


Micro Motion™ EtherNet/IP Module
User Guide
MMI-20019808, Rev AF
April 2022

Safety messages
Safety messages are provided throughout this manual to protect personnel and equipment. Read each safety message carefully
before proceeding to the next step.
Other information
Full product specifications can be found in the product data sheet. Troubleshooting information can be found in the configuration
manual. Product data sheets and manuals are available from the Micro Motion web site at www.emerson.com.
Return policy
Follow Micro Motion procedures when returning equipment. These procedures ensure legal compliance with government
transportation agencies and help provide a safe working environment for Micro Motion employees. Micro Motion will not accept
your returned equipment if you fail to follow Micro Motion procedures.
Return procedures and forms are available on our web support site at www.emerson.com, or by phoning the Micro Motion
Customer Service department.
Emerson Flow customer service
Email:
• Worldwide: flow.support@emerson.com
• Asia-Pacific: APflow.support@emerson.com
2

User Guide Contents
MMI-20019808 April 2022
Contents
Chapter 1 Before you begin........................................................................................................5
1.1 About this document...................................................................................................................5
1.2 Hazard messages.........................................................................................................................5
1.3 Related documentation............................................................................................................... 6
1.4 Functional overview.....................................................................................................................6
1.5 External view of device.................................................................................................................8
1.6 Default web pages....................................................................................................................... 8
1.7 Alternative web pages................................................................................................................. 8
Chapter 2 Installation.................................................................................................................9
2.1 Components................................................................................................................................9
2.2 Set up the module with MVD Direct Connect.............................................................................10
2.3 Set up the transmitter ...............................................................................................................22
2.4 Mount, wire, and set the network settings................................................................................. 23
2.5 Micro Motion Ethernet Config Tool installation (optional)..........................................................26
2.6 Configure the EtherNet/IP Module.............................................................................................28
Chapter 3 Basic network configuration.................................................................................... 29
3.1 TCP/IP settings...........................................................................................................................29
3.2 Modbus serial network settings................................................................................................. 31
Chapter 4 Emerson web server.................................................................................................33
4.1 Web server access information.................................................................................................. 33
4.2 Emerson EtherNet/IP Module web pages................................................................................... 33
Chapter 5 Integrate with Rockwell programming software......................................................35
5.1 Integrate with Rockwell versions 20 or later...............................................................................35
5.2 Integrate with Rockwell versions 19 or earlier............................................................................ 36
Chapter 6 Troubleshooting...................................................................................................... 41
6.1 LED indicators............................................................................................................................41
6.2 Common problems....................................................................................................................42
Appendix A Connector pin assignments...................................................................................... 45
A.1 Ethernet connector................................................................................................................... 45
A.2 Power connector....................................................................................................................... 45
A.3 Micro Motion Ethernet Config Tool installation (optional)......................................................... 45
A.4 Modbus serial network interface................................................................................................47
A.5 Typical connection.................................................................................................................... 48
Appendix B Device profile........................................................................................................... 49
B.1 Object classes............................................................................................................................ 49
User Guide 3

Contents User Guide
April 2022 MMI-20019808
B.2 Object details............................................................................................................................ 49
B.3 I/O data..................................................................................................................................... 57
B.4 Get and Set services...................................................................................................................68
B.5 Data types................................................................................................................................. 69
B.6 Codes and integer values........................................................................................................... 70
B.7 Status words..............................................................................................................................78
Appendix C Specifications...........................................................................................................83
4 Micro Motion EtherNet/IP Module

User Guide
MMI-20019808 April 2022
Before you begin
1 Before you begin
1.1 About this document
This manual contains information required to install, configure, and use the EtherNet/ IP
Module. The EtherNet/IP Module enables integration of industrial devices into the
Ethernet network with no loss of functionality, control, or reliability. The EtherNet/IP
Module can be used for new or retrofit installations.
The Micro Motion EtherNet/IP Module is a customization of the Anybus Communicator
from HMS Industrial Networks. OEM features not documented here are documented in
the Anybus Communicator User Manual available on the HMS web site.
The information in this document assumes that users understand:
• Basic transmitter and sensor installation, configuration, and maintenance concepts
and procedures
• All corporate, local government, and national government safety standards and
requirements that guard against injuries and death
1.2 Hazard messages
This document uses the following criteria for hazard messages based on ANSI standards
Z535.6-2011 (R2017).
DANGER
Serious injury or death will occur if a hazardous situation is not avoided.
WARNING
Serious injury or death could occur if a hazardous situation is not avoided.
CAUTION
Minor or moderate injury will or could occur if a hazardous situation is not avoided.
NOTICE
Data loss, property damage, hardware damage, or software damage can occur if a
situation is not avoided. There is no credible risk of physical injury.
Physical access
NOTICE
Unauthorized personnel can potentially cause significant damage and/or misconfiguration
of end users' equipment. Protect against all intentional or unintentional unauthorized use.
Physical security is an important part of any security program and fundamental to
protecting your system. Restrict physical access to protect users' assets. This is true for all
systems used within the facility.
User Guide 5

Before you begin User Guide
April 2022 MMI-20019808
1.3 Related documentation
See any of the following documents for more information:
• Anybus Communicator User Manual on the HMS web site
• The sensor installation manual
• The transmitter installation manual
• The transmitter configuration and use manual
1.4 Functional overview
The EtherNet/IP Module acts as a gateway between the serial output of a Micro Motion
device and an EtherNet/IP network. Using a web browser, the module supports:
• Process monitoring and control
• Configuration
• Administration
The EtherNet/IP Module consists of a Modbus master and an Ethernet slave.
• On the Modbus side, the module polls the transmitter for a standard set of process
variables and stores the data locally.
• On the Ethernet side, the module receives requests for data and responds with the
current values.
• The web browser is used for transmitter configuration and administration, via a
connection to the Micro Motion web pages on the EtherNet/IP Module.
• The configuration loop is used only by the MicroMotion Ethernet Config Tool. In typical
installations, this tool is not needed.
6 Micro Motion EtherNet/IP Module

User Guide
Before you begin
MMI-20019808 April 2022
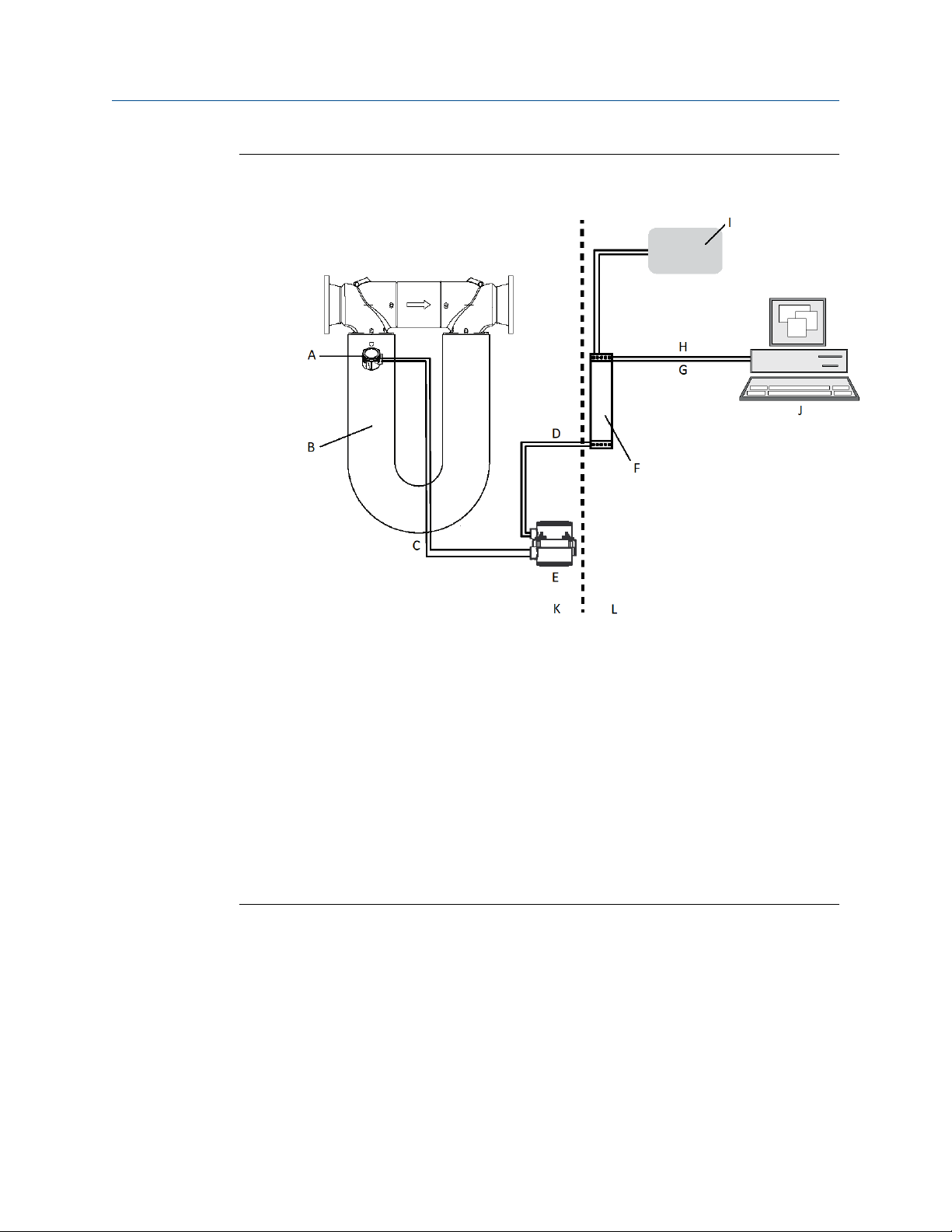
Figure 1-1: EtherNet/IP Module with a Model 2700 transmitter
A. PLC
B. Ethernet
C. EtherNet/IP Module
D. Modbus/RS-485
E. Transmitter (see Product Data Sheet for compatible transmitters)
F. To sensor
G. PC with Micro Motion Ethernet Config Tool
H. Configuration loop (with configuration cable)
I. Other devices (SCADA, PC, Inverter)
J. Web browser
Figure 1-2: EtherNet/IP Module in an MVD Direct Connect installation
A. PLC
B. Ethernet
C. EtherNet/IP Module
D. Modbus/RS-485
E. Barrier
F. Core processor
G. To sensor
H. PC with Micro Motion Ethernet Config Tool
I. Configuration loop (with configuration cable)
J. Other devices (SCADA, PC, Inverter)
K. Web browser
User Guide 7

Before you begin User Guide
April 2022 MMI-20019808
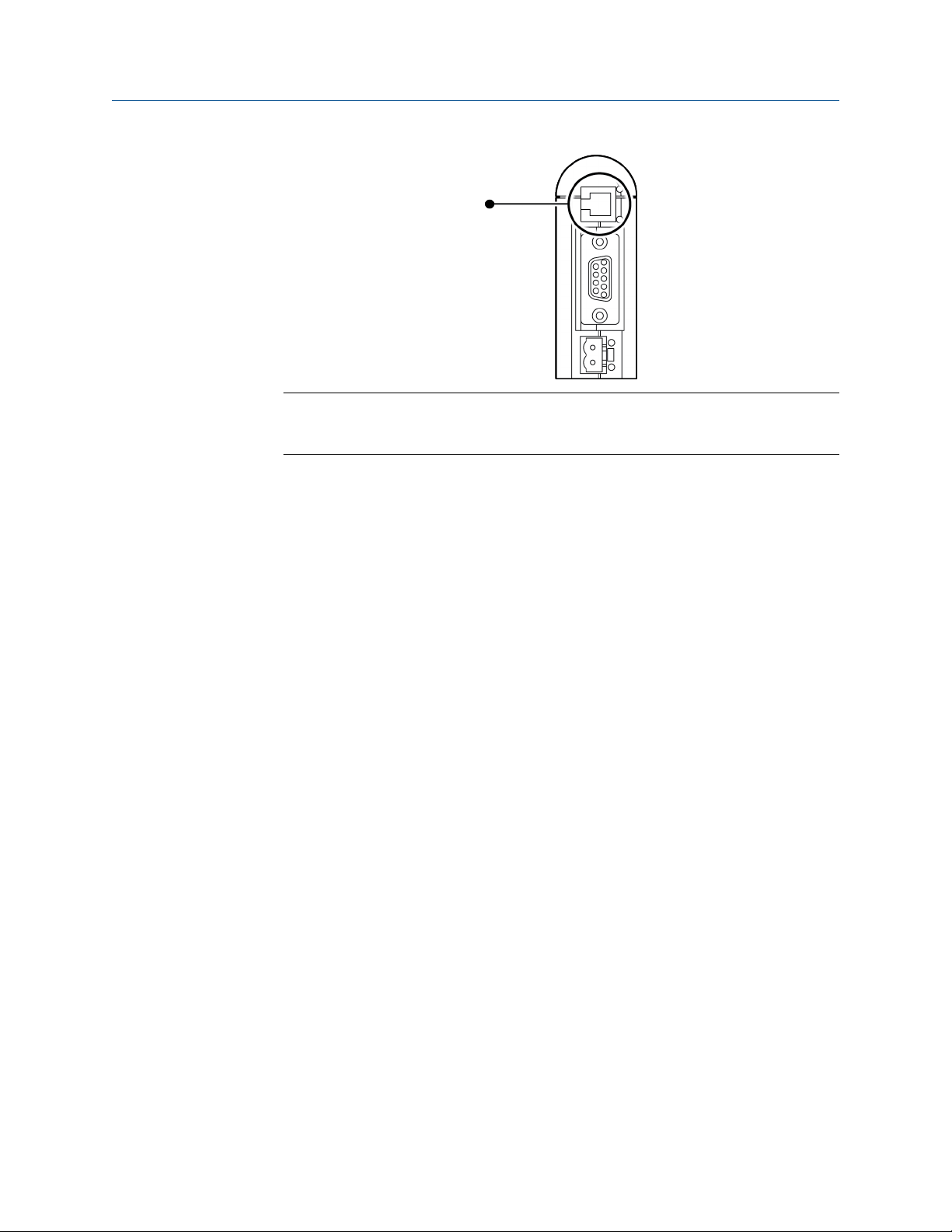
1.5 External view of device
A. Status LEDs
B. Configuration switches
C. Ethernet connector
D. PC connector (configuration)
E. Modbus serial connector (transmitter)
F. Power connector
G. DIN rail connector
1.6 Default web pages
The EtherNet/IP Module is preloaded with the Emerson standard web pages. These web
pages allow the user to view process data and alerts, to configure the most commonly
used parameters on the transmitter, to perform maintenance procedures, and to
download support files from the device.
1.7 Alternative web pages
To support the petroleum measurement or concentration measurement application,
Micro Motion supplies alternate sets of web pages and configuration files. These are
available for download from the Emerson web site.
8 Micro Motion EtherNet/IP Module

User Guide Installation
MMI-20019808 April 2022
2 Installation
2.1 Components
Ensure that you have all required components:
• Micro Motion EtherNet/IP Module
• Power connector
• Micro Motion EtherNet/IP Resource CD
— Micro Motion EtherNet/IP Module User Manual
— EDS file
— MicroMotion Ethernet Config Tool
• Configuration cable
• Modbus serial cable and connector (included)
• Ethernet cable and connector (not included)
User Guide 9

