

Page 1
Miniature Atomic Clock (MAC)
SA5X
User’s Guide
2019 Microchip Technology Inc. DS50002938A
Page 2
Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the
intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our
knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data
Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not
mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection features of our
products. Attempts to break Microchip’s code protection feature may be a violation of the Digital Millennium Copyright Act. If such acts
allow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Information contained in this publication regarding device
applications and the like is provided only for your convenience
and may be superseded by updates. It is your responsibility to
ensure that your application meets with your specifications.
MICROCHIP MAKES NO REPRESENTATIONS OR
WARRANTIES OF ANY KIND WHETHER EXPRESS OR
IMPLIED, WRITTEN OR ORAL, STATUTORY OR
OTHERWISE, RELATED TO THE INFORMATION,
INCLUDING BUT NOT LIMITED TO ITS CONDITION,
QUALITY, PERFORMANCE, MERCHANTABILITY OR
FITNESS FOR PURPOSE. Microchip disclaims all liability
arising from this information and its use. Use of Microchip
devices in life support and/or safety applications is entirely at
the buyer’s risk, and the buyer agrees to defend, indemnify and
hold harmless Microchip from any and all damages, claims,
suits, or expenses resulting from such use. No licenses are
conveyed, implicitly or otherwise, under any Microchip
intellectual property rights unless otherwise stated.
Trademarks
The Microchip name and logo, the Microchip logo, Adaptec,
AnyRate, AVR, AVR logo, AVR Freaks, BesTime, BitCloud, chipKIT,
chipKIT logo, CryptoMemory, CryptoRF, dsPIC, FlashFlex,
flexPWR, HELDO, IGLOO, JukeBlox, KeeLoq, Kleer, LANCheck,
LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi,
Microsemi logo, MOST, MOST logo, MPLAB, OptoLyzer,
PackeTime, PIC, picoPower, PICSTART, PIC32 logo, PolarFire,
Prochip Designer, QTouch, SAM-BA, SenGenuity, SpyNIC, SST,
SST Logo, SuperFlash, Symmetricom, SyncServer, Tachyon,
TempTrackr, TimeSource, tinyAVR, UNI/O, Vectron, and XMEGA
are registered trademarks of Microchip Technology Incorporated in
the U.S.A. and other countries.
APT, ClockWorks, The Embedded Control Solutions Company,
EtherSynch, FlashTec, Hyper Speed Control, HyperLight Load,
IntelliMOS, Libero, motorBench, mTouch, Powermite 3, Precision
Edge, ProASIC, ProASIC Plus, ProASIC Plus logo, Quiet-Wire,
SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub,
TimePictra, TimeProvider, Vite, WinPath, and ZL are registered
trademarks of Microchip Technology Incorporated in the U.S.A.
Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any
Capacitor, AnyIn, AnyOut, BlueSky, BodyCom, CodeGuard,
CryptoAuthentication, CryptoAutomotive, CryptoCompanion,
CryptoController, dsPICDEM, dsPICDEM.net, Dynamic Average
Matching, DAM, ECAN, EtherGREEN, In-Circuit Serial
Programming, ICSP, INICnet, Inter-Chip Connectivity, JitterBlocker,
KleerNet, KleerNet logo, memBrain, Mindi, MiWi, MPASM, MPF,
MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach,
Omniscient Code Generation, PICDEM, PICDEM.net, PICkit,
PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple
Blocker, SAM-ICE, Serial Quad I/O, SMART-I.S., SQI,
SuperSwitcher, SuperSwitcher II, Total Endurance, TSHARC,
USBCheck, VariSense, ViewSpan, WiperLock, Wireless DNA, and
ZENA are trademarks of Microchip Technology Incorporated in the
U.S.A. and other countries.
SQTP is a service mark of Microchip Technology Incorporated in
the U.S.A.
The Adaptec logo, Frequency on Demand, Silicon Storage
Technology, and Symmcom are registered trademarks of Microchip
Technology Inc. in other countries.
GestIC is a registered trademark of Microchip Technology Germany
II GmbH & Co. KG, a subsidiary of Microchip Technology Inc., in
other countries.
All other trademarks mentioned herein are property of their
respective companies.
© 2019, Microchip Technology Incorporated, All Rights Reserved.
For information regarding Microchip’s Quality Management Systems,
please visit www.microchip.com/quality.
ISBN: 978-1-5224-5327-7
DS50002938A-page 2 2019 Microchip Technology Inc.
Page 3
MAC-SA5X USER’S GUIDE
Preface
NOTICE TO CUSTOMERS
All documentation becomes dated, and this manual is no exception. Microchip tools and
documentation are constantly evolving to meet customer needs, so some actual dialogs
and/or tool descriptions may differ from those in this document. Please refer to our website
(www.microchip.com) to obtain the latest documentation available.
Documents are identified with a “DS” number. This number is located on the bottom of each
page, in front of the page number. The numbering convention for the DS number is
“DSXXXXXXXXA”, where “XXXXXXXX” is the document number and “A” is the revision level
of the document.
For the most up-to-date information on development tools, see the MPLAB® IDE online help.
Select the Help menu, and then Topics, to open a list of available online help files.
PURPOSE OF THIS GUIDE
The MAC-SA5X User's Guide provides basic recommendations for designing products
to use Microchip's Miniature Atomic Clock (MAC) SA5X. The guidelines in the document are generic because specific product requirements vary between applications.
This material consists of a brief description of SA5X design supported by block diagrams, description of environmental issues, installation guidelines, and unit operation.
WHO SHOULD READ THIS GUIDE
This document is intended for engineers and telecommunications professionals who
are designing, installing, operating, or maintaining time, frequency, and synchronization systems that require a low profile and highly precise frequency generator.
To use this document effectively, you must have a good understanding of digital telecommunications technologies, analog frequency generation, and synthesis techniques.
DOCUMENT LAYOUT
This guide contains the following sections and appendixes:
• Chapter 1. “Product Overview”: Provides an overview of the product, describes
the major hardware and software features, and lists the system specifications.
• Chapter 2. “Installation”: Contains procedures for unpacking and installing the
system, and for powering up the unit.
• Chapter 3. “Operation”: Describes procedures for frequency adjustment and
toggling on/off various features.
• Chapter 4. “Command Line Interface”: Describes the CLI command conven-
tions, functions, and features.
• Chapter 5. “Maintenance and Troubleshooting”: Contains maintenance and
troubleshooting procedures for the product. Also contains procedures for returning the MAC.
• Appendix A. “Principle of Operation”: Briefly explains Atomic Interrogation and
2019 Microchip Technology Inc. DS50002938A-page 3
Page 4
MAC-SA5X User’s Guide
Coherent Population Trapping
• Appendix B. “Legacy Command Set (SA.3Xm)”: Describes the Legacy CLI
command conventions, functions, and features. For backwards compatibility.
• Appendix C. “Reference Designs”: Provides generic sample schematics for
converting MAC input/output signals.
• Appendix D. “Evaluation Kit”: Describes the evaluation kit for use with the
MAC.
• Appendix E. “Software License Agreements”: Describes the open source soft-
ware that portions of the SA5X software makes use of.
CONVENTIONS USED IN THIS GUIDE
This manual uses the following documentation conventions:
• Acronyms and Abbreviations: Terms are spelled out the first time they appear in
Thereafter, only the acronym or abbreviation is used. This guide uses “SA5X”
text.
and “MAC” interchangeably. SA5X is the latest generation of Miniature Atomic
Clock (MAC).
• Unless explicitly labeled with Hz, MHz, etc, all references to “frequency offset”
throughout this document imply the industry-standard fractional frequency ∆f/f,
where “∆f” is the dif
is the nominal frequency (in Hz).
ference between nominal and measured value (in Hz), and “f”
WARNINGS, CAUTIONS, RECOMMENDATIONS, AND NOTES
Warnings, Cautions, Recommendations, and Notes attract attention to essential or critical information in this guide. The types of information included in each are displayed
in a style consistent with the examples below.
WARNING
To avoid serious personal injury or death, do not disregard warnings. All warnings use
this style. Warnings are installation, operation, or maintenance procedures, practices,
or statements that, if not strictly observed, may result in serious personal injury or
even death.
CAUTION
To avoid personal injury, do not disregard cautions. All cautions use this style. Cautions are installation, operation, or maintenance procedures, practices, or statements
that, if not strictly observed, may result in damage to, or destruction of, the equipment.
Cautions are also used to indicate long-term health hazards.
Note: All notes use this style. Notes contain installation, operation, or mainte-
nance procedures, practices, conditions, or statements that alert you to
important information that may make your task easier or increase your
understanding.
DS50002938A-page 4 2019 Microchip Technology Inc.
Page 5

Preface
WHERE TO FIND ANSWERS TO PRODUCT AND DOCUMENT QUESTIONS
For additional information about the products described in this guide, please contact
your Microchip representative or your local sales office. You can also contact us on the
web at www.microsemi.com/ftdsupport.
When this manual is updated the latest version will be available for downloading from
Microchip’s web site. Manuals are provided in PDF format for ease of use. After downloading, you can view the manual on a computer or print it using Adobe Acrobat
Reader.
Manual updates are available at: www.microsemi.com/ftdsupport
RELATED DOCUMENTS AND INFORMATION
See your Microchip representative or sales office for a complete list of available documentation. To order any accessory, contact the Microchip Sales Department. See
www.microsemi.com/sales-contacts/0 for sales support contact information. If you
encounter any difficulties installing or using the product, contact Microchip Frequency
and Time Systems (FTS) Services and Support:
U.S.A. Call Center: including Americas, Asia and Pacific Rim
Frequency and Time Systems
3870 N 1st St.
San Jose, CA 95134
Toll-free in North America: 1-888-367-7966
Telephone: 408-428-7907
Fax: 408-428-7998
email: ftd.support@microsemi.com
Internet: www.microsemi.com/ftdsupport
Europe, Middle East, and Africa (EMEA)
Microchip FTS Services and Support EMEA
Altlaufstrasse 42
85635 Hoehenkirchen-Siegertsbrunn
Germany
Telephone: +49 700 3288 6435
Fax: +49 8102 8961 533
email: ftd.emeasupport@microsemi.com
email: ftd.emea_sales@microsemi.com
THE MICROCHIP WEBSITE
Microchip provides online support via our website at www.microchip.com. This website
is used as a means to make files and information easily available to customers.
Accessible by using your favorite Internet browser, the website contains the following
information:
• Product Support – Data sheets and errata, application notes and sample
programs, design resources, user’s guides and hardware support documents,
latest software releases and archived software
• General Technical Support – Frequently Asked Questions (FAQs), technical
support requests, online discussion groups, Microchip consultant program
member listing
2019 Microchip Technology Inc. DS50002938A-page 5
Page 6

MAC-SA5X User’s Guide
• Business of Microchip – Product selector and ordering guides, latest Microchip
press releases, listing of seminars and events, listings of Microchip sales offices,
distributors and factory representatives
CUSTOMER SUPPORT
Users of Microchip products can receive assistance through several channels:
• Distributor or Representative
• Local Sales Office
• Field Application Engineer (FAE)
• Technical Support
Customers should contact their distributor, representative or field application engineer
(FAE) for support. Local sales offices are also available to help customers. A listing of
sales offices and locations is included in the back of this document.
Technical support is available through the website at:
http://www.microchip.com/support.
DOCUMENT REVISION HISTORY
Revision A (November 2019)
• Initial release of this document as Microchip DS50002938A.
- Under Microsemi’s literature system, this document is number
900-44500-000, Rev. A.
DS50002938A-page 6 2019 Microchip Technology Inc.
Page 7
MAC-SA5X USER’S GUIDE
Table of Contents
Preface ........................................................................................................................... 3
Purpose of This Guide........................................................................................... 3
Who Should Read This Guide............................................................................... 3
Document Layout .................................................................................................. 3
Conventions Used in this Guide ............................................................................ 4
Warnings, Cautions, Recommendations, and Notes............................................. 4
Where to Find Answers to Product and Document Questions .............................. 5
Related Documents and Information..................................................................... 5
The Microchip Website.......................................................................................... 5
Customer Support ................................................................................................. 6
Document Revision History ................................................................................... 6
Chapter 1. Product Overview
1.1 MAC-SA5X Overview ...................................................................................... 9
1.1.1 Key Features .............................................................................................. 10
1.2 Physical Description ...................................................................................... 10
1.2.1 Communications Connections.................................................................... 11
1.2.2 Input Connections....................................................................................... 11
1.2.3 Output Connections.................................................................................... 11
1.2.4 Power and Ground Connections ................................................................12
1.3 Functional Description................................................................................... 12
1.4 Configuration Management ........................................................................... 13
1.5 Alarms ........................................................................................................... 13
Chapter 2. Installation
2.1 Handling Considerations .............................................................................. 15
2.2 Mounting Considerations .............................................................................. 15
2.21 Absolute Minimum and Maximum Ratings .................................................. 19
2.3 Start-Up Sequence ....................................................................................... 19
Chapter 3. Operation
3.1 Configure the Serial Port ............................................................................... 21
3.2 Analog Tuning ............................................................................................... 21
3.3 Digital Tuning ................................................................................................ 22
3.3.1 Calibration ..................................................................................................22
3.4 1PPS Disciplining .......................................................................................... 23
3.4.1 Theory ........................................................................................................23
3.4.2 Selection of Disciplining Time Constant, “Tau”........................................... 25
3.4.3 JamSync..................................................................................................... 26
3.4.4 1PPS Phase Measurement Mode .............................................................. 26
3.4.5 Cable Length Compensation...................................................................... 26
2019 Microchip Technology Inc. DS50002938A-page 7
Page 8

