

MITEL PDSP16488AA0, PDSP16488AAC, PDSP16488AB0, PDSP16488AC, PDSP16488ACBR Datasheet
...
PDSP16488A
Single Chip 2D Convolver with Integral Line Delays
Advance Information
Supersedes version in 1996 Media IC Handbook, HB4599-1.0 DS3713 - 6.4 December 1997
and the PDSP16488A MA data sheet, DS3742
The PDSP16488A is a fully integrated, application specific,
image processing device. It performs a two dimensional convolution between the pixels within a video window and a set of
stored coefficients. An internal multiplier accumulator array can
be multi-cycled at double or quadruple the pixel clock rate. This
then gives the window size options listed in Table 1.
An internal 32kbit RAM can be configured to provide either
four or eight line delays. The length of each delay can be
programmed to the users requirement, up to a maximum of 1024
pixels per line. The line delays are arranged in two groups,which
may be internally connected in series or may be configured to
accept separate pixel inputs. This allows interlaced video or
frame to frame operations to be supported.
The 8-bit coefficients are also stored internally and can be
downloaded from a host computer or from an EPROM. No
additional logic is required to support the EPROM and a single
device can support up to 16 convolvers.
The PDSP16488A contains an expansion adder and delay
network which allows several devices to be cascaded. Convolvers with larger windows can then be fabricated as shown in
Table 2.
Intermediate 32-bit precision is provided to avoid any danger
of overflow, but the final result will not normally occupy all bits.
The PDSP16488A thus provides a gain control block in the
output path, which allows the user to align the result to the most
significant end of the 32-bit word.
Table 2 PDSP16488As needed to implement typical window sizes
Pixel
size
Width
Window size
Depth
Maximum pixel
rate (MHz)
Line delays
8
8
8
16
16
4
8
8
4
8
4
4
8
4
4
20
20
10
20
10
431024
431024
83512
43512
43512
Table 1 Single PDSP16488A configurations
Max.
pixel
rate
(MHz)
Pixel
size
333
535 737 939 11311 15315 23323
No. of PDSP16488As for N3N window size
10
10
20
20
40
40
8
16
8
16
8
16
1
1
1
1
1
2
1
2
2
4
4*
-
1
2
2
4
4*
-
4
-
6
-
-
-
4
-
6
-
-
-
4
-
8
-
-
-
9
-
-
-
-
-
*Maximum rate is limited to 30MHz by line store expansion delays
ORDERING INFORMATION
Commercial (0°C to 170°C)
PDSP16488A / C0 / AC (PGA)
Industrial (240°C to 185°C)
PDSP16488A / B0 / AC (PGA)
PDSP16488A / B0 / GC (QFP)
Military (255°C to 1125°C)
PDSP16488A / A0 / AC (PGA)
PDSP16488A / A0 / GC (QFP)
PDSP16488A / MA / ACBR (PGA) MIL-STD-883 Class B*
PDSP16488A / MA / GCPR (QFP) MIL-STD-883 Class B*
*See Notes following Static Electrical CharacteristicsTable
Note: PDSP16488A devices are not guaranteed to cascade with
PDSP16488 devices. Mitel Semiconductor do not recommend
that PDSP16488A be mixed with PDSP16488 devices in a single
equipment design. The PDSP16488A requires external pullup
resistors in EPROM Mode (see Static Electrical Characteristics).
FEATURES
■ The PDSP16488A is a replacement for the
PDSP16488 (see Note below)
■ 8 or 16-bit Pixels with rates up to 40 MHz
■ Window Sizes up to 838 with a Single Device
■ Eight Internal Line Delays
■ Supports Interlace and Frame-to-Frame Operations
■ Coefficients Supplied from an EPROM or Remote Host
■ Expandable in both X and Y for Larger Windows
■ Gain Control and Pixel Output Manipulation
■ 84-pin PGA or 132-pin QFP Package Options
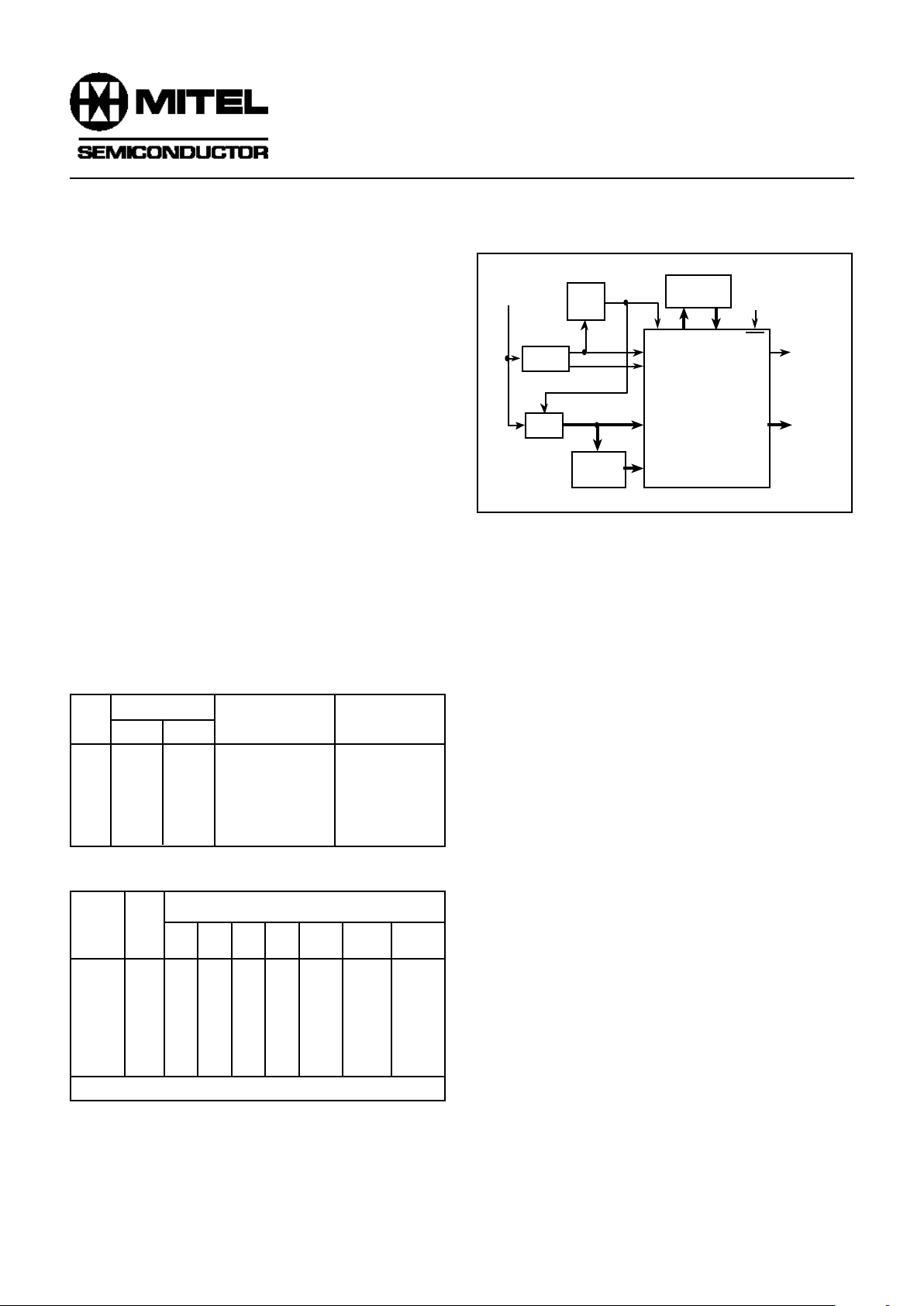
Fig. 1 Typical stand-alone real time system
PDSP16488A
EPROM
ADDR DATA
POWER
ON
RESET
DELAYED
SYNC
OUTPUT
DATA
RES
DELOP
CLK
HRES
BYPASS
SYNC
EXTRACT
COMPOSITE
DATA
PIXEL
CLOCK
GEN
ADC
OPTIONAL
FIELD
DELAY
IP7:0
L7:0
D15:0
SYNC
ODD FIELD
2
Type
Input
I/O
Input
Input
Dual
function
Output
Output
Input
Output
I/O
Input
Input
I/O
Input
Output
Output
Input
Input
Input
Input
Outputs
Outputs
Power
Power
Signal
IP7:0
L7:0
BYPASS
HRES
X15:0
D15:0
PC1
PC0
DELOP
DS
CE
R/W
PROG
CLK
BIN
OVR
RES
SINGLE
MASTER
OEN
CS3:0
F1:0
V
DD
GND
Table 3 Signal descriptions
Description
Pixel data input to the first line delay (most significant byte in 16-bit mode).
