

Page 1

MoTeC Central Logging System User Manual
Contents
Introduction ........................................................................ 1
Overview ............................................................................. 2
System Overview ................................................................................................ 2
ACL Advanced Central Logger ........................................................................... 2
Connected Devices ............................................................................................. 4
VIM Versatile Input Module...................................................................... 4
Display Devices ......................... .................. ................................ ............ 4
BR2 Beacon Receiver ............................................................................. 5
SLM Shift Light Module ........................................................................... 5
E888 / E816 Expanders ........................................................................... 5
GPS Global Positioning System .............................................................. 6
PLM Lambda Meter ....................................... ............... ............... ............ 6
Telemetry Radio System ......................................................................... 6
ECU Engine Management Systems ........................................................ 7
Operation ............................................................................ 9
PC Communications ............................................................................... ............ 9
Software .............................................................................................................. 9
ACL Manager .......................................................................................... 9
i2 Pro Data Analysis .............................................................................. 10
Telemetry Monitor .................................................................................. 10
Display .............................................................................................................. 10
Display Elements ..... .................. ................. ................ ............... ............ 11
Display Modes ....................................................................................... 13
Display Formatting ................................................................................. 15
Alarms............................................................................................................... 15
Data Logging .................................................................................................... 16
Overview................................................................................................ 16
Retrieving the Logged Data ................. ................................... ............... 19
Track Map Sensor Requirements .......................................................... 19
Functions & Calculations .................................................................................. 20
Measurement Inputs ......................................................................................... 21
Sensors ................................................................................................. 21
Input Basics ........................................................................................... 22
Input Types ............................................................................................ 23
Auxiliary Outputs ............................................................................................... 27
Communication Ports ....................................................................................... 27
Installation & Configuration ............................................ 29
Wiring................................................................................................................ 29
ACL Central Logger .......................................................................................... 30
Connected Devices ........................................................................................... 32
Page 2

VIM Input Module .................................................................................. 32
ADL2 & SDL Display ............................................................................. 34
MDD Display .......................................................................................... 35
BR2 Beacon Receiver ........................................................................... 35
SLM Shift Light Module ......................................................................... 36
E888 / E816 Expanders ......................................................................... 37
GPS Global Positioning System ............................................................ 38
PLM Lambda Meter ..................................... ............... ............... ............ 39
Telemetry Radio System ....................................................................... 39
ECU Engine Management Systems ...................................................... 40
ACL Manager Software .................................................... 43
Introduction ....................................................................................................... 43
Computer Requirements ................................................................................... 43
Installing ACL Manager...................................................................... ............... 43
Mouse & Keyboard ........................................................................................... 44
Main Menu ........................................................................................................ 44
Toolbar.............................................................................................................. 45
Online / Offline ...................................................................................... ............ 45
Configuration .................................................................................................... 45
Configuration Files ................................................................. ............... ............ 46
Changing the Configuration .............................................................................. 47
Configuration Versions and Updating ............................................................... 48
Channels ........................................................................................................... 50
Channel List ........................................................................................... 51
Channel Properties ................................................................................ 51
Selecting Channels ................................................................................ 52
Conditions Overview .............................................................. ............... ............ 54
Checking Operation .......................................................................................... 55
Sensor Zeroing ................................................................................................. 56
Details Editor .................................................................................................... 56
Windows Keyboard Use .................................................. 57
Appendices ....................................................................... 62
Appendix A: ACL General Specifications .......................................................... 62
Appendix B: ACL Options Summary ................................. ................................ 63
Appendix C: VIM General Specif ications .......................................................... 64
Appendix D: VIM Input Specifications ..................................................... .......... 65
Analogue Inputs ..................................................................................... 65
VIM Speed Inputs ...................... ................................. ............... ............ 67
Appendix E: Update Rate Summary ........................... ................ ...................... 68
Appendix F: CAN Bus Bandwidth Limit ............................................................. 69
Appendix G: ACL Manager Command Line ....................................... ............... 71
Appendix H: Comms Error Codes ............................................... ............ .......... 73
Appendix I: Ethernet Communications Cable ................................................... 77
Appendix J: ECU to ACL Wiring (RS2 32) ......................................................... 78
Appendix K: CAN Bus Wiring ............................................................................ 80
Appendix L: Wire Information ............................................................................ 81
Page 3

MoTeC Central Logging System User Manual
Appendix M: Connector Details ........................................................................ 82
Appendix N: VIM Pin List by Function ... ............................................................ 84
Appendix O: VIM Pin List by Pin Number ......................................................... 87
Appendix P: ACL Pin List by Pin Num ber ......................................................... 89
Appendix Q: ACL Case Dimensions ................................................................. 90
Appendix R: VIM Case Dimensions .................................................................. 91
© Copyright – MoTeC Pty Ltd – 2008
The information in this document is subject to change without notice.
While every effort is taken to ensure correctness, no responsibility will be taken for the
consequences of any inaccuracies or omissions in this manual.
PN 63028 Rev B, 3 September, 2008
Page 4

Page 5
MoTeC Introduction 1
Introduction
Thank you for purchasing a MoTeC Central Logging System.
This Manual Covers:
• Overview, Operation, Installation & Specifications for the ACL & VIM.
• Overview of the MoTe C ACL Manager software.
Other Manuals
Separate manuals are available for:
• BR2 - Beacon Receiver
• ADL2 - Advanced Dash Logger
• SDL - Sports Dash Logger
• MDD - Mini Digital Display
• E888/E816 - Expander
• i2 Data Analysis Software
Sensor Details
Drawings are available for all MoTeC sensors and can be found on the MoTeC
Resource CD (included) or on the MoTeC website at www.motec.com.au
drawings detail the mounting and wiring requirements for each sensor .
. The
Page 6

2 Overview
Overview
System Overview
The ACL (Advanced Central Lo gge r) forms the heart of a sophisticated and
highly configurable data acquisition system. The ACL can be connected to as
many as eight VIMs (Versatile Input Modules) to provide measurement of
more than 200 inputs. The ACL can also be connected to a display system
and many other devi c e s.
The system offers simplicity of configuration with most devices in the system
being configured and upgraded from the one software application.
The diagram below shows a typical system consisting of an ACL, two VIMs,
SDL display, SLM shift light module, BR2 beacon receiver, PLM lambda
meter and M800 ECU. The devices all communicate with the ACL via the
2-wire CAN bus.
ACL Advanced Central Logger
The ACL collects data from various measurement devices such as VIMs and
records the data to the large internal memory. It can also control display
devices and collect data fr om devices such as engine management systems,
Page 7

MoTeC Overview 3
and perform functions such as Warning Alarms, Fuel Prediction, Engine Logs,
Lookup Tables and many more.
The ACL includes 1 gigabyte of logging memory, high speed Ethernet
download, dual CAN bus communications and multiple RS232 ports. The ACL
can log up to 1000 channels at rates between 1 Hz and 5 000 Hz.
Measurement Devices
The ACL uses sophisticated communications technology that allows it to
gather data from a number of measurement devices at high speed and in
perfect synchronisation.
This allows the measurement devices to be located close to the measurement
sources, minimising wiring comple xity and weight. This also provides a
flexible and expandable system where the optimum number of measurement
devices can be used for a particular task.
Options
The ACL has a numb er of options that allow it to be upgraded to perform
additional funct i on s. The options can be enabled at any time by purchasing a
password from MoTeC.
Refer to Appendix B: ACL Options Summary.
Memory Card
The ACL is fitted with a special high temperature memory card which includes
features to protect it against permanent damage during power down. This
card must not be replaced with any other type of card.
The card should not be removed from the ACL.
More Information
Refer to the other sections in this manual for detailed information about
Software, PC Communications, Logging Operation, Input Measurements, and
Installation and Configuration.
Refer to the Appendices for details about Specifications, Wiring and
Dimensional information.
Page 8
4 Overview
Connected Devices
The following topics descr ibe the basic functions of the main devices that can
be connected to the ACL.
VIM Versatile Input Module
The VIM is a compact and versatile input expander module with 24 analogue
inputs of various types inclu d in g high sp eed, high resolution and differential
types. The VIM also has two digital inputs with programmable trigger levels.
Up to eight VIMs may be connected to the ACL providing more than 200
sensor inputs. The VIMs connect to the ACL via a CAN bus.
The VIM supports many different types of sensors including unamplified
thermocouples and strain gauges.
For more detailed information please refer to the Measurement Inputs section
and the Installati on and Configuration section in this manual.
For detailed specifications please refer to Appendix C: VIM General
Specifications and Ap pendix D: VIM Input Specifications.
Input Summary
Qty Input Description Update
Rate (Hz)
6 Analogue Voltage Fast 5000 12
8 Analogue Voltage High
Resolution
2 Analogue Voltage Special 2000 15
8 Analogue Voltage Differential 1000 15 +sign
2 Speed / Digital 100
500 15
Resolution
(bits)
Display Devices
A display device may be connected to the ACL to allow display of any value
that the ACL calculates, such as lap times, and warning alarm messages.
The ACL supports ADL2, SDL or MDD displays which are connected to the
ACL via CAN.
Page 9
MoTeC Overview 5
The input and output pins on the display devices are fully accessible
(dependant on the I/O options enabled), with exception of access to RS232
and beacon connection on the digital inputs for ADL2 and SDL.
The update rate and other specifications f or the inputs are the same as when
the display devices are used standalone. Refer to Appendix E: Update Rate
Summary.
An exception is the SDL, where SDL inputs AV1 - AV4 can be logged at up to
1000 Hz. Other Analogue Voltage and Analogue Temperature inputs can be
logged at up to 500 Hz and the Switch, Digital and Speed inputs at 100 Hz.
For more detail please refer to the Display section and the Installation and
Configuration section in this manual.
For other details including specifications and wiring information please refer to
the display's user manual.
BR2 Beacon Receiver
A BR2 Beacon Receiver may be connected to the ACL, which allows the ACL
to calculate lap times for display and to provide lap information for the data
logging analysis software.
Note The BR2 must be connected to the ACL via CAN; the ACL does not
support connecting the BR2 to a digital input on the ADL2 or SDL.
Multiple beacon tra ns mitters may also be used to generate sp lit times.
For more detail please refer to the Installation and Configuration section in
this manual and the BR2 Beacon R eceiver user manual.
SLM Shift Light Module
The MoTeC SLM Shift Light Module can be used for shift lights, warning lights
and other information lights.
The SLM includes 8 LEDs that can be programmed to any colour.
The SLM connects to the ACL via CAN.
For more detail please refer to the Installation and Configuration section in
this manual and the help screens in the ACL Manager software.
E888 / E816 Expanders
The ACL supports two E888 or E81 6 Expanders allowing expansion of the
number of inputs and outputs.
Page 10
6 Overview
The E888 / E816 connect to the ACL via CAN.
The E888 has 8 x 10 bit thermocouple inputs, 8 x 10 bit voltage inputs, 4
digital inputs, 2 s witch inputs and 8 outputs.
The E816 has 16 x 10 bit voltage inputs, 4 digital inputs, 2 switch inputs and 8
outputs.
Note The E888 / E816 inputs have lower resolution than the VIM inputs and
have slower update rates. Refer to Appendix E: Update Rate Summary.
For more detail please refer to the Measurement Inputs section and the
Installation and Configuration section in this manual.
For other informatio n suc h as wir ing information refer to th e E888 / E816 user
manual.
GPS Global Positioning System
The ACL supports many GPS (Global Positioning System) devices allowing
the ACL to record speed and position information.
This information can be used in the i2 data analysis software to create track
maps, and plot and comp are driven lines.
For more detail please refer to the Installation and Configuration section in
this manual. For other information please refer to the i2 help screens and the
documentation supplied with the GPS.
PLM Lambda Meter
The ACL supports connection to one or more PLMs (Professional Lambda
Meter) via CAN, allowing measurement of the air/fuel ratio on one or more
cylinders.
The ACL also supports lambda measurement via an SDL, ADL2 or Engine
Management System.
Telemetry Radio System
The ACL supports transmission of data via a telemetry radio to a remote
location such as a pit garage. Thi s allows monitoring of the current vehi cle
condition, position on the track, lap times, fuel remaining, laps remaining etc.
The telemetry system provid es three major functions:
1. Real time data that is transmitt ed continuously and can be shown on
graphs, gauges and other displays.
Page 11
MoTeC Overview 7
2. End of lap data which shows summary information at the end of a lap such
as lap time, maximum temperatures etc.
3. Telemetry analysis which exports the real time data to the i2 analysis
software at the end of each lap which allows norma l analysis of the data
including maths calculations, while the vehicle is still on the track.
Note This feature requires the Remote Logging option.
Other telemetry features include: warning alarms, position of multiple vehicles
on a track map, broadcast data via DDE (Dynamic data Exchange) or via IP
(Internet Protocol).
Note The Telemetry option is required for the basic functionality and the
Remote Logging option is also required for the Telemetry Analysis function.
For more detail please refer to the Installation and Configuration section in
this manual and the documentation supplied with the telemetry system.
ECU Engine Management Systems
The ACL can be connected to most MoTeC ECUs (Engine Control Unit or
EMS Engine Management System) either via CAN or RS232. This avoids
duplication of sensors and allows the ACL to display and log many ECU
parameters.
The update rate depends on how many parameters are transmitted, the
communications baud rate, and if the communications is via CAN or RS232.
For RS232, the typical update rate is about 20 times per second and for CAN
it is about 50 times per second.
For more detail please refer to the Installation and Configuration section in
this manual and the Engine Management System documentation.
Page 12