MAC-SA5X User’s Guide
3.4.6 PPS Quantization Error Correction .............................................................27
3.5 Device Information and Status ...................................................................... 27
3.6 Time of Day (TOD) ........................................................................................ 27
Chapter 4. Command Line Interface
4.1 Command Structure ...................................................................................... 30
4.1.1 Sequence Number ......................................................................................30
4.1.2 Arguments...................................................................................................30
4.1.3 Command Checksum .................................................................................31
4.2 Response Structure....................................................................................... 31
4.2.1 Error Response...........................................................................................31
4.2.2 Response Checksum..................................................................................32
4.3 Announcement Structure............................................................................... 33
4.4 Parameters.................................................................................................... 33
4.4.1 Parameter Index .........................................................................................33
4.4.2 Parameter Attributes ...................................................................................35
4.4.2.1 Parameter Units Attribute............................................................35
4.4.3 Alarms Parameter .......................................................................................36
4.5 Commands .................................................................................................... 37
4.5.1 Command Index..........................................................................................37
4.5.2 Command Usage ........................................................................................38
Chapter 5. Maintenance and Troubleshooting
5.1 Preventative Maintenance............................................................................. 43
5.2 Electrostatic Discharge (ESD) Considerations.............................................. 43
5.3 Troubleshooting............................................................................................. 43
5.4 Repairing the MAC ........................................................................................ 43
5.5 Upgrading the Firmware................................................................................ 43
5.6 Returning the MAC........................................................................................ 43
Appendix A. Principle of Operation ............................................................................45
Appendix B. Legacy Command Set (SA.3Xm)
B.1 Legacy Command Structure ......................................................................... 47
B.2 Legacy Command Index ............................................................................... 48
B.3 Legacy Command Usage ............................................................................. 48
Appendix C. Reference Designs .................................................................................51
Appendix D. Evaluation Kit
D.1 Overview and Key Features ......................................................................... 55
D.2 Physical Description ..................................................................................... 56
D.2.1 Communications Connections....................................................................57
D.2.2 Input Connections ......................................................................................58
D.2.3 Output Connections....................................................................................58
D.2.4 Power Connections ....................................................................................58
D.2.5 Functional Description and Operation ........................................................58
D.2.5.1 Troubleshooting..........................................................................59
Appendix E. Software License Agreements ..............................................................61
Worldwide Sales and Service .....................................................................................63
DS50002938A-page 8 2019 Microchip Technology Inc.
Page 9
Chapter 1. Product Overview
1.1 MAC-SA5X OVERVIEW
The MAC is a source of stable output frequency. Because it relies on the Atomic resonance of Rubidium Isotope 87 (87Rb) gas to generate the RF output, it is less susceptible to instabilities produced from the mechanical and thermal stresses inherent in
Quartz oscillators, enabling superior mid- to long-term accuracy. This stability makes it
suitable as a holdover reference in GPS denied environments. Frequency errors can
be corrected by applying a digital command or external correction voltage to the MAC.
(See Frequency steering and Section 3.2 “Analog Tuning”). Frequency drift (Aging
rate) can also be corrected by implementing the 1PPS disciplining feature of the MAC.
When combined with a GNSS receiver, this feature allows the system designer to combine the short-term stability of a Rb reference with the long-term stability of the GNSS,
approaching the performance of laboratory-grade Cesium Beam Tube frequency standards (see Section 3.4 “1PPS Disciplining”).
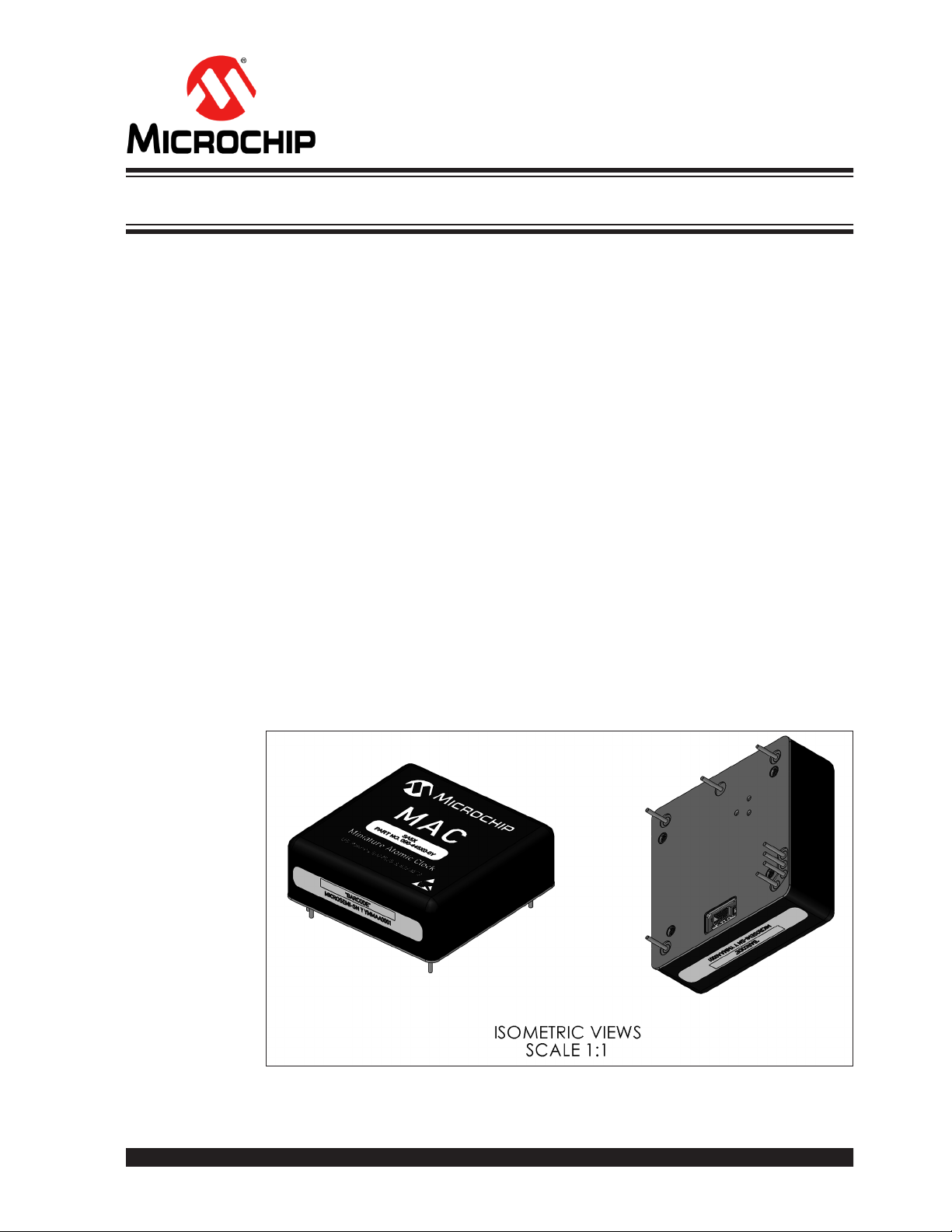
The Miniature Atomic Clock (MAC) SA5X is Microchip's seventh generation gas cell
atomic oscillator technology product. It was designed to accommodate a variety of timing applications as well as to replace several legacy Rubidium products (SA.22c, x72
and MAC-SA.3Xm). The footprint is compatible with the SA.3Xm, but with several
advancements in technology and features. Users of the previous generation (SA.3Xm)
can now expect improvements to frequency stability, warm-up time, input voltage
range, and operational temperature range. Additionally, 1PPS disciplining and USB
connections via a new embedded Molex™ connector allow greater design capabilities.
The 1PPS input allows users to quickly calibrate frequency and phase of the MAC to a
primary clock such as GPS, while the RF and 1PPS outputs provide highly stable holdover references.
MAC-SA5X USER’S GUIDE
FIGURE 1-1: The Miniature Atomic Clock (MAC) SA5X.
2019 Microchip Technology Inc. DS50002938A-page 9
Page 10
MAC-SA5X User’s Guide
The MAC reflects significant advances in physics miniaturization and atomic interrogation algorithms that serve to reduce size and power while providing a stable reference
frequency that is resistant to environmental perturbation. The SA5X comes in several
performance levels to meet a range of system requirements. The SA5X offers a low
height (18.3 mm/0.72 in), a small footprint (50.8 mm × 50.8 mm, or 2 in × 2 in), and an
industrial operating temperature range of –40°C to +75°C (measured at the baseplate).
It is refined for cost effective mass production and can be easily integrated into time,
frequency, and synchronization systems. The SA5X requires a single supply voltage
and can be mounted directly onto a circuit board as a component of a module used in
20 mm (0.8 in) wide card slots. The design produces a stable frequency with good
short and long term stability, and excellent phase noise performance.
This user guide provides engineering information for use of the SA5X. It also provides
supporting information for use of the Evaluation Kit (p/n 090-44500-000). Furthermore,
the design details of the Evaluation Kit can be used to assist with host system design
(for example, power conditioning, signal buffering, and so on). This user guide must be
used in conjunction with the current data sheet for the SA5X, which is available on the
Microchip web site.
1.1.1 Key Features
•10 MHz CMOS Output
• 1PPS Disciplining
• 1PPS LVDS Inputs and Output
• –40°C to +75°C Operating Temperature (Baseplate)
• –55°C to +100°C Storage Temperature
• USB 2.0-Compatible Communication Pins
• Wide Range Allowable DC Input (4.5 to 32V)
• Fast Warm-Up Time (<7 Minutes from –10°C to +75°C)
• <5x10
• <100 ns Time Error in 24 hrs (Calculated Based on 5x10
• Serial/USB Interface for Digital Steering, Configuration, and Diagnostics
-11
Monthly Aging Rate (On for 30 Days Prior)
Assuming Zero Initial Phase/Frequency Offset, Static Environment, On for 30
Days Prior to Holdover)
-11
/mo. Aging Rate,
1.2 PHYSICAL DESCRIPTION
Labels will contain information about the part number and the serial number. The serial
number indicates the initial time of manufacture in the following manner. The first two
digits of serial number indicate the year of manufacture (18 = 2018). Digits three and
four indicate the month of manufacture (01 = January).
The MAC consists of a 2 in x 2 in x 0.7 in PCB-mountable chassis, consisting of a
Nickel-plated Aluminum baseplate and black anodized Aluminum cover. All connections for the MAC are on the baseplate. Figure 1-2 shows the top cover on the left and
the bottom baseplate on the right.
See Figure 2-1 for a complete mechanical drawing.
DS50002938A-page 10 2019 Microchip Technology Inc.
Page 11
Product Overview
FIGURE 1-2: Top Cover and Bottom Baseplate.
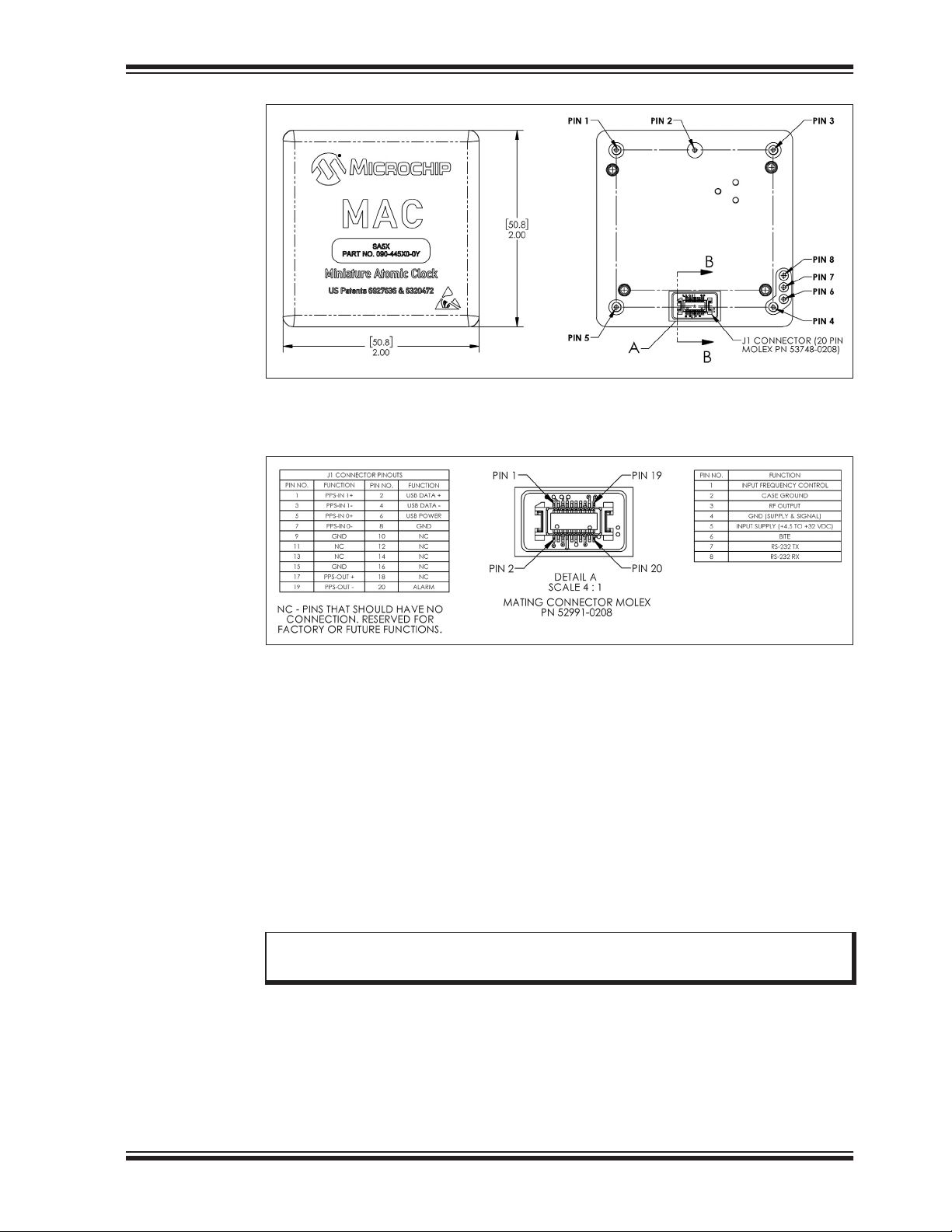
The baseplate consists of eight backwards-compatible gold-plated pins and recessed
20-lead Molex™ connector for new features (1PPS, USB, etc).
FIGURE 1-3: Pinout.
1.2.1 Communications Connections
The MAC is controlled either by the legacy serial port pins or with the high speed
USB-compatible pins on the Molex connector.
• Serial Console Port: The serial port connection is made through pins 7 and 8 on
the baseplate of the MAC. This port allows a user to connect to a terminal or computer using a terminal emulation software package. When connecting to this port,
use an appropriate converter chip such as the TRS3122E or similar to attain the
required LVCMOS levels. Figure 1-2 shows the serial port pins 7 and 8 in the
lower-right region of the baseplate. The default speed is 57600 bps and higher
speeds of 230400 bps and 921600 bps are available.
• USB Port: The USB port is capable of making high speed communication with the
MAC though the Molex (J1) connector pins J-2, 4, and 6.
Note: “Compatibility” commands are not supported when communicating via USB
port. See Appendix B. “Legacy Command Set (SA.3Xm)”.
1.2.2 Input Connections
• Analog Tuning: Analog Tuning is available on pin 1 for steering the MAC output
frequency by means of an externally supplied DC voltage. This method is for legacy applications that cannot steer the MAC digitally via the serial/USB interface.
• 1PPS Input (x2): Two selectable LVDS 1PPS inputs can be provided on pins
J1-5,7 (PPS0-IN) or J1-1,3 (PPS1-IN) for aligning the MAC’s frequency and timing
2019 Microchip Technology Inc. DS50002938A-page 11
Page 12

MAC-SA5X User’s Guide
output with an externally applied 1PPS reference signal. The PPS input is
selected via digital interface. Default input is PPS0-IN.
1.2.3 Output Connections
• 10 MHz RF Output: One CMOS output is available on pin 3.
• 1PPS Output:
J1-17, 19.
• Built-In Test Equipment (BITE): An active-low CMOS output on pin 6 signifies
that the MAC has achieved atomic lock.
• Alarm Output:
condition is present. The user can read the Alarm bits through the USB/Serial
interface to determine which alarm was triggered.
1.2.4 Power and Ground Connections
The MAC is not equipped with a power switch. DC power is applied on pin 5 with
ground pins located on pins 2 and 4. If the J1 connector is used, pins J1-8, J1-9, and
J1-15 should be grounded. Remaining pins should remain as “No Connect” (NC)
unless indicated otherwise in Figure 1-3. If J1 connector is unused, all pins should
remain as “No Connect”.
A single differential LVDS 1PPS output is available on pins
An active-low CMOS output on pin J1-20 indicates if an alarm
Recommendation: It is recommended to tie ground (Pin 4) to same node as the
baseplate ground Pin 2.
1.3 FUNCTIONAL DESCRIPTION
Communication Ports
These ports can be used to configure the MAC with Microchip’s C3 software commands using a terminal or a computer with terminal emulation software. The default
settings for the serial port are:
• Baud = 57.6K
• Data Bits = 8 bits
• Parity = None
• Stop bits = 1
• Flow Control = None
Commands allow the user to:
• Turn Analog tuning on or off
• Digitally adjust the output frequency
• Configure 1PPS Disciplining settings
• Query the MAC’s health/lock/alarm status
• Configure the Time of Day
Analog Tuning Input
Analog tuning is a means of steering the MAC's output frequency by applying a DC tuning voltage to Pin 1. This is useful for legacy applications where digital frequency steering is not possible.
1PPS Inputs
The MAC offers two selectable 1PPS inputs for use in steering the output RF (and
1PPS Output, simultaneously). PPS_Input_0 (pins J1-5,7) and PPS_Input_1 (pin
J1-1,3) are selectable with the PpsSource parameter. Their 1PPS Disciplining set-
DS50002938A-page 12 2019 Microchip Technology Inc.
Page 13
Product Overview
tings can be adjusted independently, however, the MAC can only discipline to one input
at a time. If a valid PPS signal on the selected input is present, then the parameter
PpsInDetected = 1. See Section 3.4 “1PPS Disciplining” for more details.
CAUTION
An LVDS square wave 1PPS is the allowable input.
10 MHz Output
The 10 MHz RF output appears on Pin 3 as soon as the MAC is switched ON and is
always present, regardless of the lock status. When the MAC is out of lock
(Locked = 0/Logic-High BITE pin), the output frequency is provided by the free-running
TCXO, which has frequency accuracy specification of ±2 ppm over its operating range.
The output format is 3.3V LVCMOS compatible.
Note: If a high-level (high-power) output driver is required, a driver circuit must be
implemented external to the MAC.
1PPS Output
An LVDS 1 pulse-per-second (1PPS) square wave output is available on pins J1-17,19
upon power-up. The 1PPS output is derived by digital division of the RF reference frequency and cannot be de-coupled. Therefore, the 1PPS and 10 MHz outputs are
always synchronized (within ±50 nanoseconds, regardless of Lock status).
PPS output timing relative to average PPS input timing is adjustable via the digital interface with 10 ns steps using PpsOffset parameter.
Default PPS Pulse Width is 20 μs. Pulse width may be modified via the PpsWidth
parameter.
BITE Output
The SA5X provides an active logic low indication through Pin 6, the BITE signal, when
the internal quartz oscillator is frequency-locked to the rubidium atomic resonance. As
long as the BITE signal is low, the user can be assured that the short-term stability
specifications are satisfied. The lock status is also available through the C3 Protocol
Locked parameter.
If the BITE signal is high (Locked = 0), then atomic Lock is not attained (or is lost) and
the SA5X is in its start-up sequence. During this sequence, signal output amplitude is
maintained but the stability performance is driven by the internal TCXO. Lock acquisition typically takes 5 minutes at room temperature.
Alarm Output
The Alarm Output provides an indication if an alarm is present (active logic low). It will
persist until cleared with the ackalm software command. A user can learn the exact
alarm condition from the value of the Alarms parameter (See Section 4.4.3 “Alarms
Parameter”).
1.4 CONFIGURATION MANAGEMENT
The Command Line Interface can be used to control specific functions of the MAC from
a terminal connected to the RS-232 serial port or the USB port.
Refer to Chapter 4. “Command Line Interface” for further details.
2019 Microchip Technology Inc. DS50002938A-page 13
Page 14