Pixel data input to the second group of line delays. (least significant byte in 16-bit mode). Alterna-
tively an output from the last line delay when the appropriate mode bit is set.
The first line delay in the first group is bypassed when this input is high. No internal pullup resistor.
Resets the line delay address pointers when high. Normally the composite sync signal in real time
applications. In non real time systems it defines a frame store update period, when low.
Address/data connections from a Master or Single device to the external coefficient source,
with X15 defining EPROM or Host support. Otherwise they provide the expansion data input.
Signed 16-bit scaled data or multiplexed 32-bit intermediate data. During intermediate transfers the
most significant half is valid when the clock is low, and the least significant half when clock is high.
During programming a Master device outputs a timing strobe on this pin. This is passed down
the chain in a multiple device system, using the
PC0
input on the next device.
This pin is used in conjunction with
PC1
in multiple device systems. It terminates the write strobe
from a Master device which is EPROM supported.
This output provides a version of the HRES input which has been delayed by an amount defined by
the user.
The data strobe from a host computer, active low. This pin will be an output from an EPROM
supported Master device which provides strobes to the remaining devices.
An active low enable which is internally gated with
R/W
andDSto perform reads or writes to the
internal registers. In a Single or Master device, which is supported from an EPROM, the
bottom 72 addresses are always used andCEis not needed.CEcan then be used to initiate a
new register load sequence after the power on load sequence.
Read / not write line from the host CPU. When an EPROM is used this pin should be tied low.
This pin is normally an input which signifies that registers are to be changed or examined. It is,
however, an output from an EPROM supported Single or Master device indicating to the rest
