

Mircom OpenBAS-HV-NX10, OpenBAS-HV-NX10D, OpenBAS-HV-NX10L, OpenBAS-HV-NX10P Installation Manual
Page 1
OpenBAS-HV-NX10 Series
Building Automation Controller and HVAC
Automation Solution
Installation Manual
LT-2201 Rev. 4.4
October 2017
Page 2

Page 3

Table of Contents
1.0 Introduction 7
1.1 OpenBAS-HV-NX10 Series Building Automation Controller .......................................... 7
1.2 Features ......................................................................................................................... 7
2.0 Overview 8
2.1 OpenBAS-HV-NX10 Series Components ...................................................................... 8
3.0 Installation 10
3.1 Parts of the Enclosure .................................................................................................... 10
3.2 Controller Board Connections ........................................................................................ 13
3.3 Installing Accessories .................................................................................................... 13
3.4 Ethernet Controllers (OpenBAS-NWK-ETH3) ................................................................ 17
3.5 DIP Switches .................................................................................................................. 17
3.6 USB ................................................................................................................................ 18
3.7 Reset and Download Buttons ........................................................................................ 18
3.8 Battery ............................................................................................................................ 18
3.9 Enclosure Dimensions ................................................................................................... 19
3.10 Assembly ....................................................................................................................... 20
3.11 Mounting the Enclosure ................................................................................................. 21
4.0 Field Wiring 22
4.1 Wiring the Terminals ...................................................................................................... 22
4.2 Power Supply Connection .............................................................................................. 22
4.3 Universal Inputs ............................................................................................................. 23
4.4 Analog Outputs .............................................................................................................. 31
4.5 Digital Relay Outputs ..................................................................................................... 33
4.6 Field Bus Connections and OpenBAS-ACC-DB9 .......................................................... 36
4.7 Networking ..................................................................................................................... 37
4.8 Connections and LEDs on OpenBAS-HV-HX10D ......................................................... 38
4.9 Circuit Board LEDs ........................................................................................................ 39
5.0 Specifications 40
6.0 Warranty and Warning Information 42
3 (45)
Page 4

List of Figures
Figure 1 Parts of the enclosure .................................................................................................... 10
Figure 2 Tabs on enclosure .......................................................................................................... 11
Figure 3 Lift tabs and remove circuit board .................................................................................. 12
Figure 4 Board connections ......................................................................................................... 13
Figure 5 COM ports ...................................................................................................................... 14
Figure 6 Location of factory-installed modules and jumpers ........................................................ 15
Figure 7 The jumper and RS-485 module are removed from P1 ................................................. 15
Figure 8 OpenBAS-ACC-RS232 is installed in P1 ....................................................................... 16
Figure 9 I2C, I2CB, N2, and SPI connections .............................................................................. 17
Figure 10 DIP switches .................................................................................................................. 18
Figure 11 Enclosure (back view) .................................................................................................... 19
Figure 12 Fit the circuit board in enclosure .................................................................................... 20
Figure 13 Enclosure mounted on DIN rail (circuit board not shown) .............................................. 21
Figure 14 Enclosure mounted on DIN rail (back view) ................................................................... 21
Figure 15 Power supply - 24 VAC or 24 VDC ................................................................................ 23
Figure 16 Power supply - 12 VDC .................................................................................................. 23
Figure 17 Universal Inputs ............................................................................................................. 23
Figure 18 Measuring VDC .............................................................................................................. 29
Figure 19 Digital input voltage range .............................................................................................. 30
Figure 20 Analog outputs ............................................................................................................... 32
Figure 21 Relay outputs ................................................................................................................. 33
Figure 22 Field bus connections .................................................................................................... 36
Figure 23 Networking with OpenBAS-NWK-ETH3 with the included cable ................................... 37
Figure 24 Networking with OpenBAS-NWK-ETH3 over RS-458 .................................................... 37
Figure 25 Networking with RS-485 ................................................................................................. 38
Figure 26 Connections and LEDs on the OpenBAS-HV-NX10D ................................................... 38
Figure 27 LEDs .............................................................................................................................. 39
4 (45)
Page 5

List of Tables
Table 1 OpenBAS-HV-NX10 Series Controllers ......................................................................... 8
Table 2 OpenBAS-HV-NX10 Series Accessories ....................................................................... 8
Table 3 OpenBAS-HV-NX10 Series Compatible Modules .......................................................... 9
Table 4 Analog Input Wiring ........................................................................................................ 25
Table 5 Wiring a 1000 Ω temperature sensor ............................................................................. 29
Table 6 Digital Input Wiring ......................................................................................................... 31
Table 7 Analog Output Wiring ..................................................................................................... 32
Table 8 Surge Protection on Relay Outputs ............................................................................... 34
Table 9 Field Bus Ports ............................................................................................................... 36
5 (45)
Page 6

