

Page 1

PDM
Power Distribution Modules
USER MANUAL
Page 2
MoTeC PDM User Manual
Contents
Introduction ........................................................................ 1
Features ................................................................................................... 1
System Overview ..................................................................................... 2
Installation .......................................................................... 3
Mounting .................................................................................................. 3
Wiring ....................................................................................................... 4
Battery Positive ............................................................................. 4
Battery Negative ............................................................................ 5
CAN Wiring .................................................................................... 5
Input Wiring .............................................................................................. 5
Output Wiring ........................................................................................... 6
Output Devices ........................................................................................ 6
Windscreen Wipers ....................................................................... 6
Solenoids ..................................................................................... 10
Electronic Devices ....................................................................... 11
PDM Manager Software Installation ...................................................... 12
Configuration .................................................................... 14
Configuration File .................................................................................. 14
Channels ................................................................................................ 15
Configuration Tree ................................................................................. 16
Global Setup ................................................................................ 16
Input Pins..................................................................................... 17
CAN Inputs .................................................................................. 18
CAN Output ................................................................................. 19
Functions ..................................................................................... 20
Output Pins .................................................................................. 21
CAN Keypads .............................................................................. 26
Operation .......................................................................... 27
CAN Bus Bitrate .......................................................................... 27
Sending and Retrieving Configuration Files ................................ 27
Checking Operation ..................................................................... 27
Serial Number ............................................................................. 28
Firmware Versions and Updating ................................................ 28
Password Protection ................................................................... 29
Page 3

