

Mitsubishi M63013FP Datasheet
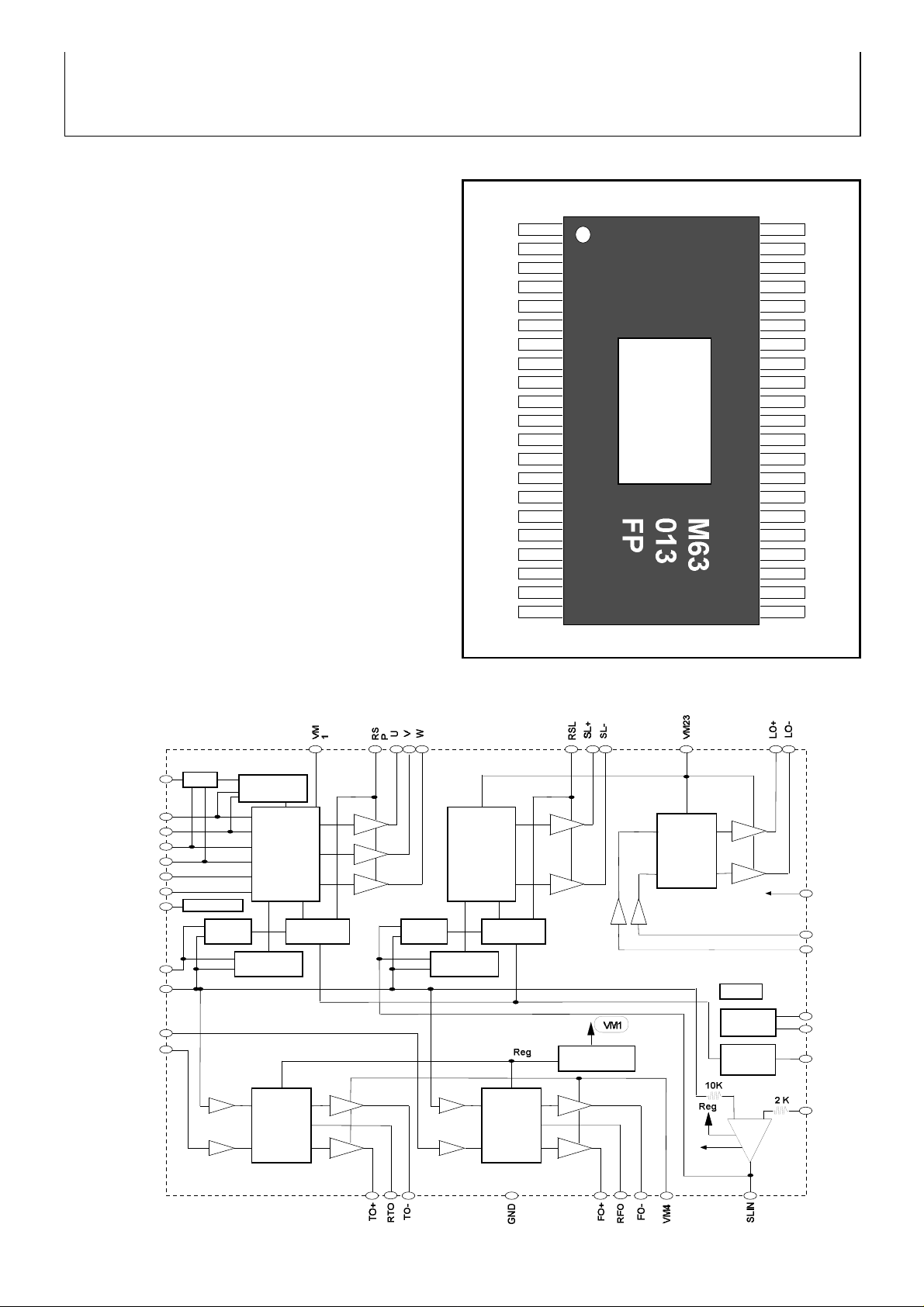
M63013FP
Preliminary
PIN CONFIGURATION
(Top View)
Package outline : 42 PIN POWER SSOP (42P9R-B)
123456789101112131415161718192021
GND
GND
LOIN+
MU2
LO+
RSL
SL-
VURSP
HW+
HV+
HU+
This IC is 1 chip driver IC for spindle motor and 4 channel
actuators. All of the motor and actuator of optical disk drive
system (CD-ROM etc.) can be drived by only this IC.
This IC has current control drive system for Focus, Tracking,
Spindle and Slide channel drive, also has a direct PWM
control system for Spindle and Slide channels drive due to
reducing IC power dissipation.
