

Page 1
General-Purpose AC Servo
J2-Jr Series
General-Purpose Interface Compatible
MODEL
MR-J2-03A5
SERVO AMPLIFIER
INSTRUCTION MANUAL
C
Page 2
z Safety Instructions z
(Always read these instructions before using the equipment.)
Do not attempt to install, operate, maintain or inspect the servo amplifier and servo motor until you have read
through this Instruction Manual, Installation guide, Servo motor Instruction Manual and appended documents
carefully and can use the equipment correctly. Do not use the servo amplifier and servo motor until you have a
full knowledge of the equipment, safety information and instructions.
In this Instruction Manual, the safety instruction levels are classified into "WARNING" and "CAUTION".
WARNING
CAUTION
Note that the CAUTION level may lead to a serious consequence according to conditions. Please follow the
instructions of both levels because they are important to personnel safety.
What must not be done and what must be done are indicated by the following diagrammatic symbols:
: Indicates what must not be done. For example, "No Fire" is indicated by .
: Indicates what must be done. For example, grounding is indicated by .
In this Instruction Manual, instructions at a lower level than the above, instructions for other functions, and so
on are classified into "POINT".
After reading this installation guide, always keep it accessible to the operator.
Indicates that incorrect handling may cause hazardous conditions,,
resulting in death or severe injury.
Indicates that incorrect handling may cause hazardous conditions,,
resulting in medium or slight injury to personnel or may cause physical
damage.
A - 1
Page 3
1. To prevent electric shock, note the following:
WARNING
Before wiring or inspection, switch power off and wait for more than 15 minutes. Then, confirm the voltage is
y
safe with voltage tester. Otherwise, you may get an electric shock.
Connect the servo amplifier and servo motor to ground.
y
Any person who is involved in wiring and inspection should be fully competent to do the work.
y
Do not attempt to wire the servo amplifier and servo motor until they have been installed. Otherwise, you
y
may get an electric shock.
Operate the switches with dry hand to prevent an electric shock.
y
The cables should not be damaged, stressed loaded,, or pinched. Otherwise, you may get an electric
y
shock.
2. To prevent fire, note the following:
CAUTION
Do not install the servo amplifier, servo motor and regenerative brake resistor on or near combustibles.
y
Otherwise a fire may cause.
When the servo amplifier has become faulty, switch off the main servo amplifier power side. Continuous
y
flow of a large current may cause a fire.
3. To prevent injury, note the follow
CAUTION
Only the voltage specified in the Instruction Manual should be applied to each terminal,, Otherwise,, a burst,,
y
damage,, etc. may occur.
Connect the terminals correctly to prevent a burst,, damage,, etc.
y
Ensure that polarity (+, −) is correct. Otherwise, a burst, damage, etc. may occur.
y
Take safety measures, e.g. provide covers, to prevent accidental contact of hands and parts (cables, etc.)
y
with the servo amplifier heat sink, regenerative brake resistor, servo motor, etc.since they may be hot while
power is on or for some time after power-off. Their temperatures may be high and you may get burnt or a
parts may damaged.
During operation, never touch the rotating parts of the servo motor. Doing so can cause injury.
y
A - 2
Page 4
4. Additional instructions
The following instructions should also be fully noted. Incorrect handling may cause a fault, injury, electric shock,
etc.
(1) Transportation and installation
CAUTION
Transport the products correctly according to their masses.
y
Stacking in excess of the specified number of products is not allowed.
y
Do not carry the servo motor by the cables, shaft or encoder.
y
Do not hold the front cover to transport the servo amplifier. The servo amplifier may drop.
y
Install the servo amplifier in a load-bearing place in accordance with the Instruction Manual.
y
Do not climb or stand on servo equipment. Do not put heavy objects on equipment.
y
The servo amplifier and servo motor must be installed in the specified direction.
y
Leave specified clearances between the servo amplifier and control enclosure walls or other equipment.
y
Do not install or operate the servo amplifier and servo motor which has been damaged or has any parts
y
missing.
Provide adequate protection to prevent screws and other conductive matter, oil and other combustible
y
matter from entering the servo amplifier.
Do not drop or strike servo amplifier or servo motor. Isolate from all impact loads.
y
When you keep or use it, please fulfill the following environmental conditions.
y
Environment
During
Ambient
temperature
Ambient
humidity
Ambience Indoors (no direct sunlight) Free from corrosive gas, flammable gas, oil mist, dust and dirt
Altitude Max. 1000m (3280 ft) above sea level
(Note)
Vibration
Note. Except the servo motor with reduction gear.
operation
In storage
In operation 90%RH or less (non-condensing) 80%RH or less (non-condensing)
In storage
[ ]0 to 55 (non-freezing) 0 to 40 (non-freezing)
[
] 32 to 131 (non-freezing) 32 to 104 (non-freezing)
[ ] 20 to 65 (non-freezing) 15 to 70 (non-freezing)
[
] 4 to 149 (non-freezing) 5 to 158 (non-freezing)
[m/s2] 5.9 or less HC-AQ Series X x Y : 19.6
2
] 19.4 or less HC-AQ Series X x Y : 64
[ft/s
Servo Amplifier Servo Motor
90%RH or less (non-condensing)
Conditions
Securely attach the servo motor to the machine. If attach insecurely, the servo motor may come off during
operation.
The servo motor with reduction gear must be installed in the specified direction to prevent oil leakage.
Take safety measures, e.g. provide covers, to prevent accidental access to the rotating parts of the servo
motor during operation.
Never hit the servo motor or shaft, especially when coupling the servo motor to the machine. The encoder
may become faulty.
Do not subject the servo motor shaft to more than the permissible load. Otherwise, the shaft may break.
When the equipment has been stored for an extended period of time, consult Mitsubishi.
A - 3
Page 5
(2) Wiring
CAUTION
Wire the equipment correctly and securely. Otherwise, the servo motor may misoperate.
y
Do not install a power capacitor, surge absorber or radio noise filter between the servo motor and servo
y
amplifier.
Connect the output terminals (U, V, W) correctly. Otherwise, the servo motor will operate improperly.
y
Do not connect AC power directly to the servo motor. Otherwise, a fault may occur.
y
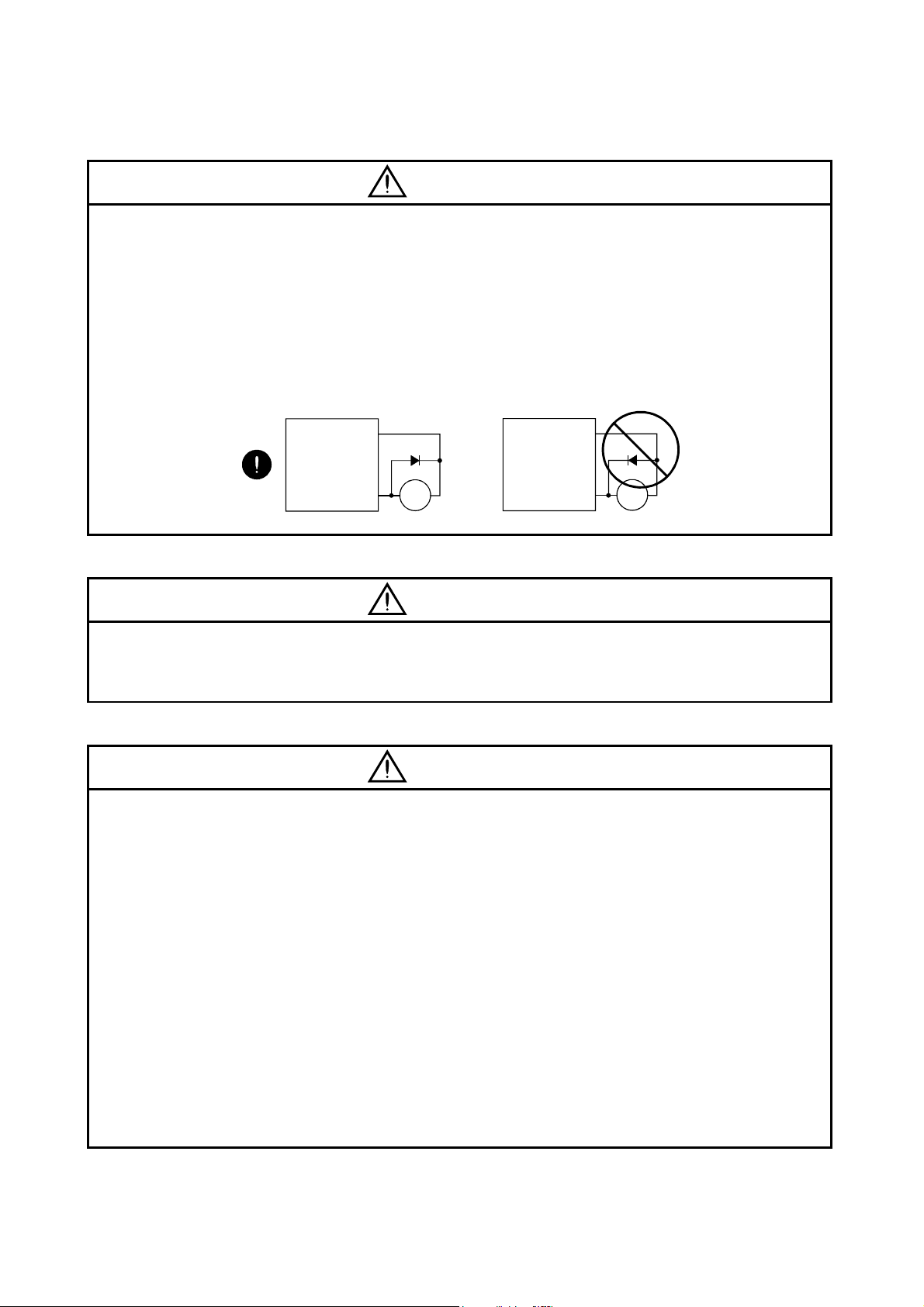
The surge absorbing diode installed on the DC output signal relay must be wired in the specified direction.
y
Otherwise, the emergency stop and other protective circuits may not operate.
Servo
Amplifier
Servo
Amplifier
COM
(24VDC)
Control
output
signal
RA
COM
(24VDC)
Control
output
signal
RA
(3) Test run adjustment
CAUTION
Before operation, check the parameter settings. Improper settings may cause some machines to perform
y
unexpected operation.
The parameter settings must not be changed excessively. Operation will be instable.
y
(4) Usage
CAUTION
Provide an external emergency stop circuit to ensure that operation can be stopped and power switched off
y
immediately.
Any person who is involved in disassembly and repair should be fully competent to do the work.
y
Before resetting an alarm, make sure that the run signal is off to prevent an accident. A sudden restart is
y
made if an alarm is reset with the run signal on.
Do not modify the equipment.
y
Use a noise filter, etc. to minimize the influence of electromagnetic interference, which may be caused by
y
electronic equipment used near the servo amplifier.
Use the servo amplifier with the specified servo motor.
y
The electromagnetic brake on the servo motor is designed to hold the servo motor shaft and should not be
y
used for ordinary braking.
For such reasons as service life and mechanical structure (e.g. where a ballscrew and the servo motor are
y
coupled via a timing belt), the electromagnetic brake may not hold the servo motor shaft. To ensure safety,
install a stopper on the machine side.
A - 4
Page 6
(5) Corrective actions
CAUTION
When it is assumed that a hazardous condition may take place at the occur due to a power failure or a
y
product fault, use a servo motor with electromagnetic brake or an external brake mechanism for the
purpose of prevention.
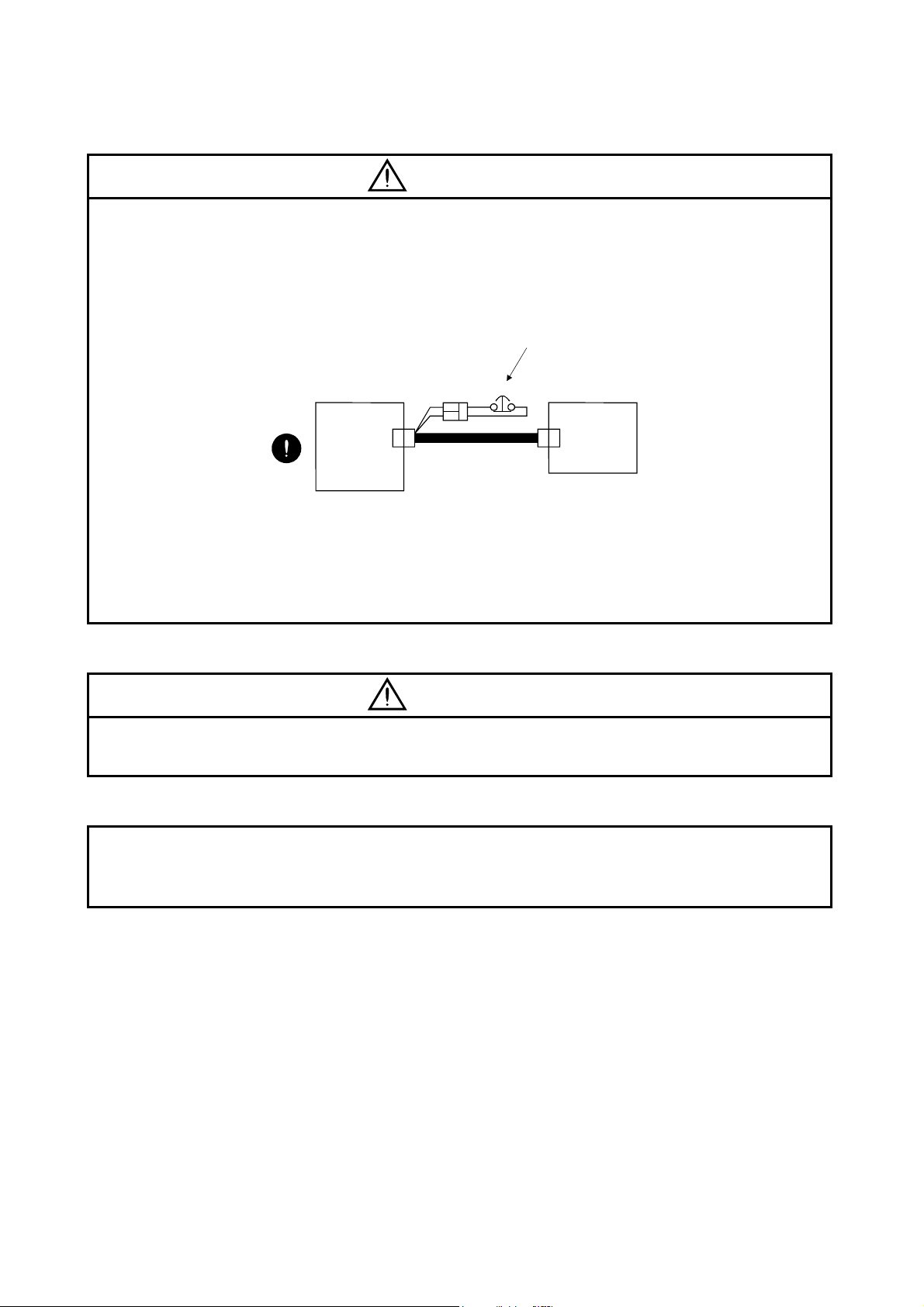
Configure the electromagnetic brake circuit so that it is activated not only by the servo amplifier signals but
y
also by an emergency stop.
Circuit must be
opened during
emergency stop.
Servoamplifier
CNP2
When any alarm has occurred, eliminate its cause, ensure safety, and deactivate the alarm before
y
restarting operation.
When power is restored after an instantaneous power failure, keep away from the machine because the
y
machine may be restarted suddenly (design the machine so that it is secured against hazard if restarted).
EMG
Servomotor
(6) Maintenance, inspection and parts replacement
CAUTION
With age, the electrolytic capacitor will deteriorate. To prevent a secondary accident due to a fault, it is
y
recommended to replace the electrolytic capacitor every 10 years when used in general environment.
(7) General instruction
To illustrate details, the equipment in the diagrams of this Instruction Manual may have been drawn without
y
covers and safety guards. When the equipment is operated, the covers and safety guards must be installed
as specified. Operation must be performed in accordance with this Instruction Manual.
A - 5
Page 7
About processing of waste
When you discard servo amplifier, a battery (primary battery), and other option articles, please follow the law of
each country (area).
FOR MAXIMUM SAFETY
These products have been manufactured as a general-purpose part for general industries, and have not
been designed or manufactured to be incorporated in a device or system used in purposes related to
human life.
Before using the products for special purposes such as nuclear power, electric power, aerospace, medicine,
passenger movement vehicles or under water relays, contact Mitsubishi.
These products have been manufactured under strict quality control. However, when installing the product
where major accidents or losses could occur if the product fails, install appropriate backup or failsafe
functions in the system.
EEP-ROM life
The number of write times to the EEP-ROM, which stores parameter settings, etc., is limited to 100,000. If the
total number of the following operations exceeds 100,000, the servo amplifier and/or converter unit may fail
when the EEP-ROM reaches the end of its useful life.
Write to the EEP-ROM due to parameter setting changes
Home position setting in the absolute position detection system
Precautions for Choosing the Products
Mitsubishi will not be held liable for damage caused by factors found not to be the cause of Mitsubishi;
machine damage or lost profits caused by faults in the Mitsubishi products; damage, secondary damage,
accident compensation caused by special factors unpredictable by Mitsubishi; damages to products other
than Mitsubishi products; and to other duties.
A - 6
Page 8
COMPLIANCE WITH EC DIRECTIVES
1. WHAT ARE EC DIRECTIVES?
The EC directives were issued to standardize the regulations of the EU countries and ensure smooth
distribution of safety-guaranteed products. In the EU countries, the machinery directive (effective in
January, 1995), EMC directive (effective in January, 1996) and low voltage directive (effective in January,
1997) of the EC directives require that products to be sold should meet their fundamental safety
requirements and carry the CE marks (CE marking). CE marking applies to machines and equipment into
which servo amplifiers have been installed.
(1) EMC directive
The EMC directive applies not to the servo units alone but to servo-incorporated machines and
equipment. This requires the EMC filters to be used with the servo-incorporated machines and
equipment to comply with the EMC directive. For specific EMC directive conforming methods, refer to
the EMC Installation Guidelines (IB(NA)67310).
(2) Low voltage directive
The low voltage directive applies also to servo units alone. Hence, they are designed to comply with the
low voltage directive.
This servo is certified by TUV, third-party assessment organization, to comply with the low voltage
directive.
(3) Machine directive
Not being machines, the servo amplifiers need not comply with this directive.
2. PRECAUTIONS FOR COMPLIANCE
The standard models of the servo amplifier and servo motor comply with the EN Standard. In addition to
the instructions provided in this Instruction Manual, also follow the instructions below. If the model is not
specifically described to comply with the EN Standard in this Instruction Manual, it has the same
specifications as those of the standard models:
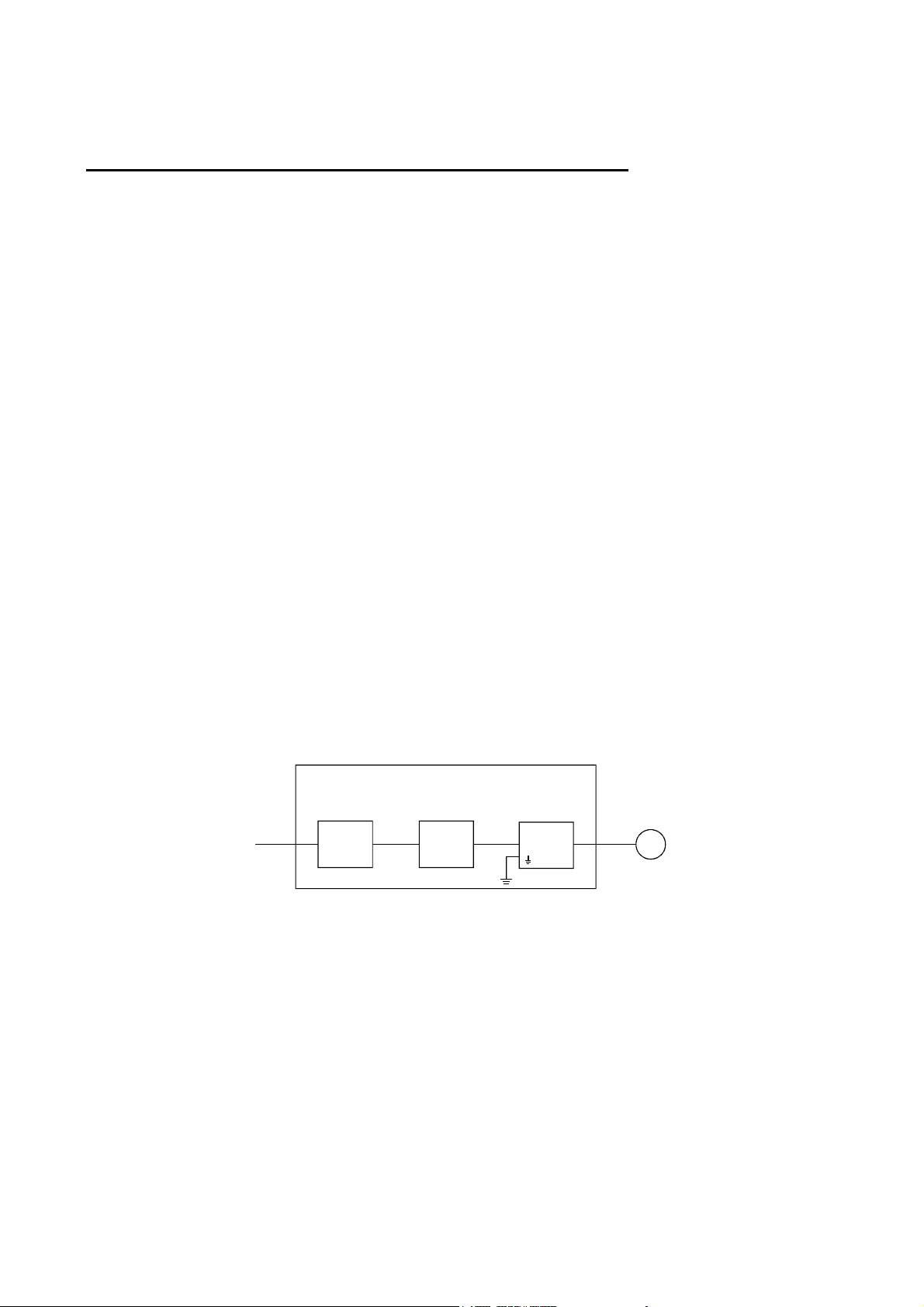
(1) Structure
Control box
Reinforced
insulation type
24VDC
power
supply
Circuit
protector
Servo
amplifier
Servo
motor
M
(2) Environment
Operate the servo amplifier at or above the contamination level 2 set forth in IEC60664-1. For this
purpose, install the servo amplifier in a control box which is protected against water, oil, carbon, dust,
dirt, etc. (IP54).
(3) Power supply
Use a 24VDC power supply which has been insulation-reinforced in I/O.
(4) Grounding
To prevent an electric shock, fit the supplied earth terminal (E) to the servo amplifier and always
connect it to the earth (E) of the control box.
A - 7
Page 9
(5) Auxiliary equipment and options
(a) The circuit protector used should be the EN or IEC Standard-compliant product of the model
described in Section 12.2.2.
(b) The sizes of the cables described in Section 12.2.2 meet the following requirements. To meet the
other requirements, follow Table 5 and Appendix C in EN60204-1.
Ambient temperature: 40 (104) [°C (°F)]
y
Sheath: PVC (polyvinyl chloride)
y
Installed on wall surface or open table tray
y
(6) Performing EMC tests
When EMC tests are run on a machine/device into which the servo amplifier has been installed, it must
conform to the electromagnetic compatibility (immunity/emission) standards after it has satisfied the
operating environment/electrical equipment specifications.
For the other EMC Directive guidelines on the servo amplifier, refer to the EMC Installation
Guidelines (IB(NA)67310).
CONFORMANCE WITH UL/C-UL STANDARD
The standard models of the servo amplifier and servo motor comply with the UL/C-UL Standard.
Unless otherwise specified, the handling, performance, specifications, etc. of the UL/C-UL Standardcompliant models are the same as those of the standard models.
When using 24VDC power supply, options and auxiliary equipment, use those which conform to the UL/CUL Standard.
For the flange size of the machine side where the servo motor is installed, refer to “CONFORMANCE
WITH UL/C-UL STANDARD” in the Servo Motor Instruction Manual.
<<About the manuals>>
This Instruction Manual and the MELSERVO Servo Motor Instruction Manual are required if you use
the General-Purpose AC servo MR-J2-03A5 for the first time. Always purchase them and use the MRJ2-03A5 safely.
Relevant manuals
Manual name Manual No.
MELSERVO-J2-Jr. Series To Use the AC Servo Safely IB(NA)67426
MELSERVO Servo Motor Instruction Manual SH(NA)3181
EMC Installation Guidelines IB(NA)67310
A - 8
Page 10
CONTENTS
1. FUNCTIONS AND CONFIGURATION 1- 1 to 1- 6
1.1 Introduction ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1- 1
1.2 Servo Amplifier Standard Specifications ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1- 2
1.3 Function List ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1- 3
1.4 Model Code Definition ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1- 4
1.5 Combination with Servo Motor ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1- 4
1.6 Parts Identification ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1- 5
1.7 Servo System with Auxiliary Equipment・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 1- 6
2. INSTALLATION 2- 1 to 2- 4
2.1 Environmental conditions ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2- 1
2.2 Installation direction and clearances ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2- 2
2.3 Keep out foreign materials ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2- 3
2.4 Cable stress・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2- 3
2.5 Using the DIN rail for installation ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2- 4
3. SIGNALS AND WIRING 3- 1 to 3- 48
3.1 Standard connection example・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3- 2
3.1.1 Position control mode AD75P (A1SD75P) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3- 2
3.1.2 Speed control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3- 4
3.1.3 Torque control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3- 5
3.2 Internal Connection Diagram of Servo Amplifier ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3- 6
3.3 I/O Signals ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3- 7
3.3.1 Connectors and signal arrangements・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3- 7
3.3.2 Signal explanations ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-10
3.4 Detailed Description of the Signals ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-19
3.4.1 Position control mode・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-19
3.4.2 Speed control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3-24
3.4.3 Torque control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3-26
3.4.4 Position/speed control change mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-29
3.4.5 Speed/torque control change mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-31
3.4.6 Torque/position control change mode・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3-33
3.5 Alarm Occurrence Timing Chart ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-34
3.6 Interfaces ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3-35
3.6.1 Common line ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3-35
3.6.2 Detailed description of the interfaces・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-36
3.7 Input Power Supply Circuit ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-40
3.7.1 Connection example ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-40
3.7.2 Explanation of signals ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-41
3.7.3 Power-on sequence ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-41
3.8 Servo Motor with Electromagnetic Brake ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-43
3.9 Grounding ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・3-46
3.10 Instructions for the 3M Connector ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3-47
Page 11
4. OPERATION 4- 1 to 4- 6
4.1 When Switching Power On for the First Time ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 4- 1
4.2 Startup・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 4- 2
4.2.1 Selection of control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 4- 2
4.2.2 Position control mode・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 4- 2
4.2.3 Speed control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 4- 4
4.2.4 Torque control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 4- 5
4.3 Multidrop Communication ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 4- 6
5. PARAMETERS 5- 1 to 5- 22
5.1 Parameter List ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5- 1
5.1.1 Parameter write inhibit・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5- 1
5.1.2 Lists ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5- 2
5.2 Detailed Description ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5- 18
5.2.1 Electronic gear ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5- 18
5.2.2 Changing the status display screen ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5- 20
5.2.3 Using forward/reverse rotation stroke end to change the stopping pattern ・・・・・・・・・・・・・・・ 5- 21
5.2.4 Alarm history clear・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 5- 21
6. DISPLAY AND OPERATION 6- 1 to 6- 16
6.1 Display Flowchart ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 1
6.2 Status Display ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 2
6.3 Diagnostic mode・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 4
6.4 Alarm mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 5
6.5 Parameter mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 6
6.6 External I/O signal display ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 8
6.7 Output signal forced output (DO forced output)・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 11
6.8 Test operation mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 12
6.8.1 Mode change ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 12
6.8.2 Jog operation ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 13
6.8.3 Positioning operation・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 14
6.8.4 Motor-less operation ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 6- 15
7. ADJUSTMENT 7- 1 to 7- 10
7.1 What Is Gain Adjustment? ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 1
7.1.1 Difference between servo amplifier and other drives ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 1
7.1.2 Basics of the servo system ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 2
7.2 Gain Adjustment ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・・・・・・・・ 7- 3
7.2.1 Parameters required for gain adjustment・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 3
7.2.2 Block diagram ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 3
7.2.3 What is auto tuning? ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 4
Page 12
7.3 Gain Adjustment by Auto Tuning ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 5
7.3.1 Adjustment method ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 5
7.3.2 Valid conditions・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 5
7.4 Manual Gain Adjustment ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 6
7.4.1 When machine rigidity is low・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 6
7.4.2 When the machine vibrates due to machine resonance frequency ・・・・・・・・・・・・・・・・・・・・・・・・ 7- 7
7.4.3 Load inertia moment is 20 or more times ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 8
7.4.4 When shortening the settling time ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 9
7.4.5 When the same gain is used for two or more axes・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 10
7.5 Slight Vibration Suppression Control・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7- 10
8. INSPECTION 8- 1 to 8- 2
9. TROUBLESHOOTING 9- 1 to 9- 12
9.1 Trouble at Start-Up ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9- 1
9.1.1 Position control mode・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9- 1
9.1.2 Speed control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9- 4
9.1.3 Torque control mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9- 5
9.2 When Alarm or Warning Has Occurred・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9- 6
9.2.1 Alarms and Warning list・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9- 6
9.2.2 Remedies for alarms ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9- 7
9.2.3 Remedies for Warnings ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 9- 11
10. OUTLINE DIMENSION DRAWINGS 10- 1 to 10- 4
10.1 Servo amplifiers・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 10- 1
10.2 Connectors ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 10- 2
11. CHARACTERISTICS 11- 1 to 11- 4
11.1 Overload Protection Characteristics ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 11- 1
11.2 Dynamic Brake Characteristics ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 11- 2
11.3 Encoder Cable Flexing Life ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 11- 3
12. OPTIONS AND AUXILIARY EQUIPMENT 12- 1 to 12- 18
12.1 Options ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 1
12.1.1 Cables and connectors ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 1
12.1.2 Junction terminal block (MR-TB20) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 7
12.1.3 Servo configurations software ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 9
12.2 Auxiliary Equipment ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 11
12.2.1 Recommended wires ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 11
12.2.2 Circuit protector ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 12
Page 13
12.2.3 Relays ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 13
12.2.4 Noise reduction techniques ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 13
12.2.5 Snubber unit ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12- 17
13. COMMUNICATION FUNCTIONS 13- 1 to 13- 26
13.1 Configuration ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 1
13.1.1 RS-422 configuration ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 1
13.1.2 RS-232C configuration ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 2
13.2 Communication Specifications ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 3
13.2.1 Communication overview ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 3
13.2.2 Parameter setting・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 4
13.3 Protocol ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 5
13.4 Character Codes ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 6
13.5 Error Codes ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 7
13.6 Checksum ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 7
13.7 Time-Out Operation ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 8
13.8 Retry Operation・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 8
13.9 Initialization・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 9
13.10 Communication Procedure Example ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 9
13.11 Command and Data No. List ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 10
13.11.1 Read commands ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 10
13.11.2 Write commands・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 11
13.12 Detailed Explanations of Commands ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 13
13.12.1 Data processing ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 13
13.12.2 Status display ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 15
13.12.3 Parameter ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 16
13.12.4 External I/O pin statuses (DIO diagnosis) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 18
13.12.5 Disable/enable of external I/O signals (DIO) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 19
13.12.6 External input signal ON/OFF (Test operation) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 20
13.12.7 Test operation mode ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 21
13.12.8 Output signal pin ON/OFF (DO forced output) ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 23
13.12.9 Alarm history ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 24
13.12.10 Current alarm・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 25
13.12.11 Other commands ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 13- 26
Page 14
Optional Servo Motor Instruction Manual CONTENTS
The rough table of contents of the optional MELSERVO Servo Motor Instruction Manual is introduced
here for your reference. Note that the contents of the Servo Motor Instruction Manual are not included
in the Servo Amplifier Instruction Manual.
1. INTRODUCTION
2. INSTALLATION
3. CONNECTORS USED FOR SERVO MOTOR WIRING
4. INSPECTION
5. SPECIFICATIONS
6. CHARACTERISTICS
7. OUTLINE DIMENSION DRAWINGS
8. CALCULATION METHODS FOR DESIGNING
Page 15
MEMO
Page 16

