

Page 1

Instructions d'utilisation
Convertisseur de signaux 7085.5010 / 7386.5010 / 8086.5010 /
9085.5010
Fréquence (7085.5010)
Analogique (courant / tension)
Série (RS232 / RS485)
SSI valeur absolue (7386.5010)
Start-Stop (8086.5010)
Compteur d’impulsion (9085.5010)
Caractéristiques du produit :
Appareil multifonctions avec modes opératoires pour codeurs incrémentaux, codeurs absolus
SSI ou codeur avec interface Start-Stop
Pour codeurs incrémentaux :
Modes opératoires comme convertisseur de fréquence ou position (Compteur d’impulsions)
Entrées incrémentales universelles (HTL / TTL / RS422) pour codeurs et capteurs NPN / PNP / NAMUR
Fonctions telles que la combinaison (par ex. A + B), mise à l’échelle, filtre, inhibition au démarrage, ….
Fréquence d’entrée jusqu’à 1 MHz
Pour codeur absolu SSI
Modes opératoires en tant que maître ou esclave avec des fréquences d'horloge jusqu'à 1 MHz
Pour les codeurs mono-tour et à multi-tour aux formats SSI de 10 ... 32 bits
Fonctions telles que contrôle rupture fils, suppression de bits, concentricité, la mise à l’échelle,
Pour les capteurs de déplacement absolus et magnétostrictifs avec interface start-stop. Modes de
Modes de fonctionnement en tant que maître ou esclave pour la mesure de distance, d’angle et de vitesse
Sortie analogique 16 bits, configurable pour un fonctionnement en tension ou en courant
Interface USB et interface RS232/RS485 pour la configuration et la lecture série
Interface RS232 / RS485 pour la configuration et la lecture en série
Temps de conversion extrêmement courts
Linéarisation avec 24 points d'interpolation
Sortie de tension auxiliaire 5 et 24 VDC pour l’alimentation du codeur
Nombreuses possibilités de connexion via 6 entrées de contrôle et 6 sorties de contrôle
Boîtier de rail DIN compact conforme à EN60715
Paramétrage facile via l’interface utilisateur OS (Freeware)
motrona GmbH, Zeppelinstraße 16, DE - 78244 Gottmadingen, Tel. +49 (0) 7731 9332-0, Fax +49 (0) 7731 9332-30, info@motrona.de, www.motrona.de
Page 2
Version:
Beschreibung:
9085.5010_01a_oi/tgo/Apr 19
Première version / édition
9085.5010_01b_oi/mbo/Août 19
Nouvellement ajouté : Chapitre “Remarque sur la compatibilité”
9085.5010_02a_oi/tgo/Novembre 19
Étendu par les codes QR et les nouvelles fonctions de filtrage en
Mode Frequency
9085.5010_02b_oi/mbo/Décembre 19
Édition révisée
9085.5010_03a_oi/mbo/tgo/Janvier 20
Supplément pour la fonction Interface Start-Stop
9085.5010_03b_oi/mbo/April 2020
Nouveau schéma de connexion au chapitre 4, taux de défaillance
9085.5010_04a_oi/mbo/August 2020
Nouvelle interface USB sur X7
Informations légales :
L'ensemble des informations contenues dans la présente description d'appareil sont sujets aux
droits d'utilisation et d'auteur de motrona GmbH. Toute duplication, modification, réutilisation et
publication sur d'autres supports électroniques ou imprimés, ainsi que leur publication sur
l'Internet, sont interdits sans l'autorisation écrite préalable de motrona GmbH.
9085_5010_04a_oi_f.docx / Feb-21 Page 2 / 74
Page 3

Sommaire
1. Sécurité et responsabilité ............................................................................................ 5
1.1. Consignes de sécurité générales .................................................................................................... 5
1.2. Utilisation conforme ........................................................................................................................ 5
1.3. Installation ....................................................................................................................................... 6
1.4. Immunité aux perturbations / Directive CEM ................................................................................. 7
1.5. Instructions de nettoyage, d'entretien et de maintenance ............................................................. 7
2. Remarque sur la compatibilité ...................................................................................... 8
3. Généralités................................................................................................................... 9
3.1. Mode opératoire .............................................................................................................................. 9
3.2. Diagramme de fonctionnement ..................................................................................................... 10
3.3. Power – LED / Message des erreurs ............................................................................................. 11
4. Raccordement électrique ............................................................................................ 12
4.1. Alimentation DC (X1) ..................................................................................................................... 12
4.2. Sortie de tension auxiliaire (X2) .................................................................................................... 12
4.3. Entrées incrémentales (X2) ............................................................................................................ 13
4.4. Entrées SSI (X2) ............................................................................................................................. 15
4.5. Entrées codeur Start-Stop (X2) ...................................................................................................... 17
4.6. Entrées de commande (X5) ............................................................................................................ 17
4.7. Sortie analogique (X4) ................................................................................................................... 19
4.8. Interface série (X3) ......................................................................................................................... 20
4.9. Interface USB (X7) .......................................................................................................................... 21
4.10. Sorties de commande (X6) ............................................................................................................. 21
5. Présentation des paramètres / des menus ................................................................. 22
5.1. General Menu ................................................................................................................................ 25
5.2. Mode Frequency ............................................................................................................................ 27
5.3. Mode Counter ................................................................................................................................ 32
5.4. Mode SSI........................................................................................................................................ 34
5.5. Mode Start/Stop ............................................................................................................................ 36
5.6. Preselection Values ....................................................................................................................... 38
5.7. Preselection 1 Menu ...................................................................................................................... 39
5.8. Preselection 2 Menu ...................................................................................................................... 42
5.9. Preselection 3 Menu ...................................................................................................................... 43
5.10. Preselection 4 Menu ...................................................................................................................... 44
5.11. Preselection 5 Menu ...................................................................................................................... 45
5.12. Preselection 6 Menu ...................................................................................................................... 46
5.13. Serial Menu ................................................................................................................................... 47
5.14. Analog Menu ................................................................................................................................. 50
5.15. Command Menu ............................................................................................................................. 51
5.16. Linearization Menu ........................................................................................................................ 53
6. Annexe ....................................................................................................................... 54
6.1. Lecture de données via l'interface série ....................................................................................... 54
6.2. Interface RTU Modbus ................................................................................................................... 55
6.2.1. Réglage des paramètres .................................................................................................................... 55
6.2.2. Communication Modbus .................................................................................................................... 56
6.2.3. Read Coils et Write Single Coil ......................................................................................................... 57
9085_5010_04a_oi_f.docx / Feb-21 Page 3 / 74
Page 4

6.2.4. Diagnostic .......................................................................................................................................... 58
6.3. Paramètre / serial codes................................................................................................................ 59
6.4. Linéarisation .................................................................................................................................. 65
6.5. Lecture des données SSI ............................................................................................................... 67
6.6. Traitement interne et le calcul des données SSI .......................................................................... 68
6.7. Modes de fonctionnement / Modes OP de l’interface Start/Stop ............................................... 71
6.8. Dimensions .................................................................................................................................... 73
6.9. Caractéristiques techniques .......................................................................................................... 74
9085_5010_04a_oi_f.docx / Feb-21 Page 4 / 74
Page 5

1. Sécurité et responsabilité
1.1. Consignes de sécurité générales
La présente description fait partie intégrante de l'appareil ; elle contient des informations
importantes sur son installation, sa fonction et son utilisation. Le non-respect de ces consignes peut
entraîner des dommages aux installations ou porter atteinte à la sécurité des hommes et des
installations.
Nous vous prions de lire attentivement cette description avant de mettre l'appareil en service et de
vous conformer à l'ensemble des consignes de sécurité et avertissements ! Conservez cette
description pour une utilisation ultérieure.
Cette description d'appareil ne peut être utilisée que par du personnel disposant d'une qualification
appropriée. Cet appareil ne peut être installé, configuré, mis en service et entretenu que par un
électricien formé à cet effet.
Exclusion de responsabilité : Le fabricant décline toute responsabilité pour d'éventuels dommages
corporels ou matériels dus à une installation, une mise en service, une utilisation et une
maintenance non conformes, ainsi qu'à des interprétations erronées ou à des erreurs humaines dans
la présente description d'appareil. Le fabricant se réserve par ailleurs le droit d'apporter à tout
moment - même sans avis préalable - des modifications techniques à l'appareil ou à la description.
D'éventuelles différences entre l'appareil et la description ne peuvent de ce fait pas être exclues.
La sécurité de l'installation ou du système complet dans lequel cet appareil est intégré, est de la
responsabilité du constructeur de l'installation ou du système complet.
Lors de l'installation, du fonctionnement ou des travaux de maintenance, il convient de respecter
l'ensemble des dispositions et normes de sécurité spécifiques au pays et à l'utilisation de l'appareil.
Si l'appareil est mis en œuvre pour des procès où une défaillance ou une erreur de manipulation peut
entraîner des dommages à l'installation ou des accidents pour les opérateurs, il faut prendre les
mesures appropriées pour éviter sûrement ces risques.
1.2. Utilisation conforme
Cet appareil est destiné exclusivement à une utilisation dans des machines et installations
industrielles. Toute autre utilisation sera considérée comme non conforme et sera de la
responsabilité exclusive de l'utilisateur. Le fabricant décline toute responsabilité en cas de
dommages dus à une utilisation non conforme. Cet appareil ne doit être utilisé que s’il a été installé
dans les règles de l’art et s'il est techniquement en parfait état, conformément aux caractéristiques
techniques L’appareil ne convient pas pour des zones présentant des risques d’explosion, ni pour les
domaines d’utilisation exclus par la norme EN 61010-1.
9085_5010_04a_oi_f.docx / Feb-21 Page 5 / 74
Page 6

1.3. Installation
L'appareil ne peut être installé et utilisé que dans un environnement correspondant à la plage de
températures admissible. Il faut assurer une ventilation suffisante et éviter le contact direct de
l'appareil avec des gaz ou des liquides chauds ou agressifs.
Avant l'installation ou avant tout travail de maintenance, isoler l'unité de toutes les sources
électriques. Veiller également à ce qu'un contact avec les sources électriques coupées ne présente
plus aucun risque.
Les appareils alimentés en courant alternatif ne peuvent être reliés au réseau basse tension que par
l'intermédiaire d'un interrupteur ou d'un interrupteur de puissance. Cet interrupteur doit être disposé
à proximité de l'appareil et être repéré comme dispositif de sectionnement.
Les lignes basse tension entrantes et sortantes doivent être séparées des lignes dangereuses sous
tension par une isolation double ou renforcée (circuits SELV).
L'ensemble des conducteurs, ainsi que leur isolation, doivent être choisis de sorte à correspondre
aux plages de tension et de température prévues. Il faut en outre se conformer aux normes
spécifiques à l'appareil et au pays s'appliquant à la structure, à la forme et à la qualité des
conducteurs. Les informations sur les sections de conducteur admissibles pour les bornes à visser
peuvent être trouvées dans les caractéristiques techniques.
Avant la mise en service, s'assurer du bon serrage de tous les raccordements, ainsi que des
conducteurs dans les bornes à visser. Toutes les bornes à visser (y compris celles qui ne sont pas
utilisées) doivent être vissées vers la droite jusqu'en butée et ainsi solidement fixées, afin d'éviter
leur desserrage en cas de secousses ou de vibrations.
Les surtensions aux bornes de l’appareil doivent être limitées à la valeur de la catégorie de surtension
II.
9085_5010_04a_oi_f.docx / Feb-21 Page 6 / 74
Page 7

1.4. Immunité aux perturbations / Directive CEM
Toutes les connexions sont protégées contre les interférences électromagnétiques.
Cependant, il faut veiller sur le lieu d’installation du dispositif à ce que des interférences capacitives
ou inductives les plus faibles possibles agissent sur l’appareil et sur tous les câbles de connexion.
Les mesures suivantes sont nécessaires à cet égard :
Un câble blindé doit toujours être utilisé pour tous les signaux d’entrée et de sortie
Des lignes de contrôle (entrées et sortie numériques, sorties relais) ne doivent pas dépasser
30 m de longueur et ne doivent pas quitter le bâtiment.
Les blindages des câbles doivent être connectés à la terre sur une grande surface à l’aide de
bornes de blindage
Le câblage des lignes de masse (GND ou 0V) doit être en forme d’étoile et ne doit pas être
connecté à la terre plusieurs fois.
L’appareil doit être installé dans un boîtier métallique et aussi loin que possible des sources
d’interférences
L’acheminement des câbles ne doit pas être parallèle aux lignes électriques et autres lignes
soumises à des interférences
Voir également le document motrona “Règles générales de câblage, de mise à la terre et de
construction de l’armoire de commande”. Vous le trouverez sur notre page d’accueil sous le lient:
https://www.motrona.com/fr/support/certificats-generaux.html
1.5. Instructions de nettoyage, d'entretien et de maintenance
Pour le nettoyage de la face avant utiliser exclusivement un chiffon doux légèrement humide. Aucun
travail de nettoyage n'est prévu ou nécessaire pour la face arrière de l'appareil. Les nettoyages non
planifiés sont de la responsabilité du personnel d'entretien en charge ou du monteur.
Aucune mesure de maintenance n'est nécessaire sur l'appareil en fonctionnement normal. En cas de
problèmes, de défauts ou de dysfonctionnements, l'appareil doit être retourné à motrona GmbH pour
vérification et éventuellement réparation. Une ouverture et une remise en état non autorisées
peuvent affecter, voire entraîner la défaillance des mesures de sécurité supportées par l'appareil.
9085_5010_04a_oi_f.docx / Feb-21 Page 7 / 74
Page 8
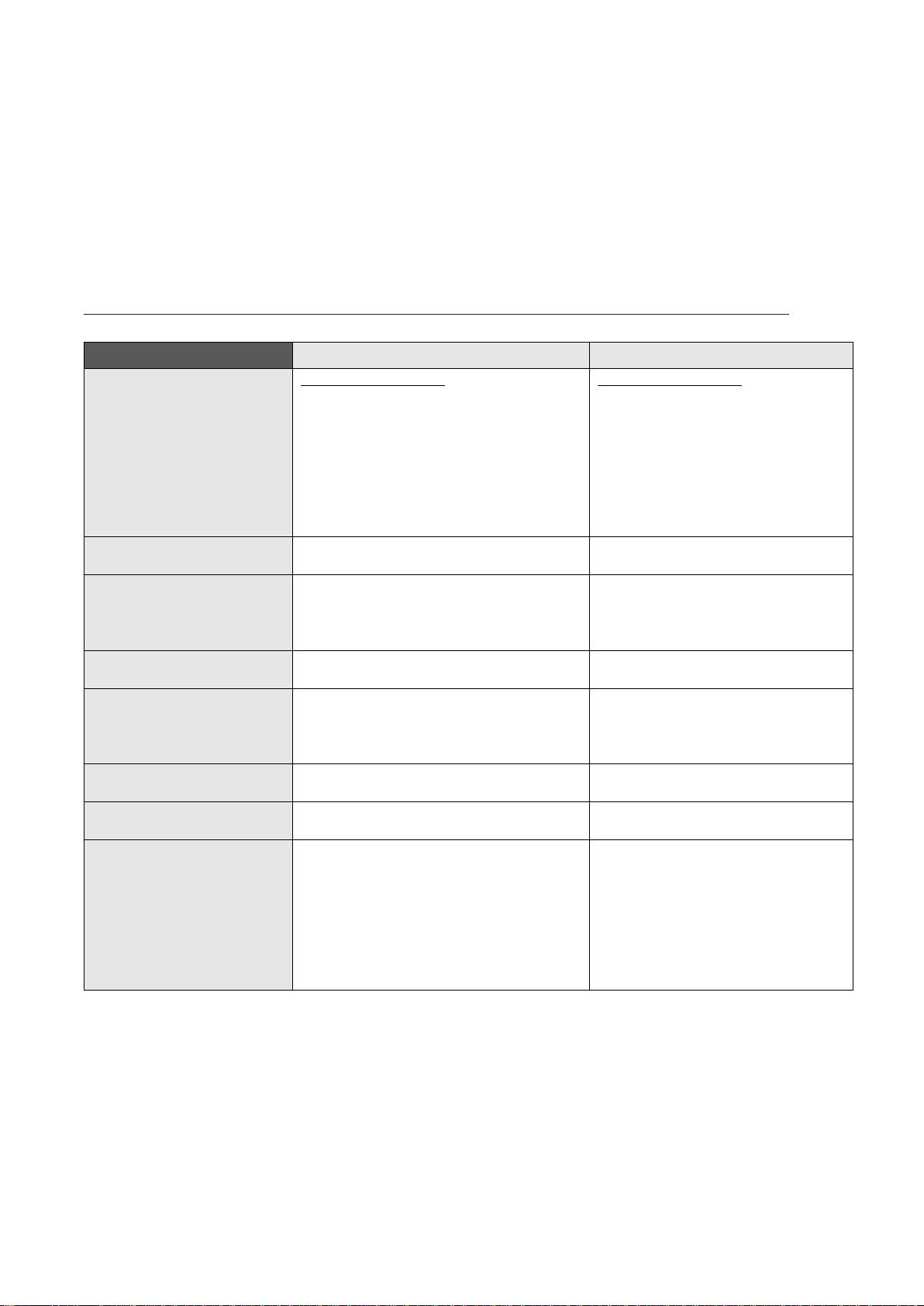
2. Remarque sur la compatibilité
9085.5010 / 7085.5010 / 7386.5010
9085.5052 / 7085.5052 / 7386.5051
Entrée indrémentale:
(9085/7085)
Configurations possibles :
RS422 (TTL), HTL différentiel, HTL PNP,
HTL NPN ou TTL PNP (asymétrique)
Le réglage effectué du paramètre
correspondant s'applique alors aux deux
entrées (A et B).
Configurations possibles :
RS422 (TTL), HTL différentiel, HTL
PNP, HTL NPN ou TTL (asymétrique)
Le réglage souhaité peut être réglé
séparément pour chaque piste (A et
B) via les commutateurs DIL
correspondants.
Entrée-Control :
Nombre : 6
Format : HTL
Nombre : 1
Format : HTL
Sortie-Control :
Nombre : 6
Format / Niveau : 5…30 V, PNP
Courant de sortie : max. 200 mA
Temps de réponse : < 1ms
Aucune sortie de commutation
Alimentation codeur :
Tension de sortie : 5VDC u. 24VDC
Courant de sortie : max. 250 mA
Tension de sortie : 5VDC
Courant de sortie : max. 250 mA
Interface Série :
RS232/RS485 via borne à vis
Baud : 9600, 19200 ou 38400 baud
RS232/RS485 via connecteur Sub-D
9 broches
Baud : 600, 1200, 2400, 4800, 9600,
19200, ou 38400 Baud
Boîtier :
Dimension (LxHxP) : 23 x 102 x 102 mm
Poids : ca. 100 g
Dimension (LxHxP) : 40 x 79 x 91 mm
Poids : ca. 190 g
Paramétrage d‘appareil :
Uniquement par logiciel OS
Par logiciel OS et partiellement à
l’aide du commutateur DIL
Mode d‘opération FU:
Uniquement canal A
Ratio B / A
L’écart en pourcentage entre les canaux B et A
Somme A + B
Différence A-B
A/Bx90
Uniquement canal A
Ratio A/B
Somme A+B
A/Bx90
Uniquement canal B
Produit AxB
Différence A-B
A= Impulsion, B = Direction
Ce produit est un successeur des convertisseurs 9085.5052 / 7085.5052 / 7386.5051 mille fois
éprouvé.
Ce convertisseur est capable de remplacer fonctionnellement le type de prédécesseur, mais il existe
des différences mineures en ce qui concerne le paramétrage.
Les principales différences entre ce produit et le modèle précédent respectif sont listés ci-dessous.
Différences entre le 9085.5010/ 7085.5010 / 7386.5010 par rapport aux modèles précédents :
9085_5010_04a_oi_f.docx / Feb-21 Page 8 / 74
Page 9

