

MOVIDRIVE MDX60B-61B User Manual


Índice
1 Descrição do Sistema............................................................................................ 7
1.1 Visão geral do sistema MOVIDRIVE® MDX60B/61B................................................... 7
1.2 Funções / características........................................................................................... 20
1.3 Funções adicionais da versão aplicação ................................................................... 23
1.4 Módulos aplicativos para MOVIDRIVE
1.5 Software de engenharia MOVITOOLS
2 Dados Técnicos da Unidade Básica................................................................... 38
2.1 Marca CE, aprovação UL........................................................................................... 38
2.2 Dados técnicos gerais................................................................................................ 39
®
2.3 MOVIDRIVE
MDX60/61B...-5_3 (400/500 VCA) ...................................................... 41
2.4 MOVIDRIVE® MDX61B...-2_3 (230 VCA) ..................................................................50
2.5 Dados da eletrônica do MOVIDRIVE
2.6 Desenhos dimensionais do MOVIDRIVE
2.7 Desenhos dimensionais do MOVIDRIVE® MDX61B .................................................58
plus®
2.8 IPOS
...................................................................................................................68
2.9 Controle manual DBG60B ......................................................................................... 70
2.10 Carcaça DBM60B/DKG60B opcional para DBG60B ................................................. 72
3 Dados Técnicos do Módulo Regenerativo......................................................... 73
3.1 Módulos regenerativos MOVIDRIVE® MDR60A........................................................ 73
4 Dados Técnicos dos Opcionais.......................................................................... 80
4.1 Placa opcional para encoder Hiperface®, tipo DEH11B ............................................80
4.2 Placa opcional para resolver, tipo DER11B ...............................................................81
4.3 Placa opcional de múltiplos encoders, tipo DEU21B .................................................82
4.4 Placa opcional para encoder absoluto, tipos DEH21B/DIP11B ................................. 83
4.5 Adaptador do conector para substituição do MD_60A pelo MDX60B/61B ................ 86
4.6 Adaptador opcional de interface DWE11B/12B.........................................................88
4.7 Conexão da interface de comunicação opcional tipo UWS11A.................................90
4.8 Interface de comunicação opcional tipo UWS21B ..................................................... 92
4.9 Interface opcional tipo USB11A .................................................................................94
4.10 Fonte de alimentação de 5 V
4.11 Placa opcional de entrada/saída tipo DIO11B ...........................................................98
4.12 Interface opcional fieldbus PROFIBUS tipo DFP21B...............................................100
4.13 Interface opcional fieldbus INTERBUS tipo DFI11B ................................................ 101
4.14 Interface opcional fieldbus INTERBUS de fibra ótica, tipo DFI21B.......................... 102
4.15 Placa opcional fieldbus PROFINET IO RT, tipo DFE32B........................................103
4.16 Placa opcional fieldbus EtherNet/IP e Modbus/TCP, tipo DFE33B ......................... 105
4.17 Placa opcional fieldbus EtherCAT
4.18 Interface opcional fieldbus DeviceNet tipo DFD11B ................................................108
4.19 Interface opcional fieldbus CAN/CANopen tipo DFC11B.........................................109
4.20 Placa opcional para operação em sincronismo tipo DRS11B..................................110
4.21 Placa opcional fieldbus PROFIBUS DP-V1 tipo DFS11B com PROFIsafe ............. 111
4.22 Placa opcional fieldbus PROFIBUS DP-V1 tipo DFS12B com PROFIsafe ............. 113
4.23 Placa opcional fieldbus PROFINET IO tipo DFS21B com PROFIsafe ....................114
4.24 Placa opcional fieldbus PROFINET IO tpo DFS22B com PROFIsafe ..................... 116
4.25 Módulo de segurança opcional MOVISAFE
4.26 Controlador opcional MOVI-PLC
4.27 Opcional OST11B ....................................................................................................121
4.28 Controlador opcional DHE/DHF/DHR21 e DHE/DHF/DHR41B ............................... 122
4.29 Módulo opcional do freio BST relacionado à segurança..........................................128
CC
®
MDX61B.....................................................27
®
MotionStudio ..............................................36
®
MDX60/61B ..................................................54
®
MDX60B .................................................56
para encoder, tipo DWI11A..................................... 96
®
, tipo DFE24B ...................................................107
®
®
basic tipo DHP11B ............................................ 120
DCS21B/31B .................................... 117
Manual de Sistema – MOVIDRIVE® MDX60B/61B
3

5 Dados Técnicos de Acessórios Externos........................................................ 130
5.1 Painel de montagem opcional DMP11B ..................................................................130
5.2 Protetor opcional tipo DLB11B.................................................................................131
5.3 Proteção contra contato acidental opcional tipo DLB21B (para tamanho 7) ........... 132
5.4 Base de montagem opcional tipo DLS11B (para tamanho 7)..................................133
5.5 Suporte de parede tipo DLH11B (para tamanho 7) ................................................. 134
5.6 Kit de conexão opcional tipo DLA11B (para tamanho 7) ......................................... 135
5.7 Duto de ar opcional tipo DLK11B (para tamanho 7) ................................................136
5.8 Acoplamento opcional do circuito intermediário tipo DLZ11B (para tamanho 7) ..... 137
5.9 Adaptador opcional do circuito intermediário 2Q DLZ12B (para tamanho 7) ..........138
5.10 Adaptador opcional do circuito intermediário 4Q DLZ14B (para tamanho 7) ..........139
6 Dados Técnicos dos Resistores de Frenagem, Bobinas e Filtros ................ 140
6.1 Resistor de frenagem opcional tipo BW... / BW...-T / BW...-P................................. 140
6.2 Bobina de rede opcional tipo ND.. ........................................................................... 151
6.3 Filtro de rede opcional tipo NF...-............................................................................. 153
6.4 Bobina de saída opcional tipo HD............................................................................157
6.5 Filtro de saída opcional tipo HF... ............................................................................160
7 Cabos Pré fabricados ........................................................................................ 164
7.1 Visão geral ............................................................................................................... 164
7.2 Jogo de cabos para conexão do circuito intermediário MDR
7.3 Cabos do motor CM com conector no lado do motor .............................................. 165
7.4 Cabos do motor com freio CM com conector no lado do motor............................... 166
7.5 Cabos do motor CMD/CMP com conector no lado do motor...................................167
7.6 Cabos para motores CMP com freio BP e conector no lado do motor .................... 167
7.7 Cabos para motores CMP com freio BY e conector no lado do motor .................... 168
7.8 Seleção do cabo do encoder: Significado dos símbolos..........................................169
7.9 Cabos do encoder para motores DR em X15 DEH11B/DEH21B/DEU21B.............170
7.10 Cabo do encoder para motores DT/DV/CMP, CM, (DS) em X15
DEH11B/DEH21B e DEU21B ..................................................................................177
7.11 Cabos do encoder para encoders lineares em X14, DEH11B/DER11B/DEU21B ... 183
7.12 Cabos do encoder para resolvers em X15 DER11B................................................ 188
→ MDX.....................164
8 Parâmetros ......................................................................................................... 191
8.1 Estrutura do menu no DBG60B ...............................................................................192
8.2 Resumo dos parâmetros.......................................................................................... 192
8.3 Explicação dos parâmetros...................................................................................... 201
8.4 Modos de operação .................................................................................................281
9 Planejamento de Projeto ................................................................................... 292
9.1 Fluxograma do procedimento ..................................................................................292
9.2 Características de controle ...................................................................................... 293
9.3 Descrição das aplicações ........................................................................................ 295
9.4 Recomendações básicas para escolha do motor .................................................... 297
9.5 Escolha para motores assíncronos CA (VFC) ......................................................... 298
9.6 Seleção para motores assíncronos CA e servomotores (CFC) ...............................314
9.7 Seleção do motor para servomotores síncronos (SERVO) .....................................380
9.8 Motores síncronos lineares SL2...............................................................................401
9.9 Capacidade de sobrecarga do conversor ................................................................401
9.10 Escolha do resistor de frenagem .............................................................................435
9.11 Conexão de motores trifásicos com freio.................................................................444
9.12 Redes de tensão aprovadas para o MOVIDRIVE
9.13 Contatores e fusíveis de rede ..................................................................................445
9.14 Conexão de potência para tamanho 7 ..................................................................... 446
®
B ..............................................445
4
Manual de Sistema – MOVIDRIVE® MDX60B/61B

9.15 Cabos de rede e de motores ................................................................................... 449
9.16 Grupo de acionamentos no modo VFC.................................................................... 456
9.17 Conexão de motores trifásicos à prova de explosão ............................................... 457
9.18 Instalação em conformidade com EMC, de acordo com a norma EN 61800-3.......458
9.19 Filtro de saída tipo HF.............................................................................................. 461
9.20 Cabos da eletrônica e geração de sinais .................................................................464
9.21 Fonte de tensão externa de 24 V
9.22 Comutação dos jogos de parâmetros ...................................................................... 467
9.23 Prioridade dos estados operacionais e relação entre os sinais de controle ............ 468
9.24 Chaves fim de curso ................................................................................................469
........................................................................ 465
CC
10 Informação Geral................................................................................................ 470
10.1 Como utilizar as instruções de operação................................................................. 470
10.2 Estrutura das indicações de segurança................................................................... 470
10.3 Reivindicações de direitos de garantia ....................................................................471
10.4 Exclusão de garantia ...............................................................................................471
10.5 Copyright..................................................................................................................471
10.6 Nomes de produto e marca registrada..................................................................... 471
11 Indicações de Segurança .................................................................................. 472
11.1 Informação geral ......................................................................................................472
11.2 Grupo alvo ............................................................................................................... 472
11.3 Utilização conforme as especificações .................................................................... 473
11.4 Transporte, armazenamento....................................................................................473
11.5 Instalação.................................................................................................................474
11.6 Conexão elétrica ......................................................................................................474
11.7 Desligamento seguro ............................................................................................... 474
11.8 Operação ................................................................................................................. 475
12 Estrutura da Unidade ......................................................................................... 476
12.1 Denominação do tipo, plaquetas de identificação.................................................... 476
12.2 Escopo de fornecimento .......................................................................................... 478
12.3 Tamanho 0 ............................................................................................................... 480
12.4 Tamanho 1 ............................................................................................................... 481
12.5 Tamanho 2S ............................................................................................................482
12.6 Tamanho 2 ............................................................................................................... 483
12.7 Tamanho 3 ............................................................................................................... 484
12.8 Tamanho 4 ............................................................................................................... 485
12.9 Tamanho 5 ............................................................................................................... 486
12.10 Tamanho 6 ...............................................................................................................487
12.11 Tamanho 7 ...............................................................................................................488
13 Instalação............................................................................................................ 490
13.1 Instruções para instalação da unidade básica.........................................................490
13.2 Remoção/instalação do controle manual .................................................................508
13.3 Remoção/instalação da tampa dianteira.................................................................. 509
13.4 Informação relacionada a UL...................................................................................511
13.5 Presilhas de fixação................................................................................................. 514
13.6 Protetor dos terminais de potência .......................................................................... 517
13.7 Esquema de ligação da unidade básica ..................................................................522
13.8 Seleção dos resistores de frenagem, bobinas e filtros ............................................528
13.9 Conexão da rede de comunicação system bus (SBus 1) ........................................ 533
13.10 Conexão da interface RS485................................................................................... 534
13.11 Conexão da interface opcional tipo DWE11B/12B................................................... 536
13.12 Conexão do adaptador opcional UWS21B (RS232)................................................ 538
Manual de Sistema – MOVIDRIVE® MDX60B/61B
5