This IC has three voltage supply terminals (for Spindle,
Slide/Loading and Focus/Tracking) , and these voltage
supply can be set separately.
Further more this IC has an operational amplifier for Slide
input, FG amplifier, thermal shut down circuit, standby circuit,
channel select function, reverse rotation detect circuit and
Short braking select.
252627282930313233343536373839404142222324
GND
GNDHBFG
TOIN
LOIN-
OSC
FO+
RTO
OPIN-
SPIN
5VCC
VM1
FG
Reverse
Detect
CTL
amp.
Frequency
generator
Direction
comp.
CTL
amp.
Direction
comp.
Hall Bias
Regulator
BIAS
TSD
FG
HU+
HU-
HV+
HV-
HW+
HW-HBREF
SPIN
TOIN
FOIN
OPIN-
OSC
MU2
MU1
+ -
sssss
s
5VCC
LOIN-
5VCC
5Vpower
supply
LOIN+
Current
comp.
Current
comp.
[FEATURES]
MITSUBISHI SEMICONDUCTORS
SPINDLE MOTOR AND 4CH ACTUATOR DRIVER
MU1
VM23
LO-
SL+
W
HW-
HV-
HU-
[APPLICATION]
CD-ROM, DVD, DVD-ROM, DVD-RAM ,Optical disc related system,etc
RFO
VM4
TOTO+
FO-
SLIN
FOIN
REF
[BLOCK DIAGRAM]
Spindle Slide
Focus
Tracking
1
( / 17)
Loading
REV990607
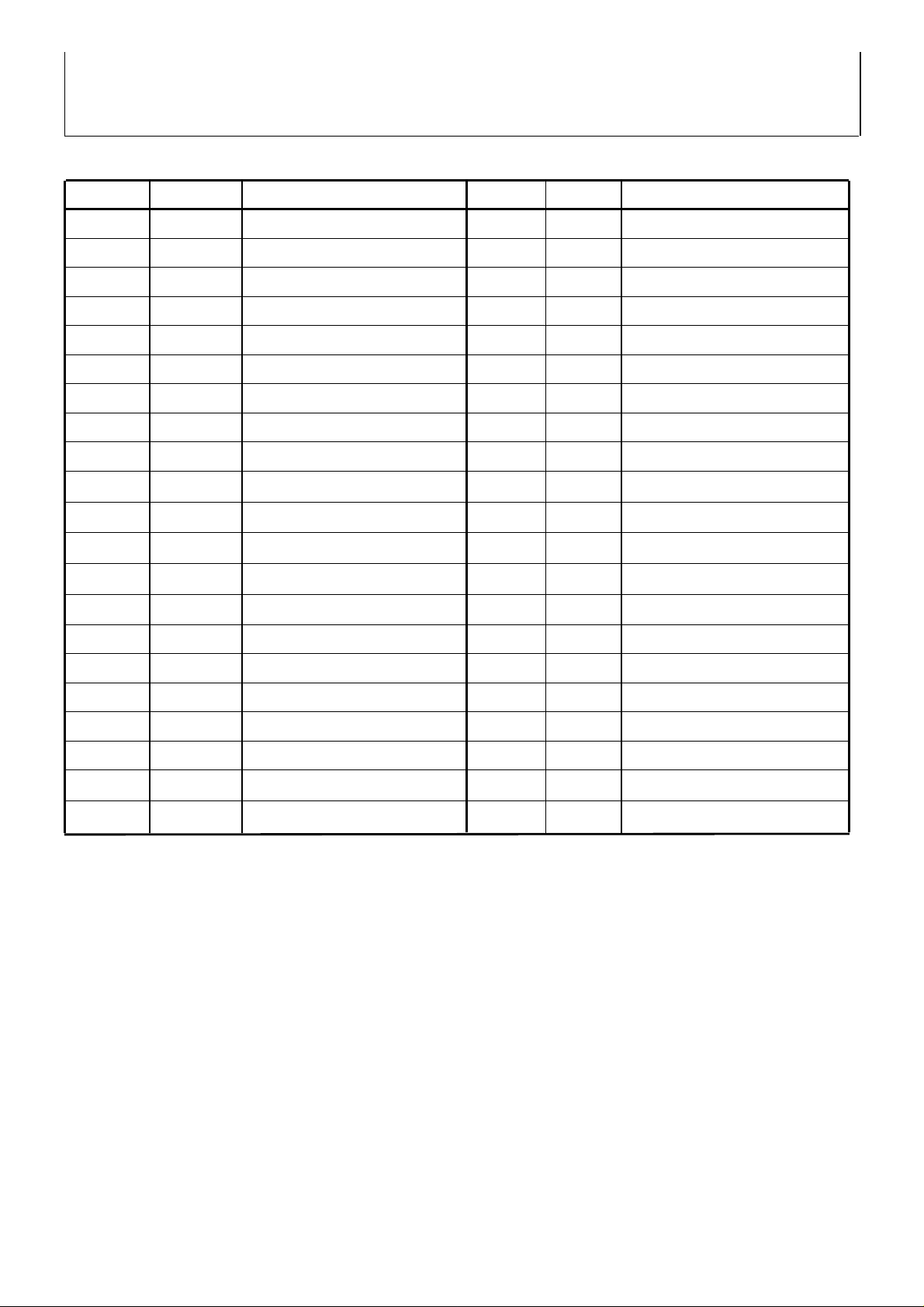
M63013FP
Preliminary
SYMBOL
SYMBOL
TERMINAL
