

Page 1

C
MIT
SUBIS
C
MELSEC System Q
Motion Controller
User's Manual
HI ELECTRI
Art. no.: 143715
01 05 2002
IB(NA)-0300040-B
Q172CPU
Q173CPU
MITSUBISHI ELECTRI
INDUSTRIAL AUTOMATION
Page 2
SAFETY PRECAUTIONS
(Read these precautions before using.)
When using this equipment, thoroughly read this manual and the associated manuals introduced in this
manual. Also pay careful attention to safety and handle the module properly.
These precautions apply only to this equipment. Refer to the Users manual of the CPU module to use for
a description of the PLC system safety precautions.
These SAFETY PRECAUTIONS classify the safety precautions int o two cat egories: "DANG ER" and
"CAUTION".
DANGER
!
CAUTION
!
Depending on circumstances, procedures indicated by ! CAUTION may also be linked to serious
results.
In any case, it is important to follow the directions for usage.
Store this manual in a safe place so that you can take it out and read it whenever necessary . Alw ay s
forward it to the end user.
Indicates that incorrect handling may cause hazardous conditions,
resulting in death or severe injury.
Indicates that incorrect handling may cause hazardous conditions,
resulting in medium or slight personal injury or physical damage.
A - 1
Page 3
For Safe Operations
1. Prevention of electric shocks
!
DANGER
Never open the front case or terminal covers while the power is ON or the unit is running, as
this may lead to electric shocks.
Never run the unit with the front case or terminal cover removed. The high v oltage t erminal and
charged sections will be exposed and may lead to electric shocks.
Never open the front case or terminal cover at times other than wiring work or periodic
inspections even if the power is OFF. The insides of the Motion controller and servo amplifier
are charged and may lead to electric shocks.
When performing wiring work or inspections, turn the power OFF, wait at least ten minutes, and
then check the voltage with a tester, et c.. Failing t o do so may lead to electr ic shocks.
Be sure to ground the Motion controller, servo amplifier and servomotor. (Ground resistance :
or less) Do not ground commonly with other devices.
100
The wiring work and inspections must be done by a qualified technician.
Wire the units after installing the Motion controller, servo amplifier and serv omotor. Failing to do
so may lead to electric shocks or damage.
Never operate the switches with wet hands, as this may lead t o electric shocks.
Do not damage, apply excessive stress, place heavy things on or sandwich t he cables, as t his
may lead to electric shocks.
Do not touch the Motion controller, servo amplifier or servomotor terminal blocks while the
power is ON, as this may lead to electric shocks.
Do not touch the internal power supply, internal grounding or signal wires of the Mot ion
controller and servo amplifier, as this may lead to electric shocks.
2. For fire prevention
!
CAUTION
Install the Motion controller, servo amplifier, servomotor and regenerative resist or on
inflammable material. Direct installation on flammable material or near flammable material may
lead to fires.
If a fault occurs in the Motion controller or servo amplifier, shut the power OFF at the servo
amplifier’s power source. If a large current continues to flow, fires may occur.
When using a regenerative resistor, shut the power OFF with an error signal. The regenerative
resistor may abnormally overheat due to a fault in the regenerative t ransistor, etc., and may
lead to fires.
Always take heat measures such as flame proofing for the inside of the control panel where
the servo amplifier or regenerativ e resistor is installed and for t he wires used. Failing to do so
may lead to fires.
A - 2
Page 4
3. For injury prevention
!
CAUTION
Do not apply a voltage other than that specified in the instruction manual on any terminal.
Doing so may lead to destruction or damage.
Do not mistake the terminal connections, as this may lead to destruction or damage.
Do not mistake the polarity ( + / - ), as this may lead to destruction or damage.
Do not touch the servo amplifier's heat radiating fins, regenerative resistor and servomotor, et c.,
while the power is ON and for a short time after the power is turned OFF. In this timing, these
parts become very hot and may lead to burns.
Always turn the power OFF before touching the servomotor shaft or coupled machines, as
these parts may lead to injuries.
Do not go near the machine during test operations or during operations such as teaching.
Doing so may lead to injuries.
4. Various precautions
Strictly observe the following precautions.
Mistaken handling of the unit may lead to faults, injuries or electric shocks.
(1) System structure
!
CAUTION
Always install a leakage breaker on the Motion controller and servo amplifier power source.
If installation of a magnetic contactor for power shut off during an error, etc., is specified in the
instruction manual for the servo amplifier, etc., always install the magnetic cont actor.
Install the emergency stop circuit externally so that the operat ion can be stopped immediately
and the power shut off.
Use the Motion controller, servo amplifier, servomotor and regenerative resistor with t he combi-
nations listed in the instruction manual. Other combinations may lead to fires or faults.
If safety standards (ex., robot safety rules, etc., ) apply to the sy stem using the Motion cont roller,
servo amplifier and servomotor, make sure that the safety standards are satisfied.
Construct a safety circuit externally of the Motion controller or serv o amplifier if the abnormal
operation of the Motion controller or servo amplifier differ from the safety directive operation in
the system.
In systems where coasting of the serv omotor w ill be a problem during t he emergency stop, the
forced stop, servo OFF or when the power is shut OFF, use dy namic brakes.
Make sure that the system considers the coasting amount even when using dynamic brakes.
A - 3
Page 5
!
CAUTION
In systems where perpendicular shaft dropping may be a problem during the emergency stop,
the forced stop and servo OFF or when the power is shut OFF, use bot h dynamic brakes and
magnetic brakes.
The dynamic brakes must be used only during the emergency stop, the forced stop and errors
where servo OFF occurs. These brakes must not be used for normal braking.
The brakes (magnetic brakes) assembled into the servomotor are for holding applications, and
must not be used for normal braking.
The system must have a mechanical allowance so that the machine itself can stop even if the
stroke limits switch is passed through at the max. speed.
Use wires and cables that have a wire diameter, heat resistance and bending resistance
compatible with the system.
Use wires and cables within the length of the range described in the instruction manual.
The ratings and characteristics of the parts (other than Motion controller, servo amplifier and
servomotor) used in a system must be compatible with the Motion controller, servo amplifier
and servomotor.
Install a cover on the shaft so that the rotary part s of the servomotor are not t ouched during
operation.
There may be some cases where holding by the magnetic brakes is not possible due to the
life or mechanical structure (when the ball screw and servomotor are connected with a timing
belt, etc.). Install a stopping device t o ensure safety on the machine side.
(2) Parameter settings and prog r amming
!
CAUTION
Set the parameter values to those that are compatible with the Motion cont roller, serv o amplifier,
servomotor and regenerative resistor model and the system application. The protect ive functions
may not function if the settings are incorrect.
The regenerative resistor model and capacity parameters must be set to values that conform to
the operation mode, servo amplifier and servo power supply module. The protective functions
may not function if the settings are incorrect.
Set the mechanical brake output and dynamic brake output validity parameters to v alues that
are compatible with the system application. The protective functions may not function if the
settings are incorrect.
Set the stroke limit input validity parameter to a v alue that is compatible with t he sy stem
application. The protective functions may not function if the setting is incorrect.
A - 4
Page 6
!
CAUTION
Set the servomotor encoder type (increment, absolute position ty pe, et c.) parameter to a v alue
that is compatible with the system application. The protect ive functions may not function if the
setting is incorrect.
Set the servomotor capacity and type (standard, low-inert ia, flat, etc.) parameter t o values t hat
are compatible with the system application. The protective functions may not function if the
settings are incorrect.
Set the servo amplifier capacity and type parameters to v alues that are compatible w ith the
system application. The protective functions may not function if the settings are incorrect.
Use the program commands for the program with the conditions specified in the instruction
manual.
Set the sequence function program capacity setting, device capacity, latch validity range, I/O
assignment setting, and validity of continuous operation during error detection to v alues t hat are
compatible with the system application. The protective functions may not function if the settings
are incorrect.
Some devices used in the program have fixed applications, so use these with the conditions
specified in the instruction manual.
The input devices and data registers assigned to the link will hold the dat a prev ious to w hen
communication is terminated by an error, etc. Thus, an error correspondence interlock program
specified in the instruction manual must be used.
Use the interlock program specified in the special function module's instruction manual for the
program corresponding to the special function module.
(3) Transportation and installation
!
CAUTION
Transport the product with the correct method according to the weight.
Use the servomotor suspension bolts only for the transportation of the servomotor. Do not
transport the servomotor with machine installed on it.
Do not stack products past the limit. When transporting the Motion controller or servo amplifier,
never hold the connected wires or cables.
When transporting the servomotor, never hold the cables, shaft or detector.
When transporting the Motion controller or servo amplifier, never hold the front case as it may
fall off.
When transporting, installing or removing the Motion controller or serv o amplifier, nev er hold
the edges.
Install the unit according to the instruction manual in a place where the w eight can be wit hstood.
A - 5
Page 7
!
CAUTION
Do not get on or place heavy objects on the product.
Always observe the installation direction.
Keep the designated clearance between the Motion controller or servo amplifier and control
panel inner surface or the Motion controller and servo amplifier, Motion controller or servo
amplifier and other devices.
Do not install or operate Motion controller, servo amplifiers or servomotors that are damaged or
that have missing parts.
Do not block the intake/outtake ports of the servomotor with cooling fan.
Do not allow conductive matter such as screw or cutting chips or combustible matter such as oil
enter the Motion controller, servo amplifier or servomotor.
The Motion controller, servo amplifier and servomotor are precision machines, so do not drop
or apply strong impacts on them.
Securely fix the Motion controller and servo amplifier to the machine according to the instruction
manual. If the fixing is insufficient, these may come off during operation.
Always install the servomotor with r eduction gears in the designat ed direct ion. Failing to do so
may lead to oil leaks.
Store and use the unit in the following environmental conditions.
Environment
Ambient
temperature
Ambient humidity
Storage
temperature
Atmosphere
Altitude
Vibration
Motion controller/Servo amplifier Servomotor
According to each instruction manual.
According to each instruction manual.
According to each instruction manual.
Indoors (where not subject to direct sunlight).
No corrosive gases, flammable gases, oil mist or dust must exist
1000m (3278.69ft.) or less above sea level
According to each instruction manual
Conditions
0°C to +40°C (With no freezing)
(32°F to +104°F)
80% RH or less
(With no dew condensation)
-20°C to +65°C
(-4°F to +149°F)
When coupling with the synchronization encoder or servomotor shaft end, do not apply impact
such as by hitting with a hammer. Doing so may lead to detector damage.
Do not apply a load larger than the tolerable load onto the servomotor shaft. Doing so may lead
to shaft breakage.
When not using the module for a long time, disconnect the power line from the Motion controller
or servo amplifier.
Place the Motion controller and servo amplifier in static electricity prev enting v inyl bags and
store.
When storing for a long time, please contact with our sales representative.
A - 6
Page 8
(4) Wiring
!
CAUTION
Correctly and securely wire the wires. Reconfirm the connections for mistakes and the terminal
screws for tightness after wiring. Failing to do so may lead to run away of the
servomotor.
After wiring, install the protective covers such as the t erminal covers t o the original positions.
Do not install a phase advancing capacitor, surge absorber or radio noise filter (option FR-BIF)
on the output side of the servo amplifier.
Correctly connect the output side ( terminals U, V, W). Incorrect connections will lead t he
servomotor to operate abnormally.
Do not connect a commercial power supply to the servomotor, as this may lead t o trouble.
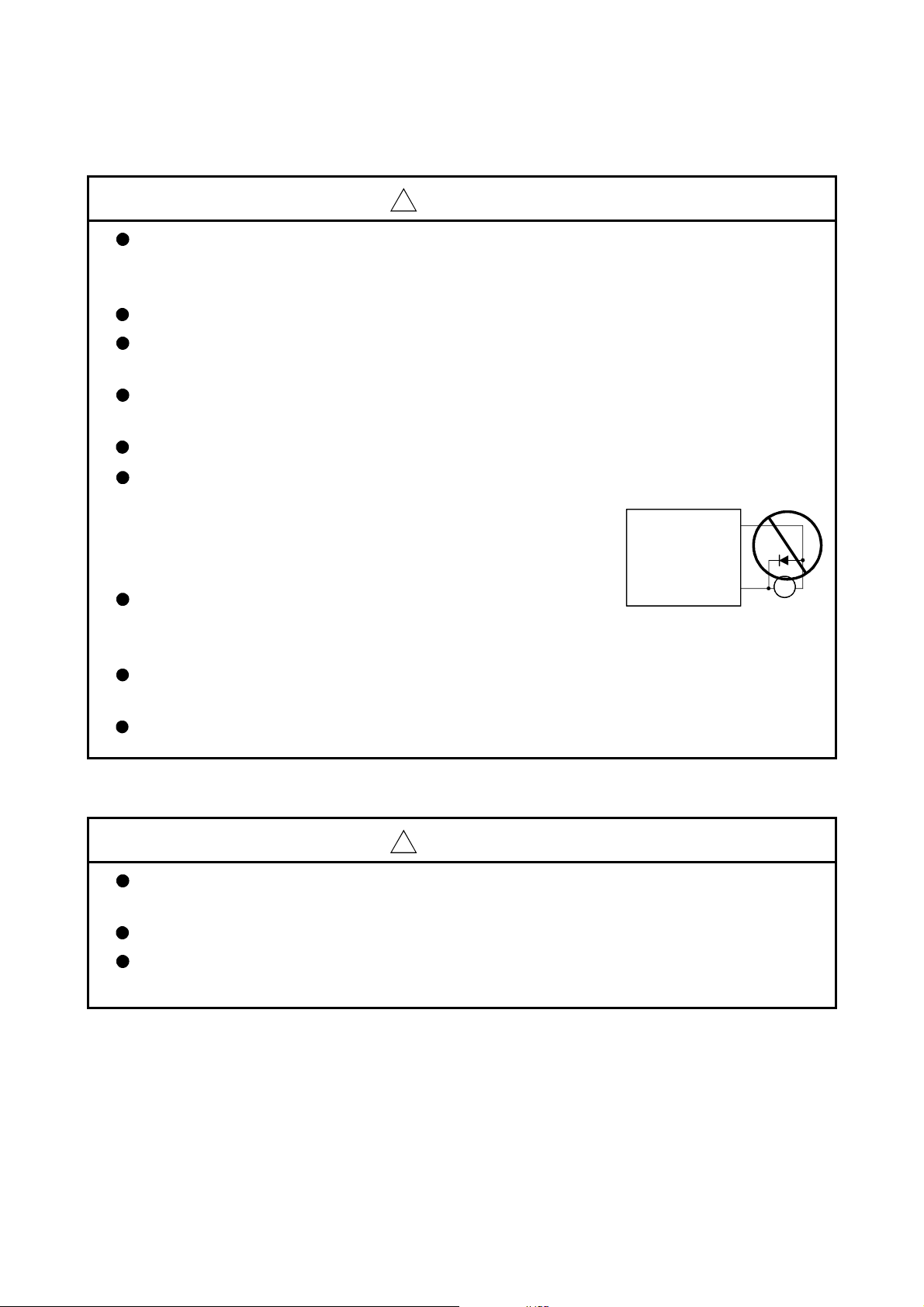
Do not mistake the direction of the surge absorbing diode
installed on the DC relay for the control signal output of
brake signals, etc. Incorrect installation may lead to signals
not being output when trouble occurs or the protective
functions not functioning.
Do not connect or disconnect the connection cables between
each unit, the encoder cable or PLC expansion cable while the
power is ON.
Servo amplifier
VIN
(24VDC)
Controll output
signal
RA
Securely tighten the cable connector fixing screws and fixing mechanisms. Insufficient fixing
may lead to the cables combing off during operation.
Do not bundle the power line or cables.
(5) Trial operation and adjustment
!
CAUTION
Confirm and adjust the program and each parameter before operation. Unpredictable
movements may occur depending on the machine.
Extreme adjustments and changes may lead to unstable operation, so never make them.
When using the absolute position system function, on starting up, and when the Motion
controller or absolute value motor has been replaced, always perform a home position return.
A - 7
Page 9
Conditions
(6) Usage methods
!
CAUTION
Immediately turn OFF the power if smoke, abnormal sounds or odors are emitted from the
Motion controller, servo amplifier or servomotor.
Always execute a test operation before starting actual operations after the program or
parameters have been changed or after maintenance and inspection.
The units must be disassembled and repaired by a qualified technician.
Do not make any modifications to the unit.
Keep the effect or magnetic obstacles to a minimum by inst alling a noise filter or by using wire
shields, etc. Magnetic obstacles may affect the electronic devices used near t he Motion
controller or servo amplifier.
When using the CE Mark-compliant equipment, refer to the "EMC Installation Guidelines"
(data number IB(NA)-67339) for the Motion controllers and refer to the corresponding EMC
guideline information for the servo amplifiers, inverters and other equipment.
Use the units with the following conditions.
Item
Input power
Input frequency 50/60Hz ±5%
Tolerable momentary
power failure
Q61P-A1 Q61P-A2 Q63P Q64P
100 to 120VAC
(85 to 132VAC) (170 to 264VAC) (15.6 to 31.2VDC)
+10% +10% +30% +10%
200 to 240VAC
-15%
-15%
20ms or less
24VDC
-35%
100 to 120VAC
200 to 240VAC
(85 to 132VAC/
170 to 264VAC)
(7) Corrective actions for errors
!
CAUTION
If an error occurs in the self diagnosis of the Motion controller or servo amplifier, confirm the
check details according to the instruction manual, and restore the operation.
If a dangerous state is predicted in case of a power failure or product failure, use a servomotor
with magnetic brakes or install a brake mechanism externally.
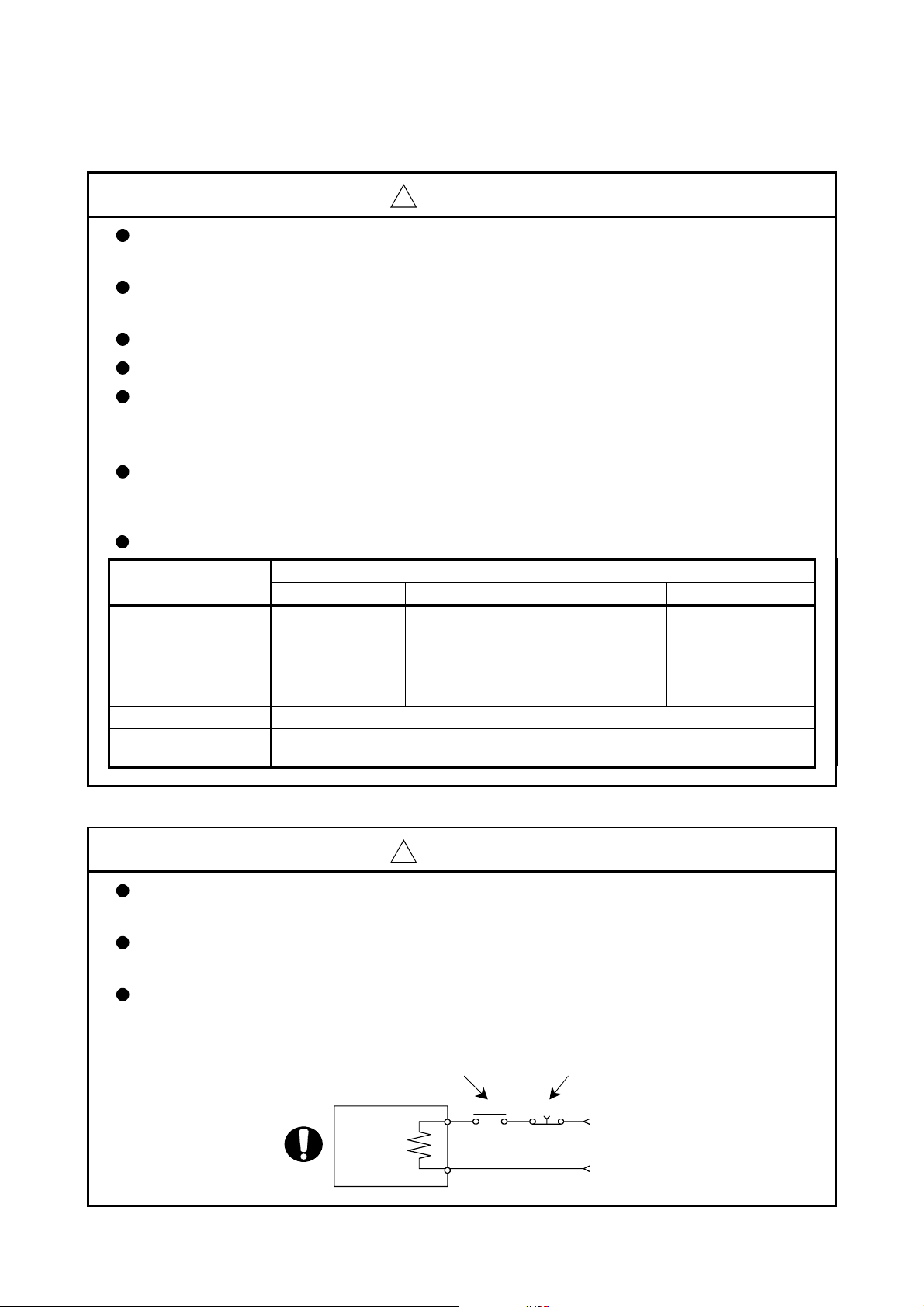
Use a double circuit construction so that the magnetic brake operation circuit can be operated
by emergency stop signals set externally.
Shut off w ith the
Shot off with servo ON signal OFF,
alarm,magnetic brake signal.
emergency stop
signal(EMG).
-15%
+10%
-15%
/
Servo motor
Magnetic
brakes
A - 8
RA1
EMG
24VDC
Page 10
!
CAUTION
If an error occurs, remove the cause, secure the safety and then resume operation after alarm
seleasl.
The unit may suddenly resume operation after a power failure is restored, so do not go near the
machine. (Design the machine so that personal safety can be ensured even if the machine
restarts suddenly.)
(8) Maintenance, inspection and part replacement
!
CAUTION
Perform the daily and periodic inspections according to the instruction manual.
Perform maintenance and inspection after backing up the program and parameters for the
Motion controller and servo amplifier.
Do not place fingers or hands in the clearance when opening or closing any opening.
Periodically replace consumable parts such as batteries according to the instruction manual.
Do not touch the lead sections such as ICs or the connector contacts.
Do not place the Motion controller or servo amplifier on metal that may cause a power leakage
or wood, plastic or vinyl that may cause st atic electr icity buildup.
Do not perform a megger test (insulation resistance measurement) during inspection.
When replacing the Motion controller or servo amplifier, always set the new module settings
correctly.
When the Motion controller or absolute value motor has been replaced, carry out a home
position return operation using one of the following methods, otherwise position displacement
could occur.
1) After writing the servo data to the Motion controller using programming software, switch on
the power again, then perform a home position return operation.
2) Using the backup function of the programming software, load the data backed up before
replacement.
After maintenance and inspections are completed, confirm that the position detection of the
absolute position detector function is correct.
Do not short circuit, charge, overheat, incinerate or disassemble the batt eries.
The electrolytic capacitor will generate gas dur ing a fault, so do not place y our face near t he
Motion controller or servo amplifier.
The electrolytic capacitor and fan will deter iorate. Periodically replace these t o prev ent
secondary damage from faults. Replacements can be made by our sales representative.
A - 9
Page 11
(9) Disposal
!
CAUTION
Dispose of the product as general industrial waste.
Do not disassemble the parts of the Motion controller, servo amplifier or servomotor.
Dispose of the battery according to local laws and regulations.
(10) General cautions
!
CAUTION
All drawings provided in the instruction manual show the state w ith the cov ers and safety
partitions removed to explain detailed sections. When operating the product, always return the
covers and partitions to the designated positions, and operate according to the inst ruction
manual.
A - 10
Page 12
REVISIONS
The manual number is given on the bottom left of the back cover.
Print Date Manual Number Revision
Nov., 2001 IB(NA)-0300040-A First edition
May., 2002 IB(NA)-0300040-B
[Addition model]
Q173CPUN/Q172CPUN, MR-J2M-B, A10BD-PCF
[Addition function]
•
For Windows 2000
•
ROM operation
•
MODE LED Installation mode/ROM writing mode
•
BOOT LED Installation mode/ROM writing mode
[Partial correction]
Japanese Manual Number IB(NA)-0300021
This manual confers no industrial property rights or any rights of any other kind, nor does it confer any patent
licenses. Mitsubishi Electric Corporation cannot be held responsible for any problems involving industrial property
rights which may occur as a result of using the contents noted in this manual.
© 2001 MITSUBISHI ELECTRIC CORPORATION
A - 11
Page 13
INTRODUCTION
Thank you for choosing the Q173CPU(N)/Q172CPU(N) Motion Controller.
Please read this manual carefully so that equipment is used to its optimum.
CONTENTS
Safety Precautions.........................................................................................................................................A- 1
Revisions ........................................................................................................................................................A-11
Contents .........................................................................................................................................................A-12
About Manuals ...............................................................................................................................................A-15
1. OVERVIEW 1- 1 to 1- 2
1.1 Overview...................................................................................................................................................1- 1
2. SYSTEM CONFIGURATION 2- 1 to 2-70
2.1 Motion System Configuration ..................................................................................................................2- 1
2.1.1 Q173CPU(N) System overall configuration...................................................................................... 2- 8
2.1.2 Q172CPU(N) System overall configuration...................................................................................... 2- 9
2.1.3 Function explanation of the Q173CPU(N)/Q172CPU(N) Motion CPU modules ............................2-10
2.1.4 Restrictions on motion systems........................................................................................................2-11
2.2 System Configuration Equipment............................................................................................................ 2-13
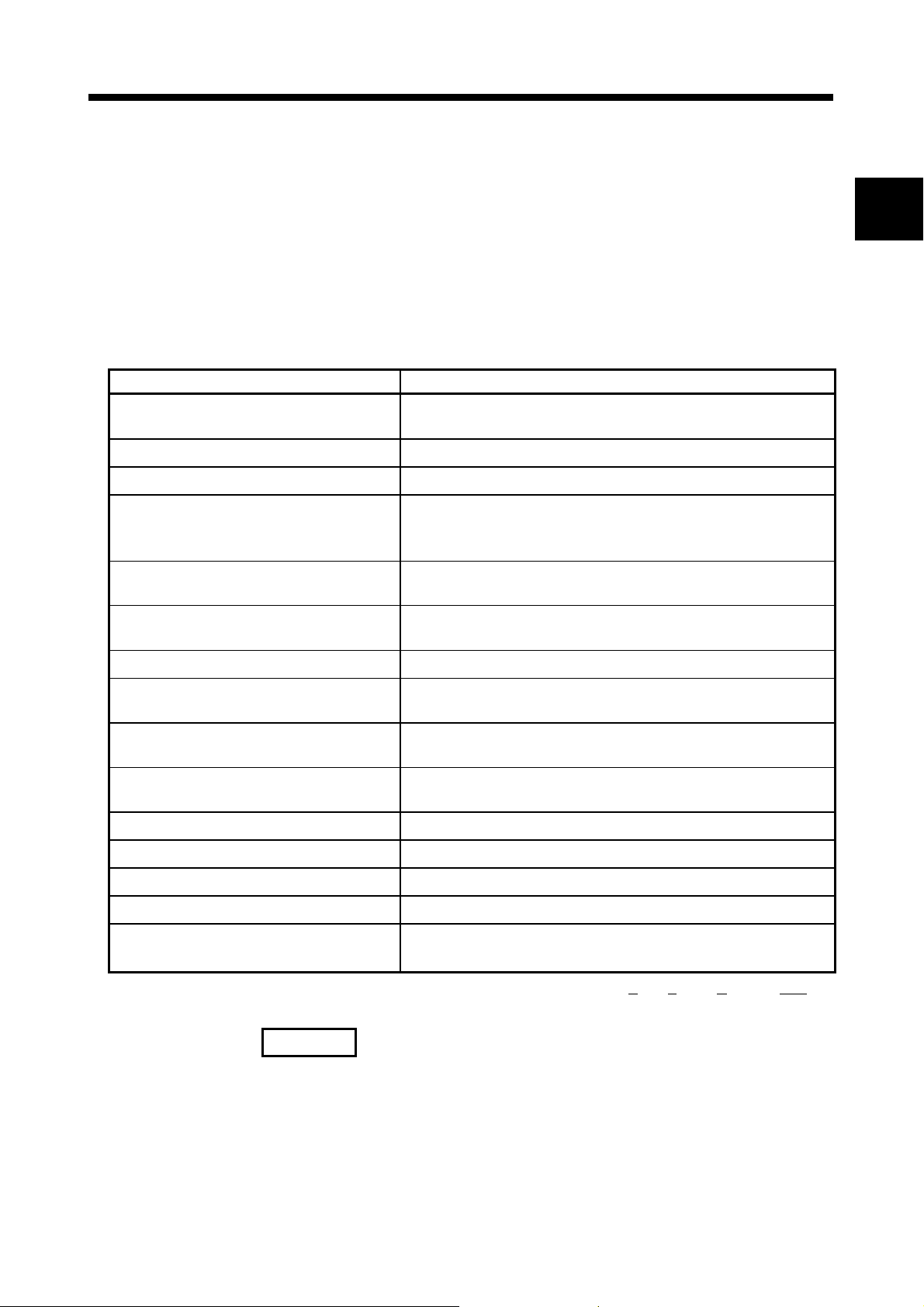
2.3 General Specifications.............................................................................................................................2-20
2.4 Specifications of Equipment and Settings...............................................................................................2-22
2.4.1 Q173CPU(N)/Q172CPU(N)..............................................................................................................2-22
2.4.2 Power supply module........................................................................................................................2-28
2.4.3 Base unit and extension cable..........................................................................................................2-34
2.4.4 Q172LX Servo external signals interface module............................................................................2-37
2.4.5 Q172EX Serial absolute synchronous encoder interface module................................................... 2-42
2.4.6 Q173PX Manual pulse generator interface module.........................................................................2-49
2.4.7 Manual pulse generator/Serial absolute synchronous encoder ......................................................2-56
2.4.8 Connection method with SSCNET cables and termination connector............................................2-57
2.4.9 External battery .................................................................................................................................2-67
2.4.10 Cooling fan unit (Q170FAN) (Q173CPU/Q172CPU only).............................................................2-69
3. DESIGN 3- 1 to 3-16
3.1 System Designing Procedure..................................................................................................................3- 1