PDM User Manual
Standby Mode........................................................................................ 29
Appendices ....................................................................... 30
Specifications ......................................................................................... 30
CAN Input Channel Examples ............................................................... 32
Fuse Characteristics .............................................................................. 34
Connectors and Pinout .......................................................................... 35
PDM16 ......................................................................................... 35
PDM32 ......................................................................................... 36
PDM15 ......................................................................................... 38
PDM30 ......................................................................................... 39
Mounting Dimensions ............................................................................ 40
PDM16 ......................................................................................... 40
PDM32 ......................................................................................... 41
PDM15 and PDM30 .................................................................... 42
Wiring ..................................................................................................... 43
Wire Specification ........................................................................ 43
UTC Wiring for PC Connection ................................................... 44
CAN Bus Wiring Requirements ................................................... 44
CAN Output Messages .......................................................................... 46
Windows Keyboard Shortcuts ............................................................... 52
Glossary ................................................................................................. 56
Copyright 2014 – MoTeC Pty Ltd
The information in this document is subject to change without notice.
While every effort is taken to ensure correctness, no responsibility will be taken for the
consequences of any inaccuracies or omissions in this manual.
PN 63029 V3.3, February 2014
Page 4
MoTeC Introduction 1
PDM16
PDM32
PDM15
PDM30
Inputs
12
23
16
16
8 Amp Outputs
8
24 7 22
20 Amp Outputs
8 8 8
8
Connectors
Autosport
Waterproof connectors
M6 stud
Case size
Length
Width
Height
130 mm
60 mm
28 mm
180 mm
60 mm
28 mm
107 mm
133 mm
39 mm
107 mm
133 mm
39 mm
Introduction
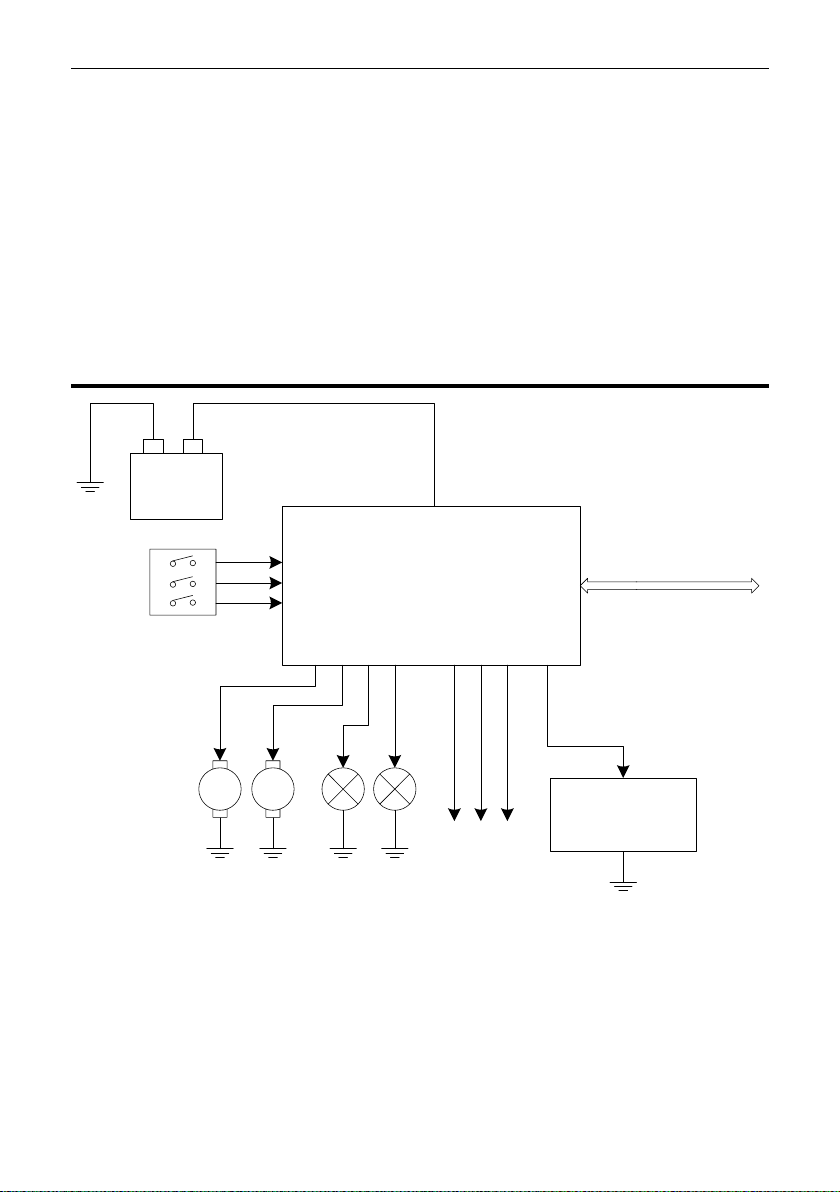
The PDMs replace conventional relays, fuses and circuit breakers by
providing electronically switched power to the various electrical systems in the
vehicle, including motors, lamps, ECUs and data systems. This simplifies
wiring and switch requirements, while increasing reliability.
There are four PDM versions: PDM16, PDM32, PDM15 and PDM30.
Throughout this manual all versions will be referred to as the PDM except
where details specific to a particular version are discussed.
Features
Each output is over-current, short circuit and thermal overload protected
Outputs are programmable in 1 A steps
Outputs are controllable via a combination of switch inputs, CAN
messages and logic functions
Switch inputs are ranging from 0 to 51 V, resolution 0.2 V
Performing up to 200 logic operations using operators like Flash, Pulse,
Set/Reset, Hysteresis, Toggle, And, Or, Less than, Greater than, Not equal
to, Equal to, True, False etc.
Performing functions such as flashing indicator lights and controlling
thermo fans and fuel pumps
Using logic functions to selectively turn off systems during low battery
voltage or engine starting, reducing drain on the battery
Page 5
2 Introduction
PDM
MM
Switches
Motors
CAN bus
Other
Devices
Lights
Outputs
Battery Input
CAN
Inputs
ECU
Battery
–
+
Providing full diagnostic information, including output currents and
voltages, input voltages, and error status
Transmitting diagnostic information via CAN to a display or data logging
device or monitoring directly on a PC
Protected against unauthorised access by a password feature.
Accessories
MoTeC UTC (USB to CAN adaptor) #61059
(Note: PDMs are not compatible with MoTeC CAN cable)
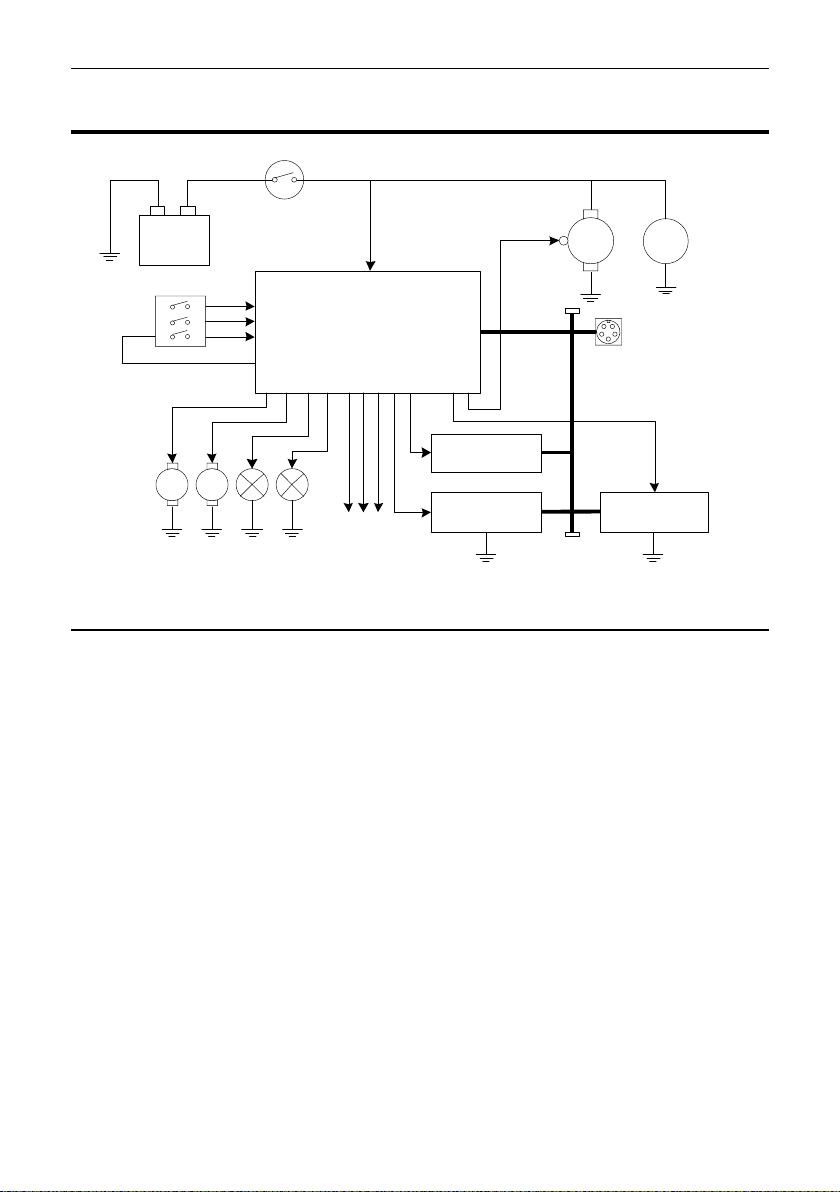
System Overview
Page 6
MoTeC Installation 3
Installation
Mounting
When mounting the PDM take into account that the PDM may get very hot
during operation.
Ensure the PDM is mounted in a well ventilated area and not against a hot
surface. For case dimensions see Mounting Dimensions.
The internal temperature is highly dependent on ambient temperature and
also on the total load current—a higher current will cause a higher
temperature.
Tip: The internal temperature can be checked in PDM Manager (see
Operation) or transmitted via CAN to be logged. Allow for sufficient time
for the temperature to stabilise. This may take 30 minutes or more.
If the internal temperature of the PDM exceeds the specified maximum values
(see Specifications), cooling may be achieved by one or more of the following:
relocating the PDM to a cooler mounting position
increasing air circulation around the PDM case
ducting cool air over the PDM case
fitting a heatsink to the back surface of the PDM case
Page 7
4 Installation
Other
Devices
PDM
A
MM
Switches
M
Motors
CAN Bus
Alternator
Lights
Starter
Motor
Outputs
Battery Input
Battery
CAN
Inputs
Isolator
Data LoggerECU
CAN Connector
for UTC
0 V
–
+
Keypad
Wiring
Battery Positive
Battery positive is supplied to the PDM via the single pin connector to suit wire
sizes 16 mm2 (6#) or 25 mm2 (4#).
The PDM16 and PDM32 use an Autosport connector, PDM15 and PDM30
use a 6 mm eyelet to suit the wire size.
The wire gauge should be chosen according to the wire temperature limit and
acceptable voltage drop. Tefzel wire must not exceed 150 °C.
The temperature of the wire is affected by the ambient temperature, air
circulation, current, wire gauge, the temperature of any surrounding wires and
the covering sheath.
See Wire Specification and Connectors and Pinout for details.
Battery Isolator Switch
Battery positive must generally be connected via an isolator switch or relay.
The isolator must isolate the battery from all devices in the vehicle including
the PDM, starter motor and alternator. The isolator must be rated to handle
the starter motor current.
When the battery is isolated, the engine may continue to run due to power
supplied by the alternator. To avoid this, the isolator switch should have a
secondary switch that is connected to a shutdown input on the ECU.
Page 8
MoTeC Installation 5
If the ECU does not have a shutdown input, the switch can be connected to a
PDM input. The PDM can then turn off power to the ignition system or the
ECU, which will cause the engine to stop.
Battery Negative
Both of the Batt– pins should be wired to battery negative via 20# wire.
These pins normally only carry the very low operating current, however during
a load dump they carry the load dump current which may be 50 ampere or
higher.
CAN Wiring
The PDM communicates over CAN with other devices connected to the same
CAN bus. The CAN bus must be wired according to CAN Bus Wiring
Requirements.
The PC also communicates to the PDM via the CAN bus. See Connecting the
PDM to a PC.
Input Wiring
The PDM Switch Inputs are intended for use with a switch that is directly
wired between a PDM input pin and a PDM 0 V pin. Each input has an
internal 10 kilo-ohm pull-up resistor to Batt+.
If it is required to connect a switch that is wired to another system in the
vehicle, ensure that the voltage levels are set appropriately as there may be
ground voltage variations between devices.
Tip: If standby current is important, wire the switches so that they are
normally open during standby. This will reduce the standby current.
Input Switch Connected to Battery
When an input is driven from a device that switches to battery, the switch
should if possible, be rearranged so that it switches to 0 V.
If the signal comes from an electronic device such as an ECU that has an
output that can only switch to battery (e.g. a signal that indicates when to turn
the fuel pump on), this might not be possible. In this case an external pulldown resistor is required. The resistor should be 1500 ohm 0.25 watt and
should be connected between the input pin and the 0 V pin.
The input trigger levels should be set to 4 V and 5 V to guarantee correct
triggering for all possible battery voltages.
Page 9
6 Installation
PDM
Park
Switch
Home
M
S
F
OEM
controller
Control
Switches
Output
Output Wiring
All outputs are high side type outputs; they switch Batt+ to the output pin.
They all have hardware thermal overload protection, fault logic and overcurrent logic.
Paralleled Outputs
Two or more output pins can be connected in parallel to increase current
capacity. Outputs that are connected in parallel must all be of the same type;
either all 8 Amp or all 20 Amp outputs.
Wire Gauges
The wire gauge must be chosen to suit the current consumed by the
connected device and to ensure that the voltage drop is acceptable. On long
runs it may be necessary to use a heavier gauge wire to minimise voltage
drop.
The wire gauge must also be compatible with the connector pin; using a
smaller than recommended wire gauge may result in a poor crimp.
Suitable wire gauges are 24# to 20# for the 8 Amp outputs and 20# to 16# for
the 20 Amp outputs. See Wiring for details.
Output Devices
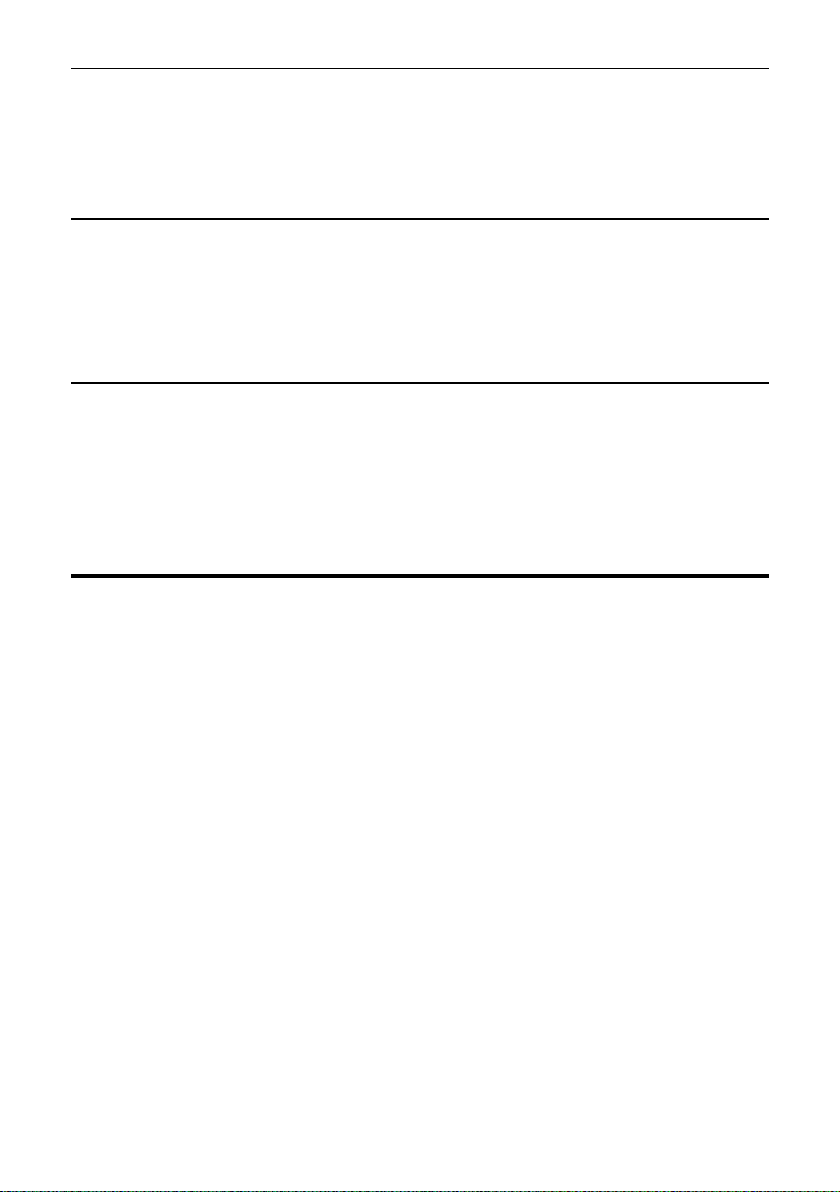
Windscreen Wipers
The PDM can drive windscreen wiper motors; however the PDM cannot be
connected to both the fast and slow motor windings at the same time. The
voltage generated by the slow winding during fast operation will cause braking
of the motor and possible damage to the PDM.
A wiper unit can be wired in a number of ways. The following schematics are
shown for 'common-ground' wiper units. For 'common-positive' wiper units the
schematics must be adjusted accordingly.
1. OEM Controller Method
Page 10
MoTeC Installation 7
PDM
c
Off
On
Fast
Slow
Park
Switch
Home
M
S
F
Output
PDM
Off
On
Fast
Slow
Relay
Park
Switch
Home
M
S
F
Control
Switches
Output
Output
The wiper unit can be wired using an OEM wiper controller with the PDM
supplying the power only.
The OEM controller performs the intermittent and motor braking functions.
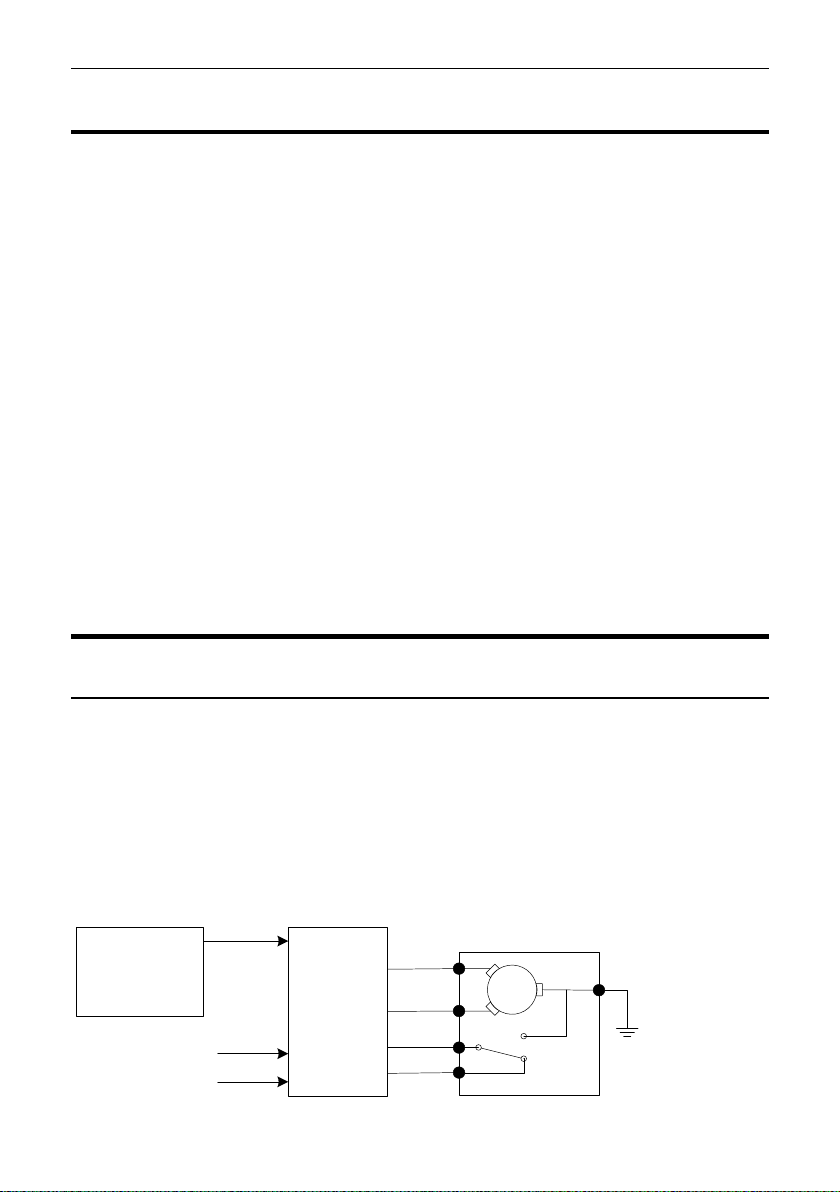
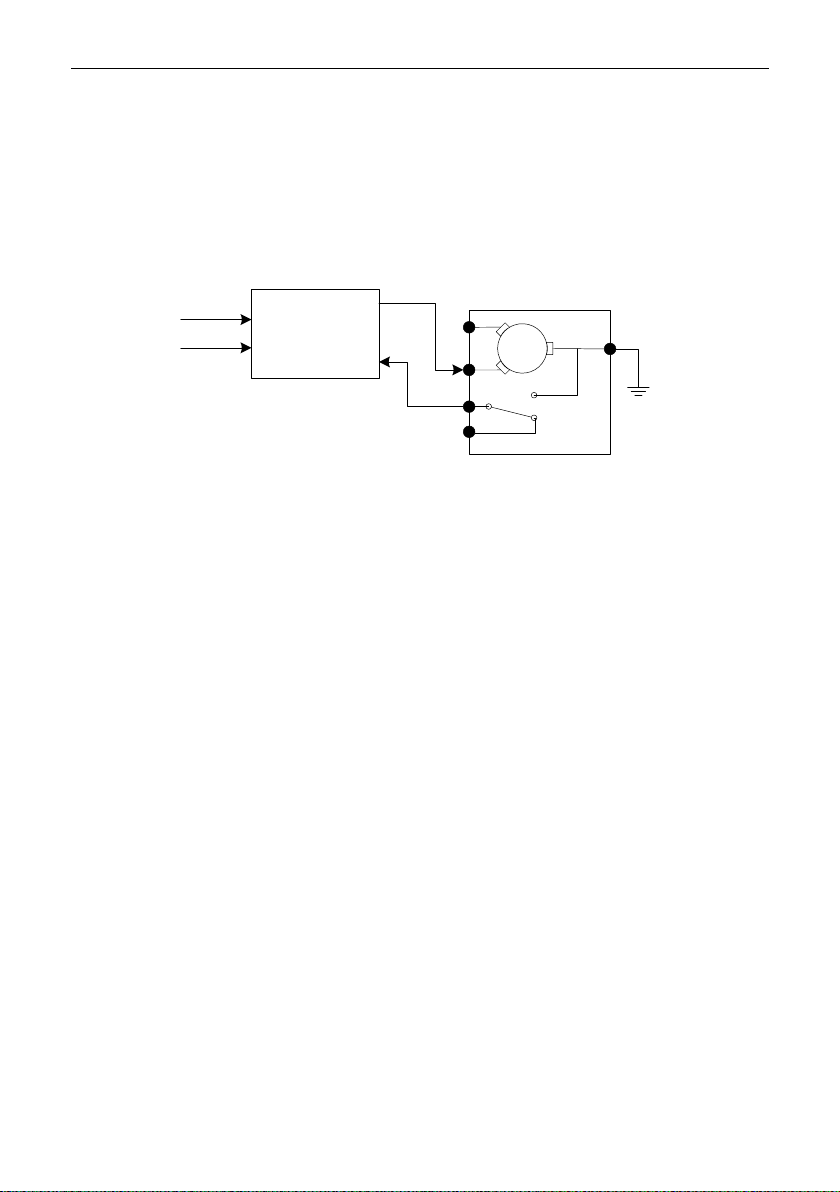
2. Two Switch Method
The wiper unit can be wired in a simple two switch arrangement; one switch
for power and the other to select fast or slow. The PDM supplies power only.
Wiper motor braking is performed by the combination of the park switch and
the on/off switch.
This arrangement cannot perform intermittent operation since the wiper will
not park if the PDM simply removes power.
The switches must be able to handle the wiper motor current (typically
4 ampere).
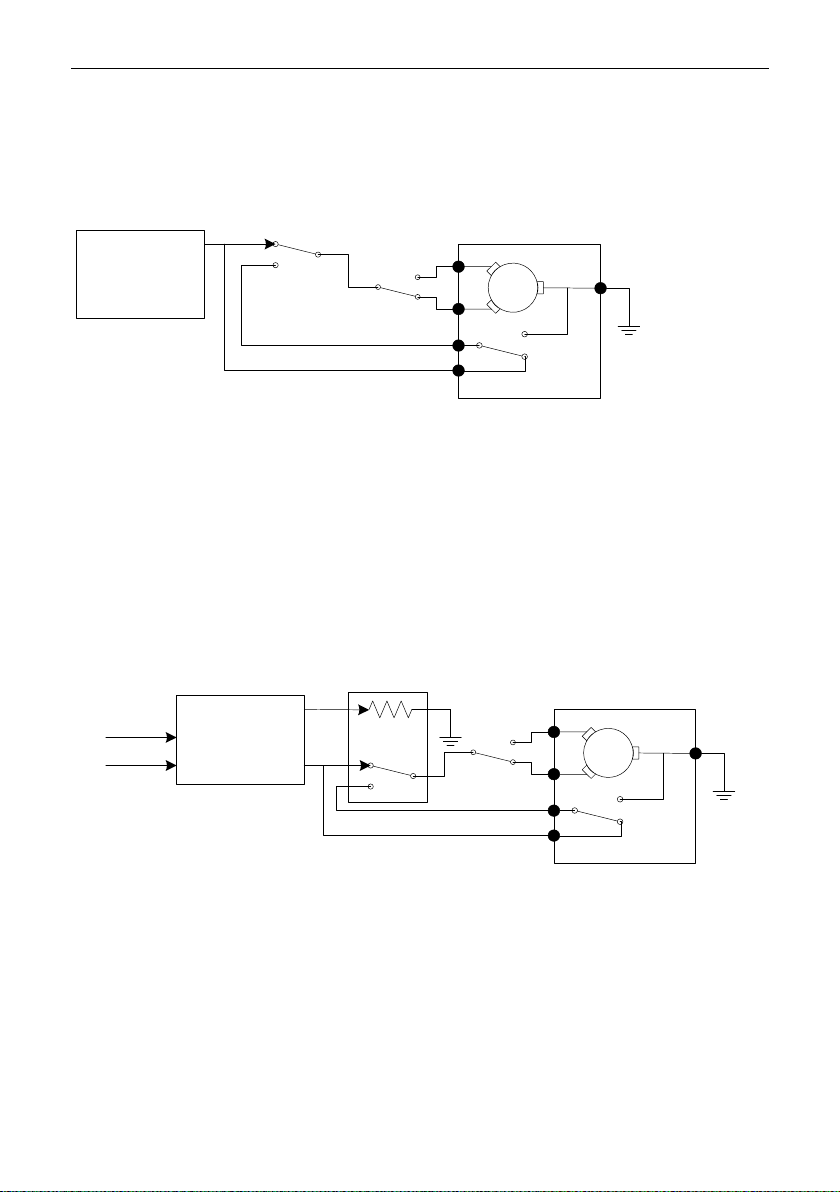
3. Relay Method
The two switch method can be modified for intermittent operation by replacing
the on/off switch with a relay. The PDM controls the relay to perform the
intermittent function. This requires two PDM outputs; one to supply power and
the other to control the relay.
Motor braking is performed by the combination of the park switch and the
relay switch.
The PDM must be configured with the appropriate logic to perform on/off and
intermittent operation based on the state of the control switches.
Page 11
8 Installation
PDM
Park
Switch
Home
M
S
F
Input
Output 9
Control
Switches
Slow operation can be achieved using the switch or using intermittent
operation to give a similar effect which avoids the need for a high current
switch.
The fast/slow switch and on/off relay must handle the wiper motor current
(typically 4 ampere). The control switches can be low current types since they
only connect to PDM inputs.
4. Direct Method
The wiper unit can be wired directly to the PDM as long as it is only connected
to one output.
In this method the park switch is wired directly to a PDM input so the park
logic must be configured in the PDM.
This method requires the use of Output 9 which performs motor braking. The
PDM performs motor braking by momentarily shorting the output to ground
when the output turns off.
The PDM must be configured with the appropriate logic to perform on/off and
intermittent operation based on the state of the control switches.
Slow operation can be achieved using a switch between the fast and slow
windings as used in the other methods or intermittent operation can be used
to wipe less frequently.
The control switches can be low current types since they only connect to PDM
inputs.
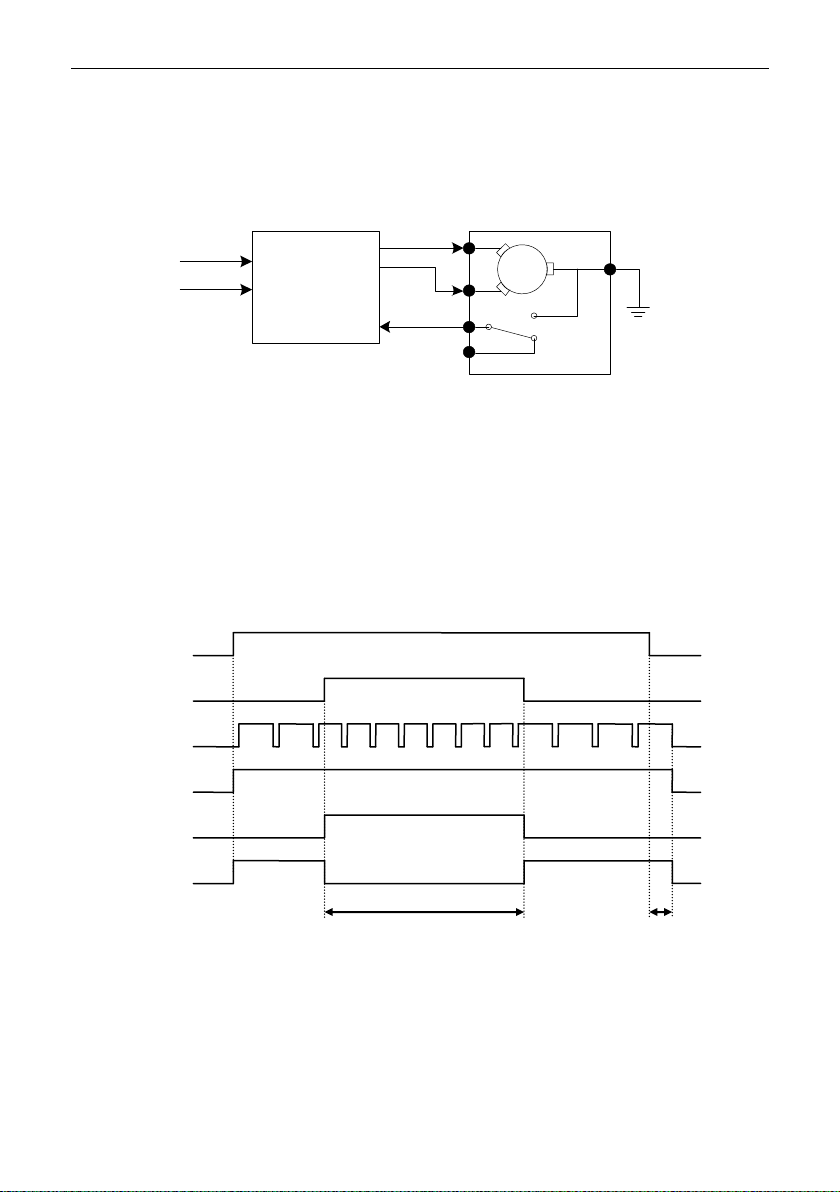
5. Direct Method with Linked Channels – PDM Version 2
Hardware
The PDM Version 2 hardware has additional functionality to simplify
windscreen wiper motor control.
This method requires the use of Output 9 which provides special wiper
functionality:
- Output 9 is isolated whenever the user nominated linked high speed
wiper output is turned on. This protects Output 9 from the high voltage
generated by the slow winding, and also prevents Output 9 from
Page 12
MoTeC Installation 9
PDM
Park
Switch
Home
M
S
F
Output 9
Output x
Control
Switches
Input
Wiper slow
input
Wiper fast
input
Wiper park
switch input
Wiper slow
condition
Out 9 (slow
winding)
Out x (High
Winding)
Out 9 held off while
linked output is on
Parking
braking the motor when the high speed winding is turned on. The
linked high speed wiper output can be configured in the Output 9
settings.
- Output 9 performs motor braking by momentarily shorting the output
to ground when the output turns off.
The PDM must be configured with the appropriate logic to perform on/off,
speed selection, intermittent operation and wiper parking based on the state
of the control switches and park switch input.
The diagram below shows an example sequence of wiper operations. The
wiper slow condition is setup to operate the slow winding when the wiper
switch is on, or when the wiper is not parked. When the linked fast winding
output is on, Output 9 is held off even though the condition driving output 9 is
still true.
Consider when implementing wiper control logic:
- The condition for the slow winding output (Output 9) can remain true
- The wiper should always be parked from the slow winding output
even when the fast winding output is on.
(Output 9) so that motor braking can be used.
Page 13
10 Installation
- Set the High Time and Low Time to 0.00s in the park switch input pin
configuration so that the wiper is parked as soon as possible after
reaching the park position.
An sample configuration for this method is included with PDM Manager.
Note: Version 2 hardware is indicated by the symbol 2 next to the engraved
serial number on the PDM case.
Solenoids
The current drawn by a normal single coil solenoid ramps up from zero to its
steady state value over a period of time. The time taken to do this depends on
the inductance and resistance of the solenoid but is normally very short (less
than 0.1 second). This has no effect on the PDM.
A solenoid will generate a voltage spike when turned off; this is clamped and
absorbed by the PDM. The amount of energy absorbed by the PDM depends
on the inductance and current in the solenoid. The PDM is capable of
absorbing the energy of most normal solenoids in a vehicle.
Two Stage Solenoids
Some solenoids have two windings; one is used to turn the solenoid on, the
other is used to hold it on once it has switched. This ensures optimum turn on
characteristics with minimum holding current.
The current drawn by the turn on winding may be higher than the current
drawn by the holding winding. Ensure the Output Load is well clear of 100%
during turn on and during holding.
Starter Solenoids
In many cases it is possible to run starter solenoids from a single 20 Amp
output even though they typically draw more than 20 ampere (possibly as
much as 40 ampere).
The Over-Current Shutdown feature allows excess current for a period of
time. This feature will shut down the output after about 10 to 20 seconds of
cranking. See the Over-Current Shutdown section for details.
The wire can be rated for 20 ampere, also ensuring that the starter motor
does not overheat during excess cranking. A larger wire gauge might be
required if the voltage drop is not acceptable.
Alternatively two 20 Amp outputs may be paralleled allowing cranking for any
period of time (subject to overheating of the starter motor).
Page 14

