

Page 1

XRC Controller
Analog Output
Function Manual
for UP/SKX-Series Robots
Part Number 142976-1
May 15, 1999
MOTO
MAN
805 Liberty Lane
West Carrollton, OH 45449
TEL: (937) 847-6200 FAX: (937) 847-6277
24-HOUR SERVICE HOTLINE: (937) 847-3200
The information contained within this document is the proprietary property of Motoman,
Inc., and may not be copied, reproduced or transmitted to other parties without the
expressed written authorization of Motoman, Inc.
©1999 by
All Rights Reserved
Because we are constantly improving our products, we reserve the right to change specifications
without notice. MOTOMAN is a registered trademark of YASKAWA Electric Manufacturing.
MOTO
MAN
Page 2

Page 3

TABLE OF CONTENTS
Section
1 INTRODUCTION
1.1 About this Document....................................................................................................1-1
1.2 Reference to Other Documentation................................................................................1-1
1.3 Customer Service Information......................................................................................1-1
2 SAFETY
2.1 Introduction..................................................................................................................2-1
2.2 Standard Conventions ..................................................................................................2-2
2.3 General Safeguarding Tips............................................................................................2-4
2.4 Mechanical Safety Devices...........................................................................................2-4
2.5 Installation Safety .........................................................................................................2-5
2.6 Programming Safety.....................................................................................................2-5
2.7 Operation Safety ...........................................................................................................2-6
2.8 Maintenance Safety.......................................................................................................2-7
3 ANALOG OUTPUT FUNCTION
1 Analog Output Function Corresponding to Speed........................................................1-1
2 Instruction ....................................................................................................................2-1
3 Examples......................................................................................................................3-1
4 Filter Process................................................................................................................4-1
5 Precautions...................................................................................................................5-1
Page
MOTO
MAN
i Analog Output Function
Page 4

NOTES
Analog Output Function ii
MOTO
MAN
Page 5

SECTION 1
INTRODUCTION
1.1 About this Document
This manual provides instructions for Analog Output Function Corresponding to
Speed and contains the following sections:
SECTION 1 – INTRODUCTION
General information about this manual, a list of reference documents, and
customer service information.
SECTION 2 – SAFETY
Provides information for the safe use and operation of Motoman products.
SECTION 3 – ANALOG OUTPUT FUNCTION
Provides detailed instructions to operate the Analog Output Function.
1.2 Reference to Other Documentation
For additional information refer to the following:
• Concurrent I/O Parameters Manual (P/N 142102-1)
• Operator’s Manual for General Purpose (P/N 142099-1)
• Operator’s Manual for Handling (P/N 142100-1)
• Operator’s Manual for Spot Welding (P/N 142101-1)
• Operator’s Manual for Arc Welding (P/N 142098-1)
• Motoman UP6, XRC Manipulator Manual (P/N 142104-1)
• Motoman SK16X, XRC Manipulator Manual (P/N 142105-1)
• Motoman SK45X, XRC Manipulator Manual (P/N 142106-1)
• Motoman UP130, XRC Manipulator Manual (P/N 142107-1)
1.3 Customer Service Information
If you are in need of technical assistance, contact the Motoman service staff at
(937) 847-3200. Please have the following information ready before you call:
• Robot Type (UP6, SK16X, etc.)
• Application Type (welding, handling, etc.)
• Robot Serial Number (located on the back side of the robot arm)
• Robot Sales Order Number (located on back side of XRC controller)
MOTO
MAN
1-1 Analog Output Function
Page 6

INTRODUCTION
NOTES
Analog Output Function 1-2
MOTO
MAN
Page 7
2.1 Introduction
.
It is the purchaser's responsibility to ensure that all local, county,
state, and national codes, regulations, rules, or laws relating to
safety and safe operating conditions for each installation are met
and followed.
We suggest that you obtain and review a copy of the ANSI/RIA National Safety
Standard for Industrial Robots and Robot Systems. This information can be
obtained from the Robotic Industries Association by requesting ANSI/RIA
R15.06. The address is as follows:
SECTION 2
SAFETY
Robotic Industries Association
900 V ictors W ay
P.O. Box 3724
Ann Arbor, Michigan 48106
TEL: (734) 994-6088
FAX: (734) 994-3338
Ultimately, the best safeguard is trained personnel. The user is responsible for
providing personnel who are adequately trained to operate, program, and maintain
the robot cell.
trained!
We recommend that all personnel who intend to operate, program, repair, or use
the robot system be trained in an approved Motoman training course and become
familiar with the proper operation of the system.
This safety section addresses the following:
• Standard Conventions (Section 2.2)
• General Safeguarding Tips (Section 2.3)
• Mechanical Safety Devices (Section 2.4)
• Installation Safety (Section 2.5)
• Programming Safety (Section 2.6)
• Operation Safety (Section 2.7)
• Maintenance Safety (Section 2.8)
The robot must not be operated by personnel who have not been
MOTO
MAN
2-1 Analog Output Function
Page 8