Page 13
MoTeC Operation 9
Operation
PC Communications
The ACL includes an Ethernet port which is used for communications with a
PC. Most modern PCs have an Ethernet port that can be used for this
purpose.
The Ethernet connector on the ACL is the 5 pin Auto Sport connector.
The ACL can be either direc t ly connected to a PC or it can b e c o nne cted to a
network. When conn ec ted to a network, any PC on the network may
communicate with the ACL.
For details refer to the PC Communications topic in the ACL Manager help
system.
Software
The ACL comes with various software applications for managing the ACL and
its connected devices, and for analysing the lo gged data and monitori ng
telemetry data.
The software must be run on an IBM compatible PC running Windows XP or
Vista.
The following software applications are provided:
ACL Manager
ACL Manager is used for configuration, testing, retrieving the logged data,
and for general management of the ACL.
An overview of ACL Manager is included later in this manual. For detailed
information use the ACL Man a ge r help system.
Connected Devices
ACL Manager supports configuration of the following connected devices: VIM,
E888 / E816, SLM, ADL2, SDL, MDD.
Page 14
10 Operation
Communications Cable
ACL Manager communicates with the ACL via an Ethernet cable. Refer to the
PC Communications section for setup deta il s.
Firmware Updating
ACL Manager is used to update the firmware in the ACL, VIMs and display
devices.
The firmware is field updatable so that new features can be used as they
become available.
i2 Pro Data Analysis
i2 Pro data analysis software is used to analyse the logged data that has
been recorded by the ACL.
For more detail please refer to the i2 Pro help.
Telemetry Monitor
The Telemetry Monitor software is used to monitor the optional telemetry link
and allows viewing of the telemetry data in various graphical formats such as
Charts, Bar Graphs and Dial Gauges. It can also show the vehicles current
track position on a track map and compare the current vehicle data to
reference data.
Alarms can be set to indicate when a particular value, such as Engine
Temperature exceeds a user programmable limit.
Display
A display device can be connected to the ACL which allows display of any
measured or calculated value. The display can also show alarm messages.
Configuration, upgrading and testing of the display device must be done using
the ACL Manager software. Do not use the configuration software that is
normally used with the display device.
Note An SDL will have access to all of the display features normally reserved
for use only with an ADL2. For example, all 3 display modes will be available.
The following description applies to the ADL2 & SDL displays.
Page 15
MoTeC Operation 11
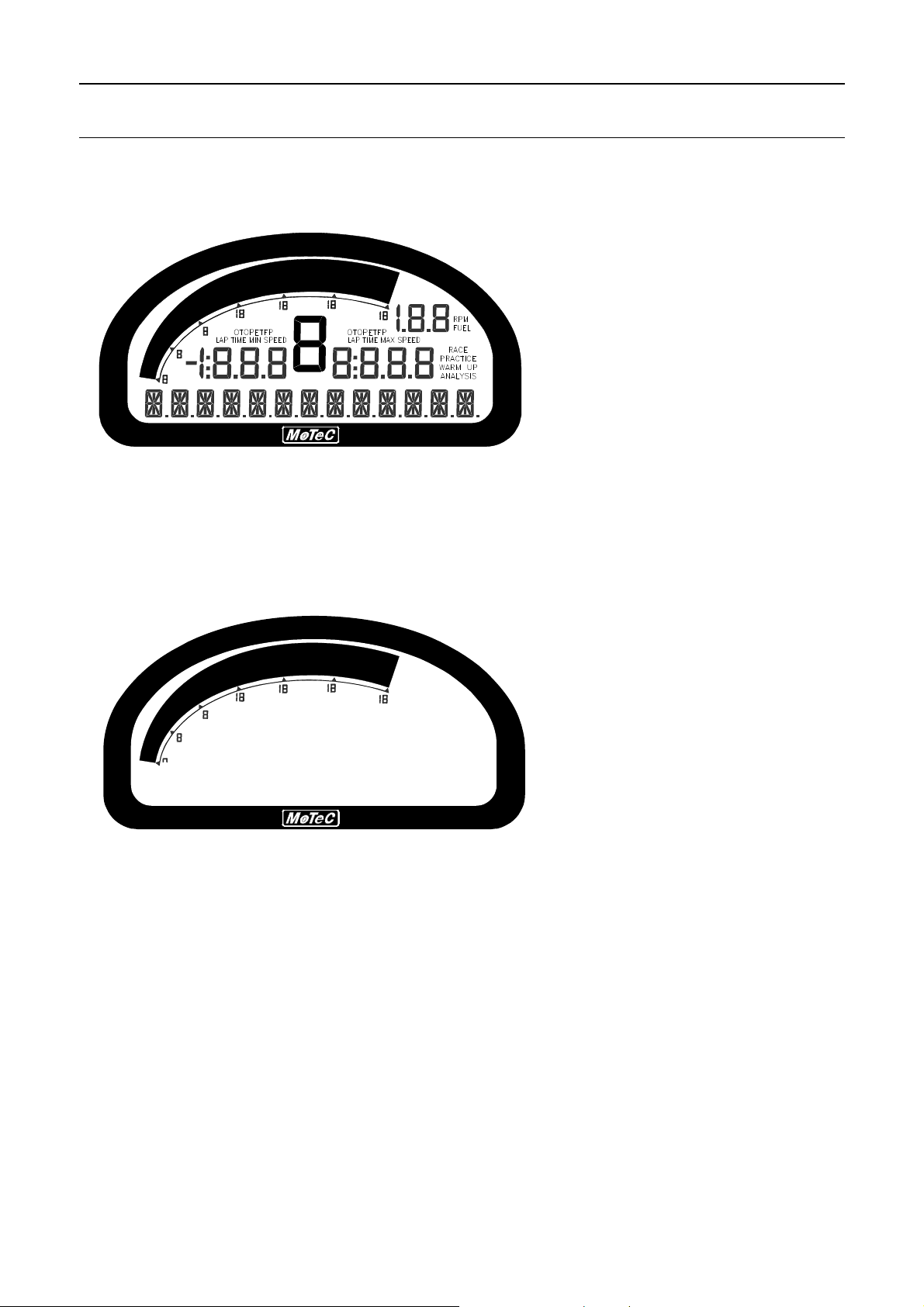
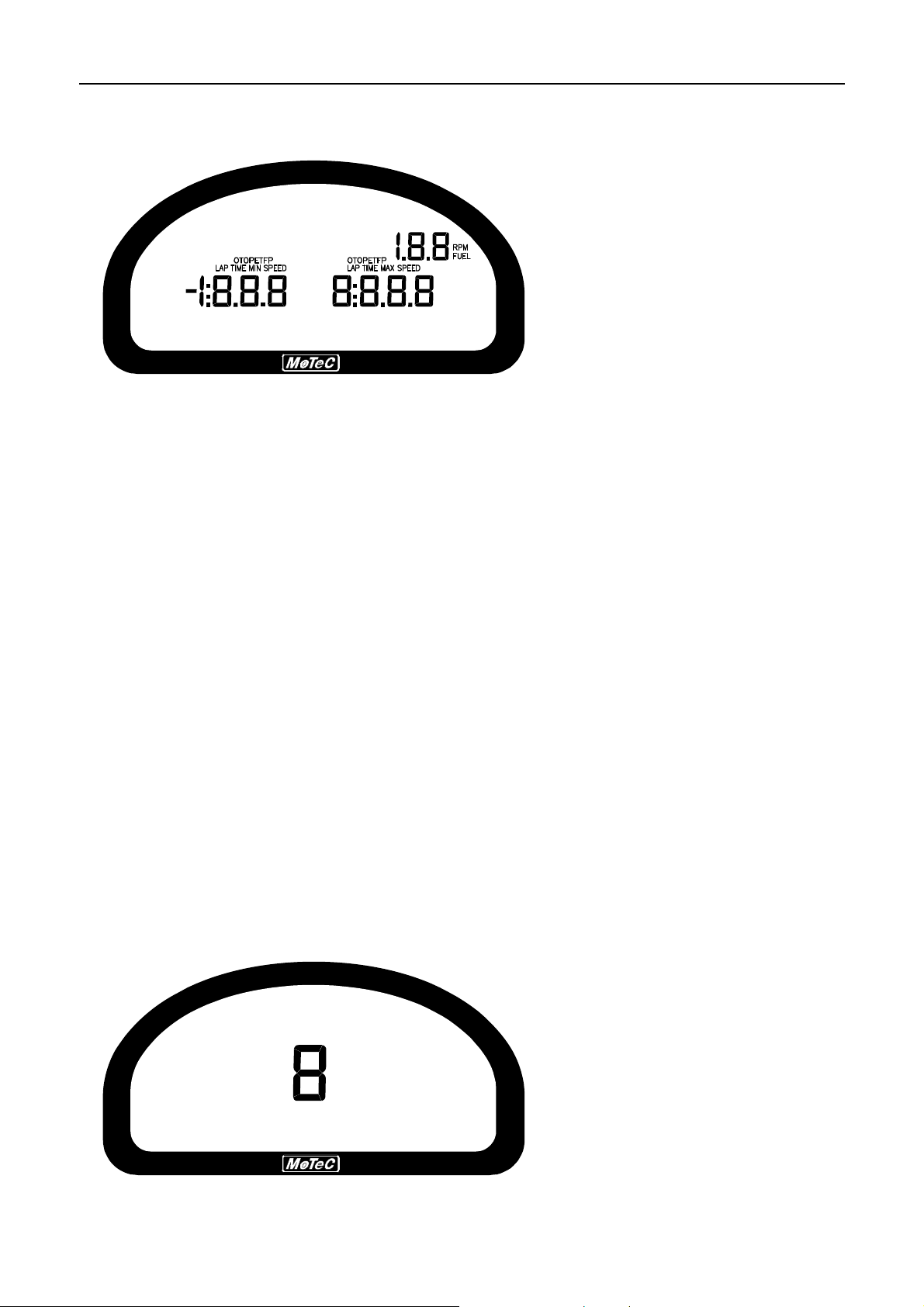
Display Elements
The display contains a Bar Graph, three Numeric Displays, a Centre Numeric
Display and a Bottom Alpha / Numeric Display.
The display has three main modes of ope ration, Race, Pract i ce and Warm-up.
Refer to the Display Modes section for details.
Bar Graph Display
The 70 segment Bar Graph has a user definabl e range and is typically used
as a tacho, however it can be used t o display any other value. When used as
a tacho it may be c o nfigured to show up to 19000 RPM.
A fully programmable shift point can be displayed, which can also be gear
dependent.
The operation of the Bar Graph can be different for each of the display modes
(Race, Practice and Warm-up). For example a lower range may be used in
Warm-up mode.
Page 16
12 Operation
Numeric Displays
The three Numeric Displa ys ( Left, Right and Top Right) can be programme d
to display any value, which may be different for each of the display modes
(Race, Practice and Warm-up).
Note Each of the three Numeric Disp la ys has a different number of digits and
is therefore suited to displaying different values. For example the Top Right
display can only show values up to a maximum of 199 and is therefore not
suitable for displaying Lap Times, but is suitable for displaying many other
values such as Lap Number, Fuel Remaining, Engi ne Temperature etc.
The Numeric Displays can show any channel value plus up to two override
values, which are shown each time their value is updated. This is useful for
values that are updated periodically, for example Lap Time. The override
values are shown for a programmable period of time. For example a numeric
display could normally show the Running Lap Time (which is continuously
updating), then be overwritten by the Lap Time for 10 seconds each time the
Lap Time is updated.
Enunciators for some of the common display values are provided above the
Numeric Displays, e.g. ET (Engine Temperature), OP (Oil Pressure).
Centre Numeric Display
Page 17
MoTeC Operation 13
The Centre Numeri c display is incorporated to show the current gear but may
be used for other purposes.
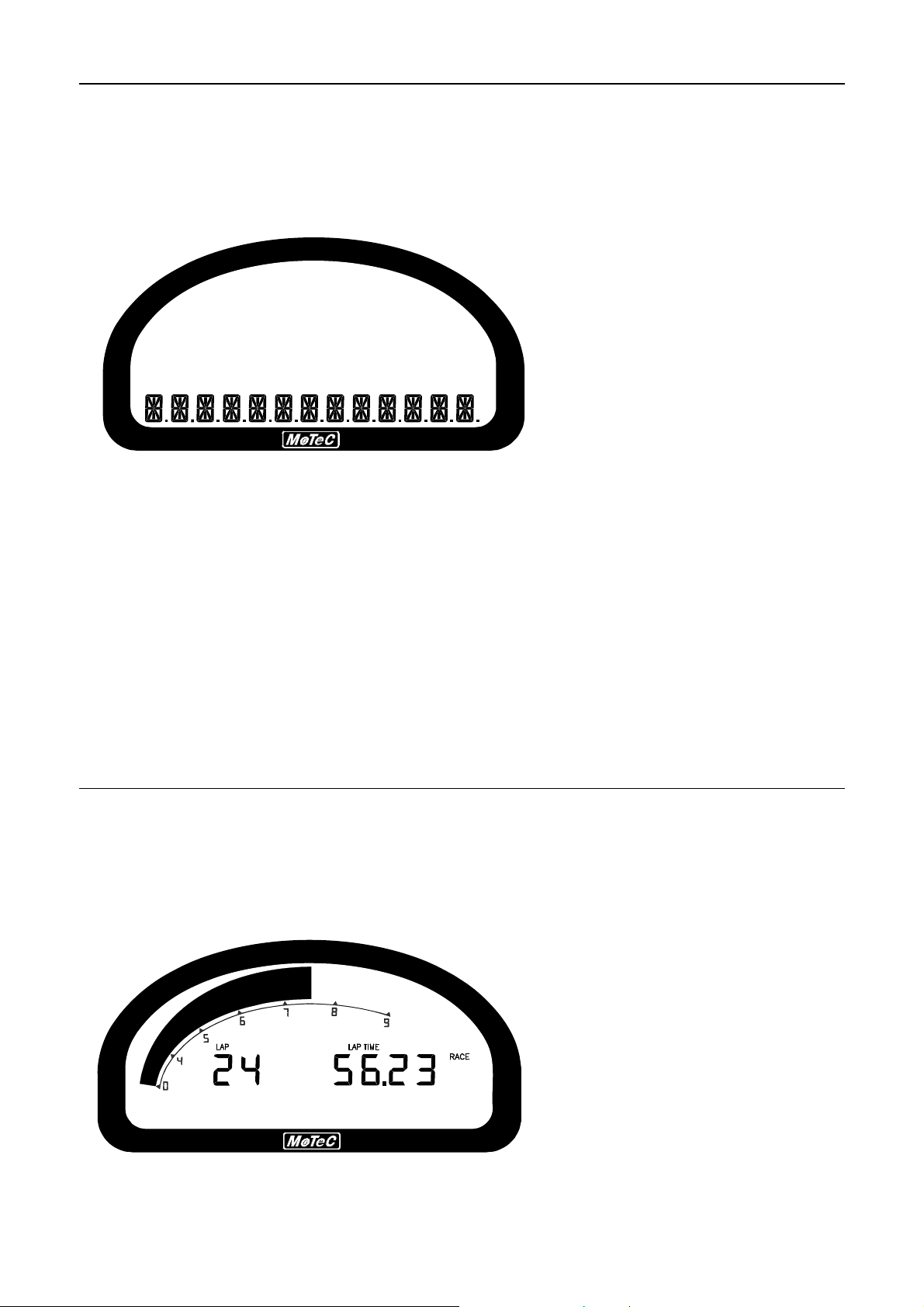
Bottom Alpha / Numeric Display
The 13-digit Bottom Alpha / Numer i c di sp lay can display up to 20 lines of
information that can be scrolled up or down using the externally connected
buttons. Each of the 20 lines can display up to 3 channel values at a time.
The values shown may be diff er ent fo r each of the three display modes.
Additionally the Bottom Alpha / Numeric Display can show up to four override
values, similar to the numeric displays.
The Bottom Alpha / Num er ic Di sp lay will also show any active alarm
messages, which will override all other values until the alarm is cleared.
Display Modes
The display has three main modes of ope ration; Race, Pract i ce and Warm-up.
The display mode is changed by pressing a button that is wired to the system.
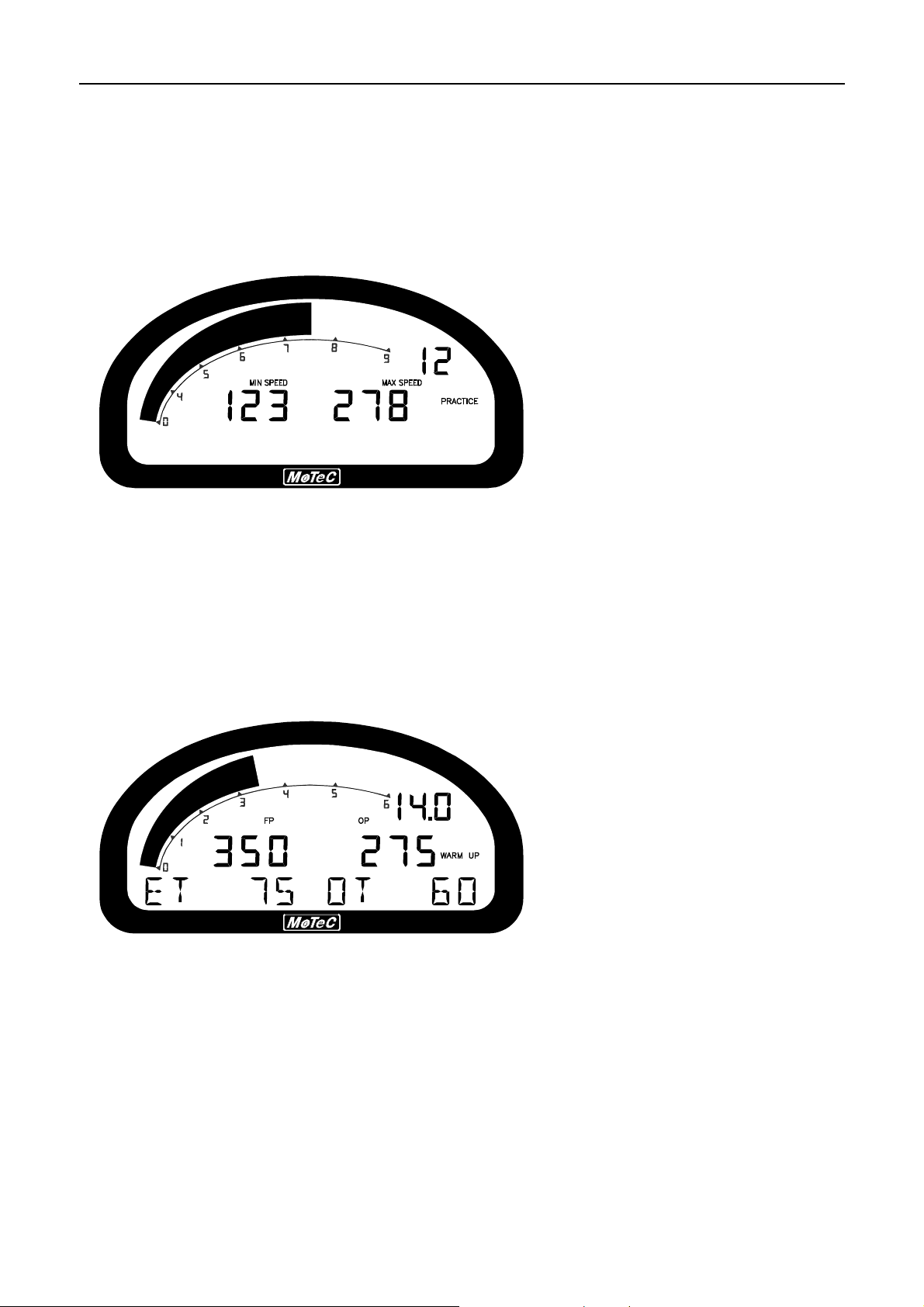
Race Mode
Page 18
14 Operation
The Race Display is normally used to display minimal information, e.g. RPM,
Lap Time, Fuel Remaining or Laps Remaining.
The bottom display may be used to display additional information as needed.
Practice Mode
The Practice Display is used t o d isplay basic information, plus information to
help the driver improve lap times, e.g. Lap Time, Lap Gain / Loss, Maximum
Straight Speed, Minimum Co r ner Speed or Corner Exit Speed.
The Bottom Display may be used to display additional information as needed.
Warm-up Mode
The Warm-up Display is used to display important engine sensor readings
during engine warm-up, e.g. RPM, Battery Voltage, Engine Temp erature, Oil
Pressure, Oil Temperature and Fuel Pressure.
The Bottom Display may be used to display many other values that may need
checking during warm-up.
Page 19
MoTeC Operation 15
Display Formatting
Units
The display units can be changed to suit the driver, for example the driver
may prefer to see the engine temper ature in degrees Fahrenheit rather than in
degrees Celsius. This is i n de pendent of the units used for other purposes.
Decimal Places
The number of decimal places can be reduced for display purposes, for
example the engine temperature is measured to 0.1 °C b ut is better displayed
with no decimal places. This is normally done automatically.
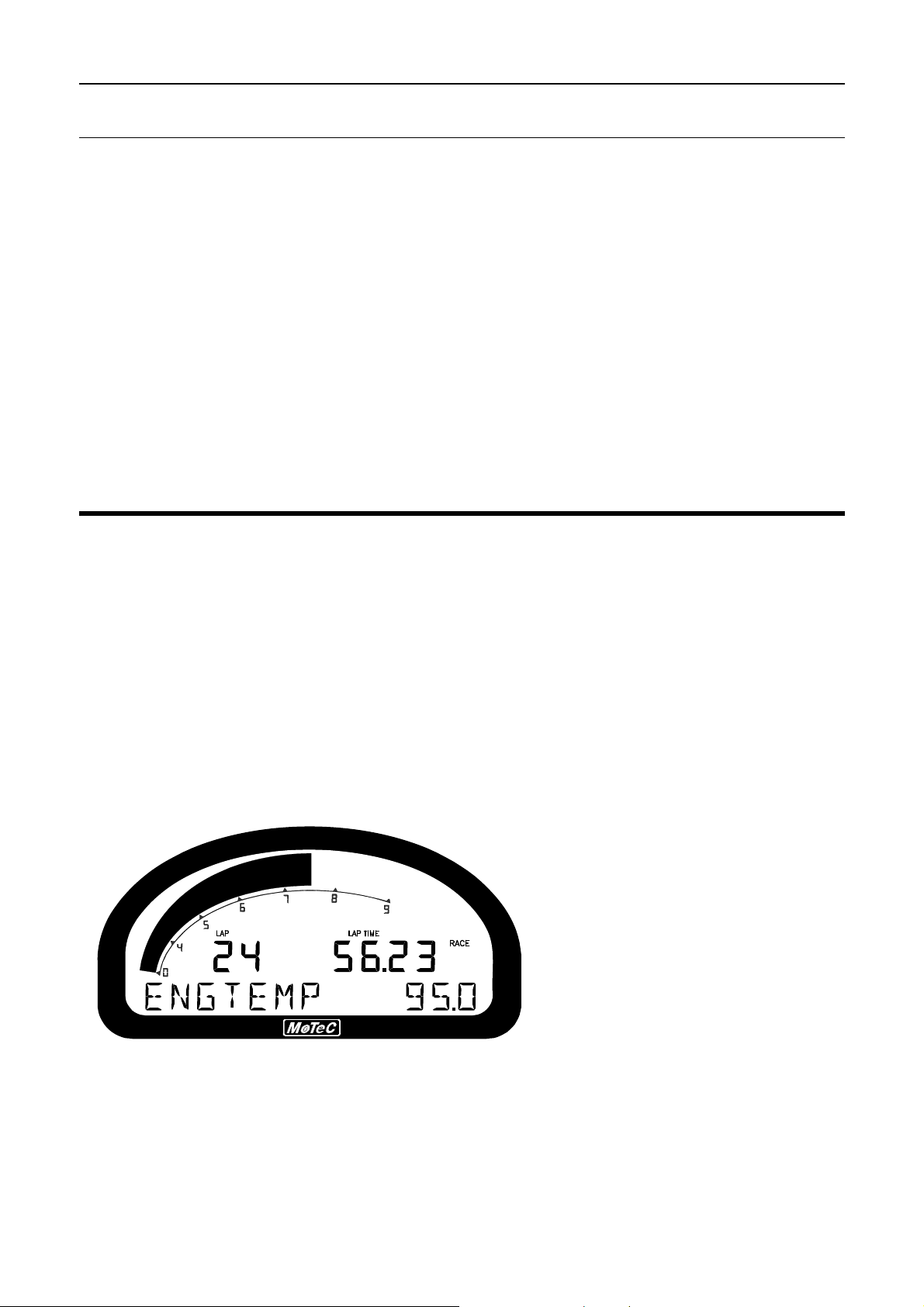
Alarms
Alarms are normally displayed on the bottom line of the connected display
device.
The alarms are con trolled by the alarm setup within the ACL. When an alarm
is activated, a messag e is shown on the bottom line of the display and a
warning light can also be activat ed .
The message displayed can include the current sensor reading or the sensor
reading when the alarm was triggered.
The example below shows an engine temperature alarm on an ADL2 / SDL
display.
The alarms remain active until they are acknowledged, either by a driver
activated switch or automatically after a defined period of time.
The warning ala r m l i m its are fully programmable and may include up to 6
comparisons to ensure that the alarms are only activated at the correct time.
For example, an engine temperature alarm may activate at 95 °C if the ground
Page 20
16 Operation
speed has been above 50 km/h for 30 seconds. The speed comparison
avoids the alarm showing du ring a pit stop due to heat soak. Additionally,
another comparison could be set at a higher temperature to cover all other
situations.
The comparison values can be automatically incremented or (decremented)
when an alarm occurs. For example, the engine temperature alarm may be
set at 95 °C with and increment of 5 °C, so that the second time the alarm
activates, it is at 100 °C. A limit may be set on the number of times the
comparison value is allowed to increment. Also, it may return to its original
value after a period of time, in case the alarm condition was temporary.
The alarms can be depe ndent on the current display mode (Race, Practice or
Warm-up)
Data Logging
Overview
Data logging allows the sensor readings (or any calculated value) to be stored
in the ACL for later analysis on a PC using the i2 Data Analysis application.
Power Supply
Control of the power supply to the ACL is important to maintain the integrity of
the data on your ACL. The ACL file system requires a specific power down
process to ensure the reliability of your data. The ACL should be powered
with permanent power to Pin 2; the ACL’s Permanent 12V pin. Pin 22 is the
Ignition Input Switch which should be used as a sig nal to st art up and shut
down the system. A backup battery can be fitted if required to ensure the ACL
shuts down properly under all circumstances.
Logging Memory
The ACL is fitted with a special high temperature memory card which includes
special features to protect it against permanent damage during power down.
This card should not be removed from the ACL nor be replaced with any other
type of card.
Logging Time
The maximum logging time is dependent on the number of items logged and
the rate at which they are logged. The configuration software will report the
logging time available, taking all these factors into account.
Page 21