MoTeC Installation 11
Electronic Devices
The PDM can supply power to electronic devices such as engine
management systems, data acquisition systems, radios etc.
Many electronic devices will have a short inrush current. The PDM will largely
ignore this due to the Output Load filtering. See the Over-Current Shutdown
section for details.
The PDM provides reverse battery protection and load dump clamping to
protect itself and the connected devices.
Ignition Systems
Inductive Ignition Systems
Most inductive ignition systems draw a peak current of about 8 ampere,
some draw as much as 20 ampere; however the average current is much
lower.
In most cases inductive ignition systems can be connected to an 8 Amp
output however the Output Load current must be checked to ensure it
stays well clear of 100%.
The average current will increase with increasing RPM so the Output Load
should be checked at maximum RPM.
CDI Ignition Systems
CDI ignition systems can draw peak currents of as much as 50 ampere. It
is recommended that all CDI ignition systems are connected to a 20 Amp
output.
The average current will increase with increasing RPM so the Output Load
should be checked at maximum RPM.
Engine Management Systems
The current drawn by an engine management system will depend on the type
of loads it is connected to and the operating conditions.
Fuel injectors draw current in pulses. The maximum average current drawn by
the fuel injectors is when they are at maximum duty cycle.
For servo devices such as Drive by Wire motors maximum current is drawn
when making large transitions.
Check that the Output Load is clear of 100% under worst case operating
conditions, i.e. when the injectors are operating at maximum duty cycle, servo
devices are making large transitions and any auxiliary loads are drawing
maximum current.
Page 15
12 Installation
CAN Keypads
The CAN Keypads continuously communicate with the PDM which will
prevent the PDM from entering its low power standby mode.
Options for powering the keypads include:
- Configuring the PDM to always power the keypads.
This allows buttons on the keypads to be used for master startup
functions, but the PDM would never enter standby mode.
To minimize battery drain, the isolator would need to be turned off (eg.
during vehicle transport or storage)
- Wiring a master switch or ignition key input to the PDM.
All outputs (including the keypad power) would be configured to turn
off when the master switch or key is turned off.
This allows the PDM to enter standby mode, minimizing battery drain.
PDM Manager Software Installation
The PDM Manager software is used to:
Change the PDM configuration
Monitor the PDM operation including the output currents and
diagnostics
Test the outputs by manually turning them off and on
Set and unlock security password
Update the firmware
PC Requirements
PDM Manager runs under Windows XP or Vista operating systems. The
minimum recommended PC specification is a Pentium 90 with 16 MB RAM
and a USB port.
Installing PDM Manager Software
Go to the MoTeC website at www.motec.com and navigate to
downloads/software/latestreleases/PDM Manager software
OR Locate PDM Manager software on the MoTeC Resource Disc
Save the selected file in your preferred location (for example desktop)
When downloading is finished, double click on the file and select run
Follow the instructions on the InstallShield Wizard
Page 16

