

Page 1
M oTe C M400/M600/M800/M880 User’s Manual
Contents
Introduction ........................................................................ 1
Additional Documentation ...................................................................................1
Overview ............................................................................. 3
ECU Models........................................................................................................ 3
Options ...............................................................................................................4
ECU Inputs & Outputs......................................................................................... 6
Calibration & Setup ...........................................................................................10
ECU Functions.................................................................................................. 11
MoTeC Software ................................................................ 15
PC Requirements.............................................................................................. 15
Connecting a PC to the ECU ............................................................................15
Installing the Software....................................................................................... 16
Starting the Software ........................................................................................16
ECU Manager Software .................................................................................... 16
Data Logging.....................................................................................................16
Telemetry.......................................................................................................... 17
Installation ........................................................................ 19
Throttle Position or MAP Load Sensing ............................................................19
Sensors............................................................................................................. 20
Wiring................................................................................................................ 23
Fuel System...................................................................................................... 26
Ignition System .................................................................................................30
Auxiliary Valves................................................................................................. 32
ECU Mounting................................................................................................... 32
ECU Cleaning ................................................................................................... 32
Initial Setup....................................................................... 33
Main Setup........................................................................................................ 33
Sensor Setup .................................................................................................... 34
Input / Output Functions.................................................................................... 35
Other Functions ................................................................................................35
Initial Calibration .............................................................. 37
Fuel Tables ....................................................................................................... 37
Ignition Tables .................................................................................................. 38
Initial Starting Procedure ................................................ 41
Pre Start Checks............................................................................................... 41
Starting .............................................................................................................43
After Start Checks............................................................................................. 44
Page 2

Calibration ........................................................................ 47
Warning Alarms ................................................................................................47
Ensure that the engine is “On Site” ................................................................... 47
Site Tables........................................................................................................ 48
Dyno .................................................................................................................48
Fuel - Main Table.............................................................................................. 48
Ignition - Main Table .........................................................................................49
Fuel - Injection Timing....................................................................................... 50
Fuel - Cold Start................................................................................................ 51
Other Calibration Tables ................................................................................... 51
Data Logging & Road Testing........................................................................... 51
ECU Manager Software ................................................... 53
Introduction ....................................................................................................... 53
For EMP Users .................................................................................................54
Basics ............................................................................................................... 55
Calibration Files ................................................................................................ 57
Versions & Upgrading ....................................................................................... 57
Screen Layouts................................................................................................. 59
Making Adjustments.......................................................................................... 62
View Screen...................................................................................................... 72
Testing the ECU Outputs .................................................................................. 73
ECU Password..................................................................................................73
File Encryption ..................................................................................................73
Enabling ECU Options ......................................................................................74
Keyboard Reference ......................................................................................... 75
Appendices....................................................................... 77
Appendix A: General Specifications.................................................................. 77
Appendix B: Sensor Supplies............................................................................ 78
Appendix C: Input Characteristics..................................................................... 79
Appendix D: Auxiliary Output Characteristics....................................................81
Appendix E: Ignition Output Characteristics...................................................... 82
Appendix F: Injector Output Characteristics...................................................... 83
Appendix G: M880 Connector........................................................................... 84
Appendix H: Wire Specifications ....................................................................... 85
Appendix J: CAN Wiring - Multiple Device ........................................................ 86
Appendix K: CAN Bus Wiring - Single Device................................................... 87
Appendix L: Pin list by Function ........................................................................ 88
For racing and off highway use only
Not legal on emissions controlled vehicles unless appropriately certified
Copyright – Motec Pty Ltd 2001-2003
While every effort is taken to ensure correctness, no responsibility will be taken for the consequences of any
The information in this document is subject to change without notice.
inaccuracies or omissions in this manual.
7 November, 2003
Page 3
MoTeC Introduction 1
Introduction
Thank you for purchasing a M oTe C Engine Management System.
This manual will help you understand the installation and calibration
requirements of your M oTe C Engine Management System.
Additional Documentation
Additional documentation is available in the form of Drawings and Tech
Notes. Please consult your local M oTe C distributor for details.
Drawing Categories
Accessories
ECUs
Looms
Ignition Modules
Combined Module & Trigger Systems
Trigger Systems
Valves
Sensors
Miscellaneous
Tech Notes
Traction Control
Boost Control
Idle Speed Control
Closed Loop Lambda Control
Wideband Lambda Sensor
Others
Page 4

Page 5
MoTeC Overview 3
Overview
The M oTe C M400, M600, M800 & M880 ECU’s are powerful and compact
programmable Engine Management Systems or Engine Control Units
(ECUs).
ECU Models
The different ECU’s are characterised by the following features:
M400
• 4 injector outputs
• 4 ignition outputs
• Waterproof plastic connector with gold plated contacts
• 512kByte logging memory (option)
• 1 wideband lambda input (option)
• Other optional functions include: Traction Control , Boost Enhancement
(Anti-lag), Hi/Lo Injection, Gear Change Ignition Cut, CAM Control, Drive
by Wire.
M600
• 6 injector outputs
• 6 ignition outputs
• Waterproof plastic connector with gold plated contacts
• 512kByte logging memory (option)
• 2 wideband lambda inputs (option)
• Other optional functions include: Traction Control , Boost Enhancement
(Anti-lag), Hi/Lo Injection, Gear Change Ignition Cut, CAM Control, Drive
by Wire.
M800
• 8 injector outputs standard
• 12 injector outputs (option, occupies 4 ignition outputs)
• 6 ignition outputs
• Waterproof plastic connector with gold plated contacts
• 1MByte logging memory (option)
• 2 wideband lambda inputs (option)
Page 6
4 Overview
• Other optional functions include: Traction Control , Boost Enhancement
(Anti-lag), Hi/Lo Injection, Gear Change Ignition Cut, CAM Control, Drive
by Wire, Pro Analysis, Telemetry, Multi Pulse Injection, Servo Motor
Control.
M880
• 8 injector outputs standard
• 12 injector outputs (option, occupies 4 ignition outputs)
• 6 ignition outputs
• Military style Autosport connector
• 4MByte logging memory (option)
• 2 wideband lambda inputs (option)
• Other optional functions include: Traction Control , Boost Enhancement
(Anti-lag), Hi/Lo Injection, Gear Change Ignition Cut, CAM Control, Drive
by Wire, Pro Analysis, Telemetry, Multi Pulse Injection, Servo Motor
Control.
Options
A number of options are available which allow the ECU to be configured for a
particular need and can also be updated later if necessary.
The options may be enabled at any time by entering an enable password.
Data Logging Option
Allows logging of the ECU sensors and operating parameters to the internal
data logging memory. The logged data may then be analysed in graphical
format using the free M oTe C Interpreter Software.
Pro Analysis
Enables more advanced functions in the data logging analysis software such
as multiple graph overlays, XY plots, maths functions, advanced track map
analysis. (Available on M800 & M880 only).
Wideband Lambda Option (Single or Dual)
Allows Wideband Lambda (Air Fuel Ratio) measurement, which may be used
for data logging or closed loop control of the Air Fuel Ratio. The ECU is
compatible with Bosch LSU or NTK wideband lambda sensors, it is not
Page 7
MoTeC Overview 5
compatible with the Bosch 4 wire LSM sensor. (Dual Lambda not available on
M400)
Telemetry
Enables the ECU to send telemetry data via a radio to the pits. The data can
be viewed in graphical format using the MoTeC Telemetry Monitor program.
(Available on M800 & M880 only).
Other
Other options include CAM Control, Drive by Wire, Traction Control, Overrun
Boost Enhancement (Anti-lag), Gear Change Ignition Cut, Hi/Lo Injection,
Servo Motor Control (M800 & M880 only) & Multi-pulse Injection (M800 &
M880 only).
Page 8

6 Overview
r
r
r
r
r
A
r
r
A
A
A
A
A
A
A
A
A
A
t
r
t
A
ECU Inputs & Outputs
The ECU analyses signals from the sensors, then controls the Fuel Injectors,
Ignition System and other auxiliary devices according to the Calibration and
Setup Data which is stored in the ECUs programmable memory.
The Inputs and Outputs are shown below.
M400/M600/M800/M880
Main Engine Sensors
REF Trigger Senso
Sync Trigger Senso
Throttle Position Senso
Manifold Pressure Senso
Engine Temp Senso
Air Temp Senso
Optional Sensors
Wide Band Lambda Senso
Wide Band Lambda Senso
eg. Oil Temp
eg. Intercooler Temp
eg. Fuel Temp
eg. Diff Temp
eg. Exhaust Temp
eg. Fuel Pressure
eg. Gear Lever Force
eg. Lateral G Force
eg. Driver Fue l Adjustmen
eg. Driver Boost Adjustmen
Wheel Speed or Switch Dig 1
Wheel Speed or Switch
Wheel Speed or Switch
Wheel Speed or Switch
REF
SYNC
TP INJ4
MAP INJ5
ET INJ6
T INJ7
LA1
LA2
T3
T4
T5
T6
V3
V4
V5
V6
V7
V8
Dig 2
Dig 3
Dig 4
INJ1
INJ2
INJ3
INJ8
IGN1
IGN2
IGN3
IGN4
IGN5
IGN6
AUX1
AUX2
AUX3
AUX4
AUX5
AUX6
AUX7
AUX8
Fuel Injector Outputs
INJ 5&6 not available
Note:
on M400
INJ 7&8 not available
Note:
on M400 & M600
Ignition Outputs
Note: IGN3-6 may be used as
Injector outputs on M800 &
M880 with 10/12 cyl option
Note: IGN 5&6 not available
on M400
Auxiliary Outputs
uxiliary Devices such as
Idle Speed Motors
Boost Control Valves
Relays
Warning Lights
etc
Communications
RS232 Communications
CAN Communications
Main Engine Sensors
The Main Engine Sensors are required for correct operation of the ECU.
The engine RPM is derived from the REF trigger sensor.
The SYNC trigger sensor is required to synchronise the Fuel and Ignition to
the correct engine cycle for sequential injection and correct firing of multicoil
ignition systems.
Page 9

MoTeC Overview 7
The Throttle Position, Manifold Pressure, Air Temp and Engine Temp are
used as inputs to the various calibration tables.
Optional Sensors
The Optional Sensors are not required for basic operation of the ECU.
The Lambda Inputs may be used for wideband air fuel ratio measurement or
wideband or narrow band closed loop lambda control.
The Digital Inputs may be used for wheel speed measurement or to activate
functions such as Dual RPM Limit, or Nitrous.
The other inputs may be used for data logging (eg. Exhaust Gas Temp, Gear
Box Temp, Driver Boost adjustment etc) or for special calibration features.
Fuel Injector Outputs
M400
Up to four injectors may be driven fully sequentially including very low ohm
types (0.5 ohms).
M600
Up to six injectors may be driven fully sequentially including very low ohm
types (0.5 ohms).
M800 & M880
Up to twelve injectors may be driven fully sequentially by the ECU if the
injectors are high resistance types (12 ohms or greater), otherwise up to eight
injectors may be driven fully sequentially including very low ohm types (0.5
ohms).
Four of the Ignition Outputs are used for full sequential 12 cylinder
operation.
Twelve cylinder engines may also be driven as six groups of 2 injectors
which leaves all six Ignition outputs available for wasted spark ignition.
Outputs not used for Fuel Injection may be used as Auxiliary Outputs.
Ignition Outputs
The Ignition Outputs may be used to drive many different types of ignition
systems, which are detailed in the various ignition system drawings.
Page 10

8 Overview
M400
Up to four ignition outputs are available for multi coil applications.
M600
Up to six ignition outputs are available for multi coil applications.
M800 & M800
Up to 6 ignition outputs are available for multi coil applications.
Outputs not used for ignition may be used as Auxiliary Outputs.
Up to 8 coils may be driven from one Ignition Output using a M oTe C CDI8
or M oTe C Ignition Expander .
Up to 12 coils may be driven from two Ignition Outputs using two M oTe C
CDI8’s or two M oTe C Ignition Expanders.
Auxiliary Outputs
The ECUs have eight Auxiliary Outputs that may be used for :
Turbo Waste Gate Control, Idle Speed Control, Gear Change Light, Driver
Warning Alarm, Tacho Output, Fuel Pump Control, Thermatic Fan Control,
Fuel Used Signal, Air Conditioner Fan Control, Air Conditioner Clutch Control,
RPM / Load Activated Output, or other functions.
CAN Communications
The CAN Communications system is a high speed network communications
system that allows multiple devices to be connected and communicate with
each other.
The CAN connection is used for all communications with the PC via the ECU
Manager software which includes; calibration, diagnostics checking,
retrieving the logged data, firmware upgrading and enabling options.
CAN may be used to communicate with the M oTe C ADL Dash Logger.
CAN will also be used to communicate with future M oTe C devices.
RS232 Serial Communications
Optionally used to communicate with the M oTe C ADL Dash Logger. In this
case the ADL is effectively picking up Telemetry data from the ECU. (Note
that CAN communications may also be used to connect to the ADL)
Page 11

