


The UC3842B, UC3843B series are high performance fixed frequency
current mode controllers. They are specifically designed for Off–Line and
dc–to–dc converter applications offering the designer a cost–effective
solution with minimal external components. These integrated circuits feature
a trimmed oscillator for precise duty cycle control, a temperature
compensated reference, high gain error amplifier, current sensing
comparator, and a high current totem pole output ideally suited for driving a
power MOSFET.
Also included are protective features consisting of input and reference
undervoltage lockouts each with hysteresis, cycle–by–cycle current limiting,
programmable output deadtime, and a latch for single pulse metering.
These devices are available in an 8–pin dual–in–line and surface mount
(SO–8) plastic package as well as the 14–pin plastic surface mount (SO–14).
The SO–14 package has separate power and ground pins for the totem pole
output stage.
The UCX842B has UVLO thresholds of 16 V (on) and 10 V (off), ideally
suited for off–line converters. The UCX843B is tailored for lower voltage
applications having UVLO thresholds of 8.5 V (on) and 7.6 V (off).
• Trimmed Oscillator for Precise Frequency Control
• Oscillator Frequency Guaranteed at 250 kHz
• Current Mode Operation to 500 kHz
• Automatic Feed Forward Compensation
• Latching PWM for Cycle–By–Cycle Current Limiting
• Internally Trimmed Reference with Undervoltage Lockout
• High Current Totem Pole Output
• Undervoltage Lockout with Hysteresis
• Low Startup and Operating Current
Simplified Block Diagram
V
7(12)
CC
V
ref
8(14)
RT/C
4(7)
Voltage
Feedback
Input
2(3)
Output
Compensation
1(1)
5.0V
R
R
T
Oscillator
+
–
Error
Amplifier
Pin numbers in parenthesis are for the D suffix SO–14 package.
Undervoltage
Lockout
Gnd 5(9)
Reference
V
ref
Latching
PWM
V
CC
Undervoltage
Lockout
V
C
7(11)
Output
6(10)
Power
Ground
5(8)
3(5)
Current
Sense
Input
Order this document by UC3842B/D
HIGH PERFORMANCE
CURRENT MODE
CONTROLLERS
N SUFFIX
PLASTIC PACKAGE
CASE 626
D1 SUFFIX
PLASTIC PACKAGE
CASE 751
(SO–8)
D SUFFIX
PLASTIC PACKAGE
CASE 751A
(SO–14)
PIN CONNECTIONS
RT/C
RT/C
NC
NC
NC
1
2
3
4
T
1
2
3
4
5
6
7
T
Compensation
Voltage Feedback
Current Sense
Compensation
Voltage Feedback
Current Sense
ORDERING INFORMATION
Device
UC384XBD
UC384XBD1 TA = 0° to +70°C
UC384XBN
UC284XBD
UC284XBD1
UC284XBN
UC384XBVD
UC384XBVD1
UC384XBVN
X indicates either a 2 or 3 to define specific device part
numbers.
Operating
Temperature Range
TA = – 25° to +85°C
TA = –40° to +105°C
(Top View)
(Top View)
8
1
8
1
14
1
8
V
ref
7
V
CC
6
Output
5
Gnd
14
V
ref
13
NC
12
V
CC
11
V
C
10
Output
9
Gnd
8
Power Ground
Package
SO–14
SO–8
Plastic
SO–14
SO–8
Plastic
SO–14
SO–8
Plastic
MOTOROLA ANALOG IC DEVICE DATA
Motorola, Inc. 1996 Rev 1
1
UC3842B, 43B UC2842B, 43B
MAXIMUM RATINGS
Rating Symbol Value Unit
Total Power Supply and Zener Current (ICC + IZ) 30 mA
Output Current, Source or Sink (Note 1) I
O
Output Energy (Capacitive Load per Cycle) W 5.0 µJ
Current Sense and Voltage Feedback Inputs V
Error Amp Output Sink Current I
in
O
Power Dissipation and Thermal Characteristics
D Suffix, Plastic Package, SO–14 Case 751A
Maximum Power Dissipation @ TA = 25°C
Thermal Resistance, Junction–to–Air
D1 Suffix, Plastic Package, SO–8 Case 751
Maximum Power Dissipation @ TA = 25°C
Thermal Resistance, Junction–to–Air
N Suffix, Plastic Package, Case 626
Maximum Power Dissipation @ TA = 25°C
Thermal Resistance, Junction–to–Air
Operating Junction Temperature T
Operating Ambient Temperature
UC3842B, UC3843B
P
D
R
θJA
P
D
R
θJA
P
D
R
θJA
J
T
A
UC2842B, UC2843B
UC3842BV, UC3843BV
Storage Temperature Range T
stg
1.0 A
– 0.3 to + 5.5 V
10 mA
862
145
702
178
1.25
100
+150 °C
0 to + 70
– 25 to + 85
–40 to +105
– 65 to +150 °C
mW
°C/W
mW
°C/W
W
°C/W
°C
ELECTRICAL CHARACTERISTICS (V
= 15 V [Note 2], RT = 10 k, CT = 3.3 nF . For typical values TA = 25°C, for min/max values TA is
CC
the operating ambient temperature range that applies [Note 3], unless otherwise noted.)
UC284XB UC384XB, XBV
Characteristics Symbol Min Typ Max Min Typ Max Unit
REFERENCE SECTION
Reference Output Voltage (IO = 1.0 mA, TJ = 25°C) V
Line Regulation (VCC = 12 V to 25 V) Reg
Load Regulation (IO = 1.0 mA to 20 mA) Reg
T emperature Stability T
T otal Output V ariation over Line, Load, and T emperature V
Output Noise Voltage (f = 10 Hz to 10 kHz, TJ = 25°C) V
ref
line
load
S
ref
n
4.95 5.0 5.05 4.9 5.0 5.1 V
– 2.0 20 – 2.0 20 mV
– 3.0 25 – 3.0 25 mV
– 0.2 – – 0.2 – mV/°C
4.9 – 5.1 4.82 – 5.18 V
– 50 – – 50 – µV
Long Term Stability (TA = 125°C for 1000 Hours) S – 5.0 – – 5.0 – mV
Output Short Circuit Current I
SC
–30 –85 –180 –30 –85 –180 mA
OSCILLATOR SECTION
Frequency
TJ = 25°C
TA = T
TJ = 25°C (RT = 6.2 k, CT = 1.0 nF)
low
to T
high
Frequency Change with Voltage (VCC = 12 V to 25 V) ∆f
Frequency Change with Temperature
TA = T
low
to T
high
Oscillator Voltage Swing (Peak–to–Peak) V
Discharge Current (V
TJ = 25°C
TA = T
TA = T
NOTES: 1. Maximum Package power dissipation limits must be observed.
to T
low
to T
low
2.Adjust VCC above the Startup threshold before setting to 15 V.
3.Low duty cycle pulse techniques are used during test to maintain junction temperature as close to ambient as possible.
T
=0°C for UC3842B, UC3843B T
low
T
= –25°C for UC2842B, UC2843B T
low
T
= –40°C for UC3842BV , UC3843BV T
low
= 2.0 V)
OSC
(UC284XB, UC384XB)
high
(UC384XBV)
high
f
OSC
49
48
225
/∆V – 0.2 1.0 – 0.2 1.0 %
OSC
∆f
/∆T – 1.0 – – 0.5 – %
OSC
OSC
I
dischg
– 1.6 – – 1.6 – V
7.8
7.5
–
= +70°C for UC3842B, UC3843B
high
= +85°C for UC2842B, UC2843B
high
= +105°C for UC3842BV , UC3843BV
high
52
–
250
8.3
–
–
55
56
275
8.8
8.8
–
49
48
225
7.8
7.6
7.2
52
–
250
8.3
–
–
55
56
275
8.8
8.8
8.8
kHz
mA
2
MOTOROLA ANALOG IC DEVICE DATA
UC3842B, 43B UC2842B, 43B
ELECTRICAL CHARACTERISTICS (V
= 15 V [Note 2], RT = 10 k, CT = 3.3 nF . For typical values TA = 25°C, for min/max values TA is
CC
the operating ambient temperature range that applies [Note 3], unless otherwise noted.)
