

BCN-B11127-479*
Section Mgr.
Section Mgr.Section Mgr.
Section Mgr. Design Eng.
Design Eng.Design Eng.
Design Eng.
APPROVALS:
APPROVALS:APPROVALS:
APPROVALS:
H.Ogi
H.OgiH.Ogi
H.Ogi
MITSUBISHI
General Purpose AC Servo
MELSERVO-J2S-S061
Built-In Positioning Function
Specifications and Instruction Manual
For Engineering Sample
MITSUBISHI

1
BCN-B11127-479*
Table of Contents
1. FUNCTION AND CONFIGURATION 2
1.1 Overview 2
1.2 Features 3
1.3 System configuration 3
2. WIRING DIAGRAM 5
3. TERMINALS 7
3.1Terminal blocks 7
3.2 Connection example 8
3.3 Power-on sequence 8
3.4 Signal explanations 12
3.5 Additional function devices 14
4. INTERFACES 16
5. AUTOMATIC OPERATION MODE 18
5.1 Positioning via point table with digital input 18
5.2 Positioning operation in accordance with point tables 22
5.3 Positioning operation vi a com munication 23
5.4 Manual operation mode 24
5.5 Zeroing 26
6. DISPLAY AND OPERATION 27
6.1 Display flowchart 27
7. PARAMETERS 28
8. COMMUNICATIONS 47
8.1Configuration 47
8.2 Communication specifications 49
8.3 Protocol 50
8.4 Character codes 52
8.5 Error codes 53
8.6 Checksum 53
8.7 Time-out operation 54
8.8 Retry operation 54
8.9 Initialization 55
8.10 Communication procedure example 55
8.11 Command and data No. list 56
8.12 Detailed explanation of commands 66
REVISIONS 85

2
BCN-B11127-479*
1. FUNCTIONS AND CONFIGURATION
1.1 Overview
The MR-J2S-
A-S061 AC se rvo amplifier w ith built-i n positioning functions i s the MR-J2 S-A generalpurpose AC servo amplifier which incorporate single-axis positioning functions. These functions perform
positioning operation by merely setting the position data (target positions), motor speeds, acceleration
and deceleratio n time co n stan ts, et c. to poin t ta ble s as if se tting the m in p aram ete rs. Th e serv o amp lifie r
is the most appropriate to configure a program-free, simple positioning system or to simplify a system, for
example.
There are up to 31 points. You can choose a configuration suitable for your purpose, e.g. simple
positioning system using external I/O signals (DI/O), operation using DI/O and RS-422 serial
communication, or multi drop operation using RS-422 serial communication.
All servo motors are equipped with an absolute position encoder as standard. An absolute position
detection syste m can be configured by merely adding a battery to the se rvo amplifier. Once the home
position has been set, z eroing i s not requi red a t power on, al arm occurrence, etc.
3
BCN-B11127-479*
1.2 Features
(1) Up to 31 point tables
(2) Stopper type zeroing operation
(3) Point table output function
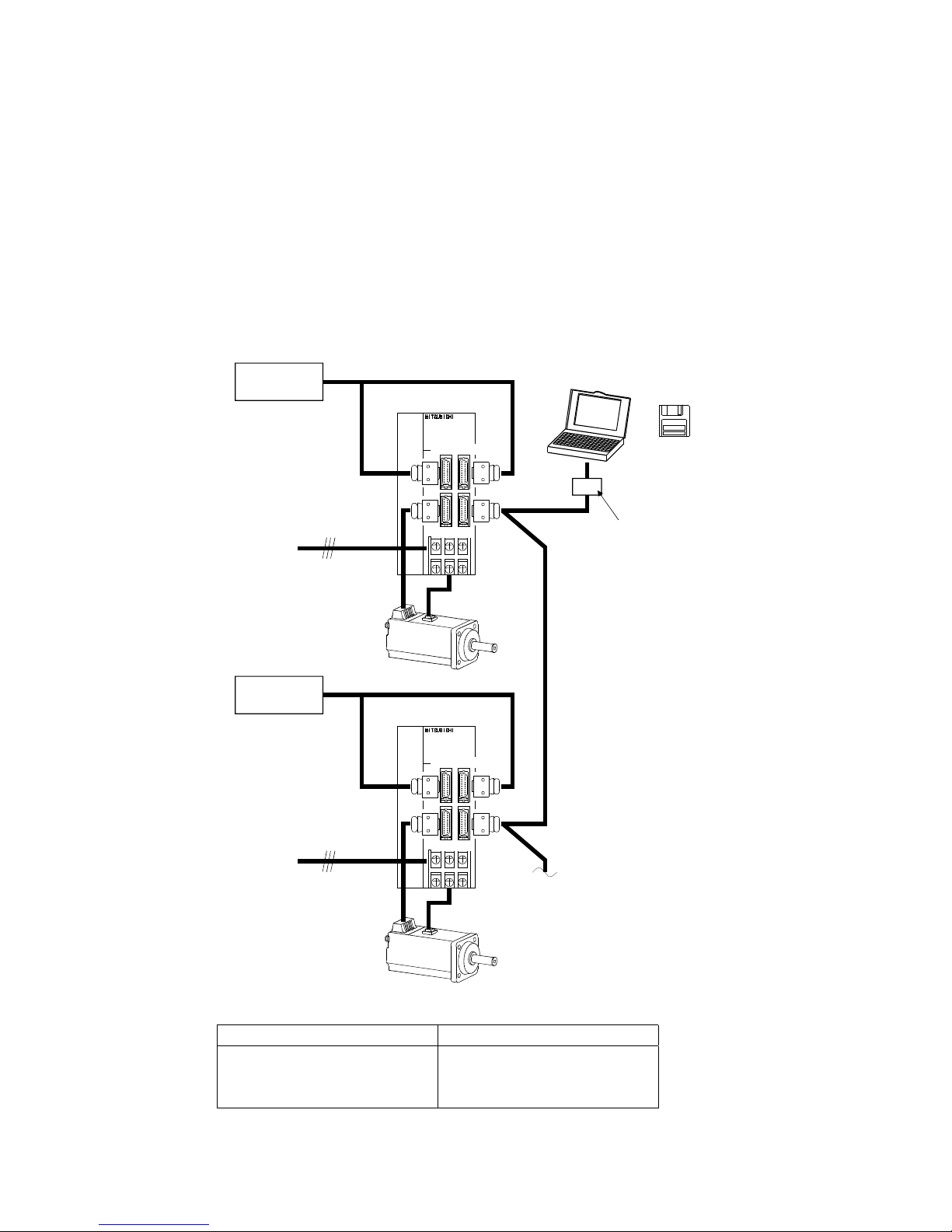
1.3 System configuration
1) Several (up to 32) servo amplifiers are connected with the personal computer by RS-422.
Servo amplifier (axis 1)
External I/O
signals
Power supply
3-phase 200VAC
or single-phase
230VAC
Servo motor
RS–422
Set-up
Software
Personal
computer
CN1A CN1B
CN2 CN3
Servo amplifier (axis 2)
External I/O
signals
Servo motor
CN1A CN1B
CN2 CN3
RS–232C
RS–232C/RS-422 converter
(to be prepared by the customer)
To the next axis
RS–422
Power supply
3-phase 200VAC
or single-phase
230VAC
Communication data
PC to Servo amplifier Servo amplifier to PC
- Positioning data to point table
- Control signals
- Parameter data
- Status monitor
- Parameter data
- Alarm information and so on
4
BCN-B11127-479*
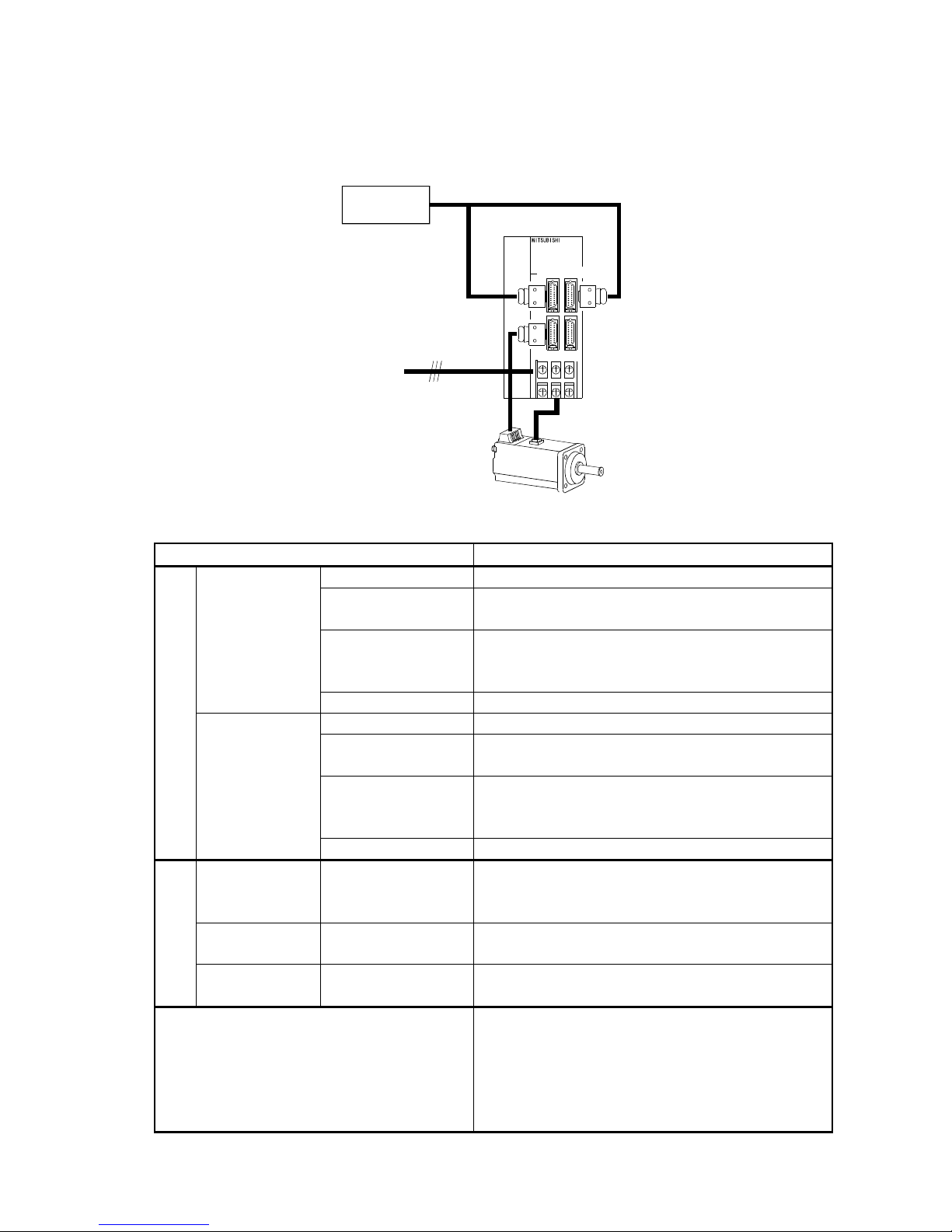
2) The follow ing configuration uses e xternal I/O signals. The external input signal s are used to
control all signals (devices) that response delay is less than 15msec.
3) Function list
Contents Description
Operation specification - Positioning up to 31 point via point block #
Position command input
- Setting at point block
- Setting range for positioning: +/- 1 [um] to +/- 999.999 [um]
Speed command input
- Setting at point block
- Set at the point block for acc. / dec. time
- Parameter # 14 is for S-Curve acc. / dec. time constant
Point block # input
System - Absolute value command with sign or incremental value command
Operation specification - Positioning via RS-422(232C) communication
Position command input
- Setting via RS-422(232C) communication
- Setting range for positioning : +/- 1 [um] to +/- 999.999 [um]
Speed command input
- Setting via RS-422(232C) communication
- Set the acc. / dec. time via RS-422(232C) communication
- Parameter # 14 is for S-Curve acc. / dec. time constant
Command type
Position data input
System - Absolute value command with sign or incremental value command
Automatic mode
- Select the required ones from among 31 preset point blocks and
perform operation in accordance with the set value
(Position block # input, Position data input)
Manual mode JOG
- Jogging operation among preset jog speed via RS-422(232C)
communication or external input
Operation mode
Manual zeroing Stopper type zeroing
- Stopper type zeroing
Capable set the zero address at parameter setting
Function on positioning control
- Absolute position detection system
- Backlash compensation
- External stroke limit function
- Software stroke limit function
- Teaching function
- Roll feeding function (equivalent)
Servo amplifie
r
External I/O
signals
Power supply
3-phase 200VAC
or single-phase
230VAC
Servo moto
r
CN1A CN1B
CN2 CN3
5
BCN-B11127-479*
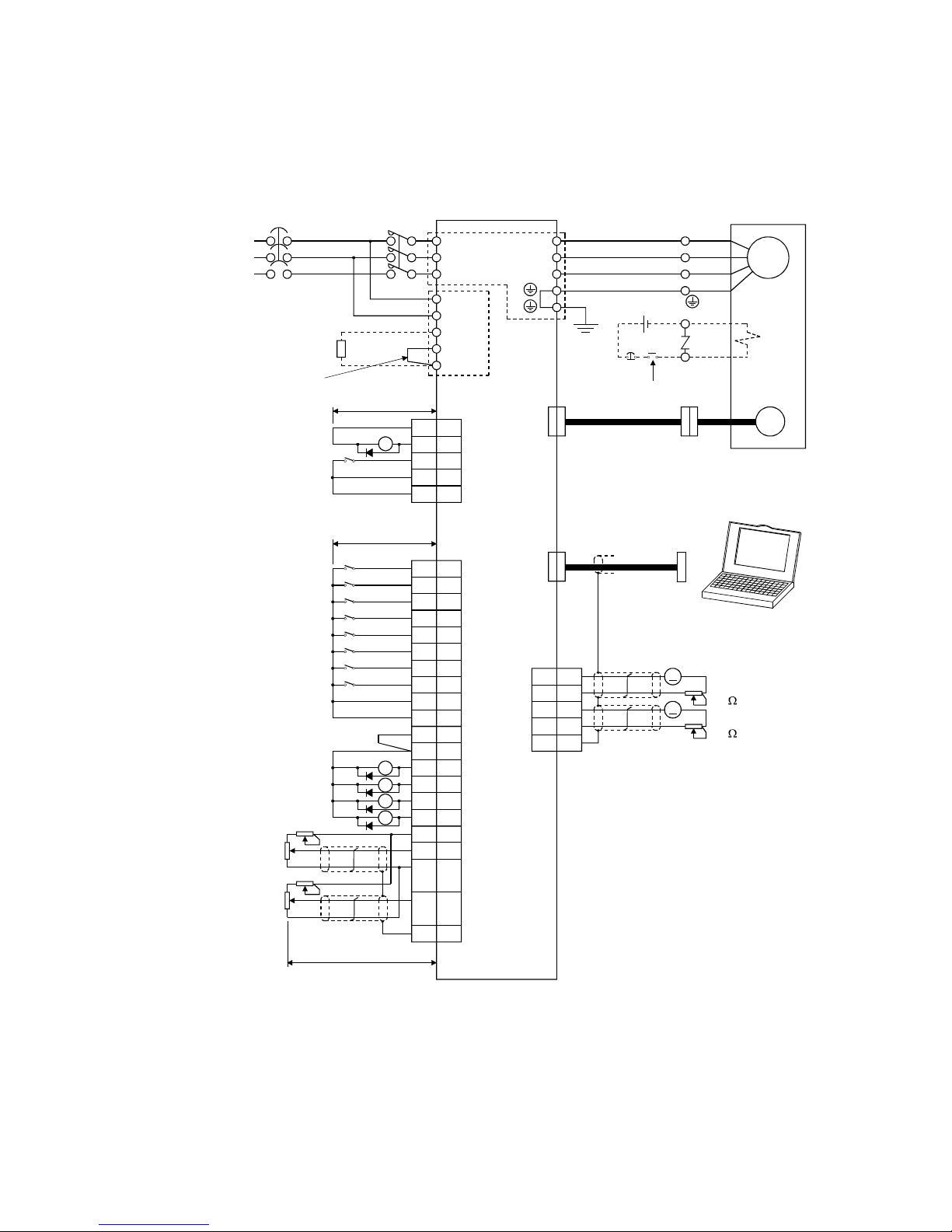
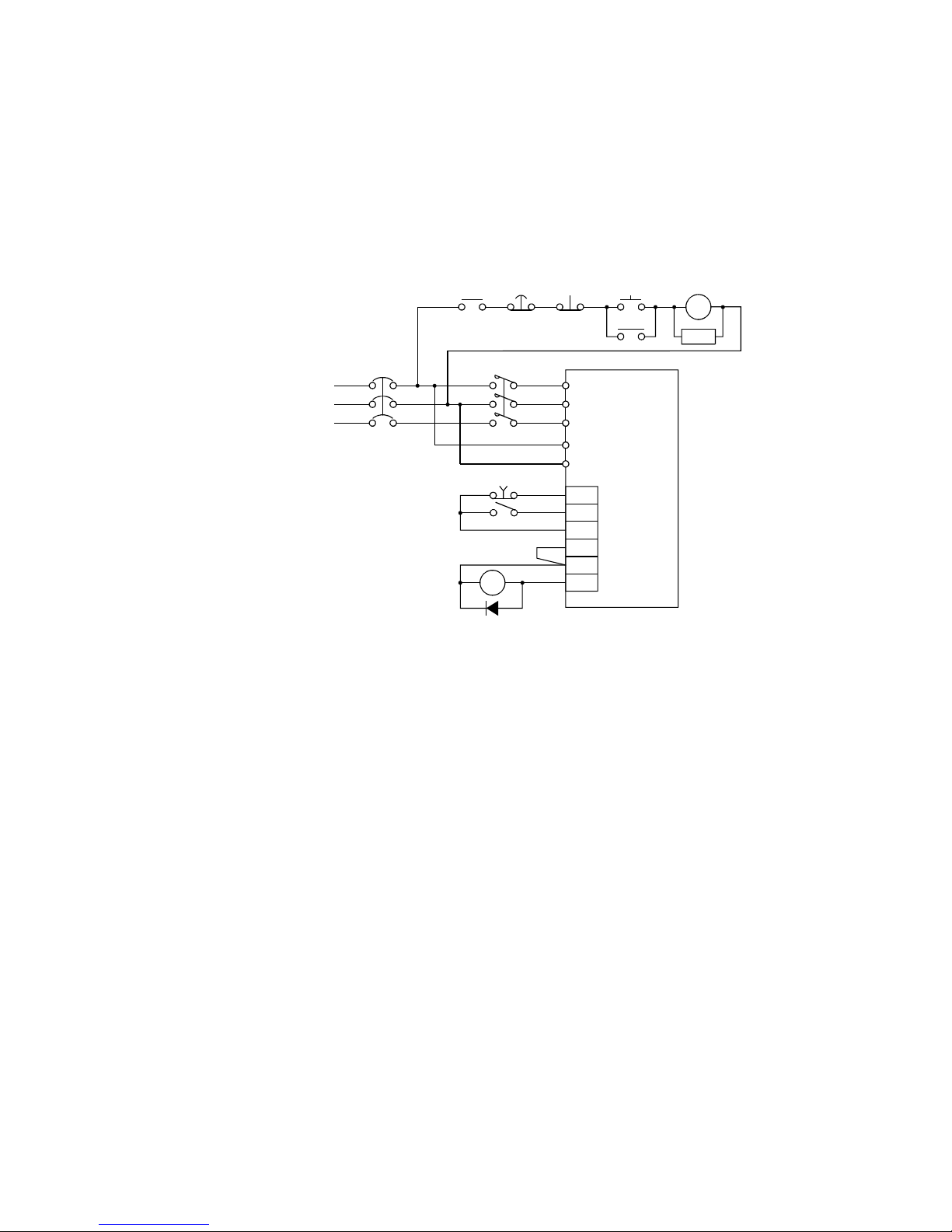
2. Wiring Diagram
Emergency stop
Proximity dog
Zeroing completion
Monitor output 1
RA2
RA3
RA4
RA5
Rough match
In position
Trouble
Ready
External torque limit
16
15
17
7
5
14
8
9
10
SON
LSN
LSP
MD0
DI0
DI1
ST1
ST2
SG
20
SG
2
11
1
12
P15R
LG
TLA
VC
Plate
SD
CN1B
10
8
DOG
SG
CN1
A
18
ZP
4
13
6
18
19
CPO
INP
ALM
RD
COM
3
VDD
13
3
Plate
LG
SD
CN3
LG
4
MO1
14
MO2
A
A
C
D
P
B1
W (Black)
V (White)
U (Red)
(Green)
Electromagnetic
brake
Encoder
Encoder cable
(Available as option or to be fabricated)
NFB
MC
Regenerative
brake option
L12
L11
L 3
L 2
L1
10 k
2m(78.74inch) max.
Upper limit setting
W
V
U
Servo amplifier
MR-J2S-A-S061
9
RA 1
20
SG
Communication cable
(Available as option or to be fabricated)
CN3
TE1
TE2
When connecting the external regenerative
brake option, always disconnec
t
the jumper from across P-D.
SM
COM
CN 2
Servo motor
Servo on
Forward rotation stroke end
Reverse rotation stroke end
Automatic/manual selection
Point table No. selection 1
Point table No. selection 2
Forward rotation start
Reverse rotation star
t
3-phase 200VAC
10m(39.37inch) max.
10m (39.37inch) max.
Upper limit setting
To be shut off when servo on signal
switches off
or alarm occurs.
Monitor output 2
B2
10 k

6
BCN-B11127-479*
Note: 1. To prevent an electric shock, always connect the protective earth (PE) terminal of the servo
amplifier to the protective eart h (P E) of th e control box.
2. Connect the diode in the correct d irection. If it is con nected reversely, the servo amplif ier wil l be
faulty and will not output signals, disabling the emergency stop and other protective circuits.
3. CN1A, CN1B, CN2 an d CN3 hav e the s ame shape . Wrong connec tion of t he co nnectors w ill lead
to a fault.
4. The sum of currents that flow in the external relays should be 80mA max. If it exceeds 80mA,
supply interface power from external.
5. When starting operation, always connect the forward/reverse rotation stroke end signal (LSN/LSP)
with SG. (Normally closed contacts)
6. Trouble (ALM) is connected with COM in normal alarm-free condition.
7. The pins with the same si gnal name a re connect ed in t he s ervo ampl ifi er.

