

Page 1
Operating Manual
6890.5060, 6890.5061, 6890.5066, 6890.5067, 6890.5069
Monitor for speed, standstill and direction of rotation with incremental encoder signals
Available devices:
6890.5060: Monitor with 3 programmable output relays and 1 analog output
6890.5061: Monitor with 3 fast switching transistor outputs and 1 analog output
6890.5066: Monitor with 1 analog output only
6890.5067: Monitor with 3 programmable output relays only
6890.5069: Monitor with 3 fast switching transistor outputs only
Product features:
Compact and most versatile monitor series for control of
overspeed, underspeed, standstill and direction of rotation
Logical monitoring of remote motion enable signals
Universal inputs for connection to incremental encoders (TTL, RS422 or HTL),
proximity switches, photocells remote TTL signals
Extremely wide frequency range, operating from 0.1 Hz up to 1 MHz
Easy setup by means of four keys and LCD menu
All models include serial RS232 interface
motrona GmbH, Zeppelinstraße 16, DE - 78244 Gottmadingen, Tel. +49 (0) 7731 9332-0, Fax +49 (0) 7731 9332-30, info@motrona.com, www.motrona.com
Page 2
Version:
Description:
6890.5060_01b_af/kk/hk_07/07
First edition in English
6890.5060_02a_af/kk/hk_01/08
Commands “Force Relays” and “Freeze Relays” added
6890.5060_03a_af/hk_11/08
Command Monitor for remote enable signal
6890.5060_03b_pp_11/11
Chapter 6.2.2 “Encoder properties” replaced TTL by HTL
6890.5060_03c_pp_07/12
Hint: “Special Menu” is password protected (Chap. 6.2.5)
6890.5060_03d_pp_11/12
Changed “Setting Range” for parameter “Wait Time” (code A3)
6890.5060_04a_sn_12/12
Additional device 6890.5061 and 6890.5069
6890.5060_04b_hk/nw_04/13
Small corrections
6890.5060_04c_sn_06/14
Small corrections Analog-Menu
6890.5060_04d/ag_04/15
Small corrections Analog-Menu.
New chapter 1. “Safety Instructions and Responsibility”.
6890.5060_04e_ag / Aug-15
- Analog output 4.13 – hint: only V or mA can be used (not both together)
- Analog menu 7.2.7 – some hints and a setup example supplemented
- Some smaller corrections and modulations
6890.5060_05a_af / Okt-16
Parameter Analogue ABS added
Parameter Preselection Mode increased to 9
Legal notices:
All contents included in this manual are protected by the terms of use and copyrights of motrona GmbH. Any
reproduction, modification, usage or publication in other electronic and printed media as well as in the internet requires
prior written authorization by motrona GmbH.
6890_5060_05a_oi_e.doc / Mrz-21 Page 2 / 40
Page 3

Table of Contents
1. Safety Instructions and Responsibility ......................................................... 5
1.1. General Safety Instructions ................................................................................... 5
1.2. Use according to the intended purpose ................................................................ 5
1.3. Installation ............................................................................................................. 6
1.4. Cleaning, Maintenance and Service Notes ........................................................... 6
2. Introduction ................................................................................................. 7
3. Available Models ......................................................................................... 7
4. Electrical Connections ................................................................................. 8
4.1. 6890.5060 .............................................................................................................. 8
4.2. 6890.5061 .............................................................................................................. 9
4.3. 6890.5066 ............................................................................................................ 10
4.4. 6890.5067 ............................................................................................................ 11
4.5. 6890.5069 ............................................................................................................ 12
4.6. Power Supply ....................................................................................................... 13
4.7. Auxiliary Output for Encoder Supply ................................................................... 13
4.8. Impulse Inputs for Encoders and Sensors ........................................................... 13
4.9. Control Inputs ...................................................................................................... 13
4.10. Serial Interface .................................................................................................... 14
4.11. Relay Outputs K1 – K3 (6890.5060 and 6890.5067 only) .................................... 14
4.12. Transistor Outputs K1 – K3 (6890.5061 and 6890.5069 only) ............................. 14
4.13. Scalable Analog Output (6890.5060, 6890.5061 and 6890.5066 only) ............... 14
5. LCD Display and Keys ................................................................................ 15
6. Keypad Operation ...................................................................................... 16
6.1. Normal Operation ................................................................................................ 16
6.2. Keypad Interlock .................................................................................................. 16
6.3. General Setup Procedure .................................................................................... 17
6.4. Changing Parameters on the Setting Level ......................................................... 17
6.5. Return from the Menu, Time-Out Function ......................................................... 18
6.6. Reset all Parameters to Factory Default Values ................................................. 18
7. Menu Structure and Parameter Description ............................................... 19
7.1. Survey of Menus ................................................................................................. 19
7.2. Parameter Descriptions ....................................................................................... 20
7.2.1. Preselection’s ................................................................................................................20
7.2.2. Definitions for the Encoder or Speed Sensor ...............................................................20
7.2.3. Serial Readout Menu ....................................................................................................21
7.2.4. Special-Menu ................................................................................................................22
7.2.5. Key-Pad-Menu ...............................................................................................................22
7.2.6. Command-Menu............................................................................................................23
6890_5060_05a_oi_e.doc / Mrz-21 Page 3 / 40
Page 4

