

SR4
2 Phase Step Motor Drive
User Manual
Rev. 1.1
AMP & MOONS’ Automation

SR4 User Manual
Contents
1 Introduction .............................................................................3
1.1 Overview ......................................................................................3
1.2 Features .......................................................................................3
1.3 Block diagram ..............................................................................4
2 Mounting the Drive ................................................................4
3 Connections ...........................................................................5
3.1 Connecting to the Power Supply .................................................5
3.2 Connecting to a Motor .................................................................5
3.3 Connecting to the Inputs ..............................................................6
3.3.1 Step & Direction Inputs ........................................................................ 6
3.3.2 EN Input............................................................................................... 7
3.3.3 Fault Output ......................................................................................... 8
4 Switch Selection .....................................................................9
4.1 Running Current ..........................................................................9
4.2 Idle Current ..................................................................................9
4.3 Microstepping ..............................................................................9
4.4 Self Test ......................................................................................10
5 Motor Selection .....................................................................10
5.1 Recommended motors ...............................................................11
6 Error Codes ...........................................................................13
7 Reference Materials ..............................................................13
7.1 Mechanical Outline .....................................................................13
7.2 Specications ..............................................................................14
7.2.1 Electrical Specications ...................................................................... 14
7.2.2 Environmental Specications ............................................................. 14
7.3 Torque Curves ............................................................................15
8 Contacting MOONS’ ..............................................................16
Rev. 1.0
8/30/2010
2