Installation User Guide
April 2022 MMI-20019808
2.2 Set up the module with MVD Direct Connect
Use the following procedures only if you are installing the module with MVD Direct
Connect.
Figure 2-1: MVD Direct Connect installations – Integral core processor, no I.S. barrier
A. Core processor
B. Sensor
C. User-supplied power cable
D. User-supplied RS-485 cable
E. DC power supply
F. Remote host
10 Micro Motion EtherNet/IP Module

User Guide Installation
MMI-20019808 April 2022
Figure 2-2: MVD Direct Connect installations – Remote core processor, no I.S. barrier
A. Junction box
B. Sensor
C. Micro Motion 9-wire cable
D. DC power supply
E. User-supplied power cable
F. User-supplied RS-485 cable
G. Core processor
H. Remote host
User Guide 11

Installation User Guide
April 2022 MMI-20019808
Figure 2-3: MVD Direct Connect installations – Integral core processor, I.S. barrier
A. Core processor
B. Sensor
C. 4-wire cable
D. Barrier
E. User-supplied RS-485 cable
F. User-supplied power cable
G. DC power supply
H. Remote host
I. Hazardous area
J. Safe area
12 Micro Motion EtherNet/IP Module
User Guide Installation
MMI-20019808 April 2022
Figure 2-4: MVD Direct Connect installations – Remote core processor, I.S. barrier
A. Junction box
B. Sensor
C. Micro Motion 9-wire cable
D. 4-wire cable
E. Core processor
F. Barrier
G. User-supplied RS-485 cable
H. User-supplied power cable
I. DC power
J. Remote host
K. Hazardous area
L. Safe area
User Guide 13

Installation User Guide
April 2022 MMI-20019808
2.2.1 Installing the MVD Direct Connect I.S. barrier
This step is required only for installations that include the MVD Direct Connect I.S. barrier.
Refer to Figure 2-3 and Figure 2-4.
Figure 2-5: Barrier dimensions in inches and (mm)
2.2.2
A. For mounting on 35 mm DIM rail
Wiring at the MVD Direct Connect I.S. barrier
This step applies only to installations that include the MVD Direct Connectc I.S. barrier.
Refer to Figure 2-3 and Figure 2-4.
Procedure
1. Conect the core processor to the barrier:
a) Connect the RS-485 wires from the core processor to the I.S. RS-485
terminals at the barrier (terminals 43 and 44), matching A and B. See
Table 2-1 and Figure 2-6. If you are using Micro Motion 4-wire cable, you can
identify the wires by color.
b) Connect the power supply wires from the core processor to the I.S. VDC
terminals at the barrier (terminals 42 and 41), matching positive and
negative (+ and –). See Table 2-1 and Figure 2-6. Do not terminate the
shields at the barrier.
14 Micro Motion EtherNet/IP Module

User Guide
MMI-20019808 April 2022
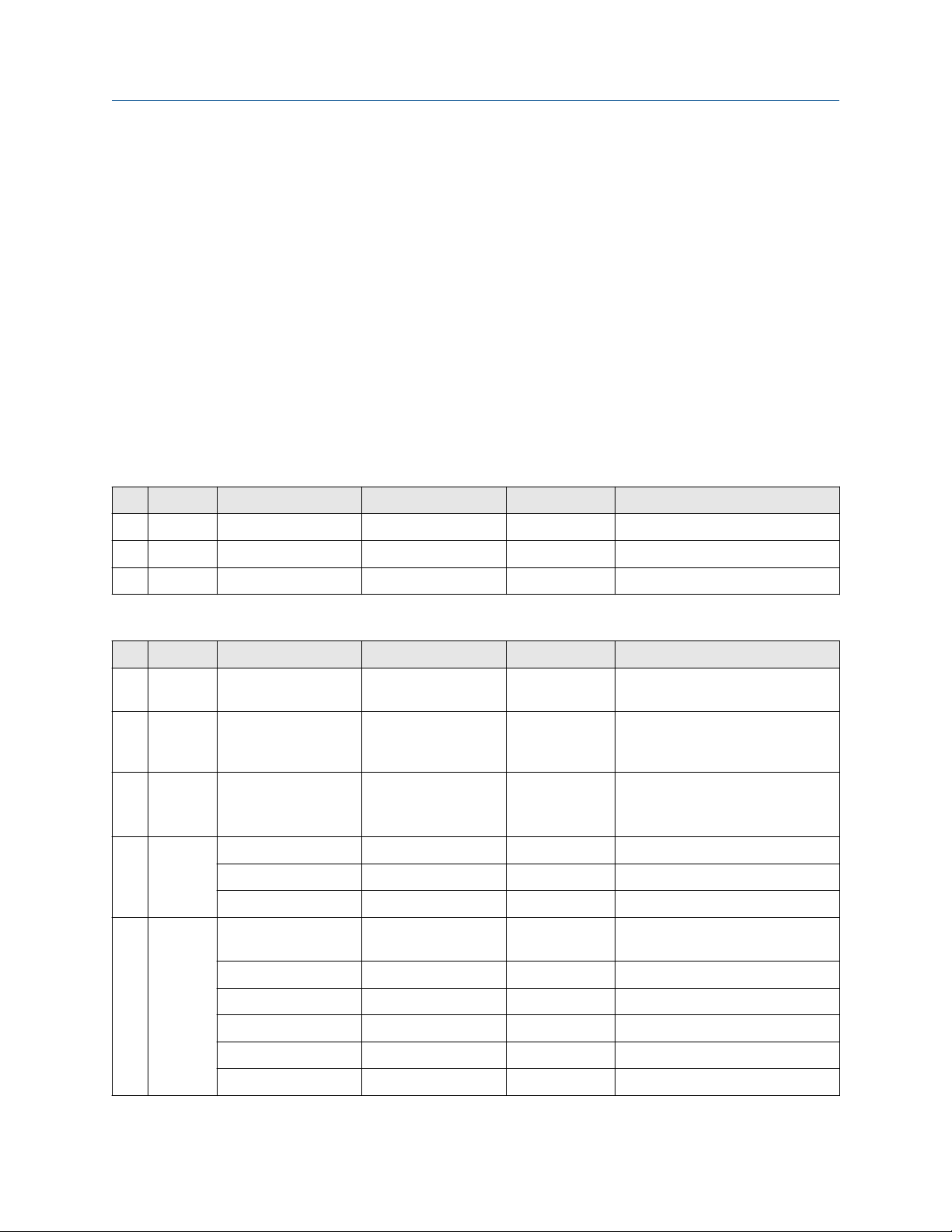
Table 2-1: Core processor terminals and barrier I. S. terminals
Installation
Function Wire color (Micro
Motion 4-wire cable
RS-485 A White 3 43
RS-485 B Green 4 44
VDC + Red 1 42
VDC - Black 2 41
2. Connect RS-485 wires to the non-I.S. RS-485 terminals at the barrier (terminals 13
and 14). See Figure 2-6. These wires will be used in the next step to connect the
barrier to the remote host. Do not terminate the shields at the barrier.
3. Connect power supply wires to the non-I.S. VDC terminals at the barrier (terminals
11 and 12). See Figure 2-6. These wires will be used in the next step to connect the
barrier to the power supply.
Figure 2-6: Barrier terminals
Core processor
terminals
Barrier I.S.
terminals
A. I.S. terminals for conection to core processor
B. I.S. terminals for conection to remote host and power supply
2.2.3
User Guide 15
Wiring to the remote host
This step is required for all MVD Direct Connect installations.
Procedure
1. At the remote host, open the wiring compartment and identify the RS-485
terminals. Refer to the vendor documentation if required.
2. If you are connecting the RS-485 wires directly from the core processor (see Figure
2-1 and Figure 2-2):
a) Connect the RS-485 wires from the core processor (for the Standard Core
Processor, refer to Figure 2-7 and for the Enhanced Core Processor, refer to
Figure 2-8) to the RS-485 terminals at the remote host.
b) Do not terminate the shield, braid, or drain wire(s) at the remote host.

Installation User Guide
April 2022 MMI-20019808
c) Do not terminate the RS-485 lines using the standard 60-ohm termination
resistor. If possible, do not terminate the RS-485 lines at all. If the RS-485
cable is 1000 feet (300 meters) long or longer, and termination is required,
the total termination must be 175 ohm or above.
Figure 2-7: Standard Core Wiring
A. Standard Core Processor
B. MVD Direct Connect Barrier
C. To Host
D. Ethernet IP Model
E. Power Supply
F. PC Connector
G. DB9 RS485
H. Ethernet Power Module 24V DC
16 Micro Motion EtherNet/IP Module

User Guide
Installation
MMI-20019808 April 2022
Figure 2-8: Enhanced Core Wiring
A. Enhanced Core Processor
B. MVD Direct Connect Barrier
C. To Host
D. Ethernet IP Model
E. Power Supply
F. PC Connector
G. DB9 RS485
H. Ethernet Power Module 24V DC
3. If you are connecting the RS-485 wires from the I.S. barrier (see Figure 2-3 and
Figure 2-4).
a) Connect the RS-485 wires from the barrier (see Figure 2-6) to the RS-485
terminals at the remote host.
b) Terminate the shields at the remote host.
User Guide 17

Installation User Guide
April 2022 MMI-20019808
c) The barrier contains internal pull-up/pull-down and termination resistors. Do
not add external resistors.
4. Close the wiring compartment.
2.2.4 Wiring to the power suppy
This step is required for all MVD Direct Connect installations.
Procedure
1. You may connect multiple MVD Direct Connect installations to a single power
supply, as long as each installation receives sufficient power.
2. If you are connecting the power supply wires directly from the core processor (see
Figure 2-1 and Figure 2-2):
a) Do not connect any other equipment to the power supply used for MVD
Direct Connect installations.
b) Connect the power supply wires from the core processor (for the Standard
Core Processor, refer to Figure 2-9 and for the Enhanced Core Processor,.
refer to Figure 2-10), matching positive and negative (+ and –).
18 Micro Motion EtherNet/IP Module

User Guide Installation
MMI-20019808 April 2022
Figure 2-9: Standard Core Wiring
A. Standard Core Processor
B. MVD Direct Connect Barrier
C. To Host
D. Ethernet IP Model
E. Power Supply
F. PC Connector
G. DB9 RS485
H. Ethernet Power Module 24V DC
User Guide 19

Installation
User Guide
April 2022 MMI-20019808
Figure 2-10: Enhanced Core Wiring
A. Enhanced Core Processor
B. MVD Direct Connect Barrier
C. To Host
D. Ethernet IP Model
E. Power Supply
F. PC Connector
G. DB9 RS485
H. Ethernet Power Module 24V DC
3. If you are connecting the power supply wires from the I.S. barrier (see Figure 2-3
and Figure 2-4):
a) The power supply may be used to power other equipment.
b) Connect the power supply wires from the barrier (see Figure 2-6), matching
positive and negative (+ and –).
20 Micro Motion EtherNet/IP Module

User Guide Installation
MMI-20019808 April 2022
2.2.5 Grounding
This step is required for all MVD Direct Connect installations.
NOTICE
Improper grounding could cause measurement error. To reduce the risk of measurement
error:
• Ground the meter to earth, or follow ground network requirements for the facility.
• For installation in an area that requires intrinsic safety, refer to the appropriate Micro
Motion approval documentation.
• For hazardous area installations in Europe, refer to standard EN 60079-14 if national
standards do not apply.
The sensor/core processor assembly (see Figure 2-1 and Figure 2-3) or the sensor alone
(see Figure 2-2 and Figure 2-4) must be grounded. To ground these components, see the
sensor installation manual.
If your installation includes a remote core processor (see Figure 2-2 and Figure 2-4), it
must be grounded. To ground the remote core processor:
• The core processor has two internal ground screws: one 4-wire ground screw and one
9-wire ground screw. Do not use the 4-wire ground screw. The 9-wire ground screw
may be used (see Figure 2-11). To access the 9-wire ground screw, remove the core
processor end-cap (see Figure 2-12).
• Use copper wire, 14 AWG (2,0 mm2) or larger, for grounding.
• Keep all ground leads as short as possible, less than 1 ohm impedance.
• Connect ground leads directly to earth, or follow plant standards.
If your installation includes the MVD Direct Connect I.S. barrier (see Figure 2-3 and Figure
2-4), the barrier is not grounded. Do not ground the barrier.
User Guide 21

Installation
April 2022 MMI-20019808
Figure 2-11: Core Processor Components
A. Conduit Opening for 4-Wire Cable
B. Conduit Opening for 9-Wire Cable
C. Mounting Bracket
D. Core Processor Cover
E. 4 X Cap Screws (4mm)
F. Core Processor Housing
G. Endcap (to 9-Wire Ground Screw)
User Guide
Figure 2-12: Core Processor 9-wire ground screw
A. 9-wire ground screw
2.3 Set up the transmitter
Use this procedure only if you are installing the module with a transmitter.
Procedure
1. Mount the transmitter and wire it to the sensor and to power.
2. Power up the transmitter.
3. Set the Modbus address on the transmitter to 1.
22 Micro Motion EtherNet/IP Module

1
2
User Guide Installation
MMI-20019808 April 2022
4. If your transmitter does not support Modbus auto-detect, configure the RS-485
terminals as follows:
• Modbus RTU
• 38400 baud
• 2 stop bits
• No parity
Postrequisites
Continue to Mount, wire, and set the network settings.
2.4 Mount, wire, and set the network settings
Use this procedure to mount, wire, and set the network settings for both the transmitter
and MVD Direct Connect configurations.
Procedure
1. Ensure that the following slot registers are available for use by the EtherNet/IP
Module:
• 655–750
• 751–846
If these slot registers are currently in use, you must reprogram your Modbus
interface.
2. Mount the EtherNet/IP Module on the DIN rail.
Figure 2-13: Snap on
User Guide 23