MoTeC Installation 13
To start the program after installation, click
Start > All Programs > MoTeC > PDM Manager
Updating PDM Manager Software
Software updates are available to give access to the latest features.
Download the latest software version from the website and follow the software
installation instructions to update to the new version.
To update the associated firmware in the device select Update Firmware from
the Online menu. For more information refer to Operation.
Connecting the PDM to a PC
The PC communicates with the PDM via the CAN bus.
The connection to the CAN bus is via USB through a MoTeC UTC.
To connect through a UTC, a mating connector for the UTC must be wired to
the PDM's CAN bus.
Refer to UTC Wiring for PC Connection and CAN Bus Wiring Requirements
for more information.
The PC must connect to the PDM at the configured PDM CAN bitrate. Refer
to the Operation section for details about CAN bitrate configuration.
Note: The MoTeC CAN cable (#61021) cannot be used with the PDM.
Page 17
14 Configuration
Configuration
The PDM requires various settings to be configured such as the maximum
current settings for the outputs and the circumstances in which to turn the
outputs on.
The configuration settings are stored in a configuration file on the PC.
Changes to the PDM configuration are performed ‘Offline’, i.e. without the PC
communicating with the PDM. The changes are saved in the configuration file
on the PC. The file must be sent to the PDM before the changes take effect.
See Operation.
Configuration File
From the File menu the following options are available:
New: creates a new configuration file
Open: selects an existing configuration file
Right-click the configuration file to Rename, Delete, Send to a disk etc.
Close: closes the current configuration file
Save: after a new configuration has been defined, it should be saved with
a meaningful name
Save as: can be used to create a copy of an existing configuration file by
giving it a new name
Check Channels: verifies that all channels are correctly generated
Exit: exits the program
To create a new configuration file
On the File menu, click New.
Select the PDM type and enter the Serial Number
The serial number can be found on the PDM label
This will open the Configuration Tree panel and the Channels panel.
Tips:
The most recently used files appear at the bottom of the File menu.
This is often the easiest way to open an existing file.
When changing the PDM type all configured inputs and outputs settings
will be transferred to the relevant pin number in the new PDM type.
Configuration files can be password protected, preventing unauthorised
retrieving and sending of configuration files.
Page 18
MoTeC Configuration 15
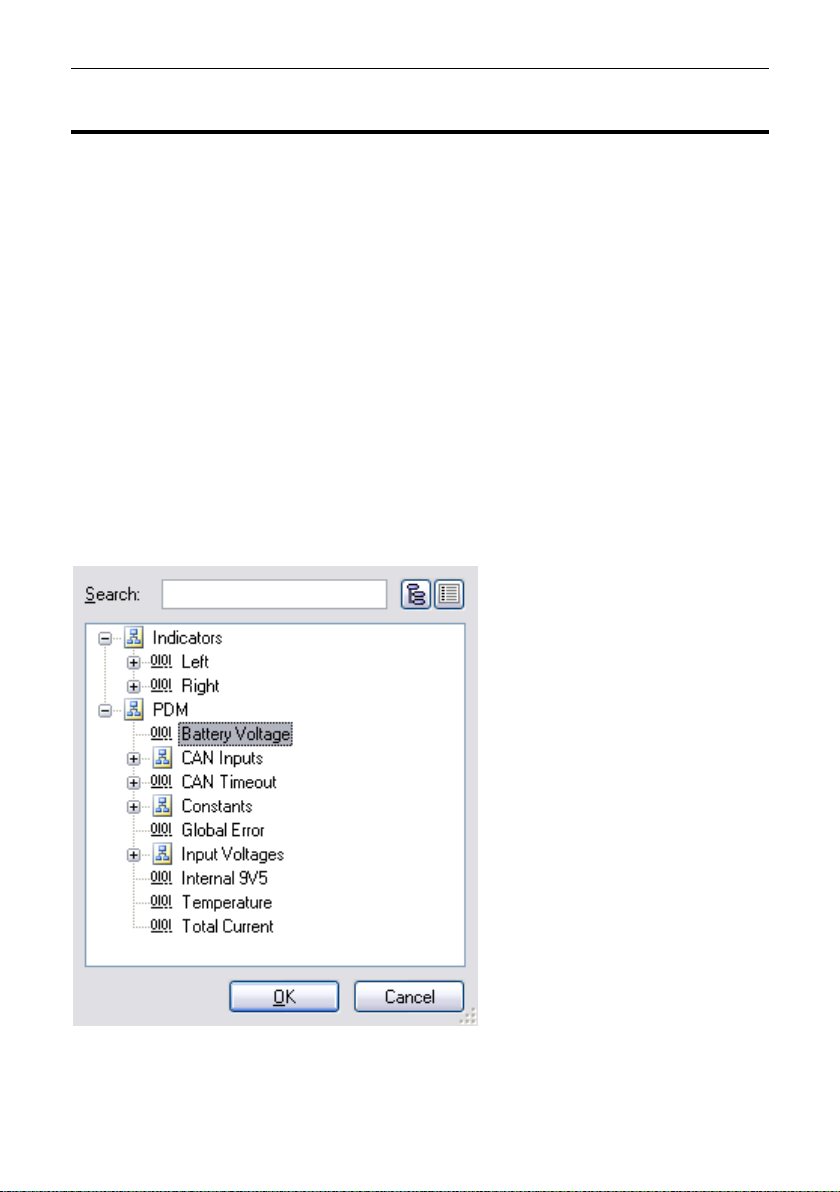
Channels
Channels are used to link the various systems within the PDM configuration.
For example: The input pin system generates two channels for each
configured input pin. Depending on the state of the input pin the input channel
value will be zero or one.
The channel can be selected to directly control a particular output. It can also
be used as an input to a Condition. This is a complex logic function that
combines a number of channels to create a new channel. This new channel
can then be used to control an output, or as an input to another condition.
Each channel can only be generated once, but may be used by multiple
outputs and conditions.
Channel Names
Each channel has a name to identify it. By including a dot between parts of
the channel name, channels are arranged in a tree structure.
For example: Indicators.Left and Indicators.Right would appear as Left and
Right under a node called Indicators.
The use of a dot between parts of the channel name is optional. The channel
list will be a simple flat list rather than a tree structure if it is not used.
Page 19
16 Configuration
To rename a channel globally
Right-click on the channel name in the Channels window and click
Rename.
This will rename the channel where it is generated as well as in all the
places where it is used.
Configuration Tree
The Configuration Tree is used to configure the Global Setup, Input Pins,
CAN Inputs, Conditions, CAN Outputs, Keypad buttons and Output Pins.
The input and output pins will be numbered according to the PDM type
selected.
Global Setup
The Global Setup in the configuration tree is used to
Enter the PDM type and serial number
Configure the CAN addresses and timeout periods for incoming CAN
messages
Configure Master Retry and Master Shutdown channels for output pins
Configure Keypad settings for CAN keypads
PDM Type and Serial Number
The PDM type (PDM32, PDM16 etc.) and serial number must be configured
correctly before a new configuration file can be sent to a PDM.
A configuration can only be sent to the matching PDM to ensure the correct
configuration of PDMs in applications with multiple PDMs.
Output Pins Master Retry
The Master Retry feature turns all outputs that are in error back on. If there is
still a fault on a particular output, this output will go into error again and will go
through the normal retry sequence.
To initiate a Master Retry by pressing a button
Wire a button to a switch input
Use the channel generated by this input as the trigger channel for the
Master Retry.
Page 20

MoTeC Configuration 17
Output Pins Master Shutdown
The Master Shutdown feature turns off all outputs that are configured for
Master Shutdown, while a user configured channel is true.
Any PDM channel can be used as the Master Shutdown channel.
Each output pin can be individually configured to support or ignore the Master
Shutdown channel.
Keypads
Up to four MoTeC CAN keypads can be configured to work with the PDM.
The global keypad setup configures the overall keypad settings. Individual
keypad buttons are configured under the Keypads in the Configuration Tree.
The Keypad Name is a description of the keypad (eg. “Main Keypad”).
The Keypad Type determines how many buttons will be shown in the keypad
button configuration.
The keypad Node ID and CAN Addresses must match the settings
programmed into the keypad. Keypads are supplied by MoTeC preprogrammed with default settings for Keypad 1. The Restore Defaults button
will select the default settings for the particular keypad.
The Brightness Control settings allow the keypad backlight and LED
brightness to be set to a specified level. An alternate brightness level and
condition can be specified to allow day/night operation.
Input Pins
Configuration of an input will create a Status and a Voltage channel. Both
channels can be used in a condition or to directly control an output. They are
transmitted via CAN.
To configure an Input Pin
In the Configuration Tree, select Input Pins
Double click the input to setup
Type a channel name and select settings as required
The trigger voltages are fully programmable. The recommended trigger
voltages are approximately 3.5 V for the low threshold and 4.2 V for the high
threshold. The high threshold should be set below 6 V to ensure detection of a
high level signal when the battery voltage is low.
To avoid switch bounce and/or to delay recognition when the switch changes
state, the inputs also have programmable trigger times. A trigger time of 0.1
second will normally reject switch bounce.
Page 21

