

Page 1

MoTeC PLM User’s Manual
Contents
Introduction ...................................................................... 3
Meter Operation................................................................ 4
PLM Connections ..........................................................................................................4
Connectors.............................................................................. 4
Analog Output ..........................................................................4
Digital inputs............................................................................ 5
Communications ...................................................................... 6
PLM Display....................................................................................................................6
Sensor Placement .........................................................................................................7
Sensor Warm-up...........................................................................................................9
Sensor Lifetime ..............................................................................................................9
Lambda.........................................................................................................................10
Engine Tuning..............................................................................................................10
Operating Tips..............................................................................................................11
PLM Setup Software.........................................................12
Computer requirements.............................................................................................12
Connecting to a PLM...................................................................................................12
Installing PLM Setup...................................................................................................12
Configurations ..............................................................................................................12
Managing Configurations.........................................................13
Changing Configurations .........................................................14
Sensor Calibration ...........................................................19
Introduction...................................................................................................................19
Calibration Methods....................................................................................................19
Use Measured Calibration Value ..............................................19
Enter Calibration Value...........................................................19
Calculate from O2 Concentration (Free Air) ...............................20
Enter Calibration Table............................................................21
PLM Communications.......................................................22
CAN Messages............................................................................................................22
Configuring Basic CAN with an ADL .........................................23
Configuring basic CAN with an M800........................................23
CAN Collect Functionality...........................................................................................24
Configuring the CAN collect master unit (PLM 1) .......................24
Configuring the CAN Collect slave units (PLM 2 to PLM
16)........................................................................................25
Page 2

MoTeC PLM User’s Manual
CAN Unit Number Display.........................................................................................26
RS232 Messages........................................................................................................27
Specifications...................................................................28
Meter....................................................................................28
Appendices ......................................................................31
Appendix A – Lambda to Air Fuel Ratio Table........................................................31
Appendix B – PLM Display Codes............................................................................32
Appendix C – PLM CAN Diagnostic Codes ............................................................33
Appendix D – PLM Connector Details......................................................................34
Appendix E – Sensor Wiring Details........................................................................36
Bosch LSU 4 Sensor ..............................................................36
NTK – UEGO Sensor..............................................................38
Appendix F – PLM to ECU Wiring Details................................................................40
Analog Output ........................................................................40
CAN......................................................................................40
Appendix G – PLM to ADL Wiring Details................................................................41
Appendix H – General CAN Bus Wiring...................................................................42
Appendix I – PC Comms Wiring...............................................................................43
Appendix J – Analog Output Wiring..........................................................................44
Appendix K – Digital Input Wiring..............................................................................46
Typical wiring for switches .......................................................46
Typical wiring for RPM measurement .......................................46
Appendix L – Glossary................................................................................................47
Appendix M – CAN Messages Format.....................................................................48
Appendix N – RS232 Message Format...................................................................53
Appendix O – Recommended CAN Collect Configuration..................................54
Appendix P – Dimensions .........................................................................................57
Copyright – Motec Pty Ltd – 2001-2005
The information in this document is subject to change without notice.
While every effort is taken to ensure correctness, no responsibility will be taken for the consequences of any
inaccuracies or omissions in this manual.
23 June, 2005
Page 3