MoTeC Operation 17
Start and Stop Logging Conditions
To avoid logging data unnecessarily, logging can be started and stopped by
user definable conditions. For example, logging might start when the vehicle
exceeds 50 km/h, and stop when the engine RPM is below 500 RPM for 10
seconds.
Note The Start Condition must be true and the Stop Condition must be false
before logging will start.
Memory Filling Options
When the logging memory is full the ACL will stop logging. However there is
an option to cycle through the available memory.
Logging Rate
The logging rate set s how oft en each channel is logged and can be set
individually for each channel.
The rate at which the value s a re logged is very important – the value must be
logged fast enough to record all variations in the reading. If the value is
logged too slowly, the readings can be totally meaningless. For example,
suspension position normally needs to be logged at 20 0 ti m es per second or
more.
However, if a value is logged faster than necessary it will not improve the
accuracy of the logged data, it will just reduce the total logging time available
and increase the logging unload time. For example, the engine temperature
only needs to be logged once per second.
CAN Bus Bandwidth Limit
High logging rates also increase the amount of data that is being
received from the measurement devices which increases the amount of
data on the CAN bus. This can lead to exceeding the CAN bus
bandwidth limit. Refer to Appendix F: CAN Bus Bandwidth Limit.
Note The ACL Manager will warn if the bandwidth is likely to be
exceeded.
Maximum Logging Rate
The maximum logging rate is limited to the update rate of the particular
channel. This varies significantly depending on the source of the
channel. For example, some VIM inputs update at 5000 Hz, whereas
some communications devi ces may only update at 50 Hz. Also some
internal calculations may be limited to 100 Hz.
Page 22

