

MITEL MT9075AL, MT9075AP, MT8815AC, MT8815AP, MT8815AE Datasheet
MT9075A
E1 Single Chip Transceiver
Preliminary Information
Features
• Combined PCM 30 framer, Line Interface Unit
(LIU) and link controllers in a 68 pin PLCC or
100 pin MQFP package
• Selectable bit rate data link access with
optional Sa bits HDLC controller (HDLC0) and
channel 16 HDLC controller (HDLC1)
• Enhanced performance monitoring and
programmable error insertion functions
• Low jitter DPLL for clock generation
• Operating under synchronized or free run mode
• Two-frame receive elastic buffer with controlled
slip direction indication
• Selectable transmit or receive jitter attenuator
• Intel or Motorola non-multiplexed parallel
microprocessor interface
• CRC-4 updating algorithm for intermediate path
points of a message-based data link application
• ST-BUS/GCI 2.048 Mbit/s backplane bus for
both data and signalling.
Applications
• E1 add/drop multiplexers and channel banks
• CO and PBX equipment interfaces
• Primary Rate ISDN nodes
• Digital Cross-connect Systems (DCS)
ISSUE 5 December 1997
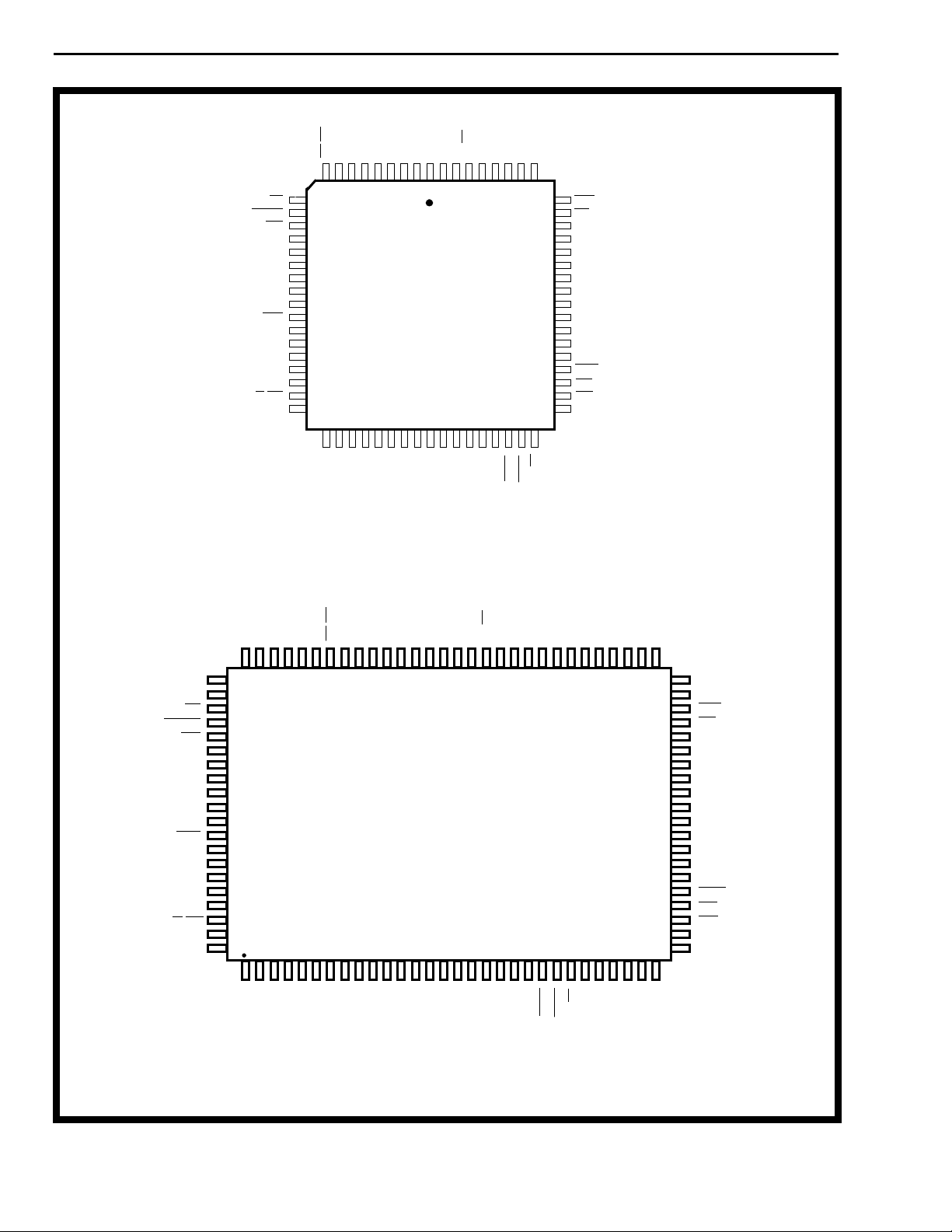
Ordering Information
MT9075AP 68Pin PLCC
MT9075AL 100 Pin MQFP
-40°C to 85°C
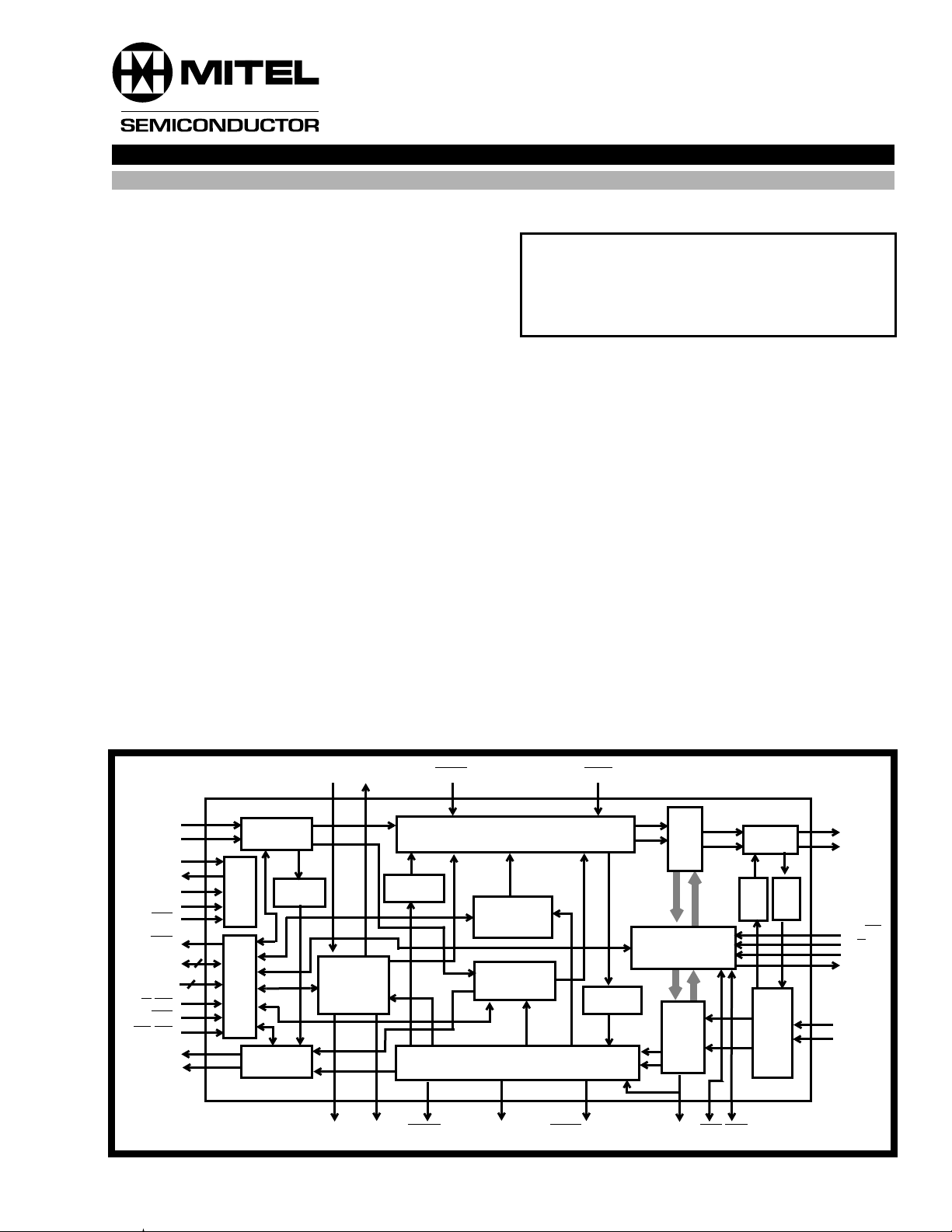
Description
The MT9075A is a single chip device which
integrates an advanced PCM 30 framer with a Line
Interface Unit (LIU).
The framer interfaces to a 2.048 Mbit/s backplane
and provides selectable rate data link access with
optional HDLC controllers for Sa bits and channel 16.
The LIU interfaces the framer functions to the PCM
30 transformer-isolated four wire line.
The MT9075A meets or supports the latest ITU-T
Recommendations including G.703, G.704, G.706,
G.732, G.775, G.796, G.823 for PCM 30, and I.431
for ISDN primary rate. It also meets or supports ETSI
ETS 300 166 and BS 6450.
DSTi
CSTi
Tdi
Tdo
Tms
Tclk
Trst
IRQ
D7~D0
AC4
~AC0
R/W/WR
CS
DS/RD
DSTo
CSTo
ST-BUS
Interface
ST Loop
IEEE
1149.1
Interface
Microprocessor
ST-BUS
Interface
RxDLCLK RxDL
TxDL TxDLCLK
Data Link,
HDLC0,
HDLC1
Alarm Detection, 2 Frame Slip Buffer
TxMF
Transmit Framing, Error and
Test Signal Generation
PL Loop
National
Bit Buffer
CAS
Buffer
Receive Framing, Performance Monitoring,
Figure 1 - Functional Block Diagram
TAIS
DG Loop
RxFP/Rx64kCK
Pulse
Generator
Jitter Attenuator
& Clock Control
Recovery
Clock,Data
E2o
F0b C4bRxMF LOS
Line
Driver
RM
Loop
MT
Rx Equalizer
& Data Slicer
Loop
TTIP
TRING
MS/FR
M/S
OSC1
OSC2
RTIP
RRING
4-129
MT9075A Preliminary Information
RESET
INT/
R/
W/WR
CS
IRQ
VSS
MOT
VDD
AC0
DSTi
CSTi
DS/RD
987654321
10
11
12
D0
13
D1
14
D2
15
D3
16
17
18
IC
19
20
21
D4
22
D5
23
D6
24
D7
25
26
27
AC1
CSTo
DSTo
282930313233343536373839404142
AC2
AC3
AC4
GNDARx
VDD
RTIP
VSS
OSC2
RRING
VDDARx
FR
BL/
OSC1
VSS
VDD
TxDL
TxDLCKICIC
68676665646362
NC
NC
VSS
VDD
RxDCLK
RxDL
TxMF
LOS
61
60
59
58
57
56
55
54
53
52
51
50
49
48
47
46
45
44
43
LS
BS/
RxMF
TAIS
Trst
Tclk
Tms
Tdo
Tdi
GNDATx
TRING
TTIP
VDDATx
VDD
VSS
IC
RxFP/Rx64KCK
F0b
C4b
E2o
68 PIN PLCC
RESET
INT/
R/
NC
NC
CS
IRQ
D0
D1
D2
D3
VSS
IC
MOT
VDD
D4
D5
D6
D7
W/WR
AC0
NC
82
84
86
88
90
92
94
96
98
100
NC
NC
NC
NC
NC
NC
NC
VSS
OSC1
OSC2
VSS
VDD
CSTo
CSTi
DSTo
DSTi
DS/RD
NC
NCNCNC
AC3
AC4
AC2
AC1
RTIP
GNDARx
RRING
VDARx
VDD
VSS
NC
NC
NC
100 PIN MQFP (JEDEC MO-112)
NC
IC
TCDLCK
TXDL
BL/FRVDD
22 24 26 28 30
2018161412108642
IC
IC
RXDL
TxMF
RXDLCK
LOS
IC
RxMF
NC
BL/LS
NCNCNC
NC
525456586062646668707274767880
NCNCNC
NC
NC
50
48
46
44
42
40
38
36
34
32
NC
NC
NC
TAIS
Trst
Tclk
Tms
Tdo
Tdi
GNDATx
TRING
TTIP
VDDATx
VDD
VSS
IC
RxFP/Rx64KCK
F0b
C4b
E2o
NC
4-130
Figure 2 - Pin Connections
Preliminary Information MT9075A
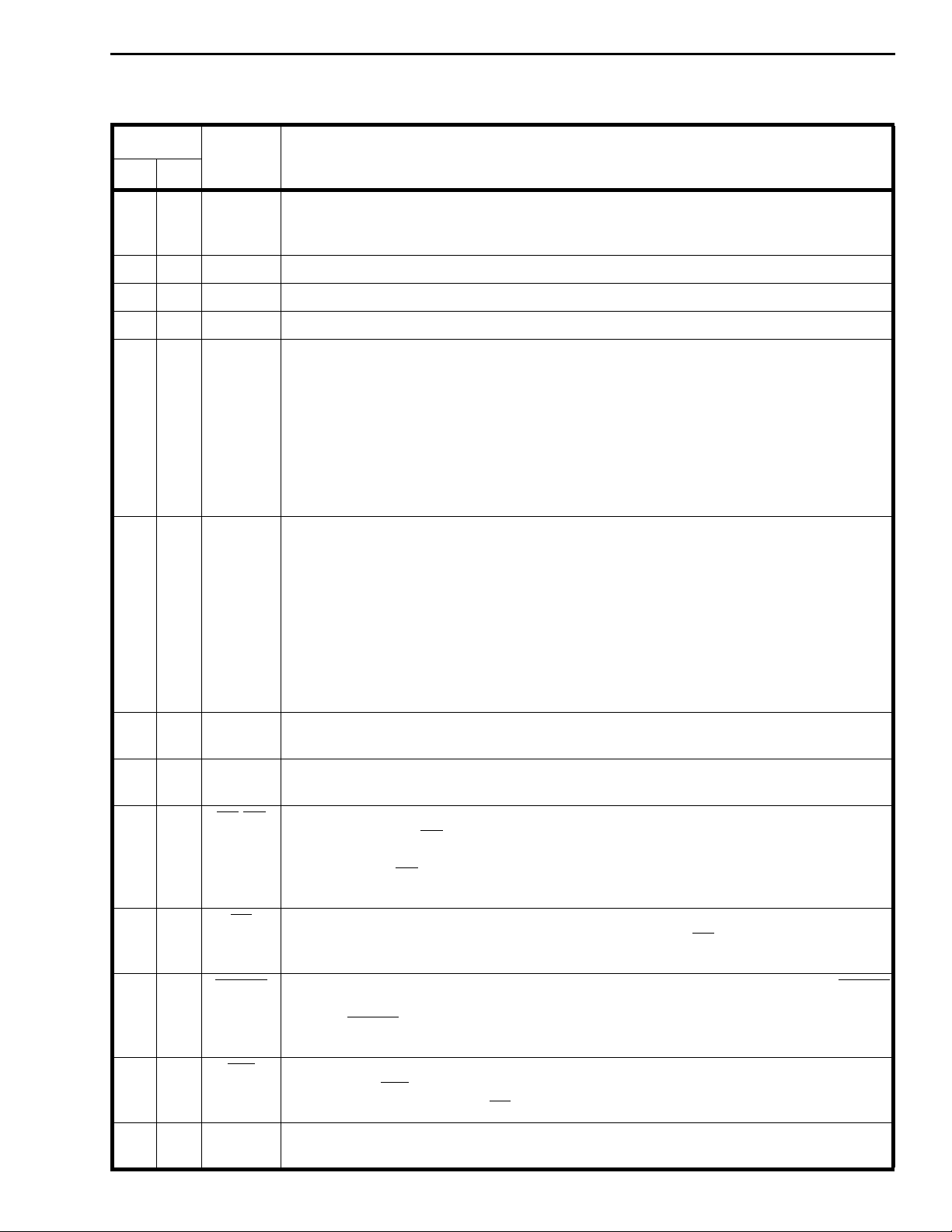
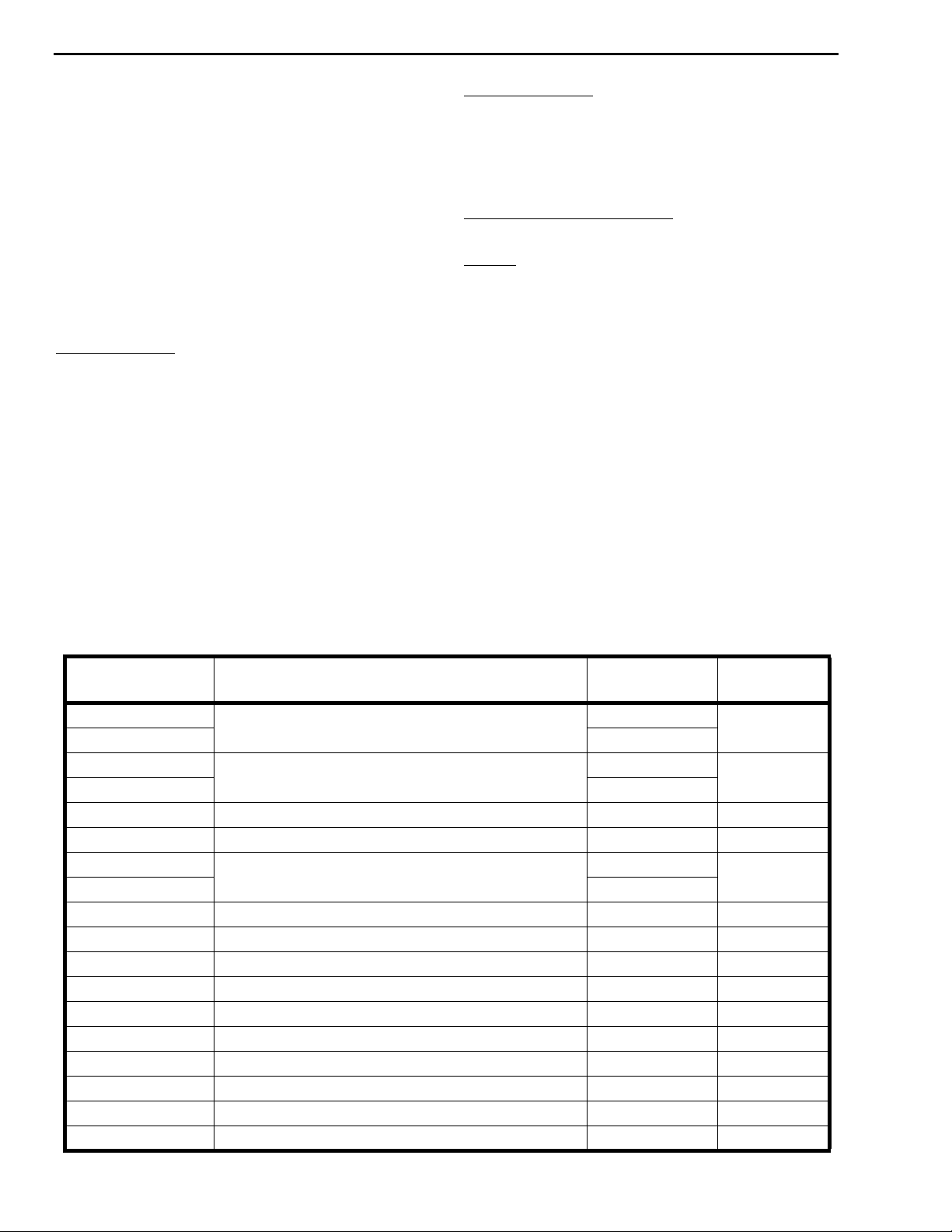
Pin Description
Pin #
Name Description
PLCC MQFP
1 66 OSC1 Oscillator Input. This pin is either connected via a 20.000 MHz crystal to OSC2 where a
crystal is used, or is directly driven when a 20.000 MHz oscillator is employed (see
Figures 6 and 7). Not suitable for TTL compatible oscillator.
