

Page 1

MIT
SUBIS
C
C
FX SERIES
Manual de Introducción
HI ELECTRI
Nro. Art.: 166947
13122005
Versión A
FX1S,FX1N,
FX
2N,FX2NC,
FX
MITSUBISHI ELECTRI
3U
INDUSTRIAL AUTOMATION
Page 2

Page 3

Los textos, ilustraciones, diagramas y ejemplos contenidos en este
manual, sirven exclusivamente para fines de explicación de la instalación,
el mando, la programación y aplicación de
controles de programa almacenable de la serie
FX
1S,FX1N,FX2N,FX2NC yFX3U de MELSEC.
En caso de surgir preguntas relacionadas a la instalación y operación
de los equipos descritos en este manual,
le rogamos dirigirse su oficina de venta o bien
directamente a su vendedor
(véase las indicaciones en la cubierta).
Información actual y respuestas para las preguntas frecuentes
están disponibles en la Internet (www.mitsubishi-automation.com).
MITSUBISHI ELECTRIC EUROPE B.V. se mantiene el derecho
de aplicar en cualquier momento modificaciones
técnicas en este manual sin aviso previo
© 12/2005
Page 4

Page 5
Manual de Introducción para la familia MELSEC FX
1S,FX1N,FX2N,FX2NC und FX3U)
(FX
Versión Modificaciones / Complementos / Correcciones
A 12/2005 pdp-dk Primera edición
Nro. Art.: 166947
Page 6

Page 7

Indicaciones de seguridad
Indicaciones de seguridad
Destinatarios
Este manual está dirigidoexclusivamentea electricistas profesionales reconocidos queestén
familiarizados con los estándares de seguridad en automatización.La proyección, la instala
ción, la puesta en servicio, el mantenimiento y el control de los dispositivos tienen que ser lle
vados a cabo exclusivamente por electricistas profesionales reconocidos que estén familiari
zados con los estándares de seguridad en automatización.Manipulaciones en el hardware o
en el software de nuestrosproductos que no estén descritas en estemanual pueden serreali
zadas únicamente por nuestros especialistas.
Empleo reglamentario
-
-
-
-
Los PLCs de la serie FX
exclusivamente para los campos de aplicación descritos en las presentes instrucciones. Hay
que respetar la totalidad de los datos característicos indicados en el manual. Los productos
han sido desarrollados, fabricados, controlados y documentados en conformidad conlas nor
mas de seguridad pertinentes. Siempre que se observen las prescripciones de manejo y las
indicaciones de seguridad descritas relativas a la proyección, el montaje y el funcionamiento
reglamentario, funcionamiento normal del productono se deriva peligro alguno nipara perso
nas ni para cosas. Manipulaciones en el hardware o en el software por parte de personas no
cualificadas, así como la no observación de las indicaciones de advertencia contenidas en
este manual ocolocadas en elproducto, pueden tener como consecuencia graves daños personales y materiales. En combinación con los PLCs de la serie FX
FX
3U de MELSEC sólo se permite el empleo de los dispositivos adicionales o de ampliación
recomendados por MITSUBISHI ELECTRIC. Todo empleo o aplicación distinto o más amplio
del indicado se considerará como no reglamentario.
Normas relevantes para la seguridad
Al realizar trabajos de proyección, instalación, puestaen servicio, mantenimiento ycontrol de
los dispositivos, hay que observar las normas de seguridad y de prevención de accidentes
vigentes para la aplicación específica. Hay que observar especialmente las siguientes nor
mas (sin pretensión de exhaustividad):
쎲
Normas VDE
–
VDE 0100
Normas para la instalaciónde redes defuerza con unatensión nominalhasta 1000 V
1S,FX1N,FX2N,FX2NC yFX3U de MELSEC han sido concebidos
1S,FX1N,FX2N,FX2NC y
-
-
-
–
VDE 0105
Servicio de redes de fuerza
–
VDE 0113
Instalaciones eléctricas con equipos electrónicos
–
VDE 0160
Equipamiento de redes de fuerza y equipos eléctricos
–
VDE 0550/0551
Normas para transformadores
–
VDE 0700
Requisitos de seguridad eléctrica para aparatos electrodomésticos y análogos
–
VDE 0860
Normas de seguridad para dispositivos de red y sus accesorios para el uso doméstico
y análogos
Manual de Introducción Familia FX I
Page 8
Indicaciones de seguridad
Normas para la prevención de incendios
쎲
Indicaciones de peligro
A continuación se recoge el significado de cada una de las indicaciones:
PELIGRO:
Significa que existe un peligro para la viday lasalud delusuario encaso deque nose to
P
E
men las medidas de precaución correspondientes.
ATENCIÓN:
Representa una advertencia deposibles dañosdel dispositivo o de otros valores materia
les en caso de que no se tomen las medidas de precaución correspondientes.
-
-
II MITSUBISHI ELECTRIC
Page 9
P
Indicaciones de seguridad
Indicaciones generales de peligro y medidas de seguridad
La siguientes indicaciones de peligro han de entenderse como directivas generales para
servo accionamientos en combinación con otros dispositivos. Es estrictamente necesario
tenerlas en cuenta al proyectar, instalar y poner en servicio la instalación electrotécnica.
Indicaciones especiales de peligro para el usuario
PELIGRO:
Hay que observar las normas de seguridad y de prevención de accidentes
쎲
vigentes en cada caso concreto. El montaje y el cableado de los módulos, ele
mentos constructivos y dispositivos tienen que llevarse siempre a cabo
estando éstos libres de tensión.
Lo
쎲
쎲
s módulos, elementos constructivos y dispositivos tienen que instalarse
dentro de una carcasa que los proteja contra el contacto y con una cobertura y
dispositivo de protección adecuados.
En el caso de dispositivos con una conexión de red fija, hayque montar un sec
cionador de red omnipolar o un fusible en la instalación del edificio.
-
-
Compruebe regularmente que los cables y líneas unidas a los dispositivos no
쎲
tienen defectos deaislamiento o roturas.Si se detectaraun fallo enel cableado,
hay que cortar inmediatamente la tensión de los dispositivos y del cableado y
recambiar el cableado defectuoso.
Antes de la puestaen serviciohay que asegurarse de que elrango de tensiónde
쎲
red permitido concuerda con la tensión de red local.
쎲
Hay que tomar las medidas de seguridad pertinentes para que una rotura de
línea o de conductor no pueda dar lugar a estados indefinidos
쎲 T
ome las medidas necesarias para poder retomar un programa interrumpido
después de intrusionesy cortes de la tensión.No debenpoder producirse estados peligrosos de servicio, tampoco por un tiempo breve.
쎲
Según DIN VDE 0641 parte 1-3, los dispositivos de protección de corriente de
defecto no son suficientes si se emplean como única protección para contac
tos indirectos en combinación con controladores lógicos programables. Para
ello hay quetomar otras medidas de protección diferentes uotras medidas adi
cionales.
쎲
Los dispositivos de PARADA DE EMERGENCIA según EN60204/IEC 204 VDE
0113 tiene queser efectivos en todos losmodos deservicio del PLC.Un desblo
queo del dispositivo de PARADA DE EMERGENCIA nodebe dar lugara ninguna
puesta en marcha incontrolada o indefinida.
쎲
Hay que tomar las medidas de seguridad pertinentes tanto de parte del soft
ware como del hardware para que una rotura de línea o de conductor no pueda
dar lugar a estados indefinidos en el control.
.
-
-
-
-
쎲
Al emplear los módulos hay que prestar atención siempre a las observaciones
de los datos característicos para magnitudes eléctricas y físicas.
Manual de Introducción Familia FX III
Page 10

Indicaciones de seguridad
IV MITSUBISHI ELECTRIC
Page 11

Contenidos
1 Introducción
1.1 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-1
1.2 Mayor información... . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-1
2 PLCs
2.1 ¿Qué es un PLC? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-1
2.2 Procesamiento de programa en el PLC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-2
2.3 Familia FX de MELSEC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-4
2.4 Criterios de selección? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-5
Contenidos
2.5 Estructura de los controles . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-6
2.5.1 Circuitos de entrada y salida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-6
2.5.2 Descripción de los equipos básicos MELSEC FX1S . . . . . . . . . . . . . . . . . 2-6
2.5.3 Descripción de los equipos básicos MELSEC FX1N . . . . . . . . . . . . . . . . . 2-7
2.5.4 Descripción de los equipos básicos MELSEC FX2N . . . . . . . . . . . . . . . . . 2-7
2.5.5 Descripción de los equipos básicos MELSEC FX2NC . . . . . . . . . . . . . . . . 2-8
2.5.6 Descripción de los equipos básicos MELSEC FX3U . . . . . . . . . . . . . . . . . 2-8
2.5.7 Glosario para los elementos funcionales . . . . . . . . . . . . . . . . . . . . . . . . . .2-9
3 Bases para la programación
3.1 Estructura de una instrucción de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-1
3.2 Bits, bytes y palabras. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-2
3.3 Sistemas numéricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-2
3.4 Conjunto de comandos básicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-5
3.4.1 Inicio de enlaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-6
3.4.2 Emisión o asignación de un resultado de enlace . . . . . . . . . . . . . . . . . . . . 3-6
3.4.3 Observación de los transductores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-8
3.4.4 Enlaces AND . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-9
3.4.5 Enlaces OR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-11
3.4.6 Instrucciones para la unión de enlaces. . . . . . . . . . . . . . . . . . . . . . . . . . . 3-12
3.4.7 Ejecución controlada por flanco de los enlaces . . . . . . . . . . . . . . . . . . . . 3-14
3.4.8 Aplicación y reposición. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-15
3.4.9 Almacenamiento, lectura y eliminación de un resultado de enlace . . . . . 3-17
Manual de Introducción Familia FX V
Page 12

Contenidos
3.5 ¡La importancia de la seguridad!. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-21
3.6 Realización de una tarea de control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-23
4 Operandos explicados en detalle
4.1 Entradas y salidas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-1
4.2 Relés internos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-3
3.4.10Generación de pulso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-18
3.4.11Función del conmutador principal (Instrucción MC y MCR) . . . . . . . . . . . 3-19
3.4.12Invertir el resultado de enlace . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-20
3.6.1 Instalación de alarma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-23
3.6.2 Puerta corrediza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-28
4.2.1 Relés internos especiales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-4
4.3 Temporizadores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-4
4.4 Contadores (Counter) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-7
4.5 Registros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-9
4.5.1 Registro de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-9
4.5.2 Registro especial . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-10
4.5.3 Registro de archivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-11
4.6 Consejos de programación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-11
4.6.1 Definición indirecta del valor nominal en temporizadores y contadores. . 4-11
4.6.2 Retardo de desactivación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-14
4.6.3 Retardo de activación y desactivación . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-15
4.6.4 Reloj . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-16
5 Programación avanzada
5.1 Instrucciones de aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-1
5.1.1 Entrada de instrucciones de aplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-7
5.2 Instrucciones para la transferencia de datos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5-8
5.2.1 Transferencia desde datos particulares con una instrucción MOV. . . . . . . 5-8
5.2.2 Transferencia de operandos en grupos de bits. . . . . . . . . . . . . . . . . . . . . 5-10
5.2.3 Transferencia de datos continuos con una instrucción BMOV . . . . . . . . . 5-11
5.2.4 Transferencia de los mismos datos hacia varios operandos de destino. . 5-12
5.2.5 Intercambio de datos con módulos especiales . . . . . . . . . . . . . . . . . . . . . 5-13
VI MITSUBISHI ELECTRIC
Page 13

5.3 Instrucciones de comparación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-17
5.3.1 La instrucción CMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-17
5.3.2 Comparaciones dentro de enlaces lógicos . . . . . . . . . . . . . . . . . . . . . . . .5-19
5.4 Instrucciones aritméticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-22
5.4.1 Suma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-23
5.4.2 Resta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-24
5.4.3 Multiplicación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-25
5.4.4 División . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-26
5.4.5 Combinación de instrucciones aritméticas . . . . . . . . . . . . . . . . . . . . . . . . 5-27
6 Posibilidades de ampliación
6.1 Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-1
6.2 Vista sinóptica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-1
Contenidos
6.2.1 Módulos de ampliación para entradas y salidas digitales adicionales . . . . 6-1
6.2.2 Módulos analógicos de entrada/salida . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6-1
6.2.3 Módulos de comunicación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-2
6.2.4 Módulos de posicionamiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-2
6.2.5 Equipos de mando MMI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6-2
Manual de Introducción Familia FX VII
Page 14

Contenidos
VIII MITSUBISHI ELECTRIC
Page 15

Introducción Introducción
1 Introducción
1.1 Introducción
... le facilitará los primeros pasos en el manejo de los PLCs del grupo MELSEC FX.Se dirige
particularmente a usuarios que todavía no tienen experiencia con la programación de contro
les de programa almacenable (PLC).
Pero también puede ayudar a programadores que han trabajado hasta la fecha con controles
de otros fabricantes, para facilitarles el cambio al grupo MELSEC FX.
-
Para la identificación de los diferentes equipos de una serie se utiliza en este manual el sím
bolo „쏔“ comocomodín.Para dar unejemplo, la denominación„FX1S-10쏔 -쏔쏔“ abarca todos
los controles que comienzan con „FX1S-10", o sea FX1S-10 MR-DS, FX1S-10 MR-ES/UL,
FX1S-10 MT-DSS y FX1S-10 MT-ESS/UL
1.2 Mayor información...
...y descripciones detalladas acerca de losdiferentes equipos se encuentran en el manual de
usuario e instalación de los diferentes módulos.
El Catálogo Técnico MELSEC FX ofrece una vista sinóptica de los controles del grupo
MELSEC FX. Además informa acerca de las posibilidades de ampliación y los accesorios
opcionalmente disponibles.
Los primeros pasos con el software de programación son explicados en el Manual de Introducción del GX Developer FX.
Una amplia descripción de todas las instrucciones de programación se encuentran en las
Instrucciones de Programación del grupo MELSECFX, disponible bajoel Nro.Art. 048261.
Las posibilidades de comunicación de los controles MELSEC FX se describen detallada
mente en el Manual de Comunicación.
Los manuales y catálogos están disponibles sin costo en la página web de Mitsubishi
(www.mitsubishi-automation.com).
-
-
Manual de Introducción Familia FX 1 – 1
Page 16

Mayor información... Introducción
1–2 MITSUBISHI ELECTRIC
Page 17
PLCs ¿Qué es un PLC?
2PLCs
2.1 ¿QuéesunPLC?
A diferencia de un control cuya función se define exclusivamente a través de su cableado, se
determina la función del PLC a través de un programa.También el PLC requiere un cableado
para su conexión con el exterior, pero el contenido de la memoria del programa se puede
modificar en cualquier instante y el programa se puede adaptar a las diferentes tareas de
control.
En PLC se ingresan yprocesan los datos y seemiten a continuación los resultadosdel proce
samiento. Este proceso se estructura en:
un nivel de entrada,
쎲
un nivel de procesamiento
쎲
y
un nivel de emisión
쎲
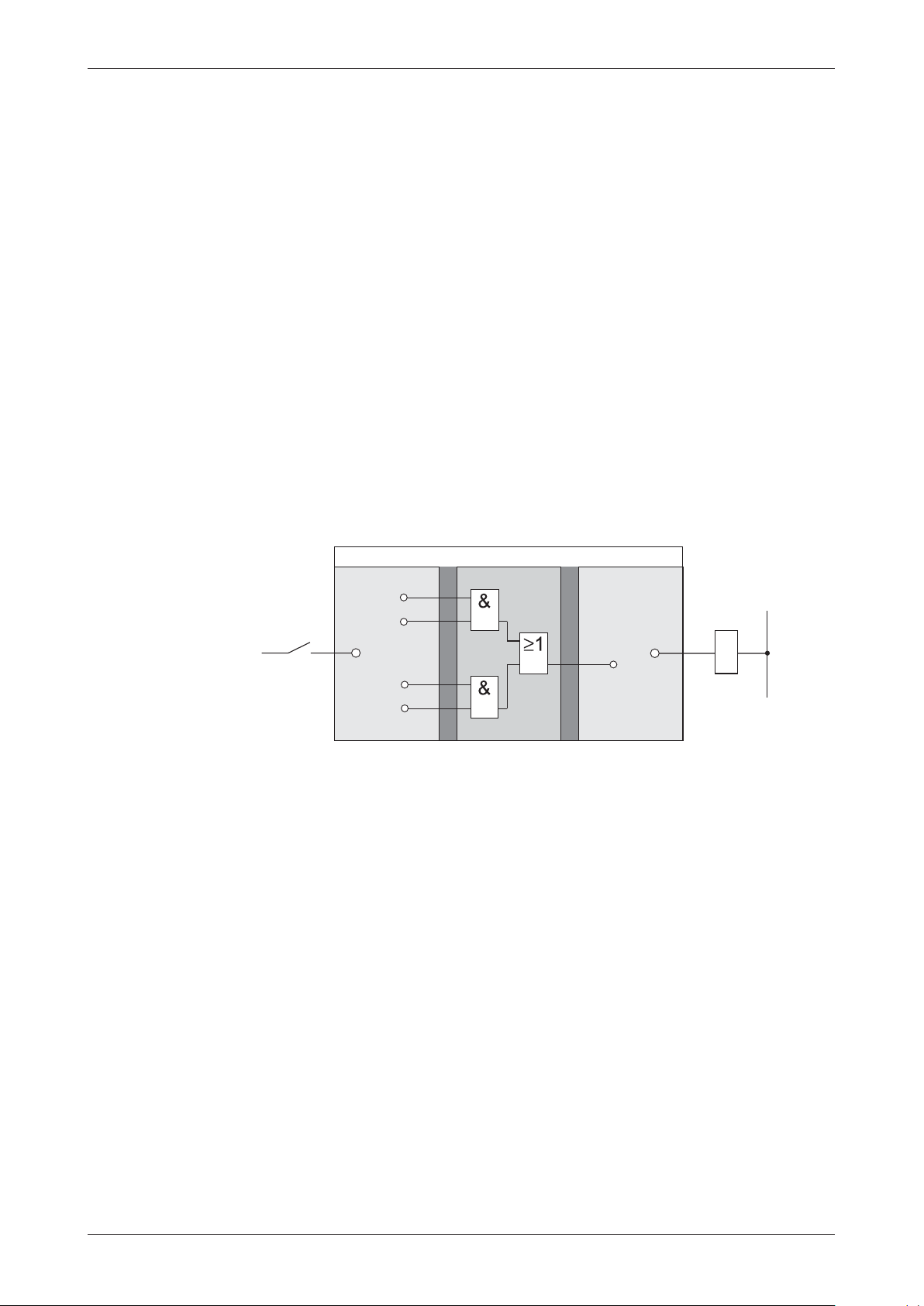
Mando de programa almacenado
Entrada
Conmutador
Nivel de entrada
Nivel de entrada
El nivel de entrada sirve para la transmisión de señales de control que provienen de los inter
ruptores, teclas o sensores, al nivel de procesamiento.
Nivel de procesamiento
Salida
Contactores
Nivel de emisión
-
-
Las señales de estos elementos constructivos se generan en el proceso de control y se trans
miten como estado lógico hacia las entradas. El nivel de entrada transmite las señales en en
función del nivel de procesamiento.
Nivel de procesamiento
Las señales registradas y preparadas en el nivel de entrada, son procesadas y lógicamente
enlazadas en elnivel de procesamiento a través de unPLC.La memoria de programa del nivel
de procesamiento se puede programar libremente. Una modificación del procedimiento de
procesamiento se puede realizar en cualquier momento mediante modificación o reemplazo
del programa almacenado.
Nivel de emisión
Los resultados que se generaron en base al procesamiento de las señales de entrada en el
programa, influyen los elementos de conmutación conectados en las salidas del nivel de emi
sión, como por ejemplo contactores, lámparas de advertencia, válvulas magnéticas, etc.
Manual de Introducción Familia FX 2 – 1
-
-
Page 18

Procesamiento de programa en el PLC PLCs
2.2 Procesamiento de programa en el PLC
Un PLC trabaja en basea unprograma definidoque segenera porlo general fuera delcontrol,
para ser transmitido luego a la memoria de programa. Para la programación resulta impor
tante saber el modo de procesamiento del programa por el PLC.
El programa se compone de una secuencia de instrucciones individuales que determinan la
función del control.El PLC procesa las instrucciones de controlsecuencialmente siguiendo la
secuencia programada.
El ciclo de programa completo se repite continuamente, por lo que se realiza una ejecución
cíclica del programa. El tiempo requerido para un ciclo de programa, es denominado tiempo
de ciclo de programa.
Procedimiento de mapping de proceso
-
En el procesamiento del programa en el PLC nose accede directamente a las entradas y sali
das, sino a su mapping de proceso:
Activación
del PLC
Eliminar memoria
de salida
Señales de entrada
Consulta de entradas y
Bornes de entrada
Mapping de proceso
de entradas
Mapping de proceso
de salidas
almacenamiento en memoria
intermedia de estados de señal
en el mapping de proceso
Programa PLC
1. instrucción de control
2. instrucción de control
3. instrucción de control
....
....
....
seg. instrucción de control
-
Bornes de salidas
Señales de salida
Transmitir mapping de proceso a
las salidas
Mapping de proceso de las entradas
Al inicio de unciclo deprograma se consultanlos estadosde señalde las entradasy sonalma
cenados en la memoria intermedia: Se genera un llamado mapping de proceso de las
entradas.
2–2 MITSUBISHI ELECTRIC
-
Page 19
PLCs Procesamiento de programa en el PLC
Ejecución del programa
Durante la ejecución del programa, el PLC accede a los estados de entrada almacenados en
el mapping de proceso. Las modificaciones de señal en las entradas son detectados por lo
tanto solamente en el siguiente ciclo de programa.
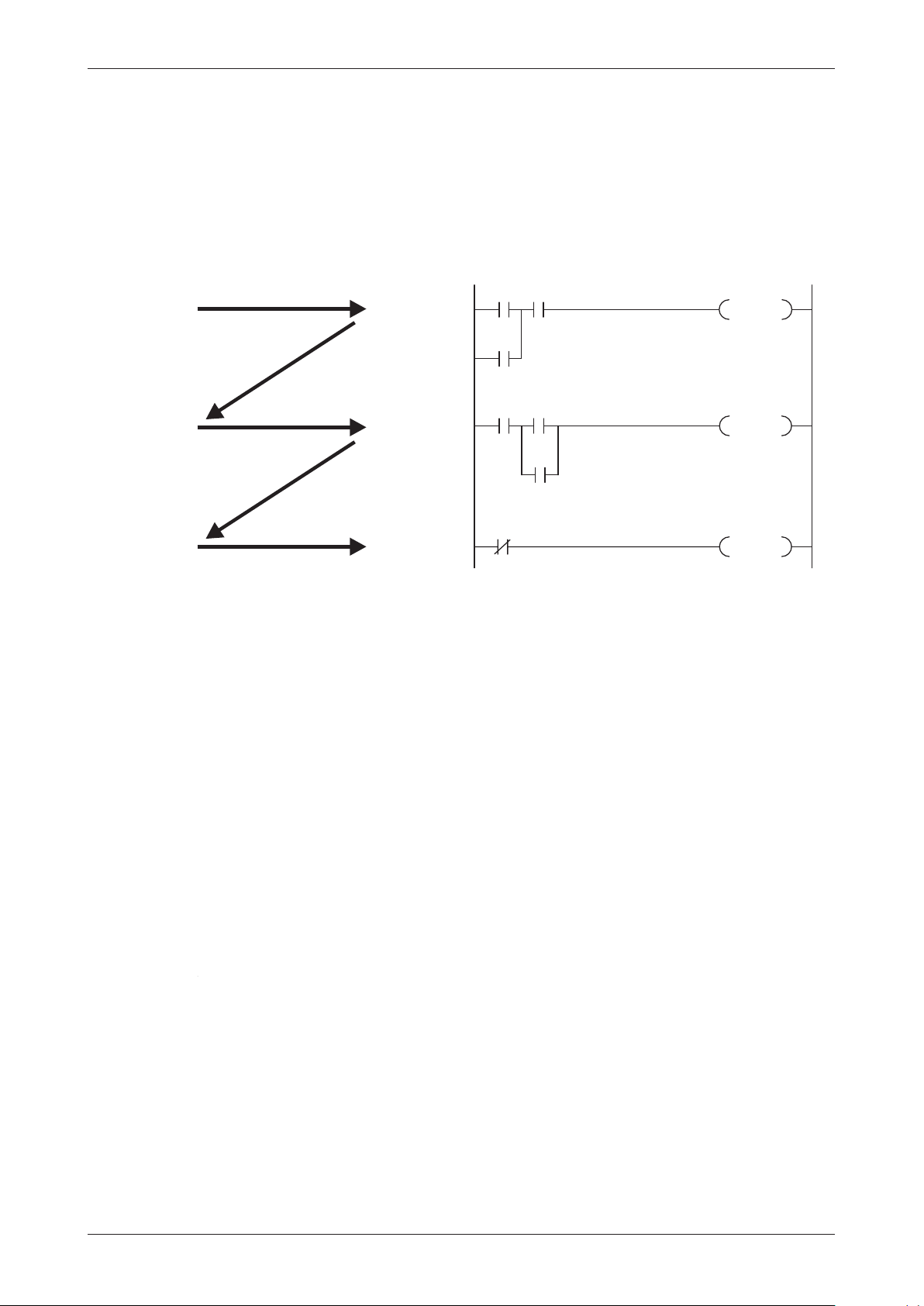
El programa es procesado desde arriba hacia abajo, según la secuencia de entrada. Los
resultados intermedios pueden utilizarse incluso en el mismo ciclo de programa.
Procesamiento de programa
0
4
9
X000 X001
M6
M1 M8013
M2
M0
M0
Generar resultado
intermedio
Y000
Controlar salida
Y001
Procesar resultado
intermedio
Mapping de proceso de las salidas
Los resultados de enlace relacionados a las salidas, son almacenados en la memoria intermedia de salida (mapping de proceso de las salidas).Solamente alfinal del ciclo de programa
se transmiten los resultadosintermedios hacia las salidas.En lamemoria intermediade salida
se mantiene el mapping de proceso de las salidas hasta la siguientesobreescritura. Después
de la asignación de valores a las salidas se repite el ciclo de programa.
Procesamiento de la señal en el PLC en base a la conexión
En un PLC en base a una conexión, el programa está predefinido a través del tipo de compo
nentes funcionales y su conexión (cableado). Todos los procesos de control son ejecutados
de forma simultánea (en paralelo). Cada modificación de los estados de señal de entrada
genera una modificación instantánea de los estados de señal de salida.
En un PLC puede considerarse una modificación de los estados de señal de entrada durante
el ciclo de programa, solamente en el siguiente ciclo de programa. Esta desventaja se com
pensa en granparte através de loscortos tiemposde ciclo de programa.El tiempo de ciclo de
programa depende de la cantidad y del tipo de las instrucciones de control.
-
-
Manual de Introducción Familia FX 2 – 3
Page 20