MoTeC Overview 9
Used for Telemetry Output (M800 & M880 only).
Page 12
10 Overview
Calibration & Setup
Calibration Tables
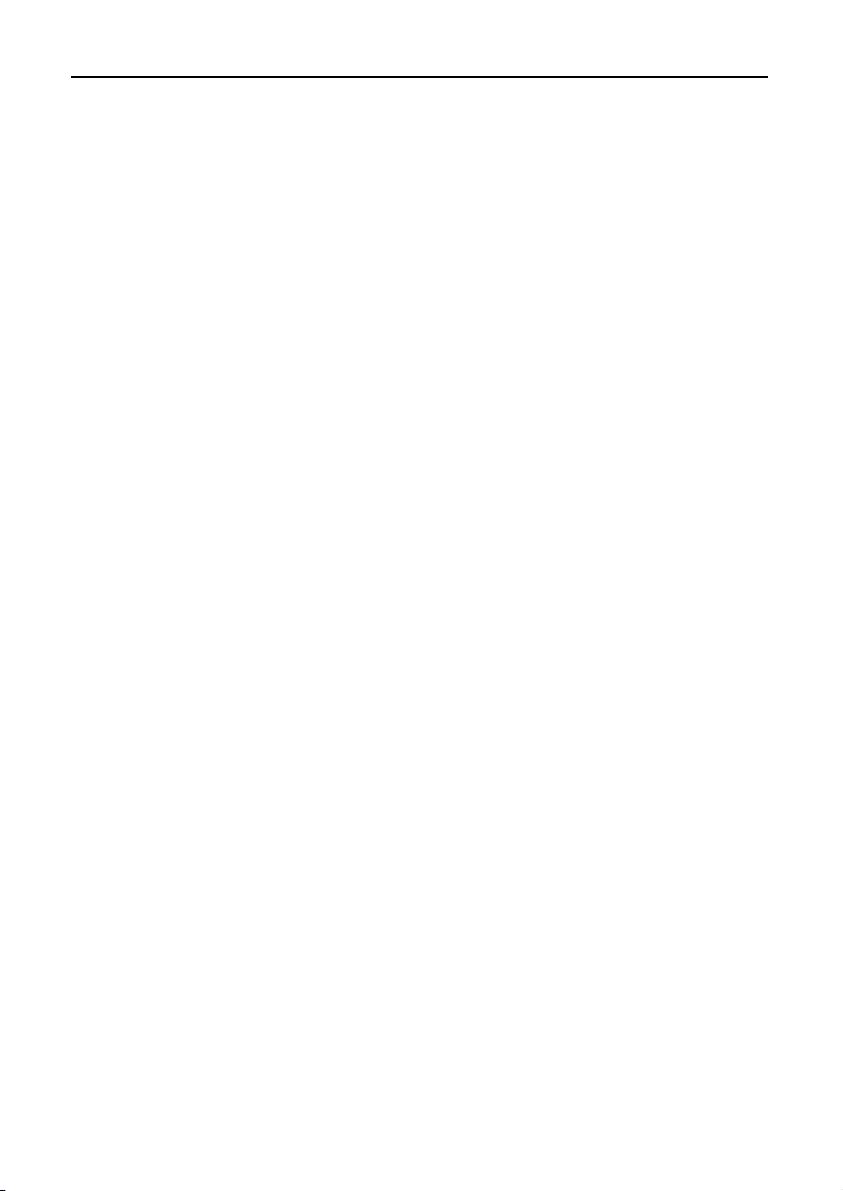
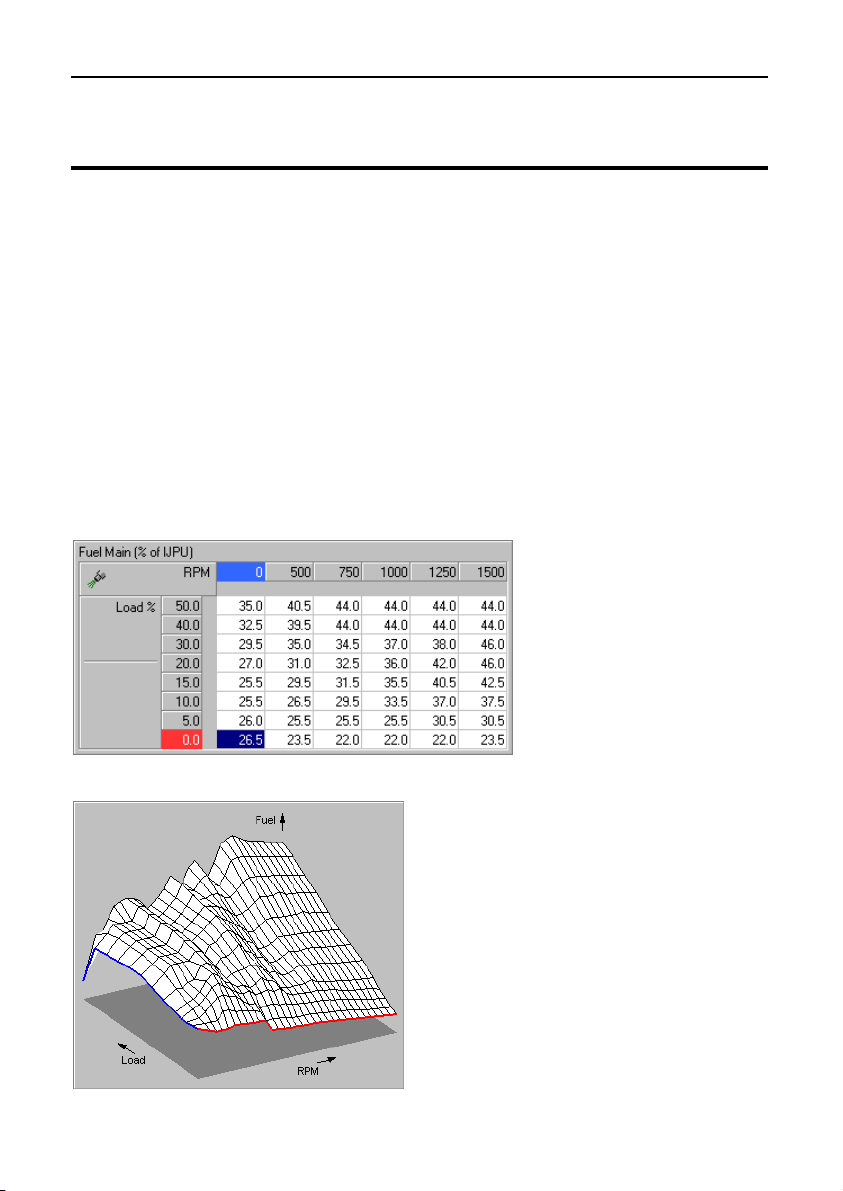
The Calibration Tables determine how the output devices should be
controlled for various sensor readings. For example the fuel calibration table
determines the base injector pulse width for all combinations of RPM and
Load. Other calibration tables will also affect the fuel injector pulse width such
as Air Temperature compensation and Engine Temperature compensation.
The ECU determines the amount of fuel to inject by first calculating the RPM
and Load then extracting the corresponding value from the table. If the RPM
and Load do not match an RPM and LOAD point exactly then the values from
the closest sites are mathematically interpolated to arrive at an intermediate
value.
A typical 3 dimensional fuel calibration table is shown below.
The calibration tables may also be represented graphically as shown below.
Page 13
MoTeC Overview 11
Setup Parameters
The Setup Parameters allow the ECU to be configured for almost any engine.
The Setup Parameters include Number of Cylinders, Ignition Type, Sensor
Types, Injector Current, Auxiliary Output Functions etc.
The Setup Parameters must be correct before attempting to start the
engine.
ECU Functions
The ECU’s can perform a large number of functions in addition to the normal
Fuel and Ignition control capabilities including Hi /Lo injection, Individual
Cylinder tables for Fuel and Ignition, Rotary ignition split and various sensor
compensations
The functions are setup using ECU Manager either in the Functions menu,
the Digital Input Functions menu or the Auxiliary Output Functions menu.
Help on each function is available from within ECU Manager by pressing the
F1 key when the appropriate screen is shown.
Tech Notes are available from M oTe C on the more complicated functions
such as Traction Control.
Note that some functions may not be available depending on the ECU Model
and options.
The functions are as follows:
Functions
The following functions are setup in the Functions menu
• Boost Control **
• Warning Alarms **
• Gear Detection *
• Overrun Fuel Cut
• Ground Sped Limiting *
• Gear Change Ignition Cut *
• Boost Enhancement (Antilag) *
• Lambda Control
• Traction Control *
* must also be setup in the Digital Input Functions
** must also be setup in the Auxiliary Output Functions
Page 14

12 Overview
Digital Input Functions
The following functions are setup in the Digital Input Functions menu
• Speed Measurement
• Period Measurement
• Pulse Measurement
• Dual RPM Limit
• Air Conditioner Request
• Nitrous
• Nitrous + Dual RPM Limit
• Ignition Switch
• Brake
• Logging Enable
• Clutch
• Beacon
• Power Steering
• Cam Position
• Telemetry Control
• Mass Air Flow Frequency Measurement
• RPM Speed Limiting
Auxiliary Output Functions
The following functions are setup in the Auxiliary Output Functions menu
• Idle Speed Control
• Aux Table Controlled Output
• Tacho Signal
• Drive by Wire Control
• Drive by Wire with Idle Speed Control
• Stepper Idle Speed Control
• Fuel Pump Control
• Thermatic Fan Control
• Air Conditioner Fan Control
• Air Conditioner Clutch Control
• RPM / Load Table Output
• Gear Change Light Output
• Fuel Used Pulse Output
• Slip Warning Output
• Alternator Control
• Spray Bars Output
• Status Output
Page 15

MoTeC Overview 13
• DC Servo Motor Control
• Cam Control
• Power Hold Output
• Servo Stepper Motor Control
• Fuel Pressure Control
Page 16

Page 17
MoTeC Software 15
MoTeC Software
The following software is available. Note that the same software is used for all
ECU models.
ECU Manager: Used for calibration, setup, diagnostics, output testing,
upgrading, unloading the logged data and enabling
ECU options.
Interpreter: Used to analyse the logged data.
Telemetry Monitor: Used to show real time telemetry data.
PC Requirements
IBM PC compatible.
200 MHz Pentium or faster.
The PC must have a 25 pin printer port (parallel port) for connection of the
M oTe C CAN Cable.
Operating System: Windows 95, 98, ME, NT4, 2000, XP.
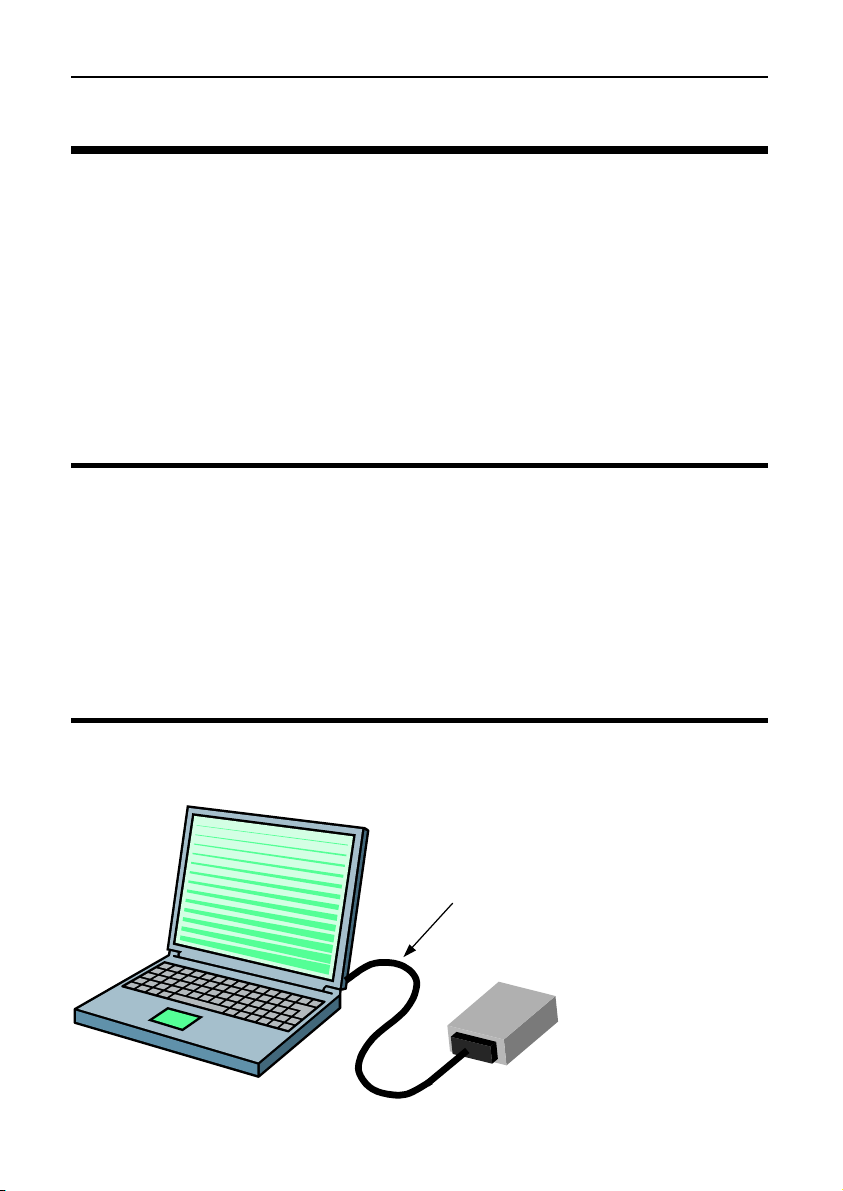
Connecting a PC to the ECU
The PC must be connected to the ECU by a M oTe C CAN Cable. Note that the
ECU must be wired with the mating connector.
MoTeC
Connected to the
Printer Port
CAN Cable
Page 18
16 Software
Installing the Software
The M oTe C Software must be installed on to the PC hard disk before it can be
used.
The main software required is the ECU Manager software, if Data Analysis is
required then the Interpreter software should also be installed, if telemetry is
required then the Telemetry Monitor software should be installed.
The software can be downloaded from the M oTe C web site at
www.motec.com.au
M oTe C is continually updating the software and newer versions may be
downloaded from the web site at no charge.
To install the software after downloading from the web double click on the
downloaded file and follow the instructions.
Note that a separate folder (directory) is automatically created for each
version of the software. Old versions are kept so that they may be used if
necessary.
Do not change the M oTe C directory structure or move the software to a
different directory, otherwise the software will not operate correctly.
, or is available on CD.
Starting the Software
To start the M oTe C Software double click the appropriate icon on the desktop
or select the appropriate program from the Start menu. For example: Start /
Programs / MoTeC / M400 M600 M800 / ECU Manager 2.1
ECU Manager Software
The ECU Manager software is covered in more detail later in this manual.
Data Logging
Data Logging allows the ECU operational data to be recorded in a memory
chip inside the ECU, the data may then be extracted for analysis on a PC.
Data logging is extremely useful for checking mixture readings, sensor
readings, diagnostics errors and other operating information.
Page 19
MoTeC Software 17
The items to be logged and the logging rates must be setup using the M oTe C
ECU Manager software. This is done in the Data Logging Setup screens.
The ECU will remember the logged data even if the ECU power is turned off.
If the logging memory becomes full the oldest data is overwritten so that
the most recent data is always available.
The ECU must have the Logging option to perform data logging.
Pro Analysis
If the Pro Analysis option is enabled then advanced analysis options such as
Track maps, multiple graph overlays, XY plots, maths functions, advanced
track map analysis. (Available on M800 & M880 only).
Unloading the Logged Data
The logged data can be extracted by connecting the M oTe C CAN Cable to the
ECU and selecting Utilities | Get Logged Data from the ECU Manager
menu.
Data Logging Analysis
The M oTe C Interpreter software may be used to analyse the logged data.
The Interpreter software is supplied separately to the ECU Manager
software.
The Interpreter software makes it easy to analyse mixture readings and other
sensor readings by presenting the data in various graphical formats.
Refer to the Interpreter help screen for more detail.
Telemetry
The MoTeC Telemetry Monitor software may be used to view live information
from the ECU via a radio link.
The Telemetry Monitor software is supplied separately to the ECU Manager
software.
The Telemetry Monitor software shows the ECU data in various graphical
forms including dial gauges, bar graphs and chart recorders.
Page 20

Page 21

MoTeC Installation 19
Installation
Throttle Position or MAP Load Sensing
The load point for the fuel and ignition calibration tables may be based on any
defined load measuring sensor.
The most commonly used are the Throttle Position sensor or the MAP
(Manifold Pressure) sensor.
Mass Air flow (MAF) sensors are also used particularly where regulations
state that the sensors cannot be changed from the factory fitted sensors.
Turbo Charged Engines
Normally use Manifold Pressure load sensing (connect the MAP sensor to the
inlet manifold).
A Throttle Position sensor is optional and will be used for acceleration
enrichment if fitted.
Normally Aspirated Engines
3D Fuel and Ignition Tables
Normally use Throttle Position load sensing.
The MAP sensor may be used to compensate for barometric pressure
changes by venting it to atmospheric pressure.
If Idle Speed Control is used then the MAP sensor should be connected to
the plenum or Manifold Pressure load sensing should be used. This is
required so that the fuel is varied as the idle speed control valve opens
and closes.
Page 22
20 Installation
Sensors
Throttle Position Sensor
The Throttle Position sensor must be a potentiometer type, older switch types
are not suitable. The sensor will produce a voltage proportional to the angle of
the throttle plate.
Throttle sensors generally have a dead band at either end and must be preloaded to avoid the dead band.
The Setup Parameters TPHI and TPLO must be set to indicate the fully
closed and fully open positions. These parameters must be reset any time the
sensor is moved or replaced. It is very important to set these parameters with
the butterfly in exactly the same place each time.
The resistance element inside the sensor may wear due to vibration in high
performance engines which can cause erratic readings. It is best to replace
the throttle position sensor periodically.
Avoid high pressure washing as this may penetrate the seals and damage the
sensor.
For wiring details refer to the appropriate M oTe C drawing.
MAP Sensor
The MAP (Manifold Absolute Pressure) sensor measures Absolute Pressure
(ie. pressure relative to a vacuum).
0 kPa Absolute = Complete Vacuum
100 kPa = 1 Bar = 14.5 PSI
Atmospheric Pressure at sea level is approximately 100 to 102 kPa,
depending on the day.
MAP sensors normally produce a voltage between 0 and 5V, depending on
the pressure.
The pressure sensor may be used to measure the inlet manifold pressure or
to measure the barometric pressure depending on the Load Sensing
arrangement detailed earlier.
The ECU Sensor Setup parameters must be set to indicate the type and
pressure range of the sensor.
Page 23

MoTeC Installation 21
Avoid severe vibration of the sensor as this can cause fluctuations in the
reading. Do not mount rigidly to the engine. Normally the pressure sensor is
mounted to the vehicle body.
If used for Manifold Pressure Sensing
For normally aspirated engines use a 100 kPa sensor.
For turbo charged engines a 300 kPa absolute sensor will measure up to 200
kPa (29 psi) of boost (above Atmospheric). If higher boost will be achieved a
sensor with a higher pressure range will be needed.
The sensor should be connected to the inlet manifold plenum via a short hose
(less than 1m). The sensor should be mounted above the level of the plenum
with the port facing down to avoid moisture accumulating on the sensor
element. The hose should run downwards all the way to the plenum.
The plenum take off point should be at a position that best represents the
average manifold pressure and has minimal pressure pulsations. A small
restrictor may be needed at the manifold end of the hose to help reduce
pressure pulsations. The take off point should not be teed in with other items
such as idle speed control valves as they can affect the pressure reading.
If used for Barometric Pressure Sensing
Use a 105 kPa sensor.
Vent the sensor to the atmosphere with the port facing down.
Avoid mounting at a point where air buffeting occurs, any pressure
fluctuations will directly affect the mixture.
It may be desirable to sense the pressure at the air intake as the pressure
may vary due to aerodynamic effects.
Air Temp Sensor
The Air Temperature sensor is mainly used to correct for air density change
due to air temperature variation.
The sensor contains a temperature dependant resistor and is designed for
high speed response in an air flow.
The Air Temp sensor must be placed to measure the air temperature before
the butterfly (and after the inter cooler on turbo charged engines).
Avoid placing the sensor too close to the stand-off vapour in a multi-runner
manifold as this will cool the sensor and give a false reading.
Page 24