SAFETY
2.2 Standard Conventions
This manual includes information essential to the safety of personnel and
equipment. As you read through this manual, be alert to the four signal words:
• DANGER
• WARNING
• CAUTION
•NOTE
Pay particular attention to the information provided under these headings which
are defined below (in descending order of severity).
DANGER!
Information appearing under the DANGER caption concerns the
protection of personnel from the immediate and imminent hazards
that, if not avoided, will result in immediate, serious personal injury
or loss of life in addition to equipment damage.
WARNING!
Information appearing under the WARNING caption concerns the
protection of personnel and equipment from potential hazards that
can result in personal injury or loss of life in addition to equipment
damage.
CAUTION!
Information appearing under the CAUTION caption concerns the
protection of personnel and equipment, software, and data from
hazards that can result in minor personal injury or equipment
damage.
NOTE: Information appearing in a NOTE caption provides additional information which is helpful in
understanding the item being explained.
Ånalog Output Function 2-2
MOTO
MAN
Page 9
SAFETY
2.3 General Safeguarding Tips
All operators, programmers, plant and tooling engineers, maintenance personnel,
supervisors, and anyone working near the robot must become familiar with the
operation of this equipment. All personnel involved with the operation of the
equipment must understand potential dangers of operation. General safeguarding
tips are as follows:
• Improper operation can result in personal injury and/or damage to the
equipment. Only trained personnel familiar with the operation of this robot,
the operator's manuals, the system equipment, and options and accessories
should be permitted to operate this robot system.
• Do not enter the robot cell while it is in automatic operation. Programmers
must have the teach pendant when they enter the robot cell.
• Improper connections can damage the robot. All connections must be made
within the standard voltage and current ratings of the robot I/O (Inputs and
Outputs).
• The robot must be placed in Emergency Stop (E-STOP) mode whenever it is
not in use.
• In accordance with ANSI/RIA R15.06, section 6.13.4 and 6.13.5, use
lockout/tagout procedures during equipment maintenance. Refer also to
Section 1910.147 (29CFR, Part 1910), Occupational Safety and Health
Standards for General Industry (OSHA).
2.4 Mechanical Safety Devices
The safe operation of the robot, positioner, auxiliary equipment, and system is
ultimately the user's responsibility. The conditions under which the equipment
will be operated safely should be reviewed by the user. The user must be aware of
the various national codes, ANSI/RIA R15.06 safety standards, and other local
codes that may pertain to the installation and use of industrial equipment.
Additional safety measures for personnel and equipment may be required
depending on system installation, operation, and/or location. The following safety
measures are available:
• Safety fences and barriers
• Light curtains
• Door interlocks
• Safety mats
• Floor markings
• Warning lights
Check all safety equipment frequently for proper operation. Repair or replace any
non-functioning safety equipment immediately.
MOTO
MAN
2-3 Analog Output Function
Page 10

SAFETY
2.5 Installation Safety
Safe installation is essential for protection of people and equipment. The
following suggestions are intended to supplement, but not replace, e xisting federal,
local, and state laws and regulations. Additional safety measures for personnel and
equipment may be required depending on system installation, operation, and/or
location. Installation tips are as follows:
• Be sure that only qualified personnel familiar with national codes, local
codes, and ANSI/RIA R15.06 safety standards are permitted to install the
equipment.
• Identify the work envelope of each robot with floor markings, signs, and
barriers.
• Position all controllers outside the robot work envelope.
• Whenever possible, install safety fences to protect against unauthorized entry
into the work envelope.
• Eliminate areas where personnel might get trapped between a moving robot
and other equipment (pinch points).
• Provide sufficient room inside the workcell to permit safe teaching and
maintenance procedures.
2.6 Programming Safety
All operators, programmers, plant and tooling engineers, maintenance personnel,
supervisors, and anyone working near the robot must become familiar with the
operation of this equipment. All personnel involved with the operation of the
equipment must understand potential dangers of operation. Programming tips are
as follows:
• Any modifications to PART 1 of the MRC controller PLC can cause severe
personal injury or death, as well as damage to the robot! Do not make any
modifications to PART 1. Making any changes without the written
permission of Motoman will
• Some operations require standard passwords and some require special
passwords. Special passwords are for Motoman use only.
WARRANTY WILL BE V OID
• Back up all programs and jobs onto a floppy disk whenever program changes
are made. To avoid loss of information, programs, or jobs, a backup must
always be made before any service procedures are done and before any
changes are made to options, accessories, or equipment.
• The concurrent I/O (Input and Output) function allows the customer to
modify the internal ladder inputs and outputs for maximum robot
performance. Great care must be taken when making these modifications.
Double-check all modifications under every mode of robot operation to
ensure that you have not created hazards or dangerous situations that may
damage the robot or other parts of the system.
VOID Y OUR WARRANTY!
YOUR
if you use these special passwords.
• Improper operation can result in personal injury and/or damage to the
equipment. Only trained personnel familiar with the operation, manuals,
electrical design, and equipment interconnections of this robot should be
permitted to operate the system.
Ånalog Output Function 2-4
MOTO MAN
Page 11

