

Page 1
Programación de Autómatas
Serie FX
Guía rápida
Código ------
Rev1.0
Page 2
Programación serie FX
Antes de empezar...
• Este manual pretende introducir al usuario en la programación de los autómatas
Mitsubishi Electric de la serie FX (modelos FX
información se encuentra en los manuales de Programación de la serie FX (Programming
manual II).
• Se dejan de lado en este manual las explicaciones detalladas de las opciones del software
de programación. Ver explicaciones correspondientes al manual del software utilizado.
• Si tiene alguna duda sobre la instalación o uso de los autómatas, así como su
programación, póngase en contacto con el distribuidor más próximo.
• Las explicaciones de este manual están sujetas a mejoras y revisiones sin previo aviso.
1S, FX1N y FX2N). Mucha y más completa
2
Page 3

Programación serie FX
ÍNDICE:
ÍNDICE 3
ESTRUCTURA DEL PROGRAMA 7
Tipos de programación disponibles en la serie FX 7
Lista de instrucciones 7
Ladder o lenguaje de contactos 7
Lenguaje SFC 8
Dispositivos utilizados por el PLC 8
Cliclo de scan 9
Estructura de un programa 11
Subrutinas 12
Interrupciones 12
Saltos condicionales 14
MAPA DE MEMORIA 17
Dispositivos de bit (X, Y, M, S) 17
Entradas y salidas X/Y 17
Relés auxiliares M 18
Relés de estado S 19
Dispositivos de 16 / 32 bits (X, Y, M, S) 20
Registros D 20
Constantes decimales y hexadecimales K/H 21
Temporizadores T 22
Contadores C 23
Contadores de alta velocidad (HSC) C 25
Registros índice V/Z 26
Grupos de bits KnM / KnX / KnY 28
3
Page 4

Programación serie FX
MÓDULOS ESPECIALES DE FUNCIÓN 30
Módulos especiales de función (SFM) 30
Buffers de memoria (BFM) 31
Instrucciones FROM / TO 32
LISTA DE INSTRUCCIONES 35
Control del flujo de programas 36
CJ 36
CALL 37
SRET 38
IRET, EI, DI 38
FEND 40
WDT 41
FOR, NEXT 42
Comparación y movimiento de datos 43
CMP 43
ZCP 44
MOV 44
SMOV 45
CML 45
BMOV 46
FMOV 47
XCH 47
SWAP 48
BCD 48
BIN 49
Operaciones aritméticas y lógicas 49
ADD 49
SUB 50
MUL 51
DIV 52
INC 53
DEC 54
WAND 54
WOR 55
WXOR 55
NEG 56
4
Page 5

Programación serie FX
Rotación y desplazamiento 56
ROR 56
ROL 57
RCR 58
RCL 58
SFTR 59
SFTL 60
WSFR 60
WSFL 61
SFWR 61
SFRD 62
Operaciones con datos (1) 63
ZRST 63
DECO 64
ENCO 64
SUM 65
BON 65
MEAN 66
ANS 66
ANR 67
SQR 67
FLT 68
Procesado de alta velocidad 69
REF 69
REFF 70
MTR 70
HSCS 72
HSCR 73
HSZ 73
SPD 76
PLSY 77
PWM 78
PLSR 79
Operaciones con datos (2) 80
ECMP 80
EZCP 81
EBCD 81
EBIN 82
5
Page 6

