


TSM24P
Integrated Step-Servo Motor
User Manual
Rev. 1.0
AMP & MOONS’ Automation
TSM24P User Manual
Contents
1 Introduction .................................................................................. 5
1.1 Features ............................................................................................. 5
1.2 Block Diagram
1.3 Safety Instructions
...................................................................................6
.............................................................................7
2 Getting Started ............................................................................ 8
2.1 Installing Software .............................................................................8
2.2 Mounting the Hardware
2.3 Choosing a Power Supply
2.3.1 Voltage ..................................................................................................9
2.3.2 Regeneration Clamp ..............................................................................9
2.3.3 Current .................................................................................................10
.....................................................................8
.................................................................9
3 Installation/Connections ............................................................ 12
3.1 Connecting the Power Supply .........................................................12
3.2 Connecting the TSM24P Communications
3.2.1 Connecting to the PC using RS-232 ....................................................13
3.3 Inputs and Outputs ..........................................................................14
3.3.1 Connector Pin Diagram ........................................................................14
3.3.2 X1/STEP and X2/DIR High Speed Digital Inputs .................................16
...................................... 13
3.3.3 X3/EN and X4/AR Digital Inputs ...........................................................17
3.3.4 Programmable Outputs ........................................................................18
4 Drive Conguration .................................................................... 19
4.1 Quick Tuner Toolbar .........................................................................19
4.1.1 Open, Save and Print ...........................................................................19
4.1.2 Restore .................................................................................................20
4.1.3 Alarm History ........................................................................................20
4.1.4 LED Flashing ........................................................................................20
4.1.5 Drive & Revision ...................................................................................20
4.1.6 Communication ....................................................................................21
4.1.7 Servo On/Off ........................................................................................21
4.1.8 Alarms ..................................................................................................21
4.1.9 Upload & Download ..............................................................................21
4.2 Basic Conguration ..........................................................................22
4.2.1 Maximum Currents ...............................................................................22
4.2.2 Digital Input Filter .................................................................................22
Rev. 1.0
0012072012
4.2.3 Electronic Gearing ................................................................................22
4.2.4 Positioning Error Fault .........................................................................22
2
+86-400-820-9661

TSM24P User Manual
4.2.5 Maximum Speed ..................................................................................23
4.2.6 Maximum Acceleration ........................................................................23
4.3 Position Mode ..................................................................................24
4.3.1 Basic Conguration .............................................................................24
4.3.2 Position Control - Digital .......................................................................25
4.3.3 I/O Denition - Digital ...........................................................................26
5 Tuning - Sampling ...................................................................... 27
5.1 Velocity Control Loop (V Loop) ........................................................ 27
5.1.1 Gain: The Velocity Proportional Term (VP) ...........................................28
5.1.2 IntegGain: The Velocity Integral Term (VI) ............................................28
5.1.3 FF Gain: Acceleration Feed-forward Term (KK) ...................................28
5.1.4 PID Filter: Torque Command Filter Term (KC) ......................................28
5.2 Position Control Loop ......................................................................29
5.2.1 Gain: The Position Proportional Term (KP) ..........................................29
5.2.2 The Position Integral Term (KI) - Not Implemented ..............................29
5.2.3 Deri Gain: The Derivative Term (KD) ....................................................29
5.2.4 Deri Filter: Torque Command Filter Term (KE) .....................................30
5.3 Notch lter ........................................................................................ 30
5.3.1 Frequency: Notch Filter Center Frequency ..........................................30
5.3.2 BandWidth: Notch Filter Frequency Bandwidth ....................................30
5.4 Getting Ready for Tuning ................................................................. 31
5.5 Tuning the Velocity Loop
5.5.1 Entering a Sample Move ......................................................................32
5.5.2 Performing a Move ...............................................................................32
5.5.3 Adjusting tuning parameters ................................................................. 33
5.5.4 Adding in the FF Gain (KK) parameter .................................................35
5.5.5 Filter parameter ....................................................................................35
5.5.6 Verify the Drive Current ........................................................................36
5.5.7 Finishing up
..........................................................................................36
..................................................................32
5.6 Tuning the Position loop ..................................................................36
5.6.1 Entering a Sample Move ......................................................................36
5.6.2 Performing a Move ...............................................................................37
5.6.3 Adjusting the Gain (KP) and Deri Gain (KD) parameters .....................37
5.6.4 The Deri Filter (KE) parameter .............................................................37
5.6.5 Filter parameter (again) ........................................................................37
5.6.6 Verify the Drive Current ........................................................................37
5.6.7 Finishing up ..........................................................................................37
5.7 Using Auto Trigger Sampling ...........................................................38
+86-400-820-9661
3
0012072012
Rev. 1.0

TSM24P User Manual
5.7.1 Setting up Auto Trigger .........................................................................38
5.8 Setting the Notch lter .....................................................................39
6 SCL Test & Monitor .................................................................... 40
6.1 SCL Test ..........................................................................................40
6.2 Move Testing
6.2.1 Jog Move ..............................................................................................40
6.2.2 Single Move ..........................................................................................41
6.2.3 Homing .................................................................................................41
.................................................................................... 40
6.3 Motion Status ................................................................................... 41
6.4 Monitor
6.5 I/O Status
6.6 Alarm
6.7 Drive Status
............................................................................................. 42
......................................................................................... 42
................................................................................................ 42
.....................................................................................43
7 Troubleshooting ......................................................................... 44
8 Reference Materials
8.1 Mechanical Outlines (Unit:mm) ........................................................45
8.2 Torque-Speed Curves
8.3 Technical Specications
8.4 SCL Command Reference
.................................................................. 45
...................................................................... 45
................................................................... 46
.............................................................. 47
9 Contacting MOONS’ .................................................................. 49
Communication
Model
TSM24P-3AG
RS-232
Rev. 1.0
0012072012
4
+86-400-820-9661

TSM24P User Manual
1 Introduction
Thank you for selecting the MOONS’ TSM24P Integrated Motor.The
TSM line of integrated step-servo motors combines servo technology
with an integrated motor to create a product with exceptional feature
and broad capability. We hope our commitment to performance, quality
and economy will result in a successful motion control project.
1.1 Features
• Programmable, Digital servo driver and motor in an integrated
package
• Operates from a 12 to 70 volt DC power supply
• Control Modes:
* Position Control
* Digital Signal type
Step & Direction
CW & CCW pulse
A/B Quadrature (Encoder Following)
• Communications:
* RS-232
• 5000 line (20,000 counts/rev) encoder feedback
• Available torque:
* TSM24P-3AG: Up to 2.4 Nm Continuous(3.0 Nm Boost)
• I/O:
* 4 optically isolated digital inputs, with adjustable bandwidth digital noise rejection lter,5 to
24 volts
* 3 optically isolated digital outputs, 30V/100 mA max.
* Differential encoder outputs (A±, B±, Z±), 26C31 line driver, 20 mA sink or source max
• Technological advances:
* Full servo control, Closed loop
* Efcient, Accurate, Fast, Smooth
* Intelligent, Compact
+86-400-820-9661
5
Rev. 1.0
0012072012

TSM24P User Manual
1.2 Block Diagram
TSM24P
Block Diagram
12-70 VDC
External
Power Supply
RS-232
TX, RX, GND, +5V
X1/STEP
X2/DIR
X3/EN
X4/AR
Y1/ALARM
Y2/IN POSITION
Y3/BRAKE
A+
A -
B+
Z+
B -
+
-
Z-
Conn
Power
Conn
Comm
I/O Connector
RS-232
Optical
Iso
Optical
Iso
Line
Driver
Digital
Filter
Software
Filter
5 Volt DC
Power Supply
3.3VDC
Internal
Logic
Supply
DSP
Driver
Controller
Voltage
Temp
Det.
Status
MOSFET
PWM
Power
Amplifier
Over
Current
Det.
motor
encoder
Rev. 1.0
0012072012
6
+86-400-820-9661

TSM24P User Manual
1.3 Safety Instructions
Only qualied personnel should transport, assemble, install, operate, or maintain this equipment.
Properly qualied personnel are persons who are familiar with the transport, assembly, installation,
operation, and maintenance of motors, and who meet the appropriate qualications for their jobs.
To minimize the risk of potential safety problems, all applicable local and national codes regulating
the installation and operation of equipment should be followed. These codes may vary from area
to area and it is the responsibility of the operating personnel to determine which codes should be
followed, and to verify that the equipment, installation, and operation are in compliance with the
latest revision of these codes.
Equipment damage or serious injury to personnel can result from the failure to follow all applicable
codes and standards. MOONS’ does not guarantee the products described in this publication
are suitable for a particular application, nor do they assume any responsibility for product design,
installation, or operation.
Read all available documentation before assembly and operation. Incorrect handling of the
products referenced in this manual can result in injury and damage to persons and machinery. All
technical information concerning the installation requirements must be strictly adhered to.
It is vital to ensure that all system components are connected to earth ground. Electrical safety is
impossible without a low-resistance earth connection.
This product contains electrostatically sensitive components that can be damaged by incorrect
handling. Follow qualied anti-static procedures before touching the product.
During operation keep all covers and cabinet doors shut to avoid any hazards that could possibly
cause severe damage to the product or personal health.
During operation, the product may have components that are live or have hot surfaces.
Never plug in or unplug the Integrated Motor while the system is live. The possibility of electric
arcing can cause damage.
Be alert to the potential for personal injury. Follow recommended precautions and safe operating
practices emphasized with alert symbols. Safety notices in this manual provide important
information. Read and be familiar with these instructions before attempting installation, operation,
or maintenance. The purpose of this section is to alert users to the possible safety hazards
associated with this equipment and the precautions necessary to reduce the risk of personal injury
and damage to equipment. Failure to observe these precautions could result in serious bodily
injury, damage to the equipment, or operational difculty.
+86-400-820-9661
7
Rev. 1.0
0012072012

TSM24P User Manual
2 Getting Started
The following items are needed:
• A 12 - 70 volt DC power supply, see the section below entitled “Choosing a Power Supply” for
help in choosing the right one
• A small at blade screwdriver for tightening the connectors (included)
• A PC running Microsoft Windows 2000, XP, Vista, or Windows 7
• The MOONS’ CD (included)
• A MOONS’ programming cable (included)
2.1 Installing Software
Before utilizing the TSM24P Integrated Step-Servo Motor and Step-Servo Quick Tuner Software in
an application, the following steps are necessary:
• Install the Step-Servo Quick Tuner software from the CD.
• Connect the drive to the PC using the programming cable.
• Connect the drive to the power supply. See instructions below.
• Launch the software by clicking Start...Programs...MOONS’.
• Apply power to the drive.
• The software will recognize the drive and display the model and rmware version. At this point,
it is ready for use.
2.2 Mounting the Hardware
As with any step motor, the TSM24P must be mounted so as to provide maximum heat sinking
and airow. Keep enough space around the Integrated Motor to allow for airow.
• Never use the drive where there is no airow or where other devices cause the
surrounding air to be more than 40°C (104°F).
• Never put the drive where it can get wet.
• Never use the drive where metal or other electrically conductive particles can
inltrate the drive.
• Always provide airow around the drive.
Rev. 1.0
0012072012
8
+86-400-820-9661

