

Page 1

MCP212X
Developer’s Daughter Board
User’s Guide
© 2006 Microchip Technology Inc. DS51571B
Page 2

Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the
intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our
knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data
Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not
mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection features of our
products. Attempts to break Microchip’s code protection feature may be a violation of the Digital Millennium Copyright Act. If such acts
allow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Information contained in this publication regarding device
applications and the like is provided only for your convenience
and may be superseded by updates. It is your responsibility to
ensure that your application meets with your specifications.
MICROCHIP MAKES NO REPRESENTATIONS OR
WARRANTIES OF ANY KIND WHETHER EXPRESS OR
IMPLIED, WRITTEN OR ORAL, STATUTORY OR
OTHERWISE, RELATED TO THE INFORMATION,
INCLUDING BUT NOT LIMITED TO ITS CONDITION,
QUALITY, PERFORMANCE, MERCHANTABILITY OR
FITNESS FOR PURPOSE. Microchip disclaims all liability
arising from this information and its use. Use of Microchip
devices in life support and/or safety applications is entirely at
the buyer’s risk, and the buyer agrees to defend, indemnify and
hold harmless Microchip from any and all damages, claims,
suits, or expenses resulting from such use. No licenses are
conveyed, implicitly or otherwise, under any Microchip
intellectual property rights.
Trademarks
The Microchip name and logo, the Microchip logo, Accuron,
dsPIC, K
EELOQ, microID, MPLAB, PIC, PICmicro,
PICSTART, PRO MATE, PowerSmart, rfPIC and SmartShunt
are registered trademarks of Microchip Technology
Incorporated in the U.S.A. and other countries.
AmpLab, FilterLab, Migratable Memory, MXDEV, MXLAB,
SEEVAL, SmartSensor and The Embedded Control Solutions
Company are registered trademarks of Microchip Technology
Incorporated in the U.S.A.
Analog-for-the-Digital Age, Application Maestro, CodeGuard,
dsPICDEM, dsPICDEM.net, dsPICworks, ECAN,
ECONOMONITOR, FanSense, FlexROM, fuzzyLAB,
In-Circuit Serial Programming, ICSP, ICEPIC, Linear Active
Thermistor, Mindi, MiWi, MPASM, MPLIB, MPLINK, PICkit,
PICDEM, PICDEM.net, PICLAB, PICtail, PowerCal,
PowerInfo, PowerMate, PowerTool, REAL ICE, rfLAB,
rfPICDEM, Select Mode, Smart Serial, SmartTel, Total
Endurance, UNI/O, WiperLock and ZENA are trademarks of
Microchip Technology Incorporated in the U.S.A. and other
countries.
SQTP is a service mark of Microchip Technology Incorporated
in the U.S.A.
All other trademarks mentioned herein are property of their
respective companies.
© 2006, Microchip Technology Incorporated, Printed in the
U.S.A., All Rights Reserved.
Printed on recycled paper.
Microchip received ISO/TS-16949:2002 certification for its worldwide
headquarters, design and wafer fabrication facilities in Chandler and
Tempe, Arizona, Gresham, Oregon and Mountain View, California. The
Company’s quality system processes and procedures are for its
PICmicro
EEPROMs, microperipherals, nonvolatile memory and analog
products. In addition, Microchip’s quality system for the design and
manufacture of development systems is ISO 9001:2000 certified.
®
8-bit MCUs, KEELOQ
®
code hopping devices, Serial
DS51571B-page ii © 2006 Microchip Technology Inc.
Page 3

MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
Table of Contents
Preface ........................................................................................................................... 1
Introduction............................................................................................................ 1
Document Layout .................................................................................................. 2
Conventions Used in this Guide ............................................................................ 3
Recommended Reading........................................................................................ 4
The Microchip Web Site ........................................................................................ 5
Customer Support ................................................................................................. 5
Document Revision History ................................................................................... 5
Chapter 1. Product Overview ....................................................................................... 7
1.1 Introduction ..................................................................................................... 7
1.2 What is the MCP212X Developer’s Daughter Board? .................................... 7
1.3 What the MCP212X Developer’s Daughter Board Kit Includes ...................... 8
Chapter 2. Installation and Operation ......................................................................... 9
2.1 Introduction ..................................................................................................... 9
2.2 Features ....................................................................................................... 10
2.3 Getting Started ............................................................................................. 11
2.4 Making a Demo System ............................................................................... 16
2.5 MCP212X Developer’s Daughter Board Description .................................... 18
Appendix A. Schematic and Layouts ........................................................................ 21
A.1 Introduction .................................................................................................. 21
A.2 Schematics and PCB Layout ....................................................................... 21
A.3 Board Schematic – Page 1 ........................................................................ 22
A.4 Board Schematic – Page 2 ........................................................................ 23
A.5 Board Layout – Component Layer ............................................................. 24
A.6 Board Layout – Top Layer .......................................................................... 25
A.7 Board Layout – Bottom Layer .................................................................... 26
Appendix B. Bill Of Materials (BOM) ......................................................................... 27
Appendix C. Board Testing ........................................................................................ 29
C.1 What is Tested ............................................................................................. 29
C.2 What is NOT Tested .................................................................................... 29
Appendix D. Using the MCP212X Developer’s Daughter Board with the
PICDEM™ HPC Explorer Demo Board ................................................ 31
D.1 demonstration using two PICDEM™ HPC Explorer Demo Boards ............. 31
© 2006 Microchip Technology Inc. DS51571B-page iii
Page 4

MCP212X Developer’s Daughter Board User’s Guide
Appendix E. Using the MCP212X Developer’s Daughter Board with the
PICDEM™ FS USB Demo Board ...........................................................37
E.1 Demonstration with the PICDEM FS USB Demo Board .............................. 37
Appendix F. Configuring the HyperTerminal® Program ..........................................41
F.1 Configuring the Hyperterminal® Program .................................................... 41
Worldwide Sales and Service .....................................................................................46
DS51571B-page iv © 2006 Microchip Technology Inc.
Page 5

MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
Preface
NOTICE TO CUSTOMERS
All documentation becomes dated, and this manual is no exception. Microchip tools and
documentation are constantly evolving to meet customer needs, so some actual dialogs
and/or tool descriptions may differ from those in this document. Please refer to our web site
(www.microchip.com) to obtain the latest documentation available.
Documents are identified with a “DS” number. This number is located on the bottom of each
page, in front of the page number. The numbering convention for the DS number is
“DSXXXXXA”, where “XXXXX” is the document number and “A” is the revision level of the
document.
INTRODUCTION
This chapter contains general information that will be useful to know before using the
MCP212X Developer’s Daughter Board. Items discussed in this chapter include:
• Document Layout
• Conventions Used in this Guide
• Recommended Reading
• The Microchip Web Site
• Customer Support
• Document Revision History
© 2006 Microchip Technology Inc. DS51571B-page 1
Page 6

MCP212X Developer’s Daughter Board User’s Guide
DOCUMENT LAYOUT
This document describes how to use the MCP212X Developer’s Daughter Board. The
manual layout is as follows:
• Chapter 1. “Product Overview” – Important information about the MCP212X
Developer’s Daughter Board.
• Chapter 2. “Installation and Operation” – Includes a detailed description of
each function, as well as instructions on how to get started with this daughter
board.
• Appendix A. “Schematic and Layouts” – Shows the schematic and layout
diagrams for the MCP212X Developer’s Daughter Board.
• Appendix B. “Bill Of Materials (BOM)” – Lists the parts used to build the
MCP212X Developer’s Daughter Board.
• Appendix C. “Board Testing” – Discusses the testing of the MCP212X
Developer’s Daughter Board in several configurations.
• Appendix D. “Using the MCP212X Developer’s Daughter Board with the
PICDEM™ HPC Explorer Demo Board” – Shows how the MCP212X
Developer’s Daughter Board can be demonstrated using the PICDEM™ HPC
Explorer Demo Board.
• Appendix E. “Using the MCP212X Developer’s Daughter Board with the
PICDEM™ FS USB Demo Board” – Shows how the MCP212X Developer’s
Daughter Board can be demonstrated using the PICDEM™ FS USB Demo Board.
• Appendix F. “Configuring the HyperTerminal
configuration of the HyperTerminal program used to demonstrate the MCP212X
Developer’s Daughter Board system.
®
Program” – Shows the
DS51571B-page 2 © 2006 Microchip Technology Inc.
Page 7

CONVENTIONS USED IN THIS GUIDE
This manual uses the following documentation conventions:
DOCUMENTATION CONVENTIONS
Description Represents Examples
Arial font:
Italic characters Referenced books MPLAB® IDE User’s Guide
Initial caps A window the Output window
Quotes A field name in a window or
Underlined, italic text with
right angle bracket
Bold characters A dialog button Click OK
N‘Rnnnn A number in verilog format,
Text in angle brackets < > A key on the keyboard Press <Enter>, <F1>
Courier New font:
Plain Courier New Sample source code #define START
Italic Courier New A variable argument file.o, where file can be
Square brackets [ ] Optional arguments mcc18 [options] file
Curly brackets and pipe
character: { | }
Ellipses... Replaces repeated text var_name [,
Preface
Emphasized text ...is the only compiler...
A dialog the Settings dialog
A menu selection select Enable Programmer
“Save project before build”
dialog
A menu path File>Save
A tab Click the Power tab
4‘b0010, 2‘hF1
where N is the total number of
digits, R is the radix and n is a
digit.
Filenames autoexec.bat
File paths c:\mcc18\h
Keywords _asm, _endasm, static
Command-line options -Opa+, -Opa-
Bit values 0, 1
Constants 0xFF, ‘A’
any valid filename
[options]
Choice of mutually exclusive
arguments; an OR selection
Represents code supplied by
user
errorlevel {0|1}
var_name...]
void main (void)
{ ...
}
© 2006 Microchip Technology Inc. DS51571B-page 3
Page 8

MCP212X Developer’s Daughter Board User’s Guide
RECOMMENDED READING
This user's guide describes how to use the MCP212X Developer’s Daughter Board.
The following Microchip documents are available and recommended as supplemental
reference resources.
MCP2122 Data Sheet (DS21894)
This data sheet provides detailed information regarding the MCP2122 device.
MCP2120 Data Sheet (DS21618)
This data sheet provides detailed information regarding the MCP2120 device.
AN946, “Interfacing the MCP2122 to Host Controller” (DS00946)
This application note discusses the interface between a Host Controller and the
MCP2122 device.
TB073, “Selecting a MCP21XX Device for IrDA
This technical brief discusses the selection of the MCP21XX devices for IrDA
standard applications.
AN756, “Using the MCP2120 for Infrared Communications” (DS00756)
This application note discusses the encoding/decoding function of the MCP2120 as
specified in the physical layer component of the IrDA
AN923, “Using the MCP2120 Developer’s Board for “IR Sniffing” (DS00923)
This application note discusses how one can use the MCP2120 Developer’s Board for
“IR Sniffing”. This technique can assist in the debugging of an IrDA
®
Applications” (DS91073)
®
standard.
®
standard system.
®
The following documents may be useful, depending on which PICDEM™ demo
board you are using with the MCP212X Developer’s Daughter Board.
PIC18F8722 Family Data Sheet (DS39646)
This data sheet provides detailed information regarding the PIC18F8722 device. This
device is used on the PICDEM™ HPC Explorer Demo Board (DM183022).
PICDEM™ 2 Plus Demo Board User’s Guide (DS51275)
This user’s guide provides detailed information regarding the PICDEM™ 2 Plus Board
(DM163022).
PIC16F87XA Family Data Sheet (DS39582)
This data sheet provides detailed information regarding the PIC16F87XA device. This
device is used on the PICDEM™ 2 Plus Demo Board (DM163022).
PICDEM™ FS USB Demonstration Board User’s Guide (DS51526)
This user’s guide provides detailed information regarding the PICDEM™ Full-Speed
USB Demo Board (DM163025).
PIC18F4550 Data Sheet (DS39632)
This data sheet provides detailed information regarding the PIC18F4550 device. This
device is used on the PICDEM™ Full-Speed USB Demo Board (DM163025).
PICDEM™ LCD Demo Board User’s Guide (DS51536)
This user’s guide provides detailed information regarding the PICDEM™ LCD
Demo Board (DM163028).
PIC18F8490 Data Sheet (DS39629)
This data sheet provides detailed information regarding the PIC18F8490 device. This
device is used on the PICDEM™ LCD Demo Board (DM163028).
DS51571B-page 4 © 2006 Microchip Technology Inc.
Page 9

