

MITEL MT9079AP, MT9079AC, MT9079AE, MT9079AL Datasheet
CMOS ST-BUS FAMILY
MT9079
Advanced Controller for E1
Features
• Meets appl icabl e requi reme nts of CCIT T
G.704, G. 706, G.732, G.7 75, G. 796, I.431 a nd
ETSI ETS 300 011
• HDB3, RZ, NRZ (fibre interf ace) an d bipo lar
NRZ line code s
• Data link acce ss an d na tional bit buffers (f ive
bytes each)
• Enhanced al arms, perform anc e mon itorin g and
error insertion
• Maskable interrupts for alarms, receive CAS bit
changes, exception conditions and counter
overflow s
• Automatic in terw orking b etwe en C RC-4 and
non-CRC-4 m u lti fram in g
• Dual transm it and re cei ve 16 by te circ ular
channel b uffers
• Two frame receive elastic buffer with controlled
slip directi on ind icat ion an d 26 ch annel
hysteresi s (208 UI wande r tole rance)
• CRC-4 updating algorithm for intermediate path
points of a messa ge- based dat a link app licati on
Applications
• Primary rate ISDN netw ork node s
• Digital Access Cross-connect (DACs)
• CO and PABX switching equipment interfaces
• E1 add/dr op mu ltiple xers a nd ch annel bank s
• Test equipme nt and satel lite in terfac es
ISSUE 2 May 1995
Ordering Information
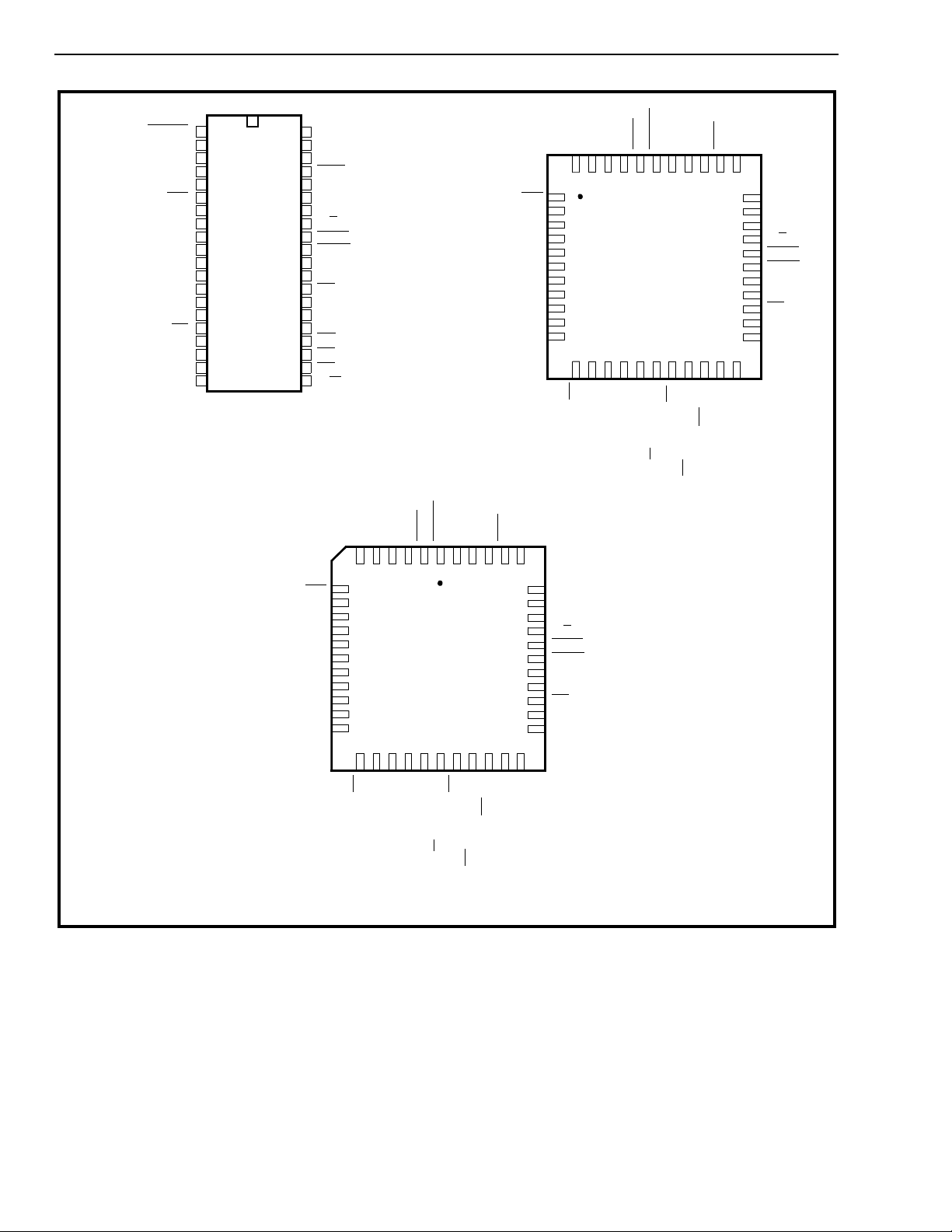
MT9079AC 40 Pin Cerami c DIP
MT9079A E 40 Pin Pl astic D IP
MT9079A L 44 Pin QFP
MT9079A P 44 Pin PLC C
-40° to 85°C
Descript io n
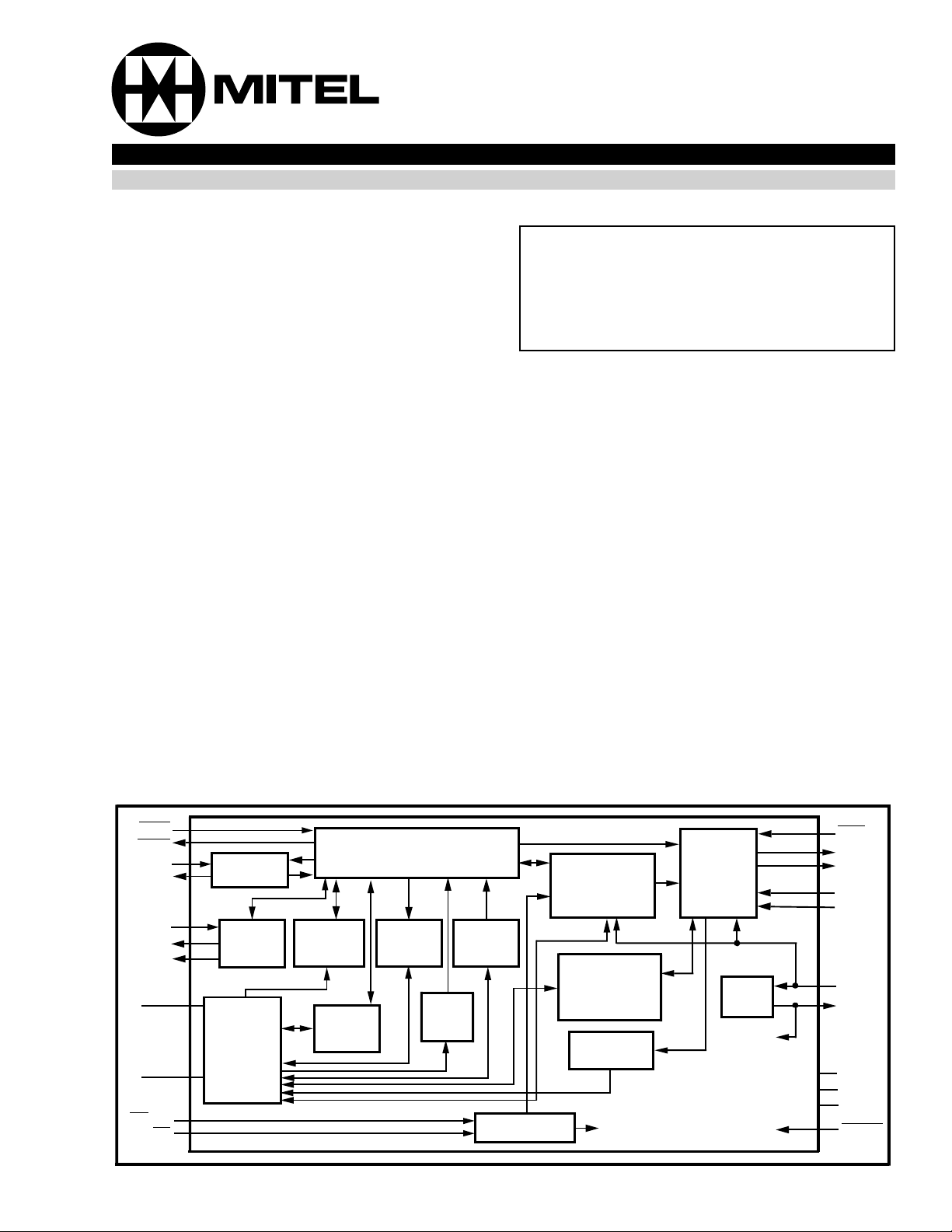
The MT9079 is a feature rich E1 (PCM 30, 2.048
Mbps) link framer and controller that meets the latest
CCITT and ETSI requirements.
The MT9079 will interface to a 2.048 Mbps
backplane and can be controlled directly by a
parallel processor, serial controller or through the
ST-BUS.
Extensive alarm transmission and reporting, as well
as exhaustive performance monitoring and error
diagnostic features make this device ideal for a wide
variety of applications.
TxMF
RxMF
DSTi
DSTo
TxDL
RxDL
DLCLK
Control
Interface
(fig. 3)
C4i/C2i
F0i
Port
Data
Interface
Data
Link
Buffer
Control
Interface
National
Bit
Buffer
ABCD
Signal
Buffer
Transmit & Receive
Frame MUX/DEMUX
Test
Code
Gen.