18 Configuration
Channel Name
Description
CAN Output
InputName
Input Status
0 = Off
1 = On
Yes
InputName.Voltage
Voltage on the input
Resolution 0.2 V
Yes
CAN Inputs
The PDM can receive CAN messages allowing the outputs to be controlled by
other devices.
The PDM can be configured to receive CAN messages on up to seven
different CAN addresses in the standard or extended address ranges. The
CAN addresses and message timeout periods are configured in Global Setup
in the Configuration Tree.
To configure a CAN input
In the Configuration Tree, select CAN Inputs
On the Edit menu, click Add
Type a channel name and select settings as required
Channel extraction
Channels are extracted from the CAN messages by specifying the CAN
message and a byte offset within the message. Optional bit masking, byte
swapping and dividing operations can be performed on the received channel,
depending on the data size (8bit, 16bit signed or 16bit unsigned).
8 Bit Values
An 8bit value is specified with a byte offset and an 8bit mask. To use the
entire 8bit value, set the mask to FF (hex).
16 Bit Signed Values
A 16bit signed value is specified with a byte offset (the first byte of the
value within the CAN message), an optional byte swap, and a divisor (1 to
255). The resulting channel will be an 8 bit value with a range of 0 to 255.
The PDM treats the received value as a signed 16 bit value (i.e. -32768 to
32767). Negative values are clamped to 0. If the value after division is
greater than 255 then the result value will be clamped to 255.
Page 22

MoTeC Configuration 19
16 Bit Unsigned Values
A 16bit unsigned value is specified with a byte offset (the first byte of the
value within the CAN message), an optional byte swap, a 16bit mask, and
a divisor (1 to 255). The resulting channel will be an 8 bit value with a
range of 0 to 255.
The PDM treats the received value as an unsigned 16 bit value (i.e. 0 to
65535). If the value after division is greater than 255 then the result value
will be clamped to 255.
Examples of the different types of CAN channel extraction are included in the
Appendices.
Timeout values
If the CAN message is not received for a period exceeding its timeout period,
the corresponding timeout channel will be set to TRUE. Each CAN input
channel can be configured to hold its previous value or go to a specific value
while the corresponding CAN message is timed out.
Tip: The timeout channel can be used in a condition.
Initial values
If the channel is configured to hold the previous value when the CAN
message times out then the channel will be set to zero on start-up. The
channel stay zero until a matching CAN message is received.
If the channel is configured to use a specific value when the CAN message
times out then the channel will be set to this value on start-up. The channel
stay at the timeout value until a matching CAN message is received.
The PDM CAN bitrate is user configurable. All devices on the CAN bus must
be set to the same speed. Refer to the Operation section for details about
CAN bitrate configuration.
CAN Output
The PDM can transmit a set of fixed standard messages, and up to four user
defined messages on the CAN bus. CAN messages are configured in Can
Outputs in the Configuration Tree.
The receiving device can use the messages for diagnostic purposes
(particularly useful if the values are logged in a logging device), to show an
alarm on a display, or to activate a feature in another device depending on the
value of a PDM input switch.
Page 23

20 Configuration
The PDM CAN bitrate is user configurable. All devices on the CAN bus must
be set to the same speed. Refer to the Operation section for details about
CAN bitrate configuration.
Standard Messages
The sets of fixed messages to be sent from the PDM are configured in
Standard Messages. Messages sets can be individually enabled and a base
CAN address is configurable.
Most MoTeC logging devices have CAN communications templates available
to receive these messages.
The transmitted CAN messages include Output Voltage, Output Current,
Output Load, Output Status, Input State, Internal Temperature, Battery
Voltage, Global Error, and Total Current. See CAN Output Messages in the
Appendices for details on the CAN messages.
Standard messages are transmitted at 20Hz.
User Defined Messages
Up to four user defined CAN messages to be sent from the PDM can be
configured in Message 0 to Message 3.
Up to 8 channels can be included in each CAN message, with one channel
per message byte.
The CAN address is user configurable in the standard or extended address
ranges.
User defined messages are transmitted at 50Hz.
Functions
Conditions
A condition is a complex logic function that combines a number of channels to
create a new channel. The logic operations include AND, OR, flash and many
more.
The new channel, with a value of either TRUE (1) or FALSE (0), can be used
to directly control an output or it can be used in another condition.
Counters
A counter generates an integer channel value that can be incremented or
decremented on transitions of other logic channels.
Number of Operations
There are a total of 200 logic operations available in the PDM. The number of
operations used is shown in the status line.
Page 24

MoTeC Configuration 21
Tip: A condition can also be configured in the output pin setup. In this case
the outcome of the logic function will not create a new channel but will be
directly connected to the output channel.
To configure a Condition or Counter
In the Configuration Tree, select Functions
On the Edit menu, click Add
Select the function type (Counter or Condition)
Type a channel name and select settings as required
Output Pins
All outputs are high side type outputs; they switch Batt+ to the output pin. All
outputs have hardware thermal overload protection, fault logic and overcurrent logic.
Paralleled Outputs
When two or more output pins are connected in parallel, they must be
configured to use a common channel or an identical condition to activate
them.
Note: outputs that are connected in parallel must all be of the same type;
either all 8 Amp or all 20 Amp outputs.
Output Protection
Over-Current Shutdown
An Over-Current Shutdown occurs when the Output Load exceeds 100%,
which corresponds to the maximum current setting.
The Output Load value is filtered so that it normally increases (and
decreases) slowly, modelling how the temperature of a wire responds to
the current flowing through it. The resultant characteristic is very similar to
a thermal circuit breaker which is often used in motorsport applications. It
is also similar to a slow blow fuse. See Fuse Characteristics for details.
The filtering of the load value ensures that the start-up current (inrush
current) of motors and lamps does not cause the output to shutdown
during this period. It also allows for short term overloads to occur without
the output shutting down.
A large over-current such as a short circuit will cause the Output Load
value to increase rapidly, causing the output to shutdown in a short period
of time to protect the wire and the PDM output. The filtering is set with a
time constant of 20 to 50 seconds based on the maximum current setting.
These values conservatively suit the appropriate wire gauge for the
Page 25

22 Configuration
selected current setting and are not adjustable.
Tips:
The Output Load and Output Current values are transmitted via CAN so
that they can be logged by another device. Check the logged Output
Load value to ensure it is not too close to 100% during normal
operation and during start-up.
The Output Load and Output Current values can also be monitored
using PDM Manager. See Checking Operation.
Fault Shutdown
A Fault Shutdown occurs when the output voltage is lower than expected.
This can be caused by a short circuit or thermal overload of the output.
A short circuit may cause a Fault Shutdown before the Over-Current
Shutdown occurs.
Output Settings
To configure an Output Pin
In the Configuration Tree, select Output Pins
Double click the output to setup
Type a channel name and select settings as required
Maximum Current
This sets the current at which the output will shutdown. The output current
may exceed this value for a period of time which allows for the start-up
(inrush) current of devices such as motors and lamps.
The maximum current can be set to 10 ampere on the 8 Amp outputs and
25 ampere on the 20 Amp outputs to be clear of the normal running
current, even for devices that draw the maximum specified current of 8 or
20 ampere.
Number of Retries and Retry Delay
When an Over-Current Shutdown or a Fault Shutdown occurs, the PDM
will attempt to turn the output on again if the Number of Retries is
configured. The Number of Retries determines how many times an output
will attempt to turn on again.
The Retry Delay determines how long an output remains shutdown before
it is turned on again.
The retry count for an output is reset whenever the condition driving the
output changes to FALSE and then to TRUE (i.e. when the condition
Page 26

MoTeC Configuration 23
driving the output turns off then on again).
Master Shutdown
If Master Shutdown is enabled on the output, the output will be turned off
while the Master Shutdown channel is true.
The Master Shutdown channel is configured in the Global Setup.
Stay Alive During Standby Mode
Up to four outputs can be configured to stay alive (i.e. remain turned on)
during the PDM low power standby mode.
Refer to the Standby Mode section for more information.
Linked High Speed Wiper Output (For output 9 only)
The PDM Version 2 hardware has additional functionality to simplify
windscreen wiper motor control.
Linked output control can be enabled and a linked channel can be selected
in the settings for Output 9.
If this setting is enabled then Output 9 will be held off while the linked
channel used for the high speed wiper winding is turned on.
See the Windscreen Wipers section for more detail.
Tips:
There is a Master Retry feature available in Global Setup
Ensure that the maximum current has been set appropriately by
checking that the Output Load value is less than 100% under all
operating conditions.
The wire used must be capable of carrying the current specified in the
maximum current setting. See Wire Specification.
Set the maximum current well clear of the normal operating current of
the device but within the current rating of the wire. Use a larger wire to
achieve this if necessary. For example, for a device that draws no more
than 5 ampere (except at start-up) use a wire that is rated at 8 ampere
and set the maximum current to 8 ampere to give a clear margin.
Consider the voltage drop of the wire when selecting the wire size.
Sometimes this dictates that a larger wire gauge is needed than the
current rating would suggest.
Setting the current close to the normal current of the device to try and
protect the device is unlikely to be effective and could result in an
inadvertent shutdown. The purpose of the maximum current setting is
Page 27

24 Configuration
Channel Name
Description
CAN
Output
OutputName
Output Control Status
0 = Off
1 = On (Note: the output may be off
due to Over-current Shutdown or
Fault Shutdown)
No
OutputName.Voltage
Voltage on the output
Resolution 0.2 V
Yes
OutputName.Current
Output Current in amps
Resolution 0.5 A on Outputs 1 – 8
Resolution 0.2 A on Outputs 9 – 32
Yes
OutputName.Load
Output Load. Filtered current as a
percentage of the maximum current
setting.
Resolution 1%
Yes
OutputName.Status
0 = Off
1 = On Active
2 = Over-Current Shutdown
4 = Fault Shutdown
Yes
OutputName.Status.
Active
0 = Output is off
1 = Output is on
No
OutputName.Status.
OverCurrent
0 = OK
1 = Over-Current Shutdown
No
OutputName.Status.
Fault
0 = OK
1 = Fault Shutdown
No
to protect the wire from overheating, not to protect the connected
device.
Some devices draw more current under circumstances such as high or
low battery voltage. Also, a motor will draw increased current when
under more load. Set a good margin and where possible check the
Output Load value under these varying circumstances.
Configuration of an output will create a number of channels, some of which
are transmitted via CAN. OutputName.Status channel is used for output
status information on CAN. The output should be on for any non-zero value.
Fault Indicator
When an output fault occurs the PDM sets the value of the Global Error
channel to TRUE (PDM.Global Error). A fault indicator light can be connected
Page 28

MoTeC Configuration 25
to any PDM output and configured to turn on when the Global Error channel is
TRUE.
The Global Error channel can also be transmitted via CAN to a display device
and used to show an alarm message and activate an alarm light.
Maximum Current for Typical Output Devices
Lamps
Tungsten Lamps
Typically used for tail lights, indicator lights and general lighting.
Tungsten lamps draw additional current during turn on. Typically this
peaks at about 5 times the steady state current and dies out in about 0.1
second. The PDM will largely ignore this due to the Output Load filtering.
Halogen Lamps
Halogen lamps are commonly used in headlights and are more efficient
than Tungsten lamps.
Halogen lamps have similar characteristics to Tungsten lamps.
Xenon (HID) Lamps
Xenon lamps are also used in headlights and are more efficient than
Tungsten and Halogen lamps.
Xenon lamps have a long duration inrush current that peaks at about 4
times the steady state current. The inrush current decays over a period of
about 10 seconds. This puts a high load on the PDM output during startup.
To avoid Over-Current Shutdown during start-up it may be necessary to
set a higher Maximum Current than normal particularly if the battery
voltage is low.
For example, a Xenon lamp with a steady state current of 3 ampere may
need a Maximum Current setting of 6 to 8 ampere. The wire should also
be rated at this current.
Unlike other lamps, Xenon lamps draw more current as the battery voltage
decreases. At 10 volt the lamp will draw 40% more current than at 14 volt.
For example a lamp that draws 3 ampere at 14 volt will draw 4.2 ampere at
10 volt. This must be allowed for when setting the Maximum Current.
To ensure that the Maximum Current is set appropriately, check that the
Output Load value stays safely below 100% during turn on when the
battery is at 12 volt (not charging).
Page 29

26 Configuration
1 2 3 4 5 6 7 8 9
10
11
12
13
14
15
Motors
Electric motors draw additional current during start-up. Typically the startup current is 3 to 5 times the steady state current and it dies out in less
than a second.
This start-up current is largely ignored by the PDM due to the Output Load
filtering.
The current in a motor increases with increasing load on the motor. A
motor draws maximum current when it is stalled. The Maximum Current
setting should take this into account.
A motor may draw more current as it or the device that it is connected to
ages; this should be allowed for when setting the Maximum Current.
Note: motor speed control is currently not supported.
CAN Keypads
Up to four MoTeC CAN keypads can be configured to work with the PDM. A
keypad must be enabled and configured under the Global Settings before the
individual buttons can be configured.
To use a keypad button, a channel name must be specified. This channel will
be true while the keypad button is pressed.
Each of the three LEDs on a keypad button can be controlled with a PDM
channel. The LED will be turned on while the channel is true.
A maximum of 120 keypad LEDs (across all keypads) can be configured.
Keypad button numbering is from left to right, from top to bottom.
E.g.
Page 30

