

MITEL MT9044AL, MT9044AP Datasheet
MT9044
T1/E1/OC3 System Synchronizer
Advance Information
Features
• Supports AT&T TR62411 and Bellcore
GR-1244-CORE Stratum 3, Stratum 4
Enhanced and Stratum 4 timing for DS1
interfaces
• Supports ITU-T G.812 Type IV clocks for 1,544
kbit/s interfaces and 2,048 kbit/s interfaces
• Supports ETSI ETS 300 011, TBR 4, TBR 12
and TBR 13 timing for E1 interfaces
• Selectable 1.544MHz, 2.048MHz or 8kHz input
reference signals
• Provides C1.5, C2, C3, C4, C6, C8, C16, and
C19 (STS-3/OC3 clock divided by 8) output
clock signals
• Provides 5 different styles of 8 KHz framing
pulses
• Holdover frequency accuracy of 0.05 PPM
• Holdover indication
• Attenuates wander from 1.9Hz
• Provides Time Interval Error (TIE) correction
• Accepts reference inputs from two independent
sources
• JTAG Boundary Scan
Applications
• Synchronization and timing control for
multitrunk T1,E1 and STS-3/OC3 systems
• ST-BUS clock and frame pulse sources
DS5058 ISSUE 3 September 1999
Ordering Information
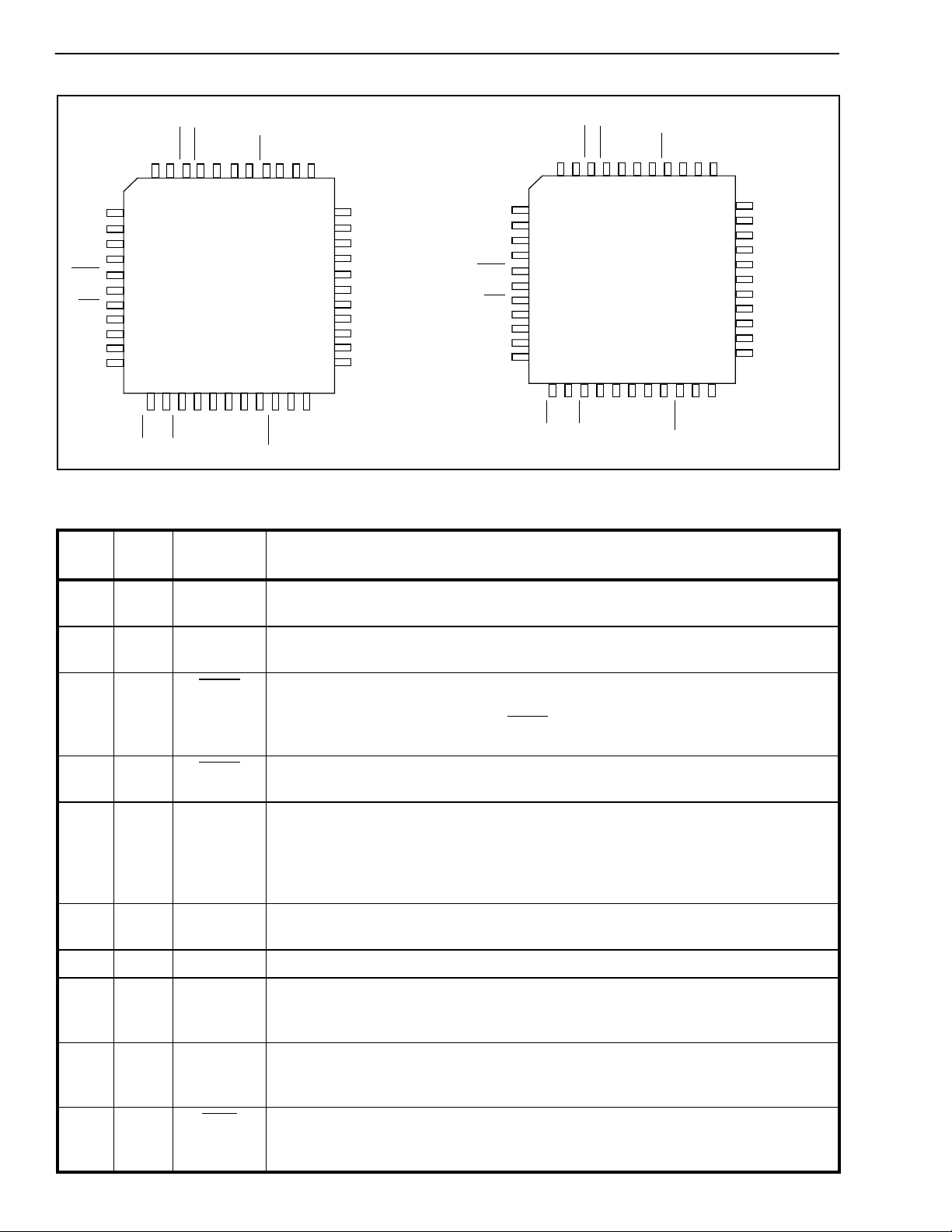
MT9044AP 44 Pin PLCC
MT9044AL 44 Pin MQFP
-40 to +85 °C
Description
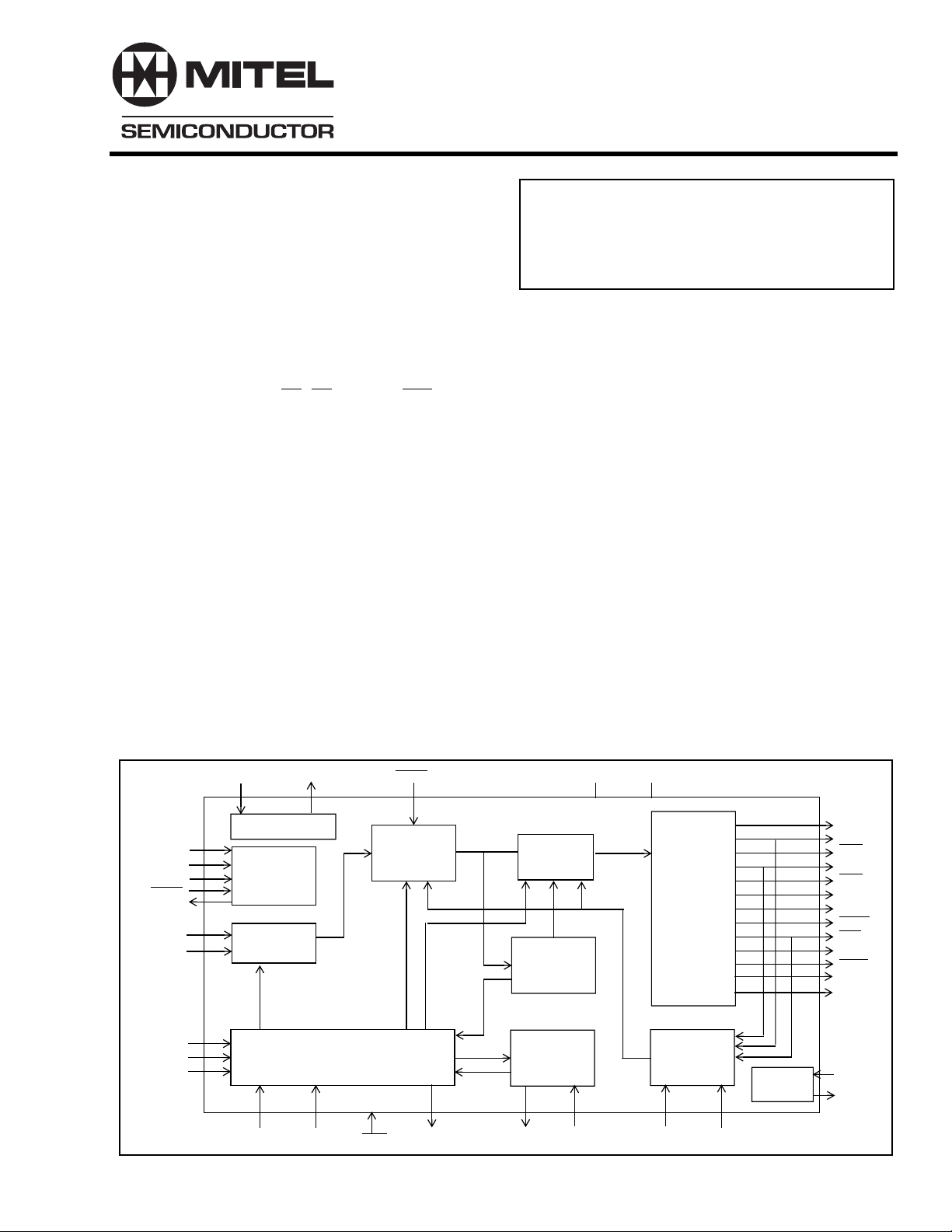
The MT9044 T1/E1/OC3 System Synchronizer
contains a digital phase-locked loop (DPLL), which
provides timing and synchronization signals for
multitrunk T1 and E1 primary rate transmission links
and STS-3/0C3 links.
The MT9044 generates ST-BUS clock and framing
signals that are phase locked to either a 2.048MHz,
1.544MHz, or 8kHz input reference.
The MT9044 is compliant with AT&T TR62411 and
Bellcore GR-1244-CORE Stratum 3, Stratum 4
Enhanced, and Stratum 4; and ETSI ETS 300 011. It
will meet the jitter/wander tolerance, jitter/wander
transfer, intrinsic jitter/wander, frequency accuracy,
capture range, phase change slope, holdover
frequency and MTIE requirements for these
specifications.
TCK
TDI
TMS
TRST
TDO
PRI
SEC
RSEL
LOS1
LOS2
Corrector
TIE
Corrector
Enable
RST
TCLR
TIE
Circuit
State
Select
HOLDOVER
Virtual
Reference
Impairment
Monitor
Guard Time
Circuit
OSCoOSCi
Master Clock
IEEE
1149.1a
Selected
Reference
Select
MUX