MoTeC PLM Setup Software 3
Introduction
The M oTeC Professional Lambda Meter measures Lambda (or Air Fuel Ratio)
over a wide range of mixtures with fast response time.
The display may be set to Show Lambda, Air Fuel Ratio (for Petrol, Alcohol,
Gas, Diesel or ‘blend’ fuel), equivalence ratio or percentage oxygen.
The PLM provides a differential Analog Output Voltage proportional to Lambda
that may be connected to an Analog Meter or other measurement instrument
such as an ECU, Data Logger or dynamometer.
The PLM also supports RS232 and CAN data links to devices such as the
Motec Dash Logger or M800 ECU for transmission of sensor and diagnostic
data.
This manual covers the configuration and operation of the meter.
Page 4
4 Meter Operation
Meter Operation
PLM Connections
Connectors
The PLM has a male and a female D-9 pin connector.
See Appendix D – PLM Connector Details for a description of the PLM pinout.
Male Connector
The loom supplied with the PLM is fitted to the male PLM connector, for
connection to the sensor and to a power supply. The Power supply must
provide enough current (up to 5 Amps at start up) for both the meter and the
sensor heater element. The vehicle battery is typically the most convenient
source of power.
It is not recommended that the power and sensor loom be extended by using a
standard serial cable. These are unable to supply the current required by the
sensor heater. If an extension is made, the wire must be at least 20 gauge.
Female Connector
The female PLM connector has pins for serial connection to a PC, CAN data
bus, 2 digital inputs and the analog voltage output.
The pinout is assigned to allow direct connection to a PC with a standard
(straight through) 9 pin serial cable. Note that the PC must have a serial
communications port (normally marked COM1). A custom cable is required to
use the other features on this connector.
Analog Output
The analog output provides a voltage proportional to Lambda. The scaling of the
analog output can be changed by using the PLM Setup software to configure
the device (see Setup | Analog Output in the PLM Setup Software section).
Page 5
MoTeC Meter Operation 5
The analog output is provided as a differential voltage using two connector pins
(Analog Out+ and Analog Out -). For correct operation Analog Out- must be
connected to the ground reference on the monitoring system.
The analog output can be configured as a wide band sensor input into a MoTeC
ECU for tuning, as described below. See Appendix F – PLM to ECU Wiring
Details for wiring details.
M4/M48 ECU
PLM Configuration Output Function = ‘LA V1’ table
La = 0.000, Aout = 0.000V
La = 5.000, Aout = 5.000V
ECU Configuration Lambda Sensor Calibration = 1 (‘Narrow Band or
MoTeC AF Meter’)
M8/M800
PLM Configuration Output Function = ‘LA V1’ table
La = 0.500, Aout = 0.000V
La = 1.750, Aout = 5.000V
ECU Configuration Lambda Sensor Calibration = 39 (‘MoTeC Meter’ or
‘MoTeC AFM1 Meter’)
Digital inputs
Digital Input 1 can be enabled as a switch input or RPM input. If the input is
enabled, the PLM can be configured to operate based on the switch state
(active high or active low) or on a non-zero RPM reading. The RPM reading is
also transmitted in the CAN and RS232 data streams.
Digital Input 2 can be enabled as a switch input, and the PLM can be configured
to operate based on the switch state (active high or active low). This input can
also be configured to change the display units on the PLM display. For more
information, see Setup | Digital Inputs in the PLM Setup Software section.
The digital inputs have a 4.7k ohm pull-up resistor, and a switching threshold of
around 2.5volts.
Page 6
6 Meter Operation
Communications
RS232 Int erface
The RS232 interface is used for configuring the PLM from a PC, and for
transmitting data to third party equipment.
For configuration from a PC, the PLM can be directly connected using a
standard (straight through) 9 pin serial cable.
See Appendix I – PC Comms Wiring for details on wiring to a PC.
CAN Interface
The CAN interface is used for transmitting data to MoTeC devices such as the
ADL (Advanced Dash Logger) or M800 ECU, or to third party equipment that
supports CAN.
The CAN communications can be configured to allow one PLM unit to collect
CAN data from up to 15 other PLM units, and then retransmit the data on a
single CAN address and on the RS232 interface.
For detailed information on communications interfaces, see the PLM
Communications section.
PLM Display
Start-up Display
On powerup, the PLM displays the current firmware version (eg. 1.1.0) for one
second, followed by a unit number based on the current CAN communications
configuration.
This unit number, displayed for one second, is useful for troubleshooting
networks of multiple PLM units. See the PLM Communications section for more
detail on displayed unit numbers.
Status Display
Whenever the sensor is not in control or is warming up, a series of displayed
codes describes the current status. A description of these codes is given in
Appendix B – PLM Display Codes .
Page 7
MoTeC Meter Operation 7
If the PLM loses control of the sensor at any point, then the sensor warm-up
process is repeated and these codes are displayed again.
Sensor Readings
The displayed format of sensor readings can be configured to select the display
units, decimal places, update rates and filtering. For more information, see
Setup | Display in the PLM Setup Software section.
If the reading is too large to be displayed using the configured settings, the
display will only show ‘- -‘.
Backlighting
The backlight intensity is configurable from 0% to 100%.
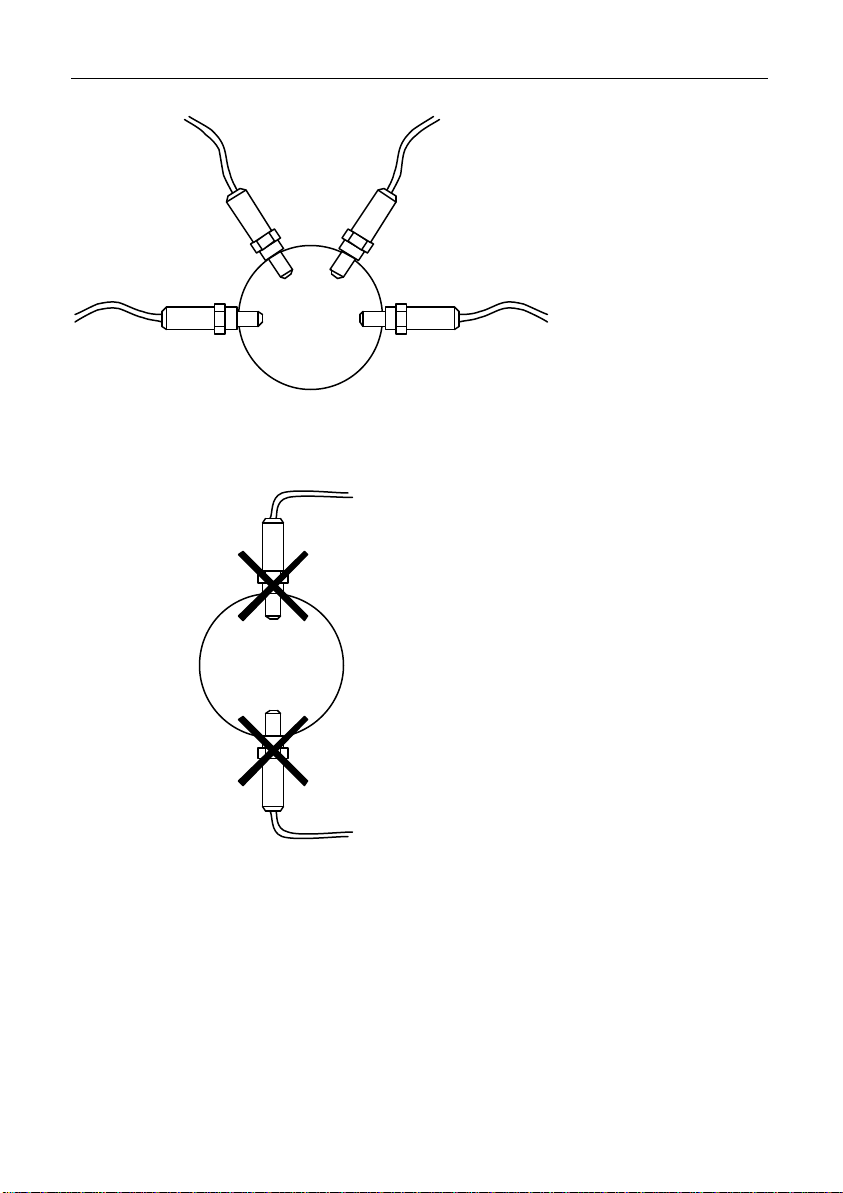
Sensor Placement
The sensor should be fitted to the exhaust system with the sensor tip protruding
into the exhaust gas flow. The sensor placement should be on an angle of
between 10 and 90 degrees to the vertical, with the tip of the sensor pointing
down. This is to ensure that no condensed water builds up between the sensor
case and the sensor ceramic. It should not be placed vertically due to excess
heat soak in this position.
It is recommended that where possible the sensor be placed at least 1m from
the exhaust ports to avoid excessive heat and at least 1m from the open end of
the exhaust system to avoid incorrect readings due to outside oxygen. This is
however not mandatory, and where necessary for shorter exhaust systems the
sensor should be placed closer to the engine.
The placement of the sensor should be away from the flame front coming out of
the cylinder head and away from areas where one cylinder may have more
affect than another.
Page 8
8 Meter Operation
Correct sensor placement
Incorrect sensor placement
Page 9
MoTeC Meter Operation 9
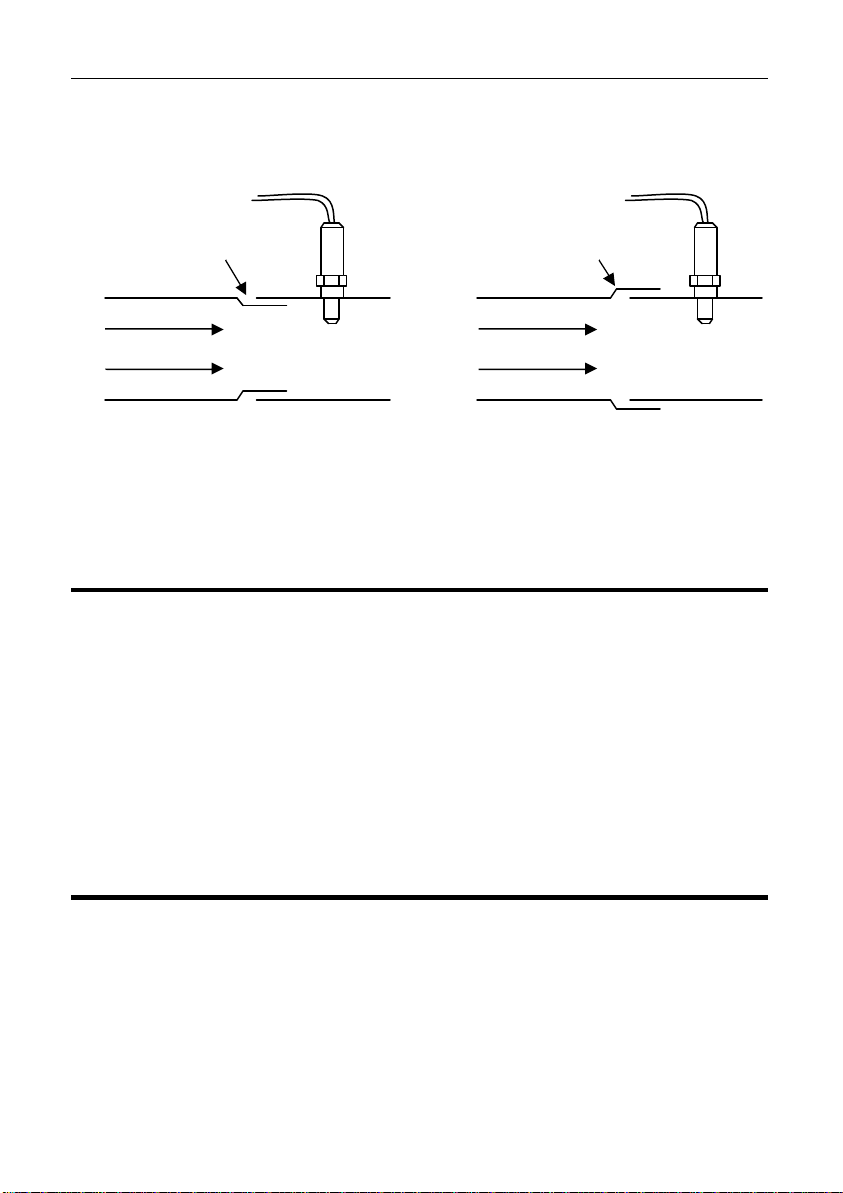
Exhaust slip joint design to avoid incorrect lambda readings
Introduced a
ir No air i
ntroduced
Exhaust slip joints should be avoided near sensor placement as some designs
allow air to enter. Slip joints can be reversed to make them better for use near
sensors.
Exhaust flow
Sensor Warm -up
The internal heater in the LSU or NTK sensor is powerful enough to allow
accurate measurement when gas temperature is at room temperature. The
Bosch LSU will take ~20seconds to heat up, while the NTK ~30 seconds before
reading.
The maximum continuous operating temperature of the sensors is 850 degrees,
and sensors should not be used for a prolonged period at temperatures higher
than this. The sensor can be heated to 930 degrees for a short period (not
exceeding 10 minutes), but the accuracy may be reduced.
Sensor Lifetime
The sensor life time is dependant on the type of fuel being used and the volume
of gas flow over the sensor. The sens or can also be contaminated by exhaust
manifold sealants, so Exhaust Gas Sensor friendly sealants should be used.
Leaded fuel will reduce the sensor lifetime substantially due to lead
contamination of the sensor element. Typically, for high performance engines
the sensor should last at least 500 Hrs in unleaded fuel and 50 Hrs in leaded
fuel. Longer lifetimes can be expected for less demanding applications.
Page 10
10 Meter Operation
At the end of its life the sensor becomes slow to respond and does not read
rich properly. The NTK and LSU are designed to be accurate for 50,000km of
operation in a road car, so the above figures are a conservative estimate.
Sensor lifetime will be reduced by contaminants such as lead, silicon, oil, etc.
Thermal cycling will also age the sensor more rapidly, along with exposure to
exhaust fumes without any heating control active (ie: not connected to the
PLM). Regular performance of the Free Air Calibration will maintain the
accuracy of the sensor over its lifetime.
Sensor Temperature
It is important to ensure that the sensor is not overheated due to incorrect
placement in the exhaust as this significantly reduces the sensor life. The
sensor impedance (Zp) is measured by the PLM, and this is a reasonable
indication of sensor temperature. Zp should be approximately 80 Ohms in
normal operation. If Zp is less than 60 the sensor is being overheated by the
exhaust and the sensor life will be reduced.
Lambda
Lambda gives a measure of Air Fuel Ratio that is independent of the type of fuel
being used.
Lambda 1.0 corresponds to the stoichiometric ratio i.e. when there is no excess
fuel and no excess air.
Lambda > 1.0 => Excess Air (Lean)
Lambda < 1.0 => Excess Fuel (Rich)
Lambda may be directly converted to Air Fuel Ratio for a specific fuel using a
multiplication factor. The PLM will display Air Fuel Ratio by loading the
appropriate configuration into one of the output tables. For more information,
see Setup | Display in the PLM Setup Software section.
A table to convert Lambda to Air Fuel Ratio for various fuels is given in Appendix
A – Lambda to Air Fuel Ratio Table.
Engine Tuning
The desired Air Fuel Ratio (or Lambda) is dependant on the tuning objective i.e.
Power, Economy or Emissions. Normally at full load the engine is tuned for
Page 11
MoTeC Meter Operation 11
maximum power and at light loads the engine is tuned for emissions or
economy.
The following table gives a guide to the required Lambda values for different
tuning objectives.
Objective Lambda
Power 0.84 to 0.90
Economy 1.05
Emissions 1.00
Note: The exact requirements for a specific engine and fuel must be found by
experimentation.
Note: On Turbo Engines extra fuel may be desirable to reduce exhaust
temperatures and help avoid knock.
Note If the vehicle is fitted with a catalytic converter extra fuel may be required
to ensure the catalyst does not overheat when not operating at Lambda
1.00
Operating Tips
If the Engine misfires for any reason, including an over-rich mixture, the Meter
may falsely read Lean. This is due to excess air being present in the exhaust
gasses which is caused by incomplete combustion when the engine misfires.
Other areas that can give misleading readings include at high RPM, closed
throttle when the mixture won’t burn completely. Following overrun fuel cut the
sensor will become saturated with oxygen and can take up to several seconds
to resume accurate readings. Engine misfires include hitting the rev-limiter, be it
a fuel or ignition cut or a combination of both, and can give a similar result with
time being required to purge the sensor of excess oxygen or fuel.
Engines with high overlap camshafts running at low speed may pump air
through the engine resulting in a false lean reading, therefore the meter may
need to read leaner than would otherwise be expected.
Page 12
12 PLM Setup Software
PLM Setup Software
The PLM Setup Software allows a PLM unit to be configured from a PC for a
particular target application. A new PLM unit must be configured before its initial
use in order to specify sensor type, display units etc. This section covers the
basic configuration of the PLM. Advanced functions are also covered in the PLM
Communications and Sensor Calibration sections.
Computer requirements
The PLM setup software runs under Windows 95, 98, ME, NT4, 2000 or XP
operating systems. The minimum recommended PC specification is a Pentium
90 with 16MB RAM and a serial port.
Connecting to a PLM
The PLM connects to the PC with a standard (straight -through) serial
communication cable from the PC serial port to the 9pin Female PLM
connector. During PC operations (sending or retrieving), the PLM should be
powered using the sensor loom.
Installing PLM Setup
The PLM Setup software can be installed either from the MoTeC Resource CD
supplied with the PLM, or from the MoTeC website (software.motec.com.au)
To start the program after installation, click on Start à Programs à MoTeC à
PLM Setup à PLM Setup
Configurations
The PLM configuration determines exactly how a unit will operates. The PLM
Setup software allows changes to be made to a configuration to change PLM
characteristics such as the sensor type, display units, analog output scaling,
backlight intensity etc.
Page 13