2
1
Installation
User Guide
April 2022 MMI-20019808
Figure 2-14: Snap off
3. Wire the EtherNet/IP Module to power (24 VDC).
Figure 2-15: Power connections on the EtherNet/IP module
A. 24 VDC
B. Ground
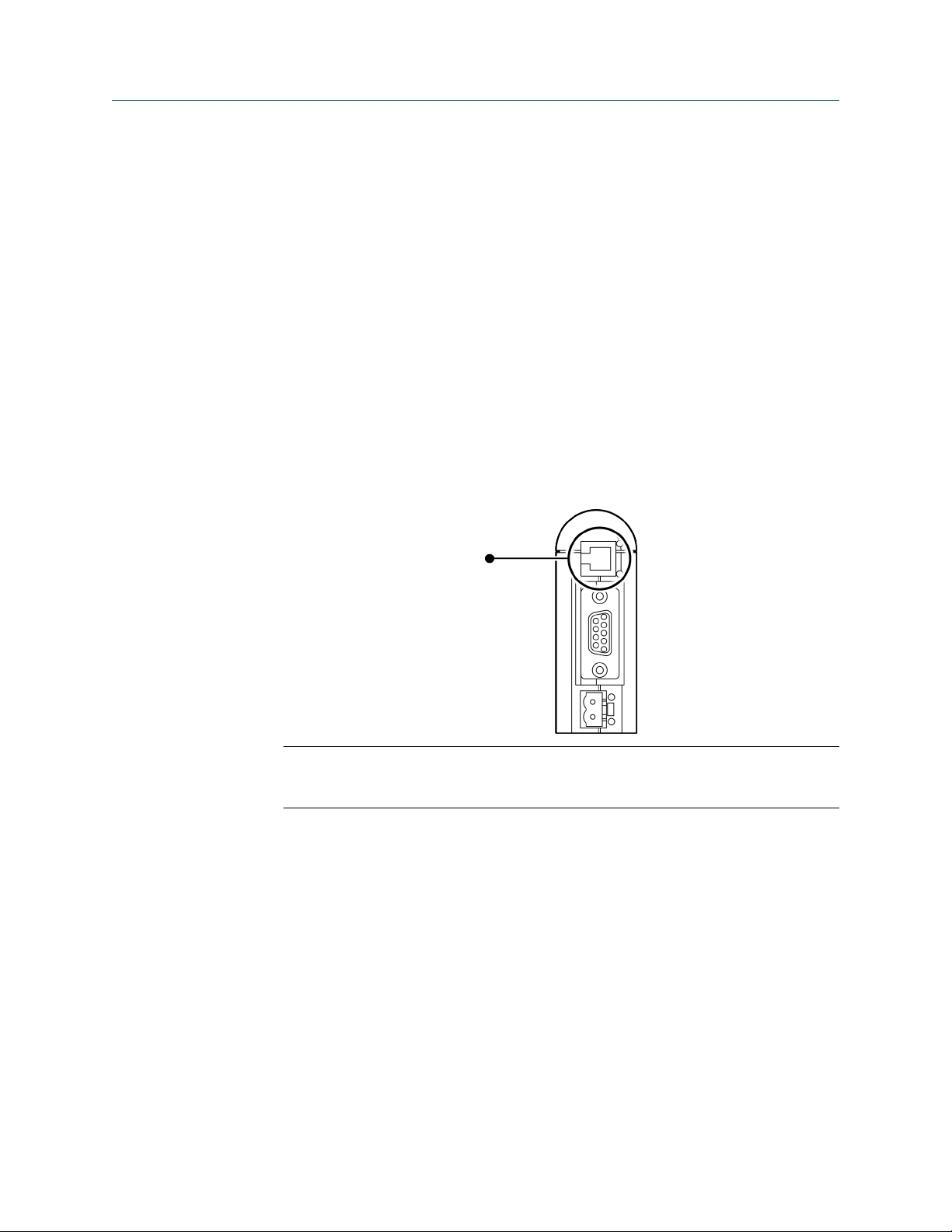
4. Install the Modbus serial cable between the EtherNet/IP Module and the RS-485
terminals on the transmitter (or the I.S. barrier, if present).
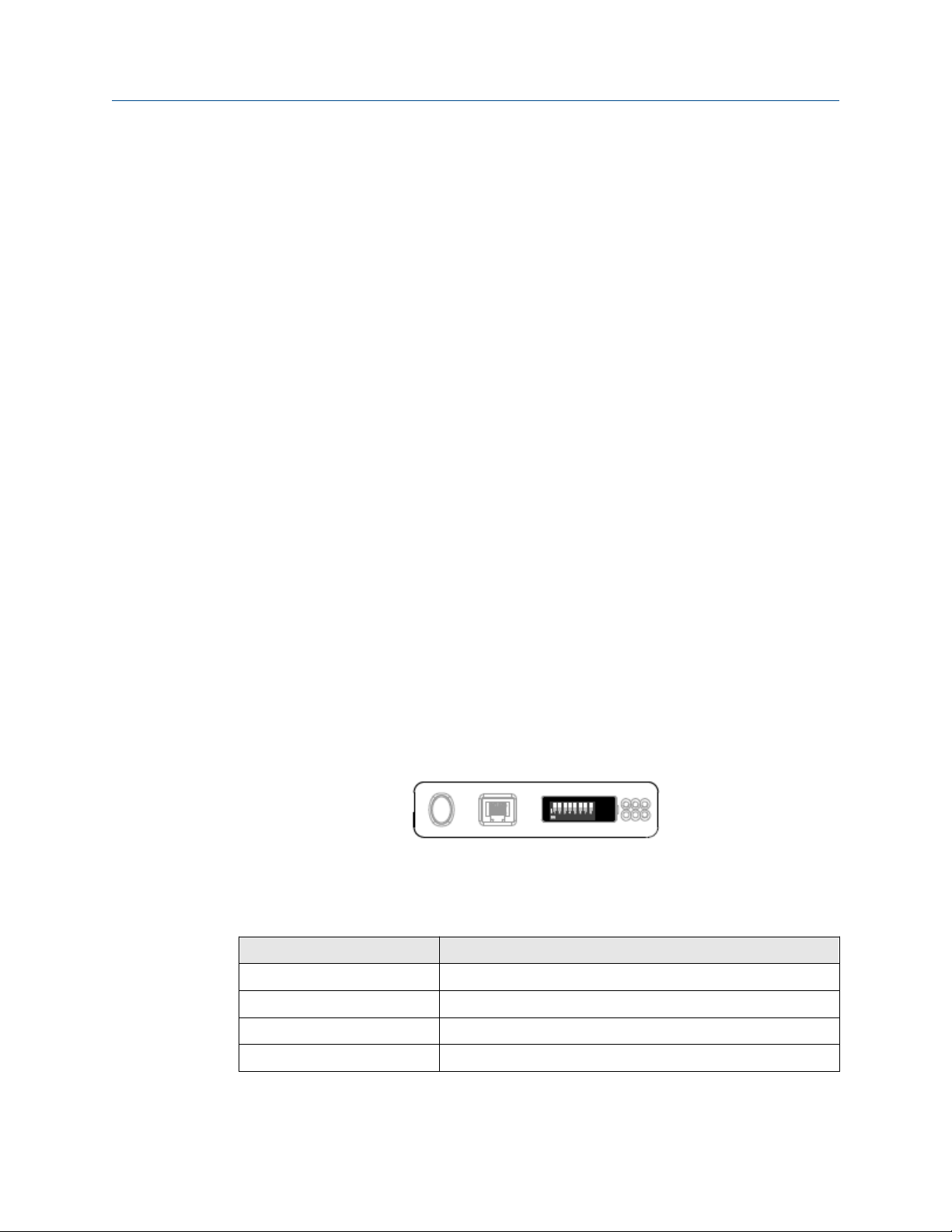
Figure 2-16: Modbus serial connector on the EtherNet/IP module
See Modbus terminals and Pin assignments (EtherNet/IP Module).
5. Set the configuration dip switches on the EtherNet/IP module as follows:
24 Micro Motion EtherNet/IP Module

User Guide
Installation
MMI-20019808 April 2022
• Switches 1–7: Off
• Switch 8: On
The IP addess is set to 192.168.0.1.
6. If you are using a Model 1500, Model 2500, or Series 3000 transmitter, ensure that
the RS-485 terminals are in RS-485 mode.
7. Cycle power to the transmitter and wait 15 seconds before applying power to the
EtherNet/IP Module.
8. Power up the EtherNet/IP Module.
The module will attempt to make a Modbus connection to the transmitter.
9. Is the Subnet Status LED (LED 5) green?
Option Description
Yes Continue with these steps.
No See LED indicators.
10. Set the network settings for the EtherNet/IP Module.
a) Change the Ethernet address setting for your PC so that it is on the same
subnet as the device. When prompted, enter the following:
• IP address: 192.168.0.x, where x is something other than 1
• Subnet mask: 255.255.255.0
b) Disable the popup blocker on your web browser.
c) Use a crossover cable (or a standard cable with a switch) and your web
browser to connect to the device, using the IP address assigned in Step 6:
192.168.0.1.
d) At the login screen, log in as user admin. The default password is admin.
Ignore the auto-configuration popup window.
e) On the Network Settings page, change the settings as required, and close the
web browser.
f) At the EtherNet/IP Module, set all dip switches to Off.
g) Cycle power to the EtherNet/IP Module.
11. Connect the EtherNet/IP Module to the Ethernet network.
See Ethernet connector.
12. Wait for the auto-configuration process to complete.
Important
For initial startup, you must use the auto-configuration process to ensure that
device memory is completely set up.
13. Add the EtherNet/IP Module to the Ethernet network control system. The EDS file is
available on the Resource CD, the EtherNet/IP Module (download from
Administration page), and the Emerson web site.
User Guide 25

Installation
April 2022 MMI-20019808
Postrequisites
For more information on transmitter installation and wiring, see your transmitter
installation manual. For information on configuring the RS-485 terminals and making an
RS-485 connection, see your transmitter configuration manual.
User Guide
2.4.1 Modbus terminals
Transmitter RS-485/A RS-485/B
Model 1500 33 34
Model 1700 with analog outputs 5 6
Model 2500 33 34
Model 2700 with analog outputs 5 6
Model 3500 with screw-type or solder-tail
terminals
Model 3500 with I/O cables 25 24
Model 3700 12 11
32a 32b
2.5 Micro Motion Ethernet Config Tool installation (optional)
Related information
Install the Ethernet Config Tool
2.5.1
Ethernet Config Tool system requirements
• Pentium 133 MHz or higher
• 10 MB of free space
• 8 MB RAM
• Windows NT v4.0 or higher, Windows 2000, or Windows XP
• Internet Explorer v4.01 SP1 or higher
2.5.2
26 Micro Motion EtherNet/IP Module
Install the Ethernet Config Tool
Procedure
1. Install the software program. Locate and run the EtherNet/IP Module setup
program on the EtherNet/IP Module Resource CD and follow the on-screen
instructions.
2. Connect the configuration cable from your PC to the EtherNet/IP Module.
User Guide Installation
MMI-20019808 April 2022
Note
For information on the Micro Motion Ethernet Config Tool user interface, see the
Anybus Communicator manual.
Related information
Micro Motion Ethernet Config Tool installation (optional)
User Guide 27

Installation User Guide
April 2022 MMI-20019808
2.6 Configure the EtherNet/IP Module
Procedure
1. From your browser, login to the EtherNet/IP Module as user admin.
2. Choose one of the following:
• NOTICE
Wait for the web pages to automatically configure the EtherNet/IP Module.
• Use the Device Configuration page to configure the EtherNet/IP Module.
3. Set up I/O at your Ethernet host by doing one of the following:
• If you are not using RSLogix, use your standard method. For information on the
I/O assemblies, see I/O data.
• If you are using RSLogix, select ETHERNET-MODULE - Generic Ethernet Module
and enter the required information.
28 Micro Motion EtherNet/IP Module
User Guide Basic network configuration
MMI-20019808 April 2022
3 Basic network configuration
3.1 TCP/IP settings
To participate on the Ethernet network, the EtherNet/IP Module needs a valid TCP/IP
configuration.
The EtherNet/IP Module can retrieve the TCP/IP settings from a DHCP or BootP server. If no
such server is found, the EtherNet/IP Module uses the settings from the system file
\ethcfg.cfg. If this file is not found, or the settings are invalid, the EtherNet/IP Module
will halt and report an error on the status LED. However, the network configuration may
still be accessed via the Ethernet Config Tool.
You can define the TCP/IP settings for the EtherNet/IP Module in the following ways:
• Micro Motion Network Configuration web page (recommended)
• Configuration switches on the device
3.1.1
3.1.2
• Ethernet Config Tool
• System file \ethcfg.cfg on the device
Micro Motion web page for network configuration
The Network Configuration page, in the Micro Motion web pages, allows you to set the IP
address, gateway address, and subnet address. If you connect to the EtherNet/IP Module
using a crossover cable and the default IP address, you can set all three parameters. The
changes will take effect at the next connection.
Configuration switches
If the configuration switches on the EtherNet/IP module are set to any non-zero value, the
device is locked to the following network settings:
Table 3-1: Network settings, locked
Parameter Value
IP address 192.168.0.x where x is determined by the switches
Gateway 192.168.0.255
Subnet 255.255.255.0
DHCP OFF
User Guide 29
Basic network configuration User Guide
April 2022 MMI-20019808
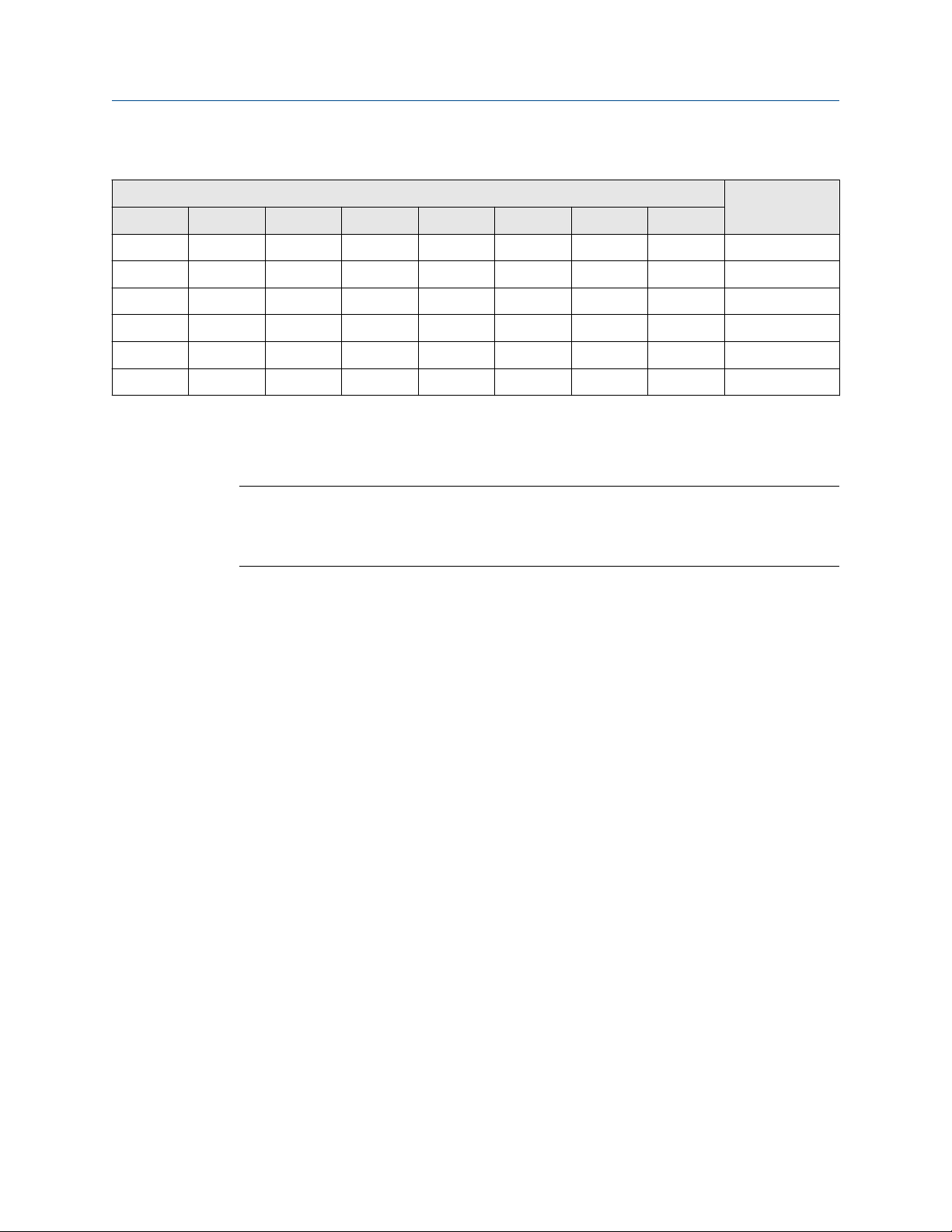
Table 3-2: Network settings using switches
Switch IP address
1 2 3 4 5 6 7 8
OFF OFF OFF OFF OFF OFF OFF ON 192.168.0.1
OFF OFF OFF OFF OFF OFF ON OFF 192.168.0.2
OFF OFF OFF OFF OFF OFF ON ON 192.168.0.3
… … … … … … … … …
ON ON ON ON ON ON ON OFF 192.168.0.254
ON ON ON ON ON ON ON ON Invalid
3.1.3 Ethernet Config Tool
See the Anybus Communicator manual for instructions.
Note
If you change the network settings using the Ethernet Config Tool, you will not be able to
use the Micro Motion web pages to change network settings in the future. All future
changes to network settings must be performed using the Ethernet Config Tool.
3.1.4
Set the configuration switches with ethcfg.cfg file
To set the network settings using the \ethcfg.cfg file:
Procedure
1. Set all configuration switches on the device to OFF.
2. Make a connection to the device from the Ethernet Config Tool and disable TCP/IP
Settings (Fieldbus parameter section). Alternatively, you can access the TCP/IP
parameters using the TCP/IP Interface Object.
3. From the FTP server, access and edit \ethcfg.cfg as desired.
In this scenario, if no \ethcfg.cfg file is found, the EtherNet/IP Module will
attempt to retrieve the settings via DHCP for 30 seconds. If the attempt fails, the
EtherNet/IP Module will halt and indicate an error via the LEDs.
See the Anybus Communicator manual for more information.
30 Micro Motion EtherNet/IP Module