7
BCN-B11127-479*
3. Terminals
3.1 Terminal blocks
Symbol Signal Description
Main circuit power input terminals
1) 200V Class
Supply L
1
, L2 and L3 with the following power.
For a single-phase 230VAC power supply, connect the power supply to L1 and
L2 and keep L3 open:
Servo amplifier
Power supply
MR-J2-10A to 70A MR-J2-100A to 700A
3-phase 200 to 230VAC,
50/60Hz
L
1•L2•L3
Single-phase 230VAC,
50/60Hz
L
1•L2
L1, L2, L3 Main circuit power supply
Cannot be used for combination with the ser vo motor HC-SFS52•53.
2) 100V Class
Supply L1, L2 with the single-phase 100 to 120V 50/60Hz power.
U, V, W Servo motor output
Servo motor power output terminalss
Connect to the servo motor power supply terminals (U, V, W).
L11, L21 Control circuit power supply
Control circuit power input terminals
1) 200V Class
Supply L11 and L21 with single-phase 200-230VAC, 50/60H z power.
2) 100V Class
Supply L11 and L21 with single-phase 100-120VAC, 50/60H z power.
P, C, D Regenerative brake option
Regenerative brake option connection terminals
C and D are factory-connected.
When using the regenerative brake option, always remove wiring from across
P-D and connect the regenerative brake option across P-C.
N Do not connect.
Protective earth (PE)
Ground terminal
Connect this terminal to the protective earth (PE) te rm inals o f the servo
motor and control box for grounding.
8
BCN-B11127-479*
3.2 Connection example
Wire the power supply and main circuits as shown below. A no-fuse breaker (NFB) must be used with the
input cables of the power supply.
Design the circuit so that the servo on signal also tur ns off as soon as the power is shut off on detection of
alarm occurrence.
MC
SK
MC
ON
OFF
Emergency
stop
RA
EMG
SON
SG
VDD
COM
(Note 1) Three-phase
200 to 230VAC
or
Single-Phase
230VAC
RA
Servo amplifier
L21
L11
L3
L2
L1
Trouble
MC
NFB
Note : For a single-phase 230VAC power supply, connect the power supply to L1
and L2 and keep L3 open.
ALM
External
emergency stop
Servo on
3.3 Power-on sequence
(1) Power-on procedure
1) Always wire the power supply as shown in above Section 3.7.1 using the magnetic contactor with
the main circuit power supply (three-phase 200V: L
1
, L2, L3, single-phase 230V: L1, L2). Configure
up an external sequence to switch off the magnetic contactor as soon as an alarm occurs.
2) Switch on the control circuit power supply L
11
, L21 simultaneously with the main circuit power
supply or before switching on the main circuit power supply. If the main circuit power supply is not
on, the display shows the corresponding warning. However, by switching on the main circuit power
supply, the warning disappears and the servo amplifier will operate properly.
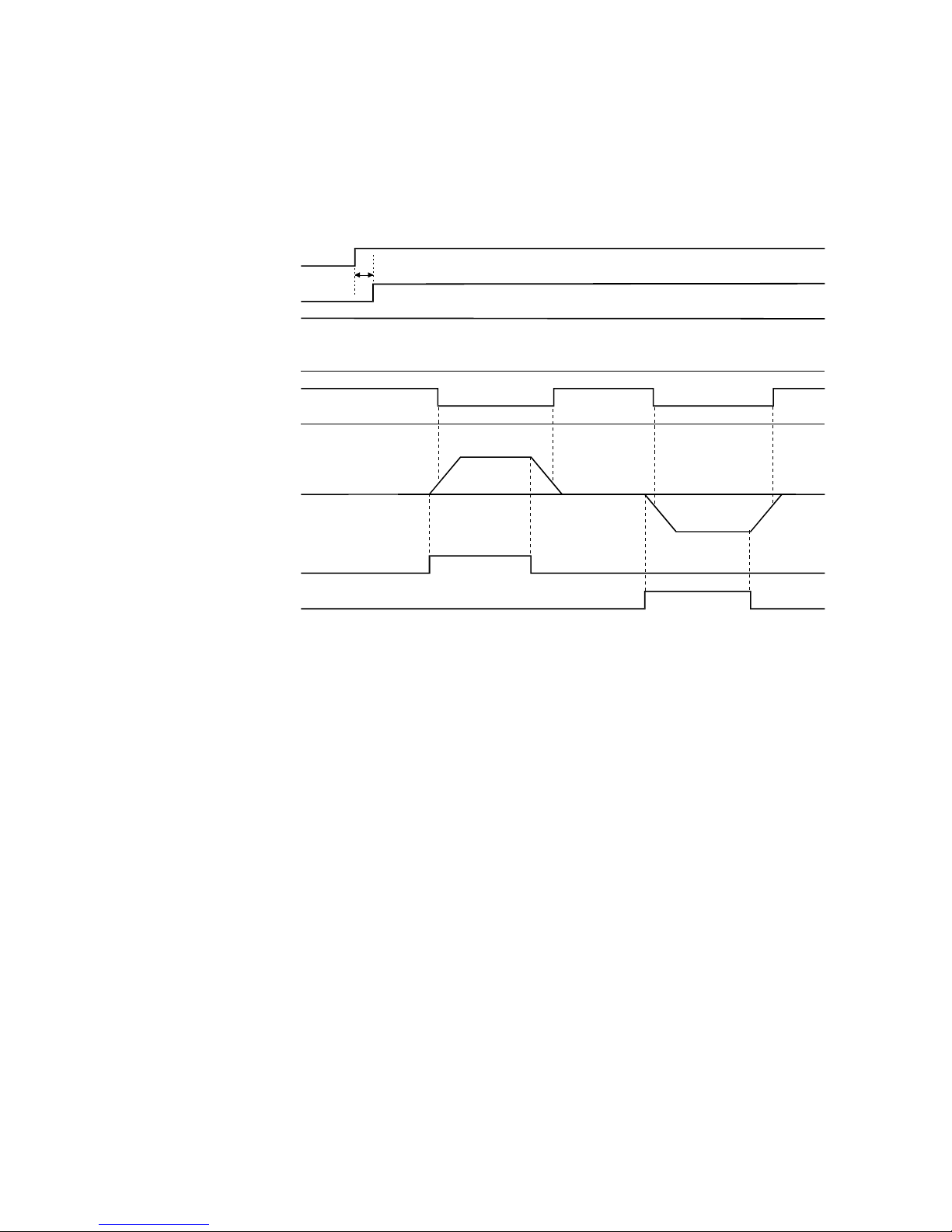
3) The servo amplifier can accept the servo-on signal (SON) about 1 second after the main circuit
power supply is switched on. Therefore, when SON is switched on simultaneously with the threephase powe r supply, the base circuit will switch on in about 1 second, and the ready signal (RD) will
switch on in further about 20ms, making the servo amplifier ready to operate.
4) When the reset signal (RES) is switched on, the base circuit is shut off and the servo motor shaft
coasts.
9
BCN-B11127-479*
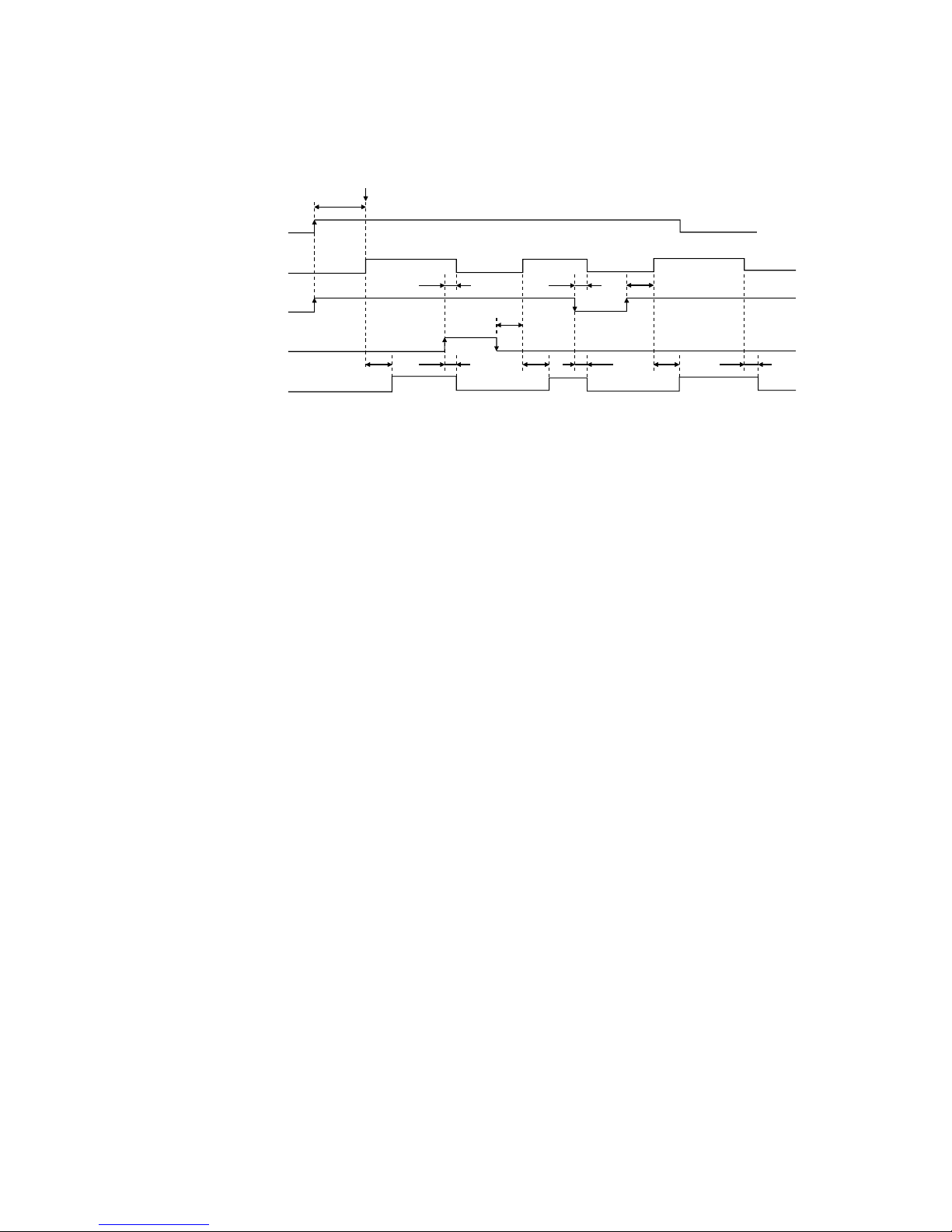
(2) Timing chart
20ms
20ms
20ms
10ms
10ms
10ms10ms
10ms
60ms
60ms
SON accepted
(1s)
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Power sypply
Base circuit
Servo on
(SON)
Reset
(RES)
Ready
(RD)
10
BCN-B11127-479*
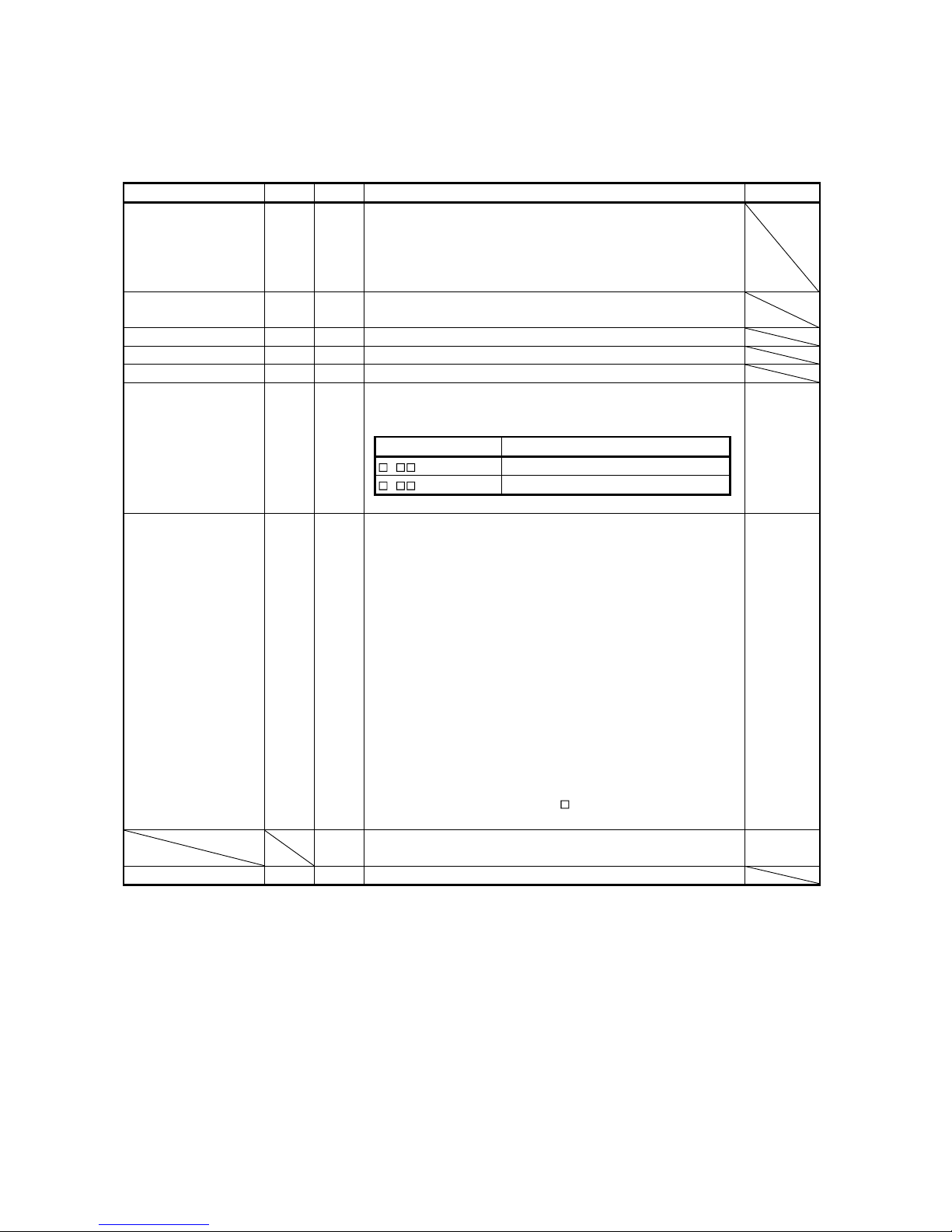
3.4 Signal explanations
1) CN1A
Signal Name Symbol Pin No. Description I/O Division
Digital I/F power supply
input
COM 9 Used to input 24VDC±10% for input interface .
Driver power input terminal for digital interface .
COM of each connector is connected in the servo amplifier.
When using an external power supply, connect a power supply of
24VDC, 200mA or more to this te r minal.
Open collector power
input
OPC 11 When using a manual pulse generator, supply 24VDC to this
terminal.
Digital I/F common SG 10, 20 Common te r minal for VDD and COM and isolated from LG.
DC15V power supply P15R 4 Used to output 15VDC. Po we r supply terminal for VC and TLA.
Control common LG 1 Common terminal for VC, T L A, MO1, MO2 and P15R.
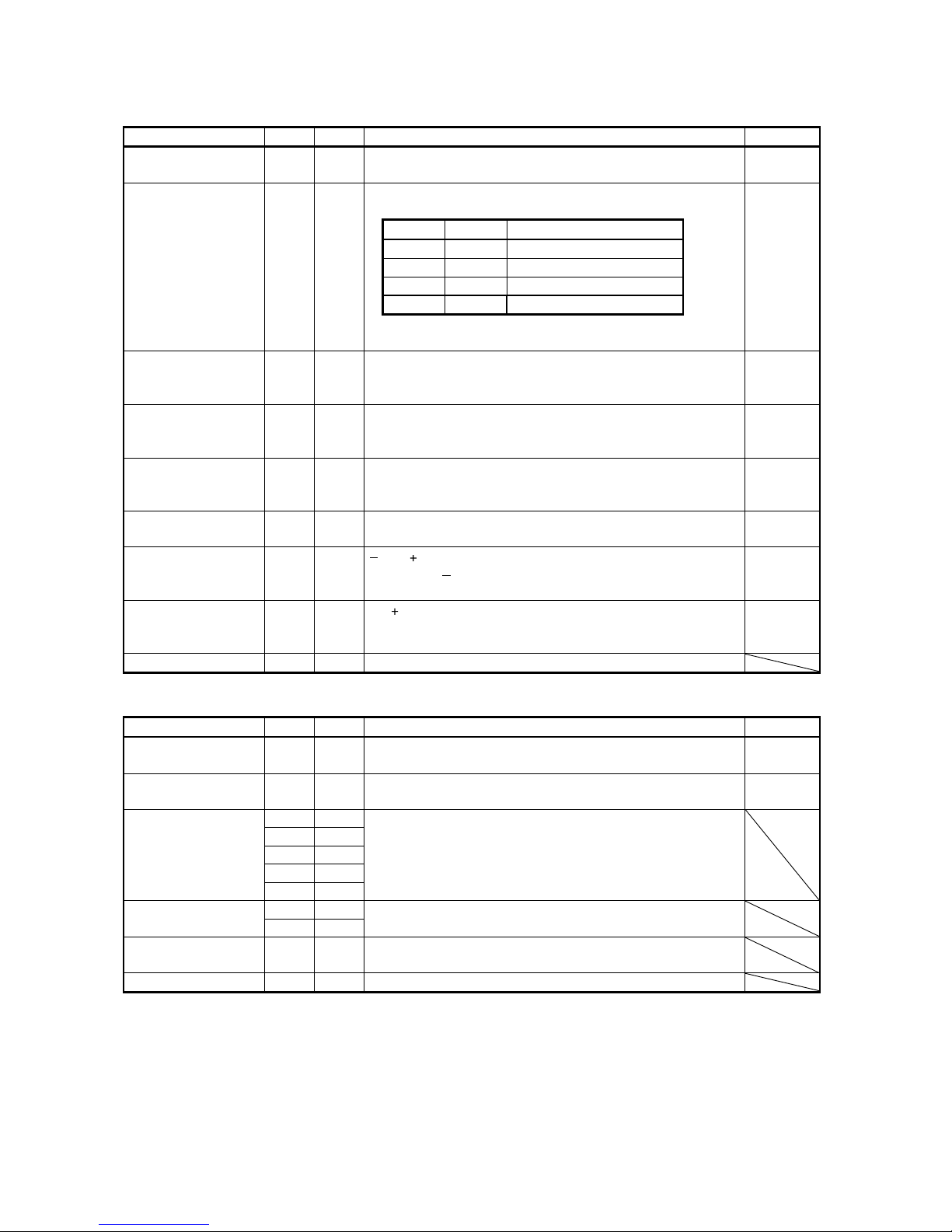
When terminals DOG-SG are shorted, the proximity dog signal is
detected. The polarity of dog detection input can be changed with the
parameter.
Parameter No.8 Polarity of P roxim ity Dog Detection Input
0 DOG-SG are opened.
1 (initial value) DOG-SG are shorted.
Proximity dog DOG 8
DI-1
Zeroing completion ZP 18 ZP-SG are connected on completion of z eroi ng .
In the absolute p osi t i on sy s t em, ZP-SG are connected when the servo
amplifier is read y to operate but are disconnected if:
1) SON-SG are op en ed;
2) EMG-SG a re opened;
3) RES-SG are shorted;
4) Alarm occurs;
5) Limit switch open s ;
6) Zeroing has not been ma d e a fter the purchase of the product;
7) Zeroing has not been ma d e a fter the occurrence of absolute position
erasure (A. 25) or ab s ol u te position counter warning
(A. E3);
8) Zeroing has not been ma d e a fter the changing of the electronic gear
value;
9) Zeroing has not b een made after the absolute position syst em w a s
made valid; or
10) The ST1 coordinate system (000
in parameter No.1) has been
changed.
DO-1
19 Empty
DI-1
DO-1
Shield SD Plate Connect one end of the shielded cable.
11
BCN-B11127-479*
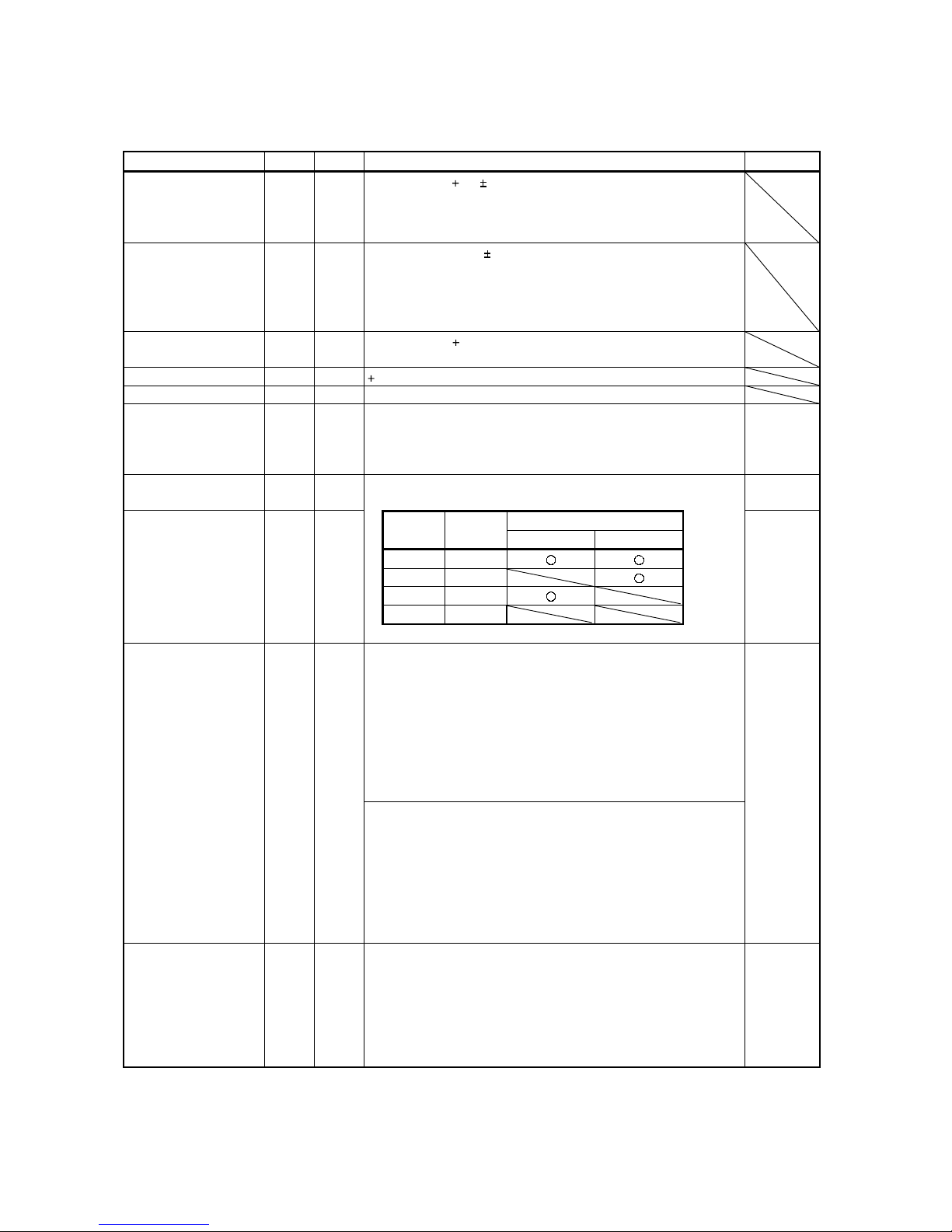
2) CN1B
Signal Name Symbol Pin No. Description I/O Division
I/F Internal power
supply
VDD 3 Used to output 24V 10% to across VDD-COM.
When using this power supply for digital interface, conne ct it with
COM.
Permissible current: 80mA
Digital I/F power supply
input
COM 13 Used to input 24VDC 10% for input interface.
Driver power input terminal for digital interface .
COM of each connector is connected in the servo amplifier.
When using an external power supply, connect a power supply of
24VDC, 200mA or more to this te r minal.
DC15V power supply P15R 11 Used to output 15VDC to across P15R-LG. Used for VC/TLA power
supply.
Digital I/F Common SG 10, 20 24VDC common terminal for VDD, COM, etc. and isolated from LG.
Control common LG 1 Common terminal for VC, T L A, MO1, MO2 and P15R.
Servo on SON 15 When SON-SG are shorted, the base circuit is switched on and the
servo amplifier is ready to operate.
When they are opened, the base circuit is shut off and the servo
motor coasts.
DI-1
Forward rotation stroke
end
LSP 16 To start operation, short LSP-SG or LSN-SG. When they are opened,
the servo m otor is stopped s u ddenly and servo-l ocked.
DI-1
Operation Across
LSP-SG
Across
LSN-SG
CCW direction CW direction
1 1
0 1
1 0
0 0
Reverse rotation stroke
end
LSN 17
Note. 0:Open,1:Short
DI-1
This signal serves as a forward rotation start signal for the
incremental value command system.
In automatic operation mode, the servo motor rotates in the forward
rotation direction as soon as ST1-SG are shorted.
In zeroing mode, zeroing star ts as soon as ST1-SG are shorted.
In jog operation mode, the servo motor rotates in the forward
rotation direction while ST1-SG are shorted.
Forward rotation denotes the direction in which the address is
incremented.
Forward rotation start ST1 8
This signal serves as a start signal for the absolute value command
system. In automatic operation mode, operation starts as soon as
ST1-SG are shorted.
In zeroing mode, zeroing star ts as soon as ST1-SG are shorted.
In jog operation mode, the servo motor rotates in the forward
rotation direction while ST1-SG are shorted.
Forward rotation denotes the direction in which the address is
incremented.
DI-1
Reverse rotation start ST2 9 In automatic operation mode, the servo motor rotates in the reverse
rotation direction as soon as ST2-SG are shorted. (Incremental value
command only)
In jog operation mode, the servo motor rotates in the reverse
rotation direction while ST2-SG are shorted.
Reverse rotation denotes the direction in which the address is
decremented.
DI-1
12
BCN-B11127-479*
Signal Name Symbol Pin No. Description I/O Division
Automatic/manual
selection
MDO 7 Short MDO-SG to choose the automatic operation mode, or open
them to choose the manual operation mode.
DI-1
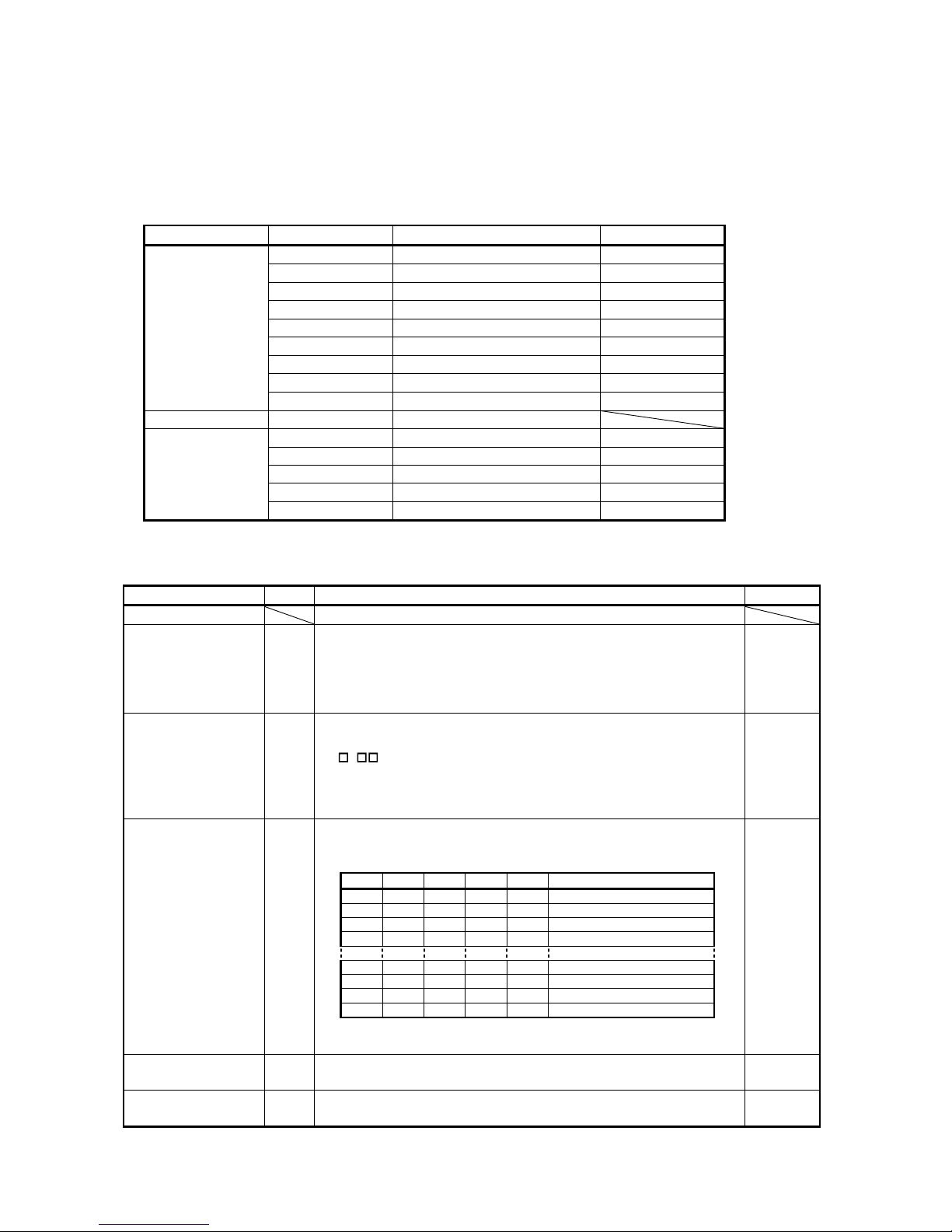
The following table lists the point table numbers which may be
chosen by the combinations of DI0 and DI1:
DI1 DI0 Selected Point Table No.
0 0 Manual zeroing
0 1 Point table No.1
1 0 Point table No.2
1 1 Point table No.3
Point table No. selection DI0
DI1 5 14
Note: 0: DI1/DI0-SG open
1: DI1/DI0-SG shorted
DI-1
Rough match CPO 4 CPO-SG are connected when the remainin g command distance falls
within the parameter-set rough match output range.
This signal is not output while the base circuit is off.
DO-1
In position INP 6 INP-SG are connected when the droop pulses fall within the
parameter-set in-position range.
This signal is not output while the base circuit is off.
DO-1
Trouble ALM 18 ALM-SG are disconnected when the protective circuit is activated to
shut off the base circuit at power off.
They are connected in normal condition at po wer off.
DO-1
Ready RD 19 RS-SG are connected when the servo amplifier is ready to operate
without failure after servo-on.
DO-1
Override VC 2 10 to 10V is applied to across VC-LG to limit the ser vo motor
speed. Apply
10[V] for 0[%] override , 0[V] for 100[%], or 10[V] for
200[%].
Analog
input
External torque limit TLA 12 0 to 10V is applied to across TLA-LG to lim it the servo motor-
generated torque.
Apply 0[V] for 0 torque or 10[V] for max. torque.
Analog
input
Shield SD Plate Connect one end of the shielded cable.
3) CN3
Signal Name Symbol Pin No. Description I/O Division
Analog monitor 1 MO1 4 Use d to output the data set in parameter No.17 to across MO1-LG in
terms of voltage. Resolution 8 bits
Analog
output
Analog monitor 2 MO2 14 Used to output the data set in parameter No.17 to across MO2-LG in
terms of voltage. Resolution 8 bits
Analog
output
SDP 9
SDN 19
RDP 5
RDN 15
RS-422 I/F
TRE 10
RS-422 communication terminal
RS-422 and RS-232C functions cannot be used together.
Short "15" and "10" at the last axis.
RXD 2 RS-232C I/F
TXD 12
RS-232C communication terminal
Use parameter No.16 for selection.
Monitor common LG 1, 3,
11, 13
Monitoring common for control common
Ground SD Plate Connect one end of the shielded cable.
13
BCN-B11127-479*
3.5 Additional function devices
By parameter setting, you can assign the signals given in this section to the pins of connectors CN1A and
CN1B, in addition to the signals in Section 3.2.
(1) Pins which accept different signals
Pin Type Connector Pin No. Device in Initial Status Device Symbol
CN1B-5 Po int table No. selection 1 DI0
CN1B-14 Point table No. selection 2 DI1
CN1A-8 Proximity dog DOG
CN1B-15 Servo on SON
CN1B-16 Forward rotation stroke end LSP
CN1B-17 Reverse rotation stroke end LSN
CN1B-7 Automatic/manual selection MDO
CN1B-8 Fo rward rotation start ST1
Input-only pins
CN1B-9 Reve rse rotation start ST2
I/O pin CN1A-19 Empty
CN1B-4 Rough match CPO
CN1B-6 In position INP
CN1B-18 Trouble ALM
CN1B-19 Ready RD
Output-only pins
CN1A-18 Zeroing completion ZP
(2) Assignable devices
1) Input devices
Device Name Symbol Description I/O Division
No assigned function No function is assigned.
Emergency stop EMG When EMG-SG are opened, the servo amplifier is placed in the emergency
stop status, the servo sw i t ch es of f, and the dynamic brake is operated t o b ri n g
the servo motor to a sudden stop.
Short EMG-SG in the emergency stop status to cancel the emergency stop
status.
DI-1
Alarm reset RES Short RES-SG to deactivate the alarm.
If RES-SG are shorted in no alarm status, the base circuit is not shut off.
Set
0 in parameter No. 55 to shut off the base circuit.
Some alarms cannot be deactivated by the reset signal.
Since this device is not designed for stopping, do not switch it on during
operation.
DI-1
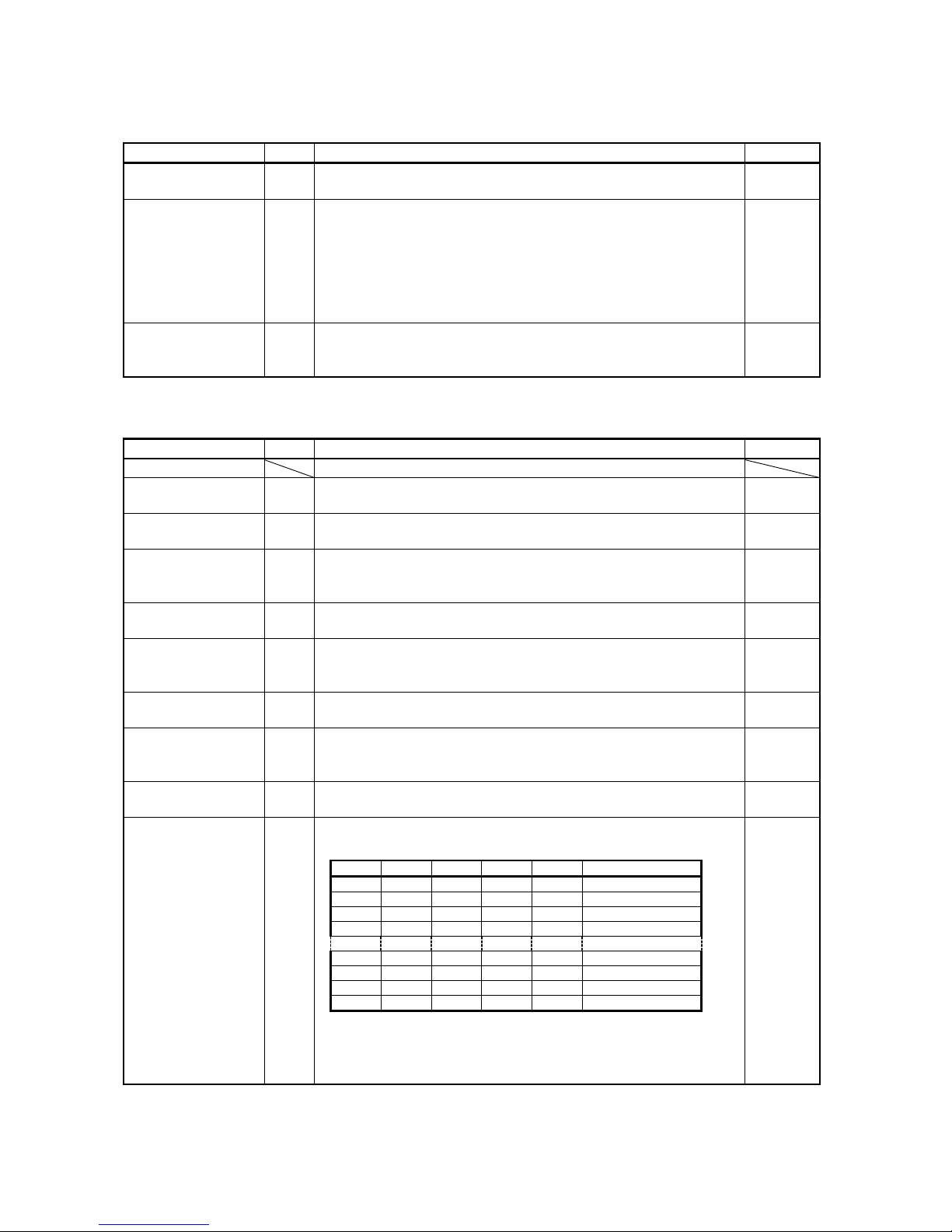
Point table No. selection DI2
DI3
DI4
Valid in the automatic mode.
The following table lists the point table numbers that may be chosen by the
combinations of DI0, DI1, DI2, DI3 and DI4:
DI4 DI3 DI2 DI1 DI0 Selected point table No.
0 0 0 0 0 Zeroing operation
0 0 0 0 1 Point table No.1
0 0 0 1 0 Point table No.2
0 0 0 1 1 Point table No.3
: : : : : :
1 1 1 0 1 Point table No.28
1 1 1 0 1 Point table No.29
1 1 1 1 0 Point table No.30
1 1 1 1 1 Point table No.31
Note:0: DI3/DI2/DI1/DI0-SG ope n
1: DI3/DI2/DI1/DI0-SG shorted
DI-1
External torque limit
selection
TL0 Short TL 0-SG to m ak e external analog torque limit valid. DI-1
Internal torque limit
selection
TL1 Open TL1-SG to m ake the torque limit value set in parameter No. 28 (T L 1)
valid, or short them to make the value se t in parameter No.29 (TL2) valid.
DI-1
14
BCN-B11127-479*
Device Name Symbol Description I/O Division
Proportion control PC Short PC-SG to switch the speed amplifier from proportional integral type to
proportional type.
DI-1
Temporary stop/Restart STP Short STP-SG during automatic operation to make a temporary stop.
Short STP-SG again to make a restart.
Shorting the forward/reverse rotation start signal during a temporary sto p is
ignored.
Switching from automatic mode to manual mode during a temporary stop
clears the remaining moving distance.
During zeroing and jog opera t i on, t h e temporary stop/restart input is ignored.
DI-1
Gain changing CDP Gain changing device
Short CDP-SG to switch the gain that changing condition depends on the
setting in parameter No. 68
DI-1
2) Output devices
Device Name Symbol Description I/O Division
No assigned function No function is assigned.
Electromagnetic brake
interlock
MBR Used to output the interlock signal for electromagnetic brake.
MBR-SG are disconnected at servo-off or alarm occurrence.
DO-1
Dynamic brake
interlock
DBR Dynamic brake inte r lock output device. DO-1
Position range POT POT-SG are connected when the actual current position is within the
parameter-set range.
The output is open when zeroing is incomplete or the base circuit is off.
DO-1
Warning WNG WNG-SG are connected when warning occurs.
Open in normal condition.
DO-1
Battery warning BWNG BWNG-SG are connected when the open battery cable warning (A. 92) or
battery warning (A. 9F) occurs.
Open in normal condition.
DO-1
Limiting torque TLC TLC-SG are connected when the internally or externally set torque limit
value is reached.
DO-1
Temporary stop PUS PUS-SG are connected when deceleration to a stop is started by the
temporary stop signal. PUS-SG is disconnected when operation is resumed by
making the temporary stop signal valid again.
DO-1
Moving completion MEN D
MEND-SG are connect ed w hen t he i n - position and rough match signal tu rn ed
on
DO-1
Point table No. output
PT0
PT1
PT2
PT3
PT4
The following table lists the point block numbers that may be chosen by the
combinations of PT0, PT1, PT2,TP3 and PT4 after positioning complete:
PT4 PT3 PT2 PT1 PT0 Point block No.
0 0 0 0 0
0 0 0 0 1 Point block No.1
0 0 0 1 0 Point block No.2
0 0 0 1 1 Point block No.3
1 1 1 0 0 Point block No.28
1 1 1 0 1 Point block No.29
1 1 1 1 0 Point block No.30
1 1 1 1 1 Point block No.31
These signals will be turned off while Powered off, Servo off, In zeroing
operation and after zeroing com ple te.
It will be hold previous status if changed operation mode, in m anual
operation and in fast zeroing
DO-1
15
BCN-B11127-479*
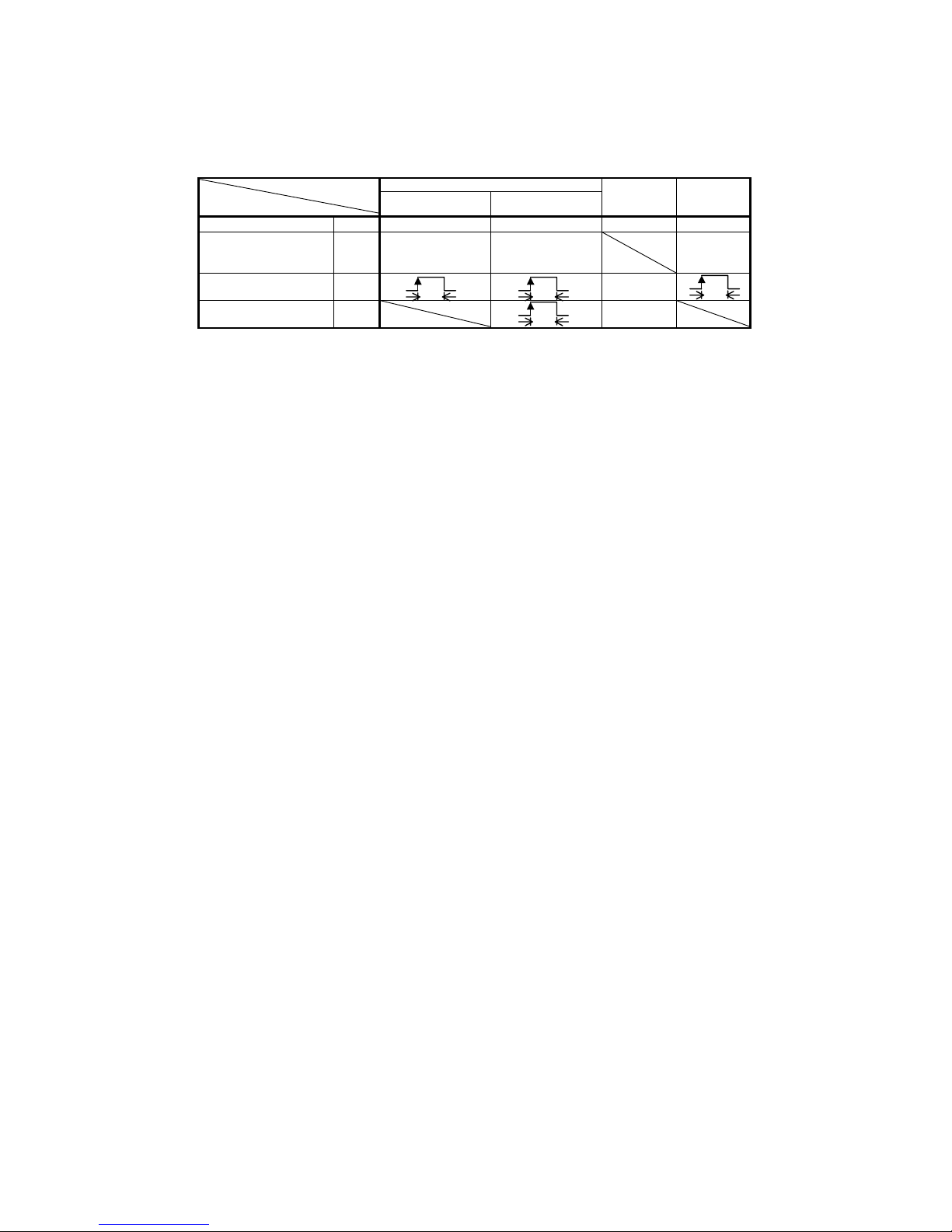
(4) Device setting of control mode
Automatic operation Operation mode
Signal
Absolute command
Incremental
command
Manual
drive
Manual
zeroing
Automatic/Manual
MD0
ON ON OFF ON
Point block No.
DI0
to
DI4
1 to 31 1 to 31 0
Forward rotation start
ST1
ON
(FWD. JOG)
Reverse rotation start
ST2
ON
(REV. JOG)
Note: The start signal will respond within 3 ms.
Servo motor will be stopped and cleared moving remain distance when Automatic/Manual signal
changed in positioning.
5ms 5ms
5ms
5ms