Reference
Select
Automatic/Manual
Control State Machine
MS1 MS2 GTo GTi FS1 FS2
Reference
DPLL
State
Select
Input
VDD VSS
Output
Interface
Circuit
Feedback
Frequency
Select
MUX
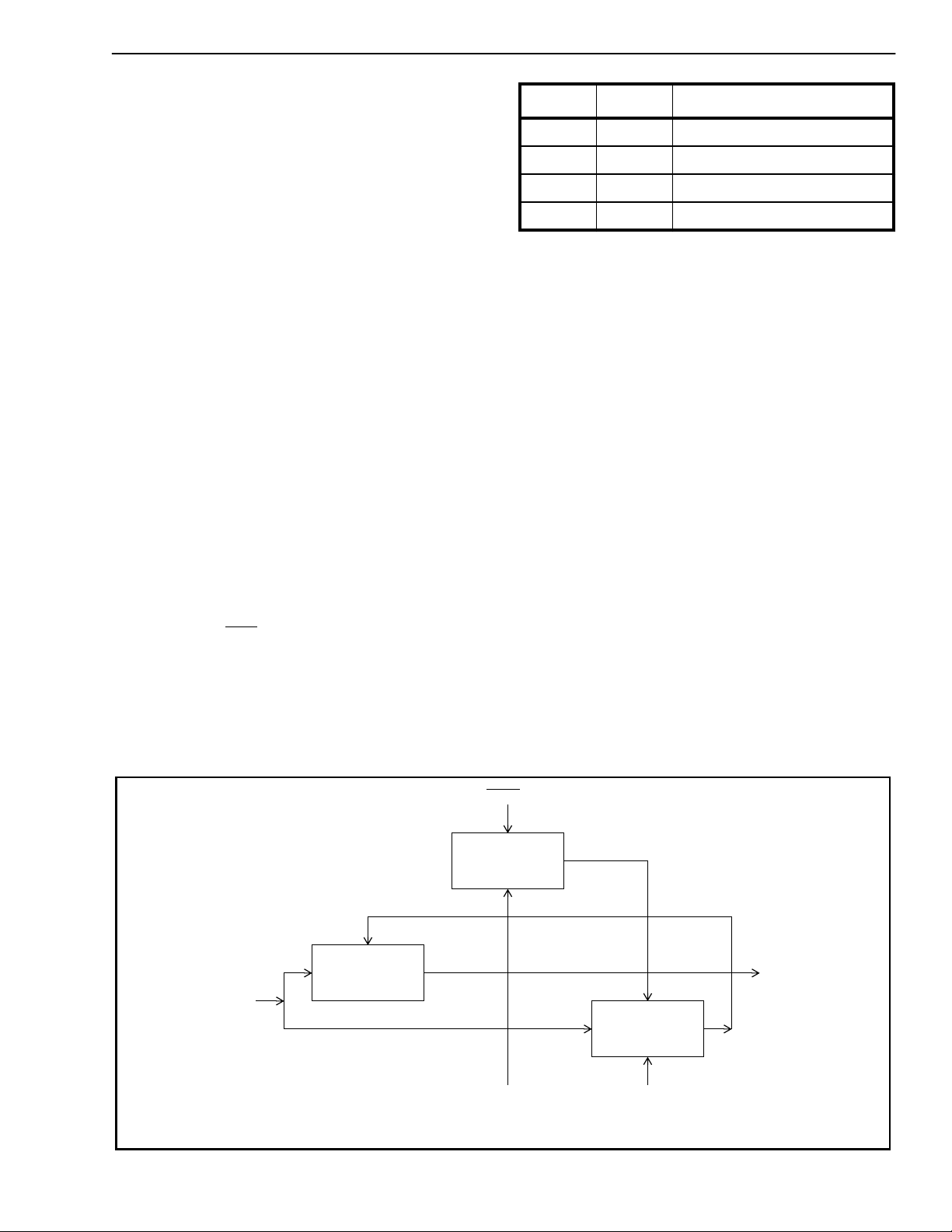
Figure 1 - Functional Block Diagram
APLL
C19o
C1.5o
C3o
C2o
C4o
C6o
C8o
C16o
F0o
F8o
F16o
RSP
TSP
ACKi
ACKo
1
MT9044 Advance Information
TDI
RST
FS1
343536
FS2
33
32
31
30
29
28
27
26
25
24
23
TEST
RSEL
MS1
MS2
TDO
LOS1
LOS2
GTo
VSS
GTi
HOLDOVER
VDD
OSCo
OSCi
VSS
F16o
RSP
F0o
TSP
F8o
C1.5o
AVDD
SEC
PRI
TRST
TCLR
43
7
8
9
10
11
12
13
14
15
16
17
18 19 20 21 22 23 24
MT9044
VSS
TCK
1
2564344
TDI
TMS
RST
25 26 27 28
FS1
404142
FS2
39
38
37
36
35
34
33
32
31
30
29
TEST
RSEL
MS1
MS2
TDO
LOS1
LOS2
GTo
VSS
GTi
HOLDOVER
VDD
OSCo
OSCi
VSS
F16o
RSP
F0o
TSP
F8o
C1.5o
AVDD
SEC
PRI
TRST
TCLR
42 41
1
2
3
4
5
6
7
8
9
10
11
12 13 14 15 16 17 18
MT9044AL
VSS
TCLK
39
404344 3738
TMS
19 20 21 22
C3o
C2o
C4o
C19o
ACKi
VSS
C4o
C2o
C6o
C8o
VDD
C16o
ACKo
C3o
ACKi
C19o
VSS
C8o
C6o
VDD
C16o
ACKo
Figure 2 - Pin Connections
Pin Description
Pin #
PLCC
1,10,
23,31
Pin #
MQFP
39,4,17
Name Description
V
SS
Ground. 0 Volts.
,25
2 40 TCK Test Clock (TTL Input): Provides the clock to the JTAG test logic. This pin is
internally pulled up to VDD.
341TCLR TIE Circuit Reset (TTL Input): A logic low at this input resets the Time Interval
Error (TIE) correction circuit resulting in a re-alignment of input phase with output
phase as shown in Figure 19. The TCLR pin should be held low for a minimum of
300ns. This pin is internally pulled down to VSS.
442TRST Test Reset (TTL Input): Asynchronously initializes the JTAG TAP controller by
putting it in the Test-Logic-Reset state. This pin is internally pulled down to VSS.
543 SEC Secondary Reference (TTL Input). This is one of two (PRI & SEC) input
reference sources (falling edge) used for synchronization. One of three possible
frequencies (8kHz, 1.544MHzMHz, or 2.048MHz) may be used. The selection of
the input reference is based upon the MS1, MS2, LOS1, LOS2, RSEL, and GTi
control inputs (Automatic or Manual). This pin is internally pulled up to VDD.