1. FUNCTIONS AND CONFIGURATION
1. FUNCTIONS AND CONFIGURATION
1.1 Introduction
The MELSERVO-J2-Jr series general-purpose AC servo has been developed as an ultracompact, small
capacity servo system compatible with the MELSERVO-J2 series 24VDC power supply. It can be used in a
wide range of fields from semiconductor equipment to s ma ll robots , etc.
The input signals of t he s ervo ampl if ier cont rol s ys tem a re compat i bl e wit h th ose of t he M R-J 2- A.
As the standard models comply with the EN Standard x UL/C-UL Standard, they can be used satisfactorily
in various countries.
The MR-J2-03A5 servo amplifier can be easily installed to a control box with a DIN rail.
The power supply/electromagnetic brake and encoder of the servo motor can be wired easily with a single
cable.
Using a personal computer where the Servo Configuration software has been installed, you can make
parameter setting, status display, etc.
Also, you can use the RS-422 communication function to set up to 32 axes of servo amplifiers.
The compatible servo motors have achieved the smallest 28mm-bore flange size in this class and are
further equipped with encoders of 8192 pulses/rev (incremental) resolution.
1 - 1
Page 17
1. FUNCTIONS AND CONFIGURATION
1.2 Servo Amplifier Standard Specifications
Servo Amplifier
Item
Voltage 21.6 to 30VDC (instantaneous permissible vo ltage 34V)
Circuit power
supply
Control circuit power supply (Note)
Control system Sine-wave PWM control, current control system
Dynamic brake Built-in
Protective functions
Speed frequency response 250Hz or more
Max. input pulse frequency 500kpps (for differential rece iver), 200kpps (for open collec tor)
Command pulse multiplying factor Electronic gear A/B, A, B: 1 to 32767, 1/50 < A/B < 50
In-position range setting
Error excessive
Position control mode
Torque limit Parameter setting system
Speed control range Analog speed command 1: 1000, inter n al speed command 1: 5000
Analog speed command input
Speed fluctuation ratio
Speed control mode
Torque limit Parameter setting system
Torque control
mode
Structure Open (IP00)
Ambient temperature
Ambient humidity 90%RH or less (non-condensing)
storage temperature
storage humidity 90%RH or less (non-condensing)
Environment
Ambient
Altitude Max. 1000m (3280ft) above sea level
Vibration
Mass
Power
supply
capacity
Analog torque command input
HC-AQ0135D Continuous 0.8A, m ax. 2.4A
HC-AQ0235D Continuous 1.6A, m ax. 4.8A
HC-AQ0335D Continuous 2.4A, m ax. 7.2A
24VDC±10%, 200mA (400mA when using the servo motor equipped with
electromagnetic brake)
Overcurrent shut-off, regenerative overvoltage shut-off, overload shut-off
(electronic thermal relay), servo motor overheat protection, encoder fault
protection, undervoltage, instantaneous power failure protection, overspeed
protection, excessive error protection
−0.03% or less (load fluctuation 0 to 100%)
±0.02% or less (power fluctuation ±10%)
DC0 to ±8V (input impedance 10 to 12kΩ)
32 to +131 [°F] (non-freezing)
−20 to +65 [°C] (non-freezing)
−4 to +149 [°F] (non-freezing)
Free from corrosive gas, flammable gas, o il m ist, dust and dirt
[kg] 0.2
[lb] 0.44
MR-J2-03A5
0 to ±10000 pulse
±80 kpulse
DC0 to ±10V
±3% or less
0 to +55 [°C] (non-freezing)
Indoors (no direct sunlight)
5.9 [m/s2] or less
19.4 [ft/s
2
] or less
Note. To comply with the Low Voltage Directive, use a reinforced insulation type stabilizing power supply.
1 - 2
Page 18
1. FUNCTIONS AND CONFIGURATION
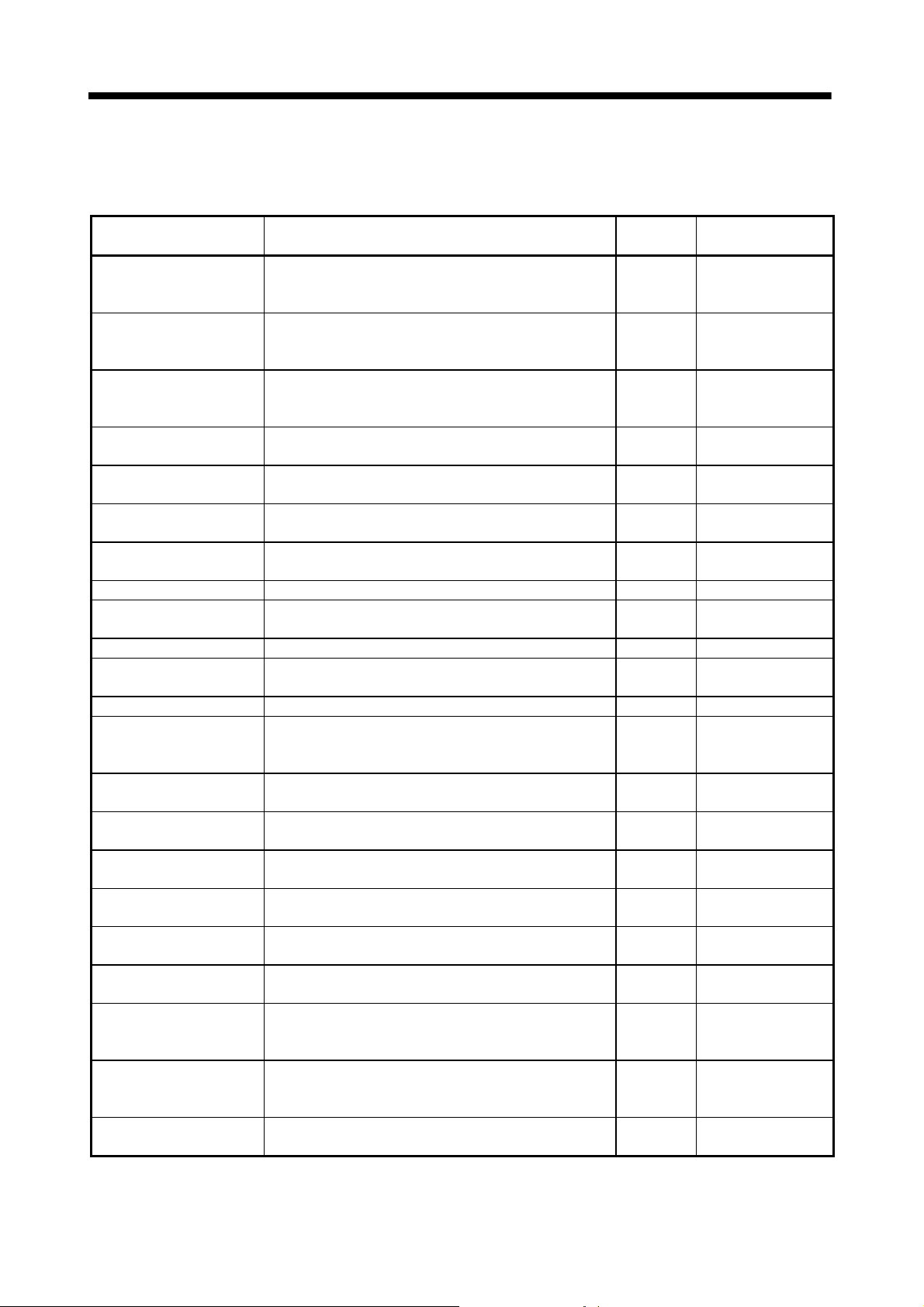
1.3 Function List
The following table lists the functions of the MR-J2-03A5. For details of the functions, refer to the
corresponding chapters and sections.
Function Description
Position control mode MR-J2-03A5 is used as position control servo. P
Speed control mode MR-J2-03A5 is used as speed control servo . S
Torque control mode MR-J2-03A5 is used as torque control servo. T
Position/speed control
change mode
Speed/torque control change
mode
Torque/position control
change mode
Slight vibration suppression
control
Electronic gear Input pulses can be multiplied by 1/50 to 50. P Parameters No. 3, 4
Real-time auto tuning
Smoothing Speed can be increa sed smoothl y in respon se to in put pu lse. P Pa ramet er No. 7
S-pattern acceleration/
deceleration time constant
Alarm history clear Alarm history is cleared. P, S, T Parameter No. 16
Restart after instantaneous
power failure
Command pulse selection
Input signal selection
Torque limit Servo motor-generated torque can be limited to any value. P, S
Speed limit Servo motor speed can be limited to any value. T
Status display
External I/O display
Output signal forced output
Automatic VC offset
Test operation mode
Using external input signal, control can be switched
between position control and speed control.
Using external input signal, control can be switched
between speed control and torque control.
Using external input signal, control can be switched
between torque control and position control.
Suppresses vibration of ±1 pulse produced at a servo motor
stop.
Automatically adjusts the gain to optimum value if load
applied to the servo motor shaft varies.
Speed can be increased and decreased smoothly. S Parameter No. 13
If the input power supply voltage had reduc ed to cause an
alarm but has returned to normal, the servo motor can be
restarted by merely switching on the start signal.
Command pulse train form can be selected from among
four different types.
Forward rotation start, reverse rotation start, servo on and
other input signals can be assigned to any pins.
Servo status is shown on the 4-digit, 7-segment LED
display
ON/OFF statuses of external I/O signals are shown on the
display.
Output signal can be forced on/off independently of the
servo status.
Use this function for output signal wiring check, etc.
Voltage is automatically offset to stop the servo motor if it
does not come to a stop at the analog speed command (VC)
or analog speed limit (VLA) of 0V.
Servo motor can be run from the operation section of the
servo amplifier without the start signal entered.
(Note)
Control Mode
P/S Section 3.4.4
S/T Section 3.4.5
T/P Section 3.4.6
P Section 7.5
P, S
S Paramete r No. 20
P Parameter No. 21
P, S, T
P, S, T Section 6.2
P, S, T Section 6.6
P, S, T Section 6.7
S, T Section 6.3
P, S, T Section 6.8
Refer To
Section 3.1.1
Section 3.4.1
Section 4.2.2
Section 3.1.2
Section 3.4.2
Section 4.2.3
Section 3.1.3
Section 3.4.3
Section 4.2.4
Section 7.3
Parameter No. 2
Parameters No. 43 to
48
Section 3.4.1 (2)
Parameter No. 28
Section 3.4.3 (3)
Parameter No. 8 to 10
1 - 3
Page 19
1. FUNCTIONS AND CONFIGURATION
Function Description
Servo configuration
software
Alarm code output
Note. P: Position control mode, S: Speed control mod e, T: Torque control mod e
P/S: Position/speed control change mod e, S/T: Sp eed/torq ue control cha nge mode, T/P: Torq ue/posit ion control chan ge mode
Using a personal computer, parameter setting, test
operation, status display, etc. can be performed.
If an alarm has occurred, the c orre sponding alarm number
is output in 3-bit code.
(Note)
Control Mode
P, S, T Section 12. 1. 3
P, S, T Section 9.2.1
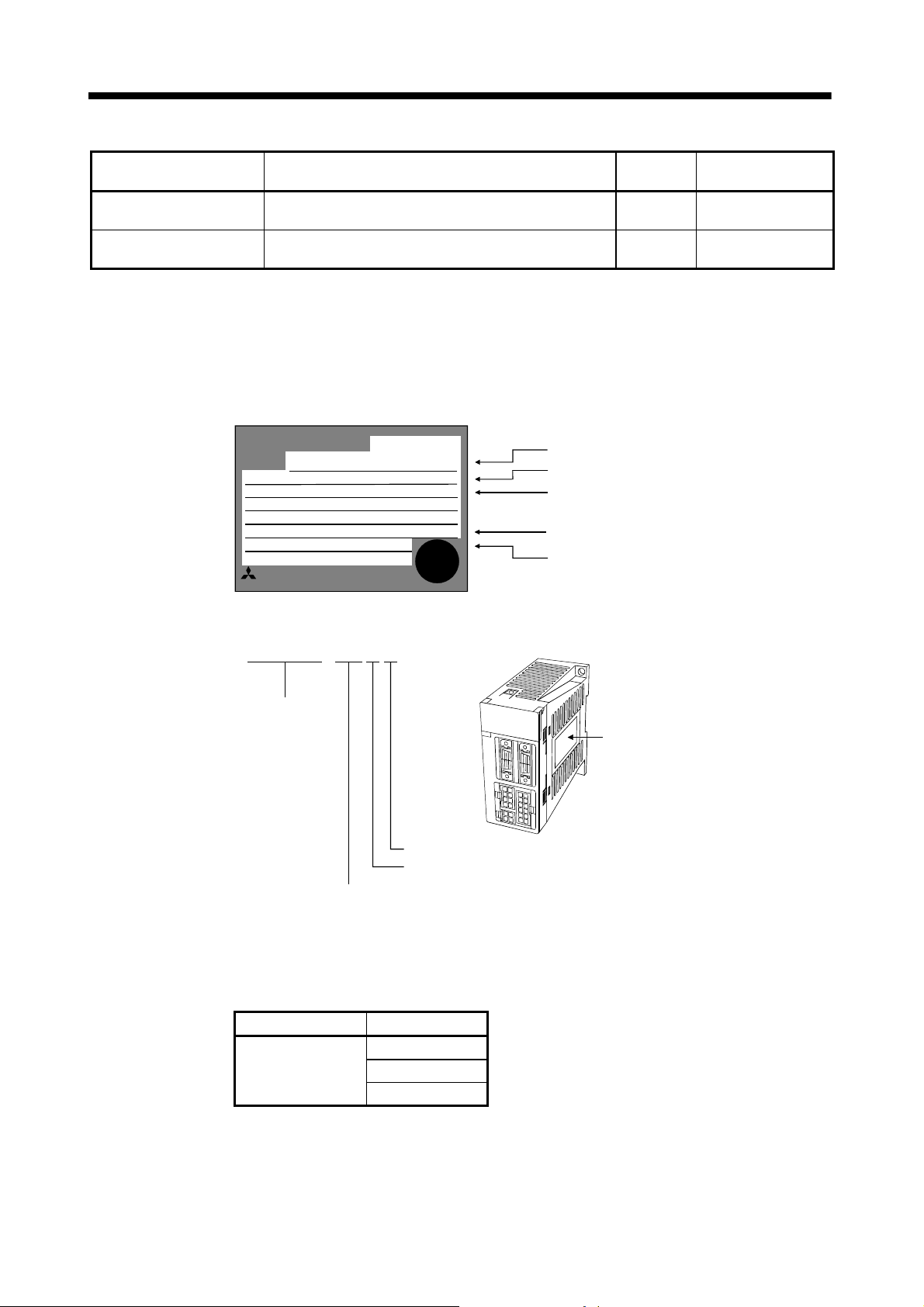
1.4 Model Code Definition
(1) Rating plate
MITSUBISHI
MITSUBISHI
MITSUBISHIMITSUBISHI
MODEL
POWER
MR‑J2‑03A5
POWER:
INPUT:
OUTPUT:
SERIAL:
MITSUBISHIELECTRICCORPORATION
MADEINJAPAN
30W
DC24V
2.3A
A5**********
TC3**AAAAG52
ACSERVO
ACSERVO
PASSED
Model
Capacity
Applicable power supply
Rated output current
Serial number
Refer To
(2) Model
MR-J2 - 03 A 5
Series name
Rating plate
24VDC power supply specification
General-purpose interface
Rated output 30[W]
1.5 Combination with Servo Motor
The HC-AQ series servo motors can be used. The same combinations apply to the servo motors provided
with electromagnetic brakes and reduction gears.
Servo Amplifier Servo motor
HC-AQ0135D
HC-AQ0235DMR-J2-03A5
HC-AQ0335D
1 - 4
Page 20
1. FUNCTIONS AND CONFIGURATION
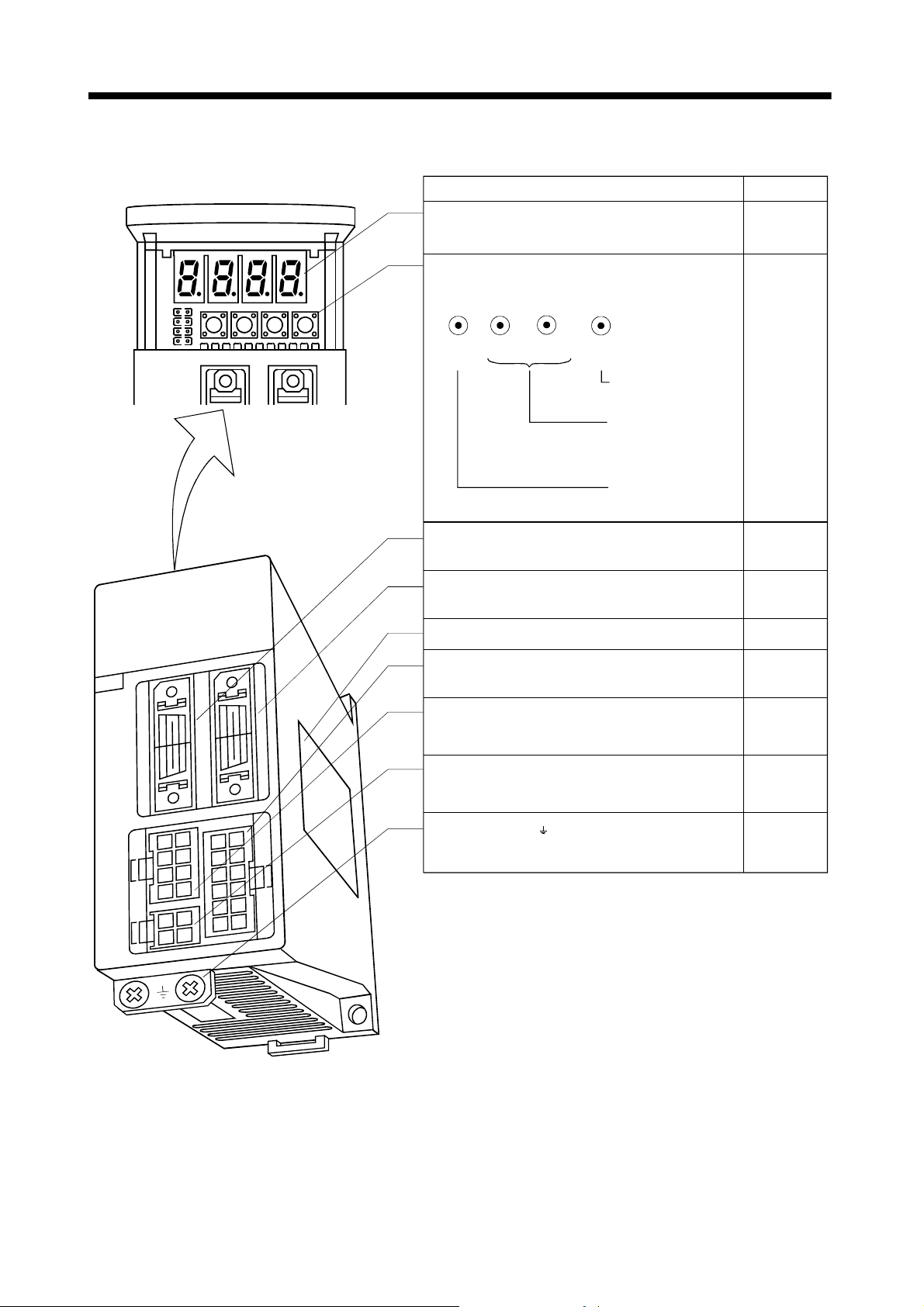
1.6 Parts Identification
Name/Application
Display
The four-digit, seven-segment LED shows the servo
status and alarm number.
Operation section
Used to perform status display, diagnostic, alarm and
parameter operations.
DOWN
MODE
I/O signal connector (CN1A)
Used to connect digital I/O signals.
I/O signal connector (CN1B)
Used to connect digital I/O signals.
Name plate
Servo motor connector (CNP2)
Connector for connection of the servo motor.
Power input connector (CNP1)
Used to connect the input power supply/control circuit
power supply/RS-422.
UP
SET
Used to set parameter
data.
Used to change the
display or data in each
mode.
Used to change the
mode.
Refer To
Chapter6
Chapter6
Section3.3
Section3.3
Section1.3
Section3.3
Section10.2.1
Section12.1.1
Section3.3
Section10.2.1
Communication connector (CNP3)
Used for connection with a personal computer
(RS-232C).
Earth (E) terminal ( )
To conform to the EN Standard, fit the supplied earth
terminal for grounding.
Section3.3
Section10.2.1
Section12.1.3
Section3.9
1 - 5
Page 21
1. FUNCTIONS AND CONFIGURATION
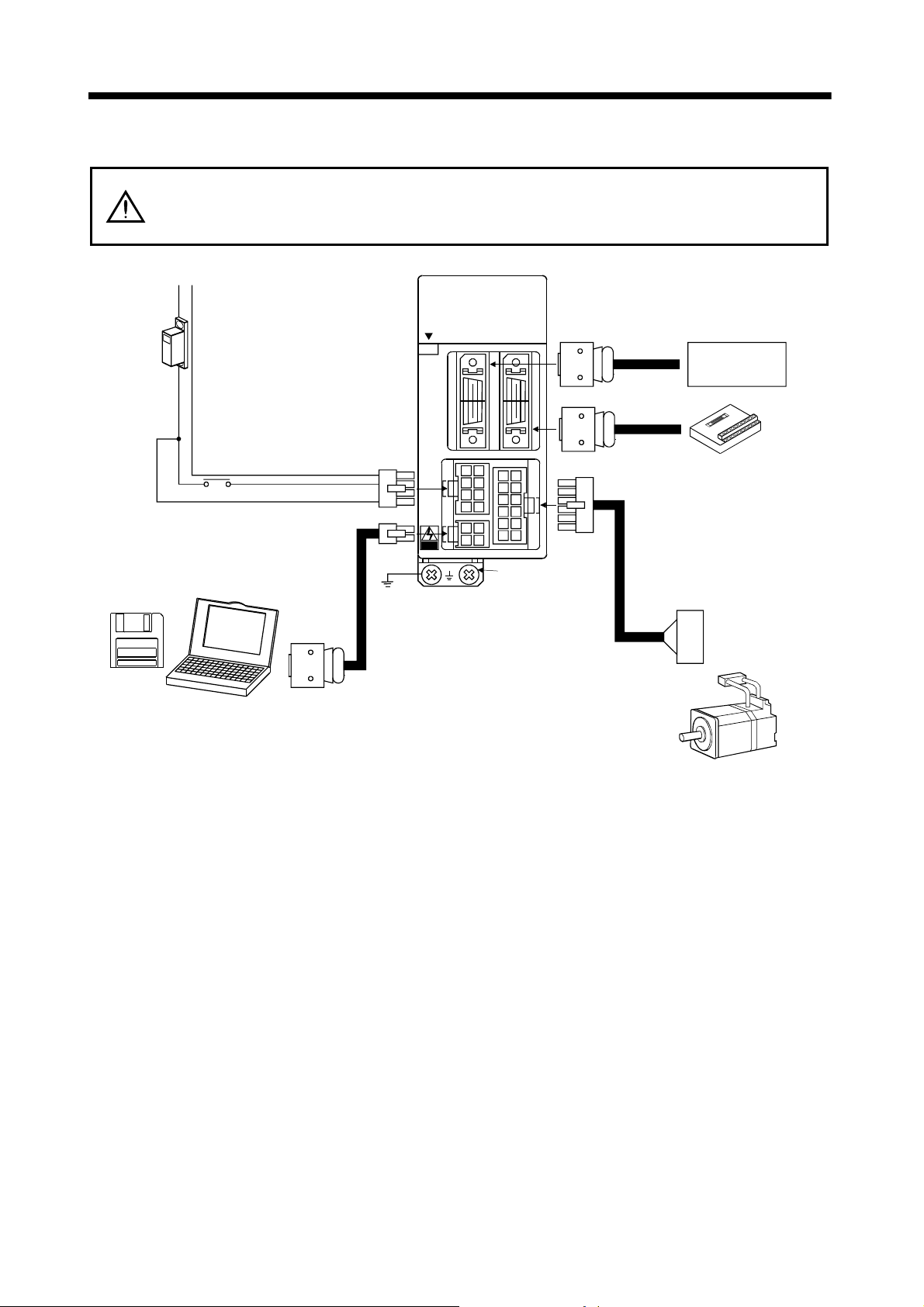
1.7 Servo System with Auxiliary Equipment
y To prevent an electric shock, fit the supplied earth terminal (E) to the servo
WARNING
amplifier (refer to ( 2), Section 3.9) and always connect it to the earth (E) of the
control box.
Power supply
24VDC
+
Servo
Configuration
software
−
Circuit
protector
Main ci rcuit po wer suppl y
Relay
Control power supply
Personal
computer
To CNP1
To CNP3
Servo amplifier
MITSUBISHI
OPEN
CN1A CN1B
CNP1 CNP2
CNP3
MELSERVO
Earth (E) terminal
To CNP2
To CN1A
To CN1B
Motor cable
Power leads
Positioning unit/
speed controller
Junction
terminal
block
Encoder
cable
Servo motor
1 - 6
Page 22
2. INSTALLATION
2. INSTALLATION
CAUTION
y Stacking in excess of the limited number of products is not allowed.
y Install the equipment to incombustible. Installing them directly or close to
combustibles will led to a fire.
y Install the equipment in a load-bearing place in accordance with this Instruction
Manual.
y Do not get on or put heavy load on the equipment to prevent injury.
y Use the equipment within the specified environmental condition range.
y Provide an adequate protection to prevent screws, metallic detritus and other
conductive matter or oil and other combustible matter from entering the servo
amplifier.
y Do not block the intake/exhaust ports of the servo amplifier. Otherwise, a fault may
occur.
y Do not subject the servo amplifier to drop impact or shock loads as they are
precision equipment.
y Do not install or operate a faulty servo amplifier.
y When the product has been stored for an extended period of time, consult
Mitsubishi.
2.1 Environmental conditions Environment Conditions
Ambient temperature
Ambient humidity 90%RH or less (non-condensing)
storage temperature
storage humidity 90%RH or less (non-condensin g)
Ambient
Altitude Max. 1000m (3280 ft) above sea level
Vibration
0 to +55 [°C] (non-freezing)
32 to +131 [°F] (non-freezing)
−20 to +65 [°C] (non-freezing)
−4 to +149 [°F] (non-freezing)
Indoors (no direct sunlight)
Free from corrosive gas, flammable gas, oil mist, dust and dirt
5.9 [m/s2] or less
2
19.4 [ft/s
] or less
2 - 1
Page 23
2. INSTALLATION
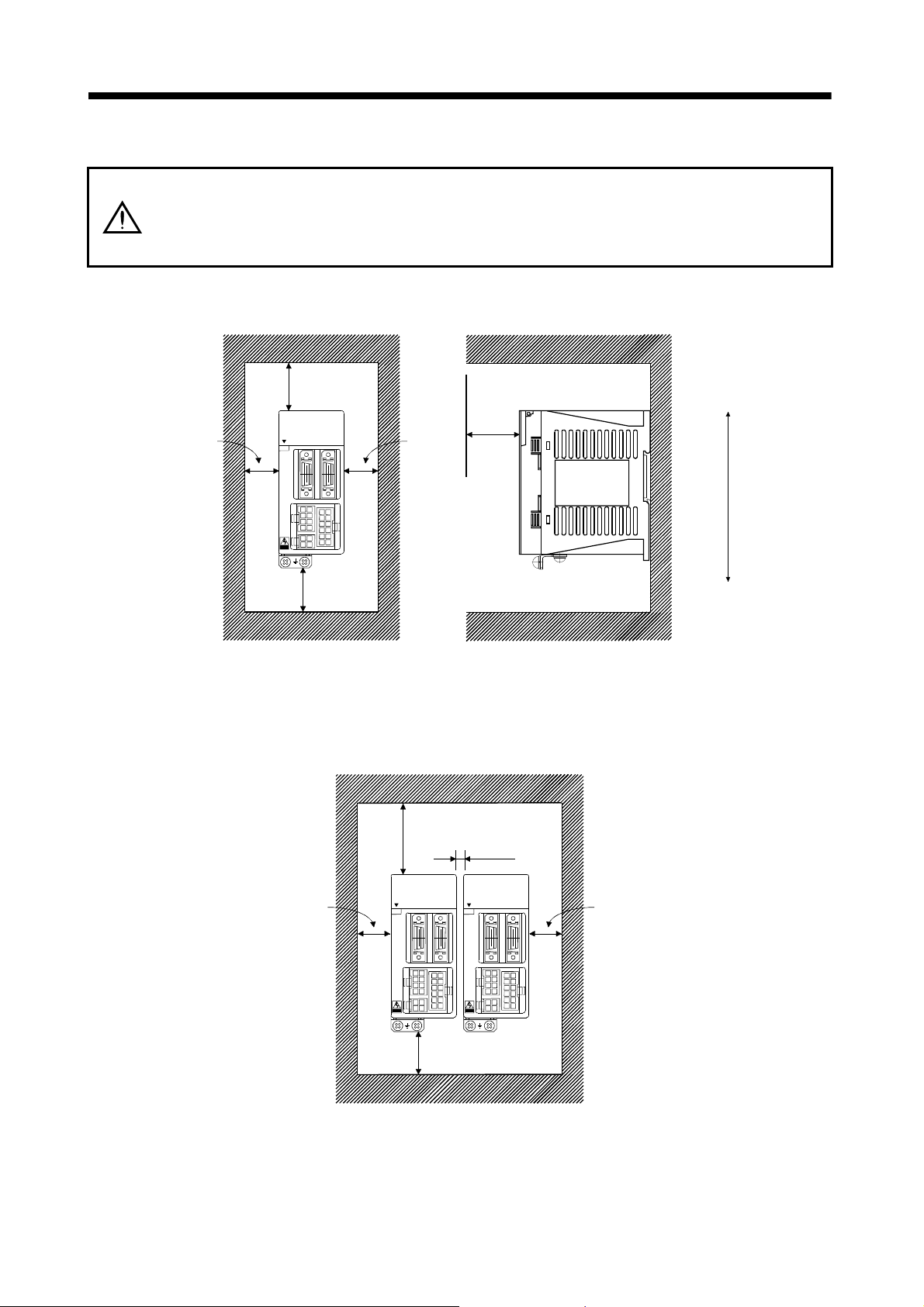
2.2 Installation direction and clearances
y The equipment must be installed in the specified direction. O therwise, a fault may
CAUTION
(1) Installation of one servo amplifier
10mm
(0.4 in.)
or more
occur.
y Leave specified clearances between the servo amplif ier and c ontr ol box ins ide walls
or other equipment.
Control box Control box
40mm
(1.6 in.)
or more
Servo am plifier
MITSUBISHI
MELSERVO
OPEN
CN1A CN1B
CNP1 CNP2
10mm
(0.4 in.)
or more
Wiring clearance
70mm
(2.8 in.)
Top
CNP3
40mm
(1.6 in.)
Bottom
or more
(2) Installation of two or more servo amplifiers
Leave a large clearance between the top of the servo amplifier and the internal surface of the control
box, and install a fan to prevent the internal temperature of the control box from exceeding the
environmental conditions.
Control box
10mm
(0.4 in.)
or more
100mm
(4.0 in.)
or more
MITSUBISHI
OPEN
CN1A CN1B
CNP1 CNP2
MELSERVO
1mm
(0.04 in.)
or more
MITSUBISHI
OPEN
MELSERVO
CN1A CN1B
CNP1 CNP2
10mm
(0.4 in.)
or more
CNP3
40mm
(1.6 in.)
or more
CNP3
(3) Others
Install the servo amplifier on a perpendicular wall in the correct vertical direction.
2 - 2
Page 24