• Inspect the robot and work envelope to be sure no potentially hazardous
conditions exist. Be sure the area is clean and free of water, oil, debris, etc.
• Be sure that all safeguards are in place.
• Check the E-STOP button on the teach pendant for proper operation before
programming.
• Carry the teach pendant with you when you enter the workcell.
• Be sure that only the person holding the teach pendant enters the workcell.
• Test any new or modified program at low speed for at least one full cycle.
2.7 Operation Safety
All operators, programmers, plant and tooling engineers, maintenance personnel,
supervisors, and anyone working near the robot must become familiar with the
operation of this equipment. All personnel involved with the operation of the
equipment must understand potential dangers of operation. Operation tips are as
follows:
• Be sure that only trained personnel familiar with the operation of this robot,
the operator's manuals, the system equipment, and options and accessories
are permitted to operate this robot system.
SAFETY
• Check all safety equipment for proper operation. Repair or replace any nonfunctioning safety equipment immediately.
• Inspect the robot and work envelope to ensure no potentially hazardous
conditions exist. Be sure the area is clean and free of water, oil, debris, etc.
• Ensure that all safeguards are in place.
• Improper operation can result in personal injury and/or damage to the
equipment. Only trained personnel familiar with the operation, manuals,
electrical design, and equipment interconnections of this robot should be
permitted to operate the system.
• Do not enter the robot cell while it is in automatic operation. Programmers
must have the teach pendant when they enter the cell.
• The robot must be placed in Emergency Stop (E-STOP) mode whenever it is
not in use.
• This equipment has multiple sources of electrical supply. Electrical
interconnections are made between the controller, external servo box, and
other equipment. Disconnect and lockout/tagout all electrical circuits before
making any modifications or connections.
• All modifications made to the controller will change the way the robot
operates and can cause severe personal injury or death, as well as damage the
robot. This includes controller parameters, ladder parts 1 and 2, and I/O
(Input and Output) modifications. Check and test all changes at slow speed.
MOTO MAN
2-5 Analog Output Function
Page 12

SAFETY
2.8 Maintenance Safety
All operators, programmers, plant and tooling engineers, maintenance personnel,
supervisors, and anyone working near the robot must become familiar with the
operation of this equipment. All personnel involved with the operation of the
equipment must understand potential dangers of operation. Maintenance tips are
as follows:
• Do not perform any maintenance procedures before reading and
understanding the proper procedures in the appropriate manual.
• Check all safety equipment for proper operation. Repair or replace any nonfunctioning safety equipment immediately.
• Improper operation can result in personal injury and/or damage to the
equipment. Only trained personnel familiar with the operation, manuals,
electrical design, and equipment interconnections of this robot should be
permitted to operate the system.
• Back up all your programs and jobs onto a floppy disk whenever program
changes are made. A backup must always be made before any servicing or
changes are made to options, accessories, or equipment to avoid loss of
information, programs, or jobs.
• Do not enter the robot cell while it is in automatic operation. Programmers
must have the teach pendant when they enter the cell.
• The robot must be placed in Emergency Stop (E-STOP) mode whenever it is
not in use.
• Be sure all safeguards are in place.
• Use proper replacement parts.
• This equipment has multiple sources of electrical supply. Electrical
interconnections are made between the controller, external servo box, and
other equipment. Disconnect and lockout/tagout all electrical circuits before
making any modifications or connections.
• All modifications made to the controller will change the way the robot
operates and can cause severe personal injury or death, as well as damage the
robot. This includes controller parameters, ladder parts 1 and 2, and I/O
(Input and Output) modifications. Check and test all changes at slow speed.
• Improper connections can damage the robot. All connections must be made
within the standard voltage and current ratings of the robot I/O (Inputs and
Outputs).
Ånalog Output Function 2-6
MOTO MAN
Page 13

YASKAWA
YASKAWA
MANUAL NO. RE-CKI-A421
YASNAC XRC OPTIONS
INSTRUCTIONS
ANALOG OUTPUT FUNCTION CORRESPONDING TO SPEED
Upon receipt of the product and prior to initial operat ion, read these instructions thoroughly, and retain
for future reference.
MOTOMAN INSTRU CTIONS
MOTOMAN SETUP MANUAL
MOTOMAN-
¨¨¨
INSTRUCTIONS
Y ASNAC XRC I NSTRUCTIO NS
Y ASNAC XRC OPER ATOR’S MANUAL
Y ASNAC XRC OPER ATOR’S MANUAL for BEGINNERS
The YASNAC XRC operator’s manuals above correspond to specific usage.
Be sure to use the appropriate manual.
Page 14

ii
• This manual explains the analog output function corresponding to the
speed of the YASNAC XRC. Read this manual carefully and be sure to
understand its contents before handling the YASNAC XRC.
• General items related to safety are listed in Section 1: Safety of the
Setup Manual. To ensure correct and safe operation, carefully read the
Setup Manual before reading this manual.
• Some drawings in this manual are shown with the protective covers or
shields removed for clarity. Be sure all covers and shields are replaced
before operating this product.
• The drawings and photos in this manual are representative examples
and differences may exist between them and the delivered product.
• Y ASKAWA may modify this model without notice when necessary due to
product improvements, modifications, or changes in specifications. If
such modification is made, the manual number will also be revised.
• If your copy of the manual is damaged or lost, contact a YASKAWA representative to order a new copy. The representatives are listed on the
back cov er. Be sure to tell the representative the manual number listed
on the front cover.
• YASKAWA is not responsible for incidents arising from unauthorized
modification of its products. Unauthorized modification voids your product’s warranty.
MANDATORY
CAUTION
Page 15

