

PRELIMINARY
)
j
Notice:This is not a final specification.
Some parametric limits are subject to change.
MITSUBISHI ICs (LSI)
M64403FP
ERROR CORRECTION WITH VARIABLE LENGTH AND DISTANCE
DESCRIPTION
The M64403FP performs the decoding for RS (Reed Solomon)
code which primitive polynomial:P (X)=X8+X4+X3+X2+1 and its
generation polynomial:G (X)=Π (X-αj).
M64403FP can set the code length and check byte length, so it is
d-2
=0
able to be adopted to various systems.
FEATURES
It adopts three stages pipe line operation (Syndrome stage,
Euclidean stage, Chen search & error value stage), so it realizes
high speed error correction operation.
Capable of erasure correcting function and it improves error
correction performance.
• Where error counts (e), erasure counts (ε) and design distance
(d) have followed restriction.
2e + ε < d
Capable of parameter register programing.
(1) Four kinds of code parameter which code length and check
byte length are programmable.
(Good for the product code that has plural code parameters.)
• Where, maximum code length (L) are 255 bytes and
maximum check byte length (d-1) are 16 bytes.
(2) Programmable for erasure threshold.
(3) Programmable for four kinds of decoding mode.
APPLICATION
DVD player, DVD-ROM (DVD:Digital Video Disc), DBS (Direct
Broadcasting by Satellite), High density floppy disk, Hard disk,
CATV (Cable TV), MD (Mini Disc), DVC (Digital Video Cassette),
DAT (Digital Audio Cassette), DCC (DIgital Compact Cassette),
DVB (Digital Video Broadcast), CD-DA (Compact Disc-Digital
Audio), CD-ROM (Compact Disc-Read Only Memory), other
communication systems and storage media etc.
PIN CONFIGURATION(TOP VIEW
DAO7
DAO6
DIEN
LOEN
DAO5
MOD2
ELO1
ELO2
ELO3
ELO4
ELO5
ELO6
ELO7
SSO
V
DAM0
DAM1
DAM2
DAM3
DAM4
DAM5
DAM6
DAM7
V
DDO
OTRG
EREN
ADDC
VDDO
VSSI
ELO0
8079787776757473727170696867666564636261605958575655545352
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
2345678
1
DDO
VSSO
V
NOEN
DAO4
DAO3
MOD0
MOD1
SSO
DAO2
DAO1
DAO0
ENM4
ENM3
V
ENM2
M64403FP
9
101112131415161718
REST
READ
WRTE
CSEL
DHEF
PWDN
CLKO
Outline 100P6S-C
ENM1
ENM0
RES
DOEN
DDO
OUTR
UNCF
SYCR
V
2021222324252627282930
19
CLKE
ERMF
TESTE
SBFB
CLKI
TESM
ORDY
IRDY
SSO
V
DAI7
EROV
DAI6
TES3
DAI5
TES1
DAI4
SSO
V
SSI
V
VDDI
VDDI
CRDY
51
50
49
48
47
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
DAI3
CRDF
CORF
TES2
ERAF
TES7
V
DDO
OMD0
OMD1
OMD2
CLKM
SSO
V
RES
VDDO
ARM0
ARM1
ARM2
ARM3
DAI0
DAI1
DAI2
PRELIMINARY
Notice:This is not a final specification.
Some parametric limits are subject to change.