SR4 User Manual
1 Introduction
Thank you for selecting the MOONS’ SR4 Motor Drive. We hope our commitment to performance,
quality and economy will make a successful motion control project.
1.1 Overview
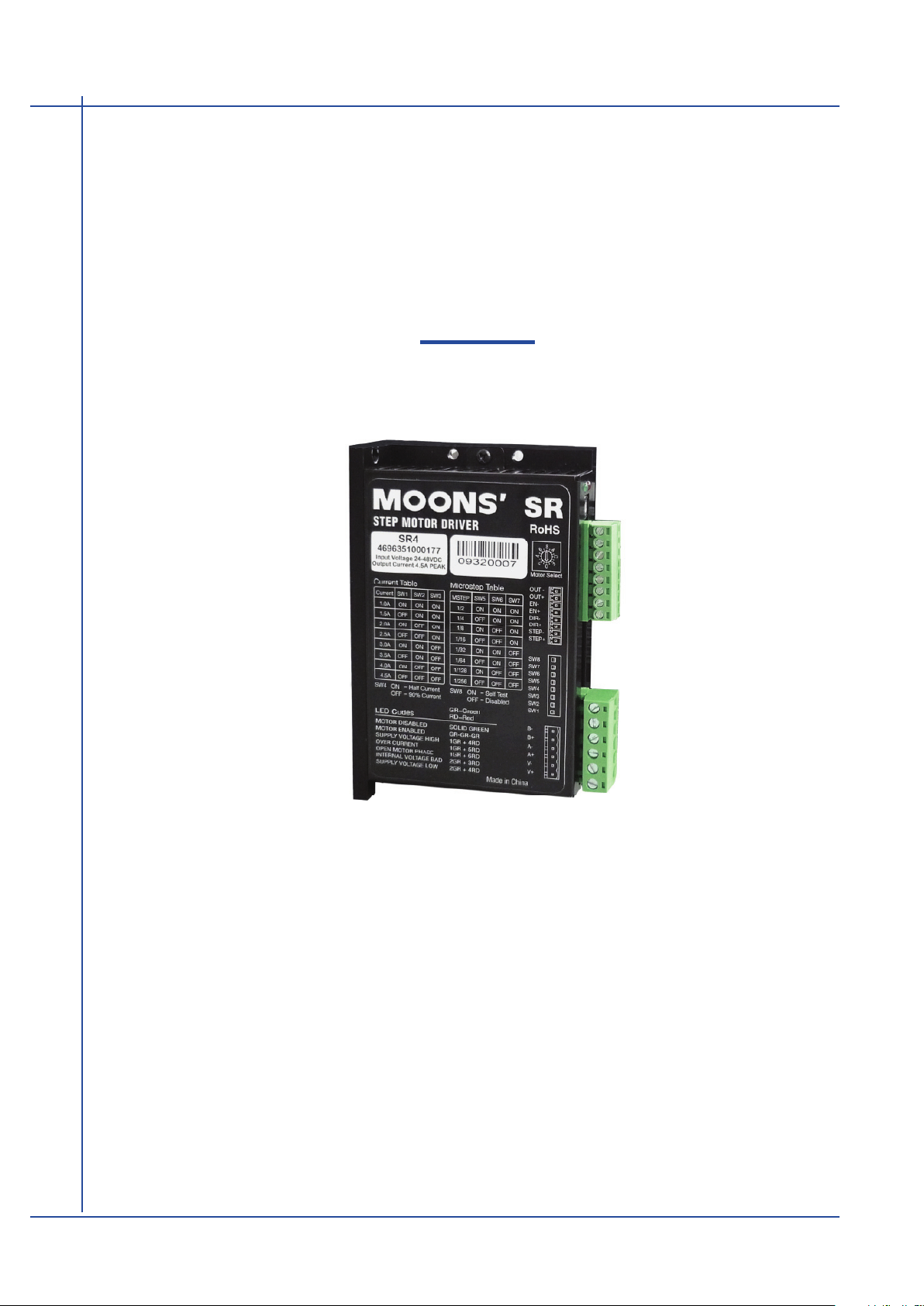
The SR series drives are cost-effective, high performance 2 phase step drives. The design is
based on PID current control technology, and features high torque, low noise, and low vibration.
The running current and microstep resolution are switch selectable.
1.2 Features
• Power Supply - operates from a 24 to 48 volt DC power supply
• Output Power - position switch selectable, 8 settings, max 4.5 amps peak
• Current Control - advanced digital current control provides excellent high speed torque
• Microstep Resolution -
25600, 51200 step/rev
• Speed Range - speeds up to 3000 rpm
• Anti Resonance - raises the system-damping ratio to eliminate midrange instability and allow
stable operation throughout the speed range of the motor.
• Auto Setup - measures motor parameters and congures motor current control and anti-resonance gain settings
• Microstep Emulation - performs high resolution stepping by synthesizing coarse steps into ne