of the system that registers are being updated.
Clock. All events are triggered on the rising edge of CLK, except the latching of least significant
expansion inputs . Internally the clock can be multiplied by two or four in order to increase the
effective number of multipliers.
This output indicates the result from the internal comparison. A high value indicates that the pixel
was greater than the internal threshold. The output is only valid from the last device in a chain.
When high this output indicates that there has been a gain control overflow.
Active low power on reset signal.
Tied to ground to indicate a Single device system. Internal pullup resistor.
Tied to ground to indicate the Master device in a multiple device system. Must be left open circuit
in a Single device system. Internal pullup resistor.
Output enable signal. Active low.
Four address bits from a Master specifying one of sixteen devices in a multiple device system.
Must be externally decoded to provide chip enables for the additional devices.
These bits indicate the field selection given by the gain control auto select logic. The same coding
as that used for Control Register bits C5:4 is used.
15V supply. All VDD pins must be connected.
0V supply. All GND pins must be connected.
3
838
ARRAY
OF
MACs
COEFFICIENT
STORE (64)
3 LINE
DELAYS
4 LINE
DELAYS
1 LINE
DELAY
Y
DELAY
Y
DELAY
BYPASS
X
DELAY
CS3:0RES
CONTROL
PC1
CONTROL
REGISTERS
COMPARATOR
D15:0
BIN
OVR
CLK OEN
PROG
MASTER
SINGLE
DELOP
HRES
PC0R/WDSCE
BIDIRECTIONAL
MULTIPURPOSE
DATA BUS X15:0
IP7:0
L7:0
F1:0
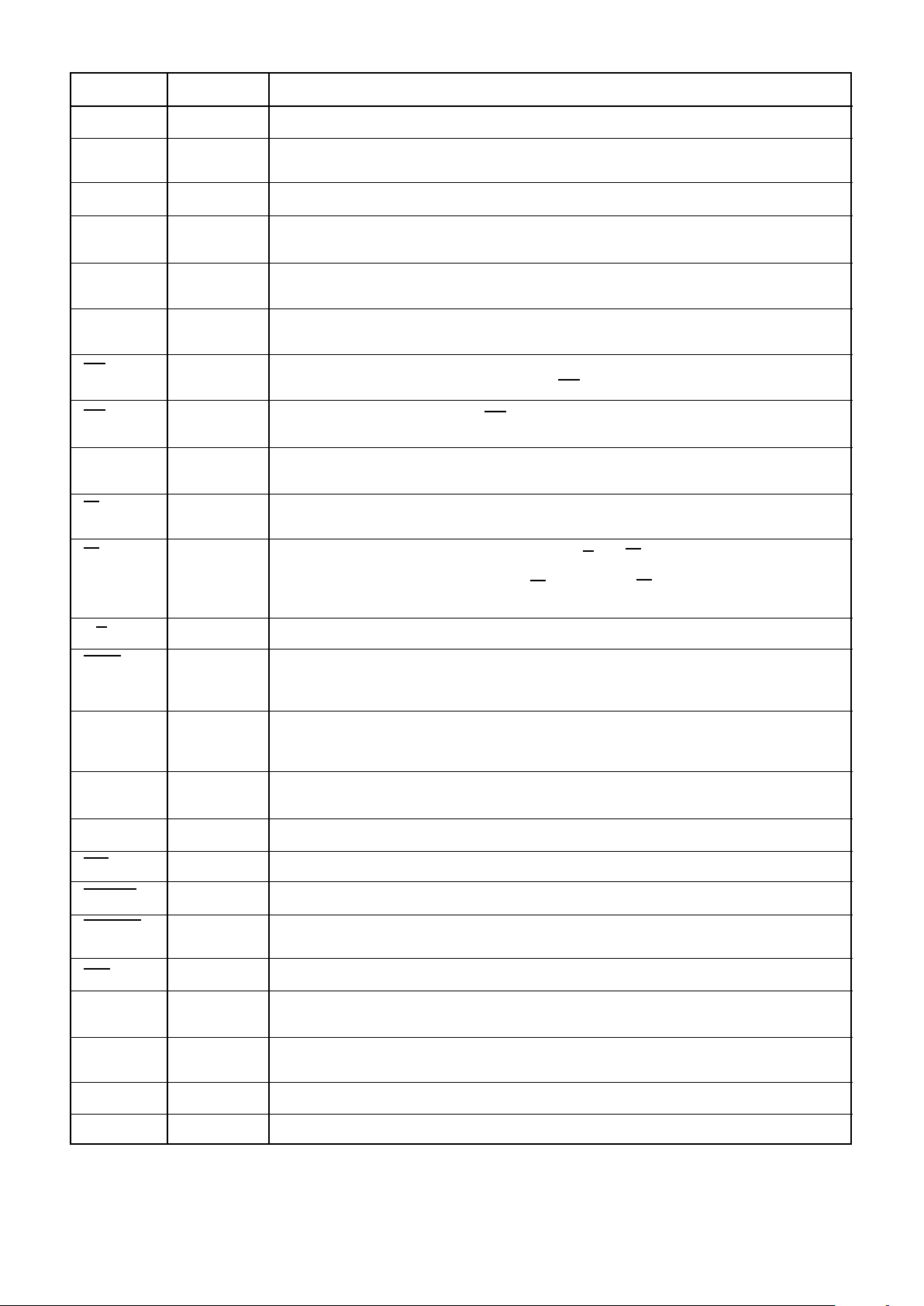
Fig. 2 Functional block diagram
4
A B C D E F G H J K L M N
1
2
3
4
5
6
7
8
9
10
11
12
13
PIN 1
PIN 132
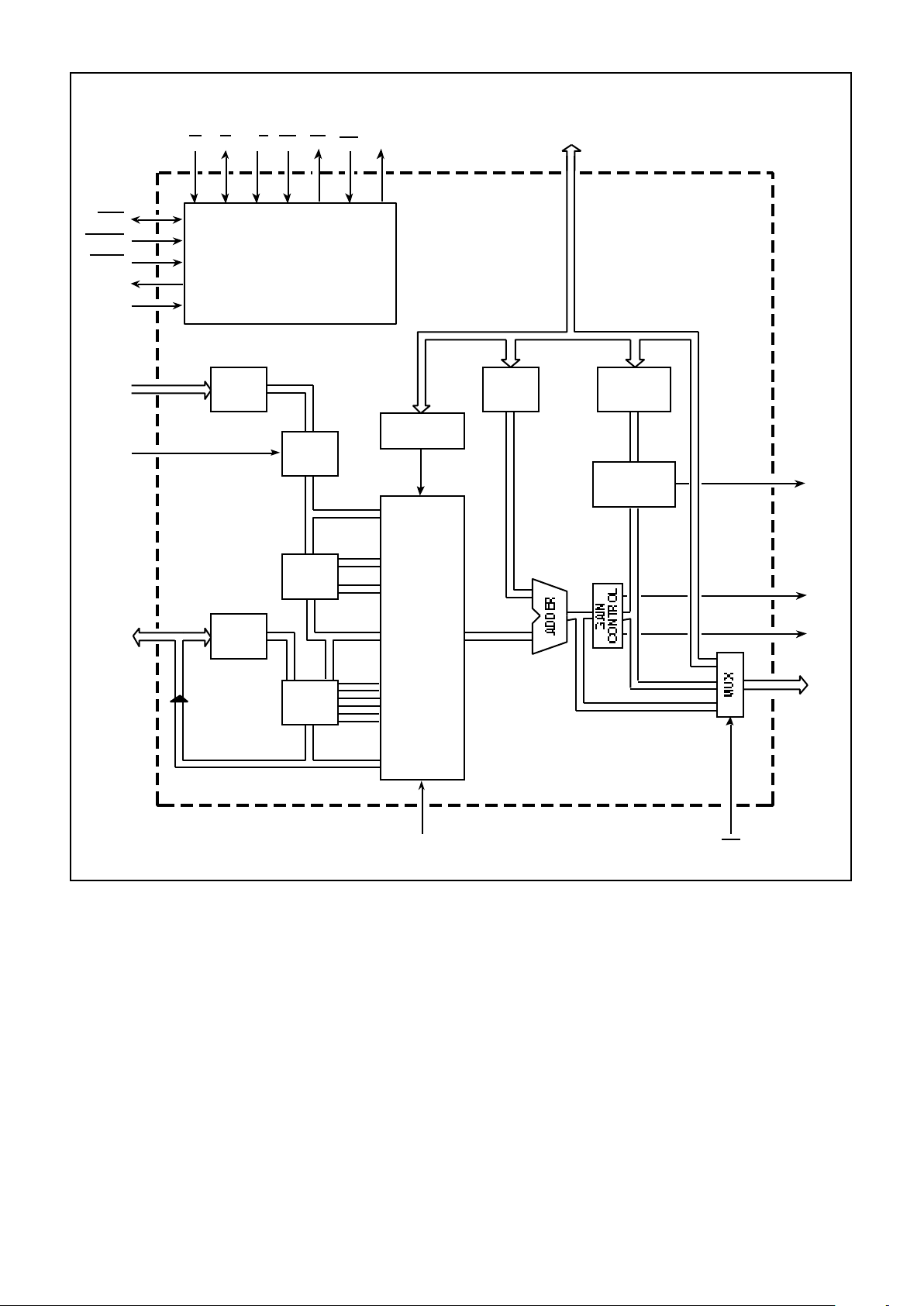
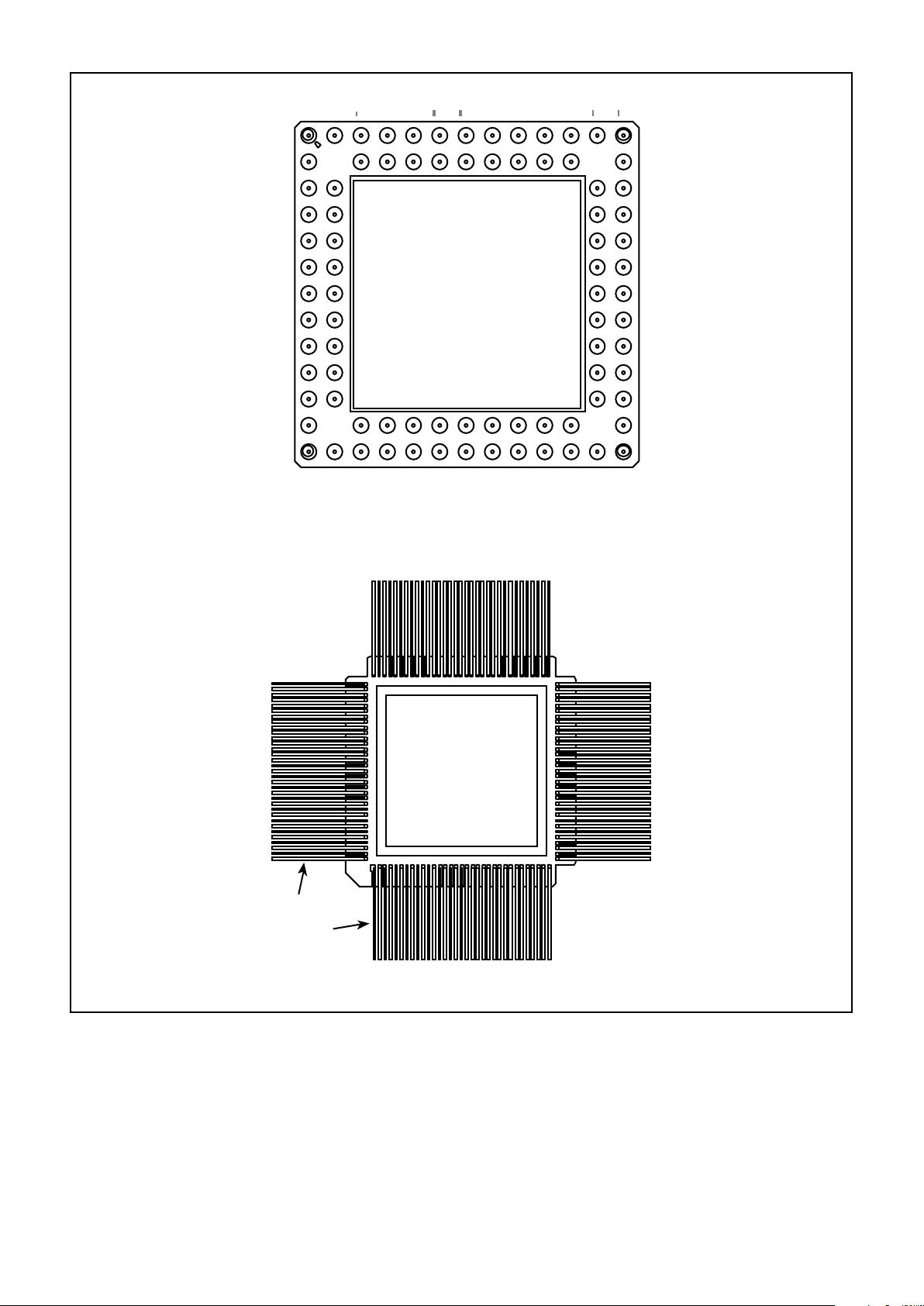
Fig. 3a Pin connections for 84 I/O pin grid array package - AC84 (Power ) (bottom view)
Fig 3b Pin connections for 132 I/O ceramic power flatpack - GC132 (Power) (top view)
Fig 3 Pin connection diagrams (not to scale). See Table 3 for signal descriptions and Tables 4 and 5 for pinouts.