User Guide Basic network configuration
MMI-20019808 April 2022
3.1.5 IP access control
You can limit the set of IP addresses that are allowed to connect to the EtherNet/IP
Module. This information is stored in the system file \ip_accs.cfg.
Sample file:
[Web]
xxx.xxx.xxx.xxx (All nodes listed can access the EtherNet/IP
Module web
server)
...
[FTP]
xxx.xxx.xxx.xxx (All nodes listed can access the EtherNet/IP
Module FTP
server)
...
[EtherNet/IP]
xxx.xxx.xxx.xxx (All nodes listed can access the EtherNet/IP
Module via
EtherNet/IP)
...
[All]
xxx.xxx.xxx.xxx (Fallback setting; used when one or more of the
above
keys is omitted)
...
3.2 Modbus serial network settings
The default parameters for the Modbus serial network are listed in the following table.
Parameter
Baud 38400 1200 to 57600
Data bits 8 (Modbus RTU) 7 (Modbus ASCII)
Parity None None
Physical layer RS485 RS485 (required for EtherNet/IP
Start bits 1 1
Stop bits
(1) For baud rates of 38400 and above, 2 stop bits are required.
(1)
These must match the RS-485 parameters configured in the transmitter. To change them
in the EtherNet/IP Module, you must use the Ethernet Config Tool. See the Anybus
Communicator manual for more information.
Default setting Valid values
2 1
8 (Modbus RTU)
Odd
Even
Module)
2
User Guide 31

Basic network configuration User Guide
April 2022 MMI-20019808
32 Micro Motion EtherNet/IP Module

User Guide Emerson web server
MMI-20019808 April 2022
4 Emerson web server
The configuration and administration functions of the Micro Motion EtherNet/IP Module
are implemented as web pages on the device. Users use their web browsers to connect to
the web server. Your browser will automatically directed to the Emerson web pages.
4.1 Web server access information
Ports
The web server communicates through port 80.
Users
Two users are predefined for the Emerson web pages. You can change the passwords, but
you cannot add or delete users.
Username Default password Description
admin admin Complete access to all functions on the Emerson
web pages
operator operator Read-only access to the Emerson web pages
4.2 Emerson EtherNet/IP Module web pages
When you connect to the EtherNet/IP Module, you are prompted for a user name and
password, then directed to the EtherNet/IP Module home page.
Use the web pages to do the following tasks:
• Administer passwords and the EDS file download
• Administer network configurations
• Monitor, configure, and maintain process data, totalizers, Smart Meter Verification,
etc.
Note
If the EtherNet/IP Module loses communication with the Micro Motion device, the web
page will indicate the communication error between the EIP module and the Micro Motion
transmitters.
For more details, refer to the transmitter configuration manual.
User Guide 33

Emerson web server User Guide
April 2022 MMI-20019808
34 Micro Motion EtherNet/IP Module

User Guide Integrate with Rockwell programming software
MMI-20019808 April 2022
5 Integrate with Rockwell
programming software
5.1 Integrate with Rockwell versions 20 or later
If you have Rockwell RSLogix 5000 or Studio 5000 Logix Designer version 20 or later
firmware and programming software, use this section to load the Electronic Data Sheet
(EDS) and commission the device using the RSLogix 5000 programming package.
Prerequisites
If you are upgrading the EDS from an older version, unregister the old EDS first using the
RSLogix EDS Hardware Installation Tool at Tools → EDS Hardware Installation Tool.
Procedure
1. Connect to the EtherNet/IP module through your web browser and download the
EDS file.
See Emerson web server.
2. In RSLogix 5000, choose Tools → EDS Hardware Installation Tool and register the
EtherNet/IP module EDS file.
3. If you have an established RSLogix Ethernet network, skip this step. If not, follow
these steps to create a network:
a) From RSLogix 5000, right-click the controller/backplane in the tree view.
b) Select New Module.
c) Select the appropriate Ethernet card.
d) Select Create.
e) Enter the Name.
f) Enter the IP Address.
g) Select the Slot where your Ethernet card is located.
h) Select OK.
i) On the Select Module Type window, select Close.
4. To add the Micro Motion EtherNet/IP module to the RSLogix 5000 Ethernet
network, right-click the Ethernet network and select New Module.
a) From the Select Module Type window, select the following options and select
Create:
Pane
Module Type Category Filters Communications Adapter
Module Type Vendor Filters Micro Motion, Inc.
User Guide 35
Option
Integrate with Rockwell programming software User Guide
April 2022 MMI-20019808
The New Module properties dialog displays. The EDS generates an Add On
Profile (AOP) for the Micro Motion Ethernet/IP module that loads all the
variables into the controller's input and output image tables as named
variables with the correct data types.
b) Enter the Name of the module.
c) Enter the IP Address.
5. Change or keep the current connection type.
Change the connection type Go to Step 6
Keep the currect connection type Go to Step 7
6. To change the connection type, select the General tab, change the connection
type.
a) Select the Change button.
b) Select the current connection.
Default = IO Connection
A pull-down menu with all the available connection types displays.
c) Select your appropriate connection, and press OK .
Important
If you change the connection after the device goes online, take the controller
offline for the change to take effect.
7. To keep the current connection type:
a) Select the current connection.
Default = IO Connection
A pull-down menu with all available connection types displays.
b) Select a connection and press OK.
Important
If you change the connection after the device goes online, take the controller
offline for the change to take effect.
8. On the New Module properties dialog, select OK.
9. On the Select Module Type dialog, select Close.
10. Open Controller Tags to verify the data organization.
5.2
36 Micro Motion EtherNet/IP Module
Integrate with Rockwell versions 19 or earlier
Use this section if you have Rockwell RSLogix 5000 version 19 or earlier firmware and
programming software. These early versions do not support Micro Motion Ethernet/IP
User Guide Integrate with Rockwell programming software
MMI-20019808 April 2022
module Electronic Data Sheet (EDS)-generated Add On Profile (AOP). Instead, you must
use the generic module hardware tree.
Procedure
1. Connect to the EtherNet/IP module through your web browser and download the
EDS file.
See Emerson web server.
2. In RSLogix 5000, choose Tools → EDS Hardware Installation Tool and register the
EtherNet/IP module EDS file.
3. If you have an established RSLogix Ethernet network, skip this step. If not, follow
these steps to create a network:
a) From RSLogix 5000, right-click the controller/backplane in the tree view.
b) Select New Module.
c) Select the appropriate Ethernet card.
d) Select Create.
e) Enter the Name.
f) Enter the IP Address.
g) Select the Slot where your Ethernet card is located.
h) Select OK.
i) On the Select Module Type window, select Close.
4. From RSLogix 5000, choose File → New.
5. Select your version from the Revision drop-down menu.
6. Enter a Name for your application.
7. Select the Slot where your Ethernet card is located.
8. Press OK.
9. To add the Micro Motion EtherNet/IP module to the RSLogix 5000 Ethernet
network, right-click the Ethernet network and select New Module.
a) Select the ETHERNET-MODULE Generic Ethernet Module and press OK.
10. Select the appropriate assembly instances for your application. Enter the assembly
numbers in the generic module setup, along with the data sizes.
Note
If your Comm Format is anything other than Data-INT, the data sizes will be
different from the sizes shown in the following tables.
Table 5-1: Standard configuration
Parameter Entry
Name MicroMotion_EIP
Description Micro Motion EtherNet/IP Module Basic
Configuration
User Guide 37

Integrate with Rockwell programming software User Guide
April 2022 MMI-20019808
Table 5-1: Standard configuration (continued)
Parameter Entry
Comm Format Data-INT
IP Address Your IP address
Input Assembly Instance: 100
Size: 20
Output Assembly Instance: 150
Size: 7
Configuration Assembly Instance: 3
Size: 0
Table 5-2: Concentration measurement
Parameter Entry
Name MicroMotion_EIP
Description Micro Motion EtherNet/IP Module CM
Comm Format Data-INT
IP Address Your IP address
Input Assembly Instance: 100
Size: 42
Output Assembly Instance: 150
Size: 7
Configuration Assembly Instance: 3
Size: 0
Table 5-3: Petroleum measurement
Parameter Entry
Name MicroMotion_EIP
Description Micro Motion EtherNet/IP Module PM
Comm Format Data-INT
IP Address Your IP address
Input Assembly Instance: 100
Size: 30
Output Assembly Instance: 150
Size: 7
38 Micro Motion EtherNet/IP Module

User Guide Integrate with Rockwell programming software
MMI-20019808 April 2022
Table 5-3: Petroleum measurement (continued)
Parameter Entry
Configuration Assembly Instance: 3
Size: 0
11. Press OK.
12. Open Controller Tags to see the data organization.
13. Use your preferred programming techniques to convert the data from the input and
output image tables to the correct data types.
If you are not using RSLogix or Studio 5000 Logix designer, use your standard
method. For information on I/O assemblies, see I/O data.
User Guide 39

Integrate with Rockwell programming software User Guide
April 2022 MMI-20019808
40 Micro Motion EtherNet/IP Module

User Guide Troubleshooting
MMI-20019808 April 2022
6 Troubleshooting
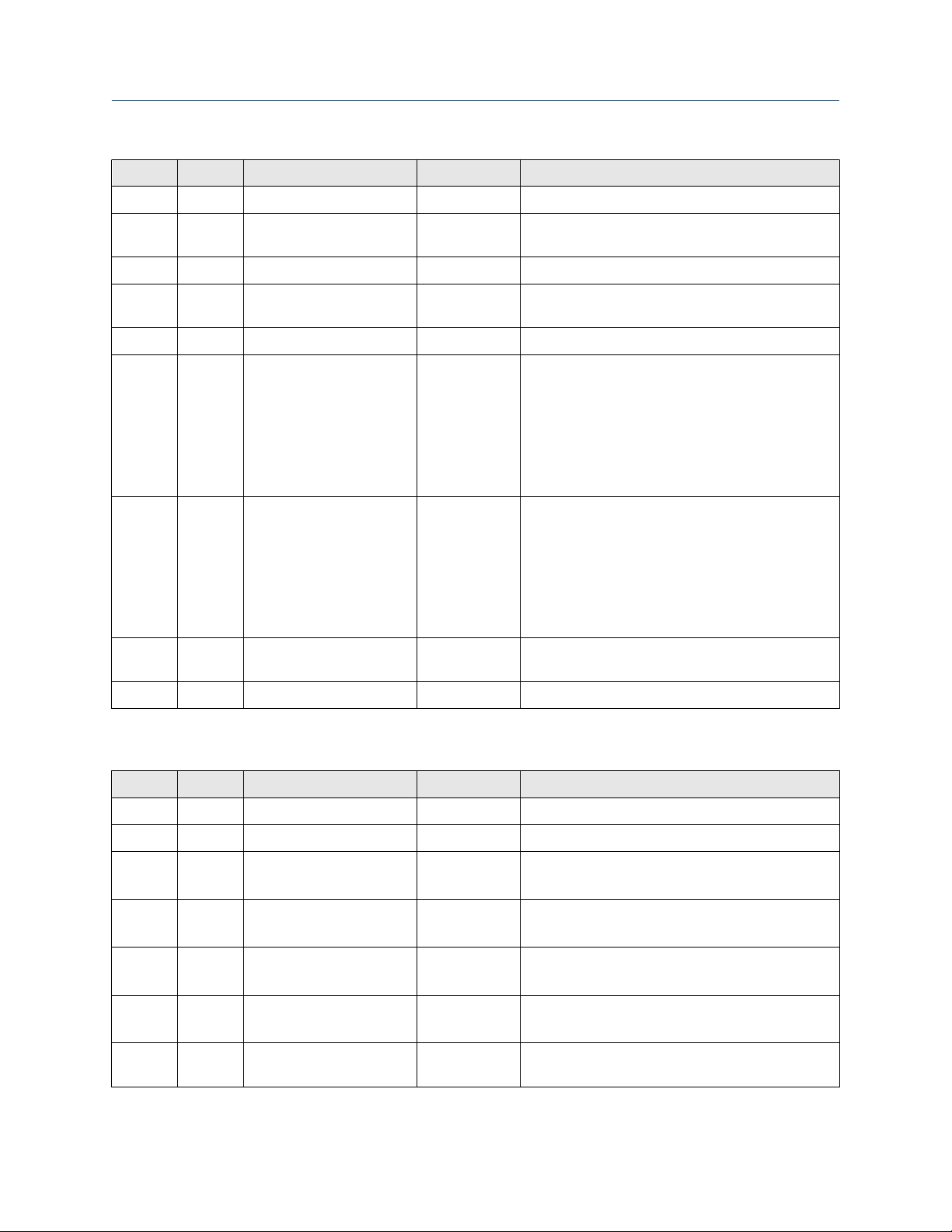
6.1 LED indicators
LED
number
A Module Status
B Network Status
Name Status Description
(EtherNet)
(EtherNet)
Off No power applied to the module.
Solid green The module is operating correctly.
Flashing green Standby. The module has not been initialized.
Flashing red Minor fault. The module may or may not be able
to recover.
Solid red Major fault. No recovery is possible. The module
must be retuned to Micro Motion for repair. See
the manual for the return policy.
Flashing green/red Self-test.
Off The module has not power or no IP address has
been assigned.
Solid green The module has at least one established
EtherNet/IP connection.
Flashing green There are no EtherNet/IP connections established
to the module.
Flashing red One or more of the connections to this module
has timed out.
Solid red The module has detected that its IP address is
already in use.
Flashing green/red Self-test.
C Link Off The module does not sense a link.
Green The module is connected to an Ethernet network.
D Activity Flashing green Packet is received or transmitted.
User Guide 41
Troubleshooting User Guide
April 2022 MMI-20019808
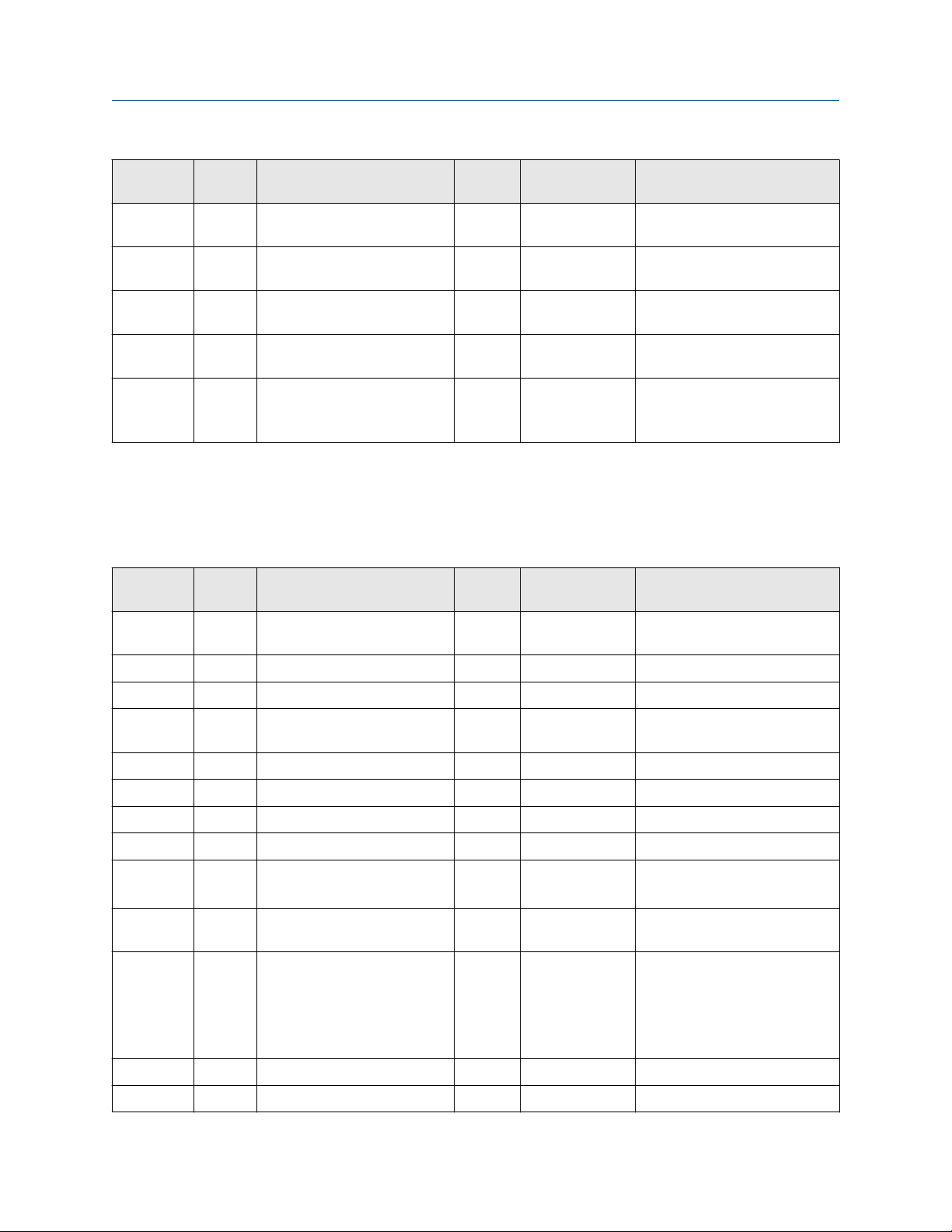
LED
number
E Subnet Status
F Device Status
Name Status Description
Off Power off.
(Modbus
Serial)
(Modbus
Serial)
Flashing green Running correctly, but one or more transaction
Green Running.
Red Transaction error/timeout or network stopped.
Flashing red Missed transactions.
Off Power off.
Flashing red/green Configuration missing or invalid.
Red Contact customer service.
Flashing red Contact customer service.
Green Initializing.
Flashing green Configuration OK.
6.2 Common problems
errors has occurred.
Check the Modbus serial network wiring and
configuration, especially the baud.
6.2.1 Configuration upload or download problem
Cause
The serial communication failed.
Recommended actions
Try again.
6.2.2
Red Config Line LED
The Config Line LED turns red in the Ethernet Config Tool.
Cause
The serial communication failed.
Recommended actions
Try again.
42 Micro Motion EtherNet/IP Module