Programación serie FX
Instrucciones para posicionamiento 82
ABS 82
ZRN 83
PLSV 84
DRVI 85
DRVA 86
LISTA DE DISPOSITIVOS DE SISTEMA 88
Estado del PLC 89
Dispositivos relacionados con el RTC (reloj de tiempo real) 90
Modos de operación del PLC 91
Flags de control de interrupción 92
Comunicaciones 92
Otros dispositivos 93
Regístros índice 93
Control de contadores 94
DISPOSITIVOS 95
Serie FX1S 95
Serie FX1N 96
Serie FX
2N 97
6
Page 7
Programación serie FX
Estructura del programa
TIPOS DE PROGRAMACIÓN DISPONIBLES EN LA SERIE FX:
Hay tres opciones disponibles para poder llevar a cabo la programación de una
tarea concreta en un autómata FX
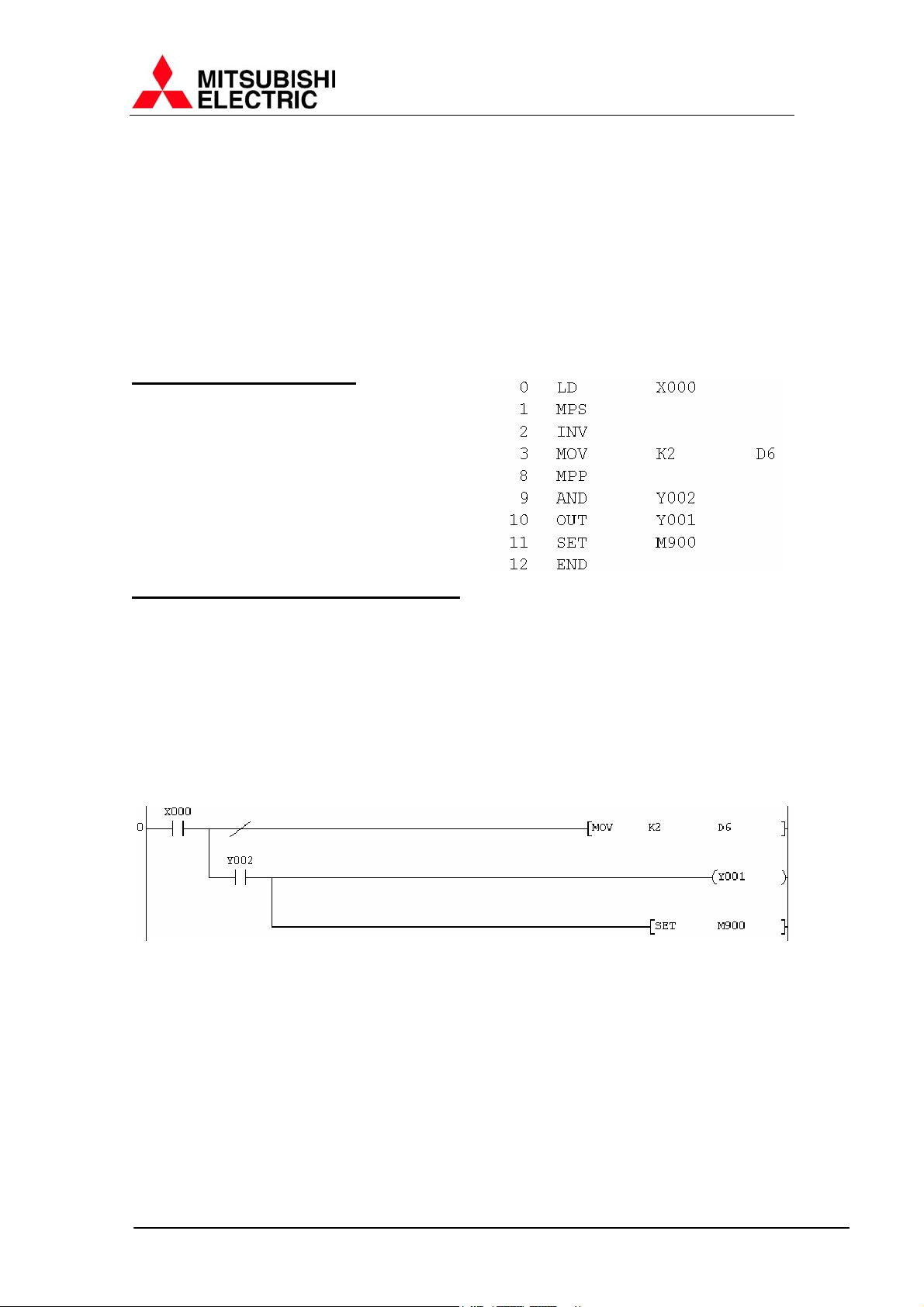
LISTA DE INSTRUCCIONES
La primera es la lista de
instrucciones, la cual permite crear toda la
secuencia a partir de una lista de comandos
encadenados de forma secuencial. Se crean
una serie de instrucciones escritas sin ningún
tipo de interfaz gráfica, es el método más
rápido y directo, pero requiere de un mayor
dominio del lenguaje.
LADDER O LENGUAJE DE CONTACTOS
La segunda de las opciones es la más utilizada, el lenguaje de contactos o
ladder. Desde este tipo de programación se crean también comandos secuenciales
que se van ejecutando contínuamente unos detrás de otros. En esta ocasión se utiliza
una pequeña interfaz gráfica a modo de líneas que unen las condiciones iniciales de la
lógica programada con las salidas o instrucciones que se deben ir ejecutando
contínuamente. Se dispone de una serie de símbolos que son utilizados por el
programador para poder establecer las condiciones que deben ser procesadas por el
autómata en cada momento.
1S, FX1N o FX2N.
El lenguaje de contactos y la programación por lista de instrucciones tienen el
mismo resultado final. La única diferencia es que un método es más visual y
entendible a simple vista, mientras que la secuencia de instrucciones escritas necesita
de una mayor experiencia para poder ver su resultado final. Desde el software de
programación se puede conmutar de un modo a otro sin más problema, por lo que
puede ser escrito un trozo de programa en lista de instrucciones y pasar a programar
otro fragmento en lenguaje de contactos indiferentemente. Sólo hay que pasar de un
modo a otro sin más que pulsar en el software sobre la opción correspondiente.
7
Page 8
Programación serie FX
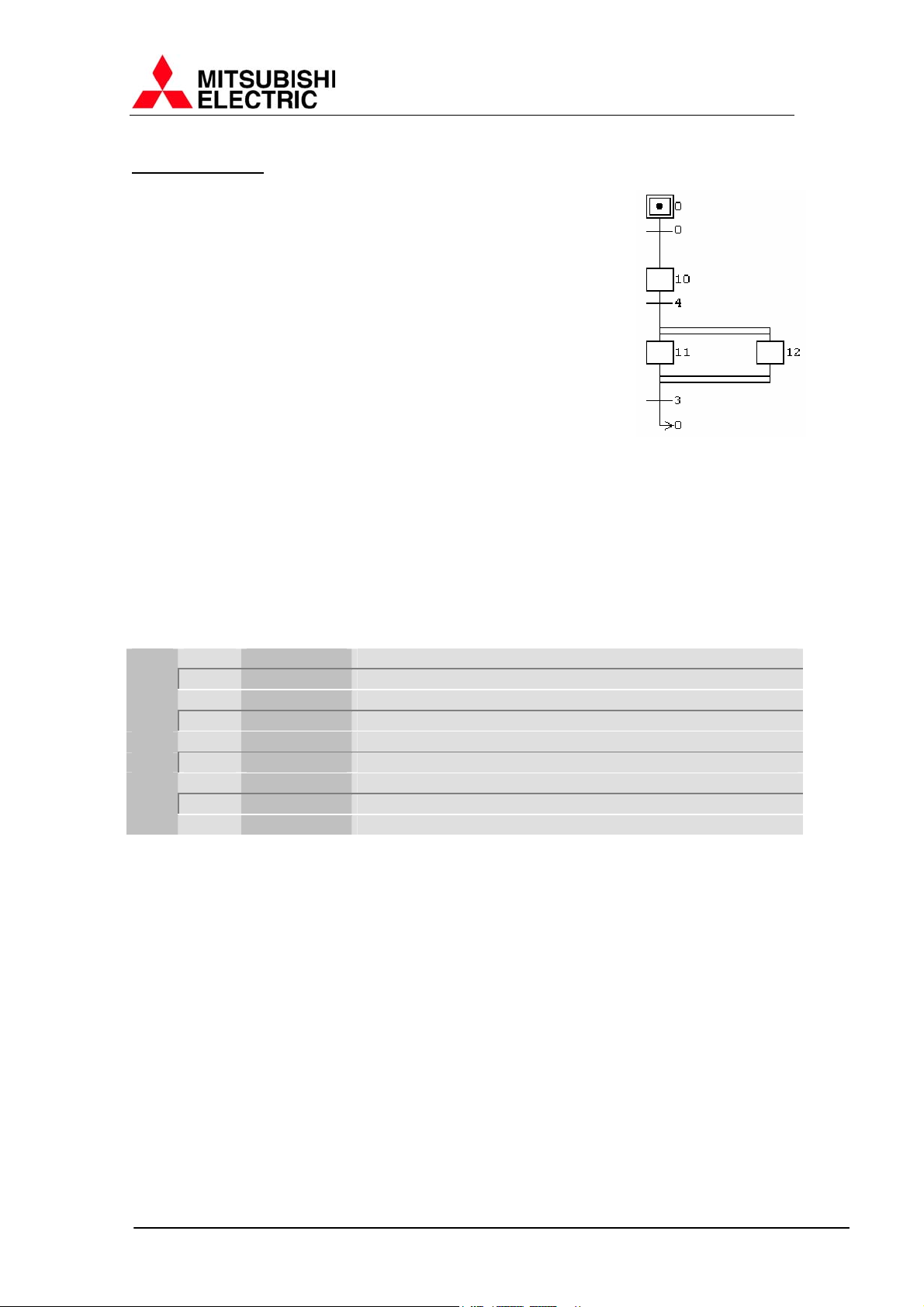
LENGUAJE SFC
Éste es el último de los lenguajes permitidos por la serie
FX. Es el más estructurado, permitiendo separar las partes de
programa por pasos que se ejecutan secuencialmente cuando
se van cumpliendo unas condiciones impuestas durante la
programación, llamadas transiciones. Con este tipo de
tratamiento del programa se está tratando realmente con lista de
instrucciones o lenguaje ladder si se tiene en cuenta que el
programa que se ejecuta en cada bloque del SFC está creado
con estos lenguajes de PLC. Es el más estructurado de los tres
lenguajes vistos.
DISPOSITIVOS UTILIZADOS POR EL PLC:
El autómata puede manejar básicamente dos tipos de dato: Registros de 16
bits (datos, temporizadores, contadores…) e información de un bit (relés auxiliares,
entradas, salidas…), también pueden tratarse datos de 32 bits juntando dos registros
consecutivos de 16 bits. Las siguientes tablas muestran todos los datos que pueden
ser utilizados y cual es su utilidad. Esta información es a modo de introducción, ya que
en un capítulo posterior se explicarán con detalle todos estos dispositivos.
TIPO NOTACIÓN DESCRIPCIÓN
X
Y
M
S
D
C
T
V, Z
NOTAS:
1. Pueden ser combinados de dos en dos para crear registros de 32 bits
2. Si no se utiliza el lenguaje SFC, pueden ser utilizados como relés auxiliares M
La notación utilizada en el caso de las entradas y salidas físicas del autómata
es octal. La numeración, por ejemplo en el caso de las entradas, comienza en la
dirección X0 y continua hasta X7, después salta a X10 y así sucesivamente (las
direcciones como X8, X9, X18, X19, y equivalentes no existen). En los otros
dispositivos la notación es decimal.
La cantidad de datos disponibles depende de cada serie (FX
Ver el anexo al final de este manual, donde se especifica en unas tablas la cantidad de
registros disponibles para cada serie.
Dentro de cada tipo de datos tratados por el autómata hay rangos llamados de
uso general y otros rangos que son retentivos. Los primeros son los bits o datos que
pierden su información cuando se deja de alimentar el autómata, o en el paso del
modo RUN al modo STOP, momento en el que se desactivan las marcas activadas
1 Octal Entradas físicas del sistema
1 Octal Salidas físicas del sistema
1 Decimal Relés auxiliares (marcas) de uso general
1 Decimal Relés de estado (utilizados para programación SFC) *2
16 *1 Decimal Registros de datos para almacenar información numérica
16/32 Decimal Contadores normales y de alta velocidad
16 Decimal Temporizadores del sistema
16 Decimal Registros índice para direccionamiento indirecto
1S, FX1N o FX2N).
8
Page 9
Programación serie FX
durante el programa y se pasa a tener un valor cero en los registros que pertenecen al
rango de uso general. Mientras que en el rango retentivo los relés auxiliares y registros
mantienen su valor ante un fallo de tensión, desactivación del autómata de la red
eléctrica o paso de estado RUN a STOP. Estos rangos de dispositivos pueden verse
en el anexo correspondiente al final de este manual.
Es importante saber que tipo de memoria dispone cada autómata, ya que el
comportamiento será diferente en el caso de los dispositivos retentivos:
Series FX
Disponen de un número fijo de registros y relés auxiliares de comportamiento
retentivo (éstos no son configurables). Dentro del rango retentivo, se tienen dos partes
diferentes. La primera son los datos que se mantienen en memoria EEPROM, una vez
apagado el autómata, éste salva ese rango de valores en una memoria retentiva
grabable eléctricamente (EEPROM) para prevenir su borrado. Mientras que también
posee de otro tipo de mecanismo, para otro rango de dispositivos, que se encarga de
guardar la información durante 10 días aproximadamente mantenida por un
condensador.
Serie FX2N:
Esta serie tiene un rango de dispositivos retentivos configurable desde el
software de programación, modificando los parámetros. El rango retentivo es
mantenido como en el caso del programa, por memoria RAM mantenida por una
batería. La memoria de programa puede ser almacenada en cassettes de memoria
EEPROM.
1S y FX1N:
CICLO DE SCAN:
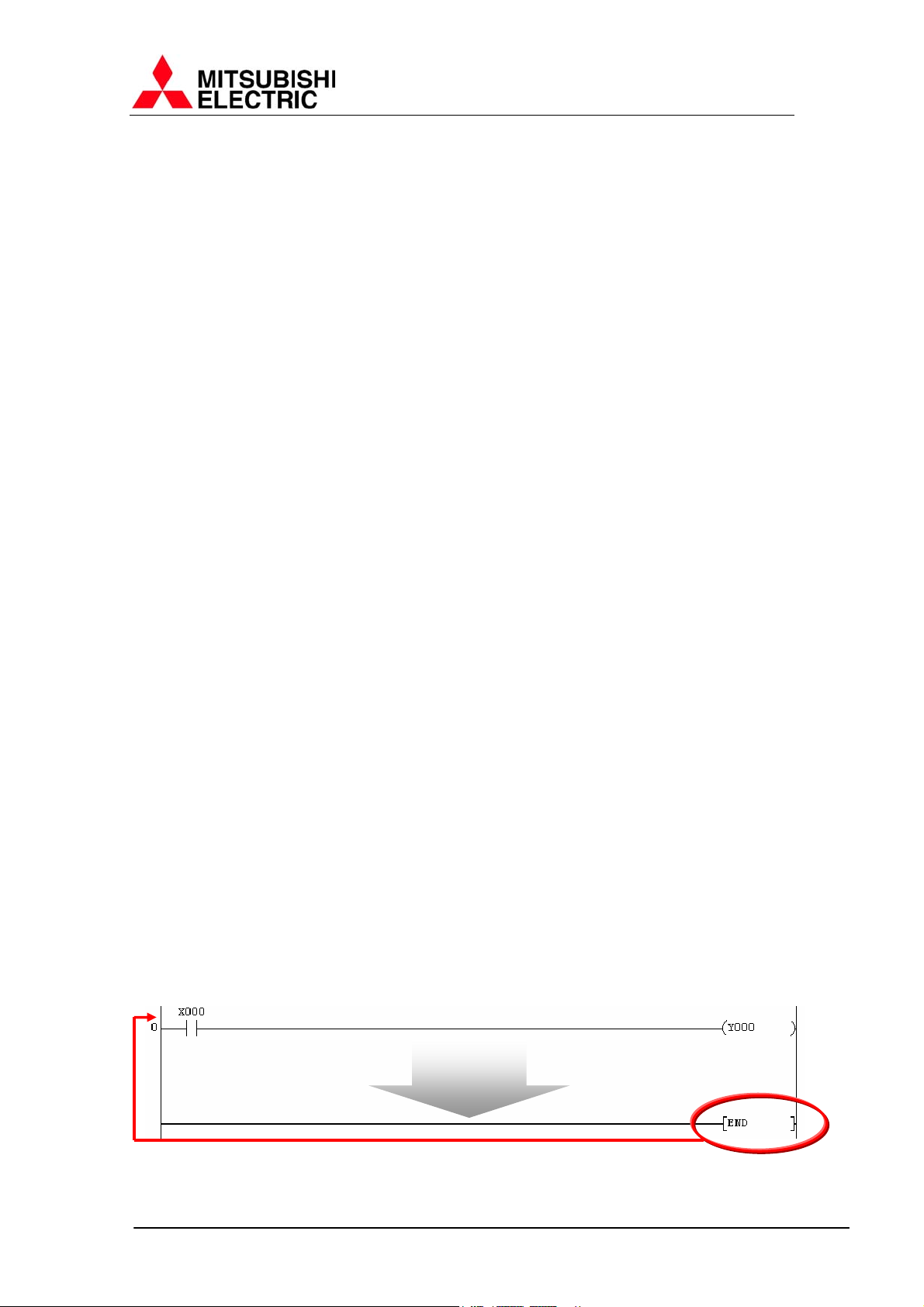
El funcionamiento de un programa de PLC es secuencial, por lo que se van
ejecutando las instrucciones almacenadas en su memoria de forma consecutiva y
cíclica. Es decir, el programa empieza desde la primera instrucción y ejecuta todos los
otros comandos, uno detrás de otro, hasta llegar a la última instrucción disponible en el
PLC.
La instrucción END es la encargada de marcar el final de programa, por lo que
es obligatoria su inclusión al final de todo código creado. Después de esta instrucción,
se procede a repetir todo el programa secuencial almacenado en la memeoria. En el
siguiente gráfico se puede ver lo explicado en estas líneas.
9
Page 10
Programación serie FX
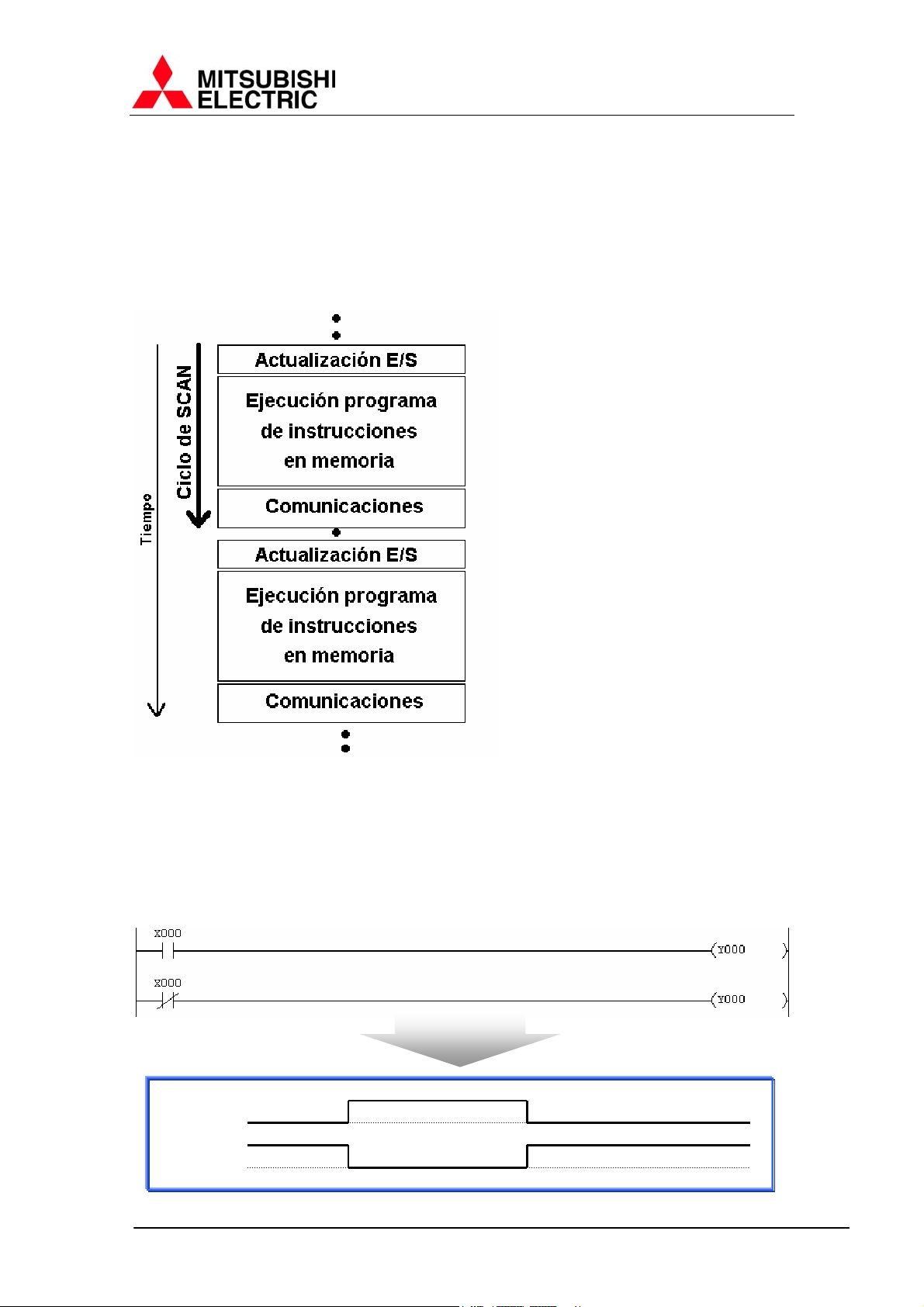
Cuando se llega a la intrucción END, y antes de saltar a la primera dirección de
programa para repetir el proceso, el autómata realiza un refresco de entradas y
salidas. En este momento se copia el estado físico de las entradas en un buffer interno
(en los dispositivos X0, X1…) para ser utilizadas por el PLC en el siguiente ciclo de
programa. También se trasladan a las salidas físicas del PLC los valores calculados
por el programa (valores actuales de los dispositivos Y0, Y1…).
Todo este proceso explicado
en las líneas anteriores más un
intercambio de datos, si se está
llevando a cabo agún tipo de
comunicaciones como por ejemplo
un Computer link o incluso un
intercambio de información con un
terminal como puede ser un
F930GOT, etc… forman el ciclo de
scan del autómata. Este ciclo de
scan es el tiempo periódico que
tarda el PLC en repetir una y otra
vez todo el programa conjuntamente
con el refresco de entradas/salidas
y comunicaciones.
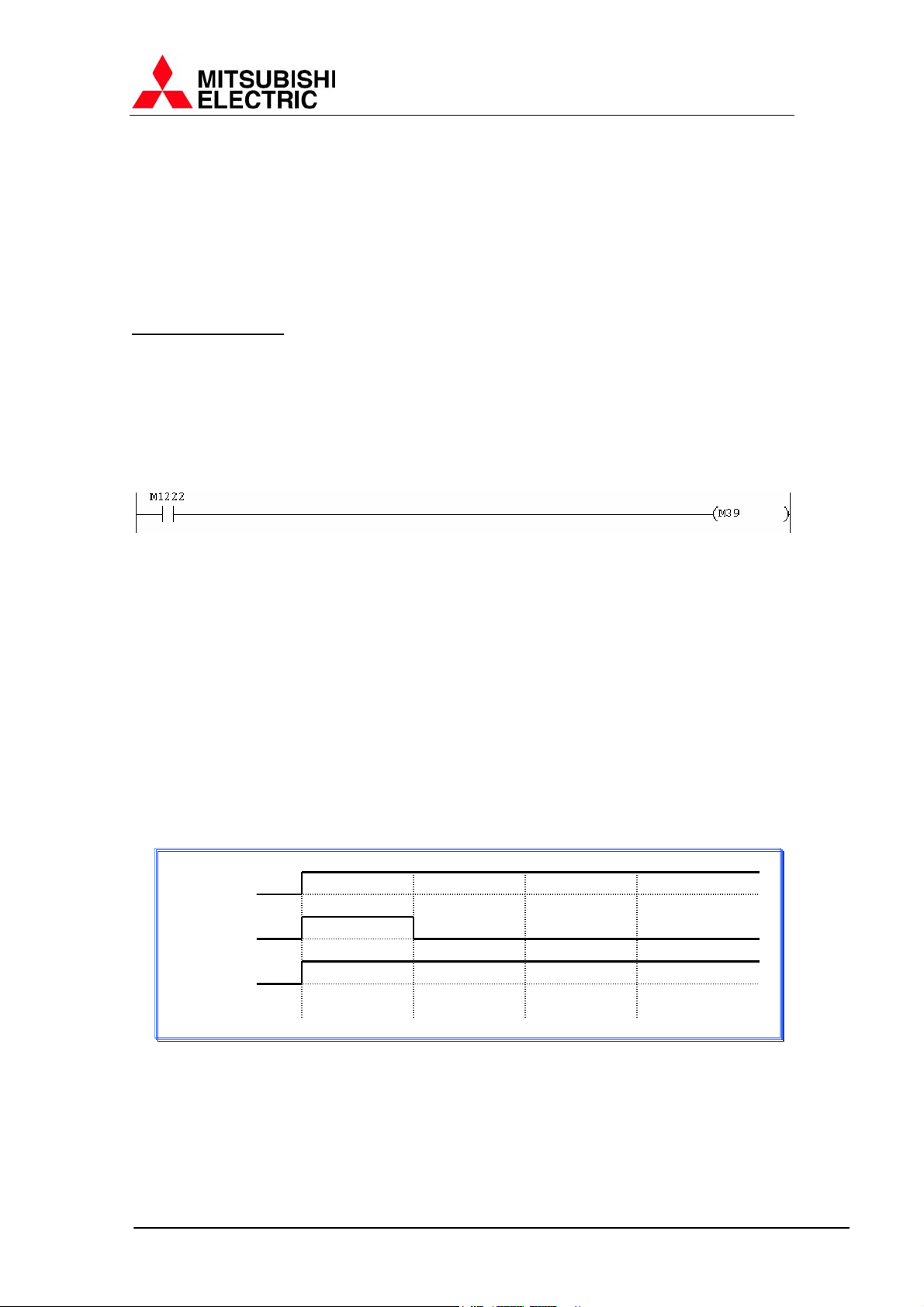
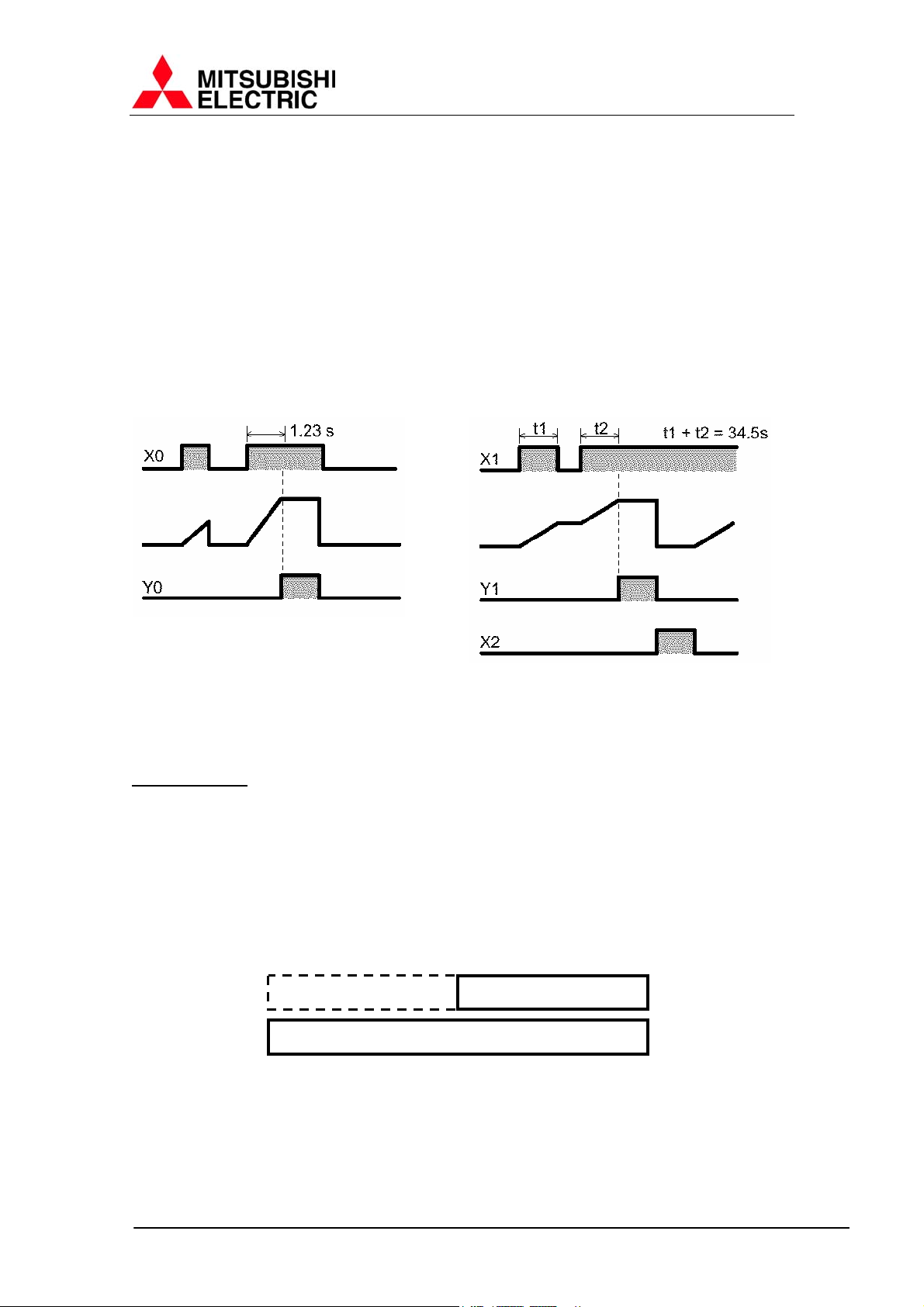
De modo que aunque un programa cambie el valor de una salida dos veces
consecutivas, sólo la última actualización será reflejada en las salidas físicas del PLC.
En el siguiente ejemplo, se activa la salida Y0 y se desactiva otra vez si la entrada X0
está activa, mientras que si X0 está en estado OFF se desactivará y activará otra vez
la salida Y0, por lo que solamente la segunda línea de programa será reflejada en la
salida física del autómata.
X0
Y0
10
Page 11
Programación serie FX
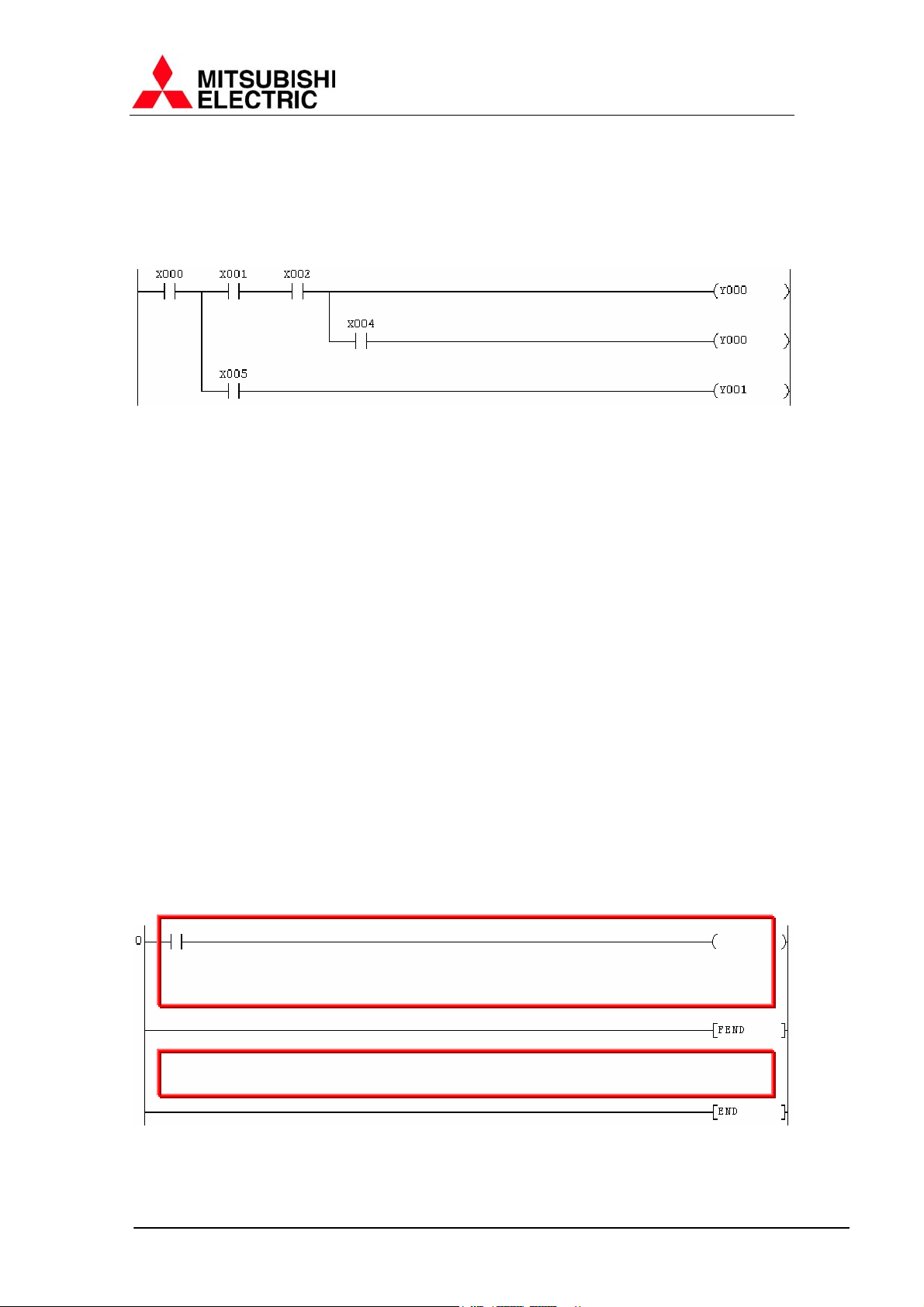
Las instrucciones de la secuencia del lenguaje de contactos se ejecutan
siguiendo el siguiente orden: De izquierda a derecha y de arriba abajo. En el siguiente
ejemplo podemos ver como se comportaría el autómata si se escribe el siguiente
programa:
Primero es evaluada la entrada X0, si se encuentra en estado activo se
continúa la evaluación de las siguientes partes que “cuelgan” de este dispositivo, sinó
se salta esta sección de programa. Después el autómata lee las entradas X1 y X2 para
saber si debe ser activada la salida Y0. Entonces si X0, X1 y X2 están activas
simultáneamente, Y0 se activará (internamente, sin reflejar su estado en las salidas
físicas del PLC, como se ha visto en líneas anteriores). Una vez ejecutado esto, el
valor de la salida Y0 dependerá también del estado de X4, ya que si esta entrada no
se encuentra activada la salida Y0 será deshabilitará siendo inútil la primera línea de
programa evaluada… La siguiente parte a ejecutar será la que continúa con el
contacto X5, si están activos X1 y X5 al mismo tiempo se activará la salida Y1.
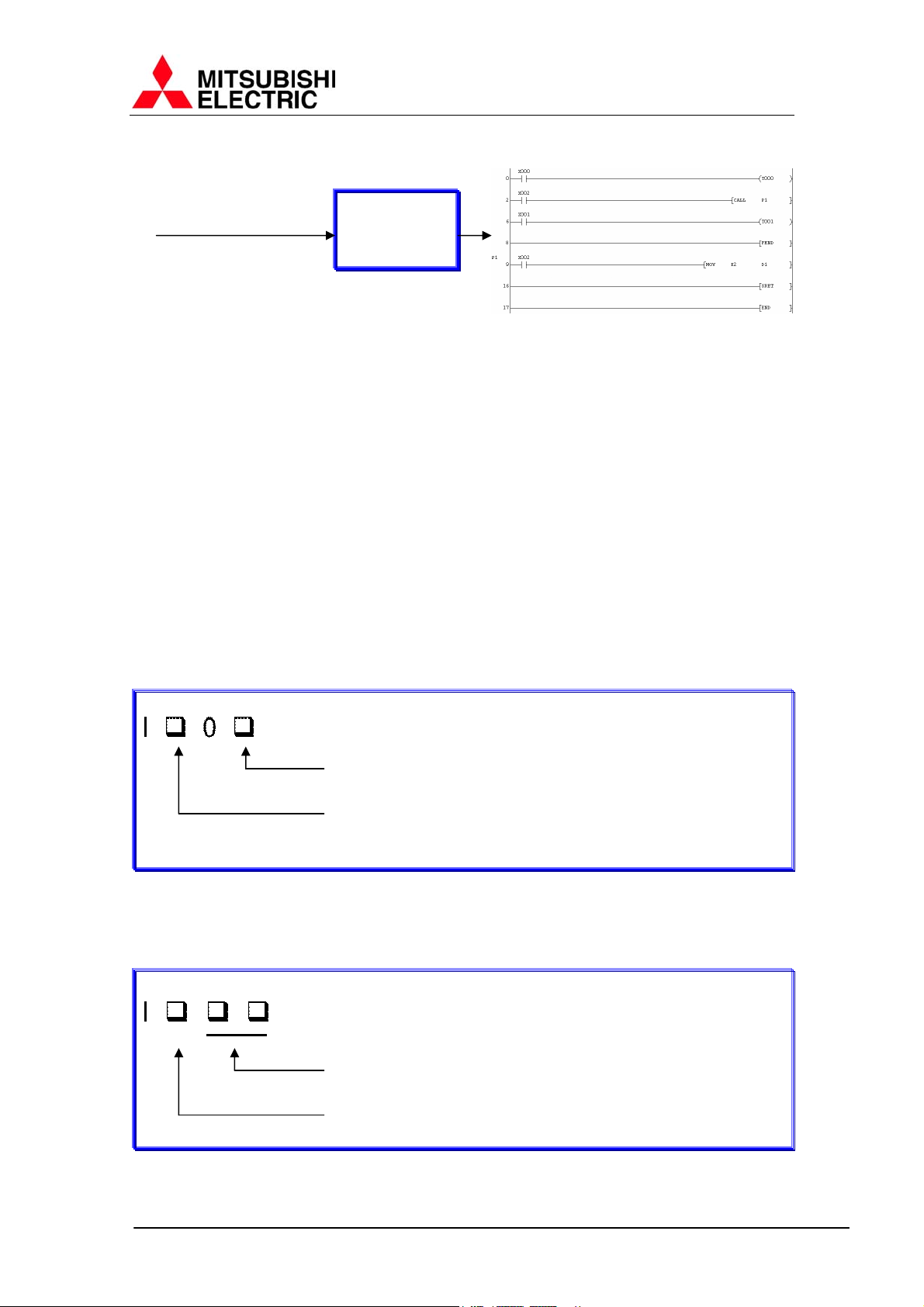
ESTRUCTURA DE UN PROGRAMA:
Como se ha comentado, el programa se repite indefinidamente desde la
posición cero hasta la instrucción END. Pero si el PLC encuentra antes una instrucción
FEND, acabará la ejecución del ciclo de scan y volverá a comenzar desde el principio.
Esto sirve para poder separar el programa de ejecución normal cíclica de la sección de
códigos de subrutinas o interrupciones. Estas últimas secciones no deben ser
ejecutadas a no ser que se especifique en el programa explícitamente u ocurra algún
evento que deba ser manejado por interrupción. Se muestra en el siguiente esquema
la separación de las dos secciones de programa expuestas:
PROGRAMA SECUENCIAL CÍCLICO
SUBRUTINAS E INTERRUPCIONES
11
Page 12
Programación serie FX
El PLC ejecutará las instrucciones secuencialmente hasta llegar al comando
FEND, que será interpretado como una instrucción END y se acabará el ciclo de scan
actual. Así, de este modo, pueden ser escritas instrucciones de autómata que no serán
ejecutadas normalemente. Las secciones de código introducidas desde en FEND al
END pueden ser subrutinas o programas de interrupción. Se describen a continuación.
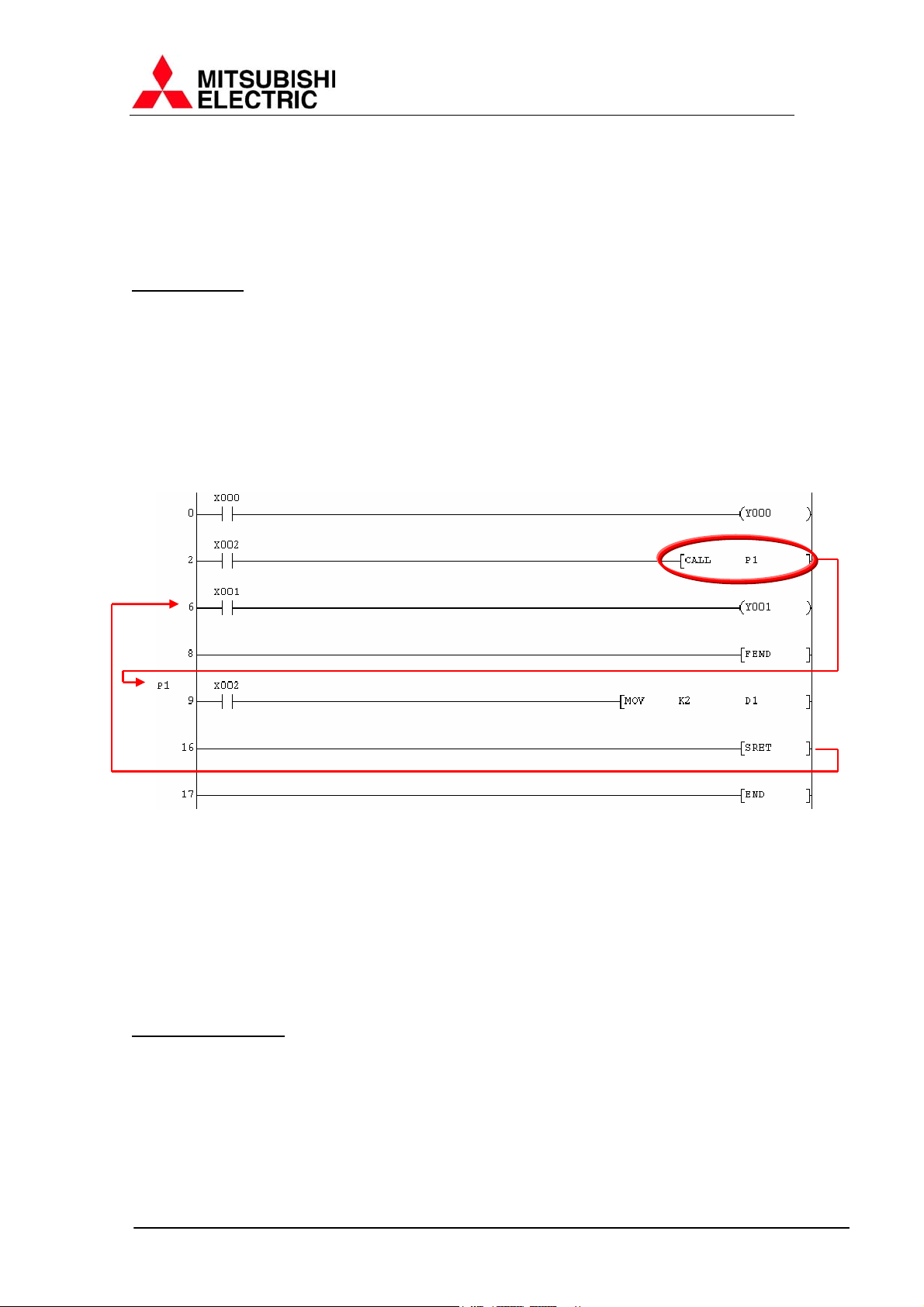
SUBRUTINAS
Una subrutina es un conjunto de instrucciones que se ejecutará de manera
eventual cada vez que sea requerido por el programa. Por ejemplo, el flujo de control
de la parte que se ejecuta cíclicamente puede ser alterada para pasar a ejecutar una
sección de programa independiente. Después de ejecutar esta parte, se devuelve el
control a la instrucción siguiente desde la que se llamó a la subrutina. Cuando se
ejecutan subrutinas se altera el valor del tiempo de ciclo de scan ya que este tiempo
se ve incrementado.
Para llamar a una subrutina se utiliza la instrucción CALL. Se especifica detrás
de este comando el puntero en el que comienza la sección de código de la subrutina,
en este caso P1. Para dar por concluída la subrutina, se debe ejecutar una instrucción
SRET que se encargue de devolver el control del flujo de programa a la posición
siguiente desde donde se llamó a la subrutina. Las series FX
número máximo de punteros de 128 (P0 a P127), mientras que la serie FX
1N y FX2N tienen un
1S tiene 64
(P0 a P63).
INTERRUPCIONES
Las interrupciones son secciones de programa que deben ser ejecutadas
cuando se cumple un evento especificado. Son subrutinas especiales, que no son
llamadas desde el programa secuencial normal, sinó que se activan mediante eventos
normalmente externos al autómata. De este modo se puede dar respuesta inmediata a
una señal externa con total independencia del ciclo de scan del autómata.
12
Page 13
Programación serie FX
INTERRUPCIÓN
Las interrupciones pueden ser causadas por varias fuentes externas e internas.
La más normal es la activación de una entrada que requiere de una respuesta
inmediata. Las 6 primeras entradas de los autómatas de la serie FX
crear interrupciones (X0 a X5), los FX
especial para generar un cambio de rumbo en la ejecución del programa de forma
independiente del ciclo de scan del PLC. También se pueden crear interrupciones para
evaluar la cuenta actual de un contador de alta velocidad o incluso crear interrupciones
por temporización (sólo la serie FX
de las interrupciones no son identificados con la letra P, se identifican con la letra I
seguida de un número de tres cifras que identifica a que tipo de interrupción pertenece
la subrutina especial.
Los punteros de interrupción siempre serán editados después de la primera
instrucción FEND. Se identifican como se especifica a continuación.
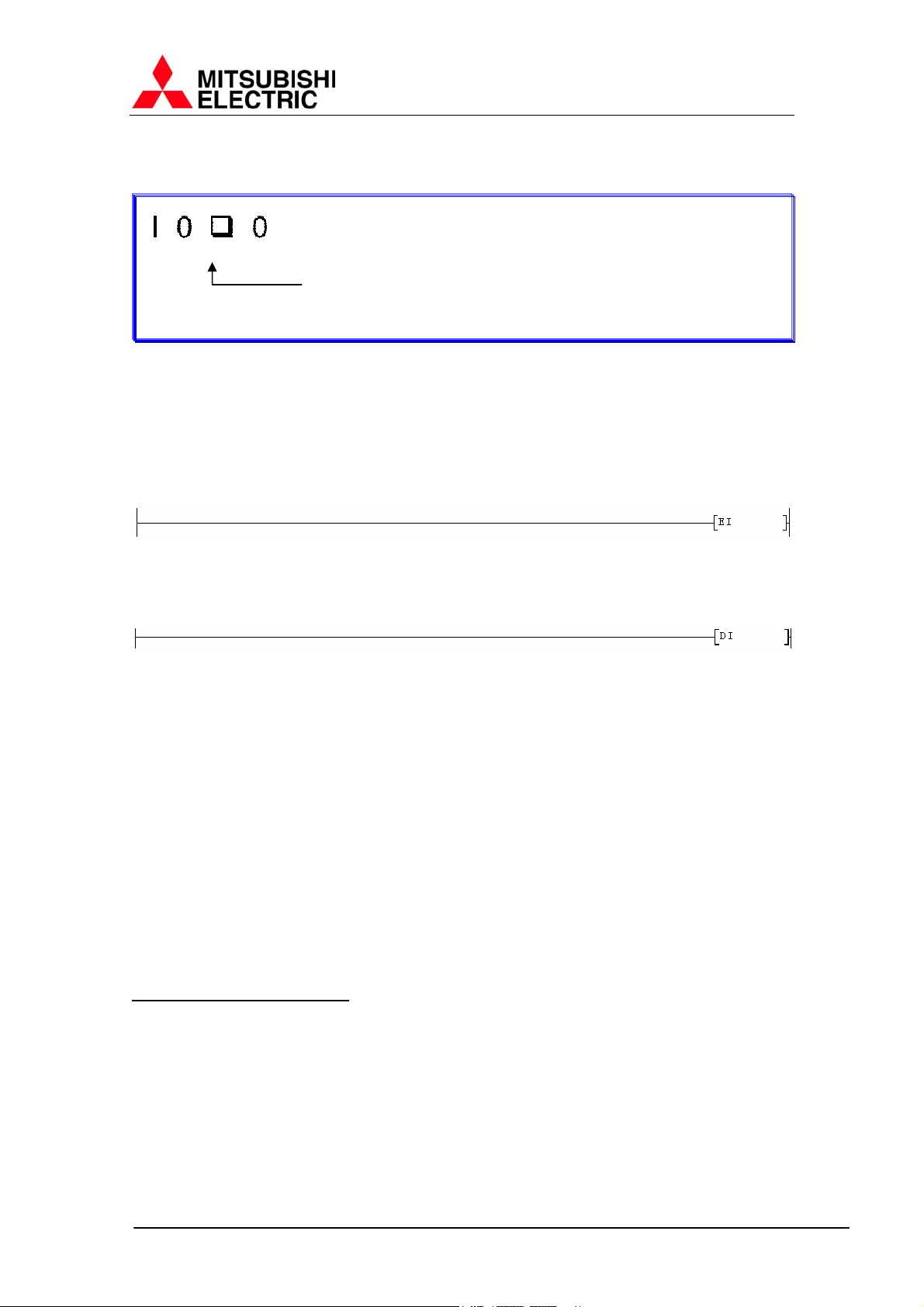
Interrupción de entradas
Interrupción de temporización
PLC
1N y FX2N permiten
1S tienen 4 (X0 a X3). Éstas tienen un hardware
2N tiene estas últimas características). Los punteros
0: flanco ascendente de la entrada
1: flanco descendente de la entrada
Número de la entrada (X0 es 0, X1 es 1, etc…)
Número de 10 a 99 para especificar el tiempo de la
interrupción en ms. Se repite periódicamente
Número de interrupción (del 6 al 8), 3 puntos
13
Page 14
Programación serie FX
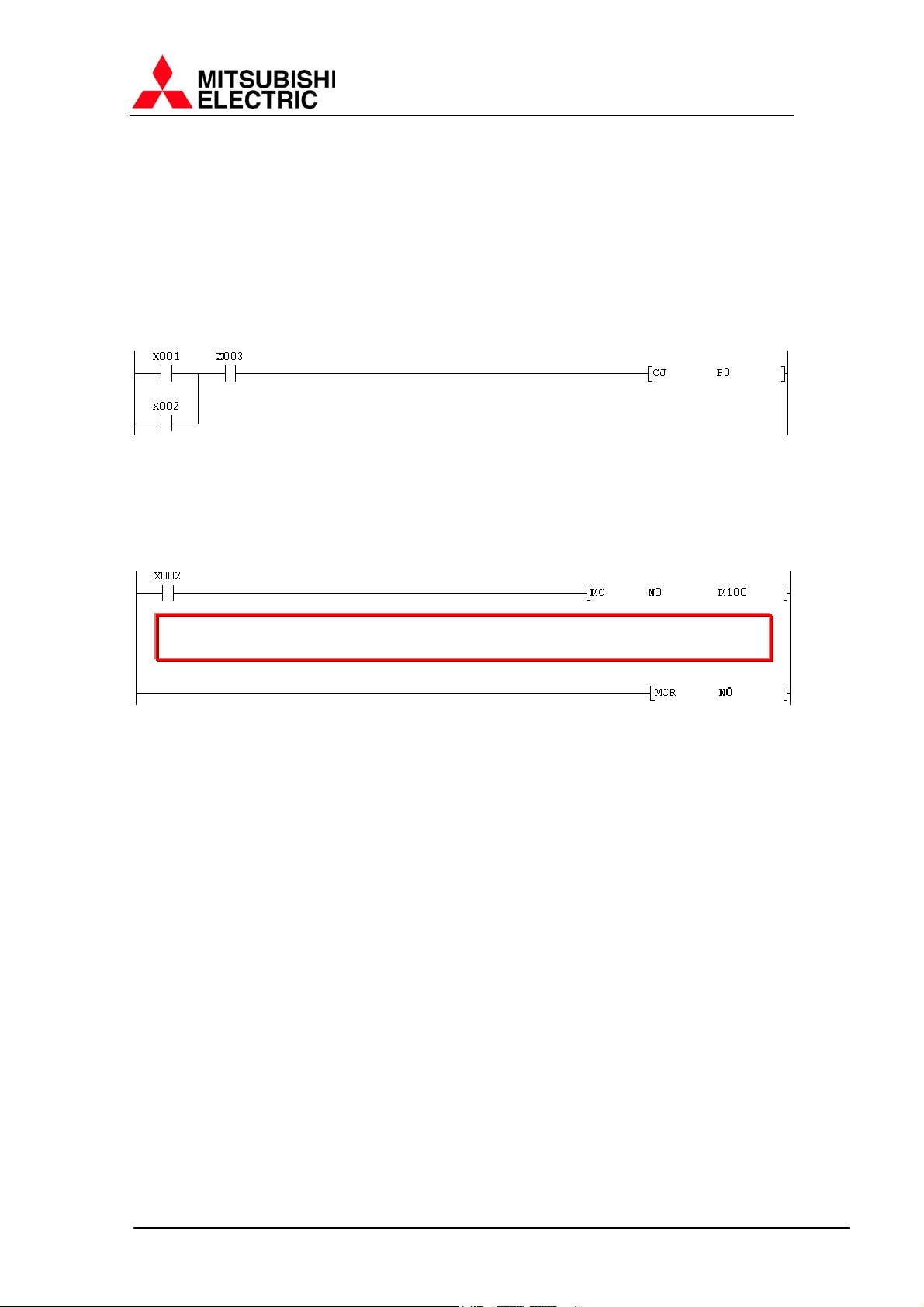
Interrupción de contadores
Número de 1 a 6 (6 puntos de interrupción)
NOTA: Con la ayuda de las instrucciones DHSCS y DHSCR deben ser definidas las interrupciones.
Las instrucciones EI y DI sirven para habilitar interrupciones (EI) y también para
deshabilitarlas (DI). Cuando se quiere hacer uso de este tipo de eventos es necesaria
la habilitación anterior de las interrupciones, sinó el programa no saltará a ejecutar la
subrutina correspondiente. Normalmente se utiliza la instrucción EI (se inserta siempre
sin condiciones anteriores).
Para deshabilitar las interrupciones de modo general se utiliza el comando DI:
Las interrupciones pueden ser habilitadas/deshabilitadas individualmente o por
grupos, utilizando para esto los relés auxiliares de sistema (rango de M8000 a M8255).
En este caso son las marcas desde M8050 a M8059.
El rango de marcas M8050 a la M8055 sirve para deshabilitar individualmente
las interrupciones asociadas a las entradas del PLC (M8050 asociada a X0, M8051 a
X1…y así sucesivamente) una vez habilitadas con el comando EI. El rango M8056 a
M8058 servirá para deshabilitar las tres interrupciones de temporización (6, 7 y 8),
asociando M8056 con la 6, la M8057 con la 7 y la M8058 con la 8. Finalmente, la
marca M8059 servirá para deshabilitar las seis interrupciones asociadas a contadores
de alta velocidad.
Evidentemente, las marcas M8056 a M8059 no están disponibles para las
series FX
1S y FX1N, ya que estas series no disponen de este tipo de interrupciones.
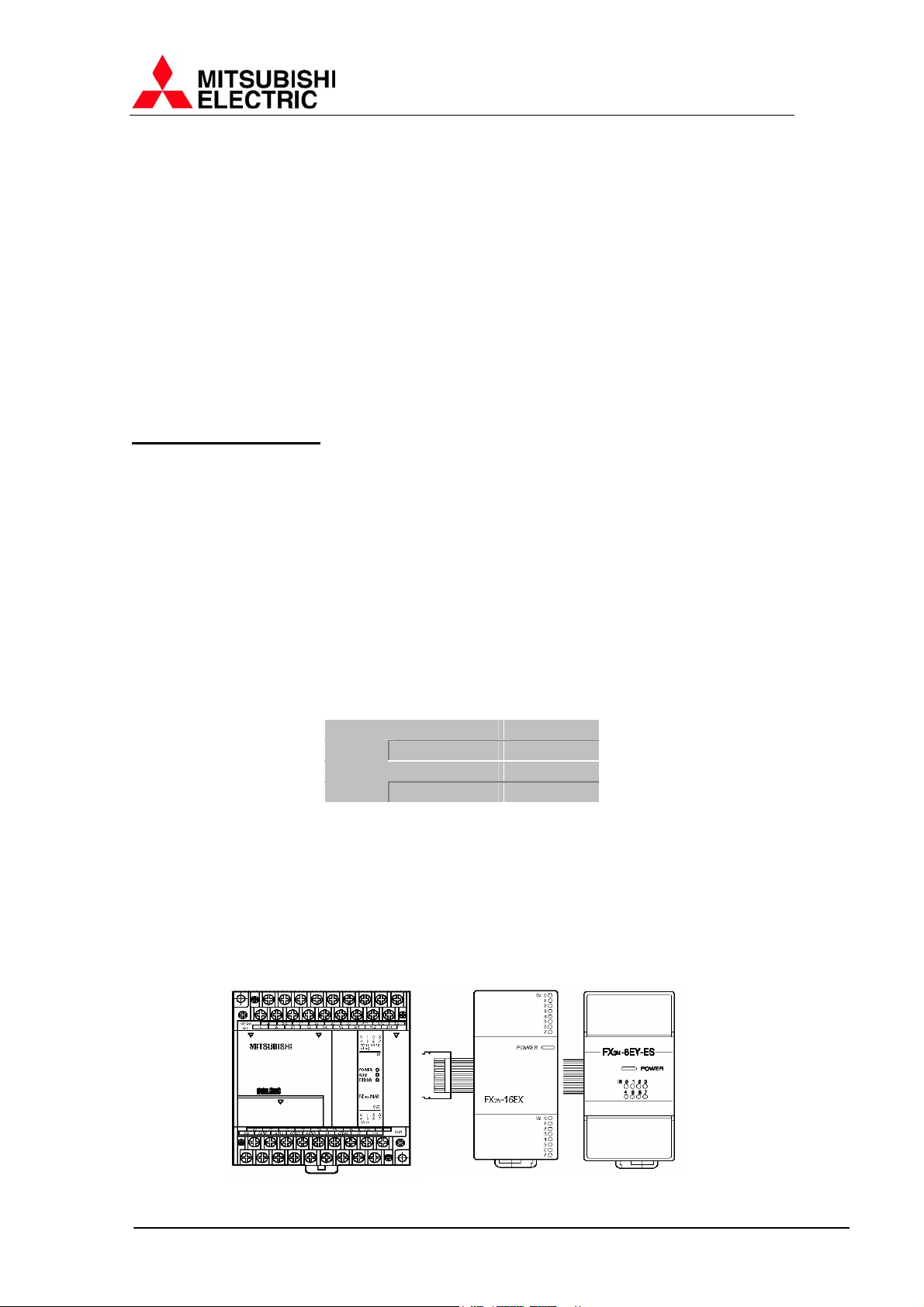
SALTOS CONDICIONALES
Para acabar con las opciones que la serie FX nos ofrece para cambiar el flujo
normal de la ejecución del programa secuencial, se verán a continuación las dos
instrucciones que van a permitir dar saltos dentro del programa. Estas son CJ y MC.
La primera servirá para saltar directamente a una posición de programa marcada con
un puntero P. El salto puede ser llevado a cabo evitando el procesado de algunas
instrucciones o puede ser también hacia atrás, volviendo a ejecutar alguna parte de
programa. En este último tipo de salto hay que tener cuidado con el ciclo de scan, ya
que se puede ver incrementado y hacer saltar el WDT (Watch dog time o perro
14
Page 15
Programación serie FX
guardián) cuando está activado. El WDT tiene configurado un tiempo máximo de ciclo
de scan permitido por el sistema, y cuando este tiempo es sobrepasado éste salta
automáticamente para bloquear el funcionamiento del PLC. Su utilidad es la de
prevenir la entrada del autómata en bucles infinitos y cuelgues provocados por un mal
uso del flujo de programa en el momento de la creación del código de programa.
La utilización de la instrucción es como se indica a continuación. Debe ir
siempre precedida de unas condiciones lógicas para determinar si se llevará a cabo el
salto o se continuará con el flujo normal del programa.
El siguiente y último método es la utilización del par de intrucciones MC y MCR.
Sirven para crear una sección de programa que será saltada si no se cumplen las
condiciones lógicas anteriores. No necesita de la ayuda de punteros P para llevar a
cabo el salto. Su funcionamiento se explicará a partir de un ejemplo:
SECCIÓN DE PROGRAMA A SALTAR
En el programa anterior se ejecutará todo el código que se encuentra entre la
instrucción MC y MCR. Si la condición anterior a MC, en este caso X2, no se cumple el
flujo de programa saltará todas las instrucciones que se encuentran entre estos dos
comandos.
Este par de comandos y todas las instrucciones de bifurcación pueden ser
vistas con detalle en el capítulo dedicado a comentar el funcionamiento de todas las
instrucciones de los autómatas de las series FX
1S, FX1N y FX2N.
15
Page 16