13.13 Conexão da interface opcional USB11A.................................................................. 540
13.14 Combinações dos opcionais para MDX61B............................................................. 542
13.15 Instalação e remoção das placas opcionais ............................................................544
13.16 Conexão do encoder e do resolver .......................................................................... 546
13.17 Conexão da placa opcional DEH11B (Hiperface
13.18 Conexão da placa opcional DEH21B....................................................................... 551
13.19 Conexão da placa opcional DEU21B....................................................................... 553
13.20 Conexão da placa opcional DER11B (resolver)....................................................... 555
13.21 Conexão de encoders externos no X:14.................................................................. 557
13.22 Conexão dos opcionais do encoder......................................................................... 558
13.23 Conexão de simulação do encoder incremental ......................................................564
13.24 Conexão mestre/escravo ......................................................................................... 565
13.25 Conexão da placa opcional DIO11B........................................................................566
13.26 Conexão da placa opcional DFC11B.......................................................................569
®
).................................................. 548
14 Colocação em Operação ................................................................................... 570
14.1 Instruções gerais para a colocação em operação ................................................... 570
14.2 Pré requisitos e recursos .........................................................................................572
14.3 Colocação em operação utilizando o controle manual DBG60B .............................573
14.4 Operação do MOVITOOLS
14.5 Partindo o motor ......................................................................................................587
14.6 Lista de parâmetros completa..................................................................................593
®
MotionStudio..............................................................583
15 Operação............................................................................................................. 607
15.1 Indicações operacionais ..........................................................................................607
15.2 Mensagens de informação....................................................................................... 608
15.3 Funções do controle manual DBG60B..................................................................... 610
15.4 Cartão de memória ..................................................................................................614
16 Service ................................................................................................................ 616
16.1 Informação de irregularidade ...................................................................................616
16.2 Mensagens de irregularidade e lista de irregularidades .......................................... 617
16.3 SEW Service............................................................................................................636
16.4 Armazenagem prolongada.......................................................................................636
16.5 Rejeitos industriais................................................................................................... 637
17 Lista de Endereços ............................................................................................ 638
Ref.: MOVIDRIVE® MDX60B/61B - System Manual
Edition 09/2010 (1683 8017/EN)
6
Manual de Sistema – MOVIDRIVE® MDX60B/61B
Descrição do Sistema
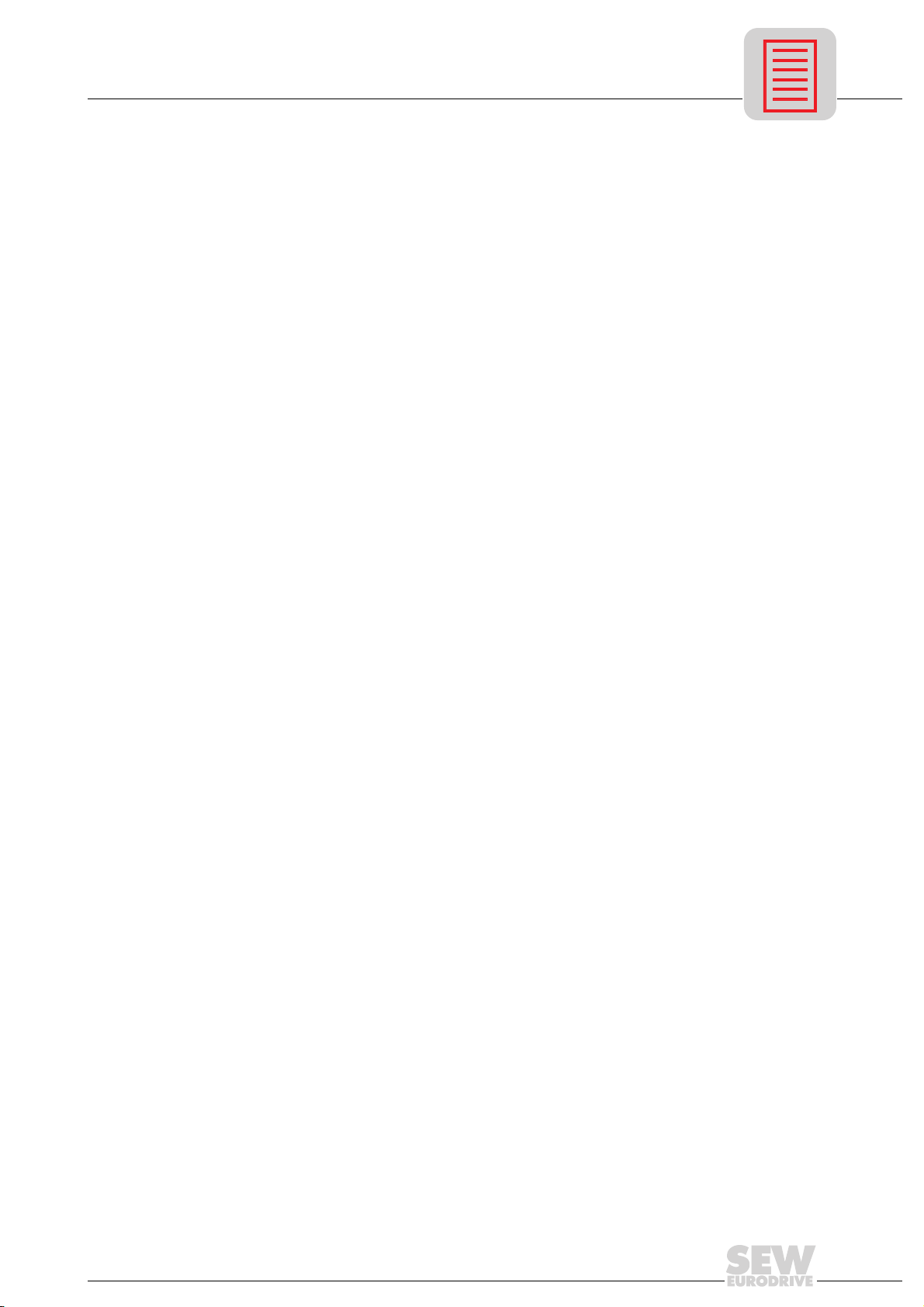
3 x 380...500 V
3 x 200...240 V
MOVIDRIVE
MDX60/61B...-5_3
®
MOVIDRIVE
MDX61B...-2_3
®
®
MOVIDRIVE MDR60A
Circuito
intermediário
CA
CA
Filtro de rede
opcional
Bobina de rede
opcional
Resistor de frenagem
opcional
Filtro de saída
opcional
Bobina de saída
opcional
Módulo regenerativo opcional
P
i
f
kVA
Hz
n
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
Visão geral do sistema MOVIDRIVE® MDX60B/61B
1 Descrição do Sistema
1.1 Visão geral do sistema MOVIDRIVE® MDX60B/61B
1.1.1 Componentes de potência
1
1
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
1452332683
7
7
1
MASTER
SLA
VE
MOVIT OOLS
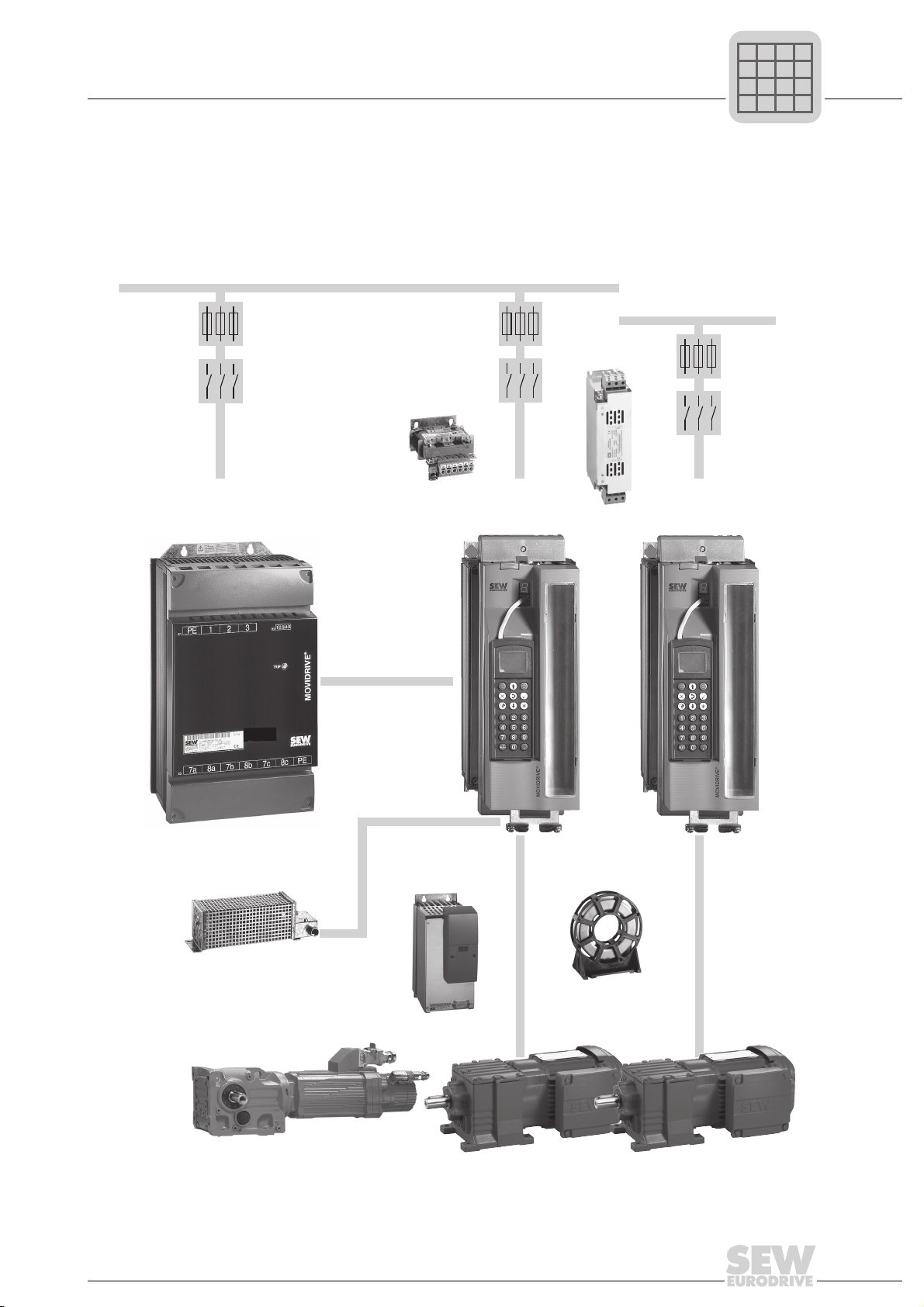
Versão padrão MDX60/61B com IPOS
plus®
DBG60B controle manual opcional
MDX60/61B versão aplicação para
o uso de "came eletrônico", "Operação em
sincronismo interno" ou módulos aplicativos.
System bus
(SBus)
Software de engenharia MOVITOOLS®
Interfaces de comunicação opcionais:
Opcionais do encoder:
USB 11AUWS 21B
UWS 11A
DEH 11BDEU 21B DEH 21B DER 11B DIP 11B DIO 11B DRS 11B
DEU 21B
P
i
f
kVA
Hz
n
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
1.1.2 Encoder e opcionais para comunicação
8
1452369291
Manual de Sistema - MOVIDRIVE® MDX60B/61B

1.1.3 Opcionais fieldbus
DFC 11B DFD 11B
DFE 32B
DFE 24B
DFI 11B
DFI 21B DFP 21B
DFE 33B
DFE33B
ETHERNET/IP
MODULE
STATUS
NETWORK
STATUS
xx xx xx xx
P
i
f
kVA
Hz
n
Descrição do Sistema
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
Visão geral do sistema MOVIDRIVE® MDX60B/61B
1
1
1452375307
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
9
9

1
DHE 41B DHF 41B DHR 41BDHP 11B OST 11B
MOVI-PLC
®
P
i
f
kVA
Hz
n
1.1.4 Opcionais de controle
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
1452634507
10
Manual de Sistema - MOVIDRIVE® MDX60B/61B

Visão geral do sistema MOVIDRIVE® MDX60B/61B
P
i
f
kVA
Hz
n
Visão geral do sistema MOVIDRIVE® MDX60B/61B
1.1.5 Opcionais de segurança
Descrição do Sistema
Descrição do Sistema
1
1
DFS 11B DFS 21BDFS 12B DFS 22B
DCS 21B
DCS 31B
1452640907
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
11
11