List of Tables
6 (45)
Page 7
1.0 Introduction
This document provides information on installing the OpenBAS-HV-NX10 series Building
Automation Controller.
1.1 OpenBAS-HV-NX10 Series Building Automation Controller
Mircom’s OpenBAS-HV-NX10 Series building automation controller is an HVAC controller with
an integrated PLC (programmable logic controller) and scheduler. It includes 18 hardware
input/output points, 2 RS-485 field bus connections, USB, SPI, and I
HV-NX10L and OpenBAS-HV-NX10D models have an operator interface with LCD display
and keyboard.
1.2 Features
Mircom’s OpenBAS-HV-NX10 series Building Automation Controller integrates into Mircom’s
unified platform for automating HVAC and mechanical rooms as well as incorporating energy
management features and lighting control to offer building owners and managers a seamless
operation with the following features:
• Modular design to cover any small, medium or large project.
• Industry standard field bus protocols to integrate into any existing BAS system, such as
BACnet, Modbus, Optomux, N2-Open, and ASCII.
2
C buses. The OpenBAS-
• Advanced Networking to integrate into IP networks and use the most advanced features
and protocols such as distributed computing, USB and Cloud storage, HTML5,
JavaScript, XML, Ajax, SMS, and GSM.
• Universal inputs to connect any industry standard sensors.
• Modular add-ons for every Building Automation System solution.
• The OpenBAS software which provides owners and managers a single solution for
managing all their building’s automation needs.
7 (45)
Page 8
2.0 Overview
2.1 OpenBAS-HV-NX10 Series Components
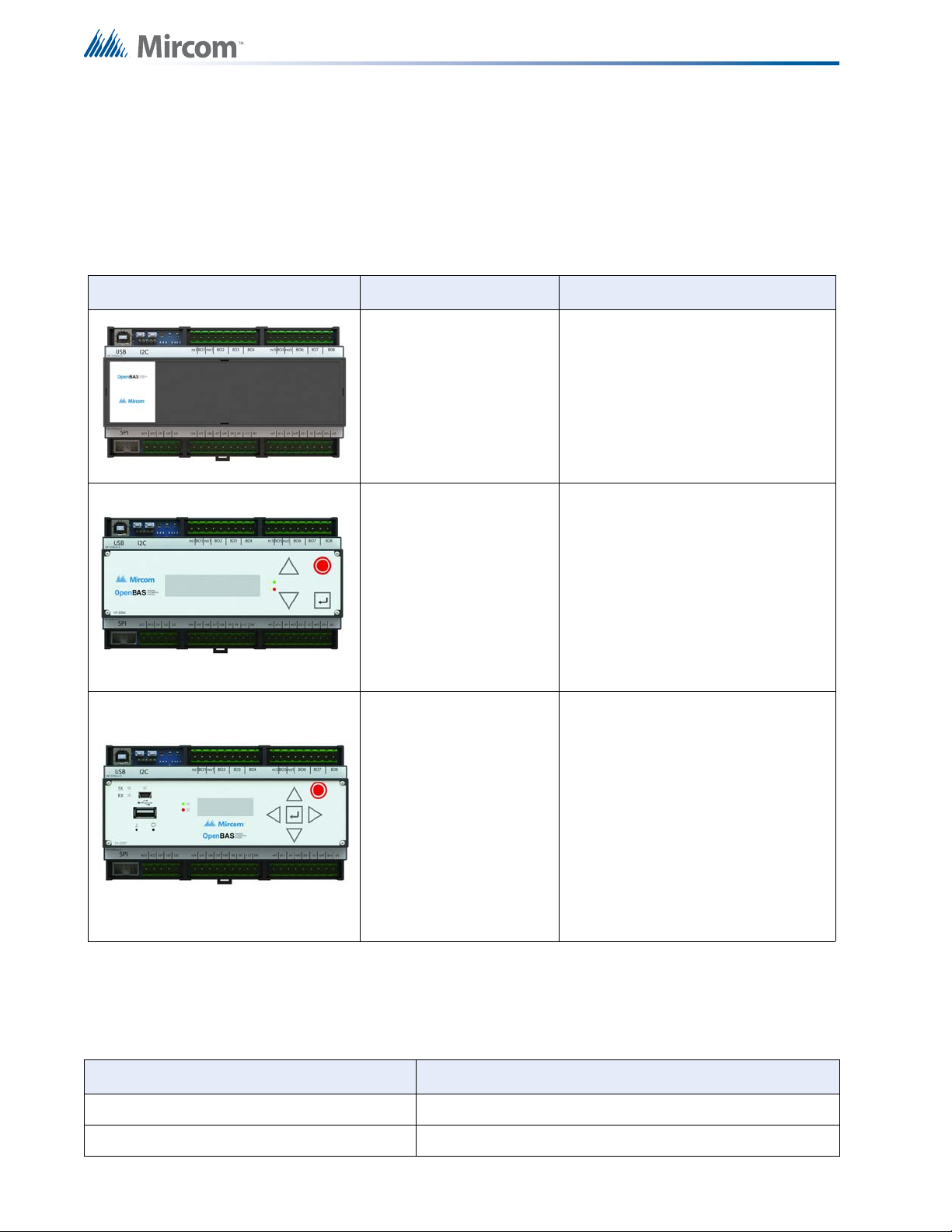
2.1.1 Controllers
Table 1 OpenBAS-HV-NX10 Series Controllers
Picture Model Description
HVAC controller
• Integrated programmable logic
OpenBAS-HV-NX10P
OpenBAS-HV-NX10L
controller and scheduler
• 18 hardware input/output points
• 2 RS-485 field bus connections
• USB, SPI and 1²C buses
HVAC controller plus the OpenBASHV-LCD display
• Integrated programmable logic
controller and scheduler
• 18 hardware input/output points
• 2 RS-485 field bus connections
• USB, SPI and 1²C buses
• Operator interface with LCD and
keyboard
HVAC controller plus the OpenBASHV-CORE2 display
• 32 bit dual core processor
• Scheduler and 3 integrated
programmable logic controllers
OpenBAS-HV-NX10D
• 18 hardware input/output points
• 3 RS-485 field bus connections,
• USB, SPI and 1²C buses
• Operator interface with graphical
LCD, keyboard, and secondary
USB for data storage
2.1.2 Accessories
Accessories are powered from the controller.
Table 2 OpenBAS-HV-NX10 Series Accessories
Model Description
OpenBAS-ACC-RS485 Optically isolated RS-485 converter
OpenBAS-ACC-RS232 RS-232 converter
8 (45)
Page 9
Table 2 OpenBAS-HV-NX10 Series Accessories (Continued)
Model Description
OpenBAS-ACC-DB9 DB9 adapter
OBS-ACC-32K128 128 KB plus 32 KB memory expansion
OpenBAS-ACC-TE1K 1000 Ω resistive silicon temperature sensor
2.1.3 Compatible Modules
Compatible modules are mounted separately from the controller.
Table 3 OpenBAS-HV-NX10 Series Compatible Modules
Model Description
Wireless 433 MHz RF receiver that integrates up to 10
OpenBAS-HV-RF433R
wireless transmitters and thermostats into OpenBAS-HVNX10 series controllers
Mounts in a DIN rail-mounted box
Overview
OpenBAS-NWK-ETH3
Ethernet controller with support for multiple protocols
• 2 field bus connections
2
• 1 I
C connection
• Mounts in a DIN rail-mounted box
• Powered separately
9 (45)
Page 10
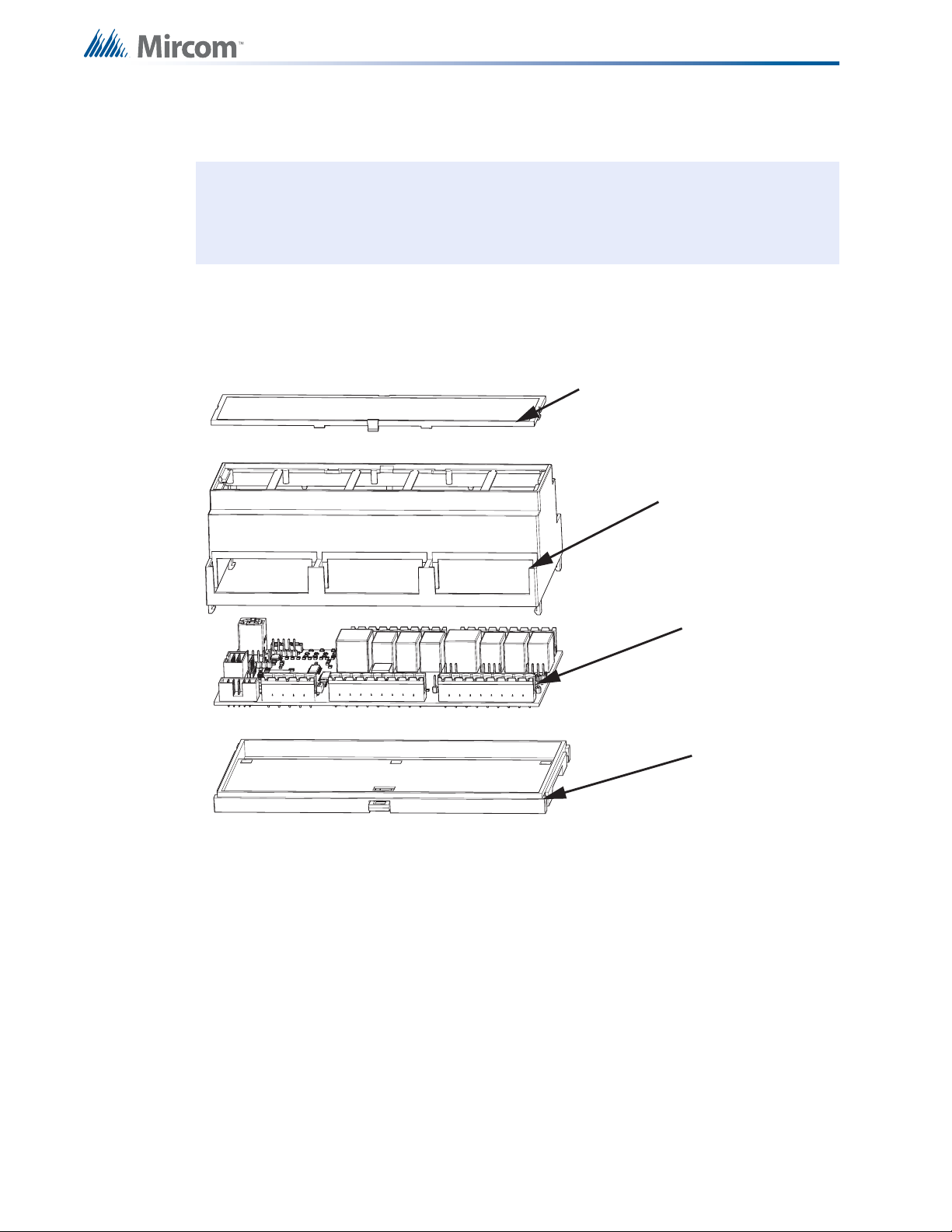
3.0 Installation
i
Circuit board
Base with
mounting clip
Enclosure
Cover (OpenBAS-HV-NX10P)
or display
(OpenBAS-HV-NX10L and
HV-NX10D)
Note: Installation of OpenBAS-HV-NX10 series automation controllers should be in
accordance with the Canadian Electrical Code or the National Electrical Code,
and comply with all local regulations. Final acceptance is subject to the Local
Authority Having Jurisdiction (AHJ).
3.1 Parts of the Enclosure
10 (45)
Figure 1 Parts of the enclosure
Page 11