3.2 External Circuit Design ............................................................................................................................3- 4
3.2.1 Power supply circuit design .............................................................................................................. 3- 8
3.2.2 Safety circuit design ..........................................................................................................................3- 9
3.3 Layout Design within The Control Panel.................................................................................................3-11
3.3.1 Installation environment....................................................................................................................3-11
3.3.2 Layout design of the base units........................................................................................................3-12
3.3.3 Calculating heat generation by Motion controller.............................................................................3-13
3.4 Design Checklist ......................................................................................................................................3-16
A - 12
Page 14
4. INSTALLATION AND WIRING 4- 1 to 4-16
4.1 Module Installation ...................................................................................................................................4- 1
4.1.1 Instructions for handling....................................................................................................................4- 1
4.1.2 Instructions for installation of the base unit ...................................................................................... 4- 3
4.1.3 Installation and removal of module...................................................................................................4- 5
4.2 Installation and Removal of Cable........................................................................................................... 4- 7
4.2.1 Installation and removal of the SSCNET cable................................................................................4- 7
4.2.2 2 Installation and removal of the battery cable.................................................................................4- 8
4.3 Installation of the Serial Absolute Synchronous Encoder....................................................................... 4- 9
4.4 Replacement of the Cooling fan unit (Q170FAN) (Q173CPU/Q172CPU only).....................................4-11
4.5 Wiring........................................................................................................................................................4-12
4.5.1 Instructions for wiring ........................................................................................................................4-12
4.5.2 Wiring to the power supply module ..................................................................................................4-15
4.6 Installation/Wiring Checklist.....................................................................................................................4-16
5. TRIAL RUN AND ADJUSTMENT 5- 1 to 5- 8
5.1 Checklist before Trial Operation..............................................................................................................5- 1
5.2 Trial Run and Adjustment Procedure ...................................................................................................... 5- 2
5.3 Operating System Installation Procedure................................................................................................5- 7
5.4 Trial Run and Adjustment Checklist ........................................................................................................5- 8
6. INSPECTION AND MAINTENANCE 6- 1 to 6-26
6.1 Maintenance Works ................................................................................................................................. 6- 2
6.1.1 Inspection and maintenance.............................................................................................................6- 2
6.2 Daily Inspection........................................................................................................................................6- 4
6.3 Periodic Inspection...................................................................................................................................6- 6
6.4 External Battery........................................................................................................................................6- 7
6.4.1 Battery service life time.....................................................................................................................6- 8
6.4.2 Battery replacement procedure ........................................................................................................6- 9
6.5 Troubleshooting .......................................................................................................................................6-11
6.5.1 Basics of troubleshooting..................................................................................................................6-11
6.5.2 Troubleshooting of Motion CPU module and I/O modules..............................................................6-12
6.5.3 I/O modules troubleshooting.............................................................................................................6-22
6.6 Error Code................................................................................................................................................6-25
6.6.1 Procedure for reading error codes....................................................................................................6-25
A - 13
Page 15
APPENDICES App- 1 to App-23
APPENDIX 1 Cables..................................................................................................................................App- 1
APPENDIX 1.1 SSCNET cables............................................................................................................App- 1
APPENDIX 1.2 Serial absolute synchronous encoder cable................................................................App-11
APPENDIX 2 Exterior Dimensions Diagram.............................................................................................App-13
APPENDIX 2.1 CPU module .................................................................................................................App-13
APPENDIX 2.2 Servo external signals interface module (Q172LX) ....................................................App-16
APPENDIX 2.3 Serial absolute synchronous encoder interface module (Q172EX) ...........................App-16
APPENDIX 2.4 Manual pulse generator interface module (Q173PX) .................................................App-17
APPENDIX 2.5 Power supply module (Q61P-A1, Q61P-A2, Q63P, Q64P)........................................App-18
APPENDIX 2.6 Dividing unit (Q173DV), Battery unit (Q170BAT)........................................................App-19
APPENDIX 2.7 Connector .....................................................................................................................App-20
APPENDIX 2.8 Manual pulse generator (MR-HDP01).........................................................................App-22
APPENDIX 2.9 Serial absolute synchronous encoder (MR-HENC) ....................................................App-22
APPENDIX 2.10 Cooling fan unit (Q170FAN) (Q173CPU/Q172CPU only) ........................................App-23
A - 14
Page 16
About Manuals
This manual is only to explain hardware of the Motion controller.
The following manuals are related to this product.
Referring to this list, please request the necessary manuals.
This User's Manual do not describes hardware specification and handling methods of the PLC CPU
modules, power supply modules, base unit and I/O module in details.
The above contents, refer to the QCPU (Q Mode) User's Manual and Building Block I/O Module User's
Manual.
Related Manuals
Manual Name
Q173CPU/Q172CPU Motion controller (SV13/SV22) Programming M anual (Real)
This manual explains the servo parameter, positioning instructions, device list and error list.
(Optional)
Manual Number
(Model Code)
IB-0300043
(1CT782)
Q173CPU/Q172CPU Motion controller (SV22) Programming M anual (Virtual)
This manual describes the dedicated instructions use to the synchronous control by virtual main shaft,
mechanical system program create mechanical module.
This manual explains the servo parameter, positioning instructions, device list and error list.
(Optional)
Q173CPU/Q172CPU Motion controller (SV13/SV22) Programming M anual (Motion SFC)
Software of Motion CPU
This manual explains the Multiple CPU system configuration, performance specifications, functions,
programming, debugging and error codes.
(Optional)
QCPU (Q Mode) User's M anual (Function Explanation/Program Fundamentals)
This manual explains the functions, programming methods and devices and so on necessary to create
programs with the QCPU (Q mode). (Optional)
QCPU (Q Mode)/QnA Programming M anual (Common Instructions)
This manual describes how to use the sequence instructions, basic instructions, application instructions
and micro computer program. (Optional)
QCPU (Q Mode)/QnA Programming M anual (PID Control)
This manual describes the dedicated instructions used to exercise PID control. (Optional)
Software of PLC
QCPU (Q Mode)/QnA Programming M anual (SFC)
This manual explains the system configuration, performance specifications, functions, programming,
debugging, error codes and others of MELSAP3. (Optional)
IB-0300044
(1CT783)
IB-0300042
(1CT781)
SH-080038
(13JL98)
SH-080039
(13JF58)
SH-080040
(13JF59)
SH-080041
(13JF60)
QCPU (Q Mode) User's M anual (Hard ware Design/Maintenance and inspection)
This manual provides the specifications of the CPU modules, power supply modules, base modules,
extension cables, memory cards and others. (Optional)
Building Block I/O Module User's Manual
This manual provides the specifications of the I/O modules, connector, connector/terminal block
Hardware of PLC
conversion modules and others. (Optional)
A - 15
SH-080037
(13Jl97)
SH-080042
(13JL99)
Page 17
MEMO
A - 16
Page 18
1 OVERVIEW
1. OVERVIEW
1.1 Overview
This User's Manual describes the hardware specifications and handling methods of the
Motion Controller's Model Q173CPU(N)/Q172CPU(N) for the Q series PLC Multiple
CPU system.
The Manual also describes those items related to the specifications of the option
module for the Motion controller, Manual pulse generator, Synchronous encoder, and
cable.
Generic term/ Abbreviation Description
Q173CPU(N)/Q172CPU(N), Motion CPU or
Motion CPU module
MR-H-BN or Servo amplifier Servo amplifier model MR-H!BN
MR-J2!-B or Servo amplifier Servo amplifier model MR-J2S-!B/MR-J2M-B/MR-J2-!B/MR-J2-03B5
Q172LX/Q172EX/Q173PX or
Motion module
QCPU, PLC CPU or
PLC CPU module
Multiple CPU system or
Motion system
Programming S/W package SW6RN-GSV!P and GX Developer software package
Manual pulse generator or
MR-HDP01
Serial absolute synchronous encoder or
MR-HENC
SSCNET
Cooling fan unit Cooling fan unit (Q170FAN)
(Note)
In this manual, the following abbreviations are used.
Q173CPUN/Q172CPUN/Q173CPU/Q 172CPU Motion CPU module
Q172LX Servo external signals interface module/
Q172EX Serial absolute synchronous encoder interface module/
Q173PX Manual pulse generator interface module
Qn(H)CPU
General name for Multiple PLC system of the Q series
General name for Manual pulse generator (MR-HDP 01)
General name for Serial absolute synchronous encoder (MR-HENC)
High speed synchronous communication network between M otion
controller and servo amplifier.
1
Dividing unit Dividing unit (Q173DV)
Battery unit Battery unit (Q170BAT)
A!0BD-PCF A10BD-PCF/A30BD-PCF SSC I/F board
Intelligent function module
General name for MELSECNET/H module/Ethernet module/C C-Link
module/Serial communication module
(Note) SSCNET: Servo System Controller NETwork
REMARK
For information about the QCPU, peripheral devices for PLC program creation, I/O
modules and intelligent function module, refer to the manual relevant to each
module. Also, refer to the programming manual of the operating system for
information about creating motion programs, and refer to the help of each software
for information about operation of each programming software package.
1 - 1
Page 19
1 OVERVIEW
MEMO
1 - 2
Page 20
2 SYSTEM CONFIGURATION
2. SYSTEM CONFIGURATION
This section describes the system configuration of the Q173CPU(N)/Q172CPU(N),
2.1 Motion System Configuration
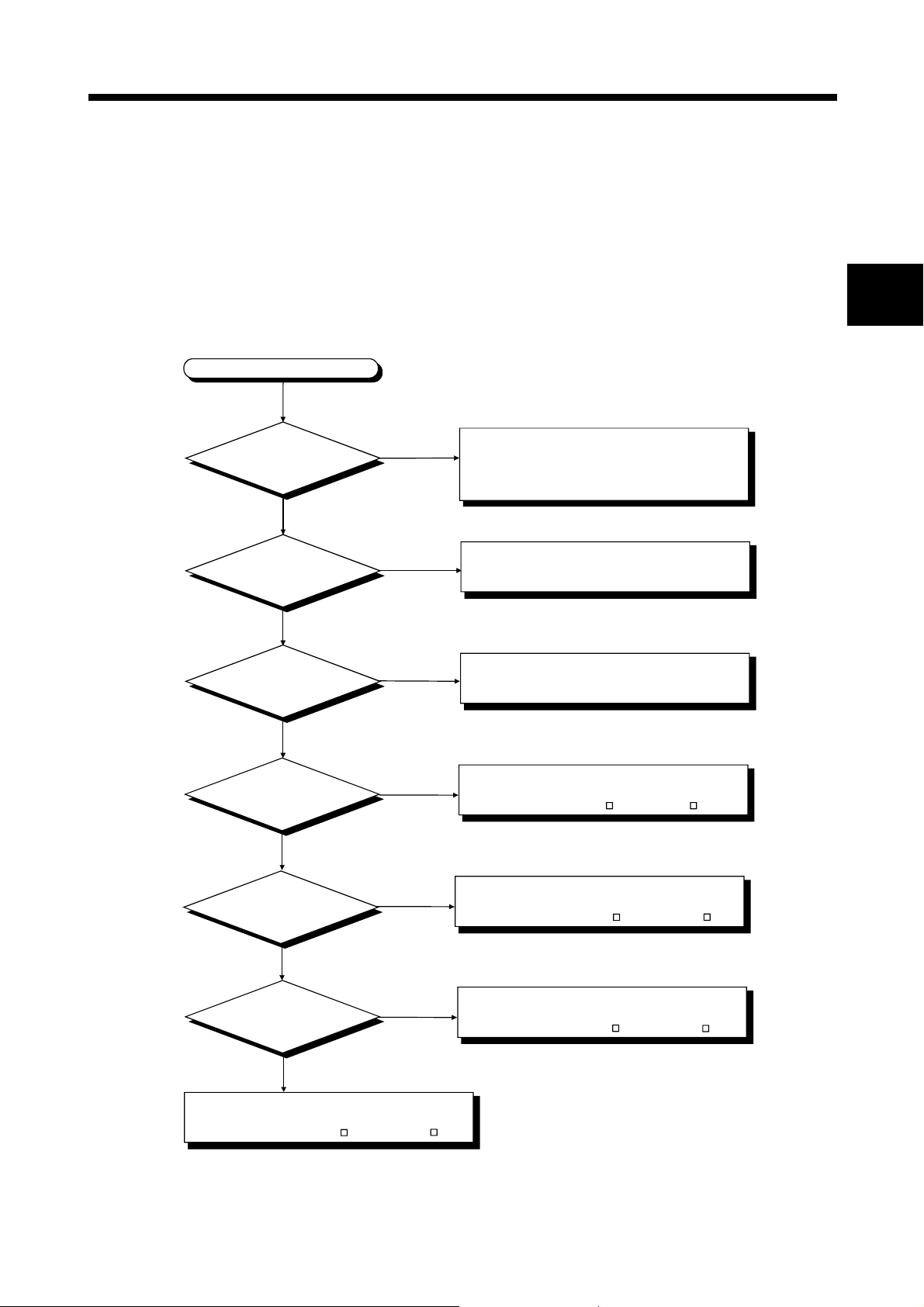
Q173CPU(N) System configuration
(Note)
cautions on use of the system, and configured equipment.
The outline of the equipment configuration, configuration with peripheral devices, and
system configuration in the Q173CPU(N)/Q172CPU(N) system is described below.
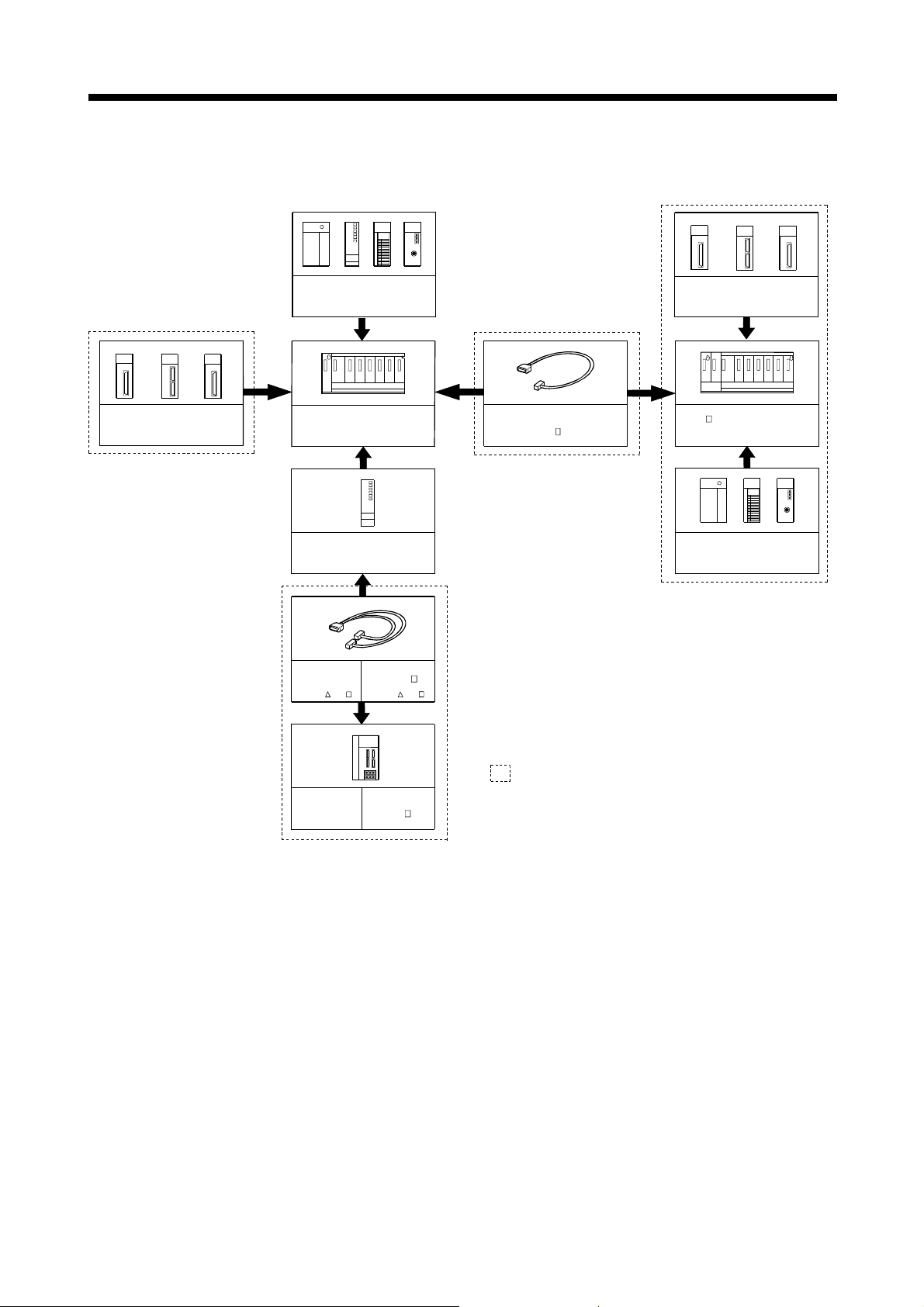
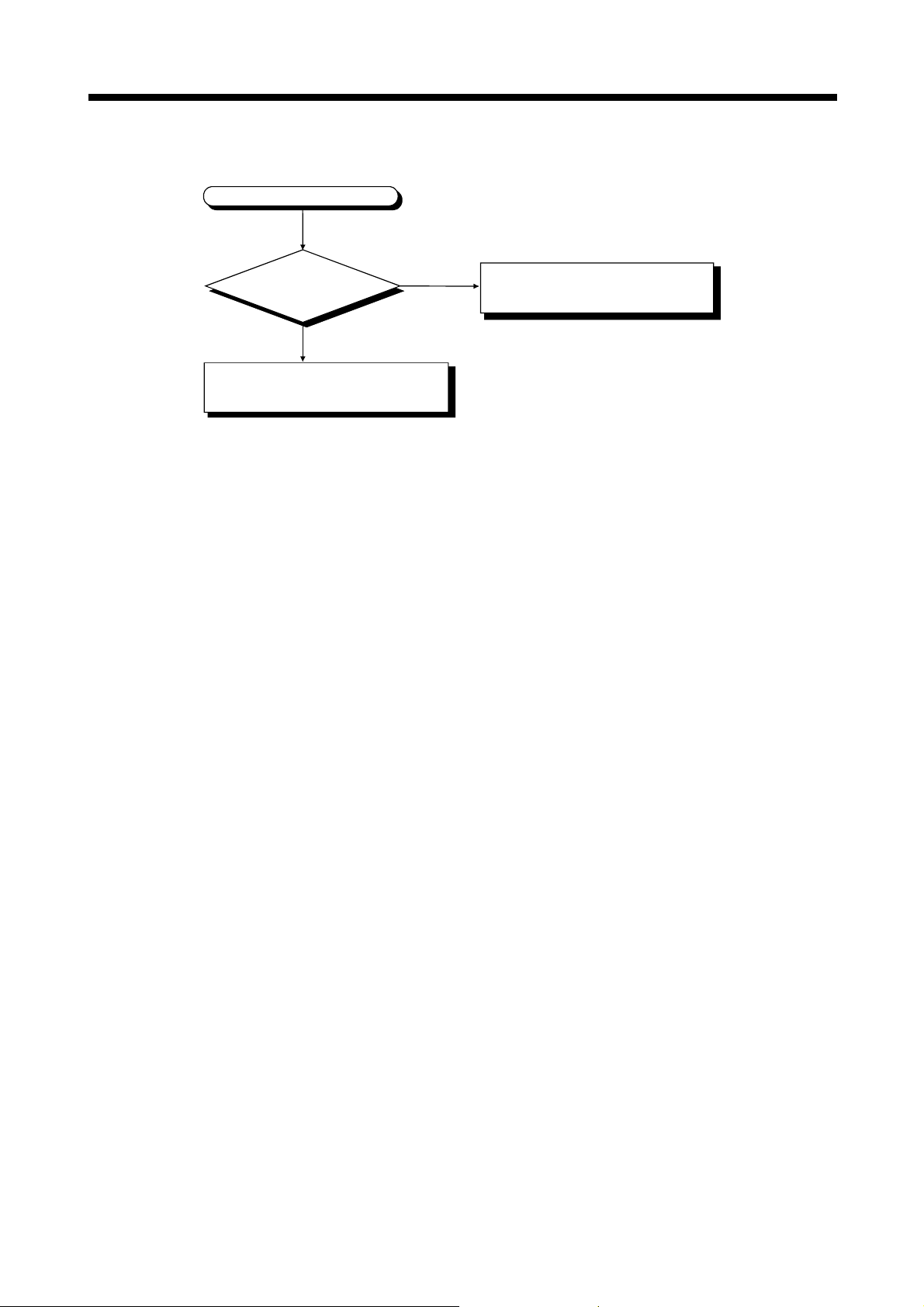
(1) Equipment configuration in Q173CPU ( N) system
Is this system
continuously power off for 1000
hours or more running?
NO
Should the
Dividing unit be used to divide
SSCNET Lines?
YES
YES
Refer to equipment configuration of "(a) When using
the Dividing unit/external battery".
Note : Set the battery (A6BAT/MR-BAT) to the Dividing
unit (Q173DV).
Refer to equipment configuration of "(a) When using
the Dividing unit/external battery".
2
NO
of the amplifier used at 1st axis
Is the type
of each SSCNET line
the same?
YES
Is it possible
to use only 1st
SSCNET Line?
NO
Is it possible
to use 1st and 2nd
SSCNET Line?
NO
Is it possible
to use 1st to 3rd
SSCNET Line?
NO
Refer to equipment configuration of "(b) When using
the Dividing cable".
Note : Use a Q173J2B4CBL M/Q173HB4CBL M.
NO
YES
YES
YES
Refer to equipment configuration of "(a) When using
the Dividing unit/external battery".
Refer to equipment configuration of "(b) when using
the Dividing cable".
Note : Use a Q173J2BCBL M/Q173HBCBL M.
Refer to equipment configuration of "(b) When using
the Dividing cable".
Note : Use a Q173J2B2CBL M/Q173HB2CBL M.
Refer to equipment configuration of "(b) When using
the Dividing cable".
Note : Use a Q173J2B3CBL M/Q173HB3CBL M.
(Note) : Continuous powe r failure time which can be backed up on the internal battery is
different depending on the charge time. It is possible to continuously power off for
1100 hours because of charge of 40 hours. Refer to the section 2.3(5) for details.
2 - 1
Page 21
2 SYSTEM CONFIGURATION
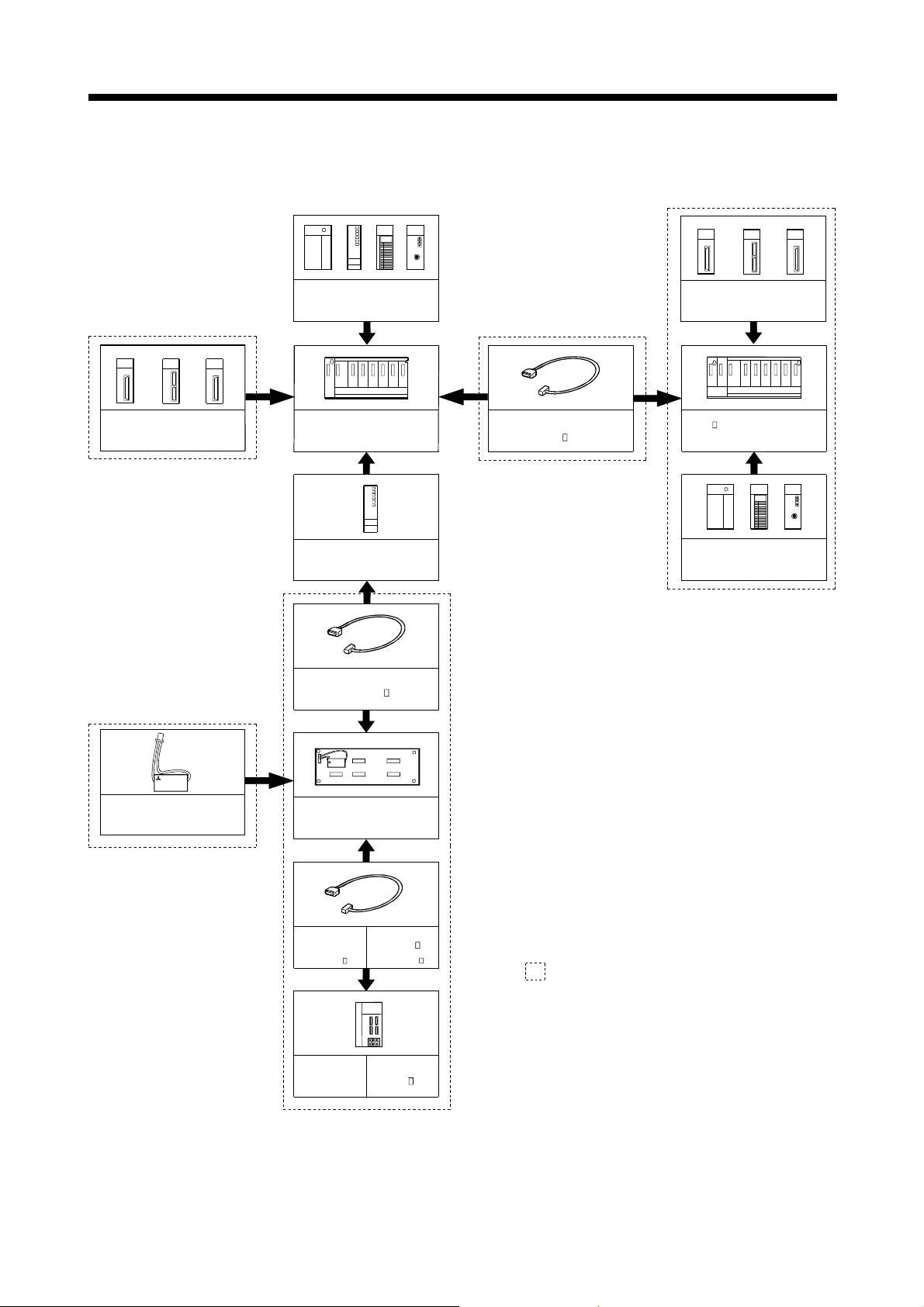
(a) When using the Dividing unit/external batter y
Extension of the Q series module
Motion module
(Q172LX, Q172EX, Q173PX)
(Note)
Power supply module/
Q CPU/ I/O module/ Intelligent
function module of the Q series
CPU base unit
(Q33B, Q35B, Q38B, Q312B)
Motion CPU module
(Q173CPU(N))
SSCNET cable
(Q173DVC BL M)
Extension cable
(QC B)
Motion module
(Q172LX, Q172EX, Q173PX)
Q6 B extension base unit
(Q63B, Q65B, Q68B, Q612B)
Power supply module/
I/O module/Intelligent function
module of the Q series
SSCNET CN1
MITSUBISHI
LITHIUM BATTERY
Battery
(A6BAT/MR-BAT)
MITSUBISHI
LITHIUM BATTE RY
Q173CPU
SSCNET cable
for MR-H-BN
(MR-J2HBUS M-A) (MR-J2HBUS M)
SSCNET CN2
Dividin g u n i t
(Q173DV)
SSCNET cable
for MR-J2 -B
SSCNET CN3
SSCNET CN4
It is possible to select the best according to the system.
MITSUBISHI
(Note) : When using the external battery, be
sure to set the Battery(A6BAT/MR-BAT)
to the Dividing unit(Q173DV).
Battery(A6BAT/MR-BAT) is optional.
Servo amplifier
(MR-H-BN)
Servo amplifier
(MR-J2 -B)
2 - 2
Page 22
2 SYSTEM CONFIGURATION
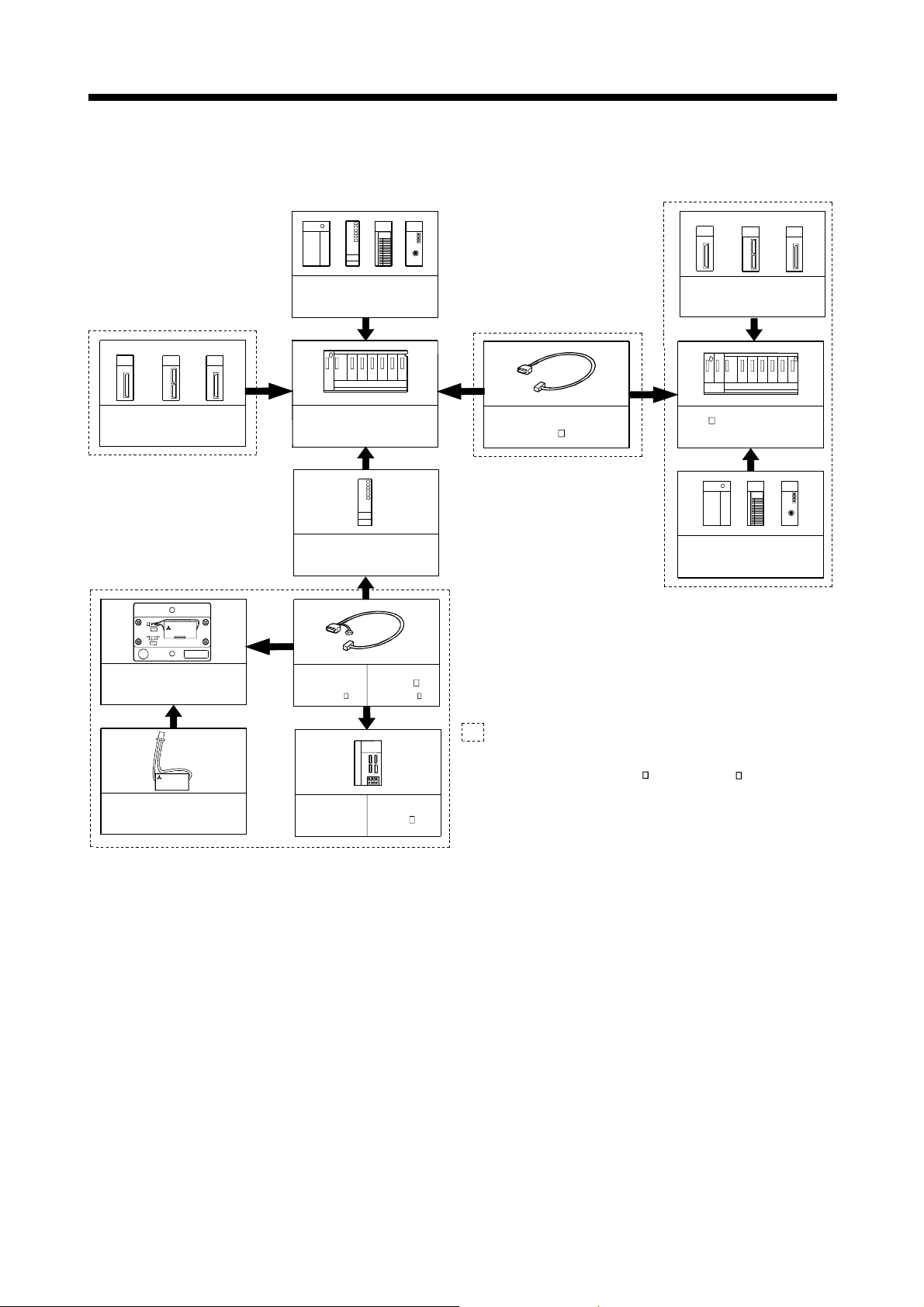
(b) When using the Dividing cable
Extension of the Q series module
Motion module
(Q172LX, Q172EX, Q173 PX)
Power supply module/
Q CPU/ I/O module/ Intelligent
function module of the Q series
CPU base unit
(Q33B, Q35B, Q38B, Q312B)
Motion CPU module
(Q173CPU(N))
SSCNET cable
for MR-H-BN
(Q173HB CBL M)
SSCNET cable
for MR-J2 -B
(Q173J2B CBL M)
(Note)
Extension cable
(QC B)
Motion module
(Q172LX, Q172EX, Q173PX)
Q6 B extension base unit
(Q63B, Q65B, Q68B, Q612B)
Power supply module/
I/O module/Intelligent function
module of the Q series
MITSUBISHI
It is possible to select the best according to the system.
Servo amplifier
(MR-H-BN)
Servo amplifier
(MR-J2 -B)
(Note) : When using the external battery,
be sure to use the Dividing unit(Q173DV).
2 - 3
Page 23
2 SYSTEM CONFIGURATION
(2) Equipment configuration in Q172CPU ( N) system
Q172CPU(N) System configuration
(Note)
Refer to equipment configuration of
"(b) When not using the external battery".
Is this system
continuously power off for 1000
hours or more running?
NO
YES
Refer to equipment configuration of
"(a) When using the external battery".
(Note) : Continuous power off time which can be backed up on the internal
battery is different depending on the charge time. It is possible to
continuously power off for 1100 hours because of charge of 40 hours.
Refer to the section 2.3 (5) for details.
2 - 4
Page 24
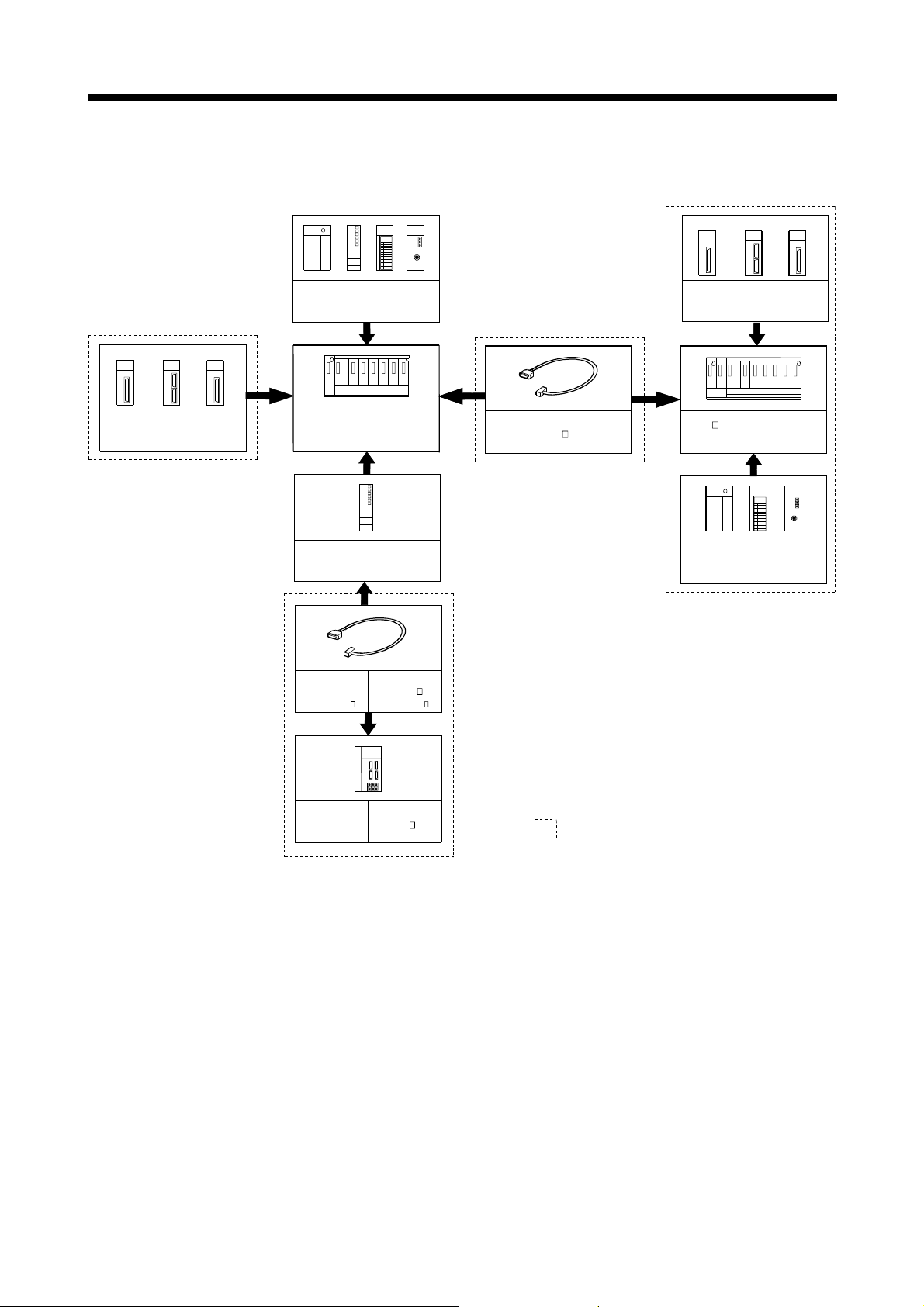
2 SYSTEM CONFIGURATION
(a) When using the external battery
Extension of the Q series module
Motion module
(Q172LX, Q172EX, Q173PX)
(Note)
MITSUBISHI
BAT
LITHIUM BATTERY
CPU
PASSED
Battery unit
(Q170BAT)
Power supply module/
Q CPU/ I/O module/ Intelligent
function module of the Q series
CPU base unit
(Q33B, Q35B, Q38B, Q312B)
Motion CPU module
(Q172CPU(N))
Q17BAT
DATE
SSCNET cable
for MR-H-BN
(Q172HBC BL M-B)
SSCNET cable
for MR-J2 -B
(Q172J2BCBL M-B)
Extension cable
(QC B)
Motion module
(Q172LX, Q172EX, Q173PX)
Q6 B extension base unit
(Q63B, Q65B, Q68B, Q612B)
Power supply module/
I/O module/Intelligent function
module of the Q series
MITSUBISHI
LITHIUM BATT ERY
Battery
(A6BAT/MR-BAT)
Servo amplifier
(MR-H-BN)
MITSUBISHI
Servo amplifier
(MR-J2 -B)
It is possible to select the best according to the system.
(Note) : When using the external battery, be sure to use the
SSCNET cable(Q172J2BCBL M-B/Q172H BCBL M-B)
and to set the battery (A6BAT/MR-BAT). Also in stall
the battery(A6BAT/MR-BAT)in the Battery unit(Q170B AT).
Battery(A6BAT/MR-BAT) is optional.
2 - 5
Page 25
2 SYSTEM CONFIGURATION
(b) When not using the external battery
Extension of the Q series module
Motion module
(Q172LX, Q172EX, Q173PX)
Power supply module/
Q CPU/ I/O module/ Intelligent
function module of the Q series
CPU base unit
(Q33B, Q35B, Q38B, Q312B)
Motion CPU module
(Q172CPU(N))
SSCNET cable
for MR-H-BN
(Q172HBCBL M) (Q172J2BCBL M)
SSCNET cable
for MR-J2 -B
Extension cable
(QC B)
Motion module
(Q172LX, Q172EX, Q173PX)
Q6 B extension base unit
(Q63B, Q65B, Q68B, Q612B)
Power supply module/
I/O module/Intelligent function
module of the Q series
Servo ampli fi er
(MR-H-BN)
MITSUBIS HI
Servo ampli fi er
(MR-J2 -B)
It is possible to select the best according to the system.
2 - 6
Page 26
2 SYSTEM CONFIGURATION
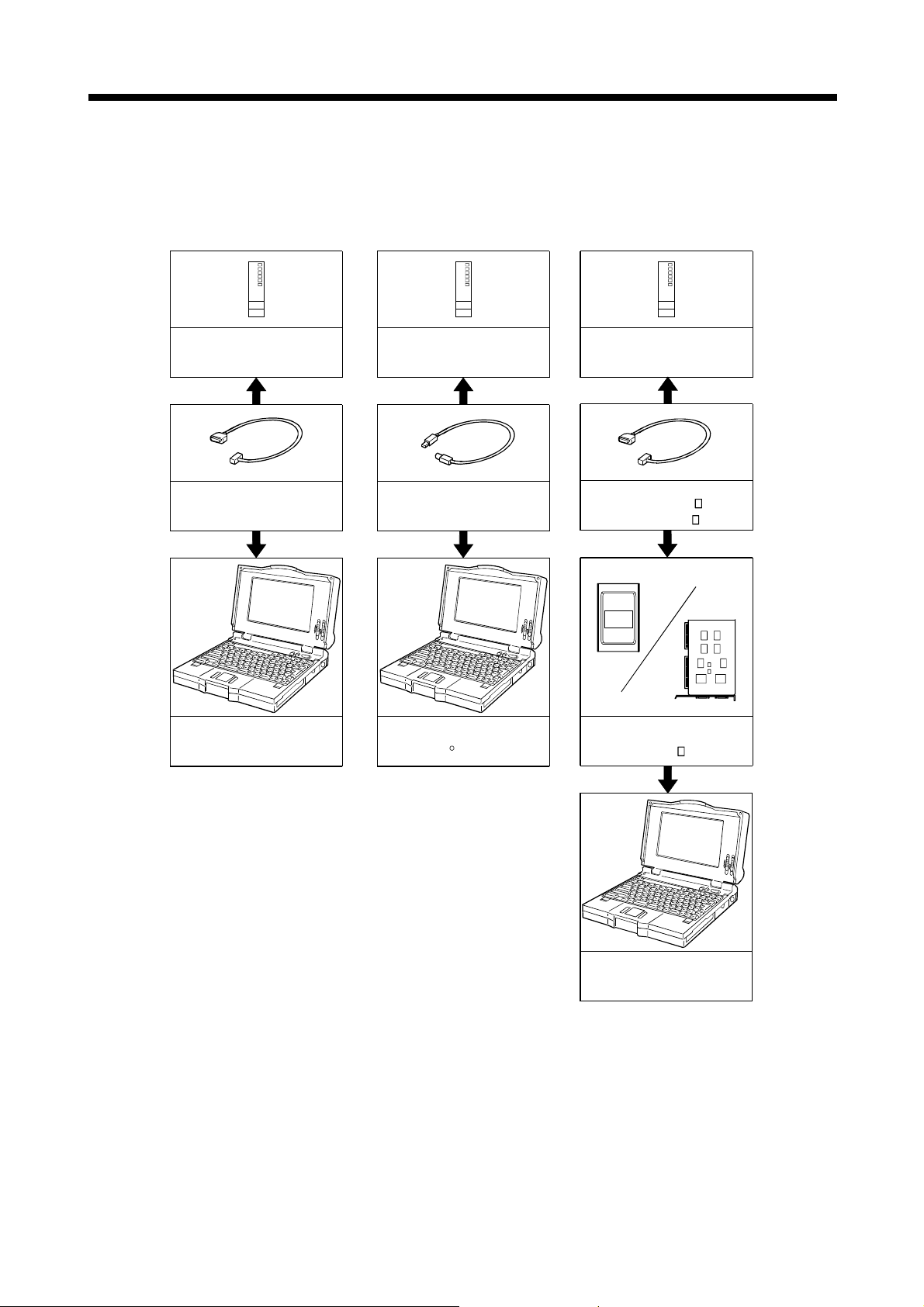
(3) Configuration of peripheral devices for the Q173CPU(N)/
Q172CPU(N)
(a) RS232 configration
The following (a) (b) (c) can be used.
(b) USB configration
(c) SSCNET configration
Motion CPU module
(Q173CPU(N), Q172CPU(N))
RS-232 cable
(QC30R2)
Personal computer
Motion CPU module
(Q173CPU(N), Q172CPU(N))
USB cable
Personal computer
(Windows 98/2000 only)
R
Motion CPU module
(Q173CPU(N), Q172CPU(N))
SSCNET cable
(Q170CDCBL M,
Q170BDCBL M)
MITSUBISHI
SSCNET
CARD
A30CD-PCF
SSC I/F Card/B o a r d
(A30CD-PCF/A 0BD-PCF)
Personal computer
(Note) : For information about GPP functions of QCPU, refer to the operating manual
of PLC. Also, refer to the programming manual of the operating system for
information about creating motion programs, and refer to the help of each
software for information about operation of each programming software
package.
2 - 7
Page 27
2 SYSTEM CONFIGURATION
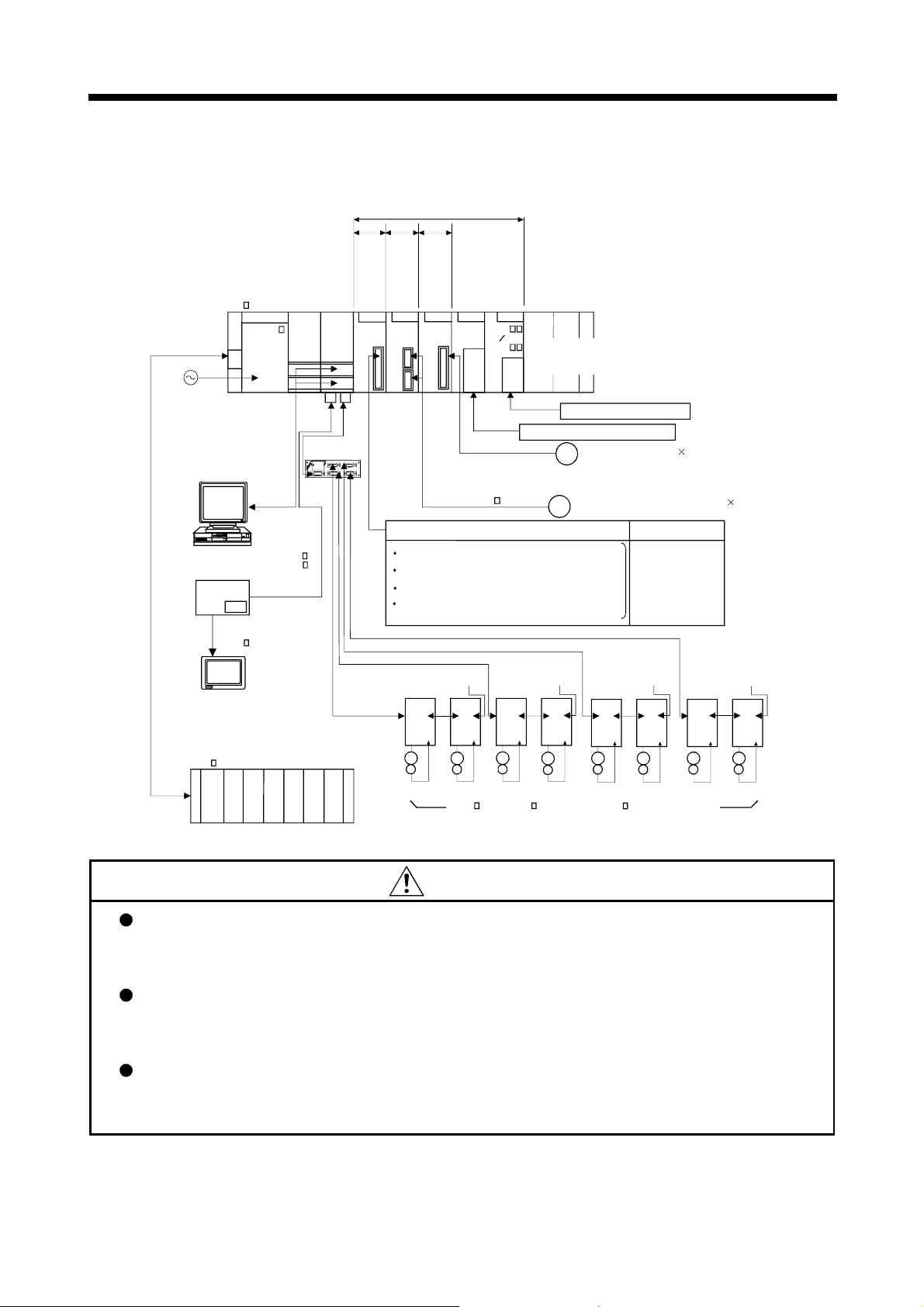
2.1.1 Q173CPU(N) System ov eral l config urati on
Motion CPU contol module
100/200VAC
Personal Computer
IBM PC/AT
Panel Personal Computer
(WinNT/Win98/Win2000)
Computer link SSC
CPU base
unit
(Q3 B)
Q61P-A
(Q170CDCBL M/
SSC I/F Card/Board
(A30CD-PCF/
A 0BD-PCF)
Qn(H)
CPU
USB/
RS232
Communication
cable
Q170BDCBL M)
SSCNET
PLC CPU/
Motion CPU
Q173
CPU
(N)
Dividing unit
(Q173DV)
MITSUBISHI
LITHIUM BATTERY
interface module
Servo external
signals
Q172
LX
SSCNET cable
SSCNET LINE1
generator
interface module
Manual pulse
Synchronous
interface module
encoder
Q172
EX
QI73
PX
QI60
QX
I/O module of the Q Series or
QY
Special function module
Input/output(Max. 256)
Interrupt signals (16 points)
Manual pulse generator 3/module
P
(MR-HDP01)
Serial absolute synchronous
encoder cable
(MR-JHSCBL M-H)
External input signals
FLS : Upper stroke limit
RLS : Lower stroke limit
STOP : Stop signal
DOG/CHANGE : Proximity dog/
Speed-position switching
SSCNET LINE2
Termination
connector
SSCNET LINE3
d8d1
Serial absolute synchronous encoder 2/module
E
(MR-HENC)
Termination
connector
d8d1
(Max. 1 module)
(Max. 6 modules)
Number of Inputs
8 axes/module
(Max. 4 module )
SSCNET LINE4
Termination
connector
d1
d8
d1
Termination
connector
d8
(Q6 B)
Extension
cable
Power supply
UP to 7 Extension base units
M
M
E
MR-H BN/MR-J2S- B/MR-J2M-B/MR-J2- B/MR-J2-03B5 model
module
Servo amplifier, Max.32 axes
M
M
E
E
E
M
M
E
E
M
E
CAUTION
Construct a safety circuit externally of the Motion controller or serv o amplifier if the abnormal
operation of the Motion controller or servo amplifier differ from the safety directive operation in
the system.
The ratings and characteristics of the parts (other than Motion controller, servo amplifier and
servomotor) used in a system must be compatible with the Motion controller, servo amplifier
and servomotor.
Set the parameter values to those that are compatible with the Motion cont roller, serv o amplifier,
servomotor and regenerative resistor model and the system application. The protect ive
functions may not function if the settings are incorrect.
M
E
2 - 8
Page 28
2 SYSTEM CONFIGURATION
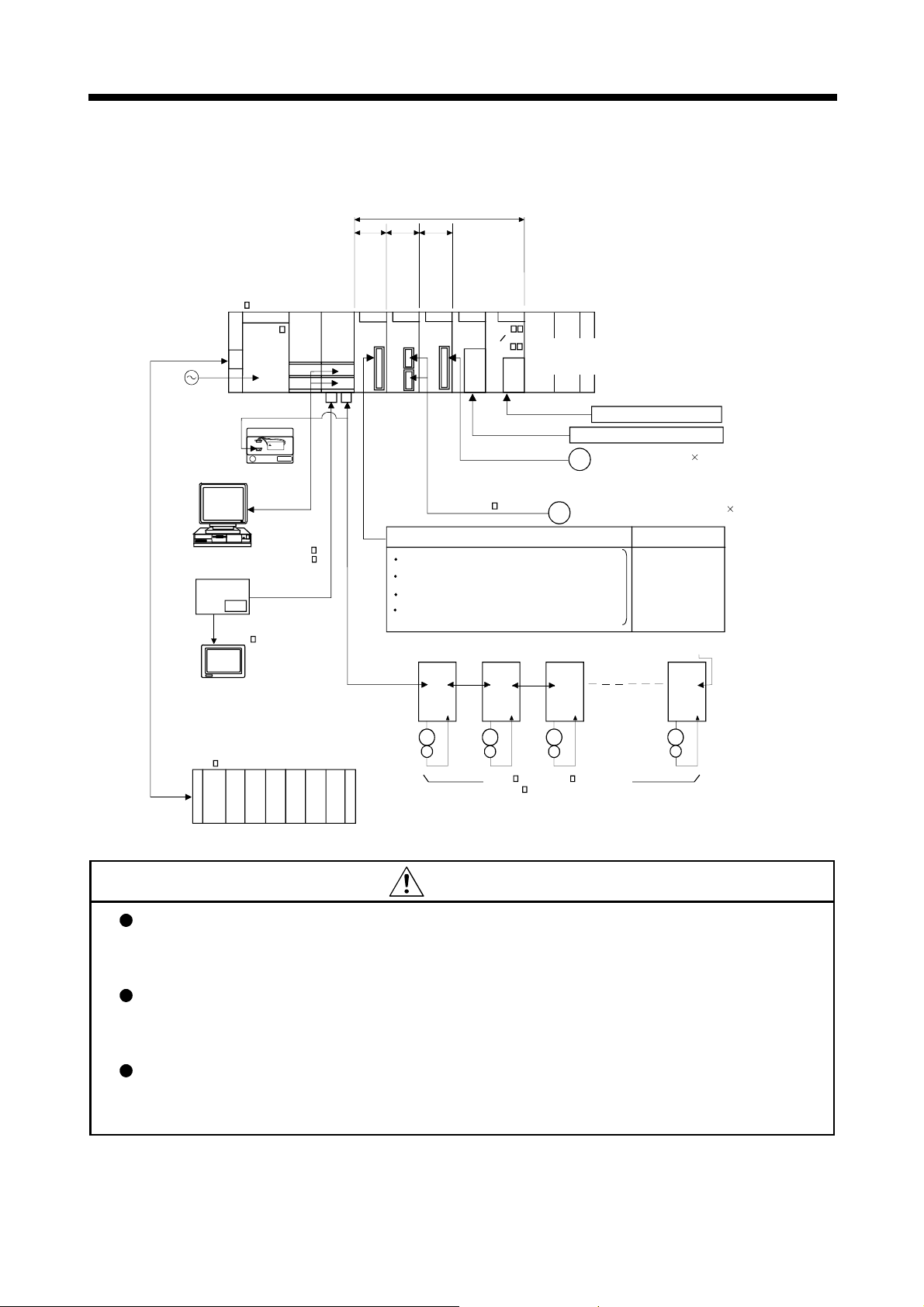
2.1.2 Q172CPU(N) System ov eral l config urati on
Motion CPU contol module
100/200VAC
Battery unit
(Q170BAT)
Personal Computer
IBM PC/AT
Panel Personal Computer
(WinNT/Win98/Win2000)
Computer link SSC
CPU base
unit
(Q3 B)
Qn(H)
Q61P-A
CPU
MITSUBISHI
LITHIUM BATTERY
USB/
RS232
Communication
cable
(Q170CDCBL M/
Q170BDCBL M)
SSCNET
SSC I/F card/board
(A30CD-PCF/
A 0BD-PCF)
PLC CPU/
Motion CPU
Q172
CPU
(N)
Manual pulse
generator
interface module
interface module
Synchronous
Servo external
encoder
signals
interface module
Q172
LX
Q172EXQI73
PX
Serial absolute synchronous
encoder cable
(MR-JHSCBL M-H)
QI60
QX
QY
External input signals
FLS : Upper stroke limit
RLS : Lower stroke limit
STOP : Stop signal
DOG/CHANGE : Proximity dog/
Speed-position switching
SSCNET cable
SSCNET LINE1
d1 d2 d3
I/O module of the Q Series or
Special function module
Input/output(Max. 256)
Interrupt signals (16 points)
Manua l pulse ge nerat o r 3/m o dule
P
(MR-HDP01)
Serial absolute synchronous encoder 2/module
E
(Max.1 module)
(Max. 4 modules) (MR-HENC)
Number of Inputs
8 axes/module
(Max. 1 module)
Termination
connector
d8
(Q6 B)
Extension
cable
Power supply
Up to 7 Extension base units
M
E
module
M
E
MR-H BN/MR-J2S- B/MR-J2M-B
/MR-J2- B/MR-J2-03B5 model
Servo amplifier, Max.8 axes
M
E
M
E
CAUTION
Construct a safety circuit externally of the Motion controller or serv o amplifier if the abnormal
operation of the Motion controller or servo amplifier differ from the safety directive operation in
the system.
The ratings and characteristics of the parts (other than Motion controller, servo amplifier and
servomotor) used in a system must be compatible with the Motion controller, servo amplifier
and servomotor.
Set the parameter values to those that are compatible with the Motion cont roller, serv o amplifier,
servomotor and regenerative resistor model and the system application. The protect ive
functions may not function if the settings are incorrect.
2 - 9
Page 29