6 44 PRI Primary Reference (TTL Input). See pin description for SEC. This pin is
internally pulled up to VDD.
7,28 1,22 V
DD
Positive Supply Voltage. +5VDC nominal.
8 2 OSCo Oscillator Master Cloc k (CMOS Output). For crystal operation, a 20MHz crystal
is connected from this pin to OSCi, see Figure 10. For clock oscillator operation,
this pin is left unconnected, see Figure 9.
9 3 OSCi Oscillator Master Clock (CMOS Input). For crystal operation, a 20MHz crystal is
connected from this pin to OSCo, see Figure 10. F or clock oscillator oper ation, this
pin is connected to a clock source, see Figure 9.
11 5 F16o Frame Pulse ST-BUS 8.192 Mb/s (CMOS Output). This is an 8kHz 61ns active
low framing pulse, which marks the beginning of an ST-BUS frame. This is typically
used for ST-BUS operation at 8.192 Mb/s. See Figure 20.
2
Advance Information MT9044
Pin Description (continued)
Pin #
PLCC
12 6 RSP Receive Sync Pulse (CMOS Output). This is an 8kHz 488ns active high framing
13 7 F0o Frame Pulse ST-BUS 2.048Mb/s (CMOS Output). This is an 8kHz 244ns active
14 8 TSP T ransmit Sync Pulse (CMOS Output). This is an 8kHz 488ns activ e high fr aming
15 9 F8o Frame Pulse (CMOS Output). This is an 8kHz 122ns active high framing pulse,
16 10 C1.5o Clock 1.544MHz (CMOS Output). This output is used in T1 applications.
17 11 AVdd Analog Vdd. +5VDC nominal.
18 12 C3o Clock 3.088MHz (CMOS Output). This output is used in T1 applications.
19 13 C2o Clock 2.048MHz (CMOS Output). This output is used for ST-BUS operation at
20 14 C4o Clock 4.096MHz (CMOS Output). This output is used for ST-BUS operation at
Pin #
MQFP
Name Description
pulse, which marks the end of an ST-BUS frame. This is typically used for
connection to the Siemens MUNICH-32 device. See Figure 21.
low framing pulse, which marks the beginning of an ST-BUS frame. This is typically
used for ST-BUS operation at 2.048Mb/s and 4.096Mb/s. See Figure 20.
pulse, which marks the beginning of an ST-BUS frame. This is typically used for
connection to the Siemens MUNICH-32 device. See Figure 21.
which marks the beginning of a frame. See Figure 20.