TSM24P User Manual
2.3 Choosing a Power Supply
The main considerations when choosing a power supply are the voltage and current requirements
for the application.
2.3.1 Voltage
The TSM24P is designed to give optimum performance between 24 and 48 Volts DC. Choosing
the voltage depends on the performance needed and motor/drive heating that is acceptable and/or
does not cause a drive over-temperature. Higher voltages will give higher speed performance but
will cause the TSM24P to produce higher temperatures. Using power supplies with voltage outputs
that are near the drive maximum may signicantly reduce the operational duty-cycle.
The extended range of operation can be as low as 10 VDC minimum to as high as 75 VDC
maximum. When operating below 18 VDC, the power supply input may require larger capacitance
to prevent under-voltage and internal-supply alarms. Current spikes may make supply readings
erratic. The supply input cannot go below 10 VDC for reliable operation. Absolute minimum power
supply input is 10 VDC. If the Input supply drops below 10 VDC the low voltage alarm will be
triggered. This will not fault the drive.
Absolute maximum power supply input is 75 VDC at which point an over-voltage alarm and fault
will occur. When using a power supply that is regulated and is near the drive maximum voltage
of 75 VDC, a voltage clamp may be required to prevent over-voltage when regeneration occurs.
When using an unregulated power supply, make sure the no-load voltage of the supply does not
exceed the drive’s maximum input voltage of 75 VDC.
2.3.2 Regeneration Clamp
If a regulated power supply is being used, there may be a problem with regeneration. When a
load decelerates rapidly from a high speed, some of the kinetic energy of the load is transferred
back to the power supply, possibly tripping the over-voltage protection of a regulated power
supply, causing it to shut down. This problem can be solved with the use of a MOONS’ RC880
Regeneration Clamp. It is recommended that an RC880 initially be installed in an application. If
the “regen” LED on the RC880 never ashes, the clamp is not necessary.
LEDs
Green - Power
Red - Regen on
RC880 Regen Clamp
+86-400-820-9661
9
Rev. 1.0
0012072012

TSM24P User Manual
2.3.3 Current
The maximum supply currents required by the TSM24P are shown in the charts below at different
power supply voltage inputs. The TSM24P power supply current is lower than the winding currents
because it uses switching ampliers to convert a high voltage and low current into lower voltage
and higher current. The more the power supply voltage exceeds the motor voltage, the less
current will be required from the power supply.
It is important to note that the current draw is signicantly different at higher speeds depending
on the torque load to the motor. Estimating how much current is necessary may require a good
analysis of the load the motor will encounter.
TSM24P-3AG 24V Power
3.5
3
2.5
2
1.5
1
Torque(N.m)
0.5
0
0 10 20 30 40 50
Speed(RPS)
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
Torque
Supply Current
Amps
Continuous
Boost
Full Load
No Load
TSM24P-3AG 48V Power
3.5
3
2.5
2
1.5
Torque(N.m)
1
0.5
0
0 10 20 30 40 50
Speed(RPS)
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
Torque
Supply Current
Amps
Continuous
Boost
Full Load
No Load
Rev. 1.0
0012072012
10
+86-400-820-9661

TSM24P User Manual
3.5
3
2.5
2
1.5
1
Torque(N.m)
0.5
0
0 10 20 30 40 50
TSM24P-3AG 70V Power
Speed(RPS)
5
4.5
4
3.5
3
2.5
2
1.5
1
0.5
0
Torque
Supply Current
Amps
Continuous
Boost
Full Load
No Load
+86-400-820-9661
11
Rev. 1.0
0012072012
TSM24P User Manual
3 Installation/Connections
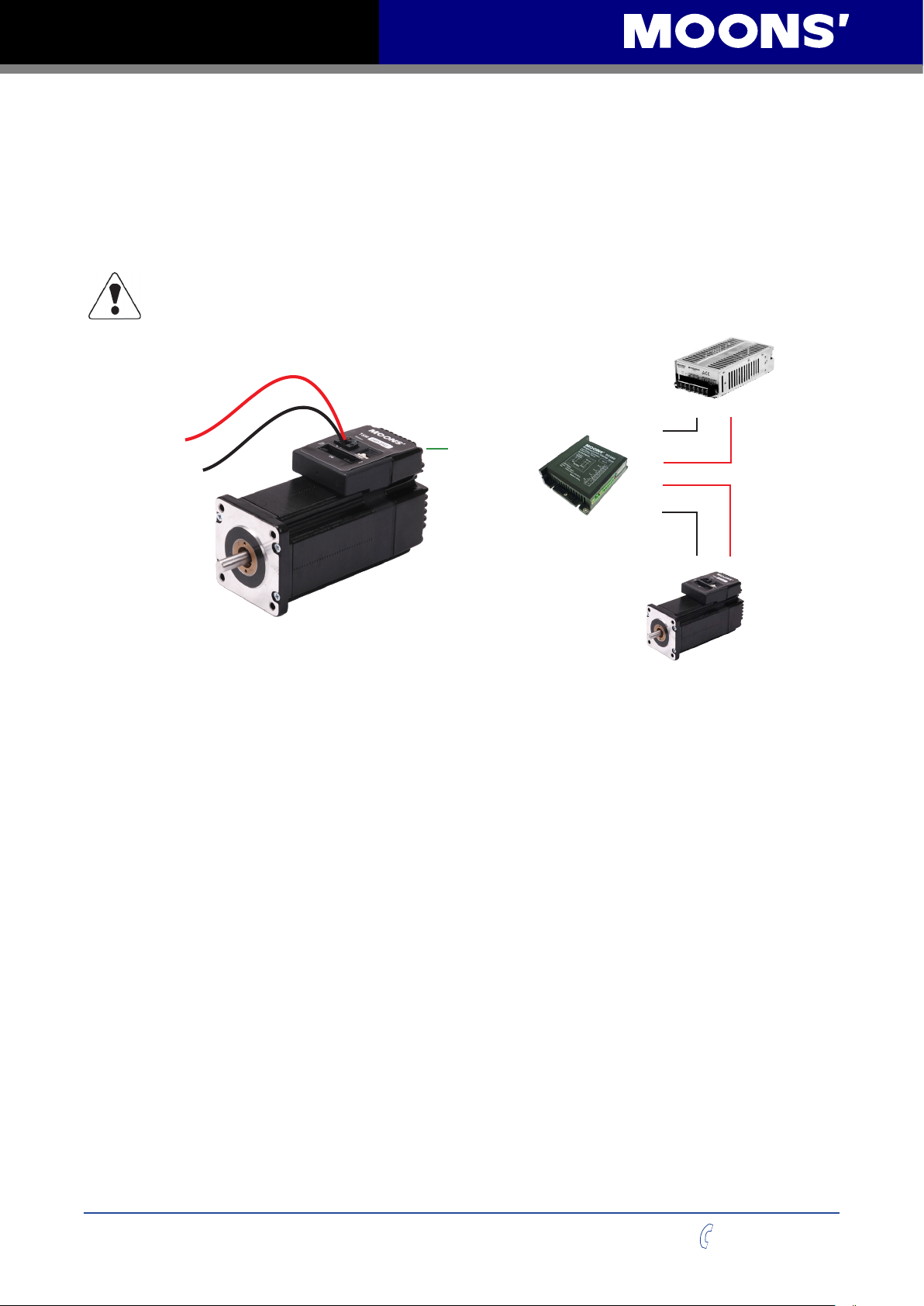
3.1 Connecting the Power Supply
Use 16 to 20-gauge wire to connect the TSM24 to a power supply. It contains an internal fuse
connected to the “+” terminal that is not user replaceable. If a user serviceable fuse is desired,
install a 10 amp fast acting fuse in line with the “+” power supply lead.
Be careful not to reverse the wires. Reversing the connection may open the internal
fuse on the drive and void the warranty.
Power Supply
V- V+
-
To Power Supply+
To Power Supply-
To Earth Ground
RC880
Vin
+
+
Vout
-
V- V+
TSM
MOONS' offers two matched power supplies for use with the TSM24P.
A 24VDC, 150W(P/N MF150A24AG-V) and a 48VDC 320W(P/N MF320A48AG-V).
These power supplies have current over load capability making them ideal for use.
(To use with a switch power supplier, a RC880 regen must be connected in system)
The RC880 regeneration clamp is for use where regeneration from the motor may cause damage
to the drive. In these cases the RC880 is connected between the drive and power supply and
absorbs regenerated energy.
Rev. 1.0
0012072012
12
+86-400-820-9661

TSM24P User Manual
3.2 Connecting the TSM24P Communications
The TSM24P comes with a cable that will provide the interface to an RS-232 port through a DB9
style connector.
3.2.1 Connecting to the PC using RS-232
Locate the TSM24P within 2.5 meters of the PC. Plug the DB9 connector of the communication
cable that came with the drive into the serial port of the PC. Plug the small end into the crimp style
connector on the TSM24P . Secure the cable to the PC with the screws on the DB9 connector.
Note: If the PC does not have an RS-232 serial port, a USB Serial Converter will be needed.
You can contact MOONS’ to buy a USB to RS-232 converter.
The RS-232 circuitry does not have any extra electrical “hardening” and care should be taken
when connecting to the RS-232 port as hot plugging could result in circuit failure.
GND
TX
+5V
RX
+86-400-820-9661
13
Rev. 1.0
0012072012

TSM24P User Manual
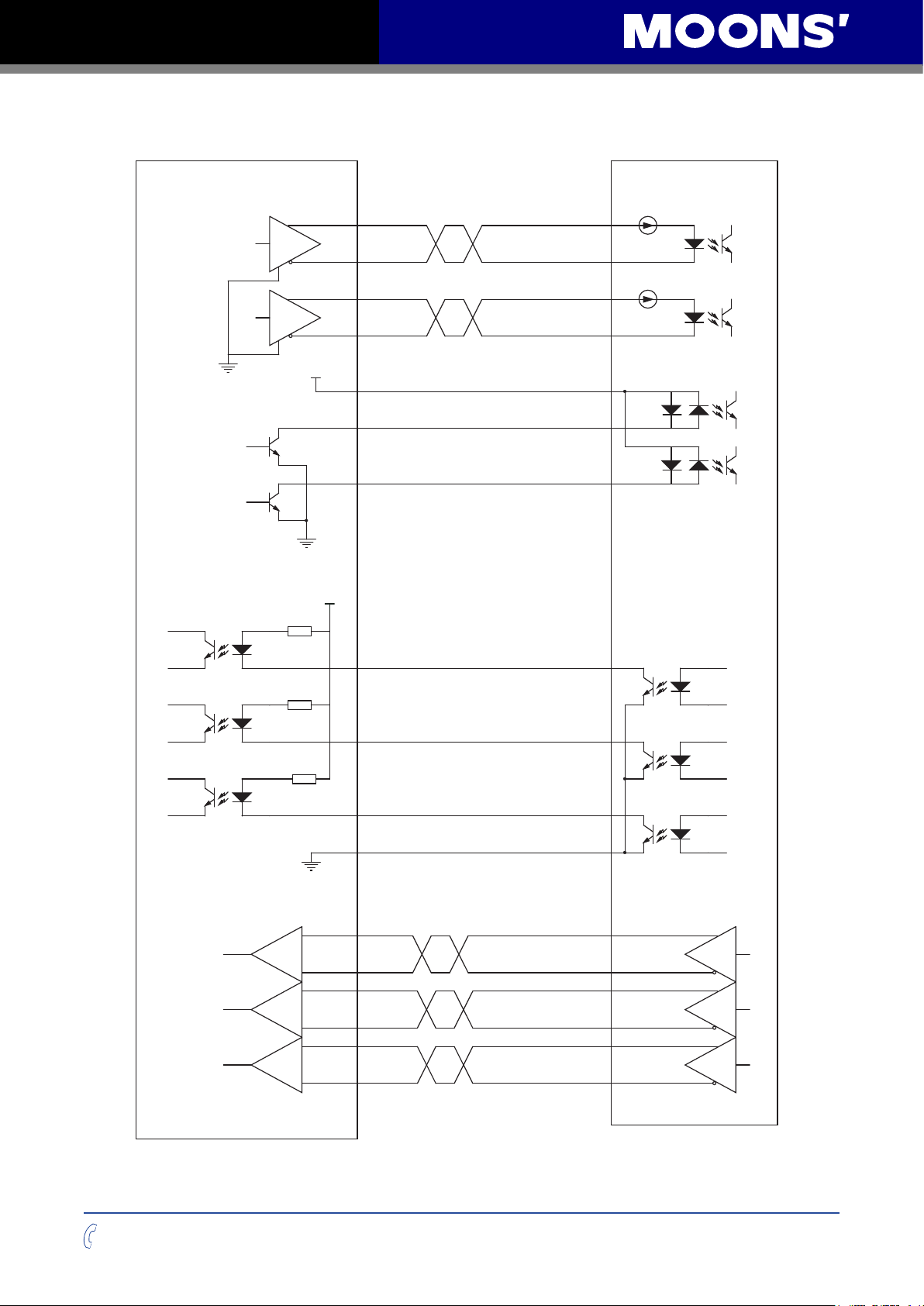
3.3 Inputs and Outputs
TSM24P drives include 4 digital inputs
X1/STEP & X2/DIR are high-speed 5-24 volt logic digital inputs for commanding position.
Quadrature signals from encoders can also be used.
X3/EN and X4/AR are 5-24 volt logic digital inputs. X3/EN is used for motor enable/disable. X4/AR
is used for alarm reset.
3.3.1 Connector Pin Diagram
27 28
ENC A+
ENC B+
ENC Z+
NC
Y3/BRAKE
Y1/ALARM
NC
NC
NC
XCOM
NC
X3/SERVO ON
X2/DIR+
X1/STEP+
ENC AENC BENC ZNC
YCOM
Y2/IN POSITION
NC
NC
NC
NC
NC
X4/ALARM RESET
X2/DIRX1/STEP-
1 2
Rev. 1.0
0012072012
14
+86-400-820-9661
TSM24P User Manual
DrivesUser Control
1 X1/STEP+
2 X1/STEP-
3 X2/DIR+
4 X2/DIR-
0VDC
5-24VDC
0VDC
9 XCOM
5 X3/SERVO ON
6 X4/ALARM RESET
Under 30V
17 Y1/ALARM
18 Y2/IN POSITION
19 Y3/BRAKE
+86-400-820-9661
0VDC
15
20 YCOM
23 ENC Z+
24 ENC Z-
25 ENC B+
26 ENC B-
27 ENC A+
28 ENC A-
Rev. 1.0
0012072012