5
Pin
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
Pin
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
Signal
N/C
D0
OEN
BIN
PC1
V
DD
GND
OVR
N/C
HRES
R/W
CE
N/C
N/C
GND
N/C
DS
GND
V
DD
PROG
GND
CS3
CS2
CS1
CS0
V
DD
RES
PC0
N/C
DELOP
X0
X1
N/C
Signal
N/C
X2
X3
X4
N/C
X5
GND
X6
X7
N/C
X8
X9
V
DD
V
DD
V
DD
X10
MASTER
N/C
X11
X12
SINGLE
GND
GND
N/C
X13
X14
N/C
X15
V
DD
BYPASS
IP0
V
DD
N/C
Pin
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
Signal
N/C
IP1
GND
IP2
N/C
V
DD
IP3
V
DD
IP4
GND
IP5
GND
IP6
V
DD
IP7
V
DD
N/C
L7
GND
L6
GND
L5
V
DD
L4
V
DD
L3
V
DD
L2
GND
L1
F1
L0
N/C
Pin
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
Signal
N/C
V
DD
F0
D15
N/C
D14
D13
GND
D12
GND
V
DD
V
DD
D11
D10
D9
GND
CLK
CLK
CLK
GND
GND
D8
V
DD
D7
D6
D5
D4
GND
D3
N/C
D2
D1
N/C
Table 5 Pin connections for GC132 (power) package. See Fig 3b.
Pin
A1
B1
C2
C1
D2
D1
E2
E1
F2
G2
G1
H2
J1
J2
K1
K2
L1
Signal
L0
F1
L1
L2
L3
N/C
L4
L5
L6
L7
IP7
N/C
IP6
IP5
IP4
N/C
IP3
Pin
L2
M1
N1
N2
M3
N3
M4
N4
M5
N5
M6
M7
N7
M8
N9
M9
N10
Signal
IP2
IP1
IP0
BYPASS
X15
X14
X13
N/C
SINGLE
X12
X11
MASTER
X10
X9
X8
X7
X6
Pin
M10
N11
M11
N12
N13
M13
L12
L13
K12
K13
J12
J13
H12
G12
G13
F12
E13
Signal
X5
X4
X3
X2
X1
X0
DELOP
PC0
RES
CS0
CS1
CS2
CS3
PROG
DS
CE
R/W
Pin
E12
D13
D12
C13
C12
B13
A13
A12
B11
A11
B10
A10
B9
A9
B8
B7
A7
Signal
HRES
OVR
PC1
BIN
OEN
D0
D1
D2
D3
D4
D5
D6
D7
D8
CLK
N/C
D9
Pin
B6
A5
B5
A4
B4
A3
B3
A2
F1
N6
F13
A6
H1
N8
H13
A8
Signal
D10
D11
N/C
D12
D13
D14
D15
F0
V
DD
1
V
DD
2
V
DD
3
V
DD
4
GND1
GND2
GND3
GND4
Table 4 Pin connections for AC84 (power) package. See Fig. 3a.

6
BASIC OPERATION
The PDSP16488A convolver performs a weighted sum of all
the pixels within an N3N two dimensional window. Each pixel
value is multiplied by a signed coefficient, or weight, and the
products are summed together. In practice positive weights
would be used to produce averaging effects, with various distribution laws, and negative weights would be used for edge
enhancement. The window is moved continuously over the video
frame, and for real time operation a new result must be obtained
for every pixel clock. In most applications odd sized windows will
be used, resulting in a centre pixel whose value is modified by the
surrounding pixels.
Output Accuracy
With 8 bit pixels, and an 838 window, it is possible for the
accumulated sum to grow to 22 bits within a single device. With
16-bit pixels, and an 834 window (the maximum possible), the
sum can grow to 29 bits. The PDSP16488A actually allows for
word growth up to 32 bits, and thus allows several devices to be
cascaded without any danger of overflow. Since coefficients can
be negative, the final result is a 32-bit signed two’s complement
number.
In a particular application the desired output will lie somewhere within these 32 bits, the actual position being dependent
on the coefficient values used. This causes problems in physically choosing which output pins to connect to the rest of the
system. To overcome this problem the PDSP16488A contains a
gain control block, which allows the final result to be aligned to the
most significant end of the 32-bit internal result. The provision of
the gain control block, rather than a simple shifter, allows the gain
to be defined more accurately.
The sixteen most significant bits of the adjusted result are
available on output pins D15:0, which contains a sign bit.
Output Saturation
If the output from the convolver is driving a display, negative
pixels will give erroneous results. An option is thus provided
(register bits C7:6) that forces all negative results to zero, which
are then interpreted as black by the display. At the same time
positive results, which overflow the gain control, are forced to
saturate at the most positive number, i.e. peak white. In this mode
the output sign bit is always zero,and should not be connected to
an A-D converter.
A separate option forces both negative and positive overflows
to saturate at their respective maximum values, but in scale
negative results remain valid. A gain control overflow warning flag
(OVR) is also available, which can be used in a host CPU
supported system to change the gain parameters if overflows are
not acceptable.
Binary Output
The PDSP16488A contains a 16-bit arithmetic comparator
which allows the output from the gain control block to be compared with a previously programmed value. An output flag allows
the user to detemine if the result was above or below a value
contained within an internal register.
Multiplier Array
The PDSP16488A contains sixteen 838 multipliers each
producing a 16-bit result. Internally the pixel clock supplied by
the user can be multiplied by two or four, which together with
the proprietary architecture, allows each multiplier to be used
several times within a pixel clock period. This increases the
effective number of multipliers, which are available to the user,
from 16 to 32 or 64 respectively. This architecture produces a
very efficient utilization of chip area, and allows the line delays
to be accommodated on the same device.
The sixteen multipliers are arranged in a 4 deep by 4 wide
array, resulting in effective arrays of 4 by 8 or 8 by 8 with the multicycling options. The multiplier array can also be configured to
handle 16-bit signed pixels; the effective number of available
multipliers is then halved.
