

Page 1
Y8y7?~i
IMPORTANT:
contents
manual
on
before
equipment. This
use
safe
untrained
this unit.
understand these
of both this
used
with
the safety
installing,
only by
operation of welding
material
persons
personstoinstall,
Contact
Read
and
manual
this unit,
throughout
operating,
unit
and
trained
your
distributorifyoudonot
instructions.
understand
and
the
with
special
or maintaining this
these
instructions
and
experienced
equipment.Donot allow
operate,
the entire
power
eutiphasis
both
manuals,
or maintain
source
are
for
in the
fully
Effe~ti.EWith
MODEL
MR-5/ARC
COMPUTER
GAS/CURRENT
CONTROL
SanEIFic...H1:33:~’
TM
PAK
350
INTERFACE
SENSING
I
OWN
ER’S
MANUAL
MILLER
ADDITIONAL
ELECTRIC
718SBOUNDS
APPLETON,WI54912
COPY
NWSA
CODE
PRINTEDINU S
ST,P0
PRICE95CENTS
NO.
A
MFG.
Box
USA
4579
+5
millER
Co.
1079
Page 2
LIMITED
WARRANTY
This
warranty
4;
LIMITED
tions
warrants to
4;
Equipment
ship
and
No
warrantyismadebyMiller
accessories
engines,
4;
the
4!
4;
4;
~Ji
4~
<
~
warrantiesoftheir
engines
date of
haveatwo
Exceptasspecified
to
components
year, suchasspot
MILLERMATIC
wire
including
not
result
Miller
ranted Equipmentinthe
within
ment to
1.
Arc
2.
Load
3.
Original
Ilabor-1
4.
All
All
Replacementorrepair
7.
Batteries
provided
of
the
Asamatterofgeneral
submittedbythe
supersedes
WARRANTY
hereof,
Miller
its
furnishedbyMillerisfree
materialasof
or other
trade
accessories
are
warranted
original
year
nozzles
from defectinworkmanshipormaterial.
shallberequired
the
following
the
original
welders,
banks
main
year
welding guns,
other
Millermatic
that
Millerisnotifiedinwriting
date
of such
all
previous MILLER
Subjecttothe
Electric
Distributor/Dealer
purchase,
warranty.
having normal
parts
periods
power
power
onlyl
failure.
original
Mfg.
the
time
items
manufacturedbyothers.
and
other
respective
bytheir
manufacturer
except
below,
Miller’s warranty
welder
that
and
user:
feeder/guns
useful
tips,
comeincontact with the
nozzle
to honor warranty
eventoffailure
from
sources,
robots,
rectifiers
Feeders
parts,
policy
user
within
Co.,
that
from defectinworkman
and
placeofdeliverybyMiller.
with
respecttoengines,
items
manufacturers,ifany . All
Tecumseh
lifeofless
relay
and
insulators
resulting
the
dateofdeliveryofEquip
and
and
plasma
exclusive
within
only,
Miller
the
EFFECTIVE:
warranties
terms
and
Appleton,
all
components.1
foregoing
Wisconsin
new
and unused
are
sold
subject
for
one
year
engines
does
not
than
contactor points,
where failure
torches...90days
oflabor..60days
may
one
welding
claimsonwar
fromadefect
3
6
months
thirty
1301
honor
periods.
OCTOBER1,1986
andisexclusive
condi
with
therefore
or,
the
Ill
Miller
price
returnofthe
to
optionofrepairorreplacement
Appleton,
facility,
any
defectorfailure,
claim
ANY
•flONASTO
BREACHOFCONTRACT
MIGHT
CUSTOMOFTRADEORCOURSEOFDEALING, INCLUDING
ANY
FITNESS FOR
ANY
CLUDED
WRITING,
ULTIMATE
USERS
EXPERIENCEDINTHE USE
WELDING
CONSUMER USE. MILLER’S
TO,
MILLER’S
trade
Such
from
which
apply
does
year
1
year
years
1
year
days
claims
with no
other
guaranteesorwarranties
In
the
caseofMiller’s
respecttothe
shall
where
reasonable
(less
kind
ANY
EXCEPT
AND
be,atMiller’s
authorizedinwritingbyMillerinappropriate
service
procedures
IMPLIED
IMPLIED
AND ALL
costofrepairorreplacementatan
stationor14)
reasonable
goodsatCustomer’s
Wisconsin,orFOB.,ata
therefore,nocompensation
willbeallowed.
EXPRESS
WARRANTY,
PERFORMANCE,
ARISEBYIMPLICATION,
WARRANTYOFMERCHANTABILITYOROF
PARTICULAR
AND
DISCLAIMEDBYMILLER.
AS
MILLER
PURCHASE
AND
FOR
EQUIPMENT
NO
WARRANTIES
breachofwarrantyorany
qualityofany
depreciation
Miller
shall
to be
followed.
WARRANTY
EQUIPMENT
EXPRESSLY
PRODUCTS
OPERATIONBYPERSONS
RESELLERISAUTHORIZEDTOEXTEND
goods,
option
(11
paymentofor
based
risk
willbeFOB.,
Upon
receiptofnoticeofapparent
instruct
the
NOT
GUARANTYORREPRESENTA
WHICH,
AND NOT
AND ANY
BUT FOR
PURPOSE,
FURNISHEDBYMILLERISEX
PROVIDED BY
BY
COMMERCIAL/INDUSTRIAL
AND
WARRANTIESDONOT
TO,
ANY
expressedorimplied
the exclusive remedies
repairor121
credit for
upon
and
MILLER authorized
for
transportation
claimantonthe
PROVIDED
OPERATIONOFLAW,
WITH
ARE
MAINTENANCE
FOR
CONSUMER.
other
replacement
cases,
authorized
the purchase
actual
expense.
usel
MILLER’s
Factory,
service
costs
warranty
HEREIN
REMEDY
THIS PROVISION,
RESPECT
MILLER
INTENDED
TRAINED
CONSUMERS
EXTEND
duty
(3)
upon
at
of
AND
-
FOR
TO
-
IN
FOR
AND
OF
OR
Page 3
May
~OM.882j
31,1990
ERRATA
After
to
data
AMENDMENTTOSECTION2—INSTALLATION
IMPORTANT:
in
this
Add the
SOURCE
IMPORTANT:
connectedtothe
terminal.
Amend
AC/Contactor Control
IMPORTANT:
computer
SHEET
this
manual
appearing
A25ft.
installation. Retain
foliowing
CONNECTIONS: Wire
Section
interface
was
laterinthis
(8m)
IMPORTANT
If dc
electrode
negative
2-3C.
COMPUTER
Connection
Cords
are
available.
printed,
interconnecting
cord
weld
supplied
refinementsInequipment
manual.
for
future
blocktothe
Stick Sensing
negative
output
weldingisdesired,
terminal
INTERFACE-WELDING
that
may
cord
withafive-pin
use.
end of Section
Connections
and
not
be used
the
design
Amphenoiplugissupplied
2-3A.
reverse connections so
lead
withaclampisconnectedtothe
in this
installation.
occurred.
COMPUTER
POWER
SOURCE
Match
This
INTERFACE-WELDING
cordtowelding
sheet
lists
exceptions
with
this
unit
butisnot
the
lead
with
ring
positive
CONNECTiONS:
power
weld
source
used
POWER
terminal
output
115
Volts
and
is
1.
Align
keyways,
collar
fully clockwise.
2.
Align
keyway,
threaded
3.
Place
appropriate
remote control