User Guide
MMI-20019808 April 2022
Troubleshooting
6.2.3 Cannot connect to the EtherNet/IP Module
The serial port seems to be available, but it is not possible to connect to the EtherNet/
IPModule.
Cause
The serial port may be in use by another application.
Recommended actions
1. Exit the EtherNet/IP Module Configuration Tool and close all other applications,
including the ones in the system tray.
2. Try again.
3. Select another serial port.
4. Try again.
6.2.4
6.2.5
Poor performance
Cause
The serial communication failed.
Recommended actions
1. In the Ethernet Config Tool, right-click Sub-Network in the Navigation window.
a) Select Sub-Network Status to see status and diagnostic information
about the Modbus serial network.
b) If the EtherNet/IP Module reports a large number of re-transmissions,
check your cabling or try a lower baud rate setting for the Modbus serial
network, if possible.
2. Is the Sub-Net Monitor in the Ethernet Config Tool active?
The sub-network monitor has a negative influence on the overall performance
of the gateway, and should be used only when necessary.
3. Is the Node Monitor of the Ethernet Config Tool active?
The node monitor has a negative influence on the overall performance of the
gateway, and should be used only when necessary.
No Modbus serial network functionality
Recommended actions
1. Connect to the device and login to the webserver. Allow the web server to
automatically configure the device's process variable slot.
2. Use the Data logger functionality of the Ethernet Config Tool to record the
serial data communication on the sub-network.
3. If no data is being transmitted, use the Ethernet Config Tool to record the serial
data communication on the sub-network.
User Guide 43

Troubleshooting User Guide
April 2022 MMI-20019808
4. If no data is being received, check the cables and connections. Also verify that
the transmitted data is correct.
6.2.6 Process variables display or report 0
Recommended actions
Verify the Modbus connection between the EtherNet/IP Module and the device.
44 Micro Motion EtherNet/IP Module

User Guide Connector pin assignments
MMI-20019808 April 2022
A Connector pin assignments
A.1 Ethernet connector
Pin Signal
Housing Cable shield
1 TD+
2 TD–
3 RD+
4 Termination
5 Termination
6 RD–
7 Termination
8 Termination
A.2 Power connector
Pin Description
1 24 VDC
2 Ground
• Use 60/75 or 75 x C copper (CU) wire only.
• The terminal tightening torque must be between 5 and 7 lbs-in (0.5 to 0.8 Nm).
A.3 Micro Motion Ethernet Config Tool installation
(optional)
Related information
Install the Ethernet Config Tool
User Guide 45
Connector pin assignments User Guide
April 2022 MMI-20019808
A.3.1 Ethernet Config Tool system requirements
• Pentium 133 MHz or higher
• 10 MB of free space
• 8 MB RAM
• Windows NT v4.0 or higher, Windows 2000, or Windows XP
• Internet Explorer v4.01 SP1 or higher
A.3.2 Install the Ethernet Config Tool
Procedure
1. Install the software program. Locate and run the EtherNet/IP Module setup
program on the EtherNet/IP Module Resource CD and follow the on-screen
instructions.
2. Connect the configuration cable from your PC to the EtherNet/IP Module.
Note
For information on the Micro Motion Ethernet Config Tool user interface, see the
Anybus Communicator manual.
Related information
Micro Motion Ethernet Config Tool installation (optional)
46 Micro Motion EtherNet/IP Module
User Guide Connector pin assignments
MMI-20019808 April 2022
A.4 Modbus serial network interface
The Modbus serial network is based on an RS-485 physical layer.
A.4.1 Bias resistors
When idle, RS-485 enters an indeterminate state, which may cause the serial receivers to
pick up noise from the serial lines and interpret this as data. To prevent this, the serial lines
should be forced into a known state using pull-up and pull-down resistors, commonly
known as bias resistors.
The bias resistors forms a voltage divider, forcing the voltage between the differential pair
to be higher then the threshold for the serial receivers, typically >200 mV. Note that bias
resistors shall only be installed on one node. Installing bias resistors on several nodes may
compromise the signal quality on the network and cause transmission problems.
A.4.2
A.4.3
Termination
To avoid reflections on the serial lines, it is important to properly terminate the subnetwork by placing termination resistors between the serial receivers near the end nodes.
Additionally, if the distance from the EtherNet/IP Module to the transmitter is greater than
100 feet, Micro Motion recommends adding the termination resistors.
The resistor value should ideally match the characteristic impedance of the cable, typically
100 to 120 Ω.
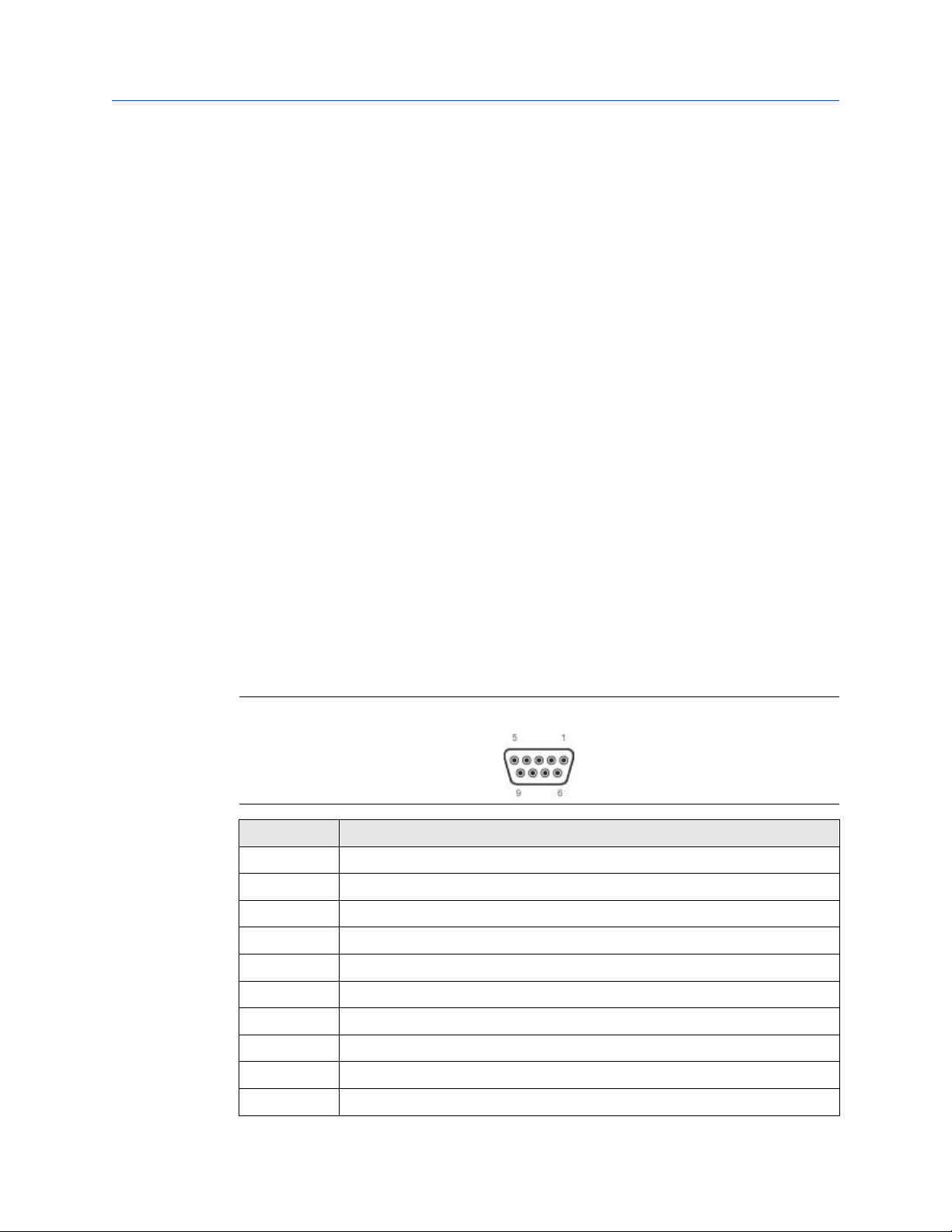
Pin assignments (EtherNet/IP Module)
Figure A-1: Female connection
Pin
1 5 V output (100mA max)
2 Unused
3 Unused
Description
4 Unused
5 Ground
6 Unused
7 Unused
8 RS-485/A (Tx+)
9 RS-485/B (Tx–)
(housing) Cable shield
User Guide 47

Connector pin assignments User Guide
April 2022 MMI-20019808
A.5 Typical connection
A. Signal ground
B. Cable shield
C. Node
D. Signal ground
48 Micro Motion EtherNet/IP Module

User Guide
MMI-20019808 April 2022
Device profile
B Device profile
B.1 Object classes
Table B-1 lists and describes all object classes supported by the EtherNet/IP Module.
Table B-1: Object classes and descriptions
Object Class ID Optional/
required
Identity 0x01 Required Contains information
Message Router 0x02 Required Tracks the accessibility
Assembly 0x04 Required Contains a list of
Port 0xF4 Required
TCP/IP Interface 0xF5 Required Groups settings related
Ethernet Link 0xF6 Required Groups diagnostic
Diagnostic 0xAA Optional Groups diagnostic
Parameter Data Input
Mapping
0xBO Optional Used for acyclic access
Description
that uniquely describes
the device
of the object classes
and instances
attributes that data
can be written to (sink)
or read from (source)
to TCP/IP.
information for the
Ethernet interface
information for the
fieldbus interface
to input data
Parameter Data
Output Mapping
0xB1 Optional Used for acyclic acces
to output data
B.2 Object details
B.2.1 Identity Object, Class 01h
This object provides identification of and general information about the device. It contains
informational attributes that uniquely describe the device.
Example: The use of attributes Vendor ID, Device Type, Product Code, and Serial Number
together uniquely identify this device.
User Guide 49

Device profile User Guide
April 2022 MMI-20019808
Supported services
Class services:
• Get Attribute All
• Get Attribute Single
Instance services:
• Get Attribute All
• Get Attribute Single
• Reset
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0001h Revision 1
Instance attributes
# Access Name Type Value Description
1 Get Vendor ID UINT Default: 0392h Micro Motion Inc
2 Get Device Type UINT Default: 000Ch Communication Adapter
3 Get Product Code UINT Default: 0002h 2 = Micro Motion EtherNet/IP
Module
4 Get Revision Struct of: -
USINT Major fieldbus version
USINT Minor fieldbus version
5 Get Status WORD - Device status; see following table
6 Get Serial Number UDINT Serial number (set at production)
7 Get Product Name SHORT_STRING “Micro Motion
EtherNet/IP
Module”
Name of product
Device status
Bit(s)
0 Module Owned
1 (reserved)
2 Configured
Name
3 (reserved)
4... 7 Extended Device Status:
Value Meaning
0000b Unknown
0010b Faulted I/O Connection
50 Micro Motion EtherNet/IP Module

User Guide
MMI-20019808 April 2022
Bit(s) Name
0011b No I/O connection established
0100b Non-volatile configuration bad
0110b Connection in Run mode
0111b Connection in Idle mode
(other) (reserved)
8 Set for minor recoverable faults
9 Set for minor unrecoverable faults
10 Set for major recoverable faults
11 Set for major unrecoverable faults
12... 15 (reserved)
Reset service
When the Identity Object receives a Reset request, it:
Device profile
B.2.2
B.2.3
• Determines if it can provide the type of reset requested
• Responds to the request
• Attempts to perform the type of reset requested
Message Router, Class 02h
The Message Router Object provides a messaging connection point through which a Client
may address a service to any object class or instance residing in the physical device.
Assembly Object, Class 04h
The Assembly Object binds attributes of multiple objects, which allows data to or from
each object to be sent or received over a single connection. Assembly objects can be used
to bind input data or output data. The terms “input” and “output” are defined from the
network's point of view. An input produces data on the network and an output consumes
data from the network.
This object provides access to the I/O Data in the Input and Output Data areas in the Micro
Motion EtherNet/IP Module.
Supported services
Class services: Get Attribute Single
Instance services:
• Get Attribute Single
• Set Attribute Single
User Guide 51