UC284XB UC384XB, XBV
Characteristics Symbol Min Typ Max Min Typ Max Unit
ERROR AMPLIFIER SECTION
Voltage Feedback Input (VO = 2.5 V) V
Input Bias Current (VFB = 5.0 V) I
Open Loop Voltage Gain (VO = 2.0 V to 4.0 V) A
FB
IB
VOL
2.45 2.5 2.55 2.42 2.5 2.58 V
– – 0.1 –1.0 – – 0.1 – 2.0 µA
65 90 – 65 90 – dB
Unity Gain Bandwidth (TJ = 25°C) BW 0.7 1.0 – 0.7 1.0 – MHz
Power Supply Rejection Ratio (VCC = 12 V to 25 V) PSRR 60 70 – 60 70 – dB
Output Current
Sink (VO = 1.1 V, VFB = 2.7 V)
Source (VO = 5.0 V, VFB = 2.3 V)
I
Sink
I
Source
2.0
– 0.512–1.0
–
–
2.0
– 0.512–1.0
–
–
Output Voltage Swing
High State (RL = 15 k to ground, VFB = 2.3 V)
Low State (RL = 15 k to V
(UC284XB, UC384XB)
, VFB = 2.7 V)
ref
(UC384XBV)
V
OH
V
OL
5.0
6.2
–
–
0.8
–
1.1
–
–
5.0
6.2
–
–
0.8
0.8
–
1.1
1.2
CURRENT SENSE SECTION
Current Sense Input Voltage Gain (Notes 4 & 5)
(UC284XB, UC384XB)
(UC384XBV)
Maximum Current Sense Input Threshold (Note 4)
(UC284XB, UC384XB)
(UC384XBV)
Power Supply Rejection Ratio
A
V
V
th
2.85
–
0.9
–
3.0
1.0
–
–
3.15–2.85
2.85
1.1
–
0.9
0.85
3.0
3.0
1.0
1.0
3.15
3.25
1.1
1.1
PSRR – 70 – – 70 – dB
VCC = 12 V to 25 V, Note 4
Input Bias Current I
Propagation Delay (Current Sense Input to Output) t
PLH(In/Out)
IB
– – 2.0 –10 – – 2.0 –10 µA
– 150 300 – 150 300 ns
OUTPUT SECTION
Output Voltage
Low State (I
High State (I
Output Voltage with UVLO Activated
VCC = 6.0 V, I
Output Voltage Rise T ime (CL = 1.0 nF, TJ = 25°C) t
Output Voltage Fall T ime (CL = 1.0 nF, TJ = 25°C) t
= 20 mA)
Sink
(I
= 200 mA) (UC284XB, UC384XB)
Sink
Source
(I
Source
= 20 mA) (UC284XB, UC384XB)
= 200 mA)
= 1.0 mA
Sink
(UC384XBV)
(UC384XBV)
V
OL
V
OH
V
OL(UVLO)
r
f
–
–
–
13
–
12
0.1
1.6
–
13.5
–
13.4
0.4
2.2
–
–
–
–
–
–
–
13
12.9
12
0.1
1.6
1.6
13.5
13.5
13.4
0.4
2.2
2.3
–
–
–
– 0.1 1.1 – 0.1 1.1 V
– 50 150 – 50 150 ns
– 50 150 – 50 150 ns
UNDERVOLTAGE LOCKOUT SECTION
Startup Threshold (VCC)
UCX842B, BV
UCX843B, BV
Minimum Operating Voltage After Turn–On (VCC)
UCX842B, BV
UCX843B, BV
NOTES: 2. Adjust VCC above the Startup threshold before setting to 15 V.
3.Low duty cycle pulse techniques are used during test to maintain junction temperature as close to ambient as possible.
T
=0°C for UC3842B, UC3843B T
low
T
= –25°C for UC2842B, UC2843B T
low
T
= –40°C for UC3842BV , UC3843BV T
low
4.This parameter is measured at the latch trip point with VFB = 0 V.
5.Comparator gain is defined as: A
∆V Output Compensation
V
∆V Current Sense Input
V
th
15
7.8
V
CC(min)
9.0
7.0
= +70°C for UC3842B, UC3843B
high
= +85°C for UC2842B, UC2843B
high
= +105°C for UC3842BV , UC3843BV
high
16
8.4
10
7.6
17
9.0
11
8.2
14.5
7.8
8.5
7.0
16
8.4
10
7.6
17.5
9.0
11.5
8.2
mA
V
V/V
V
V
V
V
MOTOROLA ANALOG IC DEVICE DATA
3
UC3842B, 43B UC2842B, 43B
(V
ELECTRICAL CHARACTERISTICS
is the operating ambient temperature range that applies [Note 3], unless otherwise noted.)
Characteristics Symbol Min Typ Max Min Typ Max Unit
PWM SECTION
Duty Cycle
Maximum (UC284XB, UC384XB)
Maximum (UC384XBV)
Minimum
TOTAL DEVICE
Power Supply Current
Startup (VCC = 6.5 V for UCX843B,
Startup (VCC 14 V for UCX842B, BV)
Operating (Note 2)
Power Supply Zener Voltage (ICC = 25 mA) V
NOTES: 2. Adjust VCC above the Startup threshold before setting to 15 V.
3.Low duty cycle pulse techniques are used during test to maintain junction temperature as close to ambient as possible.