Programación serie FX
MAPA DE MEMORIA DE LOS DISPOSITIVOS:
Los dispositivos que se han comentado al inicio de este manual se explican a
continuación con más detalle. La cantidad disponible para cada serie de la família FX
se puede encontrar en un anexo al final de este manual.
16
Page 17
Programación serie FX
Mapa de memoria
DISPOSITIVOS DE BIT (X, Y, M, S):
La serie FX dispone de cuatro tipos de dispositivo que almacenan información
a nivel de bit, es decir, sólo tienen dos estados posibles ON y OFF (1 y 0
respectivamente). Se identifican utilizando diferentes letras para cada tipo de variable.
La letra X se utiliza para tratar las entradas del autómata, la Y para las salidas, la M
para los relés auxiliares (también se identifican como marcas), y finalmente la letra S
identifica los relés de estado, los cuales serán explicados más tarde.
Entradas y salidas
El autómata utiliza la notación octal para este tipo de dispositivo. El máximo
número que el PLC admitirá dependerá de la serie con la que se está trabajando. La
siguiente tabla muestra las direcciones máximas admitidas por cada serie. Como la
notación es octal, debe tenerse en cuenta que la primera dirección posible es la X000
y la Y000. Un ejemplo de numeración para las 10 primeras entradas de un PLC FX
sería como se muestra a continuación:
X000, X001, X002, X003, X004, X005, X006, X007, X010, X011
No existen las direcciones X008, X009 (en octal sólo existen los números del 0 al 7).
La siguiente tabla muestra las direcciones máximas configurables para cada serie.
NOTA: 177 octal es 127 decimal, 77 octal es 63 decimal y 377 octal es 255 en decimal
Ejemplo de direcciones para un autómata FX1N-14MR-DS, el cual tiene en su
unidad base 8 entradas y 6 salidas. Si se añaden a éste dos extensiones, una de 16
entradas (FX2N-16EX-ES/UL) y otra de 8 salidas (FX0N-8EYR-ES/UL), se deben
utilizar las siguientes direcciones:
X/Y
ENTRADAS SALIDAS
FX1S
FX1N
FX2N
X000 – X007
Y000 – Y005
X017 Y015
X177 Y077
X377 Y377
X010 – X027
Y010 – Y017
17
Page 18
Programación serie FX
En el caso de las entradas, se tiene 8 en la unidad base y después se utiliza
una extensión de 16 entradas más, la primera dirección del módulo de extensión es la
X010 como se ha explicado, pero en el caso de las salidas, la primera dirección de la
extensión es también Y010 en lugar de Y006 (cuando la última dirección de la unidad
base es Y005). Esto es así, porque siempre un módulo de extensión debe comenzar
por un número múltiplo de 8 en octal (Y000, Y010, Y020, Y030, etc…). Lo mismo para
las entradas X.
Relés auxiliares
Este tipo de dispositivo permite el almacenamiento de información digital. Sólo
tiene dos estados y pueden ser utilizados para guardar bits de proceso de forma
auxiliar o utilizar contactores y bobinas de modo interno en el programa del autómata.
Su uso es idéntico al de las entradas y salidas del PLC, pero en este caso su notación,
como el resto de dispositivos del autómata, es decimal (M0000, M0001, M0002,
M0003, M0004, M0005, M0006, M0007, M0008, M0009, M0010, M0011…)
M
Hay un rango de marcas M con valor retentivo y otro rango de uso general que
pierden su valor (se desactivan pasando a estado OFF) cada vez que el autómata
pasa de modo RUN a STOP o se desconecta la alimentación del autómata. Ver anexo
final para ver los rangos y cantidad de dispositivos M para cada serie FX
FX
2N.
MARCAS DE SISTEMA: El rango de relés auxiliares que comprende desde la
dirección M8000 a la M8255 (256 relés), corresponde a las marcas utilizadas por el
sistema, es decir, que tienen una función específica asignada de fábrica. Por lo tanto
no deben ser utilizadas para uso general. Un ejemplo puede verse en las primeras
marcas de sistema M8000 y M8002, que pertenecen al estado siempre activo y al
estado activo durante el primer ciclo de scan respectivamente (sirviendo esta última
para configuraciones iniciales).
Otros ejemplos pueden ser: M8034 que deshabilita todas las salidas del
autómata, M8012 genera un oscilador constante de 100 ms, M8039 hace que el PLC
trabaje bajo un ciclo de scan constante, M8122 activa el envío de la trama configurada
con la intrucción RS a través del puerto de comunicaciones serie, etc…
M8000
M8002
RUN
Scan 2 Scan 3 Scan 4 Scan 1
1S, FX1N y
18
Page 19
Programación serie FX
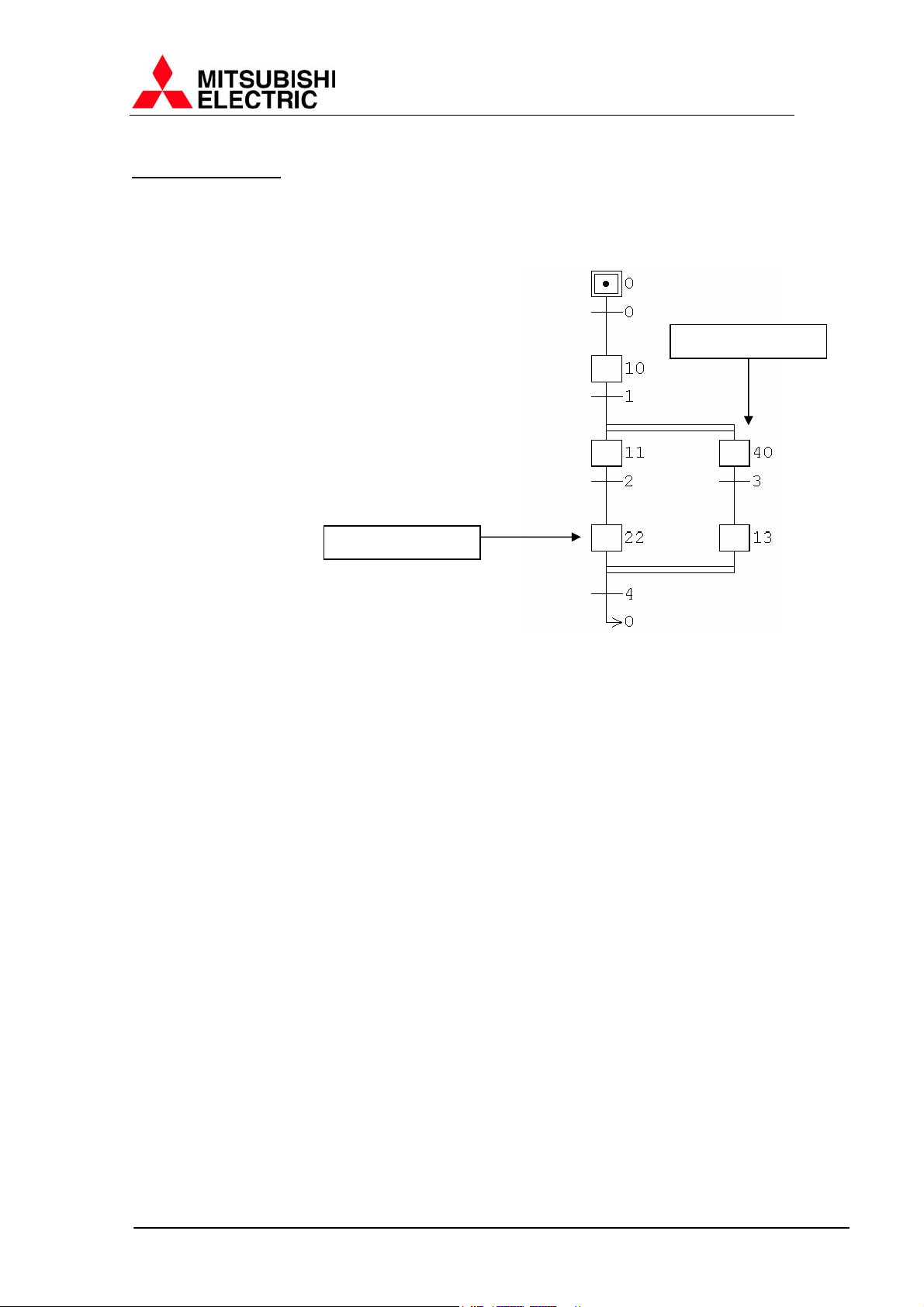
Relés de estado
Este tipo de dispositivo permite el almacenamiento de información digital. Sirve
para guardar la información correspondiente de los bloques que se encuentran activos
durante la ejecución de un programa en lenguaje SFC. Como se ha comentado al
principio de este manual, este tipo de
programación permite separar en bloques de
ejecución el programa para ser ejecutado según
unas condiciones que se van ejecutando de
forma secuencial. Pues bien, estos relés de
estado S se encargan de definier que bloque se
encuentra activo en cada momento. Cada bloque
está asociado a un relé S y la CPU del autómata
se encarga de activar y desactivar los relés
apropiados cada vez que se pasa de un bloque a
otro durante la ejecución del programa.
Los relés de estado del S000 al S009 se utilizan como relés de inicio de SFC,
esto quiere decir que sólo pueden ser utilizados para identificar a un bloque de
comienzo como en el ejemplo anterior el relé S000. Como se pueden definir varios
programas SFC de ejecución sumultánea, se deben utilizar siempre los primeros relés
S para este fin.
Cuando la programación con la que se trabaja es ladder (lenguaje de
contactos), se pueden utilizar estos relés a modo de relés auxiliares (M). Por lo tanto
se verá incrementada la cantidad de memoria disponible para almacenar información
digital. Ver anexo final para más información sobre el rango retentivo y de uso general
disponible para cada serie de autómatas FX
S
Bloque: S040
Bloque: S022
1S, FX1N y FX2N.
19
Page 20
Programación serie FX
DISPOSITIVOS DE 16/32 BITS (D, T, C, V, Z):
Esta serie de autómatas dispone de varios tipos de dispositivos para guardar
información de 16 bits de capacidad o incluso de 32 bits. Las variables utilizadas de
uso general son las de tipo D, que almacenan datos genéricos para cualquier uso
interno del programa. Seguidamente encontramos los dispositivos dedicados a
temporizadores y contadores (normales y de alta velocidad), T y C. Finalmente los
registros V y Z que sirven para trabajar con direccionamiento indirecto, ya que son
capaces de modificar la dirección de un registro D, como se verá más tarde.
Registros
binario, por lo que se puede trabajar directamente desde programa en formato decimal
y permitiendo una capacidad máxima de datos que va desde –32768 a +32767.
Cuando se trata información de 32 bits, hay que juntar dos registros
consecutivos para poder trabajar en este modo.
Con 32 bits se tiene la posibilidad de almacenar información que puede oscilar
desde el valor –2.147.483.648 al +2.147.483.647. Si se trabaja con este tipo de datos
hay que tener cuidado con los registros que forman la información de más peso del
dato de 32 bits. Por ejemplo si se trata D000 como registro de 32 bits, se están
utilizando realmente el D000 y el D001, por lo que si se escribe información en D001
se perderá la mitad de información del dato de 32 bits (formado por D000 y D001).
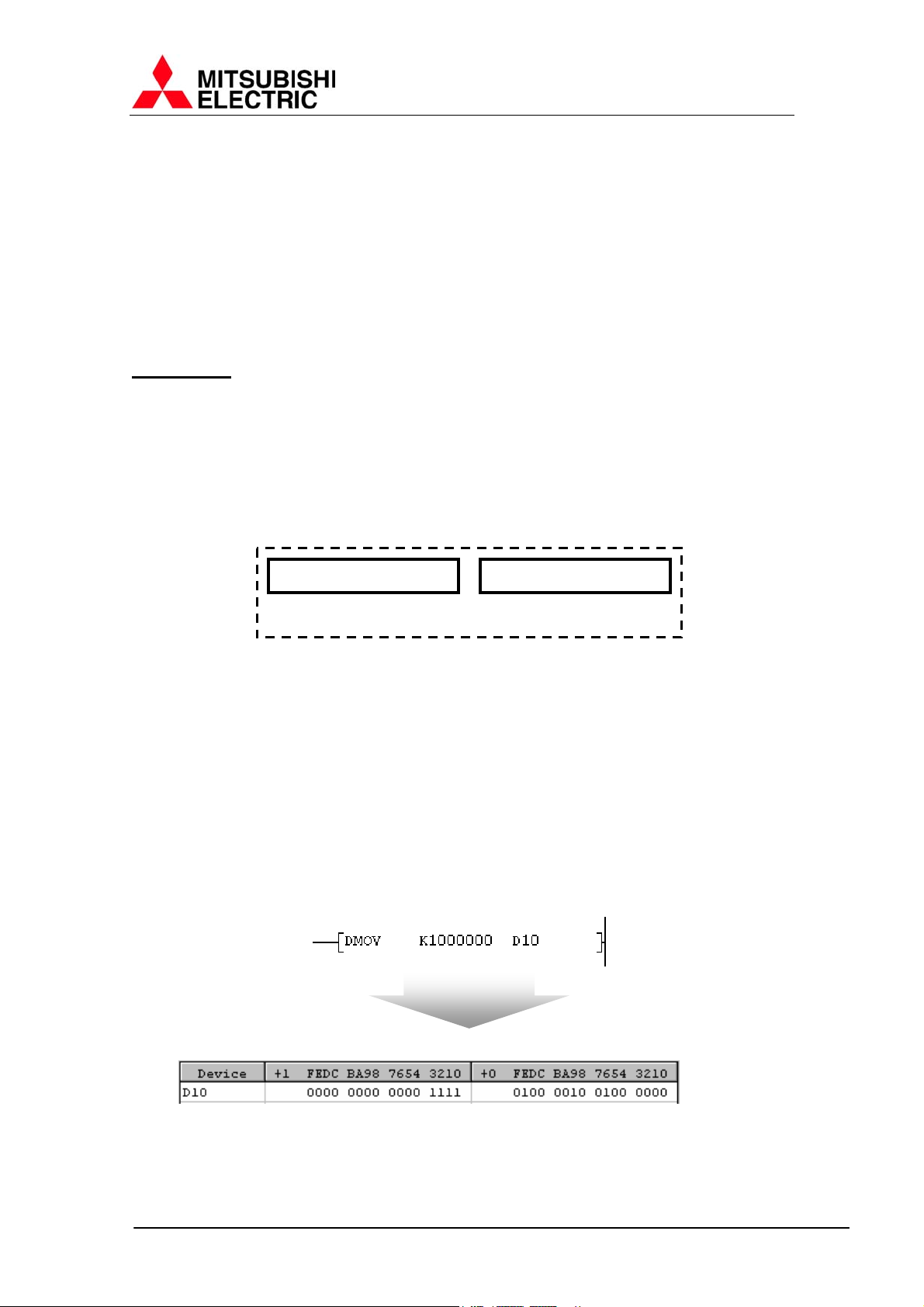
Para tratar con información de 32 bits se debe escribir delante de la instrucción
correspondiente la letra D. Así, si se quiere almacenar el valor 1000000 en el registro
D10 se debe teclear la siguiente línea de programa (La letra K delante del valor se
comentará en la siguiente sección):
NOTA: Cada uno de los registros D10 y D11, tiene un valor decimal independiente en formato 16 bits.
D
Estos registros son de 16 bits y trabajan guardando información en formato
Registro 16 bits Registro 16 bits
Registro resultante 32 bits
D0010 D0011
=1000000
16960 15
20
Page 21