3. Généralités
L'appareil est conçu comme un convertisseur de signal avec des entrées et des sorties de contrôle.
Ses fonctions étendues le rendent universellement applicable.
3.1. Mode opératoire
Généralement, toutes les fonctions doivent être configurées dans le menu des paramètres.
L'appareil peut être utilisé dans les modes de fonctionnement suivants :
Fonctionnement en tant que convertisseur de valeur absolue pour les signaux SSI (remplace le
7386.5051)
Fonctionnement en tant que convertisseur de fréquence pour les signaux d’entrée incrémentiels
(remplace le 7085.5052)
Fonctionnement comme convertisseur de valeur absolue pour les signaux d’une interface start-
stop
Fonctionnement en tant que capteur de position / compteur pour les signaux d’entrée
incrémentiels (remplace le 9085.5052)
9085_5010_04a_oi_f.docx / Feb-21 Page 9 / 74
Page 10
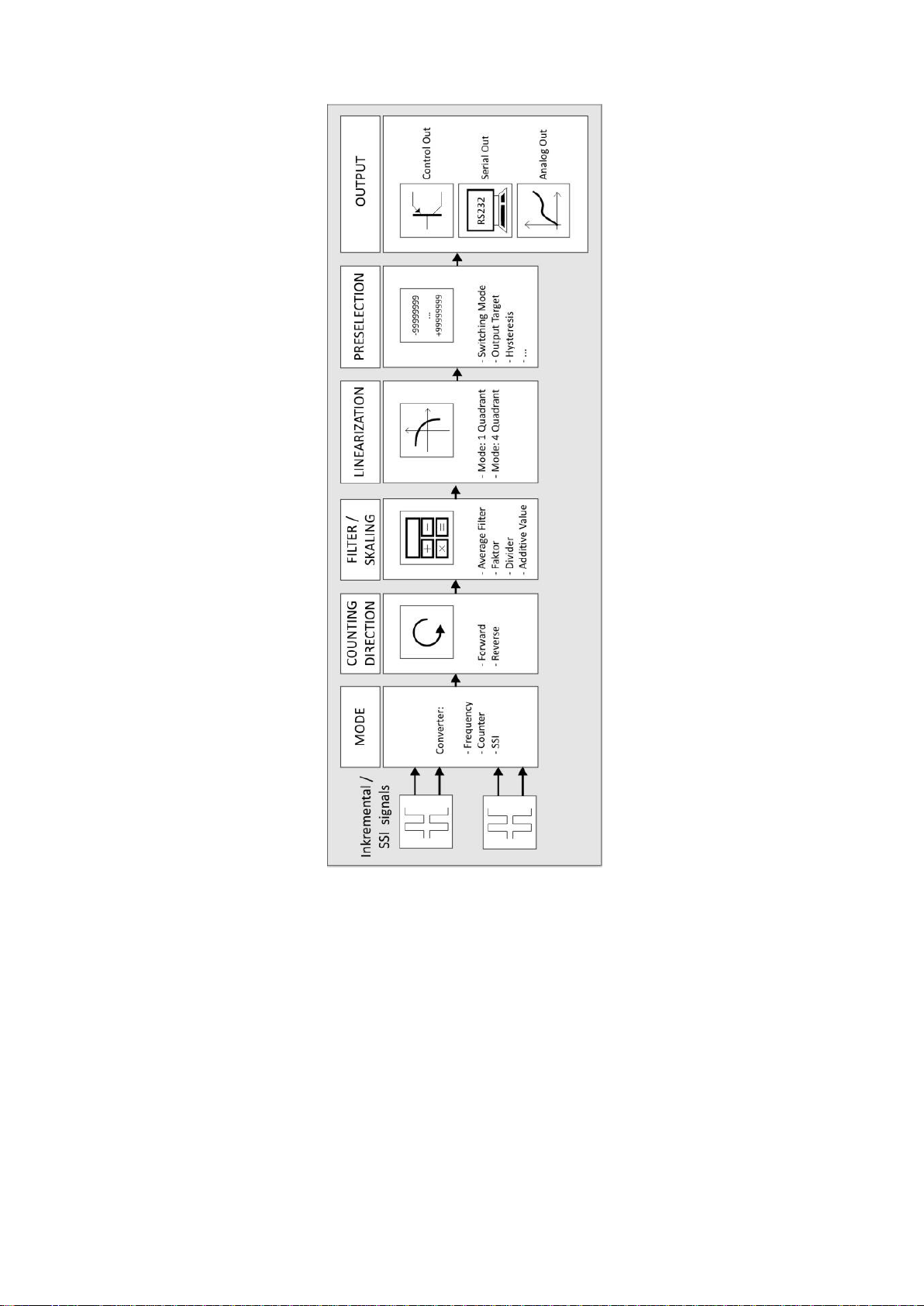
3.2. Diagramme de fonctionnement
9085_5010_04a_oi_f.docx / Feb-21 Page 10 / 74
Page 11
Code d‘erreur:
(Error_Status)
Désignation du défaut
Description du défaut
0x00000001
Maximum Value
Valeur mesurée est supérieure à
+ 99999999
0x00000002
Minimum Value
Valeur mesurée est inférieur à
-99999999
0x00000004
SSI Encoder Error
SSI Error Bit défini (uniquement pour
7386.5010)
0x00000008
Encoder Fault
Uniquement pour des tests internes!
0x00000010
Frequency (Input A) out of range
La fréquence d'entrée maximale ou
minimale admissible à l'entrée A a été
dépassée ou descendu par le réglage de
filtre exponentiel utilisé.
0x00000020
Frequency (Input B) out of range
La fréquence d'entrée maximale ou
minimale admissible à l'entrée B a été
dépassée ou descendu par le réglage de
filtre exponentiel utilisé.
0x00000040
Start/Stop Encoder Error
Aucune impulsion „Start“ et „Stop“
détectée entre deux impulsions „init“.
(Uniquement pour 8086.5010). Vérifiez les
connexions des capteurs !
0x00000080
Position Encoder Outside the
Limit
Aucune impulsion „Stop“ détectée entre
deux impulsions „init“. (Uniquement pour
8086.5010)
Cause possible : Aucun transmetteur de
position ou transmetteur de position en
dehors des limites.
3.3. Power – LED / Message des erreurs
Le dispositif a une LED verte. Elle s'allume en permanence dès que la tension d'alimentation de
l'appareil a été appliquée. Si une erreur apparaît, la LED clignote à 1 Hz. De plus, la sortie
analogique est contrôlée avec 0 V ou 0/4 mA. Si l'erreur n'existe plus, la LED se rallume
automatiquement et la sortie analogique réagit de nouveau au résultat actuel.
L'erreur exacte peut être sélectionnée à l’aide de l'interface utilisateur (OS) via l'interface série (
Variable: Error_Status, Code: „;3“)
Les codes d'erreur sont spécifiés ci-dessous :
9085_5010_04a_oi_f.docx / Feb-21 Page 11 / 74
Page 12
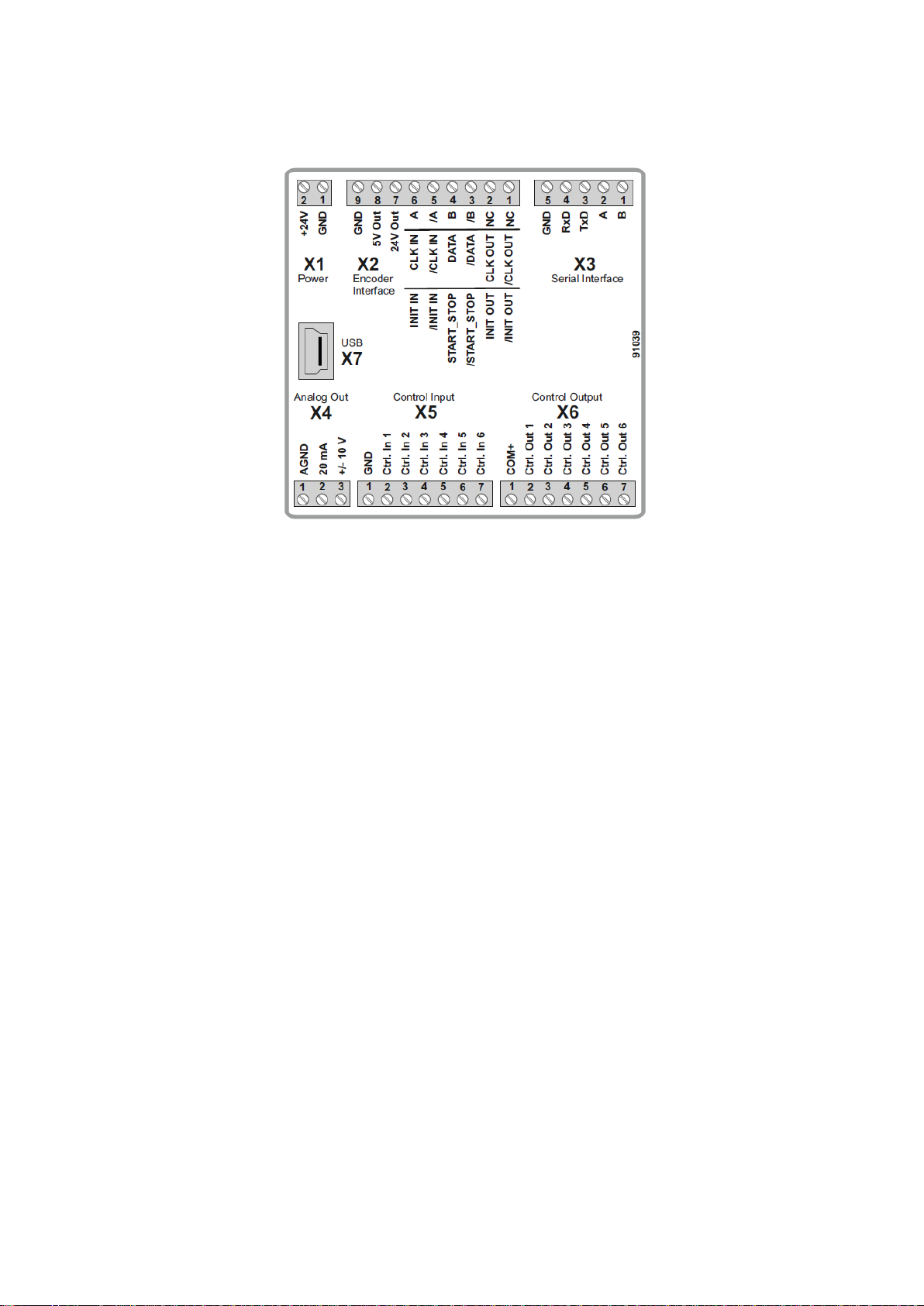
4. Raccordement électrique
Les bornes sont fermées avec un tournevis à lame plate (taille 2mm).
4.1. Alimentation DC (X1)
Les bornes X1, broches 1 et 2, permettent d'alimenter l'appareil avec une tension continue entre 18
et 30 VDC. La consommation dépend entre autres de la valeur de la tension d'alimentation et du
réglage ; il est d'environ 50 mA, auxquels s'ajoute le courant codeur prélevé par celui-ci à la sortie
de tension auxiliaire.
Tous les raccordements GND sont reliés les uns aux autres en interne.
4.2. Sortie de tension auxiliaire (X2)
Les bornes X2, broches 7, 8 et 9, offrent une tension auxiliaire (24VDC et 5VDC) permettant
l'alimentation d'un codeur / d'un capteur. La tension de sortie dépend de la tension d'alimentation
de l'appareil.
9085_5010_04a_oi_f.docx / Feb-21 Page 12 / 74
Page 13
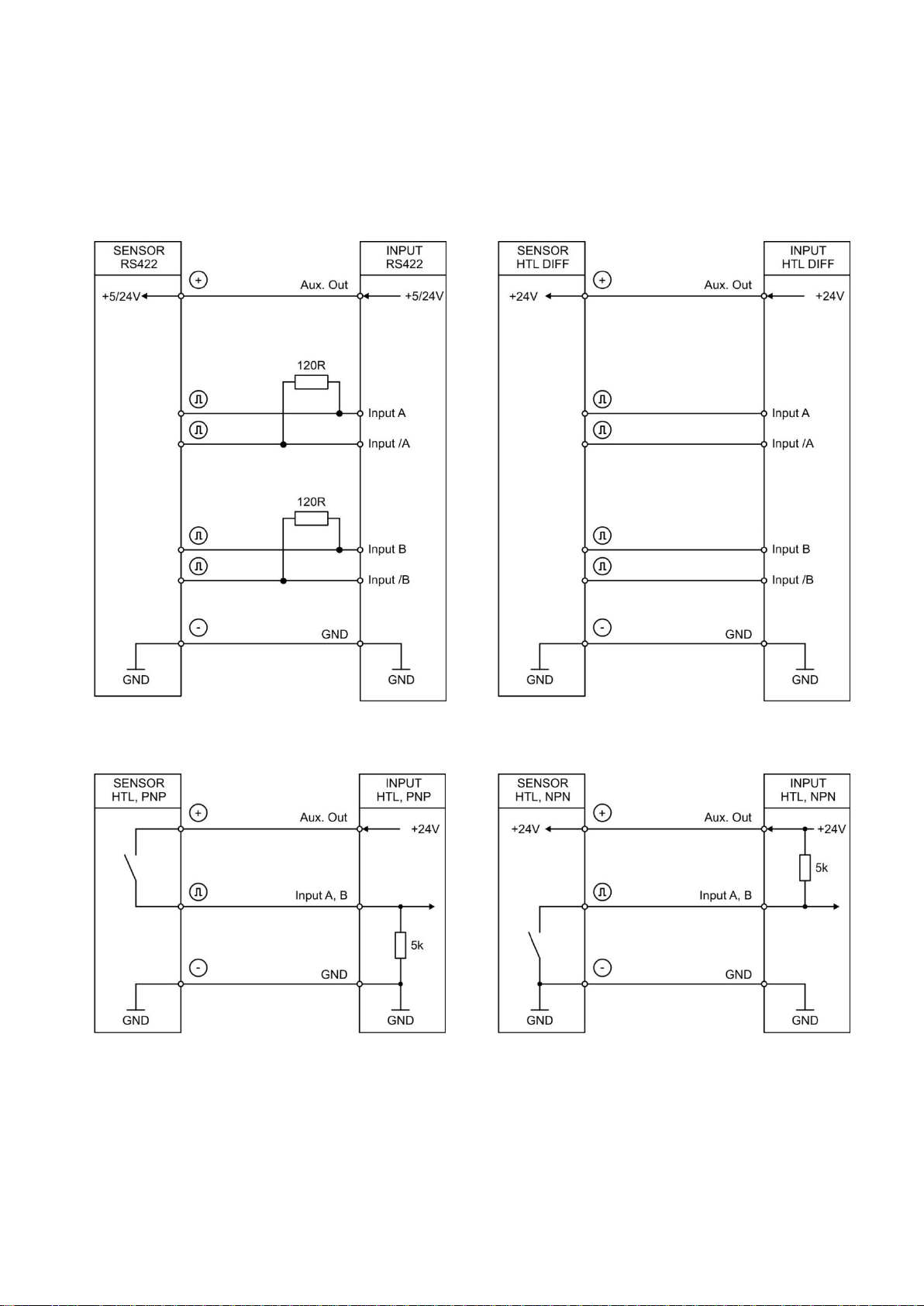
4.3. Entrées incrémentales (X2)
RS422
HTL DIFFERENTIAL
HTL PNP
HTL NPN
Les bornes X2, broches 3, 4, 5 et 6, permettent la connexion de divers signaux incrémentiels.
Raccordement des entrées incrémentales:
9085_5010_04a_oi_f.docx / Feb-21 Page 13 / 74
Page 14
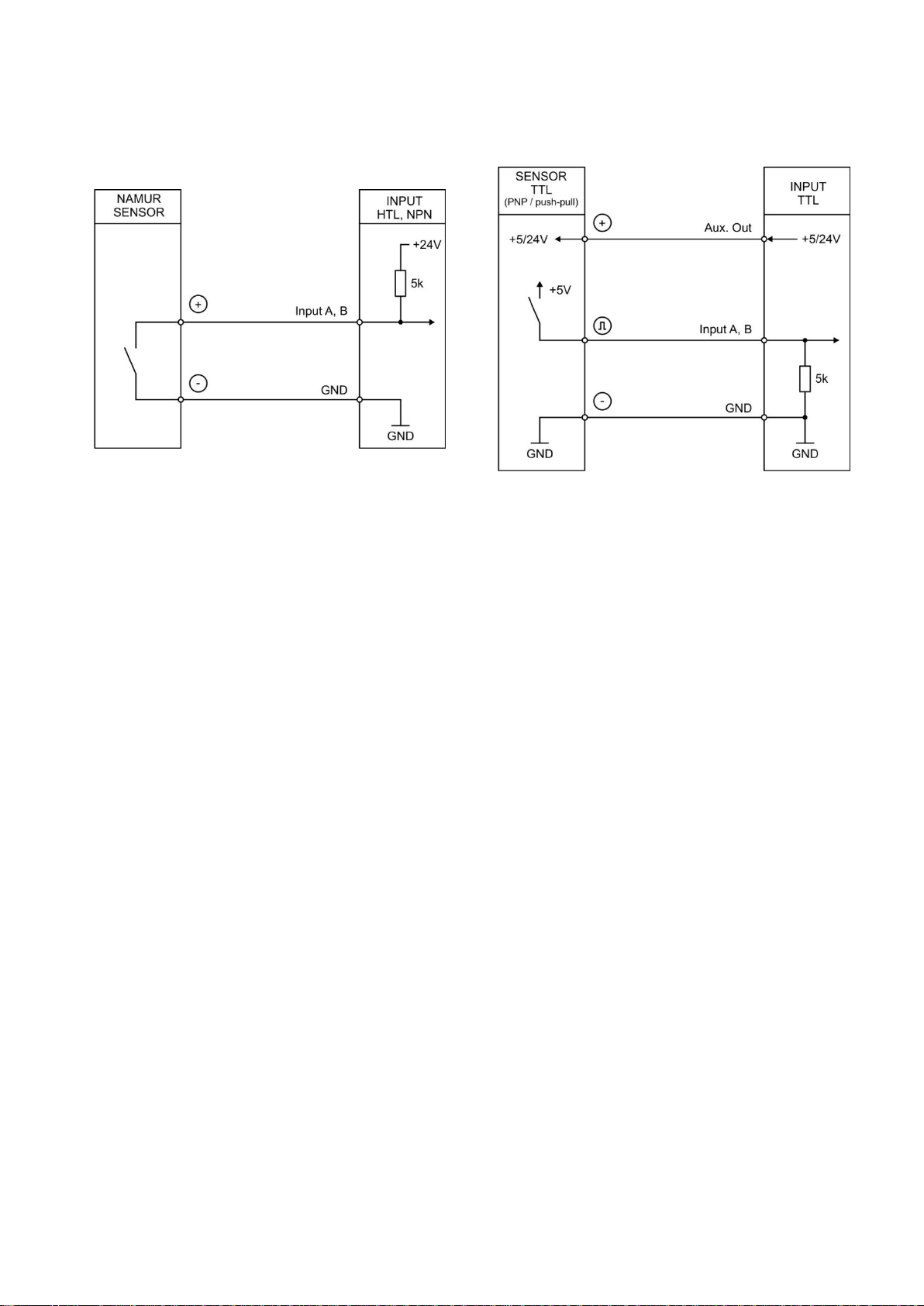
"Entrées incrémentales" suite:
HTL NPN (NAMUR)
TTL (PNP)
Par principe, toutes les entrées ouvertes PNP sont à l'état "LOW", les entrées ouvertes NPN sont à
l'état "HIGH".
Les niveaux d'entrée sont définis pour des générateurs d'impulsions électroniques.
Remarque pour les contacts de commutation mécanique :
Si, à titre exceptionnel, des contacts mécaniques sont utilisés comme source d’impulsion, un
condensateur externe usuel d’environ 10 μF doit être installé entre les bornes de raccordement GND
(-) et l’entrée correspondante (+).
Cela permettra d’obtenir un maximum de fréquence d’entrée amortie à environ 20 Hz et une
suppression d’un rebond.
9085_5010_04a_oi_f.docx / Feb-21 Page 14 / 74
Page 15
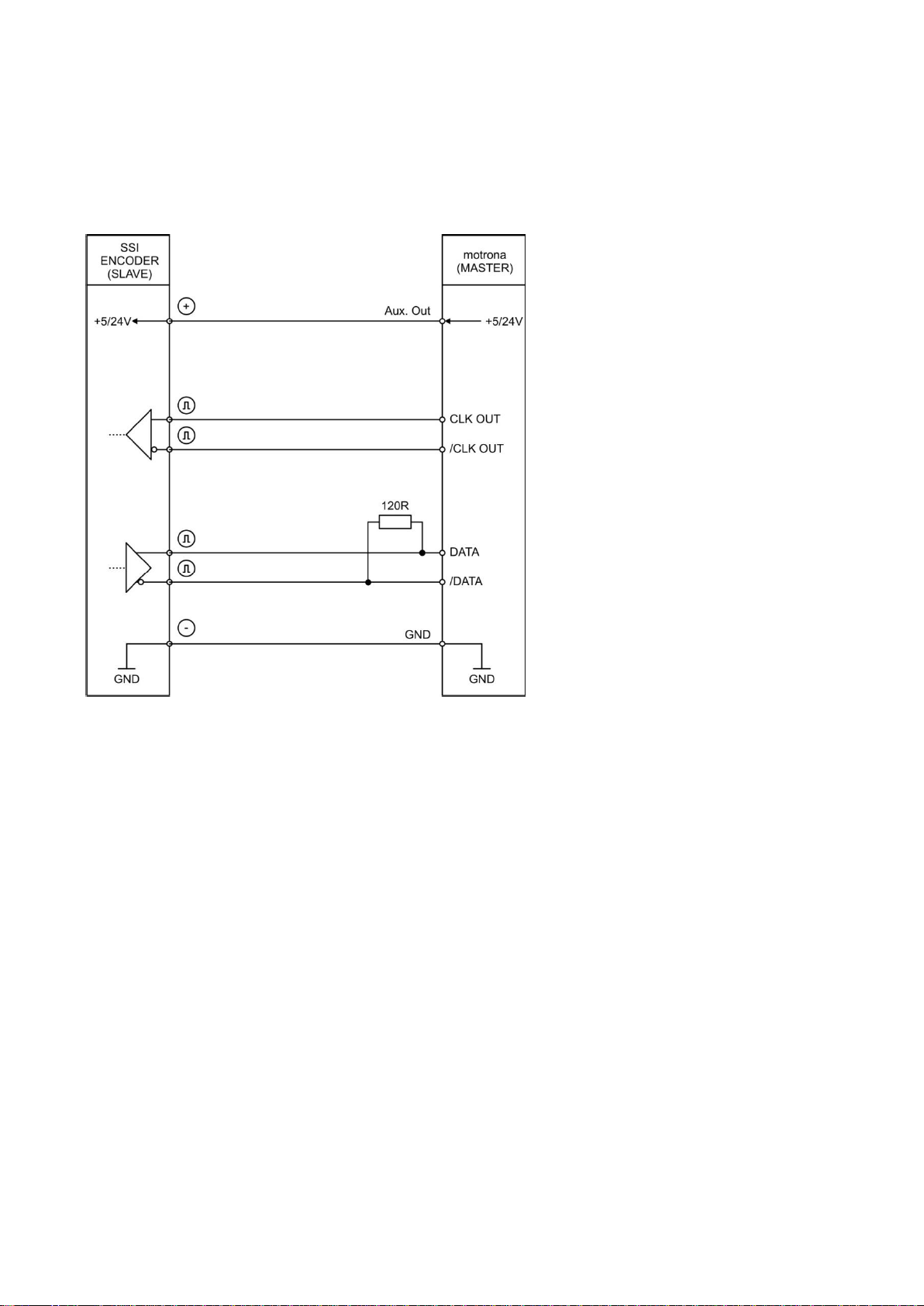
4.4. Entrées SSI (X2)
Sur la borne X2, broches 1, 2, 3 et 4, la connexion SSI pour MODE MASTER est disponible.
Sur la borne X2, broches 3, 4, 5 et 6, la connexion SSI pour le MODE SLAVE est disponible.
Raccordement des MODE Master:
9085_5010_04a_oi_f.docx / Feb-21 Page 15 / 74
Page 16
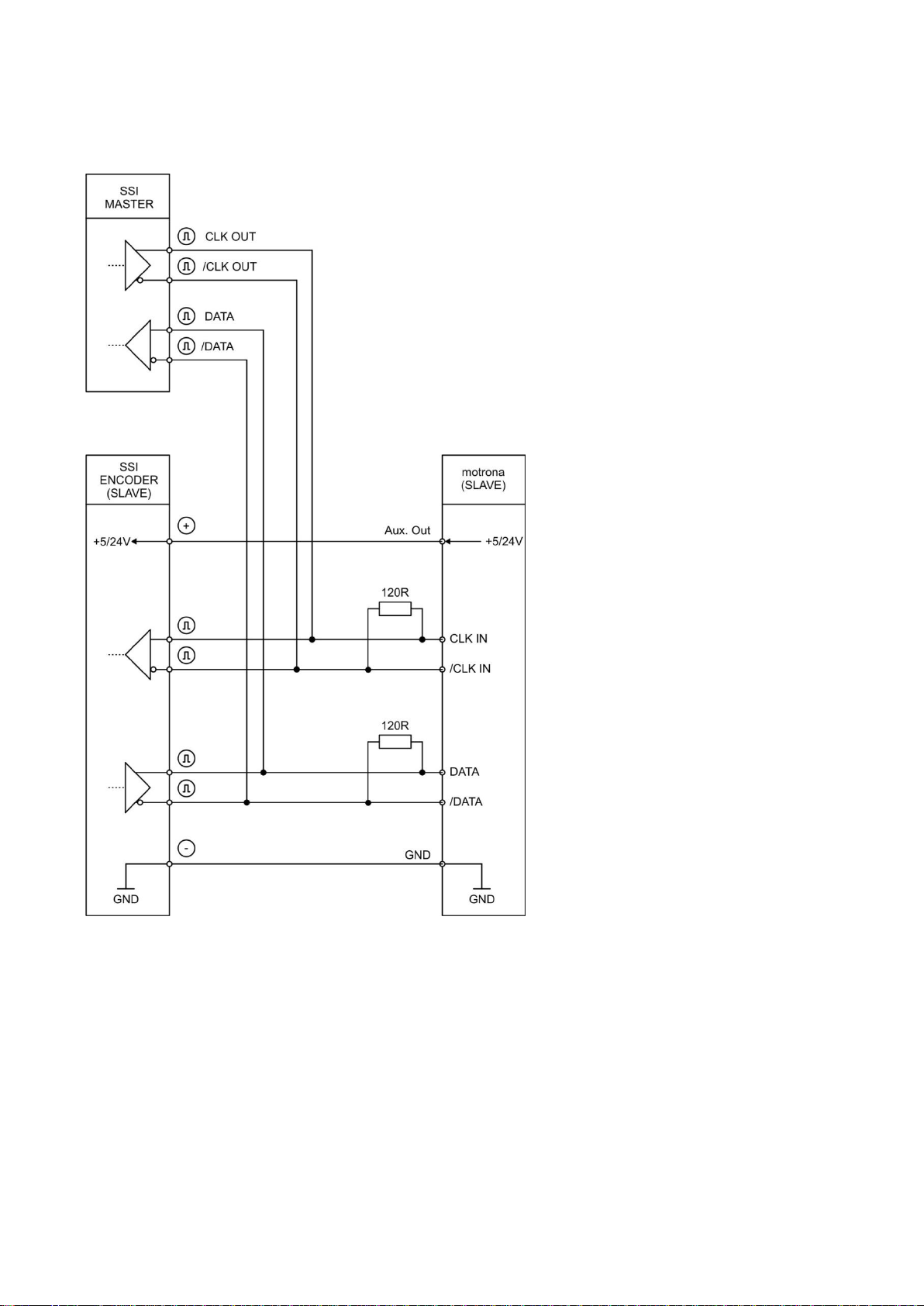
"Entrées SSI" (X2) suite:
Raccordement des MODE Slave:
9085_5010_04a_oi_f.docx / Feb-21 Page 16 / 74
Page 17
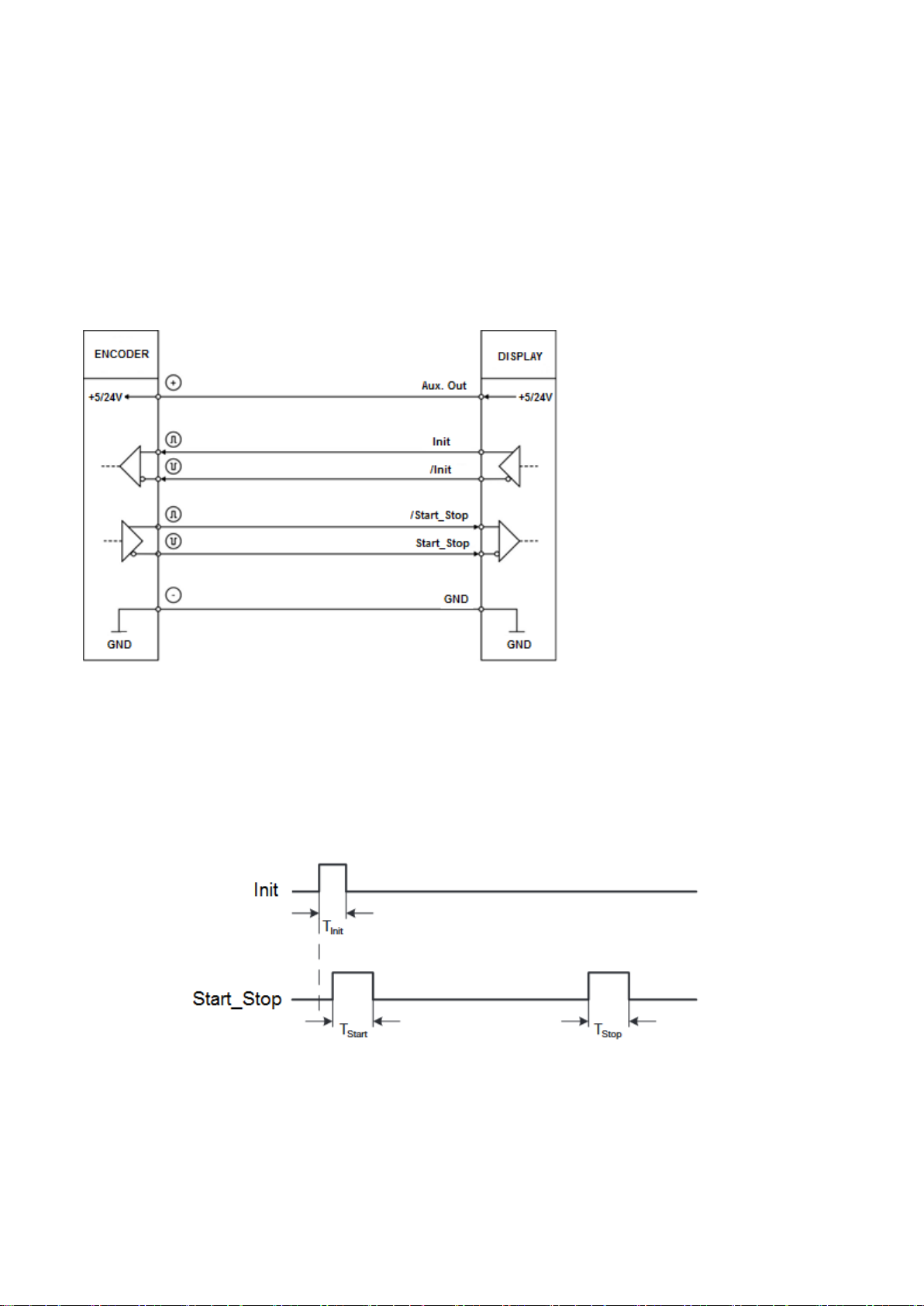
4.5. Entrées codeur Start-Stop (X2)
Sur la borne X2 – Broche 1 + 2, la connexion RS422 est disponible pour l’impulsion Init dans le
“MODE MASTER“ (L’appareil produit soi-même l’impulsion Init !).
Sur la borne X2 – Broche 5 + 6, la connexion RS422 est disponible pour l’impulsion Init dans le
“MODE SLAVE“ (L’impulsion Init est produite d’un appareil extérieur !)
A la borne X2 – Broche 3 +4 la connexion RS422 pour l’impulsion Start-Stop est disponible.
Connexion des signaux RS422:
Mode de mesure DPI:
Au conduit Init dans le „MODE MASTER“ l’impulsion Init est envoyée à intervalles réguliers au
transducteur de déplacement (SAMPLING TIME (ms)), dont le flanc montant déclenche une mesure.
La largeur d’impulsion Init peut être réglée à l’aide du paramètre "INIT PULSE TIME (µs)"
T
: 1…9 µs (réglable)
Init
T
: ~3…5 µs
Start
T
: ~3…5 µs
Stop
4.6. Entrées de commande (X5)
9085_5010_04a_oi_f.docx / Feb-21 Page 17 / 74
Page 18
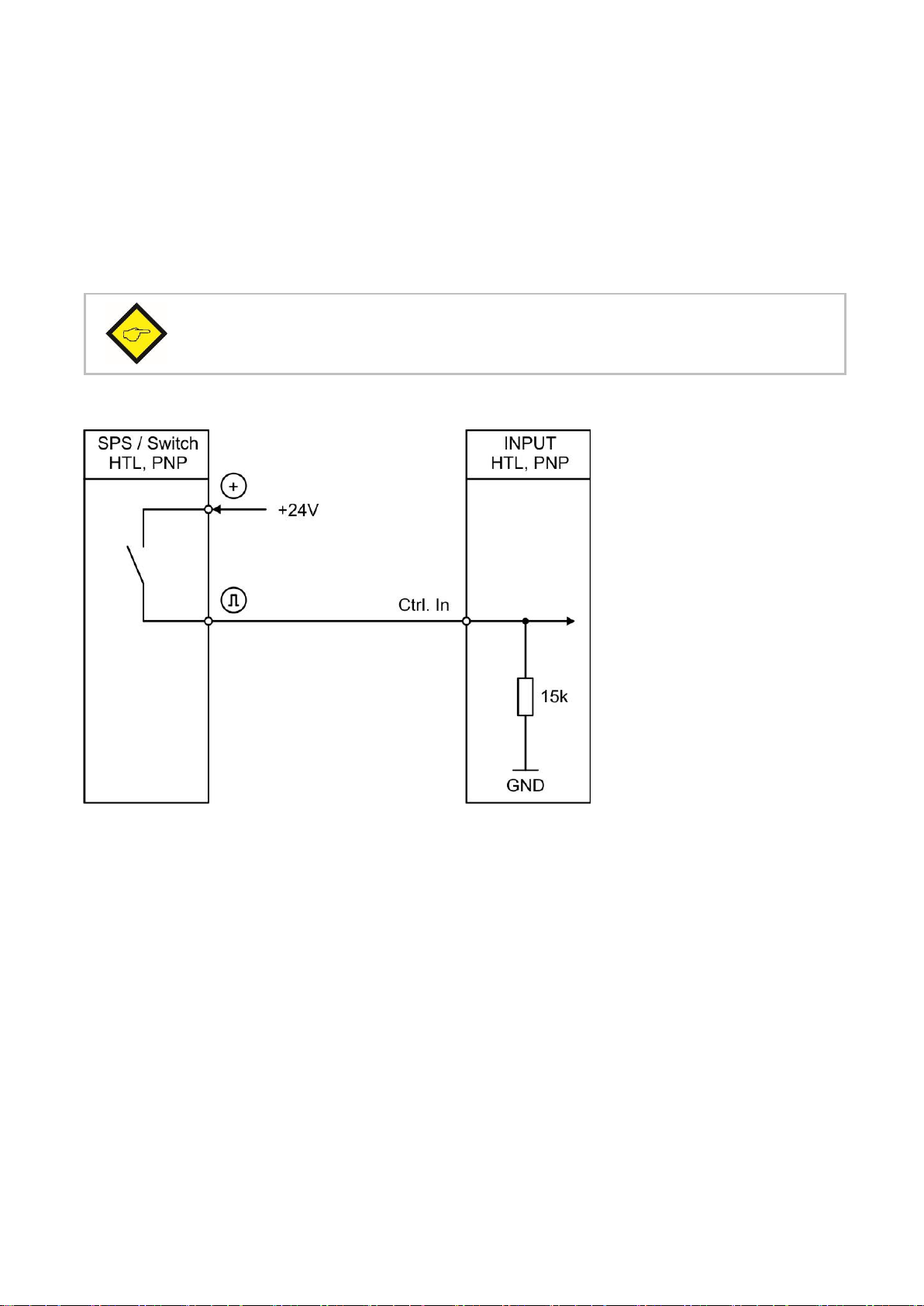
A la borne X5, broches 2, 3, 4, 5, 6 et 7 six entrées de commande avec la caractéristique HTL PNP
Remarque : Une impulsion HTL (flanc montant) en Ctrl. In 6 provoque une réinitialisation de
l’appareil aux réglages d'usine.
sont disponibles
L'entrée de contrôle 1 (Ctrl In 1) jusque l'entrée de contrôle 5 (Ctrl In 5) peuvent être librement
configurées dans le COMMAND MENU et sont utilisées pour des fonctions à déclenchement
externes, telles que par exemple pour libérer le verrouillage, réinitialiser le résultat de la mesure ou
pour “teaching“ les valeurs préréglées ou la sortie analogique utilisée.
L'entrée de contrôle 6 (Ctrl. In 6) sert exclusivement à remettre des paramètres de l'appareil aux
valeurs “Defaut“ et n'est donc pas librement configurable.
Raccordement des entrées de commande :
Par principe, les entrées de commande ouvertes sont à l'état "LOW".
Les niveaux d'entrée sont définis pour des signaux de commande électroniques.
Remarque pour les contacts de commutation mécaniques :
Si, exceptionnellement, des contacts mécaniques font office de source d'impulsion, il faut placer un
condensateur du commerce d'environ 10 µf sur les bornes, entre GND (-) et l'entrée correspondante (+).
Ceci atténue la fréquence d'entrée maximale à environ 20 Hz, supprimant les rebonds.
9085_5010_04a_oi_f.docx / Feb-21 Page 18 / 74
Page 19
4.7. Sortie analogique (X4)
Important : Un fonctionnement en parallèle de la sortie en tension et de la sortie en
courant n'est pas permis !
Les bornes X4 offrent une sortie analogique à 16 bits.
Cette sortie, ainsi que son facteur d'échelle, peuvent se configurer dans le menu ANALOG MENU.
Les configurations suivantes sont possibles :
• Sortie en tension : - -10 … +10 V
• Sortie en courant : 0 … 20 mA
• Sortie en courant : 4 … 20 mA
La sortie analogique est proportionnelle à la valeur affichée et se rapporte au potentiel AGND.
AGND et le GND de l'appareil sont reliés les uns aux autres en interne.
9085_5010_04a_oi_f.docx / Feb-21 Page 19 / 74
Page 20

