

Page 1
Getting Started Guide
1860 38th St.
Boulder, CO 80301
www.modrobotics.com
Page 2

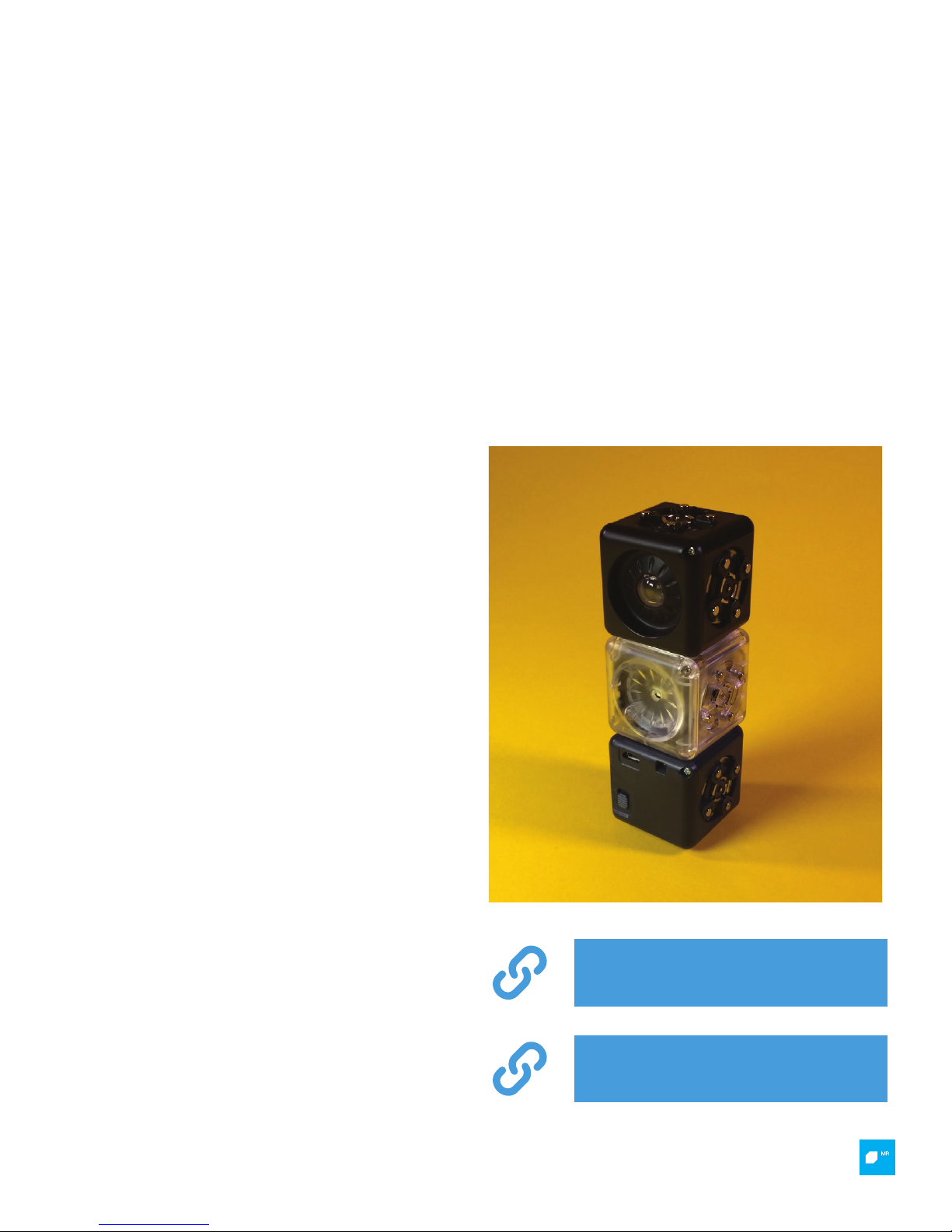
1. Make Your First Robot
The Dimbot – Uses a clear Flashlight Action
block, black Distance Sense block, and a
blueish-gray Battery block. It doesn’t matter
where you put the Battery block.
When you snap together a Battery block, a
Distance Sense block, and a Flashlight Action
block, the Flashlight Action block lights up.
You control its brightness by moving your
hand or an object closer or further from the
“eyes” on the black Distance block.
This robot’s light dims when you move your
hand away, so you could call it a Dimbot.
2. Understanding Your Cubelets
Cubelets come in three types: Sense blocks,
Action blocks, and Think blocks. Sense
blocks are black, Action blocks are clear,
and Think blocks are different colors. Most
Cubelets have five connection faces and one
special face, which identifies the function
of that Cubelet. Others have six connection
faces and their function is indicated by their
color.
Every Cubelet has a small LED light in one
corner. When the Cubelet is part of a robot
and the robot’s Battery block is turned on,
the LED light is on, too. The LED light shows
that the Cubelet is getting power and talking
to its neighbors. Each Cubelet robot must
have one Battery block which powers all the
other blocks in the robot.
The Battery block has a small switch. When
you slide it to the “O,” the Battery block is off.
Slide to the line, “|,” and it is on. Turn it off to
save battery life when you aren’t playing with
your Cubelets.
The Battery block has an internal,
rechargeable battery. To recharge the
Battery block, plug it into a micro-USB power
source.
Each connecting face of a Cubelet has three