2 SYSTEM CONFIGURATION
2.1.3 Function explanation of the Q173CPU(N)/Q172CPU ( N ) M oti on CPU modul es
(1) It is possible to download servo parameters to servo amplifier, turn the servo
ON/OFF, and send the position commands by connecting the Motion CPU
(Q173CPU(N)/Q172CPU(N)) and the servo amplifier with the SSCNET cable.
(2) It is possible to select the servo control functions/programming languages by
installing the corresponding operating system software on the Q173CPU(N)/
Q172CPU(N).
(3) It is possible to use stroke limit signals connected to Q172LX and signals of serial
encoders connected to Q172EX, etc. for the purpose of motion control by setting
the Q173CPU(N)/Q172CPU(N) as the control CPU of various motion modules
(Q172LX/Q172EX, etc.) .
(4) It is possible to perform not only servo control but also DI/O input/output control
according to programs implemented in the Motion SFC program by setting the
Q173CPU(N)/Q172CPU(N) as the control CPU of the Q series PLC I/O module
(When using the Motion SFC as the operating system software).
(For information about the Q series PLC I/O modules that can be controlled by the
Motion CPUs, refer to section 2.2 (2). )
(5) It is possible to exchange data such as automatic refresh among CPU as the Q
series PLC multiple CPU system.
(6) There is no restriction on the positions at which the modules controlled by the
Motion CPU (Q172LX/Q172EX, etc.) may be installed. Specify the installation
position in the system settings.
2 - 10
Page 30