7.2.7. Analog-Menu ................................................................................................................24
7.2.8. Serial Menu ...................................................................................................................25
7.2.9. Switching –Menu..........................................................................................................27
7.2.10. Linear.-Menu .................................................................................................................31
7.2.11. Display –Menu ..............................................................................................................32
8. Example for Commissioning ....................................................................... 33
9. Appendix ................................................................................................... 35
9.1. Hints for Use of the Linearization Function ......................................................... 35
9.2. Data Readout via Serial Interface ....................................................................... 36
9.3. “Relay Action”, override relay states by programmed states ............................. 37
9.3.1. Override relay/output states by programmable ON / OFF states ................................37
9.3.2. Freeze the actual switching state of all relays ............................................................37
9.4. Monitoring of remote motion enable signals ...................................................... 38
9.4.1. Definition of a speed window ......................................................................................38
9.4.2. Assignment of a control input ......................................................................................38
9.4.3. Assignment of the control polarity ...............................................................................38
9.4.4. Setting of a Start-up delay time ...................................................................................38
9.4.5. Setting of an appropriate Standstill definition ............................................................38
10. Dimensions: ............................................................................................... 39
11. Technical Specifications ............................................................................ 40
6890_5060_05a_oi_e.doc / Mrz-21 Page 4 / 40
Page 5
1. Safety Instructions and Responsibility
1.1. General Safety Instructions
This operation manual is a significant component of the unit and includes important rules and
hints about the installation, function and usage. Non-observance can result in damage and/or
impairment of the functions to the unit or the machine or even in injury to persons using the
equipment!
Please read the following instructions carefully before operating the device and observe all
safety and warning instructions! Keep the manual for later use.
A pertinent qualification of the respective staff is a fundamental requirement in order to use
these manual. The unit must be installed, connected and put into operation by a qualified
electrician.
Liability exclusion: The manufacturer is not liable for personal injury and/or damage to property
and for consequential damage, due to incorrect handling, installation and operation. Further
claims due to errors in the operation manual as well as misinterpretations are excluded from
liability.
In addition the manufacturer reserve the right to modify the hardware, software or operation
manual at any time and without prior notice. Therefore, there might be minor differences
between the unit and the descriptions in operation manual.
The raiser respectively positioner is exclusively responsible for the safety of the system and
equipment where the unit will be integrated.
During installation or maintenance all general and also all country- and application-specific safety
rules and standards must be observed.
If the device is used in processes, where a failure or faulty operation could damage the system or
injure persons, appropriate precautions to avoid such consequences must be taken.
1.2. Use according to the intended purpose
The unit is intended exclusively for use in industrial machines, constructions and systems. Nonconforming usage does not correspond to the provisions and lies within the sole responsibility of
the user. The manufacturer is not liable for damages which has arisen through unsuitable and
improper use.
Please note that device may only be installed in proper form and used in a technically perfect
condition and in accordance to the Technical Specifications (see chapter 11).
The device is not suitable for operation in explosion-proof areas or areas which are excluded by
the EN 61010-1 standard.
6890_5060_05a_oi_e.doc / Mrz-21 Page 5 / 40
Page 6
1.3. Installation
The device is only allowed to be installed and operated within the permissible temperature range.
Please ensure an adequate ventilation and avoid all direct contact between the device and hot or
aggressive gases and liquids.
Before installation or maintenance, the unit must be disconnected from all voltage-sources.
Further it must be ensured that no danger can arise by touching the disconnected voltagesources.
Devices which are supplied by AC-voltages, must be connected exclusively by switches,
respectively circuit-breakers with the low voltage network. The switch or circuit-breaker must be
placed as near as possible to the device and further indicated as separator.
Incoming as well as outgoing wires and wires for extra low voltages (ELV) must be separated
from dangerous electrical cables (SELV circuits) by using a double resp. increased isolation.
All selected wires and isolations must be conform to the provided voltage- and temperatureranges. Further all country- and application-specific standards, which are relevant for structure,
form and quality of the wires, must be ensured. Instructions about the permissible wire crosssections for wiring are described in the chapter 11 “Technical Specifications”.
Before first start-up it must be ensured that all connections and wires are firmly seated and
secured in the screw terminals. All (inclusively unused) terminals must be fastened by turning the
relevant screws clockwise up to the stop.
Overvoltages at the connections must be limited to values in accordance to the overvoltage
category II.
For placement, wiring, environmental conditions, as well as shielding and earthing/grounding of
the supply lines, the general standards of industrial automation industry and the specific
shielding instructions of the manufacturer are valid. Please find all respective hints and rules on
www.motrona.com/download.html --> “[General EMC Rules for Wiring, Screening and Earthing]”.
1.4. Cleaning, Maintenance and Service Notes
To clean the front of the unit please use only a slightly damp (not wet!), soft cloth. For the rear no
cleaning is necessary. For an unscheduled, individual cleaning of the rear the maintenance staff
or assembler is self-responsible.
During normal operation no maintenance is necessary. In case of unexpected problems, failures
or malfunctions the device must be shipped back to the manufacturer for checking, adjustment
and reparation (if necessary). Unauthorized opening and repairing can have negative effects or
failures to the protection-measures of the unit.
6890_5060_05a_oi_e.doc / Mrz-21 Page 6 / 40
Page 7
2. Introduction
DZ = Function: Speed Monitor
DZ 260
26 = Housing with dimensions 72 x 91 mm
(2.835 x 3.583 ‘’), with LCD and keypad
0 = Analogue output + 3 relay outputs
1 = Anlaouge output + 3 transistor outputs
6 = Analogue output only
7 = Relay outputs only
9 = Transistor outputs only
This new series of monitors has been designed as control modules for mounting inside of electric
control cabinets. The units are suitable for speed monitoring of machines, signalling overspeed,
underspeed, zero motion and the direction of rotation. Units providing an analog output can
moreover be used for closed-loop control or feedback purpose within a control system.
Very special advantages of these new monitors are the wide frequency range, the extremely fast
response and the remarkable versatility with regard to possible input formats and programmable
monitoring functions.
3. Available Models
There are five models available, all with fully similar basic functions, but with different options
concerning the outputs.
6890_5060_05a_oi_e.doc / Mrz-21 Page 7 / 40
Page 8
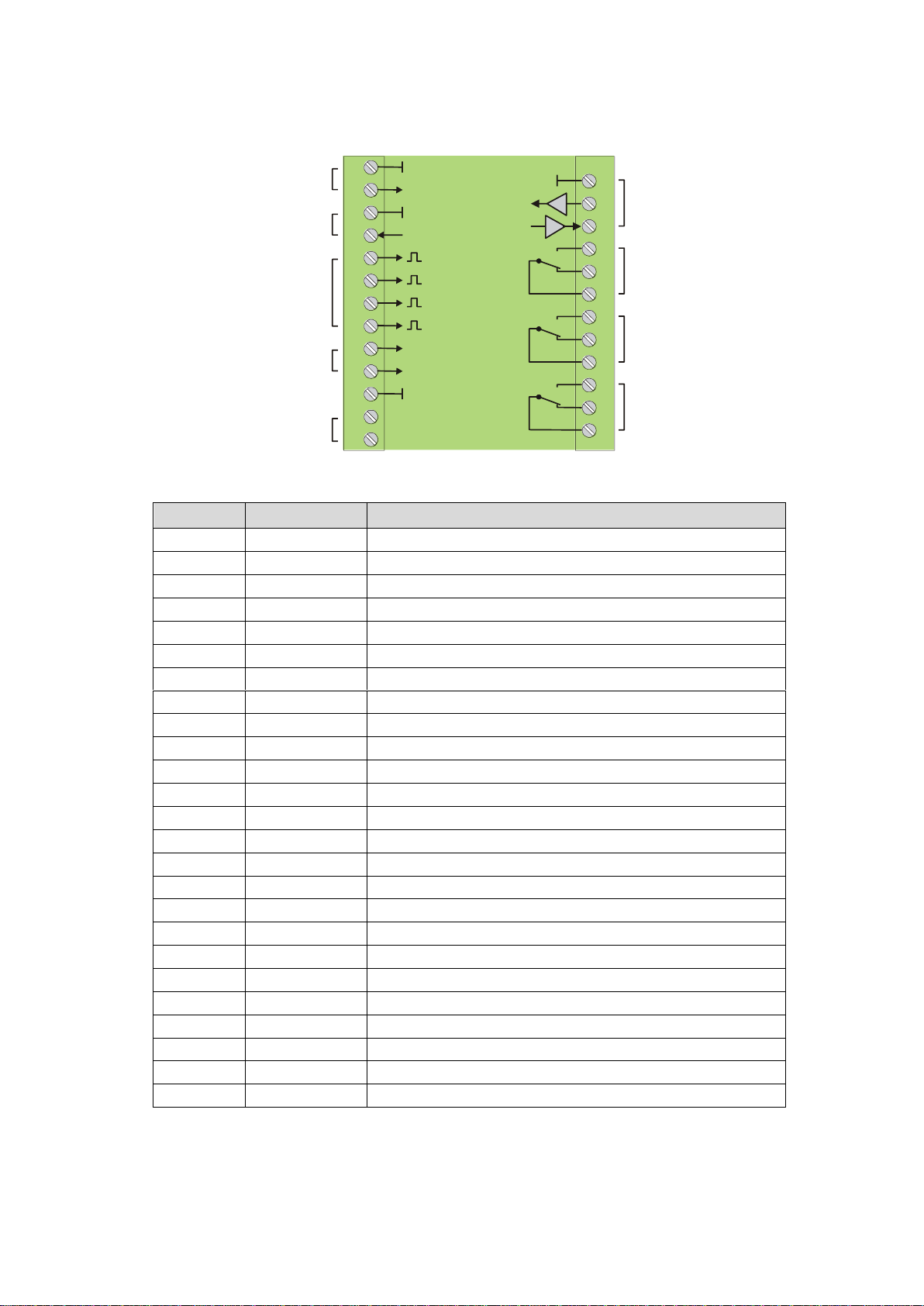
1
2
3
4
5
6
7
8
9
10 11 12 13
14 15 16 17 18 19 20 21 22 23 24 25
GND (-)
GND
GND
GND
RxD
TxD
K1
K2
K3
+Power input
+5,2V
A
/A
B
/B
0 - 10 V
0/4 - 20 mA
Control 1
Control 2
Aux. Output
+5,2V
Impulse inputs
for encoders and
sensors
Power supply
17 - 30 VDC
Control
inputs
Analogue
output
Serial RS232interface
NO
NC
C
NO
NC
C
NO
NC
C
Relay K1
Relay K2
Relay K3
Terminal
Text
Function
01
GND
GND, common minus potential
02
Vin
Power input, +17 ... 30 VDC
03
GND
GND, common minus potential
04
+5,2V
Aux. output 5.2 V / 200 mA
05
A
Impulse input, channel A
06
/A
Impulse input, channel /A (=A inverted)
07
B
Impulse input, channel B
08
/B
Impulse input, channel /B (=B inverted)
09
Control 2
Control input with programmable function
10
Control 1
Control input with programmable function
11
GND
GND, common minus potential
12
+10V Out
Analog output 0 ... 10 V
13
20mA out
Analog output 0 ... 20 mA
14
GND
GND, common minus potential
15
RXD
Serial RS232 interface, data input
16
TXD
Serial RS232 interface, data output
17
K1NO
Relay 1, normally open contact
18
K1NC
Relay 1, normally closed contact
19
K1C
Relay 1, common contact
20
K2NO
Relay 2, normally open contact
21
K2NC
Relay 2, normally closed contact
22
K2C
Relay 2, common contact
23
K3NO
Relay 3, normally open contact
24
K3NC
Relay 3, normally closed contact
25
K3C
Relay 3, common contact
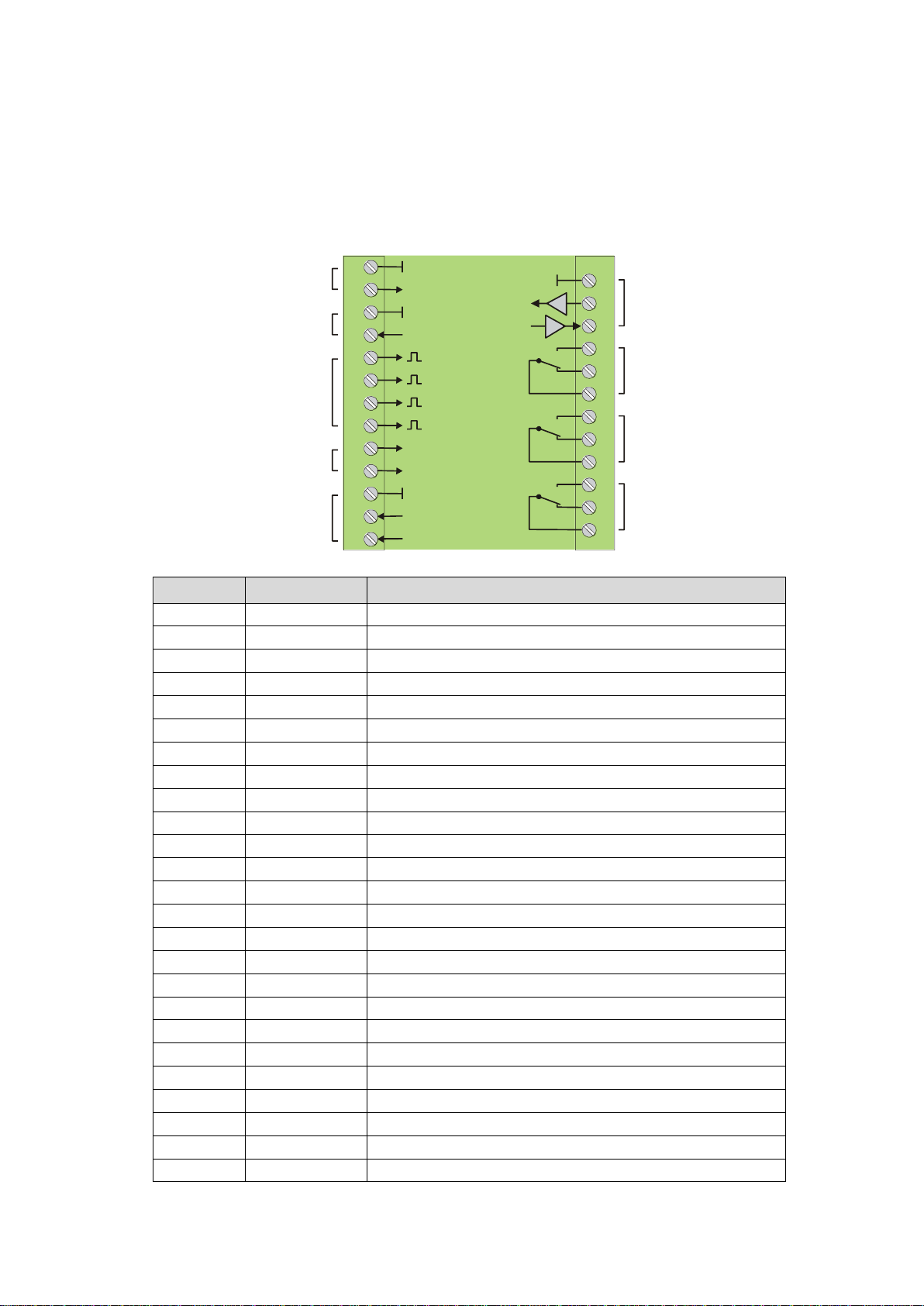
4. Electrical Connections
4.1. 6890.5060
6890_5060_05a_oi_e.doc / Mrz-21 Page 8 / 40
Page 9
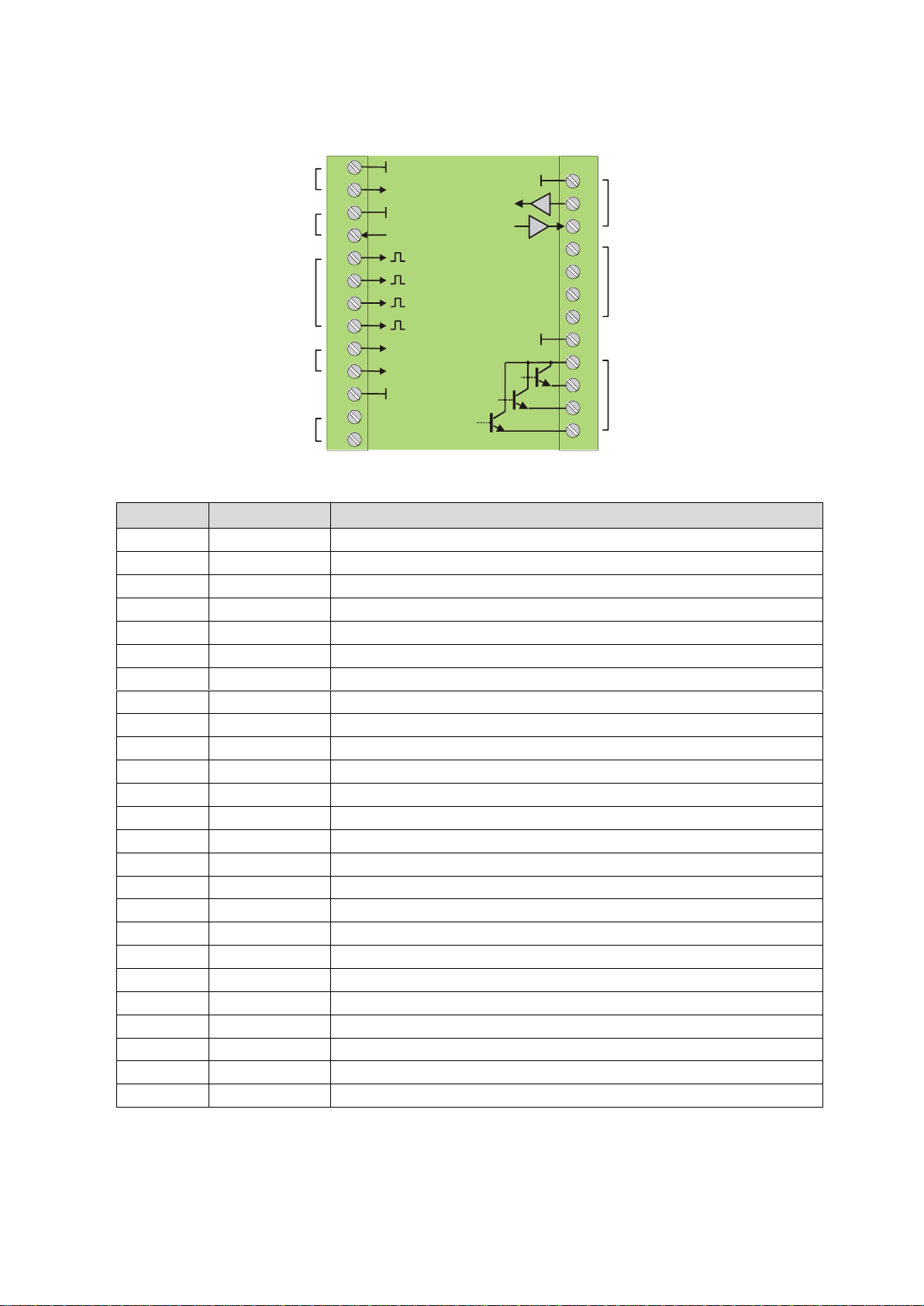
1
2
3
4
5
6
7
8
9
10 11 12 13
14 15 16 17 18 19 20 21 22 23 24 25
GND (-)
GND
GND
GND
RxD
TxD
+Power supply
+5,2V
A
/A
B
/B
0 - 10 V
0/4 - 20 mA
Control 1
Control 2
Aux. output
+5,2V
Impulse inputs
for encoders and
sensors
Power supply
17 - 30 VDC
Control
inputs
Analogue
output
Serial RS232interface
Com + (5-30 V/DC)
GND
NC
K1 out
K2 out
K3 out
Terminal
Text
Function
01
GND
GND, common minus potential
02
Vin
Power input, +17 ... 30 VDC
03
GND
GND, common minus potential
04
+5,2V
Aux. output 5.2 V / 200 mA
05
A
Impulse input, channel A
06
/A
Impulse input, channel /A (=A inverted)
07
B
Impulse input, channel B
08
/B
Impulse input, channel /B (=B inverted)
09
Control 2
Control input with programmable function
10
Control 1
Control input with programmable function
11
GND
GND, common minus potential
12
+10V Out
Analog output 0 ... 10 V
13
20mA out
Analog output 0 ... 20 mA
14
GND
GND, common minus potential
15
RXD
Serial RS232 interface, data input
16
TXD
Serial RS232 interface, data output
17
NC
Not connected
18
NC
Not connected
19
NC
Not connected
20
NC
Not connected
21
GND
GND, common minus potential
22
Com +
Common positive input for transistor outputs K1-K3
23
K1 out
Output K1, transistor PNP 30 V, 350 mA
24
K2 out
Output K2, transistor PNP 30 V, 350 mA
25
K3 out
Output K3, transistor PNP 30 V, 350 mA
4.2. 6890.5061
6890_5060_05a_oi_e.doc / Mrz-21 Page 9 / 40
Page 10
1
2
3
4
5
6
7
8
9
10 11 12 13
14 15 16 17 18 19 20 21 22 23 24 25
GND (-)
GND
GND
GND
RxD
TxD
+Power supply
+5,2V
A
/A
B
/B
0 - 10 V
0/4 - 20 mA
Control 1
Control 2
Aux. Output
+5,2V
Impulse input
for encoders and
sensors
Power supply
17 - 30 VDC
Control
inputs
Analogue
output
Serial RS232interface
NC
Terminal
Text
Function
01
GND
GND, common minus potential
02
Vin
Power input, +17 ... 30 VDC
03
GND
GND, common minus potential
04
+5,2V
Aux. output 5.2 V / 200 mA
05
A
Impulse input, channel A
06
/A
Impulse input, channel /A (=A inverted)
07
B
Impulse input, channel B
08
/B
Impulse input, channel /B (=B inverted)
09
Control 2
Control input with programmable function
10
Control 1
Control input with programmable function
11
GND
GND, common minus potential
12
+10V Out
Analog output 0 ... 10 V
13
20mA out
Analog output 0 ... 20 mA
14
GND
GND, common minus potential
15
RXD
Serial RS232 interface, data input
16
TXD
Serial RS232 interface, data output
17
NC
Not connected
18
NC
Not connected
19
NC
Not connected
20
NC
Not connected
21
NC
Not connected
22
NC
Not connected
23
NC
Not connected
24
NC
Not connected
25
NC
Not connected
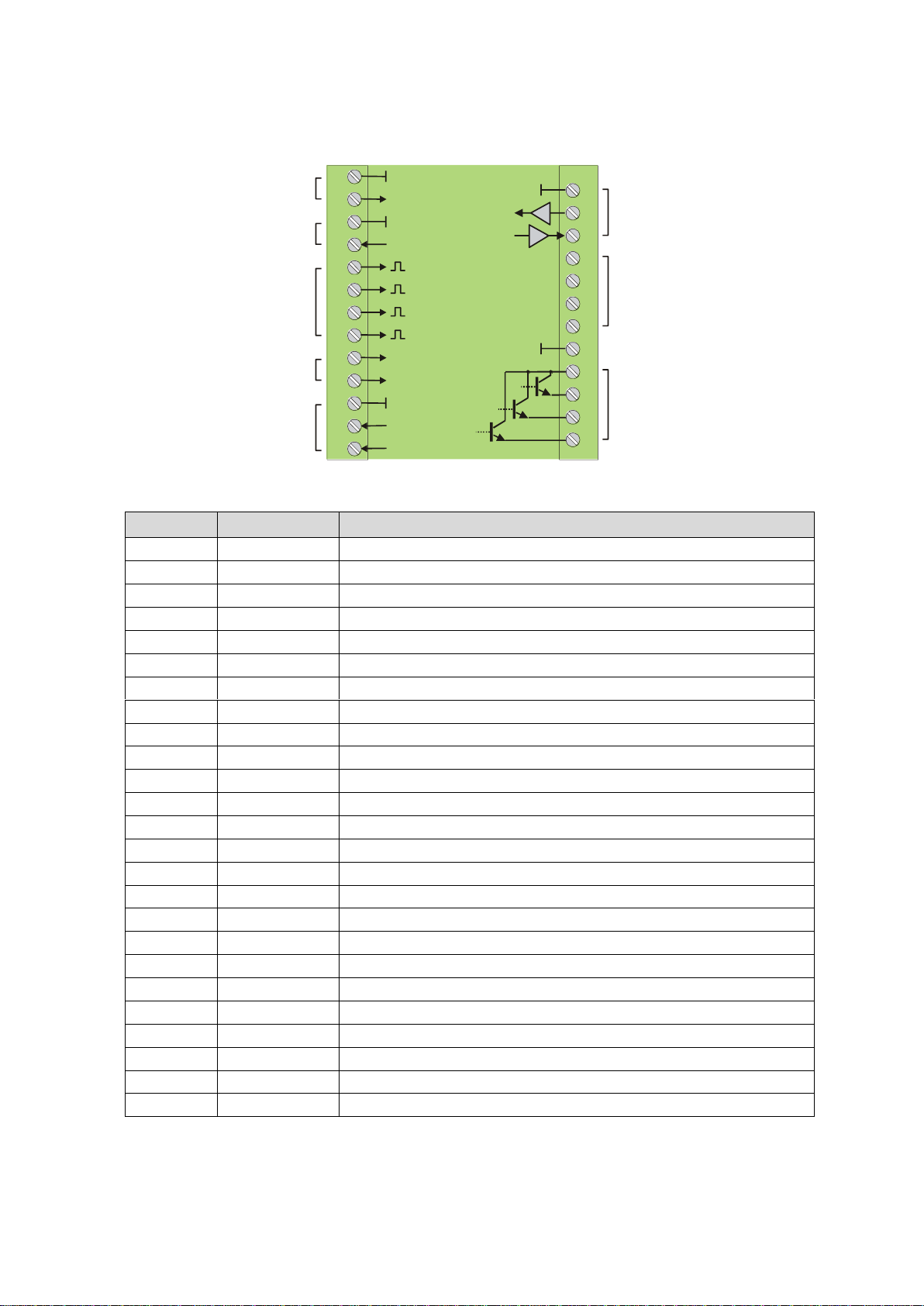
4.3. 6890.5066
6890_5060_05a_oi_e.doc / Mrz-21 Page 10 / 40
Page 11
1
2
3
4
5
6
7
8
9
10 11 12 13
14 15 16 17 18 19 20 21 22 23 24 25
GND (-)
GND
GND
GND
RxD
TxD
K1
K2
K3
+Power supply
+5,2V
A
/A
B
/B
Control 1
Control 2
Aux. output
+5,2V
Impulse inputs
for encoders and
sensors
Power supply
17 - 30 VDC
Control
inputs
NC
Serial RS232interface
NO
NC
C
NO
NC
C
NO
NC
C
Relay K1
Relay K2
Relay K3
Terminal
Text
Function
01
GND
GND, common minus potential
02
Vin
Power input, +17 ... 30 VDC
03
GND
GND, common minus potential
04
+5,2V
Aux. output 5.2 V / 200 mA
05
A
Impulse input, channel A
06
/A
Impulse input, channel /A (=A inverted)
07
B
Impulse input, channel B
08
/B
Impulse input, channel /B (=B inverted)
09
Control 2
Control input with programmable function
10
Control 1
Control input with programmable function
11
GND
GND, common minus potential
12
NC
Not connected
13
NC
Not connected
14
GND
GND, common minus potential
15
RXD
Serial RS232 interface, data input
16
TXD
Serial RS232 interface, data output
17
K1NO
Relay 1, normally open contact
18
K1NC
Relay 1, normally closed contact
19
K1C
Relay 1, common contact
20
K2NO
Relay 2, normally open contact
21
K2NC
Relay 2, normally closed contact
22
K2C
Relay 2, common contact
23
K3NO
Relay 3, normally open contact
24
K3NC
Relay 3, normally closed contact
25
K3C
Relay 3, common contact
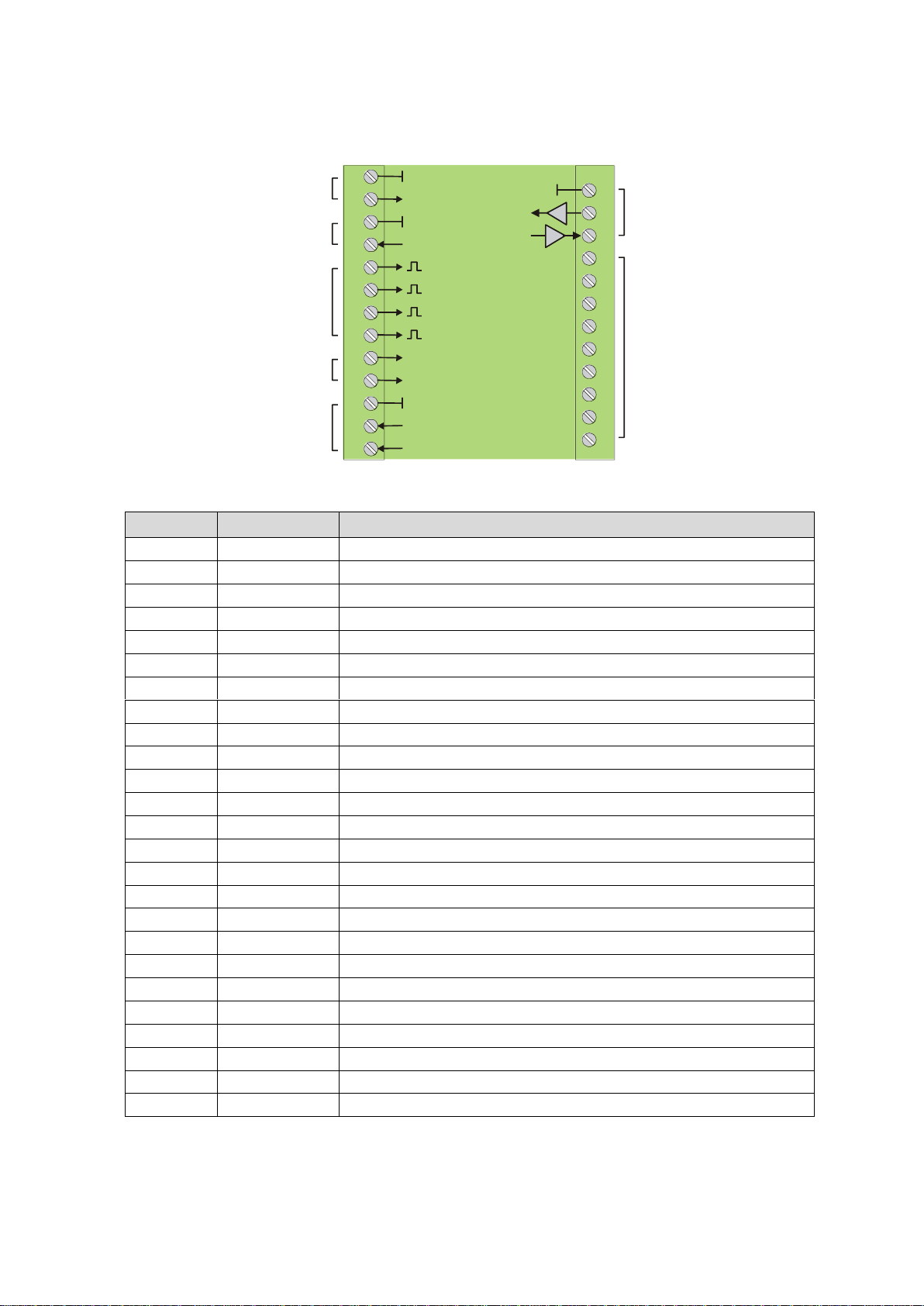
4.4. 6890.5067
6890_5060_05a_oi_e.doc / Mrz-21 Page 11 / 40
Page 12
1
2
3
4
5
6
7
8
9
10 11 12 13
14 15 16 17 18 19 20 21 22 23 24 25
GND (-)
GND
GND
GND
RxD
TxD
+Power supply
+5,2V
A
/A
B
/B
Control 1
Control 2
Aux. output
+5,2V
Impulse inputs
for encoders and
sensors
Power supply
17 - 30 VDC
Control
inputs
NC
Serial Rs232interface
Com + (5-30 V/DC)
GND
NC
K1 out
K2 out
K3 out
Terminal
Text
Function
01
GND
GND, common minus potential
02
Vin
Power input, +17 ... 30 VDC
03
GND
GND, common minus potential
04
+5,2V
Aux. output 5.2 V / 200 mA
05
A
Impulse input, channel A
06
/A
Impulse input, channel /A (=A inverted)
07
B
Impulse input, channel B
08
/B
Impulse input, channel /B (=B inverted)
09
Control 2
Control input with programmable function
10
Control 1
Control input with programmable function
11
GND
GND, common minus potential
12
NC
Not connected
13
NC
Not connected
14
GND
GND, common minus potential
15
RXD
Serial RS232 interface, data input
16
TXD
Serial RS232 interface, data output
17
NC
Not connected
18
NC
Not connected
19
NC
Not connected
20
NC
Not connected
21
GND
GND, common minus potential
22
Com +
Common positive input for transistor outputs K1-K3
23
K1 out
Output K1, transistor PNP 30 V, 350 mA
24
K2 out
Output K2, transistor PNP 30 V, 350 mA
25
K3 out
Output K3, transistor PNP 30 V, 350 mA
4.5. 6890.5069
6890_5060_05a_oi_e.doc / Mrz-21 Page 12 / 40
Page 13

