

Moog Crossbow VG700MB User Manual
VG700M Series User’s Manual
Models…
VG700MB-200
VG700MB-206
VG700MC-206
VG700MC-208
Moog Crossbow, 1421 McCarthy Blvd., Milpitas, CA 95035
Tel: 408-965-3300, Fax: 408-324-4840
email: info@xbow.com, website: www.xbow.com

©2003-2011 Moog Crossbow. All rights reserved. Information in this
document is subject to change without notice.
Moog Crossbow and SoftSensor are registered trademarks and DMU is a
trademark of Moog Crossbow. Other product and trade names are
trademarks or registered trademarks of their respective holders.

VG700M User’s Manual
Table of Contents
1
Introduction...............................................................................1
1.1 The DMU™ Series Motion and Attitude Sensing Units...............1
1.2 Package Contents..........................................................................2
2 Quick Start.................................................................................3
2.1 GyroView Software.......................................................................3
2.1.1 GyroView Computer Requirements..................................................3
2.1.2 Install GyroView..............................................................................3
2.2 Connections...................................................................................3
2.3 Setup GyroView ............................................................................4
2.4 Take Measurements.......................................................................4
3 DMU Details...............................................................................5
3.1 DMU Coordinate System..............................................................5
3.2 Connections...................................................................................5
3.3 Interface.........................................................................................7
3.4 Measurement Modes.....................................................................7
3.4.1 Voltage Mode...................................................................................7
3.4.2 Scaled Sensor Mode.........................................................................7
3.4.3 Angle Mode......................................................................................8
3.5 Commands.....................................................................................9
3.5.1 Command List..................................................................................9
3.6 Data Packet Format.....................................................................14
3.7 Timing.........................................................................................17
3.8 Temperature Sensor.....................................................................17
3.9 Adaptive-T Algorithm (installed at Crossbow factory)...............18
4 DMU Operating Tips ..............................................................19
4.1 The “Zero” Command.................................................................19
4.2 The Erection Rate........................................................................19
4.3 Mounting the DMU.....................................................................21
4.4 DMU Start Up Procedure............................................................21
4.5 Advanced Strategies for Adjusting the Erection Rate.................22
5 Appendix A. Mechanical Specifications................................23
Doc.# 7430-0280-01
Rev. G Page i

5.1 VG700M Outline Drawing..........................................................23
VG700M User’s Manual
6 Appendix B. DMU Output Quick Reference ........................24
6.1 Digital Output Conversion ..........................................................24
7 Appendix C. DMU Command Quick Reference ..................25
8 Appendix D. Troubleshooting Tips........................................26
9 Appendix E. Warranty and Support Information ...............28
9.1 Customer Service........................................................................28
9.2 Contact Directory........................................................................28
9.3 Return Procedure.........................................................................28
9.3.1 Authorization..................................................................................28
9.3.2 Identification and Protection .........................................................29
9.3.3 Sealing the Container.....................................................................29
9.3.4 Marking..........................................................................................29
9.3.5 Return Shipping Address................................................................29
9.4 Warranty......................................................................................29
Page ii Doc.# 7430-0280-01
Rev. G

VG700M User’s Manual
About this Manual
The following annotations have been used to provide additional
information.
; NOTE
Note provides additional information about the topic.
; EXAMPLE
Examples are given throughout the manual to help the reader understand
the terminology.
3 IMPORTANT
This symbol defines items that have significant meaning to the user
0 WARNING
The user should pay particular attention to this symbol. It means there is a
chance that physical harm could happen to either the person or the
equipment.
The following paragraph heading form at t i ng is use d in this m a nual :
1.1 Heading 2
1.1.1 Heading 3
Normal
Doc.# 7430-0280-01
1 Heading 1
Rev. G Page iii

