

MITEL MT8976AE, MT8976AP, MT8976AC Datasheet
ISO-CMOS ST-BUS FAMILY
MT8976
T1/ESF Framer Circuit
Features
• D3/D4 or ESF frami ng and S LC-96 com patib le
• 2 frame elastic buffer with 32 µsec jitter buffer
• Insertion and det ecti on of A , B,C ,D bits.
Signalling freeze , opt iona l debo unc e
• Selectable B8ZS, jammed bit (ZCS) or no zero
code suppression
• Yellow alarm and blue alarm signal capabilities
• Bipolar violation count, F
error count
• Selectab le robbed bit signalling
• Frame and superframe sync. signals, Tx and Rx
• AMI encoding and decoding
• Per channel, overall, and remote loop around
• Digital ph ase det ecto r betw een T1 line & STBUS
• One uncommitted scan point and drive point
• Pin compa tible wit h MT897 7 a nd MT89 79
• ST-BUS compatible
error count, CRC
T
ISSUE 9 May 1995
Ordering Information
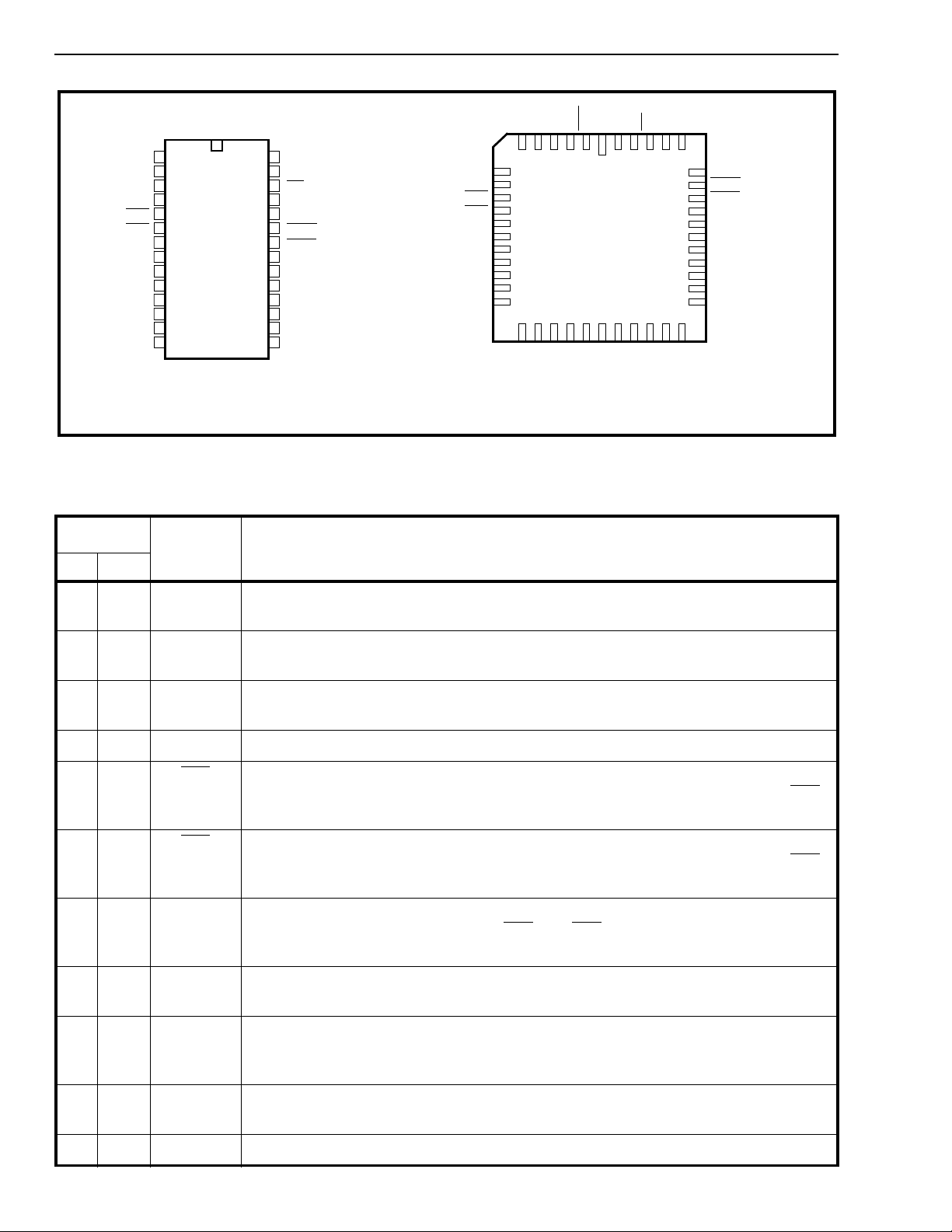
MT8976AC 28 Pin Cerami c DIP
MT8976A E 28 Pin Pl astic D IP
MT8976A P 44 Pin PLC C
-40°C to 85°C
Descript io n
The MT8976 is Mitel’s second generation T1
interface solution. The MT8976 meets the Extended
Super Frame format (ESF), the current D3/D4 format
and is compatible with SLC-96 systems.