Amend
A
There
screwsonstrain
screwsonstrain
A.
Section 2-5.
WARNING: ELECTRIC
0
Do
0
Shut
ging
Lockout/tagging
from
fuse box,orshutting
are
several
CVICC
Connections
WARNING:
A
insert
4-socket
insert
14-pin
collar fully
not
down unit,
procedures
terminal
reliefonunit
reliefifnecessary,
clockwise.
remote control switch(es)onthe
device.
COMPUTER
touch
procedures
strips
Read
INTERFACE
live
electrical
welding
before
inside the
rear
and
follow
Amp
plug
into
matching
Amphenol
SHOCK
powersource, and
making
consistofpadlocking
off
panelifnecessary,
and reinstall
plug
into
TERMINAL
can
kill.
parts.
interconnections.
and
red-tagging
computer
safety
interface
top
informationatbeginning of Section
and
cover
receptacleoncomputer
matching
welding
robot,
circuit
locate
when
receptacleonwelding
power
sourceinthe
STRIP
line
CONNECTIONS
and
disconnect
disconnect
breakerorother
for
control
procedureisfinished.
connections. Remove
appropriate terminal
interface,
proper
input
power
switchinopen
disconnecting
strip
2-5
and rotate
power
source,
position
employing
position, removing fuses
device.
unit
top
for
connections.
before
threaded
and
rotate
for
useofa
locko
ut/tag
cover,
loosen
Tighten
proceeding.
-
1.
Locate
2.
ForCCoperation,
IMPORTANT:
terminal
The
Strip
2T.
remove
Inductance controlisdisabled
jumper
link
between
terminalEandFon
when operatingintheCC(constant
2T.
current)
mode.
Page 4
B.
ARC
FAILURE
Light
Connections
(Figure 2-4)
WARNING:
A
The ARC FAILURE
Locate
supplied
1.
For
a.
Open
b.
Route
c.
Make cord connectionstoterminal
d.
Close
e.
Connect
2.
For
a.
Obtaina115or24
b.
Open
c. Route
d.
Make
e.
Close
f.
Connect
g.
Cut
contactsonisolation
h.
Connect
i.
Route cord
j.
Connect
lengthof18
robot control
robot control
cord under
robot control
cordto2TF
robot control
robot control
customer supplied18gauge/2-conductor cord under
cord connectionstoterminal
robot control
cordtoisolation
off
terminals from
one end of
cordto2TF
Read
and
light
orlthe
computerinterface front panelisturnedon
gauge/2-conductor cord
units
withnoother
unit
door,
cross member
unit
door,
and
Units
when
vac,or24
unit
door,
unit
door,
one end of
relay.
cordtoa
through strain
and
follow safety Informationatbeginning
and
for
this
connectionsatjig
and
locate
jig
below
door.
strip
common and
and
route cord
2TG.
115or24 vac,or24
Vdc
isolation
and
locate
strip
and
route
relay
coil
and
supplied18gauge/2-conductor
setofnormally-open
relief on
2TG.
rear
relay,
jig
common
cordtojig
voltage source.
panelofcomputer interface.
connection,
terminal
terminal
through strain
terminal
strip
2.
the Weld Alarm
vdcisusedatjig terminal
and install
strip
2.
and
the
Weld Alarm
interface.
contactsonisolation
and
strip
relief on
into
jig
cross member
of Section
off
by a
proceedasfollows:
2:
terminal.
rear
panelofcomputer
interface.
terminal.
cord,
and
relay.
2-5
signalfromthe
strip
2T:
below
door.
install terminalstoconnect
before
robot control
proceeding.
unit.
interface.
to
OM-882 Page
2
Page 5
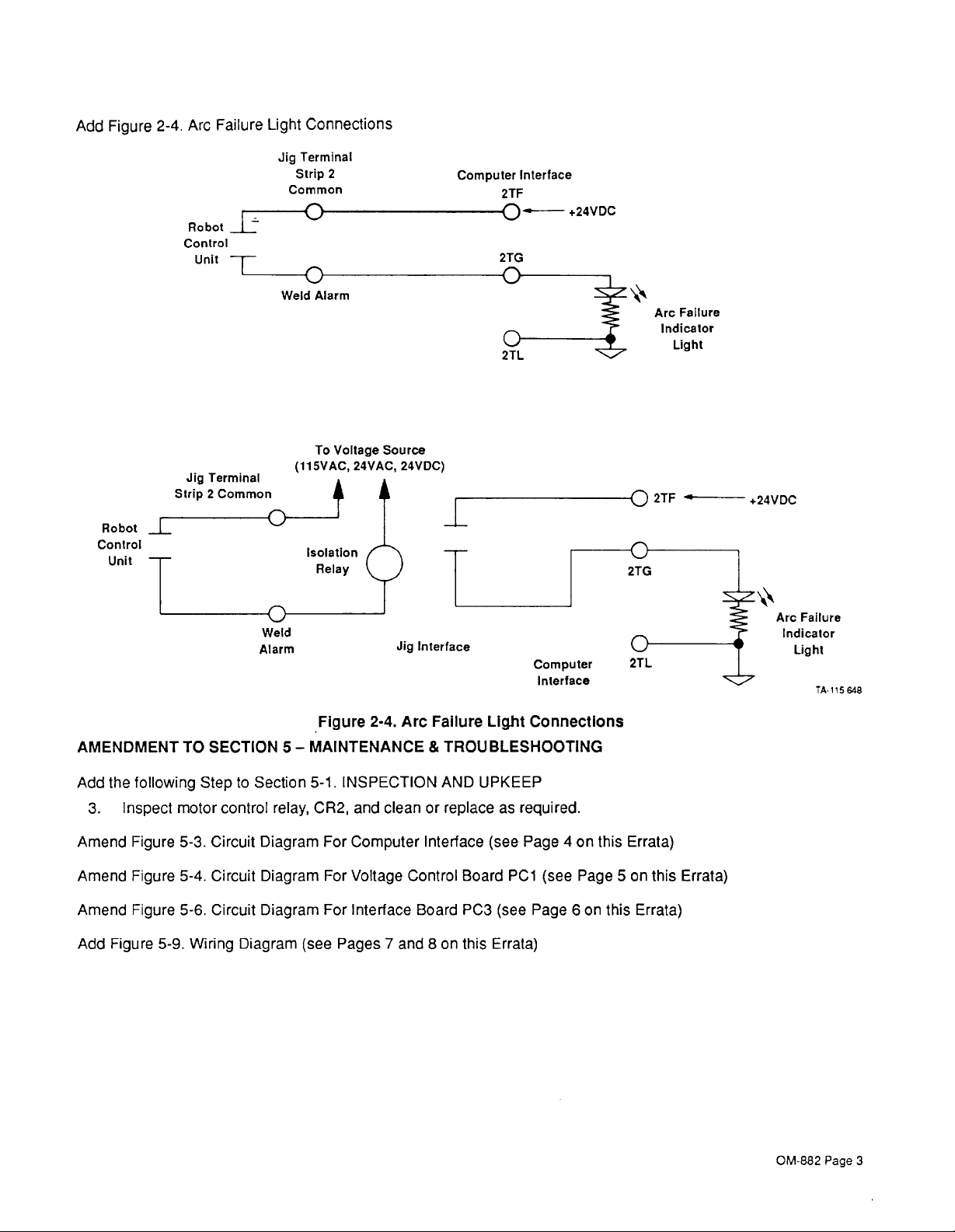
Add
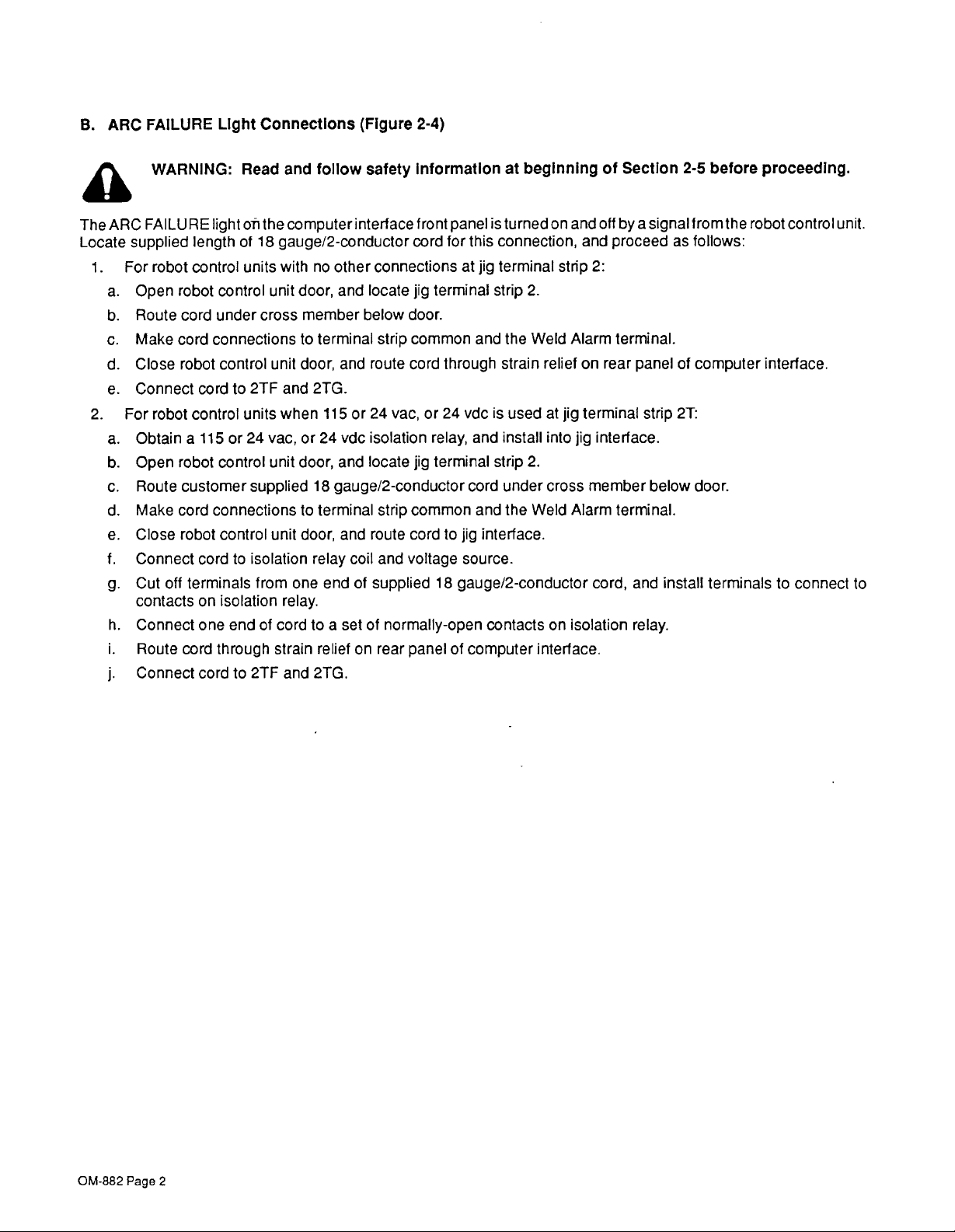
Figure
2-4.
Arc
Failure Light
Robot
control
Unit
Connections
Jig
Terminal
Strip
2
Common
weld
Alarm
Computer
2TF
2TG
2TL
Interface
+24VDC
Arc
Failure
Indicator
Light
To Voltage
(115VAC, 24VAC,
Robot
Control
Unit
Weld
Alarm
Figure
Source
24VDC)
Jig
2-4. Arc
Interface
Failure
Light
Connections
AMENDMENTTOSECTION5-MAINTENANCE&TROUBLESHOOTING
Add the
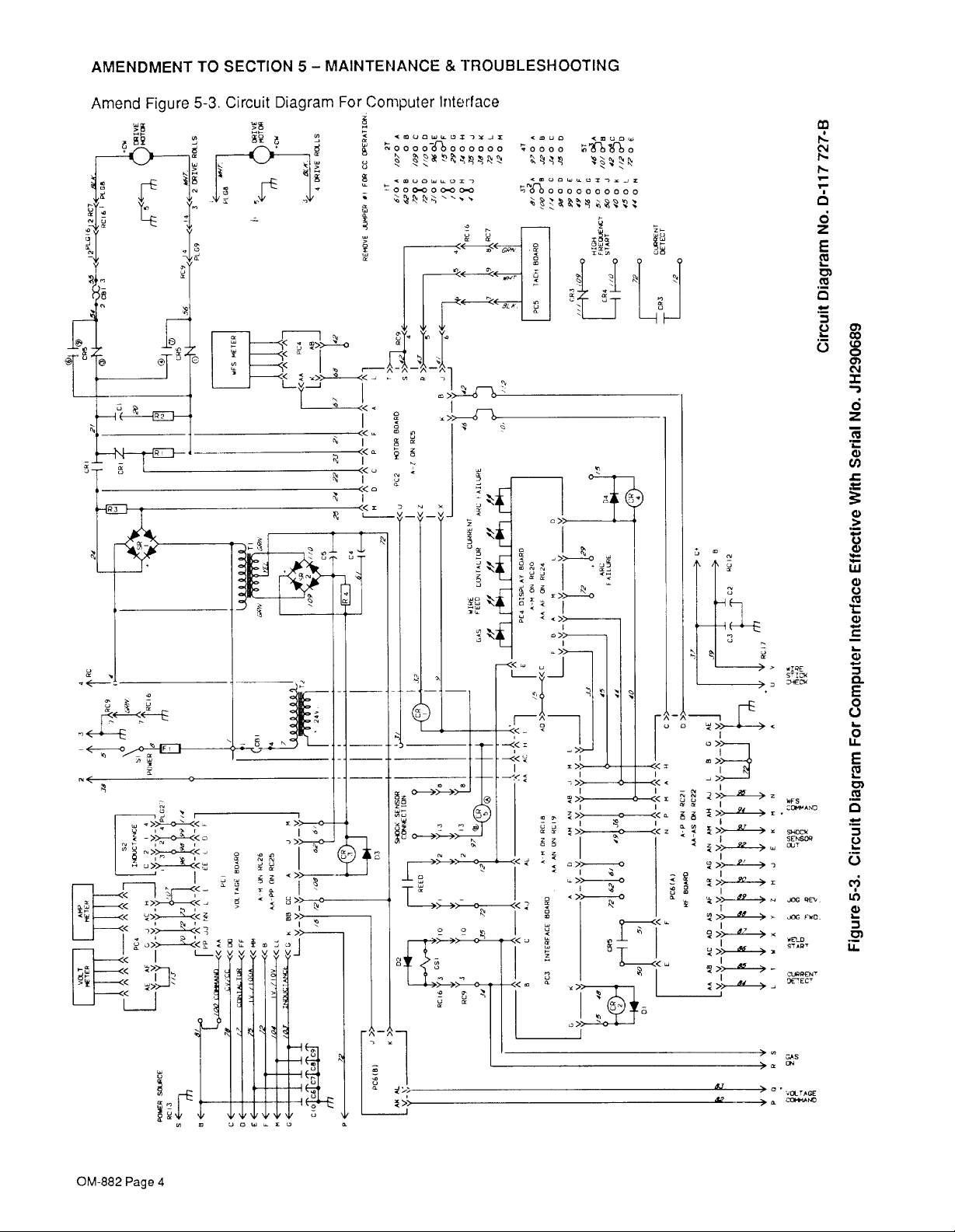
Amend
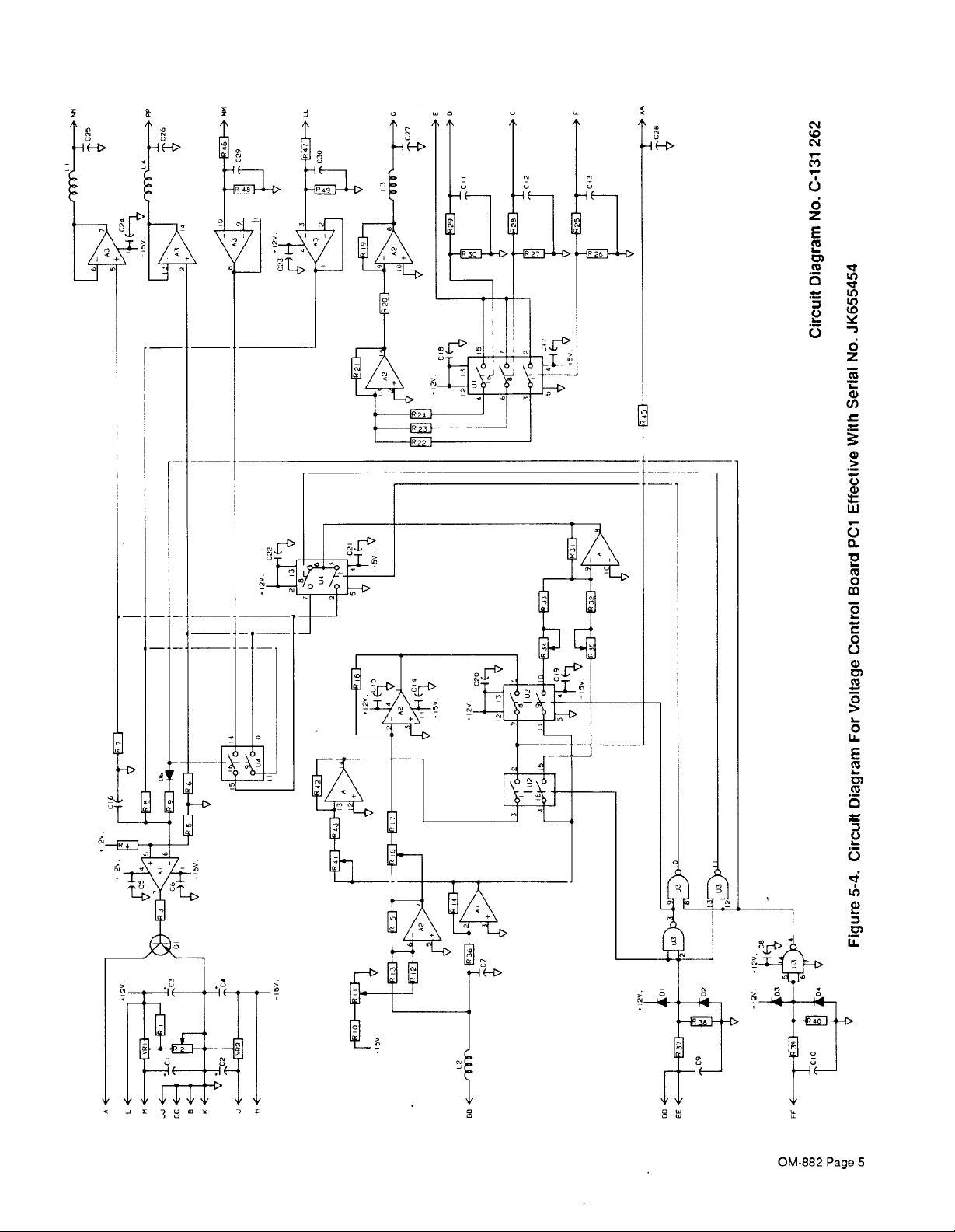
Amend
3.
following SteptoSection
Inspect
Figure
Figure
motor
5-3.
Circuit
5-4.
Circuit
control
Diagram
Diagram
relay,
5-1-INSPECTION
CR2,
and
cleanorreplaceasrequired.
For
Computer
For
Voltage
AND
Interface
Control
UPKEEP
(see
Board
Page4on
PCi
(see
this
Page5on
-rj 2TF ~—
Errata)
this
Errata)
Arc
Failure
Indicalor
Light
TA-il5
648
Amend
Add
Figure
Figure
5-9.
5-6.
Circuit Diagram
Wiring Diagram
For
Interface
(see
Pages7and8on
Board PC3 (see
this
Errata)
Page6on
this
Errata)
OM-882
Page
3
Page 6
AMENDMENT
TO SECTION
5-MAINTENANCE&TROUBLESHOOTING
Amend
Figure
K
5-3.
Circuit
U K U
-
~
Diagram
-~
For
k~,
-,
Computer
000
0~
C0CWL.~CI~N
~
Interface
000000
~000
=0CL,Lt,~tj7~~liU
00
00 000
N
C
d
z
E
Cu
0
cc
to
(3
0
C~J
6
z
w
U
0)
0)
U
0)
‘N
S~~CNN
0)
0.
E
0
C.)
I
0
U
-
-
E
I
-
N.FS
SN-CCN(
srNso~
0)
0
I..
(3
JOG
~EV
~ ~
9E’EC’
0)
1~
ci
OM-882 Page
Ua’AGE
4
Page 7
a
I
C.’J
to
C~4
1~
6
6
z
E
Cu
Cu
•~‘
to
o
.~
—
to
U,
o
(3-,
6
z
1~
0)
C/)
0)
0
0)
w
5
0.
•0
I-
Cu
0
3
0
C.)
0)
C)
Cu
3
I
-
0
IL
E
Cu
I-
C)
Cu
4
U
I-
(3
0)
C)
OM-882
-
Page
5
Page 8
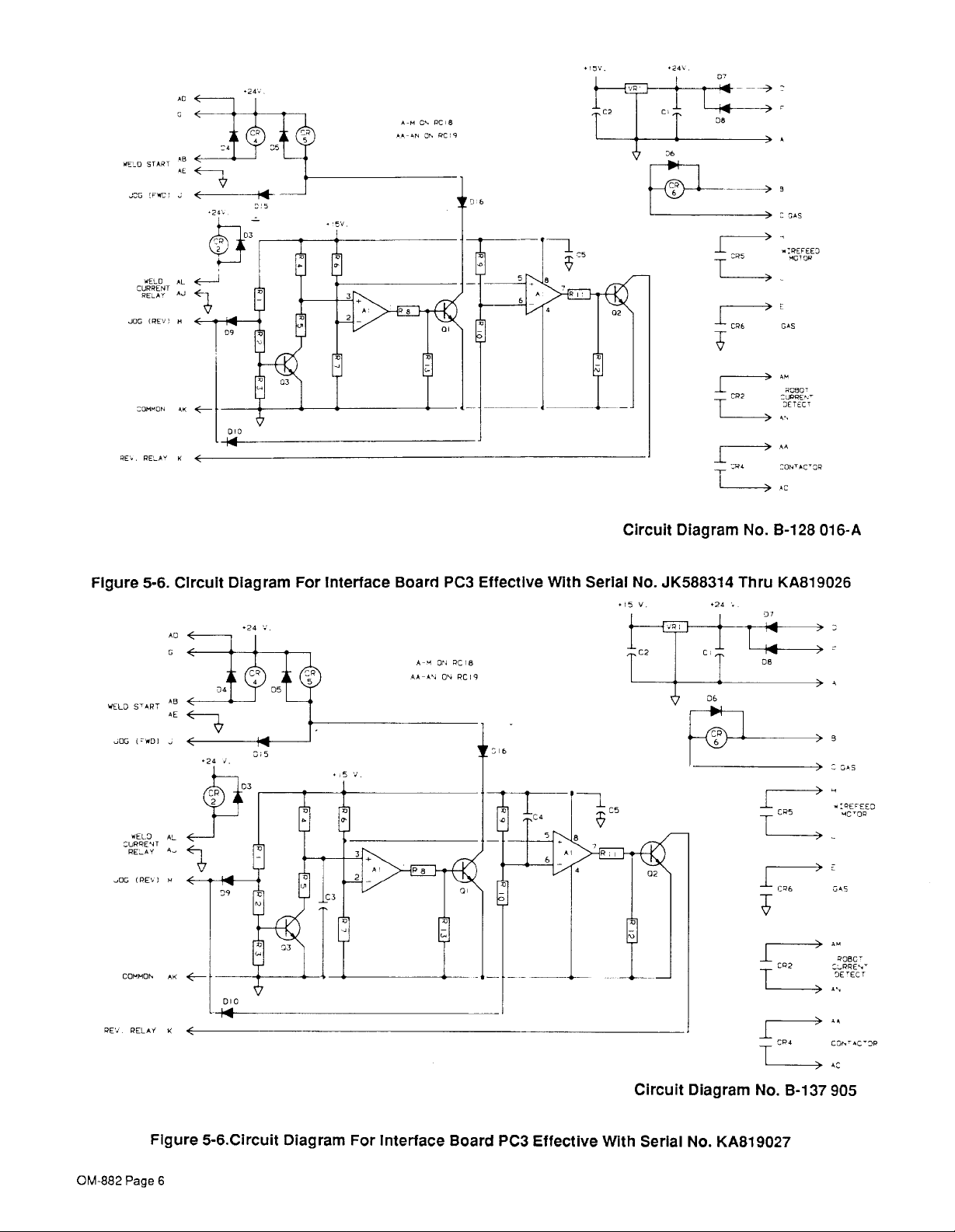
5V
,24V
4ELD
JOG
JOG
RE..
FIgure
START
F~C
WELD
CURRENT
RELA’
(RE.
RE.A’
5-6.
AR
AL
2
AL
~
AJ
A
4
CIrcuit
AC
6
Diagram
.24
C.
For
interface
Board
PC3
Effective
With
Serial
‘LO
Circuit
No.
JK588314
A
06
CR
Diagram
‘24
C ON-S
No.
REFEEC
ACTOR
6050’
CJRRE’.’
CECXC
T
CON’N-C’CR
AC
B-128
016-A
CR5
CR4
Thru KA819026
CC
~ELC
S’ART
UDO
(L(~fl(
RELO
CURRENT
RELAY A.
406
(RE6I
C07R40N,
REV. RELAX
AR
AE
—
AL
A
ALA
1<
Figure 5-6.Circuit
Diagram
For
interface
Board
PC3
Effective
With
Circuit
Serial
06
CR
6
Diagram
No. KABi
045
C66
T
OR?
CR4
No.
B-i37905
9027
C
SELFEC
AC’CR
6080’
CLPRE
N
CE
CEO
0C7,’4C’CR
AC
C
OM-882 Page
6
Page 9
‘N
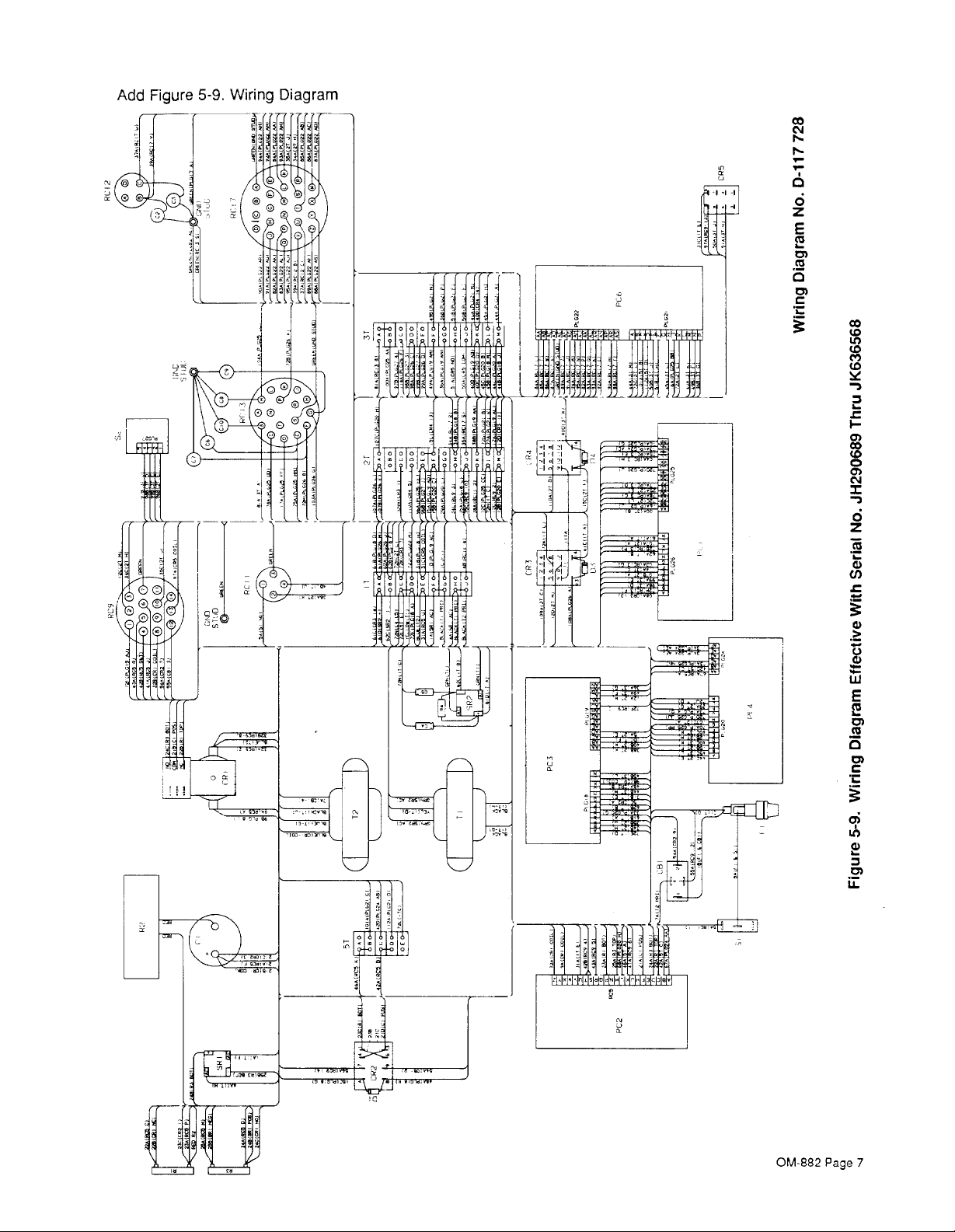
Add
Figure
5-9.
Wiring
Diagram
cc
r-.
I”
1~
0
6
z
E
Cu
C)
0
C)
-
cc
U,
to
to
1..
I
-
cc
to
0
c,,J
6
z
h..
0)
U)
0)
C.)
0)
w
E
Cu
I..
C)
Cu
0
C)
C
U,
0)
C)
ir
OM-882
Page
7
Page 10