Programación serie FX
Como en el caso de los relés auxiliares (M), se tienen 256 registros dedicados
de sistema: Rango del D8000 al D8255. Estas variables de sistema tienen una función
asignada y no deben utilizarse como registros de datos generales. Por ejemplo el Dato
D8020 se encarga de configurar el filtro de las entradas X del sistema (tiempo de
retardo en la lectura). Los registros D8014 a D8019 presentan los segundos, minutos,
hora, día, mes, año y día de la semana del calendario del reloj de tiempo real RTC.
D8120 es el registro que sirve para configurar el puerto de comunicaciones serie, etc…
También hay dos rangos diferentes en los datos D del autómata. Los de uso
general y los retentivos. Como se ha visto con los relés M, los de uso general borrarán
su valor en el paso de modo RUN a STOP o cuando se produzca un fallo en el
suministro eléctrico. Sin embargo los retentivos (o latched) mantienen el valor en
memoria en los casos anteriores. El rango es fijo o configurable según la serie de
PLC’s tratada (Ver anexo correspondiente al final del manual).
Constantes decimales y hexadecimales
Cuando se quiere identificar en una instrucción de programa una constante, un
valor que siempre que sea procesado por la CPU sea igual, se debe insertar delante
del número la letra K si se trata de un número binario o decimal (o la letra H si se trata
de un número en formato hexadecimal).
Toda instrucción en los autómatas Mitsubishi tiene en todos sus parámetros
una letra delante del número. Aunque el argumento sea una constante, así por
ejemplo en la siguiente línea de programa, se copia el valor decimal 19 al registro de
datos D4500.
K/H
Vemos como primer parámetro de la instrucción MOV la constante K19, por lo
tanto siempre que se procese este comando el registro D4500 pasará a guardar un
valor 19 decimal.
Si se quiere trabajar directamente sobre un registro tratándolo como un dato
que guarda una información binaria, es decir, que contiene una información donde
interesa tratar el estado de los bits y no tratar el dato como valor decimal, se puede
utilizar una constante de tipo hexadecimal H (ya que tiene una relación más directa
con los bits activados).
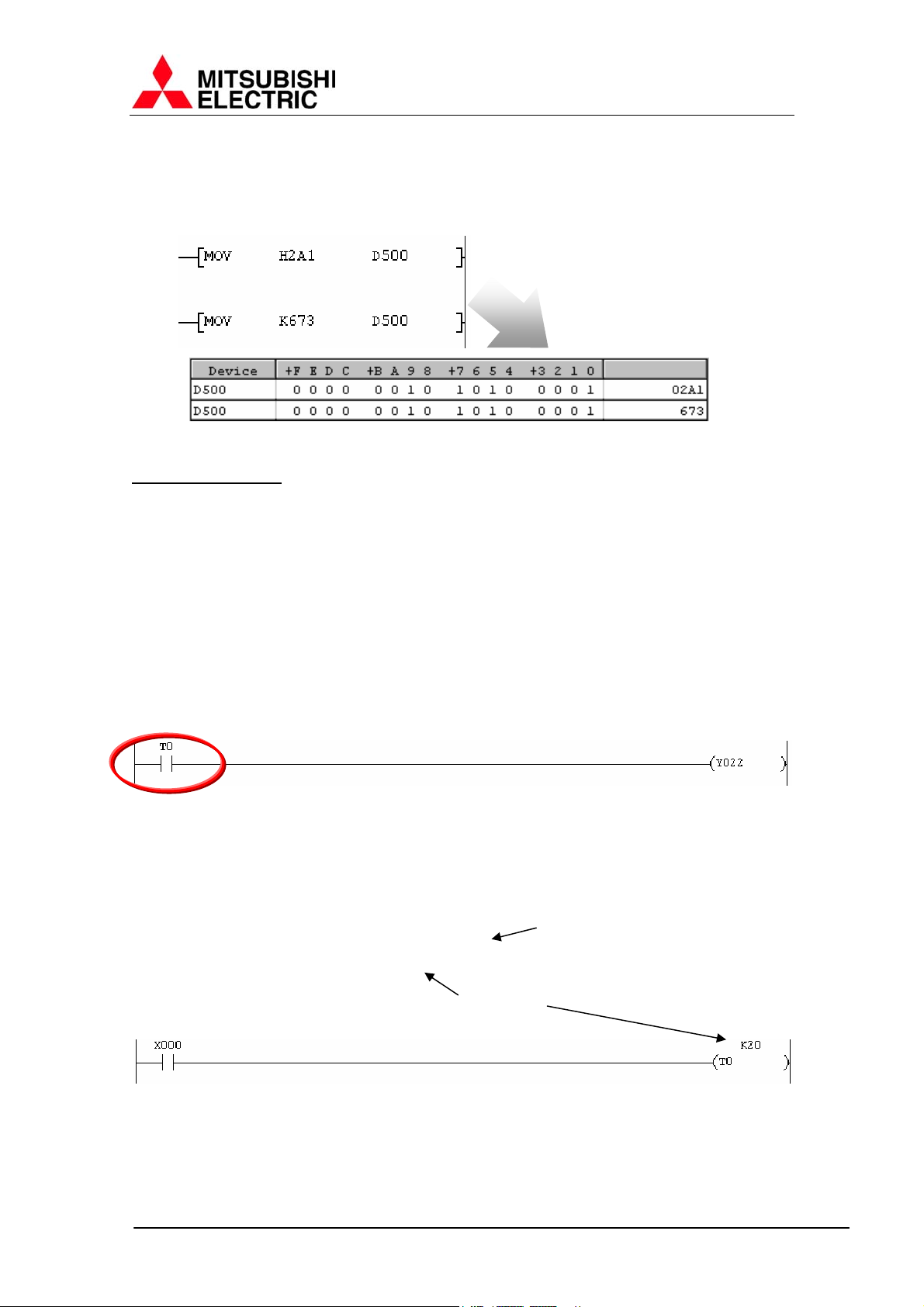
D4500 contine en sus 16 bits la siguiente información después de ejecutar la línea de
código anterior:
D4500 = 0000 0010 1010 0001 = 673 d
H 2H AH 1H
0
21
Page 22
Programación serie FX
El valor decimal 673 es igual al valor hexadecimal 2A1, por lo tanto las dos
siguientes instrucciones tienen el mismo resultado sobre el registro D500.
Temporizadores
Estos dispositivos son registros de 16 bits, como los registros de datos D, pero
tienen una tarea específica asignada. Sirven para contabilizar tiempos, son contadores
que almacenan valores temporales. Por ejemplo si se quiere crear una temporización
de 500 ms, debe emplearse una variable de tipo T para controlar ese retardo.
Estos dispositivos, cuando son definidos en el programa, necesitan de una
consigna para establecer el límite de temporización que deben contar. Cuando llegan
al final de su cuenta activan una bobina que tiene el mismo nombre (definida con una
letra T). Por lo tanto cuando se utiliza el contador T0, se debe comprobar el estado del
contacto T0 para saber si se ha finalizado la temporización, en este caso se activa la
salida Y022 cuando acaba el retardo:
Cada temporizador tiene asignada una resolución. Hay de 100 ms, de 10 ms y
de 1 ms de resolución. Por lo tanto cuando se utiliza el T0, que es de 100 ms de
resolución, para temporizar 2 segundos, se debe utilizar una consigna con un valor de
20 para conseguir el retardo deseado:
T
Resolución del temporizador
2 segundos = 20 x 100 ms
Consigna
Para definir un temporizador se utiliza el símbolo de salida digital (bobina) y se
inserta el dispositivo junto a la consigna. El temporizador funcionará (contará tiempo)
mientras esté activado el contacto (o lógica anterior) a la bobina de temporización T0 y
no se llegue al valor establecido en la consigna. Esta consigna puede ser una
22
Page 23
Programación serie FX
constante decimal (K), una constante hexadecimal (H) o un registro variable (por
ejemplo D).
Al igual que otros dispositivos, se tienen unos rangos no retentivos y otros
retentivos. Los primeros pierden su valor de temporización cuando se desactiva el
contacto que lo está activando, por lo tanto también pierden su valor cuando se pasa
de modo RUN a STOP o se desconecta de tensión el PLC. Los retentivos guardan su
valor en los casos anteriores, continuando su cuenta desde el último valor almacenado
antes de la deshabilitación del temporizador (sólo pueden ser reseteados poniendo a
cero, con una instrucción MOV, el valor del dispositivo T o con una instrucción de reset
RST).
La cantidad y direcciones de cada T, así como si son retentivos, se puede consultar en
el anexo correspondiente.
Contadores
Estos dispositivos tienen como finalidad almacenar cuentas de eventos, ya sea
control de cantidades en cualquier suceso, como guardar el valor actual de los
contadores de alta velocidad que incorporan los autómatas de estas series. Hay
contadores de 16 bits y de 32 bits. Esto quiere decir que hay registros físicos de 16
bits y también de 32 bits, por lo que no se utilizan dos contadores C consecutivos para
crear un dato de 32 bits, esos registros son especiales y son de esa capacidad (a
diferencia de lo tratado para los dispositivos de datos D).
Los contadores de 16 bits son de cuenta ascendente y no se puede modificar
su comportamiento. Mientras que los contadores de 32 bits son bidireccionales,
pueden ser configurados por software para contar en un sentido u otro. En el caso de
los contadores de alta velocidad, que son de 32 bits, el sentido de cuenta depende de
No retentivos Retentivos
C
Contador 16 bits
Contador 32 bits
23
Page 24
Programación serie FX
su configuración (hay contadores que tienen asignado el sentido de cuenta por
hardware y otros por software). Hay contadores que son de uso general y otros que
son de tipo retentivo, que guardan su valor al quitar tensión al autómata o pasar la
CPU de estado RUN a STOP. Los contadores de alta velocidad son todos retentivos.
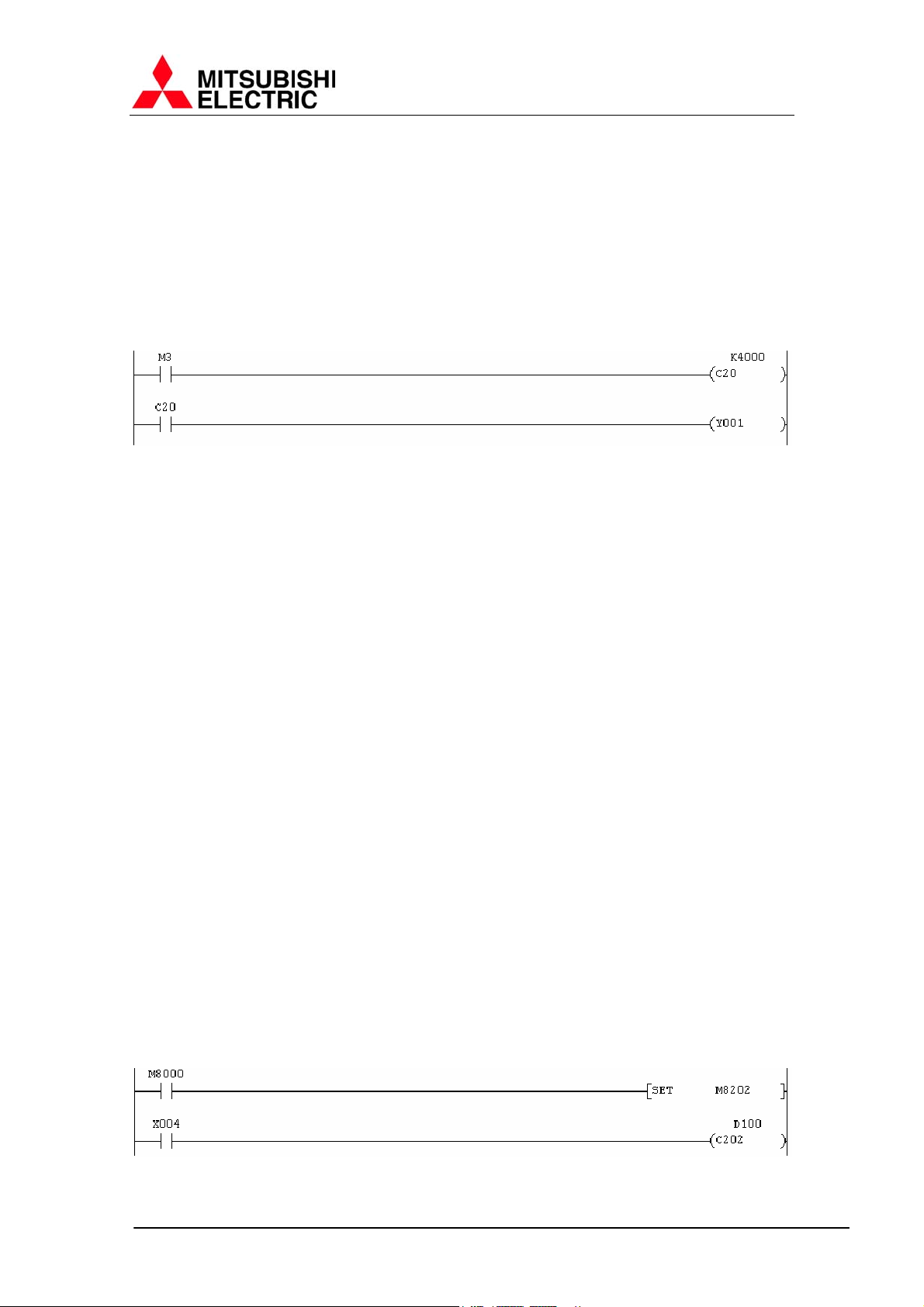
Los contadores se utilizan del mismo modo que los temporizadores. Se definen
mediante una bobina con un número de consigna (ya sea constante K, H, o dispositivo
variable D). Esta consigna define a que cuenta se activará el contacto equivalente del
contador (del mismo nombre).
Cada vez que se active el relé auxiliar M3 (se produzca un flanco ascendente),
se llevará a cabo un incremento en el valor almacenado en el contador C20. No
volverá a realizar un incremento hasta que no se desactive M3 y se active otra vez (se
produzca otro flanco). La salida Y1 se activará en el ejemplo anterior cuando se llegue
a un valor de 4000 en la cuenta de C20. El contacto C20 permanecerá activado
mientras el valor del registro equivales C20 se 4000 o superior. Cuando se resetea el
contador utilizando una instrucción MOV o RST (como en el caso de los
temporizadores) la cuenta empezará otra vez desde cero.
Los temporizadores que utilizan cuenta ascendente y descendente (del C200 a
C234) puede ser definido su sentido de cuenta utilizando los relés auxiliares de
sistema (M8200 a M8234). El formato que se sigue es el siguiente:
El relé auxiliar de sistema
Por ejemplo el contador C214, que es bidireccional, puede ser configurado utilizando
el relé de sistema M8214 siguiendo el siguiente criterio:
Por lo tanto, en el siguiente ejemplo, el contador C202 cuenta los pulsos de forma
descendente cada vez que se recibe un flanco ascendente en la entrada X004:
M8*** = ON será cuenta descendente
M8*** = OFF será cuenta ascendente
M8*** corresponde al contador C***
24
Page 25
Programación serie FX
El valor de un temporizador y de un contador puede ser evaluado en cualquier
momento con la utilización del registro T o C correspondiente. Pueden ser utilizadas
instrucciones de movimiento de datos tipo MOV o aritméticas como ADD, SUB, etc…
mientras se está contanto o temporizando algún valor. La cuenta o temporización no
se verá afectada por estas instrucciones.
Contadores de alta velocidad
Este tipo de contadores tienen un tratamiento muy similar, en cuanto a
programación, a los contadores normales pero hay que tener en consideración varios
aspectos específicos de este tipo de contador.
Cada contador de alta velocidad está asociado directamente a unas entradas
del PLC concretas, y éstas no pueden ser cambiadas.
Los contadores de alta velocidad (también llamados HSC por los manuales de
programación) son desde el C235 al C255.
El contacto o lógica anterior que activa el contador HSC no debe ser la entrada
asociada al contador, sinó las condiciones que se deben dar para activar ese contador
y, por lo tanto, que éste cuente los pulsos recibidos a través de la entrada que ya
tiene asignada por hardware.
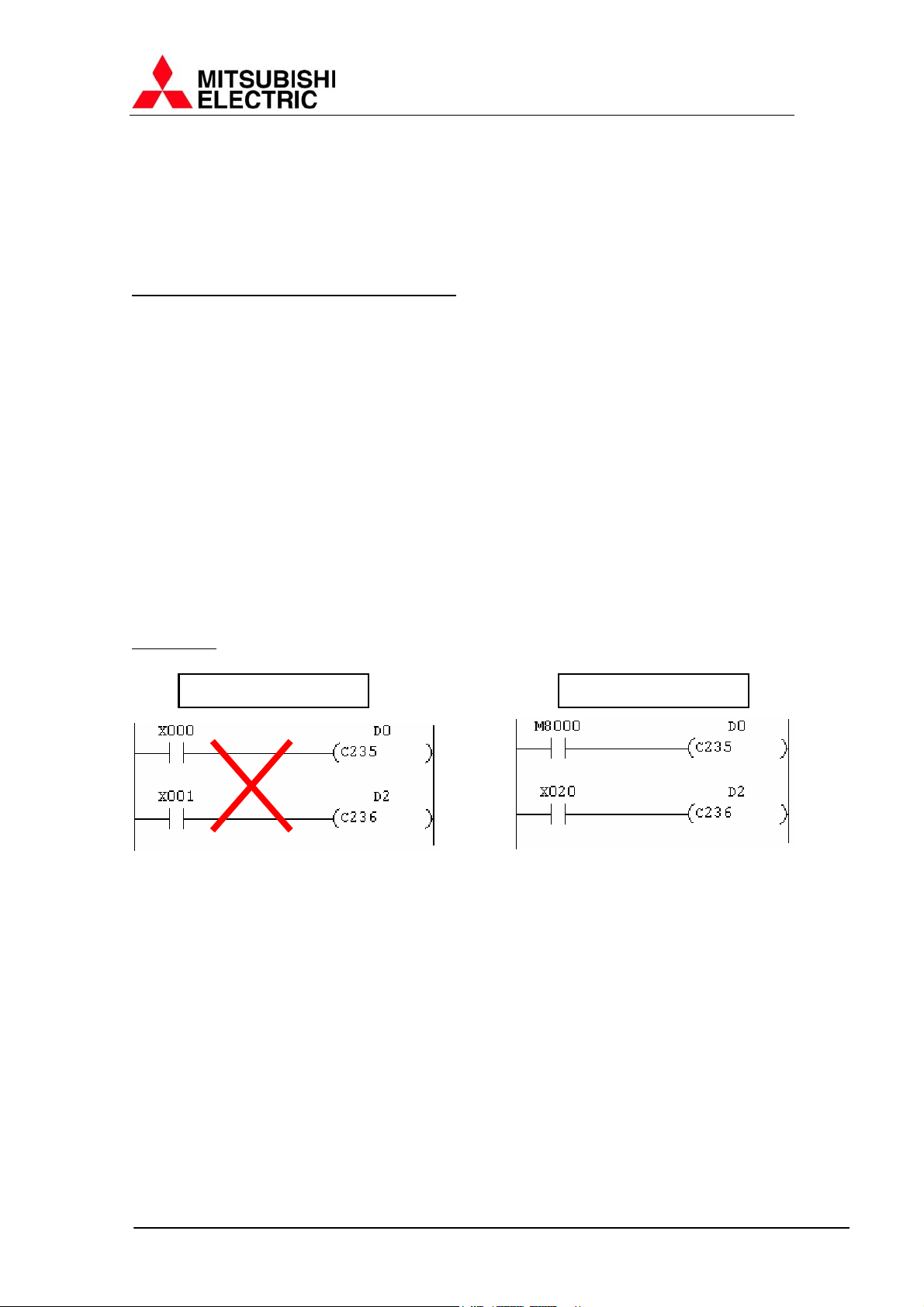
EJEMPLO:
En el ejemplo de la izquierda se utilizan como activación las entradas
asociadas a cada contador, por lo que no es correcto. Mientras que en la derecha
podemos ver en el caso del contador C235 que se utiliza para su activación el relé
auxiliar de sistema M8000 (siempre activo). El contador C236 contará pulsos por su
entrada X001 cuando esté activada la entrada X20.
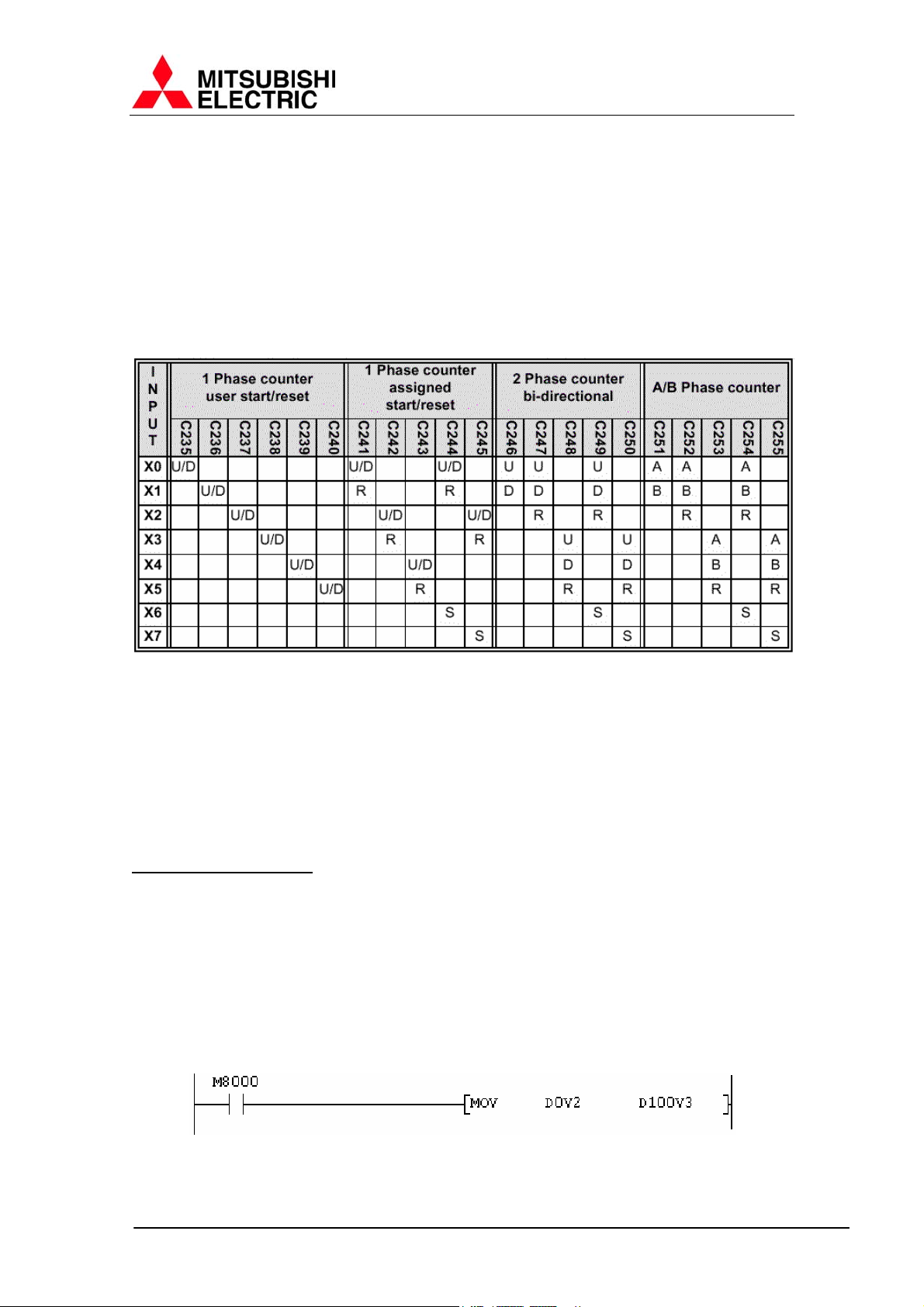
La asociación de entradas con contadores se muestra en la tabla que aparece
en la página siguiente, en la cual se muestran en la parte superior los contadores (del
C235 al C255) y en la parte izquierda se pueden ver las entradas a las que
corresponden (de X000 a X007). Con las letras U y D se designa el sentido
ascendente (U) o descendente (D) de cada contador. Con la utilización de S y R se
designan las entradas de Start y Reset respectivamente.
Incorrecto Correcto
(HSC) C
25
Page 26
Programación serie FX
En la tabla podemos ver cuatro divisiones que corresponden a los cuatro tipos
de contadores que podemos configurar en el autómata. Son los siguientes:
- Contadores de una fase (Sentido seleccionado por software)
- Contadores de una fase con Start/Reset por hardware (Sentido
seleccionado por software).
- Contadores de dos fases (Cada sentido seleccionado por entradas
diferentes).
- Contadores de dos fases en cuadratura (A/B).
Se puede apreciar en la tabla anterior que, por ejemplo, el contador C242 está
asociado a la entrada X002 y que utiliza la entrada X003 para hacer un reset del
contador a través de hardware. Sin embargo si es utilizado el C246, se deberá
conectar a X000 la entrada de pulsos para contar en modo ascendente, mientras que
en X001 se conectará la entrada para contar en modo descendente. Como se puede
apreciar el sentido de la cuenta viene determinado por hardware. En el contador visto
antes, el C242, el sentido se determina por software (M8242).
Registros índice
Estos dos tipos de dispositivo pueden ser utilizados para señalar a una
dirección de memoria (por ejemplo a un registro D) utilizando una dirección variable,
es decir, dependiendo del valor que guarda V o Z se puede apuntar a un dispositivo
diferente cada vez que el ciclo de scan pasa por esa posición del programa. En el
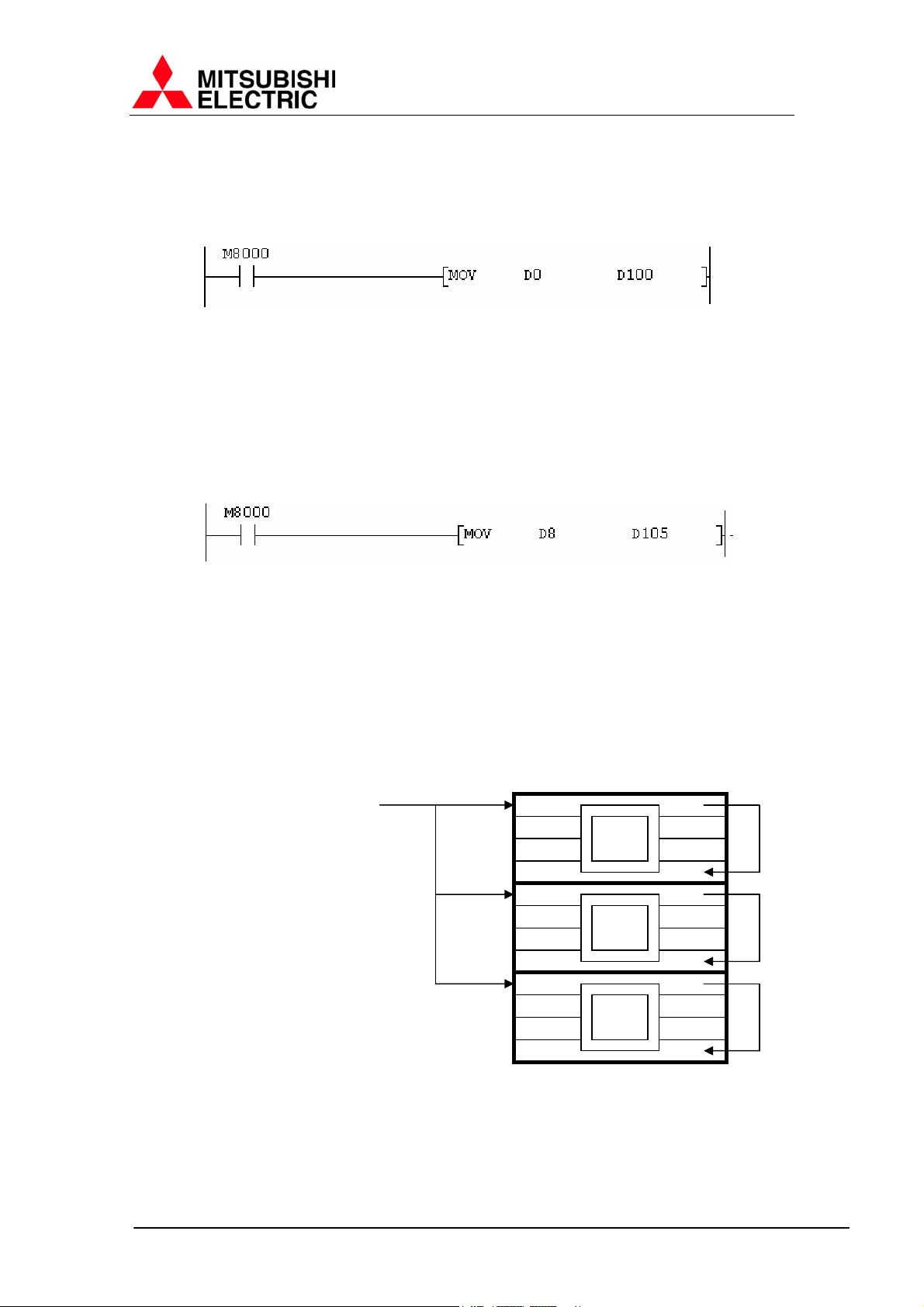
siguiente ejemplo se puede apreciar el funcionamiento de estos dispositivos, en que se
utiliza una instrucción MOV para hacer una copia de datos entre registros D del
autómata:
V / Z
26
Page 27
Programación serie FX
Se puede ver que en la instrucción MOV se han añadido en sus parámetros D0
y D100 dos regístros índice V2 y V3. Si el valor de los regístros índice es cero. La
intrucción anterior sería equivalente a la siguiente:
En este caso, se pueden utilizar los regístros índice (V2 y V3) para acceder a
diferentes partes de la memoria de datos mientras que se ejecuta un programa. Si los
índices tienen los siguientes valores:
V2=8 y V3=5
el resultado de la instrucción anterior [MOV D0V2 D100V3] sería como sigue:
Este tipo de dispositivos sirve para poder hacer instrucciones flexibles en las
que dependiendo del valor del registro índice se esté trabajando con áreas de
memoria diferentes. Por ejemplo pueden ser definidas una serie de posiciones
consecutivas de memoria para guardar los datos correspondientes al proceso en
forma de receta. Así con sólo añadir un dispositivo índice pegado a cada uno de los
datos tratados por las intrucciones, se conseguirá que el programa trate las áreas de
memoria correspondientes a cada una de las recetas.
Según el valor del regístro índice Z2, se está realmente haciendo una copia de
datos con la instrucción MOV de D0 a D3, o de D4 a D7, o de D8 a D11. Pudiéndose
utilizar cada índice guardado en Z2 para tratar cada uno de los bloques (A, B y C)
como si fuera una receta.
[ MOV D0Z2 D3Z2 ]
Z2=0
Z2=4
Z2=8
D0
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
A
B
C
27
Page 28
Programación serie FX
Grupos de bits
Durante la programación de un autómata puede surgir la necesidad de trabajar
con los bits de la información almacenada en registros de 16 bits o 32 bits. Por
ejemplo si se quiere saber que valor tiene el bit 4 del dato D20, o simplemente se ha
de guardar el contenido de una entrada en registros D, se ha de utilizar este tipo de
notación para trabajar con relés auxiliares como si fueran registros de información.
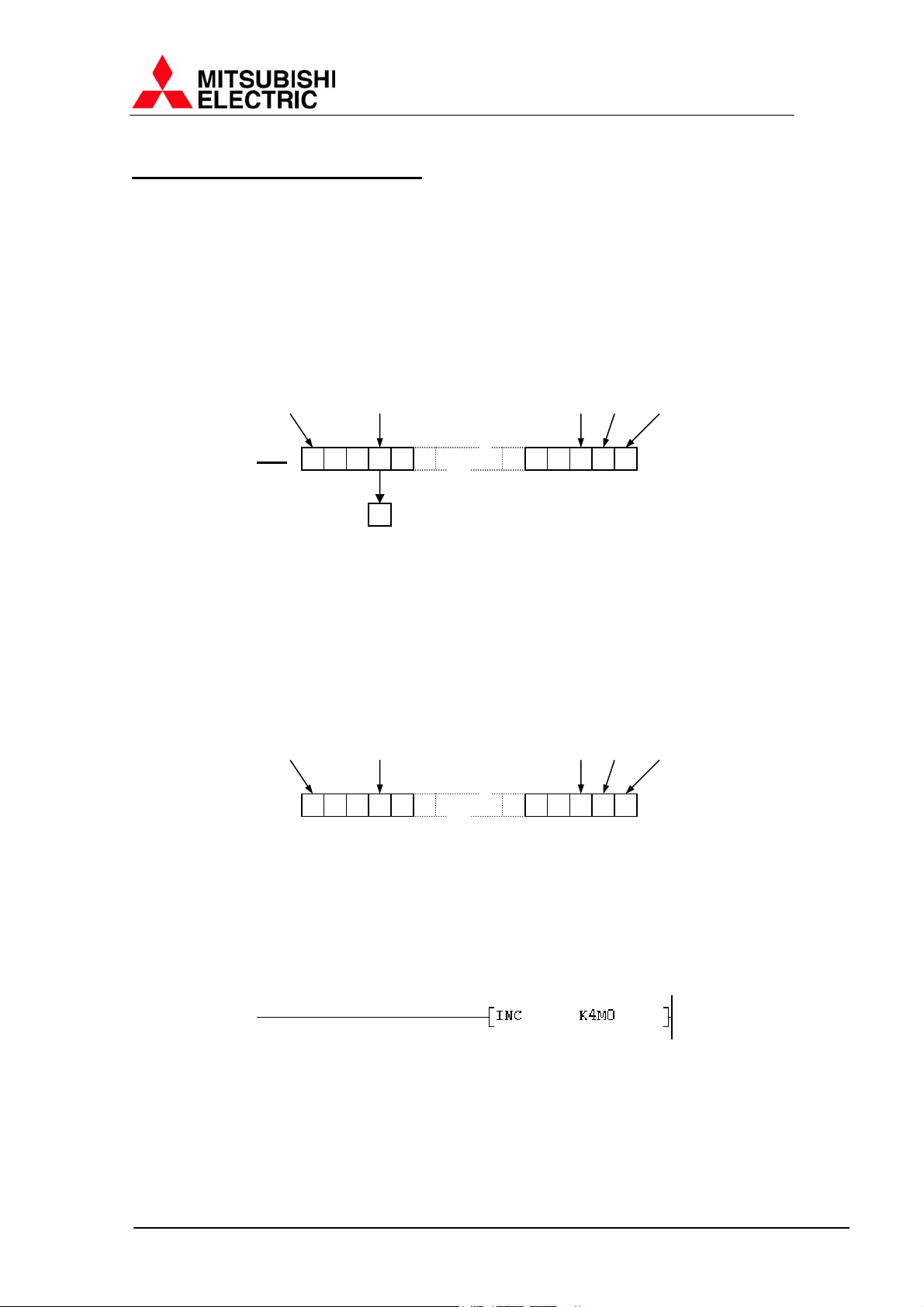
La idea sería la siguiente:
Si se tiene una copia de cada uno de los bits de un registro en relés auxiliares,
pueden ser tratados individualmente para procesar la información que nos dan o para
activar/desactivar directamente unos bits concretos de un registro. Puede ser utilizado
un grupo de bits para almacenar información numérica, por ejemplo si se utilizan los
relés del M0 al M15 para obtener en conjunto un dato numérico de 16 bits:
Así se pueden tener instrucciones como las siguientes, las cuales nos van a
permitir agrupar bits para poder ser utilizados en las instrucciones como si de registros
se tratara. El siguiente comando (INC) realiza un incremento de una unidad en el valor
contenido en el parámetro especificado a su derecha. En este caso incrementará el
valor del contenido numérico guardado en los relés de M0 a M15, los cuales forman un
registro de 16 bits.
KnM / KnX / KnY
b0 b1 b2 b15 b12
D0:
M40
M0 M1 M2 M15 M12
Suponiendo que el valor numérico guardado en el grupo de relés K4M0 (en las
líneas siguientes se explicará este tipo de formato) es un valor decimal 399, al llevar a
cabo la instrucción anterior se tendría en el grupo de bits el valor 400.
28
Page 29
Programación serie FX
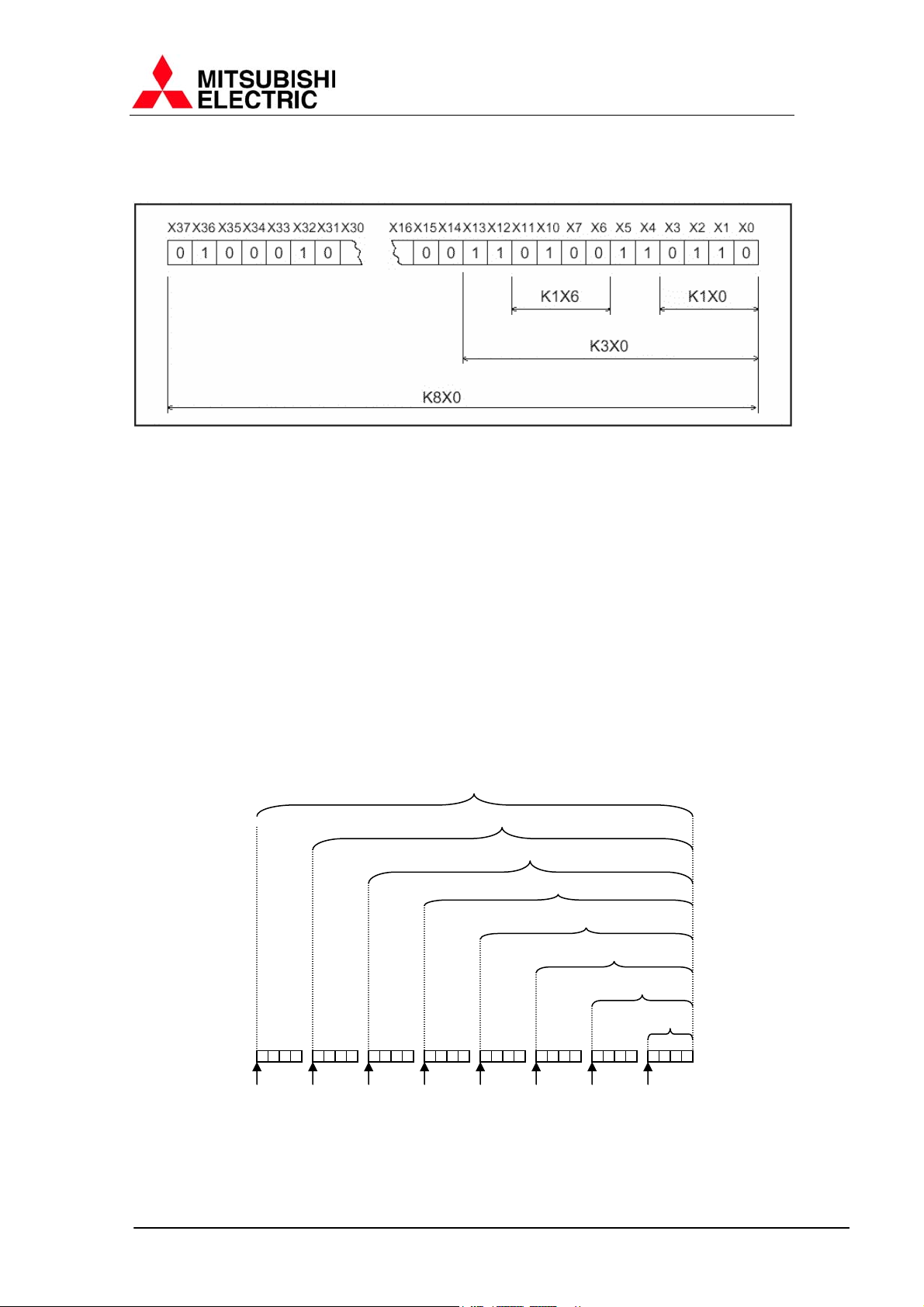
El formato de los grupos de bits se detalla a continuación:
En la tabla que se encuentra encima de estas líneas podemos ver que delante
de cada nomenclatura de bits de entradas (X) se encuentra una letra K con un
número. Esta cifra indica cuantos grupos de 4 relés deben ser organizados en
conjunto para formar un bloque (o registro de datos) desde la dirección base
especificada detrás de la cifra.
Por ejemplo K1X0 es el grupo de cuatro bits (por eso va el K1 delante) desde la
dirección base X0 (X0, X1, X2 y X3). El segundo ejemplo podría ser K8X0 el cual
desde X0 forma un registro de 32 bits (8 grupos de 4 bits = 32 bits en total).
En el siguiente esquema se puede apreciar que constante K hay que insertar
delante del dispositivo de relé, que actuará como dirección base, para saber cuantos
grupos de bits deben ser tratados como un conjunto.
29
Page 30