Installation
!
To remove the circuit board from the enclosure
Caution: Risk of Electric Shock. Disconnect the mains power and disconnect the
controller from all wiring before opening the enclosure.
Attention: Always hold circuit boards by the edges to prevent damage from static
electricity. Always wear an anti-static bracelet when handling circuit
boards.
1. On OpenBAS-HV-NX10P, remove the cover. On OpenBAS-HV-NX10L and OpenBASHV-NX10D, remove the 4 screws and then remove the display.
2. Insert a flathead screwdriver under the tabs on the enclosure, shown in Figure 2, in order
to lift the tabs and remove the base.
Figure 2 Tabs on enclosure
11 (45)
Page 12
Installation
circuit board
!
3. Hold the circuit board with one hand, and with the other hand lift the tabs so that you can
remove the circuit board from the enclosure. See Figure 3.
Lift tabs and remove
Circuit board
Figure 3 Lift tabs and remove circuit board
Attention: Be careful not to break the tabs. Do not apply excessive force.
12 (45)
Page 13
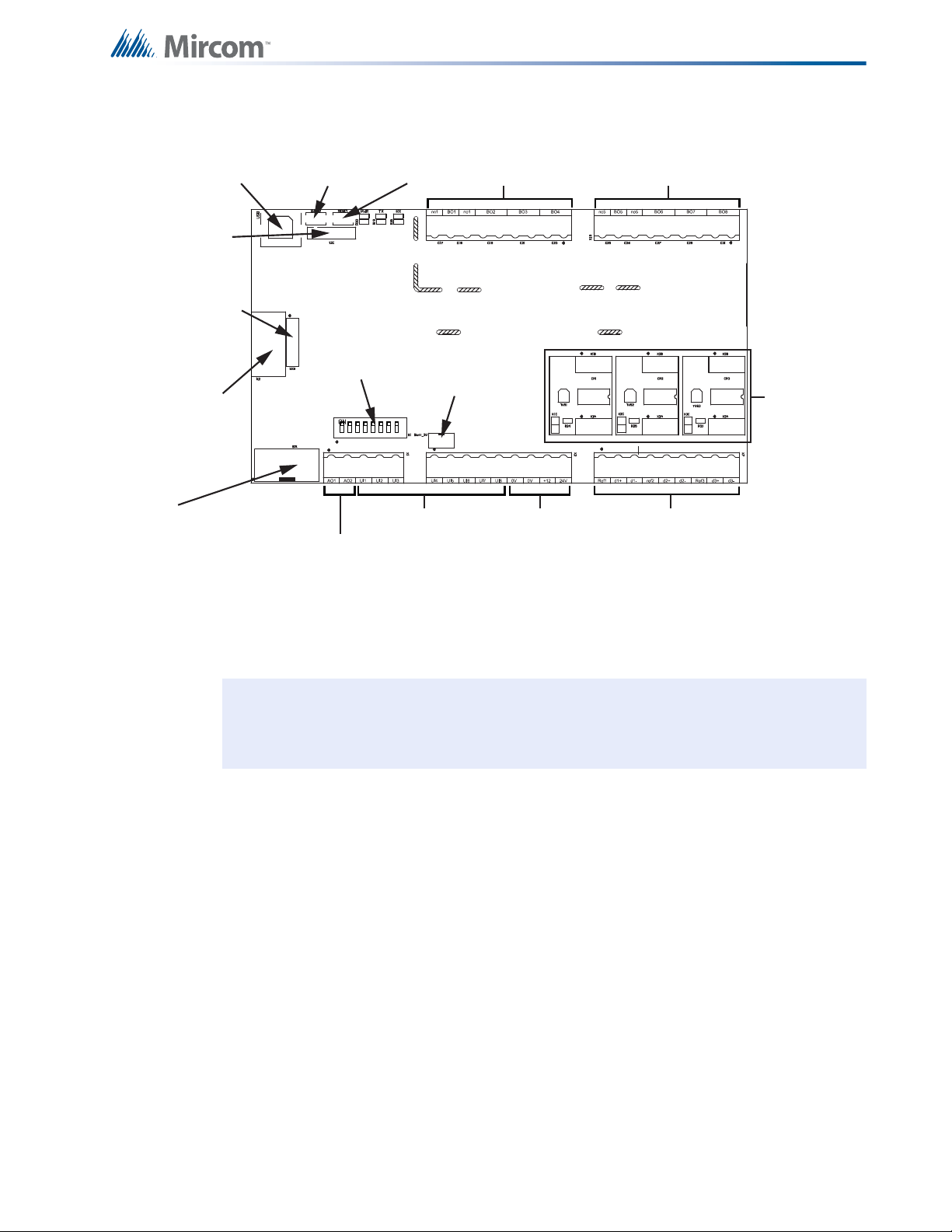
3.2 Controller Board Connections
COM1, COM2, COM3
Universal
inputs 1-8
Power
Analog
outputs 5-8
outputs 1-4
Connections for
communication
converters
connection
DIP switches
button
button
Battery
connection
!
Installation
USB
Connection for
memory expansion
or wireless receiver
Connection for
memory expansion or
OpenBAS-HV-LCD
(OpenBAS-HV-NX10L
only)
Connection for
OpenBAS- HV-CORE2
display
(OpenBAS-HV-NX10D
only)
SPI port for
Ethernet controller
Download
outputs 1-2
Figure 4 Board connections
Reset
Relay
Relay
3.3 Installing Accessories
Attention: This job must be performed only by a certified technician as dangerous
voltages might be present inside of the enclosure.
Always disconnect the power before installing accessories.
3.3.1 Communication Converters (OpenBAS-ACC-RS485, OpenBAS-ACCRS232)
By default, the field bus ports (labeled COM1, COM2 and COM3) are configured as RS-485
through factory-installed modules. They can be changed to RS-232 or optically isolated RS485 by installing the OpenBAS-ACC-RS232 or OpenBAS-ACC-RS485 converters.
The communication converters OpenBAS-ACC-RS485 and OpenBAS-ACC-RS232 attach to
the connections labeled P1, P2, and P3 in Figure 5 below. Figure 5 also shows the relationship
between the 3 converters and the field bus connections (labeled COM1, COM2, and COM3).
P1 controls COM1, P2 controls COM2, and P3 controls COM3.
13 (45)
Page 14
Installation
P1 P2 P3
COM1 COM2
COM3
Field bus
connections and
connection for
OpenBAS-ACC-DB9
Connections for
OpenBAS-ACC-RS485
and
OpenBAS-ACC-RS232
i
Figure 5 COM ports
For example, if OpenBAS-ACC-RS485 is installed in P1 and OpenBAS-ACC-RS232 is
installed in P2, then COM1 functions as optically isolated RS-485, and COM2 functions as RS-
232.
Note: P3 and COM3 are functional only on OpenBAS-HV-NX10D.
14 (45)
Page 15

Installation
Jumpers
Factory-installed
RS-485 modules
Jumper
open
Factory-installed RS-485
module removed
Figure 6 Location of factory-installed modules and jumpers
To install a communication converter
1. Open the jumper.
2. Remove the factory-installed RS-485 module.
Figure 7 The jumper and RS-485 module are removed from P1
15 (45)
Page 16

Installation
OpenBAS-ACC-RS232
i
3. Install the communication converter.
Figure 8 OpenBAS-ACC-RS232 is installed in P1
3.3.2 Memory Expansion Card (OBS-ACC-32K128) and Wireless Receiver (OpenBAS-HV-RF433R)
Connect the memory expansion cards to either one of the two terminals shown in Figure 9.
They are labeled I2C and I2CB.
Note: When connecting the I2C ports on 2 devices, make sure to connect pin 1 on the
first device to pin 1 on the second device. Pin 1 is marked by a dot or a “1”.
16 (45)
Page 17

Installation
Connection for
wireless receiver
or memory
expansion card
Connection for
OpenBAS-HV-LCD
or memory
expansion card
Connection for
OpenBAS-HV-CORE2
I2C
I2CB
N2
SPI port for
Ethernet controller
Connect the OpenBAS-HV-RF433R wireless receiver to the port labeled I2C, so that it is
accessible when the board is in the enclosure.
Figure 9 I2C, I2CB, N2, and SPI connections
3.3.3 Displays (OpenBAS-HV-LCD and OpenBAS-HV-CORE2)
The OpenBAS-HV-LCD display connects to I2CB, and the OpenBAS-HV-CORE2 display
connects to N2 as shown in Figure 9.
3.4 Ethernet Controllers (OpenBAS-NWK-ETH3)
Connect an Ethernet controller to the terminal labeled SPI (shown in Figure 9) with the cable
included with the Ethernet controller. See section 4.7 on page 37 for information on
networking.
3.5 DIP Switches
The 8 DIP switches (shown in Figure 10) are used with the 8 universal inputs ONLY when the
inputs are connected to resistive 1000 Ω temperature sensors.
In all other cases, make sure that the DIP switches are off.
For example, if you are going to connect universal input 1 to a resistive 1000 Ω temperature
sensor, turn on DIP switch 1.
The DIP switches are set at the factory in the off position.
17 (45)
Page 18
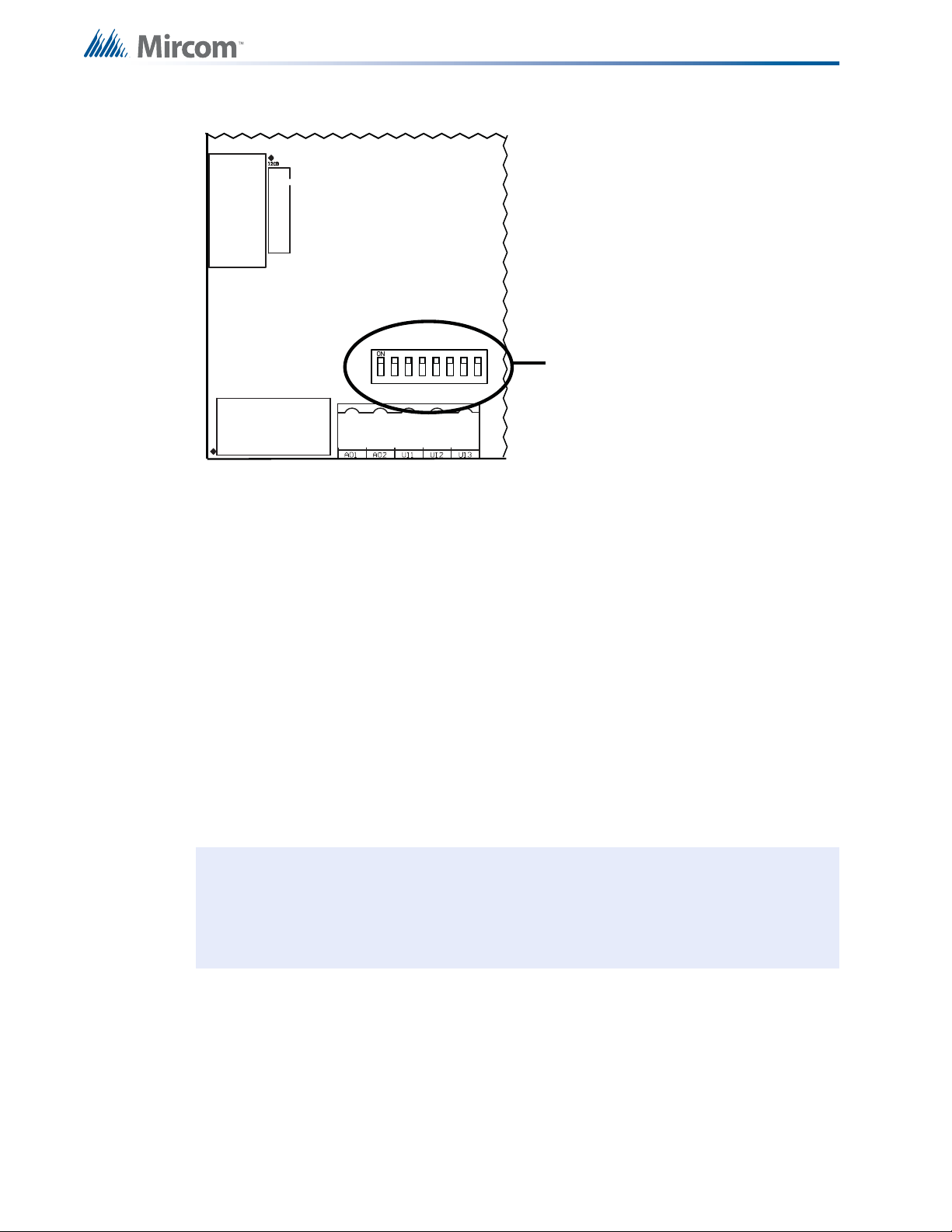
Figure 10 DIP switches
DIP switches
12
3
456
78
!
Installation
3.6 USB
The full speed USB 2.0 connection is shown in Figure 4. Connect a computer to this port in
order to configure the controller.
3.7 Reset and Download Buttons
Press the RESET button to restart the controller.
The DWNLD button is used for loading firmware on to the controller.
Refer to the OpenBAS Programming Manual for information on upgrading controllers.
3.8 Battery
Attention: Caution – The battery used in this device may present a risk of fire or
chemical burn if mistreated. Do no disassemble, heat above 60°C
(140°F), or incinerate. Replace battery with FDK Corporation ML2430
batteries only. Use of another battery may present a risk of fire or
explosion.
18 (45)
The battery is used only during power outages for real time clock and data retention. The
Mircom part number for the battery is BT-025.
Install the battery before mounting the controller.
Page 19

