

Page 1
NetPlane Core Services Overview
User’s Guide
6806800C08B
September 2007
Page 2

2007 Motorola
All rights reserved.
Trademarks
Motorola and the stylized M logo are trademarks registered in the U.S. Patent and Trademark Office. All other product or service names
are the property of their respective owners.
®
Intel
is a trademark or registered trademark of Intel Corporation or its subsidiaries in the United States and other countries.
™
and all other Java-based marks are trademarks or registered trademarks of Sun Microsystems, Inc. in the U.S. and other
Java
countries.
Microsoft
Microsoft Corporation.
PICMG
PCI Industrial Computer Manufacturers Group.
UNIX
®
, Windows® and Windows Me® are registered trademarks of Microsoft Corporation; and Windows XP™ is a trademark of
®
, CompactPCI®, AdvancedTCA™ and the PICMG, CompactPCI and AdvancedTCA logos are registered trademarks of the
®
is a registered trademark of The Open Group in the United States and other countries.
Notice
While reasonable efforts have been made to assure the accuracy of this document, Motorola assumes no liability resulting from any
omissions in this document, or from the use of the information obtained therein. Motorola reserves the right to revise this document
and to make changes from time to time in the content hereof without obligation of Motorola to notify any person of such revision or
changes.
Electronic versions of this material may be read online, downloaded for personal use, or referenced in another document as a URL to
a Motorola website. The text itself may not be published commercially in print or electronic form, edited, translated, or otherwise altered
without the permission of Motorola,
It is possible that this publication may contain reference to or information about Motorola products (machines and programs),
programming, or services that are not available in your country. Such references or information must not be construed to mean that
Motorola intends to announce such Motorola products, programming, or services in your country.
Limited and Restricted Rights Legend
If the documentation contained herein is supplied, directly or indirectly, to the U.S. Government, the following notice shall apply unless
otherwise agreed to in writing by Motorola.
Use, duplication, or disclosure by the Government is subject to restrictions as set forth in subparagraph (b)(3) of the Rights in Technical
Data clause at DFARS 252.227-7013 (Nov. 1995) and of the Rights in Noncommercial Computer Software and Documentation clause
at DFARS 252.227-7014 (Jun. 1995).
Contact Address
Motorola GmbH
ECC Embedded Communications Computing
Lilienthalstr. 15
85579 Neubiberg-Munich/Germany
Page 3
Contents
About this Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.1 Avantellis 3000 Series Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2 Avantellis 3000 Series Software Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.1 NetPlane Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.1.1 NetPlane Core Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.1.2 Platform Control Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.2.2 Carrier Grade Linux Operating System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2 NetPlane Core Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1 Architectural Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1.1 NCS Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.1.2 Message Distribution Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1.3 LEAP Portability Layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.1.4 System Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Distribution of NCS Services in the Avantellis System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2.1 NCS Directors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2.2 NCS Servers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2.3 Sample Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 System Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4 Management Access . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.5 SAF-Compliant NCS Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.5.1 Availability Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.5.1.1 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.5.2 Checkpoint Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.5.2.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.5.2.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.5.3 Message Queue Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5.3.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5.3.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5.4 Event Distribution Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.5.4.1 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.5.5 Global Lock Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5.5.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.5.5.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.6 Motorola Complementary NCS Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.6.1 Distributed Tracing Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.6.1.1 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
NetPlane Core Services Overview User’s Guide (6806800C08B)
3
Page 4

Contents
2.6.2 HPI Integration Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.6.2.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.6.3 Simple Software Upgrade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.6.3.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.6.3.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.6.4 System Resource Monitoring Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.6.5 Persistent Store-Restore Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.6.5.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.6.5.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.6.6 Management Access Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.6.6.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.6.6.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.6.7 Message-Based Checkpointing Service. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.6.7.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.6.7.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.6.8 Interface Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.6.8.1 Basic Functionality . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.6.8.2 Architecture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.7 Message Distribution Service . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
2.8 LEAP Portability Layer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.9 Implementation Notes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
2.9.1 Cancelling Application Threads . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
A NCS Toolkit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
A.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
A.2 Toolkit Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
A.3 Toolkit Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
A.4 Building the Samples . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
A.4.1 Development Host Prerequisites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
A.4.2 "Make" Commands. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
A.5 Running the Sample programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
A.5.1 Target Prerequisites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
A.5.2 Setting LD_LIBRARY_PATH . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
A.5.3 Running the Sample Programs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
B Related Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
B.1 Motorola Embedded Communications Computing Documents . . . . . . . . . . . . . . . . . . . . . . . . 51
B.2 Related Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 5
List of Tables
Table 2-1 SAF Compliant NCS Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Table 2-2 Motorola-Complementary NCS Services . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Table 2-3 System Description Content . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Table B-1 Motorola Publications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Table B-2 Related Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
NetPlane Core Services Overview User’s Guide (6806800C08B)
5
Page 6
List of Tables
6
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 7
List of Figures
Figure 1-1 Avantellis Main Software Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Figure 2-1 NetPlane Core Services Components . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Figure 2-2 NCS Service Distribution - Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Figure 2-3 NCS Directors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Figure 2-4 NCS Servers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Figure 2-5 System Description - Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Figure 2-6 Management Access - Information Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Figure 2-7 Message Distribution Service Software Components . . . . . . . . . . . . . . . . . . . . . . . . . 42
NetPlane Core Services Overview User’s Guide (6806800C08B)
7
Page 8