Programación serie FX
Módulos especiales de función
Módulos especiales de función (SFM):
En la serie FX, concretamente en los modelos FX1N y FX2N (no en los FX1S
los cuales no admiten la posibilidad de ser expandidos), se tiene la posibilidad de
insertar módulos especiales de función (llamados SFM). Con estos módulos
adicionales, la unidad base del PLC tiene la posibilidad de llevar a cabo nuevas tareas,
como pueden ser comunicaciones con redes como CC-Link, ProfibusDP, DeviceNet o
ASi. También pueden ser añadidos módulos con entradas/salidas analógicas,
contadores de alta velocidad, posicionadores, etc…
Las unidades base tienen la posibilidad de direccionar hasta 8 módulos (SFM).
De modo que, teniendo en cuenta los consumos de intensidad de cada uno de los
módulos y de cuantas entradas/salidas ocupan en el sistema, puede ser configurado
un sistema que trabaje hasta con 8 módulos especiales.
Es importante distinguir entre un módulo especial de función SFM y las
extensiones de entradas/salidas. Una extensión es un módulo que sólo aporta más
entradas o más salidas al sistema, por lo que no se considera un módulo de funciones
tipo SFM. Sin embargo cuando el módulo que se añade incorpora al sistema nuevas
características, como puede ser la posibilidad de comunicación a través de una red,
éste se considera un módulo especial de función (o SFM).
También puede ser insertado en el sistema un tipo de módulo identificado
como Extensión compacta, el cual no tiene la misma función que las extensiones
“normales” (las cuales sólo añaden entradas y salidas al sistema). Las compactas
añaden al sistema la posibilidad de alimentar más módulos especiales, para poder
llegar a controlar hasta los ocho módulos SFM y extensiones que se necesiten en la
aplicación. Esto es debido a que tienen entrada de alimentación própia.
Extensión
SFM#0 Unidad Base
Extensión compacta
SFM#1
30
Page 31

Programación serie FX
Buffers de memoria (BFM#):
Cada uno de los módulos especiales de función incorpora una serie de
registros de memoria que se encargarán de mantener la información que nos da el
módulo y de recibir los datos de configuración y/o de envío al módulo desde la unidad
base. Estos registros son los llamados BFM (Buffers de memoria o memoria de
intercambio de información entre los módulos y la unidad base). Estos BFM son
utilizados por la CPU del módulo especial (cada SFM contiene su propia CPU de
gestión de la tarea) para llevar a cabo el trabajo específico del módulo. Estos registros
BFM añaden memoria al sistema, no son mapeados ocupando direcciones de
memoria del autómata por lo que cada módulo insertado al sistema añade memoria, a
través de los BFM, al sistema.
Cada SFM (o módulo especial de función) trabaja independientemente con las
configuraciones establecidas desde la CPU de la unidad base. Por lo que una vez se
configura inicialmente un SFM, la CPU propia del módulo trabajará de forma
independiente liberando de trabajo a la CPU de la unidad base del sistema, que sólo
se encarga de ejecutar su programa y de intercambiar datos con los SFM utilizando los
buffer de memoria que éstos incorporan (BFM’s).
Para acceder a los datos de los módulos especiales se utilizarán las
instrucciones FROM y TO, con las cuales se leerán datos desde los SFM a la CPU o
desde la CPU a los SFM. Estas dos instrucciones se explicarán a continuación.
(Las instrucciones FROM y TO pueden ser encontradas también en la guía de
instrucciones adjuntada en este manual).
31
Page 32

Programación serie FX
Instrucciones FROM / TO:
Estas dos instrucciones sirven para intercambiar información con los módulos
especiales de información. Con TO escribiremos en los BFM’s del módulo y con
FROM la unidad base podrá leer la información. Estas instrucciones son bastante
similares a la instrucción MOV ya que sirven para “mover” datos, con la única
diferencia de que en esta ocasión se está moviendo datos a/desde los BFM’s.
Para transmitir o recibir datos desde un módulo de función especial (SFM) debe
ser especificada una dirección desde la cual se quiere enviar/recibir (y la cantidad de
datos desde esa dirección base). Para eso se dispone de cuatro parámetros a
especificar en las instrucciones de transferencia FROM/TO.
La descripción de los parámetros es la siguiente:
Unidad base (PLC) SFM #0
D BFM
… …
n
SFM#: Es la dirección que identifica el módulo. Cada módulo que se inserta en el
sistema está numerado desde el primero que está situado a la derecha de la unidad
base hasta el último módulo situado más a la derecha en el sistema.
SFM#0 SFM#1 SFM#2 Extensión E/S SFM#7 …
Unidad
base
…
32
Page 33

Programación serie FX
El primer módulo insertado en el sistema (el situado más a la izquierda) se
corresponde con la dirección cero (SFM#0), mientras que el situado más a la derecha
corresponderá como máximo a la dirección siete (SFM#7).
Los módulos de extensiones de entradas/salidas y/o módulos de extensiones
de entradas/salidas compactas (con alimentación) no deben ser contabilizados como
módulos de función (SFM).
BFM#: Es la dirección del registro buffer de memoria a la que se quiere acceder
dentro del módulo. A partir de esta dirección, se copiarán los valores especificados por
la instrucción. La utilidad de cada una de las direcciones BFM de cada uno de los
módulos de función, así como la cantidad de BFM’s disponibles, viene determinada
por la finalidad de dicho módulo.
Los parámetros SFM# y BFM#, en conjunto, determinarán la dirección concreta
del módulo y buffer que debe ser accedido para extraer o grabar información.
Dato: En el caso de la instrucción TO es el dato que se quiere enviar al módulo de
función, ya sea un dato constante o un dispositivo del PLC (D, T, C, etc…). Si se trata
de la instrucción FROM, el parámetro correspondiente al “Dato” será el dispositivo al
que se debe guardar la información que se recoge desde el módulo de función.
Cantidad: Las intrucción FROM y TO pueden manejar datos de la misma forma que
se haría con la instrucción de movimiento de datos en bloque BMOV. Así, si se utiliza
el parámetro de cantidad con un número superior a 1 en una instrucción TO, se está
especificando que se quiere enviar la información que comienza desde la dirección
base especificada en el parámetro “Dato”, tantos datos como se especifica en
“Cantidad”.
En el siguiente ejemplo, se utiliza una instrucción TO como movimiento de
datos en bloque:
Unidad base (PLC) SFM #2
D20 BFM#40
[ FROM K2 K40 D20 K5 ]
5
BFM#44 D24
33
Page 34

Programación serie FX
El siguiente gráfico muestra otros ejemplos de uso de las instrucciones FROM
y TO:
34
Page 35

Programación serie FX
Lista de instrucciones
En las siguientes páginas se muestra una explicación detallada de las
instrucciones más interesantes de la serie FX.
La nomenclatura utilizada para la explicación de las instrucciones es la
siguiente:
Nombre de la
instrucción
Clasificación
Series que pueden trabajar con la
instrucción (sin no está tachado)
Pasos de programa
que necesita según
formato (D xxx P)
Explicación del
funcionamiento
Identificación de los
parámetros, asociando el
Ejemplo de uso
tipo de dispositivo que
debe ser aplicado
Formato D xxx P:
Las instrucciones que tienen la posibilidad de ser introducidas con el formato Dxxx (la
letra D delante de la instucción) son instrucciones que pueden trabajar en formato 32
bits. Si tienen la posibilidad de ser introducidas con el formato xxxP (o DxxxP), son
instrucciones que pueden trabajar en modo flanco, con activación ascendente de la
lógica que le precede.
Otras nomenclaturas:
D: Destino
S: Fuente
m, n: número de periféricos activos,bits o una constante
35
Page 36

Programación serie FX
Control del flujo de Programas
CJ Salto Condicional
Mnemónico función
CJ
FNC 00
(Conditional
Jump)
Salta a la posición identificada por un
puntero
Ejemplo:
X1
X2
P9
CJ P9
operand os steps
D
Punteros entre el
rango de 0 a 63
•Cuando se produce la activación de esta
instrucción el flujo del programa se desvía
repentinamente hacia el puntero (D) especificado
por P
CJ,CJP:3
P:1
Control del flujo de Programas
Notas:
•Varias sentencias CJ pueden apuntar a un mismo puntero.
•Cada puntero se identifica con un único número.
•La instrucción CJ puede saltar a cualquier punto dentro del programa Principal o
después de la instrucción FEND
•Una instrucción CJ puede ser usada hacia adelante o hacia atrás, desde el punto de
salto, hacia el step 0 o hacia el step donde se encuentre el END.
•Los contadores y temporizadores que se encuentren activos en el momento del
salto, no cambiarán (o no incrementarán) sus valores si son saltados con la
ejecución de la instrucción de salto CJ. Esto no ocurre con los contadores de alta
velocidad, puesto que son independientes.
•Las instrucciones entre el CJ y el puntero destino, son ignoradas, sólo cuando se
produce el salto
36
Page 37

Control del flujo de Programas
CALL Llamada a subrutina
Programación serie FX
Mnemónico función
CALL
FNC 01
(Call subroutine)
Ejecuta la subrutina de programa
empezando por el puntero especificado
Ejemplo:
X1
P10
( Subrutina P10 )
CALL P9
FEND
SRET
Control del flujo de Programas
operandos s teps
D
Punteros entre el
rango de 0 a 62.
Niveles d e
anidamie nto:5
•Cuando una instrucción CALL está activa, fuerza el
programa a la rutina asociada al puntero D. Una
instrucción CALL debe usarse siempre en conjunción
con una instrucción FEND y SRET. El Programa salta
hacia la subrutina en cuestión que estará siempre
localizada tras la instrucción FEND.
•El proceso de la subrutina empieza en el puntero
definido, cuando el programa encuentra SRET retorna
hacia la instrucción inmediatamente posterior al CALL
asociado.
CALL,
CALLP:3
P:1
Notas:
•Varias sentencias CALL pueden apuntar a una misma subrutina.
•Cada puntero se identifica con un único número, desde P0 a P62.
•Los punteros usados por CALL no deberían ser usados por CJ y viceversa, puesto
que dichos bloques de funciones acaban en SRET.
•Las subrutinas pueden anidarse hasta en cinco niveles, incluyendo la instrucción
inicial CALL.
•Recuerde retornar el control de subrutina mediante SRET.
•Es preciso en el uso de Timers con subrutinas, que se seleccionen los Timers desde
T192 a T199 y de T246 a T249.
37
Page 38

p
Control del flujo de Programas
SRET Retorno de subrutina
Programación serie FX
Mnemónico función
SRET
FN C 02
(Subroutine
Return)
P10
Retorna el control del programa tras la
ejecución de una subrutina
X1
CALL P9
FEND
( Subrutina P 10 )
SRET
operand os s teps
D
No requiere SRET: 1
•SRET significa el final de la subrutina que ha sido
llamada desde un CALL, y retorna a la línea de programa
inmediatamente posterior a la instrucción CALL
•SRET sólo puede ser usado juntamente con CALL
•SRET se programa siempre tras
una instrucción FEND
Control del flujo de Programas
IRET
EI
DI
Mnemónico función
IR ET
FNC 03
(Interrupt Return)
E I
FNC 04
(E nable Interr upts)
D I
FNC 05
(Disable Interrupts)
I
(Interrupt Pointer)
Retorno de rutina de interrupción
Habilita entradas de interrupción
Inhabilita entradas de interrupción
Fuerza al programa a v olver desde la
interrupción ac tiva
Habilita las entradas de interrupción,
permite que sean procesados los saltos de
subrutinas
Inha bilita las entradas de interrupc ión, sin
que sean procesados los saltos de
subrutin as por interrupción
Identifica el principio de una rutina de
interrupción
or interrupción
operandos steps
D
No requ iere IRET :1
No requ iere EI:1
No requ iere DI:1
3 dígitos: identifican
el t ipo de inter rupció n
y la op erac ión
I: 1
38
Page 39

Control del flujo de Programas
Rutina de interrupción
•Una rutina de interrupción es una parte del programa la cual, tras una interrupción,
se ejecuta INMEDIATAMENTE interrumpiendo el flujo del programa principal. Una vez
que la rutina de interrupción ha sido procesada, el programa continua en el punto
donde se había producido la interrupción
•Las fuentes de interrupción son principalmente 3, entradas directas, contadores y
temporizadores especiales. La disponibilidad de estas fuentes de interrupción varía
según el modelo de PLC.
•Para programar y operar rutinas de interrupción, requiere hasta 3 instrucciones y un
puntero de interrupción.
Definición de una rutina de Interrupción:
•Una rutina de interrupción se especifica
entre su propio puntero (único) de
interrupción y el final de ella mediante IRET
•El inicio de la subrutina de Interrupción se
define con I seguido de un número que
define la fuente de interrupción
•Las rutinas de interrupción SIEMPRE
programadas tras
una instrucción FEND
I001
( Rutina de Interrupción I001 )
I201
( Rutina de Interrupción I201 )
FEND
IRET
IRET
Programación serie FX
Control del flujo de Programas
Control de operaciones de Interrupción
•Por defecto, el controlador está en estado de interrupciones inhabilitado. La
instrucción EI debe ser usada para habilitar las interrupciones.Todas las
interrupciones ocurridas desde EI hasta FEND o desde EI hasta DI serán atendidas.Si
estas interrupciones son solicitadas fuera de este rango, son almacenadas hasta que
se procesa una sentencia EI. Entonces , en este punto, la rutina de interrupción se
ejecutará.
•Se pueden inhabilitar o habilitar fuentes de interrupción individualmente, con su
“coil” asociado M . Poniendo éste a ON, se inhabilita la interrupción en particular.
Interrupciones anidadas
•Se pueden anidar en dos niveles,es decir, una rutina de interrupción ejecutándose
puede ser interrumpida por otra interrupción. Para ello, la rutina de interrupción que
será interrumpida deberá contener las instrucciones EI y DI; si no ,cuando una rutina
de interrupción es ejecutada el resto de interrupciones es inhabilitado.
Interrupciones simultáneas
•Si más de una interrupción ocurre secuencialmente, la prioridad de ejecución se da
a la que llegó primero.Si las interrupciones se dan simultáneamente, se da la
prioridad de ejecución a la que tenga el puntero de interrupción I más bajo.
39
Page 40

Programación serie FX
Control del flujo de Programas
FEND
Mnemónico función
FEN D
FNC 06
(First End)
•Una instrucción FEND indica el final del bloque de
programa principal (MAIN) y el inicio de el área de
programa para subrutinas. Bajo circunstancias
normales es parecida a una instrucción END.
Fin de programa principal
Se usa para indicar el final del bloque de
pro grama principal (cuando se utilizan
punteros a subrutina y de interrupción)
operan dos steps
D
No requiere FEND: 1
40
Page 41

Control del flujo de Programas
Notas:
•La instrucción FEND debe ser colocada antes de los punteros de subrutina (P) y de
los punteros de interrupción (I). FEND nunca aparece en el interior del programa
principal
•Se declaran múltiples sentencias FEND para separar diferentes subrutinas.
•FEND no debe usarse después de END
Programación serie FX
Programa ppal.
P20
X10
X10=OFF
Programa ppal.
Programa ppal.
CJ P20
FEND
FEND
Control del flujo de Programas
WDT
Mnemónico función
WTD
FN C 07
(Watchdog timer
refresh)
Refresco de “watch dog”
Usado para refrescar el temporizador del
"Watchdog" durante un scan del programa
Programa ppal.
X11
X11=ON
P21
X10=ON
I100
Programa ppal.
Rutina interrup.
CJ P21
X11=OFF
FEND
Subrutina
operandos steps
D
No requiere WTD,WTD
P :1
X0
WDT
•La instrucción WDT refresca el temporizador
“watchdog” del controlador. El “watchdog” comprueba
que a cada scan del programa , el tiempo de control
no excede de un límite arbitrario.Si esto ocurre, el
controlador cesa su actividad para prevenir algún
posible error.
•Mediante esta instrucción, se “recarga” el “watchdog”.
•Puede ubicarse durante el programa principal (main)
41
Page 42

Control del flujo de Programas
Notas:
•El “watchdog timer” tiene por defecto un tiempo de 200ms para toda la serie FX.
Este límite puede configurarse a voluntad mediante el contenido del registro de
datos D8000 (watchdog timer register)
Programación serie FX
Control del flujo de Programas
FOR
NEXT
Mnemónico función
FOR
FN C 08
(S tart of a FORNEXT loop)
N EXT
FN C 09
(End of a FORNEXT loop)
Definición e inicio de bucle
Retorno de bucle
Identifica el principio del bucle y el número
de repeticiones de éste
Identifica el final del bucle y retorna al
principio, saltando si se ha completado el
número de repeticiones
S
FOR K1X0
NEXT
operandos steps
S
K,H,
KnX,KnY,KnM,KnS,
T,C,D,V,Z
No requiere NEXT:1
•FOR y NEXT se usan siempre
conjuntamente para repetir las
instrucciones que encierran en el
bucle, tantas veces como S.
FOR: 3
42
Page 43

Control del flujo de Programas
Notas:
•El rango de valores del operando S es de 1 a 32.767. Si el número es entre 0 y -32768
el bucle sólo se ejecuta una vez.
•Una instrucción FOR debe tener siempre
de programación es FOR-NEXT , no NEXT - FOR.
•Insertando un FEND en medio de un bucle , se produciría el mismo efecto que un FOR
sin NEXT o un NEXT sin FOR. No colocar FEND dentro de bucles.
•Si se usa el WDT, en un bucle, recuérdese que éste puede desbordarse si no se utiliza
la instrucción WDT.
asociada una instrucción NEXT . El orden
Programación serie FX
Control del flujo de Programas
Bucles anidados:
•Se pueden conseguir hasta 5 niveles de anidamiento de FOR-NEXT.
FOR K4
FOR D0Z
X10
CJ P22
FOR K1X0
a b c
NEXT
P22
NEXT
NEXT
•Cuando se anidan bucles FOR-NEXT, el
bucle “más interior” se repite tantas veces
como el inmediantamente superior. Así, en
el ejemplo,
•el bucle a se repite 168 veces (a x b x c)
•el bucle b se repite 24 veces ( b x c)
•el bucle c se repite 4 veces (a, el de nivel
superior)
43
Page 44