The MT8976 interfaces to DS1 1.544 Mbit/sec digital
trunk.
Applications
• DS1/ESF digital trunk interfaces
• Computer to PBX interfaces (DMI and CPI)
• High speed comp uter t o com pute r data links
TxSF
C2i
F0i
RxSF
DSTo
DSTi
CSTi0
CSTi1
CSTo
XCtl
XSt
ST-BUS
Timing
Circuitr y
Data
Interface
Serial
Control
Interface
Control Logic
2 Frame
Elastic Buf fer
with Slip
Control
2048-1544
Converter
ABCD
Signalling RAM
DS1
Link
Inte rface
Phase
Detect or
Remote &
DS1
Counter
Digital
Loopbacks
C1.5i
RxFDLClk
RxFDL
RxA
RxB
TxA
TxB
TxFDLClk
TxFDL
RxD
E1.5i
E8Ko
V
•
SS
V
DD
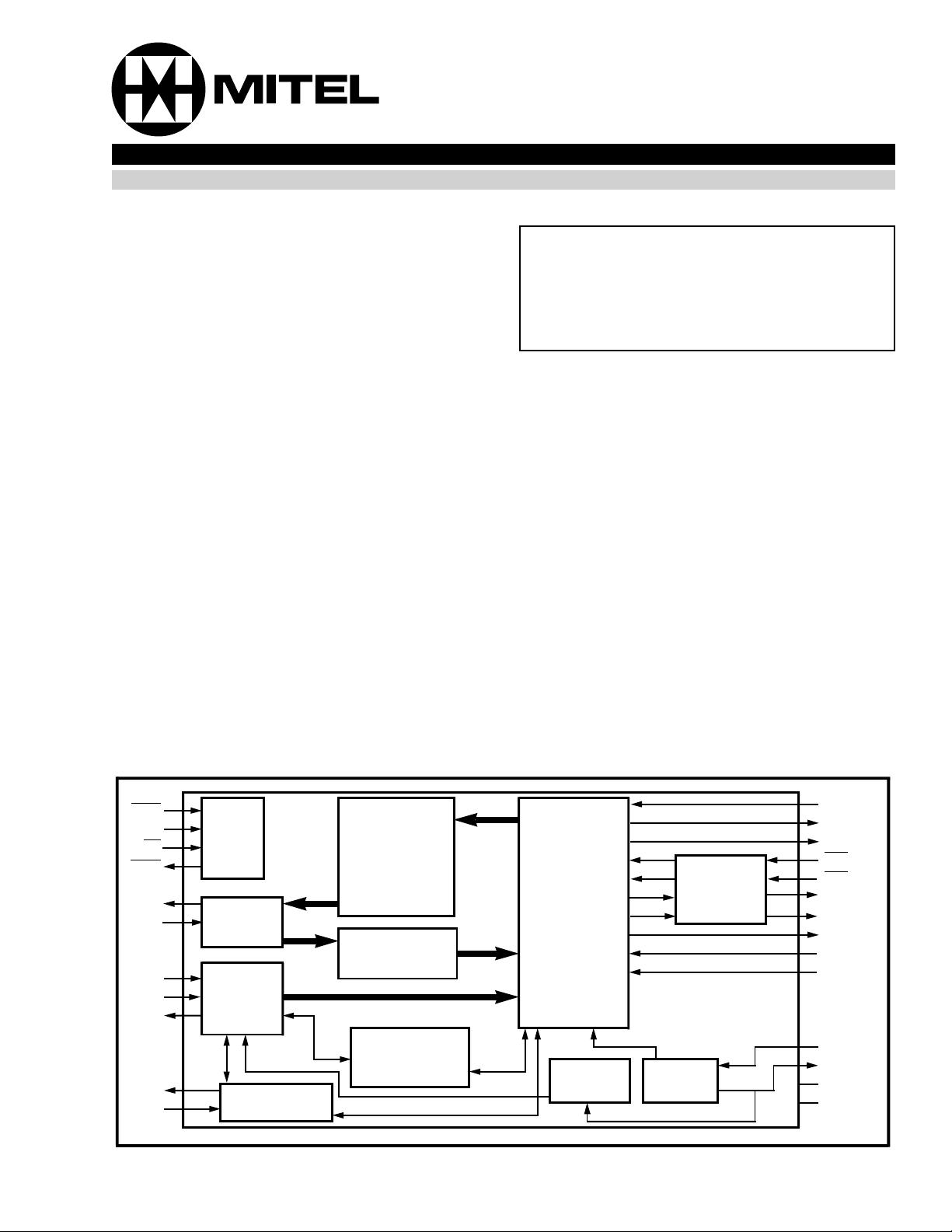
Figure 1 - Functional Block Diagram
4-29
MT8976 ISO-CMOS
1
TxA
2
TxB
DSTo
RxD
CSTi1
TxFDL
TxFDLClk
CSTi0
E8Ko
VSS
3
4
NC
5
RxA
6
RxB
7
8
9
10
11
NC
12
13
14
28 PIN CERDIP/PDIP
Pin Description
Pin #
DIP PLCC
Name Description
28
27
26
25
24
23
22
21
20
19
18
17
16
15
VDD
IC
F0i
E1.5i
C1.5i
RxSF
TxSF
C2i
RxFDL
DSTi
RxFDLClk
CSTo
XSt
XCtl
TxA
65432 44434241
7
NC
8
NC
NC
NC
NC
9
10
11
12
13
14
15
16
17
VSS
RxA
RxB
RxD
CSTi1
TxFDL
TxFDLClk
Figure 2 - Pin Connections
TxBNCDSTo
NC
E8Ko
CSTi0
44 PIN PLCC
VDD
VSS
ICNCF0iNCE1.5i
1
231819202122 2425262728
XCtl
VSS
DSTi
CSTo
RxFDLClk
40
39
38
37
36
35
34
33
32
31
30
29
NC
XSt
C1.5i
RxSF
TxSF
NC
NC
C2i
NC
NC
NC
NC
RxFDL
.