List of Figures
8
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 9
About this Manual
Overview of Contents
This manual provides an overview on the Netplane Cores Services (NCS) software which is
part of the Avantellis system software. It is divided into the following chapters and appendices.
z Chapter 1, Introduction, on page 13
Provides an overview of Avantellis and its main software components
z Chapter 2, NetPlane Core Services, on page 17
Descibes in more detail the components and functionality of the Netplane Core Services
software which constitutes one of the most important components of the Avantellis software
z Appendix A, NCS Toolkit, on page 45
Describes toolkits that ease the application development.
z Appendix B, Related Documentation, on page 51
Provides references to related user manuals and standard documents
Abbreviations
This document uses the following abbreviations:
Abbreviation Definition
AIS Application interface specification
AMF Application Management Framework
API Application Programmer’s Interface
AvA Availability Agent
AvD Availability Director
AvND Availability Node Director
AvSv Availability Service
CEF Command Execution Functions
CGL Carrier Grade Linux
CKPT Checkpoint Service
CLI Command Line Interpreter
CLM Cluster Membership Service
CPA Checkpoint Agent
CPD Checkpoin Director
CPND Checkpoint Node Director
CPSv Checkpoint Service
NetPlane Core Services Overview User’s Guide (6806800C08B)
9
Page 10
About this Manual
Abbreviation Definition
CSIs Component Service Instances
CPU Central Processing Unit
DHCP Dynamic Host Configuration Protocol
DTA Distributed Trace Agents
DTS Distributed Trace Server
DTSv Distributed Trace service
ECC Embedded Communications Computing
EDA Event Distribution Agent
EDS Event Distribution Server
EDSv Event Distribution Service
EVT Event service
FRU Field Replaceable Unit
FUF Firmware Upgrade Facility
GLA Global Locking Agent
GLD Global Locking Director
GLND Global Locking Node Director
GLSv Global Lock Service
HCD HPI Chassis Director
HISv HPI Integration Service
HPL HPI Adaption Private Library
HPM Hardware Platform Manager
IfA Interface Agents
IfD Interface Director
IfND Interface Node Director
IfSv Interface Service
LCK Locking Service
LEAP Layered Enhancement for Accelerated
Portability
LFM Local Fault Manager
MAA Managament Access Agent
MAS Management Access Server
MASv Management Access Service
MBCA Message Based Checkpoint Agent
10
MBCSv Message Based Checkpointing Service
MDS Message Distribution Service
MIB Management Information Base
MQA Message Queue Agent
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 11
About this Manual
Abbreviation Definition
MQD Message Queue Director
MQND Message Queue Node Director
MQSv Message Queue Service
MSG Messaging Service
NCS NetPlane Core Services software
OAA Object Access Agent
PCS Platform Control Software
PSA Persistent Store Agent
PSS Persistent Store Server
PSSv Persistent Store Service
SAF Service Availability Forum™
SG Service Groups
SI Service Instances
SRMA System Resource Monitoring Agent
SRMND System Resource Monitoring Node Director
SRMSv System Resource Monitoring Service
SSU Simple Software Upgrade
SUND Simple Software Upgrade Node
SU Service Units
XML Extensible Markup Language
Conventions
The following table describes the conventions used throughout this manual.
Notation Description
0x00000000 Typical notation for hexadecimal numbers
0b0000 Same for binary numbers (digits are 0 and 1)
bold Used to emphasize a word
Screen Used for on-screen output and code related
Courier + Bold Used to characterize user input and to
Reference Used for references and for table and figure
(digits are 0 through F), for example used for
addresses and offsets
elements or commands in body text
separate it from system output
descriptions
File > Exit Notation for selecting a submenu
<text> Notation for variables and keys
NetPlane Core Services Overview User’s Guide (6806800C08B)
11
Page 12
About this Manual
Notation Description
[text] Notation for software buttons to click on the
... Repeated item for example node 1, node 2,
screen and parameter description
..., node 12
.
.
.
.. Ranges, for example: 0..4 means one of the
| Logical OR
Summary of Changes
This manual has been revised and replaces all prior editions.
Part Number Edition Description
6806800C08A February 2007 First edition
6806800C08B September 2007 Added new section 2.9
Omission of information from
example/command that is necessary at the
time being
integers 0,1,2,3, and 4 (used in registers)
No danger encountered. Pay attention to
important information
Comments and Suggestions
We welcome and appreciate your comments on our documentation. We want to know what you
think about our manuals and how we can make them better.
Mail comments to:
z Motorola GmbH
Embedded Communications Computing
Lilienthalstrasse 15
85579 Neubiberg
Germany
z eccrc@motorola.com
In all your correspondence, please list your name, position, and company. Be sure to include
the title, part number, and revision of the manual and tell how you used it.
12
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 13
Introduction
1.1 Avantellis 3000 Series Overview
The Avantellis 3000 Series communications server represents the highest level of hardware
and software integration to date within Motorola’s family of Open Application-Enabling
Platforms.
It is built on the Centellis 3000 Series hardware platform which is an AdvancedTCA system
characterized by the following:
z Redundant shelf manager and alarm modules (SAM)
z Redundant switching and system controller blades (ATCA-F101)
z Redundant power entry modules (PEM)
1
z Various node blades incl. accessories (ATCA-7107 and ATCA-7221) verified and
configured for the use within the Avantellis 3000 Series system
Avantellis 3000 Series uses this hardware platform and furthermore integrates the following
software components to be used as basis for customer applications:
z NetPlane software
z Carrier Grade Operating System
This manual will focus on the Netplane Core Services (NCS) which is a component of the
Netplane software. The purpose of this manual is only to provide an overview, information that
is needed to actually use NCS for application development can be found in separate manuals.
Links to these manuals are given in this manual wherever appropriate.
NetPlane Core Services Overview User’s Guide (6806800C08B)
13
Page 14
Introduction Avantellis 3000 Series Software Architecture
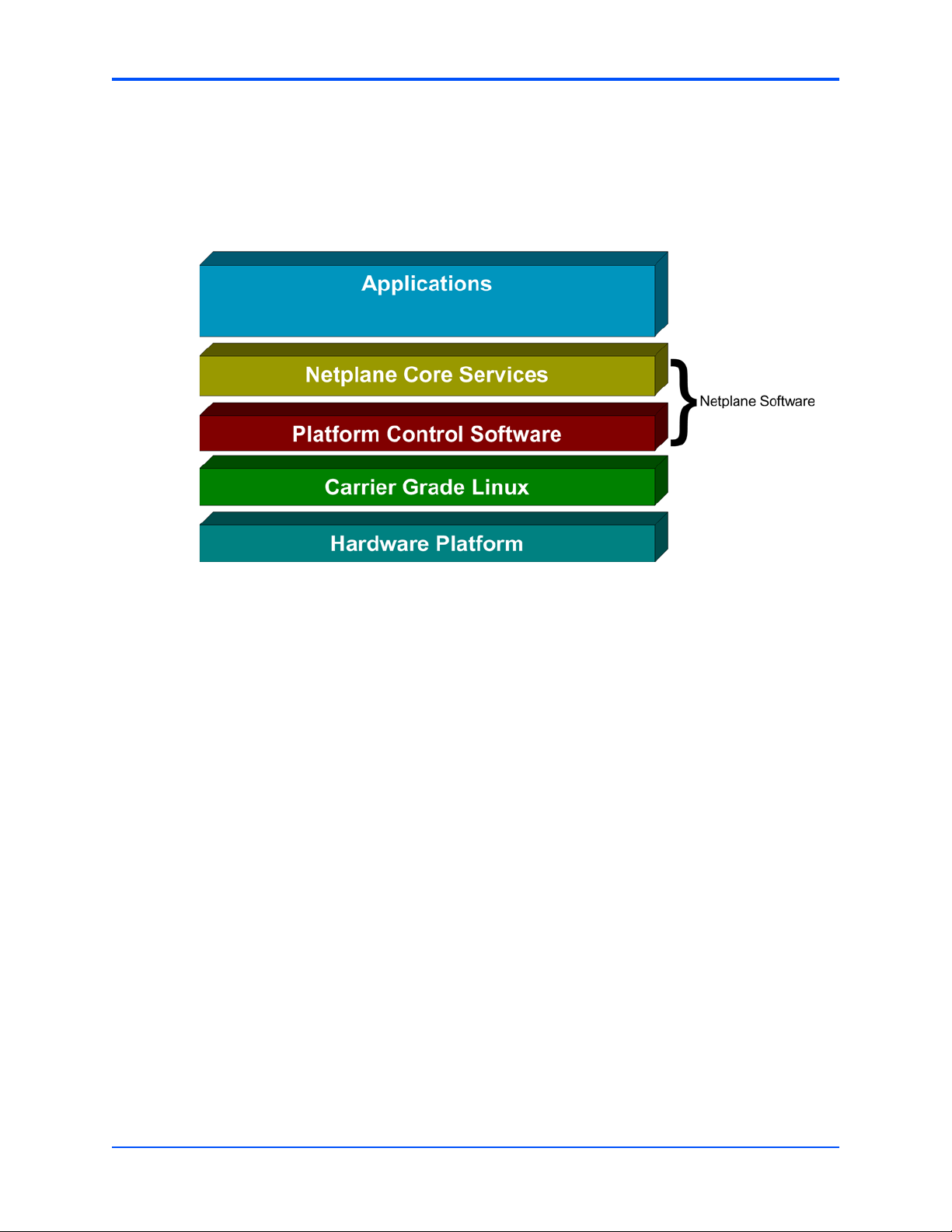
1.2 Avantellis 3000 Series Software Architecture
The following figure illustrates the main software components which constitute an Avantellis
3000 Series system.
Figure 1-1 Avantellis Main Software Components
1.2.1 NetPlane Software
The NetPlane software can be subdivided into the NetPlane Core Services and the Platform
Control Software.
1.2.1.1 NetPlane Core Services
NetPlane Core Services (NCS) is a suite of HA middleware which implements the Service
Availability Forum™ (SAF) interface specification. The SAF is a consortium of industry-leading
communications and computing companies working together to develop and publish high
availability and management software interface specifications.
In addition to the services that implement the SAF interface, NCS contains complementary
services that were introduced by Motorola and which are required in a a complete highavailability system solution.
Both the SAF-compatible services as well as the complementary services will be described in
more detail in this manual.
1.2.1.2 Platform Control Software
Platform Control Software (PCS) is an hardware and operating system abstraction layer that
was defined by Motorola. It comprises software components that are specific to the underlying
hardware platform. On the other hand, PCS is hardware and OS agnostic and is therefore
portable across various Avantellis product lines. PCS functionality also includes software that
is responsible for the HA of hardware and OS specific software entities in the system.
14
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 15

Carrier Grade Linux Operating System Introduction
NCS functionality is a service user of PCS functionality. However from another perspective,
PCS is a service user of NCS since the HA of PCS software components is achieved through
the HA services provided by NCS.
1.2.2 Carrier Grade Linux Operating System
In an Avantellis 3000 Series system the underlying operating system is Carrier Grade Linux
(CGL) V. 4.0.1.
NetPlane Core Services Overview User’s Guide (6806800C08B)
15
Page 16

Introduction Carrier Grade Linux Operating System
16
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 17

NetPlane Core Services
2.1 Architectural Overview
This chapter provides an overview on the different components of the Netplane Core Services
and provides brief insights into each service.
The following figure illustrates the main software layers that constitute the NCS software:
Figure 2-1 NetPlane Core Services Components
2
NetPlane Core Services Overview User’s Guide (6806800C08B)
17
Page 18

