

Page 1

RN2483 LoRa® Technology
Module Command Reference
User’s Guide
2015-2018 Microchip Technology Inc. DS40001784G
Page 2

Note the following details of the code protection feature on Microchip devices:
YSTEM
CERTIFIED BY DNV
== ISO/TS 16949 ==
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the
intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our
knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data
Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not
mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection features of our
products. Attempts to break Microchip’s code protection feature may be a violation of the Digital Millennium Copyright Act. If such acts
allow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Information contained in this publication regarding device
applications and the like is provided only for your convenience
and may be superseded by updates. It is your responsibility to
ensure that your application meets with your specifications.
MICROCHIP MAKES NO REPRESENTATIONS OR
WARRANTIES OF ANY KIND WHETHER EXPRESS OR
IMPLIED, WRITTEN OR ORAL, STATUTORY OR
OTHERWISE, RELATED TO THE INFORMATION,
INCLUDING BUT NOT LIMITED TO ITS CONDITION,
QUALITY, PERFORMANCE, MERCHANTABILITY OR
FITNESS FOR PURPOSE. Microchip disclaims all liability
arising from this information and its use. Use of Microchip
devices in life support and/or safety applications is entirely at
the buyer’s risk, and the buyer agrees to defend, indemnify and
hold harmless Microchip from any and all damages, claims,
suits, or expenses resulting from such use. No licenses are
conveyed, implicitly or otherwise, under any Microchip
intellectual property rights unless otherwise stated.
Microchip received ISO/TS-16949:2009 certification for its worldwide
headquarters, design and wafer fabrication facilities in Chandler and
Tempe, Arizona; Gresham, Oregon and design centers in California
and India. The Company’s quality system processes and procedures
are for its PIC
devices, Serial EEPROMs, microperipherals, nonvolatile memory and
analog products. In addition, Microchip’s quality system for the design
and manufacture of development systems is ISO 9001:2000 certified.
®
MCUs and dsPIC® DSCs, KEELOQ
®
code hopping
QUALITY MANAGEMENT S
Trademarks
The Microchip name and logo, the Microchip logo, AnyRate, AVR,
AVR logo, AVR Freaks, BitCloud, CryptoMemory, CryptoRF,
dsPIC, FlashFlex, flexPWR, Heldo, JukeBlox, KeeLoq, Kleer,
LANCheck, LINK MD, maXStylus, maXTouch, MediaLB,
megaAVR, MOST, MOST logo, MPLAB, OptoLyzer, PIC,
picoPower, PICSTART, PIC32 logo, Prochip Designer, QTouch,
SAM-BA, SpyNIC, SST, SST Logo, SuperFlash, tinyAVR, UNI/O,
and XMEGA are registered trademarks of Microchip Technology
Incorporated in the U.S.A. and other countries.
ClockWorks, The Embedded Control Solutions Company,
EtherSynch, Hyper Speed Control, HyperLight Load, IntelliMOS,
mTouch, Precision Edge, and Quiet-Wire are registered
trademarks of Microchip Technology Incorporated in the U.S.A.
Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any
Capacitor, AnyIn, AnyOut, BodyCom, chipKIT, chipKIT logo,
CodeGuard, CryptoAuthentication, CryptoAutomotive,
CryptoCompanion, CryptoController, dsPICDEM, dsPICDEM.net,
Dynamic Average Matching, DAM, ECAN, EtherGREEN, InCircuit Serial Programming, ICSP, INICnet, Inter-Chip
Connectivity, JitterBlocker, KleerNet, KleerNet logo, memBrain,
Mindi, MiWi, motorBench, MPASM, MPF, MPLAB Certified logo,
MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code
Generation, PICDEM, PICDEM.net, PICkit, PICtail, PowerSmart,
PureSilicon, QMatrix, REAL ICE, Ripple Blocker, SAM-ICE, Serial
Quad I/O, SMART-I.S., SQI, SuperSwitcher, SuperSwitcher II,
Total Endurance, TSHARC, USBCheck, VariSense, ViewSpan,
WiperLock, Wireless DNA, and ZENA are trademarks of
Microchip Technology Incorporated in the U.S.A. and other
countries.
SQTP is a service mark of Microchip Technology Incorporated in
the U.S.A.
Silicon Storage Technology is a registered trademark of Microchip
Technology Inc. in other countries.
GestIC is a registered trademarks of Microchip Technology
Germany II GmbH & Co. KG, a subsidiary of Microchip
Technology Inc., in other countries.
All other trademarks mentioned herein are property of their
respective companies.
© 2015-2018, Microchip Technology Incorporated, All Rights
Reserved.
978-1-5224-3534-1
ISBN:
DS40001784G-page 2 2015-2018 Microchip Technology Inc.
Page 3

RN2483 LoRaTECHNOLOGY MODULE
COMMAND REFERENCE USER’S GUIDE
Table of Contents
Preface ........................................................................................................................... 6
Chapter 1. Introduction
1.1 Overview ...................................................................................................... 11
1.2 Features ....................................................................................................... 12
1.3 Configuration ................................................................................................ 12
1.4 UART Interface ............................................................................................. 13
Chapter 2. Command Reference
2.1 Command Syntax ......................................................................................... 15
2.2 Command Organization ............................................................................... 15
2.3 System Commands ...................................................................................... 16
2.3.1 sys sleep <length> .................................................................................... 17
2.3.2 sys reset .................................................................................................... 17
2.3.3 sys eraseFW ............................................................................................. 17
2.3.4 sys factoryRESET ..................................................................................... 17
2.3.5 System Set Commands ............................................................................. 18
2.3.5.1 sys set nvm <address> <data> ................................................. 18
2.3.5.2 sys set pindig <pinName> <pinState> ....................................... 18
2.3.5.3 sys set pinmode <pinname> <pinmode> ................................... 18
2.3.6 System Get Commands ............................................................................ 19
2.3.6.1 sys get ver ................................................................................. 19
2.3.6.2 sys get nvm <address> ............................................................. 19
2.3.6.3 sys get vdd ................................................................................ 19
2.3.6.4 sys get hweui ............................................................................. 20
2.3.6.5 sys get pindig <pinname> .......................................................... 20
2.3.6.6 sys get pinana <pinName> ........................................................ 20
2.4 MAC Commands .......................................................................................... 21
2.4.1 mac reset <band> ..................................................................................... 21
2.4.2 mac tx <type> <portno> <data> ................................................................ 22
2.4.3 mac join <mode> ....................................................................................... 24
2.4.4 mac save ................................................................................................... 25
2.4.5 mac forceENABLE .................................................................................... 26
2.4.6 mac pause ................................................................................................. 26
2.4.7 mac resume ............................................................................................... 26
2.4.8 MAC Set Commands ................................................................................ 27
2.4.8.1 mac set appkey <appKey> ........................................................ 27
2.4.8.2 mac set appskey <appSessKey> .............................................. 28
2.4.8.3 mac set ar <state> ..................................................................... 28
2.4.8.4 mac set bat <level> ................................................................... 28
2.4.8.5 MAC Set Channel Commands .................................................. 29
2.4.8.6 mac set class <class> ............................................................... 31
2.4.8.7 mac set devaddr <address> ...................................................... 31
2015-2018 Microchip Technology Inc. DS40001784G-page 3
Page 4

2.4.8.8 mac set deveui <devEUI> ......................................................... 31
2.4.8.9 mac set dnctr <FCntDown> ...................................................... 32
2.4.8.10 mac set dr <dataRate> ............................................................ 32
2.4.8.11 mac set linkchk <linkCheck> ................................................... 32
2.4.8.12 mac set mcast <state> ............................................................ 33
2.4.8.13 mac set mcastappskey <mcastApplicationSessionkey> ......... 33
2.4.8.14 mac set mcastdevaddr <mcastAddress> ................................ 33
2.4.8.15 mac set mcastdnctr <fMcastCntDown> ................................... 34
2.4.8.16 mac set mcastnwkskey <mcastNetworkSessionkey> ............. 34
2.4.8.17 mac set nwkskey <nwkSessKey> ........................................... 34
2.4.8.18 mac set pwridx <pwrIndex> ..................................................... 35
2.4.8.19 mac set retx <reTxNb> ............................................................ 35
2.4.8.20 mac set rx2 <dataRate> <frequency> ..................................... 35
2.4.8.21 mac set rxdelay1 <rxDelay> .................................................... 36
2.4.8.22 mac set sync <synchWord> ................................................... 36
2.4.8.23 mac set upctr <fCntUp> .......................................................... 36
2.4.9 MAC Get Commands ................................................................................ 37
2.4.9.1 mac get adr ................................................................................ 37
2.4.9.2 mac get appeui .......................................................................... 37
2.4.9.3 mac get ar .................................................................................. 38
2.4.9.4 MAC Get Channel Commands .................................................. 38
2.4.9.5 mac get class ............................................................................. 40
2.4.9.6 mac get dcycleps ....................................................................... 40
2.4.9.7 mac get devaddr ........................................................................ 40
2.4.9.8 mac get deveui .......................................................................... 40
2.4.9.9 mac get dnctr ............................................................................. 40
2.4.9.10 mac get dr ................................................................................ 40
2.4.9.11 mac get gwnb .......................................................................... 41
2.4.9.12 mac get mcast ......................................................................... 41
2.4.9.13 mac get mcastdevaddr ............................................................ 41
2.4.9.14 mac get mcastdnctr ................................................................. 41
2.4.9.15 mac get mrgn ........................................................................... 41
2.4.9.16 mac get pwridx ........................................................................ 41
2.4.9.17 mac get retx ............................................................................. 42
2.4.9.18 mac get rx2 <freqband> .......................................................... 42
2.4.9.19 mac get rxdelay1 ..................................................................... 42
2.4.9.20 mac get rxdelay2 ..................................................................... 42
2.4.9.21 mac get status ......................................................................... 42
2.4.9.22 mac get sync ........................................................................... 42
2.4.9.23 mac get upctr ........................................................................... 43
2.5 Radio Commands ......................................................................................... 44
2.5.1 radio rx <rxWindowSize> .......................................................................... 45
2.5.2 radio tx <data> .......................................................................................... 45
2.5.3 radio cw <state> ........................................................................................ 46
2.5.4 rxstop ......................................................................................................... 46
2.5.5 Radio Set Commands ............................................................................... 47
2.5.5.1 radio set afcbw <autoFreqBand> .............................................. 47
2.5.5.2 radio set bitrate <fskBitrate> ...................................................... 47
2.5.5.3 radio set bt <gfBT> .................................................................... 47
2.5.5.4 radio set bw <bandWidth> ......................................................... 48
2.5.5.5 radio set cr <codingRate> ......................................................... 48
2015-2018 Microchip Technology Inc. DS40001784G-page 4
Page 5

2.5.5.6 radio set crc < crcHeader > ....................................................... 48
2.5.5.7 radio set fdev <freqDev> ........................................................... 48
2.5.5.8 radio set freq <frequency> ......................................................... 48
2.5.5.9 radio set iqi <iqInvert> ............................................................... 48
2.5.5.10 radio set mod <mode> ............................................................. 49
2.5.5.11 radio set prlen <preamble> ...................................................... 49
2.5.5.12 radio set pwr <pwrOut> ........................................................... 49
2.5.5.13 radio set rxbw <rxBandwidth> ................................................. 49
2.5.5.14 radio set sf <spreadingFactor> ................................................ 49
2.5.5.15 radio set sync <syncWord> ..................................................... 50
2.5.5.16 radio set wdt <watchDog> ....................................................... 50
2.5.6 Radio Get Commands ............................................................................... 51
2.5.6.1 radio get afcbw .......................................................................... 51
2.5.6.2 radio get bitrate .......................................................................... 51
2.5.6.3 radio get bt ................................................................................. 51
2.5.6.4 radio get bw ............................................................................... 52
2.5.6.5 radio get cr ................................................................................. 52
2.5.6.6 radio get crc ............................................................................... 52
2.5.6.7 radio get fdev ............................................................................. 52
2.5.6.8 radio get freq ............................................................................. 52
2.5.6.9 radio get iqi ................................................................................ 53
2.5.6.10 radio get mod ........................................................................... 53
2.5.6.11 radio get prlen .......................................................................... 53
2.5.6.12 radio get pwr ............................................................................ 53
2.5.6.13 radio get rssi ............................................................................ 53
2.5.6.14 radio get rxbw .......................................................................... 53
2.5.6.15 radio get sf ............................................................................... 54
2.5.6.16 radio get snr ............................................................................. 54
2.5.6.17 radio get sync .......................................................................... 54
2.5.6.18 radio get wdt ............................................................................ 54
Chapter 3. Bootloader Usage
3.1 Bootloader Hosts .......................................................................................... 55
3.2 Protocol ........................................................................................................ 56
3.3 RN Module Bootloader Commands .............................................................. 56
3.4 Command Details ......................................................................................... 57
3.5 Bootloader Usage Examples ........................................................................ 59
3.5.1 Using Bootloader with an Embedded Host ................................................ 59
3.5.2 Using Bootloader with a PC Host .............................................................. 59
3.5.2.1 Update RN2483 Module Firmware Using LoRaDevUtility ......... 59
3.5.2.2 LoRaDevUtility - Boot Load Recover ......................................... 60
3.5.2.3 Bootloading Operation complete ............................................... 60
Appendix A. Current Firmware Features and Fixes
Worldwide Sales and Service .................................................................................... 64
2015-2018 Microchip Technology Inc. DS40001784G-page 5
Page 6

RN2483 LoRaTECHNOLOGY MODULE
COMMAND REFERENCE USER’S GUIDE
Preface
NOTICE TO CUSTOMERS
All documentation becomes dated, and this manual is no exception. Microchip tools and
documentation are constantly evolving to meet customer needs, so some actual dialogs and/
or tool descriptions may differ from those in this document. Please refer to our website
(www.microchip.com) to obtain the latest documentation available.
Documents are identified with a “DS” number. This number is located on the bottom of each
page, in front of the page number. The numbering convention for the DS number is
“DSXXXXXA”, where “XXXXX” is the document number and “A” is the revision level of the
document.
For the most up-to-date information on development tools, see the MPLAB
Select the Help menu, and then Topics to open a list of available online help files.
INTRODUCTION
®
IDE online help.
This chapter contains general information that will be useful to know before using the
RN2483 module. Topics discussed in this chapter include:
• Document Layout
• Conventions Used in this Guide
• Recommended Reading
• The Microchip Website
• Development Systems Customer Change Notification Service
• Customer Support
• Revision History
DOCUMENT LAYOUT
This command reference user’s guide provides information for configuring the RN2483
low-power long-range LoRa technology transceiver module, including a description of
communication and command references. The document is organized as follows:
• Chapter 1. “Introduction” – Introduces the RN2483 module and provides a brief
overview of its features.
• Chapter 2. “Command Reference” – Provides information on the commands
used to configure the RN2483 module with examples.
• Chapter 3. “Bootloader Usage” - Gives further information on the bootloader
usage and protocol commands.
• Appendix A. “Current Firmware Features and Fixes ” – Provides information
on the release notes for each revision of the firmware.
2015-2018 Microchip Technology Inc. DS40001784G-page 6
Page 7