THE MICROCHIP WEB SITE
Microchip provides online support via our web site at www.microchip.com. This web
site is used as a means to make files and information easily available to customers.
Accessible by using your favorite Internet browser, the web site contains the following
information:
• Product Support – Data sheets and errata, application notes and sample
programs, design resources, user’s guides and hardware support documents,
latest software releases and archived software
• General Technical Support – Frequently Asked Questions (FAQs), technical
support requests, online discussion groups, Microchip consultant program
member listing
• Business of Microchip – Product selector and ordering guides, latest Microchip
press releases, listing of seminars and events, listings of Microchip sales offices,
distributors and factory representatives
CUSTOMER SUPPORT
Users of Microchip products can receive assistance through several channels:
• Distributor or Representative
• Local Sales Office
• Field Application Engineer (FAE)
• Technical Support
• Development Systems Information Line
Customers should contact their distributor, representative or field application engineer
(FAE) for support. Local sales offices are also available to help customers. A listing of
sales offices and locations is included in the back of this document.
Technical support is available through the web site at: http://support.microchip.com
Preface
DOCUMENT REVISION HISTORY
Revision B (July 2006)
• Add disclaimer to Bill of Materials regarding RoHS-Compliant part numbers.
Revision A (August 2005)
• Initial Release of this Document.
© 2006 Microchip Technology Inc. DS51571B-page 5
Page 10

MCP212X Developer’s Daughter Board User’s Guide
NOTES:
DS51571B-page 6 © 2006 Microchip Technology Inc.
Page 11

MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
Chapter 1. Product Overview
1.1 INTRODUCTION
This chapter provides an overview of the MCP212X Developer’s Daughter Board and
covers the following topics:
• What is the MCP212X Developer’s Daughter Board?
• What the MCP212X Developer’s Daughter Board kit includes
1.2 WHAT IS THE MCP212X DEVELOPER’S DAUGHTER BOARD?
The MCP212X Developer’s Daughter Board is used to evaluate and demonstrate the
MCP2122 or MCP2120 IrDA
®
Standard Encoder/Decoder device. This allows the
system designer to implement a low-cost, wireless IR port in any application providing
support for IrDA standard bit encoding/decoding.
The MCP212X Developer’s Daughter Board is designed to interface to several of the
“new” low-cost PICmicro
®
microcontroller-based demonstration (demo) boards, or to
be interfaced into your application. Multiple header interfaces are available that allow
support for the many different PICDEM™ Demo Boards, as well as being easily
jumpered into systems for development purposes. Table 1-1 shows some of the
PICDEM demo boards that are supported.
Depending on the features of the PICmicro Microcontroller Unit (MCU) and the
selected demo board, the MCP2122 TX and RX signals can either be connected
(jumpered) directly to the RS-232 line driver or to the PICmicro MCU’s RX and TX
signals. The PICmicro MCU could process that data and then send it out of the UART.
TABLE 1-1: PICDEM™ DEMO BOARD SUPPORT
Name
PICDEM™ HPC Explorer Board
PICDEM™ LCD DM163028 DS51536 PIC18F8490 J1, J2 Y Y
PICDEM™ Full-Speed USB DM163025 DS51526 PIC18F4550 J3 Y N/A
PICDEM™ 2 Plus DM163022 DS51275 PIC16F877,
User Embedded System N/A — — HD1 Y —
Note 1: Other boards may also be supported. Please refer to the MCP212X Developer’s Daughter Board and
desired PICDEM™ Demo Board documentation to determine if the boards you are using are supported.
2: For proper orientation of the daugter board to the PICDEM™ demo board, Revision 5 of the PICDEM™
HPC Explorer Board is recommended. Revision 4 will function, but the direction of the optical transceiver
will be facing the same side as the serial port connector.
3: The MCP212X Developer’s Daughter Board allows the MCP212X TX and RX signals to be routed to
different header connections. This may allow the system to support multiple configurations, such as being
either connected to the PICmicro
communicate via the DB-9 connector).
Order
Number
(2)
DM183022 DS51540 PIC18F8722 J1, J2 Y Y
Literature #
®
MCU USART or to the RS-232 driver (allows the MCP212X to directly
(1)
Host Controller
(PICmicro® MCU)
Supported
PIC18F452
Header(s)
Used
J3 Y N
TX/RX Signals to
Host
Controller
RS-232
(3)
© 2006 Microchip Technology Inc. DS51571B-page 7
Page 12

MCP212X Developer’s Daughter Board User’s Guide
1.3 WHAT THE MCP212X DEVELOPER’S DAUGHTER BOARD KIT INCLUDES
This MCP212X Developer’s Daughter Board Kit includes:
• The MCP212X Developer’s Daughter Board (with MCP2122 installed)
• A MCP2120 sample device
• MCP212X Developer’s Daughter Board User’s Guide
(Electronic version on CD-ROM)
• PICDEM™ HPC Explorer Board firmware (on CD-ROM)
• PICDEM™ USB Board firmware (on CD-ROM)
• Analog and Interface Products Demonstration Boards CD-ROM (DS21912)
DS51571B-page 8 © 2006 Microchip Technology Inc.
Page 13

Chapter 2. Installation and Operation
2.1 INTRODUCTION
This chapter discusses the operation of the MCP212X Developer’s Daughter Board
and how it can be used in conjunction with some of Microchip’s low-cost PICDEM™
Demo Boards or easily connected to your system.
When the MCP212X Developer’s Daughter Board is used in conjunction with one of the
low-cost PICDEM™ Demo Boards, it demonstrates the implementation of an
embedded system with an IrDA
A second encoder/decoder system is required to demonstrate system operation.
The Host UART interface includes only the TX and RX signals. A discussion of the Host
UART interface is given in the following application note:
•AN946, “Interfacing the MCP2122 to the Host Controller” (DS00946)
MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
®
standard physical layer interface (encoder/decoder).
© 2006 Microchip Technology Inc. DS51571B-page 9
Page 14

MCP212X Developer’s Daughter Board User’s Guide
2.2 FEATURES
The MCP212X Developer’s Daughter Board has the following features:
• Dual Header to connect to:
- PICDEM™ HPC Explorer Demo Board
- PICDEM™ LCD Demo Board
• Header to connect to:
- PICDEM™ Full-Speed USB Demo Board
- PICDEM™ 2 Plus Demo Board
• Header to easily connect to the user’s embedded system
• Installed optical transceiver circuit using:
-Vishay
• Footprint for optional optical transceiver circuits using:
- Vishay TFDU 4100
- Agilent
• Jumpers to select connection point (header) for the following signals:
-TX
-RX
-16XCLK
• Jumpers to “swap” TX and RX so that the MCP2120 can directly communicate
over the PICDEM™ HPC Explorer Board’s DB-9 connector
• Jumpers which can be used by the PICDEM demo board firmware program to
determine the mode of operation
• 8-pin DIP socket for the installation of the MCP2122
• 14-pin DIP socket for the installation of the MCP2120
• MCP2120’s crystal is socketed to allow ease of crystal selection
®
TFDU 4300
®
HSDL 3000
TABLE 2-1: PICDEM™ DEMO BOARD SUPPORT
PICmicro®
MCU Demo
Board Name
PICDEM™ HPC
Explorer
PICDEM™ LCD DM163028 PIC18F8490 UART Yes DS51536 MCU firmware could support:
PICDEM™
Full-Speed USB
PICDEM™ 2
Plus
Part #
DM183022 PIC18F8722 UART Yes DS51540 MCU firmware could support:
DM163025 PIC18F4550 USB — DS51526 MCU firmware could support:
DM163022 PIC16F877/
PICmicro
MCU
PIC18F452
MCU
®
Interface
to PC
UART — DS51275 MCU firmware could support:
MCP2122
RX/TX direct
access to DB9
User’s
Guide Lit. #
Comment
• MCP2122 → MCU
• MCP2122 → PC
(UART)
• MCP2122 → MCU
→ PC (UART)
• MCP2122 → MCU
• MCP2122 → PC
(UART)
• MCP2122 → MCU
→ PC (UART)
DB-9 does not have
CTS signal
• MCP2122 → MCU
• MCP2122 → MCU
→ PC (USB)
• MCP2122 → MCU
DS51571B-page 10 © 2006 Microchip Technology Inc.
Page 15

2.3 GETTING STARTED
This section presents an overview of the following system blocks:
• The MCP212X Developer’s Daughter Board Hardware
• The MCP212X Developer’s Daughter Board Firmware
2.3.1 The MCP212X Developer’s Daughter Board Hardware Overview
The major components for the MCP212X Developer’s Daughter Board are:
1. MCP2122 device (U4).
2. MCP2120 device socket (U1).
3. Optical transceiver (U5 – Vishay TFDU 4300).
4. Headers H1 and H2.
5. Header H3.
6. Header HD1.
7. Jumpers to route the TX, RX and 16XCLK signals.
8. Jumpers to select the baud rate and mode.
9. Footprint for two different optional optical transceiver circuits
(Vishay TFDU 4100 and Agilent HSDL 3000).
10. MCP2120 crystal (Y2).
The MCP212X Developer’s Daughter Board is assembled and tested to allow for the
evaluation and demonstration of the MCP2122 or MCP2120 features. A schematic of
the circuit, as well as the corresponding PCB layout, is shown in Appendix
A. “Schematic and Layouts”. Appendix B. “Bill Of Materials (BOM)” shows two
tables; the first is the components that are installed, while the second lists the optional
components that are not installed.
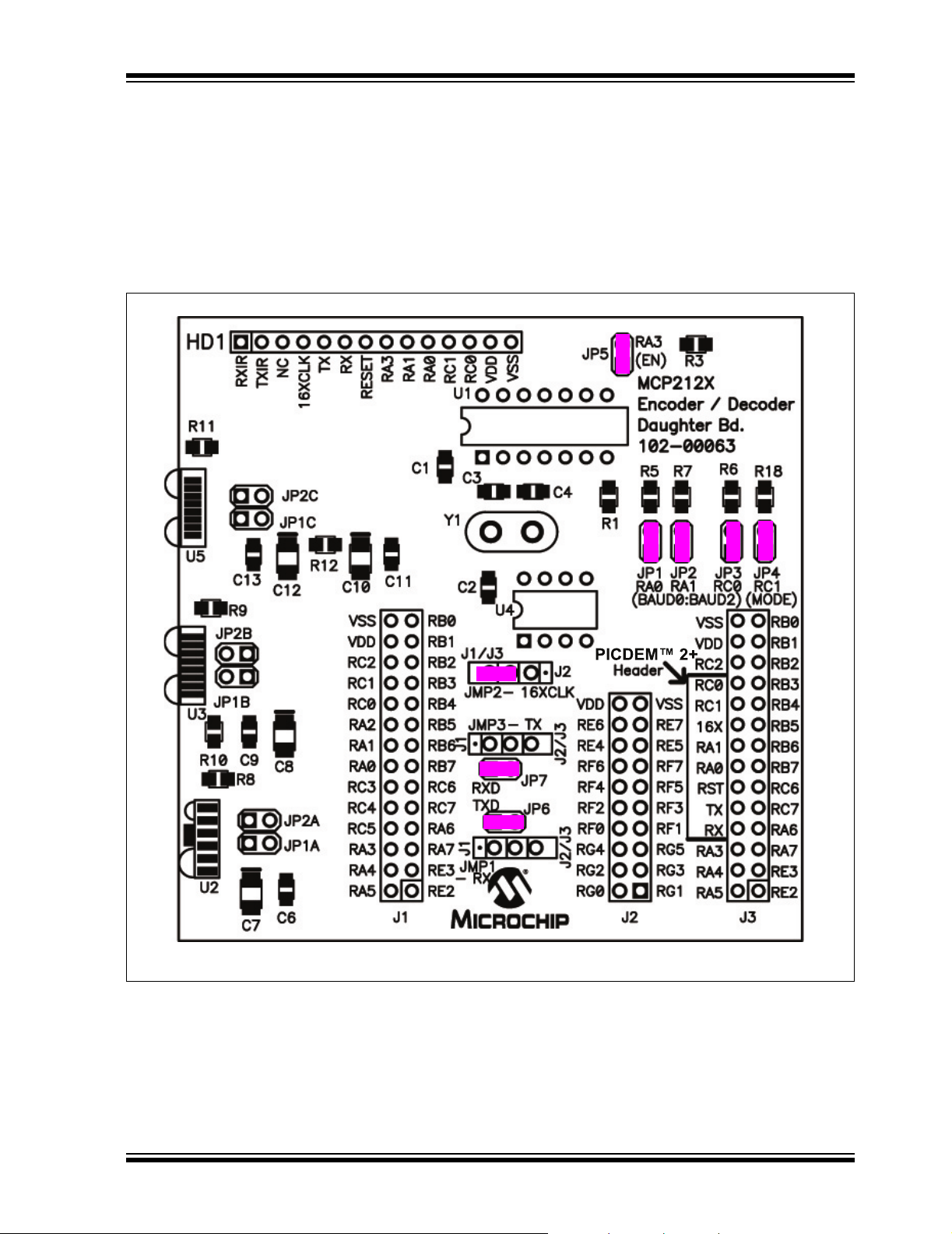
The component layout floor plan is shown in Figure 2-1.
Installation and Operation
© 2006 Microchip Technology Inc. DS51571B-page 11
Page 16