2. INSTALLATION
2.3 Keep out foreign materials
(1) When installing the unit in a control box, prevent drill chips and wire f ragments from entering the
servo amplifier.
(2) Prevent oil, water, metallic dust, etc. from entering the servo amplifie r thro ug h ope nin gs in th e co ntro l
box or a fan installed on the ceiling.
(3) When installing the control box in a place where there are much toxic gas, dirt and dust, conduct an air
purge (force clean air into the control box from outside to make the internal pressure higher than the
external pressure) to prevent such materials from entering the control box.
2.4 Cable stress
(1) The way of clamping the cable must be f ully examined so that flexin g stress and cable's own we ight
stress are not applied to the cable connection.
(2) For use in any application where the servo motor moves, fix the cables (encoder, power supply, brake)
supplied with the servo motor, and flex the optional encoder cable or the power supply and brake
wiring cables. Use the optional encoder cable within the flexing life range. Use the power supply and
brake wiring cables wit hin the fl exin g li fe of the ca b les .
(3) Avoid any probability that the cable sheath might be cut by sharp chips, rubbed by a machine corner or
stamped by workers or vehicles.
(4) For installation on a machine where th e servo motor w ill move, the fle xing radius should be made as
large as possible. Refer t o sect ion 1 1. 4 for t he flexi ng li fe.
2 - 3
Page 25
2. INSTALLATION
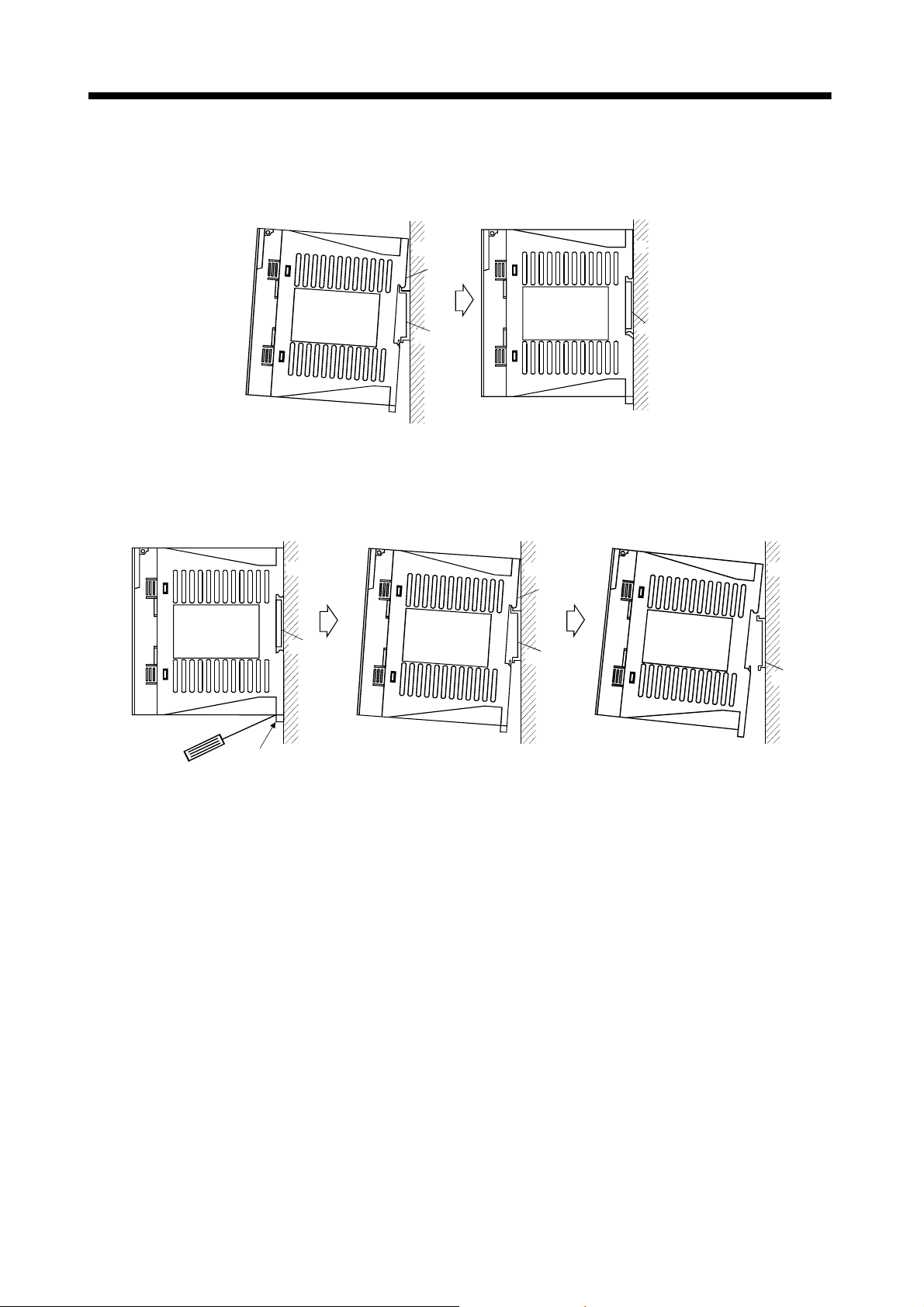
2.5 Using the DIN rail for installation
(1) Fitting into the DIN rail
Put the upper catch on the DIN rail and push the unit until it clicks.
(2) Removal from DIN rail
1) Pull down the hook.
2) Pull it toward you.
3) Lift and remove the unit.
1)
Wall
DIN rail
Wall
Upper
catch
DIN rail
2) 3)
Wall
Upper
catch
DIN rail
Wall
DIN rail
Wall
DIN rail
Hook
2 - 4
Page 26
3. SIGNALS AND WIRING
3. SIGNALS AND WIRING
y Any person who is involved in wiring should be fully competent to do the work.
y Before starting wiring, make sure that the voltage is safe in the tester more than 15
minutes after power-off. Otherwise, you may get an electric shock.
WARNING
CAUTION
y Ground the servo amplifier and the servo motor securely.
y Do not attempt to wire the servo amplifier and servo motor until they have been
installed. Otherwise, you may get an electric shock.
y The cables should not be damaged, stressed excessively, loaded heavily, or
pinched. Otherwise, you may get an electric shock.
y W ire the equipment correctly and securely. Otherwise, the servo motor may
misoperate, resulting in injury.
y Connect cables to correct terminals to prevent a burst, fault, etc.
y Ensure that polarity (+, −) is correct. Otherwise, a burst, damage, etc. may occur.
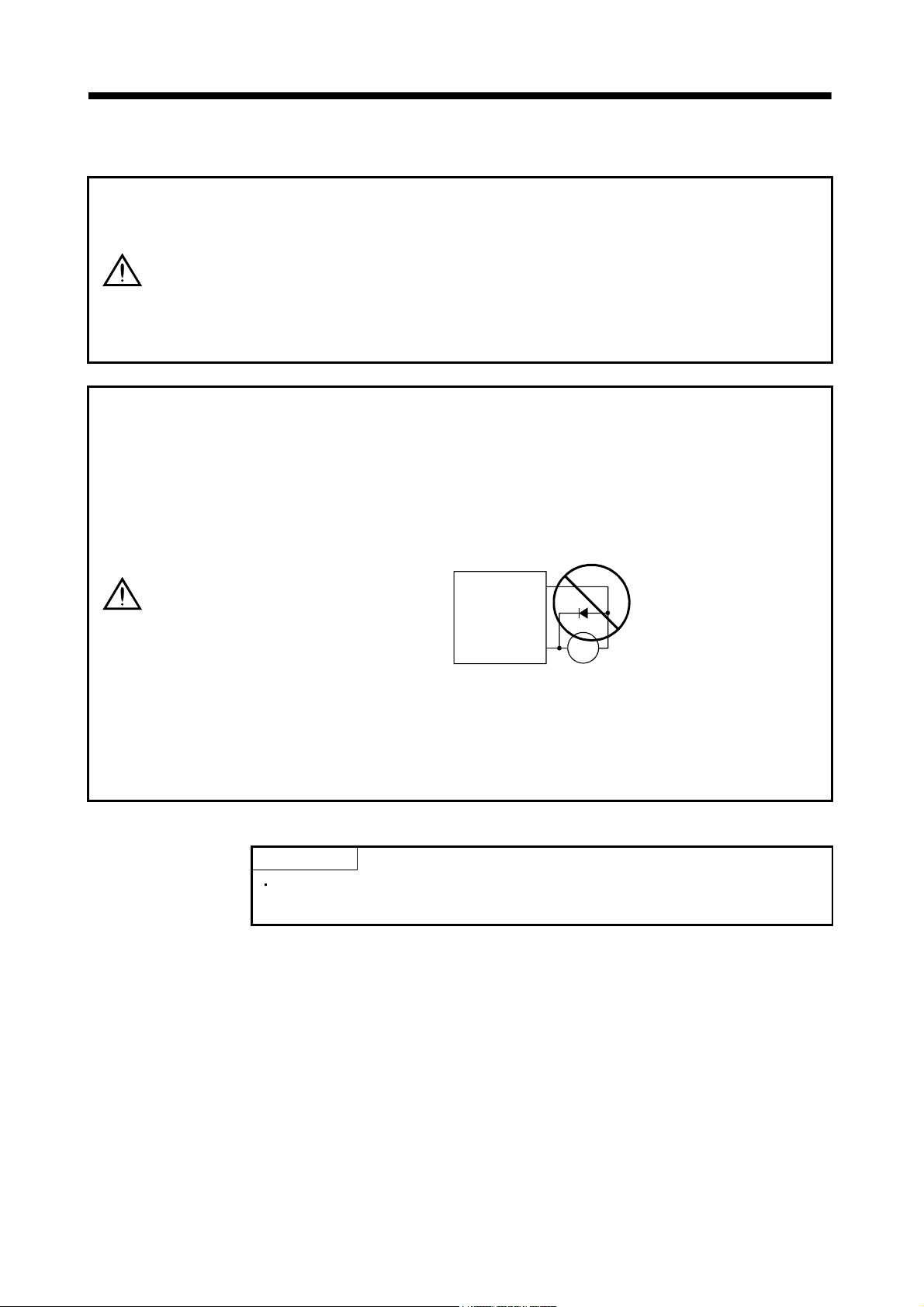
y The surge absorbing diode installed to the DC relay designed for control output
should be fitted in the specified direction. Otherwise, the signal is not output due to
a fault, disabling the forced stop and other protective circuits.
Servo amplifier
COM
(24VDC)
Control output
signal
RA
y Use a noise filter, etc. to minimize the influence of electromagnetic interference,
which may be given to electronic equipment used near the servo amplifier.
y Do not install a power capacitor, surge suppressor or radio noise filter with the power
line of the servo motor.
y Do not modify the equipment.
POINT
CN1A and CN1B have the same shape. Wrong connection of the connectors
will lead to a failure. Connect them correctly.
3 - 1
Page 27
3. SIGNALS AND WIRING
3.1 Standard connection example
POINT
y For the connection of the power supply system, refer to Section 3.7.1.
y Do not apply the test lead bars or like of a tester directly to the pins of the
connectors supplied with the servo motor. Doing so will deform the pins,
causing poor contact.
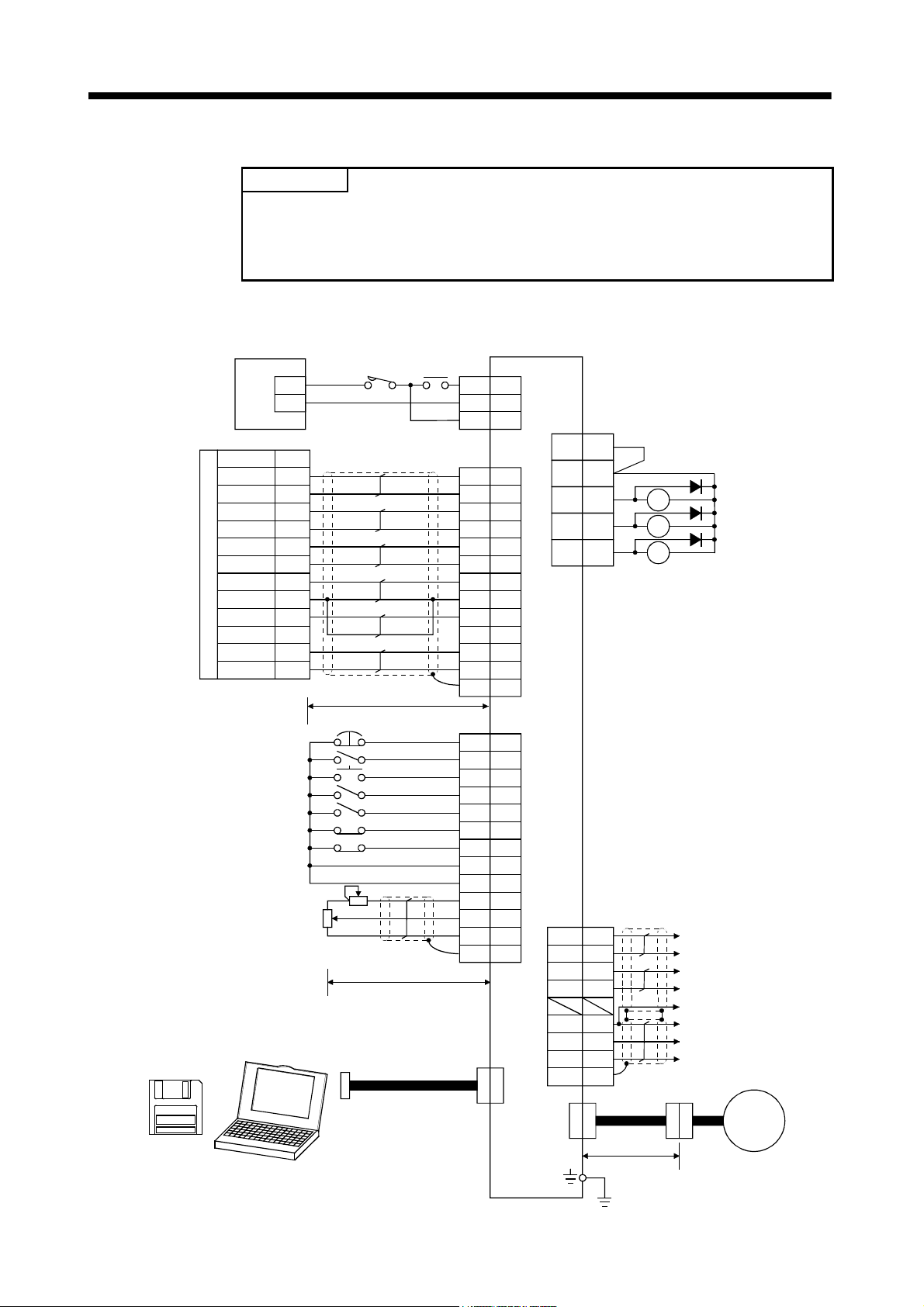
3.1.1 Position control mode AD75P (A1SD75P)
(Note 3)
(Note 5)
Forward rotation stroke end
Reverse rotation stroke end
(Note 8) Analog torque limit
(Note 9)
Servo Configuration
software
24VDC power supply
+
−
Signal Name
PULSE F
PULSE F−
PULSE R+
PULSE R−
CLEAR
CLEAR COM
READY
COM
INPS
Positioning unit AD75P/A1SD75P
PG0(+5V)
PG0 COM
Proportion control
±
10V/max. current
+
Pin No.
+
Forced stop
Servo on
Reset
Torque limit
Upper limit setting
Personal
computer
3
21
4
22
5
23
7
26
8
24
25
(Note 8)
Circuit
protector
10m (32ft) max.
2m (6.5ft) max.
RA
Servo amplifier
CNP1
P24M
P24G
P24L
(Note 4,7)
CN1A
PP
PG
NP
NG
CR
SG
RD
COM 9
INP
LZ
LZR
Plate
SD
(Note 4,7)
CN1B
EMG
SON
RES
PC
TL
LSP
LSN
SG
SG
P15R
TLA
LG
Plate
SD
CNP3
1
2
3
3
13
2
12
8
10
19
18
5
15
15
5
14
8
9
16
17
10
20
11
12
1
(Note 4)
CN1B
(Note 4,7)
CN1A
Plate
CNP2
3VDD
13 COM
18
ALM
19 ZSP
6TLC
LA
6
LAR
16
LB
7
LBR
17
LG
1
OP
14
P15R
4
SD
30m (98ft) max.
(Note1)
(Note 2)
RA1
RA2
RA3
(Note 6)
Trouble
Zero speed
Limiting torque
Encoder A-phase pulse
(differential line driver)
Encoder B-phase pulse
(differential line driver)
Control common
Control common
Encoder Z-phase pulse
(open collector)
Servo
motor
3 - 2
Page 28

