

Page 1

MGC3140
MGC3140 GestIC® Tuning User's Guide
Preface
Important: Notice to customers:
All documentation becomes dated, and this manual is no exception. Microchip tools and
documentation are constantly evolving to meet customer needs, so some actual dialogs and/or
tool descriptions may differ from those in this document. Please refer to our website
(www.microchip.com) to obtain the latest documentation available.
Documents are identified with a “DS” number. This number is located on the bottom of each
page, in front of the page number. The numbering convention for the DS number is
“DSXXXXXA”, where “XXXXX” is the document number and “A” is the revision level of the
document.
Introduction
This document describes how to tune GestIC® systems that consist of an MGC3140 gesture controller
based on Microchip's GestIC technology and Gesture sensor.
Recommended Reading
For the latest information on using the device, read the “MGC3140 3D Tracking and Gesture Controller
Data Sheet” (DS40002037) located on the Microchip website. The release notes (Readme) contain
update information and known issues that may not be included in this user’s guide. For the latest
information on using the Aurea GUI, refer to the “Aurea Graphical User Interface User’s Guide”
(DS40001681) located on the Microchip website.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 1
Page 2

MGC3140
Table of Contents
Preface............................................................................................................................ 1
1. Introduction................................................................................................................3
1.1. Aurea............................................................................................................................................3
2. Tuning Flow............................................................................................................... 4
3. Tuning........................................................................................................................5
3.1. Electrode Mapping....................................................................................................................... 5
3.2. Extended Parameterization.......................................................................................................... 6
4. Reference Material.................................................................................................. 21
5. Revision History.......................................................................................................22
The Microchip Web Site................................................................................................ 23
Customer Change Notification Service..........................................................................23
Customer Support......................................................................................................... 23
Microchip Devices Code Protection Feature................................................................. 23
Legal Notice...................................................................................................................24
Trademarks................................................................................................................... 24
Quality Management System Certified by DNV.............................................................25
Worldwide Sales and Service........................................................................................26
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 2
Page 3

1. Introduction
The MGC3140 Gesture IC (GestIC) has two types of parameters:
1. Run-time parameters that control basic functions such as selecting which of the five preset
frequencies (between 1 and 5) to use, enabling and disabling gestures and forcing a recalibration
(baseline). These are controlled by the host over the I2C interface using messages defined in the
MGC3140 run-time library interface specification reference.
2. Design-specific design-time parameters, which are configured once per project at design time and
control design characteristics, such as electrode weighting, gesture timings, and signal thresholds.
These parameters are configured using the Aurea Graphical User Interface application.
This document describes the tuning process for both the run-time and the design-time parameters.
1.1 Aurea
The Aurea Graphical Interface User’s Guide describes the use of the Aurea graphical interface to:
• Monitor the output of the MGC3140
• Control MGC3140 run-time parameters
• Configure MGC3140 design-time parameters
• Load design-time parameter files onto the MGC3140
• Program the MGC3140
• Update the MGC3140 bootloader
• Save the MGC3140 firmware and parameterization data in order to provide a final firmware (FW)
and parameterization combination for manufacture
MGC3140
Introduction
(1)
Note:
1. Combines the FW and parameters that are in Aurea that were loaded onto the device. Aurea does
not read firmware from the device.
1.1.1 Firmware and Parameter Update Using Aurea
Aurea uses a compressed file containing MGC3140 firmware, bootloader and parameterization data as
an image source for programming the MGC3140. It can also save the parameterization file and the
existing firmware from the .enz file
extension .enz.
Note:
1. The firmware cannot be read back from the IC. A newly created .enz file will create FW from the
parameters tuned in Aurea (on the PC) and the FW used by Aurea to download to the MGC3140.
1.1.1.1 Aurea .enz File Format
An .enz file is simply a zip container containing a number of files including a special file called
contents.json which describes the content of the .enz file.
• Library.hex – Contains MGC3140 firmware and bootloader in standard Intel® HEX format.
• Library.settings – A text description of design-time parameter settings.
• Loader.hex – Contains the MGC3140 bootloader in standard Intel HEX format.
• Content.json – Describes the contents of the .enz file.
Note: Aurea will not program the bootloader if the current bootloader in the MGC3140 has the same
version as in this file.
(1)
into a new compressed file. This file is noted by the
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 3
Page 4

2. Tuning Flow
Map electrodes
Load F irmw are and
starting parameters
Select parameters to
enable and data
output
Position
Important?
Set sensing area
and height limits
Adjust jitter
reduction
Tune Gestures
Tune Calibration
Tune Presence
Hold and
Approach
Tune electrode
touch i f required
Yes
Tuning Complete
Electrode w eighting
Configure electrode
dimensions
E-Field Linearization
Select Tx
Frequencies
No
It has to be noted that the implemented tuning steps will depend on the customer requirements.
Positional accuracy or reporting, some gestures or GestIC electrode touch, approach and power-saving
may or may not be required.
The following flowchart shows the tuning flow.
Figure 2-1. MGC3140 Tuning Flow
MGC3140
Tuning Flow
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 4
Page 5

3. Tuning
During the setup process, tuning parameters are adjusted using slide bars that are dragged using the
mouse. For fine tuning, click on the Slider and use the left-right arrow keys to adjust the parameter value.
In order to tune the design-time parameters, select the Setup tab in Aurea and press the 3D
Parameterization button.
Figure 3-1. Aurea Parameterization
MGC3140
Tuning
The Aurea Setup tab has two top-level menu items on the left:
• Basic – Allows basic setup of the Analog Front-End by mapping the receive electrodes to the
MGC3140 receive pins. This feature provides Printed Circuit Board (PCB) layout flexibility.
• Extended – Allows detailed tuning.
Figure 3-2. Setup - Basic Menu
3.1 Electrode Mapping
The Analog Front-End (AFE) settings comprising of Electrode Selection and Electrode Mapping can be
modified on this page. They adjust the connection between the MGC3140 and the external electrodes.
The settings are adjusted using the corresponding radio buttons or sliders.
• Electrode Selection
The optional Center electrode can be enabled or disabled by checking the four electrodes (no
Center) or five electrodes (with Center) check boxes.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 5
Page 6