MoTeC Operation 27
Operation
CAUTION: The PDM may get very hot, do not touch the PDM during
operation.
To perform any of the activities in the Online menu, the PC needs to
communicate with the PDM.
When a configuration file is open in PDM Manager, it will connect to the PDM
with the matching serial number.
If there is no file open, all connected PDMs will be displayed. PDM Manager
can be connected to a selected PDM.
CAN Bus Bitrate
The PDM can be configured to operate at CAN bit rates of 250Kbps, 500Kbps
or 1Mbps.
PDM manager includes a CAN bitrate conversion tool in the Tools > Options >
Communications menu. This tool configures the CAN bitrate and restarts the
PDM at the new rate.
Note: During the conversion process, all CAN devices must be removed from
the CAN bus except for the PDM and the UTC.
PDM Manager must be configured (in the Tools>Options>Communications
menu) to match the PDM CAN bit rate.
Sending and Retrieving Configuration Files
On the Online menu, click Send Configuration to send the currently
open configuration file to the connected PDM
On the Online menu, click Get Configuration to retrieve the current
configuration file in the connected PDM
Checking Operation
Monitor Channels
On the Online menu, click Monitor Channels
Monitor Channels shows the value of each channel in the original tree
structure.
Monitor PDM
On the Online menu, click Monitor PDM
Page 31

28 Operation
Monitor PDM shows the input-, output-, CAN input-, condition- and PDM
status channels in separate screen areas in an easy to view layout.
Test Outputs
On the Online menu, click Test Outputs
All outputs may be manually turned on and off in PDM Manager to check the
current levels.
To be able to test an output, it must first be configured in PDM Manager.
Serial Number
On the Online menu, click Show Serial Number
A configuration file can only be sent to the PDM with the matching serial
number.
This allows multiple PDMs to be used without special device configuration
requirements and also ensures that each PDM has the correct configuration
file.
Firmware Versions and Updating
On the Online menu, click Update Firmware
The software inside the PDM (firmware) can be updated by the user at any
time to take advantage of the latest features.
Matching Versions
The firmware version must match the version of the PDM Manager software
on the PC in order to communicate. PDM Manager will show a warning if the
versions do not match.
Tip:
To check the version of PDM Manager software, click About MoTeC PDM
Manager on the Help menu.
To check the firmware version in the PDM click Show Serial Number on
the Online menu
Matching Configuration File
Configuration files created with new software including new features can
not be used with older version of the software. If required, create backup
files before updating.
Page 32

MoTeC Operation 29
Password Protection
On the Online menu, click Set Password
The password will prevent unauthorised retrieving and sending of
configuration files.
It is not possible to update firmware if the PDM is password protected.
Standby Mode
The PDM has a low power standby mode to minimize battery drain when the
vehicle is turned off.
Up to four outputs can be configured in the Output Pin settings to stay alive
(i.e. remain turned on) during the standby mode. These outputs are intended
for powering applications where electronic devices require a continuous low
current (typically micro amps) supply to maintain settings or state.
The PDM enters the low current Standby Mode when all of the following
conditions have been true for 5 minutes:
- All outputs that do not have the “stay alive during standby mode” option
enabled are turned off
- All outputs that have the “stay alive during standby mode” option enabled
are below the allowed current limits (approximately 0.5A)
- No CAN messages have been received
- No CAN messages have been successfully transmitted
The PDM will exit the Standby Mode when any of the following conditions are
true:
- Activity is present on the CAN bus
- Any output that has the “stay alive during standby mode” option enabled
exceeds the allowed current limit (approximately 0.5A)
- Any input pin changes state
Page 33

30 Appendices
Battery voltage
30 V max, 6.5 V min
Current consumption
35 mA typical operating
5 mA typical standby
Total output current
(continuous)
PDM16
PDM32
PDM15
PDM30
100 A
120 A
80 A
100 A
Reverse battery
protection
Protection for PDM and all connected devices
Load dump transient
protection
Protection for PDM.
Also assists in protecting connected devices.
Operating temperature
110 °C max internal (100 °C recommended)
Typical 85 °C max ambient for 120 A total load (for
110 °C internal) depending on mounting, air
circulation and load distribution.
These specifications apply for a 12 V battery.
For a 24 V battery reduce specified temperatures
by 20 °C.
Weight
PDM16
PDM32
PDM15
PDM30
330 g
(0.72 lbs)
405 g
(0.89 lbs)
260 g
(0.57 lbs)
270 g
(0.59 lbs)
Length
130 mm
(5.1")
180 mm
(7.1")
107 mm
(4.2")
107 mm
(4.2")
Width
60 mm
(2.4")
60 mm
(2.4")
133 mm
(5.2")
133 mm
(5.2")
Height
28 mm
(1.1")
28 mm
(1.1")
39 mm
(1.5")
39 mm
(1.5")
Case
Machined aluminium
Magnesium
Environmental
protection
Rubber seal on lid and
connectors, conformal
coating on PCB
Conformal coating on
PCB
Appendices
Specifications
General
Page 34

MoTeC Appendices 31
Number of 20 A outputs
PDM16
PDM32
PDM15
PDM30
8 8 8 8 Maximum output current
20 A continuous, 115 A transient (typical)
Over-current shutdown
Programmable in steps of 1 A
Protection
Short circuit and thermal overload
protection
Inductive load clamp voltage
–17 V (relative to Batt–)
Maximum inductive load
energy
1.5 J (junction temperature = 150 °C, load
current = 20 A)
Number of 8 A outputs
PDM16
PDM32
PDM15
PDM30
8
24 7 22
Maximum output current
8 A continuous, 60 A transient (typical)
Over-current shutdown
Programmable in steps of 1 A
Protection
Short circuit and thermal overload
protection
Inductive load clamp voltage
Output 9: –0.7 V (relative to Batt–)
Other Outputs: –42 V (relative to Batt+)
Maximum inductive load
energy
0.3 J (junction temperature = 150 °C, load
current = 20 A)
Number of inputs
PDM16
PDM32
PDM15
PDM30
12
23
16
16
Pull-up resistor
10 kilo ohm to Batt+
Measurement
Range of 0 to 51 V, resolution 0.2 V
(8 bits)
Calibration
High and low trigger voltage, high and low
trigger times
Number of messages
4 messages, 8 bytes per message
Message rate
20 Hz
20 Amp Outputs
8 Amp Outputs
Inputs
CAN Input
CAN Output
Page 35

32 Appendices
Byte
0 1 2 3 4 5 6
7
Value (hex)
00
00
F3
21
40
00
CC
8A
Offset
Data Size
Mask
Byte 2
8bit
FF
Offset
Data Size
Mask
Byte 2
8bit
02
Offset
Data Size
Alignment
Divisor
Byte 3
16bit (signed)
Normal
100
Offset
Data Size
Alignment
Divisor
Byte 3
16bit (signed)
Swap Bytes
100
Offset
Data Size
Alignment
Divisor
Byte 2
16bit (signed)
Normal
100
Offset
Data Size
Alignment
Mask
Divisor
Byte 6
16bit (unsigned)
Swap Bytes
0FFF
25
CAN Input Channel Examples
Sample received CAN message used in examples below
Channel Extraction Examples
Resulting channel: 0xF3 masked with 0xFF = 0xF3
Resulting channel: 0xF3 masked with 0x02 = 0x02
Resulting channel: 0x2140 / 100 = 85
Resulting channel: 0x4021 / 100 = 164
Resulting channel: 0xF321 is negative (-3295) so channel is clamped to 0
Resulting channel: (0x8ACC masked with 0x0FFF) / 25 = 110
Page 36

MoTeC Appendices 33
Offset
Data Size
Alignment
Mask
Divisor
Byte 6
16bit (unsigned)
Normal
FFFF
100
Resulting channel: (0xCC8A masked with 0x0FFF) / 100 = 523 so channel is
clamped to 255
Typical CAN input channel application
A CAN message contains a 16 bit RPM value with resolution of 1 RPM.
Using a 16bit unsigned data type and a divider of 100 gives a resulting
channel with a resolution of 100 RPM. The maximum channel value of 255
will be equivalent to 25500 RPM.
The resulting channel can be used in conditions to turn outputs on when the
RPM is above or below preset limits.
Page 37

34 Appendices
Max current setting [A]
Trip time multiplier
4
76%
6
84%
8
92%
10
100%
15
120%
20
140%
Trip time versus over current multiplier at 10A
0.10
1.00
10.00
100.00
1 2 3 4 5 6 7 8 9
10
Over current multiplier
Trip time
(s)
Fuse Characteristics
Example:
For 25 A current where max current setting is 5 A:
Over current multiplier: 25 A / 5 A = 5
From Graph: Trip time (at 10 A) is approx. 1 second
From Table: Trip time multiplier (at 5 A) is approx. 80%
Trip time (at 5 A) = 1 x 80% = 0.8 seconds
Page 38

MoTeC Appendices 35
Connector A
Connector B
26 pin Autosport
1 pin Autosport
Mating connector #65040
Mating connector
#68093 (wire gauge #6 AWG)
#68094 (wire gauge #4 AWG)
Pin
Function
Pin
Function
A_A
8 A Output 9
B_1
Batt+
A_B
8 A Output 10
A_C
8 A Output 11
A_D
Digital/Switch Input 1
Connector C
A_E
Digital/Switch Input 2
8 Pin Autosport
A_F
Digital/Switch Input 3
Mating Plug: Deutsch AS616-08SN
A_G
0 V
Pin
Function
A_H
0 V C_A
20 A Output 1
A_J
CAN Low
C_B
20 A Output 2
A_K
CAN High
C_C
20 A Output 3
A_L
8 A Output 12
C_D
20 A Output 4
A_M
8 A Output 13
C_E
20 A Output 5
A_N
8 A Output 14
C_F
20 A Output 6
A_P
8 A Output 15
C_G
20 A Output 7
A_R
8 A Output 16
C_H
20 A Output 8
A_S
Digital/Switch Input 4
A_T
Digital/Switch Input 5
A_U
Digital/Switch Input 6
A_V
Digital/Switch Input 7
A_W
Digital/Switch Input 8
A_X
Digital/Switch Input 9
A_Y
Digital/Switch Input 10
A_Z
Digital/Switch Input 11
A_a
Digital/Switch Input 12
A_b
Batt–
A_c
Batt–
Connectors and Pinout
PDM16
Page 39

36 Appendices
Connector A
Connector B
37 pin Autosport
26 pin Autosport
Mating connector #68089
Mating connector #65040
Pin
Function
Pin
Function
A_1
Digital/Switch Input 1
B_A
8 A Output 9
A_2
Digital/Switch Input 2
B_B
8 A Output 10
A_3
Digital/Switch Input 3
B_C
8 A Output 11
A_4
Digital/Switch Input 4
B_D
8 A Output 12
A_5
Digital/Switch Input 5
B_E
8 A Output 13
A_6
0 V B_F
8 A Output 14
A_7
0 V B_G
8 A Output 15
A_8
0 V B_H
8 A Output 16
A_9
0 V B_J
8 A Output 17
A_10
CAN Low
B_K
8 A Output 18
A_11
CAN High
B_L
8 A Output 19
A_12
Digital/Switch Input 6
B_M
8 A Output 20
A_13
Digital/Switch Input 7
B_N
8 A Output 21
A_14
Digital/Switch Input 8
B_P
8 A Output 22
A_15
Digital/Switch Input 9
B_R
8 A Output 23
A_16
Digital/Switch Input 10
B_S
8 A Output 24
A_17
Digital/Switch Input 11
B_T
8 A Output 25
A_18
Digital/Switch Input 12
B_U
8 A Output 26
A_19
Digital/Switch Input 13
B_V
8 A Output 27
A_20
Digital/Switch Input 14
B_W
8 A Output 28
A_21
Digital/Switch Input 15
B_X
8 A Output 29
A_22
0 V B_Y
8 A Output 30
A_23
0 V B_Z
8 A Output 31
A_24
0 V B_a
8 A Output 32
A_25
0 V B_b
Batt–
A_26
Digital/Switch Input 16
B_c
Batt–
A_27
Digital/Switch Input 17
A_28
Digital/Switch Input 18
A_29
Digital/Switch Input 19
A_30
Digital/Switch Input 20
A_31
Digital/Switch Input 21
A_32
Digital/Switch Input 22
A_33
Digital/Switch Input 23
A_34
Not Connected
A_35
Not Connected
A_36
Not Connected
A_37
Not Connected
PDM32
Page 40