c~J
1~
6
z
E
Cu
I-
C)
0
C
U)
w
0
to
U,
to
to
6
2
I-
0)
0)
0)
E
Cu
C)
C
OM-e82 Page 8
0)
L..
Page 11
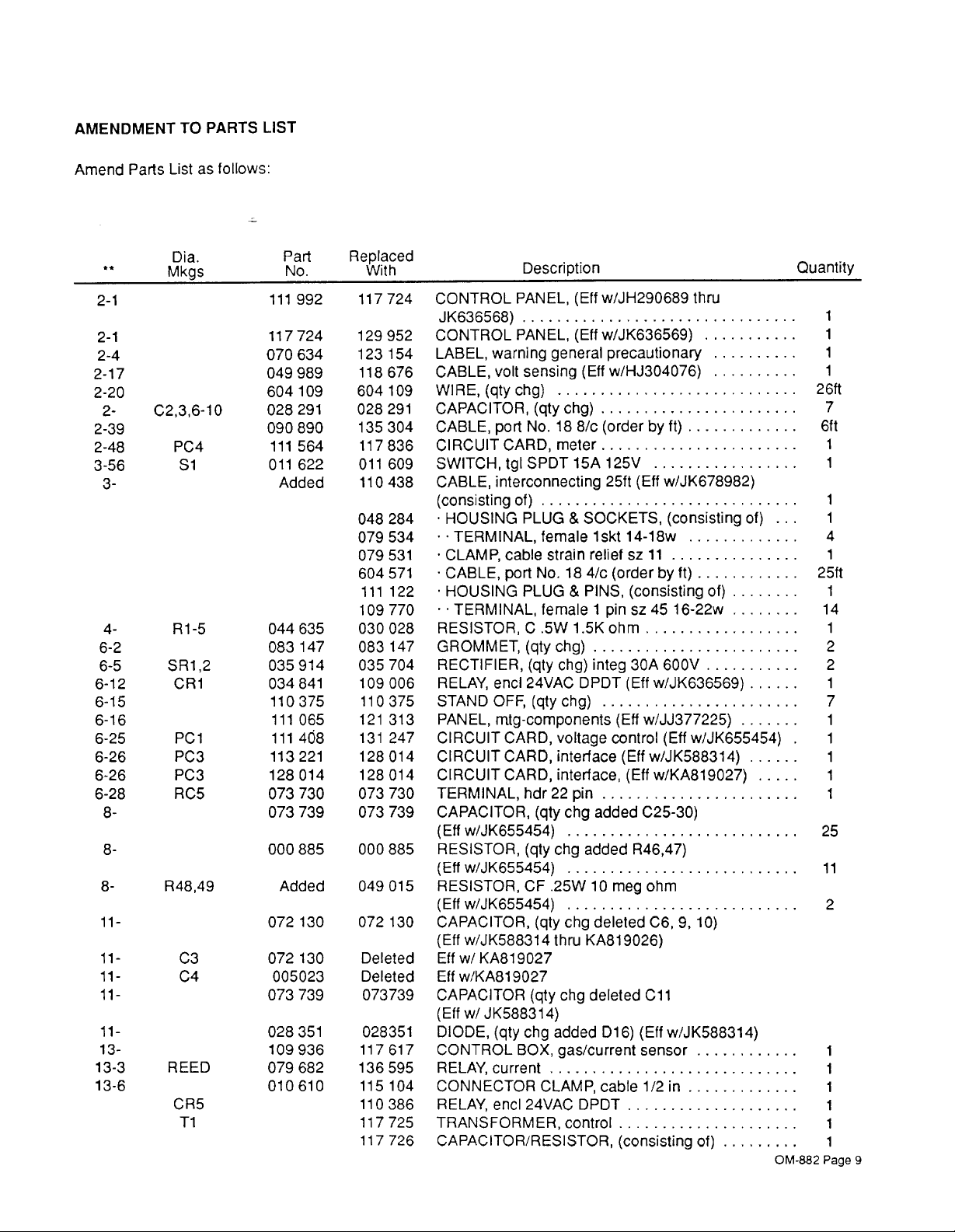
AMENDMENTTOPARTS
LIST
Amend
Parts
2-1
2-1
2-4
2-17
2-20
2-
C2,3,6-10
2-39
2-48
3-56
3-
4-
6-2
6-5
6-12
6-15
6-16
6-25
6-26
6-26
6-28
8-
8-
8- R48,49
11—
11—
11-
11-
11—
13-
13-3
13-6
List
as follows:
Dia.
Mkgs
PC4
51
Ri-S
SR
1,2
CR1
PCi
PC3
PC3
RC5
C3
C4
REED
CR5
Ti
Part
No.
111
992
117724
070 634
049 989
604
109
028
291
090 890
iii
564
011
622
Added
044
635
083
147
035 914 035
034
841
110375
111
065
111
408
113 221
128014
073
730
073 739 073
000 885 000
Added
072
130
072
130
005023 Deleted
073
739
028
3S1
109
936
079682
010
610
Replaced
With
117
724
129
952
123
154 LABEL,
118
676
604
109
028
291
135
304
117836
011
609
110
438
048 284
079 534
079
531
604
571
iii
122.HOUSING
109 770
030
028
083
147
704
109
006
110375
121
313
131
247
128 014
128014 CIRCUITCARD,interface,
073
730
739
88S
049
015
072
130
Deleted
073739
028351
117 617
136
59S
115
104
110386 RELAY,encI24VACDPDT
117725
117 726
Description
CONTROL
JK636568)
CONTROL
CABLE,
WIRE,
CAPACITOR,
CABLE,
CIRCUITOARD,
SWITCH,
CABLE,
(consisting
HOUSING
.
TERMINAL,
CLAMP, cable
CABLE,
TERMINAL,
RESISTOR,C.5W
GROMMET,
RECTIFIER,
RELAY,
STANDOFF,
PANEL,
CIRCUIT
CIRCUIT
TERMINAL,
CAPACITOR,
(EU
w/JK655454)
RESISTOR,
(Elf
w/JK655454)
RESISTOR,CF.25W10meg ohm
(Eff
w/JK655454)
CAPACITOR,
(Elf
w/JK588314
Elf
w/KA819027
Elf
w/KA819027
CAPACITOR
(Elfw/JK5883
DIODE, (qty
CONTROL
RELAY,current
CONNECTOR
TRANSFORMER,control
CAPACITOR/RESISTOR,
PANEL,
PANEL,
warning general
volt
sensing
(qty
chg)
port
tgl
interconnecting
of)
PLUG&SOCKETS,
port
PLUG
(qty
end
24VAC
rntg-components
CARD,
CARD, interface
hdr22pin
(qty
chg
BOX,
(Elf
(Effw/JK636569)
(Eff
(qty
chg)
No.188/c
meter
SPDT
iSA
female
strain
reliefsz11
No.
184/c
&
PINS,
female1pinsz45
1.5K
chg)
(qty
chg)
integ
DPDT
(qtychg)
Voltage
(qty
chg
chg
added
(qty
chg
thru KA819026)
(qty
chg
deleted
14)
added D16)
gas/current
CLAMP, cable
w/JH290689
precautionary
w/HJ304076)
(orderbyft)
125V
25ft
(Eff
w/JK678982)
iskt
14-18w
(orderbyft)
(consisting
ohm
30A
600V
(Effw/JK636569)
(Elf
w/JJ377225)
control
added C25-30)
deleted
(Effw/JK655454)
(Effw/JK588314)
(Effw/KA819027)
R46,47)
C6,9,10)
Cli
(Elf
sensor
1/2
(consisting
thru
(consisting
16-22w
w/JK588314)
in
of)
of)
of)
Quantity
OM-582
1
1
1
1
2
6ft
7
61
t
1
1
1
1
4
1
25ft
1
14
1
2
2
1
7
1
1
1
1
1
25
ii
2
Page
9
Page 12
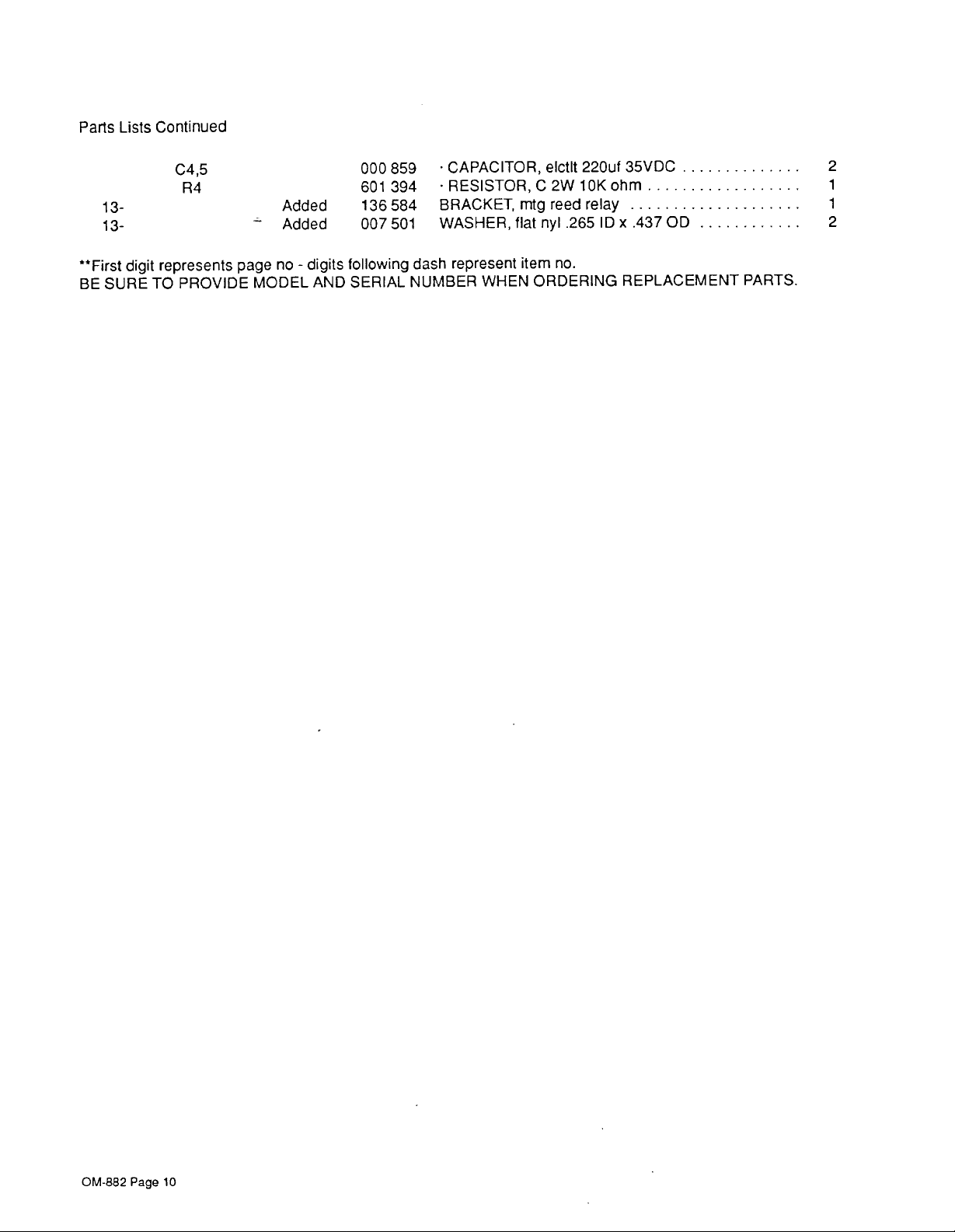
Parts
Lists Continued
C4,S
R4
13-
13-
~First
digit represents
BE
SURETOPROVIDE MODEL
page
Added
Added
no
-
digits following
AND
000
859
601
394
136584
007501
SERIAL
•
CAPACITOR,
eIctlt
•RESISTOR,C2WlOKohm
BRACKET,
WASHER,
dash
represent
NUMBER
mtg
flat
WHEN
reed
nyl
item
no.
ORDERING REPLACEMENT
220uf 35VDC
relay
.265
ID x
.437 OD
2
1
2
PARTS.
OM-882 Page
10
Page 13
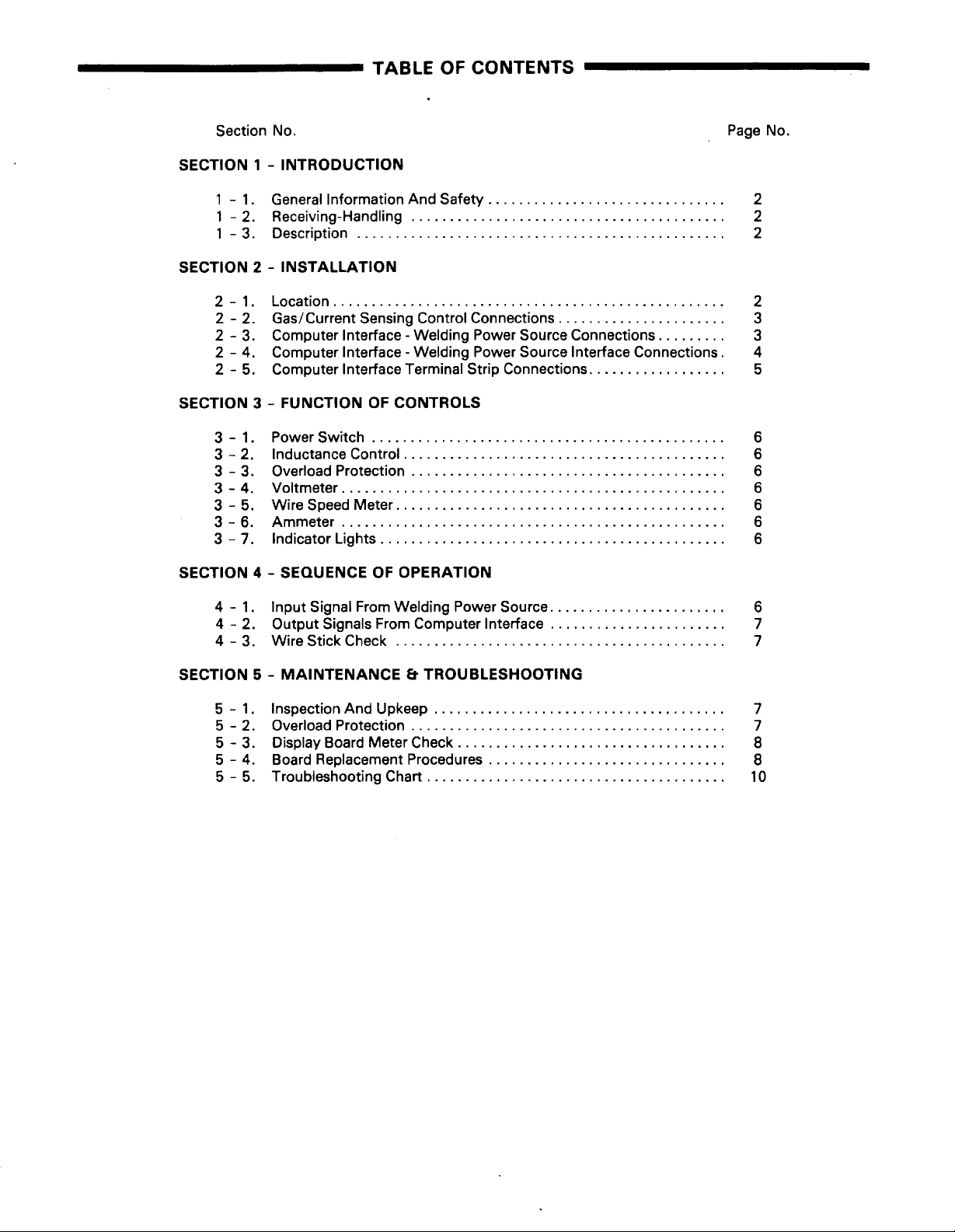
TABLE
OF
CONTENTS
Section
SECTION
1-1.
1-2.
I
-
SECTION
2-1.
2-2.
2-3.
2-4.
2-5.
SECTION
3-1.
3-2.
3-3.
3-4.
3-5.
3-6.
3
-
7.
SECTION
No.
1-INTRODUCTION
General
Receiving-Handling
3.
Description
2-INSTALLATION
Location
Gas/Current
Computer Interface-Welding
Computer Interface-Welding
Computer Interface Terminal
3-FUNCTIONOFCONTROLS
PowerSwitch
Inductance
Overload
Voltmeter
WireSpeedMeter
Ammeter
Indicator
4-SEQUENCEOFOPERATION
Information
Sensing
Control
Protection
Lights
And
Safety
Control
Connections
Power
Source
Power
Source Interface
Strip
Connections
Connections
Connections.
Page
2
2
2
2
3
3
4
5
6
6
6
6
6
6
6
No.
4-1.
4-2.
4-3.
SECTION
5-1.
5-2.
5-3.
5-4.
5-5.
input
Signal
From
Welding
Output
Wire
5-MAINTENANCE8TROUBLESHOOTING
Inspection
Overload
Display
Board
Troubleshooting
Signals
Stick
Board
Replacement
From
Check
And
Upkeep
Protection
Meter
Chart
Power
Source
Computer Interface
Check
Procedures
6
7
7
7
7
8
8
10
Page 14
SECTION
1-INTRODUCTION
I-
I
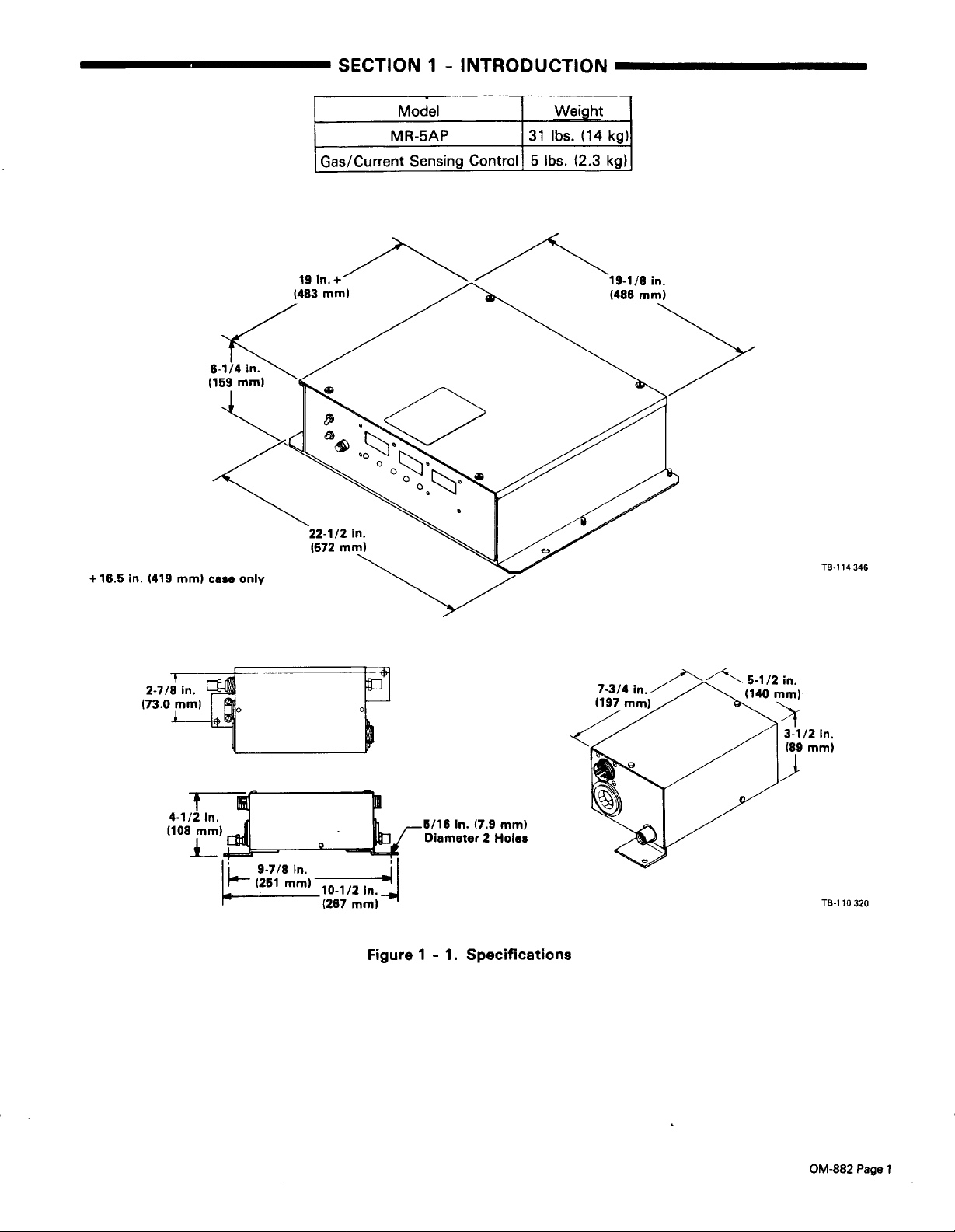
Gas/Current
Model
MR-5AP
Sensing
Weight
31
lbs.
Control5lbs.
(14
(2.3
kg)
kg)
+
16.5
in.
(419
2-7/8
(73.0 minI
minI
in.
case only
Figure
16
in. (7.9
Diameter2Holes
1-1.
mm)
Specifications
TB-i
In.
mm)
TB-i
14346
10320
OM-882
Page
1
Page 15
1-1.
GENERAL
A.
General
Information
labels,
ment
tags,
design,
INFORMATION
presented in this
and
platesonthe
installation,
troubleshooting which
followed
for
the
safe
ment.
B.
Safety
The
installation,
troubleshooting of
practices
and
be
persons
plicable
the
Arc
Owner’s
Safety
pear
words
different
WARNING
and
carefully
or
CAUTION
and
2-1.
The
covers
repair.
and
procedures
the
safetyofothers. Therefore, this equipmentisto
installed,
operated,
in accordance
codes
such
as,
end
of Section
Welding
Power
1-Safety
Sourceinthe
Manual.
instructions
throughout
specifically
this
WARNING
levelsofhazard.
statements
maintenance
followed could
proceduresorpractices
lossoflife.
statements
maintenance
LOCATION
location should
and
Lead
proceduresorpractices
(Figure
wrappers
lengths
components.
Mounting
mounting
holes
are
purposes.
AND
manual
unit
pertainstoequip-
operation,
shouldberead,
and
effective
operation,
arc
welding
which
and
maintained
with
but
not
maintenance,
understood,
useofthis
maintenance,
equipment
ensure
onlybyqualified
this
manual and
limited
Rules
to,
For
welding
pertainingtothis
manual
and
highlightedbythe
CAUTION
include
resultinserious
include
installation,
installation,
SECTION
1-1)
allow
roomtoopen
for
installation,
mustbeconsidered
provided in
Figure
1-1
maintenance,
each
gives
unit
SAFETY
and on
various
equip-
requires
personal
safety
all
those
listed
Operation
power
source
unitap-
which
identify
operation,
whichifnot
personal
operation,
which if not
and remove
when
locating
component
dimensions.
and
and
and
ap-
at
Of
signal
injury
2
and
for
carefully
or
A third
tions
efficient
1-2.
this
the
have
damage
by
of
followed
damage
to this
signal
which
operation of
RECEIVING-HANDLING-Before
equipment,
unit
and
occurred
that
the
purchaser
lading
willbefurnishedbythe
questifoccasiontofile
When requesting
ment,itis
essential
Numberofthe
1-3.
DESCRIPTION-The
trol
contains
amperage
and
with
tion in
rent
The
and
These
when
control
wire
feed
the
robot
the
constant
capabilities.
gas/current
current
components
using
cess.
INSTALLATION
-
Normally
the
the
robot control
shouldbemountedinline
source
of
The
and
robot
service
wire
manual
life
whenitis
moisture,
corrosive
could
result in
equipment.
word,
need
clean
carefully
during
may
special
this
all
inspect
shipment.
have
occurred in
with
•s•s,
emphasistoobtain
equipment.
packing
for
the
carrier.Acopyofthe
claim
arises.
information concerning
that
Model
equipmentbesupplied.
computer
wire
feed
speed,
circuitry,
speed
meter,
control. The
weld
digital
and
controlisshipped
voltage mode
sensing
sensing
the
Gas
computer
unit.
control contains
reed
relay.
function
Metal Arc
with
Welding (GMAW)
interfaceismountedontop
The
gas/current
between
drive
assembly.
for
specific information.
and
efficiencyofthe
subjectedtohigh
vapors,
and
minor
personal
highlights
injury
instruc
the most
installing
material
any
Any
transit
from
damage
claim
for
mustbefiled
around
that
loss
manufactureronre
this
equip-
Description
voltage,
ammeter,
and
interface
and
voltmeter,
Serial
con
weld
circuitrytointerface
for
opera
but
has
constant
the
gas
valve
the
robot
system
sensing
the
welding
See
installation section
system
are
control
power
reduced
levelsofdust,
extreme
heat.
may
or
bill
cur
pro
of
dirt,
-
-
-
-
-
-
OM-882
Page
2
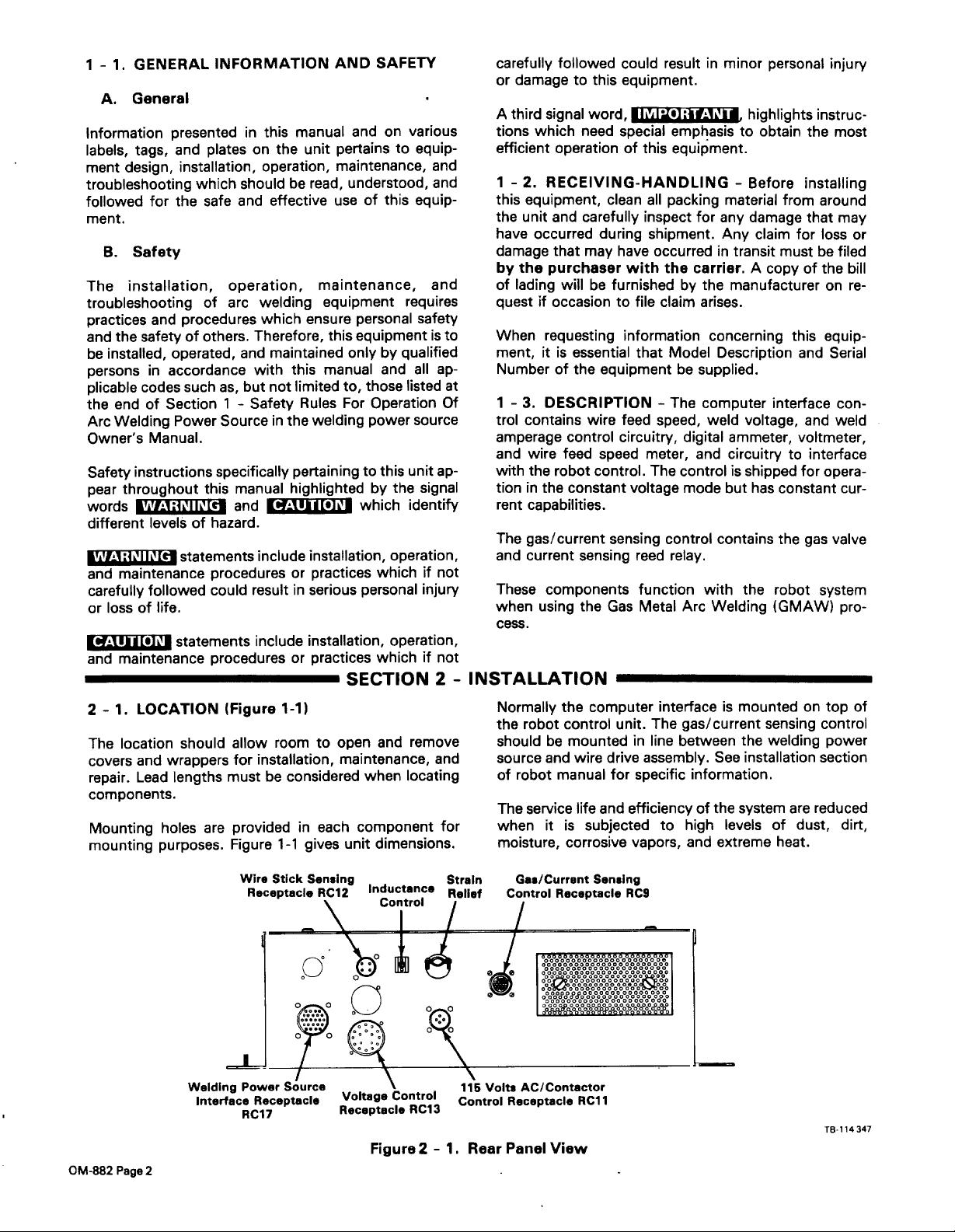
Wire
Receptacle
Welding Power
Interface
Receptacle
RC17
Stick
Source
Sensing
RC12
Voltage
Receptacle
Inductance
control
control
RC13
Figure
2-1.
Strain
Relief
115
control
Rear
Gas/current
control
Volts
Ac/contactor
ReceptacleRd1
Panel
View
Sensing
Receptacle
RC9
re-114
347
Page 16
2-2.
GAS/CURRENT
NECTIONS
N-.
•
Do
not
•
Shut
robot, and
“lockout/tagging
(Figures
ELECTRIC
touch
down
unit,
disconnect
SENSING
2-1
And
SHOCK
live electrical
welding
procedures”
terconnections.
Lockout/tagging
disconnect
from fuse
procedures
switchinopen
box,
or shutting
consistofpadlocking
position,
off
breakerorother disconnecting
A.
Computer
Control
1.
Align
ching
rotate threaded
2.
Align
ching
and
rotate threaded
B.
Gas/Current
Interface-Gas/Current
Connections
keyways,
insert 14-pin
receptacleoncomputer
collar
fully
keyways,
insert
16-pin
receptacleongas/current
collar
Sensing
nections
Align
keyways,
ching
receptacleongas/current
rotate threaded
C.
Weld
Route
cable
output
trol, to
weld
terminal,
the
cable
Owner’s
Cable
from
wire
terminal
Manual
insert
14-pin
collar
fully
Connections
welding
through
drive
assembly
for
location).
plug
clockwise.
power
the
gas/current
(see
CONTROL
2-2)
can kill.
parts.
power
input
source,
power
before
employing
makingin-
removing
and
red-tagging
device.
Amp
plug into
interface,
clockwise.
Amp
plug
sensing
fully
clockwise.
Control-Motor
from
motor
into
sensing
source
and
Motor/Drive
control,
positive
sensing
connect
Assembly
Computer
Interface
RC17
CON
and
line
fuses
circuit
Sensing
mat
and
into
mat-
control,
Con
mat-
and
weld
con
cable
to
115
Rd
-
D.
Gas
Connections
Connect
hose
from
supplied)atgas
sing
control.
gas
regulator/flowmeter
source
to IN finingongas/current
Connect
assemblytofittingongas/current
gas
flow
must
regulator/flowmeter
E.
Touch
-
Connect
gas/current
ing
connection.
2-3.
POWER
cord with
sensing
from
outlet cable. Polarityisnot
COMPUTER
SOURCE
be
accurately
at
the
Sensor Connections
two
friction
controltotouch
INTERFACE
CONNECTIONS
2-2)
ELECTRIC
•
Do
not
touch
live electrical
•
Shut
-
Lockout/tagging
disconnect
from
down
robot, and
“lockout/tagging
terconnections.
switchinopen
fuse box,orshutting
unit,
welding
disconnect
procedures”
procedures consistofpadlocking
breakerorother disconnecting
There
are several
ween
source.
following
the computer
Examine
connections.
cords
interface
and
select
used
-
Volts
AC/Contactor
control
Cord
Arc
Power
Pak
Welding
Source
gas
hose from
source.
connectors
SHOCK
parts.
input
position,
off
and
device.
for
interconnections
and
the
(customer
wire
sensing
control.
controlled by
coming
sensor
leads
important
-
WELDING
(Figures
2-1
can kill.
power
source,
power
before
employing
makingin-
removing
red-tagging
welding
proper
cord
sen
-
drive
The
a
from
com
-
for
this
And
and
line
fuses
circuit
bet
-
power
for
the
Arc
Connection
Robot
Control
Failure
In
UnIt
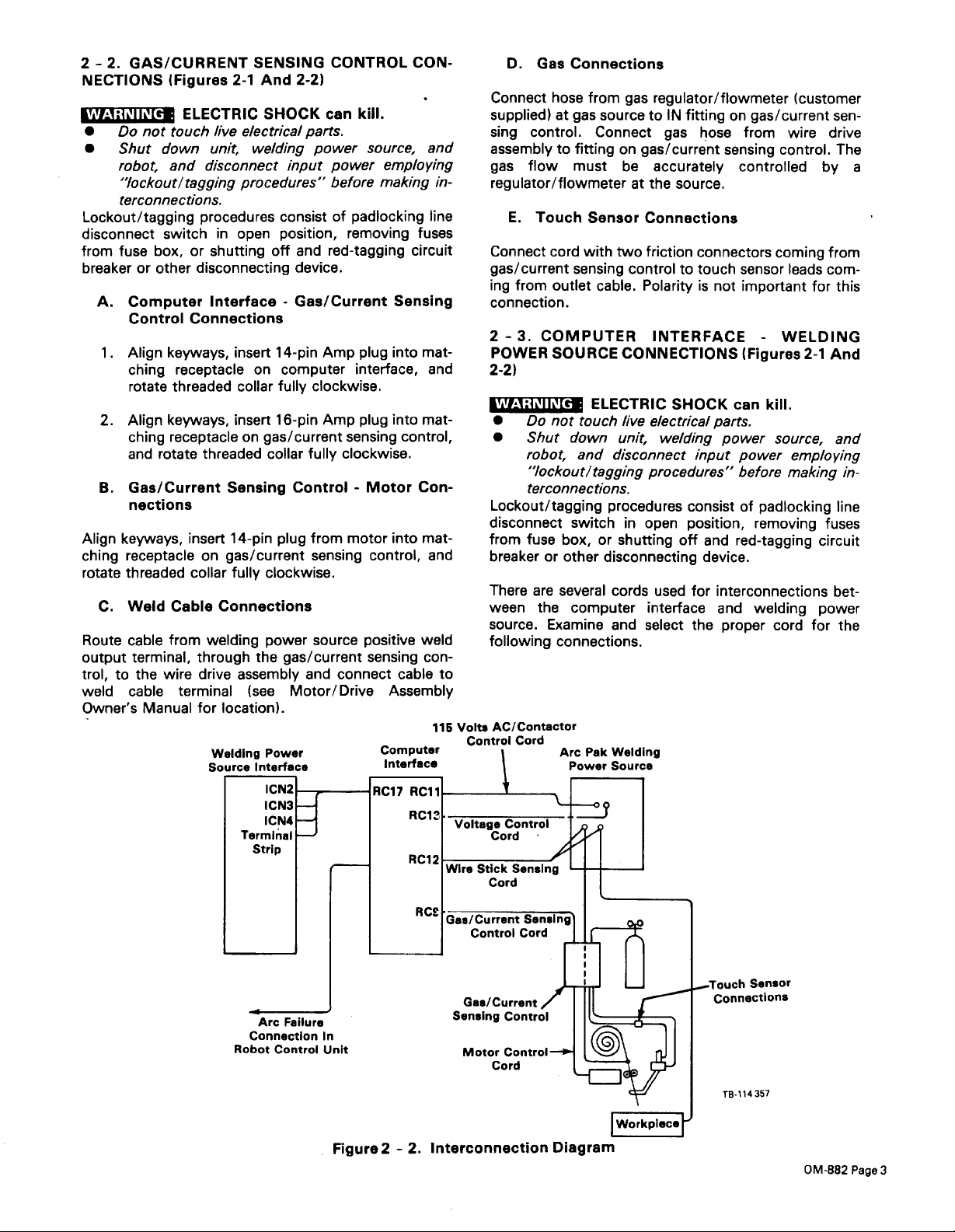
Figure
2-2.
GaslCurrent
Sensing
Motor
Control
Control-
Cord
Interconnection
Diagram
Sensor
TB-i14357
OM-882
Page
3
Page 17