VG700M User’s Manual
1 Introduction
1.1 The DMU™ Series Motion and Attitude Sensing Units
This manual explains the use of the VG700M Series of products.
The VG700M is a six-axis dynamic measurement unit (DMU) designed to
measure linear acceleration along three orthogonal axes and rotation rates
around three orthogonal axes. It uses three accelerometers and three
angular rate sensors to make a complete measurement of the dynamics of
your system.
In addition, it is designed to provide stabilized pitch and roll in dynamic
environments. The VG700M is the solid state equivalent of a vertical
gyro/artificial horizon display. The VG700MB-206 also includes a relative
heading output based upon yaw gyro information.
The DMU series products are low power, fast turn on, reliable and accurate
solutions for a wide variety of stabilization and measurement applications.
The VG700M product has an RS-422 serial link. Data may be requested via
the serial link as a single measurement or streamed continuously.
The Crossbow DMUs employ on board digital processing to provide
application-specific outputs and to compensate for deterministic error
sources within the unit. The DMUs accomplish these tasks with an analog
to digital converter and a high performance Digital Signal Processor.
The VG700M uses three micro electro-mechanical machined (MEMS)
accelerometers and three fiber optic gyro (FOG) angular rate sensors. The
three MEMS accelerometers are surface micro-machined silicon devices
that use differential capacitance to sense acceleration. These solid state
MEMS sensors are responsive and reliable. The FOG rate sensors provide
angular rate measurements that are more accurate and subject to less drift
than the silicon based rate sensors.
Doc.# 7430-0280-01 Rev. F Page 1
1.2 Package Contents
In addition to your DMU sensor product you should have:
• 1 CD with GyroView Software
GyroView (version 2.5 or greater) will allow you to immediately view the
outputs of the DMU on a PC running Micros oft ® Wi nd o w s™. Yo u ca n
also download this software from Crossbow’s web site at
http://www.xbow.com.
• 1 Digital Signal Cable.
This links the VG700M directly to a serial port via RS422 to RS232
converter. Only the transmit, receive, power, and ground channels are used.
• 1 VG700M User’s Manual
This contains helpful hints on programming, installation, valuable digital
interface information including data packet formats and conversion factors.
• 1 Set of captive mounting hardware (VG700MC-208 only)
VG700M User’s Manual
Page 2 Doc.# 7430-0280-01 Rev. F

VG700M User’s Manual
2 Quick Start
2.1 GyroView Software
Crossbow includes GyroView software to allow you to use the DMU right
out of the box and the evaluation is straightforward. Install the GyroView
software, connect the DMU to your serial port, apply power to your unit
and start taking measurements.
2.1.1 GyroView Computer Requirements
The following are minimum capabilities that your computer should have to
run GyroView successfully:
• CPU: Pentium-class
• RAM Memory: 64MB minimum, 128MB recommended
• Hard Drive Free Memory: 20MB
• Operating System: Windows 2000, XP
2.1.2 Install GyroView
To install GyroView in your computer:
1. Put in CD “Support Tools”.
2. Find the GyroView folder. Double click on the setup file.
3. Follow the setup wizard instructions. You will install GyroView
and a LabVIEW Runtime Engine. You need both.
If you have any problems or questions, you may contact Crossbow directly.
2.2 Connections
The DMU is shipped with a cable to connect the DMU to a PC COM port
via RS422 to RS232 converter.
1. Connect the 22-pin end of the digital signal cable to the port on the
DMU.
2. Connect the 9-pin end of the cable to the serial port of your
computer via RS422 to RS232 converter (not included).
3. The additional black and red wires on the cable supply power to
the DMU. Match red to (+) power and black to (-) ground. The
input voltage supply for the VG700M should be 16 - 32 VDC.
The current draw is <0.25 A at 28 VDC. See the specifications for
your unit.
0 WARNING
Do not reverse the power leads! Applying the wrong power to the DMU
can damage the unit; Crossbow is not responsible for resulting damage to
the unit.
Doc.# 7430-0280-01 Rev. F Page 3

