LINK“ /
“4-6 Zurück …zu RX M-LINK“
(= back … to RX M-LINK)
and confirm by pressing the 3-D digi-adjuster.
Select the menu point:
“4-10 Send data“ / “4-10 Dat. senden“
(= Send data)
and hold the 3-D digi-adjuster pressed in:
The MULTImate displays:
“please wait…“ / “bitte warten…“ (= please wait).
Release the 3-D digi-adjuster:
When the Send process is complete, the screen
displays “--> OK!“ (= complete!).
Disconnect the receiver, switch off the MULTImate.
2. Activating using the MULTIPLEX Launcher:
At “Sensor addresses“ / “Sensorparameter“
(= Sensor address) auswählen:
“Address w/prio 1:“ / “Adresse mit Prio 1:“
(= Address with priority 1).
Select the “Address“ / “Adresse“ (= Address) check-box,
and enter the desired address (0 … 15).
Click on the “Accept“ / “Übernehmen“ button
(= Accept).
Click on the “Send data“ / “Daten senden“ button
(= Send data).
Click on the “Close“ / “Beenden“ button
(= Finish).
Close the MULTIPLEX Launcher, disconnect the
receiver.
This is the procedure for disabling the priority address:
1. Disabling using the MULTImate:
At the menu point “4-6 Sensor addr.“ / “4-6 Sensoradr.“
(= Sensor address) select the option:
“4-6 Prio address“ / “4-6 Prio Adresse“
(= Priority address).
!
Note:
The second line of the screen displays the selected
priority address.
Hold the 3-D digi-adjuster pressed in:
The screen entry in the second line changes to:
“L off“ / “L aus“ (= L off).
Switch to the menu:
“4-6 Go back …to RX M-LINK“ /
“4-6 Zurück …zu RX M-LINK“
(= back … to RX M-LINK)
and confirm by pressing the 3-D digi-adjuster.
Select the menu point:
“4-10 Send data“ / “4-10 Dat. senden“
(= Send data)
and hold the 3-D digi-adjuster pressed in:
The MULTImate displays:
“please wait…“ / “bitte warten…“ (= please wait).
Release the 3-D digi-adjuster:
When the Send process is complete, the screen
displays “--> OK!“ (= complete!).
Disconnect the receiver, switch off the MULTImate.
2. Disabling using the MULTIPLEX Launcher:
At “Sensor addresses“ / “Sensorparameter“
(= Sensor parameters) auswählen:
“Address w/prio 1:“ / “Adresse mit Prio 1:“
(= Address with priority 1).
Clear (erase) the tick in the “Address“ / “Adresse“ check-
box (= Address).
Page 7

Operating Instructions for RX-5 M-LINK /
RX-7 M-LINK 2.4 GHz receivers
Page 17
Instructions for RX-5/7 M-LINK 2.4 GHz receivers # 985 5312 LA 30.09.2014 • Errors and omissions excepted! •
MULTIPLEX
Click on the “Accept“ / “Übernehmen“ button
(= Accept).
Click on the “Send data“ / “Daten senden“ button
(= Send data).
Click on the “Close“ / “Beenden“ button
(= Finish).
Close the MULTIPLEX Launcher, disconnect the
receiver.
13. INSTALLATION NOTES
Protect your receiver from vibration, especially in models
powered b y an internal-combustion engine (e.g. pack it loosely
in foam).
Locate the receiver at least 150 mm away from electric mo-
tors, petrol engine ignition systems and any other electronic
components such as speed controllers for electric motors and
drive batteries. Keep the aerial away from these components.
Install the receiver in the model in such a way that the aerial
is as far away as possible from all conductive materials.
If your model’s fuselage consists of conductive materials (e.g.
carbon fibre), then the aerial must be installed in such a way
that the active part of the aerial (the final 30 mm) is located
outside the model.
Do not deploy the receiver aerial inside or on model com-
ponents which are laminated or reinforced with electrically
conductive materials (metal foil, carbon fibre, metallic paints
etc.), as they have a shielding effect.
Do not shorten or extend the aerial or the aerial feed cable.
Never attempt to replace or repair the aerial or aerial cable!
Do not deploy the aerial parallel to servo leads, high-current
cables or electrically conductive parts (e.g. pushrods).
Keep to the recommended installed arrangements (
20.
,
sketches A - C)!
High-current cables, e.g. those attached to the speed con-
troller, motor and flight battery, should be kept as short as
possible.
If you are using a diode-based battery backer, always install a
PeakFilter (
# 8 5180
).
Reception quality can be optimised by fitting a special ferrite
ring (
# 8 5146
) or suppressor filter lead (
# 8 5057
) in the speed
controller cable. It is also advisable to fit effective suppressors
to conventional (brushed) electric motors (not brushless types)
(e.g. use the suppressor set
# 8 5020).
14. RANGE CHECKING
Regular range checks are very important - even when using a
2.4 GHz system - in order to ensure reliable operation of the
radio control system, and to enable you to detect sources of
interference in good time. This applies in particular:
Before the use of new or changed components, or existing
components in a new or modified arrangement.
Before re-using radi o control system components which were
previously involved in a crash or a hard landing.
If you have encountered problems on a previous flight.
Important:
Always ask a second person to help you with your range
check, so that one of you can secure and observe the model.
