

Motovario TBP Series, TP Series, TSX Series, THX Series, TPX Series Use And Maintenance Instructions
...
www.motovario.com
USE AND MAINTENANCE
INSTRUCTIONS FOR
ELECTRIC MOTORS
EN
QL0219 / REV.3

ORIGINAL VERSION IN ITALIAN
TRANSLATED VERSION IN ENGLISH
Chapter
1 Scope 4
2 General safety warning 4
3 Compliance with EU directives – CE marking 4
4 Electric motor identication 5
5 Mechanical installation 7
6 Electrical installation and start-up 8
7 Incremental encoder 9
8 Forced ventilation 10
9 Electric motor protection 11
USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
CONTENTS
10 Maintenance / spare parts 12
11 Assembly/disassembly instructions 12
12 Disposal and recycling 12
13 Storage 13
14
15
16
17
18 "ML type" direct current brake 18
19 Motor power supply wiring diagrams 20
Warranty claims
Assistance
"FM type" direct current brake
"MS type" alternating current brake
13
13
14
16
33

www.motovario.com
1. SCOPE
The instructions in this manual apply to the following series of asynchronous electric motors produced by MOTOVARIO S.p.A:
The instructions in this manual apply to the following series of asynchronous electric motors produced by MOTOVARIO S.p.A:
- TS (three-phase, single polarity, standard eciency);
- TH (three-phase, single polarity, high eciency);
- TP (three-phase, single polarity, premium eciency);
- TBS (three-phase, self-braking, single polarity, standard eciency);
- TBH (three-phase, self-braking, single polarity, high eciency);
- TBP (three-phase, self-braking, single polarity, premium eciency);
- TSX (three-phase, single polarity, standard eciency for aggressive / corrosive / food environments);
- THX (three-phase, single polarity, high eciency for aggressive / corrosive / food environments);
- TPX (three-phase, single polarity, premium eciency for aggressive / corrosive / food environments);
- TBSX (three-phase, self-braking, single polarity, standard eciency for aggressive / corrosive / food environments);
- TBHX (three-phase, self-braking, single polarity, high eciency for aggressive / corrosive / food environments);
- TBPX (three-phase, self-braking, single polarity, premium eciency for aggressive / corrosive / food environments);
- D (three-phase, double polarity);
- DB (three-phase, self-braking, double polarity);
- S (single-phase);
- HSE (high starting torque single-phase with electronic cutout).
Specialist products (i.e. dierent to those present in our catalogues and/or product oers) or specialist applications (e.g. power supply
from inverters) require additional information to be provided.
2. GENERAL SAFETY WARNING
Electric motors are a source of electrical hazards and consequently their improper use may cause injury and/or damage to people,
animals and objects.
Read the following instructions carefully before starting up the motor; all installation, commissioning, maintenance and
protection of the electric motor must be done by qualified staff in full compliance with established legislation and technical
regulations as well as the safety regulations governing the electrical equipment of machinery as declared by European
standard EN60204-1.
Please note that the present literature supplements and does not replace any established legislation, technical regulations or
safety regulations governing electric motors; it merely makes practical suggestions that qualified personnel can make use of.
It is forbidden to use electric motors in potentially explosive atmospheres unless expressly foreseen and specified on the
nameplate in compliance with European Directive 94/9/EC.
Motovario is exempt from any responsibility deriving from improper use or failure to follow current safety directives governing
electric material.
3. COMPLIANCE WITH EU DIRECTIVES – CE MARKING
Standard three-phase asynchronous electric motors (TS, TH, TP, TSX, THX, TPX, D series) and single-phase (S and HSE series) comply with
the standardised construction regulation IEC 60034-1 and therefore meet the requirements of the Low Voltage Directive 2014/35/EU.
The electric motor, considered as a component, is compliant with the following directives:
• Directive ROHS 2011/65/EU relating to the prohibition or the limitation of the use of noxious substances in electrical and electronic
equipment.