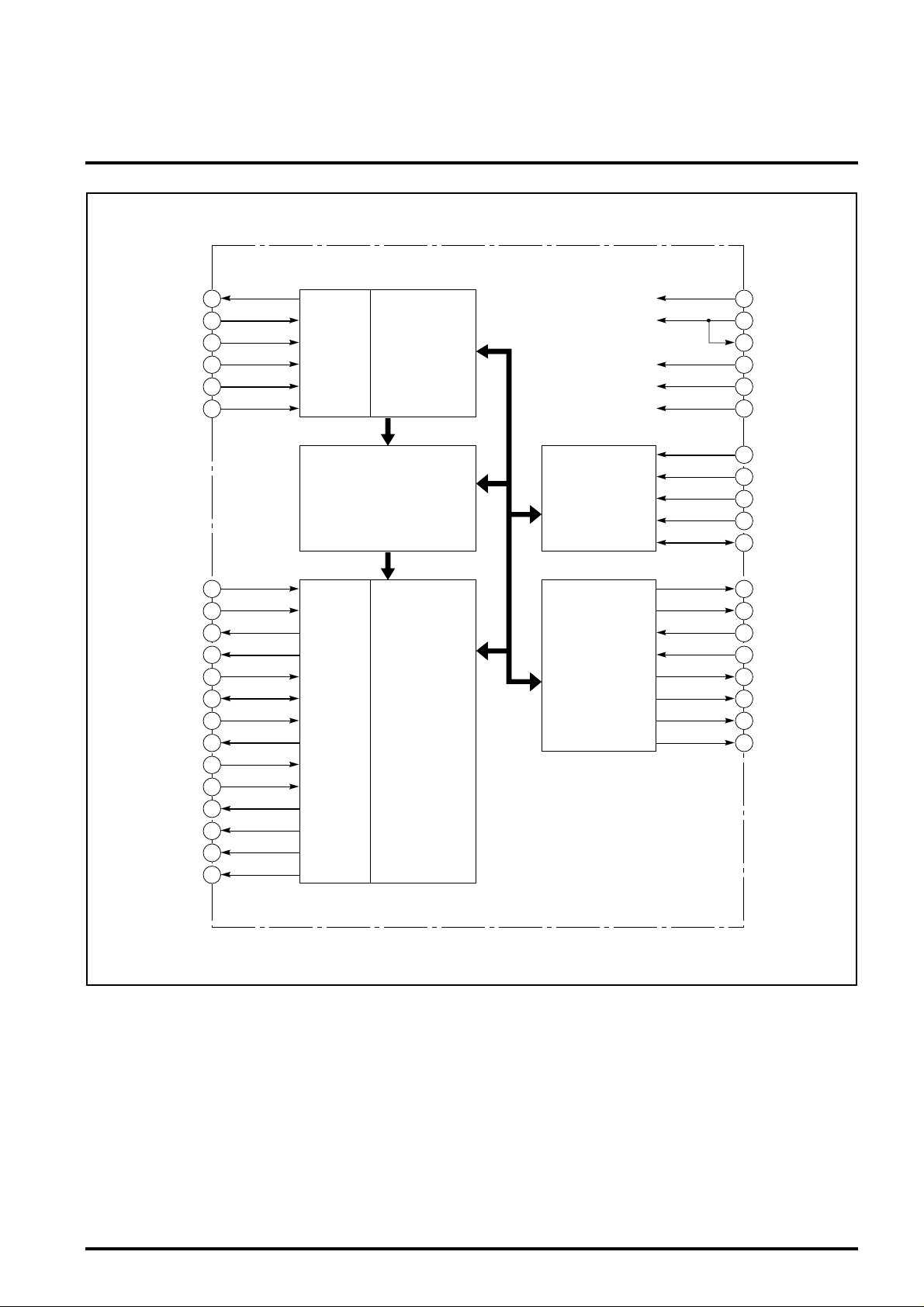
BLOCK DIAGRAM
MITSUBISHI ICs (LSI)
M64403FP
ERROR CORRECTION WITH VARIABLE LENGTH AND DISTANCE
IRDY
MOD0 – 2
DIEN
DHEF
DAI0 – 7
EREN
OTRG
ADDC
OUTR
DAO0 – 7
DOEN
ELO0 – 7
LOEN
ENM0 – 4
NOEN
ERMF
OMD0 – 2
CRDY
ORDY
CRDF
INPUT I/F
OUTPUT I/F
SYNDROME
CIRCUIT
EUCLIDEAN
CIRCUIT
CHEN SEARCH
ERROR VALUE
CIRCUIT
REST
CLKI
CLKM
CLKE
CLKO
PWDN
ARM0 – 3
MICRO
COMPUTER
I/F
CONTROL
CIRCUIT
&
CSEL
WRTE
READ
DAM0 – 7
SYCR
ERAF
TESTE
TESM
UNCF
CORF
EROV
SBFB
PRELIMINARY
Notice:This is not a final specification.
Some parametric limits are subject to change.
ABSOLUTE MAXIMUM RATINGS
Symbol UnitParameter
VDD VSupply voltage
VI Input voltage
VO
IIK Input protection diode current
OK
I
IO Output current
IDD VDD supply current
I
SS
Tstg Storage temperature
PdOUT
Output voltage
Output parasitic diode current
VSS supply current
Output
load
Output buffer@I
Output buffer@IOL=1mA
MITSUBISHI ICs (LSI)
M64403FP
ERROR CORRECTION WITH VARIABLE LENGTH AND DISTANCE
Ratings
MaxMin.