– Four electrodes
Only the four frame electrodes (North, East, South, and West) are used for signal processing.
– Five electrodes
All four frame electrodes and the Center electrode are used for signal processing.
• Electrode Mapping
The electrode mapping allocates the MGC3140 RX pins to the outlying electrodes. The correct
electrode mapping can be verified by touching the electrode and monitoring the signals in the
Signals tab. The corresponding electrode signal in the Rx Signals tab should then increase.
3.2 Extended Parameterization
When selected, the Extended menu item opens up the Firmware Selection window. The use of this
window ensures that the correct firmware is loaded onto the MGC3140 for the design-time
parameterization process.
3.2.1 Firmware
Load the firmware and parameter file which will be used as a basis for the tuning using this window, as
described in the "Aurea Graphical User Interface User's Guide" (DS40001681). Remember to select the
“Keep the current AFE parameters” check box unless the AFE electrode selection and mapping of the
parameters that are about to be downloaded are going to be used instead.
MGC3140
Tuning
Once the firmware has been loaded, the full Extended Parameter window becomes available providing
the following menu options. See figure below.
Note: The extended parameter options are only available after firmware and parameter download. They
disappear after exiting the Setup tab, or disconnecting or resetting the MGC3140, and require another
firmware and parameter download before becoming visible again.
Figure 3-3. Extended Parameter Window
3.2.2 System Start-up Window
This window provides the following features:
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 6
Page 7
• Tx frequency selection
• Active features
• Sensor data output
• Start change notification
3.2.2.1 Tx Frequency Selection
The Tx frequency selection is available from the System Start-up window.
A range of five frequencies may be selected or deselected to avoid noise. The MGC3140 constantly
monitors the noise levels on all selected frequencies and will hop to the lowest noise level frequency
when the current frequency noise gets too high. The automatic frequency hopping can be limited by
unchecking one or more frequencies in the list. The following frequencies are available: 42 kHz, 43 kHz,
44 kHz, 45 kHz, and 100 kHz.
3.2.2.2 Active Features
The Colibri Suite features can be active or inactive on MGC3140 start-up.
• Approach Detection – Selects if the Approach Detection feature is enabled at start-up.
• Touch Detection – Selects if the Touch Detection feature is enabled at start-up.
• Gestures – Selects if a particular gesture is active at start-up.
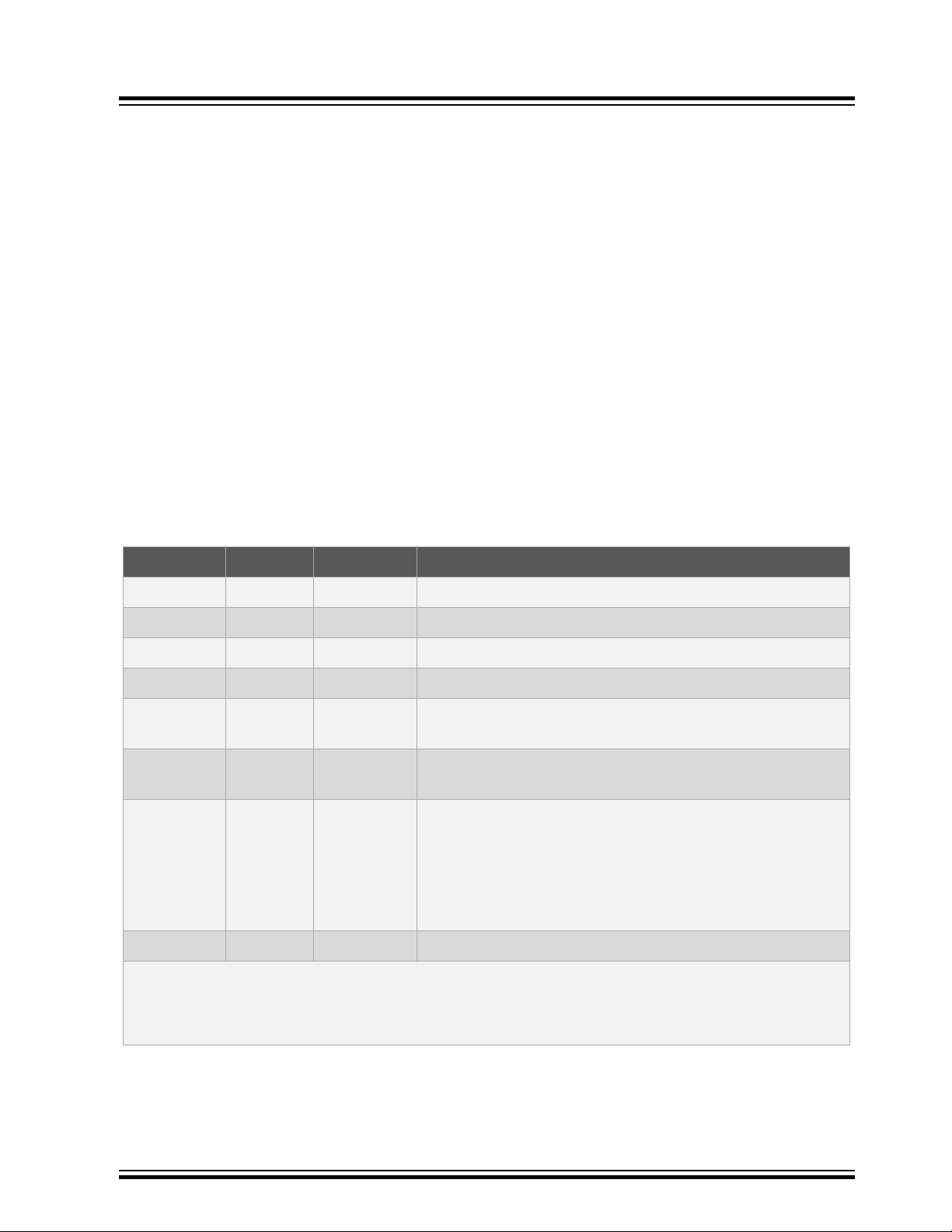
• Flicks – Flick selection has the behavior shown in the table below.
MGC3140
Tuning
Table 3-1. Flick Selection
Double Flick Edge Flick Normal Flick Description
0 0 0
0 0 1
0 1 0
0 1 1
1 0 0
1 0 1
1 1 0
1 1 1
Note:
1. 0 = Not selected
2. 1 = Selected
None Active
Only Normal Flick reported
Only Edge Flick reported
Normal and Edge Flicks reported
Double Flick reported. Disables Normal and Edge Flicks.
Normal and Edge Flicks are never reported.
Double Flick is reported. Disables Normal Flicks and Edge
Flicks. Normal and Edge Flicks are never reported.
Double Flick reported. Disables Normal and Edge Flicks.
Normal and Edge Flicks are never reported. If calibration
after flick is enabled in the Gestures menu by selecting the
'triggers calib' option, then calibrations may still be triggered
when the hand leaves the sensing area after flicks, or in the
middle of a Double Flick.
These settings should not be selected.
• Circles/AirWheel: Discrete Circles and AirWheel are exclusive. The Airwheel has higher priority
than discrete circles. When the AirWheel is enabled, only AirWheel information will be reported. To
use the Discrete Circle gestures, AirWheel must be disabled.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 7
Page 8
MGC3140
Tuning
Sensor Data Output
The Sensor Data Output I2C message (ID 0x91) contains all data which are generated in MGC3140. That
includes recognized gestures as well as continuous data like position or raw sensor data.
A detailed description of the I2C message format can be found in the "MGC3140 GestIC® Library
Interface Description User's Guide" (DS40001875).
If selected, data (On or Dynamic) will be added as a payload element to the sensor data output I2C
message.
There are three options for data selection:
• Off – Data will never be sent.
• On – Data are sent with every packet.
• Dynamic – Only changes will be sent to minimize data traffic.
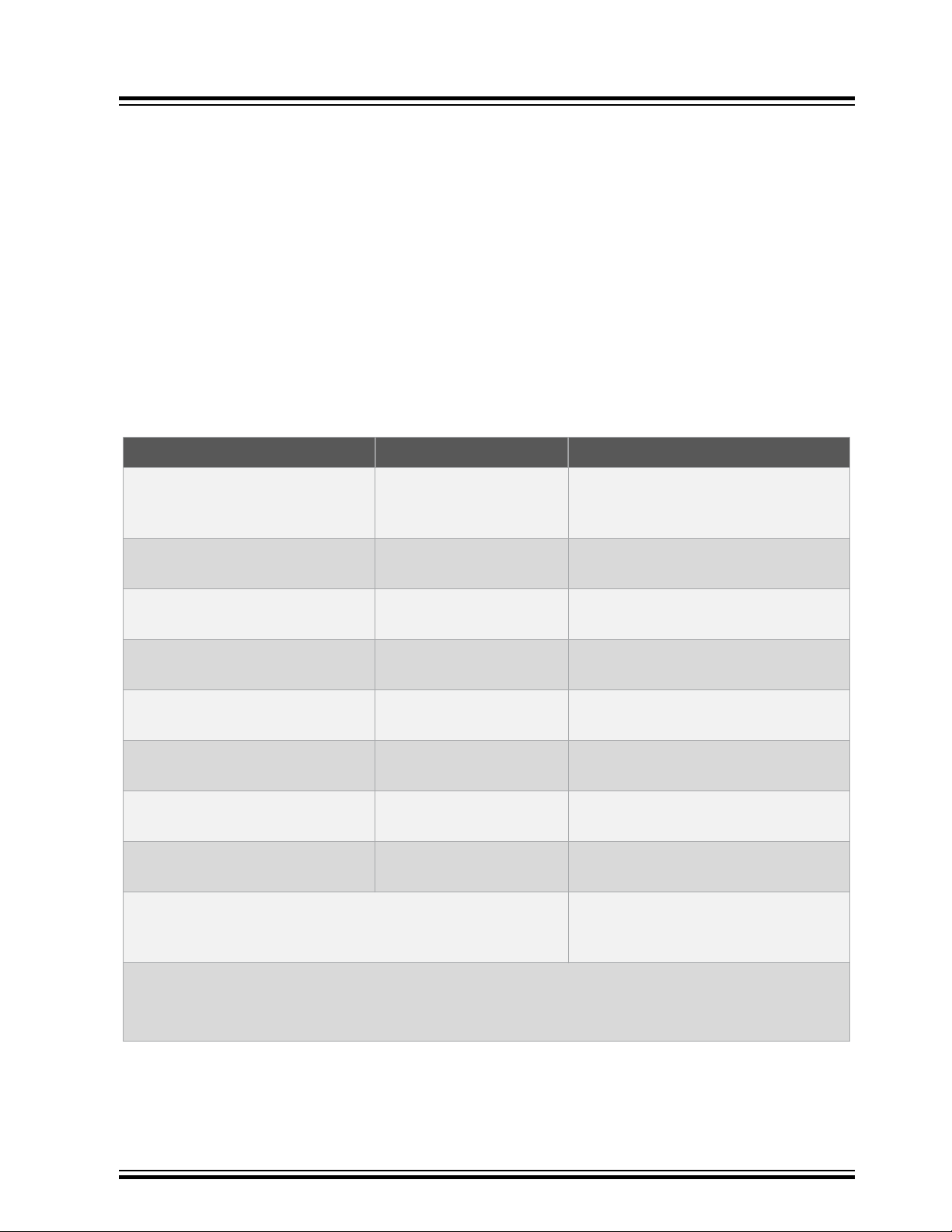
The following table lists the payload elements of the sensor data output message.
Table 3-2. Sensor Data Output Payload Elements
Data/Payload
DSP Status
Gesture Data
Touch Data
AirWheel Data
Position Data
Noise Power
Uncalibrated Signal Data
Signal Deviation Data
(1)
Element Library Command Description
DSPStatus
GestureInfo
TouchInfo
AirWheelInfo
xyzPosition
NoisePower
CICData
SDData
This field contains the Calibration
events information and the currently
used Tx frequency.
This field contains the recognized
gestures.
This field contains the Touch events
information.
This field contains the AirWheel
information.
This field contains the X, Y and Z
position data.
This field contains the current
measured signal variance.
This field contains the Uncalibrated
Signal (CIC) data.
This field contains the Signal Deviation
(SD) data.
AirWheel counter decimated by factor 4 If set, AirWheel counter is only
reported when a change of at least four
bits has occurred.
Note:
1. Payload Element names are those defined in the "MGC3140GestIC® Library Interface Description
User's Guide" (DS40001875).
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 8
Page 9