T
=0°C for UC3842B, UC3843B T
low
T
= –25°C for UC2842B, UC2843B T
low
T
= –40°C for UC3842BV , UC3843BV T
low
= 15 V [Note 2], RT = 10 k, CT = 3.3 nF, for typical values TA = 25°C, for min/max values T
CC
UC284XB UC384XB, BV
DC
(max)
DC
(min)
ICC + I
Z
= +70°C for UC3842B, UC3843B
high
= +85°C for UC2842B, UC2843B
high
= +105°C for UC3842BV , UC3843BV
high
94
–
–
C
–
–
30 36 – 30 36 – V
96
–
–
0.3
12
0.5
17
A
–
–
0
94
93
96
–
–
–
96
–
0.3
12
–
–
0
0.5
17
%
mA
80
50
Ω
20
8.0
5.0
, TIMING RESISTOR (k )
T
R
2.0
0.8
9.0
8.5
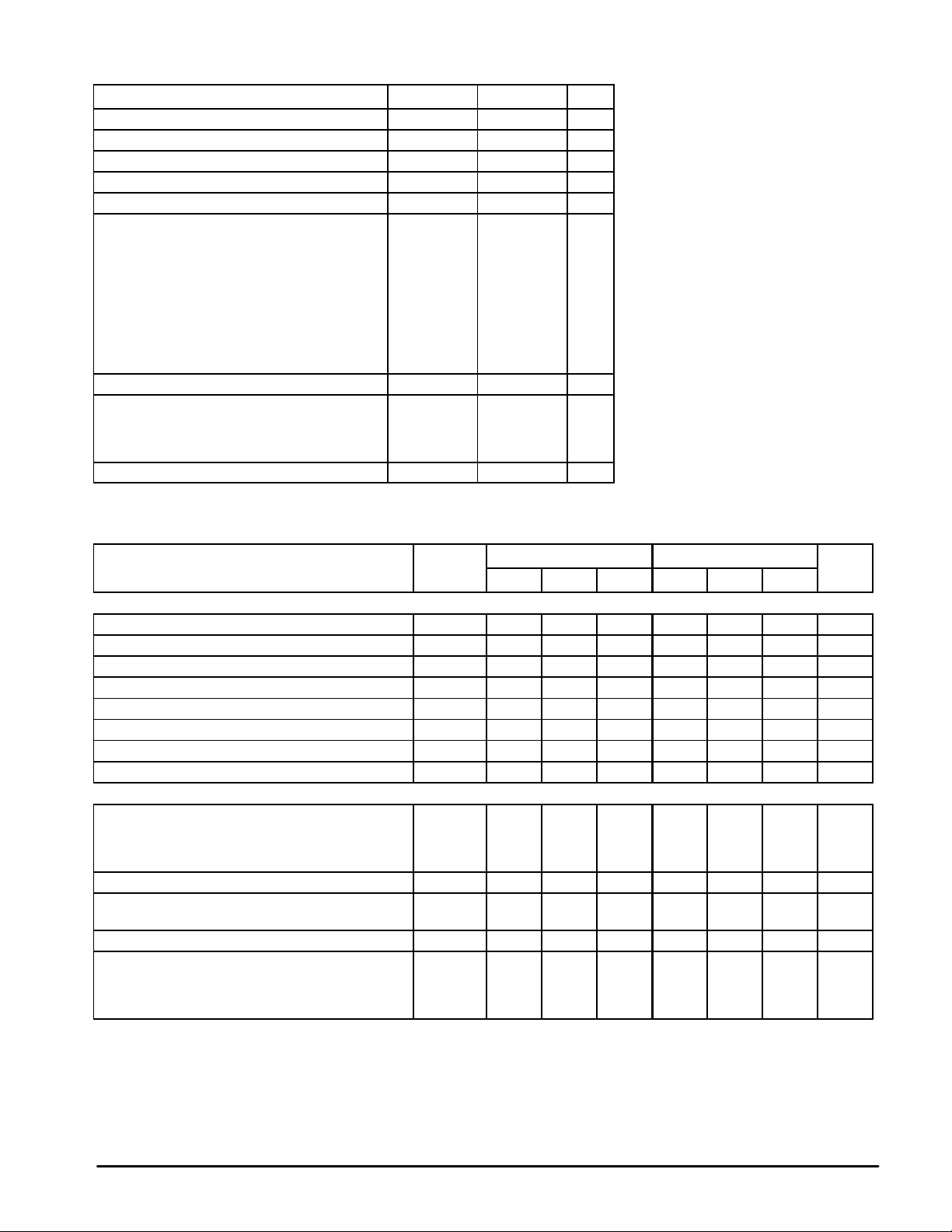
Figure 1. Timing Resistor
versus Oscillator Frequency
VCC = 15 V
°
C
TA = 25
f
, OSCILLAT OR FREQUENCY (kHz)
OSC
Figure 3. Oscillator Discharge Current
versus T emperature
VCC = 15 V
V
= 2.0 V
OSC
Figure 2. Output Deadtime
versus Oscillator Frequency
100
1. CT = 10 nF
2. CT = 5.0 nF
50
3. CT = 2.0 nF
4. CT = 1.0 nF
5. CT = 500 pF
20
6. CT = 200 pF
7. CT = 100 pF
10
5.0
2.0
% DT, PERCENT OUTPUT DEADTIME
1.0 M500 k200 k100 k50 k20 k10 k
1.0
f
, OSCILLAT OR FREQUENCY (kHz)
OSC
1
4
3
2
6
5
VCC = 15 V
°
C
TA = 25
7
1.0 M500 k200 k100 k50 k20 k10 k
Figure 4. Maximum Output Duty Cycle
versus Timing Resistor
100
90
I
80
dischg
= 7.5 mA
8.0
, DISCHARGE CURRENT (mA)
7.5
dischg
I
7.0
–55
4
– 25 0 25 50 75 100 125
TA, AMBIENT TEMPERATURE (
°
C)
70
60
50
, MAXIMUM OUTPUT DUTY CYCLE (%)
max
D
40
0.8
1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0
I
= 8.8 mA
dischg
RT, TIMING RESISTOR (k
VCC = 15 V
CT = 3.3 nF
TA = 25
Ω
)
°
C
MOTOROLA ANALOG IC DEVICE DATA
UC3842B, 43B UC2842B, 43B
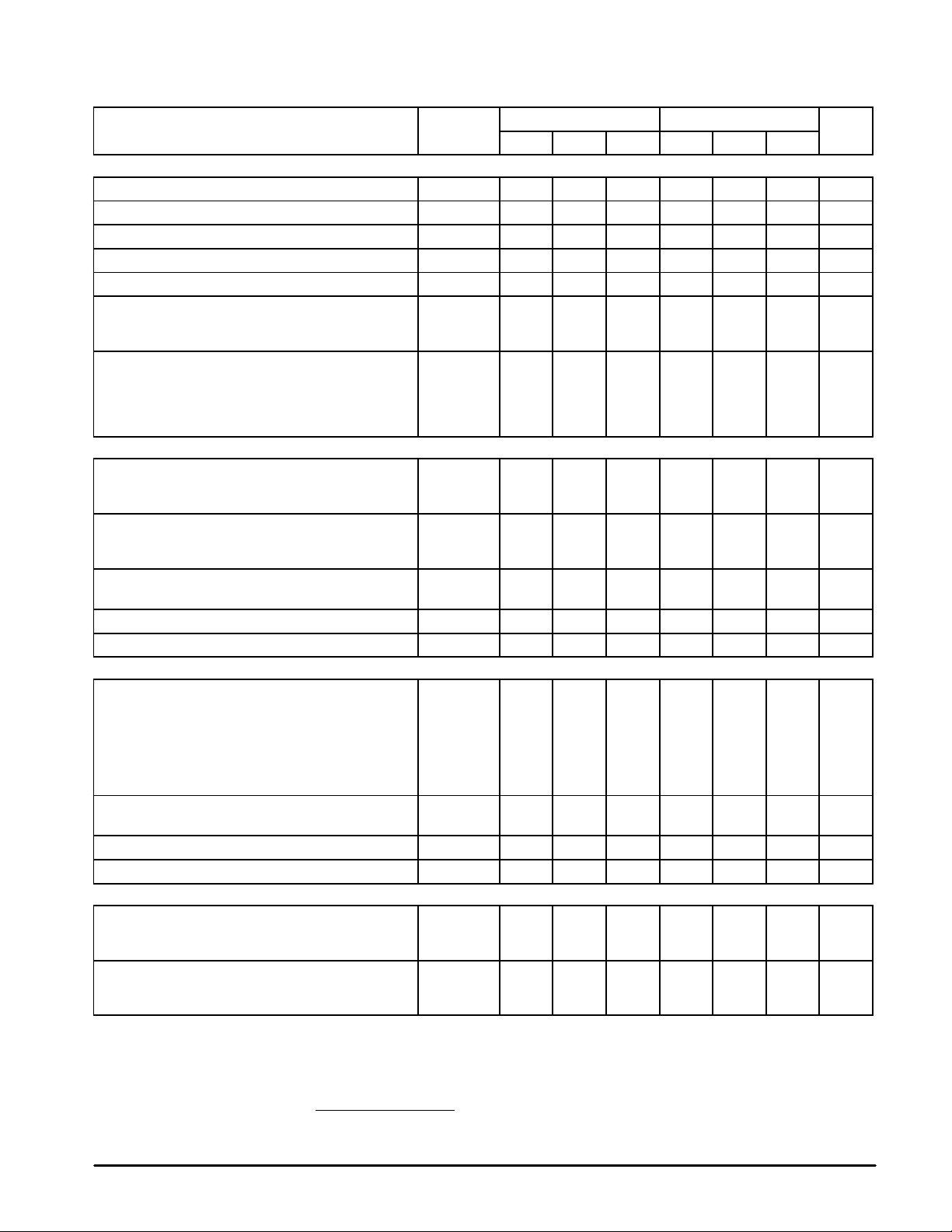
/
2.55 V
2.50 V
2.45 V
100
80
60
Figure 5. Error Amp Small Signal
Transient Response
VCC = 15 V
AV = –1.0
°
C
TA = 25
Figure 7. Error Amp Open Loop Gain and
Phase versus Frequency
VCC = 15 V
VO = 2.0 V to 4.0 V
Gain
RL = 100 K
°
C
TA = 25
20 mV/DIV
0
30
60
3.0 V
2.5 V
2.0 V
1.2
1.0
0.8
Figure 6. Error Amp Large Signal
Transient Response
VCC = 15 V
AV = –1.0
TA = 25
1.0 µs/DIV0.5 µs/DIV
Figure 8. Current Sense Input Threshold
versus Error Amp Output Voltage
VCC = 15 V
TA = 25°C
°
C
40
20
, OPEN LOOP VOL TAGE GAIN (dB)
0
VOL
A
–20
100 1.0 k 10 k 100 k 1.0 M
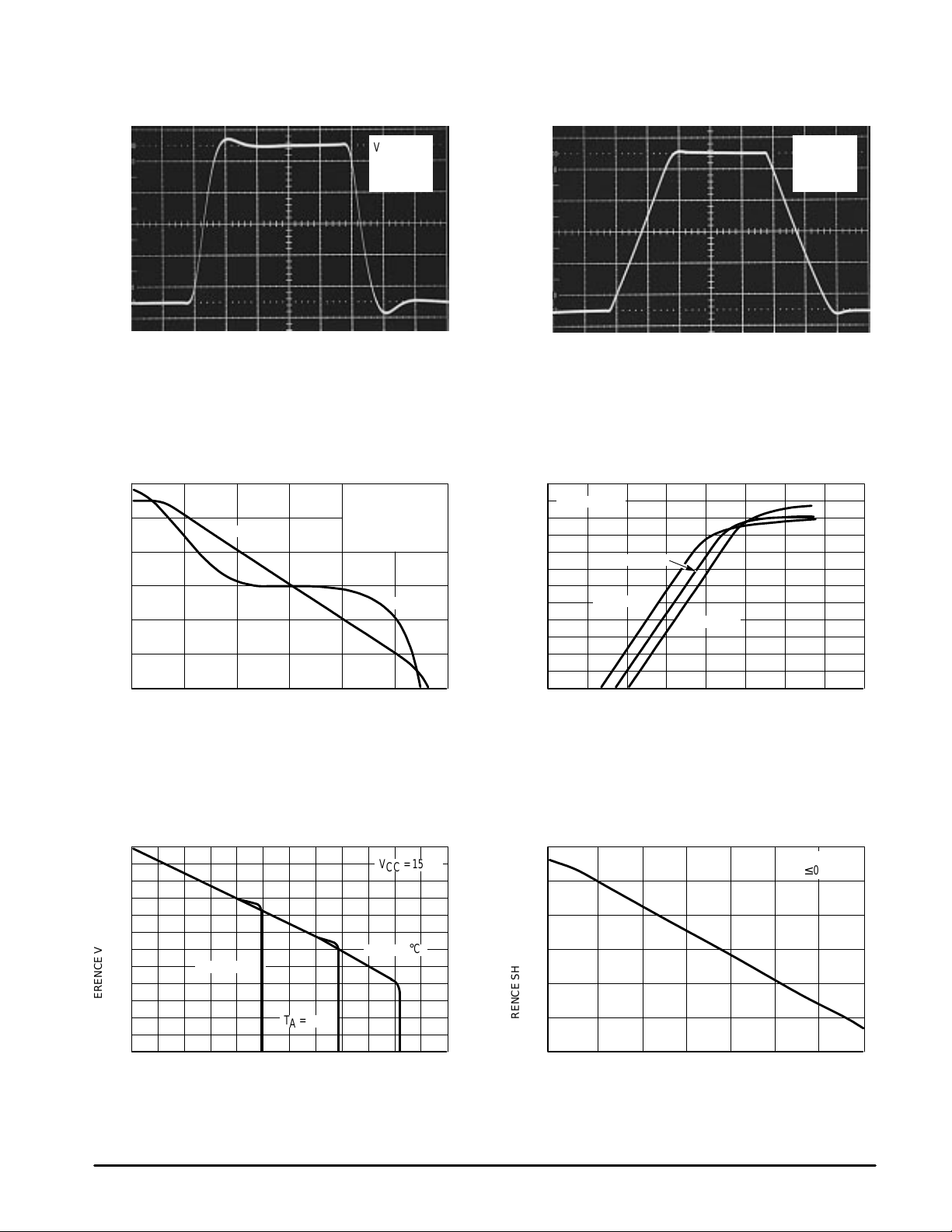
Figure 9. Reference V oltage Change
0
– 4.0
– 8.0
–12
TA = 125°C
–16
–20
, REFERENCE VOLTAGE CHANGE (mV)
ref
V
∆
–24
0
20 40 60 80 100 120
I
, REFERENCE SOURCE CURRENT (mA)
ref
f, FREQUENCY (Hz)
versus Source Current
TA = 25°C
Phase
VCC = 15 V
TA = –55°C
90
120
, EXCESS PHASE (DEGREES)
φ
150
180
10 M10
0.6
0.4
0.2
, CURRENT SENSE INPUT THRESHOLD (V)
th
V
110
90
70
, REFERENCE SHORT CIRCUIT CURRENT (mA)
50
SC
I
0
0
–55
TA = 125°C
TA = –55°C
2.0 4.0 6.0 8.0
VO, ERROR AMP OUTPUT VOLTAGE (V)
Figure 10. Reference Short Circuit Current
versus T emperature
VCC = 15 V
≤
0.1
Ω
RL
– 25 0 25 50 75 100 125
TA, AMBIENT TEMPERATURE (
°
C)
MOTOROLA ANALOG IC DEVICE DATA
5

UC3842B, 43B UC2842B, 43B