Y
)
Programación serie FX
Comparación y movimiento
CMP
Mnemónico función
CMP
FNC 10
(Compare)
•El dato S1 es comparado con S2. El resultado es indicado por 3 bit consecutivos
(del tipo Y, M o S) en el operando D:
X0
Comparación
Comparación de d os
valores, se dan
resultados de > , <, o =
CMP K100 C20 M0
M0
C20<K100,M0=ON
M1
C20=K100,M1=ON
M2
C20>K100,M2=ON
operandos
1
S
K,H,
KnX,KnY,KnM,KnS,
T,C,D,V,Z
•En nuestro caso D=M0.
•Si S2 < S1; Bit D (M0) es ON
•Si S2 = S1; Bit D+1 (M1) es ON
•Si S2 > S1; Bit D+2 (M2) es ON
2
S
Y,M ,S
(3 b i ts
consecutivos)
Comparación y movimiento
steps
D
CMP,
CMPP: 7
DCMP,
DCMPP:
13
ZCP
Mnemónico función
ZC P
F NC 1 1
(Zone
Compare)
•El dato S3 es comparado con el rango S1 - S2. El resultado es indicado por 3 bit
consecutivos (del tipo Y, M o S) en el operando D:
X0
Zona de Comparación
operan dos
1
2
3
S
•En nuestro caso D=M3.
•Si S3 < (S1;S2) Bit D (M3) es ON
•Si S3 = o entre (S1;S2) Bit D+1 (M4
es ON
•Si S3 > (S1;S2) Bit D+2 (M5) es ON
Comparación de un va lor
con un rango, se dan
resultados de >, <, o =
ZCP K100 K120 C30 M3
M3
C30<K100,K120,M3=ON
M4
K100=<C30=<K120,M4=ON
M5
C30<K100,K120,M5=ON
S
S
K,H,
KnX,KnY,KnM,KnS,
T,C, D,V,Z
1
(S
debe ser menor
que S
)
2
D
,M,S
(3 bits
consecutivos)
steps
ZC P, ZCPP : 7
DZCP, DZCPP: 17
44
Page 45

Programación serie FX
Comparación y movimiento
MOV
Mnemónico función
MOV
FNC 12
(Move)
•El contenido de S es copiado al destino D cuando su entrada de control es
activa
Mover
Mover datos desde una
zona de memoria a otra
zona de memoria
X0
MOV H0050 D20
operandos
S
K,H,
KnX,KnY,KnM,KnS,
T,C,D,V,Z
KnY,Kn M, KnS,
T,C,D,V,Z
Comparación y movimiento
SMOV
Desplazar
steps
D
MOV,
MOVP:5
DMOV,
DMOVP: 9
M nemóni co función
SM OV
FNC 13
(Shift move)
•SMOV copia un número especificado en decimal S y lo transfiere a un lugar
especificado con D. El dato existente en el destino se sobreescribe
•Nota: el destino seleccionado no debe ser más pequeño que el tamaño de dígitos
transferidos
Las posiciones se enumeran como 1:unidades, 2:decenas, 3:centenas, 4:millares
Tom a las c ifras de un
número decimal de 4
dígitos y los inserta en
otro número de 4 dígitos
X0
SMOV D1 K4 K2 D2 K3
m1 m2 n S D
K, H
(rango 1...4)
operandos
K,H
KnX,KnY
KnM,KnS
T,C,D,V,Z
Rango de 0 a 9999 (de cimal) o 0 a
9999 (BCD)
•m1: posición fuente del primer dígito a mover
•
m2: número de dígitos a ser movidos
•
n: posición destino para el primer dígito
K,H
KnY,KnM ,
KnS,
T,C, D,V,Z
steps
SMOV,
SMOVP:11
45
Page 46

Programación serie FX
Comparación y movimiento
CML
M nemónico función
CM L
FNC14
(Complement)
Copia el dato fuente a
destino,
complementando
X0
Complementa y Mueve
CML D0 K1Y0
Comparación y movimiento
operandos
S
K,H
KnX,KnY,KnM,KnS
T,C,D,V,Z
•Una copia de cada bit del dato (S) fuente es
invertido y copiado al dato de destino (D). Cada bit
en estado 1 se copia en el destino como bit 0 y
viceversa.
KnY,KnM, KnS,
T,C,D,V,Z
D
Steps
CML,
CMLP: 5
DCML,
DCMLP: 9
BMOV
M nemónico función
BM OV
FNC 15
(Block Move)
•Una cantidad de datos consecutivos pueden ser copiados a un nuevo destino con
esta instrucción. El principio de este bloque de datos se identifica con (S) y la
cantidad de datos consecutivos con (n). Es movido hacia (D) con la misma cantidad
de datos.
Copia un bloque de datos
a otra posición
Mover bloque
SDn
KnX,KnY,KnM,
KnS
T,C,D,V,Z
X0
BMOV D5 D7 K3
operandos
KnY,KnM, KnS,
T,C,D,V,Z
K,H
D (Solo para
2N
)
FX
(n=<512)
Steps
BMOV,
BMOVP: 7
46
Page 47

Comparación y movimiento
Notas:
•Si la cantidad de datos movidos (n) excede del número disponible de posiciones de
destino, sólo se copiarán las posiciones disponibles. Lo mismo ocurre si el bloque
fuente es más grande que el bloque destino.
•Si el bloque fuente y el bloque destino se solapan, se sobre-escriben los datos
solapados:
ORDEN DE
EJECUCIÓN
X0
BMOV D5 D7 K3
X0
BMOV D5 D7 K3
D5
D6
D7
D20
D21
D22
D23
3
2
1
1
ORDEN DE
EJECUCIÓN
2
3
D7
D8
D9
D18
D19
D20
D21
Programación serie FX
4
Comparación y movimiento
FMOV
M nemónico función
BM OV
FNC 15
(Fill Move)
•El dato almacenado en S es copiado a partir de la posición D en un número de
posiciones consecutivas n. Si el número de repeticiones excede del espacio
disponible para el destino, sólo se copiarán los disponibles.
Copia un dato en un
rango de datos
X0
Mueve y rellena
SDn
KnX,KnY,KnM,
KnS
T,C,D,V,Z
FMOV K0 D0 K10
operando s
KnY,KnM, KnS,
T,C, D,V,Z
K0 se escribe en las
posiciones D0....D9 (10 veces)
K,H
(n=<512)
Steps
FMOV,
FMOVP: 7
DM OV,
DMOVP:
13
47
Page 48

X
Programación serie FX
Comparación y movimiento
XCH
M nemónico función
XCH
FNC 17
(E xch ang e)
Registro de
D1 20 530
D17 530 20
Los datos designados
son intercambiados
X0
datos
Intercambio de datos
XCH D1 D17
Contenido antes de
XCH
Comparación y movimiento
Contenid o después
de XCH
operandos
D1 D2
KnY,KnM,KnS,T,C,D,V,Z
NOTA: Cuando se usa el flag M8161 para
operaciones a 8 bits el D1 y D2 deben ser
el mismo disp ositivo
•El contenido de los registros de fuente y destino
es intercambiado.
steps
XCH,
CHP: 5
DXCH,
DXCHP:9
SWAP
M nemónico función
SWAP
FNC 147
(Byte Swap)
Registro de
D1 1F A0
D1 A0 1F
D2 4C B2
D2 B2 4C
El byte (b0 a b7) es
intercambiado con el
byte (b8 a b15) del
registro destino
datos
Intercambio de bytes
X0
Contenido antes de
DSWAP
DSWAP D1
Contenido después
de DSWAP
operandos
D1 D2
KnY,KnM,KnS,T,C,D,V,Z
•El contenido de los Bytes contenidos
en el registro destino es intercambiado.
Esta instrucción es equivalente a la XCH
(con modo de operación 2, M8161=ON).
Byte 1
•
•Byte 2
•Byte 1
•Byte 2
steps
SWAP,
SWAPP: 5
DSWAP,
DSWAPP:9
48
Page 49

Programación serie FX
Comparación y movimiento
BCD
M nemónico función
BCD
FNC 18
(Bi nary
code d
decimal)
Convierte números de
binario a BCD
X0
Conversión binario - BCD
BCD D12 D35
Comparación y movimiento
operandos
SD
KnX,KnY
KnM,K nS
T,C,D,V,Z
•El dato en binario fuente S es convertido a un
número equivalente en BCD y almacenado en la
posición de destino D.
•Usar el flag M8023 para determinar la conversión
a notación científica.
KnY,KnM,KnS
T,C,D,V,Z
steps
BCD,
BCDP: 5
DBCD,
DBCDP: 9
BIN
M nemónico función
BIN
FNC 19
(Bi nary)
Convierte números en BCD
a Binario / Coma flotante
X0
Conversión BCD - binario
BIN K2X0 D13
operandos
SD
KnX,KnY
KnM,K nS
T,C,D,V,Z
•El dato BCD fuente S es convertido a un número
equivalente binario y almacenado en la posición de
destino D. El rango de datos de salida es de 16 o 32
bits.
•Usar el flag M8023 para determinar la conversión a
coma flotante.
KnY,KnM,KnS
T,C,D,V,Z
steps
BIN,
BINP: 5
DBIND,
DBINP: 9
49
Page 50

Programación serie FX
Operaciones Aritméticas y Lógicas
ADD
ADD
FNC 20
(Additi on)
Suma
El valor de los dos
registros fuente es
sumado y transferido a
un registro destino
X0
ADD D10 D12 D14
Usar el flag M8023 para sumar a coma flotante (sólo 32 bits)
Operaciones Aritméticas y Lógicas
operandos
S1 S2 D
K,H
KnX,KnY,KnM,KnS
T,C,D,V,Z
•S1 y S2 son sumados y el resultado se
introduce en D
KnY,KnM,KnS,
T,C,D,V,Z
D14= D10 + D12
StepsM nemónico función
ADD,
ADDP: 7
DADD,
DADDP:13
Notas:
•Los operandos pueden ser negativos
•Un registro fuente puede usarse como destino, es decir p.e. S1 + S2 = S2
•Si el resultado de la operación es 0, se activa un flag especial (M 8020)
•Si el resultado excede de 32.767 (16bits) o de 2.147.483.647 (32bits) se activará el flag
M8022.
•Si el resultado excede de -32.768 (16bits) o de -2.147.483.648 (32bits) se activará el
flag M8021.
•Si el resultado ha desbordado (casos anteriores) se produce acarreo junto con el dato
de destino.
•Si el destino es mas pequeño que el resultado de la operación , sólo se almacenarán
en destino los bits que puedan ubicarse.
•Para operaciones con coma flotante en modelos de la serie MELSEC F anteriores,
usar DADD,DADDP (flag M8023 activo).
•Para modelos FX2N no es apropiado usar el flag de coma flotante M8023, úsese en vez
de DADD las instrucción dedicada DEADD.
50
Page 51

Programación serie FX
Operaciones Aritméticas y Lógicas
SUB
SUB
FNC 21
(S ubtr act)
Resta
El valor de los dos
registros fuente es
restado y transferido a
un registro destino
X0
SUB D10 D12 D14
Usar el flag M8023 para sumar a coma flotante (sólo 32 bits)
Operaciones Aritméticas y Lógicas
operandos
S1 S2 D
K,H
KnX,KnY,KnM,KnS
T,C,D,V,Z
•S1 y S2 son restados y el resultado se
introduce en D
KnY,KnM,KnS,
T,C,D,V,Z
D14= D10 - D12
StepsM nemónico función
SUB,
SUBP: 7
DSUB,
DSUBP:13
Notas:
•Los operandos pueden ser negativos
•Un registro fuente puede usarse como destino, es decir p.e. S1 - S2 = S2
•Si el resultado de la operación es 0, se activa un flag especial (M 8020)
•Si el resultado excede de 32.767 (16bits) o de 2.147.483.647 (32bits) se activará el flag
M8022.
•Si el resultado excede de -32.768 (16bits) o de -2.147.483.648 (32bits) se activará el
flag M8021.
•Si el resultado se ha desbordado (casos anteriores) se produce acarreo junto con el
dato de destino.
•Si el destino es mas pequeño que el resultado de la operación , sólo se almacenarán
en destino los bits que puedan ubicarse.
•Para operaciones con coma flotante en modelos de la serie MELSEC F anteriores,
usar DSUB,DSUBP (flag M8023 activo).
51
Page 52

Programación serie FX
Operaciones Aritméticas y Lógicas
MUL
MUL
FNC 22
(Multiplication)
Producto
Realiza el producto y lo
almacena
X0
MUL D0 D2 D4
Usar el flag M8023 para sumar a coma flotante (sólo 32 bits)
Operaciones Aritméticas y Lógicas
S1 S2 D
operandos
K,H,KnX,KnY,KnM,KnS
T,C,D,V,Z
•S1 y S2 son multiplicados y el resultado es
almacenado en D
D4= D0 x D2
KnY,KnM,KnS
T,C,D,Z(V)
Z(V) no pue de usa rse
para operaciones de 32
bits
stepsM nemónico función
MUL,
MULP: 7
DMUL,
DMULP:13
Notas:
•Nótese que el resultado de multiplicar los dos datos fuente de 16 bits produce un dato
de 32 bits. El dato se almacena entonces en Dn y Dn+1.
•El resultado de multiplicar dos datos de 32 bits genera un dato de 64 bits, que se
almacena desde Dn hasta Dn+3.
•Si el destino es mas pequeño que el resultado de la operación , sólo se almacenarán
en el destino los bits que puedan ubicarse.
•Para operaciones con coma flotante, usar DMUL,DMULP (flag M8023 activo).
52
Page 53

Programación serie FX
Operaciones Aritméticas y Lógicas
MUL
FNC 23
((Division)
DIV
Realiza el cociente y lo
almacena
X0
Operaciones Aritméticas y Lógicas
Cociente
DIV D0 D2 D4
Usar el flag M8023 para sumar a coma flotante (sólo 32 bits)
S1 S2 D
operandos
K,H,KnX,KnY,KnM,KnS
T,C,D,V,Z
•S1 y S2 son divididos y el resultado es
almacenado en D
D4= D0 / D2
KnY,KnM,KnS
T,C,D,Z(V)
Z(V) no pue de usa rse
para operaciones de 32
bits
stepsM nemónico función
DIV,
DIVP: 7
DDIV,
DDIVP:13
Notas:
•Nótese que el resultado del cociente siendo los dos datos fuente de 16 bits produce
un dato de 16 bits, el resultado y el resto del cociente Véase el ejemplo: El dato se
almacena entonces en Dn ( resultado)y Dn+1 (resto).
X0
DIV D0 D2 D4
•Sel resultado de dividir dos datos de 32 bits genera un dato de 32 bits, que almacena
como Dn,Dn+1 como resultado, Dn+2,Dn+3 como resto.
•Si el divisor S2 es 0 , se produce un error de operación y la operación DIV no se
ejecuta .
•Para operaciones con coma flotante, usar DDIV,DDIVP (flag M8023 activo).
51 (D0) / 10 (D2) = 5 (D4), resto :1 (D5)
53
Page 54

p
Programación serie FX
Operaciones Aritméticas y Lógicas
INC
M nem ónic o función
INC
FNC 24
(Increment)
Incrementa el dato
destino
X1
INC D10
Operaciones Aritméticas y Lógicas
Incremento
KnY, K nM , K nS
T,C,D,V,Z
•A cada ejecución de la instrucción el dato de
destino D se incrementa en una unidad
•Si el dato es de 16 bits y se alcanza el máximo
( 32.768 ), el próximo incremento escribirá el
valor simétrico (-32.768) . En el caso de 32 bits,
ocurrirá lo mismo.
•Téngase precaución en esto último pues en
ambos casos no existe un flag relacionado para
indicar este cambio.
operandos
D
steps
INC,
INCP :3
DINC,
DINCP:5
DEC
M nemónico función
DEC
FNC 25
(Decrement)
Decrementa el dato
destino
X1
Decremento
DEC D10
erandos
o
D
KnY, KnM , KnS
T,C,D,V,Z
•A cada ejecución de la instrucción el dato de
destino D se decrementa en una unidad
•Si el dato es de 16 bits y se alcanza el mínimo
( -32.768 ), el próximo incremento escribirá el
valor simétrico (+32.768) . En el caso de 32 bits,
ocurrirá lo mismo.
•Téngase precaución en esto último pues en
ambos casos no existe un flag relacionado para
indicar este cambio.
steps
DEC,
DECP:3
DDEC,
DDECP:
5
54
Page 55

Programación serie FX
Operaciones Aritméticas y Lógicas
WAND
M nemónico función
WAND
FNC 26
(logi cal word
AND)
Una operación lógica
AND entre los datos
fuente se almacena en el
dato de destino
X0
AND lógico
WAND D10 D12 D14
. Operaciones Aritméticas y Lógicas
S1 S2 D
K,H,
KnX,KnY,KnM,KnS
T,C,D,V,Z
•Las palabras S1 y S2 son procesadas bit a
bit entre ellas, dando como resultado un AND
lógico de estos bits:
Bit n (S1) WAND Bit n (S2) = Bit n (D)
operandos
KnY,KnM,KnS,
T,C,D,V,Z
steps
WAND,
WANDP:7
DAND,
DANDP: 13
WOR
M nemónico función
WOR
FNC 27
(logical word
OR
Una operación lógica OR
entre los datos fuente se
almacena en el dato de
destino
X0
WOR D10 D12 D14
OR lógico
S1 S2 D
K,H,
KnX,KnY,KnM,KnS
T,C,D,V,Z
•Las palabras S1 y S2 son procesadas bit a
bit entre ellas, dando como resultado un OR
lógico de estos bits:
Bit n (S1) WOR Bit n (S2) = Bit n (D)
operandos
KnY,KnM,KnS,
T,C,D,V,Z
steps
WOR,
WORP:7
DOR,
DORP:13
55
Page 56

Programación serie FX
Operaciones Aritméticas y Lógicas
WXOR
M nemónico función
WOR
FNC 28
(logical
exc lusi ve
OR
Una operación lógica
XOR entre los datos
fuente se almacena en el
dato de destino
X0
WXOR D10 D12 D14
Operaciones Aritméticas y Lógicas
OR exclusivo lógico
operandos
S1 S2 D
K,H,
KnX,KnY,KnM,KnS
T,C,D,V,Z
•Las palabras S1 y S2 son procesadas bit a
bit entre ellas, dando como resultado un XOR
lógico de estos bits:
Bit n (S1) WXOR Bit n (S2) = Bit n (D)
KnY,KnM,KnS,
T,C,D,V,Z
steps
WXOR,
WXORP:7
DXOR,
DXORP:13
NEG
M nemónico función
DEC
FNC 29
(Negation)
X0
Negación lógica
Inversió n lógica d el
contenido del dato
destino
NEG D10
operandos
D
KnY, KnM , KnS
T,C,D,V,Z
•El dato D es procesado bit a bit, dando como
resultado un NOT lógico de estos bits:
•Bit n (D) NEG = Bit n (D)
•Una vez se realiza esto, se añade uno al
resultado, con lo cual se realiza el cambio de
signo de éste ( complemento a 2)
steps
NEG,
NEGP:3
DNEG,
DNEGP:5
56
Page 57

Programación serie FX
Rotación y desplazamiento
ROR
ROR
FNC 30
(Ro tation
Right)
D0: antes de la rotación
1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0
D0: después de la rotación
0 0 0 0 1 1 1 1 1 1 1 1 0 0 0 0
El dato en cuestión es
rotado bit a bit 'n'
posiciones hacia la
derecha
X0
Rotación hacia derecha
ROR D0 K4
Rotación y desplazamiento
KnY,KnM,KnS
T,C,D,V,Z
•El dato D es desplazado bit a bit n posiciones
hacia la derecha, dando como resultado una
rotación parcial
M8022
M8022: 0
operandos
Dn
K,H ROR,
•El estado del último bit
rotado es copiado al flag de
acarreo M8022
stepsM nemónico función
RORP:5
DROR,
DRORP:9
ROL
ROL
FNC 31
(Ro tation
left)
D0: antes de la rotación
1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0
M8022
D0: después de la rotación
1 1 1 1 0 0 0 0 0 0 0 0 1 1 1 1
M8022: 1
El dato en cuestión es
rotado bit a bit 'n'
posiciones hacia la
izquierda
X0
Rotación hacia izquierda
ROL D0 K4
operandos
Dn
KnY,KnM,KnS
T,C,D,V,Z
•El dato D es desplazado bit a bit n posiciones
hacia la izquierda, dando como resultado una
rotación parcial
•El estado del último bit
rotado es copiado al flag de
acarreo M8022
K,H ROL,
ROLP: 5
DROL,
DROLP:7
stepsM nemónico función
57
Page 58

. Rotación y desplazamiento
Notas sobre ROR y ROL:
•Para operaciones de 16 bits , Kn= K4 . Para operaciones de 32 bits, Kn=K8
•El número máximo para n (número de rotaciones) es de 16 (16 bits) o 32 (32 bits)
Programación serie FX
Rotación y desplazamiento
RCR
RCR
FNC 32
(R otat ion ri ght
with carry
D0: antes de la rotación
1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0
D0: después de la rotación
0 0 0 1 1 1 1 1 1 1 1 1 0 0 0 0
El dato en cuestión es
rotado bit a bit 'n'
posiciones por la
)
derecha a través del
acarreo
X0
Rotación der. con acarreo
RCR D0 K4
KnY,KnM,KnS
T,C,D,V,Z
M8022
M8022: 0
operandos
Dn
K,H RCR,
•El dato D es desplazado bit a bit n posiciones
hacia la derecha, pasando por el flag de
acarreo M8022.
•El estado del último bit desplazado es
introducido en el flag de acarreo. En la
siguiente operación de la instrucción , este flag
es el primero en ser movido hacia el dato.
stepsM nemóni co función
RCRP:5
DRCR,
DRCRP:7
58
Page 59

Programación serie FX
Rotación y desplazamiento
RCL
RCR
FNC 33
(R otat ion l eft
with carry
D0: antes de la rotación
1 1 1 1 1 1 1 1 0 0 0 0 0 0 0 0
M8022
D0: después de la rotación
1 1 1 1 0 0 0 0 0 0 0 0 0 1 1 1
M8022: 1
El dato en cuestión es
rotado bit a bit 'n'
posiciones por la
)
izquierda a través del
acarreo
X0
Rotación izq. con acarreo
RCL D0 K4
Rotación y desplazamiento
operandos
Dn
KnY,KnM,KnS
T,C,D,V,Z
•El dato D es desplazado bit a bit n posiciones
hacia la izquierda, pasando por el flag de
acarreo M8022.
•El estado del último bit desplazado es
introducido en el flag de acarreo. En la
siguiente operación de la instrucción , este flag
es el primero en ser movido hacia el dato.
K,H RCL,
RCLP: 5
DRLR,
DRCLP:9
stepsM nemóni co función
Notas sobre RCR y RCL:
•Para operaciones de 16 bits , Kn= K4 . Para operaciones de 32 bits, Kn=K8
•El número máximo para n (número de rotaciones) es de 16 (16 bits) o 32 (32 bits)
59
Page 60

Programación serie FX
Rotación y desplazamiento
SFTR
M nemónico función
SFT R
FNC 34
(B it s hift righ t)
•La instrucción copia n 2 datos fuente a un stack de longitud n 1. Para cada nueva
adición de n
derecha. El bit que es desplazado fuera del límite n
desbordamiento.
M15 M14 M13 M12 M11 M10 M9 M8 M7 M6 M5 M4 M3 M2 M1 M0
El estado de los datos
fuente es copiado a un
"stack" de bit, moviendo
el existente hacia la
derecha
X3 X2 X1 X0
Desplazamiento bit derecha
SDn1n2
X,Y,M,S Y,M,S SFTR,
2 bits, los datos existentes en el stack son desplazados n 2 bits hacia la
X6
SFTR X0 M0 K16 K4
operandos
K,H
n2 <= n1 <= 1024
1 es desviado a un área de
Rotación y desplazamiento
steps
SFTRP:9
SFTL
M nemónico función
SFT R
FNC 35
(B it s hift left )
•La instrucción copia n 2 datos fuente a un stack de longitud n 1. Para cada nueva
adición de n
izquierda. El bit que es desplazado fuera del límite n
desbordamiento.
El estado de los datos
fuente es copiado a un
"stack" de bit, moviendo
el existente hacia la
izquierda
Desplazamiento bit izquierda
SDn1n2
X,Y,M,S Y,M,S SFTL,
2 bits, los datos existentes en el stack son desplazados n 2 bits hacia la
X6
SFTL X10 Y0 K12 K3
Y13 Y12 Y11 Y10 Y7 Y6 Y5 Y4 Y3 Y2 Y1 Y0
operandos
K,H
n2 <= n1 <= 1024
1 es desviado a un área de
X12 X11 X10
steps
SFTLP:9
60
Page 61

Programación serie FX
Rotación y desplazamiento
WSFR
M nemónico función
WSFR
FNC 36
(Word shift
right)
•La instrucción copia n 2 datos fuente a un stack de palabra de longitud n 1. Para
cada nueva adición de n
desplazados n
1 es desviada a un área de desbordamiento.
límite n
X0
Rotación y desplazamiento
derecha
SDn1n2
El valor de los datos
fuente es copiado a un
puntero de palabra,
moviendo el existente
hacia la derecha
2 palabras, los datos existentes en el stack son
2 palabras hacia la derecha. La palabra que es desplazada fuera del
WSFR D0 D10 K16 K4
KnX,KnY,
KnM,KnS
T,C,D
operandos
KnY,KnM,
KnS
T,C,D
K,H n2
>= n1 >= 512
Desplazamiento palabra
steps
WSF R,
WSF RP: 9
WSFL
M nemónico función
WSFR
FNC 37
(Word shift left)
•La instrucción copia n 2 datos fuente a un stack de palabra de longitud n 1. Para
cada nueva adición de n
desplazados n
1 es desviada a un área de desbordamiento.
límite n
X0
izquierda
SDn1n2
El valor de los datos
fuente es copiado a un
puntero de palabra,
moviendo el existente
hacia la izquierda
2 palabras, los datos existentes en el stack son
2 palabras hacia la derecha. La palabra que es desplazada fuera del
WSFL D0 D10 K16 K4
KnX,KnY,
KnM,KnS
T,C,D
operandos
KnY,KnM,
KnS
T,C,D
K,H n2
>= n1 >= 512
Desplazamiento palabra
steps
WSF L,
WSF LP:9
61
Page 62

Programación serie FX
Rotación y desplazamiento
SFWR
M nemónico función
SFWR
FNC 38
(Sh ift
register
write)
Registro de
desplazamiento FIFO de
longitud N
X0
SFWR D0 D1 K10
D0 D10 D9 D8 D6 D5 D4D7 D1D2D3
Rotación y desplazamiento
Escritura registro de
desplazamiento
SDn
K,H
KnX,KnY
KnM, KnS
T,C,D,V,Z
•El contenido de el dato fuente (S) es escrito en
un registro FIFO.La posición de inserción
dentro del registro es automática.
operandos
KnY
KnM,KnS
T,C,D
=10
K,H
(entre 2 y 512)
Steps
SFWR,
SFWRP: 7
•El destino D marca la primera posición del registro FIFO.
•Si el contenido de D excede del valor n-1 (n es la longitud del registro FIFO la
inserción dentro del registro se detiene. El indicador de acarreo M8022 identifica esta
situación.
•Cuando n dispositivos son asignados por el registro FIFO, solo n-1 son escritos en el
registro. Esto es debido a que, en la declaración de la instrucción, el dispositivo (D)
toma la primera posición del registro disponible.
•Antes de empezar a usar un registro FIFO debe asegurarse que el contenido del
registro (D) es igual a 0.
•La instrucción SFWR es complementaria a FSFRD. El parámetro n en ambas
instrucciones debe ser igual
62
Page 63