MAC-SA5X User’s Guide
1.5 ALARMS
The MAC uses alarms to notify the user when certain conditions are deteriorating
below specified levels or when issues arise, such as failure to acquire Lock or temperature warning. These alarms are indicated by CLI status and the alarm pin. For more
information, see Section 3.5 “Device Information and Status” and
Section 4.4.3 “Alarms Parameter”.
DS50002938A-page 14 2019 Microchip Technology Inc.
Page 15
Chapter 2. Installation
2.1 HANDLING CONSIDERATIONS
To avoid electrostatic discharge (ESD) damage, proper ESD handling procedures must
be observed in unpacking, assembling, and testing the MAC.
The MAC is delivered in ESD-safe packaging. The MAC must be removed from the
ESD-protective bag in an ESD-safe environment. Once installed on the test fixture, it
is recommended that the entire assembly be treated as ESD-sensitive.
Retain the original MAC ESD-safe packaging material in the event that the device
needs to be returned to Microchip for service.
2.2 MOUNTING CONSIDERATIONS
For initial testing and evaluation, it is recommended that the pins not be modified or soldered to a PCB. The recommended socket for PCB attachment is Mill-Max
0332-0-43-80-18-27-10-0. After evaluation, the pins can be hand-soldered to a PCB.
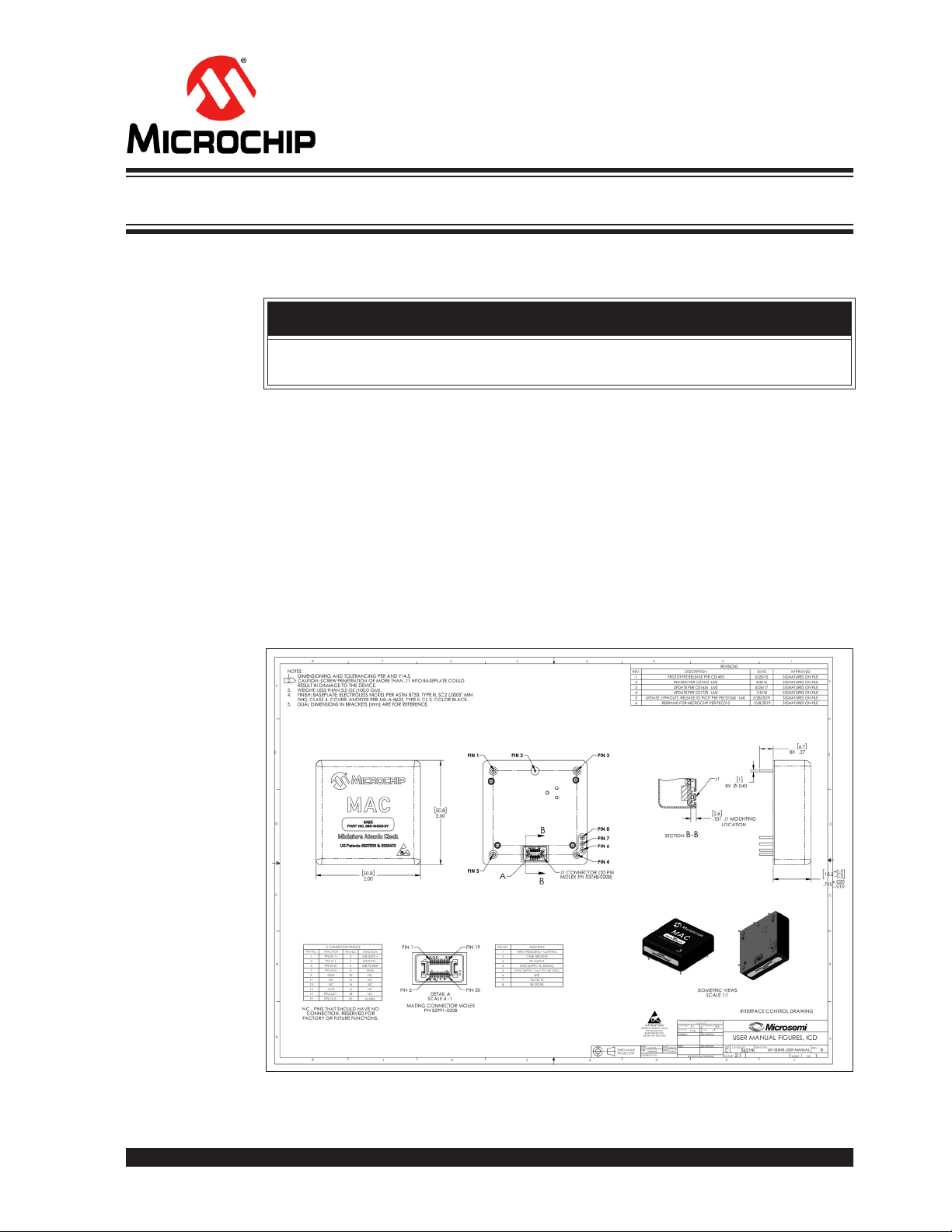
Below is the mechanical drawing (ICD). Contact Microchip for latest revision.
MAC-SA5X USER’S GUIDE
CAUTION
FIGURE 2-1: ICD 697-00498-000 for MAC.
2019 Microchip Technology Inc. DS50002938A-page 15
Page 16
MAC-SA5X User’s Guide
Solder
The MAC is a lead-free device. See the data sheet for RoHS compliance. Use SAC305
solder Sn96.5/Ag3.0/Cu0.5 or similar for hand-soldering to a PCB.
Heat Sink and Thermal Management
To allow the highest ambient operating temperature for the SA5X, it is recommended
that the bottom (baseplate) of the SA5X have good thermal contact with the mounting
surface (no air gap between baseplate and external PCB/heat sink etc). To ensure
good thermal contact, Microchip recommends that the SA5X is secured using (4) 2-56
screws. The location of the four screw holes is shown in Figure 2-1.
If the baseplate temperature rises above +75°C, the physics package heater shuts
down as control point temperatures are exceeded and the unit temperature coef
increase. The unit eventually loses lock above +75°C.
When practical, it is recommended to monitor the baseplate temperature with a thermocouple to ensure it remains below +75°C. Alternatively, one may query the telemetry
parameter Temperature to get a rough estimate of the external baseplate temperature. The Temperature parameter is measured internally on the PCB and is generally
~10°C to 15°C warmer than the actual baseplate temperature.
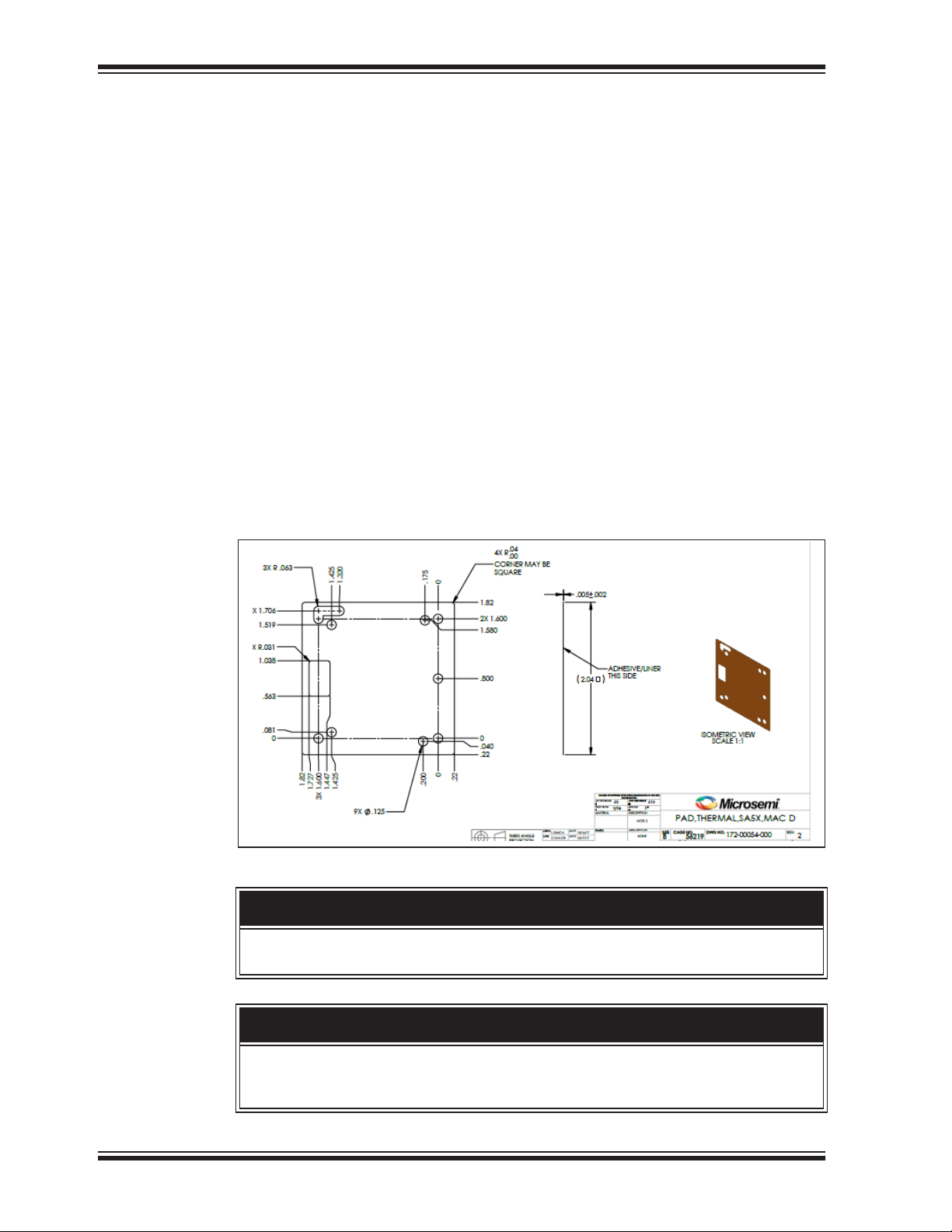
It is also important to maintain a uniform temperature into the baseplate of the SA5X
through its mounting points.
conductivity between a heat sink and the MAC's outer case. Figure 2-2 shows the
mechanical drawing for a thermal pad.
ficients
A thermal pad or thermal grease may improve thermal
FIGURE 2-2: ICD 172-00054-000 Thermal Pad.
CAUTION
To avoid damage to the SA5X, the mounting screws must not penetrate the unit by
more than 0.11 in. (2.79 mm).
WARNING
To avoid the possibility of a burn, mount the SA5X to a heat-dissipating surface. The
SA5X operates at a temperature that is hot to the touch and may cause handling distress.
DS50002938A-page 16 2019 Microchip Technology Inc.
Page 17
Installation
RF Noise Mitigation
If the system that the MAC is designed into is sensitive to RF or microwave frequencies
(especially 3.417 GHz and its harmonics), care must be taken to dampen those frequencies at locations that might be adversely affected. One way to do this is to determine the appropriate capacitor that has its "zero-ohm" characteristic at the frequency
of interest and use that capacitor to ef
might a problem. For example, it has been determined that at 3.417 GHz, the
"zero-ohm" capacitor value for an 0603-sized SMT component is 4.3 pF; for an
0402-sized capacitor, the value must be 6.8 pF; and for an 0201-sized capacitor, 8.2 pF
is ideal.
From this, it is recommended to place the appropriate-valued capacitor at the node of
interest. It is important that this cap be exactly on the node where the noise must be
squelched, and is grounded right at the cap as well. In addition, a good RF ground
plane is required, otherwise the improvement can be nullified.
The nulling capacitors are placed as close to the MAC I/O pins as possible. Because
the 3.417 GHz frequency is used within the MAC, the above mentioned nulling capacitors are recommended to be installed on pins 1,3,5-8.
EMI and Noise Considerations
When a user has an application where the phase noise and spur integrity are crucial,
the SA5X must be provided with a clean source of DC power (free of spurious current
or voltage noise). Connecting fans, heaters, and other switching devices to the DC supply powering the SA5X can result in degraded performance.
This noise is coupled through the power line to cause modulation spurs on the output
signal. Special care must be taken to avoid noise at 100 Hz and its harmonics (roughly
up to the tenth harmonic).
If power line filtering is added at the power input pin of the SA5X, this filtering cannot
have any resonance points greater than the specified impedance of less than 0.1Ω
from DC to 100 kHz in order to avoid the potential for noise peaking or oscillations in
the internal power regulators.
In addition, the input operating voltage range specified for the SA5X during turn-on
must continue to be met during operation of the unit. For example, using a 0.3Ω DC
source resistance for the input supply line may not be appropriate because the voltage
drop resulting from this resistance (caused by the turn-on current or quiescent operating current) could cause the input voltage to drop below the specified allowable value.
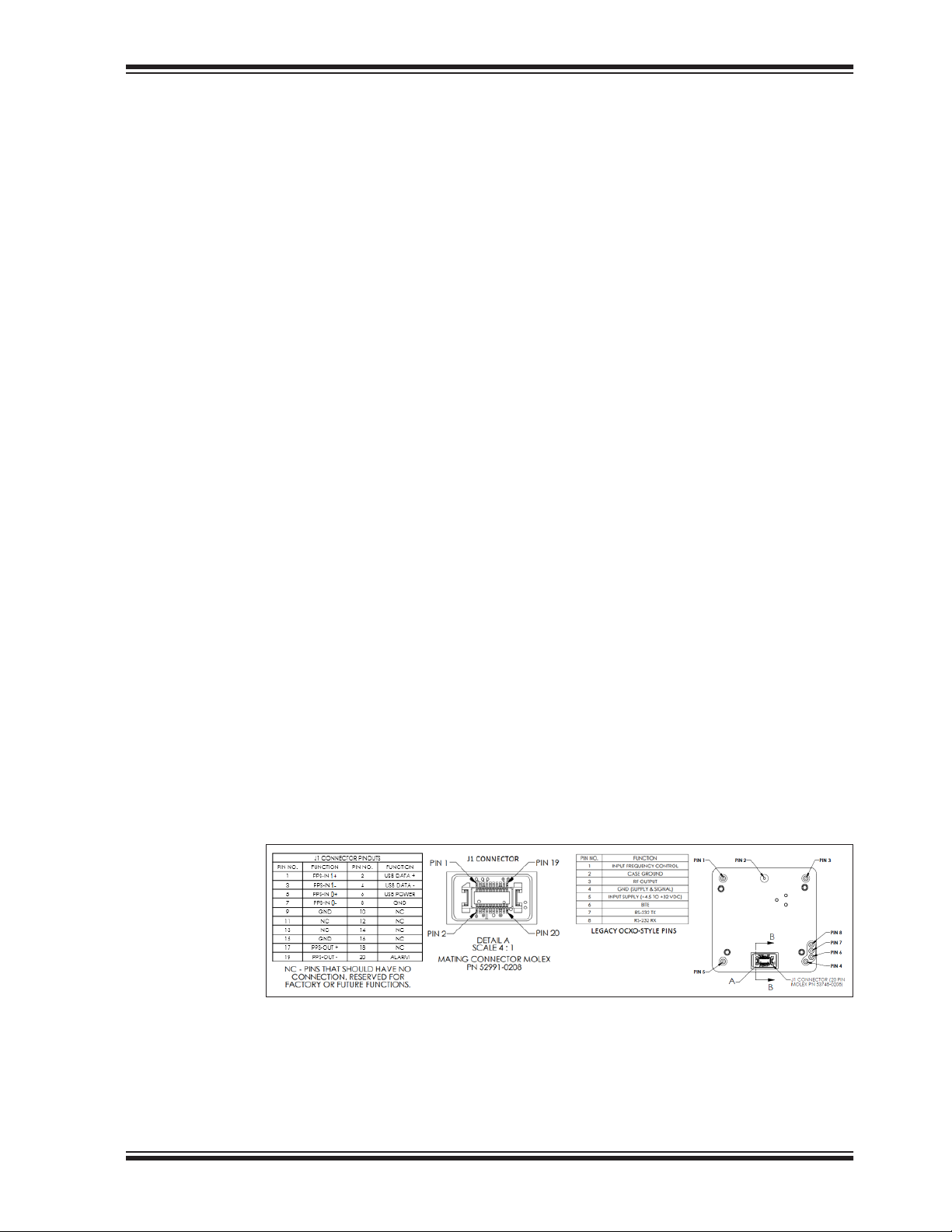
Signal Connections
The SA5X pinout is shown in Figure 2-3.
fectively short that frequency to ground where it
FIGURE 2-3: Pinout.
2019 Microchip Technology Inc. DS50002938A-page 17
Page 18
MAC-SA5X User’s Guide
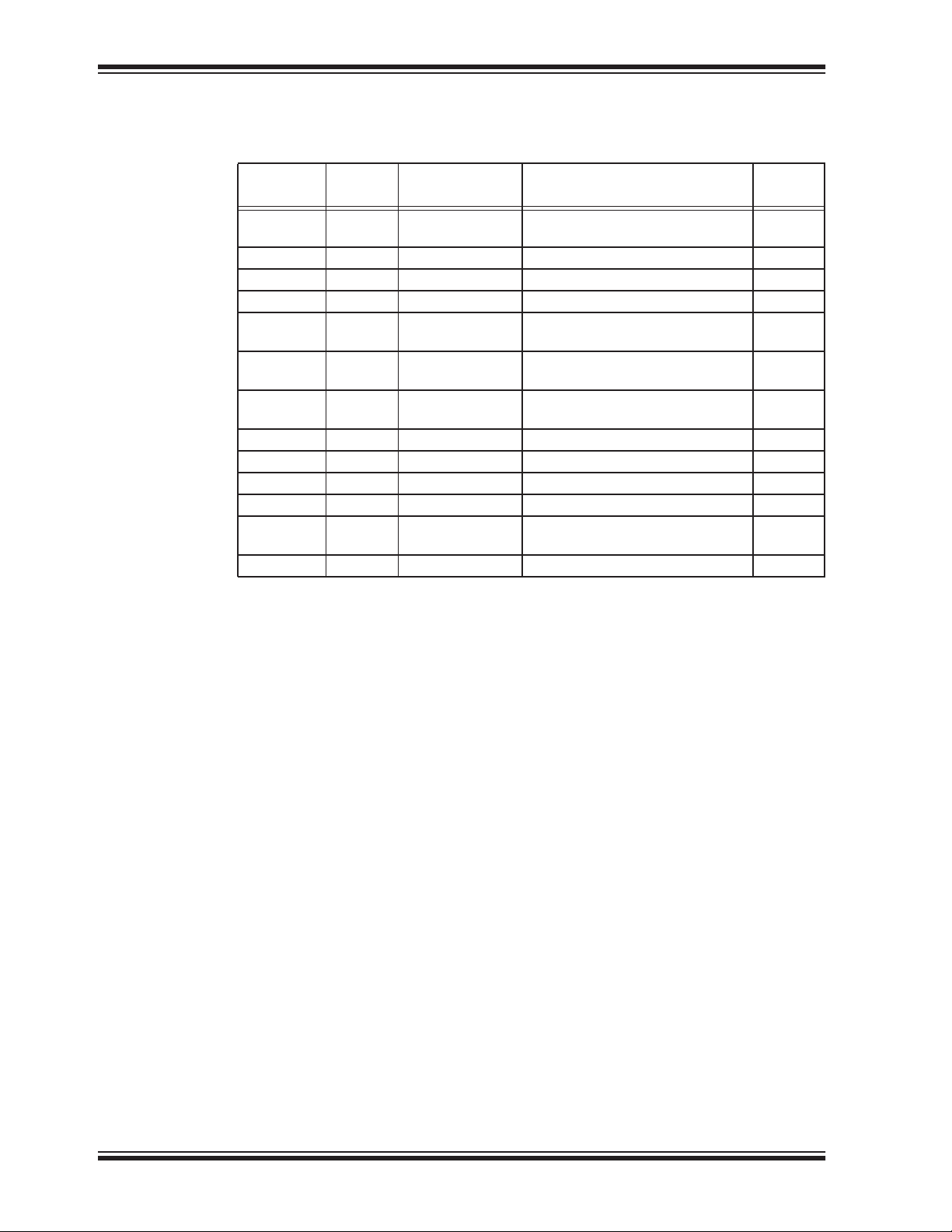
The electrical function of each pin is shown in Table 2-1.
TABLE 2-1: PIN FUNCTION TABLE
Connector
OCXO Style 1
OCXO Style 2 Baseplate — Note 3
OCXO Style 3 RF output CMOS 3.3V
OCXO Style 4 GND — Note 5
OCXO Style 5
OCXO Style 6
OCXO Style 7, 8
J1 Molex 1, 3 PPS1-IN LVDS —
J1 Molex 5, 7 PPS0-IN LVDS —
J1 Molex 8, 9, 15 GND — —
J1 Molex 17, 19 PPS-OUT –,+ LVDS square wave, 4 ns, 100Ω —
J1 Molex 20 Alarm
J1 Molex 2, 4, 6 USB USB —
Note 1: Analog tuning input sensitivity is 0V to 5V into 5 kΩ, 2.5V for no pull.
2: Analog tuning is disabled by default. Digital tuning is recommended instead.
3: Shall be connected to GND externally
4: 10 MHz, CMOS square wave, VL < 0.3V, VH > 3V. Amplitude is dependent on load.
5: Signal and Supply
6: BITE output (active-low):
7: If connecting to COM port of a computer
Pin
Number
Analog tuning
input
Supply voltage
(V
Built-In Test
Equipment (BITE)
Serial
communication
ground Pin 2.
0 = Normal Operation
1 = Unlock Condition
adapter is necessary.
Function Range/Format Note
0V to 5.0V
nominal Note 4
PP
4.5VDC to 32VDC
)
CC
. It is recommended to tie this ground to same node as baseplate
(5VDC recommended)
CMOS: Logic_H > 3V,
Logic_L < 0.3V
2.8V < Logic_H < 3.8V
0V < Logic_L < 0.3V
CMOS: Logic_H > 3V,
Logic_L < 0.3V
.
, a TTL/RS-232 (or HCMOS/RS-232)
Note 1,
Note 2
—
Note 6
Note 7
—
DS50002938A-page 18 2019 Microchip Technology Inc.
Page 19
2.2.1 Absolute Minimum and Maximum Ratings
Table 2-2 indicates the absolute minimum and maximum ratings to which the MAC can
be subjected without permanent unrecoverable damage.
Note: The MAC cannot be expected to perform normally when operated outside
of the recommended operating conditions noted on the product data sheet.
All ratings apply at +25°C, unless otherwise noted.
TABLE 2-2: MINIMUM AND MAXIMUM RATINGS
Supply Voltage (V
1PPS Inputs –0.5V to +3.6V
Analog Tuning Voltage 0V to +5V (into 5 kΩ)
Maximum Current Draw
Storage Temperature –55°C to +100°C
2.3 START-UP SEQUENCE
Installation
Parameter Rating
) 0VDC to +32VDC
CC
RS-232, BITE, Alarm: ±8 mA
RF output: ±8 mA
CAUTION
To avoid severe damage to the unit, do not apply power to the incorrect terminals. The
SA5X does not have reverse voltage protection.
When the MAC is initially powered on, it performs an acquisition sequence, which
includes stabilizing the temperature of the physics package, optimizing physics package operating parameters, and acquiring frequency lock to the atomic resonance.
A typical warm-up sequence is shown in Figure 2-4. When power is connected to the
MAC, its RF and 1PPS output signals (orange dashed line) will appear immediately.
The short-term stability specification of these signals will not be satisfied until the Lock
sequence is completed (after ~300 seconds in this example). Prior to Lock, the output
signal will have an inaccuracy of several ppm and drift per the MAC’s internal TCXO.
All MAC’s have their (Locked) output frequency calibrated to within ±5x10
prior to shipment. However, environmental conditions and transit time will affect the calibration to an unknown degree. Therefore, some additional frequency offset should be
expected when the MAC is first powered on by the user. Offsets may be corrected, as
explained in the Frequency Steering section. The re-trace specification provides some
guidance for frequency offsets due to powering off the unit; however, the specification
is not comprehensive.
Power consumption is displayed as a solid black trace. Initially, the power consumption
will draw >10W to bring the internal unit temperature up to operational level. Once the
temperature has stabilized, the steady state power consumption will drop to ~6W.
Steady state power consumption will be higher for colder ambient temperatures
because more heating will be required to maintain the correct internal temperature.
Similarly, the duration of the heat-up period (maximum power consumption) will be longer for colder ambient temperatures.
The baseplate temperature (solid orange trace) will generally rise ~15°C during the
start-up sequence, but this varies greatly with thermal management (heat sink, airflow,
etc). Generally, the temperature rise will be smaller at warmer temperatures, larger at
colder temperatures.
-11
Hz/Hz
2019 Microchip Technology Inc. DS50002938A-page 19
Page 20