NetPlane Core Services NCS Services
2.1.1 NCS Services
The following table lists and briefly explains the NCS services that implement the Service
Availability Forum (SAF) Application Interface Specification (AIS).
Table 2-1 SAF Compliant NCS Services
Corresponding SAF AIS
NCS Service Name
Availability Service
(AvSv)
Checkpoint Service
(CPSv)
Message Queue Service
(MQSv)
Event Distribution Service
(EDSv)
Global Lock Service
(GLSv)
Service(s) Description
Application Management
Framework (AMF) and
Cluster Membership
Service (CLM)
Checkpoint Service
(CKPT)
Messaging Service
(MSG)
Event service (EVT) This service provides a standardized means
Locking Service (LCK) This service provides a means to control
This service provides a standardized means
to model system components and
standardized mechanisms for monitoring,
fault reporting, fault recovery and repair of
components. It furthermore provides
functionality that oversees cluster nodes as
they join and leave the cluster.
This service oversees the life and integrity of
entities called checkpoints. Active
components write to checkpoints so that
stand-by components recover the last known
good state while turning active.
CPSv coordinates the creation and deletion
of checkpoints and maintains the checkpoint
inventory within a cluster.
This service provides a standardized means
for distributed applications to send messages
among themselves. MQSv oversees entities
called queues and queue groups and is
capable of preserving unread messages if a
reader process dies.
to publish events and to subscribe to events
anywhere in a cluster.
access to a cluster resources by competing
distributed clients.
18
Further details about each of these services will be given in the following sections.
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 19

Message Distribution Service NetPlane Core Services
The following table lists and briefly describes complementary NCS services which were
developped by Motorola.
Table 2-2 Motorola-Complementary NCS Services
NCS Service Name Description
Distributed Trace
Service (DTSv)
HPI Integration Service
(HISv)
Simple Software
Upgrade (SSU)
System Resource
Monitoring Service
(SRMSv)
Persistent Store Service
(PSSv)
Management Access
Service (MASv)
Message Based
Checkpointing Service
(MBCSv)
Interface Service (IfSv) This service oversees and coordinates the management and distribution
This service allows clients to direct debug information to a file for later
analysis.
This services allows other NCS services to access HPI events and to
invoke a limited set of HPI functions.
This service facilitates node-scoped software upgrade procedures for netbooted and disk-bladed nodes.
This service oversees system resource utilization by applications and
notifies those applications of resource utilization events.
This services tracks and makes persistent, successful changed
configuration settings accomplished through the Management Access
Service. The stored, persistent information may be used by a component
when it is restarted.
This service provides a client with a single interface for different kinds of
management operations. The supported management methods include
SNMP, Command Line Interface (CLI) and XML.
This service provides message-based checkpointing between an active
and one or more stand-by components.
of system-wide interface information. This includes support for virtual IP
features and the MIB II interface group.
Further details about these services will be given in the following sections.
2.1.2 Message Distribution Service
The Message Distribution Service (MDS) provides high-performance, reliable message
distribution services. NCS services and user applications invoke the services provided by MDS
through an API which is exposed in the form of a library that can be linked to a process. MDS
supports intra-process, inter-process as well as inter-node communication. Further details
about MDS will be given in section 2.7 of this manual.
2.1.3 LEAP Portability Layer
LEAP stands for Layered Environment for Accelerated Portability. It is an operating system
abstraction that provides portability to both NCS services and user applications from underlying
operating system specifics and provides many value-added features. Further details are given
in section 2.8 of this manual.
NetPlane Core Services Overview User’s Guide (6806800C08B)
19
Page 20

NetPlane Core Services System Description
2.1.4 System Description
This System Description is involved in the definition of a system model. It is an XML file which
defines system entities and their relation for the purpose of system configuration and
management. The System Description is read in once at system start-up and from that time on
stored in persistent memory.
2.2 Distribution of NCS Services in the Avantellis System
Many NCS services are subdivided into subparts. All subparts together form one NCS service.
The subparts may run together on one node or may even be distributed among several nodes.
This section will provide more details.
The following figure provides an overview on how NCS services are distributed in a system.
Figure 2-2 NCS Service Distribution - Overview
2.2.1 NCS Directors
A Director for a particular NCS service manages and coordinates key data among the other
distributed subparts of that service. The Director is located on a system manager node and is
implemented with a 2N redundancy model.
20
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 21

NCS Directors NetPlane Core Services
A director communicates with Node Directors that are located on blades in a system. Node
Directors handle node-scoped activities such as messaging with the central Director or with the
local NCS agent.
The NCS agent makes service capabilities available to clients such as customer applications,
by way of shared linkable libraries that expose well defined APIs.
The following figure illustrates Directors and their interaction with other NCS subparts.
Figure 2-3 NCS Directors
The following NCS Directors exist in an NCS system:
z Availability Director
z Checkpoint Director
z Cluster Fault Director
z Global Lock Director
z HPI Chassis Director
z Interface Director
z Message Queue Director
A more detailed description of these Directors will be given in the description of the respective
NCS service later in this manual.
NetPlane Core Services Overview User’s Guide (6806800C08B)
21
Page 22

NetPlane Core Services NCS Servers
2.2.2 NCS Servers
An NCS Server provides central intelligence for a particular NCS service, but unlike with NCS
Directors, there is no corresponding Node Director for an NCS Server. Instead the NCS Server
communicates directly with NCS Agents.
NCS Servers are implemented in a 2N redundancy fashion. The following figure illustrates the
role of NCS Servers in a system.
Figure 2-4 NCS Servers
The following NCS Servers exist in a system:
z Distributed Trace Server
z Event Distribution Server
z Management Access Server
z Persistent Store Server
A more detailed description is given together with the description of the respective NCS service
later in this manual.
2.2.3 Sample Applications
The NetPlane software suit contains a set of sample applications and sample make files that
ease the development of customer applications. They illustrate the use of the various APIs and
serve as a good starting-point to develop your own applications.
22
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 23

System Description NetPlane Core Services
2.3 System Description
The System Description is an XML file which is defined prior to installation of any hardware. It
describes the hardware and software configuration of a system.
The System Description file is loaded to the System manager node and read by the Availability
manager during the NCS initialization. The system configuration as described in the System
Description file is then stored in persistent memory (using the PSSv service) where it is subject
to runtime update as a result of administrative actions via SNMP for example. The following
figure illustrates how the System Description is involved in the NCS system.
Figure 2-5 System Description - Overview
The information contained in the System Description can be divided into the following
categories:
z Validation description
z NCS deployment description
z Customer deployment description
NetPlane Core Services Overview User’s Guide (6806800C08B)
23
Page 24

NetPlane Core Services Management Access
The following table provides more details.
Table 2-3 System Description Content
Description Category Description
Validation Description This describes all possible ATCA-blade population profiles
for a particular product. The description explains the
inventory and legal combinations of hardware resources,
primarily those hosting one or more SAF AMF nodes.
Hardware resources are identified by HPI Entity Path names
with key 'identifier' attributes called out.
NCS Deployment description This identifies the actual ATCA-blade configuration and NCS
Middleware deployed for this device in the network. For
example, it identifies the actual blade type expected in a slot
from among the 'valid blades' expressed in the Validation
Description. This Description also identifies which NCS
middleware pieces live where (which blade) and the
redundancy models used by those NCS middleware pieces
(since the NCS Middleware is itself HA).
This portion of the description will likely require some
adjusting at deployment time. This depends on how many
plausible (and used) configurations there are for a particular
product,
Customer deployment description This identifies how customer application SW is distributed
(deployed) for this device in the network. Just as with the
NCS Middleware, this description identifies which application
sub-parts live where (which AMF node) and the redundancy
models used by those application sub-parts (as it is generally
expected that customer applications shall be HA).
For further details about the System Description refer to the System Description Programmer’s
Reference.
2.4 Management Access
NCS provides two ways to access the Avantellis system for managent purposes: via CLI
interface and via SNMP.
Both management access points resolve to a common managed object definition. This
common definition allows the system managed objects to be distributed throughout the NCS
services. These objects may be owned (implemented) by NCS, PCS and user applications as
long as they have been properly integrated with the NCS Management Access Service (MASv).
All NCS configuration parameters are managed by this service.
The flow is roughly as follows:
1. A MASv client, such as a CLI or SNMP Agent, translates a transaction request to a MASv
format
2. The MASv client then initiates a transaction via the Management Access Agent (MAA) API
library, which always forwards the transaction to the Management Access Server (MAS),
where a repository of object locations is maintained.
24
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 25

