

Datasheet MC68HCP11A1P, MC68HCP11A1VFN, MC68HCP11A1VP, MC68HCP11A1MFN, MC68HC11A8FN1 Datasheet (Motorola)
...
MOTOROLA
Order this document
by MC68HC11A8TS/D
SEMICONDUCTOR
TECHNICAL DATA
MC68HC11A8
MC68HC11A1
MC68HC11A0
Technical Summary
8-Bit Microcontrollers
1 Introduction
The MC68HC11A8, MC68HC11A1, and MC68HC11A0 high-performance microcontroller units (MCUs)
are based on the M68HC11 Family. These high speed, low power consumption chips have multiplexed
buses and a fully static design. The chips can operate at frequencies from 3 MHz to dc. The three MCUs
are created from the same masks; the only differences are the value stored in the CONFIG register, and
whether or not the ROM or EEPROM is tested and guaranteed.
For detailed information about specific characteristics of these MCUs, refer to the
Manual
(M68HC11RM/AD).
M68HC11 Reference
1.1 Features
• M68HC11 CPU
• Power Saving STOP and WAIT Modes
• 8 Kbytes ROM
• 512 Bytes of On-Chip EEPROM
• 256 Bytes of On-Chip RAM (All Saved During Standby)
• 16-Bit Timer System
— 3 Input Capture Channels
— 5 Output Compare Channels
• 8-Bit Pulse Accumulator
• Real-Time Interrupt Circuit
• Computer Operating Properly (COP) Watchdog System
• Synchronous Serial Peripheral Interface (SPI)
• Asynchronous Nonreturn to Zero (NRZ) Serial Communications Interface (SCI)
• 8-Channel, 8-Bit Analog-to-Digital (A/D) Converter
• 38 General-Purpose Input/Output (I/O) Pins
— 15 Bidirectional I/O Pins
— 11 Input-Only Pins and 12 Output-Only Pins (Eight Output-Only Pins in 48-Pin Package)
• Available in 48-Pin Dual In-Line Package (DIP) or 52-Pin Plastic Leaded Chip Carrier (PLCC)
This document contains information on a new product. Specifications and information herein are subject to change without notice.
© MOTOROLA INC., 1991, 1996

Table 1 MC68HC11Ax Family Members
Device Number ROM EEPROM RAM CONFIG* Comments
MC68HC11A8 8K 512 256 $0F Family built around this device
MC68HC11A1 0 512 256 $0D ROM disabled
MC68HC11A0 0 0 256 $0C ROM and EEPROM disabled
Table 2 Ordering Information
Package Temperature CONFIG Description MC Order Number
48-Pin Plastic DIP
(P suffix)
–40 ° to + 85 ° C $0F BUFFALO ROM MC68HC11A8P1
–40 ° to + 85 ° C $0D No ROM MC68HC11A1P
–40 ° to + 105 ° C $0D No ROM MC68HC11A1VP
–40 ° to + 125 ° C $0D No ROM MC68HC11A1MP
–40 ° to + 85 ° C $09 No ROM, COP On MC68HCP11A1P
–40 ° to + 105 ° C $09 No ROM, COP On MC68HCP11A1VP
–40 ° to + 125 ° C $09 No ROM, COP On MC68HCP11A1MP
–40 ° to + 85 ° C $0C No ROM, No EEPROM MC68HC11A0P
52-Pin PLCC
(FN suffix)
–40 ° to + 85 ° C $0F BUFFALO ROM MC68HC11A8FN1
–40 ° to + 85 ° C $0D No ROM MC68HC11A1FN
–40 ° to + 105 ° C $0D No ROM MC68HC11A1VFN
–40 ° to + 125 ° C $0D No ROM MC68HC11A1MFN
–40 ° to + 85 ° C $09 No ROM, COP On MC68HCP11A1FN
–40 ° to + 105 ° C $09 No ROM, COP On MC68HCP11A1VFN
–40 ° to + 125 ° C $09 No ROM, COP On MC68HCP11A1MFN
–40 ° to + 85 ° C $0C No ROM, No EEPROM MC68HC11A0FN
MOTOROLA MC68HC11A8
2 MC68HC11A8TS/D

TABLE OF CONTENTS
Section Page
1 Introduction...............................................................................................................................................1
1.1 Features ..........................................................................................................................................1
2 Operating Modes and Memory Maps.......................................................................................................6
2.1 Memory Maps ..................................................................................................................................7
3 Resets and Interrupts.............................................................................................................................13
4 Electrically Erasable Programmable Read-Only Memory (EEPROM) ...................................................17
5 Parallel Input/Output...............................................................................................................................19
6 Serial Communications Interface (SCI)..................................................................................................23
7 Serial Peripheral Interface (SPI).............................................................................................................29
8 Main Timer..............................................................................................................................................32
9 Pulse Accumulator..................................................................................................................................38
10 Analog-to-Digital Converter..................................................................................................................41
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 3

XTAL
EXTAL
E
PA7
PA6
PA5
PA4
PA3
PA2
PA1
PA0
A7/D7
A6/D6
A5/D5
A4/D4
A3/D3
A2/D2
A1/D1
A0/D0
A15
A14
A13
A12
A11
A10
A9
A8
R/W
AS
PAI/OC1
OC2/OC1
OC3/OC1
PORT A
SINGLE
CHIPEXPANDED
PB7
PB6
PB5
PB4
PB3
PB2
PB1
PB0
PC7
PC6
PC5
PC4
PC3
PC2
PC1
PC0
STRB
STRA
EQUIVALENT TO MC68HC24
OC4/OC1
OC5/OC1
IC1
IC2
IC3
PORT B
PORT C
PORT C DDR
PARALLEL I/O
PULSE
ACCUMULATOR
TIMER
SYSTEM
CPU
HANDSHAKE I/O
COP
PERIODIC
INTERRUPT
BYTES
8
KBYTES
ROM
ADDRESS/DATA BUS
OSCILLATOR
256
RAM
512
BYTES
EEPROM
POWER
INTERRUPT
LOGIC
MODE
SELECT
A/D
CONVERTER
AN7
AN6
AN5
AN4
AN3
AN2
AN1
AN0
SS
SCK
SPI
MOSI
MISO
TxD
SCI
RxD
PORT E
PORT D
PORT D DDR
V
DD
V
SS
IRQ
XIRQ
RESET
MODA/
LIR
MODB/
V
STBY
V
RH
V
RL
PE7
PE6
PE5
PE4
PE3
PE2
PE1
PE0
PD5
PD4
PD3
PD2
PD1
PD0
Figure 1 MC68HC11A8 Block Diagram
MOTOROLA MC68HC11A8
4 MC68HC11A8TS/D

XTAL
PC0/A0/D0
PC1/A1/D1
PC2/A2/D2
PC3/A3/D3
PC4/A4/D4
PC5/A5/D5
PC6/A6/D6
PC7/A7/D7
RESET
XIRQ
IRQ
PD0/RxD
8
9
10
11
12
13
14
15
16
17
18
19
20
STRB/R/W
EXTAL
6
7
212223
E
5
STRA/AS
MODA/LIR
4
3
252627
24
STBY
SS
MODB/V
VRHV
2
52
1
2829303132
RL
V
51
PE7/AN7
PE3/AN3
495047
PE6/AN6
PE2/AN2
48
46
45
44
43
42
41
40
39
38
37
36
35
34
33
PE5/AN5
PE1/AN1
PE4/AN4
PE0/AN0
PB0/A8
PB1/A9
PB2/A10
PB3/A11
PB4/A12
PB5/A13
PB6/A14
PB7/A15
PA0/IC3
DD
V
PD1/TxD
PD2/MISO
PD5/SS
PD4/SCK
PD3/MOSI
PA7/PAI/OC1
PA6/OC2/OC1
PA5/OC3/OC1
PA2/IC1
PA1/IC2
PA3/OC5/OC1
PA4/OC4/OC1
Figure 2 52-Pin PLCC Pin Assignments
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 5