To install or replace the battery
3 35/64” (90 mm)
6 9/32”
(160 mm)
Mounting
clip
Hooks
1. Disconnect the mains power and open the mains breaker.
2. Disconnect all wiring from the unit.
3. Remove the top cover as described on page 21.
4. Disconnect the old battery.
5. Dispose of the used battery promptly. Keep away from children. Do not disassemble and
do not dispose of in fire.
6. Connect the new battery to the connection shown in Figure 4. The battery wire can be
connected only one way.
3.9 Enclosure Dimensions
Installation
Figure 11 Enclosure (back view)
19 (45)
Page 20

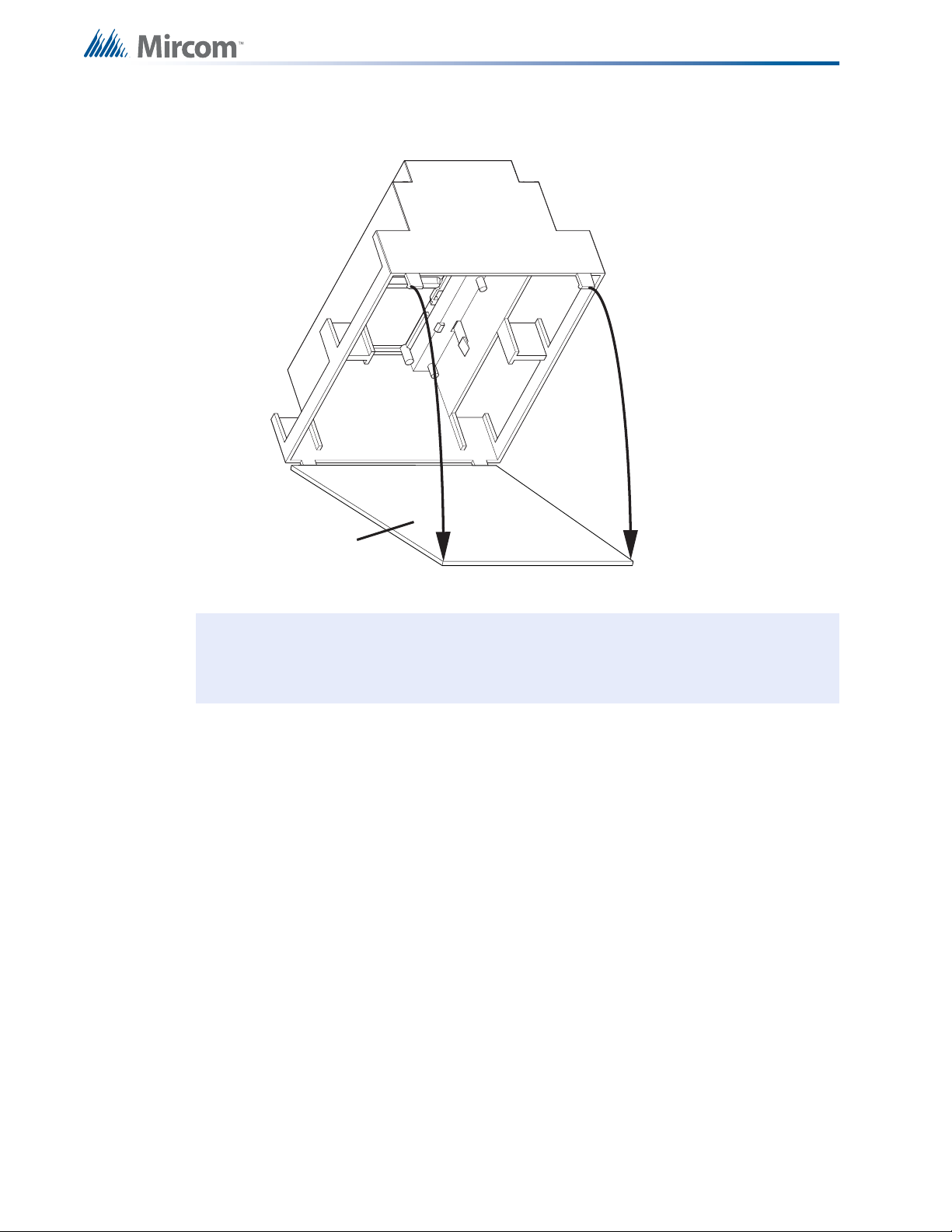
3.10 Assembly
i
Circuit board
!
To put the circuit board in the enclosure
1. Hold the circuit board with one hand, and with the other hand lift the tabs so that you can
fit the circuit board into the enclosure as shown below.
Note: Make sure that the board is the right way up: the terminal labels on the enclosure
must match the terminal labels on the circuit board.
Installation
20 (45)
Figure 12 Fit the circuit board in enclosure
2. Snap the base onto the enclosure. Make sure that the mounting clip is on the bottom.
3. On OpenBAS-HV-NX10P, snap the cover in place.
On OpenBAS-HV-NX10L, connect the OpenBAS-HV-LCD display to the connection
labeled I2CB.
On OpenBAS-HV-NX10D, connect the OpenBAS-HV-CORE2 display to the connection
labeled N2.
Make sure that the Mircom logo is the right way up.
4. Secure the display with the 4 screws.
Attention: Always hold circuit boards by the edges to prevent damage from static
electricity. Always wear an anti-static bracelet when handling circuit
boards.
Page 21

3.11 Mounting the Enclosure
!
Mount with
mounting clip on bottom
Attention: Mount the enclosure on a DIN rail in a UL-compliant metal box. Do not
drill holes in the enclosure or modify the enclosure in any way.
To mount the enclosure on a DIN rail
Mount the enclosure with terminal labels the right way up and the mounting clip on the bottom.
1. Mount a section of DIN rail so that there is enough space for the enclosure to be
mounted.
2. Slide the hooks under the rail and push the enclosure to secure it on the DIN rail. The
mounting clip locks it in place.
Installation
Figure 13 Enclosure mounted on DIN rail (circuit board not shown)
Figure 14 Enclosure mounted on DIN rail (back view)
To remove the enclosure from the DIN rail
• With your hands or with a small flathead screwdriver, pull the mounting clip to release
the enclosure from the DIN rail, and carefully pull the enclosure off the DIN rail.
21 (45)
Page 22

4.0 Field Wiring
i
Note: Installation of OpenBAS-HV-NX10 series automation controllers must be in
accordance with the Canadian Electrical Code or the National Electrical Code,
and comply with all local regulations. Final acceptance is subject to the Local
Authority Having Jurisdiction (AHJ).
4.1 Wiring the Terminals
Figure 4 on page 13 shows the location of the terminals. The terminals are depluggable for
ease of wiring.
4.1.1 Required Tools
Tools needed:
• Precision or jeweler's screwdriver set
• Wire cutter
• Wire stripper
4.1.2 Installation Tips
• Perform visual inspection of circuit board and parts for obvious issues.
• Use a wire tie to group wires for easy identification and neatness.
4.2 Power Supply Connection
The OpenBAS-HV-NX10 series controller can be powered 3 ways.
• 12 Vdc, 360 mA max.
• 24 Vdc, 450 mA max.
• 24 Vac 50/60 Hz, 500 mA max.
Notes:
• Use either of the terminals labeled 0V to connect the negative side of the power supply.
• Use the +12 or 24V terminals to daisy chain a shared supply between more than one
controller.
22 (45)
Page 23

4.2.1 24 VDC or 24 VAC
24 VAC/VDC
0 V
24V0V +120V
12 VDC
0 V
24V0V +120V
!
Universal inputs 1-8
UI2 UI3UI1 UI5 UI6UI4 UI8UI7 0V0V
UI1
UI2
UI3
UI4
UI5
UI6
UI7
UI8
When the controller is powered from the 24V terminal, it can provide 12 VDC power to field
devices through the +12 terminal. In this case, the +12 terminal can provide up to 250 mA.
Figure 15 Power supply - 24 VAC or 24 VDC
4.2.2 12 VDC
Field Wiring
Figure 16 Power supply - 12 VDC
Caution: An appropriate UL listed class 2 power supply or transformer with
necessary protection devices such as fuses or breakers should be used
to limit the risk of fire. All local codes and regulations for installation
must be observed.
4.3 Universal Inputs
Figure 17 Universal Inputs
The controller has 8 universal inputs. Depending on the application, the universal inputs can
be used the following ways:
• Analog Inputs (section 4.3.2 on page 24) 0-10 VDC
0-5 VDC
23 (45)
Page 24