MoTeC Appendices 37
Connector C
1 pin Autosport
Mating connector
#68093 (wire gauge #6 AWG)
#68094 (wire gauge #4 AWG)
Pin
Function
C_1
Batt+
Connector D
8 pin Autosport
Mating connector #68092
Pin
Function
D_A
20 A Output 1
D_B
20 A Output 2
D_C
20 A Output 3
D_D
20 A Output 4
D_E
20 A Output 5
D_F
20 A Output 6
D_G
20 A Output 7
D_H
20 A Output 8
PDM32 continued
Page 41

38 Appendices
Connector A
Connector B
34 pin waterproof connector
26 pin waterproof connector
Mating connector #65044
Mating connector #65045
Pin
Function
Pin
Function
A_1
20 A Output 1 (with A10)
B_1
Not used
A_2
8 A Output 9
B_2
Not used
A_3
20 A Output 2 (with A12)
B_3
20 A Output 6 (with B9)
A_4
8 A Output 10
B_4
Not used
A_5
20 A Output 3 (with A14)
B_5
20 A Output 7 (with B11)
A_6
8 A Output 11
B_6
Not used
A_7
20 A Output 4 (with A16)
B_7
20 A Output 8 (with B13)
A_8
8 A Output 12
B_8
Not used
A_9
20 A Output 5 (with A17)
B_9
20 A Output 6 (with B3)
A_10
20 A Output 1 (with A1)
B_10
Not used
A_11
8 A Output 13
B_11
20 A Output 7 (with B5)
A_12
20 A Output 2 (with A3)
B_12
Not used
A_13
8 A Output 14
B_13
20 A Output 8 (with B7)
A_14
20 A Output 3 (with A5)
B_14
Not used
A_15
8 A Output 15
B_15
Digital/Switch Input 13
A_16
20 A Output 4 (with A7)
B_16
Not used
A_17
20 A Output 5 (with A9)
B_17
Digital/Switch Input 15
A_18
Not used
B_18
Battery Negative
A_19
Digital/Switch Input 2
B_19
Not used
A_20
Not used
B_20
Digital/Switch Input 11
A_21
Digital/Switch Input 4
B_21
Digital/Switch Input 12
A_22
Not used
B_22
0 V
A_23
Digital/Switch Input 7
B_23
Digital/Switch Input 14
A_24
Not used
B_24
Digital/Switch Input 16
A_25
Not used
B_25
CAN Low
A_26
Battery Negative
B_26
CAN High
A_27
Digital/Switch Input 1
A_28
0 V
A_29
Digital/Switch Input 3
A_30
Digital/Switch Input 5
Connector C
A_31
Digital/Switch Input 6
M6 stud
A_32
Digital/Switch Input 8
Mating: eyelet and M6 nut
A_33
Digital/Switch Input 9
Pin
Function
A_34
Digital/Switch Input 10
C_1
Battery +
PDM15
Page 42

MoTeC Appendices 39
Connector A
Connector B
34 pin waterproof connector
26 pin waterproof connector
Mating connector #65044
Mating connector #65045
Pin
Function
Pin
Function
A_1
20 A Output 1 (with A10)
B_1
8 A Output 21
A_2
8 A Output 9
B_2
8 A Output 22
A_3
20 A Output 2 (with A12)
B-3
20 A Output 6 (with B9)
A_4
8 A Output 10
B_4
8 A Output 23
A_5
20 A Output 3 (with A14)
B-5
20 A Output 7 (with B11)
A_6
8 A Output 11
B_6
8 A Output 24
A_7
20 A Output 4 (with A16)
B_7
20 A Output 8 (with B13)
A_8
8 A Output 12
B_8
8 A Output 25
A_9
20 A Output 5 (with A17)
B_9
20 A Output 6 (with B3)
A_10
20 A Output 1 (with A1)
B_10
8 A Output 26
A_11
8 A Output 13
B_11
20 A Output 7 (with B5)
A_12
20 A Output 2 (with A3)
B_12
8 A Output 27
A_13
8 A Output 14
B_13
20 A Output 8 (with B7)
A_14
20 A Output 3 (with A5)
B_14
8 A Output 28
A_15
8 A Output 15
B_15
Digital/Switch Input 13
A_16
20 A Output 4 (with A7)
B_16
8 A Output 29
A_17
20 A Output 5 (with A9)
B_17
Digital/Switch Input 15
A_18
8 A Output 16
B_18
Battery Negative
A_19
Digital/Switch Input 2
B_19
8 A Output 30
A_20
8 A Output 17
B_20
Digital/Switch Input 11
A_21
Digital/Switch Input 4
B_21
Digital/Switch Input 12
A_22
8 A Output 18
B_22
0 V
A_23
Digital/Switch Input 7
B_23
Digital/Switch Input 14
A_24
8 A Output 19
B_24
Digital/Switch Input 16
A_25
8 A Output 20
B_25
CAN Low
A_26
Battery Negative
B_26
CAN High
A_27
Digital/Switch Input 1
A_28
0 V
A_29
Digital/Switch Input 3
A_30
Digital/Switch Input 5
Connector C
A_31
Digital/Switch Input 6
M6 stud
A_32
Digital/Switch Input 8
Mating: eyelet and M6 nut
A_33
Digital/Switch Input 9
Pin
Function
A_34
Digital/Switch Input 10
C_1
Battery +
PDM30
Page 43

40 Appendices
Mounting Dimensions
PDM16
Page 44

MoTeC Appendices 41
PDM32
Page 45

42 Appendices
PDM15 and PDM30
Page 46

MoTeC Appendices 43
Wire
Gauge
(AWG)
Current Rating
at 80 °C ambient
[A]*
Current Rating
at 100 °C ambient
[A]*
Resistance
[ohm/m]
Resistance
[ohm/1000 ft]
24#
4.5
4
0.071
22
22# 6 5
0.045
14
20# 8 6
0.028
8.5
18#
11
9
0.018
5.5
16#
15
12
0.014
4.3
14#
22
18
0.009
2.7
6#
90‡
75‡
0.0015
0.44
4#
120‡
100‡
0.0009
0.28
2#
150‡
120‡
0.0006
0.18
Recommended Wire Gauge
Output
24# to 20#
8 Amp outputs
20# to 16#
20 Amp outputs
4# to 2#
Battery pos
Wiring
Wire Specification
M22759/16
Insulation Material: Tefzel
Conductor: Tin Plated Copper
Voltage Rating: 600 V
Maximum Temperature: 150 C
*The current ratings above are an indication only and will not apply in all
circumstances.
The actual maximum current rating is determined by the maximum allowed
temperature for the wire (150 °C).
The temperature of the wire is affected by many factors including the
temperature of adjacent wires, how the wires are bundled and covered, the
ambient temperature and the current.
‡current rating for a single wire in free air
Page 47

44 Appendices
1
2 3 4
5
9
10
11
Black
White
CAN Connector (5 pin XLR Female)
PDM
0V
CAN-LO
CAN-HI
100R Resistor
*Not essential if the wiring
length is less than 2 m (7 ft)
These wires must be twisted
Minimum one twist per 50 mm (2 in)
White
Green
Green
UTC Wiring for PC Connection
To connect to a PDM through a MoTeC UTC (USB to CAN adaptor), a mating
connector for the UTC must be wired to the PDM's CAN bus.
The UTC connects to the PC USB port with a standard USB A-B cable.
If the PDM does not connect to any other CAN device, it can be directly wired
to the CAN connector.
If the wiring length is less than 2 m (7 ft) the terminating resistor is
recommended but not essential as the UTC has a built in terminating resistor.
UTC Connector Type (5 pin XLR Female):
Deltron 716-0-0501 (Non-latching)
Neutrik NC5FDL1 (Latching)
CAN Bus Wiring Requirements
The CAN bus should consist of a twisted pair trunk with 100R (0.25 watt)
terminating resistors at each end of the trunk.
The preferred cable for the trunk is 100R data cable but twisted 22# Tefzel is
usually OK.
The maximum length of the bus is 16 m (50 ft)
CAN devices (such as MoTeC PDM, M800 etc) may be connected to the
trunk with up to 500 mm (20 in) of twisted wire.
The CAN Connector for the UTC may also be connected to the trunk with up
to 500mm (20in) of twisted wire and should be within 500mm of one end of
the trunk. If desired two CAN connectors may be used so that the UTC may
be connected to either side of the vehicle. Both connectors must be within
500mm of each end of the trunk.
Page 48

MoTeC Appendices 45
CAN-LO
CAN-HI
100R
100R
CAN-LO CAN-HI
500 mm
max
CAN-LO CAN-HI
UTC
Connector
500 mm
Max
<< CAN Bus >>
100R Terminating
Resistors at each
end of the CAN Bus
CAN-LO CAN-HI CAN-LO CAN-HI
5 4 1
These wires must be twisted
Minimum one twist per 50 mm (2 in)
CAN Device
eg M1 ECU
CAN Device
eg PDM
CAN Device
eg ADL3
0V
Short CAN Bus
If the CAN Bus is less than 2 m (7 ft) long then a single termination resistor
may be used. The resistor should be placed at the opposite end of the CAN
bus to the CAN connector.
Page 49

46 Appendices
CAN Address
Byte
Bit
Channel
Scaling
Base address
+ 0
0
4..7
Compound Id = 0
0 0 Input 1 State
0 = Inactive
1 = Active
1 0 Input 2 State
2 0 Input 3 State
3 0 Input 4 State
4 0 Input 5 State
5 0 Input 6 State
6 0 Input 7 State
7 0 Input 8 State
Base address
+ 0
0
4..7
Compound Id = 1
0 0 Input 9 State
0 = Inactive
1 = Active
1 0 Input 10 State
2 0 Input 11 State
3 0 Input 12 State
4 0 Input 13 State
5 0 Input 14 State
6 0 Input 15 State
7 0 Input 16 State
Base address
+ 0
0
4..7
Compound Id = 2
0 0 Input 17 State
0 = Inactive
1 = Active
1 0 Input 18 State
2 0 Input 19 State
3 0 Input 20 State
4 0 Input 21 State
5 0 Input 22 State
6 0 Input 23 State
Base address
+ 0
0
4..7
Compound Id = 3
1
0..7
PDM Internal
Temperature
0 to 125 = 0 °C to +125 °C
1 °C steps
2
0..7
PDM Battery
Voltage
0 to 255 = 0 V to 31 V
0.1216 V steps
3
0..7
Global Error Flag
0 = OK
1 = one or more outputs is in
either Fault or Over-Current error
4
0..7
Total Current
0 to 255 = 0 to 255 A
1 A steps
5
0..7
9.5V internal rail
voltage
0 to 255 = 0 V to 15.68 V
0.0615 V steps
Should read close to 9.5 V when
the Battery voltage is > 10.5 V
6
0..7
Reset Source
CAN Output Messages
The PDM transmits the following messages at 20 Hz.
Note: only relevant messages get transmitted for a particular PDM type
Page 50

MoTeC Appendices 47
CAN Address
Byte
Bit
Channel
Scaling
Base address
+ 1
0
0..7
Compound Id = 0
1
0..7
Output 1 Current
0 to 255 = 0 to 127.5 A
0.5 A steps
2
0..7
Output 2 Current
3
0..7
Output 3 Current
4
0..7
Output 4 Current
5
0..7
Output 5 Current
6
0..7
Output 6 Current
7
0..7
Output 7 Current
Base address
+ 1
0
0..7
Compound Id = 1
1
0..7
Output 8 Current
0 to 255 = 0 to 127.5 A
0.5 A steps
2
0..7
Output 9 Current
0 to 255 = 0 to 51 A
0.2 A steps
3
0..7
Output 10 Current
4
0..7
Output 11 Current
5
0..7
Output 12 Current
6
0..7
Output 13 Current
7
0..7
Output 14 Current
Base address
+ 1
0
0..7
Compound Id = 2
1
0..7
Output 15 Current
0 to 255 = 0 to 51 A
0.2 A steps
2
0..7
Output 16 Current
3
0..7
Output 17 Current
4
0..7
Output 18 Current
5
0..7
Output 19 Current
6
0..7
Output 20 Current
7
0..7
Output 21 Current
Base address
+ 1
0
0..7
Compound Id = 3
1
0..7
Output 22 Current
0 to 255 = 0 to 51 A
0.2 A steps
2
0..7
Output 23 Current
3
0..7
Output 24 Current
4
0..7
Output 25 Current
5
0..7
Output 26 Current
6
0..7
Output 27 Current
7
0..7
Output 28 Current
Base address
+ 1
0
0..7
Compound Id = 4
1
0..7
Output 29 Current
0 to 255 = 0 to 51 A
0.2 A steps
2
0..7
Output 30 Current
3
0..7
Output 31 Current
4
0..7
Output 32 Current
Page 51