A. Wire
1.
2.
Stick
Align
keyway,
into
matching
and
rotate
Connect
power
3.
Connect
source negative
B.
Voltage
1.
Align
keyway,
ching
rotate threaded
2.
Align
keyway,
receptacleonwelding
threaded
C.
115
Volts
tions
Two
cords
are
supplied
Amphenol
with
plug
cond, supplied
andafour-pin
1.
Align
keyways,
matching
rotate threaded
Sensing
insert
Connections
four-socket
receptacleoncomputer
threaded
lead
source
lead
Control
collar
with
ring
positive
with
clamp
output
Connections
insert
17-socket
fully
terminal
output
to welding
terminal.
terminal.
receptacleoncomputer
collar
fully
clockwise.
insert
collar
fully
AC/Contactor
necessary
the
welding
and
two
with
the
Amp
plug.
17-pin
clockwise.
for
this
power
twistlock
robot,
insert
plug
power
source,
Control
connection.
source,
receptacles.
has
two
four-pin
receptacleoncomputer
collar
fully
clockwise.
Amphenol
interface,
clockwise.
to welding
plug
into
interface,
into
matching
and
Connec
One
hasa14-pin
These-
twistlock
Amp
plug
interface,
plug
power
mat-
and
rotate
cord,
plugs
into
and
2.
Connect
ching plugs,
3.
Align
matching
and
2-4.
COMPUTER
POWER
(Figures
2-1, 2-2,
WARNING:
•
Do
not
•
Shut
robot,
the
keyway,
receptacleonwelding
rotate threaded
SOURCE
ELECTRIC
touch live electrical
down
and
‘lockout/tagging
terconnections.
Lockout/tagging
disconnect
from fuse box, or shutting off
-
breaker
1.
or
Align
ching
procedures
switchinopen
other
disconnecting
keyway,
receptacleoncomputer
rotate threaded
2.
Align
keyways,
plugs
from
receptaclesonbottom
interface,
clockwise.
twistlock
and
insert
receptacles
rotate plugs
14-pin
to the
clockwise.
Amphenol
power
collar
fully
clockwise.
INTERFACE
-
WELDING
INTERFACE CONNECTIONS
And
2-3)
SHOCK
can kill.
parts.
unit,
welding
disconnect
procedures”
insert
power
input
consistofpadlocking
position,
and
device.
24-socket
source,
power
before
red-tagging circuit
employing
makingin-
removing
plug
into
interface,
collar
fully
clockwise.
insert
four-,
interconnecting
of welding
and
rotate threaded
six-,
cord
and
into
power
collars
matching
mat
plug
into
source,
and
line
fuses
mat-
and
ten-pin
source
fully
-
OM-882
Page
Power
Source
Welding
Current
(WCR)
Detect
Figure
4
2-3.
Welding
Power
Source
Interface
Connections
Page 18