2 67 OSC2 Oscillator Output. Not suitable for driving other devices. 368 VSSNegative Power Supply (Input). Digital ground. 469 VDDPositive Power Supply (Input). Digital supply (+5V ± 5%). 5 70 CSTo Control ST-BUS Output. CSTo carries one of the following two serial streams for CAS
and CCS respectively:
(i) A 2.048 Mbit/s ST-BUS status stream which contains the 30 receive signalling nibbles
(ABCDZZZZ or ZZZZABCD). The most significant nibbles of each ST-BUS time slot are
valid and the least significant nibbles of each ST-BUS time slot are tristated when control
bit MSN (page 01H, address 1AH, bit 1) is set to 1. If MSN=0, the position of the valid
and tristated nibbles is reversed.
(ii) A 64 kb/s output when the 64 KHz common channel signalling option is selected
(page 01H, address 1AH, bit 0, 64KCCS =1) for channel 16.
6 71 CSTi Control ST-BUS Input. CSTi carries one of the following two serial streams for CAS and
CCS respectively:
(i) A 2.048 Mbit/s ST-BUS control stream which contains the 30 transmit signalling
nibbles (ABCDXXXX or XXXXABCD) when page 01H, address 1AH, bit 3, RPSIG=0.
When RPSIG=1 this pin has no function. The most significant nibbles of each ST-BUS
time slot are valid and the least significant nibbles of each ST-BUS time slot are ignored
when control bit MSN (page 01H, address 1AH, bit 1) is set to 1. If MSN=0, the position
of the valid and ignored nibbles is reversed.
(ii) A 64 kb/s input when the 64 KHz common channel signalling option is selected (page
01H, address 1AH, bit 0, 64KCCS =1) for channel 16.
7 72 DSTo Data ST-BUS Output. A 2.048 Mbit/s serial stream which contains the 30 PCM or
data channels received on the PCM 30 line.
8 73 DSTi Data ST-BUS Input. A 2.048 Mbit/s serial stream which contains the 30 PCM or data
channels to be transmitted on the PCM 30 line.
974DS/RD Data/Read Strobe (Input).
In Motorola mode (DS), this input is the active low data strobe of the microprocessor
interface.
In Intel mode (RD), this input is the active low read strobe of the microprocessor
interface.
10 83 CS Chip Select (Input). This active low input enables the non-multiplexed parallel
microprocessor interface of the MT9075A. When CS is set to high, the
microprocessor interface is idle and all bus I/O pins will be in a high impedance state.
11 84 RESET RESET (Input). This active low input puts the MT9075A in a reset condition. RESET
should be set to high for normal operation. The MT9075A should be reset after powerup. The RESET pin must be held low for a minimum of 1µsec. to reset the device
properly.
12 85 IRQ Interrupt Request (Output). A low on this output pin indicates that an interrupt request
is presented. IRQ is an open drain output that should be connected to VDD through a
pull-up resistor. An active low CS signal is not required for this pin to function.
13 -1686-89D0 - D3 Data 0 to Data 3 (Three-state I/O). These signals combined with D4-D7 form the
bidirectional data bus of the microprocessor interface (D0 is the least significant bit).
4-131
MT9075A Preliminary Information
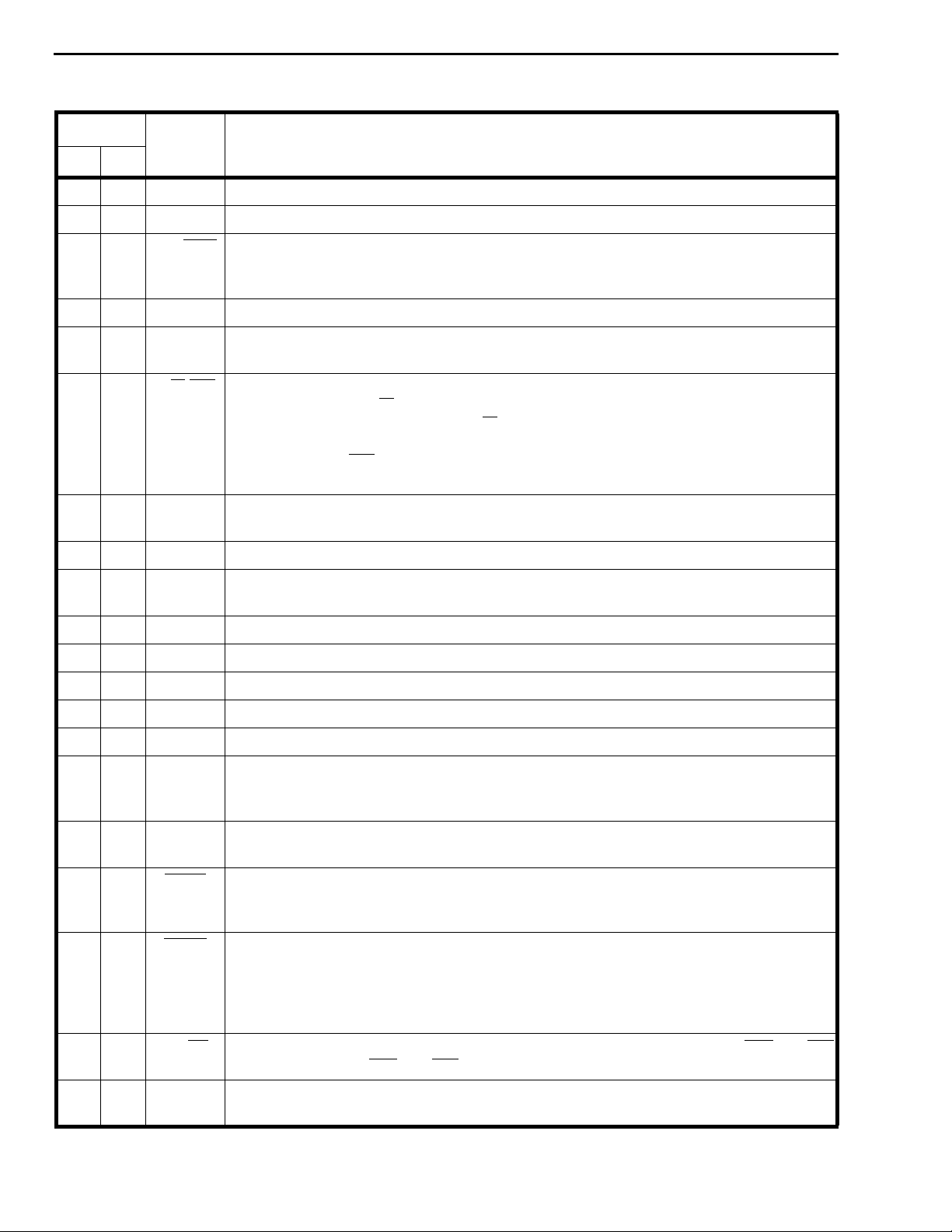
Pin Description (continued)
Pin #
Name Description
PLCC MQFP
17 90 VSS Negative Power Supply (Input). Digital ground.
18 91 IC Internal Connection. Tie to VSS (Ground) for normal operation.
19 92 INT/MOT Intel/Motorola Mode Selection (Input). A high on this pin configures the processor
interface for the Intel parallel non-multiplexed bus type. A low configures the processor
interface for the Motorola parallel non-multiplexed type.
20 93 VDD Positive Power Supply (Input). Digital supply (+5V ± 5%).
21 -2494-97D4 - D7 Data 4 to Data 7 (Three-state I/O). These signals combined with D0-D3 form the
bidirectional data bus of the microprocessor interface (D7 is the most significant bit).
25 98 R/W/WR Read/Write/Write Strobe (Input).
In Motorola mode (R/W), this input controls the direction of the data bus D[0:7] during
a microprocessor access. When R/W is high, the parallel processor is reading data
from the MT9075A. When low, the microprocessor is writing data to the MT9075A.
For Intel mode (WR), this active low write strobe configures the data bus lines as
output.
26 -3099,
8-11
31 12 GNDARx Receive Analog Ground (Input). Analog ground for the LIU receiver.
323313
14
34 15 VDDARx Receive Analog Power Supply (Input). Analog supply for the LIU receiver (+5V ± 5%).
35 16 VDD Positive Power Supply (Input). Digital supply (+5V ± 5%).
36 17 VSS Negative Power Supply (Input). Digital ground.
37 18 IC Internal Connection. Must be left open for normal operation.
38 19 IC Internal Connection. Must be left open for normal operation.
39 20 RxDLCLK Receive Data Link Clock (Output). A gapped clock signal derived from a 2.048 Mbit/s
40 21 RxDL Receive Data Link (Output). A 2.048 Mbit/s data stream containing received line data
41 22 TxMF Transmit Multiframe Boundary (Input). An active low input used to set the transmit
42 23 RxMF Receive Multiframe Boundary (Output). An output pulse delimiting the received
AC0 -
AC4
RTIP
RRING
Address/Control 0 to 4 (Inputs). Address and control inputs for the microprocessor
interface. AC0 is the least significant input.
Receive TIP and RING (Inputs). Differential inputs for the receive line signal - must be
transformer coupled (See Figure 4).
clock, available for an external device to clock in RxDL data (at 4, 8, 12, 16 or 20 kHz) on
the rising edge.
after HDB3 decoding. This data is clocked out with the rising edge of E2o.
multiframe boundary (CAS or CRC multiframe). The MT9075A will generate its own
multiframe if this pin is held high. This input is usually pulled high for most applications.
multiframe boundary. The next frame output on the data stream (DSTo) is basic frame
zero on the PCM 30 link. This receive multiframe signal can be related to either the
receive CRC multiframe (page 01H, address 10H, bit 6, MFSEL=1) or the receive
signalling multiframe (MFSEL=0).
43 24 BS/LS System Bus Synchronous/Line Synchronous Selection (Input). If high, C4b and F0b
will be inputs; if low, C4b and F0b will be outputs.
44 32 E2o 2.048 MHz Extracted Clock (Output). The clock extracted from the received signal
and used internally to clock in data received on RTIP and RRING.
4-132
Preliminary Information MT9075A
Pin Description (continued)
Pin #
Name Description
PLCC MQFP
45 33 C4b 4.096 MHz System Clock (Input/Output). C4b is the clock for the ST-BUS sections and
transmit serial PCM data of the MT9075A. In the free-run (BL/FR=0) or line synchronous
mode (BL/FR=1 and BS/LS=0) this signal is an output, while in the system bus
synchronous mode (BS/LS=1) this signal is an input clock.
46 34 F0b Frame Pulse (Input/Output). This is the ST-BUS or GCI frame synchronization
signal, which delimits the 32 channel frame of CSTi, CSTo, DSTi, DSTo and the
PCM30 link. In the free-run (BL/FR=0) or loop synchronous mode (BL/FR=1 and BS/
LS=0) this signal is an output, while in the Bus Synchronous mode (BL/FR=1 and BS/
LS=0) this signal is an input. The GCI/ST-BUS selection is made under software control.
Page 02H, address 13H, bit 0, GCI/ST=1 selects GCI frame pulse; GCI/ ST=0 selects STBUS.
47 35 RxFP/
Rx64KCK
Receive Frame Pulse/Receive CCS Clock (Output). An 8kHz pulse signal, which is
low for one extracted clock period. This signal is synchronized to the receive PCM 30
basic frame boundary.
When 64KCCS (page 01H, address 1AH, bit 0) is set to 1, this pin outputs a 64 kHz clock
derived by dividing down the e xtracted 2.048 MHz clock. This clock is used to clock CCS
data out of pin CSTo in the CCS mode.
48 36 IC Internal Connection. Must be left open for normal operation.
49 37 V
50 38 V
51 39 VDD
Negative Power Supply (Input). Digital ground.
SS
Positive Power Supply (Input). Digital supply (+5V ± 5%).
DD
Transmit Analog Power Supply (Input). Analog supply for the LIU transmitter (+5V ±
ATx
5%).
525340
41
54 42 GND
TTIP
TRING
ATx
Transmit TIP and RING (Outputs). Differential outputs for the transmit line signal - must
be transformer coupled (See Figure 4).
Transmit Analog Ground (Input). Analog ground for the LIU transmitter. 55 43 Tdi IEEE 1149.1 Test Data Input. If not used, this pin should be pulled high. 56 44 Tdo IEEE 1149.1 Test Data Output. If not used, this pin should be left unconnected. 57 45 Tms IEEE 1149.1 Test Mode Selection (Input). If not used, this pin should be pulled high. 58 46 Tclk IEEE 1149.1 Test Clock Signal (Input). If not used, this pin should be pulled high. 59 47 Trst IEEE 1149.1 Reset Signal (Input). If not used, this pin should be held low. 60 48 TAIS Transmit Alarm Indication Signal (Input). An active low on this input causes the
MT9075A to transmit an AIS (all ones signal) on TTIP and TRING pins. TAIS should be
set to high for normal data transmission.
61 57 LOS Loss of Signal or Synchronization (Output). When high, and LOS/LOF (page 02H
address 13H bit 2) is zero, this signal indicates that the receiv e portion of the MT9075A is
either not detecting an incoming signal (bit LLOS on page 03H address 18H is one) or is
detecting a loss of basic frame alignment condition (bit SYNC on page 03H address 10H
is one). If LOS/LOF=1, a high on this pin indicates a loss of signal condition.
62 58 IC Internal Connection. Tie to VSS (Ground) for normal operation.
59 NC No Connection. Leave open for normal operation.
63 60 IC Internal Connection. Tie to VSS (Ground) for normal operation.
4-133
MT9075A Preliminary Information
Pin Description (continued)
Pin #
Name Description
PLCC MQFP
64 61 TxDLCLK Transmit Data Link Clock (Output). A gapped clock signal derived from a gated 2.048
Mbit/s clock for transmit data link at 4, 8, 12, 16 or 20 kHz. The transmit data link data
(TxDL) is clocked in on the rising edge of TxDLCLK. TxDLCLK can also be used to clock
DL data out of an external serial controller.
65 62 TxDL Transmit Data Link (Input). An input serial stream of transmit data link data at 4, 8, 12,
16 or 20 kbit/s composed of 488ns-wide bit cells which are multiplexed into selected
national bits of the PCM 30 transmit signal.
66 63 BL/FR BusorLine/Freerun (Input). If this pin is set to high, the MT9075A is in the System Bus
or Line Synchronous mode depending on the BS/LS pin. If low, the MT9075A is in the
free run mode.
67 64 VDD Positive Power Supply (Input). Digital supply (+5V ± 5%).
68 65 VSS Negative Power Supply (Input). Digital ground.
1-7,
25-31,
49-56,
75-82,
100
NC No Connection. Leave open for normal operation.
4-134

Preliminary Information MT9075A
Device Overview
The MT9075A is an advanced PCM 30 framer with
an on-chip Line Interface Unit (LIU) that meets or
supports the latest ITU-T Recommendations for
PCM 30 and ISDN primary rate including G.703,
G.704, G.706, G.775, G.796, G.732, G.823 and
I.431. It also meets or supports the layer 1
requirements of ETSI ETS 300 166 and BS6450.
The Line Interface Unit (LIU) of the MT9075A
interfaces the digital framer functions to the PCM 30
transformer-isolated four wire line. The transmit
portion of the MT9075A LIU consists of a digital
buffer, a digital-to-analog converter and a differential
line driver. The receiver portion of the LIU consists of
an input signal peak detector, an optional two-stage
equalizer, a smoothing filter, data and clock slicers
and a clock extractor. The optional equalizer allows
for error free reception of data with a line attenuation
of up to 20 dB.
The LIU also contains a Jitter Attenuator (JA), which
can be configured to either the transmit or receive
path. The JA will attenuate jitter from 2.5 Hz and roll-
off at a rate of 20 dB/decade. Its intrinsic jitter is less
than 0.02 UI.