• Input for a resistive 1000 Ω temperature sensor (section 4.3.3 on page 29)
• Measuring 24 VDC (section 4.3.4 on page 29)
• Digital (binary) inputs (section 4.3.5 on page 29) for dry contacts being fed by
• Pulse counters (section 4.3.5 on page 29) active PNP 12 VDC
4.3.1 Tips for Universal Inputs
• Use 18 AWG stranded wire.
• The absolute maximum voltage is 15 VDC.
• Fit the end of the wire with terminal connectors to provide a solid connection that can
withstand temperature changes and vibration without becoming loose.
• Connect the common wires of sensors to either of the 0V terminals.
• Turn the corresponding DIP switch on ONLY when using resistive 1000 Ω temperature
sensors. See section 3.5 on page 17.
Field Wiring
0.5-4.5 VDC ratiometric
0-20 mA
4-20 mA
Thermocouple input with
x200 amplifiers
12 VDC
for dry contacts being fed by
12 VDC
• When using 2 or more external power supplies, connect the negatives or commons of
both power supplies to the 0V terminal of the controller.
To ensure that the universal inputs operate correctly, follow these guidelines:
• Limit the distance between the analog sensor and the controller to 10 m (30 ft). Mircom
recommends shielded wire for noisy environments.
• If this distance is not possible, longer wire runs with shielded wire are allowed up to 30 m
(100 ft). Connect the shield to any 0V terminal on the controller, making sure to isolate
the shield on the other end. Failing to do so creates ground loops.
• When possible, route the wiring inside metal piping and ground the piping for better
results.
• Avoid running any analog signals near sources of electric noise such as: motors,
ballasts, fluorescent lamps, variable frequency drives, high energy contacts, RF (radio
frequency) transmitters, microwave ovens, and any other equipment that generates
electromagnetic interference.
• Keep a minimum distance of 30 cm (1 ft) between analog input wiring and any conductor
carrying more than 24 VAC.
• Follow good wiring and installation practices, and follow all local regulations and
electrical codes.
4.3.2 Analog Inputs
24 (45)
Connect any sensor or transducer that outputs 0-5 V, 0.5-4.5 V ratiometric, or 0-10 V directly
to the universal inputs when they are configured as analog inputs.
Page 25
Field Wiring
!
UI#
12 VDC
0 V
Field Device
+
Signal
-
+12
0V
Controller
UI#
0V
24 V
0 V
Field Device
+
Signal
-
+12
24 V
Controller
To use the universal inputs as analog inputs
1. Connect the appropriate analog signal to the universal input according to the diagrams
below.
2. Configure the analog input type and then calibrate using the OpenBAS software.
Terminal Labeling on Field Devices
The positive terminal on field devices might be labeled one of the following:
+ +24 +PWR 24 +DC AC PWR
The negative terminal on field devices might be labeled one of the following:
-0VGNDNegCOM
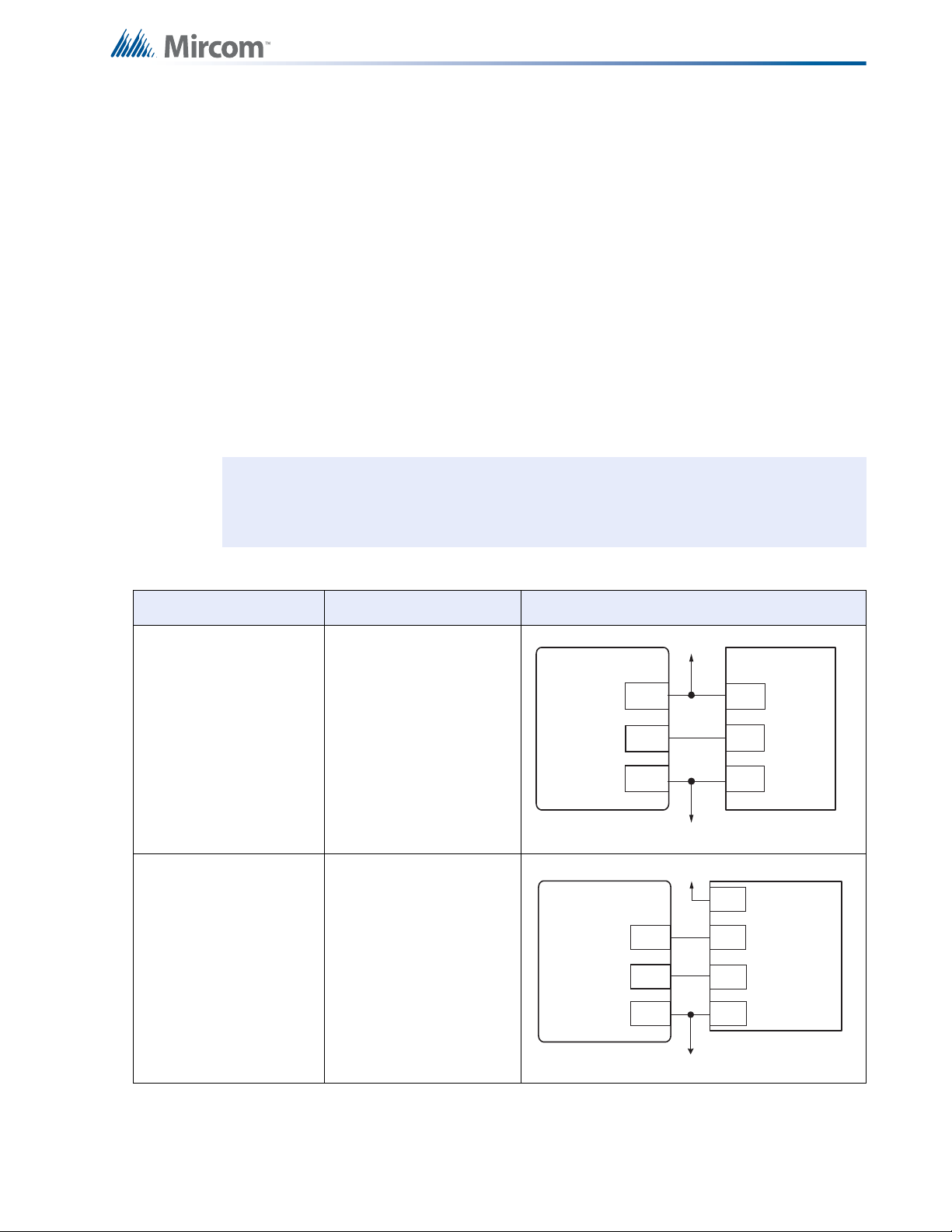
Table 4 shows how to connect different devices to the analog inputs.
Attention: When using 2 or more external power supplies, connect the negatives
or commons of both power supplies to the 0V terminal of the controller.
Table 4 Analog Input Wiring
Type of field device Power source Wiring diagram
12 VDC powered
transducer with 1-10
VDC output
12 VDC powered
transducer with 1-10
VDC output
12 VDC power supply
common to field device
and controller.
24 VAC or VDC power
supply common to field
device and controller.
The controller provides
the 12 VDC to the field
device.
25 (45)
Page 26

Table 4 Analog Input Wiring (Continued)
UI#
0 V
24V
Signal
0V
24V
0V
24 V
Field Device Controller
UI#
+
Signal
-
+12
0V
Field Device Controller
Power Supply
+
-
12VDC
Power Supply
+
-
UI#
+
Signal
-
24V
0V
Field Device Controller
Power Supply
+
-
24VAC or VDC
Power Supply
+
-
UI#
0 V
+
-
+12
0V
12VDC
ȍ
Field Device Controller
Type of field device Power source Wiring diagram
24 V external power
24 V powered
transducer with 1-10
VDC output
Transducer with 1-10
VDC output
supply common to field
device and controller.
Power can be 24 VDC or
VAC as required by the
field device.
External power supply for
field device (depends on
field device requirements)
and 12 VDC external
power supply for
controller.
Connect the negative or
common of both power
supplies to the 0V
terminal of the controller.
Field Wiring
Transducer with 1-10
VDC output
2-wire transducer with 420 mA or 0-20 mA output
Connect an external 250
Ω ½ Watt 1% load
resistor in parallel
between the universal
input terminal and 0V to
provide a return path for
the transducer signal
current.
External power supply for
field device (depends on
field device requirements)
and 24 V external power
supply for controller.
Connect the negative or
common of both power
supplies to the 0V
terminal of the controller.
12 VDC power supply
common to field device
and controller.
26 (45)
Page 27

Table 4 Analog Input Wiring (Continued)
UI#
Field Device
+
-
24V
0V
24 VDC
ȍ
Controller
24V
0V
UI1
ȍ
Controller
Power Supply
+
-
24 VAC or VDC
Power Supply
+
-
+
-
Field Device
+12
0V
UI1
ȍ
Controller
Power Supply
+
-
12 VDC
Power Supply
+
-
+
-
Field Device
UI#
0 V
+
Signal
24V
0V
24 VAC
ȍ
-
Field Device Controller
Type of field device Power source Wiring diagram
2-wire transducer with 420 mA or 0-20 mA output
Connect an external 250
Ω ½ Watt 1% load
resistor in parallel
between the universal
input terminal and 0V to
provide a return path for
the transducer signal
current.
24 VDC power supply
common to field device
and controller.
Field Wiring
0 V
2-wire transducer with 420 mA or 0-20 mA output
Connect an external 250
Ω ½ Watt 1% load
resistor in parallel
between the universal
input terminal and 0V to
provide a return path for
the transducer signal
current.
2-wire transducer with 420 mA or 0-20 mA output
Connect an external 250
Ω ½ Watt 1% load
resistor in parallel
between the universal
input terminal and 0V to
provide a return path for
the transducer signal
current.
3-wire transducer with 420 mA or 0-20 mA output
External power supply for
field device (depends on
field device requirements)
and 24 V external power
supply for controller.
Connect the negative or
common of both power
supplies to the 0V
terminal of the controller.
External power supply for
field device (depends on
field device requirements)
and 12 VDC external
power supply for
controller.
Connect the negative or
common of both power
supplies to the 0V
terminal of the controller.
Connect an external 250
Ω ½ Watt 1% load
resistor in parallel
between the universal
input terminal and 0V to
provide a return path for
the transducer signal
current.
24 VAC power supply
common to field device
and controller.
27 (45)
Page 28