+6.5
-0.3
VDD+0.3
OL=4mA
-0.3
-0.3
DD+0.3
V
±20
±20
IOL=20
I
OH=-26
150-55
2200
760
81
81
V
V
mA
mA
mA
mA
mA
˚C
MHz•pF
RECOMMENDED OPERATING CONDITION
Symbol
VDD Supply voltage
Ta
VI
tr, tf
Operating temperature
Input voltage
Input rise & fall time
Parameter
Normal input
Schmit input
ELECTRICAL CHARACTERISTICS
Symbol
VIL
VIH
VTVT+
VH
VOL
VOH
Input voltage
(TTL interface)
Schmitt input voltage
(TTL interface)
Output voltage
IOL
Output current
IOH
IIL
IIH
IOZL
IOZH
RD
CI
CO
CIO
IDD
(∗ 1) : Rating for 4mA output buffer
(∗ 2) : Rating for 1mA output buffer
Input current
Output leak current
Pull down resistance
Input terminal capacitance
Output terminal capacitance
I/O terminal capacitance
Supply current
Parameter
Limits
Min. Typ. Max.
4.75 5.25
-20
5.0
+25
0
Test conditions
VDD=5.0V V
VDD=5.0V
+70
V
500
DD
Unit
V
˚C
V
nsec
5
msec
Limits
Min. Typ. Max.
0
2.2
5.25
Unit
0.8
1.350.7
DD=5.0V
V
2.21.4
1.20.3
V
DD=5.0V,
DD=4.5V, VOL=0.4V
V
IO <1µA
VDD=4.5V, VOH=4.1V
VDD5=5.5V, VI=0V
V
DD5=5.5V, VI=5.5V
V
DD5=5.5V, VI=0V
V
DD5=5.5V, VI=5.5V
V
DD5=5.0V, VI=5.0V
4.95
(∗1)
4
(∗2)
1
-1 +1
-1 +1
-1 +1
-1 +1
316
0.05
-4
-1
(∗3)
(∗4)
mA
mA
mA
mA
715
f=1MHz, V
DD=0V
715
715
mA
DD5=5.0V, VI=5.0V
V
2
V
V
V
V
V