2 SYSTEM CONFIGURATION
2.1.4 Restrictions on motion systems
(1) It is not allowed to use the Motion CPU as the control CPU of a module installed
on the QA1S6!B extension base unit. A PLC CPU must be used as the control
CPU.
(2) The connector for installation of memory card on the Motion CPU module is for
future function expansion.
(3) The Motion CPU module cannot be used as standalone module. It must always be
used in combination with a PLC CPU (of a version that supports Multiple CPU
systems). Moreover, it must be installed on the right side of the PLC CPU module.
A PLC CPU cannot be installed in a position to the right of a Motion CPU.
(4) Use the PLC CPU in the “Q mode.”
(5) The Motion CPU cannot be set as the control CPU of the intelligent function
module or the Graphic Operation Terminal (GOT).
(6) The SSCNET cable that connects the Motion CPU and the servo amplifiers can
be pulled out from the lower part. Make sure to secure sufficient space for pulling
out the cable when designing the board.
(7) The Motion CPU is one module element of the Q series multiple PLC system. It is
necessary to set the parameters of the Q series multiple PLC system for each
PLC CPU. The Motion CPU module must also be set to support the multiple
system by system setting s.
(8) Make sure to use the Motion CPU as the control CPU of motion modules
dedicated for the Motion CPU (Q172LX, Q172EX, Q173PX, etc.). They will not
operate correctly if a PLC CPU is set and installed as the control CPU by mistake.
The Motion CPU is treated as a 32-point intelligent module by PLC CPUs of other
machines.
It cannot be accessed from other machines.
(9) When a Multiple CPU system is configured, make sure to configure the modules
so that the total current consumption of the individual modules on the CPU base
does not exceed the 5VDC output capacity of the power supply module.
(Refer to section 2.4.2 (3), (4) Power supply module.)
2 - 11
Page 31

2 SYSTEM CONFIGURATION
(10) Number of Motion CPU modules and temperature conditions
(Q173CPU/Q172CPU only)
(a) It is possible to remove the Cooling fan unit(Q170FAN) in order to disperse
heat from inside the Motion CPU module according to the number of the
Motion CPU module and ambient temperature conditions.
Removable/Not removable of the Cooling fan unit (Q170FAN) by number of
Motion CPU modules and ambient temperature is as follows.
1) When using only one Motion CPU module
2) When using two or more Motion CPU modules
Ambient temperature
of the Motion CPU
Number of the Motion CPU
1 module Removable Not removable
It is possible to remove the Cooling fan unit if the ambient temperature
in which the Motion CPU module will be operating is 0 to 40°C (32 to
104°F).
Do not remove the Cooling fan unit(Q170FAN).
0 to 40
(
32 to 104
°C
°F)
Over 40 to 55
(Over
104 to 131
°C
°F)
2 modules or more Not removable
(11) When the internal battery of the Motion CPU is charged for 40 hours of normal
operation, it will be able to provide backup power for the IC-RAM memory for
1100 hours (Guaranteed time)/4300 hours (Actual time) .
Battery backup by the external battery will be necessary if there is a possibility
that a continuous power off that lasts longer than the continuous power off hours
for the internal battery. (Refer to section 2.4.9 External battery)
Item
Charging time of
Internal rechargeable
battery only
External battery 60000 240000
8 hours or more
Charging time of
40 hours or more
Guaranteed time (MIN) [ h ] Actual time (TYP) [ h ]
Continuous power off time
200 500
1100 4300
2 - 12
Page 32

2 SYSTEM CONFIGURATION
2.2 System Configuration Equipment
Part name Model name Description
Motion CPU module
Servo external signals
interface module
Serial absolute
synchronous encoder
interface module
Manual pulse generator
interface module
PLC CPU module
Power supply module
CPU base unit
Extension base unit
Extension cable
Manual pulse generator MR-HDP01
Serial absolute
synchronous
encoder
(1) Table of motion module
Q172CPUN Max.8 axes control 1.14
Q172CPU Max.8 axes control, with Cooling fan unit 1.62
Q173CPUN Max.32 axes control 1.25
Q173CPU Max.32 axes control, with Cooling fan unit 1.75
Q172LX Servo external signal 8 axes (FLS, RLS, STOP, DOG/CHANGE×8) 0.05
Q172EX
Q173PX
Q02CPU Program capacity 28k 0.60
Q02HCPU Program capacity 28k 0.64
Q06HCPU Program capacity 60k 0.64
Q12HCPU Program capacity 124k 0.64
Q25HCPU Program capacity 252k 0.64
Q61P-A1 100 to 120VAC input/ 5VDC 6A output ——
Q61P-A2 200 to 240VAC input/ 5VDC 6A output ——
Q63P 24VDC Input/ 5VDC 6A output ——
Q64P 100 to 120VAC/200 to 240VAC Input/ 5VDC 8.5A output ——
Q33B Number of I/O modules installed 3 slots
Q35B Number of I/O modules installed 5 slots
Q38B Number of I/O modules installed 8 slots
Q312B Number of I/O modules installed 12 slots 0.121
Q63B Number of I/O modules installed 3 slots 0.105
Q65B Number of I/O modules installed 5 slots 0.110
Q68B Number of I/O modules installed 8 slots 0.114
Q612B Number of I/O modules installed 12 slots 0.121
QC05B Length 0.45m(1.48ft.)
QC06B Length 0.6m(1.97ft.)
QC12B Length 1.2m(3.9ft.)
QC30B Length 3m(9.8ft.)
QC50B Length 5m(16.4ft.)
QC100B Length 10m(32.8ft.)
MR-HENC
Serial absolute synchronous MR-HENC interface×2
Tracking input 2 points
Manual pulse generator MR-HDP01/
Synchronous encoder interface ×3, Tracking input 3 points
Pulse resolution: 25PLS/rev(100PLS/rev after magnification by 4)
Permitted axial loads Radial load: Max.19.6N
Thrust load: Max. 9.8N
Permitted speed: 200r/min(Normal rotation)
Resolution: 16384PLS/rev
Permitted axial loads Radial load: Max.98N
Thrust load: Max.49N
Permitted speed: 4300r/min
Current
consumption
5VDC[A]
0.07
0.11
0.105
0.110
0.114
——
0.06
0.15
Remark
2 - 13
Page 33

2 SYSTEM CONFIGURATION
Table of motion module(continued)
Part name Model name Description
Connection between Serial absolute synchronous encoder and
Serial absolute
synchronous
encoder cable
SSCNET cable
SSC I/F board
MR-JHSCBL!M-H
Q170BDCBL!M
Q170CDCBL!M
Q172J2BCBL!M
Q172J2BCBL!M-B
Q172HBCBL!M
Q172HBCBL!M-B
Q173J2B CBL!M
Q173HB CBL!M
Q173DVCBL!M
A10BD-PCF PCI bus loading type, 2 ch/board
A30BD-PCF ISA bus loading type, 2 ch/board
Q172EX
2m(6.56ft.), 5m(16.4 ft.) , 1 0 m(3 2 .8 ft.) , 2 0 m(6 5 .6 ft.) , 3 0 m(9 8 .4 ft.)
(Same as encoder cables for HC-SFS/RFS/UFS(2000r/min) series
motors)
Connection between Q173CPU(N)/Q172CPU(N) and SSC I/F board
3m(9.84ft.), 5m(16.4 ft.) , 1 0 m(3 2 .8 ft.)
Connection between Q173CPU(N)/Q172CPU(N) and SSC I/F card
3m(9.84ft.), 5m(16.4 ft.) , 1 0 m(3 2 .8 ft.)
Connection between Q172CPU(N) and Battery unit (Q170BAT),
Q172CPU(N) and servo amplifier (MR-J2S-!B/MR-J2M-B/
MR-J2-!B/MR-J2-03B5)
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
Connection between Q172CPU(N) and Battery unit (Q170BAT),
Q172CPU(N) and servo amplifier (MR-H!BN)
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
Connection between Q173CPU(N) and servo amplifier
(MR-J2S-!B/MR-J2M-B/MR-J2-!B/MR-J2-03B5)
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
Connection between Q173CPU(N) and servo amplifier
(MR-H!BN)
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
Connection between Q173CPU(N) and Q173DV
0.5m(1.64ft.), 1m(3.2 8 ft.)
Current
consumption
5VDC[A]
——
——
——
——
——
Remark
Battery
unit
needs to
use “-B”
type
cable.
SSC I/F card A3 0 C D - PC F PCMCIA TYPE II, 1 ch/card
Dividing unit Q173DV
Battery unit Q170BAT For IC-RAM memory backup of Q172CPU(N) ——
Battery A6BAT
Cooling fan unit Q170FAN Cooling fan of the Motion CPU module 0.08
Q172CPU(N)
connector set
Q173CPU(N)
connector set
Q172CON
Q173CON
For dividing the SSCNET lines of Q173CPU(N) into 4.
(Attachment: Battery h o l d e r fo r IC-RAM memory backu p )
For IC-RAM memory backup of Q173CPU(N)/Q172CPU(N) module
(SFC programs, Servo programs, Parameters)
Connector for Q172CPU(N)
Connector : HDR-E14MG1
Case : HDR-E14LPA5
Q173CPU(N) side connector set
Connector : HDR-E26MG1
Case : HDR-E26LPA5
(Note-1)
(Note-1)
——
——
——
——
2 - 14
Page 34

2 SYSTEM CONFIGURATION
Table of motion module(continued)
Current
Part name Model name Description
Q173CPU(N) side connector set
Connector : HDR-E26MG1
Q173DV connector set Q173DVCON
=Number of lines (none: 1 Line, 2: 2 Lines, 3: 3 Lines, 4: 4 Lines)
=Cable length (0.5: 0.5m(1.64ft.), 1: 1m(3.28ft.), 2: 2m(6.56ft.), 3: 3m(9.84ft.), 4: 4m(13.12ft.), 5: 5m(16.4ft.) )
!
(Note-1) : Crimping terminal is not sold in Mitsubishi. The following terminal is requested to be procured by customers.
Specified tool (Honda Connectors make) : FHAT-0029/FHPT-0004C
Case : HDR-E26LPA5
Q173DV side connector set
Connector : 10126-3000VE
Case : 10326-52F0-008
(Note-1)
consumption
5VDC[A]
——
(2) Q series PLC module whic h can be control by Motion CPU
Part name
AC QX10 100-120VAC, 7-8mA, 16 points, Terminal block
Input
module
Output
module
Input/Output
composite
module
Interrupt module QI60 DC24V/4mA, Positive common, 16 points, Terminal block
DC
Contact output
module
Sink Type
Transistor
Source Type
TTL•CMOS(Sink)
DC Input/
Transistor output
Model
name
QX40 24VDC/4mA, Positive common, 16 points, Terminal block
QX41 24VDC/4mA, Positive common, 32 points, Connector
QX42 24VDC/4mA, Positive common, 64 points, Connector
QX70
QX71
QX72
QX80 24VDC/4mA, Negative common, 16 points, Terminal block
QX81 24VDC/4mA, Negative common, 32 points, Connector
QY10 240VAC/24VDC, 2A/point, 8A/common, 16 points/common, Terminal block
QY40P 12V/24VDC, 0.1A/point, 1.6A/common, 16 points/common Terminal block
QY41P 12V/24VDC, 0.1A/point, 2A/common, 32 points/common Connector
QY42P
QY50
QY80
QY81P
QY70 5/12VDC, 16mA/point, 16 points(16 points/common), Terminal block
QY71 5/12VDC, 16mA/point, 32 points(32 points/common), Connector
QH42P
QX48Y57
12VDC/5V, Positive common/Negative common shared, 16 points,
Terminal block
12VDC/5V, Positive common/Negative common shared, 32 points,
Terminal block
12VDC/5V, Positive common/Negative common shared, 64 points,
Terminal block
12V/24VDC, 0.1A/point, 2A/common, 64 points(32 points/common),
Connector
12V/24VDC, 0.5A/point, 4A/common, 16 points(16 points/common),
Terminal block
12V/24VDC, 0.5A/point, 4A/common, 64 points(32 points/common),
Terminal block
12V/24VDC, 0.1A/point, 2A/common, 32 points(32 points/common),
Connector
24VDC Positive common: 32 points
DC12-24V/0.1A Output Sink type: 32 points, Connector,
Provided (Thermal protectors, protector against short circuit)
24VDC Positive common: 8 points
DC12-24V/0.5A Output Sink type: 7 points, Terminal block,
Provided (When face is broken, LED lights and signal is output to CPU)
Description
Marked " " connectors are not provided.
Remark
Remark
2 - 15
Page 35

2 SYSTEM CONFIGURATION
(3) Table of servo amplifier
Part name Model name Description
MR-H!BN MR-H series
servo amplifier
Battery MR-BAT Back-up for the absolute position detection.
Termination connector MR-TM Connected to the last servo amplifier (MR-H!BN) by SSCNET.
Regenerative resistor
SSCNET cable MR-HBUS!M
Encoder cable
Encoder connector set
MR-H!!KBN
MR-RB!
MR-H!
MR-RB!-4
MR-HSCBL!M
MR-EN1CBL!M-H
MR-JCCBL!M-L
MR-JCCBL!M-H
MR-JSCNS
MR-EN1CNS
The following servo amplifier series can be used.
(a) MR-H!BN
Refer to catalogue of the servo amplifier about the output capacity of the servomotor.
Refer to catalogue of the servo amplifier about the regenerative resistance.
Connection between MR-H!BN and MR-H!BN
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
Connection between HA-LH!K, HC-SF/RF/UF(2000r/min) series motor and MR-H!BN.
2m(6.56ft.), 5m(16.4 ft.) , 1 0 m(3 2 .8 ft.) , 2 0 m(6 5 .6 ft.) , 3 0 m(9 8 .4 ft.)
Connection between HA-FF, HC-MF/UF(3000r/min) and MR-H!BN
Servo amplifier side connector for HA-LH!K, HC-SF/RF/UF(2000r/min) series motor,
Encoder side connector set
2 - 16
Page 36

2 SYSTEM CONFIGURATION
Part name Model name Description
MR-J2S-!B MR-J2-Super series
servo amplifier
MR-J2M series
servo amplifier
MR-J2 series
servo amplifier
MR-J2-Jr se r i e s
servo amplifier
Battery MR-BAT Back-up for the absolute position detection.
Termination connector MR-A-TM
SSCNET cable
Encoder cable
Encoder connector set
MR-J2S-!B1
MR-J2M-!DU Drive unit
MR-J2M-P8B Interface unit
MR-J2M-BU! Base unit
MR-J2-!B
MR-J2-03B5
MR-J2HBUS!M-A
MR-J2HBUS!M
MR-JHSCBL!M-L Standard cable
MR-JHSCBL!M-H
MR-ENCBL!M-H
MR-JCCBL!M-L Standard cable
MR-JCCBL!M-H
MR-JCCBL!M-H
MR-JRBRCBL!M-H
MR-J2CNS
MR-ENCNS
MR-JRCNM Servo amplifier and Junction connector set for HC-AQ series motor.
MR-JRBRCNM
MR-JRBRCN Electromagnetic brake contact connector for HC-AQ series motor.
MR-J2CNM
(b) MR-J2S-!B/MR-J2M-B/MR-J2-!B/MR-J2-03B5
Refer to catalogue of the servo amplifier about the output capacity of the servomotor.
Refer to catalogue of the servo amplifier about the output capacity of
the servomotor.
Refer to catalogue of the servo amplifier about the output capacity of the servomotor.
Connected to the last servo amplifier(MR-J2S-!B/MR-J2M-B/MR-J2-!B/MR-J2-03B5)
by SSCNET
Connection between Q173DV and MR-H!BN.
Connection between MR-H!BN and (MR-J2S-!B/MR-J2M-B/MR-J2-!B/
MR-J2-03B5).
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
Connection between Q173DV and (MR-J2S-!B/MR-J2M-B/MR-J2-!B/MR-J2-03B5).
Connection between (MR-J2S-!B/MR-J2M-B/MR-J2-!B/MR-J2-03B5) and
(MR-J2S-!B/MR-J2M-B/MR-J2-!B/MR-J2-03B5).
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
Connection between HC-SFS/RFS/UFS(2000r/min) series motor and
MR-J2S-!B/MR-J2M-B.
Long fixing life
encoder cable
Long fixing life
encoder cable
Servo amplifier and junction side connector set for HC-SFS/RFS/UFS(2000r/min)
series motor, HC-SF/RF/UF(2000r/min) series motor.
Servo amplifier side(Motor cable for servomotor with electro magnetic brake) and HCAQ series motor. (Need MR-JRBRCN for electromagnetic brake contact)
Servo amplifier and junction side connector set for HC-MFS/KFS/UFS(3000r/min)
series and HA-FF, HC-MF/UF(3000r/min) series motor.
Connection between HC-SF/RF/UF(2000r/min) series motor and
MR-J2-!B.
2m(6.56ft.), 5m(16.4 ft.) , 1 0 m(3 2 .8 ft.) , 2 0 m(6 5 .6 ft.) , 3 0 m(9 8 .4 ft.)
Connection between HC-MFS/KFS/UFS(3000r/min) series motor and
MR-J2S-!B/MR-J2M-B.
Connection between HC-MF/UF(3000r/min) and HA-FF series motor
and MR-J2-!B.
2m(6.56ft.), 5m(16.4 ft.) , 1 0 m(3 2 .8 ft.) , 2 0 m(6 5 .6 ft.) , 3 0 m(9 8 .4 ft.)
Connection between HC-AQ series motor and MR-J2-03B5.
2m(6.56ft.), 5m(16.4 ft.) , 1 0 m(3 2 .8 ft.) , 2 0 m(6 5 .6 ft.) , 3 0 m(9 8 .4 ft.)
Connection between HC-AQ series motor and MR-J2-03B5.
2m(6.56ft.), 5m(16.4 ft.) , 1 0 m(3 2 .8 ft.) , 2 0 m(6 5 .6 ft.) , 3 0 m(9 8 .4 ft.)
(Motor cable for servomotor with electro magnetic brake)
2 - 17
Page 37

2 SYSTEM CONFIGURATION
(4) Software packages
Application
For conveyor assembly
(Motion SFC)
For automatic machinery
(Motion SFC)
SV13
SV22
Model name Details Remark
SW6RNC-GSVE
(Integrated start-up support software
SW6RN-GSVPROE
SW6RNC-GSVSETE
(1 CD-ROM) )
Model name PLC software package Remark
(a) OS software packages
OS software package
Q173CPU(N) Q172CPU(N)
SW6RN-SV13QB SW6RN-SV13QD
SW6RN-SV22QA SW6RN-SV22QC
(b) Integrated start-up support software packag es
Conveyor assembly software : SW6RN-GSV13P
Automatic machinery software : SW6RN-GSV22P
Cam data creation software : SW3RN-CAMP
Digital oscilloscope software : SW6RN-DOSCP
Communication system software : SW6RN-SNETP
Document print software : SW3RN-DOCPR N P,
SW20R N-DOCPRNP
SW6RNC-GSVHELPE(Operation manual(1 CD-ROM) )
Installation manual
SW6RNC-GSVPROE
A30CD-PCF(SSC I/F ca r d ( PC MCIA TYPE II 1CH/card) )
Q170CDCBL3M(A30CD-PCF cable 3m(9.84ft.) )
(Note) : Operating environment of the programming software is WindowsNTR4.0/
Windows
R
98/WindowsR2000 English version) only.
(c) PLC software packages
Remark
GX Developer SW!D5C-GPPW-E
(Note) : !=used "6" or later.
2 - 18
Page 38

2 SYSTEM CONFIGURATION
(5) Operating envir onment of the personal computer
Operating environment is as follows.
Item
CPU Pentium133MHz or more Pentium II 233MHz or more
Memory capacity Recommended 32MB or more Recommended 64MB or more
Hard disk free space Hard disk free space is as following list.
Disk drive 3.5inch (1.44MB) floppy disk drive, CD-RO M disk drive
Display 800×600 pixels, 256 colors or more
Model name Size
SW6RN-GSV13P 15MB
SW6RN-GSV22P 15MB
SW3RN-CAMP 1MB
SW6RN-DOSCP 3MB
SW6RN-SNETP
SW3RN-DOCPRNP, SW20RN-DOCPRNP 7MB
Model name Size
SW6RN-GSV13P 23MB
SW6RN-GSV22P 30MB
SW3RN-CAMP 2MB
SW6RN-DOSCP 2MB
SW6RN-SNETP 1MB
SW3RN-DOCPRNP, SW20RN-DOCPRNP 2MB
(Note-1) : Pentium Rare trademarks or registered trademarks of Intel Corporation or its subsidiaries in the United States and other
countries.
(Note-2) : WindowsNT
other countries.
R
, WindowsRare either registered trademarks or trademarks of Microsoft Corporation in the United States and/or
IBM PC/AT with w hich WindowsNT4.0/98/2000 English version operates normally.
WindowsNT
R
4.0(Service Pack 2 or later)
Windows
R
98
(Note)
or
(Note) : Impossible to use USB connection.
Windows
R
It is necessary the following capacity depending on the installed software.
SW6RNC-GSVE
Standard 1.5MB
Custom (When all selection) 2MB
SW6RNC-GSVHELPE
POINT
(1) When the operation of Windows is not unclear in the operation of this
software, refer to the manual of Windows or guide-book from the
other supplier.
(2) The screen might not be correctly displayed depending on the
R
system font size of WindowsNT
4.0/WindowsR98/WindowsR2000.
Be sure to use the small size fonts.
2000
2 - 19
Page 39

2 SYSTEM CONFIGURATION
2.3 General Specifications
General specifications of Q173CPU(N)/Q172CPU(N) module is as follows.
Item Specification
Operating ambient
temperature
Storage ambient
temperature
Operating ambient
humidity
Storage ambient
humidity
Vibration resistance Conforming
JIS B 3501,
IEC 61131-2
Under
intermittent
vibration
Under
continuous
vibration
0 to 55°C
(32 to 131°F)
-25 to 75°C
(Note-3)
(-13 to 167°F)
5 to 95% RH
5 to 95% RH
,
non-condensing
,
non-condensing
Frequency Acceleration Amplitude Sweep count
10 to 57Hz ——
0.075mm
(0.003inch)
10 times each
57 to 150Hz 9.8m/s2 ——
10 to 57Hz ——
57 to 150Hz 4.9m/s
2
——
0.035mm
(0.001inch)
in X, Y, Z
directions
(For 80 min.)
Shock resistance Conforming to JIS B 3501, IEC 61131-2(147m/s2 , 3 times in each of 3 directions X, Y, Z)
Operating ambience No corrosive gases
Operating altitude 2000m(6562ft.) or less
Installation location Inside control panel
Overvoltage category
(Note-1)
Pollution level
(Note-2
)
2 or less
II or less
(Note-1) : This indicates the section of the power supply to which the equipment is assumed to be connected between the
public electrical power distribution network and the machinery within premises.
Category II applies to equipment for which electrical power is supplied from fix ed facilities.
The surge voltage withstand level for up to the rated voltage of 300V is 2500V.
(Note-2) : This index indicates the degree to which conductive material is generated in terms of the env ironment in which
the equipment is used.
Pollution level 2 is when only non-conductive pollution occurs. A temporary conductivity caused by condensing
must be expected occasionally.
(Note-3) : Do not use or store the Motion CPU module under pressure higher than the atmospheric pressure of altitude 0m.
Doing so can cause a malfunction. When using the PLC under pressure, please contact your sales
representative.
2 - 20
Page 40

2 SYSTEM CONFIGURATION
!
CAUTION
The Motion controller must be stored and used under the conditions listed in the table of
specifications above.
When not using the module for a long time, disconnect the power line from the Motion controller
or servo amplifier.
Place the Motion controller and servo amplifier in static electricity prev enting v inyl bags and
store.
When storing for a long time, please contact with our sales representative.
2 - 21
Page 41

W
2 SYSTEM CONFIGURATION
2.4 Specifications of Equipment and Settings
2.4.1 Q173CPU(N)/Q172CPU(N) (1) Q173CPU(N)/Q172CPU( N) N ame of parts
This section explains the names and setting of the module.
Front face
Q17 CPU
2)
3)
4)
5)
6)
7)
PULL
MODE
RUN
ERR.
M.RUN
BAT.
BOOT
FRONT
SSCNET
CN2
CN1
With Front cover open
9)
10)
MODE
RUN
ERR.
M.RUN
BAT.
BOOT
ON SW
STOP RUN
RESET L CLR
1
2
3
4
5
13)
14)
15)
USB
RS-232
8)
hen opening the cover, put your finger here.
Side face
21)
1)
20)
Q172CPU
11)
12)
Bottom
Q173CPU
16)
18)
19)
18)
19)
17)
2 - 22
Page 42