3.
Remove
welding
panel.
4.
Route
remaining
2
through
source
5.
Connect
a.
b.
c.
d.
e.
6.
Reinstall and
-5.
COMPUTER
strain
interface,
leadsasfollows:
Red
leadtoterminal 52.
Blue
leadtoterminal 50.
White
Green
Long
green
to
chassis
CONNECTIONS
IMPORTANT:
withafive-pin
butisnot
future
use.
Amphenol
usedinthis
power
cord
source
from computer
reliefinbottom
to 14-position
leadtoterminal 35.
leadtoterminal 36.
lead
with
ring
ground.
secure
A
25
side
panel.
INTERFACE
ft.
(8m) interconnecting
TERMINAL
plugissupplied
installation. Retain
interface
interface
of welding
terminal
terminal
connects
with
cable
side
power
strip.
STRIP
cable
this
unit
for
There
are
several
terface
loosen
for
control
screwsonstrain
necessary, and
nection.
and
The
Tighten
reinstall
A.
ARC FAILURE
ARC
FAILURE
top
panelisturned
control
dctothe
unit.
The
computer
failure occurs.
conductor
cord
follows:
1.
Open
robot control
minal
strip
2.
Route cord under
3.
Make
cord
mon
and
4.
Close
robot control unit door,
through
terface.
5.
Connect
terminal
connections.
locate
screwsonstrain
strips
inside
the
Remove
unit
reliefonunit
appropriate terminal
reliefifnecessary,
computerin-
top
rear
panel
strip
cover when procedureisfinished.
Light
Connections
lightonthe
on and
robot control
interface
Locate
for
supplied
this
computer
offbya
signal
unit
arc
failure
lengthof18
connection,
unit
door,
interface
from
must
supply24volts
circuit
and
and
locate
the
when
gauge/2
proceed
2.
cross member
connectionstoterminal
the
Weld
Alarm
strain
reliefonrear
cord
commonto2TL
below
door.
strip
terminal.
and
route
panelofcomputerin-
and
positive to
cover,
for
con
front
robot
jig
com
cord
arc
as
ter
if
-
-
-
WARNING:
•
Do
•
Shut
and
“lockout/tagging
ELECTRIC
not
touch
down
disconnect
live electrical
unit,
welding
input
procedures”
SHOCK
parts.
power
can kill.
power
before
terconnections.
Lockout/tagging
disconnect
from
fuse box,orshutting off
procedures
switchinopen
consistofpadlocking
position,
and
red-tagging
breakerorother disconnecting device.
SECTION
2TG.
source,
and
robot
B.
CV/CC
employing
makingin-
removing
line
fuses
1.
Locate
2.
ForCCoperation,
terminalsEand F on
circuit
IMPORTANT:
when
operatingintheCC(constant
3-FUNCTIONOFCONTROLS
Connections
terminal
strip
remove
The
Inductance controlisdisabled
2T.
jumper link between
2T.
current)
mode.
Figure
3-1.
Arc
Failure
indicator
Light
Front Panel
View
Ta-i14436
OM-882
Page
5
Page 19

3-1.
Placing
input
for
OFF
3
The
trol
As
of
The
fluid
The0(zero)
stiff,
characteristics,
ter
3-3.
The
opens,
POWER
the
SWITCH
POWER
powertothe interface.
the
robottoweld.
position
-2.
shuts down
INDUCTANCE
INDUCTANCE
which
canbeset
the
levelofinductance
the
weld
outputorspeedofresponse
slower
welding
response
puddle,
setting gives
fast-responding
puddle.
The7setting
i.e.,asoft,
arc, and
Selectasetting
high
weld
best
OVERLOAD
A.
Fuse
Protection
interfaceisprotected
nal
shortorexcessive
the
interface
replacement
B.
Wire
procedures.
Drive
(Figure
3-1)
switchintheONposition
The
interface
Placing
the
POWER
switchinthe
the interface.
CONTROL
controlisa
for
inductance
increases,
(Figure
digital
pushbutton
levels1through
the
rate of
slows
time
producesasofter
and
flatter,
arc, andasmall,
gives
smoother
minimum
inductance,
maximum inductance
fast-freezing
slow-responding,
puddle
suited
PROTECTION
overload by fuse
shuts
Motor
for
from
down.
Circuit
fluidity.
the
application.
(Figure
damage
See
Breaker
duetoan
Fl.Iffuse
Section
applies
mustbeon
2-1)
con
7.
change
down.
arc,
more
bead.
i.e.,
low
spat-
3-1)
inter
Fl
5-2
for
3-4.
The
voltmeter
ofavolt while
3
-5.
The
wire
the
nearest
Actual
the
wire
3-6.
The
ammeter
amp
while
a
3-7.
There
are
visual
The
GAS
to indicate
The
CONTACTOR
power
weld
outputisavailable.
-
The
WIRE
motorisenergized
The
CURRENT
relayisenergized
VOLTMETER
displays
(Figure
weld
welding
WIRE
SPEED
speed
meter
inch
and preset
feed
speed
AMMETER
METER
displays
per
minute while
wire
feed speed
feedback
(Figure
displays
welding
INDICATOR
are
five
and preset
LIGHTS
indicator
indicationsofvarious
light
turnsonwhen
shielding
gas
light
source
contactorisenergized
FEED
light
to indicate that
light
turnsonwhen
to indicate thatanarcisestablished.
3-1)
voltagetothe
and preset
(Figure
preset
are
voltage
3-1)
wire
welding
the
nearest tenth
while
feed
and
same
circuit.
3-1)
weld
amperagetothe
amperage
(Figure
while
3-1)
lightsonthe interface.
process
the
gas
functions.
valveisenergized
flow.
turns
on
when
the
to indicate that
turnsonwhen
the
wire
wireisfeeding.
the
current
idling.
speed
to
idling.
due
to
nearest
idling.
These
welding
drive
detect
The
wire
drive
motorisprotected
overloadbycircuit
face
shuts
down.
reset
the
circuit
4
-1.
INPUT
SOURCE
and
wire
face.
These
parameters.
to
preset
to
keep
weld
SIGNAL
(Figure
drive
motor
signals
During
welding
parametersatpreset
breaker
Manually
CB1. If
depress
breaker.
SECTION
FROM
4-1)-The welding
send
signalstothe
are
used
welding
values
these
and
compensations
from
damage
CB1
opens,
the
reset
4-SEQUENCEOFOPERATION
WELDING
power
computer
to
determine
signals
are
levels.
due to
the
inter-
button
to
POWER
source
inter-
weld
compared
are
made
The
ARC
FAILURE
outage while
Welding
Current
No-Load
WeldingT~
Voltage
WeldAbnormal
D~LY
Start
light
welding.
Arc
0
to 50V
—F
Open when
turnsonwhen thereisan
Initiation
H-
abnormality
occurs.
arc
Crater
—
Time
TA-i14379
OM-882
Page6
Figure
4-1.
Input
Signal
Timing
Chart
Page 20