1
P
i
f
kVA
Hz
n
1.1.6 Descrição geral
1.1.7 Baixa emissão
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
®
O MOVIDRIVE
SEW-EURODRIVE. A nova série B dos conversores de frequência MOVIDRIVE
senta uma estrutura modular, fornece funções melhores na faixa de potência mais
baixa, mais funções básicas e maior capacidade de sobrecarga.
Os acionamentos CA com a mais moderna tecnologia de conversor digital podem ser
utilizados sem restrições na faixa de potência de 0,55 a 315 kW. Os níveis de desempenho dinâmico e controle de qualidade podem ser obtidos com o MOVIDRIVE
motores assíncronos CA, onde anteriormente eram possíveis somente utilizando servoacionamentos ou motores CC. As funções de controle integradas e a possibilidade de
melhorar o sistema com opcionais de tecnologia e comunicação, resultam em sistemas
destinados a níveis de rendimento especialmente altos em relação a ampla faixa de
aplicações, planejamento de projeto, colocação em operação e funcionamento.
Os conversores de frequência MOVIDRIVE
normas de emissão particularmente baixa, mas com o habitual alto nível de qualidade.
Uma característica especial é o uso coerente de materiais de solda livres de chumbo,
na produção de produtos eletrônicos. Estes processos livre de chumbo estão de acordo
com a Diretiva RoHS EU e a lei que regulamenta a produção de equipamentos eletrônicos.
MDX60B/61B é a nova geração dos conversores de frequência da
®
MDX60B/61B são produzidos conforme
®
apre-
®
para
1.1.8 Linha de produtos
Há três séries da linha de produtos MOVIDRIVE
• MOVIDRIVE® MDX60B: Conversor de frequência para motores assíncronos CA sem
• MOVIDRIVE
• MOVIDRIVE
®
:
®
MDX61B: Conversor de frequência para motores assíncronos CA com ou
®
MDR60A: Módulo regenerativo; conversores de frequência MOVIDRIVE®
realimentação por encoder. As unidades não possuem opcionais.
sem realimentação por encoder, ou para servomotores síncronos
e assíncronos. As unidades podem ser equipadas com opcionais.
(380/500 V) operando em modo regenerativo com realimentação
de energia na rede de alimentação.
12
Manual de Sistema - MOVIDRIVE® MDX60B/61B