22 Installation
The ECU Sensor Setup parameters must be set to indicate the particular type
of sensor.
Engine Temp Sensor
The Engine Temperature sensor is mainly used for cold start enrichment.
The sensor contains a temperature dependant resistor and is designed for
water immersion.
The ECU Sensor Setup parameters must be set to indicate the particular type
of sensor.
Trigger Sensors (REF & SYNC)
The trigger sensors supply the necessary timing information to the ECU so
that it knows when to fire the fuel injectors and ignition system. Normally two
sensors are used, REF and SYNC.
Many different types of trigger sensors and chopper patterns may be used.
The wiring and ECU setup information for the trigger sensors are specific to
the particular system. Refer to the appropriate M oTe C drawing.
Home made sensor systems often cause problems. Do not use Chrome molly
for chopper disks as it is a non magnetic material. Runout of the disk,
imperfections and bolt heads are also potential sources of problems. Where
possible it is best to use the manufacturers trigger system.
REF Sensor
Supplies the crank position information.
Some sensors supply one pulse per Top Dead Centre (4 pulses per engine
revolution on a V8), others supply as many as 360 pulses per engine rev.
The Engine RPM is derived directly from this signal.
SYNC Sensor
Used to indicate each engine cycle, which is required for sequential injection
and multi coil operation.
Generally supplies one pulse per engine cycle (ie: once every 2 revs on a 4
stroke engine).
On some special trigger systems the ECU can be synchronised using the
REF sensor only (eg. Ford Narrow Tooth)
Page 25
MoTeC Installation 23
REF / SYNC Alignment
Most modern distributors supply both REF and SYNC signals in which case
the alignment is pre-set.
When using separate REF and SYNC sensors the alignment of the two
sensors relative to one another is critical. Ensure that the sensors are aligned
correctly for the type of trigger system being used. Refer to the appropriate
drawing. Allow for any slop in the distributor drive system if the SYNC signal
is derived from the distributor.
Exhaust Gas Sensor (Lambda Sensor)
The ECU may optionally use a wideband exhaust gas sensor for data logging
or closed loop control of the Air Fuel Ratio.
The ECU is compatible with the Bosch LSU wideband sensor and the NTK
wideband sensor. These sensors are different to the sensors used on
previous model ECUs.
Note that the sensor heater must be connected to these sensors at all times
and must be controlled by the ECU by connecting it to one of the Auxiliary
Outputs.
The sensor should preferably be placed within 0.5 m of the collector pipe on a
normally aspirated engine or 0.5 m of the turbo on a turbo charged engine. If
placed too close to the exhaust outlet the reading may be effected by the
outside oxygen.
The sensor can be contaminated by exhaust manifold sealant - use an
exhaust gas sensor friendly sealant.
The lifetime of the Sensor will be significantly reduced by leaded fuels.
Refer to the M oTe C Tech Notes and Drawings for more details.
Wiring
Wiring Drawings
Refer to the Loom wiring diagram for the loom wiring details. Refer to the
drawings at the back of this manual for more general wiring details.
The wiring details for the REF and SYNC Trigger Sensors and the Ignition
Module are specific to the type of sensors and Ignition system. M oTe C can
provide wiring diagrams for most Trigger Sensors and Ignition systems.
Page 26

24 Installation
Wiring Reliability
The wiring is critical for reliable operation of the ECU. The following points will
help to ensure that the wiring is reliable.
Ground Wiring
One of the most common wiring problems is poor ground wiring.
The ground wire must be grounded properly to the engine block. There
should be no paint or anodising between the ground wire and the engine
block. Temporary wiring is likely to cause problems, use a proper eyelet
terminal that is securely crimped to the ground wire. Studs fixed in place by
Loctite® can also cause a problem as the Loctite® becomes an insulator.
These comments apply to both the ECU ground wire and the Ignition system
ground wire.
The ground wire must be at least 12# (3.3 mm
possible.
Power Wiring
The power wire must be wired by the shortest path possible to the battery via
a 30 Amp relay and a 20 Amp fuse. The relay and fuse must be in good
condition and the wires must be crimped securely to the appropriate
terminals. The relay should be activated by the Ignition Switch. The ECU
power must NOT be fed directly from the Ignition switch because it probably
wont handle the required current.
The power wire must be at least 12# (3.3 mm
possible.
2
) and must be kept as short as
2
) and must be kept as short as
Spark Plug Leads
The spark plug leads can cause interference in the ECU wiring. Keep the
ECU wires away from the plug leads wherever possible (at least 100mm). If it
is necessary to cross the plug leads, cross at right angles.
Terminal Crimping
Use the correct crimping tool for each type of terminal. Do a pull test on a
sample wire and terminal to verify that the crimp is sound. In theory the wire
should break before the wire pulls out of the crimp.
Most crimp tools are only designed for a certain range of wire sizes so be
sure to test the crimp with the particular wire size being used.
Page 27

MoTeC Installation 25
Soldering the terminal is a last resort if the correct crimping tool is not
available. Soldering will cause a stress point where the solder wicks up the
wire which is likely to fracture unless all movement is avoided. Solder flux can
also cause corrosion and may affect the contacts.
Terminal Damage
The various connector terminals are easily damaged if probes are inserted
into them. Do not insert probes of any kind into the terminals. If checking a
circuit for continuity gently touch the side of the terminals only, or preferably
attach a mating connector.
Wire Splicing
Preferably use a crimp splice. If soldering a wire splice, wire movement near
the joint must be avoided otherwise a fracture may occur at the stress point
created by the solder. Use heatshrink sleeving to insulate and provide support
to the wires.
Wire Strain
Avoid pulling the wires tight at the connectors.
Wire Movement
Avoid wire fatigue by tying the wires down close to the connectors.
Heat
Keep the ECU wires away from the exhaust system.
Page 28
26 Installation
Fuel System
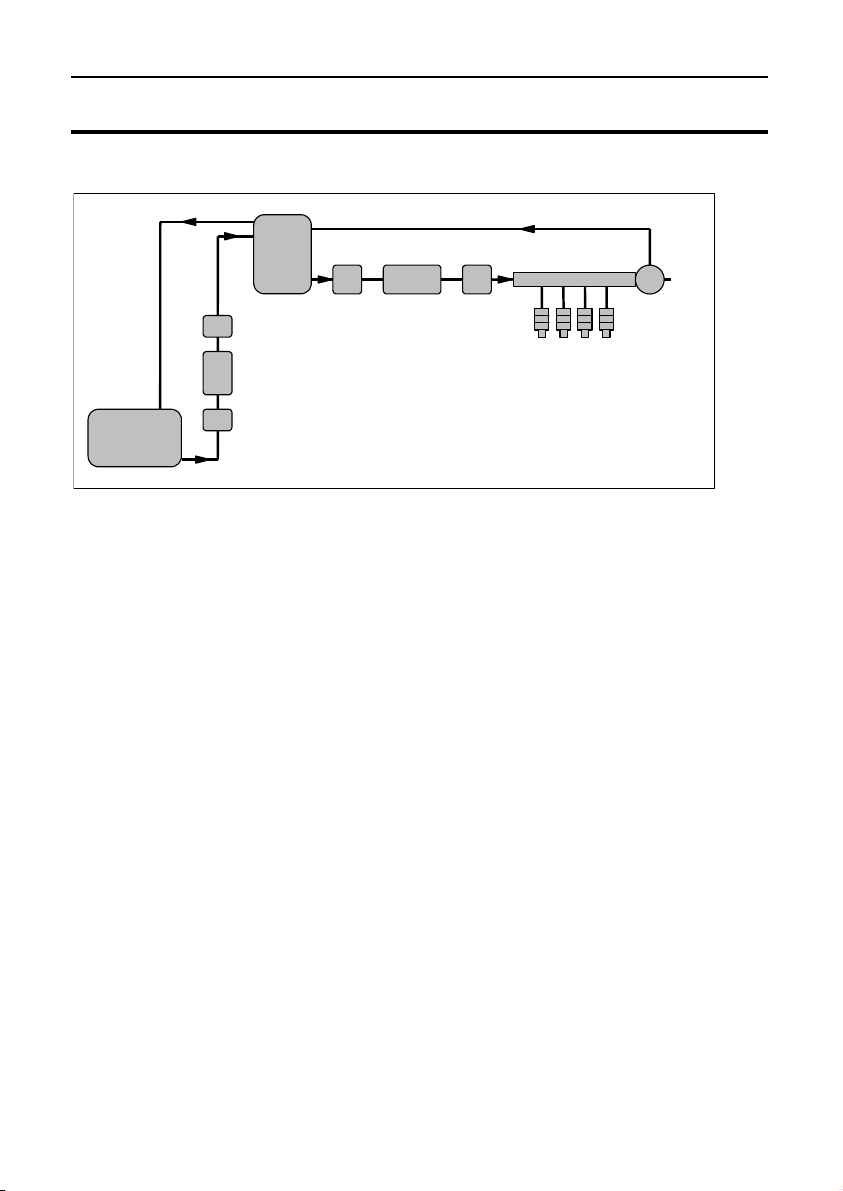
An ideal race fuel system is shown below
Fuel
Tank
Swirl
Pot
Filter
12 micron
Lift
Pump
Strainer / Water Separator
Strainer
100 micron 4 micron
Pressure
Pump
Filter
Fuel Rail
Injectors
Pressure
Regulator
Port
Lift Pump
The Lift Pump is a low pressure pump designed to lift the fuel from the fuel
tank to the swirl pot (header tank).
The Lift Pump must be capable of flowing enough fuel for full power
operation.
Swirl Pot
The swirl pot (header tank) maintains a reserve of fuel to avoid fuel starvation
to the engine during cornering and acceleration. Fuel starvation can also
cause damage to the pressure pump as it relies on the fuel for cooling,
lubrication and speed limiting.
The swirl pot also forms a header tank for the pressure pump since the
pressure pump is not capable of lifting the fuel from the tank if the tank is
lower than the pump. Place the swirl pot at the same level, or higher than the
pressure pump.
Pressure Pump
The Pressure Pump is a high pressure pump that must be capable of
delivering the required amount of fuel at the correct pressure at full power.
Page 29

MoTeC Installation 27
It is very important that the pump is capable of maintaining the correct fuel
pressure at full power otherwise the engine could be damaged due to a lean
mixture.
A 600 hp engine requires a flow rate of approximately 250 lb/hr for petrol or
gasoline.
Notes
The pressure pump must be lower than the outlet of the swirl pot.
Prime the pump with fuel before use.
The pumps flow capability is dependant on the required pressure, the flow
capability of the pump will be less at higher pressures. A small pump will
maintain correct pressure at light load but will not maintain correct
pressure as the flow requirement increases.
On boosted engines the pressure required from the pump increases with
boost pressure because the regulator maintains constant pressure above
manifold pressure.
Avoid running the pump dry as this may destroy the pump.
Filters
The filters are necessary to ensure that the fuel pump is not damaged and to
ensure that the injectors do not become blocked.
The strainer before the pressure pump is essential to prevent the pump
from seizing. A strainer is used because the pressure pump won’t suck
through a paper filter.
Fuel Lines
The fuel feed lines must be high pressure type and should be at least 8mm
(5/16 inch) diameter. The return lines should also be at least 8mm (5/16 inch)
diameter to ensure that the fuel is easily returned to the tank.
Use proper high pressure hose clamps to ensure that the lines do not blow off
under pressure.
Keep the fuel lines as cool as possible to avoid fuel vaporisation. The
temperature of the fuel will also affect the mixture due to the change in fuel
density.
Avoid fire risk by ensuring that all hoses and fittings are in good condition and
installed correctly.
Page 30

28 Installation
Fuel Rails
The fuel rails must be free of any debris that could block the injectors. Welded
fuel rails can often cause a problem unless they have been properly treated to
remove all scale and debris and even then they may corrode and cause
problems. Aluminium fuel rails mounted directly on the injectors are
recommended as they do not suffer these problems.
The fuel rails must have sufficient volume to minimise fuel pressure pulsation
and resonance problems.
Fuel Pressure Regulator
The fuel pressure regulator maintains constant fuel pressure to the injectors
which is necessary to ensure constant metering of the fuel. Any variation in
the fuel pressure will cause a corresponding mixture change.
The fuel pressure regulator should be mounted at the end of the fuel rail so
that fuel is always flowing through the rail. This helps to avoid vapour locks.
Adjustable pressure regulators are available.
If using Manifold Pressure Load Sensing
Connect the regulator port to the plenum as this ensures that constant
pressure is maintained across the injectors.
Note that this will cause the fuel pressure required from the pump to increase
as the manifold pressure increases.
If using Throttle Position Load Sensing
Leave the regulator port open to the atmosphere, unless the MAP sensor is
connected to the manifold as is recommended when using idle speed control,
in which case the regulator port should be connected to the manifold.
Fuel Injectors
The fuel injectors meter the fuel by opening for a short but defined time once
per engine cycle (sequential operation).
The injectors must be wired in the firing order of the engine.
Sizing
The size of the injector determines the maximum amount of fuel that can be
delivered to the engine.
Page 31

MoTeC Installation 29
As a rule of thumb the engine will require about 5cc per minute per horse
power for petrol or gasoline. For alcohol a higher flow rate is required.
For example : A 600 hp V8 will require each injector to flow at least
600 hp x 5 cc/min/hp / 8 injectors = 600 x 5 / 8 = 275 cc/min.
Note that the flow rate of any particular injector is dependant on the fuel
pressure applied to it.
Sometimes oversize injectors are used to maintain lower duty cycles, since
high duty cycles reduce the effect of sequential injection, since the injectors
are turned on for most of the time. However this can affect idle fuelling as the
injector may have trouble delivering small amounts of fuel.
Flow Rate Matching
The flow rate of injectors can vary between injectors of the same type. It is
advisable to match the flow rates of injectors by testing each injector on a flow
bench.
Fuel Pressure
The fuel pressure applied to the injector will directly affect the amount of fuel
that the injector delivers. Doubling the pressure however only increases the
fuel flow by about 1.4 times.
Most injectors will only operate correctly over a certain range of fuel
pressures. If the pressure is too low then the fuel may not atomise properly. If
the pressure is too high then the injectors may not turn off fully. Many
injectors will operate correctly at 2.5 bar (29 psi) and some will operate up to
5 bar (73 psi).
Current
Different injectors require different operating currents. The ECU injector
drives must be programmed to suit the injector using the Injector Current
setup parameter.
Pulse Width
The amount of time that the injector spends open during each injection pulse
is called the Injector Pulse Width and is measured in milliseconds
(thousandths of a second), abbreviated as msec.
The injector pulse width is controlled by the ECU according to the ECUs
calibration data.
Page 32

30 Installation
Duty Cycle
The Injector Duty Cycle is a measure of the ratio of the time the injector is
open (pulse width) to the available time per engine cycle. For example if the
injectors where on for half the available time then the duty cycle would be
50%.
The maximum allowable duty cycle is about 85 percent, beyond this the
injector does not have time to open and close and is therefore open
continuously and cannot deliver more fuel.
The ECU will set a Diagnostics Error if the duty cycle exceeds the maximum
allowed duty cycle.
Ignition System
Ignition System Types
Many different types of ignition systems are available with some better suited
to different applications than others.
CDI Distributed
CDI systems are suited to high revving engines with 8 or more cylinders and
are generally capable of at least 12,000 RPM on an 8 cylinder. CDIs are also
good at firing fouled plugs.
HEI Distributed
High Energy Inductive (HEI) distributed ignition systems are generally limited
to about 8000 RPM on an 8 cylinder engine but will run a 6cylinder to 11,000
RPM and a 4 cylinder to 15,000 RPM.
Most modern road cars run HEI ignition systems that are equally well suited
to high performance engines as long as the above RPM restrictions are
observed.
Multi Coil (HEI or CDI)
HEI or CDI multi coil systems will generally run any engine to 15,000 RPM.
Two types of Multi Coil systems are possible :
Page 33

MoTeC Installation 31
Butt
TDC
Coil per plug
One coil for each spark plug, fired sequentially.
Double Ended Wasted Spark
Double ended coils have two high tension towers and fire two plugs at
the same time, one on the compression stroke and the other on the
exhaust stroke. Each coil is fired sequentially twice per engine cycle
and must feed the appropriate two cylinders.
Ignition System Wiring & Setup
The wiring and setup parameters are specific to the particular ignition system.
Refer to the appropriate M oTe C Ignition System or Ignition Module drawing.
Distributor Button Alignment
If using a distributor, the button must be aligned so that it is leaving the tower
at Top Dead Centre for that cylinder.
on just leaving tower at
Button Rotation
The button must be a wide tip type to cater for a wide range of advance points
since the advance is changed electronically rather than mechanically.
Make sure that the button still overlaps the tower at the maximum advance
point.
The distributor should have no mechanical or vacuum advance as this is
provided by the ECU.
Spark Plug Leads
The spark plug leads should be high quality Inductive Suppression leads such
as Magnicor® leads and must be in good condition.
Do not use wire leads as they can cause interference.
Page 34