Management Access NetPlane Core Services
3. The MAS then forwards the transaction to the proper object owner, wherever that happens
to be in the NCS system.
4. The object owner is informed via a callback at the Object Access Agent (OAA) library APIs
5. The Object owner then does a more detailed validation check before carrying out the
transaction.
6. When done (or fails), the object owner uses the OAA APIs to explain its response.
7. On the way back, if the transaction is a SET (or its proprietary variants) and successful, then
the object repository overseen by the Persistent Store Server (PSS) updates the system
configuration.
The following figure illustrates the communication flow.
Figure 2-6 Management Access - Information Flow
The CLI access point provides a CLI parsing system. It allows to dynamically add Command
Execution Functions (CEF) to the CLI system. The CEF integrates with the Management
Access Service via the Management Access Agent. The CLI is available from the console or
via telnet.
NetPlane Core Services Overview User’s Guide (6806800C08B)
25
Page 26

NetPlane Core Services SAF-Compliant NCS Services
The SNMP access point comprises an SNMP agent and subagent based on an open-source
Linux implementation, The NCS SNMP subagent integrates SNMP requests via the
management Access agent. Application-specified additional managed objects (MIBs) can be
dynamically added to the subagent.
2.5 SAF-Compliant NCS Services
This section briefly describes those NCS services which implement standard SAF services. For
each service an architectural overview and a functional description is given. Furthermore, a
reference to user manuals is given where you can find more detailed information.
2.5.1 Availability Service
The Availability Service (AvSv) provides the following functionality:
z Leverage the SAF "System Description and Conceptual Model"
z Honour the Availability Management Framework" API
z Honour the SA Cluster membership Service API
z House the MIB tables corresponding to the hardware portion of the deployment system
description which includes entity containment and fault domain hierarchy information
z House the MIB tables corresponding to the software portion of the deployment system
description which include configuration of AMF-defined logical entities and their
relationship
z Perform blade validation on receipt of HPI hot swap insertion events
z Handle fault events such as HPI hot swap extraction events, threshold crossing events etc.
The AvSv maintains a software system model database which captures SAF-described logical
entities and their relationships to each other. The software system model database is initially
configured from data contained in the System Description file. Through time the system model
will modify due to changing system realities and administrative actions.
The SAF logical entities related in the system model include components which normalize the
view of physical resources such as processes, drivers or devices. Components are grouped into
Service Units according to fault dependencies that exist among them. A Service Unit is also
scoped to one or more (physical) fault domains. Service Units of the same type are grouped
into Service Groups (SG) which exhibit particular redundancy modelling characteristics.
Service Units within a SG are assigned to Service Instances (SI) and given a High Availability
state of active and standby.
26
The hardware database maintained by AvSv includes hardware entity containment information
and the hardware fault domain hierarchy. All hardware entities are represented by their HPI
entity paths. The hardware entity containment tree only includes managed FRUs which may or
may not include processor environments., and non-FRU resources which include processor
environments. The fault domain data includes dependency relationships between parent-child
entities as well as non-parent child entities. The hardware system model also includes
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 27

Availability Service NetPlane Core Services
validation data for managed FRUs and the linkages between entities and AMF logical nodes.
All the processor environment entities in the hardware entity containment tree, which
correspond to AMF nodes, contain the node name of the associated node. The node name
provides the linkage between the hardware and the software system models.
Further functionality provided by AvSv includes:
z Automatic and administrative means to instantiate, terminate and restart resources
z Automatic and administrative means to manage or reflect Service Group, Service Unit,
Service Instance and Resource state
z Administrative means to perform switch-over
z Administrative means to reset (but not power cycle) nodes
z Heartbeat and event subscription schemes for fault detection, isolation and identification
z Health-check services to probe and prevent system trauma that lead to faults
z Fault recovery mechanisms to fail-over SIs which maintain service availability in case of
system trauma
z Fault repair mechanisms to restore failed components
z Validation of hardware resources (managed FRUs) entering the system
The AvSv itself cannot be a single-point of failure. It provides its own internal scheme and
mechanisms to protect itself from its own failure.
2.5.1.1 Architecture
The AvSv service is comprised of the following main software components:
z Availability Director
z Availability Manager
z Availability Node Director
z Availability Agent
2.5.1.1.1 Availability Director
The Availability Director maintains the most abstract portions of the Software System Model,
such as cluster membership of nodes, service groups, service instances and service nodes.
Its main tasks include fault detection, isolation and recovery procedures as defined in the SAF
AMF. Any problems and failures on a component that cannot be handled locally, are promoted
to the Availability Director which controls and triggers the isolation of the affected component
and, if possible, the activation of a stand-by component.
2.5.1.1.2 Availability Manager
The Availability Manager maintains the hardware model of the system described above. It acts
as link between the underlying HPI and the AMF system modelling.
NetPlane Core Services Overview User’s Guide (6806800C08B)
27
Page 28

NetPlane Core Services Checkpoint Service
When the Availability Manager detects failures or hardware events such as extraction/insertion
requests, it triggers the Availability Director to recover affected software services. When the
Availability Manager receives a hot-swap event via HPI, it checks the component’s FRU
validation data to determine whether the component can be powered-on or not.
A further task includes reset management. When a reset request is received, the Availability
Manager conducts a fault-domain hierarchy look-up. It then requests the Availability Director to
switch-over the affected nodes and proceeds with the reset only if it received a confirmation
from the Availability Director.
2.5.1.1.3 Availability Node Director
The Availability Node Director (AvND) resides on each system node and its main task is to
maintain the node-scoped part of the software system model described above.
The AvND coordinates local fault identification and repair of components and furthermore
facilitates any wishes it receives from the Availability Director.
The AvND watches for components arriving or leaving the system and summarizes this
information in a Service Unit (SU) presence state, and keeps the AvD informed about the
current status and changes. The AvND is capable of disengaging, restarting and destroying any
component within its scope. This may occur according to AvD instructions or as a result of an
administrative action or automatically triggered by policies.
2.5.1.1.4 Availability Agent
The Availability Agent (AvA) is a linkable library that exposes the SAF APIs to applications. Its
task is to convey requests from the AvND or the AvD through the AvND to the application and
vice versa. Details about the supported SAF APIs can be found in the NetPlane Core Services
Overview User’s Guide which is part of the Avantellis documentation collection.
2.5.2 Checkpoint Service
The Checkpoint Service (CPSv) implements the SAF Checkpoint Service. It provides
checkpointing of data in a manner which is equivalent to hardware shared memory between
nodes.
2.5.2.1 Basic Functionality
The CPSv maintains a set of replicated repositories called checkpoints. Each checkpoint may
have one or more replicas within the scope of a cluster. At most, one replica per checkpoint may
exist on one node within a cluster.
Each checkpoint comprises one or more sections which can be dynamically created or deleted.
The CPSv does not encode the data written into checkpoint sections. If checkpoints are
replicated on heterogeneous nodes, for example nodes with different endian architecture, you
must make sure that the data can be appropriately interpreted on all nodes.
28
The CPSv service supports the following two types of update options:
z Asynchronous update option
z Synchronous update option
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 29

Checkpoint Service NetPlane Core Services
In the case of asynchronous update option, one of the replicas is designated as the active
replica. Data is always read from the active replica and there is no guarantee that all the other
replicas contain identical data. A write call returns after updating the active replica.
In the case of synchronous update options, the call invoked to write to the replicas returns only
when all replicas have been updated, i.e. either all replicas are updated or the call fails and no
changes are made to the replicas.
The CPSv supports both collocated and non-collocated checkpoints. In case of checkpoints
opened with collocated and asynchronous update option, it is up to the application to set a
checkpoint to the active state. In all other cases the CPSv itself handles which checkpoint is
currently active.
The Checkpoint Service defined by SAF does not support hot-standby. This means that the
currently stand-by component is not notified of any changes made to the checkpoint. When the
stand-by component gets active, it has to iterate through the respective checkpoint sections to
get up-to-date. To overcome this drawback, the CPSv provides additional, non-SAF APIs which
help to notify the stand-by component of changes and thus facilitate the implementation of a
hot-stand-by.
2.5.2.2 Architecture
The CPSv service consists of the following subparts:
z Checkpoint Director (CPD)
z Checkpoint Node Director (CPND)
z Checkpoint Agent (CPA)
2.5.2.2.1 Checkpoint Director
The Checkpoint Director runs on the active system manager node. Its main tasks are:
z Generating a unique ID for each new checkpoint created by applications
z Maintaining the list of nodes on which replicas of a particular checkpoint exist
z Selecting the Checkpoint Node Director (CPND) which oversees the active replica for each
checkpoint
z Coordinating the creation and deletion of checkpoints
z Maintaining a repository for the CPSv policy and configuration-related information
There is an active and a stand-by CPD running respectively on the two system manager nodes.
CPD uses the NCS Message based Checkpoint Service to keep the two synchronized and
available for failover situations.
NetPlane Core Services Overview User’s Guide (6806800C08B)
29
Page 30