MGC3140
Tuning
State Change Notification
The sensor has also the possibility to report some Boolean states and, according to the same principle in
the previous section, some can be ignored to minimize the number of messages.
These Boolean states are reported as part of two payload elements: 'System Data', always present in a
message, and 'Gesture Data', that is present depending on the selection of the sensor data output (see
Table 3-2).
The following table describes the Boolean states and to which payload element they belong to.
Table 3-3. Boolean State Descriptions
Payload Element
SystemInfo
SystemInfo
GestureInfo
GestureInfo
GestureInfo
GestureInfo
GestureInfo
None
(1)
Flag Description
Noise indication The bit reports that environmental noise
has been detected.
DSP running The bit reports that system is running (not
sleeping).
Gesture in progress indication The bit reports that a gesture evaluation is
ongoing.
Garbage The bit de/activates the report of Garbage
gesture.
Hand Presence The bit reports that object is present in
sensitive region.
Hand Inside The bit reports that object is present and
above the sensor.
Hand Hold The bit reports that object is present and
not moving.
Timestamp overflow indication De/activates the 8-bit counter (timestamp)
overflow message. This has impact on
TouchInfo and AirWheelInfo
messages.
Note:
1. Payload element names are those defined in the "MGC3140GestIC® Library Interface Description
User's Guide" (DS40001875).
3.2.3 Calibration Tuning
Baseline calibration can be caused by a number of triggers:
1. User absent time-out – where no user movement or presence is detected within the User Absent
Calibration Time-out period (configured in the Calibration Time-out window).
2. User present time-out – where an SD that is greater than the threshold set for presence detection
on any electrode indicates the presence of a hand which has not changed position for a specified
time while the Hold flag is triggered (configured in the Calibration Time-out window).
3. Touch time-out – where a touch has been detected for the Touch Calibration Time-out period
(configured in the Calibration Time-out window).
4. Negative Value – when SD achieves invalid negative values less than -4 for 100 ms (cannot be
configured).
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 9
Page 10

