

Page 1

Manual de instrucciones
MULTIPLEX
Modellsport GmbH & Co. KG
© MULTIPLEX 2003
l
Neuer Weg 2
l
D-75223 Niefern
l
Germany
Page 2
1. Índice de contenido
1. Índice de contenido 1
2. Introducción 3
3. Consejos de seguridad 3
3.1. Consejos generales de seguridad 4
3.2. Prueba de alcance 5
4. Responsabilidades / Recambio de piezas 6
5. Garantía 6
6. Datos técnicos 6
7. La emisora 7
7.1. Parte superior de la emisora 7
7.2. Parte inferior de la emisora 7
7.3. Interior de la emisora 8
7.4. Detalles mecánicos 8
7.4.1. Abrir/cerrar la carcasa de la emisora 8
7.4.2. Recambio y cambio de posición de la antena 9
7.4.3. Montaje y desmontaje del módulo HF 9
7.4.4. Cambiar el cristal de emisión (sólo en HFM-4) 10
7.4.5. Cambiar la batería de la emisora 10
7.4.6. Desactivar la neutralización de las palancas y
activar el escalonado o, en su caso, el roce 10
7.4.7. Ajustar la "dureza" de la palanca 10
7.4.8. Girar los agregados de las palancas 10
7.4.9. Modificar o cambiar el agarre de la palanca 11
7.4.10. Montaje del agarre de palanca con botón 11
7.4.11. Montaje de los conmutadores “P“ y “K“ 12
8. La batería de la emisora 13
8.1. Gestión de la batería en la ROYALevo 13
8.1.1. Esto ya existía 13
8.1.2. Esto es lo NUEVO 13
8.1.3. Prestar atención a lo siguiente 13
8.2. Brevemente lo más importante 13
8.3. Consejos de seguridad 13
8.4. Carga de la batería 14
8.5. Cuidado y almacenaje de la batería 14
8.6. Reciclado 15
9. Puesta en funcionamiento 15
9.1. El primer encendido 15
9.2. El encendido 15
9.2.1. Encendido con módulo HF de cristal HFM-4 15
9.2.2. Encendido con módulo HF con sintetizador HFMS 15
9.2.3. Encendido sin emisión HF 15
9.3. Verificaciones de seguridad al encender 16
9.3.1. Gas-Check 16
9.3.2. Comprobación HF con módulo-sintetizador 16
9.4. Selección de canal con el módulo HF con
sintetizador HFM-S 16
9.5. El indicador de estado HF (LED rojo) 16
9.6. Las pantallas de estado 17
10. El concepto de manejo 18
10.1. El teclado 18
10.1.1. Teclas de acceso directo a menús (fila 1) 18
10.1.2. Teclas de trabajo (fila 2) 18
10.1.3. Introducción de texto 18
10.2. Los reguladores digitales 3D 19
10.2.1. Programación con los reguladores digitales 3D19
10.2.2. Ajustes con los reguladores digitales 3D durante
el vuelo 19
10.3. Uso del teclado y filosofía de manejo del
regulador digital 3D 20
10.3.1. Así se abren los menús principales 20
10.3.2. Así se abren los submenús 20
10.3.3. Así se cambian valores/configuraciones 21
Manual de instrucciones
10.3.4. Así se vuelve hacia atrás 21
11. Trimado digital 22
11.1. Generalidades 22
11.2. Ventajas del trimado digital 22
11.3. La cruz de trimado digital 23
11.4. Indicación de trimado en el display 23
12. Crear un modelo nuevo 24
12.1. Generalidades 24
12.2. Un nuevo modelo de avión
12.3. Un nuevo helicóptero 25
12.4. Plantillas en detalle 29
12.5. Plantilla MOTOR 29
12.5.1. Asignación de transmisores y conmutadores 29
12.5.2. Asignación de servos/salidas del receptor 29
12.5.3. Adaptación 29
12.6. Plantilla ACRO 30
12.6.1. Asignación de transmisores y conmutadores 30
12.6.2. Asignación de servos/salidas del receptor 30
12.6.3. Adaptación 30
12.7. Plantilla HOTLINER 30
12.7.1. Asignación de transmisores y conmutadores 30
12.7.2. Asignación de servos/salidas del receptor 30
12.7.3. Adaptación 30
12.8. Plantilla DELTA 31
12.8.1. Asignación de transmisores y conmutadores 31
12.8.2. Asignación de servos/salidas del receptor 31
12.8.3. Adaptación 31
12.9. Plantilla VELERO 31
12.9.1. Asignación de transmisores y conmutadores 31
12.9.2. Asignación de servos/salidas del receptor 31
12.9.3. Adaptación 31
12.10. Plantilla 4-COMPUERTAS 32
12.10.1. Asignación de transmisores y conmutadores 32
12.10.2. Asignación de servos/salidas del receptor 32
12.10.3. Adaptación 32
12.11. Plantilla HELImech 32
12.11.1. Asignación de transmisores y conmutadores 32
12.11.2. Asignación de servos/salidas del receptor 32
12.11.3. Adaptación 32
12.12. Plantilla HELIccpm 33
12.12.1. Asignación de transmisores y conmutadores 33
12.12.2. Asignación de servos/salidas del receptor 33
12.12.3. Adaptación 33
13. Menú principal “Setup“ LL 33
13.1. Submenú “Emisora“ 33
13.1.1. Parámetro “Gráfico de trimado “ 33
13.1.2. Parámetro “Tonos“ 33
13.1.3. Parámetro “Alarma de batería“ 33
13.1.4. Parámetro “Carga de batería“ 34
13.1.5. Parámetro “Contraste” 34
13.1.6. Parámetro “ Gas-Check “ 34
13.1.7. Parámetro “HF-Check” 34
13.2. Submenú “definir mezcla” 34
13.2.1. Función de los mezcladores de libre definición34
13.2.2. Las opciones de mezcla 35
13.3. Submenú “Asignación“ 36
13.3.1. Parámetro “modo“ 37
13.3.2. Parámetro “Asignación“ 37
13.3.3. Parámetro “Nombre de la asignación” 37
13.3.4. Parámetro “Asignación - transmisor “ 37
13.3.5. Parámetro “Asignación - conmutador“ 38
13.4. Submenú „Aprendizaje“ 38
13.4.1. La función profesor/alumno 38
13.4.2. La ROYALevo como emisora de profesor 38
13.4.3. La ROYALevo como emisora de alumno 39
13.5. Submenú “Usuario“ 39
24
Página 1
Page 3
ROYAL evo
13.5.1. Parámetro “Acceso“ (PIN) 39
13.5.2. Parámetro “Idioma“ 39
13.5.3. Parámetro “Nombre“ 39
14. Menú principal “transmisores“ HH 39
14.1. Submenú “transmisores-conmutador“ 40
14.2. Submenús para transmisores individuales40
14.2.1. Ajuste de transmisores para los ejes principales40
14.2.2. Parámetro “Trim“ (trimado) 41
14.2.3. Parámetro “Step“ (distancia de paso de trimado)
41
14.2.4. Parámetro “D/R“ (Dual-Rate) 41
14.2.5. Parámetro “Recorrido“ 41
14.2.6. Parámetro “Expo“ 41
14.2.7. Parámetro “valor fijo“ 41
14.2.8. Parámetro “Tiempo de uso“ (Slow) 41
14.2.9. Parámetro “Ralentí“ (trimado de ralentí) 41
14.2.10. Parámetro “Pitch“ (curva de Pitch) 41
14.2.11. Parámetro "Gas" (curva de gas) 42
14.2.12. Parámetro “RPM“ para reguladores de
revoluciones 43
19. Accesorios 55
15. Menú principal “Mezclador“ GG 43
15.1. Submenú “CombiSwitch“ 43
15.2. Submenú “A-Diff“ 43
15.2.1. Parámetro “Modo“ 43
15.2.2. Parámetro “Difer.“ 43
15.3. Submenú “Giróscopo “ 43
15.3.1. Parámetro “Modo“ 44
15.3.2. Parámetro “Heading /amortiguación“
(sensibilidad del giróscopo) 45
15.3.3. Parámetro “Reducción“ 45
20. Conservación y cuidados 57
21. Recomendaciones y servicio 57
15.4. Submenú “Rotor de cola“ (Compensación
estática del rotor de cola/Revo-Mix) 45
15.4.1. Parámetro “Pitch+ y Pitch-“ 46
15.4.2. Parámetro “Diff Gier.“ 46
15.4.3. Parámetro “Offset“ 46
15.4.4. Parámetro “Punto neutral“ y indicación de Pitch
46
15.5. Submenú “Cabeza del rotor“ (mezcla de disco
oscilante electrónica /CCPM) 46
15.5.1. Parámetro “Geometría“ 47
15.5.2. Parámetro “Giro“ 47
15.5.3. Parámetro “Palanca +/-“ 47
15.5.4. Helicóptero con mecánica Heim 47
15.6. Submenú “comp. de gas “ 48
15.6.1. Parámetro “Gier“ 48
15.6.2. Parámetro “Roll“ 48
15.6.3. Parámetro “Nick“ 48
15.7. Ajuste de los “mezcladores libres “ 48
16. Menú principal “Servo“ KK 49
16.1. Submenú “Equilibrado“ 49
16.1.1. Parámetro “REV/TRM“ 49
16.1.2. Parámetro “P1 … P5“ 49
16.2. Submenú “Asignación“ 50
16.2.1. Caso excepcional: MULTInaut IV 51
16.2.2. Asignar servos para modelos de avión 51
16.2.3. Asignar servos para helicópteros 51
16.3. Submenú “Monitor“ 52
16.4. Submenú “Test“ 52
17. Menú principal “Reloj“ AA 52
17.1. Submenú “Modelo“ 52
17.2. Submenú “Marco“ 52
17.3. Cronómetro “´ suma “ 53
17.4. Submenú “¶¶ Intervalo“ 53
18. Menú principal “Memoria“ II 53
18.1. Submenú “Selección de modelo“ (cambio de
memoria) 53
18.2. Submenú “Copia“ 53
18.3. Submenú “Borrar“ 54
Página 2
18.4. Submenú “Fases de vuelo“ 54
18.4.1. Seleccionar el nombre de la fase de vuelo 54
18.4.2. Liberar/proteger fases de vuelo 54
18.4.3. Copiar la fase de vuelo activa 54
18.5. Submenú “Propiedad“ 54
18.6. Submenú “Nuevo modelo “ 55
19.1. Escáner (con módulo HF HFM-S) 55
19.1.1. Escaneado de toda la banda de frecuencia 55
19.1.2. Comprobación de canal al encender (ChannelCheck) 55
19.1.3. Instalación 55
19.2. Channel-Check (con módulo HF HFM-4) 55
19.2.1. Instalación 55
19.2.2. Uso 55
19.3. Otros accesorios/repuestos 55
19.3.1. Resumen 55
19.3.2. Palanca con botón/conmutador 56
19.4. Utilizar el MULTInaut IV 56
19.5. Cable de diagnóstico 56
19.6. Conexión al PC 56
19.7. Acceso a los datos de la emisora 56
19.8. Uso de simulador 57
Page 4
Manual de instrucciones
2. Introducción
Nos alegramos de que se haya decidido por el sistema
de control remoto MULTIPLEX ROYALevo.
La emisora ROYALevo fue presentada a principios de
2002: una emisora digital y moderna con la que
MULTIPLEX marcó un antes y un después en el
desarrollo de los controles a distancia. En la fase de
concepción, desarrollo y producción se han unido todos
nuestros conocimientos de varias generaciones de
emisoras. De esta forma, ha nacido una emisora de uso
universal, de fácil manejo y de diseño actual optimizado
ergonómicamente, que se puede utilizar tanto como
emisora de mano como de pupitre. Y no hay que olvidar
que:
La ROYALevo es MADE IN GERMANY.
Durante el desarrollo del Software se ha prestado
especial atención a un fácil manejo del sistema. La
emisora ROYALevo ofrece muchas funciones elegidas
por usuarios experimentados, que sirven tanto para
sencillos veleros de dos ejes como para modelos más
grandes y helicópteros. Aun así, su manejo seguirá
siendo fácil y comprensible.
Las características más importantes de la ROYALevo son:
• Carcasa optimizada ergonómicamente con precisos
agregados de palanca ajustables individualmente para su
uso como emisora de mano o de pupitre
• Display grafico inclinable (132 x 64 píxeles)
con contraste ajustable
• Trimado digital gracias a su cruz de trimado de fácil acceso
que aporta una nueva “sensación de trimado”
• Económico módulo HF estándar* con cristal
intercambiable o
módulo HF con sintetizador** con selección de canal por
Software.
• 9 o en su caso 12 canales
• 20 o en su caso 36 memorias de modelos
• 6 teclas de menú para rápido y sencillo acceso a los
principales menús
• 5 teclas de función y dos reguladores 3D Digi para una
programación amigable
• Explícitos textos de menús,
en diferentes idiomas
• Completas posibilidades de ajuste y de mezcla para
modelos de aviónes o de helicópteros
• Escasa necesidad de programación gracias a los modelos
de ejemplo
• Libre asignación de transmisores, conmutadores y servos
• 4 fases de vuelo por memoria de modelo
• 5 cronómetros
(3 cronómetros con alarma + tiempo de funcionamiento
de la emisora y del modelo)
• Posibilidad de funcionamiento selectivo como
profesor/alumno de serie
Usted sabrá apreciar la ROYALevo tras una corta fase de
aprendizaje en la que le acompañará este manual.
Su equipo MULTIPLEX
Opciones:
* Sistema de protección de encendido Channel Check MULTIPLEX
** Función de protección de encendido con escáner
¡Consultar el catálogo principal MULTIPLEX para conocer las
frecuencias disponibles!
3. Consejos de seguridad
! Este manual de instrucciones es parte del
producto. En él se incluye información
importante, así como consejos de seguridad. Por
este motivo se ha de tener en todo momento a
mano e ser incluido en caso de venta del
producto a terceros
! ¡Prestar atención a los consejos de seguridad!
¡Leer atentamente el manual de instrucciones!
No poner en funcionamiento el aparato antes de
haber leído atentamente este manual de
instrucciones y los siguientes (en su caso incluido
en el manual o anexado por separado) consejos
de seguridad.
! No realizar modificaciones técnicas en la emisora
bajo ningún concepto. Utilizar únicamente
accesorios y repuestos originales (especialmente
batería de la emisora, cristales, antena,...).
! En el caso de utilizar el aparato con productos de
otros fabricantes hay que asegurarse de su
calidad y sus capacidades. Se ha de realizar una
exhaustiva comprobación de función y capacidad
de alcance de cada configuración nueva o, en su
caso, modificada. No poner en funcionamiento el
aparato o, en su caso, el modelo si algo no
funciona correctamente. Primero hay que
encontrar el problema y subsanarlo.
! ¡Advertencia!
Modelos radiocontrolados no son un juguete
como tal. La instalación del equipo RC y su uso
requieren conocimientos técnicos, una
construcción cuidadosa así como disciplina y
sentido de la responsabilidad. Errores o
descuidos durante la construcción y su posterior
vuelo pueden ocasionar daños personales y
materiales. Dado que el fabricante no tiene
ninguna influencia sobre la correcta
construcción, cuidado y uso, hace especial
mención a estos peligros y declina cualquier
clase de responsabilidad.
! Un modelo fuera de control por la razón que sea,
puede originar grandes daños tanto materiales
como personales. Por este motivo hay que
contratar el seguro de responsabilidad civil
correspondiente.
! Respetar el orden de encendido y de apagado
para evitar un arranque peligroso e incontrolado
del motor:
1. al encender:
primero encender la emisora (ON),
después encender el receptor (OFF)
conectar la batería del motor y en su caso
encender el motor (ON)
2. al apagar:
primero desconectar la batería del motor y en su
caso apagar el motor (OFF)
apagar el receptor (OFF)
apagar la emisora (OFF)
Página 3
Page 5
ROYAL evo
mAh
×
≥
! Dejar revisar, especialmente la emisora y el
receptor, cada cierto tiempo (cada 2 o 3 años) por
un servicio técnico autorizado MULTIPLEX.
! Utilizar la emisora únicamente en el ámbito de
temperatura autorizado (
Tener en cuenta que con cambios bruscos de
temperatura (p.ej. coche caliente, ambiente frío)
se puede formar condensación en el interior de la
emisora. La humedad limita el funcionamiento
de la emisora así como de otros aparatos
electrónicos.
En caso de existir humedad en aparatos
electrónicos, apagar inmediatamente,
desconectar la alimentación eléctrica y dejar
secar (incluso algunos días), a poder ser con el
aparato abierto. Una vez seco, realizar un
exhaustivo test de función. En los casos más
graves, dejar comprobar por un servicio técnico
autorizado MULTIPLEX.
èè 6. datos técnicos).
! El uso de equipos de emisión está limitado,
según el país, a ciertas frecuencias de
emisión/canales. En algunos casos hay que
realizar gestiones administrativas antes de la
puesta en funcionamiento. ¡Por este motivo,
prestar especial atención a los siguientes
consejos!
3.1. Consejos generales de seguridad
Durante el montaje del modelo:
• Montar y ajustar los recorridos de los timones y
varillajes de tal forma que los timones se muevan
con facilidad y no se bloqueen al llegar al recorrido
máximo. No limitar el recorrido de los servos con la
emisora, sino ajustando las palancas de los timones
y el varillaje. Mantener el juego pequeño.
Sólo teniendo en cuenta los puntos mencionados
se consigue la menor carga de esfuerzo del servo,
para así aprovechar completamente su potencia y
su duración de vida y conseguir el máximo nivel de
seguridad.
• Proteger el receptor, la batería, los servos y demás
componentes de RC o electrónicos contra
vibraciones (¡Peligro de desconexión de los
componentes electrónicos!). En este caso, prestar
atención a los consejos de las instrucciones
correspondientes. Esto incluye naturalmente la
eliminación de vibraciones. Equilibrar la hélice y las
palas del rotor antes de su utilización y cambiar en
caso de deterioro. Montar los motores de
combustión de forma que no vibren y cambiar el
motor o las piezas deterioradas o de movimiento
desigual.
• No tensar o doblar los cables y proteger de las
piezas rotatorias.
• Evitar los cables alargadores de servos demasiado
largos o innecesarios. Aplicar un filtro separador a
partir de aprox. 30-50 cm (núcleos de ferrita) y
conseguir suficiente corte transversal (pérdida de
tensión). Se recomienda un mínimo de 0,3 mm2.
• No enrollar ni recortar la antena del receptor. La
colocación de la antena no se debe realizar
paralelamente a piezas conductoras p.ej. varillaje
de metal o en el interior de fuselajes que tengan un
efecto aislante (realizado o reforzado con carbono o
con pintura metálica). No colocar sobre piezas del
modelo que conduzcan electricidad. En los
modelos de gran tamaño se recomienda el uso de
una antena rígida.
• Prestar atención a una alimentación eléctrica
suficiente. Para averiguar aproximadamente la
capacidad necesaria de la batería para servos de
hasta unos 40 Ncm se puede utilizar esta fórmula:
servosnmAhCapacidad 200º][
Si el peso o el espacio no son problema, elegir la
siguiente batería superior en potencia.
• Evitar las piezas que estén en contacto entre si o en
movimiento de material conductor (p.ej. piezas
controladoras de metal o varillaje). Los llamados
“impulsos de chasquido” interfieren en el
funcionamiento de equipo de recepción.
• Evitar las interferencias producidas por
acumulación estática o fuertes campos eléctricos o
electromagnéticos mediante el correcto
aislamiento (p.ej. desparasitar los motores
eléctricos con condensadores adecuados, aislar los
motores de combustión con bujías, cables de
encendido e igniciones apantalladas) y prestar
atención a la distancia suficiente del equipo RC,
antena de recepción, cableado y baterías.
• Prestar atención a la separación suficiente entre los
cables de alta corriente (p.ej. motor eléctrico) y el
equipo de RC. Los cables de alta corriente,
especialmente aquellos entre motores eléctricos sin
escobillas y sus posicionadores, han de mantenerse
lo más cortos posible (aprox. max. 10-15 cm).
• Programar un nuevo modelo en casa y con calma.
Comprobar cuidadosamente todas las funciones.
Familiarizarse primero con la programación y el
manejo de la emisora antes de utilizarla.
Control regular del modelo
• Facilidad de movimiento y libertad de juego de los
timones y articulaciones
• Rigidez y estado del varillaje, articulaciones,
bisagras, etc.
• Comprobación aleatoria de roturas, grietas, cizallas
directamente en el modelo y en sus componentes,
así como en la instalación de RC y en el motor
• Estado y conexión de los cables y conectores
• Estado de la alimentación eléctrica y su cableado,
incluido el cable conmutador con comprobación
del aspecto externo de las células. Revisión regular
de las baterías y comprobación del estado de la
tensión/capacidad de la batería utilizando un
proceso de carga y un cargador apropiado para el
tipo de batería.
Página 4
Page 6
3.2. Prueba de alcance
La prueba de alcance es un método de comprobación
que aporta una información muy fiable sobre la función
del equipo de radio control.
Basándonos en nuestras experiencias y mediciones,
hemos creado una metodología para estar siempre
seguro.
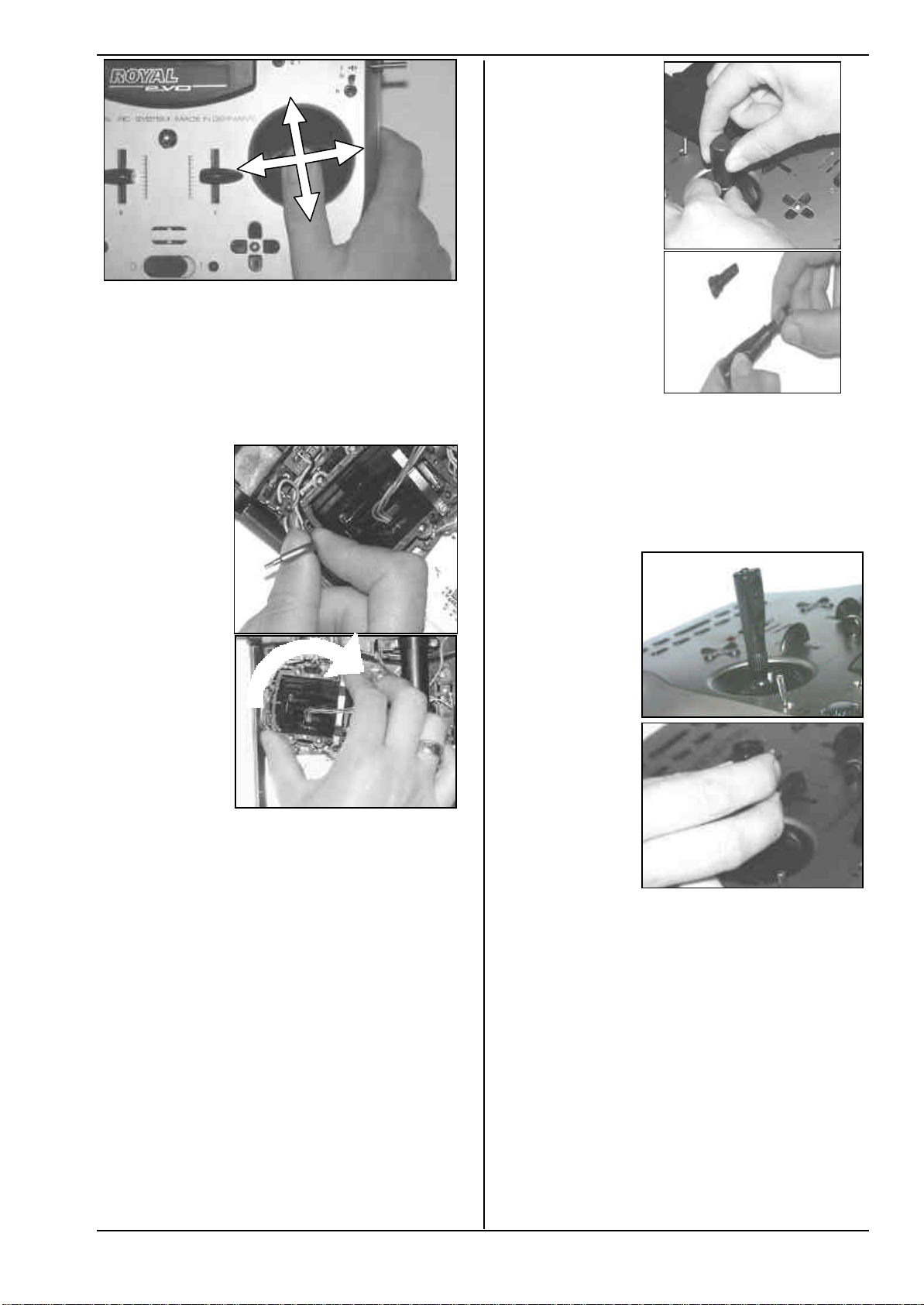
1. Llevar la antena a una
posición levantada y
ligeramente inclinada y
retraer completamente.
(è)
2. Colocar el modelo de tal
forma que la punta de
la antena del receptor
se encuentre aprox. a 1
metro del suelo.
3. Prestar atención a que
no se encuentren en las
cercanías del modelo
grandes elementos de
metal (p.ej. coches,
alambradas, etc…).
4. Realizar la prueba
únicamente cuando no
se encuentren otras
emisoras en funcionamiento (incluso en otros
canales).
5. Encender la emisora y el receptor. Comprobar que
hasta una distancia de aprox. 80 m. entre la emisora
y el modelo, los timones reaccionan claramente a
las órdenes de control y no realizan movimientos
incontrolados. En el límite de la distancia de
alcance, la palanca del servo se puede desplazar en
su propio ancho de su posición inicial (temblor).
6. Fijar el modelo y repetir la prueba con el motor en
marcha (cambiar el GAS del punto muerto a pleno
gas).
La distancia indicada de 80 m no es más que una
distancia de referencia. El alcance es muy influenciable
por las condiciones que existan en el entorno. Por
ejemplo, la presencia de picos de montaña, emisoras de
radio, estaciones de radar o similares, pueden reducir el
alcance hasta la mitad.
¿Qué se puede hacer para averiguar el motivo de un
alcance insuficiente?
1. Modificar el largo de la antena del receptor.
La cercanía de piezas de metal y de piezas
reforzadas con carbono limita la capacidad de
recepción.
También al cambiar el largo de la antena se
modifica la influencia de los motores eléctricos o de
ignición.
2. Separar los servos uno a uno del receptor y volver a
realizar la prueba.
Los cables de conexión sin filtro desparasitador
demasiado largos empeoran las condiciones de
recepción. Además, los servos envejecen y generan
mayor cantidad de interferencias que cuando están
nuevos (chispeo entre escobillas, condensadores
deparasitadores gastados del motor,…).
En caso de no obtener mejoría, hacer funcionar a modo
de prueba todo el equipo RC fuera del modelo.
Con ello se averigua si el problema está originado en el
equipo o, si por el contrario, son las características de
montaje del modelo las que fallan.
Manual de instrucciones
Controles antes de la puesta en funcionamiento:
• Cargar correctamente la batería de la emisora, del
receptor y del motor. Comprobar regularmente el
estado de la carga durante/entre las puestas en
funcionamiento. En esto se incluye el uso de un
proceso de carga apropiado al tipo de batería con
un cargador apropiado (formación) y el cuidado
regular de la batería junto a la comprobación de la
tensión/capacidad.
• En el campo de vuelo hay que informar a los
asistentes del canal/frecuencia de emisión propia o
en su caso apuntarse en el responsable de
pista/controlador además de informarse sobre la
forma de control de las frecuencias. Solo entonces
encender la emisora.
¡Existe la posibilidad de uso duplicado de canal!
• Comprobar el alcance con la antena de la emisora
retraída.
• Asegurar que se ha activado la memoria del modelo
correcto.
• Probar la función y el efecto de todas las funciones
de control y controles adicionales.
! No poner en funcionamiento en caso de aparecer
algún tipo de irregularidad. Buscar el error,
eliminarlo y volver a comprobar.
Durante el funcionamiento del modelo:
• Mientras no se tenga experiencia en el manejo de
un modelo es recomendable estar acompañado de
un piloto experimentado. Emplear un sistema de
alumno/profesor es muy útil durante los primeros
pasos.
• Usar el modelo sólo en lugares apropiados.
• Nunca volar o en su caso rodar hacia o sobre los
espectadores.
• No realizar maniobras peligrosas.
• Conocer y no sobrepasar las propias capacidades o
conocimientos.
• Aterrizar o bien apagar inmediatamente en caso de
percibir problemas o interferencias.
• ¡Ojo a las cargas estáticas!
En caso de haber aire muy seco (en la montaña y en
laderas, cerca de frentes tormentosos) la emisora
y/o el piloto se cargan estáticamente. La descarga
de contacto puede provocar daños al piloto y a la
emisora.
Medidas a tomar:
Apagar lo antes posible el equipo, caminar unos
pasos montaña abajo para llegar a una zona menos
expuesta.
Página 5
Page 7
ROYAL evo
4. Responsabilidades /
Recambio de piezas
A la empresa MULTIPLEX Modelltechnik GmbH no le es
posible controlar la aplicación de los consejos de los
manuales de montaje y de utilización, así como las
condiciones y métodos de montaje, uso y cuidado de la
emisora y sus componentes. Por tanto, la empresa
MUTIPLEX Modelltechnick GMBH no se responsabiliza
de pérdidas, daños o costes ocasionados por un uso
incorrecto o cualquier hecho relacionado
indirectamente.
Si la ley lo permite, la obligación de la empresa
MULTIPLEX Modelltechnik GmbH de realizar el
recambio de piezas, indistintamente de la razón legal,
se limita al valor de factura de las piezas implicadas de
la empresa MULTIPLEX Modelltechnik GmbH. Esto
queda invalidado, en cuanto la empresa MULTIPLEX
Modelltechnik GMBH no se responsabiliza ante
premeditación o gran irresposabilidad según dicta
forzosamente la ley vigente.
5. Garantía
Aplicamos sobre nuestros productos la garantía que sea
legal en la actualidad.
En caso necesario, dirigirse al distribuidor autorizado
donde se haya realizado la compra para reclamar la
garantía.
Excluidos de la garantía quedan los desperfectos
ocasionados por:
- uso inapropiado,
- la revisión técnica equivocada, tardía, no realizada
o realizada en un centro no autorizado,
- conexiones equivocadas,
- uso de accesorios no originales de MULTIPLEX,
- modificaciones/reparaciones no realizadas por
MULTIPLEX o un servicio técnico MULTIPLEX,
- daños ocasionados in/intencionadamente,
- desperfectos ocasionados por el desgaste de uso,
- uso fuera de las especificaciones técnicas
- o en conjunto con componentes de otros
fabricantes.
6. Datos técnicos
Nº de canales:
ROYALevo 9 9
ROYALevo 12 12
Sistema de transmisión: ajuste automático
al uso de servos
Servo 8 - 12 libre FM-PPM 7
Servo 9 - 12 libre FM-PPM 8
Servo 10 - 12 libre FM-PPM 9
¡Sólo ROYALevo 12!
Por lo menos uno de
los Servos 10 - 12 en uso FM-PPM 12
Módulo de canal: 10 kHz
Formato de impulso del
servo: UNI 1,5 ± 0,5 ms
MPX 1,6 ± 0,55 ms
ajustable por canal
Memorias de modelos:
ROYALevo 9 20
ROYALevo 12 36
Alimentación eléctrica: 7,2 V, 6 células Mignon / AA
Batería NiMH
Admisión de corriente: ~ 20 mA sin módulo HF
~ 165 mA con HFM-4
~ 190 mA con HFM-S
Ámbito de temperatura
aceptado: − 15 °C a + 55 °C
Tamaño:
Largo aprox. 220 mm
aprox. 250 mm con
con antena retraída
Ancho aprox. 200 mm
Alto aprox. 60 mm
sin palancas/asa
Peso: aprox. 750 g sin batería
aprox. 900 g sin batería
Página 6
Page 8
ƒ
‰
ˆ
•
‡
†
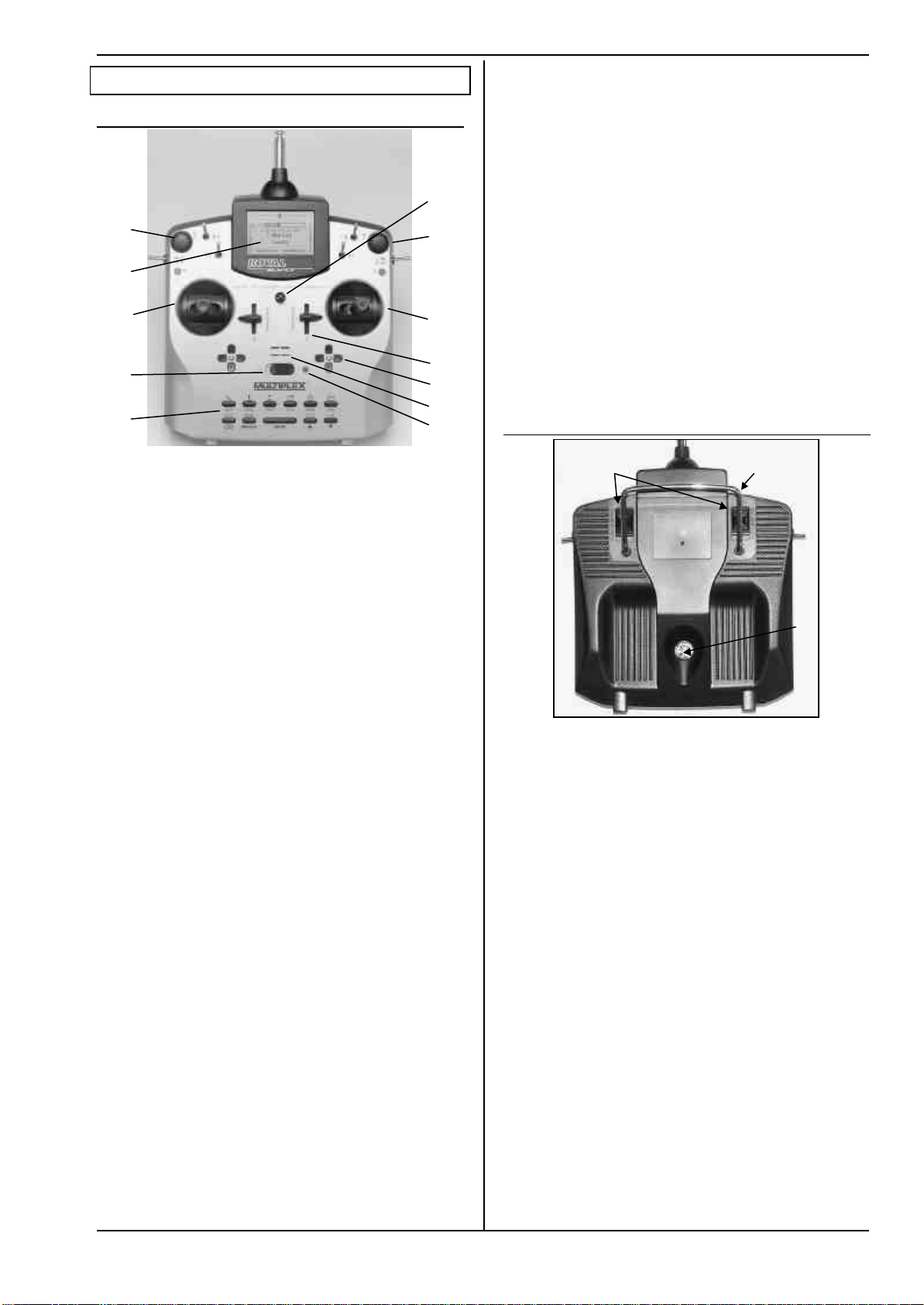
7. La emisora
7.1. Parte superior de la emisora
Š
‰
•
‚
ƒ
„
…
Los siguientes elementos se encuentran el la parte
superior de la emisora:
•• Dos palancas agregadas de alta precisión para el
manejo de los 4 ejes principales. Palancas escalonadas
para el manejo de gas/aerofreno activable en la derecha
o izquierda (è 7.4.6). Ambos agregados se pueden girar
para la acomodación a las costumbres de cada uno
(è7.4.7). Las agarraderas de las palancas se pueden
girar y subir en altura sin escalones y se pueden adquirir
en diferentes variantes.
Manual de instrucciones
Todos los conmutadores y botones (excepto ranuras
“K“ y “P“, è 7.4.11) están montados de serie en forma
de fácil acceso y no se pueden modificar ni cambiar. Las
definiciones de los conmutadores (“G“, “H“, “I“,...”O“, “P“)
es neutral y sirve únicamente como identificación ya
que se pueden definir libremente para función de canal
y/o conmutación (transmisor o conmutador) (è 13.3.4
y 13.3.5).
‰‰ Los dos reguladores 3D-Digitales se utilizan para la
programación y tareas de ajuste. Vienen montados de
serie. Durante la programación se utilizan mediante
pulsación o, en su caso, giro paralelamente con el botón
“ENTER” o en su caso con los botones “s“(ARRIBA) /
“t“(ABAJO). Durante el uso, es posible trasladar muchas
configuraciones/parámetros a los reguladores digitales
3D para realizar rápidamente modificaciones en la
configuración p.ej. durante el vuelo (è 10.2.2).
ŠŠ Enganche de agarre para la fijación de la correa de
transporte (p.ej. # 8 5161 o # 8 5646)
7.2. Parte inferior de la emisora
•
‚
‚‚ Dos reguladores “E“ y “F“ fijos con muesca central
de libre asignación de canal y/o función de
conmutación.
ƒƒ Dos cruces de trimado situadas por debajo de los
agregados de las palancas para un trimado digital de las
principales funciones formadas cada una por una pareja
de botones para izquierda/derecha y arriba/abajo.
„„ Señalizador acústico (Piezo-Piepser)
…… El LED/indicación de estado de HF (diodo rojo)
indica con la emisora encendida si se está emitiendo
una señal HF (señal de alta frecuencia):
LED se ilumina permanentemente → no hay emisión HF
LED se ilumina cada 2 seg. → emisión HF
El manejo de LED depende del consumo de corriente
del módulo HF. Si p.ej. falta el cristal o éste se encuentra
dañado, no se puede producir ninguna señal HF y el
LED permanentemente iluminado indica que no hay
emisión HF.
†† Teclado compuesto por 11 teclas en dos filas. Los
seis botones de la primera fila dan acceso a los
principales menús (botones de acceso directo). Los
cinco botones inferiores son necesarios para la
programación. Exceptuando la tecla “ENTER” todos los
botones disponen de doble función para la
introducción de texto. La escritura se realiza como en
los teléfonos móviles.
Dos cierres de pestillo • (OPEN) para la fácil y rápida
apertura de la emisora p.ej. para cambiar el cristal o el
módulo HF (è 7.4.3).
El robusto asa de transporte ‚ permite un transporte
de la emisora seguro y ofrece protección a la parte
trasera de la emisora al depositarla.
Como es habitual en MPX, también la ROYALevo
dispone de un enchufe multifunción MULTIPLEX ƒ
(identificado con “CHARGE“). Sirve para:
• carga de la emisora (è8.4.)
• como conexión durante el modo profesor/alumno
(è13.4.)
• como conexión al PC para archivar datos de
modelos (è 19.6.)
• como conexión al PC para la actualización de la
emisora (è 19.6.)
• como conexión al PC para su uso con simuladores
de vuelo
• como conexión para el uso de un receptor sin HF en
el modo de diagnóstico para tareas de
programación y ajuste (è 19.3.2)
‡‡ Interruptor ENCENDIDO/APAGADO (“O“ / “1“)
ˆˆ El display es una moderna pantalla LCD gráfica de
(132 x 64 puntos). El contraste se puede modificar (è
13.1.5). Para la optimización del ángulo de visión, se
puede inclinar la pantalla en aprox. 40°.
Página 7
Page 9
ROYAL evo
ƒ
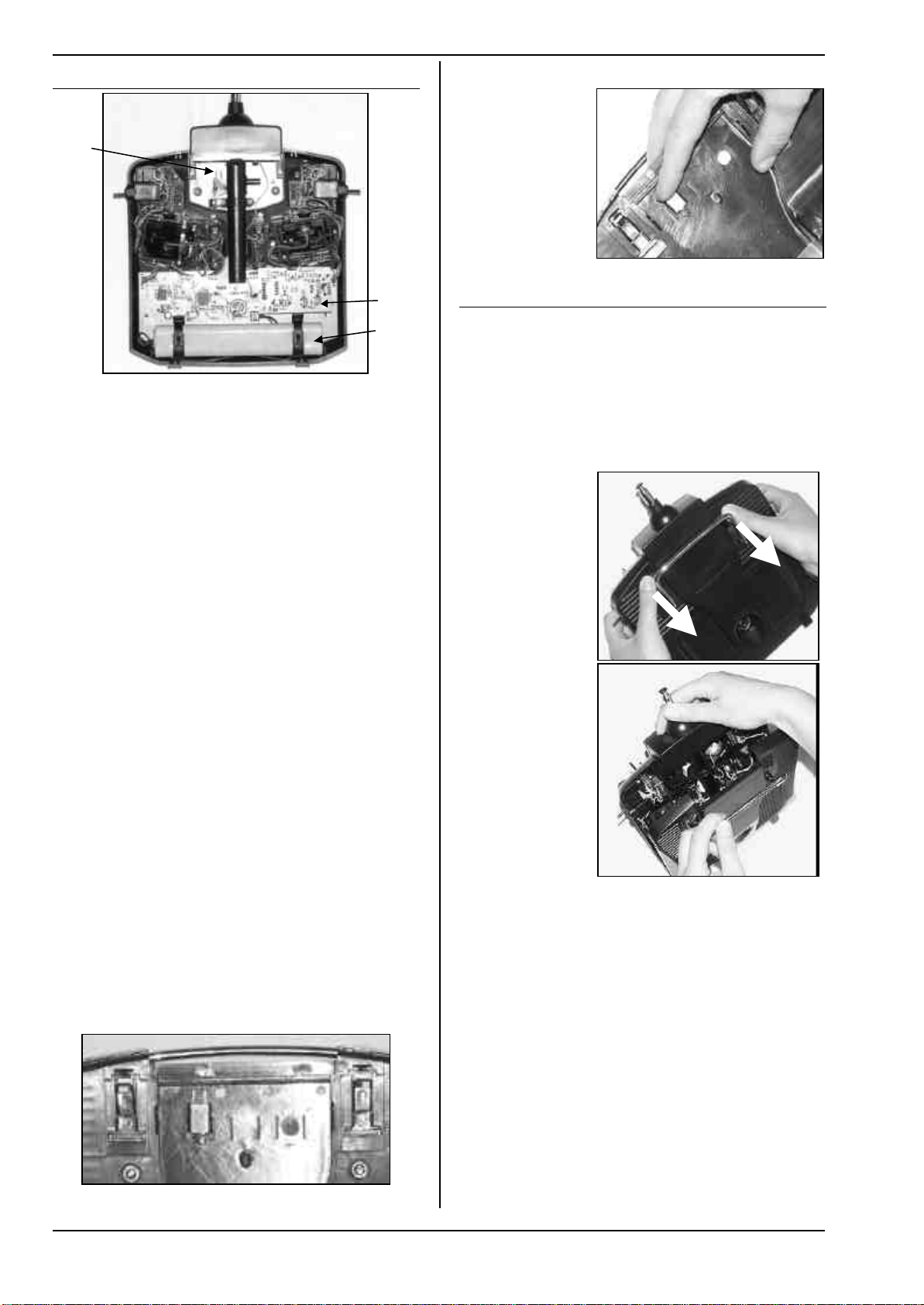
7.3. Interior de la emisora
! ¡No hacer palanca a los cristales sino deslizarlos!
¡Deslizar!
‚
•
La batería de la emisora montada de serie • está
compuesta por seis células de gran capacidad de NiMH
(hidruro de metal) del tamaño AA. Por motivos de
seguridad, las células individuales están perfectamente
colocadas y protegidas con tubo térmico.
! La batería de la emisora dispone de un fusible
térmico especial que protege la batería y
especialmente a la emisora de cortocircuitos,
polarizaciones erróneas y corriente demasiado
elevada. La emisora no dispone de fusible
propio. Por este motivo, en caso de cambio sólo
se deben utilizar packs de baterías de emisora
originales de MPX. Prestar además especial
atención a los consejos de carga de la batería de
la emisora (
Módulo HF
HF está sencillamente montado sobre la placa base y es
fácilmente accesible para p.ej. el cambio de la banda de
frecuencia (è 7.4.3). En la ROYALevo se pueden utilizar
dos módulos HF distintos:
HFM-4:
Módulo HF sencillo y económico con intercambio de
cristales para la elección del canal/frecuencia de
emisión. (¡Utilizar únicamente cristales de emisión
originales MULTIPLEX!). Ampliable con el módulo de
protección de encendido “Channel-Check“.
HFM-S:
Moderno módulo HF con sintetizador con ajuste de
canal/frecuencia de emisión por software. Ampliable
con escáner con protección de encendido.
El destornillador TORX ƒ (tamaño T6), que se
encuentra enganchado debajo de la carcasa de la
antena en la zona del display, se necesitará para p.ej. el
giro de los agregados de las palancas o para en montaje
de conmutadores adicionales en las ranuras “K“ y “P“.
En la parte interior del suelo de la carcasa se encuentran
tres sujeciones para cristales de repuesto.
èè 8.).
‚ (módulo de alta frecuencia). El módulo
7.4. Detalles mecánicos
7.4.1. Abrir/cerrar la carcasa de la emisora
! ¡Apagar la emisora antes de abrirla (peligro de
cortocircuito)!
Apertura de la carcasa de la emisora:
1. Sujetar la emisora con ambas manos y desplazar
con los pulgares los cierres de la parte trasera de la
emisora hacia abajo (dirección “OPEN”) (Imag. 1).
2. Retirar el suelo de la carcasa con cuidado (Imag. 2).
Imagen 1
Imagen 2
Cierre de la carcasa:
1. Apoyar con cuidado el suelo de la carcasa sobre el
borde de la carcasa y prestar atención para que
ambas pinzas de sujeción estén colocadas
correctamente (flecha) (Imag. 3).
2. Cerrar con cuidado el suelo de la carcasa (Imag. 4).
! Prestar atención para que no quede ningún
cable aprisionado y que la antena no se haya salido
de su guía. El suelo de la carcasa se ha de poder
colocar de forma uniforme y sin presión.
3. Desplazar hasta el tope el cierre (en sentido
opuesto a “OPEN”).
Página 8
Page 10