conductors. The outer ring and magnets
conduct ground; the inner metal ring
conducts power; and the center pin conducts
data from one Cubelet to the next. These
three conductors must connect with their
neighboring counterparts in order for two
Cubelets to communicate.
© Modular Robotics, 2016 www.modrobotics.comPage 2
Page 3
3. What’s a Robot?
A robot is a machine that senses its
surroundings and acts on its surroundings.
Every robot needs a Sense block and an
Action block. Sense blocks are black and
Action blocks are clear.
Every robot needs power. The blue-gray block
is the Battery block. The Battery block has
4. Swap Sense Blocks
Now take out the Dimbot’s Distance Sense
block. Put a Brightness Sense block in its
place. You still have a flashlight robot, but now
its brightness depends on the light around it.
Test it: Cover the Brightness Sense block with
an on-off switch. Make sure it’s on before you
start to play; turn it off when you’re done.
To build a robot, you will need a gray block,
a black block, and a clear block. Just snap
them together and you’ve built a robot!
your hand and the flashlight dims. Move your
hand away and the Flashlight gets brighter.
These cubes are modular which means you
can swap any Sense block for any other Sense
block. You’ll still have a robot, just a different
robot. In the Dimbot we swapped a Distance
Sense block for a Brightness Sense block to
make a Light-sensitive Dimbot.
Accelerate your learning with a quick and easy
getting started video, watch it on YouTube.
https://youtu.be/YPAOCOJibfQ
This guide is also available on the Modular
Robotics website!
http://www.modrobotics.com/
cubelets/cubelets-getting-started/
© Modular Robotics, 2016 www.modrobotics.comPage 3
Page 4