2 SYSTEM CONFIGURATION
No. Name Application
1) Module fixing hook Hook used to fix the module to the base unit.(Quick release installation)
2) MODE LED (Mode judging)
3) RUN LED
4) ERR. LED
5) MOTION RUN LED
6) BAT. LED Lit : When the battery error occurred. (When using the external battery.)
7) BOOT LED
8) Module loading lever Used to install the module to the base unit.
9) Memory card EJECT button Used to eject the memory card from the Motion CPU.
10) Memory card loading connector
11) USB connector
12) RS-232 connector
(Note) : When normally connecting a cable to the USB or RS232 connector, clamp the cable to prevent it from coming off due to the
dangling, moving or careless pulling of the cable. Q6HLD-R2 type RS-232C connector disconnection prevention holder is
available as a clamp for RS232 connector.
(Note)
(Note)
Lit(green)
Lit(orange)
Lit : Motion CPU normal start
Not lit : Motion CPU fault. RUN LED turn off when the trouble occurred at starting or WDT
Lit : When error occurs, LED turn on as follows
Flashing : Detection of self diagnostic error which will stop the operation.
Not lit : Normal
Lit : When motion control is executed.
Flashing : When latch clear started.
Not lit : When motion control is not executed, or when the self diagnostic error which
Lit
Not lit
Connector used to connect the memory card to the Motion CPU. (The Motion CPU make use of
the memory card by software package.)
Connector for connection with USB-compatible peripheral device. (Connector type B)
Can be connected by USB-dedicated cable.
Connector for connection with a peripheral device.
Can be connected by RS-232 connection cable (QC30R2)
: Normal mode
: Installation • ROM writing mode
error occurred.
1) WDT error
2) System setting err o r
3) Servo err o r
4) Motion SFC er r o r
5) Detection of self diagnostic error which will not stop the operation(except for
battery error).
will stop the operation was detected.
: ROM operating mode
: ROM operating mode/Installation • ROM writing mode
CPU module
RS232 cable
2 - 23
Q6HLD-R2
Page 43

2 SYSTEM CONFIGURATION
(2) Applications of switches, connectors on Q173CPU (N ) /
No. Name Application
Dip switches
ON SW
1
13)
RUN/STOP switch
14)
(Momentary switch)
RESET/L.CLR switch
15)
(Momentary switch)
16) Module fixing screw hole Hole for the screw used to fix to the base unit. (M3×12 screw : Purchase from the other supplier)
2
3
4
5
Q172CPU(N)
Dip switch 1 Must not be used. Normally OFF. (Shipped from the factory in OFF position)
•ROM operating setting (Shipped from the factory in OFF position)
Dip switch 2
Dip switch 3
Dip switch 4 Must not be used. Normally OFF. (Shipped from the factory in OFF position)
Dip switch 5
(Installation •
ROM writing
switch)
Move to RUN/STOP.
RUN : Executes Motion program.
STOP : Stops Motion pr o g r a m.
RESET : Set the switch to the “RESET” position once, and reset the hardware. Applies a reset after
an operation error and initialized the operation.
L.CLR : Clear the latch area all data which set with the parameters.
(LATCH CLEAR al so cle a r s d a ta o u tsid e th e la tch a r e a a t th is time.)
(Note-1)
Latch clear operating method
1) Set the “RUN/STOP” switch to “STOP”.
2) Move the “ R ESET/L .C L R” switch to “L.CL R” several times until the “ MOTION RUN LED”
flashing.
(“MOTION RUN LED” flashing : Latch clear completed. )
3) Move the “ R ESET/L.CLR” switch to “ L .C L R ” o n ce mor e . ( “ MOTION RUN LED” turn off.)
SW2
OFF
ON
OFF
ON
ON : Installation • ROM writing mode
OFF : Normal mode (RAM operating mode/ROM operating mode)
Turn ON dip switch 5 when installed the operating system (OS) into the Motion
CPU module from the peripheral device. After completing the installation, move
to switch and re-start.
SW3
OFF
OFF
ON
ON
RAM operating mode
Must not be set
Must not be set
ROM operating mode
17) Module fixing hook Hook used to fix to the base unit.
18) CN2 connector Connector for connection a personal computer and SSCNET.
19) CN1 connector
20) Cooling fan connector
21) Cooling fan unit
(Note-1) : It is not possible to reset the Multiple CPU system by each of the QCPU/the Motion CPU No.2 to 4.
If it is reset, other CPU occurred to stop of the overall Multiple CPU system where “MULTI CPU DOWN (Error code : 7000).
The overall Multiple CPU system reset is resetting the CPU No.1 of the QCPU.
(Note-2) : For example of the Q173CPU(N), the connector CN1 divide signals allocated each of SSCNET LINE 1 to 4.
The Dividing unit (Q173DV) or the Dividing cable (Q173J2B
servo amplifiers divide signals allocated in CN1 of the Q173CPU(N) into each of the four lines.
(Note-3) : When using the Q173CPU/Q172CPU only.
(Note-2)
Connector for connection of the Motion CPU module and servo amplifier.
(Note-3)
Connector for connection of the Motion CPU module and the Cooling fan unit (Q170 FAN).
(Note-3)
The Cooling fan unit(Q170 FAN) designed exclusively for Motion CPU module.
CBL!M/Q173HB CBL!M) between the Motion CPU and
2 - 24
Page 44

2 SYSTEM CONFIGURATION
(3) Basic specifications of Q173CPU(N)/Q172CPU(N )
Motion control specifications
Item Q173CPUN Q173CPU Q172CPUN Q172CPU
Number. of control axes 32 axes 8 axes
0.88ms/ 1 to 8 axes
SV13
Operation cycle
(default)
SV22
Interpolation functions Linear interpolation (Max.4 axes), circular interpolation (2 axes), Helical interpolation (3 axes)
PTP(Point to Point), Speed control, Speed-position control, Fixed-pitch feed, Constant speed
Control modes
Acceleration/
deceleration control
Compensation Backlash compensation, Electronic gear
Programming language Motion SFC, dedicated instruction, Mechanical support language (SV22)
Program capacity 14k steps
Number of positioning
points
Programming tool IBM PC/AT
Peripheral I/F USB(12Mbps)/RS-232(115.2kbps)/SSCNET(5.6Mbps)
Home position return
function
JOG operation function Provided
Manual pulse generator
operation function
Synchronous encoder
operation function
M-code function
Limit switch output
function
Absolute position system
Number of SSCNET I/F 5CH 2CH
Manual pulse generator/
Synchronous encoder/
Servo external signals
interface module
control, Position follow-up control, Speed switching control, High-speed oscillation control,
Synchronous control (SV22)
Q172LX : 4 modules usable Q172LX : 1 module usable
Q172EX : 6 modules usable Q172EX : 4 modules usable
Q173PX : 4 modules usable
1.77ms/ 9 to 16 axes
3.55ms/17 to 32 axes
0.88ms/ 1 to 4 axes
1.77ms/ 5 to 12 axes
3.55ms/13 to 24 axes
7.11ms/25 to 32 axes
Automatic trapezoidal acceleration/deceleration,
S-curve acceleration/deceleration
3200 points
(Positioning data can be designated indirectly)
Proximity dog type, Count type, Data set type(2 ty pes)
Possible to connect 3 modules.
Possible to connect 12 modules. Possible to connect 8 modules.
M-code output function provided
M-code completion wait function provided
Number of output points 32 point/axis
Watch data: Motion control data/Word device
Made compatible by setting battery to servo amplifier.
(Possible to select the absolute data method or incremental method for each axis)
(Note)
Q173PX : 3 modules usable
0.88ms/1 to 8 axes
0.88ms/1 to 4 axes
1.77ms/5 to 8 axes
(Note)
2 - 25
Page 45

2 SYSTEM CONFIGURATION
Motion control specifications(continued)
Item Q173CPUN Q173CPU Q172CPUN Q172CPU
Internal current
consumption(5VDC) [A]
Exterior dimensions
(When not installed the
Cooling fan unit)
[ mm(inch) ]
Weight [kg] 0.23 0.22 0.22 0.21
(Note) : When using the incremental synchronous encoder by using SV22, you can use 4 modules.
When connecting the manual pulse generator, you can use only one module.
1.25 1.75 1.14 1.62
98(3.86)(H)
27.4(1.08)(W)
114.3(4.50)(D)
118(4.65)(H)
27.4(1.08)(W)
89.3(3.52)(D)
98(3.86)(H)
27.4(1.08)(W)
114.3(4.50)(D)
118(4.65)(H)
27.4(1.08)(W)
89.3(3.52)(D)
(4) Selection of Q172EX, Q173PX
Item
Q173CPU(N) 12 modules
Q172CPU(N) 8 modules
Module selection Q172EX Q173PX
Synchronous encoder
Serial absolute Incremental
Manual pulse generator
3 modules
(5) Q173CPU(N)/Q172CPU( N) i nter nal r echar g eabl e battery
• Initial charging of the Q173CPU(N)/Q172CPU(N)
Turn on the power supply and charge the internal rechargeable battery for
eight hours or more, before starting to use the Q173CPU(N)/Q172CPU(N).
It is possible to provide backup power for the IC-RAM memory for at least
200 hours by charging the internal rechargeable battery for eight hours or
more, even if it is empty.
If the battery is charged for five days while applying power eight hours a
day, i.e., 40 hours of normal operation, it will be able to provide backup
power for the IC-RAM memory for 1100 hours.
Battery backup by the A6BAT/MR-BAT will be necessary if there is a
possibility that a continuous power off that lasts longer than the continuous
power off hours for the internal rechargeable battery specified in the table
below may occur, for example when transporting the system on a ship.
Continuous power off time
200 500
1100 4300
Internal rechargeable
battery only
Item
Charging time of
8 hours or more
Charging time of
40 hours or more
Guaranteed time (MIN) [ h ] Actual time (TYP) [ h ]
2 - 26
Page 46

2 SYSTEM CONFIGURATION
(6) Motion SFC Performance Specifications
Motion SFC Performance Specifications
Item Q173CPU(N)/Q172CPU(N)
Code total
(Motion SFC chart+ Operation control+
Program capacity
Motion SFC program
Operation control program
(F/FS)
/
Transition program
(G)
Execute specification
Number of I/O points (X/Y) 8192 points
Number of real I/O points
(PX/PY)
Number of devices
(Device In the Motion CPU
only)
(Included the positioning
dedicated device)
Transition)
Text total
(Operation control+ Transition)
Number of Motion SFC programs 256(No.0 to 255)
Motion SFC chart size/program Max. 64k bytes (Included Motion SFC chart comments)
Number of Motion SFC steps/program Max. 4094 steps
Number of selective branches/branch 255
Number of parallel branches/branch 255
Parallel branch nesting Up to 4 levels
Number of operation control programs
Number of transition programs 4096(G0 to G4095)
Code size/program Max. approx. 64k bytes (32766 steps)
Number of blocks( l ine)/program Max. 8192 blocks (in the case of 4 steps(min)/ b lo cks)
Number of characters/block Max. 128 (comment included)
Number of operand/block Max. 64 (operand: constants, word device, bit devices)
( ) nesting/block Max. 32
Descriptive
Expression
Number of multi executed programs Max. 256
Number of multi active programs Max. 256 steps/all programs
Executed
task
Number of internal relays (M)
Number of latch relays (L)
Number of link relays (B) 8192 points
Number of annunciators (F) 2048 points
Number of special relays (M) 256 points
Number of data registers (D) 8192 points
Number of link registers (W) 8192 points
Number of special registers (D) 256 points
Motion devices (#) 8192 points
Number of coasting timers (FT)
Operation control program Calculation expression/bit conditional expression
Transition program
Normal task Executed in motion main cycle
Event task
(Execution
can be
masked.)
NMI task
Fixed cycle
External
interrupt
PLC interrupt
4096 with F(Once execution type) and FS(Scan execution type)
combined. (F/FS0 to F/FS4095)
Calculation expression/bit conditional expression/comparison
(0.88ms, 1.77ms, 3.55ms, 7.11ms, 14.2ms)
Executed when input ON is set among interrupt module QI60
Executed with interrupt from PLC CPU.
(When PLC CPU dedicated command S(P).GINT is executed)
Executed when input ON is set among interrupt module QI60
Total 256 points
287k bytes
224k bytes
conditional expression
Executed in fixed cycle
(16 points).
(16 points).
Total M+L : 8192 points
1 point (888µs)
2 - 27
Page 47

2 SYSTEM CONFIGURATION
2.4.2 Power supply module (1) Table of the power supply module specificati ons
Item
Base loading position Power supply module loading slot
Applicable base unit Q33B, Q35B, Q38B, Q312B, Q65B, Q68B, Q612B
Input power supply
Input frequency 50/60Hz ±5%
Input voltage distortion factor 5% or less
Max. input apparent power 105VA
Inrush current 20A 8ms or less
Rated output current
protection
protection
Efficiency 70% or more
Permissible instantaneous power off
time
Dielectric withstand voltage
Insulation resistance
Noise immunity
Operation indication LED indication (Lit at 5VDC output)
Fuse Built-in (Unchangeable by user)
Contact
output
section
Terminal screw size M3.5 × 7
Applicable wire size 0.75 to 2mm2
Applicable crimping terminal RAV1.25 to 3.5, RAV2 to 3.5
Applicable tightening torque 59 to 78 × 10
Exterior dimensions[mm(inch)]
Weight [kg] 0.31
(Note-1)
(Note-2)
(Note-3)
Application
Rated switching
voltage/current
Minimum switching load 5VDC, 1mA
Response time OFF to ON: 10ms or less. ON to OFF: 12ms or less.
Life time
Surge suppressor None
Fuse None
5VDC 6A
24VDC ——
5VDC 6.6A or more Overcurrent
24VDC ——
5VDC 5.5 to 6.5V Overvoltage
24VDC ——
This section describes the power supply modules specifications.
Performance specifications
Q61P-A1 Q61P-A2
100 to 120VAC (+10%/-15%)
(85 to 132VAC)
20ms or less
Across inputs/LG and outputs/FG
2,830VAC rms / 3 cycles (Altitude : 2000m (6562ft.) )
Across inputs and outputs (LG and FG separated), across inputs and LG/FG, across outputs
and FG/LG.
10M
or more by insulation resistance tester(500VDC)
• By noise simulator of 1,500Vp-p noise voltage, 1µs noise width and 25 to 60Hz noise
frequency
• Noise voltage IEC61000-4-4, 2kV
ERR contact (contact switched off (opened: normally closed contact) at an error stop of CPU),
for CPU module operating status output
24VDC, 0.5A
Mechanical : 2 million times or more
Electrical : 100 thousand times at rated switching voltage/current or more
98(H) × 55.2(W) × 90(D)
(3.86(H) × 2.17(W) × 3.55(D) )
200 to 240VAC (+10%/-15%)
(170 to 264VAC)
-2
N•m
2 - 28
Page 48

2 SYSTEM CONFIGURATION
Item
Base loading position Power supply module loading slot
Applicable base unit Q33B, Q35B, Q38B, Q312B, Q65B, Q68B, Q612B
Input power supply
Input frequency —— 50/60Hz ±5%
Input voltage distortion factor —— 5% or less
Max. input apparent power 45W 160VA
Inrush current 100A 1ms or less 20A 8ms or less
Rated output current
protection
protection
Efficiency 70% or more
Permissible instantaneous power off
time
Dielectric withstand voltage 500VAC across primary and 5VDC
Insulation resistance 10M or more by insulation resistance tester
Noise immunity
Operation indication LED indication (Lit at 5VDC output)
Fuse Internal (Unchangeable by user)
Contact
output
section
Terminal screw size M3.5 × 7
Applicable wire size 0.75 to 2mm2
Applicable crimping terminal RAV1.25 to 3.5, RAV2 to 3.5
Applicable tightening torque 59 to 78 × 10
Exterior dimensions[mm(inch)]
Weight [kg] 0.33 0.40
(Note-1)
(Note-2)
(Note-3)
Application
Rated switching
voltage/current
Minimum switching load 5VDC, 1mA
Response time OFF to ON: 10ms or less. ON to OFF: 12ms or less
Life time
Surge suppressor None
Fuse None
5VDC 6A 8.5A
24VDC —— ——
5VDC 6.6A or more 9.9 to 14.4A Overcurrent
24VDC ——
5VDC 5.5 to 6.5V Overvoltage
24VDC ——
The power supply module specifications (continued)
Performance specifications
Q63P Q64P
24VDC (+30%/-35%)
(15.6 to 31.2VDC)
10ms or less(at 24VDC input) 20ms or less
• By noise simulator of 500Vp-p noise voltage,
1µs noise width and 25 to 60Hz noise
frequency
ERR contact (contact switched off (opened: normally closed contact) at an error stop of CPU),
for CPU module operating status output
Mechanical : 2 million times or more
Electrical : 100 thousand times at rated switching voltage/current or more
98(H) × 55.2(W) × 90(D)
(3.86(H) × 2.17(W) × 3.55(D) )
100 to 120VAC/200 to 240VAC (+10%/-15%)
(85 to 132VAC/170 to 264VAC)
Across inputs/LG and outputs/FG
2,830VAC rms/3 cycles
(Altitude : 2000m (6562ft.) )
Across inputs and outputs (LG and FG
separated), across inputs and LG/FG, across
outputs and FG/LG 10
resistance tester(500VDC)
• By noise simulator of 1,500Vp-p noise
voltage, 1µs noise width and 25 to 60Hz noise
frequency
• Noise voltage IEC61000-4-4, 2kV
24VDC, 0.5A
-2
N•m
98(H) × 55.2(W) × 115(D)
(3.86(H) × 2.17(W) × 4.53(D) )
or more by insulation
2 - 29
Page 49

2 SYSTEM CONFIGURATION
POINTS
(Note-1) : Overcurrent protection
The overcurrent protection device shuts off the 5V, 24VDC circuit and
stops the system if the current flowing in the circuit exceeds the specified
value. When this device is activated, the power supply module LED is
switched OFF or dimly lit. If this happens, eliminate the cause of the
overcurrent and start up the system again.
(Note-2) : Overvoltage protection
The overvoltage protection device shuts off the 5VDC circuit and stops
the system if a voltage of 5.5 to 6.5V is applied to the circuit. When this
device is activated, the power supply module LED is switched OFF. If
this happens, switch the input power OFF, then ON to restart the system.
The power supply module must be changed if the system is not booted
and the LED remains OFF.
(Note-3) : Permissible instantaneous power off time
Permissible instantaneous power off is selected to use the power supply
module.
2 - 30
Page 50

)
)2)3)4)5)
)
)7)2)
)4)5)
2 SYSTEM CONFIGURATION
(2) Names of Parts and Setting
This section describes the names of the parts of each power module.
8) 1
(a) Q61P-A1, Q61P-A2, Q63P, Q64P
Q61P-A1
Q61P-A2
8) 1
POWER
INPUT
100-120VAC
50/60Hz 105VA
OUTPUT 5VDC 6A
ERR.
L
+-
24VDC 0.5A
(FG)
(LG)
N
INPUT
100-120VAC
L
9)
Q63P
8) 1)
3
INPUT
24VDC
MAX 45W
OUTPUT 5VDC 6A
ERR.
L
24VDC 0.5A
(FG)
(LG)
24V
INPUT
24VDC
24G
3
9)
POWER
+-
7
6
9)
Q61P-A2
INPUT
200-240VAC
50/60Hz 105VA
OUTPUT 5VDC 6A
24VDC 0.5A
INPUT
200-240VAC
Q61P-A 2
ERR.
POWER
L
+-
(FG)
(LG)
N
L
Q64P
8) 1)
4
7)
2)
3)
4)
5)
6)
Q61P-A2
INPUT
100-120/200-240VAC
50/60Hz 160VA
OUTPUT 5VDC 8.5A
24VDC 0.5A
INPUT
100-120/200-240VAC
4
Q61P-A2
9)
ERR.
POWER
L
+-
(FG)
(LG)
N
L
No. Name Application
1) POWER LED 5VDC power indicator LED
2) ERR
terminals
Turned OFF (opened) when a stop error occurs in the CPU module.
Normally off when loaded in an extension base unit.
3) FG terminal Ground terminal connected to the shield pattern of the printed circuit board.
4) LG terminal Grounding for the power supply filter.
5) Power input terminals
• Used to connect a 100VAC or 200VAC power supply.(Q61P-A1, Q61P-A2, Q64P)
• Used to connect a 24VDC power supply.(Q63P)
6) Terminal screw M3.5 7
7) Terminal cover Protective cover of the terminal block
8) Module fixing screw
Used to fix the module to the base unit.
12 screw, tightening torque : 36 to 48 10
(M3
-2
N•m)
9) Module loading lever Used to install the module into the base unit.
3
6)
7)
2)
3)
4)
5)
6)
2 - 31
Page 51

2 SYSTEM CONFIGURATION
POINTS
(1) The Q61P-A1 is dedicated for inputting a voltage of 100VAC. Do not input a
voltage of 200VAC into it or trouble may occur on the Q61P-A1.
module type
100VAC 200VAC
Supply power voltage Power
Q61P-A1 Operates normally. Power module causes trouble.
Power module does not
Q61P-A2
cause trouble.
CPU cannot be operated.
Operates normally.
(2) The Q63P is dedicated for inputting a voltage of 24VDC. Do not input a voltage of
except 24VDC into it or trouble may occur on the Q63P.
(3) Be sure to ground the earth terminal FG and LG.(Ground resistance: 100
or less)
(3) Selection of the power supply modul e
The power supply module is selected according to the total of current
consumption of the I/O modules, special function module, and peripheral devices
supplied by its power module. (Select the power supply module also
consideration of the current consumption of the peripheral device connected to
the MR-HENC or MR-HDP01, etc.)
For information about the current consumption of 5VDC of the I/O modules,
special function module, and peripheral device, refer to the QCPU(Q mode)
User's Manual(Hardware Design, Maintenance and Inspection).
Part name Model name Description
Motion CPU module
Servo external signal
interface module
Serial absolute synchronous
encoder interface module (Note)
Manual pulse generator
interface module (Note)
Manual pulse generator MR-HDP01
Serial absolute synchronous
encoder
Cooling fan unit Q170FAN Cooling fan of the M otion C PU module 0.08
The current consumption of Motion controller is as follows.
Current
consumption
5VDC [A]
Q173CPUN Max.32 axes control 1.25
Q173CPU Max .32 axes control, with Cooling fan unit 1.75
Q172CPUN Max.8 axes control 1.14
Q172CPU Max .8 axes control, with Cooling fan unit 1.62
Q172LX
Q172EX
Q173PX
MR-HENC
Servo external signal 8 axes
(FLS, RLS, STOP, DOG/CHANGE×8)
Serial absolute synchronous MR-HENC interface×2
Tracking input 2 points
Manual pulse generator MR-HDP01/
Synchronous encoder interface×3, Tracking input 3 points
Pulse resolution: 25PLS/rev (100 PLS/rev after
magnification by 4)
Permitted axial loads Radial load: Max .19.6N
Thrust load: Max.9.8N
Permitted speed: 200r/min (Normal rotation)
Resolution: 16384PLS/rev
Permitted speed: 4300r/min
0.05
0.07
0.11
0.06
0.15
(Note) : Select the power supply module also consideration of the current consumption of the connecting peripheral
device (MR-HENC or MR-HDP01).
2 - 32
Page 52

2 SYSTEM CONFIGURATION
(4) Example of the power supply sel ecti on calc ulati on
(When using the Q173CPU.)
Q61P
-A1
(a) System configuration
Q02H
CPU
Q173
CPU(N)
(b) 5VDC current consumption of each module
Q02HCPU : 0.64 [A] Q173PX : 0.11 [A]
Q173CPU : 1.75 [A] MR-HDP01 : 0.06 [A]
Q172LX : 0.05 [A] QX40 : 0.05 [A]
Q172EX : 0.07 [A] QY10 : 0.43 [A]
MR-HENC : 0.15 [A] Q38B : 0.114 [A]
(c) Power consumption of overall modules
5V
I
= 0.64 + 1.75 + 0.05 + 0.07 + 0.15 + 0.11 + 0.06
Select of the power supply module(Q61P-A1(100VAC)6A) according to this
internal current consumption 3.964[A].
(Note) : Configure the system in such a way that the total current consumption
Q172LXQ172
EX
Q173
PX
QX40 QX40 QY10 QY10
MR-HDP01
MR-HENC
MR-HDP01
Q38B
2 + 0.05 2 + 0.43
2 + 0.114 = 3.964[A]
at 5VDC of all the modules is less than the allowable value.
2 - 33
Page 53

2 SYSTEM CONFIGURATION
2.4.3. Base unit and extension cable
This section describes the specifications of the extension cables for the base units
(CPU base unit or extension base unit) used in the system, and the specification
standards of the extension base unit.
(1) Table of the base unit specification
(a) CPU base unit specifications
Type
Item
Number of I/O modules 3 5 8 12
Possibility of extension Extendable
Applicable module Q series modules
5VDC internal current
consumption [A]
Fixing hole size M4 screw hole or 4.5 hole (for M4 screw)
Exterior dimensions
[mm(inch)]
Weight [kg] 0.21 0.25 0.35 0.45
Attachment Fixing screw M4 14 4 pieces (DIN rail fix ing adapter is optional)
DIN rail fixing adapter
type
Q33B Q35B Q38B Q312B
0.105 0.110 0.114 0.121
189(W)
(7.43(W) 3.86(H)
98(H)
44.1(D)
1.74(D) )
Q6DIN3 Q6DIN2 Q6DIN1
245(W)
44.1(D)
(9.65(W) 3.86(H)
1.74(D) )
98(H)
328(W)
44.1(D)
(12.92(W) 3.86(H)
1.74(D) )
98(H)
439(W) 98(H)
(17.30(W) 3.86(H)
44.1(D)
1.74(D) )
(b) Extension base unit specifications
Type
Item
Number of I/O modules 3 5 8
Possibility of extension Extendable
Applicable module Q series modules
5VDC internal current
consumption [A]
Fixing hole size M4 screw hole or 4.5 hole (for M4 screw)
Exterior dimensions
[mm(inch)]
Weight [kg] 0.23 0.25 0.35
Attachment Fixing screw M4 14 4 pieces(DIN rail fixing adapter is optional)
DIN rail fixing adapter
type
Q63B Q65B Q68B Q612B
12
439(W)
44.1(D)
1.74(D) )
0.121
98(H)
0.45
0.105 0.110 0.114
189(W)
(7.43(W) 3.86(H)
98(H)
44.1(D)
1.74(D) )
Q6DIN3 Q6DIN2
245(W)
(9.65(W) 3.86(H)
1.74(D) )
98(H)
44.1(D)
328(W)
(12.92(W) 3.86(H)
98(H)
44.1(D)
1.74(D) )
Q6DIN1
(17.30(W) 3.86(H)
2 - 34
Page 54

2 SYSTEM CONFIGURATION
(2) Table of the extension cable specifications
The list below describes the specifications of the extension cables which can
be used for the Q CPU system.
Type
Item
Cable length[m(ft.)] 0.45(1.48) 0.6(1.96) 1.2(3.94) 3.0(9.84) 5.0(16.40) 10.0(32.8)
Application
Weight [kg] 0.15 0.16 0.22 0.40 0.60 1.11
QC05B QC06B QC12B QC30B QC50B QC100B
Connection between the CPU base unit and extension base unit, or connection betw een the
extension base units.
POINT
When the extension cables are used in combination, limit the overall length of the
combined cable to 13.2m (43.28ft.).
(3) Names of parts of the base unit
Names of parts of the base unit are described below.
(a) CPU base unit (Q33B, Q35B, Q38B, Q312B)
5)
4)
1)
5V
56
2)
POWER
F6
CPU
3) 6)
I/10I/09I/08I/07I/06I/05I/04I/03I/02I/01I/00
No. Name Application
Extension cable
1)
connector
Connector for sending and receiving signals from the extension base unit, to which the
extension cables are connected.
Protective cover of extension cable connector. Before an extension cable is connected,
2) Base cover
the area of the base cover surrounded by the groove under the word "OUT " on the base
cover must be removed with a tool such as nippers.
Connector for installing the power supply module, CPU module, I/O modules, and
3) Module connector
intelligent function module.
To the connectors located in the spare space where these modules are not installed, attach
the supplied connector cover or the blank cover module QG60 to prevent entry of dirt.
4) Module fixing screw hole Screw hole for fixing the module to the base. Screw size: M3 12
5) Base fixing hole Hole for fixing this base unit onto the panel of the control panel (for M4 screw)
DIN rail adapter fixing
6)
hole
Hole for fixing DIN rail adapter
I/11
0358
2 - 35
Page 55