NetPlane Core Services Message Queue Service
2.5.2.2.2 Checkpoint Node Director
The Checkpoint Node Director (CPND) runs as process both on payload blades and on the two
system manager nodes. Its tasks are:
z Accepting checkpoint requests from Checkpoint Agents and streamline requests from
applications to checkpoints
z Maintaining and controlling the state information pertaining to checkpoints
z Coordinating read and write accesses to/from checkpoint applications across the cluster
z Keeping track of CPNDs on other nodes in order to update the local data if a CPND that is
managing the active checkpoint goes down
z Maintaining local replicas in shared memory
z Storing checkpoint control information in the shared memory so that it may be retrieved
after a CPND restart
z Managing accesses to sister replicas and coordinating accesses from other applications to
the replicas within the scope of the CPND
2.5.2.2.3 Checkpoint Agent
The Checkpoint Agent (CPA) is a linkable library available to applications that want to use
checkpoint services.
2.5.3 Message Queue Service
The Message Queue Service (MQSv) implements the SAF Message service API.
2.5.3.1 Basic Functionality
Sender application(s) which use this service, send messages to queues and queue groups
managed by MQSv and not to receiving application(s) directly. This means, if a process dies,
the message persists in the queue and can be read by the restarted application or by another
process.
Applications may create and destroy queues, where each queue has a globally unique name.
Multiple senders may then direct messages to a queue, while a single receiver may read
messages from the named queue.
Applications may group several queues into a system-wide named queue group. When sending
a message to a queue group, a group policy dictates which queue actually receives the
message. The sender does not know how many queues are in the group or what the policy is.
2.5.3.2 Architecture
The MQSv service consists of the following three subparts:
z Message Queue Director
z Message Queue Node Director
z Message Queue Agent
30
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 31

Event Distribution Service NetPlane Core Services
2.5.3.2.1 Message Queue Director
The Message Queue Director (MQD) runs as process on a system manager node. Its main
tasks are:
z Maintaining location and state data of all queues and queue groups in a system
z Resolving all queue and queue group names and location information
z Supporting group change tracking on behalf of registering clients
There is an active and a stand-by MQD running respectively on the two system manager nodes.
MQD uses the NCS Message based Checkpoint Service to keep the two synchronized and
available for failover situations.
2.5.3.2.2 Message Queue Node Director
The Message Queue Node Director (MQND) runs as process both on payload and on system
manager nodes. Its main tasks are:
z Managing queue send/receive operations initiated by Message Queue Agents (MQA)
z Creating, maintain and destroy queues
z Notifying MQAs when messages are delivered, received or when tracked group traits
change
z Destroying a queue if its creator process dies or a retention timer expires
z Preserving messages until fetched or queue is destroyed
2.5.3.2.3 Message Queue Agent
This is a linkable library that makes all MQSv APIs available to applications.
2.5.4 Event Distribution Service
The Event Distribution Service (EDSv) is compliant with the Event Service APIs defined by the
SAF.
This service controls the multiplexing of event messages in a publish/subscribe environment. It
exposes a rich set of APIs which allow applications to control event distribution criteria. The
implementation details of the event distribution mechanism remain transparent to the
application. In the NCS environment, the EDSv uses the underlying Message Distribution
Service (MDS) to implement the communication channels.
The EDSv functionality is closely linked with other NCS services, such as System Definition,
Availability Service and Checkpoint Service.
2.5.4.1 Architecture
The EDSv consists of the following two parts:
z Event Distribution Server (EDS)
z Event Distribution Agent (EDA)
NetPlane Core Services Overview User’s Guide (6806800C08B)
31
Page 32

NetPlane Core Services Global Lock Service
2.5.4.1.1 Event Distribution Server
The Event Distribution Server (EDS) is an NCS process on the System Controller blade which
handles the distribution of events based on client subscriptions and filtering mechanisms. If an
event was posted and event persistence was specified, the event will be retained by the server
process for the time period specified in the call. During the retention time period, the EDS may
redistribute the event to new subscribers for that event. Events are distributed based on a match
against the filter settings specified by the subscribed client and a priority specified in the event
header.
There is an active and a stand-by EDS running respectively on the two system manager nodes.
EDS uses the NCS Message based Checkpoint Service to keep the two synchronized and
available for failover situations.
2.5.4.1.2 Event Distribution Agent
This is a library that makes the EDSv APIs available to applications. The APIs themselves are
all described in the respective SAF documents.
2.5.5 Global Lock Service
The Global Lock Service (GLSv) implements the SAF Lock Service API.
2.5.5.1 Basic Functionality
The GLSv provides a distributed locking service which allows applications running on multiple
nodes to coordinate access to shared resources.
Locks are created and destroyed by applications as needed. Participating applications know
that the locks exist and know how to use them. Access policies are outside the scope of the
GLSv, which only provides the locking mechanism.
The GLSv supports exclusive and shared access modes. Exclusive access mode means that
only one requestor is allowed through the lock at a time. Shared access mode means that
multiple requestors are allowed through a lock at a time.
The GLSv furthermore supports synchronous and asynchronous APIs to carry out locking
operations. In addition, GLSv provides an internal mechanism which ensures deadlock
detection and prevention.
If an application creates a lock and then exits without unlocking, orphan locks are the result.
Orphan locks are managed until they are properly purged from the system.
2.5.5.2 Architecture
The GLSv consists of the following subparts:
z Global Locking Director
z Global Locking Node Director
z Global Locking Agent
32
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 33

Motorola Complementary NCS Services NetPlane Core Services
There is an active and a stand-by GLD running respectively on the two system manager nodes.
GLD uses the NCS Message based Checkpoint Service to keep the two synchronized and
available for failover situations.
2.5.5.2.1 Global Locking Director
The Global Locking Director performs the following tasks:
z Generating unique IDs referred to by an application process
z Naming one of the Global Locking Node Director (GLND) subparts as master of a particular
resource
z Reelecting a new master GLND for a resource if a GLND has left the system
2.5.5.2.2 Global Lock Node Director
The Global Lock Node Director (GLND) runs as process on all the payload and system
controller nodes. Its main tasks are:
z Managing the resource open and lock operation initiated by GLAs.
z For a particular resource, the GLND designated by GLD act as Master. This Master GLND
is responsible for managing the lock and unlocks operations on those resources.
z GLND maintains the persistence state information in a shared memory to protect against
GLND crashes and restarts
2.5.5.2.3 Global Locking Agent
A Global Locking Library (GLA) is a linkable library which makes the respective GLSv APIs
available to applications.
2.6 Motorola Complementary NCS Services
This section describes in more detail the Motorola complementary NCS services which were
introduced to complement the NCS services that implement SAF APIs.
2.6.1 Distributed Tracing Service
The Distributed Trace Service (DTSv) organizes, normalizes and manages logging activities
among all cooperating processes within a system.
The DTSv provides the means to describe pipes that can perform operations such as readwrite, filter, sort and store selectively screened logging data. The service functionality includes
the creation of customized pipes as well.
2.6.1.1 Architecture
The DTSv consists of two components:
z Distributed Trace Server
z Distributed Trace Agent
NetPlane Core Services Overview User’s Guide (6806800C08B)
33
Page 34

NetPlane Core Services HPI Integration Service
2.6.1.1.1 Distributed Trace Server
The Distributed Trace Server (DTS) is responsible for defining policies based on which logs will
be collected from the Distributed Trace Agents (DTA) at run-time. The logging policies can be
configured via a Logging Policy MIB which is owned by the DTS. At system-start default policies
will be used which can then be customized at run-time via the MIB.
2.6.1.1.2 Distributed Trace Agent
The Distributed Trace Agent (DTA) is a linkable library that makes the DTSv available to clients.
The DTAs manipulate normalized logging information according to the filter descriptions
configured in the Logging Policy MIB. If the Logging Policy MIB has not been configured,
acceptable defaults engage. When it is configured, the DTSv selectively forwards filter
descriptions to the appropriate DTAs according to the information described in the MIB. For a
detailed description of the DTA refer to the Distributed Tracing Service Programmer's Reference
.
2.6.2 HPI Integration Service
The HPI Integration Service (HISv) is a service which is only used internally by other NCS
services, in particular the AvSv and the SPSv. It provides an abstraction from the actual HPI
implementation used in the system. In the case of the NCS this implementation is OpenHPI.
2.6.2.1 Basic Functionality
The HISv allows its clients to interact with the underlying HPI interface. The main tasks of HISv
are:
z Publishing HPI events using ESDv channels and formatting expected by subscribing clients
z Executing HPI APIs on behalf of other NCS services
z Making hardware inventory information available
z Overseeing the maintenance and manipulation of the SAF HPI MIB objects
2.6.2.1.1 Architecture
The HISv is made up of the following two components:
z HPI Chassis Director
z HPI Adaption Private Library
2.6.2.1.2 HPI Chassis Director
The HPI Chassis Director (HCD) is an NCS process which is linked to a SAF-compliant
implementation of the SAF HPI library.
34
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 35