1.1.9 Versões
P
i
f
kVA
Hz
n
Descrição do Sistema
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
Visão geral do sistema MOVIDRIVE® MDX60B/61B
®
Os conversores de frequência MOVIDRIVE
poníveis em duas versões, isto é, versão padrão e versão aplicação. Os conversores
de frequência MOVIDRIVE
versão aplicação com placas resinadas (-0T/L).
®
MDX60B/61B tamanho 7 estão disponíveis somente como
MDX60/61B tamanhos 0-6 estão dis-
1
1
Versão padrão As unidades são equipadas com sistema de controle sequencial e de posicionamento
Versão aplicação Além das características da versão padrão, estas unidades incluem as funções tec-
Versões com
placas resinadas
plus®
IPOS
com os opcionais disponíveis.
A versão padrão é indicada pelos dígitos "00" no final da denominação do tipo do equipamento.
nológicas "came eletrônico" e "operação em sincronismo angular". Pode-se também
utilizar todos os módulos aplicativos disponíveis no pacote MOVITOOLS
com as versões aplicação.
A versão aplicação é indicada pelos dígitos "0T" no final da denominação do tipo do
equipamento.
As unidades são projetadas para uso em ambientes agressivos. O revestimento das
placas resinadas aumenta a resistência contra condições ambientais.
A versão com placas resinadas é indicada pelos dígitos "00/L" ou "0T-/L" no final da denominação do tipo do equipamento.
como padrão. As funções do MOVIDRIVE® MDX61B podem ser expandidas
®
MotionStudio
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
13
13
1
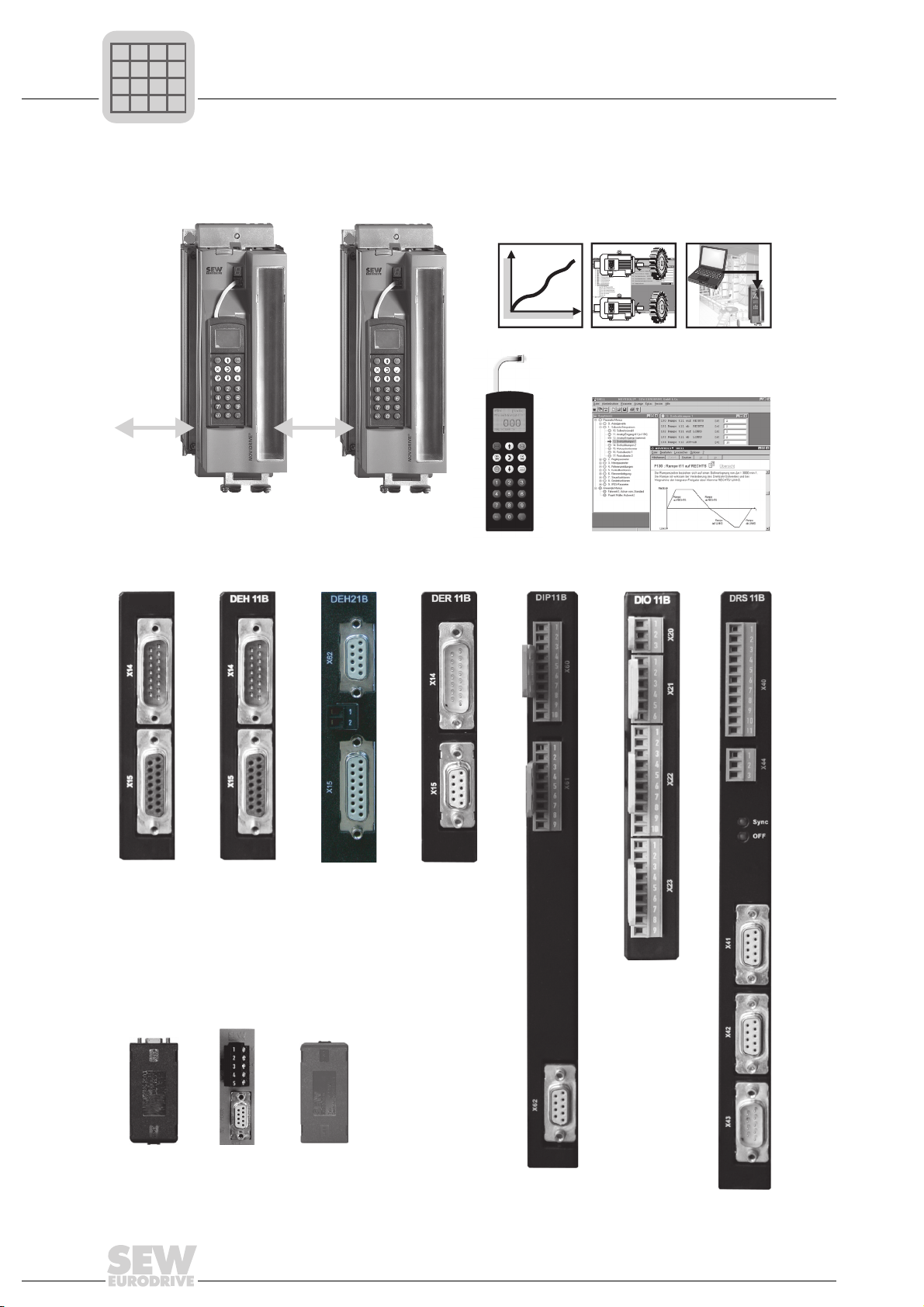
[2]
[1]
[3]
P
i
f
kVA
Hz
n
1.1.10 Conceito da unidade modular
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
As unidades do MOVIDRIVE
• Tamanho 0 (0005 ... 0014) → 2 slots opcionais
– 1 slot opcional para conexão do encoder
– 1 slot opcional para comunicação
• Tamanhos 1 ... 7 (0015 ... 2500) → 3 slots opcionais
– 1 slot opcional para conexão do encoder
– 1 slot opcional para comunicação
– 1 slot opcional para expansão
INFORMAÇÃO
• As placas opcionais somente podem ser instaladas ou removidas pelo cliente
no MDX61B tamanhos 1 a 7. O firmware das placas opcionais e a unidade
básica devem ser compatíveis.
• Para o MDX61B tamanho 0, as placas opcionais somente podem ser instaladas e removidas pela SEW-EURODRIVE. Favor considerar este aspecto na co-
locação do pedido/execução do planejamento de projeto.
®
MDX61B com opcionais, possuem os seguintes slots:
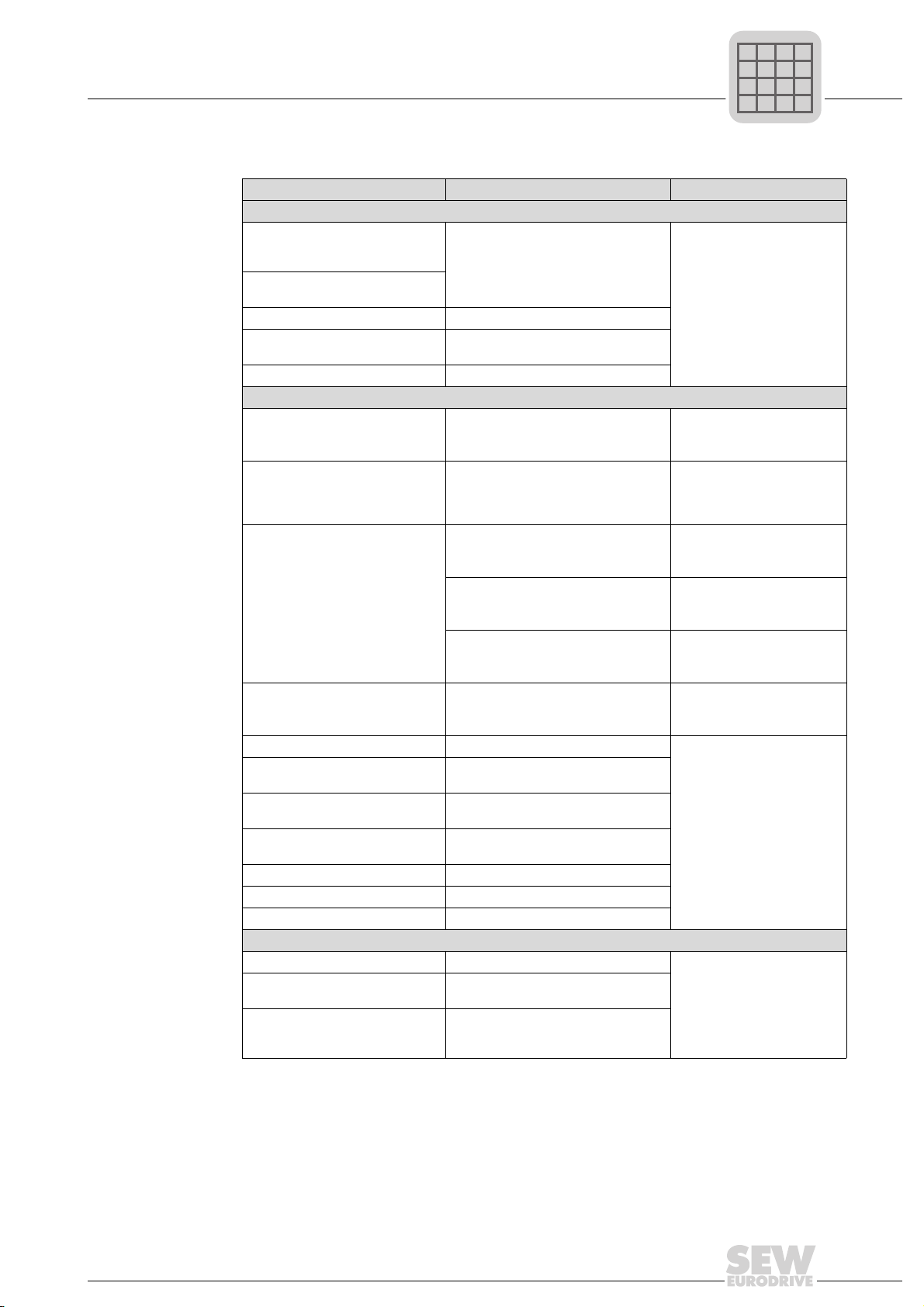
1.1.11 Slots opcionais do MOVIDRIVE
Tamanho 0 (0005 ... 0014) Tamanho 1 ... 7 (0015 ... 2500)
[1] Slot opcional para encoder
[2] Slot fieldbus para comunicação
[3] Slot de expansão para comunicação (somente tamanhos 1 - 7)
®
MDX61B
1806023691
14
O conceito de unidade modular permite escolher a opção correta, de acordo com a aplicação. Por exemplo, quando tiver um motor assíncrono CA com realimentação por encoder (Hiperface
Hiperface
®
®
, sen/cos, ou TTL), é necessário a placa opcional do encoder
tipo DEH11B.
Manual de Sistema - MOVIDRIVE® MDX60B/61B
Descrição do Sistema
P
i
f
kVA
Hz
n
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
Visão geral do sistema MOVIDRIVE® MDX60B/61B
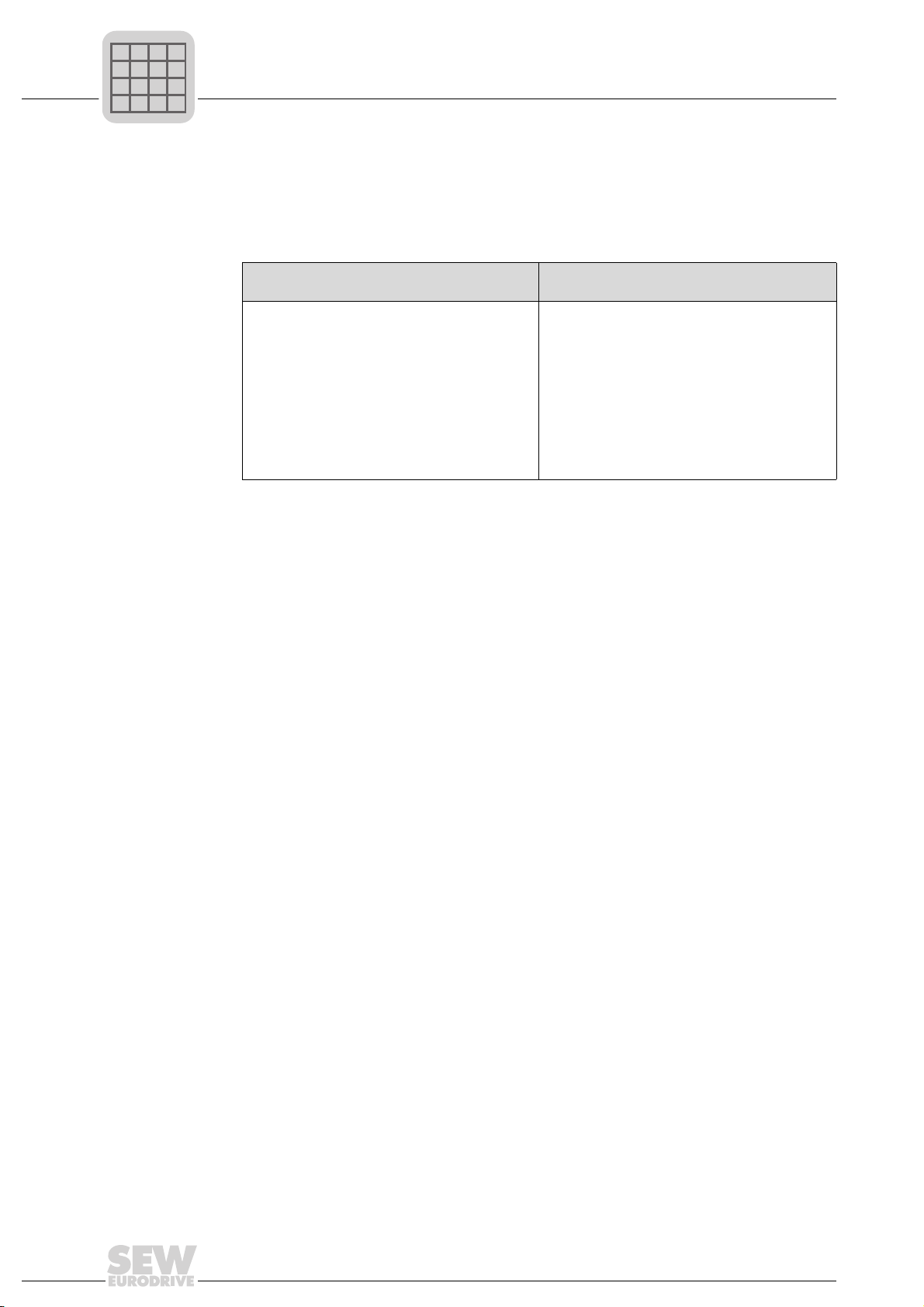
Aplicação Opcional Slot opcional
Encoder opcional
Motor assíncrono CA com
realimentação por encoder
(Hiperface
Servomotor síncrono ou assíncrono com encoder Hiperface
Servomotor síncrono com resolver Placa tipo DER11B para resolver
Motores síncronos ou assíncro-
nos com encoder absoluto
Interface encoder SSI Placa DEH21B para encoder absoluto
Opcionais de comunicação (fieldbus, control)
Controlador programável pelo
usuário MOVI-PLC
Interface adicional RS485
(somente em combinação com
o opcional DHP11B)
Controlador lógico e de
movimento livremente
programável (MOVI-PLC
São necessárias entradas/saídas
analógicas e digitais adicionais
Integração ao sistema PROFIBUS Interface PROFIBUS tipo DFP21B
Integração ao sistema PROFIBUS
com PROFIsafe
Integração ao sistema INTERBUS
Integração ao sistema Ethernet
com PROFIsafe
Integração ao sistema EtherCAT
Integração ao sistema DeviceNet Interface DeviceNet tipo DFD11B
Integração ao sistema CANopen Interface CANopen tipo DFC11B
Opcional de expansão
Interface encoder SSI Placa de encoder absoluto DIP11B
Operação em sincronismo Placa de operação em sincronismo
Módulo de segurança Opcional DCS21B (somente em con-
®
, sen/cos, TTL)
®
Placa DEH11B para encoder
Hiperface
®
Placa DEU21B de múltiplos encoders
Controlador MOVI-PLC®basic
DHP11B
DHP11B + OST11B • DHP11B em 2, OST11B
Controlador
• DHE21B (standard)
• DHE41B (advanced)
Controlador
®
)
• DHF21B (standard)
• DHF41B (advanced)
Controlador
• DHR21B (standard)
• DHR41B (advanced)
Placa de entrada/saída tipo DIO11B
Interface fieldbus DFS11B
Interface INTERBUS tipo DFI11B /
DFI21B
Interface fieldbus DFS21B
®
Interface EtherCAT® tipo DFE24B
DRS11B
junto com o opcional DFS12B/22B)
/DCS31B
®
1
2
(3 somente se o slot 2 estiver
ocupado)
em 1
• Se 1 estiver ocupado:
DHP11B + OST11B em 3
2
(3 somente se o slot 2 estiver
ocupado)
3
3
2
(3 somente se o slot 2 estiver
ocupado)
2
3
1
1
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
15
15
1
P
i
f
kVA
Hz
n
1.1.12 Modos de controle
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
Os modos de controle VFC (Voltage Mode Flux Control) e CFC (Current Mode Flux
Control)/SERVO são características dos conversores MOVIDRIVE
princípio de ambos os modos de controle é baseado no cálculo contínuo do modelo
matemático do motor.
Modo de controle VFC
(Voltage Mode Flux Control)
Modo de controle pela tensão para motores assíncronos CA com e sem realimentação por encoder.
• Com realimentação por encoder
– Torque mínimo 150%, com um motor de
– Características semelhantes à operação
• Sem realimentação por encoder
– Torque mín. 150% até 0,5 Hz, com um
1.1.13 System bus (SBus)
O system bus (SBus) é de fornecimento padrão, com isso permite que vários conversores de frequência MOVIDRIVE
transmissão de dados entre os equipamentos. Para a comunicação através da rede
SBus é utilizado o protocolo MOVILINK
para comunicação serial. A rede SBus pode ser comutada para CANopen.
mesma potência do conversor, motor
parado
do servo
motor de mesma potência do conversor
®
sejam interconectados. Isso possibilita uma rápida
®
MDX60B/61B. O
Modos de controle
CFC (Current Mode Flux Control)/SERVO
Modo de controle pela corrente para servomotores
síncronos e assíncronos. Sempre é necessário
realimentação do encoder.
• Torque mínimo 160%, com um motor de mesma
potência do conversor, motor
parado
• Precisão máxima e características concêntricas
de funcionamento até a parada
• Características de servo e controle de torque
também para motores assíncronos CA
• Resposta a variações de carga dentro de
poucos milisegundos
®
. MOVILINK® é o padrão SEW-EURODRIVE
1.1.14 MOVILINK
1.1.15 IPOS
plus®
®
O MOVILINK® sempre utiliza o mesmo formato de mensagem independente da interface selecionada (SBus, RS232, RS485, interfaces fieldbus). Com isso, o software de
controle é independente da interface selecionada.
Uma característica importante dos conversores MOVIDRIVE® é que o sistema de controle sequencial e de posicionamento IPOS
plus®
é de fornecimento padrão. O IPOS
possibilita controlar as sequências de movimento diretamente no conversor próximo à
máquina. Deste modo, a carga é retirada do controlador mestre e o conceito modular
pode ser implementado com mais facilidade.
plus®
16
Manual de Sistema - MOVIDRIVE® MDX60B/61B
Visão geral do sistema MOVIDRIVE® MDX60B/61B
P
i
f
kVA
Hz
n
Visão geral do sistema MOVIDRIVE® MDX60B/61B
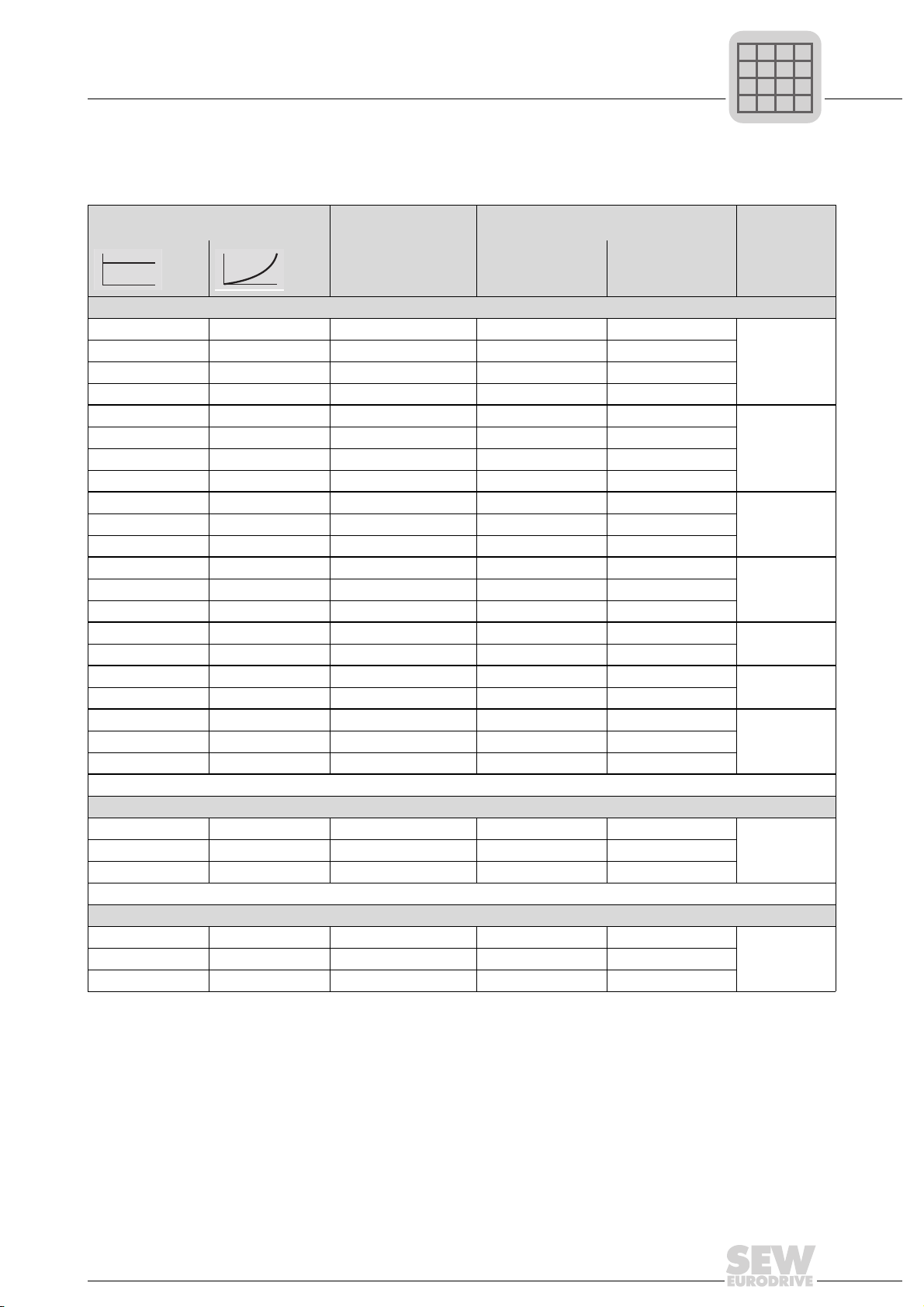
1.1.16 Resumo dos equipamentos
MOVIDRIVE
®
MDX60/61B para tensão de alimentação 3 × 380 ... 500 VCA (equipamentos 380/500 V):
Descrição do Sistema
Descrição do Sistema
1
1
Potência do motor recomendada (VFC)
Unidades de 4Q (com chopper de frenagem)
0,55 kW (0,74 cv) 0,75 kW (1,0 cv) 2,0 A
0,75 kW (1,0 cv) 1,1 kW (1,5 cv) 2,4 A
1,1 kW (1,5 cv) 1,5 kW (2,0 cv) 3,1 A
1,5 kW (2,0 cv) 2,2 kW (3,0 cv) 4,0 A
1,5 kW (2,0 cv) 2,2 kW (3,0 cv) 4,0 A
2,2 kW (3,0 cv) 3,0 kW (4,0 cv) 5,5 A
3,0 kW (4,0 cv) 4,0 kW (5,4 cv) 7,0 A
4,0 kW (5,4 cv) 5,5 kW (7,4 cv) 9,5 A
5,5 kW (7,4 cv) 7,5 kW (10 cv) 12,5 A
7,5 kW (10 cv) 11 kW (15 cv) 16 A
11 kW (15 cv) 15 kW (20 cv) 24 A
15 kW (20 cv) 22 kW (30 cv) 32 A
22 kW (30 cv) 30 kW (40 cv) 46 A
30 kW (40 cv) 37 kW (50 cv) 60 A
37 kW (50 cv) 45 kW (60 cv) 73 A
45 kW (60 cv) 55 kW (74 cv) 89 A
55 kW (74 cv) 75 kW (100 cv) 105 A
75 kW (100 cv) 90 kW (120 cv) 130 A
90 kW (120 cv) 110 kW 148 cv) 170 A
110 kW (148 cv) 132 kW (177 cv) 200 A
132 kW (177 cv) 160 kW (215 cv) 250 A
Corrente de saída
permanente
(CFC)
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
CA
Tipo do MOVIDRIVE
MDX60B
sem opcional
0005-5A3-4-.. 0005-5A3-4-..
0008-5A3-4-.. 0008-5A3-4-..
0011-5A3-4-.. 0011-5A3-4-..
0014-5A3-4-.. 0014-5A3-4-..
- 0015-5A3-4-..
- 0022-5A3-4-..
- 0030-5A3-4-..
- 0040-5A3-4-..
- 0055-5A3-4-..
- 0075-5A3-4-..
- 0110-5A3-4-..
- 0150-503-4-..
- 0220-503-4-..
- 0300-503-4-..
- 0370-503-4-..
- 0450-503-4-..
- 0550-503-4-..
- 0750-503-4-..
- 0900-503-4-..
- 1100-503-4-..
- 1320-503-4-..
®
MDX61B
com opcional
Tam anho
(dados
técnicos)
0
(página 41)
1
(página 43)
2S, 2
(página 44)
3
(página 45)
4
(página 46)
5
(página 47)
6
(página 48)
Unidades de 2Q (sem chopper de frenagem)
160 kW (215 cv) 200 kW (268 cv) 300 A
200 kW (268 cv) 250 kW (335 cv) 380 A
250 kW (335 cv) 315 kW (422 cv) 470 A
Unidades de 4Q (com chopper de frenagem)
160 kW (215 cv) 200 kW (268 cv) 300 A
200 kW (268 cv) 250 kW (335 cv) 380 A
250 kW (335 cv) 315 kW (422 cv) 470 A
CA
CA
CA
CA
CA
CA
- 1600-503-2-0T/L
- 2000-503-2-0T/L
- 2500-503-2-0T/L
- 1600-503-4-0T/L
- 2000-503-4-0T/L
- 2500-503-4-0T/L
7
(página 49)
7
(página 49)
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
17
17
1
P
i
f
kVA
Hz
n
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
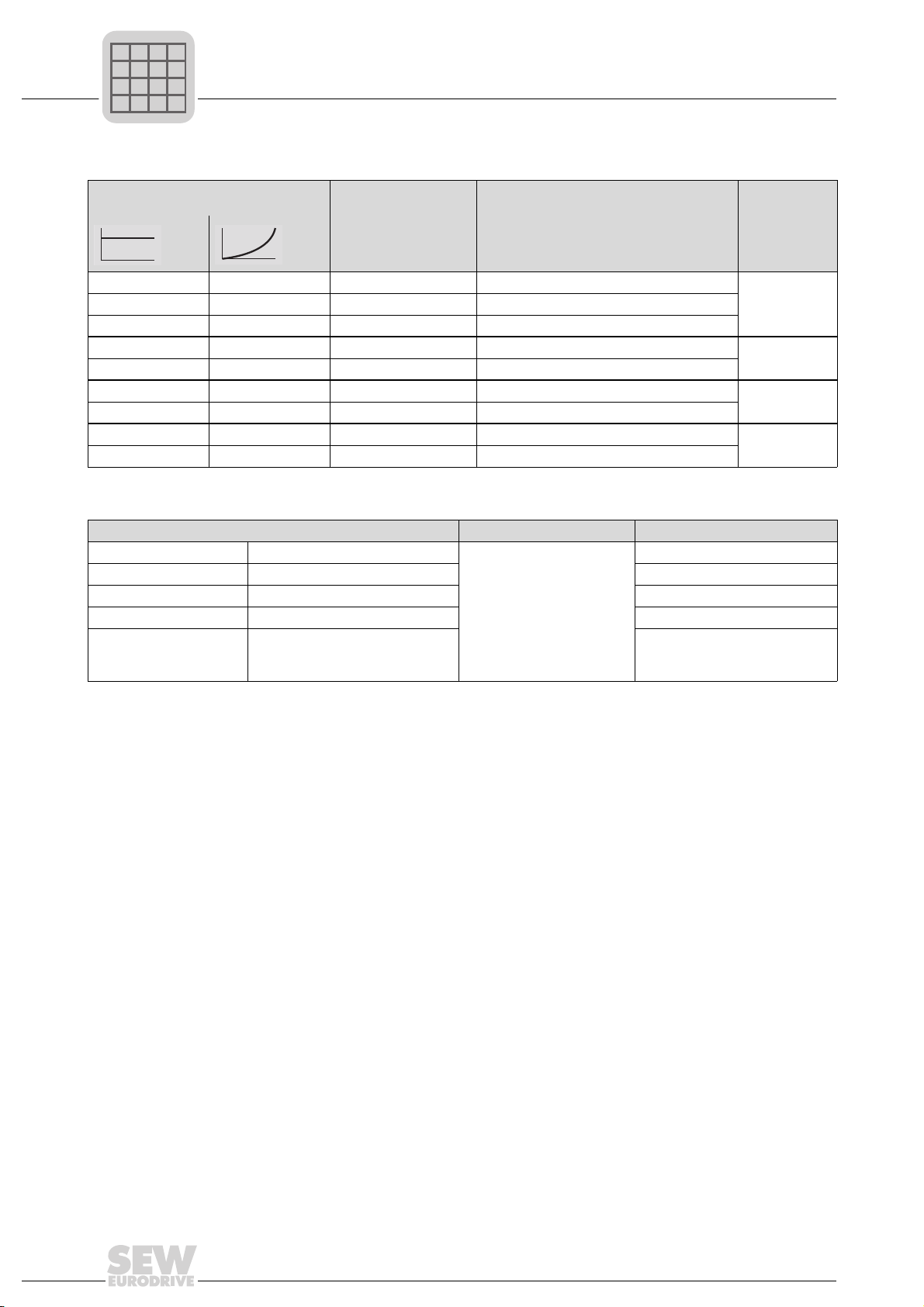
MOVIDRIVE® MDX60/61B para tensão de alimentação 3 × 200 ... 240 VCA (equipamentos 220 V):
Potência do motor recomendada (VFC)
1,5 kW (2,0 cv) 2,2 kW (3,0 cv) 7,3 A
2,2 kW (3,0 cv) 3,7 kW (5,0 cv) 8,6 A
3,7 kW (5,0 cv) 5,0 kW (7,0 cv) 14,5 A
5,5 kW (7,4 cv) 7,5 kW (10 cv) 22 A
7,5 kW (10 cv) 11 kW (15 cv) 29 A
11 kW (15 cv) 15 kW (20 cv) 42 A
15 kW (20 cv) 22 kW (30 cv) 54 A
22 kW (30 cv) 30 kW (40 cv) 80 A
30 kW (40 cv) 37 kW (50 cv) 95 A
®
MOVIDRIVE
Módulos regenerativos do MOVIDRIVE® MDR60A Tamanho (dados técnicos) MOVIDRIVE®MDX60B/61B...-5_3
0150-503-01 I
0370-503-00 I
0750-503-00 I
1320-503-00 I
1320-503-00
A partir da série nr.
DCV2000100
MDR60A com módulo regenerativo para equipamentos 380/500 V:
= 29 ACA, I
rede
= 66 ACA, I
rede
= 117 ACA, I
rede
= 225 ACA, I
rede
= 260 ACA, I
I
rede
Corrente de saída
permanente
(CFC)
CA
CA
CA
CA
CA
CA
CA
CA
CA
= 35 A
circ interm
circ interm
circ interm
circ interm
circ interm
CC
= 70 A
CC
= 141 Acc 0005 ... 0750
= 270 Acc 0005 ... 1320
= 324 Acc 0005 ... 1600
Tipo do MOVIDRIVE
MDX61B
com opcional
0015-2A3-4-..
0022-2A3-4-..
0037-2A3-4-..
0055-2A3-4-..
0075-2A3-4-..
0110-203-4-..
0150-203-4-..
0220-203-4-..
0300-203-4-..
3, 4, 6
(página 74)
®
0005 ... 0150
0005 ... 0370
Taman ho
(dados
técnicos)
1
(página 50)
2
(página 51)
3
(página 52)
4
(página 53)
18
Manual de Sistema - MOVIDRIVE® MDX60B/61B
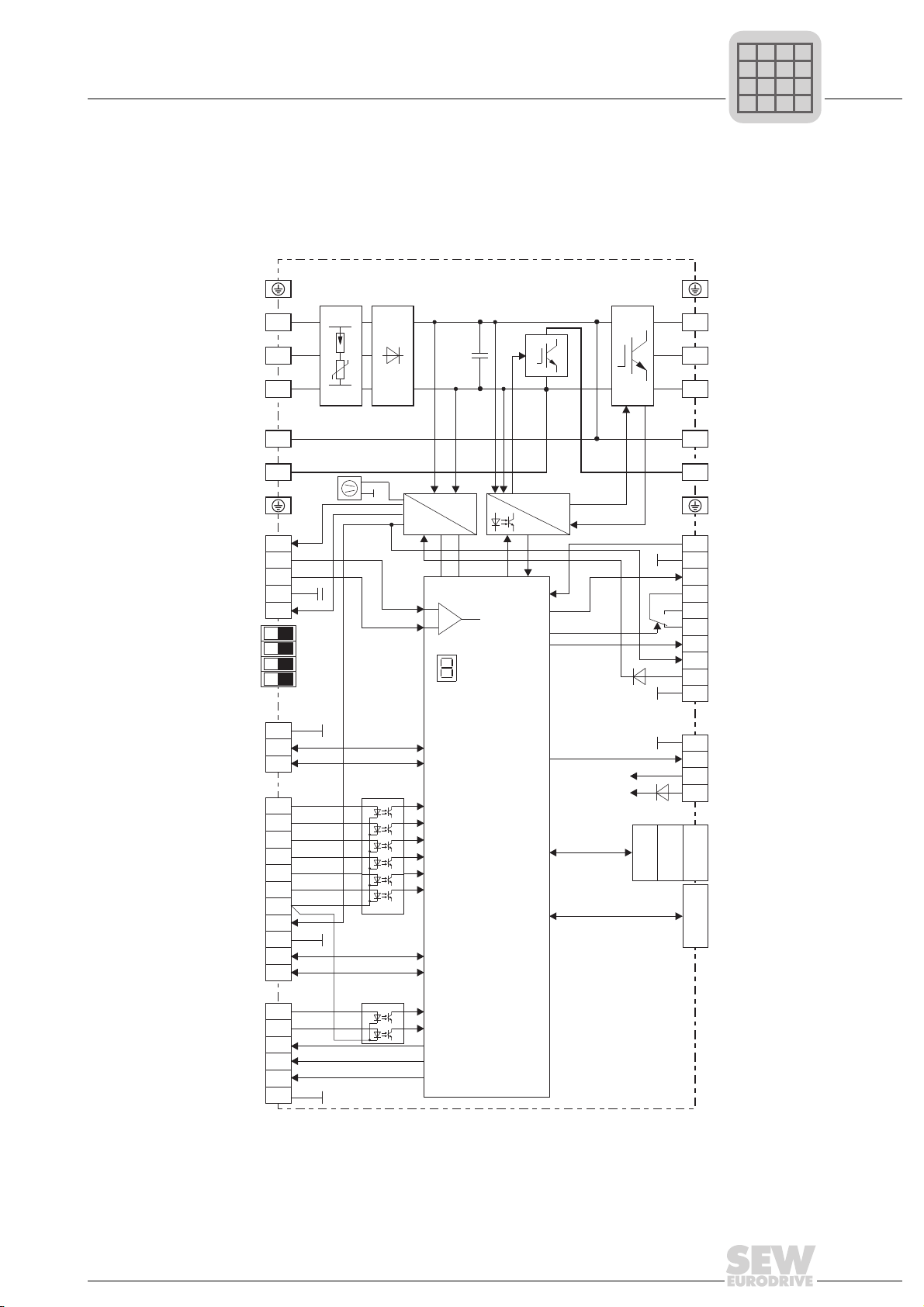
1.1.17 Diagrama em blocos
1
1
2
3
4
5
6
7
8
9
10
1
2
3
4
1
2
3
4
5
6
7
8
9
10
11
1
2
3
4
5
6
1
2
3
4
2 5
3
6
X1:
X13:
X16:
X12:
OPTION2
OPTION1
OPTION3 Xterminal
Unidade de controle
S11
S12
S13
S14
LIG DESL
+
-
1
2
3
4
5
PE
L1
L2
L3
8 8
7
9
X4:
X11:
X10:
X17:
X3:
U
Z
PE
U
V
W
GND
GND
GND
X2:
Circuito de
proteção na
entrada
Circ. interm. Chopper
de frenagem
ConversorRetificador
Fonte
chaveada
BRC
ON
Sinais de
controle
Medição de
corrente
Ventil.
Conexão do
circuito intermediário
Conexão do
resistor de frenagem
Display de
7 segmentos
Entrada analógica
e tensões de
referência
AGND
Sinal I Sinal V
Resistor de terminação SBus
Taxa de transmissão RS485
Frequência de entrada ativa
System bus
Entradas digitais
isoladas
Entradas digitais
isoladas
Referência
Saída + 24 Vcc
Interface
RS485
Entrada TF/TH/KTY
STO
Saída digital
Saída digital
Saídas digitais
Saída à relé
Saída + 24 Vcc
Entrada + 24 Vcc
Slots
opcionais
(não com MDX60B)
Controle manual
ou
interface de
comunicação
Microprocessador
Rede Motor
P
i
f
kVA
Hz
n
Descrição do Sistema
Descrição do Sistema
Visão geral do sistema MOVIDRIVE® MDX60B/61B
Visão geral do sistema MOVIDRIVE® MDX60B/61B
1
1
O diagrama em blocos a seguir mostra a estrutura básica e a teoria de operação dos
®
conversores de frequência MOVIDRIVE
MDX60B/61B.
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
1452719115
19
19