12 TxATransmit A Output. Unipolar output that can be used in conjunction with TxB and
external line driver circuitry to generate the bipolar DS1 signal.
23 TxBTransmit B Output. Unipolar output that can be used in con junct ion wit h TxA and
external line driver circuitry to generate the bipolar DS1 signal.
35 DSToData ST-BUS Output. A 2048 kbit/s serial output stream which contains the 24
PCM or data channels received from the DS1 line.
44 NC No Connecti on .
59 RxA
Receive A Complementary Input. Accepts a unipolar split phase signal decoded
externally from the received DS1 bipolar si gnal. This input, in conjunction with RxB
detects bipolar violat ion s in the received signal.
610 RxB
Receive B Complementary Input. Accepts a unipolar split phase signal decoded
externally from the received DS1 bipolar si gnal. This input, in conjunction with RxA
detects bipolar violat ion s in the received signal.
711 RxD Receive Data Input. Unipolar RZ data signal decoded from the received DS1
signal. Generally the signals input at RxA
and RxB are combined exte rnally wit h a
NAND gate and the resulting com posit e signal is input at this pin.
8 13 CSTi1 Control ST-BUS Input #1. A 2048 kbit/s serial control stream which carries 24 per-
channel contro l words.
914 TxFDLTransmit Facility Data Link (Input). A 4 kHz serial input stream that is multiplexed
into the FDL position in th e ESF mode, or the F
pattern when in SLC-96 mode. It is
s
clocked in on the rising edge of TxFDLClk.
,
,
10 16 TxFDLClk Transmit Facility Data Link Clock (Output). A 4 kHz clock used to clock in the FDL
data.
11 NC No connecti on.
4-30
Pin Description (Continued)
ISO-CMOS MT8976
Pin #
Name Description
DIP PLCC
12 19 CSTi0 Contro l ST-BUS Input #0. A 2048 kbit/s serial control stream that contains 24 per
channel control word s and two master control words.
13 20 E8Ko Extracted 8 kHz Output. The E1.5i clock is internally divided by 193 to produce an 8
kHz clock which is aligned with the received DS1 frame and output at this pin. The8
kHz signal is derived from C1.5 in Digital Loopback mode.
14 6,
V
SS
System Ground.
18,
22
15 23 XCtl External Control (Output). This is an uncommitted external output pin which is set
or reset via bit 3 in Master Control Word 1 on CSTi0. The state of XCtl is updated
once per frame.
16 24 XSt External Status (Schmitt Trigger Input). The state of this pin is sampled once per
frame and the status is reported in bit 5 of Master Status Word 2 on CSTo.
17 26 CSTo Control ST-BUS Output. This is a 2048 kbit/s serial control stream which provides
the 24 per-channel status words, and two master status words.
18 27 RxFDLClk Receive Facility Data Link Clock (Output). A 4 kHz clock signal used to clock out
FDL informa tion. The data is clocked out on the rising edg e of RxFDLClk.
19 28 DSTi Data ST-BUS Input. This pin accepts a 2048 kbit/s serial stream which contains the
24 PCM or data channels to be transmitted on the T1 trunk.
20 29 RxFDL Received Fac ility Data Link (Ou tput). A 4 kHz serial output stream t hat is
demultiplexed fro m the FDL in ESF mode, or the received F
bit pattern in SLC-96
S
mode. It is clocked out on the rising edge of RxFDLClk.
21 34 C2 i 2.048 MHz Clock Input. This is the master clock used for clocking serial data into
DSTi, CSTi0 and CSTi1. It is also used to clock serial data out of CSTo and DSTo.
22 37 TxSF
Transmit Superframe Pulse Input. A low going pulse applied at t his pin will m ake
the next transmit frame the first frame of a superframe. The device will free run if this
pin is held high.
23 38 RxSF
Received Superframe Pulse Output. A pulse output on this pin designates that the
next frame of data on the ST-BUS is from frame 1 of the received superframe. The
period is 12 frames long in D3/D4 modes and 24 fram es in ESF mode. Pulses are
output only when the device is synchronized to the received DS1 signal.