2.048Mb/s.
2.048Mb/s and 4.096Mb/s.
21 15 C19o Clock 19.44MHz (CMOS Output). This output is used in OC3/STS3 applications.
22 16 ACKi Analog PLL Clock Input (CMOS Input). This input clock is a reference for an
internal analog PLL. This pin is internally pulled down to VSS.
24 18 ACKo Analog PLL Clock Output (CMOS Output). This output clock is generated by
the internal analog PLL.
25 19 C8o Clock 8.192MHz (CMOS Output). This output is used for ST-BUS operation at
8.192Mb/s.
26 20 C16o Clock 16.384MHz (CMOS Output). This output is used for ST-BUS operation with
a 16.384MHz clock.
27 21 C6o Clock 6.312 Mhz (CMOS Output). This output is used for DS2 applications.
29 23 HOLDOVER Holdover (CMOS Output). This output goes to a logic high whenever the digital
PLL goes into holdover mode.
30 24 GTi Guard Time (Schmitt Input). This input is used by the MT9044 state machine in
both Manual and Automatic modes. The signal at this pin aff ects the state changes
between Primary Holdover Mode and Primary Normal Mode, and Primary
Holdover Mode and Secondary Normal Mode. The logic level at this input is gated
in by the rising edge of F8o. See Tables 4 and 5.
32 26 GTo Guard Time (CMOS Output). The LOS1 input is gated by the rising edge of F8o,
buffered and output on GTo. This pin is typically used to driv e the GTi input through
an RC circuit.
33 27 LOS2 Secondary Reference Loss (TTL Input). This input is normally connected to the
loss of signal (LOS) output signal of a Line Interface Unit (LIU). When high, the
SEC reference signal is lost or invalid. LOS2, along with the LOS1 and GTi inputs
control the MT9044 state machine when operating in Automatic Control. The logic
level at this input is gated in by the rising edge of F8o. This pin is internally pulled
down to VSS.
3
MT9044 Advance Information
Pin Description (continued)
Pin #
PLCC
34 28 LOS1 Primary Reference Loss (TTL Input). Typically, external equipment applies a
35 29 TDO Test Serial Data Out (TTL Output). JTAG serial data is output on this pin on the
36 30 MS2 Mode/Control Select 2 (TTL Input). This input, in conjunction with MS1,
37 31 MS1 Mode/Control Select 1 (TTL Input). The logic level at this input is gated in by the
38 32 RSEL Reference Source Select (TTL Input). In Manual Control, a logic low selects the
39 33 TEST Test (TTL Input). This input is normally tied low. When pulled high, it enables
Pin #
MQFP
Name Description
logic high to this input when the PRI reference signal is lost or invalid. The logic
level at this input is gated in b y the rising edge of F8o . See LOS2 description. This
pin is internally pulled down to VSS.
falling edge of TCK. This pin is held in high impedance state when JTAG scan is
not enable.
determines the device’s mode (Automatic or Manual) and state (Normal, Holdover
or Freerun) of operation. The logic level at this input is gated in by the rising edge
of F8o. See Table 3.
rising edge of F8o. See pin description for MS2. This pin is internally pulled down
to VSS.
PRI (primary) reference source as the input reference signal and a logic high
selects the SEC (secondary) input. In Automatic Control, this pin must be at logic
low. The logic level at this input is gated in by the rising edge of F8o. See Table 2.
This pin is internally pulled down to VSS.
internal test modes. This pin is internally pulled down to VSS.
40 34 FS2 Frequency Select 2 (TTL Input). This input, in conjunction with FS1, selects
which of three possible frequencies (8kHz, 1.544MHz, or 2.048MHz) may be input
to the PRI and SEC inputs. See Table 1.
41 35 FS1 Frequency Select 1 (TTL Input). See pin description for FS2.
42 36 TDI Test Serial Data In (TTL Input). JTAG serial test instructions and data are shifted
in on this pin. This pin is internally pulled up to VDD.
43 37 RST Reset (Schmitt Input). A logic low at this input resets the MT9044. To ensure
proper operation, the device must be reset after changes to the method of control,
reference signal frequency changes and power-up. The RST pin should be held
low for a minimum of 300ns. While the RST pin is low, all frame and clock outputs
are at logic high. Following a reset, the input reference source and output clocks
and frame pulses are phase aligned as shown in Figure 19.
44 38 TMS Test Mode Select (TTL Input). JTAG signal that controls the state transitions of
the TAP controller. This pin is internally pulled up to VDD.
4
Advance Information MT9044
Functional Description
The MT9044 is a Multitrunk System Synchronizer,
providing timing (clock) and synchronization (frame)
signals to interface circuits for T1 and E1 Primary
Rate Digital Transmission links.
Figure 1 shows the functional block diagram which is
described in the following sections.
Reference Select MUX Circuit
The MT9044 accepts two simultaneous reference
input signals and operates on their falling edges.
Either the primary reference (PRI) signal or the
secondary reference (SEC) signal can be selected
as input to the TIE Corrector Circuit. The selection is
based on the Control, Mode and Reference
Selection of the device. See Tables 1, 4 and 5.
Frequency Select MUX Circuit
The MT9044 operates with one of three possible
input reference frequencies (8kHz, 1.544MHz or
2.048MHz). The frequency select inputs (FS1 and
FS2) determine which of the three frequencies may
be used at the reference inputs (PRI and SEC). Both
inputs must have the same frequency applied to
them. A reset (RST) must be performed after every
frequency select input change. Operation with FS1
and FS2 both at logic low is reserved and must not
be used. See Table 1.
FS2 FS1 Input Frequency
0 0 Reserved
0 1 8kHz
1 0 1.544MHz
1 1 2.048MHz
Table 1 - Input Frequency Selection
Time Interval Error (TIE) Corrector Circuit
The TIE corrector circuit, when enabled, prevents a
step change in phase on the input reference signals
(PRI or SEC) from causing a step change in phase at
the input of the DPLL block of Figure 1.
During reference input rearrangement, such as
during a switch from the primary reference (PRI) to
the secondary reference (SEC), a step change in
phase on the output signals will occur. A phase step
at the input of the DPLL will lead to unacceptable
phase changes in the output signal.