TSM24P User Manual
3.3.2 X1/STEP and X2/DIR High Speed Digital Inputs
The TSM24 drives include two high-speed inputs: X1/STEP and X2/DIR. They accept 5 to 24 volt
single-ended or differential signals, up to 2 MHz. Typically these inputs connect to an external
controller that provides step & direction command signals. You can also connect a master encoder
to the high-speed inputs for “following” applications. Or you can use these inputs with Wait
Input(WI), Feed to Sensor(FS), Seek Home(SH) and other SCL or Q commands.
The diagrams below show how to connect the STEP & DIR Inputs to various commonly used
devices.
+5v to +24v out
Indexer
DIR
DIR+
DIR-
with
Sinking
Outputs
STEP
STEP+
STEP-
Connecting to Indexer with Sinking Outputs
DIR
DIR+
Indexer
with
Sourcing
COM
STEP
DIR-
STEP+
Outputs
STEP-
Connecting to Indexer with Sourcing Outputs
DIR+
DIR+
Indexer
with
Differential
DIR-
STEP+
DIR-
STEP+
Outputs
STEP-
STEP-
TSM24
TSM24
TSM24
Rev. 1.0
0012072012
Master
Encoder
5 - 24
volt DC
Power
Supply
Connecting to Indexer with Differential Outputs
Many high-speed indexers have differential outputs
A+
A-
STEP+
STEP-
TSM24
B+
B-
DIR+
DIR-
Wiring for Encoder Following
+
direction switch
DIR+
DIR-
TSM24
run/stop switch
(closed = run)
STEP+
STEP-
Using Mechanical Switches
16
+86-400-820-9661
TSM24P User Manual
Connecting a PNP type Proximity Sensor to an Input
3.3.3 X3/EN and X4/AR Digital Inputs
The TSM24 drives include two single ended inputs: X3/EN and X4/AR. They can be used with
sourcing or sinking signals, 5 to 24 volts. This allows connection to PLCs, sensors, relays and
mechanical switches. Because the input circuits are isolated, they require a source of power. If
you are connecting to a PLC, you should be able to get power from the PLC power supply. If you
are using relays or mechanical switches, you will need a 5-24 V power supply.
What is COM?
“Common” is an electronics term for an electrical connection to a common voltage. Sometimes
“common” means the same thing as “ground”, but not always. In the case of the TSM24 drives, if
you are using sourcing (PNP) input signals, then you will want to connect COM to ground (power
supply -). If you are using sinking (NPN) signals, then COM must connect to power supply +.
Note: If current is owing into or out of an input, the logic state of that input is low or closed. If no
current is owing, or the input is not connected, the logic state is high or open.
The diagrams below show how to connect the inputs to various commonly used devices.
5 - 24
volt DC
Power
+
Switch or Relay
(closed = logic low)
XCOM
TSM24
Supply
-
X3/X4
Connecting the Input to a Switch or Relay
5 - 24
volt DC
Power
Supply
+
+
NPN
Proximity
-
Sensor
-
output
XCOM
TSM24
X3/X4
Connecting an NPN type Proximity Sensor to an Input
output
X3/X4
TSM24
5 - 24
volt DC
Power
+
+
PNP
Proximity
Sensor
-
Supply
-
XCOM
+86-400-820-9661
17
Rev. 1.0
0012072012

TSM24P User Manual
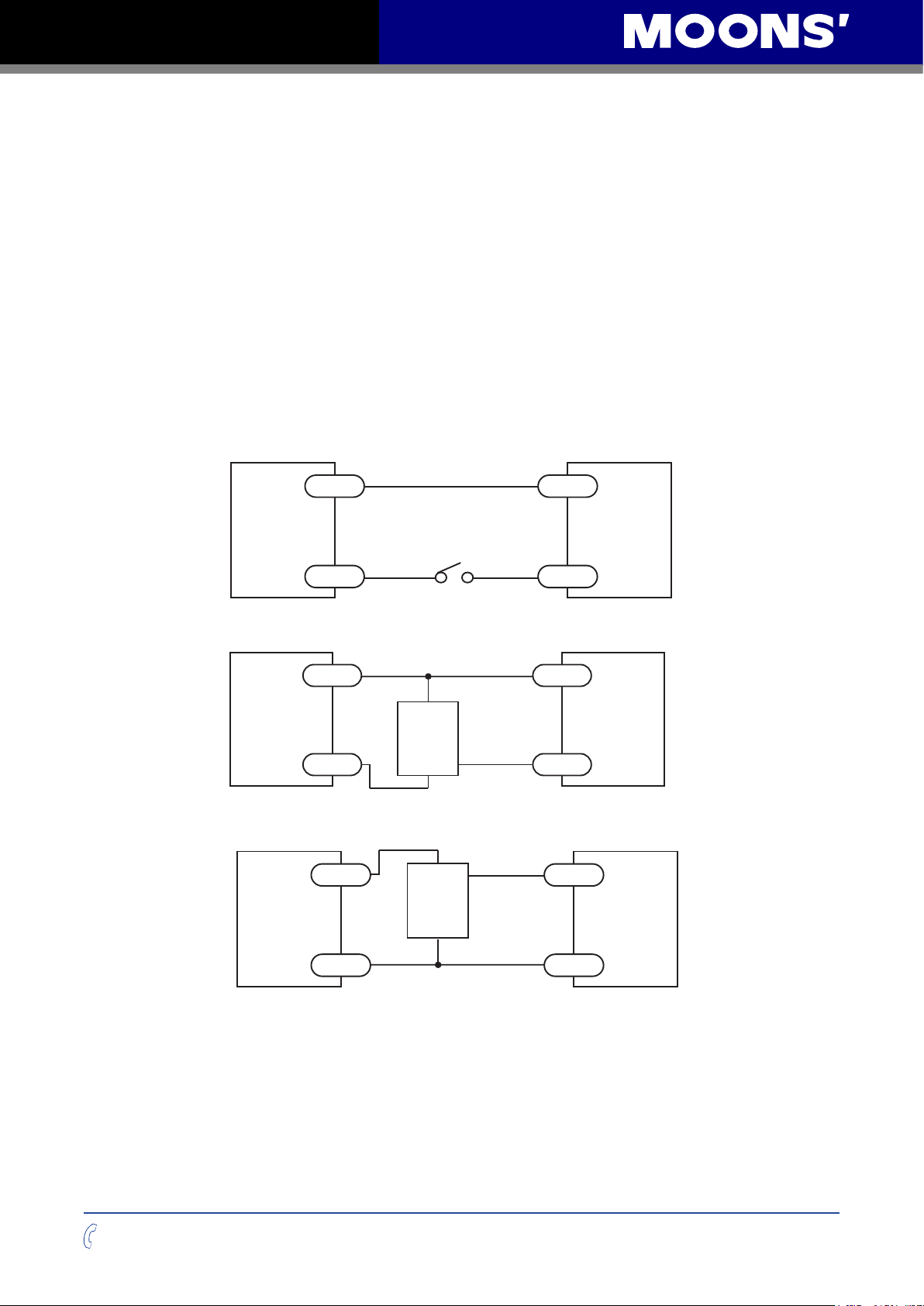
3.3.4 Programmable Outputs
The TSM24P drives feature three optically isolated digital outputs (Y1 to Y3). Y1, Y2 and Y3 share
a common terminal YCOM.
• Y1 can be set to signal a fault condition.
• Y2 can be set to indicate when the motor is moving or to indicate whether the motor is in
position.
• Y3 can be set to control a motor brake, or to provide an output frequency proportional to motor
speed (tach signal) or to provide a timing output (50 pulses/rev)
These outputs can also be turned on and off by program instructions like Set Output (SO). The
output can be used to drive LEDs, relays and the inputs of other electronic devices like PLCs and
counters. Diagrams of various connection types follow.
Do not connect the outputs to more than 30 volts. The current through each output terminal
must not exceed 100mA.
5 - 24
volt DC
Power
Supply
PLC
+
Load
-
Connecting a Sinking Output
5 - 24VDC
Power Supply
-
COM
IN
Connecting a Sourcing Output
+
relay
Y1
TSM24
YCOM
Y2
TSM24
YCOM
Rev. 1.0
0012072012
5 - 24
volt DC
Power
Supply
+
1N4935 suppresion diode
-
Driving a Relay
18
Y3
TSM24
YCOM
+86-400-820-9661

TSM24P User Manual
4 Drive Conguration
Step-Servo Quick Tuner is the PC based software application used to congure, and perform
servo tuning, drive testing and evaluation of the TSM. System servo control gains, drive
functionality, and I/O conguration are set with Quick Tuner. It also contains an oscilloscope
function to help set the servo control gains.
4.1 Quick Tuner Toolbar
4.1.1 Open, Save and Print
In addition to exchanging settings with a drive, the Step-Servo Quick Tuner software can also save
& load settings using the PC’s hard drive.
The Open button brings up a dialog box showing all the Step-Servo Quick T
drive.
When a large number of identical machines are being built it is useful to be able to exactly
duplicate each set-up. When development of one machine is completed and the motion control is
working correctly, it can be saved to a le. When the next machine is built, the set-up le may be
opened and downloaded to that drive. One of the advantages of programmable, digital control is
this easy duplication of system settings.
With the Save button a set-up can be saved to the hard drive. Long le names may be used just
as with other 32 bit Windows programs, such as Microsoft Word or Excel.
The Print button allows a hard copy of a program to be printed on any system printer. The
standard Windows printer dialog is used, allowing the choice of typical printer settings.
+86-400-820-9661
19
uner les on the hard
Rev. 1.0
0012072012