1
P
i
f
kVA
Hz
n
Descrição do Sistema
Funções/características
1.2 Funções/características
1.2.1 Propriedades do equipamento
• Ampla faixa de tensão
– Equipamentos de 380/500 V para faixa de tensão 3 × 380 ... 500 V
– Equipamentos de 220 V para faixa de tensão 3 × 200 ... 240 V
• Alta capacidade de sobrecarga
– Tamanho 0: 200% I
– Tamanhos 1 ... 6: 150% I
– Todos os tamanhos: 125% I
• Tamanhos 0 ... 6:
– Com frequência de chaveamento 4 kHz, I
– Operação em 4Q possível devido ao chopper de frenagem integrado, de forneci-
• Tamanho 7:
– Com frequência de chaveamento 2,5 kHz, I
– Pode ser selecionada operação em 2Q sem chopper de frenagem ou operação
• Estrutura compacta para economia de espaço no painel elétrico
• Filtro de rede integrado de montagem padrão nos tamanhos 0, 1, 2S e 2, obtenção
da classe limite C2 no lado de entrada, sem qualquer medida adicional
por no mínimo 60 s
N
por no mínimo 60 s
N
, operação constante sem sobrecarga (bombas,
ventiladores)
ambiente t
mento padrão
ambiente t
em 4Q com chopper de frenagem
=50°C
a
=50°C
a
N
CA
CA
é admissível na temperatura
N
é admissível na temperatura
N
• 8 entradas digitais isoladas e 6 saídas digitais, das quais uma é saída à relé; entradas/saídas programáveis
• 1 entrada TF/TH/KTY para proteção do motor utilizando termistor PTC ou termostato
• Display de 7 segmentos para indicação dos estados de operação e irregularidade
• Entrada de tensão 24 V
(ajuste de parâmetro, diagnósticos e armazenagem de dados mesmo quando a rede
é desligada)
• Bornes da eletrônica separáveis
• Bornes de potência separáveis para unidades de tamanhos 0 e 1
• STO de acordo com EN 61800-5-2, até
– Categoria 3 conforme EN 954-1
– Nível de desempenho conforme EN ISO 13849-1
1.2.2 Funções de controle
• Modos de controle VFC ou CFC para operação com controle de orientação do
campo magnético (servo assíncrono)
• Sistema de controle sequencial e de posicionamento IPOS
• Dois jogos de parâmetro completos (apenas 1 jogo de parâm. para malha fechada)
• Medição automática do motor
separada para energização da eletrônica do conversor
CC
plus®
como padrão
• Controle automático do freio através do conversor
20
Manual de Sistema - MOVIDRIVE® MDX60B/61B