5. Gesture – flick gestures may be configured to perform a baseline calibration on completion of the
flick (configured in the Gesture Control window).
6. Externally forced – host forces baseline calibration with an I2C message.
The baseline calibration should be set to meet customer requirements.
It should be noted that the User Absent and Present Calibration Time-outs have an impact on the
Approach Detection Idle Time-out before the system enters the Self Wake-up mode.
Related Links
3.2.6 Approach Detection
3.2.5 Presence, Hold and Approach
3.2.4 Gesture Tuning
The Gesture recognition and AirWheel windows permit the configuration of the following gestures:
• Normal Flicks (Gesture recognition window)
• Edge Flicks (Gesture recognition window)
• Double Flicks (Gesture recognition window)
• Circles (Gesture recognition window)
• AirWheels (AirWheel window)
MGC3140
Tuning
3.2.4.1 Gesture Recognition Window
Check the “Triggers Calib” box if baseline calibration is required after a flick has exited the sensitive
area. As the hand has to have left the sensing area before the calibration is performed, the sensor is not
influenced by the user during calibration.
The idle system is properly calibrated when the signal deviation of all channels is at or near zero.
Immediate feedback is given by the calibration indication in the Aurea status bar. Each time a selected
gesture is performed and the system calibrated, the calibration indication blinks. Note that only flicks that
cross the entire sensitive area will trigger calibration scans.
Larger Sensors – Gesture Duration
Default values are normally good but maximum gesture duration may need increasing for larger sensors
or potential slower swipe speeds.
Detection Sensitivity
Detection Sensitivity is a gain which needs to be adjusted depending on the expected system noise. With
low-detection sensitivity values, the gestures have to be performed very close to the electrodes. High
values increase sensitivity but are also less robust to noise. The Detection Sensitivity slider 1 can take
values between 0 and 3.
The figure below shows the variation of the SD against sensitivity to provide reliable gesture detection.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 10
Page 11

Figure 3-4. Minimum Signal Deviation for Reliable Gesture Detection
0
50
100
150
200
250
300
350
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6
Signal Deviation
Detection Sensitivity
MGC3140
Tuning
To adjust Detection Sensitivity, proceed as follows:
• For maximum robustness to noise:
1. Perform gestures as far away from the sensitive area as allowed by the application.
2. Reduce Detection Sensitivity until gestures are no longer detected.
3. At this point, amplitude from performed gestures is not enough to trigger gesture start. This is
approximately the minimum sensitivity of the application.
• For maximum system sensitivity:
1. Perform gestures close to the sensitive area.
2. Increase Detection Sensitivity until gestures are no longer detected.
3. At this point, noise amplitude is enough to trigger gesture start. Noise is mixed with the performed
gesture signal and no valid gesture is recognized. This is approximately the maximum sensitivity of
the application.
Gesture Suppression Time
Gesture Suppression Time is a parameter utilized to prevent a user unintentionally triggering a gesture
after touching the sensor and then removing the hand. This parameter can prevent that situation by
blocking all gestures during a certain time after sensor touch is released. While gestures are blocked, the
time is adjusted with this slider 1 taking values from 0 to 1.25s.
If Gesture Suppression Time is active (>0), touch detection also aborts ongoing gesture recognition.
If the Touch Detection feature is disabled, this feature has no impact.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 11
Page 12

3.2.4.2 AirWheel Tuning Window
The AirWheel is part of the circular gestures suite. It provides a counter which is either increased or
decreased for clockwise (CW) or counterclockwise circles (CCW), respectively. The direction can be
inverted while AirWheel is ongoing. The counter will reflect the change in direction immediately.
The AirWheel counter (eight bits) accumulates the angle change during the circular movement. The lower
five bits of the counter represent the current angular position with a resolution of 32 counts for each full
revolution. Each time the angular position crosses 0, a full revolution is counted in the upper three bits. If
rotation is in the CW direction, it adds one revolution, and if it is in the CCW direction, it subtracts one.
Figure 3-5 shows the positive sense of rotation and the mapping between the value of the lower five bits
and the angular position.
Figure 3-5. AirWheel Positive Direction and Minimum Arc Representation
MGC3140
Tuning
Though it is expected to work out-of-the-box with most designs, the AirWheel functionality can be
adjusted to suit a specific application.
Minimum Arc
Minimum Arc adjusts how many quadrants the user may rotate before the AirWheel counter starts. A
higher value means that a bigger arc has to be performed before the counter starts. The value can be
adjusted in the range between 1 and 8 quadrants; default is 3.
Figure 3-5 shows the three quadrants required between 'Start of position tracking', when the user starts
rotating, until 'Start of AirWheel counter', when the counter starts to be updated. Higher Minimum Arc
means the user may rotate more before the counter starts updating. Low Minimum Arc may lead to
unintended AirWheel recognition when the user is performing other movement in the sensitive area.
Note: Minimum Arc also affects the Discrete Circle gestures. The same arc has to be performed to
recognize a Discrete Circle gesture.
Note: Discrete Circle gestures and AirWheel are mutually exclusive. The AirWheel has priority over the
Discrete Circles. When the AirWheel is enabled, then only AirWheel information will be reported. To use
the Discrete Circles gestures, the application has to enable the clockwise and/or counterclockwise
gestures and disable the AirWheel.
Related Links
3.2.2 System Start-up Window
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 12
Page 13