V
µA
µA
µA
µA
kΩ
pF
pF
pF
PRELIMINARY
Notice:This is not a final specification.
Some parametric limits are subject to change.
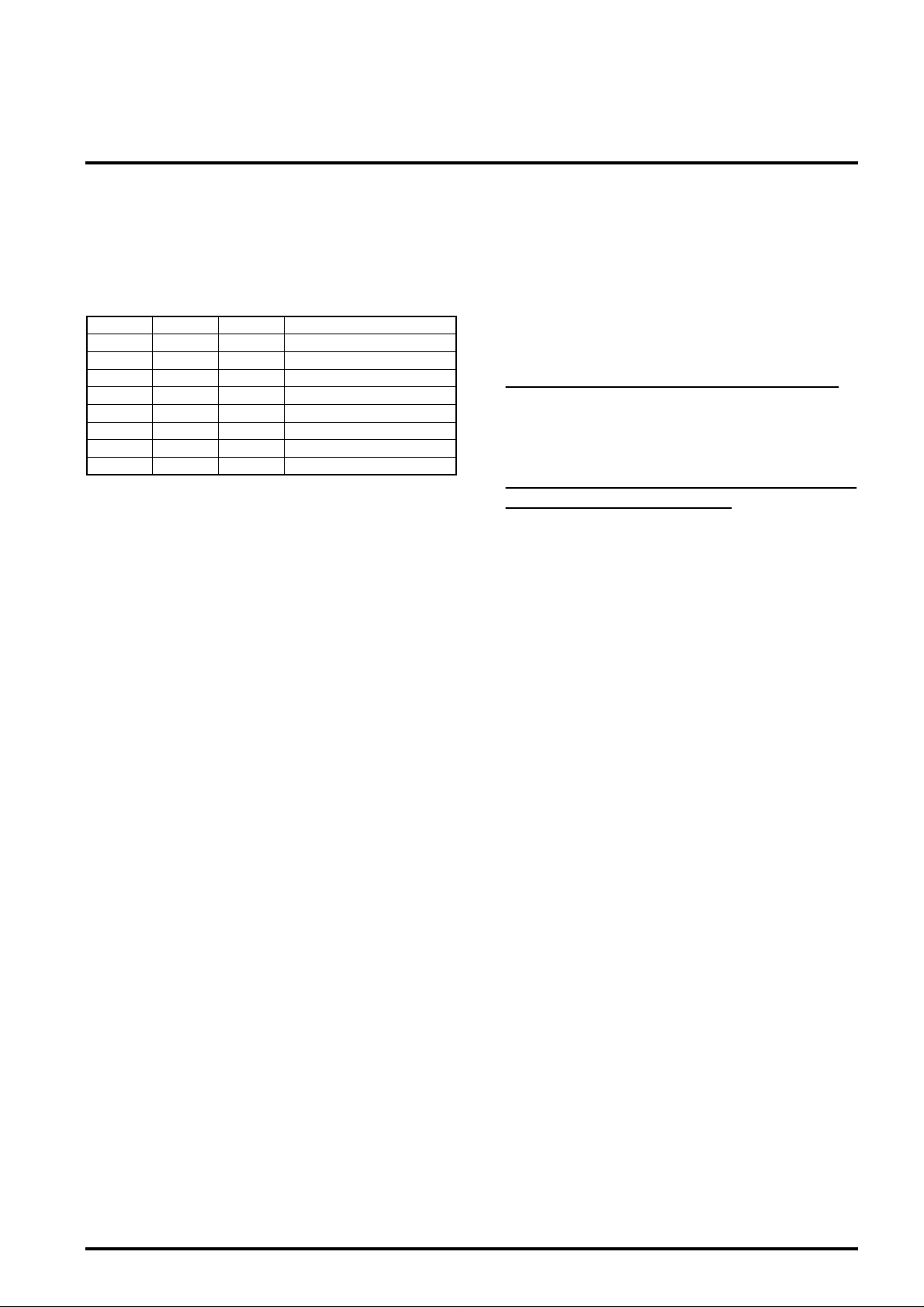
MICRO COMPUTER INTERFACE
Parameter register setting method (write) is described as follows.
(See page7 about sequence chart : See below diagram about
micro computer I/F and register table.)
1. Perform power on reset.
2. Set various parameters (code length-1, check byte length,
erasure correction threshold) to below parameter register table.
3. Set decode operation mode parameters to address-E. (See
address-E description)
See sequence chart page7 (micro computer I/F sequence) as for
read from parameter register, see below table as for register table.
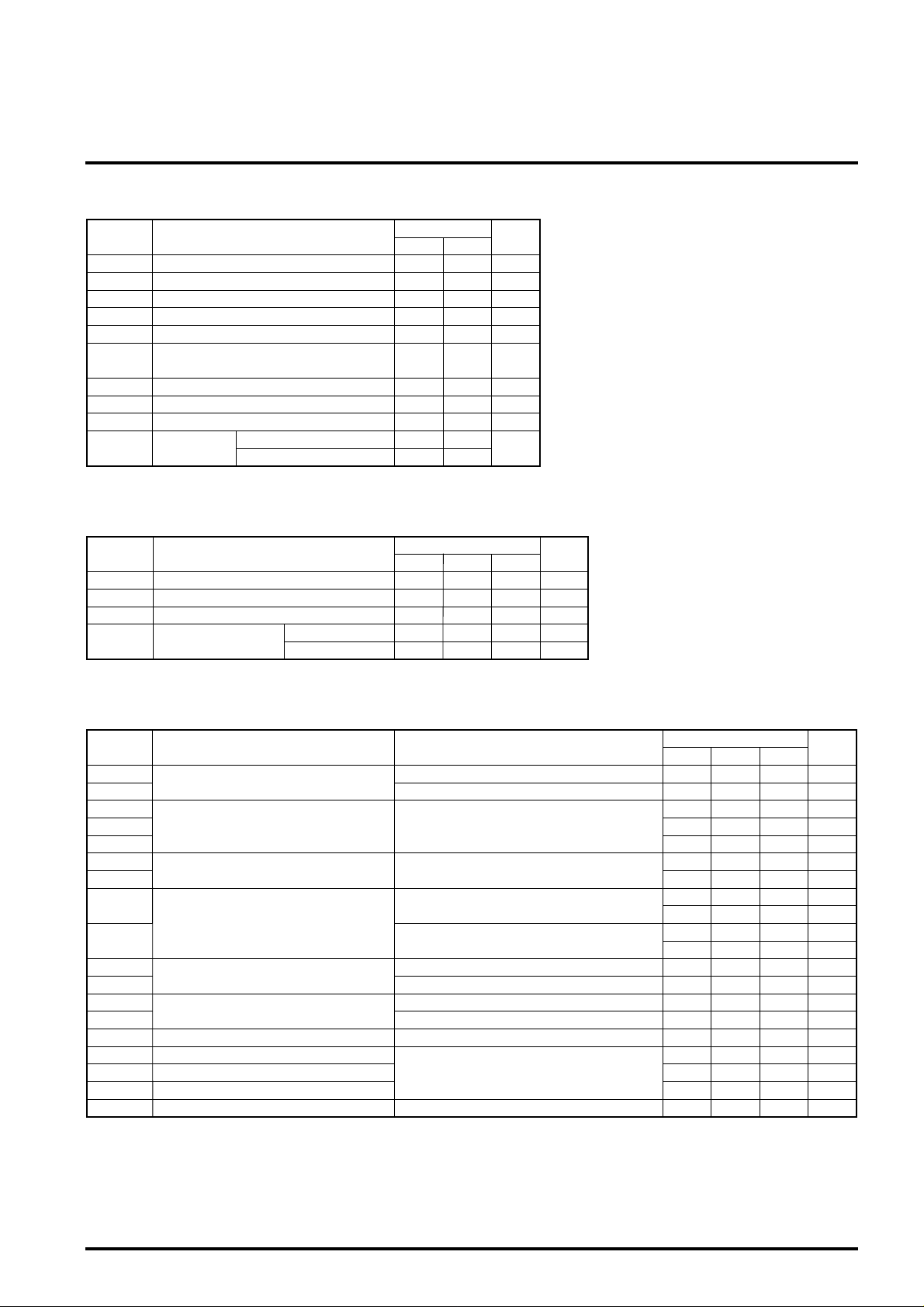
Parameter register table
address (Hex) R/W Initial (Hex) set data (Hex) description
00R/W1
00R/W2
00R/W3
00R/W4
00R/W5
00R/W6
00R/W7
00R/W8
00R/W9
00R/WA
00R/WB
—RC
——D
—R/WE
——F
ERROR CORRECTION WITH VARIABLE LENGTH AND DISTANCE
code (0) code length-1≤FE00R/W0
≤FE
≤FE
≤FE
≤10
≤10
≤10
≤10
≤10
≤10
≤10
≤10
—
—
—
—
code (1) code length-1
code (2) code length-1
code (3) code length-1
code (0) check byte length
code (1) check byte length