Dual 16
Byte Tx
Dual 16
Byte Rx
Buffer
Buffer
ST-BUS Timing
2 Frame Rx
Elastic
Buffer With
Slip Control
Performance
Monitoring &
Alarm
Control
Phase
Detector
Circuit
Timin g
Figure 1 - Functional Block Diagram
PCM 30
(E1)
Link
Interface
to all registers
and counters
÷
256
Circuit
Timing
TAIS
TxA
TxB
RxA
RxB
E2i
E8Ko
V
DD
V
SS
IC
RESET
4-237
MT9079
RESET
DSTo
RxDL
TxDL
DLCLK
D0\SIO\CSTo0
IRQ
D1
D2
D3
D4
D5
D6
D7
VDD
AC4\ST/SC
AC3
AC2
AC1
AC0
40 PIN CERDIP/PLASTIC DIP
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
D0\SIO\CSTo0
40
IC
39
TxA
TxB
38
37
TAIS
CSTo1
36
CSTi2
35
VSS
34
S/P
33
32
TxMF
31
RxMF
DSTi
30
29
E8Ko
28
F0i
27
RxA
RxB
26
E2i
25
C4i
24
23
DS
22
CS
21
R/W\RxD\CSTi0
IRQ
D1
D2
D3
D4
D5
D6
D7
VDD
NC
/C2i
\SCLK\CSTi1
TxDL
DLCLK
NC
65432
7
8
9
10
11
12
13
14
15
16
17
1819202122
RxDL
D0\SIO\CSTo0
DSTo
IC
RESET
4443424140
23
2425262728
NC
4443424140
D1
D2
D3
D4
D5
D6
D7
NC
CSTo1
1
2
3
4
5
6
7
8
9
10
11
1213141516
A4\ST/SC
NC
CSTi2
VSS
S/P
TxMF
RxMF
DSTi
E8Ko
F0i
RxA
RxB
AC3
AC2
AC1
44 PIN QFP
IRQ
VDD
TxA
TxB
TAIS
39
38
37
36
35
34
33
32
31
30
29
IC
RESET
3837363534
39
17
1819202122
CS
AC0
R/W\RxD\CSTi0
TxA
\SCLK\CSTi1
DS
TxB
TAIS
CSTo1
33
NC
32
CSTi2
VSS
31
S/P
30
29
TxMF
RxMF
28
DSTi
27
E8Ko
26
F0i
25
RxA
24
23
RxB
NC
E2i
/C2i
C4i
DSTo
RxDL
TxDL
DLCLK
4-238
AC3
AC2
A4\ST/SC
44 PIN PLCC
AC1
AC0
CS
R/W\RxD\CSTi0 1
\SCLK\CSTi1
DS
E2i
NC
/C2i
C4i
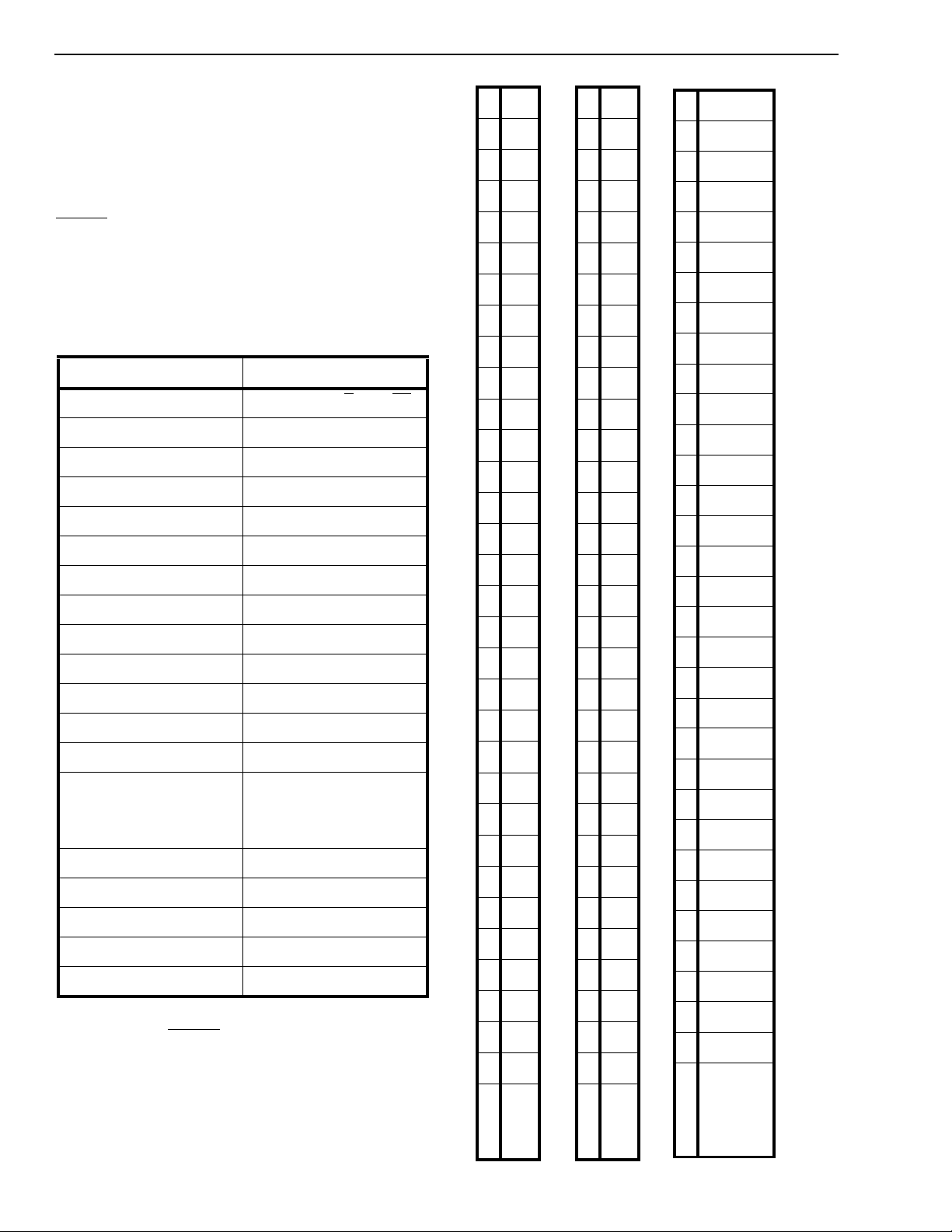
Figure 2 - Pin Connection
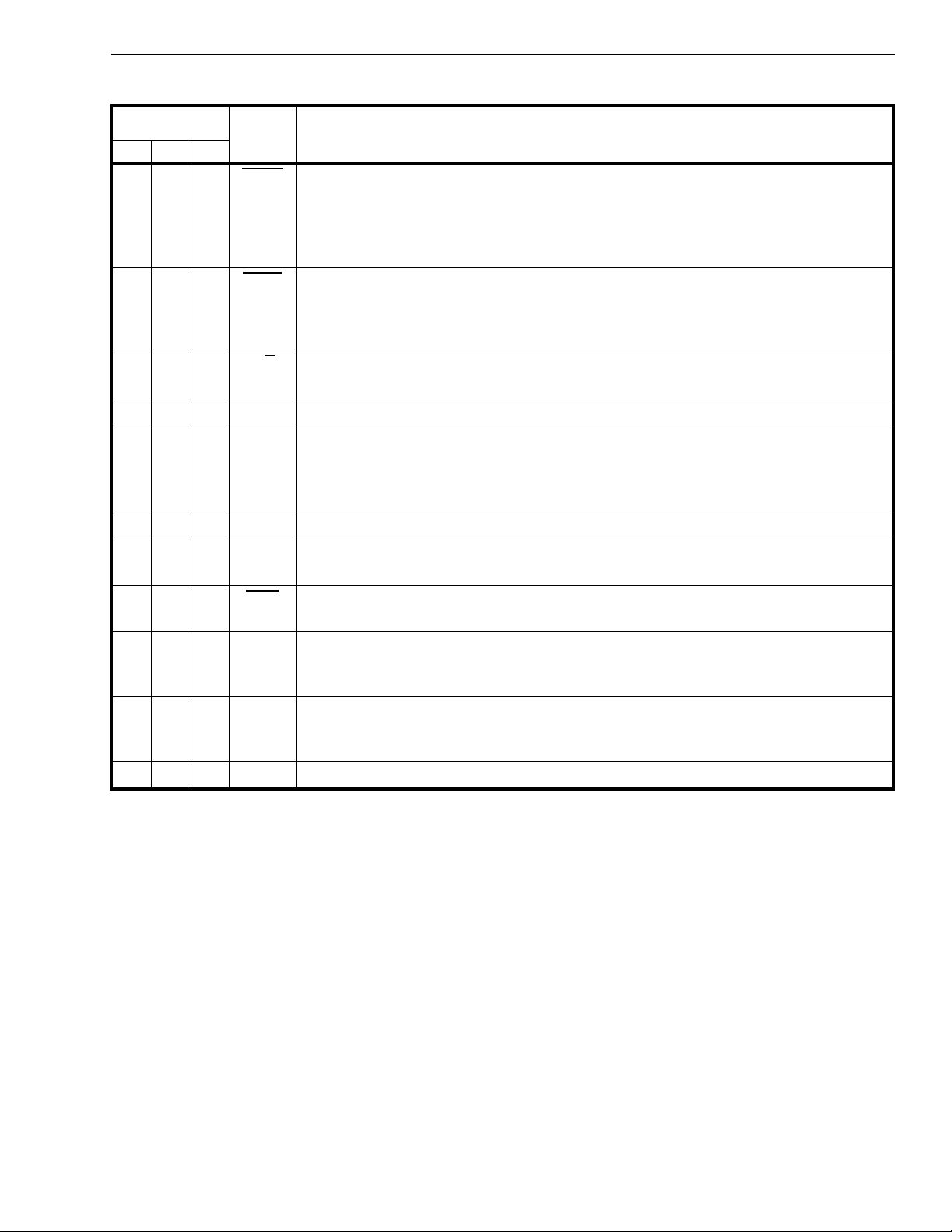
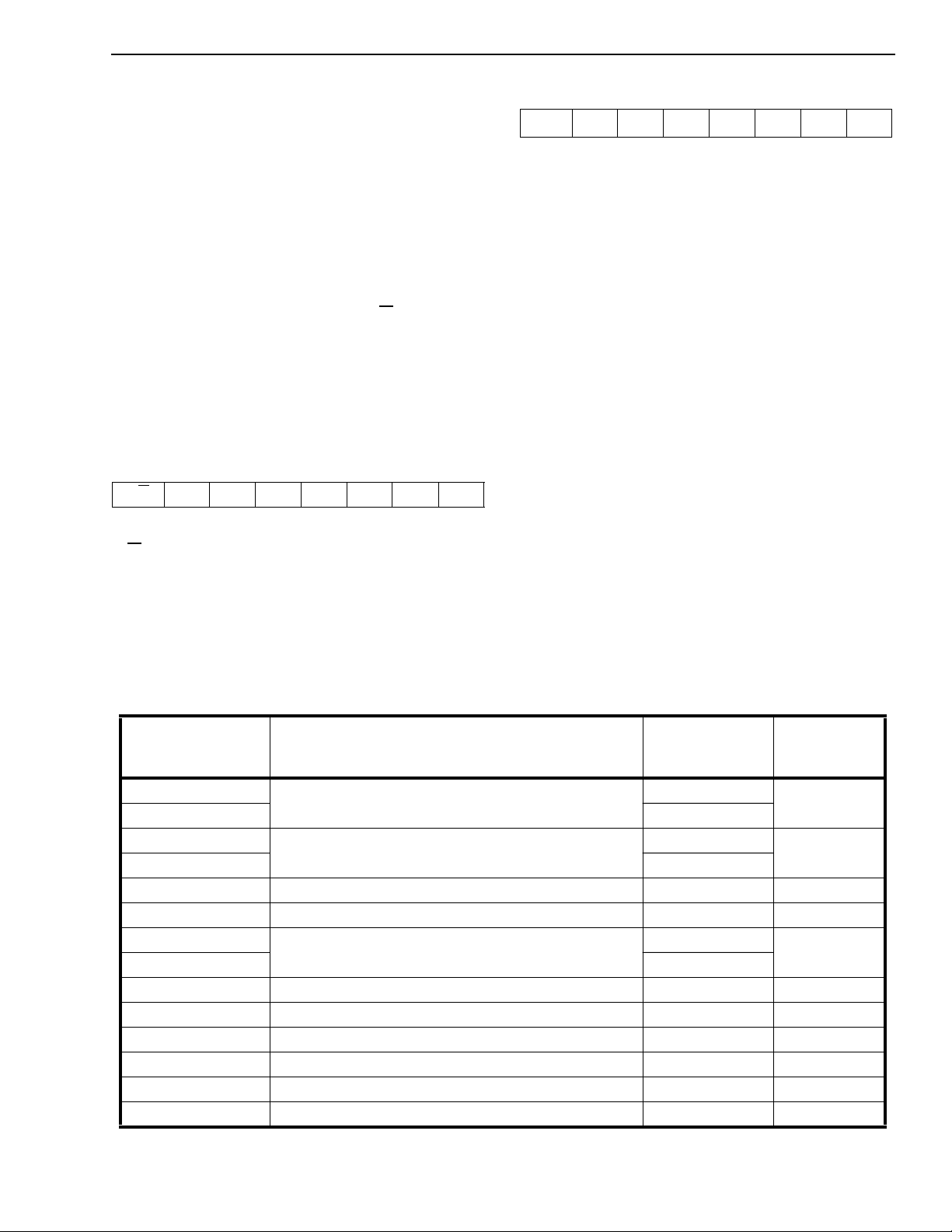
Pin Description
MT9079
Pin #
DIP PLCC QFP
1 1 39 RESET RESET (Input): Low - maintains the device in a reset condition. High - normal
2240DSToData ST-BUS (Output): A 2.048 Mbit/s serial output stream which cont ains th e 3 0
3 3 41 RxDL Receive Data Link (Output): A 4 kbit/s serial stream which is demultiplexed from a
4 4 42 TxDL Transmit Data Link (Input): A 4 kbit/s serial stream which is multiplexed into a
5 5 43 DLCLK Data Link Clock (Output): A 4 kHz clock signal used to clock out DL data (RxDL) on
-644NCNo Connection.
671 IRQ
Name Description (see notes 1, 2 and 3)
operation. The MT90 79 should be reset af ter power-up. The time const ant for a
power-up reset circuit (see Figure 11) must be a minimum of five times the rise time of
the power supply. In normal operation, the RESET
of 100 nsec. to reset the device.
PCM or data channels re ceived from the PCM 30 line. See Figure 4b.
selected national bit (non-frame ali gnm ent signa l) of the PCM 30 receive signal.
Received DL data is clocked out on the rising edge of DLCLK, see Figure 20.
selected national bit (non-frame ali gnment signa l) of the P CM 30 transmi t signal.
Transmit DL data is clocked in on the rising edge of internal clock IDCLK, see Figure
21.
its rising edge. It can also be used to clock DL data in and out of external serial
controllers (i.e., MT8952). See TxDL and RxDL pin descriptions.
Interrupt Request (Outp ut): Low - interrupt request. High - no interrup t request.
is an open drain output that should be connected to VDD through a pull-up resistor .
IRQ
An active CS
signal is not required for this pin to function.
pin must be held low for a minimum
782 D0
SIO
CSTo0
[ST]
8-14 9-15 3-9 D1-D7
15 16 10 V
-1711 NCNo Connection.
16 18 12 AC4
ST/SC
[ST S]
17-2019-2213-16AC3-AC
Data 0 (Three-state I/O): The least significant bit of the bidirecti onal dat a bus of the
[P]
parallel processor interface.
Serial Input/Output (Three state I/O): This pin function is used in serial controller
[S]
mode and can be configured as control data input/ out put for Intel operat ion
to controller pin RxD). Input data is sampled LSB first on the rising edge of SCLK; data
is output LSB first on the falling edge of SCLK. It can also be configured as the control
data output for Mot orola and Nat ional Microwire operation (dat a outp ut MSB first on
the falling edge of SCLK). See CS
Control ST-BUS Zero (Output): A 2.048 Mbit/s serial status stream which provides
device status, performance mon itoring, alarm status and phase stat us data.