MAC-SA5X User’s Guide
Care should be used to ensure that the maximum operating temperature is not violated.
For instance, a MAC that is powered up in a 70°C ambient environment will likely rise
above the maximum operating temperature during the start-up period unless careful
thermal management is employed. (See Section 2.2 “Mounting Considerations”)
The LockProgress parameter (not pictured) will reveal the Lock acquisition status in
terms of percentage-complete. Once the unit finishes the sequence, the BITE pin
(black dashed trace) will indicate Lock (logic low). Generally
be shorter at warmer temperatures, longer at colder temperatures. If this sequence
should fail, the Alarms parameter will signify “Acquisition Failed”. If this should occur,
check that the environmental specifications have not been violated (operating temperature, input voltage, magnetic field exposure, etc) and reboot the device. Contact Customer support if the alarm persists.
Note: Sequence times and power levels vary according to environmental condi-
tions, especially temperature.
, Lock acquisition times will
FIGURE 2-4: Start-Up Sequence.
Once power is supplied to the unit, it will output the following strings on the serial port:
[>Loading...]
[>Microchip SA5X]
After a typical warm-up time of 5 to 7 minutes, the oscillator is fully operational and the
operator may choose to adjust the device parameters. The MAC meets all short-term
stability specifications as soon as Lock is achieved. Long-term stability specifications
(Monthly Aging frequency drift rate) is satisfied within 30 days of continuous power at
room temperature. There are no maintenance procedures or adjustments needed,
aside from frequency adjustment which is described in a later section.
DS50002938A-page 20 2019 Microchip Technology Inc.
Page 21

Chapter 3. Operation
This section will cover the following topics:
• Configure the Serial Port
• Analog Tuning
• Digital Frequency Adjustment
• Configure 1PPS Discipline Settings
• Query the MAC’s Health/Lock/Alarm Status
• Configure the Time of Day
3.1 CONFIGURE THE SERIAL PORT
The default settings for the RS-232 interface are listed below.
• Speed: 57600 bps
• Data Bits: 8 bits
• Parity: None
• Stop Bits: 1
• Flow Control: None
The baud rate can be configured via the bootstrap loader (BSL). The following
sequence illustrates how to query and set the baud rate. The following interaction
sequence begins with the SA5X unit already powered on:
MAC-SA5X USER’S GUIDE
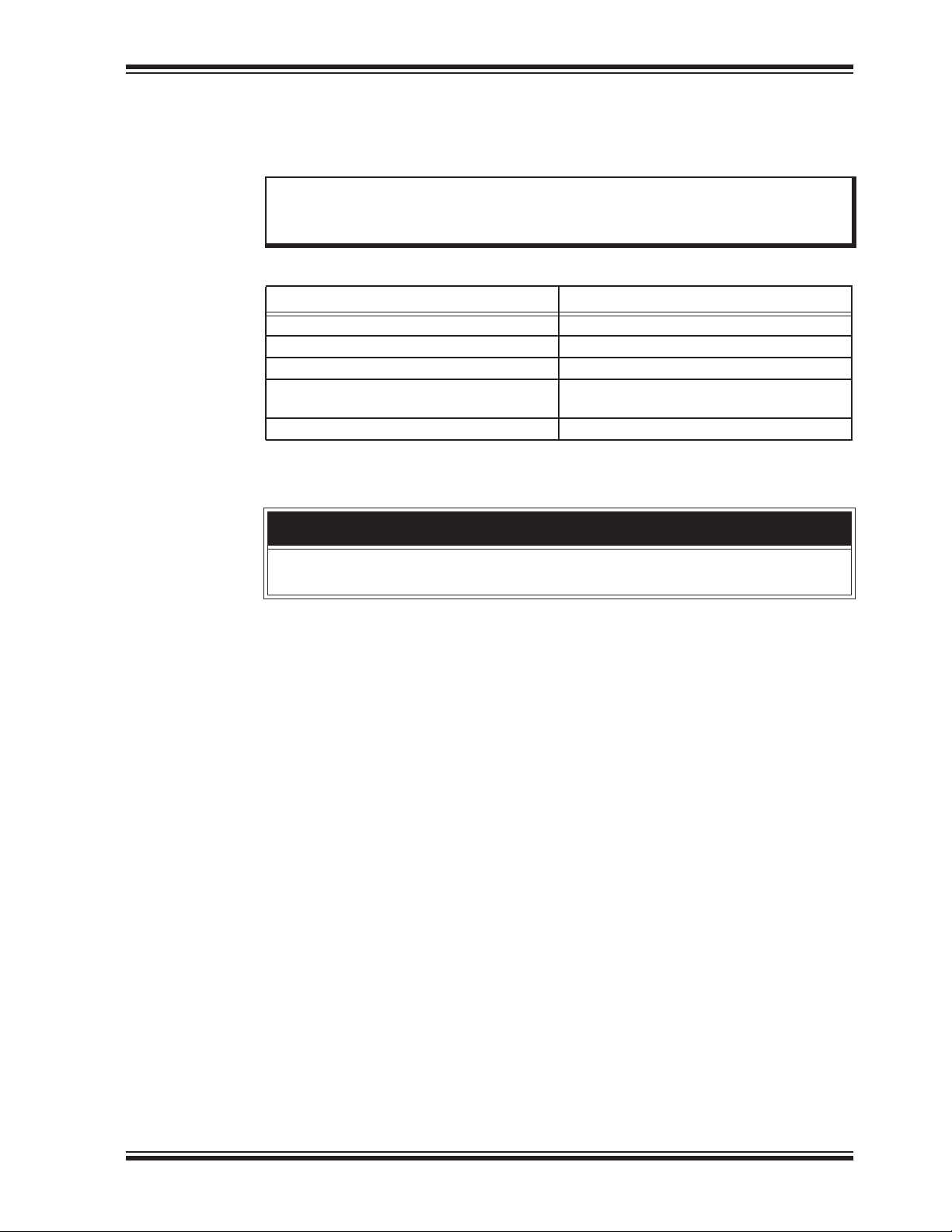
TABLE 3-1: BOOTSTRAP LOADER INTERACTION SEQUENCE
Serial Communication Description
{reset} User resets the CPU to access the bootloader.
[>Loading...] After reset, BSL announces it is ready (waits 3 seconds).
{bsl} User requests the BSL command mode (within 3 seconds).
[=BSL] BSL confirms it is now in command mode.
{baud?} User queries the currently configured baud rate (optional).
[=57600]<CR><LF> BSL returns the configured baud rate.
{baud,921600,now} User requests a new baud rate to take effect immediately.
[=921600] BSL confirms the newly configured baud rate.
{reset} User resets the CPU for the new rate to take effect.
[>Loading...] After reset, BSL announces its presence at 921600 bps.
See Chapter 4. “Command Line Interface” for reference on proper command syntax.
3.2 ANALOG TUNING
Analog tuning allows a user to correct the RF and 1PPS output frequency by applying
a DC correction voltage. Analog tuning is an inferior approach compared to Digital tuning or 1PPS Disciplining because its resolution is only parts in 1011. However, it has
been carried forward to support legacy applications.
Omission of “,now” argument will defer the change until the
next reset.
2019 Microchip Technology Inc. DS50002938A-page 21
Page 22