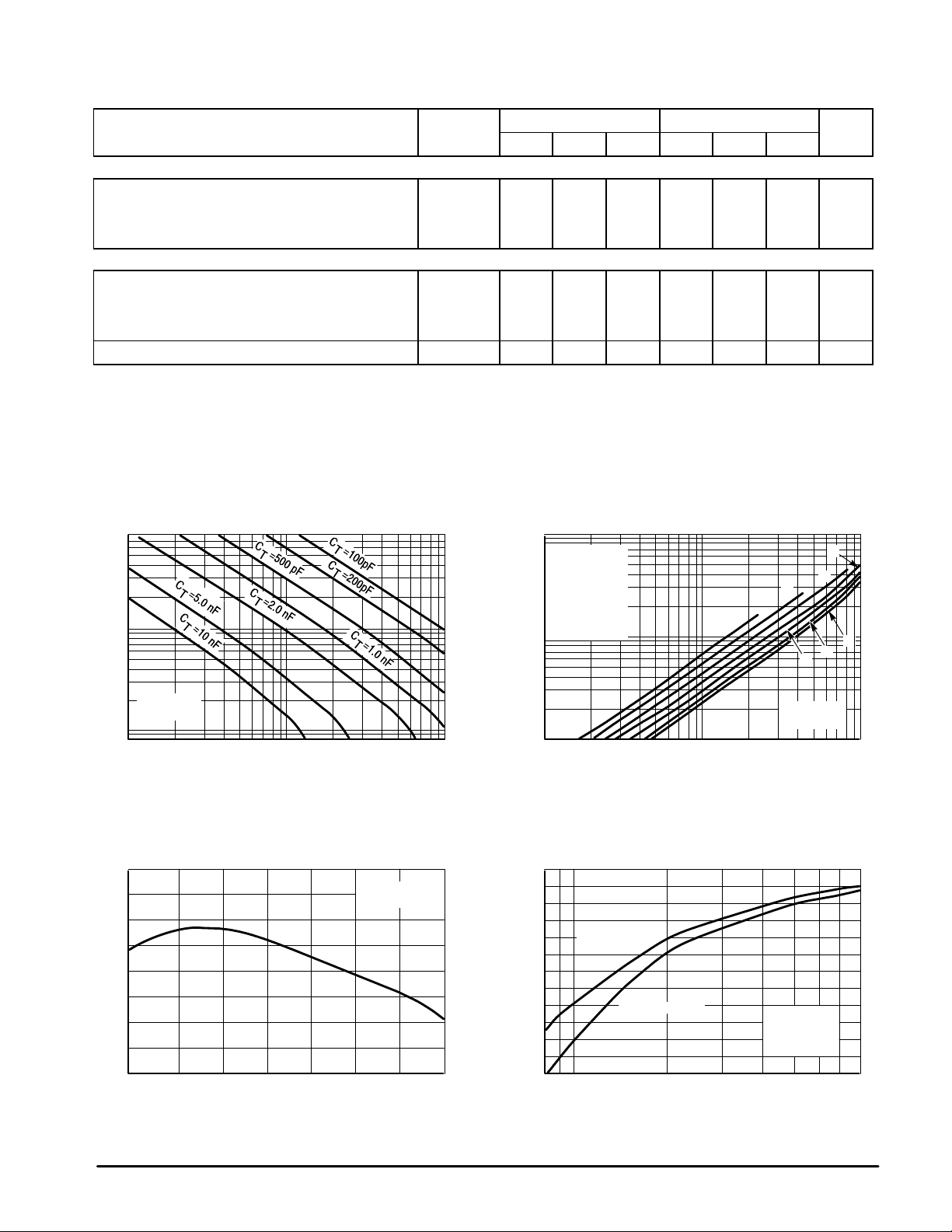
Figure 11. Reference Load Regulation Figure 12. Reference Line Regulation
, OUTPUT VOLTAGE CHANGE (2.0 mV/DIV)
O
V
∆
Figure 13. Output Saturation Voltage
versus Load Current
0
V
–1.0
– 2.0
, OUTPUT SA TURATION VOLTAGE (V)
sat
V
3.0
2.0
1.0
0
CC
TA = 25°C
TA = – 55°C
200 400 600
IO, OUTPUT LOAD CURRENT (mA)
VCC = 15 V
IO = 1.0 mA to 20 mA
°
C
TA = 25
, OUTPUT VOLTAGE CHANGE (2.0 mV/DIV)
O
V
2.0 ms/DIV 2.0 ms/DIV
∆
Figure 14. Output Waveform
Source Saturation
(Load to Ground)
TA = – 55°C
Sink Saturation
(Load to VCC)
VCC = 15 V
µ
s Pulsed Load
80
120 Hz Rate
TA = 25°C
Gnd
90%
10%
8000
50 ns/DIV
VCC = 12 V to 25
°
C
TA = 25
VCC = 15 V
CL = 1.0 nF
°
C
TA = 25
, OUTPUT VOL TAGE
O
V, SUPPLY CURRENT
CC
I
6
Figure 15. Output Cross Conduction
VCC = 30 V
CL = 15 pF
TA = 25
100 ns/DIV
Figure 16. Supply Current versus Supply V oltage
25
°
C
100 mA/DIV 20 V/DIV
20
15
10
, SUPPLY CURRENT (mA)
5
CC
I
0
RT = 10 k
CT = 3.3 nF
UCX843B
0
UCX842B
10 20 30 40
VCC, SUPPLY VOLT AGE (V)
VFB = 0 V
I
= 0 V
Sense
°
TA = 25
C
MOTOROLA ANALOG IC DEVICE DATA

UC3842B, 43B UC2842B, 43B
PIN FUNCTION DESCRIPTION
Pin
8–Pin 14–Pin
1 1 Compensation This pin is the Error Amplifier output and is made available for loop compensation.
2 3 Voltage
3 5 Current
4 7 RT/C
5 Gnd This pin is the combined control circuitry and power ground.
6 10 Output This output directly drives the gate of a power MOSFET. Peak currents up to 1.0 A are sourced
7 12 V
8 14 V
8 Power
11 V
9 Gnd This pin is the control circuitry ground return and is connected back to the power source ground.
2,4,6,13 NC No connection. These pins are not internally connected.
Function Description
Feedback
Sense
T
CC
ref
Ground
C
This is the inverting input of the Error Amplifier. It is normally connected to the switching power
supply output through a resistor divider.
A voltage proportional to inductor current is connected to this input. The PWM uses this
information to terminate the output switch conduction.
The Oscillator frequency and maximum Output duty cycle are programmed by
connecting resistor RT to V
is possible.
and sunk by this pin.
This pin is the positive supply of the control IC.
This is the reference output. It provides charging current for capacitor CT through resistor RT.
This pin is a separate power ground return that is connected back to the power source. It is used
to reduce the effects of switching transient noise on the
control circuitry.
The Output high state (VOH) is set by the voltage applied to this pin. With a separate power
source connection, it can reduce the effects of switching transient noise on the control circuitry .
and capacitor CT to ground. Operation to 500 kHz
ref
MOTOROLA ANALOG IC DEVICE DATA
7

UC3842B, 43B UC2842B, 43B
OPERA TING DESCRIPTION
The UC3842B, UC3843B series are high performance,
fixed frequency, current mode controllers. They are