Simple Software Upgrade NetPlane Core Services
HCD is scoped to one chassis and there are two instances of HCD in a chassis: one active and
one stand-by. The main tasks of HCD are:
z Performing HPI discovery sequence to realize the physical entities in the chassis
z Publishing HPI events
z Executing HPI APIs
z Supporting those parts of the HPI MIB which are scoped to the chassis which the HCS is
responsible for
2.6.2.1.3 HPI Adaption Private Library (HPL)
The HPI Adaption Private Library (HPL) is an NCS-internal private library that is used by the
SPSv and AvSv to communicate its wishes to the HCD.
2.6.3 Simple Software Upgrade
The Simple Software Upgrade (SSU) service allows to upgrade software components in the
Avantellis system. This includes the upgrade of kernel, PCS software, NCS software and
customer applications.
2.6.3.1 Basic Functionality
The SSU supports the upgrade of software components on system controller blades. The
images are booted from disk. The upgrade itself is controlled and managed via CLI commands.
Note that for the upgrade of software components on payload blades, mechanisms like DHCP
and netboot are used.
2.6.3.2 Architecture
The main component of the SSU is the Simple Software Upgrade Node (SUND). It manages
the software upgrade on the respective system manager node it resides on. It furthermore
handles SSU CLI commands which are issued to trigger the software upgrade.
For details about the SSU service, refer to the Simple Software Upgrade Programmer’s
Reference.
2.6.4 System Resource Monitoring Service
The System Resource Monitoring Service (SRMSv) service oversees system resource
utilization by applications and notifies those applications of resource consumption events.
Monitoring takes place at node-level.
The SRMSv is implemented as a bundle of System Resource Monitoring Agent (SRMA) and
System Resource Monitoring Node Director (SRMND). There is no central director.
For further details about this service refer to the System Resource Monitoring Service
programmer’s Reference
NetPlane Core Services Overview User’s Guide (6806800C08B)
35
Page 36

NetPlane Core Services Persistent Store-Restore Service
2.6.5 Persistent Store-Restore Service
The Persistent Store-Restore Service (PSSv) allows to store system configuration data on a
persistent storage medium. It allows to store the current configuration as well as to maintain
alternate configurations.
2.6.5.1 Basic Functionality
Saving the desired configuration allows the system to initialize, retrieve the saved configuration
and reach the desired state quickly, for example after a reboot. Clients may also use the PSSv
to switch to another system configuration during normal operation at any point in time.
The PSSv supports the following operations and provides CLI commands for each of them:
z Listing available configuration files and display description text for each file
z Making a copy of an existing configuration file under a new name
z Renaming an existing configuration files
z Deleting an existing configuration file from the persistent store
z Displaying the description text for an existing configuration files
z Instructing the PSSv to start a new playback session from the specified configurations
z Creating a constraint spec for a configuration
2.6.5.2 Architecture
The PSSv is made up of the following components:
z Persistent Store Server
z System Description Access Manager
z System Description Parser and PSS Interactions
z Persistent Store Agent
z PSSv Target Service
z PSSv Command Execution Functions
2.6.5.2.1 Persistent Store Server
The Persistent Store Server (PSS) interacts with the other PSSv subparts and the Management
Access Service. It performs the following tasks:
z When a saved configuration file is restored from the disk, the PSS fetches the configuration
file from the disk and propagates the data to various components in the system using the
Management Access service.
36
z The Management Access Service informs the PSS about configuration changes. PSS then
updates its in-memory representation of the configuration file. It also forwards notifications
to the System Description Parser.
z The in-memory copy of the currently active configuration is periodically stored in persistent
storage.
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 37

Management Access Services NetPlane Core Services
z PSS processes set/get requests it receives from the Management Access Service.
z PSS allows the owner of a managed object to provide a template determining the method
and contents of data that will be stored for that objects.
2.6.5.2.2 System Description Parser
The persistent data maintained by the PSS service includes application configuration data as
well as system configuration data. The latter is stored in the previously explained XML-based
System Description file. When the system powers up, the System Description Parser reads the
System Description file and parses it. It then primes the system with the system configuration
data.
Whenever the System Description file was changed (for example by an administrator to reflect
hardware changes in the system), the System Description Parser parses the new System
Description and reconciles the differences between the current system configuration and the
configuration specified by the System Description.
2.6.5.2.3 Persistent Store Agent
The Persistent Store Agent (PSA) resides in NCS services which use the services of the PSSv.
The PSA is responsible for collecting responses to SET/SETROW requests and forwarding that
information to the central PSS. For further information about the PSA refer to the Persistent
Store-Restore Service Programmer's Reference .
2.6.5.2.4 PSSv Command Execution Functions
The PSSv Command Execution Functions (PSSv CEF) are registered with the NCL CLI. They
are invoked when commands are issued at the console. PSSv CEF supports a PSSv set of
managed objects and integrates with the Management Access Service.
2.6.6 Management Access Services
The Management Access Services (MASv) provides clients with a single interface to access
distributed managed objects that may be located anywhere in the system.
2.6.6.1 Basic Functionality
The MASv provides the following functionality/mechanisms:
z Common method of converting access to managed objects from any input source to a
standard form
z Method of distributing ownership of the managed objects in a system to all the service and
application processes in a system
z Service for locating the ownership of any particular object within the system
z Command Line Interpreter which supports all NCS services and which can be customized
to support any additional customer-defined commands
NetPlane Core Services Overview User’s Guide (6806800C08B)
37
Page 38

NetPlane Core Services Management Access Services
z SNMP subagent which integrates the MASv with an SNMP agent and which can be
configured to support any additional customer-defined managed objects
z Interface to PSSv for non-volatile storage of the values of all managed objects
MASv provides a normalized structure for the managed objects of a system. Although this
structure is NCS-specific in many aspects, in many cases it uses a table indexing that is
identical to that used in SNMP standard MIBs.
2.6.6.2 Architecture
The MASv consists of the following subparts:
z Management Access Agent
z Object Access Agent
z Management Access Server
z Command Line Interpreter Management Access Point
z SNMP Management Access Point
2.6.6.2.1 Management Access Agent
The Management Access Agent (MAA) provides the link between management input services,
such as SNMP or CLI agent, and the common MASv services.
Applications or NCS services can choose between the following two forms to receive responses
from management access requests:
z Asynchronous function callback
z Synchronous function call return
For further details refer to the Management Access Service Programmer's Reference.
2.6.6.2.2 Object Access Agent
The Object Access Agent (OAA) provides an interface which allows applications and NCS
services to access managed objects. In particular, NCS services and applications can register
the following information:
z Ownership of an entire managed object table
z Ownership of a set of scalar managed objects or a row (or range of rows) of a managed
object table
z Withdrawing ownership claims regarding scalars, table rows, or an entire table
The NCS service or application can then perform read/write operations on an object or a
row of objects.
38
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 39

Message-Based Checkpointing Service NetPlane Core Services
2.6.6.2.3 Management Access Server
The Management Access Server (MAS) manages the database of managed objects. It
performs the following tasks:
z Receiving managed object row ownership information from the OAAs
z Direct management access requests from MAAs to the proper OAA
2.6.6.2.4 Command Line Interpreter Management Access Point
The Command Line Interpreter (CLI) provides a command-line based user interface for the
NCS system. It provides a mechanism for describing commands that can be used to manage
configurable entities. The commands are customizable depending on the needs of the
application or NCS and are dynamically registered and deregistered. The functionality provided
by the CLI includes:
z Displaying of available commands and results
z Programmatic description of command syntax and semantics
z Menu navigation
z Key assignment properties (hot keys)
z Dynamic registering of command descriptions
z Fetching character stream from input sources such as a file or terminal
z Matching character stream against all possible command descriptions and when a match
is found invoke respective function
The CLI provides an API which allows applications or NCS services to register and deregister
CLI commands. A detailed description of this API can be found in the Command Line Interface
Programmer's Reference.
2.6.6.2.5 SNMP Management Access Point
The SNMP Management Access Point is an SNMP subagent whose purpose is to provide a
mapping between the SNMP management agent and the MASv. This mapping allows
applications and NCS services to access managed objects maintained by applications and
NCS services. The main tasks of the SNMP Management Access Point are:
z Registering MIB rows with the SNMP master agent
z Receiving and forwarding SNMP requests from the SNMP master agent
For further details refer to the SNMP SubAgent Programmer's Reference.
2.6.7 Message-Based Checkpointing Service
The Message-Based Checkpointing Service (MBCSv) was introduced to complement the SAFcompliant Checkpointing Service. MBCSv defines a simple synchronization protocol which
keeps an active and one or more of its stand-by entities in synchronization. Unlike the SAFcompliant Checkpointing Service, the MBCSv does not maintain replicas.
NetPlane Core Services Overview User’s Guide (6806800C08B)
39
Page 40