Table 4 Analog Input Wiring (Continued)
24V
0V
UI1
ȍ
Controller
Power Supply
+
-
24 VAC or VDC
Power Supply
+
-
+
Signal
-
Field Device
+12
0V
UI1
ȍ
Controller
Power Supply
+
-
12VDC
Power Supply
+
-
+
Signal
-
Field Device
+12
Signal
0V
J or K
thermocouple
+
-
+
-
x200
instrumentation
amplier
UI#
0V
24 V
0 V
+12
24 V
Controller
+12
Signal
0V
J or K
thermocouple
+
-
+
-
x200
instrumentation
amplier
12
VDC
UI#
+12
0V
Controller
Type of field device Power source Wiring diagram
Field Wiring
3 wire transducer with 420 mA or 0-20 mA output
Connect an external 250
Ω ½ Watt 1% load
resistor in parallel
between the universal
input terminal and 0V to
provide a return path for
the transducer signal
current.
3 wire transducer with 420 mA or 0-20 mA output
Connect an external 250
Ω ½ Watt 1% load
resistor in parallel
between the universal
input terminal and 0V to
provide a return path for
the transducer signal
current.
J or K Thermocouples
When using J or K
thermocouples, install a
x200 low offset amplifier.
External power supply for
field device (depends on
field device requirements)
and 24 V external power
supply for controller.
Connect the negatives or
commons of both power
supplies to the 0V
terminal of the controller.
External power supply for
field device (depends on
field device requirements)
and 12 VDC external
power supply for
controller.
Connect the negatives or
commons of both power
supplies to the 0V
terminal of the controller.
24 VAC or VDC power
supply to controller.
The controller provides
the 12 VDC and a
maximum current of
250 mA to the field
device.
J or K Thermocouples
When using J or K
thermocouples, install a
x200 low offset amplifier.
28 (45)
12 VDC power supply
common to field device
and controller.
0 V
Page 29

4.3.3 Resistive 1000 Ω Temperature Sensor
UI#
1
2
0V
1000 Ω
resistive
temperature
sensor
Controller
0V
UI#
Nȍ
Field Device
+
-
1-30 VDC
Controller
!
For resistive temperature sensors, the corresponding DIP switch must be ON. See section
3.5 on page 17. For all other devices, the DIP switch must be OFF.
Table 5 Wiring a 1000 Ω temperature sensor
Type of field device Power source Wiring diagram
1000 Ω nickel or silicon
resistive temperature
sensor, for instance
OpenBAS-ACC-TE1K or
any PTC (positive
temperature coefficient)
thermistors
4.3.4 Measuring 24 VDC with Analog Inputs
N/A
Field Wiring
If you want to measure 24 VDC voltages, add a 15 kΩ ½ Watt 1% resistor in series with the
higher voltage to be measured. See Figure 18.
Figure 18 Measuring VDC
Caution: You can measure up to 30 VDC. A higher voltage will damage the
controller.
Only DC voltages can be input to the universal inputs. Applying AC
voltages or inverting the polarity will provide incorrect readings, and
can eventually damage the inputs.
4.3.5 Digital Inputs
The 8 universal inputs can receive digital signals. These are signals that represent only two
states.
The digital inputs have the following ranges:
• ZERO (0) is valid for an input voltage between 0 to 4 VDC
• ONE (1) is valid for an input voltage between 8 to12 VDC
29 (45)
Page 30

Field Wiring
Voltage
0V
2V
4V
6V
8V
10V
+12V
Valid
ZERO
region
Valid
ONE
region
Uncertain
region
Any voltage that lies between 4.1 to 7.9 V can give ambiguous results and must be avoided.
See Figure 19.
Input
Figure 19 Digital input voltage range
The digital inputs can be used as frequency or pulse counters with these specifications:
• Digital inputs 1-2 can measure square wave or pulsed signals
. The maximum
measurable frequency is 250 Hz (15,000 pulses per minute). The minimum pulse width
detectable is 2 milliseconds.
• Digital inputs 3-8 can measure frequencies up to 10 Hz (600 pulses per minute). The
minimum pulse width detectable is 50 milliseconds.
Dry contact, push buttons, magnetic reed switches or PNP transistors must supply voltage to
the digital input for correct operation.
To use the universal inputs as digital inputs
1. Connect the appropriate digital signal to the universal input according to the diagrams in
Ta bl e 6 .
2. Configure the digital input type using the OpenBAS software.
Table 6 shows how to connect different devices to the digital inputs.
30 (45)
Page 31

Table 6 Digital Input Wiring
UI#
+12
Field Device
Controller
0V
12VDC
OR
UI#
24V
+12
Field Device
Controller
0V
OR
UI#
Nȍ
24V
Field Device
24VDC
Controller
0V
0V
OR
!
Type of field device Power source Wiring diagram
Dry contact switch or
high switched PNP
transistor
Note: If you use a PNP
transistor, the voltage
must be DC.
Dry contact switch or
high switched PNP
transistor
Note: If you use a PNP
transistor, the voltage
must be DC.
External 12 VDC power supply
to feed the dry contact switches
12 VDC generated by the
controller
Field Wiring
0V
24V
Dry contact switch or
high switched PNP
transistor
4.4 Analog Outputs
The two analog outputs have short-circuit and thermal protection. They provide 10 mA with a
maximum voltage of 10 VDC to control the speed of a motor, the position of a valve or damper,
or light intensity using electronic ballasts with 0-10 V inputs.
Caution: Applying any external voltage less than 0 V or greater than 10 V will
damage the analog outputs.
0V
24 VDC power supply to feed
the dry contact switches
To ensure that analog outputs operate correctly, follow these guidelines:
• Use 18 AWG stranded wire.
• Limit the distance between the field device and the controller to 10 m (30 ft). Mircom
recommends shielded wire for noisy environments.
31 (45)
Page 32

Field Wiring
Analog
output 1
AO2AO1
Analog
AO#
+
-
0V
Field Device Controller
• If this distance is not possible, longer wire runs with shielded wire are allowed up to 30 m
(100 ft). Connect the shield to any 0V terminal on the controller, making sure to isolate
the shield on the other end. Failing to do so creates ground loops.
• When possible, route the wiring inside metal piping and ground the piping for better
results.
• Avoid running any analog signals near sources of electric noise such as: motors,
ballasts, fluorescent lamps, variable frequency drives, high energy contacts, RF (radio
frequency) transmitters, microwave ovens, and any other equipment that generates
electromagnetic interference.
• Keep a minimum distance of 30 cm (1 ft) between analog output wiring and any
conductor carrying more than 24 VAC.
• Follow good wiring and installation practices, and follow all local regulations and
electrical codes.
• Use either of the terminals labeled 0V to connect the return signal or common.
output 2
Figure 20 Analog outputs
Table 7 shows how to connect devices to the analog outputs.
Table 7 Analog Output Wiring
Type of field device Wiring diagram
Variable-frequency drive
with 1-10 VDC input for
speed control
Or
Dimmable ballast with 010 VDC control input
32 (45)
Page 33

Table 7 Analog Output Wiring (Continued)
AO#
+
Signal
-
24V
0V
Field Device
0V
Controller
24 V
!
BO2
BO1
no1
nc1
Relay
output 1
BO3 BO4 BO6
BO5
no5nc5
BO7
BO8
Relay
output 2
Relay
output 3
Relay
output 4
Relay
output 5
Relay
output 6
Relay
output 7
Relay
output 8
Type of field device Wiring diagram
24 VAC or VDC valve or
damper with 1-10 VDC
control input
4.5 Digital Relay Outputs
Field Wiring
Outputs 1 and 5 have common (labeled BO), normally open (labeled no), and normally closed
(labeled nc) contacts.
Outputs 2-4 and 6-8 have 2 contacts and can be configured in the software as normally open
or normally closed. By default they are normally open.
Attention: If DC voltage with anything other than purely resistive load is used on
the digital outputs, then the appropriate protective devices must be
installed.
Figure 21 Relay outputs
33 (45)
Page 34

Note: Installation of OpenBAS-HV-NX10 series automation controllers must be in
i
!
Single Phase
Motor
NO
NC
C
120 VAC
Controller
120 V lamp
120 VAC
Neutral
NO
NC
C
Controller
accordance with the Canadian Electrical Code or the National Electrical Code,
and comply with all local regulations. Final acceptance is subject to the Local
Authority Having Jurisdiction (AHJ).
Relay output connections can contain hazardous voltages that present the risk of
electric shock. Caution must be exercised when handling these terminals. Only
certified technicians should handle these terminals.
4.5.1 Surge Protection
The provisions shown in Table 8 should help to reduce electrical noise that could affect nearby
equipment.
Attention: Always install safety breakers and fuses according to the load and
voltage, and in accordance with Canadian Electrical Code or National
Electric Code. Follow all local regulations.
Field Wiring
Table 8 Surge Protection on Relay Outputs
Type of field
device
Single phase motor
120 V lamp with
ballast
Notes Wiring diagram
Install a 120 V MOV surge
protector in parallel with motor
to suppress noise.
Neutral
Install a 120 V MOV surge
protector in parallel with
solenoid coil to suppress
noise.
Note: Only lamps with ballast
require surge protection.
Incandescent, LED, and
halogen lamps do not require
surge protection.
34 (45)
Page 35

Table 8 Surge Protection on Relay Outputs (Continued)
120 VAC LED
120 VAC
Neutral
NO
NC
C
Controller
Nȍ
120 VAC coil
120 VAC
NO
NC
C
Controller
24 VDC coil
C
24 VDC
0 V
NO
NC
Controller
24 VDC lamp
24 VDC
0 V
C
NO
NC
Controller
Field Wiring
Type of field
device
120 VAC LED lamp
120 VAC coil
Notes Wiring diagram
High impedance lamps such
as LED lamps require a 15 kΩ
1W 5% resistor in parallel to
the lamp to prevent current
leakage.
Install a 120 V MOV surge
protector in parallel with
solenoid coil to suppress
noise.
Install a 1N4007 reverse
24 VDC coil
polarizing diode in parallel
with DC solenoid coil to
suppress flyback voltage.
24 VDC lamp N/A
Neutral
35 (45)
Page 36