MAC-SA5X User’s Guide
The analog frequency control is derived from the analog voltage applied to Pin 1. This
voltage is digitized, scaled, and applied to the SA5X frequency servo. Analog tuning
(AT) voltages above mid-point (2.5VDC) increase the output frequency, and, conversely, tuning voltages below midpoint decrease the output frequency. Because the
tuning range is ±1x10-8 from 0V to 5V, this corresponds to roughly 1x10
2.5 mV change in AT voltage.
If the analog frequency tuning is disabled (by default), the analog frequency control
value is zero. It may be enabled with the AnalogTuningEnabled Parameter
Analog Tuning input voltage may be read via the AnalogTuning parameter, regardless if it is enabled or not.
Recommendation: If Analog Tuning is the desired method, it is highly recommended that it be used exclusively. Do not try to implement Analog Tuning with Digital Tuning or 1PPS Disciplining simultaneously into one system.
3.3 DIGITAL TUNING
The MAC RF (and 1PPS) output may be adjusted by the user via the DigitalTuning
parameter. Relative steering values are entered in (integer) units of parts in 1015,
though the resolution realized by the MAC hardware is approximately 1 part in 1014.
Digital adjustment is clamped to ±2 parts in 108. Consult Section 3.3.1 “Calibration”
if a larger correction is desired.
-11
for every
. The
Note: Steering commands may be entered during acquisition (Locked = 0) but
will not take effect until lock is achieved.
Frequency steering is volatile (unless the store command is used). Upon reboot, the
MAC returns to its nominal (calibrated) frequency setting. To update the non-volatile
calibration, see Section 3.3.1 “Calibration”.
3.3.1 Calibration
In the unlikely event that the adjustment range of DigitalTuning has been
exhausted beyond the limits of ±2x10-8 (perhaps due to cumulative frequency aging offsets) it may be desirable to update the calibration. When this is the case, manual calibration of the MAC is accomplished in the following manner. First, the MAC output
should be compared to a superior Frequency Reference with a frequency counter or
other suitable test equipment. Next, the MAC is steered onto frequency by adjusting
the DigitalTuning parameter, (see Section 3.3 “Digital Tuning” or
Section 3.4 “1PPS Disciplining”). Finally, the present value of the DigitalTuning
parameter is summed into the non-volatile calibration register via the latch command.
This command will simultaneously reset DigitalTuning to zero at the new center
frequency. The user may then adjust the output ±2x10-8 from its current value.
Note: Once a calibration is overwritten, it cannot be recalled.
Note: The latch command is only valid when the MAC is locked (Locked = 1).
Note: Total net steering range is limited to ±1x10-6. See data sheet for exact
specification.
DS50002938A-page 22 2019 Microchip Technology Inc.
Page 23

3.4 1PPS DISCIPLINING
For further reduction of phase and frequency errors, disciplining can be enabled/disabled with the Disciplining parameter. The algorithm implements a high-resolution
phase meter within the MAC to automatically correct the phase and frequency relative
to a reference 1PPS input once per second with a resolution of 450 ps. The algorithm
will simultaneously steer the phase and frequency to that of the external reference
(1PPS input), ultimately achieving accuracies of <1 ns and 1×10
depending on the stability of the 1PPS input and ignoring external cabling delays, etc
(See Section 3.4.5 “Cable Length Compensation”).
3.4.1 Theory
The 1PPS input is user selectable from pins J1-5,7 or J1-1,3 via the PpsSource
parameter. If a valid 1PPS is present on the selected input, PpsInDetected = 1 and
the user will notice the DigitalTuning parameter automatically adjust, once Dis-
ciplining is enabled. The LastCorrection parameter will tell the user how much
the MAC was digitally steered (in frequency) since its last correction; it is simply the difference between the last two successive DigitalTuning values. Similarly, the
Phase parameter will report the most recent phase meter measurement to indicate the
time-difference between input and output 1PPS signals.
The speed and effectiveness of the disciplining algorithm can be adjusted by the time
constant “Tau”, which is user selectable through the TauPps0 (or TauPps1) parameter. See Section 3.4.2 “Selection of Disciplining Time Constant, “Tau”” for advice
on choosing an appropriate time constant.
When disciplining is turned on, it will make a correction once per second based on its
most recent internal phase meter measurement. The disciplining algorithm will attempt
to dampen an initial phase and/or frequency error E0 by ~63% after an elapsed time of
one Tau, 99% after five Tau per the equation:
Operation
-13
, respectively,
EQUATION 3-1:
t
--–
EE01e
=
–
Where:
E = The instantaneous error.
E0 = The initial error calculated from the moving average of the previous errors observed over
time duration τ, updated once per second.
τ = The user-selectable time constant, tau, in seconds.
t = Elapsed time, in seconds.
Any subsequent additional errors after E0 will prolong the settling time of the algorithm.
In the event that the reference 1PPS input is removed from the selected input (pins
J1-5,7 or J1-1,3) while disciplining, the MAC remains in holdover and preserves the
most recent DigitalTuning value. If the 1PPS reference subsequently reappears,
disciplining continues where it left off. The exception being if the measured instantaneous Phase > PhaseLimit, whereby a JamSync will be implemented and the Disciplining algorithm will start anew. (Phase outliers are ignored. See
Section 3.4.3 “JamSync”)
The status of disciplining is indicated by the DisciplineLocked parameter in the
telemetry. DisciplineLocked = 0 upon algorithm startup or when a valid PPS input
signal is not detected. DisciplineLocked = 1 when magnitude of the phase mea-
2019 Microchip Technology Inc. DS50002938A-page 23
Page 24

MAC-SA5X User’s Guide
surement is less than the DisciplineThresholdPps0 setting for two time constants of duration (see Section 3.4.2 “Selection of Disciplining Time Constant,
“Tau””).
The following state diagram provides the concept behind the disciplining and
phase-metering algorithms. For more information on phase-metering, see
Section 3.4.4 “1PPS Phase Measurement Mode”.
FIGURE 3-1: PPS State Diagram.
Note: Discipline settings are volatile, that is, not preserved across power cycles
unless the store command is used.
Note: The user is allowed to adjust the DigitalTuning parameter while in Dis-
ciplining mode. However, this is discouraged because it could prolong and
disrupt the disciplining algorithm.
DS50002938A-page 24 2019 Microchip Technology Inc.
Page 25

Operation
3.4.2 Selection of Disciplining Time Constant, “Tau”
Algorithm performance will be predicated on the selection of the disciplining time constant Tau. When possible, it is advisable to choose a Tau that corresponds to the “least
noisy” averaging time of your 1PPS input source. Generally, a longer Tau is required
for a noisy 1PPS input reference (such as a simple GPS receiver); shorter Tau is
acceptable for stable lab-grade instruments (such as a Cesium Beam Tube). Furthermore, shortening the Tau may be necessary to quickly adjust the MAC if its inherent
stability is under influence of external environmental conditions (such as g-forces, rapid
temperature changes, etc.).
FIGURE 3-2: Sample ADEV Curves.
Figure 3-2 shows the performance of several frequency references. For optimum Dis-
ciplining performance when disciplining to a GNSS reference, a time constant should
be selected where the MAC and GNSS ADEV curves intersect (τ = 25,000 seconds, in
this example). In this way, the resulting performance of the Disciplined-MAC will have
short and mid-term stability of a free-running MAC, combined with the long-term stability of GNSS.
Note: The above set of curves is very generic and a designer should inde-
pendently quantify the stability of their own GNSS source. Usually, ADEV
information for GNSS receivers is not published because the stability will
vary according to a variety of environmental conditions; the designer will
have to generate this plot on their own. A rough approximation would be to
measure the 1s ADEV performance of a GNSS and extrapolate the curve
proportional to 1/√(Tau).
2019 Microchip Technology Inc. DS50002938A-page 25
Page 26

MAC-SA5X User’s Guide
Caution should be used when using a longer time constant. Initial frequency errors at
the start of Disciplining produce phase errors that will grow proportionally with elapsed
time. For slow (long Tau) Disciplining algorithms, the initial errors could grow outside
the DisciplineThreshold or PhaseLimit settings before an adequate correction can
be made by the algorithm, resulting in a JamSync and DisciplineLocked = 0. Generally, a good Discipline approach is to use a short Tau to make quick coarse corrections,
then apply a longer T
3.4.3 JamSync
When Disciplining is first enabled, the algorithm will implement a JamSync (Observable
with the JamSyncing parameter). It will also occur whenever the Phase is beyond the
PhaseLimit parameter. A JamSync has the benefit of speeding up the disciplining
routine by quickly synchronizing the output 1PPS after one clock cycle (phase is briefly
aligned, but frequency is not). The disciplining algorithm can then continue onward by
further refining the frequency and phase errors. However, the drawback of a JamSync
is that the user will observe a phase “jump” during the JamSync, rather than a slow
steer as predicated by disciplining alone. To avoid said “jump”, the user can adjust the
PhaseLimit parameter. This is particularly useful for long Disciplining time constants.
However, the initial JamSync (when disciplining is initialized) cannot be avoided.
au to further reduce the MAC’s phase and frequency error.
NOTICE
3.4.4 1PPS Phase Measurement Mode
Phase measurement mode does not steer or Discipline the MAC’s output frequency.
Rather, it makes use of the MAC’s internal phase meter by reporting the time difference
between the MAC’s internally-generated 1PPS output (pins J1-17,19) and the externally applied reference 1PPS active input (pins J1-5,7 or J1-1,3) once per second.
Measurement resolution is approximately 450 ps. The mode is enabled with the
PhaseMetering parameter and the internal phase difference can be read via the
Phase parameter.
Note: Tau has no effect on the Phase parameter.
3.4.5 Cable Length Compensation
The zero point of disciplining can be adjusted to accommodate cable and other instrumentation delays (or advances) that impact the arrival time of the 1PPS at the MAC
1PPS input pin. The compensation value can be adjusted with the CableDelay
parameter.
The maximum compensation adjustment is ±0.5 seconds, where the positive sign indicates phase advancement of the input 1PPS. For example, if there is 45 ns of delay
(approximately 33 feet of RG-58 coaxial cable) between the on-time point and the MAC
1PPS input then the compensation value would be +45.
Note: Compensation is implemented in the disciplining algorithm, not in the phase
measurement itself. The phase measurement, as reported through telemetry, reports the actual phase measurement. That is, if the MAC is disciplined
with +50 ns of compensation, the phase meter reports –50 ns of phase difference when disciplining is settled.
DS50002938A-page 26 2019 Microchip Technology Inc.
Page 27

3.4.6 PPS Quantization Error Correction
For use with certain GNSS receivers, the PpsQErr parameter may be used to correct
known dynamic quantization errors due to the receiver itself. This is a picosecond
adjustment to the next MAC 1PPS phase measurement to account for the error.
3.5 DEVICE INFORMATION AND STATUS
Consult Section 4.4 “Parameters” for a comprehensive list of all available device
telemetry parameters. They provide insight into device settings, discipline/atomic lock
status, time of day, and alarm conditions.
Several commands provide insight into hardware/software revision, device identification, environmental extremes, and estimated NVRAM health:
• app?
• device?
• platform?
• describe?
• swrev?
• hwrev?
• serial?
• extremes?
• health?
See Section 4.5 “Commands” for details.
Operation
3.6 TIME OF DAY (TOD)
The MAC maintains a TOD parameter TimeOfDay as a 32-bit unsigned integer, which
is incremented synchronously with the rising edge of the 1PPS output. Until set otherwise, TOD begins counting from zero when the MAC is powered on.
2019 Microchip Technology Inc. DS50002938A-page 27
Page 28

MAC-SA5X User’s Guide
NOTES:
DS50002938A-page 28 2019 Microchip Technology Inc.
Page 29

MAC-SA5X USER’S GUIDE
Chapter 4. Command Line Interface
This section describes the communication interface provided by the Microchip MAC
SA5X Rubidium Oscillator. The device supports the Microchip proprietary C3 protocol.
The C3 protocol provides read/write access to the device’s parameters. The device’s
state is exposed through these parameters; modifying their values produces changes
in state.
identification functions, and device telemetry.
Key Features
Key features of the C3 protocol include:
• Text-based: Compatible across many architectures; avoids number representa-
• Orthogonal: All commands and responses share the same format.
• Parameter-based: Command set is based on exposing information and controls
• Error-detecting: With checksums, garbled commands/responses are more detect-
Message Flow
For each command message sent to the device, one response message will be
returned. In certain situations, such as device startup, announcement messages are
sent asynchronously.
The C3 protocol also provides access to flash memory operations, device
tion issues.
as a set of parameters.
able.
Note: Protocol is character case-sensitive.
4.1 COMMAND STRUCTURE
The structure of a C3 command follows:
{command#XX,argument1,|CC}
Where:
TABLE 4-1: COMMAND STRUCTURE
Field Description Required?
{ Signifies the beginning of a command. Yes
command The name of the command being issued. Yes
#XX
,argument1
|CC
} Signifies the end of a command. Yes
The sequence number, arguments, and checksum fields are optional. If a command is
entered incorrectly, MAC will reply with the appropriate error message (See
Section 4.2.1 “Error Responses”).
The sequence number of the command. (XX = two hex digits).
The start of the argument list, beginning with a comma and
containing quoted or un-quoted arguments.
The 8 bit checksum of the command message. (CC = two
hex digits).
No
Per Command
No
2019 Microchip Technology Inc. DS50002938A-page 29
Page 30

MAC-SA5X User’s Guide
Note: Spaces are not used within the command structure.
4.1.1 Sequence Number
The optional sequence number is used to match a response to an earlier command.
Commands issued with a sequence number between #01 and #FF will trigger a
response message that includes the same sequence number.
4.1.2 Arguments
The argument list follows the command name (or the sequence number, if included),
and always begins with a comma before each argument. Numbers and alphanumeric
arguments can be written as-is, but arguments that may contain punctuation should be
enclosed in double quotes to prevent ambiguity when parsing the command.
Within a quoted argument, the backslash character is a special escape character. It can
be used to escape the following sequences (Any other sequences result in the removal
of the backslash.):
TABLE 4-2: ESCAPE SEQUENCES
Escape Sequence Resulting Character
\r Carriage return.
\n New line/line feed.
\t Horizontal tab.
\\ Backslash.
4.1.3 Command Checksum
An optional 8-bit checksum provides a measure of reliability to commands and
responses. If a checksum is included with a command, the response will also include
a checksum for verification purposes.
The checksum of a command is calculated as a running XOR of all the characters
between the opening ‘{‘ and the ‘|’ checksum delimiter. It is a two-byte ASCII representation (in hexadecimal) of the XOR.
{command#XX,argument1,”argument2”|CC}
For example, the hexadecimal checksum of the {device?} command would be
entered as:
{device?|27}
If the command is garbled in transmission, causing a mismatch between the contents
and the checksum, the C3 response will be [!3] indicating a bad checksum error (See
Section 4.2.1 “Error Responses”). The command should be re-sent.
4.2 RESPONSE STRUCTURE
The structure of a C3 response follows:
[#XX=value|XX]<CR><LF>
Where:
TABLE 4-3: RESPONSE STRUCTURE
Field Description Usage
[ Indicates the start of a response. Always
DS50002938A-page 30 2019 Microchip Technology Inc.
Page 31

Command Line Interface
TABLE 4-3: RESPONSE STRUCTURE
Field Description Usage
#XX
=
value
|CC
] Indicates the end of a response. Always
<CR> A carriage return character. Always
<LF> A linefeed/newline character. Always
The sequence number in the corresponding command (XX
= two hex digits).
The response type. A normal response type is indicated by
a ‘=’ character. An error response is indicated by a ‘!’ char
acter.
The response value. It may be a number, alphanumeric, or
quoted string. The meaning of the value depends upon the
command. Max Length is 4096 characters.
The 8-bit checksum of the response message. (CC = two
hex digits).
A sequence number will be included in a response if one was provided in the command.
Similarly, a checksum will be included in a response if a checksum was given for the
command.
Only when a
sequence
command is sent
-
Always
Always
Only when a
checksum
command is sent
4.2.1 Error Responses
An error response indicates a problem with the command. It is identified by a ‘!’ character instead of ‘=’ following the optional message sequence number.
The following table lists all error numbers returned by the device:
TABLE 4-4: ERROR RESPONSES
Error Number Error Message Cause(s)
1 Invalid command Unrecognized command name, invalid syntax.
2 Insufficient arguments
3 Bad checksum
100 Invalid parameter
101 Invalid argument
102 Read-only parameter
301, 303 Corrupt file contents The firmware file contents are corrupted.
302 Bad file checksum There was an error in the file transfer.
304 Incomplete file The firmware file contents are incomplete.
310
311
312 Synchronization error A file transfer synchronization error occurred.
313
Transfer failed –
too many retries
Transfer failed –
canceled by client
Transfer failed –
Unsupported request
Not enough arguments provided for the command.
Checksum does not match the message
received.
The given parameter name or id is unrecognized.
One of the command arguments was semantically invalid. See the command’s documentation for details.
The parameter’s value cannot be written by the
user.
The file transfer was aborted after too many
retries.
The client aborted the file transfer.
The file transfer was aborted due to an unsupported request.
2019 Microchip Technology Inc. DS50002938A-page 31
Page 32