If possible, carry out the range check when no other trans-
mitters are operating.
Carrying out the range check:
1. Select “range-check mode” on your transmitter (see the
operating instructions supplied with the transmitter or RF
module).
There must be line-of-sight connection between the transmitter and receiver aerials (i.e. the model) during the range
check.
Keep the transmitter and the model about one metre above
ground during the range check.
2. When checked with reduced transmitter power, the range of the
RX-5/7 M-LINK receiver must be 40 metres. You have reached
the range limit when the servos start to move jerkily.
If your transmitter features an automatic servo test facility,
we recommend that you activate it for one control function
(e.g. rudder). This sets up a steady movement of the servo,
and enables you to detect the limit of range clearly.
Important:
Carry out the first range check with the motor switched off. Turn
the model into all attitudes, and attempt to optimise reception by
changing the position of the two aerials.
For the second range check, run the motor at varying speeds
and check that the effective ra nge is not significantly reduce d. If
there is a marked reduction, locate and eliminate the cause of
the interference (caused by the motor, the arrangement of the
receiving system and power supply, vibration, etc.).
15. EXCHANGING THE AERIALS
If you require longer or shorter aerial feed cables, please contact
the MULTIPLEX Service Department or any MULTIPLEX Service Centre, as they stock cables of different lengths, and will
gladly quote an individual price for modifying your receiver to
professional standards.
! Caution: never attempt to exchange the aerial yourself!
Changing the aerial to a professional standard requires
special tools as well as appropriate expertise. Ignoring this
warning may have an adverse effect on the receiver’s
reception quality.
! Cau tion: if the active part of the aerial (the final 30 mm)
should be damaged, the aerial must be replaced by the
MULTIPLEX Service Department or a MULTIPLEX Service
Centre; this also applies if the aerial feed cable is damaged.
16. CE CONFORMITY DECLARATION
This device has been assessed and approved in
accordance with European harmonised directives.
This means that you possess a product whose design and
construction fulfil the protective aims of the European Community designed to ensure the safe operation of equipment.
The detailed CE conformity declaration can be downloaded in
the form of a PDF file from the Internet under www.multiplexrc.de. It is located in the DOWNLOADS area under PRODUKTINFOS.
Page 8

Operating Instructions for RX-5 M-LINK /
RX-7 M-LINK 2.4 GHz receivers
Page 18
Instructions for RX-5/7 M-LINK 2.4 GHz receivers # 985 5312 LA 30.09.2014 • Errors and omissions excepted! •
MULTIPLEX
17. FCC WARNING STATEMENTS
This device complies with part 15 of the FFC rules. Operation is
subject to the following two conditions: (1) This device may not
cause harmful interference, and (2) this device must accept any
interference received, including interference that may cause
undesired operation.
NOTE: The grantee is not responsible for any changes or
modifications not expressly approved by the party responsible
for compliance. Such modifications could void the user´s
authority to operate the equipment.
18. IC WARNING STATEMENTS
This device complies with Industry Canada license-exempt RSS
standard(s). Operation is subject to the following two conditions:
(1) this device may not cause interference, and (2) this device
must accept any interference, including interference that may
cause undesired operation of the device.
19. DISPOSAL NOTES
Electrical equipment marked with the cancelled waste
bin symbol must not be discarded in the standard
household waste; instead it should be taken to a
suitable specialist disposal system.
In the countries of the EU (European Union) electrical
equipment must not be discarded via the normal
domestic refuse system (WEEE - Waste of Electrical and
Electronic Equipment, Directive 2002/96/EG). You can take
unwanted equipment to your nearest local authority waste
collection point or recycling centre. There the equipment will be
disposed of correctly and at no cost to you.
By returning your unwanted equipment you can make an
important contribution to the protection of the environment!
20. GUARANTEE / LIABILITY EXCLUSION
The company MULTIPLEX Modellsport GmbH & Co.KG accepts
no liability of any kind for loss, damage or costs which are due to
the incorrect use and operation of this product, or which are
connected with such operation in any way. Unless the law
expressly states otherwise, the liability on the part of MULTIPLEX Modellsport GmbH & Co.KG to pay damages, regardless
of the legal argument employed, is limited to the invoic e value of
those products supplied by MULTIPLEX Modellsport GmbH &
Co.KG which were directly involved in the event in which the
damage occurred. This does not apply if liability is incurred
according to statutory law on account of intentional or gross
negligence.
We guarantee our products in accordance with the currently
valid statutory regulations. If you wish to make a claim under
guarantee, your initial course of action should always be to
contact the dealer from whom you purchased the equipment.
The guarantee does not cover faults and malfunctions which are
caused by the following:
Incorrect or incompetent use
Maintenance carried out incorrectly, belatedly or not at all, or
not carried out by an authorised Service Centre
Incorrect connections
The use of accessories other than genuine MULTIPLEX
items
Modifications or repairs which were not carried out by
MULTIPLEX or by an authorised MULTIPLEX Service
Centre
Accidental or intentional damage
Defects due to normal wear and tear
Operation of the unit outside the limits stated in the
Specification
Operation of the unit in conjunction with equipment made by
other manufacturers.
21. RECOMMENDED INSTALLATIONS
*Max. = As far as possible
A
B
Max.*
Max.
*
C
 Loading...
Loading...