PA7/PAI/OC1
PA6/OC2/OC1
PA5/OC3/OC1
PA4/OC4/OC1
PA3/OC5/OC1
PA2/IC1
PA1/IC2
PA0/IC3
PB7/A15
PB6/A14
PB5/A13
PB4/A12
PB3/A11
PB2/A10
PB1/A9
PB0/A8
PE0/AN0
PE1/AN1
PE2/AN2
PE3/AN3
V
V
V
MODB/V
STBY
RL
RH
SS
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
V
DD
PD5/SS
PD4/SCK
PD3/MOSI
PD2/MISO
PD1/TxD
PD0/RxD
IRQ
XIRQ
RESET
PC7/A7/D7
PC6/A6/D6
PC5/A5/D5
PC4/A4/D4
PC3/A3/D3
PC2/A2/D2
PC1/A1/D1
PC0/A0/D0
XTAL
EXTAL
STRB/ R/W
E
STRA/AS
MODA/LIR
Figure 3 48-Pin DIP Pin Assignments
2 Operating Modes and Memory Maps
In single-chip operating mode, the MC68HC11A8 is a monolithic microcontroller without external address or data buses.
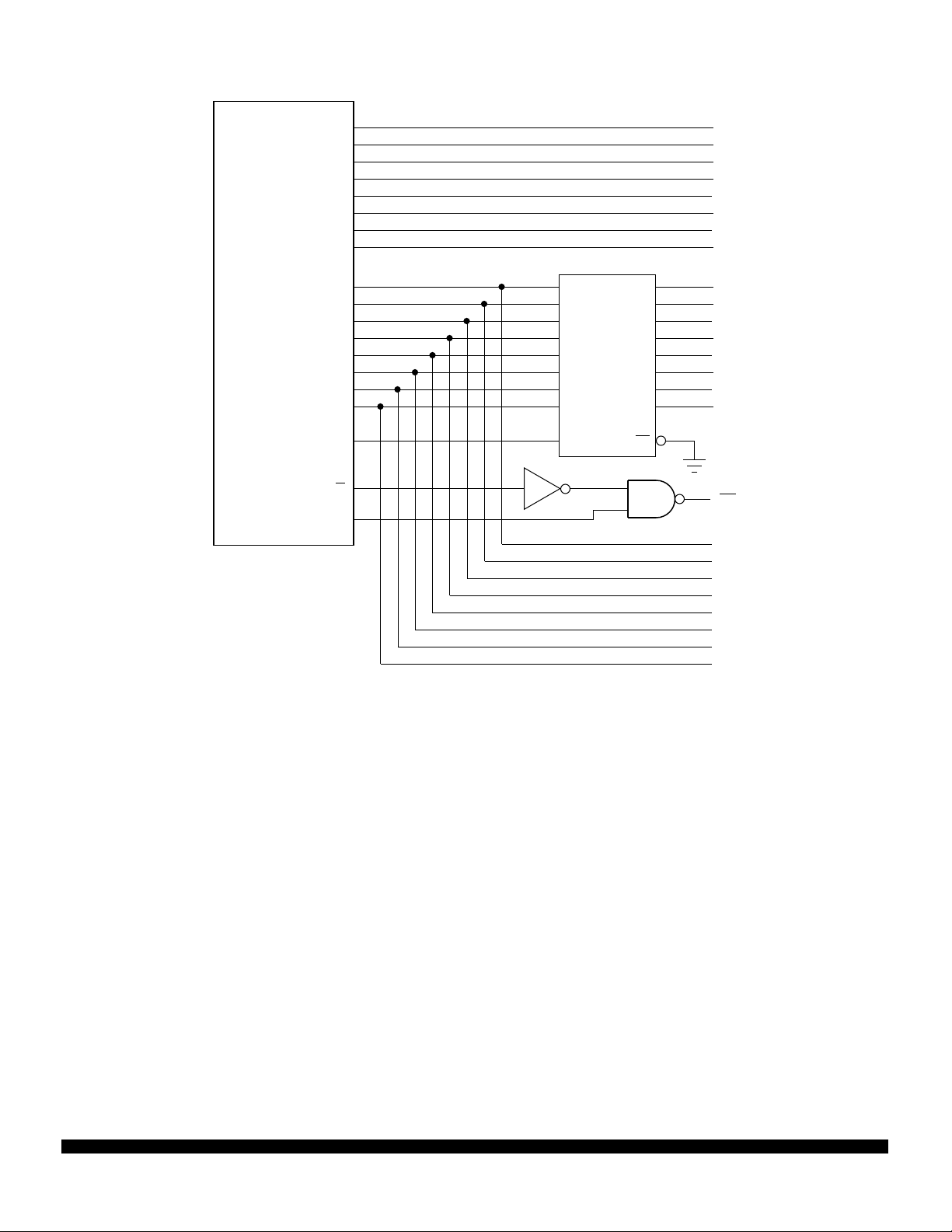
In expanded multiplexed operating mode, the MCU can access a 64 Kbyte address space. The space
includes the same on-chip memory addresses used for single-chip mode plus external peripheral and
memory devices. The expansion bus is made up of ports B and C and control signals AS and R/W
address, R/W, and AS signals are active and valid for all bus cycles including accesses to internal memory locations. The following figure illustrates a recommended method of demultiplexing low-order addresses from data at port C.
. The
MOTOROLA MC68HC11A8
6 MC68HC11A8TS/D
MC68HC11A8
PB7
PB6
PB5
PB4
PB3
PB2
PB1
PB0
PC7
PC6
PC5
PC4
PC3
PC2
PC1
PC0
AS
R/W
A15
A14
A13
A12
A11
A10
A9
A8
MC54/74HC373
D1
D2
D3
D4
D5
D6
D7
D8
LE
E
Q1
Q2
Q3
Q4
Q5
Q6
Q7
Q8
OE
A7
A6
A5
A4
A3
A2
A1
A0
WE
D7
D6
D5
D4
D3
D2
D1
D0
Figure 4 Address/Data Demultiplexing
Special bootstrap mode allows special purpose programs to be entered into internal RAM. The bootloader program uses the SCI to read a 256-byte program into on-chip RAM at $0000 through $00FF.
After receiving the character for address $00FF, control passes to the loaded program at $0000.
Special test mode is used primarily for factory testing.
2.1 Memory Maps
Memory locations are the same for expanded multiplexed and single-chip modes. The on-board 256byte RAM is initially located at $0000 after reset. The 64-byte register block originates at $1000 after
reset. RAM and/or the register block can be placed at any other 4K boundary ($x000) after reset by writing an appropriate value to the INIT register. The 512-byte EEPROM is located at $B600 through $B7FF
after reset if it is enabled. The 8 Kbyte ROM is located at $E000 through $FFFF if it is enabled.
Hardware priority is built into the memory remapping. Registers have priority over RAM, and RAM has
priority over ROM. The higher priority resource covers the lower, making the underlying locations inaccessible.
In special bootstrap mode, a bootloader ROM is enabled at locations $BF40 through $BFFF.
In special test and special bootstrap modes, reset and interrupt vectors are located at $BFC0 through
$BFFF.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 7

$0000
$1000
$B600
$E000
$FFFF
SINGLE
CHIP
EXT
EXT
EXPANDED
MUX
SPECIAL
BOOTSTRAP
EXTEXT
EXT
EXT
SPECIAL
TEST
0000
256 BYTES RAM
(CAN BE REMAPPED TO ANY
4K PAGE BY THE INIT REGISTER)
00FF
1000
64 BYTE REGISTER BLOCK
(CAN BE REMAPPED TO ANY
4K PAGE BY THE INIT REGISTER)
103F
B600
512 BYTES EEPROM
B7FF
BF40
BOOT
ROM
BFFF
E000
8K ROM
FFFF
BFC0
BFFF
FFC0
FFFF
SPECIAL
MODE
INTERRUPT
VECTORS
NORMAL
MODE
INTERRUPT
VECTORS
Figure 5 Memory Map
MOTOROLA MC68HC11A8
8 MC68HC11A8TS/D

Table 3 MC68HC11A8 Register and Control Bit Assignments (Sheet 1 of 2)
(The register block can be remapped to any 4K boundary.)
Bit 7 654321Bit 0
$1000 PA7 PA6 PA5 PA4 PA3 PA2 PA1 PA0 PORTA
$1001 Reserved
$1002 STAF STAI CWOM HNDS OIN PLS EGA INVB PIOC
$1003 PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0 PORTC
$1004 PB7 PB6 PB5 PB4 PB3 PB2 PB1 PB0 PORTB
$1005 PCL7 PCL6 PCL5 PCL4 PCL3 PCL2 PCL1 PCL0 PORTCL
$1006 Reserved
$1007 DDC7 DDC6 DDC5 DDC4 DDC3 DDC2 DDC1 DDC0 DDRC
$1008 0 0 PD5 PD4 PD3 PD2 PD1 PD0 PORTD
$1009 0 0 DDD5 DDD4 DDD3 DDD2 DDD1 DDD0 DDRD
$100A PE7 PE6 PE5 PE4 PE3 PE2 PE1 PE0 PORTE
$100B FOC1 FOC2 FOC3 FOC4 FOC5 0 0 0 CFORC
$100C OC1M7 OC1M6 OC1M5 OC1M4 OC1M3 0 0 0 OC1M
$100D OC1D7 OC1D6 OC1D5 OC1D4 OC1D3 0 0 0 OC1D
$100E Bit 15 14 13 12 11 10 9 Bit 8 TCNT (High)
$100F Bit 7 654321Bit 0 TCNT (Low)
$1010 Bit 15 14 13 12 11 10 9 Bit 8 TIC1 (High)
$1011 Bit 7 654321Bit 0 TIC1 (Low)
$1012 Bit 15 14 13 12 11 10 9 Bit 8 TIC2 (High)
$1013 Bit 7 654321Bit 0 TIC2 (Low)
$1014 Bit 15 14 13 12 11 10 9 Bit 8 TIC3 (High)
$1015 Bit 7 654321Bit 0 TIC3 (Low)
$1016 Bit 15 14 13 12 11 10 9 Bit 8 TOC1(High)
$1017 Bit 7 654321Bit 0 TOC1 (Low)
$1018 Bit 15 14 13 12 11 10 9 Bit 8 TOC2 (High)
$1019 Bit 7 654321Bit 0 TOC2 (Low)
$101A Bit 15 14 13 12 11 10 9 Bit 8 TOC3 (High)
$101B Bit 7 654321Bit 0 TOC3 (Low)
$101C Bit 15 14 13 12 11 10 9 Bit 8 TOC4 (High)
$101D Bit 7 654321Bit 0 TOC4 (Low)
$101E Bit 15 14 13 12 11 10 9 Bit 8 TOC5 (High)
$101F Bit 7 654321Bit 0 TOC5 (Low)
$1020 OM2 OL2 OM3 OL3 OM4 OL4 OM5 OL5 TCTL1
$1021 0 0 EDG1B EDG1A EDG2B EDG2A EDG3B EDG3A TCTL2
$1022 OC1I OC2I OC3I OC4I OC5I IC1I IC2I IC3I TMSK1
$1023 OC1F OC2F OC3F OC4F OC5F IC1F IC2F IC3F TFLG1
$1024 TOI RTII PAOVI PAII 0 0 PR1 PR0 TMSK2
$1025 TOF RTIF PAOVF PAIF 0000TFLG2
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 9

Table 3 MC68HC11A8 Register and Control Bit Assignments (Sheet 2 of 2)
(The register block can be remapped to any 4K boundary.)
Bit 7 654321Bit 0
$1026 DDRA7 PAEN PAMOD PEDGE 0 0 RTR1 RTR0 PACTL
$1027 Bit 7 654321Bit 0 PACNT
$1028 SPIE SPE DWOM MSTR CPOL CPHA SPR1 SPR0 SPCR
$1029 SPIF WCOL 0 MODF 0000SPSR
$102A Bit 7 654321Bit 0 SPDR
$102B TCLR 0 SCP1 SCP0 RCKB SCR2 SCR1 SCR0 BAUD
$102C R8 T8 0 M WAKE 0 0 0 SCCR1
$102D TIE TCIE RIE ILIE TE RE RWU SBK SCCR2
$102E TDRE TC RDRF IDLE OR NF FE 0 SCSR
$102F R7/T7 R6/T6 R5/T5 R4/T4 R3/T3 R2/T2 R1/T1 R0/T0 SCDR
$1030 CCF 0 SCAN MULT CD CC CB CA ADCTL
$1031 Bit 7 654321Bit 0 ADR1
$1032 Bit 7 654321Bit 0 ADR2
$1033 Bit 7 654321Bit 0 ADR3
$1034 Bit 7 654321Bit 0 ADR4
$1035 Reserved
$1038 Reserved
$1039 ADPU CSEL IRQE DLY CME 0 CR1 CR0 OPTION
$103A Bit 7 654321Bit 0 COPRST
$103B ODD EVEN 0 BYTE ROW ERASE EELAT EEPGM PPROG
$103C RBOOT SMOD MDA IRV PSEL3 PSEL2 PSEL1 PSEL0 HPRIO
$103D RAM3 RAM2 RAM1 RAM0 REG3 REG2 REG1 REG0 INIT
$103E TILOP 0 OCCR CBYP DISR FCM FCOP TCON TEST1
$103F 0000NOSEC NOCOP ROMON EEON CONFIG
MOTOROLA MC68HC11A8
10 MC68HC11A8TS/D

