

Mitsubishi M38279EF-XXXFP, M38277M8MXXXHP, M38277M8MXXXGP, M38277M8MXXXFP, M38279EFHP Datasheet
...
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
DESCRIPTION
The 3827 group is the 8-bit microcomputer based on the 740 family core technology.
The 3827 group has the LCD drive control circuit, the A-D/D-A
converter, the UART, and the PWM as additional functions.
The various microcomputers in the 3827 group include variations
of internal memory size and packaging. For details, refer to the
section on part numbering.
For details on availability of microcomputers in the 3827 group, refer to the section on group expansion.
FEATURES
●Basic machine-language instructions ...................................... 71
●The minimum instruction execution time ........................... 0.5 µs
(at 8MHz oscillation frequency)
●Memory size
ROM ................................................................. 4 K to 60 K bytes
RAM.................................................................192 to 2048 bytes
●Programmable input/output ports ............................................ 55
●Output port ................................................................................. 8
●Input port .................................................................................... 1
●Interrupts ................................................. 17 sources, 16 vectors
(includes key input interrupt)
●Timers ...........................................................8-bit ✕ 3, 16-bit ✕ 2
●Ser ial I/O1 ....................8-bit ✕ 1 (UART or Clock-synchronized)
●Serial I/O2 ...................................8-bit ✕ 1 (Clock-synchronized)
●PWM output .................................................................... 8-bit ✕ 1
●A-D con verter ............................................... 10-bit ✕ 8 channels
●D-A con verter ................................................. 8-bit ✕ 2 channels
●LCD drive control circuit
Bias...................................................................................1/2, 1/3
Duty ........................................................................... 1/2, 1/3, 1/4
Common output.......................................................................... 4
Segment output ........................................................................ 40
●2 Clock generating circuits
(connect to external ceramic resonator or quartz-crystal oscillator)
●Watchdog timer ............................................................ 14-bit ✕ 1
●Power source voltage ................................................ 2.2 to 5.5 V
●Power dissipation
In high-speed mode ..........................................................40 mW
(at 8 MHz oscillation frequency, at 5 V power source voltage)
In low-speed mode............................................................ 60 µW
(at 32 kHz oscillation frequency, at 3 V power source voltage)
●Operating temperature range................................... – 20 to 85°C
APPLICATIONS
Camera, wireless phone, etc.
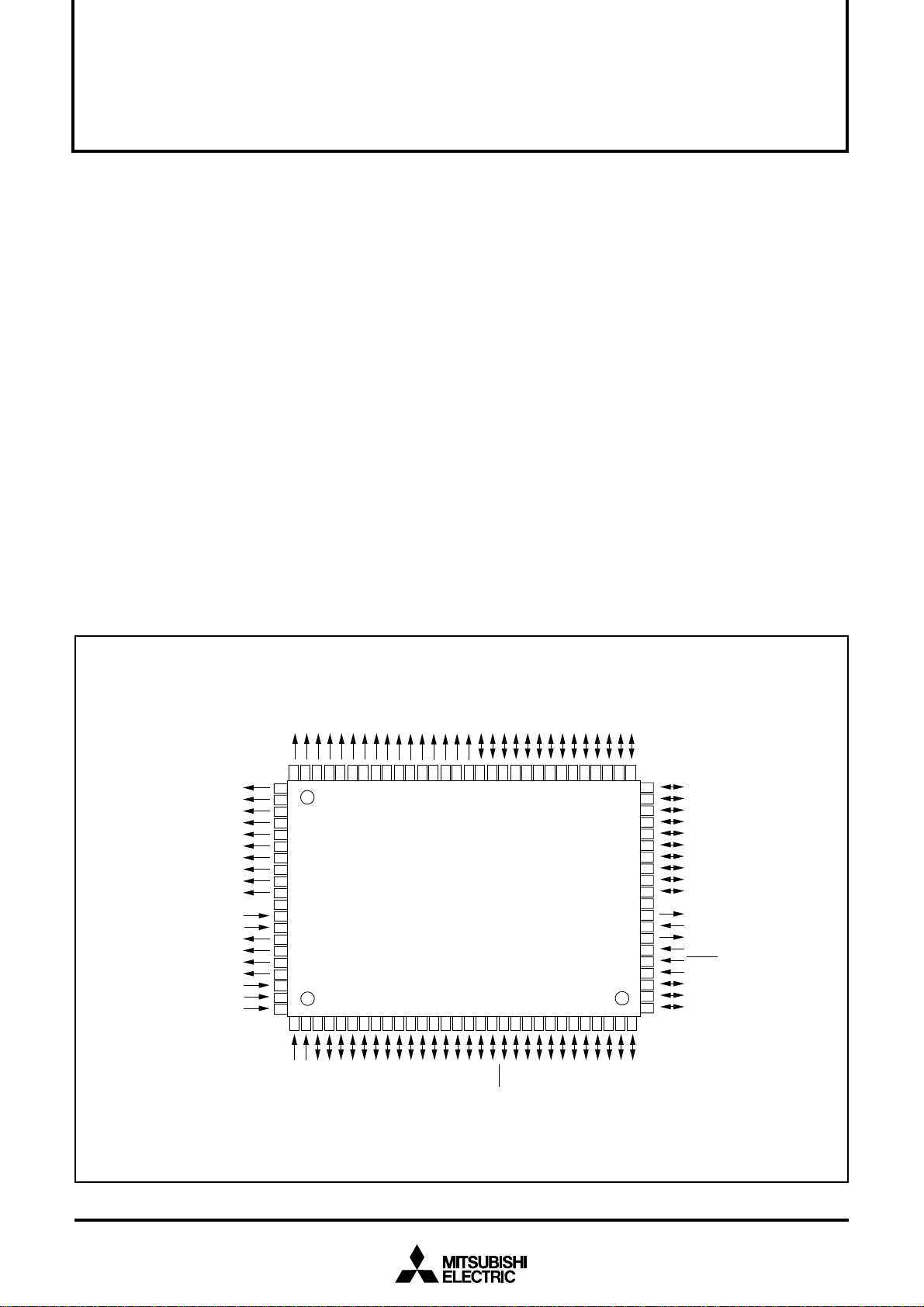
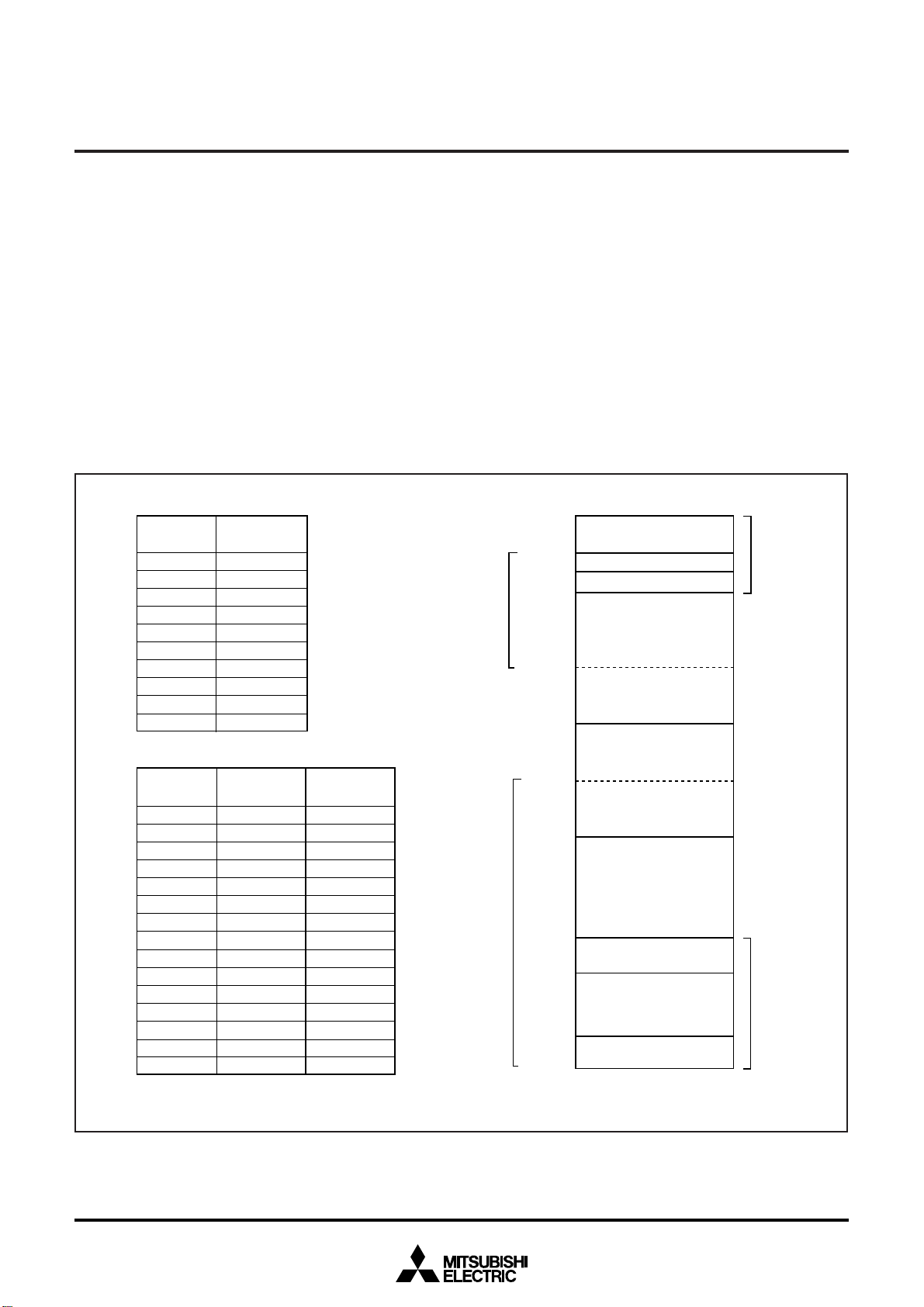
PIN CONFIGURATION (TOP VIEW)
SEG11
SEG14
SEG12
SEG10
SEG13
80
77
79
76
SEG9
SEG8
SEG7
SEG6
SEG5
SEG4
SEG3
SEG2
SEG1
SEG0
VCC
VREF
AVSS
COM3
COM2
COM1
COM0
VL3
VL2
C2
78
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
00
1
2
4
5
3
1
C1
VL1
P65/AN5
P66/AN6
P67/AN7
P34/SEG22
P32/SEG20
P30/SEG18
SEG16
SEG17
SEG15
73
75
72
74
P35/SEG23
P33/SEG21
P31/SEG19
70
71
P36/SEG24
68
67
69
66
P03/SEG29
P01/SEG27