4.8. Interface série (X3)
Important : Les opérations parallèles RS232 et RS485 ne sont pas autorisées !
Les bornes X3 offrent une interface série (RS232 ou RS485).
Cette interface peut se configurer dans le menu SERIAL MENU.
L'interface RS232 our RS485 peut s'utiliser de la manière suivante :
Pour le paramétrage de l'appareil lors de la mise en service
Pour la modification de paramètres pendant le fonctionnement
Pour la lecture de valeurs réelles via un API ou un PC
L'illustration ci-dessous représente le raccordement à un PC avec un connecteur standard
(D-SUB 9 broches) :
Connexion de l'interface RS232:
Connexion de l'interface RS485:
9085_5010_04a_oi_f.docx / Feb-21 Page 20 / 74
Page 21
4.9. Interface USB (X7)
La communication série USB se fait avec un baud de „
115200 Baud
“ et un
format de données série de „
8none1
“ et ne peut pas être modifiée par
l’utilisateur !
Au front du port mini USB X7 une interface série USB est disponible.
L’interface USB peut être utilisée aux fins suivantes :
Pour paramétrer un appareil au moment de la mise en service
Pour la modification de paramètres durant l‘exploitation
Pour lecture des valeurs réelles sur PC
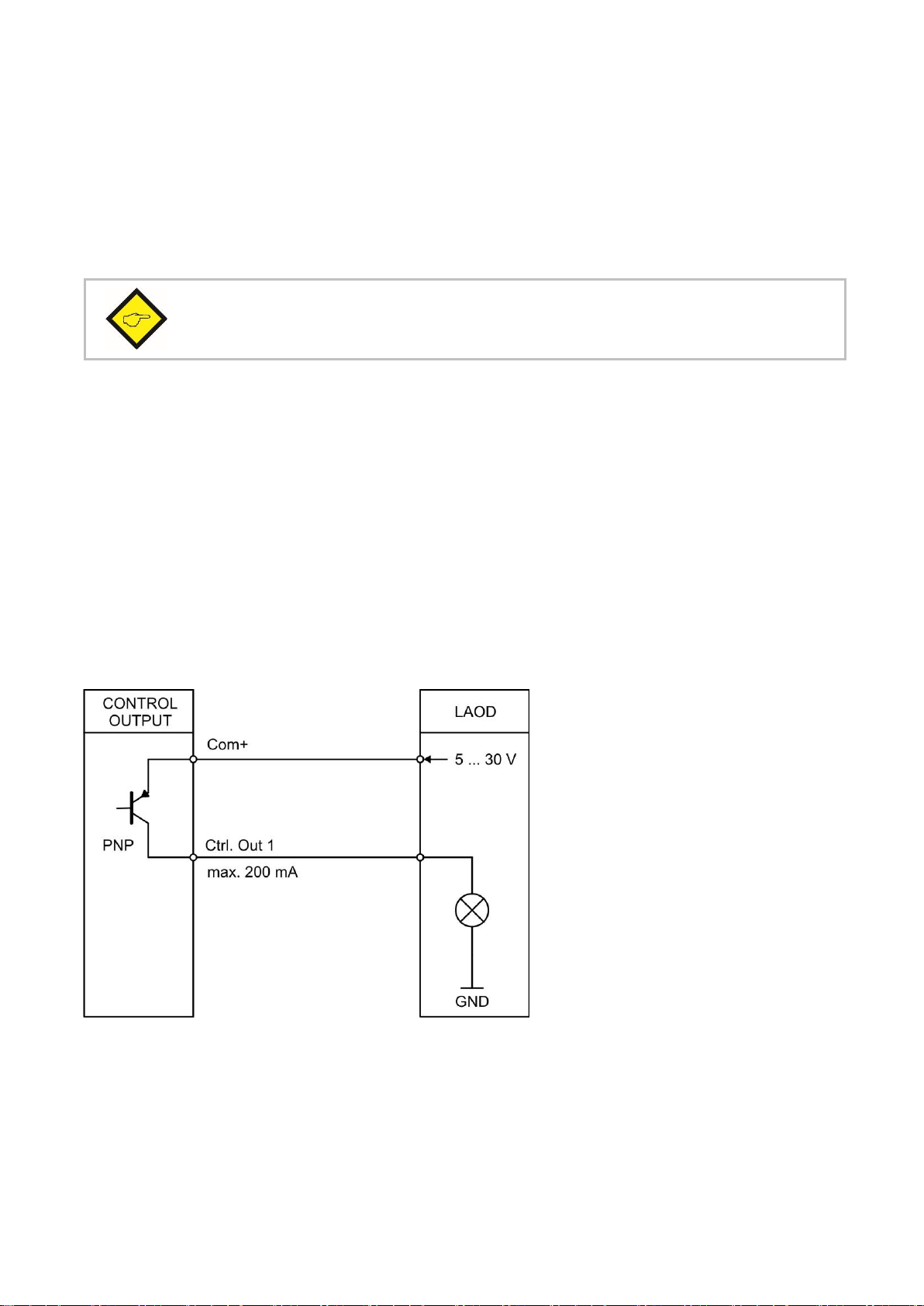
4.10. Sorties de commande (X6)
Les bornes X6, broches 2, 3, 4, 5, 6 et 7, offrent six sorties de commande.
Les conditions de commutation peuvent se définir dans le menu PRESELECTION MENU.
Les sorties Ctrl. Out 1 – 6 sont des sorties PNP rapides avec une capacité de commutation de
5 … 30 volts et 200 mA par canal.
La tension de commutation est déterminée par la tension appliquée à la borne X6 broches 1 (COM+).
Des mesures d'atténuation externes sont préconisées pour la commutation de charges inductives.
Raccordement des sorties de commande :
9085_5010_04a_oi_f.docx / Feb-21 Page 21 / 74
Page 22