Device profile
User Guide
April 2022 MMI-20019808
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0002h Revision 2
2 Get Max Instance UINT - The highest initiated instance
number
Instance attributes - Instance/Connection Point 64h
This instance corresponds to I/O Data (Input) in the Micro Motion EtherNet/IP Module. The
EtherNet/IP Module supports two different configurations. Specific input assembly
attributes depend on the configuration in use.
Configuration Input assembly attributes
Basic See Input assembly for standard configuration
Concentration measurement See Input assembly for concentration measurement configuration
Note
The default input data size is non-zero. The actual size depends on the configuration in
use. If the I/O input data size is set to 0, this instance will NOT be initialized.
# Access Name Type Value Description
3 Get Data Array of BYTE - Data produced by the Micro Motion
EtherNet/IP Module
Instance attributes - Instance/Connection Point 96h
This instance corresponds to I/O Data (Output) in the Micro Motion EtherNet/IP Module.
The EtherNet/IP Module supports two different configurations. Specific input assembly
attributes depend on the configuration in use.
Configuration
Basic See Output assembly for standard configuration
Concentration measurement See Output assembly for concentration measurement configuration
Output assembly attributes
Note
The default output data size is non-zero. The actual size depends on the configuration in
use. If the I/O output data size is set to 0, this instance will NOT be initialized.
#
Access Name Type Value Description
3 Set Data Array of BYTE - Data consumed by the Micro
Motion EtherNet/IP Module
Note
Rockwell Automation PLCs have the first four bytes consumed by a device defined as
status information. This behavior is specific to devices from Rockwell Automation and is
not defined in the EtherNet/IP specification. However, since all known PLCs are
52 Micro Motion EtherNet/IP Module

User Guide Device profile
MMI-20019808 April 2022
implemented this way, the Micro Motion EtherNet/IP Module adopts this behavior and
strips off the corresponding four bytes from the consumed data.
B.2.4 Port Object, Class F4h
Supported services
Class services:
• Get Attribute Single
• Get Attribute All
Instance services:
• Get Attribute Single
• Get Attribute All
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0001h Revision 1
2 Get Max Instance UINT 0002h 2 is the highest instance number
3 Get No. of instances UINT 0001h 1 instance is implemented
8 Get Entry Port UINT 0002h Returns the instance of the Port
object that describes the port.
9 Get All Ports Array of STRUCT 0000h 0000h Array of structure containing
{UINT; UINT;} 0000h 0000h
0004h 0002h
attributes 1 and 2 from each
instance. Instance 1 is at byte offset
4. Instance 2 is at byte offset 8, etc.
The 4 bytes at offset 0 shall be 0.
(Default)
Instance attributes, Instance 02h
#
Access Name Type Value Comments
1 Get Port Type UINT 0000h TCP/IP
2 Get Port Number UINT 0002h Port 2
3 Get Port Object Struct of:
Path Size UINT 0002h -
Path Padded EPATH 20 F5 24 01h TCP class, Instance 1
4 Get Port Name SHORT_STRING “TCP/IP” Name of port
8 Get Node Address Padded EPATH - -
User Guide 53
Device profile User Guide
April 2022 MMI-20019808
B.2.5 TCP/IP Interface Object, Class F5h
This object groups TCP/IP-related settings.
Supported services
Class services:
• Get Attribute All
• Get Attribute Single
Instance services:
• Get Attribute All
• Get Attribute Single
• Set Attribute Single
Class attributes
# Access Name Type Value Comments
1 Get Revision UINT 0001h Revision 1
2 Get Max Instance UINT 0001h 1 is the highest instance number
3 Get No. of instances UINT 0001h 1 instance is implemented
Instance attributes
#
Access Name Type Value Comments
1 Get Status DWORD 00000001h Attribute #5 contains valid
information.
2 Get Configuration
Capability
3 Get/Set Configuration Control DWORD - 0: Configuration from non-volatile
4 Get Port Object Struct of:
Path Size UINT 0002h 2 words
Path Padded EPATH 20 F6 24 01h Path to Ethernet Class, Instance 1
5 Get/Set Interface
Configuration
IP Address UDINT - IP address
DWORD 00000016h Attribute #5 is settable. Capable of
obtaining network configuration
via DHCP.
memory
2: Configuration from DHCP
Struct of:
Subnet Mask UDINT - Subnet mask
Gateway Address UDINT - Gateway Address
Name Server 1 UDINT - Primary DNS
Name Server 2 UDINT - Secondary DNS
54 Micro Motion EtherNet/IP Module

User Guide Device profile
MMI-20019808 April 2022
# Access Name Type Value Comments
Domain Name STRING - Default domain name
6 Get/Set Host Name STRING - Host name
B.2.6 Ethernet Link Object, Class F6h
This object groups diagnostic information for the Ethernet interface.
Supported services
Class services:
• Get Attribute All
• Get Attribute Single
Instance services:
• Get Attribute All
• Get Attribute Single
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0001h Revision 1
2 Get Max Instance UINT 0001h 1 is the highest instance number
3 Get No. of instances UINT 0001h 1 instance is implemented
Instance attributes
#
Access Name Type Value Comments
1 Get Interface Speed UDINT 10 or 100 Actual Ethernet interface speed
2 Get Interface Flags DWORD - -
3 Get Physical Address Array of 6 USINTS (MAC ID) Physical network address
B.2.7 Diagnostic Object, Class AAh
This object groups diagnostic information for the fieldbus interface.
Supported services
Class services: Get Attribute All
Instance services: Get Attribute Single
Class attributes
#
Access Name Type Value Description
1 Get Revision UINT 0001h Revision 1
User Guide 55

Device profile User Guide
April 2022 MMI-20019808
Instance attributes
# Access Name Type Description
01h Get Module serial number UDINT Serial number
02h Get Vendor ID UINT Manufacturer Vendor ID
03h Get Fieldbus Type UINT Fieldbus Type
04h Get Module Software
version
0Ah Get Module Type UINT Module Type
0Fh Get IN cyclic I/O length UINT Size of I/O Input area (in bytes)
11h Get IN total length UINT Total number of IN bytes supported
12h Get OUT cyclic I/O length UINT Size of I/O Output area (in bytes)
14h Get OUT total length UINT Total number of OUT bytes supported
UINT Module software version
B.2.8 Parameter Data Input Mapping Object, Class B0h
This object can be used to access Input Data acyclically, and is set up dynamically based on
the Parameter Data Mailbox initialization (see Input parameters (explicit data) for standard
configuration).
Supported services
Class services: Get Attribute All
Instance services: Get Attribute Single
Class attributes
#
Access Name Type Value Description
1 Get Revision UINT 0001h Revision 1
Instance attributes, Instance 01h
Each attribute corresponds to a block of Input Data.
#
Access Name Type Description
01h Get Data Array of USINT Mapped block of Input Data
02h Get Data Array of USINT Mapped block of Input Data
...
32h Get Data Array of USINT Mapped block of Input Data
The specific parameters in the block depend on the configuration in use.
Configuration
Basic See Input parameters (explicit data) for standard configuration
56 Micro Motion EtherNet/IP Module
Input parameters (explicit data)

User Guide Device profile
MMI-20019808 April 2022
Configuration Input parameters (explicit data)
Concentration measurement See Input parameters (explicit data) for concentration
measurement configuration
B.2.9 Parameter Data Output Mapping Object, Class B1h
This object can be used to access Output Data acyclically, and is set up dynamically (see
Output parameters (explicit data) for standard configuration).
Supported services
Class services: Get Attribute All
Instance services:
• Get Attribute Single
• Set Attribute Single
Class attributes
# Access Name Type Value Description
1 Get Revision UINT 0001h Revision 1
Instance attributes, Instance 01h
#
Access Name Type Description
01h Get/Set Data Array of USINT Mapped block of Output Data
02h Get/Set Data Array of USINT Mapped block of Output Data
...
32h Get/Set Data Array of USINT Mapped block of Output Data
The specific parameters in the block depend on the configuration in use.
Configuration
Basic See Output parameters (explicit data) for standard configuration
Concentration measurement See Output parameters (explicit data) for concentration
Output parameters (explicit data)
measurement configuration
B.3 I/O data
B.3.1 Input assembly for standard configuration
Byte Access Name Type Notes
0–3 Get Mass flow rate Float
4–7 Get Density Float
User Guide 57
Device profile User Guide
April 2022 MMI-20019808
Byte Access Name Type Notes
8–11 Get Temperature Float
12–15 Get Volume flow rate (liquid
volume)
16–19 Get Mass total Float
20–23 Get Volume total (liquid
volume)
24–27 Get Drive gain Float
28–29 Get Status word U16 or Word • For Model 1700 Analog, Model 2700 Analog,
30–31 Get Status word U16 or Word • For Model 1700 Analog, Model 2700 Analog,
32–35 Get Gas standard volume flow
rate
Float Valid only when Gas Standard Volume is not
enabled.
Float
Model 1500 Analog, Model 2500, and all Series
3000 transmitters: SNS Status Word 1 (see
Status Word 1)
• For MVD Direct Connect and 9739 MVD
transmitters: SNS Status Word 2 (see Status
Word 2)
Model 1500 Analog, Model 2500, and all Series
3000 transmitters: SNS Status Word 2 (see
Status Word 2)
• For MVD Direct Connect and 9739 MVD
transmitters: SNS Status Word 1 (see Status
Word 1)
Float Valid only when Gas Standard Volume is enabled.
36–39 Get Gas standard volume total Float Valid only when Gas Standard Volume is enabled.
B.3.2 Output assembly for standard configuration
Byte Access Name Type Notes
0–3 Get/Set External Temperature Float
4–7 Get/Set External Pressure Float
8 Get/Set Start/Stop Totals Byte 0: Stop
1: Start
9 Get/Set Reset All Process Totals Byte 0: No action
1: Reset
10 Get/Set Reset All Inventory Totals Byte 0: No action
1: Reset
11 Get/Set Start Zero Byte 0: Abort or no action
1: Start
12–13 Get/Set Start Smart Meter
Verification
Word See Table B-20
58 Micro Motion EtherNet/IP Module

User Guide Device profile
MMI-20019808 April 2022
B.3.3 Input parameters (explicit data) for standard
configuration
To update any of these attribute values, the associated trigger byte must be toggled
before reading the attribute value (executing the Get service). See Output parameters
(explicit data) for standard configuration for more information on trigger bytes.
Class B0h, Instance 01h
Attribute Access Name Type Trigger Byte
WriteAttribute
01h Get Mass flow rate unit U16 0Ch See Table B-7
02h Get Density unit U16 0Ch See Table B-13
03h Get Temperature unit U16 0Ch See Table B-14
04h Get Volume flow rate unit U16 0Ch See Table B-9
05h Get Pressure unit U16 0Ch See Table B-15
06h Get Mass total/inventory unit U16 0Ch See Table B-8
07h Get Volume total/inventory unit U16 0Ch See Table B-10
08h Get Zero time U16 0Dh Seconds
09h Get Standard deviation of auto
zero
0Ah Get Present flow signal offset at
zero flow
0Bh Get Failed Zero Calibration Value Float 0Eh
0Ch Get Device Status Word 2 U16 0Fh See Status Word 2
0Dh Get Device Status Word 3 U16 0Fh See Status Word 3
0Eh Get Device Status Word 4 U16 0Fh See Status Word 4
Float 0Eh
Float 0Eh
Description
0Fh Get Device Status Word 5 U16 0Fh See Status Word 5
10h Get Device Status Word 6 U16 0Fh See Status Word 6
11h Get Device Status Word 7 U16 0Fh See Status Word 7
12h Get External temperature input Float No trigger byte
13h Get External pressure input Float No trigger byte
14h Get Gas standard volume flow unit U16 10h See Table B-11
15h Get Gas standard volume total/
inventory unit
16h Get Smart Meter Verification:
Status
17h Get Smart Meter Verification: Run
Count
18h Get Smart Meter Verification
Algorithm State
User Guide 59
U16 10h See Table B-12
U16 13h See Table B-22
U16 13h
U16 11h See Table B-21
Device profile User Guide
April 2022 MMI-20019808
Attribute Access Name Type Trigger Byte
WriteAttribute
19h Get Smart Meter Verification Abort
Code
1Ah Get Smart Meter Verification State
at Abort
1Bh Get Smart Meter Verification
Progress
1Ch Get Enable/Disable Gas Standard
Volume Calculations
1Dh Get Subnet communication status
(RS-485 connection to
transmitter)
U16 11h See Table B-23
U16 11h See Table B-24
U16 12h % complete
U8 14h
U16 No trigger byte 0: Communications failure
Description
Any other value:
Communications good
B.3.4 Output parameters (explicit data) for standard
configuration
Class B1h, Instance 01h
Attribute Access Name Type Trigger byte
write attribute
Description
01h Get/Set Standard or special mass flow
rate unit
02h Get/Set Density unit U16 See Table B-13
03h Get/Set Temperature unit U16 See Table B-14
04h Get/Set Standard or special volume
flow rate unit
05h Get/Set Pressure unit U16 See Table B-15
06h Get/Set Zero time U16 Seconds
07h Get/Set Zero value Float
08h Get/Set Gas Standard Volume Flow unit U16 See Table B-11
09h Get/Set Output state during Smart
Meter Verification
0Ah Get/Set Enable/Disable Gas Standard
Volume Calculations
0Bh Get/Set Smart Meter Verification Index U16 16h Smart Meter Verification test
0Ch Get/Set Trigger Byte-2 U8
U16 See Table B-7
U16 See Table B-10
U16 0 = Last measured value
1 = Fault
U8
record.
0 = most recent
...
19 = oldest
0Dh Get/Set Trigger Byte-3 U8
60 Micro Motion EtherNet/IP Module
User Guide Device profile
MMI-20019808 April 2022
Attribute Access Name Type Trigger byte
write attribute
0Eh Get/Set Trigger Byte-6 U8
0Fh Get/Set Trigger Byte-9 U8
10h Get/Set Trigger Byte-15 U8
11h Get/Set Trigger Byte-17 U8
12h Get/Set Trigger Byte-18 U8
13h Get/Set Trigger Byte-16 U8
14h Get/Set Trigger Byte-20 U8
15h Get/Set Trigger Byte-23 U8
16h Get/Set Trigger Byte-26 U8
Description
B.3.5 Input assembly for concentration measurement
configuration
Byte Access Name Type Notes
0–3 Get Mass flow rate Float
4–7 Get Density Float
8–11 Get Temperature Float
12–15 Get Volume flow rate (liquid
volume)
16–19 Get Mass total Float
20–23 Get Standard volume flow Float
24–27 Get Standard volume total Float
28–31 Get Standard volume inventory Float
32–35 Get Net mass flow Float
36–39 Get Net mass total Float
40–43 Get Netmass inventory Float
44–47 Get Net volume flow Float
48–51 Get Net volume total Float
52–55 Get Net volume inventory Float
56–59 Get Reference density Float
60–63 Get Specific gravity Float
64–67 Get Concentration Float
68–71 Get Density (fixed Baume
units)
Float
Float
72–75 Get Volume total (liquid) Float
User Guide 61