Imagen 3
Imagen 4
7.4.2. Recambio y cambio de posición de la antena
La antena de la emisora se queda siempre en la emisora.
Durante el transporte se ha de retraer completamente y
esconder en el interior de la emisora. Durante las tareas
de programación y ajuste, la antena se puede quedar en
esa posición. Así el módulo HF no sufre daños.
! Durante el funcionamiento, desplegar siempre
completamente la antena. Sólo de esta forma se
garantiza la máxima seguridad, nivel de emisión
y alcance.
Durante el funcionamiento, la antena se puede colocar
y fijar en una segunda posición (diagonalmente hacia
arriba a la izquierda):
1. Sacar la antena de la emisora hasta notar una cierta
resistencia (Imag. 1)
2. Superar la resistencia (tirar usando fuerza aprox. 3-5
mm más) e inclinar la antena hacia arriba a la
izquierda (imag. 2). Ya no se apreciará la resistencia.
3. Inclinar la antena hasta hacer tope
⇒ la antena se fija.
Para la recolocación de la antena habrá que primero
desbloquear la antena como descrito en el punto 2.
Manual de instrucciones
Imagen 1
Imagen 2
7.4.3. Montaje y desmontaje del módulo HF
Ninguno de los dos módulos HF (HFM-4 y HFM-S) está
protegido por la carcasa. Por ese motivo:
• No tocar la placa base y sus componentes
• No cargar mecánicamente la placa base
• Proteger los módulos HF de cargas mecánicas.
No tocar los componentes del módulo HF.
!!
No modificar los ajustes.
En caso de haber modificado la configuración de
elementos del módulo HF o se hayan deteriorado
componentes, dejar revisar y en su caso reparar y
reprogramar en un servicio técnico o en un centro
de atención al cliente.
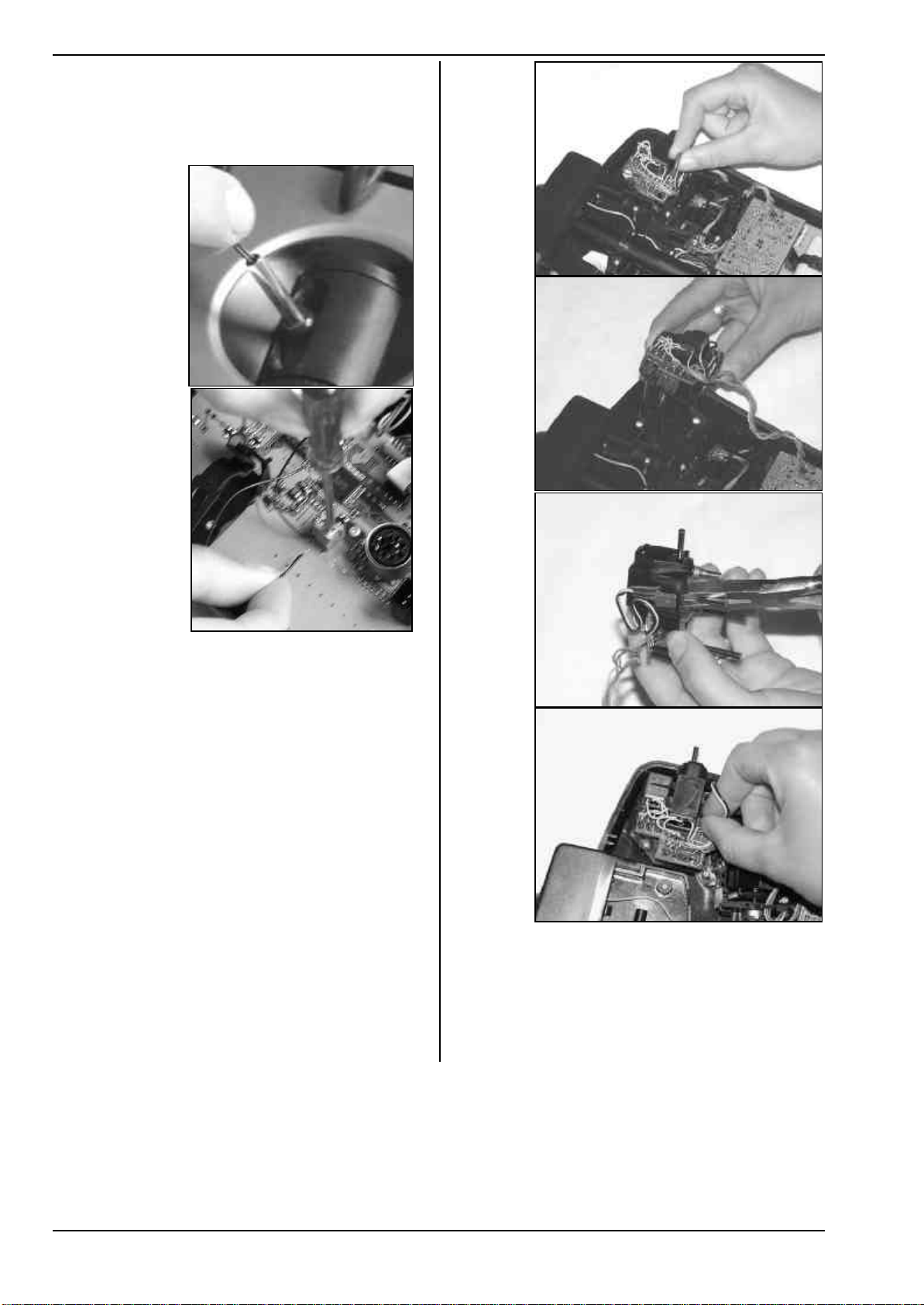
Desmontar el módulo HF:
1. ¡Apagar la emisora!
2. Abrir la emisora (è 7.4.1.)
3. ¡Apoyar la emisora boca abajo sobre una superficie
blanda para no dañar las palancas y conmutadores!
4. Sujetar el módulo HF con los dedos pulgares e
índices por las cuatro esquinas y levantar con
cuidado uniformemente (ver imagen inferior).
Montaje del módulo HF:
Sujetar el módulo como descrito. Prestar atención a que
el módulo no se coloque mal sobre los contactos.
Presionar finalmente de forma uniforme y con cuidado.
! Comprobar regularmente la antena (contacto).
Los problemas de contacto de las antenas
telescópicas disminuyen la capacidad de emisión
y así el alcance. El manejo deja de ser seguro.
Reemplazar necesariamente las antenas que
bailen, estén abolladas o tengan juego debido al
uso.
En caso de que la antena se deteriorase, se puede
reemplazar fácilmente una vez retirado el suelo de la
carcasa, desplazando la antena hacia atrás por la guía
de la antena (antena de recambio ROYALevo # 89 3002).
Evitar en todo caso el contacto con los componentes
electrónicos durante el cambio del módulo HF. El
almacenaje del módulo fuera de la emisora ha de ser
Página 9
Page 11