16
BCN-B11127-479*
4. Interfaces
This section gives the details of the I/O signal interfaces.
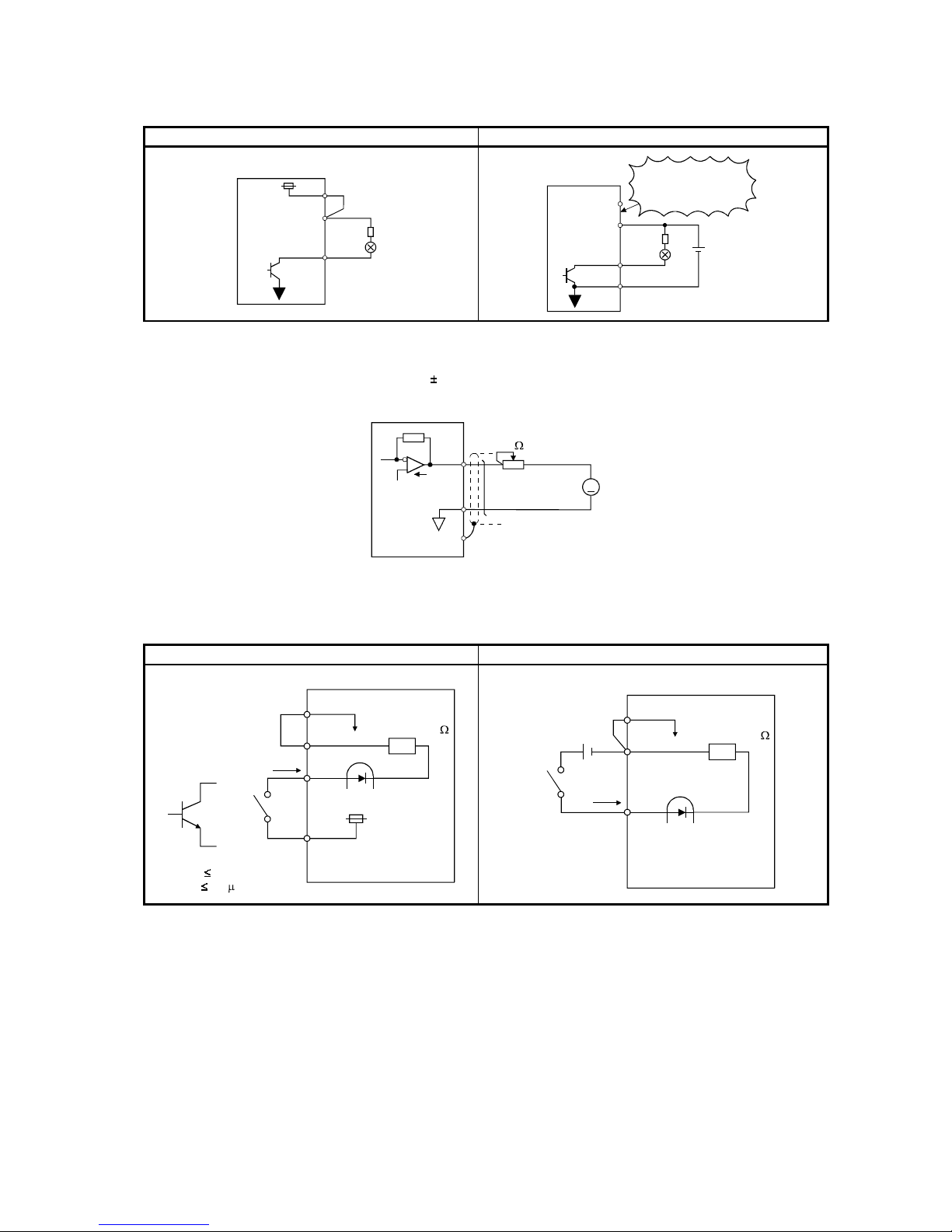
(1) Digital input interface DI-1
Give a signal with a rela y or open coll ector t ra nsi s tor.
Source input is also possible. Refer to (5) in this section.
For use of internal power supply For use of external power supply
24VDC
SON, etc.
SG
Switch
Servo amplifier
COM
VDD
R: Approx. 4.7k
Approx. 5mA
TR
V
CES
1.0V
I
CEO 100 A
(Note)
For a tran sistor
24VDC
200mA or more
SON, etc.
SG
Switch
Servo amplifier
COM
R: Approx. 4.7k
VDD
Do not connect
VDD-COM.
Note: This also applies to the use of the external power supply.
(2) Digital output interface DO-1
A lamp, relay or photocoupler can be driven. Provide a diode (D) for an inductive load, or an inrush
current suppressing resister (R) for a la mp load. (Permissible current: 40 mA or less, inrush current:
100mA or less)
1) Inductive load
For use of internal power supply For use of external power supply
ALM, etc.
24VDC
VDD
COM
SG
Load
If the diode is not
connected as show n,
the servo amplifier
will be damaged.
Servo amplifier
ALM, etc.
27VDC or
less
COM
SG
Load
Servo amplifier
VDD
If the diode is not
connected as shown,
the servo amplifier
will be damaged.
Do not connect
VDD-COM.
17
BCN-B11127-479*
For use of internal power supply For use of external power supply
Servo amplifier
ALM, etc.
24VDC VDD
COM
R
VDD
Servo amplifier
ALM, etc.
COM
SG
27VDC or
less
R
Do not connect
VDD-COM.
(3) Analog output
MO1
(MO2)
LG
SD
A
Servo amplifier
Output 10V
Max. 1mA
Reading in one or
both directions
1mA meter
10k
(5) Source input interface
When using the input interface of source type, all DI-1 input signals are of source type.
Source output cannot be provided.
For use of internal power supply For use of external power supply
24VDC
SON,
etc.
SG
Switch
Servo amplifier
COM
VDD
R: Approx. 4.7k
Approx. 5mA
TR
(Note)
For a tran sistor
V
CES
1.0V
I
CEO
100 A
24VDC
200mA or more
SON, etc.
SG
Switch
Servo amplifier
COM
R: Approx. 4.7k
Note: This also applies to the use of the external power supply.
18
BCN-B11127-479*
5. Automatic Operation Mode
5.1 Positioning via point table with digital input
(1) Parameter setting
Set the following parameters to perform automatic operation:
(a) Command mode selection (parameter No.0)
Select the absolute val ue command s ys tem or i ncrementa l va lue comma nd sys t em.
Parameter No. 0 Setting Positioning System
0 Absolute value command
1 Incremental value command
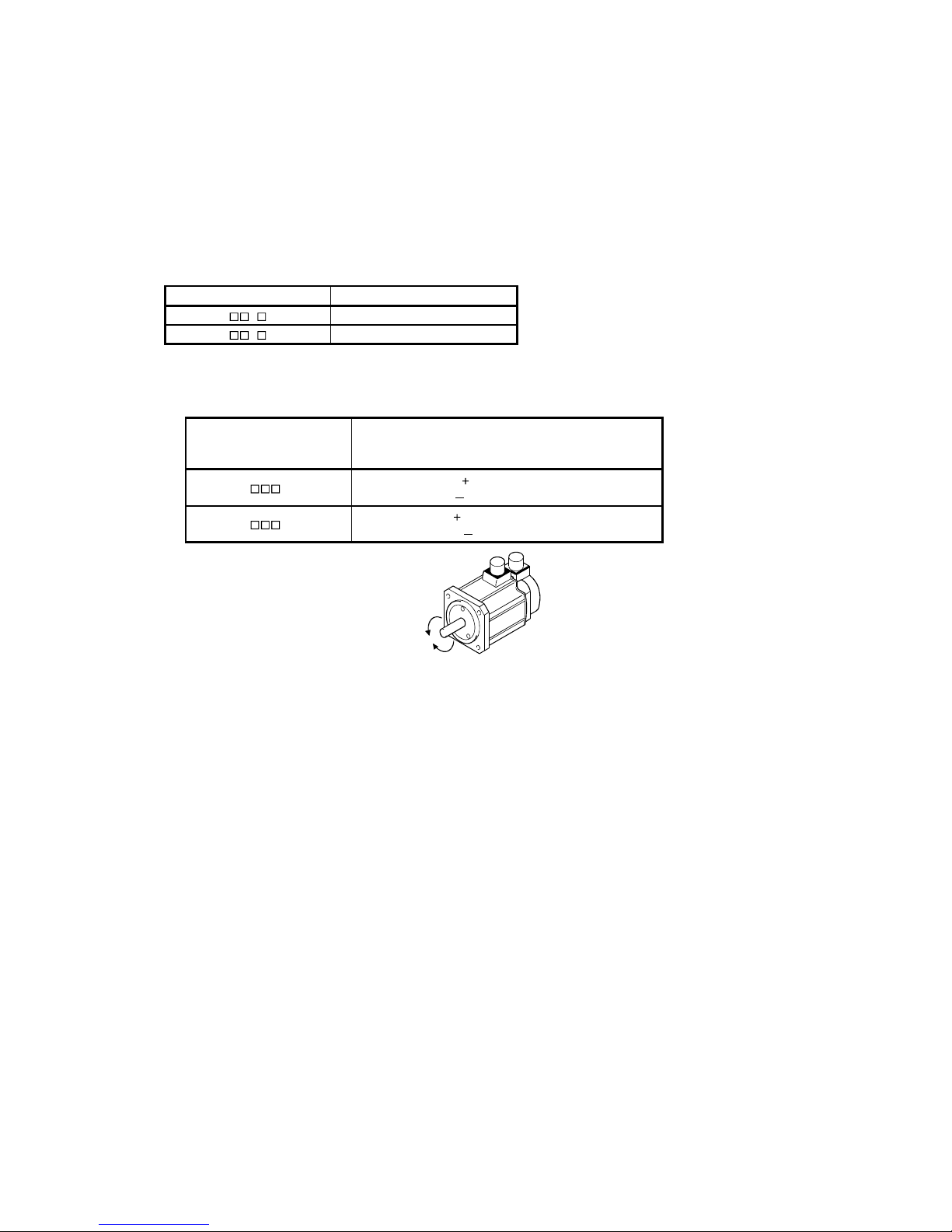
(b) Operation system selecti on (para met er No.1)
Choose the servo motor rotation direction at the time when the forward rotation start (ST1) signal
or reverse rotation start (ST 2) s i gnal i s swi tched on.
Parameter No. 1 Setting
Servo Motor Rotation Direction
When Forward Rotation Start (S T1) I s Switched On
0
CCW rotation with
position data
CW rotation with
position data
1
CW rotation with
position data
CCW rotation with
position data
CCW
CW
19
BCN-B11127-479*
(c) Feed length multiplication selection (parameter No.1)
Set the unit multiplication factor (STM) of position data. The actual moving distance is the result
of multiplying the entered position data by the unit multiplication factor.
Parameter No.1 Setting Feed Length Multiplication STM [Times]
0 Position data 1
1 Position data 10
2 Position data 100
3 Position data 1000
(2) Point table
(a) Point table setting
Up to 31 point tables may be set. The following table lists what to set:
Name Setting Range Unit Description
Position data 999999 to 999999 [ 10SMm]
In the absolute value command sys tem, moti on is ma d e to the s et ad d ress.
In the incremental value command system, motion is made over the set
distance.
Use the parameter to select the incremental value command or absolute
value command.
A negative value cannot be set to the incremental value command.
Motor speed 0 to permissible speed r/min
Set the command speed of the servo motor for execution of positioning.
The setting should be equal to or less than the instantaneous permissible
speed of the servo motor.
Acceleration
time constant
0 to 20000 ms
Set the acceleration time constant.
Set the time until the rated speed of the servo motor is re ache d.
Deceleration
time constant
0 to 20000 ms
Set the deceleration time constant.
Set the time until the servo motor running at rated speed comes to a stop.
Dwell time 0 to 20000 ms
Set the dwell time.
Set "0" in the auxiliary function to make the dwell time invalid.
Set "1" in the auxiliary function and 0 in the dwell time to perfor m
continuous operation.
When the dwell time is set, the position command of the selected point
table is completed, and after the set dwell time has elapsed, the position
command of the next point table is started.
Auxiliary
function
0 • 1
Set the auxiliary function.
Set "1" to execute point tables consecutively without a stop.
0: Automatic operation is performed in accordance with a single point
table chosen.
1: Operation is performed in accordance with consecutive point tables
without a stop.
When a different rotation direction is set, smoothing zero (command
output) is confirmed and the rotation direction is then reversed.
Setting "1" in point table No.15 results in an error.
For full information, refer to Section 4.2.5.
20
BCN-B11127-479*
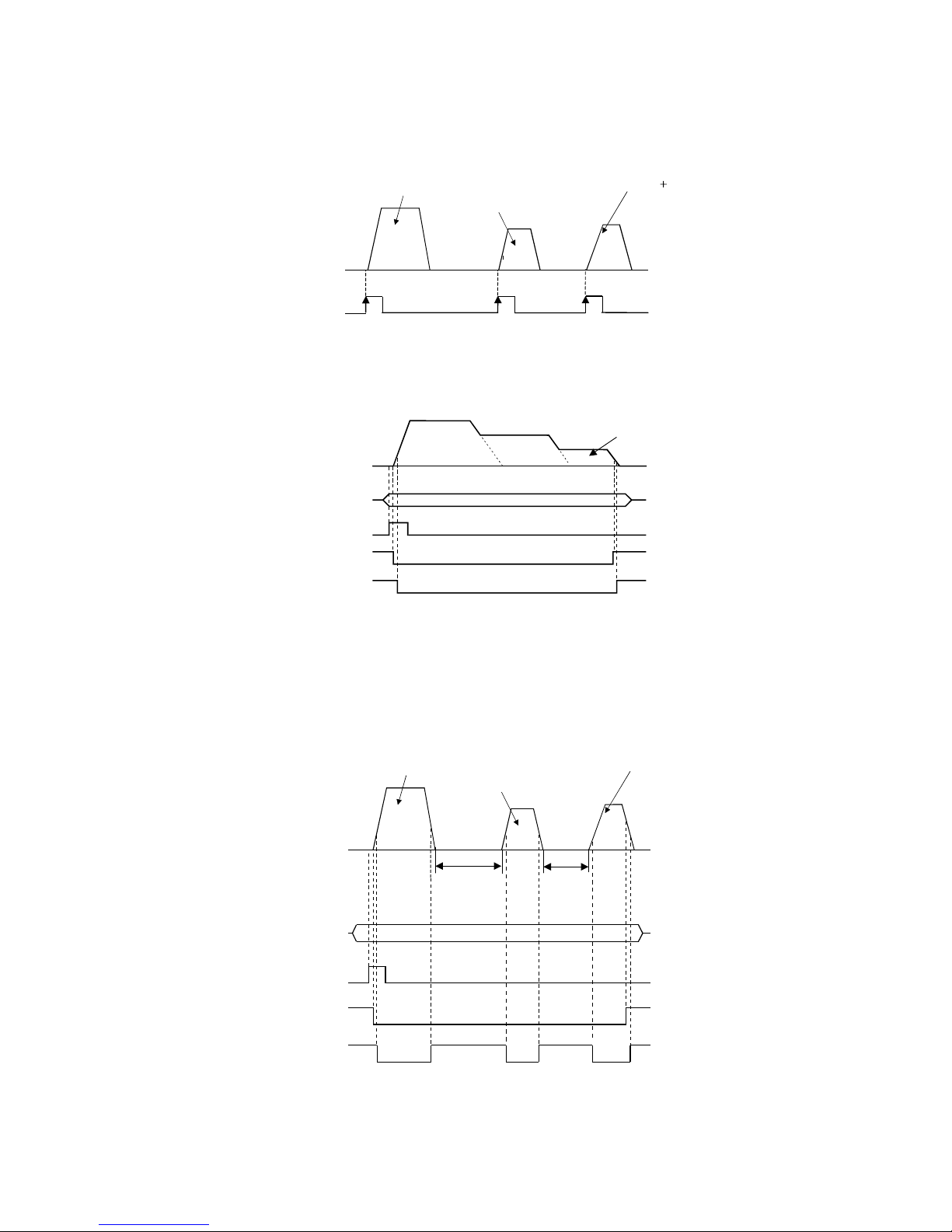
(b) Descriptions of auxiliary function
a) Auxiliary function setting “0”
b) Auxiliary function setting “1” and dwell time is “0”
c) Auxiliary function setting “1” and dwell time is not “0”
Point block No. 1
Point block No. 2
Point block No.3
Servo motor
speed
(ST1 or ST2)
Start signal
Servo motor
speed
Position block
No. 1
Position block
No.3
0
In position (INP)
ON
O FF
Rough match
(CPO)
ON
O FF
Start signal
(ST1 or ST2)
ON
O FF
Point bloc
k
No.1
Position block
No.2
Dwell
time
Point block No.1
Dwell
time
Point table No. 2
Point table No. 3
Servo motor
speed
Point block
selection
No.1
Start signal
(ST1 or ST2)
In position
(INP)
Rough match
(CPO)
21
BCN-B11127-479*
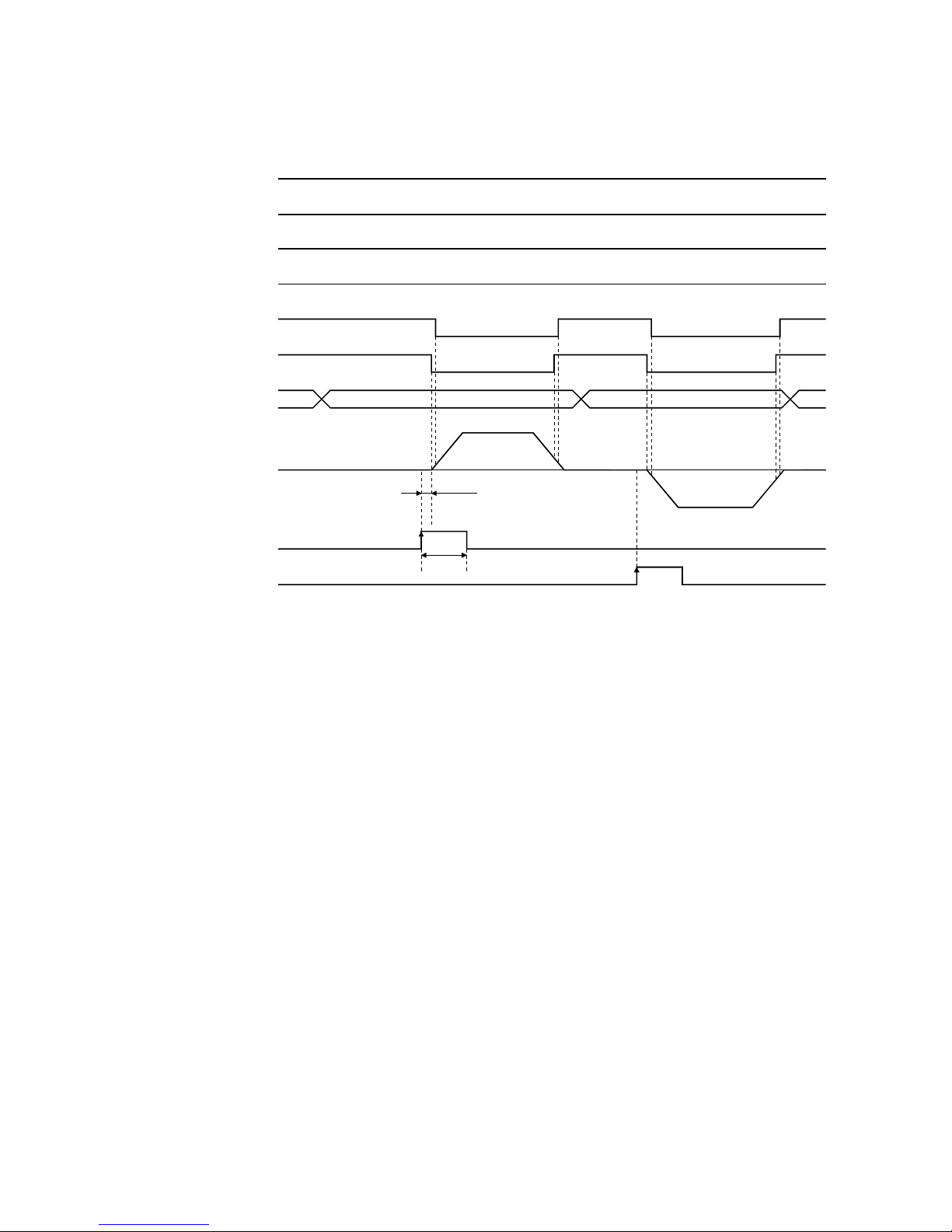
(3) Timing chart
Servo on (SON)
Ready (RD)
Trouble (ALM)
A
utomatic/manual
selection (MDO)
In position (INP)
Rough match (CPO)
Motor speed
Forward rotation star
t
(ST1)
Reverse rotation star
t
(ST2)
Point table No. No.1
No.2
Point table No. 1
Point table No. 2
4ms or
more
1.5ms or less
Note: Reverse rotation start (ST2) is invalid for absolute value command system.
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Forward
rotation
Reverse
rotation
0r/min
(Note)
22
BCN-B11127-479*
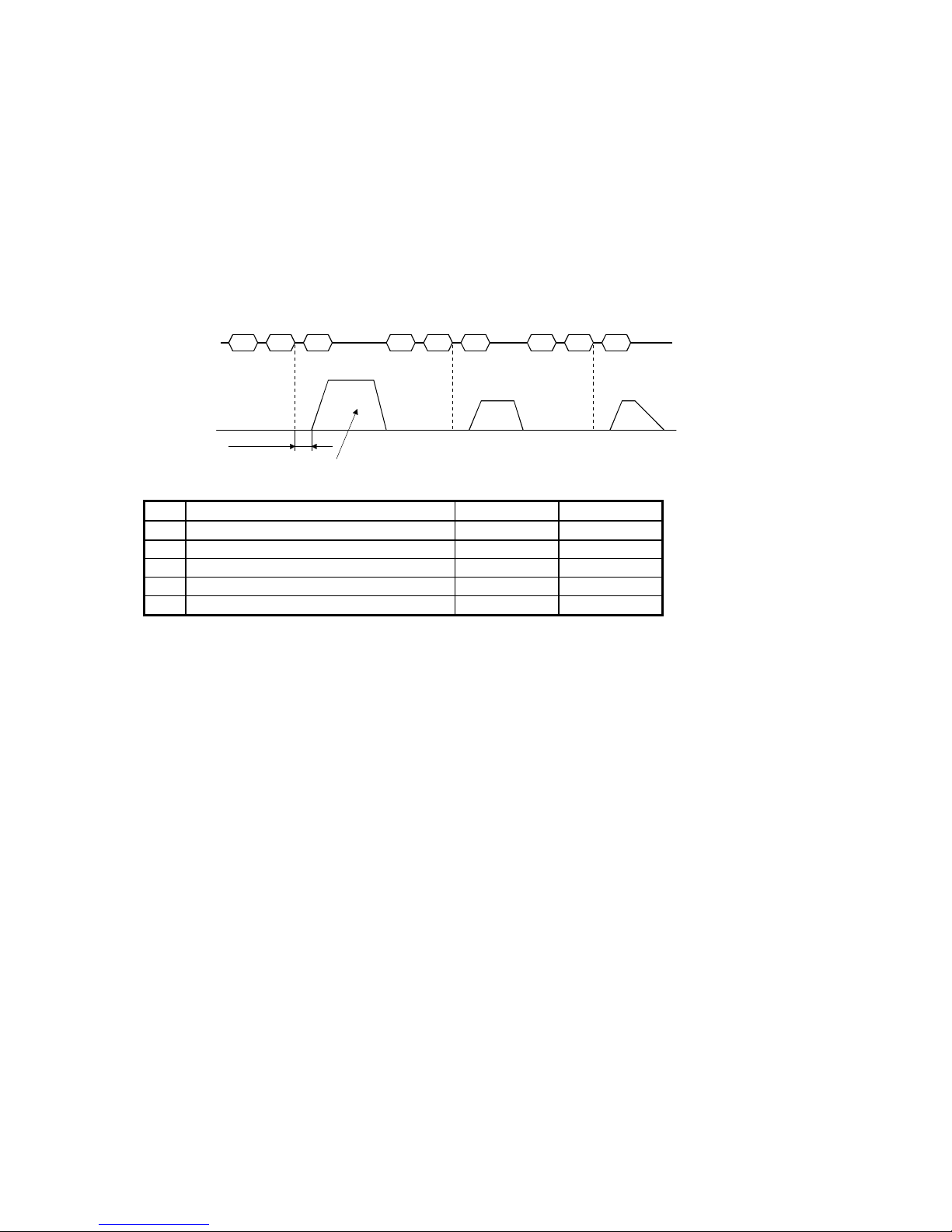
5.2 Positioning operation in accordance with point tables
By selecting the point table No. and switching on the start signal (ST1, ST2) using the communication
function, positioning operation in accordance with point tables can be started.
(1) Selection of point tables
Using the device forced output from the controller (command [9][2], data No. [6][0]), choose point
tables from among No.1 to 31
(2) Timing chart
Transmission
data
Servo motor
speed
1)
Point table No . 2
5ms
Point table No. 1 Point table No. 3
4) 5)
2)
4) 5)
3)
4)
5)
No. Transmissi on Data Command Data No.
1) Point table No.2 selec tion [9] [2] [6] [0]
2) Point table No.1 selec tion [9] [2] [6] [0]
3) Point table No.3 selec tion [9] [2] [6] [0]
4) Forward rotation start (ST1) ON [9] [2] [6] [0]
5) Forward rotation start (ST1) OFF [9] [2] [6] [0]
23
BCN-B11127-479*
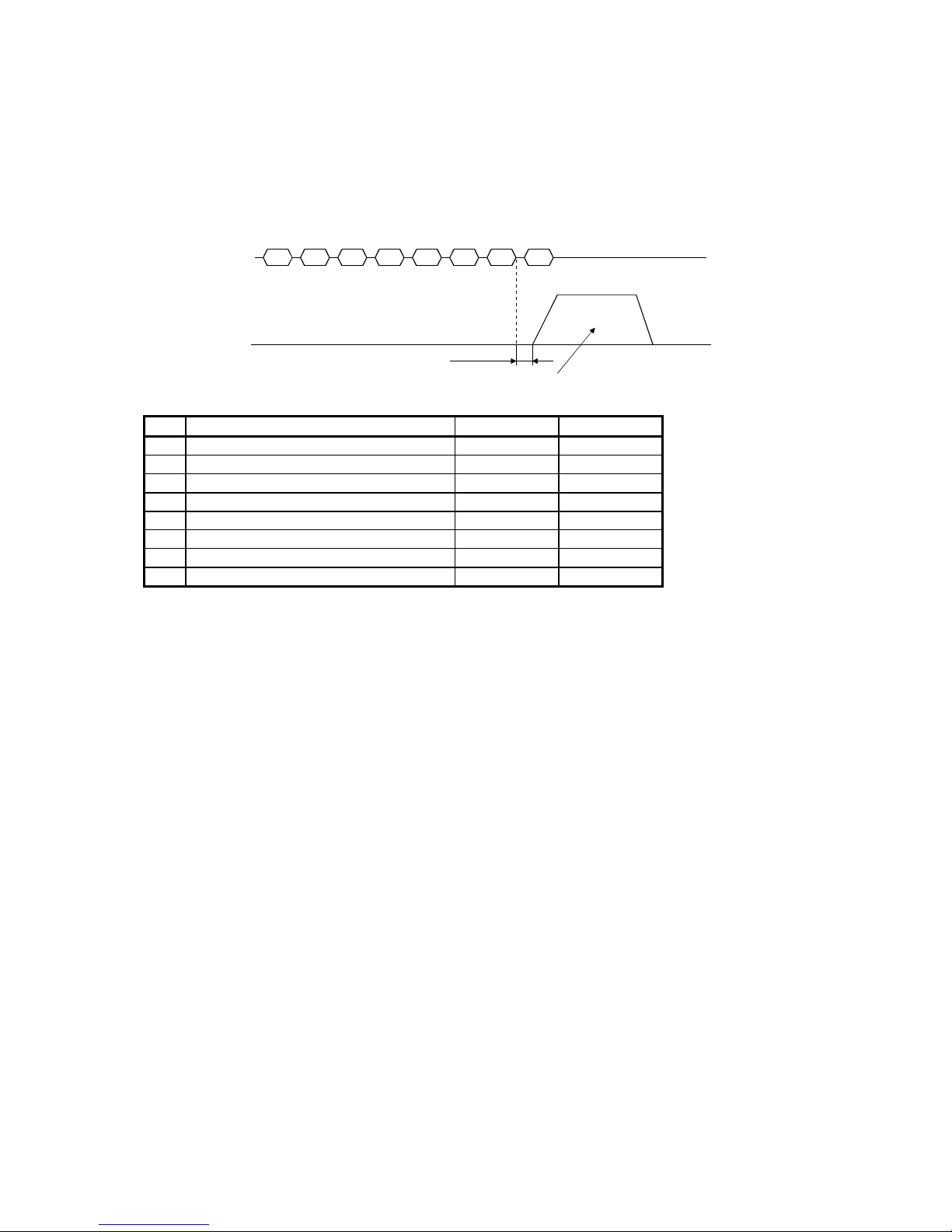
5.3 Positioning operation via communication
Positioning operation can be performed by changing the point table settings and making a start. For
example, positioning operation can be performed by writing the data of point table No.1, then specifying
point table No.1, and making a start.
Transmission data
Servo motor speed
1)
2)
3)
4) 5)
6)
7)
Values set with transmission data 1) to 5) are used for operation.
5ms
8)
No. Transmissi on Data Command Data No.
1) Point table No.1 position data wr ite [C] [0] [0] [1]
2) Point table No.1 spee d [C] [6] [0] [1]
3) Point table No.1 acceleration tim e constant [C] [7] [0] [1]
4) Point table No.1 deceleration time constant [C] [8] [0] [1]
5) Point table No.1 auxiliary function [C] [B] [0] [1]
6) Point table No.1 selec tion [9] [2] [6] [0]
7) Forward rotation start (ST1) ON [9] [2] [6] [0]
8) Forward rotation start (ST1) OFF [9] [2] [6] [0]
24
BCN-B11127-479*
5.4 Manual operation mode
For machine adjustment, home position matching, etc., jog operation or a manual pulse generator may be
used to make a motion to any position.
5.4.1 Jog operation
(1) Setting
Set the input signal and parameters as follows according to the purpose of use. In this case, the point
table No. selection 1 to 5 signals (DI0 to DI4) are invalid:
Item Setting Method Description
Manual operation mode selection Automatic/manual selection signal (MDO) Open MDO-SG (OFF).
Servo motor rotation direction Parameter No.1 Refer to (2) in this section.
Jog speed Parameter No.13 Set the speed of the servo motor.
Acceleration/deceleration time constant Point table No.1
Use the acceleration/deceleration
time constants in point table No.1.
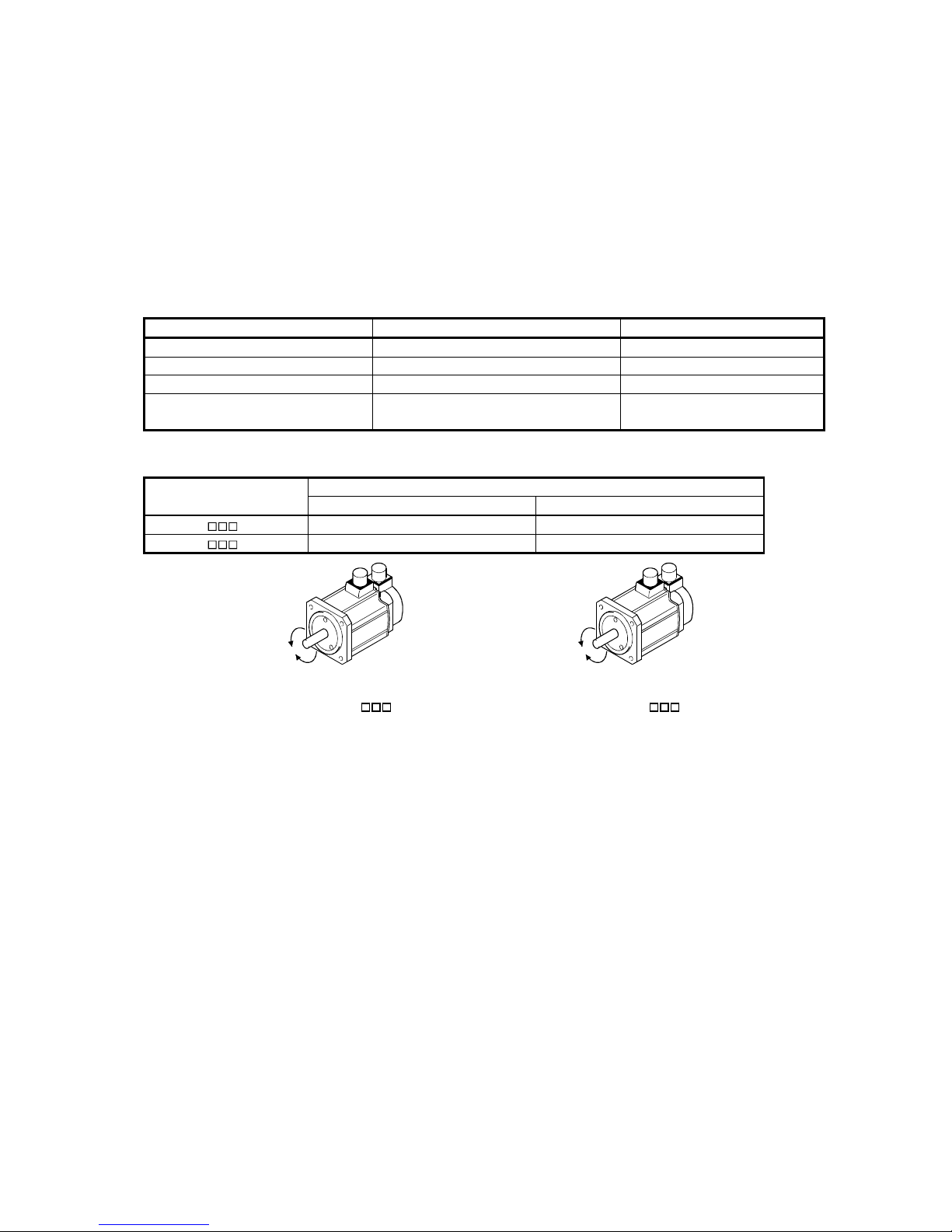
(2) Servo motor rotati on di rect i on
Servo Motor Rotation Direction
Parameter No. 1 Setting
Forward Rotation Start (ST1) ON Reverse Rotation Start (ST2) ON
0 CCW rotation CW rotation
1 CW rotation CCW rotation
ST1:ON
CCW
CW
ST2:ON
ST2:ON
CCW
CW
ST1:ON
Parameter No. 1
0 Parameter No. 1 1
25
BCN-B11127-479*
(3) Operation
By shorting ST1-SG, operat ion i s performed under t he condi ti ons of t he jog s peed set in t he pa ramet er
and the acceleration and deceleration time constants in set point table No.1. For the rotation direction,
refer to (2) in this section. By shorting ST2-SG, the servo mot or rotat es in the revers e direction t o ST1.
(4) Timing chart
Servo on (SON)
Ready (RD)
Trouble (ALM)
A
utomatic/manual mode
selection (MDO)
In position (INP)
Rough match (CPO)
100ms
Motor speed
Forward rotation start (ST1)
Reverse rotation start (ST2)
Forward rotation jog
Reverse rotation jog
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Forward
rotation
Reverse
rotation
ON
OFF
ON
OFF
0r/min