5. Présentation des paramètres / des menus
Menu / Paramètres
GENERAL MENU
MODE
ENCODER PROPERTIES
ENCODER DIRECTION
AVERAGE FILTER
FACTOR
DIVIDER
ADDITIVE VALUE
LINEARIZATION MODE
BACKUP MEMORY
FACTORY SETTINGS
MODE FREQUENCY
FREQUENCY MODE
FREQUENCY BASE
SAMPLING TIME 1 (S)
WAIT TIME 1(S)
STANDSTILL TIME 1 (S)
SAMPLING TIME 2 (S)
WAIT TIME 2(S)
MODE COUNTER
COUNT MODE
FACTOR A
SET VALUE A
FACTOR B
SET VALUE B
ROUND LOOP VALUE
Menu / Paramètres
MODE SSI
SSI MODE
ENCODER RESOLUTION
DATA FORMAT
BAUD RATE
SSI ZERO
HIGH BIT
LOW BIT
SSI OFFSET
ROUND LOOP VALUE
SAMPLING TIME (S)
ERROR BIT
ERROR POLARITY
MODE START/STOP
INIT MODE
SAMPLING TIME (ms)
INIT PULSE TIME (µs)
VELOCITY (m/s)
OPERATIONAL MODE
OFFSET
CIRCUMFERENCE (mm)
ROUND LOOP VALUE
AVERAGE FILTER - POSITION
STANDSTILL TIME (s)
AVERAGE FILTER - SPEED
PRESELECTION VALUES
PRESELECTION 1
PRESELECTION 2
PRESELECTION 3
PRESELECTION 4
PRESELECTION 5
PRESELECTION 6
Le paramétrage de l'appareil s’effectue par le biais de l'interface série à l'aide d'un PC et du logiciel
utilisateur OS. Le lien vers le téléchargement gratuit se trouve à la page 2.
Ce paragraphe présente les différents menus et leurs paramètres. Le nom du menu est inscrit en
gras, les paramètres correspondants sont disposés directement sous le nom du menu.
9085_5010_04a_oi_f.docx / Feb-21 Page 22 / 74
Page 23
"Présentation des paramètres" suite:
Menu / Paramètres
PRESELECTION 1 MENU
MODE 1
HYSTERESIS 1
PULSE TIME 1 (s)
OUTPUT TARGET 1
OUTPUT POLARITY 1
OUTPUT LOCK 1
START UP DELAY 1 (s)
PRESELECTION 2 MENU
MODE 2
HYSTERESIS 2
PULSE TIME 2 (s)
OUTPUT TARGET 2
OUTPUT POLARITY 2
OUTPUT LOCK 2
START UP DELAY 2 (s)
PRESELECTION 3 MENU
MODE 3
HYSTERESIS 3
PULSE TIME 3 (S)
OUTPUT TARGET 3
OUTPUT POLARITY 3
OUTPUT LOCK 3
START UP DELAY 3 (S)
PRESELECTION 4 MENU
MODE 4
HYSTERESIS 4
PULSE TIME 4 (S)
OUTPUT TARGET 4
OUTPUT POLARITY 4 (S)
OUTPUT LOCK 4
START UP DELAY 4 (S)
PRESELECTION 5 MENU
MODE 5
HYSTERESIS 5
PULSE TIME 5 (S)
OUTPUT TARGET 5
OUTPUT POLARITY 5
OUTPUT LOCK 5
START UP DELAY 5 (S)
Menu / Paramètres
PRESELECTION 6 MENU
MODE 6
HYSTERESIS 6
PULSE TIME 6 (S)
OUTPUT TARGET 6
OUTPUT POLARITY 6
OUTPUT LOCK 6
START UP DELAY 6 (S)
SERIAL MENU
UNIT NUMBER
SERIAL BAUD RATE
SERIAL FORMAT
SERIAL INIT
SERIAL PROTOCOL
SERIAL TIMER (S)
SERIAL VALUE
MODBUS
ANALOG MENU
ANALOG FORMAT
ANALOG START
ANALOG END
ANALOG GAIN (%)
ANALOG OFFSET (%)
COMMAND MENU
INPUT 1 ACTION
INPUT 1 CONFIG
INPUT 2 ACTION
INPUT 2 CONFIG
INPUT 3 ACTION
INPUT 3 CONFIG
INPUT 4 ACTION
INPUT 4 CONFIG
INPUT 5 ACTION
INPUT 5 CONFIG
INPUT 6 ACTION (FACTORY SETTINGS)
INPUT 6 CONFIG (RISING EDGE)
9085_5010_04a_oi_f.docx / Feb-21 Page 23 / 74
Page 24

"Présentation des paramètres" suite:
Menu / Paramètres
COMMAND MENU
INPUT 1 ACTION
INPUT 1 CONFIG
INPUT 2 ACTION
INPUT 2 CONFIG
INPUT 3 ACTION
INPUT 3 CONFIG
INPUT 4 ACTION
INPUT 4 CONFIG
INPUT 5 ACTION
INPUT 5 CONFIG
INPUT 6 ACTION (FACTORY SETTINGS)
INPUT 6 CONFIG (RISING EDGE)
LINEARISATION MENU
P1(X)
P1(Y)
P2(X)
P2(Y)
… … P23(X)
P23(Y)
P24(X)
P24(Y)
LINEARISATION MENU
P1(X)
P1(Y)
P2(X)
P2(Y)
…
…
P23(X)
P23(Y)
P24(X)
P24(Y)
9085_5010_04a_oi_f.docx / Feb-21 Page 24 / 74
Page 25

5.1. General Menu
MODE
Ce paramètre détermine la fonction de mesure (mode de fonctionnement) que l'appareil doit remplir.
0
NOT DEFINED
Mode de fonctionnement : Non défini, les résultats de modulation et de
mesure sont zéro.
1
FREQUENCY
Fonctionnement en tant que convertisseur de fréquence, signaux
incrémentaux (remplace 7085.5052)
2
COUNTER
Opération en tant que compteur, signaux incrémentiels (remplace
9085.5052)
3
SSI
Fonctionnement en tant que convertisseur de valeur absolue, signaux SSI
(remplace 7386.5051)
4
START / STOP
Mode de fonctionnement : Start / Stop – Convertisseur d’interface
ENCODER PROPERTIES
Ce paramètre détermine la caractéristique des entrées d'impulsions.
(Remarque : Uniquement pour MODE : Pertinente pour "FREQUENCY" et MODE : "COUNTER"
0
RS422
Norme RS422
1
HTL DIFFERENTIAL
HTL différentiel
2
HTL PNP
HTL PNP (commutation à +)
3
HTL NPN
HTL NPN (commutation à -)
4
TTL PNP
TTL PNP (commutation à +)
ENCODER DIRECTION
Ce paramètre inverse le sens de comptage ou de déplacement.
0
FORWARD
En avant 1 REVERSE
En arrière
AVERAGE FILTER
Calcul de la valeur moyenne ou fonction filtre activable pour éviter les fluctuations d'affichage en cas de
fréquences instables.
0
Pas de calcul de la valeur moyenne
1
Calcul de la valeur moyenne sur 2 cycles
2
Calcul de la valeur moyenne sur 4 cycles
3
Calcul de la valeur moyenne sur 8 cycles
4
Calcul de la valeur moyenne sur 16 cycles
FACTOR
Ce paramètre définit le facteur avec lequel le résultat de la mesure est multiplié.
-99999999
Valeur minimale
1
Valeur par défaut
99999999
Valeur maximale
9085_5010_04a_oi_f.docx / Feb-21 Page 25 / 74
Page 26

"General Menu " suite:
DIVIDER
Ce paramètre définit le diviseur avec lequel le résultat de la mesure est divisé.
-99999999
Valeur minimale
1
Valeur par défaut
99999999
Valeur maximale
ADDITIVE VALUE
Ce paramètre définit une constante additive, qui est ajoutée au résultat de la mesure.
-99999999
Valeur minimale
0
Valeur par défaut
99999999
Valeur maximale
LINEARIZATION MODE
Ce paramètre définit la fonction de linéarisation. Observez les notes en annexe!
0
OFF
Pas de linéarisation
1
1 QUADRANT
Linéarisation dans le 1er quadrant
2
4 QUADRANT
Linéarisation dans tous les 4 quadrants
BACK UP MEMORY
(Remarque : Uniquement pour MODE: Pertinente pour "COUNTER"!
0
NO
No zéro tension fusible
1
YES
Zéro tension fusible est active, la valeur est sauvegardé cas de panne de
courant.
FACTORY SETTINGS
0
NO
Les réglages d'usine ne sont pas chargés
1
YES
Les réglages d'usine sont chargés (valeurs par défaut sur fond gris)
9085_5010_04a_oi_f.docx / Feb-21 Page 26 / 74
Page 27

5.2. Mode Frequency
FREQUENCY MODE
Ce paramètre détermine le mode de mesure de fréquence souhaité.
0
A ONLY
Mesure de fréquence monocanal (uniquement pour le canal A).
1
RATIO
Rapport de fréquence des deux canaux (canal B / canal A).
Remarque : Interprétation du résultat avec 4 décimales au format
+/- x.xxxx.
2
PERCENT
Écart en pourcentage entre les canaux B et A.
Remarque : Interprétation du résultat avec 2 décimales au format
+/- xxx.xx %
3
A + B
Addition de fréquence des deux canaux (canal A + canal B)
4
A – B
Soustraction de fréquence des deux canaux (canal A - canal B)
5
A/B x 90°
Mesure de fréquence avec signal A / B x 90 °. (Détection du sens de
rotation avant / arrière)
FREQUENCY BASE
Définition de la base souhaitée pour la mesure de la fréquence (résolution).
0
Hz 1 1/10 Hz
2
1/100 Hz
3
1/1000 Hz
SAMPLING TIME 1 (S)
Cette valeur correspond au temps de mesure minimal (pour le canal A) en secondes. Le Sampling Time fait
office de filtre en cas de fréquences irrégulières. Ce paramètre a une influence directe sur le temps de réaction
de l'appareil.
0,001
Temps de mesure minimal en secondes
0,1
Valeur par défaut
9,999
Temps de mesure maximal en secondes
Dans ce menu, le fonctionnement est défini comme un convertisseur de fréquence (signaux
incrémentaux). Selon le mode de fonctionnement sélectionné, seul le canal A ou les deux canaux
(canaux A et B) sont actives.
9085_5010_04a_oi_f.docx / Feb-21 Page 27 / 74
Page 28

"Mode Frequency" suite:
WAIT TIME 1 (S)
Cette valeur correspond au temps de remise à zéro. Ce paramètre définit la durée de période de la fréquence
la plus basse ou le temps d'attente entre deux flancs montants (sur le canal A) avant que l'appareil ne
détecte la fréquence de 0 Hz. Les fréquences dont la durée de période est supérieure au WAIT TIME 1 défini
sont interprétées comme une fréquence de 0 Hz.
0,01
Fréquence = 0 Hz pour des fréquences inférieures à 100 Hz
1,00
Valeur par défaut
79,99
Fréquence = 0 Hz pour des fréquences inférieures à 0,01 Hz
STANDSTILL TIME 1 (S)
Ce paramètre définit le temps avant la détection de l'immobilité. En cas de détection de la fréquence = 0 Hz
(sur le canal A), l'immobilité est signalée après xx,xx secondes, et l'inhibition au démarrage est réactivée.
Une surveillance de l'immobilité peut être définie dans le menu PRESELCTION MENU.
0,01
Temporisation la plus courte en secondes
…
99,99
Temporisation la plus longue en secondes
9085_5010_04a_oi_f.docx / Feb-21 Page 28 / 74
Page 29

"Mode Frequency" suite:
AVERAGE FILTER 1 (Calcul de la moyenne)
Calcul de la moyenne commutable ou fonction de filtrage pour les fréquences instables sur l'entrée A pour
lisser le signal analogique. Avec le réglage du filtre 5 ... 16, l'appareil utilise une fonction exponentielle.
La constante de temps T (63%) correspond au nombre de cycles-Sampling.
Par ex. SAMPLING TIME = 0,1 s et AVERAGE FILTER = Filtre exponentiel, T (63 %) = 2 x Sampling Time
à savoir après 0,2 s, 63% de la hauteur de saut est atteinte.
0
Pas de moyenne (réponse rapide à tout changement)
1
Calcul de moyenne flottante avec 2 cycles
2
Calcul de moyenne flottante avec 4 cycles
3
Calcul de moyenne flottante avec 8 cycles
4
Calcul de moyenne flottante avec 16 cycles
5
Filtre exponentiel, T (63 %) = 2x SAMPLING TIME
6
Filtre exponentiel, T (63 %) = 4x SAMPLING TIME
7
Filtre exponentiel T (63 %) = 8x SAMPLING TIME
8
Filtre exponentiel, T (63 %) = 16x SAMPLING TIME
9
Filtre exponentiel, T (63 %) = 32x SAMPLING TIME
10
Filtre exponentiel, T (63 %) = 64x SAMPLING TIME
11
Filtre exponentiel, T (63 %) = 128x SAMPLING TIME
12
Filtre exponentiel, T (63 %) = 256x SAMPLING TIME
13
Filtre exponentiel, T (63 %) = 512x SAMPLING TIME
14
Filtre exponentiel, T (63 %) = 1024x SAMPLING TIME
15
Filtre exponentiel, T (63 %) = 2048x SAMPLING TIME
16
Filtre exponentiel, T (63 %) = 4096x SAMPLING TIME (réaction très lente)
Remarque :
Lors de l'utilisation du filtre exponentiel, les fréquences maximales admissibles à l'entrée
ne doivent pas être dépassées sino un dépassement du type de données s’est produit ! Si
la fréquence est néanmoins dépassée, la fréquence est remplacée par la valeur maximale
admissible (selon réglage correspondant) pour un calcul ultérieur et une erreur est générée.
La LED clignote et par conséquent la sortie analogique ajuste 0 V ou 0/4 mA. Les
fréquences maximales admissibles pour les réglages correspondantes sont indiquées cidessous.
FREQUENCY BASE
[0] - 1 Hz
[1] - 1/10 Hz
[2] - 1/100 Hz
[3] - 1/1000 Hz
AVERAGE FILTER
1+2
[5] - 2x
1.073.741.823 Hz
107.374.182,3 Hz
10.737.418,23 Hz
1.073.741,823 Hz
[6] - 4x
536.870.911 Hz
53.687.091,1 Hz
5.368.709,11 Hz
536.870,911 Hz
[7] - 8x
268.435.455 Hz
26.843.545,5 Hz
2.684.354,55 Hz
268.435,455 Hz
[8] - 16x
134.217.727 Hz
13.421.772,7 Hz
1.342.177,27 Hz
134.217,727 Hz
[9] - 32x
67.108.863 Hz
6.710.886,3 Hz
671.088,63 Hz
67.108,863 Hz
[10] - 64x
33.554.431 Hz
3.355.443,1 Hz
335.544,31 Hz
33.554,431 Hz
[11] - 128x
16.777.215 Hz
1.677.721,5 Hz
167.772,15 Hz
16.777,215 Hz
[12] - 256x
8.388.607 Hz
838.860,7 Hz
83.886,07 Hz
8.388,607 Hz
[13] - 512x
4.194.303 Hz
419.430,3 Hz
41.943,03 Hz
4.194,303 Hz
[14] - 1024x
2.097.151 Hz
209.715,1 Hz
20.971,51 Hz
2.097,151 Hz
[15] - 2048x
1.048.575 Hz
104.857,5 Hz
10.485,75 Hz
1.048,575 Hz
[16] - 4096x
524.287 Hz
52.428,7 Hz
5.242,87 Hz
524,287 Hz
9085_5010_04a_oi_f.docx / Feb-21 Page 29 / 74
Page 30

"Mode Frequency" suite:
SAMPLING TIME 2 (S)
Cette valeur correspond au temps de mesure minimal (pour le canal B) en secondes. Le Sampling Time fait
office de filtre en cas de fréquences irrégulières. Ce paramètre a une influence directe sur le temps de réaction
de l'appareil.
0,001
Temps de mesure minimal en secondes
0,1
Valeur par défaut
9,999
Temps de mesure maximal en secondes
WAIT TIME 2 (S)
Cette valeur correspond au temps de remise à zéro. Ce paramètre définit la durée de période de la fréquence
la plus basse ou le temps d'attente entre deux flancs montants (sur le canal B) avant que l'appareil ne détecte
la fréquence de 0 Hz. Les fréquences dont la durée de période est supérieure au WAIT TIME 2 défini sont
interprétées comme une fréquence de 0 Hz.
0,01
Fréquence = 0 Hz pour des fréquences inférieures à 100 Hz
1,00
Valeur par défaut
79,99
Fréquence = 0 Hz pour des fréquences inférieures à 0,01 Hz
Temps
d‘attente
9085_5010_04a_oi_f.docx / Feb-21 Page 30 / 74
Page 31