5. Swap Action Blocks
This simple brightness go-bot robot has a
Drive Action block (left) that moves the robot
when its Brightness Sense block sees light.
The gray block on the right is the Battery
block.
You can also swap Action blocks. With a Lightsensitive Dimbot now put a Drive Action block
in place of the Flashlight Action block. Now
your robot has a Brightness Sense and a Drive
block (and, of course, a Battery block).
This robot moves when it senses light. In a
bright room it’s a fast robot. In a dark room
it’s a Slowbot.
Try more swapping.
What if you use a Speaker Action block
instead of the Drive Action block? You get a
Canarybot.
What about a Distance Sense block instead of
a Brightness Sense block? You get a Fraidybot
or a Friendlybot depending on the way the
wheels are positioned. By turning the Drive
Action block so that the robot goes backward
instead of forward, you’ll have a Friendlybot or
Fraidybot.
© Modular Robotics, 2016 www.modrobotics.comPage 4
Page 5

6. How Numbers Flow
The arrow shows the flow of a number from
the Brightness Sense block to the Flashlight
Action block.
Each black Sense block senses some property
of its surroundings and turns it into a number.
Each Sense block tells its number to all its
neighbors. You can see them “talking” as
the green lights on each block flicker. (The
Bluetooth flashes different colors.)
For example, the Knob Sense block senses
how much you rotate its knob. When you
turn the knob all the way counterclockwise
(left), the Knob Sense block produces a small
number. Turn it clockwise, to the right, to
produce a big number.
The Brightness Sense block senses how light
the room is. In a dark place, the Brightness
Sense block produces a small number. In
a light place, the Brightness Sense block
produces a big number.
Each Action block takes numbers from its
neighbors and turns the numbers into an
action.
The Flashlight Action block takes a number
and lights its lamp. A big number makes
the lamp bright. A small number makes the
lamp dim. Think of the number as hopping or
flowing from one block to the next. Numbers
are flowing through the blocks of the robot
from Sense blocks to Action blocks all the
time. That’s what makes the robot behave
the way it does.
Numbers don’t flow through Sense blocks.
Each Sense block produces its own number,
so it doesn’t pass numbers from its
neighbors.
© Modular Robotics, 2016 www.modrobotics.comPage 5
Page 6

7. Using the Bar Graph to See the Numbers
You can use the Bar Graph Action block to
understand what’s going on inside your
robot—to show the numbers flowing from
block to block.
Attach the Bar Graph Action block to any
block in a robot. The Bar Graph Action block
shows how big the number is. If the number
is big, all the cells in the bar graph light. If
the number is small, only a few light up. If the
number is very small (or zero) no cells light at
all.
Try it. Build a simple Brightness Gobot with
a Brightness Sense block and a Drive Action
block. Attach the Bar Graph Action block to
one of the blocks. If there’s a lot of light, the
Bar Graph Action block will show a full bar
(and the Drive Action block will move fast). If
there’s not much light, the Bar Graph Action
block won’t light much.
You don’t need the Bar Graph Action block to
understand what’s going on with this simple
robot. But, with bigger and more complicated
robots, the Bar Graph Action block can help.
8. Arrangement of Cubelets Makes a Difference
The pictured robots have different versions
because you can put the Drive Action block
into the robot in different ways. One way, the
robot goes straight. The other way, the robot
goes around and around--you could call it a
Turnabot.
It’s not just which Sensor and Action blocks
you choose. It’s also how you position and
situate the Cubelets. The same Cubelets
arranged in a different physical configuration
make different robots.
© Modular Robotics, 2016 www.modrobotics.comPage 6
Page 7

For example, make a robot and place the
Brightness Sense block so its sensor face
points down. Now it doesn’t see the light. This
Gobot is a Nogobot. No matter how bright the
room is, the robot won’t go. Its Brightness
Sense block doesn’t sense the light.
Try placing the Brightness Sense block to face
in different directions. How does that impact
the robot’s behavior?
9. Stability
Some robots are more stable than others.
These robots all have a Distance Sense block
and a Drive Action block, but the differences in
their assembly produce different behaviors.
Try building a simple Gobot with a Distance
Sense block and a Drive Action block. It’s
stable if you build a train with all three blocks
(the Battery block, the Drive Action block, and
the Distance Sense block) arranged in a row.
The Distance Sense block produces a big
number when something gets near it. You can
chase this Fraidybot around with your hand.
When you get near the Fraidybot, it runs away.
© Modular Robotics, 2016 www.modrobotics.comPage 7
Page 8

If you build this robot as a tower instead of
a train, it still works, but it’s no longer stable:
approach the Distance Sense block and the
Drive Action block starts moving. Accelerate
too quickly and the tower falls over.
You can fix this: add a block at the bottom
next to the Drive Action block. Any block will
do, but try one of the green blocks, either a
Passive block or a Blocker block.
Notice that you can build this Gobot in
different ways. If the Distance Sense block
faces the same direction that the Drive Action
block moves, your robot comes towards your
hand.
If you turn the Distance Sense so it faces the
opposite direction, it moves away. You can
chase it around with your hand or change the
direction of the wheels on the Drive Action
Block.
© Modular Robotics, 2016 www.modrobotics.comPage 8
Page 9