4-2.
OUTPUT
TERFACE
input
signals
motor,
of
source
Wire
the
computer
and
Start
robot,
Relay
(Figure
from
and
interface
wire
feed
SIGNALS
4-2)-The
the
welding
wire
stick
regulates the
functions
Open
I I
FROM
power
check
Arc
Close
COMPUTERIN-
interface
interprets
source,
circuit.
welding
while
welding.
Initiation
wire
The
the
drive
output
power
Voltage1.25VDC
Command
2.5VDC
1OVDC
5VDC
I
I I
Close
~~chlng~
I
I I I
Output To
Motor
Start
Figure
4-3.
weldiscompleted,
determineifthe
the
weld
WIRE
puddle.
4-2.
STICK
Output
the
welding
Signal
CHECK
wire
stick
wire
Feedbackisusedtodetermineifthe
weld.Ifthe
weld,
the
feedback
robot
can
indicates
cycletoits
SECTION
•~j~j~~j5
this
unit
for
maintainedina
when
necessary.
precautionary
5
-
1.
INSPECTION
Every
legibility.
clearly
See
labels.
six
months
All
precautionary
readable
the
Parts List
AND
UPKEEP
Open
TA-i14378
Timing Chart
(Figure
4-3)-After
checkisperformed
has
burned
back
wireisfree of
the
wireisfree of
next
sequence.
out
the
to
of
the
the
Figure
If
the
feedback
power
provide
sourceissenta1
minimum welding
contactorispulsed
voltage
shouldbeenough to free
usedtodetermineifthe
the
feedback
cletoits
If
the
voltage
free
more
welding
If
the
Weld
gram
from
next
feedback
command
the
welding
voltage
wire
wire
Abnormal error
module,
the
weld.
4-3.
indicates
indicates
sequence.
indicates
is given,
wire.
increases
(see
Figure
remains
and
Wire
on.Ifthe
wireisnow
the
The
stuck,
willbedisplayedonthe
the
wire
5-MAINTENANCE&TROUBLESHOOTING
inspect
state
labels
and
forpart
the
labels
must
replaced
number
on
be
of
1.
Repairorreplace, as
and
cables; give
and
cracked insulation
equipment.
2.
Remove grease
moisture
from
particular
and
electrical
Stick
Check
the
wireisstuck,
.25
VDC
command
power
wire
source
was stuck,
the wire.
free of
wire
the
wireisstill
and
is free,
the
contactor
the
stuck,ahigher
check is performed
are
usedtotry
4-3).
the
robot
will
shut down,
mustbephysically
required,
all
hoses,
attentiontofrayed
and
areas
whereitenters
grime
from
components;
parts
and
cables.
TA~114379
the
welding
signal
output.
the
pulsed
Feedback
the
weld.
robot
cancy-
pulsed
and
and
free
robot
removed
cords,
to
The
is
to
two
the
pro
If
a
-
WARNING:
•
Do
not
•
Shut
down
and
‘lockout/tagging
ELECTRIC
touch live electrical
unit,
disconnect
SHOCK
welding
input
procedures”
inspectingorservicing.
Lockout/tagging
disconnect
from
fuse box,orshutting off
procedures
switchinopen
consistofpadlocking
position,
breakerorother disconnecting
Usage
and
shop
conditions
and
typeofmaintenance.
will
Inspect
can kill.
parts.
power
source,
power
before
and
employing
internally
removing
and
red-tagging
device.
determine
the
frequency
equipmentasfollows:
robot
line
fuses
circuit
5-2. OVERLOAD PROTECTION
WARNING:
•
Do
•
Shut
and
“lockout/tagging
ELECTRIC
not
touch
down
disconnect
live electrical
unit,
welding
input
procedures”
SHOCK
parts.
power
power
(Figure
can kill.
source,
inspectingorservicing.
Lockout/tagging
disconnect
from
fuse box,orshutting off
procedures consistofpadlocking
switchinopen
position,
and
red-tagging
breakerorother disconnecting device.
employing
before
removing
3-1)
and
robot
internally
line
fuses
circuit
OM-882
Page
7
Page 21

Figure
5-1.
Display Board
Meter
Checks
CAUTION:
IMPROPER
unit.
If
replacement
of
the
proper
becomes
size,
List).
To
replace
1.
the fuse,
Depress
proceedasfollows:
and
rotate
counterclockwise.
2. Pull
3.
4.
5.
5-3.
5-1)-Check
for
checking
out
fuse
is
free.
Insert
new fuse
Install
fuse
Depress
until
and
coverissecure.
DISPLAY
points
power
with
into
with
fuse
rotate
BOARD
are
providedonthe
supply
meters.
~
•
Do
•
Be
cedures
ty
practices.
•
Shut
or
ELECTROSTATIC
ELECTRIC
not
touch
sure
that
are
familiar
down
unit
test
equipment lead
live
electrical
personnel
before
DISCHARGE
electronic components.
•
Put
on a
handling
•
Transport
per
•
Perform
1.
Remove
2.
Locate display
properly
circuit
all
static-shielding
work
computer
grounded
boards.
static-sensitive
onlyata
board
FUSES
type,
cover when
fuse
holder
fuse
METER
can
necessary,
and
rating
fuse
holder
fuse
holder
cover.
cover
holder
cover
CHECK
damage
use
only
(see
holder
back
into
clockwise
display
and
input
command
SHOCK
can
kill.
parts.
with
and
performing
follow
testing
standard
makingorchanging meter
connections.
(ESD)
wrist
can
strap
damage
componentsinpro
carriers
interface
and
packages.
static-safe
top
work
cover.
area.
PC4.
this
fuses
Parts
cover
cover
unit.
(Figure
board
for
the
pro
-
safe-
BEFORE
-
3.
Check
voltage according to
4.Ifa
5.Ifthe
meter
power
supply
correct
meter
and
(see
the
meter is
Section
5-4).
power supplyorcommand
rect,
replace
display
and
board
5-4).
5-4.
(Figure
Lockout/tagging
disconnect
from
BOARD REPLACEMENT
5-2)
WARNING:
•
Do
not
•
Shut
robot, and
“lockout/tagging
or
servicing.
switchinthe
fuse
box,
ELECTRIC
touch
live electrical
down
unit,
disconnect
SHOCK
welding
input
procedures”
procedures consistofpadlocking
open
position,
or shutting
off
breakerorother disconnecting
ELECTROSTATIC
circuit
•
board
Putonproperly
handling
•
Transport
per
static-shielding
•
Perform
DISCHARGE
components.
grounded
circuit
boards.
all
static-sensitive
carriersorpackages.
work
onlyata
static-safe
INCORRECTLY INSTALLED
circuit
•
with
Retain
boards.
Be
sure
that
ed
onto
connectors
IMPORTANT:
respect to
all
hardware
plugs
are
before resuming
All
directions,
the
operator facing
removed during
properly
reinstallation.
A.
Display Board
1.
Remove
unit
PC4 And
top
cover.
Figure
5-1.
command
not
working,
voltage
replace
voltage is
PC4
(see
Section
PROCEDURES
can kill.
parts.
power
power
before
source,
employing
inspecting
removing
and
red-tagging
device.
(ESD)
can
damage
wrist
strap
BEFORE
componentsinpro
work
area.
PLUGS
can
damage
aligned and
operation.
suchasleftorright,
the
unit
front
this
procedure
Meter
Replacement
is
the
incor
and
line
fuses
circuit
install
are
panel.
for
-
-
-
OM-882
PageS
Page 22

2.
Remove
not
3.
Disconnect
ching
4.
Gently
Do
and
screws securing
remove
stand-offs.
plugs
receptacles
pull board
not
pullupor
LED’s
maybedamaged.
PLG2O
on PC4.
straight
down;
boardtostand-offs.
and
PLG24
away
otherwise,
from
from
front
the
mat
panel.
meters
Do
5.
To
replace
a.
Remove
b.
support.
Gently
tain
meter(s) proceedasfollows:
nuts
and
lock
washers
pull
meter
straight
outofsocket.
spacers.
from
meter
Re-
Digital
Motor
Speed
Receptacle
Interface
Receptacle
Receptacle
RCS
RC1
9
Voltage
Circuit
R(
Board
PCi
Receptacles
RF Filter
Receptacles
RC2O
Board
Ret
TO-i14344
Circuit
And
Circuit
PCS
R021
RC24
And
RC22
Figure
5-2.
Circuit
Board
Replacement
OM-882
Page
9
Page 23

c.
Slide
spacers
d.
Push
meter
protruding
e.
Reinstall
metertoboard.Donot
meter
6.
To
install
line
boardupwith
meters
7.
Reinstall
8.
Reconnect
and
securing
receptaclesonnew
9.
Reinstall
B.
Motor
1.
Remove
2.
Remove
3.
Gently
4.
Insert
5.
Reinstall
6.
Reinstall
C.
Replacement
unit
Board
unit
securing
pull
new
securing
unit
Boards
1.
Remove
unit
2. Disconnect
3.
Unlatch
ing
standoffs
rail.
onto new
into
socket
meter
with
throughtorearofPC4.
lock
washers
and
overtighten
maybedamaged.
replacement
display
front
panel
LED’s.
screws.
PLG2O
and
PLG24
PC4.
top
cover.
PC2
Replacement
top
cover.
screw
and
board
from
receptacle
board
into
RC5.
screw
and
top
cover.
Procedure
top
cover
and
locate
plug(s)
from
and
board.
slide
board
support.
meter
supports
nutstosecure
board,
carefully
openings
to matching
unlatch
standoff.
RC5.
latch
standoff.
For
Remaining
board.
out
of
nuts
retain-
or
for
4.
Slide
new
board
into
retaining
doffs.
5.
Connect
new
6.
Reinstall
5
-5.
TROUBLESHOOTING
WARNING:
•
Do
not
•
Shut
and
‘lockout/tagging
plug(s)
board.
unit
ELECTRIC
touch
live electrical
down
unit,
disconnect
to matching
top
cover.
SHOCK
welding
,nput
procedures”
inspectingorservicing.
Lockout/tagging
disconnect
from
fuse box,
procedures
switchinopen
or shutting
consistofpadlocking
position,
off
breakerorother disconnecting
MOVING
•
HOT
•
Troubleshootingtobe
PARTS can
Keep
clearofmoving
SURFACES
Allow
cooling
cause
can
cause
period
performed
parts.
before
sons.
Itisassumed
installed
operatorisfamiliar
unit
was
relatedtothe
designedtodiagnose
the troubles
Use
this chart in
while performing
troubleisnot
cedures,
tion
shouldbecontacted.Inall
malfunction,
shouldbestrictly
that
the
computer
accordingtoSection2of
with
the
functionofcontrols,
working
properly,
welding
that
may
conjunction
and
process.
and
provide
develop
with
troubleshooting
remedied
the
nearest Factory
the
after
manufacturer’s
followed.
rail
and
latch
receptacle(s)
CHART
can kill.
parts.
power
source,
power
and
employing
before
removing
and
red-tagging
device.
serious injury.
severe
burns.
servicing.
onlybyqualified
interface
that
The
remedies
in this
the
was
this
manual,
the
troubleisnot
following
for
unit.
circuit
procedures.Ifthe
performing these
Authorized
Service
casesofequipment
recommendations
stan-
on
robot
internally
line
fuses
circuit
per
properly
the
the
chart
is
some
of
diagrams
pro
Sta-
-
-
OM-882
Unit
No
Page
TROUBLE PROBABLE CAUSE REMEDY
does
not
operate.
FuseFlopen.
Check
Fl,
and replaceifnecessary
5-2). Correct overload
operation.
Circuit
meter
display.
Meter
breaker
not working.
CB1
tripped.
Check
overload
Use
check
CBl,
and resetifnecessary.
problem
before
pointsondisplay
mineifpowerisavailabletometer
10
Display board
working.
PC4
not
Use
(see
okay,
5-3).Ifcheck
Section
check pointstodetermineifpowerisavailable
Section
replace
points
5-4).
5-3).Ifcheck pointsdonot
PC4
(see
problem before
continuing
board
are
okay,
replace
Section
5-4).
(see
Section
continuing
Correct
operation.
PC4todeter
(see
Section
meter
(see
test
Page 24

TROUBLE PROBABLE CAUSE REMEDY
No
wire
feed.
Wire
feedsatmaximum. Tach
No
arc
voltage control.
Robot
signal.
Relay
CR1
Motor
board
ing.
board
drive
motor
Voltage
tions.
Wire
stick sensing
tions.
not
working.
PC2
not
PC5atwire
not
working.
control
work-
connec-
connec-
Check
PC2.
and
Replace
Replace
input
Signal
B (common)
CR1.
PC2
Replace PC5.
Check and
Check
and
secure
secure
signal
from
robottomotor
shouldbe0-10
on RC5.
(see
Section
5-4).
connections
connections
vdc
-
(see
(see
between
Section
Section
board
pins
2-3).
2-3).
K
Robot
shuts down
Touch
Robot
Sensor
moves
wireisstuck.
Wire
speed
goestozero.
No
wire
retract.
error.
when
(1PM)
due
to
welding
meter
Voltage
board
PCi
not
working.
Incorrect robot command
voltage.
Touch
Wire
Wire stick
Sensor
stick
connection.
sensing
connections.
connec-
tions.
Incorrect
robot command
voltage.
Motor
board
PC2
not
work-
ing.
Control
relay
CR2
not
work-
ing.
Replace
Check
PCi.
PCi
(see
Section
robot command
Command
voltage
5-4).
voltage at voltage
shouldbe0-10
vdc
ween pinsBBandCC(common)atRC25.
Check
continuityofleads
gas/current
Secure
Be
and
welding
minal
Check
Check
PC2.
all
connections.
sure
that
blue
leadisconnectedtoterminal
power
strip.
and
robot command
Signal
sensing
red leadisconnectedtoterminal
source
secure
connections
shouldbe0-10
between
control.
gun/torch
Repairorreplace.
interface14position
(see
Section
voltage at motor
vdc between
andB(common)atRC5.
Replace
Replace
PC2 (see
CR2.
Section
5-4).
board
bet
and
52
50 on
ter
2-3).
board
pins
K
Robot
shuts
down.
Interface
board
working.
Incorrect
robot command
voltage.
Loose
weld
output
tions.
Interconnecting
Interface
board
working.
PC3
connec-
cords.
PC3
not
Replace
Check
PC2.
PC3
robot command
Signal
andB(common)atRC5.
Clean
and
tighten
Check
all
interconnecting
or
not
replace.
Replace
Check
PC3
(see
Section
5-4).
voltage at motor
shouldbe0-10
connections.
cords for
and
secure
(see
Section
5-4).
vdc between
breaks;
all
connections.
board
pins
repair
OM-882
K
Page
11
Page 25

5-6.
USEOFINDICATOR
On
LIGHTS
FOR
TROUBLESHOOTING
Ga~
Indicator
Light
Off
Gas
flows:
System
Contactor
System
normal
On
closed:
normal
On
Gas
(on).
(on).
I
does
not
flow:
Check
gas
I,
Contactor open:
Check
interconnecting
cords.
Check
interface board
valve
-Contactor
operation.
PC3.
Wire
Feed
IF
Gas
flows:
Check
and
gas line
Check
Indicator
IF
Contactor
Check
Indicator
gas
valve
for
interface
Light
closed:
display
L.~,
1
operation
leaks.
board
board
PC3.
PC4.
Gas
dodes
System
Contactor
System
normal
normal
IF
not
Off
IF
Open:
,~.1
IF
flow:
(off).
(off).
Wire feeds:
System
Arc
System
No
Check
normal
started:
normal
arc:
weld
(on).
I
—
On
(on).
On
parameters.
Wire
does not
Check
circuit
Check
relay
Check
interface
No
arc:
Replace
Arc
started:
Check
signal
Signal
shouldbe24vdc
between
2TG.
feed:
breaker
CR1.
board
Current
reed
relay.
Arc
Failure
from
robot.
terminals 2TL
CB1.
PC3.
Indicator
Indicator
and
Wire
feeds:
Check
input
signal
robot
to motor
Signal
shouldbe0-10
between
(common)atRC5.
Check
wire
Light
Arc
started:
Replace
No
Normal
reed
Ligl~
arc:
during
board
pinsKand
feed board
relay.
II
idling.
from
B
PC2.
vdc
PC2.
Wire
does not
System
No
arc:
System
Arc
started:
Normal
normal
•
Off
V
normal
-Off
while
feed:
(off).
(off).
welding.
OM-882
Page
12
Check
display
board
PC4.
Page 26

00000
0000
0t00~N-
~i
A0UOUJL.0ZN-040
8
00000 00000
~t.~
~
;
0000
OcP~
000000
-00
I
-
I
-
I
-
I-
6
6
2
E
0
L.
U
0
4..
0
C.)
0
U
U
‘4.-
0
4-
C
0
4-
0.
E
0
C.)
0
U
-
E
0
I...
0
0
4-
U
(3
cy~
10
0
I
-
RGTA~
OM-882
Page
13
Page 27

I
&
1
N
LI)
I
-
I-
6
S
2
E
C
I
-
C
a
4-
3
U
(3
0.
C
0
.3
4-
C
0
C.,
0
C
4-
.5
‘I
0
U
-
E
C
I
-
0,
C
a
4-
3
U
(3
OM-882
Page
LI)
C
3
0,
041
14
U
C
Page 28

0
0
0)
cv)
0
C
Ca
0
z
E
U
C
0
4”
U
I
G
-
N
C-)
0.
-V
h.
C
0
0
0
S
S
0.
Co
I
-
0
4-
0
S
4-
0
U
-
S
C
I
-
C
4-
U
a
In
I’)
S
3-
it
OM-882
Page
15
Page 29

WELD
START
•15
V.
•24
V.
G
AS
AS
•24
V.
07
0
F
A
REV.
,.~
.fl3
(FAD)
(REV)
c~
RELAY K
J
N
AX
Figure
5-6.
Circuit
Diagram
For
Interface
Board
~CGAS B
Circuit
~F~-*~
~2 ~T
~4
Diagram
PC3
No.
R~UOT
cGJTACT~
B-113
431
OM-882
Page
16
Page 30

