

Page 1
现货库存、技术资料、百科信息、热点资讯,精彩尽在鼎好!
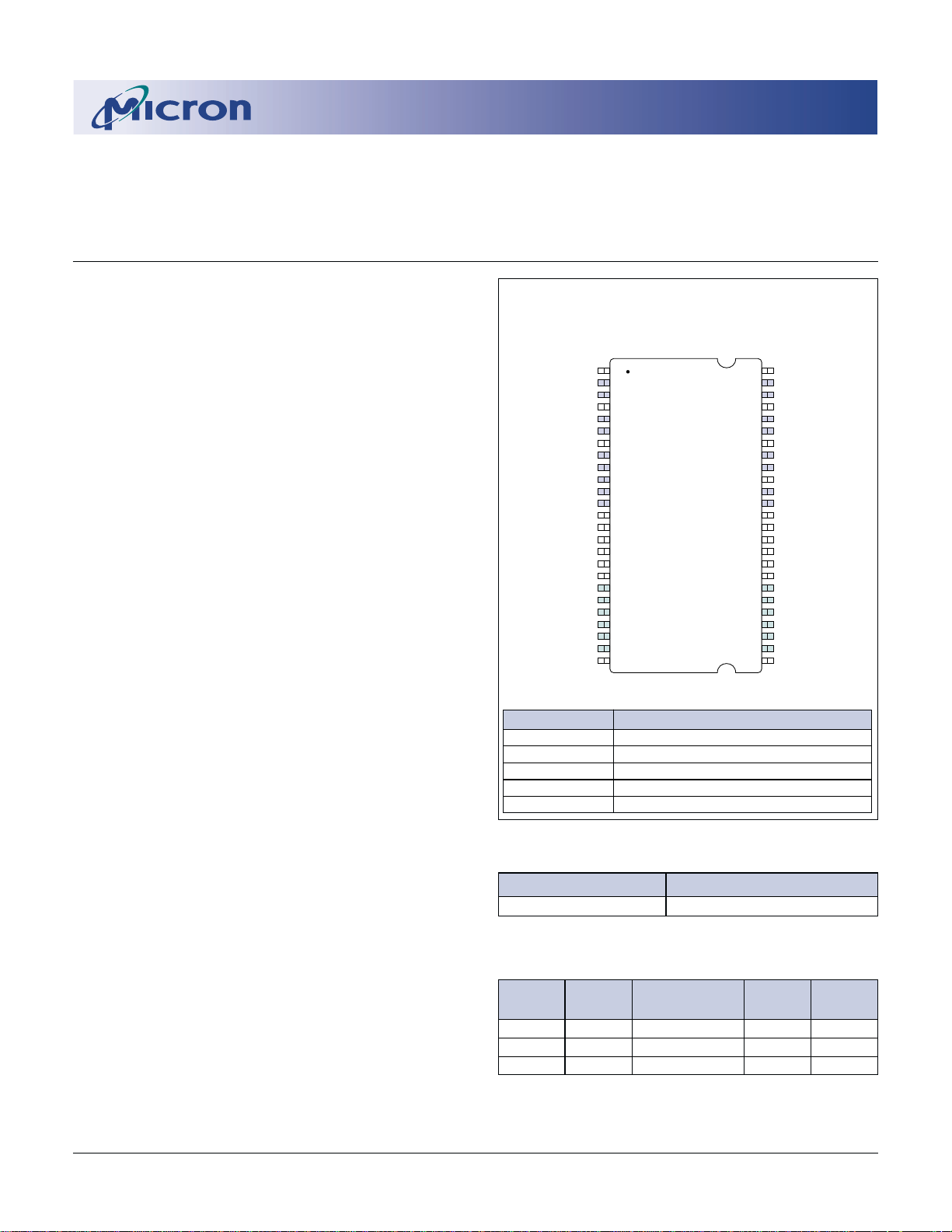
16Mb: x16
IT SDRAM
SYNCHRONOUS
DRAM
FEATURES
• PC100 functionality
• Fully synchronous; all signals registered on
positive edge of system clock
• Internal pipelined operation; column address can
be changed every clock cycle
• Internal banks for hiding row access/precharge
1 Meg x 16 - 512K x 16 x 2 banks architecture with
11 row, 8 column addresses per bank
• Programmable burst lengths: 1, 2, 4, 8 or full page
• Auto Precharge Mode, includes CONCURRENT
AUTO PRECHARGE
• Self Refresh and Adaptable Auto Refresh Modes
- 32ms, 2,048-cycle refresh or
- 64ms, 2,048-cycle refresh or
- 64ms, 4,096-cycle refresh
• LVTTL-compatible inputs and outputs
• Single +3.3V ±0.3V power supply
• Supports CAS latency of 1, 2 and 3
• Industrial temperature range: -40°C to +85°C
OPTIONS MARKING
• Configuration
1 Meg x 16 (512K x 16 x 2 banks) 1M16A1
• Plastic Package - OCPL*
50-pin TSOP (400 mil) TG
• Timing (Cycle Time)
6ns (166 MHz) -6
7ns (143 MHz) -7
8ns (125 MHz) -8A
MT48LC1M16A1 SIT - 512K x 16 x 2 banks
INDUSTRIAL TEMPERATURE
For the latest data sheet, please refer to the Micron Web site:
www.micronsemi.com/datasheets/sdramds.html
PIN ASSIGNMENT (Top View)
50-Pin TSOP
Vss
VDD
DQ0
DQ1
VssQ
DQ2
DQ3
V
DDQ
DQ4
DQ5
VssQ
DQ6
DQ7
V
DDQ
DQML
WE#
CAS#
RAS#
CS#
BA
A10
A0
A1
A2
A3
V
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
DD
50
DQ15
49
DQ14
48
VssQ
47
DQ13
46
DQ12
45
V
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
DDQ
DQ11
DQ10
VssQ
DQ9
DQ8
V
DDQ
NC
DQMH
CLK
CKE
NC
A9
A8
A7
A6
A5
A4
Vss
Note: The # symbol indicates signal is active LOW.
1 Meg x 16
Configuration 512K x 16 x 2 banks
Refresh Count 2K or 4K
Row Addressing 2K (A0-A10)
Bank Addressing 2 (BA)
Column Addressing 256 (A0-A7)
16MB (X16) SDRAM PART NUMBER
• Refresh
2K or 4K with Self Refresh Mode at 64ms S
PART NUMBER ARCHITECTURE
MT48LC1M16A1TG SIT 1 Meg x 16
• Operating Temperature
-40°C to +85°C IT
Part Number Example:
MT48LC1M16A1TG-7SIT
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
KEY TIMING PARAMETERS
SPEED CLOCK ACCESS TIME SETUP HOLD
CL = 3**
-6 166 MHz 5.5ns 2ns 1ns
-7 143 MHz 5.5ns 2ns 1ns
-8A 125 MHz 6ns 2ns 1ns
*Off-center parting line
**CL = CAS (READ) latency
1
Page 2
GENERAL DESCRIPTION
The 16Mb SDRAM is a high-speed CMOS, dynamic
random-access memory containing 16,777,216 bits. It is
internally configured as a dual 512K x 16 DRAM with a
synchronous interface (all signals are registered on the
positive edge of the clock signal, CLK). Each of the 512K x
16-bit banks is organized as 2,048 rows by 256 columns by
16 bits. Read and write accesses to the SDRAM are burst
oriented; accesses start at a selected location and continue
for a programmed number of locations in a programmed
sequence. Accesses begin with the registration of an
ACTIVE command, which is then followed by a READ or
WRITE command. The address bits registered coincident
with the ACTIVE command are used to select the bank and
row to be accessed (BA selects the bank, A0-A10 select the
row). The address bits registered coincident with the READ
or WRITE command are used to select the starting column
location for the burst access.
The SDRAM provides for programmable READ or
WRITE burst lengths of 1, 2, 4 or 8 locations, or the full page,
with a burst terminate option. An AUTO PRECHARGE
function may be enabled to provide a self-timed row
16Mb: x16
IT SDRAM
precharge that is initiated at the end of the burst sequence.
The 1 Meg x 16 SDRAM uses an internal pipelined
architecture to achieve high-speed operation. This architecture is compatible with the 2n rule of prefetch architectures, but it also allows the column address to be changed
on every clock cycle to achieve a high-speed, fully random
access. Precharging one bank while accessing the alternate bank will hide the PRECHARGE cycles and provide
seamless, high-speed, random-access operation.
The 1 Meg x 16 SDRAM is designed to operate in 3.3V,
low-power memory systems. An auto refresh mode is
provided, along with a power-saving, power-down mode.
All inputs and outputs are LVTTL-compatible.
SDRAMs offer substantial advances in DRAM operating performance, including the ability to synchronously
burst data at a high data rate with automatic columnaddress generation, the ability to interleave between internal banks in order to hide precharge time, and the capability
to randomly change column addresses on each clock cycle
during a burst access.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
2
Page 3

TABLE OF CONTENTS
16Mb: x16
IT SDRAM
Functional Block Diagram - 1 Meg x 16 ................. 3
Pin Descriptions ........................................................ 4
Functional Description ........................................ 5
Initialization ........................................................ 5
Register Definitions ............................................. 5
Mode Register ................................................ 5
Burst Length .............................................. 5
Burst Type ................................................. 5
CAS Latency .............................................. 7
Operating Mode ....................................... 7
Write Burst Mode ..................................... 7
Commands .............................................................. 8
Truth Table 1 (Commands and DQM Operation) .............. 8
Command Inhibit ............................................... 9
No Operation (NOP) .......................................... 9
Load Mode Register ............................................ 9
Active .................................................................. 9
Read .................................................................. 9
Write .................................................................. 9
Precharge ............................................................. 9
Auto Precharge .................................................... 9
Burst Terminate ................................................... 9
Auto Refresh ........................................................ 10
Self Refresh .......................................................... 10
Operation................................................................ 11
Bank/Row Activation ......................................... 11
Reads .................................................................. 12
Writes .................................................................. 18
Precharge ............................................................. 20
Power-Down ....................................................... 20
Clock Suspend .................................................... 21
Burst Read/Single Write ...................................... 21
Concurrent Auto Precharge ................................ 22
Truth Table 2 (CKE) ................................................... 24
Truth Table 3 (Current State, Same Bank) ....................... 25
Truth Table 4 (Current State, Different Bank) ................... 27
Absolute Maximum Ratings .................................... 29
DC Electrical Characteristics and
Operating Conditions ........................................... 29
DD Specifications and Conditions .......................... 29
I
Capacitance .............................................................. 30
AC Electrical Characteristics (Timing Table) .... 30
Timing Waveforms
Initialize and Load Mode Register ...................... 33
Power-Down Mode ............................................ 34
Clock Suspend Mode .......................................... 35
Auto Refresh Mode ............................................. 36
Self Refresh Mode ............................................... 37
Reads
Read - Single Read ......................................... 38
Read - Without Auto Precharge .................... 39
Read - With Auto Precharge .......................... 40
Alternating Bank Read Accesses .................... 41
Read - Full-Page Burst .................................... 42
Read - DQM Operation ................................. 43
Writes
Write - Single Write ....................................... 44
Write - Without Auto Precharge ................... 45
Write - With Auto Precharge ......................... 46
Alternating Bank Write Accesses ................... 47
Write - Full-Page Burst ................................... 48
Write - DQM Operation ................................ 49
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
3
Page 4
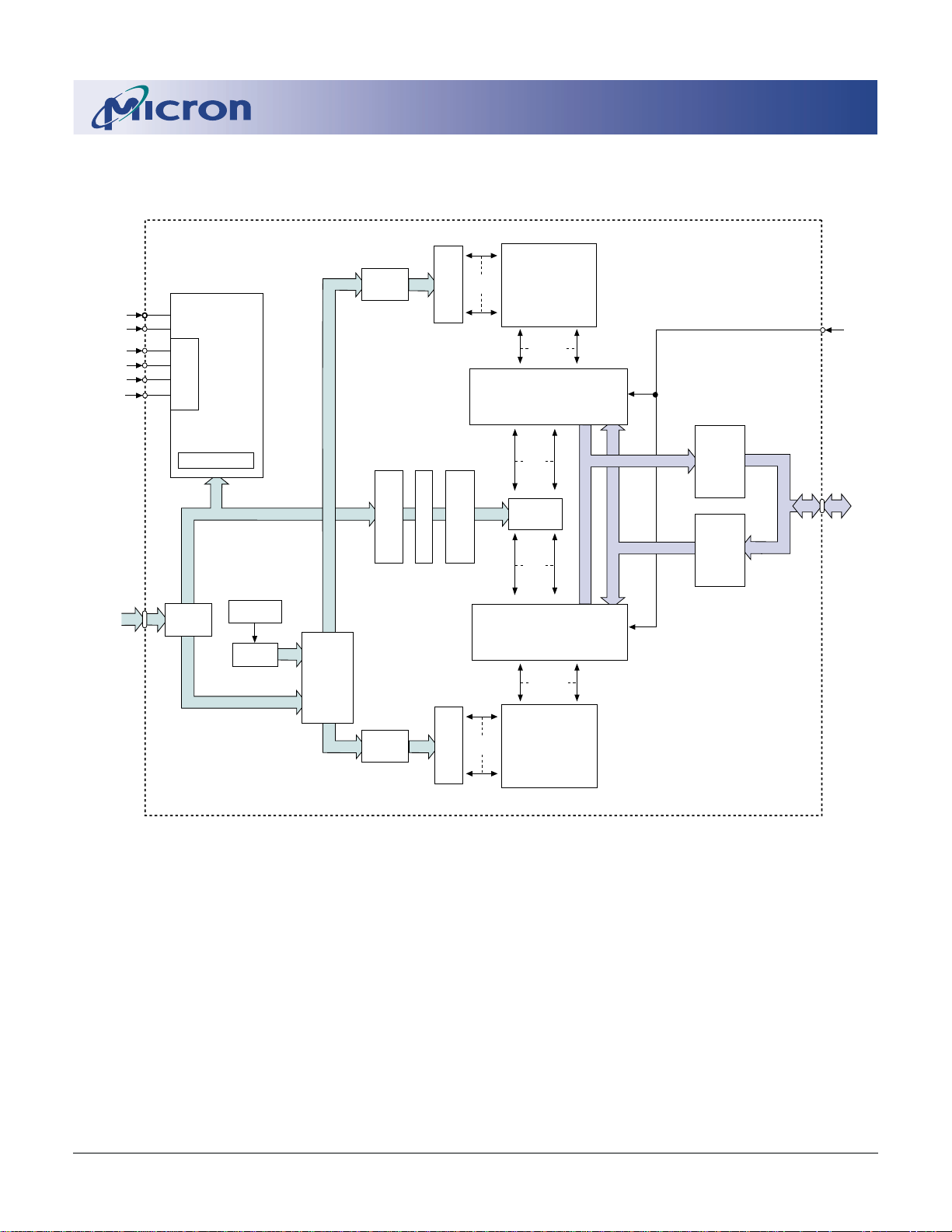
FUNCTIONAL BLOCK DIAGRAM
1 Meg x 16 SDRAM
16Mb: x16
IT SDRAM
A0-A10, BA
CKE
CLK
CS#
WE#
CAS#
RAS#
12
DECODE
COMMAND
MODE REGISTER
ADDRESS
REGISTER
CONTROL
LOGIC
12
CONTROLLER
11
REFRESH
REFRESH
COUNTER
ROW-
ADDRESS
LATCH
COLUMN-
11
ADDRESS LATCH
BURST COUNTER
2,048
ROW
DECODER
COLUMN-
ADDRESS BUFFER
8
11
8
11
ROW-
ADDRESS
MUX
BANK0
MEMORY
ARRAY
(2,048 x 256 x 16)
256 (x16)
SENSE AMPLIFIERS
I/O GATING
DQM MASK LOGIC
256
COLUMN
DECODER
256
SENSE AMPLIFIERS
I/O GATING
DQM MASK LOGIC
256 (x16)
DQML,
DQMH
DATA
16
16
OUTPUT
REGISTER
DATA
INPUT
REGISTER
16
8
DQ0DQ15
ROW-
ADDRESS
LATCH
11
ROW
DECODER
2,048
4
11
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
BANK1
MEMORY
ARRAY
(2,048 x 256 x 16)
Page 5
16Mb: x16
IT SDRAM
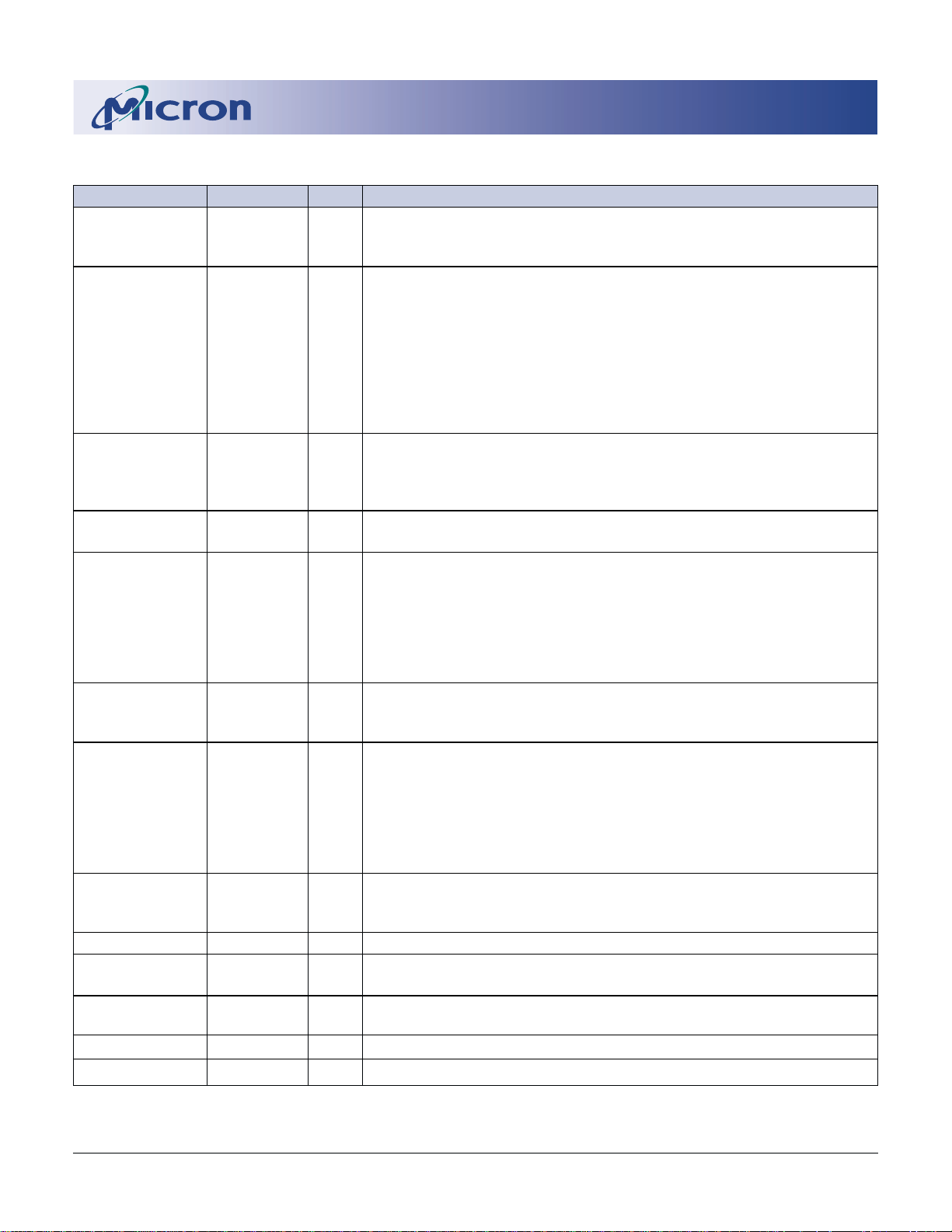
PIN DESCRIPTIONS
PIN NUMBERS SYMBOL TYPE DESCRIPTION
35 CLK Input Clock: CLK is driven by the system clock. All SDRAM input signals are
sampled on the positive edge of CLK. CLK also increments the internal
burst counter and controls the output registers.
34 CKE Input Clock Enable: CKE activates (HIGH) and deactivates (LOW) the CLK
signal. Deactivating the clock provides PRECHARGE POWER-DOWN
and SELF REFRESH operations (all banks idle), ACTIVE POWER-DOWN
(row ACTIVE in either bank) or CLOCK SUSPEND operation (burst/access
in progress). CKE is synchronous except after the device enters powerdown and self refresh modes, where CKE becomes asynchronous until
after exiting the same mode. The input buffers, including CLK, are
disabled during power-down and self refresh modes, providing low
standby power. CKE may be tied HIGH.
18 CS# Input Chip Select: CS# enables (registered LOW) and disables (registered
HIGH) the command decoder. All commands are masked when CS# is
registered HIGH. CS# provides for external bank selection on systems
with multiple banks. CS# is considered part of the command code.
15, 16, 17 WE#, CAS#, Input Command Inputs: RAS#, CAS# and WE# (along with CS#) define the
RAS# command being entered.
14, 36 DQML, Input Input/Output Mask: DQM is an input mask signal for write accesses and an
DQMH output enable signal for read accesses. Input data is masked when
DQM is sampled HIGH during a WRITE cycle. The output buffers are
placed in a High-Z state (two-clock latency) when DQM is sampled
HIGH during a READ cycle. DQML corresponds to DQ0-DQ7; DQMH
corresponds to DQ8-DQ15.
DQML and DQMH are considered same state when referenced as DQM.
19 BA Input Bank Address Inputs: BA defines to which bank the ACTIVE, READ,
WRITE or PRECHARGE command is being applied. BA is also used to
program the twelfth bit of the Mode Register.
21-24, 27-32, 20 A0-A10 Input Address Inputs: A0-A10 are sampled during the ACTIVE command
(row-address A0-A10) and READ/WRITE command (column-address A0A7, with A10 defining AUTO PRECHARGE) to select one location out of
the 512K available in the respective bank. A10 is sampled during a
PRECHARGE command to determine if all banks are to be precharged
(A10 HIGH). The address inputs also provide the op-code during a
LOAD MODE REGISTER command.
2, 3, 5, 6, 8, 9, DQ0- Input/ Data I/Os: Data bus.
11, 12, 39, 40, 42, DQ15 Output
43, 45, 46, 48, 49
33, 37 NC – No Connect: These pins should be left unconnected.
7, 13, 38, 44 VDDQ Supply DQ Power: Provide isolated power to DQs for improved noise immu-
nity.
4, 10, 41, 47 VSSQ Supply DQ Ground: Provide isolated ground to DQs for improved noise
immunity.
1, 25 VDD Supply Power Supply: +3.3V ±0.3V.
26, 50 VSS Supply Ground.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
5
Page 6