26
BCN-B11127-479*
5.5 Zeroing
5.5.1 Stopper type zeroing
In stopper type zeroing, a machine part is pressed against a stopper or the like by jog operation, manual
pulse genera tor operation or the li ke to make a home posi tion return and that po sition is defined as a
home position.
(1) Signals, parameters
Set the input signals and parameters as follows:
Item Device/Parameter Used Description
Automatic/manual selection signal (MDO) Short MDO-SG (ON).
Point table No. selectio n 1 (DI0) Open DI0-SG (OFF ).
Manual zeroing mode
selection
Point table No. selectio n 2 (DI1) Open DI1-SG (OFF ).
Stopper type zeroing Parameter No.8 3 : Stopper type zeroing is selected.
Zeroing direction Parameter No.8 Refer to the parameter No.8
Zeroing speed Parameter N o .9 Set the speed till contact with the sto pper.
Zeroing position data Paramete r N o . 42
Used to set the current position on completion
of zeroing
Stopper time Parameter No.44
Time from when the part makes contact with
the stopper to when zeroing data is obtained to
output zeroing completion (ZP)
Stopper type zeroing torque
limit
Parameter No.45
Set the servo motor torque limit value fo r
execution of stopper type zeroing.
Zeroing acceleration time
constant
Point table No.1
Use the acceleration time constant of point
table No.1.
(2) Timing chart
In position (INP)
Rough match
(CPO)
Zeroing
completion (ZP)
Servo motor speed
Forward rotation
start (ST1)
Reverse rotation
start (ST2)
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
5ms or less
Zero address
Parameter No. 42
ON
OFF
Automatic/manual
mode selection
(MDO)
10ms or more
Limiting
torque (TLC)
ON
OFF
Torque limit value
Stopper
Parameter No. 28
Parameter No. 45
Parameter No. 28
Stopper time
Parameter No. 44
Point table No.1
Acceleration time constant
Zeroing speed
Parameter No.9
The address on completion of zeroing is the va lue a ut omat ica lly s et in pa ramet er No.42 (zeroi ng
position data).
Parameter No.14 (STC) will be disabled during zeroing.