HPRIO — Highest Priority I-Bit Interrupt and Miscellaneous
Bit 7 654321Bit 0
RBOOT SMOD MDA IRV PSEL3 PSEL2 PSEL1 PSEL0
RESET: ———— 0101
$103C
RBOOT, SMOD, and MDA reset depend on conditions at reset and can only be written in special modes
(SMOD = 1).
RBOOT — Read Bootstrap ROM
0 = Bootloader ROM disabled and not in map
1 = Bootloader ROM enabled and in map at $BF40–$BFFF
SMOD —Special Mode Select
MDA — Mode Select A
Inputs Mode Latched at Reset
MODB MODA RBOOT SMOD MDA
1 0 Single Chip 0 0 0
1 1 Expanded Multiplexed 0 0 1
0 0 Special Bootstrap 1 1 0
0 1 Special Test 0 1 1
IRV — Internal Read Visibility
0 = No internal read visibility on external bus
1 = Data from internal reads is driven out through the external data bus
PSEL3–PSEL0 — Priority Select Bits 3 through 0
Refer to 3 Resets and Interrupts .
INIT — RAM and I/O Mapping
Bit 7 654321Bit 0
RAM3 RAM2 RAM1 RAM0 REG3 REG2 REG1 REG0
RESET: 00000001
$103D
RAM[3:0] —256-Byte Internal RAM Map Position
RAM[3:0] determine the upper four bits of the RAM address, positioning RAM at the selected 4K boundary.
REG[3:0] —64-Byte Register Block Map Position
REG[3:0] determine the upper four bits of the register address, positioning registers at the selected 4K
boundary. Register can be written only once in the first 64 cycles out of reset in normal modes, or any
time in special modes.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 11

TEST1 — Factory Test
Bit 7 654321Bit 0
TILOP 0 OCCR CBYP DISR FCM FCOP TCON
RESET: 0000—000
$103E
Test Modes Only
TILOP — Test Illegal Opcode
OCCR — Output Condition Code Register to Timer Port
CBYP — Timer Divider Chain Bypass
DISR — Disable Resets from COP and Clock Monitor
DISR is forced to one out of reset in special test and bootstrap modes.
FCM — Force Clock Monitor Failure
FCOP — Force COP Watchdog Failure
TCON — Test Configuration Register
CONFIG — COP, ROM, EEPROM Enables
Bit 7 654321Bit 0
0000NOSEC NOCOP ROMON EEON
RESET: 0000————
$103F
NOTE
The bits of this register are implemented with EEPROM cells. Programming and
erasing follow normal EEPROM procedures. The erased state of CONFIG is $0F.
A new value is not readable until after a subsequent reset sequence. CONFIG can
only be programmed or erased in special modes.
NOSEC — EEPROM Security Disable
Refer to 4 Electrically Erasable Programmable Read-Only Memory (EEPROM) .
NOCOP — COP System Disable
Refer to 3 Resets and Interrupts .
ROMON — ROM Enable
In single-chip mode, ROMON is forced to one out of reset.
0 = 8K ROM removed from the memory map
1 = 8K ROM present in the memory map
EEON — EEPROM Enable
0 = EEPROM is removed from the memory map
1 = EEPROM is present in the memory map
MOTOROLA MC68HC11A8
12 MC68HC11A8TS/D

3 Resets and Interrupts
The MC68HC11A8 has three reset vectors and 18 interrupt vectors. The reset vectors are as follows:
• RESET
• COP Clock Monitor Fail
• COP Failure
The eight interrupt vectors service 23 interrupt sources (three non-maskable, 20 maskable). The three
non-maskable interrupt vectors are as follows:
• Illegal Opcode Trap
• Software Interrupt
• XIRQ Pin (Pseudo Non-Maskable Interrupt)
The 20 maskable interrupt sources are subject to masking by a global interrupt mask, the I bit in the
condition code register (CCR). In addition to the global I bit, all of these sources except the external
interrupt (IRQ
M68HC11 have separate interrupt vectors. For this reason, there is usually no need for software to poll
control registers to determine the cause of an interrupt. The maskable interrupt sources respond to a
fixed priority relationship, except that any one source can be dynamically elevated to the highest priority
position of any maskable source. Refer to the table of interrupt and reset vector assignments.
On-chip peripheral systems generate maskable interrupts that are recognized only if the I bit in the CCR
is clear. Maskable interrupts are prioritized according to a default arrangement, but any one source can
be elevated to the highest maskable priority position by the HPRIO register. The HPRIO register can be
written at any time, provided the I bit in the CCR is set.
For some interrupt sources, such as the parallel I/O and SCI interrupts, the flags are automatically
cleared during the course of responding to the interrupt requests. For example, the RDRF flag in the
SCI system is cleared by the automatic clearing mechanism, which consists of a read of the SCI status
register while RDRF is set, followed by a read of the SCI data register. The normal response to an
RDRF interrupt request is to read the SCI status register to check for receive errors, then to read the
received data from the SCI data register. These two steps satisfy the automatic clearing mechanism
without requiring any special instructions.
, or Power-On
) pin are controlled by local enable bits in control registers. Most interrupt sources in the
The real-time interrupt (RTI) function generates hardware interrupts at a fixed periodic rate. These hard-
ware interrupts provide a time reference signal for routines that measure real time. The routine notes
the number of times a particular interrupt has occurred and multiplies that number by the predetermined
subroutine execution time.
There are four RTI signal rates available in the MC68HC11A8. The MCU oscillator frequency and the
value of two software-accessible control bits, RTR1 and RTR0, in the pulse accumulator control register
(PACTL) determine these signal rates. Refer to 8 Main Timer for more information about PACTL.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 13

•
•
•
•
•
Table 4 Interrupt and Reset Vector Assignments
Vector Address Interrupt Source CCR Mask Local Mask
FFC0, C1 – FFD4, D5 Reserved — —
FFD6, D7 SCI Serial System I Bit
SCI Transmit Complete TCIE
SCI Transmit Data Register Empty TIE
SCI Idle Line Detect ILIE
SCI Receiver Overrun RIE
SCI Receive Data Register Full RIE
FFD8, D9 SPI Serial Transfer Complete I Bit SPIE
FFDA, DB Pulse Accumulator Input Edge I Bit PAII
FFDC, DD Pulse Accumulator Overflow I Bit PAOVI
FFDE, DF Timer Overflow I Bit TOI
FFE0, E1 Timer Input Capture 4/Output Compare 5 I Bit I4O5I
FFE3, E2 Timer Output Compare 4 I Bit OC4I
FFE4, E5 Timer Output Compare 3 I Bit OC3I
FFE6, E7 Timer Output Compare 2 I Bit OC2I
FFE8, E9 Timer Output Compare 1 I Bit OC1I
FFEA, EB Timer Input Capture 3 I Bit IC3
FFEC, ED Timer Input Capture 2 I Bit IC2I
FFEE, EF Timer Input Capture 1 I Bit IC1I
FFF0, F1 Real-Time Interrupt I Bit RTII
FFF2, F3 Parallel I/O Handshake I Bit STAI
None
IRQ
FFF4, F5 XIRQ
FFF6, F7 Software Interrupt None None
FFF8, F9 Illegal Opcode Trap None None
FFFA, FB COP Failure None NOCOP
FFFC, FD COP Clock Monitor Fail None CME
FFFE, FF RESET None None
Pin X Bit None
OPTION —System Configuration Options
Bit 7 654321Bit 0
ADPU CSEL IRQE* DLY* CME 0 CR1* CR0*
RESET: 00010000
*Can be written only once in first 64 cycles out of reset in normal modes, or any time in special modes.
$1039
ADPU —A/D Converter Power-up
Refer to 10 Analog-to-Digital Converter .
CSEL —Clock Select
Refer to 10 Analog-to-Digital Converter .
IRQE — IRQ
Select Edge-Sensitive Only
0 = Low logic level recognition
1 = Falling edge recognition
MOTOROLA MC68HC11A8
14 MC68HC11A8TS/D

DLY — Enable Oscillator Start-Up Delay on Exit from STOP
0 = No stabilization delay on exit from STOP
1 = Stabilization delay enabled on exit from STOP
CME — Clock Monitor Enable
0 = Clock monitor disabled; slow clocks can be used
1 = Slow or stopped clocks cause clock failure reset
CR1, CR0 — COP Timer Rate Select
Divide
CR [1:0]
0 0 1 32.768 ms 16.384 ms 10.923 ms
0 1 4 131.072 ms 65.536 ms 43.691 ms
1 0 16 524.288 ms 262.140 ms 174.76 ms
1 1 64 2.097 sec 1.049 sec 699.05 ms
15
E/2
By
E = 1.0 MHz 2.0 MHz 3.0 MHz
COPRST — Arm/Reset COP Timer Circuitry
Bit 7 654321Bit 0
76543210
RESET: 00000000
XTAL = 4.0 Mhz
Timeout
–0/+32.8 ms
XTAL = 8.0 MHz
Timeout
–0/+16.4 ms
XTAL = 12.0 MHz
Timeout
–0/+10.9 ms
$103A
Write $55 to COPRST to arm COP watchdog clearing mechanism. Write $AA to COPRST to reset COP
watchdog.
HPRIO — Highest Priority I-Bit Interrupt and Miscellaneous
Bit 7 654321Bit 0
RBOOT SMOD MDA IRV PSEL3 PSEL2 PSEL1 PSEL0
RESET: ———— 0101
$103C
RBOOT — Read Bootstrap ROM Bits 7–4
Refer to 2 Operating Modes and Memory Maps .
SMOD — Special Mode Select
Refer to 2 Operating Modes and Memory Maps .
MDA — Mode Select A
Refer to 2 Operating Modes and Memory Maps .
IRV — Internal Read Visibility
Refer to 2 Operating Modes and Memory Maps .
PSEL[3:0] — Priority Select Bits 3 through 0
Can be written only while the I bit in the CCR is set (interrupts disabled). These bits select one interrupt
source to be elevated above all other I-bit related sources.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 15