10. A Sense Can Control Multiple Action Blocks
You can use a single Sense block to control
one or more Action blocks.
Build a Lighthousebot that uses the Knob
Sense block to control the speed and the
brightness of a rotating robot tower. The
Lighthousebot uses the Knob Sense block to
control the speed of the Rotate Action block
and the brightness of the Flashlight Action
block.
Build a simple Gobot with a Brightness Sense
block and a Drive Action block: It goes when it
senses light.
Add a Speaker Action block. Now it goes and
chirps when it senses light. Add a Flashlight
Action block. Now it goes and chirps and lights
up when it senses light. Add all the Action
blocks you want. They all respond to the same
Brightness Sense block.
With a lot of light on the Brightness Sense
block, all the Action blocks will act a lot.
Without light on the Brightness Sense block,
the Action blocks won’t do much.
© Modular Robotics, 2016 www.modrobotics.comPage 9
Page 10

11. Think Blocks
You’ve met the Battery block, and the black
Sense blocks and the clear Action blocks. It’s
time to meet the colored Think blocks. Think
blocks are the colored blocks.
Because Robots are machines that sense
first, then think, then act, we need to be
12. The Inverse Think Block
To make a Nightbot light up when it’s in a dark
place, you need a Red Inverse block. Ooops!
This robot as pictured is wrong. Can you figure
out why?
Let’s go back to the Light-sensitive Dimbot. It
sure Think blocks are placed between the
Sense block and the Action block you want to
impact.
In addition to the green Passive block, the
simplest Think block is the red Inverse Think
block.
has a Brightness Sense block and a Flashlight
Action block. (It also has a Battery block, of
course, but we’re going to stop mentioning the
Battery block because every robot has one.)
The Dimbot made a silly flashlight. Its lamp
is bright when it’s in a bright room, and
dark when it’s in a dark room. We’d prefer a
flashlight robot that turns on when it’s dark,
and turns off when it’s light. That’s why we
need the red Inverse Think block.
© Modular Robotics, 2016 www.modrobotics.comPage 10
Page 11

Put the red Inverse block between the
Brightness Sense block and the Flashlight
Action block. Remember the number flow
story: every Sense block produces a number.
The Brightness Sense block produces a big
number when it senses a lot of light. It tells
that big number to its neighbor (the Flashlight
Action block), which turns the big number into
a bright light.
The Inverse Think block turns a big number
into a small number (and a small number into
a big number).
When we put the Inverse Think block into the
robot, numbers pass through it from Sense
block to Action block. When the Brightness
Sense block senses a lot of light it produces
It also works the other way. When you put the
robot in a dark room (or shade it with your
hand) the Brightness Sense block produces a
small number. The Inverse Think block turns
it into a big number, and the Flashlight Action
block makes its light bright: A Nightbot that
turns on in a dark room, and turns off in a
bright room.
a big number, which the Inverse Think block
turns into a small number, and passes to the
Flashlight Action block, which dims its lamp.
© Modular Robotics, 2016 www.modrobotics.comPage 11
Page 12

Swap out the Flashlight Action block and put a
Drive Action block in its place. Now you’ve built
a robot that goes when it’s dark, and stops
when it’s light.
The Inverse Think block in this Night-Gobot
inverts the number from the Brightness Sense
block before passing it to the Drive Action
block. In low light, the Brightness Sense block
produces a small number; the Inverse Think
block inverts it to a big number, which makes
the Drive Action block go fast. In bright light,
the Brightness Sense block produces a big
number, which the Inverse Think block inverts
to a small number, so the Drive Action block
moves slowly, or not at all.
13. Differential Drive
Put two Gobots together on a robot (facing
the same way) and you’ve built a Steeringbot.
The Steeringbot has two Gobot towers with a
Battery block in between. Each Gobot tower
responds to nearby objects. Put your hand
near the right side Gobot tower and its Drive
Action block will go, while the left side’s Drive
Action block stays still (or goes slower).
When one Drive Action block moves and the
other doesn’t, or turns the other way, the
Steeringbot turns. That’s called “differential
drive steering.”
© Modular Robotics, 2016 www.modrobotics.comPage 12
Page 13