As shown in Figure 3, the TIE Corrector Circuit
receives one of the two reference (PRI or SEC)
signals, passes the signal through a programmable
delay line, and uses this delayed signal as an
internal virtual reference, which is input to the DPLL.
Therefore, the virtual reference is a delayed version
of the selected reference.
During a switch, from one reference to the other, the
State Machine first changes the mode of the device
PRI or SEC
from
Reference
Select Mux
Programmable
Delay Circuit
TCLR
Resets Delay
Control
Circuit
TIE Corrector
Enable
from
State Machine
Control Signal
Delay Value
Compare
Circuit
Feedback
Signal from
Frequency
Select MUX
Figure 3 - TIE Corrector Circuit
Virtual
Reference
to DPLL
5
MT9044 Advance Information
from Normal to Holdover. In Holdover Mode, the
DPLL no longer uses the virtual reference signal, but
generates an accurate clock signal using storage
techniques. The Compare Circuit then measures the
phase delay between the current phase (feedback
signal) and the phase of the new reference signal.
This delay value is passed to the Programmable
Delay Circuit (See Figure 3). The new virtual
reference signal is now at the same phase position
as the previous reference signal would have been if
the reference switch had not taken place. The State
Machine then returns the device to Normal Mode.
The DPLL now uses the new virtual reference signal,
and since no phase step took place at the input of
the DPLL, no phase step occurs at the output of the
DPLL. In other words, reference switching will not
create a phase change at the input of the DPLL, or at
the output of the DPLL.
Since internal delay circuitry maintains the alignment
between the old virtual reference and the new virtual
reference, a phase error may exist between the
selected input reference signal and the output signal
of the DPLL. This phase error is a function of the
difference in phase between the two input reference
signals during reference rearrangements. Each time
a reference switch is made, the delay between input
signal and output signal will change. The value of
this delay is the accumulation of the error measured
during each reference switch.
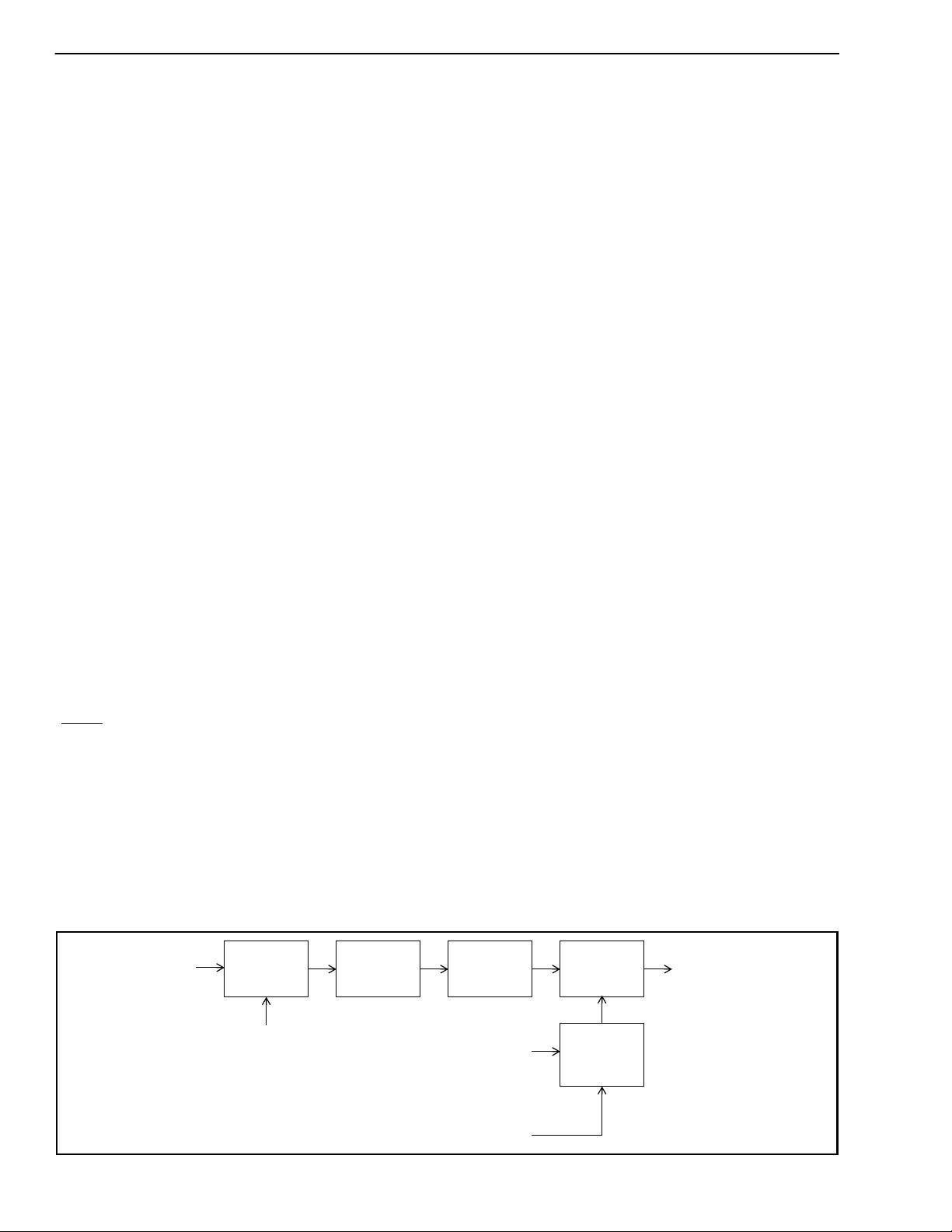
Digital Phase Lock Loop (DPLL)
As shown in Figure 4, the DPLL of the MT9044
consists of a Phase Detector, Limiter, Loop Filter,
Digitally Controlled Oscillator, and a Control Circuit.
Phase Detector - the Phase Detector compares the
virtual reference signal from the TIE Corrector circuit
with the feedback signal from the Frequency Select
MUX circuit, and provides an error signal
corresponding to the phase difference between the
two. This error signal is passed to the Limiter circuit.
The Frequency Select MUX allows the proper
feedback signal to be externally selected (e.g., 8kHz,
1.544MHz or 2.048MHz).
Limiter - the Limiter receives the error signal from
the Phase Detector and ensures that the DPLL
responds to all input transient conditions with a
maximum output phase slope of 5ns per 125us. This
is well within the maximum phase slope of 7.6ns per
125us or 81ns per 1.326ms specified by AT&T
TR62411, and Bellcore GR-1244-CORE.