Familia FX de MELSEC PLCs
2.3 Familia FX de MELSEC
Los PLCs compactos de las series FX ofrecen soluciones económicas para tareas pequeñas
a medias de controly posicionamientode 10 a256 entradas/salidasintegradas en laindustria,
artesanía y técnica doméstica.
Con excepción de FX1S, en caso de modificaciones de las instalaciones se pueden ampliar
todas las series FX, por lo cual ofrecen la posibilidad de seguir creciendo en función de la
necesidad real.
Además existela posibilidadde la integración en redes.De estaforma, los controles de lafami
lia FX puedencomunicarse con otrosPLCs y sistemasde regulación y MMIs.Asi estosse pue
den integrar los por unlado comoestaciones locales en las redes de MITSUBISHI y por otro lado
como equipos esclavos en redes abiertas (p. ej. PROFIBUS/DP).
La familia FX ofrece además la posibilidad de establecer una red tipo multidrop y una red tipo
peer-to-peer.
En caso de tener que solucionar tareas complejas de control y requerir una gran cantidad de
funciones especiales, como por ejemplo la conversión analógica-digital o bien digital-analó
gica o bien la posibilidad de integración en una red, se recomienda la selección de las series
FX1N, FX2N y FX3U con su posibilidad de ampliación modular.
Todos los tipos de control forman parte de la gran familia FX de MELSEC con su compatibili
dad completa entre sí.
Codificación
Cantidad máx. de entradas I/O integradas
Ampliabilidad
(cantidad I/O máx.)
Memoria de programa
(pasos)
Tiempo de ciclo por
instrucción lóg.µs)
Cantidad de instrucciones
(instrucciones
estándares(de estado de
paso/especiales)
Módulos especiales máx.
conectables
1S FX1N FX2N FX2NC FX3U
FX
30 60 128 96 80
34 132 256 256 384
2000 8000 16000 16000 64000
0,55 – 0,7 0,55 – 0,7 0,08 0,08 0,065
27 / 2 / 85 27 / 2 / 89 27 / 2 / 107 27 / 2 / 107 27 / 2 / 209
—284
8 (derecha)
10 (izquierdo)
-
-
-
-
2–4 MITSUBISHI ELECTRIC
Page 21

PLCs Criterios de selección?
2.4 Criterios de selección?
Los equipos básicos de las series FX1S, FX1N y FX2N(C) están disponibles en diferentes
versiones en función de la tensión de alimentación y el tipo de salidas. Es posible seleccionar
entre equipos con una tensión de alimentación de 100 – 230 V AC ó 24 V DC o bien 12 – 24 V
DC, así como entre la salida del relé y transistor.Los equipos de la serie FX3U están exclusi
vamente disponibles con alimentación de tensión AC y salidas de relé.
Entra
Series
FX1S
FX1N
FX2N
FX2NC
FX3U
das/
sali
das
10
14
20
30
14
24
40
60
16
32
48
64
80
128
16
32
64
96
16 FX3U-16 MR/ES 8 8
32 FX3U-32 MR/ES 16 16
48 FX3U-48 MR/ES 24 24
64 FX3U-64 MR/ES 32 32
80 FX3U-80 MR/ES 40 40
Tipo
-
FX1S-10 M쏔-쏔쏔
FX1S-14 M쏔-쏔쏔
FX1S-20 M쏔-쏔쏔
FX1S-30 M쏔-쏔쏔
FX1N-14 M쏔-쏔쏔
FX1N-24 M쏔-쏔쏔
FX1N-40 M쏔-쏔쏔
FX1N-60 M쏔-쏔쏔
FX2N-16 M쏔-쏔쏔
FX2N-32 M쏔-쏔쏔
FX2N-48 M쏔-쏔쏔
FX2N-64 M쏔-쏔쏔
FX2N-80 M쏔-쏔쏔
FX2N-128 M쏔-쏔쏔
FX2NC-16 M쏔-쏔쏔
FX2NC-32 M쏔-쏔쏔
FX2NC-64 M쏔-쏔쏔
FX2NC-96 M쏔-쏔쏔
Número
entradas
68
86
12 8
16 14
86
14 10
24 16
36 24
88
16 16
24 24
32 32
40 40
64 64
88
16 16
32 32
48 48
Número
salidas
Tensión de
alimentación
A selección
24 V DC ó
100 – 240 V AC
A selección
12 – 24 V DC ó
100 – 240 V AC
A selección
24 V DC ó
100 – 240 V AC
24 V DC
100 – 240 V AC Sólo relé
Tipo de salida
A selección
transistor o relé
A selección
transistor o relé
A selección
transistor o relé
A selección
transistor o relé
-
En la selección correcta del PLC se deben observar los siguientes criterios:
쎲
¿Cuántas señales (contactos de conmutación externos, teclas y sensores) deben regi
strarse?
쎲
¿Cuáles y cuántas funciones se deben conmutar?
쎲
¿Que tensión de alimentación está disponible?
쎲
¿Cuáles son las cargas que se conmutan en las salidas?Salidas de relé en casode tener
que conmutar altas cargas. Salidas de transistor para conmutacionesrápidas, sin trigger.
Manual de Introducción Familia FX 2 – 5
-
Page 22
Estructura de los controles PLCs
2.5 Estructura de los controles
Todos los equipos cuentan con una estructura idéntica. Los elementos funcionales y grupos
constructivos más importantes se explican en una vista sinóptica en la ilustración 2.5.7.
2.5.1 Circuitos de entrada y salida
Los circuitos de entrada han sido diseñados como entradas sin contacto. El aislamiento de
los circuitos de conmutación en el PLC se realiza a través de una separación galvánica
mediante un optoacoplador. Los circuitos desalida han sido diseñadoscomo salidasde relé
o de transistor. El aislamiento de los circuitos de conmutación en el PLC se realiza en los
módulos de transistor a través de una separación galvánica mediante optoacoplador.
Todas las entradas digitales requieren una determinada tensión de entrada (p. ej. 24 V DC)
como tensión de conmutación.Esta sepuede tomarde lafuente dealimentación integrada del
PLC. Cuando la tensión de conmutación en la entrada está por debajo del valor nominal
(<24 V), la entrada no es procesada.
La corriente máxima de salida en los módulos de relé es de 2 A con corriene alterna de 250 V
de resistencia y en los módulos de transistor es de 0,5 A con corriente contínua de 24 V.
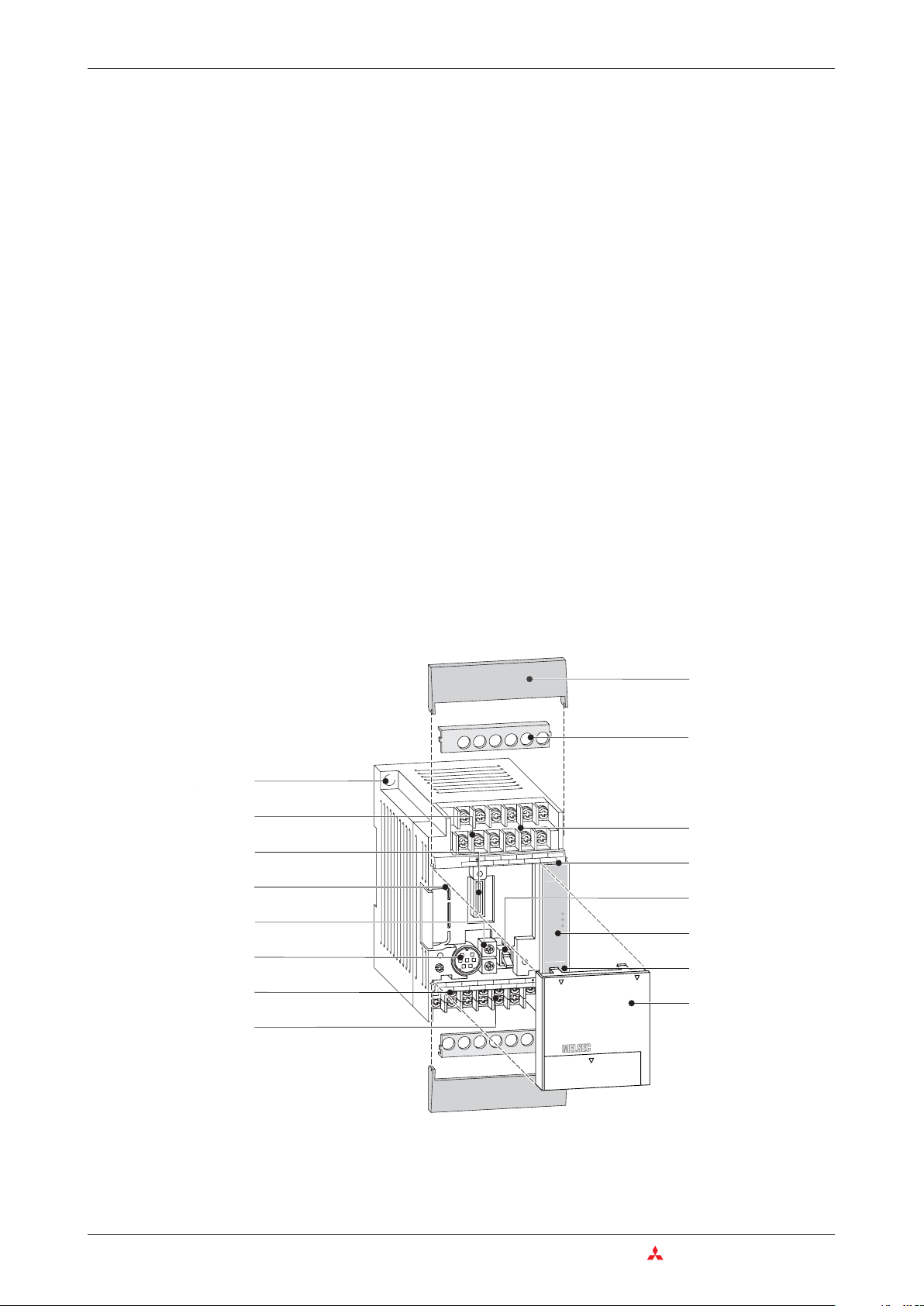
2.5.2 Descripción de los equipos básicos MELSEC FX1S
Orificio de fijación
Conexión de la
tensión de alimentación
Interfaz para adaptador
Entalladura para adaptador
o panel de mando
2 potenciómetos
analógicos
Conexión para equipos
de programación
Conexión de fuente de
tensión de servicio
Regleta de bornes para
salidas digitales
100-240
24V
X1
S/S
X0
N
L
VAC
Y2
Y1
Y0
0V
COM0
Y3
COM2
COM1
X7
X5
X3
X6
X4
X2
0123
4567
IN
POWER
RUN
ERROR
1S
FX -14MR
OUT
0123
45
14MR
Y4
-ES/UL
Y5
MITSUBISHI
Cubierta protectora
Cubierta de regleta
Regleta de bornes para
entradas digitales
LEDs para indicación
de los estados
de entrada
Interruptor RUN/STOP
LEDs para indicación
del estado operacional
LEDs para indicación
de los estados iniciales
Cubierta protectora
2–6 MITSUBISHI ELECTRIC
Page 23
PLCs Estructura de los controles
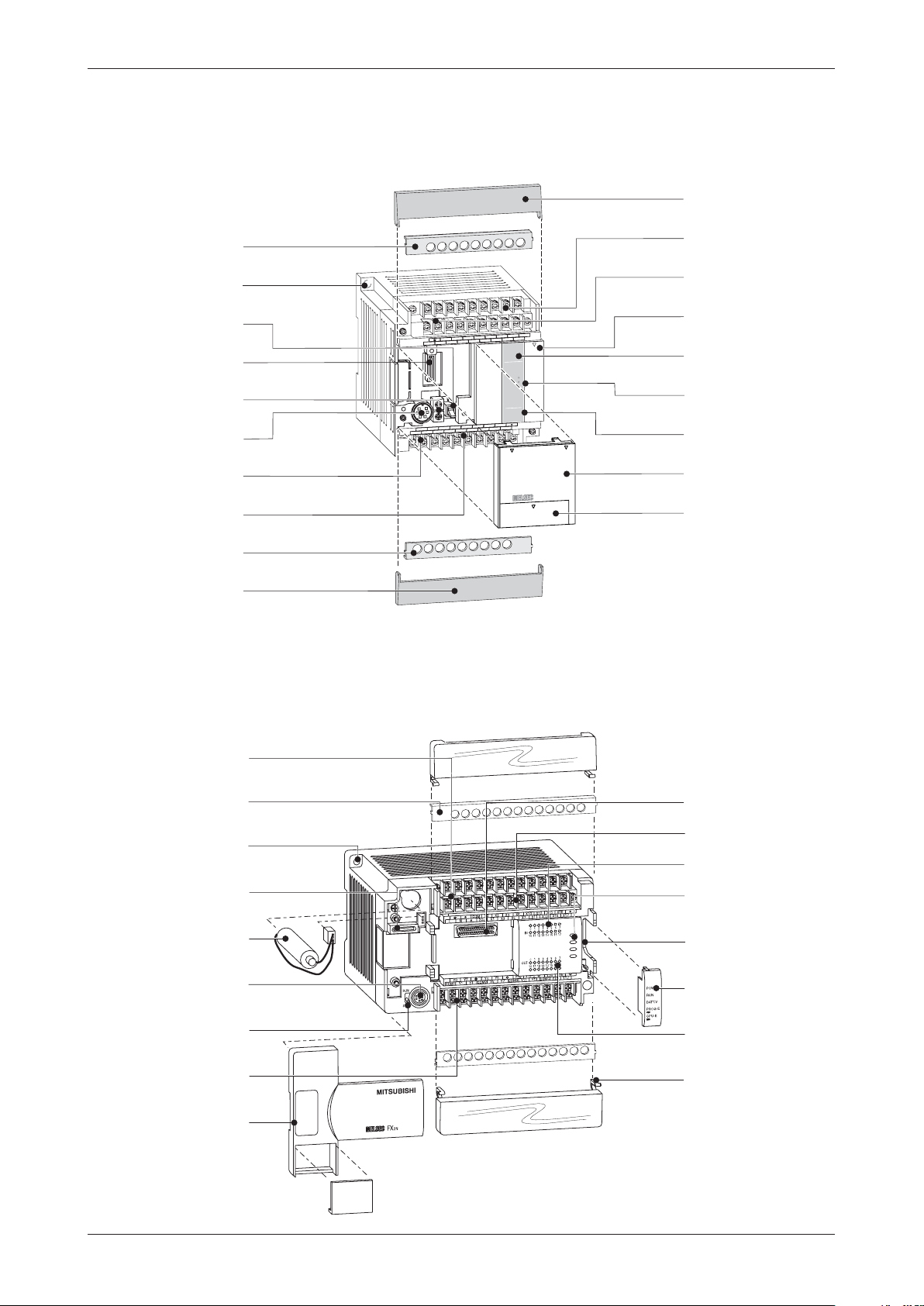
2.5.3 Descripción de los equipos básicos MELSEC FX1N
Cubierta protectora
Regleta de bornes para
Protección de contacto
Orificio de fijación
entradas digitales
Conexión de la
tensión de alimentación
Interruptor RUN/STOP
Ranura para tarjeta
de memoria
2 potenciómetos
analógicos de
valor nominal
Conexión para equipos de
Conexión de fuente de
Regleta de bornes para
programación
tensión de servicio
salidas digitales
100-240
VAC
0V
COM0
24+
X4
X2
X0
N
L
Y3
Y2
Y1
Y0
Y4
COM3
COM2
COM1
X3
X1
S/S
X15
X13
X11
X7
X5
X14
X12
X10
X6
0123
4567
8 9 10 11
1213 14 15
IN
R
POWE
RUN
ROR
R
E
MR
4
-2
1N
X
F
OUT
0123
4567
1011
24MR
Y10
Y6
Y5
-ES/UL
Y11
Y7
COM4
I
ISH
B
MITSU
Protección de contacto
Cubierta protectora
2.5.4 Descripción de los equipos básicos MELSEC FX2N
tensión de alimentación
Conexión de la
Bus de ampliación
LEDs para indicación de
los estados de entrada
LEDs para indicación del
estado operacional
LEDs para indicación de
los estados de salida
Cubierta de caja
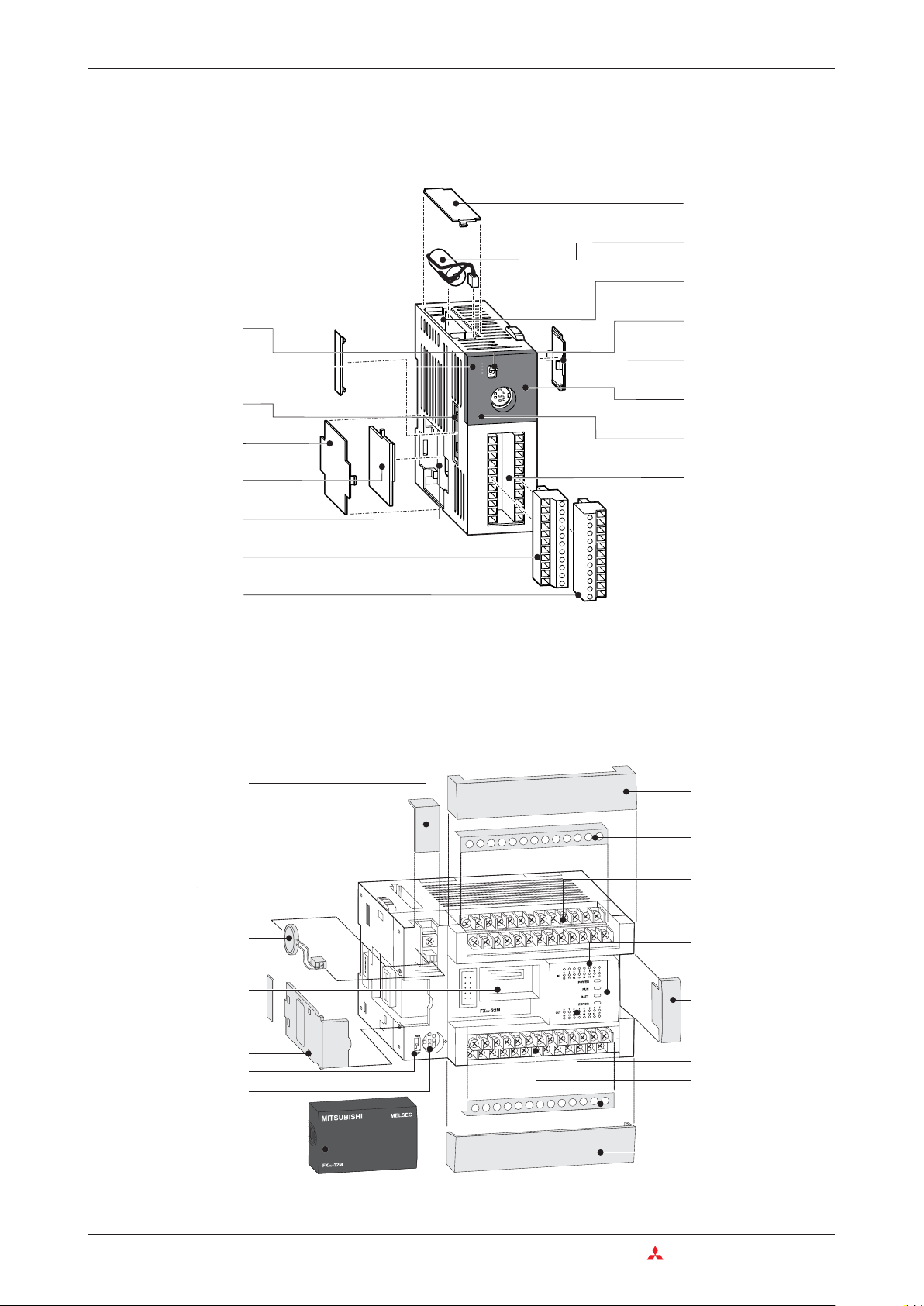
Cubierta
Protección de contacto
Orificio de fijación
Conexión de ampliación
para adaptador funcional
Batería de búfer
equipos de programación
Conexión para
Interruptor RUN/STOP
Regleta de bornes
desatornillable
para salidas digitales
Cubierta de caja
Ranura para tarjetas
de memoria
Regleta de bornes para
entradas digitales
LEDs para indicación de
los estados de entrada
LEDs para indicación del
estado operacional
Conexión
para ampliaciones
Cubierta de protección
del bus de ampliación
LEDs para indicación de
los estados de salida
Cubierta protectora
Manual de Introducción Familia FX 2 – 7
Page 24
Estructura de los controles PLCs
MELSEC
2.5.5 Descripción de los equipos básicos MELSEC FX2NC
Cubierta protectora
Batería de búfer
Ranura
para batería de búfer
Interruptor RUN/STOP
LEDs para indicación del
estado operacional
2. Interfaz para
adaptador CNV
Cubierta
Tarjeta de memori
(opcional)
Ranura para tarjeta
de memoria
Regleta de bornes para
entradas digitales
Regleta de bornes para
salidas digitales
POWER
RUN
BATT
ERROR
X0
X4
UBISHI
S
MIT
RUN
MR-T-DS
6
C
N
2
FX -1
Y0
STOP
1
1
2
2
3
3
Y4
5
5
6
6
7
7
X0
X1
X2
X3
COM
•
X4
X5
X6
X7
COM
Y0
Y1
Y2
Y3
COM1
•
Y4
2.5.6 Descripción de los equipos básicos MELSEC FX3U
Bus de ampliación
(lateral)
Cubierta de protección
para bus de ampliación
LEDs para indicación de
los estados de salida
LEDs para indicación de
los estados de entrada
Ranuras para
bornes de conexión
Cubierta de batería
Batería de búfer
Conexión de ampliación
para adaptador funcional
Tapa ciega para tarjeta de
yFX3U-7DM
adaptador
Interruptor RUN/STOP
equipos de programación
Conexión para
Cubierta de caja con
denominación de tipo
Cubierta protectora
Protección de contacto
Regleta de bornes para
entradas digitales
LEDs para indicación de los
estados de entrada
LEDs para indicación
del estado operacional
Cubierta de protección para
bus de ampliación
LEDs para indicación de los
estados de salida
Bornes de salidas
Protección de contacto
Cubierta protectora
2–8 MITSUBISHI ELECTRIC
Page 25
PLCs Estructura de los controles
2.5.7 Glosario para los elementos funcionales
La siguiente tabla describe elsignificado y elfuncionamiento delos diferentes componentes y
grupos constructivos del PLC.
Función Descripción
Conexión para
adaptador de tarjetas
Conexión para
equipos de
programación
EEPROM
Ranura disponible
para tarjeta de
memoria
Bus de ampliación
Potenciómetros
analógicos
Fuente de tensión de
servicio
Entradas digitales
Salidas digitales
LEDs para estados
de entrada
LEDs para estados
de salida
LEDs para indicación
del estado operacional
Batería
Interruptor
RUN/STOP
En esta interfaz se pueden aplicar adaptadores de ampliación opcionales. Los adaptado
res están disponibles para todas las series FX (con excepción de FX2NC) en diferentes
diseños y ofrecen al equipo base ampliaciones adicionales o interfaces de comunicación.
Los adaptadores pueden insertarse directamente en la entalladura.
En esta conexión se puede conectar el equipo de programación manual FX-20P-E o un
PC/computador portátil externo con software de programación (p. ej. GX Developer/FX).
Memoria de escritura/lectura en la cual se escribe o lee el programa de trabajo a través
del software de programación. Estas memorias son memorias fijas que mantienen su
información incluso en caso de interrupción de tensión, por lo cual no requieren un tam
ponaje de batería.
En esta ranura se pueden insertar las tarjetas de memoria opcionalmente disponibles.
Mediante inserción de estas tarjetas se desactiva la memoria interna del control y se pro
cesa exclusviamente el programa contenido en la tarjeta de memoria respectiva.
En este bus de ampliación, junto a los equipos adicionales de ampliación de entrada y
salida, se pueden conectar también módulos especiales para la ampliación del sistema
de PLC. Una vista sinóptica respectiva se encuentra en el Cap. 6 de este manual.
Con los potenciómetros analógicos se pueden definir los valores nominales. El ajuste
respectivo se consulta a través del programa y se utiliza para los temporizadores, emisión
de impulsos, etc.
La fuente de tensión de servicio (excepto FX
lada de 24 V para la alimentación de las señales de entrada y de los sensores. La capaci-
dad de carga de esta fuente de tensión depende del tipo de control
(p. ej. FX1S y FX1N: 400 mA, FX2N-16M쏔-쏔쏔 a FX2N-32M쏔-쏔쏔: 250 mA,
FX2N-48M쏔-쏔쏔 a FX2N-64M쏔-쏔쏔: 460 mA)
A través de las entradas digitales se registran las señales de control de los interruptores,
teclas o sensores conectados. Se pueden registrar los estados CON (tensión aplicada) o
DESC (tensión no aplicada).
En las salidas digitales pueden conectarse componentes de regulación y actores, en función de la aplicación y del tipo de salida.
A través de los LEDs para los estados de entrada se puede indicar la entrada en la cual
se aplica una señal, o sea, una tensión definida. Cuando se enciende el LED correspon
diente, se aplica una tensión y por lo tanto una señal de control en la entrada, y se activa
la entrada.
Los estados de salida, o sea, el estado de activación o desactivación de una salida, se
señalizan a través de los LEDs. Las salidas del control pueden conmutar diferentes ten
siones en función de su tipo y modo.
Los LEDs „RUN“, „POWER“ y „ERROR“ identifican el estado operacional actual del PLC
e indican si está activada la tensión de alimentación (POWER), si el PLC está proce
sando el programa almacenado (RUN) o bien si se ha generado un fallo (ERROR).
La batería asegura la alimentación de la memoria RAM interna del PLC de MELSEC en
caso de una interrupción de tensión (sólo para FX2N, FX2NC y FX3U). Además sirve
para la conservación de los rangos de detención para temporizadores, contadores y relés
internos. Adicionalmente alimenta el reloj de tiempo reloj en caso de una interrupción de
tensión del PLC.
El PLC cuenta con dos modos de operación: „RUN“ y „STOP“. Con el interruptor
RUN/STOP se puede realizar la conmutación entre ambos modos de operación. En la
operación „RUN“, el control procesa el programa indicado. En la operación „STOP“ no se
ejecuta un procesamiento de programa y el control se puede programar.
2NC) suministra una tensión continua regu-
-
-
-
-
-
-
Manual de Introducción Familia FX 2 – 9
Page 26