• Directive ErP 2009/125/EC on ecological designing of energy-using devices and in particular EC Regulation
no. 640/2009 (and subsequent UE modication no. 4/2014) on the ecological design of electric motors.
• Directive EMC 2014/30/EU relating to intrinsic characteristics in relation to emissions and levels of immunity.
All standard mounting position motors in continuous operation and powered from the mains are compliant with general standards
EN 61000-6-2, EN 61000-6-3, 61000-6-4 on electromagnetic emission and immunity; in the case of brake motors (TBS, TBH, TBP, TBSX,
TBHX, TBPX, DB RRSD series) or full wave rectier (DBR) the lter is implemented by connecting a 440Vac 0.22μF class X2 condenser in
parallel to the AC power, as per EN132400; the half-wave rectier type RV6 has no integral lter and is thus suited to installation with
the lter upline of the machine (to be done by the client). Follow the instructions of the devices' manufacturers in case of intermittent
malfunctions and interferences generated by the triggering devices, power supplies with inverters, systems with encoders, etc. All
electric motors are intended to be integrated in equipment and complete systems and must never be started until the equipment
they are installed in is compliant with Machinery Directive (Certicate of Integration - Directive 2006/42/EC Ann. II B). The compliance
of a complete installation with the "Machinery Directive" and the EMC Directive is the responsibility of the machine's manufacturer.
According to EC Regulation no. 640/2009, starting from 01/01/2015 the motors of the TH series (IE2, high eciency) with power greater
than or equal to 7.5 kW can be started in the European Union only if supplied by an inverter. From 01/01/2017 this provision applies to
the motors of the TH series with power greater than or equal to 0.75 kW.
4
USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
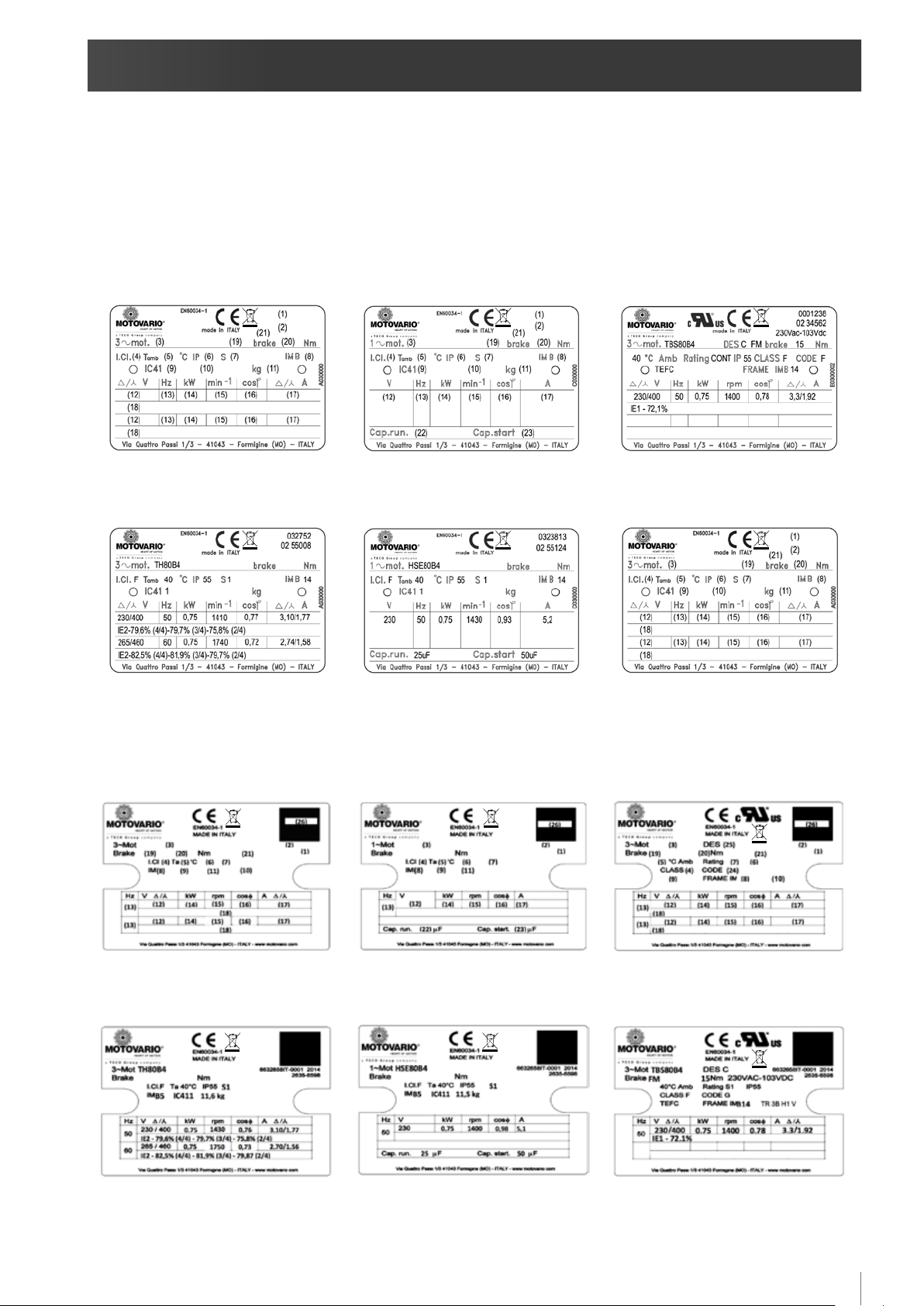
4. ELECTRIC MOTOR IDENTIFICATION
The electric motor is equipped with a metal silk-screen printed and/or punched nameplate or an adhesive label glued on metal support.
Symbols and abbreviations are detailed in the following page.
NAMEPLATES
THREEPHASE MOTOR
NAMEPLATE LAYOUT
THREE-PHASE MOTOR
COMPLETED EXAMPLE
SINGLEPHASE MOTOR
NAMEPLATE LAYOUT
SINGLE-PHASE MOTOR
COMPLETED EXAMPLE
UL/CSA MOTOR NAMEPLATE
LAYOUT
UL/CSA MOTOR
COMPLETED EXAMPLE
LABELS
THREEPHASE MOTOR LABEL SINGLEPHASE MOTOR LABEL UL/CSA MOTOR LABEL
5
www.motovario.com
(1) Serial number
(2) Year of manufacture – order number
(3) Motor type code
(series/size/no. poles)
(4) Insulation class
(5) Maximum ambient operating temperature
(6) IP protection rating
(7) Service
(8) Construction type
(9) Cooling method (*)
(10) Additional options (see below)
(11) Motor weight (only for > 30 kg)
(12) Motor voltage (depending on connection)
(13) Power frequency [Hz]
(14) Nominal power delivery [kW]
(15) Nominal speed [rpm]
(16) Nominal power factor
(17) Nominal current (depending on connection) [A]
(18) Code IE1, IE2 or IE3 (depending on type of motor and
whether applicable) followed by eciency value at 4/4, 3/4 and
2/4 of nominal power.
(brake motors only)
(19) Brake type
(20) Nominal braking moment [Nm]
(*) For UL/CSA motors, the cooling system is indicated with the following codes:
TEFC = (T)otally (E)nclosed (F)an (C)ooled - corresponds to IC411 (self-ventilation)
TENV = (T)otally (E)nclosed (N)ot (V)entilated - corresponds to IC410 (non-ventilated)
TEBC = (T)otally (E)nclosed (B)lower (C)ooled - corresponds to IC416 (forced ventilation)
(21) Brake power supply
(single-phase version only)
(22) running capacitor [μF]
(23) starting capacitor [μF]
(UL/CSA version only)
(24) “NEMA Electrical Design Classication”
(25) locked rotor current identication code
(ANSI/NFPA 70-1996)
(26) QR code
Additional options (10) notes
- H1 condensation heaters for voltage 110V
- H2 condensation heaters for voltage 230V
- TR humid environment construction
- LT low temperature construction
- HT high temperature construction
- 3B no. 3 bimetal thermal fuses
- 3P no. 3 thermistors (PTC)
- A backstop device (anti-clockwise rotation permitted)
- B backstop device (clockwise rotation permitted)
- E encoder
- V ywheel
- HC rapid connection
6

USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
5. MECHANICAL INSTALLATION
Before installation please check that:
1) the electric motor is not visibly damaged (whether damaged in transit or during storage).
2) the information on the nameplate corresponds with the features of the electric motor and its intended use; the power supply voltage
matches the mains voltage; the permitted voltage tolerance is ±10% for 230/400V 50Hz and 265/460V 60Hz, and ±5% for other voltages
and/or single-phase motors.
3) the ambient temperature is between -15°C and +40°C (+50°C 2- and 4-pole TS motors with nominal power >= 0.75 kW); in addition,
the altitude must be < 1000m above sea level; ambient temperatures outside this range and/or higher altitudes require the application
of a corrective power factor (see product catalogue).
4) If the environment features sudden temperature changes with possible consequent condensate formation, it is recommended to
request the condensation heaters and/or the condensate discharge holes.
5) The IP protection rating given on the nameplate is suited to the environment under the terms of IEC 60034-5.
6) In outdoor installations, protect the motor from the direct sunlight and, if possible, from the atmospheric agents.
Use the provided attachment points to lift the motor; the eyebolts on the motor are for lifting the motor only and not any other
equipment coupled to it; ensure that the systems mounted to the motor match the electric motor's specications.
Preliminary tasks:
1) remove any fastenings and protective material used for shipping (e.g. guards on the ends of the motor shaft) and check that the shaft
turns freely (for TBS – TBH – TBP – TBSX - TBHX - TBPX – DB series brake motors, rst release the manual release lever if present);
2) carefully clean the ends of the shaft with a normal solvent to remove any rust protection, contaminants and similar matter; take care
that the solvent does not get into the bearings or comes into contact with the seal ring lips and damages them;
3) check, especially after lengthy storage, that the motor has not absorbed humidity, by measuring the insulation resistance which must
be < 10MΩ at 20°C; take the measurement by applying a direct current of 500V between the phases towards GND; the windings must
be discharged immediately after the measurement has been taken. If the insulation resistance is insucient the motor must be dried
with hot air or using an isolation transformer, connecting the windings of each phase in series and applying an auxiliary AC current of
10-20% of the nominal current, until the resistance measurement is satisfactory.
Installing the motor:
1) take care to secure the motor adequately in relation to its weight, mounting type and position;
2) assemble the motor on a at, rigid, vibration-free and deformation-resistant surface; align the motor carefully with the driven
machine to avoid inadmissible stresses on the shaft and observe the overhung and axial loading specications (see product catalogue);
misalignments and forced locking can result in hazardous overheating;
3) if the motor construction type is IEC B14, the four retaining screws must be screwed in the ange even if they are not necessary. It
is recommendable to apply sealant, such as Loctite 242, on the retaining screws thread. The maximum screwing depth in the bearing
shield is 2 x d, where "d" is the threaded hole;
4) vertical installations must include measures to prevent foreign bodies falling into the ventilation slots; in such case, we recommend
using a fan cover with awning (compulsory in case of self-braking motor);
5) during assembly, avoid damaging the bearings by using the shaft as a stop after removing the fan cover; do not knock the end of
the shaft;
6) the motor shaft is dynamically balanced and complete with half key from size 90 upwards, with normal vibration; make sure that any
parts to be locked to the motor shaft are balanced with half key; if using double-ended shaft motors, take care not to start the motor
until the unused key has been secured.
7) the motor must be mounted in such a way that the nameplate data is legible, the terminal block box can be inspected, the motor
compartment can be cleaned, there are no moving parts outside the guards (e.g. fan cover), the assembly is suciently ventilated
without bottlenecks or machining residue, dust or uids in the air supply, and that nothing is blocking normal dispersal of heat; nally,
ensure that there is sucient distance between the fan cover holes and any external protective devices which could potentially block
the inow of cooling air.
8) in particularly humid conditions: make sure, if possible, that the cables enter the terminal block box from below, and check for
condensation; if there is a condensation drain hole, drain the condensation, then ret the plug to restore the box's IP rating. Do this only
with the power supply visibly shut o (breaker open). If there are anti-condensation heaters, make sure the motor is not powered up or
rotating before turning them on; also make sure the heaters' power supply is compliant with their ratings.
7

www.motovario.com
6. ELECTRICAL INSTALLATION AND START UP
1) Connect the motor to the mains as shown in the diagram inside the terminal block box (the wiring diagrams are also included at the
end of this manual).
2) Do not connect up or start the motor if the wiring diagram is absent.
3) Do not start the motor with the key unengaged.
4) Before making the connections, check that the motor's wires are properly tightened down to the terminal block; to connect the cable,
use the parts kit in the bag supplied with the motor, paying particular attention to the maximum tightening torques; the terminals used
to hook up the cable must be isolated to ensure the minimum distances between the live parts and inactive metal parts; the cable gland
must be suited to the external diameter of the cable used; all unused cable entry points must be sealed to restore the box's IP rating.
5) As well as the main power terminals, the terminal block box may also contain the cable terminals for the thermal protective devices
and/or condensation heaters and/or the brake (if the motor in question is a brake motor with separate power supply). The cable
terminals in the terminal block for thermal protective devices and condensation heaters are usually free. For connecting up brakes with
separate power supplies please refer to the relevant section.
Motors can also be tted with incremental encoders and/or an external forced ventilation capacity (servo-ventilation). Please consult
the relevant sections.
6) The power and GND cables must comply with established practice and standards, and be properly insulated and rated for the current
draw; the connection cabling and cable cross sections must comply with EN60204-1.
7) All motors are equipped for grounding inside the terminal block box and outside on the motor casing; the GND clamp points are
marked with the relevant symbol.
8) Secure the GND cable to prevent its slackening (use an elastic washer between the terminal and the bolt) and rotating (use only split
cable terminals).
9) Before starting up the motor, check its direction of rotation; if it is required to run in the opposite direction from the default direction,
for three-phase motors (series TS, TH, TP, TSX, THX, TPX, TBS, TBH, TBP, TBSX, TBHX, TBPX, D; DB) simply swap 2 phases; for single-phase
motors (series S), refer to the wiring diagram. The direction of rotation is clockwise when seen from the drive side.
10) If a backstop device is present, do not start the motor in the stop direction; for inspection reasons, the backstop can only be
operated once in the stop direction at a voltage less than half the power voltage.
11) After wiring the unit, ret the terminal block cover with its gasket.
12) For brake motors, check the operation of the brake and its braking torque before starting the motor.
13) For motors of the TSX, THX, TPX, TBSX, TBHX, TBPX series, smear sealant (like LOCTITE 5331) on the cable glands and the closing
plugs and tighten them correctly; properly seal the cable inlet; thoroughly clean the sealing surface of the terminal block box; in case
of installation in particularly aggressive environments, seals (to be replaced if damaged) must be stuck on the terminal block box cover
with suitable sealant (like LOCTITE 3020); if present and if necessary, touch-up the anti-corrosion pain with kit that can be supplied
upon request.
14) Do not touch the motor's housing while it is running as it can reach more than 50°C.
8

USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
7. INCREMENTAL ENCODER
Motors can (optionally) be supplied with standard or low-resolution incremental encoders (for further information see product
catalogue).
Safety information
1) Wiring must always be done by fully qualied specialist personnel.
2) Shut o the power to all equipment/machinery involved in the wiring process.
3) Do not connect or disconnect the encoder when powered up as this may irrevocably damage it.
4) A suitable ground connection must be in place for the encoder to work properly. The cable screen must be grounded at both ends to
ensure the right shielding from EMC interference.
5) Do not bang or knock the encoder shaft in any way.
6) The standard incremental encoder either comes with or without connectors. Connectors are never supplied with the low-resolution
incremental encoder. Please consult the following wiring diagrams:
Standard incremental encoder
The standard incremental encoder either comes with or without connectors. If connectors are included, the male connector should
already be connected to the encoder, whereas the female connector is supplied separately and it is the responsibility of the customer
to connect it.
Female connector Male connector
Description of terminals
PIN, 12-pin
M23 Connector
6 Brown
5 White A Signal line
1 Black
8 Pink B Signal line
4 Yellow
3 Lilac Z Signal line
10 Blue GND Ground connection of the encoder
12 Red +U
9 Screen Screen Screen
2 - N. C.
11 - N. C.
1)
Potential free to housing
2)
Screen on the encoder side connected to the housing. On the control side connected to earth.
Please note: if the encoder is not supplied with a connector, refer to the colour code for the wiring.
Colour of wires Signal TTL, HTL Explanation
S
Supply voltage
Low-resolution incremental encoder
Connections:
BLUE Power supply - negative (ground)
BROWN Power supply - positive
BLACK K1 output channel
WHITE K2 output
SCREEN Connect to negative (ground)
Signal line
Signal line
Signal line
1)
2)
Output channels
K2 K2
K1 K1
Clockwise rotation Anti-clockwise rotation
9

www.motovario.com
8. FORCED VENTILATION
It may be necessary on all model sizes to resort to forced ventilation (cooling method IC416), obtained by means of an axial ow
servo-fan whose air ow rate is independent of the speed of rotation of the drive shaft. The power supply, independent from that of
the electric motor, is provided via a connector applied directly on the fan cover (single phase version 230V 50-60Hz, sizes 63-90), or by
means of a separate terminal block box mounted on the fan cover (single-phase 230V 50-60Hz sizes 100-132 and three-phase 400V
50-60Hz sizes 100-132).
Forced ventilation has been designed as a kit; therefore it is possible to modify a standard self-ventilated electric motor (IC411) into a
motor with forced ventilation (IC416) by following these simple instructions:
- disassemble the standard fan cover, unscrewing the fastening screws from the motor casing
- remove the fastening bush of the plastic fan and remove the fan with the help of a tool;
- assemble the forced ventilation kit by tightening it to the motor casing with the fastening screws of the fan cover just disassembled.
The application of the forced ventilation kit will increase the length of the motor (see dimensional tables).
The technical specications and power details are listed below.
motor [V] / [Hz] [W] [A]
63 230V/50-60Hz 14-16 0.09-0.11
71 230V/50-60Hz 14-16 0.09-0.11
80 230V/50-60Hz 33-36 0.20-0.24
90 230V/50-60Hz 33-36 0.20-0.24
100 230V/50-60Hz 33-36 0.20-0.24
112 230V/50-60Hz 76-90 0.35-0.40
132-160 230V/50-60Hz 76-90 0.35-0.40
100 380-420V/50Hz 380-480V/60Hz 55/60 0.21/0.20
112 380-420V/50Hz 380-480V/60Hz 55/60 0.21/0.20
132-160 380-420V/50Hz 380-480V/60Hz 55/60 0.21/0.20
IC416
Single-phase power Single-phase and three-phase power
size 63-71-80-90 size 100-112-132
(1)
(2)
three-phase
power
(3)
(1) Connector mPm B202000N2 DIN 43650-A/ISO 4400
(2) Cable gland M16x1.5 – Cable entry diameter 5-10 mm
(3) Three-phase power 400V
(4) Single-phase power 230V
10
single-phase
power
(4)

USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
9. ELECTRIC MOTOR PROTECTION
All electrical equipment must be protected against damage deriving from trouble or abnormal operation. The following phenomena
must be taken into consideration:
- overcurrents deriving from short-circuiting;
- overload currents;
- break or dip in supply voltage;
- motor overspeed.
In addition, for the purposes of safety, there needs to be protection against direct contact with live parts and indirect contact with parts
normally not live but which could become live in the event of insulation failure.
• Overcurrents deriving from short-circuiting.
Fuses interrupt the electric current, while the over-current relays and thermal cutouts open the circuit via automatic switches or
contactors. These protective devices must be installed upline from the conductors to be protected.
Overload and short circuit protection can take the form of: an automatic magnetothermic switch which must have sucient interrupting
capacity to interrupt the short circuit current, capable of protecting an electrical circuit from both overloads and short circuits; or switches
which, although capable of protecting electrical circuits from overloads, require additional fuses to be installed further upline to prevent
damage from short circuits. These must be time-delay fuses since motors draw larger than normal currents for up to several seconds
while coming up to speed.
• Overload currents.
operation; however, it is recommended for all other motors as well. Protection normally takes the form of thermal cutouts installed on all
live conductors except for neutral; in single-phase motors only one ungrounded live conductor is permitted.
The time constant of the protective device must be as close as possible to that of the motor; if this stringent requirement is not met, then
the safety device may become inecient or circuit interruption ill-timed. This is especially the case for intermittent motors or motors
which are subjected to a high number of operational processes (start-up, stop, reversing); here it is advisable to use temperature sensors
incorporated into the motor (PTC thermistors or bimetal thermal fuses) that can interrupt the current if the internal motor temperature
exceeds a certain level. These devices are also recommended in reduced cooling circumstances and all other situations where the motor
may overheat, but not necessarily because of an overload current.
Please bear in mind that such devices may not be sucient to protect the motor if the rotor is locked; in this case it may be worthwhile
to connect them to the thermal ones on the phases.
In general, equipment must be designed so that the motor does not automatically restart after the thermal protective device has been
triggered. In certain production cycles, the sudden halting of a motor (especially if not coordinated with other motors in the cycle) may
damage it; in this instance, the thermal protective devices can initially send a visual or audio warning signal to the operator, and then
eventually shut down the motor if no action has been taken. The level of action to be taken and the relevant time delays must be set so
as to avoid any kind of potential hazard. If the motor is powered via a converter (i.e. inverter), then it can also be protected by limiting
the absorbed current; this limit is generally set at a value superior to the nominal current so that the motor can withstand predicted peak
loads and have a sucient starting torque. As a result, the motor must be connected to another device capable of intervening if overload
conditions persist over a certain period of time.
• Break or dip in supply voltage.
undervoltage device must be in place that guarantees suitable protection (i.e. machine shut o) at a set voltage level. If machine
operation can withstand a voltage interruption or dip for a short period, an undervoltage time delay device can be tted. The operation
of the undervoltage protective device must not interfere with any machine shutdown commands.
• Motor overspeed.
absent, causing the load to drag the shaft. Protection against this is vital in that overspeed can be hazardous. Preventive measures can
be taken, such as motor speed sensors (centrifugal circuit breakers or voltage relays connected to tachymetric dynamos) which cut o
the power supply to the motor, and braking devices, which are necessary where the interruption of the electric current is not enough to
stop the driven load (e.g. lifting).
Overload protection must feature in all motors with a power rating over 0.5kW which are normally in constant
In situations where a dip or interruption in the supply voltage may result from faulty wiring, an
Motor overspeed can occur if the converter used to power the motor is faulty, or if the brake action is insucient or
Protection can take the form of: fuses, overcurrent relays or thermal cutouts.
• Protection against direct contact with live parts.
have been housed in the motor casing; furthermore, the terminal block box can only be opened using a special tool. The removal of
the terminal block box cover for maintenance purposes must only be carried out by qualied personnel and the power supply must be
visibly shut o, including auxiliary circuits (i.e. for condensation heaters), so that no accessible parts stay live.
In the case of live parts that remain energised after power has been shut o, e.g. capacitors in single-phase motors, then discharge these
capacitors (with the power supply visibly shut o) before proceeding.
• Protection against indirect contact with live parts.
external metal parts into contact with live parts, is mainly accomplished by connecting all the accessible parts to a protective ground
conductor and by using protective devices that act by cutting o the power when, due to a fault in the winding, current ows towards
earth.
In order to minimise risk of direct contact with the live parts of the motor, these
Protection against indirect contact, i.e. contact due to insulation faults that bring
11

www.motovario.com
The fundamental principle behind this kind of protection is, in the event of fault, to prevent a ow of voltage between an accessible part
and earth or between two simultaneously accessible parts, that lasts long enough to cause serious bodily harm if such parts are touched.
A distinction can be made between:
- a protective wiring system with a protective conductor grounded independently from the mains. This protection can be eected by
means of an overcurrent circuit breaker or a residual current circuit breaker;
- a protective wiring system with a neutral conductor grounded at origin and used as a protective conductor (in this case it is not possible
to use the residual current protection and so overcurrent circuit breakers are necessary).
Please refer to the relevant regulations and standards.
The operation of protective devices must be both coordinated and allow for individual device selection so as to adequately protect lines
and equipment. The automatic reset of protective devices after they have tripped is strictly forbidden as this can be hazardous.
In addition, trained personnel must manually reset the system which the electric motor belongs to or is the main component of.
When there is a neutral conductor, the installation of protective devices on the various conductors must take into account the type of
connection (system) used.
10. MAINTENANCE / SPARE PARTS
When ordering spare parts, quote the type of motor, product code and serial number given on the nameplate.
Before working on the motors or in their vicinities, shut o the power supply and wait for all moving parts to come to a halt; ensure that
the motor cannot restart as a result of moving parts dragging the shaft; nally, wait for the motor's surface temperature to drop below
50°C (burn hazard).
Periodic maintenance:
- inspect the motor at regular intervals;
- remove powder, dust, oil and dirt on the fan and fan cover; this helps air to circulate and keep the motor cool;
- check the condition of the seal rings and V-rings;
- check the electrical and mechanical connections and the tightening/anchor nuts and bolts;
- check the condition of the bearings, listening for strange noises or vibrations;
In the event that the motor needs to be disassembled and its internal components examined, then qualied personnel must be
enlisted who use appropriate equipment and follow the relevant procedures; Motovario is in no way responsible for any damage
or injury that results from the improper use of its parts by unauthorised personnel. Removing parts without the manufacturer's
authorisation voids the warranty and the manufacturer is not liable for any claims resulting therefrom.
11. ASSEMBLY/DISASSEMBLY INSTRUCTIONS
1. Disassembly: free the motor from its couplings with the operating part. Take o the fan cover and fan, removing the relative fastenings.
Remove the key. Unscrew and remove the screw tie bars holding the motor together. Take out the ange or front shield, extracting
it from the casing and from the bearing. Extract the rotor from the support of the opposite shield, taking care not to damage the
winding.
2. Replacing the bearings: extract the bearings with a special extractor. New bearings must be mounted using a press or buer resting
on the inside ring, or using the heat mounting method. Pre-lubricated shielded bearings that do not require greasing should be used
for all kinds of motors.
3. Stator rewinding: to be done at qualied workshops only; this however will invalidate the Motovario guarantee.
4. Assembly: follow the disassembly instructions in reverse order. The only warning is to take care when mounting the seal rings,
after cleaning their seats and turning the rings correctly with their concave surface facing outwards. On completion of maintenance and
inspections, run functional and safety checks (thermal protection, brake, etc.).
12. DISPOSAL AND RECYCLING
The crossed-out wheelie bin symbol shown on the plate or on the label indicates that the motor at the end of its useful life
must be disposed of separately from other waste. The adequate separate collection of the motor allows it to be recycled,
treated and disposed of in an environmentally compatible manner contributing to avoid possible negative eects on the
environment ad on the health, and favouring the reuse and/or recycle of its materials.
The motor must be rst of all disassembled following the indications in the previous paragraph. The packages materials can be recycled:
oils, greases, detergents, solvents and paint residues must be disposed of in compliance with the prevailing laws and regulations.
The materials remained after the motor disassembly (wrapped stator: copper, steel, aluminium; rotor: steel and aluminium; anges,
shields, feet and terminal block box cover: aluminium or cast iron; bearings and pinions: steel; seal rings and electronic waste: hazardous
waste) must be separated and disposed of in compliance with the prevailing laws and regulations.
12

USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
13. STORAGE
The motors must be stored in temperate, dry, clean conditions away from bad weather, vibrations and collisions. The shaft ends
must be protected with rustproong paint or grease (do not allow such products to come into contact with the seal rings, if present).
Condensation heaters (where present) should ideally be kept energised.
14. CLAIMS
In the event of a breakdown, the entitlement to repair under warranty is granted depending on: warranty expiry date, correct handling
and installation and the integrity of the manufacturer’s assembly prior to the work done by authorised personnel.
The customer is responsible for making sure that installation technicians and operators are familiar with these instructions.
Please contact technical assistance for any problems or queries you may have.
15. ASSISTANCE
The warranty covers a period of 24 months from the date of purchase; such right is not granted in case of clear damages
and wear, removal of non-authorised components and/or use of non-original spare parts. The customer is responsible for making sure
that installation technicians and operators are familiar with these instructions.
Additional instructions valid only for brake motors (TBS, TBH, TBP, TBSX, TBHX, TBPX, DB) are detailed below.
13

www.motovario.com
X
16. "FM TYPE" DIRECT CURRENT BRAKE
5762
151714
10
Sn
16
1. Brake magnet
2. Moving coil
3. Brake disc
4. Driving hub
11
1
8
13
9
5. Manual release lever (option)
6. Protective boot + O-ring (option)
7. Thrust springs
8. V-Ring (option, combined with 6)
9. Mounting bolts
10. Locknuts
11. Braking torque adjuster screw (option)
12. Key
13. Circlip
14. Cast iron shield
15. Vibration-damping O-ring
16. Flywheel for gradual starting/braking (option)
17. Stainless steel washer (option)
36104 12
Flywheel
Size Type
S
nSmax
X
W
J
W
B
1t1t11t2t22mBPa
M
mfJ
B
63 ..2 0.2 0.5 0.6 0.6 260 15.6 30 20 100 10 1.5 16 1.8-3.5 0.7 6.1
71 ..3 0.2 0.5 0.8 1.1 370 22.4 60 25 120 10 2.2 20 2.5-5-7.5-10 1.1 13
80 ..4 0.3 0.6 1 1.6 500 30 100 40 150 10 3.1 30 5-10-15-20 1.7 28
90S-90L
100
..5 0.3 0.6 1 3.5 750 45 120 50 220 15 4.9 40 13-26-40-55
2.3
3.15498
112 ..6S 0.35 0.7 1.2 8.8 1000 70 - 80 300 30 8.3 50 20-40-60 4.5 145
132S ..6 0.35 0.7 1.2 10.3 1100 77 - 80 200 20 9.5 65 37-50-75-100 4.8 200
132M-160S ..7 0.4 0.8 1.2 22.5 1650 132 - 100 200 20 12.3 65 50-100-150 6.9 350
Adjustment and maintenance
= nominal gap [mm]
S
n
S
= maximum airgap [mm]
max
X = release lever play [mm]
JB = brake disc moment of inertia [kgcm2]
W = maximum energy which can be
dissipated by brake [MJ ]
f
W1 = energy which can be dissipated
between two successive adjustments
of airgap from Sn to S
t1 = brake release time with rectier
with normal release (NBR, RSD) [ms]
t11 = brake release time with rectier
with fast release (SBR, RRSD) [ms]
t2 = brake response time
with AC side opening [ms]
t22 = brake response time
with DC side opening [ms]
mB = weight [kg]
Pa = power absorption [ VA]
MB = available brake torques [Nm]
mF = ywheel weight [kg]
JF = ywheel moment of inertia [kgcm2]
[MJ]
max
The braking moment is xed and is indicated on the motor nameplate.
Adjusting the gap
For correct brake operation, the gap between the brake magnet and the moving coil must be in the range (Sn - S
) shown in the table;
max
it can be adjusted with the mounting bolts and the locknuts, with a feeler gauge to check the actual gap.
Release lever play adjustment (if present)
When there is a manual release lever, adjust the free travel value X of the lever (tightening/loosening the nuts) to a level equal to or
greater than the one indicated in the table before releasing.
Maintenance
The scheduled maintenance interval will depend on actual braking duty and the work done by the brake between successive adjustments
W1. When running maintenance, check that the thickness of the friction member is no less than 1 mm (in this case replace the brake disk),
adjust the gap, check the braking torque, and check any play due to excessive wear during operation.
PLEASE NOTE: the eective values may be aected by the ambient temperature and humidity, the brake temperature and the wear
of the friction members; the maintenance intervals refer to the brake adjusted to a medium gap setting, nominal voltage and separate
power supply; as regards the braking torque, allow for a running-in period in which the brake lining adapts to the engine shield braking
surface, the duration of which (number of cycles) will depend on the actual braking load. Once the brake has been run in, in nominal
operating conditions a deviation from the declared value of ±10% is always acceptable.
14

USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
Connecting up the FM brake
If the brake is powered directly by the motor itself, this is called direct power supply, if it is powered separately, it is called separate
power supply. What follows is a more detailed explanation, which makes reference to the diagrams at the foot of the page.
1. Direct brake power:
supply cables on the AC side of the rectier are connected to the motor's power terminal board; when you
power up the motor, the brake coil is automatically energised and the brake is released; when power to the motor is shut o, the brake
automatically brakes the motor. During this phase, the brake response time t
has to be added to the delay R generated by the inertia of
2
the load and by the energy accumulated by the motor. R changes in every motor and – as it depends on the load – cannot be previously
calculated.
2. Separate brake power, brake opens only from the AC side:
of the motor. In this case stop time t
3. Direct brake power, DC side opens:
does not depend on the characteristics of both the motor and load.
2
connection possible on the basis of type 1, if one can cable the rectier's rapid braking contact
the brake is powered, via the rectier, by terminals separate from those
(DC side opening) as shown in gure 3. Despite the direct power supply (see point 1), the braking response time is independent of the
characteristics of the motor and load, and is signicantly shorter than that of case 2 (t
< t2). This connection is thus an alternative to the
22
use of rapid braking rectiers (RSD and RRSD).
4. Separate brake power, AC and DC sides open:
connection possible starting from type 2, if the rectier's rapid braking contact (DC
side power o) can be hooked up as shown in diagram 4. Response time equal to that of type 3, hence this connection is an alternative
to the use of rapid braking rectiers (RSD and RRSD). The advantage over the previous case is that during brake operation the energy
stored by the motor does not have to be absorbed by the rectier, thus giving it a longer service life.
Motovario supplies brakes hooked up as shown in types 1 and 2
to be specied as "direct" or "separate" brake power respectively in
the order. Type 3 and 4 connections must be implemented by the client.
If SBR rapid release rectiers are used, the brake release time reduces from t
to t11 (see graphs below).
1
In the event of independent power supply of the brake from a direct current power source, and thus minus rectier (ex. 24Vdc), the
supply cables of the brake are set inside the terminal block box and connected to a strip connector-type ying terminal block. In this
instance, refer to case 4 for the response times (power source excluded).
NBR
SBR
[A]
[Nm]
[A]
[Nm]
1 3 42
A B
t1 t2+R
t11 t2+R
[time]
[time]
[time]
[time]
[A]
[Nm]
[A]
[Nm]
A B
t1 t2
t11 t2
[time]
[time]
[time]
[time]
A B
[A]
[Nm]
t1 t22
[A]
[Nm]
t11 t22
A B
[time]
[time]
[time]
[time]
A = Motor B = Brake
15