code (2) check byte length
code (3) check byte length
code (0) erasure threshold
code (1) erasure threshold
code (2) erasure threshold
code (3) erasure threshold
real erasure counts which is derived from syndrome calculation
reserve
decode operation mode
reserve
MITSUBISHI ICs (LSI)
M64403FP
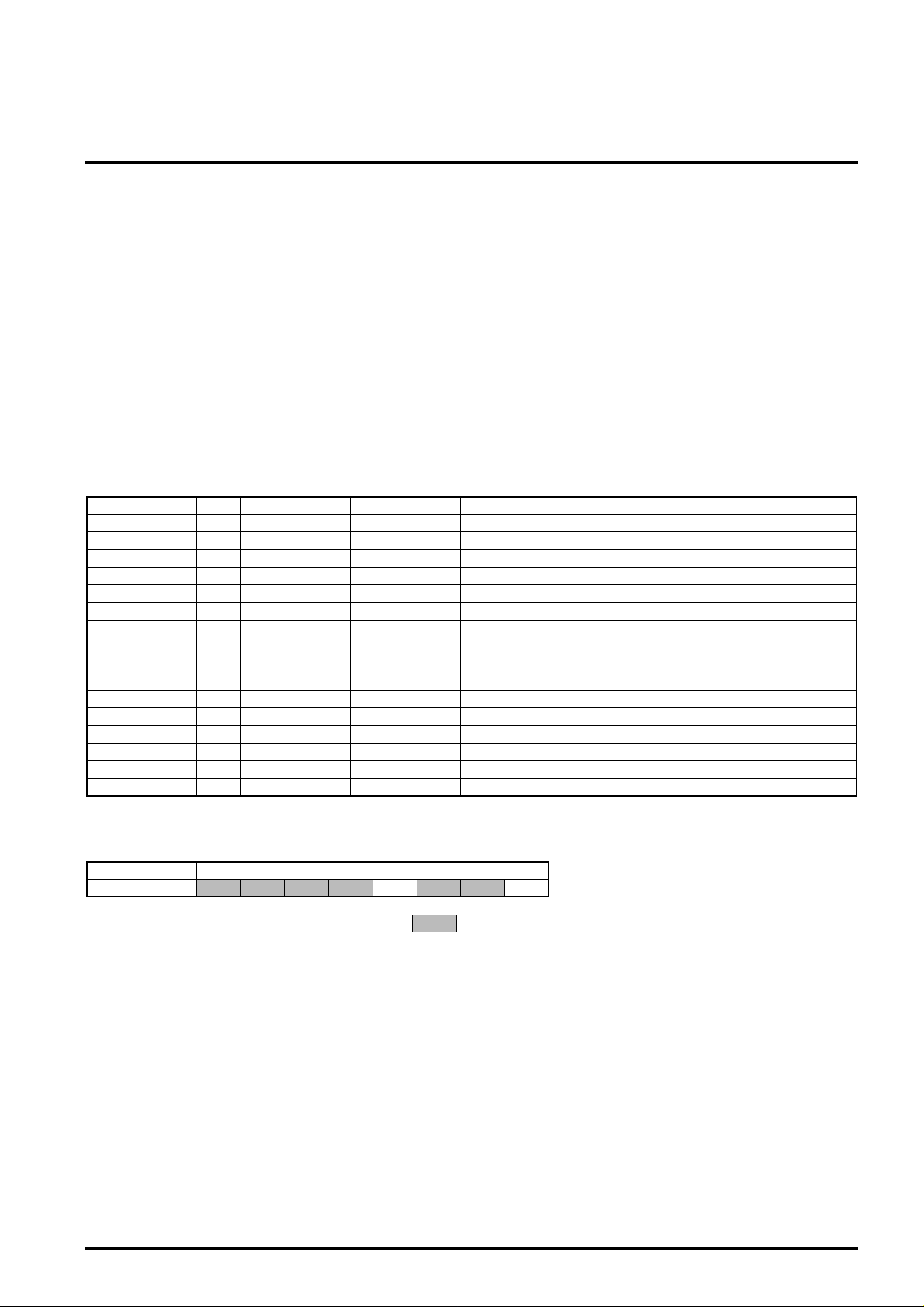
Address-E description
address (Hex) data
ED7
D0 (bit0) 0:constrained error correction mode 1:erasure correction priority mode
D3 (bit3) 0:error value output mode 1:internal correction mode
D6 D5 D4 D3 D2 D1 D0
means "0" fixed.
PRELIMINARY
Notice:This is not a final specification.
Some parametric limits are subject to change.
MITSUBISHI ICs (LSI)
M64403FP
ERROR CORRECTION WITH VARIABLE LENGTH AND DISTANCE
DECODE MODE SETTING METHOD
Decode mode is able to set at IRDY=H. Decode mode table is as
follows. Decode mode should be changed after all operations that
are set before changing.
Decodemode table
MOD0 MOD1 MOD2 mode
000
100
010
110
001
101
011
111
code (0) error correction
code (1) error correction
code (2) error correction
code (3) error correction
code (0) erasure correction
code (1) erasure correction
code (2) erasure correction
code (3) erasure correction
CODE WORD INPUT METHOD
Code word is able to input at IRDY=H. IRDY changes H to L when
head symbol for code word is input. And IRDY changes L to H
when the last symbol of code word is input.
DHEF should be H and DIEN should be L when the head symbol
of code word is input. DIEN is input enable signal for code word
and while it's L, input data is recognized as valid data and latched
to the internal circuit at rising edge of CLKI.
If the syndrome calculation for the 2nd code word finishes while the
1st code word is executed at Euclidean calculation stage, the
syndrome data that is latched internally is overwritten (called
syndrome collision) and the correcting operation for the 1st code
word is impossible. In this case, SYCR changes to H and informs
external of its status. (If the last symbol of code word is input at
SBFB=H, decoding is operated safely.)
SYCR which changes to H is reset by system reset (REST=L).
ERASURE FLAG INPUT METHOD AND
ERASURE CORRECTION MODE
Erasure correcting mode is set by the setting of erasure threshold
to address 8 to B for parameter register and the setting of
MOD2=H for decode mode signal. Erasure flag (EREN) should
input H by synchronization with symbol data of code word.
