

MITSUBISHI <CONTROL / DRIVER IC>
)
M56786FP
SPINDLE MOTOR AND 1CH ACTUATOR DRIVER
DESCRIPTION
The M56786FP is a semiconductor integrated circuit in order to
drive the spindle motor and 1ch actuator.
FEATURES
● 3.3V DSP available.
● Low power dissipation & low motor echo noise.
● Large power dissipation package(Power Package).
● High motor drive current .
● Wide dynamic range.
● Motor current control for both motor torque directions.
● Reverse torque mode select [SHORT BRAKING,etc].
● Sleep mode.
● FG signal output terminal.
● FG pulse select.
● Automatic stop.
● Low saturation voltage
● Wide power supply voltage range(4.5V–13.2V)
APPLICATION
CD-ROM, DVD,DVD-ROM,DVD-RAM etc.
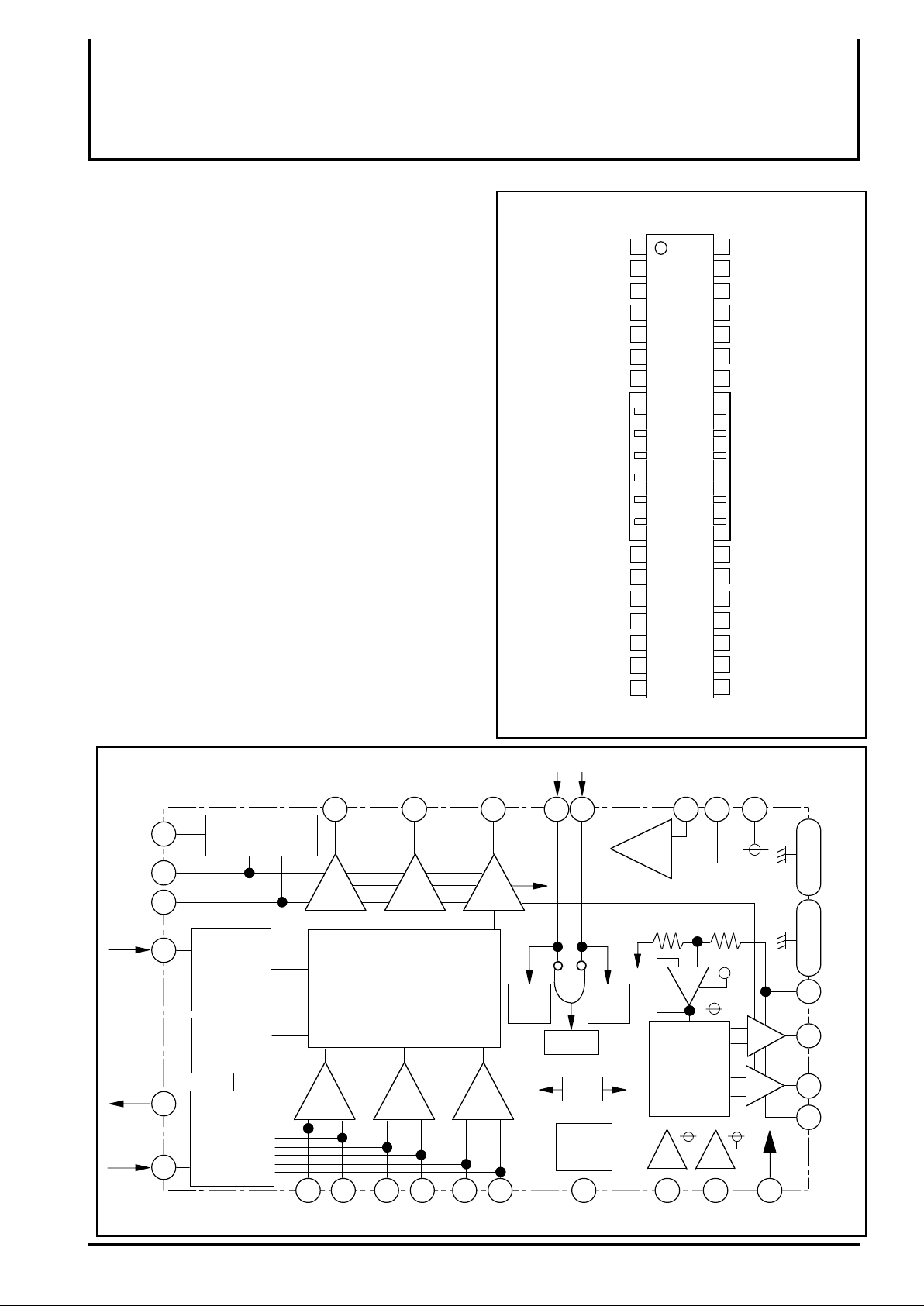
PIN CONFIGURATION(TOP VIEW
ECR
1
2
EC
3
S/S
BRS
4
FGS
FG
7
VCC1
8
10
GND
12
13
14
15 28
HB
16
Hu+
Hu-
17
18
Hv+
19
Hv-
20
Hw+
21
Hw-
42
41
40
39
385
376
36