micro-steps
• Control Modes - Step & Direction or CW/CCW pulse
• Input Digital Filters - 2 MHz digital lter for high speed inputs
• Motor Type Select - a 16 bit rotary switch is used to select the desired motor database which
is pre-loaded at the Factory
• Load Inertia Select - as part of the motor database each motor can be selected for use with
low or high load inertia.
• Idle Current - switch selectable for 50% or 90% idle running current reduction 1 second after
the motor stops
position switch selectable, 8 settings: 400, 800, 1600, 3200, 6400, 12800,
• Self Test - switch selectable, the drive will perform a 2 rev, 1 rps, CW/CCW move test
3
Rev. 1.0
8/30/2010
SR4 User Manual
SR4
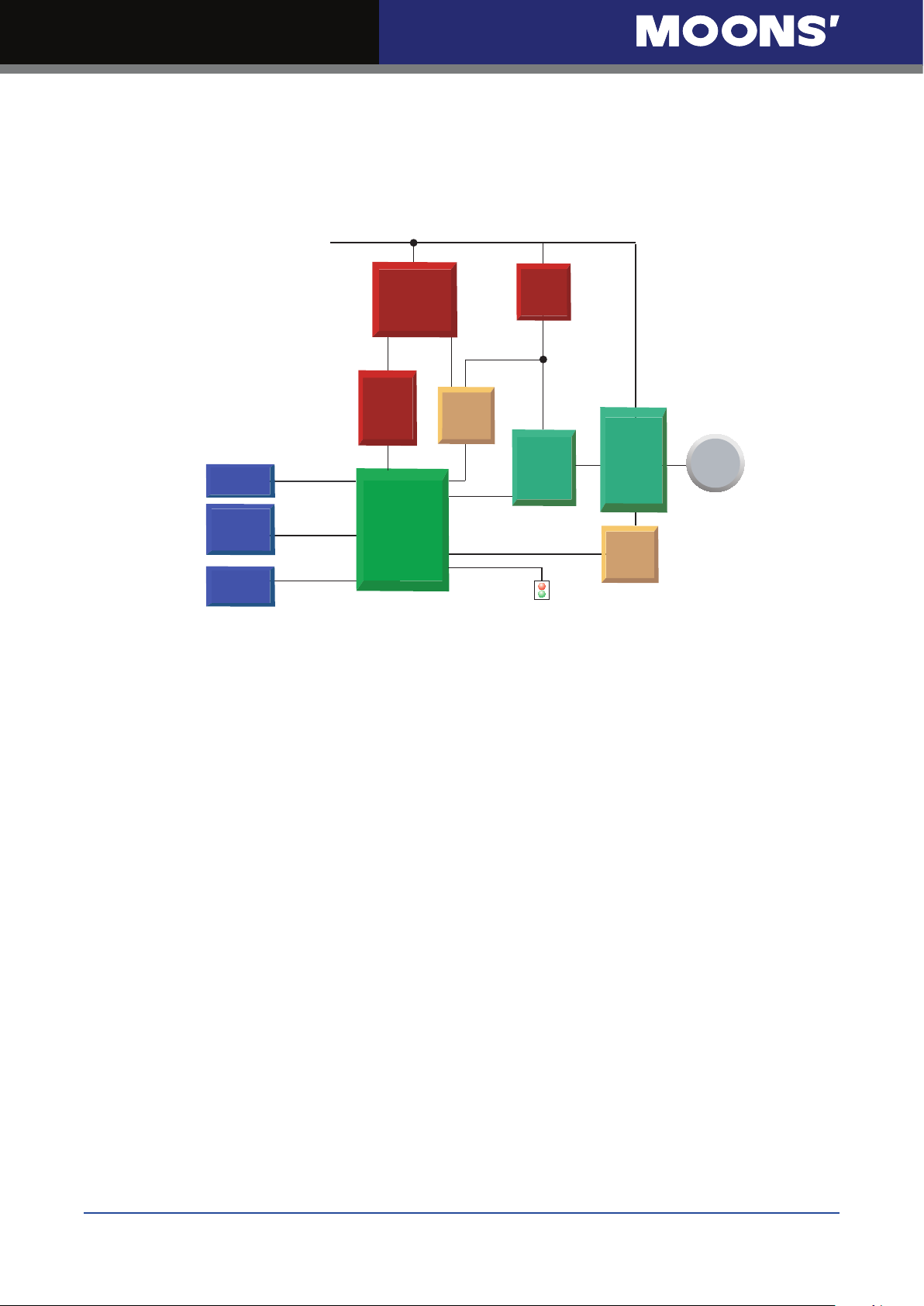
1.3 Block diagram
Block Diagram
switch
Optical
8-bit
switch
24-48VDC
External Power Supply
Rotary code
Isolation
5V
switching
reg
3.3V
reg
DSP
Voltage
Det.
17.5V
Drivers
LED
reg
Gate
(4)
MOSFETs
(8)
Over
Current
Det.
motor
2 Mounting the Drive
The SR4 Step Drive can be mounted on the wide or the narrow side of the chassis. If it is mounted on the wide side, M3 screws should be used through the four corner holes. For narrow side