specifically designed for Off–Line and dc–to–dc converter
applications offering the designer a cost–effective solution
with minimal external components. A representative block
diagram is shown in Figure 17.
Oscillator
The oscillator frequency is programmed by the values
selected for the timing components RT and CT. Capacitor C
is charged from the 5.0 V reference through resistor RT to
approximately 2.8 V and discharged to 1.2 V by an internal
current sink. During the discharge of CT, the oscillator
generates an internal blanking pulse that holds the center
input of the NOR gate high. This causes the Output to be in a
low state, thus producing a controlled amount of output
deadtime. Figure 1 shows RT versus Oscillator Frequency
and Figure 2, Output Deadtime versus Frequency, both for
given values of CT. Note that many values of RT and CT will
give the same oscillator frequency but only one combination
will yield a specific output deadtime at a given frequency . The
oscillator thresholds are temperature compensated to within
±6% at 50 kHz. Also because of industry trends moving the
UC384X into higher and higher frequency applications, the
UC384XB is guaranteed to within ±10% at 250 kHz. These
internal circuit refinements minimize variations of oscillator
frequency and maximum output duty cycle. The results are
shown in Figures 3 and 4.
In many noise–sensitive applications it may be desirable
to frequency–lock the converter to an external system clock.
This can be accomplished by applying a clock signal to the
circuit shown in Figure 20. For reliable locking, the
free–running oscillator frequency should be set about 10%
less than the clock frequency. A method for multi–unit
synchronization is shown in Figure 21. By tailoring the clock
waveform, accurate Output duty cycle clamping can be
achieved.
Error Amplifier
A fully compensated Error Amplifier with access to the
inverting input and output is provided. It features a typical dc
voltage gain of 90 dB, and a unity gain bandwidth of 1.0 MHz
with 57 degrees of phase margin (Figure 7). The
non–inverting input is internally biased at 2.5 V and is not
pinned out. The converter output voltage is typically divided
down and monitored by the inverting input. The maximum
input bias current is –2.0 µA which can cause an output
voltage error that is equal to the product of the input bias
current and the equivalent input divider source resistance.
The Error Amp Output (Pin 1) is provided for external loop
compensation (Figure 31). The output voltage is offset by two
diode drops (≈1.4 V) and divided by three before it connects
to the non–inverting input of the Current Sense Comparator.
This guarantees that no drive pulses appear at the Output
(Pin 6) when pin 1 is at its lowest state (VOL). This occurs
when the power supply is operating and the load is removed,
or at the beginning of a soft–start interval (Figures 23, 24).