24 39 C1. 5i 1.544 MHz Clock Input. This is the DS1 transmit clock and is used to output data on
TxA and TxB. It must be phase-locked to C2i. Data is clocked out on the rising
edge of C1.5i.
25 40 E1.5i 1.544 MHz Extracted Clock (Input). This clock which is extracted from the received
data is used to clock in data at RxA
nominally ali gned wit h the center of the received bit on RxD, RxA
, RxB and RxD . The falling edge of the is
and RxB.
26 42 F0i
Frame Pul se Inpu t. This is the frame synchronizat ion signal which defines the
beginning of the 32 channel ST-BUS frame.
27 44 IC Internal Connection. Tied to V
28 1 V
DD
Positive Po wer Supply In pu t. +5V ± 5%.
for normal operation.
SS
4-31
MT8976 ISO-CMOS
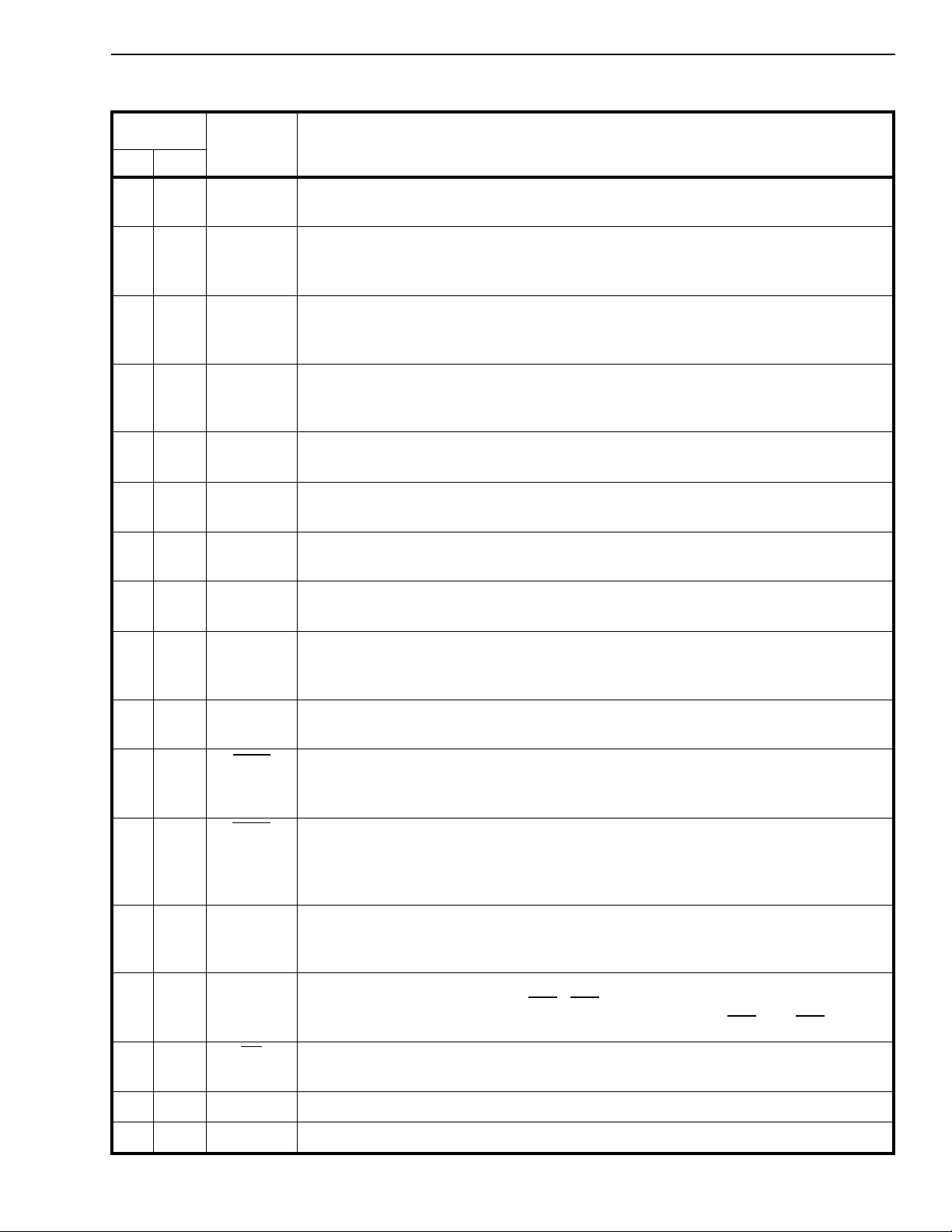
Functional Timing Diagrams
C2i
DSTi
125µSec
DSTo
CSTi0/CSTi1
CSTo
E1.5i
INT DATA
DS1 AMI
LINE SIGNAL
RxA
RxB
765 4
7
1
6
1
5
4
0
3
3
2
2
1
1
0
0
•
•
Figur e 3 - S T-BUS Ti ming
125µSec
0
110
•
•
1
•
•
•
•
•
•
•
•
•
•
7
•
7
•
RxD
E8Ko
C1.5i
INT DATA
TxA
TxB
DS1 AMI
LINE SIGNAL
Figur e 4 - D S1 Re ceiv e Ti mi ng
Figure 5 - DS1 Transm it Tim ing
4-32
ISO-CMOS MT8976
29 30 31
25 26 27 28
21 22 23 24
17 18 19 20
13 14 15 16
9 101112
X
X
X
X
X
X
30
29
28
26
25
24
22
21
20
18
17
16
14
13
12
10
9
8
31
PC
PC
PC
27
PC
PC
PC
23
PC
PC
PC
19
PC
PC
PC
15
PC
PC
PC
11
PC
PC
PC
7
X
CW
CW
CW
X
CW
CW
CW
X
CW
CW
CW
X
CW
CW
CW
X
CW
CW
CW
X
CW
CW
CW
X
31
MS
W2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
ST-BUS CHANNEL VERSUS DS1 CHANNEL CONTROLLE D
15
30
29
28
26
25
24
22
21
20
18
17
16
14
13
12
10
9
8
27
23
19
MS
11
7
PCS
PCS
PCS
X
PCS
PCS
PCS
X
PCS
PCS
PCS
X
PCS
PCS
PCS
W1
PCS
PCS
PCS
X
PCS
PCS
PCS
X
W
W
W
W
W
W
W
W
W
W
W
W
W
W
W
Figure 6 - ST-BUS Channel Allocations
W
W
W
ST-BUS VERSUS DS 1 CHANNE L STATUS
31
W2
MC
1
30
PC
CW
1
29 30 31
X
25 26 27 28
X
21 22 23 24
X
17 18 19 20
X
13 14 15 16
X
9 101112
ST-BUS CHANNEL VER SUS DS1 CHANNEL TRAN S M ITTED
X
29
PC
CW
1
28
PC
CW
X
27
1
26
PC
CW
1
25
PC
CW
1
24
PC
CW
X
23
1
22
PC
CW
1
21
PC
CW
1
20
PC
CW
X
19
1
18
PC
CW
1
17
PC
CW
1
16
PC
CW
15
W1
MC
1
14
PC
CW
1
13
PC
CW
1
12
PC
CW
X