2.3 Setup GyroView
With the DMU connected to your PC serial port and powere d, open the
GyroView software.
1. GyroView should automatically detect the DMU and display the
serial number and firmware version if it is connected.
2. If GyroView does not connect, check that you have the correct
COM port selected. You find this under the “DMU” menu.
3. Select the type of display you want under the menu item
“Windows”. Graph displays a real time graph of all the DMU
data; Navigation shows an artificial horizon display.
4. You can log data to a file by entering a data file name. You can
select the rate at which data is saved to disk.
5. Under “DMU” or “DMU Controls”, you can set the erection rate
and rate sensor zeroing time. Enter a value, and click the button.
The value is not sent until the button is clicked.
6. If the status indicator says, “Connected”, you’re ready to go. If the
status indicator doesn’t say connected, check the connections
between the DMU and the computer; check the power; check the
serial COM port assignment on your computer.
2.4 Take Measurements
Once you have configured GyroView to work with your DMU, pick what
kind of measurement you wish to see. “Graph” will show you the output
you choose as a strip-chart type graph of value vs. time. “FFT” will show
you a real-time fast Fourier transform of the output you choose.
“Navigation” will show an artificial horizon and the stabilized pitch and roll
output of the DMU. (“Navigation” does not work with the IMU models.)
Let the DMU warm up for at least 30 seconds when you first turn it on.
You should zero the rate sensors when you first use the DMU. Set the
DMU down in a stable place. On the main control panel, enter a value into
the “zero avg time” box. “3” will work well. Click the “Z” button. This
measures the rate sensor bias and sets the rate sensor outputs to zero. The
zeroing command turns on the high pass filter rate bias estimation that takes
approximately 3 minutes. The DMU needs to be held still (motionless)
during zeroing operation. The “zero” command is discussed more in “The
‘Zero’ Command” section. Now you’re ready to use the DMU!
VG700M User’s Manual
Page 4 Doc.# 7430-0280-01 Rev. F