4.6. Power Supply
The units require a DC supply from 17 to 30 V which must be applied to terminals 1 and 2.
Depending on the input voltage level and internal states, the power consumption may vary and
lies in a range of about 70 mA with a 24 V input (plus encoder currents taken from the auxiliary
voltage output).
4.7. Auxiliary Output for Encoder Supply
Terminals 4 and 3 provide a +5.2 VDC / 200 mA auxiliary output for supply of encoders and
sensors.
4.8. Impulse Inputs for Encoders and Sensors
The setup menu of the unit allows individual setting of the desired characteristics of the signal
inputs. According to the application the units will accept single-channel signals (input A only with
no direction information) as well as dual channel signals A/B including information of the
direction of rotation. The following input formats and levels are acceptable:
symmetric differential input with RS422 format A, /A, B, /B
asymmetric (single-ended) TTL levels (A and/or B only without inverted channels)
HTL level 10 ... 30 V, alternatively differential (A, /A, B, /B) or single-ended
(A and B only, without inverted channels)
Signals from proximity switches or photocells providing HTL level (10 ... 30 V)
NAMUR (2-wire) signals
4.9. Control Inputs
Two programmable control inputs allow the assignment of functions like remote start-up-delay,
reset of relay lock, hardware interlock of the keypad and similar.
Both inputs provide PNP characteristics and require HTL level. Also it is possible to set the control
function to "active LOW" or "active HIGH".
For evaluation of dynamic events the desired "active edge" can be set (rising or falling edge)
6890_5060_05a_oi_e.doc / Mrz-21 Page 13 / 40
Page 14