P37/SEG25
P02/SEG28
P00/SEG26
63
65
62
64
61
M38277M8MXXXFP
9
8
6
7
P64/AN4
P61/SOUT2/AN1
P62/SCLK21/AN2
P63/SCLK22/AN3
14
12
11
10
P57/DA2
P60/SIN2/AN0
15
13
P56/DA1
P53/RTP1
P54/CNTR0
P55/CNTR1
20
17
19
16
18
P52/RTP0
P46/SCLK1
P47/SRDY1
P50/PWM0
P51/PWM1
P07/SEG33
P05/SEG31
P06/SEG32
P04/SEG30
58
60
57
59
22
21
23
24
4/RXD
3/φ/TOUT
P45/TXD
P4
P42/INT2
P4
P14/SEG38
P12/SEG36
P10/SEG34
56
25
P41/INT1
P11/SEG35
55
26
P40/ADT
P15/SEG39
P13/SEG37
51
53
52
54
50
P16
49
P17
48
P20
47
P21
46
P22
P23
45
P24
44
P25
43
P26
42
P27
41
VSS
40
XOUT
39
XIN
38
XCOUT
37
XCIN
36
35
RESET
34
P70/INT0
33
P71
P72
32
P73
31
29
30
28
27
7
P76
P7
P74
P75
Package type : 100P6S-A (100-pin plastic-molded QFP)
Fig. 1 M38277M8MXXXFP pin configuration
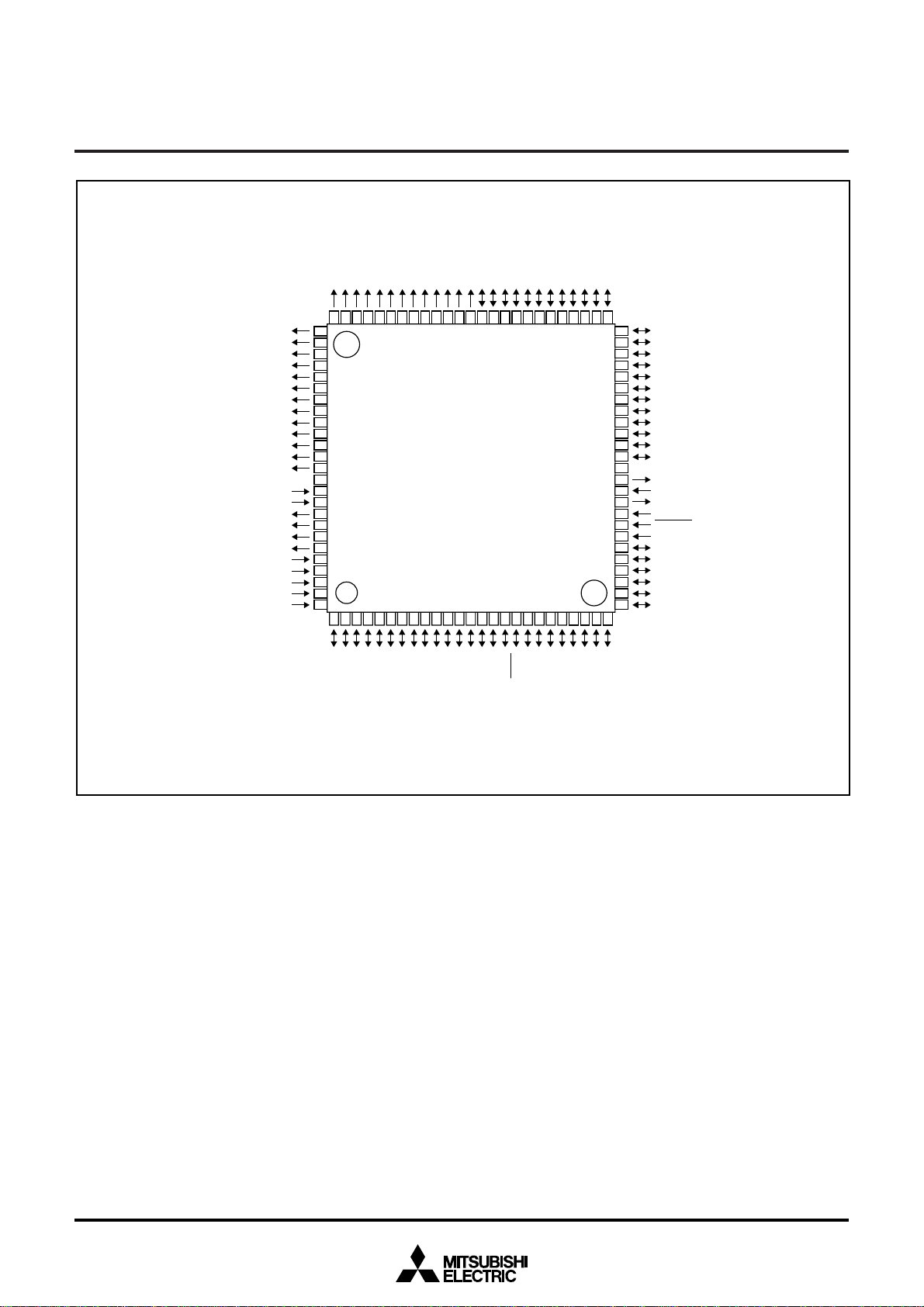
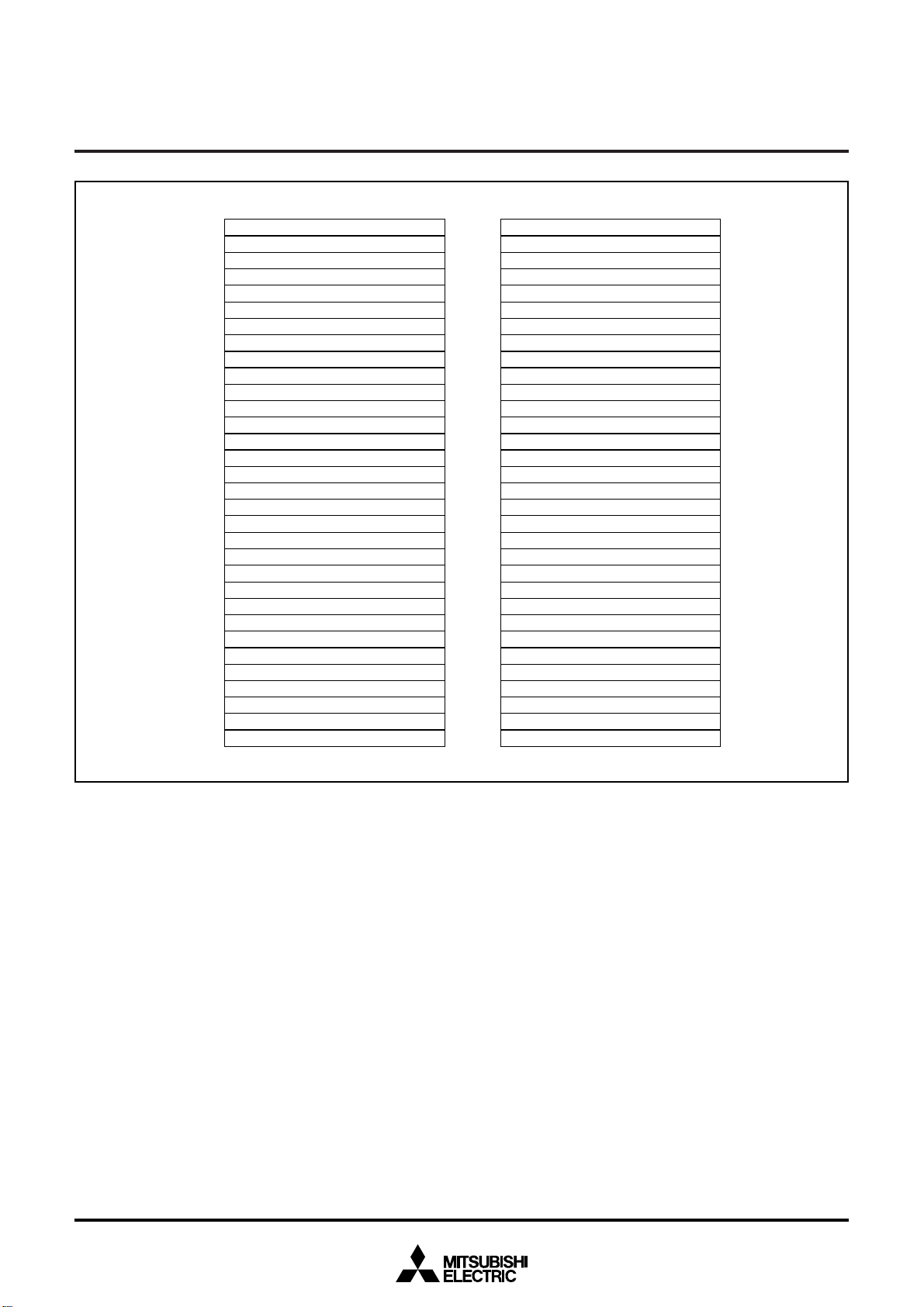
PIN CONFIGURATION (TOP VIEW)
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
SEG12
SEG11
SEG10
SEG9
SEG8
SEG7
SEG6
SEG5
SEG4
SEG3
SEG2
SEG1
SEG0
VCC
VREF
AVSS
COM3
COM2
COM1
COM0
VL3
VL2
VL1
SEG13
SEG14
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
C2
99
C1
100 26
3
2
1
P66/AN6
P67/AN7
P31/SEG19
SEG15
71
72
P33/SEG21
P30/SEG18
SEG17
70
67
68
69
66
M38277M8MXXXGP
M38277M8MXXXHP
6
9
5
8
4
7
10
P64/AN4
P65/AN5
P63/SCLK22/AN3
P57/DA2
P60/SIN2/AN0
P61/SOUT2/AN1
P62/SCLK21/AN2
P32/SEG20
SEG16
P00/SEG26
P02/SEG28
P37/SEG25
P34/SEG22
P36/SEG24
P35/SEG23
64
65
63
13
12
11
P56/DA1
P53/RTP1
P54/CNTR0
P55/CNTR1
P04/SEG30
P01/SEG27
P03/SEG29
61
58
62
59
60
17
16
18
15
14
P52/RTP0
P46/SCLK1
P47/SRDY1
P51/PWM1
P50/PWM0
P05/SEG31
57
19
XD
T
P45/
P12/SEG36
P07/SEG33
P11/SEG35
P06/SEG32
56
21
20
P44/RXD
55
3/φ/TOUT
P4
P13/SEG37
P10/SEG34
52
53
54
51
50
P14/SEG38
49
P15/SEG39
48
P16
47
P17
46
P20
45
P21
44
P22
43
P23
42
P24
41
P25
40
P26
39
P27
38
VSS
37
XOUT
36
XIN
35
COUT
X
34
XCIN
33
RESET
32
P70/INT0
31
P71
30
P72
29
P73
28
P74
27
P75
24
23
22
1/INT1
P40/ADT
P4
P42/INT2
P76
25
7
P7
Package type : GP........ 100P6Q-A (100-pin plastic-molded LQFP)
Package type : HP........ 100PFB-A (100-pin plastic-molded TQFP)
Fig. 2 M38277M8MXXXGP/M38277M8MXXXHP pin configuration
2
Key input/key-on wake-up interrupt
INT1,INT2
CNTR0,CNTR
1
DA
1
DA
2
T
OUT
INT
0
ADT
Data bus
C P U
A
X
Y
S
PC
H
PCL
PS
RESET
V
CC
VSS
Reset input ( 5 V ) ( 0 V )
R O M
R A M
LCD display
RAM
(20 bytes)
I/O port P5
P4(8)
I/O port P4
I/O port P2
P2(8)
I/O port P0
P0(8)
I/O port P1
P1(8)
P6(8)
I/O port P7
P7(8)
Output port P3
P3(8)
I/O port P6
P5(8)
Sub-clock input
Sub-clock output
XCIN XCOUT
Clock generating circuit
X
IN OUT
X
Main clock input
Main clock output
COUT
X
X
CIN
Sub-clock output
Sub-clock input
SI/O1 (8)
VREF
AVSS
A-D converter
(10)
Timer X(16)
Timer Y(16)
Timer 1(8) Timer 2(8)
Timer 3(8)
LCD drive
control circuit
VL1C1C2
VL2
VL3
COM0
COM1
COM2
COM3
SEG0
SEG1
SEG2
SEG3
SEG4
SEG5
SEG6
SEG7
SEG8
SEG9
SEG10
SEG11
SEG12
SEG13
SEG14
SEG15
SEG16
SEG17
φ
X
CIN
COUT
X
SI/O2(8)
Watchdog timer
Reset
PWM(8)
φ
Real time port function
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
D-A2 D-A1
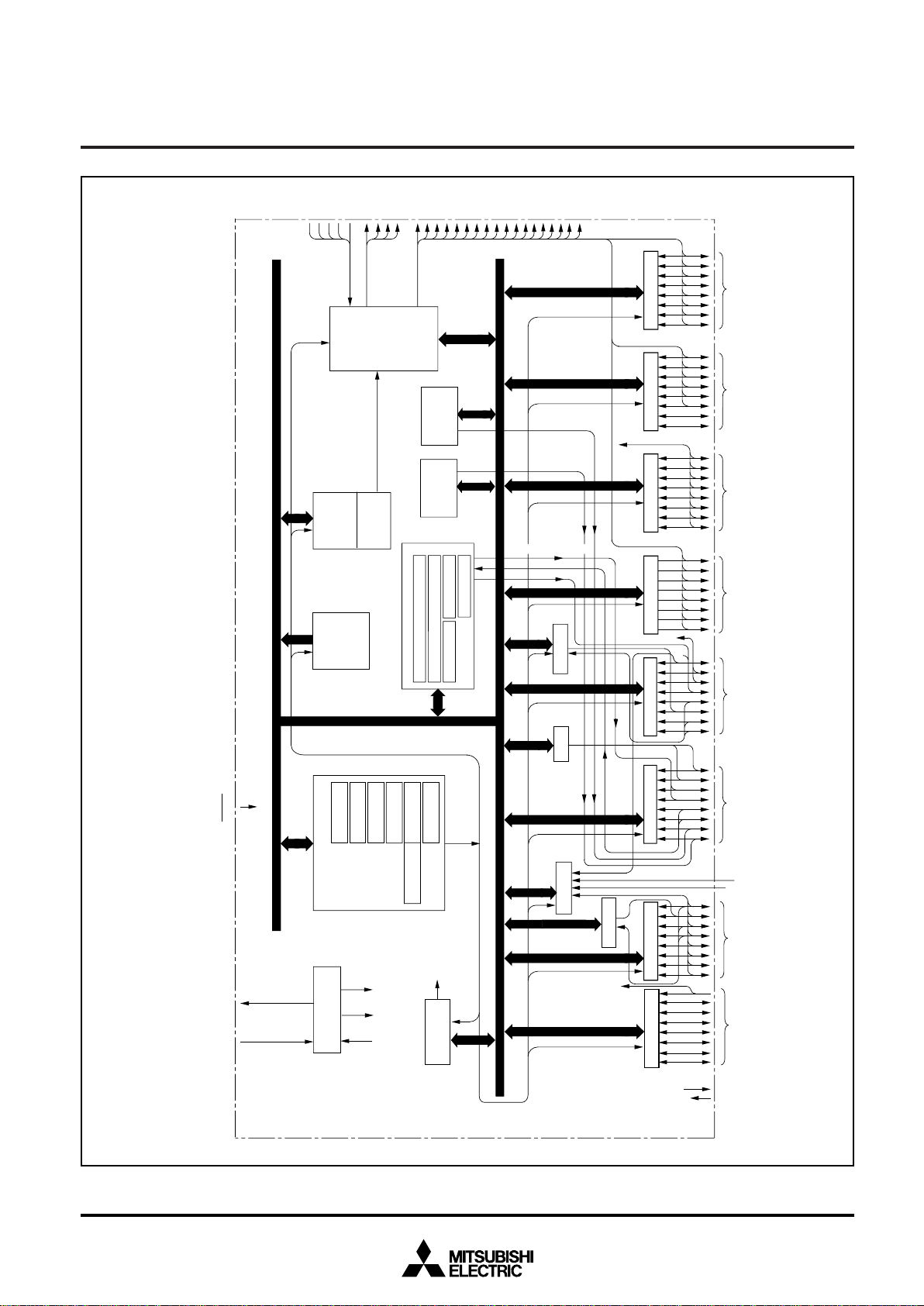
FUNCTIONAL BLOCK DIAGRAM
Fig. 3 Functional block diagram
3
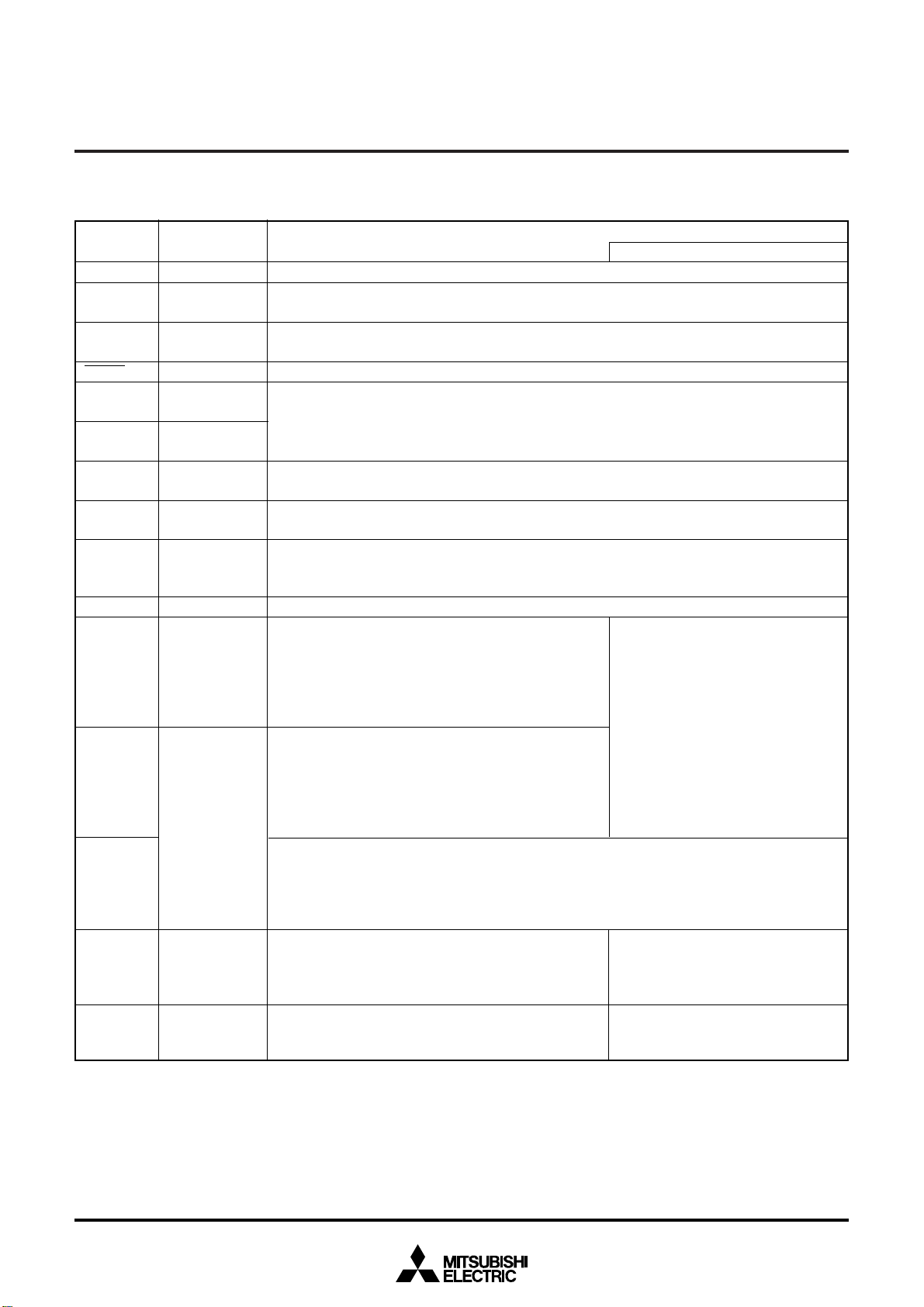
PIN DESCRIPTION
Table 1 Pin description (1)
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
V
CC, VSS
V
REF
AVSS
RESET
X
IN
XOUT
VL1–VL3
C1, C2
COM0–COM
SEG0–SEG
P00/SEG26–
P07/SEG33
P10/SEG34–
P15/SEG39
P16, P17
P20 – P27
P30/SEG18 –
P37/SEG
25
FunctionPin Name
Power source •Apply voltage of 2.2 V to 5.5 V to VCC, and 0 V to VSS.