2 SYSTEM CONFIGURATION
(4) I/O allocations
It is possible to allocate unique I/O No.s for each Motion CPU independently of
the PLC’s I/O No.s. (I/O No.s are unique between the Q series PLC CPU within a
given system, but the I/O No.s of the Motion CPU are unique for each Motion
CPU.)
ON/OFF data input to the Motion CPU is handled via input devices PX!!, while
ON/OFF data output from the Motion CPU is handled via output devices PY!!.
It is not mandatory to match the I/O device PX/PY No.s used in the motion
program with the PLC I/O No.s; but it is recommended to make them match as
much as possible.
The following figure shows an example of I/O allocation.
I/O Allocations
123 45670
Q25H
CPU
O
U
T
Power supply
module
CPU No.1
Q25H
CPU
CPU(N)
CPU No.2 CPU No.3
Q173
QX41
X0 to X1F
The Module
of the
control
CPU No.1
QY41
Y20 to Y3F
The Module
of the
control
CPU No.1
QY41
Y40 to Y5F
The Module
of the
control
CPU No.2
QX41
PX0
to PX1F
(X60 to Y7F)
The Module
of the
control
CPU No.3
QY41
PY20
to PY3F
(Y80 to Y9F)
The Module
of the
control
CPU No.3
8
QY41
YA0
to YBF
The Module
of the
control
CPU No.1
(Note-1) : When the number of the modules to be installed is 32 points.
(Note-2) : When the PX/PY No. does not match the PLC I/O No.
Refer to the Q173CPU/Q172CPU Programming Manual (Motion SFC) about the I/O
allocation setting method,.
Refer to the QCPU(Q Mode) User's Manual(Hardware Design, Maintenance and
Inspection) about the I/O allocation setting method of the Qn(H) CPU,.
POINT
I/O device of the Motion CPU can be set in the range PX/PY000 to PX/PYFFF.
The real I/O points must be 256 points or less. (As for the I/O No., it is possible not
to continue.)
2 - 36
Page 56

2 SYSTEM CONFIGURATION
2.4.4 Q172LX Servo external si g nal s i nterface module
Q172LX receives external signals (servo external signal) required for positioning
control.
(1) Q172LX
5)
Q172LX
1)
2)
CTRL
6)
Q172LX
No. Name Application
1) Module fixing hook
2) Mode judging LED
3) CTRL connector The servo external signal input connector of each axis.
4) Module loading lever Used to install the module to the base unit.
Module fixing screw
5)
hole
6) Module fixing hook Hook used to fix to the base unit.
Hook used to fix the module to the base unit.
(Quick release installation)
Display the servo external input status from the external
equipment.
LED Details
0 to 1F
Hole for the screw used to fix to the base unit.
(M3×12 screw : Purchase from the other supplier)
Indicates to display the servo external signal
input status of each axis.
3)
4)
2 - 37
Page 57

2 SYSTEM CONFIGURATION
Number of inputs
Input method Sink/Source type
Isolation method Photocoupler
Rated input voltage 12/24VDC
Rated input current 12VDC 2mA/24VDC 4mA
Operating voltage range
ON voltage/current Min.10VDC or more/2.0mA or more
OFF voltage/current Max.1.8VDC or less/0.18mA or less
Input resistance Approx. 5.6K
Response time of the
Upper/Lower stroke limit and
STOP signal.
Response time of the
proximity dog, Speedposition switching signal.
Common terminal arrangement 32 points/common (common terminal: B1, B2)
Indicates to display ON indication (LED)
External connector type 40 pin connector
Applicable wire size
Applicable connector for the external
connection
Applicable connector/
Terminal block converter module
Number of I/O occupying points 32 points(I/O allocation: Intelligent, 32 points)
Internal current consumption(5VDC) [A] 0.05
Exterior dimensions[mm(inch)]
Weight [kg] 0.15
(2) Performance specifications
Item Specifications
OFF to ON
ON to OFF
OFF to ON
ON to OFF
Servo external signals : 32 points
(Upper stroke limit, Lower stroke limit, Stop input,
Proximity dog/Speed-position switching signal)
(4 points
10.2 to 26.4VDC
(12/24VDC +10/ -15%, ripple ratio 5% or less)
0.4ms/0.6ms/1ms
(CPU parameter setting, Default 0.4ms)
A6CON1(Attachment),
A6CON2, A6CON3(Optional)
A6TBXY36, A6TBX Y54, A6TBXY70(Optional)
98(H)
(3.86(H) 1.08(W) 3.52(D) )
8 axes)
1ms
2
0.3mm
27.4(W) 89.3(D)
2 - 38
Page 58

2 SYSTEM CONFIGURATION
(3) Connection of servo external sig nal s i nterface module
(a) Servo external si g nals
There are the following servo external signals.
The Q172LX is assigned a set of input No.s per axis. Make the system
setting of the positioning software package to determine the I/O No.s
Servo external signal Application
Upper stroke limit input (FLS)
Lower stroke limit input (RLS)
Stop signal input (STOP) For stopping under speed or positioning control.
Proximity dog/
Speed-position switching input
(DOG/CHANGE)
corresponding to the axis No.s.
POINT
Signal No. 1 to 8 can be assigned to the specified axis. To make assignment, make
the system settings of the positioning software package.
For detection of upper and lower stroke limits.
For detection of proximity dog at proximity dog or count
type home position return of for switching from speed to
position switching control.
Number of points
on one Q172LX
32 points
(4 points/8 axes)
2 - 39
Page 59

2 SYSTEM CONFIGURATION
(b) The pin layout of the CTRL connector
Use the CTRL connector at the Q172LX module front to connect the servo
external signals.
The following pin layout of the Q172LX CTRL connector viewed from the
front.
The pin layout and connection description of the CTRL connector are
described below.
Signal No.
1
2
3
4
Pin No.
B20
B19
B18
B17
B16
B15
B14
B13
B12
B11
B10
B9
B8
B7
B6
B5
B4
B3
B2
B1
CTRL connector
Signal Name
DOG1/CHANGE1
DOG2/CHANGE2
DOG3/CHANGE3
DOG4/CHANGE4
FLS1
RLS1
STOP1
FLS2
RLS2
STOP2
FLS3
RLS3
STOP3
FLS4
RLS4
STOP4
No connect
No connect
COM
COM
Pin No. Signal Name
A20
A19
A18
A17
A16
A15
A14
A13
A12
A11
A10
A9
A8
A7
A6
A5
A4
A3
A2
A1
FLS5
RLS5
STOP5
DOG5/CHANGE5
FLS6
RLS6
STOP6
DOG6/CHANGE6
FLS7
RLS7
STOP7
DOG7/CHANGE7
FLS8
RLS8
STOP8
DOG8/CHANGE8
No connect
No connect
No connect
No connect
Signal No.
5
6
7
8
Applicable connector model name
A6CON1 type soldering type connector
FCN-361J040-AU connector
FCN-360C040-B connector cover
(FUJITSU TAKAMISAWA
COMPONENT LIMITED)
A6CON2 type Crimp-contact type connector
A6CON3 type Pressure-displacement type connector
DOG/CHANGE, STOP, RLS, FLS functions of each axis(1 to 8)
DOG/CHANGE Proximity dog/Speed-position
switching signal
For information about
signal details,refer to
the programing manual.
STOP Stop signal
RLS Lower stroke limit
FLS Upper stroke limit
(Attachment)
(Optional)
2 - 40
Page 60

2 SYSTEM CONFIGURATION
Input or
Output
Input
DOG/CHANGE1
DOG/CHANGE2
DOG/CHANGE3
DOG/CHANGE4
DOG/CHANGE5
DOG/CHANGE6
DOG/CHANGE7
DOG/CHANGE8
(4) Interface between CTRL connector and servo external signal
Signal name Internal circuit
FLS1
FLS2
FLS3
FLS4
FLS5
FLS6
FLS7
FLS8
RLS1
RLS2
RLS3
RLS4
RLS5
RLS6
RLS7
RLS8
STOP1
STOP2
STOP3
STOP4
STOP5
STOP6
STOP7
STOP8
Power supply
CTRL
connector
B20
B16
B12
B8
A20
A16
A12
A8
B19
B15
B11
B7
A19
A15
A11
A7
B18
B14
B10
B6
A18
A14
A10
A6
B17
B13
B9
B5
A17
A13
A9
A5
B1 B2
LED
0
4
8
C
10
14
18
1C
1
5
9
D
11
15
19
1D
2
6
A
E
12
16
1A
1E
3
7
B
F
13
17
1B
1F
Wiring example
Upper stroke
limit input
Lower stroke
limit input
Stop signal
input
Proximity dog
/Speed-position
switching signal
12VDC to 24VDC
5.6K
5.6K
5.6K
5.6K
Specification
Supply voltage
12 to 24 VDC
(10.2 to 26.4 VDC,
stabilized power
supply)
High level
10.0 VDC or more/
2.0mA or more
Low level
1.8 VDC or less/
0.18mA or less
Description
FLS
RLS
STOP
DOG/CHANGE
Common terminals
for motion control
signals,external
signal.
CAUTION
Always use a shield cable for connection of the CTRL connector and external equipment, and
avoid running it close to or bundling it with the power and main circuit cables t o minimize the
influence of electromagnetic interface. (Separate them more than 200mm (0.66ft.) away.)
Connect the shield wire of the connection cable to the FG terminal of the external equipment.
Make parameter setting correctly. Incorrect setting may disable the protective functions such
as stroke limit protection or may not provide the brake output, damaging the module.
Always wire the cables when power is off. Not doing so can damage the output circuit if any of
the output signal cables makes contact with the power supply or the output signal cables make
contact with each other.
Use extreme care when wiring the cables. Wrong wiring can damage the internal circuitry.
2 - 41
Page 61

2 SYSTEM CONFIGURATION
2.4.5 Q172EX Serial absolute synchronous encoder inter face module
Q172EX receive external signals required for serial absolute synchronous encoder.
(1) Q172EX
5)
Q172EX
SY.ENC
1
2
TREN
1
2
1)
2)
SY.ENC1
8)
6)
LITHIUM BATTERY
MITSUBISHI
SY.ENC2
Q172EX
9)
7)
3)
4)
No.
1) Module fixing hook
2) Mode judging LED
3) SY. ENC connector Input connector of the serial absolute synchronous encoder.
4) Module loading lever Used to install the module to the base unit.
5)
6) Module fixing hook Hook used to fix to the base unit.
7) Battery connector For connection of battery lead wire.
8) Battery holder Used to the Install the Battery (A6BAT/MR-BAT) to the holder.
9)
Name Application
Hook used to fix the module to the base unit.
(Quick release installation)
Display the input status from the external equipment.
LED Details
Indicates to display the signal input status of
SY.ENC
1, 2
each serial absolute synchronous encoder.
(When the serial absolute synchronous encoder
cable connected property, LED is turned on.)
Module fixing screw
hole
Battery
(A6BAT/MR-BAT)
TREN
1, 2
Hole for the screw used to fix to the base unit
(M3×12 screw : Purchase from the other supplier)
For Serial absolute synchronous encoder battery backup.
Indicates to display the signal status of tracking
enable.
2 - 42
Page 62
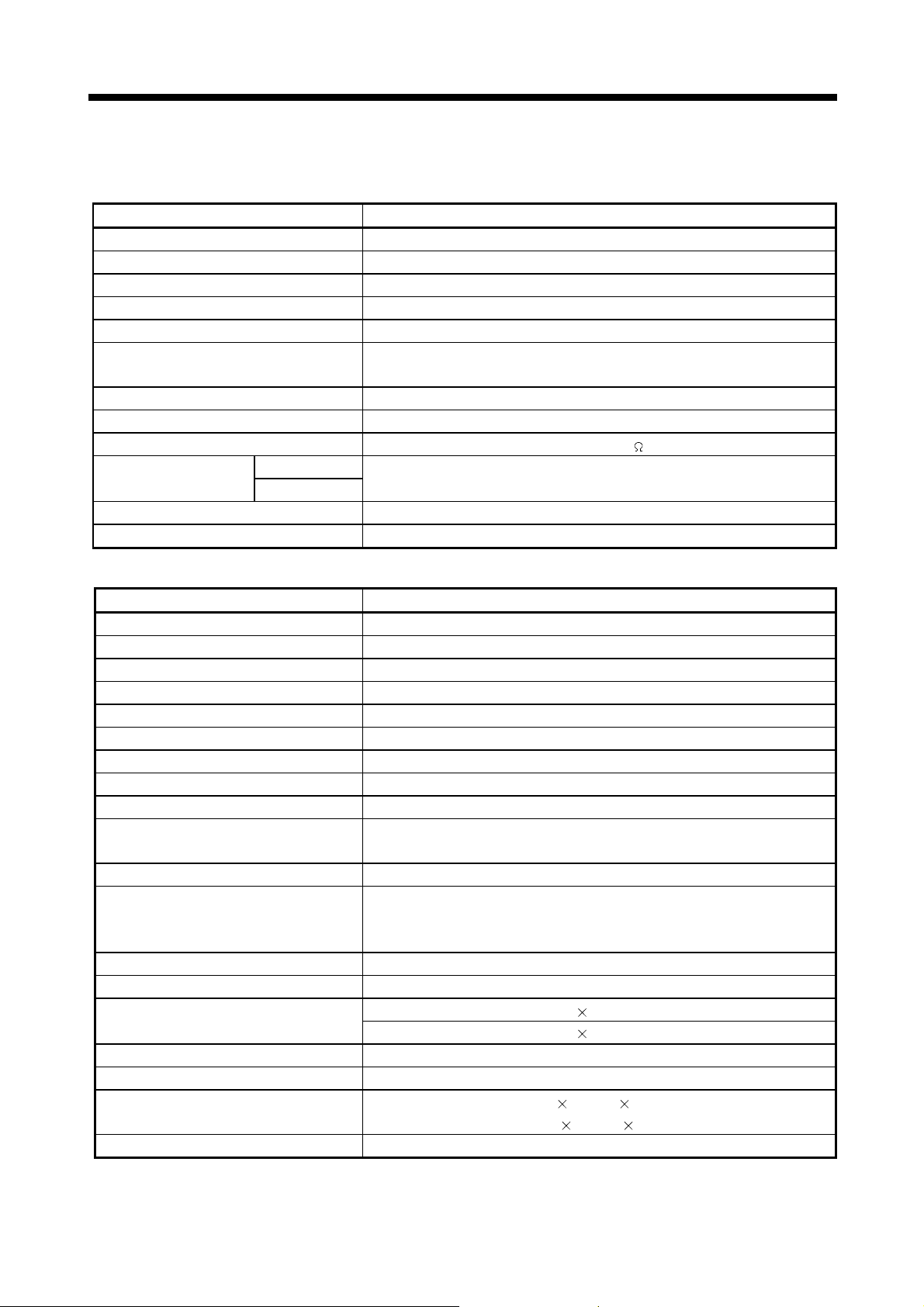
2 SYSTEM CONFIGURATION
(2) Performance specifications
Item Specifications
Number of inputs Tracking enable signal : 2 points
Input method Sink/Source type
Isolation method Photocoupler
Rated input voltage 12/24VDC
Rated input current 12VDC 2mA/24VDC 4mA
Operating voltage range
ON voltage/current 10VDC or more/2.0mA or more
OFF voltage/current 1.8VDC or less/0.18mA or less
Input resistance Approx. 5.6K
Response time
Common terminal arrangement 1 point/common (Common terminal: TREN.COM)
Indicates to display ON indication (LED)
Item Specifications
Applicable signal types Differential-output type : (SN75C11168 or equivalent)
Transmission method Serial communications
Synchronous method Counter-clock-wise (view ed from end of shaft)
Communication speed 2.5Mbps
Applicable types MR-HENC
Position detection method Absolute(ABS) method
Resolution 16384PLS/rev(14bit)
Number of modules 2/module
External connector type 20 pin connector
Applicable connector for
the external connection
Applicable wire UL20276 AWG#22 6Pair
Recommended cables
Cable length Max . 30m(98.4ft.)
Back up the absolute position. Depends on A6BAT/MR-BAT.
Battery service life time(value in actual)
Number of I/O occupying points 32 points(I/O allocation: Intelligent, 32 points)
Internal current consumption(5VDC)[A] 0.07
Exterior dimensions[mm(inch)]
Weight [kg] 0.15
(a) Tracking enable signal input
10.2 to 26.4VDC
(12/24VDC +10/ -15%, ripple ratio 5% or less)
OFF to ON
ON to OFF
(CPU parameter setting, Default 0.4ms)
0.4ms/0.6ms/1ms
(b) Serial absolute synchronous encoder input
MR-J2CNS(Optional)
MR-JHSCBL!M-H
(!=cable length 2m(6.56ft.), 5m(16.4ft.), 10m(32.8ft.), 20m(65.6ft.),
(Note)
30m(98.4ft.) )
15000[ h ], (Example of encoders 2, Ambient temperature 40°C (104°F) )
30000[ h ], (Example of encoders
(Note) : You can use these cables when the tracking enable signal is not used.
When the tracking enable signal is used, fabricate the cable on the customer side.
2 - 43
98(H)
(3.86(H)
, Ambient temperature 40°C (104°F) )
1
27.4(W) 89.3(D)
1.08(W) 3.52(D) )
Page 63

2 SYSTEM CONFIGURATION
(3) Select to number of the synchronous encoder modules.
Synchronous encoders are available in voltage output type(incremental),
differential output type(incremental) and serial absolute output type(MR-HENC).
Q172EX can be connected to only serial absolute output type(MR-HENC).
When using the incremental synchronous encoder of voltage output type or
differential output type, must be used Q173PX. (The synchronous encoders are
used only in the SV22 virtual mode.)
In addition, the usable numbers of synchronous encoders differ depending on the
modules.
The following number of serial absolute synchronous encoders and incremental
synchronous encoders combined can be used.
• Tracking enable signal
Tracking enable signal of Q172EX is used as a high-speed reading
function. It can not be used, as the input start signal which start the input
form synchronous encoders
When using the inputs start signal which start the input from synchronous
encoder, must be used Q173PX. (Type of synchronous encoder is voltage
output(incremental)or differential output(incremental). )
Tracking enable signal input High-speed reading function 2 points
The external input signal of the synchronous encoder is indicated below.
External input signal of the
synchronous encoder
Motion CPU module Synchronous encoder
Q173CPU(N)
Q172CPU(N)
Max. 12 modules
( Q172EX: Max. 6 modules )
Max. 8 modules
( Q172EX: Max. 4 modules )
Item
Number of points
on one Q172EX
2 - 44
Page 64

2 SYSTEM CONFIGURATION
(4) Connection of synchronous encoder interface module.
(a) Connection with serial absolute synchronous encoder
(MR-HENC)
Use the SY.ENC connector at the Q172EX module front to connect the
serial absolute synchronous encoder(MR-HENC).
When tracking enable signal is not used, use the MR-JHSCBL!M-H
encoder cable between the serial absolute synchronous encoder (MRHENC) and SY.ENC connector.
The following pin layout of the Q172EX SY.ENC connector viewed from the
front.
The pin layout and connection description of the SY.ENC connector are
described below.
SY.ENC connector
Pin No.
1 LG 11 LG
2 LG 12 LG
3 LG 13 LG
4 TREN 14 TREN.CO
5 No connect 15 No connect
6 MD 16 MDR
7 MR 17 MRR
8 No connect 18 P5
9 BAT 19 P5
10 P5 20 P5
(Note) : Do not connect a wire to MD(6Pin), M DR( 16Pin).
Signal
name
Pin No.
Signal
name
Applicable connector
model names
10120-3000VE connector
10320-52F0-008 connector cover
(3M make)
(b) Interface with external eq uipment
The interface between the SY.ENC connector and external equipment is
described below.
1) Wiring precautions
Q173CPU(N)/
Q172CPU(N)
Ensure the connector lock after connecting the connector.
Q172EX
Q173CPU(N)/Q172CPU(N) : Motion CPU module
Q172EX : Seria l absolute synchronous
encoder interface module
SY.ENC connector
Serial absolute synchronous encoder cable
(MR-JHSCBL M-H)
Serial absolute synchronous encoder
(MR-HENC)
2 - 45
Page 65

2 SYSTEM CONFIGURATION
(5) Interface between SY.ENC connector and external equipment
Input or
Output
Signal
name
MR 7
MRR 17
P5 10 18 19 20
LG 1 2 3 11 12
Input
BAT 9
Pin No.
SY.ENC connector
Wiring example
Serial
absolute
synchronous
encoder
Internal circuit Specification Description
Transmission method:
serial communications
Position detection
method: absolute
5VDC
Battery
TREN 4
TREN.
COM
SD
plate
14
12VDC to 24VDC
5.6K
CAUTION
Always use a shield cable for connection of the SY.ENC connector and external equipment,
and avoid running it close to or bundling it with the power and main circuit cables t o minimize
the influence of electromagnetic interface. (Separate them 200mm (0.66 ft.) or more away.)
Connect the shield wire of the connection cable to the FG terminal of the external equipment.
When increasing the cable length, use the cable 30m(98.36ft.) or less. Note that the cable
should be run in the shortest possible distance to avoid induced noise.
Always wire the cables when power is off. Not doing so can damage the output circuit if any of
the contact with each other.
Use extreme care when wiring the cables. Wrong wiring can damage the internal circuit.
2 - 46
Page 66

2 SYSTEM CONFIGURATION
(6) Details of encoder cable connections
(a) When not using tracking enable signal
SY.ENC side
connector
10120-3000VE
Synchronous
encoder side
connector
MS3106B20-29S
SY.ENC side
connector
10120-3000VE
Synchronous
encoder side
connector
MS3106B20-29S
P5 19
LG
P5 20
LG 12
MR 7
MRR 17
BT 9
LG
Plate
SD
11
1
MR-JHSCBL5M-H
(Less than 10m(32.79ft.) )
S
R
C
D
F
G
N
(Note-1),(Note-3)
P5 19
LG
11
P5
20
LG 12
P5 18
LG 3
P5 10
LG
2
MR 7
MRR 17
BT 9
LG 1
Plate
SD
MR-JHSCBL10M-H to MR-JHSCBL30M-H
(10 to 30m)
(32.79 to 98.36ft.)
(Note-1),(Note-4)
S
R
C
D
F
G
N
24VDV
(Note-2)
(Note-5)
Synchronous
encoder side
connector
MS3106B20-29S
S
R
C
D
F
G
N
SY.ENC side
connector
10120-3000VE
P5
LG
P5
LG
MR
MRR
BT
LG
TREN 4
TREN.COM 14
19
11
20
12
7
17
9
1
PlateSD
24VDV
Cable length 10m(32.79ft.)
Model name for encoder connector set (MR-J2CNS)
(Note-1) : Encoder cables are the same as HC-SFS/HC-RFS/HC-UFS(2000r/min) series motor cable.
(Note-2) : Encoder connector sets are the same as HC-SFS/HC-RFS/HC-UFS(2000r/min) series motor encoder connector set.
(Note-3) : Be sure to use a wire model name AWG#24.
(Note-4) : Be sure to use a wire model name AWG#22.
(Note-5) : When using tracking enable signal, fabricate the encoder cable by customer side.
Synchronous
encoder side
connector
MS3106B20-29S
S
R
C
D
F
G
N
(Note-3) (Note-4)
SY.ENC side
connector
10120-3000VE
P5 19
LG 11
P5
LG
P5 18
LG 3
P5 10
LG 2
MR 7
MRR 17
BT 9
LG 1
SD
TREN 4
TREN.COM 14
20
12
Plate
Cable length 10 to 30m
(32.79 to 98.36ft.)
(b) When using tracking enable signal
2 - 47
Page 67

2 SYSTEM CONFIGURATION
(7) Connection of the battery
This section describes the battery specifications, handling precautions and
installation of the Q172EX.
(a) Specifications
The specifications of the battery for memory back-up are shown in the table
below.
Battery Specifications
Model name
Item
Classification Manganese dioxide lithium primary battery
Normal voltage[V] 3.6
Battery discharge capacity [mAh] 1600
Battery warranty period 5 years
Applications
Exterior dimensions[mm(inch)] 16(0.63) × 30(1.18)
For backup absolute positioning data of the serial absolute
synchronous encoder(MR-HENC)
A6BAT/MR-BAT
(b) Battery replacement
Battery is sup plied to the
serial absolute synchronous
encorder by the encoder
cable.
For Battery replacement procedure, refer to section 6.4.2.
Battery connector
A6BAT
/MR-BAT
LITHIUM BATTERY
MITSUBISHI
MR-HENC 1 pcs. 10000 30000
MR-HENC 2 pcs. 5000 15000
Do not short a battery.
Do not disassemble a battery.
Do not burn a battery.
Do not overheat a battery.
Do not solder the battery terminals.
(c) Battery service life time
Battery service life time
Guaranteed time(MIN) [ h ] Actual time(TYP) [ h ]
CAUTION
2 - 48
Page 68

2 SYSTEM CONFIGURATION
2.4.6 Q173PX Manual pulse generator i nterface module
Q173PX receive external signals required for Manual pulse generator and Incremental
synchronous encoder (Voltage-output/Open collector type/Differential-output type).
(1) Q173PX
5)
Q173PX
PLS.A
1
2
3
PULSER
PLS.B
1
2
3
TREN
1
2
3
1)
2)
3)
6)
No
.
1) Module fixing hook
2) Mode judging LED
3) PULSER connector
4) Module loading lever Used to load the module to the base unit.
Module fixing screw
5)
hole
6) Module fixing hook Hook used to fix to the base unit.
Name Application
Hook used to fix the module to the base unit.
(Quick release installation)
Display the input status from the external equipment.
LED Details
PLS.A 1 to 3
PLS.B 1 to 3
Input signal status of the Manual pulse
generator/Incremental synchronous
encoder phases A and B
TREN 1 to 3 Tracking enable signal
Input connector of the Manual pulse generator/Incremental
synchronous encoder.
Hole for the screw used to fix to the base unit
(M3×12 screw : Purchase from the other supplier)
Q173PX
4)
2 - 49
Page 69

2 SYSTEM CONFIGURATION
(2) Performance specifications
Number of inputs Tracking enable signal : 3 points
Input method Sink/Source type
Isolation method Photocoupler
Rated input voltage 12/24VDC
Rated input current 12VDC 2mA/24VDC 4mA
Operating voltage range
ON voltage/current 10VDC or more/2.0mA or more
OFF voltage/current 1.8VDC or less/0.18mA or less
Input resistance Approx. 5.6K
Response time
Common terminal arrangement 1 point/common(Common contact: TREN.COM )
Indicates to display ON indication(LED)
(a) Tracking enable signal input
Item Specifications
OFF to ON
ON to OFF
(b) Manual pulse generator/Incremental synchronous encoder
Number of modules 3/module
Open collector type
(26LS31 or equivalent)
Input frequency Max. 200kpps (After magnification by 4)
Applicable types
External connector type 40 pin connector
Applicable wire size
Applicable connector for the external
connection
Applicable connector/
Terminal block converter module
Cable length
Number of I/O occupying points 32 points(I/O allocation: Intelligent, 32 points)
Internal current consumption(5VDC)[A] 0.11
Exterior dimensions[mm(inch)]
Weight [kg] 0.15
input
Item Specifications
Voltage-output/
Open collector type
Differential-output type
10.2 to 26.4VDC
(12/24VDC +10/ -15%, ripple ratio 5% or less)
0.4ms/0.6ms/1ms
(CPU parameter setting, Default 0.4ms)
High-voltage 3.0 to 5.25VDC Voltage-output/
Low-voltage 0 to 1.0VDC
High-voltage 2.0 to 5.25VDC Differential-output type
Low-voltage 0 to 0.8VDC
Voltage-output type/Open-collector type (5VDC), Recommended
product: MR-HDP01
Differential-output type: (26LS31 or equivalent)
Selectable by connector wiring
2
0.3mm
A6CON1(Attachment)
A6CON2, A6CON3(Optional)
A6TBXY36, A6TBX Y54, A6TBXY70(Optional)
30m (98.36ft.)
(Open collector type: 10m (32.79ft.) )
27.4(W) 89.3(D)
98(H)
(3.86(H) 1.08(W) 3.52(D) )
2 - 50
Page 70

