

User Guide
DRAFT VERSION - INTERNAL USE ONLY
TesTORK
Wireless Test Torque System
DOCUMENT NAME: TBD REV 0
DRAFT VERSION - INTERNAL USE ONLY
USER GUIDE COPYRIGHT AND DISCLAIMER
DRAFT VERSION - INTERNAL USE ONLY
Tesco Corporation (“TESCO”) has made every effort to ensure that this document contains accurate
and current information for the TESCO Torque Turn System, however, the document is intended to
be used in conjunction with a complete training program and on-site supervision and TESCO
does not warrant or guarantee that the information contained herein is either complete or accurate in
every respect, and the reader hereby protects, indemnifies and holds harmless Tesco Corporation
together with its directors, officers, employees and agents from and against all liability for personal
injury, death or property damage to any person arising directly or indirectly from the use by the reader
of the information contained in the document.
All information in this document is proprieta
Tesco Corporation. This document shall not be used, copied or reproduced in whole or in part, nor
shall be revealed in any manner to outside parties without prior written permission from Tesco
Corporation. All prints and copies shall be returned upon job completion unless otherwise specified in
writing by Tesco Corporation.
Windows® is a registered trademark of Microsoft Corporation
Tesco Corporation © 2013. All rights reserved.
3993 W. Sam Houston Parkway No., Suite 100
Telephone: (713) 359-7000
After Market Sales and Service Contact
Toll Free North America: 1-877-TESCO-77
International: 713-359-7295
ry and confidential, and shall remain the sole property of
in the United States and other countries.
Contact Information
Corporate Head Office
Houston, Texas, 77043
USA
www.tescocorp.com
www.tescoparts.com
Fax: (713) 359-7001
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 I WWW.TESCOPARTS.COM
REVISION INFORMATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Revision Information
Version Date Description of Changes
Rev 0 August 2013 First release of document
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 II WWW.TESCOPARTS.COM
USER GUIDE TABLE OF CONTENTS
DRAFT VERSION - INTERNAL USE ONLY
T
ABLE OF
Compliance Statement. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .VII
RSS-GEN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .VII
Electromagnetic Compatibility Notice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .VII
FCC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .VII
IC RSS 210. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .VII
Industry Canada RF Exposure Statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIII
Safety. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIII
4.1.1 IEC 60079-11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIII
C
HAPTER
Contents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1
C
HAPTER
1: A
2: S
C
ONTENTS
BOUT THIS DOCUMENT
YSTEM OVERVIEW
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Data logging and reports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4
Data Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
User Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
How the TesTORK system works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
What’s Included in the TesTORK kit. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5
Software Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .6
Select Job dialog box . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Existing Jobs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
New Job. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Main screen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Data fields on left Side of Screen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .11
Connections Side Panel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .12
View All Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
Add New Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Edit Current Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Drilling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Pipe Tally Side Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
Reports Side Panel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .21
Hardware Side Panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
About WTTTS side panel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
C
HAPTER
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 III WWW.TESCOPARTS.COM
3: I
NSTALLATION AND START UP
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
TABLE OF CONTENTS USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Pre-Installation Activities . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
Verify Casing Data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
Pre-Job Component Inspection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .25
Pre-job system test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
On-Site Rig Up Procedures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .26
Installing the TesTORK sub . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
System Start Up. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Turning the TesTORK on or off. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .28
Use the following procedures to turn the TesTORK sub on or off: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
To turn on the TesTORK sub . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
To turn off the TesTORK sub . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Starting TesTORK Manager software. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
To start TesTORK Manager software. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
To check connection between the TesTORK sub and TesTORK Manager software. . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
C
HAPTER
Pre-job Activity List. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34
4: O
PERATION
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Connections. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .35
Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
Log a Passed Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Log a Failed Connection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Force Past a Failed Connection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Manual Shoulder Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43
To manually set the shoulder point. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Pipe Tally . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
Reports. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .46
C
HAPTER
Computer Requirements. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
System Start Up. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
System Settings Dialog Box. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
5: S
YSTEM SETTINGS AND ADMINISTRATION
Minimum Hardware. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
Supported Operating System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
Running WTTS Software. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49
To run TesTORK Manager software from a USB flash drive . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
To run TesTORK Manager software from the host computer desktop. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
To start TesTORK Manager software automatically when the host computer starts . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
To start TesTORK software for the first time on a host computer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51
Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
. . . . . . . . . . . . . . . . . . . . . . . . .49
C
HAPTER
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 IV WWW.TESCOPARTS.COM
6: TESCO B
ASE RADIO
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59
USER GUIDE TABLE OF CONTENTS
DRAFT VERSION - INTERNAL USE ONLY
Introduction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Block Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59
Electromagnetic Compatibility Notice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60
FCC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60
IC RSS 210. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Industry Canada RF Exposure Statement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Safety. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60
4.1.1 CSA 22.2 No. 213 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
4.1.2 ANSI/ISA 12.12.01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
User Controls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61
Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Environmental. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Radio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
Contact Closures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Digital Interface. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Mounting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63
Operating Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Maintenance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .64
A
PPENDIX
Cautions and Warnings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
Torque Sub Battery Changing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . A-1
A
PPENDIX
Job Safety Analysis Worksheet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-2
Torque Turn System: Pre-Job Information Checklist. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-4
Torque Turn System: Required Data Sheet. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-7
Torque Turn System: Tool Kit Inventory Checklist. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-9
Torque Turn System: Inventory Checklist. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-11
Torque Turn System: Final Checklist. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . B-13
A
PPENDIX
Torque and RPM Wireless Network . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . C-1
A: C
HANGING THE BATTERY
B: TTS C
C: TTS G
HECKLISTS AND FORMS
ENERAL ASSEMBLY
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .B-1
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .C-1
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 V WWW.TESCOPARTS.COM
TABLE OF CONTENTS USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 VI WWW.TESCOPARTS.COM
E
DRAFT VERSION - INTERNAL USE ONLY
LECTROMAGNETIC COMPATIBILITY NOTICE
FCC
This device complies with part 15 of the FCC Rules. Operation is subject to the following two
conditions: (1) This device may not cause harmful interference, and (2) this device must
accept any interference received, including interference that may cause undesired operation.
IC RSS 210
This device complies with Industry Canada licence-exempt RSS standard(s). Operation is
subject to the following two conditions: (1) this device may not cause interference, and (2) this
device must accept any interference, including interference that may cause undesired
operation of the device.
USER GUIDE
S
AFETY
Le présent appareil est conforme aux CNR d’Industrie
radio exempts de licence. L’exploitation est autorisée aux deux conditions suivantes : (1)
l’appareil ne doit pas produire de brouillage, et (2) l’utilisateur de l’appareil doit accepter
tout brouillage radioélectrique subi, même si le brouillage est susceptible d’en compromettre
le fonctionnement.
The TESCO TesTORK is intended to be used in locations where hazardous gases may likely
be present. It meets the requirements of IEC-60079-11 for use in Zone 1 Group IIB.
Note: Only units with either a Special Inspection sticker or
Model Certification label shall be used in locations where
hazardous gases may be present.
Canada applicables aux appareils
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 VII WWW.TESCOPARTS.COM
COMPLIANCE AND COMPATIBILITY USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
4.1.1 IEC 60079-11
THIS EQUIPMENT IS SUIT ABLE FOR USE IN ZONE 1, GAS GROUP IIB, OR NONHAZARDOUS LOCATIONS ONLY.
Warning! EXPLOSION HAZARD - SUBSTITUTION OF
!
Avertissement! RISQUE D’EXPLOSION - LA SUBSTITUTION
!
Warning! The TESCO TESTORK UNIT MUST ONLY BE
!
COMPONENTS MAY IMPAIR SUITABILITY FOR
ZONE 1.
DES COMPOSANTS PEUT RENDRE CE MATERIEL
INACCEPTABLE POUR LES EMPLACEMENTS DE
ZONE 1.
ASSEMBLED AND OPERATED BY QUALIFIED
PERSONNEL
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 VIII WWW.TESCOPARTS.COM
C
DRAFT VERSION - INTERNAL USE ONLY
HAPTER
C
ONTENTS
This document contains the following information for the TESCO Wireless Torque Turn System (WTTS):
• System overview
• Rig up, configuration and calibration
• Operation
• Ch ecklists and general syst
1: A
BOUT
em information
T
HIS
D
OCUMENT
USER GUIDE
C
ONVENTIONS
This document uses signal words and symbols to identify the hazards that a person may
encounter while assembling, maintaining, servicing or operating this product.
Danger!
!
Warning!
!
Caution
!
Indicates that the situation could endanger the life of the operator
or other personnel if procedures are not followed correctly.
Indicates that the situation could present a serious risk of harm to
personnel or severe damage to equipment if procedures are not
followed correctly.
Indicates that the situation could cause damage to equipment if
the procedure is not followed correctly.
Note
Indicates additional information that will enable the user to
complete the task more easily.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 1 WWW.TESCOPARTS.COM
ABOUT THIS DOCUMENT USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 2 WWW.TESCOPARTS.COM
C
DRAFT VERSION - INTERNAL USE ONLY
HAPTER
This chapter provides an overview of the functionality and features of the TesTORK Wireless
Torque Monitoring System.
I
NTRODUCTION
The T esT ORK W ireless Torque Monitoring System was developed by TESCO to complement
the TESCO Casing Running Tool (CRT). The TesTORK enables operators to accurately monitor torque vs. turns and torque vs.
systems. RPM is also monitored.
2: S
YSTEM
time when making up connections using TESCO top drive
O
VERVIEW
USER GUIDE
The TesTORK is wireless in operation and functio
The only connection required is an AC power supply to the base radio.
ns independently of other rig equipment.
Features
The TesTORK provides the following operational features:
• Real time monitoring of torque
• Torque load is measured against both time
connection.
• Operators can define the characteristics of a sa
connection data specifying torque limits, turn values and hold time for the shoulder and
peak toque target.
• During a connection attempt, the user inte
torque load vs. time and torque load vs. number of turns. The speed (RPM) of the casing
during a connection attempt can also be viewed.
• A summary of data from the connection attem
when the connection attempt is complete