CONVENTIONS USED IN THIS GUIDE
This manual uses the following documentation conventions:
DOCUMENTATION CONVENTIONS
Description Represents Examples
Arial font:
Italic characters Referenced books MPLAB
Initial caps A window the Output window
Quotes A field name in a window or
Underlined, italic text with
right angle bracket
Bold characters A dialog button Click OK
N‘Rnnnn A number in verilog format,
Text in angle brackets < > A key on the keyboard Press <Enter>, <F1>
Courier New font:
Plain Courier New Sample source code #define START
Italic Courier New A variable argument file.o, where file can be
Square brackets [ ] Optional arguments mcc18 [options] file
Curly brackets and pipe
character: { | }
Ellipses... Replaces repeated text var_name [,
Preface
®
IDE User’s Guide
Emphasized text ...is the only compiler...
A dialog the Settings dialog
A menu selection select Enable Programmer
“Save project before build”
dialog
A menu path File>Save
A tab Click the Power tab
4‘b0010, 2‘hF1
where N is the total number of
digits, R is the radix and n is a
digit.
Filenames autoexec.bat
File paths c:\mcc18\h
Keywords _asm, _endasm, static
Command-line options -Opa+, -Opa-
Bit values 0, 1
Constants 0xFF, ‘A’
any valid filename
[options]
Choice of mutually exclusive
arguments; an OR selection
Represents code supplied by
user
errorlevel {0|1}
var_name...]
void main (void)
{ ...
}
2015-2018 Microchip Technology Inc. DS40001784G-page 7
Page 8

RECOMMENDED READING
This command reference user’s guide describes how to configure the RN2483 module.
The module-specific data sheet contains current information on the module specifications.
Other useful documents are listed below. The following documents are available and
recommended as supplemental reference resources:
RN2483 Low-Power Long-Range LoRa® Technology Transceiver Module
Data Sheet (DS50002346)
This data sheet provides detailed specifications for the RN2483 module.
LoRa® Alliance: LoRaWAN™ Specification V1.0.2
This document describes the LoRaWAN Class A protocol, which is optimized for
battery-powered end devices. This specification is available from the LoRa Alliance at
http://www.lora-alliance.org.
To obtain any of Microchip’s documents, visit the Microchip website at
www.microchip.com.
THE MICROCHIP WEBSITE
Microchip provides online support via our website at www.microchip.com. This website
is used as a means to make files and information easily available to customers. Accessible by using your favorite Internet browser, the website contains the following information:
• Product Support – Data sheets and errata, application notes and sample
programs, design resources, user’s guides and hardware support documents,
latest software releases and archived software
• General Technical Support – Frequently Asked Questions (FAQs), technical
support requests, online discussion groups, Microchip consultant program
member listing
• Business of Microchip – Product selector and ordering guides, latest Microchip
press releases, listing of seminars and events, listings of Microchip sales offices,
distributors and factory representatives
Preface
2015-2018 Microchip Technology Inc. DS40001784G-page 8
Page 9

DEVELOPMENT SYSTEMS CUSTOMER CHANGE NOTIFICATION SERVICE
Microchip’s customer notification service helps keep customers current on Microchip
products. Subscribers will receive e-mail notification whenever there are changes,
updates, revisions or errata related to a specified product family or development tool of
interest.
To register, access the Microchip website at www.microchip.com, click on Customer
Change Notification and follow the registration instructions.
The Development Systems product group categories are:
• Compilers – The latest information on Microchip C compilers, assemblers, linkers
and other language tools. These include all MPLAB C compilers; all MPLAB
assemblers (including MPASM™ assembler); all MPLAB linkers (including
MPLINK™ object linker); and all MPLAB librarians (including MPLIB™ object
librarian).
• Emulators – The latest information on Microchip in-circuit emulators.This
includes the MPLAB REAL ICE™ and MPLAB ICE 2000 in-circuit emulators.
• In-Circuit Debuggers – The latest information on the Microchip in-circuit
debuggers. This includes MPLAB ICD 4 and PICkit™ 4 in-circuit debuggers.
• MPLAB
Integrated Development Environment for development systems tools. This list is
focused on the MPLAB IDE, MPLAB IDE Project Manager, MPLAB Editor and
MPLAB SIM simulator, as well as general editing and debugging features.
• Programmers – The latest information on Microchip programmers. These include
production programmers such as MPLAB REAL ICE in-circuit emulator, MPLAB
ICD 4 in-circuit debugger and MPLAB PM3 device programmers. Also included
are non-production development programmers such as the PICkit 3.
®
IDE – The latest information on Microchip MPLAB IDE, the Windows®
Preface
CUSTOMER SUPPORT
Users of Microchip products can receive assistance through several channels:
• Distributor or Representative
• Local Sales Office
• Field Application Engineer (FAE)
• Technical Support
Customers should contact their distributor, representative or field application engineer
(FAE) for support. Local sales offices are also available to help customers. A listing of
sales offices and locations is included in the back of this document.
Technical support is available through the website at:
http://www.microchip.com/support.
2015-2018 Microchip Technology Inc. DS40001784G-page 9
Page 10

REVISION HISTORY
Revision A (March 2015)
Initial release of the document.
Revision B (March 2015)
Update to Section 1.4.
Revision C (November 2015)
Added 2.3.6.5, 2.3.6.6, 2.3.6.7, 2.4.8.16, 2.4.8.17 sections; Updated 2-4, 2-6, 2-8 and
2-14 Tables, Updated 2.3.5.2, 2.4.4, 2.4.9.7, 2.4.9.18, and 2.5.5.17 sections; Other
minor corrections.
Revision D (February 2016)
Added a new Note box in section 2.4.9.2, updated section 2.4.9.16 and Figure 2-1,
added A.3 section; Other minor corrections.
Revision E (February 2016)
Removed Version 1.0.2 in section A.4; Other minor corrections.
Preface
Revision F (March 2017)
Added Chapter 3 (Bootloader Usage); Other minor corrections.
Revision G (September 2018)
Updated Note in section 1.4; Updated section 2-2 and Table 2-4; Added a new Note
box in section 2.3.6.6; Updated 2.4.4 and 2.4.6; Updated Table 2-6 and added sections
2.4.8.11, 2.4.8.12, 2.4.8.13, 2.4.8.14, 2.4.8.15, and 2.4.8.16; Updated Table 2-8,
Figure 2-1, added sections 2.4.9.5, 2.4.9.12, 2.4.9.13, and 2.4.9.14; Added section 3.1,
3.1.1 and 3.1.2; Updated section 3.2, 3.3, 3.4; Other minor corrections.
2015-2018 Microchip Technology Inc. DS40001784G-page 10
Page 11

1.1 OVERVIEW
Network Server
RN2483
UART
LoRaTMend device
UART
PC with
terminal
software
Sensor
Sensor reading: 0x23A5 mac tx uncnf 30 23A5
40340120030000001EADBC E2ABFFDA
Encrypted data
IP Connection
Application Server
[…]1E[…]ADBC[…]
IP Connection
Application
Port: 30
Data: 23A5
Development platform
These devices deal with
plaintext application data
These entities hold secret keys
that can encrypt/decrypt
application data
These devices relay encrypted
application data without being
able to decrypt it
)))
LoRaTMGateway
(((
RN2483
Host
MCU
)
))
The Microchip RN2483 module provides LoRaWAN™ protocol connectivity using a
simple UART interface. This module handles the LoRaWAN Class A and Class C
protocols and provides an optimized text command/response interface to the host
system. This document is intended to describe an implementation of the LoRaWAN
Class A and Class C protocols. LoRaWAN protocol terms are described in more detail
in the LoRaWAN™ Specification V1.0.2 available from the LoRa Alliance
(http://www.lora-alliance.org). Thus, it is recommended to review the LoRaWAN™
Specification V1.0.2 before using the RN2483 module.
The required configuration for accessing a LoRa technology network is minimal and
can be stored in the module’s EEPROM, allowing for factory configuration of these
parameters, lowering the requirements for the host system while also increasing
system security. The module also features GPIO pins that can be configured through
the UART interface.
A simple use case is described in Figure 1-1 where an end device, containing a host
MCU which reads a sensor, commands the RN2483 to transmit the sensor reading
over the LoRa network. Data are encrypted by the RN2483 and the radio packet is
received by one or multiple gateways which forward it to the network server. The
network server sends the data to the application server which has the key to decrypt
the application data. Similarly, a development platform may consist of an RN2483
directly connected over UART to a PC which becomes the host system in this case.
Users can then type commands into the module using a terminal program.
RN2483 LoRaTECHNOLOGY MODULE
COMMAND REFERENCE USER’S GUIDE
Chapter 1. Introduction
FIGURE 1-1: SIMPLE LoRa
®
TECHNOLOGY NETWORK DIAGRAM
2015-2018 Microchip Technology Inc. DS40001784G-page 11
Page 12

RN2483 LoRa Technology Module Command Reference User’s Guide
Command Interface
Radio driver
LoRaWANTMProtocol
mac
commands
radio
commands
Hardware (GPIO, System timer, etc.)
sys
commands
Radio hardware
The flow of data can be followed as it gets generated by an end device and transported
on the network.
1.2 FEATURES
• LoRaWAN Class A and Class C protocol compliance
• Integrated FSK, GFSK and LoRa technology transceiver allowing the user to
transmit custom packets using these protocols
• Globally unique 64-bit identifier (EUI-64™)
• Configurable GPIOs
• Intelligent Low-Power mode with programmable/on-demand wake up
• Bootloader for firmware upgrade
• All configuration and control done over UART using simple ASCII commands
Refer to the RN2483, Low-Power Long-Range LoRa
Data Sheet
(DS50002346) for details on the hardware specifications of the module.
®
T echnology Transceiver Module
1.3 CONFIGURATION
The RN2483 module’s architecture is described in Figure 1-2 from the command
interface point of view. There are three types of commands that can be used, and each
allows access to different module functions:
• LoRaWAN Class A and Class C configuration and control, using the mac group of
commands
• Low-level radio configuration and control, using the radio group of commands
• Other module functions, using the sys group of commands
FIGURE 1-2: RN2483 COMMAND INTERFACE (YELLOW) AND ITS
RELATIONSHIP TO THE MODULE’S INTERNAL
COMPONENTS
The available commands can be used to configure and control the LoRaWAN protocol
layer, the radio driver and some system peripherals.
In order to communicate with a LoRa network, a specific number of parameters need
to be configured. Since two distinctive methods are offered for a device to become part
of the network, each of these requires different parameters:
• Over-the-Air Activation (OTAA), where a device negotiates network encryption
keys at the time it joins the network. For this, the device EUI, application EUI and
application key need to be configured and then the OTAA procedure can start.
• Activation by Personalization (ABP) where the device already contains the
network keys and can directly start communication with the network. Configuring
DS40001784G-page 12 2015-2018 Microchip Technology Inc.
the device address, network session key and application session key is sufficient
Page 13

for this type of initialization.
For increased security, these parameters can be configured and stored in the module’s
EEPROM during manufacturing of devices requiring LoRaWAN connectivity. Thus, the
keys do not need to be sent over the UART interface by the host system every time the
device powers up.
1.4 UART INTERFACE
All of the RN2483 module’s settings and commands are transmitted over UART using
the ASCII interface.
All commands need to be terminated with <CR><LF> and any replies they generate will
also be terminated by the same sequence.
The default settings for the UART interface are 57600 bps, 8 bits, no parity, 1 Stop bit,
no flow control. The baud rate can be changed by triggering the auto-baud detection
sequence of the module. To do this, the host system needs to transmit a Break
condition to the module followed by a 0x55 character at the new baud rate. The
auto-baud detection mechanism can also be triggered during sleep to wake the module
up before the predetermined time has expired.
Note: A break condition is signaled to the module by keeping the UART_RX pin
Introduction
low for longer than the time to transmit a complete character. For example,
at the default baud rate of 57600 bps, keeping the UART_RX pin low for
226 s is a valid 13-bit break condition, whereas at 9600 bps this may be
interpreted as a 0x00 character. Thus, the Break condition needs to be
long enough to still be interpreted as such at the baud rate that is currently
in use. At 9600 bps a valid 13-bit Break condition must need to be 1,350 s.
Break condition calculation is as follows:
T
= Nb/bps
b
Where:
= time required for Break condition
* T
b
* Nb = number of bits required for Break condition
* bps = current bit rate
= 13/57600
T
b
= 226 s
T
b
2015-2018 Microchip Technology Inc. DS40001784G-page 13
Page 14

RN2483 LoRa Technology Module Command Reference User’s Guide
NOTES:
DS40001784G-page 14 2015-2018 Microchip Technology Inc.
Page 15

Chapter 2. Command Reference
The RN2483 LoRa technology module supports a variety of commands for
configuration. This section describes these commands in detail and provides
examples.
2.1 COMMAND SYNTAX
To issue commands to the RN2483 module, the user sends keywords followed by
optional parameters. Commands (keywords) are case-sensitive, and spaces must not
be used in parameters. Hex input data can be uppercase or lowercase. String text data,
such as OTAA used for the join procedure, can be uppercase or lowercase.
The use of shorthand for parameters is NOT supported.
Depending on the command, the parameter may expect values in either decimal or
hexadecimal form; refer to the command description for the expected form. For
example, when configuring the frequency, the command expects a decimal value in
Hertz such as 868100000 (868.1 MHz). Alternatively, when configuring the LoRaWAN
device address, the hex value is entered into the parameter as aabbccdd. To enter a
number in hex form, use the value directly. For example, the hex value 0xFF would be
entered as FF.
RN2483 LoRa TECHNOLOGY MODULE
COMMAND REFERENCE USER’S GUIDE
2.2 COMMAND ORGANIZATION
There are three general command categories, as shown in Table 2-1.
TABLE 2-1: COMMAND TYPES
Command Type Keyword Description
System <sys> Issues system level behavior actions, gathers status
LoRaWAN™ Class A
and Class C Protocols
Transceiver commands <radio> Issues radio specific configurations, directly accessing
information on the firmware and hardware version, or
accesses the module user EEPROM memory.
<mac> Issues LoRaWAN Class A and Class C protocols
network communication behaviors, actions and
configuration commands.
and updating the transceiver setup.
2015-2018 Microchip Technology Inc. DS40001784G-page 15
Page 16

RN2483 LoRa Technology Module Command Reference User’s Guide
After configuring the LoRaWAN protocol settings, the user must save them to
EEPROM with the mac save command. Once the settings have been saved, they will
be retained after a reboot or Reset.
Note: Upon successful reception a command, based on the specific command,
the module will respond with one of the following:
• ok
• busy
• fram_counter_err_rejoin_needed
• invalid_class
• invalid_data_len
• invalid_param
• keys_not_init
• mac_paused
• multicast_keys_not_set
• no_free_ch
• not_joined
• silent
• err
Note: To facilitate the sharing of the radio between user custom applications and
the LoRaWAN MAC, refer to the mac pause and mac resume commands.
Since no sharing exists between sys and other types of commands, there
is no need for additional pause commands.
2.3 SYSTEM COMMANDS
System commands begin with the system keyword <sys> and include the categories
shown in Ta b le 2 - 2, Ta bl e 2 - 3 and Table 2-4.
TABLE 2-2: SYSTEM COMMANDS
Parameter Description
sleep Puts the system in sleep for a finite number of milliseconds.
reset Resets and restarts the RN2483 module.
eraseFW Deletes the current RN2483 module application firmware and prepares it for
factoryRESET Resets the RN2483 module’s configuration data and user EEPROM to
(1)
set
(1)
get
Note 1: Refer to
summaries.
firmware upgrade. The RN2483 module bootloader is ready to receive new
firmware.
factory default values and restarts the RN2483 module.
Sets specified system parameter values.
Gets specified system parameter values.
Table 2-3 for system <set> and Table 2-4 for system <get> command
DS40001784G-page 16 2015-2018 Microchip Technology Inc.
Page 17