MCP212X Developer’s Daughter Board User’s Guide
FIGURE 2-1: MCP212X DEVELOPER’S DAUGHTER BOARD COMPONENT FLOOR PLAN
DS51571B-page 12 © 2006 Microchip Technology Inc.
Page 17

Installation and Operation
2.3.2 Jumper Settings
Figure 2-2 shows the component layout for the MCP212X Developer’s Daughter Board
and the operation of the JMP1/JP6, JMP2 and JMP3/JP7 jumpers. These jumpers
determine the connections between the MCP2120’s RX, TX and 16XCLK signals, as
well as the header’s RX, TX and 16XCLK signals.
FIGURE 2-2: JMP1/JP6, JMP2 AND JMP3/JP7 CONFIGURATIONS
16XCLK Source
16XCLK is from the
J1-RC2 pin
16XCLK is from the
J3-RC2 pin or J3-16X
JMP1/JP6 (RX)
Selections
RX to H1-RC7 (RXD)
RX to H2-RG2 (RX2),
RX to H3-RC7 (RXD), and
RX to H3-RX
RX to H1-RC6 (TXD)
(DB-9 to PC)
JMP3/JP7 (TX)
Selections
TX to H1-RC6 (TXD)
TX to H2-RG1 (TX2),
TX to H3-RC6 (TXD), and
TX to H3-TX
TX to H1-RC7 (RXD)
(DB-9 to PC)
© 2006 Microchip Technology Inc. DS51571B-page 13
Page 18

MCP212X Developer’s Daughter Board User’s Guide
Figure 2-3 shows the component layout for the MCP212X Developer’s Daughter Board
and the operation of the JP1, JP2, JP3 and JP4 jumpers. When the jumper is open, the
signal is pulled high. When the jumper is shorted, the signal is pulled to ground. JP1 is
connected to the header’s RA0 signal, JP2 is connected to the header’s RA1 signal,
JP3 is connected to the header’s RC0 signal and JP4 is connected to the header’s RC1
signal. These signals are also connected to the MCP2120’s BAUD and MODE pins.
FIGURE 2-3: JP1, JP2, JP3 AND JP4 CONFIGURATIONS
Baud Rate Selection
JP1 JP2 JP3
9600 Baud
19200 Baud
38400 Baud
All Other
Settings
57600 Baud
115200 Baud
Not Defined
Mode Selection
MCP212X communicates with
DB-9 (PC)
MCP212X communicates with
PIC18F8722
Note 1: This is the firmware operation for
00063 HPC.asm when used w/
the PICDEM™ HPC Explorer
Demo Board.
(1)
DS51571B-page 14 © 2006 Microchip Technology Inc.
Page 19

Installation and Operation
A description of the MCP212X Developer’s Daughter Board jumpers is given in
Ta bl e 2- 2.
TABLE 2-2: JUMPER DESCRIPTIONS AND SETTINGS
Jumper # Description Comment
JP1A:JP2A To connect TXIR/RXIR of MCP2122 to TXD/RXD of
U5 (HSDL 3000)
S = TXIR/RXIR connected to TXD/RXD
O = TXIR/RXIR Not connected to TXD/RXD
JP1B:JP2B To connect TXIR/RXIR of MCP2122 to TXD/RXD of
U5 (TFDU 4100)
S = TXIR/RXIR connected to TXD/RXD
O = TXIR/RXIR Not connected to TXD/RXD
JP1C:JP2C To connect TXIR/RXIR of MCP2122 to TXD/RXD of
U5 (TFDU 4300)
S = TXIR/RXIR connected to TXD/RXD
O = TXIR/RXIR Not connected to TXD/RXD
JP1 Hardware control of Header RA0 signal and MCP2120
BAUD0 signal
S = Signal Connected to V
O = Signal Connected to VDD
JP2 Hardware control of Header RA1 signal and MCP2120
BAUD1 signal
S = Signal Connected to VSS
O = Signal Connected to VDD
JP3 Hardware control of Header RC0 signal and MCP2120
BAUD2 signal
S = Signal Connected to V
O = Signal Connected to VDD
JP4 Hardware control of Header RC1 signal and MCP2120
MODE signal
S = Signal Connected to V
O = Signal Connected to VDD
JP5 Hardware control of Header RA3 signal and MCP2120 EN
signal
S = Signal Connected to VSS
O = Signal Connected to VDD
JMP1 Connects MCP2120 RX signal to either Header 1’s RX
signal or Header 2/Header 3 RX signals
JP6 Connects MCP2120 RX signal to Header 1’s TX signal Used when the MCP2120
JMP2 Connects MCP2120 16XCLK signal to either Header 1’s
16XCLK signal or to Header 2/Header 3’s 16XCLK signals
JMP3 Connects MCP2120 TX signal to Header 1’s TX
signal or Header 2/Header 3 TX signals
JP7 Connects MCP2120 TX signal to Header 1’s RX
signal
Legend: S = Jumper is shorted (Closed) O = Jumper is Open
Note 1: The MCP2120’s RX signal is either connected via JMP1 or JP6 (but not both at the same time).
2: The MCP2120’s TX signal is either connected via JMP3 or JP7 (but not both at the same time).
SS
SS
SS
By default not installed.
By default not installed.
By default not installed. PCB traces
short these jumpers (bottom of PCB)
Note 1
communicates directly from the DB-9
connector. (Note 1)
Note 2
Used when the MCP2120
communicates directly from the DB-9
connector. (Note 2)
© 2006 Microchip Technology Inc. DS51571B-page 15
Page 20

MCP212X Developer’s Daughter Board User’s Guide
2.4 MAKING A DEMO SYSTEM
The MCP212X Developer’s Daughter Board requires a clock source and either a Host
Controller or a UART circuit. To demonstrate the board, the easiest method is to use
one of the compatible PICDEM™ Demo Boards. A good choice is the PICDEM™ HPC
Explorer Demo Board. This allows the MCP2120 device to interface to either:
• PIC18F8722’s EUSART1
• PIC18F8722’s EUSART2
• PICDEM™ HPC Explorer Demo Board’s DB-9 connector (MAX3232C)
Additional instructions for performing a demo using the PICDEM™ HPC Explorer
Demo Board are shown in Appendix D. “Using the MCP212X Developer’s Daughter
Board with the PICDEM™ HPC Explorer Demo Board”. Appendix E. “Using the
MCP212X Developer’s Daughter Board with the PICDEM™ FS USB Demo Board”
supplies instructions for performing a demo using the PICDEM™ FS USB Demo
Board. Appendix F. “Configuring the HyperTerminal
configuring the HyperTerminal program on the PC.
System Requirements
Table 2-3 shows the requirements for a system that can be used to demonstrate the
MCP212X Developer’s Daughter Board.
System Setup
The system setup requires a PC with two serial communication ports (UARTs) and
HyperTerminal, the system application program. Two PICDEM™ HPC Explorer Demo
Boards and two MCP212X Daughter Boards are then needed.
®
Program” may be useful for
Note: The MCP2122 may be installed in U4, or the MCP2120 may be installed in
U1. However, these devices should not be installed at the same time.
Figure 2-4 shows a system block diagram.
TABLE 2-3: SYSTEM HARDWARE REQUIREMENTS
Qty Hardware Purpose
1 PC with 2 serial ports The PC will “talk” to each PICDEM™ HPC Explorer Demo Board
(Encoder/Decoder board) via the serial port and an instance of the
HyperTerminal® program. For consistency, COM 1 will be used to talk to the
“System #1” PICDEM™ HPC Explorer Demo Board. Com 2 will be used to
communicate to the “System #2” PICDEM™ HPC Explorer Demo Board.
2 Serial Cables To connect the PC serial ports to each PICDEM™ HPC Explorer Demo
Board’s serial port.
2 PICDEM™ HPC Explorer Boards The MCP212X Developer’s Daughter Board will be installed into this board
for testing.
2 MCP2120 Daughter Boards This board will be used to communicate with the system under test.
2 2 PICDEM™ HPC Explorer Demo
Board Power Supplies (9V DC)
Used to power each of the PICDEM™ HPC Explorer Demo Boards.
DS51571B-page 16 © 2006 Microchip Technology Inc.
Page 21

FIGURE 2-4: SYSTEM BLOCK DIAGRAM
Installation and Operation
HyperTerminal
Program Window A
(Com 1)
HyperTerminal
Program Window B
Note 1: Only required if data is
communicated with the PC.
Some program modes “respond” to
received data (data not sent to PC).
®
(Com 2)
(1)
2.4.1 The PICDEM™ Demo Board Firmware Overview
Two firmware programs are supplied with this board. 00063 - HPC.asm is for the
PICDEM™ HPC Explorer Demo Board, while 00063 - FS USB.asm is for the
PICDEM™ FS USB Demo Board.
The PICDEM™ HPC Explorer Demo Board supports two modes of operation:
the Direct-to-PC and Echo modes.
In Direct-to-PC mode, the data byte communicates between the MCP2120 and the
PICDEM™ HPC Explorer Demo Board’s DB-9 connector (does not communicate with
the PIC18F8722). The PIC18F8722 is only used for the 16XCLK signal (for the
specified baud rate).
In Echo mode, the data byte that is received is “echoed” in the opposite case
(lowercase → uppercase and uppercase → lowercase).
The PICDEM™ FS USB Demo Board only supports Echo mode.
The source code for these programs are available for download from the Microchip web
site (www.microchip.com), as well as being available on the CD-ROM supplied with the
MCP212X Developer’s Daughter Board.
To use these programs, it is required that the MPLAB
and that one of Microchip’s development tools are available to program the board (such
as MPLAB
®
ICD 2).
Com 1
System #1
PICDEM™ HPC
Explorer Demo Board plus
MCP212X Daughter Boards
®
IDE be installed on a computer
Com 2
System #2
PICDEM™ HPC
Explorer Demo Board plus
MCP212X Daughter Boards
(1)
© 2006 Microchip Technology Inc. DS51571B-page 17
Page 22
MCP212X Developer’s Daughter Board User’s Guide
2.5 MCP212X DEVELOPER’S DAUGHTER BOARD DESCRIPTION
The following sections describe each element of this daughter board in further detail.
2.5.1 Power
The MCP212X Developer’s Daughter Board is powered by a 5V supply. This voltage
supply may be sourced via the PCB headers.
When the device is used in conjunction with the appropriate PICDEM™ Demo Board,
the power is supplied via the connector interface. If the MCP212X Developer’s
Daughter Board is jumpered into an application circuit via the HD1 connector, the
device power supply must be brought over as well.
2.5.2 MCP212X IrDA® Standard Encoder/Decoder Device
This demo board highlights the MCP2122 device (U4) and MCP2120 device (U1) to
demonstrate the implementation of an IR port in an embedded system application. The
MCP2120 device handles the encoding/decoding of the UART/IR bit stream.
Further Host Controller interface information is available in the device documentation:
• MCP2122 Data Sheet, “Infrared Encoder/Decoder” (DS21894)
• MCP2120 Data Sheet, “Infrared Encoder/Decoder” (DS21618)
• AN946, “Interfacing the MCP2122 to the Host Controller” (DS00946)
2.5.2.1 MCP2122 OPERATION
The MCP2122 (U4) implements an IrDA standard encoder/decoder. The baud rate is
determined by the frequency of the 16XCLK input.
The key signals for the MCP2122-to-microcontroller (Host UART) interface are shown
in Table 2-4. The key signals for the MCP2122-to-IR transceiver circuit are shown in
Ta bl e 2- 5.
TABLE 2-4: MCP2122 HOST UART INTERFACE PINS
Pin
Name
TX 2 I TTL Asynchronous receive; from Host Controller UART
RX 3 O — Asynchronous transmit; to Host Controller UART
16XCLK 1 I TTL 16 x Clock
Legend: TTL = TTL compatible input ST = Schmitt Trigger input with CMOS levels
Pin
Number
(PDIP)
I = Input O = Output
Pin
Type
Buffer
Typ e
Description
TABLE 2-5: MCP2122 IR INTERFACE PINS
Pin
Pin Name
TXIR 2 O — Asynchronous transmit to IrDA
RXIR 3 I ST Asynchronous receive from infrared transceiver
Legend: A = Analog P = Power
Number
(PDIP)
I = Input O= Output
Pin
Type
Buffer
Type
transceiver
Description
®
standard
In addition to the signals described in Table 2-4 and Table 2-5, the MCP2120 RESET
input is connected to the RESET output of the Host Controller.
DS51571B-page 18 © 2006 Microchip Technology Inc.
Page 23