ROYAL evo
za"
alante/atrás
ción
encastrado/freno
freno
en un lugar a salvo de suciedad y humedad y
protegido contra golpes y vibraciones.
7.4.4. Cambiar el cristal de emisión (sólo en HFM-4)
Retirar el cristal del módulo HF tirando de la parte de
plástico habiendo antes apagado la emisora. Al insertar
el cristal, prestar atención a que no se cargue
mecánicamente sobre el y los contactos no se doblen.
Utilizar únicamente cristales originales MULTIPLEX que
se adapten a la banda de frecuencia del módulo HF. De
otra manera, no se garantiza un manejo seguro. Los
cristales de emisión MULTIPLEX disponen de un
envoltorio azul transparente y llevan etiquetada la letra
“S“ o “Tx“
! Los cristales son componentes muy sensibles a
los golpes y a la vibración y forman parte activa
en el correcto funcionamiento del sistema de RC.
Por ello, no dejar caer, no cargar mecánicamente
(no insertar violentamente en el enchufe) y
almacenar cuidadosamente.
7.4.5. Cambiar la batería de la emisora
1. ¡Apagar la emisora!
2. Desplazar y desplegar los pestillos de las sujeciones
de plástico de la batería tirando hacia ella (Imag. 1).
3. Retirar la batería y desconectar el cable de la batería
del conector de la placa base (Imag. 2).
Imagen 1
Imagen 2
Al colocar la batería, prestar atención a que el cable de
la batería se encuentre bien posicionado y no haya
posibilidad de que quede aprisionado por la carcasa.
Aviso:
Los datos de los modelos almacenados no se borran al
cambiar la batería.
Página 10
(4) "Dure
7.4.6. Desactivar la neutralización de las palancas y
activar el escalonado o, en su caso, el roce
Las emisoras ROYALevo se entregan de serie con las
palancas neutralizadas. El muelle para el
funcionamiento escalonado o desplazado está montado
en ambos agregados de las palancas y se activa
fácilmente de la siguiente manera:
¡Apagar y abrir la emisora!
1. Girar el tornillo TORX de la correspondiente palanca
de neutralización en sentido de las agujas del reloj
(1) con el destornillador TORX (debajo de la guía de
la antena enganchado en la zona del display) hasta
que la neutralización de la palanca de haya
desactivado por completo. ¡No enroscar
demasiado! ¡Nunca desmontar el muelle o la
palanca de neutralización!
2. Si se desea utilizar la palanca con freno (roce), se ha
de desplazar el muelle. El tornillo (2) se ha de
enroscar completamente. El otro tornillo (3) sirve
para determinar la dureza del encastrado/frenado.
Cuanto más enroscado esté el tornillo, más duro
estará el encastrado/freno.
Si se desea, se pueden montar ambos muelles a una
palanca para conseguir una mezcla entre encastrado y
freno (roce) y así una sensación óptima de manejo.
(2) Muelle sobre encastrado o
(1) Neutraliza-
retorno
der./izq.
(3) Dureza de
7.4.7. Ajustar la "dureza" de la palanca
Para ser exactos, la “dureza” es la fuerza de retorno del
muelle de neutralización de un eje de palanca.
En la ROYALevo se puede ajustar la “dureza” para cada
uno de los 4 ejes de las palancas. La ilustración superior
muestra donde se ajusta. Si se enroscan los tornillos (4)
en el sentido de las agujas del reloj, el eje de palanca
correspondiente se endurece.
7.4.8. Girar los agregados de las palancas
Los agregados de las palancas de la ROYALevo se
pueden, y esto es único, girar para adecuarse a la
posición ergonómica óptima del piloto. Esto es
especialmente ventajoso durante el funcionamiento
como emisora de mano durante el cual los pulgares
descansan sobre las palancas cortas. El “eje de trabajo
natural” no se encuentra entonces exactamente en
dirección vertical y en su caso horizontal a la emisora
sino ligeramente en diagonal. Ambos agregados de
palanca se pueden girar en aprox. 15° sin escalones.
(4) "Dureza"
retorno
Page 12
Manual de instrucciones
Imagen 1
1. Soltar con el destornillador (debajo de la guía de la
antena enganchado en la zona del display) los tres
tornillos TORX del agregado de palanca
correspondiente hasta que se pueda girar (Imag. 1).
2. Girar los agregados hasta el punto deseado y volver
a apretar los tornillos. No apretar demasiado o se
deterioran los casquillos (Imag 2).
Imagen 1
Imagen 2
Imagen 2
7.4.10. Montaje del agarre de palanca con botón
Durante el uso de la emisora con los agarres largos
resulta especialmente útil el agarre largo con
botón/conmutador (# 7 5303) para la libre asignación
de funciones importantes. De esta forma se consigue un
accionamiento fácil, rápido y seguro sin necesidad de
soltar la palanca.
Imagen 1
7.4.9. Modificar o cambiar el agarre de la palanca
A la ROYALevo le acompañan de serie varias parejas de
agarres de palancas en tres tamaños diferentes. Éstos
son fácilmente intercambiables y modificables en altura
o giro:
1. Colocar la emisora sobre una superficie plana.
2. Sujetar el agarre de la palanca con una mano (Imag.
1).
3. Con la otra mano, desenroscar la tuerca (sentido de
La tecla superior tiene función de botón (p.ej. oprimido
=ON, sin oprimir=OFF). Las dos teclas laterales forman
en si un conmutador (p.ej. tecla 1 = ON, tecla 2 = OFF).
El montaje es sencillo y rápido y no requiere soldadura:
1. Apagar la emisora y desmontar el agarre de la
las agujas del reloj) (Imag. 1).
La varilla de la palanca es lisa. Ahora se puede modificar
2. Insertar los dos cables de conexión del agarre por la
la altura y girar el agarre de la palanca. Al cambiar los
agarres de las palancas hay que desenroscar las tuercas
de los agarres para ser enroscados en los nuevos
(Imag. 2).
Antes de realizar el montaje de los agarres, asegurarse
que la varilla de la palanca esté limpia y libre de
grasa/aceite. Sólo así se garantiza una correcta sujeción
3. Conectar los cables a los enchufes dispuestos en el
del agarre de la palanca.
Página 11
Imagen 2
palanca.
varilla de la palanca (imag. 1) y volver a montar el
agarre de la palanca con se describe en el cap.7.4.9.
Consejo:
La inserción de los cables se realiza fácilmente con
las terminaciones de los cables ligeramente
curvadas y sujetando la palanca por una esquina.
agregado de la palanca. Prestar atención a que los
cables tengan espacio suficiente para el
movimiento, nunca estén en tensión o puedan ser
aprisionados.
Page 13
ROYAL evo
4. Las terminaciones peladas de los cables se fijarán
con bridas roscadas (se requiere pequeño
destornillador plano) por la parte de la batería de la
emisora a la placa base en el enchufe previsto. Para
ello habrá que desmontar la batería de la emisora.
La polaridad no influye durante la conexión.
Imagen 1
Imag. 1
Imagen 2
7.4.11. Montaje de los conmutadores “P“ y “K“
En caso necesario se pueden montar los conmutadores
de dos posiciones en las ranuras “P“ y “K“. Para ello se
tendrán que desmontar las piezas de las esquinas
correspondientes:
1. Soltar los cuarto tornillos TORX del agregado de la
palanca correspondiente con el destornillador
TORX (debajo de la guía de la antena enganchado
en la zona del display) (Imag. 1).
2. Retirar cuidadosamente de la emisora la pieza
esquinada. Los conmutadores deberían estar en
posición central. Al sacarla se soltará el botón
giratorio del regulador digital 3D (Imag. 2).
3. Oprimir con ayuda de un destornillador pequeño la
tapa ciega hacia fuera.
4. En conmutador se fija con la ayuda de la tuerca
incluida (Imag. 3). Prestar atención a la correcta
dirección de montaje:
cable amarillo en dirección a la batería
5. Montar de nuevo la pieza esquinada, atornillar y
volver a colocar el botón giratorio del regulador
digital 3D (observar posición de montaje, muesca
interior). El conector se enchufa directamente a la
micro-conexión de la unidad (Imag. 4).
Imag. 2
Imag. 3
Imag. 4
Página 12
Page 14
8. La batería de la emisora
La alimentación eléctrica de la ROYALevo corre a cargo
del paquete de baterías de alta calidad de 6 células
NiMH (hidruro de metal) de tamaño (AA). Las células
NiMH ofrecen, en relación a las NiCd (níquel cadmio),
una mejor densidad energética (capacidad/peso) y con
ello una autonomía superior con el mismo peso aunque
requieren un manejo más cuidadoso, sobre todo
durante la carga.
8.1. Gestión de la batería en la ROYALevo
8.1.1. Esto ya existía
Indicación de tensión
Casi todas las emisoras modernas indican mediante un
número o de forma gráfica la tensión de la batería.
Alarma de batería
Cuando la tensión de la batería baja de un nivel límite se
activa una alarma acústica. En muchas emisoras, este
nivel límite se puede ajustar.
Estas dos funciones forman parte de la ROYALevo.
(ajustar el límite de alarma è13.1.3.)
8.1.2. Esto es lo NUEVO
La gestión de la batería de la ROYALevo supervisa el
estado de la carga de la batería de la emisora en todo
momento incluso estando apagada.
Concretamente sucede lo siguiente:
a. durante la carga
Cuando se está cargando la emisora por el
conector de carga con más de aprox. 50 mA, la
electrónica de la emisora mide constantemente la
corriente de carga y calcula la carga que ha sido
enviada a la batería. Este dato queda guardado en
la emisora.
b. durante el funcionamiento
Incluso durante el uso se sigue midiendo
constantemente la corriente, calculando la carga
utilizada y restándosela a la carga disponible. La
carga disponible de la batería es indicada en el
panel de estado 4 (è9.6).
Además de esto, se calcula e indica la autonomía
restante
funcionamiento previsto restante con el consumo
energético actual. ¡Este valor es muy variable y sólo
es orientativo!
c. con la emisora apagada
Incluso si la emisora se encuentra sin utilizar, ésta
pierde cada día apox. un 1,5% de su carga debido a
la descarga automática. El gestor de la batería
tiene en cuenta la descarga automática y corrige el
nivel de carga disponible.
disponible. Este valor indica el tiempo de
Manual de instrucciones
8.1.3. Prestar atención a lo siguiente
Para que el gestor de la batería muestre unos datos lo
más cercanos a la “realidad” posible, se deberá atender
a lo siguiente:
a. Corregir la carga de la batería
El gestor de la batería parte del supuesto que en la
emisora haya montada una batería de 1500 mAh.
Una vez la batería esté formada (más de cinco
ciclos de carga) se pueden corregir las variaciones
de la capacidad.
Menú: L , parámetro de la emisora: carga de
la bateria
Desde aquí se puede ajustar el valor aportado por
el cargador (en pasos de 50 mAh).
Cuando la tensión de carga caiga por debajo
!!
de 6,5 V, se mostrará “0 mAh” como carga
restante.
b. Cargar la batería con el cargador apropiado (èè
8.4.) por el enchufe de carga
Sólo mediante la carga por el enchufe se habilita a
la electrónica de la emisora a captar la carga.
c. durante la carga normal con corriente constante
(1/10 C)
En caso de que la batería permanezca durante más
tiempo en carga que el del resultado de la fórmula
del apartado 8.4. el gestor de la batería seguirá
mostrando una carga de 1500 mAh.
8.2. Brevemente lo más importante
• 6 células, 1500 mAh, NiMH (hidruro de metal)
• Fusible térmico montado (auto-reparable)
• Carga normal (0,1 C = 150 mA) 12 horas
• Carga rápida (1 C =1,5 A) = corriente máxima de
carga con desconexión automática
• Evitar la baja carga (< 1V/célula)
• Durante almacenaje prolongado (más de 4
semanas) evitar temperaturas superiores a 30°C
8.3. Consejos de seguridad
! La batería de la emisora se encarga de la
alimentación eléctrica de la emisora y es parte
importante para el funcionamiento seguro. Por
este motivo, prestar especial atención a los
siguientes consejos de carga y cuidado de la
batería.
! La batería de la emisora está equipada con un
fusible térmico auto-reparable que protege a la
batería y a la emisora contra cortocircuitos,
cambios de polaridad y sobrecarga. ¡La electrónica
de la emisora no dispone de fusible adicional! ¡Por
ese motivo únicamente se deben montar en la
emisora baterías originales MULTIPLEX!!
! Otros consejos de seguridad
• Las baterías no son un juguete y hay que
• Comprobar el estado de la batería en cada uso. No
La carga de la batería y el tiempo
!!
defuncionamiento restante se muestran sólo a
modo de información
fluctuaciones condicionadas al manejo ejemplar y
al cuidado de la batería.
Página 13
. Pueden aparecer
• No calentar, quemar, abrir, hacer cortocircuito,
mantenerlas fuera del alcance de los niños.
seguir utilizando baterías dañadas o defectuosas.
cargar o descargar con corrientes excesivas, cargar
demasiado/demasiado poco ni cargar las baterías
con los polos cambiados.
Page 15
ROYAL evo
• Colocar las baterías durante la carga sobre una
superficie resistente al calor, no inflamable, no
conductora y nunca dejar sin vigilancia.
• No realizar modificaciones en las baterías.
• Con un uso inadecuado existe el peligro de
inflamación, explosión, corrosión y quemado.
Medios de extinción apropiados: agua, CO2, arena
• ¡Los escapes de electrolitos son corrosivos!
No poner en contacto con la piel o los ojos.
En caso necesario aclarar con abundante agua y
llamar a un médico.
8.4. Carga de la batería
¡No conectar nunca el cargador sin haber batería!
!!
Pueden producirse altas tensiones de salida si no
está la batería conectada. Estas tensiones pueden
dañar la emisora.
Cargar con cargadores de corriente o cargadores
!
de 12 V para un máximo de 8 células
La batería se puede dejar dentro de la emisora
durante la carga. El cargador se conecta a través
del enchufe multifunción situado en la parte
inferior de la emisora (è 7.2.). Utilizar únicamente
cables de carga originales de MULTIPLEX (p.ej. el
cable cargador con conectores de banana
# 8 6020). Para más información sobre cargadores
y cables de carga, consultar el catálogo principal
MULTIPLEX.
Carga con cargadores de 12V
!!
para más de 8 células
La batería no se debe cargar por el enchufe de
carga. Separar la batería de la electrónica de la
emisora y utilizar el cable directo de carga # 8
6021.
El gestor de la batería de la ROYALevo sólo puede
trabajar correctamente si la electrónica está
constantemente (también con la emisora apagada)
conectada a la batería y así poder medir los flujos
que entran (carga) o salen (uso) de la emisora. Los
cargadores para más de ocho células disponen
como regla general de un transformador de
tensión que puede generar altas tensiones. Estas
sobrecargas pueden dañar la electrónica de la
emisora.
La productividad y capacidad total
la alcanzan las baterías NiMH después de algunos ciclos
de carga/descarga (~5 ciclos). Los primeros ciclos de
carga/descarga se deberían realizar con 0,1 C (150 mA).
Sólo entonces comenzar a realizar cargas rápidas.
¿Que significa la C en términos de corriente de carga?
C el la corriente de carga que adquiere una batería
cuando recibe en una hora el 100% de su capacidad
nominal de carga. Para la batería de 1500mAh de la
ROYALevo una corriente de 1500 mA. Si se utilizase esta
corriente para la carga, se estaría hablando de carga 1C.
Este valor se obtiene de la capacidad nominal en mAh
(o Ah), si simplemente se elimina la “h” (las horas).
Carga normal
significa que la batería se está cargando con corrientes
de entre 0,05 y 0,2 C (75 mA hasta 300 mA).
El tiempo de carga se calcula de la siguiente manera:
][ apacidad
][ carga de tiempo
h =
mAhc
][ carga de orriente
mAc
Carga rápida
significa que la batería se está cargando con corrientes
de entre 0,5 y 1 C (750 mA hasta 1,5 A). El tiempo de
carga se aplica mediante la desconexión automática.
¡No está permitida la carga de tiempo
!!
programado!
Importante para la carga rápida:
!!
El cargador debe estar preparado para baterías
NiMH.
(Sensibilidad de desconexión Delta-Peak<
5mV/célula o desconexión por temperatura a
>0,8°C/min)
Carga de conservación
significa que la batería se está cargando con corrientes
de entre 0,03 C y 0,05 C (45 hasta 75 mA). Los
cargadores automáticos pasan a este modo una vez
completada la carga. La carga de conservación puede
durar un máximo de 20 horas.
Así se carga correctamente:
1. Encender la emisora
2. Utilizar un cargador de baterías NiMH (ver columna
izq., apartado 8.4.)
3. Controlar la polaridad:
conector rojo = polo positivo (+)
conector azul/negro = polo negativo (-)
¡La batería se puede deteriorar con polaridad
cambiada!
(recalentamiento, expulsión de electrolitos
corrosivos, explosión de la célula)
4. Conectar el cable de carga a la emisora
5. Seleccionar la corriente de carga (max. 1,5 A) o
ajustar una vez iniciado el proceso de carga
!!
los cargadores rápidos!
En caso de que el cargador rápido cancele el
proceso de carga antes de tiempo, reducir la
corriente de carga y comenzar de nuevo.
6. En caso de que durante el proceso de carga se
caliente la batería de tal forma que no se pueda
tocar, suspender inmediatamente el proceso de
carga.
7. Una vez acabada la carga, desconectar primero la
emisora/batería del cargador y después el cargador
de la fuente de alimentación.
8. Si es necesario, corregir después de la carga la carga
indicada del gestor de la batería (8.1.3. a.).
Aviso:
Tanto las baterías como otros elementos técnicos están
expuestos a constantes evoluciones técnicas. Por este
motivo nos reservamos el derecho de ir actualizando las
baterías incluidas cada cierto tiempo.
y conectar el cable de carga
¡Utilizar la selección manual de corriente con
8.5. Cuidado y almacenaje de la batería
Almacenar las baterías NiMH siempre completamente
cargadas
Almacenar las baterías NiMH a temperaturas entre 0°C y
30°C, en un lugar seco y protegido de los rayos de sol.
Recargar las baterías NiMH almacenadas cada 3 meses.
Con ello se regula la descarga automática y se provoca
una descarga profunda.
Formar las baterías que lleven mucho tiempo
almacenadas (varios ciclos de carga/descarga). La
capacidad de uso se puede modificar tras un
almacenaje prolongado.
. Así se provoca una descarga profunda.
Página 14
Page 16
8.6. Reciclado
Las células NiMH no contienen cadmio contaminante.
Aun así, no arrojar la batería al cubo de basura habitual.
Dejar las baterías en un depósito de baterías apropiado.
Para ello, las baterías han de estar descargadas y
protegidas contra cortocircuito (lámina de plástico).
9. Puesta en funcionamiento
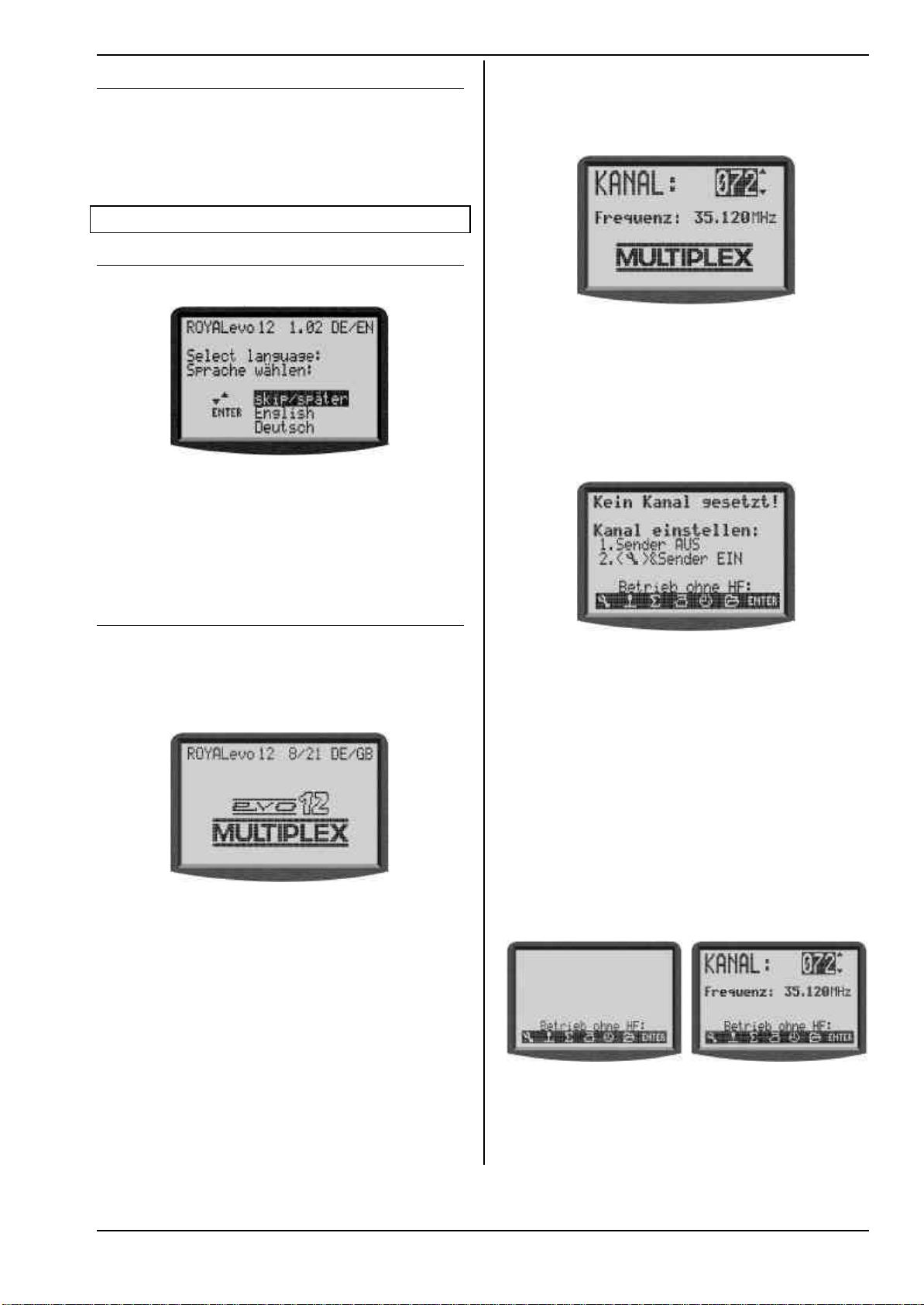
9.1. El primer encendido
Al encender por primera vez la emisora, aparecerá la
siguiente pantalla:
Seleccionar mediante las teclas “s“ (ARRIBA) y “t“
(ABAJO) el idioma deseado y confirmarlo con la
pulsación de la tecla “ENTER”. El idioma se puede
modificar en cualquier momento (è 13.5.2). Los textos
que se insertan libremente p.ej. identificación de
mezclas libres, de las asignaciones o nombres de
modelos no serán modificados durante el cambio de
idioma.
Manual de instrucciones
9.2.2. Encendido con módulo HF con sintetizador
HFM-S
Después de la pantalla de inicio (è 9.2.) se muestra
brevemente el canal seleccionado y su frecuencia de
emisión correspondiente:
A continuación, aparece la última pantalla de estado
utilizada. En caso de estar todo correcto, el módulo HF
con sintetizador es activado inmediatamente y la señal
HF (alta frecuencia) comienza a ser emitida. El LED
comienza a parpadear, la pantalla cambia a la última
pantalla de estado activada, la emisora está preparada.
Al encender la emisora por primera vez con módulo HF
con sintetizador o después de su cambio se muestra, tas
la pantalla de inicio una información sobre como se
selecciona el canal:
9.2. El encendido
Una vez encendida la emisora, independientemente de
la existencia de un módulo HF, aparecerá brevemente la
imagen inferior en la pantalla mostrando informaciones
acerca del tipo de emisora, versión del software y los
idiomas de los textos del display seleccionables en ese
momento:
Si no hubiese instalado ningún módulo HF aparecerá
brevemente el siguiente mensaje:
”Aviso: ¡No hay HF!“
9.2.1. Encendido con módulo HF de cristal HFM-4
Tras la pantalla de información de bienvenida (è 9.2.)
aparece la última pantalla de estado utilizada (è 9.6.).
En caso de estar todo correcto, el módulo HF de cristal
será activado inmediatamente y la señal HF (alta
frecuencia) comienza a ser emitida. El LED comienza a
parpadear, la pantalla cambia a la última pantalla de
estado activada, la emisora está preparada.
La selección de canal de un módulo HF con sintetizador
HFM-S se describe en el capítulo 9.4. .
9.2.3. Encendido sin emisión HF
Tanto con el módulo HF de cristal HFM-4 así como con
el módulo con sintetizador HFM-S es posible encender
la emisora con el módulo instalado sin necesidad de
realizar emisión HF. De esta forma no se utiliza ningún
canal y se puede programar la emisora con un consumo
de energía muy bajo.
Encender la emisora con el botón de herramientas L
pulsado
⇒ Ahora estamos en el menú de conexión,
HF se queda apagado (⇒ LED se ilumina
permanentemente)
Aparece la siguiente pantalla:
Módulo HF de cristal
HFM-4
Pulsando cualquier botón de acceso a menús o el botón
“ENTER” se llega a la última pantalla de estado activada.
Módulo HF con sintetizador
HFM-S
!! Aviso:
No habrá emisión HF hasta que la emisora se vuelva a
encender.
Página 15
Page 17
ROYAL evo
9.3. Verificaciones de seguridad al
encender
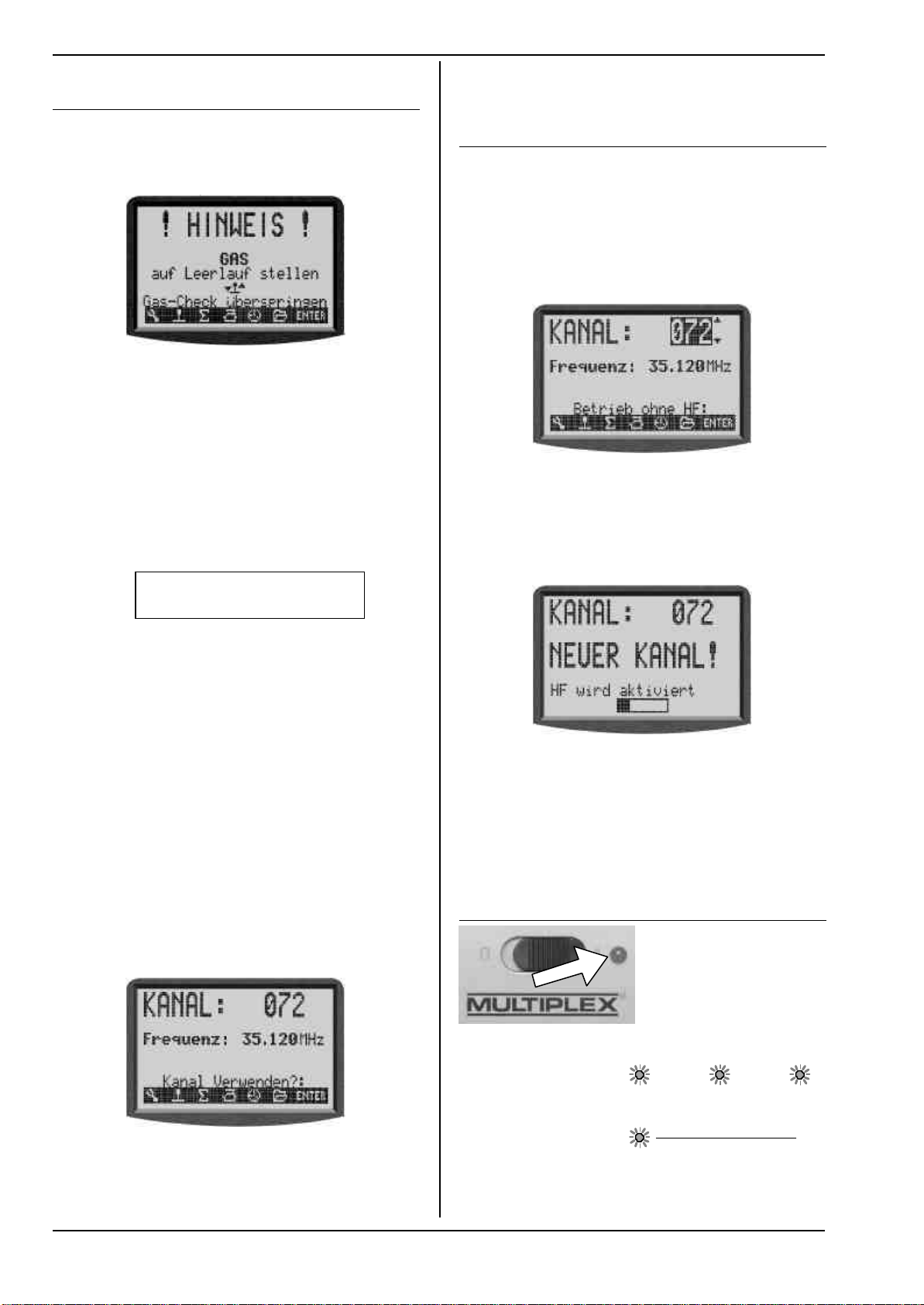
9.3.1. Gas-Check
Si el parámetro Gas-Check del menú L Emisora se
encuentra en ON (è 13.1.6.), puede aparecer el
siguiente mensaje:
La emisora se activa inmediatamente y la emisión HF
comienza.
Por motivos de seguridad, el Gas se mantiene en
!!
ralentí, hasta que el transmisor de gas (heli:
limitador de gas) se lleve a la posición de punto
muerto (heli: gas al mínimo).
El icono de debajo de la información indica como
se está manejando el gas. El la imagen superior es
por medio de la palanca.
Si está activado el Gas-NOT-apagado, la emisora se
pone en funcionamiento y muestra por un periodo de
aprox. cuatro segundos la información:
GasGas--NONOTT--OFF aOFF acctivotivo
H>
La verificación de seguridad “HF-Check“ se puede
activar o desactivar en cualquier momento (è 13.1.7.).
9.4. Selección de canal con el módulo HF
con sintetizador HFM-S
En el módulo HF con sintetizador HMF-S, la selección de
canal se realiza de forma muy sencilla, cómoda y segura:
1. Encender la emisora con el botón de
herramientas
⇒ Ahora estamos en el menú de selección de canal,
no existe emisión HF (LED se ilumina
constantemente)
Se muestra la siguiente información:
Seleccionar el canal deseado utilizando las teclas “s“
(arriba) / “t“(abajo) o con uno de los dos reguladores
digitales 3D. Debajo del número del canal se muestra la
frecuencia de emisión correspondiente.
2. Apagar y encender la emisora
(NO pulsar el botón de herramientas)
Se muestra la siguiente pantalla:
L pulsado
También en este caso se indica debajo de la
información el conmutador correspondiente.
La verificación de seguridad “Gas-Check“ se puede
activar o desactivar en cualquier momento (è 13.1.6.).
' ¡Consejo! Si las notificaciones no desaparecen
Si por equivocación se han asignado a gas o gas-NOTapagado a elementos de manejo que no estén
instalados o estén defectuosos, se puede evitar la
verificación de seguridad pulsando cualquier tecla de
menú o la tecla “ENTER”.
9.3.2. Comprobación HF con módulo-sintetizador
Si la emisora ROYALevo está equipada con un módulo
HF con sintetizador, se puede activar una verificación de
seguridad adicional (HF-Check). Únicamente cuando se
confirma mediante una tecla de menú o “ENTER” la
emisora comienza a funcionar en el canal indicado.
Si el HF-Check = activado, aparece, una vez encendida la
emisora con módulo HF con sintetizador HFM-S la
siguiente pantalla:
Por motivos de seguridad, la emisión HF no comienza
hasta que el canal/frecuencia de emisión sea
confirmado mediante la pulsación de una tecla de
menú o “ENTER“. Sólo entonces aparece la última
pantalla de estado activa y se inicia la emisión HF.
Se muestra como información el canal seleccionado. La
emisión HF con el canal nuevo seleccionado queda
desactivada (LED se ilumina constantemente), hasta
que transcurra el tiempo de espera (barra). Durante este
tiempo existe la posibilidad de apagar la emisora antes
de emitir en caso de p.ej. haber introducido un canal
erróneo. Una vez transcurra el tiempo de espera,
aparecerá la última pantalla de estado utilizada
El LED comienza a parpadear, la emisora está preparada.
9.5. El indicador de estado HF (LED rojo)
El LED rojo (diodo
luminiscente) indica
durante todo el tiempo
que la emisora esté
encendida el estado actual
del módulo HF, lo que
significa si se está emitiendo una señal HF (señal de alta
frecuencia) o si no.
Emisión HF activada: 2 seg 2 seg ...
El LED se ilumina brevemente en periodos de aprox. 2
seg e indica que la emisora está preparada.
Emisión HF desactivada:
El LED se ilumina constantemente.
Página 16
Page 18
La electrónica de la emisora reconoce, por el consumo
del módulo HF si se está emitiendo alta frecuencia.
Cuando el consumo eléctrico cae por debajo de un
mínimo, la electrónica “sabe” que no se está emitiendo
la señal o se está haciendo a muy baja intensidad (¡no se
garantiza un funcionamiento correcto!). Este método de
comprobación es muy útil ya que también se pueden
descubrir otros defectos y errores:
• ¿Está montado el módulo HF?
• ¿Está correctamente montado el módulo de HF a la
emisora (fallo de contacto)?
• ¿Funciona correctamente el módulo HF?
• ¿Hay un cristal montado y funciona correctamente?
(sólo en el módulo HF con cristal HFM-4)
• ¿Está la antena de emisión en su sitio y es correcto
el contacto?
Si se usa la ROYALevo como emisora de alumno o en el
modo de diagnóstico tampoco se realiza la emisión HF
⇒ LED se ilumina permanentemente.
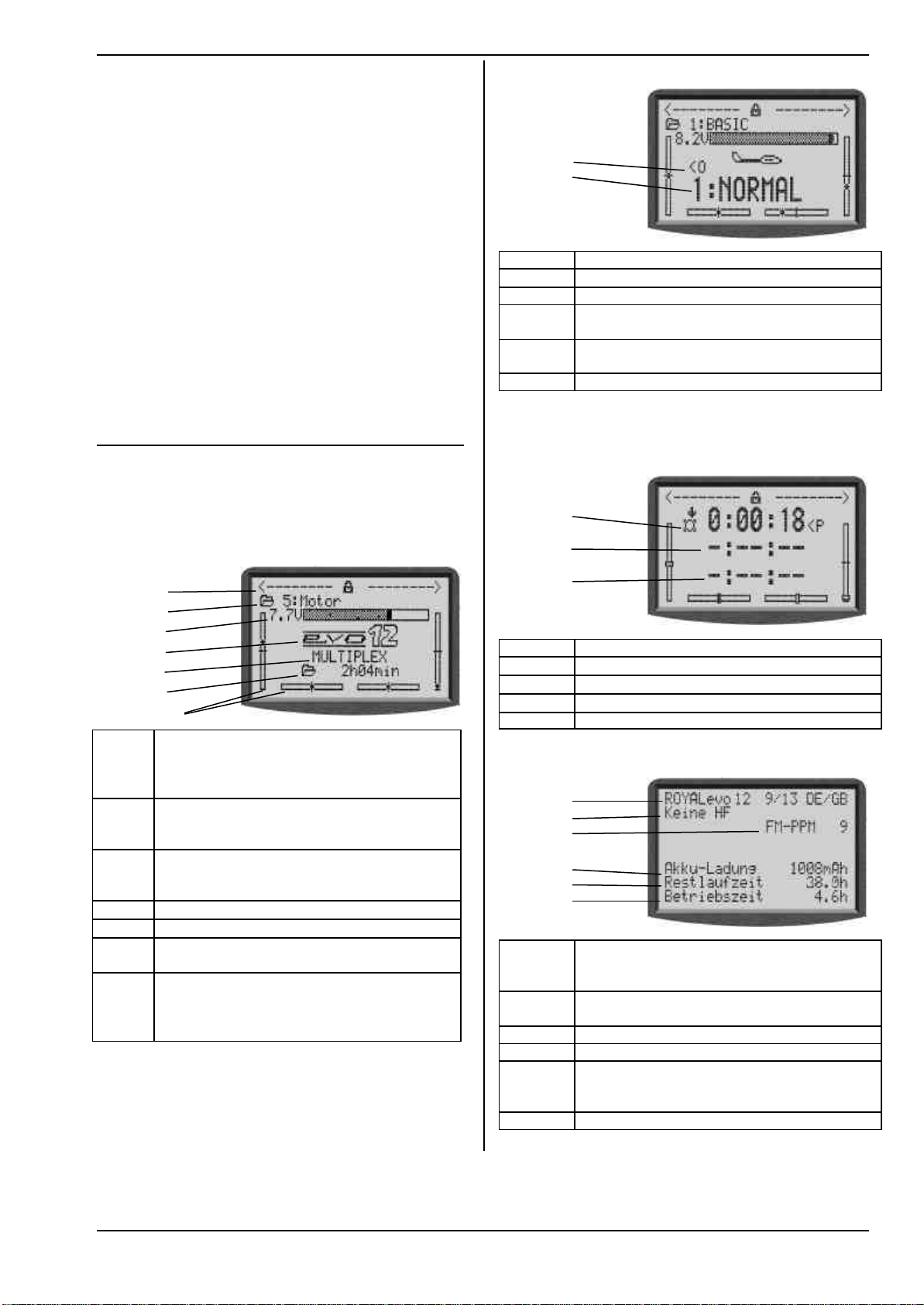
9.6. Las pantallas de estado
En total hay cuatro pantallas de estado diferentes
disponibles. Se puede cambiar de una pantalla a otra
mediante la pulsación de las teclas ”s“ o “t“.
Al conectar la emisora siempre se activará la última
pantalla utilizada.
Pantalla de estado 1
1
2
3
4
5
6
Barra
Fila 1 Estado de los reguladores digitales 3D.
A los reguladores digitales 3D se pueden
asignar multitud de parámetros de ajuste que
estarían directamente accesibles (è 10.2.2.).
Fila 2 Memoria de modelo activada con
Número de memoria (1): nombre del modelo
(BASIC)
Fila 3 Tensión operacional actual de la batería de la
emisora en forma numérica y mediante una
barra de estado
Fila 4 Versión: ROYALevo 9 o ROYALevo 12
Fila 5
Fila 6 Tiempo de uso de la memoria de modelo
Barra Las cuatro barras ubicadas en el lateral y la
Nombre del propietario (è 13.5.3)
actual (è 17.1)
parte baja de la pantalla muestran las
posiciones de trimado actuales de los cuatro
ejes de control principales/palancas (è 11.4)
Manual de instrucciones
Pantalla de estado
1
2
3
4
5
Fila 1 Estado de los reguladores digitales 3D (arriba)
Fila 2 Memoria de modelo activada (ver arriba)
Fila 3 Tensión de carga de la batería (ver arriba)
Fila 4 Conmutador con el que se cambia la fase de
vuelo activada (è 18.4)
Fila 5 Fase de vuelo activada con
Número (1): nombre (NORMAL)
Barra Posición actual de trimado (ver arriba)
Pantalla de estado 3 (cronómetro)
Sólo se muestran los cronómetros a los que se les haya
asignado un conmutador (en el ejemplo P).
1
2
3
4
Fila 1 Estado de los reguladores digitales 3D (arriba)
Fila 2
Fila 3
Fila 4
Barra Posición actual del trimado (ver arriba)
Cronómetro de marco (è 17.2)
Cronómetro de suma (è 17.3)
Cronómetro de intervalo (è17.4)
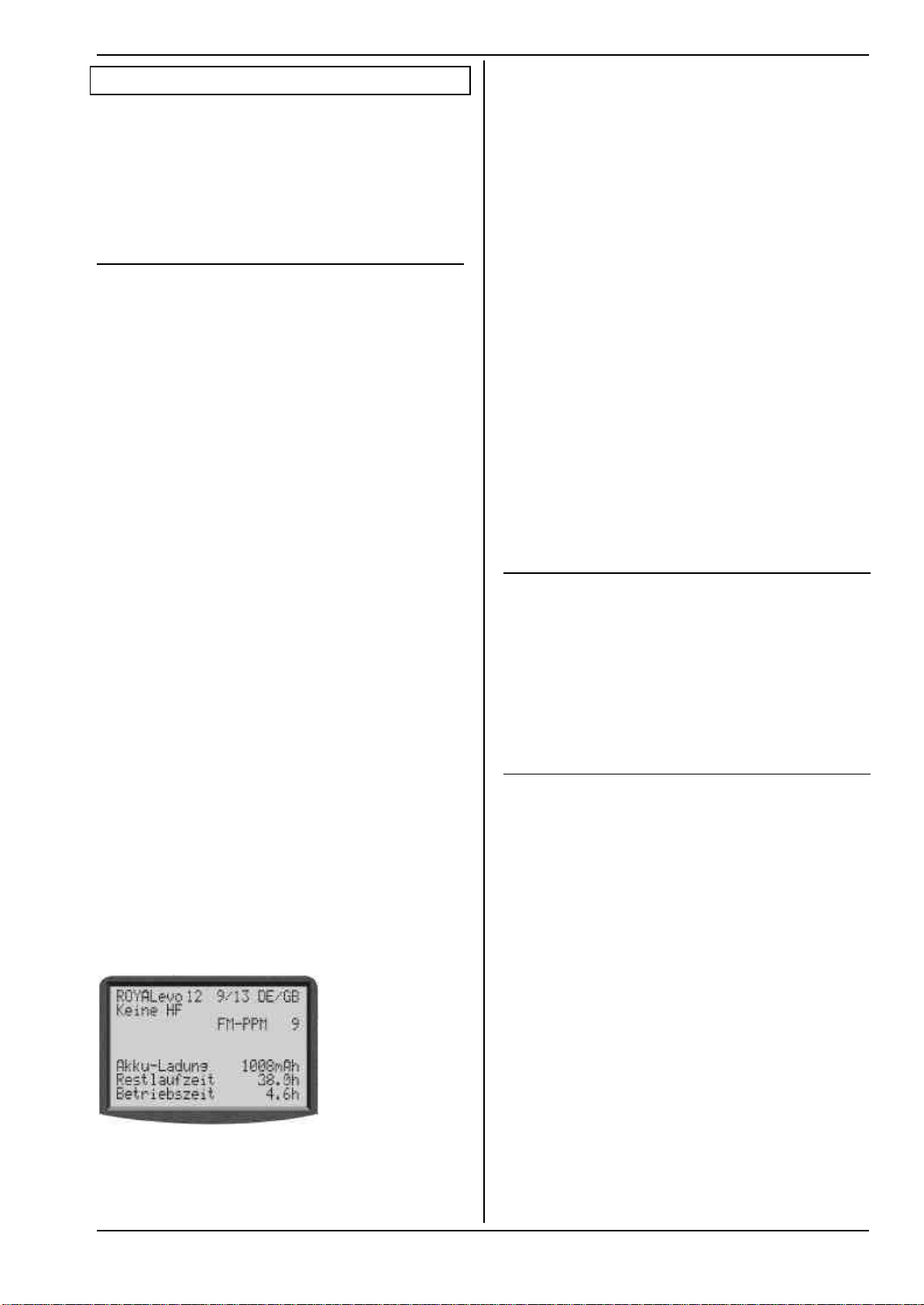
Pantalla de estado 4 (información del sistema)
1
2
3
4
5
6
Fila 1 Versión (ROYALevo 9 o 12),
Versión del software (p.ej. 9/23),
paquete de idiomas cargado (p.ej. DE/GB)
Fila 2 Sintetizador: número de canal y frecuencia
sino tipo de módulo HF (HFM-4) o "no HF"
Fila 3 Tipo de transmisión (FM-PPM 9)
Fila 4 Carga de la batería disponible
Fila 5 Tiempo aproximado de funcionamiento de la
emisora con la carga disponible y el consumo
actual
Fila 6 Tiempo total de uso
2 (fases de vuelo)
Página 17
Page 19

ROYAL evo
arriba abajo
10. El concepto de manejo
La ROYALevo dispone de un sencillo y novedoso
concepto de manejo. El manejo se realiza mediante el
teclado y los dos reguladores digitales 3D.
Los botones llevan directamente a los menús
principales. Con los reguladores digitales 3D se pueden
seleccionar puntos del menú y realizar cambios en los
valores.
10.1. El teclado
10.1.1. Teclas de acceso directo a menús (fila 1)
La programación (o la mejora de la configuración) de la
emisora se realiza mediante el teclado.
Los seis botones de la primera fila son teclas de acceso
directo a los menús. Pulsando el botón se accede
directamente a uno de los seis menús principales, los
cuales lleva a sus correspondientes submenús. Los
botones están identificados con su icono
correspondiente:
I
10.1.2. Teclas de trabajo (fila 2)
Las cinco teclas de trabajo, que están descritas en la
siguiente tabla tienen diferentes funciones en las
pantallas de estado y en los menús.
Habilita/evita la
REV/CLR
ENTER ENTER
Sin función
H
G
SETUP (configuración)
GEBER (transmisores)
MIXER (mezclador)
SERVO
TIMER (relojes)
MEMORY (memoria)
la pantalla de estado
Botón de regulado adicional
posibilidad de
modificar un valor.
Afecta a ambos
reguladores digitales
3D conjuntamente.
Todos los
cronómetros se
ajustan a la alarma
configurada
de los reguladores digitales
(retroceder/borrar)
L
K
A
Botón Función en
Función en
Selección de un valor
que ha de ser
modificado por uno
de los reguladores
digitales 3D.
Reverse/Clear
Cambiar el prefijo de
un valor,
eliminar/desactivar
valor, desactivar
función
Activar selección,
Aplicar valores,
Abandonar selección
un menú
Botón
s t
10.1.3. Introducción de texto
Durante la programación habrá momentos en los que
se deberá introducir texto. Esto sucede p.ej. al introducir
el nombre de un modelo (memoria de modelo), el
nombre del propietario o al identificar una de las
mezclas libres disponibles. La escritura se realiza
mediante el teclado de la misma forma que se utiliza en
un teléfono móvil y un regulador digital 3D.
La selección de las letras y de los símbolos, se realiza
mediante el teclado. Los caracteres disponibles
mediante pulsaciones repetidas sobre los botones están
impresos debajo de las teclas de acceso directo (fila 1) y
encima de las teclas de trabajo (fila 2):
Si se introduce una letra al comienzo del texto o
después de un espacio en blanco, se escribirá
automáticamente en mayúsculas siendo las siguientes
letras en minúsculas. En caso que querer escribir varias
letras mayúsculas seguidas se tendrá que presionar
varias veces el botón para así “pasar la página”, hasta
que vuelvan a aparecer las letras mayúsculas. El cursor
avanza automáticamente de posición tras la selección.
Mediante uno de los reguladores digitales 3D se puede
adelantar o retrasar libremente la posición del cursor.
La escritura se da por finalizada pulsando el botón
“Enter”. Aparece un requerimiento de introducción:
” ¿Borrar final de línea? Sí à REV/CLR, No à ENTER”
• El botón”REV/CLR“ borrará todo lo que esté a la
derecha de la posición del cursor
• El botón”ENTER“ deja el texto como está
Introducción de caracteres especiales
Con algunos botones se pueden “escribir” caracteres
especiales además de los que están impresos.
Botón Caracter
ABC1
DEF2
GHI3
JKL4
MNO5
PQR6
STU7
VWX8
YZ_9
/-#0
Espacio en blanco
A B C Ä 1 a b c ä
D E F 2 d e f
G H I 3 g h i
J K L 4 j k l
M N O Ö 5 m n o ö
P Q R 6 p q r
S T U Ü 7 s t u ü
V W X 8 v w x
Y Z 9 y z _ ( ) { }
0 / ? ! - + % # & < > *
Función en
la pantalla de estado
Botones de arriba y abajo
Cambio de pantalla
de estado
Función en
Seleccionar puntos
de los menús y
parámetros,
Cambiar valores
un menú
Página 18
Page 20