32 Installation
Do not use resistive suppression leads as they will reduce the spark
energy.
Auxiliary Valves
The ECU can control various auxiliary valves such as Idle Speed or Turbo
Boost control valves.
Refer to the appropriate M oTe C drawing for setup and wiring details. Refer
also to any relevant Tech Notes.
ECU Mounting
The ECU should be mounted in an area where the internal temperature of the
ECU will not exceed 85 °C, generally this is in the passenger compartment.
Allow for adequate air circulation around the ECU. The ECU internal
temperature may be viewed using the ECU Manager software or it may be
recorded using the data logging.
Mount so as to minimise vibration, this will help to prolong the ECUs life.
ECU Cleaning
Avoid high pressure washing or degreasing of the ECU.
Page 35
M oTe C Initial Setup 33
Initial Setup
Before attempting to start the engine the setup parameters must be correct.
Use the M oTe C ECU Manager software to adjust the setup parameters.
Preferably start with a calibration file from a similar engine as this will make
setup faster and easier.
Main Setup
Injectors
Injector Scaling (IJPU)
Injector Current
Injector Battery Compensation
Refer to the ECU Manager help screens for details.
Calculation Methods
Efficiency Calculation Method.
Load Calculation Method.
Refer to the ECU Manager help screens for details.
Load Sites Selection
Selects the range of load points to suit the selected sensors’ operational
range. For example 0 to 100 for a Throttle position sensor.
Refer to the ECU Manager help screens for details.
Number of Cylinders
CYLS 4 Stroke engines : use positive numbers eg. 8 for 8 cyl.
2 Stroke engines : use negative numbers eg. -2 for 2 cyl.
Rotary engines : use -2 for 2 rotor and -3 for 3 rotor.
Trigger Setup
Ref / Sync Mode (REF)
Page 36

34 Initial Setup
Crank Reference Teeth (CRT)
Crank Index Position (CRIP)
These parameters are dependant on the type of trigger system. Refer to the
appropriate M oTe C Trigger drawing, or Ignition System drawing.
Note that the trigger sensor type (Hall / Mag, Edges etc) must be setup in the
Sensor Setup screens.
Ignition
Ignition Type (IGN)
Number of Coils (COIL)
Ignition Dwell Time (DELL)
Ignition Delay Time
These parameters are dependant on the type of Ignition Module. Refer to the
appropriate M oTe C Ignition Module drawing, or Ignition System drawing.
Sensor Setup
Throttle Position Sensor Hi / Lo
TPLO Throttle Position LO (Closed Throttle)
TPHI Throttle Position HI (Wide Open Throttle)
The Throttle HI and LO points must be set every time the throttle position
sensor is moved or replaced so that the throttle can be correctly scaled
between 0 and 100%.
REF/SYNC Sensor Setup
The REF/SYNC setup parameters must be set to suit the trigger sensors.
Refer to the M oTe C Trigger drawings for details.
Sensor Calibrations
The sensors calibrations must be set to suit the connected sensors.
Refer to the ECU Manager help screens for details.
Page 37

M oTe C Initial Setup 35
Input / Output Functions
Setup any essential Input / Output functions.
It may be best to start with any non essential functions turned off (eg. Idle
Speed Control, Dual RPM Limit etc).
Refer to the ECU Manager help screens for details.
Other Functions
Ensure any other functions such as Boost Control, Traction Control etc are all
set appropriately.
It may be best to start with any non essential functions turned off (eg. Traction
Control, Lambda Control etc).
Refer to the ECU Manager help screens for details.
Page 38

Page 39

MoTeC Initial Calibration 37
Initial Calibration
Before attempting to start the engine the calibration tables should be
initialised to sensible values.
Use the M oTe C ECU Manager software to initialise the ECU calibration
tables.
Preferably start with a calibration file from a similar engine as this will make
initial calibration faster and easier.
Clear any *s from the tables by selecting Clear *s from the ECU Manager
software Tools Menu (Press the F9 key). The *s indicate values that have
been set correctly, which is inappropriate at this stage.
Fuel Tables
Fuel - Main Table
Check the Fuel - Main Table.
The table should be smooth.
In general turbo tables look quite different from throttle position tables, so it is
best to start with a table from a similar engine.
Fuel - Air Temp
Check the Fuel - Air Temp compensation table.
Typically the following table can be used :
-40 -30 -20 -10 0 10 20 30 40 50 60 70 80+
10 9 8 6 4 2 0 -2 -4 -6 -8 -10 -12
Fuel - Engine Temp
The Fuel - Engine Temp compensation table may be used instead of the cold
start warm up parameter.
If using Engine Temp compensation the following table can be used :
-10 0 10 20 30 40 50 60 70 80 90 100 110+
60 50 40 30 20 10 5 2 0 0 0 0 5
Page 40

38 Initial Calibration
Fuel - MAP
Check the Fuel - MAP compensation table.
The fuel must be increased by 100% every 100 kPa increase in air pressure.
Normally the MAP table should contain the following values, with a straight
line increase between values.
0 kPa 100 kPa 200 kPa 300 kPa 400 kPa 500 kPa
-100 0 100 200 300 400
This table is equally applicable whether the MAP sensor is used for
barometric pressure measurement or for manifold pressure measurement.
Note that the higher pressure sites will only be available if a high pressure
MAP sensor is used.
Fuel - Cold Start
Start with the typical values listed in the help.
Fuel - Acceleration Enrichment
Start with the typical values listed in the help.
Generally acceleration enrichment is not required above 4000 RPM.
Other Fuel Compensation Tables
Typically all other compensation tables should bet set to zero.
Ignition Tables
Ignition - Main Table
The table should be smooth.
Make sure that the Ignition - Main Table is initialised with a conservative
curve for the particular engine, not too advanced and not too retarded.
Ignition - Air Temp
Check the Ignition - Air Temp compensation table.
Typically the following table can be used :
Page 41

MoTeC Initial Calibration 39
-20 -10 0 10 20 30 40 50 60 70 80 90 100+
-12 -9 -6 -3 0 0 0 0 -3 -6 -9 -12 -15
Other Ignition Compensation Tables
Typically all other ignition compensation tables should bet set to zero.
Page 42

Page 43

M oTe C Initial Starting Procedure 41
Initial Starting Procedure
The ECU Manager software should be used to assist during starting.
The ECU Manager software allows all diagnostics errors and sensor
readings to be checked and allows the injectors, ignition system and auxiliary
outputs to be tested while the engine is stopped. The calibration tables and
setup parameters should also be checked.
Pre Start Checks
Calibration Tables & Setup Parameters
Check that all Setup Parameters have been set appropriately.
Check that all calibration tables have sensible values in them.
Check that any advanced functions such as Traction Control are turned off.
Power to the ECU
If the ECU has power then the ECU Manager software should indicate that
the ECU is connected (At the bottom left corner of the screen)
Diagnostic Errors
Before starting the engine check the diagnostics errors on the ECU Manager
: Diagnostics Errors screen. Any errors must be rectified before starting the
Engine.
To clear any non current errors press the Enter key on the PC while viewing
the Diagnostics Errors screen.
Note that the Diagnostic Errors are lost if the ECU power is turned off.
Sensor Errors
If an error is shown for a sensor that is not fitted the sensor should be
disabled by setting the sensor setup number to zero.
Sensor Errors may be due to bad wiring to the Sensor (either short circuit or
open circuit).
Page 44

42 Initial Starting Procedure
Test the Sensors
Before starting the engine test that all sensors are giving sensible readings by
viewing their values on the ECU Manager : View screen. Vary the sensor
readings if possible to check for correct operation.
Check that the Throttle Position Sensor varies smoothly from 0 to 100% when
moved from fully closed to fully open. Note that the TPHI and TPLO setup
parameters must have been set correctly for correct operation of the Throttle
Position sensor.
The MAP sensor should read barometric pressure when the engine is
stopped (approximately 100 to 102 kPa at sea level depending on the day).
The Engine Temp and Air Temp sensors must give correct readings.
Test the Ignition
Use the ECU Manager : Ignition Test (On the Utilities menu) to ensure that
the Ignition System is functioning correctly.
Some special ignition systems do not work in the Ignition Test screen. eg.
Mazda Series 4 & 5 and other direct fire ignition systems.
If the Ignition System is wired via the Fuel Pump relay then the ignition test
will not work unless this relay is activated.
It will be necessary to place a spark plug on the lead from the ignition coil
if the ignition system uses a distributor.
Test the Injectors
Use the ECU Manager : Injector Test (on the Utilities menu) to ensure that
all injectors are working and that they are wired in the correct firing order for
sequential operation.
WARNING: Ensure that the fuel pump is off during this test.
Initial Cranking
Crank the engine without fuel pressure and check the RPM reading.
Check that the RPM reading is sensible, if the RPM is too high or too low or is
erratic then the Setup may be incorrect or there may be a problem with the
REF sensor signal. If there is no RPM reading then the REF sensor is not
working.
Page 45

M oTe C Initial Starting Procedure 43
Check that no REF or SYNC Diagnostic Errors occur during constant
cranking. Diagnostic errors may occur as cranking winds up, this is OK, but
the errors need to be cleared by pressing the Enter key while viewing the
ECU Manager : Diagnostics Errors screen, so that constant cranking may
be checked for errors. Diagnostic errors may occur as cranking winds down,
this is also OK.
Cranking Ignition Timing
Check that the Ignition Timing is correct during constant cranking.
This can best be done in the Crank Index Position setup screen under the
ignition menu. While in this screen the ignition timing will stay fixed at the
value set under ‘Test Advance’. This allows the CRIP to be adjusted if
necessary until the timing matches the Test Advance.
Dial back timing lights such as the Snap-On® brand may not work
correctly at cranking - use a traditional timing light.
For some trigger modes (one tooth per firing) the Ignition Timing is set by
the sensor position only. In this case the ECU only controls the timing
above 500 RPM.
If the spark is going to the wrong cylinder on a Direct Fire Ignition then the
ignition may be wired incorrectly or the CRIP (Crank Index Position) setup
parameter may be out by a multiple of the angle between cylinders.
Starting
Fuel System
Power up the fuel pumps and check the fuel system for leaks before
attempting to start the engine.
Fuel Overall Trim
Use the FUEL - Overall Trim to vary the mixture when trying to start the
engine to see if the engine needs more or less fuel, this ensures that the
mixture is varied equally for all RPM and Load points.
Establish how much trim the engine needs on average then trim this out by
adjusting the setup parameter IJPU (Injector Pulse Width Scaling), or by
using the Overall Trim Table item in the Tools Menu.
Page 46

44 Initial Starting Procedure
If the Engine won’t start
Check for correct fuel pressure.
Check for fouled plugs.
Re-check for diagnostics errors.
Re-check the Ignition Timing with a Timing Light.
Check the setup parameters against the drawings.
Check that the ignition is wired in the correct firing order.
Check that the ignition is firing on the compression stroke, not the exhaust
stroke.
After Start Checks
Ignition Timing Check
Check the Ignition Timing with a Timing Light to ensure that the actual Ignition
Timing corresponds to the ECU Ignition Timing as shown on the ECU
Manager : View screen. Check the timing at high and low RPM to ensure that
it is correct at all revs. If the timing is correct at one RPM but incorrect at
another RPM and the REF sensor is a magnetic type then the trigger edge
may be incorrect or the sensor may be wired in the wrong polarity.
Adjust the setup parameter CRIP (Crank Index Position) to correct for small
variations in the REF sensor positioning.
Adjust the Ignition - Individual Cylinder Trim for cylinder number 1 and
verify that it changes the ignition timing for cylinder number 1 rather than any
other cylinder, if not then the CRIP is incorrect and needs to be adjusted by
multiples of the angle between cylinders.
Fuel Pressure
Check that correct fuel pressure is maintained under all load conditions.
Operational Diagnostics Errors
After the engine has started check for diagnostics errors.
To clear any non current errors press the Enter key while viewing the ECU
Manager : Diagnostics Errors screen.
The following operational errors may occur in a new installation.
Page 47

M oTe C Initial Starting Procedure 45
Injector Errors
Open The Injector is open circuit - check the wiring.
Short The Injector is short circuit - check the wiring.
Peak The Injector peak current was not reached.
Possible causes :
The Injector Current Setup Parameter IJCU is set too high.
The battery voltage is too low.
Over Duty
The injector duty cycle is too high, typically the duty cycle should not exceed
85%.
If the injectors exceed their maximum duty then larger injectors or higher fuel
pressure is needed.
REF / SYNC Errors
The possible causes of the various errors are detailed below :
REF Error
Too many REF pulses have occurred between SYNC pulses.
Possible causes :
A bad REF signal has caused extra pulses or a SYNC pulse has
been missed - check voltage levels with a scope.
Bad REF / SYNC alignment.
Incorrect Setup
No REF
Two SYNC signals have occurred without a REF signal.
Possible causes :
If the RPM is 0 then there is no signal - check the wiring and sensor
voltage levels with a scope.
If RPM is not 0 then a bad SYNC signal has caused extra pulses -
check voltage levels with a scope.
If RPM is low then the REF and SYNC signals may have been
swapped.
Incorrect Setup
Page 48

46 Initial Starting Procedure
SYNC Error
The SYNC signal has occurred before expected.
Possible causes :
A bad SYNC signal has caused extra SYNC pulses - check voltage
levels with a scope.
A bad REF signal has caused missing REF pulses - check voltage
levels with a scope.
Bad REF / SYNC alignment.
Incorrect Setup
No SYNC
Two or more consecutive SYNC pulses are missing.
Possible causes :
No SYNC signal - check the wiring and SYNC sensor voltage levels
with a scope.
A bad REF signal has caused many extra pulses - check voltage
levels with a scope.
Incorrect Setup
Multiple REF / SYNC Errors
Multiple REF / SYNC errors may occur, often the first error to occur is
the correct error.
Multiple errors may also occur due to incorrect Setup.
Page 49

M oTe C Calibration 47
Calibration
The Calibration Tables determine how the output devices should be
controlled for various sensor readings. For example the Fuel - Main Table
determines the pulse width for the Fuel Injectors for all combinations of RPM
and Load.
The ECU Manager software should be used to adjust the various calibration
tables to suit the engine.
Warning Alarms
Set the Warning Alarms to warn if the engine temperature goes too high. (The
warning alarms may be set in the functions menu).
Ensure that the engine is “On Site”
The engine must be “On Site” for changes to the table values to affect the
tuning, this means that the engine must be operating at the same RPM and
Load as the currently selected site in the calibration table.
Note that when the engine RPM (or Load) is between table sites the current
fuel value (or Ignition value etc) is effected by the sites to either side. For this
reason when adjusting the calibration values it is important that the engine
RPM and Load are centred on the current adjustment site to ensure that the
values from the adjacent sites have minimal influence on the value being
adjusted. Use the Target (at the left of the table) to ensure that the engine
operating point is centred on the site being adjusted.
During initial tuning, if large adjustments are required to a particular site
ensure that the sites around it are also adjusted to a similar value so that the
adjacent sites have minimal influence.
Use the SPACEBAR key to quickly move the adjustment cursor to the
engines current operating point.
Page 50

48 Calibration
Site Tables
The RPM and Load sites for the various calibration tables may be modified in
the Setup Sites screen.
A number of site tables are available which affect different calibration tables.
Use the help to check which calibration tables are effected by which site
tables.
To insert or delete sites use the Tools menu (press the F9 key). When sites
are inserted or deleted the calibration tables may be adjusted so that the new
sites do not affect the tuning.
Dyno
The alternator should be connected while tuning the engine to ensure that the
injectors are working at normal operating voltage.
The exhaust system should be the same as that in the vehicle as it will effect
the engine tuning.
On multi runner intake manifolds the air box should be fitted as it is an integral
part of the intake system and will effect the engine tuning.
The fuel pressure is critical to the injector flow and should be monitored
during dyno tuning. Incorrect fuel pressure will result in incorrect tuning. Note
that on turbo engines the fuel pressure will vary as the manifold pressure
varies because the regulator maintains a fixed pressure above manifold
pressure.
Fuel - Main Table
The Fuel - Main Table allows adjustment of the fuel at various RPM and
Load points.
Work through all the table values systematically so that all points are adjusted
for the correct Air Fuel Ratio reading.
Use extreme caution when adjusting the fuel to ensure that the engine does
not run lean at high loads. It is best to start rich. A temperature compensated
wideband Air Fuel Ratio Meter is essential to ensure correct air fuel ratio.
If the engine is missing for any reason (including over rich) the sensor may
falsely read lean due to the oxygen in the unburnt mixture.
Page 51