27
BCN-B11127-479*
6. Display and Operation
6.1 Display flowchart
Use the display (5-digit, 7-segment LED) on the front panel of the servo amplifier for status display,
parameter setting, etc. Set the parameters before operation, diagnose an alarm, confirm external
sequences, and/or confirm the operation status. Press the "MODE" "UP" or "DOWN" button once to move
to the next screen.
To refer to o r set the exp ansion paramete rs, make them valid with par ameter No. 19 ( parameter write
disable).
Current position
[pulse]
Command position
[pulse]
Command remaining
distance [pulse]
Regenerative load
Within one-revolution
position low [pulse]
ABS counter
[rev]
Load inertia moment
Ratio [times]
Communication status
Sequence
External I/O
signal display
Output signal
forced output
Test operation
Jog feed
Test operation
Positioning operation
Test operation
Motor-less operation
Current alarm
Last alarm
Second alarm in past
Third alarm in past
Fourth alarm in past
Fifth alarm in past
Sixth alarm in past
Parameter error No.
MODE
button
DOWN
UP
Software version L
Software version H
Status display
Diagnosi
s
Alarm
Expansion
parameters 3
Parameter No. 50
Parameter No. 51
Parameter No. 89
Parameter No. 90
Instantaneous torque
Within one-revolution
Bus voltage [V]
Test operation
Machine analyzer operation
Motor series ID
Motor type ID
Encoder ID
Cumulative feedback
pules [pulse]
Motor speed
[r/min]
Droop pulses
[pulse]
Peak load ratio
ratio [%]
[%]
Effective load ratio
[%]
[%]
position high [pulse]
Network I/F unit
S/W version L
Network I/F unit
S/W version H
Target position
Motor speed
Acc. time
Dwell time
Parameter No. 0
Parameter No.
1
Parameter No. 18
Parameter No. 19
Basic
parameters
Point table No.1
Point table No.2
Point table No. 30
Point table No. 31
Point table
Dec. time
A
uxiliary function
SET button
UP or DOWN
button

28
BCN-B11127-479*
7. Parameters
For any parameter whose symbol is preceded by *, set the parameter value and switch power off once,
then switch it on again to make that parameter setting valid.
For details of the parameters, refer to the corresponding items.
(1) Item list
Class No. Symbol Name and Function I ni tial Value Unit
Customer
Setting
0 *ST Y Control mode , regenerative brake option selection 0010
1 *FTY Feeding function selection 0000
2 *OP 1 Function selection 1 0002
3 AUT Auto tuning 0105
4 *CMX Electronic gear numerator 1
5 *CDV Electronic gear denominator 1
6 INP Movement completion output range 100 pulse
7 PG1 Position loo p gain 1 36 rad/s
8 ZTY Zeroing type 0013
9 ZRF Zeroing speed 500 r/min
10 CRF Creep speed 10 r/min
11 ZST Zero shift distance 0 Um
12 CRP Rough match output range 0 10
STM
m
13 JOG JOG speed 100 r/min
14 *STC S-Curve acceleration/deceleration time constant 0 Ms
15 *SNO Statio n number setting 0 station
16 *BPS Alarm history clear 0000
17 MOD For manufacture se tting 0100
18 *DMD Status display selection 0000
Basic parameters
19 *BLK Parameter block 0000

29
BCN-B11127-479*
Class No. Symbol Name and Function I ni t i al Value Unit
Customer
Setting
20 *OP2 Function selection 2 0000
21 *OP3 Function selection 3 0000
22 *OP4 Function selection 4 0000
23 *SIC Serial communications time-out selection 0 Sec
24 FFC Feed forward gain 0 %
25 VCO Override offset 0 mV
26 TLO Torque limit offset 0 mV
27 *ENR For manufacturer setting 4000
28 TL1 Internal torque limit 1 100 %
29 TL2 Internal torque limit 2 100 %
30 *BKC Backlash compensation 0 pulse
31 MO1 Analo g monitor ch1 offset 0 mV
32 MO2 Analo g monitor ch2 offset 0 mV
33 MBR Electromagnetic brake sequence output 100 ms
34 DG2 Ratio of load inertia moment to motor inertia moment 70 × 0.1 times
35 PG2 Position loop gain 2 35 rad/s
36 VG1 Speed loop gain 1 177 r ad/ s
37 VG2 Speed loop gain 2 817 r ad/ s
38 VIC Speed integral compensation 48 ms
39 VDC Speed differential compensation 980
40 OVA 0
41 DSS
For manufacture setting
0
42 *ZPS Zeroing position data 0 10
STM
m
43 DCT Moving distance after proximity dog 1000 10
STM
m
44 ZTM Stopper type ze r oing stopper time 100 ms
45 ZTT Stopper type zeroing torque limit value 30
%
46 0
47
*LMP Software limit +
0
10
STM
m
48 0
49
*LMN Software limit -
0
10
STM
m
50 0
51
*LPP Position range output address +
0
10
STM
m
52 0
Expansion parameters
53
*LNP Position range output address -
0
10
STM
m

30
BCN-B11127-479*
Class No. Symbol Name and Function I ni t i al Value Unit
Customer
Setting
54 *OP5 Function selection 5 0000
55 *OP6 Function selection 6 0000
56 *OP7 Function selection 7 0000
57 *OP8 Function selection 8 0000
58 *OP9 Function selection 9 0000
59 *OPA Function selection A 0000
60 For manufacturing setting 0000
61 NH1 Machine reso nanc e suppression filter 1 0000
62 NH2 Machine reso nanc e suppression filter 2 0000
63 LPF Low-pass filter, adaptive vibration suppression c ontrol 0000
64 GD2B Ratio of load i nertia moment t o Servo motor inertia moment 2 70 × 0.1 time
65 PG2B P o sition control gain 2 changing ratio 100 %
66 VG2B Speed control gain 2 changing r atio 100 %
67 VICB Speed integral compensation ch anging r atio 100 %
68 *CDP Gain changing selection 0000
69
CDS Gain changing condition
10
70
CDT Gain changing time constant
1
71 VPI 0 ms
72 VLI 10000 pulse
73 ERZ 10 rev
74 ER2 10 rev
75 SRT 100 r/min
76 TRT 100 ms
77 DBT
For manufacturing setting
100 ms
78 *DI0 Input/Output device selection (CN1A-19) 0001
79 *DI1 Input device selection 1 (CN 1A-19, 8) 0009
80 *DI2 Input device selection 2 (CN 1B-5, 7) 080A
81 *DI3 Input device selection 3 (CN 1B-8, 9) 0706
82 *DI4 Input device selection 4 (CN 1A-14, 15) 020B
83 *DI5 Input device selection 5 (CN 1B-16, 17) 0504
84 *DI6 Input device selection 6 (Automatic ON) 0002
85 *DI7 Input device selection 7 (Automatic ON) 0000
86 *DO1 Output device selection 1 (CN1A-18,19) 0005
87 *DO2 Output device selection 2 (CN1B-4,6) 0304
88 *DO3 Output device selection 3 (CN1B-18,19) 0102
89 0
90
For manufacturing setting
0

31
BCN-B11127-479*
(2) Detail list
Class No
Symbo
l
Name and function
Initial
Value
Unit Setting Rnge
0 *STY Control mode, Regenerative brake option selection
Use to select regenerative brake option.
0 0
0000 0000h
to
0710h
1 *FTY Feeding system selection
Used to set the feed length multiplication facto r and
External pulse multiplication factor.
0
0000 0000h
to
1013h
Basic parameters
2 *OP1 Function selection 1
Used to select the input filter and absolute position detection system.
0 0
0002 0000h
to
1006h
Selection of regenerative brake opti on
0: Not used
1: Spare (do not set)
2: MR-RB032
3: MR-RB12
4: MR-RB32
5: MR-RB30
6: MR-RB50
7: Spare (do not set)
ST1 coordinate system selection
0: Address is incremented in CCW direct i on
1: Address is incremented in CW direct i on
Feed length multiplicati on f actor (STM)
0: 1 time
1: 10 times
2: 100 times
3: 1000 times
SON-off, EMG-off follow-up for absolute value
Command in incremental system
0: Invalid
1: Valid
Selection of command mode
0: Absolute value command
1: Incremental value command
Input filter
If external input signal causes chattering due
To noise, etc., input filter is used to s uppress
it.
0: None
1: 0.888msec
2: 1.777msec
3: 2.666msec
4: 3.555msec
5: 4.444msec
6: 5.333msec
Selection of absolute pos i t i on detection system
0: Incremental system
1: Absolute position detection system

32
BCN-B11127-479*
Class No. Symbol Name and Function Initial Value Unit Setting Range
3
ATU
Auto tuning
Used to set the response level, etc. for execution of auto tuning.
0105 0001h
to
042Fh
Basic parameters
4
*CMX
Electronic gear numerator
Note: Set in the range of
20
CDV
CMX
20
1
<< .
If
100
CDV
CMX
100
1
<< is exc eeded, a parameter error will oc c u r .
1 1 to 65535
Auto tuning response level setting
If the machine hunts or generates
large gear sound, decrease the
set value.
To improve performance, e.g.
shorten the settling time, increase
the set value.
Set
value
Response
level
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
Low
Response
Gain adjustment mode selection
(For more information, refer to Section 7.1.1.)
Machine resonance
Frequency guideline
Gain adjustment
0
Description
1
3
Simple manual adjustment.
4
Manual adjustment of all
Interpolation mode
Fixes position control gain 1
Auto tuning mode 1
Fixes the load inertia moment
ratio set in parameter No. 34.
Response level setting can be
changed.
Manual mode 1
Manual mode 2
2
Auto tuning mode 2
Ordinary auto tuning.
0 0
High
response
15Hz
20Hz
25Hz
30Hz
35Hz
45Hz
55Hz
70Hz
85Hz
105Hz
130Hz
160Hz
200Hz
240Hz
300Hz
Set
Value
Ordinary auto tuning.
Middle
response

33
BCN-B11127-479*
Class No. Symbol Name and Function Initial Value Unit Set t i ng Range
5 *CDV Electronic gear denominator
Setting example Roll diameter: 50mm
Reduction ratio: 3/7
Number of pulses: 16384 pulses
1000×73××50
16384
=
)CDV(distanceMoving
)CMX(pulsesofNumber
π
=
π
9375
7168
=
29452
7168
Hence, set 7168 to CMX and 29452 to CDV.
Note: When there is a fraction, perform a carry within the setting
range and round off that fraction.
1 1 to 65535
6 INP Movement completion output rang
Used to set the droop pulse range when the movement completion
(INP) signal is output.
100 pulse 0 to 10000
7 PG1 Position loop gain 1
Used to set the gain of position loop 1.
Increase the gain to improve tracking performance in response to the
position command.
35 rad/s 4 to 2000
8 ZTY Zeroing type
Used to set the zeroing system, zeroing direction and proximity dog input
polarity.
0013
0000h
to
0117h
9 ZRF Zeroing speed
Used to set the motor speed for zeroing.
500 r/min
0
to
Max. speed
10 CRF Creep speed
Used to set the creep speed a fter proximity dog detection.
10 r/min
0
to
Max. speed
Basic parameters
11 ZST Zero shift distance
Used to set the shift distance starting at the Z-phase pulse detection position
inside the encoder.
0 um
0
to
Max. speed
Zeroing direction
0: Address increment direction
1: Address decrement direction
Proximity dog input polarity
0: Dog is detected when DOG-SG are opened
1: Dog is detected when DOG-SG are shorted
0
3

34
BCN-B11127-479*
Class No. Symbol Name and Function Initial Value Unit Setting Range
12 CRP Rough match output range
Used to set the command rema in i ng distance range where the rough match
(CPO) signal is output.
0
10
STM
m
0
to
65535
13 JOG Jog speed
Used to set the jog speed comma nd.
100 r/min
0
to
Max. speed
14 *STC S-pattern acceleration/deceleration time constant
Set when inserting an S-pattern time constant into the acceleration/deceleration
time constant of the point table.
This time constant is invalid for zeroing.
0 ms 0
to
100
15 *SNO RS-485 station number setting
Used to specify the station number for RS-485 multidrop communication.
A
lways set one stat ion t o one a x i s of s ervo a mplifier. If one station nu mb er is set
to two or more stations, normal communication cannot be made.
0 station 0
to
31
16 *BPS Alarm history clear
Used to alarm history clear.
0000 0000h
to
1214h
17 MOD For manufacturer setting
0 0
0100 0000h
to
4B4Bh
RS-422/RS-232C baudrate selection
0: 9600 [bps]
1: 19200 [bps]
2: 38400 [bps]
3: 57600 [bps]
4: 4800 [bps] (for MR-DP60)
A
larm history clear
0: Invalid (not cleared)
1: Valid (cleared)
When alarm his tory clear is made valid, t he
Alarm history is cleared at next power-on.
After the alarm history is cleared, the setti ng
is automaticall
y
made invalid (reset to 0)
Serial communic ation I/F selection
0: RS-232C
1: RS-422
Communication res ponse delay time
0: Invalid, reply sent in less than 400us
1: Valid, reply sent in 888us or more
Setting Analog Monitor Output Selection
Ch2 Ch1
0 Servo motor sped (+/- 8V/max. speed)
1 Generated torque (+/- 8V/max. torque)
2 Motor speed (+8V/max. torque)
3 Generated torque (+8V/max. torque)
4 Current command (+/- 8V/max. current command)
5 Speed command (+/- 8V/max. speed)
6 Droop pulses (+/-10V/128 pulses)
7 Droop pulses (+/- 10V/2048 pulses)
8 Droop pulses (+/- 10V/8192 pulses)
9 Droop pulses (+/- 10V/32768 pulses)
A Droop pulses (+/- 10V/131072 pulses)
B Bus voltage (+8V / 400V)

35
BCN-B11127-479*
Class No. Symbol Name and Function Ini tial Value Unit Setting Range
18 *DMD Status display selection
Used to select the status display shown at power-on .
0000 0000h
to
1F1Fh
Basic parameters
19 *BLK Parameter block
Used to select the reference and write ranges of the parameters.
Parameter No.
Set Value Operation
#00
to
#18
#19
#20
to
#53
#54
to
#90
Reference { { × ×
0000
(Initial value)
Write { { × ×
Reference × { × ×
000A
Write × { × ×
Reference { { { ×
000B
Write { { × ×
Reference { { { ×
000C
Write { { { ×
Reference { { { {
000E
Write { { { {
0000 0000h
to
FFFFh
Status display shown at power-on
00: Current position
01: Command position
02: Command remaining di stance
03: Point table No.
04: Cumulative feedback pul ses
05: Motor speed
06: Droop pulses
07: Override voltage
08: Limiting torque voltage
09: Regenerative load ratio
0A: Effective load rati o
0B: Peak load ratio
0C: Instantaneous torque
0D: Within one-revolution position (low)
0E: Within one-revol ution position (high)
0F: ABS counter
10: Load inertia moment rat i o
11: Bus voltage
0 0