10.2. Los reguladores digitales 3D
La emisora dispone de dos reguladores digitales 3D de
serie (è 10.2.) que se utilizan durante la programación
y las tareas de ajuste.
10.2.1. Programación con los reguladores digitales
3D
Durante la programación, los reguladores digitales 3D
trabajan mediante la pulsación igual que la tecla
“ENTER” y mediante el giro como las teclas “s“ (arriba) y
“t“ (abajo). Según las costumbres personales se
seleccionará automáticamente un uso individual.
10.2.2. Ajustes con los reguladores
digitales 3D durante el vuelo
Muchos ajustes de modelo se pueden optimizar
únicamente durante el vuelo. Para ello se pueden
asignar muchos parámetros diferentes a los reguladores
digitales 3D. Un ejemplo clásico es el ajuste del
diferencial de los alerones.
1. Seleccionar el parámetro de diferencial de los
alerones (imag. 1)
2. Presionar la tecla de acceso < F >
En lugar del valor del parámetro, aparece el icono
del regulador digital 3D (imag. 2).
Pulsar ahora el regulador digital 3D con el que se
desee utilizar la función.
En caso de equivocación y el parámetro no ha de
ser reajustado, pulsar simplemente la tecla ENTER.
A continuación, se puede abandonar el menú y regresar
a la pantalla de estado.
Ahora se ve que en la primera fila de la pantalla de
estado 1-3, el diferencial de los alerones se puede
ajustar desde el regulador digital 3D de la derecha
(imag. 3). Mediante la pulsación o el giro del regulador
digital 3D correspondiente, aparece brevemente el
valor actual del parámetro (imag. 4). El icono de un
candado cerrado indica que el valor no puede ser
modificado en este momento (protección contra
modificación involuntaria).
Si se quiere modificar el valor hay que pulsar la tecla del
regulador digital 3D < F >. Ahora el valor se puede
modificar. Cada modificación quedará inmediatamente
guardada. Mediante una nueva pulsación de la tecla del
regulador digital 3D se vuelve a proteger el acceso a los
valores (icono: candado cerrado).
Imagen 1 Imagen 2
Manual de instrucciones
Aviso: Si se utiliza conmutación de modo de vuelo
Los parámetros de ajuste que varíen según el modo de
vuelo activado, podrán ser mostrados y modificados en
cada modo de vuelo de forma independiente con los
reguladores digitales 3D.
Para eliminar la asignación, seguir los siguientes pasos:
1. Mantener pulsado el regulador digital 3D deseado
2. Presionar el botón (REV/CLR)
⇒ en el display aparece “- - -“, la asignación ha sido
borrada
Así mismo, se puede “sobrescribir” una asignación
mediante la realización de una diferente.
¿Qué se puede reajustar?
Se pueden reajustar prácticamente todos los
parámetros numéricos. Aunque hay algunas
excepciones. El en display siguiente no se puede
reajustar el parámetro Step (tamaño de paso del
trimado).
Los parámetros numéricos que se pueden ajustar están
identificados mediante una línea elevada detrás del
nombre del parámetro. Si se intenta reajustar un
parámetro que está protegido, aparecerá en pantalla el
siguiente icono, después de haber pulsado la tecla de
acceso al regulador digital 3D
ƒ
y sonará un sonido de error al presionar uno de los
reguladores digitales 3D.
Aviso:
Los parámetros reajustados no se pueden invertir. Esto
significa que no se puede cambiar los valores mas allá
de “0” o en su caso “OFF”, como protección contra un
desajuste inintencionado de los valores.
Imagen 3 Imagen 4
Página 19
Page 21

ROYAL evo
10.3. Uso del teclado y filosofía
de manejo del regulador digital 3D
El encendido y las pantallas de estado ya han sido
descritas (è 9.1. / è 9.6.).
A continuación se muestra la filosofía de manejo de la
ROYALevo o, en su caso, el uso del teclado y del
regulador digital 3D en el ejemplo de cambio de
idioma. El punto de partida es la pantalla de estado 1-4
(è 9.6.).
10.3.1. Así se abren los menús principales
Para acceder a los menús o en su caso comenzar la
programación se necesitan los botones de acceso
directo a menús (è 10.1.1.). Existen seis menús
principales en los cuales se encuentran sus
correspondientes submenús:
H
G
SETUP (configuración) (è 13.)
Emisora
Definir mezcla
Asignación
Aprendizaje
Usuario
Transmisores (è 14.)
Acceso a los menús individuales de los
transmisores. Sólo se muestran los transmisores
que estén siendo usados en el modelo activado
(⇒ menú dinámico).
MIXER (Mezclador) (è 15.)
Acceso a los menús de cada mezcla. Sólo se
muestran las mezclas que estén siendo usadas
en el modelo activado
(= menú dinámico).
SERVO (è 16.)
Calibrado del servo
Asignación del servo
Monitor del servo
Prueba de servo
TIMER (relojes) (è 17.)
Tiempo de uso del modelo/memoria
Cronómetro de marco
Cronómetro de suma
Cronómetro de intervalo
MEMORY (memoria) (è 18.)
Selección/cambio de modelo
Copiar modelo
Borrar modelo
Gestor de fase de vuelo
Propiedades del modelo
Guardar nuevo modelo
L
K
A
I
Para acceder a uno de los menús principales, presionar
el botón de acceso directo correspondiente.
(En el ejemplo del cambio de idioma: tecla L )
Se muestra el siguiente display:
La primera fila indica el menú principal en el cual nos
encontramos (Ej. menú principal Setup: “L Setup“).
La siguiente fila muestra siempre “¨ Exit“. Más
información: (è 10.3.4.).
En las filas siguientes se listan los submenús
correspondientes. Los cuatro puntos detrás de los
submenús .... indican que existen más menús
(submenús).
10.3.2. Así se abren los submenús
Se pueden seleccionar fila a fila los submenús mediante
las teclas ARRIBA/ABAJO (s / t) o con uno de los
reguladores digitales 3D. La fila seleccionada se
mostrará con tonalidad invertida. Como los cursores de
un ordenador.
(Ej. cambio de idioma: submenú “ Usuario “ )
Para abrir uno de los submenús, presionar la tecla
“ENTER” o uno de los reguladores digitales 3D.
El submenú se abre.
(Ej. cambio de idioma: submenú “ Usuario “):
En la primera fila se mostrará siempre, como
orientación, el icono del menú principal y el nombre del
submenú.
(Ej. cambio de idioma:
Menú principal Setup: “L“ / submenú “ Usuario “ )
Página 20
Page 22

Aviso:
En caso de que la lista de submenús no quepa en la
superficie del display se hará notar por unas flechas “ ©
“ o “ ª “ en el borde de la pantalla. Para acceder a los
submenús restantes simplemente habrá que seguir
pulsando las teclas (s / t) o uno de los reguladores
digitales 3D. Esto es similar al desplazamiento en un
programa de ordenador. Ejemplo:
10.3.3. Así se cambian valores/configuraciones
Como ejemplo debe servir el cambio al menú del
idioma de pantalla.
Partiendo de la pantalla de estado, hay que realizar lo
siguiente:
1. Pulsar el botón L
Así se accede al menú Setup. Desde ahí,
seleccionar mediante las teclas s t (o uno de las
reguladores digitales 3D) el submenú usuario.
Para acceder al submenú, presionar el botón
ENTER (o unos de los reguladores digitales 3D).
2. Seleccionar el parámetro idioma mediante los
botones s t (o uno de los reguladores digitales
3D).
Manual de instrucciones
'¡ Consejo !
Uso de la tecla REV/CLR
El valor de un parámetro no solo se puede modificar
con las teclas (s t) o con uno de los reguladores
digitales 3D. Muchos valores se pueden invertir o llevar
a su ajuste estándar utilizando la tecla REV/CLR.
10.3.4. Así se vuelve hacia atrás
Cuando se abandona el campo de datos, la selección se
encontrará en el último parámetro seleccionado. En el
ejemplo 10.3.3.: idioma
Para abandonar los submenús y menús, navegar hasta
la segunda fila ” ¨ Exit “ (imag. 1) y presionar el
botón ENTER (o uno de los reguladores digitales 3D).
Repetir este proceso hasta alcanzar de nuevo la pantalla
de estado.
Imagen. 1 Imagen. 2
3. Para activar el parámetro idioma pulsar el botón
ENTER o uno de los reguladores digitales 3D.
Ahora se podrá seleccionar mediante los botones
s t (o uno de los reguladores digitales 3D) uno
de los dos idiomas disponibles:
Al pulsar la tecla ENTER (o uno de los reguladores
digitales 3D) se confirma la selección y se
abandona el campo de datos.
Aviso para el guardado:
Los valores/ajustes modificados quedan grabados
inmediatamente. No es necesario un almacenamiento
manual.
'¡ Consejo !
Cambio directo a otro menú principal
Si se desea cambiar directamente de un menú
cualquiera a un menú principal, accionar el botón de
acceso directo correspondiente.
' Consejo !
Volver a la pantalla de estado
Pulsando dos veces consecutivas el botón de acceso
directo, se alcanzará rápidamente la última pantalla de
estado utilizada. Condición: No puede estar
seleccionado ningún valor de parámetro.
Página 21
Page 23

ROYAL evo
Zona muerta
Punto final arriba
Recorrido de la palanca
Trimado
Sin trimar
Recorrido del servo
Trimado estándar
Punto final abajo
No se alcanza
11. Trimado digital
11.1. Generalidades
La ROYALevo dispone para los 4 ejes principales
(palancas) un moderno sistema de trimado digital.
En la ROYALevo se utiliza el principio de trimado
“Center-Trim“. Significa que las correcciones de trimado
sólo se aplican a los puntos centrales de los
transmisores y no a los puntos finales del recorrido de
las palancas. La ventaja en relación al llamado “trimado
estándar“ es que se aprovecha todo el recorrido de la
palanca (y así el recorrido del servo) sin necesidad de
tener que prever una reserva para el trimado.
Principio de “Center-Trim
fase de vuelo independiente de las otras de forma
sencilla y óptima.
El trimado estándar
El grafico muestra como con el movimiento de la
palanca hacia la derecha, el servo llega al punto final
superior antes de que la palanca llegue a su punto final.
Esto significa: espacio muerto en la palanca.
Durante el movimiento de la palanca a la izquierda, el
servo no llega al punto máximo hacia abajo. Esto
significa: recorrido del servo no utilizado.
Center-Trimm
Se alcanzan ambos puntos máximos de los servos
independientemente de cómo esté colocado el
trimado.
' Consejo !
Dado que durante el “Center-Trim“ se modifica la curva
de eficacia de la palanca, hay que prestar atención a
realizar las correcciones de trimado lo más pequeñas
posibles. ¡Para correcciones más importantes, reajustar
el varillaje!
11.2. Ventajas del trimado digital
El trimado digital tiene dos ventajas fundamentales:
1. Las teclas de trimado no tienen una posición
mecánica que corresponda al valor de trimado
(como sucede con el trimado convencional de
reguladores de trimado). La posición del trimado
digital se muestra en el display y queda
automáticamente guardada en la memoria del
modelo. De esta forma, al cambiar de memoria de
modelo, no habrá que reestablecer el punto de
trimado ya que estará inmediatamente disponible
el valor correcto para ese modelo.
2. La ROYALevo ofrece a los modelos que dispongan
de varias fases de vuelo una memoria de trimado
para cada fase de vuelo. Así se puede trimar cada
Página 22
Page 24

11.3. La cruz de trimado digital
El trimado de la ROYALevo se realiza con los botones
colocados en forma de cruz debajo de los agregados de
las palancas. Están colocadas ergonómicamente y son
fácilmente accesibles tanto con la emisora en mano así
como en pupitre.
REPEAT).
Cada paso de trimado se acompaña de un pitido. Al
alcanzar el punto medio así como los extremos de
trimado, sonaran como información acústica varios
tonos separados. Los tonos de trimado se pueden
activar/desactivar (è 13.1.2.).
¡El trimado del cuarto eje de palanca (‡‡ )
!!
siempre afecta al punto neutral del gas!
Esto también es válido si se ha asignado los
aerofrenos a la palanca o para helicópteros.
Cada pulsación realiza un
paso de trimado en la
dirección correspondiente
de los ejes de control.
Si se mantiene pulsado
más de aprox. un seg., el
trimado continúa
automáticamente hasta
que se vuelva a soltar el
botón (función AUTO-
Manual de instrucciones
vuelo activa. Esto también es válido par el trimado del
gas.
11.4. Indicación de trimado en el display
La indicación de la posición de trimado se muestra
gráficamente en forma de barras lateral e inferiormente
en la pantalla de estado 1-3:
Desde el punto central de trmiado se pueden realizar un
máximo de 20 pasos de trimado en ambas direcciones.
El tamaño de los pasos (modificación de trimado/paso
de trimado) se puede modificar en caso necesario en
cuatro pasos de 0,5 % - 3,5 % ( TStep è 14.2.3).
!! Aviso de tamaño de pasos del ámbito de trimado
Al modificar el tamaño de los pasos, también se
modifica el ámbito de trimado así como el valor
de trimado ya que el número de pasos se
mantiene igual (!). Esto significa que si se cambia
el tamaño del paso de trimado hay que volver a
trimar el modelo.
El valor actual de trimado no solo se muestra de forma
gráfica en el display, también se puede mostrar el valor
numérico de cada transmisor (parám. Trim è 14.2.2)
El tipo de representación gráfica de la pantalla de
estado se puede elegir (parámetro grafico de
trimado è 13.1.1)
' ¡Consejo !
Retornar al punto central del trimado
Si se pulsan los dos botones de trimado
correspondientes a un eje de palanca simultáneamente,
se volverá al punto central de trimado en la fase de
Página 23
Page 25

ROYAL evo
12. Crear un modelo nuevo
12.1. Generalidades
La creación de un modelo nuevo se realiza en la
ROYALevo mediante la selección de una plantilla de
modelo. En total hay disponibles ocho plantillas de
modelos divididos en modelos de aviones y de
helicópteros (descripción de las plantillas de modelos
è Fehler! Verweisquelle konnte nicht gefunden wer-
. ff):
den.
1. MOTOR 7. HELImech
2. ACRO 8. HELIccpm
3. HOTLINER
4. DELTA
5. VELERO
6. 4-compuertas
Los valores definidos en las plantillas son iniciales y han
de ser adaptados al modelo. Todos los ajustes se
pueden personalizar y cambiar en cualquier momento.
"Paso a paso hasta la meta"
Existen varias formas de crear un modelo nuevo en la
ROYALevo. Los procedimientos descritos a continuación
para modelos de avión (è 12.2.) y de helicópteros (è
12.3.) narran la forma en la que, a nuestro entender, más
rápido se alcanza el objetivo.
12.2. Un nuevo modelo de avión
' Consejo: modificar la asignación
En el caso de que la asignación predefinida no se ajuste
a las necesidades, ésta puede ser modificar en cualquier
momento.
(è 13.3. L Setup, asignacion)
6. Abandonar el menú pulsando OK. El nuevo modelo
está guardado.
Paso •• Introducir el nombre del modelo
Dar al modelo un nombre (Name) en el menú
I memoria/propiedades
(è 18.5.)
Paso ŽŽ Conectar los servos
Conectar los servos, reguladores,… al receptor. Prestar
atención a la descripción de las ranuras del receptor
ocupadas, las cuales también se pueden averiguar en el
menú K servo/asignacion (è 16.2.).
! Aviso:
En caso de conectar aparatos (servos, reguladores, ...)
con diferente formato de impulso, se puede realizar un
reajuste por canal en el menú
K servo/asignacion (è 16.2.).
' Consejo:
En este menú se puede modificar la asignación de las
salidas del receptor (orden, función).
Paso •• Encender el receptor y la emisora
! ¡Prestar atención al orden de encendido!
Encender siempre primero la emisora y después el
receptor.
Paso ŒŒ Crear una nueva memoria
La ceración de un modelo nuevo se realiza mediante el
menú I memoria y su submenú nuevo modelo
(è18.6.).
En este menú sucede lo siguiente:
1. Automáticamente se selecciona el primer espacio
libre para el nuevo modelo.
(parámetro numero de memoria.)
2. Seleccionar una plantilla acorde al modelo
(parámetro plantilla).
Escoger una de las ocho plantillas que más se
ajuste a su modelo (descripción de las plantillas è
desde Fehler! Verweisquelle konnte nicht gefun-
den werden.
3. Seleccionar el tipo de servo y las ranuras utilizadas
por los servos en el receptor.
(parámetro Servo-config)
4. Escoger el modo de control (uso de las palancas)
(parámetro Mode)
5. Seleccionar la asignación (que
transmisor/conmutador maneja el que).
(parámetro asignacion)
.)
! Aviso de asignación
Para cada plantilla de modelo se indica la
asignación adecuada. El modelo funcionará
únicamente según la descripción, si se utiliza dicha
asignación (è desde 12.4.).
! ¡Cuidado!
Peligro de lesión por motores que puedan
arrancar.
Básicamente ahora se puede manejar el modelo.
Valores ajustables (recorridos de los timones, etc.) aun
se han de ajustar.
Paso •• Calibrar los servos
Realizar la calibración de los servos con mucho esmero.
Únicamente con los servos bien calibrados el manejo del
modelo es preciso.
La calibración de los servos se realiza en el menú
K servo, calibracion. (è 16.1.)
Paso ‘‘ Ajustar las mezclas
El ajuste de las mezclas se realiza con el menú G
mezcla. El menú es dinámico, lo que significa que
únicamente se mostrarán las mezclas utilizadas en ese
modelo. Las plantillas de modelos tienen valores
referenciales, los cuales hay que adaptar a cada modelo.
Más detalles sobre el tema "ajuste de las mezclas" se
encuentran en el capítulo Mezclas è 15.
Página 24
Page 26

Paso ’’ Ajustar transmisor
El ajuste de los transmisores se realiza mediante el
menú H transmisores. El menú es dinámico, lo que
significa que únicamente se mostrarán los transmisores
utilizados en ese modelo. Las plantillas de modelos
tienen valores de referencia, los cuales hay que adaptar
a cada modelo.
Todo sobre el tema "ajuste de los transmisores" se
encuentra en el capítulo è 14.
Paso ““ Comprobaciones previas al vuelo
El modelo recién creado está ahora preparado.
Comprobar cuidadosamente todas las funciones antes
de poner el modelo en funcionamiento.
Los ajustes finos, especialmente los de las mezclas y los
transmisores se realizan durante el primer vuelo del
modelo. No realizar modificaciones del menú durante el
vuelo. Pare esto, utilizar la cómoda y segura
modificación de valores mediante los reguladores
digitales 3D. (è 10.2.2.).
Paso ”” Activación de las fases de vuelo
Una vez el modelo se haya volado y trimado y todos los
valores de mezclas y transmisores estén configurados
en una fase de vuelo (normalmente fase de vuelo
Normal), se pueden activar, en caso necesario, otras
fases de vuelo para optimizar el modelo a diferentes
situaciones de vuelo. Para ello, activar otra fase de vuelo
y copiar los valores de la primera fase a la fase de vuelo
ahora activada (è 18.4) y ajustar las configuraciones de
los transmisores (menú H transmisores). Todos los
ajustes de transmisor que estén identificados con un
pequeño dígito (1 …4) se pueden modificar según la
fase de vuelo (è 14).
12.3. Un nuevo helicóptero
!! ¡Advertencia de seguridad!
Los modelos de helicópteros radio-controlados son
objetos voladores muy exigentes que requieren un
ajuste cuidadoso, responsabilidad y cuidado. El uso
inadecuado o imprudente conlleva grave peligro.
A los principiantes les recomendamos:
• Acudir a pilotos experimentados,
clubs o escuelas de vuelo de modelos.
• Recibir consejo de la tienda especializada.
• Seguir informándose con textos especializados.
Paso ŒŒ Crear una nueva memoria
La ceración de un modelo nuevo se realiza mediante el
menú I memoria y su submenú nuevo modelo
(è18.6.).
En este menú sucede lo siguiente:
1. Automáticamente se selecciona el primer espacio
libre para el nuevo modelo.
(parámetro numero de memoria.)
2. Seleccionar una plantilla acorde al modelo
(parámetro plantilla).
Escoger una de las dos plantillas que más se ajuste
a su modelo de helicóptero:
Manual de instrucciones
HELImech
Heliccpm
(Descripción de las plantillas de modelos de
helicópteros è desde 12.11.)
3. Seleccionar el tipo de servo y las ranuras utilizadas
por los servos en el receptor.
(parámetro Servo-config)
4. Escoger el modo de control (uso de las palancas)
(parámetro Mode) è 13.3.1.)
5. Seleccionar la lista de asignaciones (que
transmisor/conmutador maneja el que).
(parámetro asignacion)è 13.3.2.)
Modelo con mezcla mecánica de la
cabeza del rotor
Modelo con mezcla electrónica de la
cabeza del rotor (CCPM), en el cual el
tipo de disco oscilante (p.ej.
3-puntos 120°, 3-puntos 90°, 4puntos 90°, ...) sea indiferente. El
ajuste al disco oscilante concreto se
realiza más adelante.
La plantilla de modelo HELIccpm
parte de un disco oscilante 3-puntos
120°, en el cual el “servo Nick” se
encuentra situado, visto en dirección
de vuelo, en la parte trasera.
! Aviso a lista de asignación
Según la plantilla de modelo seleccionada se
tendrá que utilizar, de las tres listas de asignación
disponibles, la que esté seleccionada. (ver desde
capítulo 12.3., “Asignación utilizada: ...“). De otra
forma no se puede garantizar el funcionamiento
de la plantilla de modelo según la descripción.
' Consejo: modificar la asignación
En el caso de que la asignación predefinida de
transmisores y conmutadores (incluso en reposo, p.ej.
Pitch mínimo delante/detrás) no satisfaga las
necesidades puede ser modificar en cualquier
momento.
(è 13.3 L Setup, asignacion)
6. Abandonar el menú pulsando OK. El nuevo modelo
está guardado.
Paso •• Introducir el nombre del modelo
Dar al modelo un nombre (Name) en el menú
I memoria/propiedades
(è 18.5.)
Paso ŽŽ Conectar los servos al receptor
Conectar los servos, reguladores,… al receptor. Prestar
atención a la descripción de la plantilla de las ranuras
del receptor ocupadas que se han escogido en el paso
Œ punto 3 (parámetro Servo-config).
La ocupación de la salida también se puede averiguar
en el menú
K Servo/asignacion (è 16.2.).
Página 25
Page 27

ROYAL evo
!! Aviso: Modelo con disco oscilante CCPM
En caso de que se quiera ajustar un modelo con mezcla
de disco oscilante electrónica (CCPM) que disponga de
un disco oscilante diferente al de la plantilla HELIccpm
(3-puntos 120°, “Servo Nick” trasero), se tendrá que
primero adaptar la asignación de servos en el menú K
Servo/asignacion (è 16.2.). Prestar también
atención a los consejos para la mezcla cabeza de
rotor (mezcla de disco oscilante electrónica /CCPM è
15.5.).
!! Aviso
En caso de conectar aparatos (servos, reguladores, ...)
con diferente formato de impulso, se puede realizar un
reajuste por cada canal en el menú
K servo/asignacion (è 16.2.).
(Columna 3: Formato de impulso del servo UNI / MPX).
' Consejo:
En este menú se puede modificar la asignación de las
salidas del receptor (orden, función).
Paso •• Encender el receptor y la emisora
! ¡Prestar atención al orden de encendido!
Encender siempre primero la emisora y después el
receptor.
! ¡Cuidado!
Peligro de lesión por motores arrancando.
Ahora, básicamente se puede manejar el modelo. Los
valores ajustables (recorridos de los timones, etc.) aún
se han de ajustar.
Paso •• Equilibrado de los servos
! Realizar el equilibrado de los servos con esmero.
Únicamente con los servos bien calibrados, tanto el
manejo del modelo así como las mezclas son precisas.
El equilibrado de los servos se realiza en el menú
K Servo, calibracion. (è 16.1)
' Consejo:
En los servos Gas, Pitch, cola es suficiente una
calibración de 2 puntos. Comprobar antes de la
calibración el correcto giro de los servos. ¡La posterior
modificación de la dirección de giro requiere una nueva
calibración! Para la equilibrar los dos puntos de
calibración P1 y P5 utilizar la tecla de asignación, que
coloca y mantiene los servos en su/sus
correspondientes posiciones independientemente del
ajuste de la palanca (è 16.1.2). Modificar los valores
porcentuales de tal forma que los servos lleguen a su
punto máximo sin que por ello llegar al bloqueo
mencánico.
En los servos Roll, Nick es necesario un equilibrado
de servos de 3 puntos. Comprobar también aquí la
correcta dirección de giro del servo antes de la
calibración. ¡La posterior modificación de la dirección de
giro requiere una nueva calibración!
En los servos cabeza ala/atr, cabeza izq,
cabeza der y en su caso cabeza 4 (disco oscilante
CCPM) se puede realizar, en caso necesario, un
equilibrado exacto mediante el uso de una calibración
de 5 puntos. La cantidad de puntos de calibración se
puede modificar en el menú K Servo, calibracion
(è 16.1). Antes de realizar la calibración hay que
comprobar el correcto funcionamiento de los servos.
Para ello mover la palanca de Pitch hacia arriba y abajo.
Utilizar para el equilibrado de los diferentes puntos P1
... P5 la tecla de asignación. Todos los servos de la
cabeza se colocan y fijan en su correspondiente
posición, independientemente de los ajustes de la
palanca correspondiente. Ahora se puede realizar una
calibración de los valores porcentuales para que el disco
oscilante esté en posición completamente horizontal en
cada punto de calibración y no se bloquee
mecánicamente en los puntos máximos P1 y P5.
Paso ‘‘ Ajustar la mezcla de la cabeza del rotor
(sólo en modelo con cabeza de rotor CCPM)
El ajuste de la mezcla de realiza en el menú
G mezclador/cabeza de rotor (è 15.5.). La
plantilla de modelo HELIccpm se basa en un disco
oscilante de 3 puntos 120°, en el cual el “servo Nick” se
encuentra situado, visto en dirección de vuelo, en la
parte trasera. Los parámetros geometria, giro y
palanca. están configurados correspondientemente.
Si se utiliza un disco oscilante diferente, habrá que
modificar los valores.
El ajuste de los recorridos de control se realiza en el
menú H transmisores (è 14.2.4. Roll /
recorrido, Nick / recorrido)
Paso ’’ Ajustar la curva de Pitch
El ajuste de la curva de Pitch se realiza en el menú
H transmisores/Pitch (è 14.2.9.).
Se puede configurar para cada fase de vuelo una curva
de Pitch independiente para adaptar de forma óptima
el manejo del Pitch a casa fase de vuelo. Por ejemplo:
• Estacionario
con ámbito de pitch –2 ... + 10° para que el modelo
reaccione con paso mínimo de forma menos
sensible y se pueda posar con mayor delicadeza.
• Acro
con ámbito de pitch –10 ... + 10° para que el
modelo se comporte de la misma manera durante
el vuelo normal y de espalda.
• Autorot
con ámbito de pitch –8 ... + 12° para disponer de la
configuración óptima de la posición de las palas
con Pitch-mínimo y –máximo para la autorotación.
' Consejo:
La configuración de los ángulos de las palas en
estacionario es de aprox. 4 ... 5°. Durante el ajuste de las
curvas de Pitch, prestar atención a que este valor esté
configurado en todas las curvas de pitch en el mismo
punto de la palanca de pitch para así evitar que al
cambiar de fase de vuelo el modelo “salte”.
!! Aviso: modelo con disco oscilante CCPM
Evitar en los puntos de la curva de pitch P1 y P6 el
ajuste a “+” o en su caso “–“ 100% ya que de lo contrario
no serán posibles con pitch máximo/mínimo los
movimientos simétricos/cíclicos de control (Nick o Roll).
Según el tamaño del recorrido de Roll y Nick se
recomienda un ajuste de P1 y P6 de máx. 75 a 80%.
Página 26
Page 28

Paso ““ Ajustar la curva de gas
El ajuste de la curva de gas se realiza en el menú
H transmisores/gas (è 14.2.10).
El objetivo del ajuste de las curvas de gas es conseguir
unas revoluciones constantes a lo largo de todo el
ámbito de pitch. Sólo de esta forma se alcanza un
comportamiento de vuelo estable. Un ajuste fino sólo se
consigue al volar el modelo.
!! Aviso
El limitador de gas ha de estar en la posición de gas
máximo. El conmutador de gas directo ha de estar en
posición OFF. Sólo así estará activa la mezcla de
PitchàGas y el servo de gas trabajará dependiente del
ajuste de la palanca de pitch con respecto a la curva de
gas seleccionada.
El ralentí del motor se ajusta con el parámetro Min.,
cuando el limitador de gas esté en posición de ralentí.
Un ajuste fino se consigue mediante el trimado del
ralentí (botones de trimado correspondientes a la
palanca de pitch).
Paso ”” Ajuste de la mezcla del rotor de cola
(compensador del rotor de cola /REVO-MIX)
El ajuste de la mezcla del rotor de cola se realiza en el
menú G Mezclador/cola (è 15.4).
En las plantillas de modelo HELImech y HELIccpm la
compensación del rotor de cola está desactivada. Si en
el modelo se utiliza un moderno sistema de giróscopo
que sólo se utiliza en el modo Heading, se han de
mantener todos los ajustes de la mezcla de cola en
OFF o en su caso 0%. La segunda posibilidad es la de
manejar el rotor de cola, en vez de con la mezcla COLA,
directamente con la función Gier. Para ello se ha de
modificar la asignación de servos (menú K servo,
asignacion è 16.2. de COLA a Gier).
Con el uso de giróscopos que trabajen en el modo
normal o amortiguador, se debe activar y configurar
correctamente la mezcla COLA. Así se evita el típico giro
del modelo sobre el eje horizontal al realizar cambios de
momento de giro o en su caso se reduce el trabajo del
giróscopo para conseguir una estabilización óptima de
la cola.
Para ajustar el equilibrado del rotor de cola se realiza lo
siguiente:
1. Asegurarse de que al estar el servo del rotor de cola
en posición neutral, la palanca de control del servo
así como la palanca de manejo del rotor de cola se
encuentren en ángulo recto con respecto al varillaje
del rotor de cola. Modificar en caso necesario el
largo del varillaje del rotor de cola. Con este ajuste
se genera automáticamente un ajuste del rotor de
cola en el cual el modelo no gira en el vuelo
estacionario.
' Consejo:
Cuando ambas palas del rotor de cola se pliegan
hacia un lado se genera una distancia entre las
puntas de las palas, dependiendo del modelo, de
entre aprox. 10 – 20 mm.
2. Fijar ahora el punto de partida para la mezcla del
equilibrado del rotor de cola. Llevar la palanca de
Pitch a la posición correspondiente (estacionario) y
trasladar el valor del parámetro Pitch al
parámetro punto cero.
Manual de instrucciones
3. El equilibrado del rotor de cola para el ascenso se
ajusta con el parámetro Pitch+.
Llevar la palanca de pitch a la posición de ascenso
(pitch máximo) y seleccionar un valor con el cual la
distancia entre las puntas de las palas del rotor de
cola se duplique.
A continuación llevar la palanca de pitch a la
posición de descenso (pitch mínimo) y seleccionar
un valor en el cual la distancia entre las puntas de
las palas del rotor de cola sea casi 0 (aprox. 5 mm).
Copiar a las otras fases de vuelo (excepto autorotación)
valores así ajustados. Un ajuste fino del equilibrado del
rotor de cola (Pitch+, Pitch-) para cada fase de vuelo
sólo se puede realizar durante el vuelo.
Durante la fase de autorotación (AUTOROT) no se
necesita el equilibrado del rotor de cola ya que al estar
el motor apagado o al ralentí no se necesita compensar
ningún momento de giro. Seleccionar el valor OFF para
los parámetros Pitch+ y Pitch-. El ajuste del
parámetro Offset se ajusta de tal forma que las puntas
de las palas del rotor de cola formen una línea en
posición levantada. (⇒ ángulo de posición de pala 0°).
Paso •• Configurar/probar el giróscopo
Las plantillas de los modelos están diseñadas de tal
forma que patren del uso de un sistema actual de
giróscopo (normal o en su caso amortiguación o
Heading), en el cual el ajuste de sensibilidad se realiza
desde la emisora mediante un canal separado.
En ambas plantillas de modelo de la ROYALevo,
HELImech y HELIccpm, está seleccionado el manejo
de sensibilidad del giróscopo más sencillo. Este es el
modo de giróscopo transmisor (è 15.3). El ajuste de
la sensibilidad del giróscopo de las plantillas se realiza
manualmente con el transmisor giroscopo (regulador
E). Una modificación de asignación se puede realizar en
el menú L Setup, asignacion (è 13.3).
Determinar la posición del transmisor en el cual se
consiga la máxima sensibilidad del giróscopo. Llevar la
palanca correspondiente a la posición final y mover el
modelo sobre el eje vertical. Con la sensibilidad máxima
se generan los recorridos máximos en el rotor de cola. Si
se desea alcanzar la máxima sensibilidad en la posición
de la palanca contraria se ha de cambiar la polaridad de
la “dirección de giro” del canal del giróscopo. (è
16.1.1).
La sensibilidad óptima del giróscopo se ha de ajustar
durante el vuelo. Seleccionar para los primeros vuelos
una sensibilidad de un 50%. Aumentar gradualmente la
sensibilidad durante los primeros vuelos hasta que la
cola comience a oscilar. Reducir la sensibilidad hasta
que la oscilación no sea perceptible. De esta forma
estará ajustada la sensibilidad óptima.
! ¡Cuidado!
Asegurarse antes de la puesta en funcionamiento del
modelo de que el giróscopo trabaje correctamente y
que afecte en dirección contraria a un movimiento de
giro. Un giróscopo con funcionamiento incorrecto
aumenta la posibilidad de giro no deseado del modelo.
De esta forma el modelo no se podrá controlar. Prestar
atención a los consejos del fabricante del giróscopo.
Página 27
Page 29