PSEL[3:0] Interrupt Source Promoted
0000 Timer Overflow
0001 Pulse Accumulator Overflow
0010 Pulse Accumulator Input Edge
0011 SPI Serial Transfer Complete
0100 SCI Serial System
0101 Reserved (Default to IRQ
0110 IRQ
0111 Real-Time Interrupt
1000 Timer Input Capture 1
1001 Timer Input Capture 2
1010 Timer Input Capture 3
1011 Timer Output Compare 1
1100 Timer Output Compare 2
1101 Timer Output Compare 3
1110 Timer Output Compare 4
1111 Timer Output Compare 5
)
CONFIG — COP, ROM, EEPROM Enables $103F
Bit 7 654321Bit 0
0000NOSEC NOCOP ROMON EEON
RESET: 0000————
NOTE
The bits of this register are implemented with EEPROM cells. Programming and
erasing follow normal EEPROM procedures. The erased state of CONFIG is $0F.
A new value is not readable until after a subsequent reset sequence. CONFIG can
only be programmed or erased in special modes.
NOSEC — EEPROM Security Disable
Refer to 4 Electrically Erasable Programmable Read-Only Memory (EEPROM) .
NOCOP — COP system disable
0 = COP enabled (forces reset on timeout)
1 = COP disabled (does not force reset on timeout)
ROMON — ROM Enable
Refer to 2 Operating Modes and Memory Maps .
EEON — EEPROM Enable
Refer to 2 Operating Modes and Memory Maps .
MOTOROLA MC68HC11A8
16 MC68HC11A8TS/D

4 Electrically Erasable Programmable Read-Only Memory (EEPROM)
The 512 bytes of EEPROM in the MC68HC11A8 are located at $B600 through $B7FF. The EEON bit
in CONFIG controls the presence or absence of the EEPROM in the memory map. When EEON = 1
(erased state), the EEPROM is enabled. When EEON = 0, the EEPROM is disabled and out of the
memory map. EEON is reset to the value last programmed into CONFIG. An on-chip charge pump develops the high voltage required for programming and erasing. When the E clock is less than 1 MHz,
select an internal clock. This drives the EEPROM charge pump by writing a one to the CSEL bit in the
OPTION register.
The PPROG register controls the programming and erasing of the EEPROM. To erase the EEPROM,
complete the following steps using the PPROG register:
1. Write to PPROG with the ERASE, EELAT, and appropriate BYTE and ROW bits set.
2. Write to the appropriate EEPROM address with any data. Row erase only requires a write to
any location in the row. Bulk erase is accomplished by writing to any location in the array.
3. Write to PPROG with ERASE, EELAT, EEPGM, and the appropriate BYTE and ROW bits set.
4. Delay for 10 ms or more, as appropriate.
5. Clear the EEPGM bit in PPROG to turn off the high voltage.
6. Clear the PPROG register to reconfigure the EEPROM address and data buses for normal op-
eration.
To program the EEPROM, complete the following steps using the PPROG register:
1. Write to PPROG with the EELAT bit set.
2. Write data to the desired address.
3. Write to PPROG with the EELAT and EEPGM bits set.
4. Delay for 10 ms or more, as appropriate.
5. Clear the EEPGM bit in PPROG to turn off the high voltage.
6. Clear the PPROG register to reconfigure the EEPROM address and data buses for normal op-
eration.
PPROG — EEPROM Programming Control $103B
Bit 7 654321Bit 0
ODD EVEN 0 BYTE ROW ERASE EELAT EEPGM
RESET: 00000000
ODD — Program Odd Rows in Half of EEPROM (TEST)
EVEN — Program Even Rows in Half of EEPROM (TEST)
BYTE — Byte/Other EEPROM Erase Mode
The BYTE bit overrides the ROW bit.
0 = Row or bulk erase mode is used
1 = Erase only one byte of EEPROM
ROW — Row/All EEPROM Erase Mode
The ROW bit is only valid when BYTE = 0.
0 = All 512 bytes of EEPROM are erased
1 = Erase only one 16-byte row of EEPROM
BYTE ROW Action
0 0 Bulk Erase (All 512 Bytes)
0 1 Row Erase (16 Bytes)
1 0 Byte Erase
1 1 Byte Erase
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 17

ERASE — Erase/Normal Control for EEPROM
0 = Normal read or program mode
1 = Erase mode
EELAT — EEPROM Latch Control
0 = EEPROM address and data bus configured for normal reads
1 = EEPROM address and data bus configured for programming or erasing
EEPGM — EEPROM Program Command
0 = Programming or erase voltage switched off to EEPROM array
1 = Programming or erase voltage switched on to EEPROM array
CONFIG — COP, ROM, EEPROM Enables $103F
Bit 7 654321Bit 0
0000NOSEC NOCOP ROMON EEON
RESET: 0000————
NOTE
The bits of this register are implemented with EEPROM cells. Programming and
erasing follow normal EEPROM procedures. The erased state of CONFIG is $0F.
A new value is not readable until after a subsequent reset sequence. CONFIG can
only be programmed or erased in special modes.
—
NOSEC
EEPROM Security Disable
NOSEC has no meaning unless the security mask option was specified before the MCU was manufactured.
0 = Security enabled (available as a mask option on MC68HC11A8 only)
1 = Security disabled
NOCOP — COP system disable
Refer to 3 Resets and Interrupts.
ROMON — ROM Enable
Refer to 2 Operating Modes and Memory Maps.
EEON — EEPROM Enable
0 = EEPROM is removed from the memory map
1 = EEPROM is present in the memory map
MOTOROLA MC68HC11A8
18 MC68HC11A8TS/D

5 Parallel Input/Output
The MC68HC11A8 has up to 38 input/output lines, depending on the operating mode. Port A has three
input-only pins, four output-only pins, and one bidirectional I/O pin. Port A shares functions with the timer system.
Port B is an 8-bit output-only port in single-chip modes and is the high-order address in expanded
modes.
Port C is an 8-bit bidirectional port in single-chip modes and the multiplexed address and data bus in
expanded modes.
Port D is a 6-bit bidirectional port that shares functions with the serial systems.
Port E is an 8-bit input-only port that shares functions with the A/D system.
Simple and full handshake input and output functions are available on ports B and C lines in single-chip
mode. A description of the handshake functions follows.
In port B simple strobed output mode, the STRB output is pulsed for two E-clock periods each time there
is a write to the PORTB register. The INVB bit in the PIOC register controls the polarity of STRB pulses.
In port C simple strobed input mode, port C levels are latched into the alternate port C latch (PORTCL)
register on each assertion of the STRA input. STRA edge select, flag and interrupt enable bits are located in the PIOC register. Any or all of the port C lines can still be used as general purpose I/O while
in strobed input mode.
Port C full handshake mode involves port C pins and the STRA and STRB lines. Input and output handshake modes are supported, and output handshake mode has a three-stated variation. STRA is an
edge detecting input, and STRB is a handshake output. Control and enable bits are located in the PIOC
register.
In full input handshake mode, the MCU uses STRB as a “ready” line to an external system. Port C logic
levels are latched into PORTCL when the STRA line is asserted by the external system. The MCU then
negates STRB. The MCU reasserts STRB after the PORTCL register is read. A mix of latched inputs,
static inputs, and static outputs is allowed on port C, differentiated by the data direction bits and use of
the PORTC and PORTCL registers.
In full output handshake mode, the MCU writes data to PORTCL, which in turn asserts the STRB output
to indicate that data is ready. The external system reads port C (the STRB output) and asserts the STRA
input to acknowledge that data has been received.
In the three-state variation of output handshake mode, lines intended as three-state handshake outputs
are configured as inputs by clearing the corresponding DDRC bits. The MCU writes data to PORTCL
and asserts STRB. The external system responds by activating the STRA input, which forces the MCU
to drive the data in PORTCL out on all of the port C lines. This mode variation does not allow part of
port C to be used for static inputs while other port C pins are being used for handshake outputs. Refer
to the PIOC register description.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 19

PORTA — Port A Data $1000
Bit 7 654321Bit 0
PA7 PA6 PA5 PA4 PA3 PA2 PA1 PA0
RESET: HiZ 0000HiZHiZHiZ
Alt. Pin
Func.: PAI OC2 OC3 OC4 OC5 IC1 IC2 IC3
And/or: OC1 OC1 OC1 OC1 OC1 — — —
PIOC — Parallel I/O Control $1002
Bit 7 654321Bit 0
STAF STAI CWOM HNDS OIN PLS EGA INVB
RESET: 00000U11
STAF — Strobe A Interrupt Status Flag
Set when selected edge occurs on Strobe A. Cleared by PIOC read with STAF set followed by PORTCL
read (simple strobed or full input handshake mode) or PORTCL write (output handshake mode).
STAI — Strobe A Interrupt Enable Mask
0 = STAF interrupts disabled
1 = STAF interrupts enabled
CWOM — Port C Wire-OR Mode (affects all eight port C pins)
0 = Port C outputs are normal CMOS outputs
1 = Port C outputs are open-drain outputs
HNDS — Handshake Mode
0 = Simple strobe mode
1 = Full input or output handshake mode
OIN — Output or Input Handshake Select
HNDS must be set to one for this bit to have meaning.
0 = Input handshake
1 = Output handshake
PLS — Pulse/Interlocked Handshake Operation
HNDS must be set to one for this bit to have meaning.
0 = Interlocked handshake
1 = Pulsed handshake (strobe B pulses high for two E-clock cycles)
EGA — Active Edge for Strobe A
0 = STRA falling edge selected
1 = STRA rising edge selected
INVB — Invert Strobe B
0 = Active level is logic zero
1 = Active level is logic one
MOTOROLA MC68HC11A8
20 MC68HC11A8TS/D