Line Delay Operation
Internal RAM is arranged in two separate groups, and can be
configured to provide line delays to match the chosen size of the
convolver. When a four deep arrangement is used, with 8-bit
pixels, four line delays are available, and each can be programmed to contain up to 1024 pixels. In an eight deep array,
or if 16-bit pixels are needed, each line can contain up to 512
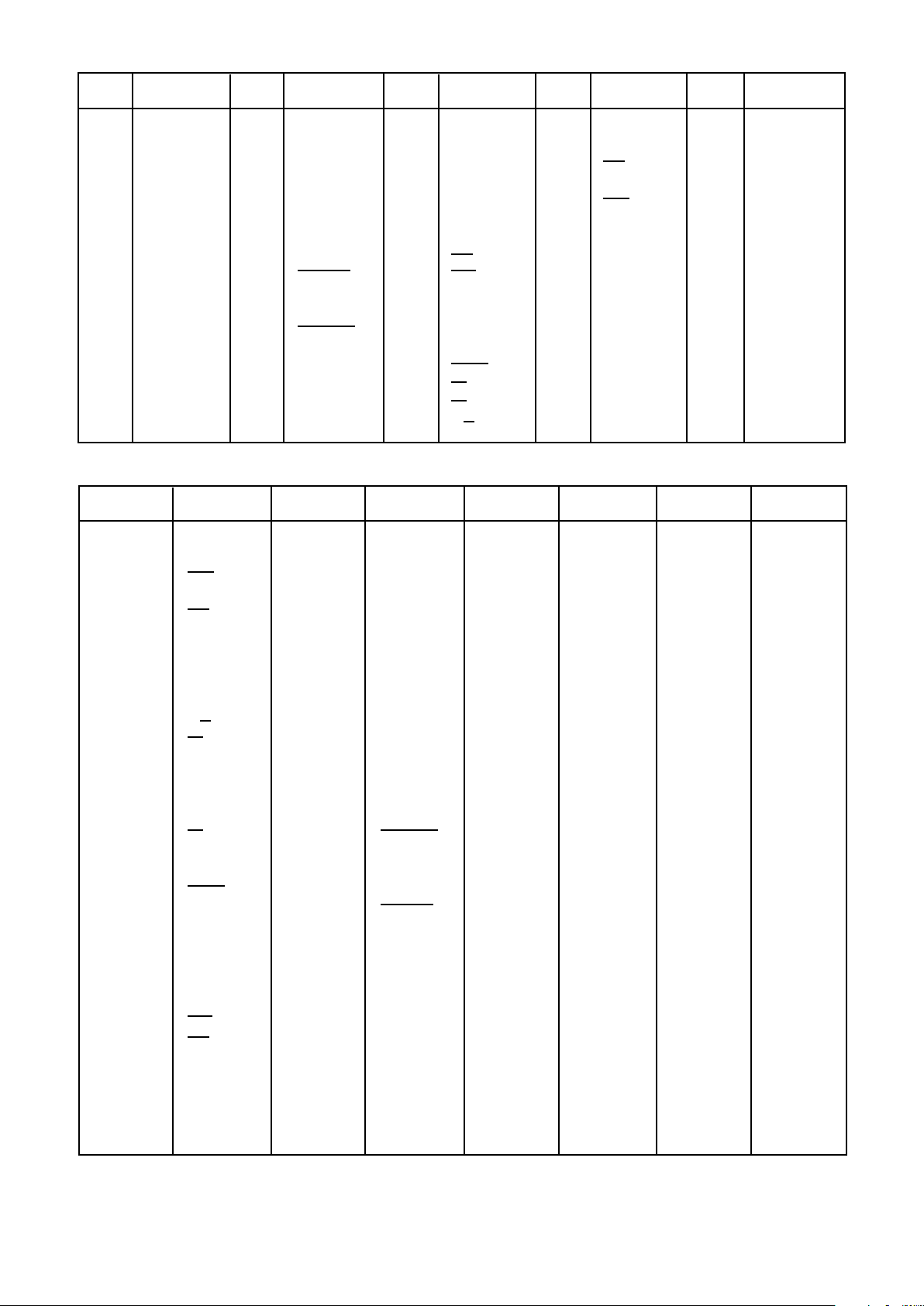
pixels. Fig. 4 illustrates the options available.
The first line delay in one of the groups can optionally be
switched in or out under the control of an input pin. It is used to
delay the pixel input when data is obtained from another
convolver in a multiple device system, or it is used to support
interlaced video.
Signals L7:0 may be used as pixel inputs or outputs. They
are configured as inputs at power-on to avoid possible bus
conflicts, but by setting a mode control bit can become outputs.
They can then be used to drive another device when multiple
PDSP16488As are required.
Interlaced Video
When using real time interlaced video, a picture or frame is
composed from two fields, with odd lines in one field and even
lines in the other. An external field delay is thus required to gather
information from adjacent lines, and the convolver needs two
input buses. The bus providing the delayed pixels has an extra
internal line delay. This is only used in the field containing the
upper line in any pair of lines, and must be bypassed in the other
field. It ensures that data from the previous field always corresponds to the line above the present active line, and avoids the
need to change the position of the coefficients from one field to
the next.
Fig. 5 shows the translation from physical to internal line
positions, for single device interlaced systems. Line N is the line
presently being convolved, which is either one or two lines
previous to the line presently being produced.
When windows requiring four or more lines are to be implemented, the first line delay, in the group supplied from the L7:0
pins, must always be bypassed. This bypass option is controlled
by register B, bit 7 and is not effected by the BYPASS input pin..
The coefficients must be loaded into the locations shown, which
match the translated line positions, with unused coefficients,
shown shaded, loaded with zeros.
Defining the Length of the Line Delay
Fig. 5 defines the maximum line lengths available in each of
the window size options. The actual line lengths can be defined
in one of three ways, to support both real time applications, taking
pixels directly from a camera, and also use in systems supported
by a frame store. In the former case the line delays must be
referenced to video synchronization pulses. In the latter case the
line lengths are well defined, and the horizontal flyback ‘dead
times’ will have been removed.
7
Fig. 4 Line delay configurations
512
512
512
512
838
ARRAY
512
512
512
512
IP7:0
BYPASS
L7:0
BYPASS
512
512
512
512
838
ARRAY
512
512
512
512
IP7:0
BYPASS
L7:0
BYPASS
1024
1024
1024
1024
434
OR
834
ARRAY
IP7:0
BYPASS
L7:0
1024
1024
1024
1024
434
OR
834
ARRAY
IP7:0
BYPASS
L7:0
512
512
512
512
512
512
512
512
IP7:0
BYPASS
L7:0
BYPASS
434
OR
834
ARRAY
16
16
16
16
To support real time applications an option is provided in
which the length of the line delay is defined by the number of
clocks obtained while the HRES input is low. HRES would
normally be composite sync when the convolver is directly
attached to an NTSC or PAL video input.
The line delay is achieved by reading the previous contents
of a RAM-based line store, and then writing new information to
the same address. When HRES is high, write operations are
inhibited, and the address counter is reset. During an active line
the counter is incremented by the pixel clock. If the maximum
count is reached before the end of a line, then write operations are
terminated and wraparound effects avoided.
The rising edge of HRES, marking the end of a line, is
normally asynchronous to the pixel clock, and it is possible for an
additional pixel to be stored on some lines. This has no effect on
the convolver operation, and will not cause a cumulative shift in
the pixel position from line to line.
An alternative means of defining the line length is, however,
provided when an exact number of pixels is needed. HRES going
low then starts the delay operation for every line, but it ceases
when the 10-bit value contained in two registers is reached. This
method can avoid the need to store blank pixels at the end of a
line before HRES goes high. With this method the line must
contain an even number of pixels but the value loaded into the
control registers, defining the line length, must be one less than
the even number required.
In an image processing system, the pixel clock is often resynchronized, or even inhibited, during blanking or sync. The
next line is then started with a precise time interval from the end
of sync (falling edge of HRES) to the first pixel clock edge. This
avoids any visible pixel jitter at the beginning of the line, which
would otherwise be present since pixel clock is asynchronous
with respect to video sync pulses.
When using the PDSP16488A the pixel clock should not be
inhibited, or re-synchronized, until the delayed version of the
HRES input goes active. This is present on the DELOP output
pin. This will ensure that no pixels on the right hand edge are lost
due to the internal pipeline delay. If the pixel clock is a continuous
signal, the user must ensure that the HRES high to low transition
meets the timing requirements defined in Fig. 10. The HRES
rising edge at the end of a line need not be synchronized.