mounting applications, M3 screws can be used in the two side holes.
The ampliers in the drive generate heat. To operate the drive continuously at maximum power
forced air cooling, as from a fan, should be provided.
Never use the drive in a space where there is no air ow or where other devices can cause the
surrounding air to be more than 40 °C. Never put the drive where it can get wet or where metal
particles can fall into it.
Rev. 1.0
8/30/2010
4
SR4 User Manual
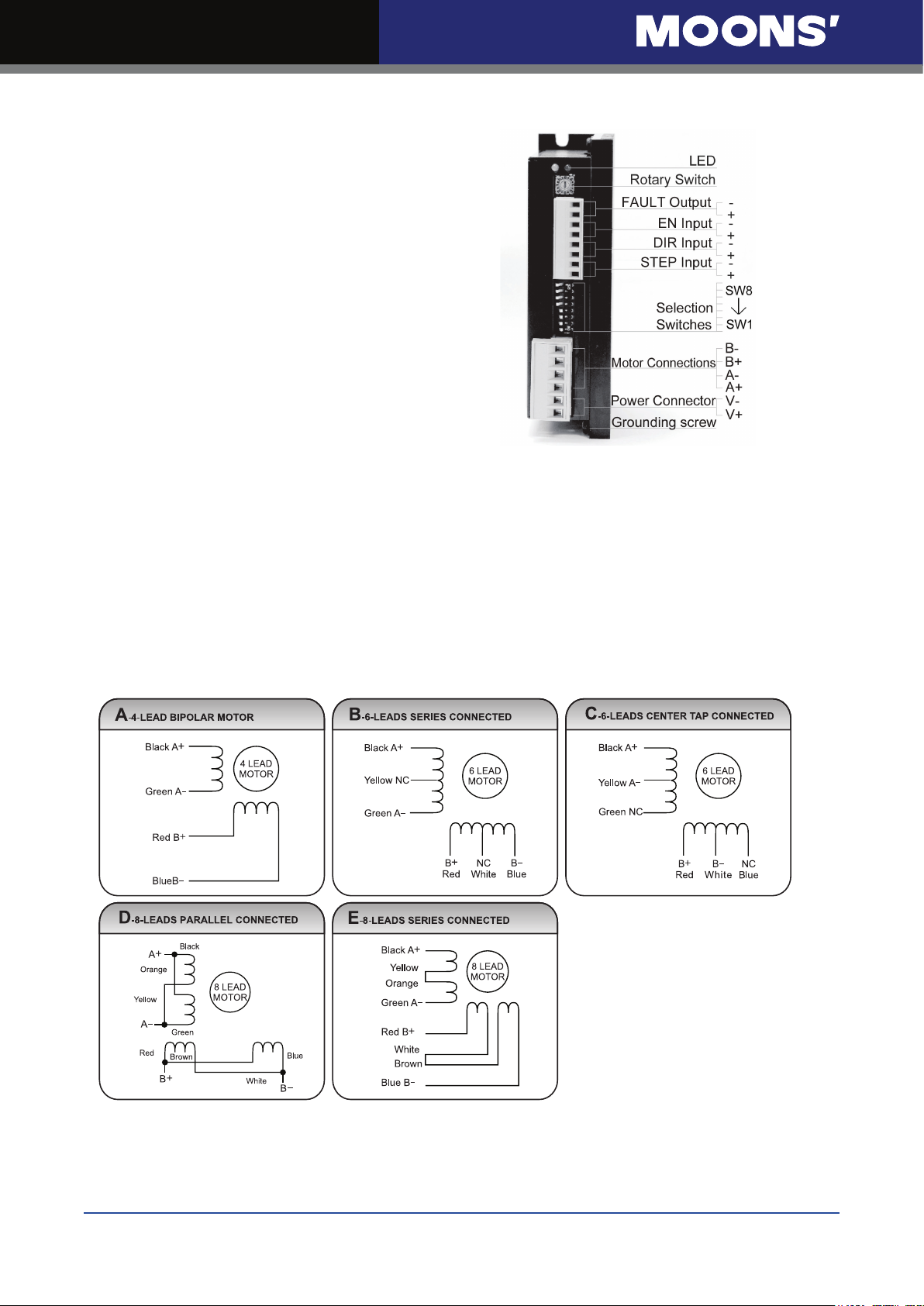
3 Connections
To use the SR4 Step Drive, the following items
are needed:
• A power supply (24 - 48 VDC)
• Pulse & Direction signal
• A compatible step motor
3.1 Connecting to the Power Supply
If the power supply does not have a fuse on the
output or some kind of short circuit current limiting
device, a fast acting fuse is required. A 4 amp fast
acting fuse should be installed in line with the “+” power supply lead.
Connect the motor power supply “+” terminal to the drive terminal labeled “V+”. Connect the power
supply “-” to the drive terminal labeled “V-”.
Be careful not to reverse the wires.
3.2 Connecting to a Motor
5
Rev. 1.0
8/30/2010