16Mb: x16
IT SDRAM
FUNCTIONAL DESCRIPTION
In general, the SDRAM is a dual 512K x 16 DRAM
that operates at 3.3V and includes a synchronous
interface (all signals are registered on the positive edge
of the clock signal, CLK). Each of the 512K x 16-bit
banks is organized as 2,048 rows by 256 columns by 16
bits.
Read and write accesses to the SDRAM are burst
oriented; accesses start at a selected location and continue for a programmed number of locations in a
programmed sequence. Accesses begin with the registration of an ACTIVE command, which is then followed by a READ or WRITE command. The address
bits registered coincident with the ACTIVE command
are used to select the bank and row to be accessed (BA
selects the bank, A0-A10 select the row). The address
bits (A0-A7) registered coincident with the READ or
WRITE command are used to select the starting column location for the burst access.
Prior to normal operation, the SDRAM must be
initialized. The following sections provide detailed
information covering device initialization, register definition, command descriptions and device operation.
Initialization
SDRAMs must be powered up and initialized in a
predefined manner. Operational procedures other than
those specified may result in undefined operation.
Once power is applied to VDD and VDDQ (simultaneously) and the clock is stable (stable clock is defined
as a signal cycling within timing constraints specified
for the clock pin), the SDRAM requires a 100µs delay
prior to applying any command other than a COMMAND INHIBIT or a NOP. Starting at some point
during this 100µs period and continuing at least
through the end of this period, COMMAND INHIBIT
or NOP commands should be applied.
Once the 100µs delay has been satisfied, with at least
one COMMAND INHIBIT or NOP command having
been applied, a PRECHARGE command should be
applied. All banks must then be precharged, thereby
placing the device in the all banks idle state.
Once in the idle state, two AUTO REFRESH cycles
must be performed. After the AUTO REFRESH cycles
are complete, the SDRAM is ready for Mode Register
programming. Because the Mode Register will power
up in an unknown state, it should be loaded prior to
applying any operational command.
Register Definition
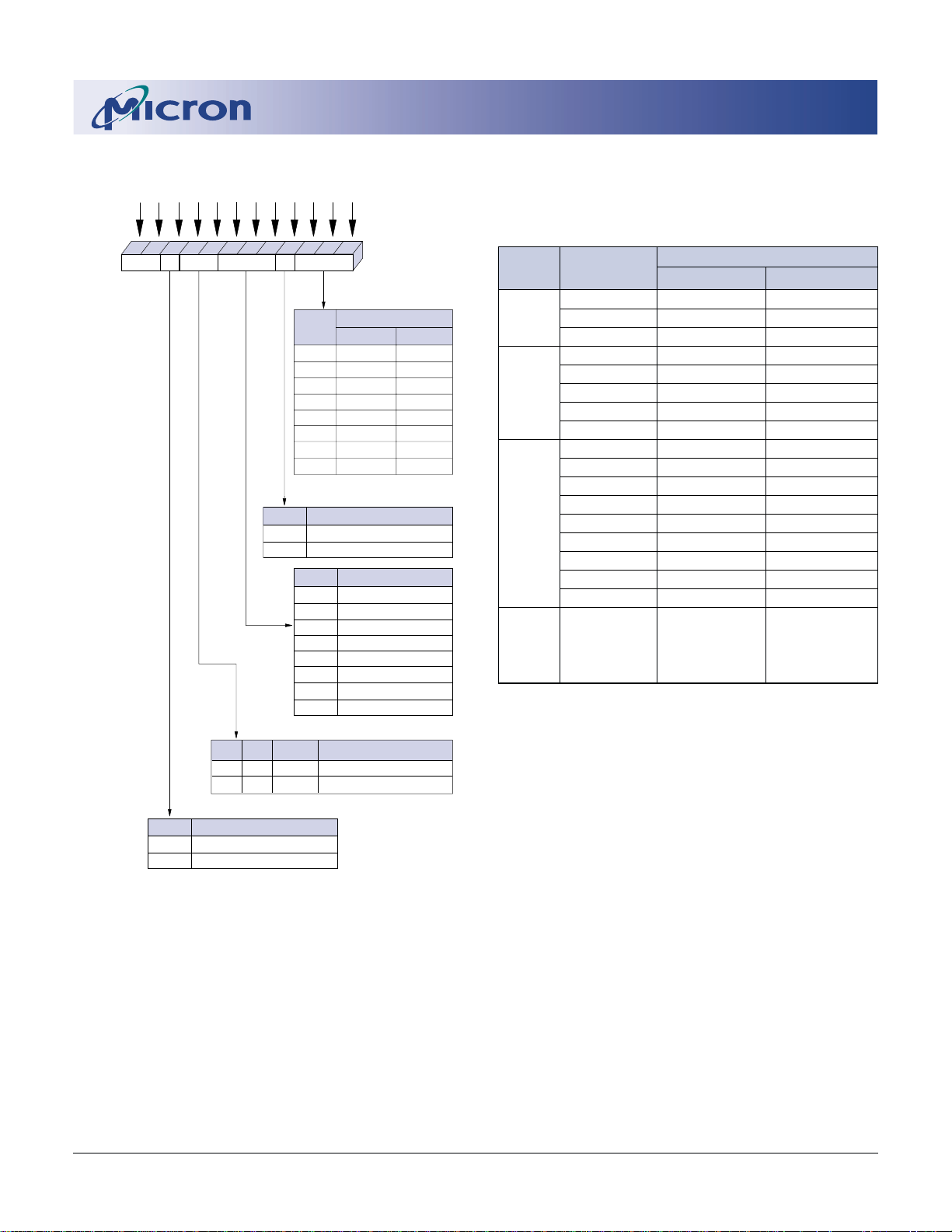
MODE REGISTER
The Mode Register is used to define the specific
mode of operation of the SDRAM. This definition
includes the selection of a burst length, a burst type, a
CAS latency, an operating mode and a write burst
mode, as shown in Figure 1. The Mode Register is
programmed via the LOAD MODE REGISTER command and will retain the stored information until it is
programmed again or the device loses power.
Mode Register bits M0-M2 specify the burst length,
M3 specifies the type of burst (sequential or interleaved), M4-M6 specify the CAS latency, M7 and M8
specify the operating mode, M9 specifies the write burst
mode, and M10 and M11 are reserved for future use.
The Mode Register must be loaded when all banks
are idle, and the controller must wait the specified time
before initiating the subsequent operation. Violating
either of these requirements will result in unspecified
operation.
Burst Length
Read and write accesses to the SDRAM are burst
oriented, with the burst length being programmable, as
shown in Figure 1. The burst length determines the
maximum number of column locations that can be
accessed for a given READ or WRITE command. Burst
lengths of 1, 2, 4 or 8 locations are available for both the
sequential and the interleaved burst types, and a fullpage burst is available for the sequential type. The fullpage burst is used in conjunction with the BURST
TERMINATE command to generate arbitrary burst
lengths.
Reserved states should not be used, as unknown operation or incompatibility with future versions may result.
When a READ or WRITE command is issued, a
block of columns equal to the burst length is effectively
selected. All accesses for that burst take place within this
block, meaning that the burst will wrap within the
block if a boundary is reached. The block is uniquely
selected by A1-A7 when the burst length is set to two,
by A2-A7 when the burst length is set to four and by A3A7 when the burst length is set to eight. The remaining
(least significant) address bit(s) is (are) used to select the
starting location within the block. Full-page bursts
wrap within the page if the boundary is reached.
Burst Type
Accesses within a given burst may be programmed
to be either sequential or interleaved; this is referred to
as the burst type and is selected via bit M3.
The ordering of accesses within a burst is determined by the burst length, the burst type and the
starting column address, as shown in Table 1.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
6
Page 7
16Mb: x16
IT SDRAM
BA
11
Reserved* WB
*Should program
M11, M10 = 0, 0
to ensure compatibility
with future devices.
A6 A5 A4
9
0
1
A9
Op Mode
A7
654
7
M8
0-0-Defined
Write Burst Mode
Programmed Burst Length
Single Location Access
A10
10
M9
M7
A3A8A2A1A0
382
Burst LengthCAS Latency BT
M0
M1M2
000
001
010
011
100
101
110
111
M3
0
1
M4M5M6
000
001
010
011
100
101
110
111
M6 - M0
-
1
0
Mode Register (Mx)
M3 = 0
1
2
4
8
Reserved
Reserved
Reserved
Full Page
Burst Type
Sequential
Interleave
Operating Mode
Standard Operation
All other states reserved
Figure 1
Mode Register Definition
Address Bus
Burst Length
CAS Latency
Reserved
1
2
3
Reserved
Reserved
Reserved
Reserved
M3 = 1
1
2
4
8
Reserved
Reserved
Reserved
Reserved
Table 1
Burst Definition
Burst Starting Column Order of Accesses Within a Burst
Length Address Type = Sequential Type = Interleaved
A0
2
4
A2 A1 A0
0 0 0 0-1-2-3-4-5-6-7 0-1-2-3-4-5-6-7
0 0 1 1-2-3-4-5-6-7-0 1-0-3-2-5-4-7-6
0 1 0 2-3-4-5-6-7-0-1 2-3-0-1-6-7-4-5
8
0 1 1 3-4-5-6-7-0-1-2 3-2-1-0-7-6-5-4
1 0 0 4-5-6-7-0-1-2-3 4-5-6-7-0-1-2-3
1 0 1 5-6-7-0-1-2-3-4 5-4-7-6-1-0-3-2
1 1 0 6-7-0-1-2-3-4-5 6-7-4-5-2-3-0-1
1 1 1 7-0-1-2-3-4-5-6 7-6-5-4-3-2-1-0
Full n = A0-A7
Page
(256) (location 0-255)
NOTE: 1. For a burst length of two, A1-A7 select the block
of two burst; A0 selects the starting column
within the block.
2. For a burst length of four, A2-A7 select the block
of four burst; A0-A1 select the starting column
within the block.
3. For a burst length of eight, A3-A7 select the block
of eight burst; A0-A2 select the starting column
within the block.
4. For a full-page burst, the full row is selected and
A0-A7 select the starting column.
5. Whenever a boundary of the block is reached
within a given sequence above, the following
access wraps within the block.
6. For a burst length of one, A0-A7 select the unique
column to be accessed, and Mode Register bit M3
is ignored.
0 0-1 0-1
1 1-0 1-0
A1 A0
0 0 0-1-2-3 0-1-2-3
0 1 1-2-3-0 1-0-3-2
1 0 2-3-0-1 2-3-0-1
1 1 3-0-1-2 3-2-1-0
Cn, Cn+1, Cn+2
Cn+3, Cn+4...
…Cn-1,
Not supported
Cn…
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
7
Page 8
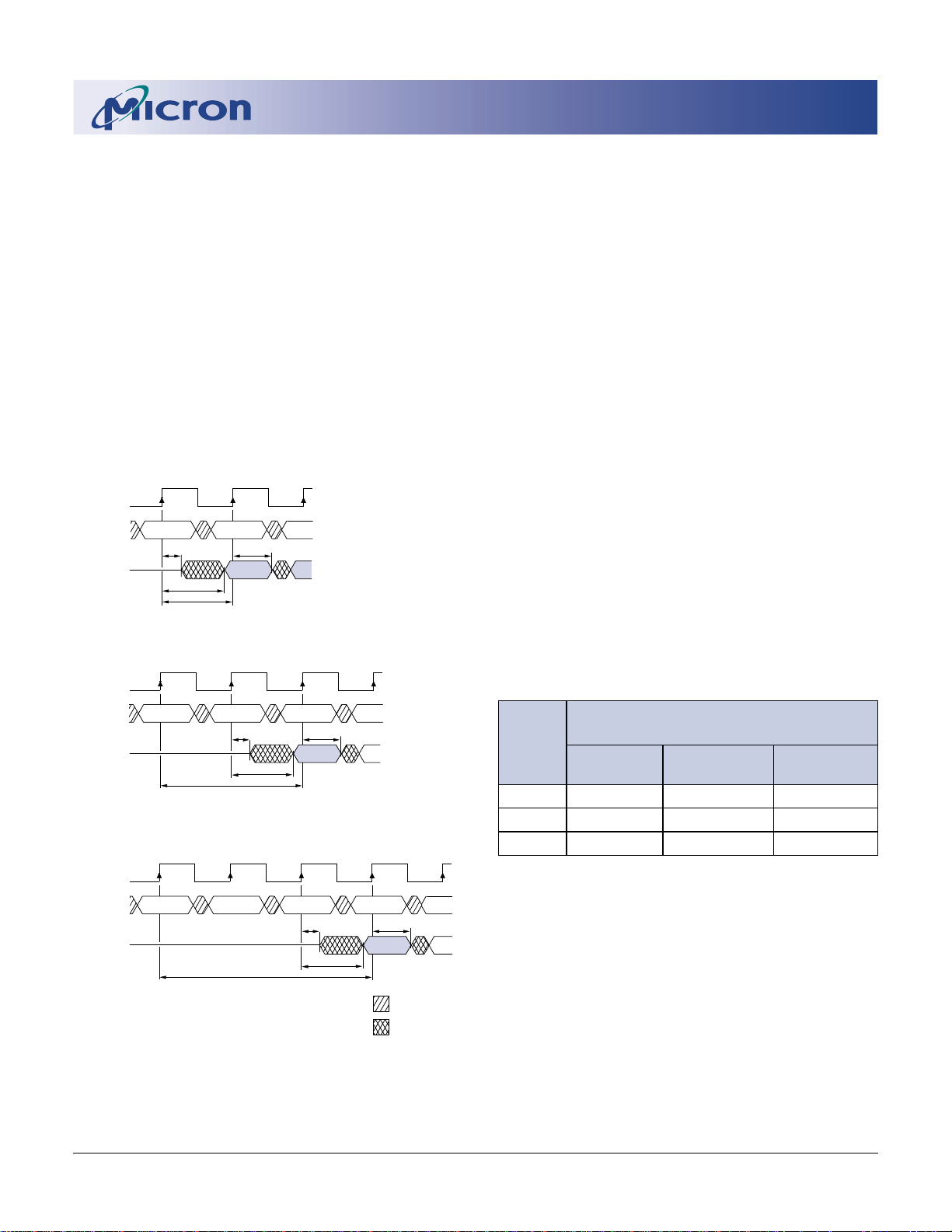
CAS Latency
The CAS latency is the delay, in clock cycles, between the registration of a READ command and the
availability of the first piece of output data. The latency can be set to 1, 2 or 3 clocks.
If a READ command is registered at clock edge n,
and the latency is m clocks, the data will be available by
clock edge n + m. The DQs will start driving as a result
of the clock edge one cycle earlier (n + m - 1), and
provided that the relevant access times are met, the
data will be valid by clock edge n + m. For example,
assuming that the clock cycle time is such that all
relevant access times are met, if a READ command is
registered at T0, and the latency is programmed to two
clocks, the DQs will start driving after T1 and the data
16Mb: x16
IT SDRAM
will be valid by T2, as shown in Figure 2. Table 2 below
indicates the operating frequencies at which each CAS
latency setting can be used.
Reserved states should not be used, as unknown
operation or incompatibility with future versions may
result.
Operating Mode
The normal operating mode is selected by setting
M7 and M8 to zero; the other combinations of values
for M7 and M8 are reserved for future use and/or test
modes. The programmed burst length applies to both
READ and WRITE bursts.
Test modes and reserved states should not be used
because unknown operation or incompatibility with
future versions may result.
CLK
COMMAND
DQ
CLK
COMMAND
DQ
CLK
COMMAND
DQ
t
LZ
t
AC
CAS Latency = 1
CAS Latency = 2
T2T1T0
Write Burst Mode
When M9 = 0, the burst length programmed via
NOPREAD
t
OH
D
OUT
M0-M2 applies to both READ and WRITE bursts; when
M9 = 1, the programmed burst length applies to READ
bursts, but write accesses are single-location (nonburst)
accesses.
Table 2
T2T1 T3T0
NOPREAD
t
LZ
t
AC
NOP
t
OH
D
OUT
SPEED LATENCY = 1 LATENCY = 2 LATENCY = 3
-6 ≤ 50 ≤ 125 ≤ 166
-7 ≤ 40 ≤ 100 ≤ 143
T2T1 T3T0
NOPREAD
NOP
t
t
LZ
AC
NOP
t
OH
D
OUT
T4
-8A ≤ 40 ≤ 77 ≤ 125
CAS Latency
ALLOWABLE OPERATING
FREQUENCY (MHz)
CAS CAS CAS
CAS Latency = 3
DON’T CARE
UNDEFINED
Figure 2
CAS Latency
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
8
Page 9