• Connection attempts are identified as being either a pass or a fail. The operator can also
ntify a connection as being a forced pass or forced fail. Comments must be added to
ide
connections identified in this way.
• Information and data defining a job can be specified be
includes company details, casing data, shoulder data and peak torque data values. Some
data can also be changed during a job.
• The TesTORK is calibrated to measure between 0-5
calibrated regularly
load applied by the top drive during casing connections
and number of turns for each casing
tisfactory casing connection by entering
rface (UI) displays real time data showing
pt is immediately displayed on the UI
fore a job begins. Information
0000 ft-lbs of toque and can be re-
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 3 WWW.TESCOPARTS.COM
SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
• The TesTORKmakes efficient use of battery life which is continually monitored. To
preserve battery life, the TesTORK will enter sleep mode after a period of no
communication between itself and the base radio.
• The TesTORK uses an auto hunt mode to establish wireless connection with the base
radio
Data logging and reports
The TesTORK provides the following data logging and reporting functionality:
• Torque, turn and time data for every connection is logged at 100 times per second
• Every connection attempt is logged
• Operators are prompted to enter comments for failed connections. Comments
added following a successful connection.
• Logs and displays connec tion number, casing depth and
nection
• Reports can be generated that provide information
summaries, and connection details (i.e. shoulder torque values, peak torque values and
number of turns)
• A connection can be abandoned if two complete turns (or less) are not completed
and the result displayed
can also be
the reason for every failed con-
on job statistics, section detail or
Data Configuration
The TesTORK software provides the following data configuration options and functionality:
• Connection data defining the characteristics of a sa
changed at any time during a job
Note: The TesTORK flags and logs all changes to connection data
during a job.
• All connection data is saved for future use. This reduces the time required to enter data
manually by allowing the operator to reuse similar data from a previous job
• Data is displayed and logged
Note: Units cannot be changed during a connection pr oc ess .
in metric or Imperial units for every connection.
tisfactory casing connection can be
User Interface
The TesTORK user interface (UI) has the following features:
• TesTORK software is automatically installed a
have to manually install the program onto a computer
• Operators can enter data and navigate the TesTORK screens with either a touch screen
(only some
• Interactive torque vs. time and turns graph reports are
• Use pan and zoom controls to view details at any point on the graph
• View torque vs. time, torque vs. turn, or torque vs. time and turns
• Show or hide RPM data by clicking a single button
laptop computers) or mouse click
nd runs from the client CD; users do not
displayed enabling the operator to:
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 4 WWW.TESCOPARTS.COM
USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
H
OW THE TES
The TesTORK system is comprised of the following components:
• TesTORK sub
• TesTORK housing
• Base radio (connects to the computer hosting TesTORK Manager software)
• TesTORK Manager software and host computer
TORK
SYSTEM WORKS
The TesTORK sub is installed between the top drive
TesTORK sub provide torque, tension and rotational data. This data is transmitted to the base
radio by a wireless transmitter located in the TesTORK housing. The TesTORK sub and TesTORK housing are a single unit referred to as the T
The base radio supplies torque, tension and rot
ware‘s host computer.
The combination of TesTORK system components enable
nection data using the TesTORK Manager software‘s user interface.
See “Appendix C: TTS General Assembly” for the general schematic overview.
W
HAT’S INCLUDED IN THE TES
The TesTORK kit consists of the following items:
• TesTORK with built in wireless transmitter
• Base radio
• Computer
• Custom battery pack.
• Printer with power cord, USB cord, paper and
• USB patch cord
and casing drive system. Sensors in the
esTORK.
ational data to the TesTORK Manager soft-
the operator to view and log con-
TORK
KIT
ink cartridges
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 5 WWW.TESCOPARTS.COM
SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
S
OFTWARE OVERVIEW
This section provides an overview of T esT ORK software including the main screen and dialog
boxes available from the main screen.
Select Job dialog box
The Select Job dialog box appears after starting TesTORK software. This dialog box enables
the operator to resume work on an existing job, or start a new job.
Two tabs are available in the Se
• Existing Jobs
• New Job
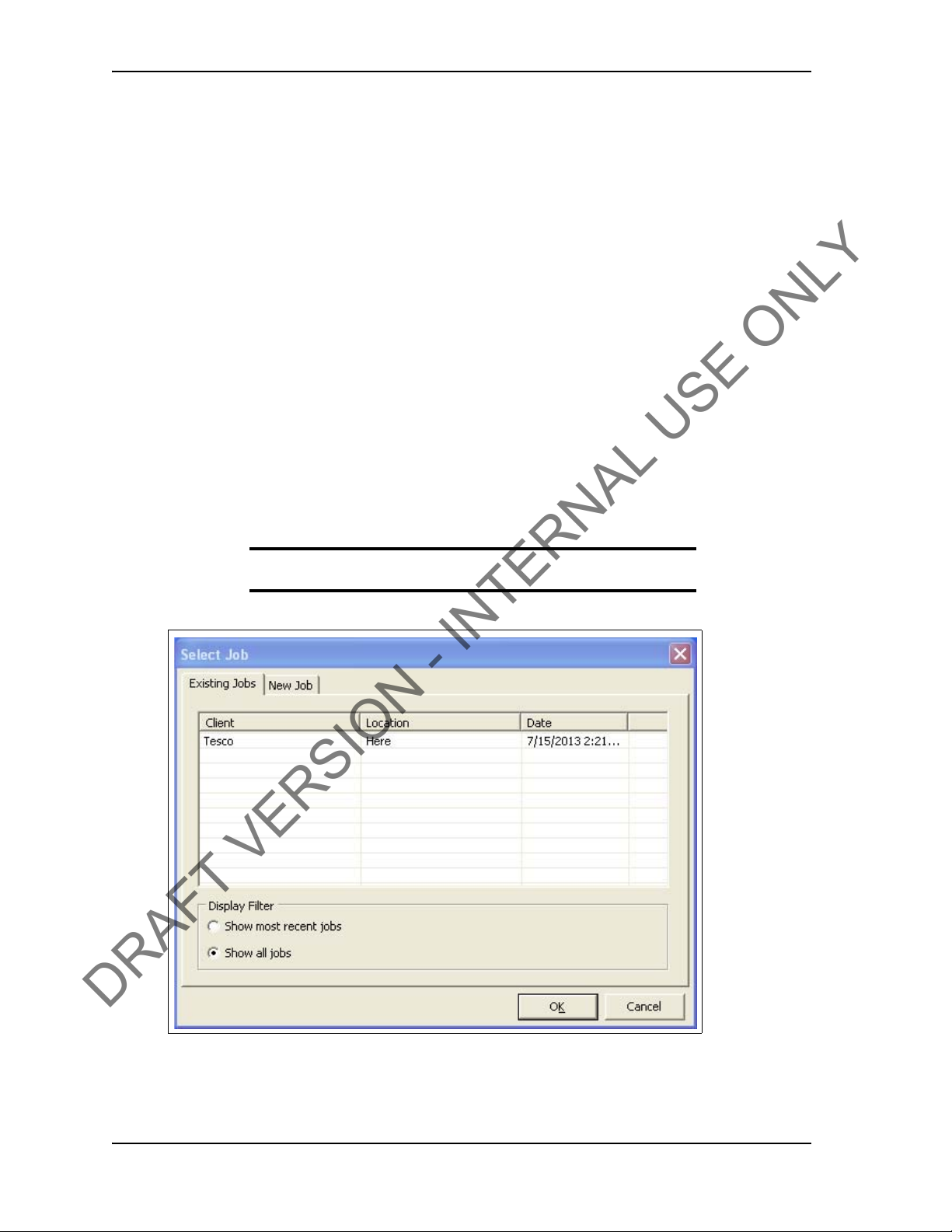
Existing Jobs
The Existing Jobs t
immediately resume work on that job. TesTORK software saves information and connection
data from each job monitored by the software.
Figure 2-1: Existing Jobs tab
ab provides a list of exiting jobs and enables the operator to select a job and
Note: If no job is selected, the most recent job is automatically restarted when the OK button is clicked.
lect Job dialog box:
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 6 WWW.TESCOPARTS.COM
USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
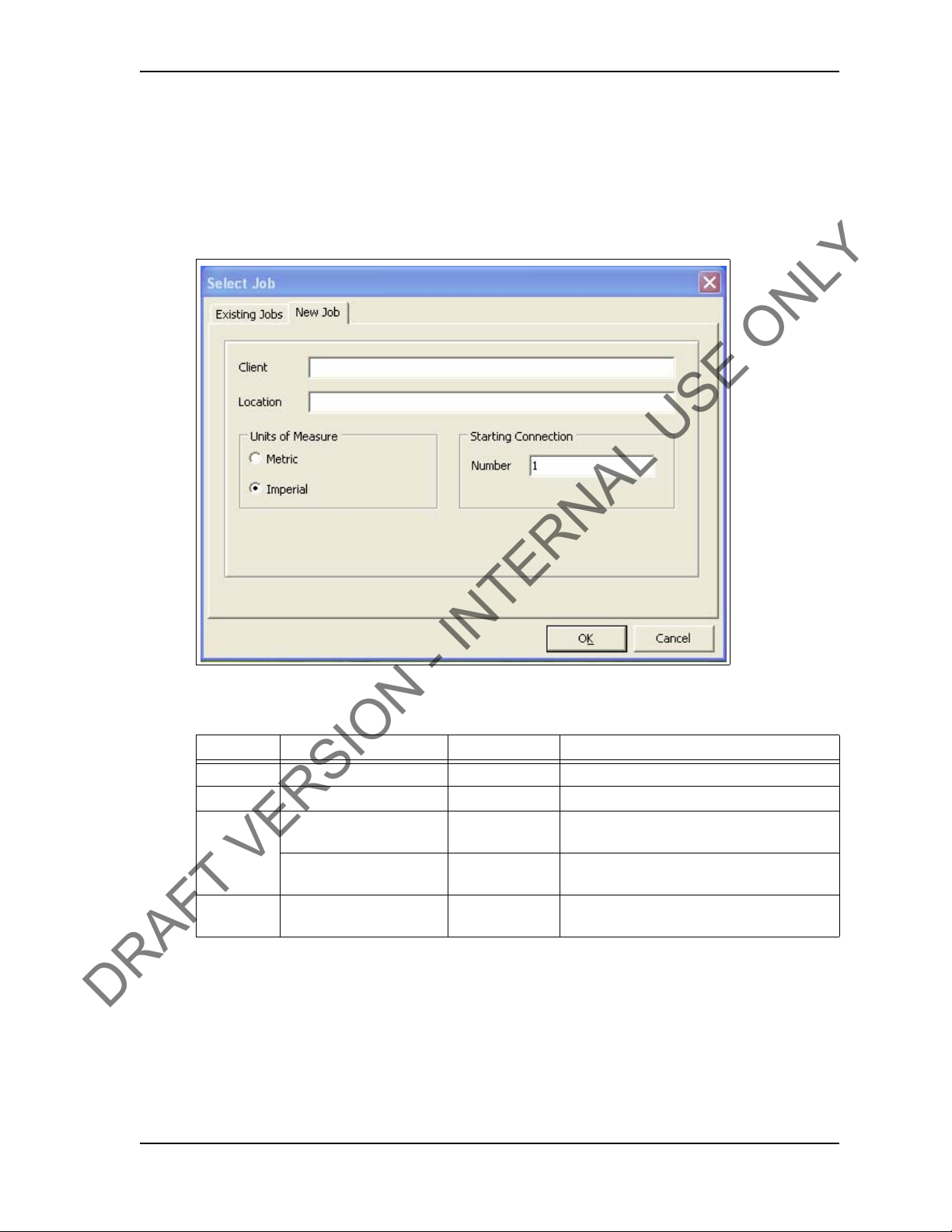
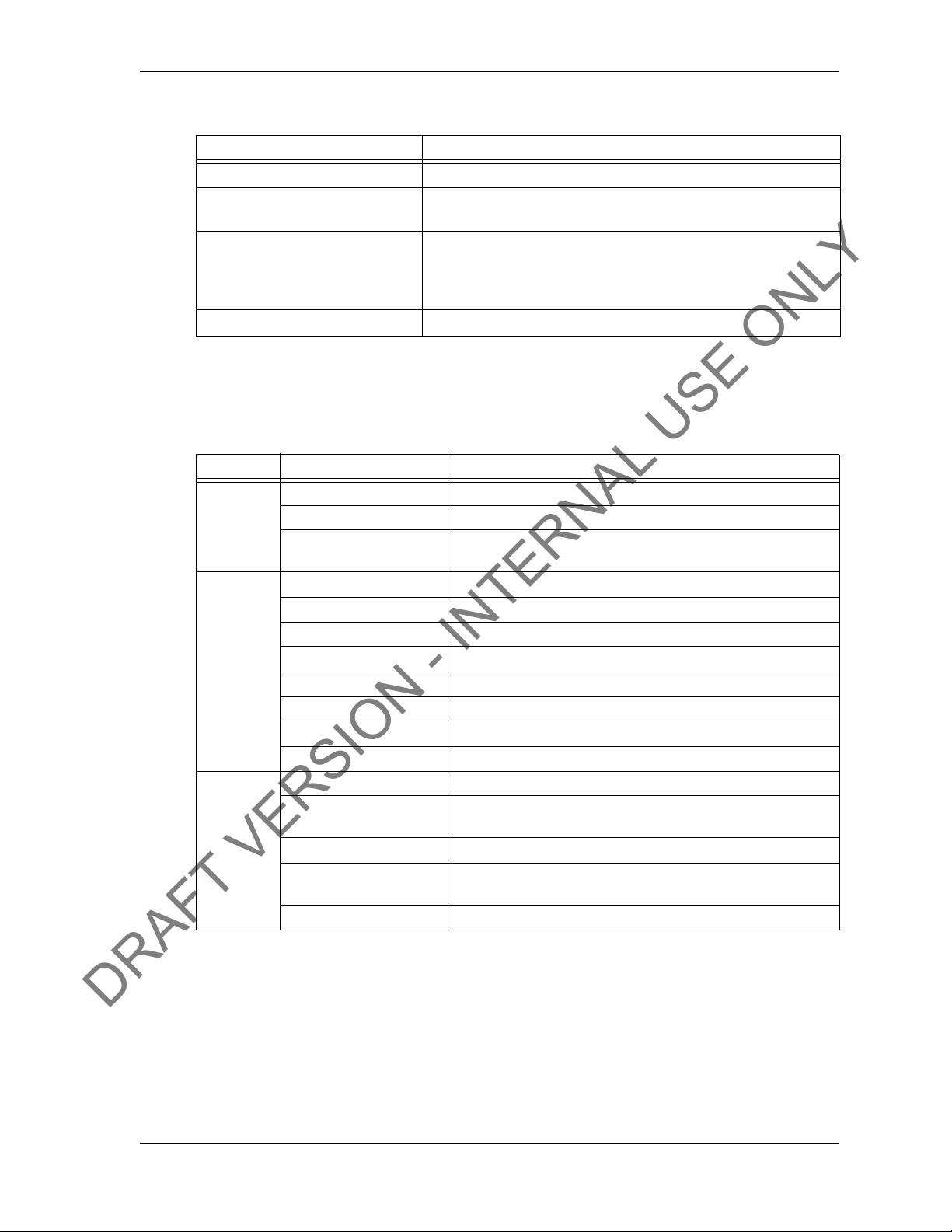
New Job
The New Job tab
enables the operator to begin a new job by entering information and
connection data that define the job. Information is first entered in the New Job tab. The Create
New Job dialog box then appears enabling the operator to enter further information and
connection data.
Figure 2-2: New Job tab
The following items are available in the New Jobs ta
Table 2-1: Create New Job dialog box
Group Item Functionality Description
Client Text box Input of text information
Location Text box Input of text information
Units of
Measure
Starting
Connection
Metric Radio button Configures all data to be displayed in imperial
Imperial Radio button Configures all data to be displayed in metric
Number Text box Defines starting connection number
b:
unit
units
s
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 7 WWW.TESCOPARTS.COM
SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
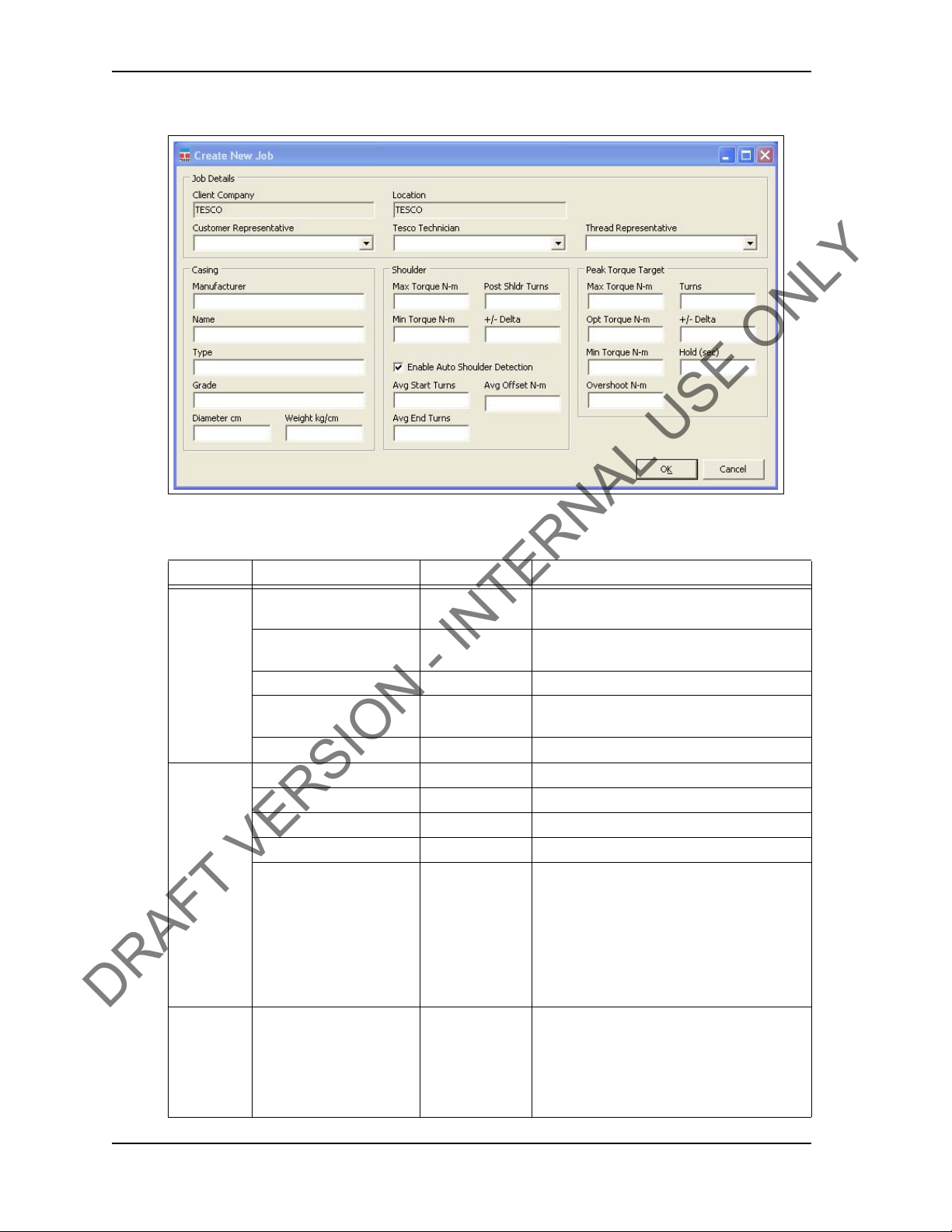
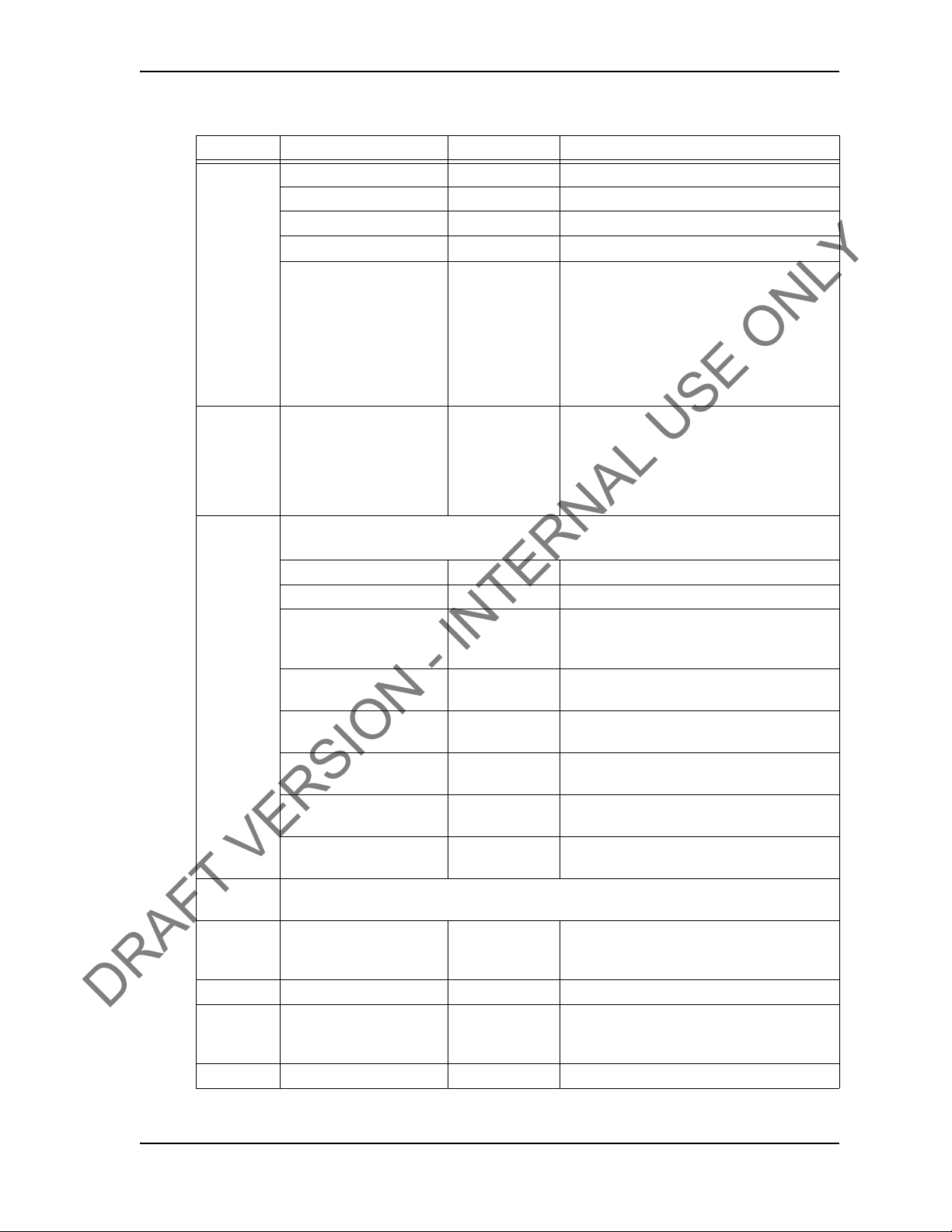
Figure 2-3: Create New Job dialog box
The following items are available in the Create New Job d ialog box:
Table 2-2: Create New Job dialog box:
Group Item Functionality Description
Job Details Client Company Text box Displays the name of the company typed in
the New Job tab
Location Text box Displays the name of the location typed in the
New Job tab.
Customer Representative Text box Representative from the customer
Tesco Technician Text box TESCO technician entering the job and
connection data
Thread Representative Text box Independent thread expert
Casing Manufacturer Text box Casing manufacturer
Name Text box Representative from casing manufacturer
Type Text box Type of casing
Grade Text box Steel grade of casing
Diameter cm Text box Casing diameter value. A correct casing
diameter
of RPM. A metric or diameter vale can be
entered pending on the units of measure
selection made in the Select Job tab.
For information on selecting how units are
displayed, see Table 2-1 on page 7.
Weight kg/cm Text box Casing weight value. A metric or diameter
vale can be
measure selection made in the Select Job tab.
For information on selecting how units are
displayed, see Table 2-1 on page 7.
value is vital for accurate calculation
entered pending on the units of
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 8 WWW.TESCOPARTS.COM
USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
Table 2-2: Create New Job dialog box:
Group Item Functionality Description
Shoulder
Peak Torque
Target
Test runs are required to determine the number of turns and the shoulder torque value. Use
the Stream Check function. For more information.
Max Torque Text box Maximum post-shoulder target range
Min Torque Text box Minimum post-shoulder target range
Post Shldr Turns Text box
+/- Delta Text box
Avg Start Turns Text box
Avg End Turns Text box
Avg Offset ft-lb Text box
Auto-Shoulder Mode Check box When the auto-shoulder mode is selected the
Consult your casing manufacturer for the information used in this parameter group.
Max Torque ft-lb Text box Maximum allowable torque value. A torque
Opt Torque ft-lb Text box Optimal torque value
Min Torque ft-lb Text box Minimum allowable torque value. A Torque
Turns Text box Number of turns required to reach peak torque
+/- Delta Text box Allowable variance in number of turns
Hold (sec) Text box Time required to maintain the optimal torque
Overshoot ft-lb Text box Increased torque value generated by the
The amount the casing should turn after
‘shouldering’ occurs; this value is typically
very low.
Allowable variance for the post-shoulder
turn.
Sets the turn count that pre-shoulder
averaging begins at
Sets the turn count that pre-shoulder
averaging ends at
Sets the shoulder torque value above the
pre-shoulder average
shoulder point can be moved (manually)
value above this setting results in a failed
connection result.
value below this setting results in a failed
connection result.
required to reach peak torque
setting. During this time, var
optimal torque range result in a failed
connection result.
momentum of the top driv
connection is fully tightened
iances outside the
e when the casing
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 9 WWW.TESCOPARTS.COM
SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
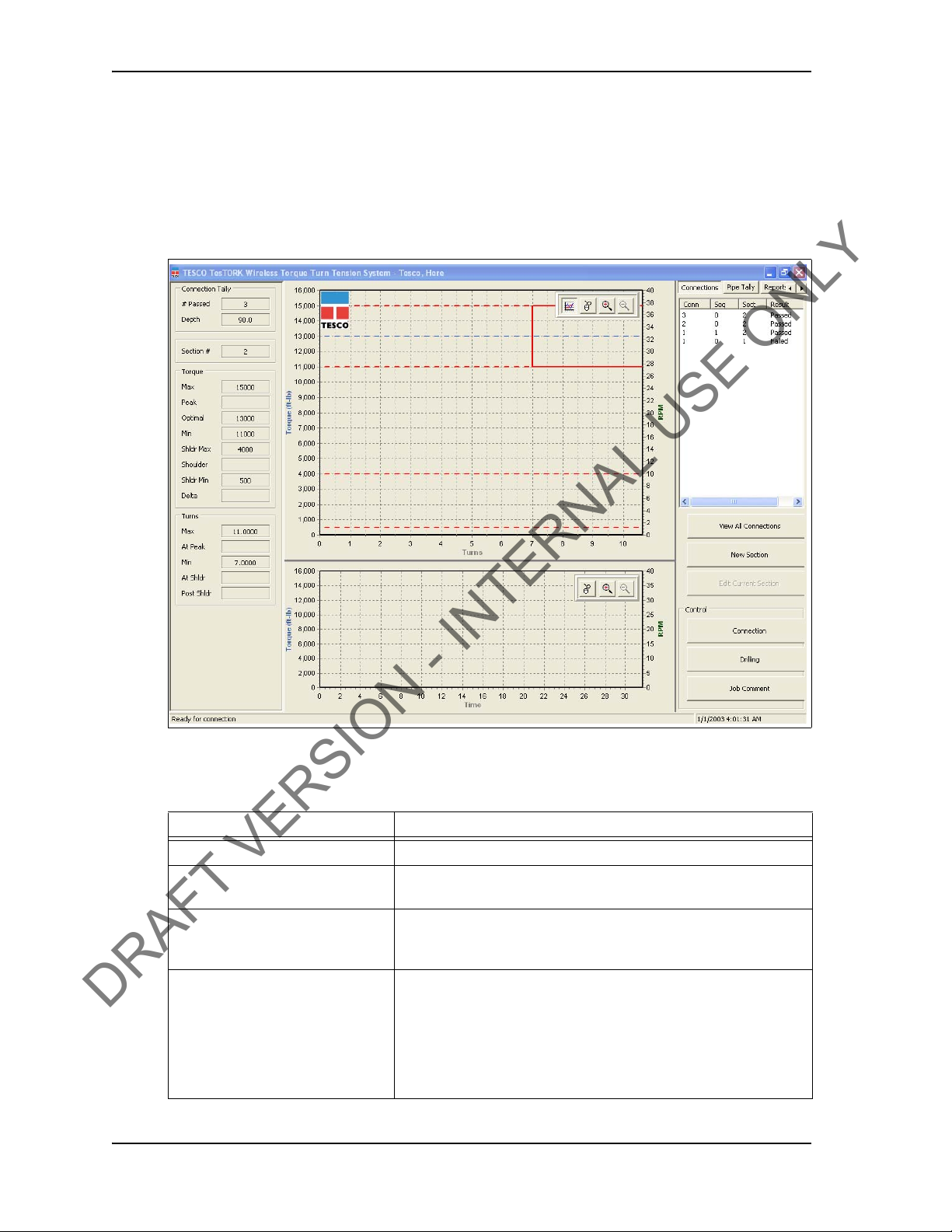
Main screen
The main screen appears after starting TesTORK so
ftware and beginning a job. The main
screen provides access to information and dialog boxes that enable the operator to accurately
monitor torque, turns and RPM while making up connections. The main screen also provides
access to data from previous connection attempts, reports and hardware configuration options.
Figure 2-4: Main screen
The following items are available from the
Table 2-3: Main Screen Interface Elements
Item
Footer bar Contains connection status information
Data fields on the left side of the
screen
Graphs Display torque (and RPM) vs. turns and torque (and RPM) vs. time
Connections button Provides access to the following dialog boxes:
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 10 WWW.TESCOPARTS.COM
Displays number of passed connections, depth, torque values, turn
values, shoulder and post-shoulder torque and turn data
Information is displayed in real time as the connection progresses.
•View All Connections
•New Section
•Edit Current Section
•Connection
•Drilling
•Job Comment
main screen:
Data/Notes
USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
Table 2-3: Main Screen Interface Elements
Item Data/Notes
Pipe Tally
Reports
Hardware
About WTTS
tab Enables the operator to view a list of all connection attempts
tab Enables the operator to view and print data section and connection
data
tab Enables the operator to view hardware configuration information.
Administrators are able to access and configure the System Settings
dialog box
tab Enables the operator to view
TesTORK software version information
Data fields on left Side of Screen
The following data is available on the left side of the screen:
Table 2-4: Data fields on left side of screen
Group Item Description
Connection
Tally
Torque Max Value entered in Create New Job or Add New Section dialog box
Turns Max V alue entered in Create New
# Passed Number of connections categorized as being passed
Depth Current total depth of casing
Section # Every change to job
new section number
Peak Peak torque value during a connection attempt
Optimal V alue entered in Create New
Min V alue entered in Create New Job or Add New Section dialog box
Shldr Max Value entered in Create New
Shoulder System or manually defined value
Shldr Min Value entered in Create New Job or Add New Section dialog box
Delta Value entered in Create New
At Peak How many turns taken to reach the peak torque value during a
connection attempt
Min V alue entered in Create New Job or Add New Section dialog box
At Shldr How many turns taken to reach the shoulder value during a
connection attempt. System
Post Shldr Value entered in Create New Job or Add New Section dialog box
information and connection data creates a
Job or Add New Section dialog box
Job or Add New Section dialog box
Job or Add New Section dialog box
Job or Add New Section dialog box
or manually defined value
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 11 WWW.TESCOPARTS.COM
SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
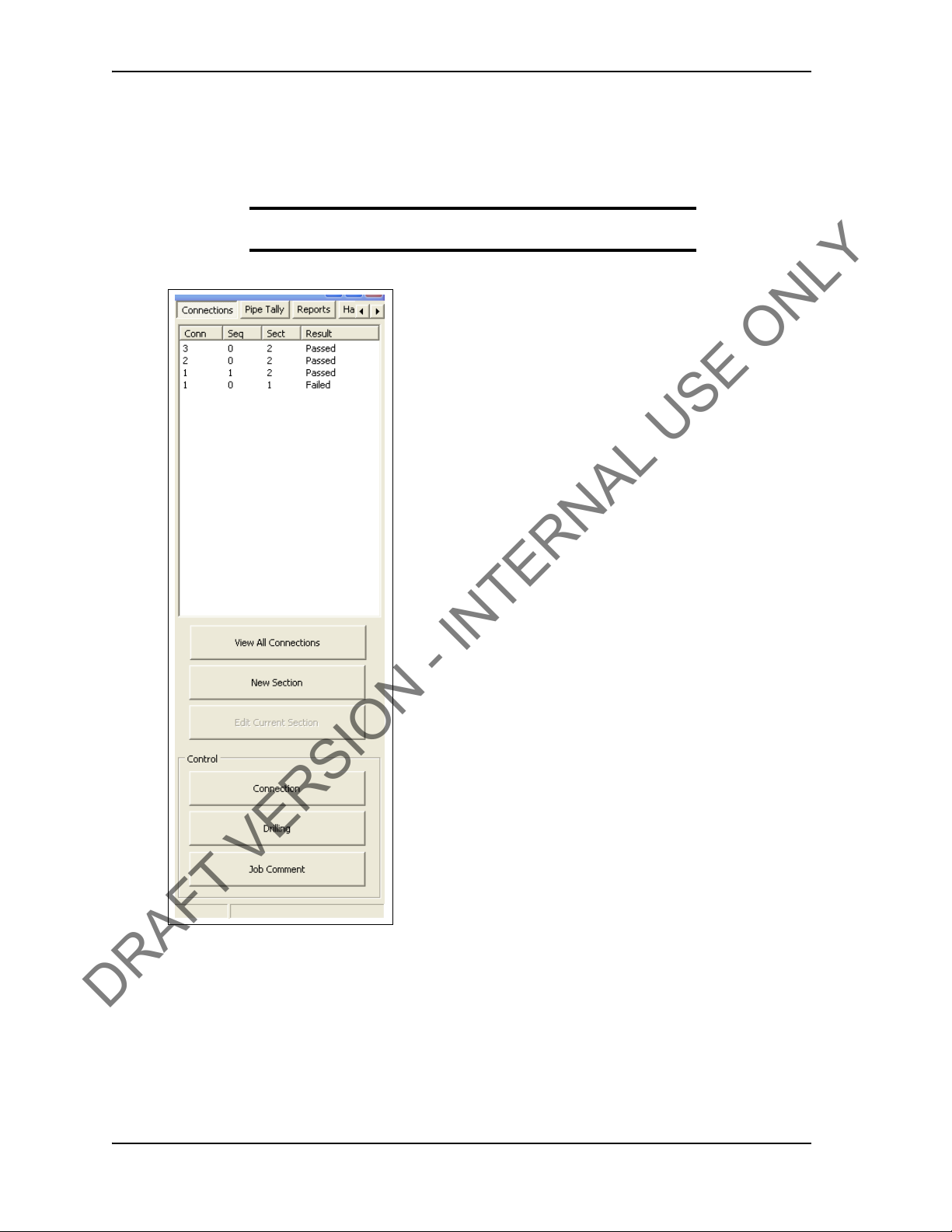
Connections Side Panel
The Connections side panel enables the operator to access the following dialog boxes and
windows:
Note: A list of the results from each attempted connection is also
displayed when the Connections button is clicked.
Figure 2-5: Connections side panel
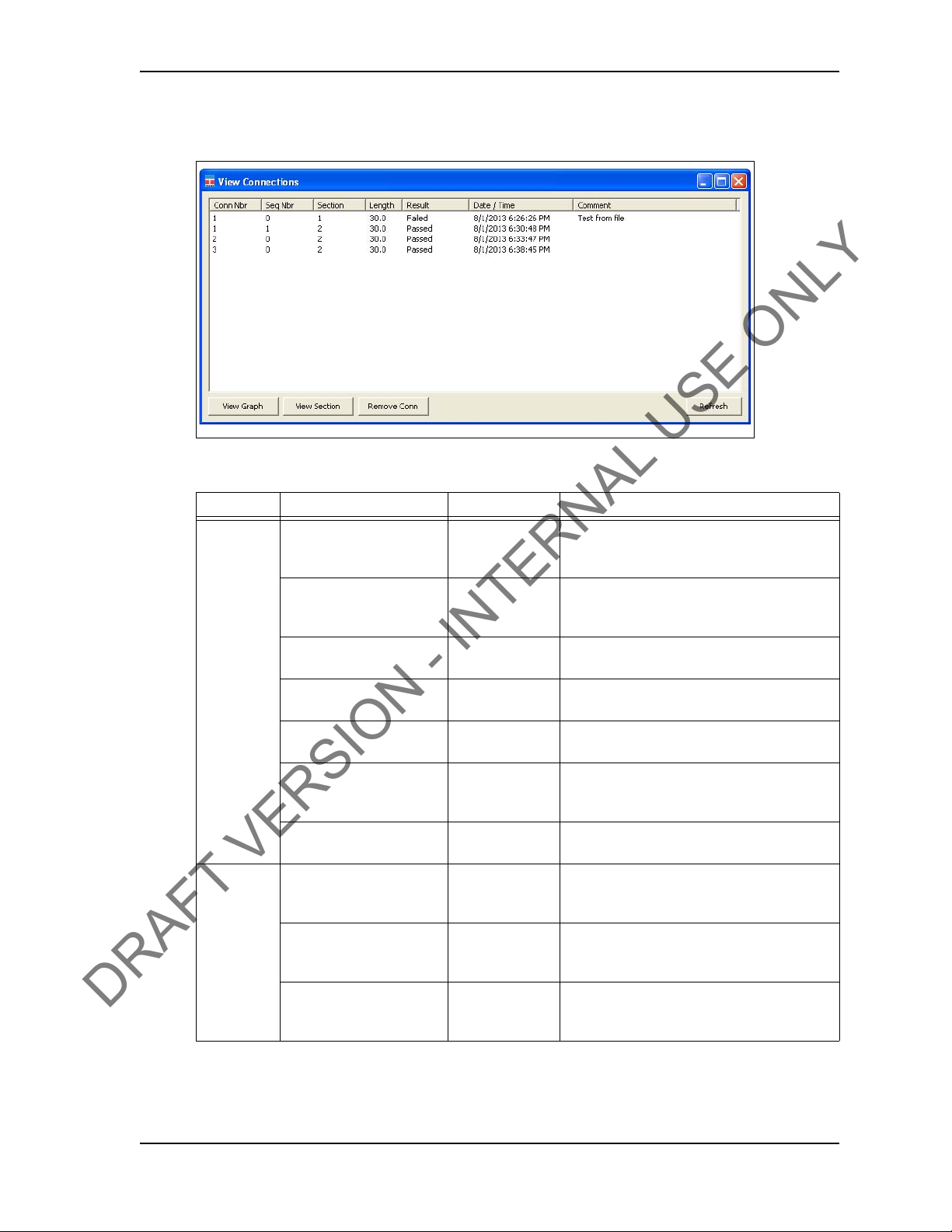
View All Connections
Clicking the V
window containing details of all casing connections made as part of the current job. The View
Connections window also features buttons that enable the operator View Graph, View Section
and Remove Conn (remove connection).
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 12 WWW.TESCOPARTS.COM
iew All Connections button enables the operator to access the View Connections
USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
Figure 2-6: View Connections Window
Table 2-5: View Connections Window:
Group Item Functionality Description
Columns Conn Nbr
(Connection Number)
Seq Number
(Sequence Number)
Section Displays the
Length Displays casing
Result Display
Date/Time Displays time
Comments Displays
Button View Graph Displays the
View Section Displays job
Remove Conn
(remove connection)
Displays the
connection
number
Displays the
sequence
number
ction
Se
length
connection result
and date
ormation
inf
Comments
graph of the
selected item.
information and
connection dat
Removes the last
connection
attempt
a.
Running total of connections made
Number of attempts made on a connection
Section number
Length of casing used in connection
Can be a passed, failed or forced pass
connection
Displays the exact time and date of each
connection attempt
The operator can enter comments
Displays the graphed connection data from
the selected connection attempt
Displays the job information and connection
data for the selected connection attempt
Removes the last connection attempt from a
job
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 13 WWW.TESCOPARTS.COM

SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Add New Section
The Add New
Section window enables the operator to make revisions to the job details and
connection data. A new section is created each time a change is made to the job details and
connection data following a connection attempt.
However, changes can be made to the job details and
connection data without creating a new
section if a connection has not yet been attempted.
Figure 2-7: Add New Section Window
Table 2-6: Add New Section Window:
Group Item Functionality Description
Job Details Client Company Text box Displays the name of the company typed in
the New Job tab
Location Text box Displays the name of the location typed in the
Job tab.
New
Customer Representative Text box Representative from the customer
Tesco Technician Text box TESCO technician entering the job and
connection data
Thread Representative Text box Independent thread expert
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 14 WWW.TESCOPARTS.COM
USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
Table 2-6: Add New Section Window:
Group Item Functionality Description
Casing Manufacturer Text box Casing manufacturer
Name Text box Representative from casing manufacturer
Type Text box Type of casing
Grade Text box Steel grade of casing
Diameter cm Text box Casing diameter value. A correct casing
Shoulder
Peak Torque
Target
diameter
of RPM. A metric or diameter vale can be
entered pending on the units of measure
selection made in the Select Job tab.
For information on selecting how units are
displayed, see Table 2-1 on page 7.
Weight kg/cm Text box Casing weight value. A metric or diameter
vale can be entered pending on the units of
measure selection made in the Select Job tab.
For information on selecting how units are
displayed, see Table 2-1 on page 7.
Test runs are required to determine the number of turns
the Stream Check function. For more information.
Max Torque Text box Maximum post-shoulder target range
Min Torque Text box Minimum post-shoulder target range
Post Shldr Turns Text box
+/- Delta Text box
Avg Start Turns Text box
Avg End Turns Text box
Avg Offset ft-lb Text box
Auto-Shoulder Mode Check box When the auto-shoulder mode is selected the
Consult your casing manufacturer for the information used in this parameter group.
Max Torque ft-lb Text box Maximum allowable torque value. A torque
Opt Torque ft-lb Text box Optimal torque value
Min Torque ft-lb Text box Minimum allowable torque value. A Torque
Turns Text box Number of turns required to reach peak torque
The amount the casing should turn after
‘shouldering’ occurs; this value is typically
very low.
Allowable variance for the post-shoulder
turn.
Sets the turn count that pre-shoulder
averaging begins at
Sets the turn count that pre-shoulder
averaging ends at
Sets the shoulder torque value above the
pre-shoulder average
shoulder point can be moved (manually)
value above this setting results in a failed
connection result.
value below this setting result
connection result.
value is vital for accurate calculation
and the shoulder torque value. Use
s in a failed
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 15 WWW.TESCOPARTS.COM
SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Table 2-6: Add New Section Window:
Group Item Functionality Description
+/- Delta Text box Allowable variance in number of turns
required to reach peak torque
Hold (sec) Text box Time required to maintain the optimal torque
setting. During this time, variances outside the
optimal torque range result in a failed
connection result.
Overshoot ft-lb Text box Increased torque value generated by the
momentum of the top driv
connection is fully tightened
e when the casing
Edit Current Selection
Enables the operator to makes changes to a curre
nt section’s job information and connection
data if no connection attempt has yet been made within that section. If a connection attempt
has been made, the button is not functional.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 16 WWW.TESCOPARTS.COM

USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
Connection
The Conn
ection dialog box enables the operator to begin monitoring a connection attempt.
Once a connection attempt is complete, the Connection dialog box displays the connection
result pass or fail. The operator can accept the connection result or assigned a Forced Pass
designation to a connection attempt that failed.
The Con
nection dialog box also enables the operator to start a streaming checking and monitor
connection data without logging the data. The operator can also add comments associated wit
each connection attempt and edit casing length data.
Figure 2-8: Connection Window
Table 2-7: Connection Window Dialog
Group Field/Element Name Data/Notes
Communications Status Bar Provides information on the connection status
between the TesTORK and TesTORK Manager
software. The following connection status messages
can be displayed:
•Hunting and TesTORK Manager software
•Idl
TORK and TesTORK Manager software
treaming - TesTORK Manager software is reiev-
•S
ing connection data from the TesTORK
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 17 WWW.TESCOPARTS.COM
No connection between the TesTORK
e - Connection is established between the Tes-
SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Table 2-7: Connection Window Dialog (Continued)
Grou
p Field/Element Name Data/Notes
Connection Number Increments with every passed or forced pass
connection. Remains the same for a failed connection
attempt.
Length (ft) Length of current casing (not including
Stream Check
Start Starts logging a connection attempt. Once the casing
Stop Stops logging the connection attempt once complete
Set Shoulder Enables the operator to manually set a shoulder point.
Mark Connection As Enables the operator to record a connection attempt
Comment Enables the operator to add a comment to any
Displays connection data without logging the data.
has completed two turns, logging cannot be aborted
and the result is recorded.
and returns connection status to Idle status.
If TesTORK Manager software doesn’t automatically
detect a shoulder, this button is set by default.
as a Pass, Failed or Forced Passed. A comment must
be added if a connection result is over ridden or the
connection attempt failed.
connection attempt. However
added to a Failed or Forced Passed. attempt.
, comments must be
thread)
Drilling
The Drilling Control dialog box enables the operat
or to view torque and turns data without the
data being logged. Data is updated every second rather than at 100 times a second.
Figure 2-9: Drilling Control Window
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 18 WWW.TESCOPARTS.COM

USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
Table 2-8: Drilling Control Window Dialog
Group Field/Element Name Data/Notes
Communications Status Bar Provides information on the connection status
between the TesTORK and TesTORK Manager
software. The following connection status messages
can be displayed:
•Hunting and TesTORK Manager software
•Idle - Connection is established between the TesTORK and TesTORK Manager software
Streaming - T
connection data from the TesTORK
Control Start Dr il ling Starts displaying torque and turns data
Stop Drilling Returns TesTORK Manager software to Idle mode
Elapsed Time Time since the St
Figure 2-10: Job Comments Window
No connection between the TesTORK
esTORK Manager software is reieving
art button was pressed
Table 2-9: Job Comments Dialog
Group Field/Element Name Data/Notes
Add Comment Enables the operator to add comments about a job
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 19 WWW.TESCOPARTS.COM

SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Pipe Tally Side Panel
The Pipe Tally side panel displays a list of all connection attempts. When a connection attempt
is selected the connection data associated with the attempt is displayed:
Figure 2-11: Pipe Tally Window
Table 2-10: Pipe Tally Dialog
Group Field/Element Name Data/Notes
Pipe Tally Conn (Connection) Connection number
Length Casing length
Sect (Section) Section number
Date/Time Time and date connection attempt was started
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 20 WWW.TESCOPARTS.COM

USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
Reports Side Panel
The Reports side panel displays the Report Sel ection window By selecting from the drop down
menu, an operator can view accumulated data from a job. Data includes job statistics, individual section details, combined section details and job comments.
Figure 2-12: Reports Window
Table 2-11: Reports Window Dialog
Group Field/Element Name Data/Notes
Report Selection Type
(Drop Down Menu)
Range (All or
Preview (Button) Displays report
Note: For a complete description of each report and the information available, see “Reports” on page 46.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 21 WWW.TESCOPARTS.COM
Range) Display all items or a range of items
Job Statistics
Sections (detail)
Sections (summary)
Connections

SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Hardware Side Panel
The Hardware side panel displays information about the Wireless Torque Turn Tension Sys-
tem.
Figure 2-13: Hardware Window
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 22 WWW.TESCOPARTS.COM

USER GUIDE SYSTEM OVERVIEW
DRAFT VERSION - INTERNAL USE ONLY
Table 2-12: Hardware Window Dialog
Group Field/Element Name Data/Notes
Item Ctrl Port Type
(Control Port Type)
Ctrl Port Desc
(Control Port Description)
Ctrl Port Cmds Tx System information
Ctrl Port Resp Rx System information
Ctrl Port Pkt Errs System information
Ctrl Port Bytes Tx System information
Ctrl Port Bytes Rx System information
Ctrl Port Last Resp System information
Device Type System information
Device Status System information - Status is Idl
Raw Data Logging System information
Cal’d Data Logging System information
Data Port Type System information
Data Port Desc System information
Data Port Cmds Tx System information
Data Port Resp Rx System information
Data Port Pkt Errs System information
Data Port Bytes Tx System information
Data Port Bytes Rx System information
Data Port Last Resp System information
Buttons Configuration Enables access to the T
Clear Stats **Please supply description
System information
System information
e when
communication is established between the
TesTORKand TesT ORK Manager software
esTork System Settings
dialog box. A password is required. For more
information on using the TesTork System Settings
dialog box, see “System Settings Dialog Box” on
page 53.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 23 WWW.TESCOPARTS.COM

SYSTEM OVERVIEW USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
About WTTTS side panel
The About WTTTS side panel displays the TESCO Wireless Torque Turn Tension System
(WTTTS) Version as well as TESCO contact information.
Figure 2-14: About WTTTS Window
Table 2-13: About WTTTS Dialog Box
Group Field/Element Name Data/Notes
About WTTTS Version The Current Software Version of the TESCO WTTTS.
Contact Information TESCO Corporation Contact Information
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 24 WWW.TESCOPARTS.COM

C
DRAFT VERSION - INTERNAL USE ONLY
HAPTER
This chapter provides information on installing and starting The TesTORK Wireless Torque
Monitoring System‘s hardware and software components.
3: I
NSTA LLATION AND
S
TART UP
USER GUIDE
PRE-I
The installation process consists of th
• Pre-installation activities
Note: Once a job has been defined, the TesTORK system components must be inspected and verified before goin g to the job
site.
• Pre-job component inspection
• On-site rig-up procedures
• Installing the Torque Sub
• System start-up
e following general procedures:
NSTALLATION ACTIVITIES
Verify Casing Data
Before traveling to the casing running job site, ensure the following information about the casing has been collected from the fiel
881031 in “Appendix B: TTS Checklists and Forms”).
• casing weight
• casing size
• approximate lengths (tally sheet)
• connection types
d supervisors at TESCO (see Pre-Job Information checklist
Pre-Job Component Inspection
Complete the following steps to ensure that the TesTORK system is complete and functional
before traveling to the job site.
1. Ens
2. Check all
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 25 WWW.TESCOPARTS.COM
ure that all TesTORK components are present in the pelican case(s).
cables for wear or damaged ends. If damage is detected, or if a cable is
suspect, pin out the cord and verify its condition.

INSTALLATION AND START UP USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
3. Connect the system together and verify that data is being received at the computer
and most importantly check the battery life. If battery life is not enough to complete
the job, install new lithium D size batteries before going to site.
Note: See “Appendix A: Changing The Battery” for more information.
4. After completing the initial system verification and confirming that all the required
components are present, repack all of the items into the pelican case(s) and crate.
ON-S
5. Submit the completed checkl
kit prepared for the upcoming job.
6. Use
form 881027 as a reference; see “Appendix B: TTS Checklists and Forms”
ist to the supervisor to confirm that there is a complete
Pre-job system test
Ensure a pre-job system test is completed (i.e. communication can be established between the
TesTORK and TesTORK Manager software) before traveling to the job site.
For example:
1. Connect all equipment.
2. Switch on
3. Ens
Manager software
computer
ure connection has been established between the TesTORK and TesTORK
ITE RIG UP PROCEDURES
Complete the following steps to ensure that the correct placement of the TesTORK system’s
hardware components after arriving at the job site.
Danger! The printer (and memory stick if used) mus t only
!
Danger! Ensure each piece of equipment has the
!
Caution: The base radio must be positioned with its antenna in line
of sight with the TesTORK.
!
1. Report to on-site supervisor(s) for orientation and initial introductions.
2. Go to
of the TesTORK system.
3. Place the ma
4. Connect the
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 26 WWW.TESCOPARTS.COM
be used in a safe area.
appropriate rating for the location for where it will
be positioned.
the rig floor and determine hardware placement for the major components
jor TesTORK system components.
major TesTORK system components.

USER GUIDE INSTALLATION AND START UP
DRAFT VERSION - INTERNAL USE ONLY
I
NSTALLING THE TES
Content or cross reference TBD
TORK
SUB
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 27 WWW.TESCOPARTS.COM

INSTALLATION AND START UP USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
S
YSTEM START UP
After the on-site rig up procedures have been completed and the TesTORK has been installed,
the TesTORK system is ready to start.
Once started, the TesTORK system is ready to be
attempts.
Note: For information on using TesTORK system to monitor and
log connection attempts, see “Operation” on page 33.
Start the TesTORK system by completing the following procedures:
1. T
urn on the TesTORK
tart TesTORK Manager software
2. S
gin monitoring and logging connection
Turning the TesTORK on or off
When the TesTORK is turned on it will automatically start looking for a wireless signal from
base radio. The TesTORK automatically connects to the base radio (and TesTORK Manager
software) once a connections is established.
Note: The TesTORK sub is automatically powered off when it
does not have a wireless connection for 15 minutes or more.
Therefore, when not in use for an extended period on the rig, dis
connect power to the receiver to preserve the batteries in the TesTORK.
-
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 28 WWW.TESCOPARTS.COM

USER GUIDE INSTALLATION AND START UP
On button
Light tube
DRAFT VERSION - INTERNAL USE ONLY
Use the following procedures to turn the TesTORK sub on or off:
To turn on the TesTORK sub
Push the Power
Figure 3-1: Turning on the TesTORK
The light tube located above the power button will flash five times
To turn off the TesTORK sub
button on the side of the TesTORK sub.
Push the Power
The power button will flash five times.
button on the side of the TesTORK sub.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 29 WWW.TESCOPARTS.COM

INSTALLATION AND START UP USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Starting TesTORK Manager software
Use the following procedures to start TesTORK Manager software and check that connection
has been established between the TesTORK sub and TesTORK Manager software.
To start TesTORK Manager software
1. Ens
ure the computer hosting TesTORK Manager software is powered up and the
desktop is displayed on the screen.
2. Double-click the T
estTORKManager program icon located on the Desktop.
The Se
Note: If this is the first time starting TesTORK Manager software
on the host computer, a dialog box appears confirming that a job
directory must be set befor e starting the software. Browse to and
select (create) a suitable folder, and then click OK.
TesTORK Manager software uses the selected folder to store log files
containing configuration and connection data from each job started in the
software.
lect Job dialog box appears.
3. Select one of the following options:
If you want to: Complete these steps:
Start an existing job
a. Ensure the Existing Jobs tab is selected.
The Existing Jobs dialog box appears.
b. Sel
ect a job, and then click OK.
Note: Use the Display Filter buttons to display the most recent jobs
or all jobs.
The TesTORK Manager software main screen appears.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 30 WWW.TESCOPARTS.COM