TERMINAL FUNCTION
TERMINAL
TERMINAL FUNCTION
1234567815161718192122232425262728363738394041
42
Loading non-inverted output
LO+
Loading inverted output
LO-
HW-
HW+
HV- sensor amp. input
HV-
RSL
Slide current sense
Motor drive output U
U
Spindle current sensie
RSP
GND
GND
GND
GND1420
29
HW+ sensor amp. input
HW- sensor amp. input
HV+ sensor amp. input
HV+
HU- sensor amp. input
HU-
HU+
HU+ sensor amp. input
35
9
SL+
Slide non-inverted output
34
10
SL-
Slide inverted output
33
GND
GND
11
GND
GND32OPIN-
12
W
Motor drive output W
31
13
V
Motor drive output V
30
MU2
mute 2
mute 1
MU1
VM23
LOIN+
Loading control input(+)
SLIN
Slide control input
SPIN
Tracking control voltage input
PWM carrier oscilation set
OSC
HB
Bias for Hall Sensor
FG
Frequency generator output
FOIN
Focus control voltage input
TOIN
Spindle control voltage input
Focus inverted output
FO-
TO-
Tracking inverted output
TO+
Tracking non-inverted output
VM4
REF
Focus non-inverted output
FO+
Reference voltage input
VM1
Operational amplifier imverted input
Motor Power Suppry 3(for Slide/Loading)