Data 1 to Data 7 (Three-state I/O): These signals, combined wit h D0, f orm th e
[P]
bidirectional data bus of the parallel p rocessor interface (D7 is the most significant bit).
Positive Power Supply (Input): +5V ± 10%.
DD
Address/Co ntro l 4 (Input): The most signif icant addre ss and control input for the
[P]
non-multiplexed parallel processor interfa ce.
ST-BUS/Serial Co ntrol ler (Inp u t): High - selects ST-BUS mode of operation.
Low - selects serial controller mode of ope ratio n.
Address/Control 3 to 0 (Inputs): Address and control inputs for the
0
non-multiplexed parallel processor interface. AC0 is the least significant input.
[P]
(connect
pin description.
4-239
MT9079
Pin Description (Continued)
Pin #
DIP PLCC QFP
21 23 17 R/W
22 24 18 CS
23 25 19 DS
Name Description (see notes 1, 2 and 3)
[P]
RxD
[S]
CSTi0
[ST]
[SP]
[P]
SCLK
[S]
Read/Write (Input): High - the parallel processor is reading data from the MT9079.
Low - the parallel processor is writing data to the MT9079.
Receive Data (Input): This pin function is used in Motorola and National Microwire
serial controller mode. Data is sampled on the rising edge of SCLK, MSB first. See
pin description.
CS
Control ST-BUS Zero (Input): A 2.048 Mbit/s serial control stream which contains
the device control, mode selection, and performance monitoring control.
Chip Select (Input): Low - selects the MT9079 parallel processor or serial controller
interface. High - the parallel processor or serial controller interface is idle and all
bus I/O pins will be in a high impedance state. When controller mode is selected,
the SCLK input is sampled when CS
Intel mode; if SCLK is low it will be in Motorola/National Microwire mode. This pin
has no function (NC) in ST-BUS mode.
Data Strobe (Input): This input is the active low data strobe of the parallel
processor interface.
Serial Clock (Input): This is used in serial controller mode to clock serial data in
and out of the MT9079 on RxD and SIO. If SCLK is high when CS
device will be in Intel mode; if SCLK is low when CS
Motorola/National Microwire mode.
is brought low. If SCLK is high the device in is
goes low, the
goes low, it will be in
CSTi1
[ST]
24 26 20 C4i
25 27 21 E2i 2.048 MHz Extracted Clock (Input): This clock is extracted from the received
-2822 NCNo Connection.
26 29 23 RxB Receive B (Input): Received split phase unipolar signal decoded from a bipolar line
27 30 24 RxA Receive A (Input): Received split phase unipolar signal decoded from a bipolar line
28 31 25 F0i
29 32 26 E8Ko Extracted 8 kHz Clock (Output): An 8 kHz signal generated by dividing the
Control ST-BUS One (Input): A 2.048 Mbit/s serial control stream which contains
the per timeslot control programming.
/C2i 4.096 MH z and 2.048 MHz Sys tem Cloc k (Inp ut): This is master clock for the serial
PCM data and ST-BUS sections of the MT9079. The MT9079 automat ically det ects
whether a 4.096 or 2.048 MHz clock is being used. See Figure 22 for timing
information.
signal. Its rising edge is used internally to clock in data received on RxA and RxB.
See Figure 29.
receiver. Receives RZ and NRZ bipolar signals. See Figures 29 and 31.
receiver. Receives RZ and NRZ bipolar signals. See Figurs 29 and 31.
Frame Pulse (Input): This is the ST-BUS frame synchronization signal which
delimits the 32 channel frame of all ST-BUS streams, as well as DSTi and DSTo in
all modes.
extracted 2.048 MHz clock (E2i) by 256 and aligning it with the received PCM 30
frame. The 8 kHz signal can be used to synchronize the system clock with the
extracted 2.048 MHz clock. E8Ko is high when 8KSEL=0. See Figure 27.
30 33 27 DSTi Data ST-BUS (Input). A 2.048 Mbit/s serial stream which contains the 30 PCM or
data channels to be transmitted on the PCM 30 line. See Figure 4a.
4-240
Pin Description (Continued)
MT9079
Pin #
DIP PLCC QFP
31 34 28 RxMF
32 35 29 TxMF
33 36 30 S/P
34 37 31 V
35 38 32 CSTi2 Control ST-BUS Input Two (Input): A 2.048 Mbit/s ST-BUS control stream which
-3933 NCNo Connection.
36 40 34 CSTo1 Control ST-BUS Output One (Output): A 2.048 Mbit/s serial status stream which
Name Description (see notes 1, 2 and 3)
Receive Multiframe Boundary (Output): An output pulse delimiting the received
multiframe bounda ry. The next frame ou tput on the dat a st ream (DSTo) is basic frame
zero on the PCM 30 link. This receive mul tiframe signal can be relat ed to either the
receive CRC multiframe (MFSEL= 1) or the receive signalling multif rame (MFS EL=0).
See Figures 25 and 26.
Transmit Multiframe Boundary (Input): This input is used to set the channel
associated and CRC transmit multiframe boundary. The device will generate its own
multiframe if this pin is held high. This input is pulled high in most applications. See
Figures 24 to 26.
Serial/P aral lel (In pu t): High - serial controll er port or ST-BUS operation.
Low - parallel processor port operation.
Negative Power Supply (Input): Ground.
SS
contains the 30 (ABCDXXXX) transmit signalling nibbles when RPSIG=0. When
RPSIG=1 thi s pin has no function. Only the most significant nibbles of each ST-BUS
timeslot are valid. See Figure 4c.
provides the 30 (ABCDXXXX) receive signalling nibbles.
37 41 35 TAIS
38 42 36 TxB Transmit B (Output): A split phase unipolar signal suitable for use with TxA, an
39 43 37 TxA Transmit A (Output):A split phase unipolar signal suitable for use with TxB, an
40 44 38 IC Internal Connection (Input): Connect to ground for normal operation.
Notes:
1. All inputs are CMOS with TTL co mpatible logic levels.
2. All outputs are CMOS and are compatible with both TTL and CMOS logic levels.
3. See AC Electrical Characteristics - Timing Parameter Measurement Voltage Levels for input and output
voltage thresholds.
Transmit Alarm Indication Signal (Input): High - TxA and TxB will transmit data
normally. Low - TxA and TxB transmits an AIS (all ones signal).
external line driver and a transformer to construct a bipolar PCM 30 line signal. This
output can also transmit RZ and NRZ bipolar signals. See Figures 28 and 30.
external line driver and a transformer to construct a bipolar PCM 30 line signal. This
output can also transmit RZ and NRZ bipolar signals. See Figures 28 and 30.
4-241
MT9079
Functional Description
The MT9079 is an advanced PCM 30 framer that
meets or supports the layer 1 CCITT
Recommendations of G.703, G.704, G.706, G.775,
G.796 and G.732 for PCM 30; I.431 for ISDN
Primary Rate; and T1.102 f or DS1A. It also meets or
supports the layer 1 requirements of ETSI ETS 300
011 and ETS 300 233. Included are all the features
of the MT8979, except for the digital attenuation
ROM and Alternate Digit Inversion (ADI). It also
provides extensive performance monitoring data
collection features.
Control of the MT9079 is achieved through the
hardware selection of either a parallel
non-multiplexed microprocessor port, an Intel or
Motorola serial controller port, or an ST-BUS port.
The parallel port is based on the signals used by
Motorola microprocessors, but it can also be easily
mated to Intel microprocessors (see the Applications
section of this data sheet).
The serial microcontroller interface of the MT9079
will automatically adapt to either Intel or Motorola
signalling. An ST-BUS interface, consisting of two
control and one status stream, may also be selected,
however, the circular and national bit buffers cannot
be accessed in this mode.
The MT9079 supports enhanced features of the
MT8979. The receive slip buffer hysteresis has been
extended to 26 channels, which is suitable for
multiple trunk applications where large amounts of
wander tolerance is required. The phase status word
has been extended to the one sixteenth bit when the
device is clocked with C4. This provides the
resolution required for high performance phase
locked loops such as those described in MSAN-134.
A new feature is the ability to select transparent or
termination modes of operation. In termination mode
the CRC-4 calculation is performed as part of the
framing algorithm. In transparent mode the MT9079
allows the data link maintenance channel to be
modified and updates the CRC-4 remainder bits to
reflect this new data. All channel, framing and
signalling data passes through the device unaltered.
This is useful for intermediate point applications of
an PCM 30 link where the data link data is modified,
but the error information transported by the CRC-4
bits must be passed to the terminating end. See the
Application section of this data sheet.
The MT9079 has a comprehensive suite of status,
alarm, performance monitoring and reporting
features. These include counters for BPVs, CRC
errors, E-bit errors, errored frame alignment signals,
BERT, and RAI and continuous CRC errors. Also,
included are transmission error insertion for BPVs,
CRC-4 errors, frame and non-frame alignment signal
errors, and loss of signal errors.
Dual transmit and receive 16 byte circular buffers, as
well as line code insertion and detection features
have been implemented and can be associated with
any PCM 30 time slot.
A complete set of loopbacks has been implemented,
which include digital, remote, ST-BUS, payload, and
local an d rem o te time slot.
The functionality of the MT9079 has been heighten
with the addition of a comprehensive set of maskable
interrupts and an interrupt vector function. Interrupt
sources consist of synchronization status, alarm
status, counter indication and overflow, timer status,
slip indication, maintenance functions and receive
channel associated signalling bit changes.
The received CAS (Channel Associated Signalling)
bits are frozen when signalling multiframe
synchronization is lost, and the CAS debounce
duration has been extended to be compliant with
CCITT Q.422.
The MT9079 framing algorithm has been enhanced
to allow automatic interworking between CRC-4 and
non-CRC -4 interfaces. Au tomatic basic fr ame alarm
and multiframe alarms have also been added.
The national bits of the MT9079 can be accessed in
three ways. First, through single byte registers;
second, through five byte transmit and receive
national bit buffers; and third, through the data link
pins TxDL , R xD L a n d DLCLK.
4-242
The PCM 30 Interface
PCM 30 (E1) basic frames are 256 bits long and are
transmitted at a frame repetition rate of 8000 Hz,
which results in a aggregate bit rate of 256 bits x
8000/sec.= 2.048 Mbits/sec. The actual bit rate is
2.048 Mbits/sec +/- 50 ppm encoded in HDB3
format. Basic frames are divided into 32 time slots
numbered 0 to 31, see Figure 32. Each time slot is 8
bits in length and is transmitted most significant bit
first (numbered bit 1). This results in a single time
slot data r ate of 8 b i ts x 8 0 00 /s e c. = 64 kb i ts/sec.
It should be noted that the Mitel ST-BUS also has 32
channels numbered 0 to 31, but the most significant
bit of an eight bit channel is numbered bit 7 (see
Mitel Application Note MSAN-126). Therefore,
MT9079
ST-BUS bit 7 is synonymous with PCM 30 bit 1; bit 6
with bit 2: and so on. See Figure 33.