M oTe C Calibration 49
The Air Fuel Ratio should be adjusted according to the engine load and the
desired results, e.g. power, economy, emissions etc. At high loads the
mixture should be approximately 0.89 Lambda for maximum power. On turbo
charged engines a richer mixture may be required to reduce exhaust
temperatures and help avoid knocking. At lighter loads the mixture may be
adjusted for best emissions (1.00 Lambda) or best economy (1.05 Lambda).
The cranking (starting) fuel may be adjusted by adjusting the 0 RPM load
sites. Typically more fuel is required at cranking than at idle RPM.
The Quick Lambda feature may be used to quickly adjust each table value
with one key stroke (Press the Q key). The adjustment is made to the value
closest to the current engine operating point. The Quick Lambda feature may
only be used if the ECU is directly measuring the lambda reading. The
desired lambda value must be set in the Functions - Lambda Control Table.
If the maximum value in the table falls bellow 60 then the setup parameter
IJPU should be decreased to increase the table values. This ensures that the
table has sufficiently fine resolution. Similarly if the table values reach the
maximum of 99.5 the IJPU setup parameter should be increased to decrease
the table values.
Use the F5 key to change quickly between the Fuel - Main Table and the
Ignition - Main Table.
Use the F6 key to change quickly between the Fuel - Main Table and Fuel Timing Table.
Use the View - Fuel Screens to check that all the fuel trims and
compensations are correct (Press the V key).
Refer to the ECU Manager software help for more details (Press F1).
Ignition - Main Table
The Ignition - Main Table allows adjustment of the Ignition Timing at various
RPM and Load points.
Start with a conservative curve for the particular engine, not too advanced
and not too retarded.
Use extreme caution when adjusting the Ignition Timing to ensure that the
engine does not knock due to excessive advance. Re-check the Ignition
Timing with a Timing Light to ensure that the what the ECU thinks is the
ignition advance is in fact the actual advance.
Page 52

50 Calibration
The Ignition Timing should be adjusted for maximum torque without knocking,
by increasing the advance until the torque stops increasing. Make sure there
is at least 3 or 4 degrees margin to the knock limit.
Too much retard will cause excessive exhaust gas temperature.
At idle a more retarded ignition setting is desirable (approximately 10 to 15
degrees). This makes the idle speed less sensitive to load changes. Also the
ignition should be flat over the idle RPM range so that timing variations do not
cause the engine to hunt, since variations in the timing will vary the engine
torque.
The Quick Lambda feature may also be used from the Ignition Main Table,
which allows ignition timing adjustments to be made while also maintaining
correct mixture readings.
Use the View - Ignition Screen to check that all the fuel trims and
compensations are correct (Press the V key).
Refer to the ECU Manager software help for more details (Press F1).
Fuel - Injection Timing
The Fuel - Injection Timing table allows adjustment of the Fuel End of
Injection Timing at various RPM points and optionally at various Load points.
This table is only effective if the injectors are fired sequentially.
Adjusting the Injection Timing ensures that the fuel is injected at the optimum
point in the engine cycle, so that the engine makes best use of the fuel. In
theory the fuel should end injection at a point where all the fuel will be sucked
into the current induction stroke, therefore the end of injection point should be
some time before the intake valve closes. The optimum point depends on the
engine RPM and load.
Torque, economy, emissions and idle quality are all effected by the Injection
Timing.
At high duty cycles the Injection Timing will have minimal influence since the
injectors are on for most of the engine cycle.
Refer to the ECU Manager software help for more details (Press F1).
Page 53

M oTe C Calibration 51
Fuel - Cold Start
The Cold Start parameters may be adjusted after the Fuel - Main Table has
been adjusted and the 0 RPM sites have been adjusted for good hot starting.
Refer to the ECU Manager software help for more details (Press F1).
Other Calibration Tables
The other calibration tables may be adjusted as necessary.
Refer to the ECU Manager software help for more details (Press F1).
Data Logging & Road Testing
The calibration must be verified on the road This is best done by logging the
air fuel ratio and other sensors and checking them using the M oTe C
Interpreter software.
Data Logging is also very useful for identifying unexpected problems such as
an incorrect air temperature reading due to fuel vapour cooling the sensor or
excessive air temperature due to hot air entering the intake system.
Data logging may also be used to verify and fine tune the operation of the
various advanced functions such as traction control.
The light load and overrun calibration must also be completed on the road as
these areas cannot be adjusted on a dyno.
Page 54

Page 55

MoTeC ECU Manager Software 53
ECU Manager Software
Introduction
The following is an overview of the main concepts of the ECU Manager
software. More detailed information is available from the online help.
The ECU Manager software is used for :
• Calibration and Setup
• Sending calibration files to the ECU
• Viewing Sensor readings
• Viewing Diagnostics information
• Testing the Outputs
• Unloading the logged data
• Upgrading the ECU firmware
• Enabling ECU options.
Page 56

54 ECU Manager Software
PC Requirements
See the MoTeC Software section earlier in this manual.
Connecting a PC to the ECU
See the MoTeC Software section earlier in this manual.
Installing the Software
See the MoTeC Software section earlier in this manual.
This topic covers information that may be helpful for users that have
previously used the M oTe C EMP Software, which ECU Manager supersedes.
For EMP Users
Windows
The main difference between ECU Manager and the old EMP software is that
it is a full Windows application. This has allowed a significant number of
improvements to be made, the most obvious being the improved graphical
user interface.
Familiarity
The operation of ECU Manager is very similar to EMP, including most
keyboard shortcuts such as: F5 to switch between Fuel and Ignition and V to
show the view screen.
The Adjust menu item is the same as the EMP Select Screen menu and may
still be activated by pressing the Esc key. Pressing the Esc key has the
advantage of highlighting the currently selected screen item which often
makes navigation to the next screen easier.
All the adjustment screens should be familiar so there is no need to relearn
how to configure the ECU.
The Tools menu replaces the old Function menu and may still be activated
by pressing the F9 key.
Communications
All communication is done using the M oTe C CAN Cable (No need for both a
Serial Cable and a CAN Cable).
Page 57

MoTeC ECU Manager Software 55
This also allows the configuration to be sent and retrieved much faster.
Making Adjustments
To enter adjust mode select Open File or Open ECU from the Adjust or File
menus. This is equivalent to selecting Adjust from the EMP main menu.
The usual keys are used for making adjustment: Arrow keys to move around,
PgUp and PgDn for making changes, Enter to set the value.
Screen Layouts
A major new feature of ECU Manager is that multiple screen layouts can be
created by the user to suit the users preference and the task at hand.
See the topic on Layouts for more detail.
Utility Programs
The utility programs such as Upgrade and Enable ECU Options are built in to
ECU Manager rather than being separate programs and may be selected
from the Utilities menu.
Note that Convert Files is selected from the File menu.
Notes
Note that because the F10 key is used to access the menu (as dictated by
Windows) the old F10 function of Copy Site up and Right has been
reassigned to the F11 key.
Basics
Starting ECU Manager
To start ECU Manager double click the icon on the desktop or select ECU
Manager from the Start menu, for example: Start / Programs / MoTeC / M400
M600 M800 / ECU Manager 2.1.
Note that the desktop icon will start the latest version of ECU Manager.
Online Help
Online help is available in two forms:
Page 58

56 ECU Manager Software
Context sensitive help is available by pressing F1 or clicking on the help
button, this shows help that is relevant to the current screen.
General help is available from the Help menu.
Main Menu
The Main Menu is used to access all of the features of the ECU Manager
software.
Select a menu item by using the mouse or use the keyboard by holding down
the Alt key followed by the keys corresponding to the underlined letter of the
menu items to be selected. For example to select File | Exit hold down the
Alt key then press F then X. Alternatively press the F10 key then use the
arrow keys and the Enter key to select the desired menu item.
Unavailable Menu Items
Note that some menu items may be unavailable if the ECU is not connected
or a file is not opened.
Unavailable items appear grey.
Button Bar (Toolbar)
The Button Bar provides an alternative way of activating some of the
commonly used items on the main menu. To find out what each item does
hold the mouse pointer over the button of interest until a hint appears.
Note that some items will not be available depending on whether the ECU is
connected and if a calibration file is open.
Status Bar
The bottom line on the screen is called the Status Bar and shows the
following:
ECU Status: Connected or NOT Connected (if the ECU is connected the
ECU firmware version is also shown). If the ECU is not connected the
Page 59

MoTeC ECU Manager Software 57
reason that it is not connected is shown where the Diagnostics Errors are
normally shown.
The number of diagnostics errors (if the ECU is connected)
Calibration Files
ECU Manager records the ECU calibration and setup data in files that are
stored on the PC hard disk, this ensures that a permanent record of the data
is kept. The files also record comments to allow easy identification of each
file. Any file may be sent to any ECU which will totally re-configure the ECU
according the calibration and setup data contained in the file.
Creating a New Calibration File
To create a new calibration file open an existing file and save it to a new file
by selecting Save As from the File menu.
Sending a Calibration File to the ECU
To send a calibration file to the ECU select Send File to ECU from the File
menu. Note that the ECU must be connected to the PC using a M oTe C CAN
Cable.
Changing the Comments
To change the file comments select Edit Comments from the File menu.
Versions & Upgrading
M oTe C is continually updating the software and newer versions may be
downloaded from the web site at no charge ( www.motec.com.au )
The software consists of the ECU Manager software that runs on the PC and
the control software (firmware) that runs inside the ECU.
The ECU firmware may be updated at any time by the user which allows the
latest features to be used.
The ECU Manager version may be viewed by selecting About from the Help
menu.
The ECU firmware version is shown on the ECU Manager status line when
the ECU is connected.
Page 60

58 ECU Manager Software
Matching Versions
The version of ECU Manager and the version of the firmware in the ECU
must match in order to be able to communicate with each other.
To communicate with an ECU that has older firmware in it, either the
matching ECU Manager software must be used or the ECU firmware must be
upgraded to match the version of ECU Manager on the PC.
Upgrading the ECU
To upgrade the ECU firmware select Upgrade ECU Version from the
Utilities menu. This will send the new firmware to the ECU and automatically
convert the calibration data in the ECU to ensure it is compatible with the new
firmware.
Calibration File Versions
The calibration files that are stored on the PC must also match the version of
software being used.
To ensure that older version calibration files are not rendered useless the
older version calibration files may be converted in order to be used with the
new version of the software. To convert older files select Convert from the
File menu.
Calibration files may also be converted from some older ECU models (M4,
M48 & M8).
Minor Version Updates
Minor version updates do not require the calibration data to be converted but
still require the firmware to be sent to the ECU by selecting Upgrade ECU
Version from the Utilities menu.
Minor updates usually contain bug fixes or minor enhancements.
A minor update is one where the number before the decimal point and
immediately after do not change, for example 2.10A, 2.10C, 2.11A are all
minor updates of version 2.1.
Software Version Release Notes
The changes between the various software versions may be viewed by
selecting Release Notes from the Help menu.
Page 61

MoTeC ECU Manager Software 59
Screen Layouts
The screen layouts are completely user definable and may be optimised to
suit the user’s preference, the screen resolution and the task to be performed.
For example it may be useful to have screen layouts to suit different types of
engines or to perform particular tasks such as CAM Control or individual
Cylinder tuning.
The image above shows one possible screen layout that suits an 800x600
screen.
Layout Pages
Separate layouts may be defined on separate pages. A number of pages may
be loaded at once and may then be selected by clicking on the tabs at the top
of the pages or by pressing the Tab or the Ctrl+Tab keys.
The layout pages are saved to files. To open, close or create new pages,
select the appropriate menu item from the Layout menu.
Page 62

60 ECU Manager Software
Layout Objects
To add an object to the layout page select Add from the Layout menu or right
click on an empty space in the layout page and select Add.
To change the properties (settings) of any object right click on the object and
select Properties.
To delete an object right click on the object and select Delete.
Adjust Tables and Adjust Graph Objects
In order to make adjustments the layout page must contain an Adjust Table or
an Adjust Graph or both.
Note that only one Adjust Table and one Adjust Graph are allowed per page.
Adjust Tables
Adjust Tables show the values for the currently selected table and allow
adjustments to be made. They also show axis indicators and a target to help
positioning of the engine operating point.
Adjust Graphs
The table values may also be shown graphically in an Adjust Graph.
The graph may be rotated if necessary by clicking on the rotation buttons or
by holding down the Ctrl key while using the arrow keys.
Graph Table
If there is no graph displayed the table object may be switched between table
mode and graph mode by pressing the G key.
Page 63

MoTeC ECU Manager Software 61
Y Axis Reversing
On certain graphs it may be desirable to reverse the Y axis so that the graph
surface is easier to see.
To do this select Reverse Y-Axis on the Tools menu or press the Y key.
Page 64

62 ECU Manager Software
Making Adjustments
On Line / Offline
Changes may be made directly to the ECU (Online) or to a file (Off line).
Online (ECU Connected)
To make changes directly to the ECU, connect the ECU then select Open
ECU from the File menu.
When the ECU is opened the calibration data is first retrieved from the ECU
then matched to a file. If the ECU data does not match an existing file then a
new file will be created, at which point an Engine Description and Comment
should be entered to describe the file.
Changes to the ECU are also saved to this file when the ECU is closed.
Offline (ECU not Connected)
To make changes to a file with the ECU offline select Open from the File
menu.
The file may be sent to the ECU at a latter date by selecting Send File to
ECU from the File menu.
Closing the ECU or File
When the changes are completed the ECU or file should be closed by
selecting Close from the File menu, this will ensure that changes are saved
to the associated file.
Warning Alarms
If the Warning Alarms have been set then a warning screen will be displayed
if any sensor goes outside its alarm limits. This can be particularly useful for
automatically monitoring engine temperature during a dyno session. The
alarms can be configured in the Functions table.
Help
Context sensitive help is available by pressing F1 or clicking on the help
button, this shows help that is relevant to the current screen.
Page 65

MoTeC ECU Manager Software 63
Selecting the Adjust Table
Once a file or the ECU has been opened the appropriate table or setup
screen may be selected from the Adjust menu by using the mouse or the
keyboard.
To select the Adjust menu using the keyboard hold down the Alt key
followed by the A key then use the arrow keys and the Enter key to make a
selection.
Alternatively the Adjust menu may be displayed by pressing the Esc key.
This has the advantage that it shows the Adjust menu with the current table
selected which often makes it easier to select the next table.
Fuel / Ignition Toggle (F5 key)
The F5 key will quickly toggle the screen between the current Fuel table and
the corresponding Ignition table or vice versa.
F6, F7, F8 Key Assignment
The F6, F7,or F8 keys may be assigned to any table by pressing Alt+F6,
Alt+F7 or Alt+F8. This assigns the current table to the F6, F7 or F8 keys
which allows that table to be returned to quickly.
Page 66
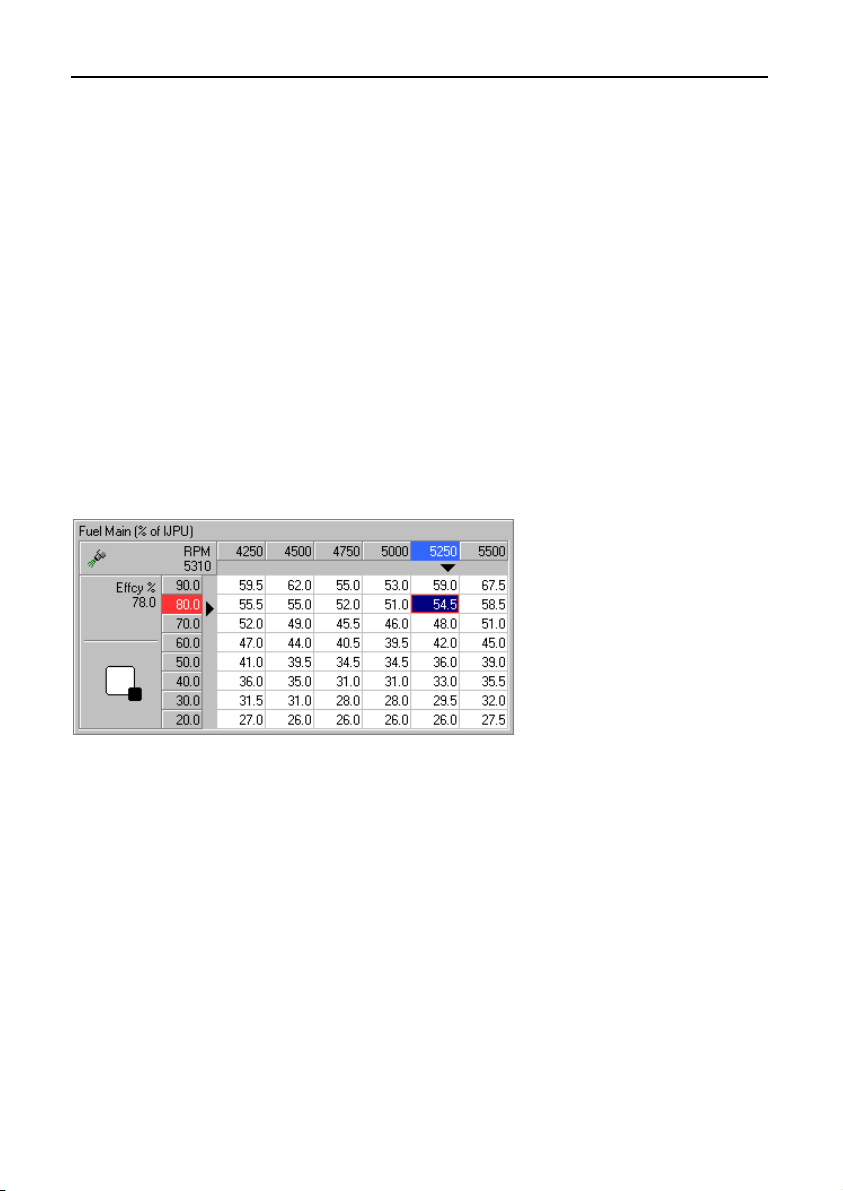
64 ECU Manager Software
Changing Table Values
Selecting the Item to be Adjusted
The cursor selects the table value that may be adjusted.
The cursor may be moved using the arrow keys, or by pressing the Space
Bar which will automatically move the cursor to the current engine operating
point.
Note that the table does not show all values at once. To view the additional
values move the adjustment cursor to the edges of the table using the arrow
keys, this will cause the table to scroll and show the hidden values.
Make sure the Engine is “On Site”
For adjustments to affect the current engine operation the engine operating
point must be at the centre of the selected site. The Adjust Table object
provides Indicators and a Target to assist in this.
Table Indicators
Indicators are shown at the top and side of the table (the black
triangles). The indicators show the current engine operating point and
therefore indicate which table value (or values) the ECU is currently
using. The indicators must point to the same site as the adjustment
cursor for any adjustments to change the current engine tuning.
The site that is closest to the current operating point is also indicated
by a red rectangle.
Table Target
A target is shown at the left of the table. This allows more accurate
positioning of the engine operating point.
Page 67

