

Mitsubishi M56755FP Datasheet
MITSUBISHI <CONTROL / DRIVER IC>
)
M56755FP
SPINDLE MOTOR DRIVER
DESCRIPTION
The M56755FP is a semiconductor integrated circuit designed for a
single chip controller for CD-ROM spindle motor.
M56755FP has a both (forward and reverse) motor torque control
by the motor speed control terminal.
M56755FP has the several braking mode that an user can flexibly
select in order to generate the reverse torque. Also, this device
includes a bias circuit for Hall Sensor, a current limit circuit and a
thermal shut down function.
FEATURES
●The supply voltage with wide range.
(4.5V to 13.2V)
●High motor drive current (1.2A)
● Motor current control for the both motor torque is possible.
● Reverse torque mode select (SHORT BRAKING, etc)
● Sleep mode
● Hall amplifier sensitivity select
● Automatic stop select (with reverse detected signal pin)
APPLICATION
CD-ROM, DVD, DVD-ROM etc.
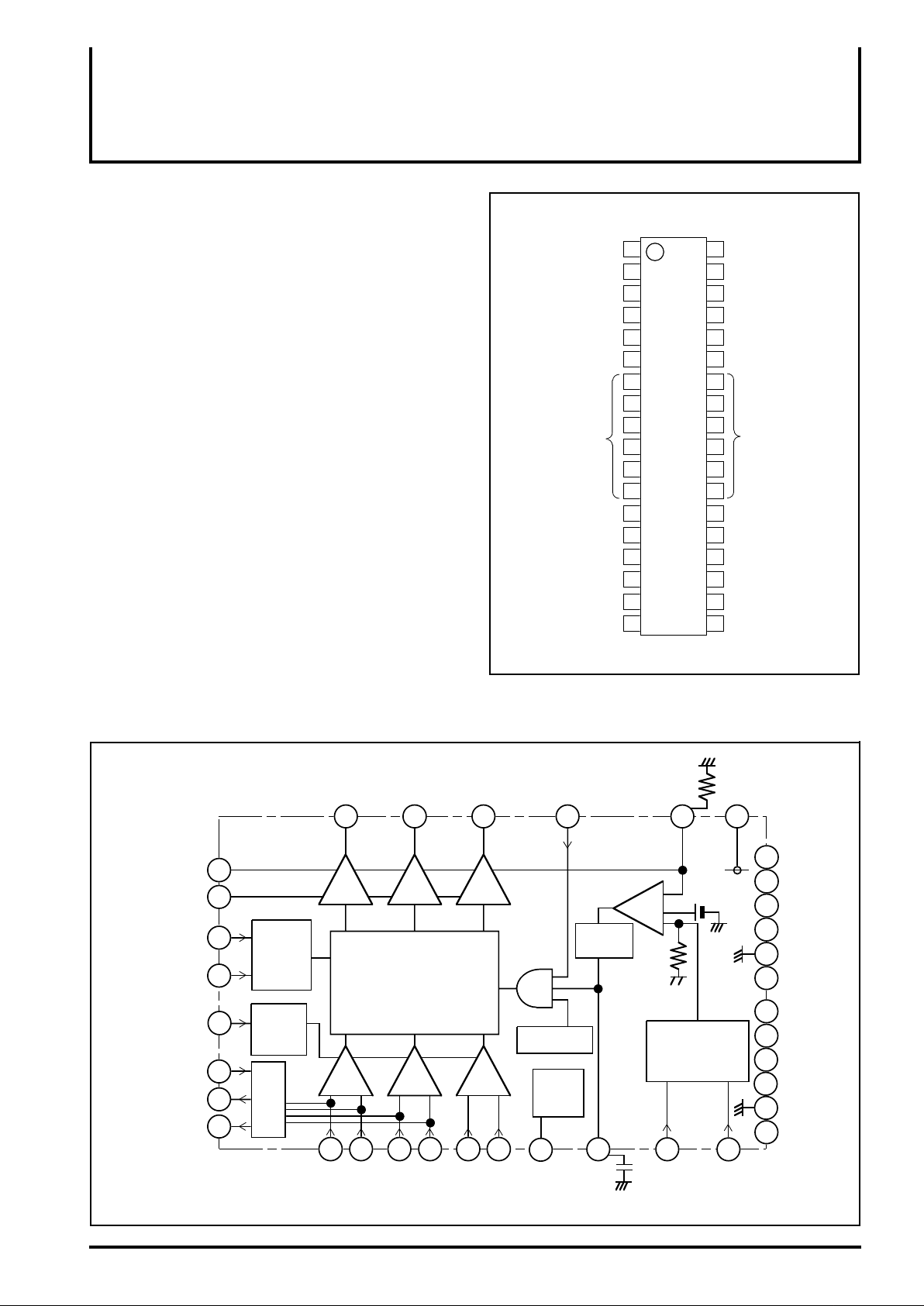
PIN CONFIGURATION(TOP VIEW
S/S
RDS
FG
MODE2
MODE1
GND
VM
VCC2
EC
ECR
VCC1
HB
1
2
3
CI
4
7
8
13
14
15 22
16 21
17 20
18
36
W
35
V
34
U
RS
33
MODE3
325
MODE4
316
30
M56755FP
29
289
2710
2611
2512
Hw-
24
Hw+
23
HvHv+
Hu-
19
Hu+
GND
BLOCK DIAGRAM
13
VM
14VCC2
MODE1
MODE2
MODE4
MODE3
FG
RDS
6
5
31
32
3
2
BRAKING
MODE
CHANGE
SENSE
FG
RDS
Outline 36P2R-D
UVW VCC1
34 35 36
120˚
MATRIX
+ - +- +-
19 20 21 22 23 24
TSD
Hall bias
18
HB
S/S
1
I / I
converter
4
CI
RS
++
V/I converter
15 16
EC ECRHu+ Hu- Hv+ Hv- Hw+ Hw-
Vref
1733
7
8
9
GND
10
11
12
25
26
27
GND
28
28
29
30
)
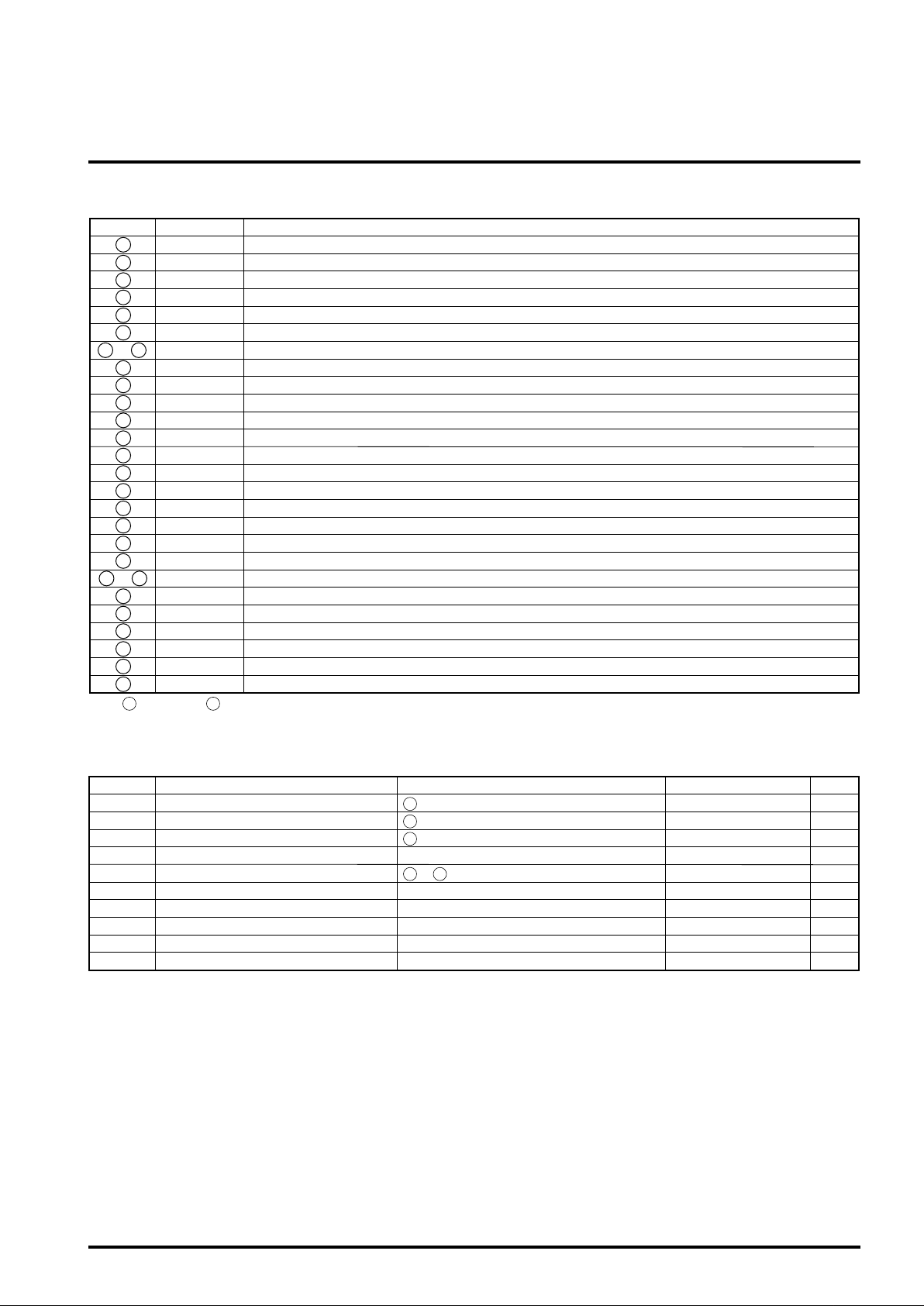
PIN DESCRIPTION
Pin No. FunctionSymbol
1
S/S
2
RDS
3
FG
4
CI
5
MODE2
6
MODE1
7 to 12
13
14
15
16
17
18
19
20
21
22
23
24
25 to 30
31
32
33
34
35
36
The pin[RDS] and pin[FG] are with pull-up resistor (10kohm).