16Mb: x16
IT SDRAM
COMMANDS
Truth Table 1 provides a quick reference of available
commands. This is followed by a written description of
each command. Three additional Truth Tables appear
TRUTH TABLE 1 – COMMANDS AND DQM OPERATION
(Notes: 1)
NAME (FUNCTION) CS# RAS#CAS# WE# DQ M ADDR D Qs NOTES
COMMAND INHIBIT (NOP) H X X X X X X
NO OPERATION (NOP) L H H H X X X
ACTIVE (Select bank and activate row) L L H H X Bank/Row X 3
READ (Select bank and column and start READ burst) L H L H L/H8Bank/Col X 4
WRITE (Select bank and column and L H L L L/H8Bank/Col Valid 4
start WRITE burst)
BURST TERMINATE L H H L X X Active
PRECHARGE (Deactivate row in bank or banks) L L H L X Code X 5
AUTO REFRESH or L L L H X X X 6, 7
SELF REFRESH (Enter self refresh mode)
LOAD MODE REGISTER L L L L X Op-Code X 2
Write Enable/Output Enable ––––L – Active 8
Write Inhibit/Output High-Z ––––H – High-Z 8
following the Operation section; these tables provide
current state/next state information.
NOTE: 1. CKE is HIGH for all commands shown except SELF REFRESH.
2. A0-A10 and BA define the op-code written to the Mode Register.
3. A0-A10 provide row address, and BA determines which bank is made active.
4. A0-A7 provide column address; A10 HIGH enables the auto precharge feature (nonpersistent), while A10 LOW disables
the auto precharge feature; BA determines which bank is being read from or written to.
5. For A10 LOW, BA determines which bank is being precharged; for A10 HIGH, all banks are precharged and BA is a
“Don’t Care.”
6. This command is AUTO REFRESH if CKE is HIGH, SELF REFRESH if CKE is LOW.
7. Internal refresh counter controls row addressing; all inputs and I/Os are “Don’t Care” except for CKE.
8. Activates or deactivates the DQs during WRITEs (zero-clock delay) and READs (two-clock delay).
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
9
Page 10

COMMAND INHIBIT
The COMMAND INHIBIT function prevents new
commands from being executed by the SDRAM, regardless of whether the CLK signal is enabled. The
SDRAM is effectively deselected. Operations already in
progress are not affected.
NO OPERATION (NOP)
The NO OPERATION (NOP) command is used to
perform a NOP to an SDRAM which is selected (CS# is
LOW). This prevents unwanted commands from being
registered during idle or wait states. Operations already
in progress are not affected.
LOAD MODE REGISTER
The Mode Register is loaded via inputs A0-A10 and
BA. See Mode Register heading in Register Definition
section. The LOAD MODE REGISTER command can
only be issued when all banks are idle, and a subsequent
executable command cannot be issued until tMRD is
met.
ACTIVE
The ACTIVE command is used to open (or activate)
a row in a particular bank for a subsequent access. The
value on the BA input selects the bank, and the address
provided on inputs A0-A10 selects the row. This row
remains active (or open) for accesses until a PRECHARGE
command is issued to that bank. A PRECHARGE command must be issued before opening a different row in
the same bank.
READ
The READ command is used to initiate a burst read
access to an active row. The value on the BA input
selects the bank, and the address provided on inputs
A0-A7 selects the starting column location. The value
on input A10 determines whether or not AUTO
PRECHARGE is used. If AUTO PRECHARGE is selected,
the row being accessed will be precharged at the end of
the READ burst; if AUTO PRECHARGE is not selected,
the row will remain open for subsequent accesses. Read
data appears on the DQs, subject to the logic level on
the DQM inputs two clocks earlier. If a given DQM
signal was registered HIGH, the corresponding DQs
will be High-Z two clocks later; if the DQM signal was
registered LOW, the DQs will provide valid data.
WRITE
The WRITE command is used to initiate a burst
write access to an active row. The value on the BA input
selects the bank, and the address provided on inputs
16Mb: x16
IT SDRAM
A0-A7 selects the starting column location. The value
on input A10 determines whether or not AUTO
PRECHARGE is used. If AUTO PRECHARGE is selected,
the row being accessed will be precharged at the end of
the WRITE burst; if AUTO PRECHARGE is not selected,
the row will remain open for subsequent accesses.
Input data appearing on the DQs is written to the
memory array subject to the DQM input logic level
appearing coincident with the data. If a given DQM
signal is registered LOW, the corresponding data will be
written to memory; if the DQM signal is registered
HIGH, the corresponding data inputs will be ignored,
and a WRITE will not be executed to that byte/column
location.
PRECHARGE
The PRECHARGE command is used to deactivate
the open row in a particular bank or the open row in
all banks. The bank(s) will be available for a subsequent
row access a specified time (tRP) after the PRECHARGE
command is issued. Input A10 determines whether one
or all banks are to be precharged, and in the case where
only one bank is to be precharged, input BA selects the
bank. Otherwise BA is treated as “Don’t Care.” Once a
bank has been precharged, it is in the idle state and
must be activated prior to any READ or WRITE commands being issued to that bank.
AUTO PRECHARGE
AUTO PRECHARGE is a feature which performs the
same individual-bank PRECHARGE function described
above, but without requiring an explicit command.
This is accomplished by using A10 to enable AUTO
PRECHARGE in conjunction with a specific READ or
WRITE command. A precharge of the bank/row that is
addressed with the READ or WRITE command is automatically performed upon completion of the READ or
WRITE burst, except in the full-page burst mode, where
AUTO PRECHARGE does not apply. AUTO
PRECHARGE is nonpersistent in that it is either enabled
or disabled for each individual READ or WRITE command.
AUTO PRECHARGE ensures that the PRECHARGE
is initiated at the earliest valid stage within a burst. The
user must not issue another command to the same
bank until the precharge time (tRP) is completed. This
is determined as if an explicit PRECHARGE command
was issued at the earliest possible time, as described for
each burst type in the Operation section of this data
sheet.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
10
Page 11