The Error Amp minimum feedback resistance is limited by the
amplifier’s source current (0.5 mA) and the required output
voltage (VOH) to reach the comparator’s 1.0 V clamp level:
R
f(min)
Current Sense Comparator and PWM Latch
T
The UC3842B, UC3843B operate as a current mode
controller, whereby output switch conduction is initiated by
the oscillator and terminated when the peak inductor current
reaches the threshold level established by the Error Amplifier
Output/Compensation (Pin 1). Thus the error signal controls
the peak inductor current on a cycle–by–cycle basis. The
Current Sense Comparator PWM Latch configuration used
ensures that only a single pulse appears at the Output during
any given oscillator cycle. The inductor current is converted
to a voltage by inserting the ground–referenced sense
resistor RS in series with the source of output switch Q1. This
voltage is monitored by the Current Sense Input (Pin 3) and
compared to a level derived from the Error Amp Output. The
peak inductor current under normal operating conditions is
controlled by the voltage at pin 1 where:
Abnormal operating conditions occur when the power
supply output is overloaded or if output voltage sensing is
lost. Under these conditions, the Current Sense Comparator
threshold will be internally clamped to 1.0 V. Therefore the
maximum peak switch current is:
When designing a high power switching regulator it
becomes desirable to reduce the internal clamp voltage in
order to keep the power dissipation of RS to a reasonable
level. A simple method to adjust this voltage is shown in
Figure 22. The two external diodes are used to compensate
the internal diodes, yielding a constant clamp voltage over
temperature. Erratic operation due to noise pickup can result
if there is an excessive reduction of the I
voltage.
A narrow spike on the leading edge of the current
waveform can usually be observed and may cause the power
supply to exhibit an instability when the output is lightly
loaded. This spike is due to the power transformer
interwinding capacitance and output rectifier recovery time.
The addition of an RC filter on the Current Sense Input with a
time constant that approximates the spike duration will
usually eliminate the instability (refer to Figure 26).
3.0 (1.0 V) + 1.4 V
≈
Ipk =
V
I
pk(max)
0.5 mA
(Pin 1)
3 R
=
– 1.4 V
S
1.0 V
R
S
= 8800 Ω
pk(max)
clamp
8
MOTOROLA ANALOG IC DEVICE DATA

UC3842B, 43B UC2842B, 43B
Figure 17. Representative Block Diagram
VCC
7(12)
V
CC
V
in
V
ref
8(14)
R
T
C
T
Voltage
Feedback
Input
Output/
Compensation
Pin numbers adjacent to terminals are for the 8–pin dual–in–line package.
Pin numbers in parenthesis are for the D suffix SO–14 package.
2.5V
4(7)
2(3)
1(1)
R
R
Error
Amplifier
Internal
Bias
Oscillator
+
1.0mA
2R
Gnd
R
Reference
3.6V
1.0V
Current Sense
Comparator
5(9)
Regulator
+
V
–
UVLO
ref
S
R
Figure 18. Timing Diagram
V
CC
UVLO
Q
PWM
Latch
36V
(See
+
Text)
–
V
C
7(11)
Output
6(10)
Power Ground
5(8)
Current Sense Input
3(5)
= Sink Only Positive True Logic
Q1
R
S
Capacitor C
Latch
“Set” Input
Output/
Compensation
Current Sense
Input
Latch
“Reset” Input
Output
T
Large RT/Small C
T
Small RT/Large C
T
MOTOROLA ANALOG IC DEVICE DATA
9

UC3842B, 43B UC2842B, 43B
Undervoltage Lockout
Two undervoltage lockout comparators have been
incorporated to guarantee that the IC is fully functional before
the output stage is enabled. The positive power supply
terminal (VCC) and the reference output (V
) are each
ref
monitored by separate comparators. Each has built–in
hysteresis to prevent erratic output behavior as their
respective thresholds are crossed. The VCC comparator
upper and lower thresholds are 16 V/10 V for the UCX842B,
and 8.4 V/7.6 V for the UCX843B. The V
comparator upper
ref
and lower thresholds are 3.6 V/3.4 V. The large hysteresis
and low startup current of the UCX842B makes it ideally
suited in off–line converter applications where efficient
bootstrap startup techniques are required (Figure 33). The
UCX843B is intended for lower voltage dc–to–dc converter
applications. A 36 V zener is connected as a shunt regulator
from VCC to ground. Its purpose is to protect the IC from
excessive voltage that can occur during system startup. The
minimum operating voltage (VCC) for the UCX842B is 11 V
and 8.2 V for the UCX843B.
These devices contain a single totem pole output stage
that was specifically designed for direct drive of power
MOSFET s. It is capable of up to ±1.0 A peak drive current and
has a typical rise and fall time of 50 ns with a 1.0 nF load.
Additional internal circuitry has been added to keep the
Output in a sinking mode whenever an undervoltage lockout
is active. This characteristic eliminates the need for an
external pull–down resistor.
The SO–14 surface mount package provides separate
pins for VC (output supply) and Power Ground. Proper
implementation will significantly reduce the level of switching
transient noise imposed on the control circuitry. This
becomes particularly useful when reducing the I
pk(max)
clamp
level. The separate VC supply input allows the designer
added flexibility in tailoring the drive voltage independent of
VCC. A zener clamp is typically connected to this input when
driving power MOSFETs in systems where VCC is greater
than 20 V . Figure 25 shows proper power and control ground
connections in a current–sensing power MOSFET
application.
Reference
The 5.0 V bandgap reference is trimmed to ±1.0%
tolerance at TJ = 25°C on the UC284XB, and ±2.0% on the
UC384XB. Its primary purpose is to supply charging current
to the oscillator timing capacitor. The reference has short–
circuit protection and is capable of providing in excess of
20 mA for powering additional control system circuitry.
Design Considerations
Do not attempt to construct the converter on
wire–wrap or plug–in prototype boards. High frequency
circuit layout techniques are imperative to prevent
pulse–width jitter. This is usually caused by excessive noise
pick–up imposed on the Current Sense or Voltage Feedback
inputs. Noise immunity can be improved by lowering circuit
impedances at these points. The printed circuit layout should
contain a ground plane with low–current signal and
high–current switch and output grounds returning on
separate paths back to the input filter capacitor. Ceramic
bypass capacitors (0.1 µF) connected directly to VCC, VC,
and V
may be required depending upon circuit layout. This
ref
provides a low impedance path for filtering the high frequency
noise. All high current loops should be kept as short as
possible using heavy copper runs to minimize radiated EMI.
The Error Amp compensation circuitry and the converter
output voltage divider should be located close to the IC and
as far as possible from the power switch and other
noise–generating components.
Current mode converters can exhibit subharmonic
oscillations when operating at a duty cycle greater than 50%
with continuous inductor current. This instability is
independent of the regulator’s closed loop characteristics
and is caused by the simultaneous operating conditions of
fixed frequency and peak current detecting. Figure 19A
shows the phenomenon graphically. At t0, switch conduction
begins, causing the inductor current to rise at a slope of m1.
This slope is a function of the input voltage divided by the
inductance. At t1, the Current Sense Input reaches the
threshold established by the control voltage. This causes the
switch to turn off and the current to decay at a slope of m2,
until the next oscillator cycle. The unstable condition can be
shown if a perturbation is added to the control voltage,
resulting in a small ∆I (dashed line). With a fixed oscillator
period, the current decay time is reduced, and the minimum
current at switch turn–on (t2) is increased by ∆I + ∆I m2/m1.
The minimum current at the next cycle (t3) decreases to (∆I +
∆I m2/m1) (m2/m1). This perturbation is multiplied by m2/m
on each succeeding cycle, alternately increasing and
decreasing the inductor current at switch turn–on. Several
oscillator cycles may be required before the inductor current
reaches zero causing the process to commence again. If
m2/m1 is greater than 1, the converter will be unstable. Figure
19B shows that by adding an artificial ramp that is
synchronized with the PWM clock to the control voltage, the
∆I perturbation will decrease to zero on succeeding cycles.
This compensating ramp (m3) must have a slope equal to or
slightly greater than m2/2 for stability. With m2/2 slope
compensation, the average inductor current follows the
control voltage, yielding true current mode operation. The
compensating ramp can be derived from the oscillator and
added to either the Voltage Feedback or Current Sense
inputs (Figure 32).