Simple
strobed
mode
STAF
Clearing
Sequence
Read PIOC
with STAF=1
then read
PORTCL
Table 5 Parallel I/O Control
HNDS OIN PLS EGA Port C Port B
0 X X Inputs latched
0
into PORTCL
on any active
edge on STRA
1
STRB
pulses on
writes to
port B
Full input
handshake
Full output
handshake
Read PIOC
with STAF=1
then read
PORTCL
Read PIOC
with STAF=1
then write to
PORTCL
1 0 0 = STRB
active level
1 = STRB
active pulse
1 1 0 = STRB
active level
1 = STRB
active pulse
1
0
0
1
Follow
DDRC
Port C
Driven
STRA
Active Edge
Follow
DDRC
Inputs latched
into PORTCL
on any active
edge on STRA
Driven as out-
puts if STRA at
active level,
follows DDRC
if STRA not at
active level
PORTC — Port C Data $1003
Bit 7 654321Bit 0
PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0
S. Chip
or Boot: PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0
RESET: 00000000
Expan. or
Test:
ADDR7/
DATA7
ADDR6/
DATA6
ADDR5/
DATA5
ADDR4/
DATA4
ADDR3/
DATA3
ADDR2/
DATA2
ADDR1/
DATA1
ADDR0/
DATA0
NOTE
In single chip and boot modes, port C pins reset to high impedance inputs (DDRC
registers are set to zero). In expanded and special test modes, port C is a multiplexed address/data bus and the port C register address is treated as an external
memory location.
Normal out-
put port,
unaffected
in hand-
shake
modes
Normal out-
put port,
unaffected
in hand-
shake
modes
PORTB — Port B Data $1004
Bit 7 654321Bit 0
PB7 PB6 PB5 PB4 PB3 PB2 PB1 PB0
S. Chip
or Boot: PB7 PB6 PB5 PB4 PB3 PB2 PB1 PB0
RESET: 00000000
Expan. or
Test: ADDR15 ADDR14 ADDR13 ADDR12 ADDR11 ADDR10 ADDR9 ADDR8
PORTCL — Port C Latched $1005
Bit 7 654321Bit 0
PCL7 PCL6 PCL5 PCL4 PCL3 PCL2 PCL1 PCL0
RESET: UUUUUUUU
Writes affect port C pins. PORTCL is used in the handshake clearing mechanism. When an active edge
occurs on the STRA pin, port C data is latched into the PORTCL register.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 21

DDRC — Data Direction Register for Port C $1007
Bit 7 654321Bit 0
DDC7 DDC6 DDC5 DDC4 DDC3 DDC2 DDC1 DDC0
RESET: 00000000
DDC[7:0] — Data Direction Register for Port C
0 = Input
1 = Output
PORTD — Port D Data $1008
Bit 7 654321Bit 0
0 0 PD5 PD4 PD3 PD2 PD1 PD0
RESET: 00000000
Alt. Pin
Func.: — — SS
SCK MOSI MISO TxD RxD
DDRD — Data Direction Register for Port D $1009
Bit 7 654321Bit 0
0 0 DDD5 DDD4 DDD3 DDD2 DDD1 DDD0
RESET: 00000000
Alt. Pin
Func.:
— — PD5/
SS
PD4/
SCK
PD3/
MOSI
PD2/
MISO
PD1/
TxD
PD0/
RxD
DDD[5:0] — Data Direction for Port D
0 = Input
1 = Output
PORTE — Port E Data $100A
Bit 7 654321Bit 0
PE7 PE6 PE5 PE4 PE3 PE2 PE1 PE0
RESET: UUUUUUUU
Alt. Pin
Func.: AN7 AN6 AN5 AN4 AN3 AN2 AN1 AN0
PACTL — Pulse Accumulator Control $1026
Bit 7 654321Bit 0
DDRA7 PAEN PAMOD PEDGE 0 0 RTR1 RTR0
RESET: 00000000
DDRA7 — Data Direction for Port A Bit 7
0 = Input
1 = Output
PAEN — Pulse Accumulator System Enable
Refer to 9 Pulse Accumulator.
PAMOD — Pulse Accumulator Mode
Refer to 9 Pulse Accumulator.
PEDGE — Pulse Accumulator Edge Control
Refer to 9 Pulse Accumulator.
RTR1, RTR0 — Real-Time Interrupt Rate
Refer to 8 Main Timer.
MOTOROLA MC68HC11A8
22 MC68HC11A8TS/D

6 Serial Communications Interface (SCI)
The SCI, a universal asynchronous receiver transmitter (UART) serial communications interface, is one
of two independent serial I/O subsystems in the MC68HC11A8. It has a standard NRZ format (one start,
eight or nine data, and one stop bit) and several baud rates available. The SCI transmitter and receiver
are independent, but use the same data format and bit rate.
TRANSMITTER
BAUD RATE
CLOCK
R8
SCCR1 SCI CONTROL 1
SCDR Tx BUFFER
10 (11) - BIT Tx SHIFT REGISTER
H(8)76543210L
SIZE 8/9
SHIFT ENABLE
TRANSFER Tx BUFFER
WAKE
M
T8
PREAMBLE—JAM 1s
TRANSMITTER
CONTROL LOGIC
TDRE
SCSR INTERRUPT STATUS
(WRITE ONLY)
JAM ENABLE
BREAK—JAM 0s
IDLE
RDRF
TC
DIRECTION (OUT)
FE
NF
OR
FORCE PIN
8
DDD1
PIN BUFFER
AND CONTROL
8
PD1
TxD
8
TDRE
TIE
TC
TCIE
SBK
RWU
RE
TE
ILIE
RIE
TCIE
TIE
SCCR2 SCI CONTROL 2
SCI Rx
REQUESTS
SCI INTERRUPT
REQUEST
INTERNAL
DATA BUS
11 SCI TX BLOCK
Figure 6 SCI Transmitter Block Diagram
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 23

RECEIVER
BAUD RATE
CLOCK
PD0
RxD
DDD0
PIN BUFFER
AND CONTROL
DATA
RECOVERY
÷16
10 (11) - BIT
Rx SHIFT REGISTER
STOP
(8)76543210
START
WAKE
M
T8
R8
SCCR1 SCI CONTROL 1
DISABLE
DRIVER
WAKEUP
RE
M
LOGIC
OR
IDLE
RDRF
TC
TDRE
SCSR SCI STATUS 1
NF
MSB ALL ONES
RWU
8
FE
SCDR Rx BUFFER
(READ ONLY)
8
RDRF
RIE
IDLE
ILIE
OR
RIE
8
SBK
RWU
RE
TE
ILIE
RIE
TCIE
TIE
SCCR2 SCI CONTROL 2
SCI Tx
REQUESTS
SCI INTERRUPT
REQUEST
INTERNAL
DATA BUS
11 SCI RX BLOCK
Figure 7 SCI Receiver Block Diagram
MOTOROLA MC68HC11A8
24 MC68HC11A8TS/D

BAUD — Baud Rate $102B
Bit 7 654321Bit 0
TCLR 0 SCP1 SCP0 RCKB SCR2 SCR1 SCR0
RESET: 00000UUU
TCLR — Clear Baud Rate Counters (TEST)
SCP1, SCP0 — SCI Baud Rate Prescaler Selects
Divide
SCP[1:0]
00 1 62.50K 125.0K 156.25K 187.5K
01 3 20.83K 41.67K 52.08K 62.5K
10 4 15.625K 31.25K 38.4K 46.88K
11 13 4800 9600 12.02K 14.42K
Internal
Clock
By
4.0 MHz
(Baud)
Crystal Frequency in MHz
8.0 MHz
(Baud)
10.0 MHz
(Baud)
12.0 MHz
(Baud)
RCKB — SCI Baud Rate Clock Check (TEST)
SCR2, SCR1, and SCR0 — SCI Baud Rate Selects
Selects receiver and transmitter bit rate based on output from baud rate prescaler stage.
Divide
SCP[2:0]
000 1 4800 9600 38.4K
001 2 2400 4800 19.2K
010 4 1200 2400 9600
011 8 600 1200 4800
100 16 300 600 2400
101 32 150 300 1200
110 64 — 150 600
111 128 — — 300
Prescaler
By
(Prescaler Output from Previous Table)
4800 9600 38.4K
Highest Baud Rate
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 25

EXTAL
XTAL
OSCILLATOR
AND
CLOCK GENERATOR
(÷4)
INTERNAL BUS CLOCK (PH2)
÷3 ÷4 ÷13
SCP[1:0]
E
1:00:10:0
1:1
AS
÷2
÷2
÷2
÷2
÷2
÷2
÷2
SCR[2:0]
0:0:0
0:0:1
0:1:0
0:1:1
1:0:0
1:0:1
1:1:0
1:1:1
÷16
SCI
TRANSMIT
BAUD RATE
(1X)
SCI
RECEIVE
BAUD RATE
(16X)
SCI BAUD GENERATOR
Figure 8 SCI Baud Rate Diagram
SCCR1 — SCI Control Register 1 $102C
Bit 7 654321Bit 0
R8 T8 0 M WAKE 0 0 0
RESET: U U 000000
R8 — Receive Data Bit 8
If M bit is set, R8 stores ninth bit in receive data character.
T8 — Transmit Data Bit 8
If M bit is set, T8 stores ninth bit in transmit data character.
M — Mode (Select Character Format)
0 = Start bit, 8 data bits, 1 stop bit
1 = Start bit, 9 data bits, 1 stop bit
MOTOROLA MC68HC11A8
26 MC68HC11A8TS/D