iii
NOTES FOR SAFE OPERATION
Read this manual carefully before installation, operation, maintenance, or inspection of the
YASNAC XRC.
In this manual, the Notes for Safe Operation are classified as “WARNING”, “CAUTION”,
“MANDATORY”,or ”PROHIBITED”.
Even items described as “CAUTION” may result in a serious accident in some situati ons. At
any rate, be sure to follow these important items.
Indicates a potentially hazardous situation which, if not avoided,
could result in death or serious injury to personnel.
Indicates a potentially hazardous situation which, if not avoided,
could result in minor or moderate injury to personnel and dama
g
e to equipment. It may also be used to alert against unsafe
practices.
Always be sure to follow explicitly the items listed under this
headin
g
.
Must never be performed.
To ensure safe and efficient operation at all times, be sure to follow all instructions, even if
not desi
g
nated as “CAUTION” and “WARNING”.
WARNING
CAUTION
MANDATOR
Y
PROHIBITED
NOTE
Page 16

iv
• Before operating the manipulator, check that servo power is turned off
when the emergency stop buttons on the playback panel or programming pendant are pressed.
When the servo power is turned of f, the SERVO ON READY lamp on the
playback panel and the SERVO ON LED on the programming pendant are
turned off.
Injury or dama
g
e to machinery may result if the emergency stop circuit cannot stop the
manipulator durin
g
an emergency. The manipulator should not be used if the emergency
stop buttons do not function.
Emergency Stop Button
• Once the emergency stop button is released, clear the cell of all items
which could interfere with the operation of the manipulator. Then turn
the servo power ON
Injury may result from unintentional or unexpected manipulator motion.
Release of Emergency Stop
• Always set the Teach Lock before entering the robot work envelope to
teach a job.
Operator injury can occur if the Teach Lock is not set and the manipulator is started from
the playback panel.
• Observe the following precautions when performing teaching operations
within the working envelope of the manipulator :
- View the manipulator from the front whenever possible.
- Always follow the predeter m ined oper ating pr ocedure.
- Ensure that you have a safe place to retreat in case of emergency.
Improper or unintended manipulator operation may result in injury.
• Confirm that no persons are present in the manipulator’s work envelope
and that you are in a safe location before:
- Turning on the Y ASNAC XRC power
- Moving the manipulator with the programming pendant
- Running check operations
- Performing automatic operations
Injury may result if anyone enters the workin
g
envelope of the manipulator during opera-
tion. Always press an emer
g
ency stop button immediately if there are problems.The
emer
g
ency stop button is located on the right side of both the YASNAC XRC playback
panel and pro
g
ramming pendant.
WARNING
TURN
Page 17

v
Definition of Terms Used Often in This Manual
The MOTOMAN manipulator is the YASKAWA industrial robot product.
The manipulator usually consists of the controller, the playback panel, the pro
g
ramming pendant, and supply cables.
The MOTOMAN manipulator is the YASKAWA industrial robot product.
In this manual, the equipment is desi
g
nated as follows.
• Perform the following inspection procedures prior to conducting manipulator teaching. If problems are found, repair them immediately, and be
sure that all other necessary processing has been performed.
-Check for problems in manipulator movement.
-Check for damage to insulation and sheathing of external wir es.
• Always return the programming pendant to the hook on the XRC cabinet
after use.
The pro
g
ramming pendant can be damaged if it is left in the manipulator’s work area, on
the floor, or near fixtures.
• Read and understand the Explanation of the Alarm Display in the setup
manual before operating the manipulator.
Equipment Manual Designation
YASNAC XRC Controller XRC
YASNAC XRC Playback Panel Playback Panel
YASNAC XRC Pro
g
ramming Pendant Programming Pendant
CAUTION
Page 18
vi
Descriptions of the programming pendant and playback panel keys, buttons, and di splays are
shown as follows:
Description of the Operation Procedure
In the explanation of the operation procedure, the expression "Select • • • " means that the
cursor is moved to the object item and the SELECT key is pressed.
Equipment Manual Designation
Pro
g
ramming
Pendant
Character Keys The keys which have characters printed on them are
denoted with [ ]
ex. [ENTER]
Symbol Keys The keys which have a symbol printed on them are
not denoted with [ ] but depicted with a small picture.
ex. pa
g
e key
The cursor key is an exception, and a picture is not
shown.
Axis Keys
Number Keys
“Axis Keys” and “Number Keys” are
g
eneric names
for the keys for axis operation and number input.
Keys pressed
simultaneously
When two keys are to be pressed simultaneously,
the keys are shown with a “+” si
g
n between them,
ex. [SHIFT]+[COORD]
Displays The menu displayed in the pro
g
ramming pendant is
denoted with { }.
ex. {JOB}
Playback Panel Buttons Playback panel buttons are enclosed in brackets.
ex. [TEACH] on the playback panel
Page 19

vii
1
Analog Output Function Corresponding to Speed
2
Instructions
2.1
Instructions for Analog Output Function Correspo nding
to Speed
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
2.1.1
ARATION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
2.1.2
ARATIOF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-2
2.2
Registration of Instructions
. . . . . . . . . . . . . . . . . . . . . . . . .2-3
2.2.1
ARATION. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-3
2.2.2
ARATIOF. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
2.3
Analog Output Display
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-6
3
Examples
3.1
Examples of Output Characteristics
. . . . . . . . . . . . . . . . .3-1
3.2
Example of Variation of Operating Speed and
Analog Output Value
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-2
4
Filter Process
4.1
When Parameter is Set to “0”
. . . . . . . . . . . . . . . . . . . . . . .4-1
4.2
When Parameter is Set to Values Other Than “0”
. . .4-1
4.3
Parameter Setting
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-2
5
Precautions
5.1
When Analog Output Corresponding to Speed is
Interrupted
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
5.2
When More than One Manipulator is Used
. . . . . . . . . .5-1
Page 20