SR4 User Manual
3.3 Connecting to the Inputs
3.3.1 Step & Direction Inputs
The SR4 Step Drive has two high speed optically isolated inputs called STEP and DIR. They accept 5 to 24 volt single-ended or differential signals, up to 2MHz. The maximum voltage that can
be applied to the input is 28V.
The motor executes one step with the falling edge of the STEP signal.
The direction of rotation is controlled by the DIR signal level. A low level signal (0 level) will result
in clockwise rotation, and a high level signal (1 level) will result in counterclockwise rotation.
Rev. 1.0
8/30/2010
6

SR4 User Manual
3.3.2 EN Input
The EN input enables or disables the drive amplier. It is an optically isolated input that accepts
a 5 to 24 volt single-ended or differential signal. The maximum voltage that can be applied to the
input is 28V.
When EN input is closed, the driver amplier is deactivated. All the MOSFETs will shut down, and
the motor will be free. When EN input is open, the drive is activated.
When the drive has encountered an error and the fault is removed from system, a falling signal
into the EN input will reset the error status and activate the drive amplier again.
7
Rev. 1.0
8/30/2010

SR4 User Manual
3.3.3 Fault Output
The FAULT Output is optically isolated. The maximum collector current is 100mA, and the maximum collector to emitter voltage is 30 volts. The output can be wired to sink or source current.
When drive is working normally, the output is open. When the drive encounters an error, the output
closes.
Rev. 1.0
8/30/2010
8

SR4 User Manual
4 Switch Selection
SW1 SW2 SW3 SW4 SW5 SW6 SW7 SW8
Running Current Idle current Microstepping Self test
4.1 Running Current
The output current of the SR4 Step Drive is set by the SW1, SW2, and SW3 switches and can be
changed as necessary. There are 8 settings available according to the ON/OFF combination of the
switches.
Peak SW1 SW2 SW3
1A ON ON ON
1.5A OFF ON ON
2A ON OFF ON
2.5A OFF OFF ON
3A ON ON OFF
3.5A OFF ON OFF
4A ON OFF OFF
4.5A OFF OFF OFF
4.2 Idle Current
The running current of the SR4 drive is automatically reduced anytime the motor isn’t moving.
Setting the SW4 switch to ON reduces the current to 50% of it running value. Setting this switch to
OFF maintains 90% of the running current. This 90% setting is useful when a high holding torque
is required. To minimize motor and drive heating it is highly recommended that the idle current
reduction feature be set to 50% unless the application requires the higher setting.
4.3 Microstepping
The microstep resolution is set by the SW5, SW6 and SW7 switches. There are 8 settings.
Microstep(step/rev) SW5 SW6 SW7
400 ON ON ON
800 OFF ON ON
1600 ON OFF ON
3200 OFF OFF ON
6400 ON ON OFF
12800 OFF ON OFF
25600 ON OFF OFF
51200 OFF OFF OFF
9
Rev. 1.0
8/30/2010

SR4 User Manual
4.4 Self Test
Setting switch SW8 to ON after the drive is powered up will cause the drive to perform a self
test move of 2 revolutions both CW and CCW at 1rps. Setting switch SW8 to OFF disables this
feature.
5 Motor Selection
Each position of the 16-bit rotary switch selects a different motor, and automatically sets the
conguration parameters in the drive. The SR4 drive comes programmed with up to 8 typical
motors as factory defaults. Drives can be customized with specially selected motors when required.
The rotary switch also selects a low or high inertia for each motor to allow for
various load conditions. The low setting is 1:1, and the high setting is 10:1. Each
motor in the loaded database has unique settings to optimize the anti-resonance.
See the table below.
When the motor selection is changed, the drive power supply will need to be cycled.
Switch Bit SR4
0 11HS5-L1
1 14HYB4-L
2 17HD2N-L
3 17HD4N-L
4 17HD6N-L
5 23HS0-L
6 23HS2-L
7 23HS3-L
8 11HS5-H2
9 14HYB4-H
A 17HD2N-H
B 17HD4N-H
C 17HD6N-H
D 23HS0-H
E 23HS2-H
F 23HS3-H
Motor selections ending in L are for low inertia and those ending in H are for high inertia.
Rev. 1.0
8/30/2010
10