ROYAL evo
Curva de
Ámbito de
Ralentí
Además del ajuste de la sensibilidad por medio del
transmisor (modo giróscopo transmisores), la
ROYALevo ofrece más posibilidades de optimización de
la sensibilidad para cada fase de vuelo.
(modo giróscopo suspension, Heading è 15.3.).
Paso –– Familiarizarse con la función de
limitador de gas y gas directo
Limitador de gas
Recomendamos encarecidamente el uso del
limitador de gas. En las plantillas de modelo es el
regulador F.
' Consejo: cambiar asignación
En caso de que la asignación del limitador de gas
(también el reposo: ralentí adelante/atrás) no satisfaga
las necesidades se puede cambiar la modificación en
cualquier momento. (è 13.3. L Setup,
asignación)
Si el limitador de gas se encuentra en la posición de
ralentí, el motor gira a las revoluciones fijadas en el
parámetro Min. (è 14.2.10). Por motivos de seguridad,
la palanca pitch no tiene influencia sobre el gas. El
motor se arranca en esta posición. Un ajuste fino de las
revoluciones al ralentí se puede realizar en cualquier
momento de forma rápida y sencilla mediante el
trimado de la palanca de pitch. Una vez que el modelo
se encuentre a una distancia de seguridad en el punto
de despegue y se haya asegurado que la palanca de
pitch se encuentre en pitch mínimo se llevará
lentamente el limitador de gas hasta la posición de gas
máximo. El motor acelera primero hasta la posición de
gas configurada de Pitch mínimo (curva de gas P1 è
14.2.10.). La curva de gas está ahora liberada. El modelo
está preparado para el vuelo. El gas se ajusta como en la
curva de gas y es manejado por el Pitch.
Curva de gas para helicóptero
Gas
Ámbito protegido por el limitador de gas
Palanca de pitch
Recorrido de gas real
gas
programad
Limitador de gas
! Atención
Asegurarse de que el limitador de gas esté en la
posición de ralentí antes de activar el gas directo. ¡De
otra forma el motor puede acelerar inmediatamente a
máxima potencia!
Gas para helicóptero
Curva de gas
Limitador de gas
(Gas min. + trimado
trimado
Aviso:
La desconexión del motor no se realiza mediante el
trimado de gas sino con la ayuda del conmutador GasNOT-OFF (è 13.3.5).
Paso —— Antes del vuelo
El modelo recién creado está ahora preparado.
Comprobar cuidadosamente todas las funciones antes
de poner el modelo en funcionamiento.
Los ajustes finos, especialmente los de las mezclas y los
transmisores se realizan durante el primer vuelo del
modelo. No realizar modificaciones del menú durante el
vuelo. Pare esto, utilizar la cómoda y segura
modificación de valores mediante los reguladores
digitales 3D. (è 10.2.2.).
Paso ˜˜ Activación de fases de vuelo
Una vez el modelo se haya volado y trimado y todos los
valores de mezclas y transmisores estén configurados
en una fase de vuelo (normalmente fase de vuelo
estacionario), se pueden activar, en caso necesario,
otras fases de vuelo para optimizar el modelo a
diferentes situaciones de vuelo. Para ello, activar otra
fase de vuelo y copiar los valores de la primera fase a la
fase de vuelo ahora activada (è 18.4) y ajustar las
configuraciones de los transmisores (menú H
transmisores). Todos los ajustes de transmisor que
estén identificados con un pequeño dígito (1 …4) se
pueden modificar según la fase de vuelo (è 14).
Paso ™™ Consejos de los expertos
Gas directo
Para el testeo y las tareas de ajuste del motor la
ROYALevo ofrece la posibilidad de uso del gas directo.
Gas directo significa que el motor puede ser manejado
de forma independiente a la palanca de pitch con el
limitador de gas desde el ralentí hasta el gas máximo. El
Mezcla Gascomp.Gascomp. (Gier/Roll/NickààGas)
No solo la ampliación del ángulo de las palas del rotor
principal (Pitch), sino también grandes recorridos de
control cíclicos (Roll, Nick) o grandes recorridos de Gier
requieren una mayor cantidad de gas para mantener
unas revoluciones del sistema constantes. Para ello
utilizar la mezcla comp-gas. (è 15.6.).
motor se puede hacer funcionar a máxima potencia en
el suelo p.ej. para tareas de testeo (¡mantener distancia
de seguridad!) con el paso de las palas en invertido
(pitch mínimo). Para activar la función de gas directo
utilizar el conmutador CombiSwitch (è 13.3.5.).
Página 28
Page 30

Mezclador de mezclas
La ROYALevo ofrece una opción especial para los
motores de combustión con escape en lo que la mezcla
se realiza mediante un servo dependiente de la apertura
del escape (p.ej. escape WEBRA mc):
Asignar en la salida del receptor en la que estará
conectado el servo de modificación de mezcla, la
función mezcla y seleccionar para la calibración del
servo 5P (è 16.2.3.). Ahora se puede ajustar la mezcla
en el menú K Servo / calibracion / mezcla
dependiente del servo de gas. (è 16.1).
La mezcla no se debe asignar como transmisor (è
13.3.4). De otra forma, la mezcla no dependerá de la
señal de gas sino del transmisor asignado. Esto sería
necesario si la modificación de la mezcla se quiera
adaptar a un escape convencional con canal adicional.
12.4. Plantillas en detalle
En los siguientes apartados se encuentran las
descripciones detalladas de las plantillas de modelos
que ofrece la ROYALevo.
En cada descripción de plantilla de modelo se informa
primero de los modelos adecuados a la plantilla.
En el primer apartado (12.x.1.) se muestra la asignación
de los transmisores y conmutadores. El croquis muestra
también como han de estar los conmutadores y
transmisores para poder poner en funcionamiento el
modelo de una forma segura.
El segundo apartado (12.x.2.) muestra la posición a la
que han de ser conectados los servos (o en su caso
giróscopcos,…) a las salidas del receptor. Estas
posiciones se pueden modificar libremente. (è 16.2.).
En el tercer apartado (12.x.3.) se aconseja sobre la
manera de adecuar el modelo a necesidades y
costumbres particulares.
Los siguientes dos pasos han de ser siempre
!!
realizados durante la programación de un modelo
nuevo.
a. Comprobar las funciones de las palancas
(alrón/profundidad/dirección)
en caso necesario, seleccionar otro modo
(è 13.3.1.)
L, asignación, modo
b. Comprobar la dirección de giro del servo para todas
las funciones
en caso necesario, invertir la dirección de giro
(REVERSE)
K, calibración, seleccionar servo, parámetro
REV/CLR
Manual de instrucciones
12.5. Plantilla MOTOR
Indicado para:
Modelos sencillos de motor
con uno o dos servos de alerones,
con compuertas (aerofrenos o compuertas de
aterrizaje)
Modelos de ejemplo:
Lupo, PiCO-CUB, Movie Star (Imag. 12.4.2.), TwinStar, Big Lift
12.5.1. Asignación de transmisores y conmutadores
Asignación utilizada: MOTOR
no utilizado: Flap (F)
A : Cronómetro de suma ´ manejado por GAS (‡)
Dual-Rate Combi-Switch Gas-NOT-OFF
A/P/D
OFF OFF
Fase 1-3
1: NORMAL
12.5.2. Asignación de servos/salidas del receptor
Para que se pueda utilizar la plantilla con muchos
modelos, se han asignado más servos que los necesarios
para el modelo indicado.
4
1
Alerón
3
Seite
Dirección
Profundidad +
12.5.3. Adaptación
paso a. y b. (ver izq.)
!!
c. Activación de la mezcla de gas en profundidad
seleccionar G, prof+, seleccionar parte Gas -Tr,
ajustar 10% en el timón de profundidad
Para realizar la adaptación en vuelo, asignar el
valor a un regulador digital 3D (è 10.2.2.).
HÖHE+
2
Gas
Alerón
6
Spoiler
5
Página 29
Page 31

ROYAL evo
12.6. Plantilla ACRO
Indicado para:
Modelos de motor como F3A (antes RC1), F3AX
Funflyer
Modelos de ejemplo:
Sky Cat (Imag. 12.5.2.)
12.6.1. Asignación de transmisores y conmutadores
Asignación utilizada: MOTOR
no utilizado: Spoiler (E), Flap (F)
A : Cronómetro de suma ´ manejado por GAS (‡)
Dual-Rate Combi- Mix-1 Gas-NOT-OFF
A/P/D Switch Snap-Flap
OFF OFF OFF
Fase 1-3
1: NORMAL
12.6.2. Asignación de servos/salidas del receptor
4
Gas
1
QUER+
Alerón +
12.7. Plantilla HOTLINER
Indicado para: F5B
Modelos de ejemplo: Bonito, Akro, Akro Star
12.7.1. Asignación de transmisores y conmutadores
Asignación utilizada: MOTOR
no utilizado: Combi-Switch (N)
Spoiler (E), Flap (F)
A : Cronómetro de suma ´ manejado por GAS (‡)
Dual-Rate Combi- Gas-NOT-OFF
A/P/D Switch (tecla)
OFF OFF
Fase 1-3 Aerofreno
1: NORMAL retraído
12.7.2. Asignación de servos/salidas del receptor
4
1
QUER+
Alerón +
2
HÖHE+
Profundidad +
QUER+
Alerón +
Gas
5
5
Alerón +
QUER+
Seite HÖHE+
Dirección +
23
Profundidad +
12.6.3. Adaptación
(Válido para plantilla ACRO)
Paso a. y b. (è 12.3.)
!!
c. Activación de la mezcla de gas en profundidad
seleccionar G, prof+, seleccionar parte Gas -Tr,
ajustar 10% en el timón de profundidad
Para realizar la adaptación en vuelo, asignar el
valor a un regulador digital 3D (è 10.2.2.).
d. Activación de la mezcla de flap en profundidad
seleccionar G, prof+, seleccionar parte Flap,
ajustar recorrido' = 5%, recorrido# = 10%
Para realizar la adaptación en vuelo, asignar el
valor a un regulador digital 3D (è 10.2.2.).
12.7.3. Adaptación
Paso a. y b. (è 12.3.)
!!
c. Levantar los alerones como ayuda al aterrizaje
Esta función está programada en la plantilla y se
utiliza mediante el transmisor (regulador E). En
caso necesario adaptar la corrección de la mezcla
prof+ (15%).
d. Activación de la mezcla de gas en profundidad
seleccionar G, prof+, seleccionar parte Gas -Tr,
ajustar 10% en el timón de profundidad
Para realizar la adaptación en vuelo, asignar el
valor a un regulador digital 3D (è 10.2.2.).
Página 30
Page 32

12.8. Plantilla DELTA
Indicado para:
Modelos Delta/mono-ala con o sin motor, modelos
Jet
Ejemplos de modelo:
PiCOJet, TWIN-JET (imag. 12.7.2.), Stuntman
12.8.1. Asignación de transmisores y conmutadores
Asignación utilizada MOTOR
no utilizado: Combi-Switch (N)
Spoiler (E), Flap (F)
A : Cronómetro de suma ´ manejado por GAS (‡)
Dual-Rate Gas-NOT-OFF
A/P/D (tecla)
OFF
Manual de instrucciones
12.9. Plantilla VELERO
Indicado para:
Veleros con dos compuertas (sólo alerones), con
motor eléctrico, deriva en V
Ejemplos de modelo:
Flamingo, Kranich, Alpha 21/27
12.9.1. Asignación de transmisores y conmutadores
Asignación utilizada: VELERO
no utilizado: Flap (F)
A : Cronómetro de suma ´ manejado por GAS (E)
Dual-Rate Combi- Mix-1 Gas- NOT A/P/D Switch (prof. en alerón) OFF
OFF OFF
OFF
Fase 1-3
1: NORMAL
12.8.2. Asignación de servos/salidas del receptor
1
DELTA+
4
GAS
5
DELTA+
12.8.3. Adaptación
Paso a. y b. (è 12.3.)
!!
c. Uso de receptor de menos de 5 canales
Cambiar asignación de servo: K ASIGNACION
p.ej. 1=DELTA+, 2=DELTA+, 3=GAS
d. Recorrido de los timones demasiado
grandes/pequeños
Seleccionar G , mezcla DELTA+, modificar parte
profundidad y/o alerón
e. Activación de la mezcla de gas en profundidad
seleccionar G, DELTA+, elegir parte Gas -Tr,
ajustar 10% en el timón de profundidad
Para realizar la adaptación en vuelo, asignar el
valor a un regulador digital 3D (è 10.2.2.).
Fase 1-3 Gas
1: NORMAL Ralentí
12.9.2. Asignación de servos/salidas del receptor
Spoiler
1
QUER+
Alerón +
Seite
Dirección + Profundidad +
Si el modelo dispone de gancho de remolque en vez de
6
Spoiler
7
3
2
HÖHE+
Alerón +
motor, se puede manejar con el servo 4. Es necesario
seguir los siguientes pasos:
1. Asignar transmisor
L, asign., transm., seleccionar embrague
seleccionar elemento de manejo (p.ej. tecla M)
2. Asignar servo
K , asignacion, seleccionar servo 4 y modificar
de gas a embrague
3. Configurar servo
La dirección de giro y puntos finales del servo 4 se
configuran en K, calibracion.
12.9.3. Adaptación
Paso a. y b. (è 12.3.)
!!
c. Levantar los alerones como ayuda al aterrizaje.
... si el modelo no dispone de aerofrenos
(Servos 6/7).
elegir G , aleron+, ajustar 90% en el aerofreno
Adaptar en caso necesario la corrección en PROF+.
d. Activación de la mezcla de gas en profundidad
seleccionar G, prof+, seleccionar parte Gas -Tr,
ajustar 10% en el timón de profundidad
Para realizar la adaptación en vuelo, asignar el
valor a un regulador digital 3D (è 10.2.2.).
4
Gas
5
QUER+
Página 31
Page 33

ROYAL evo
12.10. Plantilla 4-COMPUERTAS
Indicado para:
F3B, F3J,
veleros con 4 compuertas, con motor eléctrico, con
deriva en V
Ejemplos de modelo:
DG 600, ASW 27, Milan, EURO/ELEKTRO-MASTER,
Alpina (imag. 12.9.2.), ASH 26
12.10.1. Asignación de transmisores y conmutadores
Asignación utilizada: VELERO
A : Cronómetro de suma ´ manejado por GAS (E)
Dual-Rate Combi- Mix-1
A/P/D Switch (prof en alerón)
OFF OFF OFF
Fase 1-3 Gas Flap
1: NORMAL ralentí neutral
12.10.2. Asignación de servos/salidas del receptor
12.11. Plantilla HELImech
Indicado para:
Control del rotor principal con mezclas mecánicas
Ejemplos de modelo:
Ergo, Futura, Moskito, Raptor
12.11.1. Asignación de transmisores y conmutadores
Asignación utilizada: HELI
A : Cronómetro de suma ´ manejado por limitador de
gas (F)
Dual-Rate Gas Fase Gas A/P/D directo principal NOT-OFF
OFF OFF OFF
Fase 1-3 girósc. limit. gas (gas directo)
1: ESTACIONARIO mitad mínimo
12.11.2. Asignación de servos/salidas del receptor
Spoiler
1
QUER+
Alerón +
4
Gas
FLAP+
Dirección +
6
3
Seite
8
2
HÖHE+
Profundidad +
7
FLAP+
Spoiler
9
QUER+
Alerón +
5
ç Gancho de arrastre en vez de gas: ver arriba
12.10.3. Adaptación
Paso a. y b. (è 12.3.)
!!
c. Butterfly
Esta función está programada en la plantilla y se
utiliza mediante el transmisor (regulador E). En
caso necesario adaptar la corrección de la mezcla
prof+ (15%).
d. Activación de la mezcla de gas en profundidad
seleccionar G, prof+, seleccionar parte Gas -Tr,
ajustar 10% en el timón de profundidad
Para realizar la adaptación en vuelo, asignar el
valor a un regulador digital 3D (è 10.2.2.).
12.11.3. Adaptación
a. Comprobar las funciones de las palancas
(Roll/Nick/Gier)
en caso necesario seleccionar otro modo (è
13.3.1.)
L, asignación, modo
b. Comprobar la dirección de giro del servo para todas
las funciones
en caso necesario, invertir la dirección de giro
(REVERSE)
K, calibración, seleccionar servo, parámetro
REV/CLR
c. Posibilidades para el giróscopo
è 15.3.
Giróscopo
Página 32
Page 34

13.1.
13.2.
13.3.
13.4.
13.5.
12.12. Plantilla HELIccpm
Indicado para:
Control del rotor principal con mezclas
electrónicas
CCPM (Cyclic-Collective-Pitch-Mixing)
con 3 o 4 servos, 90° a 150°
Ejemplos de modelos:
ECO 8, Logo, Fury, Three Dee NT, Uni-Expert
12.12.1. Asignación de transmisores y conmutadores
Asignación utilizada: HELI
A : Cronómetro de suma ´ manejado por limitador de
gas (F)
Dual-Rate Gas- Fase Gas A/P/D directo principal NOT-OFF
OFF OFF OFF
Fase 1-3 girósc. limit. gas (gas directo)
1: ESTACIONARIO mitad mínimo
12.12.2. Asignación de servos/salidas del receptor
La plantilla de modelo HELIccpm parte de un disco
oscilante con 120° y un servo Nick detrás.
5
Gas
6
Kreisel
Giróscopo
3
Cola
HECK
2
KOPF li
Cabeza
1
KOPF v/h
Cabeza
12.12.3. Adaptación
a. Comprobar las funciones de las palancas
(Roll/Nick/Gier)
en caso necesario seleccionar otro modo (è
13.3.1.)
L, asignación, modo
b. Comprobar la dirección de giro del servo para todas
las funciones
en caso necesario, invertir la dirección de giro
(REVERSE)
K, calibración, seleccionar servo, parámetro
REV/CLR
Dirección de vuelo
Flugrichtung
4
KOPF re
Cabeza
Manual de instrucciones
13. Menú principal “Setup“ L
En este menú principal se realizan ajustes que afectan a
toda la emisora.
ü Este símbolo identifica ajustes globales que
afectan al funcionamiento general de la emisora.
I Algunos ajustes sólo se aplican al modelo
seleccionado. Están identificados con el icono de la
memoria de modelo.
13.1. Submenú “Emisora“
13.1.1. Parámetro “Gráfico de trimado “
ü afecta globalmente
El estado actual del tirmado se puede representar
gráficamente de seis formas diferentes (gráfico 0 a 5).
Probar cada una de ellas para averiguar cual es la más
fácilmente legible.
13.1.2. Parámetro “Tonos“
ü afecta globalmente
Con este parámetro se configuran los eventos de la
emisora que disparan una señal acústica.
Ajuste Señal acústica
1.
Solo Bat
2.
Cron+Bat
3.
Tr+cron+Bat
4.
ON OFF
5.
Todo ON
13.1.3. Parámetro “Alarma de batería“
al traspasar el límite
de carga de la batería
como 1. + alarma de cronómetro
como 2. + manejo del trmiado
siempre menos al encender
siempre
ü Parámetro afecta globalmente
Ámbito 6,50 a 7,5 V (pasos de 0,01V)
Ajuste de fábrica 6,9 V
La alarma de la batería debe hacer saber que la carga de
la batería restante sólo durará por tiempo limitado.
! Cuanto menor sea el ajuste del límite,
menor será el tiempo de funcionamiento
restante.
El tiempo de duración restante depende en gran
medida del límite configurado y del estado de la batería.
Averiguar mediante una prueba la duración restante de
la batería.
Para ello, encender la emisora con la antena
completamente extendida y con el módulo HF de cristal
(o en su caso sintetizador) instalado. No es necesario
realizar movimientos con las palancas. Seleccionar el
nivel de límite de alarma deseado. Comprobar la
tensión de la batería en la pantalla de estado 1 o 2.
Medir el tiempo desde la primera señal de aviso hasta
alcanzar el nivel mínimo de tensión de la batería (6,5 V).
! ¡La emisora se apaga automáticamente cuando la
tensión llegue a aprox. 6,3 V!
Página 33
Page 35

ROYAL evo
' ¡ Consejo !
Una vez se haya alcanzado el nivel de alarma deseado
(primer tono) ajustar el límite a 6,5 V. Así la alarma
volverá a sonar cuando se haya alcanzado la tensión
mínima de la batería. No olvidar volver a ajustar el nivel
de alarma al valor deseado.
13.1.4. Parámetro “Carga de batería“
ü Parámetro afecta globalmente
Cuando se revasa el nivel mínimo de batería de 6,5
V se mostrará automáticamente el valor 0 mAh.
Con este parámetro se puede corregir el valor de carga
emitido por el gestor de la batería (è 8.1.).
13.1.5. Parámetro “Contraste”
ü Parámetro afecta globalmente
Ámbito –8 a 8
Ajuste de fábrica 0
Mediante este parámetro se puede adaptar el nivel de
contraste de la pantalla a las condiciones de
temperatura.
13.1.6. Parámetro “ Gas-Check “
I Parámetro sólo afecta al modelo activo
! ¡Medida de seguridad para evitar el arranque
involuntario del motor al encender la emisora!
GasGas--Check ONCheck ON
Los motores eléctricos pueden arrancar a pleno gas si el
transmisor de la emisora no está en posición de ralentí.
Con el Gas-Check = ON se realizan dos comprobaciones
al encender la emisora:
1. ¿Está desactivado el Gas-NOT-OFF?
2. ¿Está el transmisor de GAS en posición de ralentí?
Hasta que el transmisor GAS no se encuentre en
posición de ralentí, se mostrará un aviso, la emisión HF
se activa inmediatamente pero la señal de gas
permanece, por motivos de seguridad, en posición de
ralentí.
13.1.7. Parámetro “HF-Check”
ü Parámetro afecta globalmente
sólo es posible con módulo HF con sintetizador
! ¡Comprobaciones de seguridad al encender la
emisora!
HFHF-- Check ONCheck ON
Dado que con módulos HF con sintetizador el cambio
de canal es bastante sencillo, se puede activar en la
ROYALevo una comprobación de seguridad adicional.
Con HF-Check = ON la emisora “pregunta” cada vez que
se enciende la emisora si se desea utilizar realmente el
canal seleccionado para comenzar la emisión. Esto se ha
de confirmar mediante una pulsación de tecla (o volver
a apagar la emisora).
13.2. Submenú “definir mezcla”
ü mezclas definidas afectan globalmente
La ROYALevo ofrece 14 mezclas que pueden ser
definidas libremente. De este “catálogo de mezclas”, el
cual se irá generando con el tiempo para el uso de los
modelos, se podrán aplicar hasta cinco de ellas en un
solo modelo y ser utilizadas tantas veces como sea.
Aviso a pilotos de helicópteros
Las mezclas libremente definibles sólo podrán
ser utilizadas en modelos de avión. Para los
modelos de helicópteros están previstas mezclas
hechas y no pueden ser modificadas.
Aviso: Mezclas predefinidas
Los mezcladores 1 a 5 están ocupados de serie. Pueden
ser modificados en cualquier momento para su
adaptación a las necesidades. Tener en cuenta que al
crear un modelo nuevo mediante una plantilla (è 12.3.)
que lleve asignadas “mezclas estándar”, no se puede
garantizar el correcto funcionamiento de la plantilla.
Al intentar modificar una de estas “mezclas estándar“
aparecerá el siguiente mensaje:
13.2.1. Función de los mezcladores de libre
definición
El principio básico de los mezcladores de libre
asignación de la ROYALevo se corresponde con el del
preciado principio utilizado en emisoras MULTIPLEX de
las series PROFImc 3000 y 4000. Esta es una forma
sencilla de entender el principio:
Partir siempre de las “funciones de manejo” o en su caso
del movimiento del servo. Ejemplo: servo de los
alerones de un modelo de velero (mezcla predefinida:
aler+). ¿Cuándo se ha de mover este servo?
1. Cuando se ejecuta el transmisor “Alerón“
(función principal)
2. Cuando se ejecuta el transmisor “Spoiler”
(Levantar los alerones como ayuda al aterrizaje)
3. Cuando se ejecuta el transmisor “Flap“
(Colocación de los alerones hacia arriba/abajo para
la modificación del perfil del ala para vuelo de
térmica y vuelo rápido)
4. Cuando se ejecuta el transmisor “Prof“
(Colocación de los alerones hacia arriba/abajo para
la compensación de golpes de dirección del timón
Página 34
Page 36

Cantidad
Nombre del
En caso
Recorrido
Recorrido
transmisor
de profundidad durante maniobras “esquinadas”
Así se define un mezclador
del vuelo acrobático ⇒ Snap-Flap)
Así, el servo de los alerones es manejado por cuatro
transmisores. Por lo que la mezcla Aler.+ está
formada por 4 componentes (se pueden utilizar hasta
cinco componentes):
El mezclador suma los valores/señales de cada
componente (por eso se muestra el icono de suma ££ ) y
transmite el resultado al/a los servos de los alerones.
Para que una mezcla funcione con un modelo,
• Ha de estar asignada la lista de asignación
correspondiente al modelo (è L Setup,
asignación, transmisores).
• La mezcla ha de estar asignada a las salidas del
receptor
(è K Servo, asignación).
Cada mezclador puede disponer de un nombre de libre
elección. Esto se realiza en la fila 3 en Name (è 10.1.3.
introducción de texto).
En las filas 1 a 5 se pueden asignar libremente hasta 5
cantidades de mezcla (transmisores):
Colum. 1 Cantidad de mezcla (transmisor)
• Se ha de configurar la cantidad de mezcla al
tamaño y la dirección de giro de los servos al
movimiento de cada transmisor
(è G Mezclador).
de mezcla
mezclador
Alerón +
Alerón
Prof. -TR
1
5
necesario,
más
servos
Colum.
Colum. 3 Opciones de mezcla
13.2.2. Las opciones de mezcla
' Consejo:
Para los que conozcan la MULTIPLEX PROFImc3000 y
4000:
En la ROYALevo se configuran las cantidades de mezcla
™
Punto neutral del transmisor: Medio
un parámetro: Recorrido
del lado del mezclador y no del lado del servo.
Ventaja:
El ajuste de estas cantidades se realiza en un sitio del
menú mezclador (è 15.), y no en varios (servos). De
esta forma se facilita la configuración y se ahorra
-100%
tiempo. Además, la configuración de una cantidad de
mezcla con un regulador digital 3D durante el vuelo se
realiza cómodamente. Es importante una calibración de
los servos cuidadosa (è 16.1.). De otra forma no se
puede garantizar que un modelo, p.ej. durante el
aterrizaje con los alerones levantados vuele en línea
recta por no tener ambos alerones la misma altura.
š
Punto neutral del transmisor: Medio
dos parámetros: recorrido y recorrido
Recorrido
Weg#Weg#
Página 35
Manual de instrucciones
Alerón, prof., dirección y Gas se pueden asignar
con o sin trimado.
Ej. Fila 4: "Gas -Tr" = Gas sin trimado
Conmutador de mezcla Mix-1, Mix-2 o Mix-
2
3
Con el conmutador asignado se podrá
activar/desactivar las cantidades de mezcla.
"----" indica: La cantidad está siempre activa.
¿Cómo ha de afectar la cantidad?
¿Qué configuraciones han de ser posibles?
¿Dónde está el punto neutral del transmisor?
Más en è 13.2.3
“Simétrica“
Recorrido del servo
Servoweg
100%
-100%
Recorrido
Geber-
100%
del
transmisor
El transmisor genera un
movimiento simétrico
del servo con recorrido
ajustable
Ejemplo:
Cant. Ale., prof., Flap en
weg
mezcladores ALER+,
FLAP+, PROF+
“Asimétrica“
Servoweg
Recorrido del servo
-100%
100%
-100%
Recorrido
Weg'Weg'
100%
del
El transmisor genera un
movimiento asimétrico
del servo. Los recorridos
de ambas direcciones se
pueden ajustar independientemente.
Geber-
weg
Ejemplo:
Cant. Flap en mezclado-
res como ALER+, FLAP+
Page 37