16Mb: x16
IT SDRAM
BURST TERMINATE
The BURST TERMINATE command is used to truncate either fixed-length or full-page bursts. The most
recently registered READ or WRITE command prior to
the BURST TERMINATE command will be truncated
as shown in the Operation section of this data sheet.
AUTO REFRESH
AUTO REFRESH is used during normal operation
of the SDRAM and is analogous to CAS#-BEFORERAS# (CBR) REFRESH in conventional DRAMs. This
command is nonpersistent, so it must be issued each
time a refresh
is required.
The addressing during an AUTO REFRESH command is generated by an internal refresh controller.
This means that the address lines are not used to
generate the refresh address, and are “Don’t Care”.
The 1 Meg x 16 SDRAM requires 2,048 AUTO
REFRESH cycles every 64ms (tREF) to ensure that each
row is refreshed. Distributed refresh would be achieved
by providing an AUTO REFRESH command once every 31.25µs. Burst refresh could be accomplished by
issuing 2,048 AUTO REFRESH commands consecutively at the minimum cycle rate of tRC.
To provide a 4K refresh scheme, the refresh rate
would be doubled. Thus, 2,048 AUTO-REFRESH commands distributed every 15.625µs would allow the 1
Meg x 16 SDRAM to have a 4K refresh if required. Of
the three types of refreshs options, utilizing the 2,048
cycles every 64ms (31.25µs per refresh) provides the
maximum power savings.
SELF REFRESH
The SELF REFRESH command can be used to retain
data in the SDRAM, even if the rest of the system is
powered down. When in the self refresh mode, the
SDRAM retains data without external clocking. The
SELF REFRESH command is initiated like an AUTO
REFRESH command except CKE is disabled (LOW).
Once the SELF REFRESH command is registered, all the
inputs to the SDRAM become “Don’t Care,” with the
exception of CKE, which must remain LOW.
Once self refresh mode is engaged, the SDRAM
provides its own internal clocking, causing it to perform its own auto refresh cycles. The SDRAM must
remain in self refresh mode for a minimum period
t
equal to
RAS, and may remain in self refresh mode for
an indefinite period beyond that.
The procedure for exiting self refresh requires a
sequence of commands. First, CLK must be stable (stable
clock is defined as a signal cycling within timing constraints specified for the clock pin) prior to CKE going
back HIGH. Once CKE is HIGH, the SDRAM must have
NOP commands issued (a minimum of two clocks) for
t
XSR, because time is required for the completion of
any internal refresh in progress.
Upon exiting self refresh mode, AUTO REFRESH
commands may be issued every 15.625µs or less as both
SELF REFRESH and AUTO REFRESH utilize the row
refresh counter.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
11
Page 12
16Mb: x16
IT SDRAM
OPERATION
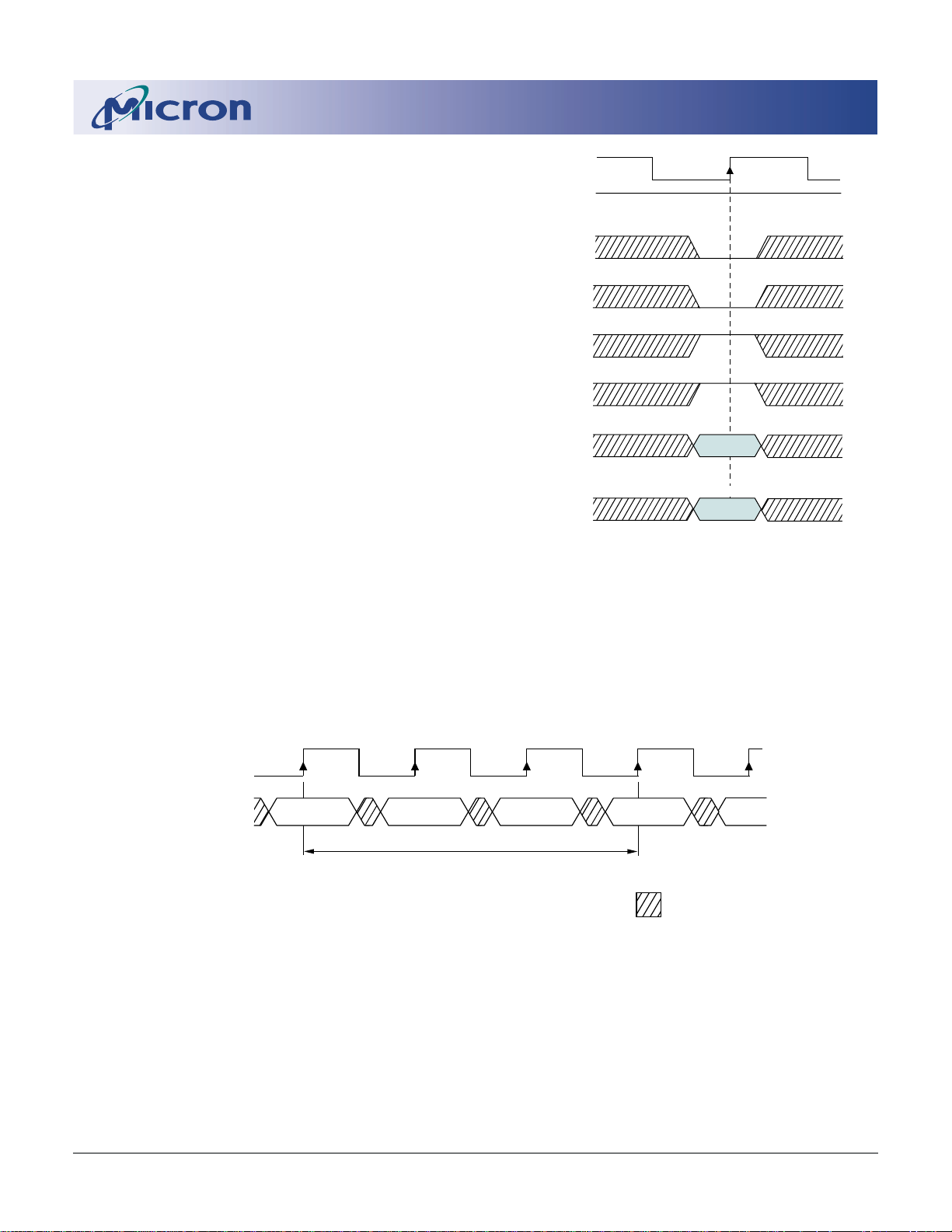
BANK/ROW ACTIVATION
Before any READ or WRITE commands can be
issued to a bank within the SDRAM, a row in that bank
must be “opened.” This is accomplished via the ACTIVE command, which selects both the bank and the
row to be activated (see Figure 3).
After opening a row (issuing an ACTIVE command) a READ or WRITE command may be issued to
that row, subject to the tRCD specification. tRCD
(MIN) should be divided by the clock period and
rounded up to the next whole number to determine
the earliest clock edge after the ACTIVE command on
which a READ or WRITE command can be issued. For
example, a tRCD specification of 20ns with a 125 MHz
clock (8ns period) results in 2.5 clocks rounded to 3.
This is reflected in Figure 4, which covers any case where
2 < tRCD (MIN)/tCK ≤ 3. (The same procedure is used
to convert other specification limits from time units to
clock cycles.)
A subsequent ACTIVE command to a different row
in the same bank can only be issued after the previous
active row has been “closed” (precharged). The minimum time interval between successive ACTIVE commands to the same bank is defined by tRC.
A subsequent ACTIVE command to another bank
can be issued while the first bank is being accessed, which
results in a reduction of total row access overhead. The
minimum time interval between successive ACTIVE commands to different banks is defined by tRRD.
CLK
CKE
RAS#
CAS#
WE#
A0-A10
CS#
BA
HIGH
ROW
ADDRESS
BANK 1
BANK 0
Figure 3
Activating a Specific Row
in a Specific Bank
CLK
COMMAND
T2T1 T3T0
NOPACTIVE
t
RCD
NOP
READ or
WRITE
T4
DON’T CARE
Figure 4
EXAMPLE: Meeting tRCD (MIN) when 2 < tRCD (MIN)/tCK
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
12
≤≤
≤ 3
≤≤
Page 13
READs
CLK
DQ
T2T1 T3T0
CAS Latency = 3
LZ
D
OUT
t
OH
t
COMMAND
NOPREAD
t
AC
NOP
T4
NOP
DON’T CARE
UNDEFINED
CLK
DQ
T2T1T0
CAS Latency = 1
LZ
D
OUT
t
OH
t
COMMAND
NOPREAD
t
AC
CLK
DQ
T2T1 T3T0
CAS Latency = 2
LZ
D
OUT
t
OH
t
COMMAND
NOPREAD
t
AC
NOP
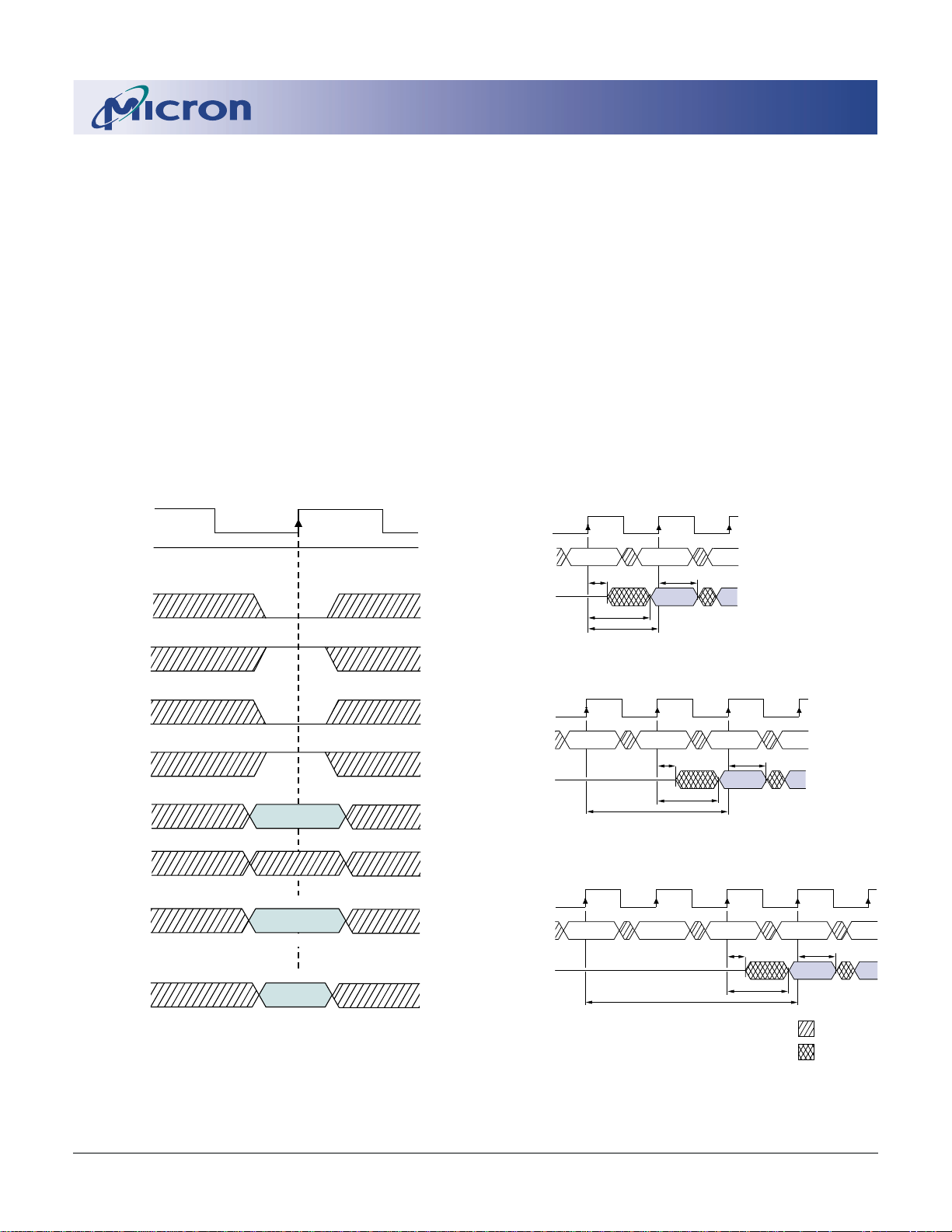
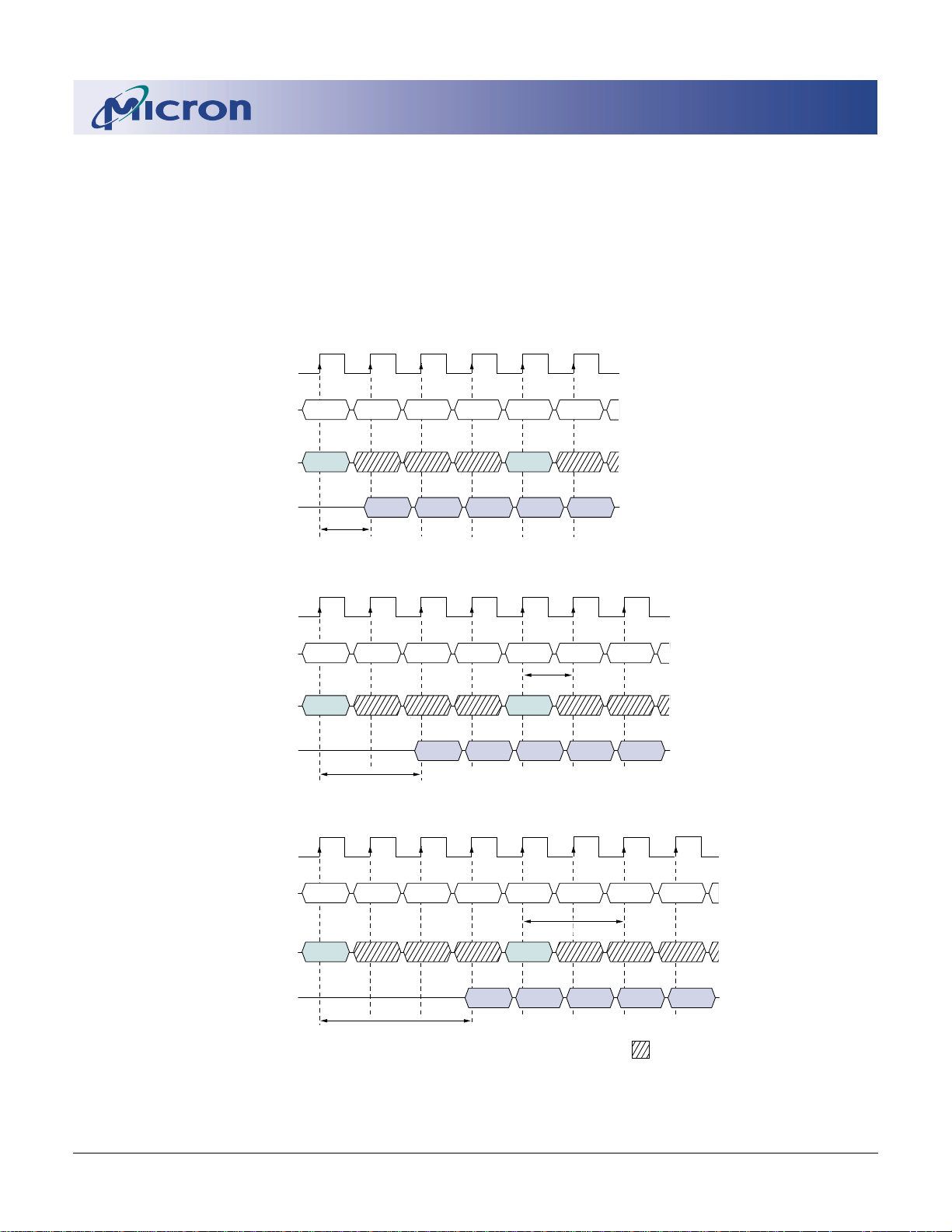
READ bursts are initiated with a READ command,
as shown in Figure 5.
The starting column and bank addresses are provided with the READ command and AUTO
PRECHARGE is either enabled or disabled for that burst
access. If AUTO PRECHARGE is enabled, the row being
accessed is precharged at the completion of the burst.
For the generic READ commands used in the following
illustrations, AUTO PRECHARGE is disabled.
During READ bursts, the valid data-out element
from the starting column address will be available
following the CAS latency after the READ command.
Each subsequent data-out element will be valid by the
next positive clock edge. Figure 6 shows general timing
for each possible CAS latency setting.
CLK
16Mb: x16
IT SDRAM
Upon completion of a burst, assuming no other
commands have been initiated, the DQs will go HighZ. A full-page burst will continue until terminated (at
the end of the page it will wrap to column 0 and
continue).
Data from any READ burst may be truncated with
a subsequent READ command, and data from a fixedlength READ burst may be immediately followed by
data from a subsequent READ command. In either
case, a continuous flow of data can be maintained. The
first data element from the new burst follows either the
last element of a completed burst, or the last desired
data element of a longer burst which is being truncated. The new READ command should be issued x
cycles before the clock edge at which the last desired
CKE
CS#
RAS#
CAS#
WE#
A0-A7
A8-A9
A10
BA
HIGH
COLUMN
ADDRESS
ENABLE AUTO PRECHARGE
DISABLE AUTO PRECHARGE
BANK 1
BANK 0
Figure 5
READ Command
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
13
Figure 6
CAS Latency
Page 14
16Mb: x16
IT SDRAM
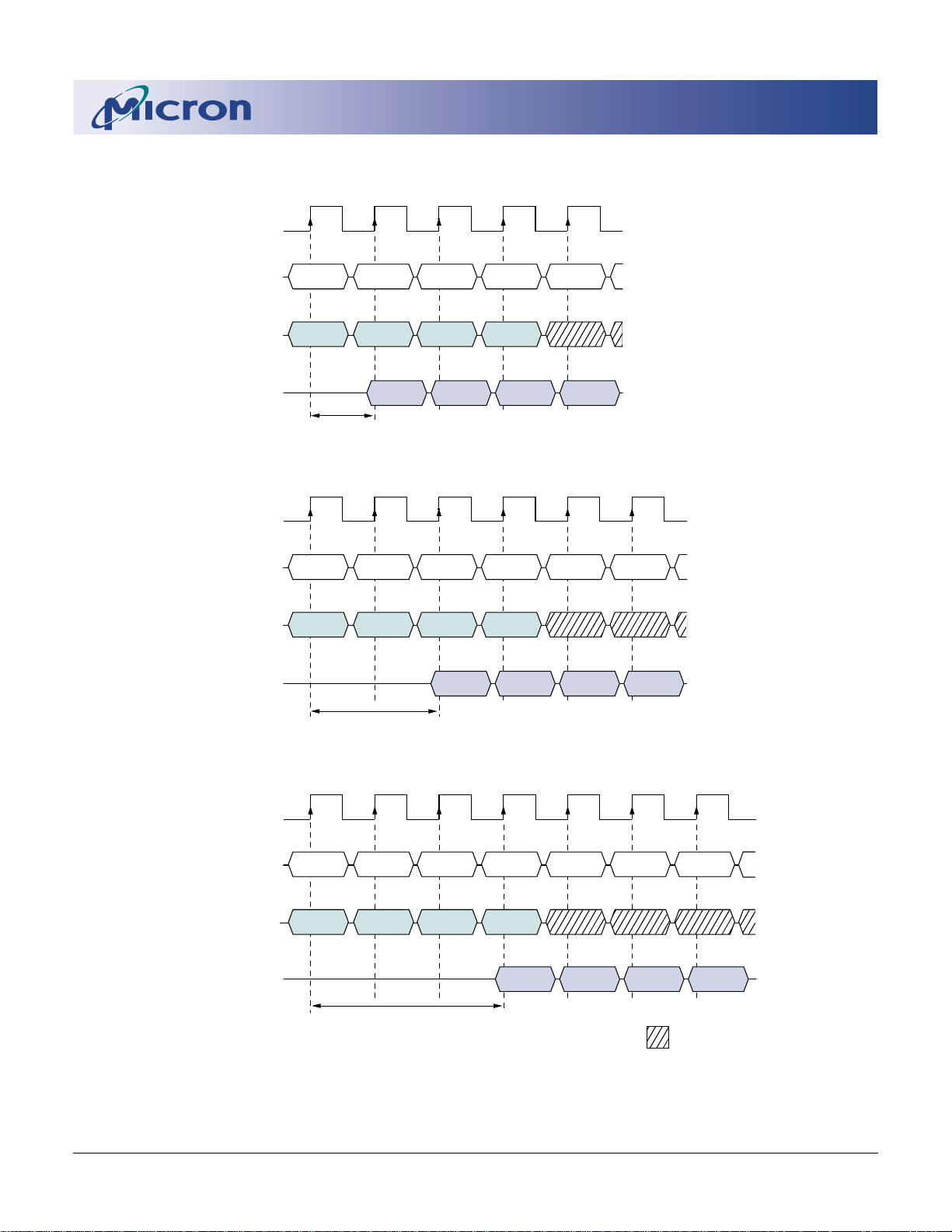
data element is valid, where x equals the CAS latency
minus one. This is shown in Figure 7 for READ latencies
of one, two and three; data element n + 3 is either the
last of a burst of four or the last desired of a longer
burst. The 1 Meg x 16 SDRAM uses a pipelined architec-
T2T1 T4T3 T5T0
CLK
COMMAND
ADDRESS
DQ
CLK
READ NOP NOP NOP
BANK,
COL n
CAS Latency = 1
NOP
D
OUT
n
D
n + 1
OUT
T2T1 T4T3 T6T5T0
ture and therefore does not require the 2n rule associated with a prefetch architecture. A READ command
can be initiated on any clock cycle following a previous
READ command. Full-speed, random read accesses
within a page can be performed as shown in Figure 8.
READ
X = 0 cycles
BANK,
COL b
OUT
D
n + 2
D
OUT
n + 3
D
OUT
b
COMMAND
ADDRESS
DQ
READ NOP NOP NOP NOP
BANK,
COL n
CAS Latency = 2
NOP
D
OUT
n
OUT
D
n + 1
T2T1 T4T3 T6T5T0
CLK
COMMAND
ADDRESS
DQ
READ NOP NOP NOP NOP
BANK,
COL n
CAS Latency = 3
NOP
D
OUT
n
NOTE: Each READ command may be to either bank. DQM is LOW.
READ
X = 1 cycle
BANK,
COL b
D
n + 2
READ
BANK,
COL b
D
n + 1
OUT
OUT
D
n + 3
X = 2 cycles
D
n + 2
OUT
OUT
D
D
n + 3
OUT
b
OUT
T7
NOP
D
OUT
b
DON’T CARE
Figure 7
Consecutive READ Bursts
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
14
Page 15
CLK
16Mb: x16
IT SDRAM
T2T1 T4T3T0
COMMAND
ADDRESS
DQ
CLK
COMMAND
ADDRESS
DQ
READ NOP
BANK,
COL n
CAS Latency = 1
READ READ READ
BANK,
COL a
D
OUT
n
BANK,
COL x
BANK,
COL m
D
OUT
a
OUT
D
x
T2T1 T4T3 T5T0
READ NOP
BANK,
COL n
READ READ READ NOP
BANK,
COL a
CAS Latency = 2
BANK,
COL x
BANK,
COL m
D
OUT
n
D
OUT
a
OUT
D
m
OUT
D
x
OUT
D
m
T2T1 T4T3 T6T5T0
CLK
COMMAND
ADDRESS
READ NOP NOP
BANK,
COL n
READ
BANK,
COL a
DQ
CAS Latency = 3
NOTE: Each READ command may be to either bank. DQM is LOW.
READ READ NOP
BANK,
COL x
BANK,
COL m
D
OUT
n
OUT
D
a
OUT
D
x
OUT
D
m
DON’T CARE
Figure 8
Random READ Accesses
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
15
Page 16
16Mb: x16
DON’T CARE
READ NOP NOPNOP NOP
DQM
CLK
DQ
D
OUT
n
T2T1 T4T3T0
COMMAND
ADDRESS
BANK,
COL n
WRITE
DIN b
BANK,
COL b
T5
DS
t
HZ
t
NOTE: A CAS latency of three is used for illustration. The
READ command
may be to any bank, and the WRITE command may be to any bank.
IT SDRAM
Data from any READ burst may be truncated with
a subsequent WRITE command, and data from a
fixed-length READ burst may be immediately followed
by data from a subsequent WRITE command (subject
to bus turnaround limitations). The WRITE burst may
be initiated on the clock edge immediately following
the last (or last desired) data element from the READ
burst, provided that I/O contention can be avoided. In
a given system design, there may be the possibility that
the device driving the input data would go Low-Z
before the SDRAM DQs go High-Z. In this case, at least
a single-cycle delay should occur between the last read
data and the WRITE command.
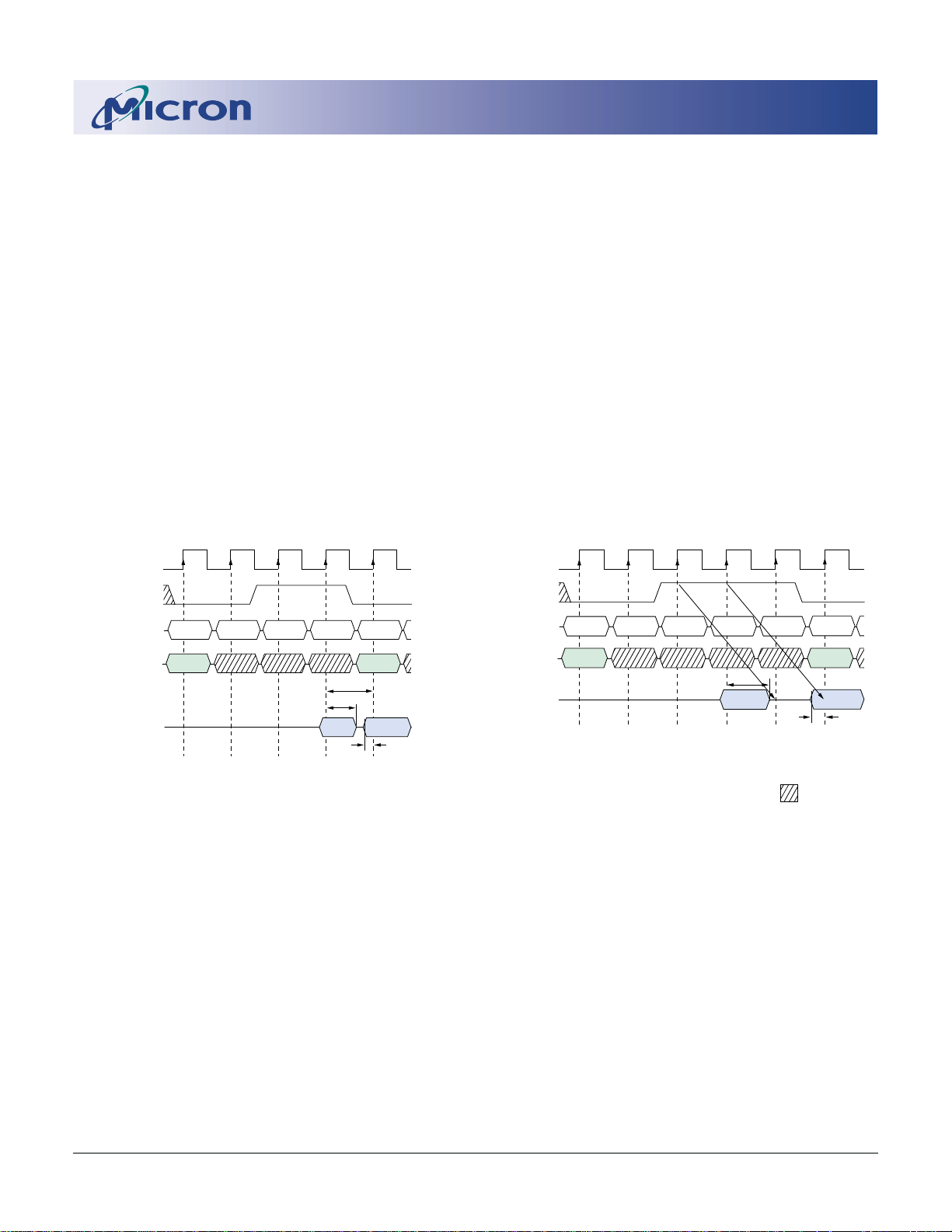
The DQM input is used to avoid I/O contention as
shown in Figures 9 and 10. The DQM signal must be
asserted (HIGH) at least two clocks (DQM latency is
two clocks for output buffers) prior to the WRITE
T2T1 T4T3T0
CLK
DQM
command to suppress data-out from the READ. Once
the WRITE command is registered, the DQs will go
High-Z (or remain High-Z) regardless of the state of the
DQM signal, provided the DQM was active on the
clock just prior to the WRITE command that truncated
the READ command. If not, the second WRITE will be
an invalid WRITE. For example, if DQM was LOW
during T4 in Figure 10, then the WRITEs at T5 and T7
would be valid, while the WRITE at T6 would be
invalid.
The DQM signal must be de-asserted (DQM latency
is zero clocks for input buffers) prior to the WRITE
command to ensure that the written data is not masked.
Figure 9 shows the case where the clock frequency
allows for bus contention to be avoided without adding a NOP cycle, and Figure 10 shows the case where the
additional NOP is needed.
COMMAND
ADDRESS
NOTE: A CAS latency of three is used for illustration. The
READ NOP NOP
BANK,
COL n
DQ
command may be to any bank, and the WRITE command
may be to any bank. If a burst of one is used, then DQM is
not required.
Figure 9
READ to WRITE
NOP
D
WRITE
BANK,
COL b
t
CK
t
HZ
OUT
n
DIN b
t
DS
READ
Figure 10
READ to WRITE with
Extra Clock Cycle
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
16
Page 17