*
GND
VM
VCC2
EC
ECR
VCC1
HB
Hu+
HuHv+
HvH
W+
W-
H
GND
MODE4
MODE3
RS
U
V
W
2 3
Start / Stop
Reverse detected signal
Frequency generator output
Phase Compensation
Reverse torque mode select 2
Reverse torque mode select 1
GND
Motor supply voltage
12V supply voltage
Motor speed control
The reference voltage for EC
5V supply voltage
Bias for Hall Sensor
Hu+ Sensor amp. input
Hu- Sensor amp. input
H
V+ Sensor amp. input
H
V- Sensor amp. input
H
W+ Sensor amp. input
H
W- Sensor amp. input
GND
Hall amplifier sensitivity select
Automatic stop select
Motor current sense
Motor drive output U
Motor drive output V
Motor drive output W
MITSUBISHI <CONTROL / DRIVER IC>
M56755FP
SPINDLE MOTOR DRIVER
ABSOLUTE MAXIMUM RATING(Ta=25˚C
Symbol
VM
VCC2
VCC1
lo
VH(c)
Pt
Kθ
Tj
Topr
Tstg
Note1 ; There is no overing Pt (power dissipation) or the area of safety operation
*
Motor supply voltage
12V supply voltage
5V supply voltage
Output current
Sensor amp. Differential input range
Power dissipation
Thermal derating
Junction temperature
Operating temperature
Storage temperature
Parameter Conditions
13
pin maximum input voltage
14
pin maximum input voltage
17
pin maximum input voltage
*Note 1
19 24
to pins
Free Air
Free Air
Rating
16
16
7.0
1.5
4.5
1.2
9.6
150
-20 – +75
-40 – +125
Unit
V
V
V
A
V
W
mW/˚C
˚C
˚C
˚C
MITSUBISHI <CONTROL / DRIVER IC>
)
M56755FP
SPINDLE MOTOR DRIVER
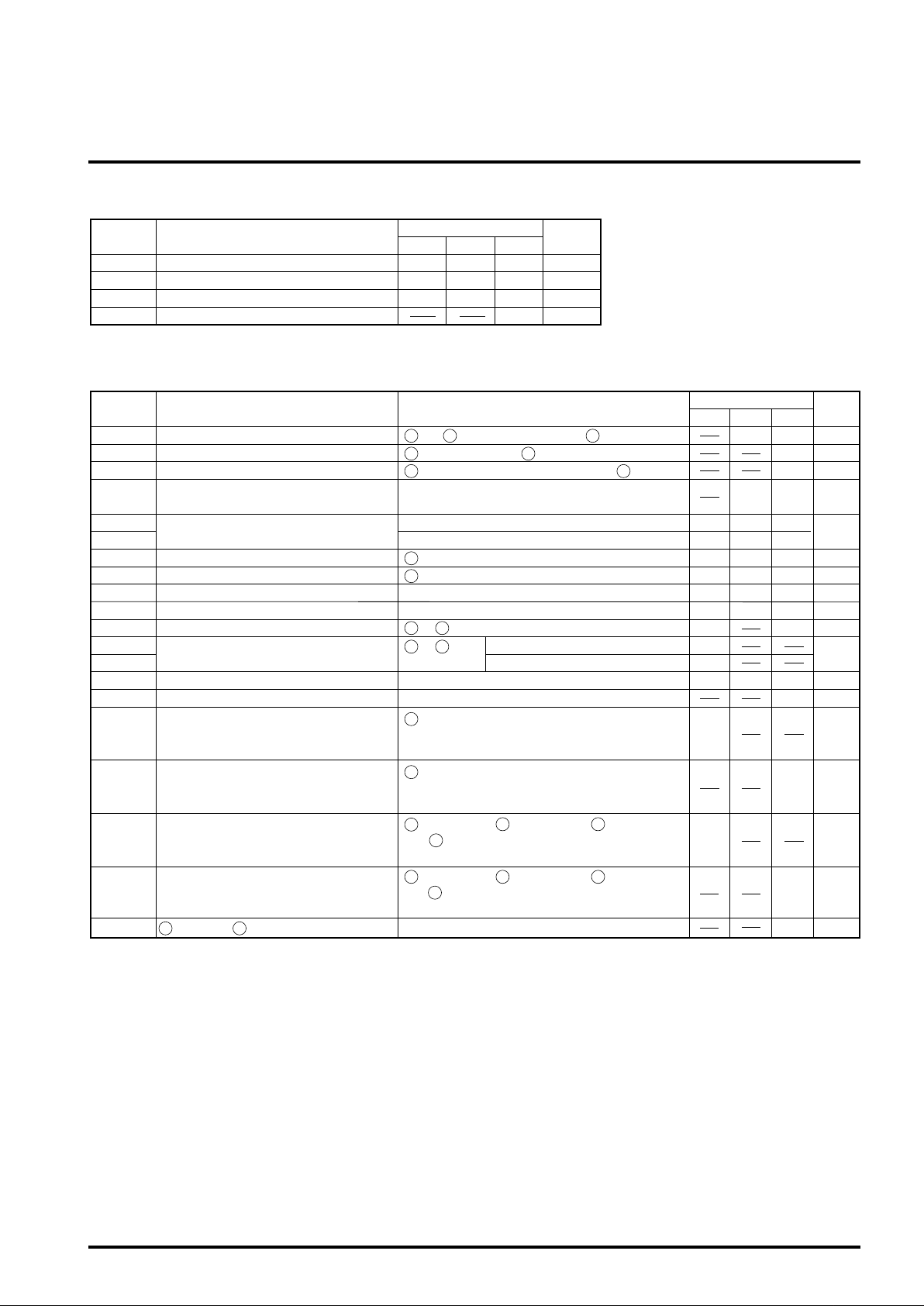
RECOMMENDED OPERATING CONDITIONS
Symbol
VCC1
VCC2
VM
lo
5V Power supply
12V Power supply
Motor Power supply
Output drive current
Parameter
ELECTRICAL CHARACTERISTICS(VCC=5V, VCC2=12V, VM=12V, Ta=25˚C unless otherwise noted
Symbol Test conditions
Sleep Mode Supply current-1lcc1
lcc2
lcc3
Vsat
ECdead-
ECdead+
ECR
EC
Gio
Vlim
VH com