ROYAL evo
Recorrido
transmisor
Zona
Recorridos
Recorrido
transmisor
Recorrido
Recorrido
transmisor
Recorrido
Recorrido
transmisor
“Unilateral con curva “
œ
Punto neutral del transmisor: Punto final
dos parámetros: punto1 y punto 2
Recorrido del servo
-100%
Servoweg
100%
Pkt1Pkt1
-100%
Pkt2Pkt2
100%
del
Geber-
El transmisor genera un
movimiento del servo
desde el punto final.
Con el punto 1 se puede
generar un movimiento
no lineal.
weg
Ejemplo:
“Torcer“ componentes
de compensación
(Spoiler en PROF+)
“Unilateral/linear con zona muerta“
›-
Punto neutral del transmisor: Punto final
dos parámetros: Zona muerta y recorrido
Servoweg
Recorrido del servo
Zona muerta
Tot.Tot.
-100%
100%
-100%
WegWeg
100%
del
Geber-
El transmisor genera un
movimiento lineal del
servo desde el centro
una vez de haya supe-
rado la zona muerta.
weg
“Simétrico con zona muerta“
™-
Punto neutral del transmisor: Medio
dos parámetros: Zona muerta y recorrido
Servoweg
Recorrido del servo
100%
-100%
muerta
-100%
La opción "Unilateral/lineal con Offset" es la única en la que los
movimientos no se realizan desde el centro sino desde la posición
definida con el Offset.
“Unilateral/lineal con Offset“
›+
100%
del
Geber-
Movimiento lineal,
simétrico con recorrido
ajustable una vez el
transmisor haya superado la zona muerta
Atención: No utilizar
con componentes de
weg
alerón si hay que ajustar una diferencia-
ción.
Punto neutral del transmisor: Posición final
dos parámetros: Offset y recorrido
-100%
Off.Off.
Servoweg
Recorrido del servo
100%
Off. = 0%
Off. = -50%
-100%
del
100%
WegWeg
Geber-
weg
El transmisor genera un
movimiento lineal del
servo desde el punto
final que puede ser
desplazado con Offset.
Ejemplo:
Cantidad de Spoiler en
mezclador FLAP+ para
gran recorrido hacia
abajo con Butterfly.
13.3. Submenú “Asignación“
Los elementos de control de la ROYALevo (palancas,
reguladores, conmutadores, teclados) pueden ser
asignados libremente. Cada elemento de manejo puede
ser transmisor o conmutador.
¿Qué son los transmisores?
Los transmisores de la emisora son elementos de
control con los que se maneja directamente un servo,
un regulador,… Éstos pueden ser las palancas, los
reguladores o también un botón. En el apartado 13.3.4.
se muestra una lista de todos los transmisores que
existen el la ROYALevo.
¿Qué son los conmutadores?
Con los conmutadores, en principio no se maneja nada
en el modelo. Los conmutadores influyen en el
funcionamiento de la emisora. Con los conmutadores se
pueden activar/desactivar funciones de mezcla (p.ej.
Combi-Switch), Dual-Rate, cronómetros, fases de vuelo
y otros. En el apartado 13.3.5. se muestra una lista de
todas las funciones conmutables.
' Consejo:
Para los que conozcan la MULTIPLEX PROFImc3000 y
4000:
Todos los elementos de la ROYALevo están montados
permanentemente. La ROYALevo ya no reconoce
diferencias “eléctricas” entre transmisores y
conmutadores. Todos los elementos de control se
pueden utilizar como transmisor o conmutador. La
asignación de los llamados “conmutadores de
transmisor” o ”conmutadores Gx” ya no es necesaria.
Ejemplo: Para medir el tiempo de funcionamiento del
motor se puede asignar fácilmente el transmisor de gas
como conmutador del cronómetro.
En este capítulo se describe como llevar a cabo la
asignación de transmisores y conmutadores a las
necesidades particulares. Se pueden crear cinco
asignaciones diferentes (= listas de asignación).
Recomendamos crear listas de asignación para
diferentes tipos de modelos p.ej. veleros, motor,
helicóptero. Durante la programación de un nuevo
modelo, simplemente habrá que asignar la lista de
asignación más adecuada al tipo de modelo. De esta
forma, todos los modelos de un tipo serán “manejados
de la misma forma”. Gracias a esta estandarización se
deberían evitar errores de manejo.
! Aviso: Listas de asignación utilizadas
Tres de las cinco listas de asignación están ocupadas de
serie. Estas se pueden modificar en cualquier momento
para adaptarlas a las necesidades particulares. Tener en
cuenta que al crear un modelo nuevo con una plantilla
de modelo (è 12.1.) con la correspondiente “lista de
asignación estándar” no se puede garantizar, entre
otras, el correcto funcionamiento de la plantilla de
modelo.
Página 36
Page 38
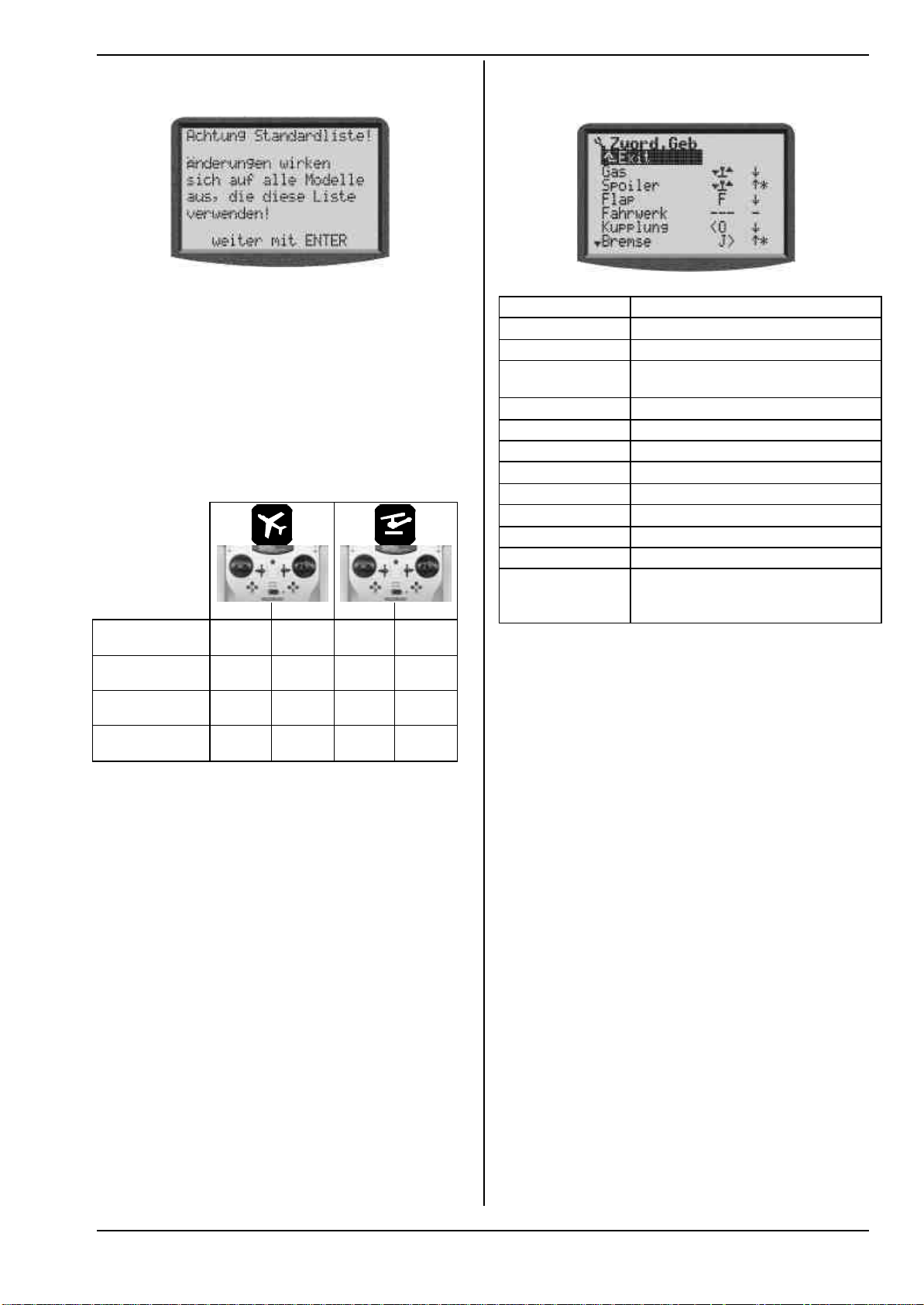
Aler.
Roll
//RPMRPM
Al intentar modificar una de estas “listas de asignación
estándar“ aparecerá el siguiente mensaje:
Manual de instrucciones
13.3.4. Parámetro “Asignación - transmisor “
Parámetro/s afecta/n sólo a la asignación activa
(è13.3.2.)
13.3.1. Parámetro “modo“
I Parámetro sólo afecta al modelo activo
Los transmisores de los ejes de control principiares
(palancas) alerón/profundidad/dirección o en su caso
Roll/Nick/Gier no se manejan mediante las listas de
asignación sino con el parámetro “modo“ (control de
modo).
Se pueden seleccionar los cuatro modos de control. Las
flechas dobles sirven como recordatorio de cómo están
las palancas usadas.
é significa dirección o en su caso Gier
è significa profundidad o en su caso Nick
Modo Izqu. Dere. Izqu. Dere.
1: è é
2: é è
3: è é
4: è é
El modo se puede cambiar en cualquier momento (p.ej.
si otro usuario que utiliza un modo de control distinto
ha de manejar el modelo). De esta forma no se
modifican configuraciones o valores (p.ej. ajustes de
trimado).
El modo para la memoria del modelo activo se puede
modificar tanto en el menú L Setup, asignacion
(è 13.3.2.) así como en el menú I memoria,
propiedades (è 18.5.).
13.3.2. Parámetro “Asignación“
I Parámetro sólo afecta al modelo activo
La lista de asignación de cada memoria de modelo se
puede modificar tanto en el menú L Setup,
asignacion así como en el menú I memoria,
propiedades (è18.5.).
13.3.3. Parámetro “Nombre de la asignación”
Parámetro sólo afecta a la asignación activa
(è 13.3.2.)
Se puede asignar un nombre a casa lista de asignación
(consistente en asignación/transmisores y asignación
conmutadores). Se pueden utilizar ocho caracteres
(introducción de texto: è 10.1.3.).
Prof.
Direc.
Direc.
Gas/Sp.
Prof.
Aler.
Gas/Sp.
Aler.
Gas/Sp.
Prof.
Aler.
Gas/Sp.
Direc.
Prof.
Direc.
Nick
Gier
Pitch
Gier
Nick
Roll
Pitch
Roll
Pitch
Nick
Roll
Pitch
Gier
Nick
Gier
Se pueden elegir los siguientes transmisores:
Transmisor Comentario
Gas
Spoiler
Flap/RPM
Tren de ater.
Embrague
Freno
Giroscopio
Mezcla
AUX1
AUX2
Pitch
Gaslimit
La asignación de las funciones (ver arriba) con sus
transmisores (elementos de manejo) correspondientes
se realiza fácilmente mediante Quick-Select.
Asignación con Quick-Select:
1. Seleccionar de la columna 1 la función deseada
(Columna: función de manejo)
2. Cambiar a la columna 2 mediante ENTER
(Columna: elemento de manejo)
3. Activar el elemento de manejo deseado
⇒ Se muestra la abreviatura del elemento de
manejo.
Flap para modelos de avión
y rev. del motor para helicópteros
Función especial/canal especial
Función especial/canal especial
Sólo para modelos de helicóptero
Sólo para modelos de helicóptero
(Limitador de gas/“preselección de
gas “)
' Consejo:
Se puede asignar un elemento de manejo a varias
funciones de manejo y también como conmutador
(también para varias funciones).
1. ¡Importante!
Llevar el elemento de control a la posición neutral
deseada (p.ej. gas a ralentí, aerofrenos en posición
retraída, Pitch en posición mín.)
2. Confirmar la acción con la tecla ENTER
⇒ El cursor regresa a la columna 1
En caso de no necesitar la función de control, borrar la
asignación mediante REV/CLR ⇒ se muestra „ – – – “.
La columna 3 indica el estado ( * = ACTIVO, el elemento
de control está en su posición neutral) y la dirección e la
posición neutral ( # / ' ).
Aviso: Asignar botones
Prestar atención a las excepciones durante la asignación
a loa elementos de control botón “H“ y “M“ así como los
botones de los agarres de las palancas “KTa“ y “KSw“
(è página siguiente).
Página 37
Page 39

ROYAL evo
13.3.5. Parámetro “Asignación - conmutador“
Parámetro/s afecta/n sólo a la asignación activa (è
13.3.2.)
Se pueden elegir los siguientes transmisores:
Conmutador Comentario
DR-A
DR-P
DR-D
CombiSwitch
Gas-NOT-OFF
µ Marco
´ Suma
¶¶
Intervalo
Mix-1 ..3
Profesor
Fase princ.
Fase 1-3
La asignación de un elemento de manejo a una de las
funciones (ver arriba) se realiza, igual que en
asignación/transmisor, mediante Quick-Select. (è
13.3.2., Asignación con Quick-Select)
Dual-Rate para transmisor de alerón
o en su caso Roll (è 14.2.4.)
Dual-Rate para transmisor de profundidad o en su caso Nick (è14.2.4.)
Dual-Rate para transmisor de
dirección o Gier (è14.2.4.)
Con modelos de avión:
ON/OFF de la mezcla
CombiSwitch (è15.1.)
Con modelos de helicóptero:
Activación de Gas directo
Activación de la función Gas-NOTOFF. Mediante la confirmación el
motor se apaga
independientemente del estado de
funcionamiento. (è 9.3.1.)
Activación del cronómetro de marco
(è17.2.)
Activación del cronómetro de suma
(è17.3.)
Activación del cronómetro de
intervalo (è17.4.)
Con modelos de avión:
Activar/Desactivar cantidades de
mezcla (è 0.)
Con modelos de helicóptero:
Mix-1: Invertir el modo del
giróscopo
Mix-2, Mix-3: sin función
Conmutador para el uso del modo
de profesor/alumno (è13.4.)
Activación de la fase de vuelo 4
Activación de las fases de vuelo 1 a 3
' ¡ CONSEJO ! ¿Dónde está ACTIVADO/
DESACTIVADO?
La flecha (#/') detrás de la letra de identificación en el
menú indica siempre la posición ON. Llevar el elemento
de manejo a la posición en la que la función
seleccionada esté activada y confirmar con ENTER (o
con la pulsación de un regulador digital 3D).
El ajuste seleccionado está ahora almacenado.
Excepción botones “H“ y “M“:
Los botones situados en el lateral de la emisora “H“ y
“M“ se pueden manejar de dos formas:
1. Invertir (Toggle) „……“
Pulsar el botón = función ON
Volver a pulsar el botón = función OFF
Ejemplo: cronómetro
• Impulso „„„“
Botón presionado = función ON
Botón no presionado = función OFF
Ejemplo: Profesor/alumno, Gas-NOT-OFF
Excepción agarre de palanca con botones:
En el agarre de palanca adicional con botones están
integrados tres botones:
• Tecla superior KTaKTa
Mientras esté el botón pulsado, la función estará
ON (impulso)
• Pareja de botones laterales KSwKSw
Una tecla definida ACTIVA la función, la otra
DESACTIVA la función (Toggle).
13.4. Submenú „Aprendizaje“
13.4.1. La función profesor/alumno
La ROYALevo puede ser tanto emisora de profesor, así
como de alumno.
Durante el funcionamiento como emisora de profesor,
la ROYALevo puede premitir manejar al alumno hasta
cinco funciones.
Como emisora de alumno, el profesor puede controlar
seis funciones.
13.4.2. La ROYALevo como emisora de profesor
Unir las emisoras del alumno y del profesor con el cable
profesor/alumno # 8 5121.
Como emisora de alumno se pueden utilizar:
ROYALevo, Cockpit MM, Commander mc, EUROPA mc,
PiCOline, PROFI mc 3010/3030/4000
Muchas emisoras MULTIPLEX más antiguas también se
pueden utilizar como emisora de alumno. Si su emisora
no se encuentra entre las arriba enumeradas, preguntar
en el servicio al cliente.
1. Asignar un conmutador prof/alumno (è 13.3.5.).
Durante la asignación fijar la posición del
conmutador para el manejo del alumno.
2. Entrar en el submenú aprendizaje.
¡ Aprendizaje¡ Aprendizaje
Modo I>* prof. M
Aleron K3 '
Prof. K2 '
Direcc. K1 #
Gas OFF Spoiler OFF -
Heli: Roll, Nick, Gier, Pitch, --- (sólo 4 funciones)
La indicación "I>*" muestra que el conmutador I
de la parte derecha de la emisora (>) ha sido
asignado como conmutador de profesor. El
asterisco posterior indica que el conmutador se
encuentra en la posición ACTIVADA. Sólo en esta
posición del conmutador se pueden realizar
asignaciones con Quick-Select (paso 4.) y el
alumno puede manejar los canales asignados.
3. Seleccionar
Modo = Profesor M, cuando la emisora del alumno
emita señales en formato MULTIPLEX.
Centro del servo = 1,6 ms
Página 38
Page 40

Modo = Profesor U, cuando la emisora del alumno
emita señales en formato UNIVERSAL.
Centro del servo = 1,5 ms
4. Elegir la función que deba controlar el alumno y
presionar la tecla ENTER (o un regulador digital
3D).
5. Mover con la emisora del alumno la transmisión
que deba ser controlada con la función
seleccionada (Quick-Select). Se muestra el número
de canal correspondiente (p.ej. K3 para alerón).
Comprobar que las direcciones de giro de los
timones sean correctas. En caso necesario se
puede invertir la dirección con el botón REV/CLR
(# o ').
Atención: Quick-Select únicamente es posible si la
ROYALevo está encendida y emitiendo HF.
Repetir los pasos 4. y 5. hasta que se hayan asignado
todos los canales deseados. Entonces se puede regresar
a la pantalla de estado y comenzar con el aprendizaje.
¡Cuidado al asignar el canal gas con el motor o
!
motor eléctrico en marcha!
Asegurarse de que nadie está en peligro por motores o
motores eléctricos acelerando y que el modelo no
pueda ocasionar algún tipo de daño.
13.4.3. La ROYALevo como emisora de alumno
Importante:
alumno, no se aplican los trimados (el profesor trima).
Como emisora de profesor se pueden utilizar:
ROYALevo, Commander mc,, PROFI mc 3010/3030/4000
Algunas emisoras MULTIPLEX más antiguas también se
pueden utilizar como emisora de profesor. Si su emisora
no se encuentra entre las arriba enumeradas, preguntar
en el servicio al cliente.
1. Entrar en el submenú aprendizaje.
2. Seleccionar
Modo = alumno M, cuando la emisora del alumno
emita señales en formato MULTIPLEX.
Centro del servo = 1,6 ms
Modo = alumno U, cuando la emisora del alumno
emita señales en formato UNIVERSAL.
Centro del servo = 1,5 ms
Aviso:
Si se apaga la ROYALevo después del uso como
profesor/alumno sin antes haber configurado el
parámetro aprendizaje/modo a OFF, la emisora se
encenderá la próxima ver, por motivos de seguridad,
directamente en el menú SETUP/aprendizaje.
Si se utiliza la ROYALevo como emisora de
13.5. Submenú “Usuario“
Manual de instrucciones
activado se podrán ver los valores pero no podrán ser
modificados.
PIN = 0000
Cuando se introduce este PIN, los ajustes de la emisora
no estarán protegidos.
PIN = **** (cuatro dígitos)
¡El PIN ha de tener al menos un dígito que no sea “0”!
Una vez se haya introducido el PIN, la protección se
activará la siguiente vez que se encienda la emisora. Se
puede navegar por todos los menús, pero si se
intentase modificar un valor se mostraría el siguiente
mensaje:
Una vez se haya introducido el PIN correcto se
desactivará la protección hasta la siguiente vez que se
encienda la emisora.
13.5.2. Parámetro “Idioma“
ü afecta globalmente
En la ROYALevo hay dos juegos de idiomas para los
textos del display. De fábrica está instalado
seleccionado como idioma activo el inglés.
El segundo idioma de fábrica es el alemán.
En el menú L, Usuario, parámetro LANGUAGE se
pueden intercambiar los idiomas activos.
En nuestra página Web http://www.multiplex-rc.de/
existe un enlace a la página
ROYALevo INFO. En esta página se podrán descargar
más juegos de idiomas que con el programa de
ordenador de la ROYALevo se podrán instalar estos
datos como segundo idioma de la emisora.
13.5.3. Parámetro “Nombre“
ü afecta globalmente
Las emisoras nuevas muestran en este campo
“MULTIPLEX”. Se pueden introducir nombres de 16
caracteres. El nombre se ve en la pantalla de estado 1
(è 9.2.).
14. Menú principal
“transmisores“ H
Como transmisores entendemos todos los elementos
de manejo de la emisora que estén asignados a una
función de modelo. Esto pueden ser palancas,
reguladores o conmutadores. Un conmutador con el
que se acciona p.ej. el gancho de remolque es por tanto
un transmisor. ¿Qué transmisores son los que hay y
cuales son los elementos que los manejan? se configura
en el menú L -asignación-transmisores.
El menú TRANSMISORES es dinámico. Sólo se muestran
los transmisores que se utilicen en el modelo activado.
Con un modelo sencillo que sólo tenga dirección y
profundidad, el display mostraría lo siguiente:
13.5.1. Parámetro “Acceso“ (PIN)
ü afecta globalmente
Mediante el PIN (personal identification number) se
pueden proteger los ajustes de la emisora. Si el PIN está
Página 39
Page 41

ROYAL evo
0% a 100%
En el apartado 14.2. se averigua primero las capacidades
de programación (parámetros) de cada transmisor. Los
puntos 14.2.1. a 14.2.12. describen los detalles de cada
parámetro.
14.1. Submenú “transmisores-conmutador“
I Afecta sólo al modelo activo
Ámbito -100% a 100%
Ajuste de fábrica 0% (centro del transmisor)
aparece siempre al final en lista de transmisores
Los transmisores/conmutadores se utilizan cuando los
procesos de conmutación se realicen mediante
transmisores proporcionales.
Ejemplo: Tiempo de funcionamiento del motor eléctrico
En el momento en el que se acelere a más de 1/4 de
potencia se ha de activar el cronómetro de suma.
Para conseguir esto, se ha de asignar como conmutador
del cronómetro ´ suma el mismo elemento de
manejo con el que se maneje el motor.
En caso de que se usen transmisores analógicos p.ej.
palancas, reguladores E o F, como conmutador, se
podrá configurar el punto de conmutación libremente.
14.2. Submenús para transmisores individuales
Transmisores para modelos de avión
El menú sólo muestra los transmisores que se utilicen
en el modelo activo. Esto es que son asignados
directamente al servo o son utilizados en uno de los
mezcladores utilizados. Lo definimos como "menú
dinámico
El punto de menú transmisores/conmutadores (è
14.1.) siempre es mostrado.
El menú muestra siempre el transmisor-conmutador (è
14.1.) y los transmisores ROLL, NICK, GIER, PITCH y GAS.
Los demás transmisores posibles, tren de aterrizaje,
giróscopo, freno y AUX1/AUX2 sólo se muestran si están
siendo utilizados en el modelo activo.
Resumen de transmisores
Cuando en la siguiente tabla se muestre 4x detrás de un
parámetro disponible significa que el parámetro puede
ser diferente en las cuatro fases de vuelo. Los
transmisores que tengan el mismo parámetro se han
agrupado.
Transmisor
Alerón
Profundidad
Dirección
".
Transmisores para helicópteros
Parámetro
disponible
Trim 4x
Paso
D/R
Observación
Sólo indicación
0.5/1.5/2.5/3.5%
Gas
Spoiler
Flap
Roll
Nick
Gier
Pitch
Gas
RPM
Limitador de gas
Tren de aterrizaje
Recorrido 4x
Expo
NOT-OFF
Ralentí
Paso
Lento
Tiempo de uso
Valor fijo 4x
Trim 4x
Paso
D/R
Paso 4x
Expo
Curva de
pitch de
seis pasos4x
Min.
Curva de gas
de cinco
puntos 4x
Tiempo de uso
Valor fijo 4x
– Sin ajustes
Tiempo de uso 0.0 a 4.0 seg
0% a 100%
-100% a +100%
Sólo indicación
Sólo indicación 0.5/1.5/2.5/3.5%
0.0 a 4.0 seg
0.0 a 4.0 seg
OFF, -100% a +100%
Sólo indicación
0.5/2.5/2.5/3.5%
0% a 100%
0% a 100%
-100% a +100%
Valores Pitch: -100% a +100%
Gas-mínimo 0% a 100%
Valores de gas: 0% a 100%
0.0 a 4.0 seg
OFF, -100% a +100%
Embrague
Freno
Giróscopo
–
Sin
ajustes
#
AUX 1
AUX 2
–
Sin
ajustes
14.2.1. Ajuste de transmisores para los ejes
principales
Alerón, profundidad, dirección
Roll, Nick, Gier
Los transmisores de los ejes principales son
representados de la misma forma y disponen también
de los mismos parámetros (è14.2.2. a 14.2.6.).
Los cambios de configuración son inmediatamente
mostrados gráficamente y modifican el
comportamiento del transmisor.
La siguiente ilustración muestra como ejemplo la
representación para el transmisor del alerón.
Al lado de los parámetros se encuentran dos
informaciones adicionales:
a. La pequeña raya detrás del nombre del parámetro
indica que el parámetro se puede asignar a un
regulador digital 3D y modificar durante el vuelo.
Expo – -90%
Página 40
Page 42

b. El pequeño dígito (1 a 4) detrás del nombre del
parámetro indica que el valor se puede modificar para
cada una de las fases de vuelo.
Trim ˜ 2.0%
Algunos parámetros se pueden asignar a un regulador
digital 3D, así como pueden tener una configuración
independiente en cada fase de vuelo. En ese caso se
muestran ambos símbolos.
Recorrido — -90%
14.2.2. Parámetro “Trim“ (trimado)
N sólo indicación
se modifica con la cruz de trimado
4 Un valor de trimado para cada fase de vuelo
El valor de este parámetro determina la cantidad y en
que dirección se ha realizado el trimado del transmisor
seleccionado. Se basa en la distancia del paso TStep y
de la cantidad de pasos de trimado. Con los mayores
pasos (3,5%) puede llegar a 70% en cada dirección.
14.2.3. Parámetro “Step“ (distancia de paso de
trimado)
0,5% – 1,5% – 2,5% – 3,5%
Sólo se pueden seleccionar estos cuatro valores como
distancia de paso. Con los pasos de trimado en ±20 se
crean valores para el ámbito de trimado de ±10%,
±30%, ±50% y ±70%.
14.2.4. Parámetro “D/R“ (Dual-Rate)
F se puede asignar a reguladores digitales 3D
10% a 100%
Con Dual-Rate se puede modificar la sensibilidad de
control del modelo. Si el parámetro Dual-Rate está
configurado en p.ej. 50%, se puede reducir a la mitad
los recorridos de los timones del modelo mediante el
conmutador correspondiente.
14.2.5. Parámetro “Recorrido“
Con este parámetro se define la cantidad del recorrido
del servo que se aprovecha con el uso del transmisor
correspondiente.
14.2.6. Parámetro “Expo“
F se puede asignar a un regulador digital 3D
-100% a 100%, 0% = OFF
Con este parámetro se puede dar a la curva del
transmisor un recorrido exponencial. Con Expo 0% el
transmisor trabaja de forma lineal. Valores-Expo
negativos producen en la parte central del transmisor
un menor recorrido de los timones, lo que habilita un
control más sensible. Los valores positivos originan
mayores recorridos de los timones en la parte central
del transmisor.
Al contrario que con Dual-Rate (è 14.2.3.) los puntos
máximos quedan con Expo sin cambios. Por lo tanto en
caso necesario estará todo el recorrido disponible.
14.2.7. Parámetro “valor fijo“
Manual de instrucciones
4 ajustable a cada fase de vuelo
F se puede asignar a un regulador digital 3D
-100% a 100%, 0% = OFF
Con este parámetro se pueden generar valores que no
pueden ser modificados por su transmisor
correspondiente.
Un ejemplo clásico es la posición de los flaps durante el
despegue del modelo. Cuando esté activada la fase
START, se deberían colocar los flaps en posición de
despegue. Durante el vuelo NORMAL deberían ser
ajustables mediante un transmisor (p.ej. regulador F).
14.2.8. Parámetro “Tiempo de uso“ (Slow)
F se puede asignar a un regulador digital 3D
0.1 a 4.0 s
Con el parámetro tiempo de uso se define el tiempo
que tarda el transmisor en llegar de un valor máximo al
otro. De esta forma los movimientos de los timones
pueden ser lentos aun cuando sean manejados por un
conmutador.
Ejemplos:
Extracción lenta del tren de aterrizaje,
para que la maniobra parezca real.
Movimiento lento de los Flaps, para que al conmutar la
posición de los flaps el modelo no haga movimientos
bruscos.
14.2.9. Parámetro “Ralentí“ (trimado de ralentí)
Sólo para el transmisor de gas
El trimado de ralentí modifica (como su nombre indica)
el ralentí. En la representación gráfica del menú H GAS
se muestra que el trimado afecta al ámbito hasta la
mitad (1/2 gas). El ámbito desde la mitad hasta el gas
máximo no se modifica.
14.2.10. Parámetro “Pitch“ (curva de Pitch)
I afecta la memoria de modelo activa
ámbito +/- 100%
4 una curva de pitch para cada fase de vuelo
F cada punto de la curva puede ser asignado a un
regulador digital 3D para su ajuste durante el
vuelo (è 10.2.2)
El ajuste de la curva de pitch en modos de helicópteros
se realiza en el menú H transmisores/pitch. Para
conseguir una adaptación perfecta del pitch a cada fase
de vuelo se puede ajustar una curva de pitch para cada
fase de vuelo.
Ejemplo 1: Curva de pitch en la fase de Estac.
(una curva de pitch más “baja” del pitch
estacionario/mitad de palanca hasta pitch mínimo/bajar
debería “sensibilizar” el vuelo estacionario y el posado)
Página 41
Page 43

ROYAL evo
Ejemplo 2: Curva de pitch en fase de vuelo VueCirc.
(Curva de pitch lineal y simétrica para comportamiento
identico durante el acsendo y descenso)
En la ROYALevo se ha creado primeramente una curva
de pitch de seis puntos. La ventaja de una curva de
pitch de seis puntos es que hay que configurar pocos
puntos y aun así se pueden ajustar “Plateaus” en el
ámbito normal e invertido para modelos modernos de
vuelo acrobático 3D con grán ámbito de pitch (hasta ±
10-12°), lo que permite un vuelo más sensible. ejemp.:
Ejemplo 2: Curva de gas en la fase Acro
(Curva de gas simétrica en “V” para un aumento de gas
al ascender en vuelos normales o invertidos)
Curva de gas Autorot(ation)Autorot(ation)
La fase de vuelo con la definición Autorot
(normalmente fase de vuelo principal 4, con la prioridad
más alta) posibilita un ajuste fijo de gas (ralentí seguro
con embrague abierto o motor OFF) para el
entrenamiento de aterrizajes en autorotación
(Autorotación = Aterrizaje de emergencia por fallo de
motor).
Ahora, los cinco puntos no se pueden ajustar por
separado. El cambio del valor afecta todos los puntos. El
valor de gas de autorotación se reduce o amplía. Ejemp.:
14.2.11. Parámetro "Gas" (curva de gas)
I afecta a la memoria de modelo activa
Ámbito 0 - 100%
4 una curva de gas para cada fase de vuelo
F Cada punto de curva se puede asignar a un
regulador digital 3D para el ajuste en vuelo (è
10.2.2)
La configuración de la curva de gas en modelos de
helicóptero se realiza mediante el menú H
transmisor/Gas. Se puede asignar a cada fase de
vuelo una curva de gas independiente de cinco puntos
para conseguir del ajuste de pitch el mejor
aprovechamiento del motor en cada fase de vuelo. El
objetivo es conseguir una cantidad de revoluciones del
motor constante durante todo el ámbito de pitch.
Ejemplo 1: Curva de gas en la fase de estacionario
Parámetro Min.Min. (Ralentí)
Limitador de gas
El valor Min. fija el nº de rev. cuando el limitador de gas
está en mín. o ralentí (mant. el motor encendido). Este
valor afecta independientemente de la fase de vuelo.
La línea horizontal punteada muestra, en todas las fases
de vuelo, la posición en el diagrama del limitador de
gas. El limitador limita el gas e impide un valor mayor,
independientemente del estado de funcionamiento.
' Consejo:
Para ajustar el ralentí (parámetro Min.) llevar el
limitador de gas a la posición de ralentí. El cambio del
ralentí Min. se puede apreciar directamente junto a la
línea horizontal punteada del limitador de gas.
Página 42
Page 44

14.2.12. Parámetro “RPM“ para reguladores de
revoluciones
Señal de manejo de reguladores de revs.
I afecta a la memoria de modelo activa
Duración 0,0 a 4,0 seg.
4 Un valor fijo para cada fase de vuelo
F El valor fijo y la duración se pueden asignar al
regulador digital 3D para el ajuste durante el vuelo
(è 10.2.2)
Con “RPM“ se puede asignar a los motores con
regulador de revoluciones un número de revoluciones
para cada fase de vuelo. Esto también funciona si no
hay ningún transmisor asignado a RPM (Flap/RPM).
Si se asigna un transmisor a Flap/RPM, se puede
desactivar el regulador de revoluciones. Para ello llevar
el transmisor a la posición de ralentí.
15. Menú principal “Mezclador“ GG
El menú principal mezclador es un menú dinámico lo
que significa que se muestran únicamente los
mezcladores utilizados en el modelo activo.
Excepciones de modelos de avión:
Los mezcladores Combi-Switch y A-Diff
(Diferencial de alerón) se muestran siempre.
Para modelos de helicópteros:
No se pueden definir libremente mezcladores
para helicópteros. Todas las mezclas de
helicóptero se mostrarán siempre en este
menú.
15.1. Submenú “CombiSwitch“
I Aler è Direcc (Aler es maestro) 2% hasta 200 %
Aler ç Direcc (Direcc es maestro) -2% hasta -200%
ajustable en pasos de 2%
Realizar giros “limpios” lo pueden hacer tanto los
modelos como los aviones de verdad únicamente
cuando se accionan conjuntamente el timón de
dirección y los alerones. Esto es especialmente difícil
para pilotos novatos. Combi-Switch “combi“-na (acopla)
el timón de dirección con los alerones y facilita así el
vuelo de giros.
El conmutador para el Combi-Switch se selecciona en el
menú L, ASIGNACION, CONMUTADOR y se muestra
aquí solo como información. La flecha indica si la
Manual de instrucciones
posición del conmutador ON se encuentra delante o
detrás.
En la última fila se selecciona el nivel de arrastre (2%
hasta 200%), fijar la dirección de arrastre mediante el
prefijo (+ significa Aler es maestro) o seleccionar OFF
para desactivar el Combi-Switch.
Combi-Switch se puede desactivar con el botón
REV/CLR.
15.2. Submenú “A-Diff“
I afecta a la memoria de modelo activada
Ámbito +/- 100%
El prefijo invierte la dirección (arriba/abajo)
Preseleccionado OFF
Posibilidad de reducción mediante Spoiler
(+SPOILER)
La diferenciación implica que los alerones tienen un
recorrido mayor hacia arriba que hacia abajo. Mediante
la diferenciación se reduce el “momento negativo de
giro“.
Si se ajusta la diferenciación a 100%, el alerón sólo
subiría (manejo-Split).
15.2.1. Parámetro “Modo“
Este parámetro afecta a todas las fases de vuelo. Aquí se
puede activar (ON) o desactivar (OFF) la diferenciación.
Si se selecciona el modo +SPOILER, se reduce la
diferenciación al extender los Spoiler, para que el
manejo del modelo se mantenga estable.
15.2.2. Parámetro “Difer.“
Dependiente de la fase de vuelo
F se puede asignar al regulador digital 3D
Si no se desea la diferenciación en alguna fase de vuelo
se ha de activar la fase de vuelo y configurar el
parámetro Differ. a 0%. En el display se muestra OFF.
La fase de vuelo activa se muestra en la primera fila
junto con el dígito delante del parámetro.
15.3. Submenú “Giróscopo “
En la ROYALevo se puede utilizar el mezclador de
giróscopo en modelos de avión y helicóptero siempre
que el giróscopo utilizado disponga de una entrada
para el ajuste de sensibilidad por control remoto.
Durante la concepción del mezclador de giróscopo de la
ROYALevo se han elegido nuevos caminos. Éstos
posibilitan el óptimo estabilizado de un eje del modelo
tanto con giróscopos sencillos, así como con los
modernos giróscopos Heading en todas las condiciones
de uso. Para ello, el mezclador de giróscopo de la
ROYALevo, ofrece diferentes tipos de uso.
Recomendamos comenzar con el modo “Transmisor",
para familiarizarse con las funciones básicas. (è 13.3.1.).
Página 43
Page 45

ROYAL evo
Max efecto
Max efecto
Aviso : Estabilización de alerón
En modelos de aviones es requisito que la estabilización
del eje longitudinal (alerones) se realice mediante un
sistema de giróscopo.
Aviso : Estabilización de Gier (rotor de cola)
En modelos de helicópteros es requisito que la
estabilización del eje longitudinal (gier/rotor de cola) se
realice mediante un sistema de giróscopo.
La siguiente tabla muestra las características de los dos
sistemas de giróscopo actualmente habituales.
Girósc. de amortiguación
(Giróscopo normal)
El giróscopo frena el
movimiento de giro del
modelo para estabilizar el
eje.
Giróscopo Heading
(Giróscopo Heading-Lock)
El giróscopo frena el
movimiento de giro del
modelo para estabilizar el
eje y lleva al modelo a la
posición inicial. Como tipo
de funcionamiento se
puede elegir Heading o
amortiguación.
El ajuste de sensibilidad se
realiza de 0 ... 100%:
100% (max.)
El ajuste de sensibilidad se
realiza de -100 ... +100%:
Dämpfung
max. Wirkung
+100%
Ajuste 0% hasta -100%
El giróscopo trabaja en el modo Heading.
No se produce una reducción.
En cada fase se puede cambiar entre
Heading y amortiguación con el
conmutador Mix-1.
Uso: Modo Transmisores
En este modo se ajuste manualmente la sensibilidad del
giróscopo mediante el transmisor de giróscopo. En las
plantillas de modelos es el regulador E. Este tipo de
funcionamiento es posible en todos los giróscopos que
dispongan de una entrada para el manejo de la
sensibilidad, incluidos los giróscopos de Heading.
Es posible la ampliación/reducción de la sensibilidad del
giróscopo. (è 15.3.3).
Parámetro modo modo àà Amortiguacion Amortiguacion
La sensibilidad del giróscopo se ajusta en el parámetro
amortiguacion (sensibilidad del giróscopo). Se
puede seleccionar un valor diferente para cada fase de
vuelo. De esta forma se adapta la sensibilidad del
giróscopo de forma óptima para cada figura/fase de
vuelo.
Uso:
Modelos de avión y helicóptero que dispongan de un
giróscopo normal.
Es posible la ampliación/reducción de la sensibilidad del
giróscopo (è 15.3.3).
Parámetro modo modo àà Heading Heading
La sensibilidad o en su caso el tipo de funcionamiento
del giróscopo se realiza mediante el parámetro
amortiguacion / Heading (sensibilidad del
giróscopo). Se puede seleccionar un valor diferente para
cada fase de vuelo. De esta forma se adapta la
sensibilidad del giróscopo de forma óptima para cada
figura/fase de vuelo.
50%
OFF
-100%
Heading
max. Wirkung
OFF
15.3.1. Parámetro “Modo“
I afecta a la memoria de modelo activa
En la ROYALevo existen tres modos de giróscopo:
Transmi. El transmisor Giroscopo (tiene que estar
asignado) maneja la sensibilidad
independientemente de los cambios de
modo de vuelo. Se puede reducir con Gier.
El ámbito de ajuste es de -100% a +100%.
Amortig. Se pueden ajustar dos sensibilidades
diferentes para cada fase de vuelo. Se
conmuta mediante el botón Mix-1. Se
puede reducir con Gier. El ámbito de ajuste
es de -100% a +100%.
Heading Se pueden ajustar dos sensibilidades
diferentes para cada fase de vuelo. Se
conmuta mediante el botón Mix-1. Se
puede reducir con Gier. El ámbito de ajuste
es de -100% a +100%.
Ajuste 0% hasta +100%
El giróscopo trabaja como un giróscopo de
amortiguación. Se puede reducir con Gier.
Si en un modelo de avión se conmuta en una fase
de vuelo a la sensibilidad (è15.3.2.) de 0 ... –100% (⇒
Heading), se desactiva el trimado de Gier. Las
modificaciones de trimado afectan a una memoria
separada de trimado de Gier para poder realizar
pequeñas correcciones (desviación de temperatura).
Este valor de trimado se aplica a todas las fases de vuelo
que trabajen en modo Heading.
La indicación de este trimado se muestra en el display
de estado 1-3. El parámetro Trim (è 14.2.2.) continúa
indicando sólo el trimado dependiendo de la fase de
vuelo en el modo amortiguación.
Con modelos de helicóptero se puede además
conmutar entre dos sensibilidades del giróscopo dentro
de una fase de vuelo (è 15.3.2).
Requerimientos:
En la asignación correspondiente, el conmutador de
mezcla Mix-1 es tiene asignado un conmutador (è
13.3.4).
Si en un modelo de helicóptero se conmuta a un
parámetro de sensibilidad 0 ... –100% (⇒ Heading), se
desactiva el trimado para Gier.
- las modificaciones de trimado afectan a una memoria
separada de trimado de Gier para poder realizar
pequeñas correcciones (desviación de temperatura).
Este valor de trimado se aplica a todas las fases de vuelo
que trabajen en modo Heading.
Página 44
Page 46