PCM 30 time slot zero is reserved for basic frame
alignment, CRC-4 multiframe alignment and the
communication of maintenance information. In most
configurations time slot 16 is reserved for either
channel associated signalling (CAS or ABCD bit
signalling) or common channel signalling (CCS). The
remaining 30 time slots are called channels and
carry either PCM encoded voice frequency signals or
digital data signals. Channel alignment and bit
numbering is consistent with time slot alignment and
bit numbering. However, channels are numbered 1 to
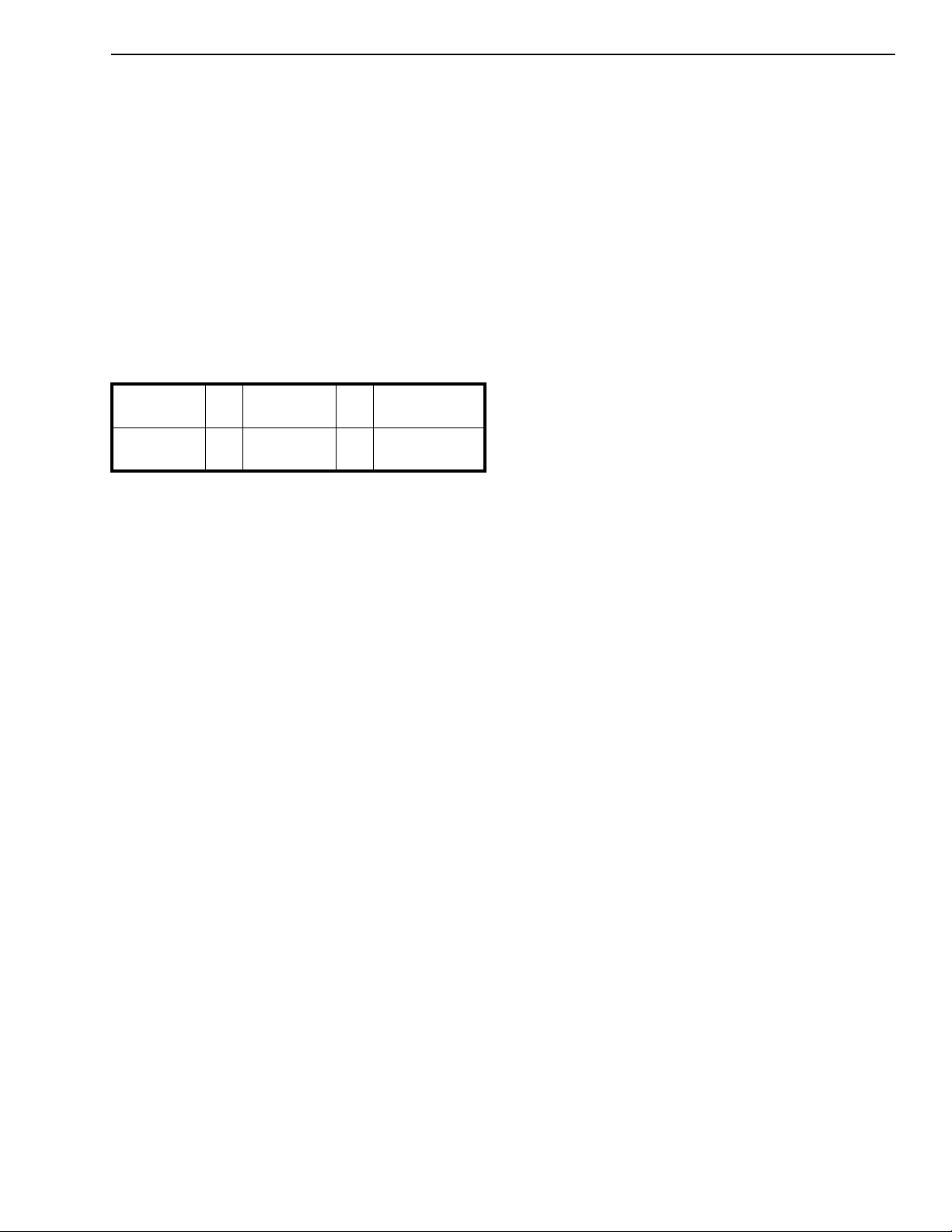
30 and relate to time slots as per Table 1.
PCM 30
Timeslots
Voice/Dat a
Chann els
0 1 2 3 ....15 16 17 18 19 .... 31
X 1 2 3 . ...1 5 X 16 17 18 .... 30
Table 1 - Time slot to Chan nel Relati on shi p
Basic Frame Alignment
Time slot zero of every basic frame is reserved for
basic frame alignment and contains either a Frame
Alignment Signal (FAS) or a Non-frame Alignment
Signal (NFAS). FAS and NFAS occur in time slot
zero of consecutive basic frames as can be see in
Table 4. Bit two is used to distinguish between a FAS
(bit two = 0) and a NFAS (bit two = 1).
Basic frame alignment is initiated by a search for the
bit sequence 0011011 which appears in the last
seven bit positions of the FAS, see Frame Algorithm
section. Bit position one of the FAS can be either a
CRC-4 remainder bit or an international usage bit.
Bits four to eight of the NFAS (i.e., S
- Sa8) are
a4
national bits, which telephone authorities used to
communicate maintenance, control and status
information. A single national bit can also be used as
a 4 KHz maintenance channel or data link. Bit three,
the ALM bit, is used to indicate the near end basic
frame synchronization status to the far end of a link.
Bit position one of the NFAS can be either a CRC-4
multiframe alignment signal, an E-bit or an
international usage bit. Refer to an approvals
laboratory and national standards bodies for specific
requirements.
CRC-4 Multiframing
The primary purpose for CRC-4 multiframing is to
provide a verification of the current basic frame
alignment, although it can be used for other
functions such as bit error rate estimation. The
CRC-4 multiframe consists of 16 basic frames
numbered 0 to 15, and has a repetition rate of 16
frames X 125 microseconds/frame = 2 msec. CRC-4
multiframe alignment is based on the 001011 bit
sequence, which appears in bit position one of the
first six N FASs of a CR C -4 multiframe.
The CRC-4 multiframe is divided into two
submultiframes, numbered 1 and 2, which are each
eight basic frames or 2048 bits in length.
The CRC-4 frame alignment verification functions as
follows. Initially, the CRC-4 operation must be
activated and CRC-4 multiframe alignment must be
achieved at both ends of the link. At the local end of
a link all the bits of every transmit submultiframe are
passed through a CRC-4 polynomial (multiplied by
4
then divided by X4 + X + 1), which generates a
X
four bit remainder. This remainder is inserted in bit
position one of the four FASs of the following
submultiframe before it is transmitted, see Table 4.
The submultiframe is then transmitted and at the far
end the same process occurs. That is, a CRC-4
remainder is generated for each received
submultiframe. These bits are compared with the bits
received in position one of the four FASs of the next
received submultiframe. This process takes place in
both directions of transmission.
When more than 914 CRC-4 errors (out of a possible
1000) are counted in a one second interval, the
framing algorithm will force a search for a new basic
frame alignment. See Frame Algorithm section for
more details.
The result of the comparison of the received CRC-4
remainder with the locally generated remainder will
be transported to the near end by the E-bits.
Therefore, if E1 = 0, a CRC-4 error was discovered in
a submultiframe one received at the far end; and if
E
= 0, a CRC-4 error was discovered in a
2
submultiframe two received at the far end. No
submultiframe sequence numbers or re-transmission
capabilities are supported with layer 1 PCM 30
protocol. See CCITT G.704 and G.706 for more
details on the operation of CRC-4 and E-bits.
CAS Signall ing Mu lti fram ing
The purpose of the signalling multiframing algorithm
is to provide a scheme that will allow the association
of a specific ABCD signalling nibble with the
appropriate PCM 30 channel. Time slot 16 is
reserved for the communication of Channel
Associated Signalling (CAS) information (i.e., ABCD
signalling bits for up to 30 channels). Refer to CCITT
4-243
MT9079
G.704 and G.732 for more details on CAS
mutliframing requirements.
A CAS signalling multiframe consists of 16 basic
frames (numbered 0 to 15), which results in a
multiframe repetition rate of 2 msec. It should be
noted that the boundaries of the signalling
multiframe may be completely distinct fro m those of
the CRC-4 multiframe. C AS multiframe alignment is
based on a multiframe alignment signal (a 0000 bit
sequence), which occurs in the most significant
nibble of time slot 16 of basic frame zero of the CAS
multiframe. Bit 6 of this time slot is the multiframe
alarm bit (usually designated Y). When CAS
multiframing is acquired on the receive side, the
transmit Y-bit is zero; when CAS multiframing is not
acquired, the transmit Y-bit is one. Bits 5, 7 and 8
(usually designated X) are spare bits and are
normally set to one if not used.
Time slot 16 of the remaining 15 basic frames of the
CAS multiframe (i.e., basic frames 1 to 15) are
reserved for the ABCD signalling bits for the 30
payload channels. The most significant nibbles are
the reserved for channels 1 to 15 and the least
significant nibbles are reserved for channels 16 to
30. That is, time slot 16 of basic frame 1 has ABCD
for channel 1 and 16, time slot 16 of basic frame 2
has ABCD for channel 2 and 17, through to time slot
16 of basic frame 15 has ABCD for channel 15 and
30.
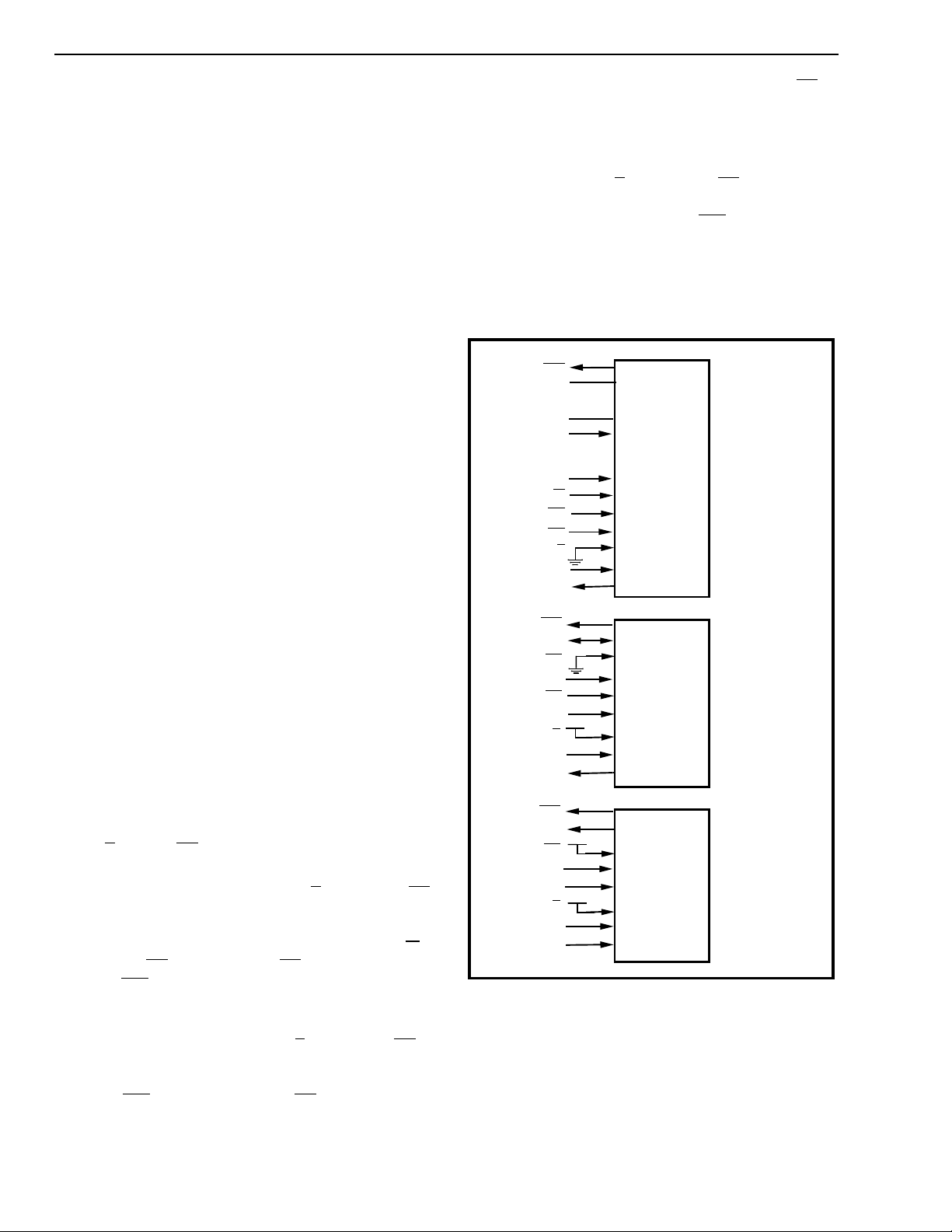
MT9079 Access and Cont rol
The Control Port Interface
The control and status of the MT9079 is achieved
through one of three generic interfaces, which are
parallel microprocessor, serial microcontroller, and
ST-BUS. This control port selection is done through
pins S/P
The parallel microprocessor port (S/P
= AC4) is non-multiplexed and consists of an eight
bit bidirectional data bus (D0-D7), a five bit
address/command bus (AC0-AC4), read/write (R/W
chip select (CS
request (IRQ
most high speed parallel microprocessors.
The serial microcontroller port (S/P = 1 and ST/SC =
0) consists of a receive data input (RxD), serial clock
input (SCLK), serial data input/output (SIO), interrupt
request (IRQ
automat ically interface to Intel, Moto rola or National
microcontrollers in either synchronous or
asynchronous modes. When controller mode is
and ST/SC.
= 0 and ST/SC
), data strobe (DS) and an interrupt
). This port can be easily interfaced to
), and chip select (CS). This port will
selected, the SCLK input is sampled when CS
brought low. If SCLK is high the device is in Intel
mode; if SCLK is low it will be in Motorola/National
Microwire mode.
The ST-BUS port (S/P
= 1 and ST/SC = 1) consists
of control streams CSTi0 and CSTi1, status stream
CSTo0, and interrupt request (IRQ
). It should be
noted that in this mode access to the circular buffers
and notional bit buffers is not provided. This port
meets the requirements of the "ST-BUS Generic
Device Specification", Mitel Application Note
MSAN-126.