MAC-SA5X User’s Guide
TABLE 4-4: ERROR RESPONSES
Error Number Error Message Cause(s)
320 Erase failed An error occurred while erasing flash memory.
321 Write failed An error occurred while writing to flash memory.
For example, the response to the invalid command {type7} would be:
[!1]<CR><LF>
4.2.2 Response Checksum
The checksum of a response is calculated as a running XOR of all the characters
between the opening ‘[‘ and the ‘|’ checksum delimiter. See the double underlined portion of the response below:
[
#XX=value|CC]<CR><LF>
For example, the checksum-response to the {device?|27} command would be:
[=sa5x|62]<CR><LF>
4.3 ANNOUNCEMENT STRUCTURE
The structure of a C3 announcement follows:
[>message|CC]<CR><LF>
Where:
TABLE 4-5: ANNOUNCEMENT STRUCTURE
Field Description Usage
message
|CC
<CR> A carriage return character. Always
<LF> A linefeed/newline character. Always
Currently, announcements only occur immediately after applying power to the unit (or
resetting the microprocessor):
[>Loading...]<CR><LF>
[>Microchip SA5X]<CR><LF>
4.4 PARAMETERS
The state of the device is exposed as a set of parameters: named values with semantic
attributes. Certain parameters are readable/writable to allow the device to be controlled
and configured, while other read-only parameters present useful status information.
Parameters are uniquely identified by either a numeric id (e.g. 769) or a name (e.g.
PpsSource). The device provides a set of commands to indicate which parameters
are available to the user and to describe each one, including name string, real world
units, whether it’s writable, etc.
[ Indicates the start of an announcement Always
>
] Indicates the end of an announcement Always
Identifies this as an announcement, versus a response or
.
error
The announcement message. It may be alphanumeric or a
quoted string.
The 8-bit checksum of the announcement message.
(CC = two hex digits)
Always
Always
Currently unused
feature
DS50002938A-page 32 2019 Microchip Technology Inc.
Page 33

Command Line Interface
4.4.1 Parameter Index
The parameters provided by the device are listed in the table below.
TABLE 4-6: PARAMETER INDEX
ID Name R/W Description Units
General Status Parameters
256 Alarms RO Bitfield of all active alarm conditions. Bitfield 32 bits
257 PpsInDetected RO
263 Locked RO
264 TimeOfDay R/W
265 DisciplineLocked RO
Configuration Parameters
512 PpsOffset R/W
513 PpsWidth R/W
515 CableDelay R/W
Disciplining Parameters
768 Disciplining R/W
769 PpsSource R/W
770 TauPps0 R/W
771 PpsQErr R/W
772 PhaseLimit R/W
773 JamSyncing RO
774 Phase RO
775 LastCorrection RO
777 TauPps1 R/W
778 PhaseMetering R/W
A signal is detected on the selected
PPS source.
The unit is in a locked and stable
state.
Time of day at the next 1PPS output
pulse. This is a configurable second
counter.
Disciplining servo is locked to the
selected PPS source.
Offset of the output pulse. Default is
0
ns.
Width of the output pulse. Default is
20,000
ns.
1PPS input cable delay compensation. Default is 0 ns.
Disciplining to 1PPS input is
enabled. Default is false.
Selected 1PPS input source:
0 = PPS Input 0, 1 = PPS Input 1.
Default is 0.
Disciplining time constant when
using PPS Input 0.
Time error of the next input pulse
due to quantization. For compatibility
with GNSS receivers.
Limit of phase offset between 1PPS
input and 1PPS output before jam
syncing. Default is 1,000
ns.
A jam sync to remove phase offset is
in progress.
Most recent measurement of phase
offset between 1PPS input and
1PPS output.
Most recent frequency correction
due to disciplining.
Disciplining time constant when
using PPS Input 1.
Metering of 1PPS phase offset without corrections is enabled. Default is
false. Cannot be enabled simultane
ously with disciplining.
Boolean 0 or 1
Boolean 0 or 1
seconds
Boolean 0 or 1
ns
ns
ns ±500,000,000
Boolean 0 or 1
— 0 or 1
seconds 10 to 45,000
ps ±1,000,000
ns ±1,000,000
Boolean 0 or 1
ns ±500,000,000.0
-15
x 10
seconds 10 to 45,000
Boolean 0 or 1
-
Allowable
Range (
0 to
2,147,483,647
±83,886,080
(10 ns step)
0 to 83,886,080
(10 ns step)
±20,000,000
Note 1)
2019 Microchip Technology Inc. DS50002938A-page 33
Page 34

MAC-SA5X User’s Guide
TABLE 4-6: PARAMETER INDEX (CONTINUED)
ID Name R/W Description Units
779 DisciplineThresholdPps0 R/W
780 DisciplineThresholdPps1 R/W
Oscillator Parameters
1293 AnalogTuning RO
1296 Temperature RO Ambient temperature of the unit. m°C
1300 DigitalTuning R/W
1306 PowerSupply RO
1312 AnalogTuningEnabled R/W
1321 EffectiveTuning RO
1332 LockProgress RO Progress toward acquiring lock. % 0 to 100
Note 1: Allowable ranges are integer-only
Phase threshold for determining a
disciplining lock to PPS Input 0.
Phase threshold for determining a
disciplining lock to PPS Input 1.
The measured analog tuning input
voltage.
Digital tuning of the oscillator frequency. Default is 0. Values are volatile (not preserved across a
power-cycle).
The measured voltage of the external power supply.
Analog tuning is enabled. Default is
false.
Total effective digital frequency tune.
This provides little insight to the user
since its value will vary depending
upon a number of constantly changing internal adjustments.
, unless indicated otherwise.
mV 0 to 5,000
x 10
mV 0 to 36,300
Boolean 0 or 1
x 10
Range (Note 1)
ns 1 to 1,000
ns 1 to 1,000
–40,000 to
100,000
-15
±20,000,000
-15
±2,147,483,647
Allowable
4.4.2 Parameter Attributes
Each parameter has a set of fixed attributes that describe semantic information about
itself: read-only, stored to flash, etc. These attributes are represented as a 32-bit field,
below.
TABLE 4-7: PARAMETER ATTRIBUTES
31-
14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
15
— Units — — — —
• Read-Only: The parameter cannot be written by the user.
• Silent: Changes to the value are excluded from the upd command.
• Persisted: This parameter will be written to flash by a store command.
• Units: A 5-bit enumeration containing the parameter’s real-world units.
Use the browse command to learn the attributes of each parameter.
4.4.2.1 PARAMETER UNITS ATTRIBUTE
The following table maps Units Attribute values to Parameter units:
—
Persisted
Silent
— —
Read-Only
DS50002938A-page 34 2019 Microchip Technology Inc.
Page 35

Command Line Interface
TABLE 4-8: UNITS ATTRIBUTE
Units Value Parameter Units
0 None/No units
1 Picoseconds
2 Nanoseconds
3 Microseconds
4 Milliseconds
5 Seconds
6 Microvolts
7 Millivolts
8 Microamps
9 Milliamps
10 Millidegrees Celsius
11 x 10
12 x 10
13 Hertz
14 Kilohertz
15 Megahertz
16 Percent (%)
17 Boolean (true/false)
18 Millimeters
19 Millimeters/second
20 Meters
21 Meters/second
22 Degrees
23 Decibel Hertz (dBHz)
24 Microdegrees Celsius
25 dBm
For example, the command {browse,attrs,PpsInDetected} will return
[=17412]. This maps to bits 10, 14 as a logic high (indicating a Units Value of “17” or
“Boolean”) and bit 2 as a logic high (indicating that the parameter is “read only”).
-12
-15
4.4.3 Alarms Parameter
The Alarms parameter represents the device’s current alarm state as a bitfield. Each 1
bit represents an active alarm condition. The user is also notified of new alarm conditions via the device’s ALARM pin (J1-20). This pin is driven high when a new alarm condition occurs and it remains high until the condition is resolved or the user
acknowledges it with the ackalm command. If multiple alarm conditions are unacknowledged by the user, the ALARM pin will remain high until each individual alarm
condition has been acknowledged or resolved.
Alarm Bits
The bits of the Alarms parameter are described as follows:
2019 Microchip Technology Inc. DS50002938A-page 35
Page 36

MAC-SA5X User’s Guide
TABLE 4-9: ALARM BITS 31-16
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16
— — — — — — — — — — — — —
TABLE 4-10: ALARM BITS 15-0
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
— — — — — — — — —
Heater Fault
Acquisition Failed
Incompatible Firmware
No External Oscillator
No PPS Input
Disciplining Range Warning
PLL Fault
Flash Fault
Temperature Warning
FPGA Fault
TABLE 4-11: ALARM DESCRIPTIONS
Bit Decimal Alarm Description
0 1 FPGA Fault Hardware fault related to the internal FPGA.
1 2 PLL Fault Hardware fault related to the internal PLL circuit.
2 4 Flash Fault Hardware fault related to flash memory.
3 8 Acquisition Failed The most recent attempt to acquire lock failed.
4 16
5 32 Cell Heater Fault Hardware failure within the Cell Heater.
6 64
16 65536
17 131072 No PPS Input
18 262144
No External
Oscillator
Incompatible
Firmware
Temperature
arning
W
Disciplining Range
Warning
An external oscillator was expected and not detected.
The loaded firmware is not compatible with the unit’s
hardware.
The clock is unable to maintain a stable internal temperature and performance is likely degraded. This
alarm is only asserted when the Locked parameter
is 1.
Disciplining is enabled but no 1PPS input is detected
on the selected input.
Disciplining is enabled but the digital tuning adjustment needed to discipline the clock is outside the
range of DigitalTuning. The user should issue a
latch command when this alarm occurs.
DS50002938A-page 36 2019 Microchip Technology Inc.
Page 37

4.5 COMMANDS
The Microchip SA5X provides access to all device features, status, and measurements
through the C3 command set.
In addition to these standard commands, backwards compatibility with the
MAC-SA.3Xm line of Rubidium Oscillators is provided through a set of compatibility
commands (See Appendix B. “Legacy Command Set (SA.3Xm)”). Only a subset of
the device’s functionality is available through the compatibility command interface; it is
included to ease the design transition from the SA.3X devices to the newer C3 protocol.
4.5.1 Command Index
The following table contains the available C3 commands. Refer to the next section for
detailed command usage.
TABLE 4-12: COMMAND DESCRIPTIONS
Device Identification Commands
platform? 0
describe? 0 Returns a readable English description of the device.
Parameter Commands
Alarms Command
Configuration Management Commands
Miscellaneous Commands
extremes? 1
Command Line Interface
Command Arguments Description
app? 0
device? 0 Returns a short string identifying the device type.
swrev? 0 Returns the software revision.
hwrev? 0 Returns the hardware revision.
serial? 0 Returns the serial number of the unit.
help 0 Returns a list of available commands.
get 1 Returns the current value of a parameter.
set 2 Sets the value of a parameter.
add 2 Adds to the current value of a parameter.
browse 1-2 Returns information about one or more parameters.
upd 0
ackalm 1
store 0 Stores the current configuration to flash memory.
latch 0
load 0 Loads the most recent configuration from flash memory.
health? 1 Returns health estimates of certain components.
reset 0 Resets the CPU.
Returns a short string identifying the firmware application
type.
Returns a short string identifying the firmware platform of the
device.
Returns a list of all parameter values that changed since the
last upd.
Acknowledges an alarm, preventing it from contributing to the
ALARM pin state.
Latches the current frequency and clears the digital tuning
parameter
Returns the minimum and maximum measurements for certain parameters over the life of the unit.
.
2019 Microchip Technology Inc. DS50002938A-page 37
Page 38

MAC-SA5X User’s Guide
4.5.2 Command Usage
This section contains command usage and details regarding each supported C3 command, listed in alphabetical order.
{ackalm,alarm}
Description Acknowledges an alarm, or multiple alarms. The acknowledged alarm remains
active but it will no longer contribute to the output of the ALARM pin as an outstanding alarm. The value of the Alarms parameter will not be af
always shows the active alarms, acknowledged or outstanding.
Arguments Requires one argument:
alarm – The decimal number of alarm bit(s) to acknowledge. Multiple alarm bits
may be OR’d together, to be acknowledged simultaneously.
Returns [=1]
Since V1.0
{add,parameter,amount}
Description Adds to the current value of a parameter.
Arguments Requires two arguments:
parameter – The numeric id or name string of the parameter to modify
eter must
amount – The amount to add to the value (may be negative).
depends on parameter used.
Returns The parameter’s updated value.
Error [!100] (Invalid parameter) if the parameter does not exist.
Error [!102] (Read-only parameter) if the parameter is read-only
Since V1.0
not be read-only.
fected; it
. Param-
Allowable range
.
{app?}
Description Returns a short string identifying the firmware application type.
Arguments None.
Returns [=clock] in normal operation, or [=bsl] in the bootstrap loader
Since V1.0
.
{browse,what,parameter}
Description Returns information about one or more parameters.
Arguments Accepts two arguments (first is required):
what – (Required)
Acceptable values for what are:
• “id” – Browses numeric parameter ids.
• “name” – Browses parameter name strings.
• “value” – Browses current parameter values.
• “attrs” – Browses parameter attributes.
parameter – (Optional)
being queried.
Returns A single item (if parameter is specified), or a list of items beginning with a
comma and delimited by commas (if parameter is omitted). Returned lists are
always the same length and in the same order
{browse,id} matches element N of {browse,name}.
Error [!101] (Invalid argument) if what value for the specified parameter does
not exist.
Examples {browse,id} – Returns all parameter IDs.
{browse,id,Alarms} – Returns the numeric id of the
The type of parameter information being queried.
The numeric id or name string of the specific parameter
. (e.g. Element N of
Alarms parameter.
DS50002938A-page 38 2019 Microchip Technology Inc.
Page 39

Command Line Interface
Since V1.0
{describe?}
Description Returns a readable English description of the device.
Arguments None.
Returns A response similar to “Microchip SA5X”.
Since V1.0
{device?}
Description Returns a short string identifying the device type.
Arguments None.
Returns [=sa5x]
Since V1.0
{extremes?,parameter}
Description Returns minimum and maximum measurements for certain parameters over the
life of the unit. The following parameters are supported:
• Temperature
• PowerSupply
An example command would be {extremes?,Temperature}
Arguments Requires one argument:
parameter – The numeric id or name string of the parameter
Returns The minimum measurement followed by the maximum measurement, sepa-
rated by a comma. Example response to the above command would be
[=-38389,83629]
…indicating a min and max temperature of –38389 m˚C and 83629 m˚C.
Error [!100] (Invalid parameter) if the parameter does not exist.
Since V1.0
.
{get,parameter}
Description Returns the current value of a parameter.
Arguments Requires one argument:
parameter – The numeric id or name string of the parameter
Returns The parameter’s current value, as an integer or floating-point number.
Error [!100] (Invalid parameter) if the parameter does not exist.
Since V1.0
.
{health?,component}
Description Returns the health rating of certain components within the unit. Currently, only
the flash memory (NVRAM) write endurance is reported.
Arguments Requires one argument:
component – The name of the component to query. Currently, only the nvram
component is supported.
Returns The component’s health rating, from 0 to 100 (full health). For example [=100]
Error [!101] (Invalid argument) if the component is not supported.
Since V1.0
2019 Microchip Technology Inc. DS50002938A-page 39
Page 40

MAC-SA5X User’s Guide
{help}
Description Returns a comma-delimited list of available commands. Commands that are not
accessible with the current authentication will not be included. Some factory-use commands may be included in the list, but are not described in this
manual because they present no usable information/function to the user outside
of the factory
Arguments None.
Returns A comma-delimited list of command names. Example response is:
[=,ackalm,add,browse,chap,describe?,extremes?,get,
health?,help,hwrev?,latch,load,reset,serial?,session,
session?,set,store,swrev?,type?,upd]
Since V1.0
{hwrev?}
Description Returns the hardware revision of the device.
Arguments None.
Returns The MAC’s hardware revision, typically a single character.
Since V1.0
{latch}
.
Description Simultaneously latches the current output frequency and clears the digital tun-
ing. This is used to center the output frequency at the current digital tuning
value. The DigitalTuning parameter will be set to zero and the output fre-
quency will be unaffected. Similarly, the DigitalTuning value will be subtracted from the current EffectiveTuning value.
Note: The new latched value is preserved across power cycle.
Arguments None.
Returns [=1]
Since V1.0
{load}
Description Loads the most recent configuration from flash memory (Discipline settings,
Analog tuning configuration, etc). The device configuration is loaded automatically on boot.
Arguments None.
Returns [=1] on success.
[=0] if no stored configuration is available.
Since V1.0
{platform?}
Description Returns a short string identifying the firmware platform of the device.
Arguments None.
Returns [=sa5x]
Since V1.0
DS50002938A-page 40 2019 Microchip Technology Inc.
Page 41