When pixels are read or written to a frame store, an alternative
line delay configuration is needed. Within the frame store lines
would be stored in contiguous locations, with no gaps caused by
the flyback period between the lines. This method of use makes
the HRES defined line delay operation difficult to use, and an
alternative mode of operation is provided. The HRES input is then
driven by a system-provided signal, which defines a complete
frame store update period. It is not a line defining signal. The high
to low transition of this signal will initiate the line store update
sequence and allow the internal address pointers to increment.
These pointers will be synchronously reset at the end of a line,
when they reach the pre-programmed value. They will then
immediately start a new operation using address zero. The actual
line delay must be pre-loaded into two control registers as
described previously.
Write operations back to the frame store must allow for the
total pipeline delay. This can be achieved by inhibiting write
operations until DELOP goes low. Write operations then continue
until it goes back high. The PDSP16488A assumes that data is
valid when a clock signal is applied, and that it also meets the set
up and hold requirements given in Fig. 10. If data is not valid due,
for example, to a frame store DRAM refresh cycle, then the user
must externally inhibit the clock. The clock supplied to the
convolver will in this mode be a signal which defines a frame store
cycle time.
The use of the convolver in a line scan system is similar to its
use with a frame store. These systems have no flyback period,
and the address counter must be synchronously reset at the end
of the line and then allowed to continue.

8
1024
1024
1024
1024
434
OR
834
ARRAY
IP7:0
ODD
FIELD
Output is shifted
by 1 line in
every field
FIELD
DELAY
VIDEO
LINE N12
L7:0
N11
N21
N
L7:0
512
512
512
512
838
ARRAY
512
512
512
512
IP7:0
FIELD
DELAY
Output is shifted
by 1 line in
every field
ODD
FIELD
DELAY
BYPASSED
REG B BIT 7 SET
VIDEO
LINE N12
N11
N21
N12
N
N22
L7:0
512
512
512
512
838
ARRAY
512
512
512
512
IP7:0
FIELD
DELAY
Output is shifted
by 2 lines in
every field
ODD
FIELD
DELAY
BYPASSED
REG B BIT 7 SET
VIDEO
LINE N14
N13
N11
N14
N
N22
N21
N23
N12
C24
C56
C16
C48
C8
C40
C0
C32
LINE N23
LINE N22
LINE N21
LINE N
LINE N11
LINE N12
LINE N13
LINE N14
C25
C57
C17
C49
C9
C41
C1
C33
C26
C58
C18
C50
C10
C42
C2
C34
C27
C59
C19
C51
C11
C43
C3
C35
C28
C60
C20
C52
C12
C44
C4
C36
C29
C61
C21
C53
C13
C45
C5
C37
C30
C62
C22
C54
C14
C46
C6
C38
C31
C63
C23
C55
C15
C47
C7
C39
838 WINDOW
C48
C8
C40
C0
C32
LINE N22
LINE N21
LINE N
LINE N11
LINE N12
C49
C9
C41
C1
C33
C50
C10
C42
C2
C34
C51
C11
C43
C3
C35
C52
C12
C44
C4
C36
535 WINDOW
C4
C8
C0
LINE N21
LINE N
LINE N11
C5
C9
C1
C6
C10
C2
333 WINDOW
Fig. 5 Line delay allocations in SINGLE device interlaced systems
9
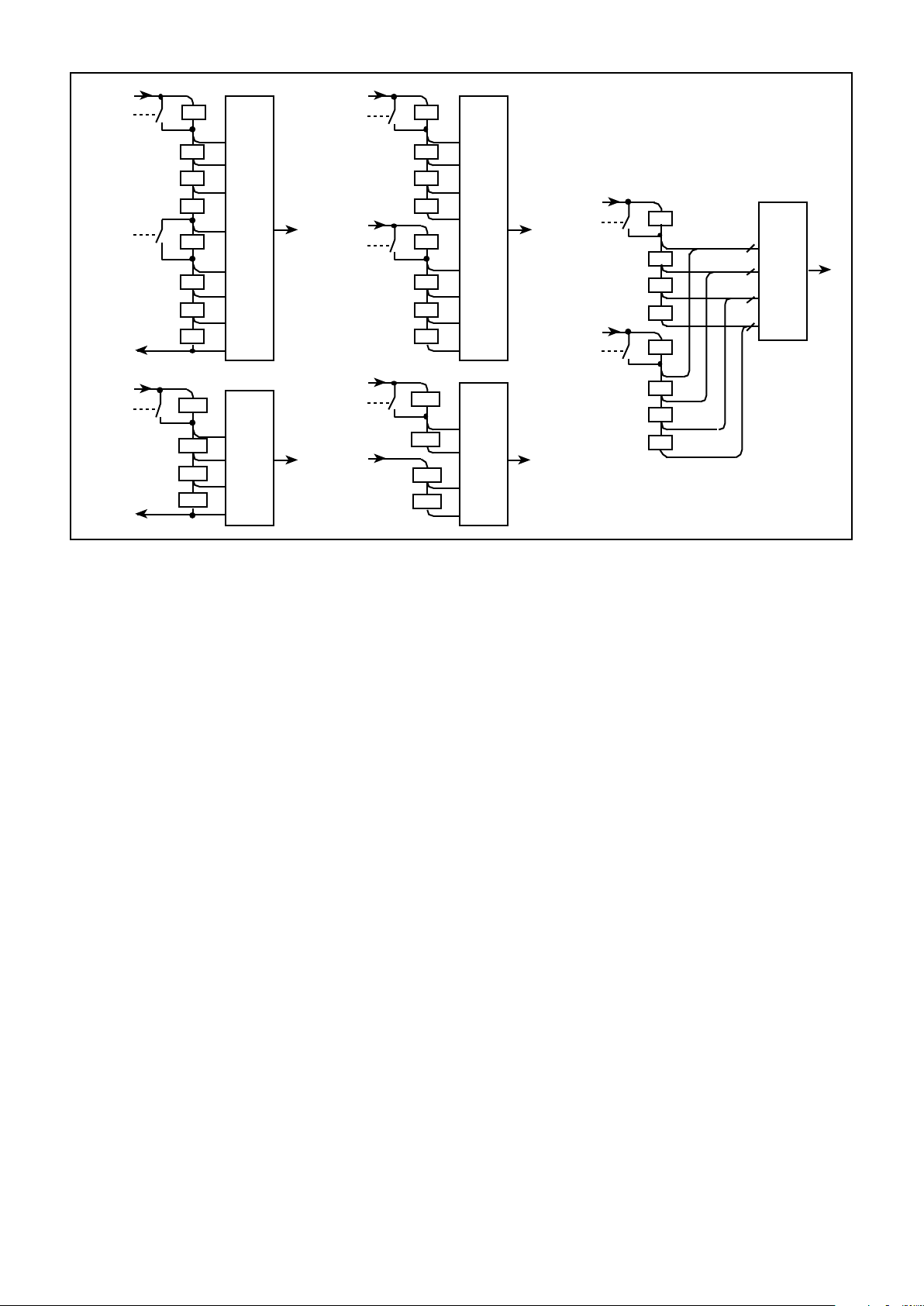
Gain Control Block
This block is provided as an aid to locating the bits of interest
in the 32-bit internal result. The magnitude of the largest convolved
output will depend on the size of the window, and the coefficient
values used. The function of the gain control block is then to
produce an output, which is accurate to 16 bits, and which is
aligned to the most significant end of this 32-bit word. The sixteen
most significant bits of the word are available on D15:0 and the
largest number need only have one sign bit if the gain control is
correctly adjusted.