4.10. Serial Interface
2
3
5
RxD RxD
TxDTxD
GND
Screen
PC
DZ 260
DZ 261
DZ 266
DZ 267
DZ 269
15
(Sub-D-9)
16
14
Important note: “voltage out” and “current out” must not be used together.
Please do never connect mA and V simultaneously!
The serial RS232 interface in general may be used
for easy setup and commissioning of the units (with use of the OS32 operator software)
to change settings and parameters by PC or PLC during the operation
to read out internal states and actual measuring values by PC or PLC
The subsequent drawing shows how to link the monitor with a PC, using the standard
9-pin SUB-D-9 connector
4.11. Relay Outputs K1 – K3 (6890.5060 and 6890.5067 only)
The units provide three programmable relay outputs (all dry changeover), providing a switching
capability of 30 V / 2 A DC or 125 V / 0.6 A AC or 230 V / 0.3 A AC. Both, switching
characteristics and monitoring function may be programmed for each of the relays individually.
4.12. Transistor Outputs K1 – K3 (6890.5061 and 6890.5069 only)
The units provide three outputs with programmable switching characteristics.
K1 – K3 are fast-switching and short-circuit-proof transistor outputs with a switching capability of
5 ... 30 V / 350 mA each. The switching voltage of the outputs must be applied remotely to the
Com+ input (terminal 22). Both, switching characteristics and monitoring function may be
programmed for each of the outputs individually.
4.13. Scalable Analog Output (6890.5060, 6890.5061 and 6890.5066 only)
The units provide a voltage output with a +/-10 V range (max. load 2 mA) and a current output
with ranges 0 / 4 ... 20 mA (burden 0 – 270 Ohm), however only one of the two can be used at a
time. Beginning and end of the desired conversion range can be set by the operator menu (see
section 7.2.7). The common potential of both outputs refers to GND.
The total resolution is 14 bits. A settling time of approx. 200 µs. is required. The overall response
time of the analog outputs primarily depends on the selected Sampling Time setting. After
volatile jumps of the input signal, the analog outputs may need up to two Sampling Time cycles
(plus 200 µsec.) to stabilize.
6890_5060_05a_oi_e.doc / Mrz-21 Page 14 / 40
Page 15

Actual speed value
Input frequency, scaled in user units
+156.5 Hz
I: LH O: COO +47 %
Analogue output (not with DZ267, DZ269)
Actual output level in % of full scale
O: Outputs (not with DZ266)
Actual switching states of relays/transistor outputs
(Rel1, Rel2, Rel3)/(out1, out2, out3)
C = Closed, O = Open
I: Inputs
Actual logical state of inputs
(Control1, Control2)
L = Low, H = High
5. LCD Display and Keys
The units provide a back-lit LCD display with 2 lines at 16 characters each, and four keys for setup
and command control.
During the setup procedure the LCD display indicates the menu with all parameter texts and the
set values of the parameters.
During normal operation, the LCD display indicates the following information:
The "Display Menu" allows free scaling of the speed measuring values and the speed-related
parameters to any kind of engineering units.
6890_5060_05a_oi_e.doc / Mrz-21 Page 15 / 40
Page 16