SR4 User Manual
20±0.5
51Max.
0
35.3Max.
0
5.1 Recommended motors
11HS Series 1.8°
28.3Max.
23±0.1
654321
16.5
A-A(2:1)
51065-0600
PIN NO.
1 BLUE
Ф22-0.052
COLOR
15±0.2
A
A
2±0.2
INK JET
LABEL
4-M2.5
Depth 2.5Min.
9.5
PIN NO.
MOLEX 53253-0670
0
Ф5-0.012
2 N/A
3 RED
Unit: mm
4 GREEN
5 N/A
6 BLACK
Parameters
PART# CONNECTION
11HS5008-01 bipolar 51 120 4 1.8 1 3.5 2.3 18 0.2
MOTOR
LENGTH
(mm)
MOTOR
HOLDING
TORQUE
(mNm)
#OF
LEADS
STEP
ANGLE
(DEG)
AMPS OHMS MH
ROTOR
INERTIA
(G-CM
2
)
MOTOR
WEIGHT
5
4.5±0.1
(Kg.)
23±0.1
28.3Max.
14HY Series 1.8°
Parameters
PART# CONNECTION
14HYB401-03 bipolar 40 200 4 1.8 1 4.3 5.5 20 0.21
MOTOR
LENGTH
(mm)
MOTOR
HOLDING
TORQUE
(mNm)
15±0.2
Ф22-0.052
#OF
LEADS
20±0.5
A
A
2±0.2
INK JET
LABEL
STEP
ANGLE
(DEG)
40Max.
Depth 2.5Min.
Unit: mm
AMPS OHMS MH
4-M3
AWG26 UL3266
0
Ф5-0.012
26±0.1
A-A(2:1)
ROTOR
INERTIA
(G-CM2)
300±10
26±0.1
4.5±0.1
MOTOR
WEIGHT
(Kg.)
35.3Max.
11
Rev. 1.0
8/30/2010

SR4 User Manual
+0.2
42.3Max
0
17HD Series 1.8°
20±0.5
L Max.
31±0.1
15±0.2
C
C
Ф22-0.052
4-M3
Depth 4.5Min
AWG26 UL3266
INK JET
LABEL
Parameters
PART# CONNECTION
LENGTH
(mm)
17HD2401-03N bipolar 39.5 400 4 1.8 1.7 1.7 3.3 57 0.28
17HD4435-02N bipolar 34.3 300 4 1.8 1.7 2 2.8 38 0.21
MOTOR
MOTOR
HOLDING
TORQUE
(mNm)
#OF
LEADS
STEP
ANGLE
(DEG)
AMPS OHMS MH
Unit: mm
C-C(4:1)
0
Ф5-0.012
ROTOR
INERTIA
(G-CM2)
300±10
4.5±0.1
MOTOR
WEIGHT
(Kg.)
31±0.1
42.3Max
17HD6404-05N bipolar 48.3 500 4 1.8 1.7 1.6 2.85 82 0.36
23HS Series 1.8°
20.6±0.5
15±0. 2
C
C
1.6±0.2
4.8±0.3
INK JET
LABEL
L
47.14±0.20
003 ± 01
C-C
0
Ф6.35-0.013
AWG22 UL3266
5.8±0.1
Unit: mm
Parameters
PART# CONNECTION
LENGTH
(mm)
23HS0416-01 bipolar 41 600 4 1.8 4.2 0.3 0.6 135 0.42
MOTOR
MOTOR
HOLDING
TORQUE
(mNm)
#OF
LEADS
STEP
ANGLE
(DEG)
AMPS OHMS MH
ROTOR
INERTIA
(G-CM2)
4-Ф5.1-0
4.65 xaM
41.74 ± 02.0
MOTOR
WEIGHT
(Kg.)
23HS2442-05 bipolar 54 1000 4 1.8 4.2 0.4 1.4 260 0.6
23HS3422-06 bipolar 76 1800 4 1.8 4.2 0.55 1.7 460 1
Rev. 1.0
8/30/2010
12

SR4 User Manual
3
112
33
75.50
6 Error Codes
The SR4 Step Drive has one bicolor (red/green) LED to indicate status. When the motor is en-
abled, the green LED ashes slowly. When the green LED is solid, the motor is disabled. If the
red LED ashes, an error has occurred. Errors are indicated by a combination of red and green
ashes as follows:
7 Reference Materials
7.1 Mechanical Outline
22.50
22.50
22.30
2-4.50
118
4-Ф3.50
3
112
Unit:mm
13
Rev. 1.0
8/30/2010