36
BCN-B11127-479*
Class No. Symbol Name and Function I ni tial Value Unit Setting Range
20 *OP2 Function selection 2
Used to select slight vibration suppression contro l.
0000 0000h
to
1111h
21 *OP3 For manufacturer setting 0002
22 *OP4 Function selection 4
0000 0000h
to
0001h
23 *SIC
Serial communication time-out selection
Used to choose the time-out period of communication protocol
0 means not time-out check.
0 s 0 to 60
24 FFC Feed forward gain
Used to set the feed forward gain.
When it is set to 100%, droop pulses will no t be generated in constant
speed operation. Note that sudden acceler atio n / dec eleration will
increase overshoot.
0 % 0 to 100
25 VCO
Override offset
Used to set the offset vol t a g e to a n a l og overri de.
0 mV -999
to
999
26 TL0
Torque limit offset
Used to set the offset vol t a g e to a n a l og torq u e l i mi t.
0 mV -999
to
999
Expansion parameters
27 *ENR
Encoder output pulses
Used to set the encoder pulses (A-phase, B-phase) output by the servo
amplifier.
Set the value 4 times greater than the A-phase or B-phase pulses.
You can use parameter No. 58 to choose the output pulse setting or output
division ratio setting.
The number of A/B-phase pulses actually output is 1/4 times greater than
the preset number of pulses.
The maximum output frequency is 1.3Mpps (after multiplicatio n by 4). Use
this parameter within this range.
4000 pulse 1
to
65535
H/W limit stop selection
0: Sudden stop
1: Slow stop
0
0
0
0
Slight vibration suppressi on control selection
0: Invalid
1: Valid
Parameter No.2 must be “03” or “04” for activate this function.
0
0

37
BCN-B11127-479*
Class No. Symbol Name and Function I ni tial Value Unit Setting Range
28 T L 1 Internal torque limit 1
Used to limit servo motor-generated torque on the assumption that the
maximum torque is 100%. When 0 is set, to r que is not produced.
This setting value will be 8V for torque monito r in monitor output.
100 % 0 to 100
29 T L 2 Internal torque limit 2
Used to limit servo motor-generated torque on the assumption that the
maximum torque is 100%. When 0 is set, to r que is not produced.
Made valid by switching on the internal torque limit selection signal.
100 % 0 to 100
30 *BKC Backlash compensation
Used to set the backlash compensation made when the command direction
is reversed.
This function compensates for the number of backlash pulses in the
opposite direction to the zeroing direction. In the absolute position
detection system, this function compensates for the back lash pulse
count in the direction opposite to the operating direction at power-on.
0 pulse 0 to 1000
31 MO1 Analog monitor ch1 offset
Used to set the offset voltage of the analog monitor ch1 output (MO1).
0 mV -999 to 999
32 MO2 Analog monitor ch2 offset
Used to set the offset voltage of the analog monitor ch2 output (MO2)
0 mV -999 to 999
33 MBR Electromagnetic brake sequence output
Used to set the delay time between when the electromagnetic brake
interlock signal (MBR) switches off and when the base circuit is shut
off.
100 ms 0 to 1000
34 GD2 Ratio of load iner tia moment to motor inertia mo m ent:
Used to set the ratio of the load inertia mom e nt to the servo motor
shaft inertia moment.
When auto tuning is selected, the result of auto tuning is
automatically set.
70 ×0.1
times
0 to 3000
35 PG2 Po sition loop gain 2
Used to set the gain of the position loop.
Set this parameter to increase the position response level to load
disturbance. Higher setting increases the respo nse level but is liable
to generate vibration and/or noise .
When auto tuning is selected, the result of auto tuning is
automatically set.
35 rad/s 1 to 1000
36 VG1 Speed loop gain 1
Normally this parameter setting need not be changed.
Higher setting increases the response level but is liable to ge nerate
vibration and/or noise.
When auto tuning is selected, the result of auto tuning is
automatically set.
177 rad/s 20 to 8000
37 VG2 Speed loop gain 2
Set this parameter when vibration occurs on machines of low rigidity
or large backlash.
Higher setting increases the response level but is liable to ge nerate
vibration and/or noise.
When auto tuning is selected, the result of auto tuning is
automatically set.
817 rad/s 20 to 20000
38 VIC Speed integral compensation
Used to set the integral time constant of the speed loo p.
When auto tuning is selected, the result of auto tuning is
automatically set.
48 ms 1 to 1000
39 VDC Speed differential compensation
Used to set the differential compensation.
Made valid when the proportion control signal is switched on.
980 0 to 1000

38
BCN-B11127-479*
Class No. Symbol Name and Function Initial Value Unit Setting Range
40 OVA 0
41
For manufacturing setting
0
42 *ZPS Zeroing position data
Used to set the current position on completion of zeroing.
0 10
S
TM
m
−32768
to
32767
43 DCT Moving distance after pro ximity dog
Used to set the moving distance after proximity dog in count type zeroing.
1000 10
S
TM
m
0 to 65535
44 ZTM Stopper type zeroing s t opper time
In stopper type zeroing, used to set the time from when the machine part
is pressed against the stopper and the torque limit set in parameter
No.45(ZTT) is reached to when the home positio n is set.
100 ms 5 to 1000
45 ZTT Stopper type zero ing to r que limit
Used to set the torque limit value relative to the m ax. to rque in [%] in
stopper type zeroing.
15 % 1 to 100
46
47
LMP Software limit
Used to set the address increment side software stroke limit. The software
limit is made invalid if this value is the same as in "software limit
".
Set the same sign to parameters No.46 and 47. Setting of different signs will
result in a parameter error.
Set address:
Upper 3
digits
Lower 3
digits
Parameter No. 47
Parameter No. 46
0 10
ST
M
m
999999
to
999999
48
49
LMN Software limit
Used to set the address decrement side software stroke limit. The software
limit is made invalid if this value is the same as in "software limit
".
Set the same sign to parameters No.48 and 49. Setting of different signs will
result in a parameter error.
Set address:
Upper 3
digits
Lower 3
digits
Parameter No. 49
Parameter No. 48
0 10
ST
M
m
999999
to
999999
50
51
LPP Position range output address
Used to set the address increment side position range output address. Set the
same sign to parameters No.50 and 51. Setting of different signs will result in
a parameter error.
Set address:
Upper 3
digits
Lower 3
digits
Parameter No. 51
Parameter No. 50
0 10
ST
M
m
999999
to
999999

39
BCN-B11127-479*
Class No. Symbol Name and Function
Initial
Value
Unit Setting Range
52
53
LNP Position range outp u t a ddress
Used to set the address decrement side position range output address. Set the
same sign to parameters No.52 and 53. Setting of different signs will result in a
parameter error.
Set addre ss:
Upper 3
digits
Lower 3
digits
Parameter No. 53
Parameter No. 52
0 10
STM
m
999999
to
999999
54 *OP5 For manufacturer setting 0000
55 *OP6 Optional function 6
Servo on response in alarm reset operation.
Used to select the operation to be performed when the alarm reset signal
switches on.
0000 0000h
to
1111h
56 *OP7 Optional function 7
Used to select the current position display mode.
Item Display of positioning Display of role feeding
Current
position
Display actual position
from machine home
position
Display actual positi on from
power on
Automatic
operation mode
Comman
ded
position
Display commanded
position from machine
home position
Display target position in
stop motion.
Count start from 0 at start
signal turned on.
And display commanded
position till target position
Current
position
Display commanded
position from machine
home position
Display target position in
stop motion.
Count start from 0 at start
signal turned on.
And display commanded
position till target position
Manual operation
Comman
ded
position
Display commanded
position from machine
home position
Display target position in
stop motion.
And display selected
position data at start sign al
turned on.
0000 0000h
to
1111h
0 0 0
Operation to be performed when the
alarm reset signal switches on
0: Base circuit not switched off
1: Base circuit switched of
f
0 0
Electric gear cal. error c l ear selection
0: Invalid
1: Valid
Current position / Commanded position display selection
0: Display of positioning
1: Display of role feeding

40
BCN-B11127-479*
Class No.
Symbol
Name and Function
Initial
Value
Unit Setting Range
57 *OP8 Function selection 8
Used to select the protocol of serial communication.
0000
0000h
to
1112h
58 *OP9 Functio n se le ctio n 9
Use to select the command pulse rotation direction, encoder output pulse
direction and encoder pulse output setting.
0000
0000h
to
1101h
59 *OPA Function selection A
Alarm code output function selection
0000
0000h
to
0211h
Expansion parameters
60 For m anufac tur e setting 0000
0
0
0
Alarm code output
0: Invalid
1: Valid
0 0
Protocol checksum sele ction
0: Yes (checksum added)
1: No (checksum no t added)
Protocol checksum sele ction
0: With station numbers
1: No station numbers
0
0
1
CCW
CW
CW
C C W
Servo motor rotation direction changing
Changes the servo motor rotation
direction for the input pulse train.
Set value
Servo motor rotation direction
At forward rotation
pulse input (Note)
A
t reverse rotation
pulse input (Note)
Encoder pulse output phase changing
Changes the phases of A, B-phase encoder pulses output .
Encoder output pulse setting selection (refer to parameter No. 27)
0: Output pulse setting
1: Division ratio setting
Servo motor rotation direction
Set value
CCW CW
0
1
A
phase
B phase
A
phase
B phase
A
phase
B phase
A
phase
B phase

41
BCN-B11127-479*
Class No. Symbol Name and function
Initial
value
Unit Setting range
61 NH1 Machine resonance suppression filter 1
Used to selection the machine resonance suppression filter.
0000
.0000h
to
031Fh
62 NH2 Machine resonance suppression filter 2
Used to set the machine resonance suppression filter.
0000
0000h
to
031Fh
2
3
0
0
1
40
d B
14
d B
8 d B
4 d B
Notch frequency selection
00
01
02
03
04
05
06
07
Setting
value
Frequency
Invalid
4500
2250
1500
1125
900
750
642.9
08
09
0
A
0B
0C
0D
0E
0F
562.5
500
450
409.1
375
346.2
321.4
300
Frequenc
y
10
11
12
13
14
15
16
17
281.3
264.7
250
236.8
225
214.3
204.5
195.7
Frequency
18
19
1
A
1B
1C
1D
1E
1F
187.5
180
173.1
166.7
160.1
155.2
150
145.2
Frequency
Notch depth selection
Setting
value
Depth Gain
Deep
Shallow
to
Setting
value
Setting
value
Setting
value
0
Notch frequency
Same setting as in parameter No. 61
However, you need not set "00" if you have
set adaptive vibration suppression control to
be "valid" or "held".
Notch depth
Same setting as in parameter No. 61

42
BCN-B11127-479*
Class No. Symbol Name and function
Initial
value
Unit Setting range
63 LPF Low-pass filter/adapt iv e vibration suppress i on control
Used to selection the low-pass filter and adaptive vibration suppression
control.
0000
0000h
to
1217h
64 GD2B Ratio of load inertia moment to ser v o motor inertia moment 2
Used to set the ratio of load inertia moment to servo motor inertia
moment when gain changing is valid.
70
0.1
times
0
to
3000
65
PG2B Position control gain 2 changing ratio
Used to set the ratio of changing the position control gain 2 when gain
changing is valid.
Made valid when auto tuning is invalid.
100 % 10
to
200
66
VG2B Speed control gain 2 changing ratio
Used to set the ratio of changing the speed control gain 2 when gain
changing is valid.
Made valid when auto tuning is invalid.
100 % 10
to
200
67
VICB Speed integral compensation changing ratio
Used to set the ratio of changing the speed integral compensation when
gain changing is valid. Made valid when auto tuning is invalid.
100 %
50
to
1000
68
*CDP Gain changing selection
Used to select the gain changing condition.
0000
0000h
to
0004h
0
Low-pass filter selection
0: Valid (Automatic adjustment)
1: Invalid
When you choose "valid",
2 (1 GD2 setting 0.1)
VG2 setting 10
bandwidth filter is set automatically.
Adaptive vibration suppression control selection
Choosing "valid" or "held" in adaptive vibration
suppression control selection makes the machine
resonance control filter 1 (parameter No. 58) invalid.
0: Invalid
1: Valid
Machine resonance frequency is always detected
and the filter is generated in response to resonance to
suppress machine vibration.
2: Held
The characteristics of the filter generated so far are held,
and detection of machine resonance is stopped.
Adaptive vibration suppression control sensitivity selection
Used to set the sensitivity of machine resonance detection.
0: Normal
1: Large sensitivity
[H
z
]
00 0
Gain changing selection
Gains are changed in accordance with the settings
of parameters No. 64 to 67 under any of the following
conditions:
0: Invalid
1: Gain changing (CDP) signal is ON
2: Command frequency is equal to higher than
parameter No. 69 setting
3: Droop pulse value is equal to higher than
parameter No. 69 setting
4: Servo motor speed is equal to higher than
parameter No. 69 setting

43
BCN-B11127-479*
Class No. Symbol Name and function
Initial
value
Unit Setting range
69 CDS Gain changing condition
Used to set the value of gain changing condition (command frequency,
droop pulses, servo motor speed) selected in parameter No. 68.The set
value unit changes with the changing condition item.
10 kpps
pulse
r/min
0
to
9999
70
CDT Gain changing time constant
Used to set the time constant at which the gains will change in response
to the conditions set in parameters No. 68 and 69.
1 ms 0
to
100
71 VPI 100
72 VLI 10000
73 ERZ 10
74 ER2 10
75 SRT 100
76 TRT 100
77 DBT
For manufacture setting
100
78
*DI0
Input / Output device selection
Used to select the CN1A-19 pin to output or input device
0000 0000h
to
0001h
79 *DI1 Input device selection 1
Used to select the function of CN1A-8 pin and CN1A-19 pin
Setting Input function Setting Input function
00 No function 17 Gain changing selection
01 Forced stop 18
02 Servo on 19
03 Alarm reset 1A
04 FWD stroke limit 1B
05 REV stroke limit 1C
06 FWD rotation start 1D
07 REV rotation start 1E
08 Auto. / Manu. 1F
09 20
0A Point table # selection 1 21
0B Point table # selection 2 22
0C Point table # selection 3 23
0D Point table # selection 4 34
0E 25
0F External torque limit 26
10 Internal torque limit 27
11 Proportional control 28
12 Temp. stop / Restart 29
13 2A
14 2B
15 Point table # selection 5 2C
16 2D
0009 0000h
to
1F1Fh
00 0
CN1A-19 pin
0: Output device
1: Input device
Set to the function of CN1A-19 pin
Set to the function of CN1A-8 pin

44
BCN-B11127-479*
Class No.
Symbol
Name and Function
Initial
Value
Unit Setting Range
80 *DI2 Input device selec tion 2
Used to select the function of CN1B-5 pin and CN1B-7 pin
080A
0000h
to
1F1Fh
81 *DI3 Input device selec tion 3
Used to select the function of CN1B-8 pin and CN1B-9 pin
0706
0000h
to
1F1Fh
82 *DI4 Input device selection 4
Used to select the function of CN1B-14 pin and CN1B-15 pin
020B
0000h
to
1F1Fh
83 *DI5 Input device selection 5
Used to select the function of CN1B-16 pin and CN1B-17 pin
0504 0000h
to
1F1F
Set to the function of CN1B-7 pin
Set to the function of CN1B-5 pin
Set to the function of CN1B-9 pin
Set to the function of CN1B-8 pin
Set to the function of CN1B-15 pin
Set to the function of CN1B-14 pin
Set to the function of CN1B-17 pin
Set to the function of CN1B-16 pin

45
BCN-B11127-479*
Class No. Symbol Name and Function Initial Value Unit Setting Range
84 *DI6 Input device selection 6
Used to set automatically ON of function device
0002 0000h
to
FFFFh
85 *DI7 Input device selection 7
Used to set automatically ON of function device
0000 0000h
to
FFFFh
Forced stop
Servo on
Reverse stroke limit
Forward stroke limit
Automatic / Manual sel ection
Point table No. select i on 1
Point table No. select i on 2
Point table No. select i on 3
Point table No. select i on 4
External torque limit selec tion
Proportional control

46
BCN-B11127-479*
Class No. Symbol Name and Function Initial Value Unit Setting Range
86 *DO1 Output device selection 1
Used to select the function of CN1A-18 pin and CN1A-19 pin
Setting Input function Setti ng Input function
00 No function 15
01 Ready 16
02 Trouble 17
03 In position 18
04 Rough mach 19
05 Zeroing complete 1A
06 Electro magnetic brake 1B
07 Dynamic brake interlock 1C
08 Position range output 1D
09 Warning output 1E
0A Battery warning 1F
0B In torque limit 20
0C In temporally stop 21
0D Moving complete 22
0E Point table # output 1 23
0F Point table # output 2 24
10 Point table # output 3 25
11 Point table # output 4 26
12 Point table # output 5 27
13 28
14 29
0005 0000h
to
1F1Fh
87 *DO2 Output device selection 2
Used to select the function of CN1B-6 pin and CN1B-4 pin
0304 0000h
to
0F0Fh
88 *DO3 Output device selection 3
Used to select the function of CN1B-18 pin and CN1B-19 pin
0102
0000h
to
0F0Fh
89 0
90
For manufacture setting
0
Set to the function of CN1A-19 pin
Set to the function of CN1A-18 pin
Set to the function of CN1B-6 pin
Set to the function of CN1B-4 pin
Set to the function of CN1B-19 pin
Set to the function of CN1B-18 pin

47
8. Communication Functions
The MR-J2S-A-S061 has the RS-422 and RS-232C serial communication functions. These functions can
be used to perform servo operation, parameter changi ng, moni tor funct ion, et c.
However, the R S- 4 22 and RS-232C communica tio n f u nc tio n s cannot be used together. Sele ct be twe e n RS422 and RS-232C with parameter No.16.
8.1 Configuration
8.1.1 RS-422 configuration
(1) Outline
Up to 32 axes of servo amplifiers from stations 0 to 31 can be operated on the same bus.
CHARGE
MITSUBISHI
CHARGE
MITSUBISHI
CHARGE
MITSUBISHI
RS-422
Controller such as
personal computer
RS-232C/
RS-422
converter
Servo amplifier Servo amplifier
To
CN3
Axis 1 (Station 0) Axis 2 (Station 1)
Axis 32 (Station 31)
Unavailable as option.
To be prepared by customer.
Servo amplifier
To
CN3
To
CN3
(2) Cable connection diagram
Wire as shown below:
RDP
RDN
SDP
SDN
GND
GND
5
15
9
19
11
1
10
RDP
RDN
SDP
SDN
LG
LG
TRE
SD
5
15
9
19
11
1
10
RDP
RDN
SDP
SDN
LG
LG
TRE
SD
5
15
9
19
11
1
10
RDP
RDN
SDP
SDN
LG
LG
TRE
SD
(Note 3) 30m(1181.10inch) max.
Plate
(Note 1)
Axis 2 servo amplifier
CN3 connector
Plate
Plate
(Note 2)
RS-422
output unit
(Note 1)
Axis 1 servo amplifier
CN3 connector
(Note 1)
Axis 32 (last axis)
servo amplifier
CN3 connector
Note: 1. 3M's CN3 connector
Connector: 10120-3000VE
Shell kit: 10320-52F0-008
2. In the last axis, connect TRE and RDN.
3. 30m(1181.10inch) max. in environment of little noise.

48
8.1.2 RS-232C configuration
(1) Outline
A single axis of servo amplifier is operated.
(2) Cable connection diagram
Wire as shown below. The communication cable for connection with the personal computer (MRCPCATCBL3M) is available.
12
11
2
1
TXD
GND
RXD
GND
FG
Personal computer
connector D-SUB25 (socket)
(Note 4)
(Note 3) 15m(590.55inch) max.
(Note 1)
Servo amplifier
CN3 connector
Plate
D-SUB29 (soc k e t) for PC-98
compatible controller
TXD
RXD
GND
RTS
CTS
DSR
DTR
3
2
5
7
8
6
4
TXD
GND
RXD
GND
CN3 connector 2
CN3 connector 1
CN3 connector 12
CN3 connector 11
SD
RD
SG
RS
CS
2
3
7
4
5
(Note 2)
Note: 1. 3M's CN3 connector
Connector: 1020-3000VE
Shell kit: 10320-52F0-008
2. For the PC-98 series. The PC-98 series also has the half-pitch type.
3. 15m (590.55inch) max. in environment of little noise.
4. For the PC-AT compatible.
CHARGE
MITSUBISHI
RS-232C
Controller such as
personal compute
r
MR-J2S-A-S061
To CN3
Servo amplifier

49
8.2 Communication specifications
The MELSERVO-J2S series is des igned to send a reply on receipt of an instruction . The device which
gives this instruction (e.g. personal computer) is called a master station and the device which sends a
reply in response to th e instruction (e.g . MR-J2S-A- S061 servo amplifier) is called a slave st ation. When
fetching data successively, the master station repeatedly commands the slave station to send data.
Item Description
Baudrate 9.6k/19.2k/38.4k/57.6k asynchronous system
Transfer code
Start bit : 1 bit
Data bit : 8 bits
Parity bit : 1 bit (even)
Stop bit : 1 bit
Transfer protocol Character system, half-duplex communication system
(LSB)
(MSB)
012
345 76
Start
Parity
Stop
Next
start
1 frame (11 bits)
Data
8.2.1 Parameter setting
When the RS-422/RS-232C communication function is used to operate the servo, choose the communication specifications with parameter No.16.
(1) Communication baudrate
Choose the communication speed. Match this value to the communication speed of the sending end
(master station).
(2) Checksum
The checksum added to data can be deleted. When the checksum is not needed for the communication
specifications of the mast er s ta ti on, delet e the check s um at para meter No.5 7

50
(3) RS-422/RS-232C serial interface selection
Select the RS-422 or RS-232C communication standard. RS-422 and RS-232C cannot be used together.
RS-422/RS-232C communication standard selection
0: RS-422 used
1: RS-232C used
Parame ter No. 16
−−−
(4) Communication delay time
Set the time from when the servo amplifier (slave station) receives communication data to when it
sends back data. Set "0" to send back data in less than 888
s or "1" to send back data in 888 s or more.
(5) Serial communication time-out
No communication for a given period of time between the master and slave stations may be judged as
a communication cable or master s t at ion fa ult to s top t he s ervo motor.
Setting Description
0 No time-out check
1 to 60
Time-out check period setting
Check period
setting (S)
8.3 Protocol
Since up to 32 axes may be connected to the bus, add a station number or group to the command, data No.,
etc. to determine the destination servo amplifier of data communication. Set the station number to each
servo amplifier using the parameter and set the group to each station using the communication command.
Transmission data is valid for the servo amplifier of the specified station number or group.
When "
" is set a s the station num ber added to the transmissio n data, the tra nsmission data i s made
valid for all servo amplifiers connected. However, when return data is required from the servo amplifier
in response to the transmission data, set "0" to the station number of the servo amplifier wh ich must
provide the return data.
(1) Transmission of data from the controller to the servo
S
O
H
S
T
X
E
T
X
S
T
X
E
T
X
Data
No.
Data
Check
sum
10 frames (data)
Station number
or
group
Error code
Check
sum
6 frames
Positive response: Error code A
Negative response: Error code other than A
Servo side
(Slave station)
Controller side
(Master station)
Command
Station number
or
group
Communication delay time
0: Invalid, reply sent in less than 888
µ
s
1: Valid, reply sent in 888
µ
s or more
Parameter No. 16
− − −

51
(2) Transmission of data request from the controller to the servo
S
O
H
S
T
X
E
T
X
S
T
X
E
T
X
Controller side
Servo side
10 frames
Command
Data
No.
Check
sum
Error code
Data
Check
sum
6 frames (data)
Station number
or
group
Station number
or
group
(3) Recovery of communication status by time-out
E
O
T
or
Controller side
Servo side
EOT causes the servo to return to
the receive neutral status.
Data
4 frames
Data
8 frames
or 12 frames or 16 frames
Data: Choose the data length from among 4, 8, 12 and 16 frames (data length depends on the command).