MoTeC PLM Setup Software 13
Standard configuration templates for most common preferences are included
with the software.
Managing Configurations
When the PLM Setup software is started, a configuration file needs to loaded
before changes can be made, or before a configuration can be sent to the PLM.
This configuration can either be loaded from a file on disk, retrieved from the
PLM (using the serial cable), or created as a new configuration.
A loaded configuration can be saved to a file on disk, and then sent to the PLM
(using the serial cable). A modified configuration must be sent to the PLM for it
to take effect.
Creating a new configuration
To create a new configuration, select File | New from the main menu, and
choose a template to base the new configuration on.
Loading an existing configuration from disk
To open an existing configuration file, select File | Open from the main menu
and select the desired file. The most recently used files may be opened from
the list of files at the bottom of the File menu.
Retrieving an existing configuration from a PLM
To retrieve a configuration from a PLM, select Online | Get Configuration from
the main menu. To specify the serial port used for the connection to the PLM,
select Options | Communications Port from the main menu. The PC must be
connected to the powered PLM using the serial port specified.
It is advisable to retrieve the initial configuration from the PLM and save this
before making modifi cations.
Saving a configuration to disk
After a configuration has been created or modified it should be saved with a
meaningful name by selecting File | Save or File | Save As from the main menu.
Sending a configuration to a PLM
To send a configuration to a PLM, select Online | Send Configuration from the
main menu. To specify the serial port used for the connection to the PLM,
Page 14