PROG
UP
DOWN
ENTER
Stage
Protected
Range
Protection
by
Key Operations
Change of Parameters
Commands
1
---
---
permitted
permitted
2
Menu
Password upon
activation of menu
Protection of selectable parts of the menu
via password
permitted
3
Keyboard
Hardware-Latch 1
interlocked
permitted
Hardware Latch 2
All functions interlocked
Using the Hardware Latch function may accidentally cause a total locking of all
functions, when the Control Inputs characteristics have been set inauspiciously.
In this exceptional case you can release the key functions again by either
a) applying the correct logical state (High or Low) to the inputs
b) or resetting the parameters to their default values (see section 6.6)
c) or change the parameters being responsible for the locking by PC
P
6. Keypad Operation
A summary of all parameters and a detailed description of parameter functions is available under
section 6.
For all operation, the units provide four keys which subsequently will be named as shown below:
The key functions depend on the actual operating state of the units. Basically we have to
distinguish between Normal Operation and Setup Operation
6.1. Normal Operation
While in normal operation state, the units monitor the speed according to the selected
operational parameters and settings. Each of the front keys provides the command functions as
attached to it upon setup in the "Command Menu"
6.2. Keypad Interlock
There is a 3-stage conception to protect the keys against unauthorized changes of the
configuration respectively against activation of commands.
The "Key Pad" menu allows to define an individual password for each group of parameters. This
function can be used to provide individual access rights to different operators. Upon access to an
interlocked section the unit asks for the corresponding password. If the correct password is not
entered in time, the unit denies access and automatically returns to normal operation.
The hardware latch function can be activated and deactivated by one of the Control Inputs, or by
means of serial access to the corresponding locking register.
6890_5060_05a_oi_e.doc / Mrz-21 Page 16 / 40
Page 17

Key
Menu Level
Parameter Level
Setting Level
PROG
Save settings and return
to normal operation
Return to Menu Level
Check entry, store result,
then go back to Parameter
Level
UP
Switch over to next menu
Select next parameter
Increment the highlighted
digit or scroll the setting
upwards
DOWN
Go back to previous menu
Select previous parameter
Decrement the highlighted
digit or scroll the setting
downwards
ENTER
Switch over to the
Parameter Level of the
current menu
Switch over to
Setting Level
Shifts the highlighted digit
one position to the left, or
from utmost left to utmost
right
6.3. General Setup Procedure
To change over from normal operation to the setup state, please keep down the PROG key for at
least 2 seconds. After this the menu appears and you can select one of the menu groups.
Inside each group you can select the desired parameter and edit the setting according to need.
After this you are free to edit more parameters, or to return to normal operation.
The function of the different keys during setup is shown in the table below.
6.4. Changing Parameters on the Setting Level
With signed parameters, the front digit can only be changed between „+“ (positive) and „-„
(negative). The subsequent example explains how to change a parameter from originally 1024 to
a new value of 250 000.
The example assumes that you are already on the Setting Level, i.e. you have already selected
the corresponding parameter and read its actual value on the display. Highlighted (blinking) digits
are marked by background colour and indicate the cursor position.
6890_5060_05a_oi_e.doc / Mrz-21 Page 17 / 40
Page 18

No.
Display
Key action
Comment
00
001024
The actual value 1024 is displayed, with
the last digit blinking
01
4 x
Change last digit to 0
02
001020
Shift cursor to left
03
001020
2 x
Change highlighted digit to 0
04
001000
2 x
Shift curser to left by 2 positions
05
001000
Change highlighted digit to 0
06
000000
Shift cursor to left
07
000000
5 x
Change highlighted digit to 5
08
050000
Shift cursor to left
09
050000
2 x
Change highlighted digit to 2
10
250000
Save new setting and return to
Parameter Level
Power the unit down
Press
and
simultaneously
Switch power on with both keys held down
When execute this action, please be aware that all parameter settings
will be lost and the whole setup procedure must be repeated!
6.5. Return from the Menu, Time-Out Function
At any time the PROG key changes the Menu by one level backwards or fully back to the normal
operation mode. The menu also switches automatically one level backwards, every time when for
10 seconds no key has been touched (Time-Out-Function).
6.6. Reset all Parameters to Factory Default Values
If applicable, the whole set of parameters can be reset to factory default values (e.g. because a
code for the keypad interlocking has been forgotten, or because the unit does no more work
correctly for reasons of bad settings). All default values are indicated in the following parameter
tables.
To execute this Reset procedure, you have to take the following steps:
6890_5060_05a_oi_e.doc / Mrz-21 Page 18 / 40
Page 19

Preselect.-Menu*
Encoder-Menu
Ser.Readout Menu
Special-Menu
Preselection 1
Encoder Proper
Multiplier
Linear Mode**
Preselection 2
Direction
Divider
Freq. Control
Preselection 3
Sampling Time
Offset
Input Filter
Wait Time
Filter
Set Value
Key-Pad-Menu
Command-Menu
***
Analog-Menu**
Serial-Menu
Protect Menu M01
Key Up Func.
Analogue Format
Unit Number
Protect Menu M02
Key Down Func.
Analogue Start
Serial Baud Rate
Protect Menu M03
Key Enter Func.
Analogue End
Serial Format
… Input 1 Config.
Analogue Swing
Serial Protocol
Protect Menu M09
Input 1 Func.
Analogue Offset
Analogue ABS
Serial Timer
Protect Menu M10
Input 2 Config.
Register Code
Protect Menu M11
Input 2 Func.
Switching-Menu*
Linear.-Menu**
Display-Menu
Pulse Time 1
P1(x)
Up-Date-Time
Pulse Time 2
P1(y)
Display Mode
Pulse Time 3
P2(x)
Encoder Factor
Hysteresis 1
P2(y)
Multiplier
Hysteresis 2
..
Hysteresis 3
P14(x)
Preselect Mode 1
P14(y)
Preselect Mode 2
P15(x)
Preselect Mode 3
P15(y)
Output Polarity
Start up Mode
Start up Relay
(*) not relevant with 6890.5066
(**) not relevant with 6890.5067, 6890.5069
(***) partially inactive with 6890.5066
Lock Relay
Standstill Time
7. Menu Structure and Parameter Description
All parameters are combined to groups, arranged in several menus. Settings are only necessary
for parameters which are really relevant for the individual application.
7.1. Survey of Menus
This section provides an overview of the menus and their assignments to the different functions
of the units. The menu names are printed bold, and associated parameters are arrayed directly
under the menu names.
Menu texts are in English language, according to the presentation on the LCD display
6890_5060_05a_oi_e.doc / Mrz-21 Page 19 / 40
Page 20

Preselection parameters are not relevant for model 6890.5066
Preselection Menu
Code
Setting Range
Default
Preselection1
Switching point of relay 1/ out 1 (engineering units)
„00“
-1 000 000.0 ... +1 000 000.0
100.0
Preselection2
Switching point of relay 2/ out 2 (engineering units)
„01“
-1 000 000.0 ... +1 000 000.0
200.0
Preselection3
Switching point of relay 3/ out 3 (engineering units)
„02“
-1 000 000.0 ... +1 000 000.0
300.0
Encoder-Menu
Code
Setting Range
Default
Encoder Proper
Encoder properties
„A0“
0 … 11
0
0
A/B/90° quadrature, RS422 or HTL differential
1
A/B/90° quadrature, single-ended, HTL NPN*
2
A/B/90° quadrature, single-ended, HTL PNP
3
A/B/90° quadrature, single-ended, TTL level
4
A=Impulse, B=direction, RS422 or HTL differential
5
A=Impulse, B=direction, single-ended, HTL NPN*
6
A=Impulse, B=direction, single-ended, HTL PNP
7
A=Impulse, B=direction, single-ended, TTL level
8
Channel A only, RS422 or HTL differential
9
Channel A only, single-ended, HTL NPN*
10
Channel A only, single-ended, HTL PNP
11
Channel A only, single-ended, TTL level
Direction
Definition of the direction of rotation with quadrature encoders
„A1“
0, 1
0
0
forward when A leads B
1
forward when B leads A
(*) With settings HTL / NPN the input terminals are connected to the power supply voltage of
the unit (+24 V) via internal pull-up resistors. For this reason it is advisable to first set the
encoder properties correctly, prior to connecting TTL encoders to the unit.
Setting HTL / NPN is also suitable for use with NAMUR (2-wire) proximities.
(connect the positive wire of the sensor to the input terminal and the negative wire to GND)
7.2. Parameter Descriptions
7.2.1. Preselection’s
These parameters assign the desired switching points to the relays/outputs. The preselection’s
use the same engineering units as the display of the actual speed (see Display-Menu).
7.2.2. Definitions for the Encoder or Speed Sensor
6890_5060_05a_oi_e.doc / Mrz-21 Page 20 / 40
Page 21

Encoder-Menu
Code
Setting Range
Default
Sampling Time
Internal time base for sampling of the input frequency (sec.)
„A2“
0.001..9.999
0.001
Wait Time
Time to wait before unit detects zero speed (sec.)
Impulse distances greater than this time will be takes as zero
„A3“
0.01..9.99
1.00
Filter
Digital filter for smoothing of unstable frequencies
„A4“
0..7
0
0
Filter off
(very fast response to frequency changes)
1
Τ (63%) = 1,9 msec. with Sampling Time = 1msec.
2
Τ (63%) = 3,8 msec. with Sampling Time = 1msec.
etc.
7
Τ (63%) = 122 msec. with Sampling Time = 1msec.
(very slow response to frequency changes)
Set Value
Fixed frequency set value for encoder simulation (Hz)
(see also "Command"-Menu)
„A5“
-1 000 000.0 ...
+1 000 000.0
0
Serial Readout Menu
Code
Setting Range
Default
Multiplier
„A8“
-9.9999 … +9.9999
+1.0000
Divider
„A9“
0.0000 … 9.9999
0.0000
Offset (absolute term)
„B0“
-99999999 … +99999999
0
Readout (:8) = Basic Value x
Multiplier
Divider
+ Offset
The definition of the "Basic Value" occurs in the "Analog Menu" and is also available
for the 6890.5067 units without analog output
the ratio Multiplier / Divider must never be greater than 15 000
Setting "Divider" to zero will skip the rescaling procedure, resulting in a shorter
response time with all functions of the unit
7.2.3. Serial Readout Menu
An actual value proportional to the input frequency can be read out via serial link, accessing the
serial readout register (code :8 ). As a Basic Value this register uses the scaling set for the analog
output, i.e. a range from 0 to 10 000 units corresponding to 0 - 100,00 % of the full scale output
(see section 7.2.7 "Analog Menu"). This readout can still be rescaled to user-friendly engineering
units, using the following parameters:
More details about serial communication can be found in the appendix.
6890_5060_05a_oi_e.doc / Mrz-21 Page 21 / 40
Page 22