18 Operation
Update Rate
Each input is measured at a maximum rate which is dependent on the
capabilities of the measuring device and may also vary between inputs on that
device. For example the VIM has some inputs that update at 500 Hz and
others that update as fast as 5000 Hz.
Refer to Appendix E: Update Rate Summary.
Anti-Alias Filter
If a channel is logged at a rate slower than its specified update rate then an
optional anti-alias filter can be applied.
The anti-alias filter i s us ed to average out any variations in the signal between
logged values. This ensures that unrepresentative values are not logged.
The anti-alias filter is implemented by averaging the channel values between
logging events. For example, if a channel has an update rate of 1000 Hz and
it is logged at 100 Hz then the preceding 10 samples will be averaged each
time it is logged.
The anti-alias filter i s nor mall y tur ne d on by default when a channel is added
to the logging list, but may be turned off if required. For normal purposes it is
recommended that the anti-alias filter is left turne d on.
Note For some channels the anti-alias filter cannot be turned on because the
averaging performed the filter would cause incorrect values. This is the case
for on/off channels and channels where the bit values have a particular
meaning, for example error group channels.
Real Time Value (VIM, ADL2, SDL)
For channels that come from a VIM, an ADL2 or an SDL the logging
anti-alias filter also affects the real-time value of the channel. This is the
value that all other parts of the system see, such as the various
calculations.
Note The anti-alias filter is limited to 50 Hz for real time values even if
the channel is logged at a lower rate. For example, a channel logged at
10 Hz will be filtered and updated at 10 Hz in the logging and 50 Hz for
the real time value.
Note Channels that are not logged are updated at 5 0 Hz .
Page 23
MoTeC Operation 19
Real Time Value (For devices other than VIM, ADL2, SDL)
The real time value from other devices and from internal calculations is
not anti-aliased at the logging rate, ho wever the va lue ca n be anti aliased in the logging.
Phase Shift
The anti-alias filter will cause a phase shift (time delay) of half the
logging rate. For example, a channel logged at 100 Hz is logged every
10 milliseconds, so it is delayed by 5 milliseconds.
For most purposes this time delay is not an issue.
Channels logged at the sam e rate are delayed by the same amount,
which negates this effect when comparing these channels.
This applies to all channels whether they are generated internally from
a calculation or whether they are generated externally from devices
such as a VIM or a display device.
Retrieving the Logged Data
A PC is used to unload the logged data from the ACL. The l o g ged data is then
stored on the computer’s hard disk.
The logged data may be retrieved at very high speed using the Ethernet
connection. Af te r each unload, the user has the option to clear the ACL
logging memory.
The unload may be interrupted part way through if necessary by
disconnecting the comp uter. The partial un load will contain the most recently
logged data and will be stored on the computer’s hard disk. In this case the
ACL logging memory is not cleared and logging will continue as normal at the
end of the existing data. Next time the logged data is unloaded both the new
data and the previously partly unloaded data will be retrieved.
Track Map Sensor Requirements
In order for the logging analysis software to plot a track map the following
sensors are required and must be logged.
• BR2 Beacon Receiver (Note that the ‘Beacon’ Channel must be logged)
• Lateral G force
• Wheel Speed
• Longitudinal G force (Optional: See Below)
Page 24
20 Operation
A Longitudinal G force sensor should be used if the vehicle has only one
wheel speed sensor. This allows the analysis software to eliminate wheel
lockups which is essential when creating or using a track map.
Alternatively, GPS data can be used to draw a track map in which case the
following sensors are required.
• BR2 Beacon Receiver (Note that the ‘Beacon’ Channel must be logged)
• GPS Latitude
• GPS Longitude
Functions & Calculations
The ACL can perform many other functions and calculatio ns in cluding the
following:
Functions:
• Shift Lights – Cont rols up to 4 staged shift light ch annels.
• Tell-tales – Stores minimum or maximum values.
• Engine Log (Up to four separate engine logs with separate conditions).
• Diagnostics Log (Event Recorder).
For details on these functions refer to the help in ACL Manager.
Special Calculations:
The ACL can calculate and display any of the following:
• Lap Time, Lap Speed, Running Lap Time, Split Lap Times, Lap Number,
Laps Remaining.
• Ground Speed, Drive Speed, Wheel Slip, Lap Distance, Trip Distance,
Odometer.
• Lap Time Gain / Loss – Continuously displays how far behind or ahead the
vehicle is compared to a reference lap.
• Gear Detection.
• Minimum Corner Speed, Maximum Straight Speed and other Min/Max
values.
• Fuel Used, Fuel Usage, Fuel Remaining, Laps Remaining, Fuel Used per
Lap.
Page 25
MoTeC Operation 21
General Purpose Calculations:
The ACL also provides a numbe r of general purpose calculations including:
• 2D and 3D Lookup Tables
• User Defined Conditions
• General Purpose Timers
• Mathematics
• Bit Combine
• PID Control
The user defined cond it ions or tables can be used to activate items such as a
Thermatic Fan or Gearbox Oil Pump.
For details on all calculations refer to the help in ACL Manager.
Measurement Inputs
The ACL’s external measurement devices have inputs that can be connected
to a wide variety of sensors.
Sensors
Different types of sensors are available to suit different t y pes of
measurements, for exampl e: temperature, pressure, movement etc.
Sensors convert a physical measurement (e.g. pressure) into an electrical
signal (e.g. volts).
Different types of sensors generate different types of electrical signals. For
example most temperature sensor s co nvert the temperature into a variable
resistance which may be measured by an Analogue Temperature input,
however most wheel speed sensors generate a variable frequency signal
which must be connected to either a Digital input or a Speed input.
Sensor Amplifiers
Some sensors may require an amplifier to be connected between their
output and the measurement device input. This will depend on whether
the measurement device supports direct measurement of the particular
type of sensor. For example an ADL2 does not allow direct
measurement of thermocouples wherea s both the E888 and VIM do.
Page 26
22 Operation
To connect a thermocouple to an ADL2 a MoTeC thermocouple
amplifier may be used. The amplifier measures the very weak signal
from the thermocouple and amplifies it so that it is suitable for
connection to an Analogue Voltage (or Analogue Temperature) input on
the ADL2.
Note Sensor amplifiers normal require power to be supplied to them,
often a regulated 5 volt or 8 volt supply. This means that they cannot be
simply connected to the vehicle battery voltage. The various MoTeC
measurement devices usually have a number of 5V and 8V sensor
supply pins for this purpose.
Amplified Sensors
Some sensors have an internal amplifier to convert the signal from the
internal sensing element to a voltage suitable to connect to an
Analogue Voltage input or in some cases to a Digital input. Many
pressure sensors and crank trigger sensors work this way.
These sensors normally require power to be supplied to them as
described for Sensor Amplifiers above.
Input Basics
Calibration
Calibration is the process of converting the electrical value, for example
voltage, into a number that represents the physical value, for example
temperature.
The calibrations can be selected from a number of predefined calibrations
provided by MoTeC, or they can be entered by the user.
Read Value Feature
Note To use the Read Value feature in ACL manager, a channel must
already be assign e d to that pin and sent to the device (unlike the same
feature in ADL2 / SDL).
Range
Each input will have a range over which it will work. For example some
analogue voltage inputs will work over a range of 0 to 5 volts and others may
work over a range of 0 to 15 volts. Similarly digital frequency inputs will only
work over a certain range of frequencies.
Page 27

MoTeC Operation 23
Caution Operation outside the specified voltage range may cause damage to
the device.
The various measurement devices will specify the available input range in
their specifications.
Resolution
The resolution is the minimum change that the input can measure. For
example an input that has a 12 bit analogue to digital converter can measure
4096 different steps. If the input has a range of 0 to 5 volts, it will have a
measurement resolution of 0.0012 volts (5 volts divided by 4096 steps).
The resolution will c orrespond to a certain physical change. For example, if
measuring suspension position, the resolution will correspond to the minimum
distance change that can be measured.
For many measurements 12 bits (4096 steps) is sufficient; however there are
some applications where a higher resolution is desirable. In this case the VIM
can be used to measure up to 15 bits (32767 steps), providing enough
resolution for very demanding applications.
The various measurement devices will specify the available resolution in their
specifications.
Update Rates
Each input is measured at a certain maximum rate. The rate is dependent on
the capabilities of the measuring device and can vary from one input to
another. For example the VIM has some inputs that update at 500 Hz and
some that update as fast as 5000 Hz.
See the Data Logging section for de tails on the relationship between logging
rates and update rates.
Refer to Appendix E: Update Rate Summary.
Input Types
The various measurement devices have a number of different input types
which are designed to suit the different types of sensors.
The various MoTe C measurement devices will contain one or more of the
following input types.
Analogue Voltage Inputs
Available on: VIM, ADL2, SDL, E888, E816
Page 28

24 Operation
Analogue voltage inputs are normally used to measure the signals from
sensors with variable voltage outputs, such as potentiometers, 3-wire
pressure sensors, thermocouple amplifiers, accelerometers.
These inputs can be configured to use several measurement methods
to suit the various types of sensors.
Absolute Voltage The sensor voltage is independent of the
sensor supply voltage
Ratiometric Volt age The sensor voltage is pro portional to the 5 V
sensor supply voltage
Variable Resistance The sensor resistance can be entered directly.
Note The external pull-up resistor value must
also be entered
Converting Analogue Voltage Inputs to Analogue
Temperature Inputs
Analogue voltage inputs can be converted to analogue temperature
type inputs allowing them t o measure 2 wire variable resis tanc e
sensors. To do this, a pull-up resistor needs to be connected from the
input to the 5 V sensor supply.
Note The VIM has pull-up pins to simplify this. The pull-up p ins can be
spliced with the desired analogue voltage input, which will connect an
internal 1000 ohm resistor to that input pin.
Analogue Temperature Inputs
Available on: ADL2, SDL
The analogue temperature inputs are the same as analogue voltage
inputs, except that they have a pull-up resistor connected internally
from the input pin to the 5 V sensor supply.
This allows the analogue temperature inputs to be used with 2 wire
variable resistance sensors such as 2 wi re temperature sens ors and
2-wire pressure sensors.
Some voltage output sensors can be used to connect to the analogue
temperature inputs if they can drive the pull-up resistor w ithout causing
an error in their reading (e.g. MoTeC Thermocouple Amplifier).
Additionally, on/off switch signals may be connected if required.
The analogue temperature inputs have the same measurement
methods as the analogue voltage inputs.
Page 29

MoTeC Operation 25
Thermocouple Inputs
Available on: E888
Thermocouple inputs are specifically designed for measuring K type
thermocouples.
Note Isolated tip thermocouples are recommended, however in most
cases the E888 will cope with grounded tip thermocouples.
Differential Voltage Inputs
Available on: VIM
These inputs are generally used for strain gauges or thermocouples.
Differential voltage inputs have two input pins which allow them to
measure one voltage with respect to another.
A differential voltage input will read a negative value when its positive
input is less than its negative input.
Differential voltage inputs generally have a programmable amplifier
gain, which allows a small signal to be amplified so that it can be
measured with sufficient resolution. The VIM differential voltage inputs
have a gain range of 1 to 64.
Note While it is possible to measure negative differential voltages
(when the positive input is less than the negative input) both inputs
must be within th e specified common mode voltage range which may
not include negative voltages. In the case of the VIM the common mode
range is normally 0 V to 3 V. However, if the first four or the second four
inputs all have their gain set to 1, the common mode range for the
group of four inputs is 0 to 5 V.
Note Isolated tip thermocouples should be used when connecting to a
VIM, because ground ed ti p th ermocouples could force the inputs
slightly negative, which is not allowed.
Lambda Inputs
Available on: ADL2, SDL
Lambda inputs allow the direct connection of a wide band lambda
sensor.
In the case of the ADL2 and SDL this is a 4-wire Bosch LSM sensor.
Note 5-wire Bosch LSU sensors should be connected via an
appropriate amp li f ier. MoTeC has various solutions available to allow
connection via an analogue voltage input or CAN.
Page 30

26 Operation
Switch Inputs
Available on: ADL2, SDL, E888, E816
Switch inputs are generally used for the external toggle switches or
press buttons.
Switches are typicall y used to operate features such as Change Display
Mode, Alarm Acknowledge, Fuel Used Reset and other similar
functions. They can also be used to monitor items such as brake status.
Normally the switch inputs have a pull-up resistor connected internally
from the input pin to the 12 V or the 5 V sensor supply. This allows a
switch to be connected between the input pin and 0 V, so that the input
is pulled to 0 V when the switch is closed.
Digital Inputs
Available on: VIM, ADL2, SDL, E888, E816
Digital inputs are identical to the switch inputs, except that they include
the ability to measure frequency, period or pulse width.
Note Not all these measurement methods are available on all input
devices, for example the E888 can only measure frequency.
Speed Inputs
Available on: VIM, ADL2, SDL
Speed inputs are similar to the d igi ta l inputs, except that they can also
be configured to suit variable reluctance (magnetic) sensors such as
some wheel speed sensors.
Because the amplitude of the signal from these sensors varies with
speed of rotation, variable trigger levels are required, which must va ry
with the frequency of the input signal.
The speed inputs can also be used with Hall Effect (open collector
output) type wheel speed sensors.
Note It is possible to monitor the voltage of the input si gnal directly as
well as reading the speed. While not intended for precision
measurement, this is especially useful when setting magnetic sensor
levels, where the measured voltages on the pin can be used to set the
trigger voltages.
Page 31

MoTeC Operation 27
Internal Sensors
The various measurement devices may also contain internal sensors.
For example, most devices measure battery voltage and internal
temperature. They may also measure other internal voltages for
diagnostic purposes and, in the case of the SDL, an internal
accelerometer is included.
Auxiliary Outputs
The ACL has no auxiliary outputs itself, but it can control the auxiliary outputs
of the connected devices, such as ADL2, SDL, E888, E816.
These outputs may be used to control various vehicle functions such as:
Warning Lights, Thermatic Fan, Gear Box Oil Pump, etc.
Items such as Thermatic Fan s or Pum p Cont ro l should be setup using the
user conditions or the general purpose tables. There is no specific setup item
for these types of devices.
Refer to the Installation and Configuration section for more information.
Refer to the device specifications for details on the characteristics of its
outputs.
Communication Ports
The ACL has various communications ports which are used to communicate
with other devices.
Ethernet Communications Port
The Ethernet communications port is used to connect the ACL to a PC which
allows configuration of the ACL and unloading of the logged data.
For more detail refer to the PC Communications via Ethernet section
CAN Communications Ports
The ACL has two independent CAN (Control Area Network) Communications
ports that can be connected to ot her devices with a compatible CAN p ort. The
bus speed for each interface can be set independ ently.
The advantage of CAN ov er ot her communication ports such as RS232, is
that many devices can be connected to the CAN bus at one time, w hich
Page 32

28 Operation
allows all connected devices to comm unicate with each other. The CAN bus
also has the advantage of being able to communicate at high speeds.
MoTeC products that use CAN for intercommunication include M400 / M600 /
M800 / M880 engine management systems, BR2 beacon receiver, PLM
Lambda meter, VIM input module, SLM shift light module, SDL and ADL2
displays, RTC real time clock, SDC and MDC diff controllers, and MDD mini
display.
Note These devices communicate at 1 Mbit/sec, so any other devices
connected on the CAN bus must also communicate at 1 Mbit/sec. If a device
communicates at anot her sp eed, it should be wired t o th e ot her CAN bus, and
the speed of that CAN bus must be set to match the speed of the device.
Serial Communications Ports
The serial commun i cations ports can be used to receive data from an ECU, a
GPS or a similar device with a compatible communications port. They can
also be used to transmit data to other devices such as a radio telemetry
device.
The port labelled RS232-1 will only send and receive RS232 data, the port
labelled RS422 supports both RS422 and RS485 in addition to RS232 data.
Note The ACL can only communicate with devices for which it has the
appropriate communications protocol defined.
Page 33

MoTeC Installation & Configuration 29
Installation & Configuration
Wiring
Wire
MoTeC recommends the use of Tefzel insulated wire.
For general sensor hook-up 22# wire is recommended (5 amps maximum at
100 °C ambient temperature)
Note The Tefzel wire is difficult to strip unless the correc t stripping tool is
used. Be careful not to nick the wires as this may result in wire failure or poor
crimping.
Refer to Appendix L: Wire Information for more detail.
Connectors
For details on mating connectors for the ACL and VIM refer to Appendix M:
Connector Details. For other products refer to the product's user manual.
To ensure that the connector is sealed, plug unused holes with filler plugs. A
heat shrink boot may also be used if desired.
Crimping
Ensure that the correct crimping tool is used for all contacts to ensure a
reliable connection.
Refer to Appendix M: Connector Details for information on the appropriate
crimping tool.
Ground Wiring
Ground the ACL to a good ground. The ground should have a direct
connection to the vehicle battery.
CAN Bus Wiring
The CAN bus has special wiring requirements, refer to Appendix K: CAN Bus
Wiring for details.
Page 34