TSM24P User Manual
4.1.2 Restore
The Restore button will reset all parameters in the drive to the ones set by the factory (defaults).
Note - as this will erase all parameters that have been changed, it may be desired to save them to
a le rst.
4.1.3 Alarm History
The TSM stores a log of previous alarm conditions viewable in the Alarm History. When an alarm
occurs, the drive stores the information on which alarm conditions were triggered. As a fault may
trigger more than one alarm condition, the drive stores all of them for reference. This information
can then be viewed in the Alarm History dialog to help with drive and system problem solving. The
drive stores up to 8 sets of alarm conditions. The Alarm History dialog can also be used to clear
the Alarm History.
4.1.4 LED Flashing
Clicking on this button will bring up a screen where the LED
ashing for certain warnings can be masked. Alarm fault conditions
are not allowed to be masked and will always be indicated by the
drive’s LEDs. Masking alarm warnings only prevents the indication
of the alarm by the LEDs. The alarm warning will still be set in the
Alarm status code and in the Alarm History. See section 7 on
“Troubleshooting” below for an explanation of these codes.
4.1.5 Drive & Revision
When Step-Servo Quick Tuner is connected to an TSM Integrated
Motor the drive model, sub-model, and rmware revision are
automatically indicated. If working ofine (no drive is connected),
the Drive model and sub-model can be selected from the drop
down lists. The model and sub-model information is found on the
label of the TSM integrated motor.
Rev. 1.0
0012072012
20
+86-400-820-9661

TSM24P User Manual
4.1.6 Communication
When the Step-Servo Quick Tuner is connected to an TSM Integrated Motor
the drive model and sub-model will cause the communications to be set to
the proper type (RS-232 or RS-485). If Step-Servo Quick Tuner is unable to
connect to the TSM Integrated Motor, manually selecting the communications
type may help establish the connection.
Port
The correct COM port may need to be selected. When the software is loaded, it looks for the
rst available COM port, but may not always nd the one connected to the drive. After a specic
COM port has been selected this setting is saved when the Step-Servo Quick Tuner is closed. If
the saved COM port is available next time Quick Tuner is started it will be automatically selected
Select the port from the drop-down list. If the port exists and is not already in use, the software will
use it to communicate with the TSM.
Uses Check Sum
The TSM Integrated Motor supports using a check sum in the communication protocol. For more
reliable communications this option can be selected. Checksum is used automatically when the
TSM is being congured, tuned or operated in the target environment. This can prevent mis-
information being sent to or received back from the drive.
4.1.7 Servo On/Off
The Enable button energizes the motor and tells it to be ready to accept motion
commands. The Disable button cuts the current to the motor and it will not be
able to execute motion commands.
The Enable button must be used to re-enable motor operation after a fault
condition has occured. Before the enable can be used the alarm fault condition must be cleared.
See Alarm Reset below.
4.1.8 Alarms
Indicator
When a fault occurs the Alarm indicator will ash red, a warning will trigger a
ashing orange signal. Green indicates there is no alarm condition.
Alarm Reset
The Alarm Reset button will clear the alarm and return the signal to green if the alarm condition
can be cleared. In some cases an alarm condition can be persistent and other action may be
required to remedy the condition.
4.1.9 Upload & Download
The Upload button allows the complete set up and tuning parameters from an TSM to be copied
to Quick Tuner. Later these settings can be saved to a PC le (see “File Saving” above). It is very
important to perform an upload from a congured drive so that its conguration is not accidentally
over-written.
The Download button is used to copy settings from Quick Tuner to the drive. Each time the
download button is clicked, all conguration settings will be downloaded to the drive.
+86-400-820-9661
21
Rev. 1.0
0012072012
TSM24P User Manual
4.2 Basic Conguration
The Control Mode of TSM24P is Position Mode.
4.2.1 Maximum Currents
Continuous - The current that can be sustained indenitely.
Boost - An TSM drive can provide a momentary current boost.
This allows for greater acceleration rates than would otherwise
be possible. To assure reliable motor operation, the drive
automatically ramps the current down after one second so that the average current does not
exceed the motor’s rating.
4.2.2 Digital Input Filter
The Digital Input Filter is a hardware lter designed to
remove noise content from the digital inputs. The Digital Filter
is programmable and can be set from a minumum of 0.067
microseconds pulse width to a maximum of 12.867 microseconds.
The lter setting is applied to all three of the digital inputs - X1/
STEP, X2/DIR, and Input #3 (EN).
This is a pulse width lter but the frequency can be calculated by multiplying the pulse time by 2
and then dividing 1 by that number - 1 / (P*2). This assumes that the frequency input is a 50%
duty cycle. Quick Tuner automatically calculates the frequency and displays it on the screen.
The Digital Input Filter is most useful when the drive is used in the Pulse & Direction type of the
Position Control Mode. The purpose of the lter is to prevent noise pulses from being added
to the step count. Setting the lter value just above the maximum intended input frequency will
help prevent noise pulses from being added to the step count. This may require some degree of
experimentation with the value so that the noise is removed but not the actual step pulse.
NOTE: Low frequency lter values will cause a lag in the system response.
4.2.3 Electronic Gearing
Generally, we recommend using the default setting 20000 steps/
rev. With Electronic Gearing drive response to incoming step
pulses can be adjusted. This is very useful when a step motor
drive is being replaced with a step-servo system, as the TSM
can have the same number of steps/revolution as the stepper.
For example, TSM24P can be programmed to operate at 200 steps/rev, like a full step drive. If
the system is working in degrees, the drive can be programmed to operate at 36,000 steps/rev
resulting in an even number of steps (100) per degree.
4.2.4 Positioning Error Fault
Positioning error is the difference, in encoder counts, between
the actual position and the commanded position of the motor.
A small amount of positioning error is a normal part of a stepservo system. In the event of a broken wire, a failed sensor, the
motor encounting a physical obstruction, or operator error, a position error fault limit can prevent
damage to the system. Anytime the position error (as reported by the encoder) exceeds this set
limit, the drive is disabled and a fault alarm occurs.
Rev. 1.0
0012072012
22
+86-400-820-9661

TSM24P User Manual
The fault limit can be set as low as 10 encoder counts, or as high as 32000. During initial tuning
of the system, this value should be set high so that the drive doesn’t shut down while the tuning
parameters are being adjusted. Once the drive is properly tuned and the expected amount of error
during normal operation is known, an appropriate fault limit can be set. For example, with Quick
Tuner’s oscilloscope function set to plot position error, sample moves using the maximum speed
and acceleration planned for use in an application should be executed. If the maximum position
error is 50 counts, the fault limit could safely be set at 100.
4.2.5 Maximum Speed
The maximum speed allowable may also be set. If the maximum speed is set below the speed a
command signal demands, the nal speed achieved will be the speed set in the Maximum Speed
parameter.
Note: Maximum Speed only works with Velocity mode. In Torque mode the Peak Torque
and Continuous Torque need to be set to proper values that will limit over-speed conditions
potentionally occurring in an application.
4.2.6 Maximum Acceleration
This sets the maximum level of acceleration for the motor.
Even if the command input tries to demand a higher level of
acceleration, the drive will only accelerate at the set maximum level. This value is also used as
a quick stop when meeting with limit sensor or other stop command such as the ST (Stop) or SK
(Stop and Kill) SCL commands.
+86-400-820-9661
23
Rev. 1.0
0012072012

TSM24P User Manual
4.3 Position Mode
The Position control mode is used with digital command input signal.
4.3.1 Basic Conguration
This mode requires the setting of Maximum Currents, Digital Input Filter, Electronic Gearing,
Positioning Error Fault, and Maximum Acceleration that will appear to the left of the Control
Mode box when this option is checked.
refer to the section 4.2 above in Page26 for help in parameter setting
Smoothing Filter - Filters the change in the position command to cause a smoother movement of
the motor. A lower lter value will result in much smoother motion but will cause a lag in response.
When using smaller EG values, smaller lter values may be necessary for acceptable operation.
Rev. 1.0
0012072012
24
+86-400-820-9661

TSM24P User Manual
4.3.2 Position Control - Digital
This mode is for systems where the position of the motor is determined by a digital input signal in
the form of pulses.
Digital Settings
Input Noise Filter - The digital inputs used in this mode are very high speed and can be sensitive
to external electrical noise. The Input Noise Filter sets a hardware circuit to lter out unwanted
noise that can cause extra steps. As a general rule, the lter frequency should be set to double
that of the desired maximum input frequency. If the frequency is set too low it may cause loss of
step counts. When setting this value the performance over the whole range of desired speeds
should be considered.
Digital Signal Types - There are three types available:
• Pulse & Direction - accepts signals such as those generated by a step motor controller. The
frequency of the pulses fed into X1/STEP determines the speed. The direction of rotation is
determined by the signal fed into X2/DIR - with either an ON or an OFF signal commanding
clockwise motion.
• CW & CCW Pulse - The motor will move CW or CCW depending on which input the pulse is
fed into. Either X1/STEP or X2/DIR can be used for CW rotation.
• A/B Quadrature - sometimes called “Slave Mode”. The motor will move according to signals
fed to the drive from a master encoder. This encoder can be mounted to a rotating mechanism
on a machine or it can be another motor in the system. Rotation direction is determined by
which input is “leading” the other.
+86-400-820-9661
25
Rev. 1.0
0012072012