14. Action Blocks Average Their Inputs
If your robot has two Sense blocks and one
Action block, which one controls the robot?
Build a Testbot with two Distance Sense
blocks and a Bar Graph Action block between
them.
The Bar Graph Action block shows a low value
if neither Distance Sense block senses an
object. Put one hand in front of each Distance
Sense block. They will both produce a high
number. The Bar Graph Action block shows a
high number.
Now put your hand in front of just one of
the Distance Sense blocks. This block now
produces a high number while the other
Distance Sense block produces a low number.
The Bar Graph Action block takes both
numbers and averages them. It shows a
number that is halfway between the numbers
it gets from its two Distance Sense neighbors.
© Modular Robotics, 2016 www.modrobotics.comPage 13
Page 14

15. Gradients: Diffusion
This robot shows the gradient story. The Bar
Graph Action block is attached to one of two
Passive blocks between two Distance Sense
blocks, one at each end of the robot. The
closer Distance Sense block has a bigger
effect on the Bar Graph Action block. If your
robot has an Action block right between two
Sense blocks, the Action block averages the
numbers the two Sense blocks tell it.
If one Sense block is farther from the Action
block than the other, then the closer block
has a stronger effect. You can test this using
the Bar Graph block. Build a robot with the two
Distance Sense blocks on either end and two
Passive blocks between them. Add a Bar Graph
Now play with your robot: put one hand in front
of each Distance Sense block, so that the Bar
Graph Action block reads high (all its cells
light). Take your hand away from the Distance
Sense block that is farther from the Bar Graph
Action block. Now put your hand back and try
the other Distance Sense block. The Bar Graph
Action block responds more strongly to the
closer Distance Sense block.
An Action block acts according to the average
of the Sense block numbers it gets, weighted
by the distances (number of blocks from
Sense block to Action block, or “hop count”)
they’ve travelled.
Action block to one of the Passive blocks.
© Modular Robotics, 2016 www.modrobotics.comPage 14
Page 15

16. Use The Minimum Block as a Switch
Suppose you want to make a light-sensitive
Gobot—it goes when it sees light. But you also
want to be able to turn it off. Of course, you
can just switch off the battery, or take out the
Battery block. But you can also use Cubelets
to make an on-off switch. Here’s how.
An ordinary Light-sensitive Gobot just has
two blocks: a Brightness Sense block and a
Drive Action block (plus a Battery block). The
number from the Brightness Sense block
tells the Drive Action block how fast to go. A
brighter light, a bigger number, a faster gobot.
Take out the Brightness Sense block and
put a Minimum Think block in its place. This
Minimum Think block will tell the Drive Action
block how fast to go. It will take all the
numbers its Sense block neighbors give it,
and choose the smallest (minimum) of those
numbers. This smallest number is what it will
pass on to its Action block neighbors.
© Modular Robotics, 2016 www.modrobotics.comPage 15
Page 16

Attach the Brightness Sense block to the
Minimum Think block, and also attach a Knob
Sense block. Now, if you turn the Knob Sense
block all the way counterclockwise (left), then
the Minimum Think block tells the Drive Action
block, “zero”, because this is the smaller of
the numbers it’s getting. If you turn the Knob
Sense block all the way clockwise (right), then
the Minimum Think block will tell the Drive
Action block whatever number it’s getting
from the Brightness Sense block. With the
Minimum Think block, the Knob Sense block
acts like an on-off switch.
17. Use the Blocker Block to Separate Two Parts of a Robot
The dark green Blocker Think block passes
power but does not allow numbers to flow
through it. Use it to build a robot with two
parts that don’t talk to each other. Here’s
an example: One half of the robot is a
Lighthousebot with a spinning light; the other
half is a robot that chirps when it sees the
light from the Lighthousebot.
The Lighthousebot is Knob Sense block that
controls the speed of a Rotate Action block,
and on top of that, a Flashlight Action block
that points outward (sideways). When you turn
the Knob Sense clockwise (to the right), the
light goes on and spins.
© Modular Robotics, 2016 www.modrobotics.comPage 16
Page 17