3.2.5 Presence, Hold and Approach
The MGC3140 detects the presence of a hand when the following conditions are met:
1. Whenever the SD of any single electrode exceeds the Presence Threshold Single Electrode
Threshold parameter.
2. Whenever the SD of all Rx electrodes exceed the Presence Threshold All Electrodes Threshold
parameter.
Once the MGC3140 has detected the presence of a hand, it does the following:
1. Sets a Hand Presence flag. This flag can be seen in the Presence Hold State window.
2. Starts a timer for Hand Present gesture event.
When the hand-present timer reaches the Presence Duration time, the presence is reported, and a Hand
Present is indicated in the Gestures window.
Figure 3-6. Hand Present Symbol
When the hand-hold timer reaches the hand-hold duration time, the Hand Hold is reported and a Hand
Present is indicated in the Gestures window.
MGC3140
Tuning
Figure 3-7. Hand Hold Symbol
The Hand Hold flag remains set unless the hand moves. The amount of movement allowed in order to
keep the Hand Hold flag set is controlled by the Hand Tremble Threshold. This parameter specifies the
amount of movement that a hand can move and still be classified as holding.
• Low values – only a small movement is necessary to clear the Hand Hold flag.
• High values – the hand can move and the Hand Hold flag will stay high.
If the amount of movement is sufficient to clear the Hand Hold flag, then:
1. The hand-hold timer is restarted, providing the hand is still present.
2. Any hand-hold indication in the Gesture window is cleared.
3. The ending of the Hand Hold is reported.
The Default Presence and Hold Default parameters are generally acceptable to most users, although the
Hold Tremble Threshold may require some tuning.
The ActiveOutside parameter chooses if Hand Hold flag and Presence gesture can be active when the
user is outside the sensor, but still in sensing space.
• ActiveOutside checked (default) means that Hand Presence is required to set Hand Hold and that
Presence Duration starts counting on the rising edge of the Hand Presence Status flag.
• ActiveOutside unchecked means that Hand Inside is required to set Hand Hold and that Presence
Duration starts counting on the rising edge of the Hand Inside Status flag.
The use of the Active Outside flag requires accurate knowledge of the sensor dimensions and accurate
position reporting.
Related Links
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 13
Page 14

3.2.8 Position Tracking
0%
5%
10%
15%
20%
25%
30%
35%
40%
0
0.5
1
1.5
2
2.5
0 50 100 150 200 250 300 350 400 450 500
Current mA
Approach scan period ms
Current Consumption Variation with Approach Scan Period
120 Second AFA scan
600 Second AFA scan
% AFA difference
3.2.10 Sensing Area
3.2.6 Approach Detection
Approach Detection is used to preserve power, by placing the MGC3140 into a Lower-Power Sleep mode
with infrequent scans.
If configured, any combination of the Rx electrodes can be enabled for Approach Detection, and a hand
will be detected by just one electrode. The Approach Electrode Selection window controls which
electrodes are enabled for Approach Detection.
3.2.6.1 Approach Detection Power Tuning
A lack of activity for a specified time by the Idle Time-out parameter will result in the MGC3140 entering
Sleep mode. When in Sleep mode, the MGC3140 periodically performs a scan looking for the presence
of a hand. The interval between scans is set by the Approach Scan Interval parameter. The bigger the
interval, the lower the power consumption, as shown in Figure 3-8.
When detecting a hand, the MGC3140 leaves Approach mode and reverts to normal continuous
scanning.
Figure 3-8. Current Consumption Variation with Approach Scan Period and AFA Frequency
MGC3140
Tuning
Note: AFA = Automatic Frequency Adaption
3.2.6.2 Approach Range
The approach range is determined by the sensor configuration, size and sensitivity setting, as shown in
the figure below.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 14
Page 15

Figure 3-9. Approach Detection Height Against Sensitivity
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 20 40 60 80 100
Detection Height as percentage of detection range
Sensitivity
Height as % of
detection range
MGC3140
Tuning
The Sensitivity slider 1 selects how much signal change is necessary to wake up the system. The value
can be adjusted in the range from 1 to 100; default is 76.
• High values will lead to a sensitive wake-up behavior. This means that small signal changes are
enough to wake up the system. This results in higher detection range in the Self Wake-up mode,
but may also lead to unintended wake-ups due to increased noise levels.
• Low values will lead to a less sensitive wake-up behavior. This means that higher signal changes
are necessary to wake up the system. This results in smaller detection range in the Self Wake-up
mode but, at the same time, the system will be less prone to unwanted wake-ups in case of
increased noise levels.
3.2.7 Touch Detection
The Touch Threshold North, East, South, West, Center fields specify the SD values that have to be
exceeded to validate the touch event. The range is 0 to 32768. The horizontal darker line in the Level
window is adjusted according to the slider value.
• Touch each electrode in its geometric center and move the finger to the borders of the electrode
while touching.
• Adjust corresponding Touch Threshold 1 according to the displayed SD value while the finger is
positioned on the electrode. If touches are missed, the Touch Threshold might be needed to be
decreased.
Note: The values in the Level window are shown in log scale.
The touched state is exited if the SD value drops below the Release Threshold. This threshold (horizontal
lighter line in the Level window) is an adjustable percentage of the Touch Threshold. The percentage of
the Touch Detection Threshold can be adjusted between 50% and 100%. To adjust it, proceed as follows:
• Touch each electrode in its geometric center and change the hand posture. If Touch state becomes
released although the user is still touching, the Release Threshold needs to be decreased.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 15
Page 16

• If the finger is lifted from the surface, but a Touch state is still reported, the Release Threshold has
SOUTH
EAST
WEST
NORTH
Electrode X distance
Electrode Y distance
Sensing Space
to be increased.
3.2.7.1 Approach Speed
The Minimum Approach Speed parameter adjusts the minimum approach speed required to detect a
touch event.
• If touch is only detected if the finger approaches quickly, decrease Minimum Approach Speed.
However, when Minimum Approach Speed is too low, false alarms may occur when a finger is
approaching slowly, but not touching.
• If Minimum Approach Speed is set to 0, the touch detection is not dependent on speed and it is
only configured by the thresholds on the SD level.
3.2.7.2 Tap Settings
• Max. Tap Time
A Single Tap is detected only when the time between a touch press and the consecutive release is
smaller than the Max. Tap Time. Higher values allow taps with longer duration.
The time can be adjusted using the corresponding slider, with values between 0 and 1s.
• Max. Double Tap Interval
The Double Tap is detected when the time between the release of a Single Tap and the consecutive
touch press is smaller than the Max. Double Tap Interval. Higher values allow longer intervals
between taps. The time can be adjusted using the corresponding slider 1, that can take values
between 0 and 1s.
• Air Taps
If Air Taps are required, set the threshold low, depending on the height of the tap required and set
the approach speed to a low value or even 0.
MGC3140
Tuning
3.2.8 Position Tracking
3.2.8.1 Electrode Dimensions
To start position parameterization, the user needs to input the electrode dimensions. The figure below
shows how to measure the electrode dimensions. Adjust the electrode X and Y distances by using the
respective slider.
Figure 3-10. Electrode Dimensions
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 16
Page 17