3. SIGNALS AND WIRING
Note 1. To prevent an electric shock, fit the supplied earth terminal (E) to the servo amplifier and always
connect it to the earth (E) of the control box. (Refer to section 3.9.)
2. Connect the diode in the correct direction. If it is connected reversely, the servo amplifier will be
Cfaulty and will not output signals, disabling the forced stop and other protective circuits.
3. The forced stop switch must be installed.
4. CN1A and CN1B have the same shape. Wrong connection of the connectors will lead to a fault.
5. When starting operation, always connect the forward/reverse rotation stroke end signal (LSN/LSP)
with SG. (Normally closed contacts)
6. Trouble (ALM) is connected with COM in normal alarm-free condition.
7. The pins with the same signal name are connected in the servo amplifier.
8. For the command pulse train input of the differential line driver system. 2m max. for the open
collector system.
9. Use MRZJW3-SETUP81E or later.
3 - 3
Page 29
3. SIGNALS AND WIRING
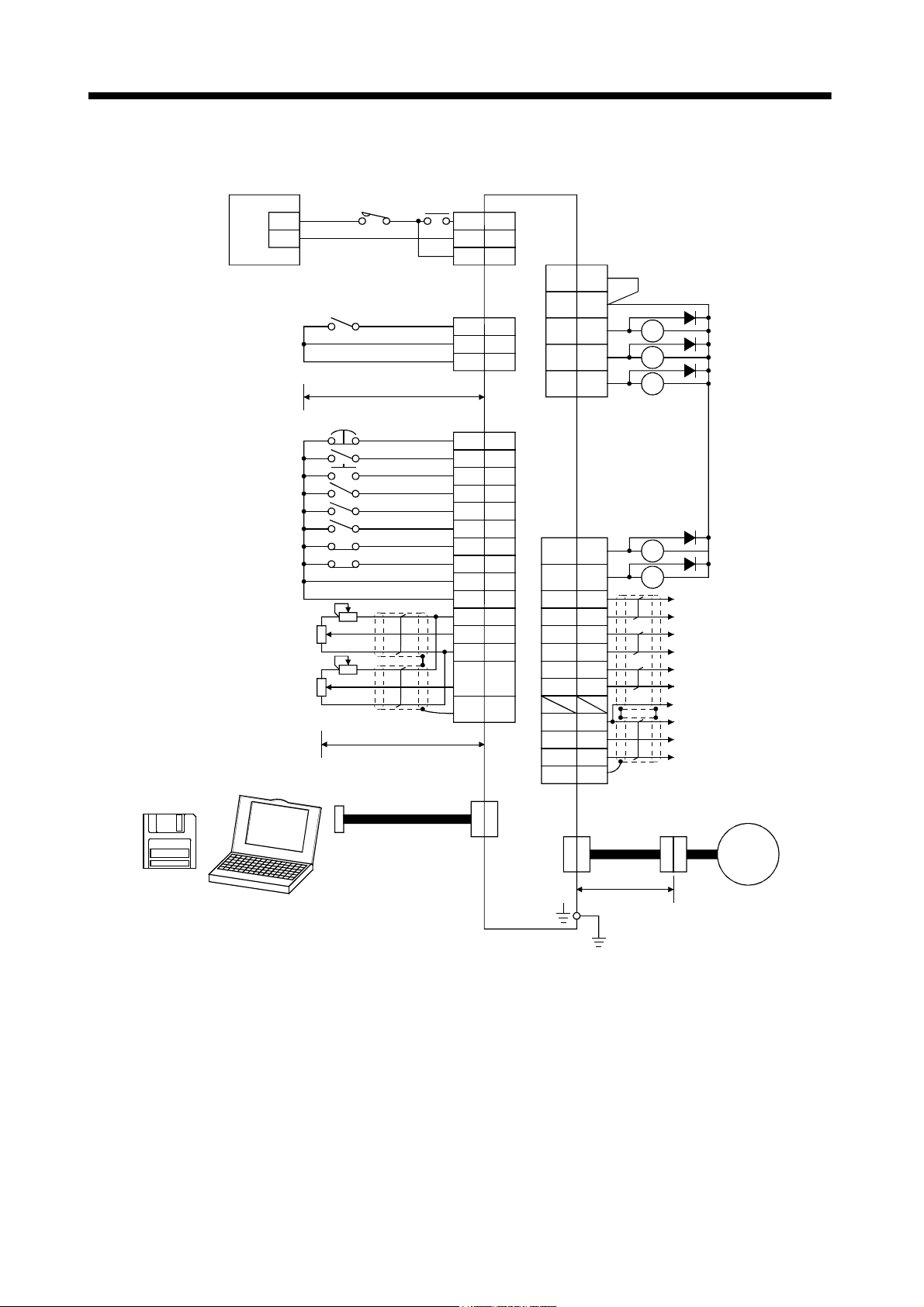
3.1.2 Speed control mode
(Note 3)
Forward rotation start
Reverse rotation start
(Note 5)
Forward rotation stroke end
Reverse rotation stroke end
Analog speed command
(Note 8) Analog torque limit
(Note 9)
Servo configuration
software
24VDC power supply
+
−
Speed Selection 1
Forced stop
Servo on
Reset
Speed selection 2
Upper limit setting
±
10V/Rated speed
Upper limit setting
+10V/max. current
Personal
computer
+
Circuit
protector
10m (32ft) max.
2m (6.5ft) max.
RA
P24M
P24G
P24L
SP1
SG
SG
EMG
SON
RES
ST1
ST2
LSP
LSN
SG
SG
P15R
VC
LG
SD
Servo amplifier
CNP1
1
2
(Note 4)
3
(Note 4,7)
CN1A
8
10
20
(Note 4,7)
CN1B
15
5
14
7SP2
8
(Note 4,7)
9
16
17
10
20
11
2
1
12TLA
Plate
CNP3
CN1B
3 VDD
13
18
19 ZSP
6TLC
CN1A
18 SA
19
5
15
6
16
7
17
1
14
4
Plate
CNP2
COM
ALM
RD
LZ
LZR
LA
LAR
LB
LBR
LG
OP
P15R
SD
30m (98ft) max.
(Note1)
RA1
RA2
RA3
RA5
RA4
Encoder Z-phase pulse
(differential line driver)
Encoder A-phase pulse
(differential line driver)
Encoder B-phase pulse
(differential line driver)
Control common
Control common
Encoder Z-phase pulse
(open collector)
(Note 6)
Trouble
Zero speed
Limiting torque
Speed reached
Ready
Servo
motor
Note 1. To prevent an electric shock, fit the supplied earth terminal (E) to the servo amplifier and always
connect it to the earth (E) of the control box. (Refer to section 3.9.)
2. Connect the diode in the correct direction. If it is connected reversely, the servo amplifier will be
faulty and will not output signals, disabling the forced stop and other protective circuits.
3. The forced stop switch must be installed.
4. CN1A and CN1B have the same shape. Wrong connection of the connectors will lead to a fault.
5. When starting operation, always connect the forward/reverse rotation stroke end signal (LSN/LSP)
with SG. (Normally closed contacts)
6. Trouble (ALM) is connected with COM in normal alarm-free condition.
7. The pins with the same signal name are connected in the servo amplifier.
8. TLA can be used by setting any of parameters No. 43 to 48 to make TL available.
9. Use MRZJW3-SETUP81E or later.
3 - 4
Page 30
3. SIGNALS AND WIRING
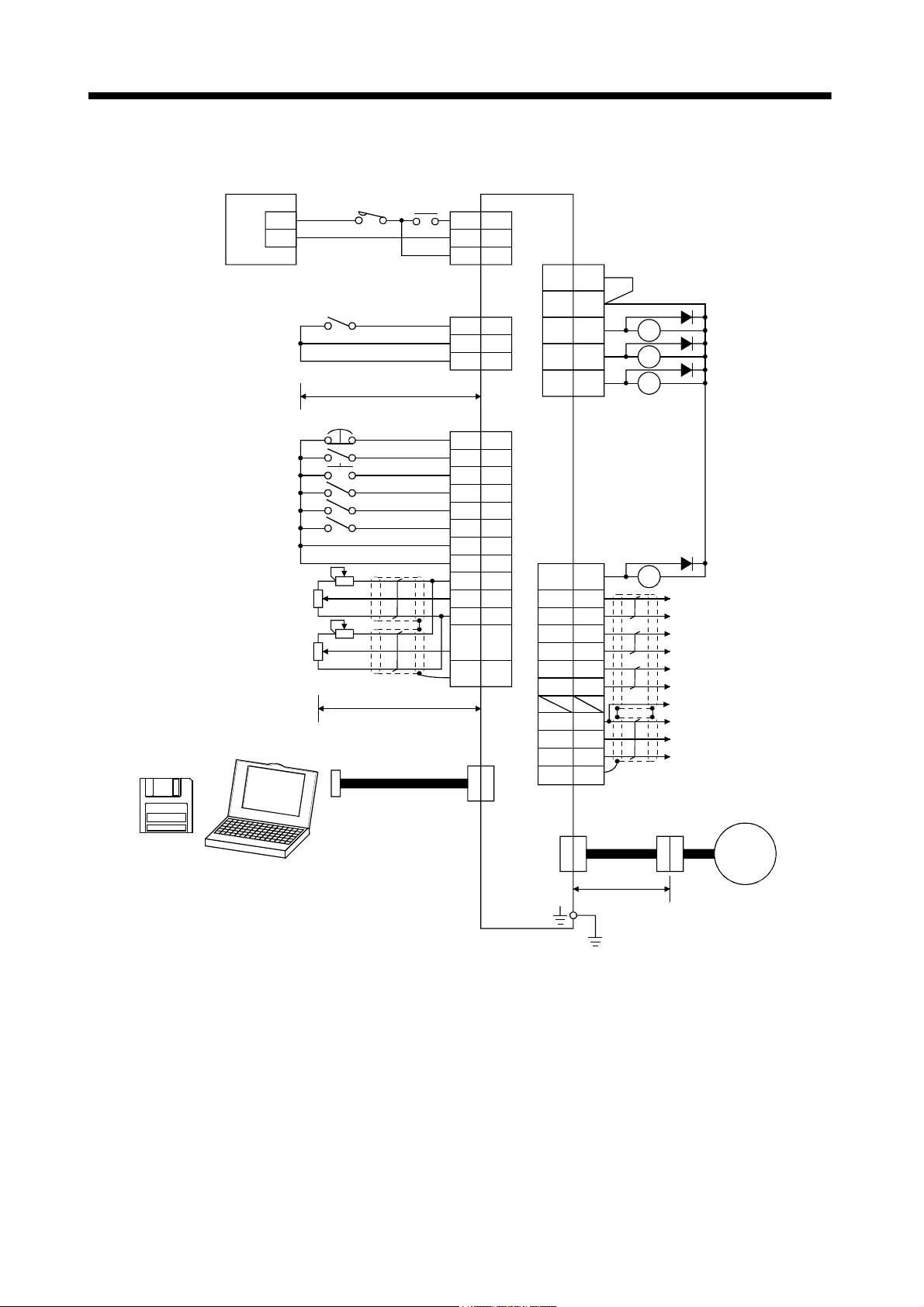
3.1.3 Torque control mode
(Note 3)
Forward rotation selection
Reverse rotation selection
Analog torque command
(Note 7)
Servo configuration
software
24VDC power supply
+
−
Speed Selection 1
Forced stop
Servo on
Reset
Speed selection2
Upper limit setting
±8V/max. current
Upper limit setting
Analog speed limit
0 to +10V/max. speed
Personal
computer
Circuit
protector
10m(32ft) max.
2m (6.5ft) max.
RA
P24M
P24G
P24L
SP1
SG
SG
EMG
SON
RES
RS1
RS2
SG
SG
P15R
TC
LG
SD
Servo amplifier
CNP1
1
2
(Note 4)
3
(Note 4,6)
CN1A
8
10
20
(Note 4,6)
CN1B
15
5
14
7SP2
9
8
(Note 4,6)
10
20
11
12
1
2VLA
Plate
CNP3
CN1B
3 VDD
13
COM
18
ALM
19 ZSP
6TLC
CN1A
19 RD RA4
5
LZ
15
LZR
LA
6
16
LAR
7
LB
17
LBR
LG
1
14
OP
P15R
4
SD
Plate
(Note 2)
RA1
RA2
RA3
Encoder Z-phase pulse
(differential line driver)
Encoder A-phase pulse
(differential line driver)
Encoder B-phase pulse
(differential line driver)
Control common
Control common
Encoder Z-phase pulse
(open collector)
(Note 5)
Trouble
Zero speed
Limiting torque
Ready
+
CNP2
30m (98ft) max.
(Note1)
Servo
motor
Note 1. To prevent an electric shock, fit the supplied earth terminal (E) to the servo amplifier and always
connect it to the earth (E) of the control box. (Refer to section 3.9.)
2. Connect the diode in the correct direction. If it is connected reversely, the servo amplifier will be
faulty and will not output signals, disabling the forced stop and other protective circuits.
3. The forced stop switch must be installed.
4. CN1A and CN1B have the same shape. Wrong connection of the connectors will lead to a fault.
5. Trouble (ALM) is connected with COM in normal alarm-free condition.
6. The pins with the same signal name are connected in the servo amplifier.
7. Use MRZJW3-SETUP81E or later.
3 - 5
Page 31

3. SIGNALS AND WIRING
3.2 Internal Connection Diagram of Servo Amplifier
The following is the internal connection diagram where the signal assignment has been made in the initial
status in each control mode.
Servo amplifier
CNP1
P24M
P24G
P24L
(Note)
PS
VDD VDD VDD 3
COM
(Note)
PS
COM COM COM 9
CR SP1 SP1
SG SG SG810,20
(Note)
PST
SON SON SON
PC ST1 RS2
TL ST2 RS1
RES
EMG
LSP
LSN
SG
(Note)
PST
OPC
PG
PP
NG
NP
SD
(Note)
PST
TLA TC 12
P15R
LG
SD
(Note)
PST
T
COM COM 13
T CN1A
SP2 SP257
RES RES
EMG EMG
LSP
LSN
SG SG
CN1A
SD SD
VC VLA 2
TLA
P15R
P15R
LG
LG
SD
SD
CN1A
1
2
3
CN1B
CN1B
8
9
14
15
16
17
10,20
11
13
3
12
2
Case
CN1B
11
1
Case
4P15R P15R P15R
Approx.4.7k
Approx.4.7k
Approx.4.7k
Approx.4.7k
Approx.4.7k
Approx.4.7k
Approx.4.7k
Approx.4.7k
Approx.4.7k
Approx.100
Approx.100Ω
Ω
+15VDC
Approx.1.2k
Approx.1.2k
Ω
Ω
CNP2
U
2
V
7
W
8
1E
CNP2
B23
B19
(Note)
CN1A
CN1B
CN1A
PST
INP SA18
RD RD RD19
(Note)
PST
TLC TLC VLC6
ALM ALM ALM18
ZSP ZSP ZSP19
DO1 DO1
DO14
(Note)
PST
6
LA
LA
16
LAR
LAR
7
LB
LB
17
LBR
LBR
5
LZ
LZ
1514LZROPLZROPLZR
LG LG
1
E
LA
LAR
LB
LBR
LZ
OP
LG
Note. P: Position control mode, S: Speed control mode, T: Torque control mode
3 - 6
Page 32

3. SIGNALS AND WIRING
3.3 I/O Signals
3.3.1 Connectors and signal arrangements
POINT
The pin configurations of the connectors are as viewed from the cable
connector wiring section.
Refer to the next page for CN1A and CN1B signal assignment.
(1) Signal arrangement
CN1A CN1B
10
1
2
3
4
5
6
7
8
9
11
12
13
14
15
16
17
18
19
20
CNP1
51
RDP P24M
62
RDN P24G
73
SDP P24L
84
SDN TRE
CNP3
1
3
SD
LG
2
4
TXD
RXD
MITSUBISHI
MELSERVO
CNP1
CNP2
CNP3
The connector frames are
connected with the E (earth)
terminal inside the servo amplifier.
6
MR MRR
5
P5 LG
SD
3
B2 B1
2
UW
1
EV
1
2
3
4
5
6
7
8
9
10
CNP2
12
11
104
9
8
7
11
12
13
14
15
16
17
18
19
20
3 - 7
Page 33