30 Installation & Configuration
ACL Central Logger
ACL Mounting
Dimensions
Refer to Appendix Q: ACL Case Dimensions.
Attachment
Attach at the four mounting points using M3 screws. Do not over tighten
the screws to avoid twisting the case.
Vibration isolation will help prolong the unit life if the vehic l e vibrates
severely.
Note The maximum internal operating temperature for the ACL is
85 °C, so it should not be mounted in a position where it will be
exposed to temperatures that will cause an internal temperature greater
than this.
Orientation
The ACL may be mounted in any ori e ntation however the following
points should be considered.
Mount so that the con nec tors can be easily accessed, particularly the
5 pin communications connector, which is used for configuration and
data unload.
Mount so that the status LEDs are visible.
ACL Wiring
Pin Connection Details
Refer to Appendix P: ACL Pin List by Pin Number
Connector
The ACL uses a 22 pin Auto Sp ort connector for device connection and
power, and a 5 pin Auto Sport connector for PC Ethernet
communications.
Refer to Appendix M: Connector Details.
Page 35

MoTeC Installation & Configuration 31
Power Wiring
The ACL uses a file system to store the logged data and needs to be
shut down correctly to ensure data integrity. The ACL should not h ave
the power disconnected without first shutting it down. Doing so is the
equivalent of just pulling the battery out of your laptop to turn it off
rather than using the shut down menu. Incorrectly powering down the
ACL may corrupt the data on the memor y card and should be avoided.
The ACL is ready to be powered off when all LEDs are off.
Note The shut down process can take up to 13 seconds.
Pin 2 of the ACL is the power pin. When the syst em is starting up,
running or shutting down, it will draw its power from this pin. Pin 22 is a
switched input that is used to signal to the ACL to begin startup or shut
down. If pin 22 has more than 8 volts the ACL will start up, if it is less
than 8 volts it will shut down.
One method of wiring this is as follows:
Wire the ACL constant power (pin 2) to the sw itching side of the master
switch, then use a 3 posit i on switch as the ignition switch for the
vehicle.
Wire the 3 position sw itch as follows:
Pos (1): All off
Pos (2): Ignition off, ACL (pin 22) on
Pos (3): Ignition on, ACL (pin 22) on
This setup allows for the ACL to remain on when cranking an engine
without ignition power, and also allows for proper shut down by allowing
the ignition to be turned off without turning the ACL off.
ACL Setup
All configuration is done using ACL Manager, including configu r ation of the
logging, communications, alarms, display device, VIMs and much more.
ACL Firmware
The firmware controls the operation of the ACL and can be updated as new
versions become available. The firmware is included with ACL Manager.
To send new firmware to the ACL, in ACL Manager, select Online | Upgrade
ACL Version from the main menu .
Page 36

32 Installation & Configuration
Connected Devices
VIM Input Module
VIM Mounting
Refer to Appendix R: VI M Case Dimensions.
Attachment
Attach at the four mounting points using M3 screws.
Vibration isolation will help prolong the unit life if the vehic l e vibrates
severely.
Note The maximum internal operating temperature for the VIM is 85 °C.
It should not be mounted in a position where it will be exposed to
temperatures that will cause an internal temperature greater than this.
Orientation
The VIM may be mounted in any orientation.
VIM Wiring
The VIMs must be wired to the ACL via one of the ACL's t w o CAN buses and
should be powered from the vehicle battery.
Pin List
Refer to Appendix O: VIM Pin List by Pin Number.
Connector
The VIM uses a 55 pin Auto Sport connector for sensor connection, and
a 5 pin Auto Sport connector for power and communi c ations.
Refer to Appendix M: Connector Details.
VIM Inputs
The sensors should be wired to the appropriate input type.
The differential voltage inputs can be used to directly connect
thermocouples and strain gauges.
Page 37

MoTeC Installation & Configuration 33
The other inputs can be used for potentiometers, voltage output
devices and 2-wire variable resistance sensors.
Note 2-wire variable resistance sensors require a pull-up resistor to be
connected. This can be achieved by connecting one of th e pull-up
resistor pins to the required input pin.
Refer to the Measurement Inputs section for more detail on sensors
and input types.
CAN Bus Limits
If using multiple VIMs and fast logging rates, it may be necessary to put
some VIMs on one CAN bus and some on the other to avoid exceeding
the CAN bus bandwidth limit.
The ACL Manager will warn if the bandwidth is lik ely to be exceeded.
Refer to Appendix F: CAN Bus Bandwidth Limit for details.
VIM Setup
All configuration is done using ACL Manager - There is no separate
configuration program for the VIM.
ACL Setup
Inputs Setup
Using ACL Manager, select Inputs | ACL connections, then in the
Connections screen select Edit | Add to add a VIM to the devices list
and enter the devi ce's serial number and CAN bus number in the
Connection Properties screen.
The various inputs ca n then be assigned to a channel a nd calibrated.
Communications Setup
There is no need to configure the communications section of the ACL;
this is done automatically if the VIM is configured.
VIM Firmware
ACL Manager will automatically update the firmware version in the VIM if
necessary, when sending the configuration to the ACL.
Page 38

34 Installation & Configuration
ADL2 & SDL Display
ADL2 & SDL Wiring
The display device must be wired to the ACL via one of the ACL's two CAN
buses and should be powered from the vehicle battery.
Refer to the ADL2 or SDL user manual for further details.
ADL2 & SDL Setup
All configuration is done using ACL Manager.
Important Do not use ADL2 Dash Manager or Sport Dash Manager software,
that is normally used to configure the display device.
ACL Setup
Inputs Setup
Using ACL Manager, select Inputs | ACL Connections, then in the
Connections screen, select Edit | Add to add one of the supported
display devices to the devices list and enter th e device's serial number
and CAN bus number in the Connection Properties screen.
The various inputs ca n then be assigned to a channel a nd calibrated.
Refer to the Measurement Inputs section for more detail on sensors
and input types.
Outputs Setup
Using ACL Manager, select Functions | Auxiliary Outputs to configure
the Outputs in the set up scr een.
Displayed Items Setup
Using ACL Manager, Select Functions | Display to use the Display
Setup screen to configure the displayed items.
Communications Setup
There is no need to configure the communications section of the ACL;
this is done automatically if the ADL2 or SDL is configured.
Page 39

MoTeC Installation & Configuration 35
ADL2 & SDL Firmware
ACL Manager will automatically update the firmware version in the device if
necessary, when sending the configuration to the ACL.
MDD Display
MDD Wiring
The MDD display must be wired to the ACL vi a one of the ACL's two CAN
buses and should be powered from the vehicle battery.
Refer to the MDD user manual for further details.
MDD Setup
The MDD setup requirements are the same as when the MDD is connected to
an ADL2. Refer to the MDD user manual for details.
All configuration is done using ACL Manager.
ACL Setup
Displayed Items Setup
Using ACL Manager, Select Functions | Display to use the Display
Setup screen to configure the displayed items.
Communications Setup
Using ACL Manager, select Inputs | Communications to assign the
desired MDD Transmit template to one of the CAN sections.
If not using CAN bus 0, click on the Advanced button to select the
correct CAN bus.
BR2 Beacon Receiver
BR2 Wiring
The BR2 beacon receiver mus t be wired to the ACL via one of the ACL's two
CAN buses and should be powered from the vehicle battery.
Note When using a BR2 with an ACL, it must be connected to the ACL via
CAN. The BR2 cannot be connected to a digital input on any of the other
connected devices.
Page 40

36 Installation & Configuration
Refer to the BR2 user manual for further details.
BR2 Setup
The BR2 beacon receiver has its own co nf iguration program, however it is not
necessary to change the BR2 configuration when using it with an ACL.
Configuration of the BR2 is only required when using its switched output
function, which is not supported by the ACL, or if the BR2 switched output is
to be connected to another device such as an ECU.
ACL Setup
Inputs Setup
Using ACL Manager, select Calculations | Lap Time and Number to
configure the BR2 Mode and ID.
Communications Setup
Using ACL Manager, select Inputs | Communications to assign the BR2
template to one of the CAN sections.
If not using CAN bus 0, click on the Advanced button to select the
correct CAN bus.
SLM Shift Light Module
SLM Wiring
The SLM must be wired to the ACL via one of the ACL's two CAN buses and
should be powered from the vehicle battery.
Refer to the SLM drawing, available online at www.motec.com.au, for further
details.
SLM Setup
The SLM is configured using ACL Manager, which includes a specific setup
screen for the SLM.
Page 41

MoTeC Installation & Configuration 37
ACL Setup
Outputs Setup
Using ACL Manager, select Functions | Shift Light Module to configure
the SLM.
Note The CAN bus number is also selected in the Shift Light Module
Setup screen.
Communications Setup
There is no need to configure the communications section of the ACL,
this is done automatically if the SLM is configured.
E888 / E816 Expanders
E888 / E816 Wiring
The E888 / E816 must be wired to the ACL via one of the ACL's two CAN
buses and should be powered from the vehicle battery.
Up to two E888 or E816 can be connected.
Note The second expander unit must be configured to a different CAN
address by MoTeC before it can be connected. This must be specified when
ordering the expander.
Refer to the E888 / E816 user manual for further details.
E888 / E816 Setup
There is no separate configuration program for the E888 / E816, all
configuration is done via ACL Manager.
ACL Setup
Inputs Setup
Using ACL Manager, select Inputs | Expander Inputs to assign inputs to
a channel and calibrate the inputs.
Inputs Communications Setup
Using ACL Manager, select Inputs | Communications to assign the
Expander Inputs template to one of the CAN sections.
Page 42

38 Installation & Configuration
If not using CAN bus 0, click on the Advanced button to select the
correct CAN bus.
If a second expander is connec ted, assign the Expander Inputs (2nd
Expander) template to an ot her CAN section.
Outputs Setup
Using ACL Manager, select Functions | Auxiliary Outputs to configure
the Expander Outputs in the setup screen.
Outputs Communications Setup
Using ACL Manager, select Inputs | Communications to assign the
Expander Outputs template to one of the CAN sectio ns.
If not using CAN bus 0, click on the Advanced button to select the
correct CAN bus.
If a second expander is connec ted, assign the Expander Outputs (2nd
Expander) template to an ot her CAN section.
GPS Global Positioning System
GPS units can be connected to the ACL via CAN or via RS232, depending on
the unit.
MoTeC GPS
Refer to the appropriate GPS user manual for wiring and configuration details.
Non MoTeC GPS Connection via RS232
GPS Setup
Configure the GPS to send NMEA RMC & GGA messages. Refer to the
device’s user manual for further details.
ACL Setup
Using ACL Manager, select Inputs | Communications, to assign the
GPS - Standard RMC GGA template to one of the RS232 sections.
Non MoTeC GPS Connection via CAN
If connecting the GPS via CAN, a custom template will be required to suit the
unit. Contact MoTeC for details.
Page 43

MoTeC Installation & Configuration 39
PLM Lambda Meter
One or more PLMs can be connected to the ACL via CAN. For installations
with multiple PLMs it is recommended that one PLM is configured as a
‘Master’ and the remaining units as ‘Slave’ devices.
PLM Setup
Use the separate PLM software to setup the PLM.
ACL Setup
Using ACL Manager, select Inputs | Communications to assign the PLM
template to one of the CAN sections.
Telemetry Radio System
Telemetry Radio Wiring
A telemetry radio can normally be wired to one of the RS232 ports.
Refer to the wiring details supplied with the telemetry system.
Telemetry Radio Setup
Configure the telemetry radios according to the instructions supplied with the
radios.
ACL Setup
Telemetry Output Setup
Select Functions | Telemetry to set up the channels that are to be
transmitted via telemetry.
Communications Setup
Using ACL Manager, select Inputs | Communications to assign the
Telemetry template to one of the RS232 sections.
Set the Baud Rate to suit the radio.
Note The same RS232 port can also be used to communicate with an
ECU. In this case the telemetry baud rate must be the same as the
ECU communications baud rate.
Page 44

40 Installation & Configuration
ECU Engine Management Systems
An ECU may be connected to the ACL which will make some of the
information in the ECU available to the ACL for display or logging or any other
purpose.
The MoTeC M4, M48 & M8 ECUs must be connected via RS232.
The MoTeC M400 / M600 / M800 / M880 ECUs may be connected via CAN or
via RS232.
Many other ECUs are also supported.
ECU Connection via RS232
ECU Wiring
If the ECU sends data via RS232, it may be wir ed to one of the RS232
ports on the ACL.
Refer to Appendix J: ECU to ACL Wiring (RS232) for details.
ECU Setup
Use the separate ECU Manager software to setup the ECU.
The ECU Telemetry Set and Telemetry Baud Rate should be selected
to suit an RS232 communications template su pported by the ACL.
ACL Setup
Using ACL Manager, select Inputs | Communications to assign the
desired ECU template to one of the RS232 sections.
Select the ECU template that matches the ECU type and ECU
telemetry set.
In the displayed channel list, tick the channels that are to be received in
the ACL.
Note If metric calibration is not used in the ECU, special scaling is
required in the ACL communications setup.
ECU Connection via CAN
ECU Wiring
If the ECU transmits data on CAN then it can be wired to one of the
ACL's two CAN buses.
Page 45

MoTeC Installation & Configuration 41
Refer to Appendix K: CAN Bus Wiring for details.
ECU Setup
Use the separate ECU manager software to setup the ECU.
Select a CAN Data Set that is supported by the ACL (normally set 1).
The CAN Address must also be entered. Normal value for ACL is 1520.
This is a decimal value that corresponds to a hexadecimal value of
0x5F0 in the ACL.
ACL Setup
Using ACL Manager, select Inputs | Communications to assign the
desired ECU template to one of the CAN sections.
Select the ECU template that matches the ECU type and ECU
telemetry set.
In the displayed channel list, tick the channels that are to be received in
the ACL.
If not using CAN bus 0, click on the Advanced button to select the
correct CAN bus.
Note If metric calibration is not used in the ECU, special scaling is
required in the ACL communications setup.
Page 46