Installation and Operation
2.5.2.2 MCP2120 OPERATION
The MCP2120 (U1) implements an IrDA standard encoder/decoder. The baud rate is
determined by the device frequency and the state of the BAUD2:BAUD0 pins. The
MCP2120 also has a Software Baud Rate mode which controls the baud rate via the
Host Controller software.
The key signals for the MCP2120-to-microcontroller (Host UART) interface are shown
in Table 2-6. The key signals for the MCP2120-to-IR transceiver circuit are shown in
Ta bl e 2- 7.
TABLE 2-6: MCP2120 HOST UART INTERFACE PINS
Pin
Name
TX 12 I TTL Asynchronous receive; from Host Controller UART
RX 11 O — Asynchronous transmit; to Host Controller UART
BAUD0 10 I TTL BAUD2:BAUD0 specifies the Baud rate of the
BAUD1 9 I TTL
BAUD3 8 I TTL
MODE 7 I TTL Selects the device mode (Data/Command) for
Legend: TTL = TTL compatible input ST = Schmitt Trigger input with CMOS levels
Pin
Number
(PDIP)
I = Input O = Output
Pin
Type
Buffer
Typ e
device, or if the device operates in Software Baud
Rate mode
Software Baud Rate operation
Description
TABLE 2-7: MCP2120 IR INTERFACE PINS
Pin
Pin Name
TXIR 6 O — Asynchronous transmit to IrDA
RXIR 5 I ST Asynchronous receive from an infrared transceiver
Legend: A = Analog P = Power
Number
(PDIP)
I = Input O = Output
Pin
Type
Buffer
Type
transceiver
Description
®
standard
In addition to the signals described in Table 2-6 and Table 2-7, the MCP2120 RESET
input is connected to the RESET output of the Host Controller. The EN input can be
either hard-wired or controlled by the Host Controller.
© 2006 Microchip Technology Inc. DS51571B-page 19
Page 24

MCP212X Developer’s Daughter Board User’s Guide
2.5.3 IR Transceiver Circuit
The IR transceiver circuit uses a Vishay® TFDU 4300 integrated optical transceiver.
Footprints for an optional optical transceiver are implemented. These footprints are for
the Vishay TFDU 4100 and the Agilent
three implementations to be installed, but with only one connected to the MCP2120
TXIR and RXIR pins.
2.5.4 Signal Header
To allow easy access to many of the system signals, a header (HD1) was placed on
one of the edges of the board. This allows the signals from the MCP2120 to be easily
accessed and connected into an existing application for initial development or
proof-of-concept.
FIGURE 2-5: 14-PIN SIGNAL INTERFACE HEADER HD1
HD1
NC
TXIR
RXIR
16XCLK
®
HSDL-3000. Jumpers are used to allow all
TX
RX
RA3
RESET
RA1
RA0
RC1
RC0
VDD
VSS
DS51571B-page 20 © 2006 Microchip Technology Inc.
Page 25

DAUGHTER BOARD USER’S GUIDE
Appendix A. Schematic and Layouts
A.1 INTRODUCTION
This appendix contains the following schematics and layouts for the MCP212X
Developer’s Daughter Board:
• Board Schematic – Headers and Jumpers
• Board Schematic – Circuitry
• Board – Component Layer
• Board – Top Layer
• Board – Bottom Layer
A.2 SCHEMATICS AND PCB LAYOUT
The layer order is shown in Figure A-1.
FIGURE A-1: LAYER ORDER
MCP212X DEVELOPER’S
Top Layer
Bottom Layer
© 2006 Microchip Technology Inc. DS51571B-page 21
Page 26
MCP212X Developer’s Daughter Board User’s Guide
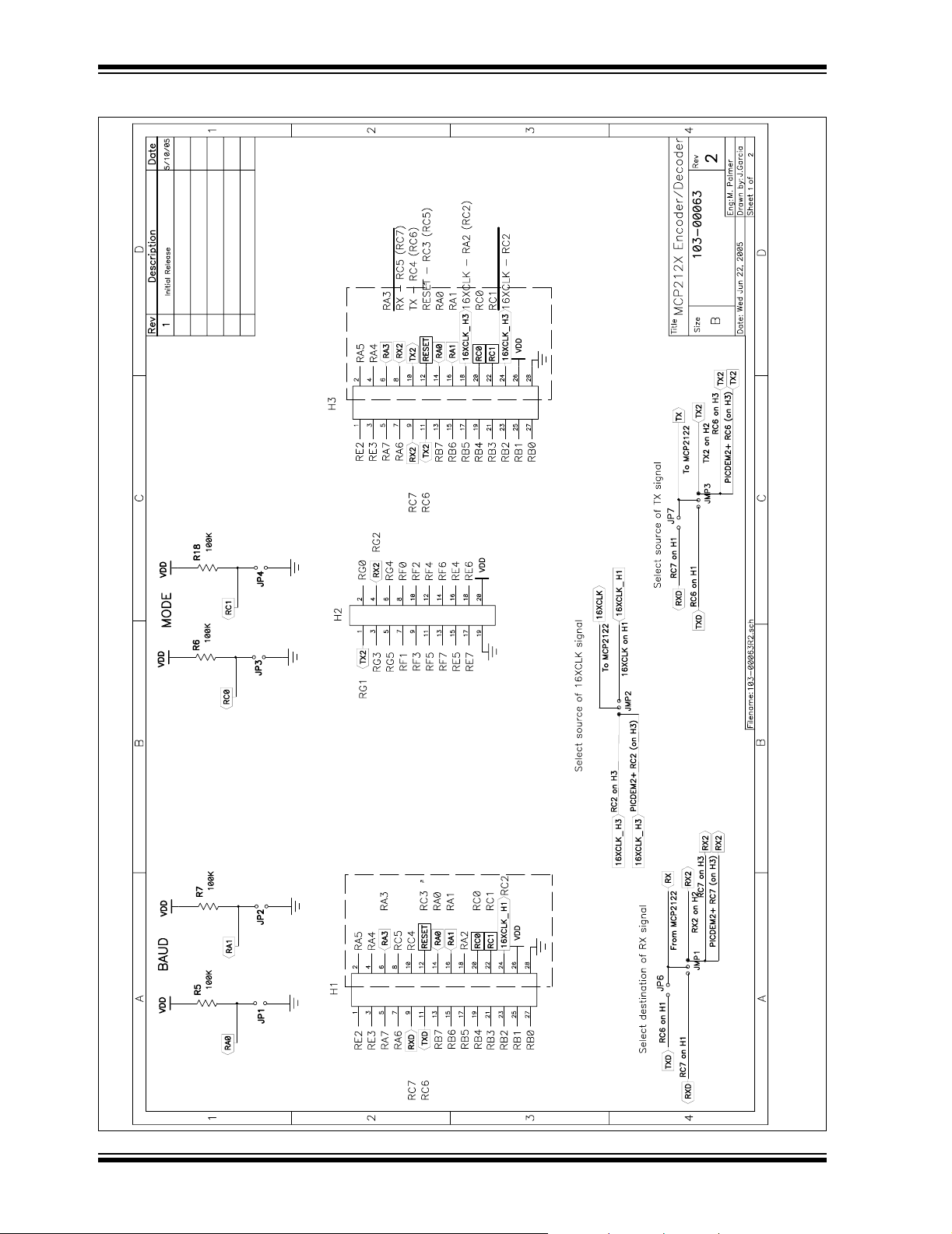
A.3 BOARD SCHEMATIC – PAGE 1
PICDEM™ 2+
Daughter Board
PICtail™
M
PICtail™ Daughter Board
DS51571B-page 22 © 2006 Microchip Technology Inc.
Page 27

A.4 BOARD SCHEMATIC – PAGE 2
Schematic and Layouts
M
9
12
14
13
TX
EN
VSS
OSC2
VDD4R
OSC1/CLKI
3
1
2
8
10
11
RX
BAUD1
BAUD2
BAUD0
ES E T
TXIR
MODE
RXIR
6
7
5
© 2006 Microchip Technology Inc. DS51571B-page 23
Page 28

MCP212X Developer’s Daughter Board User’s Guide
A.5 BOARD LAYOUT – COMPONENT LAYER
DS51571B-page 24 © 2006 Microchip Technology Inc.
Page 29