TSM24P User Manual
4.3.3 I/O Denition - Digital
Options for X3/EN are:
• Servo On when closed - the motor has no power when the input is open
• Servo On when open - the motor has no power when the input is closed
• Not used, generic programmable input
Options for X4/AR are:
• Reset alarm when closing - an alarm or fault can be cleared by closing the input
• Reset alarm when opening - an alarm or fault can be cleared by opening the input
• Not used, generic programmable input
Options for Y1 are:
• Closed on fault - the output will close if a fault occurs
• Open on fault - the output will open if a fault occurs
• Not used - generic programmable output
Options for Y2 are:
• Closed when motor is moving - The output is closed when motor is moving
• Open when motor is moving - The output is open when motor is moving
• The output is closed when position error less than setting
• The output is open when position error less than setting
• Not used - generic programmable output
Options for Y3 are:
• Closed to release brake - the output controls a fail safe brake relay
• Open to release brake - the output opens to release the brake
• Tach out - the output produces pulses relative to the motor position
• Timing out -the output produces 50 pulses / rev
• Not used - generic programmable output
Rev. 1.0
0012072012
26
+86-400-820-9661
TSM24P User Manual
Position Loop
5 Tuning - Sampling
Being a servo motor, the TSM Integrated Motor employs sophisticated algorithms and electronics
for controlling the torque, velocity and position of the motor to achieve a well behaved operation of
the load.
Because the motor encoder continuously tells the drive what the motor is doing, the drive can
alter the current applied to the motor until the motor achieves the desired operation. This is called
“closed loop control.”
One of these loops controls the amount of current going to the motor. This loop requires no
adjustment other than specifying the maximum current the motor can handle without overheating.
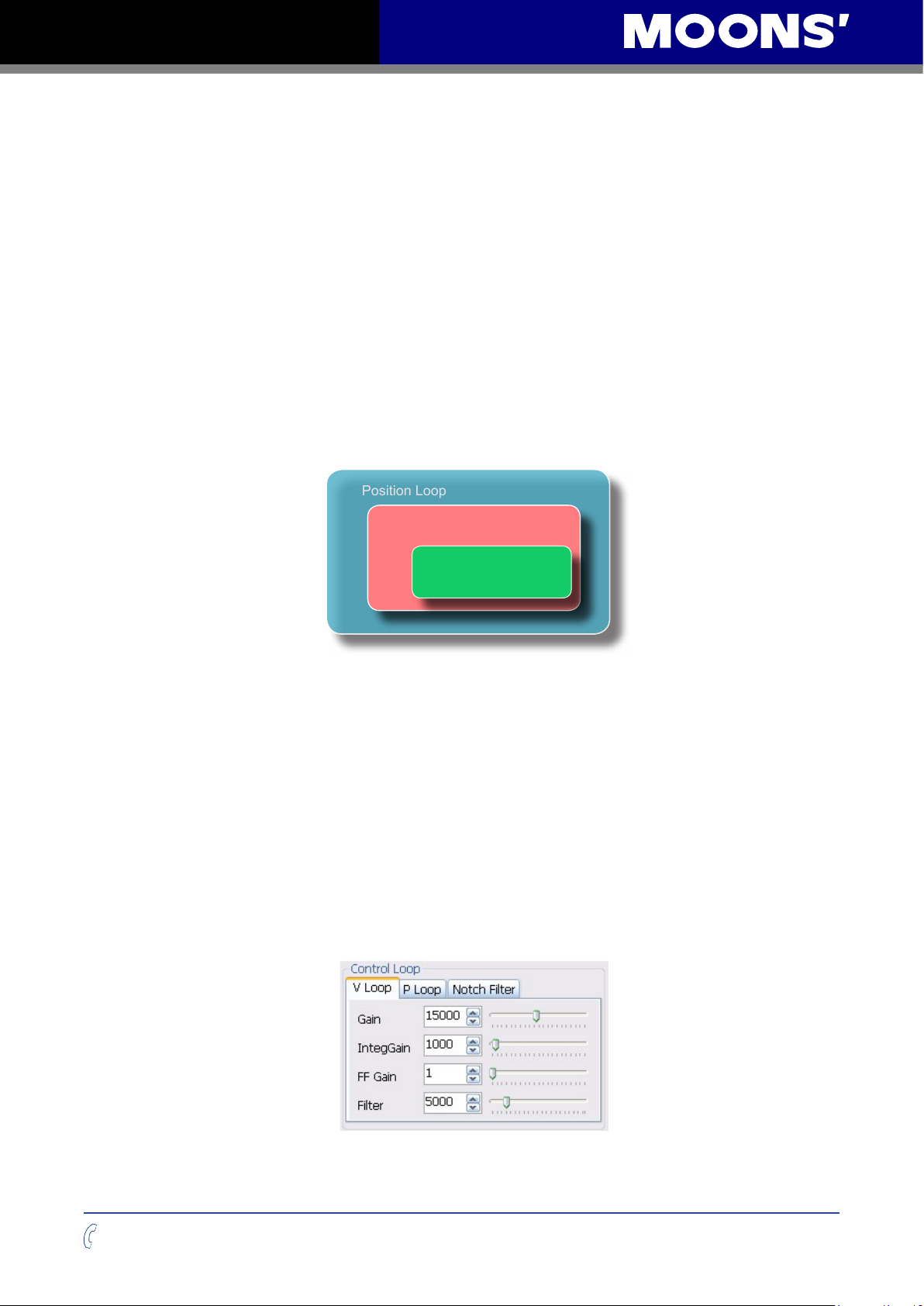
The TSM employs two control loops for the actual motor motion. The rst is a Velocity Loop which
is designed to control only the speed of the motor. The second is a Position Loop that controls the
count position of the motor. As shown in the drawing below, the Current Loop is contained in the
Velocity Loop, and the Velocity Loop is contained in the Position Loop. Knowing this is important
as good Position Loop control requires rst tuning the Velocity Loop. As mentioned above, Current
Loop tuning is not required as it is already optimized for the motor.
Velocity Loop
Current Loop
5.1 Velocity Control Loop (V Loop)
The Velocity Control Loop is designed to operate the motor in a velocity-only type of servo
control. This means that it can control the speed of the motor but cannot cause the motor to
follow a command position. The Jog commands available in the drive can use this loop only for
operation, the advantage of this is good stability even with very high inertia loads. The JM (Jog
Mode) command is available to set this feature or it can be congured when selecting the Velocity
Control Mode. Selecting the Speed Only control type setting causes the Velocity Loop alone to be
used in the various Jog or Velocity control functions. JM2 (Jog Mode 2) does the same. Position
over time control type adds in the Position control loop for precise position control during the
move and when stopped, JM1 (Jog Mode 1) also congures this setting.
The Velocity Control Loop has four terms that can be congured for optimum performance with
a given load. This loop can be set and tuned independent of the Position Control Loop. These
control terms are described below.
+86-400-820-9661
27
Rev. 1.0
0012072012

TSM24P User Manual
5.1.1 Gain: The Velocity Proportional Term (VP)
The simplest part of the Velocity Loop is the proportional, or VP, term. The drive applies current
to the motor in direct proportion to the error. For example, if a motor is not moving, and the shaft
is turned by hand or some other force, the drive will increase the motor current until the motor
returns to “0” speed. The faster the motor is moved from “0” velocity, the more the opposing torque
will increase. The VP term (also called VP gain) governs how much torque will be applied for a
given amount of velocity error (Vn). In general, more load inertia or load friction, requires more
torque and therefore a higher VP gain. The torque provided by the VP term is:
T = VP * Vn
5.1.2 IntegGain: The Velocity Integral Term (VI)
In the previous example, applying the VP term alone will not result in perfect velocity control. If
one ounce-inch of torque were applied to the motor, it would move at a slower speed. The VP term
will increase the motor torque until it is producing as much torque as the force attempting to move
it. The motor may slow down or even stop moving but there will still be error. The VI term adds up
all the error the velocity calculation has reported and produces a torque that is added to the torque
command from the VP term. The equation for this is:
T = VP * Vn + VI∑(V)
In the example, the VP term allowed the motor to reach equilibrium at a speed where the applied
torque equaled the torque of the VP term. Thus, the error was not zero. But the VI term continues
adding up the error and increasing the torque until the motor returns to the true target position.
5.1.3 FF Gain: Acceleration Feed-forward Term (KK)
Larger loads typically generate larger load Inertia. These larger inertias can be more easily
controlled by anticipating the system’s torque need. The Acceleration Feed-forward term does this
by adding an acceleration value to the Torque command. The acceleration value is derived from
the Trajectory Calculation during the acceleration and deceleration phase. As can be seen in the
equation below this increased Torque command is added with the VP and VI torque command
values:
T = KK * A + VP * Vn + VI∑(V)
5.1.4 PID Filter: Torque Command Filter Term (KC)
This nal term in the Velocity control loop can be considered an over-all lter term. In fact this term
is always used even when the drive has been placed in the Torque Control Mode where only the
Current control loop is active. The lter is a very simple single-pole low pass lter that is used to
limit the high frequency response of the Velocity and therefore the Position control loops.
Rev. 1.0
0012072012
28
+86-400-820-9661

TSM24P User Manual
5.2 Position Control Loop
The Position Control Loop is designed to provide the typical positioning control for a servo
system. All positioning type operations use this loop including when operating in the Pulse &
Direction Position Control Mode. The Position loop can also be used in the Velocity Control
Mode when the Position over time control type option is selection or the Jog Mode is JM=1.
The Position Control Loop has three terms that can be congured for optimum performance with
the given load. These control terms are described below:
5.2.1 Gain: The Position Proportional Term (KP)
The simplest part of the Position loop is the proportional, or KP, term. The drive applies current
to the motor in direct proportion to the position error. For example, if a motor is not moving, and
the shaft is turned by hand or some other force, the drive will increase the motor current until the
motor returns to the commanded target position (rest position). The farther the motor is moved
from its target position, the more the torque will increase. The KP term (also called KP gain)
governs how much torque will be applied for a given amount of error (Un). In general, more load
inertia or load friction, requires more torque and therefore a higher KP gain.
Because of the topology of the control loops, the Position Control Loop output is actually a
velocity command that indirectly affects the Torque command to the motor. The Velocity command
provided by the P term is:
V = VP * Un
5.2.2 The Position Integral Term (KI) - Not Implemented
There is no KI term as it is not required because of the Velocity loop which contains an Integrator
term. Any position error will taken up and corrected for in the Velocity loop.
5.2.3 Deri Gain: The Derivative Term (KD)
A motor run with a pure PI controller would overreact to small errors, creating even larger errors
and becoming unstable. By predicting what a motor will do ahead of time, the large errors and
instability can be avoided. The derivative term determines this by analyzing the rate of change
of the position error and including that in the torque calculation. For example, if the motor has a
position error, but the rate of change of the error is decreasing, torque is lowered. The formula
used here is:
V = KP * Un + KD * (Un – (Un-1))
where:
Un is the error in encoder counts
Un-1 is the error of the previous sample
+86-400-820-9661
29
Rev. 1.0
0012072012

TSM24P User Manual
5.2.4 Deri Filter: Torque Command Filter Term (KE)
A derivative control term can be rather noisy and even though it is effective in damping the
positioning control, it can cause objectionable audible or observable noise to the system. The lter
is a very simple single-pole low pass lter that is used to limit this high frequency noise and make
the system quieter and more stable.
5.3 Notch lter
For additional ltering, an over-all notch lter is added to the current command signal. This lter
is similar to the PID Filter in that it is active even when the driveis being used in Torque Control
Mode. Notch lters are typically used to lter at a particular frequency when there is a resonant
component in the mechanical system that may oscillate at that frequency. Couplers between the
motor and the load can commonly do this which may result in a control problem. When gains are
increased to improve performance the system may resonate in an uncontrollable manner. The
Notch Filter allows gain reduction at only the problematic resonant frequency, allowing the over-all
gain to be set higher for better system control.
The notch lter has two parameters that are described below. The notch lter can only be
congured though the Quick Tuner interface where the Quick Tuner software calculates the lter
constants used by the drive.
5.3.1 Frequency: Notch Filter Center Frequency
This denes the center frequency - the frequency where the most gain reduction occurs. For now,
nding the center frequency is a bit of a guessing game and different frequencies can be tried until
the system resonance is eliminated.
5.3.2 BandWidth: Notch Filter Frequency Bandwidth
This denes the frequency span where the signal is reduced by at least 3dB. For example if the
center frequency is set to 400Hz and the bandwidth to 200 the signal will be reduced by 3dB
starting at 300hz. It will have the greatest reduction at 400Hz, and then will be greater than 3dB
above 500Hz. When setting the notch lter a chart is displayed that provides an indication of the
ltering that will be accomplished.
Rev. 1.0
0012072012
30
+86-400-820-9661

TSM24P User Manual
5.4 Getting Ready for Tuning
Before testing a servo-system a few more parameters need to be entered. These include the Max
Speed, Acceleration and Distance (or time) requirements of the sample move. The proper prole
shape of the move is needed to operate the load in the same way as what will be expected during
online operation. Accelerating the load quickly may induce signicant ring into the motion prole.
Accelerating slower and going to a higher velocity can minimize the ringing. The best prole for
a given move is sometimes arrived at more through experimentation than hard calculation. Step-
Servo QuickTuner provides easy entry of the prole parameters plus a display of the prole for
verication.
The mechanical system should be set up as close to the
nal conguration as possible so that the tuning represents
what will be expected. The critical components include the
coupler, mechanical interface ,and similar frictional and
inertial loads. As tuning can sometimes be an uncontrolled
process where the mechanical system can be damaged,
care must be taken to minimize this possibility. This could
include having limit sensors or mechanical stops that help
to prevent such damage.
Step-Servo Quick Tuner contains a sampling Oscilloscope
that will display of variety of measurements of an executed
move. Two plots can be displayed at one time and contain
the real-time information about the move performance.
Before performing the test move, make sure the desired
move information is selected. This can include the typical
information such as Actual Speed or Position Error but also can include the Supply Voltage so
that the power supply can be monitored for proper voltage during the move.
+86-400-820-9661
31
Rev. 1.0
0012072012