Table 8 Surge Protection on Relay Outputs (Continued)
24 VAC coil
24 VAC
0 V
C
NO
NC
Controller
COM1
ref1
d1+ d1- ref2d2+ d2- ref3 d3+ d3-
COM2 COM3
Field Wiring
Type of field
Notes Wiring diagram
device
Install a 36 V MOV surge
24 VAC coil
protector in parallel with coil of
solenoid to suppress noise.
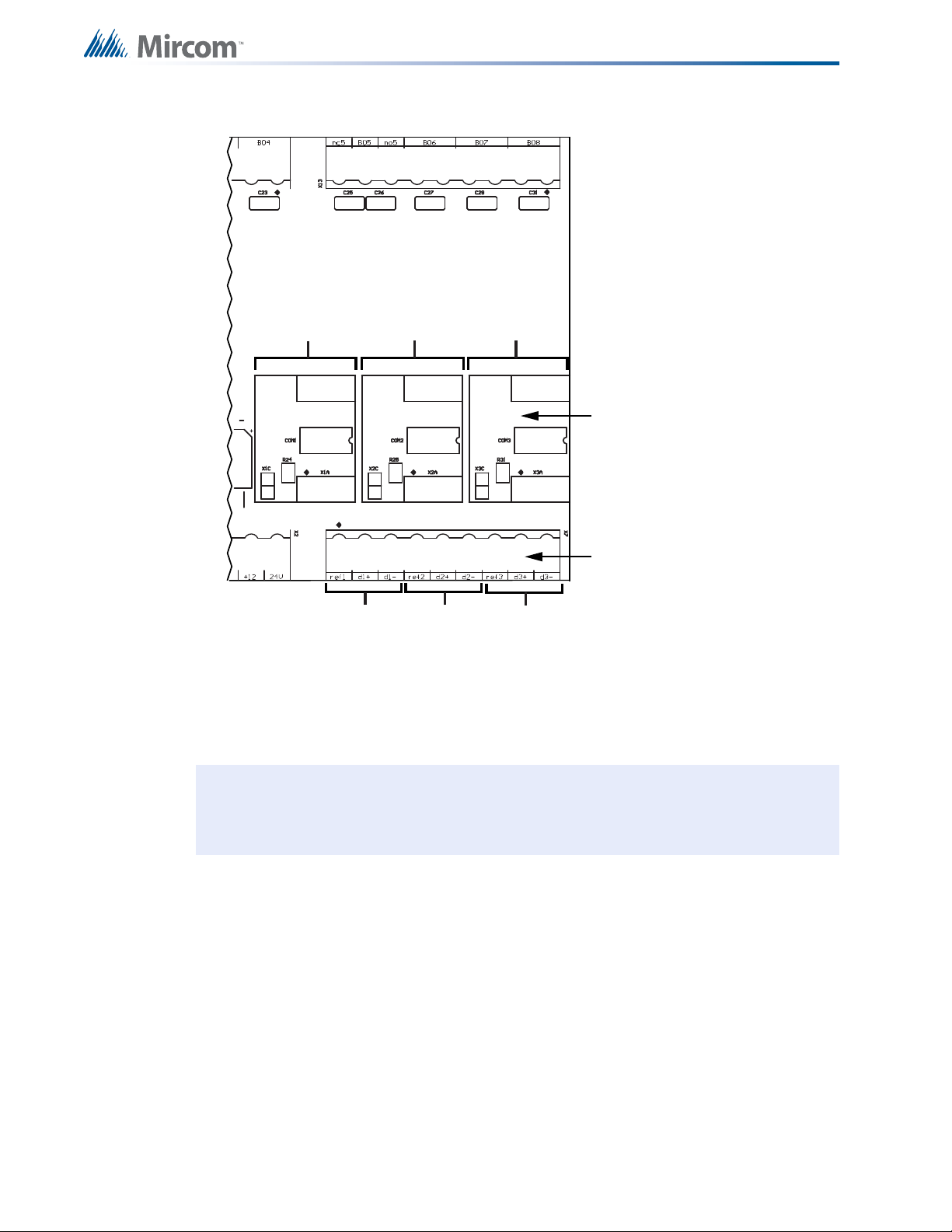
4.6 Field Bus Connections and OpenBAS-ACC-DB9
Figure 22 Field bus connections
Table 9 Field Bus Ports
Port Driver Module Functional Optional Driver Comments
COM1 RS-485 Yes Yes
COM2 RS-485 Yes Yes
COM3 RS-485
Note 1: P3 and COM3 are functional only on OpenBAS-HV-NX10D.
Note 2: Each of the three P ports allow the field replacement of the RS-485 modules with the
OpenBAS-ACC-RS485 optically isolated RS-485 module or OpenBAS-ACC-RS232
conversion module. See section 3.3.1 on page 13.
Note 3: To avoid intermittent communication blackouts, the isolation provided by the
OpenBAS-ACC-RS485 module is highly recommended for noisy environments, and to prevent
damage to the boards in extreme cases, especially if the OpenBAS-HV-NX10 series controller
is inside an enclosure containing high voltage wiring.
OpenBAS-HVNX10D only
OpenBAS-HVNX10D only
See notes 1, 2 and 3
4.6.1 OpenBAS-ACC-DB9
OpenBAS-ACC-DB9 is a DB9 adapter which is installed in one of the field bus ports.
36 (45)
Page 37

4.7 Networking
OpenBAS-NWK-ETH3
Cat 5 cable
RS-485
RS-485
Maximum 50 cm (20”)
OpenBAS-HV-NX10 Series
OpenBAS-NWK-ETH3
Cat 5 cable
RS-485
RS-485
OpenBAS-HV-NX10 Series
Figures 23 and 24 show how to add a controller to a network with OpenBAS-NWK-ETH3.
Each OpenBAS device must be powered separately.
Connect the SPI port on OpenBAS-NWK-ETH3 to the SPI port on the OpenBAS-HV-NX10
series controller with the included cable, as shown in Figure 23. See section 3.4 on page 17
for information about the SPI port.
Field Wiring
4.7.1 RS-485 Details
Figure 23 Networking with OpenBAS-NWK-ETH3 with the included cable
OpenBAS-NWK-ETH3 can also connect to one of the RS-485 connections on the OpenBASHV-NX10 series controller, as shown in Figures 24 and 25. See section 4.7.1 on page 37 for
information on the RS-485 ports.
Figure 24 Networking with OpenBAS-NWK-ETH3 over RS-458
Figure 25 shows 3 controllers networked with RS-485. The list of supported protocols is in
chapter 5.
• 22 AWG twisted pair
• Maximum length: 1219.2 m (4000 feet)
• Mircom recommends shielded cable
37 (45)
Page 38

Field Wiring
First controller
on network
Last controller
on network
Second
controller on
network
Connect shield to
chassis ground on
one metal enclosure
only
Send and
receive on P3
Reset button
Download
button
USB connection
for programming
USB connection
for backup
38 (45)
Figure 25 Networking with RS-485
4.8 Connections and LEDs on OpenBAS-HV-HX10D
Figure 26 Connections and LEDs on the OpenBAS-HV-NX10D
• USB connection for programming and updating firmware: Connect a computer to this
port in order to configure the display.
• USB connection for backup: Connect a USB stick to this port in order to create backups
for data trending.
• TX and RX: These LEDs flash to indicate communication through the P3 port (see
section 4.6 on page 36).
• Reset button: Press this button to restart the display.
• Download button: Press this button to load firmware on to the controller. Refer to the
OpenBAS Programming Manual for information on upgrading controllers.
Page 39

4.9 Circuit Board LEDs
PWR
TX
RX
• PWR: Is red when the unit is powered
• TX and RX: Flash green to indicate communication through ports COM1 and COM2
Figure 27 LEDs
Field Wiring
39 (45)
Page 40

5.0 Specifications
Standards: UL 60730-1
Input: 12 Vdc, 360 mA max., or 24 Vdc, 450 mA max.,
or 24 Vac 50/60 Hz, 500 mA max.
Output: 12 Vdc, 250 mA max. (when 24V powered)
Power Supply Protection: Resettable Fuse 1.1 A
Battery: FDK Corporation ML2430
Type: lithium
Nominal capacity: 100 mAh
Nominal voltage: 3 V
Mircom part number: BT-025
Relay Outputs 1 and 5: Voltage, current Load Form
125 VAC, 5 A General Use NO/NC
28 VDC, 5 A Resistive NO/NC
Relay Outputs 2, 3, 4, 6, 7, 8: Voltage, current Load Form
125 VAC, 5 A Resistive NO
125 VAC, 3 A General Use NO
2 Analog Outputs: Analog Output Voltage:
• 0-10 VDC
• 2-10 VDC
• 0-5 VDC
8 Universal Inputs: Analog Inputs:
• 0-10 VDC
• 0-5 VDC
• 0.5-4.5 VDC ratiometric
• 0-20 mA
• 4-20 mA
• 1000 Ω temperature sensor
• Thermocouple input with x200 amplifiers
Digital (binary) inputs:
• For dry contacts being fed by 12 VDC
Pulse counters:
• Active PNP 12 VDC
• For dry contacts being fed by 12 VDC
40 (45)
Page 41