Estructura de los controles PLCs
2–10 MITSUBISHI ELECTRIC
Page 27

Bases para la programación Estructura de una instrucción de control
3 Bases para la programación
Un programa se compone de una secuencia de diferentes instrucciones de control que defi
nen la función del control y que son ejecutadas en función de la secuencia programada por el
PLC. En la programación debe descomponerse por lo tanto el propio proceso de control en
diferentes instrucciones. Una instrucción de control es por lo tanto la unidad más pequeña de
un programa de aplicación de PLC.
3.1 Estructura de una instrucción de control
Una instrucción de control se compone de una instrucción (comando) y un (o bien en casode
instrucciones de aplicación) o varios operandos.Algunas instrucciones de control se pueden
manejar también sinoperandos.Estas instrucciones controlanel procesamientode programa
en el PLC.
En la programación se asigna un número de paso automáticamente a cada instrucción de
control, definiendo así claramente su posición dentro del programa, ya que la misma instruc
ción con el mismo operando se puede utilizar también repetidamente dentro del programa.
Indicación de una instrucciónen el plano decontactos (izquierda)y enla listade instrucciones
(derecha):
X0
Operando
Comando
Comando
AND X0
-
-
Operando
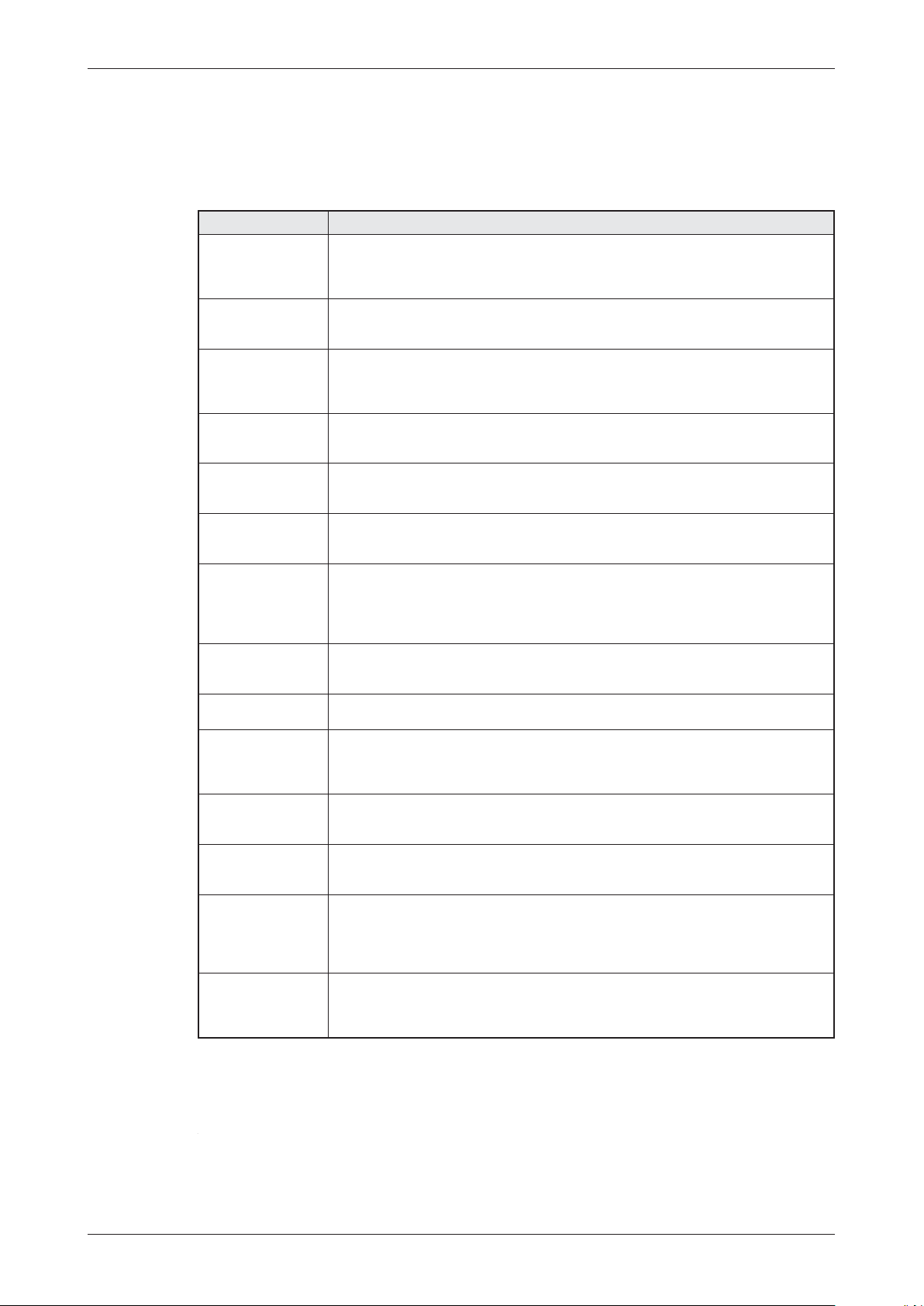
El comando describe lo que se debe hacer, o sea, la función que debe ejecutar el control.
El operando indica con qué se debe ejecutar la acción. Su denominación se compone del
identificador de operando y la dirección de operandos.
X0
Dirección de operandoIdentificador de operando
Ejemplos para identificadores de operandos:
Identificador de operando Tipo Significado
X
Y
M
T
C
D
Los operandos se describen detalladamente en el Cap. 4.
Ya que por ejemplo existen varias entradas, se define una entrada individual a través de la
indicación de la dirección del operando.
Entrada Borne de entrada del PLC (p. ej. conmutador)
Salida Borne de salida del PLC (p. ej. contactor o lámpara)
Relé interno
Temporizador
Contador Contadores
Registro de
datos
Memoria intermedia en el PLC que puede tener dos estados
(„Con“ o „Desc“)
„Relé retardado" para realización de funciones que dependen del
tiempo
Memoria de datos en el PLC en la cual se pueden almacenar p.
ej. valores de medición o resultados de cálculos.
Manual de Introducción Familia FX 3 – 1
Page 28

Bits, bytes y palabras Bases para la programación
3.2 Bits, bytes y palabras
La unidad deinformación máspequeña deun PLC (ypor logeneral en latecnología digital)es
el „bit“. Un bit puede tener solamente dos estados: „0“ (desactivado o falso) y „1“ (activado o
verdadero.) Los bits se encuentran dentro del PLC por ejemplo en forma de entradas, salidas
y relés internos, los tal llamados operandos de bit.
8 bits forman un byte, dos bytes forman una palabra. En un PLC del grupo FX, p. ej. los regis
tros de datos pertenecen a los operandos de palabra.
Bit 15 Bit 0
1 byte 1 byte
A través de su tamaño de 16 bits se pueden almacenar valores en el rango de -32768 hasta
32767 en cada registro. En caso de no resultar suficiente, se pueden combinar dos palabras
en una palabra doble con 32 bits, en la cual se puede almacenar luego valores de
-2 147 483 648 hasta 2 147 483 647.Esta posibilidadse aprovecha p.ej.en los contadores.
3.3 Sistemas numéricos
En un PLC del grupo FX se utilizan diferentes sistemas numéricos. Estos sirven para la
entrada o indicación de valores y para la emisión de una dirección de operando.
Números decimales
Diariamente manejamos números decimales. Su base es „10“, esto significa que después de
contar hasta 9 y en caso de seguir contando, se hace un arrastre hacia la siguiente década (9
→ 10, 19 → 20, 29 → 30, etc.).
-
0000000000 000000
1 palabra
–
Base: 10
–
Números: 0, 1, 2, 3, 4, 5, 6, 7, 8, 9
Con los números decimales se indican en un PLC del grupo FXlos valores nominales y cons
tantes de temporizadores y contadores. Además se indican las direcciones de los operandos
en formato digital, con excepción de las entradas y salidas.
Números binarios (sistema de números duales)
Al igual que todos los computadores, un PLC procesa exclusivamente informaciones
CON/DESC o bien 0/1 que están almacenados en bits individuales (información binaria). En
la entrada o la indicación de números en otros formatos, el software de programación con
vierte automáticamente los diferentes sistemas numéricos.
–
Base: 2
–
Números: 0 y 1
-
-
3–2 MITSUBISHI ELECTRIC
Page 29
Bases para la programación Sistemas numéricos
0
1
2
3
4
6
8
9
10
11
12
13
14
1
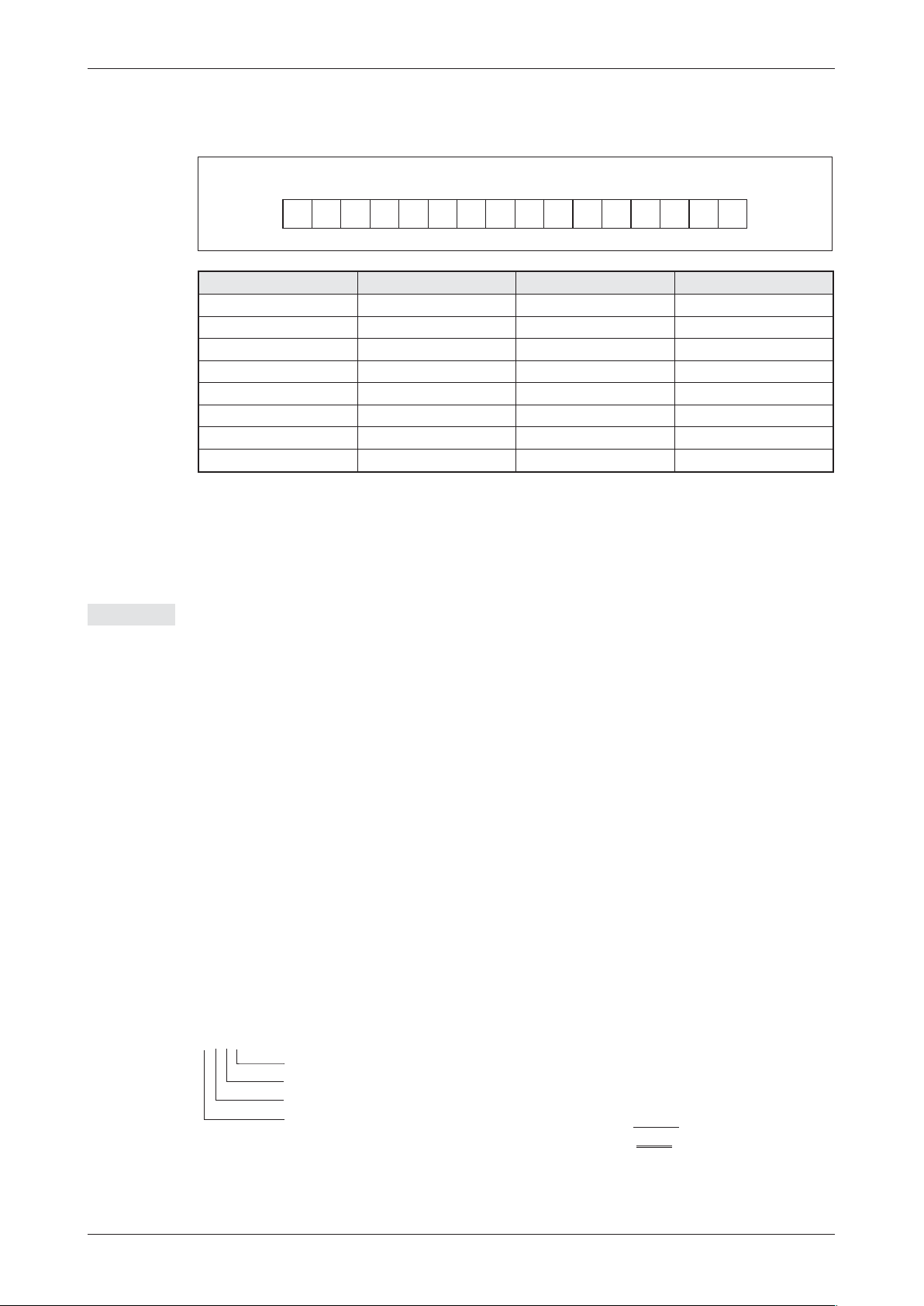
Cuando se almacenan números binarios en unapalabra, los diferentes bits obtienen determi
nados valores:
5
2
2
2
2
2
2
2
7
2
2
5
2
2
2
2
2
2
2
0000000000 000000
Indicación con base 2 Valor decimal Indicación con base 2 Valor decimal
0
2
1
2
2
2
3
2
4
2
5
2
6
2
7
2
Bit 15 seutiliza en valores binarios para la identificación del signo. (Bit15 = 0: Valor positivo, Bit 15= 1:Valor nega
*
tivo)
Para la conversión de un número binario en un número decimal, los bits que son „1“ se con
vierten según su prioridad en un valor decimal, a continuación se suman los diferentes
valores.
128256
229512
42101024
82112048
16 2
32 2
64 2
128 2
12
13
14
15
4096
8192
16384
32768*
-
-
-
Ejemplo 쑴 00000010 00011001 (binario)
00000010 00011001 (binario) = 1 x 2
00000010 00011001 (binario) = 512 + 16 + 8 + 1
00000010 00011001 (binario) = 537 (decimal)
Sistema numérico hexadecimal
Los números hexadecimales se pueden generar fácilmente en base a los números binarios,
por lo cual se utilizan frecuentemente en la tecnología digital y en los PLCs. En los controles
del grupo FX se utilizan los números hexadecimales para la indicación de las constantes. En
las instrucciones de programación y en los manuales para los módulos, se identifican los
números hexadecimales siempre mediante una „H“ agregada para prevenir confusiones con
números decimales (p. ej. 12345
–
Base: 16
–
Números:0, 1,2, 3, 4, 5,6, 7, 8, 9,A, B, C, D, E, F (Lasletras A, B, C, D, Ey Fcorresponden
a los valores decimales 10, 11, 12, 13, 14 y 15.)
En el sistema hexadecimal, en el caso de un conteo hasta F
realiza un arrastre hacia lasiguiente posición(F
ción tiene una prioridad con base 16.
1A7FH
160=1 (Enesteejemplo:15x1 = 15)
161= 16 (En este ejemplo: 7 x 16 = 112)
162= 256 (En este ejemplo: 10 x 256 = 2560)
3
= 4096 (En este ejemplo: 1 x 4096 = 4096)
16
9
+1x24+1x23+1x2
H)
H → 10H,1FH → 20H,2FH → 30H). Cada posi
0
H y continuación del conteo, se
-
6783 (Dezimal)
Manual de Introducción Familia FX 3 – 3
Page 30

Sistemas numéricos Bases para la programación
La simple conversión de números binarios en números hexadecimales e inverso, se explica
con el siguiente ejemplo práctico:
1111 0110 10 1 10011
15
F
En la conversión de valores decimales se convierten siempre 4 bits respectivamente. ¡El número decimal gene
*
rado de tal modo, no corresponde al valor del número binario completo de 16 bits!
5119
5B9
Binario
Decimal*
Hexadecimal
Sistema de números octales
En los equipos bases delgrupo FX, no existen p.ej. las entradasX8 y X9, así como las salidas
Y8 y Y9. Esto se debe a que las entradas y salidas de un PLC de MELSEC están numeradas
con el sistema numérico octal. Ya que en esto se utiliza el„8“ como base,no existenlos núme
ros 8 y9. Después de contar hasta 8 yen caso deseguir contando, se aplicaun arrastrehacia
la siguiente posición (0 a 7, 10 a 17 .... 70 a 77, 100 a 107, etc.).
Base: 8
–
– Números:0,1,2,3,4,5,6,7
Resumen
En la siguiente tabla se indican nuevamente los cuatro sistemas numéricos presentados:
-
-
Número decimal Número octal Número hexadecimal Número binario
0 0 0 0000 0000 0000 0000
1 1 1 0000 0000 0000 0001
2 2 2 0000 0000 0000 0010
3 3 3 0000 0000 0000 0011
4 4 4 0000 0000 0000 0100
5 5 5 0000 0000 0000 0101
6 6 6 0000 0000 0000 0110
7 7 7 0000 0000 0000 0111
8 10 8 0000 0000 0000 1000
9 11 9 0000 0000 0000 1001
10 12 A 0000 0000 0000 1010
11 13 B 0000 0000 0000 1011
12 14 C 0000 0000 0000 1100
13 15 D 0000 0000 0000 1101
14 16 E 0000 0000 0000 1110
15 17 F 0000 0000 0000 1111
16 20 10 0000 0000 0001 0000
::::
99 143 63 0000 0000 0110 0011
::::
3–4 MITSUBISHI ELECTRIC
Page 31

Bases para la programación Conjunto de comandos básicos
3.4 Conjunto de comandos básicos
Las instrucciones que puede ejecutar un PLC del grupo FX, pueden subdividirse en un con
junto de comandos básicos y en las tal llamadas instrucciones de aplicación.
Las funciones de las instrucciones del conjunto de comandos básicos se pueden comparar
con aquellas que se generan en las conmutaciones convencionales mediante cableado.
MIentras que todos los controles del grupo FX dominan el conjunto de comandos básicos,
deben considerarse algunas restricciones en las instrucciones de aplicación (véase el Cap.
5).
Vista sinóptica del conjunto de comandos básicos
Instrucción Significado Descripción Referencia
LD
LDI
OUT
AND
ANI
OR
ORI
ANB
ORB
LDP
LDF
ANDP
ANDF
ORP
ORF
SET
RST
MPS
MRD
MPP
PLS
PLF
MC
MCR
Carga Inicio de un enlace con consulta de estado de señal „1“
Carga invers Inicio de un enlace con consulta de estado de señal „0“
Instrucción de emisión Asignación de un resultado de enlace
AND Enlace AND con consulta de estado de señal „1“
AND-No Enlace AND con consulta de estado de señal „0“
OR Enlace OR con consulta de estado de señal „1“
OR-No Enlace OR con consulta de estado de señal „0“
Bloque AND Conexión en serie de enlaces paralelos
Bloque OR Bloque en paralelo (conexión en serie de enlaces conectados en serie)
Instrucción de carga con flanco ascendente del operando
Instrucción de carga con flanco descendente del operando
Enlaces controlados por
flancos
Aplicar operando
Reponer operando
Almacenar, leer y elimi
nar resultados interme
dios en enlaces
Generar un impulso
Control maestro
Reposición de control
maestro
Instrucción AND con flanco ascendente del operando
Instrucción AND con flanco descendente del operando
Instrucción OR con flanco ascendente del operando
Instrucción OR con flanco descendente del operando
Asignación de un estado de señal que se mantiene incluso después de
que ya no se cumple la condición de entrada.
Almacenamiento de un resultado de enlace
-
-
Lectura de un resultado de enlace almacenado
Lectura y eliminación de un resultado de enlace almacenado
Aplicación de un operando* durante un ciclo de programa con flanco
ascendente de la condición de entrada
Aplicación de un operando* durante un ciclo de programa con flanco des
cendente de la condición de entrada
Activar procesamiento de partes de programa
Párrafo 3.4.1
Párrafo 3.4.2.
Párrafo 3.4.4
Párrafo 3.4.5
Párrafo 3.4.6
Párrafo 3.4.7
Párrafo 3.4.8
Párrafo 3.4.9
Párrafo 3.4.10
-
Párrafo 3.4.11
-
Manual de Introducción Familia FX 3 – 5
Page 32

Conjunto de comandos básicos Bases para la programación
3.4.1 Inicio de enlaces
Instrucción Significado Símbolo GX Developer FX
Instrucción de carga
LD
LDI
Inicio de un enlace con consulta de
estado de señal „1“
Instrucción de carga
Inicio de un enlace con consulta de
estado de señal „0“
F5
F6
Una línea de conexión comienza siempre conuna instrucciónLD o LDI. Como operandos pue
den indicarse entradas, relés internos, temporizadores y contadores.
Ejemplos para laaplicación de estas instrucciones seencuentran en el siguiente párrafo refe
rido a la instrucción OUT.
3.4.2 Emisión o asignación de un resultado de enlace
Instrucción Significado Símbolo GX Developer FX
Instrucción de emisión,
OUT
Con una instrucción OUT sepuede terminaruna ruta decorriente.También sepueden programar varias instrucciones OUT como resultado de un enlace. El resultado de enlace que se ha
asignado a unoperando conuna instrucción OUT, puede utilizarseen los siguientes pasos de
programa como estado de señal de entrada.
Ejemplo (Instrucciones LD y OUT)
Plano de contactos
X000
0
asignación de un resultado de
enlace
Y000
Lista de instrucciones
0 LD X000
1 OUT Y000
-
-
F7
Con estas dos instrucciones se obtiene el siguiente comportamiento de señal:
ON
(1)
X0
OFF
(0)
(1)
ON
Y0
La condición de la instrucción LDI (consulta del estado de señal „1“) se cumple, por
lo tanto el resultado de enlace también está en „1“ y se activa la salida.
OFF
(0)
t
3–6 MITSUBISHI ELECTRIC
Page 33

Bases para la programación Conjunto de comandos básicos
Ejemplo (Instrucciones LDI y OUT)
Plano de contactos
X000
0
(1)
ON
X0
Y0
La condición de la instrucción LDI (consulta del estado de señal
„0“) ya no se cumple y se desactiva la salida.
OFF
ON
OFF
(0)
(1)
(0)
Y000
Lista de instrucciones
0 LDI X000
1 OUT Y000
t
Asignación doble de relés internos o salidas
Se debe asignar un resultado de enlace a un operando solamente en una posición del
programa.
Mediante ejecución del programa „desde arriba hacia
abajo“ se sobreescribe la
primera asignación para
M10 por la segunda asignación.
X001
X004
X003
M10
X005
M10
Mediante modificación de
esta parte del programa se
consideran todos los enla
ces de entrada.
X001
-
X004
X003
M10
X005
Manual de Introducción Familia FX 3 – 7
Page 34

Conjunto de comandos básicos Bases para la programación
3.4.3 Observación de los transductores
Antes de describir otras instrucciones, explicamos brevemente el significado de las señales
de transductores.
En la programación de un PLC debe observarse el modo de función de conmutadores, boto
nes y sensores, para obtener la función requerida. Una instrucción de control verifica (sin
importar el modo de control p. ej. de una entrada) ahora el estado de señal de la entrada
indicada.
Por lo tanto ya se debe saber durante la pro
Contacto
de trabajo
Al accionarse un contacto de
trabajo, se activa la entrada
(estado de señal „1“).
gramación si elemisor en la entrada del PLC
es un contacto de trabajo o de reposo. Una
entrada en la cual está conectado un con
tacto de trabajo, debe manipularse en forma
diferente a una entrada con un contacto de
reposo conectado.
Contacto
de reposo
Al accionarse un contacto de
reposo, se desactiva la
entrada (estado de señal „0“).
Frecuentemente se utilizan los transductores con contactos de trabajo. En algunos casos,
como por ejemplo para la desactivación de propulsiones, se aplican contactos de reposo por
motivos de seguridad (véase el párrafo 3.5).
La siguiente ilustración muestra dos secuencias de programa en los cuales se obtiene el
mismo resultado a pesar de emplear transductores diferentes: Se activa la salida al accionar
el conmutar.
24 V
-
-
-
X0
24 V
X0
LD X000
OUT Y000
LDI X000
OUT Y000
X000
0
ON
X0
OFF
ON
Y0
OFF
X000
0
ON
X0
OFF
ON
Y0
OFF
Conmutador activa
Conmutador activa
Y000
t
Y000
t
3–8 MITSUBISHI ELECTRIC
Page 35