The digital portion of the MT9075A connects an
incoming stream of time multiplexed PCM channels
(at 2.048 Mbit/s) to the transmit payload of the E1
trunk, while the receive payload is connected to the
ST-BUS or GCI 2.048 Mbit/s backplane bus for both
data and signalling. Control, reporting and
conditioning of the line is implemented via a parallel
microprocessor interface. The MT9075A framing
algorithm allows automatic interworking between
CRC-4 and non-CRC-4 interfaces.
The Sa bits can be accessed by the MT9075A in the
following four ways:
data link maintenance channel to be modified and
updates the CRC-4 remainder bits to reflect the
modification. All channel, framing and signalling data
passes through the device unaltered. This is useful
for intermediate point applications of a PCM 30 link
where the data link data is modified, but the error
information transported by the CRC-4 bits must be
passed to the terminating end. In the receive
transparent mode, the received line data is
channelled to DSTo with framing operations
disabled, consequently, the data passes through the
slip buffer and drives DSTo with an arbitrary
alignment.
The MT9075A has a comprehensive suite of status,
alarm, performance monitoring and reporting
features. These include counters for BPVs, CRC
errors, E-bit errors, errored frame alignment signals,
BERT, and RAI and continuous CRC errors. Also,
included are transmission error insertion for BPVs,
CRC-4 errors, frame and non-frame alignment signal
errors, payload errors and loss of signal errors.
A complete set of loopback functions is provided,
which includes digital, remote, ST-BUS, payload,
metallic, local and remote time slot.
The MT9075A also contains a comprehensive set of
maskable interrupts and an interrupt vector function.
Interrupt sources consist of synchronization status,
alarm status, counter indication and overflow, timer
status, slip indication, maintenance functions and
receive channel associated signalling bit changes. A
special set of maskable interrupts have been
included for sensing changes in the state of the
national use bits and nibbles, in compliance to
emerging ETS requirements.
The MT9075A system timing may be slaved to the
line, operated in freerun mode, or controlled by an
external timing source.
• Single byte registers;
• Five byte transmit and receive national bit
buffers;
• Data link pins TxDL, RxDL, RxDLCLK and
TxDLCLK;
• HDLC Controller with a 128 byte FIFO.
The MT9075A operates in either termination or
transparent modes selectable via software control. In
the termination mode the CRC-4 calculation is
performed as part of the framing algorithm. In the
transmit transparent mode, no framing or signalling
is imposed on the data transmit from DSTi on the
line. In addition, the MT9075A optionally allows the
4-135
MT9075A Preliminary Information
Functional Description
MT9075A Line Interface Unit (LIU)
Receiver
The receiver portion of the MT9075A LIU consists of
an input signal peak detector, an optional two-stage
equalizer, a smoothing filter, adaptive threshold
comparators, data and clock slicers, and a clock
extractor. Receive equalization gain can be set via
software control or it can be determined
automatically by the peak detectors.
The output of the receive equalizer is conditioned by
a smoothing filter and is passed on to the clock and
data slicer. The clock slicer output signal drives a
phase locked loop, which generates the extracted
clock (E2o). This extracted clock is used to sample
the output of the data comparator.
The LOS output pin (pin 61 in PLCC, pin 57 in
MQFP) is user selectable, by setting control bit LOS/
LOF (page 02H, register 13H, bit 2), to indicate a
loss of signal or loss of basic frame synchronization
condition. In addition, a status bit, LLOS (bit 4 in
page 3, register 18H) is provided to indicate the
presence of a loss signal condition. The occurrence
of a loss signal condition is defined as per I.431, i.e.,
when the incoming signal amplitude is more than 20
dB below the nominal amplitude for a time duration
of at least 1 ms.
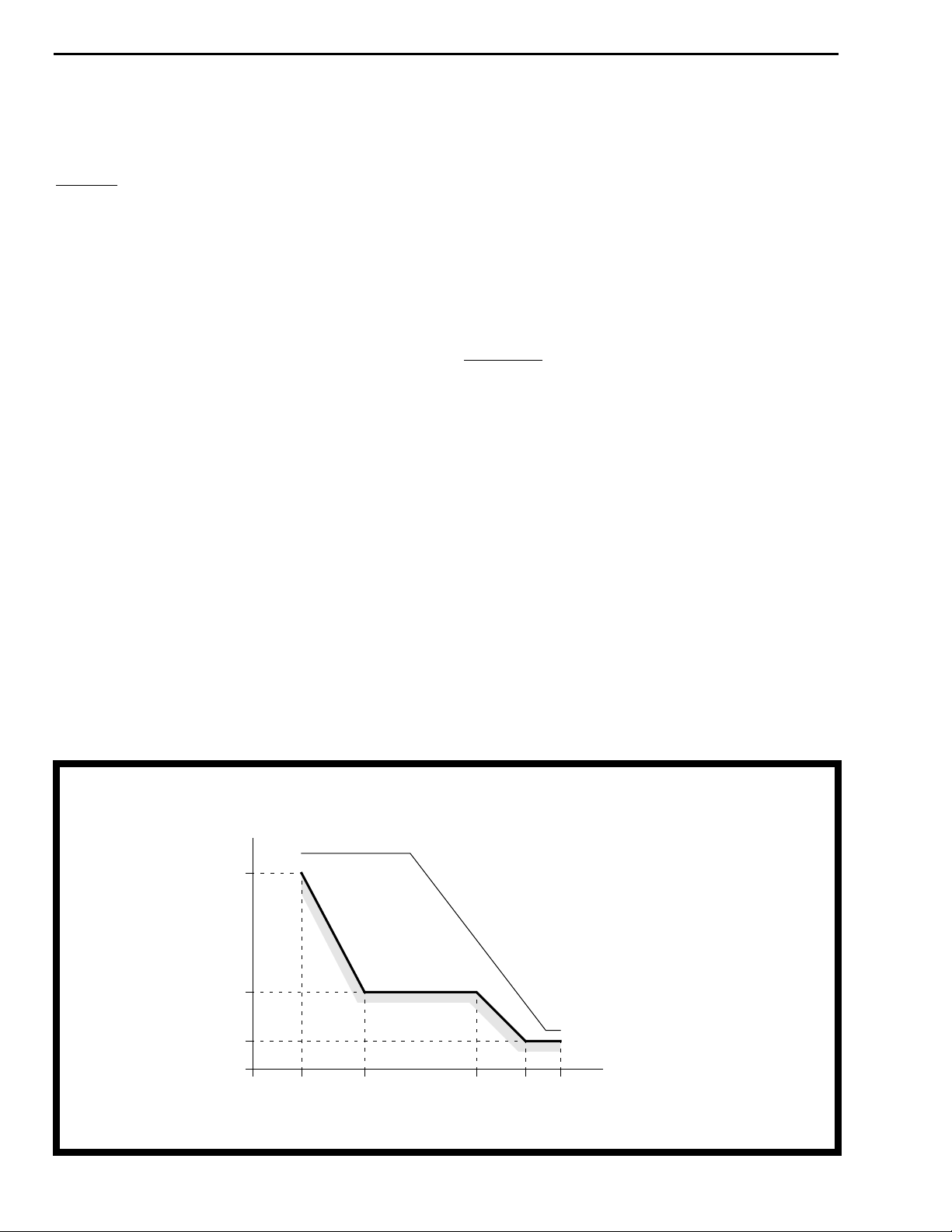
The receive LIU circuit requires a terminating
resistor of either 120Ω or 75Ω across the device side
of the receive1:1 transformer as shown in Figure 4.
The return loss of the receiver, complying with
G.703, is greater than:
• 12 dB from 51 kHz to 102 kHz;
• 18 dB from 102 kHz to 2048 kHz;
• 14 dB from 2048 kHz to 3072 kHz.
The jitter tolerance of the MT9075A clock extractor
circuit exceeds the requirements of G.823 (Figure 3).
Transmitter
The MT9075A differential line driver is designed to
drive a 1:2 step-up transformer (see Figure 4). In
120 Ω twisted pair applications, a 0.68 uF capacitor is
required between the TTIP and the transmit
transformer. For 75 Ω coaxial cable applications, a
0.68 uF capacitor and two 2.2 Ω series resistors are
required between the transformer and the TTIP and
TRING output pins as shown in Figure 4.
4-136
Peak to Peak
Jitter Amplitude
(log scale)
18UI
MT9075A
Tolerance
1.5UI
0.2UI
Jitter Frequency
(log scale)
1.667Hz 20Hz 2.4kHz 18kHz 100kHz
Figure 3 - Typical Jitter Tolerance
Preliminary Information MT9075A
Tx
TTIP
TRING
MT9075A
RTIP
RRING
0.68uF
2.4Ω*
2.4Ω*
1:2
* 2.4 Ω resistors are only
required with 75 Ωcoax
1:1
120Ω/
75Ω
Rx
Figure 4 - Analog Line Interface
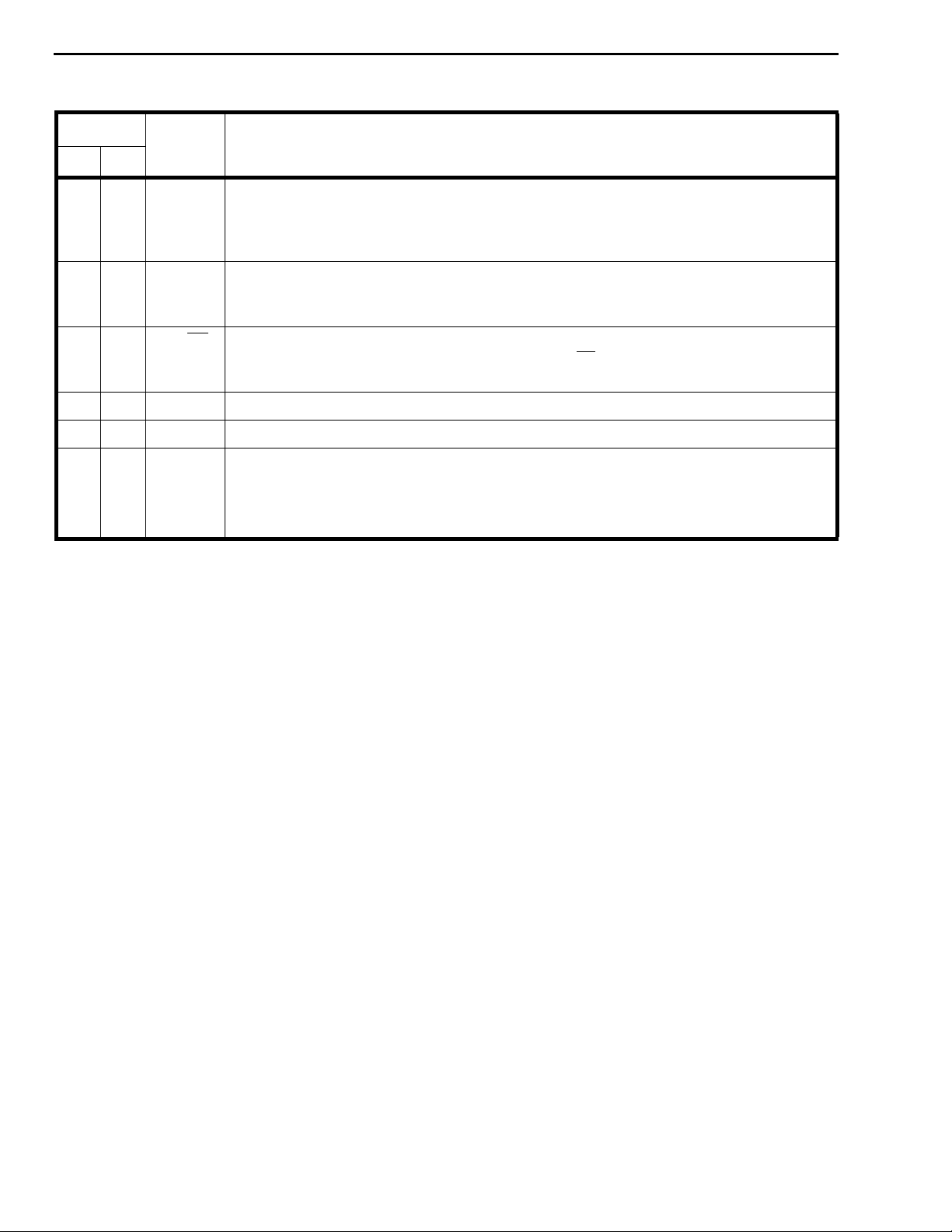
The template for the transmitted pulse, as specified in
G703, is shown in Figure 5. The nominal peak voltage
of a mark is 3 volts for 120 Ω twisted pair applications
and 2.37 volts for 75 Ω coax applications. The ratio of
the amplitude of the transmit pulses generated by TTP
and TRING is between 0.95 and 1.05.
Percentage of
Nominal Peak
120
110
100
90
80
269nS
244nS
194nS
Manufacturer For Tx For Rx
Filtran 5721-1 5721-2
Pulse Engineering PE-65351 PE-64934
Midcom 50027 50026
OSEC 02934/A 02935/A
Table 1 - Transformer Manufacturers and Part
Numbers
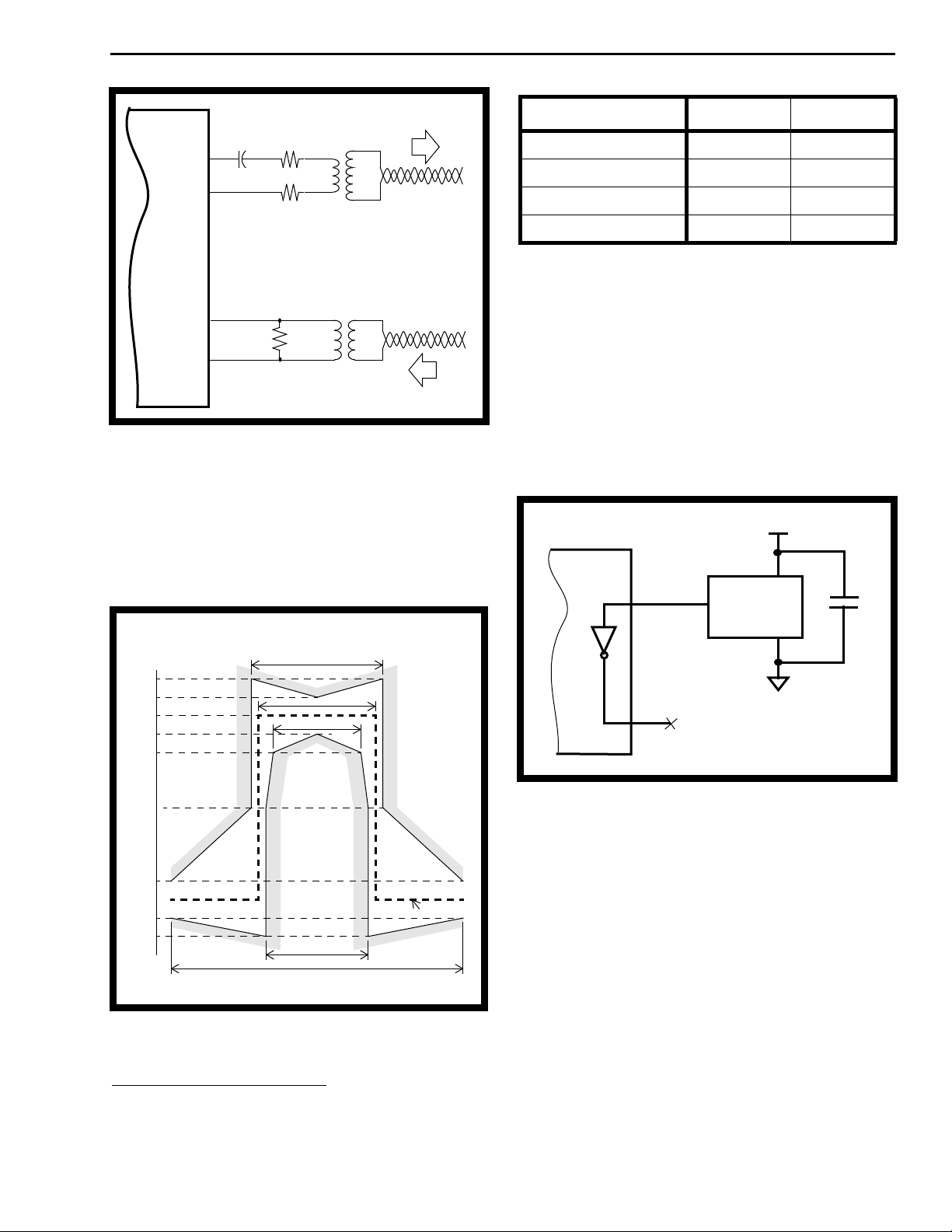
Timing Source
The MT9075A can use either a clock or crystal,
connecting to pins OSC1 and OSC2, as the
reference timing source.
Figure 6 shows a 20MHz clock oscillator, with 50ppm
tolerance, directly connected to the OSC1 pin of the
MT9075A.
+5V
MT9075A
OSC1
OSC2
20MHz
OUT
Vdd
GND
.1µF
(open)
50
10
0
-10
-20
219nS
488nS
Nominal Pulse
Figure 5 - Pulse Template (G.703)
Transformer Recommendation
Table 1 shows a list of recommended transformers
for the MT9075A line interface.
Figure 6 - Clock Oscillator Circuit
Alternatively, a crystal oscillator may be used. A
complete oscillator circuit made up of a crystal,
resistors and capacitors is shown in Figure 7. The
crystal specification is as follows.