Motor Power Suppry 4(for FS and TS)
Motor Power Suppry 1(for Spindle)
LOIN-
Loading control input(-)
5VCC
5V Power Suppry
RFO
RTO
Current feedback terminal for Focus
Current feedback terminal for Tracking
[PIN FUNCTION]
MITSUBISHI SEMICONDUCTORS
SPINDLE MOTOR AND 4CH ACTUATOR DRIVER
2
( / 17)
REV990607
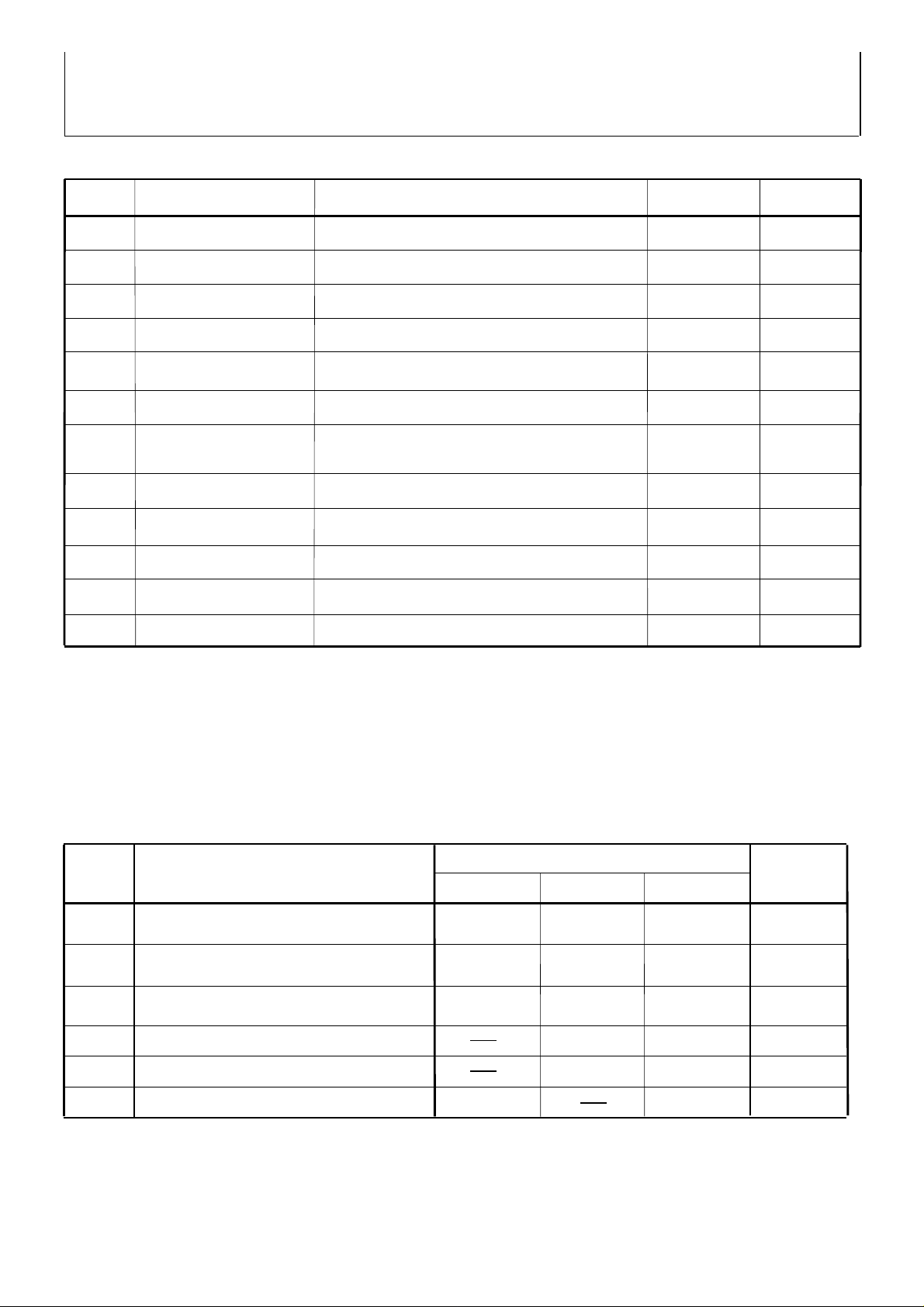
M63013FP
Preliminary
SYMBOL
PARAMETER
CONDITIONS
RATING
Unit
Motor power supply 4
Focus and Tracking power supply
Motor Output Current A
Free Air and on the grass epoxy board
Thermal derating
Operating temperature
Maximum input voltage
*note1 ; The ICs must be operated within the Pt (power dissipation) or the area of safety operation
*note 1
Focus,Tracking and Loading output current
MU1,MU2,Hw-,Hw+,Hv-,Hv+,Hu-,Hu+,REF,
SPIN,TOIN,FOIN,OSC,OPIN-,LOIN-,LOIN+
Free Air and on the grass epoxy board
Motor power supply 1
5V power supply
Motor Output Current B
*note 1
Spindle and Slide output current
with external shottky diode
SYMBOL
PARAMETER
LIMITS
VM1 power supply(for Spindle)
VM4 power supply(for Focus and Tracking)
Spindle and Slide OutputCurrent