N-BV.AA
co.~
WS
I~F~JT
N-24
V.
cOWTACTOW
DETECT
GAS
.~ IFWO)
.~G
(REV)
N-12
coeu~
V~TS
i~eu•r
4
V H
4
AS
AD
VR2
I:
.1
-~
K
C
1dj
V.
IN
1ST
INHI
LOW
I
F
A
B
COW
L
RFL
ROW
D3
V.
IN
LOW
191
IN
HI
C
04
c’J
U
0.
c~J
~
LL.
Figure
M5
I~UUT
~
5-7.
Circuit
Diagram
For
Display Board
V.
IN
(ST
IN
ROW
RFH
RFL
DOW
LOW
HI
Circuit
PC4
Diagram
No.
B-ill
341
OM-882
Page
17
Page 31

AP
AE
A.A
As
AG
N-,
AF
AD AC
N-
A
AJ
,.
AN
AL
A
~
AM AN AN AR
,~.
,,
N-~N-
A
AS
RC2I
N P
C32 C30
-~
H-’
C33
—~
PL
—~
C31
0
Figure
F— —-~
Z~I
H-
5-8.
—~
~‘ ~‘
H L
Circuit
C25
H-
C24 C22
—9
H-
-~
ILIL
H-
C29 C25 C23
Diagram
—~
P4
D C
ForRFFilter
H-
-~
V
N
,J
Board
H-
—i
IL
H-
Circuit
—9
‘
K F E S
Diagram
PC6
CAR
H-
H-
No.
~—9
~
—9
B-ill
C20
C21
H
-
•
A
117
OM-882
Page
18
Page 32

Yay
-
K
Effe~tiv
With
Serial
Nc.
~H1
3
?.~i1
PARTS
LIST
Page 33

Fig
C
1
OM-882
Page
TC-1 14
345
Figure
1
A-Control Box
Page 34

Item
No.
Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
3S
36
37
38
39
40
41
42
43
44
4S
46
47
48
49
50
A
R2
PLG9
PLG16
PLG12
RC11
PLG17
ICN4
ICN2
ICN3
RC1
3
C2,3
RC17
RC12
PC4
PLG21,25
111
010 855
010
070 634
+
109
079
030
010
010
030 949
056
109
047 636
079 535
079 739
096 813
048 598
079 534
049 989
073 686
039 328
604
600 848
600
601
601
111
097
039 734
090
097
010 916
070
057
047 838
039
039 685
049 455
048
079
111
109330
091 100
604 910
604
090
109
109
604 825
109
113
097 867
028
094
076 624
057 084
111
073 756
081
Control
992
CONTROL
RETAINER,
853
FASTENER,
LABEL,
026
COVER,
683
HEAT
RESISTOR,
941
193
TUBING,3/BODxl8gawallxl/4
199
TUBING,
HEAT
SHIELD, resistor
170
041
CABLE,
HOUSING
•
CLAMP,
CABLE,
HOUSING
CABLE,
PLUG,4socketMS-3106A-145-25
•
CLAMP,
•
WIRE,
109
•
WIRE,
750
TERMINAL,
226
•
INSULATOR
228
CLAMP,
951
CABLE,
PLUG,
868
CLAMP,
263
CABLE,
866
PLUG,17pin
CONNECTOR,
731
BLANK,
360
BLANK,
BLANK,
PLUG,
273
CLAMP,
CABLE,
283
RECEPTACLE
535
TERMINAL,
199
CABLE,
PLUG,24socket
CLAMP,
CABLE,
CABLE,
571
CABLE,
890
159
CONNECTOR
157
CONNECTOR
CABLE,
158
CONNECTOR
736
CABINET, control
RECEPTACLE,17pin
291
CAPACITOR,
RECEPTACLE,24pin
591
RECEPTACLE, 4
BUSHING, snap
564
CIRCUIT
STAND-OFF,
380
HOUSING, terminal
Box
PANEL (FigCPg
screw
No.
2
screw-hd
warning
top
SINK
WW
.275IDx
SINK
interconnecting-motor/gas
PLUG&PINS
TERMINAL,
TERMINAL,
stranded
stranded12ga
Spin MS-3106A-165-8P
male
cable
l8ga
PLUG&SOCKETS
female
volt-sensing
cable
ring
universal25amp
control-interconnecting
l7socketMS-3106A-20-295
cableAN-3057-12
No.
18/c
MS-3106A-20-29P
clamp-cable
snap-in
snap-in
snap-in1inch
cable
AN-3057-8
No.
182/c
W/P
male
interconnecting
cable
20 ga
l8ga
No.208/c
183/c
ceramic
CARD,
No.
No.
electric
fixed
100
.048
15/c
(order
(consisting
AN-3057-6
16 ga
tongue
(orderbyft)
1-3/32x1-1/8
1-3/8
mtg
(order
INS
MS-3106A-24-285
AN-3057-16
5/c
(orderbyft)
4/c
(order
(order
(orderbyft)
MS-3102A-20-29P
0.1uf500
MS-3102A-14S-2P
pin
MS-3102A-145-2P
1/4IDx
meter
6-32xS/8x1/4
header14pin
6)
2
shock
can
wattS
wallx1
(consisting
byft)
(consisting
of)
(orderbyft)
(orderbyft)
1/2
stud
(consisting
3/4
inch
mtg
hole
mtg
hole
byft)
(consisting
(consisting
byft)
byft)
3/8
mtg
(FigBPg
kill
etc
ohm
(consisting
of)
hole
of)
of)
volts dc
hole
4)
hex
of)
of)
of)
1
4
4
1
1
1
1
4
2
1
1
1
1
14
2
1
8ft
1
16
1
1
1
1
9ft
35ft
1
1
1
1
1
2
20ft
1
1
1
1
2
1
1
25ft
1
4
1
1
1
6ft
6ft
6ft
1
1
6ft
1
1
1
2
1
1
1
1
7
2
OM-882
Page
2
Page 35

Item
No.
Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
4.Recommended Spare
+
BE
A
51
52
53
54
55
56
57
58
59
When
SURETOPROVIDE
Fl
51
CB1
S2
RC9
Dl
PLG18
PLG19
PLG20,26
PLG22
PLG24
PLG27
orderingacomponent
*012
112
089 032
046 432
073 487
011
011 991
112392
047 637
079
026 202
079 760
079 798
081
092
084
111
254
655
622
534
379
159
198
500
Parts
MODEL
Control
LABEL,
LENS,
HOLDER,
FUSE,
NUT,
SWITCH,
CIRCUIT
SWITCH,
HOUSING
TERMINAL,
DIODE,1amp
HOUSING, terminal
HOUSING,
HOUSING,
HOUSING,
HOUSING,
CONNECTOR,
originally displayingaprecautionary
AND
Box
(Cont’d)
Miller robot
led
4341
fuse
miniature
speed
No.
toggle
BREAKER,1pole1.5
code
RECEPTACLE&SOCKETS
terminal
terminal
terminal
terminal
SERIAL
computer
glass10amp
2
3PDT15amp
female
400
volts
SP
header12pin
header13pin
header12pin
header16pin
header6pin
plug5position
NUMBER
WHEN
interface
250
volts
125
amp
ORDERING
volts
250
volts
(consisting
label,
of)
the
label
should
REPLACEMENT PARTS.
alsobeordered.
1
5
1
1
4
1
1
1
1
14
1
1
1
2
1
1
1
OM-882
Page
3
Page 36

Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
Cl
B
,2
C3-5
Dl
,2 028
LCDl-3
LEDl,2,4,5
LED3
Ri-S
R6,8,l
1
R7,9,l0
RC2O
RC21
-23
RC24
VR1,2
ASSE~ABLY
1Y564
2C2
111
000 348
073 739
108
089 028
097 763
044 635
030 140
003 272
081
109
084 194
071
070 026
cc
I
J~
564
Circuit
CAPACITOR,
CAPACITOR,
351
DIODE,
453
METER,
Card,
Meter
tantalum
ceramic 0.1 uf50volts
signal
0.020
amp75volts
DCO-200MV
LED,5330A1040MCD
LED,
5330A19200MCD
RESISTOR,
POTENTIOMETER,
RESISTOR,
382
TERMINAL,
161
TERMINAL,
TERMINAL, header6
248
IC,
linear
STAND-OFF,
~ C02
carbon film
cermet15turn
carbon film
header12pin
header13socket
pin
78M05
No.6-32
(FIgAPg2Item
0.47uf35
volts
dc
SP
0.25
watt
680
ohm
0.75
0.25
watt1meg ohm
x7/16xl/4
2C22
hex
122
48)
watt
220K
ohm
210
2223
LCD3
2
3
3
3
3
3
3
3
3
1
2
2
±
WI
LED 4
BE
SURETOPROVIDE
21
LED ~~UT)~4~
~
02
COMPONENTSTOBE
BY
QUALIFIED
MODEL
AND
SERIAL NUMBER
~1i
Figure
LED
2
23
LIDIi[IDIIliDIiLI
REPLACED
PERSONNEL
B-Circuit
Card,
WHEN
ORDERING
~ED3
Meter
2020
ONLY
REPLACEMENT
~U
OLd~.
~N-C<<.(<
LIDIiII
2024
Dli
PARTS.
Ret:
D-111566
OM-882
Page
4
Page 37

11
OM-882
PageS
Figure
19
C-Control
Panel
Page 38

Item
No.
Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
1
PC2
2
3
CR2
4
5
SRi
6
7
8
9
10
11
12
CR1
13
14
2T,3T
15
16
17
PC6
18
19
20
CR3,4
21
22
D3,4
23
24
25
PCi
26
PC3
27
28
C
5T
T2
R3
Ri
Cl
iT
111
992
071
642
083
052 964
038 839
035 914
109 017
605
741
079 497
030
651
006 426
031
692
034
841
038 832
038 783
601
219
110
375
111
065
110 565
110
391
079 844
095
521
027
811
026 202
048
588
048
029
111
408
113
221
009 335
073 730
Control Panel
(FigAPg2Item
1)
CIRCUITCARD,digitalmotorspeed(FigC2PglO)
147
GROMMET,
RELAY,
BLOCK,terminal20amp5
RECTIFIER,
TRANSFORMER,
CLIP,
RESISTOR,
screw8-10
enclosed24volts dc
integrated30amp
control
mtg-resistor
WWfixed25
push
pole
watt2K
in
DPDT
400
volts
ohm
RESISTOR,WWfixed25wattl0ohm
CLAMP,
CAPACITOR,
capacitor2inch
electrolyte
750 uf 200
volts dc
RELAY,24voltsacDPDT
BLOCK,
BLOCK,
terminal20amp9pole
terminal20amp12pole
LINK,jumper
STAND-OFF,support
PANEL,
CIRCUIT
GUIDE,
SPRING,
RELAY,
mtg-components
CARD,
mtg-circuit
filter
card
(FigC4Pg
holddown-relay
enclosed24volts dc
12)
4PDT
CONNECTOR,14pin
DIODE,1amp
BRACKET,
CLIP,
retaining-socket
CIRCUITCARD,voltagecontrol(FigCl
400
volts
mtg-relay
SP
relay
Pg8)
CIRCUITCARD,interface(FigC3Pg11)
STAND-OFF,
TERMINAL,
No.
4-40x5/8x1/4
header22pin
1
1
1
1
1
1
4
1
1
1
1
1
1
2
8
8
1
1
3
2
2
2
2
1
2
1
1
2
1
BE
SURETOPROVIDE
MODEL
AND
SERIAL
NUMBER
WHEN
ORDERING
REPLACEMENT
PARTS.
OM-882
PageS
Page 39

COMPONENT
BY
QUALIFIED
TO
BE
REPLACED
PERSONNEL
ONLY
Ret:
Dlii
410
OM-882
Page
Figure
7
Cl-Circuit
Card,
Voltage
Page 40

Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
Cl
A1-3
Cl
,2
C3
,4
CS-i
5,17-24
Cl
6
D1-4,6
L1-4
Ql
Rl
R2,34,35,41
R3
R4,20,26,27,30,
38,40
R5,9,10,18,25,28,
29,37,39
R6,7,12-1
R19,21
R8
R11,16
R17
.43
R22,42
R23
R24
R3
1
R32
R33
R45
RC25
R
C26
Ul
U2,4
U3
VR
1
VR2
5,36
111
408
096 275
039 482
000 348
073 739
097 488
028
351
095 258
037 200
035 824
009
173
039
333
039
332
000
885
044
789
052
136
038
000
331
039
053
572
052
138
052
139
039
325
052
137
035
826
091
799
035
823
092
648
089
347
089
346
112
058
095
268
008
970
095
269
932
046
Circuit
IC,
CAPACITOR,
CAPACITOR,
linear
Card,
324
Voltage
electrolyte
tantalum
CAPACITOR, ceramic
CAPACITOR, ceramic
DIODE,
CHOKE, 1000
TRANSISTOR,
RESISTOR,
POTENTIOMETER,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
POTENTIOMETER,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
TERMINAL,
TERMINAL,
IC,
IC,
signal
0.020
UH28MA
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
carbon film
header14pin
header12pin
interface2i2
intetface2ll
amp75volts
NPN200MA4OvoIts
cermet20turn
cermet25turn
IC,digital40ll
IC,
linear3l7T
IC,
linear
7915
(FigCPg6Item
100uf35
0.47uf35
0.1uf50
0.15uf50
volts dc
volts
voltsdc
volts
SP
0.25 watt
270
0.5
0.25
watt
18K
0.25 watt
0.25
0.25
0.25
watt
watt
watt
15K
10K
lOOK
150K
0.5
0.25
watt
4.7K
0.25
watt
12K
0.25
watt
20K
0.25
watt
39K
0.25
watt
82K
0.25
watt5.lKohm
0.25
watt6.8K
0.25
watt
8.2K
0.25
watt
100
0.25
watt
zero ohm
25)
ohm
watt5Kohm
ohm
ohm
ohm
ohm
ohm
watt2Kohm
ohm
ohm
ohm
ohm
ohm
ohm
ohm
ohm
3
2
2
19
1
5
4
4
1
7
9
7
1
2
1
3
2
1
1
1
1
1
26
1
1
1
2
1
1
1
BE
SURETOPROVIDE
MODEL
AND
SERIAL
NUMBER
WHEN
ORDERING
REPLACEMENT
PARTS.
OM-882
Page
8
Page 41

0z~
o,~
~ ~“-‘-0
ft~
LOLC)
~
C5O~
+
R90
TUVWXYZ
D
G
000
0
rn~
~ft
A50
~
!rr~
GATE
ANODE
CATHODE
(LARGE
t
N~
c~4—0
Ret:
w
TERM)
O5~
C%J
—
0-093 449-G
—
OM-882
Page
COMPONENTS
BY
QUALIFIED
Figure
9
C2-Circuit
TO
BE
REPLACED
PERSONNEL
Card,
Digital
Motor
ONLY
Speed
Page 42

Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
C2
ASO-53
C50
CS
1
C52,61
C53,62
C54
C55,66-75,77
C56
C57
C60
C63,64
C65
CR50
D50-54,56-60
D55
1C50
QSO
,53
Q5
1
Q52
R50
R51
,54,55,57,67,
68,74,75,82,89
R52,56,61
R53
R58,62,65,66,71
72,76,90
R59
R60,87,88
R63,79
R64
R70
R73,83
R77
R78
R80
R81,84
R85
R86
T50
VR5O
VR51
071
642
009
159
039 482
031
699
073
739
035 833
005
023
031
643
073
549
031
677
035
561
044 602
031 721
095 033
091 861
079 844
026 202
080 910
081
800
037
200
037 824
039 335
030 839
035 827
052
138
039 332
035 884
030 007
039 335
039
106
039
331
049 015
039 328
052
142
039
108
035 886
035 825
030
937
030 090
092 648
085
399
081
799
047
272
037
261
Circuit
IC,
CAPACITOR,
CAPACITOR,
linear
Card,
3S8
Digital
electrolyte
mylar
0.0022
CAPACITOR, ceramic
CAPACITOR,
CAPACITOR,
mylar
0.033 uf
tantalum
CAPACITOR, ceramic
CAPACITOR,
CAPACITOR,
CAPACITOR,
CAPACITOR,
CAPACITOR,
RELAY,
SOCKET,
SPRING,
DIODE,1amp
DIODE,
IC,
interface 2907
TRANSISTOR,
THYRISTOR,
TRANSISTOR,
RESISTOR,
RESISTOR, carbon
RESISTOR, carbon
RESISTOR,
RESISTOR, carbon
POTENTIOMETER,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
RESISTOR,
TRANSFORMER,
IC,
linear78LO8
IC,
linear78Ll2
HEAT
SINK
mylar
0.015 uf 200
tantalum
mylar4uf 200
poly-film 0.47uf400
mylar
0.22
enclosed24voltsac4PDT
relay
holddown-relay
400
volts
zener15volts5watt
NPN
200MA40volts
SCR
7.4
UJT1SMA40volts
WW
fixed5watt
film
film
carbonfilm0.25wattl5Kohm
film
cermet15turn
carbon
film
carbon film
carbon
carbon
carbon
film
film
film
carbon film
carbon film
carbon film
carbon film
carbon
0.5
carbon 0.S
carbon film
pulse
Motor
Speed
100
uf35voltsdc
uf 200
0.1
uf50voltsdc
100
2.2uf20
0.01
uf 500
5.6uf3S
volts
uf 200
volts dc
SP
amp
200
volts
220
0.25
watt
0.25
watt
0.25
watt
0.25 watt
0.25
watt1K
0.25
watt
0.25
watt10meg
0.25
watt1.5K
0.25
watt
0.25
watt
0.25
watt
0.25
watt1Kohm
watt10ohm
watt47ohm
0.2S
watt
(FigCPg6Item
volts dc
voltsdc
volts
volts dc
volts
volts dc
volts dc
SP
ohm
10K
ohm
20K
ohm
100K
ohm
0.75
watt
47K
ohm
ohm
4.7K
ohm
ohm
ohm
120K
ohm
82K
ohm
22K
ohm
zero ohm
50K
ohm
1)
4
1
1
2
2
1
12
1
1
1
2
1
1
1
1
10
1
1
2
1
1
1
10
3
1
8
1
3
2
1
1
2
1
1
1
2
1
1
15
1
1
1
1
BE
SURETOPROVIDE
MODEL
AND
SERIAL
NUMBER
WHEN
ORDERING
REPLACEMENT
PARTS.
OM-882
Page
10
Page 43

Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
R3,6,7,12,13
C3
Al
Cl
C2
C3,6,9,10
C4
C5,11
CR4-6
CR2
D3-8
D9,10,15
Qi
-3
R1,2,8,11
R4
R5,10
R9
RC18
RC19
VR1
E
113
221
Circuit
009
159
IC,linear358
039 482
000 348
072
005 023
073 739
099 018
095
091 861
079 844
026 202
028
037 200 TRANSISTOR,
035 826
039
072
039
052
079 759
079 795
081
C2
(N
CAPACITOR,
CAPACITOR,
130
CAPACITOR,tantaluml
CAPACITOR,tantalum2.2uf20volts
CAPACITOR,ceramic0.1
RELAY,enclosed24voltsdcSPDT
521
RELAY,
SOCKET,
SPRING,
DIODE,1amp
351
DIODE,signalo.O2Oamp7SvoltsSP
RESISTOR,
331
RESISTOR,carbonfilm0.25watt4.7Kohm
561
RESISTOR,carbonfilm0.2Swatt27OKohm
106
RESISTOR,
145
RESISTOR,
TERMINAL,
TERMINAL,
832
IC,linear78MlS
P6
m~j
Card,
enclosed24voltsdc4PDT
relay
holddown-relay
carbonfilm0.2Swatt6.BKohm
carbon film
carbon film
header12pin
header13pin
E~I
Interface
electrolyte
tantalum
400
NPN
c-’J
0.47uf35
volts
200MA40volts
0.25
0.25
fl
(FigCPg6Item
100uf35
uf35voltsdc
uf50voltsdc
SP
volts dc
volts
watt
470
ohm
watt47OK
L)
ohm
26)
1
1
1
1
1
1
1
1
1
1
6
3
3
4
1
1
1
1
1
1
1
03
El
VRI
‘~‘
I~3K
DZN~
Cl
+
08
07
L....U
RCl8<cncowuoi~~J~
e
6
~j
R7
III
a~o
~—
0
COMPONENTSTOBE
BY
QUALIFIED
Figure
C3-Circuit
04
RCl9.~-
PERSONNEL
Card,
.~ .~ .~
REPLACED
ONLY
Interface
(N-i
o
-
-
~
CR2
.~
.4-4-4-4-4-
e
Ret:
C-lOS 275-A
BE
OM-882
SURETOPROVIDE
Page
11
MODEL
AND
SERIAL NUMBER
WHEN
ORDERING
REPLACEMENT PARTS.
Page 44

Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
C20-25,28-33,48,49
C4
C1-6,9-14,46,47
L1-3,5-7,9
RC21
RC22
110
565
028 292
028
291
110190
089
347
092
160
QI~IDQI~ID
• • •
a.~
7~IIDQ~D~
•
-i
0
• • •
-J
I’
Ir
I,
m m m
Circuit
CAPACITOR,
CAPACITOR, ceramic
CHOKE,1000UH
TERMINAL,
TERMINAL,headerl6pin
Card,
Filter
(FigCPg6Item
ceramic0.OOSuflOOOvoltsdc
0.1
header14pin
• •
Cu
-J
•
•
C29 )
rl
0
17)
uf500voltsdc
ASSEMBLYI10565
C32C13
11
m
m
m m
LU
ii ii ‘I
14
14
7
1
1
G
Cl
C46
C47
C4
C3
0
BE
SURETOPROVIDE
MODEL
COMPONENTS
QUALIFIED
Figure
AND
SERIAL NUMBER
C4-Circuit
TO
BE
REPLACED
PERSONNEL
Card,
Filter
WHEN
ORDERING
ONLY
BY
REPLACEMENT
PARTS.
Ret:
C-i10567
OM-882
Page
12
Page 45

Item
No.
Dia.
Mkgs.
Part
No.
Description
Quantity
Figure
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
D
REED
RC7
D2
4T
GS1
RC16
109
936
047
+079
079
109
049 455
010
010 494
057 358
010 604
602 934
079
079
047
079
109 938
038
109
090 246
079 535
Control
LABEL,
497
682
WRAPPER
687
RELAY,
021
CASE
CORD,
610
CONNECTOR,
BUSHING,
BUSHING,
FITTING,
FITTING,
FITTING,
573
574
BRACKET,
637
HOUSING
•
TERMINAL,
534
Box,
general
current
SECTION,
No.
182/c
snap
snapIDx1.37
hose-brassbushing
pipe-coupling
pipe-nippleL1/4
mtg-component
RECEPTACLE&SOCKETS
DIODE,1amp
081
BLOCK,
561
VALVE,24volts dc2way
terminal20amp4pole
RECEPTACLE
•
TERMINAL,
Gas/Current
precautionary
bottom/front/sides
(orderbyft)
clamp-cable
1-3/8IDx
1/2
1-3/4
mtg
1/4
NPT
NPTx6
female
400
volts
SP
1/4
W/PINS
(consisting
male
67
Sensor
inch
mtg
hole
1/4
NPTx5/8-18
IPS
port
of)
hole
(consisting
1/8
orifice
8
of)
1
1
1
1
2ft
1
2
2
2
1
1
2
1
14
1
9
+
BE
OM-882
1
When
orderingacomponent
SURETOPROVIDE
Page
13
2
MODEL
Figure
D-Control
Box,
Gas/Current
originally displayingaprecautionary
AND
SERIAL
NUMBER
WHEN
ORDERING
label,
Sensor
the
label
should
REPLACEMENT
alsobeordered.
PARTS.
TC-109
Lao
Page 46

ERRATA
After
this
to
data
appearing
SHEET
manual
was
prInted,
laterinthis
refinementsInequipment
manual.
design
occurred.
This
sheet
lists
exceptIons
AMENDMENTTOSECTION
IMPORTANT:A25
in this
installation.
Amend
A
There
screwsonstrain
screwsonstrain
A.
Section
WARNING: ELECTRIC
•
•
Lockout/tagging
from
are
several
CV/CC Connections
WARNING:
ft.
(8m)
interconnecting
Retain
2-5.
Do
not
Shut
ging
fuse
terminal
reliefonunit
reliefifnecessary,
cord
COMPUTER
touch
live
down
unit,
procedures
procedures consistofpadlocking
box,orshutting
strips
Read
A
1.
2.
Locate
For
terminal
CC
operation, remove
strip
2T.
2-INSTALLATION
cord
withafive-pin
for
future
use.
INTERFACE
SHOCK
electrical
welding
rear
and
power
before
making
off
and
inside the computer
panelifnecessary, and
and
reinstall
follow
jumper
TERMINAL STRIP CONNECTIONS
can
kill.
parts.
source,
interconnections.
red-tagging
top
safety
link
informationatbeginning of
between terminalEand
and
robot,
line
circuit
interface
locate
cover
when procedureisfinished.
Amphenoiplugissupplied
and
disconnect
disconnect
breaker
for
control
appropriate
or
connections.
input
power
switchinopen
other
disconnecting
Remove
terminal strip
Section
F on
2T.
with
this
employing
position,
device.
unit
for
connections.
2-5
before
unit
butisnot
locko
removing
top
cover,
proceeding.
used
ut/tag
-
fuses
loosen
Tighten
IMPORTANT:
B.
ARC
FAILURE
WARNING:
A
The ARC
unit.
1.
2.
FAILURE
Locate
a.
b.
c.
d.
e.
a.
b.
supplied
For
robot
Open robot
Route
Make
Close
Connect
For
robot
Obtaina115or24
Open
The
Inductance
Light Connections
Read
light on
length
control units
control
cord
under
cord
connectionstoterminal strip common
robot
control
cordto2TF
control units
robot
control
control
is
disabled
(Figure
and
follow
the
computer
of
18
gauge/2-conductor
withnoother
unit door, and locate
cross
member
unit door,
and
2TG.
when
vac,or24
unit
door,
safety
interface
connectionsatjig
below
and
route
115or24
vdc
isolation
and
locate
vac,or24
when
operatingintheCC(constant
2-4)
informationatbeginning of
front
panelisturnedonand
cord
for
this
connection,
terminal strip
jig
terminal strip
door.
cord
through
relay,
jig
terminal
and
vdcisusedatjig
and install
the
strain
strip
2.
Weld
Alarm
reliefonrear
terminal strip
into
jig
2.
Section
off
by a
and
proceedasfollows:
2:
terminal.
panelofcomputer
interface.
current)
2-5
before
signal
from
2T:
mode.
proceeding.
the
robot
interface.
control
-v
Page 47

c.
d.
e. Close
f.
g.
h.
i.
j.
Add
Figure
Route
customer
Make
cord
robot
Connect
Cut
contacts
Connect
cordtoisolation
off
terminals
on
one end of
Route cord
Connect
2-4.
cord
Arc
Robot
Control
supplied18gauge/2-conductor
connectionstoterminal
control
isolation
through strain
Failure Light
to
2TF
unit door,
from
one endofsupplied18gauge/2-conductor
relay
and
coil
route
relay.
cordtoa
and
setofnormally-open
relief
on
2TG.
Connections
JIg
TermInal
StrIp
2
Common
unit
Weld
Alarm
cord
strip common
cordtojig interface.
and
voltage
rear
panelofcomputer
source.
Computer
under
cross
member
and
the
Weld
Alarm
cord,
contactsonisolation
interface.
Interface
2W
2TG
below
terminal.
and install
relay.
Arc
door.
terminalstoconnect
FaIlure
Indicator
Ught
to
Robot
Control
Unit
Alarm
To
(11
5VAC,
Figure
Voltage
24VAC,
2-4.
Source
24VDC)
JIg
Interface
Arc Failure
0
2TF
~—
I
Arc
Failure
IndIcator
Light
computer
LIght
Connections
Interface
TA-i15648
OM-882
Page 2
Page 48

AMENDMENTTOSECTION5-MAINTENANCE&TROUBLESHOOTING
Amend
.0,
j
I!:
N-N-N-
Figure
R3
5-3.
Circuit
N-s
Diagram
a K
~
e~7
0j-~
For
<
~
Computer
I
8
;
I
N-N-N-
i~N-- ~
N-N-
~<o. ~
N-N-
I
-
~<‘N- ~
Xx
~N-~N-
interface
000
0~
~
—000.000.00.0
_9Z~L.~j
A~AA
-
A
N-N-
S
N
!
N
r-.
C..’
000000
CSOO
aOOOO
0000000000
<000W
-V.
-
6
z
E
-N-
~
I_
N-N
-
NL&N-O
—~
-0>
0
(U
(U
0
U
L.
C.)
0,
(0
0
0,
c’J
=
0
z
a)
Cl)
4-
a)
4-
N
-
~ ~4~L—
RN-
‘—~
<lop,
N-N-v
N-N-
•~»•~•0•~~•«
REV
EN-S.
w
a)
C.)
‘U
a)
C
a-
a)
0.
E
0
C.)
a
0
U
E
0)
CU
0
U
a-
(3
cR~
L~)
a)
a
0)
-
-
-
N-.N-j
.1
N-N-
~
N--
a
»....~
—,
~
0—))~—-*
I
— a
N-N-N-
-N-
I
I~v
v~.-’
V
N>
~
Ii~
I
—
a>
V
N-
N-N-j
EN-N
-
N
4>
~
~
a.->
a>
N-->
IN-
K
N-N->
a>
~
o
a
——
~
N N
N
N
a
~
:j2N~
jVN-
‘<a
~
I I
~
I
~
—
~
~
N-N-
~
>—~.
I
»...AL~
»..dL...)~
».....AL~.
N
N-
~
-
-,
WIRE
~g
~FS
CZI44AM~
OJT
.-~
.iDE
WELO
START
OJRRENT
DETECT
~
IN-’,.,’
‘N-N-I
N
21
DALE
~
N-,
a
OOWA.SN-N
-
N-,
I
.-~~~~1
GAS
N-N-
N-LTAIN-E
A,
C04W~
OM-882
Page
3
Page 49

Amend
Figure
5-6.
Circuit Diagram
For
Interface Board
PC3
WELD
JOG
JOG
REV.
‘ISV
N-24 ~.C2
START
As
AS
(FN-dD)
,~ CR R
WELD
AL
CURRENT
RELAY
A.J
(REV)
P4
COl.*40N
AM
RELAY
~
*24
Cit
7
6
V
L...
44..................).R
C
GAS
CR5
CR6
CR2
L.............>
CR4
WIREFEED
MOTOR
GAS
WOBOT
CURRENT
AN
CONTACTOR
L~AC
FIgure
5-6.
CIrcuit
Diagram
For Interface
Board
PC3
Effective
CIrcuit
With
Serial
Diagram
No.
JK588314
No.
5-128
016
OM-882Page4
Page 50

Add
Figure
5-9.
Wiring Diagram
C.,’
1—
r-.
1~
6
z
E
(U
a-
0)
0
0)
0)
0)
C..’
=
z
U)
•6~
6
a-
a)
a)
4-
C.)
a)
E
(U
a-
0)
(U
0
0)
a)
a
0)
U..
-
uu
OM-882 Page 5
Page 51

AMENDMENTTOPARTS
LIST
Amend
2-1
2-4
2-17
2-20
2-
2-48
3-56
4-
6-2
6-5
6-15
6-16
6-26
6-28
11—
11—
11—
13-
13-6
Parts
Listasfollows:
Dia.
Mk~s
C2,3,6-1
PC4
51
Ri
SRl,2
PC3
RCS
C3
CS
D9,
10,15,16
CR5
Ti
C4,5
R4
-5
Part
No.
111
992
070 634
049 989
604 109
0
028
111
011
291
564
622
044 635
083 147
035 914
110
375
111
065
113
221
073 730
072 130
073 739
028
351
109
936
010 610
Replaced
With
117 724
123
154
118
676
604
109
028
291
117836
011 609
030 028
083 147
035 914
110
375
121
313
128
014
073 730
072
130
073 739
028
351
117
617
115 104
110 386
117
725
117
726
000 859
601
394
Description
CONTROL
LABEL,
CABLE,
WIRE,
CAPACITOR,
CIRCUIT
SWITCH,
RESISTOR,
GROMMET,
RECTIFIER, (qty
STAND
PANEL,
CIRCUIT
PANEL
warning general precautionary
volt
sensing
(qty
chg)
CARD,
toggle SPDT
carbon
(qty
(qty
(Eff
chg)
meter
0.5
chg)
w/HJ304076)
15
watt
chg)
OFF,
(qty
chg)
mtg-components
CARD,
interface
TERMINAL, header22pin
CAPACITOR,
CAPACITOR,
DIODE, (qty
CONTROL
CONNECTOR
RELAY,
TRANSFORMER,
(qty
chg)
(Eff
(qty
chg)
(Eff
chg)
(Eff
w/JK588314)
BOX,
gas/current sensor
CLAMP,
cable
enclosed24volts ac
control
CAPACITOR/RESISTOR,
CAPACITOR,
RESISTOR,
electrolytic
carbon2watt
amp 125
1.5K
(Eff
volts
ohm
w/JJ377225)
(Effw/JK588314)
w/JK588314)
w/JK588314)
1/2
inch
DPDT
(consisting
of)
220 uf35volts dc
10K
ohm
Quantity
1
1
1
26ft
7
1
1
1
2
2
7
1
1
1
1
1
4
1
1
1
1
1
2
1
**First
digit
represents page
BE
SURETOPROVIDE MODEL
OM-882
Page6
no-digits
AND
following
SERIAL
dash
represent
NUMBER
item
WHEN
no.
ORDERING
REPLACEMENT
PARTS.
 Loading...
Loading...