TSM24P User Manual
5.5 Tuning the Velocity Loop
5.5.1 Entering a Sample Move
Start by selecting the V Loop tab in the Control Loop dialog section. This will cause the
Sampling to perform moves that are based on Time and operates the drive in the Speed Only
Velocity mode.
Now parameters may be entered for a Velocity based move.
Plot 1 & Plot 2: two different values can be selected
for viewing in the scope window, in this case Actual
Speed and Velocity Error are selected. These are
typical values for Velocity tuning.
Sample Move: move prole values are entered in
the Sample Move section. This example sets a move
Time of 200ms at a Jog Speed of 20 rev/sec and an
Accel/Decel rate of 300 rev/s/s. In the window to the
right of the Sampling data entry section the Desired
Prole will be displayed. This provides a visual
reference of what the expected move will look like.
Plot Zoom: the length of the plot values that are
displayed can be set from 1 to 5 times the prole
length.
Dir: the direction of the move can be set to cw, ccw
or alternate. These directions refer to the motor shaft
as viewed from the front of the motor. Alternate toggles the direction after each move. Start with a
known direction before switching to toggle.
Sample Once: after the Start button is clicked, a single move is performed, the motor stops, and
the results will be displayed.
Sample Continuously: after the Start button is clicked, the move will be repeated and the results
displayed until the Stop button is clicked. During continuous sampling the tuning gains can be
changed at any time and will be updated automatically. This enables more dynamic adjustment of
the gains for speeding up the tuning process.
5.5.2 Performing a Move
Once the move settings are correct the mechanism to be moved shold also be checked to ensure
it is ready to move. It is especially important to make sure the direction is set correctly. In some
cases it is wise to select alternate to avoid running the mechanism into a hard stop. Select the
Sample Once button. Click the Start button and observe the results.
If problems occurred during the move an Alarm indicating a Fault or Warning may be displayed
and need to be cleared. The drive may be left disabled until the Alarm is cleared and the Enable
button is clicked.
Note: Clicking the Alarm Reset button and then the Enable button will clear a fault and
enable the drive.
Now the motion parameters will need to be adjusted to achieve the desired move prole. The
move can be repeated by clicking the Start button. If the drive continues to fault it is possible the
maximum current or position error parameters are being exceeded. These can be set in the Drive
Conguration tab.
The current setting can be checked by selecting Current in one of the Plot lists and clicking Start
again to see what current is being required of the drive during a move. The current prole of the
move will be displayed and may give a clue as to why a fault is occurring.
Rev. 1.0
0012072012
32
+86-400-820-9661

TSM24P User Manual
5.5.3 Adjusting tuning parameters
The two primary parameters for a Timed move are the Proportional (VP) & Integral (VI) gain
parameters of the velocity loop.
Starting with these two terms is a good way to begin tuning as they are the minimum required
terms in Velocity Loop tuning. The FF Gain is not required but adds to the tuning, this will be
discussed later.
Note 1: The Disable button in the Menu bar of the Step-Servo Quick Tuner window under the
label Servo will disable the motor should a serious problem occur.
Note 2: The Gain values can be changed at any time during the tuning process. When the StepServo Quick Tuner software detects a change in the value it will automatically download the new
value. The Download button in the upper right of the window does not need to be clicked.
Once a successful move has been accomplished (no fault occurs) the motor is ready for tuning.
Adjust the VP and VI parameters and observe the results. VP and VI shold be adjusted at the
same time and in small increments. The following two gures shows responses with different VP
and VI settings.
This rst plot is performed with the default tuning values and no load added to the motor.
The second plot is performed with higher gain values for the VP (25000) and VI (3000), as can be
seen the velocity error decreases as the gains are increased.
To get a good comparison between different plots where the gains have been changed, turn off
the Auto Scale by clearing that check box below the plot screen. When auto scaling is turned off,
the difference can be seen more clearly.
+86-400-820-9661
33
Rev. 1.0
0012072012

TSM24P User Manual
Rev. 1.0
0012072012
34
+86-400-820-9661

TSM24P User Manual
5.5.4 Adding in the FF Gain (KK) parameter
The Acceleration Feed Forward (KK) applies more current to the motor to help compensate
for high inertia in the system. In a servo system more current is typically required during the
acceleration and deceleration phases of the move prole.
A reduction in the Velocity Error peak values should then be seen. As seen in this plot with the KK
set to 3000 the peaks in the Velocity error have been reduced. With loads that have greater inertia
this can provide a signicant improvement.
NOTE: The FF Term (KK) is not available when operating in the Pulse & Direction Control
Mode. Setting this value will have no effect.
If the Velocity Error goes too positive during acceleration, the adjustment was too large and the
value should be adjusted in smaller amounts until there is as near to zero error as possible. The
Rescale button next to the Auto Scale may be clicked at any time to re-scale the plot on the new
Velocity Error value.
5.5.5 Filter parameter
Step-servo has a control loop lter for special situations where the motor may resonate or may
have signicant audible noise. This lter is designed as a low pass type for the control loop output.
When a system is subject to mechanical resonance, this low pass lter can be set below the
natural frequency of the system so that the control loop output does not excite the resonance.
With a large inertial load, the gain parameters, especially the VP and VI terms, may need to be set
high to get a good response. The lter may then need to be decreased in value (lower frequency)
to prevent ringing or oscillation. The default of 15000 works well in many cases but can be
increased or decreased with little risk.
+86-400-820-9661
35
Rev. 1.0
0012072012

TSM24P User Manual
5.5.6 Verify the Drive Current
The amount of drive current can be veried at any time during the tuning process to make sure the
current supplied to the motor is not being limited by the drive. If too much current is being required
changes may be made to the move prole. Select Current in one of the Plot selection lists and
repeat the move, from this the current can be evaluated.
5.5.7 Finishing up
If the TSM will only be operated in a Velocity Control Mode with a Speed only Control Type, the
tuning is complete. The Position Loop (P Loop) does not need to be tuned as it is not used. After
verifying the drive current, the Notch Filter may be the only setting still needing adjusting. See
section 5.8 on “Setting the Notch Filter”.
If the TSM will be operated in a Position Control Mode, proceed to section 5.6 ”Tuning the
Position Loop” below.
See Section 5.7 below on “Using Auto Trigger Sampling” for tuning the TSM while using an
external Pulse & Direction controller.
5.6 Tuning the Position loop
5.6.1 Entering a Sample Move
Select the P Loop tab in the Control Loop dialog section.
This will cause the Sampling to do moves that are based
on distance and operates the drive in the Point to Point
Positioning mode.
Now the parameters for a Position based move can be
entered. There is one consideration that must be addressed
here. If the TSM is being operated in the Position Control
Mode with a Pulse & Direction Digital Signal Type setting
and being commanded by, for example, an external Pulse and Direction controller, the Auto
Trigger option may be used to capture and plot the move. See Section 5.6 on “Using the Auto
Trigger Sampling” for more details on this feature.
Plot 1 & Plot 2: two different values can be selected for
viewing in the scope window, in this case Actual Speed
and Position Error are selected. For Position tuning these
are typical values.
Sample Move: move prole values are entered in the
Sampling section. This example sets a move Distance of
3.00 revs at a Max Speed of 20,000 rev/sec and an Accel/
Decel rate of 300 rev/s/s. In the window to the right of the
Sampling data entry section the Desired Prole will be
displayed. This provides a visual reference of what the
expected move will look like.
Plot Zoom: the length of the plot values that are displayed
can be set from 1 to 5 times the prole length.
Dir: the direction of the move can be set to cw, ccw
or alternate. These directions refer to the motor shaft as viewed from the front of the motor.
Alternate toggles the direction after each move. Start with a known direction before switching to
toggle.
Sample Once: after the Start button is clicked, a single move is performed, the motor stops, and
the results will be displayed.
Rev. 1.0
0012072012
36
+86-400-820-9661

TSM24P User Manual
Sample Continuously: after the Start button is clicked, the move will be repeated and the results
displayed until the Stop button is clicked. During continuous sampling the tuning gains can be
changed at any time and will be updated automatically. This enables more dynamic adjustment of
the gains for speeding up the tuning process.
5.6.2 Performing a Move
Once the move settings are correct the mechanism to be moved shold also be checked to ensure
it is ready to move. It is especially important to make sure the direction is set correctly. In some
cases it is wise to select alternate to avoid running the mechanism into a hard stop. Select the
Sample Once button. Click the Start button and observe the results.
If problems occurred during the move an Alarm indicating a Fault or Warning may be displayed
and need to be cleared. The drive may be left disabled until the Alarm is cleared and the Enable
button is clicked.
Note: Clicking the Alarm Reset button and then the Enable button will clear a fault and
enable the drive.
Now the motion parameters will need to be adjusted to achieve the desired move prole. The
move can be repeated by clicking the Start button. If the drive continues to fault it is possible the
maximum current or position error parameters are being exceeded. These can be set in the Drive
Conguration tab.
The current setting can be checked by selecting Current in one of the Plot lists and clicking Start
again to see what current is being required of the drive during a move. The current prole of the
move will be displayed and may give a clue as to why a fault is occurring.
5.6.3 Adjusting the Gain (KP) and Deri Gain (KD) parameters
Adjust the KP and KD parameters and observe the results. Increasing the KP may improve the
positioning performance, but it may also cause the system to be more unstable. To counter this
the KD can be increased. The KD parameter is important: too little gain will cause the system
to oscillate; too much gain may cause the system to squeal from a high frequency oscillation. If
a very springy coupler is used between the motor and load, the KD parameter may need to be
reduced until the system is stable or the Notch Filter may need to be used to reduce the system
gain at the sensitive frequency where it oscillates.
5.6.4 The Deri Filter (KE) parameter
With a large inertial load, the KP and KD gain parameters may need to be set high to get good
response. The lter may then need to be decreased in value (lower frequency) to prevent ringing
or decrease the derivative noise.
5.6.5 Filter parameter (again)
Sometimes it may also be necessary to adjust the output lter when gain values increase. The
lter frequency may then need to be decreased in value to prevent ringing or oscillation.
5.6.6 Verify the Drive Current
The amount of drive current can be veried at any time during the tuning process to make sure the
current supplied to the motor is not being limited by the drive. If too much current is being required
changes may be made to the move prole. Select Current in one of the Plot selection lists and
repeat the move, from this the current can be evaluated.
5.6.7 Finishing up
After verifying the drive current, the Notch Filter may be the only setting still needing adjusting.
See section 5.8 on “Setting the Notch Filter”.
+86-400-820-9661
37
Rev. 1.0
0012072012