USER GUIDE INSTALLATION AND START UP
DRAFT VERSION - INTERNAL USE ONLY
If you want to: Complete these steps:
Create a new job
a. Click the New Jobs tab.
The New Jobs dialog box appears.
ype a client name in the Client box.
b. T
ype a location in the Location box.
c. T
d. Sel
e. Type a starting connection number in the Starting Connection box.
f. Cl
g. T
h. Click OK.
ect a unit of measure using the Units of Measure radio buttons.
ick OK.
The Create New Job Window appears
ype the relevant information or data in the text boxes.
Note: For a description of each text box item, see Figure 2-3 on
page 8.
The TesTORK Manager software main screen appears.
To check connection between the TesTORK sub and TesTORK Manager software
1. On
Figure 3-2: Connections dialog box
the main screen, click the Connections button.
The Co
nnections dialog box appears.
2. Check the Communications status box
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 31 WWW.TESCOPARTS.COM

INSTALLATION AND START UP USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
The message Idle is displayed when communication between the TesTORK and TesTORK Manager software is established.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 32 WWW.TESCOPARTS.COM

C
DRAFT VERSION - INTERNAL USE ONLY
HAPTER
This chapter provides information on using the various features of TesTORK Wireless Torque
Monitoring System.
4: O
USER GUIDE
PERATION
PRE-
Information in this chapter include
• Pre-job activity list
•Overview
• Connections
s:
JOB ACTIVITY LIST
Ensure the following activities have been completed before using the procedures in this chapter.
T able 1: Pre-job task list
Activity Reference
Pre-installation activities
On-site rig-up procedures
Installation of the TesTORK sub
System Start-up
Ensuring connection has been established between the TesTORK sub and
TesTORK Manager software.
page 25
page 26
page 27
page 28
page 31
Note: For more information on checking the connectivity between
the TesTORK sub and TesTORK Manager software, see
check connection between the TesTORK sub and TesTORK Manager software” on page 31.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 33 WWW.TESCOPARTS.COM
“To

OPERATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
O
VERVIEW
The T esTORK system system’s different features and functionality are accessed by clicking on
buttons at the top right side of the screen. As each button is clicked, the dialog box on the right
side of the screen changes enabling access to the features and functionality associated with
each button.
Figure 4-1: Connections tab a nd Buttons
The following operational features and
functionality are available by clicking the buttons at
the top right side of the screen.
Table 2: Operational features
Button Enables the operator to:
Connections •View information on completed connec-
tions
•Add a new section by updating the connection configuration data
•Log a connection attempt
•Monitoring a drilling operation
•Add a job comment
Pipe Tally View a list of connections
Reports View and print reports providing information
atistics, sections, connections and job
job st
comments
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 34 WWW.TESCOPARTS.COM

USER GUIDE OPERATION
DRAFT VERSION - INTERNAL USE ONLY
C
ONNECTIONS
Click the Connections button to access the following features:
T able 3: Pre-job task list
Side panel Use this feature to: Reference
Connection
•Log a passed connection
•Log a failed connection
•Force past a failed connection
Drilling
Job Comment
View All Connections
New Section
Edit Current Section
Continually monitor torque and RPM at the at
the top drive during a drilling operation
Add a comment about the job
View information on each connection attempt
for the current job.
The following Information is available:
•Graphs showing the connection attempt
data
• Configuration data used for each connection attempt
Begin a new section by changing the job
details or connection configuration data.
Edit a new section before a connection
attempt has been made
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 35 WWW.TESCOPARTS.COM

OPERATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Connection
Use the following procedures to:
Table 4:
Procedure Description
Log a passed connection
Log a failed connection
Force past a failed connection It is possible to force a Pass status on a failed connection if the
operator has determined that the connection is correct, but
tTesTORK Manager software has not recognized it as such.
One situation in which a failed connection might be forced is
when the threaded coupling on the top of the casing has been
removed. This can cause faults to occur. Torquing two
connections at once can create a fault alarm as the shoulders
might not synchronize and the applied/registered torque might be
more erratic than what was set as parameters for Fail status. In
this case, it is permitted to force a Pass status if the correct end
result torque is achieved. The comment section allows comments
regarding the reason for the pass; comments are required for all
force failed or force passed connections. In addition, the option to
increase the connection number to account for the double joint is
available.
Another situation where a force pass connection might occur is if
the operator clicks the Start button after the casing has already
turned a number times. This will produce a fault that indicates
shouldering occurred too early and/or the optimum torque was
achieved within too few turns. If it is confirmed that the connection
is actually correct, then force pass the connection.
Log a Passed Connection
Use the following procedure to accept the Pas
tem and continue to the next connection.
1. On
the main screen, click the Connections button.
sed status assigned to a connection by the sys-
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 36 WWW.TESCOPARTS.COM

USER GUIDE OPERATION
DRAFT VERSION - INTERNAL USE ONLY
The Connections dialog box appears.
Figure 4-2: Connections dialog box
Note: Change the casing length if required.
Note: The connection number is automatically assigned the next
number in the sequence.
Note: Click Stream Check to display connection data without
logging a connection attempt or determining a shoulder point.
To close the Conn
check, click Stream Check.
2. Click Start.
TesTORK Manager software is now ready to begin logging and displaying connection data.
Note: No data is displayed until the top drive operator begins a
connection attempt.
3. Start a connection attempt.
ections dialog box after performing a stream
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 37 WWW.TESCOPARTS.COM

OPERATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
TesTORK Manager software begins logging and displaying connection data.
Figure 4-3: Connection data
4. When the Torque and RPM values reach zero, click Stop.
Figure 4-4: Torque and RPM values
5. T
ype comments in the Comment text box, if required.
6. Click Save.
The connection number and length are added to the running totals and the connec-
data is logged.
tion
Log a Failed Connection
Use the following procedure to accept the F
and continue to the next connection.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 38 WWW.TESCOPARTS.COM
ailed status assigned to a connection by the system

USER GUIDE OPERATION
DRAFT VERSION - INTERNAL USE ONLY
1. On the main screen, click the Connections button.
The Connections dialog box appears.
Figure 4-5: Connections dialog box
Note: Change the casing length if required.
Note: The connection number is automatically assigned the next
number in the sequence.
Note: Click Stream Check to display connection data without
logging a connection attempt or determining a shoulder point.
To close the Conn
check, click Stream Check.
2. Click Start.
TesTORK Manager software is now ready to begin logging and displaying connection data.
Note: No data is displayed until the top drive operator begins a
connection attempt.
3. Start a connection attempt.
ections dialog box after performing a stream
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 39 WWW.TESCOPARTS.COM

OPERATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
TesTORK Manager software begins logging and displaying connection data.
Figure 4-6: Connection data
4. When the Torque and RPM values reach zero, click Stop.
Figure 4-7: Torque and RPM
Failed is displayed
ype comments in the Comment text box.
5. T
Note: A comment must be typed in the Comment text box before
clicking Save.
6. Click Save.
in the Mark Connection drop-down list.
The connection number and length are added to the running totals and the connection
data is logged.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 40 WWW.TESCOPARTS.COM

USER GUIDE OPERATION
DRAFT VERSION - INTERNAL USE ONLY
Force Past a Failed Connection
Use the following procedure to assign a For
Failed status by the system, and continue to the next connection.
1. On
Figure 4-8: Connections dialog box
the main screen, click the Connections button.
The Connections dialog box appears.
ce Past result to a connection attempt assigned
Note: Change the casing length if required.
Note: The connection number is automatically assigned the next
number in the sequence.
Note: Click Stream Check to display connection data without
logging a connection attempt or determining a shoulder point.
To close the Conn
check, click Stream Check.
2. Click Start.
TesTORK Manager software is now ready to begin logging and displaying connection data.
Note: No data is displayed until the top drive operator begins a
connection attempt.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 41 WWW.TESCOPARTS.COM
ections dialog box after performing a stream

OPERATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
3. Start a connection attempt.
TesTORK Manager software begins loggin
Figure 4-9: Connection data
g and displaying connection data.
4. Wh
Figure 4-10: Torque and RPM
5. Select Forced
6. T
en the Torque and RPM values reach zero, click Stop.
Failed is displayed
ype comments in the Comment text box.
Note: A comment must be typed in the Comment text box before
clicking Save.
in the Mark Connection drop-down list.
Pass from the Mark Connection drop-down list.
7. Click Save.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 42 WWW.TESCOPARTS.COM

USER GUIDE OPERATION
DRAFT VERSION - INTERNAL USE ONLY
The connection number and length are added to the running totals and the connection data is logged.
M
ANUAL SHOULDER OPERATION
TesTORK Manager software enables the operator to manually change the shoulder point to
any desired point. The program then recalculates the delta turn and delta torque from the new
shoulder point values.
When a new job folder is created, the shoulder detection met
Auto Mode. In Auto Mode, everything works the same as previously described. If the shoulder
detection method needs to be changed to
ialog box and select manual shoulder.
tion d
Note: Notice the Shoulder Target values have been disabled and
the Shoulder Target Mode has been changed to Manual Shoul-
der. Th
has been selected.
Note: Selecting Manual Shoulder disables alarms associated
with automatic shouldering.
To manually set the shoulder point
**Needs finishing
Use the following procedure to manually set
1. On
e Main Screen also indicates that Manual Shoulder mode
the main screen, click the Connections button.
MANUAL, then the operator must go to the Connec-
the shoulder point.
hod automatically defaults to
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 43 WWW.TESCOPARTS.COM

OPERATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
The Connections dialog box appears.
Figure 4-1 1: Con ne ctions dialog box
Note: Change the casing length if required.
Note: The connection number is automatically assigned the next
number in the sequence.
Note: Click Stream Check to display connection data without
logging a connection attempt or determining a shoulder point.
To close the Conn
check, click Stream Check.
2. Click Start.
TesTORK Manager software is now ready to begin logging and displaying connection data.
Note: No data is displayed until the top drive operator begins a
connection attempt.
3. Start a connection attempt.
ections dialog box after performing a stream
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 44 WWW.TESCOPARTS.COM

USER GUIDE OPERATION
DRAFT VERSION - INTERNAL USE ONLY
P
IPE TALLY
Clicking the Connections button enables access to the following features:
• View All Connections
• New Section
• Edit Current Section
Control buttons. Use these buttons to log connection attempts and monitor an
attempts.
Note: For screen shots and a description of each dialog box elements, see
Use the Connections button to access the following features:
• View All Connections
• New Section
“Pipe Tally Side Panel” on page 20.
d log connection
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 45 WWW.TESCOPARTS.COM

OPERATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
R
EPORTS
The following section provide3s information on the different reports available from the TesTORK Manager software.
Figure 4-12: Summary Report Window
Table 4-1: Summary Report Window Dialog
Group Field/Element Name Data/Notes
Charts Final Torque vs Final Turns
Shoulder Torque vs Shoulder
Turns
Delta Torque vs Delta Turns
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 46 WWW.TESCOPARTS.COM

USER GUIDE OPERATION
DRAFT VERSION - INTERNAL USE ONLY
Figure 4-13: Summary Report By Torque Window
Table 4-2: Summary Report By Torque Window Dialog
Group Field/Element Name Data/Notes
Charts Final Torque (ft-lb)
Shoulder Torque (ft-lb)
Delta Torque (ft-lb)
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 47 WWW.TESCOPARTS.COM

OPERATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Figure 4-14: Summary Report By Turns Window
Table 4-3: Summary Window By Turns Dialog
Group Field/Element Name Data/Notes
Charts Final Turns
Shoulder Turns
Delta Turns
The TTS provides view and print report data.
Note: For screen shots and dialog bo x elements, see
Panel” on page 21.
“Reports Side
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 48 WWW.TESCOPARTS.COM

C
DRAFT VERSION - INTERNAL USE ONLY
HAPTER
5: S
YSTEM
S
ETTINGS
A
ND
A
DMINIS
TRATION
This chapter assumes that the installation, configuration, and calibration procedures for the
TesTORK Wireless Torque Monitoring System have been completed.
C
OMPUTER REQUIREMENTS
The following computer requirements are the minimum hardware and software requirements
for the computer hosting WTTS software.
USER GUIDE
-
Minimum Hardware
• Dedicated hardware platform
•2 GB of RAM
Supported Operating System
Windows® 7 or Windows 8 operating system
Running WTTS Software
WTTS software is designed to be a portable program. The following options for running the
software are provided.
• The operator can run WTTS software directly
Note: When running WTTS software directly from a USB flash
• The operator can run TesTORK Manager software directly from the host computer’s
desktop.
• TesTORK Manager software can be configured to start automatica
hosting the software starts.
from a USB flash drive.
lly when the computer
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 49 WWW.TESCOPARTS.COM
SYSTEM SETTINGS AND ADMINISTRATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
To run TesTORK Manager software from a USB flash drive
Use the following procedure to run TesTORK Manager software directly from a USB flash
e:
driv
1. Ins
2. Double click the WTTS software executable file.
To run TesTORK Manager software from the host computer desktop
Use the following procedure to run TesTORK Manager software directly from the host computer’s desktop:
1. 1. Insert the USB flas
2. Browse to and right-click the WTTS software executable file, and then click
3. Browse to
ert the USB flash drive into an available USB port on the computer hosting
TesTORK Manager software.
Note: If the contents of the AutoPlay dialog box doesn’t appear,
navigate to the USB flash drive folder containing the
Manager software executable file.
The Se
Note: If the contents of the AutoPlay dialog box doesn’t appear,
navigate to the containing the TesTORK Manager software exe
cutable file.
Copy.
lect Job dialog box appears.
h drive.
the host computer’s desktop.
Alarm Toggle Bar
TesTORK
-
4. Right-click,
The TesTORK Manager software executable file
desktop.
To start TesTORK Manager software automatica
Use the following procedure to configure TesTORK Manager
when the computer hosting the software starts:
1. Ins
2. Browse to
3. Select St
4. Right
5. Right click
ert the USB flash drive. If the contents of the AutoPlay dialog box doesn’t
appear, navigate to the folder containing the TesTORK Manager software executable file.
then click Copy.
tartup folder opens in Windows Explorer.
The S
and then click Paste.
lly when the host computer starts
and right-click the TesTORK Manager software executable file, and
art > All Programs > Startup
click on the Startup folder, and then click Open.
the Startup folder, and then click Paste.
is pasted on the host computer’s
software to start automatically
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 50 WWW.TESCOPARTS.COM