PARALLEL µP
IRQ
D0
•
•
•
D7
AC4
AC0
R/W
S/P
CSTi2
CSTo1
IRQ
RxD
ST/SC
SIO
CS
SCLK
S/P
CSTi2
CSTo1
IRQ
CSTo0
ST/SC
CSTi0
CSTi1
S/P
CSTi2
),
CSTo1
CS
DS
+5V
+5V
+5V
•
•
•
CONTROL
INTERFACE
SERIAL µP
CONTROL
INTERFACE
ST-BUS
CONTROL
INTERFACE
Figure 3 - Control Port Interface
Control and Status Register Access
The parallel microprocessor and serial
microcontroller interfaces gain access to specific
registers of the MT9079 through a two step process.
First, writing to the Command/Address Register
(CAR) selects one of the 14 pages of control and
status registers (CAR address: AC4 = 0, AC3-AC0 =
is
4-244
MT9079
don't care, CAR data D7 - D0 = page number).
Second, each page has a maximum of 16 registers
that are addressed on a read or write to a non-CAR
address (non-CAR: address AC4 = 1, AC3-AC0 =
register address, D7-D0 = data). Once a page of
memory is selected, it is only necessary to write to
the CAR when a different page is to be accessed.
See Figur e 1 7 for timing requirements.
Communications between a serial controller and
MT9079 is a two byte operations. First, a
Command/Address byte selects the address and
operation that follows. That is, the R/W
read or write function and A
determines if the next
4
byte is a new memory page address (A
data transfer within the current memory page (A
bit sel ect s a
= 0) or a
4
=
4
1). The second byte is either a new memory page
address (when A
= 0) or a data byte (when A4 = 1).
4
This is illustrated as follows:
a) Command/Address byte -
R/W XXA
4
A
3
A
2
A
1
A
0
where:
R/W - read or write operation,
X - no function,
= 0 - new memory page address to follow,
A
4
= 1 - data byte to follow, and
A
4
A
- determines the byte address.
3-A0
b) Page address or data byte -
D
D
D
D
D
D
D
7
6
5
4
3
2
D
1
0
See Figures 18 and 19 for timing requirements.
Register Access and Locations
Table 2 associates the MT9079 control and status
pages with access and page descriptions, as well as
an ST-BUS stream. When ST-BUS access mode is
used, each page contains 16 registers that are
associated consecutively with the first or second 16
channels of each ST-BUS stream. That is, page 1
regis ter lo cati ons 1 000 0 to 11111 a ppea r on CS Ti0
time slots 0 to 15, and page 2 register locations
1 0 0 0 0 t o 11111 a p pear on CSTi0 time slots 16 to 31.
It should be noted that access to the transmit and
receive circular buffers is not supported in ST-BUS
mode.
Common ST-BUS Streams
There are several control and status ST-BUS
streams that are common to all modes. CSTo1
contains the received channel associated signalling
bits (e.g., CCITT R1 and R2 signalling), and when
control bit RPSIG = 0, CSTi2 is used to control the
transmit channel associated signalling. DSTi and
DSTo contain the transmit and receive voice and
digital data. Figures 4a, b and c illustrate the relative
Page Address
D
- D
7
0
Register Description
000000 01 Master
000000 10 R/W
Control
00000011 Master
000001 00 R/W
Status
Processor/
Controller
Access
ST-BUS
Access
R/W CSTi0
RCSTo0
000001 01 Per Channel Transmit Sig nall ing R/W CSTi2
00000110 Per Cha nnel R ece ive Sign alling R CSTo1
00000111 Per Time Slot
000010 00 R/W
Control
R/W CSTi1
000010 01 Transmit Cir cular B uffer Zer o R/W --000010 10 Transmit Circular B uffer On e R /W --00001011 Receive Circular Buffer Zero R --00001100 Receive Ci rcular Buffer O ne R --00001101 Transmit National Bit Buffer R/W --00001110 Receive Nati ona l Bit Buffer R ---
Table 2 - Register Summary
4-245
MT9079
channel positions of the ST-BUS and PCM 30
interface. See Tables 13, 14, 16 and 17 for CAS bit
positions in CSTo1 and CSTi2.
15
14
30
29
Reset Operation (Initial izati on)
The MT9079 can be reset using the hardware
RESET
pin (see pin description for external reset
circuit requirements) or the software reset bit RST
(page 1, address 11H). During the reset state, TxA
and TxB are low. When the device emerges from its
reset state it will begin to function with the default
settings described in Table 3.
Function Status
Port Selection as per pins S/P & ST/SC
Mode Termination
ST-BUS Offset 00000000*
Loopbacks Deactivated
E8Ko Deactivated
Transmit FAS C
Transmit non-FAS 1/S
Transmit MFAS (CAS) 00001111
Data Link Deactivated
CRC Interworking Activated
Code Insert/Detect Deactivated
Signalling CAS (CSTi2 & CSTo1)
ABCD Bit Debounce Deactivated
Interrupt Mask Word Zero
Interrupts
unmasked, all others
masked; interru pts not
0011011
n
1111111
n
suspended
13
28
12
27
11
26
10
25
9
24
8
23
7
22
6
21
5
20
4
19
3
18
2
17
1
0
15
14
13
12
11
10
9
8
7
16
X
15
14
13
12
11
10
9
8
7
17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
CSS
RxMF Output Signalling Multiframe
Error Insertion Deactivated
Coding 10*
Tx/Rx Buffers Deactivated
Counters Random
Table 3 - Reset Status
*cleared by the RESET pin, but not by the
RST control bit.
See the Applications section for the MT9079
initialization procedure.
4-246
DSTi # 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
123456789101112131415
PCM 30
Timeslot #
6
6
5
5
4
4
Figure 4c - Relationship between PCM 30 Frames, Channels and CSTo1 Channels
3
3
2
2
1
1
0
X
PCM 30
channel
Basic Fr am e
Timeslot 16 for
CCS = denotes Signalling Channel if Common Channel Signalling Mode Selected
x = Unused Channel
PCM 30
0 1 2 3 4 5 6 7 8 9 101112131415SIG171819202122232425262728293031
Timeslot #
Figure 4b - Relationship between Received PCM 30 Timeslots and Output DSTo Channels
CSTo1/CSTi2 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
Figure 4a - Relationship between Input DSTi Channels and Transmitted PCM 30 Timeslots
DSTo 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31
MT9079
TAIS Ope ration
The TAIS
(Transmit AIS) pin allows the PRI interface
to transmit an all ones signal form the point of
power-up without writing to any control registers.
After the interface has been initialized normal
operation can take place by making TAIS
high.
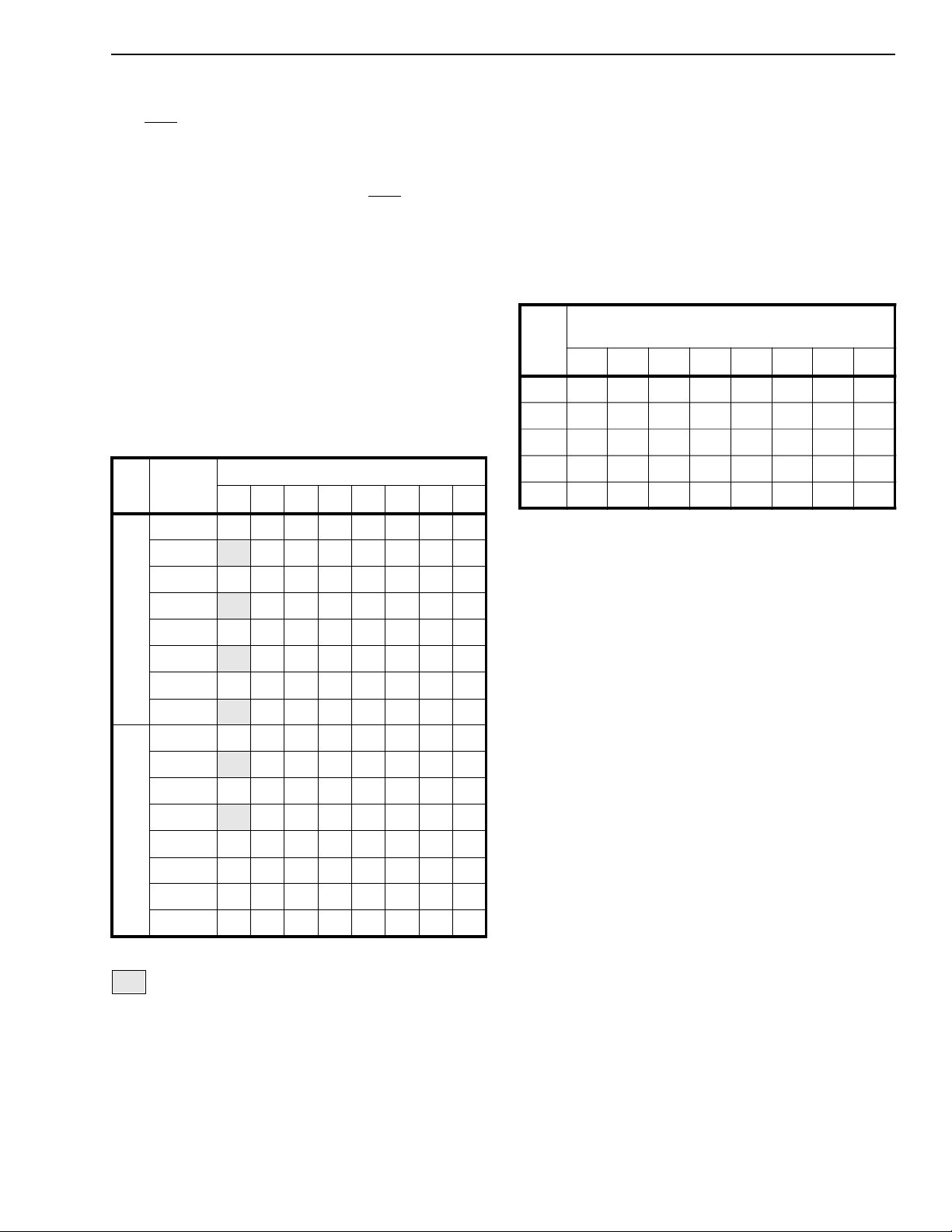
National B it Bu ff ers
Table 4 shows the contents of the transmit and
receive Frame Alignment Signals (FAS) and
Non-frame Alignment Signals (NFAS) of time slot
zero of a PCM 30 signal. Even numbered frames
(CRC Frame # 0, 2, 4, ...) are FASs and odd
numbered frames (CRC Frame # 1, 3, 5, ...) are
NFASs. The bits of each channel are numbered 1 to
8, with 1 being the most significant and 8 the least
significant.
CRC
CRC
Frame/
Type
0/FAS C10011011
1/NFAS
2/FAS C20011011
PCM 30 Channel Zero
12345678
01ALMSa4Sa5Sa6Sa7S
a8
modes, but cannot be accessed in ST-BUS mode. In
ST-BUS mode access to the national bits can be
achieved through the Transmit and Receive
Non-frame Alignment Signal (CSTi0 and CSTo).
When selected, the Data Link (DL) pin functions
override the transmit national bit buffer function.
The CALN (CRC-4 Alignment) status bit and
maskable interrupt CALNI indicate the beginning of
every received CRC-4 multiframe.
Addre
ssable
Bytes
NBB0 S
NBB1 S
NBB2 S
NBB3 S
NBB4 S
Frames 1, 3, 5, 7, 9, 11, 13 & 15 of a CRC-4
Multiframe
F1 F3 F5 F7 F9 F11 F13 F15
a4Sa4Sa4Sa4Sa4Sa4Sa4Sa4
a5Sa5Sa5Sa5Sa5Sa5Sa5Sa5
a6Sa6Sa6Sa6Sa6Sa6Sa6Sa6
a7Sa7Sa7Sa7Sa7Sa7Sa7Sa7
a8Sa8Sa8Sa8Sa8Sa8Sa8Sa8
Table 5 - MT9079 National Bit Buffers
Note: NBB0 - NBB4 are addressa ble bytes of the MT9079
transmit and receive national bit buffers.
3/NFAS
4/FAS C30011011
5/NFAS
Sub Multi Frame 1
6/FAS C40011011
7/NFAS
8/FAS C10011011
9/NFAS
10/FAS C20011011
11/NFAS
12/FAS C30011011
13/NFAS E
Sub Multi Frame 2
14/FAS C40011011
15/NFAS E
01ALMSa4Sa5Sa6Sa7S
11ALMSa4Sa5Sa6Sa7S
01ALMSa4Sa5Sa6Sa7S
11ALMSa4Sa5Sa6Sa7S
11ALMSa4Sa5Sa6Sa7S
1 ALM Sa4Sa5Sa6Sa7S
1
1 ALM Sa4Sa5Sa6Sa7S
2
a8
a8
a8
a8
a8
a8
a8
Table 4 - FAS and NFAS Structure
indicates positio n of CRC-4 multiframe alignment signal.
Table 5 illustrates the organization of the MT9079
transmit and receive national bit buffers. Each row is
an addressable byte of the MT9079 national bit
buffer, and each column contains the national bits of
an odd numbered frame of each CRC-4 Multiframe.