Analog refer-
•Reference voltage input pin for A-D converter and D-A converter.
ence voltage
Analog power
source
Reset input
Clock input
•GND input pin for A-D converter and D-A converter.
•Connect to V
SS.
•Reset input pin for active “L”.
•Input and output pins for the main clock generating circuit.
•Connect a ceramic resonator or a quar tz-crystal oscillator between the X
Clock output
LCD power
source
Charge-pump
the oscillation frequency.
•If an external clock is used, connect the clock source to the XIN pin and leave the XOUT pin open.
•Input 0 ≤ V
L1 ≤ VL2 ≤ VL3 ≤ VCC voltage.
•Input 0 – VL3 voltage to LCD.
•External capacitor pins for a voltage multiplier (3 times) of LCD contorl.
capacitor pin
Common output
3
17
Segment output
I/O port P0
•LCD common output pins.
2 and COM3 are not used at 1/2 duty ratio.
•COM
•COM
3 is not used at 1/3 duty ratio.
•LCD segment output pins.
•8-bit output port.
•CMOS compatible input level.
•CMOS 3-state output structure.
•Pull-up control is enabled.
•I/O direction register allows each port to be individually
programmed as either input or output.
I/O port P1
•6-bit output port with same function as por t P0.
•CMOS compatible input level.
•CMOS 3-state output structure.
•Pull-up control is enabled.
•I/O direction register allows each 6-bit pin to be programmed as either input or output.
•2-bit I/O port.
•CMOS compatible input level.
•CMOS 3-state output structure.
•I/O direction register allows each pin to be individually programmed as either input or output.
•Pull-up control is enabled.
I/O port P2
•8-bit I/O port with same function as port P0.
•CMOS compatible input level.
•CMOS 3-state output structure.
•Pull-up control is enabled.
Output port P3
•8-bit output por t with same function as port P0.
•CMOS 3-state output structure.
•Port output control is enabled.
Function except a port function
IN and XOUT pins to set
•LCD segment output pins
•Key input (key-on wake-up) interrupt
input pins
•LCD segment output pins
4
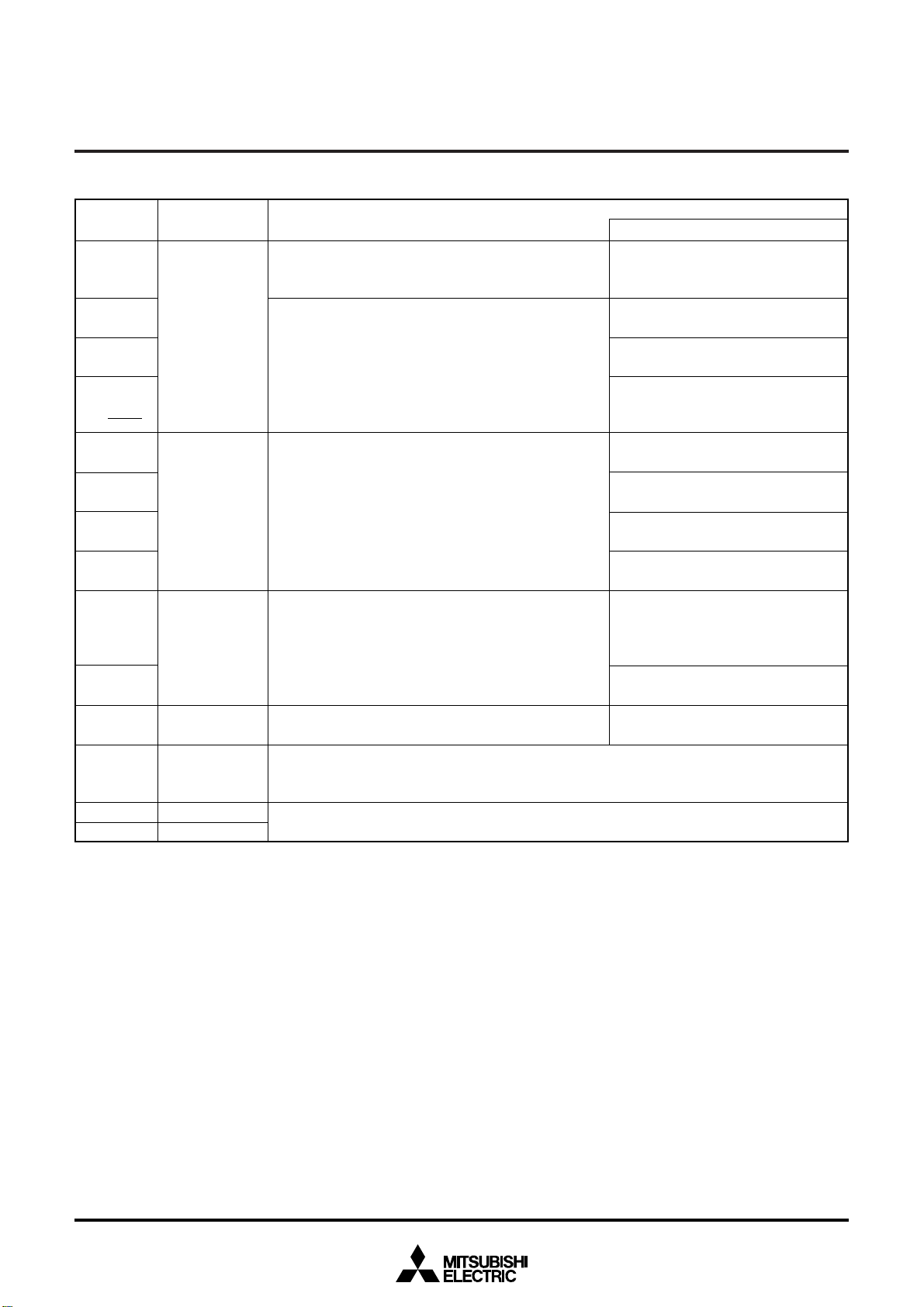
Table 2 Pin description (2)
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
P40/ADT
P41/INT1,
P42/INT2
P43/φ/TOUT
P44/RXD,
P45/TXD,
P46/SCLK1,
P47/SRDY1
P50/PWM0,
P51/PWM1
P52/RTP0,
P53/RTP1
P54/CNTR0,
P55/CNTR1
P56/DA1,
P57/DA2
P60/AN0/S
IN2,
P61/AN1/S
OUT2,
P62/AN2/S
CLK21,
P63/AN3/S
CLK22
P64/AN4–
P67/AN7
P70/INT0
P71–P77
XCOUT
XCIN
Name
I/O port P4
I/O port P5
I/O port P6
Input port P7
I/O port P7
Sub-clock output
Sub-clock input
FunctionPin
•1-bit I/O port with same function as P16 and P17.
•CMOS compatible input level.
•CMOS 3-state output structure.
•7-bit I/O port with same function as P16 and P17.
•CMOS compatible input level.
•CMOS 3-state output structure.
•Pull-up control is enabled.
•8-bit I/O port with same function as P1
6 and P17.
•CMOS compatible input level.
•CMOS 3-state output structure.
•Pull-up control is enabled.
•8-bit I/O port with same function as P1
6 and P17.
•CMOS compatible input level.
•CMOS 3-state output structure.
•Pull-up control is enabled.
•1-bit I/O port.
•CMOS compatible input level.
•7-bit I/O port with same function as P1
6 and P17.
•CMOS compatible input level.
•N-channel open-drain output structure.
•Sub-clock generating circuit I/O pins.
(Connect a resonator. External clock cannot be used.)