Command Reference
2.3.1 sys sleep <length>
<length>: decimal number representing the number of milliseconds the system is
put to sleep, from 100 to 4294967296.
Response: ok after the system gets back from Sleep mode
invalid_param if the length is not valid
This command puts the system to sleep for the specified number of milliseconds. The
module can be forced to exit from sleep by sending the UART a Break condition
followed by a 0x55 character. Forcing the module from sleep in the manner also
triggers the UART auto baud detection. The module will adjust the UART baud rate to
match the baud rate at which the 0x55 character was sent. Refer to the note box in
1.4 “UART Interface”.
Example: sys sleep 120 // Puts the system to sleep for 120 ms.
2.3.2 sys reset
Response: RN2483 X.Y.Z MMM DD YYYY HH:MM:SS, where X.Y.Z is firmware
version, MMM is month, DD is day, YYYY is year, HH:MM:SS is hour,
minutes, seconds (format: [HW] [FW] [Date] [Time]). [Date] and [Time] refer
to the release of the firmware.
This command resets and restarts the RN2483 module; stored LoRaWAN protocol
settings will be loaded automatically upon reboot.
Example: sys reset // Resets and restarts the RN2483 module.
2.3.3 sys eraseFW
Response: no response
This command deletes the current RN2483 module application firmware and prepares
it for firmware upgrade. The RN2483 module bootloader is ready to receive new
firmware.
Example: sys eraseFW // Deletes the current RN2483 module
application firmware.
2.3.4 sys factoryRESET
Response: RN2483 X.Y.Z MMM DD YYYY HH:MM:SS, where X.Y.Z is firmware
version, MMM is month, DD is day, YYYY is year, HH:MM:SS is hour,
minutes, seconds (format: [HW] [FW] [Date] [Time]). [Date] and [Time] refer
to the release of the firmware.
This command resets the module’s configuration data and user EEPROM to factory
default values and restarts the module. After factoryRESET, the RN2483 module will
automatically reset and all configuration parameters are restored to factory default
values. All LoRaWAN protocol settings set by the user will be lost.
Example: sys factoryRESET // Restores factory default values.
2015-2018 Microchip Technology Inc. DS40001784G-page 17
Page 18

RN2483 LoRa Technology Module Command Reference User’s Guide
2.3.5 System Set Commands
TABLE 2-3: SYSTEM SET COMMANDS
Parameter Description
nvm Stores <data> to a location <address> of user EEPROM.
pindig Allows user to set and clear available digital pins.
pinmode Allows user to set the functionality of a pin to either digital input, digital output
or analog input (if available).
2.3.5.1 sys set nvm <address> <data>
<address>: hexadecimal number representing user EEPROM address, from 300 to
3FF
<data>: hexadecimal number representing data, from 00 to FF
Response: ok if the parameters (address and data) are valid
invalid_param if the parameters (address and data) are not valid
This command allows the user to modify the user EEPROM at <address> with the
value supplied by <data>. Both <address> and <data> must be entered as hex
values. The user EEPROM memory is located inside the MCU on the module.
Example: sys set nvm 300 A5 // Stores the value 0xA5 at user EEPROM
address 0x300.
2.3.5.2 sys set pindig <pinname> <pinstate>
<pinname>: string representing the pin. Parameter can be: GPIO0 - GPIO13,
UART_CTS, UART_RTS, TEST0, TEST1
<pinstate>: decimal number representing the state. Parameter values can be: 0 or
1.
Response: ok if the parameters (<pinname>, <pinstate>) are valid
invalid_param if the parameters (<pinname>, <pinstate>) are not
valid
This command allows the user to modify the unused pins available for use by the
module. The selected <pinname> is driven high or low depending on the desired
<pinstate>.
Default: GPIO0-GPIO13, UART_CTS, UART_RTS, TEST0 and TEST1 are driven low
(value 0).
Example: sys set pindig GPIO5 1 // Drives GPIO5 high 1, V
DD.
Note: In order for the pin to be driven to a value, make sure you have first
configured the pin to be a digital output using the command sys set
pinmode <pinname> digout.
2.3.5.3 sys set pinmode <pinname> <pinmode>
<pinname>: string representing the pin. Parameters can be: GPIO0 - GPIO13,
UART_CTS, UART_RTS, TEST0, TEST1
<pinmode>: string representing the functional mode of the pin. Parameters can be:
digout, digin or ana.
Response: ok if all the parameters are valid
invalid_param if any of the parameters are not valid
This command allows the user to configure the functional mode of a pin. A pin can be
DS40001784G-page 18 2015-2018 Microchip Technology Inc.
Page 19

Command Reference
configured as digital output by using the digout parameter. A pin can be configured
as digital input by using the digin parameter. A pin can be configured as analog input
by using the ana parameter.
Note: Not all pins have analog input functionality.
Example: sys set pinmode GPIO0 ana //Configures GPIO0 as analog input
Note: This command must be called prior to reading or setting the value of a pin
in order to have correct behavior.
2.3.6 System Get Commands
TABLE 2-4: SYSTEM GET COMMANDS
Parameter Description
ver Returns the information on hardware platform, firmware version, release
date.
nvm Returns data from the requested user EEPROM <address>.
vdd Returns measured voltage in mV.
hweui Returns the preprogrammed EUI node address.
pindig Returns the state of a digital input.
pinana Returns the state of an analog input.
2.3.6.1 sys get ver
Response: RN2483 X.Y.Z MMM DD YYYY HH:MM:SS, where X.Y.Z is firmware
version, MMM is month, DD is day, YYYY is year, HH:MM:SS is hour,
minutes, seconds
(format: [HW] [FW] [Date] [Time]). [Date] and [Time] refer to the release of
the firmware.
This command returns the information related to the hardware platform, firmware
version, release date and time stamp on firmware creation.
Example: sys get ver // Returns version-related information.
2.3.6.2 sys get nvm <address> <address>: hexadecimal number representing user EEPROM address, from 300 to
3FF
Response: 00 – FF (hexadecimal value from 00 to FF) if the address is valid
invalid_param if the address is not valid
This command returns the data stored in the user EEPROM of the RN2483 module at
the requested <address> location.
Example: sys get nvm 300 // Returns the 8-bit hex value stored at
300.
2.3.6.3 sys get vdd
Response: 0–3600 (decimal value from 0 to 3600)
This command informs the RN2483 module to do an ADC conversion on the V
DD. The
measurement is converted and returned as a voltage (mV). Example: sys get vdd // Returns mV measured on the V
DD
module.
2015-2018 Microchip Technology Inc. DS40001784G-page 19
Page 20

RN2483 LoRa Technology Module Command Reference User’s Guide
2.3.6.4 sys get hweui
Response: hexadecimal number representing the preprogrammed EUI node
address
This command reads the preprogrammed EUI node address from the RN2483 module.
The value returned by this command is a globally unique number provided by
Microchip.
Example: sys get hweui // Reads the preprogrammed EUI node
address.
Note: The preprogrammed EUI node address is a read-only value and cannot be
changed or erased. This value can be used to configure the device EUI
using the mac set deveui command (see Section 2.4.8.8).
2.3.6.5 sys get pindig <pinname>
<pinname>: string representing the pin. Parameters can be: GPIO0 - GPIO13,
UART_CTS, UART_RTS, TEST0, TEST1
Response: decimal number representing the state (either 0 or 1).
This command allows the user to read the state of a digital input. To be used as a
digital input, a pin needs to be configured using the sys set pinmode command.
Example: sys get pindig GPIO0 //Reads the state of the GPIO0 digital input
Note: The sys set pinmode <pinname> digin command must be
called to configure the function of the pin prior to reading its digital input
value.
2.3.6.6 sys get pinana <pinname>
<pinname>: string representing the pin. Parameters can be: GPIO0 - GPIO3,
GPIO5 - GPIO13
Response: decimal number representing the result of the conversion, from 0 to 1023,
where 0 represents 0V and 1023 is V
DD, the supply voltage of the module.
This command allows the user to read the state of an analog input. To be used as an
analog input, a pin needs to be configured using the sys set pinmode command.
Example: sys get pinana GPIO0 //Reads the state of the GPIO0 analog input
Note: The sys set pinmode <pinname> ana command must be
called to configure the functional mode of the pin prior to reading its
analog input value.
DS40001784G-page 20 2015-2018 Microchip Technology Inc.
Page 21
2.4 MAC COMMANDS
LoRaWAN protocol commands begin with the system keyword mac and include the
categories shown in Table 2-5.
TABLE 2-5: MAC COMMANDS
Parameter Description
reset Resets the RN2483 module to a specific frequency band.
tx Sends the data string on a specified port number and sets default values for
join Informs the RN2483 module to join the configured network.
save Saves LoRaWAN Class A configuration parameters to the user EEPROM.
forceENABLE Enables the RN2483 module after the LoRaWAN network server
pause Pauses LoRaWAN stack functionality to allow transceiver (radio)
resume Restores the LoRaWAN stack functionality.
set Accesses and modifies specific MAC related parameters.
get Reads back current MAC related parameters from the module.
2.4.1 mac reset <band>
Command Reference
most of the LoRaWAN™ parameters.
commanded the end device to become silent immediately.
configuration.
<band>: decimal number representing the frequency band, either 868 or 433
Response: ok if band is valid
invalid_param if band is not valid
This command will automatically reset the software LoRaWAN stack and initialize it
with the default parameters.
Example: mac reset 868 // Sets the default values and selects the 868
default band.
Note: This command will set default values for most of the LoRaWAN
parameters. Everything set prior to this command will lose its set value.
2015-2018 Microchip Technology Inc. DS40001784G-page 21
Page 22

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.2 mac tx <type> <portno> <data>
<type>: string representing the uplink payload type, either cnf or uncnf (cnf –
confirmed, uncnf – unconfirmed)
<portno>: decimal number representing the port number, from 1 to 223
<data>: hexadecimal value. The length of <data> bytes capable of being
transmitted are dependent upon the set data rate (for further details, refer
to the LoRaWAN™ Specification V1.0.2).
Response: this command may reply with two responses. The first response will be
received immediately after entering the command. In case the command is
valid (ok reply received), a second reply will be received after the end of the
uplink transmission. For further details, refer to the LoRaWAN™
Specification V1.0.2.
Response after entering the command:
• ok – if parameters and configurations are valid and the packet was forwarded to
the radio transceiver for transmission
• invalid_param – if parameters (<type> <portno> <data>) are not valid
• not_joined – if the network is not joined
• no_free_ch – if all channels are busy
• silent – if the module is in a Silent Immediately state
• frame_counter_err_rejoin_needed – if the frame counter rolled over
• busy – if MAC state is not in an Idle state
• mac_paused – if MAC was paused and not resumed back
• invalid_data_len if application payload length is greater than the maximum
application payload length corresponding to the current data rate
Response after the first uplink transmission attempt:
• mac_tx_ok if uplink transmission was successful and no downlink data was
received back from the server;
• mac_rx <portno> <data> if transmission was successful, <portno>: port
number, from 1 to 223; <data>: hexadecimal value that was received from the
server;
• mac_err if transmission was unsuccessful, ACK not received back from the
server
• invalid_data_len if application payload length is greater than the maximum
application payload length corresponding to the current data rate. This can occur
after an earlier uplink attempt if retransmission back-off has reduced the data rate.
A confirmed message will expect an acknowledgment from the server; otherwise, the
message will be retransmitted by the number indicated by the command mac set
retx <value>, whereas an unconfirmed message will not expect any
acknowledgment back from the server. For further details, refer to the LoRaWAN™
Specification V1.0.2.
The port number allows multiplexing multiple data streams on the same link. For
example, the end device can send measurements on one port number and
configuration data on another. The server application can then distinguish the two types
of data based on the port number.
Example: mac tx cnf 4 5A5B5B // Sends a confirmed frame on port 4 with
application payload 5A5B5B.
DS40001784G-page 22 2015-2018 Microchip Technology Inc.
Page 23

Command Reference
If the automatic reply feature is enabled and the server sets the Frame Pending bit or
initiates downlink confirmed transmissions, multiple responses will be displayed after
each downlink packet is received by the module. A typical scenario for this case would
be (prerequisites: free LoRaWAN channels available and automatic reply enabled):
• The module sends a packet on port 4 with application payload 0xAB
• Radio transmission is successful and the module will display the first response:
ok
• The server needs to send two separate downlink confirmed packets back on port
1 with the following data: 0xAC, then 0xAF. First it will transmit the first one (0xAC)
and will set the Frame Pending bit. The module will display the second response
mac_rx 1 AC
• The module will initiate an automatic uplink unconfirmed transmission with no
application payload on the first free channel because the Frame Pending bit was
set in the downlink transmission
• The server will send back the second confirmed packet (0xAF). The module will
display a third response mac_rx 1 AF
• The module will initiate an automatic unconfirmed transmission with no application
payload on the first free channel because the last downlink transmission was
confirmed, so the server needs an ACK
• If no reply is received back from the server, the module will display the fourth
response after the end of the second Receive window: mac_tx_ok
• After this scenario, the user is allowed to send packets when at least one enabled
channel is free
Based on this scenario, the following responses will be displayed by the module:
• mac tx cnf 4 AB
• ok
• mac_rx 1 AC
• mac_rx 1 AF
• mac_tx_ok
2015-2018 Microchip Technology Inc. DS40001784G-page 23
Page 24

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.3 mac join <mode>
<mode>: string representing the join procedure type (case-insensitive), either otaa
or abp (otaa – over-the-air activation, abp – activation by
personalization).
Response: this command may reply with two responses. The first response will be
received immediately after entering the command. In case the command is
valid (ok reply received) a second reply will be received after the end of the
join procedure. For further details, refer to the LoRaWAN™ Specification
V1.0.2.
Response after entering the command:
• ok – if parameters and configurations are valid and the join request packet was
forwarded to the radio transceiver for transmission
• invalid_param – if <mode> is not valid
• keys_not_init – if the keys corresponding to the Join mode (otaa or abp)
were not configured
• no_free_ch – if all channels are busy
• silent – if the device is in a Silent Immediately state
• busy – if MAC state is not in an Idle state
• mac_paused – if MAC was paused and not resumed back
Response after the join procedure:
• denied if the join procedure was unsuccessful (the module attempted to join the
network, but was rejected);
• accepted if the join procedure was successful;
This command informs the RN2483 module it should attempt to join the configured
network. Module activation type is selected with <mode>. Parameter values can be
otaa (over-the-air activation) or abp (activation by personalization). The <mode>
parameter is not case sensitive. Before joining the network, the specific parameters for
each activation type should be configured (for over the air activation: device EUI,
application EUI, application key; for activation by personalization: device address,
network session key, application session key).
Example: mac join otaa // Attempts to join the network using
over-the-air activation.
DS40001784G-page 24 2015-2018 Microchip Technology Inc.
Page 25