Default values are set for Emerald Development Kit V1.0 with default 95x60 mm Electrode (4-layer/1.5
mm PCB).
• Electrode X Distance corresponds to the distance between the inner edges of West and East
electrodes.
• Electrode Y Distance corresponds to the distance between the inner edges of North and
South electrodes.
3.2.8.2 Electrode Weighting
The Electrode Weighting is an optional step to adjust parameters for position tracking. Five
measurements with the artificial hand and five reference measurements without it are conducted at a
constant height of 30 mm. Always use the 30-mm Styrofoam spacer to establish the height. The drawing
in the Electrode Weighting step will show the correct placement of the artificial hand for each
measurement (West, North, East, South and Center).
The Start Measurement button will trigger the measurement. After pressing the button, a bar will show
the progress of the measurement.
The reference needs to be measured within the next 10s to avoid influences from signal drifts. A down
counter is displayed in the Visualization window. If the reference measurement was not acquired during
these 10 seconds, a pop-up window will be displayed. The measurement needs to be repeated.
MGC3140
Tuning
Removing the artificial hand and pressing the Start Measurement button will trigger the reference
measurement. The measurement table displays the signal level with artificial hand (hand brick), without it
(reference) and the difference between them (Delta).
The measurement process checks if the measured data is valid and if the environment is noisy.
When the data is not valid, it is displayed in red in the measurement table. If the variance of the signal
was higher than ten digits during measurements, the noise indicator in the status bar blinks and Aurea
shows a red message reporting that there was noise detected during the last measurement:
"Measurement variance exceeded threshold". If the Delta is negative, meaning that the reference level
was higher than the one with artificial hand, a red message will be displayed: "The Delta is negative".
The user has to check the measurement setup and repeat the measurement.
Typical reasons for failed measurements are:
• User activity in the sensing space while measuring
• PC not grounded
• Artificial hand is not grounded
• Artificial hand is shaking and the setup was not mechanically stable
• External noise sources (conducted or irradiated)
Once the Electrode Weighting step is finished, press the OK button.
It is not necessary to adjust/correct the 30-mm Styrofoam spacer brick for the thickness of the target
device housing or for a decoration layer covering the electrodes.
The collected data corresponds to the Signal Deviation Mean (SDM) of the electrodes signal levels.
3.2.9 E-Field Linearization
The E-Field Linearization is an optional step to adjust parameters for position tracking. Four
measurements with the artificial hand centered with the system and four reference measurements without
it are conducted at different heights (10 mm, 30 mm, 50 mm and 80 mm). Always use a Styrofoam spacer
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 17
Page 18

SOUTH
EAST
WEST
NORTH
Hand Path
MGC3140
Tuning
to establish the height. The drawing in the E-Field Linearization step in Aurea shows the spacer to be
used.
The Start Measurement button will trigger the measurement. After pressing the button, a bar will show
the progress of the measurement.
The reference needs to be measured within the next 10s to avoid influences from signal drifts. A down
counter is displayed in the Visualization window. If the reference measurement was not acquired during
these 10s, a pop-up window will be displayed. The measurement needs to be repeated.
Removing the artificial hand and pressing the Start Measurement button will trigger the reference
measurement. The measurement table displays the signal level with artificial hand (hand brick), without it
(reference) and the difference between them (Delta).
The measurement process checks if the measured data is valid and if the environment is noisy. When the
data is not valid, it is displayed in red in the measurement table. If the variance of the signal was higher
than ten digits during measurements, the noise indicator in the status bar blinks and Aurea shows a red
message reporting that there was noise detected during the last measurement: "Measurement variance
exceeded threshold". If the Delta is negative, meaning that the reference level was higher than the one
with artificial hand, a red message will be displayed: "The Delta is negative".
The user has to check the measurement setup and repeat the measurement.
Typical reasons for failed measurements are:
• User activity in the sensing space while measuring
• PC not grounded
• Artificial hand not grounded
• Artificial hand is shaking and the setup was not mechanically stable
• External noise sources (conducted or irradiated).
Once the E-Field Linearization step is finished, press the OK button.
Note: The collected data corresponds to the Signal Deviation Mean (SDM) of the electrodes signals
levels.
3.2.10 Sensing Area
The Sensing Area parameterization step is intended to adapt the calculated XY position to the real
electrode dimensions of the system. This is done by setting the four scaling parameters X POS MIN, X
POS MAX, Y POS MIN and Y POS MAX. The grid of the 2D-position plot in the Visualization window will
be scaled if a slider of these parameters is moved.
Figure 3-11. Sensing Area Hand Path
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 18
Page 19

MGC3140
Tuning
The Apply button will apply the current setting and will rescale the Visualization window according to the
current setting. The Clear button will reset the position drawing.
The sub-steps within the Sensing Area step are as follows:
• While touching the device, move the hand posture, which is typical for the application, along the
maximum XY positions which the user would like to reach in the application. Repeat the hand
moving along the maximum XY position about ten times to get a more meaningful drawing. The 2Dsignal plot in the Visualization window draws the calculated position based on the hand movement.
It is likely that the real position does not fit the calculated position.
• Use the slider of the four scaling parameters to reduce the grid size until it fits within the deformed
position drawing.
• Press Apply and check if reaching all XY positions with the same hand movement is now possible.
• If all positions can be reached, continue with the next parameterization step. If not, adjust the
sliders and press Apply again until the positioning meets expectation.
The following graphic shows a typical position drawing and the parameter setting of the corresponding
parameterization step. The grid and thus the scaling are changing with the parameter settings.
Figure 3-12. Sensing Area Tuning Examples
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 19
Page 20