Focus, Tracking and Loading Output Current
Motor power supply 2
VM23 power supply(for Slide and Loading)
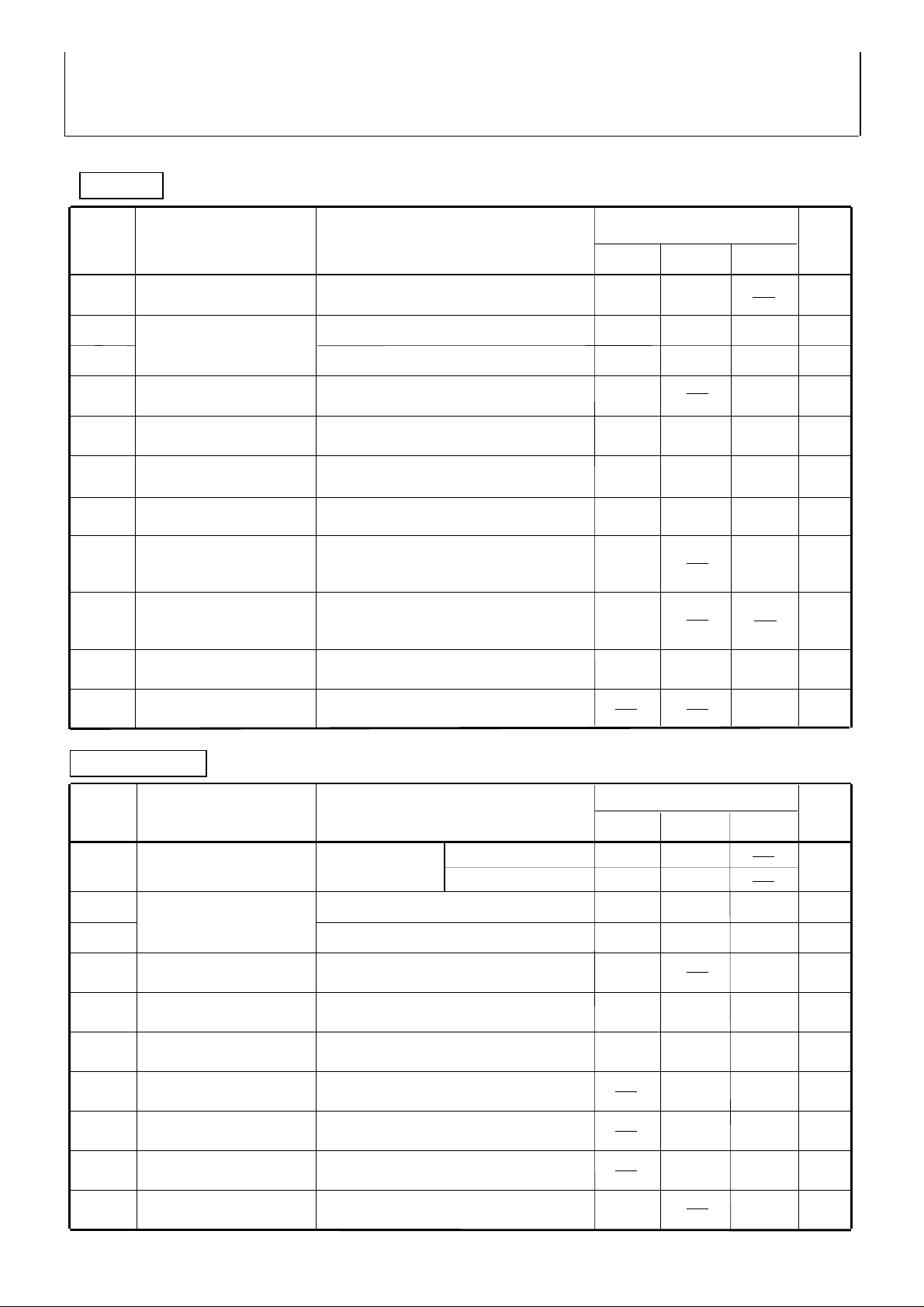
[ABSOLUTE MAXIMUM RATING] (Ta=25ºC)
MITSUBISHI SEMICONDUCTORS
SPINDLE MOTOR AND 4CH ACTUATOR DRIVER
5VCC
VM1
VM23
Motor power supply 23
Spindle power supply
Slide and Loading power supply
VM4
IoA
IoB
Vin
of terminals
Pt
Power dissipation
Kθ mW / ºC
Tj
Junction temperature
Topr
Tstg
Storage temperature
7
15
15
15
1.2
1.0
0 to 5VCC
2.6
20.8
150
-20 to +75
-40 to +150
V
V
V
V
A
A
V
W
ºC
ºC
ºC
The spindle and slide output terminal is needed external shottky diode between each output and GND
when it is used above 0.6A. Discription(IoA) is case of with external shottky diode.
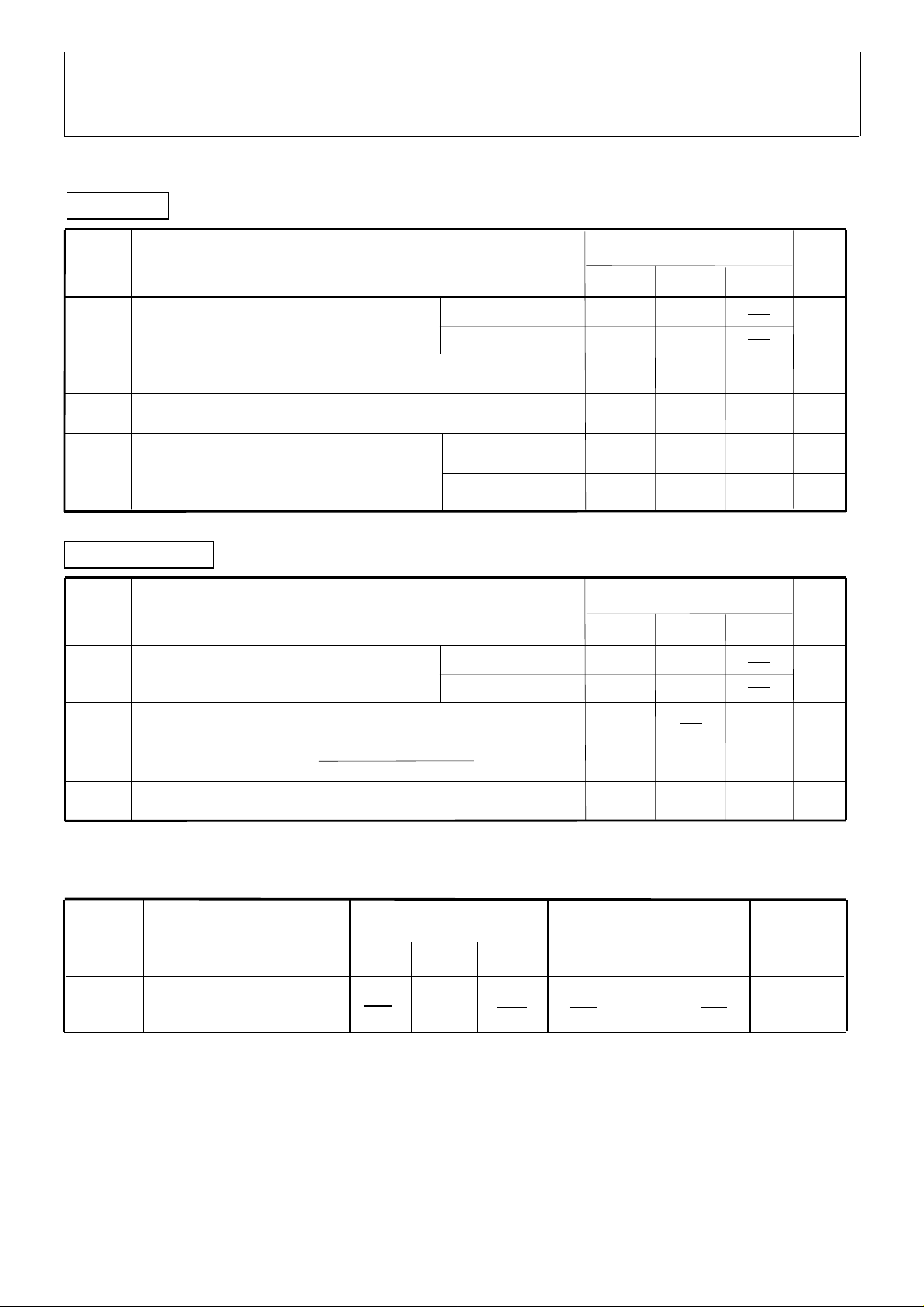
[RECOMMENDED OPERATING CONDITIONS] (Ta=25ºC )
minimum typical maximum
VM1
VM23 4.5
VM4
IoA
*note2
IoB
*note2
The spindle and slide output terminal is needed external shottky diode between each output and GND
when it is used above 0.6A. Discription(IoA) is case of with external shottky diode.
6
30
12
12
5
0.5