MoTeC ECU Manager Software 65
For best calibration the indicator should be within or close to the centre
rectangle, this ensures that the ECU tuning is determined mainly by the
site being adjusted and not by the adjacent sites.
Up / Down Adjustment
Up or Down adjustments may be made to the selected table value using the
PgUp and PgDn keys.
Fast adjustments may be made by holding the Ctrl key down while
pressing the PgUp or PgDn keys. This will increment the value by ten
times the normal amount.
If the PgUp or PgDn keys are held down the value will continue to change
until the key is released.
Locking in the New Value
When the desired adjustment has been made the new value must be locked
in (“Set”) by pressing the Enter key, this stores the new adjustment in the
ECUs programmable memory.
If the cursor is moved before pressing the Enter key the value will revert to
its previous unadjusted value.
Direct Entry
The table values may also be entered directly using the number keys followed
by the Enter key.
Maths Operations
Mathematical operations may be performed on the currently selected value or
the WHOLE table or a BLOCK within a table.
To perform a maths function enter the value followed by an operation key (+, , *, / ), for example 2.5+ will add 2.5 to the current table value.
To apply the maths operation to the whole table type a T before pressing the
operation key, for example: 2.5T+ will add 2.5 to the whole table.
Block Operations
To mark a block hold down the shift key while pressing the arrow keys then
perform a maths operation.
Page 68

66 ECU Manager Software
Quick Lambda
The Quick Lambda feature allows the Fuel - Main Table values to be
adjusted to the correct lambda by simply pressing the Q key. This feature
uses the Wideband Lambda reading and the value from the Lambda Table to
calculate the new fuel table value.
The Lambda Table may be accessed by pressing the F8 key.
Note that this feature requires a Wideband Lambda sensor or meter to be
connected to the ECU.
Set Indicators (*)
A * will appear next to items that have been set, with the exception of tables
that are dependent on the engine operating point where a * will only appear if
the engine operating point corresponds to the currently selected site. The *
indicates that the point has been tuned.
The *'s may be cleared individually or all *'s may be cleared at once.
To clear an individual * press the Delete key. To clear ALL *'s select Clear
ALL*'s from the Tools menu.
Page 69

MoTeC ECU Manager Software 67
Tools
The Tools Menu allows selection of various functions as listed on the menu
below.
The Tools Menu may also be displayed by pressing the F9 key, in this case
the previously selected item will be highlighted which makes it easier to do
repetitive operations.
Note that the items on the menu will changes depending on which adjust
table is shown, for example Quick Lambda is not available for all tables
The letter to the right of some menu items is the “hot key”. Pressing this key
will activate the item without selecting the Tools menu.
Compare Mode On / Off
Turns Compare Mode on or off.
Compare Mode shows the difference between the current file and the
selected comparison file.
When Compare Mode is turned on the selected compare file description is
shown on the status line at the bottom of the screen.
Page 70

68 ECU Manager Software
The comparison file may be selected by choosing Select Compare File from
the Tools menu.
When Compare Mode is turned on an icon will appear at the left of the Adjust
Menu items that contain differences.
Select Compare File
Selects the file used for Compare Mode.
Jump to Site
Moves the Cursor block to the Site closest to the current engine operating
point.
Quick Lambda
Adjusts the fuel value to achieve the lambda value in the Wideband Lambda
table. The Lambda Table may be accessed from the Functions | Lambda
Control menu or by pressing the F8 key.
The new fuel value is calculated by checking the difference between the
Lambda sensor reading and the value in the Wideband Lambda Table.
The Lambda reading may be either Lambda 1, Lambda 2 or the Average of
both, this is configured in the Wideband Lambda setup.
The engine must be operating near the centre of the site for the calculation to
give correct results.
Quick Lambda may be used from the Fuel Main Table, Fuel Injection Timing
Table, Ignition Main Table, Fuel Second Load Table & Fuel Individual Tables.
When used from the Fuel Main Table the cursor jumps to the closest site if
the cursor is not on site.
When used from the Ignition main Table or Fuel Injection Timing Table the
Fuel Main Table site closest to the current operating point is adjusted.
When used from the Fuel Second Load Table or the Fuel Individual Tables
the change is made to that table rather than the Fuel Main Table.
Quick Lambda + Copy Up & Right
As for Quick Lambda except that the new value is copied to the sites
immediately above, right and diagonally above and right if the sites do not
contain a *.
Page 71

MoTeC ECU Manager Software 69
Lambda Was
Adjusts the fuel table value by an appropriate amount by comparing the value
entered by the user to the desired lambda value in the Lambda Table.
The value that is entered may be either the current lambda reading from a
lambda meter if tuning online or the lambda reading from the logged data if
tuning offline.
Note that if a lambda sensor is directly connected to the ECU then online
tuning may be performed more easily using the Quick Lambda function.
Overall Trim Table
Trims the whole Table by the percentage indicated by the Overall Trim then
sets the Overall Trim back to 0.
This is useful during initial tuning of the Fuel Main Table since an existing
table can be used then trimmed to take into account variations in injector
sizing etc. Note that it is better to change the IJPU setup parameter if large
changes are required as this will ensure that the Table numbers maintain
sufficient range and resolution i.e. ensures that the table numbers do not
become too small or too large.
Note that during the interpolation the engine may run incorrectly. It is
therefore best if the engine is stopped during the interpolation. If the engine is
running a warning will be given before the interpolation is started.
Interpolate Vertical Column
Linearly interpolates the current Column between the Upper most value and
the Lower most value leaving the Upper most value, the Lower most value
and points marked with an * unchanged.
Note that it may be necessary to use the Backspace key to mark the desired
points with an *.
Interpolate Horizontal Row
Linearly interpolates the current Row between the left most value and the
right most value leaving the left most value, the right most value and any
points marked with an * unchanged.
Note that it may be necessary to use the Backspace key to mark the desired
points with an *.
Page 72

70 ECU Manager Software
Copy Vertical Column Right
Copies the data in the current Column to the Column immediately to its right.
Copy Horizontal Row Up
Copies the data in the current row to the row above.
Copy Site Up And Right
Copies the value of the current site to the sites immediately above, right and
diagonally above and right if the sites do not contain an *.
Reverse Y-Axis
Reverses the Y axis for the Graph or Table or both. This makes some graphs
easier to see.
Toggle Table Mode
If a table is displayed and there is no graph displayed this will switch the table
between table mode and graph mode.
Set All Values To Current
Set all values in the current table to the value of the current site.
Reset ECU
Resets the ECU. This can be useful if changes have been made to a setup
item that requires the ECU to be reset, normally this does not happen until a
different screen is selected.
Clear All *
Clears all *'s in either the currently displayed table or all tables.
The *’s are normally used to indicate which sites have been tuned.
Clear Current *
Clears the * on the current site.
Set with *
Sets an * on the current site whether or not the engine is currently at that site.
Page 73

MoTeC ECU Manager Software 71
Copy Table from Another File
Copy a table from another calibration file into the current table.
Warning - The current table data will be overwritten.
Import CSV File
Read a CSV (Comma Separated Value) file into the current calibration table.
Normally the CSV file is one that has been written out from another
configuration file, possibly for a different ECU type.
Warning - The current table data will be overwritten.
Note that the CSV file must be for the same type of table.
Note also that the site values are not imported therefore the site values must
be the same as the sites in the CSV file for the table to have the same result.
Export CSV File
Write the current table to a CSV (Comma Separated Value) file.
May be used to transfer data between different ECU types or for use in a
spreadsheet.
Insert Site
Insert a site to the left of the current site.
The new site value will be half way between the value of the current site the
value of the site to the left.
(Available only in the Site setup screens)
Delete Site
Delete the current site.
(Available only in the Site setup screens)
Page 74
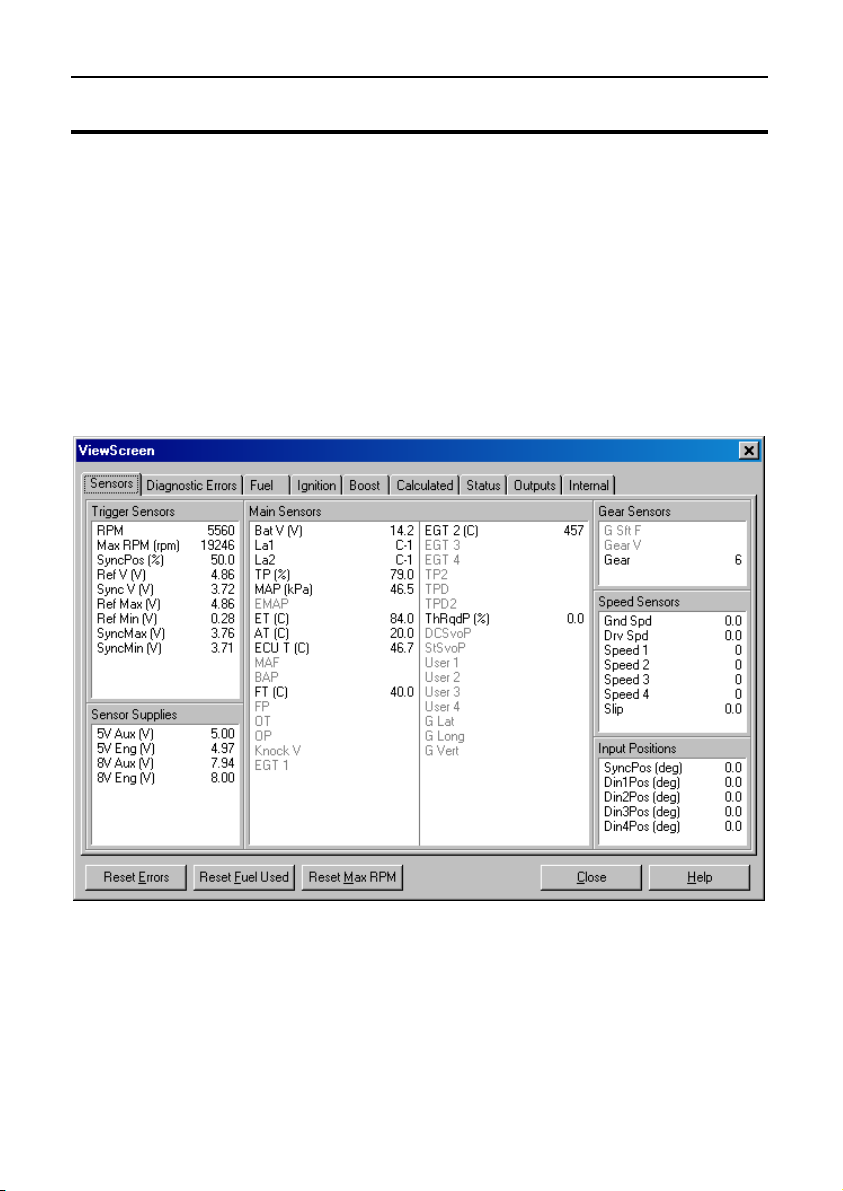
72 ECU Manager Software
View Screen
The View Screen may be shown by pressing the V key or by selecting the
desired view page from the View menu. The View Screen displays all the
operating details of the ECU including:
Sensor data
Diagnostics errors
Fuel injection detail including all trims and compensations
Ignition detail including all trims and compensations
Boost control detail
Status information
Output Status
Internal Voltages etc
The View Screen has a number of pages that may be accessed by pressing
Tab while holding down the Ctrl key or by pressing the first letter of the
screen name.
It also allows resetting of The Diagnostic Errors, Maximum RPM and the Fuel
Used. The Diagnostic Errors Screen may be accessed directly by pressing
the F3 key.
Note that the view screen may be viewed with or without the ECU open (but
only if the ECU is connected).
Page 75

MoTeC ECU Manager Software 73
Testing the ECU Outputs
The ECU Outputs (Fuel Injectors, Ignition Outputs and Auxiliary Outputs) may
be tested by selecting Test Outputs from the Utilities menu.
This allows verification of the operation of the wiring and actuators. It is also
very useful in checking that the injectors are wired in firing order.
ECU Password
A password may be set in the ECU to stop unauthorised access to the ECU
configuration data.
The password may be set by selecting Adjust | Security Setup from the
main menu.
Channel Locking
Note that the live channel information (RPM, Engine Temp) may still be
viewed even when the password is set unless the particular channel has been
locked using the Channel Locking feature.
Channels that have been locked cannot be viewed on the View screens or
sent as Telemetry data once the ECU password has been set.
Channel locking may be set by selecting Adjust | Security Setup from the
main menu.
File Encryption
File Encryption allows a configuration file to be distributed to a customer
without the customer being able to view the contents of the file.
An encrypted file can only be sent to an ECU that has it's password set to the
same value as the Encryption Number that was used to encrypt the file. An
encrypted file cannot be sent to an ECU with no password.
The data in an encrypted file cannot be viewed.
The comments for an encrypted file are the same as those of the file from
which it was created. The comments cannot be edited. It is possible to create
files with the same comments so care needs to be taken to ensure the correct
files are used. Any unnecessary files should be deleted.
Page 76

74 ECU Manager Software
Enabling ECU Options
A number of options are available which allows the ECU to be configured for
a particular need or updated later if necessary. The options include Data
Logging, Wideband Lambda measurement, Drive by Wire and more.
The options may be enabled at any time by selecting Utilities | Enable ECU
Options from the main menu and entering the enabling password.
Page 77

MoTeC ECU Manager Software 75
Keyboard Reference
PgUp Adjust Up
PgDn Adjust Down
Ctrl + PgUp Fast Adjust Up
Ctrl + PgDn Fast Adjust Down
Shift + PgUp Slow Adjust Up (Not available on all tables)
Shift + PgDn Slow Adjust Down (Not available on all tables)
Enter Set the adjusted Value
Alt+X Close the ECU or File
Esc Show the Adjust menu with the current screen item highlight
Tab Select the next Layout page
Spacebar Jump the cursor to the site closest to the current engine
operating point.
F1 Show Help
F3 Show the Diagnostics Errors screen
F5 Toggle between the Fuel and Ignition screens
Alt+F6 Remember the current screen, Show it when F6 is pressed
Alt+F7 Remember the current screen, Show it when F7 is pressed
Alt+F8 Remember the current screen, Show it when F8 is pressed
F6 Select the Fuel Timing screen (or the Remembered screen)
F7 Select the Boost Limit screen (or the Remembered screen)
F8 Select the Lambda Table screen (or the Remembered
screen)
F9 Show the Tools menu
F10 Select the main menu
F11 Copy site up and right
C Turn Compare Mode Off / On
E Edit the File Comments
G Switch table between table mode and graph mode
L Lambda Was
Q Quick Lambda
W Quick Lambda plus copy up and right
V Show the last View screen
S Show the sensors tab on view screen
Y Reverse the Y axis on the table, graph or both.
Delete Delete * at the current site
Backspace Place * at the current site
Home Select one of a number of default view angles for the graph.
Ctrl+Arrrow Change the view angle of the graph
Shift+Arrow Mark a block on the table (mathematics may be applied to
the block)
Ctrl+Shift+Arrow Copy the current table value to an adjacent cell.
Page 78