Note: Experiment with those settings to improve the system linearity. Typically, the system has a more
linear behavior for smaller grid sizes.
3.2.11 Minimum Z Level
Minimum Z level tuning is similar to the Sensing Area step which was intended to adjust the XY
positioning; the Z positioning step is intended to adjust the Z position calculation. The Z position is
adjusted through two steps: minimum and maximum Z level. The first step is to adjust the minimum Z
distance level (Z = 0) by configuring the Z POS MIN parameter. This parameter can be modified by using
the respective slider. For fine tuning, click on the slider and use the arrow keys on the PC keyboard.
• Touch the surface of the sensing area with a typical hand posture for the application and keep the
touch.
• Adjust the slider Z POS MIN until the green Z level illustrated in the 3D-signal plot hits the zero
level. In this manner, the zero level is the lowest level which is possible to reach in the 3D-signal
plot.
• The Z position must increase while the hand is moving up from the surface.
3.2.12 Maximum Z Level
The second step of the Z level adjustment is to identify the maximum Z distance level. This parameter
setting can be modified by using the respective slider. For fine tuning, click on the slider and use the
arrow keys on the PC keyboard.
MGC3140
Tuning
The sub-steps within the Maximum Distance Level step are as follows:
• Set Z POS MAX to its maximum value.
• Touch the surface and then slowly remove the hand in Z direction with a hand posture that is typical
for the application.
• The Z position will stop following the user's hand at some point.
• Adjust Z POS MAX such that the top of the grid is aligned with the green Z level.
3.2.13 Jitter Reduction
Jitter control is configured in the Filter Adjustment window. The filter adjustments are used to reduce the
system jitter (position error when hand is stable) and to define the desired hand tracking speed.
3.2.13.1 Jitter Reduction
Place the hand on the corner, close to the electrodes (where the jitter is more visible), hold it for a few
seconds and watch the position using the Position Tracking window. The position should not have high
deviation in a distance.
Increase the Jitter Reduction parameter value to reduce system jitter. High values will lead to a more
lethargic system behavior and will also slow down the tracking speed. Low values will lead to a more
responsive system behavior and will speed up the tracking speed.
3.2.13.2 Speed
Perform hand gestures to check the tracking speed in the Position Tracking window. Adjust the Speed
parameter value to speed up or to slow down the tracking speed.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 20
Page 21

4. Reference Material
• MGC3140 GestIC® Library Interface Description User’s Guide (DS40001875)
• Aurea Graphical User Interface User's Guide (DS40001681)
• GestIC® Design Guide (DS40001716)
• MGC3140 3D Tracking and Gesture Controller Data Sheet (DS40002037)
MGC3140
Reference Material
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 21
Page 22

5. Revision History
Revision Description Date
A Initial release September, 2018
MGC3140
Revision History
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 22
Page 23

MGC3140
The Microchip Web Site
Microchip provides online support via our web site at http://www.microchip.com/. This web site is used as
a means to make files and information easily available to customers. Accessible by using your favorite
Internet browser, the web site contains the following information:
• Product Support – Data sheets and errata, application notes and sample programs, design
resources, user’s guides and hardware support documents, latest software releases and archived
software
• General Technical Support – Frequently Asked Questions (FAQ), technical support requests,
online discussion groups, Microchip consultant program member listing
• Business of Microchip – Product selector and ordering guides, latest Microchip press releases,
listing of seminars and events, listings of Microchip sales offices, distributors and factory
representatives
Customer Change Notification Service
Microchip’s customer notification service helps keep customers current on Microchip products.
Subscribers will receive e-mail notification whenever there are changes, updates, revisions or errata
related to a specified product family or development tool of interest.
To register, access the Microchip web site at http://www.microchip.com/. Under “Support”, click on
“Customer Change Notification” and follow the registration instructions.
Customer Support
Users of Microchip products can receive assistance through several channels:
• Distributor or Representative
• Local Sales Office
• Field Application Engineer (FAE)
• Technical Support
Customers should contact their distributor, representative or Field Application Engineer (FAE) for support.
Local sales offices are also available to help customers. A listing of sales offices and locations is included
in the back of this document.
Technical support is available through the web site at: http://www.microchip.com/support
Microchip Devices Code Protection Feature
Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the
market today, when used in the intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of
these methods, to our knowledge, require using the Microchip products in a manner outside the
operating specifications contained in Microchip’s Data Sheets. Most likely, the person doing so is
engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 23
Page 24

MGC3140
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their
code. Code protection does not mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the
code protection features of our products. Attempts to break Microchip’s code protection feature may be a
violation of the Digital Millennium Copyright Act. If such acts allow unauthorized access to your software
or other copyrighted work, you may have a right to sue for relief under that Act.
Legal Notice
Information contained in this publication regarding device applications and the like is provided only for
your convenience and may be superseded by updates. It is your responsibility to ensure that your
application meets with your specifications. MICROCHIP MAKES NO REPRESENTATIONS OR
WARRANTIES OF ANY KIND WHETHER EXPRESS OR IMPLIED, WRITTEN OR ORAL, STATUTORY
OR OTHERWISE, RELATED TO THE INFORMATION, INCLUDING BUT NOT LIMITED TO ITS
CONDITION, QUALITY, PERFORMANCE, MERCHANTABILITY OR FITNESS FOR PURPOSE.
Microchip disclaims all liability arising from this information and its use. Use of Microchip devices in life
support and/or safety applications is entirely at the buyer’s risk, and the buyer agrees to defend,
indemnify and hold harmless Microchip from any and all damages, claims, suits, or expenses resulting
from such use. No licenses are conveyed, implicitly or otherwise, under any Microchip intellectual
property rights unless otherwise stated.
Trademarks
The Microchip name and logo, the Microchip logo, AnyRate, AVR, AVR logo, AVR Freaks, BitCloud,
chipKIT, chipKIT logo, CryptoMemory, CryptoRF, dsPIC, FlashFlex, flexPWR, Heldo, JukeBlox, KeeLoq,
Kleer, LANCheck, LINK MD, maXStylus, maXTouch, MediaLB, megaAVR, MOST, MOST logo, MPLAB,
OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, Prochip Designer, QTouch, SAM-BA, SpyNIC, SST,
SST Logo, SuperFlash, tinyAVR, UNI/O, and XMEGA are registered trademarks of Microchip Technology
Incorporated in the U.S.A. and other countries.
ClockWorks, The Embedded Control Solutions Company, EtherSynch, Hyper Speed Control, HyperLight
Load, IntelliMOS, mTouch, Precision Edge, and Quiet-Wire are registered trademarks of Microchip
Technology Incorporated in the U.S.A.
Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, BodyCom,
CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM,
dsPICDEM.net, Dynamic Average Matching, DAM, ECAN, EtherGREEN, In-Circuit Serial Programming,
ICSP, INICnet, Inter-Chip Connectivity, JitterBlocker, KleerNet, KleerNet logo, memBrain, Mindi, MiWi,
motorBench, MPASM, MPF, MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient
Code Generation, PICDEM, PICDEM.net, PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE,
Ripple Blocker, SAM-ICE, Serial Quad I/O, SMART-I.S., SQI, SuperSwitcher, SuperSwitcher II, Total
Endurance, TSHARC, USBCheck, VariSense, ViewSpan, WiperLock, Wireless DNA, and ZENA are
trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.
SQTP is a service mark of Microchip Technology Incorporated in the U.S.A.
Silicon Storage Technology is a registered trademark of Microchip Technology Inc. in other countries.
GestIC is a registered trademark of Microchip Technology Germany II GmbH & Co. KG, a subsidiary of
Microchip Technology Inc., in other countries.
All other trademarks mentioned herein are property of their respective companies.
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 24
Page 25