11
1
10
PC
CW
9
1
PC
ST-BUS CHANNEL VERSUS DS1 CHANNEL RECEIVED
CW
8
1
PC
CW
7
X
ST-BUS CHANNEL VERSUS DS1 CHANNEL CONTROLLE D
5678
X
1234
X
DSTi 0
DS1 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
5678
X
1234
X
DSTo 0
DS1 1 2 3 4 5 6 7 8 9 101112 131415 161718 192021 222324
6
1
PC
CW
5
1
PC
CW
4
1
PC
CW
3
X
2
1
PC
CW
1
1
PC
CW
1
PC
CW
CSTi0 0
DS1 1 2 3 4 5 6 7 8 9 101112 131415 161718 192021 222324
PCCW =PER CHANNEL CONTROL WORD
MCW1/2 =MASTER CONTROL WORD 1/2
6
5
4
2
1
CSTi1 0
PC
PC
PC
3
PC
PC
PC
CW
CW
CW
X
CW
CW
CW
2
2
2
2
2
2
DS1 1 2 3 4 5 6 7 8 9 101112 131415 161718 192021 222324
PCCW =PER CHANNEL CONTROL WORD
6
W
PCS
5
W
PCS
4
W
PCS
3
W
PS
2
W
PCS
1
W
PCS
0
W
PCS
CSTo
DS1 1 2 3 4 5 6 7 8 9 101112 131415 161718 192021 222324
PCSW =PER CHANNEL STATUS WORD
PSW =PHASE STATUS WO RD
MSW =MASTE R STATUS WORD
X=UNUSED CHANNEL
4-33

MT8976 ISO-CMOS
Functional Description
The MT8976 provides a simple interface to a
bidirectional DS1 link. All of the formatting and
signalling insertion and detection is done by the
device. Various programmable options in the device
include: ESF, D3/D4, or SLC-96 mode, common
channel or robbed bit signalling, zero code
suppression, alarms, and local and remote loop
back. All data and control information is
communicated to the MT8976 via 2048 kbit/s serial
streams conf or mi ng to Mi te l’s ST-BUS forma t.
The ST-BUS is a TDM serial bus that operates at
2048 kbits/s. The serial streams are divided into 125
µsec frames that are made up of 32 8 bit channels.
A serial stream that is made up of these 32 8 bit
channels is known as an ST-BUS stream, and one of
these 64 kbit/s channels is known as an ST-BUS
channel.
The system side of the MT8976 is made up of STBUS inputs and outputs, i.e., control inputs and
outputs (CSTi/o) and data inputs and outputs
(DSTi/o). These signals are functionally represented
in Figure 3. The line side of the device is made up of
the split phase inputs and outputs that can be
interfaced to an external bipolar receiver and
transmitter. Functional transmit and receive timing
is shown in Figures 4 and 5.