Frequency: 20MHz
Tolerance: 50ppm
Oscillation Mode: Fundamental
Resonance Mode: Parallel
Load Capacitance: 32pF
Maximum Series Resistance: 35
Ω
Approximate Drive Level: 1mW
4-137
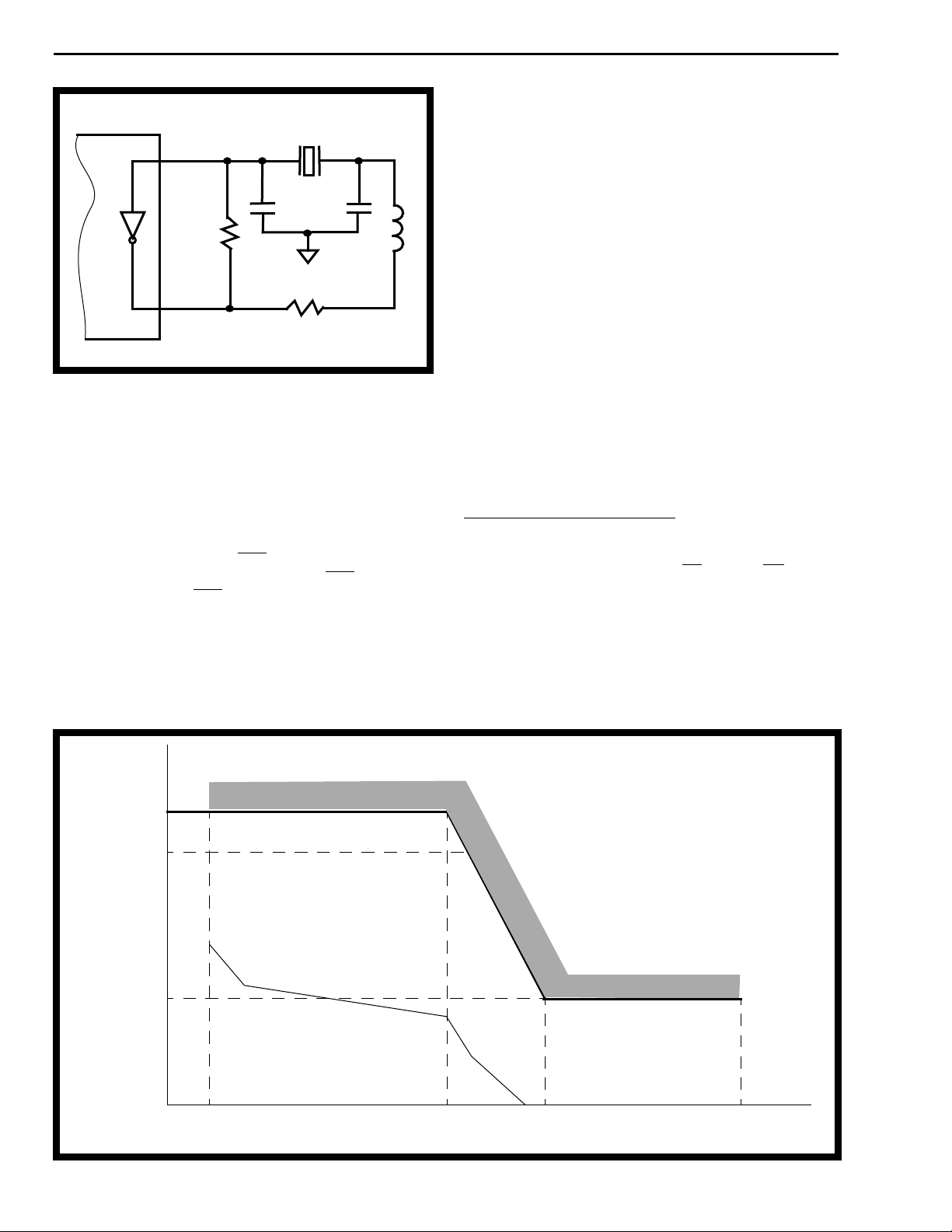
MT9075A Preliminary Information
jittered clock is used to clock the data out of the
FIFO.
MT9075A
OSC1
1MΩ
OSC2
Note: the 1µH inductor is optional
Figure 7 - Crystal Oscillator Circuit
56pF
20MHz
100Ω
39pF
1µH*
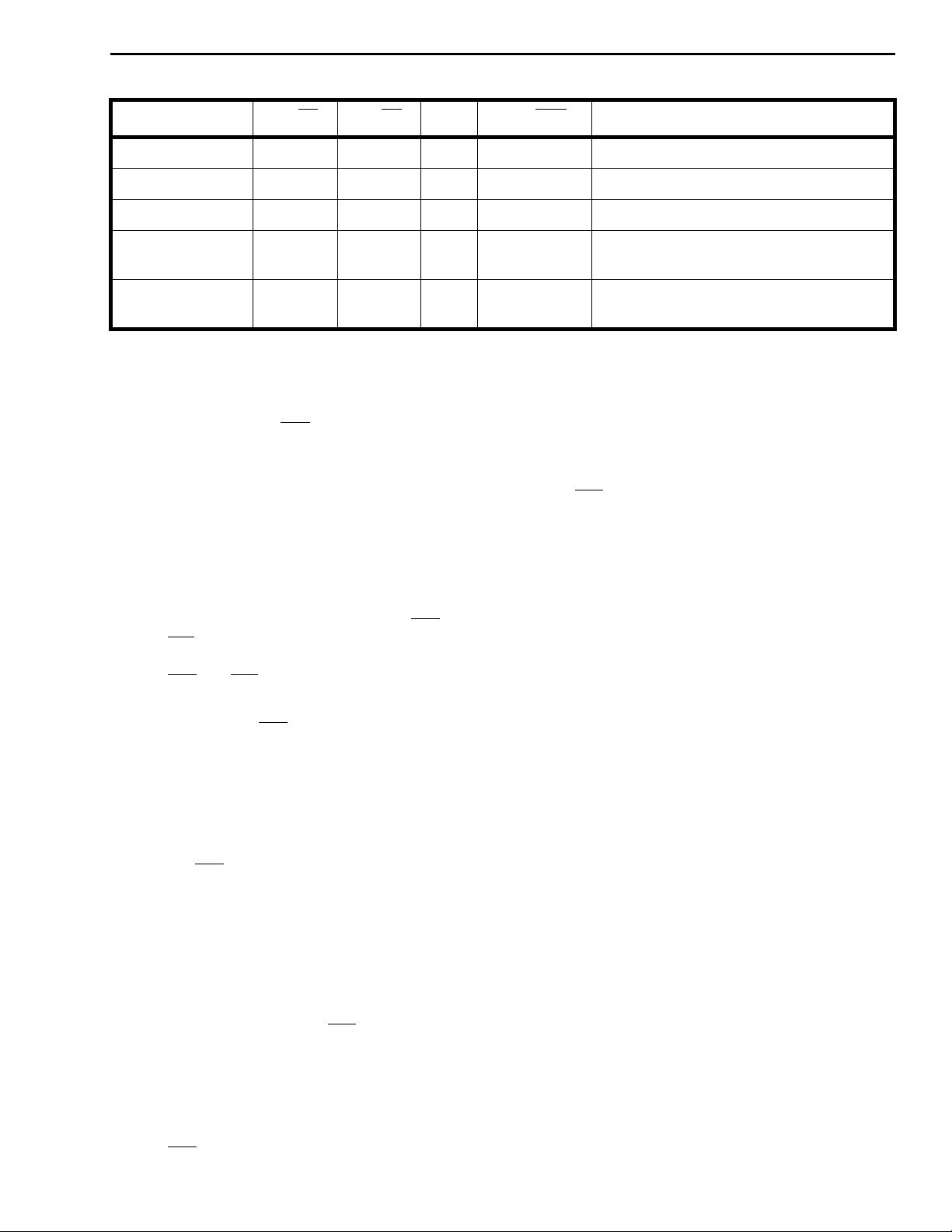
The JA meets the jitter transfer characteristics as
proposed by G.823 and the relevant
recommendations as shown in Figure 8. The JA
FIFO depth can be selected to be from 16 to 128
words deep, in multiples of 16 (2-bit) words. Its read
pointer can be centered by changing the JFC bit
(address 18H of page 02H) to provide maximum jitter
tolerance. If the read pointer should come within 4
bits of either end of the FIFO, the read clock
frequency will be increased or decreased by 0.0625
UI to correct the situation. The maximum time
needed to centre is T
= 3904∗Depth ns, where
max
Depth is the selected JA FIFO depth. During this
time the JA will not attenuate jitter.
Jitter Attenuator (JA)
The MT9075A Jitter Attenuator (JA), which consists
of a Phase Locked Loop (PLL) and data FIFO, can
be used on either the transmit or receive side of the
interface.
On the transmit side the C4b signal clocks the data
into the FIFO, the PLL de-jitters the C4b clock and
the resulting clean C4b signal clocks the data out of
the FIFO.
When the JA is selected on the receive side, the
extracted clock signal clocks the data into the FIFO.
The same clock feeds the PLL and the resulting de-
dB
0.5
0
To ensure normal operation, the JA FIFO depth
should be set in software to be larger than the
anticipated maximum UI of input jitter.
Clock Jitter Attenuation Modes
MT9075A has three basic jitter attenuation modes of
operation, selected by the BS/LS and BL/FR control
pins.
• System Bus Synchronous Mode.
• Line Synchronous Mode.
• Free-run mode.
4-138
-20 dB/decade
JITTER ATTENUATION (dB)
-19.5
10 40 400 10K
Frequency (Hz)
Figure 8 - Typical Jitter Attenuation Curve
Preliminary Information MT9075A
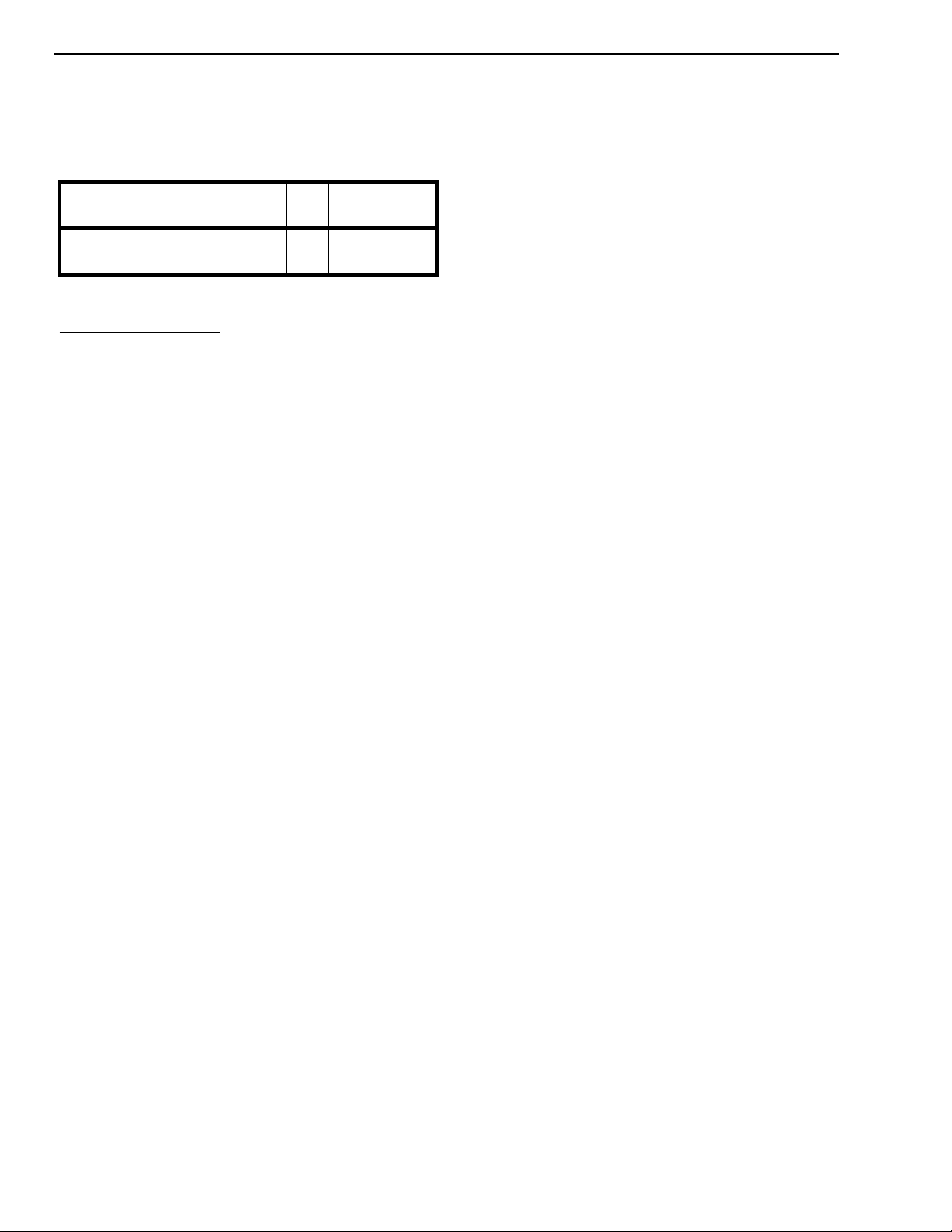
Mode Name BS/LS BL/FR JAS JAT/JAR Note
SysBusSync1 1 1 1 1 JA on Tx side; No JA on Rx side
SysBusSync2 1 1 1 0 JA on Rx side; No JA on Tx side
SysBusSync3 1 1 0 x No JA on Tx or Rx side
Line
Synchronous
Free-Run x 0 x x In free-run mode JA will be automatically
Depending on the mode selected, the Jitter
Attenuator (JA) can attenuate either transmit clock
jitter or receive clock jitter, or be disconnected.
Control bits JAS, JAT/JAR (address 18H of page
02H) determine the JA selection under certain
modes. Table 2 shows the configuration of related
control pins and control bits required to place the
MT9075A in the appropriate jitter attenuation mode.
Referring to the mode names given in Table 2, the
basic operation of the jitter attenuation modes is
summarized as follows:
•In
•In
•In
•In
•In
SysBusSync
F0b are always configured as inputs, while in
the Line Synchronous and Free-Run modes
C4b and F0b are configured as outputs.
SysBusSync1
applied to C4b. The applied clock is
dejittered by the internal PLL before being
used to transmit data. The clock extracted
(with no jitter attenuation performed) from
the receive data can be monitored on pin
E2o.
SysBusSync2
pin C4b is assumed to be jitter-free and is
directly used to transmit data. The internal
PLL is used to dejitter the extracted receive
clock. The dejittered receive clock is output
on pin E2o.
SysBusSync3
is applied to either the transmit or receive
clocks. The transmit data is synchronized to
clock applied to pin C4b. The extracted
receive clock is not dejittered and is supplied
directly to the E2o output.
Line Synchronous
extracted from the receive data is dejittered
using the internal PLL and then output on pin
C4b. Pin E2o provides the extracted receive
0 1 x x By default, JA is on the receive side.
Controls bits need not be selected.
disconnected
Table 2 - Selection of Clock Jitter Attenuation Modes
clock before it has been dejittered. The
transmit data is synchronous to the clean
receive clock.
(1-3) modes, pins C4b and
mode, an external clock is
mode, the clock applied to
mode, no jitter attenuation
mode, the clock
•In
The PCM 30 Interface
PCM 30 (E1) basic frames are 256 bits long and are
transmitted at a frame repetition rate of 8000 Hz,
which results in an aggregate bit rate of 256 bits x
8000/sec = 2.048 Mbits/sec. The actual bit rate is
2.048 Mbits/sec +/-50 ppm encoded in HDB3 format.
The HDB3 control bit (page 01H, address 15H, bit 5)
selects either HDB3 encoding or alternate mark
inversion (AMI) encoding. Basic frames are divided
into 32 time slots numbered 0 to 31, see Figure 31.
Each time slot is 8 bits in length and is transmitted
most significant bit first (numbered bit 1). This results
in a single time slot data rate of 8 bits x 8000/sec. =
64 kbits/sec.
It should be noted that the Mitel ST-BUS also has 32
channels numbered 0 to 31, but the most significant
bit of an eight bit channel is numbered bit 7 (see
Mitel Application Note MSAN-126). Therefore, STBUS bit 7 is synonymous with PCM 30 bit 1; bit 6
with bit 2: and so on (Figure 31).
PCM 30 time slot 0 is reserved for basic frame
alignment, CRC-4 multiframe alignment and the
communication of maintenance information. In most
configurations time slot 16 is reserved for either
Channel Associated Signalling (CAS or ABCD bit
signalling) or Common Channel Signalling (CCS).
The remaining 30 time slots are called channels and
carry either PCM encoded voice signals or digital
Free-Run
synchronized to the internally generated
clock. The internal clock is output on pin
C4b. The clock signal extracted from the
receive data is not dejittered and is output
directly on pin E2o.
mode the transmit data is
4-139
MT9075A Preliminary Information
data. Channel alignment and bit numbering is
consistent with time slot alignment and bit
numbering. However, channels are numbered 1 to 30
and relate to time slots as per Table 3.
PCM 30
Timeslot
Voice/Data
Channels
Table 3 - Time Slot to Channel Relationship
Basic Frame Alignment
Time slot 0 of every basic frame is reserved for basic
frame alignment and contains either a Frame
Alignment Signal (FAS) or a Non-Frame Alignment
Signal (NFAS). FAS and NFAS occur in time slot zero
of consecutive basic frames as shown in Table 7. Bit
two is used to distinguish between FAS (bit two = 0)
and NFAS (bit two = 1).
Basic frame alignment is initiated by a search for the
bit sequence 0011011 which appears in the last
seven bit positions of the FAS, see the Frame
Algorithm section. Bit position one of the FAS can be
either a CRC-4 remainder bit or an international
usage bit.
0 1 2 3...15 16 17 18 19...31
x 1 2 3...15 x 16 17 18...30
CRC-4 Multiframing
The primary purpose for CRC-4 multiframing is to
provide a verification of the current basic frame
alignment, although it can also be used for other
functions such as bit error rate estimation. The CRC4 multiframe consists of 16 basic frames numbered 0
to 15, and has a repetition rate of 16 frames X 125
microseconds/frame = 2 msec.
CRC-4 multiframe alignment is based on the 001011
bit sequence, which appears in bit position one of the
first six NFASs of a CRC-4 multiframe.