MGC3140
©
2018, Microchip Technology Incorporated, Printed in the U.S.A., All Rights Reserved.
ISBN: 978-1-5224-3493-1
Quality Management System Certified by DNV
ISO/TS 16949
Microchip received ISO/TS-16949:2009 certification for its worldwide headquarters, design and wafer
fabrication facilities in Chandler and Tempe, Arizona; Gresham, Oregon and design centers in California
and India. The Company’s quality system processes and procedures are for its PIC® MCUs and dsPIC
DSCs, KEELOQ® code hopping devices, Serial EEPROMs, microperipherals, nonvolatile memory and
analog products. In addition, Microchip’s quality system for the design and manufacture of development
systems is ISO 9001:2000 certified.
®
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 25
Page 26

Worldwide Sales and Service
AMERICAS ASIA/PACIFIC ASIA/PACIFIC EUROPE
Corporate Office
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 480-792-7200
Fax: 480-792-7277
Technical Support:
http://www.microchip.com/
support
Web Address:
www.microchip.com
Atlanta
Duluth, GA
Tel: 678-957-9614
Fax: 678-957-1455
Austin, TX
Tel: 512-257-3370
Boston
Westborough, MA
Tel: 774-760-0087
Fax: 774-760-0088
Chicago
Itasca, IL
Tel: 630-285-0071
Fax: 630-285-0075
Dallas
Addison, TX
Tel: 972-818-7423
Fax: 972-818-2924
Detroit
Novi, MI
Tel: 248-848-4000
Houston, TX
Tel: 281-894-5983
Indianapolis
Noblesville, IN
Tel: 317-773-8323
Fax: 317-773-5453
Tel: 317-536-2380
Los Angeles
Mission Viejo, CA
Tel: 949-462-9523
Fax: 949-462-9608
Tel: 951-273-7800
Raleigh, NC
Tel: 919-844-7510
New York, NY
Tel: 631-435-6000
San Jose, CA
Tel: 408-735-9110
Tel: 408-436-4270
Canada - Toronto
Tel: 905-695-1980
Fax: 905-695-2078
Australia - Sydney
Tel: 61-2-9868-6733
China - Beijing
Tel: 86-10-8569-7000
China - Chengdu
Tel: 86-28-8665-5511
China - Chongqing
Tel: 86-23-8980-9588
China - Dongguan
Tel: 86-769-8702-9880
China - Guangzhou
Tel: 86-20-8755-8029
China - Hangzhou
Tel: 86-571-8792-8115
China - Hong Kong SAR
Tel: 852-2943-5100
China - Nanjing
Tel: 86-25-8473-2460
China - Qingdao
Tel: 86-532-8502-7355
China - Shanghai
Tel: 86-21-3326-8000
China - Shenyang
Tel: 86-24-2334-2829
China - Shenzhen
Tel: 86-755-8864-2200
China - Suzhou
Tel: 86-186-6233-1526
China - Wuhan
Tel: 86-27-5980-5300
China - Xian
Tel: 86-29-8833-7252
China - Xiamen
Tel: 86-592-2388138
China - Zhuhai
Tel: 86-756-3210040
India - Bangalore
Tel: 91-80-3090-4444
India - New Delhi
Tel: 91-11-4160-8631
India - Pune
Tel: 91-20-4121-0141
Japan - Osaka
Tel: 81-6-6152-7160
Japan - Tokyo
Tel: 81-3-6880- 3770
Korea - Daegu
Tel: 82-53-744-4301
Korea - Seoul
Tel: 82-2-554-7200
Malaysia - Kuala Lumpur
Tel: 60-3-7651-7906
Malaysia - Penang
Tel: 60-4-227-8870
Philippines - Manila
Tel: 63-2-634-9065
Singapore
Tel: 65-6334-8870
Taiwan - Hsin Chu
Tel: 886-3-577-8366
Taiwan - Kaohsiung
Tel: 886-7-213-7830
Taiwan - Taipei
Tel: 886-2-2508-8600
Thailand - Bangkok
Tel: 66-2-694-1351
Vietnam - Ho Chi Minh
Tel: 84-28-5448-2100
Austria - Wels
Tel: 43-7242-2244-39
Fax: 43-7242-2244-393
Denmark - Copenhagen
Tel: 45-4450-2828
Fax: 45-4485-2829
Finland - Espoo
Tel: 358-9-4520-820
France - Paris
Tel: 33-1-69-53-63-20
Fax: 33-1-69-30-90-79
Germany - Garching
Tel: 49-8931-9700
Germany - Haan
Tel: 49-2129-3766400
Germany - Heilbronn
Tel: 49-7131-67-3636
Germany - Karlsruhe
Tel: 49-721-625370
Germany - Munich
Tel: 49-89-627-144-0
Fax: 49-89-627-144-44
Germany - Rosenheim
Tel: 49-8031-354-560
Israel - Ra’anana
Tel: 972-9-744-7705
Italy - Milan
Tel: 39-0331-742611
Fax: 39-0331-466781
Italy - Padova
Tel: 39-049-7625286
Netherlands - Drunen
Tel: 31-416-690399
Fax: 31-416-690340
Norway - Trondheim
Tel: 47-72884388
Poland - Warsaw
Tel: 48-22-3325737
Romania - Bucharest
Tel: 40-21-407-87-50
Spain - Madrid
Tel: 34-91-708-08-90
Fax: 34-91-708-08-91
Sweden - Gothenberg
Tel: 46-31-704-60-40
Sweden - Stockholm
Tel: 46-8-5090-4654
UK - Wokingham
Tel: 44-118-921-5800
Fax: 44-118-921-5820
© 2018 Microchip Technology Inc.
User Guide
DS40002055A-page 26
 Loading...
Loading...