WAKE — Wake Up by Address Mark/Idle
0 = Wake up by IDLE line recognition
1 = Wake up by address mark (most significant data bit set)
SCCR2 — SCI Control Register 2 $102D
Bit 7 654321Bit 0
TIE TCIE RIE ILIE TE RE RWU SBK
RESET: 00000000
TIE — Transmit Interrupt Enable
0 = TDRE interrupts disabled
1 = SCI interrupt requested when TDRE status flag is set
TCIE — Transmit Complete Interrupt Enable
0 = TC interrupts disabled
1 = SCI interrupt requested if TC is set to one
RIE — Receiver Interrupt Enable
0 = RDRF and OR interrupts disabled
1 = SCI interrupt requested when RDRF flag or the OR status flag is set
ILIE — Idle Line Interrupt Enable
0 = IDLE interrupts disabled
1 = SCI interrupt requested when IDLE status flag is set
TE — Transmitter Enable
0 = Transmitter disabled
1 = Transmitter enabled
RE — Receiver Enable
0 = Receiver disabled
1 = Receiver enabled
RWU — Receiver Wake Up Control
0 = Normal SCI receiver
1 = Wake up enabled and receiver interrupts inhibited
SBK — Send Break
0 = Break generator off
1 = Break codes generated as long as SBK is set to one
SCSR — SCI Status Register $102E
Bit 7 654321Bit 0
TDRE TC RDRF IDLE OR NF FE 0
RESET: 11000000
TDRE — Transmit Data Register Empty Flag
Set if transmit data can be written to SCDR; if TDRE is zero, transmit data register is busy. Cleared by
SCSR read with TDRE set followed by SCDR write.
TC — Transmit Complete Flag
Set if transmitter is idle (no data, preamble, or break transmission in progress). Cleared by SCSR read
with TC set followed by SCDR write.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 27

RDRF — Receive Data Register Full Flag
Set if a received character is ready to be read from SCDR. Cleared by SCSR read with RDRF set followed by SCDR read.
IDLE — Idle Line Detected Flag
Set if the RxD line is idle. IDLE flag is inhibited when RWU is set to one. Cleared by SCSR read with
IDLE set followed by SCDR read. Once cleared, IDLE is not set again until the RxD line has been active
and becomes idle again.
OR — Overrun Error Flag
Set if a new character is received before a previously received character is read from SCDR. Cleared
by SCSR read with OR set followed by SCDR read.
NF — Noise Error Flag
Set if majority sample logic detects anything other than a unanimous decision. Cleared by SCSR read
with NF set followed by SCDR read.
FE — Framing Error
Set if a zero is detected where a stop bit was expected. Cleared by SCSR read with FE set followed by
SCDR read.
SCDR — SCI Data Register $102F
Bit 7 654321Bit 0
R7/T7 R6/T6 R5/T5 R4/T4 R3/T3 R2/T2 R1/T1 R0/T0
RESET: UUUUUUUU
NOTE
Receive and transmit are double buffered. Reads access the receive data buffer
and writes access the transmit data buffer.
MOTOROLA MC68HC11A8
28 MC68HC11A8TS/D

7 Serial Peripheral Interface (SPI)
The SPI is one of two independent serial communications subsystems that allow the MCU to communicate synchronously with peripheral devices and other microprocessors. Data rates can be as high as
one half of the E-clock rate when configured as master, and as fast as the E clock when configured as
slave.
INTERNAL
MCU CLOCK
DIVIDER
÷2 ÷4 ÷16 ÷32
SELECT
SPR0
SPR1
SPI CONTROL
SPI CLOCK (MASTER)
MSB LSB
8/16-BIT SHIFT REGISTER
READ DATA BUFFER
MSTR
SPE
CLOCK
LOGIC
CLOCK
S
M
M
S
PIN CONTROL LOGIC
S
M
MSTR
DWOM
SPE
MISO
PD2
MOSI
PD3
SCK
PD4
SS
PD5
MODF
WCOL
SPIF
SPR0
SPR1
CPHA
CPOL
MSTR
DWOM
SPE
SPIE
8
SPI STATUS REGISTER
SPI INTERRUPT
REQUEST
8 8
INTERNAL
DATA BUS
SPI CONTROL REGISTER
Figure 9 SPI Block Diagram
DDRD — Data Direction Register for Port D $1009
Bit 7 654321Bit 0
0 0 DDD5 DDD4 DDD3 DDD2 DDD1 DDD0
RESET: 00000000
Alt. Pin
Func.:
__ __ PD5/
SS
PD4/
SCK
PD3/
MOSI
PD2/
MISO
PD1/
TxD
PD0/
RxD
11 SPI BLOCK
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 29

DDD[5:0] — Data Direction for Port D
1
When DDRD bit 5 is zero and MSTR = 1 in SPCR, PD5/SS is a general-purpose output and mode fault
logic is disabled.
0 = Input
1 = Output
SPCR — Serial Peripheral Control Register $1028
Bit 7 654321Bit 0
SPIE SPE DWOM MSTR CPOL CPHA SPR1 SPR0
RESET: 000001UU
SPIE — Serial Peripheral Interrupt Enable
0 = SPI interrupts disabled
1 = SPI interrupts enabled
SPE — Serial Peripheral System Enable
0 = SPI off
1 = SPI on
DWOM — Port D Wired-OR Mode
DWOM affects all six port D pins.
0 = Normal CMOS outputs
1 = Open-drain outputs
MSTR — Master Mode Select
0 = Slave mode
1 = Master mode
CPOL, CPHA — Clock Polarity, Clock Phase
Refer to Figure 10
SCK CYCLE #
SCK (CPOL = 0)
SCK (CPOL = 1)
SAMPLE INPUT
(CPHA = 0)
DATA OUT
SAMPLE INPUT
DATA OUT(CPHA = 1)
SS (TO SLAVE)
1. SS
ASSERTED
2. MASTER WRITES TO SPDR
3. FIRST SCK EDGE
4. SPIF SET
5. SS NEGATED
MSB654321LSB
3
2
1
23456781
654321 LSBMSB
SLAVE CPHA=1 TRANSFER IN PROGRESS
MASTER TRANSFER IN PROGRESS
SLAVE CPHA=0 TRANSFER IN PROGRESS
4
5
SPI TRANSFER FORMAT
Figure 10 SPI Transfer Format
MOTOROLA MC68HC11A8
30 MC68HC11A8TS/D

SPR1 and SPR0 — SPI Clock Rate Selects
SPR [1:0]
00 2 1.0 MHz
01 4 500 kHz
10 16 125 kHz
11 32 62.5 kHz
E-Clock
Divide By
Frequency at
E = 2 MHz (Baud)
SPSR — Serial Peripheral Status Register $1029
Bit 7 654321Bit 0
SPIF WCOL 0 MODF 0000
RESET: 00000000
SPIF — SPI Transfer Complete Flag
Set when an SPI transfer is complete. Cleared by reading SPSR with SPIF set followed by SPDR access.
WCOL — Write Collision
Set when SPDR is written while transfer is in progress. Cleared by SPSR with WCOL set followed by
SPDR access.
MODF — Mode Fault (A Mode Fault Terminates SPI Operation)
Set when SS
is pulled low while MSTR = 1. Cleared by SPSR read with MODF set followed by SPCR
write.
SPDR — SPI Data Register $102A
Bit 7 654321Bit 0
Bit 7 654321Bit 0
NOTE
SPI is double buffered in, single buffered out.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 31

8 Main Timer
The main timer is based on a free-running 16-bit counter with a four-stage programmable prescaler. A
timer overflow function allows software to extend the system's timing capability beyond the counter's
16-bit range.
The timer has three channels of input capture and five channels of output compare.
Refer to the following table for a summary of crystal-related frequencies and periods.
Table 6 Timer Summary
XTAL Frequencies
Control
Bits
PR[1:0] Main Timer Count Rates
0 0
1 count —
overflow —
0 1
1 count —
overflow —
1 0
1 count —
overflow —
1 1
1 count —
overflow —
RTR[1:0] Periodic (RTI) Interrupt Rates
0 0
0 1
1 0
1 1
4.0 MHz 8.0 MHz 12.0 MHz Other Rates
1.0 MHz 2.0 MHz 3.0 MHz (E)
1000 ns 500 ns 333 ns (1/E)
1.0 µs
65.536 ms
4.0 µs
262.14 ms
8.0 µs
524.29 ms
16.0 µs
1.049 s
8.192 ms
16.384 ms
32.768 ms
65.536 ms
500 ns
32.768 ms
2.0 µs
131.07 ms
4.0 µs
262.14 ms
8.0 µs
524.29 ms
4.096 ms
8.192 ms
16.384 ms
32.768 ms
333 ns
21.845 ms
1.333 µs
87.381 ms
2.667 µs
174.76 ms
5.333 µs
349.52 ms
2.731 ms
5.461 ms
10.923 ms
21.845 ms
(E/1)
(E/2
(E/4)
(E/2
(E/8)
(E/2
(E/16)
(E/2
(E/2
(E/2
(E/2
(E/2
16
18
19
20
13
14
15
16
)
)
)
)
)
)
)
)
MOTOROLA MC68HC11A8
32 MC68HC11A8TS/D

PRESCALER
MCU
E CLK
1, 4, 8, OR 16
PR1 PR0
16-BIT COMPARATOR =
TOC1 (HI) TOC1 (LO)
16-BIT COMPARATOR =
TOC2 (HI) TOC2 (LO)
16-BIT COMPARATOR =
TOC3 (HI) TOC3 (LO)
16-BIT COMPARATOR =
TOC4 (HI) TOC4 (LO)
16-BIT COMPARATOR =
TI4/O5 (HI) TI4/O5 (LO)
16-BIT LATCH CLK
16-BIT LATCH
TIC1 (HI) TIC1 (LO)
16-BIT LATCH
TIC2 (HI) TIC2 (LO)
16-BIT LATCH
TIC3 (HI) TIC3 (LO)
DIVIDE BY
16-BIT TIMER BUS
CLK
CLK
CLK
TCNT (HI) TCNT (LO)
16-BIT FREE RUNNING
COUNTER
OC1F
OC2F
OC3F
OC4F
OC5
I4/O5F
IC4
I4/O5
IC1F
IC2F
IC3F
TFLG 1
STATUS
FLAGS
TOI
TOF
TAPS FOR RTI,
COP WATCHDOG, AND
PULSE ACCUMULATOR
FOC1
FOC2
FOC3
FOC4
FOC5
CFORC
FORCE OUTPUT
COMPARE
TMSK 1
INTERRUPT
ENABLES
OC1I
OC2I
OC3I
OC4I
I4/O5I
IC1I
IC2I
IC3I
9
INTERRUPT REQUESTS
(FURTHER QUALIFIED BY
I BIT IN CCR)
TO PULSE
ACCUMULATOR
8
BIT 7
7
BIT 6
6
BIT 5
5
BIT 4
4
BIT 3
3
BIT 2
2
BIT 1
1
BIT 0
PORT A
PIN CONTROL
CAPTURE COMPARE BLOCK
PIN
FUNCTIONS
PA7/OC1/
PAI
PA6/OC2/
OC1
PA5/OC3/
OC1
PA4/OC4/
OC1
PA3/OC5/
IC4/OC1
PA2/IC1
PA1/IC2
PA0/IC3
Figure 11 Main Timer
NOTE: Port A pin actions are controlled by OC1M, OC1D, PACTL, TCTL1, and TCTL2 registers.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 33