La indicación de este trimado se muestra en el display
de estado 1-3. El parámetro Trim (è 14.2.2.) continúa
indicando sólo el trimado dependiendo de la fase de
vuelo en el modo amortiguación.
- el compensador estático del rotor de cola se
desactiva
(è 15.4)
Uso:
Modelos de avión y helicóptero que dispongan de un
giróscopo Heading.
Es posible reducir la sensibilidad del giróscopo
(è 15.3.3), pero sólo afecta durante el uso del tipo de
funcionamiento amortiguación (sensibilidad del
giróscopo 0 ... +100% ⇒ Amortiguacion).
15.3.2. Parámetro “Heading /amortiguación“
(sensibilidad del giróscopo)
En el modo de giróscopo
La sensibilidad del giróscopo se configura únicamente
de forma manual mediante el transmisor giróscopo (è
15.3.1 modo à transmisor). El valor configurado del
parámetro de Heading / amortiguacion
(sensibilidad del giróscopo) no tendrá efecto en este
modo de giróscopo.
En el modo de giróscopo amortiguacionamortiguacion :
I afecta a la memoria de modelo activada
transmisortransmisor :
un valor independiente para cada fase de vuelo
Ámbito 0 ... +100%
F se puede asignar a un regulador digital 3D
El valor del parámetro amortiguacion (sensibilidad
del giróscopo) se puede ajustar para cada fase de vuelo
de forma independiente. El transmisor amortiguador
no tendrá efecto sobre los valores seleccionados (è
15.3.1 Modo à amortiguador).
En el modo de giróscopo HeadingHeading :
I afecta a la memoria de modelo activa
dos valores independientes para cada fase de
vuelo activables mediante el conmutador Mix-1
Ámbito –100% (Heading) ... +100% (amortig.)
F puede asignar a un regulador digital 3D
Se pueden utilizar dos valores por fase de vuelo para
ajustar el nivel de sensibilidad del giróscopo. La
conmutación se realiza mediante el conmutador Mix-1
(è 15.3.1 Modo à Heading)
' Consejo:
Si en una fase de vuelo se desea poder “llamar” sólo un
ajuste de sensibilidad del giróscopo
independientemente de la posición del conmutador
Mix-1, se ha de ajustar en mismo valor en ambas
posiciones del conmutador.
El transmisor giroscopo no tendrá efecto sobre los
valores seleccionados.
! Aviso durante el uso del mezclador de giróscopo
en el modo
Comprobar antes de volar el modelo a que el giróscopo
esté funcionando según la sensibilidad ajustada:
1. Activar una fase de vuelo cuya sensibilidad esté
configurada en el ámbito 0 ... -100% (Heading).
Heading:
Manual de instrucciones
2. Llevar la palanca de Gier o en su caso rotor de cola
a una posición máxima cualquiera y volver ubicar
en la posición neutral (centro)
Si se el servo de Gier o en su caso rotor de cola regresa a
su posición original el giróscopo estará trabajando en el
modo de amortiguación ⇒ Se ha de invertir la dirección
cambiando la polaridad del canal giroscopo (è
16.1.1)
15.3.3. Parámetro “Reducción“
I afecta ala memoria de modelo activada
Ámbito 2% ... 200%, en pasos de 2%
F puede asignar a un regulador digital 3D
La reducción reduce la sensibilidad en torno a un valor
ajustable. De esta forma se evita que el sistema de
giroscopio contraste un movimiento de giro deseado.
Los valores de 2% hasta 98% reducen la sensibilidad del
giróscopo pero sin llegar a anularla.
Valores de 102% hasta 200% conllevan la reducción
total antes de que la palanca de Gier llegue a una
posición final.
La reducción se aplica en todos los modos de giróscopo
trans., amortig., Heading con el mismo valor
independientemente de la fase de vuelo. Excepción:
Ámbito de sensibilidad 0 ... -100% (Heading).
! Aviso
Muchos sistemas de giróscopo tienen su propia función
de reducción. En ese caso, normalmente no se podrá
activar la reducción desde la emisora (reduccion ⇒
OFF). Prestar atención a los consejos del manual de
instrucciones del sistema de giróscopo.
15.4. Submenú “Rotor de cola“
(Compensación estática del rotor de
cola/Revo-Mix)
Detrás del mezclador rotor de cola de la ROYALevo
se esconde la llamada “compensación del rotor de cola
estática”. Cuando se lleva un helicóptero desde el vuelo
estacionario a un ascenso o descenso se amplía o
reduce el momento de giro que tiene que compensar el
rotor de cola. El modelo gira sobre su eje vertical. Un
mezclador bien ajustado compensa los cambios del
momento de giro, evita el giro indeseado y facilita el
trabajo del giróscopo, con lo que es posible una alta
estabilidad. Para esto se necesitan 4 parámetros:
Pitch+, Pitch-, Offset, punto neutral
! Consejos
Antes del ajuste del mezclador de COLA han de estar
realizadas todas las configuraciones de la cabeza del
rotor (incluida la curva de pitch). Antes de realizar los
ajustes finos en vuelo se ha de configurar la curva de
gas. Tras un cambio posterior de la curva de gas es
normalmente necesaria una corrección en el mezclador
COLA.
Página 45
Page 47

ROYAL evo
en su caso detrás
e debe desactivar el mezclador COLACOLA!
(è 15.3.).
Preparación:
• Para que aparezca el mezclador COLA en el menú
G Mezclador, se ha de asignar el servo COLA en el
menú K Servo/asignacion (è 16.2.).
• Para el equilibrado del servo Cola será suficiente
con uno de dos puntos (è 16.1.).
Importante: Evitar los bloqueos mecánicos en los
ajustes (P1, P5).
15.4.1. Parámetro “Pitch+ y Pitch-“
I afecta a la memoria de modelo activa
ading
ador de
4 un valor independiente para cada fase de vuelo
Ámbito -100 ... +100%
F se puede asignar a un regulador digital 3D
Con los parámetros Pitch+ / Pitch- se ajustan de
forma separada las mezclas de Pitch à Cola para
ascenso y descenso para cada fase de vuelo:
Pitch+ à Corrección de vuelo ascendente
Pitch- à Corrección de vuelo descendente
15.4.2. Parámetro “Diff Gier.“
I afecta a la memoria de modelo activa
en Pitch+. En la dirección contraria (descenso) se
aplica el valor seleccionado en Pitch- (è 15.4.1).
Procedimiento:
1. Ajustar la posición de partida de la mezcla de
compensación del rotor de cola. Llevar la palanca
de pitch a la posición correspondiente
(estacionario) y copiar el valor del parámetro
Pitch al parámetro punto neutral. Utilizar una
muestra de ajuste de la pala del rotor principal.
2. El valor de Pitch (última fila) no se puede modificar.
Muestra la posición actual de la palanca de pitch.
Copiar este valor al parámetro punto neutral.
15.5. Submenú “Cabeza del rotor“
(mezcla de disco oscilante electrónica
/CCPM)
La ROYALevo dispone de un mezclador de disco
oscilante (CCPM), el cual se puede ajustar a cualquier
tipo de disco oscilante (hasta 4 puntos de manejo o en
su caso servos), que necesite una mezcla electrónica.
Para esto se necesitan tres parámetros:
Geometria, Giro, relacion de palanca
4 un valor independiente para cada fase de vuelo
Ámbito -100 ... +100%
F se puede asignar a un regulador digital 3D
El parámetro diff. Gier sirve para reducir el
recorrido del rotor de cola en una dirección. Esto es
necesario si el modelo se comporta de forma distinta al
girar a la izquierda o en su caso derecha (velocidad de
giro). Se puede seleccionar un valor para cada fase de
vuelo.
15.4.3. Parámetro “Offset“
I afecta a la memoria de modelo activa
4 un valor independiente para cada fase de vuelo
Ámbito -100 ... +100%
F se puede asignar a un regulador digital 3D
Para equilibrar el momento de giro en 0°-Pitch (rotor
principal), hay que realizar un pequeño ajuste (=
Offset) del rotor de cola. Se puede ajustar el valor en
cada fase de vuelo de forma independiente. Esto es
necesario cuando se prevea el cambio a otras
revoluciones del sistema. En la fase de vuelo
autorotacion se puede modificar el Offset
(especialmente con el rotor de cola en movimiento) de
tal forma que el rotor de cola no muestre modificación.
15.4.4. Parámetro “Punto neutral“ y indicación de
Pitch
I afecta a la memoria de modelo activa
4 un valor independiente para cada fase de vuelo
Ámbito -100 ... +100%
F se puede asignar a un regulador digital 3D
En el punto neutral se configura el punto de partida de
la mezcla del compensador del rotor de cola. Desde este
ángulo de ajuste de pitch en dirección ascendente se
consigue una mezcla PitchàCola con el valor ajustado
Preparación:
Para que el mezclador cabeza de rotor aparezca en
el menú G mezclador, se han de asignar, dependiendo
del tipo de disco oscilante, los siguientes servos en el
menú K servo/asignacion (è 16.2):
Servo Observación
Cabeza al/at
Cabeza iz
Cabeza de
Cabeza 4
El orden de asignación de los servos es indiferente.
Ejemplo 1:
Geometria +120°
Giro +0°
Rel. de palanca
Cabeza iz
Servo del disco oscilante delante o
Servo del disco oscilante izquierda
Servo del disco oscilante derecha
Sólo con manejo de cuatro puntos
Disco oscilante de 3 puntos 120°
0%
Cabeza de
120°
Dirección de
Cab.al/de
Página 46
Page 48

Ejemplo 2:
Disco oscilante de 4 puntos 90°
Geometria -90°
Giro +0°
Rel. de palanca
0%
Cab.al/at
90°
Cabeza iz
Cabeza de
Cabeza 4
Dirección de
15.5.1. Parámetro “Geometría“
I afecta a la memoria de modelo activa
Ámbito 90 ... 150° / -91 ... -150°
Preselección +120°
El parámetro geometria describe el ángulo entre el
servo del disco oscilante Cabeza al/at y los servos
colocados simétricamente con el Cabeza iz o en su
caso cabeza de.
Atención: El ángulo ha de ser indicado con el signo
negativo
si el servo Cabeza al/at está, visto en
dirección de vuelo, delante (ejemp. 2).
15.5.2. Parámetro “Giro“
I afecta a la memoria de modelo activa
Ámbito -100 ... +100°
negativo à sentido de las agujas del reloj,
positivo à sentido contrario a las agujas del reloj
Preselección 0°
El parámetro Giro (también llamado giro virtual del
disco oscilante) se necesita,
• si el disco oscilante no se encuentra montado
mecánicamente en el modelo que el servo Cabeza
al/at no se encuentre sobre el eje de vuelo
• si el modelo se mueve p.ej. con un movimiento de
control de Nick también en Roll.
Flugrichtung
Dirección de vuelo
Drehung 20°
Giro 20º
Geometría
Geometrie
90°
Flugrichtung
Dirección de vuelo
Drehung 20°
Giro 20º
140°
Manual de instrucciones
15.5.3. Parámetro “Palanca +/-“
I afecta a la memoria de modelo activa
Ámbito -100 ... +100%
Preselección 0%
El parámetro Palanca +/- sólo se utiliza con discos
oscilantes de tres puntos cuyos puntos de manejo se
encuentren, por motivos mecánicos, a diferentes
distancias del centro del eje del rotor.
Se ajusta la diferencia en % de la distancia radial (centro
eje motor à articulación) del servo Cabeza al/at
con los dos servos laterales Cabeza iz o en su caso
cabeza de. Las palancas laterales son 100%.
Ejemplo:
Distancia Cabeza al/at: 40mm
Distancia Cabeza de / iz: 50mm (=100%)
La palanca de articulación es, en dirección de vuelo
(cabeza al/at) un 20% más corta que las palancas de las
articulaciones laterales.
⇒ Se ajusta: Palanca +/- -20%.
Cabeza iz
Cabeza al/at
Dirección de vuelo
' Consejo:
Una vez se hayan introducidos los valores mecánicos
como parámetro del mezclador Cabeza de rotor, se
ha de realizar el equilibrado cuidadoso de los servos de
la cabeza en el menú K servo/equilibrado (è
16.1). Sólo así se garantiza un control preciso. La
dirección de giro del servo se puede comprobar
mediante movimientos de control de pitch. Los servos
que no funcionen correctamente se habrá que cambiar
la polaridad del giro. Durante el equilibrado del servo
puede ser útil si se desengancha el varillaje del disco
oscilante-cabeza de rotor, para igualar los recorridos
máximos (P1, P5). El ajuste de los recorridos de los
servos se realiza en el menú H transmisor (è 14.2.4.
Roll / recorrido, Nick / recorrido, è 14.2.9. Pitch / curva
de pitch)
15.5.4. Helicóptero con mecánica Heim
Si se desea utilizar un helicóptero con mecánica HEIMhay que realizar lo siguiente:
1. Seleccionar como plantilla del nuevo modelo
"HELIccpm"
2. Asignar como servo 9 "CABEZA al/at". Este servo no
se utiliza en el modelo. Únicamente sirve para
activar el mezclador de la cabeza.
Cabeza de
Página 47
Page 49
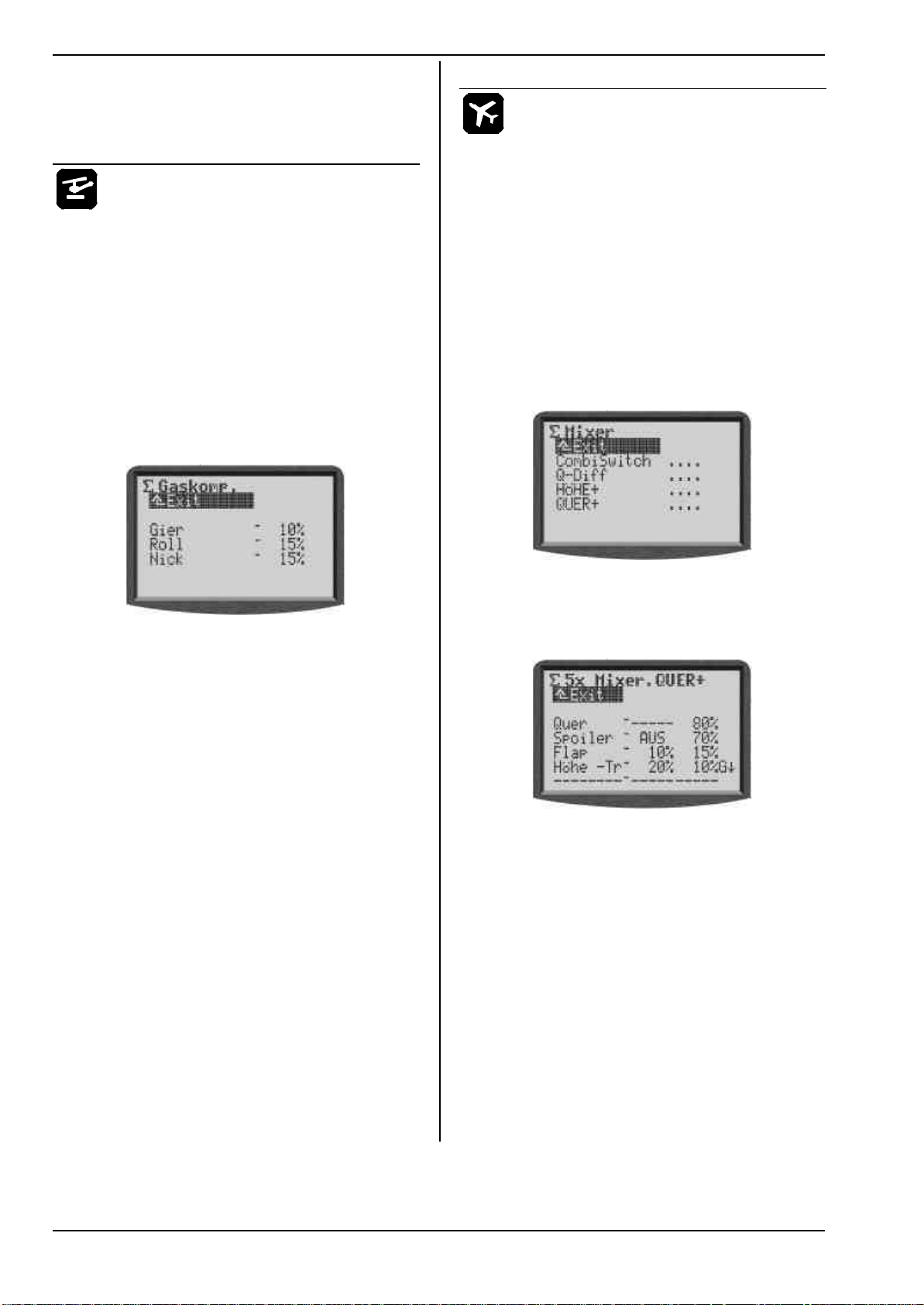
ROYAL evo
3. Asignar Nick al servo original “cabeza al/at ".
4. Ajustar en el mezclador "cabeza de rotor" la
geometría a 90º. Así los servos "CABEZA iz" y
"CABEZA de" son manejados por Roll y Pitch.
15.6. Submenú “comp. de gas “
I afecta a la memoria de modelo activa
F Cualquier valor puede ser asignado durante el
vuelo a un regulador digital 3D (è 10.2.2)
El mezclador de compensación de gas comp. de gas.
Sirve para mantener régimen de revoluciones constante
en modelos de helicóptero. No sólo los movimientos de
control colectivos (Pitch), sino también grandes
movimientos cíclicos (Roll y Nick) y grandes
movimientos del rotor de cola (especialmente presentes
en vuelos acrobáticos) producen una modificación no
deseada de las revoluciones del sistema. Ésta se puede
compensar de forma independiente con el siguiente
mezclador. Los ajustes exactos se averiguan durante el
vuelo. Normalmente se requieren valores de 10 – 20%:
15.7. Ajuste de los “mezcladores libres “
“Mezcladores libres“ son todos los mezcladores que
están definidos en el menú
Setup/def. mezclador (è 13.2). Los mezcladores
allí definidos (max. 14) se ajustan a las necesidades de
cada modelo en el menú G mezclador.
! Consejos
Los mezcladores definidos en el menú Setup/def.
mezclador (è 13.2) únicamente se pueden utilizar
con modelos de avión y no de helicóptero.
Para una mejor visualización del menú G mezclador
únicamente se muestran los mezcladores que sean
utilizados por el modelo activado, o lo que es lo mismo,
que hayan sido asignados mediante el menú K
Servo/asignacion (è 16.2):
15.6.1. Parámetro “Gier“
Ámbito +/-100%, Preselección OFF
Los movimientos de Gier, que amplían el ángulo de las
palas del rotor de cola, implican un aumento lineal del
gas hasta el valor máximo con recorrido completo.
Los movimientos de Gier, que reducen el ángulo de las
palas del rotor de cola, implican una reducción lineal del
gas hasta el valor máximo con recorrido completo.
Para este parámetro se requieren valores positivos y
negativos ya que un movimiento de Gier, según el
sistema de helicóptero, puede ser realizado con el
movimiento del motor o en su contra. El gas se ha de
aumentar o en su caso reducir de forma adecuada.
15.6.2. Parámetro “Roll“
Ámbito 1% hasta 100%, Preselección OFF
Los movimientos de Roll (derecha e izquierda)
conllevan un aumento lineal del gas hasta el valor
máximo con recorrido completo.
15.6.3. Parámetro “Nick“
Ámbito 1% hasta 100%, Preselección OFF
Los movimientos de Nick (delante y atrás) conllevan un
aumento lineal del gas hasta el valor máximo con
recorrido completo.
Los mezcladores CombiSwitch y A-Diff se muestran
siempre.
El ejemplo del mezclador Aler+, el cual está definido
de serie y es utilizado por varias plantillas de modelo,
explica como se ajusta un “ mezclador libre”:
El ejemplo muestra la configuración del mezclador
Aler+ (à de los diferentes recorridos de los alerones),
de la forma que podría ocurrir p.ej. en un velero (alas de
4 compuertas).
¿Qué indica el menú?
Cantidades de mezcla
En la cinco últimas filas se listan según la definición de
mezcla las cantidades de mezcla o en su caso de los
transmisores (los cuales producen un movimiento del
timón/es).
Valores
En las dos columnas siguientes se muestran los valores
(1 o 2) de la cantidad de mezcla correspondiente. ¡En
este menú sólo se pueden cambiar estos valores!
Título “dinámico"
Según sobre que cantidad de mezcla se encuentre el
cursor, la tercera fila del menú mostrará un título
dinámico en el que se detallan las cantidades de mezcla.
Página 48
Page 50

Columna 1
(sobre cant. de
mezcla)
Indica mediante un icono la
opción de mezcla asignada a la
cantidad de mezcla
(è 13.2.3)
Columna 2+3 Indica el tipo y de esa forma el
efecto de los valores de mezcla.
Columna 4 Indica si la cantidad de mezcla es
conmutable, en caso afirmativo,
con qué conmutador y estado
actual:
Asterisco * à Cant. mezcla = ON
Flecha à Indica la posición ON
del botón de la cantidad en caso
de estar OFF
Ejemplo:
La cantidad (transmisor) Aler (cantidad principal)
afecta de forma simétrica al centro del servo de/de los
servos de los alerones con un ajuste de recorrido de
80%.
Ejemplo:
El componente (transmisor) Prof. -Tr (profundidad
sin trimado) afecta de forma asimétrica al centro del
servo de los servos de los alerones (Snap-Flap). El ajuste
de recorrido es hacia un lado 30% y hacia el otro 20%. La
cantidad de mezcla se puede desactivar con el
conmutados G. El estado actual del conmutador es ON
(asterisco *), lo que significa que el componente está
activado.
16. Menú principal “Servo“ KK
I Todos los ajustes y asignaciones que se realicen en
este menú afectarán al modelo activo
16.1. Submenú “Equilibrado“
Manual de instrucciones
Con el “equilibrado” se pueden ajustar los recorridos, los
puntos medios e incluso los puntos intermedios de todos los
servos de tal forma que se muevan de forma equilibrada y
alcancen los recorridos máximos necesarios.
Todas las modificaciones de los parámetros REV/TRM y
de los puntos de equilibrado de servos P1 ... P5 se
muestran directamente en el diagrama. De esta forma
es posible un control de los ajustes rápido y fácil.
En la fila 1 se muestra cada definición del servo. En la
parte superior del gráfico se muestra el número de
canal (salida del receptor) del servo seleccionado.
Los dígitos 1 ... 5 por debajo del gráfico (eje-X)
corresponden a los puntos de equilibrado de los servos
P1 ... P5.
16.1.1. Parámetro “REV/TRM“
El primer parámetro REV/TRM tiene dos funciones:
1. El servoreverse (REV) modifica la dirección de giro
2. Trimado de servo (TRM)
Servoreverse REV
Para cambiar la dirección de giro del servo, seleccionar
el valor del parámetro y pulsar la tecla REV/CLR:
⇒ se cambia la “polarización” de la curva
⇒ se cambia el prefijo
(sólo si el valor del parámetro TRM ≠ 0)
Trimado de servo TRM
El trimado de servo se utiliza para corregir desviaciones
del timón con respecto al punto neutral. Esto puede
suceder p.ej. en servos que no estén suficientemente
compensados en temperatura y modifican por ello su
punto neutral.
El valor de trimado seleccionado afecta como Offset en
todos los puntos de equilibrado P1 hasta P5. Eso
conlleva un desplazamiento paralelo de la curva. La
forma de la curva se mantiene sin cambios. Este efecto
corresponde al método de trimado estándar.
Utilizar el trimado de servo TRM únicamente para
equilibrar desviaciones entre los servos que se hayan
notado durante el vuelo y utilizar al ajustar un modelo
nuevo. Aquí se requiere una correcta justificación
mecánica.
16.1.2. Parámetro “P1 … P5“
Mediante el ajuste de los puntos de equilibrado de los
servos (parámetro “P1 … P5“) se pueden resolver varios
trabajos. Concretamente son:
• Fijar el ámbito máximo de trabajo del servo
Los valores ajustados aquí (recorrido de servo) no
Página 49
Page 51

ROYAL evo
Aquí se selecciona el transmisor o mezclador
“ significa que la salida del receptor no
pueden ser sobrepasados en ninguna condición de uso.
(protección de bloqueado mecánico del los servos)
• ajustar recorridos de timón simétricos
• adaptar entre si los valores de los servos
De esta forma se evita el bloqueado mutuo, cuando dos
(o más) servos manejen el mismo timón.
• equilibrar diferencias mecánicas de las
articulaciones de los timones
Con los puntos intermedios P2 y P4 se pueden p.ej.
adaptar entre si p.ej. las compuertas que tengan un
recorrido diferente en modelos de avión con varias
compuertas.
Es especialmente importante realizar una
compensación cuidados en los servos a los que han sido
asignados mezclas.
! Aviso:
Utilizar la compensación de servo únicamente para
ajustes finos. Se recomienda encarecidamente un
preajuste mecánico cuidadoso. No reducir en ningún
caso el recorrido máximo del servo (P1 y P5) a más de
aprox. 10 - 20%. De otra forma no se aprovecha la fuerza
de mantenimiento del servo, la exactitud de colocación
del servo se pierde y el juego del engranaje del servo
aumenta.
Así se equilibra un servo:
1. Servo, que son manejados por las funciones
principales
aterrizaje, ...):
Comprobar primero si la dirección de giro del servo
se corresponde con el movimiento del transmisor.
En caso necesario, cambiar la dirección de giro
mediante el parámetro REV/CLR (è 16.1.1.). Una
modificación posterior implica un nuevo
equilibrado.
Servos, que son manejados por mezcladores
(ALER+, DELTA, DERIVA-V, ...):
En los servos a los que se les haya asignado una
mezcla será indiferente la dirección de giro del
servo. La dirección correcta del recorrido del timón
se ajustará en el mezclador.
2. Seleccionar un punto de equilibrado (P1 hasta P5) y
activar el valor (valor porcentual invertido).
Presionar ahora la tecla de asignación de los
reguladores digitales < F >.
El servo asume automáticamente la posición que
corresponde al valor porcentual seleccionado de la
posición de equilibrado. Con una mano se puede
medir y controlar cómodamente el recorrido de los
timones (metro, regla,…), la otra mano queda libre
para modificar el valor de mediante los botones de
ARRIBA/ABAJO s / t o con un regulador digital
3D.
Una vez el recorrido sea correcto, volver a presionar
la tecla de asignación de reguladores digitales
< F >. El servo asume la posición que corresponde
al ajuste del transmisor correspondiente.
La cantidad de puntos de equilibrado de servo
ajustables (min. 2, max. 5 puntos) se guía por el ajuste
seleccionado al asignar el servo (è 16.2).
(Alerón, profundidad, dirección, tren de
' Consejo: Línea vertical como orientación
La línea vertical punteada indica, como orientación, la
posición actual del transmisor correspondiente. Una vez
se haya activado un valor con el botón de asignación de
los ajustadores digitales < F >, la línea vertical salta al
punto correspondiente y se mantienen ahí hasta que se
Página 50
vuelva a pulsar el botón de asignación o se mueva el
transmisor correspondiente.
16.2. Submenú “Asignación“
I afecta a la memoria de modelo activa
Asignación libre
Preselecciones en las plantillas de modelo para el
estándar MULTIPLEX o de otras marcas
Según el tipo de emisora, se muestran en la lista
los 9 o 12 servos posibles.
La ROYALevo ofrece la posibilidad, así como ya sucedía
en las series de emisoras de MULTIPLEX PROFImc 3000 y
4000, de definir libremente el uso de las salidas del
receptor. La ventaja en relación a los sistemas de radiocontrol de uso fijo de salidas del receptor es p.ej. que la
señal para un segundo servo de alerones (como norma
se asigna a un canal superior p.ej. canal 5) se puede fijar
a un canal de libre elección y así posibilitar el uso de
p.ej. un pequeño receptor de cuatro canales.
Columna 1 Columna 2 Columna 3 Columna 4
Nº de Transmisor o Formato de Nº de puntos
servos mezclador impulso de equilibrado
Los detalles se muestran en la tabla de la derecha.
Así se realiza la asignación:
1. Seleccionar servo,
presionar el regulador digital 3D
2. Seleccionar la función (transmisor o mezclador),
presionar el regulador digital 3D
3. Seleccionar (o no) el formato de impulso,
presionar el regulador digital 3D
4. Seleccionar la cantidad de puntos de equilibrado,
presionar el regulador digital 3D
El cursor regresa al número de servo. La asignación ha
concluido.
Así se elimina una asignación:
1. Seleccionar servo,
presionar el regulador digital 3D
2. Pulsar la tecla REV/CLR,
presionar el regulador digital 3D
Tabla del menú
Col. 1 Nº de canal/servo
Col. 2 Fuente de señal
Col. 3 Formato impulso del servo
asignacion de servo
ROYALevo 9 ⇒ máximo 9 canales
ROYALevo 12 ⇒ máximo 12 canales
El tipo de transmisión apropiado (PPM 7/8/9
o PPM 12) se ajusta automáticamente
(è Fehler! Verweisquelle konnte nicht ge-
funden werden.
que ha de ser manejado por el canal.
„ - - -
se está utilizando. En este caso se emite una
señal neutral por la salida.
.).
Page 52