2 SYSTEM CONFIGURATION
(3) Connection of manual pulse generator
Manual pulse generators are available in voltage output/open collector type and
differential output type. Since these types differ in connection method, design
according to the connection method of section 2.4.6 (5).
In addition the usable numbers of manual pulse generator which can be used
with each CPU modules are max. 3 modules.
Motion CPU module Manual pulse generator
Q173CPU(N)
Q172CPU(N)
Max. 3 modules
( Q173PX: Max. 1 module )
(4) Connection of incremental synchronous encoder
Incremental synchronous encoders are available in voltage output/Open collector
type and differential output type. Since these types differ in connection method,
design according to the connection method of section 2.4.6 (5).
Serial type absolute synchronous encoder (MR-HENC) not connected to
Q173PX. Then connect to Q172EX.
In addition, the usable numbers of synchronous encoders differ depending on the
modules.
The following number of serial absolute synchronous encoders and incremental
synchronous encoders combined can be used.
Motion CPU module Synchronous encoder
Q173CPU(N)
Q172CPU(N)
Max. 12 modules
( Q173PX: Max. 4 modules )
Max. 8 modules
( Q173PX: Max. 3 modules )
• Tracking enable signal
Tracking enable signal of Q173PX is used to start the input from
incremental synchronous encoders.
The external input signal of the incremental synchronous encoder is
indicated below.
This signal is used as the input start signal or high-speed reading function
from incremental synchronous encoder.
External input signal of the
incremental synchronous encoder
Item
Number of points on
one Q173PX
Tracking enable signal input High-speed readings function
Each 1 point
( Total 3 points )
2 - 51
Page 71

2 SYSTEM CONFIGURATION
(5) Connection of manual pulse generator inter face module
(a) The pin layout of the PULSER connector
Use the PULSER connector at the Q173PX module front to connect the
manual pulse signals, incremental synchronous encoder signals.
The following pin layout of the Q173PX PULSER connector viewed from
the front.
The pin layout and connection description of the PULSER connector are
described below.
Pin No.
2)
3)
2)
3)
2)
3)
4)
B20
B19
B18
B17
B16
B15
B14
B13
B12
B11
B10
B9
B8
B7
B6
B5
B4
B3
B2
B1
PULSER co nnector
Signal Name
HB1
SG
5V
HA1N
HB1N
HB2
SG
5V
HA2N
HB2N
HB3
SG
5V
HA3N
HB3N
No connect
TREN1
TREN2
TREN3
FG
Pin No. Signal Name
A20
A19
A18
A17
A16
A15
A14
A13
A12
A11
A10
A9
A8
A7
A6
A5
A4
A3
A2
A1
HA1
SG
HPSEL1
HA1P
HB1P
HA2
SG
HPSEL2
HA2P
HB2P
HA3
SG
HPSEL3
HA3P
HB3P
No connect
TREN1
TREN2
TREN3
FG
2)
1)
3)
2)
1)
3)
2)
1)
3)
4)
Applicable connector model name
A6CON1 type soldering type connector
FCN-361J040-AU connector
FCN-360C040-B connector cover
A6CON2 type Crimp-contact type connector
A6CON3 type Pressure-displacement type connector
Input type from manual pulse generator/incremental synchronous
1) :
(FUJITSU TAK AM ISAWA
COMPONENT LIMITED)
(attachment)
(Optional)
encoder switched by HPSEL .
Not connection : Voltage-output type/open collector type.
HPSEL -SG connection : Diffrential-output type.
(Switching is possible for each input 1 to 3)
Voltage output/open collector type
2) :
Connect the A-phase signal to HA1P/HA2P/HA3P, and the B-phase
signal to HB1P/HB2P/HB3P.
Differential output type
3) :
Connect the A-phase signal to HA1P/HA2P/HA3P, and the A-phase
inverse signal to HA1N/HA2N/HA3N.
Connect the B-phase signal to HB1P/HB2P/HB3P, and the B-phase
inverse signal to HB1N/HB2N/HB3N.
Connect the shield cable between manual pulse generator /incremental
4) :
synchronos encoder and Q173PX at the FG signal.
2 - 52
Page 72
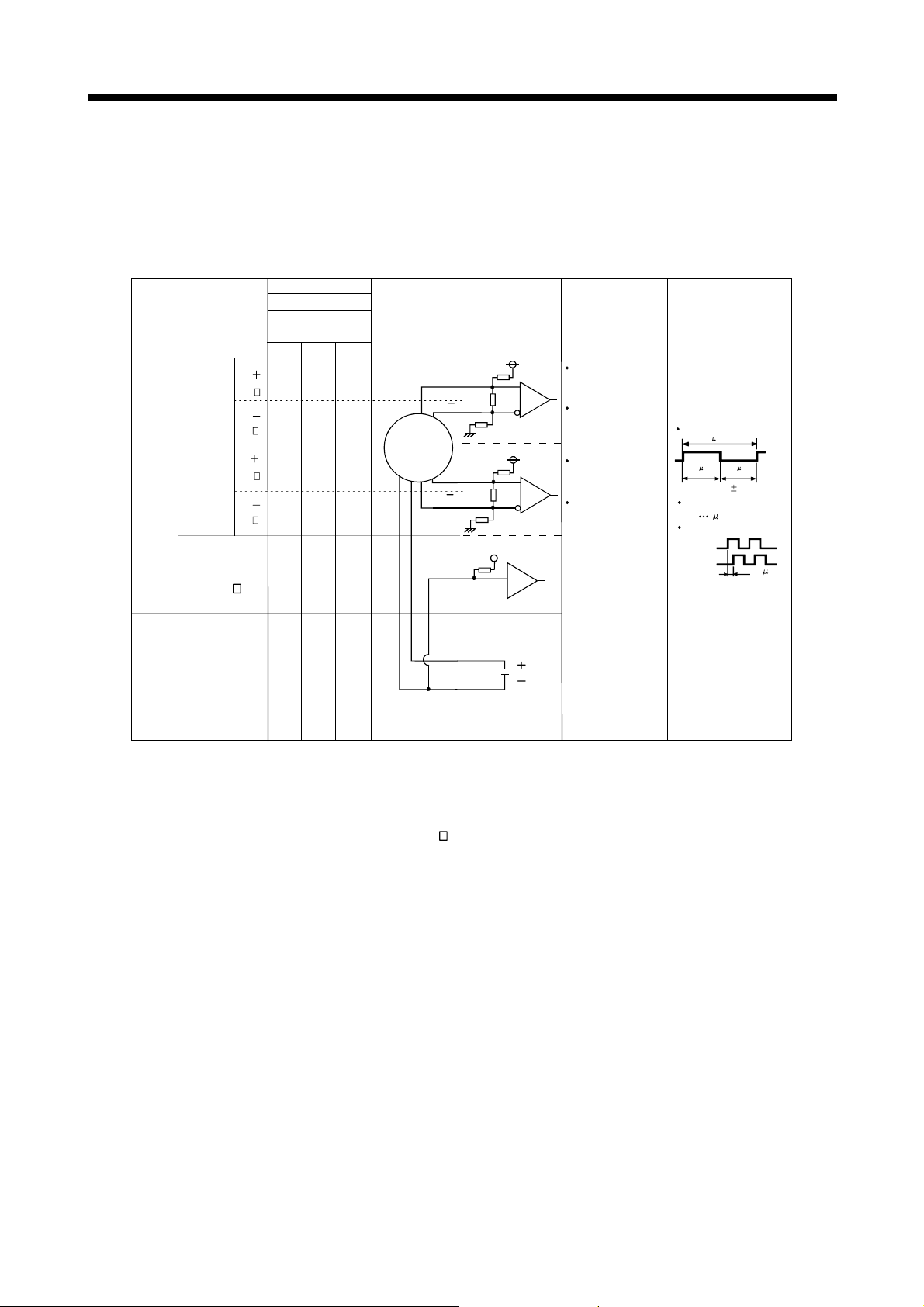
2 SYSTEM CONFIGURATION
(b) Interface between PULSER connector and manual pulse
generator(Differential output type)/Incr emental synchronous
encoder
Interface between Manual pulse generator( Di fferential output ty pe) /
Incremental synchronous encoder
Input or
Output
Power
supply
Input
Signal name
Manual
pulse
generator,
phase A
Manual
pulse
generator,
phase B
Select type
signal
HPSEL
(Note-1)
P5
SG
A
HA P
A
HA N
B
HB P
B
HB N
Pin No.
PULSER connector
Voltage-Output
type
123
A17 A12 A7
B12 B7
B17
A16 A11 A6
B16 B11 B6
A18 A13 A8
B18 B13 B8
A19 A14 A9
B19 B14 B9
Wiring example Internal circuit Specification Description
Manual pulse
generator/
synchronous
encoder
(Note-2)
5V
SG
Rated input voltage
A
A
B
B
Power supply
5VDC
5.5VDC or less
HIGH level
2.0 to 5.25VDC
LOW level
0.8VDC or less
26LS31 or
equivalent
For connection
manual pulse
generator
Phases A, B
Pulse width
20 s or more
5 s
5 s
or more
(Duty ratio: 50% 25%)
Phase A
Phase B
(1) Positioning address
increses if Phase A
leads Phase B.
(2) Positioning address
decreses if Phase B
leads Phase A.
or more
Rise, fall time
1 s or less.
Phase difference
2.5 s or
more
(Note-1) :
(Note-2) :
The 5V(P5)DC power supply from the Q173PX must not be connected if a separated power
supply is used as the Manual pulse generator/Incremental synchronous encoder power supply.
Use a 5V stabilized power supply as a separated power supply. Any other power supply may
cause a failure.
When used to the Manual pulse generator(differential-output type)/Incremental synchronous
encoder, connection of HPSEL and SG.
2 - 53
Page 73

2 SYSTEM CONFIGURATION
(c) Interface between PULSER connector and manual pul se
generator (Voltage output/Open collector ty pe) /
Incremental synchronous encoder.
Interface between Manual pulse generator( Voltage-output/Open collector
type)/Incremental synchronous encoder
Input or
Signa l name
Output
Manual
pulse
generator,
phase A
HA
Manual
pulse
Input
generator,
phase B
HB
Select type
signal
HPSEL
(Note)
P5
Power
supply
SG
Pin No.
PULSER connector
Voltage-Output
type
123
A20
A15 A10
B20 B15 B10
A18 A13 A8
B18 B13 B8
A19 A14 A9
B19 B14 B9
Wiring example Internal circuit
A
Manual pulse
generator/
synchronous
encoder
B
No connect
Power supply
5V
SG
5VDC
Specification
Rated input voltage
5.5VDC or less
HIGH level
3 to 5.25VDC/
2mA or less
LOW level
1VDC or less/
5mA or more
Description
For connection
manual pulse
generator
Phases A, B
Pulse width
20 s or more
5 s
5 s
or more
(Duty ratio: 50% 25%)
Rise, fall time
1 s or less
Phase difference
Phase A
Phase B
(1) Positioning address
increses if Phase A
leads Phase B.
(2) Positioning address
decreses if Phase B
leads Phase A.
or more
2.5 s or
more
The 5V(P5)DC power supply from the Q173PX must not be connected if a separated power
(Note) :
supply is used as the Manual pulse generator/Incremental synchronous encoder power
supply.
Use a 5V stabilized power supply as a separated power supply. Any other power supply
may cause a failure.
(d) Interface between PULSER connector and tracking enabl e
signal
Interface between tracking enable signal
Input or
Output
Input
Signal name
Tracking
enable
TREN
TREN
Pin No.
PULSER co nne ct o r
1 2 3
A4 A3 A2
B4 B3 B2
Wiring example Internal circuit Specification Description
Tracking enable
signal input.
12V to 24VDC
2 - 54
Page 74

2 SYSTEM CONFIGURATION
(6) Connection examples of manual pulse gener ator
Connection of manual pulse generator Connection of manual pulse generator
(Voltage-output/Open collector type) (Differential-output type)
Q173PX
Signal name
HA
HB
SG
SG
SG
P5
FG
:1 to 3
Manual pulse
generator side
A
B
0V
(Note-2)
shield
(Note-1) : The 5VDC(P5) power supply from the Q173PX must not be connected if a separate
power supply is used as the Manual pulse generator/Incremental synchronous
encoder power supply.
If a separate power supply is used as the manual pulse generator power supply,
use a 5V stabilized power supply.
Any other power supply may cause a failure.
(Note-2) : Connect HPSEL ! to the SG terminal if a separate power supply is used as the
manual pulse generator/Incremental synchronous encoder power supply.
5V
(Note-1)
Q173PX
Signal name
HA P
HA N
HB P
HB N
SG
P5
FG
SG
HPSEL
:1 to 3
Manual pulse
generator side
(Note-2)
A
A
B
B
0V
5V
(Note-1)
CAUTION
If a separate power supply is used as the manual pulse generator/incremental synchronous
encoder power supply, use a 5V stabilized power supply. Any other pow er supply may cause
a failure.
2 - 55
Page 75

2 SYSTEM CONFIGURATION
2.4.7 Manual pulse generator/Serial absol ute synchronous encoder (1) Table of the Manual pulse generator specifications
Item Specifications
Model name MR-HDP01
Pulse resolution 25PLS/rev(100 PLS/rev after magnification by 4)
Output method
Power supply voltage 4.5 to 13.2VDC
Current consumption 60mA
Life time 100 rev olutions (at 200r/min)
Permitted axial loads
Operation temperature -10 to 60°C(14 to 140°F)
Weight [kg(lb)] 0.4(0.88)
Number of max. revolution Instantaneous Max. 600r/min. normal 200r/min
Pulse signal status 2 signals : A phase, B : phase, 90° phase difference
Friction torque 0.1N/m(at 20°C (68°F) )
Voltage-output(power supply voltage -1V or more),
Output current = Max. 20mA
Radial load : Max. 19.6N
Thrust load : Max. 9.8N
(2) Table of the Serial absolute synchronous encoder specifications
Item Specifications
Model name MR-HENC
Resolution 16384PLS/rev
Transmission method Serial communications(connected to Q172EX)
Direction of increasing
addresses
Protective construction Dust-proof, Oil-proof(IP52)
Permitted speed 4300r/min
Permitted axial loads
Runout at input shaft tip
Recommended coupling Bellows coupling
Permitted angular acceleration
Operation temperature -5 to 55°C(23 to 131°F)
Internal current consumption 0.15A
Weight [kg(lb)] 1.5 (3.3)
Connecting cable
Communications method Differential driver/receiver conforming to RS422A
Transmission distance Max . 30m(98.4ft.)
CCW(viewed from end of shaft)
Radial load : Max. 98N
Thrust load : Max. 49N
0.02mm(0.00079 inch) or less,
15mm(0.59 inch) from tip
2
40000rad/s
MR-JHSCBL!M-H
=Cable length : 2m(6.56ft.), 5m(16.4ft.),
!
10m(32.8ft.), 20m(65.6ft.), 30m(98.4ft.)
2 - 56
Page 76

2 SYSTEM CONFIGURATION
2.4.8 Connection method with SSCNET cables and termination connector
This section explains how to connect between Motion CPU module and servo
amplifiers. Connected between the Motion CPU module and servo amplifiers by the
SSCNET. When using the Q172CPU(N), can be used only one SSCNET line for
connection to servo amplifier(Connect to CN1). The Q173CPU(N) can be used up to
four SSCNET lines for servo amplifier connection(Connect to CN1). One SSCNET line
allows connection of up to eight servo amplifies.
Also, SSCNET cables or termination connector are different depending on the servo
amplifiers.
(1) Connection between Q173CPU( N) and ser vo amplifiers
(a) When using the Dividing unit/external battery
Q173CPU(N)
Motion CPU
module
SSCNET cable over all length per 1 line
1)+total of 3) 30m(98.36ft.)
CN1
1)
Q173DV
Dividing unit
SSCNET CN1
MITSUBISHI
LITHIUM BATTERY
SSCNET CN2
Q173CPU
(Note-1)
SSCNET CN3
SSCNET CN4
3)
3)
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
SSCNET LINE1
3)
4)
CN1A
CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
SSCNET LINE2
4)
3)
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
(Note-1) : When using the external battery, set the Battery (A6BAT/MR-BAT) into
the Dividing unit (Q173DV).
2 - 57
Page 77

2 SYSTEM CONFIGURATION
(b) When using the Dividing cable
Q173CPU(N)
Motion CPU
module
CN1
SSCNET cable over all length per 1 line
2)+total of 3) 30m(98.36ft.)
2)
CN1A CN1B
2)
Servo amplifier
MR-H-BN/
MR-J2 -B
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
SSCNET LINE1
3)
SSCNET LINE2
3)
4)
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
4)
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
2 - 58
Page 78

2 SYSTEM CONFIGURATION
No. Part name Model name Description
Motion CPU to
1)
Dividing unit
SSCNET cable
Motion CPU to
2)
servo amplifier
SSCNET cable
Servo amplifier/Dividing
3)
unit to servo amplifier
SSCNET cable
4) Termination connector
(Note-1)
Q173DVCBL!M
Q173J2B CBL!M
Q173HB
MR-J2HBUS!M
MR-J2HBUS!M-A
MR-HBUS!M
MR-TM • Connected to the last MR-H-BN by SSCNET
MR-A-TM • Connected to the last MR-J2!-B by SSCNET
(Note-1) : Branch from a connector on the Q173CPU(N) side according to the number of lines.
(Note-2) : !=cable length
(Note-3) :
(Note-2)
(Note-2) ,(Note-3)
(Note-2) ,(Note-3)
CBL!M
(Note-2)
(Note-2)
(Note-2)
=SSCNET LINE No.(none(LINE1), 2(LINE1/2), 3(LINE1/2/3), 4(LINE1/2/3/4))
• Connection between Q173CPU(N) and Q173DV
0.5m(1.64ft.), 1m(3.2 8 ft.)
• Connection between Q173CPU(N) and the first
MR-J2!-B
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between Q173CPU(N) and the first
MR-H-BN
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between MR-J2!-B and MR-J2!-B
• Connection between Q173DV and MR-J2!-B
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between Q173DV and MR-H-BN
• Connection between MR-H-BN and MR-J2!-B
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between MR-H-BN and MR-H-BN
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
2 - 59
Page 79

2 SYSTEM CONFIGURATION
(2) Connection between Q172CPU( N) and ser vo amplifiers
(a) When not using the external battery
Q172CPU(N)
Motion CPU
module
CN1
SSCNET cable over all length per 1 line
1)+total of 3) 30m(98.36ft.)
1)
4)
3)
CN1A CN1B
Servo amplifie r
MR-H-BN/
MR-J2 -B
CN1A CN1B
Servo amplifie r
MR-H-BN/
MR-J2 -B
(b) When using the external battery
Q172CPU(N)
Motion CPU
module
SSCNET cable over all length per 1 line
2)+total of 3) 30m(98.36ft.)
CN1
MITSUBISHI
BAT
LITHIUM BATTERY
CPU
Battery unit
(Q170BAT)
2)
4)
3)
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
2 - 60
Page 80

2 SYSTEM CONFIGURATION
No. Part name Model name Description
Motion CPU to
1)
servo amplifier
SSCNET cable
Motion CPU to
servo amplifier
2)
SSCNET cable
(For connection of the
Battery module)
Servo amplifier to
3)
servo amplifier
SSCNET cable
4) Termination connector
Q172J2BCBL!M
Q172HBCBL!M
Q172J2BCBL!M-B
Q172HBCBL!M-B
MR-J2HBUS!M
MR-J2HBUS!M-A
MR-HBUS!M
MR-TM • Connected to the last MR-H-BN by SSCNET
MR-A-TM • Connected to the last MR-J2!-B by SSCNET
(Note-1)
(Note-1)
(Note-1)
(Note-1)
(Note-1)
(Note-1)
(Note-1)
• Connection between Q172CPU(N) and MR-J2!-B
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between Q172CPU(N) and MR-H-BN
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between Q172CPU(N) and MR-J2!-B, Q170BA
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between Q172CPU(N) and MR-H-BN, Q170BAT
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between MR-J2!-B and MR-J2!-B
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between MR-H-BN and MR-J2!-B
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
• Connection between MR-H-BN and MR-H-BN
0.5m(1.64ft.), 1m(3.2 8 ft.) , 5 m(1 6 .4 ft.)
(Note-1) : !=cable length
2 - 61
Page 81

2 SYSTEM CONFIGURATION
(3) Cable specifications
(a) Q172J2BCBL!M (-B)
Model name
Item
Cable length [m(ft.)] 0.5(1.64) 1(3.28) 5(16.4)
(b) Q172HBCBL!M (-B)
Model name
Item
Cable length [m(ft.)] 0.5(1.64) 1(3.28) 5(16.4)
(c) Q173J2B CBL!M
Model name
Item
Cable length [m(ft.)] 0.5(1.64) 1(3.28) 5(16.4)
(d) Q173HB CBL!M
Model name
Item
Cable length [m(ft.)] 0.5(1.64) 1(3.28) 5(16.4)
(e) Q173DVCBL!M
Model name
Item
Cable length [m(ft.)] 0.5(1.64) 1(3.28)
(f) MR-HBUS!M
Model name
Item
Cable length [m(ft.)] 0.5(1.64) 1(3.28) 5(16.4)
(g) MR-J2HBUS!M (-A)
Model name
Item
Cable length [m(ft.)] 0.5(1.64) 1(3.28) 5(16.4)
Q172J2BCBL05M(-B) Q172J2BCBL1M(-B) Q172J2BCBL5M(-B)
Q172HBCBL05M(-B) Q172HBCBL1M(-B) Q172HBCBL5M(-B)
Q173J2B
= SSCNET LINE No. : none(LINE 1), 2(LINE 2), 3(LINE 3), 4(LINE 4)
Q173HB
= SSCNET LINE No. : none(LINE 1), 2(LINE 2), 3(LINE 3), 4(LINE 4)
MR-HBUS05M MR-HBUS1M MR-HBUS5M
MR-J2HBUS05M(-A) MR-J2HBUS1M(-A) MR-J2HBUS5M(-A)
CBL05M Q173J2B CBL1M Q173J2B CBL5M
CBL05M Q173HB CBL1M Q173HB CBL5M
Q173DVCBL05M Q173DVCBL1M
2 - 62
Page 82

2 SYSTEM CONFIGURATION
(4) Connection example w i th servo amplifiers
As the SSCNET cables or termination connector is different depending on the
servo amplifiers, refer to the following connection example.
The SSCNET cables and termination connector used in the connection example
are any of the models shown in the following table.
When absolute position detection control is executed, installed battery(MR-BAT/
A6BAT) to servo amplifier.
Part name Model name Depiction in connection example
Servo amplifier to servo amplifier
SSCNET cable
MR-HBUS!M
MR-J2HBUS!M
MR-J2HBUS!M-A
Motion CPU to servo amplifier
SSCNET cable
Motion CPU to Dividing unit
SSCNET cable
Termination connector
Q173HB CBL!M/
Q172HBCBL!M(-B)
Q173J2B
Q172J2BCBL!M(-B)
Q173DVCBL!M
MR-TM
MR-A-TM
CBL!M/
(a) MR-H-BN configuration
Motion
CPU module
Q173CPU(N)
/Q172CPU(N)
MR-H-BN MR-H-BN MR-H-BN
Termination
connector
Battery
MR-BAT,
A6BAT
Q172CPU(N) configuration : Q172HBCBL M
Q173CPU(N) configuration : Q173HB CBL M
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
2 - 63
Page 83

2 SYSTEM CONFIGURATION
(b) MR-J2!-B configuration
Motion
CPU module
Q173CPU(N)
/Q172CPU(N)
MR-J2 -B
MR-J2 -B
MR-J2 -B
Termination
connector
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Q172CPU(N) configuration : Q172J2BCBL M
Q173CPU(N) configuration : Q173J2B CBL M
(c) MR-J2!-B/MR-H-BN configurati on
Motion
CPU module
Q173CPU(N)
/Q172CPU(N)
Motion
CPU module
Q173CPU(N)
/Q172CPU(N)
Motion
CPU module
Q173CPU(N)
/Q172CPU(N)
MR-J2 -B MR-J2 -B
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
MR-H-BN
Battery
MR-BAT,
A6BAT
Q172CPU(N) configuration : Q172J2BCBL M
Q173CPU(N) configuration : Q173J2B CBL M
MR-H-BN MR-H-BNMR-J2 -B
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Q172CPU(N) configuration : Q172HBCBL M
Q173CPU(N) configuration : Q173HB CBL M
MR-J2 -B MR-J2 -BMR-H-BN
Termination
connector
Termination
connector
Termination
connector
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Q172CPU(N) configuration : Q172J2BCBL M
Q173CPU(N) configuration : Q173J2B CBL M
2 - 64
Page 84

2 SYSTEM CONFIGURATION
(d) When using the external battery
As the SSCNET cable used depend on the servo amplifiers, when using
the external battery, refer to the following connection example.
1) Example of Q173CPU(N)
Motion
CPU module
Q173CPU(N)
Q173DVCBL M
Q173DV
Battery
Motion
CPU module
Q173CPU(N)
Q173DVCBL M
Q173DV
Battery
2) Example of Q172CPU(N)
Motion
CPU module
Q172CPU(N)
• MR-H-BN + MR-J2!-B + MR-H-BN configuration
MR-H-BN MR-H-BNMR-J2 -B
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
• MR-J2!-B + MR-H-BN + MR-J2!-B configuration
MR-H-BNMR-J2 -B MR-J2 -B
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
• MR-H-BN + MR-J2!-B + MR-H-BN configuration
Q172HBCBL M-B
MR-J2 -BMR-H-BN MR-H-BN
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Termination
connector
Termination
connector
Termination
connector
Battery
MR-BAT,
A6BAT
Q170BAT
Battery
Battery
MR-BAT,
A6BAT
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Motion
CPU module
Q172CPU(N)
• MR-J2!-B + MR-H-BN + MR-J2!-B configuration
Q172J2BCBL M-B
MR-J2 -B MR-J2 -BMR-H-BN
Q170BAT
Battery
Battery
MR-BAT,
A6BAT
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Battery
MR-BAT,
A6BAT
Termination
connector
2 - 65
Page 85

2 SYSTEM CONFIGURATION
(5) Setting of the servo amplifier axis numbers(dno.) and axis N o.
The axis No.s are used to set the axis numbers of the SSCNET connected servo
amplifiers in the program. Axis No.s 1 to 32 can be set for the Q173CPU(N), 1 to
8 for the Q172CPU(N). To set the axis No.s, assign the axis No.s to the axis
numbers(dno.) set with the axis selection switches(rotary switch) of the servo
amplifiers(Positions 0 to 7 of the rotary switch correspond to d1 to d8 on the
system settings screen.) to each SSCNET line in the system settings of the
positioning software package.
You cannot set the same axis number(dno.) and axis No.(dno.) more than once.
Correspondences between dno.s and rotary switches of servo amplifier
SSCNET
LINE
(Note)
dno.
1 1 “0” 1 2 “0”
2 1 “1” 2 2 “1”
3 1 “2” 3 2 “2”
4 1 “3” 4 2 “3”
5 1 “4” 5 2 “4”
6 1 “5” 6 2 “5”
7 1 “6” 7 2 “6”
8 1 “7” 8 2 “7”
Servo amplifier's
rotary switch
dno.
(Note)
SSCNET
LINE
Servo amplifier's
rotary switch
SSCNET
LINE
(Note)
dno.
1 3 “0” 1 4 “0”
2 3 “1” 2 4 “1”
3 3 “2” 3 4 “2”
4 3 “3” 4 4 “3”
5 3 “4” 5 4 “4”
6 3 “5” 6 4 “5”
7 3 “6” 7 4 “6”
8 3 “7” 8 4 “7”
(Note) : dno. is the servo amplifier axis numbers displayed in the system settings of the positioning
software package. Set the axis No. relative to the dno. in system settings.
Servo amplifier's
rotary switch
dno.
(Note)
SSCNET
LINE
Servo amplifier's
rotary switch
The Dividing unit (Q173DV) and the SSCNET cables (Q173J2B CBL!M/
Q173HB
CBL!M) between the Motion CPU and servo amplifiers divide signals
allocated in CN1 of the Q173CPU(N) into each of the four lines. The following
table shows correspondence between the connector No. after the division and
the SSCNET line No. .
Correspondences between SSCNET LINE No. and connector No.
SSCNET LINE No. Connector No. of the Dividing unit Connector No. of the SSCNET cable
1 SSCNET CN1 1
2 SSCNET CN2 2
3 SSCNET CN3 3
4 SSCNET CN4 4
(Note) : SSCNET LINE No. Q173CPU(N) : 4 lines / Q172CPU (N) : 1 line.
2 - 66
Page 86