52
8.4 Character codes
(1) Control codes
Code Name
Hexadecimal
(ASCII code)
Description
Personal Computer Terminal Key Operation
(General)
SOH
STX
ETX
EOT
01H
02H
03H
04H
start of head
start of text
end of text
end of transmission
ctrl
A
ctrl
B
ctrl
C
ctrl
D
(2) Codes for data
JIS8 unit codes are used.
b8 0 0 0 0 0 0 0 0
b7 0 0 0 0 1 1 1 1
b6 0 0 1 1 0 0 1 1
b5 0 1 0 1 0 1 0 1
b
8
to
b
5
b
4 b3 b2 b1
C
R
0 1 2 3 4 5 6 7
0 0 0 0 0 NUL DLE Space 0 @ P ` p
0 0 0 1 1 SOH DC1 ! 1 A Q a q
0 0 1 0 2 STX DC2 " 2 B R b r
0 0 1 1 3 ETX DC3 # 3 C S c s
0 1 0 0 4 $ 4 D T d t
0 1 0 1 5 % 5 E U e u
0 1 1 0 6 & 6 F V f v
0 1 1 1 7 ' 7 G W g w
1 0 0 0 8 ( 8 H X h x
1 0 0 1 9 ) 9 I Y i y
1 0 1 0 10 : J Z j z
1 0 1 1 11 ; K [ k {
1 1 0 0 12 , L ¥ l |
1 1 0 1 13 - M ] m }
1 1 1 0 14 . N ^ n ¯
1 1 1 1 15 / ? O _ o DEL
(3) Station numbers
You may set 32 station numbers from station 0 to station 31 and the JIS8 unit codes are used to
specify the stations .
Station number 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
JIS8 code 0 1 2 3 4 5 6 7 8 9 A B C D E F
Station number 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
JIS8 code G H I J K L M N O P Q R S T U V
For example, "30H" is transmitted in hexadecimal when the station number is "0" (first axis).
(4) Group
Group a b c d e f All group
JIS8 code a b c d e f
For example, "61H" is transmitted in hexadecimal for group a.

53
8.5 Error codes
Error codes are used in the following cases and an error code of single-code length is trans mitt ed.
On receipt of data from the master station, the slave station sends the error code corresponding to that
data to the master station. The code transmitted in u ppercase indicates tha t the servo is normal and the
one in lowercase indicates that an alarm has occurred.
Error Code
Servo normal Servo alarm
Error Name Description Remarks
[A] [a] Normal operation Data transmitted was processed properly. Positive response
[B] [b] Parity error Parity error occurred in the transmitted data.
[C] [c] Checksum error Checksum error occurred in the transmitted data.
[D] [d] Character error
Character not existing in the specifications was
transmitted.
[E] [e] Command error
Command not existing in the specifications was
transmitted.
[F] [f] Data No. error
Data No. not existing in the specifications was
transmitted.
Negative response
8.6 Checksum
Checksum range
Check
Checksum range
ETXSTX or
SOH
Station number
or
group
The checksum is sent as a JIS8-coded hexadecimal code representing the lower two digits of the sum of
JIS8-coded hexadecimal values up t o ET X , wit h t he excepti on of the fi rs t cont rol code (S T X or S OH).
S
T
X
02H
[0]
30H
[A]
41H
[1]
31H
[2]
32H
[5]
35H
[F]
46H
E
T
X
[5] [2]
03H
30H 41H 31H 32H 35H 46H 03H
152H
Lower 2 digits 52 is sent after conversion into ASCII code [5][2].

54
8.7 Time-out operation
The master station transmits EOT when the slave station does not start reply operation (STX is not
received) 300[ms] after the master station ha s ended communication operat ion. 100[ms] after that, th e
master station retransmits the message. Time-out occurs if the slave station does not answer after the
master station has performed the a bove operat i on three t imes . (Communi cat ion error)
E
O
T
300ms
100ms
E
O
T
300ms
100ms
E
O
T
300ms
100ms
300ms
Message
Message
Message
Message
Time-out
Controller
(Master station)
Servo
(Slave station)
8.8 Retry operation
When a fault occurs in communication between the master and slave stations, the error code in the
response data from the slave station is a negative response code ([B] to [F], [b] to [f]). In this case, the
master station retransmits the message which was sent at the occurrence of the fault (Retry operation). A
communication error occurs if the above operation is repeated and results in the error three or more
consecutive times.
Message
Message
Message
Communication error
Controller
(Master station)
Servo
(Slave station)
S
T
X
S
T
X
S
T
X
Station number
or
group
Station number
or
group
Station number
or
group
Similarly, when the master station detects a fault (e.g. checksum, parity) in the response data from the
slave station, the master station retransmits the message which was sent at the occurrence of the fault. A
communication error occurs if the retry operation is performed three times .

55
8.9 Initialization
After the slave station is switched o n, it cannot reply to communication un til the internal init ialization
processing terminates. Hence, a t power-on, ordina ry communica ti on shoul d be s ta rt ed aft er:
1) 1s or more time has elapsed after the slave station is switched on; and
2) Making sure that normal communi cation can be made by reading the parameter or other data which
does not pose any safety problems.
8.10 Communication procedure example
The following example reads the set value of parameter No.2 "function selection 1" from the servo
amplifier of station 0:
Data Item Value Description
Station number 0 Servo amplifier station 0
Command 05 Read command
Data No. 02 Parameter No.2
Checksum 30H 30H 35H 02H 30H 32H 03H FCH
0 2STX ETX5
0
Yes
No
Yes
No
No
No
Yes
Yes
Yes
No
[0][0][5] [0][2]
[0]
Axis No.
Command
Data No.
Data
Procedure
Data make-up
Checksum calculation and
addition
Addition of SOH to make
up transmission data
Data transmission
Data receive
Is there receive data?
3 consecutive times?
Error processing
Other than error code
[A] [a]?
Receive data analysis
End
300ms elapsed?
3 consecutive times?
Error processing
100ms after EOT transmission
Master station slave station
Master station slave station
Master station slave station
STX ETX
46H 43HSOH FCTransmission data
5
0 STX 0 2
ETX

56
8.11 Command and data No. list
8.11.1 Read commands
(1) Status display (Command [0][1])
Command Data No. Description Display Item Frame Length
[0][1] [8][0] Current position 12
[0][1] [8][1] Command position 12
[0][1] [8][2] Command remaining distance 12
[0][1] [8][3] Point table No. 12
[0][1] [8][4] Cumulative feedback pulses 12
[0][1] [8][5] Motor speed 12
[0][1] [8][6] Droop pulses 12
[0][1] [8][7] Override 12
[0][1] [8][8] Torque limit voltage 12
[0][1] [8][9] Regenerative load ratio 12
[0][1] [8][A] Effective load ratio 12
[0][1] [8][B] Peak load ratio 12
[0][1] [8][C] Instantaneous torque 12
[0][1] [8][D] Within one-revolution position 12
[0][1] [8][E] ABS counter 12
[0][1] [8][F] Load inertia moment ratio 12
[0][1] [9][0]
Status display data value and
processing information
Bus voltage 12
(2) Parameter (Command [0][5])
Command Data No. Description Frame Length
[0][5]
[0][0] to
[5][A]
Current value of each parameter
(Decimal number of data No. corresponds to the parameter number.)
8
(3) External I/O signals (Command [1][2])
Command Data No. Description Frame Length
[1][2] [0][0] Input device statuses 8
[1][2] [4][0] External input pin statuse s 8
[1][2] [6][0] Statuses of input devices switched on through communication 8
[1][2] [8][0] Output device statuses 8
[1][2] [C][0] External output pin statuses 8

57
(4) Alarm history (Command [3][3])
Command Data No. Description Alarm Occurrence Sequence Frame Length
[3][3] [1][0] Most recent alarm 4
[3][3] [1][1] First alarm in past 4
[3][3] [1][2] Second alarm in past 4
[3][3] [1][3] Third alarm in past 4
[3][3] [1][4] Fourth alarm in past 4
[3][3] [1][5]
Alarm number in alarm history
Fifth alarm in past 4
[3][3] [2][0] Most recent alarm 8
[3][3] [2][1] First alarm in past 8
[3][3] [2][2] Second alarm in past 8
[3][3] [2][3] Third alarm in past 8
[3][3] [2][4] Fourth alarm in past 8
[3][3] [2][5]
Alarm occurrence time in alarm
history
Fifth alarm in past 8
(5) Current alarm (Command [0][2]•[3][5])
Command Data No. Description Frame Length
[0][2] [0][0] Current alarm numbe r 4
Command Data No. Description Status Display Item Frame Length
[3][5] [8][0] Current position 12
[3][5] [8][1] Command position 12
[3][5] [8][2] Command remaining distance 12
[3][5] [8][3] Point table No. 12
[3][5] [8][4] Cumulative feedback pulses 12
[3][5] [8][5] Motor speed 12
[3][5] [8][6] Droop pulses 12
[3][5] [8][7] Override 12
[3][5] [8][8] Torque limit voltage 12
[3][5] [8][9] Regenerative load ratio 12
[3][5] [8][A] Effective load ratio 12
[3][5] [8][B] Peak load ratio 12
[3][5] [8][C] Instantaneous torque 12
[3][5] [8][D] Within one-revolution position 12
[3][5] [8][E] ABS counter 12
[3][5] [8][F] Load inertia moment ratio 12
[3][5] [9][0]
Status display data value and
processing information at alarm
occurrence
Bus voltage 12

58
(6) Point table/position data (Command [4][0])
Command Data No. Description Point table No. Frame Length
[4][0] [0][1] Point table No.1 8
[4][0] [0][2] Point table No.2 8
[4][0] [0][3] Point table No.3 8
[4][0] [0][4] Point table No.4 8
[4][0] [0][5] Point table No.5 8
[4][0] [0][6] Point table No.6 8
[4][0] [0][7] Point table No.7 8
[4][0] [0][8] Point table No.8 8
[4][0] [0][9] Point table No.9 8
[4][0] [0][A] Point table No.10 8
[4][0] [0][B] Point table No.11 8
[4][0] [0][C] Point table No.12 8
[4][0] [0][D] Point table No.13 8
[4][0] [0][E] Point table No.14 8
[4][0] [0][F] Point table No.15 8
[4][0] [1][0] Point table No.16 8
: : : :
[4][0] [1][F]
Position data read
Point table No.31 8
(7) Point table/speed data (Command [5][0])
Command Data No. Description Point table No. Frame Length
[5][0] [0][1] Point table No.1 8
[5][0] [0][2] Point table No.2 8
[5][0] [0][3] Point table No.3 8
[5][0] [0][4] Point table No.4 8
[5][0] [0][5] Point table No.5 8
[5][0] [0][6] Point table No.6 8
[5][0] [0][7] Point table No.7 8
[5][0] [0][8] Point table No.8 8
[5][0] [0][9] Point table No.9 8
[5][0] [0][A] Point table No.10 8
[5][0] [0][B] Point table No.11 8
[5][0] [0][C] Point table No.12 8
[5][0] [0][D] Point table No.13 8
[5][0] [0][E] Point table No.14 8
[5][0] [0][F] Point table No.15 8
[5][0] [1][0] Point table No.16 8
: : : :
[5][0] [1][F]
Speed data read
Point table No.31 8

59
(8) Point table/acceleration time constant (Command [5][4])
Command Data No. Description Point table No. Frame Length
[5][4] [0][1] Point table No.1 8
[5][4] [0][2] Point table No.2 8
[5][4] [0][3] Point table No.3 8
[5][4] [0][4] Point table No.4 8
[5][4] [0][5] Point table No.5 8
[5][4] [0][6] Point table No.6 8
[5][4] [0][7] Point table No.7 8
[5][4] [0][8] Point table No.8 8
[5][4] [0][9] Point table No.9 8
[5][4] [0][A] Point table No.10 8
[5][4] [0][B] Point table No.11 8
[5][4] [0][C] Point table No.12 8
[5][4] [0][D] Point table No.13 8
[5][4] [0][E] Point table No.14 8
[5][4] [0][F] Point table No.15 8
[5][4] [1][0] Point table No.16 8
: : : :
[5][4] [1][F]
Acceleration time constant read
Point table No.31 8
(9) Point table/deceleration time constant (Command [5][8])
Command Data No. Description Point table No. Frame Length
[5][8] [0][1] Point table No.1 8
[5][8] [0][2] Point table No.2 8
[5][8] [0][3] Point table No.3 8
[5][8] [0][4] Point table No.4 8
[5][8] [0][5] Point table No.5 8
[5][8] [0][6] Point table No.6 8
[5][8] [0][7] Point table No.7 8
[5][8] [0][8] Point table No.8 8
[5][8] [0][9] Point table No.9 8
[5][8] [0][A] Point table No.10 8
[5][8] [0][B] Point table No.11 8
[5][8] [0][C] Point table No.12 8
[5][8] [0][D] Point table No.13 8
[5][8] [0][E] Point table No.14 8
[5][8] [0][F] Point table No.15 8
[5][8] [1][0] Point table No.16 8
: : : :
[5][8] [1][F]
Deceleration ti me constant read
Point table No.31 8

60
(10) Point table/dwell time (Command [6][0])
Command Data No. Description Point table No. Frame Length
[6][0] [0][1] Point table No.1 8
[6][0] [0][2] Point table No.2 8
[6][0] [0][3] Point table No.3 8
[6][0] [0][4] Point table No.4 8
[6][0] [0][5] Point table No.5 8
[6][0] [0][6] Point table No.6 8
[6][0] [0][7] Point table No.7 8
[6][0] [0][8] Point table No.8 8
[6][0] [0][9] Point table No.9 8
[6][0] [0][A] Point table No.10 8
[6][0] [0][B] Point table No.11 8
[6][0] [0][C] Point table No.12 8
[6][0] [0][D] Point table No.13 8
[6][0] [0][E] Point table No.14 8
[6][0] [0][F] Point table No.15 8
[6][0] [1][0] Point table No.16 8
: : : :
[6][0] [1][F]
Dwell time read
Point table No.31 8
(11) Point table/auxiliary function (Command [6][4])
Command Data No. Description Point table No. Frame Length
[6][4] [0][1] Point table No.1 8
[6][4] [0][2] Point table No.2 8
[6][4] [0][3] Point table No.3 8
[6][4] [0][4] Point table No.4 8
[6][4] [0][5] Point table No.5 8
[6][4] [0][6] Point table No.6 8
[6][4] [0][7] Point table No.7 8
[6][4] [0][8] Point table No.8 8
[6][4] [0][9] Point table No.9 8
[6][4] [0][A] Point table No.10 8
[6][4] [0][B] Point table No.11 8
[6][4] [0][C] Point table No.12 8
[6][4] [0][D] Point table No.13 8
[6][4] [0][E] Point table No.14 8
[6][4] [0][F] Point table No.15 8
[6][4] [1][0] Point table No.16 8
: : : :
[6][4] [1][F]
Auxiliary function read
Point table No.31 8

61
(12) Group setting (Command [1][F])
Command Data No. Description Frame Length
[1][F] [0][0] Reading of group setting value 4
8.11.2 Write commands
(1) Status display (Command [8][1])
Command Data No. Description Setting Range Frame Length
[8][1] [0][0] Status display data clear 1EA5 4
(2) Parameter (Command [8][4])
Command Data No. Description Setting Range Frame Length
[8][4]
[0][0] to
[5[A
Each parameter write
(Decimal number of data No. corresponds to the
parameter number.)
Depends on the
parameter.
8
(3) External I/O signal (Command [9][2])
Command Data No. Description Setting Range Frame Length
[9][2] [6][0] Communicatio n input device signal 8
(4) Alarm history (Command [8][2])
Command Data No. Description Setting Range Frame Length
[8][2] [2][0] Alarm history cle a r 1EA5 4
(5) Current alarm (Command [8][2])
Command Data No. Description Setting Range Frame Length
[8][2] [0][0] Alarm reset 1EA5 4

62
(6) Point table/position data (Command [C][0])
Command Data No. Description Point table No. Setting Range Frame Length
[C][0] [0][1] Point table No.1 8
[C][0] [0][2] Point table No.2 8
[C][0] [0][3] Point table No.3 8
[C][0] [0][4] Point table No.4 8
[C][0] [0][5] Point table No.5 8
[C][0] [0][6] Point table No.6 8
[C][0] [0][7] Point table No.7 8
[C][0] [0][8] Point table No.8 8
[C][0] [0][9] Point table No.9 8
[C][0] [0][A] Point table No.10 8
[C][0] [0][B] Point table No.11 8
[C][0] [0][C] Point table No.12 8
[C][0] [0][D] Point table No.13 8
[C][0] [0][E] Point table No.14 8
[C][0] [0][F] Point table No.15 8
[C][0] [1][0] Point table No.16 8
: : : :
[C][0] [1][F]
Position data write
Point table No. 31 8
(7) Point table/speed data (Command [C][6])
Command Data No. Description Point table No. Setting Range Frame Length
[C][6] [0][1] Point table No.1 8
[C][6] [0][2] Point table No.2 8
[C][6] [0][3] Point table No.3 8
[C][6] [0][4] Point table No.4 8
[C][6] [0][5] Point table No.5 8
[C][6] [0][6] Point table No.6 8
[C][6] [0][7] Point table No.7 8
[C][6] [0][8] Point table No.8 8
[C][6] [0][9] Point table No.9 8
[C][6] [0][A] Point table No.10 8
[C][6] [0][B] Point table No.11 8
[C][6] [0][C] Point table No.12 8
[C][6] [0][D] Point table No.13 8
[C][6] [0][E] Point table No.14 8
[C][6] [0][F] Point table No.15 8
[C][6] [1][0] Point table No.16 8
: : : :
[C][6] [1][F]
Speed data write
Point table No. 31 8

63
(8) Point table/acceleration time constant (Command [C][7])
Command Data No. Description Point table No. Setting Range Frame Length
[C][7] [0][1] Point table No.1 8
[C][7] [0][2] Point table No.2 8
[C][7] [0][3] Point table No.3 8
[C][7] [0][4] Point table No.4 8
[C][7] [0][5] Point table No.5 8
[C][7] [0][6] Point table No.6 8
[C][7] [0][7] Point table No.7 8
[C][7] [0][8] Point table No.8 8
[C][7] [0][9] Point table No.9 8
[C][7] [0][A] Point table No.10 8
[C][7] [0][B] Point table No.11 8
[C][7] [0][C] Point table No.12 8
[C][7] [0][D] Point table No.13 8
[C][7] [0][E] Point table No.14 8
[C][7] [0][F] Point table No.15 8
[C][7] [1][0] Point table No.16 8
: : : :
[C][7] [1][F]
Acceleration time constant write
Point table No.31 8
(9) Point table/deceleration time constant (Command [C][8])
Command Data No. Description Point table No. Setting Range Frame Length
[C][8] [0][1] Point table No.1 8
[C][8] [0][2] Point table No.2 8
[C][8] [0][3] Point table No.3 8
[C][8] [0][4] Point table No.4 8
[C][8] [0][5] Point table No.5 8
[C][8] [0][6] Point table No.6 8
[C][8] [0][7] Point table No.7 8
[C][8] [0][8] Point table No.8 8
[C][8] [0][9] Point table No.9 8
[C][8] [0][A] Point table No.10 8
[C][8] [0][B] Point table No.11 8
[C][8] [0][C] Point table No.12 8
[C][8] [0][D] Point table No.13 8
[C][8] [0][E] Point table No.14 8
[C][8] [0][F] Point table No.15 8
[C][8] [1][0] Point table No.16 8
: : : :
[C][8] [1][F]
Deceleration ti me constant write
Point table No.31 8

64
(10) Point table/dwell time (Command [C][A])
Command Data No. Description Point table No. Setting Range Frame Length
[C][A] [0][1] Point table No.1 8
[C][A] [0][2] Point table No.2 8
[C][A] [0][3] Point table No.3 8
[C][A] [0][4] Point table No.4 8
[C][A] [0][5] Point table No.5 8
[C][A] [0][6] Point table No.6 8
[C][A] [0][7] Point table No.7 8
[C][A] [0][8] Point table No.8 8
[C][A] [0][9] Point table No.9 8
[C][A] [0][A] Point table No.10 8
[C][A] [0][B] Point table No.11 8
[C][A] [0][C] Point table No.12 8
[C][A] [0][D] Point table No.13 8
[C][A] [0][E] Point table No.14 8
[C][A] [0][F] Point table No.15 8
[C][A] [1][0] Point table No.16 8
: : : :
[C][A] [1][F]
Dwell time write
Point table No.31 8
(11) Point table/auxiliary function (Command [C][B])
Command Data No. Description Point table No. Setting Range Frame Length
[C][B] [0][1] Point table No.1 8
[C][B] [0][2] Point table No.2 8
[C][B] [0][3] Point table No.3 8
[C][B] [0][4] Point table No.4 8
[C][B] [0][5] Point table No.5 8
[C][B] [0][6] Point table No.6 8
[C][B] [0][7] Point table No.7 8
[C][B] [0][8] Point table No.8 8
[C][B] [0][9] Point table No.9 8
[C][B] [0][A] Point table No.10 8
[C][B] [0][B] Point table No.11 8
[C][B] [0][C] Point table No.12 8
[C][B] [0][D] Point table No.13 8
[C][B] [0][E] Point table No.14 8
[C][B] [0][F] Point table No.15 8
[C][B] [1][0] Point table No.16 8
: : : :
[C][B] [1][F]
Auxiliary function write
Point table No.31 8

65
(12) Operation mode selection (Command [8][B])
Command Data No. Description Setting range Frame length
[8][B] [0][0] Operation mode changing
0000: Exit from test operation mode
0001: Jog operation
0002: Positioning operation
0003: Motor-less operation
0004: Output signal (DO) forced output
0000 to 0004 4
(13) External input signal disable (Command [9][0])
Command Data No. Description Setting range Frame length
[9][0] [0][0] Turns off the external input signals (DI), external analog
input signals and pulse train inputs with the exception of
EMG, LSP and LSN, independently of the external ON/OFF
statuses.
1EA5 4
[9][0] [0][3] Changes the external output signals (DO) into the value of
command [8][B] or command [A][0] data No. [0][1].
1EA5 4
[9][0] [1][0] Enables the disabled external input signals (DI), external
analog input signals and pulse train inputs with the
exception of EMG, LSP and LSN.
1EA5 4
[9][0] [1][3] Enables the disabled external output signals (DO). 1EA5 4
(14) Data for test operation mode (Command [9][2]
[A][0])
Command Data No. Description Setting range Frame length
[9][2] [0][0] Input signal for test operation 8
[9][2] [A][0] Forced output from signal pin 8
Command Data No. Description Setting range Frame length
[A][0] [1][0] Writes t he sp eed of the t est oper at ion mode (j og oper at ion,
positioning operation).
0000 to 7FFF 4
[A][0] [1][1] Writes th e acc eler ation/d ec eler ation t ime c onstant of t he
test operation mode (jog operation, p ositioning op erat ion).
00000000 to
7FFFFFFF
8
[A][0] [1][2] Clears th e acc eler ation/d ec elerat ion t ime const ant of th e test
operation mode (jog operation, positioning op erat ion).
1EA5 4
[A][0] [1][3] Writes the moving distance (in pulses) of the test operation
mode (jog operation, positioning operat ion).
80000000 to
7FFFFFFF
8
[A][0] [1][5] Temporary stop command of the test operation mode (jog
operation, positioning operation)
1EA5 4
(15) Group setting (Command [9][F])
Command Data No. Description Setting range Frame length
[9][F] [0][0] Setting of group 4

66
8.12 Detailed explanations of commands
8.12.1 Data processing
When the command + data number or the command + data number + data are sent from the master
station to a slave s t at ion, a reply or da ta is ret urned from the s ervo a mpli fier accordi ng t o the purpos e.
In these send data and receive dat a, numeri ca l val ues are repres ent ed in deci mal, hexadeci mal , et c.
Hence, data must be processed t o meet t hei r purposes .
Follow the corresponding explanation since whether data must be processed or not and how to process
them changes with monitoring, parameters, etc.
How to process send/receive data when reading and writing data will be described below.
(1) Processing read data
For the display type of 0, eight-character data is converted from a hexadecimal number to a decimal
number and a decimal point is provided from the decimal point information.
For the display type of 1, eight-character data is used as-is.
How to process receive data "003000000929" to show the status is explained here by way of example.
Receive data is as follows:
00
Data 32 bits long (represented in hexadecimal)
(Data conversion into display type is required)
Display type
0: Conversion into decimal required
1: Used unchanged in hexadecimal
Decimal point pos it ion
0: No decimal point
1: Lower first digit (usually not used)
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
6: Lower sixth digit
3
0900
00920
As the display type is "0" in this case, the hexadecimal data is converted into a decimal number.
00000929H
2345
Since the decimal point position is "3", the decimal point is put in the third lower digit.
Hence, "23.45" appears.