VG700M User’s Manual
3 DMU Details
3.1 DMU Coordinate System
The DMU will have a label on one face illustrating the DMU coordinate
system. With the connector facing you, and the mounting plate down, the
axes are defined as:
X-axis – from face with connector through the DMU.
Y-axis – along the face with connector from left to right.
Z-axis – along the face with the connector from top to bottom.
The axes form an orthogonal right-handed coordinate system. Acceleration
is positive when it is oriented towards the positive side of the coordinate
axis. For example, with the DMU sitting on a level table, it will measure
zero g along the x- and y-axes and +1 g along the z-axis. Gravitatio nal
acceleration is directed downward, and this is defined as positive for the
DMU z-axis. In a typical installation, this will require the system to mount
with the connector facing aft.
The angular rate sensors are aligned with these same axes. The rate sensors
measure angular rotation rate around a given axis. The rate measurements
are labeled by the appropriate axis. The direction of a positive rotation is
defined by the right-hand rule. With the thumb of your right hand pointing
along the axis in a positive direction, your fingers curl around in the
positive rotation direction. For example, if the DMU is sitting on a level
surface and you rotate it clockwise on that surface, this will be a positive
rotation around the z-axis. The x- and y-axis rate sensors would measure
zero angular rate, and the z-axis sensor would measure a positive angular
rate.
Pitch is defined positive for a positive rotation around the y-axis (pitch up).
Roll is defined as positive for a positive rotation around the x-axis (roll
right).
The angles are defined as standard Euler angles using a 3-2-1 system. To
rotate from the body frame to an earth-level frame, roll first, then pitch,
then yaw.
3.2 Connections
The VG700M has a male 22-pin circular connector. The signals are as
shown in Table 1.
Doc.# 7430-0280-01 Rev. F Page 5
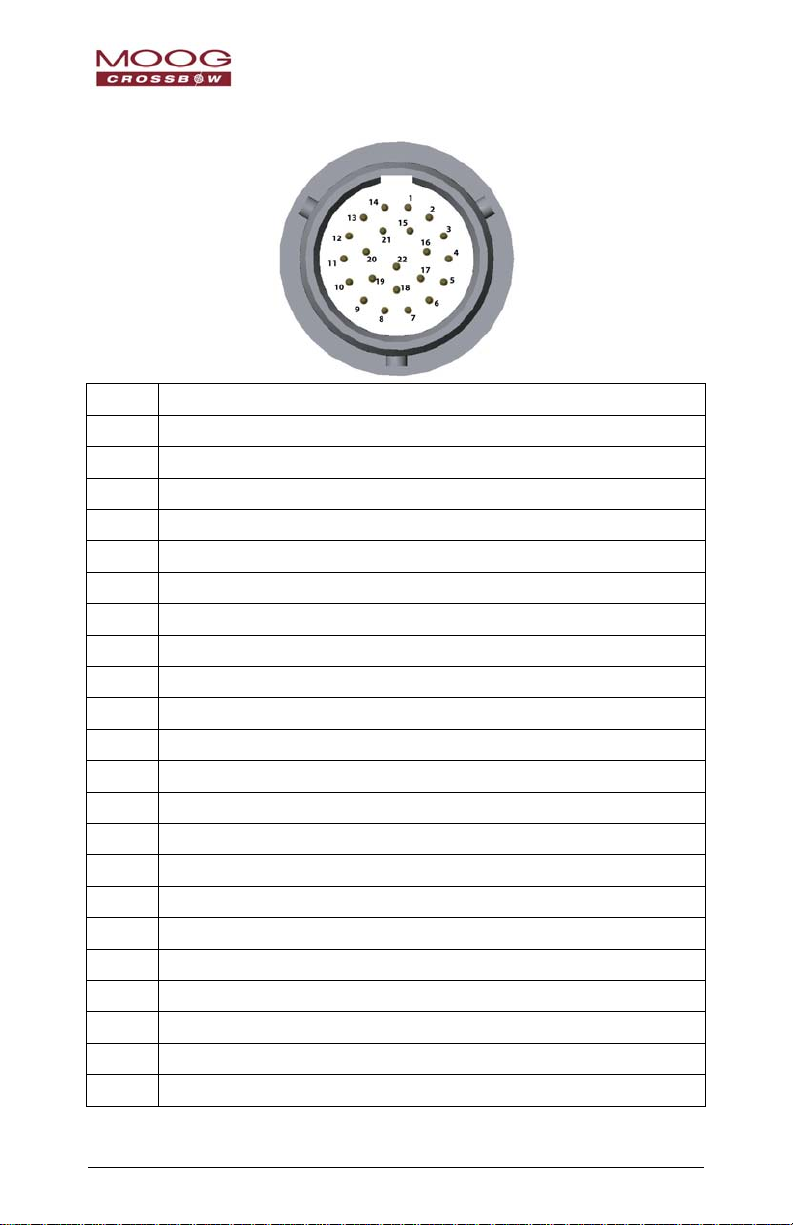
Table 1. VG700M Connector Pin Out
Pin Signal
1 RS-422 Transmit (-)
2 RS-422 Transmit (+)
3 RS-422 Receive (-)
4 Power Input Ground
5 Positive Power Input (+)
6 Do Not Connect
7 Factory Use Only
8 Factory Use Only
9 Factory Use Only
10 Factory Use Only
11 Factory Use Only
12 Factory Use Only
13 Factory Use Only
14 Factory Use Only
15 Do Not Connect
16 RS-422 Receive (+)
17 Signal Ground
18 Factory Use Only
19 Do Not Connect
20 Case Ground
21 Factory use only
22 Do Not Connect
VG700M User’s Manual
Page 6 Doc.# 7430-0280-01 Rev. F
 Loading...
Loading...