The CRC-4 multiframe is divided into two
submultiframes, numbered 1 and 2, which are each
eight basic frames or 2048 bits in length.
The CRC-4 frame alignment verification functions as
follows. Initially, the CRC-4 operation must be
activated and CRC-4 multiframe alignment must be
achieved at both ends of the link. At the local end of
a link, all the bits of every transmit submultiframe are
passed through a CRC-4 polynomial (multiplied by
X4 then divided by X4 + X + 1), which generates a
four bit remainder. This remainder is inserted in bit
position one of the four FASs of the following
submultiframe before it is transmitted (see Table 7).
Bits four to eight of the NFAS (i.e., Sa4 - Sa8) are
additional spare bits which may be used as follows:
•Sa4 to Sa8 may be used in specific point-to-point
applications (e.g. transcoder equipments
conforming to G.761).
•Sa4 may be used as a message-based data link
for operations, maintenance and performance
monitoring.
•Sa5to Sa8 are for national usage.
A maintenance channel or data link at 4,8,12,16,or
20 kHz for selected Sa bits is provided by the
MT9075A to implement these functions. Note that for
simplicity all Sa bits including Sa4 are collectively
called national bits throughout this document.
Bit three (designated as “A”), the Remote Alarm
Indication (RAI), is used to indicate the near end
basic frame synchronization status to the far end of a
link. Under normal operation, the A (RAI) bit should
be set to 0, while in alarm condition, it is set to 1.
Bit position one of the NFAS can be either a CRC-4
multiframe alignment signal, an E-bit or an
international usage bit. Refer to an approvals
laboratory and national standards bodies for specific
requirements.
The submultiframe is then transmitted and, at the far
end, the same process occurs. That is, a CRC-4
remainder is generated for each received
submultiframe. These bits are compared with the bits
received in position one of the four FASs of the next
received submultiframe. This process takes place in
both directions of transmission.
When more than 914 CRC-4 errors (out of a possible
1000) are counted in a one second interval, the
framing algorithm will force a search for a new basic
frame alignment. See Frame Algorithm section for
more details.
The result of the comparison of the received CRC-4
remainder with the locally generated remainder will
be transported to the far end by the E-bits.
Therefore, if E1 = 0, a CRC-4 error was discovered in
a submultiframe 1 received at the far end; and if E2 =
0, a CRC-4 error was discovered in a submultiframe
2 received at the far end. No submultiframe
sequence numbers or re-transmission capabilities
are supported with layer 1 PCM 30 protocol. See
ITU-T G.704 and G.706 for more details on the
operation of CRC-4 and E-bits.
4-140
Preliminary Information MT9075A
SYNC CRCSYN CRCIWK Recommended Transmit RAI setting
0 0 1 Set transmit RAI continuously low.
0 0 0 This state cannot exist with AUTC set low.
1 1 x Set transmit RAI continuously high.
0 1 1 Transmit a flickering (0 to 1 to 0) RAI every 8 milliseconds.
0 1 0 The link is a CRC to non CRC link. Set transmit RAI to the appropriate
stable state (usually low).
Table 4 - Transmit RAI setting for CRC to non CRC interworking with AUTC set low
There are two CRC multiframe alignment algorithm
options selected by the AUTC control bit (address
11H, page 01H). When AUTC is zero and CSYN is
zero, automatic CRC-to-non-CRC interworking is
selected, if CRC-4 multiframe alignment is not found
in 400 msec, the status bit CRCIWK (page 03H,
address 10H) is set low and no further attempt to
achieve CRC-4 synchronization is made as long as
the device remains in terminal frame
synchronization. When AUTC is one and CSYN is
zero, a reframe will be initiated every 8 msec if the
MT9075A achieves terminal frame synchronization,
but fails to achieve CRC-4 synchronization.
The control bit for transmit E bits (TE, bit 4 at
address 16H of page 01H) will have the same
function in both states of AUTC. That is, when CRC-4
synchronization is not achieved the state of the
transmit E-bits will be the same as the state of the TE
control bit. When CRC-4 synchronization is achieved
the transmit E-bits will function as per ITU-T G.704.
Table 4 outlines the recommended setting of the
TALM control bits of the MT9075A.
which occurs in the most significant nibble of time
slot 16 of basic frame 0 of the CAS multiframe. Bit 6
of this time slot is the multiframe alarm bit (usually
designated Y). When CAS multiframing is acquired
on the receive side, the transmit Y-bit is zero; when
CAS multiframing is not acquired, the transmit Y-bit is
one. Bits 5, 7 and 8 (usually designated X) are spare
bits and are normally set to one if not used.
Time slot 16 of the remaining 15 basic frames of the
CAS multiframe (i.e., basic frames 1 to 15) are
reserved for the ABCD signalling bits for the 30
payload channels. The most significant nibbles are
reserved for channels 1 to 15 and the least
significant nibbles are reserved for channels 16 to
30. That is, time slot 16 of basic frame 1 has ABCD
for channel 1 and 16, time slot 16 of basic frame 2
has ABCD for channel 2 and 17, through to time slot
16 of basic frame 15 has ABCD for channel 15 and
30.
MT9075A Access and Control
CAS Signalling Multiframing
The purpose of the signalling multiframing algorithm
is to provide a scheme that will allow the association
of a specific ABCD signalling nibble with the
appropriate PCM 30 channel. Time slot 16 is
reserved for the communication of Channel
Associated Signalling (CAS) information (i.e., ABCD
signalling bits for up to 30 channels). Refer to ITU-T
G.704 and G.732 for more details on CAS
multiframing requirements.
A CAS signalling multiframe consists of 16 basic
frames (numbered 0 to 15), which results in a
multiframe repetition rate of 2 msec. It should be
noted that the boundaries of the signalling multiframe
may be completely distinct from those of the CRC-4
multiframe. CAS multiframe alignment is based on a
multiframe alignment signal (a 0000 bit sequence),
Register Access
The control and status of the MT9075A is achieved
through a non-multiplexed parallel microprocessor
port. The parallel port may be configured for
Motorola style control signals (by setting pin INT/
MOT low) or Intel style control signals (by setting pin
INT/MOT high).
The controlling microprocessor gains access to
specific registers of the MT9075A through a two step
process. First, writing to the internal Command/
Address Register (CAR) selects one of the 18 pages
of control and status registers (CAR address: AC4 =
0, AC3-AC0 = don't care, CAR data D7 - D0 = page
number). Second, each page has a maximum of 16
registers that are addressed on a read or write to a
non-CAR address (non-CAR: address AC4 = 1, AC3AC0 = register address, D7-D0 = data). Once a page
4-141
MT9075A Preliminary Information
of memory is selected, it is only necessary to write to
the CAR when a different page is to be accessed.
See Figures 11 and 12 for timing requirements.
Please note that for microprocessors with read/write
cycles less than 200 ns, a wait state or a dummy
operation (for C programming) between two
successive read/write operations to the HDLC FIFO
is required.
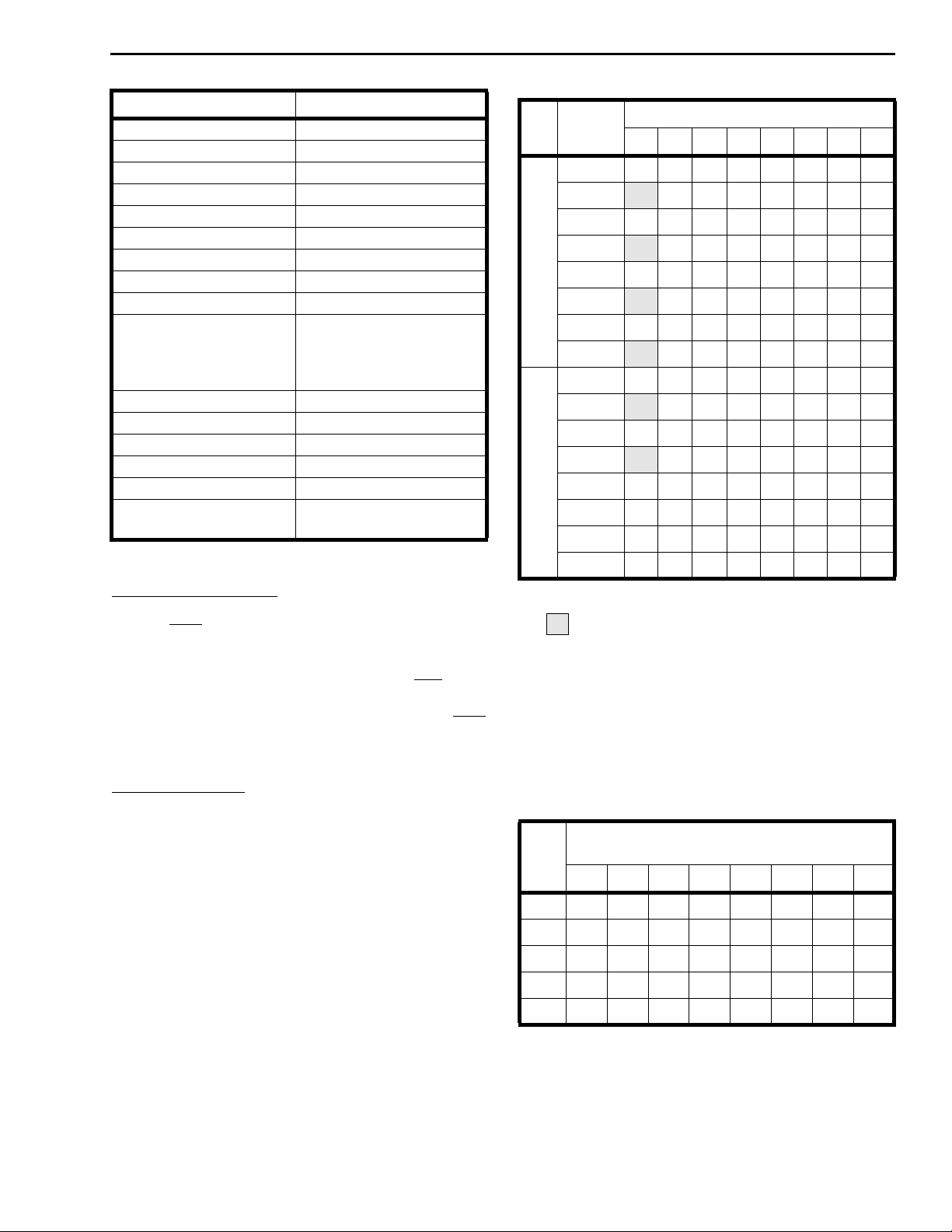
Table 5 associates the MT9075A control and status
pages with access and page descriptions.
ST-BUS Streams
The ST-BUS stream can also be used to access
channel associated signalling nibbles. CSTo contains
the received channel associated signalling bits (e.g.,
ITU-T R1 and R2 signalling), and when control bit
RPSIG (page 01H, address 1AH) is set to 0, CSTi is
used to control the transmit channel associated
signalling. The DSTi and DSTo streams contain the
transmit and receive voice and digital data.
Identification Code
The MT9075A shall be identified by the code
10101010, read from the identification code status
register (page 03H, address 1FH).
Reset Operation (Initialization)
The MT9075A can be reset using the hardware
RESET pin (pin 11 in PLCC, pin 84 in MQFP, see pin
description for external reset circuit requirements) or
the software reset bit RST (page 01H, address 11H).
When the device emerges from its reset state it will
begin to function with the default settings described
in Table 6. A reset operation takes 1 full frame (125
us) to complete.
Page Address
D7 - D
0
00000001 (01H) Master
00000010 (02H) R/W
00000011 (03H) Master
00000100 (04H) R/W
00000101 (05H) Per Channel Transmit Signalling R/W CSTi
00000110 (06H) Per Channel Receive Signalling R CSTo
00000111 (07H) Per Time Slot
00001000 (08H) R/W
00001001 (09H) 1 Second Status R --00001010 (0AH) unused --00001011 (0BH) HDLC0 Control and Status (TS 0) R/W --00001100 (0CH) HDLC1 Control and Status (TS 16) R/W --00001101 (0DH) Transmit National Bit Buffer R/W --00001110 (0EH) Receive National Bit Buffer R --00001111 (0FH) Tx message mode Buffer 0 R/W --00010000 (10H) Tx message mode Buffer 1 R/W --00010001 (11H) Rx message mode Buffer 0 R/W --00010010 (12H) Rx message mode Buffer 1 R/W ---
Control
Status
Control
Register Description
Table 5 - Register Summary
Processor
Access
R/W
R
R/W
ST-BUS
Access
--
---
---
4-142
Preliminary Information MT9075A
a
Function Status
Mode Termination
Loopbacks Deactivated
Transmit FAS Cn0011011
Transmit non-FAS 1/Sn1111111
Transmit MFAS (CAS) 00001111
Data Link Deactivated
CRC Interworking Activated
Signalling CAS Registers
ABCD Bit Debounce Deactivated
Interrupts Interrupt Mask Word
Zero unmasked, all
others masked;
interrupts not suspended
RxMF Output Signalling Multiframe
Error Insertion Deactivated
HDLCs Deactivated
Counters Cleared
Tx Message Buffer All locations set to 54H
Per Time Slot Control
All locations cleared
Buffer
Table 6 - Reset Status
Transmit AIS Operation
CRC
CRC
Frame/
Type
0/FAS C10011011
1/NFAS
2/FAS C20011011
3/NFAS
4/FAS C30011011
5/NFAS
Sub Multi Frame 1
6/FAS C40011011
7/NFAS
8/FAS C10011011
9/NFAS
10/FAS C20011011
11/NFAS
12/FAS C30011011
13/NFAS E
Sub Multi Frame 2
14/FAS C40011011
15/NFAS E
PCM 30 Channel Zero
12345678
01ASa4Sa5Sa6Sa7S
01ASa4Sa5Sa6Sa7S
11ASa4Sa5Sa6Sa7S
01ASa4Sa5Sa6Sa7S
11ASa4Sa5Sa6Sa7S
11ASa4Sa5Sa6Sa7S
1ASa4Sa5Sa6Sa7S
1
1ASa4Sa5Sa6Sa7S
2
Table 7 - FAS and NFAS Structure
a8
a8
a8
a8
a8
a8
a8
a8
The pin TAIS (Tr ansmit AIS, pin 60 in PLCC, pin 48 in
MQFP) allows an all ones signal to be transmitted
from the point of power-up without the need to write
any control registers. During this time the IRQ pin is
tristated. After the interface has been initialized
normal operation can take place by making TAIS
high.
National Bit Buffers
Table 7 shows the contents of the transmit and
receive Frame Alignment Signals (FAS) and Nonframe Alignment Signals (NFAS) of time slot zero of
a PCM 30 signal. Even numbered frames (CRC
Frame # 0, 2, 4,...) are FASs and odd numbered
frames (CRC Frame # 1, 3, 5,...) are NFASs. The bits
of each channel are numbered 1 to 8, with bit 1 being
the most significant and bit 8 the least significant.
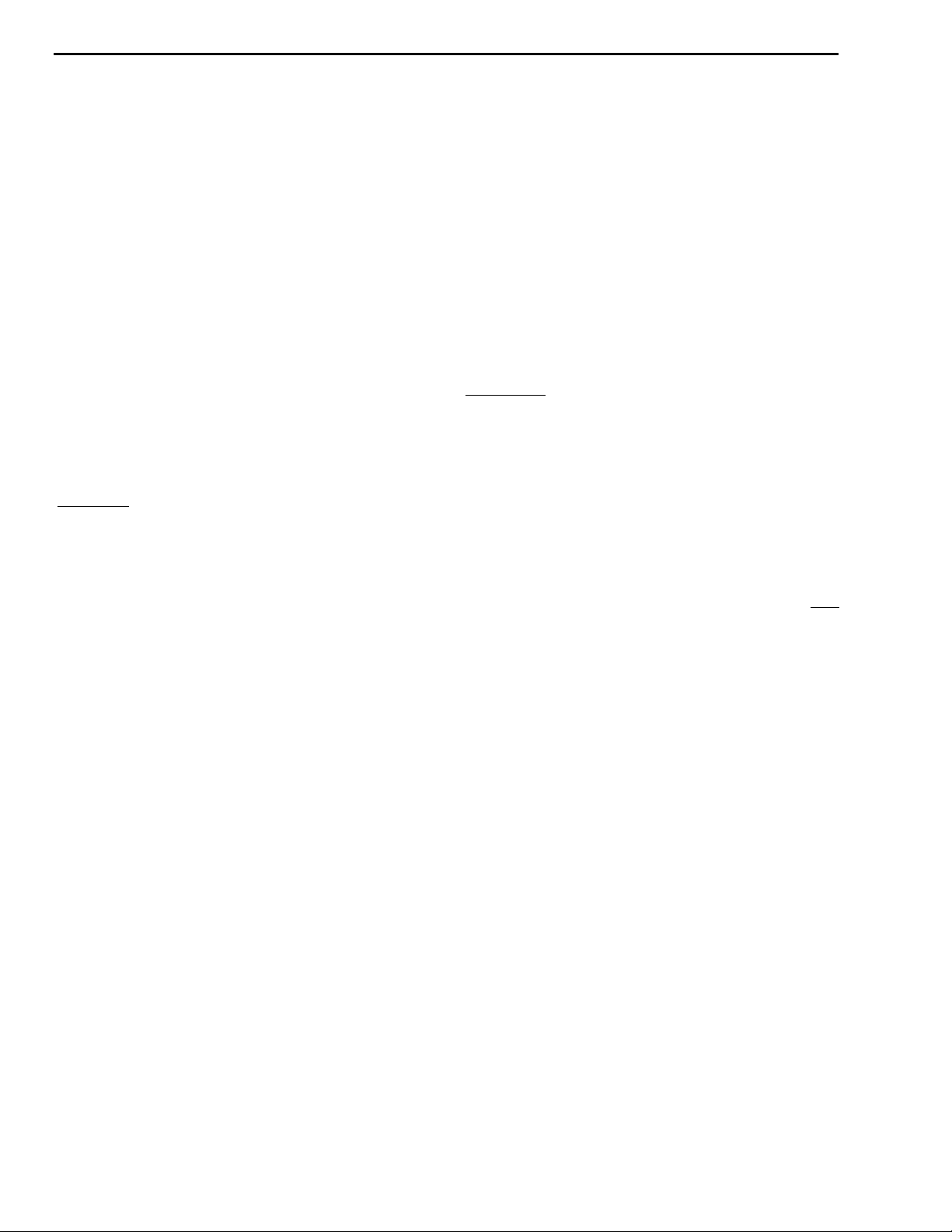
indicates position of CRC-4 multiframe alignment sign
Table 8 illustrates the organization of the MT9075A
transmit and receive national bit buffers. Each row is
an addressable byte of the MT9075A national bit
buffer, and each column contains the national bits of
an odd numbered frame of each CRC-4 Multiframe.