TSM24P User Manual
5.7 Using Auto Trigger Sampling
In cases where an external controller is used to perform move proles, such as in the Position
Control Mode using Pulse & Direction input, the Auto Trigger will allow the Sampling to collect
data and display the move prole.
This sampling technique is different in that it is not triggered by the start of a move prole as the
drive cannot know when the move is actually started (remember the controller is external). Instead
the Auto Trigger waits for a predened set of conditions to tell it when to start collecting the move
prole data.
5.7.1 Setting up Auto Trigger
When using Auto Trigger, the primary effort is to select the conditions that will trigger the
sampling. Begin by selecting the desired trigger value in the Plot 1 list. This selection is what is
monitored by the Auto Trigger, Plot 2 is not monitored.
In the Auto Trigger tab the displayed text will indicate the value to be used and the conditions to
trigger the capture of the selected value. In the example to the right, the capture will begin when
Actual Speed is Above 1.000 rev/sec, the capture will Capture data for 0.300 seconds and
there will be a 10% Capture delay from the beginning of the capture to the trigger point. The
Capture delay allows viewing of the data prior to the trigger point so that a more complete prole
can be observed.
When changing Plot 1 to other selections notice that the conditions for the capture trigger will
change with it. For example, when selecting Position Error the capture will look at Counts for
determining the trigger point.
Sample Once: when the Start button is clicked the TSM drive begins continuous collection of
data. It will constantly check the data to see if the value meets the capture trigger conditions. At
the same time Quick Tuner monitors the status of the TSM to detect if the capture is complete.
When the capture is complete the data is displayed in the prole window.
Sample Continuously: when the Start button is clicked the capture is repeated each time the
trigger condition is met until the Stop button is clicked. During continuous sampling the tuning
gains can be changed at any time and will be updated automatically. This allows more dynamic
adjustment of the gains for speeding up the tuning process
NOTE: When adjusting control loop gain values remember that the FF Term (KK) has no
effect when operating in the Position – Pulse & Direction Control Mode.
Rev. 1.0
0012072012
38
+86-400-820-9661

TSM24P User Manual
5.8 Setting the Notch lter
The notch lter is used when there is a specic resonate frequency present in the system and
good performance requires that only the “bad” frequency be removed. Sometimes the resonate
frequency is low enough that it should only be removed using the notch lter. Using the standard
output lter or reducing the gain settings may compromise the system performance too much.
When performing the move proles as discussed above, a signicant resonate frequency may be
experienced visually on the plot window, audibly, or both. Finding this frequency can be a difcult
task and it is often discovered by experimentation. Change the frequency then perform sampling
moves until the resonance is reduced or removed. Keeping the bandwidth wide (maybe equal to
the center frequency) may help nd the center frequency. When the center is found, the bandwidth
may be reduced until the resonance starts to return.
+86-400-820-9661
39
Rev. 1.0
0012072012

TSM24P User Manual
6 SCL Test & Monitor
6.1 SCL Test
The SCL (Serial Command Language) Test tool is used to
send commands to the serial port of the connected drive. A
command can be entered manually in the Command window
at the bottom of the screen. The history of the sent command
and responses of the drive are displayed in the Command
History & Response window. This tool is designed to help
the user learn SCL usage prior to implementation on the
system controller. The command interface allows entry of all
supported SCL commands. Any command syntax errors that
are encountered are also displayed in the response window.
The Command History & Response window also displays
commands and responses used when operating the other
functions provided on the SCL Test & Monitor tab such as Jog
Move or Single Move.
Step-Servo Quick Tuner communicates to the connected
drive using a high baud rate of 115200 and a protocol that
includes the Checksum. These protocol settings are used to
provide high speed and reliable communications with the drive
during the conguration, tuning, or testing operations. The
response window will indicate the exact command syntax that
is being used. This means that the user will be able to see both the Checksum calculated for that
command and the Checksum provided in the response by the drive. This is a useful feature to
help the system programmer determine the proper Checksum calculation in the system controller.
An option that is not recommended is to check the Hide Checksum box (turns off the Checksum).
A user might also select hiding the Checksum so that it is not visible in the Command History &
Response window.
6.2 Move Testing
6.2.1 Jog Move
The Jog Move tool provides a window for setting the Jog Speed
(commanded velocity) in rps, and the Accel/ Decel (acceleration
to and deceleration from the set speed) in rps2. By clicking
and holding the CW Jog or CCW Jog button, the drive can be
commanded to operate at the set jogging speed. (CW Jog causes
the motor to spin in a clockwise direction as viewed from the front
(shaft side) of the motor; CCW Jog does the opposite.) This is the most basic move for testing
motor operation. Be careful as this operation is not a distance move and holding the button too
long could drive a connected mechanism to the end of its limits.
Rev. 1.0
0012072012
40
+86-400-820-9661

TSM24P User Manual
6.2.2 Single Move
The Single Move tool provides settings for the Command
Distance, Command Speed, Acceleration, Deceleration,
and Electronic Gearing for a relative or an absolute type
of move. Clicking the Absolute Move button will command
the drive to move the motor to the commanded position as
indicated by the Command Distance setting. Clicking the
Relative CW Move or Relative CCW button will cause the
drive to move the motor the set distance from its current
position. Clicking the Stop button will cause an immediate stop
of the move with the given deceleration setting.
If the TSM is connected to a system where position sensors
are also connected, the TSM can be commanded to move
to the sensor in either a CW or CCW direction. It can be
instructed to Move to Sensor #1, #2, or #3, and to Stop
When there is a Low, High, Rising Edge or Falling Edge. This
move can be accomplished in the CW or CCW Direction.
6.2.3 Homing
Using the Homing function is a bit more complicated
because it requires that CW and CCW limit sensors and a
Home sensor be available to perform the homing function.
Homing is a complex operation that causes the motor
to move in the direction as dened by the Command
Distance and speed dened by the Command Speed and
the Acceleration, located under the Single Move area, until
the Home sensor connected to X3 is activated. If during the
move the Limit sensors X1 or X2 are activated, the motor will
reverse direction until the Home sensor is found.
WARNING: Do not use this function unless the limit and
home sensors are attached.
6.3 Motion Status
The Motion Status tool provides the most common information
needed about the moving or position status of the drive. Four
parameters are displayed that will show the Command Position,
Actual Position, Position Error and the Actual Speed.
Although the drive is being constantly polled for this status
information, the information is not real time as there is a slight
delay in the polling routine.
The Clear Position button is provided to clear the position
information and set it to zero. The position can only be cleared when the motor is not moving.
+86-400-820-9661
41
Rev. 1.0
0012072012

TSM24P User Manual
6.4 Monitor
The Monitor tool allows the user to view ve of nine different
parameters at any one time. Each of the 5 dropdown lists contains
the same 9 parameters that can be selected and displayed.
These parameters are updated as part of the polling process and
therefore the values may lag behind the actual value in the TSM.
6.5 I/O Status
The I/O Status tool displays the current state of the three Inputs
(1, 2, 3) the one Output (Y) and the Encoder Index sensor (I) if
there is one. When the I/O indicator is gray this shows an “open”
condition. For the Inputs, this means the circuit is not activated and
will be “high”; for the Output this means it is off and also “high”.
When the indicator is green the Input has been activated and is
considered “low”; the same is true for the Output. The Encoder
Index also follows this convention.
6.6 Alarm
The TSM has a number of different Alarm indications that will give
either fault or warning conditions of the drive. Alarms are shown
in the 2 different categories of Faults or Warnings because of
the difference in how they affect the drive status. Alarm faults
indicate that a serious condition has occurred, the drive has been
shut down, and is in a disabled state. Warnings are informational
and may or may not be serious. The operational conditions must
be considered when warning occurs. Warnings do not disable
the drive but the CW or CCW limits will halt the movement of the
motor.
When fault conditions occur the user must take care to evaluate
the condition and may need to remedy the cause. Faults or
Warnings may be cleared using the Alarm Reset button at the top
of the application window. If a Fault or Warning is not cleared after
clicking this button the condition which caused the Alarm may still
be present. When clearing a Fault the drive is not automatically
re-enabled, the Enable button must also be clicked to re-enable
the drive.
Faults
Position Error the drive exceeded the position fault limit as set by the PF (Position
Fault) command
Drive
Overtemperature
Over Voltage the DC bus voltage exceeded 75 VDC
Internal Voltage one of the internal power supplies exceeded its range limit
Motor Short a motor phase experienced a short circuit condition
Open Winding a motor phase winding was open at power up
Bad Encoder (not implemented at this time)
the DSP temperature exceeded 95 C or the drive internal PCB
exceeded 85℃
Rev. 1.0
0012072012
42
+86-400-820-9661
TSM24P User Manual
Warnings
CCW Limit when the DL (Dene Limits) command is congured, Input#2 has been
triggered
CW Limit when the DL (Dene Limits) command is congured, Input#1 has been
triggered
Under Voltage the DC bus voltage has dropped below 10 VDC
Move While Disabled a move was commanded while the drive was disabled
Current Foldback the command current exceeded either the boost or continuous limit
Blank Q Segment does not apply to an S model
Flash memory a ash memory error occured when saving parameters
NV Memory Error the ash memory was found corrupted at power-up
Comm Error the drive has detected a communications error either in the hardware
or in the protocol
6.7 Drive Status
The Drive Status is an overall indication of the drive condition.
In a typical application this is the most common information that
should be collected from the drive. Collecting the drive status
information allows the system controller to keep track of drive
operations and conditions.
Drive Status
Enabled the drive is enabled and ready for moving operations
Tuning the drive is in the process of tuning data capture
Fault an alarm fault condition has occured (check Alarm Status)
InPosition command position is within the PL (Position Limit) range
Moving a commanded move is in process
Jogging commanded jogging is in process
Stopping the motor is decelerating
WaitInput a WI (Wait on Input) command is executing
Saving drive is saving parameter data
Alarm an Alarm Code is present
Homing the SH (Seek Home) command is executing
Delay a WT (Wait Time) command is executing
Q Programing does not apply to an S model
Initializing the drive is in the process of power-up initialization
+86-400-820-9661
43
Rev. 1.0
0012072012
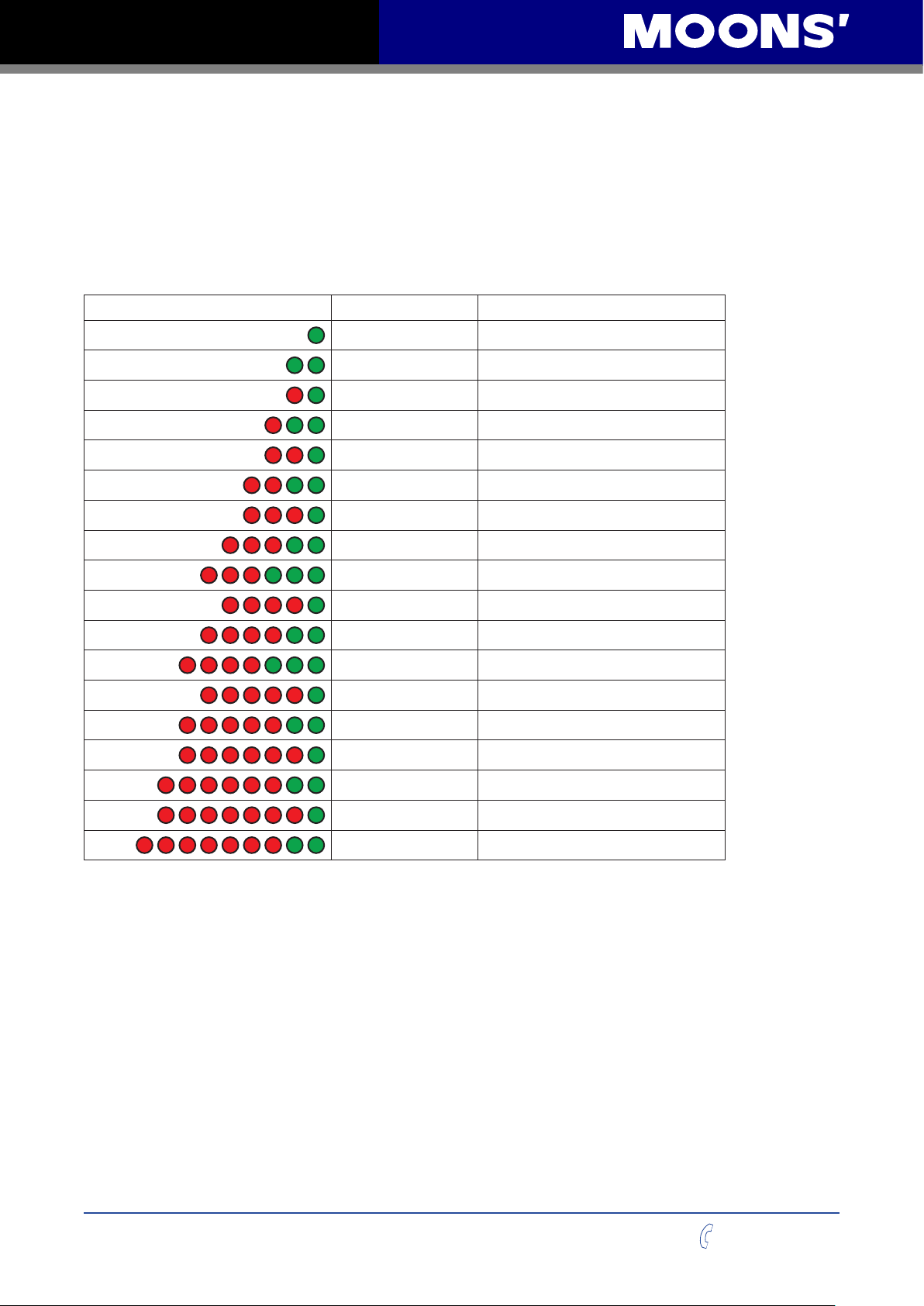
TSM24P User Manual
7 Troubleshooting
LED Error Codes
The TSM24P uses red and green LEDs to indicate status. When the motor is enabled, the green
LED ashes slowly. When the green LED is solid, the motor is disabled. Errors are indicated by
combinations of red and green ashes as shown below. This feature can be disabled for certain
warnings but not for alarms. See section 4.1.4 on “LED Flashing” above for information on how to
do this and which warnings may be masked.
Code Error
solid green motor disabled
ashing green motor enabled
1 red, 1 green position limit
1 red, 2 green drive disabled
2 red, 1 green ccw limit
2 red, 2 green cw limit
3 red, 1 green over temperature
3 red, 2 green internal voltage bad
3 red, 3 green non-volatile memory error
4 red, 1 green over voltage
4 red, 2 green under voltage
4 red, 3 green non-volatile double error
5 red, 1 green over current
5 red, 2 green current limit
6 red, 1 green open winding
6 red, 2 green encoder failure
7 red, 1 green communication error
7 red, 2 green save failed
Rev. 1.0
0012072012
44
+86-400-820-9661