48 Appendices
CAN Address
Byte
Bit
Channel
Scaling
Base address
+ 2
0
0..7
Compound Id = 0
1
0..7
Output 1 Load
0 to 255 = 0 to 255%
1% steps
2
0..7
Output 2 Load
3
0..7
Output 3 Load
4
0..7
Output 4 Load
5
0..7
Output 5 Load
6
0..7
Output 6 Load
7
0..7
Output 7 Load
Base address
+ 2
0
0..7
Compound Id = 1
1
0..7
Output 8 Load
0 to 255 = 0 to 255%
1% steps
2
0..7
Output 9 Load
3
0..7
Output 10 Load
4
0..7
Output 11 Load
5
0..7
Output 12 Load
6
0..7
Output 13 Load
7
0..7
Output 14 Load
Base address
+ 2
0
0..7
Compound Id = 2
1
0..7
Output 15 Load
0 to 255 = 0 to 255%
1% steps
2
0..7
Output 16 Load
3
0..7
Output 17 Load
4
0..7
Output 18 Load
5
0..7
Output 19 Load
6
0..7
Output 20 Load
7
0..7
Output 21 Load
Base address
+ 2
0
0..7
Compound Id = 3
1
0..7
Output 22 Load
0 to 255 = 0 to 255%
1% steps
2
0..7
Output 23 Load
3
0..7
Output 24 Load
4
0..7
Output 25 Load
5
0..7
Output 26 Load
6
0..7
Output 27 Load
7
0..7
Output 28 Load
Base address
+ 2
0
0..7
Compound Id = 4
1
0..7
Output 29 Load
0 to 255 = 0 to 255%
1% steps
2
0..7
Output 30 Load
3
0..7
Output 31 Load
4
0..7
Output 32 Load
Page 52

MoTeC Appendices 49
CAN Address
Byte
Bit
Channel
Scaling
Base address
+ 3
0
0..7
Compound Id = 0
1
0..7
Output 1 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Output 2 Voltage
3
0..7
Output 3 Voltage
4
0..7
Output 4 Voltage
5
0..7
Output 5 Voltage
6
0..7
Output 6 Voltage
7
0..7
Output 7 Voltage
Base address
+ 3
0
0..7
Compound Id = 1
1
0..7
Output 8 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Output 9 Voltage
3
0..7
Output 10 Voltage
4
0..7
Output 11 Voltage
5
0..7
Output 12 Voltage
6
0..7
Output 13 Voltage
7
0..7
Output 14 Voltage
Base address
+ 3
0
0..7
Compound Id = 2
1
0..7
Output 15 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Output 16 Voltage
3
0..7
Output 17 Voltage
4
0..7
Output 18 Voltage
5
0..7
Output 19 Voltage
6
0..7
Output 20 Voltage
7
0..7
Output 21 Voltage
Base address
+ 3
0
0..7
Compound Id = 3
1
0..7
Output 22 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Output 23 Voltage
3
0..7
Output 24 Voltage
4
0..7
Output 25 Voltage
5
0..7
Output 26 Voltage
6
0..7
Output 27 Voltage
7
0..7
Output 28 Voltage
Base address
+ 3
0
0..7
Compound Id = 4
1
0..7
Output 29 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Output 30 Voltage
3
0..7
Output 31 Voltage
4
0..7
Output 32 Voltage
Page 53

50 Appendices
CAN Address
Byte
Bit
Channel
Scaling
Base address
+ 4
0
6..7
Compound Id = 0
0
0..5
Output 1 Status
0 = Output off
1 = Output on
2 = Output Over-Current Error
4 = Output Fault Error
1
0..7
Output 2 Status
2
0..7
Output 3 Status
3
0..7
Output 4 Status
4
0..7
Output 5 Status
5
0..7
Output 6 Status
6
0..7
Output 7 Status
7
0..7
Output 8 Status
Base address
+ 4
0
6..7
Compound Id = 1
0
0..5
Output 9 Status
0 = Output off
1 = Output on
2 = Output Over-Current Error
4 = Output Fault Error
1
0..7
Output 10 Status
2
0..7
Output 11 Status
3
0..7
Output 12 Status
4
0..7
Output 13 Status
5
0..7
Output 14 Status
6
0..7
Output 15 Status
7
0..7
Output 16 Status
Base address
+ 4
0
6..7
Compound Id = 2
0
0..5
Output 17 Status
0 = Output off
1 = Output on
2 = Output Over-Current Error
4 = Output Fault Error
1
0..7
Output 18 Status
2
0..7
Output 19 Status
3
0..7
Output 20 Status
4
0..7
Output 21 Status
5
0..7
Output 22 Status
6
0..7
Output 23 Status
7
0..7
Output 24 Status
Base address
+ 4
0
6..7
Compound Id = 3
0
0..5
Output 25 Status
0 = Output off
1 = Output on
2 = Output Over-Current Error
4 = Output Fault Error
1
0..7
Output 26 Status
2
0..7
Output 27 Status
3
0..7
Output 28 Status
4
0..7
Output 29 Status
5
0..7
Output 30 Status
6
0..7
Output 31 Status
7
0..7
Output 32 Status
Page 54

MoTeC Appendices 51
CAN Address
Byte
Bit
Channel
Scaling
Base address
+ 5
0
0..7
Compound Id = 0
1
0..7
Input 1 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Input 2 Voltage
3
0..7
Input 3 Voltage
4
0..7
Input 4 Voltage
5
0..7
Input 5 Voltage
6
0..7
Input 6 Voltage
7
0..7
Input 7 Voltage
Base address
+ 5
0
0..7
Compound Id = 1
1
0..7
Input 8 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Input 9 Voltage
3
0..7
Input 10 Voltage
4
0..7
Input 11 Voltage
5
0..7
Input 12 Voltage
6
0..7
Input 13 Voltage
7
0..7
Input 14 Voltage
Base address
+ 5
0
0..7
Compound Id = 2
1
0..7
Input 15 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Input 16 Voltage
3
0..7
Input 17 Voltage
4
0..7
Input 18 Voltage
5
0..7
Input 19 Voltage
6
0..7
Input 20 Voltage
7
0..7
Input 21 Voltage
Base address
+ 5
0
0..7
Compound Id = 3
1
0..7
Input 22 Voltage
0 to 255 = 0 to 51 V
0.2 V steps
2
0..7
Input 23 Voltage
Page 55

52 Appendices
Windows Keyboard Shortcuts
When using a laptop in and around a car, it is often not practical to use a
mouse to navigate through the program.
Using the keyboard to select options is easier.
Main Menu
To access the main menu, press ALT + the key for the underlined letter in the
menu, followed by the underlined letter of the item in the drop down menu.
E.g. ALT + F, N for File New.
Alternatively press and release ALT, select the desired menu item using the
arrow keys, press ENTER to activate it.
Closing a Window
Press ENTER for OK or Close (only when the OK or Close button has a bold
line around it)
Press ESC to Cancel or Close
Page 56

MoTeC Appendices 53
Selecting an Item in a Window
To access the various items in a window, press ALT + the key for the
underlined letter of the item of interest, e.g. to select ‘Polarity’ press ALT + P
Alternatively use the TAB key to move through the dialog box (use SHIFT +
TAB to move backwards). The selected control is usually indicated by a
dotted line around it, or by highlighting the text or item selected within the
control.
Using the Selected Item
The method of using the selected item (or control) depends on the type of
control. The common controls are detailed below:
Check Box
A check box is used to tick on or off a particular option.
Press ALT + the key for the underlined letter, or use the TAB key to navigate
to the Check Box. To select, press SPACEBAR.
Page 57

54 Appendices
Command Button
Command buttons are generally used to show another screen or perform a
particular function.
Press ALT + the key for the underlined letter, or use the TAB key to navigate
to the command button. To select, press ENTER or SPACEBAR.
Drop-down List Box
A Drop-down list box is used to select from a number of items, but only the
selected item is shown until a new item needs to be selected.
Press ALT + the key for the underlined letter or use the TAB key to navigate
to the Drop-down List Box. To select the desired item, use the arrow keys and
press ENTER to close the list.
Group Box
The Group box is used to select an item from a group of options.
Press ALT + the key for the underlined letter, or use the TAB key to navigate
to the Group box. To select, use the arrow keys.
Tabs
Tabs are used to select the different tab pages of a screen.
To select the next tab, press CTRL + TAB. To select the previous tab, press
CTRL + SHIFT +TAB.
Text Box
A text box is used to enter a value or text.
Page 58

MoTeC Appendices 55
Press ALT + the key for the underlined letter or use the TAB key to navigate
to the Text Box, type in the new value or text. Use the BACKSPACE or
DELETE to remove unwanted characters.
Tree Structure
A Tree Structure is used to select items from a hierarchical list
The UP ARROW key moves the cursor up (selects the item above)
The DOWN ARROW key moves the cursor down (selects the item below)
The RIGHT ARROW key expands; expandable branches indicated by a plus
sign (+)
The LEFT ARROW key collapses; collapsible branches indicated by a minus
sign (-)
Page 59

56 Appendices
MoTeC Devices
ACL
Advanced Central Logger
ADL2
Advanced Dash Logger - second generation
ADL3
Advanced Dash Logger - third generation
BR2
Beacon Receiver
BTX
Beacon Transmitter
CIM
Computer Interface Module
CLS
Central Logging System
DBW4
Drive By Wire expander
E816
Input/Output Expander
E888
Input/Output Expander
i2
MoTeC data analysis software
i2 Pro
MoTeC data analysis software, professional version
IEX
Ignition Expander
LTC
Lambda to CAN module
LTCD
Lambda to CAN Dual module
M2R
ECU dedicated to run 2 rotor engines
M4
ECU for engines with up to 4 cylinders or up to 2 rotors
M400
ECU for modern engines with up to 4 cylinders or up to 2 rotors
M48
ECU for engines with up to 8 cylinders and 2 rotors
M600
ECU for modern engines with up to 6 cylinders or up to 3 rotors
M800
ECU for modern engines with up to 12 cylinders or up to 4
rotors
M800 Plug-In
ECU for direct replacement of a factory ECU
M880
ECU for modern engines with up to 12 cylinders or up to 4
rotors
MDC
Mitsubishi Diff Controller
MDD
Mini Digital Display
MLS
ECU dedicated to run Chevrolet LS1 and Lexus/Toyota V8s
PCI cable
PC Interface cable
PDM15
Power Distribution Module with 15 outputs
PDM16
Power Distribution Module with 16 outputs
Glossary
Page 60

MoTeC Appendices 57
PDM30
Power Distribution Module with 30 outputs
PDM32
Power Distribution Module with 32 outputs
PLM
Professional Lambda Meter
RTC
Real Time Clock
SDC
Subaru Diff Controller
SDL
Sport Dash Logger
SGA
Strain Gauge Amplifier
SLM
Shift Light Module
SUU
Software Update Unit
TCM
Traction Control Module
UTC
USB to CAN adaptor
VIM
Versatile Input Module
Other
Calibration
The process of converting an electrical value into a physical
value e.g. Volts into kilometres per hour
CAN
Controller Area Network - communication protocol
CDI
Capacitive Discharge Ignition
ECU
Engine Control Unit
GPS
Global Positioning System
MAF
Mass Air Flow
MAP
Manifold Absolute Pressure
PID
Proportional, Integral and Derivative gain
PWM
Pulse Width Modulated.
RPM
Revolutions Per Minute
RS232
Recommended Standard 232, communication protocol
RX
Receive
TDC
Top Dead Centre
TX
Transmit
Page 61

58 Notes
 Loading...
Loading...