0.5
13.2
13.2
13.24.5
1.0
0.8
120
Unit
V
V
V
A
A
KHzFosc
3
( / 17)
REV990607
M63013FP
Preliminary
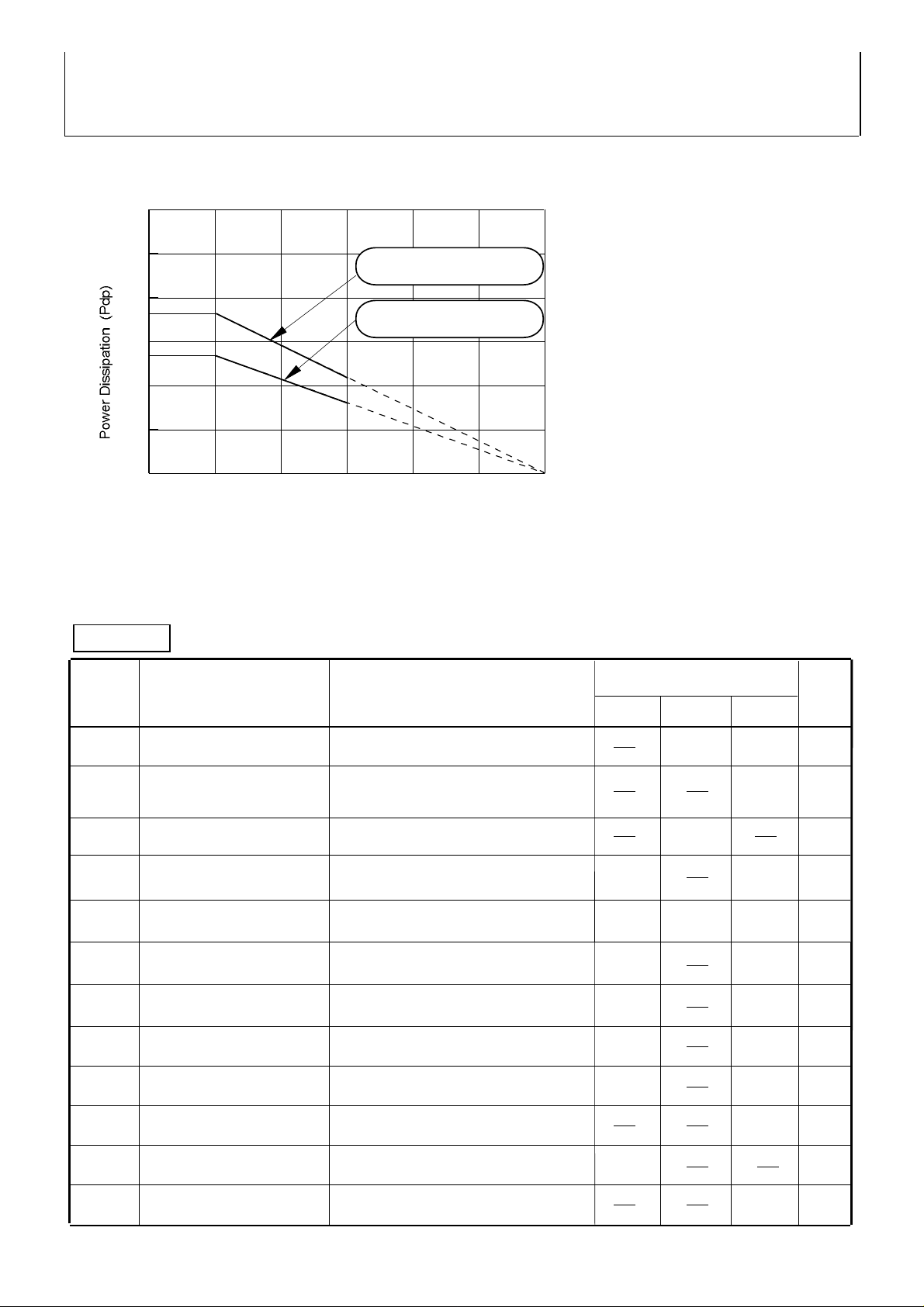
Ambient Temperature Ta (ºC)
(W)
Icc1
Icc2mAFosc
KHz
5VCC,VM1, VM23, VM4 current
µA
5VCC,VM1, VM23, VM4 current under Sleep
SYMBOL
PARAMETER
Supply current
CONDITIONS
MIN
TYP
MAX
PWM carrier frequency
(MU1 = MU2 =0V)
OSC : with 180pF
VinREF
V
REF input voltage range
VMULO
V
MUTE terminal low voltage
MU1,MU2
VMUHI
V
IMU
µA
Mute terminal input current
at 5V input voltage
IinREF
µA
REF input voltage range
VREF=1.65V
(Ta=25ºC, 5VCC=VM4=5V,VM1=VM23=12V unless otherwise noted.)
VinOP
V5OPamp input voltage range
IinOP
OPamp input current
µA
VofOP
OPamp input offset voltage
VoutOP
V
OPamp output voltage range
MUTE terminal high voltage
MU1,MU2
MU1,MU2
[THERMAL DERATING]
6.0
5.0
4.0
3.0
2.0
1.0
0 25 50 75 100 125 150
SPINDLE MOTOR AND 4CH ACTUATOR DRIVER
3.6W
using N-type board
2.6W
using P-type board
MITSUBISHI SEMICONDUCTORS
This IC's package is POWER-SSOP,
so improving the board on which the IC
is mounted enables a large power