Descrição do Sistema
P
i
f
kVA
Hz
n
Descrição do Sistema
Funções/características
Funções/características
• Frenagem CC para desaceleração do motor também na operação em 1Q
• Função economia de energia para otimizar automaticamente a corrente de magnetização
• Compensação de escorregamento para alta precisão estática de rotação, mesmo
sem realimentação por encoder
• Função flying restart para sincronizar o conversor a um motor SEW em funcionamento
• Função elevação para todos os sistemas de motor conectados
• Proteção contra arriamento do motor através do limite de corrente de escorregamento na faixa de enfraquecimento de campo
• Janela de frequência para evitar faixas que causam ressonância mecânica
• Corrente de aquecimento contra formação de água de condensação no motor
• Bloqueio de parâmetros para proteção contra alterações de parâmetros
• Controlador de velocidade e entrada do encoder para encoders incremental,
Hiperface
dor na interface do usuário.
®
ou SSI e resolvers. Ferramenta de fácil utilização de ajuste do controla-
1
1
• Funções para a proteção total do conversor e do motor (curto-circuito, sobrecarga,
sobretensão/subtensão, falha à terra, sobretemperatura no conversor, prevenção de
arriamento do motor, sobretemperatura no motor)
• Controle de rotação e monitoração da potência máxima motora e regenerativa
• Controle da faixa de sinal programável (rotação, corrente, corrente máxima)
• Memória para apresentar diagramas X/t utilizando o programa de visualização de
dados de processo SCOPE (8 canais, em tempo real)
• Memória de irregularidade (5 últimas) com todos os dados de operação relevantes
no momento da irregularidade
• Medição das horas em operação (unidade conectada à rede ou em 24 V
liberado (estágio de saída energizado)
• Tecnologia modular para configuração de aplicações específicas
• Operação, ajuste de parâmetro e tecnologia de conexão idênticos para toda a família MOVIDRIVE
1.2.3 Possibilidades para setpoint
• Rampa de parada (total de 4 rampas)
• Potenciômetro do motor, pode ser combinado com setpoint analógico e setpoint fixo
interno
• Seleções do setpoint externo: (0 ... +10 V
20 mA)
• Suavização para mudanças de rotação sem trancos
• Curva característica de entrada programável para processamento flexível de setpoint
) e horas
CC
®
, -10 VCC ... +10 VCC, 0 ... 20 mA, 4 ...
CC
• 6 setpoints fixos bipolares que podem ser combinados com setpoints externos e com
a função de potenciômetro do motor
• Frequência de entrada primária
• Limitação de tranco ajustável
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
21
21

1
P
i
f
kVA
Hz
n
1.2.4 Comunicação/operação
1.2.5 Ampliação do sistema
Descrição do Sistema
Funções/características
• Rede de comunicação para no máx. 64 MOVIDRIVE
• Interface RS485 para comunicação entre um PLC/PC industrial e até 31
conversores
• Fácil colocação em operação e ajuste de parâmetro utilizando controle manual
ou PC
• Módulo de memória conectável para rápida substituição da unidade durante a
operação
• Ampla faixa dos opcionais de expansão, por exemplo:
– Controle manual removível com memória de parâmetro
– USB11A, interface RS232 ↔ RS485
– Interface fieldbus PROFIBUS, INTERBUS, Ethernet, DeviceNet, CAN/CANopen
– Placa de expansão de entradas e saídas
– Resistores de frenagem, filtros de rede, bobinas de rede, bobinas de saída, filtros
de saída
• MOVITOOLS
®
MotionStudio com visualização de dados de processo SCOPE
®
• Versão aplicação com acesso a funções tecnológicas e módulos aplicativos para resolver tarefas de acionamento de modo rápido e fácil
• Módulo regenerativo MOVIDRIVE
mentada na rede de comunicação, remove a carga térmica do painel elétrico e ajuda
a reduzir custo.
1.2.6 Normas e certificações
• Certificação UL, cUL, C-Tick. O MOVIDRIVE
ficação UL ou cUL ou C-Tick. O certificado GOST-R (Rússia) foi aprovado para a
linha MOVIDRIVE
• Desligamento seguro das conexões de potência e da eletrônica conforme EN
61800-5-1
• Conformidade com todas as exigências de certificação CE de máquinas e instalações com MOVIDRIVE
Diretiva EMC 2004/108/EC. Atendimento a norma de produto EMC EN 61800-3.
• STO de acordo com EN 61800-5-2, até
– Categoria 3 de acordo com a norma EN 954-1
– Nível de desempenho de acordo com a norma EN ISO 13849-1
®
MDR60A. A energia regenerativa é reali-
®
MDR60A1320-503-00 não tem certi-
®
.
®
, baseadas na Diretiva de Baixa Tensão 2006/95/EC e na
22
Manual de Sistema - MOVIDRIVE® MDX60B/61B