3. SIGNALS AND WIRING
(2) CN1A and CN1B signal assignment
The signal assignment of connector changes with the control mode as indicated below;
(Note2)
Connector Pin No.
(Note1)
I/O
P P/S S S/T T T/P
1 LGLGLGLGLGLG
2 I NP NP/
3 I PP PP/
4 P15R P15R/P15R P15R P15R P15R P15R
5 0 LZ LZ LZ LZ LZ LZ
6 0 LA LA LA LA LA LA
7 0 LB LB LB LB LB LB
8I CRCR/SP1
9 COM COM COM COM COM COM
CN1A
10 SG SG SG SG SG
11 OPC OPC/ /OPC
12 I NG NG/ /NG
13 I PG PG/ /PG
140 OPOPOPOPOPOP
15 0 LZR LZR LZR LZR LZR LZR
16 0 LAR LAR LAR LAR LAR LAR
17 0 LBR LBR LBR LBR LBR LBR
18 0 INP INP/SA SA SA/ /INP No.49
190 RDRDRDRDRDRDNo.49
20 SG SG SG SG SG SG
1 LGLGLGLGLGLG
2I /VC VC VC/VLA VLA VLA/
3 VDD VDD VDD VDD VDD VDD
(Note3,4)
4 0 DO1 DO1 DO1 DO1 DO1 DO1
(Note3)
5 I SON SON SON SON SON SON No.43 to 48
(Note3)
6 0 TLC TLC TLC TLC/VLC VLC VLC/TLC No.49
(Note3)
7 I LOP SP2 LOP SP2 LOP No.43 to 48
(Note3)
8 I PC PC/ST1
(Note3)
9 I TL TL/ST2
10 SG SG SG SG SG SG
CN1B
11 P15R P15R P15R P15R P15R P15R
12 I TLA
(Note6)
TLA/TLA
13 COM COM COM COM COM COM
14 I RES RES RES RES RES RES No.43 to 48
15 I EMG EMG EMG EMG EMG EMG
16 I LSP LSP LSP LSP/
17 I LSN LSN LSN LSN/
18 0 ALM ALM ALM ALM ALM ALM No.49
19 0 ZSP ZSP ZSP ZSP ZSP ZSP No.1,49
20 SG SG SG SG SG SG
Note 1. I: Input signal, O: Output signal, -: Others (e. g. power)
2. P: Position control mode, S: Speed control mode, T: Torque control mode, P/S: Position/speed control
change mode, S/T: Speed/torque control change mode, T/P: Torque/position control change mode
3. The signal of CN1A-18 is always output. However, this pin may not be used when assigning alarm
codes to CN1A-18.
I/O Signals in Control Modes
(Note3)
SP1 SP1/SP1
(Note4)
ST1 ST1/RS2
(Note5)
ST2 ST2/RS1
TLA
(
Note6)
TLA/TC
(Note3)
(Note4)
(Note5)
/NP
/PP
SP1 SP 1/CR No.43 to 48
RS2 RS2/PC No.43 to 48
RS1 RS1/TL No.43 to 48
TC TC/TLA
/LSP
/LSN
Related
parameter
3 - 8
Page 34

3. SIGNALS AND WIRING
(3) Symbols and signal names
Symbol Signal Name Symbol Signal Name
SON Servo on TLC Limiting torque
LSP Forward rotation stroke end VLC Limiting speed
LSN Reverse rotation stroke end RD Ready
CR Clear ZSP Zero speed
SP1 Speed selection 1 INP In position
SP2 Speed selection 2 SA Speed reached
PC Proportion control ALM Trouble
ST1 Forward rotation start WNG Warning
ST2 Reverse rotation start OP Encoder Z-phase pulse (open collector)
TL Torque limit selection MBR Electromagnetic brake interlock
RES Reset LZ
EMG Forced stop LZR
LOP Control change LA
VC Analog speed command LAR
VLA Analog speed limit LB
TLA Analog torque limit LBR
TC Analog torque command VDD I/F internal power supply
RS1 Forward rotation selection COM Digital I/F power supply input
RS2 Reverse rotation selection OPC Open collector power input
PP SG Digital I/F common
NP P15R DC15V power supply
PG LG Control common
NG
Forward/reverse rotation pulse train
SD Shield
Encoder Z-phase pulse
(differential line driver)
Encoder A-phase pulse
(differential line driver)
Encoder B-phase pulse
(differential line driver)
3 - 9
Page 35

3. SIGNALS AND WIRING
3.3.2 Signal explanations
For the I/O interfaces (symbols in I/O column in the table), refer to Section 3.6.2.
In the Control Mode field of the table
P : Position control mode, S: Speed control mode, T: Torque control mode
{ : Denotes that the signal may be used in the initial setting status.
∆
: Denotes that the signal may be used by setting the corresponding parameter among parameters 43 to
49.
The pin No.s in the connector pin No. column are those in the initial status.
(1) Input signals
Connec-
Signal Symbol
Servo-on SON CN1B5Ready signal input terminal.
Reset RES CN1B14Alarm reset signal input terminal.
Forward rotation
stroke end
Reverse rotation
stroke end
LSP CN1B
LSN CN1B
tor Pin
No.
16
17
Functions/Applications
Connect SON-SG to switch on the base circuit and make the servo
amplifier ready to operate (servo on).
Disconnect SON-SG to shut off the base circuit and coast the
servo motor (servo off) .
Set1 in parameter No. 41 to switch this signal on
(keep terminals connected) automatically in the servo
amplifier.
Disconnect RES-SG for more than 50ms to reset the alarm.
Some alarms cannot be deactivated by the reset signal. Refer to
Section 9.2.
Turning RES on in an alarm-free status shuts off the base circuit.
Forward/reverse rotation stroke end signal input terminals.
To start operation, short LSP-SG and/or LSN-SG. Open them to
bring the motor to a sudden stop and make it servo-locked.
Set1 in parameter No. 22 to make a slow stop.
(Note) Input signals Operation
LSP LSN
11{{
01 {
10{
00
Note. 0: OFF (LSP/LSN-SG open)
1: ON (LSP/LSN-SG shorted)
Set parameter No. 41 as indicated below to switch on the signals
(keep terminals connected) automatically in the servo amplifier:
Parameter No.41 Automatic ON
1 LSP
1 LSN
CCW
directionCWdirection
I/O
Division
DI-1
DI-1
DI-1
Control
Mode
PST
{{{
{{{
{{
3 - 10
Page 36

3. SIGNALS AND WIRING
Connec-
Signal Symbol
Torque limit TL CN1B9Torque limit selection input device.
Forward rotation
start
Reverse rotation
start
Forward rotation
selection
Reverse rotation
selection
ST1 CN1B
ST2 CN1B
RS1 CN1B
RS2 CN1B
tor Pin
No.
8
9
9
8
Functions/Applications
Short TL-SG to make the analog torque limit valid.
For details, refer to (2), section 3.4.1.
Used to start the servo motor in any of the following directions:
(Note) Input signals
ST2 ST1
0 0 Stop (servo lock)
0 1 CCW
10 CW
1 1 Stop (servo lock)
Note. 0: OFF (ST1/ST2-SG open)
1: ON (ST1/ST2-SG shorted)
If both ST1 and ST2 are switched on or off during operation, the
servo motor will be decelerated to a stop according to the
parameter No. 12 setting and servo-locked.
Used to select any of the following servo motor torque generation
directions:
(Note) Input signals
RS2 RS1
00
01
10
11
Note. 0: OFF (RS1/RS2-SG open)
1: ON (RS1/RS2-SG shorted)
Servo Motor Starting Direction
Torque Generation
Direction
Torque is not
generated
Forward rotation in
driving mode / reverse
rotation in
regenerative mode
Reverse rotation in
driving mode /
forward rotation in
regenerative mode
Torqueis not
generated
Rotation Direction
Stop
CCW
CW
Stop
I/O
Division
DI-1
DI-1
DI-1
Control
Mode
PST
{ ∆
{
{
3 - 11
Page 37

3. SIGNALS AND WIRING
Connec-
Signal Symbol
Speed selection 1 SP1 CN1A
Speed selection 2 SP2 CN1B
tor Pin
No.
8
7
Functions/Applications
<Speed control mode>
Used to select the command speed for operation.
(Note) Input signals
SP2 SP1
0 0 Analog speed command (VC)
01
10
11
Note. 0: OFF (SP1/SP2-SG open)
1: ON (SP1/SP2-SG shorted)
<Torque control mode>
Used to select the limit speed for operation.
(Note) Input signals
SP2 SP1
0 0 Analog speed limit (VLA)
0 1 Internal speed limit 1 (parameter No. 8)
1 0 Internal speed limit 2 (parameter No. 9)
1 1 Internal speed limit 3 (parameter No. 10)
Note. 0: OFF (SP1/SP2-SG open)
1: ON (SP1/SP2-SG shorted)
<Position/speed, speed/torque, torque/position control change mode>
Internal speed command 1
(parameter No. 8)
Internal speed command 2
(parameter No. 9)
Internal speed command 3
(parameter No. 10)
Speed Command
Speed Limit
I/O
Division
DI-1
Control
Mode
PST
{{
As CN1B-7 acts as a control change signal, the speed
selected when the speed or torque control mode is selected is as
follows:
x When speed control mode is selected
(Note)
SP1
Analog speed command (VC)
0
Internal speed command 1 (parameter No. 8)
1
Note. 0: OFF (SP1-SG open)
1: ON (SP1-SG shorted)
x When torque control mode is selected
(Note)
SP1
Analog speed limit (VLA)
0
Internal speed limit 1 (parameter No. 8)
1
Note. 0: OFF (SP1-SG open)
1: ON (SP1-SG shorted)
Speed Command
Speed Limit
3 - 12
Page 38

3. SIGNALS AND WIRING
Connec-
Signal Symbol
Proportion
control
Forced stop EMG CN1B15Disconnect EMG-SG to bring the servo motor to a forced stop
Clear CR CN1A8Connect CR-SG to clear the position control counter droop pulses
Control change LOP CN1B
tor Pin
No.
PC CN1B8Connect PC-SG to switch the speed amplifier from the
proportional integral type to the proportional type.
If the servo motor at a stop is rotated even one pulse due to any
external factor, it generates torque to compensate for a position
shift. When the servo motor shaft is to be locked mechanically
after positioning completion (stop), switching on the proportion
control signal (PC) upon positioning completion will suppress the
unnecessary torque generated to compensate for a position shift.
When the shaft is to be locked for a long time, switch on the
proportion control signal and torque control signal (TL) at the
same time to make the torque less than the rated by the analog
torque limit.
state, in which the servo is switched off and the dynamic brake is
operated.
Connect EMG-SG in the forced stop state to reset that state.
on the leading edge of the signal. The pulse width should be 10ms
or more.
When the parameter No. 42 setting is 1, the pulses are
always cleared while CR-SG are connected.
<Position/speed control change mode>
Used to select the control mode in the position/speed control
7
change mode.
Functions/Applications
I/O
Division
DI-1
DI-1
DI-1
DI-1
Control
Mode
PST
{ ∆
{{{
{
(Note) LOP Control Mode
0 Position
1 Speed
Note. 0: OFF (LOP-SG open)
1: ON (LOP-SG shorted)
<Speed/torque control change mode>
Used to select the control mode in the speed/torque control change
mode.
(Note) LOP Control Mode
0 Speed
1Torque
Note. 0: OFF (LOP-SG open)
1: ON (LOP-SG shorted)
<Torque/position control mode>
Used to select the control mode in the torque/position control
change mode.
(Note) LOP Control Mode
0Torque
1 Position
Note. 0: OFF (LOP-SG open)
1: ON (LOP-SG shorted)
Refer to
Functions/
Appli-
cations.
3 - 13
Page 39

3. SIGNALS AND WIRING
Signal Symbol
Analog torque
limit
Analog torque
command
Analog speed
command
Analog speed
limit
Forward rotation
pulse train
Reverse rotation
pulse train
Connec-
tor Pin
No.
TLA To use this signal in the speed control mode, set any of
TC
VC Apply 0 to ±10VDC across VC-LG. Speed set in parameter No. 25
VLA
PP
NP
PG
NG
CN1B
12
CN1B
2
CN1A
3
CN1A
2
CN1A
13
CN1A
12
parameters No. 43 to 48 to make TL available.
When the analog torque limit (TLA) is valid, torque is limited in
the full servo motor output torque range. Apply 0 to +10 VDC
across TLA-LG. Connect the positive terminal of the power supply
to TLA. Maximum torque is generated at +10 V. (Refer to (2) in
Section 3.4.1.)
Used to control torque in the full servo motor output torque
range.
Apply 0 to ±8VDC across TC-LG. Maximum torque is generated at
±8V. (Refer to (1) in Section 3.4.3.)
The torque generated at ±8V input can be changed using
parameter No. 26.
is provided at ±10V. (Refer to (1) in Section 3.4.2.)
Apply 0 to ±10VDC across VLA-LG. Speed set in parameter No.
25 is provided at ±10V. (Refer to (3) in Section 3.4.3.)
Used to enter a command pulse train.
x In the open collector system (max. input frequency
200kpps):
Forward rotation pulse train across PP-SG
Reverse rotation pulse train across NP-SG
x In the differential receiver system (max. input frequency
500kpps):
Forward rotation pulse train across PG-PP
Reverse rotation pulse train across NG-NP
The command pulse train form can be changed using
parameter No. 21.
Functions/Applications
I/O
Division
Analog
input
Analog
input
Analog
input
Analog
input
DI−2
Control
Mode
PST
{ ∆
{
{
{
{
3 - 14
Page 40

3. SIGNALS AND WIRING
(2) Output signals
Connec-
Signal Symbol
Trouble ALM CN1B18ALM-SG are disconnected when power is switched off or the
Ready RD CN1A19RD-SG are connected when the servo is switched on and the servo
In position INP INP-SG are connected when the number of droop pulses is in the
Speed reached SA
Limiting speed VLC CN1B6VLC-SG are connected when speed reaches the value set to any of
Limiting torque TLC CN1B6TLC-SG are connected when the torque generated reaches the
Zero speed ZSP CN1B19ZSP-SG are connected when the servo motor speed is zero speed
Electromagnetic
brake interlock
Warning WNG To use this signal, assign the connector pin for output using
MBR
tor Pin
No.
CN1A
18
CN1B
19
Functions/Applications
protective circuit is activated to shut off the base circuit. Without
alarm, ALM-SG are connected within about 1s after power on.
amplifier is ready to operate.
preset in-position range. The in-position range can be changed
using parameter No. 5.
When the in-position range is increased, INP-SG may be kept
connected during low-speed rotation.
SA turns off when servo on (SON) turns off or the servomotor
speed has not reached the preset speed with both forward rotation
start (ST1) and reverse rotation start (ST2) turned off. SA turns
on when the servomotor speed has nearly reached the preset
speed. When the preset speed is 20r/min or less, SA always turns
on.
the internal speed limits 1 to 3 (parameters No. 8 to 10) or the
analog speed limit (VLA) in the torque control mode. They are
disconnected when the servo-on signal (SON) switches off.
value set to the internal torque limit 1 (parameter No. 28) or
analog torque limit (TLA). They are disconnected when the servoon signal (SON) switches off.
(50r/min) or less. Zero speed can be changed using parameter No.
24.
Set1 in parameter No. 1 to use this parameter. Note that
ZSP will be unusable.
In the servo-off or alarm status, MBR-SG are disconnected.
When an alarm occurs, they are disconnected independently of
the base circuit status.
parameter No. 49. The old signal before assignment will be
unusable.
When warning has occurred, WNG-SG are connected.
When there is no warning, WNG-SG are disconnected within
about 1s after power-on.
I/O
Division
DO−1
DO−1
DO−1
DO−1
DO−1
DO−1
DO−1
DO−1
DO−1
Control
Mode
PST
{{{
{{{
{
{
{
{{
{{{
∆∆∆
∆∆∆
3 - 15
Page 41

3. SIGNALS AND WIRING
Signal Symbol
Alarm code ACD0
ACD1
ACD2
Connec-
tor Pin
No.
CN1A
19
CN1A
18
CN1B
19
Functions/Applications
To use this signal, set 1 in parameter No. 49.
This signal is output when an alarm occurs. When there is no
alarm, respective ordinary signals (RD, INP, SA, ZSP) are output.
Alarm codes and alarm names are listed below:
(Note) Alarm Code
CN1B
CN1A
CN1A
19 Pin
18 Pin
19 Pin
000
0 0 1 A. 33 Overvoltage
010A. 10Undervoltage
011
100
101
110
Note. 0: OFF (Pin-SG open)
1: ON (Pin-SG shorted)
Alarm
Display
8888 Watchdog
A. 11 Board error 1
A. 12 Memory error 1
A. 13 Clock error
A. 15 Memory error 2
A. 17 Board error 2
A. 18 Board error 3
A. 37 Parameter error
A. 8E RS-232C error
A. 50 Overload 1
A. 51 Overload 2
A. 24 Motor output ground fault
A. 32 Overcurrent
A. 31 Overspeed
Command pulse frequency
A. 35
alarm
A. 52 Error excessive
A. 16 Encoder error 1
A. 20 Encoder error 2
Name
I/O
Division
DO−1
Control
Mode
PST
∆∆∆
3 - 16
Page 42

3. SIGNALS AND WIRING
Signal Symbol
Encoder Z-phase
pulse
(Open collector)
Encoder A-phase
pulse
(Differential line
driver)
Encoder B-phase
pulse
(Differential line
driver)
Encoder Z-phase
pulse
(Differential line
driver)
Connec-
tor Pin
No.
OP CN1A14Outputs the zero-point signal of the encoder. One pulse is output
per servo motor revolution. OP and LG are connected when the
zero-point position is reached. ( Negative logic)
The maximum pulse width is about 400µs. For zeroing using this
pulse, set the creep speed to 100r/min. or less.
LA
LAR
LB
LBR
LZ
LZR
CN1A
CN1A
CN1A
CN1A
CN1A
CN1A
Outputs pulses per servo motor revolution set in parameter No.
27 in the differential line driver system. The encoder B-phase
6
pulse lags the encoder A-phase pulse by a phase angle of π/2.
16
7
17
The same signal as OP is output in the differential line driver
system.
5
15
Functions/Applications
I/O
Division
DO−2
DO−2
DO−2
Control
Mode
PST
{{{
{{{
{{{
3 - 17
Page 43

3. SIGNALS AND WIRING
(3) Power supply
Connec-
Signal Symbol
I/F internal
power supply
Digital I/F power
supply input
Open collector
power input
Digital I/F
common
DC15V power
supply
Control common LG CN1A
Shield SD Plate Connect the external conductor of the shield cable. {{{
VDD CN1B3Used to output 24VDC for input interface.
COM CN1A
OPC CN1A11When inputting a pulse train in the open collector system, supply
P15R CN1A
tor Pin
No.
9
CN1B
13
SG CN1A
10
20
CN1B
10
20
4
CN1B
11
1
CN1B
1
CN3
1
3
5
11
13
15
Functions/Applications
Connected with P24L inside the servo amplifier.
Used to input 24VDC for input interface.
Connect the positive terminal of the 24VDC external power
supply.
24VDC±10%
this terminal with the positive (+) power of 24VDC.
Common terminal for input signals such as SON and EMG. Pins
are connected internally.
Internally connected with LG.
Outputs 15VDC to across P15R-LG. Available as power for TC,
TLA, VC, VLA.
Permissible current: 30mA
Common terminal for TLA, TC, VC, VLA, FPA, FPB, OP and
P15R.
Pins are connected internally.
I/O
Division
Control
Mode
PST
{{{
{{{
{{{
{{{
{{{
{{{
3 - 18
Page 44

3. SIGNALS AND WIRING
3.4 Detailed Description of the Signals
3.4.1 Position control mode
(1) Pulse train input
(a) Input pulse waveform selection
Command pulses may be input in any of three different forms, for which positive or negative logic
can be chosen. Set the command pulse train form in parameter No. 21.
Arrow
A- and B-phase pulse trains are imported after they have been multiplied by 4.
Pulse Train Form Forward Rotation Reverse Rotation
Forward rotation
pulse train
Reverse rotation
pulse train
or in the table indicates the timing of importing a pulse train.
PP
NP
PP
Parameter No. 21
(Command pulse train)
0010
Pulse train + sign
Negative logic
A-phase pulse train
B-phase pulse train
Forward rotation
pulse train
Reverse rotation
pulse train
Pulse train + sign
Positive logic
A-phase pulse train
B-phase pulse train
NP
PP
NP
PP
NP
PP
NP
PP
NP
0011
L
H
H
0012
0000
0001
L
0002
3 - 19
Page 45

3. SIGNALS AND WIRING
(b) Connections and waveforms
1) Open collector system
Connect as shown below:
The explanation assumes that the input waveform has been set to the negative logic and forward
and reverse rotation pulse trains (parameter No.21 has been set to 0010). The waveforms in the
table in (a), (1) of this section are voltage waveforms of PP and NP based on SG. Their
relationships with transistor ON/OFF are as follows:
Forward rotation
pulse train
(transistor)
Servo amplifier
24VDC
(ON)(OFF)
(ON)(OFF)
P24G
P24L
VDD
OPC
PP
NP
SG
SD
About 2k
About 2k
Ω
Ω
(OFF)
Reverse rotation
pulse train
(transistor)
(ON) (OFF) (ON) (OFF) (ON)(OFF)
3 - 20
Page 46

3. SIGNALS AND WIRING
2) Differential line driver system
Connect as shown below:
The explanation assumes that the input waveform has been set to the negative logic and forward
and reverse rotation pulse trains (parameter No.21 has been set to 0010).
For the differential line driver, the waveforms in the table in (a), (1) of this section are as follows.
The waveforms of PP, PG, NP and NG are based on that of the ground of the differential line
driver.
Servo amplifier
PP
PG
NP
NG
SD
Forward rotation
pulse train
PP
PG
Reverse rotation
pulse train
NP
NG
3 - 21
Page 47

3. SIGNALS AND WIRING
(2) Torque limit
CAUTION
If the torque limit is canceled during servo lock, the servomotor may suddenly
rotate according to position deviation in respect to the command position.
(a) Torque limit and generated torque
By setting parameter No. 28 (internal torque limit 1), torque is always limited to the maximum
value during operation. A relationship between the limit value and servo motor-generated torque is
shown below.
Max. torque
Generated torque
0
0100
Torque limit value [%]
A relationship between the applied voltage of the analog torque limit (TLA) and the torque limit
value of the servo motor is shown below. Generated torque limit values will vary about 5% relative
to the voltage depending on products.
At the voltage of less than 0.05V, generated torque may vary as it may not be limited sufficiently.
Therefore, use this function at the voltage of 0.05V or more.
100
±5%
Torque limit value [%]
0
010
0.05
TLA application voltage [V]
TLA application voltage vs.
torque limit value
2kΩ
Japan Resistor
RRS10 or equivalent
2kΩ
Servo amplifier
TL
SG
P15R
TLA
LG
SD
3 - 22
Page 48

3. SIGNALS AND WIRING
(b) Torque limit value selection
Choose the torque limit made valid by the internal torque limit value 1 (parameter No. 28) using the
external torque limit selection (TL) or the torque limit made valid by the analog torque limit (TLA)
as indicated below:
(Note) TL
0
1
Note. 0: TLA-SG off (open)
1: TLA-SG on (short)
If TLA > Parameter No. 28 If TLA < Parameter No. 28
Internal torque limit value 1
(parameter No. 28)
(c) Limiting torque (TLC)
TLC-SG are connected when the torque generated by the servo motor reaches the torque set to
internal torque limit value 1 or analog torque limit.
(3) In-position (INP)
PF-SG are connected when the number of droop pulses in the deviation counter falls within the preset
in-position range (parameter No. 5). INP-SG may remain connected when low-speed operation is
performed with a large value set as the in-position range.
Servo-on (SON)
ON
OFF
Torque Limit Value Made Valid
Internal torque limit value 1
(parameter No. 28)
Analog torque limit (TLA)
(4) Ready (RD)
Alarm
Droop pulses
In position (INP)
Servo-on (SON)
Alarm
Ready (RD)
Yes
No
ON
OFF
ON
OFF
Yes
No
ON
OFF
In-position range
80ms or less 10ms or less 10ms or less
3 - 23
Page 49