Special-Menu
Code
Setting Range
Default
Linear Mode
Programmable linearization for Basic Value and Analog Output
„B3“
0..2
0
0
Linearization off
1
Linearization range 0 V … +10 V
2 Linearization range -10 V … +10 V
Freq. Control
Defines behaviour and response of the unit to sudden interruptions of
the input frequency.
This parameter must only be changed in very special cases and under
special instruction of an motrona engineer.
Otherwise please use always the default setting "2"!
„B4“
0..2
2
Input Filter
Digital filter for limitation of the input frequency
„B5“
0..3
0
0
Filter off, the full range of frequency will be evaluated
1
Filter to cut frequencies higher than 500 kHz
2
Filter to cut frequencies higher than 100 kHz
3 Filter to cut frequencies higher than 10 kHz
Using the Input Filter will cause wrong frequency measurement when you use the unit with
frequencies higher than indicated above.
Key-Pad-Menu (Passwords for menu groups)
Code
Setting Range
Default
Protect Menu 01 (Preselect.-Menu)
„C0“
0..999999
0
Protect Menu 02 (Encoder-Menu)
„C1“
Protect Menu 03 (Ser.Readout.-Menu)
„C2“
0 = no interlock
Protect Menu 04 (Special-Menu) a)
„C3“
6079
Protect Menu 05 (Key-Pad-Menu)
„C4“
1 – 999 999 =
Protect Menu 06 (Command-Menu)
„C5“
password for the
Protect Menu 07 (Analog-Menu)
„C6“
corresponding
Protect Menu 08 (Serial-Menu)
„C7“
group
Protect Menu 09 (Switching-Menu)
„C8“
Protect Menu 10 (Linear-Menu)
„C9“
Protect Menu 11 (Display-Menu)
„D0“
7.2.4. Special-Menu
7.2.5. Key-Pad-Menu
a) This menu is protected by the password 6079 due to factory setting. After entry of the
password please press the Enter button at least 2 seconds.
6890_5060_05a_oi_e.doc / Mrz-21 Page 22 / 40
Page 23

Command-Menu (assignment of functions)
Code
Setting Range
Default
Key Up Func.
Supplementary command function of the UP key
„D7“
0..9
0
0
no function
1
Activation of a serial data transmission
2
Force programmed relay/output states / freeze (a)(c)
3
Frequency simulation according to parameter "Set Value"
4
Freeze actual input frequency
5
Remote start-up-delay function (a)
6
Release lock of relay 1 (a)
7
Release lock of relay 2 (a)
8
Release lock of relay 3 (a)
9
Release lock of all relays 1-3 (a)
Key Down Func.
Supplementary command function of the DOWN key (see UP)
„D8“
0..9
0
Key Enter Func.
Supplementary command function of the ENTER key (see UP)
„D9“
0..9
0
Input 1 Config.
Switching characteristics of input „Control1“
„E0“
0..3
0
0
Static low
1
Static High
2
Dynamic, rising edge
3
Dynamic, falling edge
Input 1 Func.
Control function of input „Control1“
„E1“
0..12
0
0
no function
1
Activation of a serial data transmission
2
Force programmed relay/output states / Freeze (a)(c)
3
Frequency simulation according to parameter "Set Value"
4
Freeze actual input frequency
5
Remote start-up-delay function (a)
6
Release lock of relay 1/transistor output 1 (a)
7
Release lock of relay 2/transistor output 2 (a)
8
Release lock of relay 3/transistor output 3 (a)
9
Release lock of all relays 1-3/output 1-3 (a)
10
Interlock for parameter access via keypad (b)
11
Total keypad interlock (b)
12
Command monitor for remote motion enable signal
Input 2 Config. (see Input 1 Config.)
„E2“
0..3
0
Input 2 Func. (see Input 1 Func.)
„E3“
0..12
0
7.2.6. Command-Menu
(a) these parameters are not relevant for model 6890.5066.
(b) see section 6.2 (c) see section 9.3 (d) see section 9.4
6890_5060_05a_oi_e.doc / Mrz-21 Page 23 / 40
Page 24

Analog-Menu (settings for analog outputs)
Code
Setting Range
Default
Analogue Format
Output format and range of the analog output
„E6“
0..3
0
0 -10 V to +10 V
1 0 V to +10 V
2 4 mA to 20 mA
3 0 mA to 20 mA
Analogue Start *)
Start value (engineering units) for 0 V resp. -10 V or 0 mA / 4 mA
Please note: „Analog Start“ represents the value, where the
analog output should start with 0 V. )*
… see example below
„E7“
- 1000000.0
… + 1000000.0
+0000000.0
Analogue End
End value (engineering units) for 10 V or 20 mA
„E8“
- 1000000.0
… + 1000000.0
+0001000.0
Analogue Swing
Max. output value (1.00 = 10 V or 20 mA)
Example: adjustment for a limitation to 8 V = 00.80
„E9“
0 ... 10.00
01.00
Analog Offset
Shift of the zero position (mV)
„F0“
-9999 ... 9999
0000
Analogue ABS
Only positive voltage values are displayed.
Please note: Independent of the parameters Analogue Start and
Analogue End, only positive values are displayed. At normal
case (Analogue ABS=0) the displayed voltage value is for
example -1,234V. If Analogue ABS=1, in this case 1,234V would
be displayed.
„F1“
0 ... 1
0
The settings above are at the same time used to generate the Basic Value 0 - 10 000
(corresponding to 0 - 100,00 %), which finally can be read out from the serial register
with access code :8 (see 7.2.3)
7.2.7. Analog-Menu
*) Example: If a display range of -250 to +250 must output a proportional analog range
from -10 V to +10 V, the “Analog Start” parameter must be set to 0 and the “Analog End”
value to +250.
6890_5060_05a_oi_e.doc / Mrz-21 Page 24 / 40
Page 25

Serial -Menu (Configuration of the serial link)
Code
Setting Range
Default
Unit Number (Serial device address)
A unit number between 11 and 99 can be assigned to each unit.
The address must not contain any zeros (0) since these addresses are
reserved for collective addressing of several units.
„90“
11 ... 99
11
Serial Baud Rate (Transmission speed)
„91“
0..6
0
0=
9600 Baud
1=
4800 Baud
2=
2400 Baud
3=
1200 Baud
4=
600 Baud
5=
19200 Baud
6=
38400 Baud
Serial Format (Format of transmit data)
„92“
0 ... 9
0
0=
7 Data, Parity even, 1 Stop
1=
7 Data, Parity even, 2 Stop
2=
7 Data, Parity odd, 1 Stop
3=
7 Data, Parity odd, 2 Stop
4=
7 Data, no Parity, 1 Stop
5=
7 Data, no Parity, 2 Stop
6=
8 Data, Parity even, 1 Stop
7=
8 Data, Parity odd, 1 Stop
8=
8 Data, no Parity, 1 Stop
9=
8 Data, no Parity, 2 Stop
7.2.8. Serial Menu
Serial transmissions will operate in either the “PC Mode“ or in “Printer Mode“.
With “PC-Mode“, the unit receives a request string and responds with a corresponding data
string. For details of the protocol see separate description “SERPRO“.
With “Printer Mode“ the unit sends data without any request and under Timer control as
described subsequently.
As soon as the unit receives a character, it automatically switches over to PC Mode and operates
according to protocol. When for a period of 20 sec. no character has been received, the unit
switches automatically back to “Printer Mode“ and starts cyclic data transmission again.
6890_5060_05a_oi_e.doc / Mrz-21 Page 25 / 40
Page 26

Serial -Menu (Configuration of the serial link)
Code
Setting Range
Default
Serial Protocol
Determines the sequence of characters sent, when you use the serial
output for cyclic data transmission under timer control
(xxxxxxx is the measuring value transmitted).
„F3“
0 ... 1
0
0=
Transmission = Unit Nr. – Data, LF, CR
1=
Transmission = Data, LF, CR
Setting "1" removes the unit address from the string which allows a
slightly faster transmission cycle.
Unit No.
0: 1 1 +/- X X X X X X
LF
CR
1: +/- X X X X X X
LF
CR
Serial Timer
This register determines the cycle time in seconds for cyclic
transmission when the Printer Mode is switched on.
With setting “0” all cyclic transmission is switched off and the unit will
only send data upon request (PC mode).
„F4“
0 ... 9.99
0
Register Code
Serial access code of the register which, in Printer Mode, should be
transmitted with every cycle. The most important registers are shown
below.
Setting
Code
Register contents
7
:7
Actual analog output value
10000 = 10 V = 20 mA
8
:8
User-defined readout value
(see 7.2.3)
9
:9
Frequency detected on the input
(Scaling is 0.1 Hz)
11
;1
Actual LCD display value
„F5“
0 ... 19
(:0) … (;9)
8
6890_5060_05a_oi_e.doc / Mrz-21 Page 26 / 40
Page 27

These parameters are not relevant for model 6890.5066.
Indications | f | mean that only the absolute value of the frequency is considered. With all other
indications, frequencies are categorically signed (+ with forward and - with reverse)
Switching -Menu (Switching characteristics of relays/outputs)
Code
Setting Range
Default
Pulse Time 1 Rel.1: Duration of timed output, sec. (0=static)
„F8“
0 ... 9.99
0
Pulse Time 2 Rel.2: Duration of timed output, sec. (0=static)
„F9“
0 ... 9.99
0
Pulse Time 3 Rel.3: Duration of timed output, sec. (0=static)
„G0“
0 ... 9.99
0
Hysteresis 1 Rel.1: Switching Hysteresis (engineering units)
„G1“
0 ... 99999.9
0
Hysteresis 2 Rel.2: Switching Hysteresis (engineering units)
„G2“
0 ... 99999.9
0
Hysteresis 3 Rel.3: Switching Hysteresis (engineering units)
„G3“
0 ... 99999.9
0
Preselect Mode 1 (switching operation for relay 1/output 1)
„G4“
0..9
0
0
|f| >= |Preselection| (catch*)
1
|f| <= |Preselection| with start-up-delay (catch*)
2
|f| == |Preselection| with start-up-delay (catch*)
3
Standstill (f=0) after expiration of standstill time
4
f >= Preselection (catch*)
(also suitable for signalization of forward direction)
5
f <= Preselection (catch*)
(also suitable for signalization of reverse direction)
6
f == Preselection (catch*)
7
Relay/output signals "forward" when a positive frequency (f > 0)
is detected. This information disappears upon detection of
"standstill"
8
Relay/output signals "reverse" when a negative frequency (f < 0)
is detected. This information disappears upon detection of
"standstill"
9
f > (Preselection + Hysteresis) or f < (Preselection – Hysteresis)
with start-up suppression and latch *)
The parameter Preselection forms the center, the hysteresis
specifies the area around.
Preselect Mode 2 (switching operation for relay 2/output 2)
see Preselection Mode 1
„G5“
0..8
0
Preselect Mode 3 (switching operation for relay 3/output 3)
see Preselection Mode 1
„G6“
0..8
0
7.2.9. Switching –Menu
*) The corresponding relay/output can be used with catch operation, when a catch function has been
assigned to it under parameter „Lock Relay“.
6890_5060_05a_oi_e.doc / Mrz-21 Page 27 / 40
Page 28