Bases para la programación Conjunto de comandos básicos
3.4.4 Enlaces AND
Instrucción Significado Símbolo GX Developer FX
AND,
AND
ANI
Un enlace AND corresponde a una conexión
en serie de varios conmutadores (al menos 2).
La corriente fluye solamente cuando están
cerrados todos los contactos. En caso que
uno o varios contactos están abiertos, no se
cumple la función ANDy la corrienteno fluye.
(enlace AND con consulta de
estado de señal „1“)
AND-No,
(enlace AND con consulta de
estado de señal „0“)
F5
F6
En el software de programación, para las instrucciones AND y ANI-Ase utilizan los mismos
paneles de mando y teclas de función como para las instrucciones LD y LDI. En la programa
ción en el plano de contactos, el software asigna las instrucciones automáticamente en función de la posición de inserción.
En caso de programar la listade instrucciones, se debe observar que las instrucciones AND y
ANI no se deben programar al inicio de una ruta de corriente. El inicio de un enlace se programa con una instrucción LD o LDI (párrafo 3.4.1).
Ejemplo para la instrucción AND
Plano de contactos
Lista de instrucciones
Instrucción AND
X0000X001
Y000
0 LD X000
1 AND X001
2 OUT Y000
La salida Y0 se activa solamente cuando están activados X0 y X1:
ON
(1)
X0
OFF
(0)
ON
(1)
X1
OFF
(0)
-
(1)
ON
Y0
OFF
(0)
t
Manual de Introducción Familia FX 3 – 9
Page 36

Conjunto de comandos básicos Bases para la programación
Ejemplo para la instrucción ANI
Plano de contactos
Lista de instrucciones
Instrucción ANI
X0000X001
Y000
0 LD X000
1 ANI X001
2 OUT Y000
La salida Y0 se activa solamente cuando está activado X0 y X1 desactivado:
ON
(1)
X0
OFF
(0)
ON
(1)
X1
OFF
(0)
(1)
ON
Y0
OFF
(0)
t
3–10 MITSUBISHI ELECTRIC
Page 37

Bases para la programación Conjunto de comandos básicos
3.4.5 Enlaces OR
Instrucción Significado Símbolo GX Developer FX
OR
OR
ORI
Un enlace ORcorresponde enla tecnologíade
conmutación a una conexión en paralelo de
varios conmutadores. La corriente fluye
después de cerrar el contacto. La corriente no
fluye solamente cuando no está cerrado nin
guno de los contactos.
Ejemplo para la instrucción OR
(enlace OR con consulta de
estado de señal „1“)
OR-No,
(enlace OR con consulta de
estado de señal „0“)
F5
F6
-
Plano de contactos
X000
0
Y000
Lista de instrucciones
0 LD X000
1 OR X001
2 OUT Y000
X001
Instrucción OR
En este ejemplo se activa la salida Y0 cuando se activa X0 o X1:
(1)
ON
X0
X1
Y0
OFF
ON
OFF
ON
OFF
(0)
(1)
(0)
(1)
(0)
t
Manual de Introducción Familia FX 3 – 11
Page 38

Conjunto de comandos básicos Bases para la programación
Ejemplo para la instrucción ORI
Plano de contactos
X000
0
Y000
Lista de instrucciones
0 LD X000
1 ORI X001
2 OUT Y000
X001
Instrucción ORI
La salida Y0 está activada cuando X0 está activado o X1 está desactivado:
(1)
ON
X0
X1
Y0
OFF
ON
OFF
ON
OFF
(0)
(1)
(0)
(1)
(0)
t
3.4.6 Instrucciones para la unión de enlaces
Instrucción Significado Símbolo GX Developer FX
ANB
ORB
Las instrucciones ANB y ORB son instrucciones para el PLC, pero se indican enla programa
ción en el plano de contactos solamente como líneas de enlace. Solamente en la indicación o
programación del programa como lista de instrucciones, se muestran estas instrucciones y
deben ingresarse también con su abreviación AND o bien ORB.
Ambas instrucciones sepueden manejarsin operandos y pueden utilizarserepetidamente sin
restricciones en el programa.La cantidad de instrucciones LD y LDI y por lo tanto la cantidad
de instrucciones ORBo bien ANBdelante de unainstrucción deemisión estárestringida enun
valor máximo de 8.
Bloque AND,
(conexión en serie de enlaces paralelos)
Bloque OR
(conexión en serie de enlaces conecta
dos en serie)
-
-
3–12 MITSUBISHI ELECTRIC
Page 39

Bases para la programación Conjunto de comandos básicos
Ejemplo para la instrucción ANB
Plano de contactos
Instrucción ANB
X000
0
M2
Lista de instrucciones
0 LD X000
1ORI M2
2 LDI X001
3OR M10
4ANB
5 OUT Y007
En este ejemplo seactiva la salidaY07 cuando laentrada X00 está„1“ oel reléinterno M2 está
„0“ y la entrada X01 está „0“ o el relé interno M10 está „1“.
Ejemplo para la instrucción ORB
Plano de contactos
X000
0
X001
Y007
M10
1. Conexión en paralelo (enlace OR)
2. Conexión en paralelo (enlace OR)
Una instrucción ANB une ambos enlaces OR.
X001
Y007
M2
Lista de instrucciones
0 LD X000
1 ANI X001
2LDI M2
3AND M10
4ORB
5 OUT Y007
La salida Y07 se activa cuando la entrada X00 está „1“ y la entrada X01 está „0“ o cuando el
reléinternoM2está„0“y el relé interno M10 está „1“.
M10
Instrucción ORB
1. Conexión en serie (enlace AND)
2. Conexión en serie (enlace AND)
Una instrucción ORB une ambos enlaces AND.
Manual de Introducción Familia FX 3 – 13
Page 40

Conjunto de comandos básicos Bases para la programación
3.4.7 Ejecución controlada por flanco de los enlaces
Instrucción Significado Símbolo GX Developer FX
LDP
LDF
ANDP
ANDF
ORP
ORF
Instrucción de carga con flanco ascen
dente del operando
Instrucción de carga con flanco descen
dente del operando
Instrucción AND con flanco ascendente
del operando
Instrucción AND con flanco descendente
del operando
Instrucción OR con flanco ascendente
del operando
Instrucción OR con flanco descendente
del operando
-
-
En el programa de PLC debe registrarse y evaluarse frecuentemente el flanco ascendente o
el flanco descendente de losoperandos.En caso de unflanco ascendente, el estado deseñal
conmuta de „0“ a „1“ y en caso de un flanco descendente conmuta de „1“ a „0“.
Los enlaces que reaccionan frente aun flanco, emitenuna señal „1“ solamente en aquel ciclo
de programa en el cual el operando consultado modifica su estado de señal.
Porejemplo, sin evaluación por flancos, seemite unresultado erróneo porun conmutadorque
se acciona enuna cinta detransporte por lospaquetes que pasany con elcual sedebe contar
la cantidad de paquetes, ya que el conteo aumenta en cada ciclo de programa por el valor de
„1“ mientras se acciona el conmutador. Pero cuando se registra el flanco ascendente de la
entrada, aumenta el valor del conteo solamente una vez por paquete.
Además se puede ejecutar la mayoría de las instrucciones de aplicación también con control
por flanco (véase el Cap. 5).
Evaluación de un flanco ascendente
Plano de contactos
X001
0
ON
(1)
X1
OFF
(0)
1
M0
El relé interno M0 se activa solamente durante un ciclo de
programa.
0
M0
Lista de instrucciones
0 LDP X001
1OUT M0
t
3–14 MITSUBISHI ELECTRIC
Page 41

Bases para la programación Conjunto de comandos básicos
Evaluación de un flanco descendente
Plano de contactos
M235 X010
0
M374
Lista de instrucciones
0 LD M235
1 ANDF X010
2 OUT M374
1
M235
0
(1)
X10
OFFON(0)
1
M374
0
Cuando se desactiva X10 y M235 está en „1“, se activa el relé interno
M374 durante un ciclo de programa.
t
Con excepción de la evaluación por flancos, la función de las instrucciones LDP y LDF, de las
instrucciones ANDPy ANDF yde las instrucciones ORP y ORF resulta idéntica con la función
de las instrucciones LD, AND o bien OR, esto significa que las instrucciones con control por
flanco se pueden utilizar en un programa de la misma manera como las instrucciones
„normales“.
3.4.8 Aplicación y reposición
Instrucción Significado Símbolo GX Developer FX
SET
RST
햲
Con una instrucción SET se pueden activar las salidas (Y), los relés internos (M) y los relés de pasos (S)
햳
Con una instrucción RSTse pueden reponerlas salidas (Y), losrelés internos (M),los relésde pasos (S), lostem
porizadores (T), los contadores (C) y los registros (D, V, Z).
El estado de señal de una instrucción OUT se mantiene en „1“ mientras que el resultado de
enlace delante de lainstrucción OUTestá también„1“. Porejemplo,cuando seconecta unpul
sador en una entrada y una lámpara en una salida, brilla la lámpara en combinación con una
instrucción LD y OUT solamente cuando se acciona el pulsador.
Con una instrucción SET se activa una salida o un relé interno después de un breve impulso
de activación. El operando se mantiene activado hasta que es desactivado nuevamente por
una instrucción RST. De esta forma se puedenrealizar p. ej. autoenclavamientos o bien laacti
vación y desactivación de del operando con pulsadores. (Una salida se desactiva también
cuando se detieneel PLCo bien cuandose interrumpe latensión de alimentación.Algunos de
los relés internos mantienen en estos casos su último estado de señal, por lo cual se quedan
activados.)
Aplicación de un operando
(asignación del estado de señal „1“)
Reposición de un operando
(asignación del estado de señal „0“)
,
,
SET 첸
RST 첸
F8
F8
-
-
-
Manual de Introducción Familia FX 3 – 15
Page 42

Conjunto de comandos básicos Bases para la programación
Parala entradade unainstrucción SET oRST enel plano de contactosdebe hacerse clic enla
barra de herramientas del GXDeveloper en elsímbolo antesindicado obien se debeaccionar
F8
la tecla
. Ingrese luego la instrucción y el operando, p. ej. SET Y1.
Plano de contactos
X001
0
X002
2
X1
X2
SET M0
RST M0
Lista de instrucciones
0 LD X001
1 SET M0
2 LD X002
3RST M0
Cuando la instrucción de aplicación y repo
sición de un operando están en el mismo
ciclo „1“, se prioriza la última operación de
la secuencia. En este ejemplo es la instruc
ción RST
-
-
M0
t
Como ejemplo para una aplicación se indica aquí un control de bomba para el llenado de un
recipiente. La bomba se puede controlar manualmente con los conmutadores „CON“ y
„DESC“. Por motivos de seguridad se utiliza un conmutador con contacto de reposo. Cuando
el recipiente está lleno, un conmutador de nivel desactiva la bomba.
Plano de contactos
Lista de instrucciones
X001
0
Bomba
CON
SET Y000
Bomba
0 LD X001
1 SET Y000
2 LDI X002
3 OR X003
4 RST Y000
X002
2
Bomba
DESC
RST Y000
Bomba
X003
Conmutador
nivel
3–16 MITSUBISHI ELECTRIC
Page 43

Bases para la programación Conjunto de comandos básicos
3.4.9 Almacenamiento, lectura y eliminación de un resultado de enlace
Instrucción Significado Símbolo GX Developer FX
MPS
MRD
MPP
Almacenamiento de un resultado
de enlace
Lectura de un resultado de enlace alma
cenado
Lectura y eliminación de un resultado de
enlace almacenado
—
—
—
—
—
—
Con las instrucciones MPS, MRD y MPP se pueden almacenar, consultar y eliminar los resul
tados (intermedios) de enlace.Mediante estas instrucciones se pueden establecer niveles de
enlace y estructuras el programa en forma clara.
En la entrada del programa en elplano decontactos se insertan estas instrucciones automáti
camente por el software de programación. Solamente en la indicación o programación en la
lista de instrucciones seindican o biendeben ingresarse lasinstrucciones MPS, MRD y MPP.
Plano de contactos
X000
0
MPS
MRD
MPP
X001
Y000
X002
Y001
X003
Y002
Lista de instrucciones
0 LD X000
1MPS
2 AND X001
3 OUT Y000
4MRD
5 AND X002
6 OUT Y001
7MPP
8 AND X003
9 OUT Y002
Para una mejor comprensión de la secuencia de programa arriba indicada se muestra el
mismo ejemplo nuevamente con otro tipo de programación.
Plano de contactos
Lista de instrucciones
-
-
0 LD X000
1 AND X001
2 OUT Y000
3 LD X000
4 AND X002
0
3
X000 X001
X000
X002
Y000
Y001
5 OUT Y001
X000
6
X003
Y002
6 LD X000
7 AND X003
8 OUT Y002
Los operandos (en el ejemplo X0) deben estar programados repetidamente. De esta forma
resulta un mayor trabajo de programación, particularmente en caso de prolongados progra
mas y amplias rutas de corriente .
Para la última instrucción de emisión debe utilizarse MPP en vez de MRD para eliminar la
memoria de enlace.Se puedenaplicar tambiénvarias instrucciones MPS yformarse así hasta
11 niveles de enlace. Otros ejemplos para las instrucciones MPS, MPP y MRS se encuentran
en las instrucciones de programación del grupo FX, Nro. Art. 048261.
-
Manual de Introducción Familia FX 3 – 17
Page 44

Conjunto de comandos básicos Bases para la programación
3.4.10 Generación de pulso
Instrucción Significado Símbolo GX Developer FX
Aplicación de un operando* durante un
PLS
PLF
Con una instrucción PLS o PLF se pueden controlar las salidas (Y) y los relés internos (M).
*
Cuando se utiliza una instrucción PLS en vez de una instrucción OUT, el operando indicado
emite el estado de señal „1“ solamente en aquel ciclo de programa en el cual cunmuta el
estado de señal de losenlaces delante dela instrucción PLS de „0“a „1“(flanco ascendente).
Una instrucción PLF reacciona en caso de un flanco descendente y emite el estado de señal
„1“ para un ciclo de programa cuando el estado de señal de los enlaces delante de esta ins
trucción conmuta de „1“ a „0“.?
Parala entrada deuna instrucción PLS oPLF en elplano de contactosdebe hacerse clicen la
barra de herramientas delGX Developeren el símbolo arribaindicado obien sedebe accionar
la tecla
F8
ciclo de programa con flanco ascendente
de la condición de entrada
Aplicación de un operando* durante un
ciclo de programa con flanco descen
dente de la condición de entrada
-
PLS 첸
PLF 첸
. Ingrese la instrucción y el operando, p. ej. PLS Y2.
F8
F8
-
Plano de contactos
X000
0
M0
2
X001
4
M1
6
X0
X1
M0
M1
PLS M0
SET Y000
PLF M1
RST Y000
Lista de instrucciones
0 LD X000
1PLS M0
2LD M0
3 SET Y000
4 LD X001
5PLF M1
6LD M1
7 RST Y000
ConX0seevalúaelflanco
ascendente.
ConX1seevalúaelflanco
descendente.
Los relés internos M0 y M1 se
activan solamente durante un ciclo
de programa.
Y0
t
3–18 MITSUBISHI ELECTRIC
Page 45

Bases para la programación Conjunto de comandos básicos
3.4.11 Función del conmutador principal (Instrucción MC y MCR)
Instrucción Significado Símbolo GX Developer FX
MC
MCR
햲
Como operandos de una instrucción MC se pueden utilizar las salidas (Y) y los relés internos (M). n: N0 a N7
햳
n:N0aN7
Control maestro, aplicación de una con
dición de control
Control maestro, reposición de una con
dición de control
-
-
MC n 첸
MCR n
F8
F8
Mediante aplicación (MC)o reposición(MCR) deuna condiciónde controlse puedenactivar o
desactivar algunas áreas individuales del programa. Una instrucción de control maestro se
puede comparar en la programación en el plano de contactos con un conmutador en la barra
colectora izquierda, la cual debe estar cerrada para que se pueda procesar la siguiente parte
del programa.
Plano de contactos
X001
MC N0 M10
N0
0
M10
X002
El „contacto de conmutación“
no debe programarse y se
indica solamente en la observación de la ejecución de pro-
4
Y003
X003
6
Y004
grama (modo de pantalla).
10
8
X002
X004
MCR N0
M155
Lista de instrucciones
0 LD X001
1MC N0 M10
4 LD X002
5 OUT Y003
6 LD X003
7 OUT Y004
8 MCR N0
10 LD X002
11 AND X004
12 OUT M155
En el ejemplo indicado arriba se procesan las rutas de corriente entre la instrucción MC y
MCR solamente cuando está activada la entrada X001.
El área de programa que se debe activar, se define mediante la indicación de la dirección de
bifurcación de programa N0 a N7 (llamada dirección de nesting). La indicación de los operan
dos Y oM define un contacto deactivación.Este contactoactiva el rango deprograma cuando
se ha cumplido la condición de entrada para la instrucción MC.
-
Manual de Introducción Familia FX 3 – 19
Page 46

Conjunto de comandos básicos Bases para la programación
Cuando no se ha cumplido la condición de entrada de una instrucción MC, se modifican los
estados de los operandos entre MC y MCR del siguiente modo:
Los temporizadores y contadores remanentes, así como los operandos que se controlan
–
con instrucciones SET y RST, mantienen su estado.
Se reponen los temporizadores y operandos no remanentes que son referidos directa
–
mente con una instrucción OUT.
(Una descripción de los temporizadores y contadores arriba indicados se encuentra en el
siguiente capítulo.)
3.4.12 Invertir el resultado de enlace
Instrucción Significado Símbolo GX Developer FX
-
INV
Inversión del resultado de enlace
Una instrucción INV se indica sin operandos e invierte el resultado de enlace que estuvo
vigente antes de la ejecución de la instrucción INV:
Cuando el resultado de enlace es „1“, resulta ser „0“ después de la inversión.
–
Cuando el resultado de enlace es „0“, resulta ser „1“ después de la inversión.
–
Plano de contactos
Lista de instrucciones
X001 X002
0
Y000
0 LD X001
1 AND X002
Instrucción INV
2INV
3 OUT Y000
Para el ejemplo arriba indicado resulta el siguiente comportamiento de señal:
1
X001
X002
0
1
0
Resultado de enlace antes de
la instrucción INV
Resultado de enlace
después de la instrucción
INV
Y000
1
0
1
0
t
La instrucción INV se puede utilizar cuando se debe invertir el resultado de un enlace com
plejo. Se puede programar en la misma posición como las instrucciones AND o ANI.
Una instrucción INV no se puede programar al inicio de un enlace, tal como una instrucción
LD, LDI, LDP o LDF.
3–20 MITSUBISHI ELECTRIC
-
Page 47

Bases para la programación ¡La importancia de la seguridad!
3.5 ¡La importancia de la seguridad!
Un PLC tiene muchas ventajas frente aun controlcableado, pero enasuntos deseguridad, no
se debe confiar exclusivamente en él.
Dispositivos de PARADA DE EMERGENCIA
A causa de la falta de un control en la instalación no deben ponerse en peligro las personas o
máquinas. Por lo tanto deben funcionar los dispositivos de PARADA DE EMERGENCIA
incluso cuando elPLC no trabaja correctamente obien cuando sedebe interrumpir p.ej. la ali
mentación de corriente de las salidas del PLC.
En ningún caso se debe manejar un conmutador de PARADA DE EMERGENCIA solamente
como entrada en el PLC, con disparo de la interrupción por el programa.
Seguridad incluso en caso de rotura de cable
La seguridad de servicio se debe garantizar incluso cuando está interrumpida la transmisión
de las señales desde los conmutadores hacia el PLC. Por este motivo se transmiten los
comandos de activación a través de conmutadores o tecla con contactos de trabajo y coman
dos de desactivación con contactos de reposo hacia el PLC.
-
-
+24 V
En este ejemplo puede desactivarse el con
tactor para un accionamiento adicional
PARADA DE
EMERGENCIA
X001
0
Motor CON
CON DESC
X000 X001
COM Y000
X002
Y001
SET Y000
0V
Motor CON
mente con un interruptor de PARADA DE
EMERGENCIA.
En el programa se explora elcontacto de tra
bajo del pulsador CON con una instrucción
LD y el contacto de reposo del pulsador
DESC con una instrucción LDI. La salida y
con esto también el accionamiento se
desactivan cuando la entrada X002 tiene el
estado de señal „0“. Esto se aplica cuando
se acciona el pulsador DESC o bien cuando
se interrumpe laconexión entre el pulsadory
la entrada X002.
2
X002
Motor DESC
RST Y000
Motor CON
De esta forma se desactiva la salida o bien se previene su activación incluso en caso de una
rotura de cable. La desactivación se trata con prioridad porque se procesa en el programa
después de la activación.
-
-
-
Contactos de bloqueo
En caso que no se puedan conectar simultáneamente dos salidas en unaconmutación, como
p. ej. en la conmutación de las salidas, debe efectuarse también el bloqueo de los contactos
controladores. En el programa se realiza solamente un bloqueo interno y en caso de un error
del PLC se pueden activarse ambas salidas simultáneamente.
Manual de Introducción Familia FX 3 – 21
Page 48

¡La importancia de la seguridad! Bases para la programación
Ejemplo para un bloqueo con contactos: Los
contactores K1 yK2 nose pueden activar con
-
X000 X001
X002
juntamente.
COM Y000
K2
K1 K2
Y001
K1
Desactivaciones forzadas
Cuando se controlan movimientos a través de un PLC y se pueden generar riesgos a causa
del sobrepaso delpunto final,deben integrarse interruptores de fin de carrera adicionales que
interrumpen el movimiento de forma inmediata e independientemente del PLC. Un ejemplo
para la desactivación forzada se encuentra en el párrafo 3.6.2.
Realimentaciones de señal
Por lo general no se supervisan las salidas del PLC. Una salida se activa y en el programa se
basa en lasuposición quefuera delPLC seefectúela reacción requerida.En la mayoría de los
casos resulta suficiente con esto, pero en las aplicaciones sensibles en las cuales los errores
en el circuito de salida, como roturas cable o contactos soldados, pueden causar consecuencias graves para la seguridad o el funcionamiento, deben supervisarse las señales emitidas
del PLC.
En este ejemplo, un contacto de trabajo del
contactor K1 activa la entradaX002 cuando se
activa la salida Y000. De esta forma se puede
monitorizar en el programa si esta salida y el
contactor conectado están trabajando correctamente.
No se registra si lacarga conmuta se comporta
del modo requerido (p. ej. si el accionamiento
gira efectivamente). Para esto se requieren
otros monitorizaciones,comop.ej.una moni
torización de la tensión de carga o un control
de contactor.
X000 X001
COM Y000
X002
Y001
+24 V
-
K1
3–22 MITSUBISHI ELECTRIC
Page 49

Bases para la programación Realización de una tarea de control
3. 6 Realización de una tarea de control
Un PLC ofreceuna cantidadcasi infinita deposibilidades parael enlacede entradas ysalidas.
En muchas instrucciones ofrecidas por los controles de la familia MELSEC FX, resulta impor
tante seleccionar las instrucciones apropiadas para la solución de una tarera de control, de
modo que se pueda realizar el programa con ellas.
-
En base ados tareas simples de controlse muestra el camino desde el planteamientodel pro
blema hasta el programa acabado.
3.6 .1 Instalación de alarma
Ya antes de la programación debe haberse aclarado el planteamiento del problema y de la
tarea. En cierta forma, se empieza „desde atrás“ para describir lo que el PLC debe ofrecer:
Planteamiento del problema
Se debe generar una instalación de alarma que dispone de varios bucles de señalización y
que integra funciones retrasadas de activación y desactivación.
Con un interruptor de llave se activa la instalación con un tiempo de retardo de 20 segun
–
dos.De estaforma queda tiempopara salir dela casa.Durante este tiempose indica silos
circuitos de señalización están cerrados.
– Tras la interrupción del circuito de señalización debe dispararse una alarma (principio de
corriente de reposo, de esta forma se realiza una puesta de alarma incluso en caso de
sabotaje). Adicionalmente debe indicarse el circuito de señalización que disparó la
alarma.
– Después de un tiempo de espera de 10 segundos debe activarse una bocina y una lám-
para para fines de señalización. (La alarma se dispara después de un tiempo de espera
para poder desactivar la instalación después de entrar en la casa. Por este motivo se
indica con una lámpara particular si la instalación está activada.)
– La advertencia acústica de alarma debe activarse durante 30 segundos. La señal óptica
debe mantenerse activada hasta la desactivación de la instalación.
–
La alarma debe poderse desactivar a través del interruptor de llave.
-
-
Definición de las señales de entrada y salida
A continuación se deben definir las señales de entrada y salida que se deben procesar. En la
descripción funcional se indica que para el manejo de la instalación de alarma se requiere un
interruptor de llave y 4 lámparas de advertencia. Además se ocupan al menos tres entradas
para los circuitos de señalización y dos salidas para la bocina y la lámpara de parpadeo. En
total se utilizan 4 entradas y 6 salidas. Luego se asignan las señales a las entradas y salidas
del PLC:
Función
Entradas
Salidas
Instalación activada
Circuito de señalización 1
Circuito de señalización 2
Circuito de señalización 3
Indicación „Alarma activada“
Alarma acústica (bocina)
Alarma óptica (lámpara omnidireccional)
Indicación de circuito de señalización 1
Indicación de circuito de señalización 2
Indicación de circuito de señalización 3
Identi-
ficador
S1 X1
S11, S12 X2
S21, S22 X3
S31, S32 X4
H0 Y0
E1 Y1
H1 Y2
H2 Y3
H3 Y4
H4 Y5
Direcci
ón
Observación
Contacto de trabajo (interruptor de llave)
Contactos de trabajo
(Una alarma es disparada cuando la
entrada tiene el estado de señal „0“.)
La función de las salidas se cumple
cuando se activa la salida correspon
diente. P. ej. cuando se activa Y1, se
enciende una señal acústica.
-
Manual de Introducción Familia FX 3 – 23
Page 50