Loop Filter - the Loop Filter is similar to a first order
low pass filter with a 1.9 Hz cutoff frequency for all
three reference frequency selections (8kHz,
1.544MHz or 2.048MHz). This filter ensures that the
jitter transfer requirements in ETS 300 011 and AT&T
TR62411 are met.
The programmable delay circuit can be zeroed by
applying a logic low pulse to the TIE Circuit Reset
(TCLR) pin. A minimum reset pulse width is 300ns.
This results in a phase alignment between the input
reference signal and the output signal as shown in
Figure 20. The speed of the phase alignment
correction is limited to 5ns per 125us, and
convergence is in the direction of least phase travel.
The state diagrams of Figure 7 and 8 indicate the
state changes that activate the TIE Corrector Circuit.
Virtual Reference from
TIE Corrector
Phase
Detector
Feedback Signal from
Frequency Select MUX
Limiter Loop Filter
Figure 4 - DPLL Block Diagram
Control Circuit - the Control Circuit uses status and
control information from the State Machine and the
Input Impairment Circuit to set the mode of the
DPLL. The three possible modes are Normal,
Holdover and Freer un.
Digitally Controlled Oscillator (DCO) - the DCO
receives the limited and filtered signal from the Loop
FIlter, and based on its value, generates a
corresponding digital output signal. The
synchronization method of the DCO is dependent on
the state of the MT9044.
State Select from
Input Impairment
Monitor
State Select from
State Machine
Digitally
Controlled
Oscillator
Control
Circuit
DPLL Reference to
Output Interface Circuit
6
Advance Information MT9044
In Normal Mode, the DCO provides an output signal
which is frequency and phase locked to the selected
input reference signal.
In Holdover Mode, the DCO is free running at a
frequency equal to the last (less 30ms to 60ms)
frequency the DCO was generating while in Normal
Mode.
T1 Divider
12MHz
Tapped
Delay
Line
C1.5o
C3o
In Freerun Mode, the DCO is free running with an
accuracy equal to the accuracy of the OSCi 20MHz
source.
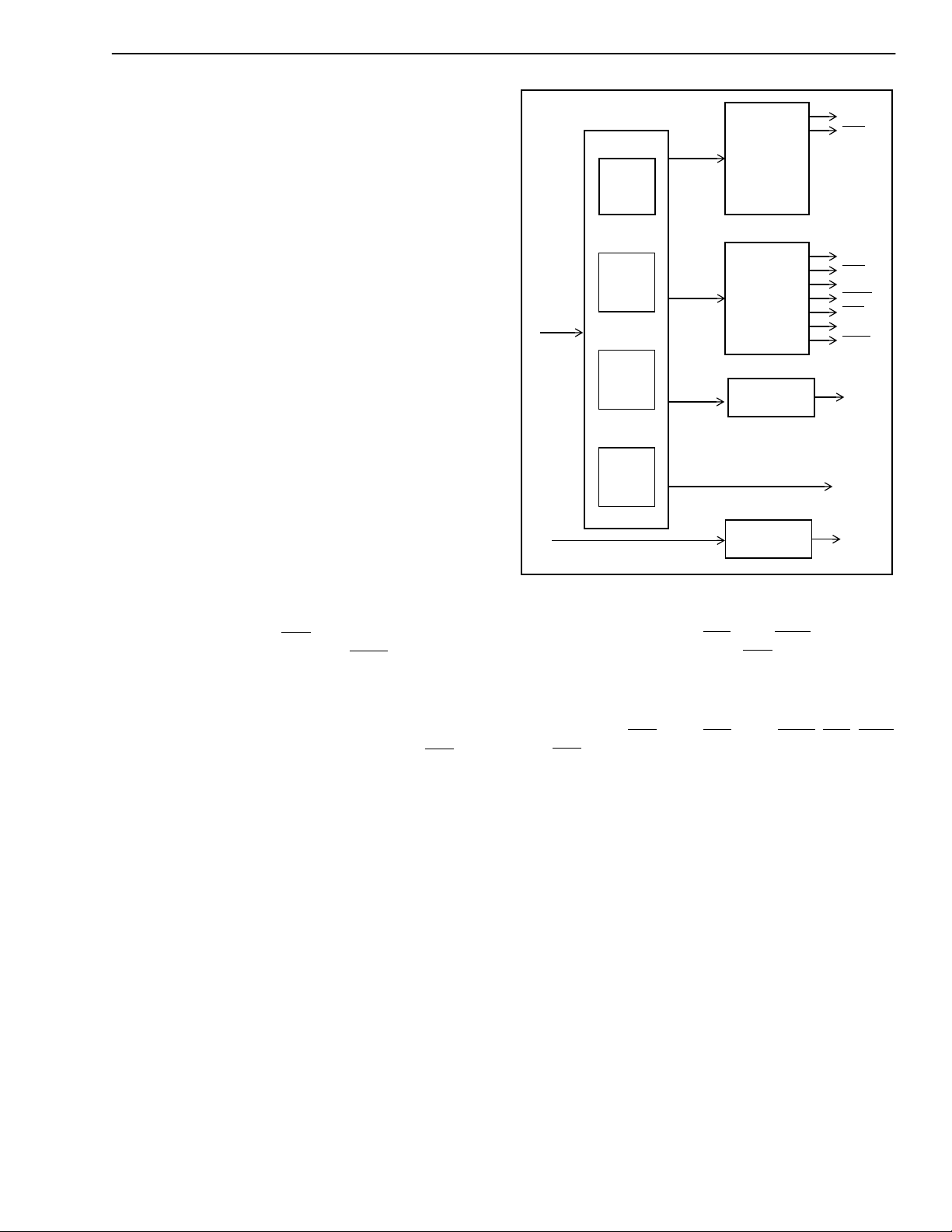
Output Interface Circuit
The output of the DCO (DPLL) is used by the Output
Interface Circuit to provide the output signals shown
in Figure 5. The Output Interface Circuit uses four
Tapped Delay Lines followed by a T1 Divider Circuit ,
an E1 Divider Circuit, a DS2 Divider Circuit and an
analog PLL to generate the required output signals.
Four tapped delay lines are used to generate a
16.384MHz, 12.352MHz, 12.624MHz and 19.44 MHz
signals.