Fig. 6 indicates the mechanism employed with the required
function implemented in two steps. Two mode control bits,
register C, bits 5:4, allow one of four 20 bit fields to be selected
from the final 32-bit value. These four fields are positioned with
the first at the most significant end, and then at four bit
displacements down to the least significant end.
By setting an enabling bit, register C, bit 0, the field selection
can optionally be done automatically. This feature should only be
used in the real time operating mode, when HRES defines video
lines. Internal logic examines the most significant 13, 9, or 5 bits
from the 32-bit result, and makes a field selection dependent on
which group does not contain identical sign bits. If less than five
sign bits are obtained, the logic will select the field containing the
most significant 20 bits. The selection is indicated by F1:0.
The automatic field selection is particularly useful when a
fixed scene is being processed. The selection is reset when any
internal register is updated (i.e.
PROG
has been low) and is then
held high for ten further occurrences of the HRES input. This
allows the internal multiplier/accumulator array to be completely
flushed before a field selection is made. As convolver outputs of
greater magnitude are produced the field selection logic will
respond by selecting a more significant field. The most significant
field found necessary remains selected until
PROG
again goes
low. Even if the automatic field selection is not enabled, F1:0 will
still indicate which field would have been selected. These are
coded in the same way as register C, bits 5:4.
Having chosen a field, either manually or automatically, it
is then multiplied by a 4-bit unsigned integer. This is contained
within the user-programmed gain control register, and the
multiplication will produce a 24-bit result . The middle 16 bits
of this result contain the required output bits. The gain control
multiplier can overflow in to the unused most significant four
bits if the parameters are chosen wrongly. This condition is
flagged by pin OVR.
By setting appropriate mode control bits, further manipulation
of the gain control output is possible. One option, register C, bits
Fig. 6 Gain control block
7:6 = 11, allows all negative outputs to be forced to zero, and at
the same time positive gain control overflows will saturate at the
maximum positive number. Register C, bits 7:6 = 10 will saturate
positive and negative overflows at their respective maximum
values, but otherwise leaves them unchanged. Occasional overflows can be tolerated in some systems, and this option prevents
any gross errors.
Expansion
Multiple devices can be connected in cascade in order to
obtain window sizes larger than those provided by a single
PDSP16488A. This requires an additional adder in each device
which is fed from expansion data inputs. This adder is not used
by a Single device or the first device in a cascaded system, and
is enabled or disabled by register B, bit 4.
The first device in the cascaded system must be designated
as a Master device by
MASTER
tying low. Its expansion input
bus is then used as the source of data for the coefficient and
control registers in all devices in the system.
In order to reduce the pin count required for 32-bit buses, both
expansion in and data out are time-multiplexed with the phases
of the pixel clock. When the clock is high the least significant half
will be valid, and when the clock is low the most significant half will
be valid.
In practice this multiplexing is only possible with pixel clocks
up to 20MHz. Above these frequencies the multiplexing must be
inhibited by setting register A, bit 7. The intermediate data
accuracy will then be reduced, since only the lower 16 bits of the
internal 32-bit intermediate sum are available on the D15:0 output
pins. In such systems the coefficients must be scaled down in
order to keep the intermediate and final results down to 16 bits.
The final device should not use the gain control block but instead
should simply output the non-multiplexed 16-bit result. The OVR
flag and pixel saturation options will not be available.
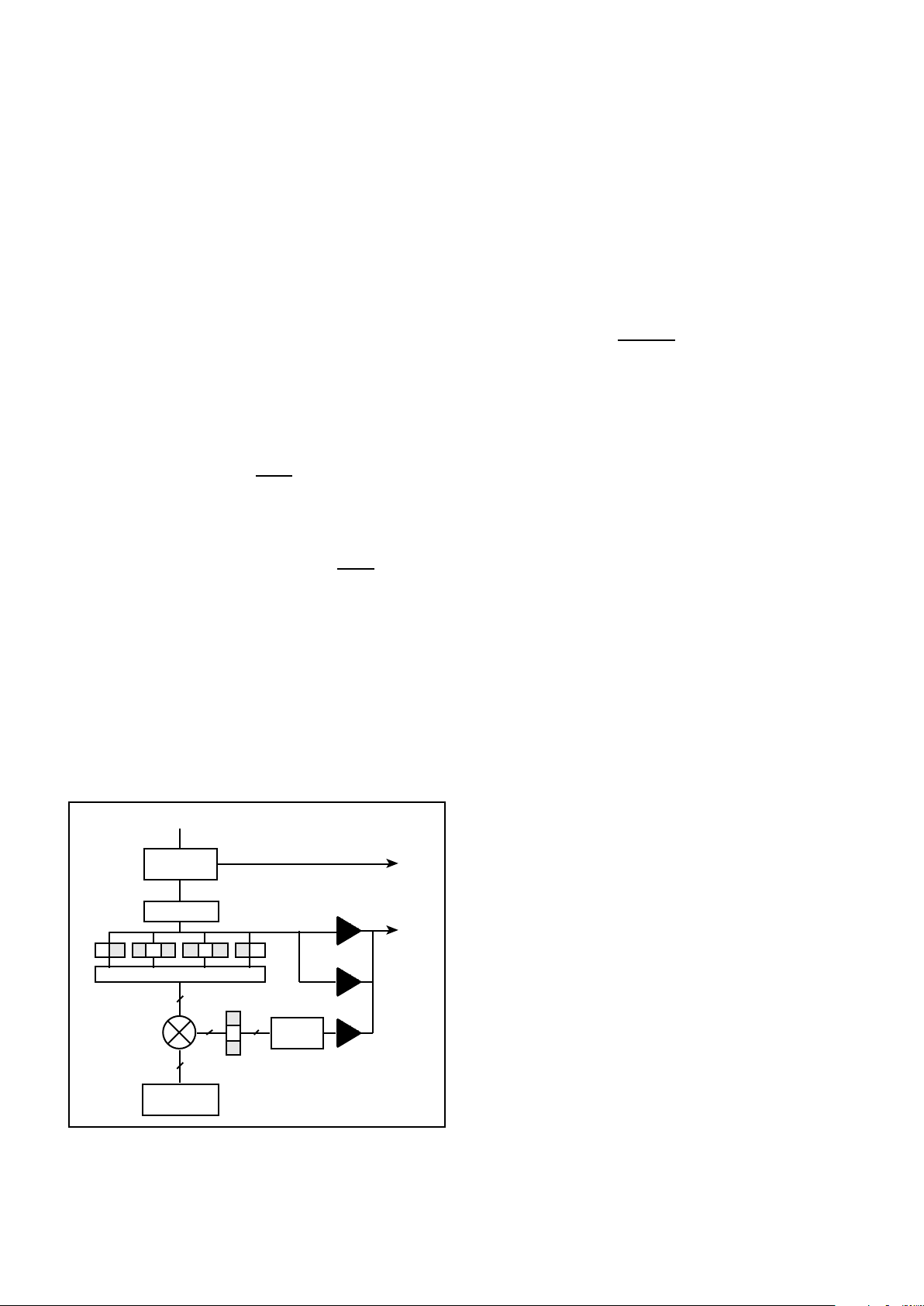
Pixel Input and Output Delays
In a real time system, when line delays are referenced to
video sync pulses present on the HRES input, the first pixel from
the last line delay does not appear on the L7:0 pins until the fifth
active pixel clock edge after HRES has gone low. This is
illustrated in Fig. 8. In a vertically expanded system, this output
provides the input to the first line delays in the vertically displaced
devices. The internal logic is thus designed to always expect this
five clock delay. Compensation must thus be applied to the
devices which are directly connected to the video source, such
that the first pixel is not valid until the fifth clock rising edge.