Realización de una tarea de control Bases para la programación
Programación
Ahora se puede proceder con la programación. La necesidad y cantidad de relés internos
requeridos se define frecuentamente en el momento de la programación. Sin embargo es
seguro que en esta instalación hay tres elementos de tiempo con funciones importantes. En
un control cableado se aplican relés retardados, pero en un PLC se realizan los tiempos de
forma electrónica (véase el párrafo 4.3). Estos „temporizadores“ se pueden definir incluso
antes de la programación:
Función Dirección Observación
Tempori
zador
Retardo en activación
Retardo en disparo de alarma
Tiempo de activación para bocina
T0
T1
T2
Tiempo: 20 segundos
Tiempo: 10 segundos
Tiempo: 30 segundos
Luego se solucionan las diferentes tareas parciales del control:
Activación retardada de la instalación de alarma
쎲
Plano de contactos
X001
0
K200
T0
Lista de instrucciones
0 LD X001
1 OUT T0 K200
T0
4
Y000
4LD T0
5 OUT Y000
Después de la activación del interruptor de llave se ejecuta el retardo de activación realizado
con el temporizador T0. Después del transcurso de 20 s (K200 = 200 x 0,1 s = 20 s) se indica
con la lámpara de control conectada en la salida Y000 que la instalación de alarma está
activada.
쎲 Supervisión de circuitos de señalización y detección de alarmas
Plano de contactos
X002
Y000
6
SET
M1
Lista de instrucciones
6 LDI X002
7 AND Y000
8 SET M1
SET
Y003
9 SET Y003
10 LDI X003
X003
10
Y000
SET
M1
11 AND Y000
12 SET M1
13 SET Y004
SET
Y004
14 LDI X004
15 AND Y000
X004
14
Y000
SET
M1
16 SET M1
17 SET Y005
SET
Y005
La salida Y000 seconsulta tambiénen elprograma para determinarsi la instalación dealarma
está activada. Se podría utilizar también un relé interno que se activa y desactiva en forma
paralela al Y000. Solamente en caso de una instalación de alarma activada se activa el relé
interno M1 al interrumpirse el circuito de señalización, para indicar que se ha disparado una
alarma. Adicionalmente se señaliza con las salidas Y003 a Y005, el circuito de señalización
3–24 MITSUBISHI ELECTRIC
Page 51

Bases para la programación Realización de una tarea de control
que se ha interrumpido.El relé interno M1y la salida correspondiente se mantienen activados
incluso tras cierre del circuito de señalización.
Retardo del disparo de alarma
쎲
Plano de contactos
M1
18
T1
22
K100
T1
K300
T2
Lista de instrucciones
18 LD M1
19 OUT T1 K100
22 LD T1
23 OUT T2 K300
Cuando se dispara una alarma (M1 está en „1“ en este caso), se arranca el tiempo de retraso
de 10 s.Después del transcurso de este tiempo, T1 arrancael temporizador T2 que estáajus
tado en 30 s y que define el tiempo de activación de la bocina.
Indicación de alarma (activación de bocina y lámpara omnidireccional)
쎲
Plano de contactos
T2
T1
26
T1
29
Y001
Y002
Lista de instrucciones
26 LD T1
27 ANI T2
28 OUT Y001
29 LD T1
30 OUT Y002
La bocina se activa después delretardo deactivación de 10s (T1)y mientrassigue trabajando
el temporizador T2. La bocina se apaga después de transcurrir 30 s (T2).La lámpara omnidireccional se activa también después de 10 s. La siguiente ilustración muestra el comportamiento de señal para esta parte del programa:
-
M1
T1
T2
Y1
Y2
1
0
1
10 s
0
1
30 s
0
ON
OFF
ON
OFF
t
Manual de Introducción Familia FX 3 – 25
Page 52

Realización de una tarea de control Bases para la programación
Reposición de todas las salidas y del relé interno
쎲
Plano de contactos
X001
31
RST
RST
Y000
Y001
Lista de instrucciones
31 LDI X001
32 RST Y000
33 RST Y001
34 RST Y002
35 RST Y003
RST
Y002
36 RST Y004
37 RST Y005
RST
RST
RST
RST
Y003
Y004
Y005
M1
38 RST M1
Cuando la instalación de alarma está dotada con un interruptor de llave, se reponen también
todas las salidas utilizadasy elrelé internoM1.En caso dedisparo de unaalarma, se indica en
este momento el circuito de señalización que ha sido interrumpido.
3–26 MITSUBISHI ELECTRIC
Page 53

Bases para la programación Realización de una tarea de control
Conexión del PLC
El siguiente esquema muestra la facilidad con la cual se puede diseñar la instalación de
alarma, p. ej. con un FX
1N-14MR.
PE
L1
S/S
0V
S1
S11
S12
S21
S22
S31
S32
N
100-240
VAC
MITSUBISHI
24V COM0
S/SX0X1X2X3X4X5X6X7
LN
Y00V
COM1Y1COM2Y2Y3Y4Y5
0123
4567
POWER
RUN
ERROR
FX -14MR1S
0123
45
14MR
-ES/UL
IN
OUT
H0
E1
H1
H2
H3
H4
Manual de Introducción Familia FX 3 – 27
Page 54

Realización de una tarea de control Bases para la programación
3.6.2 Puerta corrediza
Descripción funcional
Se debe controlar una puerta corrediza para el acceso a una nave de almacenamiento, de
modo que el manejose puedarealizar cómodamentedesde el exterior como tambiéndesde el
interior. En esto se deben observar también algunos aspectos de seguridad.
Lampara de advertencia H1
S7
S3
S1
STOP
S6
S0 S2 S4
쎲 Manejo
– Desde afuera se debe abrir la puerta con el interruptor de llave S1 y cerrar con el inter-
ruptor S5.En la nave debe abrirse la puerta tras pulsacióndel interruptor S2 y cerrarse
tras pulsación del interruptor S4.
– Un control temporizado adicional debe cerrar la puerta automáticamente después de
haber estado abierta durante más de 20 segundos.
–
Los estados „Puerta en movimiento” y
con una lámpara de advertencia que parpadea.
쎲
Dispositivos de seguridad
Puerta enposición nodefinida” deben indicarse
„
S5
–
Con un interruptor de parada (S0) debe poder detenerse el movimiento de la puerta en
cualquier instante, de modo que la puerta se mantenga en su posición actual. ¡Este inte
rruptor de parada no implica una función de PARADA DE EMERGENCIA! Por este motivo
se procesa el interruptor exclusivamente en el PLC yno conmutalas tensiones externas.
–
Cuando un sensor (S7) detecta un obstáculo al cerrarse la puerta, debe abrirse la puerta
automáticamente.
–
Para la detención del motor en ambas posiciones finales, están previstos ambos interrup
tores de fin de carrera S3 („Puerta abierta“) y S6 („Puerta cerrada“).
3–28 MITSUBISHI ELECTRIC
-
-
Page 55

Bases para la programación Realización de una tarea de control
Asignación de las señales de entrada y salida
A través de la descripción funcional se puede derivar la cantidad de las entradas y salidas
requeridas.El control del motor deaccionamiento se realiza con dos salidas.Las señales son
asignadas a las entradas y salidas del PLC:
Función
Entradas
Salidas
Temporizador
Programa
Pulsador PARADA
Conmutador de llave p.puerta
ABIERTA (exterior)
Conmutador p.puerta ABIERTA (interior)
Interruptor final arriba (PUERTA abierta)
Conmutador p.puerta CERRADA (interior)
Conmutador p.puerta CERRADA (exterior)
Interruptor final abajo (puerta CERRADA)
Sensor
Lámpara de advertencia
Contactor de motor (motor con rotación
a la izquierda)
Contactor de motor (motor con rotación
a la derecha)
Retardo para cierre automático
Identi-
ficador
Direc
ción
S0 X0
S1 X1
S2 X2
S3 X3
S4 X4
S5 X5
S6 X6
S7 X7
H1 Y0
K1 Y1
K2 Y2
—T0
Observación
Contacto de reposo (Al accionar el con
mutador, X0 = „0“ y puerta se detiene.)
Contactos de trabajo
Contacto de reposo (X2 = „0“, con puerta
arriba y S3 accionado.)
Contactos de trabajo
Contacto de reposo (X6 = „0“, con puerta
abajo y S6 accionado.)
X7 conmuta a „1“ tras detección de obstáculo
—
Rotación a la izquierda = Abrir puerta
Rotación a la derecha = Cerrar puerta
Tiempo: 20 segundos
-
쎲 Mando de la puerta corrediza mediante el conmutador
Las señales de entrada para el mando de la puerta deben convertirse en dos comandos para el
motor deaccionamiento en el programa: „Abrir puerta“ y „Cerrar puerta“.Ya que se trata deseñales de conmutadores que están disponibles solamente durante un breve tiempo en las entradas,
se requiere el almacenamiento de estas señales. Para esto se aplican y reponen dos relés inter
nos que se integran en el programa inicialmente en forma suplente para las salidas:
–
M1: Abrir puerta
–
M2: Cerrar puerta
Plano de contactos
Lista de instrucciones
X001
0
PLS
M100
0 LD X001
1 OR X002
X002
2 PLS M100
4 LD M100
M100
4
M2
SET
M1
X004
7
PLS
M200
X005
5ANI M2
6 SET M1
7 LD X004
8 OR X005
9 PLS M200
11 LD M200
12 ANI M1
13 SET M2
-
M200
11
M1
SET
M2
Manual de Introducción Familia FX 3 – 29
Page 56

Realización de una tarea de control Bases para la programación
Primero se procesanlas señalespara abrir la puerta: Cuando se acciona elinterruptor de llave
S1 o el conmutador S2, se genera un impulso y M100 se conmuta al estado de señal „1“
durante un sólo ciclo de programa.De esta manera la puerta no se puede bloquear mediante
sujeción o apriete del conmutador.
El accionamiento debe activarse solamente cuando no gira en dirección opuesta. Por este
motivo se activa M1 solamente cuando M2 no está activado.
INDICACIÓN El bloqueo de las direcciones de giro debe suplementarse fuera del PLC además mediante
un bloqueo de los contactos (véase el esquema de conexiones).
La evaluaciónde los conmutadores S4y S5para el cierrede la puerta se realiza en forma simi
lar. La consulta de M1 por el estado de señal „0“ previene que M1 y M2 se puedan activar
simultáneamente.
Cierre automático de la puerta después de 20 segundos
쎲
Plano de contactos
X003
14
T0
18
K200
T0
SET M2
Lista de instrucciones
14 LDI X003
15 OUT T0 K200
18 LD T0
19 SET M2
Cuando la puerta está abierta, se acciona el S2 y se desactiva la entrada X3.(S3 cuenta con
un contacto de reposo por motivosde seguridad.) Con T0 empiezaahora eltiempo deretardo
realizado de 20 s (K200= 200 x 0,1 s= 20 s).Después deltranscurso de estetiempo se activa
el relé interno M2 y se cierra la puerta.
쎲 Detención de la puerta con el conmutador PARADA
Plano de contactos
X000
20
RST
Lista de instrucciones
20 LDI X000
21 RST M1
RSTM1M2
22 RST M2
-
Mediante pulsación del conmutador PARADA S0 se reponen los dos relés internos M1 y M2,
con lo cual se detiene la puerta.
쎲
Detección de obstáculos con la barrera de luz
Plano de contactos
X007 M2
23
RST
Lista de instrucciones
23 LD X007
24 AND M2
25 RST M2
SETM2M1
26 SET M1
Cuando la barrera de luz detecta un obstáculo durante el cierre, se repone el M2, con lo cual
se termina elproceso de cierre.A continuación se activa M1 y se abrenuevamentela puerta.
3–30 MITSUBISHI ELECTRIC
Page 57

Bases para la programación Realización de una tarea de control
Desactivación del motor con el interruptor de fin de carrera
쎲
Plano de contactos
X003
27
RST
Lista de instrucciones
27 LDI X003
28 RST M1
29
X006
RSTM1M2
29 LDI X006
22 RST M2
Con la puerta abierta se acciona el interruptor de fin de carrera y se desactiva la entrada X3.
De esta forma se repone el M1 y se detiene el accionamiento. Cuando la puerta alcanza la
posición inferior, se acciona el S6, se desactiva el X6, por lo que se repone el M2 y se detiene
el accionamiento. Por motivos de seguridad, los interruptores de fin de carrera tienen contac
tos de reposo. De esta forma se desactiva el accionamiento incluso en caso de una interrup
ción de la conexión entre el conmutador y la entrada o bien se previene la activación.
INDICACIÓN Los interruptores de fin de carrera deben detener el accionamiento incluso independiente
mente del PLC, con integración en el cableado (véase el plano de conexiones).
Control de motor
쎲
Plano de contactos
M1
31
M2
33
Y001
Y002
Lista de instrucciones
31 LD M1
32 OUT Y001
33 LD M2
34 OUT Y002
-
-
-
Al final del programa se transmiten los estados de señal de los dos relés internos M1 y M2
hacia las salidas Y001 o bien Y002.
쎲
Lámpara de advertencia: „Puerta en movimiento“ y „Puerta en posición no definida“
Plano de contactos
X003 X006 M8013
35
Y000
Lista de instrucciones
35 LD X003
36 AND X006
37 AND M8013
38 OUT Y000
Cuando no se accionaninguno delos dosinterruptores defin decarrera, seabre obien secie
rra la puerta o bien se detuvo en una posición intermedia. En estos casos parpadea una lám
para de advertencia.Como ciclode parpadeo se aplica un reléespecial M8013que seaplica y
repone automáticamente con un ciclo de 1 s (véase el párrafo 4.2).
-
-
Manual de Introducción Familia FX 3 – 31
Page 58

Realización de una tarea de control Bases para la programación
Conexión del PLC
Parael control arribaindicado deuna puerta corrediza se puede aplicarp.ej. un FX
Cerrar puerta (exterior)
S5 S6 S7
L1
PE
Interruptor final superior
S3 S4
Cerrar puerta (interior)
24 V
S0
PA RA DA
Abrir puerta (exterior)
S1
Abrir puerta (interior)
S2
N
S/S
0V
100-240
VAC
S/SX0X1X2X3X4X5X6X7
LN
MITSUBISHI
0123
4567
IN
1N-14MR.
Interruptor final inferior
Barrera de luz
24V COM0
Lßmpara de
Y00V
COM1Y1COM2Y2Y3Y4Y5
K2
S3
K1 K2H1
advertencia
Abrir puerta
K1
S6
POWER
RUN
ERROR
FX -14MR1S
OUT
0123
45
14MR
-ES/UL
Bloqueo con contactos
Desactivación por interruptor de fin de carrera
Cerrar puerta
3–32 MITSUBISHI ELECTRIC
Page 59

Operandos explicados en detalle Entradas y salidas
4 Operandos explicados en detalle
Los operandos de unPLC seutilizan eninstrucciones de control,lo quesignifica quesus esta
dos de señal o bien valores se pueden consultar o influir a través del programa de PLC. Un
operando se compone de
un identificador de operando y
–
una dirección de operando.
–
Ejemplo para indicación de un operando (p. ej. entrada 0):
X0
Dirección de operandoIdentificador de operando
4.1 Entradas y salidas
Las entradas y salidas conectan un PLC con el proceso a controlar. En la consulta de una
entrada por el programa de PLC se verifica la tensión en un borne de entrada del control. Ya
que se trata de entradas digitales, éstas cuentan consolamente dos estados de señal:CON y
DESC.Cuando latensión enel borne deentrada alcanza los24 V, seactiva laentrada (estado
de señal „1“).Con unatensión más baja, laentrada es considerada comodesactivada (estado
de señal „0“).
Como identificador deoperandos para las entradas se utiliza„X“. La misma entrada puede ser
consultada en el programa repetidamente sin restricciones.
INDICACIÓN Con el programa de PLCno se puedemodificar el estadode las entradas.Porejemplo,no es
posible la indicación de una entrada como operando de una instrucción OUT.
-
Cuando se utiliza una salida como operandode una instrucción de emisión, se emite el resultado de enlace (el estado de señal del operando) en el borne de salida del control.En las salidas de relé se activa el relé correspondiente (todos los relés tienen contactos de trabajo) y en
los controles con salidas de transistorse activael transistor referido y con él todos los disposi
tivos conectados.
Ejemplo para la conexión de conmutadores
en entradas y lámparas o contactores en las
salidas de un PLC de MELSEC.
X000 X001
Y000 Y001
El identificador deoperando delas salidases „Y“. Las salidas sepueden utilizaren las instruc
ciones de emisión, pero también en las instrucciones de enlace. Bajo ninguna circumstancia
se debe programar la mismasalida repetidamente comooperando de unainstrucción de emi
sión (véase el párrafo 3.4.2).
X002
Y002
-
-
-
Manual de Introducción Familia FX 4 – 1
Page 60

Entradas y salidas Operandos explicados en detalle
La siguiente tabla muestra un resumen de las entradas y salidas de los controles de la familia
MELSEC FX.
Operando Entradas Salidas
Identificador de operando X Y
Tipo de operando Operando de bit
Valores que puede tener
un operando
Indicación de la dirección
de operando
FX
FX
Cantidad de operandos y direcciones (en función del tipo del
equipo base)
FX
FX
FX
0 ó 1
Octal
6 (X00–X05)
8 (X00–X07)
1S
12 (X00–X07, X10, X11, X12, X13)
16 (X00–X07, X10–X17)
8 (X00–X07)
14 (X00–X07, X10–X15)
24 (X00–X07, X10–X17, X20–X27)
36 (X00–X07, X10–X17, X20–X27,
1N
2N
2NC
3U
X30–X37, X40, X41, X42, X43)
Con los equipos de ampliación se puede
aumentar la cantidad máxima de entra
das a 84 (X123). Sin embargo, la suma
de entradas y salidas no debe sobrepa
sar el valor de 128.
8 (X00–X07)
16 (X00–X07, X10–X17)
24 (X00–X07, X10–X17, X20–X27)
32 (X00–X07, X10–X17, X20–X27,
X30–X37)
40 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47)
64 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47, X50–X57,
X60–X67, X70–X77)
8 (X00–X07)
16 (X00–X07, X10–X17)
32 (X00–X07, X10–X17, X20–X27,
X30–X37)
48 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47, X50–X57)
8 (X00–X07)
16 (X00–X07, X10–X17)
24 (X00–X07, X10–X17, X20–X27)
32 (X00–X07, X10–X17, X20–X27,
X30–X37)
40 (X00–X07, X10–X17, X20–X27,
X30–X37, X40–X47)
4 (Y00–Y03)
6 (Y00–Y05)
8 (Y00–Y07)
14 (Y00–Y07, Y10–Y15)
6 (Y00–Y05)
10 (Y00–Y07, Y10, Y11)
16 (Y00–Y07, Y10–Y17)
24 (Y00–Y07, Y10–Y17, Y20–Y27)
Con los equipos de ampliación se puede
aumentar la cantidad máxima de salidas
a 64 (Y77). Sin embargo, la suma de
entradas y salidas no debe sobrepasar
el valor de 128.
8 (Y00–Y07)
16 (Y00–Y07, Y10–Y17)
24 (Y00–Y07, Y10–Y17, Y20–Y27)
32 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37)
40 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47)
64 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47, Y50–Y57,
Y60–Y67, Y70–Y77)
8 (Y00–Y07)
16 (Y00–Y07, Y10–Y17)
32 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37)
48 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47, X50–X57)
8 (Y00–Y07)
16 (Y00–Y07, Y10–Y17)
24 (Y00–Y07, Y10–Y17, Y20–Y27)
32 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37)
40 (Y00–Y07, Y10–Y17, Y20–Y27,
Y30–Y37, Y40–Y47)
*
Con los equipos de ampliación puede aumentarse la cantidad de entradas en unvalor máximo de 248 (X367) y la
cantidad de salidas enun valor máximo de 248 (Y367).Sin embargo, la suma de entradas y salidas no debesobre
pasar el valor de 256.
4–2 MITSUBISHI ELECTRIC
-
Page 61

Operandos explicados en detalle Relés internos
4.2 Relés internos
Frecuentementedeben almacenarse losresultados intermedios binarios (estado de señal „0“
ó „1“) en un programa de PLC.Para este propósito están disponibles los „relés internos“ en el
PLC (identificador de operando: „M“).
En los relés internos se registra el resultado (intermedio) de enlace, por ejemplo con una ins
trucción OUT, de modo que posteriormente se pueda consultar con las instrucciones de
enlace. Los relés internos ayudan en una estructuración clara del programa y reducen los
pasos requeridos en el programa. Los resultados de enlace que se requieren repetidamente
en un programa, se pueden integrar en un relé interno y utilizar posteriormente la cantidad de
veces que sea necesario.
M1
M1
M1
Consulta de estado de señal „1“
(¿Relé interno aplicado?)
Consulta de estado de señal „0“
(¿Relé interno repuesto?)
Los controles del grupo FX disponen aparte de los relés internos „normales“, también de los
llamados relés internos retentivos. Los relés internos sin búfer se reponen en el estado de
señal „0“ en el momento de la interrupción de la tensión de alimentación del PLC y siguen con
este estado inclusodespués dela activación del PLC. Sin embargo, los relésinternos detentivos mantienen su información incluso en caso de una falta de corriente.
-
Operando
Identificador de operando M
Tipo de operando Operando de bit
Valores que puede tener un operando 0 ó 1
Indicación de la dirección de operando Decimal
1S 384 (M0–M383) 128 (M384–M511)
FX
1N 384 (M0–M383) 1152 (M384–M1535)
FX
FX
Cantidad de operandos y
direcciones
햲
También es posible asignara estos relés internos la función de relés internos detentivos a través de un ajuste en
los parámetros de PLC.
햳
También es posible asignara estosrelés internos lafunción derelés internossin búfer a través de unajuste enlos
parámetros de PLC.
2N
FX2NC
FX
3U 500 (M0–M499)
Relés internos sin búfer ?Relé interno detentivo
500 (M0–M499)
Relé internos
524 (M500–M1023)
2048 (M1024–M3071)
524 (M500–M1023)
6656 (M1024–M7679)
Manual de Introducción Familia FX 4 – 3
Page 62

Temporizadores Operandos explicados en detalle
4.2.1 Relés internos especiales
Junto a losrelés internos que sepueden activar ydesactivar discrecionalmente porel usuario
en el programa, existen también los
relés internos especiales
rango a partir de la dirección M8000 e indican determinados estados del sistema o bien influ
yen el procesamiento deprograma. La siguiente tabla muestra solamente unapequeña selec
ción de relés internos especiales.
. Estos relés internos ocupan el
-
-
Relé
especial
M8000
M8001
M8002 Impulso de la inicialización
M8004 Error de PLC
M8005 Tensión baja de batería
M8013 Reloj: 1 segundo
M8031
M8034
Descripción
En el modo de operación „RUN“ del PLC, el estado de señal de este
relé interno corresponde siempre a „1“.
En el modo de operación „RUN“ del PLC, el estado de señal de este
relé interno corresponde siempre a „0“.
Eliminar todos los operandos (con excepción del registro de datos D)
que no están registrados en el rango de alimentacioón de batería.
Bloquear las salidas; las salidas no se pueden activar, pero el pro
grama es ejecutado.
4.3 Temporizadores
En el control de procesos o procedimientos, frecuentemente debe activarse o desactivarse
algunos procesos con retardo detiempo.En la tecnología de relés se aplican paraesto los relés
retardados, mientras que en un PLC existen para esto los elementos de tiempo (ingl.:
En realidad, los temporizadores cuentan un ciclo interno del PLC (p. ej. impulsos con un ciclo
de 0,1 s). Cuando el valor de conteo alcanza un valor predeterminado a través del programa,
se activa la salida del temporizador.
Procesamiento en el
programa
Consulta del estado de señal
Consulta del estado de señal
Asignación de un estado de
señal
timer
).
Todos los temporizadores trabajan como retardo de activación y se activan mediante control
con una señal „1“. Para el arranque y la reposición se programan los temporizadores al igual
que las salidas.La salidade untemporizador puede serconsultada dentrodel programa repe
tidamente sin restricciones.
Plano de contactos
X0
0
K123
T200
Lista de instrucciones
0LD X0
1 OUT T200 K123
T200
4
Y0
4 LD T200
5OUT Y0
El temporizador T200 arranca cuando se activa la entrada X0. El valor nominal es123 x 10ms
= 1,23 s. Después de transcurrir 1,23 s, T200 activa la salida Y0.
-
4–4 MITSUBISHI ELECTRIC
Page 63

Operandos explicados en detalle Temporizadores
1,23 s
X0
T200
Cuando esta activado X0, el temporizador
cuenta los impulsos internos de 10 ms. Se
activa la salida de T200 al alcanzar el valor
nominal.
Cuando se desactiva la entrada X0 o se
interrumpe la tensión de alimentación del
PLC, se repone el temporizador y se desac
tiva también su salida.
-
Y0
La indicación del valor nominal de tiempo se puede realizar también indirectamente a través
del valor numérico decimal almacenado en el registro de datos. Esta posibilidad se describe
en el párrafo 4.6.1.
Elementos de tiempo remanentes
Los controles de las series FX
tiempo arriba descritos también de elementos de tiempo remanentes que mantienen su valor
real de tiempo ya alcanzado incluso después de la desactivación del enlace controlado.
Los valores reales de tiempo se almacenan en una memoria cuyo contenido se mantiene
incluso en caso de una falta de corriente.
Ejemplo para la programación de un temporizador remanente
1N,FX2N,FX2NC yFX3U disponen aparte de los elementos de
Plano de contactos
X1
0
T250
4
K345
T250
Y1
Lista de instrucciones
0LD X0
1 OUT T250 K345
4 LD T250
5OUT Y1
6LD X2
7 RST T250
X2
6
El temporizador T250arranca cuandose activa la entrada X0.El valor nominal es 345x 0,1s =
34,5 s.Después de alcanzar el valor nominal, T250 activa la salida Y1. Con la entrada X2 se
repone el temporizador y se desactiva su salida.
T250RST
Manual de Introducción Familia FX 4 – 5
Page 64