TSM24P User Manual
8 Reference Materials
8.1 Mechanical Outlines (Unit:mm)
129.15±1
90
77
58.5
24
20
Ø10
Ø38.1
1.5
8
9.5 Flat
8.2 Torque-Speed Curves
Note: all torque curves were measured at 20,000 steps/rev.
Note: 5 amp rating is continuous, 7.5 amp rating is boost
60.5 Max.
47.14
50.9
4-Ø4.5
47.14
60.5 Max.
TSM24P-3AG
3.5
3
2.5
2
1.5
Torque(N·m)
1
0.5
0
0 10 20 30 40 50
Continuous
Boost
Speed(rps)
24V 48V 70V
24V 48V 70V
+86-400-820-9661
45
Rev. 1.0
0012072012

TSM24P User Manual
8.3 Technical Specications
Power Amplier
Amplier Type Dual H-Bridge, 4 Quadrant
Current Control 4 state PWM at 20 KHz
Output Torque TSM24P-3AG: Up to 2.4N•m Continuous(3.0 N•m Boost)
Power Supply External 12 - 70 VDC power supply required
Protection
Over-voltage, under-voltage, over-temp, motor/wiring shorts (phase-to-phase,
phase-to-ground)
Controller
Electronic Gearing Software selectable from 200 to 51200 steps/rev in increments of 2 steps/rev
Encoder Resolution 20000 counts/rev
Speed Range Up to 3600rpm
Filters Digital input noise lter, Smoothing lter, PID lter, Notch lter
Non-Volatile Storage Congurations are saved in FLASH memory on-board the DSP
Modes of Operation Step & Direction, CW/CCW pulse, A/B quadrature pulse
X1/STEP+/- : Optically isolated, 5-24 volt. Minimum pulse width = 250 ns,
Maximum pulse frequency = 2 MHz
Function: Step, CW step, A quadrature (encoder following), CW limit, or general
purpose input
Digital Inputs
Digital Outputs
X2/DIR+/- : Optically isolated, 5-24 volt. Minimum pulse width = 250 ns,
Maximum pulse frequency = 2 MHz
Function: Direction, CCW step, B quadrature (encoder following), CCW limit or
general purpose input
X3/EN, X4/AR: Optically isolated, 5-24 volt.
Function: Enable, Alarm Reset or general purpose input.
Y1, Y2, Y3: Optically isolated, 30V/100 mA max.
Function: Fault, Motion, In position, Brake, Tach, Timing or general purpose
programmable
Encoder output Standard Line driver outputs including A+/A-/B+/B-/Z+/Z- are supported
Communication
Interface
RS-232
Physical
Ambilent Temperature 0 to 40°C (32 to 104°F) When mounted to a suitable heatsink
Humdity 90% Max., non-condensing
Mass TSM24P-3AG:1200 g
Rotor Inertia TSM24P-3AG:460 g•cm
Rev. 1.0
0012072012
2
46
+86-400-820-9661

TSM24P User Manual
8.4 SCL Command Reference
The Serial Command Language (SCL) was developed to give users a simple way to control a
motor drive via a serial port. This eliminates the need for separate motion controllers or indexers
to supply Pulse and Direction signals to the drive. It also provides an easy way to interface to a
variety of other industrial devices such as PLCs and HMIs, which often have standard or optional
serial ports for communicating to other devices. Some examples of typical host devices might be:
A Windows based PC running MOONS’ software
An industrial PC running a custom or other proprietary software application
A PLC with an ASCII module/serial port for sending text strings
An HMI with a serial connection for sending text strings
SCL commands control the motion of the step motor, use of the inputs and outputs, and congure
aspects of the drive such as motor current and microstep resolution.
In SCL mode, the TSM24P receives commands from the host, executing them immediately or
sending them to a command buffer and then executing them directly from the buffer. It cannot,
however, create a stored program for stand-alone operation. For that function, the TSM24Q is
needed.
The communications protocol of SCL is simple in that the host initiates all communication, with
one exception. The only time the drive will initiate communication is at power-up. At that time, the
drive will send an identier to tell the software which drive is connected and what the rmware
version is.
There are two types of SCL commands: buffered and immediate. Buffered commands are loaded
into and then executed out of the drive’s command buffer. Buffered commands are executed
one at a time and in sequential order. The buffer can be lled with commands without the host
controller needing to wait for a specic command to execute before sending the next command.
Special buffer commands enable the buffer to be loaded and to pause for a desired time.
Immediate commands are not buffered, but are executed immediately, running in parallel with a
buffered command if necessary. Immediate commands are designed to access the drive at any
time and can be sent as often as needed. This allows a host controller to get information from the
drive at a high rate, most often for checking drive status or motor position.
The basic structure of a command packet from the host to the drive is always a text string followed
by a carriage return. The text string is composed of the command itself, followed by any required
parameters. A carriage return denotes the end of transmission to the drive.
The syntax of the command is
XXAB<cr>
where XX designates the command (always composed of 2 uppercase letters), and A and B
dene the possible parameters. These parameters can vary in length, can be letters or numbers,
and are often optional. Once a drive receives the <cr> (carriage return), it will determine whether
or not it understood the command-if it did, it will either execute or buffer the command. The drive
can also be programmed ahead of time to send a response as to whether or not it understood the
command as well as any error code.
Some SCL commands transfer data to the drive for immediate or later use. These data values
are stored in data registers and remain there until new commands change the values or power
is removed from the drive. Some data registers in a drive are Read-Only and contain predened
information about the drive which can also be read through SCL commands.
+86-400-820-9661
47
Rev. 1.0
0012072012

TSM24P User Manual
Because of the intense nature of serial communications required in host mode applications,
there is a serial communication Protocol (PR) command available that will adjust a drive’s
serial communications protocol to best t an application. Typically this command is used when
conguring a drive and saved as part of the startup parameters. But it can be used at any time to
dynamically alter the serial communications.
The SCL Utility Software Manual contains the complete command listing as well as instructions on
connecting and conguring the TSM24P for use in SCL mode, using the Data Registers and the
Protocol command. It also contains detailed information on:
Host Serial Communications
Host Serial Connections
Alarm and Status Codes
Working with Inputs and Outputs
The Manual is available from the MOONS’ website at http://www.moonsindustries.com/Products/
Drives/Software/.
under the SCL Utility download section.
Rev. 1.0
0012072012
48
+86-400-820-9661

TSM24P User Manual
9 Contacting MOONS’
Service Center
+86-400-820-9661
Headquarters
No. 168 Mingjia Road Industrial Park North Minhang District Shanghai 201107, P.R. China
Tel: +86(0)21-52634688
Fax: +86(0)21-62968682
E-mail: info@moons.com.cn
MOONS' Industries (America), Inc.
1113 North Prospect Avenue,Itasca, IL 60143 U.S.A.
Tel: 001-630-833-5940
Fax: 001-630-833-5946
MOONS' Industries (Europe) S.r.l.
Via Torri Bianche n.1 20059 Vimercate(MB) Italy
Tel: +39 039 62 60 521
Office Germany: Röntgenstr. 9, 64846 Gross-Zimmern, Germany, Mail: info@moonsindustries.eu
MOONS' Industries (South-East Asia) Pte Ltd.
33 Ubi Avenue 3 #08-23 Vertex Singapore 408868
Tel: +65 6634 1198
Fax: +65 6634 1138
Shenzhen Branch Ofce
Room 2209, 22/F, Kerry Center,No. 2008 Renminnan Road Shenzhen 518001 P. R.China
Tel: +86 (0)755 25472080
Fax: +86 (0)755 25472081
Beijing Branch Ofce
Room 202, Unit 2, 7th Building,Huilongsen International Science & Technology Industry Park,
No.99, Kechuang 14th Street,Beijing 101111 P. R.China
Tel: +86 (0)10 59755578
Fax: +86 (0)10 59755579
Qingdao Branch Ofce
Room 10E, No.73 Wangjiao Mansion, mid. Hongkong Road Qingdao 266071 P. R.China
Tel: +86 (0)532 85879625
Fax: +86 (0)532 85879512
Wuhan Branch Ofce
Room 3001, World Trade Tower, No.686 Jiefang Avenue, Jianghan District, Wuhan 430022 P.R.China
Tel: +86 (0)27-85448742
Fax: +86 (0)27-85448355
Nanjing Branch Ofce
Room 302, Building A, Tengfei Creation Center,55 Jiangjun Avenue, Jiangning District,Nanjing 211100
P. R.China
Tel: +86 (0)25 52785841
Fax: +86 (0)25 52785485
Chengdu Branch Ofce
Room 1917, Western Tower, No.19,4th Section of South People Road,Wuhou District,Chengdu 610041
P.R.China
Tel: +86 (0)28-85268102
Fax: +86 (0)28-85268103
+86-400-820-9661
49
Rev. 1.0
0012072012
 Loading...
Loading...