Data Link Ope ration
The MT9079 has a user defined 4 kbit/sec. data link
for the transport of maintenance and performance
monitoring information across the PCM 30 link. This
channel functions using one of the national bits (S
S
, Sa6, Sa7 or Sa8) of the PCM 30 channel zero
a5
non-frame alignment signal. The S
bit used for the
a
DL is selected by making one of the bits, S
- Sa8,
a4
a4
high in the Data Link Select Word. Access to the DL
is provided by pins DLCLK, TxDL and RxDL, which
allow easy interfacing to an HDLC controller.
The 4 kHz DLCLK output signal is derived from the
ST-BUS clocks and is aligned with the receive data
link output RxDL. The DLCLK will not change phase
with a received frame slip, but the RxDL data has a
50% chance of being lost or repeated when a slip
occurs.
The TxDL input signal is clocked into the MT9079 by
the rising edge of an internal 4 kHz clock (e.g., internal
data link clo ck IDCLK ). The I DCLK is 18 0 d egrees out
of phase with the DLCLK. See Figures 20 and 21 for
timing requirements.
,
The transmit and receive national bit buffers are
selectible in microprocessor or microcontroller
4-247
MT9079
Elastic Buffer
When control bit RDLY=0, the MT9079 has a two
frame receive elastic buffer, which absorbs wander
and low frequency jitter in multi-trunk applications.
The received PCM 30 data (RxA and RxB) is clocked
into the elastic buffer with the E2i clock and is
clocked out of the elastic buffer with the C4i
/C2i
clock. The E2i extracted clock is generated from, and
is therefore phase-locked with, the receive PCM 30
data. In normal operation, the E2i clock will be
phase-locked to the C4i
/C2i clock by an external
phase locked loop (PLL). Therefore, in a single trunk
system the receive data is in phase with the E2i
clock, the C4i
/C2i clock is phase-locked to the E2i
clock, and the read and write positions of the elastic
buffer will remain fixed with respect to each other.
In a multi-trunk slave or loop-timed system (i.e., PABX
application) a single trunk will be chosen as a network
synchronizer, which will function as described in the
previous paragraph. The rem aining trunks wil l use the
system timing derived form the synchronizer to clock
data out of t heir elastic buffe rs. Even though the P CM
30 signals from the network are synchronize to each
other, due to multiplexing, transmission impairments
and route diversity, these signals may jitter or wander
with respect to the synchronizer trunk signal. Therefore, the E2i clocks of non-synchronizer trunks may
wander with respect to the E2i clock of the synchronizer and the system bus. Network standards state
that, within limits, trunk interfaces must be able to
receive error-free data in the presence of jitter and
wander (refer to network requirements for jitter and
wander tolerance). The MT9079 will allow a minimum
of 26 channels (208 UI, unit intervals) of wander and
low frequency jitter before a frame slip will occur.
The minimum delay through the receive elasti c buffer
is approximately two channels and the maximum delay
is approximately 60 channels (RDLY=0 ), see Figure 5.
When the C4i
/C2i and the E2i clocks are not
phase-locked, the rate at which data is being w ritten
into the elastic buffer from th e PCM 30 side may differ
from the rate at which it is being read out onto the
ST-BUS. If this situation persists, the delay limits
stated in the previous paragraph will be violated and
the elastic buffer will p erform a controlled frame slip.
That is, the buffer pointers will be automatically
adjusted so that a full PCM 30 frame is either repeated
or lost. All frame slips occur on PCM 30 frame boundaries.
The RSLIP and RSLPD st atus bits gi ve indication of a
slip occurrence and direction. A maskable interrupt
is also provided.
SLPI
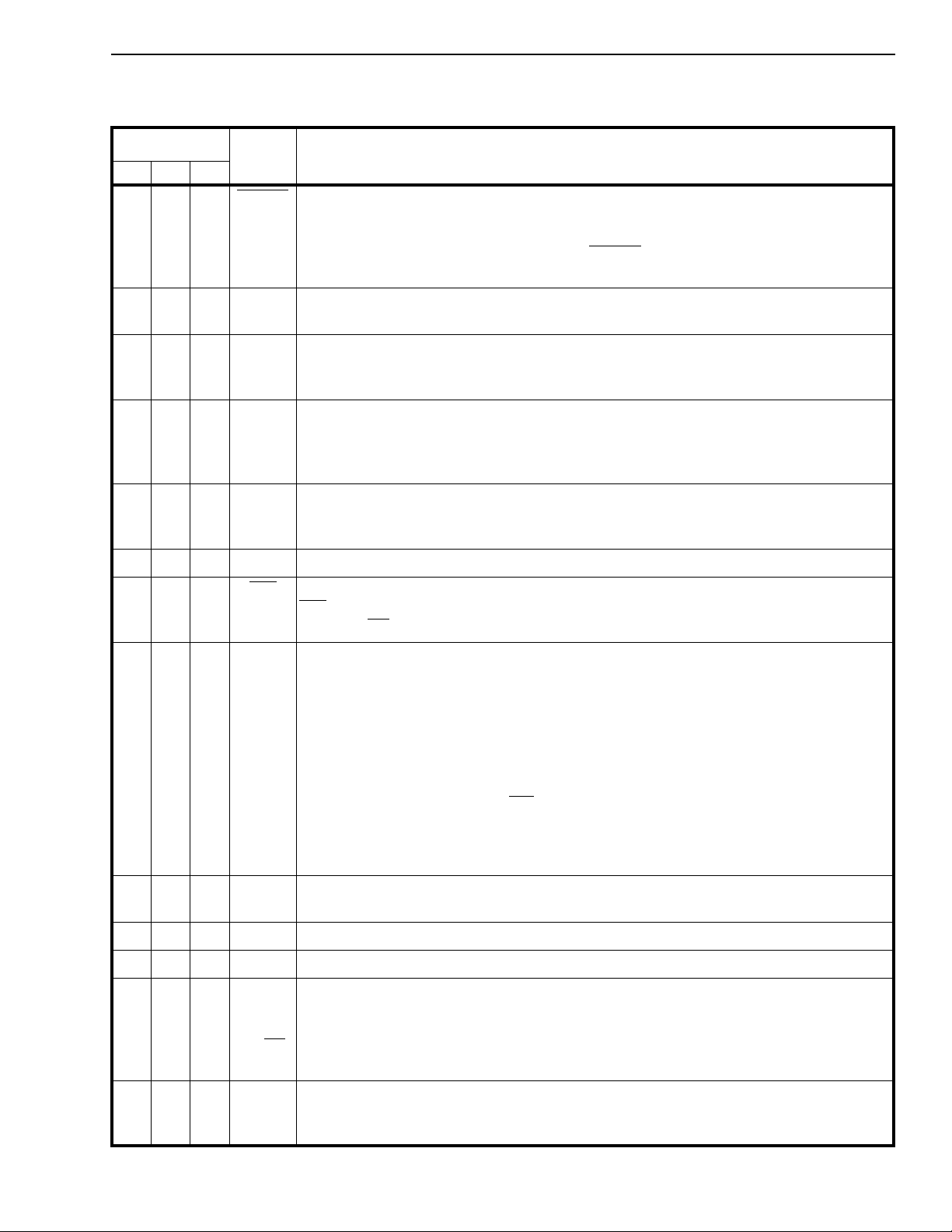
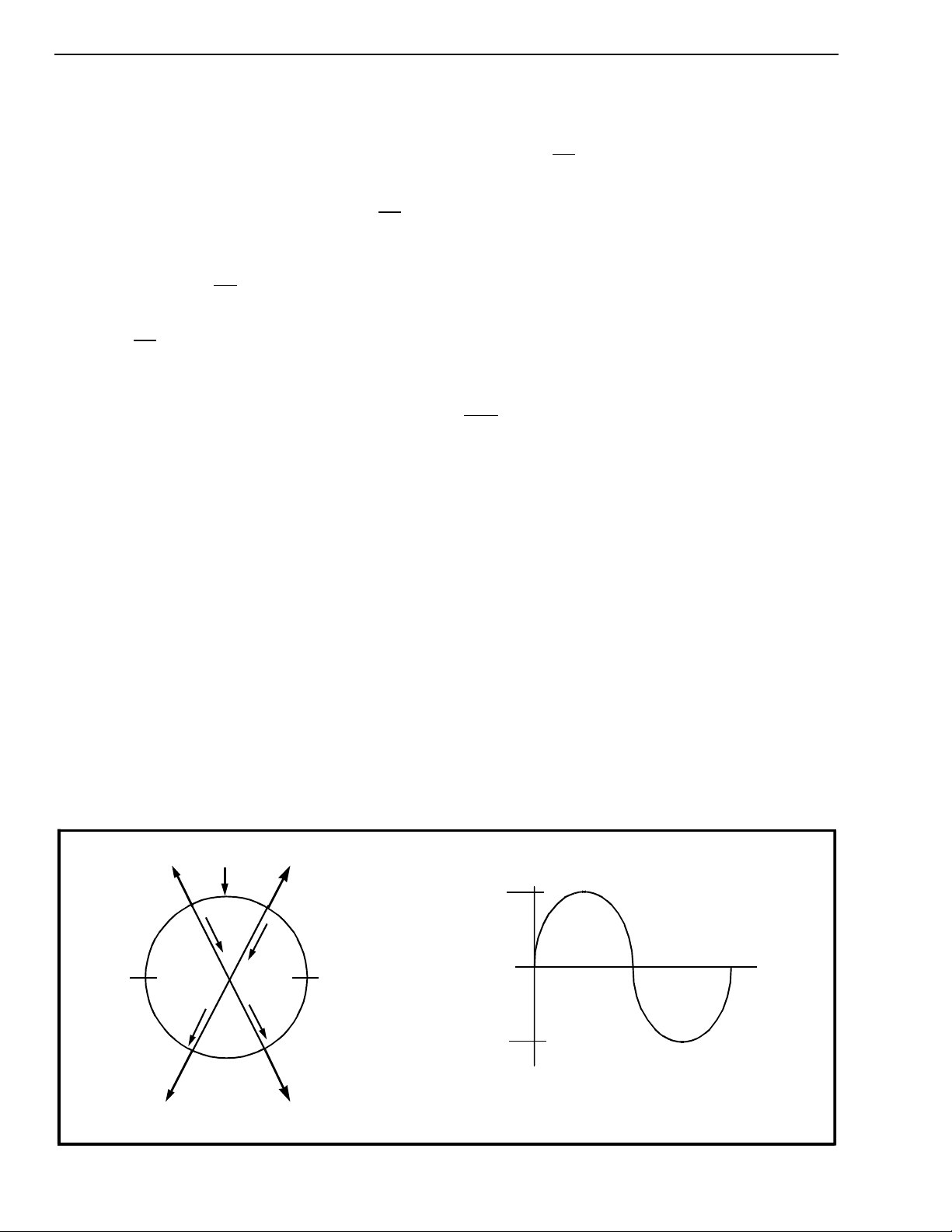
Figure 5 illustrates the relationship between the read
and write pointers of the receive elastic buffer.
Measuring clockwise from the write pointer, if the
read pointer comes within two channels of the write
pointer a frame slip will occur, which will put the read
pointer 34 channels from the write pointer.
Conversely, if the read pointer moves more than 60
channels from the write pointer, a slip will occur,
which will put the read pointer 28 channels from the
write pointer. This provides a worst case hysteresis
of 13 channels peak (26 channels peak-to-peak) or a
wander tolerance of 208 UI.
When control bit RDLY=1, the receive elastic buffer
becomes one frame long and the controlled slip
function is disabled. This is to allow the user to
control the receive throughput delay of the MT9079
in one of th e fo l low in g wa y s:
4-248
Read Pointer
60 CH
47 CH
34 CH
Read Pointer
Write
Pointer
512 Bit
Elastic
Store
Read Point er
13 CH
2 CH
Wander Tolerance
15 CH
-13 CH
28 CH
Read Point er
Figure 5 - Elastic Buffer Functional Diagram (208 UI Wander Tolerance)

MT9079
1) by programming the SOFF7-0 bits to select the
desired throughput delay, which is indicated by
the phase status word bits RxTS4-0 and
RxBC2-0.
2) by controlling the position of the F0i
respect to the received time slot zero position.
The phase status word bits RxTS4-0 and
RxBC2-0 will also indicate the delay in this
application.
With RDLY=1, the elastic buffer may underflow or
overflow. This is indicated by the RSLIP and RSLPD
status bits. If RSLPD=0, the elastic buffer has
overflowed and a bit was lost; if RSLPD=1, a
underflow condition occurred and a bit was
repeated.