The transmit and receive national bit buffers are
located at page 0DH and 0EH respectively.
Addre
ssable
Bytes
NBB0 S
NBB1 S
NBB2 S
NBB3 S
NBB4 S
Frames 1, 3, 5, 7, 9, 11, 13 & 15 of a CRC-4
Multiframe
F1 F3 F5 F7 F9 F11 F13 F15
a4Sa4Sa4Sa4Sa4Sa4Sa4Sa4
a5Sa5Sa5Sa5Sa5Sa5Sa5Sa5
a6Sa6Sa6Sa6Sa6Sa6Sa6Sa6
a7Sa7Sa7Sa7Sa7Sa7Sa7Sa7
a8Sa8Sa8Sa8Sa8Sa8Sa8Sa8
Table 8 - MT9075A National Bit Buffers
Note that the Data Link (DL) pin functions, if
selected, override the transmit national bit buffer
function.
4-143
MT9075A Preliminary Information
The CRC-4 Alignment status CALN (page 03H,
address 12H) and maskable interrupt CALNI (page
01H, address 1DH) indicate the beginning of every
received CRC-4 multiframe.
Maskable interrupts are available for change of state
of Sa5 bits or change of state of Sa6 nibbles. By
writing the proper control bits, an interrupt can be
generated on a change of state of any Sa bit (except
Sa4 - normally reserved for the data link), or any
nibbles for Sa5 through Sa8. See the description of
page 01H, address 19H for more details.
In addition, the transparent transmission of channel
0 is supported to meet the ETS requirement.
Selectable on a bit by bit basis, Sa bits in channel 0
DSTi data can be programmed using register 17H of
page 01H to be sent transparently onto the line.
Data Link Operation
Timeslot 0
The MT9075A has a user defined 4, 8, 12, 16 or 20
kbit/s data link for transport of maintenance and
performance monitoring information across the PCM
30 link. This channel functions using the Sa bits
(Sa4~Sa8) of the PCM 30 timeslot zero non-frame
alignment signal (NFAS). Since the NFAS is
transmitted every other frame - a periodicity of 250
microseconds - the aggregate bit rate is a multiple of
4 kb/s. As there are five Sa bits independently
available for this data link, the bit rate will be 4, 8, 12,
16 or 20 kb/s, depending on the bits selected for the
Data Link (DL).
The RxDLCLK signal (pin 39 in PLCC, pin 20 in
MQFP) is derived from the receive extracted clock
and is aligned with the receive data link output RxDL.
The HDB3 decoded receive data, at 2.048 Mbit/s, is
clocked out of the device on pin RxDL (pin 40 in
PLCC, pin 21 in MQFP). In order to facilitate the
attachment of this data stream to a Data Link
controller, the clock signal RxDLCLK consists of
positive pulses, of nominal width of 244 ns, during
the Sa bit cell times that are selected for the data
link. Again, this selection is made by programming
address 10H of master control page 01H. No DL
data will be lost or repeated when a receive frame
slip occurs. See Figures 13-16 for timing
requirements.
Timeslot 16
Channel 16 may be used to create a transparent 64
kb/s clear channel. In this event CSTi (pin 6 in PLCC,
pin 71 in MQFP) becomes the data input pin for
channel 16 transmit data, and CSTo (pin 5 in PLCC,
pin 70 in MQFP) becomes a 64 kb/s serial output
link. The CSTo output link is synchronous to the
extracted clock timebase. The pin Rx64KCK (pin 47
in PLCC, pin 35 in MQFP) provides a 64 kHz clock
for use with 64 kb/s data emanating from CSTo. The
64 kb/s input data from CSTi is clocked in with an
internal 64 kHz clock synchronous to the I/O pin C4b
(pin 45 in PLCC, pin 33 in MQFP) timebase. The
internal clock toggles coincident with every second
ST-BUS channel boundar y, with the first r ising edge
of a frame occurring at the beginning of ST-BUS
channel 2.
Dual HDLC
The Sa bits used for the DL are selected by setting
the appropriate bits, Sa4~Sa8, to one in the Data Link
Select Word (page 01H, address 10H, bits 4-0).
Access to the DL is provided by pins TxDLCLK,
TxDL, RxDLCLK and RxDL, which allow easy
interfacing to an external controller.
Data to be transmit onto the line in the Sa bit position
is clocked in from the TxDL pad (pin 65 in PLCC, pin
62 in MQFP) with the clock TxDLCLK (pin 64 in
PLCC, pin 61 in MQFP). Although the aggregate
clock rate equals the bit rate, it has a nominal pulse
width of 244 ns, and it clocks in the TxDL as if it were
a 2.048 Mb/s data stream. The clock can only be
active during bit times 4 to 0 of the STBUS frame.
The TxDL input signal is clocked into the MT9075A
by the rising edge of TxDLCLK. If bits are selected to
be a part of the DL, all other programmed functions
for those Sa bit positions are overridden.
4-144
The MT9075A has two identical HDLC controllers
(HDLC0, HDLC1) for the Sa bits and channel 16
respectively. The following features are common to
both HDLC controllers:
• Independent transmit and receive FIFO's;
• Receive FIFO maskable interrupts for nearly
full (programmable interrupt levels) and
overflow conditions;
• Transmit FIFO maskable interrupts for
nearly empty (programmable interrupt
levels) and underflow conditions;
• Maskable interrupts for transmit end-ofpacket and receive end-of-packet;
• Maskable interrupts for receive bad-frame
(includes frame abort);
• Transmit end-of-packet and frame-abort
functions.
Preliminary Information MT9075A
HDLC0 Functions
When connected to the Data Link (DL) HDLC0 will
operate at a selected bit rate of 4, 8, 12, 16 or 20
kbits/sec. HDLC0 can be selected by setting the
control bit HDLC0 (bit 7) to one in page 01H, address
14H. When this bit is zero all interrupts from HDLC0
are masked. For more information refer to following
sections.
HDLC1 Functions
This controller may be connected to time slot 16
under Common Channel Signalling (CCS) mode. It
should be noted that the AIS16S function (page 03H,
address 19H) will always be active and the TAIS16
function (page 01H, address 16H) will override all
other transmit signalling.
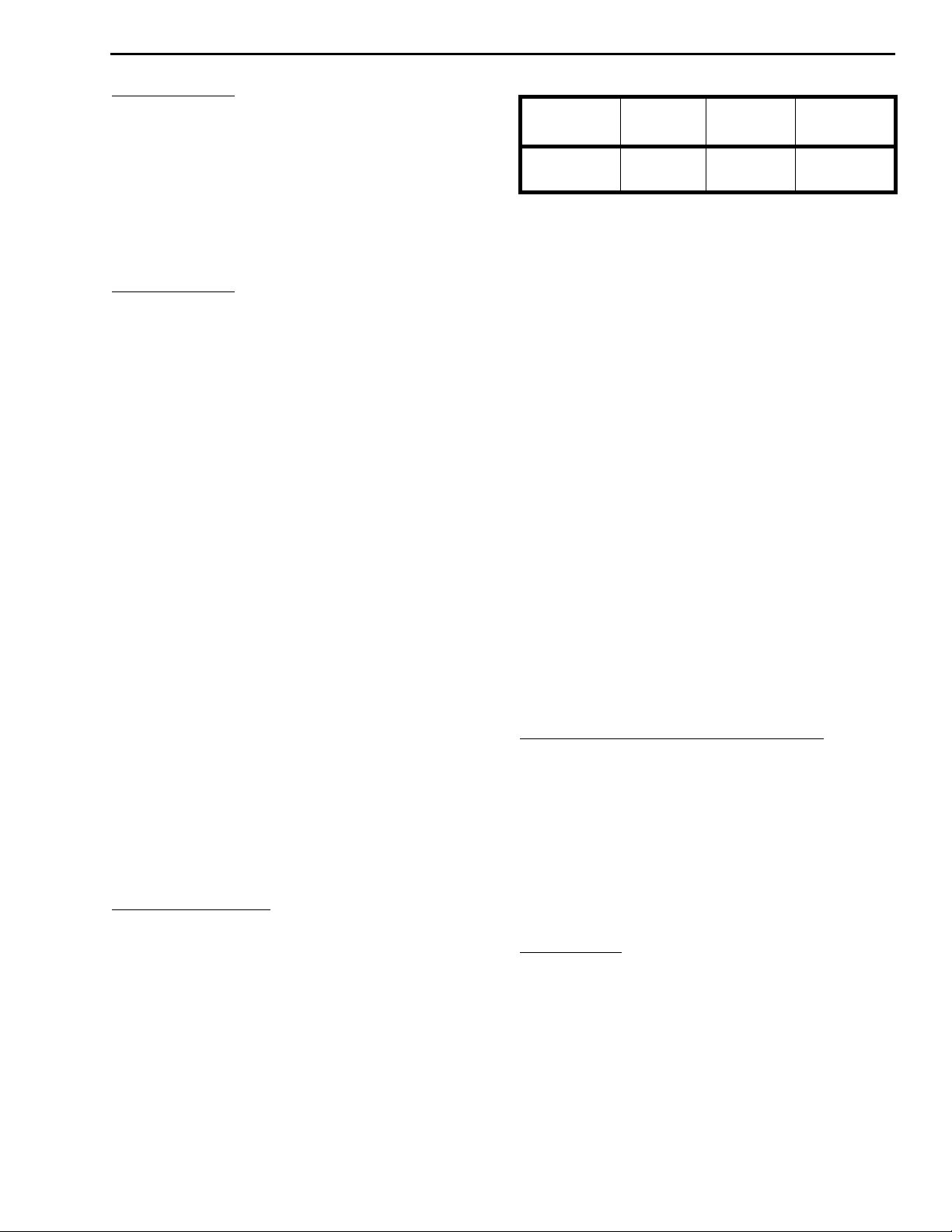
Opening
Flag (7EH)
One Byte
01111110
Table 9 - HDLC Frame Format
The data field usually consists of an address field,
control field and information field. The address field
consists of one or two bytes directly following the
opening flag. The control field consists of one byte
directly following the address field. The information
field immediately follows the control field and
consists ofn bytes of data. The HDLC does not
distinguish between the control and information
fields and a packet does not need to contain an
information field to be valid.
Data
Field
n Bytes
n ≥ 2
FCS
Two Bytes One Byte
Closing
Flag (7EH)
01111110
HDLC1 can be selected by setting the control bit
HDLC1 (bit 6) to one in page 01H, address 14H.
When this bit is zero all interrupts from HDLC1 are
masked.
HDLC Overview
The HDLC handles the bit oriented packetized data
transmission as per X.25 level two protocol defined
by CCITT. It provides flag and abort sequence
generation and detection, zero insertion and
deletion, and Frame Check Sequence (FCS)
generation and detection. A single byte, dual byte
and all call address in the received frame can be
recognized. Access to the receive FCS and inhibiting
of transmit FCS for terminal adaptation are also
provided. Each HDLC controller has a 128 byte deep
FIFO associated with it. The status and interrupt
flags are programmable for FIFO depths that can
vary from 16 to 128 bytes in steps of 16 bytes. These
and other features are enabled through the HDLC
control registers on page 0BH and 0CH.
HDLC Frame Structure
The FCS field, which precedes the closing flag,
consists of two bytes. A cyclic redundancy check
utilizing the CCITT standard polynomial
“X16+X12+X5+1” produces the 16-bit FCS. In the
transmitter the FCS is calculated on all bits of the
address and data field. The complement of the FCS
is transmitted, most significant bit first, in the FCS
field. The receiver calculates the FCS on the
incoming packet address, data and FCS field and
compares the result to “F0B8”. If no transmission
errors are detected and the packet between the flags
is at least 32 bits in length then the address and data
are entered into the receive FIFO minus the FCS
which is discarded.
Data Transparency (Zero Insertion/Deletion)
Transparency ensures that the contents of a data
packet do not imitate a flag, go-ahead, frame abort
or idle channel. The contents of a transmitted frame,
between the flags, is examined on a bit-by-bit basis
and a 0 is inserted after all sequences of 5
contiguous 1s (including the last five bits of the
FCS). Upon receiving five contiguous 1s within a
frame the receiver deletes the following 0.
A valid HDLC frame (also referred as “packet”)
begins with an opening flag, contains at least 16 bits
of data field, and ends with a 16 bit FCS followed by
a closing flag (Table 9).
All HDLC frames start and end with a unique flag
sequence “011111102” (7EH). The transmitter
generates these flags and appends them to the
packet to be transmitted. The receiver searches the
incoming data stream for the flags on a bit-by-bit
basis to establish frame synchronization.
Invalid Frames
A frame is invalid if one of the following four
conditions exists:
• If the FCS pattern generated from the
received data does not match the “F0B8”
pattern then the last data byte of the packet
is written to the received FIFO with a ‘bad
packet’ indication.
4-145
MT9075A Preliminary Information
• A short frame exists if there are less than 25
bits between the flags. Short frames are
ignored by the receiver and nothing is written
to the receive FIFO.
• Packets which are at least 25 bits in length
but less than 32 bits between the flags are
also invalid. In this case the data is written to
the FIFO but the last byte is tagged with a
“bad packet” indication.
• If a frame abort sequence is detected the
packet is invalid. Some or all of the current
packet will reside in the receive FIFO,
assuming the packet length before the abort
sequence was at least 26 bits long.
Frame Abort
The transmitter will abort a current packet by
substituting a zero followed by seven contiguous 1s
in place of the normal packet. The receiver will abort
upon reception of seven contiguous 1s occurring
between the flags of a packet which contains at least
26 bits.
Note that should the last received byte before the
frame abort end with contiguous 1s, these are
included in the seven 1s required for a receiver
abort. This means that the location of the abort
sequence in the receiver may occur before the
location of the abort sequence in the originally
transmitted packet. If this happens then the last data
written to the receive FIFO will not correspond
exactly with the last byte sent before the frame abort.
Interframe Time Fill and Link Channel States
When the HDLC transmitter is not sending packets it
will wait in one of two states
• Interframe Time Fill state: This is a
continuous series of flags occurring between
frames indicating that the channel is active
but that no data is being sent.
• Idle state: An idle Channel occurs when at
least 15 contiguous 1s are transmitted or
received.
In both states the transmitter will exit the wait state
when data is loaded into the transmitter FIFO.
Go-Ahead
A go-ahead is defined by a 9 bit sequence
"011111110" (contiguous 7Fs) and hence is the
occurrence of a frame abort sequence followed by a
zero. This feature is used to distinguish a proper inpacket frame abort sequence from one occurring
outside of a packet for some special applications
HDLC Functional Description
The HDLC controller can be reset by either the reset
pin (RESET, pin 11 in PLCC or pin 84 in MQFP) or by
the control bit HRST at address 1BH in page 0BH
(for HDLC0) or page 0CH (for HDLC1). When reset,
the HDLC Control Registers are cleared, resulting in
the transmitter and receiver being disabled. The
receiver and transmitter can be enabled independent
of each other through Control Register 1 at address
13H. The transceiver input and output are enabled
when the enable control bits in Control Register 1
are set. Transmit to receive loopback as well as a
receive to transmit loopback are also supported.
Transmit and receive bit rates and enables can
operate independently.
Received packets from the serial interface are
sectioned into bytes by an HDLC receiver that
detects flags, checks for go-ahead signals, removes
inserted zeros, performs a cyclical redundancy
check (CRC) on incoming data, and monitors the
address if required. Packet reception begins upon
detection of an opening flag. The resulting bytes are
concatenated with two status bits (RQ9 and RQ8 at
address 14H) and placed in a receiver first-in-firstout buffer (RX FIFO). Register 14H also contains
control bits that generate status and interrupts for
microprocessor read control.
In conjunction with the control circuitry, the
microprocessor writes data bytes into a transmit
buffer (TX FIFO) register that generates status and
interrupts. Packet transmission begins when the
microprocessor writes a byte to the TX FIFO. Two
status bits are added to the TX FIFO for transmitter
control of frame aborts (FA) and end of packet (EOP)
flags. Packets have flags appended, zeros inserted,
and an FCS, added automatically during serial
transmission. When the TX FIFO is empty and
finished sending a packet, Interframe Time Fill bytes
(continuous flags (7E hex)), or Mark Idle (continuous
ones) are transmitted to indicate that the channel is
idle.
HDLC Transmitter
Following initialization and enabling, the transmitter
is in the Idle Channel state (Mark Idle), continuously
sending ones. Interframe Time Fill state (Flag Idle) is
selected by setting the Mark Idle bit in Control
Register 1 to one. The transmitter remains in either
of these two states until data is written to the TX
FIFO. Control Register 1 bits EOP (End Of Packet)
and FA (Frame Abort) are set as status bits before
the microprocessor loads 8 bits of data into the 10 bit
wide FIFO (8 bits data and 2 bits status). To change
4-146
Preliminary Information MT9075A
the tag bits being loaded in the FIFO, Control
Register 1 must be written to before writing to the
FIFO. However, EOP and FA are reset after writing to
the TX FIFO. The Transmit Byte Count Register may
also be used to tag an EOP. The register is loaded
with the number of bytes in the packet and
decrements after every write to the Tx FIFO. When a
count of one is reached, the next byte written to the
FIFO is tagged as an end of packet. The register
may be made to cycle through the same count if the
packets are of the same length by setting Control
Register 2, bit Cycle (at address 15H of page 0BH
for HDLC0 or 0CH for HDLC1).