Function except a port function
•A-D trigger input pin
•Interrupt input pin
•Interrupt input pins
•φ clock output pin
•Timer 2 output pin
•Serial I/O1 I/O pins
•PWM function pins
•Real time port function pins
•Timer X, Y function pins
•D-A conversion output pins
•A-D conversion input pins
•Serial I/O2 I/O pins
•A-D conversion input pins
•Interrupt input pin
5
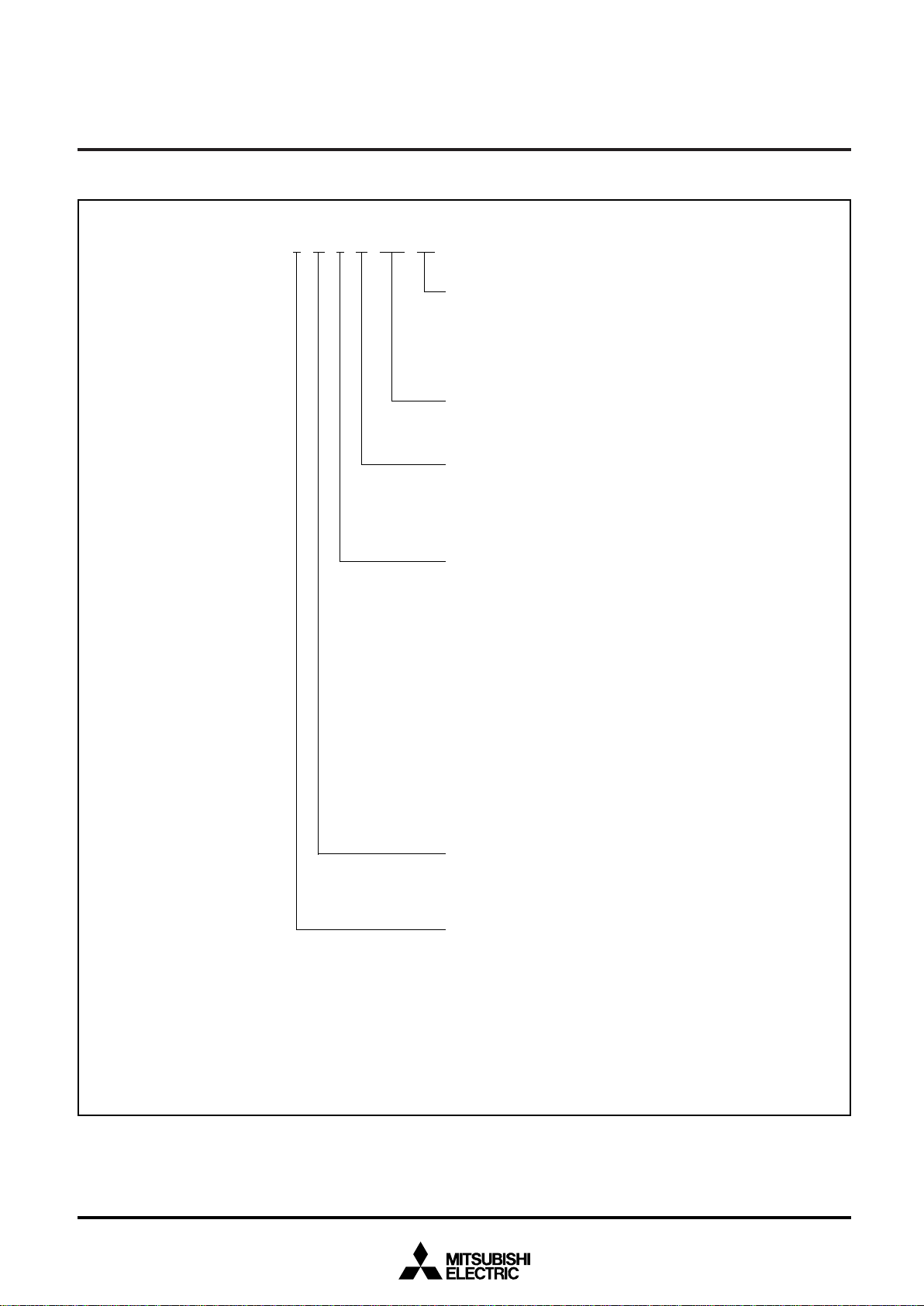
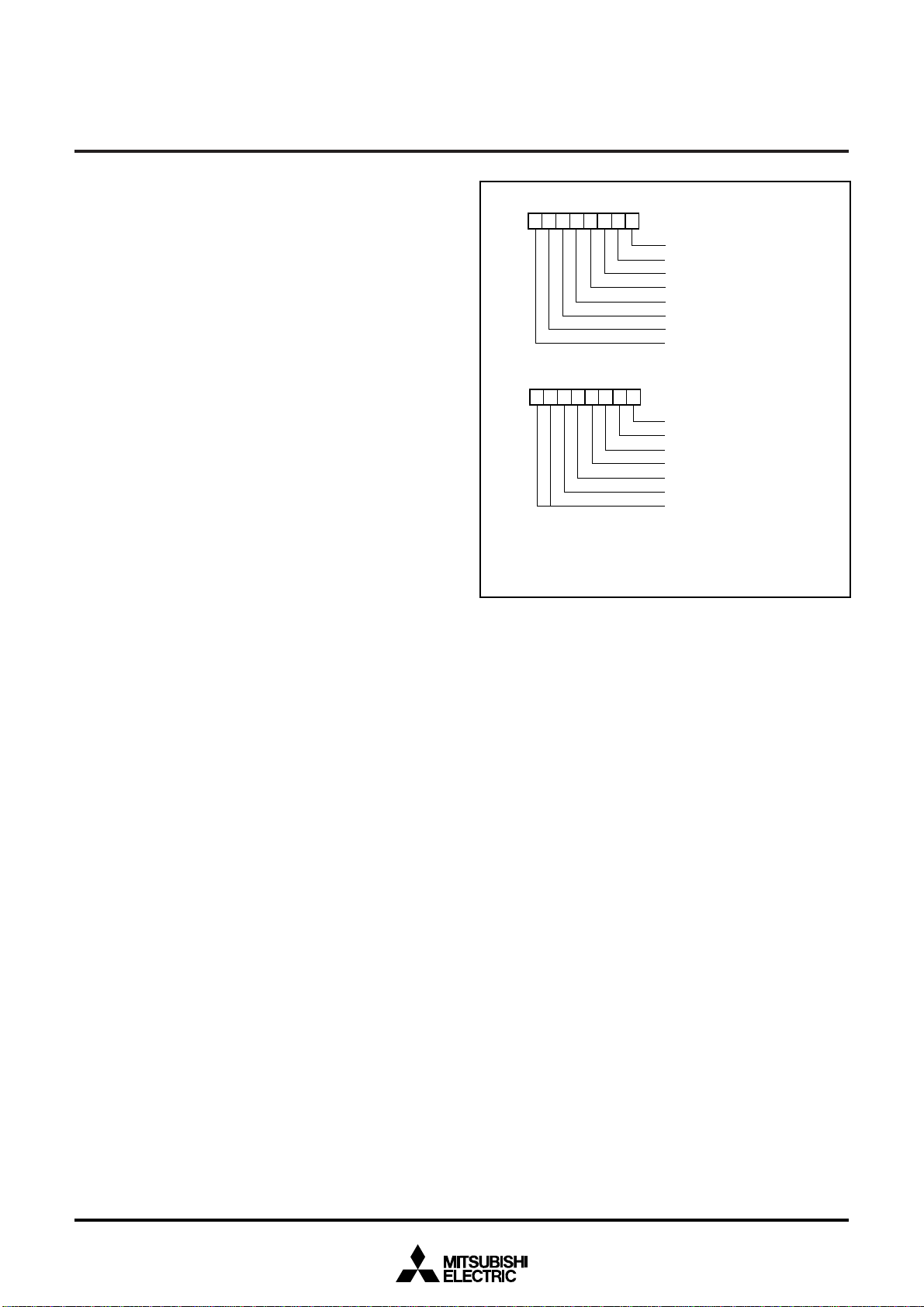
PART NUMBERING
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
Product
M3827 7 M 8 M XXX HP
Package type
: 100P6S-A package
FP
: 100PFB-A package
HP
: 100P6Q-A package
GP
: 100D0 package
FS
ROM number
Omitted in some types.
Normally, using hyphen
When electrical characteristic, or division of quality
identification code using alphanumeric character.
– : Standard
M : Low power source version
ROM/PROM size
: 4096 bytes
1
2
: 8192 bytes
3
: 12288 bytes
: 16384 bytes
4
5
: 20480 bytes
6
: 24576 bytes
: 28672 bytes
7
8
: 32768 bytes
9
: 36864 bytes
: 40960 bytes
A
B
: 45056 bytes
C
: 49152 bytes
: 53248 bytes
D
E
: 57344 bytes
F
: 61440 bytes
The first 128 bytes and the last 2 bytes of ROM
are reserved areas ; they cannot be used.
Fig. 4 Part numbering
6
Memory type
: Mask ROM version
M
: EPROM or One Time PROM version
E
RAM size
0
: 192 bytes
1
: 256 bytes
2
: 384 bytes
3
: 512 bytes
4
: 640 bytes
5
: 768 bytes
6
: 896 bytes
7
: 1024 bytes
8
: 1536 bytes
9
: 2048 bytes
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
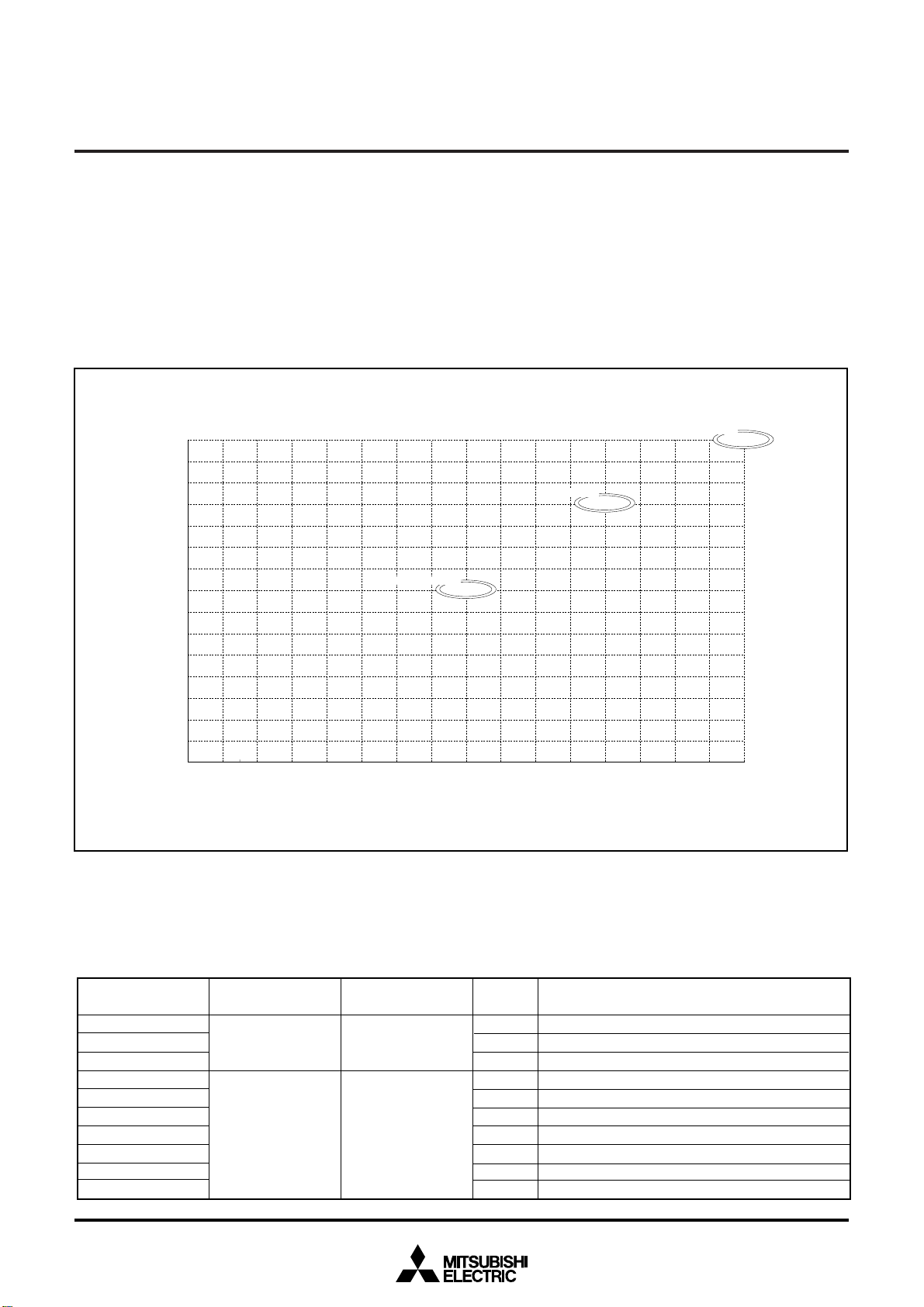
GROUP EXPANSION
Mitsubishi plans to expand the 3827 group as follows:
Memory Type
Support for Mask ROM, One Time PROM, and EPROM versions
Memory Size
ROM/PROM size ................................................. 4 K to 60 K bytes
RAM size ............................................................192 to 2048 bytes
Memory Expansion Plan
ROM size (bytes)
60K
56K
52K
48K
44K
40K
36K
32K
28K
24K
20K
16K
12K
8K
4K
Under development
Package
100PFB-A ................................0.4 mm-pitch plastic molded TQFP
100P6Q-A ................................0.5 mm-pitch plastic molded LQFP
100P6S-A ................................0.65 mm-pitch plastic molded QFP
100D0 ..................... Window type ceramic LCC (EPROM version)
M38277M8M
Planning
M38278MCM
Under development
M38279EF
256 384 512 640 768 896
192
Note: Products under development or planning: the development schedule and specifications
may be revised without notice.
Fig. 5 Memory expansion plan
Currently supported products are listed below.
Table 3 List of supported products
Product
(P) ROM size (bytes)
ROM size for User in ( )
M38277M8MXXXFP
M38277M8MXXXHP
M38277M8MXXXGP
32768
(32638)
M38279EF-XXXFP
M38279EFFP
M38279EF-XXXHP
M38279EFHP
M38279EF-XXXGP
61440
(61310)
M38279EFGP
M38279EFFS
RAM size (bytes)
RAM size (bytes)
1024
2048
1024
Package
100P6S-A
100PFB-A
100P6Q-A
100P6S-A
100P6S-A
100PFB-A
100PFB-A
100P6Q-A
100P6Q-A
100D0
1408
1536 1664 1792
Remarks
Mask ROM version
Mask ROM version
Mask ROM version
One Time PROM version
One Time PROM version (blank)
One Time PROM version
One Time PROM version (blank)
One Time PROM version
One Time PROM version (blank)
EPROM version
204819201152 1280
As of May 1998
7
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
FUNCTIONAL DESCRIPTION
Central Processing Unit (CPU)
The 3827 group uses the standard 740 family instruction set. Refer to the table of 740 family addressing modes and machine
instructions or the 740 Family Software Manual for details on the
instruction set.
Machine-resident 740 family instructions are as follows:
The FST and SLW instruction cannot be used.
The STP, WIT, MUL, and DIV instruction can be used.
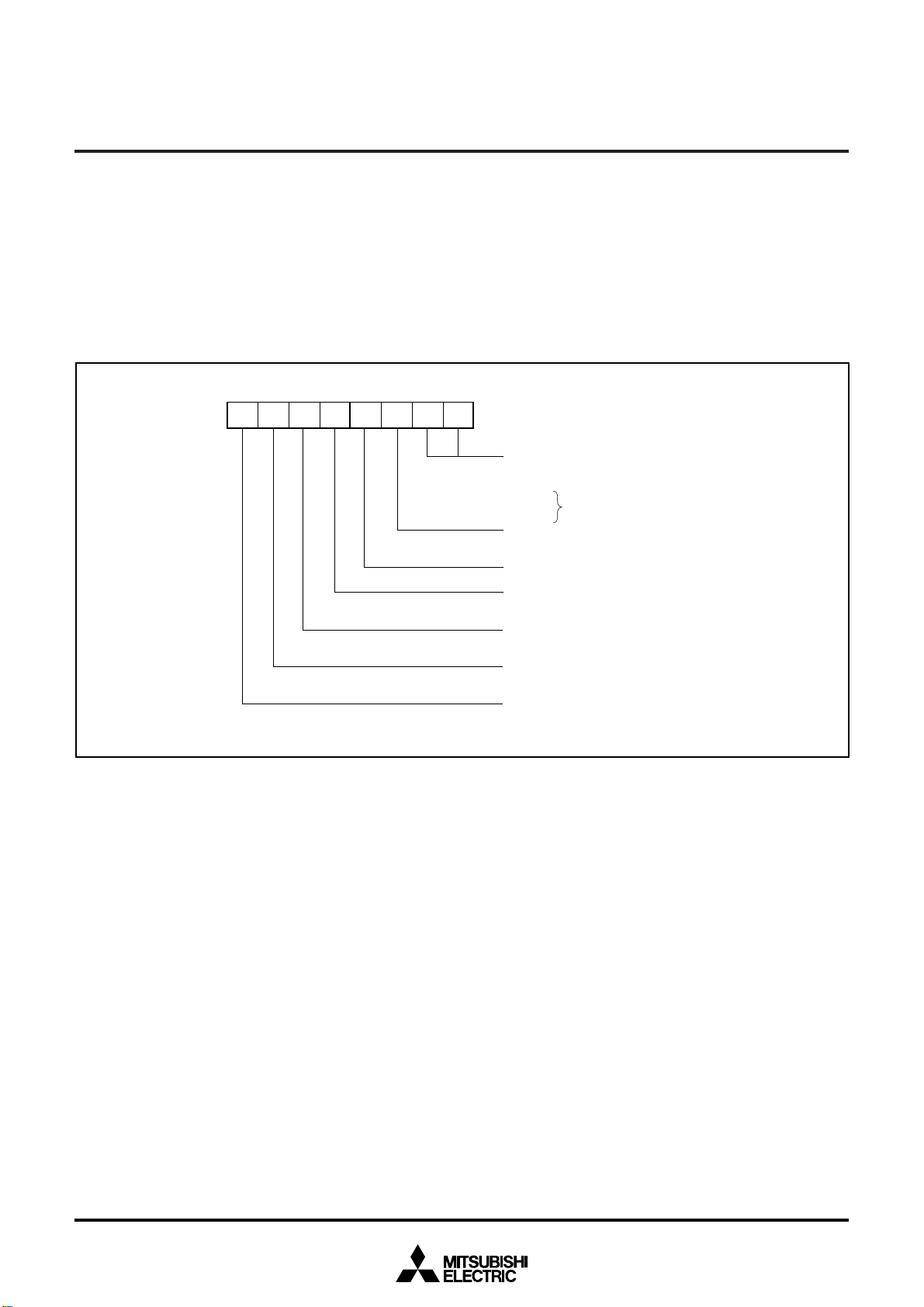
b7 b0
[CPU Mode Register (CPUM)] 003B16
The CPU mode register contains the stack page selection bit and
the internal system clock selection bit.