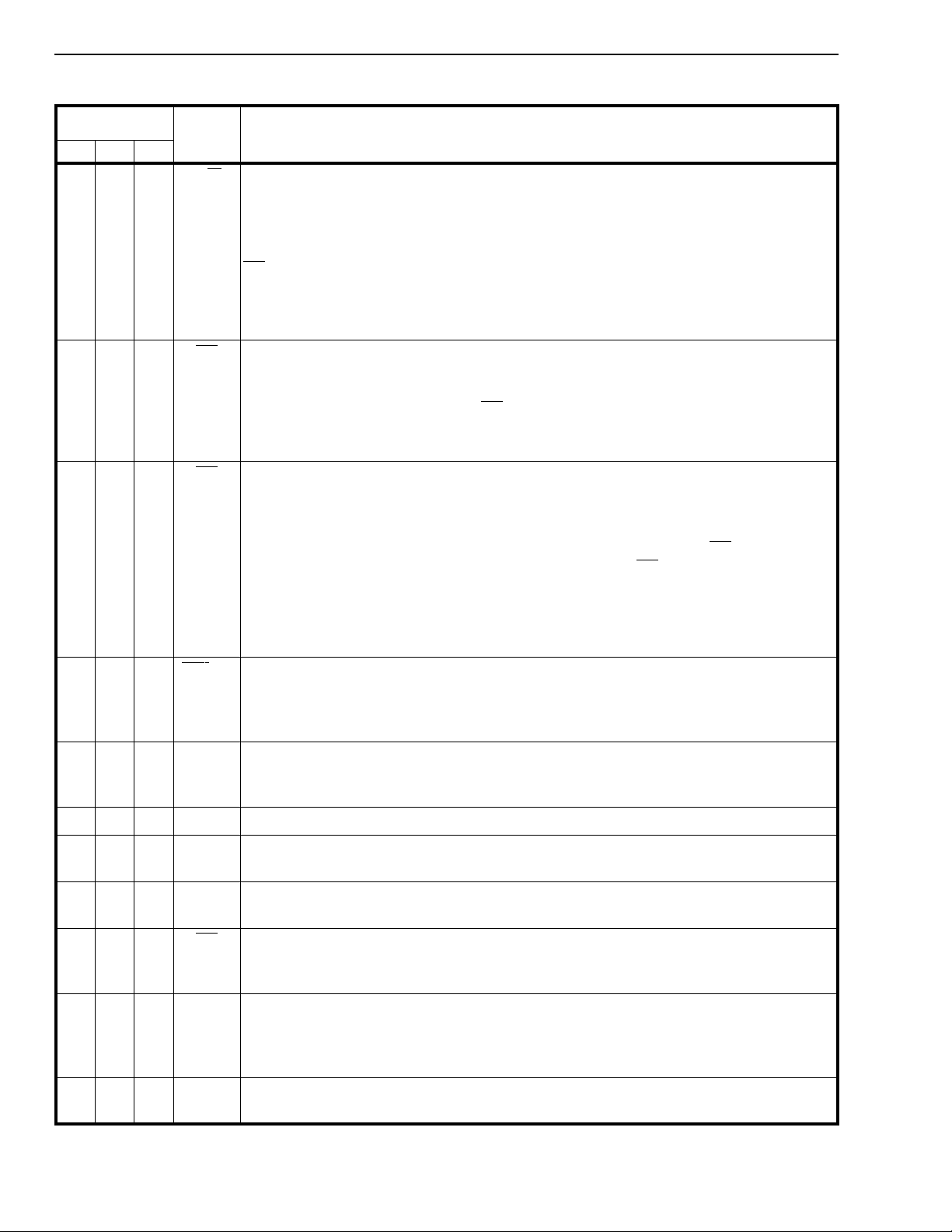
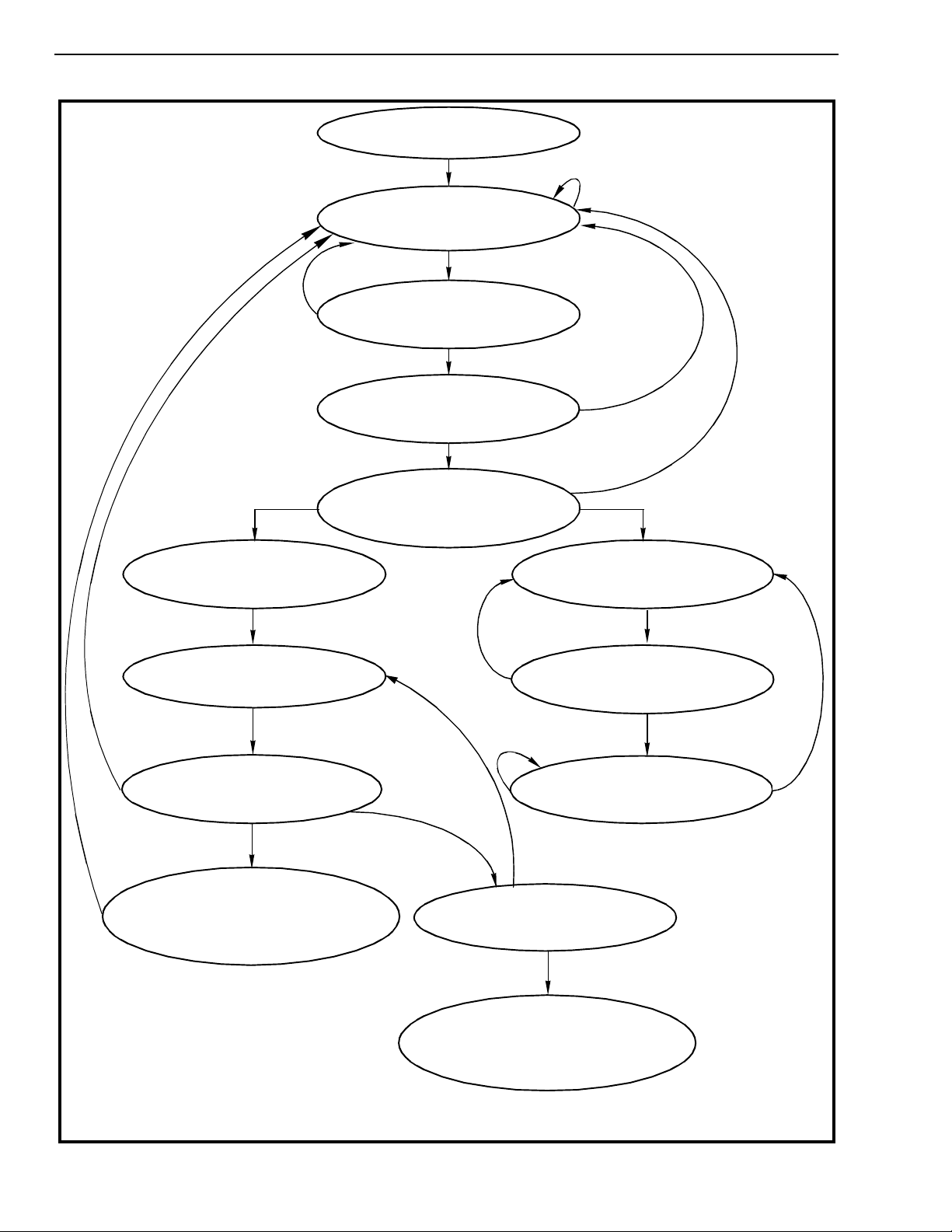
Framing Algorithm
The MT9079 contains three distinct, but
interdependent, framing algorithms. These
algorithms are for basic frame alignment, signalling
multiframe alignment and CRC-4 multiframe
alignment. Figure 6 is a state diagram that illustrates
these functions and how they interact.
pulse with
The MT9079 framing algorithm supports automatic
interworking of interfaces with and without CRC-4
processing capabilities. That is, if an interface with
CRC-4 capability, achieves valid basic frame
alignment, but does not achieve CRC-4 multiframe
alignment by the end of a predefined period, the
distant end is considered to be a non-CRC-4
interface. When the distant end is a non-CRC-4
interface, the near end automatically suspends
receive CRC-4 functions, continues to transmit
CRC-4 data to the distant end with its E-bits set to
zero, and provides a status indication. Naturally, if
the distant end initially achieves CRC-4
synchronization, CRC-4 processing will be carried
out by both ends. This feature is selected when
control bit AUTC
Notes for Fig u re 6 :
1) The basic frame align ment, signalling multiframe
alignment, and CRC-4 multiframe alignment
functions operate in parallel and are independent.
2) The receive channel associated signalling bits
and signalling multiframe alignment bit will be frozen
when multiframe alignment is lost.
= 0. See Figure 6 for more details.
After power-up the basic frame alignment framer will
search for a frame alignment signal (FAS) in the
PCM 30 receive bit stream. Once the FAS is
detected, the corresponding bit two of the non-frame
alignment signal (NFAS) is checked. If bit two of the
NFAS is zero a new search for basic frame alignment
is initiated. If bit two of the NFAS is one and the next
FAS is correct, the algorithm declares that basic
frame synchronization has been found (i.e., SYNC
low).
Once basic frame alignment is acquired the
signalling and CRC-4 multiframe searches will be
initiated. The signalling multiframe algorithm will
align to the first multiframe alignment signal pattern
(MFAS = 0000) it receives in the most significant
nibble of channel 16 (MFSYNC = 0). Signalling
multiframing will be lost when two consecutive
multiframes are received in error.
The CRC-4 multiframe alignment signal is a 001011
bit sequence that appears in PCM 30 bit position one
of the NFAS in frames 1, 3, 5, 7, 9 and 11 (see Table
4). In order to achieved CRC-4 synchronization two
consecutive CRC-4 multiframe alignment signals
must be received without error (CRCSYN
Figure 6 for a more detailed description of the
framing functions.
= 0). See
is
3) Manual re-framing of the receive basic frame
alignment and signalling multiframe alignment
functions can be performed at any time.
4) The transmit RAI bit will be one until basic frame
alignment is established, then it will be zero.
5) E-bits can be optionally set to zero until the
equipment interworking relationship is established.
When this has been determined one of the following
will take place:
a) CRC-to-non-CRC operation - E-bits = 0,
b) CRC-to-CRC operation - E-bits as per G.704 and
I.431.
6) All manual re-frames and new basic frame
alignment searches start after the current frame
alignment signal position.
7) After basic frame alignment has been achieved,
loss of frame alignment will occur any time three
consecutive incorrect FAS or NFAS are received.
Loss of basic frame alignment will reset the complete
framing algorithm.
4-249
MT9079
Out of synchronization
>914 CRC errors
in one second
No CRC
multiframe alignment.
8 msec. timer expired*
CRC-4 multi-frame alignment
Start 400 msec timer.
Note 7.
YES
Search for primary basic
frame alignment signal
RAI=1, Es=0.
YES
NO
Verify Bit 2 of non-frame
alignment signal.
YES
Verify second occurrence
of frame alignment signal.
YES
Primary basic frame synchronization
acquired. Enable traffic RAI=0, E’s=0. Start
loss of primary basic frame alignment
checking. Notes 7 & 8.
NO
3 consecutive
incorrect frame
alignment
signals
NO
CRC-4 multi-frame alignment
Search for multiframe
alignment signal.
Note 7.
Start 8 msec timer.
Note 7.
Basic frame
alignment acquired
Find two CRC frame
alignment signals.
Note 7.
CRC multiframe
alignment
CRC-to-CRC interworking. Re-align to new
basic frame alignment. Start CRC-4 processing.
E-bits set as per G.704 and I.431. Indicate
CRC synchronization achieved.
Notes 7& 8.
timer expir ed **
Basic frame
alignment
acquired
No CRC
multiframe
alignment.
8 msec. timer expired*
No CRC
multiframe
alignment.
8 msec.
CRC-to-non-CRC interworking. Maintain
primary basic frame alignment. Continue to
send CRC-4 data, but stop CRC processing.
E-bits set to ‘0’. Indicate CRC-to-non-CRC
NO
Multiframe synchronization
acquired as per G.732.
NO
Check for two consecutive errored
multiframe alignment signals.
Parallel search for new basic frame
alignment signal.
Notes 6 & 7.
400 msec timer expired
operation. Note 7.
YES
Note 7.
YES
Notes 7 & 8.
* only if CRC-4 synchronization is selected and automatic CRC-4 interworking is de-selected.
** only if automatic CRC-4 interw orking is selected.
Figure 6 - Synchronization State Diagram
4-250
MT9079
8) When CRC-4 multiframing has been achieved,
the primary basic frame alignment and resulting
multiframe alignment will be adjusted to the basic
frame alignment determined during CRC-4
synchronization. Therefore, the primary basic frame
alignment will not be updated during the CRC-4
multiframing search, but will be updated when the
CRC-4 multiframing search is complete.
Channel Signalling
When control bit TxCAS
is low the MT9079 is in
Channel Associated Signalling mode (CAS); when
TxCAS
is high it is in Common Channel Signalling
(CCS) mode. The CAS mode ABCD signalling
nibbles can be passed either via the micro-ports
(RPSIG = 1) or through related channels of the
CSTo1 and CSTi2 serial links (RPSIG = 0), see
Figure 4. Memory page five contains the receive
ABCD nibbles and page six the transmit ABCD
nibbles for micro-port CAS access.
In CAS operation an ABCD signalling bit debounce
of 14 msec. can be selected (DBNCE = 1). This is
consistent with the signalling recognition time of
CCITT Q.422. It should be noted that there may be
as much as 2 msec. added to this duration because
signalling equipment state changes are not
synchronous with the PCM 30 multiframe.