The E1 Divider Circuit uses the 16.384MHz signal to
generate four clock outputs and three frame pulse
outputs. The C8o, C4o and C2o clocks are
generated by simply dividing the C16o clock by two,
four and eight respectively. These outputs have a
nominal 50% duty cycle.
The T1 Divider Circuit uses the 12.384MHz signal to
generate two clock outputs. C1.5o and C3o are
generated by dividing the internal C12 clock by four
and eight respectively. These outputs have a
nominal 50% duty cycle.
The DS2 Divider Circuit uses the 12.624 MHz signal
to generate the clock output C6o. This output has a
nominal 50% duty cycle.
C2o
C4o
C8o
C16o
F0o
F8o
F16o
C6o
C19o
ACKo
From
DPLL
ACKi
Tapped
Delay
Line
Tapped
Delay
Line
Tapped
Delay
Line
16MHz
12MHz
19MHz
E1 Divider
DS2 Divider
Analog PLL
Figure 5 - Output Interface Circuit Block
Diagram
The frame pulse outputs (F0o, F8o, F16o, TSP, RSP)
are generated directly from the C16 clock.
The T1 and E1 signals are generated from a
common DPLL signal. Consequently, the clock
outputs C1.5o, C3o, C2o, C4o, C8o, C16o, F0o, F16o
and C6o are locked to one another for all operating
states, and are also locked to the selected input
reference in Normal Mode. See Figures 20 and 21.
All frame pulse and clock outputs hav e limited driving
capability, and should be buffered when driving high
capacitance (e.g. 30pF) loads.
Analog Phase Lock Loop (APLL)
The analog PLL is intended to be used to achieve a
50% duty cycle output clock. Connecting C19o to
ACKi will generate a phase locked 19.44 MHz ACKo
output with a nominal 50% duty cycle. The analog
PLL has an intrinsic jitter of less than 0.01 U.I. In
order to achieve this low jitter level a separate pin is
provided to power (AVdd) the analog PLL.
7
MT9044 Advance Information
Input Impairment Monitor
This circuit monitors the input signal to the DPLL and
automatically enables the Holdover Mode
(Auto-Holdover) when the frequency of the incoming
signal is outside the auto-holdover capture range
(See AC Electrical Characteristics - Performance).
This includes a complete loss of incoming signal, or
a large frequency shift in the incoming signal. When
the incoming signal returns to normal, the DPLL is
returned to Normal Mode with the output signal
locked to the input signal. The holdover output
signal is based on the incoming signal 30ms
minimum to 60ms prior to entering the Holdover
Mode. The amount of phase drift while in holdover is
negligible because the Holdover Mode is very
accurate (e.g. ±0.05ppm). The the Auto-Holdover
circuit does not use TIE correction. Consequently,
the phase delay between the input and output after
switching back to Normal Mode is preserved (is the
same as just prior to the switch to Auto-Holdover).
Automatic/Manual Control State Machine
Guard Time Circuit
The GTi pin is used by the Automatic/Manual Control
State Machine in the MT9044 under either Manual or
Automatic control. The logic level at the GTi pin
performs two functions, it enables and disables the
TIE Corrector Circuit (Manual and Automatic), and it
selects which mode change takes place (Automatic
only). See the Applications - Guard Time section.
For both Manual and Automatic control, when
switching from Primary Holdover to Primary Normal,
the TIE Corrector Circuit is enabled when GTi=1, and
disabled when GTi=0.
Under Automatic control and in Primary Normal
Mode, two state changes are possible (not counting
Auto-Holdover). These are state changes to Primary
Holdover or to Secondary Normal. The logic level at
the GTi pin determines which state change occurs.
When GTi=0, the state change is to Primary
Holdover. When GTi=1, the state change is to
Secondary Normal.
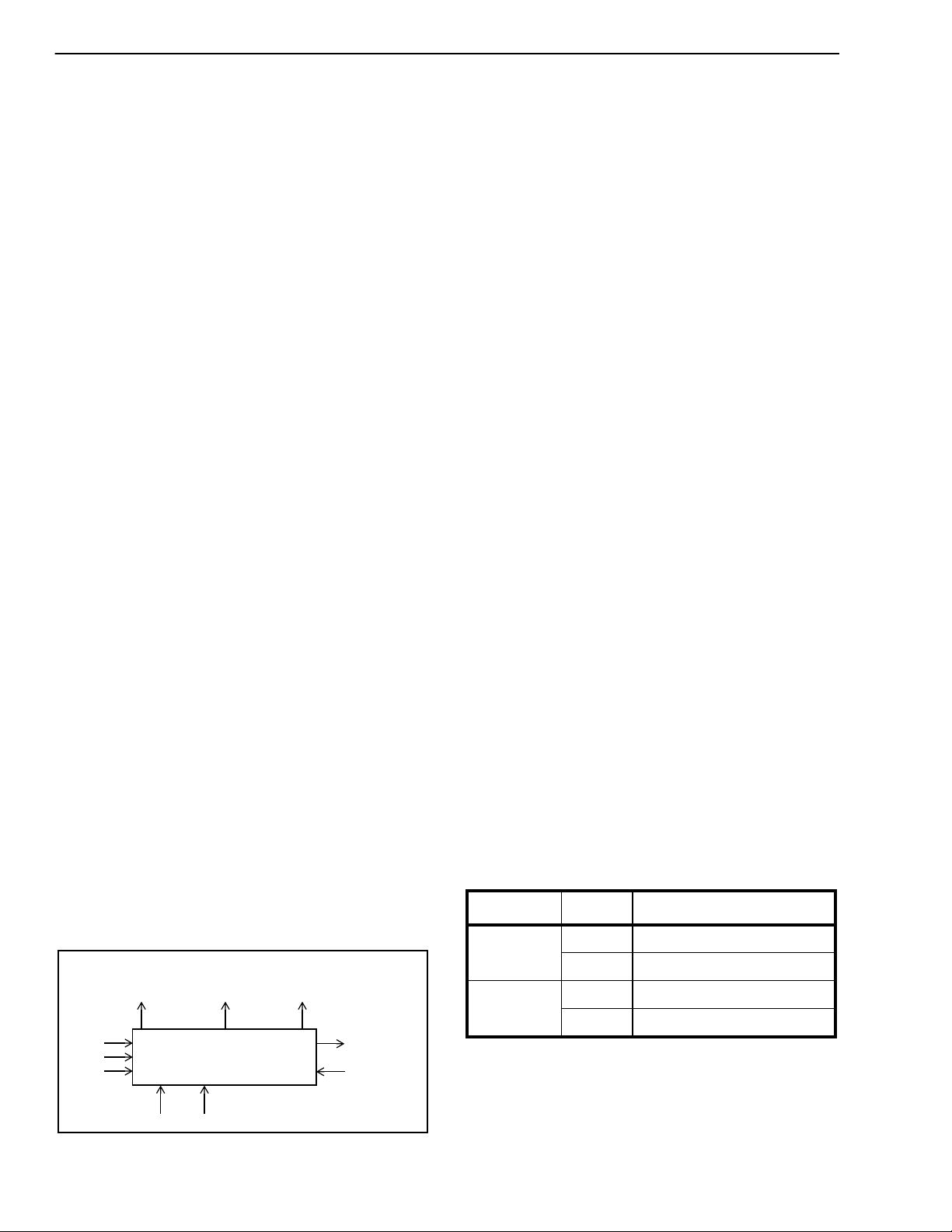
The Automatic/Manual Control State Machine allows
the MT9044 to be controlled automatically (i.e.