Switching -Menu (Switching characteristics of the relays/outputs)
Code
Setting Range
Default
Output Polarity (Relay/output active „on“ or active „off“ *)
Parameter with binary interpretation
„G7“
0..7
0
0
all Relays are energized when the assigned event occurs
1
Relay 1/transistor output 1 inverted
2
Relay 2 transistor output 2 inverted
3
Relay 1&2 transistor output 1&2 inverted
4
Relay 3 transistor output 3 inverted
5
Relays 1&3 transistor output 1&3 inverted
6
Relays 2&3 transistor output 2&3 inverted
7
All relays inverted
Start-up Mode
Start-up-delay after power-up and after standstill
„G8“
0..10
0
0
No start-up-delay
1
Start-up-delay 1 second
2
Start-up-delay 2 seconds
3
Start-up-delay 4 seconds
4
Start-up-delay 8 seconds
5
Start-up-delay 16 seconds
6
Start-up-delay 32 seconds
7
Start-up-delay 64 seconds
8
Start-up-delay 128 seconds
9
Automatic delay until to first overstepping of the set value
10
Start-up-delay by remote signal
Start up Relay / Switching Output
Assignment of a start-up-delay function to the relays/outputs
„G9“
0..7
0
0
No start-up-delay for any of the relays
1
Relay 1/transistor output 1 provides start-up-delay
2
Relay 2/transistor output 2 provides start-up-delay
3
Relays 1&2/transistor output 1&2 provide start-up-delay
4
Relay 3/transistor output 3 provides start-up-delay
5
Relays 1&3/transistor output 1&3 provide start-up-delay
6
Relays 2&3/transistor output 2&3 provide start-up-delay
7
All relays provide start-up-delay
*) Active "on" means the relay/output will be energized upon occurrence of the assigned event.
Active "off" means the relay/output will be de-energized upon occurrence of the assigned event.
6890_5060_05a_oi_e.doc / Mrz-21 Page 28 / 40
Page 29

Switching -Menu (Switching characteristics of the relays/outputs)
Code
Setting Range
Default
Lock Relay /Switching Output
Assignment of a catch function to the relays *)
„H0“
0..15
0
0
No catch function for any of the relays
1
Relay 1/output 1 with catch (release by key/control input)
2
Relay 2/output 2 with catch (release by key/ control input)
3
Relays 1&2/output 1&2 with catch (release by key/control input)
4
Relay 3/output 3 with catch (release by key/control input)
5
Relays 1&3/output 1&3 with catch (release by key/control input)
6
Relays 2&3/output 2&3 with catch (release by key/control input)
7
all Relays/outputs with catch (release by key/control input)
815
similar to 0 - 7, but catch to release by key/by control input and
automatically upon standstill
Standstill Time
Time setting for standstill definition
A time of xx.xx seconds after detection "zero input frequency" the unit
signals "standstill" and re-activates the start-up-delays
„H1“
0..99.99
0
Relay / Switching Output Action (for more details see section 9.3)
Selection of the relays/transistor outputs of which the switching state
should be overridden by key command or remote command (nonselected relays will continue normally)
„K8“
0…8
0
0
No relay/transistor output selected
1
Relay 1/transistor output 1
2
Relay 2/transistor output 2
3
Relays 1 & 2/transistor output 1&2
4
Relay 3/transistor output 3
5
Relays 1 & 3 /transistor output 1&3
6
Relays 2 & 3/transistor output 2&3
7
All relays/transistor outputs selected
8
Freeze actual switching state of all relays/transistor outputs
*) According to parameter settings, the catch situation can be released by either pressing one of the front
keys or by a remote control signal or automatically upon detection of standstill (see "Command menu").
6890_5060_05a_oi_e.doc / Mrz-21 Page 29 / 40
Page 30

Switching -Menu (Switching characteristics of the relays/outputs)
Code
Setting Range
Default
Action Polarity (for more details see section 9.3)
Desired override state of the corresponding relays/transistor outputs
(parameter is out of function when “Relay Action” is set to “8”)
„K9“
0…7
0
Setting
Relay/out K1
Relay/out K2
Relay/out K3
0 0 0 0 1 1 0 0 2 0 1 0 3 1 1 0 4 0 0 1 5 1 0 1 6 0 1
1
7 1 1
1
0 = Coil of the relay is de-energized – transistor output off.
1 = Coil of the relay is energized – transistor output on
6890_5060_05a_oi_e.doc / Mrz-21 Page 30 / 40
Page 31

Linear.-Menu
(Interpolation points for linearization)
Code
Setting Range
Default
P1(x) % Interpolation point 1, original value
„H2“
-100.000...100.000
100.000
P1(y) % Interpolation point 1, substitute value
„H3“
P2(x) etc.
„H4“
P2(y) etc.
„H5“
P3(x)
„H6“
P3(y)
„H7“
P4(x)
„H8“
P4(y)
„H9“
P5(x)
„I0”
P5(y)
„I1”
P6(x)
„I2”
P6(y)
„I3”
P7(x)
„I4”
P7(y)
„I5”
P8(x)
„I6”
P8(y)
„I7”
P9(x)
„I8”
P9(y)
„I9”
P10(x)
„J0“
P10(y)
„J1“
P11(x)
„J2“
P11(y)
„J3“
P12(x)
„J4“
P12(y)
„J5“
P13(x)
„J6“
P13(y)
„J7“
P14(x)
„J8“
P14(y)
„J9“
P15(x)
„K0“
P15(y)
„K1“
P16(x)
„K2“
P16(y)
„K3“
7.2.10. Linear.-Menu
6890_5060_05a_oi_e.doc / Mrz-21 Page 31 / 40
Page 32

Display -Menu
Code
Setting Range
Default
Up-Date-Time
Update time of the LCD display (seconds)
„K4“
0.05...1.00
0.10
Display Mode
Scaling of the unit's engineering units and the actual LCD display
„K5“
0..4
0
0
Hz
1
kHz (switch points and analog output remain in Hz)
2
RPS (revolutions per second) = f / Encoder Factor (*)
3
RPM (revolutions per minute) = 60 x f / Encoder Factor (*)
4
Customer-specific units set by Encoder-Factor und Multiplier
Display = f x Multiplier / Encoder Factor (*)
Encoder Factor number of impulses per revolution “ppr”
(with Display-Modes 2 – 4 only)
„K6“
1..99999
1
Multiplier Impulse multiplier (with display-Mode 4 only)
Display = f x Multiplier / Encoder Factor
„K7“
1..200
1
7.2.11. Display –Menu
*) f = Input frequency in Hz
With display modes 2 – 4 also the switching point settings will use the same engineering units
as set for the display
6890_5060_05a_oi_e.doc / Mrz-21 Page 32 / 40
Page 33

1 2 3 4 5 6 7 8 9 10 11 12 13
14 15 16 17 18 19 20 21 22 23 24 25
GND (-)
GND
GND
GND
RxD
TxD
K1
K2
K3
+power in
+5,2V
A
/A
B
/B
0 - 10 V
0/4 - 20 mA
Control 1
Control 2
NO
NC
C
NO
NC
C
NO
NC
C
Relay K1
(standstill)
Relay K2
(underspeed forw. + rev.)
Relay K3
(overspeed, forward only)
A
B
+
+
2 x NAMUR
+24V
forward rotation
reverse rotation
0
Rel.1: Standstill
Rel.2: Underspeed
(pulsed output)
Rel.3: Overspeed
(forward roation only)
-100 +100
+300
8. Example for Commissioning
The following example is to explain setup and commissioning of the units with a typical
application.
A tooth wheel with 32 teeth should be monitored with respect to speed and standstill
For speed pick-up we use two proximity switches "Namur-type", which for detection of the
direction of rotation are mechanically displaced to generate an impulse offset
Relay 1 should signal "standstill" when one second after detection of "zero frequency" no
further input impulse has been registered
Relay 2 should generate a timed output pulse of 0.3 seconds when the speed drops below
100 RPM in either forward or reverse direction.
Relay 3 should switch on and catch when, with forward direction only, the speed exceeds
300 RPM. With reverse direction relays 3 should not respond at all
Release of the relay 3 catch state should be possible by either a positive signal applied to
input "Control1", or by activating the ENTER key.
6890_5060_05a_oi_e.doc / Mrz-21 Page 33 / 40
Page 34

Nr,
Menu
Parameter
Value
Function
1
Preselect Menu
Preselection1
Preselection2
Preselection3
--100
300
unimportant (relay 1 is used for standstill)
Switching point for "underspeed"
Switching point for "overspeed"
2
Encoder Menu
Encoder Proper.
Wait Time
=1
=5,00
A/B/90°, HTL / NPN for two displaced Namur sensors
Frequencies < 0,2 Hz are considered as "0"
3
Command
Menu
Key Enter Func.
Input 1 Config.
Input 1 Func.
=7
=1
=7
ENTER key to release the relay 3 catch
Function of "Control1" input is static HIGH
"Control1" input to release the relay 3 catch
4
Switching
Menu
Pulse Time 1
Pulse Time 2
Pulse Time 3
Presel. Mode1
Presel. Mode2
Presel. Mode3
Output Polarity
Start-up Mode
Start-up Relay
Lock Relay
Standstill Time
=0
=0.30
=0
=3
=1
=4
=0
=0
=0
=4
=1.00
Relay 1 static
Relay 2 timed output 0.3 seconds
Relay 3 static
Relay 1 energizes after lapse of standstill time
Relay 2 energizes when absolute value underpasses
Relay 3 energizes with positive overstepping only
All relays with non-inverted function (energize)
No start-up-delay function
No relay assignment to start-up-delay
Relay 3 to operate with catch function
Standstill output 1 second after detection of
"frequency = 0"
(i.e. 6 seconds after the last input pulse)
5
Display Menu
Display Mode
Encoder Factor
Multiplier
=3
=32
=1
Engineering units are RPM
Tooth wheel generates 32 pulses per revolution
No specific impulse scaling
The table below shows the setup procedure for an application according to the previous example.
Parameters which are not mentioned are optional, but not relevant for this function.
6890_5060_05a_oi_e.doc / Mrz-21 Page 34 / 40
Page 35