The CPU mode register is allocated at address 003B
CPU mode register
(CPUM (CM) : address 003B
Processor mode bits
b1 b0
0 0 : Single-chip mode
0 1 :
1 0 :
1 1 :
Stack page selection bit
0 : 0 page
1 : 1 page
Not used (returns “1” when read)
(Do not write “0” to this bit.)
Port X
0 : Stop oscillating
1 : X
Main clock ( X
0 : Oscillating
1 : Stopped
Main clock division ratio selection bit
0 : X
1 : X
Internal system clock selection bit
0 : X
1 : X
Not available
C
switch bit
CIN
, X
COUT
IN-XOUT
IN
/2 (high-speed mode)
IN
/8 (middle-speed mode)
IN-XOUT
selected (middle-/high-speed mode)
CIN-XCOUT
16
)
) stop bit
selected (low-speed mode)
16.
Fig. 6 Structure of CPU mode register
8
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
MEMORY
Special Function Register (SFR) Area
The Special Function Register area in the zero page contains control registers such as I/O ports and timers.
RAM
RAM is used for data storage and for stack area of subroutine
calls and interrupts.
ROM
The first 128 bytes and the last 2 bytes of ROM are reserved for
device testing and the rest is user area for storing programs.
Interrupt V ector Area
The interrupt vector area contains reset and interrupt vectors.
RAM area
RAM size
(bytes)
192
256
384
512
640
768
896
1024
1536
2048
ROM area
ROM size
(bytes)
4096
8192
12288
16384
20480
24576
28672
32768
36864
40960
45056
49152
53248
57344
61440
Address
XXXX
00FF
013F16
01BF16
023F16
02BF16
033F16
03BF16
043F16
063F16
083F16
Address
YYYY
F000
E00016
D00016
C00016
B00016
A00016
900016
800016
700016
600016
500016
400016
300016
200016
100016
16
16
16
16
Address
ZZZZ
F08016
E08016
D08016
C08016
B08016
A08016
908016
808016
708016
608016
508016
408016
308016
208016
108016
16
Zero Page
Access to this area with only 2 bytes is possible in the zero page
addressing mode.
Special Page
Access to this area with only 2 bytes is possible in the special
page addressing mode.
000016
SFR area
Zero page
Special page
RAM
ROM
004016
005416
010016
XXXX16
084016
YYYY16
ZZZZ16
FF0016
FFDC16
FFFE16
FFFF16
LCD display RAM area
Reserved area
Not used
Reserved ROM area
(128 bytes)
Interrupt vector area
Reserved ROM area
Fig. 7 Memory map diagram
9
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
Port P0 (P0)
000016
Port P0 direction register (P0D)
000116
Port P1 (P1)
000216
Port P1 output control register (P1D)
000316
Port P2 (P2)
000416
Port P2 direction register (P2D)
000516
Port P3 (P3)
000616
Port P3 output control register (P3C)
000716
Port P4 (P4)
000816
Port P4 direction register (P4D)
000916
Port P5 (P5)
000A16
Port P5 direction register (P5D)
000B16
Port P6 (P6)
000C16
Port P6 direction register (P6D)
000D16
Port P7 (P7)
000E16
Port P7 direction register (P7D)
000F16
001016
001116
001216
001316
001416
Key input control register (KIC)
001516
PULL register A (PULLA)
001616
PULL register B (PULLB)
001716
Transmit/Receive buffer register(TB/RB)
001816
Serial I/O1 status register (SIO1STS)
001916
Serial I/O1 control register (SIO1CON)
001A16
UART control register (UARTCON)
001B16
Baud rate generator (BRG)
001C16
Serial I/O2 control register (SIO2CON)
001D16
Reserved area
001E16
Serial I/O2 register (SIO2)
001F16
0020
16
Timer X (low) (TXL)
Timer X (high) (TXH)
002116
Timer Y (low) (TYL)
002216
Timer Y (high) (TYH)
002316
002416
Timer 1 (T1)
Timer 2 (T2)
002516
Timer 3 (T3)
002616
Timer X mode register (TXM)
002716
Timer Y mode register (TYM)
002816
Timer 123 mode register (T123M)
002916
OUT/φ output control register (CKCON)
T
002A16
PWM control register (PWMCON)
002B16
PWM prescaler (PREPWM)
002C16
PWM register (PWM)
002D16
002E16
002F16
003016
A-D control register (ADCON)
003116
A-D control register (low-order) (ADL)
003216
A-D control register (high-order) (ADH)
003316
D-A1 conversion register (DA1)
003416
D-A2 conversion register (DA2)
003516
D-A control register (DACON)
003616
Watchdog timer control register (WDTCON)
003716
Segment output enable register (SEG)
003816
LCD mode register (LM)
003916
Interrupt edge selection register (INTEDGE)
003A16
CPU mode register (CPUM)
003B16
Interrupt request register 1(IREQ1)
003C16
Interrupt request register 2(IREQ2)
003D16
Interrupt control register 1(ICON1)
003E16
Interrupt control register 2(ICON2)
003F16
Fig. 8 Memory map of special function register (SFR)
10
I/O PORTS
Direction Registers
The I/O ports have direction registers which determine the input/
output direction of each individual pin. (P0
0–P07 and P10–P15 use
bit 0 of port P0, P1 direction registers respectively.)
When “1” is written to that bit, that pin becomes an output pin.
When “0” is written to the bit corresponding to a pin, that pin becomes an input pin.
If data is read from a pin set to output, the value of the port output
latch is read, not the value of the pin itself. Pins set to input are
floating and the value of that pin can be read. If a pin set to input
is written to, only the port output latch is written to and the pin remains floating.
Port P3 Output Control Register
Bit 0 of the port P3 output control register (address 000716) enables control of the output of ports P3
0 to P37.
When the bit is set to “1”, the port output function is valid.
When resetting, bit 0 of the port P3 output control register is set to
“0” (the port output function is invalid.) and ports P3
0 to P37 are
pulled up.
Pull-up Control
By setting the PULL register A (address 001616) or the PULL register B (address 0017
program.
However, the contents of PULL register A and PULL register B do
not affect ports programmed as the output ports.
The PULL register A setting is invalid for pins set to segment output on the segment output enable register.
16), ports P0 to P6 can control pull-up with a
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
b7 b0
b7 b0
Note : The contents of PULL register A and PULL register B
do not affect ports programmed as the output port.
Fig. 9 Structure of PULL register A and PULL register B
PULL register A
(PULLA : address 0016
P00, P01 pull-up
P0
2, P03 pull-up
4–P07 pull-up
P0
P1
0–P13 pull-up
4, P15 pull-up
P1
P1
6, P17 pull-up
0–P23 pull-up
P2
P2
4–P27 pull-up
PULL register B
(PULLB : address 0017
P41–P43 pull-up
P4
4–P47 pull-up
0–P53 pull-up
P5
P5
4–P57 pull-up
0–P63 pull-up
P6
P6
4–P67 pull-up
Not used (return “0” when read)
16)
16)
0 : No pull-up
1 : Pull-up
11
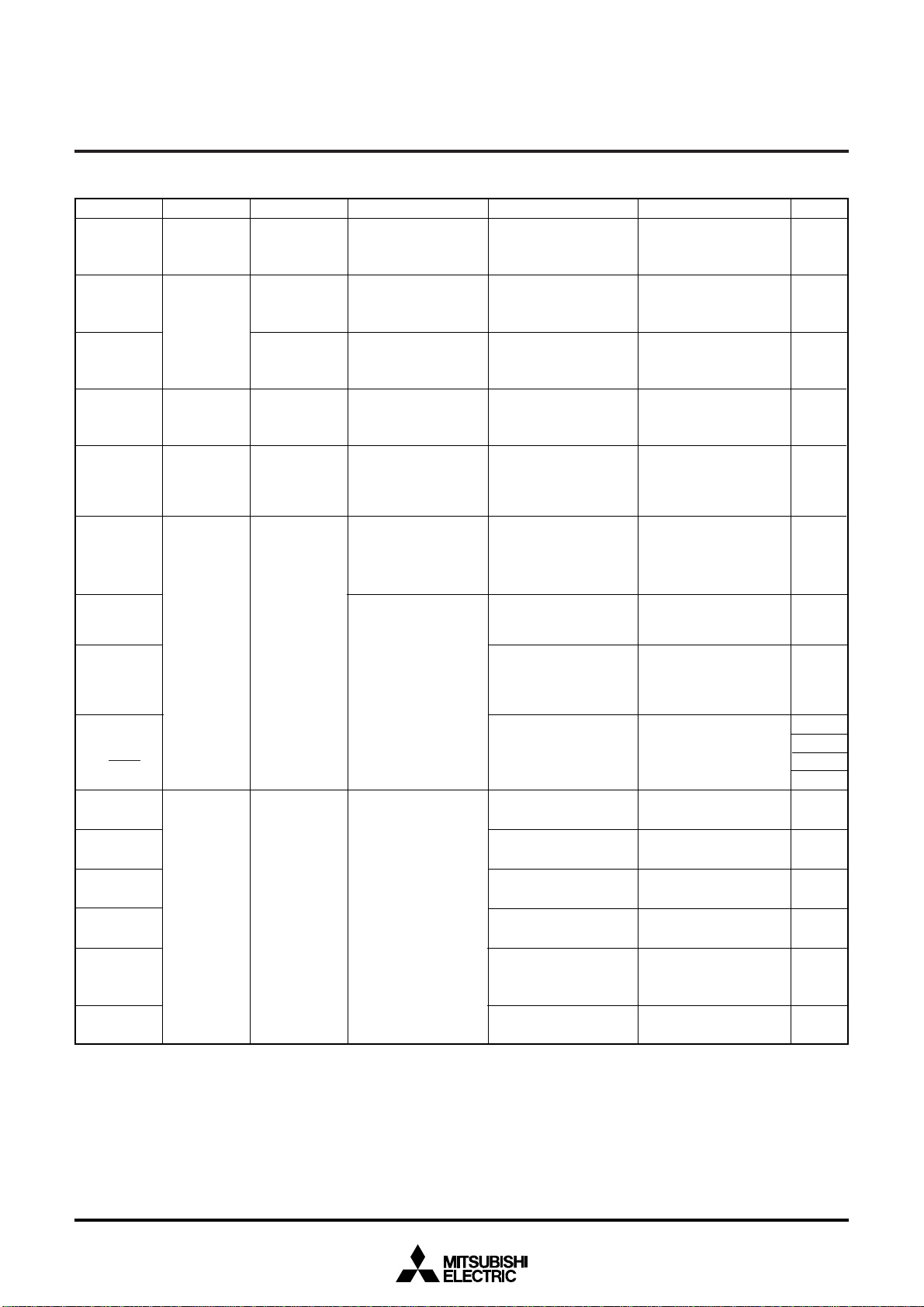
Table 4 List of I/O port function (1)
Pin
P00/SEG26–
P07/SEG33
P10/SEG34–
P15/SEG39
P16 , P17
P20–P27
P30/SEG18–
P37/SEG25
P40/ADT
Port P0
Port P1
Port P2
Port P3
Port P4
Input/OutputName
Input/output,
byte unit
Input/output,
6-bit unit
Input/output,
individual bits
Input/output,
individual bits
Output
Input/output,
individual bits
I/O Format
CMOS compatible
input level
CMOS 3-state output
CMOS compatible
input level
CMOS 3-state output
CMOS compatible
input level
CMOS 3-state output
CMOS compatible
input level
CMOS 3-state output
CMOS 3-state output
CMOS compatible
input level
N-channel open-drain
output
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
Non-Port Function
LCD segment output
LCD segment output
Key input (key-on
wake-up) interrupt
input
LCD segment output
A-D trigger input
External interrupt input
Related SFRs
PULL register A
Segment output enable
register
PULL register A
Segment output enable
register
PULL register A
PULL register A
Interrupt control register2
Key input control register
PULL register A
Segment output enable
register
P3 output enable register
A-D control register
Interrupt edge selection
register
Diagram No.
(1)
(2)
(1)
(2)
(4)
(4)
(3)
(13)
P4
1/INT1,
P42/INT2
P43/φ/TOUT
P44/RXD,
P45/TXD,
P46/SCLK1,
P47/SRDY1
P50/PWM0,
P51/PWM1
P52/RTP0,
P53/RTP1
P54/CNTR0
P55/CNTR1
P56/DA1
P57/DA2
Port P5
Input/output,
individual bits
CMOS compatible
input level
CMOS 3-state output
CMOS compatible
input level
CMOS 3-state output
External interrupt input
Timer output φ output
Serial I/O1 function I/O
PWM output
Real time port
function output
Timer X function I/O
Timer Y function input
DA1 output
A-D VREF input
DA2 output
PULL register B
Interrupt edge selection
register
PULL register B
Timer 123 mode register
TOUT/φ output control
register
PULL register B
Serial I/O1 control register
Serial I/O1 status register
UART control register
PULL register B
PWM control register
PULL register B
Timer X mode register
PULL register B
Timer X mode register
PULL register B
Timer Y mode register
PULL register B
D-A control register
A-D control register
PULL register B
D-A control register
(4)
(12)
(5)
(6)
(7)
(8)
(10)
(9)
(11)
(14)
(15)
(15)
12
MITSUBISHI MICROCOMPUTERS
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
Table 5 List of I/O port function (2)
Pin Name I/O Format Non-Port Function Related SFRS
P60/SIN2/AN0
P61/SOUT2/
AN1
P62/SCLK21/
AN2
P63/SCLK22 /
AN3
P64/AN4–
P67/AN7
P70/INT0
P71–P77
Port P6
Port P7
Input/Output
Input/
output,
individnal
bits
Input
Input/
output,
individnal
bits
CMOS compatible input
level
CMOS 3-state output
CMOS compatible input
level
CMOS compatible input
level
N-channel open-drain
output
A-D conversion input
Serial I/O2 function I/O
A-D conversion input
External interrupt input
A-D control register
Serial I/O2 control
register
A-D control register
Interrupt edge
selection register
3827 Group
Diagram No.