NetPlane Core Services Interface Service
2.6.7.1 Basic Functionality
The main tasks of the MBCSv are:
z Dynamic discovery of peer entities
z Providing an interface to the active entity for checkpointing the state updates to the stand-
by peers
z Whenever the clients’s role changes to stand-by from any other role or whenever a new
active client is detected, the client synchronizes its state with that of the active client (cold
synchronization)
z Periodic synchronization of the client’s state with that of the currently active client to obtain
an abbreviated summary account (warm synchronization)
z Driving client behavior depending on the HA role assigned by the client application
2.6.7.2 Architecture
The only component of the MBCSv is the Message-Based Checkpointing Agent (MBCA). It
provides stateful, message-based checkpoint replication services for its clients. For more
details about the MBCA refer to the Message Based Checkpointing Service Programmer's
Reference.
2.6.8 Interface Service
The Interface Service (IfSv) provides a common means of configuring physical and logical
interface information in the NCS system, and allowing that information to be distributed to all
applications and services within the system.
2.6.8.1 Basic Functionality
The IfSv provides a means by which applications and NCS services can delete and modify
interface information for which they are responsible.
The IfSv supports the MIB II Interfaces group of managed objects as well as some Motorola
extensions. Furthermore IfSv supports the RMON-MIB defined in RFC 2819 and RMON2-MIB
defined in RFC 2021.
The IfSv interfaces with an ifIndexAlocator Platform Service in order to define an ifIndex value
for each interface created. If this service is not provided, IfSv generates an ifIndex using an
internal mechanism.
2.6.8.2 Architecture
The IfSv consists of the following components:
z Interface Director
40
z Interface Agents
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 41

Message Distribution Service NetPlane Core Services
2.6.8.2.1 Interface Director
The Interface Director (IfD) is located on the system manager node. Its main functions include:
z Defining an ifIndex for each configured interface (either obtained from ifIndex Allocator
Platform Service or generated internally)
z Responding to requests from Interface Agents to provide an ifIndex
z Registering ownership of the interface managed objects
z Maintains a consolidated database with respect to the interfaces present on all the nodes.
2.6.8.2.2 Interface Node Director
The Interface Node Director (IfND) exists on each node. It is responsible for state management
of the physical interfaces, including status monitoring. The interfaces of the IfND are private and
internal to NCS.
2.6.8.2.3 Interface Agents
Interface Agents (IfA) are a linkable library that provides the IfSv functionality to its clients. Its
functionality includes:
z Providing an interface to applications which they use to create and delete physical and
logical interfaces
z Fetching an ifIndex for each created interface from the IfD
z Registering ownership of the managed object rows for the interfaces created
z Providing an interface that allows applications to register with the IfSv
z Notifying applications of any operational state changes of an interface
z Providing interface information to applications
For further details refer to the Interface Service Programmer's Reference.
2.7 Message Distribution Service
The Message Distribution Service (MDS) provides a communication network to be used by
threads and/or processes distributed over physical nodes in a system. MDS clients can
dynamically find and talk to other MDS clients anywhere in the same MDS system.
NetPlane Core Services Overview User’s Guide (6806800C08B)
41
Page 42

NetPlane Core Services Message Distribution Service
The following figure provides an overview of the components that constitute the MDS.
Figure 2-7 Message Distribution Service Software Components
The MDS Services API make the MDS available to its clients, i.e. other NCS services, customer
applications or ECC applications. For a detailed description of the API, refer to the Message
Distribution Service Programmer's Reference.
The Service Discovery Protocol layer realizes the connection paths between all MDS
participants. If connections are broken or connected or participants die, fellow MDS instances
are informed asynchronously through callbacks which other services are no longer reachable.
MDS uses the Q.2110 Reliability P2P as underlying communication protocol. It has been
adapted slightly to NCS needs and provides:
z Transfer of data with sequence integrity
z Error connection by selective retransmission
z Error reporting to layer management
The Transport Adaption layer is an abstraction layer which hides the details of the underlying
transport protocol. In the Avantellis system Ethernet is used for inter-nodal base fabric
communications and POSIX queues are used for intra-nodal communications.
42
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 43

LEAP Portability Layer NetPlane Core Services
2.8 LEAP Portability Layer
The LEAP (Layered Enhancement for Accelerated Portability) layer was introduced to facilitate
the porting of NCS applications and user applications to other operating systems. It provides
various abstractions from OS-specific details. In particular, LEAP provides:
z IP-layer abstraction
z File system abstraction
z Dynamic library abstraction
z Monitored buffer and memory manager
z Monitored process internal queues
z Monitored timer services which can oversee a large number of timers at once
z Object locking
LEAP provides its services in the form of C macros and libraries to be linked by applications.
For further details on the LEAP and on how to use it, refer to the LEAP Programmer's
Reference.
2.9 Implementation Notes
This section summarizes important information that should be kept in mind when writing
applications that make use of NCS.
2.9.1 Cancelling Application Threads
NCS libraries is not a cancel-safe implementation. If an application thread acquires a NCS
resource (Example: acquired a lock, waiting on semaphore, etc) then the thread should be
cancelled only after releasing the resource acquired by the thread. Similarly, the application
thread should not be cancelled when execution of NCS API is under progress.
NetPlane Core Services Overview User’s Guide (6806800C08B)
43
Page 44

NetPlane Core Services Cancelling Application Threads
44
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 45

A NCS Toolkit
A.1 Introduction
The NCS software is accompanied by a toolkit that enables you to develop NCS-based
applications. This section describes the toolkit and its functions.
A.2 Toolkit Installation
The NCS toolkit is a tar file with the naming convention: ncs<release name>_dev_<build
name>.tar.gz. (for example: ncs06A_dev_3.1.4.tar.gz, where the release name is
"06A" and the build name is "3.1.4"). The tar file is packaged to be installed on a SuSE 9.0, i386
platform.
A
You can extract the tar files in the directory of the your choice <install-dir>. The command to
extract the tar is: tar -zxvf <tar file name>.
This creates the directory ncs<release name>_dev_<build name> in the location in
which it is installed (<install dir>).
On extracting this tar file, all files related to the toolkit are installed in the directory <install-
dir>/ncs<relase name>_dev_<build name>/. Name this as TOOLKIT_HOME
directory.
To uninstall this version of the toolkit, simply delete the directory, ncs<release
name>_dev_<build name>.
A.3 Toolkit Contents
The toolkit contains the following components:
z NCS software headers
These prototype the routines implemented by NCS software. They are located in the
$(TOOLKIT_HOME)/include directory
z NCS libraries
NCS applications should be linked with these to use NCS Services. The libraries are
located in the $(TOOLKIT_HOME)/libs directory, which has one directory per target. For
example, $(TOOLKIT_HOME)/libs/linux-ppc contains NCS libraries built for a Linux
PowerPC architecture
NetPlane Core Services Overview User’s Guide (6806800C08B)
45
Page 46