14 PLM Setup Software
select Options | Communications Port from the main menu. The PC must be
connected to the powered PLM using the serial port specified.
When a configuration file is sent to the PLM, any changes are automatically
saved to the current configuration file on the PC.
Changing Configurations
Once an existing configuration file has been opened or retrieved, or a new
configuration has been created, the configuration may be modified by choosing
the options under the Setup menu.
Setup | Sensor
Sensor:
The sensor type used with the PLM (NTK, Bosch LSU 4 or Bosch LSU
4.2) must be specified before a configuration can be sent to a PLM. It is
important to select the correct sensor type to prevent damage to the
sensor and ensure correct lambda measurements.
Calibration:
There are several options available for choosing the calibration method of
the sensor being used.
The default option, ‘Use measured calibration value’ allows the PLM to
determine the factory sensor calibration and can be used in most cases.
If the calibration value of the sensor is known then it can be entered by
selecting the option ‘Enter calibration value’. This value is engraved on
sensors supplied by MoTeC as an equivalent resistor calibration value.
Either of these two options will be sufficient in nearly all situations. The
more advanced calibration methods (‘Calculate from O2 concentration’
and ‘Enter calibration table’) are des cribed in the section Sensor
Calibration.
Heater Control:
This parameter allows the heater voltage to be set when using an NTK
sensor. For most situations this can be left at the default value of 10.5
volts. A value of 12 – 12.5 volts will give better results during cold start or
warm-up calibrations or during extensive periods of overrun fuel cut where
the sensor may become too cold for accurate measurement. Running the
Page 15

MoTeC PLM Setup Software 15
heater at a sustained voltage above 10.5 volts will reduce the sensor
lifetime.
Sensor Timeout:
The option to ignore sensor errors is only recommended for very
specialised applications where extreme changes in lambda may cause a
short loss of sensor control. Enabling this option will disable the default
PLM behaviour of shutting down the sensor for a timeout period when
control is lost. This timeout is to protect the sensor as loss of control can
indicate a wiring fault.
Setup | Display
Output Tables:
The Output Table Setup dialog is displayed when the Output Tables
button is clicked. The Output Tables are used by the PLM to calculate
the displayed value. The PLM stores two tables that can be configured
with different calibrations for displaying lambda, air fuel ratio or
equivalence ratio.
In addition to a lambda calibration, there are a number of pre-defined
calibrations for air fuel ratio for different fuels. To display one of these, the
calibration must be loaded by clicking on the ‘Load’ button and choosing
the appropriate calibration from the list displayed.
Advanced users can generate their own calibration tables using the Ipn
(normalised sensor pump cell current) value measured by the meter.
These user calibrations can be saved for re-use by clicking the ‘Save As’
button.
Output to Display:
The default PLM display value can be selected as the result from one of
the two tables that are specified under the Output Tables setup.
Display Decimals Table 1 / Table 2:
This is the number of decimals used to display the values from Table 1
and Table 2 in the Output Tables setup. The display decimals are
specified for both tables as the PLM can be configured to swap the
display between the two tables using a digital input.
Normal use would be to 2 decimal places for lambda.
Page 16

16 PLM Setup Software
Display Update Rate:
The update rate of the displayed value can be from 1 to 10 times per
second.
Filter Time:
The display data can be filtered so that it is more stable and easier to
read. This filtering is independent of the update rate. The filter time can
be specified in 0.1second units from 0 to 25 seconds.
Backlight Intensity:
Backlight intensity is configurable from 0 to 100%
Setup | Digital Inputs
Device Activation:
If digital inputs are not used for PLM activation, the ‘Run always ’ option
should be selected. The remaining four options allow the PLM to be
activated either while a digital input (1 or 2) remains active, or after a
digital input (1 or 2) first becomes active.
If one of digital input device activation modes is selected, the
corresponding digital input mode must be configured as Active Low,
Active High or Measure RPM. This allows the PLM to be configured to
operate only when measuring RPM, or when a switch is set.
Input 1 Mode:
‘Off’ – digital input 1 is disabled
‘Active High’ – digital input 1 is active when the input voltage is high
‘Active Low’ – digital input 1 is active when the input voltage is low
‘Measure RPM’ – digital input 1 is active when a non-zero RPM is
measured and the RPM value is transmitted in the CAN and RS232 data
streams (if configured under the communications setup).
RPM Pulses per Revolution:
If Input 1 Mode is ‘Measure RPM’ the number of pulses per engine
revolution must be specified here to calibrate the RPM measurement.
Page 17

MoTeC PLM Setup Software 17
Input 2 Mode:
‘Off’ – digital input 2 is disabled
‘Active High’ – digital input 2 is active when the input voltage is high
‘Active Low’ – digital input 2 is active when the input voltage is low
‘Display Other Output Table When Low’ – the other output table is used
for the display value while digital input 2 is low. For example, if Output to
Display (in the Setup | Display menu) is table 2, then table 1 will be
displayed while digital input 2 is low.
Setup | CAN Messages
The configuration templates included with PLM Setup are all configured to send
CAN data to a MoTeC ADL (Advanced Dash Logger) or M800 ECU by default.
The Output to Transmit parameter specifies the output table to be used for
transmitted values.
The Output Table Setup dialog is displayed when the Output Tables button is
clicked.
Note that the two tables setup in this dialog are used for displayed values,
transmitted values and analog outputs, but each function can use either table 1
or table 2.
For use with MoTeC equipment (ADL or M800), the selected table must be
setup for Lambda with 3 decimal places. Other table setups should only be
used for interfacing with third party equipment.
For basic CAN communications with an ADL, the Address parameter for
Message 1 should match the address in the PLM CAN communications
template loaded in the ADL.
If multiple PLMs (up to six units) are connected to an ADL then eac h should be
given a different address. The addresses chosen must match those of the PLM
CAN communication templates provided with Dash Manager. For example, the
ADL template ‘PLM #1 (CAN ID 460)’ requires that the Message 1 Address be
460. Note that “CAN Collect” functionality is the preferred method for
communications from more than one PLM to an ADL.
For basic CAN communications with an M800 ECU, the Address parameter for
Message 1 should be 460 for the first PLM, 461 for second PLM etc.
Only advanced users should change the other CAN message settings, or
configure Collect Master functionality. CAN Messages are covered in more
detail in the PLM Communications section.
Page 18
18 PLM Setup Software
Setup | Analog Output
Output Table:
The Output Table Setup dialog is displayed when the Output Tables
button is clicked.
Note that the two tables setup in this dialog are the same tables used for
displayed values, transmitted values and analog outputs, but each
function can use either table 1 or table 2.
Output Function:
This parameter spec ifies input to the analog output Calibration Table. The
‘Ip’ and ‘Ipn’ options are the raw and normalized sensor pump cell
currents (Ipn is normalized using the calibration method specified under
Setup | Sensor). The other options are the two tables that are specified
under the Output Tables setup.
Calibration Table:
The calibration table allows users to set the voltage output that
corresponds to the table input value. The table takes the input value and
translates it to an analog voltage (0 to 5 volts) by way of the calibration
table. The voltage is linearly interpolated between points in the table, so
at least two pairs of values must be entered in the table.
Once created, calibration tables can be saved (using the Save As
button), and reloaded (using the Load button) for use in other
configurations.
Default Output:
The analog output voltage is set to the Default Output voltage if the PLM
is not active or if the analog output is disabled.
Page 19

MoTeC Sensor Calibration 19
Sensor Calibration
Introduction
The NTK and Bosch lambda sensors are factory calibrated with a trimming
resistor embedded in the sensor connector. This resistor value can be read by
the PLM and used to calibrate the sensor readings for a new sensor.
As sensors age their calibration changes. To maintain accurate readings, the
PLM allows comparison of the measured O2 concentration in air against that of
the pure O2 reference in the sensor itself to calculate a new calibration.
Sensor calibration values in the PLM Setup software are expressed as either an
equivalent calibrat ion resistor value, or as a gain factor. It is recommended that
all applications that require sensor calibration values to be measured and
recorded (such as workshops using multiple sensors) should use the gain factor
calibration number rather than the equivalent resistor. Support for equivalent
resistor calibration values is included for backwards compatibility with previous
PLM software.
Calibration Methods
There are four calibration methods available under the Setup | Sensor menu.
Use Measured Calibration Value
The factory calibration resistor is measured by the PLM and used to calibrating
readings. The factory sensor plug must be present to use this calibration
method.
Enter Calibration Value
A previously measured calibration value can be entered directly as either an
equivalent calibration resistor value or as a gain factor value.
Entered calibration values are useful when sensors are calibrated using the free
air calibration (O2 concentration). The results of the free air calibration can be
recorded for a particular sensor and then entered when the sensor is used with
another PLM.
Page 20