Follows are about erasure threshold.
(1) Constrained error correction mode is derived when the bit0 (D0)
of the parameter register address-E is set to L.
If the input erasure count is over the erasure threshold value ,
the operation is adopted ordinary error correction mode by
force.
(2) Erasure correction priority mode is derived when the bit0 (D0)
of the parameter register address-E is set to H.
If the error is detected at syndrome calculation and erasure
count is over the erasure threshold value , M64403FP regards
its operation as uncorrectable and correcting operation doesn't
execute.
In any cases ( , ), EROV (erasure over flag) changes to H.
(∗3) (∗4)
(∗4)
(∗3)

PRELIMINARY
j
Notice:This is not a final specification.
Some parametric limits are subject to change.
MITSUBISHI ICs (LSI)
M64403FP
ERROR CORRECTION WITH VARIABLE LENGTH AND DISTANCE
CORRECTED DATA OUTPUT METHOD
When the decode operation finishes and correction result is able to
output to a code word, OUTR changes to H for one period for
CLKO. In this case, error location data is shown on ELO0 to ELO7,
error value is shown on DAO0 to DAO7 and error correction count
or erasure count is shown on ENM0 to ENM7. (Details are
described later.)
When output enable signals (LOEN, DOEN, NOEN) are set to L
(active mode), respective data (error location, error value, error or
erasure count) are able to output. When these output enable
signals are set to H, respective data bus change to high
impedance status.
Error location data (ELO0 to ELO7) 00 hex means the location of
head data for input code word.
Error value data (DAO0 to DAO7) corresponds with error location
data (ELO0 to ELO7).
ADDC should be L for one period of CLKO in order to output next
error location and next error value.
(See page10 : Correction data operation sequence chart)
ENM0 to ENM4 outputs error correcting count at ERMF=L, erasure
count at ERMF=H. This erasure count means real error count at
constrained error correction mode, total count for real error and
erasure at erasure correction priority mode. And this erasure count
includes empty erasure (it means error value is zero). If erasure
count excesses 31 dec, ENM0 to ENM4 shows 31 dec.
After the external circuit read error count/error location/error value
for a code word, OTRG should change L to H only one time by
synchronization with CLKO clock. Data shift for internal pipe line
circuit is executed by this operation. If this operation is so late,
registers in the internal pipe line become full. And data collision
may occur if code word is input more and its syndrome data is
generated. In this case, M64403FP informs external of its status
and SYCR changes to H. (If the last symbol of code word is input
at SBFB=H, decoding is operated safely.)
SYCR which changes to H is reset by system reset (REST=L).
OUTPUT CONTROL SIGNAL
When OUTR changes to H, CORF (error detected flag), UNCF
(uncorrectable flag) and EROV (erasure over flag) are output.
CORF changes to L when M64403FP regards input code word as
no error. CORF changes to H when M64403FP detects error.
UNCF changes to H when M64403FP regards the error correction
as impossible. If the input erasure flag count excesses erasure
threshold value with erasure correction priority mode, UNCF
changes to H also.
OMD0 to OMD2 show the current operated code word's decode
mode which was set by MOD0 to MOD2.
INTERNALCORRECTION MODE
The internal correction mode is active when the bit3 (D3) of
parameter register address-E is set to H. In this internal correction
mode, the code word that was input already and shown by OMD0
to OMD2 input to ELO0 to ELO7.
In order to recognize the header symbol of input data, OTRG
should be H by synchronization with the header symbol of code
word. ADDC should be L while valid code word is input.
Corrected data is output from DAO0 to DAO7 after three clocks
delay. OUTR changes to H by synchronization with header symbol
in order to show the header symbol of corrected code word. CRDY
changes to L by synchronization with output code word. CRDF
changes to H for corrected portion. In addition, ORDY changes to
H while output period of information symbol in order to distinguish
from code word from information symbol and check symbol.
MISOPERATION FOR ODD CHECK BYTE
NUMBER
M64403FP have no good operation when check byte number are
ust d/2 (d=check byte number+1) as UNCF don't to change to H,
and misdata is output.
But we can judge the misoperation when ENM<4:0> indicates d/2
in error correction mode, and ENM<4:0> indicates d/2 when
erasure number=0 or EROV=H in erasure correction mode.
 Loading...
Loading...