x-registers must use continuously increasing settings, i.e. P1(x) must
have the lowest and P16(x) must have the highest setting
All entries use a percental format of xx.xxx% full scale.
Setting 000.000 % means zero output and setting 100.000 % means
full scale output.
With Linearisation Mode set to 1, it is a must to set P1(x) to 0 % and
P16(x) to 100 %. Linearisation is defined in the positive range only
and the negative range will be a mirror image of the positive range
with reference to zero.
With Linearisation Mode set to 2, it is a must to set P1(x) to –100 %
and P16(x) to +100 %. This enables the user to set curves which are
not symmetric to the zero position.
x
y
P1(x)= 0%
P1(y)=10%
Linearisation Mode = 1
x
y
Linearisation Mode = 2
P1(x)= -100%
P1(y)= 95%
P8(x)= 0%
P8(y)= 80%
P16(x)=+100%
P16(y)= -60%
*)
P16(x)=100%
P16(y)= 80%
*) Output mode = 0
9. Appendix
9.1. Hints for Use of the Linearization Function
The linearization function of these units allow to convert a linear input frequency into a non-linear
developing, which can be indicated on the LCD display and which is also available as analog
signal or as serial data, for further processing.
There are 16 programmable x/y coordinates available, which can be set in any desired distance
over the full conversion range. Between two coordinates, the unit uses linear interpolation.
Therefore it is advisable to use more coordinates in a range with strong curves and only a few
coordinates where the curvature is less.
To specify an individual linearization curve, the „Linearisation Mode“ register must be set to
either 1 or 2.
The registers P1(x) to P16(x) are used to specify the coordinates on the x-axis. These are the
measuring values that the unit normally would generate according to the actual input frequency.
These settings must be in % of full scale.
Now enter the attached values to registers P1(y) to P16(y). These are the values that the unit will
generate instead of the x- values, i.e. P2(y) will substitute P2(x) etc.
6890_5060_05a_oi_e.doc / Mrz-21 Page 35 / 40
Page 36

EOT
AD1
AD2
C1
C2
ENQ
EOT = control character (Hex 04)
AD1 = unit address, High Byte
AD2 = unit address, Low Byte
C1 = register code, High Byte
C2 = register code, Low Byte
ENQ = control character (Hex 05)
ASCII Code:
EOT 1 1 : 9
ENQ
Hex Code:
04
31
31
3A
39
05
Binary Code:
0000 0100
0011 0001
0011 0001
0011 1010
0011 1001
0000 0101
STX
C1
C2
x x x x x x x
ETX
BCC
STX = control character (Hex 02)
C1 = register code, High Byte
C2 = register code, Low Byte
xxxxx = readout data
ETX = control character (Hex 03)
BCC = block check character
9.2. Data Readout via Serial Interface
All register codes shown in the "Serial Menu" are available for serial readout by PC or PLC. For
communication the monitors use the Drivecom Protocol according to ISO 1745. All protocol details
can be found in our manual SERPRO_2a.doc which is available for download from our homepage
www.motrona.com.
To request for a data transmission you must send the following request string to the converter:
The following example shows the request string for readout of the actual input frequency of a
monitor (code :9) from a unit with unit address 11:
After a correct request, the unit will respond:
For all further details see SERPRO_2a.doc.
6890_5060_05a_oi_e.doc / Mrz-21 Page 36 / 40
Page 37

Action
Parameter settings
1
Assign the Override Command to key “UP”
Key Up Func. = 2
2
Select relays/outputs K1 and K3
Relay Action = 5
3
Set the desired switching state of the
relays/outputs (both de-energized)
Action Polarity = 2
Action
Parameter settings
1
Assign the Freeze command to input “Control1”
Input 1 Func. = 2
2
Set the input to “Active High” characteristics
Input 1 Config = 1
3
Assign the “Freeze relays” function to the input
Relay Action = 8
These commands will override the switching states of the selected relays/outputs. All
relays/outputs will immediately return to the actual control state after removing the
override command. All internal measuring and control cycles will continue normally.
To use these functions, please set the corresponding key and input characteristics to
static operation only, since dynamic (edge-triggered) operation would make no sense
9.3. “Relay Action”, override relay states by programmed states
Models providing relay outputs allow to temporary change the actual relay states according to a
programmable ON / OFF pattern, or to temporary freeze the actual switching states. These
override functions can be activated by either touching a front key or by a remote command.
9.3.1. Override relay/output states by programmable ON / OFF states
Parameter “Relay Action” allows to select which of the relays/outputs should be affected by the
override action. Parameter “Action Polarity” provides setting of the desired “ON / OFF” pattern»
(see section 7.2.9, “Switching Menu”). The desired way of activation this override command can
be set by the “Command-Menu” (see 7.2.6).
Application example:
You would like to temporary de-energize relays K1 and K3 by touching the key “UP”, whilst relay
K2 should continue to function normally.
9.3.2. Freeze the actual switching state of all relays
This function will temporary freeze all relays in their actual state for the duration where you press
a key or apply a remote command. During the freeze period the relays will no more follow any
changes of the input frequency
Application example:
You would like to freeze all relays by applying a “High” signal to input “Control1”
6890_5060_05a_oi_e.doc / Mrz-21 Page 37 / 40
Page 38

The command monitor uses always the same relay/transistor output to which the
underspeed function has been assigned.
It is important to set a time higher than the Start-up delay time!
While the command monitor function is active, you can see an indicator box in the
PI/PO column of the PC screen. The "Command Monitor" box shines blue when the
motion command is in "Disable" state.
9.4. Monitoring of remote motion enable signals
The unit provides a special "Command Monitor" function for logical control of a motion enable
signal and the resulting response of the system. In addition to the normal monitoring functions
this mode is suitable to generate alarm outputs under any of the following conditions:
motion is disabled, but still the system moves
motion is enabled, but the system does not move at all (mechanical deadlock), or the
system does not reach the scheduled speed within an expected time (overload)
the motion command changes over from "enable" to "disable" but the system does not come
down to standstill within an expected time
The following parameter settings will activate the Command Monitor function:
9.4.1. Definition of a speed window
The application requires one of the relays to operate in overspeed mode (Preselect Mode = 0) and
another relay to operate in underspeed mode (Preselect Mode = 1). This will define a window for
the expected speed under regular motion conditions (see 7.2.9)
9.4.2. Assignment of a control input
One of the two control inputs has to be set to the control function "12" to activate the monitoring
of the command. This input must be connected to the remote Enable/Disable signal (see
parameters "Input Function" under 7.2.6)
9.4.3. Assignment of the control polarity
Parameter "Input Config" provides setting of the input polarity as follows:
Input Config = 0 => Motion disabled (stop) corresponds to input level "LOW"
Motion enabled (run) corresponds to input level "HIGH"
Input Config = 1 => Motion disabled (stop) corresponds to input level "HIGH"
Motion enabled (run) corresponds to input level "LOW"
9.4.4. Setting of a Start-up delay time
Any signal changes from "disable" to "enable" or vice-versa will require some delay until the
system could really follow the command (acceleration or deceleration). Therefore it is mandatory
to set an appropriate start-up delay time (to the relay/output responsible for "underspeed" only).
See section 7.2.9 “Start Up Mode" and "Start Up Relay".
9.4.5. Setting of an appropriate Standstill definition
Under parameter "Standstill Time" an appropriate time must be set (see section 7.2.9).
6890_5060_05a_oi_e.doc / Mrz-21 Page 38 / 40
Page 39

(3.583’’)
91,0 mm
72,0 mm
(2,835’’)
33,0 mm
51,0 mm
76,0 mm
(1.299’’)
(2.001’’)
(2.992’’)
Front view
Side view
10. Dimensions:
6890_5060_05a_oi_e.doc / Mrz-21 Page 39 / 40
Page 40

11. Technical Specifications
Power supply:
Input voltage:
Protection circuit:
Ripple:
Consumption:
17 … 30 VDC
reverse polarity protection
≤ 10 % at 24 VDC
approx. 70 mA (unloaded)
Connections:
Connector type:
screw terminals, 1,5 mm² / AWG 14
Encoder supply:
Output voltage:
Output current:
approx. 5.2 V
max. 70 mA
Incremental input:
Signal levels:
Characteristic (HTL):
Internal resistance (HTL):
Channels:
Frequency:
RS422, differential voltage > 1 V
TTL: LOW 0 … 0.5 V / HIGH: 3 … 5.3 V
HTL: LOW 0 … 4 V / HIGH: 10 … 30 V
NPN / PNP
Ri ≈ 4.75 kOhm
A, /A, B, /B
max. 1 MHz at RS422 and TTL symmetrical
max. 350 kHz at HTL and TTL asymmetrical
Control inputs:
Number of inputs:
Application:
Signal levels:
Internal resistance:
min. time of dynamic signals:
min. time of static signals: 2 msec.Frequenz (Steuer-Eingänge):
2
inductive proximity switches or control commands
LOW < 2.5 V, HIGH > 10 V (max.30 V),
Ri ≈ 3.9 kOhm
50 µs
2 ms
Analog output:
(not with
6890.5067
and 6890.5069)
Voltage output:
Current output:
Resolution:
Accuracy:
Oscillation time:
-10 … +10 V / 0 … +10 V (max. 2 mA)
0 … 20 mA / 4 … 20 mA (burden: max. 270 Ohm)
14 bit (±13 bit)
0.1 %
approx. 200 µs (reaction after 2 x sampling time + 200 µs)
Relay outputs:
(only with
6890.5060
and 6890.5067)
Number of relays:
Operating capacity:
Reaction time:
3 potential free changeover contacts
30 VDC / 2 A or 115 VAC / 0.6 A or 230 VAC / 0.3 A
approx. 4 ms
Transistor outputs:
(not with
6890.5061
and 6890.5069)
Number of outputs:
Signal levels:
Output current:
Protection:
Reaction time:
3
5 … 30 VDC (depends on COM+ voltage), PNP
max. 350 mA per output
short circuit proof
< 1 ms
Serial interface:
Format:
Baud rate:
RS232
2400 … 38400 Baud
Display:
Type:
Characteristic:
Background lightened LCD
2 lines, each 16 characters, 3,5 mm
Housing:
Material:
Mounting:
Dimensions (w x h x d):
Protection class:
Weight:
Plastic
35 mm top hat rail (according to EN 60715)
72 x 91 x 76 mm
IP20
approx. 200 g
Temperature
range:
Operation:
Storage:
0 °C … +45 °C / +32 … +113 °F (not condensing)
-25 °C … +70 °C / -13 … +158 °F (not condensing)
Failure rate:
MTBF in years:
23.4 a (long-term usage at 60 °C / 140 °F )
Conformity and
standards:
EMC 2004/108/EC:
LV 2006/95/EC:
RoHS 2011/65/EU:
EN 61000-6-2, EN 61000-6-3, EN 61000-6-4
EN 61010-1
EN 50581
6890_5060_05a_oi_e.doc / Mrz-21 Page 40 / 40
 Loading...
Loading...