20 Sensor Calibration
Calculate from O2 Concentration (Free Air)
This calibration method uses the known oxygen concentration of free air to
calibrate a sensor. Re-calibration using this method allows a sensor to maintain
accuracy as it ages.
To perform the free air calibration, the PLM must be powered up and connected
to a PC (with a serial cable) running the PLM Setup software. The configuration
in the PLM must match the sensor type being used for the calibration. Free air
calibration must be done in the open air – not in a workshop or dyno room
where there will be large amounts of hydrocarbons in the atmosphere.
The O2 Concentration parameter specifies the actual % concentration of
Oxygen in the at mosphere and should be entered if known. A nominal value of
20.94% is given, but the more accurately this is known for current atmospheric
conditions (temperature, pressure) the more accurate the calibration will be.
To start the calibration process, click the ‘Calibrate’ button. The following dialog
is displayed while the sensor readings stabilize.
When the sensor reading is stable the calibration can be stored by clicking the
Store button, as shown below.
The new calibration value is displayed as bot h a gain factor and an equivalent
resistor calibration. This calibration can be recorded against the sensor serial
number to allow the sensor to be used with another PLM unit by simply entering
the calibration value.
Page 21

MoTeC Sensor Calibration 21
To apply the new calibration, the PLM configuration must be saved and sent to
the PLM.
Enter Calibration Table
For advanced applications, a calibration table can be specified to calculate Ipn
(normalized sensor pump cell current) from Ip (sensor pump cell current).
At least two pairs of values must be specified in the table, and linear
interpolation is used between the points. Calibration tables may be saved and
reloaded for use in other calibrations.
Page 22

22 PLM Communications
PLM Communications
CAN Messages
The PLM can transmit up to four CAN messages containing readings and
diagnostics.
The format of these four messages is fixed (see Appendix M – CAN Messages
Format), but the following parameters can be configured by the user for each
message under the Setup | CAN Messages menu.
Address Format:
Standard address formatting is recommended for most applications.
Extended addressing should normally only be used if required for
interfacing to third party equipment , however it is supported by the ADL if
required.
Address:
The CAN address for a message is specified in hex. The recommended
address range for PLM messages is hex 460 to hex 46F.
Compound ID:
The compound ID (0 to 255) is placed in the first data byte of the CAN
message and is used to differentiate between messages sent to a single
CAN address. Multiple messages can be transmitted to a single address
by specifying different compound IDs for each message.
Message Rate:
The message rate (1,2,5,10,20 or 50 times per second) determines how
often the CAN message is transmitted.
Scaling
The scaling of the actual reading for the PLM is determined by the Output to
Transmit parameter which specifies the output table to be used for transmitted
values (eg. Lambda, O2 concentration etc.).
Page 23

MoTeC PLM Communications 23
For use with MoTeC equipment (ADL or M800), the selected table must be
setup for Lambda with 3 decimal places. Other table setups should only be
used for interfacing with third party equipment.
Configuring Basic CAN with an ADL
To connect a small number of PLM units (maximum of six) to an ADL, the ADL
must use one CAN template (PLM#1 to PLM#6) for each PLM.
The PLM units must be configured as follows to match the ADL templates.
Output To Transmit LA V1, with 3 decimal places in the table
Address Format Standard
Address As per ADL template (460 to 465)
Compound Id Message 1 = 0
Message 2 = 1
Message 3 = 2
Message 4 = 3
Message Rate Message 1 = User defined
Message 2 = User defined
Message 3 = User defined
Message 4 = User defined
Collect Master = Off
Configuring basic CAN with an M800
Up to 12 PLM units can transmit to an M800 ECU if configured as follows:
Output To Transmit LA V1, with 3 decimal places in the table
Address Format Standard
Address PLM 1 = 460
PLM 2 = 461
….
PLM 12 = 46F
Page 24

24 PLM Communications
Compound Id Message 1 = 0
Message Rate Message 1 = User defined
Message 2 = Off
Message 3 = Off
Message 4 = Off
Collect Master = Off
CAN Collect Functionality
For applications involving multiple PLM units, a single PLM can be configured to
collect calibrated lambda readings from up to 15 other PLMs on the CAN bus,
and to retransmit the 16 readings on a single CAN address. This functionality is
available in PLM firmware V1.1 and later.
Note that only the calibrated lambda reading is collected and re-transmitted. If
the CAN collect feature is used, PLM Diagnostic CAN messages may still be
turned on, but care must be taken in assigning addresses not to interfere with
messages from the other PLMs.
Configuring the CAN collect master unit (PLM 1)
Only one PLM on the CAN bus should be configured as a Collect Master.
To enable the CAN collect functionality, a base address and a message rate
must be specified in the Collect Master tab of the CAN Message Setup dialog.
Page 25

MoTeC PLM Communications 25
The base address is the address on which the collected Lambda values will be
retransmitted. This address must lie on a 16 message boundary (i.e. the
address, in hex, must end in 0). The base address also defined the addresses
of the Collect slave units that the master will monitor. The recommended
address is Hex 460.
The message rate is the rate at which the Lambda values are retransmitted on
the CAN bus to the measuring device (usually an ADL or ECU).
Messages 1 to 4 do not need to be configured on the master unit.
Output to Transmit must be LA V1, with 3 decimal places in the table setup.
The master PLM unit will briefly display “CU 1” (Collect Unit 1) on start-up after
displaying the firmware version.
If the slave PLM stops transmitting to the master PLM for 1.5 seconds then the
master PLM will retransmit a value of 0 for the missing slave.
Configuring the CAN Collect slave units (PLM 2
to PLM 16)
The Message 1 tab of the CAN Message Setup dialog must be configured as
follows:
Output To Transmit LA V1, with 3 decimal places in the table
Address Format Standard
Compound ID 00
Message Rate As required for application. This is the rate at which the
Lambda value for this unit will be sent to the master
unit.
Address Master PLM Collect Master Base Address + PLM
number – 1 (in hexadecimal)
Eg. For a master PLM base address Hex 460:
PLM 5 address would be Hex 464
PLM 12 address would be Hex 46B
Page 26

26 PLM Communications
Messages 2 to 4 are not required and should be “OFF” on the slave units.
The Collect Master message rate must be set to OFF on the slave units.
A PLM configured as a slave unit will briefly display the PLM unit number (eg “U
4” for PLM 4) on start-up after displaying the firmware version.
Appendix O – Recommended CAN Collect Configuration describes the
recommended configuration for connecting multiple PLM units to an ADL.
CAN Unit Number Display
On power-up, a PLM will display a unit number based on the current CAN
communications configuration. This unit number is displayed for one second
after the firmware version has been displayed. The unit number is useful for
trouble shooting systems containing multiple PLMs.
The unit number displayed is based on whether the unit is a Collect Master, and
on the least significant digit of the CAN address specified for CAN Message 1,
as shown below.
Display PLM Number Configuration
U 0 PLM 0 Collect Master disabled
Message 1 disabled (Message Rate = Off)
Page 27