Command Line Interface
{reset}
Description Resets the CPU. Any un-stored configuration will be lost. The device will reac-
quire lock on restart.
Arguments None.
Returns No response. Processor is immediately reset.
Since V1.0
{serial?}
Description Returns the serial number of the unit.
Arguments None.
Returns The unit’s alphanumeric serial number as an 11 character text string.
Since V1.0
{set,parameter,value}
Description Sets the value of a parameter.
Arguments Requires two arguments:
parameter – The numeric id or name string of the parameter to modify
value – The new value, as a decimal integer or floating-point number
allowed by the parameter.
Returns The updated value of the parameter.
Error [!100] (Invalid parameter) if the parameter does not exist.
Error [!102] (Read-only parameter) if the parameter is read-only
Since V1.0
.
, as
.
{store}
Description Stores the current configuration to flash memory. The configuration will be
loaded automatically on the next restart, or it can be loaded manually with the
load command.
Arguments None.
Returns [=1] on success.
[=0] on flash memory failure.
Since V1.0
{swrev?}
Description Returns the software revisions.
Arguments None.
Returns The revision strings as a comma-delimited list. The first element is the CPU firm-
ware revision. The second element is the FPGA revision.
Example response is [=V1.0.4.0.5ADA4E31,V1.0]
Since V1.0
{upd}
Description Returns a list of all parameter values that changed since the previous upd. This
command is useful for collecting telemetry from the device without continuously
polling each parameter. Only the values of the parameters that changed will be
reported.
Arguments None.
2019 Microchip Technology Inc. DS50002938A-page 41
Page 42

MAC-SA5X User’s Guide
Returns A list of parameter updates notifications, beginning with a comma and delimited
by commas. Each notification is composed of two fields, also delimited by com
mas.
The first field in a notification is the id of the parameter that updated. The second field is the parameter’s new value.
So, if three parameter values have changed since the previous upd command,
the returned string will be a list with a total of six values (3 notifications * 2
fields), each preceded by a comma.
For example, if the response is [=,513,20000,515,25,779,20] then the
PpsWidth, CableDelay, and DisciplineThresholdPps0 parameter val
ues have changed to 20,000 ns, 25 ns, and 20 ns, respectively.
Since V1.0
-
-
DS50002938A-page 42 2019 Microchip Technology Inc.
Page 43

MAC-SA5X USER’S GUIDE
Chapter 5. Maintenance and Troubleshooting
5.1 PREVENTATIVE MAINTENANCE
There are no maintenance procedures or adjustments needed, aside from frequency
adjustment. See the product data sheet for environmental requirements.
5.2 ELECTROSTATIC DISCHARGE (ESD) CONSIDERATIONS
Maintenance personnel should wear ESD wrist straps when installing or working on the
MAC.
CAUTION
To avoid electrostatic discharge damage, proper ESD handling procedures must be
observed in unpacking, assembling, and testing the MAC.
5.3 TROUBLESHOOTING
If the MAC does not respond to user commands, check the following:
1. Ensure that the BAUD, flow, and syntax of your terminal interface are configured
as described previously.
2. Check all physical connections.
3. Check that the MAC is not in “compatibility mode”. Use the backslash character
“\” to exit compatibility mode.
Note: The MAC enters compatibility mode whenever legacy MAC-SA.3Xm com-
mands are entered. It stays in this mode until the user inputs the backslash
character “\”.
5.4 REPAIRING THE MAC
The MAC cannot be repaired in the field. It must be sent back to the factory for
replacement.
5.5 UPGRADING THE FIRMWARE
As of the initial release of this manual, upgrading the firmware in the field is not
supported. It must be sent back to the factory for any future upgrades, if applicable.
5.6 RETURNING THE MAC
You should return the equipment to Microchip only after you have exhausted the
troubleshooting procedures described earlier in this chapter, or if Microchip FTS
Services and Support has advised you to return the unit.
2019 Microchip Technology Inc. DS50002938A-page 43
Page 44

MAC-SA5X User’s Guide
Note: Please retain the original packaging for re-shipping the product. If the orig-
inal packaging is not available, contact Microchip FTS Services and Support for assistance.
Repacking the Unit
Return all units in the original packaging. If the original packaging is not available,
contact Microchip FTS Services and Support. Use standard packing procedures for
products being returned for repair to protect the equipment during shipment.
Connectors should be protected with connector covers or the equipment should be
wrapped in plastic before packaging.
Equipment Return Procedure
To return equipment to Microchip for repair:
1. Contact Microchip per the guidelines on page 5 to obtain a return material authorization number (RMA) before returning the product for service.
You can request an RMA on the internet at www.microsemi.com/ftdsupport
Retain the assigned RMA number for future reference.
2. Provide a description of the problem, product item number, serial number, and
warranty expiration date.
3. Provide the return shipping information (customer field contact, address, telephone number, and so forth.)
4. Ship the product to Microchip, transportation prepaid and insured, with the
Return Material Authorization (RMA) number and item numbers or part numbers
clearly marked on the outside of the container to the address given with the RMA.
Repaired equipment is returned to you with shipping costs prepaid by Microchip.
DS50002938A-page 44 2019 Microchip Technology Inc.
Page 45

MAC-SA5X USER’S GUIDE
R
bGa
sCe
l
l
Appendix A. Principle of Operation
The MAC is a passive atomic clock, incorporating the interrogation technique of Coherent Population Trapping (CPT) and operating upon the D1 optical resonance of atomic
87Rb to control the frequency of a quartz crystal oscillator via a frequency-locked loop
(FLL). The FLL function block is shown in Figure A-1. The principal RF output from the
MAC is provided by a Temperature-Compensated Crystal Oscillator (TCXO) and provided on the MAC output pin 3. The laser is mounted on a Thermal-Electric Cooler
(TEC) for precise temperature control and is modulated by the microwave synthesizer
at half the hyperfine frequency to produce sidebands in the laser spectrum. The light
travels through the temperature-controlled Rb cell exposed to a magnetic “C-field”
before hitting the photodetector that detects the transmitted CPT resonance signal. The
photodetector current is used to generate a control signal with phase and amplitude
information that permits continuous regulation of the TCXO frequency. Servos control
frequency synthesis chain, laser current, TEC setpoint, C-field, and cell heater. Additionally, the microprocessor and FPGA provide precise 1 pulse per second functionality.
The main advantage of employing CPT is it allows the use of low power lasers allowing
to construct low power, small size atomic clocks.
DDS
TCXO
Contr ol
Frequen cy
Micro wave
Synthesizer
uWave Power Control
TEC Contro l
Laser Current
FIGURE A-1: Block Diagram.
Laser/Micro-TEC
Rb Gas C ell
Rb Gas C ell
Cell Heater
C-Field
TEC Set
DACDAC DAC DA C DAC ADC
CPU/FPGA
Cell Heater Control
DAC
Photo diode
Signal
Filters/
Buīers
2019 Microchip Technology Inc. DS50002938A-page 45
Page 46

MAC-SA5X User’s Guide
NOTES:
DS50002938A-page 46 2019 Microchip Technology Inc.
Page 47

Appendix B. Legacy Command Set (SA.3Xm)
This section describes the commands used in the Legacy MAC product: SA.3Xm. They
have been carried forward to the SA5X product to accommodate legacy applications.
These compatibility commands do not follow the aforementioned C3 command syntax;
the response syntax is unique to each command. When a compatibility command is
received, the Microchip SA5X serial command processor enters “compatibility mode.”
An escape character ‘\’ is required to escape the mode before issuing any further C3
commands.
Generally, these commands are considered inferior to the C3 commands and are not
recommended for new designs. All of the old commands may be used with the new
product and will have the same intended functionality. However, you may see some
minor changes in the MAC response to these commands (such as string length or additional data fields).
Any serial port terminal emulator program can be used to communicate with the MAC.
B.1 LEGACY COMMAND STRUCTURE
The legacy SA.3Xm communication protocol supports the following types of commands:
• Single keystroke: A carriage return is not required.
• Multiple keystroke: Requires a specific start (<) and end (>) character. Used for
commands that require arguments. A carriage return is not required. All multiple
keystroke commands return confirmation strings describing what action they have
taken.
The MAC communicates exclusively with “printable” ASCII characters.
All commands produce a response from the MAC, which are human readable, with individual lines ending in a carriage return/line feed sequence. If an unsupported or
improperly formatted command is received, the MAC responds with "?" followed by a
carriage return/line feed sequence.
MAC-SA5X USER’S GUIDE
Note: The remainder of this document abbreviates “carriage return/line feed” as
“[CRLF]”.
2019 Microchip Technology Inc. DS50002938A-page 47
Page 48

MAC-SA5X User’s Guide
B.2 LEGACY COMMAND INDEX
Table B-1 summarizes the Legacy MAC SA.3Xm commands.
TABLE B-1: LEGACY COMMAND INDEX
Command Description
A Analog Tuning Enable
a Analog Tuning Disable
c Display Current Values
6 Return telemetry headers as comma-delimited string
^ Return telemetry as comma-delimited string
<NX0> Disables analog tuning and persists the setting past power-off
<NX1> Enables analog tuning and persists the setting past power-off
<FA>
<FS> Save current DDS Center Frequency to Non-volatile memory (NVRAM)
<FCnnn> Add nnn to the current DDS Center Frequency. (nnn is in pp 10
<FFnnn> Add nnn to the current DDS Center Frequency. (nnn is in pp 10
<FDnnn> Replace the Digital Adjust value with nnn. (nnn is in pp 10
<FGnnn> Replace the Digital Adjust value with nnn. (nnn is in pp 10
<FEnnn> Add nnn to the Digital Adjust value. (nnn is in pp 10
<FHnnn> Add nnn to the Digital Adjust value. (nnn is in pp 10
Apply the Digital Adjustment value to the Center Frequency and zero out
the Digital
Adjustment value
12
15
12
)
15
)
12
)
15
)
)
)
B.3 LEGACY COMMAND USAGE
A
Enables analog tuning but does not persist the setting past power-off. This command
also returns a confirmation string. See the <NX1> Analog Tuning command for a persistent version.
a
Disable Analog tuning. See <NX0> for a persistent version.
c
Returns a list of current telemetry values. Example Response:
...CURRENT VALUES...
BITE = 0
Version = V1.0.4
SerialNumber = 1801MX00041
TEC Control (mDegC) = 55177
RF Control (0.1mv) = 20184
DDS Frequency Center Current (0.01Hz) = 0
CellHeaterCurrent (ma) = 418
DCSignal (mv) = 1000
Temperature (mDegC) = 55024
Digital Tuning (0.01Hz) = 3
Digital Tuning (pp15) = 3000000
Analog Tuning On/Off = 0
Analog Tuning (mv) = 1450
DS50002938A-page 48 2019 Microchip Technology Inc.
Page 49

Legacy Command Set (SA.3Xm)
Note: BITE = 0 is an indication of Atomic Lock (1 = un-Lock)
Analog Tuning = 0 indicates that it is turned off (1 = on)
6
Retrieves the telemetry headers. Response is a comma-delimited string, suitable for
importing into spreadsheet programs.
Example Response:
BITE,Version,SerialNumber,TEC Control (mDegC),RF Control
(0.1mv),DDS Frequency Center Current (0.01Hz),CellHeaterCurrent
(ma),DCSignal(mv),Temperature (mDegC),Digital Tuning
(0.01Hz),Analog Tuning On/Off,Analog Tuning (mv),Digital Tuning
(pp15)
^
Retrieves the telemetry values. Response is a comma-delimited string, suitable for
importing into spreadsheet programs.
Example Response:
0,V1.0.4,1801MX00041,55173,20174,0,413,1000,55306,3,0,1450,3000
000
Note: Similar functionality (comma-separated headers and values) is available
with the C3 commands using {browse,name} and {browse,value}.
Note: Maximum output string length = 128 characters.
<NX0>
The command disables analog tuning and persists the setting past power-off. See the
A command for a non-persistent version.
<NX1>
The command enables Analog Tuning and persists the setting past power-off.
<FA>
This command has essentially the same function as the new latch command. Previously, for the legacy MAC-SA3x, the purpose of this command was to add the digital
adjustment value into the current center frequency value so that the accumulated
changes can be saved. The center frequency could then be subsequently saved using
the <FS> command, if the changes were to be made permanent (this step is no longer
necessary because <FA> now saves the value to NVRAM). Upon execution of <FA>,
the digital adjustment will be re-set to zero.
<FS>
Save the current DDS center frequency to non-volatile memory (NVRAM). The <FS>
command can be used to persist the setting of the DDS center frequency. However,
there is no way to persist digital adjustment, per se. The recommend procedure to
"persist" digital adjustment is to use the <FA> command to alter the DDS center frequency and set the digital adjustment to zero and then use the <FS> command to save
the DDS center frequency. As the default value of the digital adjustment is zero, this
effectively saves the value.
Note: This command is redundant with the <FA> command when used on
MAC-SA5X because the <FA> command also saves the value to NVRAM.
2019 Microchip Technology Inc. DS50002938A-page 49
Page 50

MAC-SA5X User’s Guide
<FCnnn>
Command will increment or decrement the center frequency by the specified number
interpreted as pp 10
outside of that range are clamped at the maximal excursion either positive or negative.
Example: <FC-10>
Functional Response: Center Frequency will decrement by –10×10
Example Response: " ...Persistent Frequency Adjustment = –10"
<FFnnn>
Command has identical function as <FCnnn> command, except it will increment or
decrement the Center Frequency by the specified number interpreted as pp 1015. The
range of nnn for the <FFnnn> command is ±20000000. Values outside of that range
are clamped.
Note: <FC?> and <FF?> return the current Center Frequency in 0.01 Hz.
<FDnnn>
Command will replace the digital adjustment value with the specified number interpreted as pp 1012. The range of nnn for the <FDnnn> command is ±20000. Values outside of that range are clamped at the maximal excursion either positive or negative.
Example: <FD1000>
Functional Response: digital adjustment set to 1000×10
Example Response: " ...One Time Frequency Adjustment = 1000"
<FGnnn>
Command will replace the digital adjustment value with the specified number interpreted as pp 1015. The range of nnn for the <FGnnn> command is ±20000000. Values
outside of that range are clamped.
12
. The range of nnn for the <FCnnn> command is ±20000. Values
-12
-12
Note: <FD?> and <FG?> return the digital adjustment in pp 1012 and pp 1015,
respectively.
<FEnnn>
Command will augment the digital adjustment, whereas the commands in the previous
section replaced the digital adjustment value. <FEnnn> will increment or decrement
the digital adjustment by the specified number interpreted as pp 1012. The range of nnn
for the <FEnnn> command is ± 20000. Values outside that range are clamped at the
maximal excursion either positive or negative.
Example: <FE-500>
Functional Response: digital adjustment will decrement by –500×10
-12
Example Response: " ...One Time Frequency Adjustment = –500"
<FHnnn>
Command will increment or decrement the digital adjustment by the specified number
interpreted as pp 1015. The range of nnn for the <FHnnn> command is ±20000000.
Values outside of that range are clamped.
Note: <FE?> and <FH?> return the digital adjustment in pp 1012 and pp 1015,
respectively. They are redundant commands to <FD?> and <FG?>.
DS50002938A-page 50 2019 Microchip Technology Inc.
Page 51

MAC-SA5X USER’S GUIDE
Appendix C. Reference Designs
The following schematics are borrowed from the evaluation kit schematic diagram and
may contain extra features that are not required by the end-user. Specific applications
should modify these schematics according to each systems requirement.
USB Connection
This reference schematic maps a USB-micro connection to the MAC’s USB pins
J1-2,4,6.
FIGURE C-1: USB Connection.
RS-232 Connection
This reference schematic converts USB-mini signals and maps them to the MAC’s
RS-232 pins 7 and 8.
FIGURE C-2: RS-232 Schematic.
If a designer wants to use the RS-232 pins without a USB converter, a line driver such
as the TI MAX202 or similar device is recommended (shown in Figure C-3). This schematic was implemented on the previous generation evaluation board and is not featured on the current design.
2019 Microchip Technology Inc. DS50002938A-page 51
Page 52

MAC-SA5X User’s Guide
FIGURE C-3: RS-232 Schematic without USB Converter.
1PPS Input Connection
This reference schematic converts a single-ended (3.3V @ 50Ω) 1PPS signal to the
differential LVDS format required by the MAC.
FIGURE C-4: 1PPS Input Schematic.
DS50002938A-page 52 2019 Microchip Technology Inc.
Page 53