Funções adicionais da versão aplicação
MASTER
SLAVE
P
i
f
kVA
Hz
n
Funções adicionais da versão aplicação
1.3 Funções adicionais da versão aplicação
Descrição do Sistema
Descrição do Sistema
1
1
A SEW-EURODRIVE oferece funções adicionais para aplicações especiais. Pode-se
utilizar estas funções adicionais com MOVIDRIVE
São disponíveis as seguintes funções adicionais:
• Came eletrônico
• Operação em sincronismo angular interno
INFORMAÇÃO
Favor consultar os manuais "Electronic Cam" e "Internal Synchronous Operation" para
informação detalhada sobre as funções adicionais.
1.3.1 Came eletrônico
Pode-se utilizar a linha MOVIDRIVE
sequências complexas de movimento em máquinas cíclicas. Esta solução oferece
maior flexibilidade comparada ao came mecânico. Com isso, atende-se necessidades
da produção moderna e linhas de processamento.
Um editor de came de fácil utilização pode ajudar durante a colocação em operação.
Também é possível importar dados do came existente. Pode-se também ajustar os
parâmetros específicos da aplicação para as fases de engate e desengate utilizando o
editor de came.
®
na versão aplicação (...-0T).
®
com "came eletrônico" quando precisar conciliar
Observar os seguintes pontos:
• O "came eletrônico" pode ser executado somente com o MOVIDRIVE
versão aplicação (...-0T).
• É obrigatório a realimentação por encoder. Por esta razão o "came eletrônico" somente pode ser realizado nos modos de operação "CFC", "SERVO" e "VFC-n control" com conexão mestre/escravo via X14-X14 ou via SBus.
• O "came eletrônico" está disponível somente no jogo de parâmetro 1.
• O opcional "Placa de operação em sincronismo tipo DRS11B" não pode ser utilizado
com a função "came eletrônico".
®
MDX61B
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
23
23
1
P
i
f
kVA
Hz
n
Descrição do Sistema
Funções adicionais da versão aplicação
Motores e
encoders
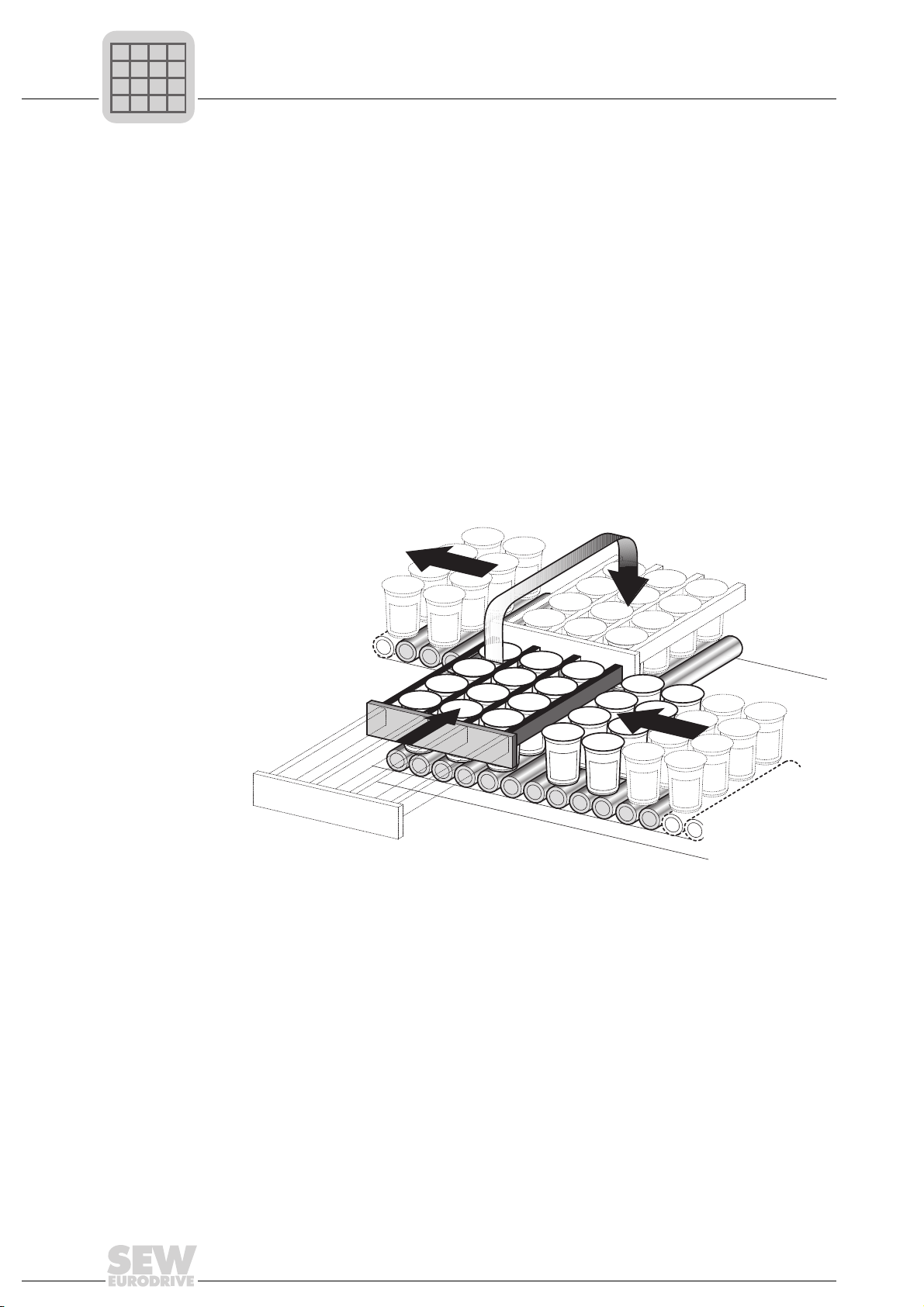
Exemplo A figura abaixo mostra um exemplo típico de aplicação para o "came eletrônico." Reci-
Utilizar os seguintes tipos de motor:
• Na operação com MOVIDRIVE
– Servomotor assíncrono CT/CV, encoder sen/cos de alta resolução instalado
como padrão ou encoder Hiperface
– Motor CA séries DR/DZ/DX/D com encoder incremental, de preferência encoder
sen/cos de alta resolução ou encoder Hiperface
– Servomotores síncronos DS/CM/CMD/CMP, resolver (instalado como padrão)
ou encoder Hiperface
É necessário medida de velocidade de alta resolução para operação otimizada do came
eletrônico. Os encoders de fornecimento padrão dos motores CT/CV e
DS/CM/CMD/CMP cumprem estas exigências. A SEW-EURODRIVE recomenda a utilização de encoders sen/cos de alta resolução como encoders incrementais, caso
sejam utilizados motores DR/DZ/DX/D.
pientes preenchidos com iogurte são transportados para outra fase do processamento.
A função "came eletrônico" permite movimento suave, importante para esta aplicação.
®
MDX61B...-4-0T:
®
.
®
.
®
1453201035
24
Manual de Sistema - MOVIDRIVE® MDX60B/61B
1.3.2 Operação em sincronismo interno
P
i
f
kVA
Hz
n
Pode-se utilizar a família MOVIDRIVE
quando um grupo de motores tiver que ser operado em sincronismo angular em relação
a outro ou com redução proporcional ajustável (engrenagem eletrônica). Um editor de
fácil utilização ajuda durante a colocação em operação.
Observar os seguintes pontos:
• A "Operação em sincronismo angular interno" pode ser implementada somente com
MOVIDRIVE
• É obrigatório a realimentação por encoder. Por esta razão a "operação em sincronismo angular interno" somente pode ser realizada nos modos de operação
"CFC", "SERVO" e "VFC-n control" com conexão mestre/escravo via X14-X14 ou via
SBus.
• A "Operação em sincronismo angular interno" está disponível somente no jogo de
parâmetro 1.
• O opcional "Placa de operação em sincronismo tipo DRS11B" não pode ser utilizado
com a função "operação em sincronismo interno".
®
MDX61B versão aplicação (...-0T).
Descrição do Sistema
Descrição do Sistema
Funções adicionais da versão aplicação
Funções adicionais da versão aplicação
®
com "operação em sincronismo interno"
1
1
Motores e
encoders
Utilizar os seguintes tipos de motor para operação com MOVIDRIVE
• Servomotor assíncrono CT/CV, encoder sen/cos de alta resolução instalado como
padrão ou encoder Hiperface
• Motor CA séries DR/DZ/DX/D com encoder incremental, de preferência encoder
sen/cos de alta resolução ou encoder Hiperface
• Servomotores síncronos DS/CM/CMD/CMP, resolver (instalado como padrão) ou
encoder Hiperface
É necessário medida de velocidade de alta resolução para "operação em sincronismo
angular interno" otimizada. Os encoders de fornecimento padrão dos motores CT/CV e
DS/CM/CMD/CMP cumprem estas exigências. A SEW-EURODRIVE recomenda a utilização de encoders sen/cos de alta resolução como encoders incrementais, caso
sejam utilizados motores DR/DZ/DX/D.
®
®
.
®
.
®
MDX61B...-4-0T:
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
25
25
1
P
i
f
kVA
Hz
n
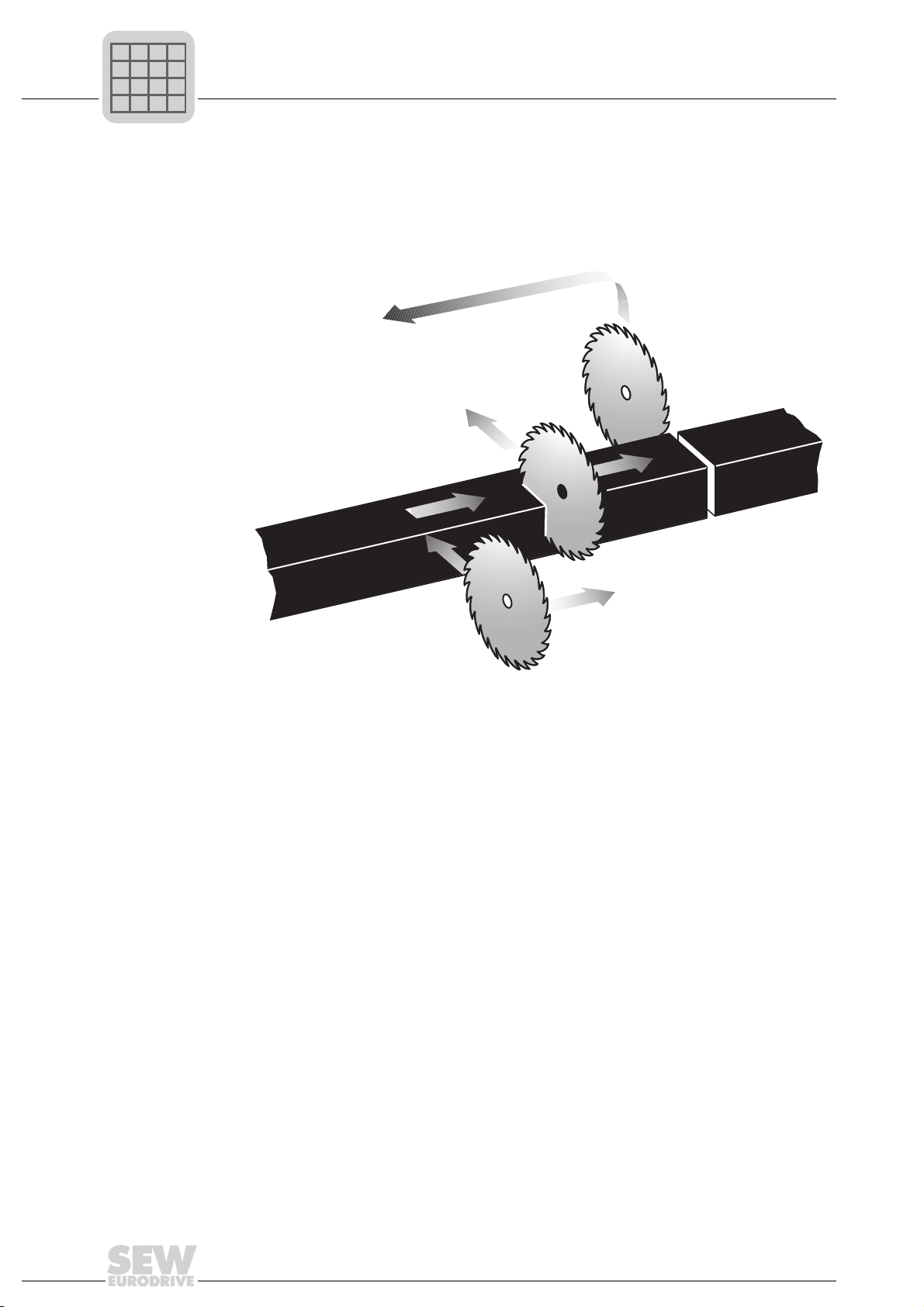
Exemplo A figura abaixo mostra uma aplicação típica com "operação em sincronismo angular in-
Descrição do Sistema
Funções adicionais da versão aplicação
terno". O material extrusado deve ser cortado no sentido do comprimento. A serra recebe um sinal de partida e sincroniza com o material. Durante o processo, a serra se
movimenta sincronizadamente com o material. No final do processo a serra retorna à
sua posição de partida.
41692939
26
Manual de Sistema - MOVIDRIVE® MDX60B/61B