Page 47

MoTeC ACL Manager Software 43
ACL Manager Software
Introduction
The following is an overview of th e main concepts of the ACL Manager
software. More detailed information is available from the online help provided
with ACL Manager. Online help is accessed by clicking on the help buttons
that appear on most ACL Manager screens and by selecting Help from the
main menu.
The ACL Manager software is used for:
• Editing ACL configuration files
• Sending configuration files to the ACL, VIMs, SDL and ADL2
• Retrieving the logged data from the ACL
• Testing the ACL and connected devices
• Enabling ACL options
• Upgrading the ACL, VIM, SDL and ADL2 firmware versions
• Changing event, venue and vehicle details
Computer Requirements
The PC must be IBM compatible, running Windows XP or Vista.
Recommended Minimum Specifications
Pentium 4 processor, 512 MB RAM memory, Ethernet port.
Installing ACL Manager
From a CD-ROM
Place the CD-ROM into the CD drive of the PC.
A new window will appear. This can be navigated using the on screen
buttons.
Page 48

44 ACL Manager Software
If the new wondow does not appear, click on the Windows Start button and
select Run. Type ‘D:\moteccd’
Click on the button marked ‘Software’, then ‘ACL’.
Select the version of ACL Manager (or other software) that you wish to install
and click on the name.
When the dialog appears asking you to ‘Open’ or ‘Save’ th e selected file,
choose ‘Open’ and then follow the installation program instructions.
From the Internet
Go to the MoTeC web sit e at www.motec.com.au and navigate to the current
release software. Click on ACL Manager to start the download and choose to
save the file to a locati on wher e it can be easily located after downloading
(such as the desktop). After downloading double click on the file to start the
installation process.
Mouse & Keyboard
The ACL Manager Software may be operated using the keyboard or a mouse.
On many Notebook PCs the pointing device (mouse substitute) is difficult to
use and in many cases it is much easier and faster to use the ke yboard. For
details on using the keyboard refer to the Windows Keyboard Use section
later in this manual.
Main Menu
The main menu is used to access all of the features of the ACL Manager
software. Click the mouse on one of the menu items or press ALT +
the underlined letter in the menu name
File menu.
. For example, press ALT + F to select the
the key for
Unavailable Menu Items
When ACL Manager is start e d, the items related to changing the configuration
will be unavailable because a configuration file has not yet been loaded.
Unavailable items appear in grey as shown below.
Page 49

MoTeC ACL Manager Software 45
Toolbar
The Tool Bar provides an alternative way of activating some of the commonly
used items on the main menu. To find out what each item does hold the
mouse pointer over the butto n of interest until a hint appears.
Online / Offline
All changes to the ACL configuration are performed Offline, i.e. without the PC
communicating with the ACL. Once the configuration changes have been
made and saved to a file, they can be sent to the ACL which is an Online
process, i.e. the PC is communicating with the ACL.
Many other functions are also performed online, for example, Get Logged
Data, Zero Sensors, Monitor Active Channels.
Configuration
The configuratio n of the ACL dete rmines exactly how it operates.
The strength of th e ACL lies in its flexibilit y of conf iguration. All aspects of the
ACL can be configured including; which sensor is connected to which input,
the calibration of each sensor , what to di splay and where to display it, what to
log and how fast to log it, tacho range, warning alarms, multi stage shift lights,
etc.
Page 50

46 ACL Manager Software
Configuration Files
The ACL configur ations are stored in files on the PC hard disk and can be
sent to the ACL at any time.
When changing the configuration, changes are only made to the file on the
PC. The file must be sent to the ACL before the changes take effect.
Creating a New Configuration File
A new configuration file can be created by selecting File | New from the main
menu, This will create a new configuration based on one of a number of
predefined templates.
After a new configuration has been defined, it shou ld be saved with a
meaningful name by selecting File | Save from the main menu. The file may
then be sent to the ACL by selecting Online | Send Configuration from the
main menu.
Alternatively a new file can be created by loading an existing configuration file
and saving it to a new file by sele cting File | Save As from the main menu.
Opening an Existing File
Before an existing configuration file can be modified or sent to the ACL it must
first be open ed.
To open a configuration file select File | Open from the main menu and select
the desired file.
Note The most recently used files appear at the bottom of the File menu,
which is often the easiest way to open a recently used file.
Sending the Configuration to the ACL
The currently open configuration file can be sent to the ACL by selecting
Online | Send Configurati on from the main menu.
When a configuration file is sent to the ACL any changes are automatically
saved to the file.
Retrieving the Configuration from the ACL
The configuratio n c an be ret r i e v ed from the ACL if neces sa r y by selecting
Online | Get Configuration from the Online menu. However this is not normally
necessary unless the original file is not available on the PC.
Page 51

MoTeC ACL Manager Software 47
Backups
Whenever a file is saved, the previous contents of the file are saved in the
‘Save Backups’ directory. The total number of backup files is limited to 100.
When a file is sent to the ACL, the existing ACL data is retrieved and stored in
the ‘From Dash Backups’ directory, this is in case the data in the ACL needs
to be restored. The total number of these backup files is limited to 10.
File Management
The configuration files may be renamed, deleted, sent to another disk etc by
clicking the right mouse button on the desired file when the Open File screen
is displayed.
Changing the Configuration
Once an existing configuration file has been opened or a new one created,
the various parts of the configuration may be modified by choosing the
appropriate items from the main menu. The configuration setup items are
accessed from the main menu items: Inputs, Calculations and Functions.
Setup Details
For details on each of the ACL Manager setup screens click on the Help
button that is provided on each screen.
Configuration Sequence
The configuration is best setup in the following order:
1. Inputs (Input Pins & Communications)
2. Calculations (Lap Time, Fuel Prediction etc)
3. Functions (Logging, Display, Alarms, Auxilia ry Ou tpu t s et c)
This simplifies the setup procedure by ensuring that the required channels are
available for the functions that use them.
Note Channels cannot be used until they have been generated by an i nput,
calculation or function.
Page 52

48 ACL Manager Software
Configuration Versions and Updating
Updating
The firmware inside the ACL can be updated by the user at any time to take
advantage of the latest features offered by MoTeC.
To update the ACL firmware version select Online | Upgrade ACL Firmware
from the ACL Manager main menu.
Matching Versions
The version of firmware i n side the ACL must match the version of the ACL
Manager software. If the versions do not match, ACL Manager will show a
warning when it attempts to communicate with the ACL.
To check the version of ACL Manager, select Help | About MoTeC ACL
Manager from the main menu.
Configuration File Version
After the ACL firmware version has be en upgraded the configuration file in the
ACL must also be updated to match the new version. The display will show a
warning until a new conf iguration has been sent to the ACL.
Note There is an option to automatically upgrade the configuration file in the
ACL when performing an upgrade. This eliminates the necessity to manually
upgrade the file and then send it. (refer to the Converting Older Version Files
section)
Page 53

MoTeC ACL Manager Software 49
Converting Older Version Configuration Files
An older version configuration file can be converted to the latest version by
selecting the app ro pr iate version in the ‘File of type’ entry box on the File
Open screen. When the file is opened the file is converted to the new version
format and saved with the same file name but with t he new version file
extension. The old file is not changed.
Converting ADL2 or SDL Configuration Files
A configuration from an ADL2 or SDL can be imported as a starting po int for
an ACL configuration. This is particularly useful if the ADL2 or SDL will be
connected to the ACL with most of the same sensors connected to it.
Note Additional configuration will be required to configure features that are
new or different in the ACL.
Page 54

50 ACL Manager Software
r
A
Channels
Channels are used to convey information between the various systems of the
ACL. For example an input pin may feed a channel called ‘Engine
Temperature’. This channel may then be used by any other system, such as
the Display System or Data Logging systems.
Channel Connection Example
Sensors
Analogue
Inputs
Speed
Inputs
ECU
CAN
Comms
Data
Logging
System
Display
System
Alarm
System
Logging
Memory
LCD
Display
RS232
Comms
Gear
Detection
Auxiliary
Outputs
Fuel Pressure
Oil Pressure
Wheel Speed Front
Wheel Speed Rea
Engine RPM
Engine Temperature
larm Warning Light
Gear
Channels
Telemetry
Warning
Light
Page 55

MoTeC ACL Manager Software 51
Channel List
MoTeC has defined an extensive list of channels. All systems within the ACL
that generate values must choose to feed one of these channels.
General Purpose Channels
Since the use of all channels cannot be predetermined, a number of general
purpose channels have been included for occasions when a suitable
predefined channel is not available.
These channels may be required when measuring an uncommon value, or
when a general purpose function needs to generate a special output channel.
For example, a 3D table may generate an output channel to control a valve of
some sort, in which case a general purpose channel may be used and
renamed appropriately.
Channel Usage
The ACL channel scheme allows complete flexib ility in channel usage, as any
available channel can be used by any other function, i.e. any channel can be
logged, displayed, used in conditions, used in alarms, used as an input to the
user definable tables, etc.
Channel Properties
For each channel th e following properties have been defined, some of which
may be modified by the user.
Properties that may be modified by the user:
• Name
• Abbreviation
• Units (e.g. degrees Celsius, degrees Fahrenheit etc)
Fixed Details
• Measurement type (e.g. Temperature)
• Resolution (e.g. 0.1 °C for Engine Temperature)
• Suitable logging rates
• Suitable display filtering
• Minimum and maximum range
Page 56

52 ACL Manager Software
Predefining these pr operties makes the channels easy to use throughout the
rest of the software. Knowing the mea sur ement type allows the channels to
be displayed in any unit suitable for that type, with automatic conversion
between the units. For example all temperature channels can be displayed in
degrees Celsius, Fahrenheit or Kelvin.
Channel Names & Abbreviations
The channel names may be changed if necessary. However name changes
should be limited to name preferences rather than redefining the purpose of
the channel, except for the general purpose channels which may be renamed
to suit the current use.
Channel Units
The units for a channel can be selected from a predefin ed list, for example the
Engine Temperature channel may have units of degrees Celsius, Fahrenheit
or Kelvin. Conversion between units is automatically handled by the software.
Note The units are used for display purposes only. This means that the units
can be changed at any time without affecti n g the ca libration of the channel.
Channel Resolution
The resolution of all channels is fixed, for example the resolution of the
Engine Temperature channel is fixed at 0.1 °C.
Fixed channel resolutions ensu r e that the uni t co nversio n system works
properly and that channel comparisons can be performed correctly.
Selecting Channels
There are two methods of selecting cha nnels, either the Category Method or
the Search Method.
Category Method
This method divides all the channels into categories and sub c a tegories, so
that the list can be narrowed down to a small list of channels. For example,
the ‘Engine Sensors / Cooling’ category shows a list of channels associated
with the cooling system of the engine.
When selecting a channel from the complete list of channels, it is usually
easiest to use the category selection method, for example when assigning a
channel to an input pin.
Page 57

MoTeC ACL Manager Software 53
To expand a category click on the plus sign (+) next to the category na me.
Page 58

54 ACL Manager Software
Search Method
This method lists all channe ls in alphabetical order and allows a channel to be
found either by typing the first few letters of any word in the channel name, or
by scrolling through the list.
Note The words may be typed out of order so that ‘Engine Oil Temp’ could be
found by typing "temp eng oil" or "oil t eng" or "e o t”
This method is most useful when selecting a channel from the av ailable
channels. For example, if ‘Engine Temperature’ has been assigned to an
input pin, it can be easily located in the Search list, since this list normally only
contains 50 to 100 items.
Conditions Overview
Conditions are used extensively throughout the software to define a true /
false condit i on based on comparing one or more channels to a value. Most
conditions can perform up to 6 comparisons.
Conditions are used to define features such as when to start logging, or when
to activate an alarm.
For example an engine oil pressure alarm may read as: Activate the alarm
when: Engine Oil Pressure < 200 kPa for 0.5 seconds AND Engine RPM >
1500 RPM for 1 second. This condition could also include a test for lower
Page 59

MoTeC ACL Manager Software 55
engine speeds but set at a lower engine oil pressure, which would cover the
range from 500 to 1500 RPM, which might read as: Engine Oil Pressure < 50
kPa for 1 second AND Engine RPM > 500 RPM for 2 seconds.
The following shows an example of an Engine Oil Pressure alarm condition.
In the case of alarms, the condition can also contain an increment or
decrement amount, which may increa se or decrease the test value by a
certain amount each time the alarm is acknowledged. The number of times
this value is in cremented can be limite d.
Checking Operation
Monitor Channels
The currently active channels can be monitored to allow checking of the
operation of all functions and measurements.
To monitor the active channels select Online | Monitor Channels from the
main menu.
Oscilloscope Screen
Any channel may also be shown on an oscilloscope style screen by
pressing the Utilities | Oscilloscope button on the Monitor Channels
screen.
Simulate
The Simulate feature all ows m os t i nput channels to be manually changed so
that the ACL operation can be checked under abnormal conditions, e.g. high
engine temperature.
This is extremely useful for checking that the ACL is working as expected.
To activate the Simulate screen select Online | Simulate from the main menu.
Page 60

56 ACL Manager Software
Tests
A number of tests are provided to c heck the operation of the ACL, such as the
Inputs Test.
To run one of the tests select the appropriate test from the Online menu.
Note To test any input on the ACL, the input must first have a channel and
calibration assigned, and have had that configuration sent to the ACL.
Sensor Zeroing
Some sensors require regular zeroing, for example steering angle,
suspension position, ride heights, G-for ce sensors and throttle position. ACL
Manager provides a screen to allow easy zeroing of all these sensors.
To zero the sensors select Online | Zero Sensors from the main menu.
Details Editor
The Details Editor allows details about the Event, Venue and Vehicle to be
entered.
This data is attached to the logged data file for later reference.
Some of this data is also attached to the configuration to determine the
operation of some functions, for example, the track length is used to
determine lap speed, if used.
To change the details select File | Edit Details from the main menu.
Page 61

MoTeC Windows Keyboard Use 57
Windows Keyboard Use
This section gives some det a ils on how to use the keyboard with Windows
applications.
Main Menu
To access the main menu, press ALT + the key for the underlined letter in the
menu, followed by the underlined letter of the item in the drop down menu.
E.g. ALT + F, N for F
Alternatively pre ss an d rele ase ALT, select the desired menu item using the
arrow keys, press ENTER to activate it.
ile New.
Closing a Window
Press ENTER for OK or Close (only works when the OK or Cancel button has
a bold line around it)
Press ESC to Cancel or Close
Getting Help
To get help on the current screen or screen item press F1, or press ALT + H if
the screen has a Help button.
To access the main help system select Help from the Main Menu.
Page 62

58 Windows Keyboard Use
Selecting an Item in a Window
To access the variou s it ems in a window, press ALT + the key for the
underlined letter of the item of in terest, e.g. to select the ‘F
press ALT + F
Alternatively use the TAB key to move through the dialog box (use SHIFT +
TAB to move backwards). The selected control is usually indicated by a
dotted line around it, or by highlighting the text or item selected within the
control.
lash Light’ item
Using the Selected Item
The method of using the selected item (or control) depends on the type of
control. The common controls are detailed below:
Button
Buttons are generally used to show another screen or perform a
particular function .
Press ALT + the key for the underlined letter (S
navigate to the Button. To select, press ENTER or SPACEBAR.
), or use the TAB key to
Page 63