2 SYSTEM CONFIGURATION
2.4.9 External battery
This section describes the battery specifications which used Motion CPU, handling
Item
Classification Manganese dioxide lithium primary battery
Normal voltage [V] 3.6
Battery discharge capacity [mAh] 1600
Battery warranty period 5 years
Applications
Exterior dimensions [mm(inch)] 16×30
precautions and equipments.
(1) External battery speci ficati ons( For M otion C PU module)
Model name
(For IC-RAM back-up of the Q173CPU(N)/Q172CPU(N))
A6BAT/MR-BAT
Continuous power off
(2) Q173CPU(N)/Q172CPU(N ) back- up by the external battery.
When using the external battery, set the external battery(A6BAT/MR-BAT) in the
system setti ng s.
Item
Guaranteed time (MIN) Actual time(TYP)
[ h ] [ h ]
Continuous power off time External battery use 60000 240000
(3) External battery and SSC N ET cable
When using the external battery, install A6BAT/MR-BAT to the Dividing unit or
Item
Q173CPU(N) Q173DV Q173DVCBL!M
Q172CPU(N) Q170BAT
Battery unit. Also be sure the following cables.
Installation location of
the external battery
Q172J2BCBL!M-B (For MR-J2!-B)/
Q172HBCBL!M-B (For MR-H-BN)
SSCNET cable
CAUTION
Do not shot a battery.
Do not disassemble a battery.
Do not burn a battery.
Do not overheat a battery.
Do not solder the battery terminal.
When using the external battery, be sure to select " the external battery use " in the system
settings. If not setting the external battery, the back-up data of Motion CPU, may not back up,
since the battery voltage detection error is not det ected.
2 - 67
Page 87
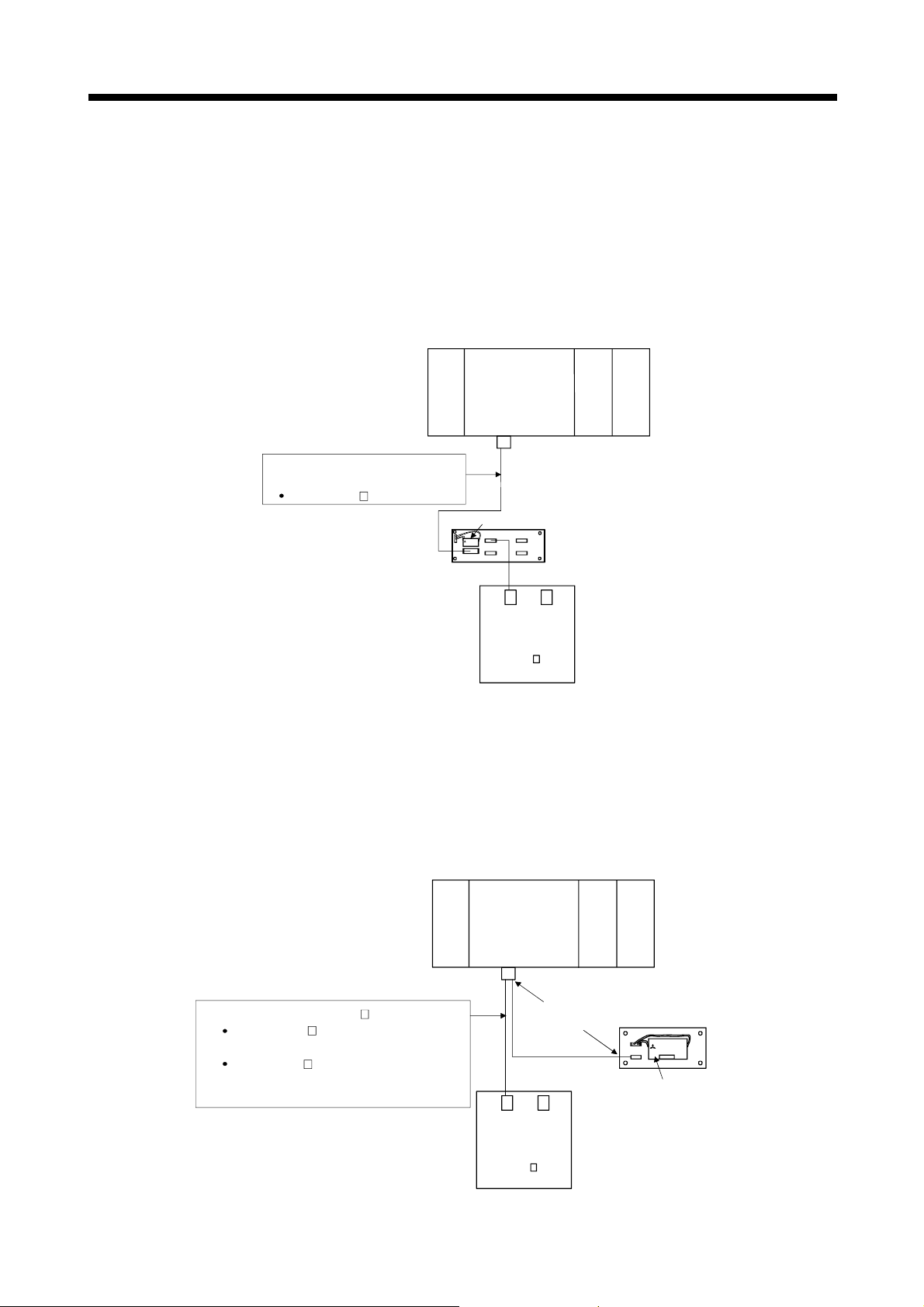
2 SYSTEM CONFIGURATION
(a) Connection with Q173CPU( N )
Connection procedure of Q173CPU(N) and A6BAT/MR-BAT
1) Set the A6BAT/MR-BAT to the Dividing unit(Q173DV)
2) Connect the A6BAT/MR-BAT connector to the BAT connector of the
3) Connect between Q173CPU(N) and Q173DV by the SSCNET cable
Connection between Q173CPU(N)
and Dividing unit (Q173DV).
Q173DVCBL M
Q173DV.
(Q173DVCBL!M)
A6BAT/MR-BAT
Q173CPU
Q173CPU(N)
Motion
CPU mdule
SSCNET CN1
MITSUBISHI
LITHIUM BATTERY
SSCNET CN2
CN1
Dividing unit
(Q173DV)
SSCNET CN3
SSCNET CN4
SSCNET LINE1
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
(b) Connection with Q172CPU( N )
Connection procedure of Q172CPU(N) and A6BAT/MR-BAT
1) Set the A6BAT/MR-BAT to the Battery unit (Q170BAT).
2) Connect the A6BAT/MR-BAT connector to the BAT connector of the
Q170BAT.
3) Connect between Q172CPU(N) and Q170BAT by the SSCNET cable.
Q172CPU(N)
Motion
CPU module
CN1
Battery unit
(Q170BAT)
MITSUBISHI
BAT
LITHIUM BATTERY
CPU
A6BAT/MR-BAT
Connection between MR-J2 -B
Q172J2BCBL M-B
Connection between MR-H-BN
Q172HBCBL M-B
(Note) : Connection cable length of Q170BAT
can use to 0.5m(1.64ft.).
500mm
(1.64ft.)
CN1A CN1B
Servo amplifier
MR-H-BN/
MR-J2 -B
2 - 68
Page 88

2 SYSTEM CONFIGURATION
2.4.10 Cooling fan unit (Q170FAN) (Q173CPU /Q172C PU onl y)
This section explains the specifications of the Cooling fan unit(Q170FAN) used for the
Motion CPU module.
(1) Removable conditions of the Cooling fan unit
It is possible to remove the Cooling fan unit (Q170FAN) in order to disperse heat
from inside the Motion CPU module according to the number of Motion CPU
module and ambient temperature conditions.
Removable/Not removable of the Cooling fan unit (Q170FAN) by number of
Motion CPU module and ambient temperature is as follows.
(a) When using only one Motion CPU module
It is possible to remove the Cooling fan unit if the ambient temperature in
which the Motion CPU module will be operating is 0 to 40°C (32 to 104°F) .
(b) When using two or more Motion CPU module
Do not remove the Cooling fan unit(Q170FAN).
Ambient temperature
of the Motion CPU
Number of the Motion CPU
1 module Removable Not removable
0 to 40°C
(32 to 104°F)
Over 40 to 55°C
(Over 104 to 131°F)
2 modules or more Not removable
(2) Cooling fan unit specifications
Model name
Item
Type Cooling fan
Operating ambient
Temperature °C (°F )
Operating voltage range [V] 4.3 to 5.8
Rated current [A] 0.08
Rated rotational speed [r/min] 7500
Service life time 30000 hours rated voltage continuous operation (at 40°C (104°F) )
Application For cooling Motion CPU module
Weight [kg] 0.01
As a guideline for preventive maintenance, the module should be inspected
every six months and replaced approximately every two to three y ears even if the
accumulated number of operating hours is less than the service life time shown
above (Refer to section 6.3 Periodic Inspections.)
Q170FAN
0 to 70
(
32 to 158
)
2 - 69
Page 89

2 SYSTEM CONFIGURATION
(3) In point of the layout design wi thi n the contr ol panel
Leave 50mm(1.97inch) or more clearance between the top of the modules and
structures or parts.
Top of control panel, wiring duct, or other components
Cooling fan unit
(Q170FAN)
The wind blows lies
50mm
(1.97inch) min.
PLC CPU
Power supply
Motion CPU
2 - 70
Page 90

3 DESIGN
3. DESIGN
3.1 System Designing Procedure
Design the system which uses the Multiple CPU system in the following procedure.
Motion control system design
Select the CPU module according to number of control axes.
Select the motion functions to be installed accdording to the machinery
and equipment to be controll ed (selection of the programing so ftware
packages according to the OS software packages).
Select the number of Q172LX's and design according to the each
axis control system and whether servo external signals are required
or not.
When there is mechanical home position and dog type home position
return is made: Proximity dog required
For speed control: Speed-position switching control required
When overrun prevention is necessary: Stroke limit required
When each axis stop is necessary: STOP signal required
3
Select Q173PX, Q172EX and design accoding to whether manual
pulse generators and synchronous encoders are requir ed or not.
Select interrupt module QI60 accoding to whether Interrupt input are
required or not.
Select I/O modules according to the specifications of the external
equipment to be controlled.
Select the CPU base unit, extension base units, extens ion power
supply module and extens ion cables, and make I/O assignment
according to necessary number of Q172LX's, Q172EX's, Q173PX's,
QX 's, QY P's and the number of I/O modules.
Select the servo amplifier and servo motor according to the motor
capacity and number of revolution from the machine mechanism to be
controlled each axis.
Set the servo amplifier connection by SSCNET and axis numbers and
axis No.(dno.).
Refer to section 2.4.5
Refer to section 2.4.6
Refer to a MELSEC-Q
series manual.
Refer to section 2.4.4
Refer to section 2.4.5
Refer to section 2.4.6
Refer to the servo
amplifier manual.
Refer to section 2.4.8
3 - 1
Page 91

3 DESIGN
Extenal circuit design
Power supply circuit design
Design the power supply circuit which supplies power to such system
components as the Motion controller, I/O equipment and servo
amplifiers, etc., taking into consideration the protective coord ination
and noise suppression techniques.
Safty circuit design
Design the operation-ready circuit which stops the system at
occurrence of any alarm such as a Motion controller or servo amplifier
alarm or the emergency stop, the circuit which avoids a malfunction
while power is instable at power-on, and the electromagnetic brake
circuit for servo motors.
Layout design within control panel
Temperatures and vibrations in consid eration of heat generated from
modules, and handling of the modules installed.
Carry out layout design from such aspects as installation environment,
etc. .
Refer to section 3.2
Refer to section 3.2.1
Refer to section 3.2.2
Refer to section 3.3
!
CAUTION
Provide appropriate circuits external to the Motion CPU to prevent cases where danger
may resu lt from
Motion CPU failure
abnormal operation of the overall system in the event of a power supply fault or
.
Install the Motion controller, servo amplifier, servomotor, and regenerative resistor on inflammable
material. Direct installation on flammable material or near flammable material may lead to fires.
If a fault occurs in the Motion controller or servo amplifier, shut the power OFF at the servo amplifier’s
power source. If a large current continues to flow, fires may occur.
When using a regenerative resistor, shut the power OFF with an error signal. The regenerative
resistor may abnormally overheat due to a fault in the regenerative transistor, etc., and may lead to
fires.
Always take heat measures such as flame proofing for the inside of the control panel where the servo
amplifier or regenerative resistor is installed and for the wires used. Failing to do so may lead to fires.
Do not apply a voltage other than that specified in the instruction manual on any terminal.
Doing so may lead to destruction or damage.
Do not mistake the polarity ( + / - ), as this may lead to destruction or damage.
3 - 2
Page 92

3 DESIGN
!
CAUTION
Do not touch the servo amplifier's heat radiating fins, regenerative resistor and servomotor, etc.
while the power is ON and for a short time after the power is turned OFF. In this timing, these
parts become very hot and may head to burns.
Always turn the power OFF before touching the servomotor shaft or coupled machines, as these parts
may lead to injuries.
Do not go near the machine during test operations or during operations such as teaching.
Doing so may lead to injuries.
Always install a leakage breaker on the Motion controller and servo amplifier power source.
If installation of a magnetic contactor for power shut off during an error, etc., is specified in the
instruction manual for the servo amplifier, etc., always install the magnetic contactor.
Install an emergency stop circuit externally so that the operation can be stopped immediately and the
power shat off.
Use the Motion controller, servo amplifier, servomotor and regenerative resistor with the combinations
listed in the instruction manual. Other combinations may lead to fires or faults.
If safety standards (ex., robot safety rules, etc.,) apply to the system using the Motion controller,
servo amplifier and servomotor, make sure that the safety standards are satisfied.
Construct a safety circuit externally of the Motion controller or servo amplifier if the abnormal
operation of the Motion controller or servo amplifier differ from the safety directive operation in
the system.
In systems where coasting of the servomotor will be a problem during the emergency stop, the forced
stop, servo OFF or when the power is shut OFF, use dynamic brakes.
Make sure that the system considers the coasting amount even when using dynamic brakes.
In systems where perpendicular shaft dropping may be a problem during the emergency stop, the
forced stop, servo OFF or when the power is shut OFF, use both dynamic brakes and magnetic brakes.
The dynamic brakes must be used only during the emergency stop, the forced stop and errors where
servo OFF occurs. These brakes must not be used for normal braking.
The brakes (magnetic brakes) assembled into the servomotor are for holding applications, and must
not be used for normal braking.
The system must have a mechanical allowance so that the machine itself can stop even if the
stroke limits switch is passed through at the max. speed.
Use wires and cables that have a wire diameter, heat resistance and bending resistance compatible
with the system.
Use wires and cables within the length of the range described in the instruction manual.
The ratings and characteristics of the parts (other than Motion controller, servo amplifier, servomotor)
used in a system must be compatible with the Motion controller, servo amplifier and servomotor.
Install a cover on the shaft so that the rotary parts of the servomotor are not touched during operation.
There may be some cases where holding by the magnetic brakes is not possible due to the service
life time or mechanical structure (when the ball screw and servomotor are connected with a timing belt,
etc.).Install a stopping device to ensure safety on the machine side.
3 - 3
Page 93

3 DESIGN
3.2 External Circuit Desig n
As to the ways to design the external circuits of the Motion system, this section
explains the method and instructions for designing the power supply circuits and
safety circuits, etc.
(1) Sample system circuit desig n for motion contr ol
3-phase
200/220VAC
Power Supply
200VAC
200VAC
FG
LG
24VDC
Power
supply
Q61P-A2
24V
24G
NFB
S
T
R
CP1
CP2
PLC CPU
Qn(H)CPU
Number of inputs:
8 axes/module
Motion CPU Input module
Q173CPU(N)/
Q172CPU(N)
Servo external
signals interfac e
module
Q172LX
FLS1
DOG8/
CHANGE8
FLS1
DOG8/
CHANGE8
COM
QX40
Forced stop
Xn
COM
Output module
QY10
PYm
G24
EMG
Output of Motion CPU
PYm
CP3
Ra1
Servo amplifier output situation
(On : servo normal output, OFF : alarm abnormal
Ra1
3 - 4
Emergency St op
EMG
Operation Ready
OFF
ON
MC
MC
SK
Page 94

3 DESIGN
POINT
1) (Note-1) : The following is the Motion SFC program example.
2) (Note-2) : It is also possible to use a full wave rectified power supply as the power
supply for the electromagnetic brake.
3) (Note-3) : It is also possible t o use forced stop signal of t he servo amplifier.
4) It recommends using one leakage breaker for one servo amplifier. When electric
power is supplied to multiple servo amplifiers for one lea kage breaker, select the
wire connected to the servo amplifier according to the capacity of the leakage
breaker.
5) (Note-4) : Only the point has des cribed the servo amplifier MR-J2M-B.
Refer to "MR-J2M-B Servo amplifier Instruction Ma nual" for details.
6) (Note-5) : For information about connection of the SSCNET cable and termination
connector refer to section 2.4.8 (4).
Circuit example when using MR-H-BN
CP4
(Note-4)
(Note-4)
R
MR-H -B N
S
T
R1
S1
COM
MBR
EM1
EM2
< Example> For control axis 1 and axis 2
Servo error detection
[F 1]
SET PYm
[G 1]
M2408 M2428
[F 2]
RST PYm
PYm ON with initial
(ON : normal)
Servo error detection of
the axis 1, axis 2.
OFF : abnormal(error)
END
Ra2
Ground
U
V
W
Erectomagnetic
brake
(Note-2)
SM
Ra2
U
V
W
DC24V
(Note-3)
MC
CP5
CP6
CP7
+24V
24VDC
Power
supply
24G
Circuit example when using MR-J2-B/MR-J2S-B
(Note-4)
(Note-4)
L1
MR-J2-B/
L2
MR-J2S-B
L3
L11
L12
COM
MBR
EM1
SG
U
V
W
(Note-3)
DC24V
U
V
W
Ground
Ra3
Circuit example when using MR-J2M-B
(Note-4)
(Note-4)
L1
MR-J2M-B
L2
L3
L11
L12
VIN
MBR
EM1
SG
U
V
W
(Note-3)
Ra4
DC24V
U
V
W
Ground
Circuit example when using MR-J2-03B5
MC
Ra1
P24
MR-J2-03B5
P24G
P24L
EMI
U
V
W
E
B1
B2
U
V
W
Ground
SM
Erectomagnetic
brake
(Note-2)
Erectomagnetic
brake
(Note-2)
SM
Erectomagnetic
brake
(Note-2)
Ra3
(Note-5)
SM
Ra4
3 - 5
Page 95

3 DESIGN
Power supply
(2) System design circuit example of the PLC I/O
(a) System design circui t ex ampl e( when not using ERR contact of
power supply module)
Power supply
Using AC and DCUsing AC
MC
Start
switch
MC
Fuse
Stop
switch
outut module
Ym
Yn
Output module
Transformer
CPU
SM52
SM403
Program
RA1
MC2
MC1
Ym
Yn
MC
Input module
L
RA1
MC1
MC2
DC power supply
established signal input
START/STOP circuit
Starting possible
when the PLC RUN
output RA1 is ON
Alarm output
(lamp or buzzer)
RA1 switched
ON by SM403
MC
Turns output equipment
power off when STOP
occurs.
on emergency stop,
on stop at upper/ lower
limit switch.
Interlock circuits as necessry.
Provide external interlock
circuits for conficting
operations, such as forward
rotation and reverse rotarion,
and for parts that could
damage the machine or
cause accidents if no
interlock were used.
Start
switch
MC
Stop
switch
Output module
Output module
The power-ON procedure is as follows:
For AC For AC/DC
1) Switch power ON.
2) Set CPU to RUN.
3) Turn ON the start switch.
4) When the magnetic contactor (MC) comes on, the output
equipment is powered and may be driven by the program.
1) Switch power ON.
2) Set CPU to RUN.
3) When DC power is established, RA2 goes ON.
4) Timer (TM) times out after the DC pow er reaches 100%.
(The TM set value should be the period of time from w hen
RA2 goes ON to the establishment of 100% DC voltage.
Set this value to approximately 0.5 seconds.)
5) Turn ON the start switch.
6) When the magnetic contactor (MC) comes on, the output
equipment is powered and may be driven by the program.
(If a voltage relay is used at RA2, no timer (TM) is required
in the program.)
3 - 6
Transformer
Fuse
SM52
SM403
XM
TM
N0
M10
RA1
RA2
Ym
Yn
Transformer
CPU
Ym
Yn
TM
MC1 N0 M10
Program
MC
Input module
MC2
MC1
RA1
MC1
MC2
L
Fuse
XM
DC power
supply
(-) (+)
Fuse
RA2
MC
Set TM to time
to establish
DC input signal
A voltage relay
is recommended
Alarm output
(lamp or buzzer)
RA1 switched
ON by SM403
MC
Turns output
equipment
power off when
STOP occurs
on emergency
stop,on stop at
upper/ lower limit
switch.
Page 96

3 DESIGN
(b) System design circui t ex ampl e( when using ERR contact of
power supply module)
Power supply
Using AC and DC
DC power supply
established signal input
START/STOP circuit
Starting possible
when the PLC RUN
output RA1 is ON
Start
switch
MC
Transformer
Fuse
SM403
N0
Stop
switch
RA1
RA2
output module
Ym
Yn
SM52
XM
TM
MC1 N0 M10
M10
Program
RA3
Transformer
CPU
Ym
Yn
TM
MC
Input module
RA1
Fuse
DC power
supply
(-)
(+)
Fuse
Set TM to time
to establish
DC input signal
RA2
XM
L
A voltage relay
is recommended
Alarm output
(lamp or buzzer)
MC
RA3 switched
OFF by ERR
MC
Turns output equipment
power off when ERR
switch OFF
on emergency stop,
on stop at upper/lower
limit switch.
Power supply module
Interlock circuits as
necessry. Provide
external interlock
circuits for conficting
operations, such as
forward rotation and
reverse rotarion,
and for parts that could
damage the machine or
cause accident if no
interlock were used.
ERR
output module
MC2
MC1
RA3
MC1
MC2
The power-ON procedure is as follows:
For AC/DC
1) Switch power ON.
2) Set CPU to RUN.
3) When DC power is established, RA2 goes ON.
4) Timer (TM) times out after the DC pow er reaches 100%. (The TM set value should be the period of time
from when RA2 goes ON to the establishment of 100% DC voltage. Set this value to approximately 0.5s.)
5) Turn ON the start switch.
6) When the magnetic contactor (MC) comes on, the output equipment is powered and may be driven by the
program. (If a voltage relay is used at RA2, no timer (TM) is required in the program.)
3 - 7
Page 97

e
3 DESIGN
3.2.1 Power supply circui t design
This section describes the protective coordination and noise suppression techniques of
the power supply circuit.
(1) Separation and protective coordi nation ( l eakag e cur rent pr otecti on,
over current protection) of power suppl y l i nes
When wiring, separate the lines of Multiple CPU system power supplies from
those of the I/O equipment and servo amplifier as shown below.
When there is much noise, connect an insulation transformer.
Main power
supply
100/200VAC
200VAC
NFB
(2) Grounding
The motion system may malfunction as it is affected by various noises such as
electric path noises from the power supply lines, radiated and induced noises
from other equipment, servo amplifiers and their cables, and electromagnetic
noises from conductors. To avoid such troubles, connect the earthing ground of
each equipment and the shield grounds of the shielded cables to the earth.
Also use ferrite cores to prevent the sneak noises from the SSCNET.
For grounding, use the exclusive ground terminal wire of each equipment or a
single-point earth method to avoid grounding by common wiring, where
possible, since noises may sneak from other equipment due to common
impedances.
PLC power
supply
I/O power
supply
Main circuit
power supply
Servo amplifier
power supply
Insulation
transformer
CP
CP
CP
NFB
Multiple CPU
system
T1
I/O devices
Main circuit devic
Servo amplifier
Panel personal
computer
100/200VAC
Line noise filter
Multiple CP U
system
SSCNET
Servo amplifier
Ferrite cores
SM
3 - 8
Page 98

3 DESIGN
3.2.2 Safety circuit design (1) Concept of safety circuits
When the Motion controller is powered on-off, proper outputs may not be
provided temporarily due to the delays and rise times of the Motion controller
power supply and external I/O control power supplies (especially DC).
Therefore, the circuit must be made up to enable the Motion controller to be
powered on first. Also, abnormal operations may be performed when the
external power supply becomes faulty or the Motion controller fails.
Constructed circuit of the parts (emergency stop, protective and interlock circuits,
etc.) which may lead to machine breakdown and accidents due to abnormal
operations at externally of the Motion controller in a fail-safe viewpoint, to prevent
these abnormal operations from leading to the abnormal operation of the whole
system.
(2) Emergency stop circui t
The circuit should be constructed outside the Motion controller or servo amplifier.
Shut off the power supply to the external servo amplifier by this circuit, make the
magnetic brakes of the servomotor operated.
(3) Forced stop circuit
(a) It is possible to effect the forced stop all axes of the external servo amplifier
Forced stop
(MR-H!BN/MR-J2!-B) at once via the forced stop input of the input
modules. After the forced stop, remove the forced stop factor and cancel the
forced stop. (The servo error detection signal does not turn on with the forced
stop.)
It is possible to set the forced stop input No. by the parameter setting of the
system setti ng .
The forced stop wiring example is shown below.
Input module (Example : QX10)
TB1
R
R
R
Internal
circuit
LED
TB16
TB17
100VAC
(Note): It is possible to set the forced stop (Xn)
of the system settings at the user side.
3 - 9
Page 99

3 DESIGN
Item
Emergency stop
Forced stop
(b) It is also possible to use the forced stop signal of the servo amplifier.
Refer to manual of the servo amplifier about servomotor capacity.
Operation status of the emergency stop and the forced stop are as follows.
Operation of
the signal ON
Servo OFF
Shut off the power supply to the external servo amplifier by
external circuit, make the servomotor stopped.
The servomotor is stopped according to the stop instruction from
Motion controller to the servo amplifier.
Remark
3 - 10
Page 100
3 DESIGN
3.3 Layout Design withi n The Control Panel
3.3.1 Installation environment
Install the Motion controller system in the following environment conditions.
(1) Ambient temperature is a range the following conditions.
Number of
the Motion CPU
1 0 to 40°C (32 to 104°F)
2 or more
Q173CPUN/
Q172CPUN
0 to 55°C (32 to 131 °F)
(2) Ambient humidity is in a range from 5% to 95% RH
(3) No condensing from sudden temperature changes
(4) No corrosive or inflammable gas
(5) There must not be a lot of conductible dust, iron filings, oil mist, or salt, organic
solvents
(6) No direct sunlight
(7) No strong electrical or magnetic fields
(8) No direct vibrations or shocks on the Motion controller
Q173CPU/Q172CPU
With Cooling fan unit
(Shipped from the factory)
(Note-1) : It is need to install the Cooling fan unit(Q170FAN).
Without Cooling fan unit
—
(Note-1)
3 - 11
 Loading...
Loading...