La preselección de (MPX / UNI) ya se realizó al
En el caso de que no todos los
s/reguladores/giróscopos que van a ser
al transmisor trabajen con el
mato de impulso, aquí se puede
Aux2
crear un nuevo modelo (è18.6.).
servo
conectados
mismo for
cambiar el formato de impulso de cada salida
del receptor de forma independiente.
Col. 4 Puntos de equilibrado del servo
Se fija la cant. de puntos de equilibrado disk.
en el menú equilibrado de servo (è 16.1.).
2P 2 puntos (p.ej. para Gas, embrague)
3P 3 puntos (p.ej. profundidad, dirección)
5P 5 puntos
(cuando se quiere evitar o generar un
comportamiento no lineal)
16.2.1. Caso excepcional: MULTInaut IV
¡La función MULTInaut sólo está disponible
para modelos de avión!
La ROYALevo puede controlar dos comp. de emisora
MULTInaut IV. Así se pueden conmutar hasta 8
consumidores y/o controlar 8 servos en distintas
funciones.
En el menú de asignación de servo se define por que
canales (salidas del receptor) se transmiten las señales
de los componentes MULTInaut. En el modelo se han de
conectar los componentes MULTInaut a estos canales.
Utilizar MULTInaut IV è 19.4.
!!
16.2.2. Asignar servos para modelos de avión
Según el tipo de modelo (avión/helicóptero) se dispone
de los siguientes transmisores/mezcladores:
Tipo de modelo “Avión“
Observación
Aler
Prof
Direc
Gas
Spoiler
Flap
Tren
Embrague
Freno
Girosco.
Mezcla
Aux1
M.naut 1
M.naut 2
Todos los
mezcladore
s libres
sólo señal de alerón sin mezcla *
sólo señal de prof. sin mezcla
sólo señal de direc. sin mezcla
sólo señal de gas sin mezcla
sólo señal de Spoiler sin mezcla
sólo señal de flap sin mezcla
sólo señal de tren sin mezcla
sólo señal de embrague sin mezcla
sólo señal de freno sin mezcla
Señal de giróscopo con todas las mezclas
del mezclador de giróscopo
sólo señal AUX1/2 sin mezcla
Señal de control para MULTInaut IV è 19.4.
Todas las mezclas que estén definidas en
“def. mezclador” * (è 13.2) *
Manual de instrucciones
* Aviso para mezcladores/servos con función de
alerón
Para que con canales con fuente de señal alerón o en su
caso un mezclador con cantidad de alerón la
diferenciación del alerón trabaje correctamente, se han
de conectar cada servo de forma aleatoria al receptor.
1
ALER+
QUER+
6
FLAP+
7
FLAP+
5
ALER+
QUER+
Servo 1 ALER+ izquierda
Servo 5 ALER+ derecha
Servo 6 FLAP+ izquierda
Servo 7 FLAP+ derecha
16.2.3. Asignar servos para helicópteros
Tipo de modelo “Helicóptero“
Observación
Roll
Nick
Gier
Gas
Spoiler
RPM
Tren
Embrague
Freno
Girosco.
Mezcla
Pitch
Limite
de gas
COLA
Cabeza
al/at
Cab. iz
Cab. de
Cab. 4
** Aviso
Sólo señal roll sin mezcla
para mezcla mecánica de la cabeza del rotor
Sólo señal nick sin mezcla
para mezcla mecánica de la cabeza del rotor
Sólo señal gier sin mezcla
Señal de gas con mezcla de curva de gas,
limitador de gas, gas directo, gas NOT OFF
(para modelos de avión)
Señal de manejo de reg. de revoluciones
Señal del tren de ater. sin mezcla
Señal de embrague mezcla
Señal de freno mezcla
Señal de giróscopo respetando todas las
mezclas del mezclador de giróscopo
Sólo señal pitch sin mezcla
para mezcla mecánica de la cabeza del rotor
Sólo señal límite de gas sin mezcla
para mezcla mecánica de la cabeza del rotor
Señal de cola respetando todas las mezclas
→cola (p.ej. equilibrado de rotor de cola
estático/Revo-Mix)
Señal para servos de discos oscilantes **
Cabeza al/at, I y D con disco oscilante de
articulación de tres puntos ( 3-puntos 120°)
Cabeza al/at, I, D y 4 con disco oscilante de
articulación de cuatro p. (p.ej. 4-puntos 90°)
(mezcla electrónica de disco oscilante,
CCPM)
Página 51
Page 53
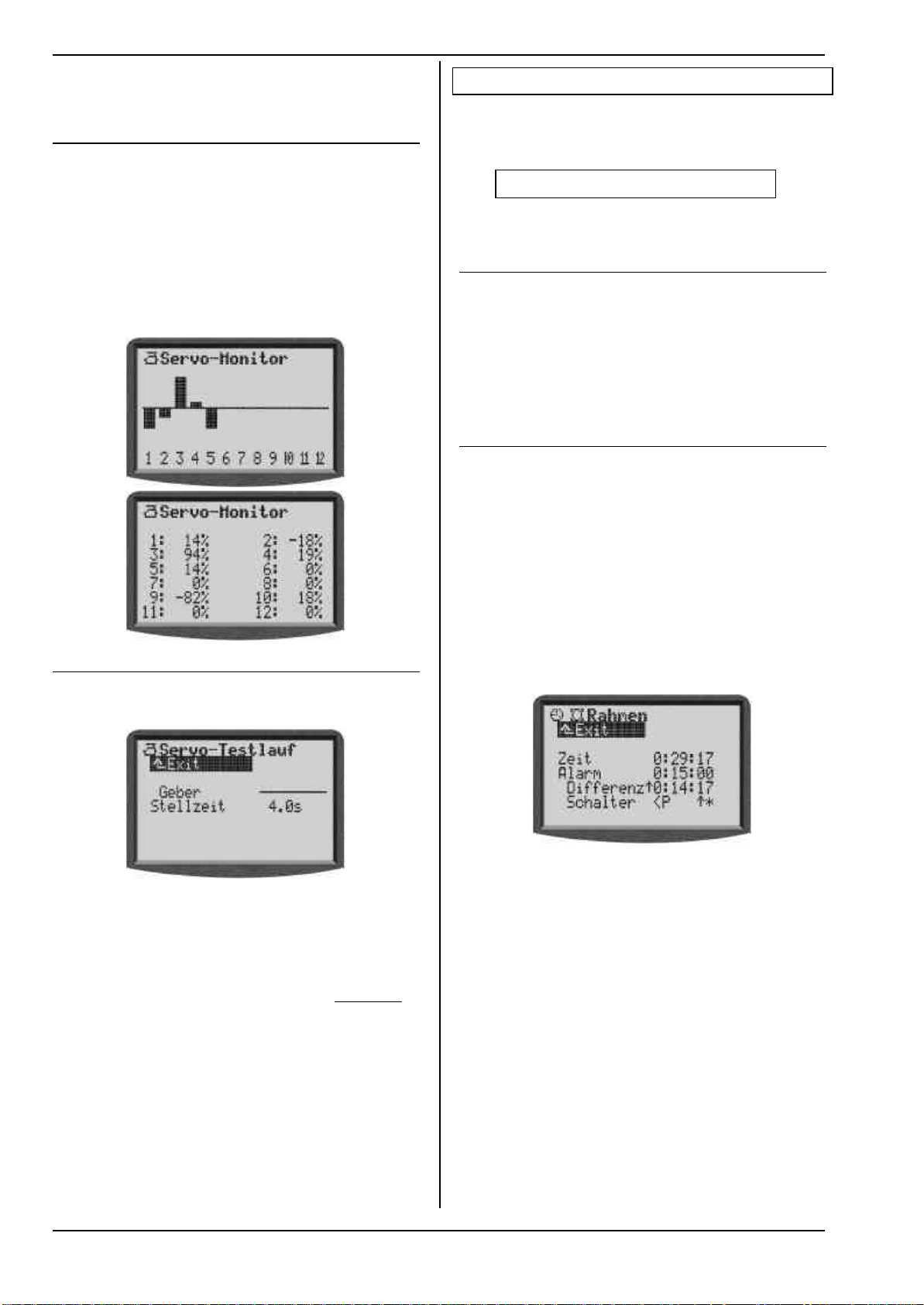
ROYAL evo
Para que la mezcla electrónica de disco oscilante trabaje
correctamente se han de conectar los servos al receptor
en un orden concreto. (è 15.5.)
16.3. Submenú “Monitor“
El monitor del servo sustituye a un receptor con servos
conectados. Se pueden comprobar y encontrar errores
en la función/control de reguladores de navegación,
sistemas de giróscopo, ….
Existen dos variantes de visualización (gráficamente con
muestra de las señales de salida en forma de columnas
o de forma numérica con indicación de valores
porcentuales). Se puede cambiar de una a otra
mediante los botones de ARRIBA/ABAJO (s / t) o
alternativamente con uno de los reguladores digitales
3D:
16.4. Submenú “Test“
Movimiento automático que se puede utilizar como test
o demostración o como ayuda “electrónica” al realizar el
test de alcance.
17. Menú principal “Reloj“ AA
La ROYALevo dispone de cinco cronómetros. Cuatro de
ellos se encuentran en el menú Timer A. El quinto mide
el tiempo de uso de la emisora. Sólo es visible en la
pantalla de estado 4.
Tiempo de uso 5h25min
Cuando este cronómetro alcanza las 1000 horas
comienza de nuevo desde cero.
17.1. Submenú “Modelo“
I Parámetro afecta sólo al modelo activo
Ámbito = 199 h 59 min
Borrar con la tecla (REV/CLR)
Este cronómetro está disponible una vez en cada
memoria de modelo. Se pondrá en marcha siempre que
la emisora esté en funcionamiento. El gran ámbito
permite la medición del tiempo de uso de un modelo
durante toda la temporada.
17.2. Submenú “Marco“
I Parámetro afecta sólo al modelo activo
Ámbito = 3:30:00 (3 horas y media)
Borrar sólo en el menú
La particularidad de este cronómetro es que se inicia
mediante el conmutador asignado pero no se puede
detener con el mismo conmutador mientras que el
cronómetro de marco siga en funcionamiento.
Aplicaciones:
• Medición del tiempo total de un vuelo
• Tiempo de marco en competiciones
Cuando se abre el submenú, se muestra debajo del
nombre del cronómetro (marco, suma o intervalo) y de
Ext. Lo siguiente:
Fila 1: Tiempo
Una vez se haya seleccionado el transmisor comenzará
una señal de control uniforme (desde un punto máximo
del transmisor al otro). Todos los servos que están
controlados directamente o mediante una mezcla
comienzan a moverse.
El test se puede detener de dos formas:
• Pulsar la tecla REV/CLR ⇒ se muestra “ transmisor “
• No seleccionar ningún transmisor (“ - - - - - - - “)
El tiempo de recorrido se puede ajustar de 0,1 – 4,0 seg.
Página 52
Este es el tiempo transcurrido desde la puesta en
funcionamiento del cronómetro. Si se selecciona este
campo se puede borrar el tiempo mediante la tecla
(REV/CLR).
Fila 2: Alarma = tiempo de marco
Aquí se muestra y ajusta el tiempo de marco.
Fila 3: Diferencia (sólo indicador)
Aquí se aprecia el tiempo que también se muestra en la
pantalla de estado 3. Es el resultado de la diferencia de
tiempo con alarma. La flecha delante de la diferencia
indica la dirección del tiempo mostrado:
' dirección ascendente
# dirección descendente
Fila 4: Conmutador
Aquí se muestra el conmutador con el que se controla el
cronómetro (<N) y en que posición se encuentra en
estado ON (' = delante). Si el conmutador se encuentra
en la posición seleccionada como ON, aparece detrás
una flecha y un asterisco '*.
(sólo indicador)
Page 54

Esquema de alarma:
• a partir del décimo seg. antes de la alarma
programada, tono corto cada segundo (æ)
• Cuando se alcanza la alarma programada
tono largo (æ --- )
17.3. Cronómetro “´´ suma “
I Parámetro afecta sólo al modelo activo
Ámbito = 3 h 30 min
Borrar con la tecla (REV/CLR) en la
pantalla de estado 3, o en el menú
Este cronómetro suma diferentes tiempos. Una vez
iniciado se puede detener pulsando de nuevo el
conmutador y volver a poner en funcionamiento
accionando una tercera vez el conmutador.
Aplicación:
Medición del tiempo de funcionamiento del motor con
el conmutador del transmisor gas
El cronómetro "suma" se puede utilizar de dos formas
diferentes:
1. Ajustar la alarma a 0:00:00
El cronómetro comienza en cero, funciona hacia
delante, suma el tiempo y se activa y desactiva
mediante el conmutador asignado. El reajuste a
cero se realiza en la pantalla de estado 3 con la tecla
REV/CLR en este menú. En este caso no existe una
alarma.
2. Ajuste alarma no = 0:00:00
El cronómetro comienza en el tiempo de alarma
seleccionado, funciona contra-reloj y suena una
alarma cuando haya transcurrido el tiempo
seleccionado.
Esquema de alarma:
• a partir del quinto seg. antes de la alarma
programada, dos tonos cortos cada segundo (æ æ)
• Cuando se alcanza la alarma programada
tono doble largo (æ --- æ ---)
17.4. Submenú “¶¶¶¶ Intervalo“
I Parámetro afecta sólo al modelo activo
Ámbito de ajuste = 3 h 30 min
Se borra automáticamente cada vez que se
enciende la emisora
Con este cronómetro se puede “llamar” el intervalo
seleccionado tantas veces como se desee.
El cronómetro comienza en el tiempo de alarma
seleccionado, funciona contra-reloj y suena una alarma
cuando haya transcurrido el tiempo seleccionado.
Si el conmutador se encuentra en posición ON al
finalizar el tiempo de alarma, el intervalo vuelve a
comenzar.
Si el conmutador se encuentra en posición OFF al
finalizar el tiempo de alarma, el tiempo sigue
avanzando hacia delante hasta llegar al valor máximo (4
h 30 min).
Esquema de alarma:
• a partir del segundo antes de la alarma
programada, tres tonos cortos (ææ æ)
• Cuando se alcanza la alarma programada
tono triple largo (æ --- æ --- æ)
Manual de instrucciones
18. Menú principal “Memoria“ II
La ROYALevo tiene según el tipo 20 o 36 memorias de
modelos. Las memorias de modelos están numeradas.
Además se pueden añadir a cada memoria de modelo
un nombre de hasta 16 caracteres.
Los datos de los modelo se encuentran en una memora
no volátil y no se pierden aun cuando se desconecta la
batería de la emisora.
Además de la gestión de las memorias (cambiar, copiar,
borrar), en este menú se crean los nuevos modelos (è
18.6.) y se gestionan las fases de vuelo (è 18.4.).
18.1. Submenú “Selección de modelo“
(cambio de memoria)
Cuando se accede a este submenú se muestra una lista
con todas las memorias de modelos, cuyo principio
podría tener p.ej. el siguiente aspecto:
La memoria de modelo activa está marcada con una x.
Una memoria de modelo vacía está marcada como ---
-----. Las memorias vacías se pueden seleccionar pero
no activar.
Para cambiar el modelo, seleccionar la memoria
correspondiente y presionar el regulador digital 3D o la
tecla ENTER.
18.2. Submenú “Copia“
Todos los valores de ajuste de transmisores,
mezcladores, trimadores, nombres de memoria y
trimado pueden ser copiados.
El proceso de copia se realiza en cuatro pasos:
1. Seleccionar el modelo, que ha se ser copiado. Esto
puede ser cualquier modelo.
2. Confirmar la selección mediante el regulador
digital 3D o la tecla ENTER. El signo identificativo
de detrás del nombre de modelo cambia de x a c
(copy).
3. Buscar destino
El nombre del modelo y la c acompaña a la
búsqueda.
4. Confirmar destino mediante el regulador digital 3D
o la tecla ENTER.
• Si la memoria de destino está vacía, se genera
automáticamente la copia.
• Si la memoria de destino está ocupada, se muestra
el mensaje de confirmación "¿Sobrescribir el
modelo existente?".
• Ahora se puede interrumpir el proceso de copia
(Presionar la tecla ENTER o regulador digital 3D).
• Si se desea sobrescribir un modelo existente,
presionar la tecla REV/CLR.
Cuando termine la copia se volverá al modelo
anteriormente activo.
Página 53
Page 55

ROYAL evo
18.3. Submenú “Borrar“
Cuando se haya seleccionado la memoria que se desea
eliminar, presionar el regulador digital 3D o la tecla
ENTER. Ahora se muestra el mensaje de confirmación
"¿Eliminar el modelo definitivamente?".
• Si no se desea borrar,
presionar el botón ENTER o el regulador digital 3D.
• Si se desea borrar,
confirmar con la tecla (REV/CLR).
Si se ha seleccionado la memoria activa identificada con
x no podrá ser eliminada.
18.4. Submenú “Fases de vuelo“
I válido para el modelo activo
Cuarto fases posibles
La conmutación de fase se realiza de forma “suave”
(aprox. 1 seg.)
El nombre de la fase se puede elegir entre 13
muestras
Las fases se pueden liberar/proteger
(tono de alarma al seleccionar una fase protegida)
Las fases se pueden copiar
Para cada fase se pueden adaptar las propiedades de los
transmisores de la emisora a las necesidades del
modelo (p.ej. recorrido de los timones cortos para
VUELO RÁPIDO, flaps extendidos durante el
ATERRIZAJE, mayor cantidad de Pitch durante
AUTOROTACION). Todos los ajustes, que pueden ser
diferentes para cada fase de vuelo, están provistos del
dígito identificativo de la fase de vuelo en el menú de
transmisor (è 14.2).
Condición: Si se desea trabajar con las fases de vuelo,
tiene que haber en el menú L, ASIGNACION,
CONMUTADOR por lo menos asignado un conmutador
(fase principal o fase 1-3). Si este no es el caso, la
emisora trabajará siempre en la fase 1.
Este es el aspecto que puede tener el menú de fases de
vuelo:
El nombre sirve únicamente como información
adicional. Lo importante para las propiedades es
siempre el número de fase de vuelo.
Una vez se haya activado el campo del nombre se podrá
seleccionar el nombre apropiado. Con el botón
REV/CLR se selecciona el primer nombre de la lista
(NORMAL).
18.4.2. Liberar/proteger fases de vuelo
Las fases de vuelo se liberan/protegen mediante el
botón REV/CLR. Seleccionar la fase de vuelo, activar el
nombre y conmutar con el botón REV/CLR entre "libre"
y "protegido". Si se selecciona otro nombre mediante el
regulador digital 3D también se libera una fase de vuelo
protegida. La fase de vuelo activa (x) no se puede
proteger.
Aviso:
Si se selecciona una fase de vuelo protegida en la
posición de conmutación actual, sonará un pitido
constante como aviso. Se mantiene activa la última fase
de vuelo utilizada, el número correspondiente se
muestra en la pantalla de estado 2 y el nombre de la
fase de vuelo protegida aparece tachada.
18.4.3. Copiar la fase de vuelo activa
La fase de vuelo activa está marcada con x detrás del
nombre. Los valores de esta fase se pueden copiar a una
de las otras tres fases. Para ello se requieren los
siguientes pasos:
1. Seleccionar la fase activa (x)
2. Pulsar 2 x el regulador digital 3D (o ENTER), la "x" se
activa
3. Pulsar la tecla de adaptación (F)
Los ajustes de la fase activa son adaptados.
4. Seleccionar la fase de destino de la copia
En el cursor aparece una "c".
5. Confirmar con el regulador digital 3D o ENTER
18.5. Submenú “Propiedad“
I valido para el modelo activo
muestra de los tipos de modelos disponibles
En este menú se pueden ver algunas de las propiedades
del modelo activo. Exceptuando la plantilla utilizada, los
valores se pueden modificar las propiedades.
Ejemplo:
De el se extrae lo siguiente:
1. Fases de vuelo 2 y 3 están protegidas
(nombre tachado)
2. Fase de vuelo 1 (la fase principal) está activa
( x detrás del nombre)
3. En conmutador para la fase principal el “J” en la
parte derecha
4. Para la fase 4 no hay asignado ningún conmutador
(--- detrás de fase 4)
18.4.1. Seleccionar el nombre de la fase de vuelo
Están disponibles los siguientes nombres:
NORMAL, START1, START2, TERMICA1, TERMICA2,
SPEED1, SPEED2, VUELOCIRCULAR, ATERRIZAJE,
AUTOROTACION, ESTACIONARIO, 3D, ACRO
Página 54
Modo indica en el ejemplo, que la palanca izquierda (<)
maneja la dirección y la profundidad (D/P). Este ajuste
te puede modificar.
Asignación indica cual de las listas de asignación
posibles está siendo utilizada para transmisores y
conmutadores. Este ajuste es modificable.
Plantilla muestra la plantilla de modelo con la que se
creó el modelo. Aquí no se pueden hacer cambios.
Para el Nombre del modelo se pueden utilizar hasta 16
letras. Cuando se crea un modelo nuevo se adopta
directamente el nombre de la plantilla utilizada.
Page 56

18.6. Submenú “Nuevo modelo “
Cuando se accede a este submenú se muestra la
siguiente pantalla:
La emisora propone el número de memoria. Siempre es
la primera memoria disponible. En número de la
memoria no se puede modificar.
La plantilla determina que ajustes básicos se adoptan
por la memoria (è desde 12.4.). Este ajuste se puede
modificar.
Servo-config. (configuración del servo) fija la
asignación de los servos y el formato de impulso. Las
siguientes combinaciones son posibles:
Servo-config.
MPX
MPX-UNI
Futaba
JR
Modo realiza la asignación de las palancas de centro. en
el ejemplo, que la palanca izquierda (<) maneja la
dirección y la profundidad (D/P). Este ajuste te puede
modificar.
Asignación fija cual de las listas de asignación posibles
está siendo utilizada para transmisores y conmutadores.
Este ajuste es modificable.
Mediante OK se completa el proceso y el nuevo modelo
queda creado.
Aviso:
En caso de que no haya ninguna memoria libre se
mostrará el número 1 y la advertencia “¡Atención! ¡No
hay memorias libres!”. En este caso abandonar el menú
mediante la tecla EXIT.
Asignación de
servo
MPX MPX
MPX UNI
Futaba UNI
JR UNI
Formato
de impulso
Manual de instrucciones
19.1.3. Instalación
El escáner se puede montar posteriormente en la
emisor sin necesidad de herramientas.
¡Las frecuencias/bandas disponibles aparecen en el
catálogo principal MPX!
19.2. Channel-Check
(con módulo HF HFM-4)
En el módulo HF HFM-4 de la ROYALevo se puede añadir
un módulo Channel-Check. En este módulo se utiliza el
mismo cristal que se ha de utilizar en el modelo.
Cada vez que se enciende la emisora, comprueba el
módulo si el canal se encuentra libre.
El módulo Channel-Check para la
ROYALevo es idéntico al módulo
también utilizado en las emisoras PiCO
line, COCKPIT MM y en el módulo HF
HFM3.
¡Las frecuencias/bandas disponible
aparecen en el catálogo principal MPX!
19.2.1. Instalación
Apagar la emisora y abrirla, retirar el módulo HF
instalar el cristal receptor en el módulo Channel-Check
Colocar el módulo Check sobre el módulo HF
Volver a montar todo en la emisora
19.2.2. Uso
Sacar totalmente la antena
Encender la emisora
LED se ilumina
siempre:
canal ocupado
LED
intermitente:
Canal libre
(sin garantía)
Se muestra el
siguiente mensaje
¡Pero sólo con la
antena completamente
Módulo ChannelCheck
extendida
ca. 300 m
19. Accesorios
19.1. Escáner (con módulo HF HFM-S)
El módulo HF con sintetizador HFM-S de la ROYALevo
permite ser equipado con un escáner. El escáner puede
realizar dos funciones:
19.1.1. Escaneado de toda la banda de frecuencia
Todos los canales de la banda de frecuencia son
comprobados. Las señales existentes se muestran en el
display con una columna. La altura de la columna
representa la potencia de la señal.
19.1.2. Comprobación de canal al encender
(Channel-Check)
El canal seleccionado por el sintetizador es comprobado
al encender la emisora. Si el canal se encuentra
ocupado, el sintetizador permanece inactivo y el
usuario es avisado mediante un mensaje de alerta. La
emisora comenzará a funcionar normalmente si el
escáner no recibe ninguna señal durante la
comprobación.
Página 55
19.3. Otros accesorios/repuestos
19.3.1. Resumen
Artículo Nº pedido
Bolsa de emisora 76 3322
Antena de emisora 110 cm 89 3002
Púlpito de emisora 8 5305
Space-Box ROYALevo BASIC 8 5658
Space-Box protección climatológica 8 5655
Correa de transporte Profi 8 5646
Correa cruzada 8 5640
Almohadilla de correa 8 5641
Interruptores dos posiciones 7 5748
Palanca con botón/conmut. (è 19.3.2.) 7 5303
Page 57
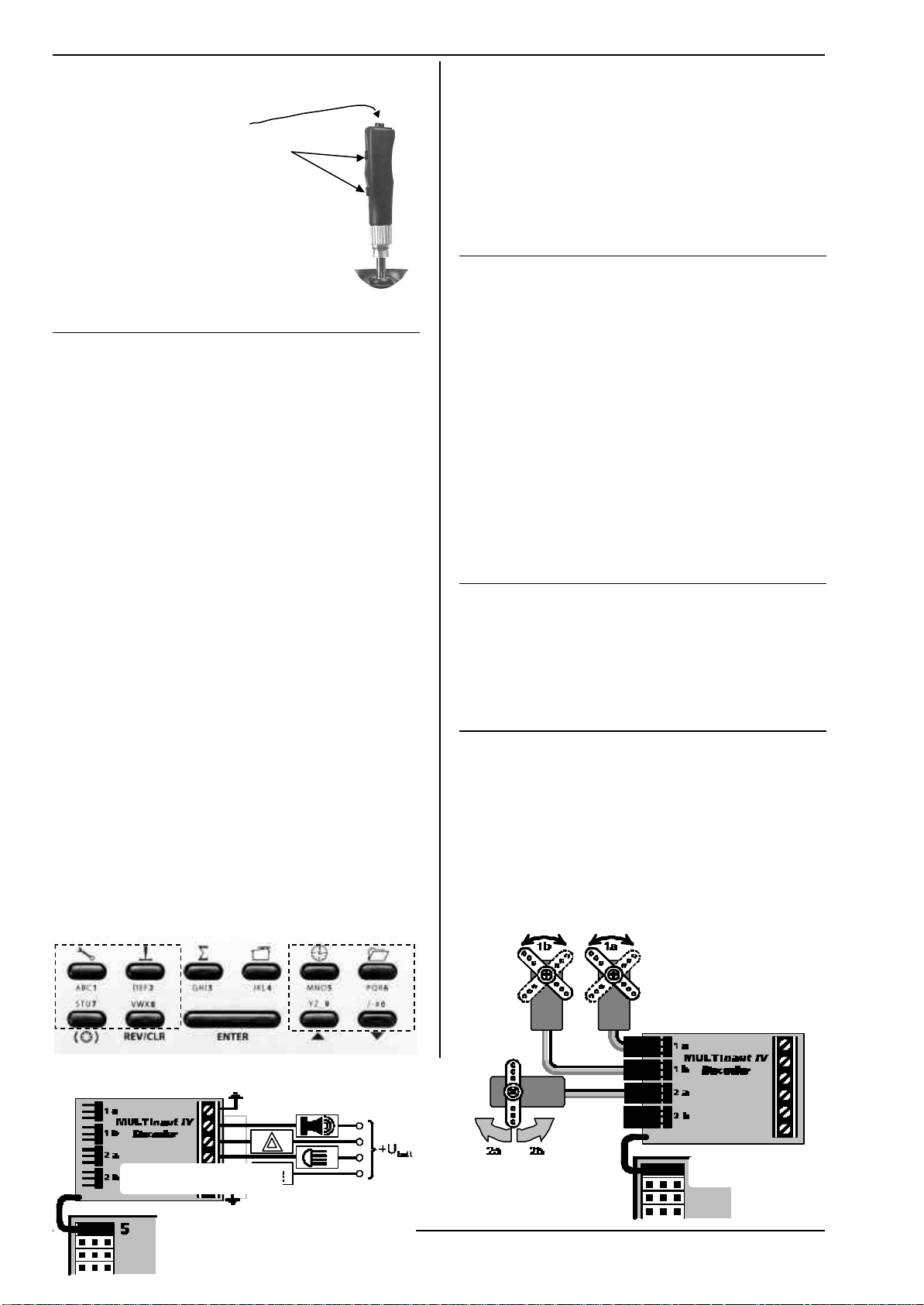
ROYAL evo
KSw '
KSw #
1a
1b
2a
2b
Servo 5 = M.naut 1
Servo 6 = M.naut 2
B
1a 1b2a
2b
19.3.2. Palanca con botón/conmutador
# 7 5303
Para la ROYALevo existe un agarre
de palanca con un botón KTa y una
función de conmutación KSw
integrados. Este agarre se sirve con
dos alambres para la conexión a la
electrónica de la emisora. La
asignación de transmisores y
conmutadores se realiza de la misma
forma que los otros botones (H y M)
y conmutadores.
19.4. Utilizar el MULTInaut
IV
Los modelos que estén equipados con el elemento de
emisora MULTInaut IV se pueden manejar con la
ROYALevo.
Para el manejo de las funciones del MULTInaut se utiliza
en la ROYALevo el teclado. Conmutadores adicionales o
especiales no son necesarios. De esta forma lo único
que se necesita son elementos de receptor MULTInauten el modelo.
A cada canal MULTInaut le están asignas cuatro teclas
(grupo de teclas) y manejan los consumibles y servos
conectados.
Como afecta una pulsación depende de lo que es
manejado por el MULTInaut. Existen las siguientes
posibilidades:
1. Croquis izquierdo para servo 5 = M.naut 1
Conmutar consumibles (p.ej. lámparas, claxon, ...)
Cada pulsación de la tecla modifica el estado de
conexión del consumible
(OFF à ON o en su caso ON àOFF)
2. Croquis derecho para servo 6 = M.Naut 2
a. Manejar un servo de dos posiciones (p.ej. tren de
aterrizaje, ...)
Cada pulsación de una tecla mueve el servo (A o B)
correspondiente de una posición final a la otra
(derecha à izquierda o en su caso izquierda à
derecha)
b. Mover el servo (quasi-) proporcionalmente
(p.ej. modificación de mezcla)
Mientras que una tecla esté pulsada el servo (C)
correspondiente se moverá en una dirección
(como máximo hasta la posición final). El recorrido
total del servo está dividido en 32 pasos y es
recorrido en aprox. 4 seg.. Una pulsación corta
origina un paso de aprox. 3°.
Así se activa el MULTInaut:
1. Asignar M.naut 1 o 2 a la salida a la que esté
conectado un descodificador MULTInaut.
2. Presionar la tecla ENTER durante más de 3 seg. En
una de las cuatro pantallas de estado activa el
grupo de teclas para MULTInaut. Aviso en pantalla:
Teclas MULTINAUT activas!
3. Pulsar de nuevo la tecla ENTER durante más de 3
seg. finaliza este modo de uso.
19.5. Cable de diagnóstico
Para realizar tareas de ajuste y comprobación se puede
conectar directamente el modelo con la emisora
mediante el cable de diagnóstico. De esta forma no se
emite señal HF.
Para ello realizar lo siguiente:
1. Unir la emisora (enchufe multifunción) y el equipo
de recepción del modelo mediante el cable de
diagnóstico correspondiente
2. Encender primero la emisora (HF queda OFF)
3. Encender la unidad de recepción
Según el tipo de receptor se ha de utilizar diferentes
cables de diagnóstico:
Cable de conexión
para cable de conmutación MULTIPLEX con
enchufe de carga # 8 5105
para el “EinStein“ # 8 5162
19.6. Conexión al PC
El enchufe multifunción de la ROYALevo (parte inferior)
ofrece, a parte de función de carga, profesor/alumno y
diagnóstico también un conector de serie para el PC.
Mediante esta conexión son posibles dos funciones:
• acceder a datos de la emisora
• utilizar simuladores de vuelo de modelos
19.7. Acceso a los datos de la emisora
Mediante el intercambio de datos entre la emisor y el PC
se tienen varias posibilidades:
• Almacenar las memorias de los modelos en el PC
(Backup)
• Cargar nuevas versiones del software a la emisora
Especialmente el último punto junto con Internet abre
grandes posibilidades de actualización de la emisora y
de intercambio de idiomas de pantalla.
El software necesario (# 85 5321) y el cable de conexión
correspondiente (# 8 5157) se consiguen como
accesorio.
Grupo de teclas
para M.naut 1
Página 56
Grupo de teclas
para M.naut 2
A
C
1 a
1 b
2 a
2 b
GND
Page 58

19.8. Uso de simulador
Muchos fabricantes de simuladores de vuelo ofrecen un
cable interface con el que se puede conectar la emisora
MULTIPLEX directamente al PC. El cable interface
MULTIPLEX no está preparado para los simuladores.
Si hay preguntas acerca de su utilización, por favor
ponerse en contacto con el fabricante del simulador.
20. Conservación y cuidados
La emisora no necesita una conversación o cuidados
especiales. Se recomienda encarecidamente dejar
revisar la emisora en un servicio técnico autorizado
MULTIPLEX cada 2-3 años o dependiendo del uso de la
emisora. Las comprobaciones de funcionamiento y
alcance son obligatorias (è 3.2.).
El polvo y la suciedad se eliminan preferiblemente con
un pincel de cedras blandas. Eliminar la suciedad mayor,
especialmente grasas y aceites con un paño
humedecido o en su caso con un producto de limpieza
doméstica delicado. ¡Nunca utilizar productos “duros”
como alcoholes o disolventes!
Se han de evitar los golpes y presiones sobre la emisora.
El almacenaje y transporte de la emisora se debe
realizar en condiciones adecuadas (maleta o bolsa de
emisora).
Comprobar regularmente el estado de la carcasa,
mecánica y especialmente el cableado o en su caso
contactos de la emisora.
!! Apagar y desconectar en caso necesario la
batería de la emisora antes de su apertura. Evitar
el contacto con componentes electrónicos y
placas.
21. Recomendaciones y servicio
Nos hemos esforzado a la hora de realizar este manual
de instrucciones para que cualquier pregunta pueda
obtener una respuesta de forma rápida y sencilla. En
caso de que aun así surjan dudas sobre la ROYALevo,
acudir al establecimiento especializado que atenderá
gustosamente cualquier tipo de preguntas.
Para problemas técnicos esta a disposición nuestra
Hotline: +49 7233 7343
Para reparaciones y revisiones, acudir a uno de nuestros
servicios técnicos autorizaos.
Manual de instrucciones
Alemania
MULTIPLEX-Service
Neuer Weg 15 • D-75223 Niefern
Tel. 07233/73-33
Fax. 07233/73-19
Austria
MULTIPLEX Service Heinz Hable
Seppengutweg 11 • A-4030 Linz
Tel. 0732/321100
Suiza
MULTIPLEX Service Werner Ankli
Marchweg 175 • CH-4234 Zullwil
Tel. 061/7919191
079/2109508
RC-Service Basel K. Elsener
Felsplattenstraße 42 • CH-4012 Basel
Tel. 061/3828282
079/3338282
Francia
MULTIPLEX Service Hubscher Electronic
9, rue Tarade • F-67000 Strasbourg
Tel. 03 88 41 12 42
Italia
Holzner & Premer OHG-Snc. • c/o Robert Holzner
Prission 113 • I-39010 Trisens BZ
Tel. 0473/920887
0337/451198
Holanda
MULTIPLEX Service • Jan van Mouwerik
Slot de Houvelaan 30 • NL-3155 VT Maasland
Tel. 010/5913594
Bélgica
MULTIPLEX Service • Jean Marie Servais
Rue J.-B. Fichefet 56 • B-5100 Janbes
Tel. 081/304564
Suecia
ORBO elktronik/hobby ab
Lidgatan 20 • S-17158 Solna
Tel. 08832585
© MULTIPLEX 2002
¡Reservado el derecho de errores y modificaciones!
Página 57
 Loading...
Loading...