viii
Page 21

1-1
1
Analog Output Function Corresponding
to Speed
The analog output function corresponding to speed changes the analog output value automatically, accordin
g
to the manipulator operating speed. This function does no t need resetting of
the analo
g
output value according to the operating speed, so that the time required for job
teachin
g
can be reduced.
For example, when the thickness of sealin
g
or painting should be constant, the discharged
amount of seals or paints can be controlled by the manipulator operatin
g
speed.
Page 22

1-2
Page 23

2.1 Instructions for Analog Output Function Corresponding to Speed
2-1
2
Instructions
2.1
Instructions for Analog Output Function Corresponding to Speed
The instructions, ARATION and ARATIOF, are used for the analog output function correspondin
g
to speed.
2.1.1
ARATION
The analog output function corresponding to speed is performed after executing ARATION
instruction. This instruction is valid durin
g
circular interpolation, linear interpolation or spline
interpolation. It is executed only at playback or FWD key operation; it is not executed durin
g
axis operation.
This instruction is also used when each set value fo r the analo
g
output function corr esponding
to speed is to be chan
g
ed.
ARATION AO#(1)
BV=10.00 V=200.0 OFV=2.00
• ‚ ƒ „
•
Output port number
General analo
g
output port to execute the analog output corresponding to speed
Settin
g
range : 1 to 8
‚
Basic voltage
Volta
g
e to be output at the speed set with the basic speed.
ƒ
Basic speed
Operatin
g
speed which becomes the basis for when the set voltage is output.
„
Offset voltage
Analo
g
voltage when the operating speed is 0.
Page 24

2.1 Instructions for Analog Output Function Corresponding to Speed
2-2
According to the set value of the ARATION instruction, the output characteristics for the relation between the operatin
g
speed and the analog voltage are calculated. The analog output
function correspondin
g
to speed is executed depending on these output characteristics.
The followin
g g
raph shows the output characteristics.
Output Characteristics When Analog Output Fun ction Corresponding to Speed is Used
2.1.2
ARATIOF
When the ARATIOF instruction is e xecuted, the an alog output corresponding to speed is completed, and the set offset volta
g
e becomes the fixed output.
ARATIOF AO#(1)
•
•
Output port number
General analo
g
output port to end the analog output corresponding to speed
Settin
g
range : 1 to 8
When the analog output value exceeds ± 14.00 V because of the operating speed, the
value is limited within ± 14.00 V.
Analog voltage
Operating
speed
Basic
speed
Basic
voltage
Offset
voltage
14V
0
NOTE
Page 25

2.2 Registration of Instructions
2-3
2.2
Registration of Instructions
The instructions can be registered when the cursor is in the address area on the job content
display in teach mode. Perform the followin
g
operations before registering an instruction.
2.2.1
ARATION
*1
*2
The instruction list dialog is displayed.
*3
The ARATION instruction is displayed in the input buffer line.
Select {JOB} from the top menu Select {JOB CONTENT}
Move the cursor to the
address area
Move the cursor to one line above the place to re
g
ister the ARATION instruction*1
Press [INFORM LIST]
*2
Select “ARATION”*3 Change any additional items and
numerical values
*4
Press [INSERT] and [ENTER]
*5
Operation
EDIT DISPLAY
JOB UTILITY
JOB CONTENT
J:TEST S:003 TOOL:0
0000 NOP
0001 'TEST JOB
0002 MOVJ VJ=50.00
0003 MOVJ VJ=12.50
0004 MOVL V=276
0005 TIMER T=1.00
0006 DONT OT#(1)ON
=> MOVJ VJ=100.00
!
R1
S
C
L
Address
area
Instruction
area
Operation
Explanation
0020 MOVL V=138
0021 MOVL V=138
0022 MOVL V=138
The line above the place to
register ARATION instruction
DONT
DIN
WAIT
PULSE
AOUT
ARATION
ARATIOF
=> ARATION AO#(1)
Page 26

2.2 Registration of Instructions
2-4
*4
<Register without changes>
To register without changes, perform operation of *5.
<Register with addition or change of the additional items>
• To change the output port number
In case of using [SHIFT] and the cursor key, move the cursor to the output port number,
and then press [SHIFT] and the cursor key simultaneous ly, to change the output port
number.
In case of using t he number keys, move the cursor to the output port number, and
press [SELECT] to display an input buffer line. Enter the number, and then press
[ENTER] to change the number displayed.
• To change the basic voltage, the speed, and the offset voltage
Move the cursor to the instruction in the input buffer line, and t hen press [SELECT].
The detail edit display is shown.
Move the cursor to “UNUSED” of the additional it em to be changed, and then p ress
[SELECT]. The selection dialog is displayed.
Move the cursor to the additional item to be changed, and press [SELECT].
When the additional item is changed, press [ENTER]. The detail edit display is closed,
and the job content display is shown.
=> ARATION AO#(1)
EDIT DISPLAY
JOB UTILITY
DETAIL EDIT
ARATION
ANLG OUTPUT NO AO#(%) 1
BASE VOLTAGE UNUSED
SPEED UNUSED
OFFSET VOLTAGE UNUSED
=> ARATION AO#(1)
!
R1
S
C
L
=> ARATION AO#(1)
EDIT DISPLAY
JOB UTILITY
DETAIL EDIT
ARATION
ANLG OUTPUT NO AO#(%) 1
BASE VOLTAGE UNUSED
SPEED UNUSED
OFFSET VOLTAGE UNUSED
=> ARATION AO#(1)
!
R1
S
C
L
UNUSED
BV=
Page 27