USER GUIDE SYSTEM SETTINGS AND ADMINISTRATION
DRAFT VERSION - INTERNAL USE ONLY
6. TesTORK Manager software will now start automatically when the computer
hosting the software starts.
Note: To stop T esT ORK Manager software from st arting automatically, repeat steps 3-4. Then delete the WTTS software shortcut
icon from the startup folder.
S
YSTEM START UP
T esTORK software is a portable application that runs on a compatible computer without being
installed in a way that modifies the computer’s configuration information.
Note: For information the computer requirements required to run
TesTORK software, see “Computer Requirements” on page 49.
The TesTORK software executable file can be stored and started from a host computer’ s desktop. TesTORK software can also be stored and starte
USB drive.
d from portable storage device such as a
A single folder is created when the TesTORK software is started for
provides a location for all configuration data and data logs for each job. This enables operators
to start T esTORK software and resume work on an existing job without reentering any configuration data. New configuration data is ente
Use the following procedures to start TesTORK software for
To start TesTORK software for the fi
1. Ens
2. Double-click the T
3. Click OK.
ure the Torque Turn System TesTORK computer is powered up and the
desktop is displayed on the screen.
A dialog box appears confirming that a job data directory must be set before
starting the
The Br
Note: TesTORK software uses the selected folder to store log
files containing configuration and connection data from each job
started in the software.
software.
owse For Folder dialog box appears.
rst time on a host computer
estTORKManager program icon located on the Desktop.
red each time a new job is started.
the first time on a host computer
the first time. The folder
4. Browse to and select (or create) a suitable folder, and then click OK.
The Se
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 51 WWW.TESCOPARTS.COM
lect Job dialog box appears.

SYSTEM SETTINGS AND ADMINISTRATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
5. Select one of the following options:
If you want to: Complete these steps:
Start an existing job
a. Ensure the Existing Jobs tab is selected.
b. Select a job, and then click OK.
Use the Display Filter buttons to display the most recent jobs or all
jobs.
The TesTORK main screen appears.
Create a new job
a. Click the New Jobs tab.
The New Jobs dialog box appears.
ype a client name in the Client box.
b. T
c. Type a location in the Location box.
d. Sel
e. T
f. Click OK.
g. T
h. Cl
ect a unit of measure using the Units of Measure radio buttons.
ype a starting connection number in the Starting Connection box.
The Create New Job Window appears
ype the relevant information or data in the text boxes.
For a description of each text box item, see Figure 2-3 on page 8.
ick OK.
The TesTORK Manager software main screen appears.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 52 WWW.TESCOPARTS.COM

USER GUIDE SYSTEM SETTINGS AND ADMINISTRATION
DRAFT VERSION - INTERNAL USE ONLY
S
YSTEM SETTINGS DIALOG BOX
Configuration
Selecting the Co
Figure 5-1: System Settings Window -> Communications Tab Window
nfiguration button opens the System Settings window.
Table 5-1: System Settings -> Communications Tab Dialog
Group Field/Element Name Data/Notes
WTTS/Base Radio Serial (Radio Button) Comm Port
USB (Radio Button) Port Description
UDP (Radio Button) Destination IP
No Device (Radio Button) There is no WTTTS Device
Data Logging Enable Raw Data Logging
(Checkbox)
Enable Calibrated Data
Logging
(Checkbox)
If the Enable Raw Dat
user can select where to save the log file by clicking
...
on the “
If the Enable Calibrated Dat
user can select where to save the log file by clicking
on the “
” button.
...
” button.
a Logging box is checked the
a Logging is checked the
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 53 WWW.TESCOPARTS.COM

SYSTEM SETTINGS AND ADMINISTRATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Table 5-1: System Settings -> Commu
Group Field/Element Name Data/Notes
Diagnostics Link State
Last RFC
Temperature
Battery Life
Battery Type
Pressure
RPM
Last Reset
RF Channel
Current Mode
RFC Rate
RFC Timeout
Stream Rate
Stream Timeout
Pairing Timeout
nications Tab Dialog (Continued)
Figure 5-2: System Settings -> Calibration Tab -> Device Memory Tab Window
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 54 WWW.TESCOPARTS.COM

USER GUIDE SYSTEM SETTINGS AND ADMINISTRATION
DRAFT VERSION - INTERNAL USE ONLY
Table 5-2: System Settings -> Calibration -> Device Memory Dialog
Group Field/Element Name Data/Notes
Device Memory Cal Version
Cal Revision
Serial Number
Manufacturer Info
Manufacturer Date
Torque 000 Offset
Torque 000 Span
Torque 180 Offset
Torque 180 Span
Tension 000 Offset
Tension 000 Span
Tension 090 Offset
Tension 090 Span
Tension 180 Offset
Tension 180 Span
Tension 270 Offset
Tension 270 Span
Gyro Offset
Gyro Span
Pressure Offset
Pressure Span
Buttons Save To File Save Calibration Data to User-Specified File
Location
Load From File Load Calibration Data from a User-Specified
Location
Write To Device
Read From Device
.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 55 WWW.TESCOPARTS.COM

SYSTEM SETTINGS AND ADMINISTRATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Figure 5-3: System Settings -> Calibration -> Raw Data View Tab Window
Table 5-3: System Settings -> Calibration -> Raw Data View Dialog
Group Field/Element Name Data/Notes
Data ViewRaw Page
Data
Buttons Save To File Save Calibration Data to User-Specified File
Location
Load From File Load Calibration Data from a User-Specified File
Location
Write To Device
Read From Device
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 56 WWW.TESCOPARTS.COM

USER GUIDE SYSTEM SETTINGS AND ADMINISTRATION
DRAFT VERSION - INTERNAL USE ONLY
Figure 5-4: System Settings -> Graph Settings Window
Table 5-4: System Settings -> Graph Settings Dialog
Group Field/Element Name Data/Notes
Miscellaneous Graph
Settings
Graph Axis Settings
(Axis Spans)
Graph Axis Settings
(Axis Increments)
Auto-Shoulder
Pa
rameters
RPM Averaging Nbr of samples to average
Shoulder Box size (pixels)
RPM Curve Color Specify the Color of the RPM Curve Graph
Torque Curve Color Specify the Color of the Torque Curve Graph
Show shoulder cursors
(Checkbox)
Torque
RPM
Turns
Time
Turns
Time
Min turns before shoulder
Minimum slope
Number of turns at slope
Nag on Auto-Shoulder
over
ride
(Checkbox)
If checked, shoulder cursors are displayed in the
gr
aph
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 57 WWW.TESCOPARTS.COM

SYSTEM SETTINGS AND ADMINISTRATION USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Figure 5-5: System Settings -> Misc Window
Table 5-5: System Settings -> Misc Dialog
Group Field/Element Name Data/Notes
Job Directory Location of Job Directory The user can navigate to the desired job directory by
clicking the “
Sys Admin Password Enter current password Enter the Current Password into the Text field
Enter new password Enter the New Password into the Text Field
Confirm new password Confirm the New Password by Entering it in the Text
Field
Save (Button) Save the New Password
Default Units of
Measure
Job Status Finish Job
Metric/Imperial
(Radio Buttons)
(Button)
Re-Open Job
(Button)
Select with Which Units of Measurement the WTTTS
will Display
...
” button.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 58 WWW.TESCOPARTS.COM

C
DRAFT VERSION - INTERNAL USE ONLY
HAPTER
I
NTRODUCTION
The TESCO Base Radio is a high performance communications system designed to provide
wireless communications with a variety of TESCO products, including:
• TESCO Wireless Torque Turn System (WTTTS)
• TESCO Cement Plug Tracking System (CPTS)
• TESCO Compact Casing Drive System (CCDS)
6: TESCO B
ASE
R
USER GUIDE
ADIO
B
LOCK DIAGRAM
Figure 6-1: TESCO Base Radio Block Diagram
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 59 WWW.TESCOPARTS.COM

TESCO BASE RADIO USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
E
LECTROMAGNETIC COMPATIBILITY NOTICE
FCC
This device complies with part 15 of the FCC Rules. Operation is subject to the following two
conditions: (1) This device may not cause harmful interference, and (2) this device must
accept any interference received, including interference that may cause undesired operation.
IC RSS 210
This device complies with Industry Canada licence-exempt RSS standard(s). Operation is
subject to the following two conditions: (1) this device may not cause interfer ence, and (2) this
device must accept any interference, including interference that may cause undesired
operation of the device.
S
AFETY
Le présent appareil est conforme aux CNR d’Industrie
radio exempts de licence. L’exploitation est autorisée aux deux conditions suivantes : (1)
l’appareil ne doit pas produire de brouillage, et (2) l’utilisateur de l’appareil doit accepter
tout brouillage radioélectrique subi, même si le brouillage est susceptible d’en compromettre
le fonctionnement.
The TESCO Base Radio is intended to be used in locations where hazardous gases may
occasionally be present. It meets the requirements of IEC-60079-11 for use in Zone 2 Group
IIB; CSA 22.2 No. 213 and ANSI/ISA 12.12.01-2012 Class 1 Division 2, gas groups C and D.
Note: Only units with either a Special Inspection sticker or
Model Certification label shall be used in locations where
hazardous gases may be present.
Canada applicables aux appareils
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 60 WWW.TESCOPARTS.COM

USER GUIDE TESCO BASE RADIO
DRAFT VERSION - INTERNAL USE ONLY
4.1.1 CSA 22.2 No. 213
THIS EQUIPMENT IS SUITABLE FOR USE IN CLASS 1, DIVISION 2, GROUPS C AND
D, OR NON-HAZARDOUS LOCATIONS ONLY.
Warning! EXPLOSION HAZARD - SUBSTITUTION OF
!
Avertissement! RISQUE D’EXPLOSION - LA SUBSTITUTION
!
Warning! EXPLOSION HAZARD - DO NOT DISCONNECT
!
Avertissement! RISQUE D’EXPLOSION - AVANT DE
!
4.1.2 ANSI/ISA 12.12.01
U
SER CONTROLS
COMPONENTS MAY IMPAIR SUITABILITY FOR
CLASS 1, DIVISION 2.
DES COMPOSANTS PEUT RENDRE CE MATERIEL
INACCEPTABLE POUR LES EMPLACEMENTS DE
CLASSE 1, DIVISION 2.
EQUIPMENT UNLESS POWER HAS BEEN
SWIT
CHED OFF OR THE AREA IS KNOWN TO BE
NON-HAZARDOUS.
DECONNECTER L’EQUIPEMENT, COUPER LE
COURA
L’EMPLACEMENT EST DESIGNE NON
DANGEREUX
NT OU S’ASSURER QUE
The TESCO Base Radio is designed to be used as part of a TESCO Wireless System. All
control of the Base Radio is through the TESCO Software.
There are no physical user controls on the TESCO Base Radio.
S
PECIFICATIONS
Environmental
The TESCO Base Radio is designed for outdoor use.
Table 6-1: TESCO Base Radio Environmental Specifications
Operating Temperature Range
Storage Temperature
Operating and Storage Humidity
Ingress Protection
-40 °C to +70 °C.
-40 °C to +85 °C.
10% to 95%
IP66 (when used with recommended connectors or dust
caps)
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 61 WWW.TESCOPARTS.COM

TESCO BASE RADIO USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
Radio
The TESCO Base Radio contains two radio transceivers. This allows the TESCO Base Radio
to receive streaming real time measurement data from the Wireless Torque Turn Tension
System on one channel while at the same time monitor supervisory devices such as the
TESCO Compact Casing Drive System on the other channel.
Both radio channels are under control of the same mic
roprocessor and the software ensures
that the two radio channels operate on different frequency channels and never transmit at the
same time.
The following specifications apply to both radio
Table 6-2: Radio Specifications
Parameter
Protocol
Modulation
FCC/IC Emission Designator
Frequency Band
Standard Channels
Channel Bandwidth
RF Transmit Power
Connector
Allowable Antenna Gain
links:
Specification
Subset of IEEE 802.15.4
GMSK, DSSS at 250 kb/s, 2 Mchip/s
2M42G7D
2.405 to 2.480 GHz (channel centers)
Channel 11 (2.405 GHz center)
Channel 15 (2.425 GHz center)
Channel 20 (2.450 GHz center)
Channel 25 (2.475 GHz center)
3 MHz max. (TBV)
-5 dBm max.
WTTTS: N-Type
General Purpose: RP-TNC
+5 dBi max.
Contact Closures
The TESCO Base Radio provides up to four opto-isolated solid-state contact closures that may
be used for a variety of control alerting purposes. The state of these closures is set through the
main application software.
Table 6-3: Contact Closure Specifications
Parameter
Configuration
Load Current
Off-State Voltage
On-State Resistance
Isolation Voltage
Turn-On Time
Turn-Off Time
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 62 WWW.TESCOPARTS.COM
Specification
Form A (Normally Open)
100 mA max.
350 V Peak (AC or DC)
35 ohms max, (t < 1 s); 50 ohms max, (continuous)
1500 Vrms min.
1 ms max.
1 ms max.