MoTeC PLM Communications 27
CU1 PLM 1 Collect Master enabled
U1 PLM 1 Collect Master disabled
Message 1 address = xx0
U2 PLM 2 Collect Master disabled
Message 1 address = xx1
… … …
U16 PLM 16 Collect Master disabled
Message 1 address = xxF
A correctly configured network of PLMs using the CAN collect functionality
should have the unit numbers CU1, U2, U3, U4 etc.
A correctly configured network of PLMs that are not using the CAN collect
functionality should have the unit numbers U1, U2, U3, U4 etc.
A correctly configured PLM that is not using CAN communication should have
the unit number U0.
RS232 Messages
The PLM transmits RS232 status messages at a rate of 20 times a second.
If the PLM is configured as a CAN Collect Master then the transmitted message
contains the Lambda values for the master PLM and up to 15 slave PLMs.
If the PLM is not configured as a CAN Collect Master the transmitted message
contains Lambda values and diagnostics for the PLM.
Appendix N – RS232 Message Format describes the format of the RS232
Messages. Note that the number of decimal places for calibrated sensor
readings depends on the selected output table in the PLM configuration.
The transmitted messages conform to the MoTeC generic data protoc ol and are
sent at 9600 baud, 8 data bit, no parity, 1 stop bit (9600, 8N1).
Page 28

28 Specifications
Specifications
Meter
Power Supply
Input Voltage Range 7 to 16Volts
Input current 60mA typical, backlight off
110mA typical, backlight on
Plus sensor heater current
Protection Reverse polarity protected
Load Dump Clamp Max 40V at 100 Amp 100msec
Sensors
Sensors 1
Compatible Types Bosch LSU 4/ Bosch LSU 4.2/ NTK UEGO
Calibration Methods Automatic using sensor’s built in calibration resistor
Manual Table Entry
Known Oxygen Environment
Calibration Constant
Type Detection Manual
Sensor Thread M18 x 1.5
Max Exhaust Temp 850 deg
Normal Temp Range 150 – 800 deg
Measurements
Lambda 0.7 to 32.0
02 0 to 22%
A/F Ratio Fuel dependant (see lambda range)
Accuracy +/- 1.5% (sensor specific)
Page 29

MoTeC Specifications 29
Sensor Heater
Outputs 1
Current Max 8 Amp
Control Bosch - Digital PID
NTK - Constant Voltage
Voltage supply to the PLM should be at least 11V for
proper operation of the sensor heater when using an
NTK UEGO sensor.
Output
Output Type Differential
Calibration User Programmable
Max Output Current 10mA (Short circuit protected)
Output Voltage Swing 0 to 4.5V relative to the negative output (when the
negative output is less than 0V and greater than
negative 4.5V (relative to Battery -) and for output
currents less than 1mA.
If the negative output is greater than 0V then the
output voltage swing will be reduced by the voltage on
the negative output (relative to Battery -)
If the negative output is connected to a floating device
such as a multimeter or other high impedance
measuring device then it will float in the range 1.25V
to 2.5V, this will reduce the output voltage swing by
2.5V to 0 to 2V. In this case connecting the negative
output to Battery - will restore the full output voltage
swing.
Negative Pin Output
Voltage Range Must be within -4.5 to +5 volts (relative to Battery -)
The negative out put has an impedance of
approximately 5kohm connected to a variable voltage
in the range 1.25V to 2.5V (relative to Battery -)
Min Positive Pin
Output Voltage -4.5V (relative to Battery -) for current less than 1mA
Page 30

30 Specifications
Max Positive Pin
Output Voltage 4.5V (relative to Battery -) for current less than 1mA
Inputs
Digital 2 x User Programmable as RPM or PLM Operate
Communications
CAN 1Mbit
RS232 9600 baud, 8 data bits, no parity, 1 stop bit (9600,
8N1)
Display
Type LCD 3.5 Digit
Digit Height 12.7mm
Lighting Green LED Back Light
Connection
Connectors 2 x 9 Pin Dsub (commonly called D9)
Environment
Temperature Range -10 to 70 Deg C
Case
Dimensions(WxHxD) 105x41x25 mm (Excluding Connector)
Weight 135grams
Page 31

MoTeC Appendices 31
Appendices
Appendix A – Lambda to Air Fuel Ratio Table
Lambda Air Fuel Ratio
Petrol Alcohol LPG Diesel
0.70 10.3 4.5 10.9 10.2
0.75 11.0 4.8 11.6 10.9
0.80 11.8 5.1 12.4 11.6
0.85 12.5 5.4 13.2 12.3
0.90 13.2 5.8 14.0 13.1
0.95 14.0 6.1 14.7 13.8
1.00 14.7 6.4 15.5 14.5
1.05 15.4 6.7 16.3 15.2
1.10 16.2 7.0 17.1 16.0
1.15 16.9 7.4 17.8 16.7
1.20 17.6 7.7 18.6 17.4
1.25 18.4 8.0 19.4 18.1
1.30 19.1 8.3 20.2 18.9
1.35 19.8 8.6 20.9 19.6
1.40 20.6 9.0 21.7 20.3
1.45 21.3 9.3 22.5 21.0
1.50 22.1 9.6 23.3 21.8
1.55 22.8 9.9 24.0 22.5
1.60 23.5 10.2 24.8 23.2
Page 32

32 Appendices
Appendix B – PLM Display Codes
Warm-up Codes
C-6 Sensor Protection Shutdown. The C-6 state is entered when the PLM
can not pump enough current into the pump cell to balance the sense cell.
When C-6 is entered pump current is turned off. The PLM will try to gain control
of the sensor (the C-1 state) every 10 seconds. If it is then unable to regain
control after 2 seconds then it will re-enter the C-6 state.
C-5 User Stop. The sensor has been turned off via a digital input
C-4 No Heater detected. This will occur if the sensor is disconnected or the
heater is open circuit – ie: the sensor is damaged. Heater circuit should be
approx 3ohms at room temp
C-3 Warm Up. The PLM is heating the sensor prior to normal operation and
waiting for sensor to warm up.
C-2 Control Initialization. Waiting to start pump current
C-1 Checking Operation. Waiting to get control of sensor cell voltage.
In normal operation the PLM will display C-3, C-2, C-1 then start reading lambda
values. The C-4 and C-6 error states will occur if a problem is detected.
Error Codes
0010 The config loaded into the PLM does not match the PLM firmware version
0011 The config stored in the PLM is corrupt (CRC failure)
0020 The factory calibration values does not match the PLM firmware version
0021 The calibration stored in the PLM is corrupt (CRC failure)
Page 33

MoTeC Appendices 33
Appendix C – PLM CAN Diagnostic Codes
These are the bit field descriptions for the diagnostic error groups that are sent
to the ADL via the CAN link.
Diagnostic Group 1
1: No Sensor
2: Sensor Hot
4: Sensor Cold
8: Sensor Faulty
32: Warm Up
64: Ref voltage out of range
Diagnostic Group 2
These codes correspond to those displayed by the PLM.
1 (C-1) - Checking Operation.
2 (C-2) - Control Initialization.
4 (C-3) - Warm Up.
8 (C-4) - No heater detected.
16 (C-5) - User Stop (sensor turned off via digital input).
32 (C-6) - Sensor Protection Shutdown.
Page 34

34 Appendices
Appendix D – PLM Connector Details
Sensor Connector - Male D9
1 Battery +12 Power (Note 2)
2 Heater +
3 Rc
4 Ip
5 Sensor Common
6 Battery 0V Power
7 Heater –
8 Vs
9 Ipr
Auxiliary Connector – Female D9
1 CAN Hi (Note 3)
2 RS232 Tx
3 RS232 Rx
4 Digital Input 1
5 Comms 0V
6 CAN Lo (Note 3)
7 Digital Input 2
8 Analog out + (Note 4)
9 Analog out – (Note 4)
Note1: Extension of Standard Sensor Loom
The length of the standard loom supplied for connection of the PLM to a sensor
is 2.5m. Longer looms are available from MoTeC by request.
It is not recommended that the loom is extended by using a standard serial
cable. These are unable to supply the current required by the sensor. If an
extension is made, the wire thickness must be at least 20 gauge.
Note 2: Power Supply Current
If using a power supply other than the vehicle battery, start -up current for the
sensor is up to 5A, though operating current is much lower than this, 0.5 – 1
Amps, depending on exhaust gas temperature.
Page 35