A.6 BOARD LAYOUT – TOP LAYER
Schematic and Layouts
© 2006 Microchip Technology Inc. DS51571B-page 25
Page 30
MCP212X Developer’s Daughter Board User’s Guide
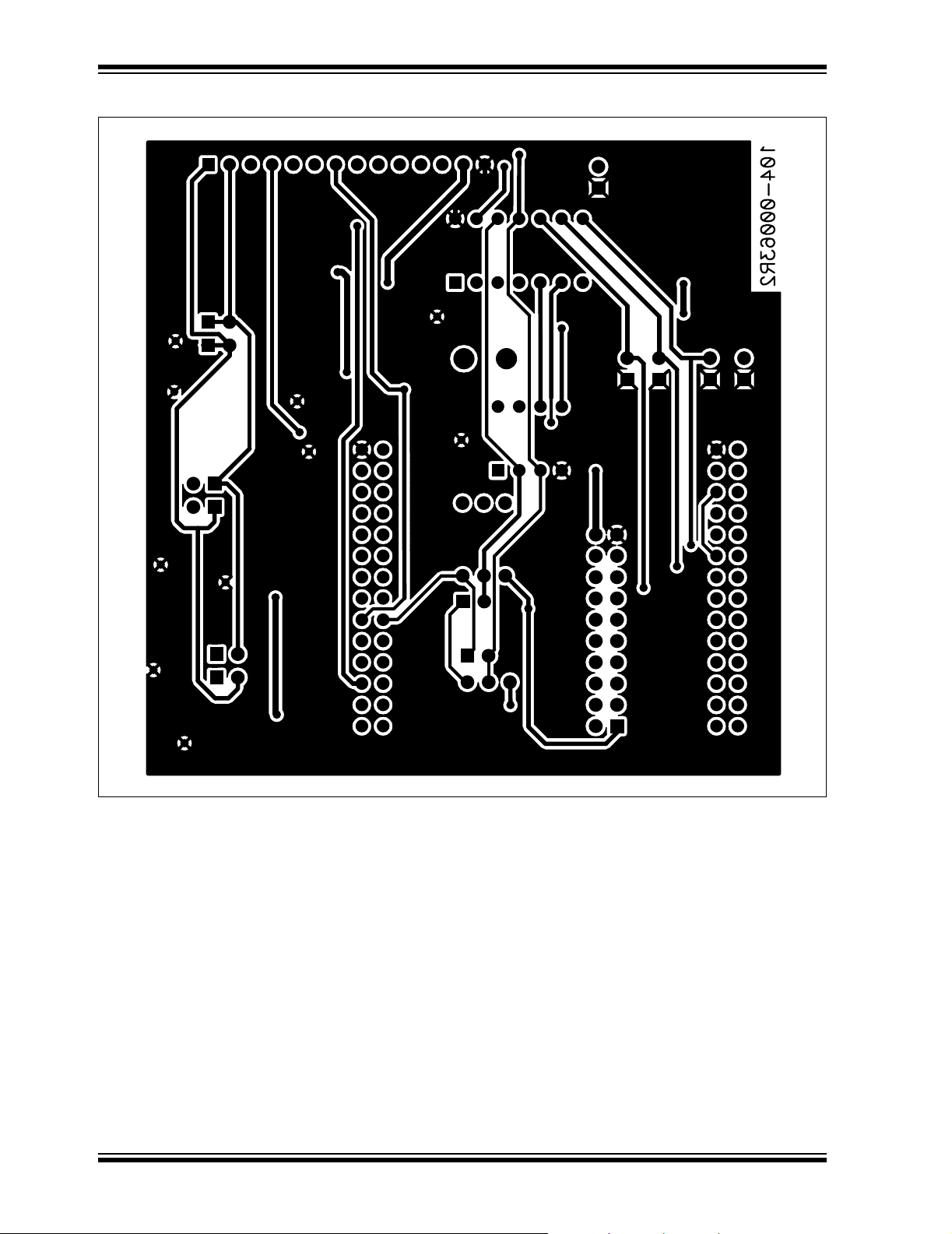
A.7 BOARD LAYOUT – BOTTOM LAYER
DS51571B-page 26 © 2006 Microchip Technology Inc.
Page 31
MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
Appendix B. Bill Of Materials (BOM)
The MCP212X Developer’s Daughter Board allows the MCP2120 or MCP2122 device
to be evaluated. The board also allows the customer to evaluate the operation of one
of three optical tranceiver devices.
Table B-1 shows the components that are installed in the MCP212X Developer’s
Daughter Board PCB, while Table B-2 shows the components that are NOT installed
on the MCP212X Developer’s Daughter Board PCB.
TABLE B-1: BOM – COMPONENTS INSTALLED
Qty Reference Description Manufacturer Part Number
4 C1, C2, C11, C13 0.1 µF (SMT) Panasonic® - ECG ECJ-2VB1C104K
2 C3, C4 18 pF (SMT) Yageo America 0805CG180J9B200
2 C10, C12 4.7 µF/16V (SMT) Panasonic - ECG ECS-T1AY475R
1 H1, H3 2x14 Male connector Header Jameco Valuepro 2012-254-2X14SG
1 H2 2x10 Male connector Header Jameco Valuepro 7000-2X10SG
1 HD1 1x14 Male connector Header Jameco Valuepro 7000-1x14SG
3 JMP1, JMP2, JMP3 1x3 Jumper Stakes (Male) Jameco Valuepro 7000-1x3SG
7 JP1, JP2, JP3, JP4,
JP5, JP6, JP7
2 R1, R3 10 kΩ (SMT) Panasonic - ECG ERJ-6ENF1002V
4 R5, R6, R7, R18 100 kΩ (SMT) Panasonic - ECG ERJ-6ENF1003V
1 R12 47Ω (SMT) Panasonic - ECG ERJ-6ENF47R5V
1 U1 14-pin DIP Socket Microchip
1 U4 8-pin DIP Socket Jameco Valuepro 6100-14
1 MCP2122 (provided) Jameco Valuepro 6100-8
1 U5 TFDU-4300 Microchip
2 Y1 Crystal Sockets pin Manufacturing Corp 0667-0-15-01-30-27-10-0
1 7.3728 MHz Crystal (Through hole) CTS Frequency
1 — PCB 105-00063 (R2 or greater) Microchip
8 — Jumper Shunt (used on JP1, JP2,
Note 1: The components listed in this Bill of Materials are representative of the PCB assembly. The released BOM
used in manufacturing uses all RoHS-compliant components.
1x2 Jumper Stakes (Male) Jameco Valuepro 7000-1x2SG
Technology Inc.
Technology Inc.
MP073
Controls
Technology Inc.
Jameco Valuepro 2012JH
JP3, JP4, JP5, JP6, JP7 and JMP2)
© 2006 Microchip Technology Inc. DS51571B-page 27
Page 32

MCP212X Developer’s Daughter Board User’s Guide
TABLE B-2: BOM – OPTIONAL COMPONENTS, NOT INSTALLED
Qty Reference Description Manufacturer Part Number
0 C6 0.47 µF (SMT)
0 C7 6.8 µF Tantalium (SMT)
0 C8 4.7 µF/16V (SMT)
0 C9 0.1 µF (SMT) Panasonic - ECG ECJ-2VB1C104K
0 JP1A, JP1B, JP1C,
JP2A, JP2B, JP2C
0R8 6.8Ω (SMT)
0R9 14Ω (SMT)
0 R10 47Ω (SMT)
0R11 0Ω (SMT)
1 U1 MCP2120 (In the Sample Pack) Microchip
0 U2 HSDL-3000 Agilent
0 U3 TFDU-4100 Vishay
0 — Jumper Shunt (used on JP1A and
1x2 Jumper Stakes (Male) Jameco Valuepro 7000-1x2SG
MCP2120-I/P
Technology Inc.
®
®
Jameco Valuepro 2012JH
JP2A, or JP1B and JP2B, or
JP1C and JP2C)
HSDL-3000
TFDU-4100
DS51571B-page 28 © 2006 Microchip Technology Inc.
Page 33

MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
Appendix C. Board Testing
The MCP212X Developer’s Daughter Board can be used in multiple configurations.
Only a subset of these configurations will be tested. The tests were performed at 9600
baud. Other baud rates were not tested.
TABLE C-1: MCP212X DEVELOPER’S DAUGHTER BOARD TESTED CONFIGURATIONS
JP3:JP2:JP1 JP4 JP5
S:S:S O S 2-3 2-3 (JMP1) 2-3 (JMP3) 9600 baud, MCP2122 to PIC18F8772
S:S:S S S 2-3 S (JP6) S (JP7) 9600 baud, MCP2122 to DB9 (PC) on
Legend: O = Jumper is “Open” S = Jumper is “Shorted”
1-2 = Pin 1 is shorted to Pin 2 (of 3 pin header)
2-3 = Pin 2 is shorted to Pin 3 (of 3 pin header)
JMP2
(16XCLK)
JMP1/JP6
(MCP212x RX
Destination)
JMP3/JP7
(MCP212x TX
Destination)
Comment
UART2 on Header 2 (Echo mode)
Header 1
C.1 WHAT IS TESTED
The following portions of the board are tested:
• MCP2122
• TFDU-4300 and circuitry
• Header 1 – TXD and RXD signals
• Header 1 – 16XCLK signal
• Header 2 – TX2 and RX2 signals
•JP4
•JP6
•JP7
C.2 WHAT IS NOT TESTED
The following portions of the board are NOT tested:
• MCP2120 and crystal circuitry
• TFDU-4100 and circuitry
• HSDL-3000 and circuitry
• Header 3
• JP1, JP2, JP3 and JP5
• JMP2 (P1 – P2)
• JMP1 (P1 – P2)
• JMP3 (P1 – P2)
• Header HD1
© 2006 Microchip Technology Inc. DS51571B-page 29
Page 34

MCP212X Developer’s Daughter Board User’s Guide
NOTES:
DS51571B-page 30 © 2006 Microchip Technology Inc.
Page 35

MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
Appendix D. Using the MCP212X Developer’s Daughter
Board with the PICDEM™ HPC Explorer Demo Board
D.1 DEMONSTRATION USING TWO PICDEM™ HPC EXPLORER DEMO BOARDS
To perform a demonstration of the MCP212X Developer’s Daughter Board, two
systems are needed. Each system is a MCP212X Developer’s Daughter Board
(MCP212XEV-DB) plus the PICDEM™ HPC Explorer Demo Board (DM183022).
Figure D-1 shows a block diagram of the demonstation system.
FIGURE D-1: SYSTEM BLOCK DIAGRAM
HyperTerminal
Program Window A
(Com 1)
HyperTerminal
Program Window B
(Com 2)
®
The firmware for these demos is available on the Microchip web site, as well as on the
AIPD Evaluation Board CD-ROM. The filename is 00063 - HPC.asm. This code must
be programmed into the PICDEM™ HPC Explorer Demo Board’s PIC18F8722 for
demo operation. This code supports two demos. The demo executed is dependent on
the state of the JP4 jumper.
Note: Other PICDEM™ Demo Boards may be used, but appropriate firmware
Com 1
System #1
PICDEM™ HPC
Explorer Demo Board plus
MCP212X Developer’s
Daughter Boards
needs to be installed to demonstrate the system.
System #2
PICDEM™ HPC
Explorer Demo Board plus
MCP212X Developer’s
Daughter Boards
Com 2
© 2006 Microchip Technology Inc. DS51571B-page 31
Page 36