3. SIGNALS AND WIRING
3.4.2 Speed control mode
(1) Speed setting
(a) Speed command and speed
The servo motor is run at the speeds set in the parameters or at the speed set in the applied voltage
of the analog speed command (VC). A relationship between the analog speed command (VC) applied
voltage and the servo motor speed is shown below:
Speed [r/min]
−
CW direction
10
Rated speed [r/min]
CCW direction
0
10
+
VC applied voltage [V]
Rated speed
Forward rotation (CCW)
Reverse rotation (CW)
The following table indicates the rotation direction according to forward rotation start (ST1) and
reverse rotation start (ST2) combination:
(Note 1) External Input Signals (Note 2)Rotation Direction
ST2 ST1
00
01 CCW CW CCW
10 CW
11
Note 1. 0: ST1/ST2-SG off (open)
1: ST1/ST2-SG on (short)
2. If the torque limit is canceled during servo lock, the servomotor may suddenly rotate according to position
deviation in respect to the command position.
+ Polarity 0V − Polarity
Stop
(Servo lock)
Stop
(Servo lock)
Analog Speed Command (VC)
Stop
(Servo lock)
Stop
(No servo lock)
Stop
(Servo lock)
Stop
(Servo lock)
CCW CW
Stop
(Servo lock)
Internal Speed
Commands
Stop
(Servo lock)
Stop
(Servo lock)
Generally, make connection as shown below:
Servo amplifier
2kΩ
Japan Resistor
RRS10 or equivalent
2kΩ
SP1
SP2
SG
P15R
VC
LG
SD
3 - 24
Page 50

3. SIGNALS AND WIRING
(b) Speed selection 1 (SP1), speed selection 2 (SP2) and speed command value
Choose any of the speed settings made by the internal speed commands 1 to 3 using speed selection
1 (SP1) and speed selection 2 (SP2) or the speed setting made by the analog speed command (VC).
(Note) External Input Signals
SP2 SP1
0 0 Analog speed command (VC)
0 1 Internal speed command 1 (parameter No. 8)
1 0 Internal speed command 2 (parameter No. 9)
1 1 Internal speed command 3 (parameter No. 10)
Note. 0: SP1/SP2-SG off (open)
1: SP1/SP2-SG on (short)
The speed may be changed during rotation. In this case, the values set in parameters No. 11 and 12
are used for acceleration/deceleration.
When the speed has been specified under any internal speed command, it does not vary due to the
ambient temperature.
(2) Speed reached (SA)
SA-SG are connected when the servo motor speed nearly reaches the speed set to the internal speed
command or analog speed command.
Set speed selection
Speed Command Value
Internal speed
Internal speed
command 1
command 2
(3) Torque limit
As in Section 3.4.1 (2).
Start (ST1,ST2)
Servo motor speed
Speed reached (SA)
ON
OFF
ON
OFF
3 - 25
Page 51

3. SIGNALS AND WIRING
3.4.3 Torque control mode
(1) Torque control
(a) Torque command and generated torque
A relationship between the applied voltage of the analog torque command (TC) and the torque
generated by the servo motor is shown below.
The maximum torque is generated at ±8V. Note that the torque generated at ±8V input can be
changed with parameter No. 26.
Max. torque
Generated torque
−8
−0.05
CW direction
CCW direction
+0.05 +8
TC applied voltage [V]
Max. torque (Note)
Forward rotation (CCW)
Reverse rotation (CW)
Generated torque limit values will vary about 5% relative to the voltage depending on products.
Generated torque may vary at the voltage of −0.05V to +0.05V.
The following table indicates the torque generation directions determined by the forward rotation
selection (RS1) and reverse rotation selection (RS2) when the analog torque command (TC) is used.
(Note) External Input Signals Rotation Direction
RS2 RS1
0 0 Torque is not generated Torque is not generated
CCW (reverse rotation in
01
10
1 1 Torque is not generated
Note. 0: RS1/RS2-SG off (open)
1: RS1/RS2-SG on (short)
driving mode/forward
rotation in regenerative
mode)
CW (forward rotation in
driving mode/reverse
rotation in regenerative
mode)
+ Polarity 0V − Polarity
Torque control Command (TC)
CW (forward rotation in
driving mode/reverse
rotation in regenerative
No torque
mode)
CCW (reverse rotation in
driving mode/forward
rotation in regenerative
mode)
Torque is not generated
Generally, make connection as shown below:
−8 to +8V
Servo amplifier
RS1
RS2
SG
TC
LG
SD
3 - 26
Page 52

3. SIGNALS AND WIRING
(b) Analog torque command offset
Using parameter No. 30, the offset voltage of -999 to +999mV can be added to the TC applied
voltage as shown below.
Max. torque
Parameter No.30 offset range
Generated torque
−999 to +999mV
0
TC applied voltage [V]
+8(−8)
(2) Torque limit
By setting parameter No. 28 (internal torque limit 1), torque is always limited to the maximum value
during operation. A relationship between limit value and servo motor-generated torque is as in (2) in
section 3.4.1. Note that the analog torque limit (TLA) is unavailable.
(3) Speed limit
(a) Speed limit value and speed
The speed is limited to the values set in parameters No. 8 to 10 (internal speed limits 1 to 3) or the
value set in the applied voltage of the analog speed limit (VLA).
A relationship between the analog speed limit (VLA) applied voltage and the servo motor speed is
shown below.
When the motor speed reaches the speed limit value, torque control may become unstable. Make the
set value more than 100r/min smaller than the desired speed limit value.
Speed [r/min]
CW direction
−10
Rated speed
CCW direction
0
10
+
VLA applied voltage [V]
Rated speed
Forward rotation (CCW)
Reverse rotation (CW)
The following table indicates the limit direction according to forward rotation selection (RS1) and
reverse rotation selection (RS2) combination:
(Note) External Input Signals Speed Limit Direction
RS1 RS2
10 CCW CW CCW
01 CW CCW CW
Note. 0: RS1/RS2-SG off (open)
1: RS1/RS2-SG on (short)
Analog Speed Limit (VLA)
+ Polarity − Polarity
Internal Speed
Commands
Generally, make connection as shown below:
Servo amplifier
SP1
SP2
SG
2kΩ
Japan Resistor
RRS10 or equivalent
2kΩ
P15R
VC
LG
SD
3 - 27
Page 53

3. SIGNALS AND WIRING
(b) Speed selection 1 (SP1)/speed selection 2 (SP2) and speed command values
Choose any of the speed settings made by the internal speed limits 1 to 3 using speed selection 1
(SP1) and speed selection 2 (SP2) or the speed setting made by the speed limit command (VLA).
(Note) External Input Signals
SP2 SP1
0 0 Speed limit command (VLA)
0 1 Parameter No. 8
1 0 Parameter No. 9
1 1 Parameter No. 10
Note. 0: SP1/SP2-SG off (open)
1: SP1/SP2-SG on (short)
Speed Command Value
When the internal speed commands 1 to 3 are used to command the speed, the speed does not vary
with the ambient temperature.
(c) Limiting speed (VLC)
VLC-SG are connected when the servo motor speed reaches the limit speed set to any of the internal
speed limits 1 to 3 or analog speed limit.
3 - 28
Page 54

3. SIGNALS AND WIRING
3.4.4 Position/speed control change mode
Set 0001 in parameter No. 0 to switch to the position/speed control change mode. This function is not
available in the absolute position detection system.
(1) Control change (LOP)
Use control change (LOP) to switch between the position control mode and the speed control mode from
an external contact. Relationships between LOP-SG status and control modes are indicated below:
(Note) LOP Servo Control Mode
0 Position control mode
1 Speed control mode
Note. 0: LOP-SG off (open)
1: LOP-SG on (short)
The control mode may be changed in the zero-speed status. To ensure safety, change control after the
servo motor has stopped. When position control mode is changed to speed control mode, droop pulses
are reset.
If the signal has been switched on-off at the speed higher than the zero speed and the speed is then
reduced to the zero speed or less, the control mode cannot be changed. A change timing chart is shown
below:
Position
control mode
Speed
control mode
Position
control mode
Zero speed
Servo motor speed
Zero speed (ZSP)
Control change (LOP)
Note: When ZSP is not on, control cannot be changed if LOP is switched on-off.
If ZSP switches on after that, control cannot not be changed.
level
ON
OFF
ON
OFF
(2) Torque limit in position control mode
As in Section 3.4.1 (2).
(Note)
(Note)
3 - 29
Page 55

3. SIGNALS AND WIRING
(3) Speed setting in speed control mode
(a) Speed command and speed
The servo motor is run at the speed set in parameter No. 8 (internal speed command 1) or at the
speed set in the applied voltage of the analog speed command (VC). A relationship between analog
speed command (VC) applied voltage and servo motor speed and the rotation directions determined
by the forward rotation start signal (ST1) and reverse rotation start signal (ST2) are as in (a), (1) in
section 3.4.2.
Generally, make connection as shown below:
2k
Japan resistor
RRS10 or equivalent
When a precision speed command is required, refer to (a), (1) in section 3.4.2
(b) Speed selection 1 (SP1) and speed command value
Use speed selection 1 (SP1) to select between the speed set by the internal speed command 1 and
the speed set by the analog speed command (VC) as indicated in the following table:
(Note) External Input Signals
SP1
0 Analog speed command (VC)
1 Internal speed command 1 (parameter No. 8)
Note. 0: SP1-SG off (open)
1: SP1-SG on (short)
2k
Speed Command Value
Servo amplifier
SP1
SG
P15R
VC
LG
SD
By making speed selection 2 (SP2) usable by setting of parameter No. 43 to 48, you can choose the
speed command values of analog speed command (VC) and internal speed commands 1 to 3.
(Note) External input signals
SP2 SP1
0 0 Analog speed command (VC)
0 1 Internal speed command 1 (parameter No. 8)
1 0 Internal speed command 2 (parameter No. 9)
1 1 Internal speed command 3 (parameter No. 10)
Note. 0: SP/1SP2-SG off(open)
1: SP/1SP2-SG on(short)
Speed command value
The speed may also be changed during rotation. In this case, it is increased or decreased according
to the value set in parameter No. 11 or 12.
When the internal speed command 1 is used to command the speed, the speed does not vary with
the ambient temperature.
(c) Speed reached (SA)
As in Section 3.4.2 (2).
3 - 30
Page 56

3. SIGNALS AND WIRING
3.4.5 Speed/torque control change mode
Set 0003 in parameter No. 0 to switch to the speed/torque control change mode.
(1) Control change (LOP)
Use control change (LOP) to switch between the speed control mode and the torque control mode from
an external contact. Relationships between LOP-SG status and control modes are indicated below:
(Note) LOP Servo Control Mode
0 Speed control mode
1 Torque control mode
Note. 0: LOP-SG off (open)
1: LOP-SG on (short)
The control mode may be changed at any time. A change timing chart is shown below:
Torque
control mode
Load torque
Forward rotation in driving mode
Speed
control mode
(Note)
Servo motor speed
Analog torque
command (TC)
Control change (LOP)
Speed
control mode
10V
0
ON
OFF
Note: When the start signal (ST1 x ST2) is switched off as soon as the mode is changed to speed control,
the servo motor comes to a stop according to the deceleration time constant.
(2) Speed setting in speed control mode
As in Section 3.4.2 (1).
(3) Torque limit in speed control mode
As in Section 3.4.1 (2).
3 - 31
Page 57

3. SIGNALS AND WIRING
(4) Speed limit in torque control mode
(a) Speed limit value and speed
The speed is limited to the limit value set in parameter No. 8 (internal speed limit 1) or the value set
in the applied voltage of the analog speed limit (VLA). A relationship between the analog speed limit
(VLA) applied voltage and the servo motor speed is as in (a), (3) in section 3.4.3.
Generally, make connection as shown below:
2kΩ
Japan Resistor
RRS10 or equivalent
When a precision speed command is required, refer to (a), (3) in section 3.4.3.
(b) Speed selection 1 (SP1) and speed limit value
Use speed selection 1 (SP1) to select between the speed set by the internal speed command 1 and
the speed set by the analog speed limit (VLA) as indicated in the following table:
(Note) External Input Signals
SP1
0 Analog speed limit (VLA)
1 Internal speed limit 1 (parameter No. 8)
Note. 0: SP1-SG off (open)
1: SP1-SG on (short)
Speed Command Value
2k
Servo amplifier
SP1
SG
Ω
P15R
VLA
LG
SD
When the internal speed limit 1 is used to command the speed, the speed does not vary with the
ambient temperature.
(c) Limiting speed (VLC)
As in (c), (3) in section 3.4.3.
(5) Torque control in torque control mode
As in Section 3.4.3 (1).
(6) Torque limit in torque control mode
As in Section 3.4.3 (2).
3 - 32
Page 58

3. SIGNALS AND WIRING
3.4.6 Torque/position control change mode
Set 0005 in parameter No. 0 to switch to the torque/position control change mode.
(1) Control change (LOP)
Use control change (LOP) to switch between the torque control mode and the position control mode
from an external contact. Relationships between LOP-SG status and control modes are indicated below:
(Note) LOP Servo Control Mode
0 Torque control mode
1 Position control mode
Note. 0: LOP-SG off (open)
1: LOP-SG on (short)
The control mode may be changed in the zero-speed status.
To ensure safety, change control after the servo motor has stopped. When position control mode is
changed to torque control mode, droop pulses are reset.
If the signal has been switched on-off at the speed higher than the zero speed and the speed is then
reduced to the zero speed or less, the control mode cannot be changed. A change timing chart is shown
below:
Speed
control mode
Torque
control mode
Speed
control mode
Servo motor speed
Analog torque
command (TLA)
Zero speed (ZSP)
Control change (LOP)
(2) Speed limit in torque control mode
As in Section 3.4.3 (3).
(3) Torque control in torque control mode
As in Section 3.4.3 (1).
(4) Torque limit in torque control mode
As in Section 3.4.3 (2).
Zero speed
level
10V
0V
ON
OFF
ON
OFF
(5) Torque limit in position control mode
As in Section 3.4.1 (2).
3 - 33
Page 59

3. SIGNALS AND WIRING
3.5 Alarm Occurrence Timing Chart
y
When an alarm has occurred, remove its cause, make sure that the operation
signal is not being input, ensure safety, and reset the alarm before restarting
CAUTION
When an alarm occurs in the servo amplifier, the base circuit is shut off and the servo motor is coated to a
stop. Switch off the main circuit power supply in the external sequence. To reset the alarm, switch the
control circuit power supply off, then on.
However, the alarm cannot be reset unless its cause of occurrence is removed.
(Note 3)
Main circuit
control circuit
power supply
Base circuit
(Note 1)
Dynamic brake
Servo-on
(SON)
Ready
(RD)
Trouble
(ALM)
Reset
(RES)
operation.
y
As soon as an alarm occurs, turn off Servo-on (SON) and power off the main
circuit.
ON
OFF
ON
OFF
Valid
Invalid
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Brake operation
Alarm occurs.
Remove cause of trouble.
50ms or more
Power off
Brake operation
15 to 40ms (Note 2)
Power on
Note 1. At an occurrence of the overcurrent(A.32) alarm and a power failure of the control circuit power supply 40ms or more,
the dynamic brake cannot be operated.
2. Changes depending on the operating status.
3. Shut off the main circuit power as soon as an alarm occurs.
(1) Overcurrent, overload 1 or overload 2
If operation is repeated by switching control circuit power off, then on to reset the overcurrent (A.
32), overload 1 (A. 50) or overload 2 (A. 51) alarm after its occurrence, without removing its cause,
the servo amplifier and servo motor may become faulty due to temperature rise. Securely remove
the cause of the alarm and also allow about 15 minutes for cooling before resuming operation.
(2) Instantaneous power failure
Undervoltage (A.10) occurs when the input power is in either of the following statuses.
A power failure of the control circuit power supply continues for 40ms or longer and the control
circuit is not completely off.
The bus voltage dropped to 15VDC.
(3) Position control mode
When an alarm occurs, the home position is lost. When resuming operation after deactivating the
alarm, make a return to home position.
3 - 34
Page 60

3. SIGNALS AND WIRING
3.6 Interfaces
3.6.1 Common line
The following diagram shows the power supply and its common line.
DI-1
(Note)
Analog input
(+10V/max. current)
DC24V
CNP1
CN1A
CN1B
P24G
P24L
VDD
COM
SON etc.
SG
OPC
PG NG
PP NP
SG
15VDC±10% 30mA
P15R
TLA
VC etc.
LG
SD
ALM etc.
LAR etc.
OP
LG
LA etc.
LG
SD
RDP
RDN
SDP
SDN
P24C
RA
CN1A
CN1B
DO-1
Open collector
output
35mA or less
CNP1
Differential line
driver output
35mA or less
MR
MRR
Servo motor
M
Note. For the open collector pulse train input. Make the following connection for the differential line driver pulse train input:
Earth
ECNP2
OPC
SD
CNP2
Servo motor encoder
PGxNG
PPxNP
SG
3 - 35
Page 61

3. SIGNALS AND WIRING
3.6.2 Detailed description of the interfaces
This section gives the details of the I/O signal interfaces (refer to I/O Division in the table) indicated in
Section 3.3.2.
Refer to this section and connect the interfaces with the external equipment.
(1) Digital input interface DI-1
Give a signal with a relay or open collector transistor.
24VDC
Servo amplifier
P24G
P24L
For a transistor
Approx. 5mA
TR
V
1.0V
CES
≤
CEO
I
≤100µA
VDD
COM
SON
etc.
Switch
SG
R:Approx. 4.7kΩ
(2) Digital output interface DO-1
A lamp, relay or photocoupler can be driven. Provide a diode (D) for an inductive load, or an inrush
current suppressing resister (R) for a lamp load. (Permissible current: 40mA or less, inrush current:
100mA or less)
24VDC
Servo amplifier
P24G
P24L
VDD
COM
24VDC
ALM,etc.
SG
3 - 36
Load
If the diode is not
connected as shown,
the servo amplifier
will be damaged.
Page 62

3. SIGNALS AND WIRING
(3) Pulse train input interface DI-2
Provide a pulse train signal in the open collector or differential line driver system.
(a) Open collector system
1) Interface
24VDC
2m(78.74in) or less
Servo amplifier
P24G
P24L
VDD
OPC
PP(NP)
Approx. 10mA
SG
SD
Max. input pulse
frequency 200kpps
Approx. 1.2k
Ω
2) Conditions of the input pulse
0.9
PP
0.1
NP
tc
tc tLH
tHL
tLH = tHL < 0.2µs
tc > 2µs
tF > 3µs
tF
3 - 37
Page 63

3. SIGNALS AND WIRING
(b) Differential line driver system
1) Interface
10m (393.70in) or less
Servo amplifier
Max. input pulse
frequency 500kpps
PP(NP)
2) Conditions of the input pulse
(4) Encoder pulse output DO-2
(a) Open collector system
Interface
Max. output current 35mA
Servo amplifier
Am26LS31 or equivalent
PP PG
NP NG
0.9
0.1
tc tLH
PG(NG)
SD
tHL
tc
About 100
tLH tHL 0.1 s
tc 1 s
tF 3 s
tF
Servo amplifier
5 to 24VDC
OP
LG
SD
OP
LG
SD
Photocoupler
3 - 38
Page 64

3. SIGNALS AND WIRING
(b) Differential line driver system
1) Interface
Max.output current 35mA
Servo amplifier
LA
(LB,LZ)
LAR
(LBR,LZR)
LG
Am26LS32 or equivalent
150
Servo amplifier
LA
(LB,LZ)
Ω
LAR
(LBR,LZR)
100Ω High-speed photocoupler
SD
2) Output pulse
(5) Analog input
Input impedance 10 to 12k
Shorted
Ω
Upper limit setting 2k
2k
Servo motor CCW rotation
LA
LAR
LB
LBR
LZ
LZR
Open
OP
T
π/2
SD
400µs or more
Servo amplifier
P15R
VC‚ etc
Approx.
LG
10k
SD
15VDC
3 - 39
Page 65

3. SIGNALS AND WIRING
3.7 Input Power Supply Circuit
CAUTION
y W hen the servo amplifier has become faulty, switch power off on the servo
amplifier power side. Continuous flow of a large current may cause a fire.
3.7.1 Connection example
Wire the power supply and main circuits as shown below so that the servo-on signal also turns off as soon
as power is switched off at detection of alarm occurrence.
When using an electromagnetic brake, determine the power supply by taking the rated current value of
the electromagnetic brake into consideration.
Forced
24VDC
RA1
Circuit
protector
+
−
stop
RA2
P24M
P24G
P24L
EMG
SG
OFF
CNP1
1
2
3
CN1B
15
10
ON
RA2
Servo amplifier
CN1B
3
13
18
VDD
COM
ALM
RA2
RA1
Circuit
protector
Circuit
protector
RA3
RA5
RA4
RA6
Forced
stop
Forced
stop
P24M
P24G
P24L
EMG
SG
P24M
P24G
P24L
EMG
SG
OFF
CNP1
1
2
3
CN1B
15
10
OFF
CNP1
1
2
3
CN1B
15
10
ON
RA4
Servo amplifier
CN1B
3
13
18
ON
RA6
Servo amplifier
CN1B
3
13
18
VDD
COM
ALM
VDD
COM
ALM
RA4
RA3
RA6
RA5
3 - 40
Page 66

3. SIGNALS AND WIRING
3.7.2 Explanation of signals
Abbreviation Signal Name Description
P24M Main circuit power input Power supply for main circuit
P24G Power ground
P24L Control power input
Ground
3.7.3 Power-on sequence
(1) Power-on procedure
1) Always wire the power supply as shown in above Section 3.7.1 using the relay with the main
circuit power supply. Configure up an external sequence to switch off the relay as soon as an
alarm occurs.
2) Switch on the control circuit power supply P24L, P24G simultaneously with the main circuit
power supply or before switching on the main circuit power supply. If the main circuit power
supply is not on, the display shows the corresponding warning. However, by switching on the
main circuit power supply, the warning disappears and the servo amplifier will operate properly.
3) The servo amplifier can accept the servo-on signal (SON) about 1 second after the main circuit
power supply is switched on. Therefore, when SON is switched on simultaneously with the 24V
power supply, the base circuit will switch on in about 1 second, and the ready signal (RD) will
switch on in further about 20ms, making the servo amplifier ready to operate.
Main circuit power supply and control power supply. Connected to SG and LG
inside the unit.
Control power supply and digital I/O power supply. Always use a stabilizing
power supply.
Grounding terminal
Connect to the earth of the control box for grounding.
(2) Timing chart
Power supply
Base circuit
Servo on
(SON)
Reset
(RES)
Ready
(RD)
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
SON accepted
(1s)
20ms
10ms
60ms
10ms 20ms 10ms 20ms 10ms
10ms
60ms
3 - 41
Page 67

3. SIGNALS AND WIRING
(3) Forced stop
To stop operation and switch power off immediately, provide a forced stop circuit.
CAUTION
Make up a circuit which shuts off main circuit power as soon as EMG-SG are opened at a forced stop.
To ensure safety, always install a forced stop switch across EMG-SG. By disconnecting EMG-SG, the
dynamic brake is operated to bring the servo motor to a sudden stop. At this time, the display shows the
servo forced stop warning (A. E6).
During ordinary operation, do not use the external forced stop to alternate stop and run.
The servo amplifier life may be shortened.
During ordinary operation, do not use the forced stop signal to alternate stop and run.
If the start signal is on or a pulse train is input during a forced stop, the servo motor will rotate as soon
as the warning is reset. During a forced stop, always shut off the run command.
y
Servo amplifier
P24L
VDD
COM
Approx.
Ω
4.7k
EMG
SG
(4) CNP1 connector wiring
The servo amplifier is packed with the following parts for wiring the CNP1.
For connection of the terminals and cables, use the crimping tool 57026-5000 (for UL1007) or 570275000 (for UL1015).
Part Model Maker
Connector 5557-08R
Terminal 5556
Molex
3 - 42
Page 68

3. SIGNALS AND WIRING
3.8 Servo Motor with Electromagnetic Brake
Configure the electromagnetic brake operation circuit so that it is activated not only
by the servo amplifier signals but also by an external emergency stop signal.
CAUTION
POINT
Refer to the Servo Motor Instruction Manual for specifications such as the
power supply capacity and operation delay time of the electromagnetic
brake.
Servo amplifier
CNP2
Circuit must be opened
during emergency stop signal.
EMG
Servo motor
Note the following when the servo motor equipped with electromagnetic brake is used for applications
requiring a brake to hold the motor shaft (vertical lift applications):
1) The brake will operate when the emergency stop switch on.
2) While the reset signal is on, the base circuit is shut off. When using the servo motor with a
vertical shaft, use the electromagnetic brake interlock signal (MBR).
3) Switch off the servo-on command after the servo motor has stopped.
(1) Connection diagram
Configure up a circuit which switches off main circuit power and makes the electromagnetic brake
effective as soon as EMG-SG are disconnected at a emergency stop.
For connection, use the optional MR-JRBRCBL
M-H electromagnetic braked servo motor cable and
MR-JRBRCN electromagnetic brake contact connector set.
10m(32.8ft) or less
(Note)
EMG
Servo motor
Servo amplifier
CNP2
Connector set for electromagnetic
brake contact (option)
MR-JRBRCN
CNP21
B1A 1
B1B
2
Cable for servo motor with
electromagnetic brake (option)
MR-JRBRCBL M-H
Note. Fit a snubber circuit to the forced stop contact. (Refer to Section 12.2.5)
3 - 43
Page 69