Data for transmission on the DS1 line is clocked
serially into the device at the DSTi pin. The DSTi pin
accepts a 32 channel time division multiplexed STBUS stream. Da ta is clo cked in w ith th e falling e dge
of the C2i clock. ST-BUS frame boundaries are
defined by the frame pulse applied at the F0i pin.
Only 24 of the available 32 channels on the ST-BUS
serial stream are actually transmitted on the DS1
side. The unused 8 channels are ignored by the
device.
Data received from the DS1 line is clocked out of the
devi ce in a si milar man ner at the DSTo pin. D ata is
clocked out on the rising edge of the C2i clock. Only
24 of the 32 channels output by the device contain
the information from the DS1 line. The DSTo pin is,
however, actively driven during the unused channel
timeslots. Figure 6 shows the correspondence
between the DS1 channels and the ST-BUS
channels.
All control and monitoring of the device is
accomplished through two ST-BUS serial control
inputs and one serial control output. Control ST-BUS
input number 0 (CSTi0) accepts an ST-BUS serial
stream which contains the 24 per channel control
words and two master control words. The per
channel control words relate directly to the 24
information channels output on the DS1 side. The
master control words affect operation of the whole
device. Control ST-BUS input number 1 (CSTi1)
accepts an ST-BUS stream containing the A, B, C
and D signalling bits. The relationship between the
CSTi channels and the controlled DS0 channels is
shown in Figure 6. Status and signalling information
is received from the device via the control ST-BUS
output (CSTo). This serial output stream contains two
master status words, 24 per channel status words
and one Phase Status Word. Figure 6 shows the
correspondence between the received DS1 channels
and the status words. Detailed information on the
operation of the control interface is presented below.
Progra m ma ble Fe atu res
The main features in the device are programmed
through two master control words which occupy
channels 15 and 31 in Control ST-BUS input stream
number 0 (CSTi0). These two eight bit words are
used to:
• Select the different operating modes of the
device ESF, D3/D4 or SLC-96.
• Activate t he fe atur es tha t are ne eded i n a
certain application; common channel signalling,
zero code s uppre ssi on, si gnall ing de bounc e,
etc.
• Turn on in service alarm s, di agnos tic loop
arounds, an d the extern al c ontrol fun ction .
Tables 1 and 2 contain a complete explanation of the
function of the different bits in Master Control Words
1 and 2.
Major Operating Modes
The major operating modes of the device are
enabled by bits 2 and 4 of Master Control Word 2.
The Extended Superframe(ESF) mode is enabled
when bit 4 is set high. Bit 2 has no effect in this
mode. The ESF mode enables the transmission of
the S bit pattern shown in Table 3. This includes the
frame/superframe pattern, the CRC-6, and the
Facility Data Link (FDL). The device generates the
frame/multiframe pattern and calculates the CRC for
each superframe. The data clocked into the device
on the TxFDL pin is incorporat ed into the FDL. ESF
mode will also insert A, B, C and D signalling bits into
the 24 frame multiframe. The DS1 frame begins after
approximately 25 periods of the C1.5i clock from the
F0i
frame pulse.
During synchronization the receiver locks to the
incoming frame, calculates the CRC and compares it
4-34
ISO-CMOS MT8976
Bit Name Description
7 Debounce When set the received A, B, C and D signalling bits are reported directly in the per channel
status words output at CSTo. When clear, the signallin g bits are debounced for 6 to 9 ms
before they are placed on CSTo.
6 TSPZCS Transparent Zero Code Suppr essi on . When this bit is set, no zero code suppression is
implemente d.
5 B8Z S Bi nary Eig ht Zer o Supp ressi on . When this bit is set, B8ZS zero code suppression is
enabled. When clear, bit 7 in data channels containing all zeros is forced high before being
transmitted on the DS1 side. This bit is inactive if the TSPZCS bit is set.
4 8KHSel 8 kHz Output Select. When set, the E8Ko pin is held high. When clear, the E8Ko
generates an 8 kHz output derived from the E1.5i or C1.5 clock (see Pin Description for
E8Ko).
3 XCtl External Control Pin. When set, the XCtl pin is held high. When clear, XCtl is held low.
2 ESFYLW ESF Yellow Alarm. Valid only in ESF mode. When set, a sequence of eight 1’s followed
by eight 0’s is sent in the FDL bit positions. When cle ar, the FDL bit contains data input at
the TxFDL pin.
1 Robbed bit When this bit is set, robbed bit signalling is disabled on all DS0 transmit channels. Whe n
clear , A, B, C and D signalling bit insertion in bit 8 for all DS0 transmit channels in every 6
frame is enabled.
0 YLALR Yellow Alarm. When set, bit 2 of all DS1 channels is set low. When clear, bit 2 operates
normally.
Table 1. Master Control Word 1 (Channel 15, CSTi0)
to the CRC received in the next multiframe. The
device will not declare itself to be in synchronization
unless a valid framing pattern in the S-bit is detected
and a correct CRC is received. The CRC check in
this case provides protection against false framing.
The CRC check can be turned off by setting bit 1 in
Master Control Word 2.