If the transmitter is in the Idle Channel state when
data is written to the TX FIFO, then an opening flag
is sent and data from TX FIFO follows. Otherwise,
data bytes are transmitted as soon as the current
flag byte has been sent. TX FIFO data bytes are
continuously transmitted until either the FIFO is
empty or an EOP or FA status bit is read by the
transmitter. After the last bit of the EOP byte has
been transmitted, a 16-bit FCS is sent followed by a
closing flag. When multiple packets of data are
loaded into TX FIFO, only one flag is sent between
packets.
Frame Aborts (FA, the transmission of 7F hex), are
transmitted by tagging a byte previously written to
the TX FIFO. When a byte has an FA tag, then an FA
is sent instead of that tagged byte. That is, all bytes
previous to but not including that byte are sent. After
an FA, the transmitter returns to the Mark Idle or
Interframe Time Fill state, depending on the state of
the Mark idle control bit.
TX FIFO underrun will occur if the FIFO empties and
the last byte did not have either an EOP or FA tag. A
frame abort sequence will be sent when an underrun
occurs.
Below is an example of the transmission of a three
byte packet (’AA’’03’’77’ hex) (Interframe time fill).
TxEN can be enabled before or after this sequence.
(a) Write’04’ to Control Register 1 - Mark Idle bit set
(b) Write’AA’ to Tx FIFO -Data byte
(c) Write’03’ to Tx FIFO - Data byte
(d) Write’34’ to Control Register 1 - TxEN; EOP;
Mark Idle bits set
(e) Write’77’ to Tx FIFO - Final data byte
The transmitter may be enabled independently of the
receiver. This is done by setting the TxEN bit of the
Control Register. Enabling happens immediately
upon writing to the register. Disabling using TxEN
will occur after the completion of the transmission of
the present packet; the contents of the FIFO are not
cleared. Disabling will consist of stopping the
transmitter clock. The Status and Interrupt Registers
may still be read, and the FIFO and Control
Registers may be written to while the transmitter is
disabled. The transmitted FCS may be inhibited
using the Tcrci bit of Control Register 2. In this mode
the opening flag followed by the data and closing flag
is sent and zero insertion is still included, but no
FCS. That is, the FCS is injected by the
microprocessor as part of the data field. This is used
in V.120 terminal adaptation for synchronous
protocol sensitive UI frames.
HDLC Receiver
After initialization and enabling, the receiver clocks in
serial data, continuously checking for Go-Aheads (0
1111 1110), flags (0111 1110), and Idle Channel
states (at least fifteen ones). When a flag is
detected, the receiver synchronizes itself to the
serial stream of data bits, automatically calculating
the FCS. If the data length between flags after zero
removal is less than 25 bits, then the packet is
ignored so no bytes are loaded into Rx FIFO. When
the data length after zero removal is between 25 and
31 bits, a first byte and bad FCS code are loaded
into the Rx FIFO. For an error-free packet, the result
in the CRC register should match the HEX pattern of
“F0B8” when a closing flag is detected.
If address recognition is required, the Receiver
Address Recognition Registers (address 10H and
11H) are loaded with the desired address and the
Adrec bit in the Control Register 1 (address 13H) is
set to one. Bit 0 of the Address Registers is used as
an enable bit for that byte, thus allowing either or
both of the first two bytes to be compared to the
expected values. In addition, seven bits of address
comparison can be realized on the first byte if this is
a single byte address by setting the
Control Register 2 (address 15H).
Two Status Register bits (RQ8 and RQ9) are
appended to each data byte as it is written to the Rx
FIFO. They indicate that a good packet has been
received (good FCS and no frame abort), or a bad
packet with either incorrect FCS or frame abort. The
Status and Interrupt Registers should be read before
reading the Rx FIFO since status and interrupt
information correspond to the byte at the output of
the FIFO (i.e., the byte about to be read). The Status
Register bits are encoded as follows:
RQ9 RQ8 Byte status
1 1 last byte (bad packet)
0 1 bad packet
1 0 last byte (good packet)
0 0 packet byte
Seven
bit of
4-147

MT9075A Preliminary Information
The end-of-packet-detect (EOPD) interrupt indicates
that the last byte written to the RX FIFO was an EOP
byte. The end-of-packet-read (EOPR) interrupt
indicates that the byte about to be read from the RX
FIFO is an EOP byte. The Status Register should be
read to see if the packet is good or bad before the
byte is read.
A minimum size packet has an 8-bit address, an 8-bit
control byte, and a 16-bit FCS pattern between the
opening and closing flags. Thus, the absence of a
data transmission error and a frame length of at least
32 bits results in the receiver writing a valid packet
code with the EOP byte into RX FIFO. The last 16
bits before the closing flag are regarded as the FCS
pattern and will not be transferred to the receiver
FIFO. Only data bytes (Address, Control,
Information) are loaded into the Rx FIFO.
In the case of an RX FIFO overflow, no clocking
occurs until a new opening flag is received. In other
words, the remainder of the packet is not clocked into
the FIFO. Also, the top byte of the FIFO will not be
written over. If the FIFO is read before the reception
of the next packet then reception of that packet will
occur. If two beginning of packet conditions (RQ9=0;
RQ8=1) are seen in the FIFO, without an
intermediate EOP status, then overflow occurred for
the first packet.
The receiver may be enabled independently of the
transmitter. This is done by setting the RxEN bit of
Control Register 1. Enabling happens immediately
upon writing to the register. Disabling using RxEN
will occur after the present packet has been
completely loaded into the FIFO. Disabling can occur
during a packet if no bytes have been written to the
FIFO yet. Disabling will consist of disabling the
internal receive clock. The FIFO, Status, and
Interrupt Registers may still be read while the
receiver is disabled. Note that the receiver requires a
flag before processing a frame, thus if the receiver is
enabled in the middle of an incoming packet it will
ignore that packet and wait for the next complete
one.
The receive CRC (FCS) can be monitored in the Rx
CRC Registers (address 18H and 19H). These
registers contain the actual CRC sent by the other
transmitter in its original form, that is, MSB first and
bits inverted. These registers are updated by each
end of packet (closing flag) received and therefore
should be read when an end of packet is received so
that the next packet does not overwrite the registers.
Slip Buffer
In addition to the elastic buffer in the jitter
attenuator(JA), another elastic buffer (two frames
deep) is present, attached between the receive side
and the ST-BUS (or GCI Bus) side of the MT9075A.
This elastic buffer is configured as a slip buffer which
absorbs wander and low frequency jitter in multitrunk applications. The received PCM 30 data is
clocked into the slip buffer with the E2o clock and is
clocked out of the slip buffer with the C4b clock. The
E2o extracted clock is generated from, and is
therefore phase-locked with, the receive PCM 30
data. In normal operation, the E2o clock will be
phase-locked to the C4b clock by an external phase
locked loop (PLL). Therefore, in a single trunk
system the receive data is in phase with the E2o
clock, the C4b clock is phase-locked to the E2o
clock, and the read and write positions of the slip
buffer will remain fixed with respect to each other.
In a multi-trunk slave or loop-timed system (i.e.,
PABX application) a single trunk will be chosen as a
network synchronizer, which will function as
described in the previous paragraph. The remaining
trunks will use the system timing derived from the
synchronizer to clock data out of their slip buffers.
Even though the PCM 30 signals from the network
are synchronous to each other, due to multiplexing,
transmission impairments and route diversity, these
signals may jitter or wander with respect to the
synchronizing trunk signal. Therefore, the E2o clocks
of non-synchronizer trunks may wander with respect
to the E2o clock of the synchronizer and the system
bus.
Network standards state that, within limits, trunk
interfaces must be able to receive error-free data in
the presence of jitter and wander (refer to network
requirements for jitter and wander tolerance). The
MT9075A will allow a maximum of 26 channels (208
UI, unit intervals) of wander and low frequency jitter
before a frame slip will occur.
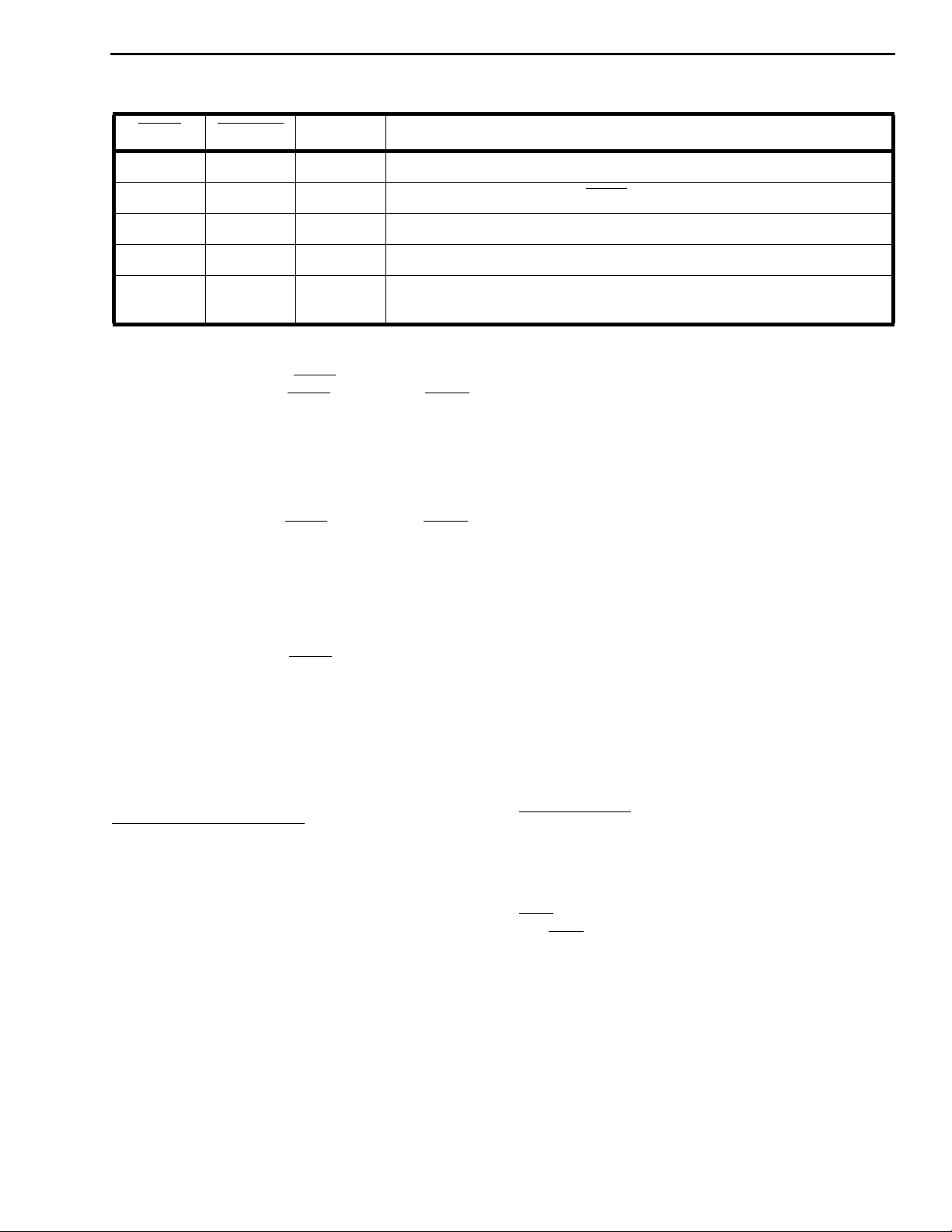
The minimum delay through the receive slip buffer is
approximately two channels and the maximum delay
is approximately 60 channels (see Figure 9).
When the C4b and the E2o clocks are not phaselocked, the rate at which data is being written into the
slip buffer from the PCM 30 side may differ from the
rate at which it is being read out onto the ST-BUS. If
this situation persists, the delay limits stated in the
previous paragraph will be violated and the slip
buffer will perform a controlled frame slip. That is, the
buffer pointers will be automatically adjusted so that
a full PCM 30 frame is either repeated or lost. All
frame slips occur on PCM 30 frame boundaries.
4-148
Preliminary Information MT9075A
Two status bits, RSLIP and RSLPD (page 03H,
address 15H), give indication of a slip occurrence
and direction. RSLIP changes state in the event of a
slip. If RSLPD=0, the slip buffer has overflowed and a
frame was lost; if RSLPD=1, a underflow condition
occurred and a frame was repeated. A maskable
interrupt SLPI (page 01H, address 1BH) is also
provided.
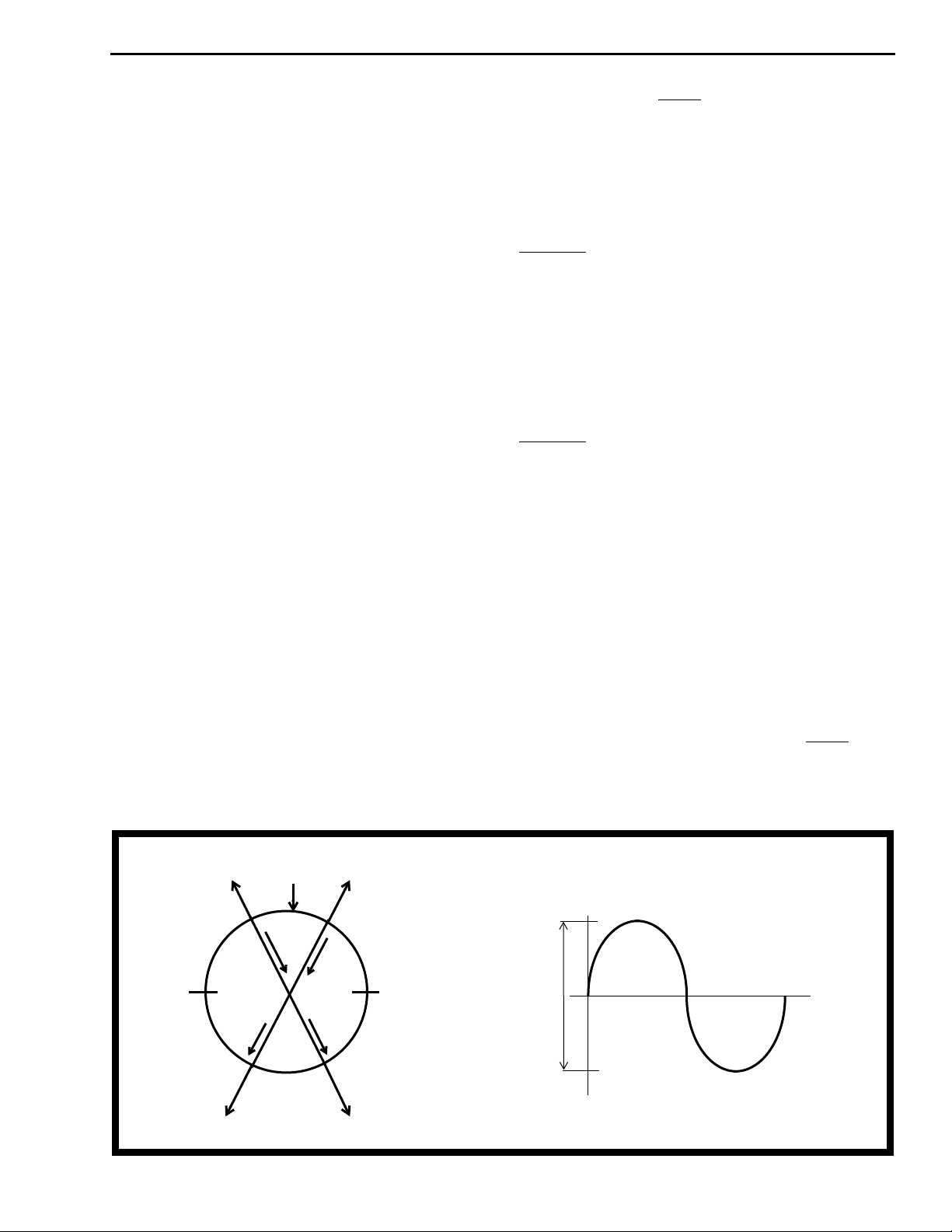
Figure 9 illustrates the relationship between the read
and write pointers of the receive slip buffer.
Measuring clockwise from the write pointer, if the
read pointer comes within two channels of the write
pointer a frame slip will occur, which will put the read
pointer 34 channels from the write pointer.
Conversely, if the read pointer moves more than 60
channels from the write pointer, a slip will occur,
which will put the read pointer 28 channels from the
write pointer. This provides a worst case hysteresis
of 13 channels peak (26 channels peak-to-peak) or a
wander tolerance of 208 UI.