35
349
M56786FP
33
3211
31
30
29
27
26
25
24
23
22
ININ+
MUTE
OUTV
DD+
DD-
V
OUT+
GND
U
V
W
TP
CI
R
S
CC2
V
BLOCK DIAGRAM
CURRENT
SENSE & LIMIT
BRAKING
MODE
CHANGE
REVERSE
DETECT
FG
&
SELECT
RS
VCC2
BRS
FG
FGS
I
C
24
23
22
4
6
5
Outline 42P9R-D
UVW VCC1
28 26
+-
17
16
Hu+ Hu- Hv+ Hv- Hw+ Hw-
27
120°
MATRIX
+- +
19 20
18
S/S
3 740
GND
SPM
BIAS
Sleep
spm ch1
-
21
TSD
HALL
BIAS
15
HB
MUTE
CH1
BIAS
CONTROL
RR
VDD-
EC
2
+
-
CH1
X8
V
CC2
ECR
1
VDD+
VCC2
B2B1
4142
IN+IN-
8 to 14
GND
29 to 35
GND
V
DD+
38
+
-
+
-
V
CC2
25
TP
OUT+
36
OUT-
39
DD-
V
37
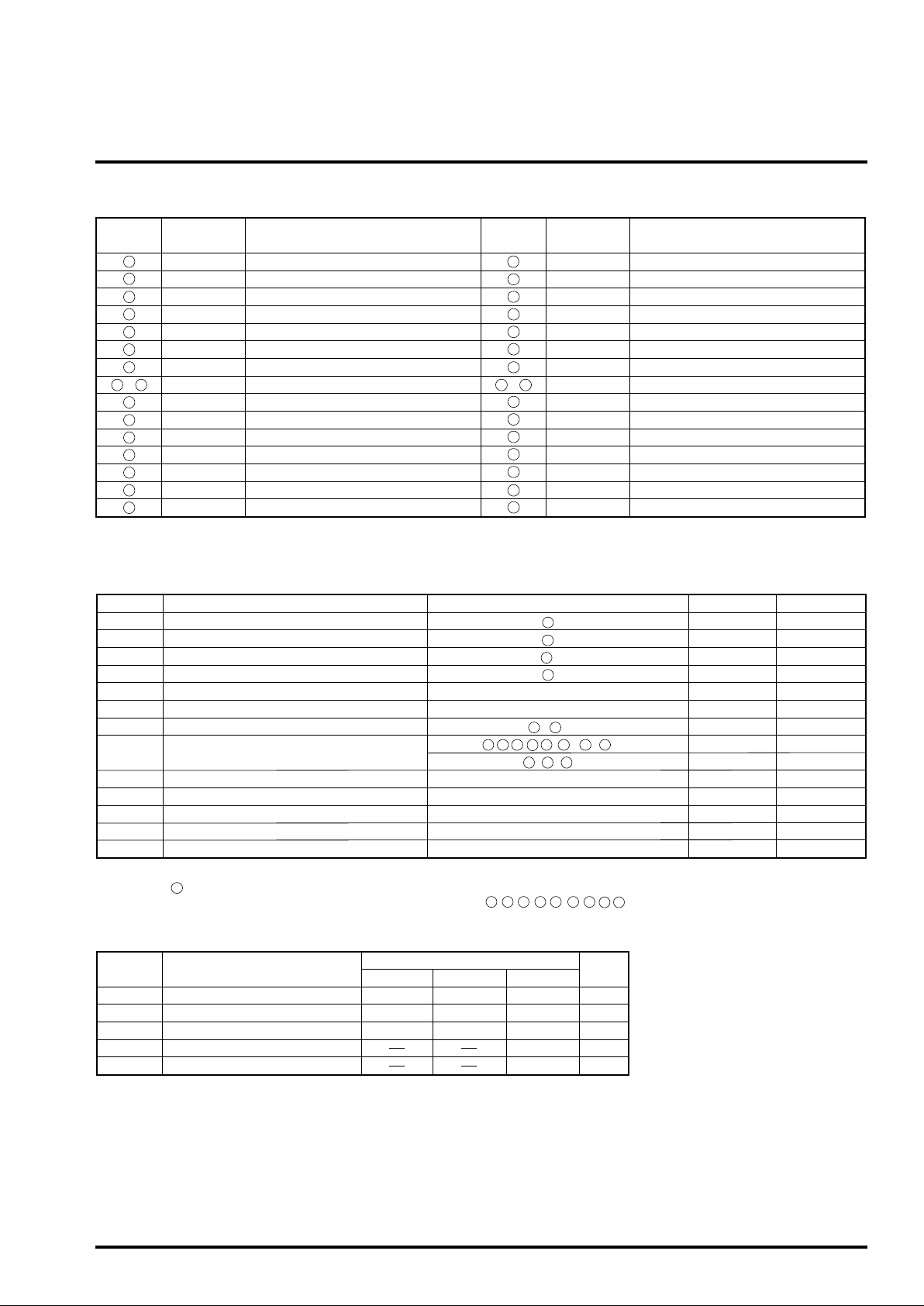
PIN DESCRIPTION
MITSUBISHI <CONTROL / DRIVER IC>
M56786FP
SPINDLE MOTOR AND 1CH ACTUATOR DRIVER
1
2
3
4
5
6
7
–
8 14
15
16
17
18
19
20
21
Symbol FunctionPin No.
ECR The reference voltage for EC
EC Motor speed control
S/S Start / Stop for spindle driver
BRS Reverse torque mode select
FGS FG pulse select
FG Frequency generator output
V
CC1 5V supply voltage
GND
GND
Bias for Hall SensorHB
Hu+ Hu+ Sensor amp. input
Hu- Hu- Sensor amp. input
Hv+ Hv+ Sensor amp. input
Hv- Hv- Sensor amp. input
Hw+ Hw+ Sensor amp. input
Hw- Hw- Sensor amp. input
Pin No.
22
23
24
25
26
27
28
–
29 35
36
37
38
39
40
41
42
Symbol
CC2 12V supply voltage
V
R
S Motor current sense
CI Phase Compensation
TP Test Note1
W
Motor drive output W
V Motor drive output V
U Motor drive output U
GND GND
OUT+ Non-inverted output of actuator driver
VDD- GND of actuator driver
VDD+ Power supply of actuator driver
OUT- Inverted output of actuator driver
MUTE Mute of actuator driver
IN+ Non-inverted input of actuator driver
IN- Inverted input of actuator driver
*Pull-up resistors (10kohm) are included in the circuits connected to pin[FG].
*Note1. The pin TP is test terminal. Please make an open the pin TP.