MoTeC Appendices 35
Note 3: Wiring
See Appendix G – PLM to ADL Wiring Details for CAN wiring to an ADL
See Appendix F – PLM to ECU Wiring Details for CAN wiring to an M800 ECU
See Appendix H – General CAN Bus Wiring for recommended CAN wiring
practices
Note 4: Analog Output
Connect the “Analog out +” to the input on the measuring device.
Connect the “Analog out –“ to the 0V reference point on the measuring device.
“Analog out –“ must be connected for the measuring device to make a correct
reading.
See Appendix F – PLM to ECU Wiring Details for wiring the analog outputs to
M4/M48, M8 & M800 ECUs
Page 36

36 Appendices
6 Ip
Bosch
LSU 4
5 Heater +
4 Heater
-3
Common
BAT-
N/C
2 Vs
Heater
-
1
BAT+
BAT-Vs Ipr
PLM
Heater +
M2
Rc M1
BAT+
M3M4M5M6M7M8M9Ip
Common
Ipr
Appendix E – Sensor Wiring Details
Bosch LSU 4 Sensor
Wiring Details
Page 37

MoTeC Appendices 37
6
Ipr
Bosch
LSU 4.2
5
Common
4
Heater
- 3 Heater +
BAT-
N/C 2 Ip
Heater
-
1 BAT+ BAT- Vs
Ipr
PLM
Heater +
M2 Rc M1
BAT+
M3 M4 M5 M6 M7
M8
M9 Ip Common
Vs
Bosch LSU 4.2 Sensor
Wiring Details
Page 38

38 Appendices
NTK – UEGO Sensor
Page 39

MoTeC Appendices 39
3 Common
NTK UEGO
4 Ip
5 Vs6
BAT-
N/C7
Heater
-
Heater
-
8
BAT+
BAT-Vs Ipr
PLM
Heater +
M2
Rc
M1
BAT+
M3M4M5
M6
M7
M8M9Ip Common
Heater +
21 RcCommon
N/C
Wiring Details
Page 40

40 Appendices
F8 F9 32
Red
PLM M4/M48
La+ La
- A out
A out
-
F8 F9
24A
36A
Red
PLM M8
La+ La
- A out
A out
- 0V 10A
Appendix F – PLM to ECU Wiring Details
Analog Output
PLM wiring using the Analog Output to M4/M48/M8/M800 ECUs :
(Previously La- was shown connected to ECU 0V, this is now optional)
PLM
A out +
A out -
F8
Red
F9
Black
B25, B12 / 60, 61
B16 / 27
M800/M880
La1S or La2S
Sensor 0V
CAN
One or more PLMs may be connected to the M800 ECU via the CAN bus.
Note that the ECU version must be V3.0 or higher.
See Appendix H – General CAN Bus Wiring for details on correct wiring and
termination for CAN devices.
Page 41

MoTeC Appendices 41
Appendix G – PLM to ADL Wiring Details
One or more PLMs may be connected to the MoTeC ADL via the CAN bus.
See Appendix H – General CAN Bus Wiring for details on correct wiring and
termination for CAN devices.
Page 42

42 Appendices
CAN-LO CAN-HI
100R
CAN
-LO
CAN
-HI
500mm
Max
CAN
-LO
CAN
-HI
CAN Cable
500mm
Max
500mm
Max
CAN
-LO
CAN
-HI
CAN
-LO
CAN
-HI
5 4 3 1
Appendix H – General CAN Bus Wiring
The CAN bus should consist of a twisted pair trunk with 100R (0.25Watt)
terminating resistors at each end of the trunk.
The preferred cable for the trunk is 100R Data Cable but twisted 22# Tefzel is
usually OK.
The maximum length of the bus is 16m (50ft) including the MoTeC CAN Cable
(PC to CAN Bus Communications Cable)
CAN Devices (such as MoTeC PLM, ADL, etc) may be connected to the trunk
with up to 500mm (20in) of twisted wire.
The connector for the CAN Communications Cable may also be connected to
the trunk with up to 500mm (20in) of twisted wire and should be within 500mm
of one end of the trunk. If desired two CAN Cable connectors may be used so
that the MoTeC CAN Cable may be connected to either side of the vehicle.
Both connectors must be within 500mm of each end of the trunk.
100R Terminating
Resistors at each
end of the CAN Bus
These wires must be Twisted
Minimum one twist per 50mm (2in)
<< CAN Bus >>
Connector
0V
8V
Short CAN Bus
If the CAN Bus is less than 2m (7ft) long then a single termination resistor may
be used. The resistor should be placed at the opposite end of the CAN Bus to
the CAN Cable connector.
100R
CAN
Device
CAN
Device
CAN
Device
Page 43

MoTeC Appendices 43
PLM
0V
Standard Serial Comms cable.
only 3 wires are required.
F5
PC Serial Port
Comms 0V
5
Appendix I – PC Comms Wiring
A PC may be connected to the PLM by connecting to the 9 pin female
connector as shown below. This allows the PLM to be configured using the
PLM Configuration software.
It is also acceptable to use a standard 1:1 male to female communications
cable which connects all 9 pins.
Note that during configuration the PLM must also have power connected to it via
the PLM 9 pin male connector.
RS232 Rx
RS232 Tx
F3
F2
This will connect all 9 pins, but
3
RS232 Tx
2
RS232 Rx
Page 44

44 Appendices
F8 F9
PLM Floating
Input +
Input –
A out +
A out
-
M6
Battery
- Battery
-
F8 F9
PLM Single Ended
Input +
Input
- A out +
A out
-
M6
Ground
Ground
Battery
- Battery
-
Appendix J – Analog Output Wiring
Floating Measuring Device
When connected to a floating measuring device such as a multimeter, Aout –
should be connected to Battery – as shown to ensure that the full output voltage
swing is available. (See the specifications for details)
Measuring Device
Single Ended Input Measuring Device
A single ended measuring device has the negative input internally connected to
the devices ground pin.
Note: The Ground voltage must not be more than 4.5 volts below Battery –.
Note: If the Ground voltage is greater than the Bat tery – voltage then the PLM
output voltage swing will be reduced. (See the specifications for details)
Differential Input Measuring Device
When connected to a differential input measuring device, Aout – should be
connected to Battery– as shown to ensure that the full output voltage swing is
available. (See the specifications for details)
Measuring Device
Page 45

MoTeC Appendices 45
F8 F9
PLM
Input +
Input
–
A out +
A out
-M6
Ground
Ground
Battery
-
Battery
-
Note: Aout+ and Aout – must be within the within the input common mode range
of the measuring device. This limits the voltage difference that can be between
Battery– and Ground.
Differential Input
Page 46

46 Appendices
Dig
ital
Input
1/2
PLM
0V
Dig
ital
Input
1
PLM
0V
Signal
Sensor 0V
RPM Sensor: Must
8V sensor
Appendix K – Digital Input Wiring
Typical wiring for switches
Typical wiring for RPM measurement
be Hall Effect type
supply
Page 47

MoTeC Appendices 47
Appendix L – Glossary
CAN – Controller Area Network. High speed serial data bus common in
automotive applications
Ip – Sensor pump cell current
Ipn – Normalised Ip
Vs – Sense voltage
Page 48