The device can be forced to resynchronize itself. If
Bit 3 in Master Control Word 2 is set for one frame
and then subsequently reset, the de vice will start to
search for a new frame position. The decision to
reframe is made by the user’s system processor on
the basis of the status conditions detected in the
received master status words. This may include
consideration of the number of errors in the received
CRC in conjunction with an indication of the
presence of a mimic. When the device attains
synchronization the mimic bit in Master Status Word
1 is set if the device found another possible
candidate when it was searching for the framing
pattern.
Note that the device will resynchronize automatically
if the errors in the terminal framing pattern (F
T
or
FPS) exceed the threshold set with bit 0 in Master
Control Word 2.
The CRC/MIMIC bit in Master Control Word 2, when
set high, allows the device to synchronize in the
presence of a mimic. If this bit is reset, the device will
not synchronize in the presence of a mimic (Also,
refer to section on Framing algorithm).
In the D3/D4 mode the device can also be made
compatible with SLC-96 by setting bit two of Master
Control Word 2. This allows the user to insert and
extract the signalling framing pattern on the DS1 bit
stream using the FDL input and output pins. The
user must format this 4 kbits of information externally
to meet all of the requirements of the SLC-96
specification (see Table 5). The device multiplexes
and demultiplexes this information into the proper
position. This mode of operation can also be used for
any other application that uses all or part of the
signalling framing pattern. As long as the serial
stream clocked into the TxFDL contains two proper
sets of consecutive synchronization bits (as shown
in Table 5 for frames 1 to 24), the device will be able
to insert and extract the A, B signalling bits. The
TxSF
pin should be held high in this mode.
Superframe boundaries cannot be defined by a
pulse on this input. The RxSF
output functions
normally and indicates the superframe boundaries
based on the synchronization pattern in the F
received bit position.
th
S
Standard D3/D4 framing is enabled when bit 4 of
Master Control Word 2 is reset (logic 0). In this
mode the device searches for and inserts the
framing pattern shown in Table 4. This mode only
supports AB bit signalling, and does not contain a
CRC check.
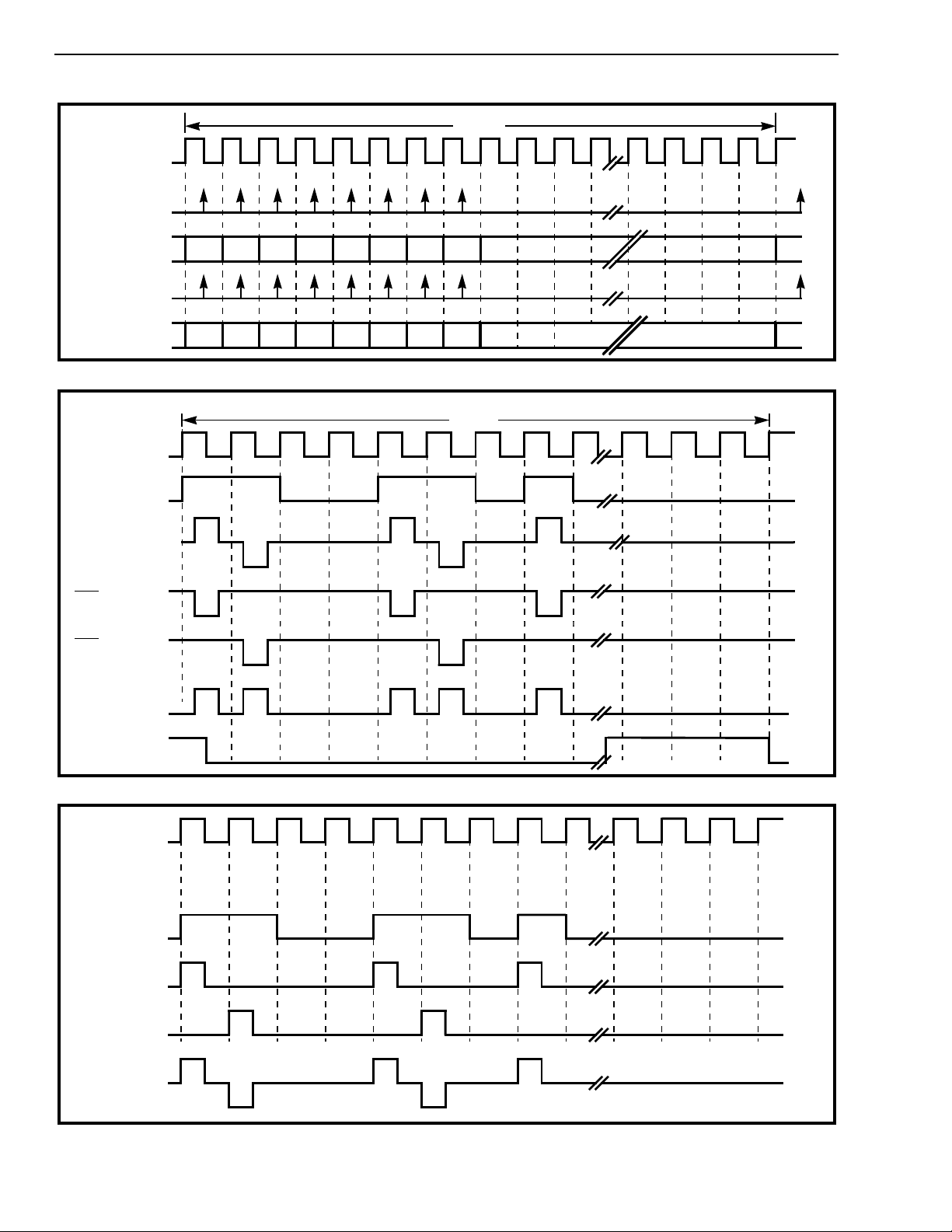
Zero Code Suppression
The combination of bits 5 and 6 in Master Control
Word 1 allow one of three zero code suppression
4-35
MT8976 ISO-CMOS
Bit Name Description
.