16Mb: x16
IT SDRAM
A fixed-length READ burst may be followed by, or
truncated with, a PRECHARGE command to the same
bank (provided that AUTO PRECHARGE was not
activated) and a full-page burst may be truncated with
a PRECHARGE command to the same bank. The
PRECHARGE command should be issued x cycles before the clock edge at which the last desired data
element is valid, where x equals the CAS latency minus
one. This is shown in Figure 11 for each possible CAS
T2T1 T4T3 T6T5T0
CLK
COMMAND
ADDRESS
DQ
READ NOP NOP NOP NOP
BANK a,
COL n
CAS Latency = 1
NOP
OUT
n
D
OUT
n + 1
D
latency; data element n + 3 is either the last of a burst of
four or the last desired of a longer burst. Following the
PRECHARGE command, a subsequent command to
the same bank cannot be issued until tRP is met. Note
that part of the row precharge time is hidden during
the access of the last data element(s).
In the case of a fixed-length burst being executed to
completion, a PRECHARGE command issued at the
optimum time (as described above) provides the same
T7
t
RP
ACTIVE
BANK a,
ROW
OUT
D
n + 2
PRECHARGE
X = 0 cycles
BANK
(a or all)
D
OUT
n + 3
CLK
COMMAND
ADDRESS
BANK a,
COL n
DQ
CLK
COMMAND
ADDRESS
BANK a,
COL n
DQ
NOTE: DQM is LOW.
T2T1 T4T3 T6T5T0
READ NOP NOP NOP NOPNOP
CAS Latency = 2
T2T1 T4T3 T6T5T0
READ NOP NOP NOP NOPNOP
CAS Latency = 3
T7
t
D
n + 3
OUT
RP
ACTIVE
BANK a,
ROW
PRECHARGE
X = 1 cycle
BANK
(a or all)
OUT
OUT
n
D
D
OUT
n + 1
D
n + 2
T7
t
X = 2 cycles
D
n + 2
OUT
RP
D
n + 3
OUT
ACTIVE
BANK a,
ROW
D
OUT
n
PRECHARGE
BANK
(a or all)
D
OUT
n + 1
DON’T CARE
Figure 11
READ to PRECHARGE
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
17
Page 18

16Mb: x16
IT SDRAM
operation that would result from the same fixedlength burst with AUTO PRECHARGE. The disadvantage of the PRECHARGE command is that it requires
that the command and address buses be available at the
appropriate time to issue the command; the advantage
of the PRECHARGE command is that it can be used to
truncate fixed-length or full-page bursts.
Full-page READ bursts can be truncated with the
BURST TERMINATE command, and fixed-length
T2T1 T4T3 T6T5T0
CLK
COMMAND
ADDRESS
DQ
CLK
READ NOP NOP NOP
BANK,
COL n
CAS Latency = 1
NOP
D
OUT
n
D
OUT
n + 1
T2T1 T4T3 T6T5T0
READ bursts may be truncated with a BURST TERMINATE command, provided that AUTO PRECHARGE
was not activated. The BURST TERMINATE command
should be issued x cycles before the clock edge at which
the last desired data element is valid, where x equals the
CAS latency minus one. This is shown in Figure 12 for
each possible CAS latency; data element n + 3 is the last
desired data element of a longer burst.
D
n + 2
OUT
BURST
TERMINATE
X = 0 cycles
OUT
D
n + 3
NOP
COMMAND
ADDRESS
DQ
CLK
COMMAND
ADDRESS
DQ
NOTE: DQM is LOW.
D
OUT
n + 1
BURST
TERMINATE
X = 1 cycle
OUT
D
n + 2
D
n + 3
OUT
READ NOP NOP NOP
BANK,
COL n
CAS Latency = 2
NOP
D
OUT
n
T2T1 T4T3 T6T5T0
D
OUT
n
BURST
TERMINATE
D
OUT
n + 1
X = 2 cycles
OUT
D
n + 2
READ NOP NOP NOP NOP
BANK,
COL n
CAS Latency = 3
NOP
Figure 12
Terminating a READ Burst
NOP
D
n + 3
OUT
T7
NOP
DON’T CARE
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
18
Page 19

WRITEs
CLK
DQ
D
IN
n
T2T1 T3T0
COMMAND
ADDRESS
NOP NOPWRITE
D
IN
n + 1
NOP
BANK,
COL n
NOTE: Burst length = 2. DQM is LOW.
WRITE bursts are initiated with a WRITE com-
mand, as shown in Figure 13.
The starting column and bank addresses are provided with the WRITE command and AUTO
PRECHARGE is either enabled or disabled for that
access. If AUTO PRECHARGE is enabled, the row being
accessed is precharged at the completion of the burst.
For the generic WRITE commands used in the following illustrations, AUTO PRECHARGE is disabled.
During WRITE bursts, the first valid data-in element
will be registered coincident with the WRITE command. Subsequent data elements will be registered on
each successive positive clock edge. Upon completion
of a fixed-length burst, assuming no other commands
have been initiated, the DQs will remain High-Z, and
any additional input data will be ignored (see Figure
14). A full-page burst will continue until terminated.
(At the end of the page it will wrap to column 0 and
continue.)
Data for any WRITE burst may be truncated with a
subsequent WRITE command, and data for a fixedlength WRITE burst may be immediately followed by
data for a subsequent WRITE command. The new
WRITE command can be issued on any clock following
the previous WRITE command, and the data provided
16Mb: x16
IT SDRAM
coincident with the new command applies to the new
command. An example is shown in Figure 15. Data n
+ 1 is either the last of a burst of two, or the last desired
of a longer burst. The 1 Meg x 16 SDRAM uses a
pipelined architecture and therefore does not require
the 2n rule associated with a prefetch architecture. A
WRITE command can be initiated on any clock cycle
following a previous WRITE command. Full-speed,
random write accesses within a page can be performed
as shown in Figure 16.
CLK
CKE
CS#
RAS#
CAS#
WE#
A0-A7
A8-A9
A10
BA
HIGH
COLUMN
ADDRESS
ENABLE AUTO PRECHARGE
DISABLE AUTO PRECHARGE
BANK 1
BANK 0
Figure 13
WRITE Command
WRITE Burst
CLK
COMMAND
ADDRESS
DQ
NOTE: DQM is LOW.
command may be to any bank.
WRITE to WRITE
Figure 14
BANK,
COL n
IN
D
n
Figure 15
T2T1T0
NOPWRITE WRITE
BANK,
COL b
D
IN
n + 1
D
IN
b
Each WRITE
DON’T CARE
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
19
Page 20

16Mb: x16
DQM
CLK
DQ
T2T1 T4T3T0
COMMAND
ADDRESS
BANK a,
COL
n
T5
NOPWRITE
PRECHARGE
NOPNOP
DIN
n
DIN
n + 1
ACTIVE
t
RP
DON’T CARE
BANK
(
a
or all)
t
WR
NOTE: DQM could remain LOW in this example if the WRITE burst is a
fixed length of two. Future SDRAMs will require a
t
WR of at least
two clocks.
BANK a,
ROW
DQM
DQ
COMMAND
ADDRESS
BANK a,
COL
n
NOPWRITE
PRECHARGE
NOP
D
IN
n
D
IN
n + 1
ACTIVE
t
RP
BANK
(
a
or all)
t
WR
BANK a,
ROW
NOP
t
WR = 1 CLK (tCK tWR)
t
WR = 2 CLK (tCK < tWR)
IT SDRAM
Data for any WRITE burst may be truncated with a
subsequent READ command, and data for a fixedlength WRITE burst may be immediately followed by a
subsequent READ command. Once the READ command is registered, the data inputs will be ignored, and
WRITEs will not be executed. An example is shown in
Figure 17. Data n + 1 is either the last of a burst of two,
or the last desired of a longer burst.
Data for a fixed-length WRITE burst may be followed by, or truncated with, a PRECHARGE command
to the same bank (provided that AUTO PRECHARGE
was not activated), and a full-page WRITE burst may
be truncated with a PRECHARGE command to the
same bank. The PRECHARGE command should be
t
issued
WR after the clock edge at which the last desired
T2T1 T3T0
CLK
COMMAND
WRITE
WRITE
WRITE WRITE
input data element is registered. In addition, when
truncating a WRITE burst, the DQM signal must be
used to mask input data for the clock edge prior to, and
the clock edge coincident with, the PRECHARGE command. An example is shown in Figure 18. Data n + 1 is
either the last of a burst of two or the last desired of a
longer burst. Following the PRECHARGE command, a
subsequent command to the same bank cannot be
issued until tRP is met.
In the case of a fixed-length burst being executed to
completion, a PRECHARGE command issued at the
optimum time (as described above) provides the same
operation that would result from the same fixedlength burst with AUTO PRECHARGE. The disadvantage of the PRECHARGE command is that it requires
that the command and address buses be available at the
appropriate time to issue the command; the advantage
of the PRECHARGE command is that it can be used to
truncate fixed-length or full-page bursts.
ADDRESS
COMMAND
ADDRESS
BANK,
COL n
DQ
NOTE: Each WRITE command may be to any bank.
DIN
n
BANK,
COL a
DIN
a
BANK,
COL x
D
IN
x
BANK,
COL m
D
IN
m
DQM is LOW.
Figure 16
Random WRITE Cycles
T2T1 T3T0
CLK
NOPWRITE
BANK,
COL n
D
n + 1
IN
DIN
DQ
n
NOTE: The WRITE command may be to any bank, and the READ command may
be to any bank. DQM is LOW. CAS latency = 2 for illustration.
READ NOP NOP
BANK,
COL b
T4 T5
NOP
DOUT
b
D
b + 1
OUT
Figure 17
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
WRITE to READ
Figure 18
WRITE to PRECHARGE
20
Page 21

16Mb: x16
t
RAS
t
RCD
t
RC
All banks idle
Input buffers gated off
Exit POWERDOWN mode
()(
)
()(
)
()(
)
t
CKS
< t
CKS
COMMAND
NOP ACTIVE
Enter POWERDOWN mode
NOP
CLK
CKE
()(
)
()(
)
DON’T CARE
IT SDRAM
Fixed-length or full-page WRITE bursts can be truncated with the BURST TERMINATE command. When
truncating a WRITE burst, the input data applied
coincident with the BURST TERMINATE command
will be ignored. The last data written (provided that
DQM is LOW at that time) will be the input data
applied one clock previous to the BURST TERMINATE
command. This is shown in Figure 19, where data n is
the last desired data element of a longer burst.
T2T1T0
CLK
COMMAND
ADDRESS
DQ
NOTE: DQMs are low
WRITE
BANK,
COL n
DIN
n
BURST
TERMINATE
Next
Command
(Address)
(Data)
Figure 19
Terminating a WRITE Burst
CLK
PRECHARGE
The PRECHARGE command is used to deactivate
the open row in a particular bank or the open row in
all banks (see Figure 20). The bank(s) will be available
t
for a subsequent row access some specified time (
RP)
after the PRECHARGE command is issued. Input A10
determines whether one or all banks are to be
precharged, and in the case where only one bank is to
be precharged, input BA selects the bank. When all
banks are to be precharged, input BA is treated as
“Don’t Care.” Once a bank has been precharged, it is in
the idle state and must be activated prior to any READ
or WRITE commands being issued to that bank.
POWER-DOWN
POWER-DOWN occurs if CKE is registered LOW
coincident with a NOP or COMMAND INHIBIT, when
no accesses are in progress (see Figure 21). If POWERDOWN occurs when all banks are idle, this mode is
referred to as precharge power-down; if power-down
occurs when there is a row active in either bank, this
mode is referred to as active power-down. Entering
power-down deactivates the input and output buffers, excluding CKE, for maximum power savings while
in standby. The device may not remain in the powerdown state longer than the refresh period (64ms) since
no refresh operations are performed in this mode.
The power-down state is exited by registering a NOP
or COMMAND INHIBIT and CKE HIGH at the desired
clock edge (meeting
t
CKS).
CKE
HIGH
CS#
RAS#
CAS#
WE#
A0-A9
Figure 21
A10
BA
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
Figure 20
PRECHARGE Command
BANK 0 and 1
BANK 0 or 1
BANK 1
BANK 0
21
POWER-DOWN
Page 22