"Mode Frequency" suite:
AVERAGE FILTER 2(Calcul de la moyenne)
Calcul de la moyenne commutable ou fonction de filtrage pour les fréquences instables sur l'entrée B pour
lisser le signal analogique. Avec le réglage du filtre 5 ... 16, l'appareil utilise une fonction exponentielle.
La constante de temps T (63%) correspond au nombre de cycles-Sampling.
Par ex. SAMPLING TIME = 0,1 s et AVERAGE FILTER = Filtre exponentiel, T (63 %) = 2 x Sampling Time
à savoir après 0,2 s, 63% de la hauteur de saut est atteinte.
0
Pas de moyenne (réponse rapide à tout changement)
1
Calcul de moyenne flottante avec 2 cycles
2
Calcul de moyenne flottante avec 4 cycles
3
Calcul de moyenne flottante avec 8 cycles
4
Calcul de moyenne flottante avec 16 cycles
5
Filtre exponentiel, T (63 %) = 2x SAMPLING TIME
6
Filtre exponentiel, T (63 %) = 4x SAMPLING TIME
7
Filtre exponentiel T (63 %) = 8x SAMPLING TIME
8
Filtre exponentiel, T (63 %) = 16x SAMPLING TIME
9
Filtre exponentiel, T (63 %) = 32x SAMPLING TIME
10
Filtre exponentiel, T (63 %) = 64x SAMPLING TIME
11
Filtre exponentiel, T (63 %) = 128x SAMPLING TIME
12
Filtre exponentiel, T (63 %) = 256x SAMPLING TIME
13
Filtre exponentiel, T (63 %) = 512x SAMPLING TIME
14
Filtre exponentiel, T (63 %) = 1024x SAMPLING TIME
15
Filtre exponentiel, T (63 %) = 2048x SAMPLING TIME
16
Filtre exponentiel, T (63 %) = 4096x SAMPLING TIME (réaction très lente)
Remarque :
Lors de l'utilisation du filtre exponentiel, les fréquences maximales admissibles à l'entrée
ne doivent pas être dépassées sino un dépassement du type de données s’est produit ! Si
la fréquence est néanmoins dépassée, la fréquence est remplacée par la valeur maximale
admissible (selon réglage correspondant) pour un calcul ultérieur et une erreur est générée.
La LED clignote et par conséquent la sortie analogique ajuste 0 V ou 0/4 mA. Les
fréquences maximales admissibles pour les réglages correspondantes sont indiquées cidessous.
9085_5010_04a_oi_f.docx / Feb-21 Page 31 / 74
Page 32

5.3. Mode Counter
COUNT MODE
Sélection de la configuration du compteur.
0
A SINGLE
L'entrée A fait office d'entrée de comptage L'entrée B définit le sens de
comptage : "LOW" = en avant, "HIGH" = en arrière
1
A + B
Somme : compte les impulsions A + les impulsions B
2
A – B
Différence : compte les impulsions A – les impulsions B
3
A/B 90 x1
Compteur/décompteur pour impulsions déphasées de 2x90°
(Exploitation simple des flancs x 1)
4
A/B 90 x2
Compteur/décompteur pour impulsions déphasées de 2x90°
(Exploitation double des flancs x 2)
5
A/B 90 x4
Compteur/décompteur pour impulsions déphasées de 2x90°
(Exploitation quadruple des flancs x 4)
FACTOR A
Facteur d'évaluation du pouls pour l'entrée A.
p. ex. avec un réglage 1,23456, l'appareil affiche la valeur 123456 après lecture de 100000 impulsions en
entrée.
0,00001
Valeur minimale
1
Valeur par défaut
99,99999
Valeur maximale
SET VALUE A
Avec une commande "RESET / SET COUNTER A" (via l'entrée de commande), le compteur de l'entrée A est
réglé sur la valeur définie ici.
-99999999
Valeur minimale
0
Valeur par défaut
+99999999
Valeur maximale
FACTOR B
Facteur d'évaluation du pouls pour l'entrée B.
p. ex. avec un réglage 1,23456, l'appareil affiche la valeur 123456 après lecture de 100000 impulsions en
entrée.
0,00001
Valeur minimale
1
Valeur par défaut
99,99999
Valeur maximale
SET VALUE B
Avec une commande "RESET / SET COUNTER B" (via l'entrée de commande), le compteur de l'entrée A est
réglé sur la valeur définie ici.
-99999999
Valeur minimale
0
Valeur par défaut
+99999999
Valeur maximale
Dans ce menu, le fonctionnement est défini comme un capteur de position pour les signaux
incrémentaux (impulsion, somme, différence, compteur et décompteur). Les entrées A et B sont
actives.
9085_5010_04a_oi_f.docx / Feb-21 Page 32 / 74
Page 33

"Mode Counter" suite:
ROUND LOOP VALUE
Détermine le nombre d'étapes d'encodeur lorsqu'une fonction de rotation est souhaitée.
(Uniquement pour le mode COUNT: A SINGLE et A / B x 90)
0
Affichage normal des données de codeur, la rotation est désactivée
…
99999999
Numéro d'étape pour la fonction de rotation
9085_5010_04a_oi_f.docx / Feb-21 Page 33 / 74
Page 34

5.4. Mode SSI
SSI MODE
SSI réglages pour Mode maître ou esclave
En fonction du MODE SSI, différents terminaux doivent être utilisés pour le SSI CLK !
(Mode Master: Terminal X2 - Broche 1 et 2 / Mode Esclave: Terminal X2 - Broche 5 et 6)
0
MASTER
Mode maître : Le signal d'horloge pour le codeur SSI est généré provient de
l'appareil
1
SLAVE
Mode esclave : Le signal d'horloge pour le codeur SSI Encoder provient du
maître externe.
ENCODER RESOLUTION
Résolution de Codeur SSI (nombre total de bits)
10
Valeur minimale
25
Valeur par défaut
32
Valeur maximale
DATA FORMAT
Définition du code SSI (Binaire ou code Gray)
0
GRAY CODE
Code SSI Gray
1
BINARY CODE
Code SSI Binaire
BAUD RATE
Fréquences d’horloge des télégrammes SSI
0
2 MHZ
N.A.
1
1.5 MHZ
N.A.
2
1 MHZ
Fréquences d’horloge 1 MHz
3
500 KHZ
Fréquences d’horloge 500 kHz
4
250 KHZ
Fréquences d’horloge 250 kHz
5
100 KHZ
Fréquences d’horloge 100 kHz
SSI ZERO
Avec une commande "ZERO POSITION" (via l'entrée de commande), la position SSI actuelle du codeur est
importé dans le paramètre "SSI ZERO" et en conséquence le point zéro actuel du codeur est décalé. (Décalage
du point zéro du codeur)
0
Valeur minimale
…
999999999
Valeur maximale
HIGH BIT (pour suppression de bits)
Définit le bit le plus élevé (MSB) de la suppression de bits à évaluer.
Pour l'évaluation de tous les bits, Hi_bit doit être positionné sur le nombre total de bits pré-définis
01
Valeur minimale
25
Valeur par défaut
32
Valeur maximale
Dans ce menu, l’opération est définie comme un convertisseur de valeur absolue (signaux SSI).
9085_5010_04a_oi_f.docx / Feb-21 Page 34 / 74
Page 35

"Mode SSI" suite:
LOW BIT (pour suppression de bits)
Définit le bit le plus bas (LSB) pour l'évaluation de la suppression de bits.
Pour l'évaluation de tous les bits, Lo_bit doit être positionné sur "01".
01
Valeur minimale
… 32
Valeur maximale
SSI OFFSET
Avec une commande "RESET / SET VALUE" (via une entrée de commande ou une interface utilisateur PC), la
valeur de position non encore mise à l'échelle, actuellement acquise (après suppression du bit et
éventuellement remise à zéro du codeur) est importé dans le paramètre "SSI OFFSET" et l'affichage est mis à
zéro. À partir du nouveau point zéro de l'affichage, vous pouvez maintenant vous déplacer dans les directions
positive et négative, en fonction du sens de rotation.
(Affichage du décalage du point zéro)
0
Valeur minimale
…
999999999
Valeur maximale
ROUND LOOP VALUE
Détermine le nombre d'étapes d'encodeur lorsqu'une fonction de rotation est souhaitée.
0
Affichage normal des données de codeur, la rotation est désactivée
…
99999999
Numéro d'étape pour la fonction de rotation
SAMPLING TIME (S)
Détermine le cycle de lecture du signal SSI dans le mode Master.
0.001
Temps de mesure minimal en secondes
0.010
Valeur par défaut
9.999
Temps de mesure maximal en secondes
ERROR BIT
Définit la surveillance codeur et le bit d'erreur
0
Pas de bit d'erreur
Vérifiez que l'encodeur connecté est désactivé.
…
32
Position du bit d'erreur à évaluer.
Vérifiez que l'encodeur connecté est activé.
ERROR POLARITY
Définit la polarité du bit d'erreur dans le cas d'erreur
0
Bit est Low dans le cas d'erreur
1
Bit est High dans le cas d'erreur
Remarque : Traitement de la valeur SSI voir annexe (chapitres 6.5 et 6.6)
9085_5010_04a_oi_f.docx / Feb-21 Page 35 / 74
Page 36

5.5. Mode Start/Stop
INIT MODE
Mode de fonctionnement : Master ou Slave
Selon le MODE INIT sélectionné, différentes bornes doivent être utilisées pour l’impulsion Init.
(Mode Master : Borne X2 – broche 1 et 2 / Mode Slave: Borne X2 – broche 5 et 6)
0
MASTER
Fonctionnement Master : Appareil génère l’impulsions Init.
1
SLAVE
Fonctionnement Slave : Impulsion Init vient d’un Master externe.
SAMPLING TIME (ms)
Période entre deux impulsions Init (en millisecondes). Correspond au temps au bout duquel une nouvelle
mesure est lancée et influence ainsi directement le temps de réponse de l’appareil.
00.200
Temps de mesure minimal
04.000
Valeur Default
16.000
Temps de mesure maximal
INIT PULSE TIME (µs)
Ce paramètre définit la largeur d’impulsion de l’impulsion Init (en microsecondes).
1
Plus petite valeur
2
Valeur Default
9
Plus grande valeur
VELOCITY (m/s)
Vitesse du guide d‘onde de l’encodeur utilisé (en m/s).
0001.00
Plus petite valeur
2800.00
Valeur Default
9999.99
Plus grande valeur
OPERATIONAL MODE
Ce paramètre définit, quel type de mesure l’appareil doit exécuter.
0
POSITION
Mesure de distance
1
ANGLE
Mesure d‘angle
2
SPEED
Mesure de vitesse
Remarque : Pour plus d‘informations sur les différents "OPERATIONAL MODES" et
l’interprétation de mesure respectifs, voir l’annexe ! (Chapitre 6.7)
OFFSET
Avec une commande “Reset / Set Value“ (via entrée de commande ou interface utilisateur PC), la position
actuelle du codeur est transférée de manière non volatile au paramètre “OFFSET“ (Décalage du point zéro !)
-99999999
Plus petite valeur
0
Valeur Default
99999999
Plus grande valeur
Dans ce menu le fonctionnement est défini comme convertisseur d’interface Stop-Start.
9085_5010_04a_oi_f.docx / Feb-21 Page 36 / 74
Page 37

“Mode Start/Stop“ suite:
CIRCUMFERENCE (mm)
Réglage de la taille de référence (en „mm“) pour une mesure d’ange. Ici, vous devez définir la distance
parcourue (Par ex. l’étendue) pour laquelle la valeur de sortie suivante (ROUND LOOP VALUE) doit être
générée.
(Remarque : Uniquement pour l’OPERATIONAL MODE : „ANGLE“)
00000.001
Valeur de présélection minimale
01000.000
Valeur par défaut
99999.999
Valeur de présélection maximale
ROUND LOOP VALUE
Réglage de la valeur de mesure souhaitée qui doit être générée lorsqu’une variable de référence précédente
(„CIRCUMFERENCE“) est atteinte. Remarque : Uniquement pour l’ OPERATIONAL MODE: „ANGLE“)
1
Valeur de présélection minimale
360
Valeur par défaut
99999999
Valeur de présélection maximale
AVERAGE FILTER – POSITION (Filtre pour le calcul de la valeur moyenne)
Moyennage commutable pour éviter les fluctuations de position
0
Pas de calcul de la valeur moyenne
1
Calcul de moyenne flottante avec 2 cycles
2
Calcul de moyenne flottante avec 4 cycles
3
Calcul de moyenne flottante avec 8 cycles
4
Calcul de moyenne flottante avec 16 cycles
STANDSTILL TIME (s)
Ce paramètre détermine le temps pour la définition de l’arrêt. Lorsque un arrêt est constaté, après xx,xx
secondes l’arrêt est signalé et le shunt de démarrage est réactive. La surveillance de l’arrêt pour être réglée
dans le PRESELECTION MENU.
0,01
Délai minimale en secondes
… 99,99
Délai maximale en secondes
AVERAGE FILTER – SPEED (Filtre pour le calcul de la valeur moyenne)
Calcul de moyenne commutable pour éviter les fluctuations de vitesse.
0
Pas de calcul de la valeur moyenne
1
Calcul de moyenne flottante avec 2 cycles
2
Calcul de moyenne flottante avec 4 cycles
3
Calcul de moyenne flottante avec 8 cycles
4
Calcul de moyenne flottante avec 16 cycles
9085_5010_04a_oi_f.docx / Feb-21 Page 37 / 74
Page 38

5.6. Preselection Values
PRESELECTION 1
Présélection / point de commutation 1
-99999999
Valeur de présélection minimale
1000
Valeur par défaut
+99999999
Valeur de présélection maximale
PRESELECTION 2
Présélection / point de commutation 2
-99999999
Valeur de présélection minimale
2000
Valeur par défaut
+99999999
Valeur de présélection maximale
PRESELECTION 3
Présélection / point de commutation 3
-99999999
Valeur de présélection minimale
3000
Valeur par défaut
+99999999
Valeur de présélection maximale
PRESELECTION 4
Présélection / point de commutation 4
-99999999
Valeur de présélection minimale
4000
Valeur par défaut
+99999999
Valeur de présélection maximale
PRESELECTION 5
Présélection / point de commutation 5
-99999999
Valeur de présélection minimale
5000
Valeur par défaut
+99999999
Valeur de présélection maximale
PRESELECTION 6
Présélection / point de commutation 6
-99999999
Valeur de présélection minimale
6000
Valeur par défaut
+99999999
Valeur de présélection maximale
Ce menu permet le réglage des valeurs de présélection et des points de commutation. Les points de
commutation se réfèrent toujours au résultat de mesure mis à l’échelle “Measurement Result“!
9085_5010_04a_oi_f.docx / Feb-21 Page 38 / 74
Page 39

5.7. Preselection 1 Menu
MODE 1
Condition de commutation pour la présélection 1 La sortie commute pour la condition suivante :
0
|RESULT|>=|PRES|
Valeur affichée égale ou supérieure à la valeur de PRESELECTION 1
La condition de commutation suivante s'obtient avec HYSTERESIS 1 différent de
0 :
Valeur affichée >= PRESELECTION 1 ON,
Valeur affichée < PRESELECTION 1 – HYSTERESIS 1 OFF
1
|RESULT|<=|PRES|
Valeur affichée inférieure ou égale à la valeur de PRESELECTION 1
(Nous préconisons l'inhibition au démarrage START UP DELAY)
La condition de commutation suivante s'obtient avec HYSTERESIS 1 différent de
0 :
Valeur affichée <= PRESELECTION 1 ON,
Valeur affichée > PRESELECTION 1 + HYSTERESIS 1 OFF
2
|RESULT|=|PRES|
Valeur affichée égale à la valeur de PRESELECTION 1 En utilisant l'hystérèse, il
est possible de définir et de surveiller une bande de fréquences (Présélection
+/- ½ Hystérésis).
La condition de commutation suivante s'obtient avec HYSTERESIS 1 différent de
0 :
Valeur affichée > PRESELECTION 1 + ½ HYSTERESIS 1 OFF,
Valeur affichée < PRESELECTION 1 – ½ HYSTERESIS 1 OFF
3
RESULT>=PRES
Valeur affichée égale ou supérieure à Présélection 1, p. ex. vitesse de rotation
excessive
La condition de commutation suivante s'obtient avec HYSTERESIS 1 différent de
0 :
Valeur affichée >= PRESELECTION 1 ON,
Valeur affichée < PRESELECTION 1 – HYSTERESIS 1 OFF
4
RESULT<=PRES
Valeur affichée inférieure ou égale à Présélection 1, p. ex. vitesse de rotation
insuffisante
(nous préconisons l'inhibition au démarrage START UP DELAY)
La condition de commutation suivante s'obtient avec HYSTERESIS 1 différent de
0 :
Valeur affichée <= PRESELECTION 1 ON,
Valeur affichée > PRESELECTION 1 + HYSTERESIS 1 OFF
5
RESULT=PRES
Valeur affichée égale à PRESELECTION 1. En utilisant HYSTERESIS 1, il est
possible de définir et de surveiller une bande de fréquences (Présélection +/- ½
Hystérésis).
La condition de commutation suivante s'obtient avec HYSTERESIS 1 différent de
0 :
Valeur affichée > PRESELECTION 1 + ½ HYSTERESIS 1 OFF,
Valeur affichée < PRESELECTION 1 – ½ HYSTERESIS 1 OFF
6
RESULT = 0
Valeur affichée égale à 0 (immobilité après écoulement du temps de détection
de l'immobilité STANDSTILL TIME (s)),
p. ex. surveillance de l'immobilité. (Uniquement en MODE: „START/STOP“ +
OPERATIONAL MODE : “SPEED“ et MODE “FREQUENCY“).
7
RES>=PRES-TRAIL
Présélection relative 1 :
Valeur affichée égale ou supérieure à PRESELECTION 1 – PRESELECTION 4
PRESELECTION 4 est la présélection relative de PRESELECTION 1
8
ERROR SET
Message collectif pour toutes les erreurs
9085_5010_04a_oi_f.docx / Feb-21 Page 39 / 74
Page 40

"Preselection 1 Menu" suite:
HYSTERESIS 1
Hystérèse pour la définition du point de désactivation de la condition de commutation de la présélection 1.
0
Pas d'hystérèse de commutation
…
99999
Hystérèse de commutation de 99999
PULSE TIME 1 (S)
Durée de l'impulsion fugitive pour la condition de commutation de la présélection 1.
0,000
Pas d'impulsion fugitive (signal statique)
…
60,000
Durée d'impulsion de 60 secondes
OUTPUT TARGET 1
Affectation d'une sortie pour la condition de commutation de la présélection 1.
Si plusieurs conditions de commutation sont affectées à une seule sortie, cette sortie s'active dès que l'une
des conditions est remplie.
0
NO
Pas d'affectation
1
CTRL OUT 1
Affectation de la condition de sortie à Ctrl. Out 1
2
CTRL OUT 2
Affectation de la condition de sortie à Ctrl. Out 2
3
CTRL OUT 3
Affectation de la condition de sortie à Ctrl. Out 3
4
CTRL OUT 4
Affectation de la condition de sortie à Ctrl. Out 4
5
CTRL OUT 5
Affectation de la condition de sortie à Ctrl. Out 5
6
CTRL OUT 6
Affectation de la condition de sortie à Ctrl. Out 6
OUTPUT POLARITY 1
Etat de commutation pour la condition de commutation de la présélection 1.
0
ACTIVE HIGH
"HIGH" si actif
1
ACTIVE LOW
"LOW" si actif
OUTPUT LOCK 1
Auto-maintien pour la condition de commutation de la présélection 1.
0
NO
Pas d'auto-maintien
1
YES
Auto-maintien
9085_5010_04a_oi_f.docx / Feb-21 Page 40 / 74
Page 41

"Preselection 1 Menu" suite:
START UP DELAY 1 (S)
Inhibition au démarrage pour la condition de commutation de la présélection 1.
Plage temporelle jusqu'à ce que la fonction de surveillance est mise au point.
Ce paramètre s'applique uniquement aux conditions de commutation | RESULT | <= | PRES | ou RESULT <=
PRES et uniquement pour le MODE "FREQUENCY" - canal A ou MODE: “START/STOP“ + OPERATIONAL
MODE: “SPEED“.
START UP DELAY est réglé à une fréquence de 0 Hz (ou respectivement avec une vitesse de 0 m/s) sur le
paramètre ici défini et démarré. La fonction de surveillance reste désactivée jusqu'à l'expiration du temps
réglé.
Avec un réglage de "60 000", l’inhibition au démarrage automatique est activé. C’est-à-dire la fonction de
surveillance reste désactivée jusqu'à ce que la valeur prédéfinie / le point de commutation soit dépassé
pour la première fois.
0.000
Pas d’inhibition au démarrage
…
59.999
Inhibition au démarrage en secondes
60.000
Inhibition au démarrage automatique
9085_5010_04a_oi_f.docx / Feb-21 Page 41 / 74
Page 42