7 RMLOOP Remo te Loo pb ack. When set, the data received at RxA
and RxB is looped back to TxB
and TxA respectively. The data is clocked into the device with E1.5i. The device still
monitors the received data and outputs it at DSTo . The device operates normally when the
bit is clear.
6 DGLOOP Digital Loopback. When set, the data input on DSTi is looped around to DSTo. The
normal received data on RxA, RxB and RxD is ignored. However, the data input at DSTi
is still transmitted on TxA and TxB . The device frames up on the looped data using the
C1.5i clock.
5 ALL1'S All One’s Alarm. When set, the chip transmits an unframed all 1's signal on TxA and TxB.
4 ESF/D4 ESF/D4 Se lect. When set, the device is in ESF mode. When clear, the device is in
D3/D4 mode.
3 ReFR Refr ame. If set for at least one frame and then cleared, the chip will begin to search for a
new frame position. Only the change from high to low will cause a refram e, not a
continuous low level.
2 SLC-96 SLC-96 Mode Select. The chip is in SLC-96 mode when this bit is set. This enables input
and output of the F
bit pattern using the same pins as the facility dat a link in ES F mode.
S
The chip will use the same fram ing algo rithm as D3/D4 mode. The user must insert the
valid F
the transmitter to insert A and B bits in every 6
replaces the F
bits in 2 out of 6 superframes to allow the receiver to find superframe sync, and
S
pattern in the outgoing S bit position. Inactive in ESF mode .
S
th
frame. The SLC-96 FDL compl ete ly
1 CRC/MIMIC In ESF mode, when se t, the chip disregards the CRC calculation during synchronizati on.
When clear, the device will check for a correct CRC before going into synchronization. In
D3/D4 mode, when set, the device will synch ronize on the fi rst correct S-bit patt ern
detected. When this bit is clear, the device will not synchronize if it has detected more than
one candidate for the frame alignm ent pattern (i.e., a mimic).
0 M ain t. Maintenance Mode. When set, the device wil l declare itself out -of-sync if 4 out of 12
consecutive F
bits. In this mode, four consecutive bits following an errored F
bits are in error. When clear, the out-of -sync threshold is 2 errors in 4 FT
T
bit are examined.
T
Table 2. Master Control Word 2 (Channel 31, CSTi0)
schemes to be selected. The three choices are:
none, binary 8 zero suppression (B8ZS), or jammed
bit (bit 7 forced high). No zero code suppression
allows the device to interface with systems that have
already applied some form of zero code suppression
to the data input on DSTi. B8ZS zero code
suppression replaces all strings of 8 zeros with a
known bit pattern and a specific pattern of bipolar
violations. This bit pattern and violation pattern is
shown in Figure 7. The receiver monitors the
received bit pattern and the bipolar violation pattern
and replaces all matching strings with 8 zeros.
Loopback Modes
Remote and digital loopback modes are enabled by
bits 6 and 7 in Master Control Word 2. These modes
can be used for diagnostics in locating the source of
a fault condition. Remote loop around loops back
data received at RxA
and RxB back out on TxA and
TxB, thus effectively sending the received DS1 data
back to the far end unaltered so that the
transmission line can be tested. The received signal
is still monitored with the appropriate received
channels on the DS1 side made available in the
proper format at DSTo.
The digital loop around mode diverts the data
received at DSTi back out the DSTo pin. Data
receive d on DS Ti is, how e ver, still transmitted out via
TxA and TxB. This loop back mode can be used to
test the near end interface equipment when there is
no transmission line or when there is a suspected
failure of the line.
The all one’s transmit alarm (also known as the blue
alarm or the keep alive signal) can be activated in
conjunction with the digital loop around so that the
transmission line sends an all 1's signal while the
normal data is looped back locally.
The MT8976 also has a per channel loopback mode.
See Table 6 and the following section for more
information.
Per Channel Control Features
In addi tion to th e two master c ontrol words in CSTi0
there are also 24 Per Channel Control Words. These
control words only affect individual DS0 channels.
The correspondence between the channels on CSTi0
and the affected DS0 channel is shown in Fig. 6.
4-36
 Loading...
Loading...