Programación serie FX
Rotación y desplazamiento
SFRD
M nemónico función
SFRD
FNC 39
(Sh ift
register
Read)
Lee el registro de
desplazamiento FIFO de
longitud N
X0
SFRD D0 D1 K10
Rotación y desplazamiento
Lectura registro de
desplazamiento
SDn
KnY,KnM,Kn
S T ,C,D
=10
operandos
KnY,KnM,Kn
S
T,C,D,V,Z
•La instrucción lee la primera porción del
registro de desplazamiento FIFO creado
con SFWR, mueve el contenido hacia
‘arriba’ una posición , y decrementa el
contenido del dato de encabezado (S) una
unidad. El dato leído es escrito en el
dispositivo de destino (D).
D20D10 D9 D8 D6 D5 D4D7 D1D2D3
K,H
(entre 2 y 512)
Steps
SFRD,
SFRDP: 7
•El destino S marca la primera posición del registro FIFO, y refleja la última entrada
del registro FIFO.
•Si el contenido de S es igual a 0 el flag de acarreo M8022 identifica esta situación.
•Sólo n-1 son leídos en el registro FIFO. Esto es debido a que, el primer registro el
dato de encabezamiento (S) es usado para contener información sobre la longitud del
registro FIFO.
•La instrucción SFRD es complementaria a SFWR. El parámetro n en ambas
instrucciones debe ser igual
63
Page 64

Y
Programación serie FX
Operaciones con datos (1)
ZRST
M nemónico función
ZRST
FNC 40
(Zone rese t)
Re-inicia un rango de
dispositivos
M8002
Operaciones con datos (1)
(RESET)
ZRST M500 M599
Reinicialización dispositivos
operandos
D1 D2
,M, S
T,C,D
•El rango determinado por D1 y D2 es re-
iniciado, es decir, los datos se inicializan
con 0 y si éstos eran bits, se ponen a 0
(OFF).
•D2 debe ser igual o menor que D1. Si no,
sólo D1 se ‘reseteará’.
•Los datos a iniciar deben ser todos del
mismo tipo
steps
ZRST ,
ZRSTP: 5
DECO
M nemónic o función
DECO
FNC 41
(decode)
M17 M16 M15 M14 M13 M12 M11 M10
Decodifica un valor
expresado en binario a
decimal
X4
7 6 5 4 3 2 1 0
0
0 0 0 0 0 0
Decodificación a decimal
DECO X0 M10 K3
X2 X1 X0
0 1 1
4 2 1
1
=3 (dec)
SD n
K,H
X,Y,M,S
T,C,D,V,Z
operandos
Y,M,S
T,C, D
•El dato fuente es creado. mediante los
operandos S y n, donde S especifica el
encabezado de los datos fuente y n el
número consecutivo de datos desde este
encabezado.
•El dato fuente obtenido se lee como
binario y es convertido a decimal, y
transferido a un dispositivo destino (D).
•Cuando el destino es un dato, n debe
estar entre 1 y 4.
•Cuando el destino son bits, n debe estar
entre 1 y 8.
K,H DECO,
steps
DECOP:7
64
Page 65

Programación serie FX
Operaciones con datos (1)
ENCO
M nemónic o función
ENCO
FNC 42
(En cod e)
7 6 5 4 3 2 1 0
0
M17 M16 M15 M14 M13 M12 M11 M10
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1
Codifica un valor
expresado en decimal a
binario
X5
0 0 0 0 0 0
Codificación a binario
ENCO M10 D10 K3
1
D10
=3 (bin)
Operaciones con datos (1)
.... 8 4 2 1
SD n
X,Y,M,S
T,C,D,V,Z
operandos
T,C,D,V,Z K,H ENCO,
•El bit activo de mayor orden del rango
determinado por S es el que se toma como
valor a convertir a binario, el resultado es
almacenado en el registro de destino D.
•El rango de destino es determinado con
n. Por ejemplo si n=4 el rango de valores
en el destino será de 0...15. Si n= 3, el
rango será de 0...7.
steps
ENCOP:7
SUM
M nemónico función
SUM
FNC 43
(Sum of
acti ve b its)
1 0 1 1 0 1 0 0 1 0 0 1 0 1 1 1
0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1
Suma el número de bits
activos
X0
Suma de bits en activo
SUM D0 D2
D0
D2
=9 bits ON
=9 (bin)
operandos
SD
K,H,
KnX,KnY,KnM,KnS
T,C,D,V,Z
•El número de bits activos (ON) del
dispositivo de entrada (S) es almacenado
en el dispositivo de salida (D).
•El destino tendrá un tamaño de 16 bits, y
el resultado de la suma estará expresado
en binario.
•Si el resultado de la suma es 0 (todos a
OFF) se activa el flag M8020.
KnX,KnY,KnM,KnS
T,C,D,V,Z
steps
SUM,
SUM P:7
DSUM,
DSUMP:9
65
Page 66

Programación serie FX
Operaciones con datos (1)
BON
M nemónico función
BON
FNC 44
(Ch eck
spec ified bit
status)
b15 b14 b13 b12 b1 1 b10 b9 b8 b7 b6 b5 b4 b3 b2 b 1 b0
El estado del bit
especificado es indicado
en el destino
X0
1 0 1 1 0 1 0 0 1 0 0 1 0 1 1 1
Bit 11º de D10 = b10 ,
entonces M0=1
Lectura de estado de bit
BON D10 M0 K11
D10
Operaciones con datos (1)
SDn
K,H
KnX,KnY,KnM,KnS
T,C,D,V,Z
operandos
Y,M ,S K,H BON,
•La posición de un bit concreto (n) es
especificada desde el dispositivo fuente
(S).el valor n es como un ‘offset’ desde el
valor S.Un valor de 0 apunta al primer bit de
S y un valor de 15 apunta al 16º valor de S.
•Si el bit señalado es activo, entonces el
destino (D) es activado como si fuera un
‘flag’.
•El dispositivo de salida actúa entonces
como ‘espejo’ del bit fuente señalado.
steps
BONP :7
DBO NP,
DBO N:13
MEAN
M nemónico función
MEAN
FNC 45
(Mea n)
Calcula la media del
rango se leccionado
X0
MEAN D0 D10 K3
n
D=
∑
n=1
En el ejemplo:
(D0)+ (D1)+(D2)
D10=
Sn
n
3
Media aritmética
operandos
SDn
KnX,KnY,KnM,KnS,
T,C,D
•El rango de datos fuente es definido
mediante los operandos S y N. S marca el
primer dato de la serie y n el número de
datos consecutivos a partir de él.
•El valor resultante de la operación es
almacenado en el dispositivo D.
KnY,KnM,KnS
T,C,D,V,Z
Steps
K,H MEAN,
MEANP:7
DMEAN,
DMEANP:13
66
Page 67

Programación serie FX
Operaciones con datos (1)
ANS
M nemónico función
ANS
FNC 46
(Ti mme d
annu nciator
set)
Inicia un Timer y activa
un flag cuando ha
concluido el tiempo
X0
Inicio de temporizador
ANS T0 K10 S900
Operaciones con datos (1)
‘RESET’ de flags
ANR
anunciadores
Mnemónico función
AN R
FNC 47
(Annunciator
reset)
El último flag anunciador es
reseteado en cada operación ANR
SDn
T (0...199) S (S90 0...S999) K
oper andos
(1...32767 x100m s)
•La instrucción inicia el temporizador (S)
con n x 100ms. Cuando el tiempo ha
expirado, el flag designado como
‘anunciador’ (D) de esta situación se
activa a ON.
•Si la instrucción se desactiva mediante su
control añadido (p.e. X0), el tiempo es
automáticamente reiniciado. Sin embargo,
el estado del flag anunciador no
en esta situación.
operandos steps
D
No necesario ANR,
Steps
ANS: 7
cabiará
ANRP: 1
X3
ANR
•Los flags anunciadores que se han utilizado con
ANS y que han sido activados, pueden
‘resetearse’ con esta instrucción.
•En cada activación de ANR la acción de
reinicialización de estos flags es secuencial, el
primer flag activado será el último en
desactivarse, y el último será el primero.
67
Page 68

Programación serie FX
Operaciones con datos (1)
SQR
M nemónico función
SQR
FNC 48
(Square
Root)
Raiz c uadr ada de S K,H,D D SQR,
X0
D2= SQRT (5)
X7
Raiz cuadrada
SQR K5 D2
SQR K5 D2
M8000
Operaciones con datos (1)
M8023
M8023
operandos
SD
•Realiza la raíz cuadrada de un número (S) y
coloca el resultado en un dispositivo de destino
(D). La operación es de enteros positivos y el
resultado se aproxima al valor más alto entero.
Cuando ocurre esto se activa el flag de redondeo
M8021.
•Cuando se produce un resultado 0 se activa el
flag M8020. Si se intenta procesar un valor
negativo, se activa el flag M8067.
•Para operaciones con coma flotante, úsese el
flag M8023. En este caso, tanto el dato fuente
como el destino serán de 32 bits.
steps
SQRP:5
DSQR,
DSQRP:9
FLT
M nemónico función
FLT
FNC 49
(Floating
Point)
Convertir datos
desde/hacia formato de
coma flotante
X12
X27
Coma Flotante ⇔ Decimal
FLT D15 D2
FLT D100 D120
M8000
M8023
M8023
operandos
SD
D D FLT,
•Cuando el flag de coma flotante M8023 =OFF el
dato decimal fuente (S) es convertido a un valor
equivalente en coma flotante y depositado en el
dispositivo de destino (D)
• Cuando el flag de coma flotante M8023 =ON el
dato en coma flotante fuente (S) es convertido a un
valor equivalente en decimal y depositado en el
dispositivo de destino (D)
steps
FLTP:5
DFLT,
DFLTP:9
68
Page 69

Operaciones con datos (1)
Notas:
•Son usados dos dispositivos consecutivos D, D+1 para ubicar el dato fuente en
coma flotante.
•Los flags M8020,M8021 y M8022 son usados como indicador de 0, redondeo
mínimo, y acarreo.
•Los números en coma flotante siempre ocupan 32 bits consecutivos, Cuando se
convierte entre números c.flotante y decimales , reservar suficiente espacio en el
dispositivo destino.
Programación serie FX
Proceso a alta velocidad
REF
M nemónico función
REF
FNC 50
(Re fres h)
Refresco de entradas y
salidas
X0
X10...X18 será actualizado
Refresco inmediato de I / O
REF X10 K8
operandos
SD
X,Y K,H REF,
•Una operación del PLC estándar procesa todo el
programa desde el primer step hasta la instrucción
final END. La actualización de las entradas y salidas
se hace en el momento que se procesa el step que
las escribe o lee. En cambio, la instrucción REF
puede actualizar estas entradas y salidas
inmediatamente cuando ésta es procesada por el
PLC.
•REF actualiza en bloques de 8 (n) dispositivos
consecutivos.
steps
REFP: 5
69
Page 70

Proceso a alta velocidad
Notas:
•Los valores de D deben ser siempre múltiplos de 10 (10,20,30...) para seleccionar el
banco de E/S.
•Los valores de n deben ser siempre múltiplos de 8 (8,16,24,32...) para seleccinar
bloques de 8 dispositivos consecutivos
Programación serie FX
Proceso a alta velocidad
Refresco de E/S y
REFF
inicialización de filtros
M nemónico función
REF
FNC 51
(Refresh an d
filter adjust)
Refresco de entradas y
salidas e inic ializac ión
(SET ) de filtros de entrada
X10
REFF K1
oper andos
n
K,H
n=0 a 60ms (0=50us)
X000 a X 007 (X000 a X 017 para FX2N )
son auto mática mente asig nado s cuan do
se us a esta inst ruc ción
•El PLC está provisto de unos filtros de entrada cuyo
objetivo es evitar los ‘rebotes’ de los pulsadores o
interruptores mecánicos que hubiera en sus entradas.
Este filtro fuerza una duración mínima del impulso de
entrada, que por defecto es de 10ms.
•Para aplicaciones de alta velocidad de entrada, puede
ser necesario reajustar este tiempo, entonces esta
instrucción puede aplicarse.
•El valor n se ajusta desde 0 ( 50us) hasta 60ms.
REFF,
REFFP: 3
70
Page 71

Programación serie FX
Proceso a alta velocidad
MTR
M nemónic o funci ón steps
MTR
FNC 52
(Input
matrix)
M8000
Multiplexa un banco de
entradas dentro d e un
número de dispositivos
Ejemplo:
Ver notas
Entrada de matriz
SD1D2n
X Y Y,M,S MTR:9
Estos operand os deben ser siempre múltiplos
de 1 0 (0 0,10,2 0...)
MTR X10 Y20 M 30 K3
operandos
K,H
(n= 2 a 8)
•Esta instrucción permite la selección de
8 dispositivos de entradas consecutivas
(posición de encabezado marcada en S),
para ser usada múltiples (n) veces
multiplexadas.Las salidas (D1) actúan
como señal de control de multiplex. El
resultado es almacenado en una tabla
matriz (encabezado por D2)
Proceso a alta velocidad
M8000
MTR X10 Y20 M 30 K3
•El ejemplo multiplexa 7 entradas en
tres niveles.
•Cuando la salida Y20 es ON, las
entradas del primer banco son leídas.Su
estado es almacenado de M30 a M37.
•En el segundo step Y20 pasa a OFF y
Y21 a ON, en este momento las entradas
del siguiente banco de entradas es
leído. Su estado es almacenado en M40
a M47.
•El último paso de este ejemplo es
cuando Y21 pasa a OFF y Y22 pasa a
ON. Esto permite que todas las entradas
del tercer banco sea leído y almacenado
en M50 a M57.
Dispositivos de
entrada
(contactos)
X10 X11 X12 X13 X14 X15 X16 X17
PLC
Y20 Y21 Y22
71
Page 72

Proceso a alta velocidad
Notas:
•La instrucción MTR está pensada para conmutación de entradas/salidas muy
rápida, por esta razón es sólo recomendada para módulos con salidas de
transistor.
•Para que esta instrucción funcione correctamente, debe excitarse continuamente,
p.e. Con el flag M8000 (RUN). Cuando se completa la matriz, el flag M8029 se
activa.Este flag se resetea automáticamente cuando se desactiva MTR.
•Cada grupo de 8 entradas es agrupado en un ‘banco’, n es el nº de bancos. Cada
banco tiene una salida Y (D1) dedicada a activarlos.
Programación serie FX
Proceso a alta velocidad
Comparación con contador
HSCS
de alta velocidad
M nemónico función
HSCS
FNC 53
(High s peed
coun ter set)
M8000
99 →100
101
activa una salida cuando
el contador de alta
velocidad llega al valor
especificado
HSCS K100 C255 Y10
→100
Y10= ON
S1 S2 D
K,H
KnX,KnY,Kn
M,KnS
T,C,D,V,Z
•HSCS compara el valor actual del contador
seleccionado (S2) con el valor de
comparación seleccionado (S1). Cuando el
valor del contador cambia a un valor igual al
de S1, el dispositivo especificado como
destino (D) es puesto a ON.
•Si el contador es forzado al valor de cambio,
la salida especificada NO será ON. Sólo
responde a cambios de
incremento/decremento.
operandos
C (235 a 255) Y,M ,S HSCS:1 3
Ste ps
72
Page 73

Proceso a alta velocidad
Notas:
•Se recomienda el uso del flag M8000 (RUN) para activar esta función HSCS, y
similares como HSCR, HSZ
•La serie FX permite hasta 6 instrucciones HSCS/HSCR/HSZ activadas
simultáneamente.
•La serie FX2N puede usar punteros de interrupción I010... I060 como dispositivos de
salida.
Programación serie FX
Proceso a alta velocidad
HSCR
M nemónico función
HSCR
FNC 54
(High spee d
counter
reset)
M8000
99 →100
101
desactiva (reset) una
salida cuando e l
contador de alta
velocidad llega al valor
especificado
HSCR K100 C255 Y10
→100
Y10= OFF
Reset con contador de alta
velocidad
S1 S2 D
K,H
KnX,KnY,Kn
M,Kn S
T,C,D,V,Z
•HSCR compara el valor actual del contador
seleccionado (S2) con el valor de
comparación seleccionado (S1). Cuando el
valor del contador cambia a un valor igual al
de S1, el dispositivo especificado como
destino (D) es puesto a OFF (reset).
•Si el contador es forzado al valor de cambio,
la salida especificada NO será reseteada.
Sólo responde a cambios de incremento /
decremento.
•Puntos a remarcar, mismos que HSCS.
operandos
C (235 a 2 55) Y,M ,S,C
(si se usa C, debe
ser el mismo que
S2)
Steps
HSCR:1 3
73
Page 74

Programación serie FX
Proceso a alta velocidad
HSZ
Comp. de contador de
alta velocidad con rango
M nemónico función steps
HSZ
FNC 55
(high speed
zone
comp are)
Valor del contador a.v. se
compara con un rango
El ra ng o design ad o es
mantenido en una tabla de
datos , gobernando las salidas
'Y' directamente
El ra ng o design ad o es
mantenido en una tabla de
dat os , goberna ndo las
frec uencias PLSY directamente
usando D8132
S1 S2 S3 D
K,H
KnX,KnY,KnM,KnS
T,C,D,V,Z
D K,H (1... 12 8)
Proceso a alta velocidad
operandos
C (235 ...25 5)
Y,M,S
(3 consecuti vos)
M813 0
M813 2
HSZ:17
MODO 1:
•Funciona como ZMP, pero el dispositivo a comparar es un contador de alta velocidad.
•El operando D es el dato de encabezado de 3 dispositivos consecutivos para el
resultado de la comparación.
(D) =ON cuando S3 es menor que S1
(D+1)=ON cuando S3 está entre S1 y S2
(D+2)=ON cuando S3 es mayor que S2
M8000
DHSZ K1000 K1200 C251 Y10
Y10 (D) =ON cuando C251 es m enor que S1, K1000
Y11(D+1)=ON cuando C251 está entre S1 y S2 (K100 y K1200)
Y12(D+2)=ON cuando C251 es mayor que S2 (K1200)
74
Page 75

Proceso a alta velocidad
MODO 2:
•S1 y S2 definen una tabla , S1 es el encabezado y S2 el número de registros (máx
128). Cada registro ocupa 4 datos consecutivos proporcionados como:
•D,D+1: Usado como registro 32b para contener el dato a comparar
•D+2: Almacena el nº dispositivo de salida en formato HEX
•D+3: Almacena la acción (SET/RESET) a realizar en el dispositivo D+2,
SET =1, RESET=0.
M8000
DHSZ D180 K5 C251 M8132
Programación serie FX
Ejemplo:
Proceso a alta velocidad
Nº de registro
(D8130)
0
1
2
3
4
800
400
600
100
40
Y10
Y37
M8131
D,D+1 D+2 D+3
K: 5 valores consecutivos
desde D150
D150,151:40
D154,155:100
D158,159:400
D162,163:600
D166,167:800
Salida ‘Y’
D152:Y10
D156:Y10
D160:Y10
D164:Y10
D168:Y37
Reset del contador
M8000
•Cuando los valores del contador
alcanzan los rangos de la tabla, se realiza
ON
la acción definida por D+3 sobre la salida
OFF
cuyo índice se determina por D+2.
•El flag M8130 se activa cuando el
contador llega a su fin, y en este
momento el registro D8130 se pone a 0.
SET/RESET
DHSZ D150 K5 C251 M8130
D153: K1
D157: K0
D161: K1
D165: K0
D169: K1
75
Page 76

Proceso a alta velocidad
MODO 3:
•S1 y S2 definen una tabla , S1 es el encabezado y S2 el número de registros (máx
128). Cada registro ocupa 4 datos consecutivos proporcionados como:
•D,D+1: Usado como registro 32b para contener el dato a comparar
•D+2,D+3: Contiene un valor de frecuencia en Hz (0...1000)
Este último valor es almacenado en D8132 , juntamente con la instrucción PLSY
genera una frecuencia en la salida determinada por PLSY del valor definido por D+2 y
D+3. Ejemplo:
X17
DHSZ D150 K5 C251 M8130
PLS M10
PLSY D8132 K10 Y7
M10
Programación serie FX
Ejemplo:
Proceso a alta velocidad
Nº de registro
(D8131)
0
1
2
3
4
Comparador
D8131
Salida en Hz
800
400
600
100
40
600
550
100
50
D,D+1 D+2,D+3
K: 5 valores consecutivos
desde D180
D180,181:40
D184,185:100
D188,189:400
D192,193:600
D196,197:800
SET/RESET
D182,183: K100
D186,187: K600
D190,191: K550
D194,195: K40
D198,199: K0
•Cuando los valores del contador
alcanzan los rangos de la tabla, se genera
en la salida definida por PLSY la
frecuencia indicada por D+2 y D+3.
•El flag M8133 se activa cuando el
contador llega a su fin, y en este
momento el registro D8131 se pone a 0.
76
Page 77

Programación serie FX
Proceso a alta velocidad
SPD
M nemónico función
SPD
FNC 56
(Speed
detection)
X10
S1
Detecta el número de
pulsos recibidos en un
tiempo dado.
X10
SPD X0 K100 D0
Proceso a alta velocidad
n
S2
S2
Con el valor acumulado D se calcula
velocidades, frecuencias, etc:
Detección de velocidad
S1 S2 D
X0. ..X5 K ,H
o
p
operandos
T,C,D,Z,(V)
KnX,KnY,KnM,
KnS
T,C,D,V,Z
•El número de pulsos recibidos en S1 es
contado y almacenado en D+1, como
valor actual.
•El instante de tiempo en el que se realiza
la cuenta viene determinado por S2 en
ms.
•El tiempo restante es mostrado mediante
el dispositivo D+2.
•El número de cuentas último será
almacenado en D
nValor de cuenta actual, D+1
oAcumulado/Valor último de la cuenta
p Tiempo restante en ms,D+2
•Cuando el tiempo de cuenta ha
expirado, el resultado de D+1 es
inmediatamente transferido a D.
Luego D+1 es reseteado y se
inicia un nuevo tiempo de
cuenta.
•Las entradas utilizables con
esta instrucción son de X0 a X5.
La entrada especificada con S1
no puede usarse en otro proceso
de alta velocidad.
(3 dispositivos
conse cutivos)
Steps
SPD:7
Velocidad lineal (m/s)
n x S2
n= pulsos / m
(D)
X 10
Velocidad radial ( r p m)
3
n= pulsos / revolución
60 x (D)
n x S2
X 10
3
77
Frecuencia (Hz)
(D)
S2
Page 78

Programación serie FX
Proceso a alta velocidad
PLSY
PLSY
FNC 57
(Pu lse Y
output)
X10
Salida de pulsos
Saca un determinado nº
de pulsos e n una
determinada frecuencia,
por una salida
PLSY K1000 D0 Y0
Proceso a alta velocidad
S1 S2 D
operandos
Y
(Y000,Y001
sol a m e n te )
•La cantidad de pulsos especificada por
S2 es sacada por la salida D a la
frecuencia S1. D puede ser Y000 o Y001.
StepsM nemónico función
PLSY: 7
DPLSY:13
•La ejecución de PLSY no interrumpe el flujo del programa. Durante la ejecución
pueden cambiarse sus parámetros, que no se harán efectivos hasta que la
ejecución anterior haya finalizado.
•La serie FX1S y FX1N pueden usar frecuencias de 1 a 132.767 Hz (operación de
16 bits) y de 1 a 100 kHz (operación de 32 bits). La serie FX2N de 2 a 20000Hz.
•El nº máximo de pulsos para una operación de 16 bits es de 32767, y 32 bits
hasta 2.147.483.647.
•Cuando el nº de pulsos se ha completado, se activa el flag especial M8029. Este
se desactiva cuando se llama de nuevo a un PLSY.
•El ciclo del pulso es del 50%.
•Debido a que actúa sobre salidas a alta frecuencia, es recomendable usarla sólo
en PLC con módulos de salida de transistor. Máxima corriente de trabajo 200mA.
• En los modelos FX2N el nº de pulsos puede ser monitorizado en los registros
D8140, D8141 para Y0 y D8142, D8143 para Y1. El nº total de pulsos puede verse
en D8136, D8137.
•Esta instrucción sólo puede ser usada una vez en el programa.
78
Page 79

Programación serie FX
Proceso a alta velocidad
PWM
M nemónico función
PWM
FNC 58
(Pulse width
modulation)
Genera pulsos de
anchura definida
X10
PWM D10 K50 Y0
S1
S2
Proceso a alta velocidad
Pulsos de ancho definido
S1 S2 D
operandos
K,H
KnX,KnY,KnM,KnS
T,C,D,V,Z
en los modelos FX2N
•La instrucción genera un tren de pulsos a
través del dispositivo D definido.
•Las características de este pulso se
definen como:
- Período de la señal : S2 (ms)
- Duración del pulso: S1 (ms)
Y
(Y000, Y001
sol a m e n te )
Steps
PWM: 7
•Notas
•Es una instrucción de 16 bits, por lo tanto los valores aceptables son 1 a 32767.
•S2 no puede se menor que S1. El ciclo de trabajo es de S1/S2.
•Debido a que actúa sobre salidas a alta frecuencia, es recomendable usarla sólo
en PLC con módulos de salida de transistor, máxima corriente de trabajo 200mA.
•Esta instrucción sólo puede ser usada una vez en un programa.
79
Page 80

Programación serie FX
Proceso a alta velocidad
PLSR
M nemónico función
PLSR
FNC 59
(Pu lse ram p)
Genera un tren de pulsos
en rampa de subida y de
bajada
M54
PLSR K500 D0 K3600 Y00
H
z
2
1
Rampas de pulsos
operandos
•Una cantidad específica de pulsos (S2)
es conducida a una salida (D).
•La frecuencia de salida es
incrementada gradualmente en 10
pasos de aceleración en ms (S3) hasta
alcanzar la frecuencia final (S1).
•Al desactivarlo, la frecuencia decrece
también en 10 pasos durante un tiempo
t
de deceleración (S3).
10
9
8
S3 S3
1
2
(Hz)
S1
S1 S2 D
K,H
KnX,KnY,KnM,KnS
T,C,D,V,Z
8
9
10
Y
(Y000,Y001
solamen te)
Proceso a alta velocidad
Notas:
•La serie FX2N puede usar frecuencias de 20 a 20000 Hz. La serie FX1S y FX1N
puede usar frecuencias de 10 a 100000 Hz. La frecuencia debe ser elegida en
múltiplos de 10.
•Los pasos son 1/10 de la máxima frecuencia.
•Rango de pulsos va de 110 a 32.767 (16 bits) o 2.147.483.647 (32 bits)
•La salida debe ser Y000 o Y001 de un módulo PLC de salida a transistor.
•El flag M8029 se activa cuando se alcanza la frecuencia S1.
Steps
PLSR: 9
DPLSR:17
•Limitaciones del tiempo de aceleración:
•S3 tiene un tiempo máximo de 5000ms
•Seleccionar S3 para que sea más de 10 veces el tiempo de Scan de programa. Si
no, la aceleración será irregular.
•Las frecuencias de salida están limitadas de 2 a 20000 Hz
90000
Mínimo Máximo
S3 ≥ x5
S1
S3 ≤ x818
80
S2
S1
Page 81