2.2 Registration of Instructions
2-5
*5
The instruction displayed in the input buffer line is registered.
2.2.2
ARATIOF
*1
*2
The instruction list dialog is displayed.
*3
The ARATIOF instruction is displayed in the input buffer line.
*4
The ARATIOF i nstruction is registered.
Move the cursor to one line above the place to register ARATIOF instruction*1 Press
[INFORM LIST]
*2
Select “ARATIOF”*3 Press [INSERT] and [ENTER]
*4
0020 MOVL V=138
0021 ARTION AO#(1) BV=10.00
0022 MOVL V=138
The line where ARATION
instruction is registered
Operation
Explanation
0030 MOVL V=138
0031 MOVL V=138
The line above the place to
register ARATIOF instruction
DIN
WAIT
PULSE
AOUT
ARATION
ARATIOF
JMP
=> ARATIOF AO#(1)
0030 MOVL V=138
0031 ARTIOF AO#(1)
0032 MOVL V=138
Page 28
2.3 Analog Output Display
2-6
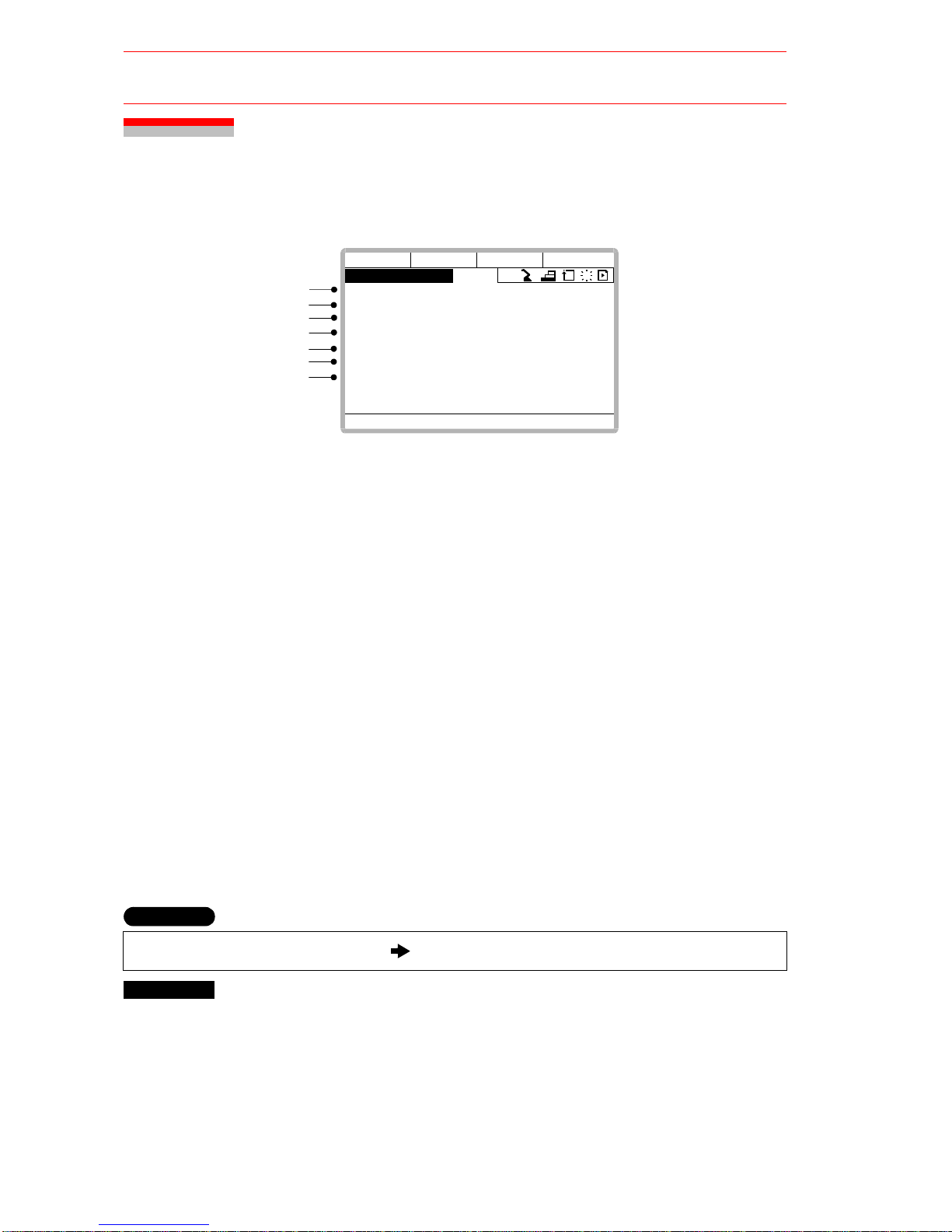
2.3
Analog Output Display
The current settings can be confirmed on the analog output display.
•
Terminal
General analo
g
output port
‚
OUTPUT (V)
Displays the volta
g
e that is currently output.
ƒ
BASIC (V)
Displays the basic volta
g
e used for the analog output corresponding to speed.
This value is used until a new value is set by ARATION instruction.
„
TRAIT
Displays the current output characteristics of the output port.
SP RAT : durin
g
execution of the analog output corresponding to speed
STATIC : fixed output status
…
OFFSET (V)
Displays the offset volta
g
e used for the analog output corresponding to speed.
This value is used until a new value is set by ARATION instruction.
†
BASIC SPD
Displays the basic speed used for the analo
g
output corresponding to speed.
This value is used until a new value is set by ARATION instruction.
‡
ROBOT
Displays the manipulator number for the analo
g
output corresponding to speed.
*1
The analog output display is shown.
Pressin
g
the page key shows the displ ay for the ou tput term inals AOUT1 to 4 and th e
display for the output terminals AOUT5 to 8 alternately.
Select {IN/OUT} from the top menu Select {ANALOG OUTPUT}
*1
EDIT DISPLAY
DATA UTILITY
ANALOG OUTPUT
TERMINAL AOUT1 AOUT2 AOUT3 AOUT4
OUTPUT(V) :-14.00 -14.00 -10.00 -14.00
BASIC(V) : 0.00 0.00 0.00 0.00
TRAIT :SP RAT SP RAT STATIC SP RAT
OFFSET(V) : 0.00 0.00 0.00 0.00
BASIC SPD :1200.0 1200.0 1200.0 1200.0
ROBOT : R1 R2 R3 R4
!
‚
ƒ
„
…
R1
S
C
L
•
†
‡
Operation
Explanation
Page 29