5.8. Preselection 2 Menu
MODE 2
Condition de commutation de la présélection 2, voir le menu PRESELECTION 1 MENU (à l'exception de la
présélection relative).
Voir le menu PRESELECTION 1 MENU
6
RES>=PRES-TRAIL
Présélection relative 2 :
Valeur affichée égale ou supérieure à PRESELECTION 2 – PRESELECTION 5
PRESELECTION 5 est la présélection relative de PRESELECTION 2
HYSTERESIS 2
Hystérèse de commutation pour la condition de commutation de la présélection 2, voir le menu
PRESELECTION 1 MENU.
PULSE TIME 2 (S)
Durée de l'impulsion fugitive pour la condition de commutation de la présélection 2, voir le menu
PRESELECTION 1 MENU.
OUTPUT TARGET 2
Affectation d'une sortie pour la condition de commutation de la présélection 2.
0
NO
Pas d'affectation
1
CTRL OUT 1
Affectation de la condition de sortie à Ctrl. Out 1
2
CTRL OUT 2
Affectation de la condition de sortie à Ctrl. Out 2
3
CTRL OUT 3
Affectation de la condition de sortie à Ctrl. Out 3
4
CTRL OUT 4
Affectation de la condition de sortie à Ctrl. Out 4
5
CTRL OUT 5
Affectation de la condition de sortie à Ctrl. Out 5
6
CTRL OUT 6
Affectation de la condition de sortie à Ctrl. Out 6
OUTPUT POLARITY 2
Etat de commutation pour la condition de commutation de la présélection 2, voir le menu
PRESELECTION 1 MENU.
OUTPUT LOCK 2
Auto-maintien pour la condition de commutation de la présélection 2, voir le menu PRESELECTION 1 MENU.
START UP DELAY 2 (S)
Inhibition au démarrage pour la condition de commutation de la présélection 2, voir le menu
PRESELECTION 1 MENU.
9085_5010_04a_oi_f.docx / Feb-21 Page 42 / 74
Page 43

5.9. Preselection 3 Menu
MODE 3
Condition de commutation de la présélection 3, voir le menu PRESELECTION 1 MENU (à l'exception de la
présélection relative).
Voir le menu PRESELECTION 1 MENU
6
RES>=PRES-TRAIL
Présélection relative 3 :
Valeur affichée égale ou supérieure à PRESELECTION 3 – PRESELECTION 6
PRESELECTION 6 est la présélection relative de PRESELECTION 3
HYSTERESIS 3
Hystérèse de commutation pour la condition de commutation de la présélection 3, voir le menu
PRESELECTION 1 MENU.
PULSE TIME 3 (S)
Durée de l'impulsion fugitive pour la condition de commutation de la présélection 3, voir le menu
PRESELECTION 1 MENU.
OUTPUT TARGET 3
Affectation d'une sortie pour la condition de commutation de la présélection 3.
0
NO
Pas d'affectation
1
CTRL OUT 1
Affectation de la condition de sortie à Ctrl. Out 1
2
CTRL OUT 2
Affectation de la condition de sortie à Ctrl. Out 2
3
CTRL OUT 3
Affectation de la condition de sortie à Ctrl. Out 3
4
CTRL OUT 4
Affectation de la condition de sortie à Ctrl. Out 4
5
CTRL OUT 5
Affectation de la condition de sortie à Ctrl. Out 5
6
CTRL OUT 6
Affectation de la condition de sortie à Ctrl. Out 6
OUTPUT POLARITY 3
Etat de commutation pour la condition de commutation de la présélection 3, voir le menu
PRESELECTION 1 MENU.
OUTPUT LOCK 3
Auto-maintien pour la condition de commutation de la présélection 3, voir le menu PRESELECTION 1 MENU.
START UP DELAY 3 (S)
Inhibition au démarrage pour la condition de commutation de la présélection 3, voir le menu
PRESELECTION 1 MENU.
9085_5010_04a_oi_f.docx / Feb-21 Page 43 / 74
Page 44

5.10. Preselection 4 Menu
MODE 4
Condition de commutation de la présélection 4, voir le menu PRESELECTION 1 MENU (à l'exception de la
présélection relative).
Voir le menu PRESELECTION 1 MENU
6
RES>=PRES-TRAIL
Présélection relative 4 :
Valeur affichée égale ou supérieure à PRESELECTION 4 – PRESELECTION 1
PRESELECTION 1 est la présélection relative de PRESELECTION 4
HYSTERESIS 4
Hystérèse de commutation pour la condition de commutation de la présélection 4, voir le menu
PRESELECTION 1 MENU.
PULSE TIME 4 (S)
Durée de l'impulsion fugitive pour la condition de commutation de la présélection 4, voir le menu
PRESELECTION 1 MENU.
OUTPUT TARGET 4
Affectation d'une sortie pour la condition de commutation de la présélection 4.
0
NO
Pas d'affectation
1
CTRL OUT 1
Affectation de la condition de sortie à Ctrl. Out 1
2
CTRL OUT 2
Affectation de la condition de sortie à Ctrl. Out 2
3
CTRL OUT 3
Affectation de la condition de sortie à Ctrl. Out 3
4
CTRL OUT 4
Affectation de la condition de sortie à Ctrl. Out 4
5
CTRL OUT 5
Affectation de la condition de sortie à Ctrl. Out 5
6
CTRL OUT 6
Affectation de la condition de sortie à Ctrl. Out 6
OUTPUT POLARITY 4
Etat de commutation pour la condition de commutation de la présélection 4, voir le menu
PRESELECTION 1 MENU.
OUTPUT LOCK 4
Auto-maintien pour la condition de commutation de la présélection 4, voir le menu PRESELECTION 1 MENU.
START UP DELAY 4 (S)
Inhibition au démarrage pour la condition de commutation de la présélection 4, voir le menu
PRESELECTION 1 MENU.
9085_5010_04a_oi_f.docx / Feb-21 Page 44 / 74
Page 45

5.11. Preselection 5 Menu
MODE 5
Condition de commutation de la présélection 5, voir le menu PRESELECTION 1 MENU (à l'exception de la
présélection relative).
Voir le menu PRESELECTION 1 MENU
6
RES>=PRES-TRAIL
Présélection relative 5 :
Valeur affichée égale ou supérieure à PRESELECTION 5 – PRESELECTION 2
PRESELECTION 2 est la présélection relative de PRESELECTION 5
HYSTERESIS 5
Hystérèse de commutation pour la condition de commutation de la présélection 5, voir le menu
PRESELECTION 1 MENU.
PULSE TIME 5 (S)
Durée de l'impulsion fugitive pour la condition de commutation de la présélection 5, voir le menu
PRESELECTION 1 MENU.
OUTPUT TARGET 5
Affectation d'une sortie pour la condition de commutation de la présélection 5.
0
NO
Pas d'affectation
1
CTRL OUT 1
Affectation de la condition de sortie à Ctrl. Out 1
2
CTRL OUT 2
Affectation de la condition de sortie à Ctrl. Out 2
3
CTRL OUT 3
Affectation de la condition de sortie à Ctrl. Out 3
4
CTRL OUT 4
Affectation de la condition de sortie à Ctrl. Out 4
5
CTRL OUT 5
Affectation de la condition de sortie à Ctrl. Out 5
6
CTRL OUT 6
Affectation de la condition de sortie à Ctrl. Out 6
OUTPUT POLARITY 5
Etat de commutation pour la condition de commutation de la présélection 5, voir le menu
PRESELECTION 1 MENU.
OUTPUT LOCK 5
Auto-maintien pour la condition de commutation de la présélection 5, voir le menu PRESELECTION 1 MENU.
START UP DELAY 5 (S)
Inhibition au démarrage pour la condition de commutation de la présélection 5, voir le menu
PRESELECTION 1 MENU.
9085_5010_04a_oi_f.docx / Feb-21 Page 45 / 74
Page 46

5.12. Preselection 6 Menu
MODE 6
Condition de commutation de la présélection 6, voir le menu PRESELECTION 1 MENU (à l'exception de la
présélection relative).
Voir le menu PRESELECTION 1 MENU
6
RES>=PRES-TRAIL
Présélection relative 6 :
Valeur affichée égale ou supérieure à PRESELECTION 6 – PRESELECTION 3
PRESELECTION 3 est la présélection relative de PRESELECTION 6
HYSTERESIS 6
Hystérèse de commutation pour la condition de commutation de la présélection 6, voir le menu
PRESELECTION 1 MENU.
PULSE TIME 6 (S)
Durée de l'impulsion fugitive pour la condition de commutation de la présélection 6, voir le menu
PRESELECTION 1 MENU.
OUTPUT TARGET 6
Affectation d'une sortie pour la condition de commutation de la présélection 6.
0
NO
Pas d'affectation
1
CTRL OUT 1
Affectation de la condition de sortie à Ctrl. Out 1
2
CTRL OUT 2
Affectation de la condition de sortie à Ctrl. Out 2
3
CTRL OUT 3
Affectation de la condition de sortie à Ctrl. Out 3
4
CTRL OUT 4
Affectation de la condition de sortie à Ctrl. Out 4
5
CTRL OUT 5
Affectation de la condition de sortie à Ctrl. Out 5
6
CTRL OUT 6
Affectation de la condition de sortie à Ctrl. Out 6
OUTPUT POLARITY 6
Etat de commutation pour la condition de commutation de la présélection 6, voir le menu
PRESELECTION 1 MENU.
OUTPUT LOCK 6
Auto-maintien pour la condition de commutation de la présélection 6, voir le menu PRESELECTION 1 MENU.
START UP DELAY 6 (S)
Inhibition au démarrage pour la condition de commutation de la présélection 6, voir le menu
PRESELECTION 1 MENU.
9085_5010_04a_oi_f.docx / Feb-21 Page 46 / 74
Page 47

5.13. Serial Menu
UNIT NUMBER
Entre 11 et 99. Les adresses comportant un "0" ne sont pas permises, celles-ci étant utilisées pour
des adresses de groupe ou collectives.
11
Plus petite adresse sans zéro.
… 99
Plus grande adresse sans zéro.
SERIAL BAUD RATE
Ce paramètre permet de régler la vitesse de transmission série.
0
9600
9600 bauds
1
19200
19200 bauds
2
38400
38400 bauds
SERIAL FORMAT
Ce paramètre permet de régler le format des données
0
7-EVEN-1
7 bits de données Parité paire 1 bit d'arrêt
1
7-EVEN-2
7 bits de données Parité paire 2 bits d'arrêt
2
7-ODD-1
7 bits de données Parité impaire 1 bit d'arrêt
3
7-ODD-2
7 bits de données Parité impaire 2 bits d'arrêt
4
7-NONE-1
7 bits de données Sans parité 1 bit d'arrêt
5
7-NONE-2
7 bits de données Sans parité 2 bits d'arrêt
6
8-EVEN-1
8 bits de données Parité paire 1 bit d'arrêt
7
8-ODD-1
8 bits de données Parité impaire 1 bit d'arrêt
8
8-NONE-1
8 bits de données Sans parité 1 bit d'arrêt
9
8-NONE-2
8 bits de données Sans parité 2 bits d'arrêt
SERIAL INIT
Ce paramètre définit la vitesse de transmission des valeurs d'initialisation à l'interface utilisateur du PC. Des
réglages supérieurs à 9600 bauds permettent ainsi de raccourcir la durée de l'initialisation.
0
NO
Transmission des valeurs d'initialisation à 9600 bauds. L'appareil
fonctionne ensuite de nouveau avec la valeur définie par l'utilisateur.
1
YES
Transmission des valeurs d'initialisation à la vitesse de transmission
définie par l'utilisateur. L'appareil continue ensuite de fonctionner avec la
valeur définie par l'utilisateur.
Ce menu permet la définition des réglages de base de l'interface série.
9085_5010_04a_oi_f.docx / Feb-21 Page 47 / 74
Page 48

"Serial Menu" suite:
SERIAL PROTOCOL
Détermine la séquence de caractères pour les transmissions contrôlées par des commandes ou par le temps.
(xxxxxxx = valeur SERIAL VALUE).
Si le réglage est à 1, le n° d'unité n'est pas nécessaire et la transmission commence directement par la
valeur mesurée, ce qui permet un cycle de transmission plus rapide.
0
Protocole d'émission = N° d'unité, +/-, Données, LF, CR
1 1 +/- X X X X X X X LF
CR
1
Protocole d'émission = +/-, Données, LF, CR
+/- X X X X X X X LF
CR
SERIAL TIMER (S)
Cycle de temps réglable en secondes pour la transmission automatique (cyclique) de SERIAL VALUE via
l'interface série.
Dans le cas d'une requête par un protocole de requête, la transmission cyclique est interrompue pendant 20
secondes.
0,000
La transmission cyclique est désactivée et l'appareil n'émet que s'il reçoit la
commande SERIAL PRINT sur une entrée de commande ou une requête par
l'intermédiaire d'un protocole de requête.
…
60,000
Temps de cycle en secondes.
SERIAL VALUE
Ce paramètre détermine quelle valeur sera transmise.
Réglage
Code
Signification
0
:0
Measurement_Result (Résultat après la liaison, la mise à l'échelle, les
filtres, etc.)
1
:1
Analog_Out_Voltage (Modulation sortie analogique (en mV))
2
:2
Frequency 1 (fréquence mesurée - canal A sans mis à l’échelle)
3
:3
Frequency 2 (fréquence mesurée - canal B sans mis à l’échelle)
4
:4
Counter (Nombre total après liaison sans mise à l'échelle, filtres, etc.)
5
:5
Counter_A (Lecture de compteur – canal A)
6
:6
Counter_B (Lecture de compteur – canal B)
7
:7
SSI_binary (Lecture + valeur SSI binaire éventuellement convertie)
8
:8
SSI_Result (Valeur SSI, y compris zéro SSI et SSI Offset sans mise à
l'échelle, filtre, etc.)
9
:9
Minimum_Value (Valeur minimale de Measurement_Result)
10
;0
Maximum_Value (Valeur maximale de Measurement_Result)
11
;1
Analog_Out_Current (Modulation sortie analogique [in µA])
12
;2
Analog_Out_Percentage (Modulation sortie analogique en pourcentage)
(Résultat de mesure en xxx.x %)
9085_5010_04a_oi_f.docx / Feb-21 Page 48 / 74
Page 49

"Serial Menu" suite:
13
;3
Error Status (Lecture du code d‘erreur)
14
;4
SSI Read Value (Lecture, valeur SSI non convertie)
15
;5
SSI Loop Value (Valeur SSI après calculation/compensation Round Loop )
16
;6
Actual Speed ()
17
;7
Actual Position (Start Stop : Position [en µm] avec Offset sans mise à
l’échelle
18
;8
Actual Angle (Start Stop : par ex. angle avec Offset et sans mise à
l’échelle)
19
;9
Raw Position (Start Stop : Position [en µm] sans Offset et mise à
l’échelle)
MODBUS
Ce paramètre active le protocole Modbus et détermine l'adresse Modbus.
Pour plus de détails sur la communication Modbus, veuillez consulter le manuel supplémentaire
Modbus_RTU
0
Modbus désactivé
Interface série utilise le protocole LecomL (Motrona standard)
1 … 247
Modbus enabled: interface série utilise le protocole Modbus RTU
La valeur réglée est l'adresse Modbus de l'appareil
9085_5010_04a_oi_f.docx / Feb-21 Page 49 / 74
Page 50

5.14. Analog Menu
ANALOG FORMAT
Ce paramètre définit la caractéristique de sortie. Pour le format de sortie (-10 … +10 V), la polarité de la
sortie est affichée après le signe.
La sortie analogique est proportionnelle à la valeur affichée.
0
-10…10V
-10 … +10 V
1
0…20MA
0 … 20 mA
2
4…20MA
4 … 20 mA
ANALOG START
Ce paramètre permet de définir la valeur de départ du niveau de sortie analogique. La valeur de départ
indique la valeur affichée pour laquelle la sortie analogique émet 0 V ou 0/4 mA.
-99999999
Valeur de départ minimale
0
Valeur par défaut
+99999999
Valeur de départ maximale
ANALOG END
Ce paramètre permet de définir la valeur de fin du niveau de sortie analogique. La valeur de fin indique la
valeur affichée pour laquelle la sortie analogique émet sa valeur maximale, (+/-) 10 V ou 20 mA.
-99999999
Valeur de fin minimale
10000
Valeur par défaut
+99999999
Valeur de fin maximale
ANALOG GAIN (%)
Ce paramètre permet de régler le niveau de sortie maximal. ANALOG GAIN indique le niveau de sortie
maximal de la sortie analogique en % de (+/-) 10 V ou 20 mA.
p. ex. 102,00 correspond à un niveau de sortie de 10,2 V / 20,4 mA, lorsque la valeur ANALOG END est atteinte.
p. ex. 95,00 correspond à un niveau de sortie de 9,5 V / 18 mA, lorsque la valeur ANALOG END est atteinte.
0,00
Niveau de sortie minimal
100,00
Valeur par défaut
110,00
Niveau de sortie maximal
ANALOG OFFSET (%)
Ce paramètre permet de régler le décalage du point zéro de la sortie.
p. ex. 0,20 correspond à un niveau de sortie de 0,02 V / 0,04 mA, lorsque la valeur ANALOG START est
atteinte.
-99,99
Décalage minimal du point zéro
0
Valeur par défaut
+99,00
Décalage maximal du point zéro
Ce menu permet la définition des réglages de base de la sortie analogique. La sortie analogique se
réfère toujours au résultat de mesure mis à l’èchelle "Measurement Result"!
9085_5010_04a_oi_f.docx / Feb-21 Page 50 / 74
Page 51

5.15. Command Menu
INPUT 1 ACTION (fonction Input 1)
Ce paramètre détermine la fonction de commande de l'entrée "Ctrl. In 1"
(s) = commutation statique INPUT CONFIG doit être définie sur actif LOW / HIGH
(d) = commutation dynamique INPUT CONFIG doit être définie sur RISING/FALLING EDGE
0
NO
Aucune fonction
1
RESET/SET VALUE
Mode "SSI": Transfert de la valeur de position actuellement
détectée (après suppression des bits et décalage zéro éventuel )
dans le paramètre "SSI Offset" ( décalage d'origine du codeur )
Mode "Counter": Réinitialiser / régler les deux valeurs de compteur
(canaux A et B) aux valeurs définies dans SET VALUE A et. B
Mode "Start/Stop" Transfert sécurisé en cas de panne de courant
de la position actuelle ou de la mesure d’angle au paramètre "Offset"
(d) (s)
2
FREEZE
Gel de la valeur d'affichage
(s)
3
TEACH ANALOG START
Acceptation du résultat de la mesure en cours dans le paramètre
"Analog Start"
(d)
4
TEACH ANALOG END
Acceptation du résultat de la mesure en cours dans le paramètre
"Analog End"
(d)
5
TEACH PRESELECTION 1
Valeur d’affichage actuelle est stockée comme PRESELECTION 1
(d)
6
TEACH PRESELECTION 2
Valeur d’affichage actuelle est stockée comme PRESELECTION 2
(d)
7
TEACH PRESELECTION 3
Valeur d’affichage actuelle est stockée comme PRESELECTION 3
(d)
8
TEACH PRESELECTION 4
Valeur d’affichage actuelle est stockée comme PRESELECTION 4
(d)
9
TEACH PRESELECTION 5
Valeur d’affichage actuelle est stockée comme PRESELECTION 5
(d)
10
TEACH PRESELECTION 6
Valeur d’affichage actuelle est stockée comme PRESELECTION 6
(d)
11
RESET MIN/MAX
Réinitialiser la valeur minimum / maximum
(d) (s)
12
LOCK RELEASE
Libérer le verrouillage de toutes les sorties
(d)
13
SERIAL PRINT
Emission des données série, voir SERIAL VALUE
(d)
14
ACTIVATE DATA
N.A. 15
STORE DATA
N.A.
16
TESTPROGRAM
N.A. 17
CLEAR LOOP TIME
Réinitialiser la valeur Loop Time
(d)
18
RESET/SET COUNTER A
Mode "Counter": Réinitialiser / régler la valeur du compteur du
canal A sur la valeur définie dans SET VALUE A
(d) (s)
19
RESET/SET COUNTER B
Mode "Counter": Réinitialiser / régler la valeur du compteur du
canal B sur la valeur définie dans SET VALUE B
(d) (s)
20
LOCK COUNTER A
Mode "Counter": Le compteur (canal A) est désactivé et ne compte
plus aucune impulsion tant que cette commande est présente. -
(s)
21
LOCK COUNTER B
Mode "Counter":Le compteur (canal B) est désactivé et ne compte
plus aucune impulsion tant que cette commande est présente. -
(s)
22
ZERO POSITION
Mode "SSI": Transfert de la position SSI actuelle dans le
paramètre "SSI-Zero"
(d) (s)
23
FACTORY SETTINGS
L'appareil est réinitialisé aux paramètres d'usine.
(d)
9085_5010_04a_oi_f.docx / Feb-21 Page 51 / 74
Page 52