3. SIGNALS AND WIRING
(2) Setting
Using parameter No.33 (electromagnetic brake sequence output), set a time delay (Tb) at servo-off from
electromagnetic brake operation to base circuit shut-off as in the timing chart shown in (2) in this section.
(3) Operation timing
(a) Servo-on (SON) command ON/OFF
Tb [ms] after the servo-on (SON) signal is switched off, the servo lock is released and the servo
motor coasts. If the electromagnetic brake is made valid in the servo lock status, the brake life may
be shorter. Therefore, when using the electromagnetic brake in a vertical lift application or the like,
set Tb to about the same as the electromagnetic brake operation delay time to prevent a drop.
Coasting
Servo motor speed
0 r/min
Base circuit
Electromagnetic
brake (CNP2-9)
Servo-on(SON)
(b) Forced stop (EMG) ON/OFF
Servo motor speed
Base circuit
Electromagnetic
brake (CNP2-9)
Forced stop
(EMG)
ON
OFF
Invalid(ON)
Valid(OFF)
ON
OFF
ON
OFF
Invalid(ON)
Valid(OFF)
Invalid(ON)
Valid(OFF)
(80ms)
(80ms)
(10ms)
Tb
Electromagnetic brake
operation delay time
Dynamic brake
Dynamic brake
Electromagnetic brake
Electromagnetic brake
Electromagnetic brake
operation delay time
3 - 44
Page 70

3. SIGNALS AND WIRING
(c) Alarm occurrence
POINT
When the overcurrent(A.32) alarm occurs, the dynamic brake cannot be
operated.
Servo motor speed
Dynamic brake
Dynamic brake
Electromagnetic brake
Electromagnetic brake
Base circuit
Electromagnetic
brake(CNP2-9)
Trouble (ALM)
ON
OFF
Invalid(ON)
Valid(OFF)
No(ON)
Yes(OFF)
Electromagnetic brake
operation delay time(10ms)
(d) Main circuit power off
When main circuit power switches off, the undervoltage alarm (A.10) occurs and the operation
timing is as shown in (c) of this section.
(e) Control circuit power off
POINT
When the control circuit power supply is turned off, the dynamic brake
cannot be operated.
Coasting
Servo motor speed
20ms
Electromagnetic brake
Control power
(P24L)
ON
OFF
(3) Release of electromagnetic brake
To release the electromagnetic brake when main circuit power is off, use the output signal forced
output (refer to Section 6.7).
The electromagnetic brake can be released by turning on the electromagnetic brake power B1 (CNP2-
9).
3 - 45
Page 71

3. SIGNALS AND WIRING
3.9 Grounding
y Ground the servo amplifier and servo motor securely.
WARNING
(1) Connection diagram
The servo amplifier switches the power transistor on-off to supply power to the servo motor. Depending
on the wiring and ground cablerouting, the servo amplifier may be affected by the switching noise (due
to di/dt and dv/dt) of the transistor. To prevent such a fault, refer to the following diagram and always
ground.
To conform to the EMC Directive, refer to the EMC INSTALLATION GUIDELINES (IB(NA)67310).
y To prevent an electric shock, always connect the earth terminal (E) of the servo
amplifier to the earth (E) of the control box (refer to (2) of this section for the fitting
method of the earth terminal).
Control box
24VDC
Circuit
protector
RA
Servo amplifier
P24M
P24G
P24L
CN1A CN1B
Earth (E)
Servo motor
Programmable
controller
Outer
box
3 - 46
Page 72

3. SIGNALS AND WIRING
(2) Fitting of earth (E) terminal (AERSBAN-JR)
As shown below, fit the earth (E) terminal to the bottom or top of the servo amplifier.
Positioning boss
Earth (E) terminal
AERSBAN-JR
M4 screw
3.10 Instructions for the 3M Connector
When fabricating an encoder cable or the like, securely connect the shielded external conductor of the cable
to the ground plate as shown in this section and fix it to the connector shell.
External conductor Sheath
Strip the sheath.
External conductor
Pull back the external conductor to cover the sheath
Screw
SheathCore
Ground plate
Cable
Screw
3 - 47
Page 73

3. SIGNALS AND WIRING
MEMO
3 - 48
Page 74

4. OPERATION
4. OPERATION
4.1 When Switching Power On for the First Time
Before starting operation, check t he foll owing:
(1) Wiring
(a) A correct power supply is connected to the power input terminals (P24M x P24G x P24L) of the servo
amplifier.
(b) The servo motor power supply terminals (U, V, W) of the servo amplifier match in phase with the
power input terminals (U, V, W) of the servo motor.
(c) The servo motor power supply terminals (U , V, W) of the servo amplifier are not shorted to the
power input terminals (P24M x P24L).
(d) The servo amplifier and servo motor are grounded securely.
(e) When stroke end limit switches are used, the signals across LSP-SG and LSN-SG are on during
operation.
(f) 24VDC or higher voltages are not a ppli ed to t he pins of connect ors CN1A and C N1B.
(g) SD and SG of connectors CN1A and CN1B is not shorted.
(h) The wiring cab les a re free from excess i ve force.
(2) Environment
Signal cables and power cables are not shorted by wire offcuts, metallic dust or the like.
(3) Machine
(a) The screws in the servo motor installation part and shaft-to-machine connection are tight.
(b) The servo motor and the machine connected with the s ervo motor ca n be operat ed.
4 - 1
Page 75

4. OPERATION
4.2 Startup
WARNING
y Do not operate the switches with wet hands. You may get an electric shock.
y Before starting operation, check the parameters. Some machines may perform
unexpected operation.
y Take safety measures, e.g. provide covers, to prevent accidental contact of hands
and parts (cables, etc.) with the servo amplifier heat sink, regenerative brake
CAUTION
resistor, servo motor, etc. since they may be hot while power is on or for some time
after power-off. Their temperatures may be high and you may get burnt or a parts
may damaged.
y During operation, never touch the rotating parts of the servo motor. Doing so can
cause injury.
Connect the servo motor with a machine a fter confi rming t hat t he servo mot or operat es properl y al one.
4.2.1 Selection of control mode
Use parameter No. 0 to choose the control mode used. After setting, this parameter is made valid by
switching power off, then on.
4.2.2 Position control mode (1) Power on
(a) Switch off the servo on (SON) signal.
(b) When main circuit power/control circuit power is switched on, "C (Cumulative feedback pulses)"
appears on the parameter unit.
(2) Test operation 1
Using jog operation in the "test operation mode", make sure that the servo motor operates. (Refer to
Section 6.8.2.)
(3) Parameter setting
Set the parameters according to the structure and specifications of the machine. Refer to Chapter 5 for
the parameter definitions and to Sections 7.8 for the setting method.
Parameter Name Setting Description
No. 0 Select the control mode 0 Fourth digit : Position control mode
First digit: : Middle response (initial val u e) i s s el ected.
No. 2 Auto tuning 104
No. 3 Electronic gear numerator (CMX) 1 Electronic gear numerator
No. 4 Electronic gear deno m inato r (CDV) 1 Electronic gear denominator
Second digit : Ordinary machine
Third digit : Used
After setting the above parameters, switch power off once. Then switch power on again to make the
set parameter values valid.
4 - 2
Page 76

4. OPERATION
(4) Servo on
Switch the servo on in the foll owing procedure:
(a) Switch on main circuit/control power.
(b) Switch on the servo on signal (SON) (s hort SON-S G).
When placed in the servo-on status, the servo amplifier is ready to operate and the servo motor is
locked.
(5) Command pulse input
Entry of a pulse train fr om the p ositionin g de vice ro tates the servo moto r. At first, r un it at low spe ed
and check the rotation directi on, etc. If it does not run i n the i ntended di recti on, check t he input s igna l.
On the status displ ay, check t he s peed, command pul s e frequency, load fa ctor, etc. of the s ervo mot or.
When machine operation check is over, check automatic operation with the program of the positioning
device.
This servo amplifier has a real-time auto tuning function under model adaptive control. Performing
operation automatically adjusts gains. The optimum tuning results are provided by setting the
response level appropriate for the machine in parameter No. 2.
(6) Zeroing
Make home position return as required.
(7) Stop
In any of the following statuses, the servo amplifier interrupts and stops the operation of the servo
motor:
Refer to Section 3.8, (2) for the se rvo motor equippe d with electrom agnetic brake. Note th at the stop
pattern of stroke end (LSP/LS N) OFF is as des cribed bel ow.
(a) Servo on (SON) OFF
The base circuit is shut off and the servo motor coasts .
(b) Alarm occurrence
When an alarm occurs, the base circuit is shut off and the dyn amic brake is operated to bring the
servo motor to a sudden stop.
(c) Forced stop (EMG) OFF
The base circuit is shut off and the dynamic brake is operated to bring the servo motor to a sudden
stop. Alarm A. E6 occurs.
(d) Stroke end (LSP/L SN) OF F
The droop pulse value is erased and t he servo motor is st opped and servo-lock ed. It can b e run in the
opposite direction.
4 - 3
Page 77

4. OPERATION
4.2.3 Speed control mode (1) Power on
(a) Switch off the servo on (SON) signal.
(b) When main circuit power/control circuit power is switched on, "r (servo motor speed)" appears on the
display shows.
(2) Test operation
Using jog operation in the test operation mode, make sure that the servo motor operates. (Refer to
Section 6.8.2.)
(3) Parameter setting
Set the parameters according to the structure and specifications of the machine. Refer to Chapter 5 for
the parameter definitions and to Sections 6.5 for the setting method.
Parameter Name Setting Description
No. 0 Select the control mode 2 First digit : Speed control mode
First digit : Middle response (initial value) is selected.
No. 2 Auto tuning 104
No. 8 Internal speed command 1 1000 Set 1000r/min.
No. 9 Internal speed command 2 1500 Set 1500r/min.
No. 10 Internal spe ed command 3 2000 Set 2000r/min.
No. 11 Acceler ation time constant 1000 Set 1000ms.
No. 12 Decele r atio n tim e constant 500 Set 500ms.
No. 13
S-pattern acceleration/deceleration
time constant
Second digit : Ordinary machine
Third digit : Used
0 Not used
After setting the above parameters, switch power off once. Then switch power on again to make the
set parameter values valid.
(4) Servo on
Switch the servo on in the foll owing procedure:
(a) Switch on main circuit/control power.
(b) Switch on the servo on signal (SON) (s hort SON-S G).
When placed in the servo-on status, the servo amplifier is ready to operate and the servo motor is
locked.
(5) Start
Using speed selection 1 (SP1) and speed selection 2 (SP2), choose the servo motor speed. Turn on
forward rotation start (ST1) to run the motor in the forward rotation (CCW) direction or reverse
rotation start (ST2) to run it in the reve rse rotatio n (CW) dir ection. At first, set a low spe ed and check
the rotation direction, etc. If it does not run i n the i ntended di recti on, check the i nput s igna l.
On the status displ ay, check t he s peed, l oad fact or, et c. of the s ervo motor.
When machine operation check is over, check aut omat ic opera t ion wit h t he host cont roller or t he li ke.
This servo amplifier has a real-time auto tuning function under model adaptive control. Performing
operation automatically adjusts gains. The optimum tuning results are provided by setting the
response level appropriate for the machine in parameter No. 2.
4 - 4
Page 78

4. OPERATION
(6) Stop
In any of the following statuses, the servo amplifier interrupts and stops the operation of the servo
motor:
Refer to Section 3.8, (2) for the servo motor equipped with electromagnetic brake. Note that
simultaneous ON or simultaneous OFF of stroke end (LSP, LSN) OFF and forward rotation star t (ST1)
or reverse rotation start (ST2) signal has the same stop pattern as described below.
(a) Servo on (SON) OFF
The base circuit is shut off and the servo motor coasts .
(b) Alarm occurrence
When an alarm occurs, the base circuit is shut off and the dyn amic brake is operated to bring the
servo motor to a sudden stop.
(c) Forced stop (EMG) OFF
The base circuit is shut off and the dynamic brake is operated to bring the servo motor to a sudden
stop. Alarm A. E6 occurs.
(d) Stroke end (LSP/L SN) OF F
The servo amplifier removes droop pulses and operates the servo-lock. The motor may be run in the
opposite direction.
(e) Simultaneous ON or simultaneous OFF of forward rotation start (ST1) and reverse rotation start
(ST2) signals
The servo motor is decelerated to a stop.
POINT
A sudden stop indicates deceleration to a stop at the deceleration time
constant of zero.
4.2.4 Torque control mode (1) Power on
(a) Switch off the servo on (SON) signal.
(b) When main circuit power/control circuit power is switched on, "U (torque command voltage)"
appears on the parameter unit.
(2) Test operation
Using jog operation in the "test operation mode" of the Parameter unit, make sure that the servo motor
operates. (Refer to Section 6. 8.2 .)
(3) Parameter setting
Set the parameters according to the structure and specifications of the machine. Refer to Chapter 5 for
the parameter definitions and to Sections 6.5 for the setting method.
Parameter Name Setting Description
No. 0 Select the control mode 4 First digit : Torque control mode
No. 8 Internal speed command 1 1000 Set 1000r/min.
No. 9 Internal speed command 2 1500 Set 1500r/min.
No. 10 Internal spe ed command 3 2000 Set 2000r/min.
No. 11 Acceler ation time constant 1000 Set 1000ms.
No. 12 Decele r atio n tim e constant 500 Set 500ms.
No. 13
No. 14 Torque c ommand time constant 2000 Set 2000ms
No. 28 Internal torque limit 1 50 Controlled to 50% output
S-pattern acceleration/deceleration
time constant
0 Not used
After setting the above parameters, switch power off once. Then switch power on again to make the
set parameter values valid.
4 - 5
Page 79

4. OPERATION
(4) Servo on
Switch the servo on in the foll owing procedure:
1) Switch on main circuit/control power.
2) Switch on the s ervo on si gnal (S ON) (short S ON-SG).
When placed in the servo-on status, the servo amplifier is ready to operate and the servo motor
is locked.
(5) Start
Using speed selection 1 (SP1) and speed selection 2 (SP2), choose the servo motor speed. Turn on
forward rotation select (DI4) to run the motor in the forward rotation (CCW) direction or reverse
rotation select (DI3) to run it in the reverse rotation (CW) direction, generating torque. At first, set a
low speed and check the rotation direction, etc. If it does not run in the intended direction, check the
input signal.
On the status displ ay, check t he s peed, l oad fact or, et c. of the s ervo motor.
When machine operation check is over, check aut omat ic opera t ion wit h t he host cont roller or t he li ke.
(6) Stop
In any of the following statuses, the servo amplifier interrupts and stops the operation of the servo
motor:
Refer to Section 3.8, (2) for the s ervo motor eq uipped wi th el ectr omagnet ic b rak e.
(a) Servo on (SON) OFF
The base circuit is shut off and the servo motor coasts .
(b) Alarm occurrence
When an alarm occurs, the base circuit is shut off and the dyn amic brake is operated to bring the
servo motor to a sudden stop.
(c) Forced stop (EMG) OFF
The base circuit is shut off and the dynamic brake is operated to bring the servo motor to a sudden
stop. Alarm A. E6 occurs.
POINT
A sudden stop indicates deceleration to a stop at the deceleration time
constant of zero.
4.3 Multidrop Communication
You can use the RS-422 commu nicatio n f un ctio n to o pe rate two o r mo re se rv o amp lifie rs o n th e same bus.
In this case, set station numbers to the servo amplifiers to recognize the servo amplifier to which the
current data is being sent. Use parameter No. 15 to set the stat ion numbers.
Always set one station number to one servo amplifier. Normal communication cannot be made if the same
station number is set to two or more servo amplifiers.
For details, refer to Chapter 13.
4 - 6
Page 80

5. PARAMETERS
5. PARAMETERS
CAUTION
y Never adjust or change the parameter values extremely as it will make operation
instable.
5.1 Parameter List
5.1.1 Parameter write inhibit
POINT
y After setting the parameter No. 19 value, switch power off, then on to make
that setting valid.
In the MR-J2-03A5 servo amplifier, its parameters are classified into the basic parameters (No. 0 to 19)
and expansion parameters (No. 20 to 49) according to their safety aspects and frequencies of use. In the
factory setting condition, the customer can change the basic parameter values but cannot change the
expansion parameter values. When fine adjustment, e.g. gain adjustment, is required, change the
parameter No. 19 setting to make the expansion parameters write-enabled.
The following table indicates the parameters which are enabled for reference and write by the setting of
parameter No. 19. Operation can be performed for the parameters marked
Parameter No. 19 Setting Operation
0000
(initial value)
000A
000B
000C
Reference {
Write {
Reference No. 19 only
Write No. 19 only
Reference {{
Write {
Reference {{
Write {{
Basic Parameters
No. 0 to No. 19
Expansion Parameters
No. 20 to No. 49
.
5 - 1
Page 81

5. PARAMETERS
5.1.2 Lists
(1) Item list
No. Symbol Name
0 *STY Control mode selection P x S x T 0000
1 *OP1 Function selection 1 P x S x T 0002
2 ATU Auto tuning P x S 0104
3 CMX Electronic gear (Command pulse multiplying factor numerator) P 1
4CDV
5 INP In-position range P 100 pulse
6 PG1 Position loop gain 1 P 145 rad/s
7PST
8SC1
9SC2
Basic parameters
10 SC3
11 STA Acceleration time constant S x T0ms
12 STB Deceleration time constant S x T0ms
13 STC S-pattern acceleration/deceleration time constant S x T0 ms
14 TQC Torque command time constant T 0 ms
15 *SNO Station number setting P x S x T0station
16 *BPS Communication baudrate selection, alarm history clear P x S x T 0000
17 For manufacturer setting 0
18 *DMD Status display selection P x S x T 0000
19 *BLK Parameter write inhibit P x S x T 0000
POINT
• For any parameter whose symbol is preceded by*, set the parameter value
and switch power off once, then switch it on again to make that parameter
setting valid.
For details of the parameters, refer to the corresponding items.
The symbols in the Control Mode column of the table indicate the following modes:
P : Position control mode
S : Speed control mode
T : Torque control mode
Control
Mode
Electronic gear (Command pulse multiplying factor
denominator)
Position command acceleration/deceleration time constant
(Smoothing)
Internal speed command 1 S 100 r/min
Internal speed limit 1 T 100 r/min
Internal speed command 2 S 500 r/min
Internal speed limit 2 T 500 r/min
Internal speed command 3 S 1000 r/min
Internal speed limit 3 T 1000 r/min
P1
P3ms
Initial
Value
Unit
Customer
Setting
5 - 2
Page 82

5. PARAMETERS
No. Symbol Name
20 *OP2 Function selection 2 P x S x T 0000
21 *OP3 Function selection 3 (Command pulse selection) P 0000
22 *OP4 Function selection 4 P x S x T 0000
23 FFC Feed forward gain P 0 %
24 ZSP Zero speed P x S x T50 r/min
25 VCM
26 TLC Analog torque command maximum output T 100 %
27 *ENR Encoder output pulses P x S x T 4000 pulse
28 TL1 Internal torque limit 1 P x S x T 100 %
29 VCO
30 TLO
31 For manufacturer setting 0
32 For manufacturer setting 0
33 MBR Electromagnetic brake sequence output P x S x T0 ms
34 GD2
Basic parameters
35 PG2 Position loop gain 2 P 97 rad/s
36 VG1 Speed loop gain 1 P x S 873 rad/s
37 VG2 Speed loop gain 2 P x S 1144 rad/s
38 VIC Speed integral compensation P x S20 ms
39 VDC Speed differential compensation P x S 980
40 For manufacturer setting 0
41 *DIA Input signal automatic ON selection P x S x T 0000
42 *DI1 Input signal selection 1 P x S x T 0003
43 *DI2 Input signal selection 2 (CN1B-pin 5) P x S x T 0111
44 *DI3 Input signal selection 3 (CN1B-pin 14) P x S x T 0222
45 *DI4 Input signal selection 4 (CN1A-pin 8) P x S x T 0665
46 *DI5 Input signal selection 5 (CN1B-pin 7) P x S x T 0770
47 *DI6 Input signal selection 6 (CN1B-pin 8) P x S x T 0883
48 *DI7 Input signal selection 7 (CN1B-pin 9) P x S x T 0994
49 *DO1 Output signal selection 1 P x S x T 0000
Note 1. The setting of "0" provides the rated servo motor speed.
2. Depends on the servo amplifier.
Analog speed command maximum speed S
Analog speed limit maximum speed T
Analog speed command offset S (Note2) mV
Analog speed limit offset T (Note2) mV
Analog torque command offset T 0 mV
Analog torque limit offset S 0 mV
Ratio of load inertia moment to servo motor inertia moment
Control
Mode
P x S x T 3.0
Initial
Value
(Note1) 0
(Note1) 0
Unit
(r/min)
(r/min)
0.1
times
Customer
Setting
5 - 3
Page 83

5. PARAMETERS
(2) Details list
Class No. Symbol Name and Function
0 *STY Control mode, regenerative brake option selection
Used to select the control mode and regenerative brake option.
000
Select the control mode.
0:Position
1:Position and speed
2:Speed
3:Speed and torque
4:Torque
5:Torque and position
1 *OP1 Function selection 1:
Used to select the input signal filter and CN1B-pin 19’s output
signal.
Initial
Value
0000 0000h
0002 0000h
Unit
Setting
Range
to
0005h
to
0012h
Control
Mode
P x S x T
P x S x T
Basic parameters
00
Input signal filter
If external input signal causes chattering
due to noise, etc., input filter is used to
suppress it.
0:None
1:1.77[ms]
2:3.55[ms]
CN1B-pin 19's function selection
0:Zero Speed detection signal
1:Electromagnetic brake interlock sugnal
5 - 4
Page 84

5. PARAMETERS
Class No. Symbol Name and Function
2 ATU Auto tuning:
Used to set the response level, etc. for execution of auto tuning.
0
Auto tuning response level
setting
Set Value Response Level
Basic parameters
1
2
3
4
5
⋅
If the macine hunts or generates
large gear sound, decrease the
set value.
⋅
To improve performance, e.g.
shorten the settling time, increase
the set value.
Select the machine.
For example, used to improve the
position setting characteristic
when friction is large.
0: Ordinary machine
1: Machine with large friction
Auto tuning selection
0: Auto tuning selected for use of interpolation
axis control, etc. in position control
1: Auto tuning for ordinary operation
2: No auto tuning
Low response
Middle response
High response
Initial
Value
0104 0001h
Unit
Setting
Range
to
0215h
Control
Mode
P x S
3 CMX Electronic gear numerator:
Used to set the electronic gear numerator value.
For the setting, refer to Section 5.2.1.
Setting "0" automatically sets the resolution of the servo motor
connected.
4 CDV Electronic gear denominator:
Used to set the electronic gear denominator value.
For the setting, refer to Section 5.2.1.
11
to
32767
11
to
32767
P
P
5 - 5
Page 85

5. PARAMETERS
Class No. Symbol Name and Function
5 INP In-position range:
Used to set the droop pulse range in which the imposition (INP)
signal will be output.
6 PG1 Position loop gain 1:
Used to set the gain of position loop 1.
Increase the gain to improve trackability in response to the position
command.
7 PST Position command acceleration/deceleration time constant
(smoothing):
Used to set the time constant of a low pass filter in response to the
position command.
Example: When a command is given from a synchronizing detector,
synchronous operation can be started smoothly if started during line
operation.
Synchronizing
detector
Start
Servo amplifier
Servo motor
Initial
Value
100 pulse 0
145 red/s 4
3ms0
Unit
Setting
Range
to
10000
to
1000
to
20000
Control
Mode
P
P
P
Basic parameters
9SC2
Without time
constant setting
Servo motor
speed
ON
OFF
Start
Internal speed command 1:
Used to set speed 1 of internal speed commands.
Internal speed limit 1:
Used to set speed 1 of internal speed limits.
Internal speed command 2:
Used to set speed 2 of internal speed commands.
Internal speed limit 2:
Used to set speed 2 of internal speed limits.
With time
constant setting
t
100 r/min
500 r/min
0 to
instan-
taneous
permi-
ssible
speed
0 to
instan-
taneous
permi-
ssible
speed
S8SC1
T
S
T
5 - 6
Page 86