Temporizadores Operandos explicados en detalle
t1 t2
X1
t1 + t2 = 34,5 s
Cuando está activado X1, el temporizador
cuenta los impulsos internos de 100 ms.
Incluso cuando se desactiva X1, se man
tiene el valor real alcanzado hasta este ins
tante. Cuando el valor real corresponde al
valor nominal, se activa la salida del
T250
temporizador.
Ya que no se elimina el valor de tiempo real
Y1
al desactivarse la entrada X1 o la tensión de
alimentación del PLC, se requiere una
instrucción particular en el programa. Con la
entrada X2 se repone el temporizador T250
X2
y se desactiva su salida.
Resumen de temporizadores de las unidades base del grupo FX
Operando
Identificador de operando T
Tipo de operando (para control y consulta) Operando de bit
Valores que puede tener un operando (salida de temporizador) 0 ó 1
Indicación de la dirección de operando Dezimal
Definición del valor nominal de tiempo
100 ms
(rango de 0,1 a 3276,7 s)
10 ms
1S
Cantidad de operan
dos y direcciones
FX
FX
-
FX
FX2NC
FX
(rango de 0,01 a 327,67 s)
1 ms
(rango de 0,001 a 32,767 s)
100 ms
(rango de 0,1 a 3276,7 s)
10 ms
1N
(rango de 0,01 a 327,67 s)
1 ms
(rango de 0,001 a 32,767 s)
100 ms
(rango de 0,1 a 3276,7 s)
2N
10 ms
(rango de 0,01 a 327,67 s)
1 ms
(rango de 0,001 a 32,767 s)
100 ms
(rango de 0,1 a 3276,7 s)
10 ms
3U
(rango de 0,01 a 327,67 s)
1 ms
(rango de 0,001 a 32,767 s)
Normale Timer Remanente Timer
Como constante decimal de número entero. La
definición se realiza directamente en la instrucción o indirectamente en un registro de datos.
63 (T0–T62) —
31 (T32–T62)* —
1 (T63) —
200 (T0–T199) 6 (T250–T255)
46 (T200–T245) —
4 (T246–T249) —
200 (T0–T199) 6 (T250–T255)
46 (T200–T245) —
— 4 (T246–T249)
200 (T0–T199) 6 (T250–T255)
46 (T200–T245)
256 (T256–T511) 4 (T246–T249)
-
-
Timer
*
Estos temporizadores están disponibles solamente cuando está activado el relé interno especial M8028.En este
caso se reduce la cantidad de temporizadores de 100 ms en un total de 32 (T0–T31).
4–6 MITSUBISHI ELECTRIC
Page 65

Operandos explicados en detalle Contadores (Counter)
4.4 Contadores (Counter)
Para la programación de los procesos de conteo están disponibles los contadores internos
(engl.:
Los contadores cuentan las señales que reciben en su entrada a través del programa.
Cuando el valor de conteoalcanza unvalor nominal predeterminadoa través del programa, se
activa la salida del contador. Este puede consultarse dentro del programa repetidamente sin
restricciones.
Ejemplo para la programación de un contador
counter
) en los controles del grupo FX.
Plano de contactos
Lista de instrucciones
X0
0
C0RST
0LD X0
1RST C0
3LD X1
X1
3
C0
K10
4 OUT C0 K10
7LD C0
8OUT Y0
C0
7
Y0
Cada vez quese activala entrada X1,el contador C0 suma el valor de 1.Se activa lasalida Y0
después de haber activado y desactivado 10veces la entrada X1 (como valor nominal del contador se programó K10).
La ilustración siguiente demuestra el proceso de la señal por este ejemplo del programa.
X0
Con la entrada X0 se repone el contador
mediante una instrucción RST. El valor real
del contador se ajusta en 0 y se desactiva la
X1
10
9
8
7
6
5
4
3
2
1
0
salida del contador.
Después de alcanzar el valor nominal del
contador, el contador ya no es influido por los
siguientes impulsos en la entrada X1.
Y0
En los contadores se diferencia entre los contadores de 16 bits y los contadores de 32 bits.Su
nombre se refiere a la memoria requerida para el valor de conteo.La siguiente tabla muestra
las características más importantes de estos contadores.
Manual de Introducción Familia FX 4 – 7
Page 66

Contadores (Counter) Operandos explicados en detalle
Característica Contador de 16 bits Contador de 32 bits
Dirección de con
teo
Rango para valor
nominal
Definición del
valor nominal
Comportamiento
en exceso de
conteo
Salida de conta
dor?
Reposición Con una instrucción RST se elimina el valor real del contador y se desactiva la salida.
Conteo ascendente
1 a 32767 -2 147 483 648 a 2 147 483 647
Como constante decimal (K) directamente
en la instrucción o indirectamente en un
registro de datos.
Cuenta máx. a 32767, luego ya no se
modifica el valor real
La salida se mantiene activada después
de alcanzar el valor nominal.
Conteo ascendente y descendente (la dirección de
conteo se define mediante activación o desactiva
ción de un relé interno especial.)
Como constante decimal (K) directamente en la
instrucción o indirectamente en un par de regis
tros de datos.
Contador circular: Después del conteo hasta
2 147 483 647, el siguiente valor es -2 147 483 648.
(En el conteo descendente se realiza un salto de
-2 147 483 648 a 2 147 483 647.)
En el conteo ascendente se mantiene la salida
activada después de alcanzar el valor nominal.En
el conteo descendente se repone la salida al pasar
por inferior del valor nominal.
-
-
Junto a loscontadores normales, los controles delgrupo FX ofrecen tambiénlos llamados contado
res de alta velocidad. Estos son contadores de32 bitsque procesan las rápidas señales de conteo
externas que se registran a través de las entradas X0 a X7.Con estos contadores se pueden solu
cionar obien procesar fácilmente p. ej.las tarjetas deposicionamento, en combinación con instruc
ciones especiales.Los contadores de alta velocidad trabajan en base a la interrupción. En esto se
interrumpe un programa de PLC y se reacciona inmediatamente frente a la señal del contador.Una
descripción detallada de los contadores dealta velocidad se encuentra enlas instrucciones de programación de los controles del grupo FX, Nro. Art. 048261.
Vista sinóptica de los contadores
Contadores
Operando
Identificador de operando C
Tipo de operando (para control y consulta) Operando de bit
Valores que puede tener una salida de contador 0 ó 1
Indicación de la dirección de operando Dezimal
Definición del valor nominal del contador
Contador de 16 bits 16 (C0–C15) 16 (C16–C31)
1S
Contador de 32 bits — —
Contador de 32 bits de alta velocidad — 21 (C235–C255)
Contador de 16 bits 16 (C0–C15) 184 (C16–C199)
1N
Contador de 32 bits 20 (C200–C219) 15 (C220–C234)
Contador de 32 bits de alta velocidad — 21 (C235–C255)
Contador de 16 bits 100 (C0–C99)
2N
Contador de 32 bits 20 (C200–C219)
Contador de 32 bits de alta velocidad 21 (C235–C255)
Contador de 16 bits 100 (C0–C99)
Contador de 32 bits 20 (C200–C219)
Contador de 32 bits de alta velocidad 21 (C235–C255)
Cantidad de
operandos y
direcciones
FX
FX
FX
FX2NC
FX3U
Contadores normales
Como constante decimal de número entero. La defi
nición se realiza directamente en la instrucción o
bien indirectamente en un registro de datos (en caso
de contadores de 32 bits en dos registros de datos).
Contadores
remanentes
100 (C100–C199)
15 (C220–C234)
100 (C100–C199)
15 (C220–C234)
-
-
-
-
햲
En los contadores remanentesse mantiene el valorreal delcontador incluso en caso de interrupcionde lacorrien
te de alimentación.
햳
En los parámetros de PLC se puede ajustarsi deben mantenerselos valores reales de estos contadores después
de la interrupción de la corriente de alimentación.
4–8 MITSUBISHI ELECTRIC
-
Page 67

Operandos explicados en detalle Registros
4.5 Registros
En un PLC, los relés internos sirven para el almacenamiento de resultados intermedios bina
rios.El estadode un reléinterno entrega solamente la información Con/Desco bien 0/1,por lo
que no sirve para el almacenamiento de valores de medición o los resultados de cálculos.
Para este propósito, los controles FX están equipados con registros.
Un registro se compone de 16 bits o una palabra (véase el párrafo 3.2). Mediante intercone
xión de dos registros de 16 bits se puede formar un „registro doble“ con 32 bits.
Registro:
Formato de 16 bits
Registro doble:
Formato de 32 bits
1 bit de signo
14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
222222 22 22222 22
1 bit de signo
30 29 28
222
0: = número positivo
1: = número negativo
...
15 bits de datos
31 bits de datos
...
210
222
-
-
En un registro sepueden almacenarvalores enun rango de 0000
mientras que un registro doble puede contener valores en un rango de 00000000
FFFFFFFF
H (-2 147 483 648 a 2 147 483 647).
Para el manejo de los registros, los controles del grupo FX ofrecen una gran cantidad de ins
trucciones, con los cuales se pueden p. ej. escribir valores en un registro, leerse enlos regis
tros, copiarse ocompararse los contenidosde registros obien procesarse encálculos aritmé
ticos (Cap. 5).
4.5.1 Registro de datos
Los registros dedatos sepueden utilizarcomo memoria enun programa de PLC. Un valor que
se ingresa en unregistro dedatos através del programa dePLC, se mantieneen elregistro sin
cambio alguno hasta que será sobreescrito en el programa con otro valor.
En el casode instrucciones para datos de 32 bits se indica solamente la direcciónde un regis
tro de 16bits; el siguienteregistro es asignadoautomáticamente porla parte de valorsuperior
de los datos de 32 bits. P. ej. cuando se indica el registro D0 para el almacenamiento de un
valor de 32 bits, D0 contiene los bits 0 a 15 y D1 contiene los bits 16 a 31 del valor.
0: = número positivo
1: = número negativo
H a FFFFH (-32768 a 32767),
H a
-
-
-
-
Manual de Introducción Familia FX 4 – 9
Page 68

Registros Operandos explicados en detalle
Comportamiento en caso de interrupción o detención del PLC
Junto a los registros sin búfer cuyo contenido se elimina en caso de una detención del PLC o
bien al interrumpirse la corriente de alimentación del PLC, los controles cuentan también con
registros cuyo contenido se mantiene en estos casos (registros detentivos).
INDICACIÓN Cuando está activado el relé interno especial M8033, en caso de una detención del PLC no
se eliminan tampoco los contenidos de los registros de datos sin búfer.
Registros de datos en resumen
Operando
Identificador de operando D
Tipo de operando
Valores que puede tener un operando
Indicación de la dirección de operando Dezimal
Cantidad de operandos y
direcciones
햲
También es posible asignar a estos registros la función de registros detentivos a través de un ajuste en los parámetros de PLC.
햳
También es posible asignar a estosregistros la función de registros sin búfer a través de unajuste en los parámetros de PLC.
4.5.2 Registro especial
Registros de datos
Registros sin búfer Registro detentivo
Operando de palabra (se pueden combinar dos registros en un
registro doble.)
Registro de 16 bits: 0000H a FFFFH (-32768 a 32767)
Registro de 32 bits: 00000000
1S 128 (D0–D127) 128 (D128–D255)
FX
1N 128 (D0–D127) 7872 (D128–D7999)
FX
FX
2N
FX2NC
FX
3U 200 (D0–D199)
200 (D0–D199)
2 147 483 647)
H a FFFFFFFFH (-2 147 483 648 a
312 (D200–D511)
7488 (D512–D7999)
524 (M500–M1023)
6656 (M1024–M7679)
Similar a los relés internos especiales (véase el párrafo 4.2.1), los registros forman parte de
los registros especiales a partir de la dirección D8000 . Frecuentemente existe una relación
directa entre los relés internos especiales ylos registros especiales.P. ej. el relé interno espe
cial M8005 indica que la tensión de la batería del PLC resulta demasiado baja y el registro
especial D8005 contiene el valor de tensión medida. Una pequeña selección de registros
especiales se indica en la siguiente tabla.
Relé especial Descripción
D8004
D8005 Tensión de batería (El contenido „36“ corresponde p. ej. a 3,6 V.)
D8010 Tiempo de ciclo actual del programa
D8013–D8019 Hora y fecha del reloj integrado
D8030 Valor leído del potenciómetroVR1 (0 a 255)
D8031 Valor leído del potenciómetro VR2 (0 a 255)
Dirección de relé interno de error
(indica el relé interno de error aplicado.)
Procesamiento en el
programa
Consulta del contenido
Consulta del contenido
Modificar el contenido
Consulta del contenido (sólo
para FX1S y FX1N)
-
4–10 MITSUBISHI ELECTRIC
Page 69

Operandos explicados en detalle Consejos de programación
Registros modificables en forma externa
En los controlesde lasseries FX
puede modificar el contenido de los registros especiales D8030 y D8031 en el rango de0a255
(véase el párrafo 4.6.1). Con estos potenciómetros se pueden modificar p. ej. los valores nomina
les para temporizadores y contadores, sin necesidad de conectar un equipo de programación.
4.5.3 Registro de archivo
El contenido de registros de archivos no se pierde incluso en caso de interrupción de la
corriente de alimentación. Por esta razón es posible almacenar valores en los registros de
archivos que se transfieren luego a los registros de datos después de la activación del PLC y
que son requeridospor el programa p. ej.para cálculos,comparaciones ocomo valores nomi
nales para los temporizadores.
Los registros de archivo no tienen una estructura diferente a los registros de datos. Se forman
incluso de los registrosde datosD1000 aD7999 enbloquescon 500 direcciones respectivamente.
Operando Registro de archivo
Identificador de operando D
Tipo de operando
Valores que puede tener un operando
Indicación de la dirección de operando Dezimal
Cantidad de operandos y
direcciones
1S yFX1N están integrados dos potenciómetroscon los cuales se
Operando de palabra (se pueden combinar dos registros en un
registro doble.)
Registro de 16 bits: 0000H a FFFFH (-32768 a 32767)
FX
1S
FX
1N
FX
2N
FX2NC
FX3U
Registro de 32 bits: 00000000
2 147 483 647)
1500 (D1000–D2499)
Se puede definir un máximo de 3 bloques con 500 registros de
archivo respectivamente en los parámetros de PLC.
7000 (D1000–D7999)
Se puede definir un máximo de 14 bloques con 500 registros de
archivo respectivamente en los parámetros de PLC.
H a FFFFFFFFH (-2 147 483 648 a
-
-
En las instrucciones de programación para los controles del grupo FX, Nro. Art. 048261, se
describen detalladamente los registros de archivos.
4.6 Consejos de programación
4.6.1 Definición indirecta del valor nominal en temporizadores y contadores
Los valores de tiempo y valores nominales de conteo pueden transferirse a los temporizado
res y contadores directamente dentro de una instrucción de emisión:
Plano de contactos
X17
0
M50
4
K500
T31
K34
C0
T31 es un temporizador de 100 ms. Con la constante ä500ô se ajusta el tiempo de retardo en
500 x 0,1 s = 50 s. El valor nominal para el contador C0 se ajusta en "34".
Lista de instrucciones
0LD X17
1 OUT T31 K500
4LD M50
5 OUT C0 K34
-
Manual de Introducción Familia FX 4 – 11
Page 70

Consejos de programación Operandos explicados en detalle
La ventaja de este tipo de definición de valor nominal consiste en que posteriormente ya no
resulta necesario seguir preocupándose del valor nominal.Incluso después de una interrup
ción de corriente o bien directamente despuésde la activación se aplican los valores nomina
les definidos por elprograma.Sin embargo, la desventaja principal implica que encaso deuna
modificación del valor nominal serequiere un cambio del programa.Particularmente los valo
res nominales de los temporizadores se adaptan frecuentemente sólo después de la puesta
en servicio del control y durante la prueba del programa.
Los valores nominales para temporizadores y contadores pueden ingresarse también en los
registros de datos, con la posibilidad de lectura de estos registros por el programa. De esta
forma se pueden modificar rápidamentelos valores definidoscon un equipo de programación
conectado.En este caso también es posible la definición de valores nominales a través de los
conmutadores en el panel o en una unidad de mando.
La siguiente ilustración muestra ejemplos para la definición indirecta de los valores
nominales:
-
-
-
Plano de contactos
M15
0
X17
6
M8002
10
M50
16
– Cuando el reléinterno M15 está en „1“, se copia el contenido del registro dedatos D100 al
registro de datos D131. Este registro contiene el valor nominal para T131. El contenido de
D100 puede modificarse, p. ej. con una unidad de mando.
–
El relé interno especial M8002 está activado solamente después del arranque del PLC
para un ciclode programa.Después de la activación* delPLC se ingresa la constante„34“
en el registro de datosD5 que sirvecomo memoriade valor nominal para el contadorC0.
Los valores nominales nodeben ingresarse necesariamente enel programa PLC en losregis
tros de datos. También esposible su definiciónmediante unequipo deprogramación antes del
inicio del programa.
MOV D100 D131
D131
T31
MOV K34 D5
D5
C0
Lista de instrucciones
0LD M15
1 MOV D100 D131
6LD X17
7 OUT T31 D131
10 LD M8002
11 MOV K34 D5
16 LD M50
17 OUT C0 D5
-
ATENCIÓN:
Parael almacenamiento de valoresnominales paratemporizadores ycontadores deben
E
4–12 MITSUBISHI ELECTRIC
utilizarse registros de datosdetentivos encaso quelos valores nominales noson ingre
sados en los registros a través del programa de PLC. Observe que se perderán los con
tenidos de estos registros en caso de agotarse la batería de búfer.
En caso de utilizarse registros normales,se eliminan los valores nominales cuando se
interrumpe la corriente de alimentación o bien cuando el conmutador RUN/STOP es
conmutado a la posiciónSTOP. Después de laactivación dela corrienteo enel siguiente
arranque del PLC sepueden generarestados peligrosos a través de los valoresnomina
les ajustados en „0“.
-
-
-
Page 71

Operandos explicados en detalle Consejos de programación
Definición de valores nominales mediante potenciómetro integrado
En los controles de las series FX
1S yFX1N se pueden modificar rápida y fácilmente las defini
ciones de valores nominales, como p. ej. los tiempos, a través de dos potenciómetros del
control.
El valor del potenciómetro superior VR1 puede
leerse en el registro especial D8030.En D8031 se
almacena el valor de VR2, el potenciómetro infe
rior. Para utilizar un potenciómetro como fuente
del valor nominal para un temporizador, se indica
un registro en vez de una constante en el pro
grama.
El valor en el registro puede modificarse de 0 a
255, en función de laposición del potenciómetro.
Lista de instrucciones
0 LD X001
100-240
L
VAC
Y0
0V
COM1
COM0
24+
Potenciómetro
Plano de contactos
X001
0
X1
S/S
X4
X2
X0
N
Y3
Y2
Y1
Y4
COM3
COM2
X10
X6
Y6
Y5
Y7
COM4
MITSUBISHI
Y10
X12
0123
4567
8 9 10 11
12 13 14 15
POWE
RUN
R
E
1N
X
F
0123
4567
10 11
Y11
X14
IN
R
ROR
MR
4
-2
OUT
24MR
-ES/UL
X15
X13
X11
X7
X5
X3
D8030
T1
1 OUT T1 D8030
T1
4
D8031
T2
4LD T1
5 OUT T2 D8031
8LD T1
T1
8
T2
Y000
8ANI T2
10 OUT Y000
-
-
-
En el ejemplo de programación arriba indicado, se activa Y0 después del transcurso de T1
durante un tiempo determinado por T2 (emisión retardada de impulsos).
Comportamiento de señal
ON
X1
OFF
1
T1
[D8030]
0
1
T2
[D8031]
0
ON
Y0
OFF
t
Manual de Introducción Familia FX 4 – 13
Page 72

Consejos de programación Operandos explicados en detalle
4.6.2 Retardo de desactivación
Todos los temporizadores de un PLC trabajan con retardo de activación.La salida del temporiza
dor se activa despuésdel transcurso del tiempo definido.Pero frecuentemente se requieren retar
dos de desactivación.(Un ejemplo de aplicación esel control del ventilador quese mantienetoda
vía activado durante algunos minutos después de apagar la iluminación del baño.)
Versión de programa 1 (autoenclavamiento)
Plano de contactos
Lista de instrucciones
X001
0
Y000
T0
X001
5
Mientras se mantiene activada la entrada X1 (p. ej. interruptor de luz), se mantiene también acti
vada la salida Y0 (ventilador). Pero Y0 se mantiene activado a través del autoenclavamiento
incluso después de la desactivación de X1,ya que el temporizador T0 aún no ha vencido.Este se
arranca junto con ladesactivación deX1. Después del transcursodel tiempoajustado (en el ejemplo 300 x 0,1s =30 s),T0 interrumpeel autoenclavamiento de Y0 y estasalida esdesactivada.
Y000
K300
T0
0 LD X001
1 LD Y000
2ANI T0
3ORB
4 OUT Y000
5 LDI X001
6 OUT T0 K300
-
-
-
-
Comportamiento de señal
X1
30 s
T0
Y0
Versión de programa 2 (aplicación/reposición)
Plano de contactos
X001
0
X001
2
SET Y000
K300
T0
T0
6
RST Y000
t
Lista de instrucciones
0 LD X001
1 SET Y000
2 LDI X001
3 OUT T0 K300
6LD T0
7 RST Y000
En la activación de X1se aplicala salidaY0 (activada).T0 esarrancado junto conla desactiva
ción de X1.Después del transcurso del tiempo ajustado, T0 repone la salida Y0. El comporta
miento de señal resulta idéntico a la versión de programa 1.
4–14 MITSUBISHI ELECTRIC
-
-
Page 73

Operandos explicados en detalle Consejos de programación
4.6.3 Retardo de activación y desactivación
En la aplicación práctica puede surgir también que una salida debe ser activada en forma
retrasada y desactivada también en forma retrasada. Esta tarea puede solucionarse fácil
mente con enlaces básicos lógicos.
-
Plano de contactos
X000
0
X000
4
T1
T2
8
Y000
Comportamiento de señal
ON
X0
OFF
1
T1
0
K25
T1
K50
T2
Y000
Lista de instrucciones
0 LD X000
1OUT T1 K25
4 LDI X000
5OUT T2 K50
8LD T1
9 OR Y000
10 ANI T2
11 OUT Y000
1
T2
0
ON
Y0
OFF
t1
t2
t
Mediante el autoenclavamiento con Y000 a través de T1, se mantiene activada la salida
durante el retardo de desactivación.
Manual de Introducción Familia FX 4 – 15
Page 74

Consejos de programación Operandos explicados en detalle
4.6.4 Reloj
En el control están disponibles relés internos especiales con los cuales pueden solucionarse
fácilmente aquellas tareasde programaciónque requierenun ciclo fijo(p. ej.para elcontrol de
una lámpara parala advertencia de fallos). M8013 seactiva ydesactiva p. ej. con unritmo de 1
segundo. Una descripción detallada de todos los relés internos especiales se encuentra en
las instrucciones de programación del grupo FX, Nro. Art. 048261.
Sin embargo, cuando se requieren otros tiempos de ciclo o bien diferentes tiempos de activa
ción y desactivación, puede aplicarse un reloj con dos temporizadores.
Plano de contactos
X001
T2
0
K10
T1
Lista de instrucciones
0 LD X001
1ANI T2
T1
5
K20
T2
2OUT T1 K10
5LD T1
6OUT T2 K20
9 OUT Y000
Y000
X1 arranca el reloj. Sin embargo, esta entrada puede omitirse también. En este caso, el reloj
está constantemente activado.En otroprograma se procesa lasalida de T1,p. ej. para lámparas de advertencia. El tiempo de activación se determina por T2 y el tiempo de desactivación
por T1.
La salida del temporizador T2 se activa solamente para un ciclo de programa. En la siguiente
ilustración que indica el comportamiento de señal del programa de ejemplo, se muestra este
tiempo excesivamente largo.T2 desactiva T1y con esto se desactiva acontinuación en forma
inmediata también T2.En realidad, el tiempo de activación se prolonga por el tiempo que se
requiere para la ejecución del programa. Ya que el tiempo de ciclo se mueve solamente en el
rango de algunos milisegundos, por lo general es posible omitirlo.
-
Comportamiento de señal
ON
X0
OFF
1
T1
T2
Y1
0
1
0
ON
OFF
t1
t2
t
4–16 MITSUBISHI ELECTRIC
Page 75

Programación avanzada Instrucciones de aplicación
5 Programación avanzada
Con las instrucciones lógicas básicas quese describen en el Cap.3, unPLC puedereproducir
las funciones delos controlesde contacto.Pero con estono seacaban las posibilidadesde un
PLC.Ya que el corazón de cada PLC es un computador, también es posible realizar cálculos,
comparaciones de valores numéricos, conversiones de sistemas numéricos o bien el proce
samiento de valores analógicos.
-
En la ejecución de estas funciones que sobrepasan los enlaces lógicos, se requieren instruc
ciones particulares, las llamadas instrucciones de aplicación.
5.1 Instrucciones de aplicación
Las instrucciones de aplicación se identifican a través de una abreviación que se deriva de la
descripción de su función. Por ejemplo, la instrucción con la cual se pueden comparar dos
números de 16 y 32 bits, es denominada „CMP“. (Del verbo
Todas las abreviaciones para las instrucciones de aplicación provienen del inglés.)
En la programación se indica laabreviación,seguida por el olos operandos.La siguientetabla
muestra un resumen de todas las instrucciones de aplicación para destacar las posibilidades
de los controles de la familia FX. No se asusta, ya que no es necesario memorizar todas las
abreviaciones.En la programación se puede utilizar la función de ayuda del software de programación GX Developer o GX IEC Developer. Todas las instrucciones se describen detalladamente y con ejemplos en las instrucciones de programación de la familia FX,Nro.Art.
136748, Versión D. En este capítulo se describen por lo tanto solamente las instrucciones de
mayor uso (indicadas en la tabla con fondo gris).
Segmentación
Instrucciones
de ejecución
de programa
Instrucciones de
comparación y
transferencia
Ins-
trucción
CJ
CALL
SRET
IRET
EI
DI
FEND
WDT
FOR
NEXT
CMP
ZCP
MOV
SMOV
CML
BMOV
FMOV
XCH
BCD
BIN
Significado
Salto dentro de un programa
Llamada de un subprograma
Fin de un subprograma
Terminar programa de interrupción
Activar programa de interrupción
Desactivar programa de interrupción
Terminación de un área de programa
Refrescar temporizador de vigilancia
Inicio de una repetición de programa
Fin de una repetición de programa
Comparación de datos numéricos
Comparación de rangos de datos numéricos
Transferencia de datos
Transferencia shift
Copiar e invertir
Transferencia de bloque
Transferia de datos idénticos
Intercambio de datos
Conversión BCD
Conversión binaria
to compare
FX1S FX1N FX2N FX2NC FX3U
en inglés: comparar.
Control
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
-
Manual de Introducción Familia FX 5 – 1
Page 76