ABSOLUTE MAXIMUM RATING (Ta=25˚C)
Symbol
RS
VCC2
V
CC1 Power supply 1 voltage
V
DD+ Power supply 3 voltage
Motor supply voltage
Power supply 2 voltage
Parameter
Io1 SPM Output current
Io2 ATC Output Current
VH(c) Sensor amp. Differential input range
Vin Maximum voltage of input terminals
Pt Power dissipation
Kθ
Tj
Topr
Tstg
Thermal derating
Junction temperature
Operating temperature
Storage temperature
*Note2 ; The ICs must be operated within the Pt (power dissipation) or the area of safety operation.
*Note3 ; The 25 pin[Tp] is a test terminal. Please make open this terminal.
*Note4 ; Please don't connect directly the external power supply to the26 , 27 ,28 ,36, 39 , 23 ,15, 6 ,24 pin.
Conditions Unit
23 pin 15 V
22 pin
7 pin
38 pin
Note 2
Note 2
16 – 21 pins
1 , 2 , 3 , 4 , 5 , 16 – 21 , 40 pin
23 , 41 , 42 pin
Free Air
Free Air
Function
Rating
15
7.0
15
1.2
0.7
4.5
0–V
CC1
CC2
0–V
1.2
9.6
150
-20–+75
-40–+125
V
V
V
A
A
V
V
V
W
mW/˚C
˚C
˚C
˚C
RECOMMENDED OPERATING CONDITIONS
Symbol
CC1
V
VDD+
Io1
Io2
Power supply 1
Power supply 2VCC2
Power supply 3
SPM Output drive current
ACT Output drive current
Parameter
4.5
Limits
12.0
12.04.5
Max.Typ.Min.
5.55.04.5
13.2
13.2
700
700
Unit
V
V
V
mA
mA
MITSUBISHI <CONTROL / DRIVER IC>
SPINDLE MOTOR AND 1CH ACTUATOR DRIVER
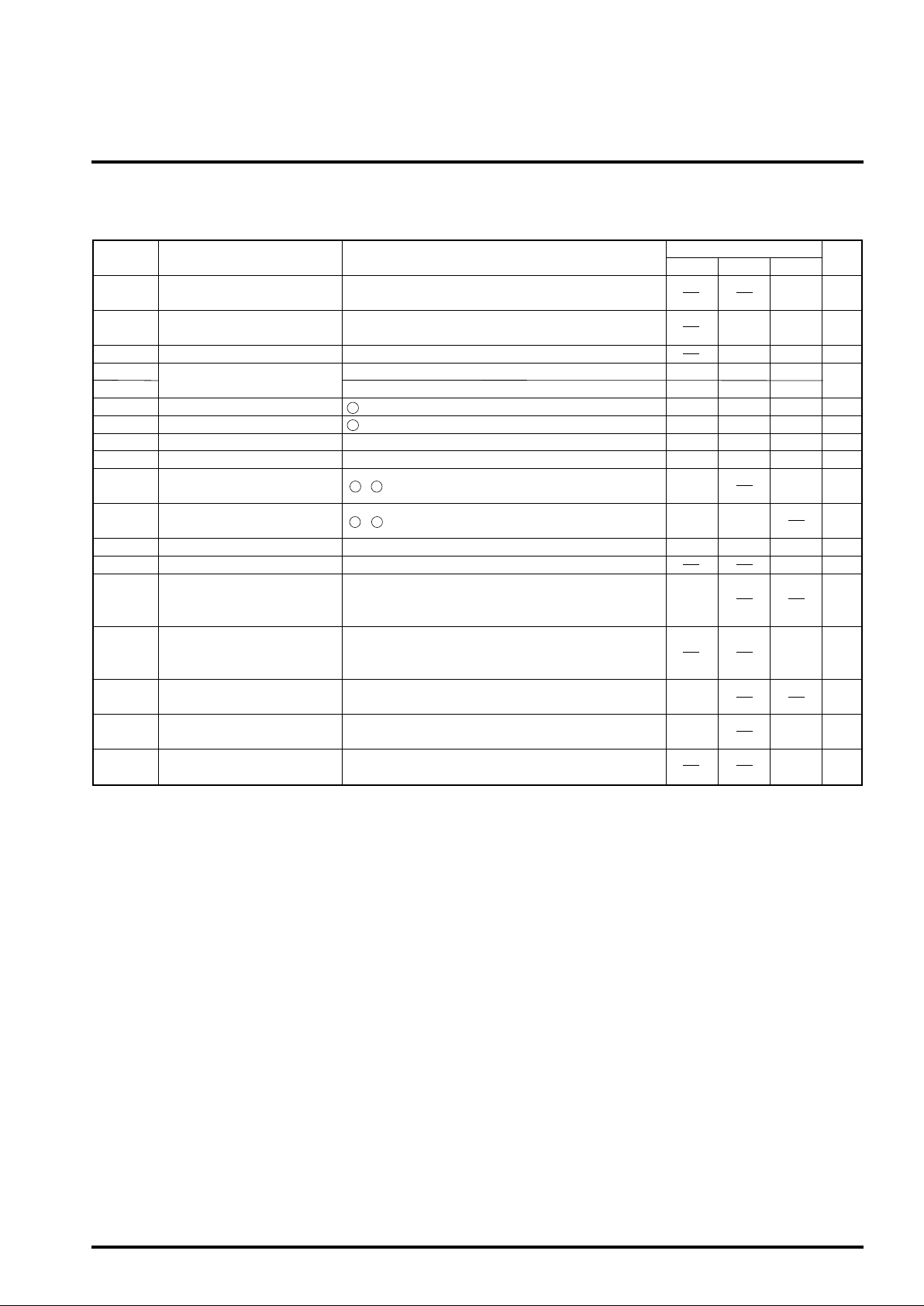
ELECTRICAL CHARACTERISTICS
(VCC1=5V, VCC2=12V, VDD+=5V, VDD-=GND, Ta=25˚C unless otherwise noted.)
Symbol Conditions UnitParameter
V
Isleep
Icc
Vsat
ECdeadECdead+
ECR
EC
Gio
Vlim
VH com
VHmin
VHb
IHb
Von
Voff
V
iH1
ViM
V
iL1
Sleep Mode Supply current
Supply current