"Command Menu" suite:
INPUT 1 CONFIG
Ce paramètre détermine le comportement de commutation pour "Ctrl. In 1"
0
ACTIVE LOW
Activation si "LOW" (statique)
1
ACTIVE HIGH
Activation si "HIGH" (statique)
2
RISING EDGE
Activation pour flanc montant
3
FALLING EDGE
Activation pour flanc descendant
INPUT 2 ACTION
Ce paramètre détermine la fonction de commande de l'entrée "Ctrl. In 2"
Voir le paramètre INPUT 1 ACTION pour l'affectation de la fonction
INPUT 2 CONFIG
Ce paramètre détermine le comportement de commutation pour "Ctrl. In 2"
Voir le paramètre INPUT 1 CONFIG pour l'affectation de l'activation
INPUT 3 ACTION
Ce paramètre détermine la fonction de commande de l'entrée "Ctrl. In 3"
Voir le paramètre INPUT 1 ACTION pour l'affectation de la fonction
INPUT 3 CONFIG
Ce paramètre détermine le comportement de commutation pour "Ctrl. In 3"
Voir le paramètre INPUT 1 CONFIG pour l'affectation de l'activation
INPUT 4 ACTION
Ce paramètre détermine la fonction de commande de l'entrée "Ctrl. In 4"
Voir le paramètre INPUT 1 ACTION pour l'affectation de la fonction
INPUT 4 CONFIG
Ce paramètre détermine le comportement de commutation pour "Ctrl. In 4"
Voir le paramètre INPUT 1 CONFIG pour l'affectation de l'activation
INPUT 5 ACTION
Ce paramètre détermine la fonction de commande de l'entrée "Ctrl. In 5"
Voir le paramètre INPUT 1 ACTION pour l'affectation de la fonction
INPUT 5 CONFIG
Ce paramètre détermine le comportement de commutation pour "Ctrl. In 5"
Voir le paramètre INPUT 1 CONFIG pour l'affectation de l'activation
INPUT 6 ACTION (FACTORY SETTINGS)
Ce paramètre est défini en permanence sur "Factroy Settings" (réinitialiser l'appareil aux paramètres d'usine) et ne peut
pas être modifié.
INPUT 6 CONFIG (RISING EDGE)
Ce paramètre est préréglé sur "Rising Edge" (flanc montant) et ne peut pas être modifié.
9085_5010_04a_oi_f.docx / Feb-21 Page 52 / 74
Page 53

5.16. Linearization Menu
P1(X) … P24(X)
Coordonnée X du point de linéarisation.
Valeur affichée générée par l'appareil sans linéarisation, en fonction du signal d'entrée.
-99999999
Valeur minimale
0
Valeur par défaut
+99999999
Valeur maximale
P1(Y) … P24(Y)
Coordonnée Y du point de linéarisation.
Valeur affichée que l'appareil doit générer à la place de la coordonnée X.
p. ex. P2(X) est remplacé par P2(Y).
-99999999
Valeur minimale
0
Valeur par défaut
+99999999
Valeur maximale
Ce menu permet de définir les points de linéarisation. La fonction de linéarisation se réfère toujours
au résultat de mesure mis à l’échelle "Measurement Result"
9085_5010_04a_oi_f.docx / Feb-21 Page 53 / 74
Page 54

6. Annexe
EOT
AD1
AD2
C1
C2
ENQ
Code ASCII :
EOT
1
1
: 1 ENQ
Hexadécimal :
04
31
31
3A
31
05
Binaire :
0000 0100
0011 0001
0011 0001
0011 1010
0011 0001
0000 0101
STX
C1
C2
xxxxx
ETX
BCC
6.1. Lecture de données via l'interface série
Le logiciel utilisateur OS gratuit est disponible sur
https://www.motrona.com/fr/support/software.html
Les positions de code (SERIAL VALUE) définies dans le MENU SERIAL peuvent être lues à tout
moment de façon sérielle par un PC ou un API. La communication des appareils motrona se base sur
le protocole Drivecom selon ISO 1745 ou le protocole Modbus. Vous trouverez davantage
d'informations à ce sujet dans notre description SERPRO (Drivecom), voir www.motrona.de et dans
le chapitre " Interface Modbus RTU" dans ce manuel.
Chaîne de requête de lecture de données :
EOT = Caractère de contrôle (Hex 04)
AD1 = Adresse d'appareil, octet haut
AD2 = Adresse d'appareil, octet bas
C1 = Position de code à lire, octet haut
C1 = Position de code à lire, octet bas
ENQ = Caractère de contrôle (Hex 05)
Exemple : chaine de requête détaillée pour la lecture de la valeur affichée courante (Code = :1) d'un
appareil dont l'adresse est 11 :
Si la requête est correcte, l'appareil répond par :
STX = Caractère de contrôle (Hex 02)
C1 = Position de code à lire, octet haut
C1 = Position de code à lire, octet bas
xxxxx = Données à lire
ETX = Caractère de contrôle (Hex 03)
BCC = Block check character
9085_5010_04a_oi_f.docx / Feb-21 Page 54 / 74
Page 55

6.2. Interface RTU Modbus
UNIT NUMMER
Non valide pour la communication Modbus
(pour définir l'adresse Modbus voir paramètre "MODBUS ")
SERIAL BAUD RATE
Ce paramètre permet de régler la vitesse de transmission série.
0
9600
9600 bauds
1
19200
19200 bauds
2
38400
38400 bauds
SERIAL FORMAT
Ce paramètre permet de régler le format des données.
0
7-EVEN-1
Pas être utilisé avec le protocole Modbus.
1
7-EVEN-2
2
7-ODD-1
3
7-ODD-2
4
7-NONE-1
5
7-NONE-2
6
8-EVEN-1
8 bits de données Parité paire 1 bit d'arrêt
7
8-ODD-1
8 bits de données Parité impaire 1 bit d'arrêt
8
8-NONE-1
Pas être utilisé avec le protocole Modbus.
9
8-NONE-2
8 bits de données Sans parité 2 bits d'arrêt
L'interface Modbus de la série touchMatrix est un esclave Modbus RTU standard et offre les
fonctions Modbus suivantes :
Read Coils
Write Single Coil
Read Holding Registers
Write Multiple Registers
Diagnostic
Une connaissance de base de la communication Modbus RTU est requise pour le fonctionnement du
module d'interface et la compréhension de ce manuel.
6.2.1. Réglage des paramètres
Réglage des paramètres requis dans "Serial menu ":
9085_5010_04a_oi_f.docx / Feb-21 Page 55 / 74
Page 56

"Réglage des paramètres" suite :
SERIAL INIT
Non valide pour la communication Modbus
SERIAL PROTOCOL
Non valide pour la communication Modbus
SERIAL TIMER (S)
Non valide pour la communication Modbus
SERIAL VALUE
Non valide pour la communication Modbus
MODBUS
Ce paramètre active le protocole Modbus et détermine l'adresse Modbus.
0
Ne pas utiliser avec le protocole Modbus (Modbus est désactivé)
1 … 247
Modbus activé : l'interface série utilise le protocole Modbus RTU
Le nombre défini ici détermine l'adresse de noeud Modbus.
6.2.2. Communication Modbus
Les fonctions Modbus suivantes sont disponibles :
Read Holding Registers et Write Multiple Registers
Les fonctions "Read Holding Registers" et "Write Multiple Register"peuvent être utilisées pour
accéder à tous les registres d’appareil.
Tous les variables (valeurs réelles) et les registres d'état sont assignés aux registres Modbus Hold.
Tous les registres d’appareil sont des registres de 32 bits, les registres Modbus Hold sont des
registres de 16 bits, par conséquent, chaque registre d’appareil nécessite deux registres Modbus
Hold.(Pour cette raison, l'utilisation de la fonction "Write Single Register".n'est pas possible.)
Pour chaque opération de lecture ou d'écriture, il est seulement possible d'accéder à un seul registre
de la touchMATRIX série, de sorte que la "quantité (ou nombre) de registres" dans Modbus-Request
doit toujours être 2.
Accès aux paramètres
Holding Register 0x2000/0x2001 hex et les suivantes permettent l'accès aux paramètres d’appareil
Les numéros de registre en maintien pour un paramètre particulier peuvent être calculés en utilisant
le paramètre # qui peut être trouvé dans le tableau des paramètres mentionné dans le manuel de
touchMATRIX série
Holding Register low = (paramètre #) x 2
Holding Register high = (paramètre #) x 2 + 1
Exemple:
Accès au paramètre # 51 "PRESELECTION 1" avec Holding Register 0x0066 et 0x0067 hex.
9085_5010_04a_oi_f.docx / Feb-21 Page 56 / 74
Page 57

Accès aux valeurs réelles
Numéro
de Coil
Code de
série de la
commande
Commande
0
54
RESET/SET
Transfert de la valeur de position actuellement
détectée dans les paramètres "Offset". Réglage
du compteur A et le compteur B sur "Set Value"
1
55
FREEZE DISPLAY
Gel de la valeur d'affichage
2
56
TEACH ANALOG START
Transfert du résultat de la mesure en cours dans
le paramètre "Analog Start"
3
57
TEACH ANALOG END
Transfert du résultat de la mesure en cours dans
le paramètre "Analog End"
4
58
TEACH PRESELECTION 1
Valeur d’affichage actuelle est stockée comme
PRESELECTION 1
5
59
TEACH PRESELECTION 2
Valeur d’affichage actuelle est stockée comme
PRESELECTION 2
6
60
TEACH PRESELECTION 3
Valeur d’affichage actuelle est stockée comme
PRESELECTION 3
7
61
TEACH PRESELECTION 4
Valeur d’affichage actuelle est stockée comme
PRESELECTION 4
8
62
TEACH PRESELECTION 5
Valeur d’affichage actuelle est stockée comme
PRESELECTION 5
9
63
TEACH PRESELECTION 6
Valeur d’affichage actuelle est stockée comme
PRESELECTION 6
10
64
RESET MIN/MAX
Réinitialiser la valeur minimum / maximum
11
65
LOCK RELEASE
Libérer le verrouillage de toutes les sorties
12
66
SERIAL PRINT (ne pas utiliser Modbus)
Emission des données série, voir SERIAL VALUE
13
67
ACTIVATE DATA (non requis avec
Modbus)
Activer les données (non requis avec Modbus)
Holding Register 0x1000/0x1001 hex et les suivantes permettent l'accès aux variables d'apparei
(registres des valeurs réelles):
Holding Register 0x1000 / 0x1001 hex Valeurs réelles avec le code de série“:0”
(Valeur d'affichage)
Holding Register 0x1002 / 0x1003 hex Valeurs réelles avec le code de série“:1”
Holding Register 0x1004 / 0x1005 hex Valeurs réelles avec le code de série“:2”
Holding Register 0x1006 / 0x1007 hex Valeurs réelles avec le code de série“:3”
etc.
Accès à partir du registre de statut
Holding Register 0x2000/0x2001 hex et les suivantes permettent l'accès aux registres d'état
d'apparei:
Holding Register 0x2000 / 0x2001 hex L'état de la sortie (Ctrl. Out status, en lecture seule)
Holding Register 0x2002 / 0x2003 hex Commandes sérielles
Holding Register 0x2004 / 0x2005 hex Commande externe (Ctrl. In Status, en lecture seule)
Holding Register 0x2006 / 0x2007 hex Toutes les commandes (en lecture seule)
6.2.3. Read Coils et Write Single Coil
Les fonctions "Read Coils" und "Write Single Coil" peuvent être utilisées pour lire et
définir/réinitialiser les commandes individuelles:
9085_5010_04a_oi_f.docx / Feb-21 Page 57 / 74
Page 58

14
68
STORE DATA
Enregistrer à EEPROM
15
69
TESTPROGRAM (ne pas utiliser Modbus)
Programme de test (ne pas utiliser Modbus)
6.2.4. Diagnostic
L'appareil prend en charge la sous-fonction de diagnostic 00 "Return Query Data". D'autres fonctions
de diagnostic ne sont pas disponibles.
9085_5010_04a_oi_f.docx / Feb-21 Page 58 / 74
Page 59

6.3. Paramètre / serial codes
#
Menu
Nom
Code
Min
Max
Default
0
GENERAL MENU
MODE
00 0 4 0 1
GENERAL MENU
ENCODER PROPERTIES
01 0 4 0 2
GENERAL MENU
ENCODER DIRECTION
02 0 1 0 3
GENERAL MENU
FACTOR
03
-99999999
99999999
1
4
GENERAL MENU
DIVIDER
04
-99999999
99999999
1
5
GENERAL MENU
ADDITIVE VALUE
05
-99999999
99999999
0
6
GENERAL MENU
LINEARIZATION MODE
06 0 2 0 7
GENERAL MENU
BACKUP MEMORY
07 0 1 1 8
GENERAL MENU
FACTORY SETTINGS
08 0 1 0 9
GENERAL MENU
__
09 0 0
0
10
GENERAL MENU
__
10 0 0
0
11
MODE FREQUENCY
FREQUENCY MODE
11 0 5
0
12
MODE FREQUENCY
FREQUENCY BASE
12 0 3
2
13
MODE FREQUENCY
SAMPLING TIME 1 (S)
13 1 9999
100
14
MODE FREQUENCY
WAIT TIME 1 (S)
14 1 7999
100
15
MODE FREQUENCY
STANDSTILL TIME 1 (S)
15 1 9999
1
16
MODE FREQUENCY
AVERAGE FILTER 1
16 0 16
0
17
MODE FREQUENCY
SAMPLING TIME 2 (S)
17 1 9999
100
18
MODE FREQUENCY
WAIT TIME 2 (S)
18 1 7999
100
19
MODE FREQUENCY
AVERAGE FILTER 2
19 0 16
0
20
MODE FREQUENCY
__
20 0 0
0
21
MODE FREQUENCY
__
21 0 0
0
22
MODE COUNTER
COUNT MODE
22 0 5
3
23
MODE COUNTER
FACTOR A
23 1 9999999
100000
24
MODE COUNTER
SET VALUE A
24
-99999999
99999999
0
25
MODE COUNTER
FACTOR B
25 1 9999999
100000
26
MODE COUNTER
SET VALUE B
26
-99999999
99999999
0
27
MODE COUNTER
ROUND LOOP VALUE
27 0 99999999
0
28
MODE COUNTER
__
28 0 0
0
29
MODE COUNTER
__
29 0 0
0
30
MODE SSI
SSI MODE
30 0 1
0
31
MODE SSI
ENCODER RESOLUTION
31
10
32
25
21
MODE SSI
DATA FORMAT
32 0 1
0
33
MODE SSI
BAUD RATE
33 0 5
2
34
MODE SSI
SSI ZERO
34 0 999999999
0
35
MODE SSI
HIGH BIT
35 1 32
25
36
MODE SSI
LOW BIT
36 1 32
1
37
MODE SSI
SSI OFFSET
37 0 999999999
0
38
MODE SSI
ROUND LOOP VALUE
38 0 99999999
0
39
MODE SSI
SAMPLING TIME (S)
39 1 9999
10
40
MODE SSI
ERROR BIT
40 0 32
0
41
MODE SSI
ERROR POLARITY
41 0 1
0
42
MODE SSI
__
42 0 0
0
43
MODE SSI
__
43 0 0
0
9085_5010_04a_oi_f.docx / Feb-21 Page 59 / 74
Page 60

"Paramètre / serial codes" suite:
#
Menu
Nom
Code
Min
Max
Default
44
MODE START/STOP
INIT MODE
44 0 1
0
45
MODE START/STOP
SAMPLING TIME (ms)
45
200
16000
4000
46
MODE START/STOP
INIT PULSE TIME (ys)
46 1 9
2
47
MODE START/STOP
VELOCITY (m/s)
47
100
999999
280000
48
MODE START/STOP
OPERATIONAL MODE
48 0 2
0
49
MODE START/STOP
OFFSET
49
-99999999
99999999
0
50
MODE START/STOP
CIRCUMFERENCE (mm)
50 1 99999999
100000
51
MODE START/STOP
ROUND LOOP VALUE
51 1 99999999
360
52
MODE START/STOP
AVERAGE FILTER POSITION
52 0 4
0
53
MODE START/STOP
STANDSTILL TIME (s)
53 1 9999
1
54
MODE START/STOP
AVERAGE FILTER SPEED
U0 0 4
0
55
MODE START/STOP
__
U1 0 0
0
56
MODE START/STOP
__
U2 0 0
0
57
PRESELECTION VALUES
PRESELECTION 1
A0
-99999999
99999999
1000
58
PRESELECTION VALUES
PRESELECTION 2
A1
-99999999
99999999
2000
59
PRESELECTION VALUES
PRESELECTION 3
A2
-99999999
99999999
3000
60
PRESELECTION VALUES
PRESELECTION 4
A3
-99999999
99999999
4000
61
PRESELECTION VALUES
PRESELECTION 5
A4
-99999999
99999999
5000
62
PRESELECTION VALUES
PRESELECTION 6
A5
-99999999
99999999
6000
63
PRESELECTION 1 MENU
MODE 1
A6 0 8
0
64
PRESELECTION 1 MENU
HYSTERESIS 1
A7 0 99999
0
65
PRESELECTION 1 MENU
PULSE TIME 1 (S)
A8 0 60000
0
66
PRESELECTION 1 MENU
OUTPUT TARGET 1
A9 0 6
1
67
PRESELECTION 1 MENU
OUTPUT POLARITY 1
B0 0 1
0
68
PRESELECTION 1 MENU
OUTPUT LOCK 1
B1 0 1
0
69
PRESELECTION 1 MENU
START UP DELAY 1 (S)
B2 0 60000
0
70
PRESELECTION 1 MENU
__
B3 0 0
0
71
PRESELECTION 1 MENU
__
B4 0 0
0
72
PRESELECTION 1 MENU
__
B5 0 0
0
73
PRESELECTION 1 MENU
__
B6 0 0
0
74
PRESELECTION 2 MENU
MODE 2
B7 0 8
0
75
PRESELECTION 2 MENU
HYSTERESIS 2
B8 0 99999
0
76
PRESELECTION 2 MENU
PULSE TIME 2 (S)
B9 0 60000
0
77
PRESELECTION 2 MENU
OUTPUT TARGET 2
C0 0 6
2
78
PRESELECTION 2 MENU
OUTPUT POLARITY 2
C1 0 1
0
79
PRESELECTION 2 MENU
OUTPUT LOCK 2
C2 0 1
0
80
PRESELECTION 2 MENU
START UP DELAY 2 (S)
C3 0 60000
0
81
PRESELECTION 2 MENU
__
C4 0 0
0
82
PRESELECTION 2 MENU
__
C5 0 0
0
83
PRESELECTION 2 MENU
__
C6 0 0
0
84
PRESELECTION 2 MENU
__
C7 0 0
0
85
PRESELECTION 3 MENU
MODE 3
C8 0 8
0
86
PRESELECTION 3 MENU
HYSTERESIS 3
C9 0 99999
0
87
PRESELECTION 3 MENU
PULSE TIME 3 (S)
D0 0 60000
0
9085_5010_04a_oi_f.docx / Feb-21 Page 60 / 74
Page 61