dissipation without a heat sink.
For example, using an 1 layer glass
epoxy resin board, the IC's power
dissipation is 2.6W at least. And it
comes to 3.6W by using an improved 2
layer board.
The information of the N, P type board
is shown in attached.
[ELECTRICAL CHARACTERISTICS]
Common
Sleep current
OPIN-
OPIN-=1.65V
REF=1.65V(OPIN-=OPOUT ;buffer)
-10
0.5Io=-2.0 to +2.0mA
LIMITS
Unit
60
78
30
110
0
0-1.0 -0.15
+10
mV
4.5
4
( / 17)
1.0
-10
3.0
3.3
+10
0.8
500
REV990607
M63013FP
Preliminary
Vdyc1
Vdead1-
V
Vin1
V
mV
SYMBOL
PARAMETER
Dynamic range of output
CONDITIONS
LIMITS
MIN
TYP
MAX
Control voltage input range 1
Control voltage dead zone 1
SPIN
Gvo1
V/V
Control gain 1
Gio1=Gvo1/ Rs [A/V]
Vlim1F
V
Control limit 1F
VHmin
mVp-p
VHBVHB output voltage
IHB
mA
HB terminal sink current
VHcom
V
common mode input range
Hall sensor amp.
input signal level
Hall sensor amp.
mV
Vdead1+
SPIN<REF
REF<SPIN
Ilim1F=Vlim1F/ Rs [A]
at Load current (IHB)=10mA
[REVERSE]
[FORWARD]
Hu+,Hu-,Hv+,Hv-,Hw+ ,Hw-
Hu+,Hu-,Hv+,Hv-,Hw+ ,Hw-
(Ta=25ºC, 5VCC=VM4=5V,VM1=VM23=12V unless otherwise noted.)