76 ECU Manager Software
Alt+1...0 Select Individual Cyl 1…10 table (Only when an Individual
Table is currently selected)
Page 79

MoTeC Appendices 77
Appendices
Appendix A: General Specifications
Physical
Case Size 147mm x 105mm x 40mm (5.8in x 4.1in x 1.6in)
Weight M400, M600, M800: 0.50 kg (1.10lb)
M880: 0.525kg (1.16 lb)
Power Supply
Operating Voltage: 6 to 22 Volts DC
Operating Current: 0.5 Amps Max (excluding sensor and load currents)
Reverse Battery Protection via External Fuse
Battery Transient Protection
Operating Temperature
Internal Temperature Range: -10 to 80°C (14 to 176°F)
Ambient Temperature Range: -10 to 70°C (14 to 158°F) typical, depending
on output loading
Page 80

78 Appendices
Appendix B: Sensor Supplies
Maximum Current
5V ENG Sensor Supply: 0.20 Amps Max
5V AUX Sensor Supply: 0.15 Amps Max
8V ENG Sensor Supply: 0.30 Amps Max
8V AUX Sensor Supply: 0.30 Amps Max
Accuracy / Temp Drift
5V ENG Sensor Supply: ± 0.5% max at 25°C + 100ppm/°C max
5V AUX Sensor Supply: ± 0.5% max at 25°C + 100ppm/°C max
8V ENG Sensor Supply: ± 5% max over entire temperature range
8V AUX Sensor Supply: ± 5% max over entire temperature range
Protection
Short to ground
Short to battery
Thermal overload
Page 81

MoTeC Appendices 79
Appendix C: Input Characteristics
Analog Voltage Inputs
Suitable for: Potentiometers, Voltage output sensors & Variable resistance
sensors.
• Note that variable resistance sensors require a pullup resistor to the 5V
sensor supply. (Normally a 1000 ohm resistor is used)
Measurement Voltage Range: 0 to 15 V
• Note that voltages outside this range may affect the readings on other
inputs.
Input Resistance: 100k ohms to 0V
Resolution: 3.74 mV
Filter: 150Hz 1
Measurement Method: Absolute
Analog Temp Inputs
Suitable for: 2 wire variable resistance sensors and some voltage output
sensors.
st
order
• Note that some voltage output sensors may not be able to drive input
resistance.
Measurement Voltage Range: 0 to 15 V
• Note that voltages outside this range may affect the readings on other
inputs.
Input Resistance: 1000 ohms to the 5V sensor supply and 100k ohms to 0V.
Resolution: 3.74 mV
Filter: 150Hz 1
Measurement Method: Absolute
st
order
When used as Switch Inputs
The Analog Temp Inputs may also be used as Switch Inputs
Trigger Levels: Programmable 0 to 15V
Hysteresis: Individually programmable high and low levels.
Page 82

80 Appendices
Lambda Inputs
Wideband
Sensor Type: NTK or Bosch LSU
Measurement Range : 0.70 to 32.0 Lambda
Narrow Band
The LA1S and LA2S inputs may be used to measure the voltage of
normal narrow band oxygen sensors.
Note: If closed loop control is to be used then an external 33k ohm bias
resistor from the input to 0V is required to bias the input to
stoichiometric (0.45V) while the sensor is cold.
Voltage Input
The LA1S and LA2S inputs may be used as ordinary voltage inputs.
Specifications are the same as the Analog Voltage inputs except the
inputs include a 220k ohm resistor to 5V.
Digital Inputs
Suitable for : Switch to 0V, Logic signal & open collector device (eg Hall
Switch)
Pullup Resistor : 4700 ohms to 5V
Voltage Range : 0 to 15V
Positive Trigger Threshold : 3.5 V max
Negative Threshold : 1.0 V min
Hysteresis : 0.5 V Min
Filter Time Constant : 22usec
Trigger Edge: Programmable
Measurement Methods: Switched, Speed / Frequency, Period, Pulse Width
Page 83

MoTeC Appendices 81
Appendix D: Auxiliary Output Characteristics
The following tables list the characteristics for the Auxiliary Outputs, including
the Ignition and Injector Outputs when used as Auxiliary Outputs.
Output Low Side Driver High Side Driver General
Nominal
Max
Current
(A)
AUX1
AUX2
AUX3
AUX4
AUX5
AUX6
AUX7
AUX8
IGN1
IGN2
IGN3
IGN4
IGN5
IGN6
INJ1
INJ2
INJ3
INJ4
INJ5
INJ6
INJ7
INJ8
5 7 * 5 7 Recirculate 10000
5 7 * 5 7 Recirculate 10000
1 3 - - 60V 10000
1 3 - - 60V 10000
1 3 0.7 0.7 * Recirculate
1 3 0.7 0.7 * Recirculate
1 3 0.7 0.7 * Recirculate
1 3 0.7 0.7 * Recirculate
1 3 - - 60V 5000
1 3 - - 60V 5000
1 3 - - 60V 5000
1 3 - - 60V 5000
1 3 - - 60V 5000
1 3 - - 60V 5000
2 4 - - 60V 5000
2 4 - - 60V 5000
2 4 - - 60V 5000
2 4 - - 60V 5000
2 4 - - 60V 5000
2 4 - - 60V 5000
2 4 - - 60V 5000
2 4 - - 60V 5000
Min
Current
Limit
(A)
Nominal
Max
Current
(A)
Min
Current
Limit
(A)
Fly-Back
Voltage
(V)
Max
Freq
(Hz)
200
200
200
200
Normally the current should not exceed the Nominal Max Current but in some
circumstances it may exceed this value for a short period of time as long as it
does not exceed the Min Current Limit and as long as the duty cycle is low.
The limiting factor is thermal dissipation in the output driver.
The total maximum low side current should not exceed 15A.
The minimum frequency for all outputs is 15Hz (except when used as a
switched output).
Items marked * use a linear current limit, all other outputs shutdown at the
current limit.
Page 84

82 Appendices
Appendix E: Ignition Output Characteristics
Source Current: 20mA (Single Coil / Coil per Plug) / 40mA (Wasted Spark)
Source Voltage: 5.7V max at 20mA, 4.6V max at 40mA
Sink Current: 1 Amp max nominal (3 Amp current limit)
Page 85

MoTeC Appendices 83
Appendix F: Injector Output Characteristics
The Injector outputs can operate in two modes: Peak and Hold mode and
Saturated mode.
Peak and Hold Mode
This mode is normally required for low resistance injectors (5 ohms or less).
This mode allows the injector current to build up to a high value to open the
injector and is then reduced to minimise power dissipation in the injector.
Normally this means that the ECU has to dissipate a large amount of power.
M oTe C uses a switch mode technique to minimise power dissipation in the
ECU. The opening current is referred to as the Peak current and the reduced
current as the Holding current.
The peak current is fully programmable from 0 to 6 Amps and is suitable for
very low ohm injectors including 0.5 ohms.
Holding Current: 25% of Peak Current
Flyback Voltage: 60V
Diagnostics: Open Circuit, Short to Battery, Peak current not reached.
Saturated Drive Mode
This mode is normally used for high resistance injectors (12 ohms or greater).
Nominal Maximum Current: 2 Amps
Current Limit: 4 Amps
Flyback Voltage: 60V
Diagnostics: Open Circuit, Short to Battery
High / Low Injection
The injector output characteristics may be set independently for High/Low
injectors allowing two different types of injectors to be used.
Page 86

84 Appendices
Appendix G: M880 Connector
Mating Connector (for M880 only)
Deutsch : AS6-18-35SN
Wire
Wire to suit connector : 22# Tefzel, Mil Spec : M22759/16-22
Crimp Tool
Crimp Tool : M22520/2-01
Positioner for Crimp Tool : M22520/2-07
• Note that the Crimp Contacts are type 22D (this is needed to set the crimp
tool correctly)
Wire Stripping Tool
The following tool is recommended
Ideal Industries 45-2133 stripping tool with LB1195 wire stop.
Heatshrink Boots
Straight : Racychem 202K153, Hellermann 156-42-G
Right Angle : Racychem 222K153, Hellermann : 1156-4-G
Page 87

MoTeC Appendices 85
Appendix H: Wire Specifications
M22759/16 Wire Ratings (For Various Wire Gauges)
Insulation Material : Tefzel
Conductor : Tin Plated Copper
Voltage Rating : 600 V
Maximum Temperature : 150 °C
Wire
Gauge
(AWG)
22 0.38 5 0.045 14
20 0.61 6 0.028 8.5
18 0.96 9 0.018 5.5
16 1.2 12 0.014 4.3
14 1.9 18 0.009 2.7
Cross
Sectional
Area (mm
2
)
Max Current
at 100 °C
Ambient
(Amps)
Resistance
( ohm / m )
Resistance
( ohm / 1000 ft )
12 3.0 24 0.006 1.8
Wire Stripping Tool
The following tool is recommended
Ideal Industries 45-2133 stripping tool with LB1195 wire stop.
Page 88

86 Appendices
Appendix J: CAN Wiring - Multiple Device
The CAN bus should consist of a twisted pair trunk with 100R (0.25Watt)
terminating resistors at each end of the trunk.
The preferred cable for the trunk is 100R Data Cable but twisted 22# Tefzel is
usually OK.
The maximum length of the bus is 16m (50ft) including the MoTeC CAN
Cable (PC to CAN Bus Communications Cable)
CAN Devices (such as MoTeC ADL, BR2 etc) may be connected to the trunk
with up to 500mm (20in) of twisted wire.
The connector for the CAN Communications Cable may also be connected to
the trunk with up to 500mm (20in) of twisted wire and should be within
500mm of one end of the trunk. If desired two CAN Cable connectors may be
used so that the MoTeC CAN Cable may be connected to either side of the
vehicle. Both connectors must be within 500mm of each end of the trunk.
100R Terminating
Resistors at each
end of the CAN Bus
CAN-HI
CAN-LO
100R
CAN-LO
CAN-HI
CAN
Device
These w ires must be Tw isted
Minimum one twist per 50mm (2in)
500mm
<< CAN Bus >>
500mm
Max
CAN-LO
CAN-HI
CAN
Device
CAN-HI
CAN
Device
Max
CAN-LO
CAN Cable
Connector
543
CAN-LO
CAN-HI
500mm Max
1
0V
8V
100R
Short CAN Bus
If the CAN Bus is less than 2m (7ft) long then a single termination resistor
may be used. The resistor should be placed at the opposite end of the CAN
Bus to the CAN Cable connector.
Single Device
See Appendix K: CAN Bus Wiring - Single Device.
Page 89
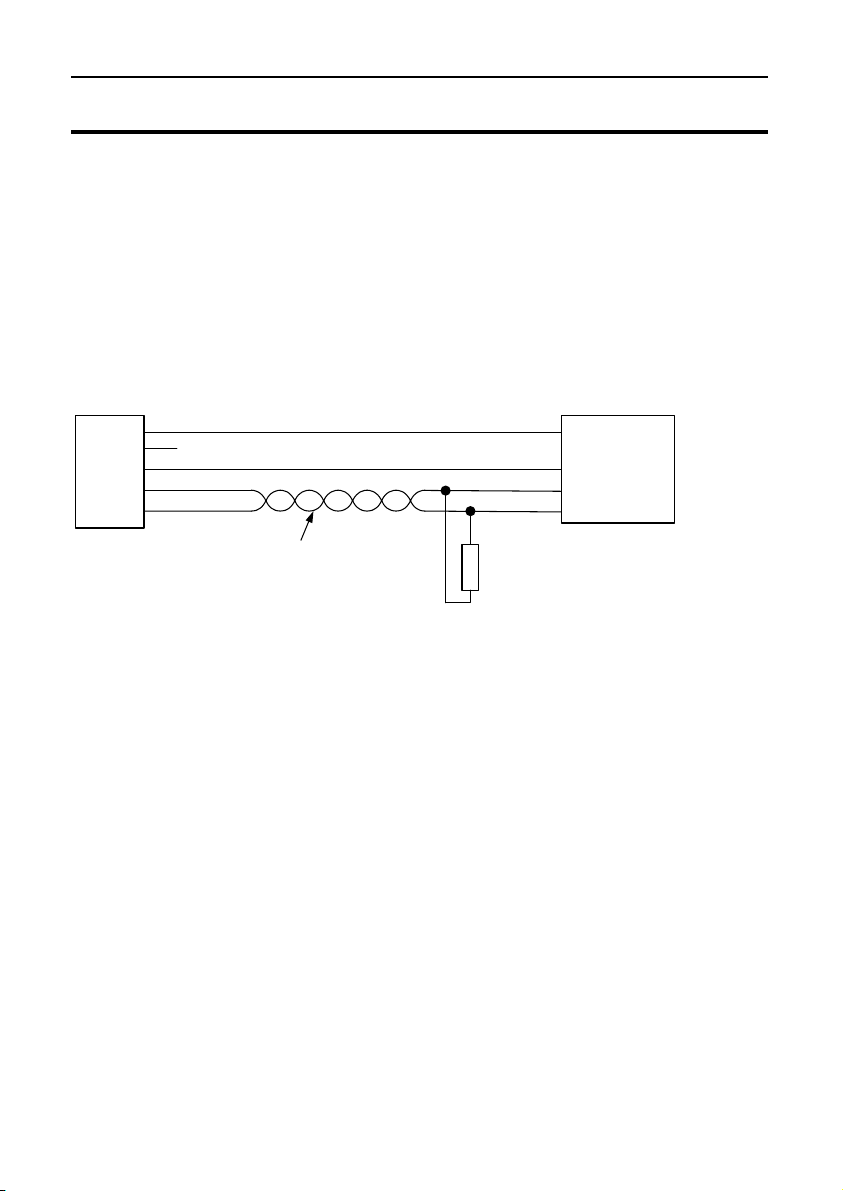
MoTeC Appendices 87
Appendix K: CAN Bus Wiring - Single Device
When a single device (such as an ECU) is connected to the CAN bus then
the wiring scheme shown below may be used to provide a connection point
for the M oTe C CAN cable.
If the wiring length is less than 2m (7ft) then the terminating resistor is
recommended but not essential.
If other devices are connected to the CAN bus a special wiring scheme is
required, see Appendix J: CAN Wiring - Multiple Device.
5 Pin Connector
Black
Red
Green
White
B14 / 13
A13 / 2
B24 / 47
B23 / 48
1
2
3
4
5
M800/M880
0V
8V
CAN-LO
CAN-HI
These wires must be Tw isted
Minimum one twist per 50mm (2in)
5 Pin Connector Type :
Deltron 716-0-0501 (Non Latching)
Neutrik NC5FDL1 (Latching)
100R Resistor
* Not essential if the w iring
length is less than 2m (7f t)
Page 90

88 Appendices
Appendix L: Pin list by Function
M400
M600
M800 M880
Pin No Pin No Abrev Description
Battery
A26 23,32,41 VBAT Battery Positive
A10,A11 14,15,19 GND Battery Negative
Sensor Supplies
A12 3 8V-ENG 8V Engine Sensor Supply
A2 16 5V-ENG 5V Engine Sensor Supply
B16 27 0V-ENG 0V Engine Sensor Supply
A13 2 8V-AUX 8V Auxiliary Sensor and CAN Supply
A9 34 5V-AUX 5V Auxiliary Sensor Supply
B15 11 0V-AUX 0V Auxiliary Sensor Supply
Auxiliary Outputs
A18 9 AUX1 Auxiliary Output 1
A1 8 AUX2 Auxiliary Output 2
A23 43 AUX3* Auxiliary Output 3
A24 51 AUX4* Auxiliary Output 4
A31 59 AUX5 Auxiliary Output 5
A32 65 AUX6 Auxiliary Output 6
A33 58 AUX7 Auxiliary Output 7
A34 64 AUX8 Auxiliary Output 8
Ignition Outputs
A3 1 IGN1* Ignition Output 1
A4 5 IGN2* Ignition Output 2
A5 4 IGN3* Ignition Output 3
A6 10 IGN4* Ignition Output 4
A7 17 IGN5* Ignition Output 5 (Not available on M400)
A8 25 IGN6* Ignition Output 6 (Not available on M400)
Injector Outputs
A19 33 INJ1 Injector Output 1
A20 50 INJ2 Injector Output 2
Page 91