www.motovario.com
10
17. "MS TYPE" ALTERNATING CURRENT BRAKE
14 16 15 2 6 7 5
X
11
1
8
13
9
Sn
1. Brake magnet
2. Moving coil
3. Brake disc
4. Driving hub
5. Manual release lever (option)
6. Protective boot + O-ring (option)
7. Thrust springs
8. V-Ring (option, combined with 6)
9. Mounting bolts
10. Locknuts
11. Braking torque adjuster screw (option)
12. Key
13. Circlip
14. Cast iron shield
15. Vibration-damping O-ring
16. Stainless steel washer (option)
10
4
Size Type
S
nSmax
X
W
J
B
63 ..2 0.2 0.5 0.6 0.6 260 15.6 4 20 1.3 60 1.8-3.5
71 ..3 0.2 0.5 0.8 1.1 370 22.4 4 40 1.9 80 2.5-5-7.5-10
80 ..4 0.3 0.6 1 1.6 500 30 6 60 3 110 5-10-15-20
90S-90L-100 ..5 0.3 0.6 1 3.5 750 45 8 90 5.6 250 13-26-40
112 ..6S 0.35 0.7 1.2 8.8 1000 70 16 120 9.7 470 40-60
132S ..6 0.35 0.7 1.2 10.3 1100 77 16 140 10.3 550 50-75-100
132M-160S ..7 0.4 0.8 1.2 22.5 1650 132 16 180 14.7 600 50-100-150
12
6 3
W
1t1t2mBPa
S
= nominal gap [mm]
n
S
= maximum airgap [mm]
M
B
max
X = release lever play [mm]
JB = brake disc moment of inertia [kgcm2]
W = maximum energy which can be
dissipated by brake [MJ ]
W1 = energy which can be dissipated
between two successive adjustments
of airgap from Sn to S
t1 = brake release time with rectier
with normal release (NBR, RSD) [ms]
t2 = brake response time
with AC side opening [ms]
mB = weight [kg]
Pa = power absorption [ VA]
MB = available brake torques [Nm]
[MJ]
max
Adjustment and maintenance
The braking moment is xed and is indicated on the motor nameplate.
Adjusting the gap
For correct brake operation, the gap between the brake magnet and the moving coil must be in the range (Sn - S
it can be adjusted with the mounting bolts and the locknuts, with a feeler gauge to check the actual gap.
Release lever play adjustment (if present)
When there is a manual release lever, adjust the free travel value X of the lever (tightening/loosening the nuts) to a level equal to or
greater than the one indicated in the table before releasing.
) shown in the table;
max
Maintenance
The scheduled maintenance interval will depend on actual braking duty and the work done by the brake between successive adjustments
W1. When running maintenance, check that the thickness of the friction member is no less than 1 mm (in this case replace the brake disk),
adjust the gap, check the braking torque, and check any play due to excessive wear during operation.
PLEASE NOTE: the eective values may be aected by the ambient temperature and humidity, the brake temperature and the wear
of the friction members; the maintenance intervals refer to the brake adjusted to a medium gap setting, nominal voltage and separate
power supply; as regards the braking torque, allow for a running-in period in which the brake lining adapts to the engine shield braking
surface, the duration of which (number of cycles) will depend on the actual braking load. Once the brake has been run in, in nominal
operating conditions a deviation from the declared value of ±10% is always acceptable.
16

USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
t1 t2+R
t1 t2
t1 t2+R
[Nm]
[tempo]
[tempo]
[A]
Connecting up the MS brake
1. Direct brake power:
the brake is powered directly o the motor's terminal block; when the motor is powered up, the brake coil is
automatically energised and the brake is released; when power to the motor is shut o, the brake coil is automatically de-energised and
the brake brakes the motor. During this phase, the brake response time t
has to be added to the delay R generated by the inertia of the
2
load and by the energy accumulated by the motor. R changes in every motor and – as it depends on the load – cannot be previously
calculated.
[A]
MOTOR BRAKE
[tempo]
[Nm]
[tempo]
2. Separate brake power:
the brake is powered o a terminal block separate from the motor's block; in this case t1 and t2 depend only
on the characteristics of the brake.
[A]
[Nm]
MOTOR BRAKE
[tempo]
[tempo]
17