Figure 19. Continuous Current Waveforms
(A)
m
2
m
2
m
1
t
1
Oscillator Period
Dl)Dl
t
1
2
(B)
m
3
m
2
t
5
m
m
2
2
m
m
1
1
t
3
Inductor
Current
t
Control Voltage
Inductor
Current
Control Voltage
∆
I
m
1
Oscillator Period
t
0
t
4
∆
I
Dl)Dl
m
1
6
10
MOTOROLA ANALOG IC DEVICE DATA

UC3842B, 43B UC2842B, 43B
Figure 20. External Clock Synchronization Figure 21. External Duty Cycle Clamp and
Multi–Unit Synchronization
V
ref
8(14)
R
T
External
Sync
Input
The diode clamp is required if the Sync amplitude is large enough to cause the bottom
side of CT to go more than 300 mV below ground.
C
0.01
4(7)
T
2(3)
47
1(1)
EA
R
Bias
R
Osc
+
2R
R
5(9)
R
A
8 4
R
B
6
5
2
C
1
1.44
+
f
(R
)
A
5.0k
5.0k
5.0k
2RB)C
R
Q
S
MC1455
D
(max)
+
3
7
RA)
8(14)
4(7)
2(3)
1(1)
R
B
2R
B
EA
T o Additional
UCX84XBs
R
Bias
R
Osc
+
2R
R
5(9)
Figure 22. Adjustable Reduction of Clamp Level Figure 23. Soft–Start Circuit
V
CC
7(12)
8(14)
4(7)
R
2
2(3)
1(1)
R
1
V
Clamp
R
Bias
R
Osc
+
1.0 mA
EA
1.67
≈
R
2
ǒ
R
1
2R
+ 0.33x10
Ǔ
)
1
5.0V Ref
+
–
[
Clamp
V
Clamp
R
7(11)
6(10)
5(8)
3(5)
≤ 1.0 V
S
+
–
V
Clamp
R
1.0V
5(9)
–3
ǒ
R
R1R
1
2
)
R
S
R
Comp/Latch
Where: 0 ≤ V
Ǔ
2
I
Q
pk(max)
V
Q1
R
in
8(14)
4(7)
2(3)
1.0M
S
C
1(1)
t
Soft–Start
R
R
+
EA
≈ 3600C in µF
Bias
Osc
1.0mA
+
–
2R
R
5(9)
5.0V Ref
S
Q
R
1.0V
MOTOROLA ANALOG IC DEVICE DATA
11

UC3842B, 43B UC2842B, 43B
Figure 24. Adjustable Buffered Reduction of
Clamp Level with Soft–Start
R
C
+
–
V
Clamp
1.0V
5(9)
Where: 0
R1R
ƫ
C
R
1
5.0V Ref
≤
V
Clamp
2
)
R
Comp/Latch
2
8(14)
4(7)
2(3)
R
2
1(1)
R
C
1
t
Soft-Start
MPSA63
V
Clamp
EA
[
+*
R
Bias
R
Osc
+
1.0 mA
2R
1.67
R
2
ǒ
Ǔ
)
1
R
1
V
Inƪ1
*
3V
Clamp
S
Q
R
≤ 1.0 V
I
pk(max)
Figure 25. Current Sensing Power MOSFET
V
V
CC
7(12)
+
–
7(11)
6(10)
5(8)
3(5)
V
Clamp
[
R
S
V
in
5.0V Ref
+
–
Q1
S
Q
R
Comp/Latch
R
S
Control Circuitry Ground:
T o Pin (9)
Virtually lossless current sensing can be achieved with the implementation of a
SENSEFET power switch. For proper operation during over–current conditions, a
reduction of the I
clamp level must be implemented. Refer to Figures 22 and 24.
pk(max)
CC
(12)
+
–
(11)
(10)
(8)
(5)
G
R
S
1/4 W
V
in
V
If: SENSEFET = MTP10N10M
RS = 200
Then: V
D
SENSEFET
M
RSIpkr
[
Pin 5
r
Pin 5
S
K
Power Ground:
T o Input Source
Return
DM(on)
[
0.075 I
DS(on)
)
R
pk
S
Figure 26. Current Waveform Spike Suppression Figure 27. MOSFET Parasitic Oscillations
V
CC
7(12) 7(12)
5.0V Ref
+
–
S
Q
R
Comp/Latch Comp/Latch
The addition of the RC filter will eliminate instability caused by the leading
edge spike on the current waveform.
+
–
7(11)
6(10)
5(8)
3(5)
V
in
5.0V Ref
+
Q1
R
C
R
S
–
S
Q
R
Series gate resistor Rg will damp any high frequency parasitic oscillations
caused by the MOSFET input capacitance and any series wiring inductance in
the gate–source circuit.
V
CC
+
–
7(11)
R
6(10)
5(8)
3(5)
V
in
Q1
g
R
S
12
MOTOROLA ANALOG IC DEVICE DATA

UC3842B, 43B UC2842B, 43B
Figure 28. Bipolar Transistor Drive Figure 29. Isolated MOSFET Drive
I
B
+
0
–
The totem pole output can furnish negative base current for enhanced transistor
turn–off, with the addition of capacitor C1.
Base Charge
Removal
6(10)
5(8)
3(5)
V
in
C1
Q1
R
S
V
CC
7(12)
5.0V Ref
+
–
S
Q
R
Comp/Latch
+
–
7(11)
6(10)
5(8)
3(5)
Boundary
C
Isolation
R
R
S
V
in
+
Q1
0
–
50% DC 25% DC
+
Ipk
N
S
N
P
VGS Waveforms
+
0
–
V
*
1.4
(Pin1)
3R
S
ǒ
N
S
Ǔ
N
p
Figure 30. Latched Shutdown Figure 31. Error Amplifier Compensation
8(14)
4(7)
2(3)
1(1)
MCR
101
The MCR101 SCR must be selected for a holding of < 0.5 mA @ T
be used in place of the SCR as shown. All resistors are 10 k.
2N
3905
2N
3903
R
R
Osc
+
EA
. The simple two transistor circuit can
A(min)
Bias
1.0 mA
From V
O
R
i
C
f
R
d
≥
8.8 k
2R
R
5(9)
Error Amp compensation circuit for stabilizing any current mode topology except for boost and flyback
converters operating with continuous inductor current.
C
Rf
From V
O
R
p
R
i
C
p
Error Amp compensation circuit for stabilizing current mode boost and flyback
topologies operating with continuous inductor current.
f
R
d
2(3)
1(1)
2(3)
1(1)
2.5V
+
1.0mA
2R
2.5V
EA
+
EA
R
f
R
f
1.0mA
R
5(9)
2R
R
5(9)
MOTOROLA ANALOG IC DEVICE DATA
13

From V
O
MPS3904
R
Slope
R
i
R
d
UC3842B, 43B UC2842B, 43B
Figure 32. Slope Compensation
7(12)
36V
8(14)
R
T
R
Bias
R
4(7)
C
T
2(3)
C
f
R
f
1(1)
+
EA
– 3.0m
Osc
1.0mA
2R
5.0V Ref
+
–
–m
S
R
R
1.0V
Comp/Latch
m
5(9)
The buffered oscillator ramp can be resistively summed with either the voltage
feedback or current sense inputs to provide slope compensation.