MCP212X Developer’s Daughter Board User’s Guide
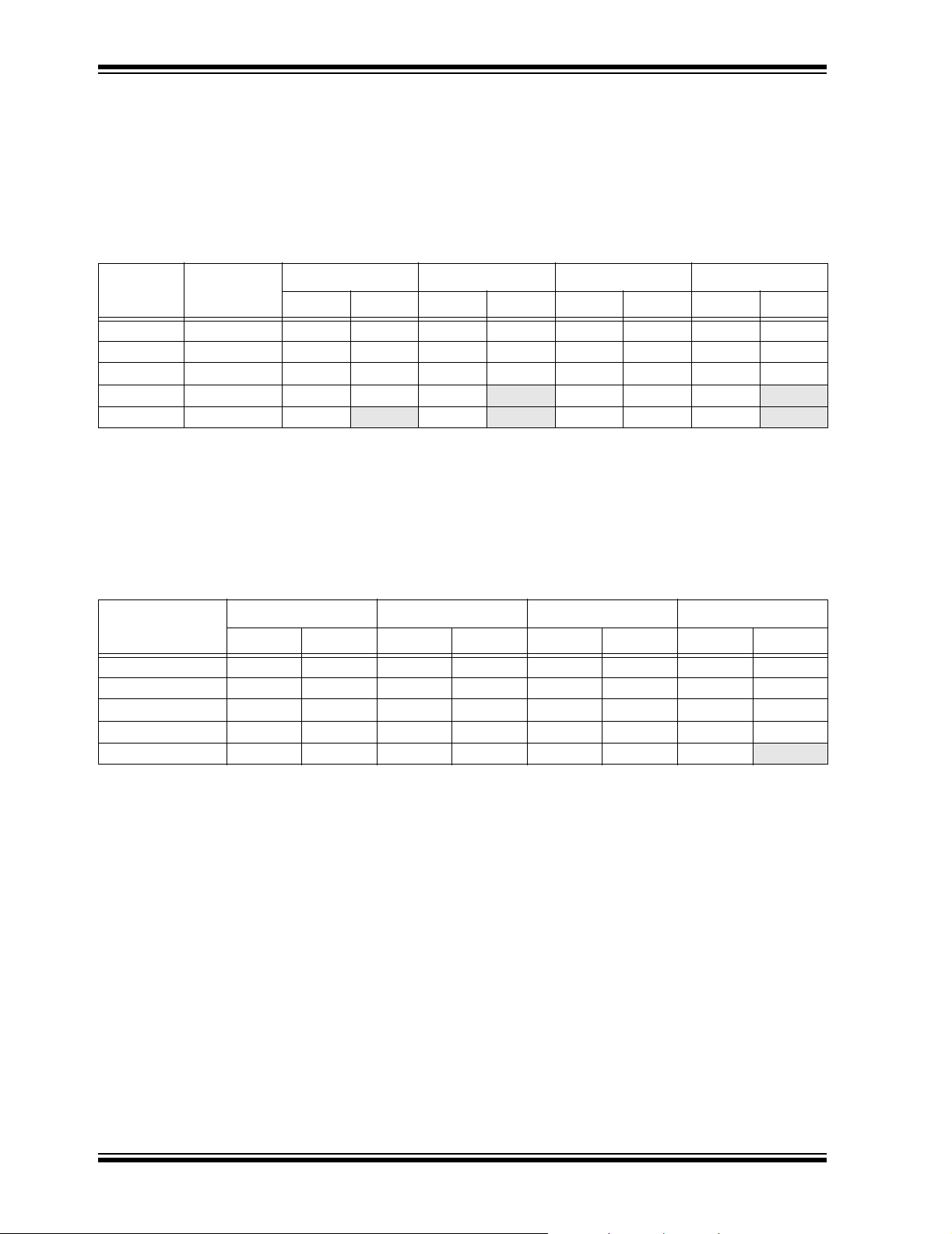
The crystal frequency of the PICDEM™ Demo Board determines the error rates for the
EUSART baud rates, as well as the 16XCLK generation (for the MCP2122). So for the
PICDEM™ HPC Explorer Demo Board, the default crystal is 10 MHz (does have a 4x
PLL). Therefore, the 16XCLK frequency for 115200 baud has an error outside usable
limits for IrDA
Table D-1). The demo will be limited to 9600 baud. Table D-2 shows the SPBRG values
for the EUSART at the same crystal frequencies.
®
standard communication for both 10 MHz and 40 MHz operation (see
TABLE D-1: PR VALUES FOR PWM
Desired
Baud Rate
9600 153,600 64 -0.16% 32 1.36% 23 0% 15 -1.73%
19200 307,200 32 1.36% 15 -1.73% 11 0% 7 -1.73%
38400 614,400 15 -1.73% 7 -1.73% 5 0% 3 -1.73%
57600 921,600 10 1.36% 4
115200 1,843,200 4 -8.51% 2 -35.6% 1 0% 1 32.18%
Note 1: Shaded values indicate a % error that is larger than should be used.
2: The following shows the PICDEM™ Demo Board device frequencies:
3: CCP Duty Cycle should be approximately 50% of the PR value.
16XCLK
PICDEM™ HPC Explorer Demo Board has a 10 MHz crystal installed (4xPLL -> 40 MHz).
PICDEM™ FS USB Demo Board has a 20 MHz crystal installed.
PICDEM™ 2 Plus Demo Board has a 4 MHz crystal installed.
PICDEM™ LCD has a socket for an external canned oscillator (also has an internal 8 MHz RC).
@ 40 MHz
(3)
PR
TABLE D-2: SPBRG VALUES FOR EUSART
Desired
Baud Rate
9600 225 -1.73% 129 -0.16% 95 0% 64 -0.16%
19200 129 -0.16% 64 -0.16% 47 0% 32 1.36%
38400 64 -0.16% 32 1.36% 23 0% 15 -1.73%
57600 42 -0.94% 21 1.36% 15 0% 10 1.36%
115200 21 1.36% 10 1.36% 7 0% 4
Note 1: Shaded values indicate a % error that is larger than should be used.
2: The following shows the PICDEM™ Demo Board device frequencies:
PICDEM™ HPC Explorer Demo Board has a 10 MHz crystal installed (4xPLL -> 40 MHz).
PICDEM™ FS USB Demo Board has a 20 MHz crystal installed.
PICDEM™ 2 Plus Demo Board has a 4 MHz crystal installed.
PICDEM™ LCD has a socket for an external canned oscillator (also has an internal 8 MHz RC).
3: SYNC = 0, BRGH = 1, BRG16 = 0.
@ 40 MHz
SPBRG
(3)
(2)
%Error SPBRG
(1)
(2)
%Error PR
(1)
@ 20 MHz
(3)
@ 20 MHz
(3)
(2)
%Error PR
-8.51% 3 0% 2 9.58%
(2)
%Error SPBRG
@ 14.759 MHz
(3)
@ 14.759 MHz
(3)
%Error SPBRG
(2)
%Error PR
(2)
@ 10 MHz
@ 10 MHz
(3)
%Error
(3)
%Error
-8.51%
(2)
(2)
DS51571B-page 32 © 2006 Microchip Technology Inc.
Page 37
Using the MCP212X Developer’s Daughter Board
with the PICDEM™ HPC Explorer Demo Board
D.1.1 Demo #1 Operation
In Demo #1, the MCP212X Developer’s Daughter Board will communicate directly to
the PICDEM™ HPC Explorer Demo Board’s DB-9 connector (and then to the PC). The
PICDEM™ HPC Explorer Demo Board is used to determine the communication baud
rate (9600) via the JP3, JP2 and JP1 jumper states. Given this state, the PICmicro
MCU can then supply the 16XCLK frequency to the MCP2122. Power is supplied over
the J1 and J2 interface headers. Jumper JP4 is used to select which demonstration
program to run. Figure D-2 shows the jumper configuration for Demo #1.
FIGURE D-2: DEMO #1 CONFIGURATION
®
© 2006 Microchip Technology Inc. DS51571B-page 33
Page 38

MCP212X Developer’s Daughter Board User’s Guide
Table D-3 shows the steps for Demo #1 operation.
TABLE D-3: DEMO #1 STEPS
Step Action Result
1 Place both devices on a flat surface about 25 cm (10”)
apart, with the IR ports facing each other.
2 On the System #1 Unit:
The jumpers must be configured as in Figure D-3.
3 On the System #1 Unit:
Apply power to the unit via the 9V power supply.
4 On the System #1 Unit:
Connect the PC serial port cable that is connected to
COM1.
5 On the System #2 Unit:
Insert the MCP212X Developer’s Daughter Board into
the PICDEM™ HPC Explorer Demo Board.
Ensure that the jumpers are configured as in
Figure D-2.
6 On the System #2 Unit:
Apply power to the unit via the 9V power supply.
7 On the System #2 Unit:
Connect the PC serial port cable that is connected to
COM2.
8 On the System #1 Unit:
Depress and release Switch 2 (S2 – M
9 On the System #2 Unit:
Depress and release Switch 2 (S2 – M
10 On the PC:
Open the HyperTerminal
COM 1.
Ensure that the window indicates that the
HyperTerminal program is connected.
11 On the PC:
In the HyperTerminal program COM1 window, type
alpha-numeric characters (such as “123456 asdfg”).
12 On the PC:
In the HyperTerminal program COM2 window, depress
the Return key and type alpha-numeric characters
(such as “7890 hjkl;”).
13 On the System #2 Unit:
Power-down the board and remove the tested
MCP212x Daughter Board.
14 Go to Step #5 —
®
program window for
CLR).
CLR).
—
—
On the System #1 Unit:
The green power LED (D) will turn on.
—
Test unit will echo the received Alpha character
(changing the case; upper to lower and lower to
upper).
On the System #2 Unit:
The green power LED (D) will turn on.
—
—
—
—
On the PC:
In the HyperTerminal program COM 2 window, the
same characters should be displayed (“123456
asdfg”).
On the PC:
In the HyperTerminal program COM 1 window, the
same characters should be displayed (“7890 hjkl;”) on
the line below the “123456 asdfg” characters.
—
DS51571B-page 34 © 2006 Microchip Technology Inc.
Page 39

Using the MCP212X Developer’s Daughter Board
with the PICDEM™ HPC Explorer Demo Board
D.1.2 Demo #2 Operation
In Demo #2, the System 2 unit will echo any alpha character received, changing the
case of the character (lowercase to uppercase/uppercase to lowercase). The System
1 unit is connected to the PC, while the System 2 unit is not connected, though it still
needs to be powered. The PICDEM™ HPC Explorer Demo Board is used to determine
the communication baud rate (9600) via the JP3, JP2 and JP1 jumper states. Given
this state, the PICmicro
MCP2122. Power is supplied over the J1 and J2 interface headers. Jumper JP4 is used
to select which demo program to run. Figure D-3 shows the jumper configuration for
Demo #2.
Table D-3 shows the steps for Demo #2.
FIGURE D-3: DEMO #2 CONFIGURATION
®
MCU can then supply the 16XCLK frequency to the
© 2006 Microchip Technology Inc. DS51571B-page 35
Page 40

MCP212X Developer’s Daughter Board User’s Guide
TABLE D-4: DEMO #2 STEPS
Step Action Result
1 Place both devices on a flat surface about 25 cm (10”)
apart, and with the IR ports facing each other.
2 On the System #1 Unit:
The jumpers must be configured as in Figure D-3.
3 On the System #1 Unit:
Apply power to the unit via the 9V power supply.
4 On the System #1 Unit:
Connect the PC serial port cable that is connected to
COM1.
5 On the System #2 Unit:
Insert the MCP212X Developer’s Daughter Board into
the PICDEM™ HPC Explorer Demo Board.
Ensure that the jumpers are configured as in
Figure D-2.
6 On the System #2 Unit:
Apply power to the unit via the 9V power supply.
7 On the System #1 Unit:
Depress and release Switch 2 (S2 – M
8 On the System #2 Unit:
Depress and release Switch 2 (S2 – M
9 On the PC:
Open the HyperTerminal
COM 1.
Ensure that the window indicates that the
HyperTerminal program is connected
10 On the PC:
In the HyperTerminal program window, type an “a”.
11 On the PC:
Type some additional alpha characters into the
HyperTerminal program window.
12 On the System #2 Unit:
Power down the board and remove the tested
MCP212X Developer’s Daughter Board.
13 Go to Step #5 —
®
program window for
CLR).
CLR).
—
—
On the System #1 Unit:
The green power LED (D) will turn on.
—
Test unit will echo the received Alpha character
(changing the case; uppercase to lowercase and
lowercase to uppercase)
On the System #2 Unit:
The green power LED (D) will turn on.
—
—
—
On the PC:
The HyperTerminal window will display an “aA”.
On the PC:
The typed alpha character will echo where the case
has changed; lowercase -> uppercase and
uppercase -> lowercase.
—
DS51571B-page 36 © 2006 Microchip Technology Inc.
Page 41

MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
Appendix E. Using the MCP212X Developer’s Daughter
Board with the PICDEM™ FS USB Demo Board
E.1 DEMONSTRATION WITH THE PICDEM FS USB DEMO BOARD
To perform a demonstration of the MCP212X, two systems are needed. One system
will operate as an encoder/decoder passing information to the PC. This system may be
either the:
• MCP212X Developer’s Daughter Board (MCP212XEV-DB) plus the PICDEM™
HPC Explorer Demo Board (DM183022) or
• MCP2120 Developer’s Board (DM163008)
The second system is a MCP212X Developer’s Daughter Board (MCP212XEV-DB)
plus the PICDEM™ FS USB Demo Board (DM163025). This system operates in a
stand-alone mode and will “echo” the characters it receives (changing the case of the
received alpha character). Figure E-1 shows a block diagram of the demonstration
system.
FIGURE E-1: SYSTEM BLOCK DIAGRAM
HyperTerminal
Program Window A
(Com 1)
®
Com 1
System #1
PICDEM™ HPC Explorer
Demo Board +
MCP212X Developer’s
Daughter Boards
The firmware for these demos is available on the Microchip web site, as well as on the
AIPD Evaluation Board CD-ROM. The file name is 00063 - FS USB.asm. This code
must be programmed into the PICDEM™ FS USB Demo Board’s PIC18F4550 for
demo operation. This code requires the JP4 jumper to be in the documented state.
Note: Other PICDEM™ Demo Boards may be used, but appropriate firmware
needs to be installed to demonstrate the system.
System #2
PICDEM™ FS USB
Demo Board +
MCP212X Developer’s
Daughter Boards
© 2006 Microchip Technology Inc. DS51571B-page 37
Page 42
MCP212X Developer’s Daughter Board User’s Guide
The crystal frequency of the PICDEM™ Demo Board determines the error rates for the
EUSART baud rates, as well as the 16XCLK generation (for the MCP2122). So, for the
PICDEM™ FS USB Demo Board, the default crystal is 20 MHz. The 16XCLK
frequency for 115200 and 57600 baud has an error outside usable limits for IrDA
standard communication for 20 MHz operation (see Table E-1). Therefore, the demo
will be limited to 9600 baud. Table E-2 shows the SPBRG values for the EUSART at
the same crystal frequencies.
®
TABLE E-1: PR VALUES FOR PWM
Desired
Baud Rate
9600 153,600 64 -0.16% 32 1.36% 23 0% 15 -1.73%
19200 307,200 32 1.36% 15 -1.73% 11 0% 7 -1.73%
38400 614,400 15 -1.73% 7 -1.73% 5 0% 3 -1.73%
57600 921,600 10 1.36% 4
115200 1,843,200 4 -8.51% 2 -35.6% 1 0% 1 32.18%
Note 1: Shaded values indicate a % error that is larger then should be used.
2: The following shows the PICDEM™ Demo Board device frequencies:
3: CCP duty cycle should be approximately 50% of the PR value.
16XCLK
PICDEM™ HPC Explorer Demo Board has a 10 MHz crystal installed (4xPLL -> 40 MHz),
PICDEM™ FS USB Demo Board has a 20 MHz crystal installed,
PICDEM™ 2 Plus Demo Board has a 4 MHz crystal installed,
PICDEM™ LCD has a socket for an external canned oscillator (also has an internal 8 MHz RC).
@ 40 MHz
(3)
PR
TABLE E-2: SPBRG VALUES FOR EUSART
Desired
Baud Rate
9600 225 -1.73% 129 -0.16% 95 0% 64 -0.16%
19200 129 -0.16% 64 -0.16% 47 0% 32 1.36%
38400 64 -0.16% 32 1.36% 23 0% 15 -1.73%
57600 42 -0.94% 21 1.36% 15 0% 10 1.36%
115200 21 1.36% 10 1.36% 7 0% 4
Note 1: Shaded values indicate a % error that is larger then should be used.
2: The following shows the PICDEM™ Demo Board device frequencies:
PICDEM™ HPC Explorer Demo Board has a 10 MHz crystal installed (4xPLL -> 40 MHz),
PICDEM™ FS USB Demo Board has a 20 MHz crystal installed,
PICDEM™ 2 Plus Demo Board has a 4 MHz crystal installed,
PICDEM™ LCD has a socket for an external canned oscillator (also has an internal 8 MHz RC).
3: SYNC = 0, BRGH = 1, BRG16 = 0.
@ 40 MHz
SPBRG
(3)
(2)
%Error SPBRG
(1)
(2)
%Error PR
(1)
@ 20 MHz
(3)
@ 20 MHz
(3)
(2)
%Error PR
-8.51% 3 0% 2 9.58%
(2)
%Error SPBRG
@ 14.759 MHz
(3)
@ 14.759 MHz
(3)
%Error SPBRG
(2)
%Error PR
(2)
@ 10 MHz
@ 10 MHz
(3)
%Error
(3)
%Error
-8.51%
(2)
(2)
DS51571B-page 38 © 2006 Microchip Technology Inc.
Page 43

Using the MCP212X Developer’s Daughter Board
with the PICDEM™ FS USB Demo Board
E.1.1 Demo #1 Operation
In Demo #1, the System 2 unit will echo any alpha character received, changing the
case of the character (lowercase to uppercase/uppercase to lowercase). The System
1 unit is connected to the PC, while the System 2 unit is not connected, though it still
needs to be powered. The PICDEM™ FS USB Demo Board is used to determine the
communication baud rate (9600) via the JP3, JP2 and JP1 jumper states. Given this
state, the PICmicro
Power is supplied over the J3 interface header. Jumper JP4 is used to select which
demo program to run. Figure E-2 shows the jumper configuration for Demo #1.
Table E-3 shows the steps for Demo #1.
FIGURE E-2: DEMO #1 CONFIGURATION
®
MCU can then supply the 16XCLK frequency to the MCP2122.
TABLE E-3: DEMO #1 TEST STEPS
Step Action Result
1 Place both devices on a flat surface about 25 cm (10”)
apart, with the IR ports facing each other.
—
© 2006 Microchip Technology Inc. DS51571B-page 39
Page 44

MCP212X Developer’s Daughter Board User’s Guide
TABLE E-3: DEMO #1 TEST STEPS
Step Action Result
2 On the System #1 Unit:
The jumpers must be configured as in Figure E-2.
3 On the System #1 Unit:
Apply power to the unit via the 9V power supply.
4 On the System #1 Unit:
Connect the PC serial port cable that is connected to
COM1.
5 On the System #2:
Insert the MCP212X Developer’s Daughter Board into
the PICDEM™ HPC Explorer Demo Board.
Ensure that the jumpers are configured as shown in
Figure E-2.
6 On the System #2:
Apply power to the unit via the 9V power supply.
7 On the System #1 Unit:
Depress and release Switch 2 (S2 – M
8 On the System #2:
Depress and release Switch 2 (S2 – M
9 On the PC:
Open the HyperTerminal
COM 1.
Ensure that the window indicates that the
HyperTerminal program is connected.
10 On the PC:
In the HyperTerminal program window, type an “a”.
11 On the PC:
Type some additional alpha characters in the
HyperTerminal program window.
12 On the System #2:
Power down the board and remove the tested
MCP212X Developer’s Daughter Board.
13 Go to Step #5 —
®
program window for
CLR).
CLR).
—
On the System #1 Unit:
The green power LED (D) will turn on.
—
System #2 will echo the received alpha character
(changing the case; uppercase to lowercase and
lowercase to uppercase).
On the System #2:
The green power LED (D) will turn on.
—
—
—
On the PC:
The HyperTerminal program window will display
an “aA”.
On the PC:
The typed alpha character will echo where the case
has changed; lowercase -> uppercase and
uppercase -> lowercase.
—
DS51571B-page 40 © 2006 Microchip Technology Inc.
Page 45
MCP212X DEVELOPER’S
DAUGHTER BOARD USER’S GUIDE
Appendix F. Configuring the HyperTerminal® Program
F.1 CONFIGURING THE HyperTerminal® PROGRAM
To ensure that the PC is able to communicate to the PICDEM™ HPC Explorer Demo
Board, the HyperTerminal program must be properly configured. This section describes
the configuration that the HyperTerminal program should be in.
The screen-shots shown in Figure F-1 through Figure F-6 show the settings of the
HyperTerminal program in the Windows
You should save each configuration of the HyperTerminal program in order to easily
distinguish which HyperTerminal program window is “tacking” with which PICDEM™
HPC Explorer Board.
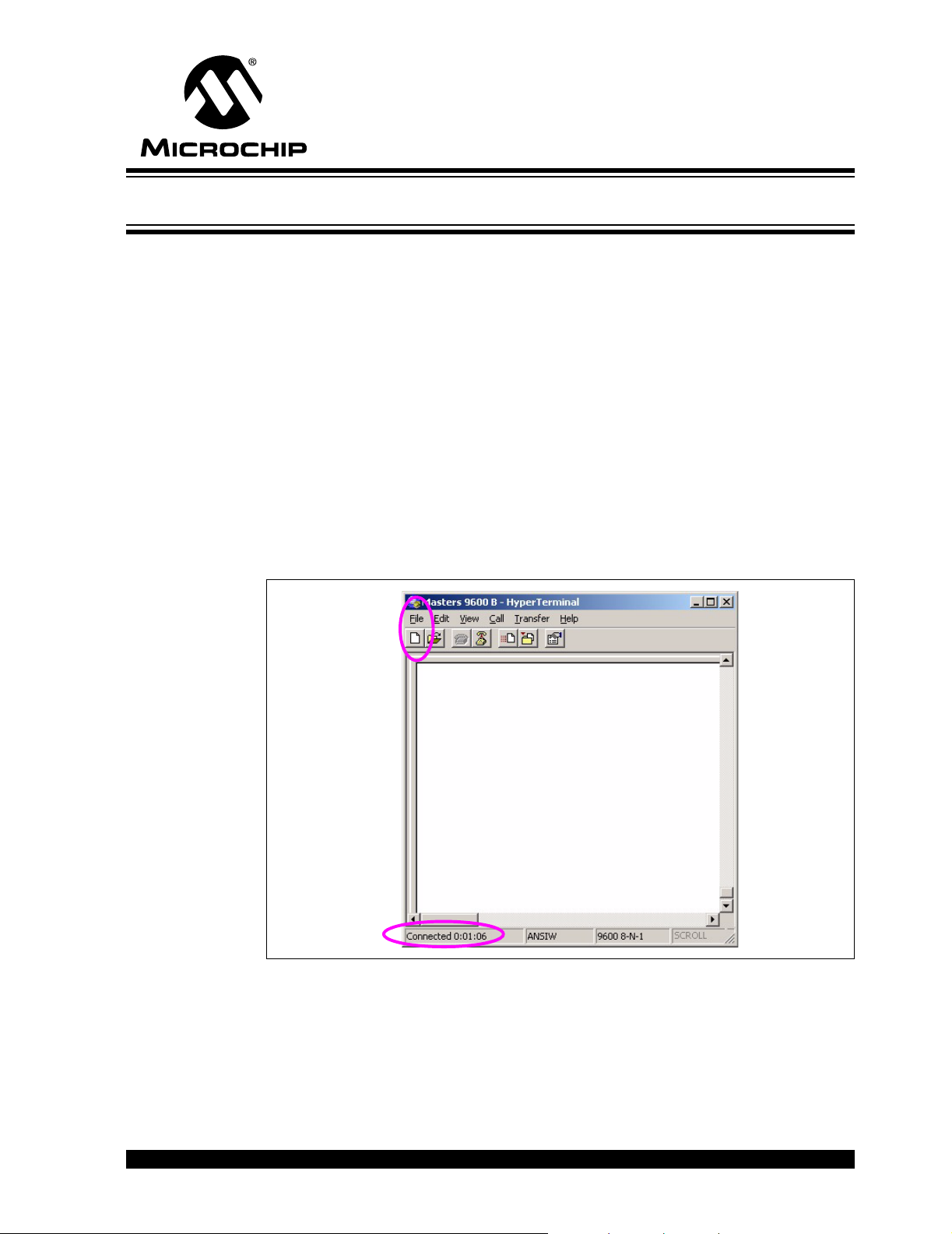
After opening the HyperTerminal program window, select Call -> Disconnect. In the
lower-left corner, the HyperTerminal program window will indicate “Disconnected”.
Next, in the HyperTerminal program window, select File -> Properties. The window in
Figure F-2 is shown. Ensure that the appropriate COM port is selected for both the
“Golden” unit and the “Testing” unit. Then select the Configure button.
®
operating system.
FIGURE F-1: HyperTerminal
®
PROGRAM MAIN WINDOW
© 2006 Microchip Technology Inc. DS51571B-page 41
Page 46
MCP212X Developer’s Daughter Board User’s Guide
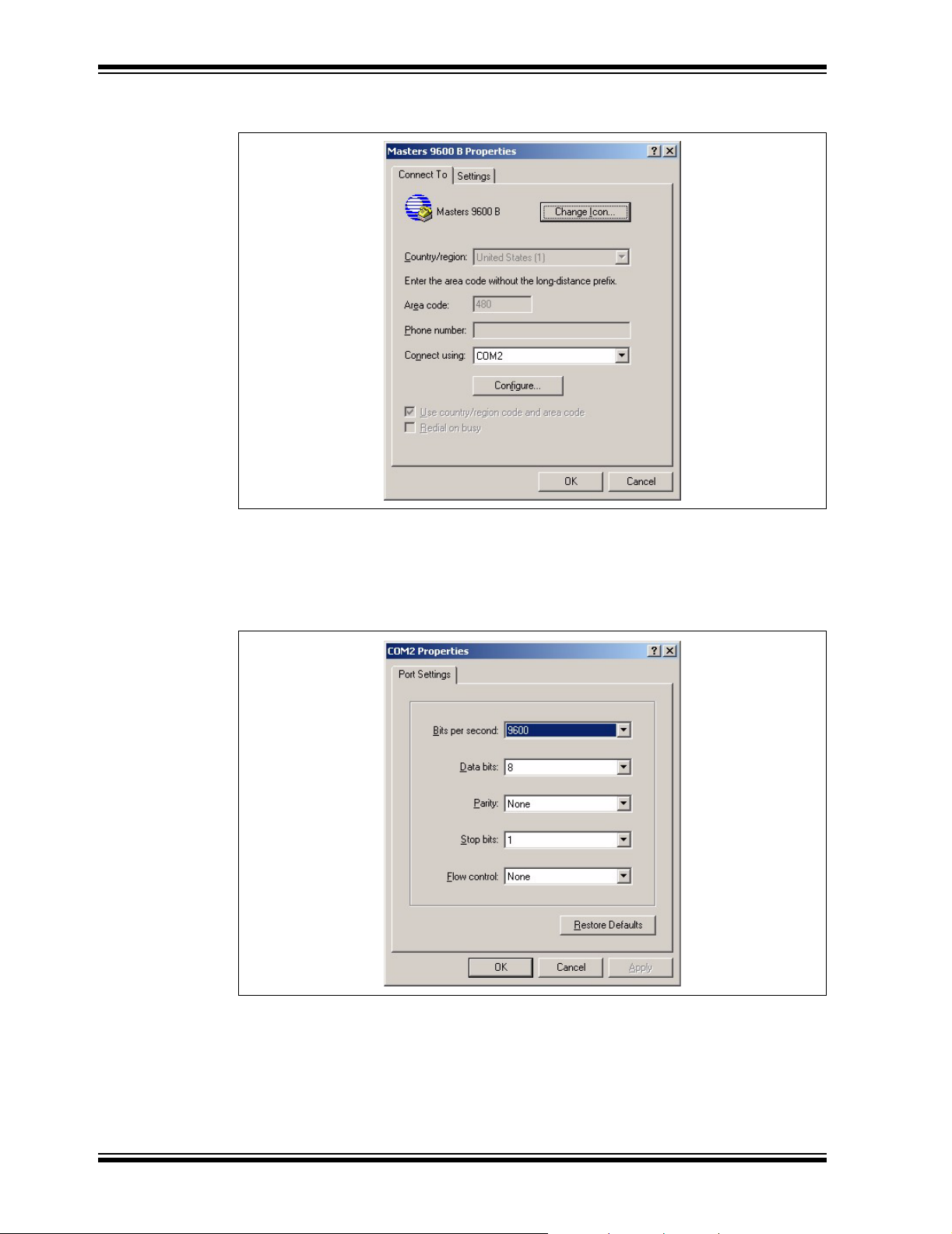
FIGURE F-2: HyperTerminal® PROGRAM PROPERTIES
CONNECT TO WINDOW
This will open up the Port Settings window. The port settings should be configured as
shown in Figure F-3. After configuring the port settings, select OK. The Figure F-2
window will be shown. Select the Settings tab.
FIGURE F-3: HyperTerminal
CONFIGURATION WINDOW
®
PROGRAM PROPERTIES
DS51571B-page 42 © 2006 Microchip Technology Inc.
Page 47
Configuring the HyperTerminal® Program
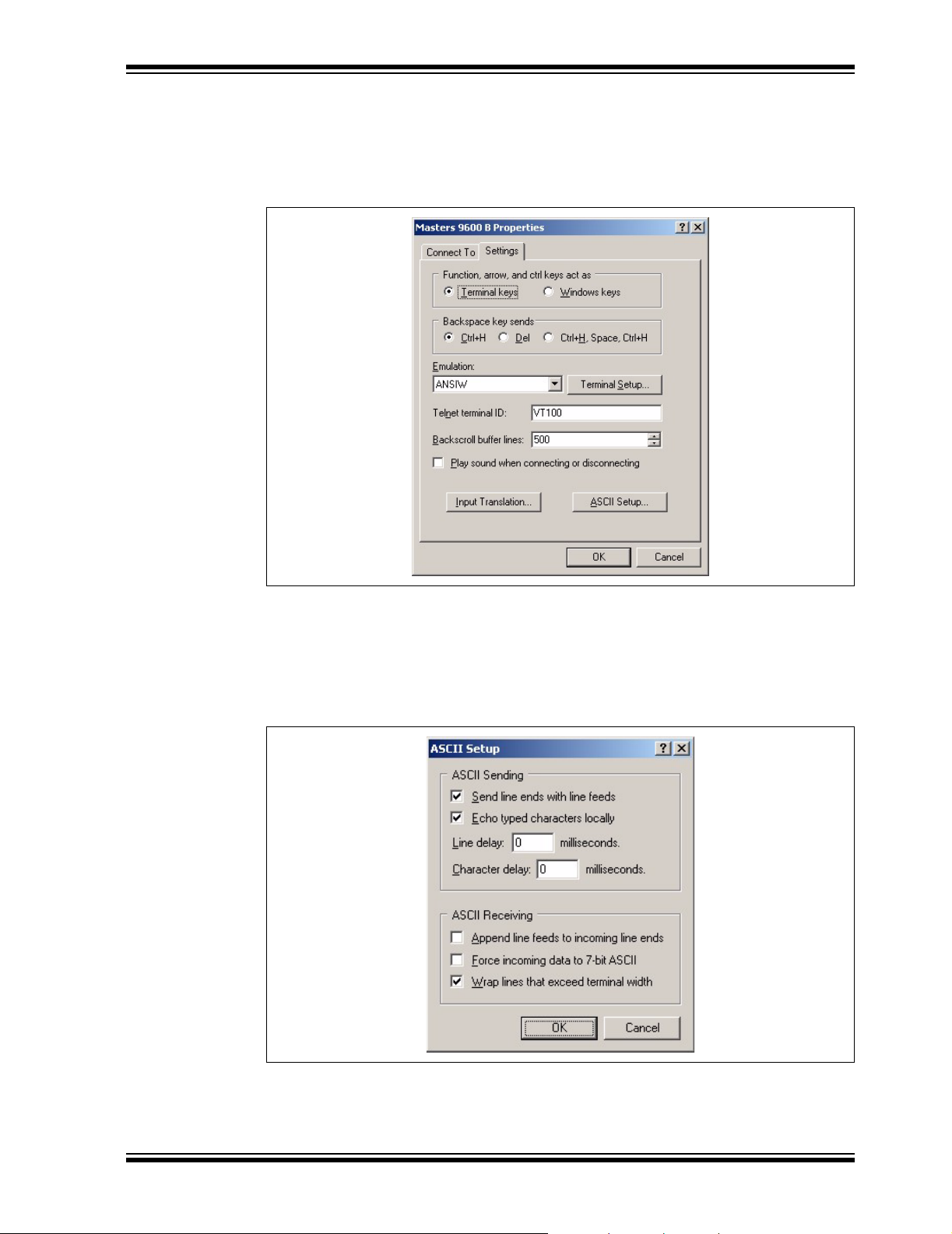
The window will now look as shown in Figure F-4. Ensure that your settings match the
settings shown. Select the ASCII Setup button. This will open the ASCII Setup window
(Figure F-5).
FIGURE F-4: HyperTerminal
SETTINGS WINDOW
Ensure that your settings match the settings shown. Select the OK button. The window
in Figure F-4 will again be shown. Select the Input Translation button. This will open
the Translation Button window (Figure F-6). Click OK and close each window. After
these “property” windows are closed, you may wish to save each configuration with a
name that you can remember (one for COM1 and the other for COM2).
®
PROGRAM PROPERTIES
FIGURE F-5: HyperTerminal
®
PROGRAM ASCII SETUP WINDOW
© 2006 Microchip Technology Inc. DS51571B-page 43
Page 48