Instrucciones de aplicación Programación avanzada
Segmentación
Instrucciones arit
méticas y lógicas
Instrucciones de
desplazamiento
Operaciones de
datos
Instrucciones
de alta velocidad
-
Ins-
trucción
ADD
SUB
MUL
DIV
INC
DEC
AND
OR
XOR
NEG
ROR
ROL
RCR
RCL
SFTR
SFTL
WSFR
WSFL
SFWR
SFRD
ZRST
DECO
ENCO
SUM
BON
MEAN
ANS
ANR
SQR
FLT
REF
REFF
MTR
DHSCS
DHSCR
DHSZ
SPD
PLSY
PWM
PLSR
Significado
Adición de datos numéricos
Sustracción de datos numéricos
Multiplicación de datos numéricos
División de datos numéricos
Incrementar
Decrementar
Enlace AND lógico
Enlace OR lógico
Enlace OR lógico exclusivo
Negación de datos
Rotación hacia la derecha
Rotación hacia la izquierda
Rotación de bits hacia la derecha
Rotación de bits hacia la izquierda
Desplazarmientos de datos binarios por bits,
derecha
Desplazarmientos de datos binarios por bits,
izquierda
Desplazamientos de datos por palabras hacia
la derecha
Desplazamientos de datos por palabras hacia
la izquierda
Escritura en memoria FIFO
Lectura de una memoria FIFO
Reponer rangos de operandos
Decodificar datos
Codificar datos
Determinación de bits aplicados
Verificación de un bit
Determinación de valores medios
Arranque de un intervalo de tiempo
Reponer bits de indicación
Determinación de la raíz cuadrada
Conversión del formato numérico
Refrescar entradas y salidas
Ajustar filtro de entrada
Entrada por lectura de matriz (MTR)
Aplicación mediante contador de alta veloci
-
dad
Reposición mediante contador de alta veloci
dad
Comparación de rangos
Detección de velocidad
Emisión de una cantidad definida de impul
-
sos
Emisión de impulsos con modulación de
ancho de impulso
Emisión de una cantidad determinada de
impulsos
Control
FX1S FX1N FX2N FX2NC FX3U
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
-
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
5–2 MITSUBISHI ELECTRIC
Page 77

Programación avanzada Instrucciones de aplicación
Segmentación
Instrucciones
referidas a la
aplicación
Instrucciones de
entrada/emisión
Instrucciones
para comunicación
serial
Salvaguar
dar/recuperar
registro
de índice
Operaciones con
números de coma
flotante (1)
Ins-
trucción
IST
SER
ABSD
INCD
TTMR
STMR
ALT
RAMP
ROTC
SORT
TKY
HKY
DSW
SEGD
SEGL
ARWS
ASC
PR
FROM
TO
RS
PRUN
ASCI
HEX
CCD
VRRD
VRSC
RS2
PID
ZPUSH
ZPOP
DECMP
DEZCP
DEMOV
DESTR
DEVAL
DEBCD
DEBIN
DEADD
DESUB
DEMUL
DEDIV
Significado
Inicializar estado de paso
Instrucción de búsqueda
Comparación absoluta de contadores
Comparación incremental de contadores
Temporizador de aprendizaje
Temporizadores especiales
Función de flip-flop
Función de rampa
Posicionamiento de mesa redonda
Instrucción de clasificación
Teclado decimal
Teclado hexadecimal
Conmutador digital
Indicación de 7 segmentos
Indicación de 7 segmentos con detenc.
Indicación de 7 segmentos con teclas adicio
nale
Conversión ASCII
Emisión de datos mediante salidas
Lectura de datos en módulo especial
Escritura de datos en módulo especial
Transmisión serial de datos
Cambio de entradas o relés internos
Conversión en carácter ASCII
Conversión en un valor hexadecimal
Verificación de sumas y paridad
Entrada por lectura de valores nominales de
FX
1N-8AV-BD y FX2N-8AV-BD
Entrada por lectura de posiciones de conmuta
dores de FX
1N-8AV-BD y FX2N-8AV-BD
Transmisión serial de datos (2)
Programación de un circuito de regulación
Salvaguardar contenido del registro de índice
Recuperar contenido del registro de índice
Comparación de números de coma flotante
Comparación de números de coma flotante
en un rango
Transferencia de números de coma flotante
Convertir número de coma flotante en
secuencia de caracteres
Convertir secuencia de caracteres en núme
ros de coma flotante
Conversión del formato de coma flotante en
formato numérico científico
Conversión del formato numérico científico
en formato de coma flotante
Adición de números de coma flotante
Sustracción de números de coma flotante
Multiplicación de números de coma flotante
División de números de coma flotante
Control
FX1S FX1N FX2N FX2NC FX3U
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹쏹
-
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
-
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹쏹
쏹쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
-
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹
쏹
쏹
쏹
쏹
Manual de Introducción Familia FX 5 – 3
Page 78

Instrucciones de aplicación Programación avanzada
Segmentación
Operaciones con
números de coma
flotante (2)
Instrucciones arit
méticas de núme
ros de coma flo
-
tante
Instrucciones de
procesamiento
de datos
Instrucciones de
posicionamiento
Operaciones con
reloj integrado del
PLC
Conversión de
código Gray
-
-
Ins-
trucción
DEXP
DLOGE
DLOG10
DESQR
DENEG
INT
SIN
COS
TAN
ASIN
ACOS
ATAN
RAD
DEG
WSUM
WTOB
BTOW
UNI
DIS
SWAP
SORT
DSZR
DVIT
TBL
DABS
ZRN
PLSV
DRVI
DRVA
TCMP
TZCP
TADD
TSUB
HTOS
STOH
TRD
TWR
HOUR
GRY
GBIN
Significado
Número de coma flotante como exponente a
base e
Cálculo de logaritmo natural
Cálculo del logaritmo decimal
Raíces cuadradas de números de coma flo
-
tante
Inversión de signo de números de coma flo
-
tante
Conversión del formato de coma flotante al
formato
decimal
Cálculo del seno
Cálculo del coseno
Cálculo de la tangente
Cálculo del seno del arco
Cálculo del arcocoseno
Cálculo de la arcotangente
Conversión de grados a radianes
Conversión de radianes a grados
Formar suma de contenidos de operandos de
palabra
Segmentar datos en operandos de palabra
en bytes
Formar operandos de palabra de varios bytes
Combinar grupos de 4 bits en operandos de
palabra
Segmentar operandos de palabra en grupos
de 4 bits
Cambiar byte de valor inferior y superior
Clasificar datos en tabla
Despl. punto de referencia (con interruptor de
aproximación)
Posicionamiento mediante interrupción
Posicionamiento según tabla de datos
Leer posición real absoluta
Despl. punto de referencia
Emisión de impulsos con frecuencia variable
Posicionar en valor incremental
Posicionar en valor absoluto
Comparación de datos de reloj
Comparación de datos de reloj en un rango
Adición de datos de reloj
Sustracción de datos de reloj
Convertir indicación de tiempo en forma
„Horas, minutos, segundos“ a segundos
Convertir indicación de tiempo en segundos
al formato „Horas, minutos, segundos“
Leer hora y fecha
Transmitir hora y fecha al PLC
Contador de horas de servicio
Convertir código Gray en número decimal
Convertir número decimal en código Gray
Control
FX1S FX1N FX2N FX2NC FX3U
쏹
쏹
쏹
쏹쏹쏹
쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹쏹쏹
쏹
쏹
쏹
쏹
쏹
쏹
쏹
쏹
쏹
쏹
쏹쏹쏹
쏹
쏹
쏹
쏹
쏹쏹쏹쏹쏹
쏹쏹 쏹
쏹쏹 쏹
쏹쏹 쏹
쏹쏹 쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹
쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹쏹쏹
쏹쏹쏹
5–4 MITSUBISHI ELECTRIC
Page 79

Programación avanzada Instrucciones de aplicación
Segmentación
Intercambio de
datos con módu
los analógicos
Instrucción de
memoria externa
Diferentes instruc
ciones
Instrucciones
para datos que
están almacena
dos en operandos
consecutivos
(bloques de
datos)
Instrucciones de
procesamiento
para secuencias
de caracteres
Instrucciones de
procesamiento
para listados de
datos
trucción
-
WR3A
COMRD
-
HCMOV
BKCMP=
-
BKCMP>
BKCMP<
BKCMP<>
BKCMP<=
BKCMP>=
RIGHT
INSTR
Ins-
RD3A
EXTR
RND
DUTY
CRC
BK+
BK-
STR
VAL
$+
LEN
LEFT
MIDR
MIDW
$MOV
FDEL
FINS
POP
SFR
SFL
Significado
Leer valores analógicos de entrada
Escribir valor analógico de salida
Ejecutar instrucción almacenada en ROM
externa
Leer comentario de operando
Generar número aleatorio
Emitir impulso con largo definido
Verificar datos (control CRC)
Transferir valor real de un contador de alta
velocidad
Sumar datos en un bloque de datos
Sustraer datos en un bloque de datos
Comparar datos en bloques de datos
Convertir datos binarios en secuencias de
caracteres
Convertir secuencias de caracteres en datos
binarios
Combinar secuencias de caracteres
Determinar largo de secuencias de caracte-
res
Salida de datos de secuencia de caracteres
desde la derecha
Salida de datos de secuencia de caracteres
desde la izquierda
Seleccionar secuencia de caracteres
Reemplazar secuencia de caracteres
Buscar secuencia de caracteres
Transferir secuencia de caracteres
Eliminar datos de lista de datos
Insertar datos en lista de datos
Leer datos que se ingresan al final en una
lista de datos
Desplazar palabra de datos de 16 bits hacia
la derecha
Desplazar palabra de datos de 16 bits hacia
la izquierda
Control
FX1S FX1N FX2N FX2NC FX3U
쏹쏹쏹쏹
쏹쏹
쏹
쏹
쏹
쏹
Manual de Introducción Familia FX 5 – 5
Page 80

Instrucciones de aplicación Programación avanzada
Segmentación
Instrucciones de
comparación
Instrucciones de
control de datos
Instrucciones
para la comunicación con converti
dores de frecuen
cia
Intercambio de
datos con módu
los especiales
Instrucción para
contador de alta
velocidad
Instrucciones
para registros de
archivo ampliados
-
-
-
Ins-
trucción
LD=
LD>
LD<
LD<>
LD<=
LD>=
AND=
AND>
AND<
AND>=
OR=
OR>
OR<
OR<>
OR<=
OR>=
LIMIT
BAND
ZONE
SCL
DABIN
BINDA
SCL2
IVCK
IVDR
IVRD
IVWR
IVBWR
RBFM
WBFM
HSCT
LOADR
SAVER
INITR
LOGR
RWER
INITER
Significado
Comparación de datos dentro de enlaces
Restringir rango de emisión de valores
Determinar offset de entrada
Determinar offset de salida
Escalar valores
Convertir número en código ASCII a valor
binario
Convertir número binario en código ASCII
Escalar valores (La tabla de valores tiene una
estructura diferente a la instrucción SCL.)
Verificar estado del convertidor de frecuencia
Controlar convertidor de frecuencia
Leer parámetros del convertidor de frecuen-
cia
Escribir parámetros en convertidor de fre
-
cuencia
Escribir parámetros en bloques en converti
-
dor de frecuencia
Leer en memoria búfer de módulos especia
-
les
Escribir en memoria búfer de módulos espe
ciales
Comparar valor real de un contador de alta
velocidad con datos en listas de datos
Leer datos en registros de archivo ampliados
Escribir datos en registros de archivo amplia
dos
Inicializar registros ampliados y registros de
archivo ampliados
Almacenar valores de operandos en registros
ampliados o en registros de archivo amplia
-
dos
Transmitir datos de registro ampliado a regis
tro de archivo ampliado
Inicializar registros de archivo ampliados
Control
FX1S FX1N FX2N FX2NC FX3U
쏹쏹쏹쏹쏹
-
-
-
쏹
쏹
쏹
쏹
쏹
5–6 MITSUBISHI ELECTRIC
Page 81

Programación avanzada Instrucciones de aplicación
5.1.1 Entrada de instrucciones de aplicación
En el software de programación GX Developer FX debe posicionarseel cursor para la entrada
de instrucciones de aplicación en aquella posición en la línea de conexión en la cual se debe
insertar la instrucción,para luegohacer clic enel símbolo enla barra de herramientas.
Pero también es posible seleccionar la
instrucción en la ventana de entrada. Haga
clic en el símbolo „쑽“ para abrir una lista de
selección.
En el campo de entrada se ingresa la abreviación de las instrucciones para operandos. Las
entradas están separadas por un caracter blanco.
Delante de todas lascifras sedebe ingresar un carácter queindica el tipode operandoo bien –
en caso de constantes – el formato numérico. El carácter „K“ identifica constantes hexadeci
males y el carácter „H“ identifica constantes hexadecimales.
En este ejemplo se ingresa el valor „5“ con
una instrucción MOV en el registro de
datos D12.
Help
Conlatecla
ción requerida. Aquí se obtienen también informaciones acerca del modode trabajo de la instrucción, así como el tipo y la cantidad de operandos.
Después de clicar en
incorporado en el programm.
En caso de programar en la lista de instrucciones, debe ingresarse ésta en una línea con la
abreviación de la instrucción, seguida por el operando. Las diferentes entradas se separan
también aquí con caracteres blancos.
se puede abrir una ventana de diálogo ybuscarse una instruccióncon lafun-
OK
la función sea
M457
MOV K5 D12
-
Manual de Introducción Familia FX 5 – 7
Page 82

Instrucciones para la transferencia de datos Programación avanzada
5.2 Instrucciones para la transferencia de datos
En el PLCse aplicanlos registros dedatos como memoria para losvalores de medición y emi
sión, los valores intermedios o los valores de tabla.Aunque las instrucciones aritméticas leen
sus valores de operandos directamente en los registros de datos e ingresan allí - en caso de
requerirlo - también el resultado, se requieren también instrucciones de transferencia para el
soporte deestas instrucciones,con lascuales se puedencopiar losdatos deun registroa otro
o bien ingresarse las constantes en un registro de datos.
5.2.1 Transferencia desde datos particulares con una instrucción MOV
Con una instrucción MOV (del verbo inglés
copian de una fuente de datos hacia el destino.
Plano de contactos
0
쐃
Fuente de datos (Aquí se puede indicar también una constante.)
쐇
Destino de datos
En este ejemplo se transmite el contenido del registro de datos D10 alregistro de datos D200
cuando está activada la entrada X1. La siguiente ilustración muestra el comportamiento de
señal para este ejemplo:
MOV D10 D200
to move
= mover) se desplazan los datos y se
Lista de instrucciones
0 MOV D10 D200
-
X001
D10
D200
Mientras se cumple la condición de entrada
de la instrucción MOV, se transmite el conte
nido de la fuente de datos al destino de
datos.El contenido de la fuente de datos no
se modifica con la transferencia.
Ejecución controlada por flanco de la instrucción MOV
Para determinadas aplicaciones resulta más fácil cuando el destino de datos se describe
solamente en un ciclo de programa. Por ejemplo cuando en otra posición en el programa se
transfiere al mismodestino o biencuando se deberealizar una transferencia solamente enun
momento definido.
2271
5384
5384
-
963
963
Cuando ya no se cumple la condi
ción de entrada, no se puede modi
ficar el contenido del destino de
datos a través de estas instrucción.
125
t
-
-
Una instrucción MOV seejecuta solamente una vez conflanco ascendentede lacondición de
entrada, cuando se coloca una „P“ después de la abreviación MOV.(La letra „P“ se refiere al
5–8 MITSUBISHI ELECTRIC
Page 83

Programación avanzada Instrucciones para la transferencia de datos
término inglés
impulso.)
En el siguiente ejemplose ingresa el contenido deD20 en elregistro de datosD387 solamente
cuando el estado de señal de M110 conmuta de „0“ a „1“.
Plano de contactos
M110
0
Incluso cuando se mantieneactivado el M110, nosigue ejecutándosela transferenciaal regis
tro D387. El comportamiento de señal para este ejemplo lo explica:
Pulse
M110
D20
D387
e indica que la instrucción es controlada por un cambio de señal o un
Lista de instrucciones
0 LD M110
MOVP D20 D387
4700
6800
3300
4700
1 MOVP D20 D387
3300
t
-
El contenido de la fuente de datos se transmite al destino de datos
solamente en caso de flanco ascendente de la condición de entrada.
Transferencia de datos de 32 bits
Cuando se deben transferir datos de 32 bits con una instrucción MOV, se coloca una „D“
delante de la instrucción.
Plano de contactos
X010
0
Cuando está activada la entrada X010, se transfiere el estado del contador de 32 bits C200 a
los registros de datos D40 y D41. D40 contiene los bits de valor inferior.
También es posible la combinación del procesamiento de palabras dobles y la ejecución con
trolada por flanco, como lo muestra el siguiente ejemplo.
Plano de contactos
DMOV C200 D40
M10
0
En la aplicación del relé interno M10 se transfiere el contenido de los registros D10 y D11
hacia los registros D610 y D611.
DMOVP D10 D610
Lista de instrucciones
0 LD X010
1 DMOV C200 D40
Lista de instrucciones
0LD M10
1 DMOVP D10 D610
-
Manual de Introducción Familia FX 5 – 9
Page 84

Instrucciones para la transferencia de datos Programación avanzada
5.2.2 Transferencia de operandos en grupos de bits
En el párrafo anterior se explicó el modo de transferencia de constantes o los contenidos de
registros de datoshacia otros registros de datos, a través de unainstr ucción MOV.Los valores
numéricos se pueden almacenar también en operandos de bits consecutivos, como los relés
internos.Paraactuar sobre varios operandos debits consecutivos a través de una instrucción
de aplicación, se indica la dirección del primer operando de bit conjuntamente con un factor
„K“ que indica la cantidad de operandos.
Este factor „K“ indica la cantidad de unidades con 4 operandos respectivamente:K1 = 4 ope
randos, K2 = 8 operandos, K3 = 12 operandos, etc.
Con la indicación „K2M0“se definen p.ej.los ochorelés internos M0 a M7.Es posiblela aplica
cón de factores de K1 (4 operandos) a K8 (32 operandos).
Ejemplos para la indicación de operandos de bits
K1X0: 4 entradas, arranque con X0 (X0 a X3)
–
K2X4: 8 entradas, arranque con X4 (X4 bis X13, conteo octal!)
–
K4M16: 16 relés internos, arranque con M16 (M16 a M31)
–
K3Y0: 12 salidas, arranque con Y0 (Y0 a Y13, conteo octal!)
–
K8M0: 32 relés internos, arranque con M0 (M0 a M31)
–
La posibilidad de actuar sobre varios operandos de bit con una sola instrucción, reduce tam
bién el trabajo de programación.Las siguientes dos secuencias de programa tienen la misma
función: La transferencia de estados de señal de los relés internos M0 a M3 hacia las salidas
Y10aY13.
M8000
MOV K1M0 K1Y010
M0
M1
M2
M3
Y010
Y011
Y012
Y013
-
-
-
Cuando el destino de datos es más pequeño que la fuente de datos, no se transfieren los bits
que sobran (véase la siguiente ilustración, ejemplo superior). Cuando el destino de datos es
más grande que la fuente de datos, se llenan las posiciones adicionales con „0“.Mediante la
interpretación del bit 15 como signo, el valor generado resulta siempre positivo. (Como en el
ejemplo inferior en la siguiente ilustración.)
Bit 15
0 1 0 1 0 1 0 1 0 1 0 1 0 1 0 1
Bit de signo (0: positivo, 1: negativo)
Estos relés internos no se modifican.
M15 M8 M7 M0
M14 M13
Bit de signo (0: positivo, 1: negativo)
0 0 0 0 0 0 0 0 0 1 0 1 0 1 0 1
Bit 15
MOVD0K2M0
0 1 0 1 0 1 0 1
M6 M5M12 M11 M10 M9 M4 M3 M2 M1
MOVK2M0D1
Bit 0
Bit 0
5–10 MITSUBISHI ELECTRIC
Page 85

Programación avanzada Instrucciones para la transferencia de datos
5.2.3 Transferencia de datos continuos con una instrucción BMOV
Con la instrucción MOV explicada en el párrafo 5.2.1 se puede transferir un valor de 16 bits o
bien un valor de 32 bits hacia un destino de datos. Para la transferencia de datos continuos
pueden programarse sucesivamente varias instrucciones MOV. Para facilitar el trabajo de
programación, está disponible la instrucción BMOV. La abreviación se aplica para „Block
Move“: Los operandos se transfieren continuamente, como bloque.
Plano de contactos
0
쐃
Fuente de datos (operando de 16 bits, se indica el primer operando del rango fuente)
쐇
Destino de datos (operando de 16 bits, se indica el primer operando del rango destino)
쐋
Cantidad de elementos a transferir (máx. 512)
Con los operandos arriba indicados se obtiene la siguiente función:
BMOV D10 D200 K5
Lista de instrucciones
0 BMOV D10 D200 K5
BMOV D10 D200 K5
D 10
D 11
D 12
D 13
D 14
La instrucción BMOV se puede ejecutar también con control por flanco, programándose en
este caso como instrucción BMOVP (véase el párrafo 5.2.1).
1234
5678
-156
8765
4321
1234
5678
-156
8765
4321
D 200
D 201
D 202
D 203
D 204
5 Registro de datos
En caso de querertransferir gruposde operandosde bitscon unainstrucción BMOV, los facto
res „K“ de la fuente de datos y del destino de datos deben ser idénticos.
Ejemplo
BMOV K1M0 K1Y0 K2
M0
M1
M2
M3
M4
M5
M6
M7
0
1
1
0
1
0
1
0
Y000
0
Y001
1
1
Y002
Y003
0
Se transmiten dos rangos con ope
1
Y004
Y005
0
1
Y006
Y007
0
randos de 4 bit respectivamente.
-
-
Manual de Introducción Familia FX 5 – 11
Page 86

Instrucciones para la transferencia de datos Programación avanzada
5.2.4 Transferencia de los mismos datos hacia varios operandos de destino
Con una instrucción FMOV se ingresa el contenido de un operando de palabra o de palabra
doble o una constanteen varios operandos consecutivas de palabrao bien de palabra doblen.
De esta forma se pueden eliminar las tablas de datos o retornarse los registros de datos a un
valor inicial definido.
Plano de contactos
0
쐃
Datos que deben ingresarseen losoperandos dedestino; también es posible la indicación
de constantes.
쐇
Destino de datos (se indica el primer operando del rango destino)
쐋
Cantidad de elementos a describir del rango destino (máx. 512)
En el siguiente ejemplo se ingresa el valor „0“ en 7 elementos:
FMOV D4 D250 K20
Lista de instrucciones
0 FMOV D4 D250 K20
FMOV K0 D10 K7
0
0
D 10
0
D 11
0
D 12
D 13
0
0
D 14
0
D 15
0
D 16
7 Registro de datos
Cuando se ingresa una instrucción FMOV como instrucción FMOVP, se realiza la transferen
cia de datos con control por flancos (véase la descripción para la instrucción MOV en el
párrafo 5.2.1).
Cuando se deben transferir los datos de 32 bits, debe colocarse una „D“ delante dela instruc
ción(DFMOVobienDFMOVP).
-
-
5–12 MITSUBISHI ELECTRIC
Page 87

Programación avanzada Instrucciones para la transferencia de datos
5.2.5 Intercambio de datos con módulos especiales
ConexcepcióndelaserieFX1S puede aumentarse la cantidad de entradas y salidas de todos
los equipos básicos de la familia FX mediante la conexión de equipos de ampliación. Adicio
nalmente puede aumentarse el alcance de funciones del control mediante instalación de los
llamados módulos especiales. Los módulos especiales registran p.ej. los valores analógicos
como corrientes o tensiones, regulan las temperaturas o realizan la comunicación con los
equipos externos.
-
Mientras no se requiereninstrucciones particulares para las ampliaciones externas (las entra
das y salidasadicionales se tratan al igualque lasentradas y salidasdel equipo base),se utili
zan dos instrucciones de aplicación para el intercambio de datos entre el equipo base y el
módulo especial: Las instrucciones ROM y TO.
En el módulo especial se encuentra un rango dememoria enel cual se almacenan en búfer p.
ej.los valores de medición analógicos o los datos recibidos. A causade esta función se deno
mina este rangode memoria como „memoria búfer“.También el equipobase puede accedera
la memoria búfer en un módulo especial y leer p.ej.los valoresde medición y los datos recibi
dos, pero tambiénpuede ingresar los datos que son procesados luego por el módulo especial
(ajustes para función del módulo especial, datos de emisión, etc.).
Equipo base
Memoria de
Módulo especial
Memoria de búfer
operandos
TO
FROM
-
-
-
-
Una memoria de búfer puede contener hasta
32767 diferentes celdas de memoria. Cada
una de estas direcciones de memoria de búfer
puede almacenar 16 bitde información.La fun
ción de una dirección de memoria de búfer
depende del tipo de módulo especial y se
indica en las instrucciones de servicio de los
diferentes módulos especiales.
-
Direcciones de memoria búfer 0
Direcciones de memoria búfer 1
Direcciones de memoria búfer 2
:
:
Direcciones de memoria búfer n-1
Direcciones de memoria búfer n
Para la función correcta, la función FROM o TO requiere determinadas indicaciones:
–
¿En que módulo especial deben leerse los datos o bien en que módulo especial deben
transferirse los datos?
–
¿Cuál es la primera dirección de memoria de búfer en que se leen los datos o bien en la
cual se ingresan los datos?
–
De cuántas direcciones de memoria búfer deben leerse los datos o bien en cuántas direc
ciones deben ingresarse los datos.
–
En qué parte del equipo básico deben almacenarse los datos de la memoria búfer o bien
dónde están almacenados los datos que deben transferirse al módulo especial.
-
Manual de Introducción Familia FX 5 – 13
Page 88