3.1 Examples of Output Characteristics
3-1
3
Examples
3.1
Examples of Output Characteristics
The graph below shows the change in the output characteristics when the following job is
done.
Output Voltage
(V)
MOVJ VJ=50.00
ARATION AO#(1) BV=7.00 V=150.0 OFV=-
10.00
7.00
MOVL V=50.0
-4.33
MOVC V=100.0
1.33
MOVC V=100.0
1.33
MOVC V=100.0
1.33
MOVL V=200.0
12.67
Analog voltage
(V)
Operating speed
(mm/s)
Basic
speed
Basic
voltage
Offset
voltage
14V
0
100
50 150
200
-5
-10
5
10
7
Page 30

3.2 Example of Variation of Operating Speed and Analog Output Value
3-2
3.2
Example of Variation of Operating Speed and
Analog Output Value
The following graph shows the change of the analog output according to the speed variation.
MOVL V=200.0
žžžž•
ARATION AO#(1) BV=10.00 V=200.0 OFV=-2.00
MOVC V=150.0
žžžž‚
MOVC VR=20.0
žžžžƒ
(When the tool center point speed is 100 mm/s)
MOVC V=150.0
žžžž„
MOVL V=180.0
žžžž…
MOVL
žžžž†
(When the tool center point speed is 180 mm/s)
AOUT AO#(1) 10.00
žžžž‡
Analog Vol tage according to Speed
• Since the analog output corresponding to speed is made for the calculated speed, there
may be little difference from the actual operatin
g
speed of the manipulator.
• When a posture speed is specified, the analo
g
output corresponding to speed is made for
the operatin
g
speed at the tool center point with the posture speed.
Time
Analog
voltage (V)
Operating
speed (mm/s)
10
8.8
7
4
200
180
150
100
•
‚
ƒ
„
…†
‡
NOTE
Page 31

4.1 When Parameter is Set to “0”
4-1
4
Filter Process
In the analog output function corresponding to speed, the output analog signal can be filtered
by settin
g
a filter constant at the parameters.
4.1
When Parameter is Set to “0”
The analog signal according to the speed reference (the speed determined by a path operation) is output.
4.2
When Parameter is Set to Values Other Than “0”
The analog signal according to the speed of filtered speed reference is output. By the filter
process, the output si
g
nal can be close to the manipulator’s actual speed.
Page 32

4.3 Parameter Settin
g
4-2
4.3
Parameter Setting
Adjust the settings of parameters during actual operations.
The standard parameter settin
g
s are as follows.
• For small capacity robot with a payload 6 k
g
and 16 k
g
Primary filter constant : 50 msec
Secondary filter constant : 50 msec
• For lar
g
e capacity robot with a payload 60 kg and 130 k
g
Primary filter constant : 100 msec
Secondary filter constant : 100 msec
Parameter
S3C426
S3C427
Analog output No. 1
Analo
g
output No. 1
Primary filter constant
Secondary filter constant
[units of msec]
[units of msec]
S3C428
S3C429
Analo
g
output No. 2
Analo
g
output No. 2
Primary filter constant
Secondary filter constant
[units of msec]
[units of msec]
S3C430
S3C431
Analo
g
output No. 3
Analo
g
output No. 3
Primary filter constant
Secondary filter constant
[units of msec]
[units of msec]
S3C432
S3C433
Analo
g
output No. 4
Analo
g
output No. 4
Primary filter constant
Secondary filter constant
[units of msec]
[units of msec]
S3C434
S3C435
Analo
g
output No. 5
Analo
g
output No. 5
Primary filter constant
Secondary filter constant
[units of msec]
[units of msec]
S3C436
S3C437
Analo
g
output No. 6
Analo
g
output No. 6
Primary filter constant
Secondary filter constant
[units of msec]
[units of msec]
S3C438
S3C439
Analo
g
output No. 7
Analo
g
output No. 7
Primary filter constant
Secondary filter constant
[units of msec]
[units of msec]
S3C440
S3C441
Analo
g
output No. 8
Analo
g
output No. 8
Primary filter constant
Secondary filter constant
[units of msec]
[units of msec]
Page 33