Saturation voltage
Control voltage dead zone
Reference voltage Input range
Control voltage Input range
Control gain
Control limit
Hall sensor amp
common mode input range
Hall sensor amp.
input signal level
Hall bias terminal output voltage
Hall bias terminal sink current
Motor start voltage
Motor stop voltage
BRS input high voltage
BRS input middle voltage
BRS input low voltage
CC1 & VCC2 pin total Current
(at S/S pin, MUTE pin low or open)
VCC1 & VCC2 pin total Current
(EC=ECR=1.65V) [S/S pin, MUTE pin High]
Top and Bottom saturation voltage.(Load current:500mA)
EC<ECR
EC>ECR
1 pin(it is possible to input 0 to 5V)
2 pin(it is possible to input 0 to 5V)
Io=Gio/Rsense [A/V]
Ilim=Vlim/Rsense [A]
16 – 21 pins
23 – 28 pins
Load current (IHb)=10mA.
[S/S]pin input voltage when it starts up the motor.
*The IC is in the active condition.
*The hall bias is available.
[S/S]pin input voltage when it stops the motor.
*The IC is in the sleep condition.
*The hall bias is off.
BRS input voltage that the short braking is selected
when the reverse torque.
BRS input voltage that the free run is selected when the
reverse torque.
BRS input voltage that the reverse braking is selected
when the reverse torque.
M56786FP
Limits
Min.
0.34
0.27
1.3
60
0.6
2.0
3.6
1.6
Typ.
19
1.2
-30
0
0
0
+30
1.65
1.65
0.4
0.3
120
0.85
Max.
10
28
1.9
0-60
+60
3.3
3.3
0.46
0.33
CC1-1.3
V
1.2
30
0.8
2.2
0.8
µA
mA
V
mV
V
V
V/V
V
V
mVp-p
V
mA
V
V
V
V
V
*Note3. The ViM is the limit in case of external voltage input control. The free run mode is selected when the BRS pin is open, too.
 Loading...
Loading...