MoTeC Appendices 89
A21 63 INJ3 Injector Output 3
A22 66 INJ4 Injector Output 4
A27 24 INJ5 Injector Output 5 (Not available on M400)
A28 42 INJ6 Injector Output 6 (Not available on M400)
A29 57 INJ7 Injector Output 7 (Not available on M400 & M600)
A30 62 INJ8 Injector Output 8 (Not available on M400 & M600)
Analog Voltage Inputs
A14 26 AV1 Analog Voltage Input 1
A15 18 AV2 Analog Voltage Input 2
A16 6 AV3 Analog Voltage Input 3
A17 7 AV4 Analog Voltage Input 4
A25 12 AV5 Analog Voltage Input 5
B20 36 AV6 Analog Voltage Input 6
B21 35 AV7 Analog Voltage Input 7
B22 44 AV8 Analog Voltage Input 8
Analog Temp Inputs
B3 28 AT1 Analog Temperature Input 1
B4 38 AT2 Analog Temperature Input 2
B5 30 AT3 Analog Temperature Input 3
B6 39 AT4 Analog Temperature Input 4
B7 29 AT5 Analog Temperature Input 5
B19 37 AT6 Analog Temperature Input 6
Digital Inputs
B8 46 DIG1 Digital Input 1
B9 45 DIG2 Digital Input 2
B10 52 DIG3 Digital Input 3
B11 53 DIG4 Digital Input 4
Trigger Inputs
B1 49 REF Crank Reference Timing Input
B2 56 SYNC Cam Sync Timing Input
Lambda Inputs
B26 60 LA1-P Lambda1 Pump Current
B25 54 LA1-S Lambda1 Sense Voltage
B13 61 LA2-P Lambda2 Pump Current (Not available on M400)
B12 55 LA2-S Lambda2 Sense Voltage (Not available on
M400)
Page 92

90 Appendices
Comms
B17 40 TX-232 RS232 Transmit Data
B18 31 RX-232 RS232 Receive Data
B24 47 CAN-LO Can Bus Low
B23 48 CAN-HI Can Bus High
B14 13 0V-COM 0V Comms
A13 2 8V-AUX 8V Auxiliary Sensor and CAN Supply
Note Outputs marked * do not have a recirculation diode, see the Output
Specifications for more detail.
Page 93

M oTe C 9 1
1
)
e
P
t
2
o
A
N
t
l
o
V
2
1
+
6
2
A
y
a
l
e
r
U
C
E
m
o
r
F
V
2
1
L
(
P
1
A
L
)
3
1
B
(
6
2
B
2
1
+
r
e
t
a
e
H
p
I
2
V
1
d
0
+
e
-
r
r
r
s
o
e
e
t
t
U
s
a
a
t
n
e
e
o
e
S
H
H
N
3
4
6
5
y
e
w
t
e
i
r
o
l
h
l
G
e
W
Y
r
o
)
s
S
n
2
e
A
S
L
2
(
e
S
1
A
L
)
2
1
B
(
5
2
B
s
V
2
k
c
a
l
B
t
n
l
i
E
o
g
T
V
n
O
0
E
N
6
1
B
-
s
V
r
V
0
e
t
r
a
o
e
s
H
n
e
S
p
I
1
.
t
e
s
e
r
a
s
r
e
t
d
e
R
e
m
a
r
a
p
"
r
o
s
n
e
S
a
d
b
m
a
L
"
g
n
i
w
o
l
l
o
f
p
e
u
h
t
t
e
e
S
r
u
U
s
C
n
E
E
t
l
o
V
2
1
+
1
4
,
2
3
,
3
2
y
a
l
e
r
U
C
E
m
o
r
F
V
2
1
1
N
E
E
R
C
S
S
T
N
E
M
N
G
I
S
0
S
1
9
A
=
=
L
E
E
E
N
U
U
L
L
N
A
A
A
V
V
H
C
P
U
T
E
S
R
2
1
a
a
O
L
L
S
N
E
S
)
P
2
A
L
(
P
1
A
L
)
1
6
(
0
6
2
1
+
r
e
t
a
e
H
p
I
P
U
T
N
E
O
I
S
T
R
A
O
R
S
B
I
N
8
L
3
E
A
S
C
=
A
R
E
D
O
U
B
L
S
M
A
N
A
V
E
L
S
-
P
P
U
U
)
T
T
2
E
E
a
S
S
L
(
R
R
O
O
1
S
S
a
L
N
N
E
E
S
S
r
)
o
s
S
n
2
e
A
S
L
(
2
e
S
1
A
L
)
5
5
(
4
5
t
l
n
E
i
o
T
g
V
O
n
0
N
E
7
2
-
s
V
r
V
0
e
t
r
a
o
e
s
H
n
e
S
1
e
t
o
N
r
o
e
s
r
n
a
e
s
n
o
d
e
v
a
r
g
n
e
r
e
b
m
u
n
1
=
=
E
E
U
U
L
L
A
A
V
V
r
e
b
m
u
N
e
l
p
a
y
T
C
s
s
r
T
t
o
U
n
s
e
P
n
T
e
m
s
n
U
h
y
O
g
a
i
Y
s
m
s
R
a
w
A
l
I
o
e
L
h
I
n
X
n
o
d
n
e
p
e
d
l
l
i
W
a
d
b
m
a
L
k
c
i
u
Q
9
n
U
a
=
h
A
c
-
N
d
S
O
n
I
N
a
T
O
d
C
I
e
N
T
s
U
C
u
F
N
U
F
T
U
P
T
t
u
U
p
t
O
/
u
T
O
e
U
d
x
P
o
u
N
I
M
A
e
b
g
n
n
i
r
a
i
c
w
t
u
s
p
e
t
t
u
a
c
o
i
d
n
.
n
i
)
(
s
t
e
k
c
a
r
b
n
i
n
o
i
t
a
m
r
o
f
n
I
l
o
i
o
t
r
i
t
n
n
g
o
I
c
r
.
r
o
t
e
r
u
t
o
p
a
t
n
e
c
i
e
H
j
2
n
e
I
a
h
,
d
t
X
b
r
o
U
m
2
f
A
a
e
d
L
t
y
e
r
o
n
s
o
u
A
N
f
Page 94

92
A
A
A
A
A
A
A
A
A
A
A
A
V
Refer to the
Trigger Drawings
for details
REF
(Magnetic)
+
_
SYNC
(Magnetic)
+
_
See drawing
X25 for wiring
details
Sensors
B1
B2
Throttle
Position
Manifold
Pressure
Air
Te mp
Engine
Te mp
Lambda
1
REF
(Hall or Optic al)
+
Sig
_
SYNC
(Hall or Optic al)
+
Sig
_
ANALOG
TEMP INPU TS
ANALOG
OLT INPUTS
DIGITAL
INPUTS
Auxiliary Sensor 0 Volt
Serial Connector
D9 female
CAN Connector
Deltron
716-0-0501
Power to Auxiliary
sensors
Looking into Connector on ECU
B1A1 B7
A9
A10 A17
A18 A25
A26 A34
B8
B14
B20
Connect in firing order
for sequential operation
1 st
2 nd
Relays or Valves
Note 4
Note 3
Ignition
System
See Detail
Drawings
3 rd
Note 2
4 th
Note 1
20 Amp
Fuse
Ignition
Switch
20 Amp
Fuse
- +
12 Volt
Battery
Aux 1
Aux 2
Aux 3
Aux 4
Aux 5
Aux 6
Aux 7
Aux 8
12V
GND
Injectors
19
A20
21
22
18
A1
23
24
Stepper Motor, Relays or Valves
31
32
33
A34
26
A3
4
A5
A6
A10, A11
Chassis
Earth
A12
ECU
8V Eng
B1
REF
B2
SYNC
A2
5V Eng
A14
AV 1
A15
AV 2
B3
AT 1
B4
AT 2
B16
0V Eng
B25
LA1S
B26
LA1P
B5
AT 3
B6
AT 4
B7
AT 5
B19
AT 6
A16
AV 3
A17
A25
AV 5
B20
AV 6
B21
AV 7
B22
AV 8
B8
Dig 1
B9
B10
Dig 3
B11
Dig 4
B15
0V Aux Power
B17
2
B18
3
5
1
4
5
3
RS 232 Rx
B14
0V Comms
B24
CAN LO
B23
CAN HI
A13
8V Aux Power
9
5V Aux Power
Note 1
The Fuse is essent ial to ensu re that t he
ECU is not damaged by reversed battery
polarity
B13
B19
Note 2
To avoid the fuse blowing due to reverse
B26
battery polarity use a diode activated relay
eg. Bosch 0332 014 112
Injector 1
Injector 2
Injector 3
Injector 4
AUX OUTPUTS
Ignition 1
Ignition 2
Ignition 3
Ignition 4
Page 95

M oTe C 9 3
A
A
A
A
A
A
A
A
A
A
A
A
A
A
V
Refer to the
Trigger Drawings
for details
REF
(Magnetic)
+
_
SYNC
(Magnetic)
+
_
See drawing
X25 for wiring
details
Sensors
B1
B2
Throttle
Position
Manifold
Pressure
Air
Te mp
Engine
Te mp
Lambda
1
Lambda
2
REF
(Hall or Optic al)
+
Sig
_
SYNC
(Hall or Optic al)
+
Sig
_
ANALOG
TEMP INPU TS
ANALOG
OLT INPUTS
DIGITAL
INPUTS
Auxiliary Sensor 0 Volt
Serial Connector
D9 female
CAN Connector
Deltron
716-0-0501
Power to Auxiliary
sensors
Looking into Connector on ECU
B1A1 B7
A9
A10 A17
A18 A25
A26 A34
B8
B14
B20
Connect in firing order
for sequential operation
1 st
2 nd
5 th
6 th
Relays or Valves
Note 4
Note 3
Ignition
System
See Detail
Drawings
3 rd
Note 2
4 th
Note 1
20 Amp
Fuse
Ignition
Switch
20 Amp
Fuse
- +
12 Volt
Battery
Aux 1
Aux 2
Aux 3
Aux 4
Aux 5
Aux 6
Aux 7
Aux 8
12V
GND
Injectors
19
A20
21
22
27
28
18
A1
23
24
Stepper Motor, Relays or Valves
31
32
33
A34
26
A3
4
A5
A6
A7
A8
A10, A11
Chassis
Earth
A12
ECU
8V Eng
B1
REF
B2
SYNC
A2
5V Eng
A14
AV 1
A15
AV 2
B3
AT 1
B4
AT 2
B16
0V Eng
B25
LA1S
B26
LA1P
B12
LA2S
B13
LA2P
B5
AT 3
B6
AT 4
B7
AT 5
B19
AT 6
A16
AV 3
A17
A25
AV 5
B20
AV 6
B21
AV 7
B22
AV 8
B8
Dig 1
B9
B10
Dig 3
B11
Dig 4
B15
0V Aux Power
B17
2
B18
3
5
1
4
5
3
RS 232 Rx
B14
0V Comms
B24
CAN LO
B23
CAN HI
A13
8V Aux Power
9
5V Aux Power
Note 1
The Fuse is essent ial to ensu re that t he
ECU is not damaged by reversed battery
polarity
B13
B19
Note 2
To avoid the fuse blowing due to reverse
B26
battery polarity use a diode activated relay
eg. Bosch 0332 014 112
Injector 1
Injector 2
Injector 3
Injector 4
Injector 5
Injector 6
AUX OUTPUTS
Ignition 1
Ignition 2
Ignition 3
Ignition 4
Ignition 5
Ignition 6
Page 96

94
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
A
V
Refer to the
Trigger Drawing s
for details
REF
(Magnetic)
+
_
SYNC
(Magnetic)
+
_
See drawing
X25 for wiring
details
Sensors
B1
B2
Throttle
Position
Manifold
Pressure
Air
Te mp
Engine
Tem p
Lambda
1
Lambda
2
REF
(Hall or Optical)
+
Sig
_
SYNC
(Hall or Optical)
+
Sig
_
ANALOG
TEMP INP UTS
ANALOG
OLT INPUTS
DIGITAL
INPUTS
Auxiliary Sensor 0 Volt
Serial Connector
D9 female
CAN Connector
Deltron
716-0-0501
Power to Auxiliary
sensors
Looking into Connector on ECU
A9
B1A1 B7
A10 A17
A18 A25
A26 A34
B8
B14
B20
Connect in firing order
for sequential operation
1 st
2 nd
5 th
6 th
Relays or Valves
Note 4
Note 3
Ignition
System
See Detail
Drawings
3 rd
7 th
Note 2
4 th
8 th
Note 1
20 Amp
Fuse
Ignition
Switch
20 Amp
Fuse
- +
12 Volt
Battery
Aux 1
Aux 2
Aux 3
Aux 4
Aux 5
Aux 6
Aux 7
Aux 8
12V
GND
Injectors
19
A20
21
22
27
28
29
30
18
A1
23
24
Stepper Motor, Relays or Valves
31
32
33
A34
26
A3
4
A5
A6
A7
A8
A10, A11
Chassis
Earth
ECU
A12
8V Eng
B1
REF
B2
SYNC
A2
5V Eng
A14
AV 1
A15
AV 2
B3
AT 1
B4
AT 2
B16
0V Eng
B25
LA1S
B26
LA1P
B12
LA2S
B13
LA2P
B5
AT 3
B6
AT 4
B7
AT 5
B19
AT 6
A16
AV 3
A17
A25
AV 5
B20
AV 6
B21
AV 7
B22
AV 8
B8
Dig 1
B9
B10
Dig 3
B11
Dig 4
B15
0V Aux Power
B17
2
B18
3
5
1
4
5
3
RS 232 Rx
B14
0V Comms
B24
CAN LO
B23
CAN HI
A13
8V Aux Power
9
5V Aux Power
Note 1
The Fuse is essential to ensure that the
ECU is not damaged by reversed battery
polarity
B13
B19
Note 2
To avoid the fuse blowing due to reverse
B26
battery polarity use a diode activated relay
eg. Bosc h 0332 014 112
Injector 1
Injector 2
Injector 3
Injector 4
Injector 5
Injector 6
Injector 7
Injector 8
AUX OUTPUTS
Ignition 1
Ignition 2
Ignition 3
Ignition 4
Ignition 5
Ignition 6
Page 97

M oTe C 9 5
V
Refer to the
Trigger Drawings
for details
REF
(Magnetic)
+
_
SYNC
(Magnetic)
+
_
Manifold
Pressure
See drawing
X25 for wiring
details
0V To Auxiliary
Sensors
Serial Connector
D9 female
CAN Connector
Deltron
716-0-0501
Power to Auxiliary
sensors
Looking into
Connector
on ECU
Sensors
49
56
Throttle
Position
Air
Te mp
Engine
Te mp
Lambda
1
Lambda
2
REF
(Hall or Optic al)
+
Sig
_
SYNC
(Hall or Optic al)
+
Sig
_
ANALOG
TEMP INPUTS
ANALOG
OLT INPUTS
DIGITAL
INPUTS
Connect in firing order
for sequential operation
1 st
2 nd
5 th
6 th
Relays or Valves
Note 4
Note 3
Ignition
System
See Detail
Drawings
3 rd
7 th
Note 2
4 th
8 th
Note 1
20 Amp
Fuse
Ignition
Switch
20 Amp
Fuse
- +
12 Volt
Battery
Aux 1
Aux 2
Aux 3
Aux 4
Aux 5
Aux 6
Aux 7
Aux 8
12V
GND
Injectors
33
50
63
66
24
42
57
62
9
8
43
Stepper Motor, Relays or Valves
59
65
58
64
23,32,41
1
5
4
10
17
25
14,15,19
20,21,22
Chassis
Earth
ECU
3
8V Eng
49
REF
56
SYNC
16
5V Eng
26
AV 1
18
AV 2
28
AT 1
38
AT 2
27
0V Eng
54
LA1S
60
LA1P
55
LA2S
61
LA2P
30
AT 3
39
AT 4
29
AT 5
37
AT 6
6
AV 3
7
12
AV 5
36
AV 6
35
AV 7
44
AV 8
46
Dig 1
45
52
Dig 3
53
Dig 4
11
0V Aux Power
40
2
31
3
5
1
4
5
3
RS 232 Rx
13
0V Comms
47
CAN LO
48
CAN HI
2
8V Aux Power
34
5V Aux Power
Note 1
The Fuse is essent ial to ensu re that t he
ECU is not damaged by reversed battery
polarity
Note 2
To avoid the fuse blowing due to reverse
battery polarity use a diode activated relay
eg. Bosch 0332 014 112
Injector 1
Injector 2
Injector 3
Injector 4
Injector 5
Injector 6
Injector 7
Injector 8
AUX OUTPUTS
Ignition 1
Ignition 2
Ignition 3
Ignition 4
Ignition 5
Ignition 6
Page 98

96 Notes
Page 99

MoTeC Notes 97
Page 100

98 Notes
 Loading...
Loading...