5.1 When Analog Output Corresponding to Speed is Interrupted
5-1
5
Precautions
5.1
When Analog Output Corresponding to Speed is
Interrupted
If the manipulator is stopped for some reason and the editi ng operation is performed, the analo
g
output corresponding to speed is interrupted. This interruption is performed in all output
terminals, and the analo
g
voltage fixed immediately before the interruption is output to each
output terminal.
The analo
g
output corresponding to speed is not interrupted in any other cases.
5.2
When More than One Manipulator is Used
The attribute of the job where the instruction is executed determines the manipulator where
the analo
g
output corresponding to speed is performed.
For a coordinated job, the analo
g
output corresponding to speed is performed at the operating
speed of the manipulator at the slave side.
Page 34

5.2 When More than One Manipulator is Used
5-2
Page 35

Page 36

YASKAWA
YASKAWA ELECTRIC CORPORATION
Specifications are subject to change without notice
for ongoing product modifications and improvements.
MANUAL NO. RE-CKI-A421
Printed in Japan January 1999 99-1
C
YASNAC XRC OPTIONS
INSTRUCTIONS
ANALOG OUTPUT FUNCTION CORRESPONDING TO SPEED
TOKYO OFFICE
New Pier Takeshiba South Tower, 1-16-1, Kaigan, Minatoku, Tokyo 105-6891, Japan
MOTOMAN INC. HEADQUARTERS
805 Liberty Lane West Carrollton, OH 45449, U.S.A.
MOTOMAN INC. TROY FACILITY
1050 S. Dorset, Troy, OH 45373, U.S.A.
YASKAWA MOTOMAN CANADA LTD.
2280 ARGENTIA ROAD, MISSISSAUGA, ONTARIO, L5N 6H8, CANADA.
Y A SKAWA EL ECTRIC EUROPE GmbH
Am Kronberger Hang 2, 65824 Schwalbach,Germany.
Motoman Robotics AB
Box 504 S38525 Torsås, Sweden
Motoman Robotec GmbH
Kammerfeldstraβe1,85391 Allershausen, Germany
YASKAWA ELECTRIC KOREA CORPORATION
Kfpa Bldg #1201, 35-4 Youido-dong, Yeongdungpo-Ku, Seoul 150-010, Korea
Y A SKAWA EL ECTRIC (SINGAPORE) PTE. LTD.
151 Lorong Chuan, #04-01, New Tech Park Singapore 556741, Singapore
YATEC ENGINEERING CORPORATION
Shen Hsiang Tang Sung Chiang Building 10F 146 Sung Chiang Road, Taipei, Taiwan
BEIJING OFFICE
Room No. 301 Office Building of Beijing Intemational Club, 21 Jianguomenwai Avenue, Beijing 100020, China
SHANGHAI OFFICE
27 Hui He Road Shanghai 200437 China
YASKAWA JASON (HK) COMPANY LIMITED
Rm. 2909-10, Hong Kong Plaza, 186-191 Connaught Road West, Hong Kong
TAIPEI OFFICE
Shen Hsiang Tang Sung Chiang Building 10F 146 Sung Chiang Road,Taipei, Taiwan
BEIJING YASKAWA BEIKE AUTOMATION ENGINEERING CO.,LTD.
30 Xue Yuan Road, Haidian, B eijing P.R. China Post Code: 100083
SHOUGANG MOTOMAN ROBOT CO., LTD.
7,Yongchang-North Street, Beijing Economic Technological Investment & Development Area,
Beijing 100076, P.R. China
Phone 81-3-5402-4511 Fax 81-3-5402-4580
Phone 1-937-847-6200 Fax 1-937-847-6277
Phone 1-937-440-2600 Fax 1-937-440-2626
Phone 1-905-813-5901 Fax 1-905-813-5911
Phone 49-6196-569-300 Fax 49-6196-888-301
Phone 46-486-48800 Fax 46-486-41410
Phone 49-8166-900 Fax 49-8166-9039
Phone 82-2-784-7844 Fax 82-2-784-8495
Phone 65-282-3003 Fax 65-289-3003
Phone 886-2-2563-0010 Fax 886-2-2567-4677
Phone 86-10-6532-1850 Fax 86-10-6532-1851
Phone 86-21-6553-6600 Fax 86-21-6531-4242
Phone 852-2803-2385 Fax852-2547-5773
Phone 886-2-2563-0010 Fax 886-2-2567-4677
Phone 86-10-6233-2782 Fax 86-10-6232-1536
Phone 86-10-6788-0551 Fax 86-10-6788-2878
 Loading...
Loading...