"Paramètre / serial codes" suite:
#
Menu
Nom
Code
Min
Max
Default
88
PRESELECTION 3 MENU
OUTPUT TARGET 3
D1 0 6
3
89
PRESELECTION 3 MENU
OUTPUT POLARITY 3
D2 0 1
0
90
PRESELECTION 3 MENU
OUTPUT LOCK 3
D3 0 1
0
91
PRESELECTION 3 MENU
START UP DELAY 3 (S)
D4 0 60000
0
92
PRESELECTION 3 MENU
__
D5 0 0
0
93
PRESELECTION 3 MENU
__
D6 0 0
0
94
PRESELECTION 3 MENU
__
D7 0 0
0
95
PRESELECTION 3 MENU
__
D8 0 0
0
96
PRESELECTION 4 MENU
MODE 4
D9 0 8
0
97
PRESELECTION 4 MENU
HYSTERESIS 4
E0 0 99999
0
98
PRESELECTION 4 MENU
PULSE TIME 4 (S)
E1 0 60000
0
99
PRESELECTION 4 MENU
OUTPUT TARGET 4
E2 0 6
4
100
PRESELECTION 4 MENU
OUTPUT POLARITY 4
E3 0 1
0
101
PRESELECTION 4 MENU
OUTPUT LOCK 4
E4 0 1
0
102
PRESELECTION 4 MENU
START UP DELAY 4 (S)
E5 0 60000
0
103
PRESELECTION 4 MENU
__
E6 0 0
0
104
PRESELECTION 4 MENU
__
E7 0 0
0
105
PRESELECTION 4 MENU
__
E8 0 0
0
106
PRESELECTION 4 MENU
__
E9 0 0
0
107
PRESELECTION 5 MENU
MODE 5
F0 0 8
0
108
PRESELECTION 5 MENU
HYSTERESIS 5
F1 0 99999
0
109
PRESELECTION 5 MENU
PULSE TIME 5 (S)
F2 0 60000
0
110
PRESELECTION 5 MENU
OUTPUT TARGET 5
F3 0 6
5
111
PRESELECTION 5 MENU
OUTPUT POLARITY 5
F4 0 1
0
112
PRESELECTION 5 MENU
OUTPUT LOCK 5
F5 0 1
0
113
PRESELECTION 5 MENU
START UP DELAY 5 (S)
F6 0 60000
0
114
PRESELECTION 5 MENU
__
F7 0 0
0
115
PRESELECTION 5 MENU
__
F8 0 0
0
116
PRESELECTION 5 MENU
__
F9 0 0
0
117
PRESELECTION 5 MENU
__
G0 0 0
0
118
PRESELECTION 6 MENU
MODE 6
G1 0 8
0
119
PRESELECTION 6 MENU
HYSTERESIS 6
G2 0 99999
0
120
PRESELECTION 6 MENU
PULSE TIME 6 (S)
G3 0 60000
0
121
PRESELECTION 6 MENU
OUTPUT TARGET 6
G4 0 6
6
122
PRESELECTION 6 MENU
OUTPUT POLARITY 6
G5 0 1
0
123
PRESELECTION 6 MENU
OUTPUT LOCK 6
G6 0 1
0
124
PRESELECTION 6 MENU
START UP DELAY 6 (S)
G7 0 60000
0
125
PRESELECTION 6 MENU
__
G8 0 0
0
126
PRESELECTION 6 MENU
__
G9 0 0
0
127
PRESELECTION 6 MENU
__
H0 0 0
0
128
PRESELECTION 6 MENU
__
H1 0 0
0
129
SERIAL MENU
UNIT NUMBER
90
11
99
11
130
SERIAL MENU
SERIAL BAUD RATE
91 0 2
0
131
SERIAL MENU
SERIAL FORMAT
92 0 9
0
132
SERIAL MENU
SERIAL INIT
9~ 0 1
0
133
SERIAL MENU
SERIAL PROTOCOL
H2 0 1
0
9085_5010_04a_oi_f.docx / Feb-21 Page 61 / 74
Page 62

"Paramètre / serial codes" suite:
#
Menu
Nom
Code
Min
Max
Default
134
SERIAL MENU
SERIAL TIMER (S)
H3 0 60000
0
135
SERIAL MENU
SERIAL VALUE
H4 0 19
0
136
SERIAL MENU
MODBUS
H5 0 247
0
137
SERIAL MENU
__
H6 0 0
0
138
SERIAL MENU
__
H7 0 0
0
139
ANALOG MENU
ANALOG FORMAT
H8 0 2
0
140
ANALOG MENU
ANALOG START
H9
-99999999
99999999
0
141
ANALOG MENU
ANALOG END
I0
-99999999
99999999
10000
142
ANALOG MENU
ANALOG GAIN %
I1 0 11000
10000
143
ANALOG MENU
ANALOG OFFSET %
I2
-9999
9999
0
144
COMMAND MENU
INPUT 1 ACTION
I3 0 23
0
145
COMMAND MENU
INPUT 1 CONFIG.
I4 0 3
2
146
COMMAND MENU
INPUT 2 ACTION
I5 0 23
0
147
COMMAND MENU
INPUT 2 CONFIG.
I6 0 3
2
148
COMMAND MENU
INPUT 3 ACTION
I7 0 23
0
149
COMMAND MENU
INPUT 3 CONFIG.
I8 0 3
2
150
COMMAND MENU
INPUT 4 ACTION
I9 0 22
0
151
COMMAND MENU
INPUT 4 CONFIG.
J0 0 3
2
152
COMMAND MENU
INPUT 5 ACTION
J1 0 22
0
153
COMMAND MENU
INPUT 5 CONFIG.
J2 0 3
2
154
COMMAND MENU
INPUT 6 ACTION
(FACTORY SETTINGS)
J3
22
22
22
155
COMMAND MENU
INPUT 6 CONFIG.
(RISING EDGE)
J4 2 2
2
156
COMMAND MENU
__
J5 0 0
0
157
COMMAND MENU
__
J6 0 0
0
158
COMMAND MENU
__
J7 0 0
0
159
COMMAND MENU
__
J8 0 0
0
160
COMMAND MENU
__
J9 0 0
0
161
COMMAND MENU
__
K0 0 0
0
162
LINEARIZATION MENU
P1(X)
K1
-99999999
99999999
0
163
LINEARIZATION MENU
P1(Y)
K2
-99999999
99999999
0
164
LINEARIZATION MENU
P2(X)
K3
-99999999
99999999
0
165
LINEARIZATION MENU
P2(Y)
K4
-99999999
99999999
0
166
LINEARIZATION MENU
P3(X)
K5
-99999999
99999999
0
167
LINEARIZATION MENU
P3(Y)
K6
-99999999
99999999
0
168
LINEARIZATION MENU
P4(X)
K7
-99999999
99999999
0
169
LINEARIZATION MENU
P4(Y)
K8
-99999999
99999999
0
170
LINEARIZATION MENU
P5(X)
K9
-99999999
99999999
0
171
LINEARIZATION MENU
P5(Y)
L0
-99999999
99999999
0
172
LINEARIZATION MENU
P6(X)
L1
-99999999
99999999
0
173
LINEARIZATION MENU
P6(Y)
L2
-99999999
99999999
0
174
LINEARIZATION MENU
P7(X)
L3
-99999999
99999999
0
175
LINEARIZATION MENU
P7(Y)
L4
-99999999
99999999
0
176
LINEARIZATION MENU
P8(X)
L5
-99999999
99999999
0
177
LINEARIZATION MENU
P8(Y)
L6
-99999999
99999999
0
9085_5010_04a_oi_f.docx / Feb-21 Page 62 / 74
Page 63

"Paramètre / serial codes" suite:
#
Menu
Nom
Code
Min
Max
Default
178
LINEARIZATION MENU
P9(X)
L7
-99999999
99999999
0
179
LINEARIZATION MENU
P9(Y)
L8
-99999999
99999999
0
180
LINEARIZATION MENU
P10(X)
L9
-99999999
99999999
0
181
LINEARIZATION MENU
P10(Y)
M0
-99999999
99999999
0
182
LINEARIZATION MENU
P11(X)
M1
-99999999
99999999
0
183
LINEARIZATION MENU
P11(Y)
M2
-99999999
99999999
0
184
LINEARIZATION MENU
P12(X)
M3
-99999999
99999999
0
185
LINEARIZATION MENU
P12(Y)
M4
-99999999
99999999
0
186
LINEARIZATION MENU
P13(X)
M5
-99999999
99999999
0
187
LINEARIZATION MENU
P13(Y)
M6
-99999999
99999999
0
188
LINEARIZATION MENU
P14(X)
M7
-99999999
99999999
0
189
LINEARIZATION MENU
P14(Y)
M8
-99999999
99999999
0
190
LINEARIZATION MENU
P15(X)
M9
-99999999
99999999
0
191
LINEARIZATION MENU
P15(Y)
N0
-99999999
99999999
0
192
LINEARIZATION MENU
P16(X)
N1
-99999999
99999999
0
193
LINEARIZATION MENU
P16(Y)
N2
-99999999
99999999
0
194
LINEARIZATION MENU
P17(X)
N3
-99999999
99999999
0
195
LINEARIZATION MENU
P17(Y)
N4
-99999999
99999999
0
196
LINEARIZATION MENU
P18(X)
N5
-99999999
99999999
0
197
LINEARIZATION MENU
P18(Y)
N6
-99999999
99999999
0
198
LINEARIZATION MENU
P19(X)
N7
-99999999
99999999
0
199
LINEARIZATION MENU
P19(Y)
N8
-99999999
99999999
0
200
LINEARIZATION MENU
P20(X)
N9
-99999999
99999999
0
201
LINEARIZATION MENU
P20(Y)
O0
-99999999
99999999
0
202
LINEARIZATION MENU
P21(X)
O1
-99999999
99999999
0
203
LINEARIZATION MENU
P21(Y)
O2
-99999999
99999999
0
204
LINEARIZATION MENU
P22(X)
O3
-99999999
99999999
0
205
LINEARIZATION MENU
P22(Y)
O4
-99999999
99999999
0
206
LINEARIZATION MENU
P23(X)
O5
-99999999
99999999
0
207
LINEARIZATION MENU
P23(Y)
O6
-99999999
99999999
0
208
LINEARIZATION MENU
P24(X)
O7
-99999999
99999999
0
209
LINEARIZATION MENU
P24(Y)
O8
-99999999
99999999
0
9085_5010_04a_oi_f.docx / Feb-21 Page 63 / 74
Page 64

Serial Code
Command
54
RESET/SET
55
FREEZE DISPLAY
56
TEACH ANALOG START
57
TEACH ANALOG END
58
TEACH PRESELECTION 1
59
TEACH PRESELECTION 2
60
TEACH PRESELECTION 3
61
TEACH PRESELECTION 4
62
TEACH PRESELECTION 5
63
TEACH PRESELECTION 6
64
RESET MIN/MAX
65
LOCK RELEASE
66
SERIAL PRINT
67
ACTIVATE DATA
68
STORE DATA
69
TESTPROGRAM
Codes en série des commandes :
9085_5010_04a_oi_f.docx / Feb-21 Page 64 / 74
Page 65

6.4. Linéarisation
Mode : 1 Quadrant :
Mode : 4 Quadrant :
P1(X) doit être réglé à 0. La linéarisation n'est
définie que dans la plage des valeurs positives.
Dans le cas de valeurs mesurées négatives, la
courbe est dupliquée symétriquement par
rapport au point zéro.
P1(X) peut aussi être réglé à des valeurs
négatives. Dans le cas de valeurs mesurées
inférieures à P1(X), la valeur P1(Y) est affichée
en permanence.
Cette fonction permet de convertir un signal d'entrée linéaire en une représentation non linéaire (ou
vice-versa). Jusqu'à 24 points de linéarisation sont disponibles, pouvant être répartis à volonté sur
l'ensemble de la plage à linéariser.
L'appareil effectuera automatiquement une interpolation linéaire entre deux points de linéarisation.
Il est recommandé de placer autant de points que possible aux endroits présentant des courbures
importantes, un minimum de points étant suffisant aux endroits où la courbure est faible.
Afin de pouvoir définir une courbe de linéarisation, il faut régler le paramètre LINEARIZATION MODE
à 1 QUADRANT ou à 4 QUADRANT (voir l'illustration ci-dessous).
Les paramètres P1(X) à P24(X) permettent la saisie de jusqu'à 24 coordonnées X.
Ceux-ci correspondent aux valeurs affichées sans linéarisation.
Les paramètres P1(Y) à P24(Y) permettent la saisie des valeurs qui devront être affichées à la place
des valeurs X.
Ainsi, par exemple, la valeur P5(X) sera remplacée par la valeur P5(Y).
Les coordonnées X doivent avoir des valeurs continuellement croissantes.
Donc, P1(X) aura la valeur la plus petite, chaque valeur suivante devant être plus grande que la
précédente. En cas de valeurs supérieures à la dernière valeur X définie, la valeur Y correspondante
est affichée en permanence.
9085_5010_04a_oi_f.docx / Feb-21 Page 65 / 74
Page 66

Exemple d'application de la linéarisation :
L'illustration ci-dessous représente une écluse dont l'ouverture est mesurée par un codeur
incrémental et doit être affichée. Dans cette disposition, le codeur génère un signal proportionnel à
l'angle de rotation φ ; l'affichage direct de la taille "d" de l'ouverture est recherché.
9085_5010_04a_oi_f.docx / Feb-21 Page 66 / 74
Page 67

6.5. Lecture des données SSI
Les données reçues sont complétées à 32 bits de longueur de données.
9085_5010_04a_oi_f.docx / Feb-21 Page 67 / 74
Page 68

6.6. Traitement interne et le calcul des données SSI
Vérification du bit
d'erreur
Conversion de
données
Gray Code binaire
Fractionnement des
données: Bit par révolution et nombre de
révolutions
9085_5010_04a_oi_f.docx / Feb-21 Page 68 / 74
Page 69

“Traitement interne et le calcul des données SSI” suite :
Compte tenu de SSI
zero
Vérification du sens
de rotation
Evaluation de la
suppression de bits
9085_5010_04a_oi_f.docx / Feb-21 Page 69 / 74
Page 70

“Traitement interne et le calcul des données SSI” suite :
Compte tenu de SSI
offset
Calcul de Valeur
d'affichage
9085_5010_04a_oi_f.docx / Feb-21 Page 70 / 74
Page 71

6.7. Modes de fonctionnement / Modes OP de l’interface Start/Stop
L’appareil prend en charge les modes de fonctionnement suivantes :
• MASTER
- L‘impulsion Init pour le codeur connecté est générée par l‘appareil.
- Dans ce cas, les deux connexions Init (INIT OUT, /INIT OUT) sont configurées comme
sorties.
• SLAVE
- L’impulsion Init pour le codeur est générée par un appareil externe.
- Dans ce cas, les deux connexions init (ext. INIT IN, ext. /INIT IN) sont configures comme
entrées.
Le mode de fonctionnement souhaité peut être sélectionné dans le "General Menue" l’aide du
paramètre "INIT MODE"
L’appareil peut également être utilisé dans les trois "Operational Modes" suivantes. La fonction de
mesure souhaitée (mesure de distance, mesure d’angle ou mesure de vitesse) peut être sélectionnée
à l’aide du paramètre "OPERATIONAL MODES".
• POSITION (mesure de distance)
La position actuelle du codeur de position est déterminée sur la base d’une mesure de temps
d’exécution effectuée à partir de l’impulsion de démarrage et d’arrêt et peut être convertie en une
autre unité si désirée en utilisant les paramètres de mise à l’échelle existants (facteur, diviseur et
valeur additive). (Par ex. pour la lecture en série de la valeur de position dans une unité souhaitée.)
Interprétation du résultat de la mesure lors de la mesure de distance :
Le réglage par défaut des paramètres de mise à l’échelle („FACTOR = 1“, „DIVIDER = 1“ und
ADDITIVE VALUE = 0“) correspond à un résultat de mesure de position en micromètres (µm). Par ex.,
pour obtenir une position en "inch" avec trois décimales fictives, le paramètre „FACTOR“ doit être
réglé sur „10“, le paramètre „DIVIDER“ sur „254“ et le paramètre „ADDITIVE VALUE“ sur „0“.
9085_5010_04a_oi_f.docx / Feb-21 Page 71 / 74
Page 72

“Modes de fonctionnement / Modes OP de l’interface Start/Stop” suite :
La sortie analogique, les points de commutation des sorties transistor ainsi que la
fonction de linéarisation se réfèrent toujours au résultat de mesure à l’échelle du
mode de fonctionnement sélectionné
• ANGLE (Mesure d‘angle)
Lors de la mesure de l’angle, la position souhaitée ou respectivement la valeur de sortie de l’angle
par tour peut être spécifiée à l’aide du paramètre „ROUND LOOP VALUE“. Cette valeur de sortie est
générée dès que la distance parcourue (par ex. circonférence), qui est définie comme variable de
référence dans le paramètre „CIRCUMFERENCE (en mm) “, est atteinte. La valeur de sortie
recommence alors à 0 jusqu’à ce que la distance parcourue soit à nouveau atteinte. (Fonction Round
Loop !)
En utilisant les paramètres de mise à l’échelle disponibles (facteur, diviseur et valeur additive), cette
valeur de sortie peut être remise à l’échelle encore une fois, si désiré.
Interprétation du résultat de la mesure lors de la mesure d‘angle:
Le paramètre par défaut („CIRCUMFERENCE (mm) = 100.000“ et „ROUND LOOP VALUE = 360“, ainsi
que „FACTOR = 1“, „DIVIDER = 1“ et „ADDITIVE VALUE = 0“) correspond à une sortie d’angle ou de
position de 0…360“ (p. ex. : degrés) tous les 100.000 mm.
• SPEED (mesure de la vitesse)
La vitesse est enregistrée et peut être convertie en une autre unité si désirée en utilisant les
paramètres de mis à l’échelle disponibles (Factor, Divider et Additive Value)
Interprétation du résultat de la mesure lors de la mesure de vitesse :
Le paramètre par défaut („FACTOR = 1“, „DIVIDER = 1“ und „ADDITIVE VALUE = 0“) correspond à
une vitesse de sortie en mètres par seconde[m/s].
9085_5010_04a_oi_f.docx / Feb-21 Page 72 / 74
Page 73

6.8. Dimensions
9085_5010_04a_oi_f.docx / Feb-21 Page 73 / 74
Page 74

6.9. Caractéristiques techniques
Caractéristiques techniques :
Connexions :
Type de connexion :
Borne à vis, 1,5 mm² / AWG 16
Alimentation DC:
Tension d'alimentation
Circuit de protection :
Consommation
Protection par fusible
18 … 30 VDC
Protection contre l’inversion de polarité
Env. 50 mA (sans charge)
Externe : T 0,5 A
Alimentation du codeur :
Tension de sortie :
Charge max :
5 VDC et 24 VDC (env.1 V moins que la tension d'entrée)
max. 250 mA
Entrée incrémentale :
Canaux :
Configuration :
RS422 :
HTL différentiel :
TTL / HTL (PNP / NPN)
Charge:
Précision
Mesure de fréquence :
A, /A, B, /B
RS422, TTL, HTL différentiel, HTL PNP ou HTL NPN
max. 1 MHz (RS422 signal différentiel> 0,5 V)
max. 500 kHz (HTL signal différentiel > 2 V)
max. 250 kHz (TTL, HTL PNP ou HTL NPN)
max. 6 mA / Ri > 5 kOhm / 10 pF
+/- 50 ppm, +/-1 Digit
Interface SSI:
Canaux :
Configuration :
Format :
Fréquence :
Résolution :
Charge :
Clock, /Clock, Data, /Data
Master ou Slave
Binaires- ou Gray-Code
max. 1 MHz
10 … 32 Bit
max. 3 mA / Ri > 10 kOhm / 10 pF
Interface Start/Stop:
RS422 entrée :
RS422 sortie
Largeur d’impulsion Init :
Fréquence impulsion Init:
Fréquence élémentaire
Chronométrage :
Résolution:
1 x (Start_Stop, /Start_Stop); 1x (ext. Init_In, ext. /Init_In)
1 x (Init_Out, /Init_Out)
1…9 μs (réglable)
62,5 Hz - 5000 Hz (réglable)
48 MHz
Dépendant de la vitesse du guide d’ondes du codeur
(p.ex. 0,059mm / Etape à v = 2850 m/s)
Entrées de contrôle :
Nombre :
Format :
Fréquence :
Charge :
6
HTL, PNP (Low 0 … 3 V, High 9 … 30 V)
max. 10 kHz
max. 2 mA / Ri > 15 kOhm / 470 pF
Sortie Analogique :
Configuration :
Sortie tension :
Sortie courant :
Résolution
Précision :
Temps de réponse :
Courant- ou tension analogique
-10…+10 V (max. 2 mA)
0/4 … 20 mA (Charge max. 270 Ohm)
16 Bit
± 0,1 % 0°C … +45°C
± 0,15 % -20°C … 0°C et +45°C … +60°C
< 1 ms
Sortie de contrôle :
Nombre :
Format / Niveau :
Sortie courant :
Temps de réponse :
6
5 … 30 V (en fonction de la tension vers COM+), PNP
max. 200 mA
< 1 ms
Interface Série :
Format:
Baud:
RS232 ou RS485
9600, 19200 ou 38400 baud
Interface USB :
Mini-USB:
115200 Baud, Format de données 8 none 1
Affichage :
DEL:
État à DEL vert
Boîtier :
Matériel :
Montage :
Dimensions (l x h x p ):
Type de protection :
Poids :
Plastic
Profilé chapeau, 35 mm (suivant EN 60715)
23 x 102 x 102 mm
IP20
Env. 100 g
Température ambiante
Opération :
Stockage :
-20°C … +60°C (sans condensation)
-25°C … +75°C (sans condensation)
Taux de défaillance
MTBF en années :
59,1 a (Service constant à 60 °C)
Conformité et normes :
CEM 2014/30/EU:
RoHS (Ⅱ) 2011/65/EU
RoHS (Ⅲ) 2015/863:
EN 61326-1 : 2013 for industrial location
EN 55011 : 2017 / CISPR11 : 2017 Class A
EN IEC 6300 : 2018
9085_5010_04a_oi_f.docx / Feb-21 Page 74 / 74
 Loading...
Loading...