Command Reference
2.4.4 mac save
Response: ok
The mac save command must be issued after configuration parameters have been
appropriately entered from the mac set <cmd> commands. This command will save
LoRaWAN Class A protocol configuration parameters to the user EEPROM. When the
next sys reset command is issued, the LoRaWAN Class A protocol configuration will
be initialized with the last saved parameters.
The LoRaWAN protocol configuration savable parameters are:
• adr: ADR state
• appeui: Application Identifier
• appkey: Application Key
• appskey: Application Session key
• ch: All Channel Parameters
- drrange: Data Rate Range
- status: Status
• class: LoRaWAN operating Class
• devaddr: End-Device Address
• deveui: End-Device Identifier
• dnctr: Downlink Frame Counter
• dr:Data Rate
• join flags: Join parameter flags
- appeui: Application Identifier set
- appmultiskey: Application Multicast Session Key set
- appskey: Application Key set
- devaddr: End-Device Address set
- deveui: End-Device Identifer set
- devmultiskey: End-Device Multicast Session Key set
- nwkmultiskey: Network Multicast Session Key set
- nwkskey: Network Session Key set
• mcast: Multicast State
• mcastappskey: Multicast Application Session Key
• mcastdevaddr: Multicast End Device Address
• mcastnwkskey: Multicast Network Session Key
• nwkskey: Network Session Key
• rx2 parameters: RX Window 2 parameters
- freq: Frequency
- status: Status
• upctr: Uplink Frame Counter
Example: mac save // Saves the LoRaWAN Class A protocol
configuration parameters to the user
EEPROM.
2015-2018 Microchip Technology Inc. DS40001784G-page 25
Page 26
RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.5 mac forceENABLE
Response: ok
The network can issue a certain command (Duty Cycle Request frame with parameter
255) that would require the RN2483 module to go silent immediately. This mechanism
disables any further communication of the module, effectively isolating it from the
network. Using mac forceENABLE after this network command has been received
restores the module’s connectivity by allowing it to send data.
Example: mac forceENABLE // Disables the Silent Immediately state.
Note: The silent immediately status bit of the MAC status register
indicates the device has been silenced by the network. Refer to Figure
2-1: “MAC Status bit-Mapped Register (1)”.
2.4.6 mac pause
Response: 0 – 4294967295 (decimal number representing the number of milliseconds
the mac can be paused)
This command pauses the LoRaWAN stack functionality to allow transceiver (radio)
configuration. Through the use of mac pause, radio commands can be generated
between a LoRaWAN Class A protocol uplink application (mac tx command), and the
LoRaWAN Class A protocol Receive windows (second response for the mac tx
command). This command will reply with the time interval in milliseconds that the
transceiver can be used without affecting the LoRaWAN functionality. The maximum
value (4294967295) is returned whenever the LoRaWAN stack functionality is in Idle
state and the transceiver can be used without restrictions. ‘0’ is returned when the
LoRaWAN stack functionality cannot be paused.
For example, when operating in LoRaWAN Class C mode, the receiver is continuously
in receive. The mac pause command will return ‘0’ indicating that the LoraWAN stack
cannot be paused.
After the radio configuration is complete, the mac resume command must be used to
return to LoRaWAN protocol commands.
Example: mac pause // Pauses the LoRaWAN stack
functionality if the response is different
from 0.
Note: If already joined to a network, this command MUST be called BEFORE
configuring the radio parameters, initiating radio reception, or transmission.
2.4.7 mac resume
Response: ok
This command resumes LoRaWAN stack functionality, in order to continue normal
functionality after being paused.
Example: mac resume // Resumes the LoRaWAN stack functionality.
Note: This command MUST be called AFTER all radio commands have been
issued and all the corresponding asynchronous messages have been
replied.
DS40001784G-page 26 2015-2018 Microchip Technology Inc.
Page 27

Command Reference
2.4.8 MAC Set Commands
TABLE 2-6: MAC SET COMMANDS
Parameter Description
appkey Sets the application key for the RN2483 module.
ar Sets the state of the automatic reply.
appskey Sets the application session key for the RN2483 module.
bat Sets the battery level needed for Device Status Answer frame command
response.
ch Allows modification of channel related parameters.
class Sets the LoRaWAN operating class.
devaddr Sets the unique network device address for the RN2483 module.
deveui Sets the globally unique identifier for the RN2483 module.
dnctr Sets the value of the downlink frame counter that will be used for the next
downlink reception.
dr Sets the data rate to be used for the next transmissions.
linkchk Sets the time interval for the link check process to be triggered.
mcast Sets the Multicast state to on, or off.
mcastappskey Sets the multicast application session key.
mcastdevaddr Sets the multicast network device address.
mcastdnctr Sets the value of the multicast downlink frame counter that will be used for
the next multicast downlink reception.
mcastnwkskey Sets the multicast network session key.
nwkskey Sets the network session key for the RN2483 module.
pwridx Sets the output power to be used on the next transmissions.
retx Sets the number of retransmissions to be used for an uplink confirmed
packet.
rx2 Sets the data rate and frequency used for the second Receive window.
rxdelay1 Sets the value used for the first Receive window delay.
sync Sets the synchronization word for the LoRaWAN communication.
upctr Sets the value of the uplink frame counter that will be used for the next
uplink transmission.
2.4.8.1 mac set appkey <appKey>
<appKey>: 16-byte hexadecimal number representing the application key
Response: ok if key is valid
invalid_param if key is not valid
This command sets the application key for the module. The application key is used to
derive the security credentials for communication during over-the-air activation.
Example: mac set appkey 00112233445566778899AABBCCDDEEFF
Note: If this parameter was previously saved to user EEPROM by issuing the
mac save command, after modifying its value, the mac save command
should be called again.
2015-2018 Microchip Technology Inc. DS40001784G-page 27
Page 28

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.8.2 mac set appskey <appSesskey> <appSessKey>: 16-byte hexadecimal number representing the application session
key
Response: ok if key is valid
invalid_param if key is not valid
This command sets the application session key for the module. This key provides
security for communication between module and application server.
Example: mac set appskey AFBECD56473829100192837465FAEBDC
Note: If this parameter was previously saved to user EEPROM by issuing the
mac save command, after modifying its value, the mac save command
should be called again.
2.4.8.3 mac set ar <state> <state>: string value representing the state, either on or off.
Response: ok if state is valid
invalid_param if state is not valid
This command sets the state of the automatic reply. By enabling the automatic reply,
the module will transmit a packet without a payload immediately after a confirmed
downlink is received, or when the Frame Pending bit has been set by the server. If set
to OFF, no automatic reply will be transmitted.
Example: mac set ar on // Enables the automatic reply process
inside the module.
Note: The RN2483 module implementation will initiate automatic transmissions
with no application payload if the automatic reply feature is enabled and the
server sets the Frame Pending bit or initiates a confirmed downlink
transmission. In this case, if all enabled channels are busy due to duty cycle
limitations, the stack will wait for the first channel that will become free to
transmit. The user will not be able to initiate uplink transmissions until the
automatic transmissions are done.
2.4.8.4 mac set bat <level> <level>: decimal number representing the level of the battery, from 0 to 255. ‘0’
means external power, ‘1’ means low level, 254 means high level, 255
means the end device was not able to measure the battery level.
Response: ok if the battery level is valid
invalid_param if the battery level is not valid
This command sets the battery level required for Device Status Answer frame in use
with the LoRaWAN Class A protocol.
Example: mac set bat 127 // Battery is set to ~50%.
DS40001784G-page 28 2015-2018 Microchip Technology Inc.
Page 29

Command Reference
2.4.8.5 MAC SET CHANNEL COMMANDS
TABLE 2-7: MAC SET CHANNEL COMMANDS
Parameter Description
freq Sets the module operation frequency on a given channel ID.
dcycle Sets the module operation duty cycle on a given channel ID.
drrange Sets the module allowed data rate range (min.- max.) allowed on a given
channel ID.
status Sets the use of the specified channel ID.
2.4.8.5.1 mac set ch freq <channelID> <frequency>
<channelID>: decimal number representing the channel number, from 3 to 15.
<frequency>: decimal number representing the frequency, from 863000000 to
870000000 or from 433050000 to 434790000, in Hz.
Response: ok if parameters are valid
invalid_param if parameters are not valid
This command sets the operational frequency on the given channel ID. The default
channels (0-2) cannot be modified in terms of frequency.
Example: mac set ch freq 13 864000000 // Define frequency for channel
13 to be 864 MHz.
Note: If this parameter was previously saved to user EEPROM by issuing the
mac save command, after modifying its value, the mac save command
should be called again.
2.4.8.5.2 mac set ch dcycle <channelID> <dutyCycle>
<channelID>: decimal number representing the channel number, from 0 to 15.
<dutyCycle>: decimal number representing the duty cycle, from 0 to 65535.
Response: ok if parameters are valid
invalid_param if parameters are not valid
This command sets the duty cycle used on the given channel ID on the module. The
<dutyCycle> value that needs to be configured can be obtained from the actual duty
cycle X (in percentage) using the following formula: <dutyCycle> = (100/X) – 1. The
default settings consider only the three default channels (0-2), and their default duty
cycle is 0.33%. If a new channel is created either by the server or by the user, all the
channels (including the default ones) must be updated by the user in terms of duty
cycle to comply with the ETSI regulations.
Example: mac set ch dcycle 13 9 // Defines duty cycle for channel 13 to be
10%. Since (100/10) – 1 = 9, the
parameter that gets configured is 9.
Note: If this parameter was previously saved to user EEPROM by issuing the
mac save command, after modifying its value, the mac save command
should be called again.
2015-2018 Microchip Technology Inc. DS40001784G-page 29
Page 30
RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.8.5.3 mac set ch drrange <channelID> <minRange> <maxRange>
<channelID>: decimal number representing the channel number, from 0 to 15
<minRange>:
<maxRange>:
Response: ok if parameters are valid
This command sets the operating data rate range, min. to max., for the given
<channelID>. By doing this the module can vary data rates between the
<minRange> and <maxRange> on the specified <channelID>. For the actual values
of the data rates and the corresponding spreading factors (SF), refer to the
LoRaWAN™ Specification.
Example: mac set ch drrange 13 0 2 // Using EU863-870 band: on channel
Note: If this parameter was previously saved to user EEPROM by issuing the
decimal number representing the minimum data rate, from 0 to 7
decimal number representing the maximum data rate, from 0 to 7
invalid_param if parameters are not valid
13 the data rate can range from 0
(SF12/125 kHz) to 2 (SF10/125 kHz)
as required.
mac save command, after modifying its value, the mac save command
should be called again.
2.4.8.5.4 mac set ch status <channelID> <status>
<channelID>: decimal number representing the channel number, from 0 to 15.
<status>: string value representing the state, either on or off.
Response: ok if parameters are valid
invalid_param if parameters are not valid
This command sets the operation of the given <channelID>.
Example: mac set ch status 4 off // Channel ID 4 is disabled from use.
WARNING
<channelID> parameters (frequency, data range, duty cycle) must be issued prior
to enabling the status of that channel.
Note: If this parameter was previously saved to user EEPROM by issuing the
mac save command, after modifying its value, the mac save command
should be called again.
DS40001784G-page 30 2015-2018 Microchip Technology Inc.
Page 31

Command Reference
2.4.8.6 mac set class <class>
<class>: A letter representing the LoRaWAN device class, either a or c.
Response: ok if class is valid
invalid_param if the class is not valid
This command sets the end device LoRaWAN operating class. The default end device
class is Class A. When the class is configured as Class C, the end device will enter
Class C continuous receive mode after the next uplink message is sent. The LoRaWAN
network server must also configure this node as a Class C node. The network server
configuration is performed out of band from LoRaWAN communications. For more
information on the description of operating in Class C mode, refer to the LoRaWAN™
Specification V1.0.2.
Example: mac set class c
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2.4.8.7 mac set devaddr <address>
<address>: 4-byte hexadecimal number representing the device address, from
00000000 – FFFFFFFF
Response: ok if address is valid
invalid_param if address is not valid
This command configures the module with a 4-byte unique network device address
<address>. The <address> MUST be UNIQUE to the current network. This must be
directly set solely for activation by personalization devices. This parameter must not be
set before attempting to join using over-the-air activation because it will be overwritten
once the join process is over.
Example: mac set devaddr ABCDEF01
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2.4.8.8 mac set deveui <devEUI>
<devEUI>: 8-byte hexadecimal number representing the device EUI
Response: ok if address is valid
invalid_param if address is not valid
This command sets the globally unique device identifier for the module. The identifier
must be set by the host MCU. The module contains a pre-programmed unique EUI and
can be retrieved using the sys get hweui command (see Section 2.3.6.4) or user
provided EUI can be configured using the mac set deveui command.
Example: mac set deveui 0004A30B001A55ED
Note: If this parameter was previously saved to user EEPROM by issuing the
mac save command, after modifying its value, the mac save command
should be called again.
2015-2018 Microchip Technology Inc. DS40001784G-page 31
Page 32

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.8.9 mac set dnctr <fCntDown> <fCntDown>: decimal number representing the value of the downlink frame counter
that will be used for the next downlink reception, from 0 to
4294967295.
Response: ok if parameter is valid
invalid_param if parameter is not valid
This command sets the value of the downlink frame counter that will be used for the
next downlink reception.
Example: mac set dnctr 30
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2.4.8.10 mac set dr <dataRate> <dataRate>: decimal number representing the data rate, from 0 and 7, but within the
limits of the data rate range for the defined channels.
Response: ok if data rate is valid
invalid_param if data rate is not valid
This command sets the data rate to be used for the next transmission. For the
description of data rates and the corresponding spreading factors, refer to the
LoRaWAN™ Specification V1.0.2.
Example: mac set dr 5 // On EU863-870; SF7/125 kHz.
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2.4.8.11 mac set linkchk <linkCheck> <linkCheck>: decimal number that sets the time interval in seconds for the link check
process, from 0 to 65535
Response: ok if the time interval is valid
invalid_param if the time interval is not valid
This command sets the time interval for the link check process to be triggered
periodically. A <value> of ‘0’ will disable the link check process. When the time
interval expires, the next application packet that will be sent to the server will include
also a link check MAC command. For more information on the Link Check MAC
command, refer to the LoRaWAN™ Specification V1.0.2.
Example: mac set linkchk 600 // The module will attempt a link check
process at 600-second intervals.
Note: If the command mac reset is issued, the link check process will be set as
disabled.
DS40001784G-page 32 2015-2018 Microchip Technology Inc.
Page 33
Command Reference
2.4.8.12 mac set mcast <state>
<state>: string value representing the state, either on or off.
Response: ok if state is valid
invalid_param if the state is not valid
This command sets the end device Multicast state (mcast) to either be enabled or dis-
abled. When multicast is enabled, and the device is operating in Class C continuous
receive mode, the end device can receive multicast messages from the server. For
more information on the description of multicast operation, refer to the LoRaWAN™
Specification V1.0.2.
Example: mac set mcast on
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2.4.8.13mac set mcastappskey <mcastApplicationSessionkey>
<mcastApplicationSessionkey>: 16-byte hexadecimal number representing the
application session key.
Response: ok if key is valid
invalid_param if the key is not valid
This command sets the multicast application session key for the module. This key iden-
tifies the multicast application session key used when the network sends a multicast
message from an application.
Example: mac set mcastappskey 29100192AFBECD564738837465FAEBDC
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2.4.8.14mac set mcastdevaddr <mcastAddress>
<mcastAddress>: 4-byte hexadecimal number representing the device multicast
address, from 00000000 - FFFFFFFF.
Response: ok if address is valid
invalid_param if the address is not valid
This command configures the module with a 4-byte multicast network device address
<address>. The <address> MUST match the multicast address on the current network. This must be directly set for multicast devices.
Example: mac set mcastdevaddr 54ABCDEF
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2015-2018 Microchip Technology Inc. DS40001784G-page 33
Page 34