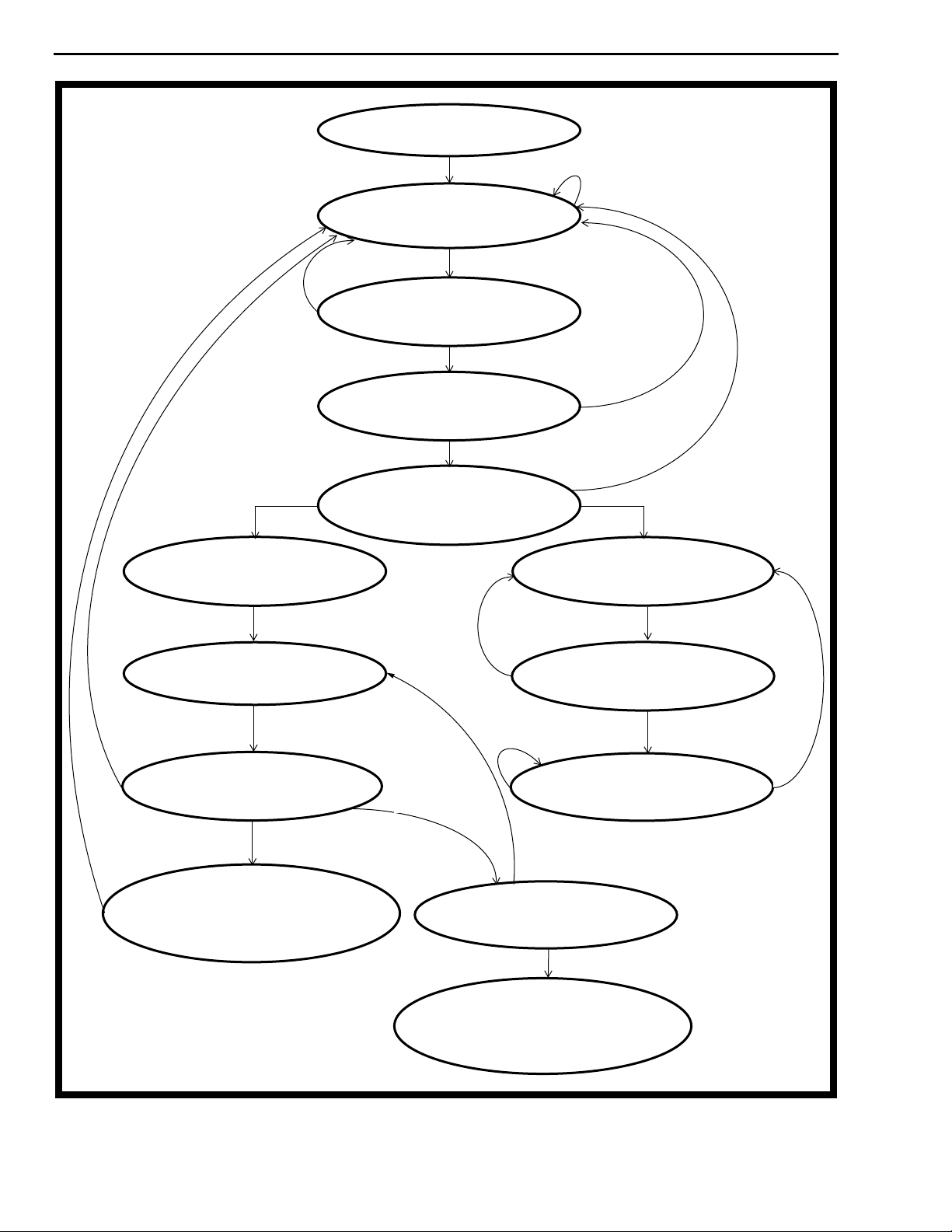
Framing Algorithm
The MT9075A contains three distinct framing
algorithms: basic frame alignment, signalling
multiframe alignment and CRC-4 multiframe
alignment. Figure 10 is a state diagram that
illustrates these algorithms and how they interact.
After power-up, the basic frame alignment framer will
search for a frame alignment signal (FAS) in the PCM
30 receive bit stream. Once the FAS is detected, the
corresponding bit 2 of the non-frame alignment
signal (NFAS) is checked. If bit 2 of the NFAS is zero
a new search for basic frame alignment is initiated. If
bit 2 of the NFAS is one and the next FAS is correct,
the algorithm declares that basic frame
synchronization has been found (i.e., page 03H,
address 10H, bit 7, SYNC is zero).
Once basic frame alignment is acquired the
signalling and CRC-4 multiframe searches will be
initiated. The signalling multiframe algorithm will
align to the first multiframe alignment signal pattern
(MFAS = 0000) it receives in the most significant
nibble of channel 16 (page 3, address 10H, bit 6,
MFSYNC = 0). Signalling multiframing will be lost
when two consecutive multiframes are received in
error.
The CRC-4 multiframe alignment signal is a 001011
bit sequence that appears in PCM 30 bit position one
of the NFAS in frames 1, 3, 5, 7, 9 and 11 (see Table
7). In order to achieve CRC-4 synchronization two
CRC-4 multiframe alignment signals must be
received without error (page 03H, address 10H, bit 5,
CRCSYN = 0) within 8 msec.
The MT9075A framing algorithm supports automatic
interworking of interfaces with and without CRC-4
processing capabilities. That is, if an interface with
CRC-4 capability, achieves valid basic frame
alignment, but does not achieve CRC-4 multiframe
alignment by the end of a predefined period, the
distant end is considered to be a non-CRC-4
interface. When the distant end is a non-CRC-4
interface, the near end automatically suspends
receive CRC-4 functions, continues to transmit CRC4 data to the distant end with its E-bits set to zero,
and provides a status indication. Naturally, if the
distant end initially achieves CRC-4 synchronization,
CRC-4 processing will be carried out by both ends.
This feature is selected when control bit AUTC (page
01H, address 11H) is set to zero.
Read Pointer
60 CH
47 CH
34 CH
Read Pointer
512 Bit
Elastic
Store
Write
Pointer
Read Pointer
2 CH
28 CH
Read Pointer
13 CH
15 CH
26 Channels
-13 CH
Figure 9 - Read and Write Pointers in the Slip Buffers
Wander Tolerance
4-149
MT9075A Preliminary Information
Out of synchronization
>914 CRC errors
in one second
No CRC
multiframe alignment.
8 msec. timer expired*
CRC-4 multi-frame alignment
Start 400 msec timer.
Note 7.
YES
Search for primary basic frame
alignment signal RAI=1, Es=0.
YES
NO
Verify Bit 2 of non-frame
alignment signal.
YES
Verify second occurrence of
frame alignment signal.
YES
Primary basic frame synchronization
acquired. Enable traffic RAI=0, E’s=0. Start
loss of primary basic frame alignment
checking. Notes 7 & 8.
NO
3 consecutive
incorrect frame
alignment
signals
NO
Signalling multi-frame alignment
Search for multiframe
alignment signal.
Note 7.
Start 8 msec timer.
Note 7.
Basic frame
alignment acquired
Find two CRC frame
alignment signals.
Note 7.
CRC multiframe
alignment
CRC-to-CRC interworking. Re-align to new basic
frame alignment. Start CRC-4 processing. E-bits set
as per G.704 and I.431. Indicate CRC synchronization
achieved.
Notes 7& 8.
* only if CRC-4 synchronization is selected and automatic CRC-4
interworking is de-selected.
** only if automatic CRC-4 interworking is selected.
8 msec.
timer expired**
NO
Multiframe synchronization
acquired as per G.732.
NO
No CRC
multiframe
alignment.
Parallel search for new basic frame
alignment signal.
Notes 6 & 7.
CRC-to-non-CRC interworking. Maintain primary
basic frame alignment. Continue to send CRC-4
data, but stop CRC processing. E-bits set to ‘0’.
Indicate CRC-to-non-CRC operation. Note 7.
Check for two consecutive errored
multiframe alignment signals.
400 msec timer expired
YES
Note 7.
YES
Notes 7 & 8.
4-150
Figure 10 - Synchronization State Diagram

Preliminary Information MT9075A
Notes for Synchronization State Diagram
(Figure 10)
1) The basic frame alignment, signalling multiframe
alignment, and CRC-4 multiframe alignment
functions operate in parallel and are independent.
2) The receive channel associated signalling bits and
signalling multiframe alignment bit will be frozen
when multiframe alignment is lost.
3) Manual re-framing of the receive basic frame
alignment and signalling multiframe alignment functi-
ons can be performed at any time.
4) The transmit RAI bit will be one until basic frame
alignment is established, then it will be zero.
5) E-bits can be optionally set to zero until the
equipment interworking relationship is established.
When this has been determined one of the following
will take place:
a) CRC-to-non-CRC operation - E-bits = 0,
b) CRC-to-CRC operation - E-bits as per G.704 and
I.431.
6) All manual re-frames and new basic frame
alignment searches start after the current frame
alignment signal position.
7) After basic frame alignment has been achieved,
loss of frame alignment will occur any time three
consecutive incorrect basic frame alignment signals
are received. Loss of basic frame alignment will reset
the complete framing algorithm.
8) When CRC-4 multiframing has been achieved, the
primary basic frame alignment and resulting
multiframe alignment will be adjusted to the basic
frame alignment determined during CRC-4
synchronization. Therefore, the primary basic frame
alignment will not be updated during the CRC-4
multiframing search, but will be updated when the
CRC-4 multiframing search is complete.
Channel Signalling
When control bit TxCCS (page 01H, address 1AH) is
set to one, the MT9075A is in Common Channel
Signalling (CCS) mode. When TxCCS is low it is in
Channel Associated Signalling mode (CAS). The
CAS mode ABCD signalling nibbles can be passed
either via the micro-ports (when page 01H, address
1AH, bit 3, RPSIG = 1) or through related channels
of the CSTo and CSTi serial links (when RPSIG = 0).
Memory page 05H contains the receive ABCD
nibbles and page 06H the transmit ABCD nibbles for
micro-port CAS access.
In CAS operation an ABCD signalling bit debounce
of 14 msec. can be selected by writing a one to
DBNCE (page 02H, address 10H, bit 0)). This is
consistent with the signalling recognition time of ITUT Q.422. It should be noted that there may be as
much as 2 msec. added to this duration because
signalling equipment state changes are not
synchronous with the PCM 30 multiframe.
If multiframe synchronization is lost (page 03H,
address 10H, bit 6, MFSYNC = 1) all receive CAS
signalling nibbles are frozen. Receive CAS nibbles
will become unfrozen when multiframe
synchronization is acquired.
When the CAS signalling interrupt is unmasked
(page 01H, address 1CH, bit 0, SIGI=0), pin IRQ (pin
12 in PLCC, 85 in MQFP) will become active when a
signalling nibble state change is detected in any of
the 30 receive channels. The SIGI interrupt vector
(page 04H, address 12H) is 01H.
In CCS mode the data transmit on channel 16 is
either sourced from channel 16 data on DSTi or from
the pin CSTi. If 64KCCS (page 01H, address 1AH,
bit 0) is zero the data is sourced from DSTi. If
64KCCS is high data destined for channel 16 is
clocked in from CSTi (pin 6 in PLCC, pin 71 in
MQFP) with an internal 64 KHz clock divided down
from C4b. Data received from channel 16 is clocked
out on CSTo (pin 5 in PLCC, pin 70 in MQFP). By
dividing down the extracted 2.048 MHz clock, a 64
kHz receive clock synchronous with the data is
created. This signal is output on Rx64KCK (pin 47 in
PLCC, pin 35 in MQFP).
Loopbacks
In order to meet PRI Layer 1 requirements and to
assist in circuit fault sectionalization, the MT9075A
has six loopback functions. The control bits for
digital, remote, ST-BUS, payload and metallic
loopbacks are located on page 01H, address 15H.
The remote and local time slot loopbacks are
controlled through control bits 5 and 4 of the Per
Time Slot Control Words on pages 07H and 08H.
a)
Digital Loopback
framer LIU interface. Bit DLBK = 0 normal; DLBK = 1
activate.
(DG Loop) - DSTi to DSTo at the
4-151
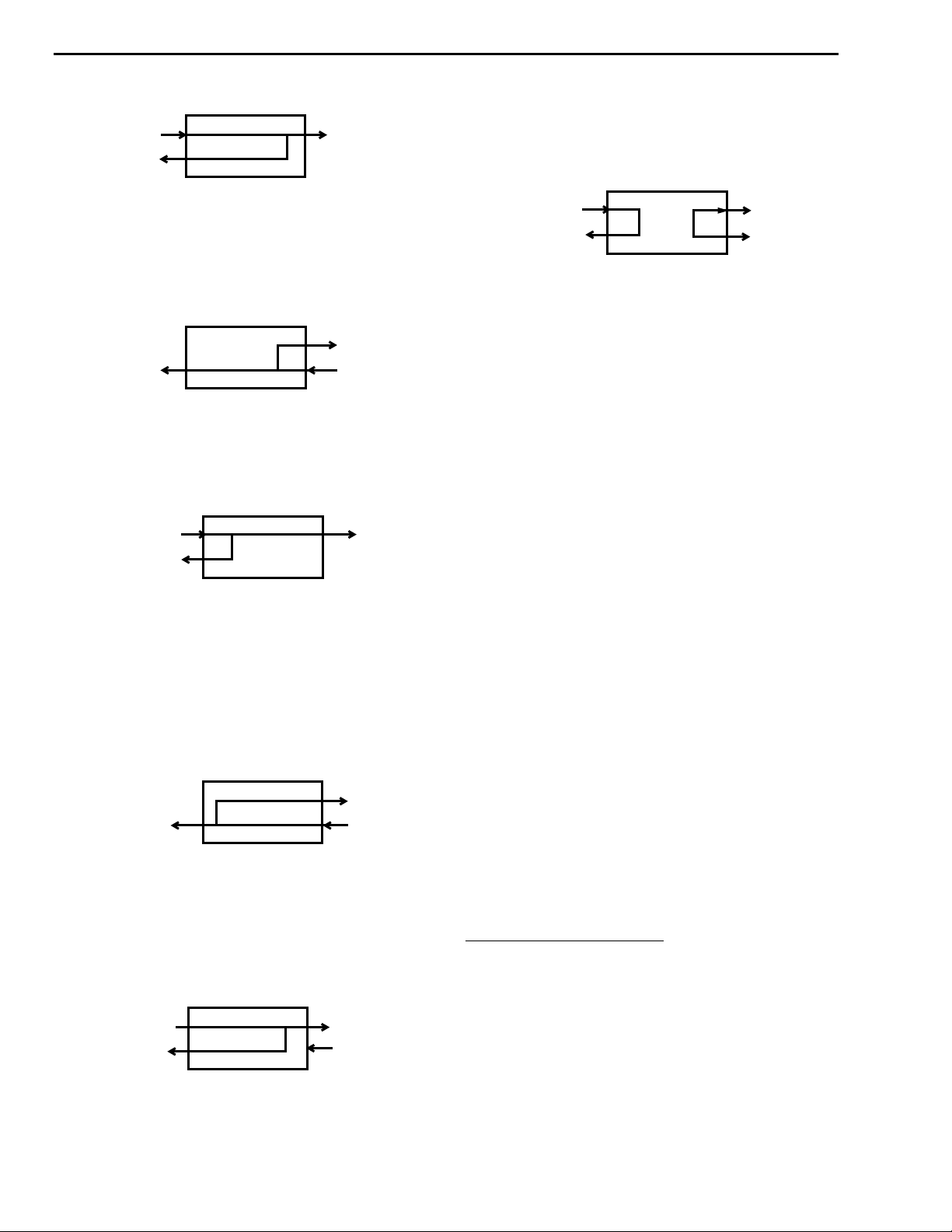
MT9075A Preliminary Information
slots to the transmit PCM 30 time slots. Local time
MT9075A
DSTi
System
DSTo
b)
Remote Loopback
(RM Loop) - RTIP and RRING
Tx
PCM30
to TTIP and TRING respectively at the PCM 30 side.
Bit RLBK = 0 normal; RLBK = 1 activate.
slot loopback bit LTSL = 0 normal; LTSL = 1 activate,
will loop around DSTi time slots towards the DSTo
time slots.
MT9075A
System
DSTi
DSTo
Tx
PCM30
Rx
MT9075A
System
DSTo
c)
ST-BUS Loopback
(ST Loop) - DSTi to DSTo at
Tx
PCM30
Rx
the system side. Bit SLBK = 0 normal; SLBK = 1
activate.
MT9075A
DSTi
System
DSTo
d)
Payload Loopback
(PL Loop) - RTIP and RRING
Tx
PCM30
to TTIP and TRING respectively at the system side
with FAS and NFAS operating normally. Bit PLBK = 0
normal; PLBK = 1 activate. The payload loopback is
effectively a physical connection of DSTo to DSTi
within the MT9075A. Channel zero and the DL
originate at the point of loopback.
MT9075A
DSTi
System
DSTo
e)
Metallic Loopback
(MT Loop) - The external
Tx
Rx
PCM30
signals RTIP and RRING are isolated from the
receiver and the analog outputs TTIP and TRING are
internally connected to the receiver analog input. Bit
MLBK = 0 normal; MLBK = 1 activate.
MT9075A
DSTi
System
DSTo
f)
Local and Remote Time Slot Loopback
Tx
Rx
PCM30
. Remote
time slot loopback control bit RTSL = 0 normal; RTSL
= 1 activate, will loop around receive PCM 30 time
Error Counters
The MT9075A has nine error counters, which can be
used for maintenance testing, an ongoing measure
of the quality of a PCM 30 link and to assist the
designer in meeting specifications such as ITU-T
I.431 and G.821. All counters can be preset or
cleared by writing to the appropriate locations. A
separate status page - “1 Second Status” on page
09H - latches the states of the following counters: Ebit Error Counter, Errored Frame Alignment Signal
Counter, Bipolar Violation Counter and CRC Error
Counter on a one second interval, coincident with
the one second status bit.
Associated with each counter is a maskable event
occurrence interrupt and a maskable counter
overflow interrupt. Overflow interrupts are useful
when cumulative error counts are being recorded.
For example, every time the frame error counter
overflow (FERO) interrupt occurs, 256 frame errors
have been receiv ed since the last FERO interrupt. All
counters are cleared and held low by programming
the counter clear bit (master control page 01H,
address 1AH, bit 2) high. Counter overflows set bits
in the counter overflow latch (page 04H, address
16H); this latch is cleared when read.
The overflow reporting latch (page 04H, address
16H) contains a register whose bits are set when
individual counters overflow. These bits stay high
until the register is read.
PRBS Error Counter (PS7-0)
There are two 8 bit counters associated with PRBS
comparison; one for errors and one for time. Any
errors that are detected in the receive PRBS will
increment the PRBS Error Rate Counter of page
04H, address 10H. Writes to this counter will clear an
8 bit counter, PSM7-0 (page 01H, address 11H)
which counts receive CRC-4 multiframes. A
maskable PRBS counter overflow (PRBSO) interrupt
(page 1, address 19H) is associated with this
counter.
4-152
 Loading...
Loading...