SR4 User Manual
7.2 Specications
7.2.1 Electrical Specications
Parameter Min. Typ. Max. Unit
Power Supply 24 - 48 VDC
Output Current (Peak) 1 - 4.5 amps
STEP/DIR Input Signal Average Forward Current 6 10 15 mA
Step Frequency 2 - 2M Hz
STEP Minimum Pulse Width Hi and Low 250 - - ns
DIR Minimum Pulse Width 50 - - us
Under Voltage Protection - 20 - VDC
Over Voltage Protection - 60 - VDC
STEP/DIR Input Signal Voltage 4.0 - 28 VDC
Driver Initialization time - - 2.5 S
7.2.2 Environmental Specications
Heat Sinking Method Natural cooling or fan-forced cooling
Surrounding Air Conditions Avoid dust, oily mist and corrosive air
Operating Temperature 0 - 40°C (32 - 104°F)
Maximum Ambient Humidity 90% non-condensing
Shock 5.9m/s² maximum
Storage Temperature -10 - 70°C (14 - 158°F)
Rev. 1.0
8/30/2010
14

SR4 User Manual
11HS5008-01
)m Nm(euqroT
)m Nm(euqroT
17HD2401-03N
17HD6404-05N
)m Nm(euqroT
23HS2442-05
)m N(euqroT
23HS0416-01
Speed(rps)
)m N(euqroT
23HS3422-06
)m N(euqroT
14HYB401-03
)m Nm(euqroT
17HD4435-02N
)m Nm(euqroT
7.3 Torque Curves
Drive: SR4
Microstep: 51200 steps/rev
Current: 1.0A(Peak)
100
80
.
60
40
20
0
0 10 20 30 40 50
Speed(rps)
Drive: SR4
Microstep: 51200 steps/rev
Current: 2.0A(Peak)
48V
24V
400
300
.
200
100
0
0 10 20 30 40 50
Speed(rps)
Drive: SR4
Microstep: 51200 steps/rev
Current: 1.0A(Peak)
150
120
.
90
60
30
0
0 10 20 30 40 50
Speed(rps)
Drive: SR4
Microstep: 51200 steps/rev
Current: 2.0A(Peak)
48V
24V
300
250
.
200
150
100
50
0
0 10 20 30 40 50
Speed(rps)
Drive: SR4
Microstep: 51200 steps/rev
Current: 2.0A(Peak)
48V
24V
500
400
.
300
200
100
0
0 10 20 30 40 50
Speed(rps)
Drive: SR4
Microstep: 51200 steps/rev
Current: 4.5A(Peak)
48V
24V
1.0
0.8
.
0.6
0.4
0.2
0
0 10 20 30 40 50
Speed(rps)
Drive: SR4
Microstep: 51200 steps/rev
Current: 4.5A(Peak)
48V
24V
0.5
0.4
.
0.3
0.2
0.1
0
0 10 20 30 40 50
Drive: SR4
Microstep: 51200 steps/rev
Current: 4.5A(Peak)
48V
24V
1.5
1.2
.
0.9
0.6
0.3
0
0 10 20 30 40 50
Speed(rps)
15
Rev. 1.0
8/30/2010

SR4 User Manual
Headquarters
8 Contacting MOONS’
168 Mingjia Road, Minhang District,
Shanghai 201107, P.R.China
Tel: +86 (0)21 52634688
Fax: +86 (0)21 52634098
Shenzhen Branch Office
Room 2209, 22/F, Kerry Center, 2008 Renminnan Road, Luohu District,
Shenzhen 518001, P.R.China
Tel: +86 (0)755 25472080
Fax: +86 (0)755 25472081
Beijing Branch Office
Room 202,Unit 2,7th Building, Huilongsen International Science & Technology
Industry Park, No.99,kechuang 14th street, Beijing 101111 ,P.R. China
Tel: +86 (0)10 59755578
Fax: +86 (0)10 59755579
Nanjing Branch Office
Room 302, Building A, Tengfei Creation Center, 55 Jiangjun Road, Jiangning District,
Nanjing 211100, P.R. China
Tel: +86 (0)25 52785841
Fax: +86 (0)25 52785485
Qingdao Branch Office
Room E, 10th Floor, 73 Wangjiao Mansion, Hongkong Middle Road, Shinan District,
Qingdao 266071, P.R. China
Tel: +86 (0)532 85879625
Fax: +86 (0)532 85879512
Europe Branch: Moons' Industries (Europe) S.R.L.
Via Torri Bianche n.1 20059 Vimercate(MB) Italy
Tel: +39 039 62 60 521
Fax: +39 039 96 31 409
Rev. 1.0
8/30/2010
16
 Loading...
Loading...