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.8.15mac set mcastdnctr <fMcastCntDown>
<fMcastCntDown>: decimal number representing the value of the multicast downlink
frame counter from 0 to 4294967295.
Response: ok if parameter is valid
invalid_param if the parameter is not valid
This command sets the value of the multicast downlink frame counter that will be used
for the next downlink reception.
Example: mac set mcastdnctr 40
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2.4.8.16mac set mcastnwkskey <mcastNetworkSessionkey>
<mcastNetworkSessionkey>: 16-byte hexadecimal number representing the
network session key
Response: ok if key is valid
invalid_param if the key is not valid
This command sets the multicast network session key for the module. This key is 16
bytes in length, and provides security for communication between the module and multicast network server.
Example: mac set mcastnwkskey 6AFBECD1029384755647382910DACFEB
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2.4.8.17 mac set nwkskey <nwkSessKey> <nwkSessKey>: 16-byte hexadecimal number representing the network session key
Response: ok if key is valid
invalid_param if key is not valid
This command sets the network session key for the module. This key is 16 bytes in
length, and provides security for communication between the module and network
server.
Example: mac set nwkskey 1029384756AFBECD5647382910DACFEB
Note: If this parameter was previously saved to user EEPROM by issuing the
mac save command, after modifying its value, the mac save command
should be called again.
DS40001784G-page 34 2015-2018 Microchip Technology Inc.
Page 35
Command Reference
2.4.8.18 mac set pwridx <pwrIndex>
<pwrIndex>: decimal number representing the index value for the output power,
from 0 to 5 for 433 MHz frequency band and from 1 to 5 for 868 MHz
frequency band.
Response: ok if power index is valid
invalid_param if power index is not valid
This command sets the output power to be used on the next transmissions. Refer to
the LoRaWAN™ Specification V1.0.2 for the output power corresponding to the
<pwrIndex> and also to the RN2483 Low-Power Long-Range LoRa
Transceiver Module Data Sheet (DS50002346) for the actual radio power capabilities.
Example: mac set pwridx 1 // Sets the TX output power to 14 dBm on the
next transmission for a 868 MHz EU module.
2.4.8.19 mac set retx <reTxNb>
<reTxNb>: decimal number representing the number of retransmissions for an uplink
confirmed packet, from 0 to 255.
Response: ok if <retx> is valid
invalid_param if <retx> is not valid
This command sets the number of retransmissions to be used for an uplink confirmed
packet, if no downlink acknowledgment is received from the server.
Example: mac set retx 5 // The number of retransmissions made
for an uplink confirmed packet is set to 5.
®
Technology
2.4.8.20 mac set rx2 <dataRate> <frequency>
<dataRate>: decimal number representing the data rate, from 0 to 7.
<frequency>: decimal number representing the frequency, from 863000000 to
870000000 or from 433050000 to 434790000, in Hz.
Response: ok if parameters are valid
invalid_param if parameters are not valid
This command sets the data rate and frequency used for the second Receive window.
The configuration of the Receive window parameters should be in concordance with
the server configuration.
Example: mac set rx2 3 865000000 // Receive window 2 is configured with
SF9/125 kHz data rate with a center
frequency of 865 MHz.
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
2015-2018 Microchip Technology Inc. DS40001784G-page 35
Page 36

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.8.21 mac set rxdelay1 <rxDelay> <rxDelay>: decimal number representing the delay between the transmission and
the first Reception window in milliseconds, from 0 to 65535.
Response: ok if <rxDelay> is valid
invalid_param if <rxDelay> is not valid
This command will set the delay between the transmission and the first Reception
window to the <rxDelay> in milliseconds. The delay between the transmission and
the second Reception window is calculated in software as the delay between the
transmission and the first Reception window + 1000 (ms).
Example: mac set rxdelay1 1000 // Set the delay between the transmission
and the first Receive window to 1000 ms.
2.4.8.22 mac set sync <synchWord> <synchWord>: one byte long hexadecimal number representing the synchronization
word for the LoRaWAN communication
Response: ok if parameters are valid
invalid_param if parameter is not valid
This command sets the synchronization word for the LoRaWAN communication. The
configuration of the synchronization word should be in concordance with the Gateway
configuration.
Example: mac set sync 34 //Synchronization word is configured to
use the 0x34 value
2.4.8.23 mac set upctr <fCntUp> <fCntUp>: decimal number representing the value of the uplink frame counter that
will be used for the next uplink transmission, from 0 to 4294967295.
Response: ok if parameter is valid
invalid_param if parameter is not valid
This command sets the value of the uplink frame counter that will be used for the next
uplink transmission.
Example: mac set upctr 10
Note: If this parameter had previously been saved to user EEPROM by issuing
the mac save command, after modifying its value, the mac save
command should be called again.
DS40001784G-page 36 2015-2018 Microchip Technology Inc.
Page 37

Command Reference
2.4.9 MAC Get Commands
TABLE 2-8: MAC GET COMMANDS
Parameter Description
adr Gets the state of adaptive data rate for the device.
appeui Gets the application identifier for the end device.
ar Gets the state of the automatic reply.
ch Gets parameters related information which pertains to channel operation and
behaviors.
class Gets the LoRaWAN operating class for the end device.
dcycleps Gets the duty cycle prescaler which can only be configured by the server.
devaddr Gets the current stored unique network device address for that specific end
device.
deveui Gets the current stored globally unique identifier for that specific end device.
dnctr Gets the value of the downlink frame counter that will be used for the next
downlink reception.
dr Gets the data rate to be used for the next transmission.
gwnb Gets the number of gateways that successfully received the last Link Check
Request frame.
mcast Gets the state of multicast reception for the end device.
mcastdevaddr Gets the current stored multicast network device address for the end device.
mcastdnctr Gets the value of the multicast downlink frame counter that will be used for the
next multilink downlink reception.
mrgn Gets the demodulation margin as received in the last Link Check Answer frame.
pwridx Gets the output power index value.
retx Gets the number of retransmissions to be used for an uplink confirmed packet.
rx2 Gets the data rate and frequency used for the second Receive window.
rxdelay1 Gets the interval value stored for rxdelay1.
rxdelay2 Gets the interval value stored for rxdelay2.
status Gets the current status of the RN2483 module.
sync Gets the synchronization word for the LoRaWAN communication.
upctr Gets the value of the uplink frame counter that will be used for the next uplink
transmission.
2.4.9.1 mac get adr
Response: string representing the state of the adaptive data rate mechanism, either
on or off.
This command will return the state of the adaptive data rate mechanism. It will reflect if
the ADR is on or off on the requested device.
Default: off
Example: mac get adr
2.4.9.2 mac get appeui
Response: 8-byte hexadecimal number representing the application EUI.
This command will return the application identifier for the module. The application
identifier is a value given to the device by the network.
Default: 0000000000000000
Example: mac get appeui
2015-2018 Microchip Technology Inc. DS40001784G-page 37
Page 38

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.9.3 mac get ar
Response: string representing the state of the automatic reply, either on or off.
This command will return the current state for the automatic reply (AR) parameter. The
response will indicate if the AR is on or off.
Default: off Example: mac get ar
2.4.9.4 MAC GET CHANNEL COMMANDS
TABLE 2-9: MAC GET CHANNEL COMMANDS
Parameter Description
freq Gets the module operation frequency for the specified channel ID.
dcycle Gets the module duty cycle used for transmission on the specified channel
ID.
drrange Gets the valid data rate range (min. to max.) allowed for the module on the
specified channel ID
status Gets the status for the specified channel ID to indicate if it is enabled for use.
TABLE 2-10: DEFAULT PARAMETERS FOR CHANNELS
Channel Number Parameters
Channel 0 Frequency (Hz) 868100000 433175000
Duty cycle
Data rate range 0-5 0-5
Status On On
Channel 1 Frequency (Hz) 868300000 433375000
Duty cycle
Data rate range 0-5 0-5
Status On On
Channel 2 Frequency (Hz) 868500000 433575000
Duty cycle
Data rate range 0-5 0-5
Status On On
Channels 3-15 Frequency (Hz) 0 0
Duty cycle
Data rate range 15 15 15 15
Status Off Off
Note 1: The default settings consider only the three default channels (0-2), and their default
duty cycle is 0.33%. If a new channel is created either by the server or by the user,
all the channels (including the default ones) must be updated by the user in terms
of duty cycle to comply with the ETSI regulations.
(1)
(1)
(1)
(1)
Frequency band
868 433
302 302
302 302
302 302
65535 65535
DS40001784G-page 38 2015-2018 Microchip Technology Inc.
Page 39
Command Reference
2.4.9.4.1 mac get ch freq <channelID>
<channelID>: decimal number representing the channel number, from 0 to 15.
Response: decimal number representing the frequency of the channel, from
863000000 to 870000000 or from 433050000 to 434790000, in Hz,
depending on the frequency band selected.
This command returns the frequency on the requested <channelID>, entered in
decimal form.
Default: see Ta ble 2 -10
Example: mac get ch freq 0
2.4.9.4.2 mac get ch dcycle <channelID>
<channelID>: decimal number representing the channel number, from 0 to 15.
Response: decimal number representing the duty cycle of the channel, from 0 to
65535.
This command returns the duty cycle on the requested <channelID>. The duty cycle
is returned in decimal value. The actual duty cycle (in percentage) can be obtained
using the returned value V as: percent = 100/(V + 1).
Default: see Ta ble 2 -10
Example: mac get ch dcycle 0 // Reads back duty cycle setting on Channel
ID 0. If the value reported back is 99, the
actual duty cycle on the channel (in
percentage) is 100/(99 + 1) = 1.
2.4.9.4.3 mac get ch drrange <channelID>
<channelID>: decimal number representing the channel number, from 0 to 15.
Response: decimal number representing the minimum data rate of the channel, from 0
to 7 and a decimal number representing the maximum data rate of the
channel, from 0 to 7
This command returns the allowed data rate index range on the requested
<channelID>, entered in decimal form. The <minRate> and <maxRate> index
values are returned in decimal form and reflect index values. For the description of data
rates and the corresponding spreading factors, refer to the LoRaWAN™ Specification
V1.0.2.
Default: see Ta ble 2 -10
Example: mac get ch drrange 0
2.4.9.4.4 mac get ch status <channelID>
<channelID>: decimal number representing the channel number, from 0 to 15.
Response: string representing the state of the channel, either on or off.
This command returns if <channelID> is currently enabled for use. <channelID> is
entered in decimal form and the response will be on or off reflecting the channel is
enabled or disabled appropriately.
Default: see Ta ble 2 -10
Example: mac get ch status 2
Note: <channelID> parameters must be issued prior to enabling the status of
that channel. If a channel is disabled through the <status>, all channel
parameters must be reconfigured prior to enabling.
2015-2018 Microchip Technology Inc. DS40001784G-page 39
Page 40

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.9.5 mac get class
Response: A single letter A or C
This command will return the LoRaWAN operation class as set in the module. Default: A Example: mac get class
2.4.9.6 mac get dcycleps
Response: decimal number representing the prescaler value, from 0 to 65535.
This command returns the duty cycle prescaler. The value of the prescaler can be
configured ONLY by the SERVER through use of the Duty Cycle Request frame. Upon
reception of this command from the server, the duty cycle prescaler is changed for all
enabled channels.
Default: 1 Example: mac get dcycleps
2.4.9.7 mac get devaddr
Response: 4-byte hexadecimal number representing the device address, from
00000000 to FFFFFFFF. This command will return the current end-device address of the module. Default: 00000000 Example: mac get devaddr
2.4.9.8 mac get deveui
Response: 8-byte hexadecimal number representing the device EUI.
This command returns the globally unique end-device identifier, as set in the module. Default: pre-programmed EUI node address Example: mac get deveui
Note: After the mac reset <band> command is explicitly called, the device EUI
value will be set to all zeros. Make certain that a valid value is given to the
device EUI.
2.4.9.9 mac get dnctr
Response: decimal number representing the value of the downlink frame counter that
will be used for the next downlink reception, from 0 to 4294967295.
This command will return the value of the downlink frame counter that will be used for
the next downlink reception.
Default: 0
Example: mac get dnctr
2.4.9.10 mac get dr
Response: decimal number representing the current data rate.
This command will return the current data rate. Default: 5 Example: mac get dr
DS40001784G-page 40 2015-2018 Microchip Technology Inc.
Page 41

Command Reference
2.4.9.11 mac get gwnb
Response: decimal number representing the number of gateways, from 0 to 255.
This command will return the number of gateways that successfully received the last
Link Check Request frame command, as received in the last Link Check Answer.
Default: 0 Example: mac get gwnb
2.4.9.12 mac get mcast
Response: string representing the Multicast state of the module, either on or off
This command will return the Multicast state as set in the module. Default: off Example: mac get mcast
2.4.9.13 mac get mcastdevaddr
Response: 4-byte hexadecimal number representing the device multicast address,
from 00000000 to FFFFFFFF This command will return the current multicast end-device address of the module. Default: 00000000 Example: mac get mcastdevaddr
2.4.9.14 mac get mcastdnctr
Response: decimal number representing the value of the downlink frame counter that
will be used for the next multilink downlink reception, from 0 to 4294967295.
This command will return the value of the downlink frame counter that will be used for
the next downlink reception. Default: 0 Example: mac get mcastdnctr
2.4.9.15 mac get mrgn
Response: decimal number representing the demodulation margin, from 0 to 255.
This command will return the demodulation margin as received in the last Link Check
Answer frame. For the description of the values, refer to the LoRaWAN™ Specification
V1.0.2.
Default: 255 Example: mac get mrgn
2.4.9.16 mac get pwridx
Response:
This command returns the current output power index value. Default: 1 Example: mac get pwridx
decimal number representing the current output power index value, from 0 to 5.
2015-2018 Microchip Technology Inc. DS40001784G-page 41
Page 42

RN2483 LoRa Technology Module Command Reference User’s Guide
2.4.9.17 mac get retx
Response: decimal number representing the number of retransmissions, from 0 to 255.
This command will return the currently configured number of retransmissions which are
attempted for a confirmed uplink communication when no downlink response has been
received.
Default: 7 Example: mac get retx
2.4.9.18 mac get rx2 <freqBand> <freqBand>: decimal number representing the frequency band, either 868 or 433.
Response: decimal number representing the data rate configured for the second
Receive window, from 0 to 7 and a decimal number for the frequency
configured for the second Receive window, from 863000000 to 870000000
or from 433050000 to 434790000, in Hz.
This command will return the current data rate and frequency configured to be used
during the second Receive window.
Default: 0 869525000 // for 868 band
0 434665000 // for 433 band
Example: mac get rx2 868
2.4.9.19 mac get rxdelay1
Response: decimal number representing the interval, in milliseconds, for rxdelay1,
from 0 to 65535.
This command will return the interval, in milliseconds, for rxdelay1. Default: 1000 Example: mac get rxdelay1
2.4.9.20 mac get rxdelay2
Response: decimal number representing the interval, in milliseconds, for rxdelay2,
from 0 to 65535.
This command will return the interval, in milliseconds, for rxdelay2. Default: 2000 Example: mac get rxdelay2
2.4.9.21 mac get status
Response: 4-byte hexadecimal number representing the current status of the module.
This command will return the current status of the module. The value returned is a bit
mask represented in hexadecimal form. For the significance of the bit mask, refer to
Figure 2-1.
Default: 00000000 Example: mac get status
2.4.9.22 mac get sync Response: one byte long hexadecimal number representing the synchronization word
for the LoRaWAN communication.
This command will return the synchronization word for the LoRaWAN communication.
Default: 34
DS40001784G-page 42 2015-2018 Microchip Technology Inc.
Page 43