For this reason the PDSP16488A contains an optional four
clock pipeline delay on each of the pixel data inputs, as shown in
Fig. 7. When the delay is used the first pixel in a video line must
be available on the input pins after the first pixel clock edge. This
would be so if the device were connected to an A-D converter,
since that would introduce a one pixel pipeline delay. If the system
introduces any further external pipeline delays, then the internal
delay should be bypassed, and the user should ensure that the
first pixel is valid after the fifth clock edge.
The use of this four clock delay is controlled by register B,
bit 3. This delay is in addition to the delays which are provided to
support expansion in both the X and Y directions, and are
controlled by register D, bits 3:2. Both delays are in fact simply
added together in the device, but are separately defined since
they add delays for different system reasons.
FROM EXPANSION ADDER
AUTOMATIC
FIELD SELECT
32 BITS
204 8 208 4 201220 12
MUX
GAIN CONTROL
REGISTER
4
16
4
20
4
24
SATURATE
LOGIC
16
MSB
LSB
D15:0
F1:0
10
4 CLOCK
DELAY
LINE
DELAYS
0
DELAYS
Σ
WIDTH = S
+
4 CLOCK
DELAYS
0
DELAYS
0
DELAYS
ZERO
REG B3 = 1
DELAY = 0, DEFINED BY REG D3:2 = 00
REG D0 = 0
4 CLOCK
DELAY
LINE
DELAYS
0
DELAYS
Σ
WIDTH = S
+
4 CLOCK
DELAYS
D
DELAYS
0
DELAYS
REG B3 = 0
D = 41S(N21) DEFINED BY REG D3:2
REG D0 = 0
4 CLOCK
DELAY
LINE
DELAYS
0
DELAYS
Σ
WIDTH = S
+
D
DELAYS
0
DELAYS
4 CLOCK
DELAY
LINE
DELAYS
0/4
DELAYS
Σ
WIDTH = S
+
0
DELAYS
0
DELAYS
REG D0 = 0 IF S = 4,
OR REG D0 = 1 IF S = 8
Nth PDSP16488A IN THE ROW
4 CLOCK
DELAY
LINE
DELAYS
0/4
DELAYS
Σ
WIDTH = S
+
D
DELAYS
0
DELAYS
Nth PDSP16488A IN THE ROW
4 CLOCK
DELAY
LINE
DELAYS
0/4
DELAYS
Σ
WIDTH = S
+
D
DELAYS
0
DELAYS
REG B3 = 1
D = 41S(N21) DEFINED BY REG D3:2
Nth PDSP16488A IN THE ROW
INPUT
OUTPUT
PDSP16488A
PDSP16488A
PDSP16488A
REG B3 = 1
DELAY = 0, DEFINED BY REG D3:2 = 00
REG D0 = 0 IF S = 4,
OR REG D0 = 1 IF S = 8
REG B3 = 1
D = 41S(N21) DEFINED BY REG D3:2
REG D0 = 0 IF S = 4,
OR REG D0 = 1 IF S = 8
REG B3 = 0
D = 41S(N21) DEFINED BY REG D3:2
REG D0 = 0
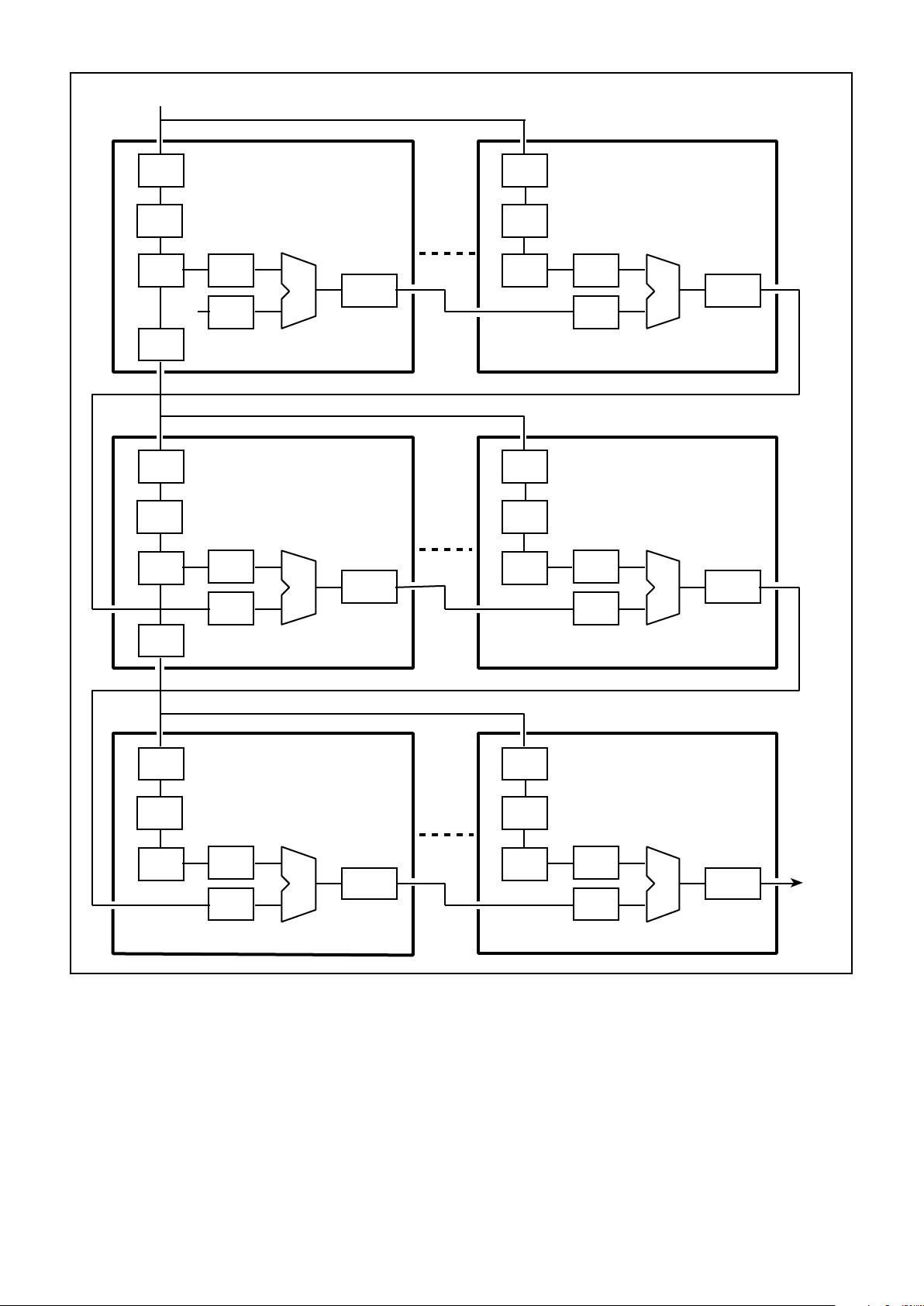
Fig. 7 Multi-device delay paths
Delay Compensation for Large Windows
A large window is composed of several partial windows each of
which is implemented in an individual device. If necessary the partial
window must be padded with zero coefficients to become one of the
standard sizes. When constructing a large window it is necessary to
delay the expansion data inputs in order to compensate for growth
in the horizontal direction. Delays in the partial sums are also
necessary to compensate for the total pipeline delay needed to
produce the previous complete horizontal stripe.
Within each device in a horizontal stripe, apart from the first,
the expansion input must be delayed by the width of the partial
window, before it is added to the internal sum. Since partial
windows can only be 4 or 8 pixels wide, a delay of 4 or 8 pixel
clocks is needed. There is, however, an in-built delay of 4 pixels
in the inter device connection, and the PDSP16488A thus only
needs an option to delay the expansion input by an additional four
pixels.
 Loading...
Loading...