Specifications
Communication Ports: 2 RS-485 ports (3 RS-485 ports on OpenBAS-HV-NX10D) supporting
the following protocols:
• COM1
• BACnet/MSTP
• Modbus/RTU-Slave
• Modbus/RTU-Master
• N2-Open
• Optomux
• COM2
• N2-Open
• Optomux
• N2/O22-master
• ASCII
• ECM
• COM3 (OpenBAS-HV-NX10D only)
• Modbus/RTU-Slave
• N2-Open
• Optomux
• N2/O22-master
• ASCII
RS-485 ports can be configured as RS-232 or optically isolated RS-485
1 USB 2.0 port supporting the following protocols:
• Optomux
• ASCII
2
2 I
C ports for memory expansion, LCD display, and OpenBAS-HV-
RF433R
1 SPI port
1 port for OpenBAS-HV-CORE2 display
Physical Characteristics: Weight: 360 g (12.8 oz)
Enclosure dimensions: 6 9/32” x 3 35/64” x 2 17/64” (160 mm x 90 mm x
58 mm)
Ambient Conditions: Operating Temperature: 0° to 40°C (32° to 104°F), 10% to 90% RH
noncondensing
Indoor Use Only
Purpose of Control: Operating Control
Construction of Control: Independently Mounted, for Panel Mount
Action Type and additional
Type 1.C
features:
Pollution Degree: 2
Software Class: Class A
Rated Impulse Voltage: 120V circuits: 2500V
24V circuits: 330V
41 (45)
Page 42

6.0 Warranty and Warning Information
WARNING!
Please read this document CAREFULLY, as it contains important warnings, life-safety, and
practical information about all products manufactured by the Mircom Group of Companies,
including Mircom and Secutron branded products, which shall include without limitation all fire
alarm, nurse call, building automation and access control and card access products
(hereinafter individually or collectively, as applicable, referred to as “Mircom System”).
NOTE TO ALL READERS:
1. Nature of Warnings. The within warnings are communicated to the reader out of an
abundance of caution and create no legal obligation for Mircom Group of Companies,
whatsoever. Without limiting the generality of the foregoing, this document shall NOT be
construed as in any way altering the rights and obligations of the parties, governed by the legal
documents that apply in any given circumstance.
2. Application. The warnings contained in this document apply to all Mircom System and shall
be read in conjunction with:
a. the product manual for the specific Mircom System that applies in given circumstances;
b. legal documents that apply to the purchase and sale of a Mircom System, which may
include the company’s standard terms and conditions and warranty statements;
c. other information about the Mircom System or the parties’ rights and obligations as may
be application to a given circumstance.
3. Security and Insurance. Regardless of its capabilities, no Mircom System is a substitute for
property or life insurance. Nor is the system a substitute for property owners, renters, or other
occupants to act prudently to prevent or minimize the harmful effects of an emergency
situation. Building automation systems produced by the Mircom Group of Companies are not
to be used as a fire, alarm, or life-safety system.
NOTE TO INSTALLERS:
All Mircom Systems have been carefully designed to be as effective as possible. However,
there are circumstances where they may not provide protection. Some reasons for system
failure include the following. As the only individual in contact with system users, please bring
each item in this warning to the attention of the users of this Mircom System. Failure to
properly inform system end-users of the circumstances in which the system might fail may
result in over-reliance upon the system. As a result, it is imperative that you properly inform
each customer for whom you install the system of the possible forms of failure:
4. Inadequate Installation. All Mircom Systems must be installed in accordance with all the
applicable codes and standards in order to provide adequate protection. National standards
require an inspection and approval to be conducted by the local authority having jurisdiction
following the initial installation of the system and following any changes to the system. Such
inspections ensure installation has been carried out properly.
42 (45)
5. Inadequate Testing. Most problems that would prevent an alarm a Mircom System from
operating as intended can be discovered by regular testing and maintenance. The complete
system should be tested by the local authority having jurisdiction immediately after a fire,
storm, earthquake, accident, or any kind of construction activity inside or outside the premises.
Page 43

The testing should include all sensing devices, keypads, consoles, alarm indicating devices
and any other operational devices that are part of the system.
NOTE TO USERS:
All Mircom Systems have been carefully designed to be as effective as possible. However,
there are circumstances where they may not provide protection. Some reasons for system
failure include the following. The end user can minimize the occurrence of any of the following
by proper training, testing and maintenance of the Mircom Systems:
6. Inadequate Testing and Maintenance. It is imperative that the systems be periodically
tested and subjected to preventative maintenance. Best practices and local authority having
jurisdiction determine the frequency and type of testing that is required at a minimum. Mircom
System may not function properly, and the occurrence of other system failures identified below
may not be minimized, if the periodic testing and maintenance of Mircom Systems is not
completed with diligence and as required.
7. Improper Operation. It is important that all system users be trained in the correct operation
of the alarm system and that they know how to respond when the system indicates an alarm.
A Mircom System may not function as intended during an emergency situation where the user
is unable to operate a panic or emergency switch by reason of permanent or temporary
physical disability, inability to reach the device in time, unfamiliarity with the correct operation,
or related circumstances.
Warranty and Warning Information
8. Insufficient Time. There may be circumstances when a Mircom System will operate as
intended, yet the occupants will not be protected from the emergency due to their inability to
respond to the warnings in a timely manner. If the system is monitored, the response may not
occur in time enough to protect the occupants or their belongings.
9. Carelessness or Safety Hazards. Moreover, smoke detectors may not provide timely
warning of fires caused by carelessness or safety hazards such as smoking in bed, violent
explosions, escaping gas, improper storage of flammable materials, overloaded electrical
circuits or children playing with matches or arson.
10. Power Failure. Some Mircom System components require adequate electrical power supply
to operate. Examples include: smoke detectors, beacons, HVAC, and lighting controllers. If a
device operates only by AC power, any interruption, however brief, will render that device
inoperative while it does not have power. Power interruptions of any length are often
accompanied by voltage fluctuations which may damage Mircom Systems or other electronic
equipment. After a power interruption has occurred, immediately conduct a complete system
test to ensure that the system operates as intended.
11. Battery Failure. If the Mircom System or any device connected to the system operates from
batteries it is possible for the batteries to fail. Even if the batteries have not failed, they must be
fully charged, in good condition, and installed correctly. Some Mircom Systems use
replaceable batteries, which have a limited life-span. The expected battery life is variable and
in part dependent on the device environment, usage and type. Ambient conditions such as
high humidity, high or low temperatures, or large temperature fluctuations may reduce the
expected battery life. Moreover, some Mircom Systems do not have a battery monitor that
would alert the user in the event that the battery is nearing its end of life. Regular testing and
replacements are vital for ensuring that the batteries function as expected, whether or not a
device has a low-battery monitor.
12. Physical Obstructions. Motion sensors that are part of a Mircom System must be kept clear
of any obstacles which impede the sensors’ ability to detect movement. Signals being
communicated by a Mircom System may not reach the receiver if an item (such as metal,
water, or concrete) is placed on or near the radio path. Deliberate jamming or other
inadvertent radio signal interference can also negatively affect system operation.
43 (45)
Page 44

Warranty and Warning Information
13. Wireless Devices Placement Proximity. Moreover all wireless devices must be a minimum
and maximum distance away from large metal objects, such as refrigerators. You are required
to consult the specific Mircom System manual and application guide for any maximum
distances required between devices and suggested placement of wireless devices for optimal
functioning.
14. Failure to Trigger Sensors. Moreover, Mircom Systems may fail to operate as intended if
motion, heat, or smoke sensors are not triggered.
a. Sensors in a fire system may fail to be triggered when the fire is in a chimney, walls, roof,
or on the other side of closed doors. Smoke and heat detectors may not detect smoke
or heat from fires on another level of the residence or building. In this situation the
control panel may not alert occupants of a fire.
b. Sensors in a nurse call system may fail to be triggered when movement is occurring
outside of the motion sensors’ range. For example, if movement is occurring on the other
side of closed doors or on another level of the residence or building the motion detector
may not be triggered. In this situation the central controller may not register an alarm
signal.
15. Interference with Audible Notification Appliances. Audible notification appliances may be
interfered with by other noise sources such as stereos, radios, televisions, air conditioners,
appliances, or passing traffic. Audible notification appliances, however loud, may not be heard
by a hearing-impaired person.
16. Other Impairments. Alarm notification appliances such as sirens, bells, horns, or strobes
may not warn or waken a sleeping occupant if there is an intervening wall or door. It is less
likely that the occupants will be alerted or awakened when notification appliances are located
on a different level of the residence or premise.
17. Software Malfunction. Most Mircom Systems contain software. No warranties are provided
as to the software components of any products or stand-alone software products within a
Mircom System. For a full statement of the warranties and exclusions and limitations of
liability please refer to the company’s standard Terms and Conditions and Warranties.
18. Telephone Lines Malfunction. Telephone service can cause system failure where telephone
lines are relied upon by a Mircom System. Alarms and information coming from a Mircom
System may not be transmitted if a phone line is out of service or busy for a certain period of
time. Alarms and information may not be transmitted where telephone lines have been
compromised by criminal tampering, local construction, storms or earthquakes.
19. Component Failure. Although every effort has been made to make this Mircom System as
reliable as possible, the system may fail to function as intended due to the failure of a
component.
20. Integrated Products. Mircom System might not function as intended if it is connected to a
non-Mircom product or to a Mircom product that is deemed non-compatible with a particular
Mircom System. A list of compatible products can be requested and obtained.
Warranty
44 (45)
Purchase of all Mircom products is governed by:
https://www.mircom.com/product-warranty
https://www.mircom.com/purchase-terms-and-conditions
https://www.mircom.com/software-license-terms-and-conditions
Page 45

45
CANADA - Main Office
25 Interchange Way
Vaughan, ON L4K 5W3
Tel: (905) 660-4655
(888) 660-4655
Fax: (905) 660-4113
U.S.A
4575 Witmer Industrial Estates
Niagara Falls, NY 14305
Tel: (905) 660-4655
(888) 660-4655
Fax: (905) 660-4113
© Mircom 2017
Printed in Canada
Subject to change without prior notice
www.mircomgroup.com
 Loading...
Loading...