67
(2) Writing processed data
When written data is handled as a decimal number, the decimal point position must be specified. If it
is not specifie d, data cann ot be written. When data is h andled as a hexade cimal number, specify "0"
for the decimal point position.
The data to be sent is as follows:
0
Data is transferred in hexadeci ma l.
Decimal point position
0: No decimal point
1: Lower first digit
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
How to process set data to t he val ue of " 15 .5 " i s expla ined here b y way of exa mple.
Since the decimal point position is the second digit, the decimal point data is "2".
As the data to be transmitted is a hexadecimal number, the decimal data is converted into a
hexadecimal number.
115
9B
Hence, "0200009B" is sent.

68
8.12.2 Status display
(1) Status display data read
When the ma ster station tran smits the data N o. (refer to the following tabl e for assignmen t) to the
slave station, the slave station sends back the data value and data processing information.
(a) Transmission
Transmit command [0][1] and the data No. corresponding to the status display item to be read.
(b) Reply
The slave station sends back the status display data requested.
00
Data 32 bits long (represented in hexadecimal)
(Data conversion into display type is required)
Display type
0: Conversion into decimal required
1: Used unchanged in hexadecimal
Decimal point position
0: No decimal point
1: Lower first digit (usually not used)
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
6: Lower sixth digit
(2) Status display data clear
The cumulative feedback pulse data of the status display is cleared. Send this command immediately
after reading the status display item. The data of the status display item transmitted is cleared to zero.
Command Data No. Data
[8][1] [0][0] 1EA5
For example, after sending command [0][1] and data No. [8][0] and receiving the status display data,
send command [8][1], data No. [0][0] and data [1EA5 ] to clear the cum ulative feedback pulse value to
zero.

69
8.12.3 Parameter
(1) Parameter read
Read the parameter setting.
1) Transmission
Transmit command [0][5] and the data No. corresponding to the parameter No.
Command Data No. Data No. Definition
[0][5]
[0][0] to
[5][A]
Corresponds to the parameter No.
2) Reply
The slave station s ends b ac k t he dat a a nd proces si ng informa t ion of t he reques t ed paramet er No.
Data is transferred in hexadecimal.
Decimal point position
0: No decimal point
1: Lower first digit
2: Lower second digit
3: Lower third digit
4: Lowe r fourth digit
5: Lower fifth digit
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Parameter w rit e ty p e
0: Valid after write
1: Valid when power is switched on again after write
Read enable/disable
0: Read enable
1: Read disable
0
Enable/disable information changes according to the setting of parameter No.19 "parameter write
inhibit". When the enable/disable setting is read disable, ignore the parameter data part and
process it as unreadabl e.

70
(2) Parameter write
Write the parameter setting.
Write the value with in t he s ett i ng range.
Transmit command [8][4], the data No., and the set data.
The data number is represented in hexadecimal. The decimal value converted from the data number
value corresponds to the parameter number. Refer to (1)(a) in this section.
When the data to be written is handled as decimal, the decimal point position must be specified. If it is
not specified, data cannot be written. When the data is handled as hexadecimal, specify 0 as the
decimal point position.
Write the data after making sure that it is within the upper/lower limit value range. Read the
parameter data to be written, confirm the decimal point position, and create transmission data to
prevent error occurrence. On completion of write, read the same parameter data to verify that data
has been written correctly.
Command Data No. Set Data
[8][4]
[0][0] to
[5][A]
See below.
0
Data is transferred in hexadecimal.
Decimal point position
0: No decimal point
1: Lower first digit
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit

71
8.12.4 External I/O signal statuses
(1) Reading of input device statuses
Read the statuses of th e input devices .
(a) Transmission
Transmit command [1][2] and da ta No. [0][0 ].
Command Data No.
[1][2] [0][0]
(b) Reply
The slave stati on sends b ack t he st a tus es of t he input pins .
b31 b0
0:OFF
1:ON
b1
Command of each bit is transmitted to the master
station as hexadecimal data.
bit Signal Name bit Signal Name bit Signal Name
0 Servo on (SON) 10 20 Point table selection 2 (DI1)
1 Forward rotation stroke limit (LSP ) 11 Forward r otation start (ST1) 21 P oint table selection 3 (DI2)
2 Reverse rotation stroke limit (LSN) 12 Reverse rotation start (ST 2) 22 Po int table selection 4 (DI3)
3 External torque limit selection (TL) 13 23
4 Internal torque limit selection (TL2) 14 24 Temporary stop/re star t (ST P )
5 Proportion control selection (P C) 15 25
6 Alarm reset (RES) 16 Eme r gency stop (EMG) 26
7 17 Automatic/manual selection (MDO) 27 Gain changing (CDP )
8 18 Proximity do g (DOG) 28
9
19 Point table selection 1 (DI0)
29 Point table selection 5 (DI4)
(2) External input pin status read
Read the ON/OFF stat us es of t he ext ernal output pins .
(a) Transmission
Transmit command [1][2] and da ta No. [4][0 ].
Command Data No.
[1][2] [4][0]
(b) Reply
The ON/OFF status es of th e input pins a re s ent b ack .
b31 b0
0:OFF
1:ON
b1
Command of each bit is transmitted to the master
station as hexadecimal data.
bit External Input Pin bit External Input Pin
0 CN1B-16 5 CN1A-8
1 CN1B-17 6 CN1B-7
2 CN1B-15 7 CN1B-8
3 CN1B-5 8 CN1B-9
4 CN1B-14
9 CN1A-19

72
(3) Read of the statuses of input devices switched on through communication
Read the ON/OFF status es of t he input devices s wit ched on through communi cat ion.
(a) Transmission
Transmit command [1][2] and da ta No. [6][0 ].
Command Data No.
[1][2] [6][0]
(b) Reply
The slave stati on sends b ack t he st a tus es of t he input pins .
b31 b0
0:OFF
1:ON
b1
Command of each bit is transmitted to the master
station as hexadecimal data.
bit Signal Name bit Signal Name bit Signal Name
0 Servo on (SON) 10 20 Point table selection 2 (DI1)
1 Forward rotation stroke limit (LSP ) 11 Forward r otation start (ST1) 21 P oint table selection 3 (DI2)
2 Reverse rotation stroke limit (LSN) 12 Reverse rotation start (ST 2) 22 Po int table selection 4 (DI3)
3 External torque limit selection (TL) 13 23
4 Internal torque limit selection (TL2) 14 24 Temporary stop/re star t (ST P )
5 Proportion control selection (P C) 15 25
6 Alarm reset (RES) 16 Eme r gency stop (EMG) 26
7 17 Automatic/manual selection (MDO) 27 Gain changing (CDP )
8 18 Proximity do g (DOG) 28
9
19 Point table selection 1 (DI0)
29 Point table selection 5 (DI4)
(4) External output pin status read
Read the ON/OFF stat us es of t he ext ernal output pins .
(a) Transmission
Transmit command [1][2] and dat a No. [C][0].
Command Data No.
[1][2] [C][0]
(b) Reply
The slave stati on sends b ack t he ON/OF F st at us es of the out put pins .
b31 b0
0:OFF
1:ON
b1
Command of each bit is transmitted to the master
station as hexadecimal data.
bit External output Pin bit External output Pin
0 CN1A-19 5 CN1B-18
1 CN1A-18 6 CN1A-14
2 CN1B-19
3 CN1B-6
4 CN1B-4

73
(5) Read of the statuses of output devices
Read the ON/OFF stat us es of the out put devices .
(a) Transmission
Transmit command [1][2] and da ta No. [8][0 ].
Command Data No.
[1][2] [8][0]
(b) Reply
The slave stati on sends b ack t he s ta tus es of t he out put devi ces .
b31
b0
0:OFF
1:ON
b1
Command of each bit is transmitted to the master
station as hexadecimal data.
bit Signal Name bit Signal Name bit Signal Name
0 Ready (RD) 11 Dynamic brake (DBR) 22 Point table No. output 3 (PT2)
1 12 23 Point table No. output 4 (PT 3)
2 13 24 Point table No. output 5 (PT 4)
3 Limiting torque (TLC) 14 25
4 15 Battery warning (BWNG) 26
5 In position (INP) 16 Rough match (CPO) 27
6 17 Zeroing co m ple tion (ZP) 28 Moving complete (MEND)
7 Warning (WNG)
18 Position range output (POT)
29
8 Trouble (ALM) 19 Temporary stop (PUS) 30
9 20 Point table N o. output 1 (PT0) 31
10 Electromagnetic brake (MBR) 21 Point table No . output 2 (PT1) 32
8.12.5 Device ON/OFF
Each input device can be switched on/off. However, when the device to be switched off exists in the
external input signal, also switch off that input signal.
Send command [9][2], data No. [6][0] and da t a.
Command Data No. Set Data
[9][2] [6][0] See below.
b31 b0
0:OFF
1:ON
b1
Command of each bit is transmitted to the slave
station as hexadecimal data.
bit Signal Name bit Signal Name bit Signal Name
0 Servo on (SON) 10 20 Point table selection 2 (DI1)
1 Forward rotation stroke limit (LSP ) 11 Forward r otation start (ST1) 21 P oint table selection 3 (DI2)
2 Reverse rotation stroke limit (LSN) 12 Reverse rotation start (ST 2) 22 Po int table selection 4 (DI3)
3 External torque limit selection (TL) 13 23
4 Internal torque limit selection (TL2) 14 24 Temporary stop/re star t (ST P )
5 Proportion control selection (P C) 15 25
6 Alarm reset (RES) 16 Eme r gency stop (EMG) 26
7 17 Automatic/manual selection (MDO) 27 Gain changing (CDP )
8 18 Proximity do g (DOG) 28
9
19 Point table selection 1 (DI0)
29 Point table selection 5 (DI4)

74
8.12.6 Alarm history
(1) Alarm No. read
Read the alarm No. which occurred in the past. The alarm numbers and occurrence times of No.0 (last
alarm) to No.5 (sixth alarm in the past) are read.
(a) Transmission
Send command [3][3] and data No. [1][0] t o [1][5 ].
(b) Reply
The alarm No. corresponding to the da ta No. i s provi ded.
00
Alarm No. is transferred in decimal.
For example, "0032" means A.32 and "00FF" A._ (no alarm).
(2) Alarm occurrence time read
Read the occurrence time of alarm which occurred in the past.
The alarm occurrence time corresponding to the data No. is provided in terms of the total time
beginning with operation start , wit h t he minut e unit omi tt ed.
(a) Transmission
Send command [3][3] and data No. [2][0] t o [2][5 ].
Refer to Section 8.11.1.
(b) Reply
The alarm occurrence time is transferred in decimal.
Hexadecimal must be converted into decimal.
For example, data [0][1][F][5] indicates that the alarm occurred 501 hours after start of operation.

75
(3) Alarm history clear
Erase the alarm history.
Send command [8][2] and data No. [2][0].
Command Data No. Data
[8][2] [2][0] [1][E][A][5]
8.12.7 Current alarm
(1) Current alarm read
Read the alarm No. which is occurring currently.
(a) Transmission
Send command [0][2] and data No. [0][0].
Command Data No.
[0][2] [0][0]
(b) Reply
The slave station sends back the alarm currently occurring.
00
Alarm No. is transferred in decimal.
For example, "0032" means A.32 and "00FF" A._ (no alarm).
(2) Read of the status display at alarm occurrence
Read the statu s display data at alarm occurrence. When the data No. corresponding to the status
display item is transmitted, the data value and data processing information are sent back.
(a) Transmission
Send command [3][5] and any of data No. [8][0 ] to [8 ][E] correspondi ng to t he s ta tus di spl ay i tem t o
be read. Refer to Section 8.11.1.
(b) Reply
The slave station sends back the requested status display data at alarm occurrence.

76
00
Data 32 bits long (represented in hexadecimal)
(Data conversion into display type is required)
Display type
0: Conversion into decimal required
1: Used unchanged in hexadecimal
Decimal point positio n
0: No decimal point
1: Lower first digit (usually not used)
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
6: Lower sixth digit
(3) Current alarm clear
As by the entry of the RES s igna l, res et the s ervo am pli fier al ar m to ma ke t he servo a mpl ifier rea dy t o
operate. After removing the cause of the a la rm, res et t he a lar m wit h no command ent ered.
Transmission
Command Data No. Data
[8][2] [0][0] [1][E][A][5]

77
8.12.8 Point table
(1) Position data read
Read the position data of the point table.
(a) Transmission
Transmit command [4][0] and a ny of dat a No. [0][1 ] t o [1][F ] correspondi ng to t he point t ab le t o be
read. Refer to Section 8.11.1.
(b) Reply
The slave stati on s ends b ac k t he pos it i on dat a of t he req ues ted poi nt t a bl e.
Hexadecimal data
Decimal point position
0: No decimal point
1: Lower first digit (usually not used)
2: Lower second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
6: Lower sixth digit
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Parameter write type
0: Valid a fter write
1: Valid when power is switched on again after write
Read enable/disable
0: Read enable
1: Read disable
0
When the enable/disab le s et ti ng is read di s ab le, ignore t he dat a part and proces s it as unrea dab le.
(2) Speed data read
Read the speed data of the poi nt t ab le.
(a) Transmission
Transmit command [5][0] and a ny of dat a No. [0][1 ] t o [1][F ] correspondi ng to t he point t ab le t o be
read. Refer to Section 8.11.1.
(b) Reply
The slave stati on s ends b a ck t he s peed da ta of t he reques t ed point t ab le.
0
Hexadecimal data
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Parameter write type
0: Valid after write
1: Valid when power is switched on again after write
Read enable/disable
0: Read enable
1: Read disable
0
When the enable/disab le s et ti ng is read di s ab le, ignore t he dat a part and proces s it as unrea dab le.

78
(3) Acceleration time constant read
Read the acceleration time constant of the point table.
(a) Transmission
Transmit command [5][4] and a ny of dat a No. [0][1 ] t o [1][F ] correspondi ng to t he point t ab le t o be
read. Refer to Section 8.11.1.
(b) Reply
The slave station s ends ba ck t he a ccelera ti on ti me cons ta nt of t he req uest ed point t ab le.
0
Hexadecimal data
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Parameter write type
0: Valid after write
1: Valid when power is switched on again after write
Read enable/disable
0: Read enable
1: Read disable
0
When the enable/disab le s et ti ng is read di s ab le, ignore t he dat a part and proces s it as unrea dab le.
(4) Deceleration time constant read
Read the deceleration time constant of the point table.
(a) Transmission
Transmit command [5][8] and any of data No. [ 0][1] to [1][F] corresponding to the point table to be
read. Refer to Section 8.11.1.
(b) Reply
The slave stati on sends ba ck the decel erat ion t i me const ant of t he reques t ed point t ab le.
0
Hexadecimal data
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Parameter write type
0: Valid after write
1: Valid when power is switched on again after write
Read enable/disable
0: Read enable
1: Read disable
0
When the enable/disab le s et ti ng is read di s ab le, ignore t he dat a part and proces s it as unrea dab le.

79
(5) Dwell time read
Read the dwell time of the point table.
(a) Transmission
Transmit command [6][0] and a ny of dat a No. [0][1 ] t o [1][F ] correspondi ng to t he point t ab le t o be
read. Refer to Section 8.11.1.
(b) Reply
The slave stati on s ends b a ck t he dwel l t ime of t he req ues ted poi nt ta bl e.
0
Hexadecimal data
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Parameter write type
0: Valid after write
1: Valid when power is switched on again after write
Read enable/disable
0: Read enable
1: Read disable
0
When the enable/disab le s et ti ng is read di s ab le, ignore t he dat a part and proces s it as unrea dab le.
(6) Auxiliary function read
Read the auxiliary function of the point table.
(a) Transmission
Transmit command [6][4] and a ny of dat a No. [0][1 ] t o [1][F ] correspondi ng to t he point t ab le t o be
read. Refer to Section 8.11.1.
(b) Reply
The slave station sends back the auxiliary function of the requested point table.
0
Hexadecimal data
Display type
0: Used unchanged in hexadecimal
1: Conversion into decimal required
Parameter write type
0: Valid after write
1: Valid when power is switched on again after write
Read enable/disable
0: Read enable
1: Read disable
0
When the enable/disable setting is read disable, ignore the data part and process it as unreadable.

80
(7) Position data write
Write the positi on dat a of the poi nt ta b le.
Transmit command [C][0], any of da ta No. [0 ][1] t o [1][F ] correspondi ng t o the poi nt t ab le t o be wri tt en
to, and the data. Refer to Section 8.11.2.
Command Data No. Data
[C][0]
[0][1] to
[1][F]
See below.
Hexadecimal data
The decimal point position should be the same as
the feed length multiplication (STM) set in parameter
No. 1. The slave station w ill n ot acc e pt t he decimal
point position which is different from the STM setting.
When the positioning address is changed frequently through
communication, set "1" to the write mode to change only the RAM data in
the servo amplifier.
If the EEP-ROM value is changed frequently, EEP-ROM fault will occur
due to the excess of the permissible EEP-ROM write times.
Write mode
0: EEP-ROM, RAM write
1: RAM write
Decimal point position
0: No decimal point
1: Lower first digit
2: Lowe r second digit
3: Lower third digit
4: Lower fourth digit
5: Lower fifth digit
6: Lower sixth digit
(8) Speed data write
Write the speed data of t he point t ab l e.
Transmit command [C][6], any of da ta No. [0 ][1] t o [1][F ] correspondi ng t o the poi nt t ab le t o be wri tt en
to, and the data. Refer to Section 8.11.2.
Command Data No. Data
[C][6]
[0][1] to
[1][F]
See below.
0
Hexadecimal data
Write mode
0: EEP-ROM, RAM write
1: RAM write
When the positioning address is changed frequently through
communication, set "1" to the write mode to change only the RAM data in
the servo amplifier .
If the EEP-ROM value is changed frequently, EEP-ROM fault will occur
due to the excess of the permissible EEP-ROM write times.

81
(9) Acceleration time constant write
Write the acceleration time constant of the point table.
Transmit command [C][7], any of da ta No. [0 ][1] t o [1][F ] correspondi ng t o the poi nt t ab le t o be wri tt en
to, and the data. Refer to Section 8.11.2.
Command Data No. Data
[C][7]
[0][1] to
[1][F]
See below.
0
Hexadecimal data
Write mode
0: EEP-ROM, RAM write
1: RAM write
When the positioning address is changed frequently through
communication, set "1" to the write mode to change only the RAM data in
the servo amplifier .
If the EEP-ROM value is changed frequently, EEP-ROM fault will occur
due to the excess of the permissible EEP-ROM write times.
(10) Deceleration time constant write
Write the deceleration time constant of the point table.
Transmit command [C][8], any of data No. [0][1] to [1][F] corresponding to the point table to be
written to, and the data. Refer to Section 8.11.2.
Command Data No. Data
[C][8]
[0][1] to
[1][F]
See below.
0
Hexadecimal data
Write mode
0: EEP-ROM, RAM write
1: RAM write
When the positioning address is changed frequently through
communication, set "1" to the write mode to change only the RAM data in
the servo amplifier .
If the EEP-ROM value is changed frequently, EEP-ROM fault will occur
due to the excess of the permissible EEP-ROM write times.

82
(11) Dwell time write
Write the dwell ti me of the poi nt ta b le.
Transmit command [C][A], any of data No. [0][1] to [1][F] corresponding to the point table to be
written to, and the data. Refer to Section 8.11.2.
Command Data No. Data
[C][A]
[0][1] to
[1][F]
See below.
0
Hexadecimal data
Write mode
0: EEP-ROM, RAM write
1: RAM write
When the positioning address is changed frequently through
communication, set "1" to the write mode to change only the RAM data in
the servo amplifier .
If the EEP-ROM value is changed frequently, EEP-ROM fault will occur
due to the excess of the permissible EEP-ROM write times.
(12) Auxiliary function write
Write the auxiliary function of the point table.
Transmit command [C][B], any of data No. [0][1] to [1][F] corresponding to the point table to be
written to, and the data. Refer to Section 8.11.2.
Command Data No. Data
[C][B]
[0][1] to
[1][F]
See below.
0
Hexadecimal data
Write mode
0: EEP-ROM, RAM write
1: RAM write
When the positioning address is changed frequently through
communication, set "1" to the write mode to change only the RAM data in
the servo amplifier .
If the EEP-ROM value is changed frequently, EEP-ROM fault will occur
due to the excess of the permissible EEP-ROM write times.

83
8.12.9 Servo amplifier group designation
With group se tting made to the slave stations, data can be transmitted simul taneously to two or more
slave stations set as a group through RS-422 communication.
(1) Group setting write
Write the group designati on val ue t o the s l ave s t at ion.
Transmission
Transmit command [9][F], da ta No. [0][0 ] and da t a.
Command Data No. Data
[9][F] [0][0] See below.
0 0
Group designation
0: No group designation
1: Group a
2: Group b
3: Group c
4: Group d
5: Group e
6: Group f
Response command enable
Set whether data can be sent back or not in
response to the read command of the master station.
0: Response disable
Data cannot be set back.
1: Response enable
Data can be set back.
(2) Group setting read
Read the set group designati on val ue from the s l ave s ta t ion.
(a) Transmission
Transmit command [1][F] and da ta No. [0 ][0].
Command Data No.
[1][F] [0][0]
(b) Reply
The slave stati on sends b ack t he group s ett ing of t he poi nt t a bl e reques t ed.
0 0
Group designation
0: No group designation
1: Group a
2: Group b
3: Group c
4: Group d
5: Group e
6: Group f
Response command enable
0: Response disable
1: Response enable

84
8.12.10 Other commands
(1) Servo motor end pulse unit absolute position
Read the absolute posi ti on in t he s ervo mot or end puls e unit .
(a) Transmission
Send command [0][2] and data No. [9][0].
Command Data No.
[0][2] [9][0]
(b) Reply
The slave stati on sends ba ck the req ues ted s ervo mot or end puls es.
Absolute value is sent back in hexadecimal in
the servo motor end pulse unit.
(Must be converted into decimal)
For example, data "000186A0" is 100000 [pulse] in the motor end pulse unit.
(2) Command unit absolute position
Read the absolute posi ti on in t he command uni t .
(a) Transmission
Send command [0][2] and data No. [9][1].
Command Data No.
[0][2] [9][1]
(b) Reply
The slave station s ends ba ck t he req ues ted comma nd puls es .
Absolute value is s ent ba ck in he xadecimal in the
command unit.
(Must be converted into decimal)
Fot example, data "000186A0" is 100000 [pulse] in the command unit.

85
REVISIONS
Print Date Document # Revision Editor
‘02/01/09 BCN-B11127-479* First edition H.Ogi
 Loading...
Loading...