48 Appendices
Appendix M – CAN Messages Format
Messages 1 to 4 can be optionally transmitted from any PLM unit.
Messages 5 to 10 are only transmitted from a PLM unit configured as a CAN
Collect Master.
Message 1
Byte Name Scaling
0 Compound ID – user defined,
default 0
1:2 Calibrated Sensor Output Value –
user defined, default Lambda
3 Heater duty cycle Byte*1 = xxx%
4 Device Internal Temperature Byte*195/10-500 = xxx.xC
5 Zp (Pump cell impedance) Byte*1 = X ohm
6 Diagnostic Field 1 Sensor RUN
7 Sensor state RUN
N/A
Hi:lo*1 = x.xxxLa (Note 1)
Sensor COLD
Sensor FAULT
Sensor WARM UP
ADC Ref fault
CONTROL_WAIT
PUMP_WAIT
WARM_UP
NO_HEATER
STOP
PUMP_OFF
2
4
8
32
64
0
1
2
3
4
5
6
Page 49

MoTeC Appendices 49
Message 2
Byte Name Scaling
0 Compound ID – user defined,
default 1
1:2 Ipn (Normalised pump cell
current)
3 Vs (Sense voltage) Byte*5 = X mV
4 Vp (Pump cell voltage) Byte * 10000 / 255 – 5000 = X
5 Reserved N/A
6:7 Ip (Raw pump cell current) Hi:Lo * 1 = X µA
N/A
Hi:Lo * 1 = X µA
mV
Message 3
Byte Name Scaling
0 Compound ID – user defined,
default 2
1 Bosch calibration resistor Byte*1 = X ohm
3 NTK calibration resistor Byte*1 = x.x kohm
4 Reserved N/A
5 Reserved N/A
6 Battery Voltage Byte*1 = x.xV
7 Sensor in control
N/A
Sensor voltage within
limits
1
Sensor voltage outside
limits
0
Page 50

50 Appendices
Message 4
Byte Name Scaling
0 Compound ID – user defined,
default 3
1 Positive Analog output pin
voltage
2 Negative Analog output pin
voltage
3 Sensor type NONE
4 Reset source (Note 2) Low Voltage reset
5 Firmware Version x.xx
6:7 RPM HI:LO xxxxx RPM
N/A
Byte*1000/255–500 = x.xx V
Byte*1000/255–500 = x.xx V
NTK
BOSCH LSU4
BOSHC LSU4.2
Illegal Address reset
Illegal operation reset
Watchdog timer reset
External reset
Message 5
Byte Name Scaling
0 Compound ID = 4 N/A
1 Reserved N/A
2:3 PLM 1 (Master PLM) Calibrated Sensor Output
Value
4:5 PLM 2 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
6:7 PLM 3 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
Hi:Lo*1 = x.xxxLa
(Note 1)
(Note 1)
(Note 1)
0
1
2
3
2
8
16
32
64
Message 6
Byte Name Scaling
0 Compound ID = 5 N/A
1 Reserved N/A
2:3 PLM 4 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
4:5 PLM 5 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
6:7 PLM 6 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
Page 51

MoTeC Appendices 51
Message 7
Byte Name Scaling
0 Compound ID = 6 N/A
1 Reserved N/A
2:3 PLM 7 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
4:5 PLM 8 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
6:7 PLM 9 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
Message 8
Byte Name Scaling
0 Compound ID = 7 N/A
1 Reserved N/A
2:3 PLM 10 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
4:5 PLM 11 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
6:7 PLM 12 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
Message 9
Byte Name Scaling
0 Compound ID = 8 N/A
1 Reserved N/A
2:3 PLM 13 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
4:5 PLM 14 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
6:7 PLM 15 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
Message 10
Byte Name Scaling
0 Compound ID = 9 N/A
1 Reserved N/A
2:3 PLM 16 Calibrated Sensor Output Value Hi:Lo*1 = x.xxxLa
(Note 1)
4:7 Reserved N/A
Page 52

52 Appendices
Note 1
Calibrated Sensor Output Value is x.xxxLa when the PLM is setup to transmit
Lambda with 3 decimal places as recommended for connection to MoTeC
equipment.
Note 2
Low Voltage reset: this is the only reset code that should be seen in normal
operation
External reset: this reset code may be seen after upgrading firmware
Page 53

MoTeC Appendices 53
Appendix N – RS232 Message Format
Master PLM Message
Byte Description Value
0 Header 0 = 0x80 0x80
1 Header 1 = 0x81 0x81
2 Header 2 = 0x82 0x82
3 Data Length 32
4:5 PLM 1 (Master) Calibrated sensor reading Hi:Lo = x.xxxLa
6:7 PLM 2 Calibrated sensor reading Hi:Lo = x.xxxLa
8:9 PLM 3 Calibrated sensor reading Hi:Lo = x.xxxLa
. .
. .
32:33 PLM 15 Calibrated sensor reading Hi:Lo = x.xxxLa
34:35 PLM 16 Calibrated sensor reading Hi:Lo = x.xxxLa
36:37 Checksum Hi:Lo = 16 bit sum
of unsigned bytes 0
to 35
Non-Master PLM Message
Byte Description Value
0 Header 0 = 0x80 0x80
1 Header 1 = 0x81 0x81
2 Header 2 = 0x82 0x82
3 Data Length 8
4:5 Calibrated sensor reading Hi:Lo = x.xxxLa
6 Sensor cold status
7 Sensor faulty status
8 Sensor control state
9 Sensor in control status
10:11 RPM Hi:Lo = RPM
12:13 Checksum 16 bit sum of
unsigned bytes 0 to
11
Page 54

54 Appendices
Appendix O – Recommended CAN Collect
Configuration
The following configuration is recommended for connecting multiple PLM units
to an ADL.
Master Unit (PLM 1)
CAN Message 1 Message Rate OFF
CAN Message 2 Message Rate OFF
CAN Message 3 Message Rate OFF
CAN Message 4 Message Rate OFF
Base Address Hex 460 Collect Master
Message Rate At least 1 per second
Slave Units (PLM 2 to PLM 16)
CAN Message 1
Address Format Standard
Compound ID 00
Message Rate Same as PLM 1 Collect
Address PLM 2 = Hex 461
Master Message Rate
PLM 3 = Hex 462
PLM 4 = Hex 463
PLM 5 = Hex 464
PLM 6 = Hex 465
PLM 7 = Hex 466
PLM 8 = Hex 467
PLM 9 = Hex 468
PLM 10 = Hex 469
Page 55

MoTeC Appendices 55
PLM 11 = Hex 46A
PLM 12 = Hex 46B
PLM 13 = Hex 46C
PLM 14 = Hex 46D
PLM 15 = Hex 46E
PLM 16 = Hex 46F
CAN Message 2 Message Rate OFF
CAN Message 3 Message Rate OFF
CAN Message 4 Message Rate OFF
CAN Collect
Message Rate OFF
ADL
Use the CA N template “PLM Collect 16 Channel”, and enable (ie. tick) the
channels required. By default the template has the first 8 channels enabled.
This template places PLM values in the following channels:
ADL Channel Channel Value
Lambda – Cyl 1 PLM 1 (Master PLM) Reading
Lambda – Cyl 2 PLM 2 Reading
Lambda – Cyl 3 PLM 3 Reading
Lambda – Cyl 4 PLM 4 Reading
Lambda – Cyl 5 PLM 5 Reading
Lambda – Cyl 6 PLM 6 Reading
Lambda – Cyl 7 PLM 7 Reading
Lambda – Cyl 8 PLM 8 Reading
Lambda – Cyl 9 PLM 9 Reading
Page 56

56 Appendices
Lambda – Cyl 10 PLM 10 Reading
Lambda – Cyl 11 PLM 11 Reading
Lambda – Cyl 12 PLM 12 Reading
Lambda 1 PLM 13 Reading
Lambda 2 PLM 14 Reading
Lambda – Left Bank PLM 15 Reading
Lambda – Right Bank PLM 16 Reading
Page 57

MoTeC Appendices 57
Appendix P – Dimensions
Page 58

58 Notes
Page 59

MoTeC Notes 59
 Loading...
Loading...