MoTeC Windows Keyboard Use 59
Check Box
A check box is used to tick on or off a particular option.
Press ALT + the key for the underlined letter (F
navigate to the Check Box. To select, press SPACEBAR.
), or use the TAB key to
Radio Buttons
Radio buttons are used to select an item from a group of options.
Press ALT + the key for the underlined letter (F,
TAB key to navigate to the Radio Buttons group. To select, use the
arrow keys.
A or D), or use th e
Edit
An edit control is used to enter a value or text.
Press ALT + the key for the underlined letter (M
navigate to the Edit Box, type in the new value or text. Use the
BACKSPACE or DELETE to remove unwanted characters.
) or use the TAB key to
List
A list is used to select from a number of options.
Press ALT + the key for the underlined letter (M
navigate to the List Box. To select, use the arrow keys.
) or use the TAB key to
Page 64

60 Windows Keyboard Use
Drop down List
A drop down list is used to select from a number of items, but only the
selected item is shown until a new item needs to be selected.
Press ALT + the key for the underlined letter (L
navigate to the Drop down List Box. To select the desired item, use the
arrow keys, and press ENTER to close the list.
) or use the TAB key to
Tabs
Tabs are used to select the different ta b pages of a screen.
To select the next tab, press CTRL + TAB. To select the previous tab,
press CTRL + SHIFT +TAB.
Tree View
A Tree View is used to select items from a hierarchical list
The UP ARROW key moves the cursor up (selects the item above)
The DOWN ARROW key moves the cursor down (selects the item
below)
Page 65

MoTeC Windows Keyboard Use 61
The RIGHT ARROW key expa nds; expandable branches indicated by a
plus sign (+)
The LEFT ARROW key collapses; collapsible branches indicated by a
minus sign (-)
Page 66

62 Appendices
Appendices
Appendix A: ACL General Specifications
Physical
Case Size 151(w) x 134(h) x 28(d) mm (excluding connector)
Weight 460 grams
Power Supply
Operating Voltage: 7 to 30 volts DC
Operating Current: 0.20 ampere typical
Reverse Battery Protection
Battery Transient Protection
Operating Temperature
Internal Temp erature Range -40 to 85 °C
Ambient Temperature Range -40 to 70 °C typical
CAN Busses
Maximum Data Rate: 1 Mbit/sec
Recommended terminating impedance: 100 ohms.
Page 67

MoTeC Appendices 63
Appendix B: ACL Options Summary
The following options are available when the d ev ices are used as part of the
Central Logging System.
i2 Pro Analysis Option
Allows use of i2 Pro data analysis software.
Telemetry Option
Allows the viewing of live data tran sm itted from an ACL via radio modem to a
PC.
Remote Logging Option
Allows telemetry data to be converted to a log file for analysis.
Page 68

64 Appendices
Appendix C: VIM General Specifications
Physical
Case Size 38(w) x 90(h) x 26.2(d) mm (excluding conne ctor)
Weight 120 grams (0.85 lb)
Power Supply
Operating Voltage: 7 to 30 volts DC
Operating Current: 0.15 amperes typical (excluding sensor currents)
Reverse Battery Protection
Battery Transient Protection
Operating Temperature
Internal Temp erature Range -40 to 85 °C
Ambient Temperature Range -40 to 70 °C typical
Sensor Supply Current
5 V Sensor Supply: 0.2 amperes max
Internal Sensors
Battery Voltage
Internal Temp erature
Internal Voltages
Page 69

MoTeC Appendices 65
(Hz)
(Hz)
(
A
(
y
A
A
Appendix D: VIM Input Specifications
Analogue Inputs
VIM Analogue Input Specifications
Input
Type
V F 6 5000 4400 8xAvg ** 12 66k
AV H 8 500 330 6.4kHz # 15 150k (Gain=1)
AV S 2 2000 720 6.4kHz # 15 150k (Gain=1)
AV D 8 1000 360 6.4kHz # 15
AV SPD
##
Qty Update
Rate
++
2 100 7000 None 12 90k @
Analogue
Filter
*
Digital
Filter
Bits Effective Input
Resistance
ohms)
4.7k (Gain=64)
Gain=64)
4.7k
150k (Gain=1)
+Sign
>1M (Gain>1)
VIM Analogue Input Specifications Continued
Input
pe
T
AV F 1 0 to 5V, 1.22 mV steps N/A
Gain
Range
Range & Resolution
at Gain = 1
Range & Resolution
at Gain = 64
V H 1-64 0 to 5V, 153 uV steps 0 to 78 mV, 2.38 uV steps
V S 1-64 0 to 5V, 153 uV steps 0 to 78 mV, 2.38 uV steps
AV D 1-64 -5 to +5 V differential,
0 to 5 V absolute,
153 uV steps
***
AV SPD
##
1 0 to 10.3 V, 2.5 mV steps N/A
-78 to +78 mV differential,
0 to 3 V absolute,
2.38 uV steps
++ If the channel is logged at a lower rate than the update rate an optional
anti-alias filter can be applied which averages the values between each log
event. In this case the effective update rate is equal to the logging rate. The
anti-alias filter causes a phase shift equal to half the logging rate. The antialias filter also affects the real time value of the channel which is filtered and
updated at the logging rate or at 50 Hz whichever is greater. If the channel is
not logged then the real time value is updated at 50 Hz.
* First order RC type. The frequency is the 3 dB point.
Page 70

66 Appendices
** Inputs are sampled at 40 kHz, 8 samples are averaged to give a 5 kHz
update rate.
*** This specification only applies if the gains of a group of four inputs are all
set to 1 otherwise the differential range is -3 V to 3 V and the common mode
range is 0 V to 3 V absolute. There are two groups of four inputs; AVD1-4 and
AVD5-8.
# 5th order digital sync filter. The frequency specifies the 3 dB point.
## These inputs are not intended for precision measurements, they are
intended for check ing the voltage levels of the speed sensors.
@ Input set to magnetic type.
VIM Pull-up Resistor Pins
The Pull-up Resistor pins R1 to R4 have a 1000 ohms resistor internally
connected to the 5 V sensor supply.
VIM Analogue Input Sampling Times
This table shows the time at which each input is sampled relative to an
arbitrary zero point.
Where multiple VIMs are used, all VIMs are precisely synchronised so that the
same inputs on each VIM sample at exactly the same time.
Input Sample
Time
(usec)
AV F1 100 5000
AV F2 100 5000
AV F3 100 5000
AV F4 100 5000
Update
Rate
(Hz)
AV F5 100 5000
AV F6 100 5000
AV H1 1550 500
AV H2 1800 500
AV H3 50 500
Page 71

MoTeC Appendices 67
AV H4 300 500
AV H5 550 500
AV H6 800 500
AV H7 1050 500
AV H8 1300 500
AV S1 150 2000
AV S2 400 2000
AV D1 550 1000
AV D2 800 1000
AV D3 50 1000
AV D4 300 1000
AV D5 650 1000
AV D6 900 1000
AV D7 150 1000
AV D8 400 1000
AV SPD1 1200 500
AV SPD2 1450 500
VIM Speed Inputs
The Speed inputs can be individually set to be used in one of the two modes:
Hall or Magnetic. The VIM Speed input can also be set to measure analogue
voltages. This is especially useful when setting levels for magnetic type
sensors since the measured voltage can be used to determine the voltage
levels to use for the mag levels.
Note The same pin is allocated twice in the VIM, one input is when the pin is
being measured in analogue voltage mode. The other input is when the same
pin is being measured in a digital mode.
In Hall mode, a 4700 ohms pull-up resistor is connected to 5 V and the trigger
level is set with a single Hall Voltage Threshold setting.
In Magnetic mode, the pull-up resistor is disengaged and the trigger levels
can be varied depending on the input frequency.
Update rate is 100 Hz for speed measurement.
Page 72

68 Appendices
Appendix E: Update Rate Summary
The following table shows the maximum update rates for the various
measurement devices
Device Input Type Maximum
Update Rate
(per second)
ACL RS232 Communications 200 *
ACL General CAN communications 200 *
VIM AV Fast Inputs 5000
VIM AV Differential Voltage Inputs 1000
VIM AV High Resolution Inputs 500
VIM AV Special Inputs 2000
VIM Speed Inputs 100
ADL2/SDL
ADL2/SDL Other Analogue Voltage Inputs 500
ADL2/SDL Analogue Temperature Inputs 500
ADL2/SDL Lambda Inputs 100
ADL2/SDL Digital & Speed Inputs 100
SDL Internal G Sensors 100
E888
E888/816
*RS232 & General CAN Communications update rate depends on how
frequently the data is sent from the device. Typically the update rate from an
M4, M48, M8 or M800 ECU is about 20 times per second using RS232 and
about 50 times per second for the M800 using CAN.
Analogue Voltage Inputs 1 to 4
(ADL2/SDL) and 11 to 14 (ADL2)
Thermocouple Inputs
(First Device / Second Device)
Analogue Voltage & Digital Inputs
(First Device / Second Device)
1000
100 / 50
200 / 50
Page 73

MoTeC Appendices 69
Appendix F: CAN Bus Bandwidth Limit
The total available CAN bandwidth available on a single CAN bus is
1 Mbit/sec.
The bandwidth used by the total of all devices on a particular CAN bus must
not exceed approximately 90% of this value (900000 bits/second)
If the total bandwidth required exceeds this specification then some devices
should be connected to the second CAN bus.
Note ACL Manager will warn if the bandwidth is likely to be exceeded.
VIM
Approximate Bandwidth = Total Measurement Rate (samples/sec) x 30 (bits
per sample)
Note The Measurement Rate for each input is equal to the logging rate for
that input or 50 Hz, whichever is higher.
Example Calculation
4 channels at 2000 Hz
20 channels at 500 Hz
40 channels at 20 Hz (Occupies 50 Hz)
Calculation:
Total Measurement Rate = 4 x 2000 + 20 x 500 + 40 x 50 =
20000 (samples/sec)
Approximate Bandwidth = 20000 x 30 = 600000 (bits/sec)
E888/E816
Device on first CAN Address
Bandwidth = 145000 (bits/sec)
Device on second CAN Address
Bandwidth = 55000 (bits/sec)
Page 74

70 Appendices
Other Devices
BR2 Negligible
SLM Negligible
PLM Negligible
SDL TBD
ADL2 TBD
MDD TBD
M800 ECU TBD
Page 75

MoTeC Appendices 71
Appendix G: ACL Manager Command Line
Usage:
aclmanager.exe -c[connection name] -x -l -e –t -p -s –u [config file name]
[config file name]
(Optional)
Fully qualified path to the configuration file.
(eg "c:\motec\dash\config\bathurst.d30")
Note The path must include the file extension (eg .d30)
Options:
Each of the following options can be given as /[char ac t er] or -[character].
They are shown here as -[character].
-c[connection name]
(Optional)
Select a preconfigured connection by name as configured in the dash
connections dialog.
(eg -c"Primary CAN Connection").
Note There must not be a space between the c and the c onnection
name.
-x
(Optional)
Causes the application to terminate when one the following tasks has
been performed.
Tasks:
One or more of the following may be specified.
-l
(Optional)
Perform a “Get Logged Data” operation.
-e
(Optional)
Perform a “Get Engine Log” operation.
Page 76

72 Appendices
-t
(Optional)
Perform a “Get Tell-tale Values” operation.
-p
(Optional)
Perform a “Print Summary” operation.
Note The config file must be specified using a fully qualified path
including the file extension.
(eg -p "c:\motec\dash\config\bathurst.d30")
Note There must be a space between -p and the config file name.
-s
(Optional)
Perform a “Send Configuration” operation.
Note The config file must be specified using a fully qualified path
including the file extension.
(eg -s "c:\motec\dash\config\bathurst.d30")
Note There must be a space between -s and the config file name.
-u
(Optional)
Perform an “Upgr ade Dash Version” operation.
Page 77

MoTeC Appendices 73
Appendix H: Comms Error Codes
The "Comms CAN x Diagnost ic" a nd " Com m s RS2 3 2 Di a g no stic" channels
seen can be used to diagnose communications problems.
Multiple errors are shown by error codes added together. For example: A
RS232 error of 9 = parity + overrun.
The error values have the following definitions:
RS232 Errors
Errors generated by RS232 com munications.
1 PARITY Parity bit incorrect. The comms parity setup is
wrong, or there is electrical interference
causing errors in the data.
2 FRAMING Not seeing the stop bit. The baud rate or stop
bit setup is wrong or there is electrical
interference causing errors in the data.
4 NOISE Glitch in the data. Electrical interference is
causing glitches in the signal. (ACL does not
generate this error)
8 OVERRUN A byte was received before the previous byte
was read indicating that the processor was too
busy to read the message.
512 NO DATA A valid message header was not found - either
there is a wiring fault or comms is setup
incorrectly.
1024 CHECKSUM A valid message header was found, but the
checksum was wrong. If seen in combination
with other errors there is electrical noise. If only
checksum errors occur there may be a
software incompatibility between the ACL and
the other device .
2048 WRONG DATA Could not decode the protocol.
General CAN Errors
Errors Generated by general CAN communications.
2 FRAMING Only generated when used with an
E888/E816 expander. Inconsisten t message
Page 78

74 Appendices
length.
8 OVERRUN Receive or transmit overrun error. In the
receive case a byte was received befor e the
previous byte was read indicating that the
processor is too busy to read the message.
In the transmit case the transmit buffer is full
which could happen if the CAN b u s is too
busy.
256 BAD CONFIG The device configuration is not valid (eg
overlapping CAN addresses)
512 NO DATA A valid message header was not found -
either there is a wiring fa u lt or comms is
setup incorrectly , ( pr oblem could be at either
end). E.g.: transmit and receive CAN IDs do
not match.
1024 CHECKSUM Only generated when used with an Async
Expander. See RS232 errors
2048 WRONG DATA Only generated when used with an Async
Expander or E888/E816 Expander. Async
Expander: Could not decode the protocol.
E888/E816: Compound ID incorrect.
4096 BUS WARNING More than 96 errors have occurred on the
CAN bus. Check wiring and termination
resistors. The CAN bus may sti ll be
operational.
8192 BUS OFF More than 255 errors have occurred on the
CAN bus. CAN communications is
suspended when this error occurs. Check
wiring, termination resistors and the CAN
baud rate. Also check that CAN HI and CAN
LO are correct (not swapped).
16384 CAN TRANSMIT CAN bus transmit warning
"VIMCOM" Errors
Errors generated by "VIMCOM" devices (VIM, ADL2, SDL).
Note VIM COM devices are connected via CAN.
Page 79