Figure 33. 27 W Off–Line Flyback Regulator
+
–
Q
7(11)
6(10)
5(8)
3(5)
V
CC
V
in
R
S
Ω
18k
4.7k
100
pF
0.01
4700pF
10k
150k
115 Vac
8(14)
4(7)
2(3)
1(1)
4.7
EA
MDA
202
R
Bias
R
Osc
+
+
250
5.0V Ref
+
–
S
Q
R
Comp/Latch
5(9)
Test Conditions Results
Line Regulation: 5.0 V
±12V
Load Regulation: 5.0 V
±12V
Output Ripple: 5.0 V
±12V
Vin = 95 to 130 Vac ∆ = 50 mV or ± 0.5%
∆ = 24 mV or ± 0.1%
Vin = 115 Vac,
I
= 1.0 A to 4.0 A
out
Vin = 115 Vac,
I
= 100 mA to 300 mA
out
∆ = 300 mV or ± 3.0%
∆ = 60 mV or ± 0.25%
Vin = 115 Vac 40 mV
80 mV
Efficiency Vin = 115 Vac 70%
All outputs are at nominal load currents, unless otherwise noted
MBR1635
4.7k
56k
1N4935 1N4935
7(12)
+
–
7(11)
6(10)
5(8)
3(5)
68
++
100
1N4937
22
1N5819
1.0k
470pF
Primary: 45 Turns #26 AWG
T1 –
Secondary
T1
3300
pF
47
MTP
4N50
L1
– 15 µH at 5.0 A, Coilcraft Z7156
L2, L3
– 25
±
12 V: 9 Turns #30 A WG (2 Strands) Bifiliar
2200
MUR110
1000
1000
MUR110
680pF
2.7k
0.5
µ
H at 5.0 A, Coilcraft Z7157
L1
++
1000
L2
++
++
L3
1N4937
5.0V/4.0A
5.0V RTN
12V/0.3A
10
±
12V RTN
10
–12V/0.3A
Wound
Secondary 5.0 V: 4 Turns (six strands) #26 Hexfiliar Wound
Secondary Feedback: 10 Turns #30 AWG (2 strands)
Bifiliar Wound
Core: Ferroxcube EC35–3C8
Bobbin: Ferroxcube EC35PCB1
≈
0.10” for a primary inductance of 1.0 mH
Gap:
pp
pp
14
MOTOROLA ANALOG IC DEVICE DATA

NOTE 2
A
E
B
C
A1
–T–
SEATING
PLANE
H
14
F
–A–
G
D
58
1
H
4
e
B
SS
UC3842B, 43B UC2842B, 43B
OUTLINE DIMENSIONS
N SUFFIX
PLASTIC PACKAGE
58
–B–
C
N
D
0.13 (0.005) B
0.25MB
K
M
T
M
A
SEATING
PLANE
0.10
A0.25MCB
CASE 626–05
ISSUE K
L
J
M
M
A
M
D1 SUFFIX
PLASTIC PACKAGE
CASE 751–06
(SO–8)
ISSUE T
h
X 45
_
q
NOTES:
1. DIMENSION L TO CENTER OF LEAD WHEN
FORMED PARALLEL.
2. PACKAGE CONTOUR OPTIONAL (ROUND OR
SQUARE CORNERS).
3. DIMENSIONING AND TOLERANCING PER ANSI
Y14.5M, 1982.
DIM MIN MAX MIN MAX
A 9.40 10.16 0.370 0.400
B 6.10 6.60 0.240 0.260
C 3.94 4.45 0.155 0.175
D 0.38 0.51 0.015 0.020
F 1.02 1.78 0.040 0.070
G 2.54 BSC 0.100 BSC
H 0.76 1.27 0.030 0.050
J 0.20 0.30 0.008 0.012
K 2.92 3.43 0.115 0.135
L 7.62 BSC 0.300 BSC
M ––– 10 ––– 10
N 0.76 1.01 0.030 0.040
NOTES:
C
L
1. DIMENSIONING AND TOLERANCING PER ASME
Y14.5M, 1994.
2. DIMENSIONS ARE IN MILLIMETER.
3. DIMENSION D AND E DO NOT INCLUDE MOLD
PROTRUSION.
4. MAXIMUM MOLD PROTRUSION 0.15 PER SIDE.
5. DIMENSION B DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR
PROTRUSION SHALL BE 0.127 TOTAL IN EXCESS
OF THE B DIMENSION AT MAXIMUM MATERIAL
CONDITION.
MILLIMETERS
DIM MIN MAX
A 1.35 1.75
A1 0.10 0.25
B 0.35 0.49
C 0.19 0.25
D 4.80 5.00
E
3.80 4.00
1.27 BSCe
H 5.80 6.20
h
0.25 0.50
L 0.40 1.25
0 7
q
INCHESMILLIMETERS
__
__
MOTOROLA ANALOG IC DEVICE DATA
15

–T–
SEATING
PLANE
–A–
14 8
G
D 14 PL
0.25 (0.010) A
UC3842B, 43B UC2842B, 43B
OUTLINE DIMENSIONS
D SUFFIX
PLASTIC PACKAGE
CASE 751A–03
(SO–14)
ISSUE F
–B–
P 7 PL
M
71
0.25 (0.010) B
C
X 45
R
K
M
S
B
T
S
M
_
M
NOTES:
1. DIMENSIONING AND TOLERANCING PER
ANSI Y14.5M, 1982.
2. CONTROLLING DIMENSION: MILLIMETER.
3. DIMENSIONS A AND B DO NOT INCLUDE
MOLD PROTRUSION.
4. MAXIMUM MOLD PROTRUSION 0.15 (0.006)
PER SIDE.
5. DIMENSION D DOES NOT INCLUDE DAMBAR
PROTRUSION. ALLOWABLE DAMBAR
PROTRUSION SHALL BE 0.127 (0.005) TOTAL
IN EXCESS OF THE D DIMENSION AT
MAXIMUM MATERIAL CONDITION.
F
J
DIM MIN MAX MIN MAX
A 8.55 8.75 0.337 0.344
B 3.80 4.00 0.150 0.157
C 1.35 1.75 0.054 0.068
D 0.35 0.49 0.014 0.019
F 0.40 1.25 0.016 0.049
G 1.27 BSC 0.050 BSC
J 0.19 0.25 0.008 0.009
K 0.10 0.25 0.004 0.009
M 0 7 0 7
____
P 5.80 6.20 0.228 0.244
R 0.25 0.50 0.010 0.019
INCHESMILLIMETERS
Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty , representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “T ypical” parameters which may be provided in Motorola
data sheets and/or specifications can and do vary in different applications and actual performance may vary over time. All operating parameters, including “Typicals”
must be validated for each customer application by customer’s technical experts. Motorola does not convey any license under its patent rights nor the rights of
others. Motorola products are not designed, intended, or authorized for use as components in systems intended for surgical implant into the body, or other
applications intended to support or sustain life, or for any other application in which the failure of the Motorola product could create a situation where personal injury
or death may occur. Should Buyer purchase or use Motorola products for any such unintended or unauthorized application, Buyer shall indemnify and hold Motorola
and its officers, employees, subsidiaries, affiliates, and distributors harmless against all claims, costs, damages, and expenses, and reasonable attorney fees
arising out of, directly or indirectly, any claim of personal injury or death associated with such unintended or unauthorized use, even if such claim alleges that Motorola
was negligent regarding the design or manufacture of the part. Motorola and are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal
Opportunity/Affirmative Action Employer.
How to reach us:
USA/EUROPE/Locations Not Listed: Motorola Literature Distribution; JAPAN: Nippon Motorola Ltd.: SPD, Strategic Planning Office, 141,
P.O. Box 5405, Denver, Colorado 80217. 1–303–675–2140 or 1–800–441–2447 4–32–1 Nishi–Gotanda, Shagawa–ku, Tokyo, Japan. 03–5487–8488
Customer Focus Center: 1–800–521–6274
Mfax: RMFAX0@email.sps.mot.com – TOUCHTONE 1–602–244–6609 ASIA/PACIFIC: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
Moto rola Fax Ba ck System – US & Canada ONLY 1–800–774–1848 51 Ting Kok Road, Tai Po, N.T., Hong Kong. 852–26629298
HOME PAGE: http://motorola.com/sps/
16
– http://sps.motorola.com/mfax/
◊
MOTOROLA ANALOG IC DEVICE DATA
Mfax is a trademark of Motorola, Inc.
UC3842B/D
 Loading...
Loading...