Command Reference
17
16 15 14
13 12 3 - 045678
9
1011
Mac state
(2)
Join status (‘0’ – network not joined, ‘1’ – network joined)
Automatic reply status (‘
0
’ – disabled, ‘1’ – enabled)
ADR status (‘
0
’ – ADR is disabled, ‘1’ – ADR is disabled)
Silent immediately status (‘
0
’ – disabled, ‘1’ – enabled)
Mac pause status (‘0’ – mac is not paused, ‘1’ – mac is paused)
Link check status (
‘0’
– link check is disabled, ‘1’ – link check is enabled)
Channels updated (
‘0’
– not updated,
‘1’
– updated via CFList or NewChannelReq MAC command)
Output power updated (
‘0’
– not updated, ‘1’ – updated via LinkADRReq MAC command)
NbRep updated (
‘0’
– not updated, ‘1’ – updated via LinkADRReq MAC command)
(3)
Prescaler updated (‘0’ – not updated, ‘1’ – updated via DutyCycleReq MAC command)
Second Receive window parameters updated (
‘0’
– not updated, ‘1’ – updated RX ParamSetupReq command)
RX timing setup updated (
‘0’
– not updated, ‘1’ – updated via RX TimingSetupReq MAC command)
Note 1: Bits 11 (Channels updated), 12 (Output power updated), 13 (NbRep updated), 14 (Prescaler updated),
15 (Second Receive window parameters updated) and 16 (RX timing setup updated) are cleared after
issuing a “mac get status” command.
2: Mac state:
0 – Idle (transmissions are possible)
1 – Transmission occurring
2 – Before the opening of Receive window 1
3 – Receive window 1 is open
4 – Between Receive window 1 and Receive window 2
5 – Receive window 2 is open
6 – Retransmission delay - used for ADR_ACK delay, FSK can occur
7 – APB_delay
8 – Class C RX2 1 open
9 – Class C RX2 2 open
3: NbRep is the number of repetitions for unconfirmed packets (for more details, refer to the LoRaWAN™
Specification V1.0.2).
1831-19
Multicast status
(‘
0
’ – Multicast disabled, ‘1’ – Multicast enabled
RFU
Rx Done Status (‘0’ – Rx data is not ready, ‘1’ – Rx data is ready)
Rejoin needed (‘0’ – end-device functional. ‘1’ – end-device not functional and rejoin is needed)
Example: mac get sync
2.4.9.23 mac get upctr
Response: decimal number representing the value of the uplink frame counter that will
be used for the next uplink transmission, from 0 to 4294967295.
This command will return the value of the uplink frame counter that will be used for the
next uplink transmission.
Default: 0
Example: mac get upctr
FIGURE 2-1: MAC STATUS BIT-MAPPED REGISTER
(1)
2015-2018 Microchip Technology Inc. DS40001784G-page 43
Page 44
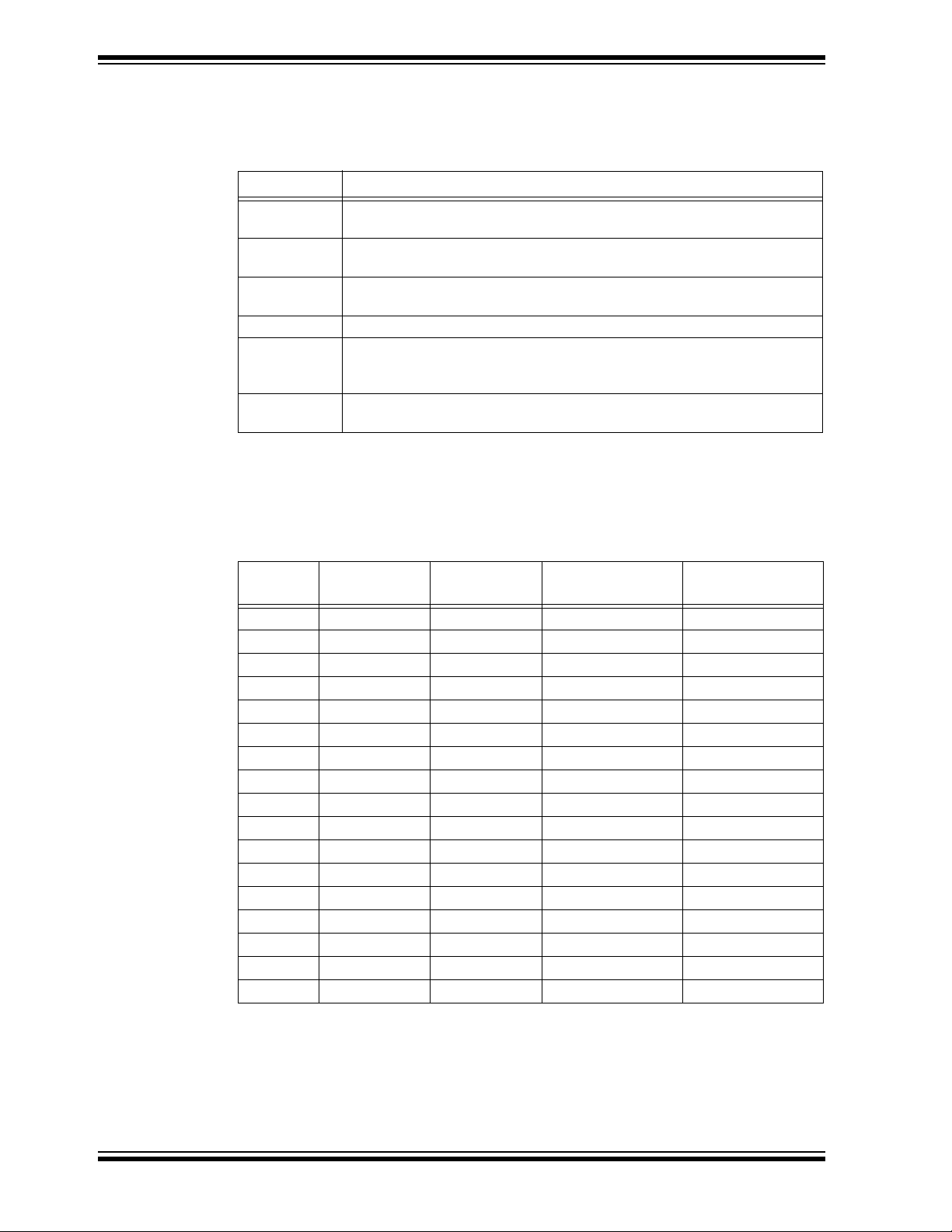
RN2483 LoRa Technology Module Command Reference User’s Guide
2.5 RADIO COMMANDS
TABLE 2-11: RADIO COMMANDS
Parameter Description
rx This command configures the radio to receive simple radio packets
according to prior configuration settings.
tx This command configures a simple radio packet transmission according to
prior configuration settings.
cw This command will put the module into a Continuous Wave (cw)
Transmission for system tuning or certification use.
rxstop This command causes the radio to exit Continuous Receive mode.
set This command allows modification to the radio setting directly. This
command allows for the user to change the method of radio operation within
module type band limits.
get This command grants the ability to read out radio settings as they are
currently configured.
Note 1: The mac pause command must be called before any radio transmission or
reception, even if no MAC operations have been initiated before.
(1)
TABLE 2-12: RADIO PARAMETERS AVAILABILITY FOR DIFFERENT
OPERATIONS
Command radio get radio set
bt √√ — √
mod √√ √ √
freq √√ √ √
pwr √√ √ √
sf √√ √ —
afcbw √√ — √
rxbw √√ — √
bitrate √√ — √
fdev √√ — √
prlen √√ — √
crc √√ √ √
iqi √√ √ —
cr √√ √ —
wdt √√ √ √
sync √√ √ √
bw √√ √ —
snr √— √ —
Availability for
®
Modulation
LoRa
Availability for FSK
Modulation
DS40001784G-page 44 2015-2018 Microchip Technology Inc.
Page 45

Command Reference
2.5.1 radio rx <rxWindowSize>
<rxWindowSize>: decimal number representing the number of symbols (for LoRa
modulation) or time-out (in milliseconds, for FSK modulation) that
the receiver will be opened, from 0 to 65535. Set
<rxWindowSize> to ‘0’ in order to enable the Continuous
Reception mode. Continuous Reception mode will be exited once
a valid packet is received.
Response: this command may reply with two responses. The first response will be
received immediately after entering the command. If the command is valid
(ok reply received), a second reply will be received after the reception of a
packet or after the time-out occurred.
Response after entering the command:
• ok – if parameter is valid and the transceiver is configured in Receive mode
• invalid_param – if parameter is not valid
• busy – if the transceiver is currently busy
Response after the receive process:
• radio_rx <data> – if reception was successful, <data>: hexadecimal value
that was received;
• radio_err – if reception was not successful, reception time-out occurred
Example: radio rx 0 // Puts the radio into continuous Receive mode.
Ensure the radio Watchdog Timer time-out is higher than the Receive window size.
Note: The mac pause command must be called before any radio transmission
or reception, even if no MAC operations have been initiated before.
Note: When transmitting FSK packets, the payload and the 2-byte CRC is
whitened by being XORed with a pseudorandom sequence generated by
an LFSR with the polynomial X
reverted on reception so that it is transparent to the user.
9
+ X5 + 1. This process is automatically
2.5.2 radio tx <data>
<data>: hexadecimal value representing the data to be transmitted, from 0 to 255
bytes for LoRa modulation and from 0 to 64 bytes for FSK modulation.
Response: this command may reply with two responses. The first response will be
received immediately after entering the command. If the command is valid
(ok reply received), a second reply will be received after the effective
transmission.
Response after entering the command:
• ok – if parameter is valid and the transceiver is configured in Transmit mode
• invalid_param – if parameter is not valid
• busy – if the transceiver is currently busy
Response after the effective transmission:
• radio_tx_ok – if transmission was successful
• radio_err – if transmission was unsuccessful (interrupted by radio Watchdog
Timer time-out)
This command transmits the <data> passed.
2015-2018 Microchip Technology Inc. DS40001784G-page 45
Page 46

RN2483 LoRa Technology Module Command Reference User’s Guide
Example: radio tx 48656c6C6F // Transmits a packet of
[0x48][0x65][0x6c][0x6C][0x6F];
Hello.
Note: In order to meet ETSI regulations in the given frequency bands, the radio
has to use either Listen Before Talk (LBT) + Adaptive Frequency Agility
(AFA) or duty cycle limitations. By issuing the radio tx <data>
command the module does not perform LBT before transmission, thus the
user has to make sure that duty cycle limits are not violated. For more
information on duty cycle limits please check the EN 300 220-2 v2.4.1
standard.
Note: The mac pause command must be called before any radio transmission
or reception, even if no MAC operations have been initiated before.
Note: When transmitting FSK packets, the payload and the 2-byte CRC is
whitened by being XORed with a pseudorandom sequence generated by
an LFSR with the polynomial X
reverted on reception so that it is transparent to the user.
9
+ X5 + 1. This process is automatically
2.5.3 radio cw <state>
<state>: string representing the state of the Continuous Wave (CW) mode, either on
or off.
Response: ok if state is valid
invalid_param if state is not valid
This command will enable or disable the CW mode on the module. CW mode allows
the user to put the transceiver into Transmission mode to observe the generated signal.
By altering the settings for the radio the user can observe the changes in transmissions
levels.
Example: radio cw on
Note: Please note that using radio cw off resets the module, this command
being semantically identical to sys reset.
2.5.4 rxstop
Response: ok
This command causes the radio to exit Continuous Receive mode initiated through the
radio rxstop command.
Example: radio rxstop
DS40001784G-page 46 2015-2018 Microchip Technology Inc.
Page 47

Command Reference
2.5.5 Radio Set Commands
TABLE 2-13: RADIO SET COMMANDS
Parameter Description
afcbw Set the value used by the automatic frequency correction bandwidth.
bitrate Set the frequency shift keying (FSK) bit rate.
bt Set the data shaping for frequency shift keying (FSK) modulation type.
bw Set the value used for the radio bandwidth.
cr Set the coding rate used by the radio.
crc Set if a CRC header is to be used.
fdev Set the frequency deviation allowed by the end device.
freq Set the current operation frequency for the radio.
iqi Set if IQ inversion is used.
mod Set the module Modulation mode.
prlen Set the preamble length used during transmissions.
pwr Set the output power level used by the radio during transmission.
rxbw Set the operational receive bandwidth.
sf Set the requested spreading factor (SF) to be used during transmission.
sync Set the sync word used.
wdt Set the time-out limit for the radio Watchdog Timer.
2.5.5.1 radio set afcbw <autoFreqBand> <autoFreqBand>: float representing the automatic frequency correction, in kHz.
Parameter values can be: 250, 125, 62.5, 31.3, 15.6, 7.8, 3.9, 200,
100, 50, 25, 12.5, 6.3, 3.1, 166.7, 83.3, 41.7, 20.8, 10.4, 5.2, 2.6.
Response: ok if the automatic frequency correction is valid
invalid_param if the automatic frequency correction is not valid
This command modifies the automatic frequency correction bandwidth for
receiving/transmitting.
Example: radio set afcbw 125
2.5.5.2 radio set bitrate <fskBitRate> <fskBitRate>: decimal number representing the FSK bit rate value, from 1 to
300000.
Response: ok if the bit rate value is valid
invalid_param if the bit rate value is not valid
This command sets the FSK bit rate value.
Example: radio set bitrate 5000 // FSK bit rate is set to 5 kb/s.
2.5.5.3 radio set bt <gfBT> <gfBT>: string representing the Gaussian baseband data shaping, enabling GFSK
modulation. Parameter values can be: none, 1.0, 0.5, 0.3.
Response: ok if the data shaping is valid
invalid_param if the data shaping is not valid
This command modifies the data shaping applied to FSK transmissions. Entering any
<gfBT> other than none will result in a Gaussian Filter BT being applied to
transmissions in FSK mode.
Example: radio set bt none // Data shaping in FSK mode is disabled or null.
2015-2018 Microchip Technology Inc. DS40001784G-page 47
Page 48

RN2483 LoRa Technology Module Command Reference User’s Guide
2.5.5.4 radio set bw <bandWidth> <bandWidth>: decimal representing the operating radio bandwidth, in kHz.
Parameter values can be: 125, 250, 500.
Response: ok if the bandwidth is valid
invalid_param if the bandwidth is not valid
This command sets the operating radio bandwidth for LoRa operation.
Example: radio set bw 250 // The operating bandwidth is 250 kHz.
2.5.5.5 radio set cr <codingRate>
<codingRate>: string representing the coding rate. Parameter values can be: 4/5,
4/6, 4/7, 4/8.
Response: ok if the coding rate is valid
invalid_param if the coding rate is not valid
This command modifies the coding rate currently being used by the radio.
Example: radio set cr 4/7 // The coding rate is set to 4/7.
2.5.5.6 radio set crc < crcHeader > <crcHeader>: string representing the state of the CRC header, either on or off.
Response: ok if the state is valid
invalid_param if the state is not valid
This command enables or disables the CRC header for communications.
Example: radio set crc on // Enables the CRC header.
2.5.5.7 radio set fdev <freqDev> <freqDev>: decimal number representing the frequency deviation, from 0 to 200000.
Response: ok if the frequency deviation is valid
invalid_param if frequency deviation is not valid
This command sets the frequency deviation during operation.
Example: radio set fdev 5000 // Frequency deviation is 5 kHz.
2.5.5.8 radio set freq <frequency> <frequency>: decimal representing the frequency, from 433050000 to 434790000 or
from 863000000 to 870000000, in Hz.
Response: ok if the frequency is valid
invalid_param if the frequency is not valid
This command changes the communication frequency of the radio transceiver.
Example: radio set freq 868000000
2.5.5.9 radio set iqi <iqInvert> <iqInvert>: string representing the state of the invert IQ, either on or off.
Response: ok if the state is valid
invalid_param if the state is not valid
This command enables or disables the Invert IQ for communications.
Example:
radio set iqi on // Invert IQ is enabled.
DS40001784G-page 48 2015-2018 Microchip Technology Inc.
Page 49