MCP212X Developer’s Daughter Board User’s Guide
FIGURE F-6: HyperTerminal® PROGRAM INPUT TRANSLATION WINDOW
DS51571B-page 44 © 2006 Microchip Technology Inc.
Page 49

NOTES:
Configuring the HyperTerminal® Program
© 2006 Microchip Technology Inc. DS51571B-page 45
Page 50

WORLDWIDE SALES AND SERVICE
AMERICAS
Corporate Office
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 480-792-7200
Fax: 480-792-7277
Technical Support:
http://support.microchip.com
Web Address:
www.microchip.com
Atlanta
Alpharetta, GA
Tel: 770-640-0034
Fax: 770-640-0307
Boston
Westborough, MA
Tel: 774-760-0087
Fax: 774-760-0088
Chicago
Itasca, IL
Tel: 630-285-0071
Fax: 630-285-0075
Dallas
Addison, TX
Tel: 972-818-7423
Fax: 972-818-2924
Detroit
Farmington Hills, MI
Tel: 248-538-2250
Fax: 248-538-2260
Kokomo
Kokomo, IN
Tel: 765-864-8360
Fax: 765-864-8387
Los Angeles
Mission Viejo, CA
Tel: 949-462-9523
Fax: 949-462-9608
Santa Clara
Santa Clara, CA
Tel: 408-961-6444
Fax: 408-961-6445
Toronto
Mississauga, Ontario,
Canada
Tel: 905-673-0699
Fax: 905-673-6509
ASIA/PACIFIC
Asia Pacific Office
Suites 3707-14, 37th Floor
Tower 6, The Gateway
Habour City, Kowloon
Hong Kong
Tel: 852-2401-1200
Fax: 852-2401-3431
Australia - Sydney
Tel: 61-2-9868-6733
Fax: 61-2-9868-6755
China - Beijing
Tel: 86-10-8528-2100
Fax: 86-10-8528-2104
China - Chengdu
Tel: 86-28-8676-6200
Fax: 86-28-8676-6599
China - Fuzhou
Tel: 86-591-8750-3506
Fax: 86-591-8750-3521
China - Hong Kong SAR
Tel: 852-2401-1200
Fax: 852-2401-3431
China - Qingdao
Tel: 86-532-8502-7355
Fax: 86-532-8502-7205
China - Shanghai
Tel: 86-21-5407-5533
Fax: 86-21-5407-5066
China - Shenyang
Tel: 86-24-2334-2829
Fax: 86-24-2334-2393
China - Shenzhen
Tel: 86-755-8203-2660
Fax: 86-755-8203-1760
China - Shunde
Tel: 86-757-2839-5507
Fax: 86-757-2839-5571
China - Wuhan
Tel: 86-27-5980-5300
Fax: 86-27-5980-5118
China - Xian
Tel: 86-29-8833-7250
Fax: 86-29-8833-7256
ASIA/PACIFIC
India - Bangalore
Tel: 91-80-4182-8400
Fax: 91-80-4182-8422
India - New Delhi
Tel: 91-11-4160-8631
Fax: 91-11-4160-8632
India - Pune
Tel: 91-20-2566-1512
Fax: 91-20-2566-1513
Japan - Yokohama
Tel: 81-45-471- 6166
Fax: 81-45-471-6122
Korea - Gumi
Tel: 82-54-473-4301
Fax: 82-54-473-4302
Korea - Seoul
Tel: 82-2-554-7200
Fax: 82-2-558-5932 or
82-2-558-5934
Malaysia - Penang
Tel: 60-4-646-8870
Fax: 60-4-646-5086
Philippines - Manila
Tel: 63-2-634-9065
Fax: 63-2-634-9069
Singapore
Tel: 65-6334-8870
Fax: 65-6334-8850
Taiwan - Hsin Chu
Tel: 886-3-572-9526
Fax: 886-3-572-6459
Taiwan - Kaohsiung
Tel: 886-7-536-4818
Fax: 886-7-536-4803
Taiwan - Taipei
Tel: 886-2-2500-6610
Fax: 886-2-2508-0102
Thailand - Bangkok
Tel: 66-2-694-1351
Fax: 66-2-694-1350
EUROPE
Austria - Wels
Tel: 43-7242-2244-3910
Fax: 43-7242-2244-393
Denmark - Copenhagen
Tel: 45-4450-2828
Fax: 45-4485-2829
France - Paris
Tel: 33-1-69-53-63-20
Fax: 33-1-69-30-90-79
Germany - Munich
Tel: 49-89-627-144-0
Fax: 49-89-627-144-44
Italy - Milan
Tel: 39-0331-742611
Fax: 39-0331-466781
Netherlands - Drunen
Tel: 31-416-690399
Fax: 31-416-690340
Spain - Madrid
Tel: 34-91-708-08-90
Fax: 34-91-708-08-91
UK - Wokingham
Tel: 44-118-921-5869
Fax: 44-118-921-5820
07/21/06
DS51571B-page 46 © 2006 Microchip Technology Inc.
Page 51

Mouser Electronics
Authorized Distributor
Click to View Pricing, Inventory, Delivery & Lifecycle Information:
Microchip:
MCP212XEV-DB
 Loading...
Loading...