NCS Toolkit Building the Samples
z NCS MIBs
These are implemented by NCS services and are used to configure them. They are located
in the $(TOOLKIT_HOME)/source /mib directory.
z NCS sample programs and makefiles
These are provided to jump-start the application development process by providing code
that is illustrative of the usage of NCS.The sample programs also serve to demonstrate the
basic capabilities of each service. Application developers can leverage the makefiles
provided with the sample code to build their development setup for cross-compiling the
application for all targets supported by NCS
z NCS tools
These help develop NCS-based applications. They include an SMIDUMP tool used for
generating code automatically to help implement MIBs
A.4 Building the Samples
This section describes how NCS sample programs can be built for different targets supported
by NCS.
A.4.1 Development Host Prerequisites
The development host should be based on the SuSE Linux 9.0 (Intel i386 architecture).
It should also have the following build support installed:
z MVL cross-compile tool-chain, which is required to build sample applications for a real NCS
target.
z SuSE Linux 9.0 native, which is required to build sample applications for a development
NCS target. (A development target is one in which some NCS target interfaces are provided
by dummy plug-ins.)
z NetSNMP 5.1.1 headers available in the (cross) compilation before building the
“snmptm_demo” product. (Please refer to the Management Access Service Programmer’s
Reference for details.)
A.4.2 "Make" Commands
This section describes a script that allows to build the sample applications.
Description
The script described here allows to build sample applications that are available for most NCS
services. The script is located in: $TOOLKIT_HOME/source/common and it has to be invoked
from a BASH shell command prompt.
46
More service-specific build instructions, if any, are defined in the respective user’s guides. The
generated demo binaries and libraries are in the
$TOOLKIT_HOME/source/common/bin/<target-architecture> and
$TOOLKIT_HOME/source/common/libs/<target-architecture> directories
respectively.
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 47

"Make" Commands NCS Toolkit
Synopsis
./make_env.sh <target-architecture> <product>
Parameters
<target-architecture>
The parameter target-architecture determines the CPU architecture of the target. It can be one
of the following:
z mvl-ppc
PowerPC-based target
z mvl-i686
Intel(c) Xeon-based target
z mvl-em64t
Intel (c) 64-bit Xeon (LV-Nocona)-based target
z linux-i386
Intel(c) i386-based target (meant for a development target)
<product>
This parameter determines which of the sample applications for the different NCS services is
to be built. The following values are possible.
z leaptest_demo
Builds the LEAP sample program
z edsv_demo
Builds the EDSv sample program
z cli_demo
Builds the CLI sample program
z glsv_demo
Builds the Global Lock Service sample program
z ifsv_demo
Builds the Interface Service sample program
z cpsv_demo
Builds the Checkpoint Service sample program
z mqsv_demo
Builds the Message Queue Service sample program
z dlsv_demo
Builds the Distributed Tracing Service sample program
z avsv_demo
Builds the Availability Service sample program
z snmptm_demo
Builds the SNMP TestMib sample application program
NetPlane Core Services Overview User’s Guide (6806800C08B)
47
Page 48

NCS Toolkit Running the Sample programs
z mds_demo
Builds the MDS sample program
z mbcsv_demo
Builds the Message-based Checkpointing Service sample program
z srmsv_demo
Builds the System Resource Monitoring Service sample program
Example
To build the LEAP sample application for a PowerPC target, run the following command:
./make_env.sh mvl-ppc leaptest_demo
A.5 Running the Sample programs
This sections describes the steps to run the sample programs.
A.5.1 Target Prerequisites
The sample programs can only be run on the target architecture they have been built for.
Therefore, a sample program first needs to be built based on the target’s architecture. Refer to
Appendix A, Building the Samples for steps to cross-compile a sample program for a target.
The target could be a system manager host or a payload node, based on the design of the
sample program.
After building the sample programs, executable (binaries) are created in the
$TOOLKIT_HOME/source/common/bin/<target-architecture> directory. Copy them
from the development host to the target where they are intended to run. The target directory
can be of your choice, however, we recommend
/opt/motorola/ncs/scxb/sample_programs or
/opt/motorola/ncs/pld/sample_programs.
Sample program may need additional files to be copied onto the target. Please refer to
the respective user’s guides for them.
Make sure that NCS software for a particular target is installed on the target machine. The
configuration files should be edited to run the NCS software correctly. Most of the samples
require the NCS services to be running on the target. The existence of a
/opt/motorola/ncs/scxb indicates that the target is a system manager host and the
existence of a /opt/motorola/ncs/pld indicates that target is a payload node.
48
If the target for the sample program is a payload node, the system manager host software
should also be running on a connected node.
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 49

Setting LD_LIBRARY_PATH NCS Toolkit
A.5.2 Setting LD_LIBRARY_PATH
Set the environment variable LD_LIBRARY_PATH to include the directory in which NCS
libraries are installed.
For a system manager host setup, the path is: export
LD_LIBRARY_PATH=/opt/motorola/ncs/scxb/lib
For a payload node setup, the path is: export
LD_LIBRARY_PATH=/opt/motorola/ncs/pld/lib
For running the AvSv demo, the Xerces XML parser must be installed and available. The Xerces
package should be installed in /opt/xerces-c-src_2_5_0. The library path for the
package, /opt/xerces-c-src_2_5_0/lib, must also be appended to the existing
LD_LIBRARY_PATH environmental variable. If the package is installed in some other location,
the equivalent library path should be appended to the existing LD_LIBRARY_PATH
environmental variable.
A.5.3 Running the Sample Programs
After setting the LD_LIBRARY_PATH, the sample programs can be run from the location where
they have been copied (from the development host) on the development target. For a
description of how to execute these sample applications, please refer to respective user’s
guides.
For example: To verify the LEAP sample application, execute the leaptest_demo.out binary. For
options, refer to the LEAP Sample Application section in the LEAP Programmer’s Reference.
NetPlane Core Services Overview User’s Guide (6806800C08B)
49
Page 50

NCS Toolkit Running the Sample Programs
50
NetPlane Core Services Overview User’s Guide (6806800C08B)
Page 51

B Related Documentation
B.1 Motorola Embedded Communications
Computing Documents
The Motorola publications listed below are referenced in this manual. You can obtain electronic
copies of Embedded Communications Computing (ECC) publications by contacting your local
Motorola sales office or by visiting ECC’s World Wide Web literature site:
http://www.motorola.com/computer/literature. This site provides the most up-to-date copies of
ECC product documentation.
Table B-1 Motorola Publications
Document Title Publication Number
Availability Service Programmer’s Reference 6806800C44
B
Avantellis 3000 Series Rel. 3.0 User’ s Guide 6806800B91
Checkpoint Service Programmer’s Reference 6806800C47
Command Line Interface Programmer's Reference 6806800C11
Distributed Tracing Service Programmer's Reference 6806800B40
Event Distribution Service Programmer’s Reference 6806800C48
Global Lock Service Programmer’s Reference 6806800C49
HPI Integration Service Programmer’s Reference 6806800C51
Interface Service Programmer’s Reference 6806800B50
LEAP Programmer's Reference 6806800B56
Management Access Service Programmer's Reference 6806800B55
Message Based Checkpointing Service Programmer's
Reference
Message Distribution Service Programmer's Reference 6806800B89
Message Queue Service Programmer’s Reference 6806800C50
NetPlane Core Services Overview User’s Guide 6806800C08
Persistent Store Restore Service Programmer's Reference 6806800B54
Simple Software Upgrade Programmer's Reference 6806800B19
SMIDUMP Tool Programmer's Reference 6806800B37
6806800B41
SNMP SubAgent Programmer's Reference 6806800B38
System Description Programmer's Reference 6806800B90
System Resource Monitoring Service Programmer's
Reference
NetPlane Core Services Overview User’s Guide (6806800C08B)
6806800B39
51
Page 52

Related Documentation Related Specifications
B.2 Related Specifications
For additional information, refer to the following table for related specifications. As an additional
help, a source for the listed document is provided. Please note that, while these sources have
been verified, the information is subject to change without notice.
Table B-2 Related Specifications
Document Title Version/Source
Service Availability Forum Application Interface
Specification, Volume 1, Overview and Models
Service Availability Forum Application Interface
Specification, Volume 2, Availability Management
Framework
Service Availability Forum Application Interface
Specification, Volume 3, Cluster Membership
Service
Service Availability Forum Application Interface
Specification, Volume 4, Checkpoint Service
SAF-AIS-B.01.01/
http://www.saforum.org
SAF-AIS-AMF-B.01.01/
http://www.saforum.org
SAF-AIS-CLM-B.01.01/
http://www.saforum.org
SAF-AIS-CKPT-B.01.01/
http://www.saforum.org
Service Availability Forum Application Interface
Specification, Volume 5, Event Service
Service Availability Forum Application Interface
Specification, Volume 6, Message Service
Service Availability Forum Application Interface
Specification, Volume 7, Lock Service
SAF-AIS-EVT-B.01.01/
http://www.saforum.org
SAF-AIS-MSG-B.01.01/
http://www.saforum.org
SAF-AIS-LCK-B.01.01/
http://www.saforum.org
52
NetPlane Core Services Overview User’s Guide (6806800C08B)
 Loading...
Loading...