(17)
(18)
(19)
(20)
(16)
(23)
(13)
COM0–COM3
SEG0–SEG17
Notes1: How to use double-function ports as function I/O ports, refer to the applicable sections.
2: Make sure that the input level at each pin is either 0 V or V
tential, a current will flow V
Common
Segment
Output
Output
CC to VSS through the input-stage gate.
LCD common output
LCD segment output
CC during execution of the STP instruction. When an input level is at an intermediate po-
LCD mode register
(21)
(22)
13
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
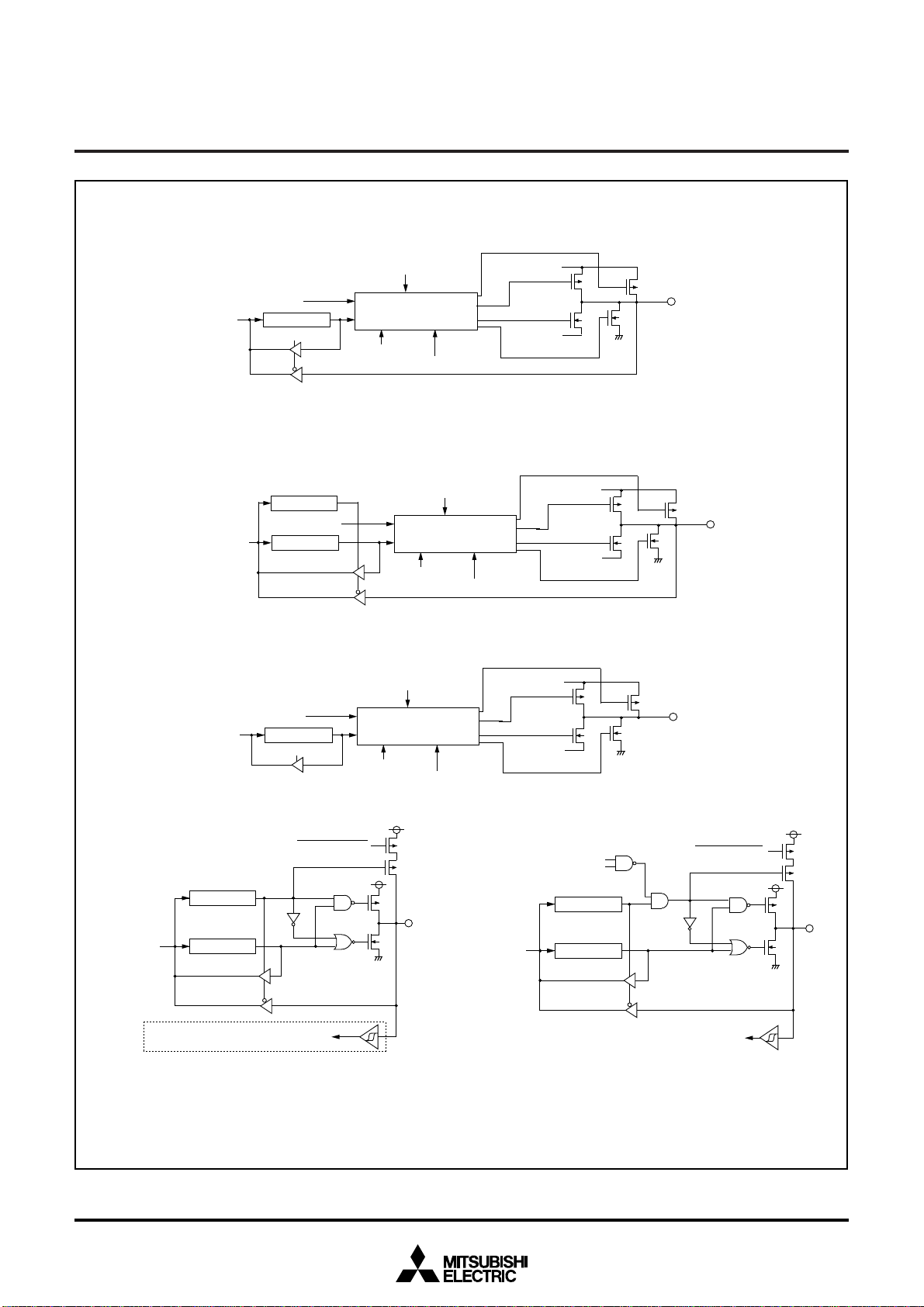
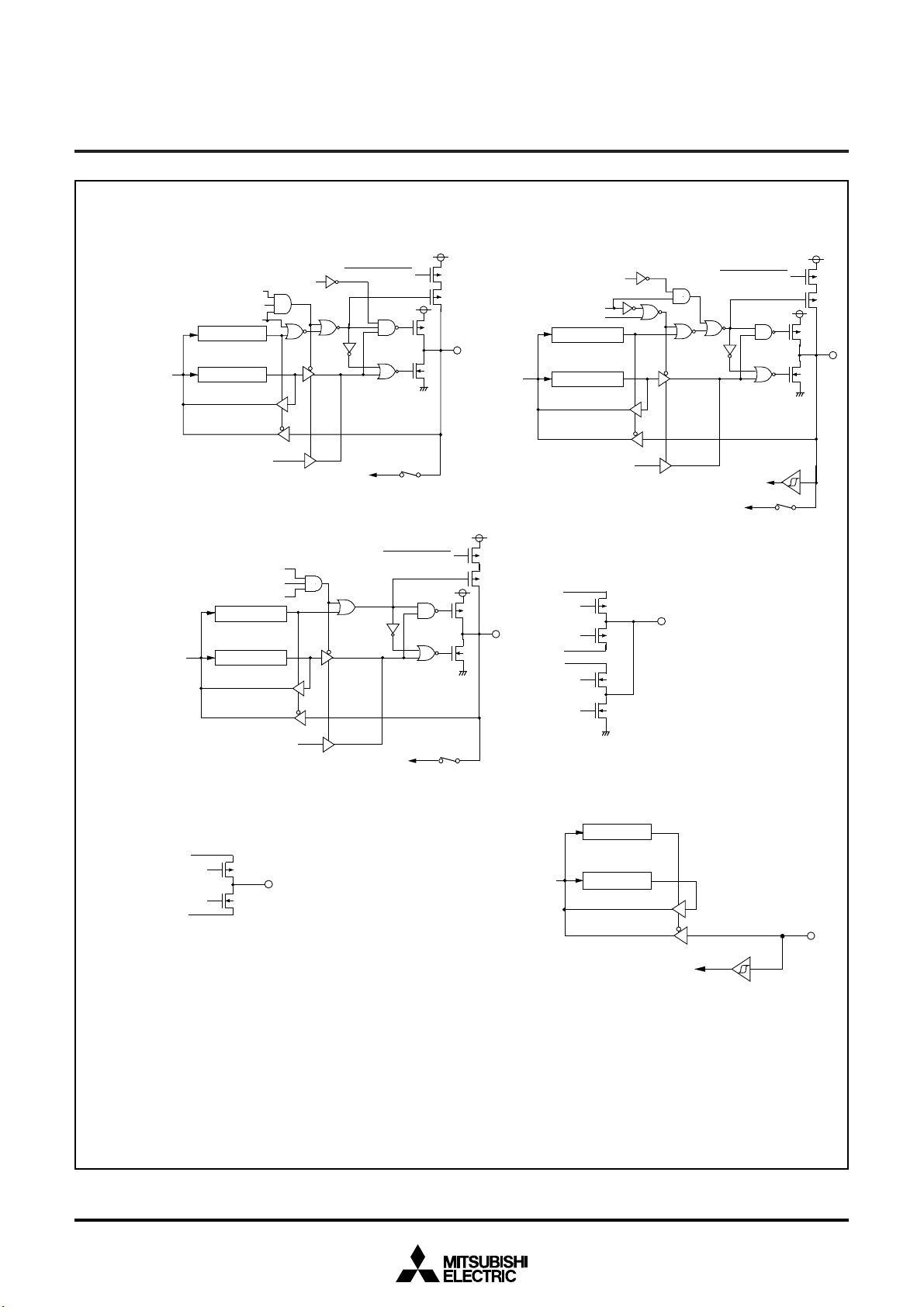
(1) Ports P01–P07, P11–P15
Segment data
Data bus
Port latch
Port direction register
(2) Ports P00, P10
Direction register
Segment data
Data bus
Port latch
(3) Port P3
Segment data
Data bus
Port latch
LCD drive timing
Interface logic level
shift circuit
Port/Segment
Port direction register
LCD drive timing
Port/Segment
LCD drive timing
Interface logic level
shift circuit
Port/Segment
Segment/Port
Segment
Interface logic level
shift circuit
Port direction register
Segment/Port
Segment
Output control
Pull-up
VL2/VL3/VCC
V
L1/VSS
Port
Pull-up
Segment/Port
Segment
Pull-up
VL2/VL3/VCC
V
L1/VSS
Port
VL2/VL3/VCC
L1/VSS
V
Port
(4) Ports P16, P17, P2, P41, P42
Direction register
Data bus
Fig. 10 Port block diagram (1)
14
Port latch
Key input interrupt input
1, INT2 interrupt input
INT
Except P1
Pull-up control
6, P17
(5) Port P44
Serial I/O1 enable bit
Reception enable bit
Data bus
Pull-up control
Direction register
Port latch
Serial I/O1 input
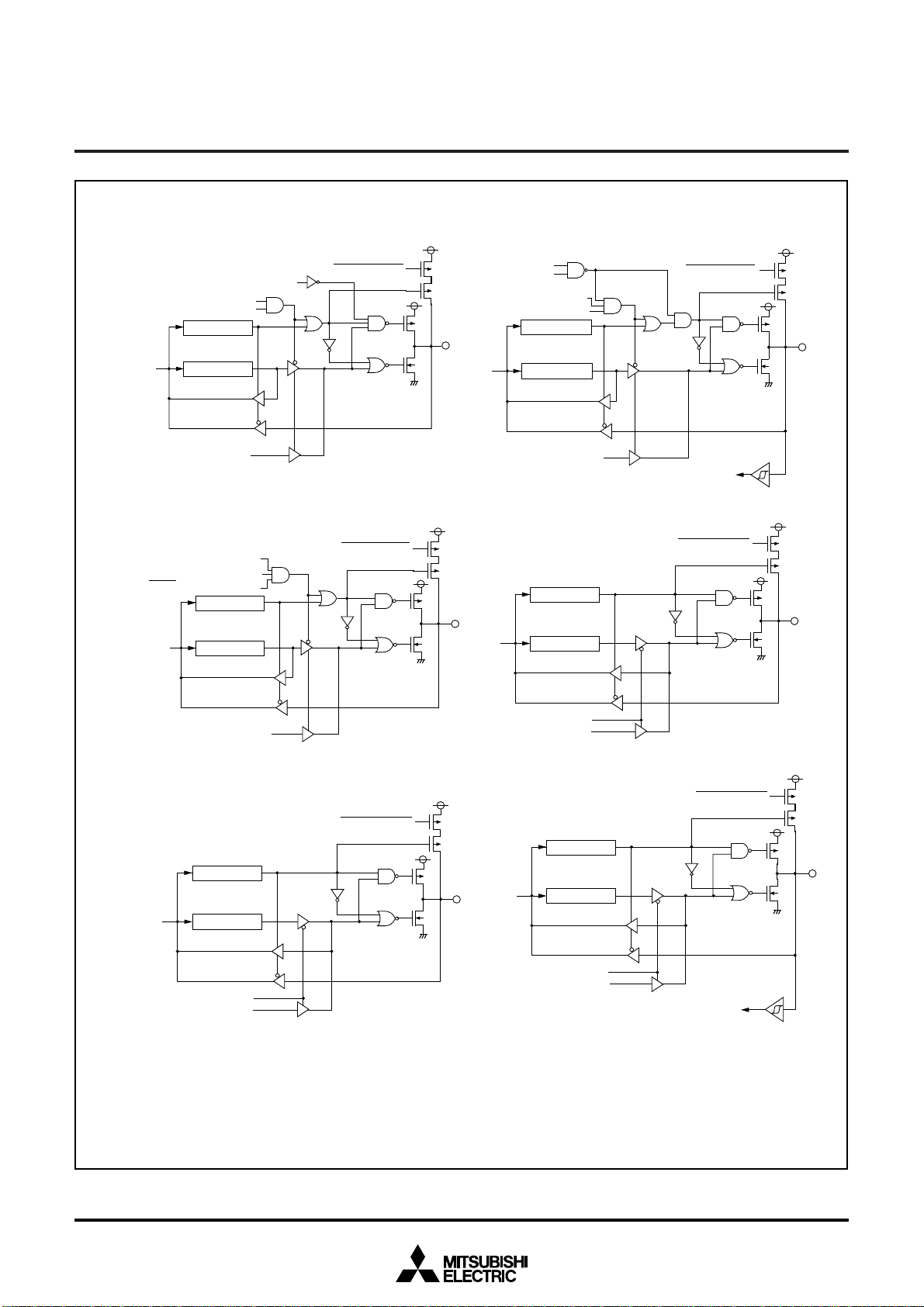
(6) Port P45 (7) Port P46
Serial I/O1 clock
selection bit
Serial I/O1 enable bit
Serial I/O1 enable bit
P45/TxD P-channel output disable bit
Serial I/O1 enable bit
Transmission enable bit
Direction register
Pull-up control
Serial I/O1 mode selection bit
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
Pull-up control
Direction register
Data bus
Port latch
Serial I/O1 output
(8) Port P47
Serial I/O1 mode selection bit
Serial I/O1 enable bit
S
RDY1 output enable bit
Direction register
Data bus Port latch
Serial I/O1 ready output
(10) Ports P50,P51
Direction register
Data bus
Port latch
Pull-up control
Pull-up control
Data bus
Serial I/O1 clock outupt
Port latch
(9) Ports P52, P53
Direction register
Data bus
Real time control bit
Real time port data
(11) Port P54
Data bus
Serial I/O1 clock input
Pull-up control
Port latch
Pull-up control
Direction register
Port latch
PWM function enable bit
PWM output
Fig. 11 Port block diagram (2)
Pulse output mode
Timer output
CNTR0 interrupt input
15
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
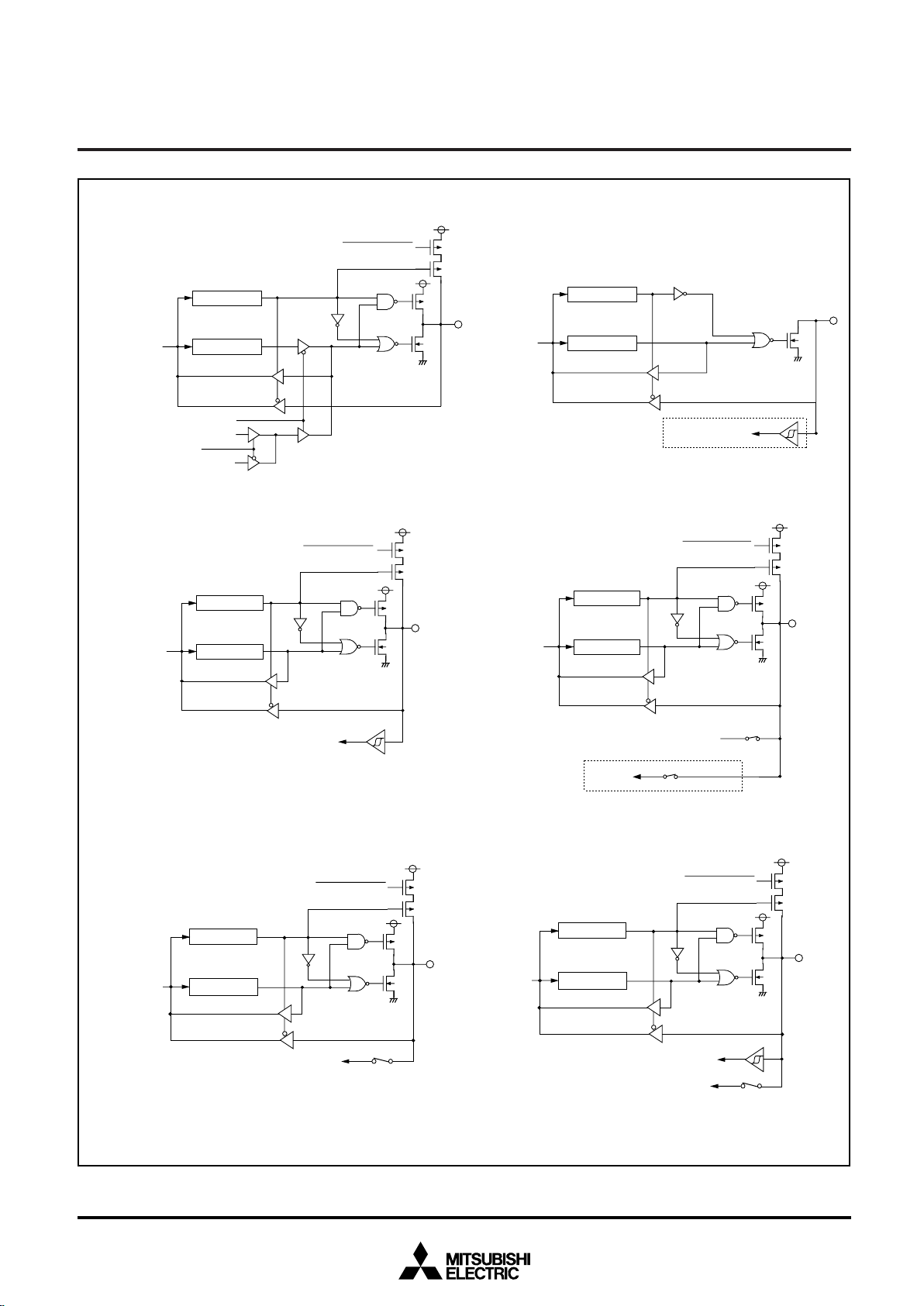
(12) Port P43
TOUT/φ output control
Timer output
TOUT/φ selection bit
(14) Port P55
Data bus
Direction register
Port latchData bus
φ output
Direction register
Port latch
Pull-up control
Pull-up control
(13) Ports P40, P71–P77
Direction register
Data bus
Port latch
Except P71 to P77
(15) Ports P56, P57
Direction register
Data bus
Port latch
A-D trigger input
Pull-up control
CNTR1 interrupt input
(16) Ports P64–P67
Direction register
Data bus Port latch
A-D conversion input
Fig. 12 Port block diagram (3)
Pull-up control
Analog input pin selection bit
Except P5
(17) Port P60
Data bus
D-A conversion output
VREF input switch
7
Direction register
Port latch
A-D conversion input
D-A
1, D-A2 output enable bit
VREF input selection bit
Pull-up control
Serial I/O2 input
Analog input pin selection bit
16
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
(18) Port P61
P61/SOUT2 P-channel output disable bit
Serial I/O2 transmit completion signal
Synchronous clock selection bit
Serial I/O2 port selection bit
Data bus
Direction register
Port latch
Serial I/O2 output
A-D conversion input
(20) Port P63
Synchronous clock selection bit
Synchronous clock output pin selection bit
Serial I/O2 port selection bit
Direction register
Data bus
Port latch
Pull-up control
Analog input pin selection bit
Pull-up control
(19) Port P62
Synchronous clock selection bit
Serial I/O2 port selection bit
Synchronous clock output pin
Data bus
selection bit
Direction register
Port latch
Serial I/O2 clock output
(21) COM0–COM3
VL3
VL2
VL1
Pull-up control
Serial I/O2 clock input
A-D conversion input
The gate input signal of each
transistor is controlled by the
LCD duty ratio and the bias
value.
Analog input pin selection bit
Serial I/O2 clock output
(22) SEG0–SEG17
VL2/VL3
VL1/VSS
Fig. 13 Port block diagram (4)
A-D conversion input
The voltage applied to the sources of
P-channel and N-channel transistors
is the controlled voltage by the bias
value.
Analog input pin selection bit
(23) Port P70
Data bus
VSS
Direction register
Port latch
INT0 input
17
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
INTERRUPTS
Interrupts occur by seventeen sources: seven external, nine internal, and one software.
Interrupt Control
Each interrupt except the BRK instruction interrupt have both an
interrupt request bit and an interrupt enable bit, and is controlled
by the interrupt disable flag. An interrupt occurs if the corresponding interrupt request and enable bits are “1” and the interrupt
disable flag is “0.” Interrupt enable bits can be set or cleared by