DON’T CARE
CLK
DQ
DOUT
n
T2T1 T4T3 T6T5T0
COMMAND
ADDRESS
READ NOP NOP NOP
BANK,
COL n
NOP
D
OUT
n + 1
D
OUT
n + 2
D
OUT
n + 3
NOTE: For this example, CAS latency = 2, burst length = 4 or greater, and
DQM is LOW.
CKE
INTERNAL
CLOCK
NOP
CLOCK SUSPEND
The clock suspend mode occurs when a column
access/burst is in progress and CKE is registered LOW. In
the clock suspend mode, the internal clock is deactivated, “freezing” the synchronous logic.
For each positive clock edge on which CKE is sampled
LOW, the next internal positive clock edge is suspended. Any command or data present on the input
pins at the time of a suspended internal clock edge are
ignored; any data present on the DQ pins will remain
driven; and burst counters are not incremented as long
as the clock is suspended (see examples in Figures 22
and 23).
T2T1 T4T3 T5T0
CLK
CKE
16Mb: x16
IT SDRAM
Clock suspend mode is exited by registering CKE
HIGH; the internal clock and related operation will
resume on the subsequent positive clock edge.
BURST READ/SINGLE WRITE
The burst read/single write mode is entered by programming the write burst mode bit (M9) in the Mode
Register to a logic 1. In this mode, all WRITE commands result in the access of a single column location
(burst of one) regardless of the programmed burst
length. READ commands access columns according to
the programmed burst length and sequence, just as in
the normal mode of operation (M9 = 0).
INTERNAL
CLOCK
COMMAND
ADDRESS
DQ
NOP
WRITE
BANK,
COL n
D
n
IN
n + 1
NOPNOP
D
D
IN
n + 2
IN
NOTE: For this example, burst length = 4 or greater, and DQM
is LOW.
Figure 22
Clock Suspend During WRITE Burst
Figure 23
Clock Suspend During READ Burst
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
22
Page 23

CONCURRENT AUTO PRECHARGE
An access command (READ or WRITE) to another
bank while an access command with AUTO
PRECHARGE enabled is executing is not allowed by
SDRAMs, unless the SDRAM supports CONCURRENT
AUTO PRECHARGE. Micron SDRAMs support CONCURRENT AUTO PRECHARGE. Four cases where
CONCURRENT AUTO PRECHARGE occurs are defined below.
READ with AUTO PRECHARGE
1. Interrupted by a READ (with or without AUTO
16Mb: x16
IT SDRAM
PRECHARGE): A READ to bank m will interrupt a
READ on bank n, CAS latency later. The
PRECHARGE to bank n will begin when the READ
to bank m is registered (Figure 24).
2. Interrupted by a WRITE (with or without AUTO
PRECHARGE): A WRITE to bank m will interrupt a
READ on bank n when registered. DQM should be
used two clocks prior to the WRITE command to
prevent bus contention. The PRECHARGE to bank
n will begin when the WRITE to bank m is registered
(Figure 25).
T2T1 T4T3 T6T5T0
CLK
COMMAND
Internal
States
ADDRESS
NOTE: DQM is LOW.
BANK n
BANK m
DQ
READ - AP
BANK n
Page Active READ with Burst of 4 Interrupt Burst, Precharge
Page Active READ with Burst of 4
BANK n,
COL a
CAS Latency = 3 (BANK n)
READ - AP
BANK m
BANK m,
COL d
CAS Latency = 3 (BANK m)
NOP
D
t
RP - BANK n
OUT
a
NOP NOPNOPNOP
OUT
D
a + 1
D
OUT
d
Figure 24
READ with AUTO PRECHARGE Interrupted by a READ
T2T1 T4T3 T6T5T0
CLK
NOP
WRITE - AP
BANK m
t
RP -
BANK
NOPNOPNOPNOP
n
Internal
States
COMMAND
BANK n
BANK m
READ - AP
BANK n
Page
READ with Burst of 4 Interrupt Burst, Precharge
Active
Page Active WRITE with Burst of 4
Idle
T7
t
T7
NOP
t
NOP
WR -
RP - BANK m
Precharge
D
OUT
d + 1
Idle
BANK
Write-Back
m
DQM
DQ
BANK n,
COL a
1
CAS Latency = 3 (BANK n)
ADDRESS
NOTE: 1. DQM is HIGH at T2 to prevent D
OUT
-a+1 from contending with DIN-d at T4.
BANK m,
COL d
D
OUT
a
D
IN
d
D
d + 1
IN
D
d + 2
IN
D
IN
d + 3
DON’T CARE
Figure 25
READ with AUTO PRECHARGE Interrupted by a WRITE
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
23
Page 24

WRITE with AUTO PRECHARGE
3. Interrupted by a READ (with or without AUTO
PRECHARGE): A READ to bank m will interrupt a
WRITE on bank n when registered, with the dataout appearing CAS latency later. The PRECHARGE
to bank n will begin after tWR is met, where tWR
begins when the READ to bank m is registered. The
last valid WRITE to bank n will be data-in registered
one clock prior to the READ to bank m (Figure 26).
16Mb: x16
IT SDRAM
4. Interrupted by a WRITE (with or without AUTO
PRECHARGE): A WRITE to bank m will interrupt a
WRITE on bank n when registered. The PRECHARGE
to bank n will begin after
begins when the WRITE to bank m is registered.
The last valid data WRITE to bank n will be data
registered one clock prior to a WRITE to bank m
(Figure 27).
t
WR is met, where tWR
T2T1 T4T3 T6T5T0
CLK
COMMAND
BANK n
Internal
States
BANK m
ADDRESS
NOTE: 1. DQM is LOW.
WRITE - AP
BANK n
Page Active WRITE with Burst of 4 Interrupt Burst, Write-Back Precharge
Page Active READ with Burst of 4
BANK n,
COL a
D
DQ
IN
a
a + 1
READ - AP
BANK m
t
WR - BANK n
BANK m,
COL d
D
IN
CAS Latency = 3 (BANK m)
NOPNOPNOPNOP
t
RP - BANK n
NOP NOP
D
OUT
d
Figure 26
WRITE with AUTO PRECHARGE Interrupted by a READ
T2T1 T4T3 T6T5T0
CLK
COMMAND
WRITE - AP
BANK n
NOP
WRITE - AP
BANK m
NOPNOPNOPNOP
T7
t
RP - BANK m
D
OUT
d + 1
T7
NOP
BANK n
Internal
States
BANK m
ADDRESS
NOTE: 1. DQM is LOW.
Page Active WRITE with Burst of 4 Interrupt Burst, Write-Back Precharge
t
WR - BANK n
Page Active WRITE with Burst of 4
DQ
BANK n,
COL a
D
IN
a
D
a + 1
IN
a + 2
BANK m,
COL d
D
D
IN
IN
d
D
d + 1
IN
t
RP - BANK n
IN
D
d + 2
t
WR - BANK m
Write-Back
D
IN
d + 3
DON’T CARE
Figure 27
WRITE with AUTO PRECHARGE Interrupted by a WRITE
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
24
Page 25

TRUTH TABLE 2 – CKE
(Notes: 1-4)
16Mb: x16
IT SDRAM
CKE
n-1
CKE
CURRENT STATE COMMAND
n
n
ACTION
n
L L Power-Down X Maintain Power-Down
Self Refresh X Maintain Self Refresh
Clock Suspend X Maintain Clock Suspend
L H Power-Down COMMAND INHIBIT or NOP Exit Power-Down 5
Self Refresh COMMAND INHIBIT or NOP Exit Self Refresh 6
Clock Suspend X Exit Clock Suspend 7
H L All Banks Idle COMMAND INHIBIT or NOP Power-Down Entry
All Banks Idle AUTO REFRESH Self Refresh Entry
Reading or Writing VALID Clock Suspend Entry
H H See Truth Table 3
NOTE: 1. CKE
2. Current state is the state of the SDRAM immediately prior to clock edge n.
3. COMMANDn is the command registered at clock edge n and ACTIONn is a result of COMMANDn.
4. All states and sequences not shown are illegal or reserved.
5. Exiting power-down at clock edge n will put the device in the all banks idle state in time for clock edge n + 1 (provided
6. Exiting SELF REFRESH at clock edge n will put the device in the all banks idle state once tXSR is met. COMMAND
7. After exiting clock suspend at clock edge n, the device will resume operation and recognize the next command at clock
is the logic state of CKE at clock edge n; CKE
n
that tCKS is met).
INHIBIT or NOP commands should be issued on any clock edges occurring during the tXSR period. A minimum of two NOP
commands must be provided during
edge n + 1.
t
XSR period.
was the state of CKE at the previous clock edge.
n-1
NOTES
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
25
Page 26

16Mb: x16
IT SDRAM
TRUTH TABLE 3 – CURRENT STATE BANK n - COMMAND TO BANK n
(Notes: 1-6; notes appear below and on next page)
CURRENT STATE CS# RAS# CAS# WE# COMMAND (ACTION) NOTES
Any H X X X COMMAND INHIBIT (NOP/Continue previous operation)
L H H H NO OPERATION (NOP/Continue previous operation)
L L H H ACTIVE (Select and activate row)
Idle L L L H AUTO REFRESH 7
LLLLLOAD MODE REGISTER 7
L L H L PRECHARGE 11
L H L H READ (Select column and start READ burst) 10
Row Active L H L L WRITE (Select column and start WRITE burst) 10
L L H L PRECHARGE (Deactivate row in bank or banks) 8
Read L H L H READ (Select column and start new READ burst) 10
(Auto L H L L WRITE (Select column and start WRITE burst) 10
Precharge L L H L PRECHARGE (Truncate READ burst, start PRECHARGE) 8
Disabled) L H H L BURST TERMINATE 9
Write L H L H READ (Select column and start READ burst) 10
(Auto L H L L WRITE (Select column and start new WRITE burst) 10
Precharge L L H L PRECHARGE (Truncate WRITE burst, start PRECHARGE) 8
Disabled) L H H L BURST TERMINATE 9
NOTE: 1. This table applies when CKE
met (if the previous state was self refresh).
2. This table is bank-specific, except where noted; i.e., the current state is for a specific bank and the commands shown
are those allowed to be issued to that bank when in that state. Exceptions are covered in the notes below.
3. Current state definitions:
Idle: The bank has been precharged and tRP has been met.
Row Active: A row in the bank has been activated and tRCD has been met. No data bursts/accesses and no
register accesses are in progress.
Read: A READ burst has been initiated, with AUTO PRECHARGE disabled, and has not yet terminated
or been terminated.
Write: A WRITE burst has been initiated, with AUTO PRECHARGE disabled, and has not yet terminated
or been terminated.
4. The following states must not be interrupted by a command issued to the same bank. COMMAND INHIBIT or NOP
commands, or allowable commands to the other bank, should be issued on any clock edge occuring during these states.
Allowable commands to the other bank are determined by its current state and Truth Table 3, and according to Truth
Table 4.
Precharging: Starts with registration of a PRECHARGE command and ends when tRP is met. Once tRP is met,
the bank will be in the idle state.
Row Activating: Starts with registration of an ACTIVE command and ends when tRCD is met. Once tRCD is met,
the bank will be in the row active state.
Read w/Auto
Precharge Enabled: Starts with registration of a READ command with AUTO PRECHARGE enabled and ends when tRP
has been met. Once tRP is met, the bank will be in the idle state.
Write w/Auto
Precharge Enabled: Starts with registration of a WRITE command with AUTO PRECHARGE enabled and ends when
t
RP has been met. Once tRP is met, the bank will be in the idle state.
was HIGH and CKEn is HIGH (see Truth Table 2) and after tXSR has been
n-1
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
26
Page 27

16Mb: x16
IT SDRAM
NOTE (continued):
5. The following states must not be interrupted by any executable command; COMMAND INHIBIT or NOP commands must
be applied on each positive clock edge during these states.
Refreshing: Starts with registration of an AUTO REFRESH command and ends when
met, the SDRAM will be in the all banks idle state.
Accessing Mode
Register: Starts with registration of a LOAD MODE REGISTER command and ends when
met. Once tMRD is met, the SDRAM will be in the all banks idle state.
Precharging All: Starts with registration of a PRECHARGE ALL command and ends when tRP is met. Once tRP is
met, all banks will be in the idle state.
6. All states and sequences not shown are illegal or reserved.
7. Not bank-specific; requires that all banks are idle.
8. May or may not be bank-specific; if all banks are to be precharged, all must be in a valid state for precharging.
9. Not bank-specific; BURST TERMINATE affects the most recent READ or WRITE burst, regardless of bank.
10. READs or WRITEs listed in the Command (Action) column include READs or WRITEs with AUTO PRECHARGE enabled and
READs or WRITEs with AUTO PRECHARGE disabled.
11. Does not affect the state of the bank and acts as a NOP to that bank.
t
RC is met. Once tRC is
t
MRD has been
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
27
Page 28

16Mb: x16
IT SDRAM
TRUTH TABLE 4 – CURRENT STATE BANK n - COMMAND TO BANK m
(Notes: 1-6; notes appear below and on next page)
CURRENT STATE CS# RAS# CAS# WE# COMMAND (ACTION) NOTES
Any H X X X COMMAND INHIBIT (NOP/Continue previous operation)
L H H H NO OPERATION (NOP/Continue previous operation)
Idle XXXXAny command otherwise allowed to bank m
Row Activating, L L H H ACTIVE (Select and activate row)
Active or L H L H READ (Select column and start READ burst) 7
Precharging L H L L WRITE (Select column and start WRITE burst) 7
L L H L PRECHARGE
Read L L H H ACTIVE (Select and activate row)
(Auto L H L H READ (Select column and start new READ burst) 7, 10
Precharge L H L L WRITE (Select column and start WRITE burst) 7, 11
Disabled) L L H L PRECHARGE 9
Write L L H H ACTIVE (Select and activate row)
(Auto L H L H READ (Select column and start READ burst) 7, 12
Precharge L H L L WRITE (Select column and start new WRITE burst) 7, 13
Disabled) L L H L PRECHARGE 9
Read L L H H ACTIVE (Select and activate row)
(With Auto L H L H READ (Select column and start new READ burst) 7, 8, 14
Precharge) L H L L WRITE (Select column and start WRITE burst) 7, 8, 15
L L H L PRECHARGE 9
Write L L H H ACTIVE (Select and activate row)
(With Auto L H L H READ (Select column and start READ burst) 7, 8, 16
Precharge) L H L L WRITE (Select column and start new WRITE burst) 7, 8, 17
L L H L PRECHARGE 9
NOTE: 1. This table applies when CKE
met (if the previous state was self refresh).
2. This table describes alternate bank operation, except where noted, i.e., the current state is for bank n and the
commands shown are those allowed to be issued to bank m (assuming that bank m is in such a state that the given
command is allowable). Exceptions are covered in the notes below.
3. Current state definitions:
Idle: The bank has been precharged and tRP has been met.
Row Active: A row in the bank has been activated and tRCD has been met. No data bursts/accesses and no
Read: A READ burst has been initiated, with AUTO PRECHARGE disabled, and has not yet terminated
Write: A WRITE burst has been initiated, with AUTO PRECHARGE disabled, and has not yet terminated
Read w/Auto
Precharge Enabled: Starts with registration of a READ command with AUTO PRECHARGE enabled and ends when tRP
Write w/Auto
Precharge Enabled: Starts with registration of a WRITE command with AUTO PRECHARGE enabled and ends when
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
was HIGH and CKEn is HIGH (see Truth Table 2) and after tXSR has been
n-1
register accesses are in progress.
or been terminated.
or been terminated.
has been met. Once tRP is met, the bank will be in the idle state.
t
RP has been met. Once tRP is met, the bank will be in the idle state.
28
Page 29

16Mb: x16
IT SDRAM
NOTE (continued):
4. AUTO REFRESH, SELF REFRESH and LOAD MODE REGISTER commands may only be issued when all banks are idle.
5. A BURST TERMINATE command cannot be issued to another bank; it applies to the bank represented by the current state
only.
6. All states and sequences not shown are illegal or reserved.
7. READs or WRITEs to bank m listed in the Command (Action) column include READs or WRITEs with AUTO PRECHARGE
enabled and READs or WRITEs with AUTO PRECHARGE disabled.
8. CONCURRENT AUTO PRECHARGE: Bank n will initiate the AUTO PRECHARGE command when its burst has been interrupted by bank m’s burst.
9. Burst in bank n continues as initiated.
10. For a READ without AUTO PRECHARGE interrupted by a READ (with or without AUTO PRECHARGE), the READ to bank m
will interrupt the READ on bank n, CAS latency later (Figure 7).
11. For a READ without AUTO PRECHARGE interrupted by a WRITE (with or without AUTO PRECHARGE), the WRITE to bank m
will interrupt the READ on bank n when registered (Figures 9 and 10). DQM should be used one clock prior to the WRITE
command to prevent bus contention.
12. For a WRITE without AUTO PRECHARGE interrupted by a READ (with or without AUTO PRECHARGE), the READ to bank m
will interrupt the WRITE on bank n when registered (Figure 17), with the data-out appearing CAS latency later. The last
valid WRITE to bank n will be data-in registered one clock prior to the READ to bank m.
13. For a WRITE without AUTO PRECHARGE interrupted by a WRITE (with or without AUTO PRECHARGE), the WRITE to bank
m will interrupt the WRITE on bank n when registered (Figure 15). The last valid WRITE to bank n will be data-in
registered one clock prior to the READ to bank m.
14. For a READ with AUTO PRECHARGE interrupted by a READ (with or without AUTO PRECHARGE), the READ to bank m will
interrupt the READ on bank n, CAS latency later. The PRECHARGE to bank n will begin when the READ to bank m is
registered (Figure 24).
15. For a READ with AUTO PRECHARGE interrupted by a WRITE (with or without AUTO PRECHARGE), the WRITE to bank m
will interrupt the READ on bank n when registered. DQM should be used two clocks prior to the WRITE command to
prevent bus contention. The PRECHARGE to bank n will begin when the WRITE to bank m is registered (Figure 25).
16. For a WRITE with AUTO PRECHARGE interrupted by a READ (with or without AUTO PRECHARGE), the READ to bank m will
interrupt the WRITE on bank n when registered, with the data-out appearing CAS latency later. The PRECHARGE to bank
n will begin after tWR is met, where tWR begins when the READ to bank m is registered. The last valid WRITE to bank n
will be data-in registered one clock prior to the READ to bank m (Figure 26).
17. For a WRITE with AUTO PRECHARGE interrupted by a WRITE (with or without AUTO PRECHARGE), the WRITE to bank m
will interrupt the WRITE on bank n when registered. The PRECHARGE to bank n will begin after tWR is met, where tWR
begins when the WRITE to bank m is registered. The last valid WRITE to bank n will be data registered one clock prior
to the WRITE to bank m (Figure 27).
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
29
Page 30