MoTeC Appendices 75
ACL Errors
These errors are generated by the ACL communications system.
2 FRAMING Incorrect number of samples received.
256 BAD CONFIG Configuration mismatch between ACL
and device. Resend the configuration.
512 NO DATA VIMCOM packets have not been found.
Either there is a wiring fault or ACL
Connections is setup incorrectly.
2048 WRONG DATA VIMCOM packet has bad length.
4096 BUS WARNING More than 96 errors have occurred on
the CAN bus. Check wiring and
termination resistors. The CAN bus may
still be operational.
8192 BUS OFF More than 255 errors have occurred on
the CAN bus. CAN communications is
suspended when this error occurs.
Check wiring, terminat io n resistors and
the CAN baud rate. Also check that CAN
HI and CAN LO are correct (not
swapped).
VIMCOM Device Errors.
These error codes are sent once by the VIMCOM device on resuming
data transmission and therefore indicate why data was previously not
being transmitted.
4097 STARTUP Device has restarted (normally due to
power up) Data is not sent until sync is
achieved.
4098 HALT Data not sent due to deliberate halt. For
example configuration or firmware being
sent.
4099 OVERRUN Data not sent due to transmit buffer
overrun (possibly due to CAN bus too
busy)
4100 SYNC TIMEOUT Data not sent due to ACL sync message
timeout (sync not received from ACL)
4101 CAN ERROR Data not sent due to error on CAN bus
Page 80

76 Appendices
4102 SYNC
EXCEEDED
Data not sent due to excessive sync
error (synchronisation too far out)
Page 81

MoTeC Appendices 77
p
Appendix I: Ethernet Communications Cable
The ACL communicates with a PC via a CAT5 Ethernet cable that is
terminated with a 5 pi n Auto Sport connector.
Only 4 of the 8 Ethernet wires are required as shown in the schematic below.
The wire must be CAT5 UTP.
Autos
ort RJ45
1
2
3
4
3
6
1
2
Page 82

78 Appendices
r
Appendix J: ECU to ACL Wiring (RS232)
The following details the methods for connecting the various MoTeC ECUs to
the ACL via RS232. In all cases this is done using the serial data stream
generated by the Telemetry function of each ECU.
In the case of the M800, M880 and M4e the ACL may be directly wired to the
ECU because these ECUs use RS232 interface levels. On the M48, M4 (pre
M4e) and the M8, a Computer Interface Module (CIM) or a PCI cable is
required to convert the signals to RS232.
M800 / M880
15
9 pin PC
Connector
(if used)
ACL
2
3
5
B17 / 40
B18 / 31
B14 / 13
M800 / M880
ECU
Note The data to the ACL will be interrupted while a PC is connected (DOS
software only)
Note The 9 pin connector is not used if using the Windows Calibration
software.
Note Data may be sent to the ACL via the CAN bus as an alternative to the
serial connection.
M4e
9 Pin PC
Connecto
15
ACL
2
3
5
22
23
5
M4e ECU
Note Older M4 ECUs require a different connection method
Note The data to the ACL will be interrupted while a PC is connected.
Page 83

MoTeC Appendices 79
M48, M4 (pre M4e) and M8
The M48 & M8 and M4 (pre M4e) require the u se of a CI M module or a PCI
Cable to convert the logic level signals used by these ECUs into RS232
levels.
Using a CIM Module
15
ACL
12
CIM
PC Connector
Refer to the CI M module drawing for full wiring details.
Note The data to the ACL will be interrupted while a PC is connec ted.
M4 / M48 / M8
ECU
Page 84

80 Appendices
Appendix K: CAN Bus Wiring
The CAN bus should consist of a twisted pair trunk with 100R (0.25 watt)
terminating resistors at each end of the trunk.
The preferred cable for the trunk is 100R Data Cable but twisted 22# Tefzel is
usually OK.
The maximum length of the bus is 16 m (50 ft)
CAN Devices (such as MoTeC ACL, ADL2, BR2 etc) may be connected to the
trunk with up to 50 0 mm (20 in) of twisted wire.
100R Terminating
Resistors at each
end of the CAN Bus
These wires must be Twisted
Minimum one twist per 50 mm (2 in)
CAN-HI
CAN-LO
100R
CAN-LO
CAN-HI
CAN Device
eg VIM
<< CAN Bus >>
500mm
Max
CAN-LO
CAN-HI
CAN Device
eg ACL
CAN-LO
CAN-HI
CAN Device
eg ADL2
100R
Page 85

MoTeC Appendices 81
Appendix L: Wire Information
M22759/16 Wire Ratings (For Various Wire Gauges)
Insulation Material : Tefzel
Conductor : Tin Plated Copper
Voltage Rating : 600 V
Maximum Temperature : 150 °C
Wire
Gauge
(AWG)
22 0.38 5 0.045 14
20 0.61 6 0.028 8.5
18 0.96 9 0.018 5.5
16 1.2 12 0.014 4.3
14 1.9 18 0.009 2.7
12 3.0 24 0.006 1.8
Cross
Sectional
Area (mm
Max Current
2
)
at 100 °C
Ambient
(amperes)
Resistance
(ohm / m)
Resistance
(ohm / 1000 ft)
Wire Stripping Tool
The following tool is recomme n d ed
Ideal Industries 45-2133 stripping tool with LB1195 wire stop.
Page 86

82 Appendices
Appendix M: Connector Details
ACL Mating Connectors
22 Pin Connector: Deutsc h AS61 2- 3 5SN
5 Pin Connector: Deutsch ASL606-05SN-HE
VIM Mating Connectors
55 Pin Connector: Deutsc h AS61 6- 3 5SN
5 Pin Connector: Deutsch ASL606-05SN-HE
Wire
Wire to suit connectors : 22# Tefzel, Mil Spec : M22759/16-22
Crimp Tool
Crimp Tool : M22520/2-01
Positioner for 22 pin and 55 pin connectors
Positioner for Crimp Tool : M22520/2-07
Note The Crimp Contacts are type 22D (needed to set the crimp tool
correctly)
Positioner for 5 pin connector
Positioner for Crimp Tool : Deutsch 604973
Wire Stripping Tool
The following tool is recomme n d ed
Ideal Industries 45-2133 stripping tool with LB1195 wire stop.
Heatshrink Boots
For 5 Pin
Straight Raychem 202A111, Hellerman 113-4-G
Right Angle Raychem 222A111, Hellerman 1108-4-G
Page 87

MoTeC Appendices 83
For 22 Pin
Straight Raychem 202K142, Hellerman 154-42-G
Right Angle Raychem 222K142, Hellerman 1154-42-G
For 55 Pin
Straight Raychem 202K153, Hellerman 156-42-G
Right Angle Raychem 222K153, Hellerman 1156-42-G
Page 88

84 Appendices
A
A
Appendix N: VIM Pin List by Function
VIM 5 Pin Connector
Pin Name Function
Power
1 BAT – Battery –
3 BAT + Battery +
CAN Bus
4 CAN LO CAN Low
5 CAN HI CAN High
Not Used
2 Not Used
VIM 55 Pin Connector
Pin Name Function
Fast Analogue Volt Inputs
47 AV F1 Analogue Voltage Fast 1
48 AV F2 Analogue Voltage Fast 2
49 AV F3 Analogue Voltage Fast 3
50 AV F4 Analogue Voltage Fast 4
51 AV F5 Analogue Voltage Fast 5
52 AV F6 Analogue Voltage Fast 6
High Resolution Analogue Volt Inputs
2 AV H1 Analogue Voltage High Resolution 1
3 AV H2 Analogue Voltage High Resolution 2
6 AV H3 Analogue Voltage High Resolution 3
7 AV H4 Analogue Voltage High Resolution 4
8 AV H5 Analogue Voltage High Resolution 5
9 AV H6 Analogue Voltage High Resolution 6
13 AV H7 Analogue Voltage High Resolution 7
14 AV H8 Analogue Voltage High Resolution 8
Special Analogue Volt Inputs
19 AV S1 Analogue Voltage Special (Fast High Resolution) 1
20
V S2
nalogue Voltage Special (Fast High Resolution) 2
Page 89

MoTeC Appendices 85
A
A
Differential Analogue Volt Inputs
15 AV D1+ Analogue Voltage Differential 1+
16 AV D1– Analogue Voltage Differential 1–
23
24 AV D2– Analogue Voltage Differential 2–
45 AV D3+ Analogue Voltage Differential 3+
46 AV D3– Analogue Voltage Differential 3–
36 AV D4+ Analogue Voltage Differential 4+
37 AV D4– Analogue Voltage Differential 4–
30 AV D5+ Analogue Voltage Differential 5+
31 AV D5– Analogue Voltage Differential 5–
38 AV D6+ Analogue Voltage Differential 6+
39 AV D6– Analogue Voltage Differential 6–
28 AV D7+ Analogue Voltage Differential 7+
29 AV D7– Analogue Voltage Differential 7–
21 AV D8+ Analogue Voltage Differential 8+
22 AV D8– Analogue Voltage Differential 8–
Pull-up Resistors
V D2+
nalogue Voltage Differential 2+
11 R1 Pull-up Resistor 1
12 R2 Pull-up Resistor 2
33 R3 Pull-up Resistor 3
34 R4 Pull-up Resistor 4
Speed Inputs
41 SPD1 Speed 1
42 SPD2 Speed 2
Sensor 5 V
18 5V Sensor 5 V
26 5V Sensor 5 V
27 5V Sensor 5 V
35 5V Sensor 5 V
43 5V Sensor 5 V
44 5V Sensor 5 V
Sensor 0 V
1 0V 1 Sensor 0 V 1
5 0V 1 Sensor 0 V 1
Page 90

86 Appendices
32 0V 2 Sensor 0 V 2
40 0V 2 Sensor 0 V 2
17 0V 3 Sensor 0 V 3
25 0V 3 Sensor 0 V 3
4 0V 4 Sensor 0 V 4
10 0V 4 Sensor 0 V 4
Not Used
53 Not Used
54 Not Used
55 Not Used
Page 91

MoTeC Appendices 87
A
A
–
Appendix O: VIM Pin List by Pin Number
VIM 5 Pin Connector
Pin Name Function
1 BAT – Battery –
2 Not Used
3 BAT + Battery +
4 CAN LO CAN Low
5 CAN HI CAN High
VIM 55 Pin Connector
Pin Name Function
1 0V 1 Sensor 0 V 1
2 AV H1 Analogue Voltage High Resolution 1
3 AV H2 Analogue Voltage High Resolution 2
4 0V 4 Sensor 0 V 4
5 0V 1 Sensor 0 V 1
6 AV H3 Analogue Voltage High Resolution 3
7 AV H4 Analogue Voltage High Resolution 4
8 AV H5 Analogue Voltage High Resolution 5
9 AV H6 Analogue Voltage High Resolution 6
10 0V 4 Sensor 0 V 4
11 R1 Pull-up Resistor 1
12 R2 Pull-up Resistor 2
13 AV H7 Analogue Voltage High Resolution 7
14 AV H8 Analogue Voltage High Resolution 8
15 AV D1+ Analogue Voltage Differential 1 +
16 AV D1– Analogue Voltage Differential 1 –
17 0V 3 Sensor 0 V 3
18 5V Sensor 5 V
19 AV S1 Analogue Voltage Special (Fast High Resolution) 1
20 AV S2 Analogue Voltage Special (Fast High Resolution) 2
21 AV D8+ Analogue Voltage Differential 8 +
22
23 AV D2+ Analogue Voltage Differential 2 +
24 AV D2– Analogue Voltage Differential 2 –
V D8–
nalogue Voltage Differential 8
Page 92

88 Appendices
A
A
–
A
A
25 0V 3 Sensor 0 V 3
26 5V Sensor 5 V
27 5V Sensor 5 V
28 AV D7+ Analogue Voltage Differential 7 +
29 AV D7– Analogue Voltage Differential 7 –
30 AV D5+ Analogue Voltage Differential 5 +
31
32 0V 2 Sensor 0 V 2
33 R3 Pull-up Resistor 3
34 R4 Pull-up Resistor 4
35 5V Sensor 5 V
36 AV D4+ Analogue Voltage Differential 4 +
37 AV D4– Analogue Voltage Differential 4 –
38 AV D6+ Analogue Voltage Differential 6 +
39 AV D6– Analogue Voltage Differential 6 –
40 0V 2 Sensor 0 V 2
41 SPD1 Speed 1
42 SPD2 Speed 2
43 5V Sensor 5 V
44 5V Sensor 5 V
45 AV D3+ Analogue Voltage Differential 3 +
V D5–
nalogue Voltage Differential 5
46 AV D3– Analogue Voltage Differential 3 –
47 AV F1 Analogue Voltage Fast 1
48
49 AV F3 Analogue Voltage Fast 3
50 AV F4 Analogue Voltage Fast 4
51 AV F5 Analogue Voltage Fast 5
52 AV F6 Analogue Voltage Fast 6
53 Not Used
54 Not Used
55 Not Used
V F2
nalogue Voltage Fast 2
Page 93

MoTeC Appendices 89
Appendix P: ACL Pin List by Pin Number
ACL 5 Pin Connector
Pin Name Function
1 RX+ Ethernet Rece ive + (Orange/White)
2 RX – Ethernet Receive – (Orange)
3 TX + Ethernet Transmit + (Green/White)
4 TX – Ethernet Transmit – (Green)
5 Not Used
ACL 22 Pin Connector
Pin Name Function
1 BAT – Battery –
2 BAT + Battery +
3 J1850 J1850 Comms
4 LIN LIN Comms
5 CAN 0 LO CAN Bus 0 Low
6 CAN 0 HI CAN Bus 0 High
7 CAN 1 LO CAN Bus 1 Low
8 CAN 1 HI CAN Bus 1 High
9 Reserved Reserved (RS232 0 Carrier Detect)
10 Reserved Reserved (RS232 0 Receive)
11 Reserved Reserved (RS232 0 Transmit)
12 Reserved Reserved (RS232 0 Request to Send)
13 Reserved Reserved (RS232 0 Clear to Send)
14 RS232 1 CD RS232 1 Carrier Detect
15 RS232 1 RX RS232 1 Receive
16 RS232 1 TX RS232 1 Transmit
17 RS422 TX+ RS422 Transmit + (RS485 +)
18 RS422 TX– RS422 Transmit – (RS485 –)
19 RS422 RX+ RS422 Receive +
20 RS422 RX- RS422 Receive –
21 SW IN Not Used
22 IGN ON Power Request On/Off
(Switch to Battery + )
Page 94

90 Appendices
Appendix Q: ACL Case Dimensions
Page 95

MoTeC Appendices 91
Appendix R: VIM Case Dimensions
Page 96

92 Note s
Page 97

MoTeC Notes 93
Page 98

94 Note s
Page 99

MoTeC Notes 95
 Loading...
Loading...