Descrição do Sistema
P
i
f
kVA
Hz
n
Descrição do Sistema
Módulos aplicativos para MOVIDRIVE® MDX61B
Módulos aplicativos para MOVIDRIVE® MDX61B
1.4 Módulos aplicativos para MOVIDRIVE® MDX61B
1.4.1 A tarefa do acionamento
A tarefa do acionamento muitas vezes envolve mais do que o ajuste da velocidade de
um motor. O conversor também é necessário para controlar sequências de movimento
e empregar tarefas típicas de PLC. Aplicações cada vez mais complexas tem que ser
solucionadas, sem resultar em processos longos de colocação em operação e configuração.
1
1
1.4.2 A solução com MOVIDRIVE
A SEW-EURODRIVE oferece vários programas de controle padronizados especificamente para aplicações de "posicionamento," "bobinamento," e "controle". Estes programas são chamados módulos aplicativos. Os módulos aplicativos fazem parte do programa de operação MOVITOOLS
cação.
A interface do usuário de fácil utilização pode ajudar no processo de ajuste dos
parâmetros. Tudo o que se tem a fazer é inserir os parâmetros necessários para a aplicação. O módulo aplicativo utiliza esta informação para criar o programa de controle e
carregá-lo no conversor. O MOVIDRIVE
de funcionamento, a carga é reduzida do controle da máquina e os conceitos de descentralizados são mais fáceis de serem implementados.
Resumo dos
benefícios
• Ampla faixa de funções
• Interface de usuário gráfica e de fácil utilização
• Insere-se apenas os parâmetros necessários para a aplicação
• Processo orientado de ajuste de parâmetros em vez de programação complicada
• Não é necessário experiência de programação
• Nenhum treinamento longo, portanto planejamento de projeto e colocação em
operação rápidos
• Todos os movimentos são controlados diretamente no MOVIDRIVE
®
®
MotionStudio e podem ser utilizados na versão apli-
®
assume o controle completo dos processos
®
• Conceitos descentralizados podem ser implementados com mais facilidade
1.4.3 Escopo de fornecimento e documentação
Os módulos aplicativos fazem parte do software de engenharia MOVITOOLS
Studio e podem ser utilizados com MOVIDRIVE
Os manuais de aplicação individuais também podem ser adquiridos em formato PDF,
através de download na homepage da SEW.
®
MDX61B na versão aplicação (...-0T).
®
Motion-
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
27
27

1
P
i
f
kVA
Hz
n
1.4.4 Módulos aplicativos disponíveis
Posicionamento Movimento linear; as tarefas de posicionamento são controladas pelo conversor:
Enrolamento • Bobinador/Desbobinador
Descrição do Sistema
Módulos aplicativos para MOVIDRIVE® MDX61B
Os módulos aplicativos atualmente disponíveis são indicados abaixo. Estes módulos
aplicativos são explicados nas próximas páginas.
• Tabela de posicionamento, controle através de bornes ou de rede fieldbus
Movimento linear; as posições gravadas são controladas pelo PLC:
• Posicionamento através da rede
• Posicionamento ampliado atavés da rede
• Posicionamento absoluto (velocidade rápida/reduzida de posicionamento)
Movimento rotacional:
• Módulo de posicionamento via bornes: O conversor grava a posição do movimento
• Módulo de posicionamento via fieldbus: O PLC grava a posição do movimento
Controle •Serra móvel
• DriveSync via rede fieldbus
• Posicionamento baseado em sensores
28
Manual de Sistema - MOVIDRIVE® MDX60B/61B
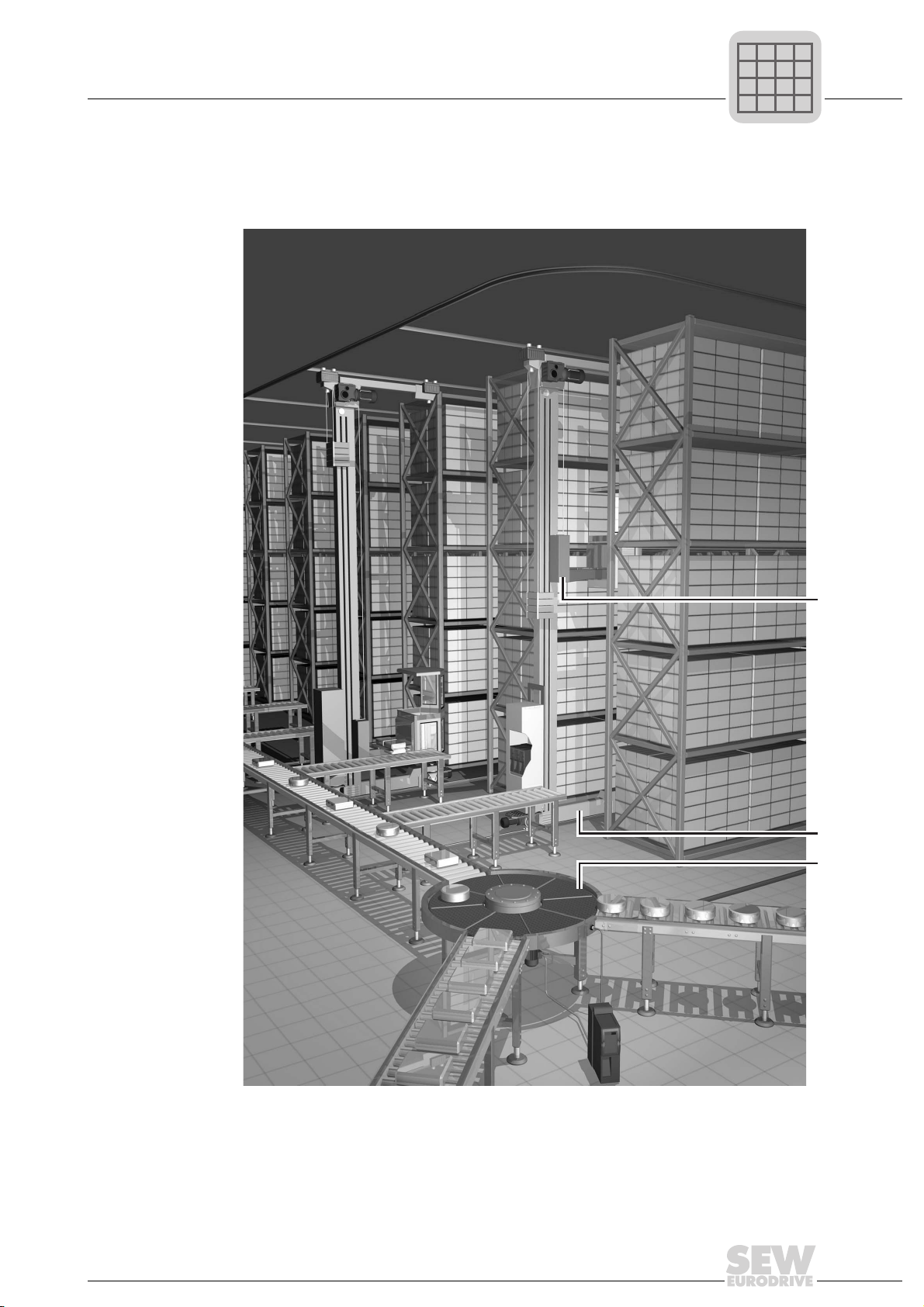
1.4.5 Aplicação
1.
2.
3.
P
i
f
kVA
Hz
n
Descrição do Sistema
Descrição do Sistema
Módulos aplicativos para MOVIDRIVE® MDX61B
Módulos aplicativos para MOVIDRIVE® MDX61B
A figura a seguir mostra um exemplo de como os vários módulos aplicativos SEW são
utilizados em armazéns.
1
1
1. Elevação: Tabela de posicionamento
2. Curso do eixo: Posicionamento absoluto ou posicionamento via rede
3. Distribuidor giratório: Módulo de posicionamento
1453256971
–
Manual de Sistema - MOVIDRIVE® MDX60B/61B
29
29

1
P
i
f
kVA
Hz
n
1.4.6 Posicionamento
1.4.7 Posicionamento linear
Descrição do Sistema
Módulos aplicativos para MOVIDRIVE® MDX61B
Os módulos aplicativos para o "Posicionamento" são adequados para todas as aplicações onde são especificadas posições finais e o movimento então ocorre nestas
posições. O movimento pode ser linear ou rotacional.
Por exemplo, sistemas de translação, elevação, pórticos, mesas giratórias, dispositivos
girantes, e armazenagem e coleta.
No caso de módulos aplicativos para posicionamento linear, a SEW-EURODRIVE diferencia se a gravação da posição do movimento é feita no conversor ou no PLC mestre.
Gravação da
posição do
movimento
no conversor
• Tabela de posicionamento via bornes
• Tabela de posicionamento via fieldbus
Estes módulos aplicativos são adequados para aplicações em que o movimento ocorre
somente para um número limitado de posições finais e que é necessário o grau mais
alto possível de independência do controle da máquina.
Podem ser gravadas no conversor até 32 posições de movimento nestes módulos aplicativos. A gravação do movimento compreende posição final, velocidade e rampa. A
posição que o movimento ocorre é selecionada utilizando código binário, por meio de
entradas digitais do conversor ou através de bornes virtual (fieldbus, system bus). Estes
módulos aplicativos possuem as seguintes características:
• Podem ser definidas e selecionadas até 32 posições.
• A velocidade de deslocamento pode ser selecionada para cada movimento de
posicionamento.
• A rampa pode ser ajustada separadamente para cada movimento de
posicionamento.
• O programa das chaves fim de curso pode ser definido e avaliado.
• Tanto o encoder incremental quanto o encoder absoluto podem ser avaliados.
• Procedimento orientado para a colocação em operação e diagnósticos.
Há quatro modos de operação para controle da máquina:
• Modo manual: A máquina pode ser movida manualmente.
• Referenciamento: A posição zero da máquina é determinada automaticamente para
a medida de posição incremental.
• Teach-in: A posição salva pode ser corrigida sem uma unidade de programação.
• Modo automático: O PLC mestre controla o processo automaticamente.
30
Manual de Sistema - MOVIDRIVE® MDX60B/61B
 Loading...
Loading...