Command Reference
2.5.5.10 radio set mod <mode> <mode>: string representing the modulation method, either lora or fsk.
Response: ok if the modulation is valid
invalid_param if the modulation is not valid
This command changes the modulation method being used by the module. Altering the
mode of operation does not affect previously set parameters, variables or registers.
FSK mode also allows GFSK transmissions when data shaping is enabled.
Example: radio set mod lora
2.5.5.11 radio set prlen <preamble> <preamble>: decimal number representing the preamble length, from 0 to 65535.
Response: ok if the preamble length is valid
invalid_param if the preamble length is not valid
This command sets the preamble length for transmit/receive.
Example: radio set prlen 8 // Preamble length is 8.
2.5.5.12 radio set pwr <pwrOut> <pwrOut>: signed decimal number representing the transceiver output power, from -3
to 15.
Response: ok if the output power is valid
invalid_param if the output power is not valid
This command changes the transceiver output power. However, note that the
transceiver is designed to transmit a maximum of +14 dBm. It is possible to set the
output power above the regulatory limits. This power setting allows some
compensation on the cable or transmission line loss. For more details on output power
please check the RN2483 Low-Power Long-Range LoRa
Module Data Sheet.
Example: radio set pwr 14
®
Technology Transceiver
2.5.5.13 radio set rxbw <rxBandwidth> <rxBandwidth>: float representing the signal bandwidth, in kHz. Parameter values
can be: 250, 125, 62.5, 31.3, 15.6, 7.8, 3.9, 200, 100, 50, 25, 12.5,
6.3, 3.1, 166.7, 83.3, 41.7, 20.8, 10.4, 5.2, 2.6.
Response: ok if the signal bandwidth is valid
invalid_param if signal bandwidth is not valid
This command sets the signal bandwidth when receiving.
Example: radio set rxbw 250 // Signal bandwidth for receiving is 250
kHz.
2.5.5.14 radio set sf <spreadingFactor> <spreadingFactor>: string representing the spreading factor. Parameter values
can be: sf7, sf8, sf9, sf10, sf11 or sf12.
Response: ok if the spreading factor is valid
invalid_param if the spreading factor is not valid
This command sets the spreading factor used during transmission.
Example: radio set sf sf7
2015-2018 Microchip Technology Inc. DS40001784G-page 49
Page 50

RN2483 LoRa Technology Module Command Reference User’s Guide
2.5.5.15 radio set sync <syncWord> <syncWord>: hexadecimal value representing the Sync word used during
communication. For LoRa modulation one byte is used, for FSK up to
eight bytes can be entered.
Response: ok if the sync word is valid
invalid_param if the sync word is not valid
This command configures the sync word used during communication.
Example: radio set sync 12 // Set the sync word to a single byte with the
value 0x12.
2.5.5.16 radio set wdt <watchDog> <watchDog>: decimal number representing the time-out length for the Watchdog
Timer, from 0 to 4294967295. Set to ‘0’ to disable this functionality.
Response: ok if the watchdog time-out is valid
invalid_param if the watchdog time-out is not valid
This command updates the time-out length, in milliseconds, applied to the radio
Watchdog Timer. If this functionality is enabled, then the Watchdog Timer is started for
every transceiver reception or transmission. The Watchdog Timer is stopped when the
operation in progress in finished.
Example: radio set wdt 2000 // The Watchdog Timer is configured for
2000 ms.
Note: Ensure the value configured for the Watchdog Timer matches the radio
configurations. For example, set the <watchDog> value to ‘0’ in order to
disable this functionality during the radio continuous reception.
DS40001784G-page 50 2015-2018 Microchip Technology Inc.
Page 51

Command Reference
2.5.6 Radio Get Commands
TABLE 2-14: RADIO GET COMMANDS
Parameter Description
afcbw Get the value used by the automatic frequency correction bandwidth.
bitrate Get the frequency shift keying (FSK) bit rate.
bt Get the data shaping for frequency shift keying (FSK) modulation type.
bw Get the value used for the radio bandwidth.
cr Get the coding rate used by the radio.
crc Get if a CRC header is to be used.
fdev Get the frequency deviation allowed by the end device.
freq Get the current operation frequency for the radio.
iqi Get if IQ inversion is used.
mod Get the module Modulation mode.
prlen Get the preamble length used during transmissions.
pwr Get the output power level used by the radio during transmission.
rssi Gets the RSSI value from the last received frame.
rxbw Get the operational receive bandwidth.
sf Get the requested spreading factor (SF) to be used during transmission.
snr Get the signal-to-noise ratio (SNR) of the last received packet.
sync Get the synchronization word used for communication.
wdt Get the time-out limit for the Watchdog Timer.
2.5.6.1 radio get afcbw Response: float representing the automatic frequency correction band, in kHz.
Parameter values can be: 250, 125, 62.5, 31.3, 15.6, 7.8, 3.9, 200, 100, 50,
25, 12.5, 6.3, 3.1, 166.7, 83.3, 41.7, 20.8, 10.4, 5.2, 2.6.
This command reads back the status of the Automatic Frequency Correction
Bandwidth.
Default: 41.7
Example: radio get afcbw // Reads back the current automatic
frequency correction bandwidth.
2.5.6.2 radio get bitrate Response: signed decimal representing the configured bit rate, from 1 to 300000.
This command reads back the configured bit rate for FSK communications.
Default: 50000
Example: radio get bitrate // Reads back the current FSK bit rate
setting.
2.5.6.3 radio get bt Response: string representing the configuration for data shaping. Parameter values
can be: none, 1.0, 0.5, 0.3.
This command reads back the current configuration for data shaping applied to FSK
transmissions.
Default: 0.5
Example: radio get bt // Reads the current data shaping FSK
configuration.
2015-2018 Microchip Technology Inc. DS40001784G-page 51
Page 52

RN2483 LoRa Technology Module Command Reference User’s Guide
2.5.6.4 radio get bw Response: decimal representing the current operating radio bandwidth, in kHz.
Parameter values can be: 125, 250 or 500.
This command reads back the current operating radio bandwidth used by the
transceiver.
Default: 125
Example: radio get bw // Reads back the current operational
bandwidth applied to transmissions.
2.5.6.5 radio get cr Response: string representing the current value settings used for the coding rate.
Parameter values can be: 4/5, 4/6, 4/7, 4/8.
This command reads back the current value settings used for the coding rate during
communication.
Default: 4/5
Example: radio get cr // Reads back the current coding rate
transceiver settings.
2.5.6.6 radio get crc
Response: string representing the status of the CRC header, either on or off
This command reads back the status of the CRC header, to determine if it is to be
included during operation.
Default: on Example: radio get crc // Reads back if the CRC header is enabled
for use.
2.5.6.7 radio get fdev Response: signed decimal representing the frequency deviation setting, from 0 to
200000.
This command reads frequency deviation setting on the transceiver.
Default: 25000
Example: radio get fdev // Reads back current configured frequency
deviation setting.
2.5.6.8 radio get freq Response: decimal number representing the frequency, from 433050000 to
434790000 or from 863000000 to 870000000, in Hz.
This command reads back the current operation frequency of the module.
Default: 868100000
Example: radio get freq // Reads back the current frequency the
transceiver communicates on.
DS40001784G-page 52 2015-2018 Microchip Technology Inc.
Page 53

Command Reference
2.5.6.9 radio get iqi
Response: string representing the status of the Invert IQ functionality, either on or off.
This command reads back the status of the Invert IQ functionality. Default: off Example: radio get iqi // Reads back the status of the Invert IQ
functionality.
2.5.6.10 radio get mod Response: string representing the current mode of operation of the module, either
lora or fsk.
This command reads back the current mode of operation of the module.
Default: lora
Example: radio get mod // Reads if module is modulating in LoRa or
FSK.
2.5.6.11 radio get prlen Response: signed decimal representing the preamble length, from 0 to 65535.
This command reads the current preamble length used for communication.
Default: 8
Example: radio get prlen // Reads back the preamble length used by
the transceiver.
2.5.6.12 radio get pwr Response: signed decimal representing the current power level, from -3 to 15.
This command reads back the current power level settings used in operation.
Default: 1
Example: radio get pwr // Reads back the current transmit output
power.
2.5.6.13 radio get rssi Response: decimal representing the rssi for the last received frame.
This command reads back the radio Received Signal Strength Indication (rssi) value
for the last received frame.
Default: -128
Example: radio get rssi // Reads back the radio rssi.
2.5.6.14 radio get rxbw Response: float representing the signal bandwidth, in kHz. Parameter values can be:
250, 125, 62.5, 31.3, 15.6, 7.8, 3.9, 200, 100, 50, 25, 12.5, 6.3, 3.1, 166.7,
83.3, 41.7, 20.8, 10.4, 5.2, 2.6.
This command reads back the signal bandwidth used for receiving.
Default: 25
Example: radio get rxbw // Reads back the receive signal bandwidth.
2015-2018 Microchip Technology Inc. DS40001784G-page 53
Page 54

RN2483 LoRa Technology Module Command Reference User’s Guide
2.5.6.15 radio get sf Response: string representing the current spreading factor.
This command reads back the current spreading factor being used by the transceiver.
Parameter values can be: sf7, sf8, sf9, sf10, sf11, sf12”
Default: sf12
Example: radio get sf // Reads back the current spreading factor
settings.
2.5.6.16 radio get snr Response: signed decimal number representing the signal-to-noise ratio (SNR), from
-128 to 127.
This command reads back the SNR for the last received packet.
Default: -128
Example: radio get snr // Reads back the measured SNR for the
previously packet reception.
2.5.6.17 radio get sync
Response: hexadecimal number representing the synchronization word used for radio
communication.
This command reads back the configured synchronization word used for radio
communication. One byte long synchronization word is used for the LoRa modulation
while up to eight bytes can be entered for FSK.
Default: 34
Example: radio get sync
2.5.6.18 radio get wdt Response: decimal number representing the length used for the watchdog time-out,
from 0 to 4294967295.
This command reads back, in milliseconds, the length used for the watchdog time-out.
Default: 15000
Example: radio get wdt // Reads back the current time-out value
applied to the Watchdog Timer
DS40001784G-page 54 2015-2018 Microchip Technology Inc.
Page 55

Chapter 3. Bootloader Usage
This chapter describes the operation of the bootloader on the RN2483 LoRa modules.
The bootloader can be used to upgrade the firmware in the field without requiring the
use of a hardware programming tool.
3.1 BOOTLOADER HOSTS
The bootloader requires a host computer to control the bootloader operations and provide the firmware file to be programmed into the RN2483 module. The host computer
can either be the embedded host microcontroller in the end product, or a PC can be
used. If the product's embedded microcontroller will be used with the bootloader, the
user must implement the bootloader protocol described later in this section. If a PC is
being used as a host for the RN2483 module, for example during development,
Microchip has a bootloader host application that can be used.
The bootloader on the RN2483 module is based on the Microchip's standard 8-bit
UART bootloader. This document describes the specifics of the RN2483 bootloader
implementation.
The RN2483 module bootloader is invoked automatically when the firmware becomes
corrupted, or if the firmware is erased.
To invoke the RN2483 bootloader to update the firmware, the RN2483 system command to erase the firmware needs to be executed. For more information, refer to
2.3.3 “sys eraseFW”.
RN2483 LoRa TECHNOLOGY MODULE
COMMAND REFERENCE USER’S GUIDE
Note: Once the sys eraseFW command is executed, the RN2483 module
becomes unresponsive to all Microchip LoRa Stack commands. The
RN2483 module will be in Bootloader mode, and will remain in Bootloader
mode until new firmware is successfully installed. The RN2483 firmware
must be programmed into the module using the bootloader, or a hardware
programming tool.
For additional information on bootloader usage, refer to 3.5 “Bootloader Usage
Examples”.
2015-2018 Microchip Technology Inc. DS40001784G-page 55
Page 56

RN2483 LoRa Technology Module Command Reference User’s Guide
3.2 PROTOCOL
The RN2483 bootloader is similar to other Microchip bootloaders. This section
describes the specifics of RN2483 bootloader protocol. Ta bl e 3 -1 provides the list of
commands required to update the RN2483 module firmware.The Microchip standard
TABLE 3-1: SUPPORTED COMMANDS
Command Description
0x00 Get version and other info
0x01 Reserved
0x02 Write Flash
0x03 Erase Flash
0x04 Reserved
0x05 Reserved
0x06 Reserved
0x07 Reserved
0x08 Calculate and return Flash checksum
0x09 Reset Device
8-bit UART bootloader has a common command protocol for all commands.
TABLE 3-2: COMMAND PROTOCOL
Byte: 012 3 4 5 6 7 8
Fields: CMD Length(LSB..MSB) Key 1 Key 2 Address (LSB..MSB)
<Command><LenLSB><LenMSB><Key1><Key2><address(4 bytes)LSB..MSB>
Byte Order
There are two multi-byte fields common to all commands. These are the Length field,
and the Address field. These values are sent in little-endian format. This means that
the low-order byte (Least Significant Byte) is sent first, and the high-order byte (Most
Significant Byte) is sent last.
Write Operations
When an Erase or Write command is issued, the two key fields must be supplied with
correct values. For read operations, they key fields are not used. The values of the keys
are always:
• Key1 = 0x55
• Key2 = 0xaa
General Differences from 8-Bit Bootloader
• Module bootloader only uses the first-length byte and ignores the second-length
byte in all commands. The protocol still requires that the second length-byte be
sent, but the bootloader ignores this value.
• Each command is preceded by 0x55 (ASCII ‘U’); this is used for auto-baud
detection.
3.3 RN MODULE BOOTLOADER COMMANDS
The command format has an initial byte of 0x55, and the second byte of the length field
(MSB) is always 0x00.
DS40001784G-page 56 2015-2018 Microchip Technology Inc.
Page 57

Bootloader Usage
The typical bootloader response to commands starts with repeating back the command
and follows with a command specific response. Exceptions to this format are described
in the commands in which they occur.
TABLE 3-3: RN MODULE BOOTLOADER COMMANDS
Byte: 012 3 4 5 6 7 8 9
Fields: 0x55 CMD Len 0x00 Key1 Key2 Address (LSB..MSB)
<0x55><Command><Len><0x00><Key1><Key2><address(4 bytes)LSB..MSB>
3.4 COMMAND DETAILS
TABLE 3-4: GET VERSION INFO
Byte: 012 3 4 5 6 7 8 9
Values: 0x55 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
This command returns bootloader version and memory information.
Response:
<get version info command><bytes described in Ta bl e 3 - 5>
TABLE 3-5: GET VERSION INFO COMMAND (BYTES)
Byte Value
0 Bootloader version – low byte
1 Bootloader version – high byte
2 Max. packet size – low byte (not used)
3 Max. packet size – high byte (not used)
4 ACK packet size – low byte (not used)
5 ACK packet size – high byte (not used)
6 Device ID – low byte
7 Device ID – high byte
8 (not used)
9 (not used)
10 Erase row size
11 Write latch size
12 User ID 1
13 User ID 2
14 User ID 3
15 User ID 4
Ta bl e 3 -5 describes the bytes of information that follow the get version info com-
mand.
TABLE 3-6: WRITE FLASH
Byte: 012 3 4 5 6 7 8 9
Values: 0x55 0x02 Len 0x00 Key1 Key2 Address
Byte: Len Number of bytes (9 through 8+Len)
Values: Data[0]-Data[Len-1]
2015-2018 Microchip Technology Inc. DS40001784G-page 57
Page 58