Reference Designs
Analog Tune Input Connection
This reference schematic shows how the Evaluation kit maps AT voltages to the MAC.
FIGURE C-5: Analog Tune Schematic.
1PPS Output Connection
This reference schematic converts the MAC’s differential 1PPS LVDS output to a single-ended 3.3V signal and contains a driver circuit capable of driving a 50Ω coaxial
cable.
FIGURE C-6: 1PPS Output Schematic.
2019 Microchip Technology Inc. DS50002938A-page 53
Page 54

MAC-SA5X User’s Guide
RF (10 MHz) Output Connection
This reference schematic buffers the MAC’s RF output as a 50Ω, 3.3V signal on J2.
FIGURE C-7: RF Output to Differential Schematic.
DS50002938A-page 54 2019 Microchip Technology Inc.
Page 55

MAC-SA5X USER’S GUIDE
Appendix D. Evaluation Kit
The evaluation kit (p/n 090-44500-000) may be purchased separately and is provided
as a means for a user to quickly test out the features of the MAC-SA5X. It is intended
for static, bench-top use and is not designed for environmental testing.
FIGURE D-1: Evaluation Board.
D.1 OVERVIEW AND KEY FEATURES
The Evaluation Kit has the following features:
•10 MHz LVCMOS Output via SMA(f) Connector
• 1PPS Disciplining (Steering) via Two Selectable SMA(f) Connectors
• 1PPS LVCMOS Output via SMA(f) Connector
• –40°C to +75°C Operating Temperature (Baseplate)
• –55°C to +100°C Storage Temperature
• Interface for Digital Steering, Configuration, and Diagnostics via:
- USB-mini Communication Port for Accessing RS-232 MAC Pins
- USB-micro Communication Port for Accessing USB MAC Pins
• Wall-Plug Power Connector with On/Off Toggle Switch
• Alternate Wide Range Allowable DC Input (4.5V to 32V) Connector
• Heat Sink and Thermal Pad for Thermal Conditioning
• LED Status Indications for Power, Lock, and Alarm
• Insertable Socket Design to Quickly Plug in a MAC without Need for Soldering
• Analog Tuning via SMA(f) Connector
2019 Microchip Technology Inc. DS50002938A-page 55
Page 56

MAC-SA5X User’s Guide
D.2 PHYSICAL DESCRIPTION
The Evaluation Kit contains the following items:
TABLE D-1: EVALUATION KIT CONTENTS
Description Purpose
#2-56UNC-2A X 31LG type screw (Qty = 4) Fasten MAC-SA5X to Evaluation Board
Wall-mount power adapter US (90VAC to
AC) to 5VDC
264V
USB 2.0(M) to USB-mini(M) cable
Thermal Pad (p/n 172-00054-000)
PCBA/Baseplate Subassembly
The PCBA/Baseplate consists of a 3.9” x 5.1” aluminum heat sink/baseplate attached
to a PCBA with six mounting screws. All connections are on the PCBA. The physical
connections of the PCBA/Baseplate are highlighted in Figure D-2.
Supply Power to the MAC and Evaluation
board (PS1 connector)
Connection from a PC to Evaluation board’s
serial-to-USB-mini adapter
Provide thermal interface between MAC and
heat sink
Heat sink and PCBA receptacle containing all
connections
FIGURE D-2: PCBA/Baseplate Physical Connections.
• A power on/off toggle switch is within the red-dashed box.
• Power input connections are identified by red-dashed arrows.
• Input connections are identified by solid-red arrows and are accessible with
SMA(f) RF connectors.
• Output connections are identified by green arrows and are also accessible with
SMA(f) RF connectors.
• Blue arrows identify the communications ports (accessible with USB-micro and
USB-mini).
• Blue boxes highlight the communications LEDs.
• A MAC-SA5X may be plugged into the purple box with its J1 connector oriented
towards the bottom of the Evaluation board so that it mates with the Evaluation
board’s J9 connector.
DS50002938A-page 56 2019 Microchip Technology Inc.
Page 57

Evaluation Kit
TABLE D-2: CONNECTIONS
Eval
Board ID
J7 Analog Tune
J5 PPS_in_0
J6 PPS_in_1
J2 10 MHz
J3 BITE/Lock (OUTPUT) MAC Lock status (CMOS, 1 MΩ) 6
J4 PPS_out
J1 RS-232
J8 USB-micro
PS1 5VDC Power
J10 Wide Voltage Input
SW1 Toggle Switch
DS3 Power Status
DS1 Alarm Status
DS2 Lock Status
Label Function
(INPUT) Accepts DC voltage for frequency
steering
(INPUT) Accepts a 1PPS (3.3V, 50Ω) signal
for Freq/Phase Disciplining
(INPUT) Accepts a 1PPS (3.3V, 50Ω) signal
for Freq/Phase Disciplining
(OUTPUT) Buffered MAC RF output (3.3V,
50Ω)
(OUTPUT) Buffered MAC 1PPS output signal (3.3V, LVCMOS, 50Ω)
(COMM.) access the MAC’s serial communication port
(COMM.) access the MAC’s high-speed USB
communication port
(POWER) accepts the 5VDC wall-mount
power adapter for powering the Evaluation
board and the MAC
(POWER) accepts an alternate source of
voltage for the MAC (only) if J1
removed
(SWITCH) allows power to flow to the Evaluation board from the 5VDC supply
(LED) illuminates when power is provided to
PS1
(LED) illuminates when an alarm condition is
triggered
(LED) illuminates when Atomic Lock is
achieved
1 jumpers are
Maps to MAC
Pin
1
J1-5,7
J1-1,3
3
J1-17,19
7, 8
J1-2,4,6
5
5
N/A
N/A
J1-20
6
D.2.1 Communications Connections
The Evaluation board has two USB connections for communicating between a PC and
a MAC-SA5X (blue arrows in Figure D-2). The “RS-232” connection accepts a
USB-mini(M) connector that then passes to a serial converter on the Evaluation board
and applies the appropriate levels on pins 7,8 of the MAC. A USB 2.0-to-USB-mini
cable is provided in the kit.
The “USB-micro” connection accepts a USB-micro(M) connector that maps to pins
J1-2,4 of the MAC. A cable is not provided in the kit.
Consult the main portion of the MAC-SA5X User Guide for advice on communicating
with a MAC plugged in to the Evaluation board.
Three LEDs communicate status information to the user by illuminating under the following conditions:
• Power Status LED illuminates when power is provided to PS1.
• Alarm Status LED illuminates when an alarm condition is triggered.
• Lock Status LED illuminates when Atomic Lock is achieved.
2019 Microchip Technology Inc. DS50002938A-page 57
Page 58

MAC-SA5X User’s Guide
D.2.2 Input Connections
Three input connections are available via SMA connectors on the top of the Evaluation
board. The “Analog Tune” connector accepts a DC voltage (see Section 3.2 “Analog
Tuning”) for steering the RF (and PPS outputs). This pin maps to pin 1 on the inserted
MAC device.
Two 1PPS input connections are available (“PPS_in_0” and “PPS_in_1”) for disciplining the MAC’s output frequency. The Evaluation board accepts a 3.3V @ 50Ω L
1PPS signal. See Section 3.4 “1PPS Disciplining” for details.
D.2.3 Output Connections
Three SMA(f) connectors provide outputs from the MAC’s 10 MHZ, 1PPS_out, and
BITE/Lock pins. The 10 MHz and 1PPS are buffered according to the schematics in
Appendix D and designed to drive 50Ω, while the BITE/Lock pin maps directly to the
SMA. See Section 1.2.3 “Output Connections” for more details.
D.2.4 Power Connections
The Evaluation board is supplied with a wall-mount power supply capable of powering
the ICs on the board (through “PS1”) as well as a MAC inserted into the board. The
toggle switch “SW1” controls the flow of power to the board.
Alternatively, one may use the wide voltage range connector “J10” if they wish to test
a MAC under variable voltage conditions.
VCMOS
Note: The J11 jumpers must be removed in this mode of operation. Also, the 5V
wall-mount supply must still be employed in order to power the other ICs on
the Evaluation board.
D.2.5 Functional Description and Operation
CAUTION
To avoid electrostatic discharge (ESD) damage, proper ESD handling procedures must
be observed in unpacking, assembling, and testing the MAC.
The MAC and Evaluation board are delivered in ESD-safe packaging. They must be
removed from the ESD-protective bag in an ESD-safe environment. Once installed on
the test fixture, it is recommended that the entire assembly be treated as ESD-sensitive.
Retain the original MAC ESD-safe packaging material in the event that the device
needs to be returned to Microchip for service.
The Evaluation board accepts a MAC-SA5X device using sockets that do not require
the use of solder. Four screws are provided to ensure the device remains properly
seated on the board. Care should be afforded and the number of insertions should be
minimized in order to maximize the lifetime of the sockets and the J9 connector. The
Evaluation board is not designed for repeated production-type testing.
Once a MAC is inserted and the wall-mount power supply is connected, the toggle
switch may be flipped to supply power to the MAC. The user should expect the “Power
Status” LED to illuminate and the communication ports will become active. RF and
1PPS outputs are immediately available after supplying power.
A terminal emulation program may be used to configure and observe the MAC telemetry by connecting a PC to J1 or J8 of the Evaluation board (see
Section 3.1 “Configure the Serial Port”). Once power is supplied to the MAC, it will
DS50002938A-page 58 2019 Microchip Technology Inc.
Page 59

Evaluation Kit
behave as outlined in Section 2.3 “Start-Up Sequence”. After several minutes, the
user should expect the “Lock Status” LED to illuminate, indicating that Atomic Lock has
been achieved, and the short-term stability performance of the MAC will behave per the
product specifications. Also, the BITE/Lock pin (J3) will flip to a logic zero once Lock is
achieved.
Settings such as turning on/off Analog Tuning, Digital Tuning, and 1PPS disciplining
can all be adjusted with terminal emulation software. See Chapter 4. “Command Line
Interface” for appropriate syntax.
See the sections above regarding appropriate expected input/output signal levels from
the Evaluation board. The levels in Appendix D take precedence over other sections of
this User Guide that pertain to the MAC-SA5X only.
D.2.5.1 TROUBLESHOOTING
If an error should occur, the “Alarm Status” LED will illuminate. This pin is driven low
when a new alarm condition occurs and it remains low until the condition is resolved or
the user acknowledges it with the ackalm command. If an alarm cannot be cleared,
contact the factory for guidance.
If communication cannot be achieved, ensure the MAC is properly seated and that the
communication port settings are appropriate.
If the LEDs do not illuminate, check the power cable connector and toggle switch for
damage.
If atomic Lock cannot be achieved, check that the environmental conditions are within
product specifications and that the MAC is properly seated on the board.
2019 Microchip Technology Inc. DS50002938A-page 59
Page 60

MAC-SA5X User’s Guide
DS50002938A-page 60 2019 Microchip Technology Inc.
Page 61

MAC-SA5X USER’S GUIDE
Appendix E. Software License Agreements
Portions of the SA5X software make use of the following open source software:
FreeRTOS Kernel, Copyright ©2019 Amazon.com, Inc. or its affiliates. All Rights
Reserved.
Permission is hereby granted, free of charge, to any person
obtaining a copy of this software and associated documentation
files (the "Software"), to deal in the Software without
restriction, including without limitation the rights to use,
copy, modify, merge, publish, distribute, sublicense, and/or
sell copies of the Software, and to permit persons to whom the
Software is furnished to do so, subject to the following
conditions:
The above copyright notice and this permission notice shall be
included in all
copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND,
EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES
OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR COPYRIGHT HOLDERS
BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER IN
AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF
OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS
IN THE SOFTWARE.
2019 Microchip Technology Inc. DS50002938A-page 61
Page 62

MAC-SA5X User’s Guide
NOTES:
DS50002938A-page 62 2019 Microchip Technology Inc.
Page 63

Worldwide Sales and Service
AMERICAS
Corporate Office
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 480-792-7200
Fax: 480-792-7277
Technical Support:
http://www.microchip.com/
support
Web Address:
www.microchip.com
Atlanta
Duluth, GA
Tel: 678-957-9614
Fax: 678-957-1455
Austin, TX
Tel: 512-257-3370
Boston
Westborough, MA
Tel: 774-760-0087
Fax: 774-760-0088
Chicago
Itasca, IL
Tel: 630-285-0071
Fax: 630-285-0075
Dallas
Addison, TX
Tel: 972-818-7423
Fax: 972-818-2924
Detroit
Novi, MI
Tel: 248-848-4000
Houston, TX
Tel: 281-894-5983
Indianapolis
Noblesville, IN
Tel: 317-773-8323
Fax: 317-773-5453
Tel: 317-536-2380
Los Angeles
Mission Viejo, CA
Tel: 949-462-9523
Fax: 949-462-9608
Tel: 951-273-7800
Raleigh, NC
Tel: 919-844-7510
New York, NY
Tel: 631-435-6000
San Jose, CA
Tel: 408-735-9110
Tel: 408-436-4270
Canada - Toronto
Tel: 905-695-1980
Fax: 905-695-2078
ASIA/PACIFIC
Australia - Sydney
Tel: 61-2-9868-6733
China - Beijing
Tel: 86-10-8569-7000
China - Chengdu
Tel: 86-28-8665-5511
China - Chongqing
Tel: 86-23-8980-9588
China - Dongguan
Tel: 86-769-8702-9880
China - Guangzhou
Tel: 86-20-8755-8029
China - Hangzhou
Tel: 86-571-8792-8115
China - Hong Kong SAR
Tel: 852-2943-5100
China - Nanjing
Tel: 86-25-8473-2460
China - Qingdao
Tel: 86-532-8502-7355
China - Shanghai
Tel: 86-21-3326-8000
China - Shenyang
Tel: 86-24-2334-2829
China - Shenzhen
Tel: 86-755-8864-2200
China - Suzhou
Tel: 86-186-6233-1526
China - Wuhan
Tel: 86-27-5980-5300
China - Xian
Tel: 86-29-8833-7252
China - Xiamen
Tel: 86-592-2388138
China - Zhuhai
Tel: 86-756-3210040
ASIA/PACIFIC
India - Bangalore
Tel: 91-80-3090-4444
India - New Delhi
Tel: 91-11-4160-8631
India - Pune
Tel: 91-20-4121-0141
Japan - Osaka
Tel: 81-6-6152-7160
Japan - Tokyo
Tel: 81-3-6880- 3770
Korea - Daegu
Tel: 82-53-744-4301
Korea - Seoul
Tel: 82-2-554-7200
Malaysia - Kuala Lumpur
Tel: 60-3-7651-7906
Malaysia - Penang
Tel: 60-4-227-8870
Philippines - Manila
Tel: 63-2-634-9065
Singapore
Tel: 65-6334-8870
Taiwan - Hsin Chu
Tel: 886-3-577-8366
Taiwan - Kaohsiung
Tel: 886-7-213-7830
Taiwan - Taipei
Tel: 886-2-2508-8600
Thailand - Bangkok
Tel: 66-2-694-1351
Vietnam - Ho Chi Minh
Tel: 84-28-5448-2100
EUROPE
Austria - Wels
Tel: 43-7242-2244-39
Fax: 43-7242-2244-393
Denmark - Copenhagen
Tel: 45-4450-2828
Fax: 45-4485-2829
Finland - Espoo
Tel: 358-9-4520-820
France - Paris
Tel: 33-1-69-53-63-20
Fax: 33-1-69-30-90-79
Germany - Garching
Tel: 49-8931-9700
Germany - Haan
Tel: 49-2129-3766400
Germany - Heilbronn
Tel: 49-7131-72400
Germany - Karlsruhe
Tel: 49-721-625370
Germany - Munich
Tel: 49-89-627-144-0
Fax: 49-89-627-144-44
Germany - Rosenheim
Tel: 49-8031-354-560
Israel - Ra’anana
Tel: 972-9-744-7705
Italy - Milan
Tel: 39-0331-742611
Fax: 39-0331-466781
Italy - Padova
Tel: 39-049-7625286
Netherlands - Drunen
Tel: 31-416-690399
Fax: 31-416-690340
Norway - Trondheim
Tel: 47-7288-4388
Poland - Warsaw
Tel: 48-22-3325737
Romania - Bucharest
Tel: 40-21-407-87-50
Spain - Madrid
Tel: 34-91-708-08-90
Fax: 34-91-708-08-91
Sweden - Gothenberg
Tel: 46-31-704-60-40
Sweden - Stockholm
Tel: 46-8-5090-4654
UK - Wokingham
Tel: 44-118-921-5800
Fax: 44-118-921-5820
DS50002938A-page 63 2019 Microchip Technology Inc.
05/14/19
 Loading...
Loading...