CFORC — Timer Compare Force $100B
Bit 7 654321Bit 0
FOC1 FOC2 FOC3 FOC4 FOC5 0 0 0
RESET: 00000000
FOC5–FOC1 — Write ones to Force Compare(s)
0 = Not affected
1 = Output compare x action occurs, but OCxF flag bit not set
OC1M — Output Compare 1 Mask $100C
Bit 7 654321Bit 0
OC1M7 OC1M6 OC1M5 OC1M4 OC1M3 0 0 0
RESET: 00000000
Set bit(s) to enable OC1 to control corresponding pin(s) of port A.
OC1D — Output Compare 1 Data $100D
Bit 7 654321Bit 0
OC1D7 OC1D6 OC1D5 OC1D4 OC1D3 0 0 0
RESET: 00000000
If OC1Mx is set, data in OC1Dx is output to port A bit x on successful OC1 compares.
TCNT — Timer Counter $100E, $100F
$100E Bit 15 14 13 12 11 10 9 Bit 8 High TCNT
Bit 7 654321Bit 0 Low
TCNT resets to $0000. In normal modes, TCNT is read-only.
TIC1–TIC3 — Timer Input Capture $1010–$1015
$1010 Bit 15 14 13 12 11 10 9 Bit 8 High TIC1
$1011 Bit 7 654321Bit 0 Low
$1012 Bit 15 14 13 12 11 10 9 Bit 8 High TIC2
$1013 Bit 7 654321Bit 0 Low
$1014 Bit 15 14 13 12 11 10 9 Bit 8 High TIC3
$1015 Bit 7 654321Bit 0 Low
TICx not affected by reset.
MOTOROLA MC68HC11A8
34 MC68HC11A8TS/D

TOC1–TOC5 — Timer Output Compare $1016–$101F
$1016 Bit 15 14 13 12 11 10 9 Bit 8 High TOC1
$1017 Bit 7 654321Bit 0 Low
$1018 Bit 15 14 13 12 11 10 9 Bit 8 High TOC2
$1019 Bit 7 654321Bit 0 Low
$101A Bit 15 14 13 12 11 10 9 Bit 8 High TOC3
$101B Bit 7 654321Bit 0 Low
$101C Bit 15 14 13 12 11 10 9 Bit 8 High TOC4
$101D Bit 7 654321Bit 0 Low
$101E Bit 15 14 13 12 11 10 9 Bit 8 High TOC5
$101F Bit 7 654321Bit 0 Low
All TOCx register pairs reset to ones ($FFFF).
TCTL1 — Timer Control 1 $1020
Bit 7 654321Bit 0
OM2 OL2 OM3 OL3 OM4 OL4 OM5 OL5
RESET: 00000000
OM2–OM5 — Output Mode
OL2–OL5 — Output Level
OMx OLx Action Taken on Successful Compare
0 0 Timer disconnected from output pin logic
0 1 Toggle OCx output line
1 0 Clear OCx output line to 0
1 1 Set OCx output line to 1
TCTL2 — Timer Control 2 $1021
Bit 7 654321Bit 0
— — EDG1B EDG1A EDG2B EDG2A EDG3B EDG3A
RESET: 00000000
Table 7 Timer Control Configuration
EDGxB EDGxA Configuration
0 0 Capture disabled
0 1 Capture on rising edges only
1 0 Capture on falling edges only
1 1 Capture on any edge
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 35

TMSK1 — Timer Interrupt Mask 1 $1022
Bit 7 654321Bit 0
OC1I OC2I OC3I OC4I OC5I IC1I IC2I IC3I
RESET: 00000000
OC1I–OC5I — Output Compare x Interrupt Enable
If the OCxI enable bit is set when the OCxF flag bit is set, a hardware interrupt sequence is requested.
IC1I–IC3I — Input Capture x Interrupt Enable
If the ICxI enable bit is set when the ICxF flag bit is set, a hardware interrupt sequence is requested.
NOTE
Bits in TMSK1 correspond bit for bit with flag bits in TFLG1. Ones in TMSK1 enable
the corresponding interrupt sources.
TFLG1 — Timer Interrupt Flag 1 $1023
Bit 7 654321Bit 0
OC1F OC2F OC3F OC4F OC5F IC1F IC2F IC3F
RESET: 00000000
Clear flags by writing a one to the corresponding bit position(s).
OC1F–OC5F — Output Compare x Flag
Set each time the counter matches output compare x value.
IC1F–IC3F — Input Capture x Flag
Set each time a selected active edge is detected on the ICx input line.
TMSK2 — Timer Interrupt Mask 2 $1024
Bit 7 654321Bit 0
TOI RTII PAOVI PAII 0 0 PR1 PR0
RESET: 00000000
TOI — Timer Overflow Interrupt Enable
0 = TOF interrupts disabled
1 = Interrupt requested when TOF is set to one
RTII — Real-Time Interrupt Enable
0 = RTIF interrupts disabled
1 = Interrupt requested when RTIF is set to one
PAOVI — Pulse Accumulator Overflow Interrupt Enable
Refer to 9 Pulse Accumulator.
PAII — Pulse Accumulator Input Edge Interrupt Enable
Refer to 9 Pulse Accumulator.
NOTE
Bits in TMSK2 correspond bit for bit with flag bits in TFLG2. Ones in TMSK2 enable
the corresponding interrupt sources.
PR1 and PR0 — Timer Prescaler Select
In normal modes, PR1 and PR0 can only be written once, and the write must be within 64 cycles after
reset. Refer to Table 6 for specific timing values.
MOTOROLA MC68HC11A8
36 MC68HC11A8TS/D

PR[1:0] Prescaler
0 0 1
0 1 4
1 0 8
1 1 16
TFLG2 — Timer Interrupt Flag 2 $1025
Bit 7 654321Bit 0
TOF RTIF PAOVF PAIF 0000
RESET: 00000000
Clear flags by writing a one to the corresponding bit position(s).
TOF — Timer Overflow Flag
Set when TCNT changes from $FFFF to $0000.
RTIF — Real-Time (Periodic) Interrupt Flag
Set periodically. Refer to RTR[1:0] bits in PACTL register.
PAOVF — Pulse Accumulator Overflow Interrupt Flag
Refer to 9 Pulse Accumulator.
PAIF — Pulse Accumulator Input Edge Interrupt Flag
Refer to 9 Pulse Accumulator.
PACTL — Pulse Accumulator Control $1026
Bit 7 654321Bit 0
DDRA7 PAEN PAMOD PEDGE 0 0 RTR1 RTR0
RESET: 00000000
DDRA7 — Data Direction for Port A Bit 7
Refer to 5 Parallel Input/Output.
PAEN — Pulse Accumulator Enable
Refer to 9 Pulse Accumulator.
PAMOD — Pulse Accumulator Mode Select
Refer to 9 Pulse Accumulator.
PEDGE — Pulse Accumulator Edge Select
Refer to 9 Pulse Accumulator.
RTR [1:0] — Real-Time Interrupt (RTI) Rate
Table 8 Real-Time Interrupt Rates
RTR[1:0] Divide E By XTAL = 4.0 MHz XTAL = 8.0 MHz XTAL = 12.0 MHz
0 0
0 1
1 0
1 1
13
2
14
2
15
2
16
2
E = 1.0 MHz 2.0 MHz 3.0 MHz
8.19 ms 4.096 ms 2.731 ms
16.38 ms 8.192 ms 5.461 ms
32.77 ms 16.384 ms 10.923 ms
65.54 ms 32.768 ms 21.845 ms
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 37

9 Pulse Accumulator
The MC68HC11A8 has an 8-bit counter that can be configured to operate as a simple event counter or
for gated time accumulation, depending on the PAMOD bit in the PACTL register. The pulse accumulator counter can be read or written at any time.
The port A bit 7 I/O pin can be configured as a clock in event counting mode, or as a gate signal to enable a free-running clock (E divided by 64) in gated time accumulation mode.
Table 9 Pulse Accumulator Timing
Common XTAL Frequencies
Selected Crystal 4.0 MHz 8.0 MHz 12.0 MHz
CPU Clock (E) 1.0 MHz 2.0 MHz 3.0 MHz
Cycle Time (1/E) 1000 ns 500 ns 333 ns
Pulse Accumulator (in Gated Mode)
(E/2
(E/2
E ÷ 64 CLOCK
(FROM MAIN TIMER)
14
6
)
)
1 count —
overflow —
PAOVI
PAII
TMSK2 INT ENABLES
64.0 µs
16.384 ms
PAI EDGE
PAEN
32.0 µs
8.192 ms
PAOVI
PAOVF
PAII
PAIF
PAIF
PAOVF
TFLG2 INTERRUPT STATUS
DISABLE
FLAG SETTING
21.33 µs
5.461 ms
INTERRUPT
1
REQUESTS
2
OVERFLOW
MCU PIN
PA7/
PAI/
OC1
FROM
MAIN TIMER
OC1
OUTPUT
BUFFER
FROM
DDRA7
INPUT BUFFER
AND
EDGE DETECTOR
PEDGE
PAMOD
PAEN
PACTL CONTROL
2:1
MUX
DATA
BUS
CLOCK
PAEN
INTERNAL
DATA BUS
PACNT 8-BIT COUNTER
ENABLE
PULSE ACC BLOCK
Figure 12 Pulse Accumulator System Block Diagram
MOTOROLA MC68HC11A8
38 MC68HC11A8TS/D