LOS1, LOS2 and GTi signals) or controlled manually
(i.e. MS1, MS2, GTi and RSEL signals). With
manual control a single mode of operation (i.e.
Normal, Holdover and Freerun) is selected. Under
automatic control the state of the LOS1, LOS2 and
GTi signals determines the sequence of modes that
the MT9044 will follow.
As shown in Figure 1, this state machine controls the
Reference Select MUX, the TIE Corrector Circuit, the
DPLL and the Guard Time Circuit. Control is based
on the logic levels at the control inputs LOS1, LOS2,
RSEL, MS1, MS2 and GTi of the Guard Time Circuit
(See Figure 6).
All state machine changes occur synchronously on
the rising edge of F8o. See the Controls and Modes
of Operation section for full details on Automatic
Control and Manual Control.
To
Reference
Select MUX
To TIE
Corrector
Enable
To DPLL
State
Select
Master Clock
The MT9044 can use either a clock or crystal as the
master timing source. For recommended master
timing circuits, see the Applications - Master Clock
section.
Control and Modes of Operation
The MT9044 can operate either in Manual or
Automatic Control. Each control method has three
possible modes of operation, Normal, Holdover and
Freerun.
As shown in Table 3, Mode/Control Select pins MS2
and MS1 select the mode and method of control.
Control RSEL Input Reference
MANUAL 0 PRI
1 SEC
AUTO 0 State Machine Control
RSEL
LOS1
LOS2
Automatic/Manual Control
State Machine
MS1
MS2
Figure 6 - Automatic/Manual Control State
Machine Block Diagram
8
To and From
Guard Time
Circuit
1 Reserved
Table 2 - Input Reference Selection
Advance Information MT9044
Normal Mode
MS2 MS1 Control Mode
0 0 MANUAL NORMAL
0 1 MANUAL HOLDOVER
1 0 MANUAL FREERUN
1 1 AUTO State Machine Control
Table 3 - Operating Modes and States
Manual Control
Normal Mode is typically used when a slave clock
source, synchronized to the network is required.
In Normal Mode, the MT9044 provides timing (C1.5o,
C2o, C3o, C4o, C8o, C16o, and C19) and frame
synchronization (F0o, F8o, F16o, RSP, TSP) signals,
which are synchronized to one of two reference
inputs (PRI or SEC). The input reference signal may
have a nominal frequency of 8kHz, 1.544MHz or
2.048MHz.
Manual Control should be used when either very
simple MT9044 control is required, or when complex
control is required which is not accommodated by
Automatic Control. For example, very simple control
could include operation in a system which only
requires Normal Mode with reference switching
using only a single input stimulus (RSEL). Very
simple control would require no external circuitry.
Complex control could include a system which
requires state changes between Normal, Holdover
and Freerun Modes based on numerous input
stimuli. Complex control would require external
circuitry, typically a microcontroller.
Under Manual Control, one of the three modes is
selected by mode/control select pins MS2 and MS1.
The active reference input (PRI or SEC) is selected
by the RSEL pin as shown in Table 2. Refer to Table
4 and Figure 7 for details of the state change
sequences.
Automatic Control
Automatic Control should be used when simple
MT9044 control is required, which is more complex
than the very simple control provide by Manual
Control with no external circuitry, but not as complex
as Manual Control with a microcontroller. For
example, simple control could include operation in a
system which can be accommodated by the
Automatic Control State Diagram shown in Figure 8.
Automatic Control is also selected by mode/control
pins MS2 and MS1. However, the mode and active
reference source is selected automatically by the
internal Automatic State Machine (See Figure 6).
The mode and reference changes are based on the
logic levels on the LOS1, LOS2 and GTi control pins.
Refer to Table 5 and Figure 8 for details of the state
change sequences.
From a reset condition, the MT9044 will take up to 25
seconds for the output signal to be phase locked to
the selected reference.
The selection of input references is control
dependent as shown in State Tables 4 and 5. The
reference frequencies are selected by the frequency
control pins FS2 and FS1 as shown in Table 1.
Holdover Mode
Holdover Mode is typically used for short durations
(e.g. 2 seconds) while network synchronization is
temporarily disrupted.
In Holdover Mode, the MT9044 provides timing and
synchronization signals, which are not locked to an
external reference signal, but are based on storage
techniques. The storage value is determined while
the device is in Normal Mode and locked to an
external reference signal.
When in Normal Mode, and locked to the input
reference signal, a numerical value corresponding to
the MT9044 output frequency is stored alternately in
two memory locations every 30ms. When the device
is switched into Holdover Mode, the value in memory
from between 30ms and 60ms is used to set the
output frequency of the device.
The frequency accuracy of Holdover Mode is
±0.05ppm, which translates to a worst case 35 frame
(125us) slips in 24 hours. This meets the Bellcore
GR-1244-CORE Stratum 3 requirement of ±0.37ppm
(255 frame slips per 24 hours).
Two factors affect the accuracy of Holdover Mode.
One is drift on the Master Clock while in Holdover
Mode, drift on the Master Clock directly affects the
Holdover Mode accuracy. Note that the absolute
Master Clock (OSCi) accuracy does not affect
Holdover accuracy, only the change in OSCi
accuracy while in Holdover. For example, a ±32ppm
9
 Loading...
Loading...