16Mb: x16
IT SDRAM
ABSOLUTE MAXIMUM RATINGS*
Voltage on VDD, VDDQ Supply
Relative to VSS ................................ -1V to +4.6V
Voltage on Inputs, NC or I/O Pins
Relative to V
Operating Temperature, T
Storage Temperature (plastic) .......... -55°C to +150°C
Power Dissipation .................................................. 1W
SS ................................ -1V to +4.6V
(ambient) -40°C to +85°C
A
*Stresses greater than those listed under “Absolute
Maximum Ratings” may cause permanent damage to
the device. This is a stress rating only, and functional
operation of the device at these or any other conditions above those indicated in the operational sections
of this specification is not implied. Exposure to absolute maximum rating conditions for extended periods
may affect reliability.
DC ELECTRICAL CHARACTERISTICS AND OPERATING CONDITIONS
(Notes: 1, 6) (-40°C ≤ TA ≤ +85°C; VDD, VDDQ = +3.3V ±0.3V)
PARAMETER/CONDITION SYMBOL MIN M AX UNITS NOTES
SUPPLY VOLTAGE VDD, VDDQ 3 3.6 V
INPUT HIGH VOLTAGE: Logic 1; All inputs VIH 2.2 VDD + 0.3 V 22
INPUT LOW VOLTAGE: Logic 0; All inputs VIL -0.3 0.8 V 22
INPUT LEAKAGE CURRENT:
Any input 0V ≤ VIN ≤ VDD II -5 5 µA
(All other pins not under test = 0V)
OUTPUT LEAKAGE CURRENT: DQs are disabled; 0V ≤ VOUT ≤ VDDQIOZ -10 10 µA
OUTPUT LEVELS: VOH 2.4 – V
Output High Voltage (IOUT = -4mA)
Output Low Voltage (IOUT = 4mA) VOL – 0.4 V
IDD SPECIFICATIONS AND CONDITIONS
(Notes: 1, 6, 11, 13) (-40°C ≤ TA ≤ +85°C; VDD, VDDQ = +3.3V ±0.3V)
PARAMETER/CONDITION SYMBOL -6 -7 -8A UNITS NOTES
OPERATING CURRENT: Active Mode; IDD1 145 140 135 mA 3, 18,
Burst = 2; READ or WRITE; tRC = tRC (MIN); 19, 26
CAS latency = 3
STANDBY CURRENT: Power-Down Mode; IDD2 222mA26
CKE = LOW; All banks idle
STANDBY CURRENT: Active Mode; CS# = HIGH; IDD3 45 40 35 mA 3, 12,
CKE = HIGH; All banks active after tRCD met; 19, 26
No accesses in progress
OPERATING CURRENT: Burst Mode; Continuous burst; IDD4 140 130 100 mA 3, 18,
READ or WRITE; All banks active, CAS latency = 3 19, 26
AUTO REFRESH CURRENT: tRC = 15.625µs; CAS latency = 3; IDD5 45 40 35 m A 3, 12,
CS# = HIGH; CKE = HIGH 18, 19,
SELF REFRESH CURRENT: CKE ≤ 0.2V IDD6 111mA4
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
30
MAX
26
Page 31

16Mb: x16
IT SDRAM
CAPACITANCE
PARAMETER SYMBOL MIN MAX UNITS NOTES
Input Capacitance: CLK CI1 2.5 4.0 p F 2
Input Capacitance: All other input-only pins CI2 2.5 5.0 p F 2
Input/Output Capacitance: DQs CIO 4.0 6.5 pF 2
ELECTRICAL CHARACTERISTICS AND RECOMMENDED AC OPERATING CONDITIONS
(Notes: 5, 6, 8, 9, 11) (-40°C ≤ TA ≤ +85°C)
AC CHARACTERISTICS -6 -7 -8A
PARAMETER SYMBOL MIN MAX MIN MAX MIN MAX UNITS NOTES
Access time from CLK (pos. edge) CL = 3
CL = 2
CL = 1
Address hold time
Address setup time
CLK high level width
CLK low level width
Clock cycle time CL = 3
CL = 2
CL = 1
CKE hold time
CKE setup time
CS#, RAS#, CAS#, WE#, DQM hold time
CS#, RAS#, CAS#, WE#, DQM setup time
Data-in hold time
Data-in setup time
Data-out high-impedance time CL = 3
CL = 2
CL = 1
Data-out low-impedance time
Data-out hold time
ACTIVE to PRECHARGE command
AUTO REFRESH, ACTIVE command period
AUTO REFRESH period
ACTIVE to READ or WRITE delay
Refresh period - 2,048 or 4,096 rows
PRECHARGE command period
ACTIVE bank A to ACTIVE bank B command
Transition time
WRITE recovery time
Exit SELF REFRESH to ACTIVE command
t
AC 5.5 5.5 6 ns
t
AC 8 8.5 9 ns 22
t
AC 18 22 22 ns 22
t
AH 1 1 1 n s
t
AS 2 2 2 ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK 6 7 8 ns 23
t
CK 8 10 13 ns 22, 23
t
CK 20 25 25 ns 23
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH 1 1 1 ns
t
CMS 2 2 2 ns
t
DH 1 1 1 n s
t
DS 2 2 2 ns
t
HZ 5.5 5.5 6 ns 10
t
HZ 6 8.5 9 ns 10
t
HZ 18 22 22 ns 10
t
LZ 1 1 1 ns
t
OH 1.5 1.5 1.5 ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 ns 22
t
RCAR 66 70 80 ns
t
RCD 18 20 24 ns 22
t
REF 64 64 64 ms
t
RP 18 21 24 ns 22
t
RRD 12 14 16 ns
t
T 0.3 1.2 0.3 1.2 0.3 10 ns 7
t
WR 1 + 4ns 1 + 3ns 1 + 2ns
t
CK 24
10 10 10 ns 25
t
XSR 80 80 80 ns 20
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
31
Page 32

AC FUNCTIONAL CHARACTERISTICS
(Notes: 5, 6, 7, 8, 9, 11) (-40°C ≤ TA ≤ +85°C)
16Mb: x16
IT SDRAM
PARAMETER SYMBOL -6 -7 -8A UNITS NOTES
READ/WRITE command to READ/WRITE command
CKE to clock disable or power-down entry mode
CKE to clock enable or power-down exit setup mode
t
CCD 1 1 1
t
CKED 1 1 1
t
PED 1 1 1
t
CK 17
t
CK 14
t
CK 14
DQM to input data delay tDQD000tCK 17
DQM to data mask during WRITEs tDQM 0 0 0
DQM to data high-impedance during READs tDQZ 2 2 2
WRITE command to input data delay tDWD 0 0 0
Data-in to ACTIVE command CL = 3
CL = 2
CL = 1
Data-in to PRECHARGE
Last data-in to burst STOP command
Last data-in to new READ/WRITE command
Last data-in to PRECHARGE command
LOAD MODE REGISTER command to ACTIVE or REFRESH command
Data-out to high-impedance from PRECHARGE command CL = 3
CL = 2
CL = 1
t
DAL 5 5 5
t
DAL 4 4 4
t
DAL 3 3 3
t
DPL 2 2 2
t
BDL000tCK 17
t
CDL111tCK 17
t
RDL111tCK 16, 21
t
MRD 2 2 2
t
ROH 3 3 3
t
ROH 2 2 2
t
ROH 1 1 1
t
CK 17
t
CK 17
t
CK 17
t
CK 15, 21
t
CK 15, 21
t
CK 15, 21
t
CK 16
t
CK 26
t
CK 17
t
CK 17
t
CK 17
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
32
Page 33

NOTES
1. All voltages referenced to VSS.
2. This parameter is sampled. VDD, VDDQ = +3.3V;
f = 1 MHz, tA = 25°C.
DD is dependent on output loading and cycle
3. I
rates. Specified values are obtained with minimum
cycle time and the outputs open.
4. Enables on-chip refresh and address counters.
5. The minimum specifications are used only to
indicate cycle time at which proper operation over
the full temperature range (-40°C ≤ TA ≤ +85°C) is
ensured.
6. An initial pause of 100µs is required after powerup, followed by two AUTO REFRESH commands,
before proper device operation is ensured. (V
DD
and VDDQ must be powered up simultaneously.
VSS and VSSQ must be at same potential.) The two
AUTO REFRESH command wake-ups should be
repeated any time the tREF refresh requirement is
exceeded.
7. AC characteristics assume tT = 1ns.
8. In addition to meeting the transition rate
specification, the clock and CKE must transit
between VIH and VIL (or between VIL and VIH) in a
monotonic manner.
9. Outputs measured at 1.5V with equivalent load:
Q
30pF
10.tHZ defines the time at which the output achieves
the open circuit condition; it is not a reference to
VOH or VOL. The last valid data element will meet
t
OH before going High-Z.
11. AC timing and IDD tests have VIL = 0V and VIH =
3V with timing referenced to 1.5V crossover point.
16Mb: x16
IT SDRAM
12.Other input signals are allowed to transition no
more than once in any two-clock period and are
otherwise at valid VIH or VIL levels.
DD specifications are tested after the device is
13.I
properly initialized.
14.Timing actually specified by
specified as a reference only at minimum cycle rate.
15.Timing actually specified by tWR plus tRP; clock(s)
specified as a reference only at minimum cycle rate.
16.Timing actually specified by
17.Required clocks are specified by JEDEC functionality and are not dependent on any timing parameter.
18.The I
DD current will decrease as the CAS latency is
reduced. This is due to the fact that the maximum
cycle rate is slower as the CAS latency is reduced.
19.Address transitions average one transition every
two-clock period.
20. CLK must be toggled a minimum of two times
during this period.
21. Based on tCK = 166 MHz for -6, 143 MHz for -7
and 125 MHz for -8A.
22. VIH overshoot: VIH (MAX) = VDDQ + 2V for a pulse
width ≤ 3ns, and the pulse width cannot be greater
than one third of the cycle rate. VIL undershoot:
VIL (MIN) = -2V for a pulse width ≤ 3ns. The pulse
width cannot be greater than one third of the
cycle rate.
23.The clock frequency must remain constant during
access or precharge states (READ, WRITE, including tWR, and PRECHARGE commands). CKE may
be used to reduce the data rate.
24.Auto precharge mode only.
25.Precharge mode only.
26.tCK = 6ns for -6, 7ns for -7, 8ns for -8A.
t
CKS; clock(s)
t
WR.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
33
Page 34

INITIALIZE AND LOAD MODE REGISTER
16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
ADDRESS
DQ
T0 T1 Tn + 1 To + 1 Tp + 1 Tp + 2 Tp + 3
()(
t
CK
)
t
t
CKH
CKS
()(
)
()(
)
t
CMH
()(
)
NOP
()(
)
()(
)
1
()(
)
()(
)
()(
)
High-Z
()(
)
PRECHARGE
T=100µs
(MIN)
t
CMS
BANK(S)
t
RP
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
AUTO
REFRESH
t
CH
Power-up:
VDD and
CLK stable.
Precharge
all banks.
AUTO REFRESH
t
RCAR
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
NOP
t
CL
AUTO
REFRESH
AUTO REFRESH
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
t
RC
LOAD MODE
REGISTER
t
t
AH
AS
CODE
t
MRD
NOP
Program Mode Register.
ACTIVENOP NOPNOP
BANK,
ROW
2, 3
DON’T CARE
UNDEFINED
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
t
MRD222tCK
t
RC 60 70 80 n s
t
RCAR 66 70 80 ns
t
RP 18 21 24 n s
*CAS latency indicated in parentheses.
NOTE: 1. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
2. The Mode Register may be loaded prior to the AUTO REFRESH cycles if desired.
3. Outputs are guaranteed High-Z after command is issued.
-6 -7 -8A
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
34
Page 35

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
2
DQM
ADDRESS
DQ
Precharge all
active banks.
POWER-DOWN MODE
T0 T1 T2 Tn + 1 Tn + 2
t
t
CKH
CKS
t
t
CMH
CMS
PRECHARGE NOP NOP ACTIVENOP
t
t
AH
AS
BANK(S)
High-Z
t
CK
Two clock cycles
t
t
CKS
CL
t
CH
Input buffers gated off while in
1
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
t
CKS
power-down mode.
All banks idle, enter
power-down mode.
Exit power-down mode.
All banks idle.
BANK,
ROW
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
*CAS latency indicated in parentheses.
NOTE: 1. Violating refresh requirements during power-down may result in loss of data.
2. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
-6 -7 -8A
DON’T CARE
UNDEFINED
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
35
Page 36

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
CLOCK SUSPEND MODE
T0 T1 T2 T3 T4 T5 T6 T7 T8 T9
t
CKS
t
CMS
3
t
AS
COLUMN m
(A0 - A7)
t
AS
t
AS
BANK
t
CKH
t
CMH
t
AH
t
AH
t
AH
t
CK
t
CMS
2
t
CMH
t
CL
t
CKStCKH
t
LZ
t
CH
t
AC
OUT
t
OH
m
D
OUT
m + 1
t
AC
D
1
NOPNOP NOP NOPNOPREAD WRITE
COLUMN e
2
(A0 - A7)
BANK
t
HZ
t
t
DH
DS
DIN e
NOP
DIN e + 1
DON’T CARE
UNDEFINED
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AC (3) 5.5 5.5 6 ns
t
AC (2) 8 8.5 9 ns
t
AC (1) 18 22 22 ns
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
t
DH111ns
t
DS222ns
t
HZ (3) 5.5 5.5 6 ns
t
HZ (2) 6 8.5 9 ns
t
HZ (1) 18 22 22 ns
t
LZ111ns
t
OH 1.5 1.5 1.5 ns
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 2, the CAS latency = 3, and AUTO PRECHARGE is disabled.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
36
-6 -7 -8A
Page 37

AUTO REFRESH MODE
16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
ADDRESS
DQ
T0 T1 T2 Tn + 1 To + 1
t
CK
t
t
CKH
CKS
t
t
CMH
CMS
NOP
1
t
t
AH
AS
BANK(S)
High-Z
t
RP
t
CH
AUTO
REFRESH
t
RCAR
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
t
CL
AUTO
REFRESH
()(
)
()(
)
()(
)
()(
)
NOPNOP
NOPNOPPRECHARGE
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
t
RC
ACTIVE
BANK,
ROW
Precharge all
active banks.
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
t
RC 60 70 80 n s
t
RCAR 66 70 80 ns
t
RP 18 21 24 n s
*CAS latency indicated in parentheses.
NOTE: 1. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
-6 -7 -8A
DON’T CARE
UNDEFINED
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
37
Page 38

SELF REFRESH MODE
16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
ADDRESS
DQ
T0 T1 T2 Tn + 1 To + 1 To + 2
t
CK
t
t
CKH
CKS
t
t
CMH
CMS
PRECHARGE NOP NOP
1
tt
AS
AH
t
CH
t
t
CL
CKS
AUTO
REFRESH
> t
RAS
BANK(S)
High-Z
t
RP
Precharge all
active banks.
Enter self
refresh mode.
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
t
XSR
()(
)
()(
)
()(
)
()(
)
t
CKS
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
Exit self refresh mode.
(Restart refresh time base.)
CLK stable prior to exiting
self refresh mode.
AUTO
REFRESH
DON’T CARE
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RP 18 21 24 n s
t
XS R 80 80 80 n s
*CAS latency indicated in parentheses.
NOTE: 1. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
-6 -7 -8A
UNDEFINED
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
38
Page 39

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM /
DQML, DQMH
A0-A9, A11
A10
BA0, BA1
DQ
SINGLE READ – WITHOUT AUTO PRECHARGE
T0 T1 T2 T3 T4 T5 T6 T7 T8
t
CKS
t
t
CMS
ACTIVE NOP READ ACTIVE NOP
t
AS
ROW
t
AS
ROW
t
AS
BANK
t
CKH
CMH
t
AH
t
AH
t
AH
t
RCD
t
RAS
t
RC
t
CK
t
CL
t
CMS
COLUMN m
DISABLE AUTO PRECHARGE
t
BANK
t
CH
CMH
2
CAS Latency
t
OH
t
HZ
PRECHARGE
ALL BANKS
SINGLE BANKS
BANK(S)
t
RP
NOPNOP
t
AC
t
LZ
DOUT m
1
NOP
ROW
ROW
BANK
DON’T CARE
UNDEFINED
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AC (3) 5.5 5.5 6 ns
t
AC (2) 8 8.5 9 ns
t
AC (1) 18 22 22 ns
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CMH111ns
t
CMS 2 2 2 ns
t
HZ (3) 5.5 5.5 6 ns
t
HZ (2) 6 8.5 9 ns
t
HZ (1) 18 22 22 ns
t
LZ111ns
t
OH 1.5 1.5 1.5 ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 n s
t
R CD 18 20 24 n s
t
RP 18 21 24 n s
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4, the CAS latency = 2, and the READ burst is followed by a “manual” PRECHARGE.
2. A8, A9 = “Don’t Care.”
-6 -7 -8A
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
39
Page 40