TMSK2 — Timer Interrupt Mask 2 $1024
Bit 7 654321Bit 0
TOI RTII PAOVI PAII 0 0 PR1 PR0
RESET: 00000000
TOI — Timer Overflow Interrupt Enable
Refer to 8 Main Timer.
RTII — Real-Time Interrupt Enable
Refer to 8 Main Timer.
PAOVI — Pulse Accumulator Overflow Interrupt Enable
0 = PAOVF interrupts disabled
1 = Interrupt requested when RTIF is set to one
PAII — Pulse Accumulator Input Edge Interrupt Enable
0 = PAIF interrupts disabled
1 = Interrupt requested when PAIF is set to one
PR1, PR0 — Timer Prescaler Select
Refer to 8 Main Timer.
NOTE
Bits in TMSK2 correspond bit for bit with flag bits in TFLG2. Ones in TMSK2 enable
the corresponding interrupt sources.
TFLG2 — Timer Interrupt Flag 2 $1025
Bit 7 654321Bit 0
TOF RTIF PAOVF PAIF 0000
RESET: 00000000
Clear flags by writing a one to the corresponding bit position(s).
TOF — Timer Overflow Flag
Refer to 8 Main Timer.
RTIF — Real-Time Interrupt Flag
Refer to 8 Main Timer.
PAOVF — Pulse Accumulator Overflow Flag
Set when PACNT changes from $FF to $00.
PAIF — Pulse Accumulator Input Edge Flag
Set each time a selected active edge is detected on the PAI input line.
PACTL — Pulse Accumulator Control $1026
Bit 7 654321Bit 0
DDRA7 PAEN PAMOD PEDGE 0 0 RTR1 RTR0
RESET: 00000000
DDRA7 — Data Direction for Port A Bit 7
Refer to 5 Parallel Input/Output.
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 39

PAEN — Pulse Accumulator System Enable
0 = Pulse Accumulator disabled
1 = Pulse Accumulator enabled
PAMOD — Pulse Accumulator Mode
0 = Event counter
1 = Gated time accumulation
PEDGE — Pulse Accumulator Edge Control
PAMOD PEDGE Action on Clock
0 0 PAI falling edge increments the counter
0 1 PAI rising edge increments the counter
1 0 A zero on PAI inhibits counting
1 1 A one on PAI inhibits counting
RTR1 and RTR0 — Real-Time Interrupt (RTI) Rate
Refer to 8 Main Timer.
PACNT — Pulse Accumulator Counter $1027
Bit 7 654321Bit 0
Bit 7 654321Bit 0
RESET: 00000000
Can be read and written.
MOTOROLA MC68HC11A8
40 MC68HC11A8TS/D

10 Analog-to-Digital Converter
The A/D converter system uses an all capacitive charge redistribution technique to convert analog signals to digital values. The MC68HC11A8 A/D system is an 8-channel, 8-bit, multiplexed-input, successive-approximation converter and is accurate to ±1 least significant bit (LSB). It does not require
external sample and hold circuits because of the type of charge redistribution technique used.
Dedicated lines VRH and VRL provide the reference supply voltage inputs. Refer to the A/D converter
block diagram.
A multiplexer allows the single A/D converter to select one of 16 analog signals, as shown in the ADCTL
register description.
PE0
AN0
PE1
AN1
PE2
AN2
PE3
AN3
PE4
AN4
PE5
AN5
PE6
AN6
PE7
AN7
ANALOG
MUX
8-BIT CAPACITIVE DAC
WITH SAMPLE AND HOLD
SUCCESSIVE APPROXIMATION
REGISTER AND CONTROL
RESULT
RESULT REGISTER INTERFACE
CD
MULT
SCAN
CCF
ADCTL A/D CONTROL
CC
CB
CA
V
V
RH
RL
INTERNAL
DATA BUS
ADR1 A/D RESULT 1 ADR2 A/D RESULT 2 ADR3 A/D RESULT 3 ADR4 A/D RESULT 4
EA9 A/D BLOCK
Figure 13 A/D Converter Block Diagram
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 41

E CLOCK
12 E CYCLES
MSB
CYCLES
BIT 6
BIT 5
BIT 4
BIT 3
BIT 2
BIT 1
LSB
4
CYC
2
2
2
2
2
CYC
CYC
CYC
CYC
CYC
2
CYC
2
2
CYC
END
SAMPLE ANALOG INPUT SUCCESSIVE APPROXIMATION SEQUENCE
WRITE TO ADCTL
SET CC FLAG
CONVERT FIRST
CHANNEL, UPDATE
0 32 64 96 128 — E CYCLES
ADR1
CONVERT SECOND
CHANNEL, UPDATE
ADR2
CONVERT THIRD
CHANNEL, UPDATE
ADR3
CONVERT FOURTH
CHANNEL, UPDATE
ADR4
REPEAT SEQUENCE, SCAN = 1
A/D CONVERSION TIM
Figure 14 A/D Conversion Sequence
DIFFUSION/POLY
ANALOG
INPUT
PIN
< 2 pF
INPUT
PROTECTION
DEVICE
+ ~20V
– ~0.7V
+ ~12V
– ~0.7V
DUMMY N-CHANNEL
OUTPUT DEVICE
COUPLER
≤ 4 KΩ
400 nA
JUNCTION
LEAKAGE
*
~ 20 pF
DAC
CAPACITANCE
V
RL
* THIS ANALOG SWITCH IS CLOSED ONLY DURING THE 12-CYCLE SAMPLE TIME.
Figure 15 Electrical Model of an Analog Input Pin (Sample Mode)
ADCTL — A/D Control/Status $1030
Bit 7 654321Bit 0
CCF 0 SCAN MULT CD CC CB CA
RESET: U 0 UUUUUU
CCF — Conversions Complete Flag
Set after an A/D conversion cycle. Cleared when ADCTL is written.
SCAN — Continuous Scan Control
0 = Do four conversions and stop
1 = Convert four channels in selected group continuously
MULT — Multiple Channel/Single Channel Control
0 = Convert single channel selected
1 = Convert four channels in selected group
ANALOG INPUT PIN
MOTOROLA MC68HC11A8
42 MC68HC11A8TS/D

CD–CA — Channel Select D through A
Table 10 A/D Converter Channel Assignments
Channel Select Control Bits Channel Result in ADRx if
CD CC CB CA Signal MULT = 1
0 0 0 0 AN0 ADR1
0 0 0 1 AN1 ADR2
0 0 1 0 AN2 ADR3
0 0 1 1 AN3 ADR4
0 1 0 0 AN4* ADR1
0 1 0 1 AN5* ADR2
0 1 1 0 AN6* ADR3
0 1 1 1 AN7* ADR4
1 0 X X Reserved ADR1–ADR4
1 100V
1 101V
1 110(V
1 1 1 1 Reserved** ADR4
* Not available in 48-pin package
**Used for factory testing
** ADR1
RH
** ADR2
RL
)/2** ADR3
RH
ADR1–ADR4 — A/D Results $1031–$1034
Bit 7 654321Bit 0
$1031 Bit 7 654321Bit 0 ADR1
$1032 Bit 7 654321Bit 0 ADR2
$1033 Bit 7 654321Bit 0 ADR3
$1034 Bit 7 654321Bit 0 ADR4
Table 11 Analog Input to 8-Bit Result Translation Table
Bit 7 654321Bit 0
(1)
%
(2)
Volts
(1)
% of VRH–V
50% 25% 12.5% 6.25% 3.12% 1.56% 0.78% 0.39%
2.500 1.250 0.625 0.3125 0.1562 0.0781 0.0391 0.0195
(2)
RL
VRL = 0.0 V; V
RH
= 5.0 V
OPTION — System Configuration Options $1039
Bit 7 654321Bit 0
ADPU CSEL IRQE* DLY* CME 0 CR1* CR0*
RESET: 00010000
*Can be written only once in first 64 cycles out of reset in normal modes, or any time in special modes.
ADPU — A/D Power Up
0 = A/D Converter powered down
1 = A/D Converter powered up
CSEL
—
Clock Select
0 = A/D and EEPROM use system E clock
1 = A/D and EEPROM use internal RC clock
MC68HC11A8 MOTOROLA
MC68HC11A8TS/D 43

IRQE — IRQ Select Edge Sensitive Only
Refer to 3 Resets and Interrupts.
DLY — Enable Oscillator Start-Up Delay on Exit from STOP
Refer to 3 Resets and Interrupts.
CME — Clock Monitor Enable
Refer to 3 Resets and Interrupts.
CR1, CR0 — COP Timer Rate Select
Refer to 3 Resets and Interrupts.
MOTOROLA MC68HC11A8
44 MC68HC11A8TS/D

Motorola reserves the right to make changes without further notice to any products herein. Motorola makes no warranty, representation or guarantee regarding
the suitability of its products for any particular purpose, nor does Motorola assume any liability arising out of the application or use of any product or circuit, and
specifically disclaims any and all liability, including without limitation consequential or incidental damages. “Typical” parameters can and do vary in different
applications. All operating parameters, including “Typicals” must be validated for each customer application by customer’s technical experts. Motorola does not
convey any license under its patent rights nor the rights of others. Motorola products are not designed, intended, or authorized for use as components in
systems intended for surgical implant into the body, or other applications intended to support or sustain life, or for any other application in which the failure of
the Motorola product could create a situation where personal injury or death may occur. Should Buyer purchase or use Motorola products for any such
unintended or unauthorized application, Buyer shall indemnify and hold Motorola and its officers, employees, subsidiaries, affiliates, and distributors harmless
against all claims, costs, damages, and expenses, and reasonable attorney fees arising out of, directly or indirectly, any claim of personal injury or death
associated with such unintended or unauthorized use, even if such claim alleges that Motorola was negligent regarding the design or manufacture of the part.
Motorola and
B are registered trademarks of Motorola, Inc. Motorola, Inc. is an Equal Opportunity/Affirmative Action Employer.
How to reach us:
USA/EUROPE: Motorola Literature Distribution;
P.O. Box 20912; Phoenix, Arizona 85036. 1-800-441-2447
MFAX: RMFAX0@email.sps.mot.com - TOUCHTONE (602) 244-6609
INTERNET: http://Design-NET.com
JAPAN: Nippon Motorola Ltd.; Tatsumi-SPD-JLDC, Toshikatsu Otsuki,
6F Seibu-Butsuryu-Center, 3-14-2 Tatsumi Koto-Ku, Tokyo 135, Japan. 03-3521-8315
HONG KONG: Motorola Semiconductors H.K. Ltd.; 8B Tai Ping Industrial Park,
51 Ting Kok Road, Tai Po, N.T., Hong Kong. 852-26629298
M
MC68HC11A8TS/D
 Loading...
Loading...