Y
(
)
)
Programación serie FX
Operaciones con Datos (2)
ECMP
Mnemónico función
ECMP
FNC 110
(Floating point
Compare)
•El dato S1 es comparado con S2. El resultado es indicado por 3 bit consecutivos
(del tipo Y, M o S) en el operando D:
Comparación de dos
valores en coma flotante,
se dan resultados de >, <,
o =
X0
Comparación (Float)
operandos
1
DECMP K1,23 D20 M0
M0
D20<K1,23 M0=ON
M1
D20=K1,23 M1=ON
M2
D20>K1,23 M2=ON
S
(el número entero es
K,H
con ve rtido a co ma flotan te
automáticamente)
(Tiene q ue ser en formato de
D
co ma fl otant e (32 bits)
•En nuestro caso D=M0.
•Si S2 < S1; Bit D (M0) es ON
•Si S2 = S1; Bit D+1 (M1) es ON
•Si S2 > S1; Bit D+2 (M2) es ON
S
2
Y,M ,S
(3 bi ts
co nsecu tiv os)
Operaciones con Datos (2)
steps
D
DECMP,
DECMPP:
13
EZCP
Mnemónico función
E ZC P
F NC 1 11
(Floating Point
Zone Co mpare)
•El dato S3 es comparado con el rango S1 - S2. El resultado es indicado por 3 bit
consecutivos (del tipo Y, M o S) en el operando D:
X0
Zona de Comparación (Float)
operan dos
1
2
3
S
•En nuestro caso D=M3.
•Si S3 < (S1;S2) Bit D (M3) es ON
•Si S3 = o entre (S1;S2) Bit D+1 (M4
es ON
•Si S3 > (S1;S2) Bit D+2 (M5) es ON
D
,M,S
(3 bits
consecutivos)
Comparación de un va lor
en coma flotante con un
rango, se dan resultados
de >, <, o =
DEZCP K1,1 D40 C30 M3
M3
C30<K1,1,D40,M3=ON
M4
K1,1=<C30=<D40,M4=ON
M5
C30<K1,1,D40,M5=ON
S
S
(el n úmero ent ero e s
K,H
convertido a coma flotante
au tom átic ame nte)
(Tiene que ser en
D
format o de co ma flota nte
32 bits
steps
DE ZCP ,
DEZCPP: 13
81
Page 82

Programación serie FX
Operaciones con Datos (2)
EBCD
M nemónico función
EBCD
FNC 118
(Float to
Scientific
conv ersion)
Convierte números en coma
flotante a notació n científica
X0
Operaciones con Datos (2)
formato científico
DEBCD D12 D35
Conversión de coma flotante a
operandos
SD
D - Deben ser con
datos en coma
flotante (3 2 bits)
•El dato en coma flotante fuente S es convertido a
un número equivalente en notación científica y
almacenado en la posición de destino D. Para
mantener una máxima precisión en la conversión, la
mantisa D debe estar en el rango 1000 a 9999 (o
cero) y el exponente D+1 corregido al un valor
apropiado.
D - Dos
dispositivos
consecutivos son
usados
D :Man itisa
D +1: E xponent e
steps
DEBCD,
DEBCDP:
9
EBIN
M nemónico función
EBIN
FNC 119
(Sc ien tifi c to
Float
conversion)
Convierte números en
notación cie ntífica a coma
flotante
X0
DEBIN D25 D13
Conversión de notación científica
a coma flotante
operandos
SD
D - Dos
dispositivos
consecutivos son
usados
S: Man itisa
S+1: Exponente
•El dato en notación científica fuente S es
convertido a un número equivalente en coma
flotante y almacenado en la posición de destino D.
Para mantener una máxima precisión en la
conversión, la mantisa S debe estar en el rango
1000 a 9999 (o cero) y el exponente S+1 corregido al
un valor apropiado.
D - Deben ser con
datos en coma
flotante (32 bits)
steps
DEBIN,
DEBINP:
9
82
Page 83

Programación serie FX
Instrucciones para Posicionamiento
ABS
M nemónico función
ABS FNC
155
(Absolute
current
value read)
lee la posición abso luta
de un servo serie MRJ2/J2 S o M R-H
M0
Lectura de posición absoluta
DABS X000 Y003 D8140
Ejemplo de conexión
X000
X001
X002
COM
+V3
+V4
+V5
Y003
Y004
Y005
operandos
SD
X, Y, M , S Y, M , S T , C, D, V, Z DABS:
z
z
servodrive
servodrive
modo absoluto, tras un fallo de la
modo absoluto, tras un fallo de la
alimentación. El valor (S) es la primera
alimentación. El valor (S) es la primera
de las 3 entradas de comunicación,
de las 3 entradas de comunicación,
(D1) es la primera de las dos salidas y
(D1) es la primera de las dos salidas y
(D2) es el registro de destino.
(D2) es el registro de destino.
Usa un protocolo dedicado
Usa un protocolo dedicado
exclusivamente para esta serie de
exclusivamente para esta serie de
servos
servos
1
Lee la posición absoluta del
Lee la posición absoluta del
(MR--
(MR
D
J2) funcionando en
J2) funcionando en
Steps
2
13 steps
Notas:
D01
ZSP
TLC
SG
SON
ABSM
ABSR
SG
MR-J2-A
•Ésta es una
instrucción de 32 bits,
úsese DABS como
instrucción
•La lectura empieza
cuando se activa
mediante un
dispositivo de bit. Si
éste bit abre durante la
ejecución, la lectura se
aborta.
• Cuando se completa
la lectura, el flag
M8029 se activa a ON
disositivo
•La alimentación del servo debe activarse antes de la del PLC, o al mismo tiempo.
•El dispositivo D2 puede ser cualquiera de tipo word, aunque para una correcta captura
debe transferirse luego hacia D8141 & D8140 ( current position register)
•DABS al finalizar la lectura, tras desactivar la instrucción se activará la señal SON del serv
83
Page 84

Programación serie FX
Instrucciones para Posicionamiento
ZRN
Mnemónico función
ZRN
FNC 15 6
Zero Return
M0
•S1 es la velocidad de retorno a cero
•S2 es la velocidad de aproximación
•S3 es la señal de cambio entre estas
velocidades
• D es la salida de pulsos
Ejecuta un retorno a cero
tras puesta en marcha o
setting inicial
Retorno a cero
ZRN K1000 K100 X003 Y000
ZRN K1000 K100 X003 Y000
operand os
1
S
K,H,KnX,KnY,
KnM,KnS
T,C,D,V,Z
2
S
•Cuando se ejecuta un posicionado
incremental o absoluto, el PLC
almacena la posición actual , valor que
aumenta o decrece dependiendo
durante la operación
•Usando estos valores se conoce la
posición de la máquina. Sin embargo,
si se para el PLC, esta posición se
pierde.
Notas:
•S1 (velocidad de retorno), en 16 bits
puede seleccionarse entre 10 y 32.767
Hz, en 32bits puede seleccionar entre
10 y 100KHz
•S2 (velocidad de acercamiento), puede
M0X003M8145
seleccionarse de 10 a 32.767 Hz
3
S
X,Y
M,S
D
Y
(sólo
Y000
eY001)
steps
ZRN:
9 steps
DZRN:
17 Steps
•Si no se selecciona un dispositivo de entrada ( X) como señal de cambio, el retorno a
cero puede verse afectado por el ciclo de scan y puede dar lugar a error de posición.
•Sólo Y000 e Y001 pueden ser usadas como salidas de pulsos. Sólo los PLC de salida
transistor pueden ser usados para este propósito. Corriente de carga de 10 a 100mA.
•Cuando M8140 se activa, una señal de borrado debería ser enviada al servo cuando el
retorno a cero se ha completado.
•Dispositivos implicados en este posicionamiento:
• D8141 & D8140 : Valor de posición actual para Y000 y D8143 & D8142 : Valor de
posición actual para Y001
• D8147 & D8146 : Velocidad máxima (10~100.000 Hz )
• D8148 : Tiempo de aceleración / deceleración
• M8145/M8146: Stop imediato Y000 e Y001 respectivamente.
• M8147 y M8148: Busy/ready flag para Y000 e Y001 respectivamente
84
Page 85

Programación serie FX
Instrucciones para Posicionamiento
PLSV
M nemónico función
PLSV
FNC 157
Pulse V
v
Notas:
•S en 16 bits puede seleccionarse entre 10 y 32.767 Hz, en 32bits puede seleccionar
entre 10 y 100KHz.
•Sólo Y000 e Y001 pueden ser usadas como salidas de pulsos. Sólo los PLC de salida
transistor pueden ser usados para este propósito. Corriente de carga de 10 a 100mA.
•La dirección D2 se define como: OFF ( negativo), ON ( positivo ). El signo de la
frecuencia determina el sentido de giro
•La frecuencia de pulsos puede cambiarse durante la ejecución de la instrucción.
•No existe acc/ decc. Para utilizarla, puede intentarse relacionar PLSV con RAMP (FNC 67)
•La desactivación de la instrucción detiene inmediatamente el tren de pulsos.
Frecuencia de pulsos
variable
M0
1000
variable
PLSV K1000 Y000 Y004
3000
2000
operandos
SD
K, H,
KnX, KnY,
KnM, KnS,
T, C, D, V, Z
1500
Y
Y000, Y001
•Genera un nº de pulsos indefinido durante
toda su activación a frecuencia (S) con
salida en Y determinada por (D1) y bit Y de
dirección determinado por (D2).
t
1
Y, M , S PLSV
Steps
2
D
9 steps
DPL SV
17 step
Salida de pulsos en frecuencia
•Dispositivos implicados en este posicionamiento:
• D8141 & D8140 : Valor de posición actual para Y000 y D8143 & D8142 : Valor de
posición actual para Y001
• D8147 & D8146 : Velocidad máxima (10~100.000 Hz )
• D8148 : Tiempo de aceleración / deceleración
• M8145/M8146: Stop imediato Y000 e Y001 respectivamente.
• M8147 y M8148: Busy/ready flag para Y000 e Y001 respectivamente. Cuando estan en
BUSY, no es posible re-iniciar la instrucción.
85
Page 86

Programación serie FX
Instrucciones para Posicionamiento
DRVI
M nemónico función
DRVI
FNC 158
Drive to
Increment
M0
v
Posicionamiento
Incremental
3000Hz
Posicionamiento incremental
operandos
1
K, H,
KnX, KnY,
KnM, KnS,
T, C, D, V, Z
DRVI K25000 K3000 Y000 Y004
t
25000
SD
Y
Y000, Y001
•Genera un nº de pulsos (S1) a frecuencia
(S2) con salida en Y determinada por (D1) y
bit Y de dirección determinado por (D2). El
posicionamiento es incremental
2
D
Y, M , S DRVI
Notas:
•S en 16 bits puede seleccionarse entre 10 y 32.767 Hz, en 32bits puede seleccionar
entre 10 y 100KHz.
El máximo nº de pulsos en 32 bits es ±999.999. El sentido es de
•
•
El máximo nº de pulsos en 32 bits es ±999.999. El sentido es de
signo. En 16
signo. En 16
Durante la ejecución de la instrucción no puede cambiarse el co
•
•
Durante la ejecución de la instrucción no puede cambiarse el co
operandos
operandos
Si el dispositivo que activa la instrucción se desactiva durant
•
•
Si el dispositivo que activa la instrucción se desactiva durant
el equipo decelera con el valor de D8148 y se detiene
el equipo decelera con el valor de D8148 y se detiene
No es posible re--
•
•
No es posible re
contactos de sistema M8147 y M8148 para Y000/Y001 respectivamente.e.
contactos de sistema M8147 y M8148 para Y000/Y001 respectivament
bit
es ±32767.
bit
es ±32767.
de la instrucción. Si se hace, será efectiva en la próxima ejecu
de la instrucción. Si se hace, será efectiva en la próxima ejecu
armar la instrucción durante el estado BUSY indicado por los
armar la instrucción durante el estado BUSY indicado por los
terminado por su
terminado por su
ntenido de los
ntenido de los
ción de ésta.
ción de ésta.
e la ejecución de ésta,
e la ejecución de ésta,
Steps
9 steps
DDRVI
17 step
•Dispositivos implicados en este posicionamiento:
• D8141 & D8140 : Valor de posición actual para Y000 y D8143 & D8142 : Valor de
posición actual para Y001
• D8147 & D8146 : Velocidad máxima (10~100.000 Hz )
• D8148 : Tiempo de aceleración / deceleración
• M8145/M8146: Stop imediato Y000 e Y001 respectivamente.
• M8147 y M8148: Busy/ready flag para Y000 e Y001 respectivamente. Cuando estan en
BUSY, no es posible re-iniciar la instrucción.
86
Page 87

Programación serie FX
Instrucciones para Posicionamiento
DRVA
M nemónico función
DRVA
FNC 158
Drive to
absolute
M0
0
Posicionamiento
Abs oluto
V
5000
Posicionamiento Absoluto
operandos
SD
K, H,
KnX, KnY,
KnM, KnS,
T, C, D, V, Z
DRVA K25000 K3000 Y000 Y004
3000Hz
t
25000
20000
Y
Y000, Y001
Genera un nº de pulsos para alcanzar una
•
posición absoluta (S1) a frecuencia (S2)
con salida en Y determinada por (D1) y bit
Y de dirección determinado por (D2). Todas
las cotas son referidas a un punto
considerado el cero.
•D8141 & D8140 : Valor de posición actual
para Y000 y D8143 & D8142 : Valor de
posición actual para Y001
1
2
D
Y, M , S DRVA
Notas:
•S en 16 bits puede seleccionarse entre 10 y 32.767 Hz, en 32bits puede seleccionar
entre 10 y 100KHz.
• El máximo nº de pulsos en 32 bits es ±999.999, en 16 bit es ±32767.El sentido de
movimiento será cambiado a conveniencia por la propia instrucción para alcanzar las
cotas absolutas.
• Durante la ejecución de la instrucción no puede cambiarse el contenido de los
operandos de la instrucción. Si se hace, los cambios serán efectivos en la próxima
ejecución de ésta.
• Si el dispositivo que activa la instrucción se desactiva durante la ejecución de ésta,
el equipo decelera con el valor de D8148 y se detiene.
• No es posible re-armar la instrucción durante el estado BUSY indicado por los
contactos de sistema M8147 y M8148 para Y000/Y001 respectivamente.
Steps
9 steps
DDRVA
17 step
•Dispositivos implicados en este posicionamiento:
• D8141 & D8140 : Valor de posición actual para Y000 y D8143 & D8142 : Valor de
posición actual para Y001
• D8147 & D8146 : Velocidad máxima (10~100.000 Hz )
• D8148 : Tiempo de aceleración / deceleración
• M8145/M8146: Stop imediato Y000 e Y001 respectivamente.
• M8147 y M8148: Busy/ready flag para Y000 e Y001 respectivamente. Cuando estan en
BUSY, no es posible re-iniciar la instrucción.
87
Page 88

Programación serie FX
Lista de dispositivos de sistema
Se describe a continuación una serie de marcas y registros de sistema que son
de uso más común en la programación de los autómatas de las series FX1S, FX1N y
FX2N.
ESTADO DEL PLC:
(M8000 – M8009)
M8000 Siempre en estado ON (siempre activado)
M8001 Siempre en estado OFF (siempre desactivado)
M8002 Activo durante el primer ciclo de scan (útil para llevar a cabo
configuraciones iniciales)
M8003 Activo siempre menos el primer ciclo de scan del autómata
M8004 Flag de error: Cuando una de las marcas de M8060 a M8067 está
activada
M8005 Activa cuando el nivel de la batería es inferior al valor establecido en el
registro de sistema D8006
M8006 Error de batería
M8007 Fallo momentáneo en el suministro de tensión de alimentación del PLC
M8008 Posible perdida de datos por fallo en alimentación
M8009 Fallo en la fuente de alimentación de suministro de 24 Vcc
(D8000 – D8009)
D8000 Watch dog timer. Este registro contiene el valor de seguridad del
temporizador WDT, si se introduce D800=0 se desactivará el WDT. El
valor por defecto el 200 ms.
D8004 Identifica el número del error D8004 puede ser de 8060 a 8067 (valor
equivalente a la marca de error activada), si D8004 es igual a 8065
quiere decir que el flag de error M8065 está activo.
D8005 El nivel inicial de la batería (valor 36 quiere decir 3.6 voltios)
D8006 Nivel de la batería desde el cual se quiere activar el bit de batería baja
(ver el relé de sistema M8005)
D8007 Valor del tiempo transcurrido durante el evento establecido por el relé de
sistema M8007
D8008 Valor del tiempo transcurrido durante el evento establecido por el relé de
sistema M8008
D8009 El dispositivo con dirección más baja afectado por el fallo de tensión de
24 Vcc.
88
Page 89

Programación serie FX
DISPOSITIVOS RELACIONADOS CON EL RTC (Reloj de Tiempo Real):
(M8010 – M8019)
M8011 Oscilador en ciclos de 10 ms.
M8012 Oscilador en ciclos de 100 ms.
M8013 Oscilador en ciclos de 1 segundo
M8014 Oscilador en ciclos de 1 minuto
M8015 Cuando M8015=ON se para el reloj del sistema (RTC)
M8016 Cuando M8016=ON se guarda el valor del RTC en los registros de
sistema D8013 a D8019 (con el valor fijo). Si no se utiliza M8016, los
valores de los registros D8013 a D8019 se actualizan constantemente.
M8018 Cuando M8018=ON el RTC está presente en el sistema
M8019 Error en la configuración de puesta en hora del reloj (RTC)
(DM8010 – D8019)
D8010 Valor actual del último ciclo de scan
D8011 Valor mínimo de ciclo de scan obtenido (en una resolución de 0.1 ms)
D8012 Valor máximo de ciclo de scan obtenido (en una resolución de 0.1 ms).
El tiempo de espera durante la operación de tiempo de scan constante
no está incluída.
D8013 Valor de los segundos del reloj de tiempo real (0-59)
D8014 Valor de los minutos del reloj de tiempo real (0-59)
D8015 Valor de las horas del reloj de tiempo real (0-23)
D8016 Valor de los días del reloj de tiempo real (1-31)
D8017 Valor de los meses del reloj de tiempo real (1-12)
D8018 Valor de los años del reloj de tiempo real (0-99)
D8019 Valor de los días de la semana del reloj de tiempo real (0-6)
FLAGS DE OPERACIÓN:
(M8020 – M8029)
M8020 ZERO. Se activa cuando el resultado de la operación ADD o SUB es
cero.
M8021 BORROW. Cuando la operación SUB da como resultado un número
inferior a cero
M8021 CARRY. Cuando la operación ADD da como resultado un acarreo como
consecuencia de un desbordamiento en la operación.
M8028 Cambia los temporizadores del T32 al T62 a resolución 10 ms cuando
se activa este relé (M8028=ON). Sólo para la serie FX
1S.
89
Page 90

Programación serie FX
(D8020 – D8029)
D8020 Valor del filtro de entrada del autómata.
Para la serie FX2N, las entradas son de X000 a X017 con un valor por
defecto de 10 ms (valor cero es igual a 20 µs).
Para la serie FX1S, FX1N, las entradas son de X000 a X007 con un valor
por defecto de 10 ms (valor cero es igual a 10 µs).
D8028 Valor contenido en el registro índice Z0
D8029 Valor contenido en el registro índice V0
Nota: El valor de los registros índice desde V1 a V7 y de Z0 a Z7 se
encuentran en otros dispositivos de sistema (D8182 a D8195)
MODOS DE OPERACIÓN DEL PLC:
(M8030 – M8039)
M8030 Cuando este relé de sistema está activo, la batería puede estar en
estado bajo pero no se iluminará el led de error.
M8031 Borra toda la memoria de dispositivos no retentivos. (Y, M, S, T, C y D
son reseteados). Los dispositivos de sistema se configuran a su valor de
configuración inicial.
M8032 Borra toda la memoria de dispositivos retentivos. (Y, M, S, T, C y D son
reseteados). Los dispositivos de sistema se configuran a su valor de
configuración inicial.
M8033 Durante el proceso de activación de STOP a RUN y de RUN a STOP,
todos los dispositivos conservan su valor
M8034 Todas las salidas se desactivarán cuando M8034=ON. El programa
continuará su ejecución normal calculando los valores correctos de las
salidas, pero las salidas físicas estarán desactivadas.
M8039 Relé de activación del modo de control con ciclo de scan fijo (valor en el
registro D8039)
(D8030 – D8039)
D8030 Valor leído desde el primer potenciómetro de la parte frontal del PLC.
Sólo para la serie FX
1S y FX1N.
D8031 Valor leído desde el segundo potenciómetro de la parte frontal del PLC.
Sólo para la serie FX
1S y FX1N.
D8039 Cuando M8039=ON, el valor de este registro especifica el tiempo del
ciclo de scan constante.
90
Page 91

Programación serie FX
FLAGS DE CONTROL DE INTERRUPCIÓN:
(M8050 – M8059)
Si está activada la instrucción EI, el autómata puede generar interrupciones, pero esta
instrucción es genérica. Utilizando los siguientes relés de sistema
pueden ser activadas/desactivadas las interrupciones
independientemente.
M8050 La interrupción en la entrada X000 queda deshabilitada con M8050=ON
M8051 La interrupción en la entrada X001 queda deshabilitada con M8051=ON
M8052 La interrupción en la entrada X002 queda deshabilitada con M8052=ON
M8053 La interrupción en la entrada X003 queda deshabilitada con M8053=ON
M8054 La interrupción en la entrada X004 queda deshabilitada con M8054=ON
M8055 La interrupción en la entrada X005 queda deshabilitada con M8055=ON
M8056 La interrupción de temporización primera (6xx) queda deshabilitada con
M8056=ON. Sólo para la serie FX
2N.
M8057 La interrupción de temporización segunda (7xx) queda deshabilitada con
M8057=ON. Sólo para la serie FX
2N.
M8058 La interrupción de temporización tercera (8xx) queda deshabilitada con
2N.
M8059
M8058=ON. Sólo para la serie FX
Deshabilita el grupo de interrupciones de I010 a I060
COMUNICACIONES:
(M8120 – M8129)
M8122 Requerimiento de envío a través de un puerto de comunicaciones serie
(FX1N-232BD / FX2N-232BD / FX1N-485BD / FX2N-485BD) de la
información actual en el buffer de salida especificado en los parámetros
de la instrucción RS
M8123 Final de la recepción de datos por el puerto serie (FX1N-232BD / FX2N-
232BD / FX1N-485BD / FX2N-485BD). La información ha sido guardada
en el buffer de entrada especificado en los parámetros de la instrucción
RS
(D8120 – D8129)
D8120 Configuración de las comunicaciones serie utilizando las tarjetas FX1N-
232BD / FX2N-232BD / FX1N-485BD / FX2N-485BD
D8121 Número de estación para comunicaciones serie RS-485/422 con la
utilización del protocolo dedicado.
91
Page 92

Programación serie FX
OTROS DISPOSITIVOS:
(M8160 – M8199)
M8161 Selección de operación en modo 8 bits para las instrucciones ASC, RS,
ASCI, HEX y CCD.
M8170 Captura de pulsos desde la entrada X000
M8171 Captura de pulsos desde la entrada X001
M8172 Captura de pulsos desde la entrada X002
M8173 Captura de pulsos desde la entrada X003
M8174 Captura de pulsos desde la entrada X004
M8175 Captura de pulsos desde la entrada X005
M8198 Conmuta el contenido de origen y destino de las instrucciones de
programación del autómata.
REGISTROS ÍNDICE:
(D8180 – D8199)
D8182 Valor contenido en el registro índice Z1
D8183 Valor contenido en el registro índice V1
D8184 Valor contenido en el registro índice Z2
D8185 Valor contenido en el registro índice V2
D8186 Valor contenido en el registro índice Z3
D8187 Valor contenido en el registro índice V3
D8188 Valor contenido en el registro índice Z4
D8189 Valor contenido en el registro índice V4
D8190 Valor contenido en el registro índice Z5
D8191 Valor contenido en el registro índice V5
D8192 Valor contenido en el registro índice Z6
D8193 Valor contenido en el registro índice V6
D8194 Valor contenido en el registro índice Z7
D8195 Valor contenido en el registro índice V7
Nota: El valor de los registros índice V0 y Z0 se encuentra en otros
dispositivos de sistema (D8028 y D8029)
92
Page 93

CONTROL DE CONTADORES:
(M8200 – D8255)
M8200M8234
PARA CONTADORES NORMALES C. Si M8xxx=ON el contador
correspondiente xxx contará en orden descendente, si M8xxx=OFF el
contador xxx contará de forma ascendente.
M8235M8245
PARA CONTADORES DE ALTA VELOCIDAD (HSC) DE UNA FASE.
Si M8xxx=ON el contador correspondiente xxx contará en orden
descendente, si M8xxx=OFF el contador xxx contará de forma
ascendente.
M8246M8255
PARA CONTADORES DE ALTA VELOCIDAD (HSC) DE DOS FASES.
Si M8xxx=ON el contador correspondiente xxx contará en orden
descendente, si M8xxx=OFF el contador xxx contará de forma
ascendente.
Programación serie FX
93
Page 94

Programación serie FX
Dispositivos
Serie FX1S
M
Cantidad Rango
General 128 M0-M127
Retentivos 128 M128-M255
Sistema 256 M8000-M8255
S
Cantidad Rango
General 128 S0-S127
T
Cantidad Rango
100 ms 63 T0-T62
10 ms 31 T32-T62*
1 ms 1 T63
* Con M8028=ON T32-T62 son de 10 ms de resolución, Si M8028=OFF son de 100
ms de resolución (T0 a T62)
C
Cantidad Rango
General (16 bits asc.) 16 C0-C15
Retentivos (16 bits asc.) 16 C16-C31
C (Alta velocidad)
Cantidad Rango
1 Fase 4 C235-C238
1 Fase (con start/stop) 3 C241,C242,C244
2 Fases 3 C246,C247,C249
Fase A/B 3 C251,C252,C254
D
Cantidad Rango
General 128 D0-D127
Retentivos 128 D128-D255
Ajustables extern. 2 D8030, D8031
Sistema 256 D8000-D8255
94
Page 95

Programación serie FX
V, Z
Cantidad Rango
Registros índice V 8 V0-V7
Registros índice Z 8 Z0-Z7
P, I (Punteros)
Cantidad Rango
De subritina (P) 64 P0-P63
De interrupción (I) 6 -
Serie FX1N
M
Cantidad Rango
General 384 M0-M383
Retentivos 1152 M384-M1535
Sistema 256 M8000-M8255
S
Cantidad Rango
General 1000 S0-S999
T
Cantidad Rango
100 ms 200 T0-T200
10 ms 46 T201-T245
1 ms (retentivos) 4 T246-T249
100 ms (retentivos) 6 T250-T255
C
Cantidad Rango
General (16 bits asc.) 16 C0-C15
Retentivos (16 bits asc.) 184 C16-C199
General (32 bits bidirec.) 20 C200-C219
Retentivos (32 bits bid.) 15 C220-C234
95
Page 96

Programación serie FX
C (Alta velocidad)
Cantidad Rango
1 Fase 4 C235-C238
1 Fase (con start/stop) 3 C241,C242,C244
2 Fases 3 C246,C247,C249
Fase A/B 3 C251,C252,C254
D
Cantidad Rango
General 128 D0-D127
Retentivos 7872 D128-D7999
Ajustables extern. 2 D8030, D8031
Sistema 256 D8000-D8255
V, Z
Cantidad Rango
Registros índice V 8 V0-V7
Registros índice Z 8 Z0-Z7
P, I (Punteros)
Cantidad Rango
De subritina (P) 128 P0-P127
De interrupción (I) 6 -
Serie FX2N
M
Cantidad Rango
General 3072 M0-M3071
Retentivos 2572 M500-M3071*
Sistema 256 M8000-M8255
* Configurable por software
S
Cantidad Rango
General 1000 S0-S999
96
Page 97

Programación serie FX
T
Cantidad Rango
100 ms 200 T0-T200
10 ms 46 T201-T245
1 ms (retentivos) 4 T246-T249
100 ms (retentivos) 6 T250-T255
C
Cantidad Rango
General (16 bits asc.) 16 C0-C15
Retentivos (16 bits asc.) 184 C16-C199
General (32 bits bidirec.) 20 C200-C219
Retentivos (32 bits bid.) 15 C220-C234
C (Alta velocidad)
Cantidad Rango
1 Fase 4 C235-C238
1 Fase (con start/stop) 3 C241,C242,C244
2 Fases 3 C246,C247,C249
Fase A/B 3 C251,C252,C254
D
Cantidad Rango
General 8000 D0-D7999
Retentivos 512 D0-D511*
Ajustables extern. - Sistema 256 D8000-D8255
* Configurable por software
V, Z
Cantidad Rango
Registros índice V 8 V0-V7
Registros índice Z 8 Z0-Z7
P, I (Punteros)
Cantidad Rango
De subritina (P) 128 P0-P127
De interrupción (I) 6 cont, 6 entrad, 3 temp -
97
 Loading...
Loading...