RN2483 LoRa Technology Module Command Reference User’s Guide
This command writes data into the Flash memory. The length field can range from 0 to
255. This determines the number of bytes written to Flash. The Write Flash command
does not erase any Flash memory before writing data; therefore, this command should
be preceded by an Erase Flash command for proper operation.
Response:
<write flash command><Status>
Status is either a ‘0’ indicating that the command failed, or a ‘1’ indicating the
command was successful.
Note: The data bytes are not returned in the command response. Only the write
.
TABLE 3-7: ERASE FLASH
Byte: 0123456789
Values: 0x55 0x03 Blocks 0x00 Key1 Key2 Address
This command erases one or more blocks of Flash memory, starting at address
Address. The Blocks field can range from 0 to 255. The 1-255 value of the Blocks field
represents the number of blocks to erase. If the Blocks field is ‘0’, the bootloader will
erase 256 blocks.
Response:
<erase flash command><Status>
Status is either a ‘0’ indicating that the command failed, or a ‘1’ indicating the
command was successful.
flash command followed by the Status is returned.
TABLE 3-8: CALCULATE AND RETURN CHECKSUM
Byte: 012 3 4 5 6 7 8 9
Values: 0x55 0x08 Len 0x00 0x00 0x00 Address
This command returns the checksum calculated over the Flash memory range
beginning at Address for a length of Len bytes. If Len is odd, 1 is added to make Len
even.
The checksum algorithm treats the Flash memory as an array of 16-bit values during
the calculation, which is not performed byte by byte. In MPLAB X, this is known as
Checksum Algorithm 2.
Response:
<calculate and ret urn checksum command (modified)><CSumLSB>
<CSumMSB>
Note: The Len field in the returned calculate and return checksum com-
mand is set to 0x00 in the reply.
Status is either a ‘0’ indicating that the command failed, or a ‘1’ indicating the
command was successful.
TABLE 3-9: RESET DEVICE
Byte: 012 3 4 5 6 7 8 9
Values: 0x55 0x09 0x00 0x00 0x00 0x00 0x00000000
This command does not generate a response and immediately performs a software
reset of the module. If the firmware update was successful, the RN2483 firmware will
execute after the reset. If the firmware was not updated or the update failed, the bootloader will execute after the reset.
DS40001784G-page 58 2015-2018 Microchip Technology Inc.
Page 59

3.5 BOOTLOADER USAGE EXAMPLES
3.5.1 Using Bootloader with an Embedded Host
This section provides an overview of the requirements to use an embedded host microcontroller to control the bootloader.
The end user is responsible for implementing application software for an embedded
bootloader host. The bootloader communication protocol is described in
3.2 “Protocol”.
The following is a list of the suggested steps that the bootloader host application should
perform:
Erasing the RN2483 firmware:
• Check the existing firmware version
- sys get ver (2.3.6.1)
• Erase the existing firmware
- sys eraseFW (2.3.3)
The RN2483 module will automatically reset, and execute the bootloader.
Installing new firmware using the bootloader:
• Check the bootloader firmware version
- Get Version Info (Table 3-4)
• Erase all of the Flash from address 0x300 to 0xFFFF
- Erase Flash (Ta ble 3 -7) – The erase command must be issued (4)
times to erase all the blocks of Flash program memory
• Write the new blocks of firmware. Repeat until all blocks have been written
- Write Flash (Ta b le 3 - 6)
• Request the firmware checksum from the bootloader. Compare to the value
calculated by the host application
- Calculate and return Flash checksum (Ta b le 3 -8 )
• Reset the device (Ta b le 3 - 9)
Bootloader Usage
3.5.2 Using Bootloader with a PC Host
This section describes using the Microchip LoRa Development Utility software
application on a PC to update the firmware of the RN2483 module.
As of this writing, the current version of the Microchip LoRa Development Utility application for the PC is “LoRaDevUtility.jar” version 1.0.1. This can be found in the
LoRa Development Suite Software on the Microchip website (www.microchip.com).
Connect the UART on the RN2483 to a COM port on the PC. For example, the Microchip MCP2221 USB to Serial Breakout Module (ADM00559) can be used. For information on connecting the UART on the RN2483 module, refer to the RN2483, Low-Power
Long-Range LoRa
Note: The LoRaDevUtility supports other Microchip products and was intended
for other purposes beyond the bootloader functionality. This document only
describes the bootloader for Device Firmware Update (DFU) function as
used by the RN2483 modules.
3.5.2.1 UPDATE RN2483 MODULE FIRMWARE USING LORADEVUTILITY
1. Launch the LoRaDevUtility.jar application.
2. The LoraDevUtility probes all the available serial ports on the PC. The left win-
2015-2018 Microchip Technology Inc. DS40001784G-page 59
®
Technology Transceiver Module Data Sheet (DS50002346).
Page 60

RN2483 LoRa Technology Module Command Reference User’s Guide
dow pane lists all of the Microchip LoRaWAN devices found.
3. The RN2483 module is displayed as RN Module n. Where n is a unique number
assigned by the LoRaDevUtility. Select “RN Module” in the left pane.
4. The center and right panes are displayed. In the center pane, click the DFU
(Device Firmware Update) tab.
5. In the DFU pane click the button next to the “Select File” field. Navigate to the
RN2483 LoRaWAN hex file containing the firmware update.
6. Click “Update Firmware” button. Notice the RN Module Console pane on the
right. A message sys eraseFW appears at the bottom of the list. After a few seconds, the bootloader starts and the message Device: COMn Bootloading
Started is displayed. When the bootloading operation has completed, the message Device: COMn Bootloading Successful appears. The bootloading
operation may take 20 seconds or more depending on the speed of the
connection.
Note: Sometimes the communication link may be disconnected after the
sys eraseFW command, and before the bootloading operation completes.
If the messages Device: COMn Bootloading started, or Device:
COMn Bootloading Successful do not appear, additional steps must
be performed. The RN2483 module is in Bootloader mode and will remain
in Bootloader mode until new firmware is successfully installed. If the bootloading process does not complete, follow the steps in
3.5.2.2 “LoRaDevUtility - Boot Load Recover” to complete the
bootloading operation.
3.5.2.2 LORADEVUTILITY - BOOT LOAD RECOVER Skip this section if the Device: COMn Bootloading Successful message is
displayed in the right pane.
If the communication link is disconnected, the message RN Module n
disconnected. Communications Link Failure appears in the bottom pane of
the LoRaDevUtility screen. Perform the following steps to use the Boot Load Recover
function:
1. Remove any RN Module n devices listed in the left pane by clicking on the X
next to the name.
2. From the LoRaDevUtility Module menu, select “Boot Load Recover”.
3. A list of COM ports appear in the left pane. Select the COM port connected to the
RN2483 device.
4. The DFU tab appears in the center pane. To complete the bootloading operation
follow steps 5 and 6 from 3.5.2.1 “Update RN2483 Module Firmware Using
LoRaDevUtility”.
3.5.2.3 BOOTLOADING OPERATION COMPLETE
After successfully updating the RN2483 module firmware using the bootloader, close
the LoRaDevUtility application. The RN2483 module is now ready for use.
DS40001784G-page 60 2015-2018 Microchip Technology Inc.
Page 61

RN2483 LoRaTECHNOLOGY MODULE
COMMAND REFERENCE USER’S GUIDE
Appendix A. Current Firmware Features and Fixes
Please check the product web page for the current RN2483 firmware version at
www.microchip.com/lora
A.1. Version 0.9.5
Initial release of the firmware.
A.2. Version 1.0.0
Release for LoRaWAN™ specification V1.0
• Added support for additional RN2483 commands:
- mac set sync
- mac get sync
- mac set upctr
- mac get upctr
- mac set dnctr
- mac get dnctr
- sys set pinmode
- sys get pindig
- sys get pinana
- radio get sync
• Added new parameters to be saved in nonvolatile memory whenever a mac save
command is triggered
- LoRaWAN current data rate
- LoRaWAN RX2 window parameters (data rate and frequency)
- Adaptive Data Rate status
- LoRaWAN uplink frame counter
LoRaWAN downlink frame counter
• Changed the default value for the LoRaWAN End-Device Identifier (deveui)
• Changed the valid range for the radio set fdev parameter to [0.. 200000]
• Changed the valid range for the radio set bitrate parameter to [1.. 300000]
• Changed sys sleep command behavior to not influence the GPIO configuration
• Changed the 433 MHz radio frequency band to [433050000 .. 434790000]
• Fixed an issue that may have caused the RN2483 module to mishandle data on
LoRaWAN port 0
• Fixed an issue that may have caused the module to fail joining
• Fixed radio get snr command to display correct value
.
2015-2018 Microchip Technology Inc. DS40001784G-page 61
Page 62

RN2483 LoRaTechnology Module Command Reference User’s Guide
A.3. Version 1.0.1
Release containing modifications needed to successfully pass the LoRaWAN
Certification Program testing in 868 MHz band.
• Added support for usage of the reserved ports, from 224 to 255 for transmitting
and receiving Application Data
• Increased the size of the value returned by the mac get status command from
2 bytes to 4 bytes
• Updated the size of the LoRaWAN receive windows and the moment in time at
which these are opened
• Fixed an issue that may have caused the RN2483 module to mishandle packets
received with DR = 7
• Fixed an issue that may have caused the RN2483 module to mishandle the
LoRaWAN RXParamSetupReq command
• Fixed an issue that may have caused the RN2483 module to mishandle the usage
of LoraWAN ADRACKReq in packets
A.4 Version 1.0.3
Release for LoRaWAN™ specification 1.0.1
• Fixed an issue that impacted the Sleep mode current
• Fixed UART wake up from sleep issue
• Added support for RxTimingSetupAns and RxParamSetupAns responses in
uplink frames until the next downlink is received.
• Added support to Ignore downlink frames to port 0 with Mac commands in FOpts
and Payload
A.5 Version 1.0.4
• Fixed - if channel duty cycle is set to zero, join duty cycle is ignored
A.6 Version 1.0.5
Release for LoRaWAN™ specification 1.0.2
• Added support for LoRaWAN Class C and Multicast
• Fixed - Large length packets
• Added support for additional RN2483 commands:
- mac set class
- mac get class
- radio get rssi
• Added support for Block Link ADR, additional command support
• Added support for Join duty cycle back-off (based on duration of Join attempts)
DS40001784G-page 62 2015-2018 Microchip Technology Inc.
Page 63

NOTES:
2015-2018 Microchip Technology Inc. DS40001784G-page 63
Page 64

Worldwide Sales and Service
AMERICAS
Corporate Office
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 480-792-7200
Fax: 480-792-7277
Technical Support:
http://www.microchip.com/
support
Web Address:
www.microchip.com
Atlanta
Duluth, GA
Tel: 678-957-9614
Fax: 678-957-1455
Austin, TX
Tel: 512-257-3370
Boston
Westborough, MA
Tel: 774-760-0087
Fax: 774-760-0088
Chicago
Itasca, IL
Tel: 630-285-0071
Fax: 630-285-0075
Dallas
Addison, TX
Tel: 972-818-7423
Fax: 972-818-2924
Detroit
Novi, MI
Tel: 248-848-4000
Houston, TX
Tel: 281-894-5983
Indianapolis
Noblesville, IN
Tel: 317-773-8323
Fax: 317-773-5453
Tel: 317-536-2380
Los Angeles
Mission Viejo, CA
Tel: 949-462-9523
Fax: 949-462-9608
Tel: 951-273-7800
Raleigh, NC
Tel: 919-844-7510
New York, NY
Tel: 631-435-6000
San Jose, CA
Tel: 408-735-9110
Tel: 408-436-4270
Canada - Toronto
Tel: 905-695-1980
Fax: 905-695-2078
ASIA/PACIFIC
Australia - Sydney
Tel: 61-2-9868-6733
China - Beijing
Tel: 86-10-8569-7000
China - Chengdu
Tel: 86-28-8665-5511
China - Chongqing
Tel: 86-23-8980-9588
China - Dongguan
Tel: 86-769-8702-9880
China - Guangzhou
Tel: 86-20-8755-8029
China - Hangzhou
Tel: 86-571-8792-8115
China - Hong Kong SAR
Tel: 852-2943-5100
China - Nanjing
Tel: 86-25-8473-2460
China - Qingdao
Tel: 86-532-8502-7355
China - Shanghai
Tel: 86-21-3326-8000
China - Shenyang
Tel: 86-24-2334-2829
China - Shenzhen
Tel: 86-755-8864-2200
China - Suzhou
Tel: 86-186-6233-1526
China - Wuhan
Tel: 86-27-5980-5300
China - Xian
Tel: 86-29-8833-7252
China - Xiamen
Tel: 86-592-2388138
China - Zhuhai
Tel: 86-756-3210040
ASIA/PACIFIC
India - Bangalore
Tel: 91-80-3090-4444
India - New Delhi
Tel: 91-11-4160-8631
India - Pune
Tel: 91-20-4121-0141
Japan - Osaka
Tel: 81-6-6152-7160
Japan - Tokyo
Tel: 81-3-6880- 3770
Korea - Daegu
Tel: 82-53-744-4301
Korea - Seoul
Tel: 82-2-554-7200
Malaysia - Kuala Lumpur
Tel: 60-3-7651-7906
Malaysia - Penang
Tel: 60-4-227-8870
Philippines - Manila
Tel: 63-2-634-9065
Singapore
Tel: 65-6334-8870
Taiwan - Hsin Chu
Tel: 886-3-577-8366
Taiwan - Kaohsiung
Tel: 886-7-213-7830
Taiwan - Taipei
Tel: 886-2-2508-8600
Thailand - Bangkok
Tel: 66-2-694-1351
Vietnam - Ho Chi Minh
Tel: 84-28-5448-2100
EUROPE
Austria - Wels
Tel: 43-7242-2244-39
Fax: 43-7242-2244-393
Denmark - Copenhagen
Tel: 45-4450-2828
Fax: 45-4485-2829
Finland - Espoo
Tel: 358-9-4520-820
France - Paris
Tel: 33-1-69-53-63-20
Fax: 33-1-69-30-90-79
Germany - Garching
Tel: 49-8931-9700
Germany - Haan
Tel: 49-2129-3766400
Germany - Heilbronn
Tel: 49-7131-67-3636
Germany - Karlsruhe
Tel: 49-721-625370
Germany - Munich
Tel: 49-89-627-144-0
Fax: 49-89-627-144-44
Germany - Rosenheim
Tel: 49-8031-354-560
Israel - Ra’anana
Tel: 972-9-744-7705
Italy - Milan
Tel: 39-0331-742611
Fax: 39-0331-466781
Italy - Padova
Tel: 39-049-7625286
Netherlands - Drunen
Tel: 31-416-690399
Fax: 31-416-690340
Norway - Trondheim
Tel: 47-7288-4388
Poland - Warsaw
Tel: 48-22-3325737
Romania - Bucharest
Tel: 40-21-407-87-50
Spain - Madrid
Tel: 34-91-708-08-90
Fax: 34-91-708-08-91
Sweden - Gothenberg
Tel: 46-31-704-60-40
Sweden - Stockholm
Tel: 46-8-5090-4654
UK - Wokingham
Tel: 44-118-921-5800
Fax: 44-118-921-5820
DS40001784G-page 64 2015-2018 Microchip Technology Inc.
08/15/18
 Loading...
Loading...