USER GUIDE TESCO BASE RADIO
DRAFT VERSION - INTERNAL USE ONLY
Table 6-3: Contact Closure Specifications (Continued)
Parameter
Connector
Specification
Amphenol USBBF TV 2 1 G 13-13
Power
Power to the TESCO Base Radio is provided by the host computer through the USB
connector.
Table 6-4: Base Radio Power Specifications
Parameter
Input Voltage Range
Current
Specification
4.5 - 5.5 Vdc
200 mA max.
Digital Interface
The interface to the computer is by means of a single USB connector.
Table 6-5: Digital Interface Specifications
Parameter
Connector Type
Interface Standard
Specification
USB Type-B
USB 2.0, Serial Port Protocol
M
OUNTING
The TESCO Base Radio may be mounted to the back of the Labresav computer by means of
the Mounting Adapter, TESCO part number 5036743.
Alternatively, it may be mo
When both radio channels are used, to minimize the risk of generating emissions that could
interfere with other radio systems, ensure the two antennas are spaced at least 8” (20 cm)
apart.
In order to comply with the requireme
must be mounted at least 8” (20 cm) from all persons.
unted in any convenient location within reach of the computer.
Note: If mounted in a location exposed to weather, ensure
that all unused connectors have dust-caps installed and
properly fitted.
nts for exposure to radio frequency energy, all antennas
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 63 WWW.TESCOPARTS.COM
TESCO BASE RADIO USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
O
PERATING INSTRUCTIONS
The TESCO Base Radio is intended to be used only as part of a TESCO Wireless System. To
operate the TESCO Base Radio, connect it by means of a USB cable to a computer running the
TESCO Wireless System software.
M
AINTENANCE
The TESCO Base Radio contains no user serviceable parts.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 64 WWW.TESCOPARTS.COM

USER GUIDE CHANGING THE BATTERY
DRAFT VERSION - INTERNAL USE ONLY
A
PPENDIX
C
AUTIONS AND
A: C
W
ARNINGS
HANGING
T
HE
B
ATTERY
Warning! This equipment contains intrinsically safe
!
To reduce the risk of ignition of a flammable or explosive atmosphere when servicing the
battery be sure the battery seals are seated properly and sealing surfaces are clean.
• The battery is rechargeable
• The battery is Class 1 Div 1 certified
• The battery terminals are the same left to right. The battery can be
provided the terminals are facing inwards.
T
ORQUE SUB BATTERY CHANGING
1. Turn the sub so the battery compartment is easily accessible.
2. Using a 5/16” hex key, open all 4 captive screws.
3. Remove the plate.
4. Pull out the existing battery.
5. Push in the new battery.
circuitry. Substitution of components may
impair intrinsic safety.
inserted upside down
6. Replace the battery compartment into the top s
Note: The TesTORK system will automatically power up when
the battery is fitted in the battery compartment.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 1 WWW.TESCOPARTS.COM
ub with 4 captive screws.

CHANGING THE BATTERY USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 2 WWW.TESCOPARTS.COM
USER GUIDE TTS CHECKLISTS AND FORMS
DRAFT VERSION - INTERNAL USE ONLY
A
PPENDIX
The following forms are available for the Torque Turn System. See the following pages for
examples of each form.
B: TTS C
HECKLISTS AND
F
ORMS
The following forms are available in
TescoLink.
• Form #881020 - Job Safety Analysis Sheet
• Form #881049 - Wireless TTS Pre-Job Information Sheet
• Form #881032 - TTS Required Data Sheet
• Form #881028 - TTS Tool Kit Inventory List
• Form #881050 - Wireless TTS Inventory List
• Form #881042 - Final Checklist
full-size on the laptop or can be downloaded from
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 1 WWW.TESCOPARTS.COM
TTS CHECKLISTS AND FORMS USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
J
OB SAFETY ANALYSIS
Form Description
The Job Safety Analysis Sheet is an internal document for all TESCO workers including field,
shop, and office employees.
W
ORKSHEET
This document is to be filled out by the supervisor at the beginning of each
job.
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 2 WWW.TESCOPARTS.COM

USER GUIDE TTS CHECKLISTS AND FORMS
Job Safety Analysis Worksheet
Job #: Job Location: Analysis Made By:
Date: Job Supervisor: Analysis Reviewed With:
Form #881020 Rev A - Job Safety Analysis Worksheet 1 Tesco Corporation 2004: Updated June 3, 05
Personal Protective Equipment Required and/or Recommended
Hard Hat Steel Toe Boots Gloves Safety Glasses Apron Respirator Safety Harness Face Shield Rubber Gloves
Other: _________________ _____________________ ________________________
Sequence of Basic Job Step Potential Accidents or Hazards Recommended Safe Job Procedures Name of Person Performing Review
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 3 WWW.TESCOPARTS.COM

TTS CHECKLISTS AND FORMS USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
T
ORQUE TURN SYSTEM
: PRE-J
OB INFORMATION CHECKLIST
Form Description
The pre-job information checklist is a collection of rig information.
The pre-job information checklist is partially filled
sent to the field office to collect the remaining information. The information on this checklist
is used by the job supervisor responsible for the torque turn job in the field.
out by the TESCO Service Manager then
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 4 WWW.TESCOPARTS.COM

USER GUIDE TTS CHECKLISTS AND FORMS
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 5 WWW.TESCOPARTS.COM

TTS CHECKLISTS AND FORMS USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 6 WWW.TESCOPARTS.COM

USER GUIDE TTS CHECKLISTS AND FORMS
DRAFT VERSION - INTERNAL USE ONLY
T
ORQUE TURN SYSTEM
: R
EQUIRED DATA SHEET
Form Description
The required data sheet is used for information collection and is to be filled out by TESCO
personnel after information has been received from the rig on the Pre-Job Information Checklist (form # 881031).
If some information is not received from the rig, the TESCO job supervisor
supply the remaining information while on site. A rig survey is required.
will be required to
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 7 WWW.TESCOPARTS.COM

TTS CHECKLISTS AND FORMS USER GUIDE
Torque Turn System
Required Data Sheet
Form #881032 Rev A TTS Required Data Sheet Page 1 of 1 Tesco Corporation 2005: Updated 3 June 2005
The following casing information is required to set the parameters for the Torque/Turn or Torque/Time monitors. Tesco
will ONLY use operator supplied data. Rig Survey checklist must be completed by a Tesco Representative.
Rig Survey
Required
Oil Company:
Well Name:
Drilling Supervisor:
L.S.D.:
Drilling Engineer:
Contractor:
Wellsite Supervisor:
Rig Number:
Wellsite Phone Number:
Top Drive Make:
Top Drive Model:
Projected Casing Depth:
Project Date of Job:
Calibration check interval:
Every joints
(Tesco recommends checking a minimum of once at the mid-point.)
Casing Information
Manufacturer:
Connection Name:
Casing Grade:
Casing Weight:
lb/ft or kg/m
(Check unit of measure)
Torque Target
Minimum Make Up Torque:
lbf-ft or N-m
(Check unit of measure)
Optimum Make Up Torque:
lbf-ft or N-m
Maximum Make Up Torque:
lbf-ft or N-m
Maximum Make Up RPM:
Shoulder Target
Turns to Shoulder:
Turns +/-:
Post-Shoulder Turns:
Turns +/-:
Trigger Torque:
lbf-ft or N-m
(Check unit of measure)
Maximum Shoulder RPM:
The above information was supplied and approved by the following:
Name (print):
Position/title of approver:
Date:
Signature:
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 8 WWW.TESCOPARTS.COM

USER GUIDE TTS CHECKLISTS AND FORMS
DRAFT VERSION - INTERNAL USE ONLY
T
ORQUE TURN SYSTEM
Form Description:
The tool kit inventory checklist provides information for the job supervisor who is responsib le
to maintain control of all tools.
: T
OOL KIT INVENTORY CHECKLIST
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 9 WWW.TESCOPARTS.COM

TTS CHECKLISTS AND FORMS USER GUIDE
Torque Turn System
Tool Kit Inventory Checklist
Tesco Form #881028 Updated June 3, 2005 TTS Tool Kit Checklist © Tesco Corporation, 2005
Item Description Part # Qty Origin Item Size Going to Site Leaving Site
1 Battery - for Flashlight 1623 1 USA Spring Top
2 Flashlight 2766 1
3 Bulb - for Flashlight 6054 4 Hong Kong 6 Volt
4 Duct Tape - Roll 1584 2 USA 2"
5 Stainless Steel Wire - Roll 2909 1 CHINA 0.032"
6 Tie Wrap - Plastic 5381 100 USA ¼" x 12"
7 Tie Wrap - Plastic 805 100 USA 5/16" x 30"
8 Tie Wrap - Plastic 806 50 USA 1/8" x 7"
9 Hex Key Set - Short Arm 1289 1 USA 0.028" to 5/8"
10 Hex Key Set - Short Arm - Metric 1286 1 USA 0.7 mm to 10 mm
11 Fluke Meter - Process 787 18012 1 USA
12 Fuse for Fluke Meter 0487 2 USA 11 Amp
13 Fuse for Fluke Meter 0491 2 USA 44/100 Amp
14 Alligator Clip 3794 2 USA Red and Black
15 Solder 60/40 6465 1 CANADA 60/40
16 Solder for Pyropen 7475 1 CANADA 3/32/Silver
17 Butane for Pyropen 1650 1 USA 145 g
18 Pyropen 1524 1 USA cordless
19 Vise Grip 1400 1 USA 10”
20 Side Cutting Pliers 1368 1 TAIWAN 7”
21 Wire Stripper 1526 1 USA
22 Unidriver 1380 1 TAIWAN 13 PC.
23 Utility Knife 1293 1 JAPAN L2hd
24 Small Torque Wrench 5814 1 USA
25 Terminating Screw Driver 4277 1 USA 1/8”x6”
26
27
The Above information was collected by?
Going to site Name (print): Signature:
Leaving site Name (print): Signature:
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 10 WWW.TESCOPARTS.COM

USER GUIDE TTS CHECKLISTS AND FORMS
DRAFT VERSION - INTERNAL USE ONLY
T
ORQUE TURN SYSTEM
: I
NVENTORY CHECKLIST
Form Description
The inventory list is to be filled out by the job supervisor prior to arriving and leaving the job
site.
The purpose of this list is to keep track of all equipment
to prepare exportation papers for the equipment.
and to assist with information needed
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 11 WWW.TESCOPARTS.COM

TTS CHECKLISTS AND FORMS USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 12 WWW.TESCOPARTS.COM

USER GUIDE TTS CHECKLISTS AND FORMS
DRAFT VERSION - INTERNAL USE ONLY
T
ORQUE TURN SYSTEM
Form Description
The final checklist is to be completed by the job supervisor before leaving the job site.
: F
INAL CHECKLIST
The purpose of this checklist is to ensure that the
complete the job.
crew is equipped with all the tools needed to
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 13 WWW.TESCOPARTS.COM

TTS CHECKLISTS AND FORMS USER GUIDE
Torque Turn System: Final Checklist
Form # 881042 Rev A TTS Final Checklist Page 1 of 1 Tesco Corporation 2005: Updated June 3, 2005
Final Check List Item Complete Comments
Box 1 on Truck
Box 2 on Truck
Casing Tool on Truck
Tool Box on Truck
Pre-Job Forms Completed
Directions To The Rig
Communications Devices
Personal Computer
Fuel For The Vehicle
Additional Items
The above check was performed by:
Name (print): Signature:
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 14 WWW.TESCOPARTS.COM

USER GUIDE TTS GENERAL ASSEMBLY
DRAFT VERSION - INTERNAL USE ONLY
A
PPENDIX
T
ORQUE AND
C: TTS G
RPM W
IRELESS NETWORK
ENERAL
A
SSEMBLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 1 WWW.TESCOPARTS.COM
TTS GENERAL ASSEMBLY USER GUIDE
DRAFT VERSION - INTERNAL USE ONLY
CONTACT: 1-877-TESCO-77 WIRELESS TORQUE TURN SYSTEM WWW.TESCOCORP.COM
INTL: 713-359-7295 2 WWW.TESCOPARTS.COM
 Loading...
Loading...