Instrucciones para la transferencia de datos Programación avanzada
Dirección del módulo especial
Para transferir los datos al módulo correcto en caso de varios módulos especiales o bien para
leer bajo estas circunstancias en el módulo correcto, se requiere una identificación especial
de los módulos. Para esto, cada módulo especial obtiene automáticamente un número del
rango de0a7.(Sepuede conectarun máximode 8módulos especialesen elPLC.) Los núme
ros se asignan sucesivamente y la enumeración comienza con el módulo que se conecta pri
mero con el PLC.
24+
24+
24-
V+
VI-
I+
FG
V+
VI-
I+
FG
V+
VI-
I+
FG
V+
VI-
I+
24+
24-
V+
VI-
I+
V+
VI-
I+
V+
VI-
2N
FX -4DA
I+
V+
VI-
I+
FX2N-4DA
D / A
24-
SLD
L+
L-
SLD
L+
L-
SLD
L+
2N
FX -4AD-PT
L-
SLD
L+
L-
FX2N-4AD-TC
-
-
Módulo especial 0 Módulo especial 1
Módulo especial 2
Dirección inicial en la memoria búfer
Cada una de las hasta 32767 direcciones de memoria búfer puede direccionarse de forma
decimal en un rango de 0 a 32766 (FX1N: 0 a 31). Los datos de 32 bits se almacenan de tal
modo en la memoria búfer que la celda de memoria con ladirección más baja contengalos 16
bits de menorvalor yla siguientedirección de memoria de búfer contenga los16 bitsde mayor
valor.
Dirección de memoria de búfer n+1 Dirección de memoria de búfer n
16 bit de valor superior
16 bit de menor inferior
Valor de 32 bit
Como dirección inicial para datos de 32 bits debe indicarse siempre la dirección que contiene
los 16 bits de valor inferior.
Cantidad de los datos a transferir
La cantidad de datosse refiere alas unidades dedatos atransferir.Cuando se ejecuta unains
trucción FROM o TO comoinstrucción de16 bits, corresponde esta indicacióna lacantidad de
palabras que setransfieren. En caso de una instrucción de 32bits en la forma DFROM o DTO
se indica la cantidad de palabras dobles a transferir.
-
5–14 MITSUBISHI ELECTRIC
Page 89

Programación avanzada Instrucciones para la transferencia de datos
Instrucción de 16 bit
Cantidad de datos: 5
D100
D101
D102
D103
D104
Dir. 5
Dir. 6
Dir. 7
Dir. 8
Dir. 9
Instrucción de 32 bit
Cantidad de datos: 2
D100
D101
D102
D103
D104
Dir. 5
Dir. 6
Dir. 7
Dir. 8
Dir. 9
El valor que se puede indicar como volumen de datos, depende del PLC utilizado y si la ins
trucción FROM es ejecutada como instrucción de 16 o 32 bits:
PLC utilizado
2N
FX
2NC
FX
3U
FX
Instrucción de 16 bit (FROM,TO) Instrucción de 32 bit (DFROM,DTO)
Rango permitido para la „cantidad de datos a transmitir“
1 a 32 1 a 16
1 a 32 1 a 16
1 a 32767 1 a 16383
Destino o fuente de datos en el equipo básico
En la mayoría de los datos, los datos son leídos de los registros y se transfieren luego a un
módulo especial obien sontransferidos de sumemoria de búfer alrango deregistros dedatos
del equipo básico. Como destino o fuente de datos se pueden aprovechar también las salidas
y los relés internos o bien los valores reales de temporizador o contador.
-
Ejecución controlada por flanco de las instrucciones
Cuando se agrega una „P“ a la abreviación de la instrucción, se realiza la transferencia de los
datos con control porflanco (véase ladescripción dela instrucciónMOV en el párrafo5.2.1).
La instrucción FROM en el detalle
Con una instrucción FROM se transfieren los datos desde la memoria de búfer de un módulo
especial al equipo básico. El contenido de la memoria búfer no se cambia y los datos son
copiados.
Plano de contactos
0
쐃
Dirección de módulo especial (0 a 7)
쐇
Dirección inicial en la memoria búfer (FX
FROM K0 K9 D0 K1
1N: 0 a 31, FX2N,FX2NC yFX3U: 0 a 32766)
Lista de instrucciones
0FROMK0K9D0K1
La indicación puede realizarse mediante una constante o un registro de datos que contie
ne el valor de la dirección.
쐋
Destino de datos en equipo básico
쐏
Cantidad de los datos a transferir
En el ejemplo arriba indicado se transfiere desde el módulo convertidor analógico/digital
2N-4AD con la dirección 0,el valor realdel canal 1 de la dirección de memoria búfer 9 hacia
FX
el registro de datos D0.
-
Manual de Introducción Familia FX 5 – 15
Page 90

Instrucciones para la transferencia de datos Programación avanzada
En el siguiente ejemplo para una instrucción de 32 bits se leen los datos del módulo especial
con la dirección 2. A partir de la dirección de memoria búfer 8 se leen 4 palabras dobles y se
almacenan en el equipo básico en los registros de datos D8 a D15.
0
En el últimoejemplo seha programado una instrucciónFROMP.De esta forma seingresan los
contenidos de las cuatro direcciones de memoria búfer 0a3enlosregistrosdedatosD10a
D13 cuando el estado de señal de la condición de entrada cambia de „0“ a „1“.
0
DFROM K2 K8 D8 K4
FROMP K0 K0 D10 K4
5–16 MITSUBISHI ELECTRIC
Page 91

Programación avanzada Instrucciones de comparación
La instrucción TO en el detalle
Con una instrucción TO- se transfieren los datos del equipo básico hacia la memoria búfer de
un módulo especial. El contenido de la fuente de datos no se modifica en este proceso de
copiado.
Plano de contactos
0
쐃
Dirección de módulo especial (0 a 7)
쐇
Dirección inicial en la memoria búfer (FX
쐋
Fuente de datos en equipo básico
쐏
Cantidad de los datos a transferir
TO K0 K1 D0 K1
1N: 0 a 31, FX2N,FX2NC yFX3U: 0 a 32766)
En el ejemplo arriba indicado se transfiere el contenido del registro de datos D0 a ladirección
de memoria de búfer 1 del módulo con la dirección 0.
5.3 Instrucciones de comparación
Para poder verificar el estado de los operandos de bit, como las entradas o los relés internos,
basta con las instrucciones lógicas básicas porque estos operandos puedentener solamente
los estados „0“ y „1“. Frecuentemente debe verificarse enel programa elcontenido de unoperando de palabra, de lo cual depende una determinada acción, como p. ej.la activación de un
ventilador de refrigeración alsobrepasarse unadeterminada temperatura.Los controles de la
familia FX ofrecen diferentes posibilidades para la comparación de datos.
Lista de instrucciones
0TO K0K1D0K1
5.3.1 La instrucción CMP
Con la instrucción CMP se comparan dos valores numéricos.Estos valores pueden ser cons
tantes o loscontenidos de registrosde datos. Pero también es posiblela indicación de valores
de temporizador o de contador. En función del resultado de la comparación (mayor, inferior o
igual) se activa uno de los tres operandos de bit.
Plano de contactos
0
쐃
Condición de entrada
쐇
Primer valor de comparación
쐋
Segundo valor de comparación
쐏
Primer detres relés internos o salidas consecutivos quese activan en función del resulta
do de comparación (estado de señal „1“).
Primer operando: CON cuando valor de comparación 1 > valor de comparación
Segundo operando: CON cuando valor de comparación 1 = valor de comparación 2
Tercer operando: CON cuando valor de comparación 1 < valor de comparación 2
En este ejemplo se controlan los relés internos M0, M1 y M2 con la instrucción CPM. M0
está „1“ cuando elcontenido deD0 esmayor a 100, M1está „1“ cuando elcontenido deD0
es igual a „100“ y M2 se activa cuando en D0 se almacena un valor inferior a „100“.
CMP D0 K100 M0
Lista de instrucciones
0 LD ....
1 CMP D0 K100 M0
-
-
Manual de Introducción Familia FX 5 – 17
Page 92

Instrucciones de comparación Programación avanzada
También despuésde ladesactivación de la condiciónde entradase mantieneel estadode
los tres operandos de bit porque se almacena su último estado.
Para comparar los datos de 32 bits, se llama la instrucción CMP con una „D“ previa como ins
trucción DCMP:
Plano de contactos
0
En el ejemplo arribaindicado secompara el contenidode D0 yD1 conel contenido deD2 yD3.
El control de los tres operandos de bit corresponde a la instrucción CMP.
Ejemplo de aplicación
Con una instrucción CMPse puede realizarrápida y fácilmenteuna regulación dedos puntos.
Plano de contactos
DCMP D0 D2 M0
M8000
0
CMP D20 K22 M20
M20
8
RST Y000
Lista de instrucciones
0 LD ....
1DCMPD0D2M0
Lista de instrucciones
0 LD M8000
1 CMP D20 K22 M20
8LD M20
9 RST Y000
10 LD M22
11 SET Y0001
M22
10
SET Y000
-
La instrucción CMPse procesaen esteejemplo cíclicamente.M8000 estásiempre „1“cuando
el PLC procesa el programa. El registro D20 contiene el valor real de la temperatura de
ambiente.La constante K22 indicael valor nominalde 22 쎷.Los relés internos M20y M22 indican cuando el valor nominal es sobrepasado o bien pasado por inferior. Cuando está demasiado caliente, se desactiva la salida Y0. En caso de una temperatura insuficiente se activa la
salida Y0 nuevamente con el M22. Mediante esta salida se puede controlar p. ej. un bomba
que regula la alimentación de agua caliente.
5–18 MITSUBISHI ELECTRIC
Page 93

Programación avanzada Instrucciones de comparación
5.3 .2 Comparaciones dentro de enlaces lógicos
En la instrucción CMP previamente descrita, se indica el resultado de comparación con tres
operandos de bit. Perofrecuentemente senecesita enlazarsolamente unainstrucción deemi
sión o un enlace con condición, sin ocupar tres operandos para esto. Para este propósito
están disponibles las instrucciones de „Comparación de carga“, así como las comparaciones
AND y OR.
Comparación al inicio de un enlace
-
Plano de contactos
0
쐃
쐇
쐋
>= D40 D50
Condición de comparación
Primer valor de comparación
Segundo valor de comparación
Lista de instrucciones
0 LD>= D40 D50
Cuando se cumple la condición indicada, el estado de señal después de la instrucción de
comparación es igual a „1“. El estado de señal „0“ indica que la comparación no se ha cum
plido todavía. Son posibles las siguientes comparaciones:
– Comparación por „Igual“: = (valor de comparación 1 = valor de comparación 2)
La salida de la instrucción conmuta solamente al estado de señal „1“ cuando los valores
de ambos operandos resultan iguales.
– Comparación por „Mayor“: > (valor de comparación 1 > valor de comparación 2)
La salida de la instrucción conmuta solamente al estado de señal „1“ cuando el primer valor de comparación es mayor al segundo valor de comparación.
– Comparación por „Inferior“: < (valor de comparación 1 < valor de comparación 2)
La salida de la instrucción conmuta solamente al estado de señal „1“ cuando el primer valor de comparación es inferior al segundo valor de comparación.
-
–
Comparación por „Desigual“: <> (valor de comparación 1 desigual a valor de com
paración 2)
La salida de la instrucción conmuta solamente al estado de señal „1“ cuando el primer y
segundo valor de comparación resultan desiguales.
–
Comparación por „Inferior-Igual“: <= (Valor de comparación 1 울 Valor de compara
ción 2)
La salida de la instrucción conmuta solamente al estado de señal „1“ cuando el primer va
lor de comparación es inferior o igual al segundo valor de comparación.
–
Comparación por „Superior-Igual“: >= (valor de comparación 1 욷 valor de compa
ración 2)
La salida de la instrucción conmuta solamente al estado de señal „1“ cuando el primer va
lor de comparación es superior o igual al segundo valor de comparación.
-
-
-
-
-
Manual de Introducción Familia FX 5 – 19
Page 94

Instrucciones de comparación Programación avanzada
Cuando se deben comparar los datos de 32 bits, debe agregarse una „D“ (para „palabras
dobles“) a la instrucción:
Plano de contactos
0
En este ejemplo se verifica si el contenido de los registros de datos D10 y D11 es superior al
contenido de los registros D250 y D251.
Otros ejemplos:
Plano de contactos
0
El relé interno M12 tiene el estado de señal „1“ cuando el valor del contador de X0 corres
ponde o bien es superior al contenido de D20.
Plano de contactos
D> D10 D250
Esta "D" identifica los datos de 32 bit.
>= C0 D20
M12
T52
0
> D10 K-2500
Y003
Lista de instrucciones
0 LDD> D10 D250
Lista de instrucciones
0LD>= C0 D20
5OUT M12
Lista de instrucciones
0 LD> D10 K-2500
5AND T52
6 OUT Y003
-
Cuando el contenido deD10 essuperior a -2500 yel temporizador T52 havencido, se activa la
salida Y003.
Plano de contactos
0
D< C200 K182547
M53
Lista de instrucciones
0 LDD< C200 K182547
9 OR M110
10 OUT M53
M110
M53 conmuta a „1“ cuando el estado del contador del contador de 32 bits C200 es inferior a
182547 o bien cuando el relé interno M110 tiene el estado de señal „1“.
Comparación como enlace AND
Plano de contactos
0
쐃
Condición de comparación
쐇
Primer valor de comparación
<= D40 D50
Lista de instrucciones
0 LD ...
1 AND<= D40 D50
쐋
Segundo valor de comparación
Una comparación con enlaceAND puedeutilizarse enel programa como una instrucciónAND
normal (véase el Cap. 3).
5–20 MITSUBISHI ELECTRIC
Page 95

Programación avanzada Instrucciones de comparación
Las posibilidades de comparación corresponden a aquellas delas comparaciones alinicio de
un enlace, quese describieron previamente.También en un enlace AND se pueden comparar
valoresde32bits:
Plano de contactos
0
D= D30 D400
Lista de instrucciones
0 ANDD= D30 D400
Esta "D" identifica los datos de 32 bit.
Comparación como enlace OR
Plano de contactos
0
Lista de instrucciones
0 LD ...
1 OR>= C20 K200
>= C20 K200
쐃
Condición de comparación
쐇
Primer valor de comparación
쐋
Segundo valor de comparación
En el programa se puede utilizar una comparación con enlace OR, como una instrucción OR
(véase el Cap. 3).
Para las comparaciones se aplican las condiciones arriba descritas. En la comparación de
datos de 32 bitsse agrega una„D“, talcual como enlas otras instruccionesde comparación.
Plano de contactos
0
Lista de instrucciones
0 LD ...
1 ORD= C200 D10
D= C200 D10
Esta "D" identifica los datos de 32 bit.
Manual de Introducción Familia FX 5 – 21
Page 96

Instrucciones aritméticas Programación avanzada
5.4 Instrucciones aritméticas
Todos los controles del grupo FX dominan las cuatro operaciones fundamentales y pueden
sumar, resta, multiplicar y dividir losnúmeros sin posiciones después de la coma. Las instruc
ciones relacionadas se describen en este párrafo.
-
Las unidades base de la serie FX
coma flotante. Para esto se requieren instrucciones especiales que se describen en las ins
trucciones de programacióin del grupo FX, Nro. Art. 136748.
Después de una sumaorestadeben verificarse en el programa los estadosde los relés espe
ciales indicados a continuación, para determinar si en la operación aritmética se ha sobrepa
sado el rango de valores permitido o si el resultado es „0“.
M8020
쎲
Este relé especial tiene elestado de señal„1“ cuando elresultado de sumaorestaes „0“.
M8021
쎲
Cuando el resultadode unasumaorestaes inferior a-32 767(operación de16 bits)o bien
es inferior a -2147 483648 (operaciónde 32bits), elestado deseñal deM8021 conmuta a
„1“.
M8022
쎲
Cuando el resultado sobrepasa el valor +32 767 (operaciones de 16 bits) o bien
+2 147 483 647 (operaciones de 32 bits, M8022 conmuta al estado de señal „1“.
Estos relés especiales puedenutilizarse enel programa para la habilitación deotras operaciones aritméticas.
En este cálculo se utiliza el resultado de la sustracción en D2 como divisor. Per una división
por „0“ no es posible ygenera un error. La divisiónse ejecuta por lo tanto solamente cuando el
divisor es desigual a „0“.
2N,FX2NC yFX3U pueden procesar además los números de
-
-
-
Plano de contactos
M8000
0
M8020
8
SUB D0 D1 D2
DIV D3 D2 D5
Lista de instrucciones
0 LD M8000
1 SUB D0 D1 D2
8 LDI M8020
9 DIV D3 D2 D5
5–22 MITSUBISHI ELECTRIC
Page 97

Programación avanzada Instrucciones aritméticas
5.4.1 Suma
Con una instrucción ADD-A se suman dos valores de 16 ó 32 bits y se almacena el resultado
en otro operando.
Plano de contactos
0
쐃
Primer operando de fuente o constante
쐇
Segundo operando de fuente o constante
쐋
Operando en el cual se ingresa el resultado de la adición
ADD D0 D1 D2
Lista de instrucciones
0 ADD D0 D1 D2
En el ejemplo arriba indicado se suman los contenidos de los registros de datos D0 y D1 y se
almacena el resultado en D2.
Ejemplos
Al contenido del registro de datos D100 se suma el valor „1000“:
ADD K1000 D100 D102
1000
D 100
53+
D 102
1053
El signo de los valores se considera en la adición:
ADD D10 D11 D12
D 10
5
D 11
-8
+
D 12
-3
También esposible la adiciónde valoresde 32 bits.En este caso se colocauna „D“ delante de
la instrucción (ADD -> DADD)
D 0
DADD D0 D2 D4
D 1
65238
+
D 2D 3
27643
D 4D 5
92881
El resultado puede ingresarse nuevamente en uno de los operandos de fuente.Pero se debe
observar que el resultado secambia en cada ciclo de programacuando la instrucción ADD es
ejecutada cíclicamente.
ADD D0 K25 D0
D 0
18
25
+
D 0
43
Una instrucción ADD se puede ejecutar también con control por flanco, esto significa que se
ejecuta solamente una vez, cuando el estado de señal de la condición de entrada conmuta de
„0“ a „1“.En este caso debe agregarse simplemente una „P“ a la instrucción (ADD -> ADDP,
DADD -> DADDP).
En el siguiente ejemplo, se suma la constante “27” al contenido de D47 solamente unavez en
el ciclo de programa enel cual conmuta el estado de señaldel relé internoM47 de„0" a “1".
Plano de contactos
M47
0
ADDP D47 K27 D51
Lista de instrucciones
0LD M47
1 ADDP D47 K27 D51
Manual de Introducción Familia FX 5 – 23
Page 98

Instrucciones aritméticas Programación avanzada
5.4.2 Resta
Para la resta de dos valores numéricos (contenidos de operandos de 16 bits o 32 bits o cons
tantes) se utiliza la instrucción SUB. El resultado de la resta se almacena en el tercer
operando.
Plano de contactos
0
쐃
Minuendo (Se resta de este valor)
쐇
Sustraendo (Este valor es restado)
쐋
Diferencia (Resultado de la sustracción)
SUB D0 D1 D2
Lista de instrucciones
0 SUB D0 D1 D2
En la instrucción arriba indicada se resta el contenido de D1 del contenido de D0 y se alma
cena el resultado en D2.
Ejemplos
Del contenido del registro de datos D100 se sustrae el valor „100“ y se almacena el resultado
en D101:
SUB D100 K100 D101
D 100
247
100
–
D 101
147
-
-
Los valores son restados bajo consideración de sus signos:
SUB D10 D11 D12
D 10
5
D 11
-8
–
D 12
13
Cuando se deben sustraer valores de 32 bits, se coloca una „D“ delante de la instrucción
(SUB -> DSUB)
D 0
DSUB D0 D2 D4
D 1
65238
D 2D 3
–
27643
D 4D 5
37595
El resultado puede ingresarse nuevamente en uno de los operandos de fuente. Cuando se
ejecuta la instrucción SUB cíclicamente, se modifica el contenido de este operando en cada
ciclo de programa.
SUB D0 K25 D0
D 0
197
25
–
D 0
172
Una instrucción SUB se puede ejecutar también con control por flanco. En este caso se
agrega una „P“ a la instrucción. (SUB -> SUBP, DSUB -> DSUBP).
En el siguiente ejemplo se resta el contenido de D394 solamente una vez en el ciclo de pro
grama del contenido de D50en elcual conmuta el estado deseñal delrelé internoM50 de „0“ a
„1“.
Plano de contactos
Lista de instrucciones
-
M50
0
SUBP D50 D394 D51
0LD M50
1 SUBP D50 D394 D51
5–24 MITSUBISHI ELECTRIC
Page 99

Programación avanzada Instrucciones aritméticas
5.4.3 Multiplicación
Con una instrucción MUL multiplica dos valores de 16 ó 32 bits y almacena el resultado en un
tercer rango de operandos.
Plano de contactos
0
쐃
Multiplicador
쐇
Multiplicador
쐋
Producto (multiplicando x multiplicador = producto)
INDICACIÓN En la multiplicación de dosvalores de 16bits, el resultadopuede sobrepasarel rango que se
MUL D0 D1 D2
Lista de instrucciones
0 MUL D0 D1 D2
puede indicar con 16 bits.Por esto motivo se almacena el producto siempre en dos operan
dos continuos de 16 bits (= 32 bits).
Cuando se multiplican dos valores de 32 bits, se almacena el resultado incluso en cuatro
operandos continuos de 16 bits (= 64 bits).
Porfavor,ponga atención enel tamaño deestos rangos deoperandos en la programación y
evite una asignación doble a causa de solapamientos de rangos. En la instrucción un operando respectivamente que contiene los datos de valor más bajo.
-
Ejemplos
Multiplicación de los contenidos de D0 y D1 y almacenamiento del resultado en D3 y D2:
MUL D0 D1 D2
D 0
1805
D 1 D 2
481
x
D 3
868205
La multiplicación serealiza bajo observacióndel signo.En esteejemplo se multiplica el conte
nido de D10 con la constante „-5“:
MUL D10 K-5 D20
D 10
8
-5
x
D 21
D 20
-40
Para la multiplicación de valores de 32 bits se coloca una „D“ delante de la instrucción
(MUL -> DMUL)
D 0
DMUL D0 D2 D4
D 1
65238
x
D 2D 3
27643
D 6D 7 D 5 D 4
1803374034
Cuando se agregauna „P“ a la instrucción MUL (MUL -> MULP, DMUL -> DMULP),se ejecuta
ésta con control por flanco. La siguiente multiplicación se realiza solamente al activarse la
entrada X24:
Plano de contactos
X24
0
MULP D25 D300 D26
Lista de instrucciones
0LD X24
1 MULP D25 D300 D26
-
Manual de Introducción Familia FX 5 – 25
Page 100

Instrucciones aritméticas Programación avanzada
5.4.4 División
Para dividir dos números (contenidos de operandos de 16 ó 32 bits), en los controles de la
familia FX está disponible la instrucción DIV-A.Ya que con esta instrucción no se pueden pro
cesar números con posiciones después de la coma, el resultado de ladivisión se indica siem
pre en números enteros. El resto se almacena de forma particular.
-
-
Plano de contactos
0
쐃
Dividendo
쐇
Divisor
쐋
Cuociente (Resultado de la división: Dividendo 앦 Divisor = Cuociente)
INDICACIONES El divisor no debe asumirel valor „0“.Una divisiónpor „0“no esposible y generaun error.
DIV D0 D1 D2
Lista de instrucciones
0 DIV D0 D1 D2
Cuando se dividen dos valores de 16 bits, se almacena el cuociente en un operando de 16
bits y el resto no dividible en el siguiente operando. Para el resultado de la división se ocu
pan por lo tanto siempre dos operandos de 16 bits (= 32 bits).
En la división dedos valores de32 bitsse ingresa el cuociente endos operandos de 16 bitsy
el resto no dividible en los siguientesdos operandosde 16 bits.En este tipode división serequieren cuatro cuocientes continuos de 16 bits (= 64 bits) para el resultado.
Por favor, observe en la programación el tamaño requerido de estos rangos de operandos
para prevenir una asignación doble a través de solapaduras de rangos.En la instrucción se
indica un operando que contiene los datos de valor más bajo.
-
Ejemplos
El contenido de D0 sedivide por elcontenido de D1y el resultadose almacena enD2 yD3:
DIV D0 D1 D2
D 0
40
D 1
쐦
6
D 2
6
D 3
4
Cuociente (6 x 6 = 36)
Resto(40-36=4)
En la división se consideran los signos. En este ejemplo se divide el valor del contador de C0
por el contenido de D10:
DIV C0 D10 D200
C 0
36
D 10
쐦
-5
D 200
-7
D 201
1
Cuociente
Resto
5–26 MITSUBISHI ELECTRIC
 Loading...
Loading...