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
READ – WITHOUT AUTO PRECHARGE
T0 T1 T2 T3 T4 T5 T6 T7 T8
t
CKS
t
t
CMS
3
t
AS
ROW
t
AS
ROW
t
AS
BANK
t
CK
t
CKH
CMH
t
AH
t
AH
t
AH
t
RCD CAS Latency
t
RAS
t
RC
t
CL
t
CMS
COLUMN m
DISABLE AUTO PRECHARGE
t
CH
t
CMH
2
(A0 - A7)
BANK BANK(S) BANK
NOPNOP NOPACTIVE NOP READ NOP ACTIVE
t
AC
t
AC
t
LZ
t
OH
D
OUT
m
OUT
t
t
OH
m+1
AC
1
PRECHARGE
BANK 0 and 1
BANK 0 or 1
t
t
OH
D
OUT
m+2D
t
RP
AC
D
OUT
t
OH
m+3
t
HZ
ROW
ROW
DON’T CARE
UNDEFINED
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AC (3) 5.5 5.5 6 ns
t
AC (2) 8 8.5 9 ns
t
AC (1) 18 22 22 ns
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CMH111ns
t
CMS 2 2 2 ns
t
HZ (3) 5.5 5.5 6 ns
t
HZ (2) 6 8.5 9 ns
t
HZ (1) 18 22 22 ns
t
LZ111ns
t
OH 1.5 1.5 1.5 ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 n s
t
R CD 18 20 24 n s
t
RP 18 21 24 n s
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4, the CAS latency = 2, and the READ burst is followed by a “manual” PRECHARGE.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
-6 -7 -8A
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
40
Page 41

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
READ – WITH AUTO PRECHARGE
T0 T1 T2 T3 T4 T5 T6 T7 T8
t
CKS
t
t
CMS
3
t
AS
ROW
t
AS
ROW
t
AS
BANK
t
CK
t
CKH
CMH
t
AH
t
AH
t
AH
t
RCD CAS Latency
t
RAS
t
RC
t
CL
t
CMS
COLUMN
(A0 - A7)
ENABLE AUTO PRECHARGE
t
t
CMH
BANK
CH
m
2
NOPNOP NOPACTIVE NOP READ NOP ACTIVENOP
t
AC
t
AC
t
LZ
t
OH
D
OUT
m
t
OH
1
t
AC
t
AC
t
OH
DOUT m + 2DOUT m + 1
t
RP
DOUTm + 3
ROW
ROW
BANK
t
OH
t
HZ
DON’T CARE
UNDEFINED
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AC (3) 5.5 5.5 6 ns
t
AC (2) 8 8.5 9 ns
t
AC (1) 18 22 22 ns
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CMH111ns
t
CMS 2 2 2 ns
t
HZ (3) 5.5 5.5 6 ns
t
HZ (2) 6 8.5 9 ns
t
HZ (1) 18 22 22 ns
t
LZ111ns
t
OH 1.5 1.5 1.5 ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 n s
t
R CD 18 20 24 n s
t
RP 18 21 24 n s
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4, the CAS latency = 2, and the READ burst is followed by a “manual” PRECHARGE.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
-6 -7 -8A
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
41
Page 42

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
ALTERNATING BANK READ ACCESSES
T0 T1 T2 T3 T4 T5 T6 T7 T8
t
CKS
t
t
CMS
3
t
AS
ROW
t
AS
ROW
t
AS
BANK 0 BANK 0 BANK 1 BANK 1
t
CKH
CMH
t
AH
t
AH
t
AH
t
RCD - BANK 0
t
RAS - BANK 0
t
RC - BANK 0
t
RRD
t
CK
t
CL
t
CMS
COLUMN m
ENABLE AUTO PRECHARGE
t
CMH
(A0 - A7)
t
CH
2
CAS Latency - BANK 0
NOP NOPACTIVE NOP READ NOP ACTIVE
t
AC
t
LZ
ACTIVE
ROW
ROW
D
OUT
t
AC
t
OH
m
t
RCD - BANK 1
ENABLE AUTO PRECHARGE
t
AC
t
OH
OUT
m + 1
1
READ
COLUMN b
2
(A0 - A7)
t
AC
t
OH
D
OUT
m + 2D
CAS Latency - BANK 1
D
OUT
t
RP - BANK 0
t
t
OH
m + 3
AC
ROW
ROW
BANK 0
t
AC
t
OH
D
OUT
b
t
RCD - BANK 0
DON’T CARE
UNDEFINED
TIMING PARAMETERS
-6 -7 - 8A
SYMBOL* MI N MAX MIN M AX M IN M AX UNITS
t
AC (3) 5.5 5.5 6 ns
t
AC (2) 8 8.5 9 ns
t
AC (1) 1 8 2 2 2 2 ns
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 1 3 n s
t
CK (1) 20 25 2 5 n s
t
CKH 1 1 1 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKS 2 2 2 ns
t
CMH 1 1 1 ns
t
CMS 2 2 2 ns
t
LZ111ns
t
OH 1.5 1.5 1.5 ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 ns
t
RCD 18 20 24 ns
t
RP 18 21 24 ns
t
RRD 12 14 16 ns
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4, and the CAS latency = 2.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
42
-6 -7 -8A
Page 43

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
READ – FULL-PAGE BURST
T0 T1 T2 T3 T4 T5 T6 Tn + 1 Tn + 2 Tn + 3 Tn + 4
t
CKS
t
CMS
3
t
AS
ROW
t
AS
ROW
t
AS
BANK
t
CKH
t
CMH
t
AH
t
AH
t
AH
t
CL
t
CK
t
CH
NOPNOP NOPACTIVE NOP READ NOP BURST TERMNOP NOP
t
t
CMH
CMS
COLUMN m
2
(A0 - A7)
BANK
t
t
AC
t
LZ
AC
t
OH
D
OUT
m
t
AC
t
OH
D
OUT
m+1
1
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
t
AC
()(
)
t
OH
()(
)
D
OUT
m+2
()(
)
t
AC
t
OH
D
OUT
m-1
t
OH
D
OUT
m
NOP
t
AC
D
OUT
256 locations within same row.
t
OH
m+1
t
HZ
t
RCD
CAS Latency
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AC (3) 5.5 5.5 6 ns
t
AC (2) 8 8.5 9 ns
t
AC (1) 18 22 22 ns
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the CAS latency = 2.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
4. Page left open; no tRP.
Full page completed.
Full-page burst does not self-terminate.
Can use BURST TERMINATE command.
4
DON’T CARE
UNDEFINED
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
t
HZ (3) 5.5 5.5 6 ns
t
HZ (2) 6 8.5 9 ns
t
HZ (1) 18 22 22 ns
t
LZ111ns
t
OH 1.5 1.5 1.5 ns
t
R CD 18 20 24 n s
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
43
Page 44

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
READ – DQM OPERATION
T0 T1 T2 T3 T4 T5 T6 T7 T8
t
t
CKS
t
CMStCMH
3
t
AS
ROW
t
AS
ROW
t
AS
BANK
CKH
t
AH
t
AH
t
AH
t
RCD
t
CK
t
CL
t
CMS
COLUMN m
ENABLE AUTO PRECHARGE
DISABLE AUTO PRECHARGE
t
t
CMH
(A0 - A7)
BANK
CH
3
CAS Latency
NOPNOP NOPACTIVE NOP READ NOPNOP NOP
t
AC
t
LZ
t
D
OH
t
OUT
HZ
m
1
t
AC
t
AC
t
LZ
OUT
t
OH
m + 2
t
OH
D
OUT
m + 3D
t
HZ
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AC (3) 5.5 5.5 6 ns
t
AC (2) 8 8.5 9 ns
t
AC (1) 18 22 22 ns
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4, and the CAS latency = 2.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
t
HZ (3) 5.5 5.5 6 ns
t
HZ (2) 6 8.5 9 ns
t
HZ (1) 18 22 22 ns
t
LZ111ns
t
OH 1.5 1.5 1.5 ns
t
R CD 18 20 24 n s
DON’T CARE
UNDEFINED
-6 -7 -8A
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
44
Page 45

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM /
DQML, DQMH
A0-A9, A11
A10
BA0, BA1
DQ
SINGLE WRITE – WITHOUT AUTO PRECHARGE
T0 T1 T2 T4T3 T5 T6
t
t
CKS
t
t
CMS
ACTIVE NOP WRITE NOP PRECHARGE ACTIVE
t
AS
ROW
t
AS
ROW
t
AS
BANK
CKH
CMH
t
AH
t
AH
t
AH
t
CK
t
CL
t
CH
t
t
CMS
CMH
COLUMN m
DISABLE AUTO PRECHARGE
t
DS
3
BANK BANK BANK
t
DH
ALL BANKS
SINGLE BANK
1
NOP
DIN m
t
RCD
t
RAS
t
RC
t
WR
2
t
RP
ROW
ROW
DON’T CARE
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CMH111ns
t
CMS 2 2 2 ns
t
DH111ns
t
DS222ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 n s
t
R CD 18 20 24 n s
t
RP 18 21 24 n s
t
WR 10 10 10 n s
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4, and the WRITE burst is followed by a “manual” PRECHARGE.
2. 10ns is required between <DIN m> and the PRECHARGE command, regardless of frequency, to meet tWR.
3. A8, A9 = “Don’t Care.”
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
45
-6 -7 -8A
Page 46

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
BANK 0 and 1
BANK 0 or 1
t
4
WR
1
t
WRITE – WITHOUT AUTO PRECHARGE
T0 T1 T2 T3 T4 T5 T6 T7 T8
t
t
CKS
t
t
CMH
CMS
3
t
AS
ROW
t
AS
ROW
t
AS
BANK
CKH
t
AH
t
AH
t
AH
t
RCD
t
RAS
t
RC
t
CK
t
CL
t
CH
NOPNOP NOPACTIVE NOP WRITE NOPPRECHARGE ACTIVE
t
t
CMH
CMS
COLUMN
m
2
(A0 - A7)
DISABLE AUTO PRECHARGE
BANK BANK(S) BANK
t
t
DH
DS
DIN m
DH
DS
DIN m + 1 DIN m + 2 DIN m + 3
t
t
t
t
DH
DS
t
t
DH
DS
ROW
ROW
RP
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CMH111ns
t
CMS 2 2 2 ns
t
DH111ns
t
DS222ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 n s
t
R CD 18 20 24 n s
t
RP 18 21 24 n s
t
WR 10 10 10 n s
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4, and the WRITE burst is followed by “manual” PRECHARGE.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
4. Faster frequencies will require two clocks (when tWR > tCK).
-6 -7 -8A
DON’T CARE
UNDEFINED
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
46
Page 47

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
DH
1
t
4
WR
t
RP
WRITE – WITH AUTO PRECHARGE
T0 T1 T2 T3 T4 T5 T6 T7 T8
t
CKS
t
t
CMS
3
t
AS
ROW
t
AS
ROW
t
AS
BANK
t
CKH
CMH
t
AH
t
AH
t
AH
t
RCD
t
RAS
t
RC
t
CK
t
CL
t
CH
NOPNOP NOPACTIVE NOP WRITE NOPNOP ACTIVE
t
t
CMH
CMS
COLUMN
m
2
(A0 - A7)
ENABLE AUTO PRECHARGE
BANK BANK
t
t
DH
DS
DIN m
t
DS
D
IN
m + 1 D
t
DH
t
DS
IN
m + 2 D
t
DH
t
t
DS
IN
m + 3
ROW
ROW
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
4. Faster frequencies will require two clocks (when
t
WR > tCK).
DON’T CARE
UNDEFINED
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CMH111ns
t
CMS 2 2 2 ns
t
DH111ns
t
DS222ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 n s
t
R CD 18 20 24 n s
t
RP 18 21 24 n s
t
WR 1 + 4ns 1 + 3ns 1 + 2ns
t
CK
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
47
Page 48

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
COLUMN b
(A0 - A7)
BANK 1
t
DS
DIN b
4
1
2
t
t
DH
DS
DIN b + 1 DIN b + 2
t
RP - BANK 0
ALTERNATING BANK WRITE ACCESSES
T0 T1 T2 T3 T4 T5 T6 T7 T8
t
t
CKS
t
t
CMS
CMH
3
t
AS
ROW
t
AS
ROW
t
AS
BANK 0 BANK 0 BANK 1
CKH
t
AH
t
AH
t
AH
t
RCD - BANK 0
t
RAS - BANK 0
t
RC - BANK 0
t
RRD
t
CK
t
CL
t
CH
t
t
CMS
CMH
COLUMN m
2
(A0 - A7)
ENABLE AUTO PRECHARGE
t
t
DS
DIN m
DH
t
DS
NOP NOPACTIVE NOP WRITE NOP ACTIVE
t
DH
DIN m + 1 DIN m + 2 DIN m + 3
ACTIVE WRITE
ROW
ENABLE AUTO PRECHARGE
ROW
t
t
DH
DS
t
RCD - BANK 1
t
DS
t
DH
t
WR - BANK 0
ROW
ROW
BANK 0
t
DH
t
DS
t
DH
t
RCD - BANK 0
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH111ns
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
4. Faster frequencies will require two clocks (when
t
WR > tCK).
DON’T CARE
UNDEFINED
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CMS 2 2 2 ns
t
DH111ns
t
DS222ns
t
RAS 42 120,000 42 120,000 48 120,000 ns
t
RC 60 70 80 n s
t
R CD 18 20 24 n s
t
RP 18 21 24 n s
t
R RD 12 14 16 n s
t
WR 1 + 4ns 1 + 3ns 1 + 2ns
t
CK
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
48
Page 49

WRITE – FULL-PAGE BURST
16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
2
DQM
A0-A9
A10
BA
DQ
T0 T1 T2 T3 T4 T5 Tn + 1 Tn + 2 Tn + 3
t
CKS
t
CMStCMH
t
AS
ROW
t
AS
ROW
t
AS
BANK
t
CKH
t
t
t
AH
AH
AH
t
RCD
t
CL
t
CH
CK
t
CMS
COLUMN m
(A0 - A7)
t
DS
t
CMH
BANK
DIN m
NOPNOP NOPACTIVE NOP WRITE BURST TERMNOP NOP
1
t
DH
t
t
DH
DS
t
t
DS
DH
t
DS
DIN m + 1 DIN m + 2 DIN m + 3
t
256 locations within
t
DH
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
()(
)
t
t
DH
DS
()(
)
DIN m - 1
()(
)
t
t
DH
DS
same row.
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
*CAS latency indicated in parentheses.
NOTE: 1. A8 and A9 = “Don’t Care.”
2. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
3. Page left open; no tRP.
Full page completed.
Full-page burst does not
self-terminate. Can use
BURST TERMINATE command.
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
t
DH111ns
t
DS222ns
t
R CD 18 20 24 n s
3
DON’T CARE
UNDEFINED
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
49
Page 50

16Mb: x16
IT SDRAM
CLK
CKE
COMMAND
DQM
A0-A9
A10
BA
DQ
t
DH
1
t
t
DS
DIN m + 3
DH
WRITE – DQM OPERATION
T0 T1 T2 T3 T4 T5 T6 T7
t
t
CKH
CKS
t
t
CMH
CMS
3
t
t
AS
ROW
t
t
AS
ROW
t
t
AS
BANK
AH
AH
AH
t
CK
t
CL
t
CH
t
t
CMH
CMS
COLUMN m
2
(A0 - A7)
ENABLE AUTO PRECHARGE
DISABLE AUTO PRECHARGE
BANK
t
t
DH
DS
DIN m
NOPNOP NOPACTIVE NOP WRITE NOPNOP
t
DS
DIN m + 2
t
RCD
TIMING PARAMETERS
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
AH111ns
t
AS222ns
t
CH 2.5 2.75 3 ns
t
CL 2.5 2.75 3 ns
t
CK (3) 6 7 8 ns
t
CK (2) 8 10 13 ns
t
CK (1) 20 25 25 ns
*CAS latency indicated in parentheses.
NOTE: 1. For this example, the burst length = 4.
2. A8 and A9 = “Don’t Care.”
3. DQM represents DQML and DQMH. DQML controls the lower byte, and DQMH controls the upper byte.
DON’T CARE
UNDEFINED
-6 -7 -8A
SYMBOL* MIN MAX MIN MAX MIN MAX UNITS
t
CKH 1 1 1 ns
t
CKS 2 2 2 ns
t
CMH111ns
t
CMS 2 2 2 ns
t
DH111ns
t
DS222ns
t
R CD 18 20 24 n s
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
50
Page 51

16Mb: x16
IT SDRAM
50-PIN PLASTIC TSOP (400 mil)
C-4
21.04
20.88
0.88
0.10 (2X)
50
2.80
10.21
10.11
125
0.80
PIN #1 ID
TYP
R 1.00 (2X)
NOTE: 1. All dimensions in millimeters
R 0.75 (2X)
MAX
MAX
or typical where noted.
MIN
0.45
0.30
1.2
11.86
11.66
0.10
2. Package width and length do not include mold protrusion; allowable mold protrusion is 0.01" per side.
0.25
GAGE PLANE
0.60
0.40
SEE DETAIL A
0.18
0.13
0.80
TYP
0.25
0.05
DETAIL A
8000 S. Federal Way, P.O. Box 6, Boise, ID 83707-0006, Tel: 208-368-3900
E-mail: prodmktg@micronsemi.com, Internet: http://www.micronsemi.com, Customer Comment Line: 800-932-4992
Micron is a registered trademark of Micron Technology, Inc.
16Mb: x16 IT SDRAM Micron Technology, Inc., reserves the right to change products or specifications without notice.
16MSDRAMx16IT.p65 – Rev. 5/99 ©1999, Micron Technology, Inc.
51
 Loading...
Loading...