VHmin1
VHmin2
VHb
IHb
Von
Voff
ViH
ViL
VOL
Sleep Mode Supply current-2
Supply current-3
Saturation voltage
Control voltage
dead zone
Reference voltage Input range
Control voltage Input range
Control gain
Control limit
Hallsensorampcommonmodeinput range
Hall sensor amp. input signal level
Hall bias terminal output voltage
Hall bias terminal sink current
Motor start voltage
Motor stop voltage
mode pin input high voltage
mode pin input low voltage
2
pin [RDS], pin [FG] output low voltage
Parameter
3
13 14
17
17
Top and Bottom saturation voltage.
Load current 500mA
EC < ECR
EC > ECR
16
15
lo = Gio /Rsense [A/V]
llim=Vlim / Rsense [A]
19 24
19 24
input signal
Load current (IHb) 10mA.
and pin [MODE4] input voltage when makes
high level.
and pin [MODE4] input voltage when makes low
level.
at Io current = 1mA
Limits
Min. Typ. Max.
4.5
4.5
4.5
5.0
12.0
12.0
5.5
13.2
13.2
700
and pin total Input Current [ pin lo or open]
pin Input Current [ pin lo or open]
pin Input Current (EC=ECR=2.5V) [ pin Hi]
Unit
V
V
V
mA
1
1
1
pin Input voltage range. (3.3V DSP available)
pin Input voltage range. (3.3V DSP available)
– pins input range.
– pins
MODE4 = open
MODE4 = GND
1
pin input voltage when makes the motor start up.
*The ICs will be the active condition.
*The hall bias will be available.
1
pin input voltage when makes the motor stop.
*The ICs will be the sleep condition.
*The hall bias will be off.
6
pin [MODE1], pin [MODE2], pin [MODE3]
31
6
pin [MODE1], pin [MODE2], pin [MODE3]
31
5
325
32
Limits
Min. Typ. Max.
100
0
500
6.0
1.9
1.2
-50+5-25
+25-5+50
4.0
1.65
0.5
1.65
2.3
0.3
4.0
2.65
0.33
4.5
0.5
1.95
0.27
1.2
50
35
0.85
1.2
0.6
30
2.0
0.8
2.0
0.8
0.5
Unit
µA
µA
mA
V
mV
V
V
V/V
V
V
mVp-p
V
mA
V
V
V
V
V
 Loading...
Loading...