Vdead2-
V
Vin2
V
mV
SYMBOL
MIN
TYP
MAX
Control voltage input range 2
Control voltage dead zone 2
SLIN
Gvo2
V/V
Control gain 2
Vlim2
V
Control limit 2
Tdon
Output turn-on delay
Tdoff
Output turn-off delay
mV
Vdead2+
SLIN < REF
REF < SLIN
Tdsw
Output switching delay
Ileak
Output leak current
MU1=MU2=5v,MU1=MU2=0v
Vdyc2
Dynamic range of output
(Ta=25ºC, 5VCC=VM4=5V,VM1=VM23=12V unless otherwise noted.)
MU1=MU2=0V or MU1=MU2=5V or
MU1=5V/MU2=0V
at VM23=5[V]
at VM23=12[V]
[REVERSE]
[FORWARD]
Vlim1R
Control limit 1R
Ilim1R=Vlim1R/ Rs [A]
V
[ELECTRICAL CHARACTERISTICS]
Spindle
MITSUBISHI SEMICONDUCTORS
SPINDLE MOTOR AND 4CH ACTUATOR DRIVER
Unit
Io=0.5 [A]
-80
0
0.85
0.4
1.3
60
10.810.3
-40
+40
+80
50
1.0 1.15
0.5
0.410.27 0.34
3.7
1.20.6 0.85
30
0
0.6
Slide
PARAMETER
LIMITS
CONDITIONS
3.83.3
Io=0.5 [A]
-80
0
10.810.3
-40
+40
0
Gio2=Gvo2/ Rs [A/V]
Ilim2=Vlim2/ Rs [A] 0.5
0.85
0.43
1.0
3.5
5.0
-100
0
+80
5
1.15
0.58
2.01.0
7.0
10.0
100
Unit
µsec
µsec
µsec
µA
5
( / 17)
REV990607
M63013FP
Preliminary
MIN
TYP
MAX
MIN
TYP
MAX
FUNCTION START TEMPERATURE OF IC
FUNCTION STOP TEMPERATURE OF IC
Thermal Shut Down
Vdyc3
V
Vin3VSYMBOL
PARAMETER
CONDITIONS
LIMITS
MIN
TYP
MAX
Control voltage input range3
Gvo3
Control gain 3
Voff1
mV
Output offset voltage
Dynamic range of output
LOIN+,LOIN-
(Ta=25ºC 5VCC=VM4=5V,VM1=VM23=12V unless otherwise noted.)
VM23=5[V]
VM23=12[V]
Vdyc4
V
Vin4VSYMBOL
PARAMETER
CONDITIONS
LIMITS
MIN
TYP
MAX
Control voltage input range 4
Gvo4
dB
Control gain 4
Voff2
Output offset voltage
Dynamic range of output
FOIN,TOIN
(Ta=25ºC, 5VCC=VM4=5V,VM1=VM23=12V unless otherwise noted.)
VM4=5[V]
VM4=12[V]
mV18dB
mV
[ELECTRICAL CHARACTERISTICS]
Loading
MITSUBISHI SEMICONDUCTORS
SPINDLE MOTOR AND 4CH ACTUATOR DRIVER
Unit
Focus / Tracking
Io=0.5[A]
(LO+) - (LO-)
(LOIN+) - (LOIN-)
(LO+) - (LO-)
Io=0.5[A]
VM1=12[V]
RFO (RTO)-FO-(TO-)
FOIN(TOIN)-REF
RFO (RTO)-FO-(TO-)
at REF=FOIN(TOIN)=1.65V
LOIN+=LOIN-=5V
LOIN+=LOIN-=1.65V
0
16.6
-100
0
-5
3.83.3
10.810.3
5
19.3
0
0
+100
+50-50
Unit
4.23.8
7.66.8
5
-8.0-6.7
0
-9.4
+5
[THERMAL CHARACTERISTICS]
SYMBOL PARAMETER
TSD
160
6
( / 17)
130
Unit
ºC
REV990607
 Loading...
Loading...