Device profile
User Guide
April 2022 MMI-20019808
Byte Access Name Type Notes
76–79 Get Drive gain Float
80–81 Get Status word U16 or Word • For Model 1700 Analog, Model 2700 Analog,
Model 1500 Analog, Model 2500, and all Series
3000 transmitters: SNS Status Word 1 (see
Status Word 1)
• For MVD Direct Connect and 9739 MVD
transmitters: SNS Status Word 2 (see Status
Word 2)
82–83 Get Status word U16 or Word • For Model 1700 Analog, Model 2700 Analog,
Model 1500 Analog, Model 2500, and all Series
3000 transmitters: SNS Status Word 2 (see
Status Word 2)
• For MVD Direct Connect and 9739 MVD
transmitters: SNS Status Word 1 (Status Word
1)
B.3.6 Output assembly for concentration measurement
configuration
Byte Access Name Type Notes
0–3 Get/Set External Temperature Float
4–7 Get/Set External Pressure Float
8 Get/Set Start/Stop Totals Byte 0: Stop
1: Start
9 Get/Set Reset All Process Totals Byte 0: No action
1: Reset
10 Get/Set Reset All Inventory Totals Byte 0: No action
1: Reset
11 Get/Set Start Zero Byte 0: Abort or no action
1: Start
12–13 Get/Set Start Smart Meter
Verification
Word See Table B-20
B.3.7 Input parameters (explicit data) for concentration
measurement configuration
To update any of these attribute values, the associated trigger byte must be toggled
before reading the attribute value (executing the Get service). See Output parameters
(explicit data) for standard configuration for more information on trigger bytes.
62 Micro Motion EtherNet/IP Module
User Guide Device profile
MMI-20019808 April 2022
Class 0h, Instance 01h
Attribute Access Name Type Trigger Byte
WriteAttribute
01h Get Mass flow rate unit U16 0Ah See Table B-7
02h Get Density unit U16 0Ah See Table B-13
03h Get Temperature unit U16 0Ah See Table B-14
04h Get Volume flow rate unit U16 0Ah See Table B-9
05h Get Pressure unit U16 0Ah See Table B-15
06h Get Mass total/inventory unit U16 0Ah See Table B-8
07h Get Volume total/inventory unit U16 0Ah See Table B-10
08h Get Zero time U16 0Bh Seconds
09h Get Standard deviation of auto
zero
0Ah Get Present flow signal offset at
zero flow
0Bh Get Failed Zero Calibration Value Float 0Ch
0Ch Get Device Status Word 2 U16 0Dh See Status Word 2
0Dh Get Device Status Word 3 U16 0Dh See Status Word 3
0Eh Get Device Status Word 4 U16 0Dh See Status Word 4
Float 0Ch
Float 0Ch
Description
0Fh Get Device Status Word 5 U16 0Dh See Status Word 5
10h Get Device Status Word 6 U16 0Dh See Status Word 6
11h Get Device Status Word 7 U16 0Dh See Status Word 7
12h Get External temperature input Float No trigger byte
13h Get External pressure input Float No trigger byte
14h Get Smart Meter Verification: Run
Count
15h Get Smart Meter Verification:
Status
16h Get Smart Meter Verification
Algorithm State
17h Get Smart Meter Verification Abort
Code
18h Get Smart Meter Verification State
at Abort
19h Get Smart Meter Verification
Progress
1Ah Get Concentration units code U8 13h
1Bh Get Derived variable U16 12h See Table B-17
1Ch Get Active matrix U16 12h
U16 0Eh
U16 0Eh See Table B-22
U16 0Fh See Table B-21
U16 0Fh See Table B-23
U16 0Fh See Table B-24
U16 10h % complete
User Guide 63

Device profile User Guide
April 2022 MMI-20019808
Attribute Access Name Type Trigger Byte
WriteAttribute
1Dh Get Subnet communication status
(RS-485 connection to
transmitter)
U16 No trigger byte 0: Communications failure
Description
Any other value:
Communications good
B.3.8 Output parameters (explicit data) for concentration
measurement configuration
Class B1h, Instance 01h
Attribute Access Name Type Trigger byte
write attribute
01h Get/Set Standard or special mass flow
rate unit
02h Get/Set Density unit U16 See Table B-13
03h Get/Set Temperature unit U16 See Table B-14
04h Get/Set Standard or special volume
flow rate unit
05h Get/Set Pressure unit U16 See Table B-15
06h Get/Set Zero time U16 Seconds
U16 See Table B-7
U16 See Table B-10
Description
07h Get/Set Zero value Float
08h Get/Set Output state during Smart
Meter Verification
09h Get/Set Smart Meter Verification Index U16 11h Smart Meter Verification test
0Ah Get/Set Trigger Byte-2 U8
0Bh Get/Set Trigger Byte-3 U8
0Ch Get/Set Trigger Byte-6 U8
0Dh Get/Set Trigger Byte-9 U8
0Eh Get/Set Trigger Byte-14 U8
0Fh Get/Set Trigger Byte-15 U8
10h Get/Set Trigger Byte-16 U8
11h Get/Set Trigger Byte-24 U8
12h Get/Set Trigger Byte-25 U8
13h Get/Set Trigger Byte-17 U8
U16 0 = Last measured value
1 = Fault
record.
0 = most recent
...
19 = oldest
64 Micro Motion EtherNet/IP Module

User Guide Device profile
MMI-20019808 April 2022
B.3.9 Input assembly for petroleum measurement
configuration
Byte Access Name Type Notes
0–3 Get Mass flow rate Float
4–7 Get Density Float
8–11 Get Temperature Float
12–15 Get Volume flow rate (liquid
volume)
16–19 Get Mass total Float
20–23 Get Volume total Float
24–27 Get Drive gain Float
28–29 Get Status word U16 or Word • For Model 1700 Analog, Model 2700 Analog,
30-31 Get Status word U16 or Word • For Model 1700 Analog, Model 2700 Analog,
32–35 Get Temperature-corrected
density
Float
Model 1500 Analog, Model 2500, and all Series
3000 transmitters: SNS Status Word 1 (see
Status Word 1)
• For MVD Direct Connect and 9739 MVD
transmitters: SNS Status Word 2 (see Status
Word 2)
Model 1500 Analog, Model 2500, and all Series
3000 transmitters: SNS Status Word 2 (see
Status Word 2)
• For MVD Direct Connect and 9739 MVD
transmitters: SNS Status Word 1 (see Status
Word 1)
Float
36–39 Get CTL Float
40–43 Get Temperature-corrected
volume flow
44–47 Get Temperature-corrected
volume total
48–51 Get Temperature-corrected
volume inventory
52–55 Get Average temperature-
corrected density
56–59 Get Average temperature Float
User Guide 65
Float
Float
Float
Float

Device profile User Guide
April 2022 MMI-20019808
B.3.10 Output assembly for petroleum measurement
configuration
Byte Access Name Type Notes
0–3 Get/Set External Temperature Float
4–7 Get/Set External Pressure Float
8 Get/Set Start/Stop Totals Byte 0: Stop
1: Start
9 Get/Set Reset All Process Totals Byte 0: No action
1: Reset
10 Get/Set Reset All Inventory Totals Byte 0: No action
1: Reset
11 Get/Set Start Zero Byte 0: Abort or no action
1: Start
12–13 Get/Set Start Smart Meter
Verification
Word See Table B-20
B.3.11 Input parameters (explicit data) for petroleum
measurement configuration
To update any of these attribute values, the associated trigger byte must be toggled
before reading the attribute value (executing the Get service). See Output parameters
(explicit data) for standard configuration for more information on trigger bytes.
Class B0h, Instance 01h
Attribute
01h Get Mass flow rate unit U16 0Dh See Table B-7
02h Get Density unit U16 0Dh See Table B-13
03h Get Temperature unit U16 0Dh See Table B-14
04h Get Volume flow rate unit U16 0Dh See Table B-9
05h Get Pressure unit U16 0Dh See Table B-15
06h Get Mass total/inventory unit U16 0Dh See Table B-8
07h Get Volume total/inventory unit U16 0Dh See Table B-10
Access Name Type Trigger Byte
WriteAttribute
Description
08h Get Zero time U16 0Eh Seconds
09h Get Standard deviation of auto
zero
0Ah Get Present flow signal offset at
zero flow
0Bh Get Failed Zero Calibration Value Float 0Fh
66 Micro Motion EtherNet/IP Module
Float 0Fh
Float 0Fh

User Guide Device profile
MMI-20019808 April 2022
Attribute Access Name Type Trigger Byte
WriteAttribute
0Ch Get Device Status Word 2 U16 10h See Status Word 2
0Dh Get Device Status Word 3 U16 10h See Status Word 3
0Eh Get Device Status Word 4 U16 10h See Status Word 4
0Fh Get Device Status Word 5 U16 10h See Status Word 5
10h Get Device Status Word 6 U16 10h See Status Word 6
11h Get Device Status Word 7 U16 10h See Status Word 7
12h Get External temperature input Float No trigger byte
13h Get External pressure input Float No trigger byte
14h Get Smart Meter Verification: Run
Count
15h Get Smart Meter Verification:
Status
16h Get Smart Meter Verification
Algorithm State
17h Get Smart Meter Verification Abort
Code
18h Get Smart Meter Verification State
at Abort
U16 11h
U16 11h See Table B-22
U16 12h See Table B-21
U16 12h See Table B-23
U16 12h See Table B-24
Description
19h Get Smart Meter Verification
Progress
1Ah Get API Table Type U16 14h See Table B-18
1Bh Get Reference temperature Float 15h
1Ch Get Thermal expansion coefficient
(TEC)
1Dh Get Subnet communication status
(RS-485 connection to
transmitter)
U16 13h % complete
Float 15h
U16 No trigger byte 0: Communications failure
Any other value:
Communications good
B.3.12 Output parameters (explicit data) for petroleum
measurement configuration
Class B1h, Instance 01h
Attribute
01h Get/Set Standard or special mass flow
02h Get/Set Density unit U16 See Table B-13
03h Get/Set Temperature unit U16 See Table B-14
Access Name Type Trigger byte
write attribute
U16 See Table B-7
rate unit
Description
User Guide 67

Device profile User Guide
April 2022 MMI-20019808
Attribute Access Name Type Trigger byte
write attribute
04h Get/Set Standard or special volume
flow rate unit
05h Get/Set Pressure unit U16 See Table B-15
06h Get/Set Zero time U16 Seconds
07h Get/Set Zero value Float
08h Get/Set Output state during Smart
Meter Verification
09h Get/Set Smart Meter Verification Index U16 16h Smart Meter Verification test
0Ah API Table Type U16 See Table B-18
0Bh Reference temperature Float
0Ch Thermal expansion coefficient
(TEC)
0Dh Get/Set Trigger Byte-2 U8
0Eh Get/Set Trigger Byte-3 U8
U16 See Table B-10
U16 0 = Last measured value
Float
Description
1 = Fault
record.
0 = most recent
...
19 = oldest
0Fh Get/Set Trigger Byte-6 U8
10h Get/Set Trigger Byte-9 U8
11h Get/Set Trigger Byte-14 U8
12h Get/Set Trigger Byte-15 U8
13h Get/Set Trigger Byte-16 U8
14h Get/Set Trigger Byte-17 U8
15h Get/Set Trigger Byte-20 U8
16h Get/Set Trigger Byte-24 U8
B.4 Get and Set services
The Get Attribute Single and Set Attribute Single services are used with many objects and
attributes. Details of these two services are provided here
B.4.1
Table B-2: Get service arguments
Parameter name Data type Required Parameter value Notes
Attribute ID USINT Y The attribute ID of the
Get Attribute Single service
No default
attribute to be read
68 Micro Motion EtherNet/IP Module

User Guide Device profile
MMI-20019808 April 2022
Table B-3: Get service response
Return value Data type
Attribute value The data type of the returned attribute
B.4.2 Set Attribute Single service
Table B-4: Set service arguments
Parameter name Data type Required Parameter value Notes
Attribute ID USINT Y The attribute ID of the
attribute to be set
Attribute Value The data type of
the attribute
being set
Y The value to which the
attribute will be set
No default
No default
Table B-5: Set service response
Return value Data type
No success response data
B.5 Data types
Table B-6: Data types
Data type Size (bytes) Description Range
BOOL 1 True/false represented as 0 = false and 1 =
true
SINT 1 8-bit signed integer –128 to +127
USINT 1 8-bit unsigned integer 0 to 255
INT 2 16-bit signed integer –32768 to +32767
0, 1
UINT 2 16-bit unsigned integer 0 to 65535
DINT 4 32-bit signed integer –2147483648 to
+2147483647
UDINT 4 32-bit unsigned integer 0 to 4294967296
REAL 4 IEEE single-precision floating-point –3.8E38 to +3.8E38
DREAL 8 IEEE double-precision floating-point
ENGUNITS 1 Enumerated value representing an
engineering unit of measure
BYTE 1 8-bit bitfield N/A
SHORT_STRING Up to 128 bytes Character array where the first byte is the
number of characters in the array, and the
subsequent bytes contain the ASCII
characters. This is not a NULL terminated
string.
User Guide 69
4096 to 65535
N/A

Device profile User Guide
April 2022 MMI-20019808
B.6 Codes and integer values
Table B-7: Mass flow measurement unit codes
Code Description
70 Grams per second
71 Grams per minute
72 Grams per hour
73 Kilograms per second
74 Kilograms per minute
75 Kilograms per hour
76 Kilograms per day
77 Metric tons per minute
78 Metric tons per hour
79 Metric tons per day
80 Pounds per second
81 Pounds per minute
82 Pounds per hour
83 Pounds per day
84 Short tons (2000 pounds) per minute
85 Short tons (2000 pounds) per hour
86 Short tons (2000 pounds) per day
87 Long tons (2240 pounds) per hour
88 Long tons (2240 pounds) per day
253 Special
Table B-8: Mass totalizer and mass inventory measurement unit codes
Code Description
60 Grams
61 Kilograms
62 Metric tons
63 Pounds
64 Short tons (2000 pounds)
65 Long tons (2240 pounds)
253 Special
70 Micro Motion EtherNet/IP Module
User Guide
Device profile
MMI-20019808 April 2022
Table B-9: Liquid volume flow measurement unit codes
Code Description
15 Cubic feet per minute
16 U.S. gallons per minute
17 Liters per minute
18 Imperial gallons per minute
19 Cubic meters per hour
22 U.S. gallons per second
23 Million U.S. gallons per day
24 Liters per second
25 Million liters per day
26 Cubic feet per second
27 Cubic feet per day
28 Cubic meters per second
29 Cubic meters per day
30 Imperial gallons per hour
31 Imperial gallons per day
130 Cubic feet per hour
131 Cubic meters per minute
132 Barrels per second
133 Barrels per minute
134 Barrels per hour
135 Barrels per day
(1)
(1)
(1)
(1)
136 U.S. gallons per hour
137 Imperial gallons per second
138 Liters per hour
170 Beer barrels per second
171 Beer barrels per minute
172 Beer barrels per hour
173 Baeer brrels per day
(2)
(2)
(2)
(2)
235 U.S. gallons per day
253 Special
(1) Unit based on oil barrels (42 U.S. gallons).
(2) Unit based on beer barrels (31 U.S. gallons). Not available with the standrad core processor.
User Guide 71