Now add a Blocker block to the base (say, on
the Battery). Then, on the other side of the
Blocker block add a Speaker Action block, and,
on top, put a Brightness Sense block with its
sensor face pointing towards the rotating
light. The Speaker Action block chirps (if the
room is bright).
To the right of the green Blocker block is a
mini lighthouse: a Knob Sense block, a Rotate
Action block and a Flashlight Action block. The
Flashlight Action block spins when you turn
up the Knob Sense block. When light from the
spinning Flashlight Action block strikes the
Brightness Sense block, the Speaker Action
block responds by chirping faster.
18. Using the Threshold
The Threshold Cubelet is a Think block with an
adjustable knob. Unlike most Think Cubelets,
the Threshold allows you to alter its effect
within the robot. The Threshold Cubelet acts
as an insulator, or blocker, of numbers below
a value established by the Threshold knob.
Numbers above the set Threshold value will
continue to flow from block to block.
© Modular Robotics, 2016 www.modrobotics.comPage 17
Page 18

Construct a Testbot with a Battery, Bar Graph,
and Distance Sensor. The closer an object
is to the Distance Sensor, the higher the
value displayed on the Bar Graph Cubelet.
Now, place the Threshold Cubelet between
the Distance Sensor and Bar Graph. Set the
Threshold value to the lowest setting. You’ll
notice that the Threshold Cubelet doesn’t
seem to have any effect. That’s because we’ve
set the Threshold value at a low number… so,
any number above the Threshold value, 0, will
pass on from block to block.
If you turn the Threshold Knob up to about 50
percent, you’ll notice that numbers below the
halfway mark don’t appear on the Bar Graph
display. Once numbers from the Distance
Sensor exceed the Threshold value, you’ll
notice that the Bar Graph display will show
values normally.
You can adjust the Threshold Cubelet settings
to create robots that respond suddenly or to
build binary behaviors.
© Modular Robotics, 2016 www.modrobotics.comPage 18
Page 19

19. Using the Bluetooth
The Bluetooth Cubelet is a THINK block with
special abilities. It has a Bluetooth radio
inside that enables devices like a computer,
tablet, or smartphone to communicate
with Cubelets. Using the FREE Cubelets App
you can control your robots with any iOS or
Android device. With the release of Cubelets
OS 4, Modular Robotics periodically releases
firmware updates and new features via the
Bluetooth Cubelet.
http://www.modrobotics.com/cubelets/
bluetooth-getting-started/
http://www.modrobotics.com/
cubelets/apps/cubelets-flash/
20. A Note to Experienced Programmers
Experienced programmers often ask, “So
which block is the IF-THEN block”. Or, “Which
block is the CPU?” We understand the
questions, but that’s not how Cubelets work.
Building robots with Cubelets is different
from the procedural programming (in C, Java,
or BASIC) that you may know. In procedural
programming, a robot’s behavior results
from executing a sequence of instructions
in the robot’s “brain” (usually a single
microcontroller).
Cubelets operate with a completely different
model: distributed programming.
Every Cubelet has a microcontroller.
The robot’s behavior results from local
interactions between Sense, Think, and
Action blocks and the numbers flowing from
block to block.
There’s no single “brain” block, and there’s
no sequence of instructions. There are
no variables, functions, or procedural
logic. Instead, in Cubelets, the robot is
the program. The way you put the blocks
together determines the way numbers
flow from Sense to Action blocks, and this
determines your robot’s behavior.
Need help? Email us!
support@modrobotics.com
© Modular Robotics, 2016 www.modrobotics.comPage 19
 Loading...
Loading...