software. Interrupt request bits can be cleared by software, but
cannot be set by software. The BRK instruction interrupt and reset
cannot be disabled with any flag or bit. The I flag disables all interrupts except the BRK instruction interrupt and reset. If several
interrupts requests occurs at the same time the interrupt with highest priority is accepted first.
Table 6 Interrupt vector addresses and priority
Interrupt Source
Reset (Note 2)
INT0
INT1
Serial I/O1
reception
Serial I/O1
transmission
Timer X
Timer Y
Timer 2
Timer 3
CNTR
0
CNTR1
Timer 1
INT2
Serial I/O2
Key input
(Key-on wake-up)
ADT
A-D conversion
BRK instruction
Notes1: Vector addresses contain interrupt jump destination addresses.
2: Reset function in the same way as an interrupt with the highest priority.
Prior ity
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Vector Addresses (Note 1)
LowHigh
FFFD
FFFB16
FFF916
FFF716
FFF516
FFF316
FFF116
FFEF16
FFED16
FFEB16
FFE916
FFE716
FFE516
FFE316
FFE116
FFDF16
FFDD16
16
FFFC16
FFFA16
FFF816
FFF616
FFF416
FFF216
FFF016
FFEE16
FFEC16
FFEA16
FFE816
FFE616
FFE416
FFE216
FFE016
FFDE16
FFDC16
Interrupt Operation
Upon acceptance of an interrupt the following operations are automatically performed:
1. The contents of the program counter and processor status
register are automatically pushed onto the stack.
2. The interrupt disable flag is set and the corresponding
interrupt request bit is cleared.
3. The interrupt jump destination address is read from the vector table into the program counter.
■Notes
When the active edge of an external interrupt (INT0–INT2, CNTR0,
CNTR
1) is set or when switching interrupt sources of ADT/A-D
conversion interrupt, the corresponding interrupt request bit may
also be set. Therefore, take following sequence:
(1) Disable the external interrupt which is selected.
(2) Change the active edge in interrupt edge selection register
(timer XY mode register when using CNTR
(3) Clear the set interrupt request bit to “0.”
(4) Enable the external interrupt which is selected.
Interrupt Request
Generating Conditions
At reset
At detection of either rising or
falling edge of INT
At detection of either rising or
falling edge of INT1 input
At completion of serial I/O1 data
reception
At completion of serial I/O1
transmit shift or when transmission buffer is empty
At timer X underflow
At timer Y underflow
At timer 2 underflow
At timer 3 underflow
At detection of either rising or
falling edge of CNTR0 input
At detection of either rising or
falling edge of CNTR
At timer 1 underflow
At detection of either rising or
falling edge of INT
At completion of serial I/O2 data
transmission or reception
At falling of conjunction of input
level for port P2 (at input mode)
At falling of ADT input
At completion of A-D conversion
At BRK instruction execution
0 input
1 input
2 input
Non-maskable
External interrupt
(active edge selectable)
External interrupt
(active edge selectable)
Valid when serial I/O1 is selected
Valid when serial I/O1 is selected
External interrupt
(active edge selectable)
External interrupt
(active edge selectable)
External interrupt
(active edge selectable)
Valid when serial I/O2 is selected
External interrupt
(valid when an “L” level is applied)
Valid when ADT interrupt is selected External interrupt
(Valid at falling)
Valid when A-D interrupt is selected
Non-maskable software interrupt
0, CNTR1)
Remarks
18
Interrupt request bit
Interrupt enable bit
Interrupt disable flag (I)
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
Fig. 14 Interrupt control
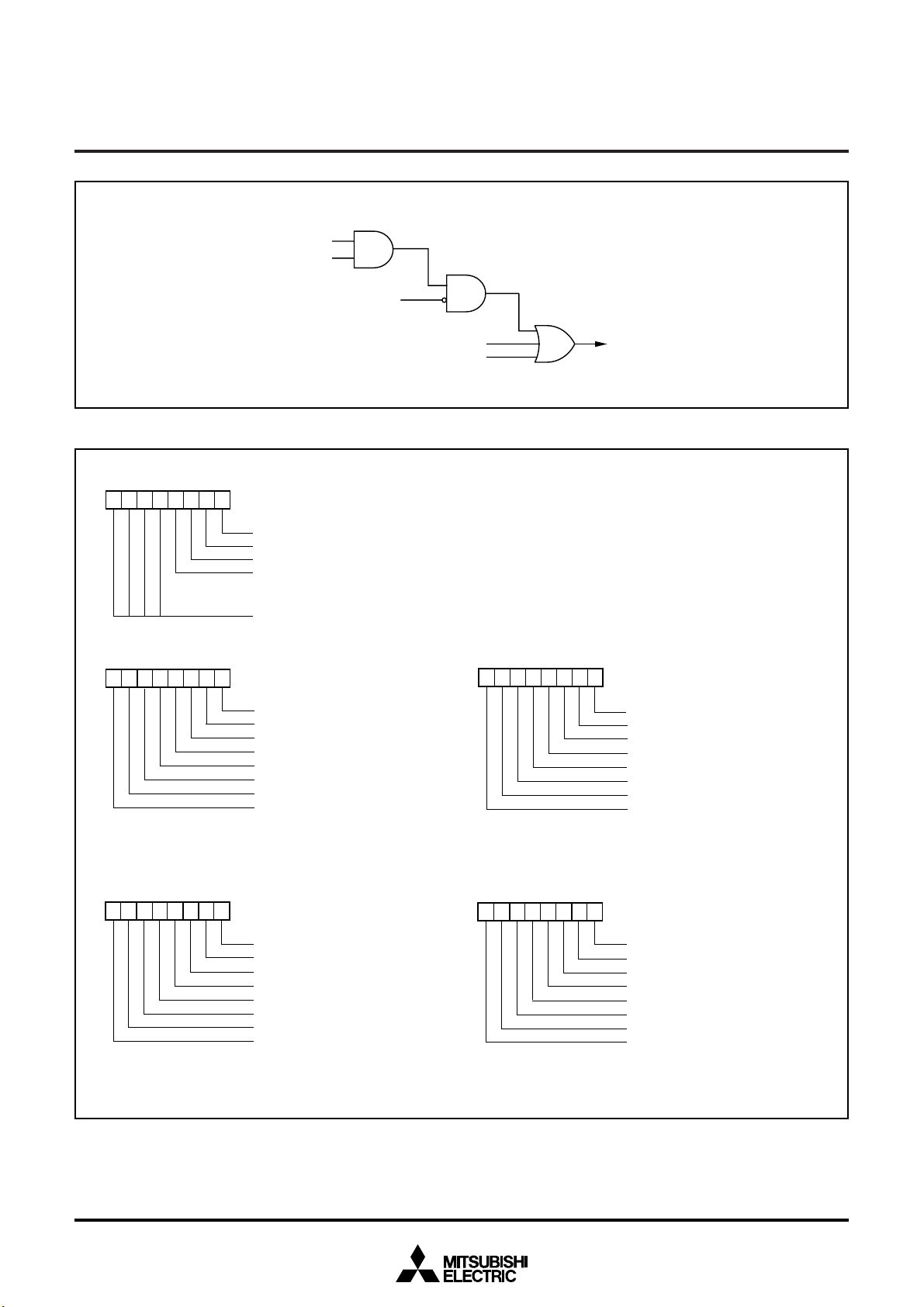
b7 b0
b7 b0
Interrupt edge selection register
16
(INTEDGE : address 003A
)
INT0 interrupt edge selection bit
INT
1
interrupt edge selection bit
2
interrupt edge selection bit
INT
INT
3
interrupt edge selection bit
Not used (return “0” when read)
Interrupt request register 1
(IREQ1 : address 003C
16
)
INT0 interrupt request bit
1
interrupt request bit
INT
Serial I/O1 receive interrupt request bit
Serial I/O1 transmit interrupt request bit
Timer X interrupt request bit
Timer Y interrupt request bit
Timer 2 interrupt request bit
Timer 3 interrupt request bit
BRK instruction
Reset
0 : Falling edge active
1 : Rising edge active
b7 b0
0 : No interrupt request issued
1 : Interrupt request issued
Interrupt request
Interrupt request register 2
(IREQ2 : address 003D
16
)
CNTR0 interrupt request bit
CNTR
1
interrupt request bit
Timer 1 interrupt request bit
INT
2
interrupt request bit
Serial I/O2 interrupt request bit
Key input interrupt request bit
ADT/AD conversion interrupt request bit
Not used (returns “0” when read)
b7 b0
Interrupt control register 1
(ICON1 : address 003E
INT0 interrupt enable bit
1
interrupt enable bit
INT
Serial I/O receive interrupt enable bit
Serial I/O transmit interrupt enable bit
Timer X interrupt enable bit
Timer Y interrupt enable bit
Timer 2 interrupt enable bit
Timer 3 interrupt enable bit
Fig. 15 Structure of interrupt-related registers
b7 b0
16
)
Interrupt control register 2
(ICON2 : address 003F
16
)
CNTR0 interrupt enable bit
1
interrupt enable bit
CNTR
Timer 1 interrupt enable bit
INT
2
interrupt enable bit
Serial I/O2 interrupt enable bit
Key input interrupt enable bit
ADT/AD conversion interrupt enable bit
Not used (returns “0” when read)
(Do not write “1” to this bit.)