If basic frame synchronization is lost (page 3,
address 10H, SYNC
= 1) all receive CAS signalling
nibbles are frozen. Receive CAS nibbles will become
unfrozen when basic frame synchronization is
acquired.
When the SIGI interrupt is unmasked, IRQ
will
become active when a signalling nibble state change
is detected in any of the 30 receive channels. The
SIGI interrupt mask is located on page 1, address
1CH, bit 0; and the SIGI interrupt vector (page 4,
address 12H) is 01H.
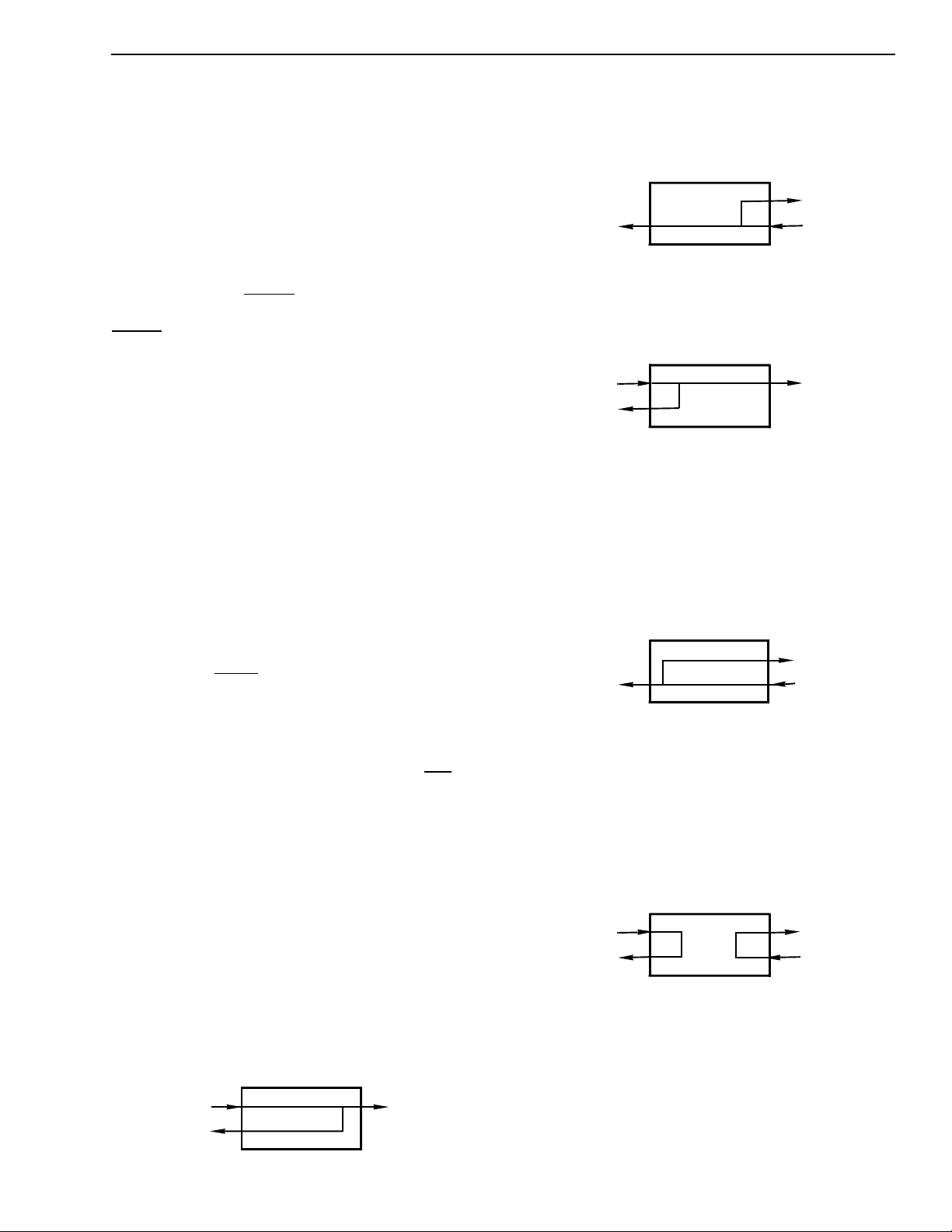
b) Remote loopback (RxA and RxB to TxA and TxB
respectively at the PCM 30 side). Bit RLBK = 0
normal; RLBK = 1 activate.
MT9079
System
DSTo
Tx
PCM30
Rx
c) ST-BUS loopback (DSTi to DSTo at the system
side). Bit SLBK = 0 normal; SLBK = 1 activate.
MT9079
System
DSTi
DSTo
Tx
PCM30
d) Payload loopback (RxA and RxB to TxA and TxB
respectively at the system side with FAS and NFAS
operating normally). Bit PLBK = 0 normal; PLBK = 1
activate. The payload loopback is effectively a
physical connection of DSTo to DSTi within the
MT9079. Channel zero and the DL originate at the
point of loopback.
MT9079
System
DSTi
DSTo
Tx
PCM30
Rx
e) Local and remote time slot loopback. Remote
time slot loopback control bit RTSL = 0 normal; RTSL
= 1 activate, will loop around transmit ST-BUS time
slots to the DSTo stream. Local time slot loopback
bits LTSL = 0 normal; LTSL = 1 activate, will loop
around receive PCM 30 time slots towards the
remote PCM 30 end.
Loopbacks
In order to meet PRI Layer 1 requirements and to
assist in circuit fault sectionalization the MT9079 has
six loopback functions. These are as follows:
a) Digital loopback (DSTi to DSTo at the PCM 30
side). Bit DLBK = 0 normal; DLBK = 1 activate.
MT9079
System
DSTi
DSTo
Tx
PCM30
MT9079
System
DSTi
DSTo
Tx
PCM30
Rx
The digital, remote, ST-BUS and payload loopbacks
are located on page 1, address 15H, control bits 3 to
0. The remote and local time slot loopbacks are
controlled through control bits 4 and 5 of the per time
slot control words, pages 7 and 8.
4-251

MT9079
PCM 30 Interfacing and Encoding
Bits 7 and 6 of page 1, address 15H (COD1-0)
determine the PCM 30 format of the PCM 30
transmit and receive signals. The RZ format
(COD1-0 = 00) can be used where the line interface
is implemented with discrete components. In this
case, the pulse width and state of TxA and TxB
directly determine the width and state of the PCM 30
pulses.
NRZ format (COD1-0 = 01) is not bipolar, and
therefore, only requires a single output line and a
single input line (i.e., TxA and RxA). This signal
along with a synchronous 4, 8 or 16 MHz clock can
interface to a manchester or similar encoder to
produce a self-clocking code for a fibre optic
transducer.
The NRZB format (default COD1-0 = 10) is used for
interfacing to monolithic Line Interface Units (LIUs).
With this format pulses are present for the full bit
cell, which allows the set-up and hold times to be
meet easily.
The HDB3
selects either HDB3 encoding or alternate mark
inversion (AMI) encoding.
control bit (page 1, address 15H, bit 5)
Bit Error Rate Counter (BR7-BR0)
An eight bit Error Rate (BERT) counter BR7 - BR0 is
located on page 4 address 18H, and is incremented
once for every bit detected in error on either the
seven frame alignment signal bits or in a selected
channel. When a selected channel is used, the data
received in this channel will be compared with the
data of the bit error rate compare word CMP7-CMP0.
See the explanation of the CDDTC control bit of the
per time slot control words (pages 7 and 8) and the
bit error rate compare word (page 2, address 11).
There are two maskable interrupts associated with
the bit error rate measurement. BERI is initiated
when the least significant bit of the BERT counter
(BR0) togg l e s, and BERO
counter value changes from FFH to 00H.
Errored Frame Alignment Signal Counter
(EFAS7-EFAS0)
An eight bit Frame Alignment Signal Error counter
EFAS7 - EFAS0 is located on page 4 address 1AH,
and is incremented once for every receive frame
alignment signal that contains one or more errors.
in initiated when the BERT
Performance Monitoring
MT9079 Error Counters
The MT9079 has six error counters, which can be
used for maintenance testing, an ongoing measure
of the quality of a PCM 30 link and to assist the
designer in meeting specifications such as CCITT
I.431 and G.821. In parallel microprocessor and
serial microcontroller modes, all counters can be
preset or cleared by writing to the appropriate
locations. When ST-BUS access is used, this is done
by writing the value to be loaded into the counter in
the appropriate counter load word (page 2, address
18H to 1FH). The counter is loaded with the new
value when the appropriate counter load bit is
toggled (page 2, address 15H).
Associated with each counter is a maskable event
occurrence interrupt and a maskable counter
overflow interrupt. Overflow interrupts are useful
when cumulative error counts are being recorded.
For example, every time the frame error counter
overflow interrupt (FERO) occurs, 256 frame errors
have been received since the last FERO interrupt.
There are two maskable interrupts associated with
the frame alignment signal error measurement. FERI
is initiated when the least significant bit of the
errored frame alignment signal counter toggles, and
FERO is initiated when the counter changes from
FFH to 00 H .
Bipolar Violation Error Counter (BPV15-BPV0)
The bipolar violation error counter will count bipolar
violations or encoding errors that are not part of
encoding. This counter BPV15-BPV0 is 16
HDB3
bits long (page 4, addresses 1DH and 1CH) and is
incremented once for every BPV error received. It
should be noted that when presetting or clearing the
BPV error counter, the least significant BPV counter
address should be written to before the most
significant location.
There are two maskable interrupts associated with
the bipolar violation error measurement. BPVI is
initiated when the least significant bit of the BPV
error counter toggles. BPVO
counter changes from FFFFH to 0000H.
is initiated when the
4-252

MT9079
CRC Error and E-bit Counters
CRC-4 errors and E-bit errors are counted by the
MT9079 in order to support compliance with CCITT
requirements. These eight bit counters are located
on page 4, addresses 1FH and 1EH respectively.
They are incremented by single error events, which
is a maximum rate of twice per CRC-4 multiframe.
There are two maskable interrupts associated with
the CRC error and E-bit error measurement. CRCI
and EBI are initiated when the least significant bit of
the appropriate counter toggles, and CRCO and
EBO are initiated when the appropriate counter
changes fro m FFH to 0 0H .
G.821 Bit Error Rate Estimation
A G.821 BERT estimation for an E1 link can be done
with either the BERT counter, when it is associated
with the FAS, or the Errored Frame Alignment Signal
counter. It should be noted that the BERT counter
will be incremented once for every bit error found in
the FAS, and not just once for every FAS in error.
The formula for the link BERT estimation is as
follows:
BERT estimation = BERT counter value/(N*F*T)
where:
N is the number of bits verified (i.e., when the FAS
is used N = 7; when a channel is selected N = 8).
F is the number of FAS or channels in one second
(i.e., when the FAS is used F= 4000, when a
channel is selected F = 8000).
T is the elapsed time in seconds.
A similar formula can be used to provide a BERT
estimation of the transmit direction by using the E-bit
error counter, EBt.
A more accurate BERT estimation can be done using
the Bipolar Violation Error counter. The BPV error
counter will count violations that are not due to HDB3
encoding. The formula for this is as follows:
BERT estimation = BPV Error counter value/(256*8000*T)
where:
256 is the number of bits per basic frame.
8000 is the number of basic frames in one second.
T is the elapsed time in seconds.
This assumes that one BPV error will be the result of
one bit error.
RAI and Continuous CRC-4 Error Counter
When the re ceive Remote Alarm Indic ation is activ e
(RAI = 1 - bit 3 of the NFAS) and a receive E-bit
indicates a remote error (En = 0), the RCRC counter
will be incremented. This counter will count the
number of submultiframes that were received in error
at the remote end of a link during a time when layer
one capabilities were lost at that end. This eight bit
RCRC counter is located on page 4, addresses 19H.
There are two maskable interrupts associated with
the RCRC counter. RCRI is initiated when the least
significant bit of the RCRC counter toggles, and
RCRO and EBO are initiated when the counter
changes from FFH to 00H.
A similar formula can be used with the FAS error
counter.
BERT estimation = FAS Error counter value/(7*4000*T).
The CRC-4 error counter can also be used for BERT
estimation. The formula for BERT estimation using
the CRC-4 e rr o r c o unt is as fo llows:
BERT estimation = CEt counter value/(2048000*T)
where:
2048000 is the number of bits that are
received in one second.
T is the elapsed time in seconds.
Maintenance and Alarms
Error Insertion
Five types of error conditions can be inserted into the
transmit PCM 30 data stream through control bits,
which are located on page 2, address 10H. These
error events include the bipolar violation errors
(BPVE), CRC-4 errors (CRCE), FAS errors (FASE),
NFAS errors (NFSE), and a loss of signal condition
(LOSE). The LOSE function overrides the HDB3
encoding function.
4-253
 Loading...
Loading...