5. PARAMETERS
Class No. Symbol Name and Function
10 SC3
Internal speed command 3:
Used to set speed 3 of internal speed commands.
Internal speed limit 3:
Used to set speed 3 of internal speed limits.
11 STA 0
Acceleration time constant:
Used to set the acceleration time required to reach the rated speed
from zero speed in response to the analog speed command and
internal speed commands 1 to 3.
If the preset command speed is
Speed
Rated
lower than the rated speed,
acceleration/deceleration time
will be shorter.
speed
Zero
speed
Parameter
No.11 setting
Parameter
No.12 setting
Example: Set 3000 (3s) to increase speed from 0r/min to 1000r/min in
1 second.
POINT
Basic parameters
y When configuring an external position loop, set 0 or minimal
values in parameters No. 11 and 12.
Time
Initial
Value
Unit
1000 r/min
ms 0
Setting
Range
0 to
instan-
taneous
permi-
ssible
speed
to
20000
Control
Mode
S
T
S x T
12 STB Deceleration time constant:
Used to set the deceleration time required to reach zero speed from
the rated speed in response to the analog speed command and
internal speed commands 1 to 3.
13 STC S-pattern acceleration/deceleration time constant:
Used to smooth start/stop of the servo motor.
Command speed
Speed
Servomotor
0r/min
STA
STC
STA: Aeceleration time constant (parameter No.11)
STB: Deceleration time constant (parameter No.12)
STC: S-pattern acceleration/deceleration time con stant (parameter No.13)
STC
STC
STB
STC
Time
0
0ms0
to
1000
S x T
5 - 7
Page 87

5. PARAMETERS
Class No. Symbol Name and Function
14 TQC
15 *SNO Station number setting
16 *BPS Communication baudrate selection, alarm history clear:
Torque command time constant:
Used to set the constant of a low pass filter in response to the torque
command.
Torque
TQC: Torque command time constant
Used to specify the station number for multidrop communication.
Always set one station to one axis of servo amplifier. If one station
number is set to two or more stations, normal communication cannot
be made.
Used to select the communication baudrate for use of the set-up
software and to clear the alarm history.
Torque command
TQC
TQC
After
filtered
Time
Initial
Value
0ms0
0sta-
0000 0000h
Setting
Unit
Range
20000
tion0to
1112h
to
31
to
Control
Mode
T
P x S x T
P x S x T
Basic parameters
Communication response delay time
0: Invalid, reply sent in less than 400µs
1: Valid, reply sent in 400µs or more
17 For manufacturer setting
Do not change this value by any means.
RS-422/RS-232C boudrate selection
0: 9600 [bps]
1: 19200[bps]
2: 4800 [bps]
Alarm history clear
0: Invalid
1: Valid
When alarm history clear is made valid,
the alarm history is clearedat next power-on.
After the alarm history is cleared, the setting
is automatically made invalid (reset to 0).
RS-422/RS-232C communication standard selection
0: RS-232C used
1: RS-442 used
0
5 - 8
Page 88

5. PARAMETERS
p
Class No. Symbol Name and Function
18
*DMD
Status display selection:
Used to select the status display shown at power-on.
00
Selection of status display at
power-on
0: Cumulative feedback pulses
1: Servo motor speed
2: Droop pulses
3: Cumulative command pulses
4: Command pulse frequency
5: Analog speed command voltage
(Note 1)
6: Analog torque command voltage
(Note 2)
7: Regenerative load ratio
8: Effective load ratio
9: Peak load ratio
A: Within one-revolution position
B: ABS counter
C: Load inertia moment ratio
Note: 1.
In speed control mode. Analog
speed limit voltage in torque
control mode.
In torque control mode. Analog
2.
torque limit voltage in speed or
position control mode.
Initial
Value
Unit
Setting
Range
0000 0000h
to
001Ch
Control
Mode
P x S x T
Status display at power-on in
corresponding control mode
0: Depends on the control mode.
Basic parameters
19 *BLK 0000 0000h
Parameter write inhibit:
Control Mode
Position
Position/speed
Speed
Speed/torque
Torque
Torque/position
ends on the first digit setting of this parameter.
1: De
Cumulative feedback pulses/servo motor speed
Servo motor speed/analog torque command voltage
Analog torque command voltage/cumulative feedback pulses
Status Display at Power-On
Cumulative feedback pulses
Servo motor speed
Analog torque command voltage
Used to select the reference and write ranges of the parameters.
Operation can be performed for the parameters marked
Basic
Set Value Operation
0000
(Initial value)
000A
000B
000C
Reference
Write
Reference No. 19 only
Write No. 19 only
Reference
Write
Reference
Write
Parameters
No. 0 to No. 19
No. 20 to No. 49
{
{
{{
{
{{
{{
.
Expansion
Parameters
P x S x T
to
000Ch
5 - 9
Page 89

5. PARAMETERS
Class No. Symbol Name and Function
20 *OP2 Function selection 2:
Used to select restart after instantaneous power failure,
servo lock at a stop in speed control mode, and slight vibration
suppression control.
0
Restart after instantaneous
power failure
If the power supply voltage has
returned to normal after an
undervoltage status caused by the
reduction of the input power supply
voltage in the speed control mode,
the servo motor can be restarted
by merely turning on the start signal
without resetting the alarm.
0: Invalid (Undervoltage alarm
(A.10) occurs.)
1: Valid
Stop-time servo lock selection
The shaft can be servo-locked to
remain still at a stop in the speed
control mode.
0: Valid
1: Invalid
Expansion parameters
Initial
Value
0000
Unit
Setting
Range
0000h
to
0111h
Control
Mode
S
Slight vibration suppression control
Used to suppress vibration at a stop.
0: Invalid
1: Valid
21 *OP3 Function selection 3 (Command pulse selection) :
Used to select the input form of the pulse train input signal.
(Refer to Section 3.4.1.)
00
Command pulse train input form
0: Forward/reverse rotation pulse train
1: Signed pulse train
2: A/B phase pulse train
Pulse train logic selection
0: Positive logic
1: Negative logic
0000 0000h
to
0012h
P
P
5 - 10
Page 90

5. PARAMETERS
Class No. Symbol Name and Function
22 *OP4 Function selection 4:
Used to select stop processing at LSP/LSN signal off and choose the
machine resonance suppression filter.
0
How to make a stop when LSP/LSN
signal is valid. (Refer to Section 5.2.3)
0: Sudden stop
1: Slow stop
In the position control mode,
⋅
the servo motor is decelerated
to a stop according to parameter
No. 7 setting.
⋅
In the speed control mode,
the servo motor is decelerated
to a stop according to parameter
No. 12 setting.
VC/VLA voltage averaging
Used to set the filtering time when the
analog speed command (VC) voltage or
analog speed limit (VLA) is imported.
Set 0 to vary the speed to voltage fluctuation in real time. Increase the set value
to vary the speed slower to voltage fluctuation.
Expansion parameters
Set Value
0
1
2
37.11
Filtering Time [ms]
0
1.77
3.55
Initial
Value
0000
Unit
Setting
Range
0000h
to
7301h
Control
Mode
P S
P
S
T
Machine resonance suppression filter
Set Value
0
1
2
3375
4
5
6
7161
Notch Frequency [Hz]
Not used
1125
563
282
225
188
5 - 11
Page 91

5. PARAMETERS
Class No. Symbol Name and Function
23 FFC Feed forward gain:
Set the feed forward gain. When the setting is 100%, the droop pulses
during operation at constant speed are nearly zero. However, sudden
acceleration/deceleration will increase the overshoot. As a guideline,
when the feed forward gain setting is 100%, set 1s or more as the
acceleration/deceleration time constant up to the rated speed.
When setting this parameter, always set auto tuning (parameter No.
2) to ″No″
24 ZSP Zero speed:
Used to set the output range of the zero speed signal (ZSP).
25 VCM
Used to set the speed at the maximum input voltage (10V) of the
analog speed command (VC).
Set 0 to select the rated speed of the servo motor connected.
Analog speed limit maximum speed:
Used to set the speed at the maximum input voltage (10V) of the
analog speed limit (VLA).
Set 0 to select the rated speed of the servo motor connected.
26 TLC Analog torque command maximum output:
Used to set the output torque at the analog torque command voltage
(TC = ±8V) of +8V on the assumption that the maximum torque is
100[%]. For example, set 50 to output (maximum torque × 50/100) at
the TC of +8V.
27 *ENR Encoder output pulses:
Expansion parameters
Used to set the number of output pulses per encoder revolution
output by the servo amplifier.
28 TL1 100 % 0
Internal torque limit 1:
Set this parameter to limit servo motor-generated torque on the
assumption that the maximum torque is 100[%]. When 0 is set,
torque is not produced.
Internal torque limit 1:
Set this parameter to limit servo motor-generated torque on the
assumption that the maximum torque is 100[%].
When 0 is set, torque is not produced.
Across
TL-SG
Open Internal torque limit 1 (Parameter No. 28)
Short
Torque limit relationship Valid torque limit
Analog torque limit < internal torque limit 1
Analog torque limit > internal torque limit 1
Torque Limit
Analog torque limit
Internal torque limit 1
Initial
Value
Unit
Setting
Range
0%0
to
100
50 r/min 0
to
10000
0
0Analog speed command maximum speed:
r/min 1
to
10000
0
0
r/min 1
to
10000
100 % 0
to
1000
4000 pulse 5
to
16384
to
100
Control
Mode
P
P x S x T
S
T
T
P x S x T
T
P x S
5 - 12
Page 92

5. PARAMETERS
Class No. Symbol Name and Function
29 VCO
31 For manufacturer setting
32 For manufacturer setting
33 MBR Electromagnetic brake sequence output:
34 GD2 Ratio of load inertia moment to servo motor inertia moment:
35 PG2 Position loop gain 2:
Expansion parameters
36 VG1 Speed loop gain 1:
37 VG2 Speed loop gain 2:
38 VIC Speed integral compensation
Analog speed command offset:
Used to set the offset voltage of the analog speed command (VC).
When automatic VC offset is used, the automatically offset value is
set to this parameter.(Refer to Section 6.3.)
The initial value is the value provided by the automatic VC offset
function before shipment at the VC-LG voltage of 0V.
Analog speed limit offset:
Used to set the offset voltage of the analog speed limit (VLA). When
automatic VC offset is used, the auto-matically offset value is set to
this parameter.(Refer to Section 6.3.)
The initial value is the value provided by the automatic VC offset
function before shipment at the VLA-LG voltage of 0V.
Analog torque command offset:
Used to set the offset voltage of the analog torque command (TC).
Analog torque limit offset:
Used to set the offset voltage of the analog torque limit (TLA).
Do not change this value by any means.
Do not change this value by any means.
Used to set the delay time (Tb) between electromagnetic brake
operation and the base drive circuit is shut-off.
Used to set the ratio of the load inertia moment to the servo motor
shaft inertia moment. When auto tuning is selected, the result of
auto tuning is auto-matically set.
Used to set the gain of the position loop.
Set this parameter to increase the position response to level load
disturbance. Higher setting increases the response level but is liable
to generate vibration and/or noise.
When auto tuning is selected, the result of auto tuning is
automatically set.
Normally this parameter setting need not be changed.
Higher setting increases the response level but is liable to generate
vibration and/or noise.
When auto tuning is selected, the result of auto tuning is
automatically set.
Set this parameter when vibration occurs on machines of low rigidity
or large backlash. Higher setting increases the response level but is
liable to generate vibration and/or noise.
When auto tuning is selected, the result of auto tuning is
automatically set.
Used to set the integral time constant of the speed loop.
When auto tuning is selected, the result of auto tuning is
automatically set.
Initial
Value
Depends
on servo
amplifier
100 ms 0
216 rad/s 20
714 rad/s 20
Unit
mV −999
.
0mV−999
0
0
70 0.1
times0to
30 rad/s 1
ms 1
20
Setting
Range
to
999
to
999
to
1000
1000
to
500
to
5000
to
8000
to
1000
Control
Mode
S
T
T30 TLO
S
P x S x T
P x S
P
P x S
P x S
P x S
5 - 13
Page 93

5. PARAMETERS
Class No. Symbol Name and Function
39 VDC Speed differential compensation:
Used to set the differential compensation.
Made valid when the proportion control signal is switched on.
40 For manufacturer setting
Do not change this value by any means.
Used to set automatic ON of SON, LSP and LSN.
0
Servo on signal (SON) input selection
0: Switched on/off by external input.
1: Switched on automatically in servo:
amplifier.
(No need of external wiring)
Forward rotation stroke end signal
(LSP) input selection
0: Switched on/off by external input.
1: Switched on automatically in servo
amplifier.
(No need of external wiring)
Reverse rotation stroke end signal (LSN)
input selection
0: Switched on/off by external input.
1: Switched on automatically in servo
amplifier.
(No need of external wiring)
42 *DI1 Input signal selection 1:
Used to assign the control mode changing signal input pins and to set
the clear signal.
Expansion parameters
00
Control change signal (LOP) input pin assignment
Used to set the control mode
change signal input connector
pins. Note that this parameter is
made valid when parameter No.
0 is set to select the position/speed, speed/torque or torque/position change mode.
Set Value
0
1
2
3 CN1B-7
4 CN1B-8
5 CN1B-9
Connector Pin No.
CN1B-5
CN1B-14
CN1A-8
Initial
Value
980 0
0000h
0000
0003 0000h
Unit
Setting
Range
to
1000
0000h
to
0111h
to
0015h
Control
Mode
P x S
P x S x T41 *DIA Input signal automatic ON selection:
P x S
P/S
S/T
T/P
Clear signal (CR) selection
0: Droop pulses are cleared on the
leading edge.
1: Always cleared while on.
5 - 14
P x S x T
Page 94

5. PARAMETERS
Class No. Symbol Name and Function
43 *DI2 Input signal selection 2 (CN1B-pin 5):
This parameter is unavailable when parameter No. 42 is set to assign
the control change signal (LOP) to CN1B-pin 5.
Allows any input signal to be assigned to CN1B-pin 5.
Note that the setting digit and assigned signal differ according to the
control mode.
0
Position
control mode
Speed control
mode
Torque control mode
Signals that may be assigned in each control mode are indicated
below by their symbols.
Set value
0
1
2
3
4
5
6
Expansion parameters
7
8
9
PST
SON SON SON
RES RES RES
PC PC
TL TL TL
CR CR CR
Input signals of
CN1B-pin 5
selected.
(Note) Control Mode
SP1 SP1
SP2 SP2
ST1 RS2
ST2 RS1
Initial
Value
0111
Unit
Setting
Range
0000h
to
0999h
Control
Mode
P x S x T
Note. P: Position control mode
S: Speed control mode
T: Torque control mode
44 *DI3 Input signal selection 3 (CN1B-pin 14):
Allows any input signal to be assigned to CN1B-pin 14.
The assignable signals and setting method are the same as in input
signal selection 2 (parameter No. 43).
0
Position
control mode
Speed control
mode
Torque control mode
This parameter is unavailable when parameter No. 42 is set to assign
the control change signal (LOP) to CN1B-pin 14.
Input signals of
CN1B-pin 14
selected.
0222
0000h
to
0999h
P x S x T
5 - 15
Page 95

5. PARAMETERS
Class No. Symbol Name and Function
45 *DI4 Input signal selection 4 (CN1A-pin 8):
Allows any input signal to be assigned to CN1A-pin 8.
The assignable signals and setting method are the same as in input
signal selection 2 (parameter No. 43).
0
Position
control mode
Speed control
mode
Torque control mode
This parameter is unavailable when parameter No. 42 is set to assign
the control change signal (LOP) to CN1 A-pin 8.
46 *DI5 Input signal selection 5 (CN1B-pin 7):
Allows any input signal to be assigned to CN1B-pin 7.
The assignable signals and setting method are the same as in input
signal selection 2 (parameter No. 43).
0
Position
control mode
Speed control
mode
Torque control mode
Input signals of
CN1A-pin 8
selected.
Input signals of
CN1B-pin 7
selected.
Initial
Value
0665
0770
Unit
Setting
Range
0000h
to
0999h
0000h
to
0999h
Control
Mode
P x S x T
P x S x T
This parameter is unavailable when parameter No. 42 is set to assign
the control change signal (LOP) to CN1 B-pin 7.
47 *DI6 Input signal selection 6 (CN1B-pin 8):
Allows any input signal to be assigned to CN1B-pin 8.
Expansion parameters
48 *DI7 Input signal selection 7 (CN1B-pin 9):
The assignable signals and setting method are the same as in input
signal selection 2 (parameter No. 43).
0
Position
control mode
Speed control
mode
Torque control mode
This parameter is unavailable when parameter No. 42 is set to assign
the control change signal (LOP) to CN1B-pin 8.
Allows any input signal to be assigned to CN1B-pin 9.
The assignable signals and setting method are the same as in input
signal selection 2 (parameter No. 43).
0
Position
control mode
Speed control
mode
Torque control mode
This parameter is unavailable when parameter No. 42 is set to
assign the control change signal (LOP) to CN1B-pin 9.
Input signals of
CN1B-pin 8
selected.
Input signals of
CN1B-pin 9
selected.
0883
0994
0000h
to
0999h
0000h
to
0999h
P x S x T
P x S x T
5 - 16
Page 96

5. PARAMETERS
Class No. Symbol Name and Function
49 *DO1 Output signal selection 1:
Used to select the connector pins to output the alarm code and
warning (WNG).
0
0
Setting of alarm code output
Set Value
(Note) Alarm Code
CN1B
CN1A
pin 19
pin 18
000
00
01
Expansion parameters
1
1
1
CN1B-19
0ZSP
1
Alarm code is output at alarm occurrence.
Alarm
CN1A
Display
pin 19
8888
A. 11
A. 12
A. 13
A. 15
A. 17
A. 18
A. 37
A. 8E
A. 33
1
100
0
0
1
A. 10
A. 50
1
A. 51
A. 24
0
A. 32
A. 31
A. 35
1
A. 52
A. 16
0
A. 20
Note: 0:OFF
1:ON
Setting of warning (WNG) output
Select the connector pin to output
warning. The old signal before
selection will be unavailable.
Connector Pins
CN1A-18 CN1A-19
INP or SA
Watchdog
Board error 1
Memory error 1
Clock error
Memory error 2
Board error 2
Board error 3
Parameter error
Serial communication error
Overvoltage
Undervoltage
Overload 1
Overload 2
Motor output ground fault
Overcurrent
Overspeed
Command pulse error
Error excessive
Encoder error 1
Encoder error 2
RD
Name
Initial
Value
0000
Unit
Setting
Range
0000h
to
0051h
Control
Mode
P x S x T
Set Value
Connector Pin No.
0
1
2
3 CN1A-18
4 CN1B-19
5 CN1B-6
5 - 17
Not output.
CN1A-19
CN1B-18
Page 97

5. PARAMETERS
5.2 Detailed Description
5.2.1 Electronic gear
POINT
• The guideline of the electronic gear setting range is
set value is outside this range, noise may be generated during
acceleration/deceleration or operation may not be performed at the preset
speed and/or acceleration/deceleration time constants.
(1) Concept of electronic gear
The machine can be moved at any multiplication factor to input pulses.
CMX
CMX
CDV
=
3 No. Parameter
4 No. Parameter
CDV
Input pulse train
Electronic gear
Parameters No. 3, 4
+
Deviation
counter
−
Encoder feedback pulse
1
50
<
CMX
< 50. If the
CDV
Motor
Encoder
The following setting examples are used to explain how to calculate the electronic gear:
(a) For motion in increments of 10µm per pulse
Machine specifications
Ballscrew lead Pb =10 [mm]
Reduction ratio: n = 1/2
Servo motor resolution: Pt = 8192 [pulses/rev]
CMX
CDV
= ∆
Pt
ο
l
= ∆
x
∆
S
ο
l
Pt
=
x
⋅
Pbn
10×10
-3
x
8192
⋅
1021
n=NL/NM
=1/2
Servo motor
8192 [pulse/rev]
16384
=
1000
NL
=
n
Pb=10[mm]
NM
2048
125
Hence, set 2048 to CMX and 125 to CDV.
(b) Conveyor setting example
For rotation in increments of 0.01° per pulse
Servo motor
Machine specifications
8192 [pulse/rev]
Table
Table resolution: 36000 pulses/rev
Reduction ratio: n = 4/64
Servo motor resolution: Pt = 8192 [pulses/rev]
Timing belt : 4/64
CMX
CDV
=
Pt
∆
=
S
Pt
131072
=
×
64436000
36000
=
4096
1125
Reduce CDV to 32767 or less and round off the result to the units.
Hence, set 4096 to CMX and 1125 to CDV.
5 - 18
Page 98

5. PARAMETERS
(2) Setting for use of AD75P
The AD75P also has the following electronic gear parameters. Normally, the servo amplifier side
electronic gear must also be set due to the restriction on the command pulse frequency (differential
500kpps, open collector 200kpps).
AP: Number of pulses per motor revolution
AL: Moving distance per motor revolution
AM: Unit scale factor
Servo amplifierAP75P
Command
value
Control
unit
AP
AMAL
Electronic gear
Command
pulse
Electronic gear
CMX
CDV
+
Deviation
counter
-
Feedback pulse
Servo motor
Electronic gear setting example for use of AD75P
Rated Servo Motor Speed 3000r/min
Input system Open collector Differential line driver
Servo amplifier
AD75P
Note 1. Command pulse frequency at rated speed
2. Assuming that AP=8192 and AL=8000, the command unit amount per motor revolution is 8000 pulses/rev, which
makes positioning data setting easier.
3. In the case where the ballscrew lead is 10mm.
Max. input pulse frequency 200kpps 500kpps
Feedback pulse/revolution 8192pulse/rev
Electronic gear (CMX/CDV) 125/256 1/1
Command pulse frequency (Note 1) 200kpps 409.6kpps
Number of pulses per servo motor revolution as viewed from AD75P 4000pulse/rev 8192pulse/rev
Minimum command unit
1pulse
Electronic gear
Minimum command unit
0.1µm(Note 3)
AP 1 1(Note 2)
AL 1 1(Note 2)
AM 1 1(Note 2)
AP 4000 8192
AL 1000 1000
AM 100 100
5 - 19
Page 99

5. PARAMETERS
5.2.2 Changing the status display screen
The status display item of the servo amplifier display shown at power-on can be changed by changing the
parameter No. 18 settings.
The item displayed in the initial status changes with the control mode as follows:
Control Mode Displayed Item
Position control mode Cumulative feedback pulses
Speed control mode Motor speed
Torque control mode Torque command voltage
For display details, refer to Section 6.2.
00
Selection of status display at
power-on
0: Cumulative feedback pulses
1: Servo motor speed
2: Droop pulses
3: Cumulative command pulses
4: Command pulse frequency
5: Analog speed command voltage
(Note 1)
6: Analog torque command voltage
(Note 2)
7: Regenerative load ratio
8: Effective load ratio
9: Peak load ratio
A: Within one-revolution position
B: ABS counter
C: Load inertia moment ratio
Note: 1.
In speed control mode. Analog
speed limit voltage in torque
control mode.
2.
In torque control mode. Analog
torque limit voltage in speed or
position control mode.
Status display at power-on in
corresponding control mode
0: Depends on the control mode.
Control Mode
Position
Position/speed
Speed
Speed/torque
Torque
Torque/position
1: Depends on the first digit setting of this parameter.
Cumulative feedback pulses/servo motor speed
Servo motor speed/analog torque command voltage
Analog torque command voltage/cumulative feedback pulses
Status Display at Power-On
Cumulative feedback pulses
Servo motor speed
Analog torque command voltage
5 - 20
Page 100

5. PARAMETERS
5.2.3 Using forward/reverse rotation stroke end to change the stopping pattern
The stopping pattern is factory-set to make a sudden stop when the forward/reverse rotation stroke end is
made valid. A slow stop can be made by changing the parameter No. 22 value.
Parameter No.22 Setting Stopping Method
0
(initial value)
1
5.2.4 Alarm history clear
The servo amplifier stores one current alarm and five past alarms from when its power is switched on first.
To control alarms which will occur during operation, clear the alarm history using parameter No.16 before
starting operation.
Clearing the alarm history automatically returns to “
After setting, this parameter is made valid by switch power from OFF to ON.
Sudden stop
Droop pulses are reset to make a stop.
Slow stop
Position control mode : The motor is decelerated to a stop in accordance with the
parameter No. 7 value.
Speed control mode : The motor is decelerated to a stop in accordance with the
parameter No. 12 value.
0 ”.
Parameter No.16
Alarm history clear
0: Invalid (not cleared)
1: Valid (cleard)
5 - 21
 Loading...
Loading...