Device profile User Guide
April 2022 MMI-20019808
Table B-10: Liquid volume totalizer and liquid volume inventory measurement unit codes
Code Description
40 U.S. gallons
41 Liters
42 Imperial gallons
43 Cubic meters
46 Barrels
(1)
112 Cubic feet
170 Beer barrels
(2)
253 Special
(1) Unit based on oil barrels (42 U.S. gallons).
(2) Unit based on beer barrels (31 U.S. gallons). Not available with the standrad core processor.
Table B-11: Gas standard volume flow measurement unit codes
Code Description
121 Normal cubic meters per hour
122 Normal liters per hour
123 Standard cubic feet per minute
174 Normal liters per day
175 Normal liters per minute
176 Normal liters per second
177 Standard liters per day
178 Standard liters per hour
179 Standard liters per minute
180 Standard liters per second
181 Normal cubic meters per day
182 Normal cubic meters per minute
183 Normal cubic meters per second
184 Standard cubic feet per day
185 Standard cubic feet per hour
186 Standard cubic feet per second
187 Standard cubic meters per day
188 Standard cubic meters per hour
189 Standard cubic meters per minute
190 Standard cubic meters per second
253 Special
72 Micro Motion EtherNet/IP Module

User Guide Device profile
MMI-20019808 April 2022
Table B-12: Gas standard volume totalizer and inventory measurement unit codes
Code Description
166 Normal cubic meters
167 Normal liters
168 Standard cubic feet
171 Standard liters
172 Standard cubic meters
253 Special
Table B-13: Density measurement unit codes
Code Description
90 Specific gravity unit (not temperature corrected)
91 Grams per cubic centimeter
92 Kilograms per cubic meter
93 Pounds per U.S. gallon
94 Pounds per cubic foot
95 Grams per millileter
96 Kilograms per liter
97 Grams per liter
98 Pounds per cubic inch
99 Short tons per cubic yard
104 Degrees API
Table B-14: Temperature measurement unit codes
Code Description
32 Degrees Celsius
33 Degrees Fahrenheit
34 Degrees Rankine
35 Kelvin
Table B-15: Pressure and differential pressure measurement unit codes
Code Description
1 Inches water @ 68 °F
2 Inches mercury @ 0 °C
3 Feet water @ 68 °F
4 Millimeters water @ 68 °F
User Guide 73
Device profile User Guide
April 2022 MMI-20019808
Table B-15: Pressure and differential pressure measurement unit codes (continued)
Code Description
5 Millimeters mercury @ 0 °C
6 Pounds per square inch
7 Bar
8 Millibar
9 Grams per square centimeter
10 Kilograms per square centimeter
11 Pascals
12 Kilopascals
13 Torr @ 0 °C
14 Atmospheres
145 Inches water @ 60 °F
237 Megapascals
238 Inches water @ 4 °C
239 Millimeters water @ 4 °C
(1)
(1)
(1)
(1)
(1) Not available with the standard core processor.
Table B-16: Concentration measurement unit codes
Code Description
100 Degrees Twaddell
101 Degrees Brix
102 Degrees Baume (heavy)
103 Degrees Baume (light)
105 % solids per weight (% mass)
106 % solids per volume (% volume)
107 Degrees Balling
108 Proof per volume
109 Proof per mass
160 Degrees Plato
253 Special (use with all systems that include an enhanced core processor)
255 Special (use with all systems that include a standard core processor)
74 Micro Motion EtherNet/IP Module

User Guide Device profile
MMI-20019808 April 2022
Table B-17: Concentration measurement derived variable codes
Code Description
0 None
256 Density at reference
512 Specific gravity
768 Mass concentration (Density)
1024 Mass concentration (Specific gravity)
1280 Volume concentration (Density)
1536 Volume concentration (Specific gravity)
1792 Concentration (Density)
2048 Concentration (Specific gravity)
Table B-18: API Table Type codes
Code Description
17 Table 5A
18 Table 5B
19 Table 5D
36 Table 6C
49 Table 23A
50 Table 23B
51 Table 23D
68 Table 24C
81 Table 53A
82 Table 53B
83 Table 53D
100 Table 54C
Table B-19: Fixed output codes for Smart Meter Verification
Value Description
0 Last measured value
1 Fault value
User Guide 75

Device profile User Guide
April 2022 MMI-20019808
Table B-20: Enable Smart Meter Verification
Code Description
1 Enable with fixed output (see Table B-19)
5 Abort
6 Enable with continuous measurement
Table B-21: Smart Meter Verification algorithm state
Value Description
0 Inactive
1 Performing startup checks
2 Cutting drive setpoint
4 Initializing filters
6 Setting test tones
7 Ramping test tones
8 Checking drive stability
9 Setting drive voltage measurement
10 Verifying drive voltage
11 Resetting DAQ/MUX
12 Setting current calibration
13 Calibrating current amplitude
14 Resetting DAQ/MUX
15 Calculating system parameters
16 Test completed
17 Disabling test tones
18 Restoring normal drive setpoint
Table B-22: Smart Meter Verification status
Bit
number
0 State at abort
1
2
Status
3
4 Abort code
5
6
76 Micro Motion EtherNet/IP Module
User Guide Device profile
MMI-20019808 April 2022
Table B-22: Smart Meter Verification status (continued)
Bit
number
7 Result:
Status
0=Pass
1=Fail
Table B-23: Smart Meter Verification abort codes
Abort code Description Suggested action
1 User-initiated abort None required. Wait for 15 seconds before
starting another test.
3 Frequency drift Ensure that temperature, flow, and density are
stable, and rerun the test.
5 High drive gain Ensure that flow is stable, minimize entrained gas,
and rerun the test.
8 Unstable flow Enter that flow is stable and rerun the test.
13 No factory reference data for meter verification
test performed on air
14 No factory reference data for meter verification
test performed on water
15 No configuration data for meter verification Contact Micro Motion customer service and
Contact Micro Motion customer service and
provide the abort code.
Contact Micro Motion customer service and
provide the abort code.
provide the abort code.
Other General abort. Repeat the test. If the test aborts again, contact
Micro Motion customer service and provide the
abort code.
Table B-24: Smart Meter Verification state at abort
Value Description
0 Inactive
1 In progress
15 Debug mode
16 Measurement completed
User Guide 77
Device profile User Guide
April 2022 MMI-20019808
B.7 Status words
B.7.1 Status Word 1
Bit number Status description
0 Core EEPROM Checksum Error (Config, Powerdown, Program)
1 Core RAM Test Error
2 Real-Time Interrupt Failure
3 Sensor Failure (A003)
4 Temperature Sensor Out-of-Range (A004)
5 Calibration Failure (Zero, Density, Temperature)
6 Other Failure
7 Transmitter Initializing/Warming Up (Low Power Fault)
8 Primary Variable Out-Of-Limits
9 Non-Primary Variable Out-Of-Limits
10 Simulation Mode Active (A132)
11 Undefined
12 Watchdog Error
13 Cold Start (HART bit)
14 Transmitter Configuration Changed (HART bit)
15 Fault (Failure has occurred which affects accuracy)
B.7.2 Status Word 2
Bit number Status description
0 Primary mA Output Saturated (A100)
1 Secondary mA Output Saturated (A113)
2 Primary mA Output Fixed (A101)
3 Secondary mA Output Fixed (A114)
4 Density Outside Limits (A8)
5 Drive Over-Range (A102)
6 PIC/Daughterboard Communication Failure (A029)
7 External Input Failure (A115)
8 Core EEPROM Checksum Error (Config, Powerdown, Program) (A001)
9 Core RAM Error (A002)
10 Sensor Not Responding (No Tube Interrupt) (A003)
78 Micro Motion EtherNet/IP Module
User Guide Device profile
MMI-20019808 April 2022
Bit number Status description
11 Temperature Sensor Out-of-Range (A004)
12 Input Over-Range (A005)
13 Frequency Output Saturated (A110)
14 Transmitter Not Characterized (Flowcal or Sensor Type) (A006)
15 Real-Time Interrupt Failure (A007)
B.7.3 Status Word 3
Bit number Status description
0 Burst Mode Enabled (A106) (AI Simulate enabled on Model 2700 transmitters with PROFIBUS-PA,
firmware v2.2)
1 Power Reset Occurred (A107)
2 Transmitter Initializing/Warming Up (Low Power Fault) (A009)
3 Sensor/Xmtr Communication Failure (A028)
4 Paper Out (A130)
5 Event #2 Triggered (A108) (basic event model)
6 Event #1 Triggered (A109) (basic event model)
7 Sensor/Xmtr Communication Failure (A026)
8 Calibration Failure (Autozero, Density, Temperature) (A010)
9 Excess Calibration Correction, Zero too Low (A011)
10 Excess Calibration Correction, Zero too High (A012)
11 Process Too Noisy to Perform Auto Zero (A013)
12 Transmitter Failed (A014)
13 Data Loss Possible (Totals+Inventories Questionable) (A103)
14 Calibration-In-Progress (Autozero, Density, Temperature) (A104)
15 Slug Flow (A105)
B.7.4 Status Word 4
Bit number Status description
0 Petroleum Measurement: Temperature Outside Standard Range (A116)
1 Petroleum Measurement: Line Density Outside Standard Range (A117)
2 Line RTD Temperature Out-Of-Range (A016)
3 Case/Meter RTD Temperature Out-Of-Range (A017)
4 Flow Direction (0=Forward/Zero, 1=Reverse)
5 Factory Configuration Data Is Invalid
User Guide 79
Device profile User Guide
April 2022 MMI-20019808
Bit number Status description
6 Concentration Measurement: Unable to fit curve data (A120)
7 Last Measured Value Override Active
8 Enhanced Density Extrapolation Alarm (A121)
9 Cal Factors Unentered (Flocal Mandatory) (A020)
10 1000/2000/3000 EEPROM Checksum Error (A018)
11 1000/2000/3000 RAM Test Error (A019)
12 Unrecognized/Unentered Sensor Type (K1 Mandatory) (A021)
13 Core configuration database corrupt (A022)
14 Core powerdown totals corrupt (A023)
15 Core program corrupt (A024)
B.7.5 Status Word 5
Bit number Status description
0 Core Protected Boot Sector Fault (invalid/corrupt application) (A025)
1 For Series 1000/2000/3000: Software Upgrade Recommended (A112)
For Enhanced Core Processors: Data Bad (Fault exists and LMV timer has expired)
2 Frequency Output Fixed (A111)
3 Primary mA Readback Failure
4 Discrete Output 1 Status (0=OFF, 1=ON)
5 Discrete Output 2 Status (0=OFF, 1=ON)
6 Density Calibration in Progress (D3)
7 Density Calibration in Progress (D4)
8 DO3 Status (0=OFF, 1=ON)
9 DO4 Status (0=OFF, 1=ON)
10 Temperature Calibration-in-Progress (Slope)
11 Temperature Calibration-in-Progress (Offset)
12 Density Calibration in Progress (Flowing Density)
13 Density Calibration in Progress (D2)
14 Density Calibration in Progress (D1)
15 Zero Calibration in Progress
80 Micro Motion EtherNet/IP Module

User Guide Device profile
MMI-20019808 April 2022
B.7.6 Status Word 6
Bit number Status description
0 Discrete Input 1 Status (0=OFF, 1=ON)
Weights and Measures: Database Checksum for Core Processors Only
1 Discrete Input 2 Status (0=OFF, 1=ON)
Weights and Measures: Database Checksum for Core Processors Only
2 Discrete Output 1 Fixed (A118)
Weights and Measures: Database Checksum for Core Processors Only
3 Discrete Output 2 Fixed (A119)
Weights and Measures: Database Checksum for Core Processors Only
4 Discrete Output 3 Fixed (A122)
Weights and Measures: Database Checksum for Core Processors Only
5 Discrete Output 4 Fixed (A123)
Weights and Measures: Database Checksum for Core Processors Only
6 Security Breach (A27)
Weights and Measures: Database Checksum for Core Processors Only
7 Frequency Input Saturated (A124)
Weights and Measures: Database Checksum for Core Processors Only
8 Discrete Event 1 Status
Discrete Batch: Batch Timeout (A125) for 1500 and Series 3000 Only
9 Discrete Event 2 Status
Discrete Batch: Batching for 1500 and Series 3000 Only
10 Discrete Event 3 Status
Discrete Batch: Batch End Warn for Series 3000 Only
11 Discrete Event 4 Status
Discrete Batch: Batch Overrun (A126) for Series 3000 Only
12 Discrete Event 5 Status
Discrete Batch: Batch Pump for Series 3000 Only
13 Discrete Batch: Batch Primary Valve for 1500 and Series 3000 Only
14 Discrete Batch: Batch Secondary Valve for 1500 and Series 3000 Only
15 Incorrect Board Type (A30)
Discrete Batch: Start Not Okay for 1500 and Series 3000 Only
Note
Not all alarms are applicable to all transmitters. For more information, see the transmitter
configuration manual for your transmitter.
User Guide 81

Device profile User Guide
April 2022 MMI-20019808
B.7.7 Status Word 7
Bit number Status description
0 K1/FCF Combination Unrecognized
1 Warming Up
2 Low Power (A031)
3 Tube Not Full (A033)
4 Smart Meter Verification / Outputs in fault (A032)
5 Smart Meter Verification / Outputs at last value (A131)
6 PIC UI EEPROM Error (A133)
7 NVM Initialized (transmitter)
8 Power Outage (A136)
9 NOC Measurements Paused (A137)
10 TBR Active (A138)
11 External Water Cut Out of Range (A139)
12 TMR Active (A140)
13 One or more DDC Triggers Completed (A141)
14 Smart Meter Verification failed (A34)
15 Smart Meter Verification aborted (A35)
82 Micro Motion EtherNet/IP Module

User Guide Specifications
MMI-20019808 April 2022
C Specifications
Physical specifications
Physical specifications Description
Housing Plastic housing with snap-on connection to DIN rail Protection
class: IP20
Dimensions 4.72 in x 2.95 in x 1.06˝ LxWxH (120 mm x 75mm x 27mm)
Electrical specifications
Electrical specifications Description
Power supply 24 V ±10%
Power consumption Maximum: 280mA on 24 V
Typical: 100mA
Environmental specifications
Environmental specifications Description
Relative humidity 5 to 95% non-condensing
Temperature Operating: 32 °F (0.0 °C) to 131 °F (55.0 °C)
Ambient: -13 °F (-25.0 °C) to 185 °F (85.0 °C)
EMC compliance (CE) specifications
Complies with EMC directive 2004/108/EC.
EN 61001-6-4 (2007)
EN 61000-6-2 (2005) Immunity standard for
Emission standard for industrial
environment
industrial environment
EN 55016-2-3 (2006) Class A
EN 61000-4-2 (2009)
EN 61000-4-3 (2006)
EN 61000-4-4 (2004)
EN 61000-4-5 (2005)
EN 61000-4-6 (2007)
UL/c-UL compliance specifications
The certification has been documented by UL in file E214107.
Galvanic isolation on Modbus serial interface
EN 60950-1 (2001)
User Guide 83
Pollution Degree 2
Material Group IIIb
250 VRMS or 250 VDC: Working voltage
500 V: Secondary circuit transient rating

*MMI-20019808*
MMI-20019808
Rev. AF
2022
For more information:
©
2022 Micro Motion, Inc. All rights reserved.
The Emerson logo is a trademark and service mark of Emerson
Electric Co. Micro Motion, ELITE, ProLink, MVD and MVD Direct
Connect marks are marks of one of the Emerson Automation
Solutions family of companies. All other marks are property of
their respective owners.
www.emerson.com
 Loading...
Loading...