www.motovario.com
10°
18. "ML TYPE" DIRECT CURRENT BRAKE
5
6
10
11
7
8
9
12
2341
1. Brake magnet
2. Moving coil
3. O-Ring
4. Thrust springs
5. Manual release lever
6. Mounting bolts
7. Studbolt
8. Return spring
9. Cast iron fan
10. Key
11. Gap adjuster locknut
12. Motor shield
Sn
Size Type
S
nSmax
63 ..2 0.2 0.5 0.6 0.6 260 15.6 30 20 100 10 1.5 16 1.8-3.5
71 ..3 0.2 0.5 0.8 1.1 370 22.4 60 25 120 10 2.2 20 2.5-5-7.5-10
80 ..4 0.3 0.6 1 1.6 500 30 100 40 150 10 3.1 30 5-10-15-20
90S-90L
100
..5 0.3 0.6 1 3.5 750 45 120 50 220 15 4.9 40 13-26-40-55
112 ..6S 0.35 0.7 1.2 8.8 1000 70 - 80 300 30 8.3 50 20-40-60
132S ..6 0.35 0.7 1.2 10.3 1100 77 - 80 200 20 9.5 65 37-50-75-100
132M-160S ..7 0.4 0.8 1.2 22.5 1650 132 - 100 200 20 12.3 65 50-100-150
X
W
J
W
B
1t1t11t2t22mBPa
M
B
S
= nominal gap [mm]
n
S
= maximum airgap [mm]
max
JB = brake disc moment of inertia [kgcm2]
W = maximum energy which can be
dissipated by brake [MJ ]
W1 = energy which can be dissipated
between two successive adjustments
of airgap from Sn to Smax [MJ]
t1 = brake release time [ms]
t2 = brake response time with AC side
power shutdown [ms]
t22 = brake response time
DC side [ms]
mB = weight [kg]
Pa = power absorption [W]
MB = braking moment [Nm]
Adjustment and maintenance
The braking moment is given by the value MB in the table and on the motor nameplate.
Adjusting the gap
For correct brake operation, the gap between the brake magnet and the moving coil must be in the range (Sn - S
it can be adjusted with the shaft head locknut, with a feeler gauge to check the actual gap.
Maintenance
The scheduled maintenance interval will depend on actual braking duty and the work done by the brake between successive adjustments
W
. When running maintenance, check that the thickness of the friction member is no less than 1mm, adjust the gap, check the braking
1
torque, and check any play due to excessive wear during operation (in particular the play between the fan hole and the motor shaft).
PLEASE NOTE: the eective values may be aected by the ambient temperature and humidity, the brake temperature and the wear
of the friction members; the maintenance intervals refer to the brake adjusted to a medium gap setting, nominal voltage and separate
power supply; as regards the braking torque, allow for a running-in period in which the brake lining adapts to the engine shield braking
surface, the duration of which (number of cycles) will depend on the actual braking load. Once the brake has been run in, in nominal
operating conditions a deviation from the declared value of ±10% is always acceptable.
18
) shown in the table;
max

USE AND MAINTENANCE MANUAL FOR ELECTRIC MOTORS
Connecting up the ML brake
If the brake is powered directly by the motor itself, this is called direct power supply, if it is powered separately, it is called separate
power supply. What follows is a more detailed explanation, which makes reference to the diagrams at the foot of the page.
1. Direct power supply:
the rectier AC side power cables are connected to the motor terminal board; when the motor is powered up,
the brake coil is automatically energised and the brake releases; when power to the motor is shut o, the brake coil automatically deenergises and the brake brakes the motor. During this phase, the brake response time t
has to be added to the delay R generated by the
2
inertia of the load and by the energy accumulated by the motor. R changes in every motor and – as it depends on the load – cannot be
previously calculated.
2. Separate brake power, brake opens only from the AC side:
of the motor. In this case stop time t
3. Direct brake power, DC side opens:
does not depend on the characteristics of both the motor and load.
2
connection possible on the basis of type 1, if one can cable the rectier's rapid braking contact
the brake is powered, via the rectier, by separate terminals from those
(DC side opening) as shown in gure 3. Despite the direct power supply (see point 1), the braking response time is independent of the
characteristics of the motor and load, and is signicantly shorter than that of case 2 (t
< t2). This connection is thus an alternative to the
22
use of rapid braking rectiers (RSD and RRSD).
4. Separate brake power, AC and DC sides open:
connection possible on the basis of type 2, if one can cable the rectier's rapid
braking contact (DC side opening) as shown in gure 4. Response time equal to that of type 3, hence this connection is an alternative to
the use of rapid braking rectiers (RSD and RRSD). The advantage over the previous case is that during brake operation the energy stored
by the motor does not have to be absorbed by the rectier, thus giving it a longer service life.
Motovario supplies brakes hooked up as shown in types 1 and 2
to be specied as "direct" or "separate" brake power respectively in
the order. Type 3 and 4 connections must be implemented by the client.
If SBR rapid release rectiers are used, the brake release time reduces from t
to t11 (see graphs below).
1
In the event of independent power supply of the brake from a direct current power source, and thus minus rectier (ex. 24Vdc), the
supply cables of the brake are set inside the terminal block box and connected to a strip connector-type ying terminal block. In this
instance, refer to case 4 for the response times (power source excluded).
NBR
SBR
[A]
[Nm]
[A]
[Nm]
1 3 42
A B
t1 t2+R
t11 t2+R
[time]
[time]
[time]
[time]
[A]
[Nm]
[A]
[Nm]
A B
t1 t2
t11 t2
[time]
[time]
[time]
[time]
A B
[A]
[Nm]
t1 t22
[A]
[Nm]
t11 t22
A B
[time]
[time]
[time]
[time]
A = Motor B = Brake
19

19. MOTOR POWER SUPPLY WIRING DIAGRAM
www.motovario.com
TS-TH-TP-TSX-THX-TPX series with
6 terminals
MOTOR - TS/TH
Wiring diagram
TO POWER
Standard S series
MOTOR - S
Wiring diagram
max
tightening
torque
M4 = 2Nm
M5 = 3Nm
M6 = 4Nm
Cod. 07492T1
max
tightening
torque
M4 = 2Nm
M5 = 3Nm
M6 = 4Nm
TS-TH-TP-TSX-THX-TPX series
with 9 terminals
MOTOR - TS/TH
Wiring diagram
max
tightening
torque
M4 = 2Nm
M5 = 3Nm
M6 = 4Nm
TO POWER
Cod. 07492T3
S series with balanced winding
MOTOR - S (balanced winding)
Wiring diagram
max
tightening
torque
M4 = 2Nm
M5 = 3Nm
M6 = 4Nm
TO POWER
Standard HSE series
MOTOR - HSE
Wiring diagram
standard winding
balanced winding
Cod. 07492S1
TO POWER
D series (2/4 and 4/8 poles)
MOTOR - D
Wiring diagram
high speed low speed
TO POWER
D series (2/8 poles)
MOTOR - D
Wiring diagram
high speed low speed
Cod. 07492S2
max
tightening
torque
M4 = 2Nm
M5 = 3Nm
M6 = 4Nm
Cod. 07492D1
max
tightening
torque
M4 = 2Nm
M5 = 3Nm
M6 = 4Nm
TO POWER
20
Cod. 2513041
TO POWER
Cod. 07492D2

www.motovario.com
21

www.motovario.com
22

www.motovario.com
23

www.motovario.com
 Loading...
Loading...