0 : Interrupts disabled
1 : Interrupts enabled
19
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
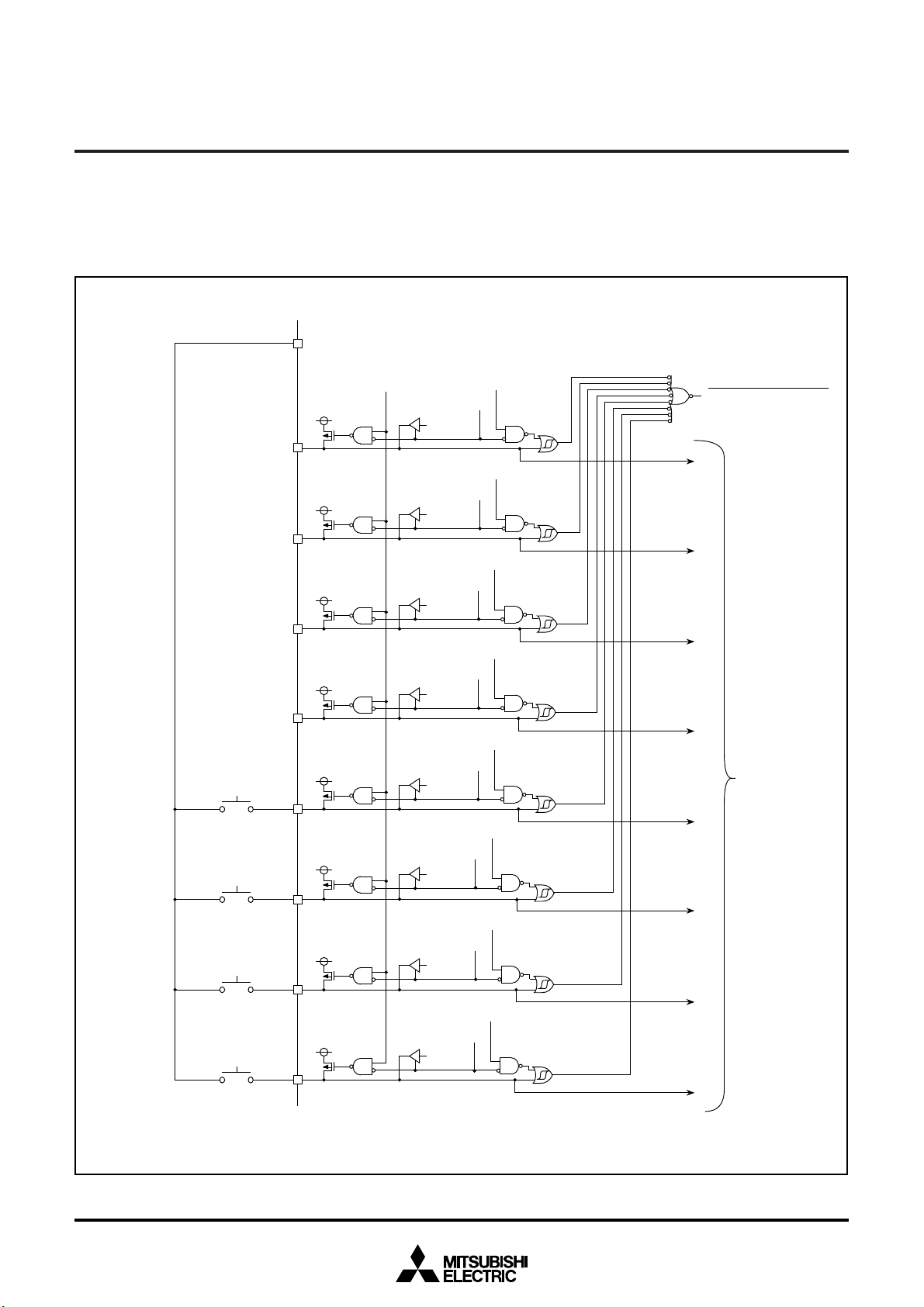
Key Input Interrupt (Key-on wake-up)
A Key-on wake up interrupt request is generated by applying “L”
level to any pin of port P2 that have been set to input mode. In
other words, it is generated when AND of input level goes from “1”
Port PXx
“L” level output
Port P27 output
Port P26 output
Port P25 output
PULLA register
Bit 2 = “1”
✽
✽
✽
Key input control register = “1”
Port P27
direction register = “1”
✽✽
Port P27
latch
Port P26
direction register = “1”
✽✽
Port P26
latch
Port P25
direction register = “1”
✽✽
Port P25
latch
to “0”. An example of using a key input interrupt is shown in Figure
16, where an interrupt request is generated by pressing one of the
keys consisted as an active-low key matrix which inputs to ports
P2
0–P23.
Key input interrupt request
Key input control register = “1”
Key input control register = “1”
Port P24 output
Port P23
input
Port P22
input
Port P21
input
Port P20
input
Key input control register = “1”
Port P24
✽
✽
✽
✽
✽
direction register = “1”
✽✽
Port P24
latch
Port P23
direction register = “0”
Port P22
direction register = “0”
Port P21
direction register = “0”
Port P20
direction register = “0”
Key input control register = “1”
✽✽
Port P23
latch
Key input control register = “1”
✽✽
Port P22
latch
Key input control register = “1”
✽✽
Port P21
latch
Key input control register = “1”
✽✽
Port P20
latch
Port P2 input
reading circuit
Fig. 16 Connection example when using key input interrupt and port P2 block diagram
20
✽ P-channel transistor for pull-up
✽✽ CMOS output buffer
MITSUBISHI MICROCOMPUTERS
3827 Group
SINGLE-CHIP 8-BIT CMOS MICROCOMPUTER
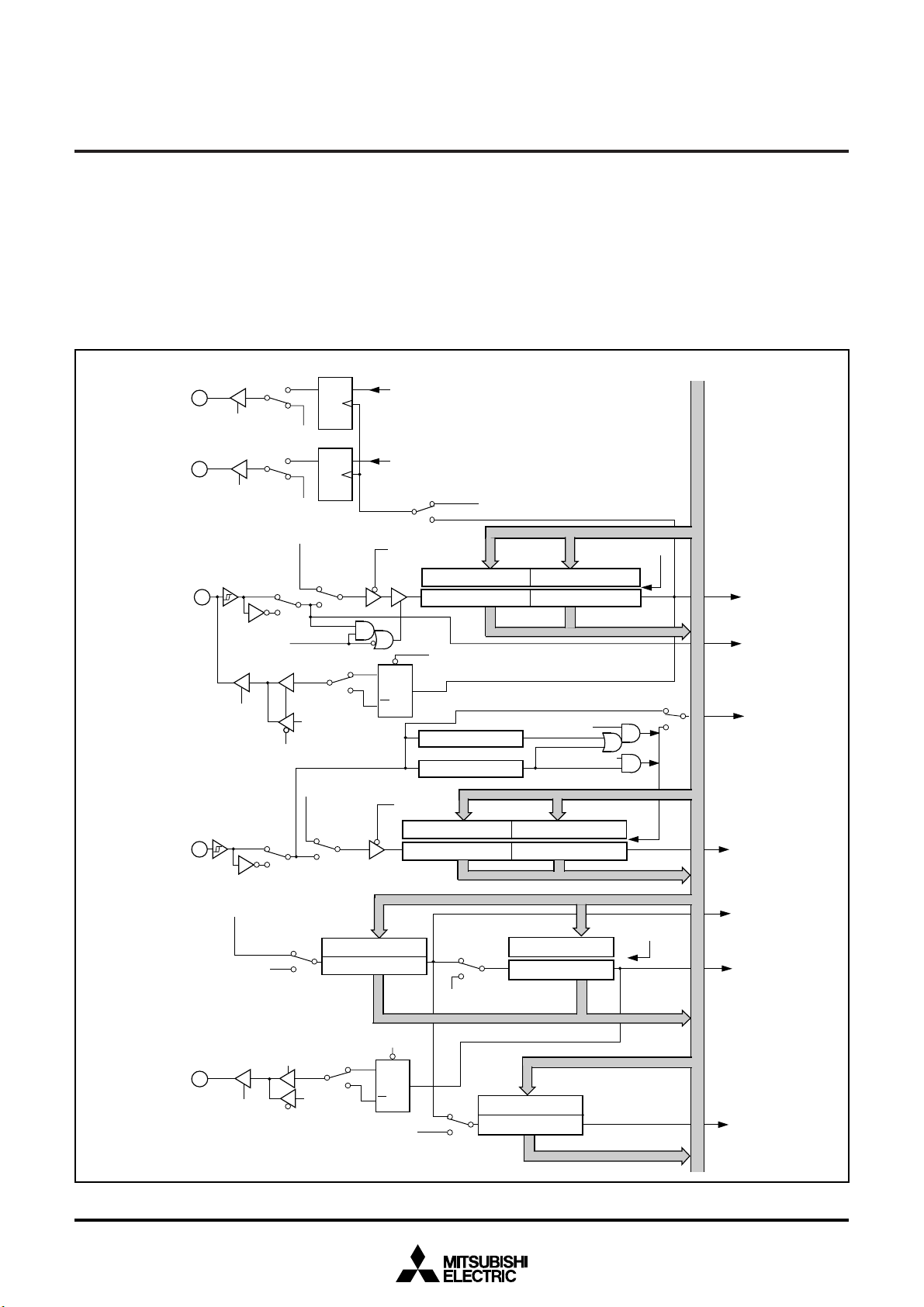
TIMERS
The 3827 group has five timers: timer X, timer Y, timer 1, timer 2,
and timer 3. Timer X and timer Y are 16-bit timers, and timer 1,
timer 2, and timer 3 are 8-bit timers.
All timers are down count timers. When the timer reaches “00
an underflow occurs at the next count pulse and the corresponding timer latch is reloaded into the timer and the count is
continued. When a timer underflows, the interr upt request bit cor-
Real time port
P5
2
P52 direction register
P53
3 direction register
P5
4/CNTR0
P5
P54 direction register
P55/CNTR1
f(XIN)/16
(f(XCIN)/16 in φ = XCIN divided by 2)
P4
3/φ/TOUT
3 direction register
P4
control bit “1”
P5
Real time port
control bit “1”
P5
f(XIN)/16
(f(XIN)/16 in low-speed mode✽)
CNTR
0 active
edge switch bit
“0”
Pulse width
measurement
mode
“1”
CNTR0 active
edge switch bit
Pulse output mode
CNTR1 active
edge switch bit
“0”
“1”
Timer 1 count source
selection bit
XCIN
TOUT output
control bit
f(XIN)/16(f(XCIN)/16 in low-speed mode✽)
Q D
Latch
“0”
2 latch
Q D
“0”
3 latch
Timer X operating mode bits
“00”,“01”,“11”
Latch
Real time port
control bit “0”
“10”
“0”
“1”
4 latch
P5
f(XIN)/16
(f(XCIN)✕16 in φ = XCIN divided by 2)
“00”,“01”,“11”
Timer Y operating
“10”
mode bit
“0”
Timer 1 latch (8)
Timer 1 (8)
“1”
OUT output
T
active edge
switch bit
P4
3 latch
“0”
“1”
T
OUT output
control bit
Q
Q
16”,
2 data for real time port
P5
3 data for real time port
P5
Timer X stop
control bit
Timer X (low) latch (8) Timer X (high) latch (8)
S
Q
T
Q
Rising edge detection
Falling edge detection
Timer Y stop
control bit
Timer Y (low) latch (8) Timer Y (high) latch (8)
Timer Y (low) (8) Timer Y (high) (8)
S
T
Timer 3 count
source selection bit
responding to that timer is set to “1”.
Read and write operation on 16-bit timer must be performed for
both high and low-order bytes. When reading a 16-bit timer, read
the high-order byte first. When writing to a 16-bit timer, write the
low-order byte first. The 16-bit timer cannot perform the correct operation when reading during the write operation, or when writing
during the read operation.
Data bus
Timer X mode register
“1”
Pulse output mode
write signal
Timer X write
control bit
Timer X (low) (8)
Timer X (high) (8)
Timer Y operating mode bit
Pulse width HL continuously measurement mode
Period
measurement mode
Timer 2 count source
selection bit
“0”
Timer 2 latch (8)
Timer 2 (8)
“1”
f(XIN)/16
(f(XCIN)✕16 in φ=XCIN divided by 2)
Timer 3 latch (8)
“0”
Timer 3 (8)
“1”
“00”,“01”,“10”
“11”
Timer 2 write
control bit
Timer Y
interrupt
request
Timer 1
interrupt
request
Timer 2
interrupt
request
Timer 3
interrupt
request
Timer X
interrupt
request
CNTR0
interrupt
request
CNTR1
interrupt
request
Fig. 17 Timer block diagram
21
 Loading...
Loading...