

Page 1
PIC24FJ128GA Family
Data Sheet
General Purpose,
16-Bit Flash Microcontrollers
© 2006 Microchip Technology Inc. Advance Information DS39747B
Page 2
Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the
intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our
knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data
Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not
mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection features of our
products. Attempts to break Microchip’s code protection feature may be a violation of the Digital Millennium Copyright Act. If such acts
allow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Information contained in this publication regarding device
applications and the like is provided only for your convenience
and may be superseded by updates. It is your responsibility to
ensure that your application meets with your specifications.
MICROCHIP MAKES NO REPRESENTATIONS OR WARRANTIES OF ANY KIND WHETHER EXPRESS OR IMPLIED,
WRITTEN OR ORAL, STATUTORY OR OTHERWISE,
RELATED TO THE INFORMATION, INCLUDING BUT NOT
LIMITED TO ITS CONDITION, QUALITY, PERFORMANCE,
MERCHANTABILITY OR FITNESS FOR PURPOSE.
Microchip disclaims all liability arising from this information and
its use. Use of Microchip devices in life support and/or safety
applications is entirely at the buyer’s risk, and the buyer agrees
to defend, indemnify and hold harmless Microchip from any and
all damages, claims, suits, or expenses resulting from such
use. No licenses are conveyed, implicitly or otherwise, under
any Microchip intellectual property rights.
Trademarks
The Microchip name and logo, the Microchip logo, Accuron,
dsPIC, K
EELOQ, microID, MPLAB, PIC, PICmicro, PICSTART,
PRO MATE, PowerSmart, rfPIC and SmartShunt are
registered trademarks of Microchip Technology Incorporated
in the U.S.A. and other countries.
AmpLab, FilterLab, Migratable Memory, MXDEV, MXLAB,
SEEVAL, SmartSensor and The Embedded Control Solutions
Company are registered trademarks of Microchip Technology
Incorporated in the U.S.A.
Analog-for-the-Digital Age, Application Maestro, dsPICDEM,
dsPICDEM.net, dsPICworks, ECAN, ECONOMONITOR,
FanSense, FlexROM, fuzzyLAB, In-Circuit Serial
Programming, ICSP, ICEPIC, Linear Active Thermistor,
MPASM, MPLIB, MPLINK, MPSIM, PICkit, PICDEM,
PICDEM.net, PICLAB, PICtail, PowerCal, PowerInfo,
PowerMate, PowerTool, REAL ICE, rfLAB, rfPICDEM, Select
Mode, Smart Serial, SmartTel, Total Endurance, UNI/O,
WiperLock and Zena are trademarks of Microchip Technology
Incorporated in the U.S.A. and other countries.
SQTP is a service mark of Microchip Technology Incorporated
in the U.S.A.
All other trademarks mentioned herein are property of their
respective companies.
© 2006, Microchip Technology Incorporated, Printed in the
U.S.A., All Rights Reserved.
Printed on recycled paper.
Microchip received ISO/TS-16949:2002 quality system certification for
its worldwide headquarters, design and wafer fabrication facilities in
Chandler and Tempe, Arizona and Mountain View, California in
October 2003. The Company’s quality system processes and
procedures are for its PICmicro
devices, Serial EEPROMs, microperipherals, nonvolatile memory and
analog products. In addition, Microchip’s quality system for the design
and manufacture of development systems is ISO 9001:2000 certified.
®
8-bit MCUs, KEEL
®
OQ
code hopping
DS39747B-page ii Advance Information © 2006 Microchip Technology Inc.
Page 3
PIC24FJ128GA FAMILY
General Purpose, 16-bit Flash Microcontrollers
High-Performance CPU:
• Modified Harvard Architecture
• Up to 16 MIPS operation @ 32 MHz
• 8 MHz internal oscillator:
- 4x PLL option
- Multiple divide options
• 17-bit x 17-bit Single-Cycle Hardware
Fractional/Integer Multiplier
• 32-bit by 16-bit Hardware Divider
• 16 x 16-bit Working Register Array
• C compiler Optimized Instruction Set Architecture:
- 76 base instructions
- Flexible addressing modes
• Linear Program Memory Addressing up to 12 Mbytes
• Linear Data Memory Addressing up to 64 Kbytes
• Two Address Generation Units for separate Read
and Write Addressing of Data Memory
Special Microcontroller Features:
• Operating Voltage Range of 2.0V to 3.6V
• Flash Program Memory:
- 1000 erase/write cycles, typical
- Flash retention 20 years, typical
• Self-Reprogrammable under Software Control
• Selectable Power Management modes:
- Sleep, Idle and Alternate Clock modes
• Fail-Safe Clock Monitor operation:
- Detects clock failure and switches to on-chip,
low-power RC oscillator
• On-Chip LDO Regulator
• JTAG Boundary Scan and Programming Support
• Power-on Reset (POR), Power-up Timer (PWRT)
and Oscillator Start-up Timer (OST)
• Flexible Watchdog Timer (WDT) with On-Chip,
Low-Power RC Oscillator for reliable operation
• In-Circuit Serial Programming™ (ICSP™) and
In-Circuit Emulation (ICE) via 2 pins
Analog Features:
• 10-bit, up to 16-channel Analog-to-Digital Converter
(A/D):
- 500 ksps conversion rate
- Conversion available during Sleep and Idle
• Dual Analog Comparators with Programmable
Input/Output Configuration
Peripheral Features:
• Two 3-wire/4-wire SPI modules, supporting 4 Frame
modes with 4-level FIFO Buffer
•Two I2C™ modules support Multi-Master/Slave
mode and 7-bit/10-bit Addressing
• Two UART modules:
- Supports RS-232, RS-485 and LIN 1.2
- Supports IrDA
- Auto-Wake-up on Start bit
- Auto-Baud Detect
- 4-level FIFO buffer
• Parallel Master Slave Port (PMP/PSP):
- Supports 8-bit or 16-bit data
- Supports 16 address lines
• Hardware Real-Time Clock/Calendar (RTCC):
- Provides clock, calendar and alarm functions
• Five 16-bit Timers/Counters with Programmable
prescaler
• Five 16-bit Capture Inputs
• Five 16-bit Compare/PWM Outputs
• High-Current Sink/Source on select I/O pins:
18 mA/18 mA
• Configurable Open-Drain Output on Digital I/O pins
• Up to 5 External Interrupt Sources
®
with on-chip hardware endec
Program
Device Pins
PIC24FJ64GA006 64 64K 8K 5 5 5 2 2 2 16 2 Y Y
PIC24FJ96GA006 64 96K 8K 5 5 5 2 2 2 16 2 Y Y
PIC24FJ128GA006 64 128K 8K 5 5 5 2 2 2 16 2 Y Y
PIC24FJ64GA008 80 64K 8K 5 5 5 2 2 2 16 2 Y Y
PIC24FJ96GA008 80 96K 8K 5 5 5 2 2 2 16 2 Y Y
PIC24FJ128GA008 80 128K 8K 5 5 5 2 2 2 16 2 Y Y
PIC24FJ64GA010 100 64K 8K 5 5 5 2 2 2 16 2 Y Y
PIC24FJ96GA010 100 96K 8K 5 5 5 2 2 2 16 2 Y Y
PIC24FJ128GA010 100 128K 8K 5 5 5 2 2 2 16 2 Y Y
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 1
Memory
(Bytes)
SRAM
(Bytes)
Timers
16-bit
Input
Capture
Compare/
PWM Output
SPI I2C™
UART
10-bit
A/D (ch)
PMP/PSP
Comparators
JTAG
Page 4

PIC24FJ128GA FAMILY
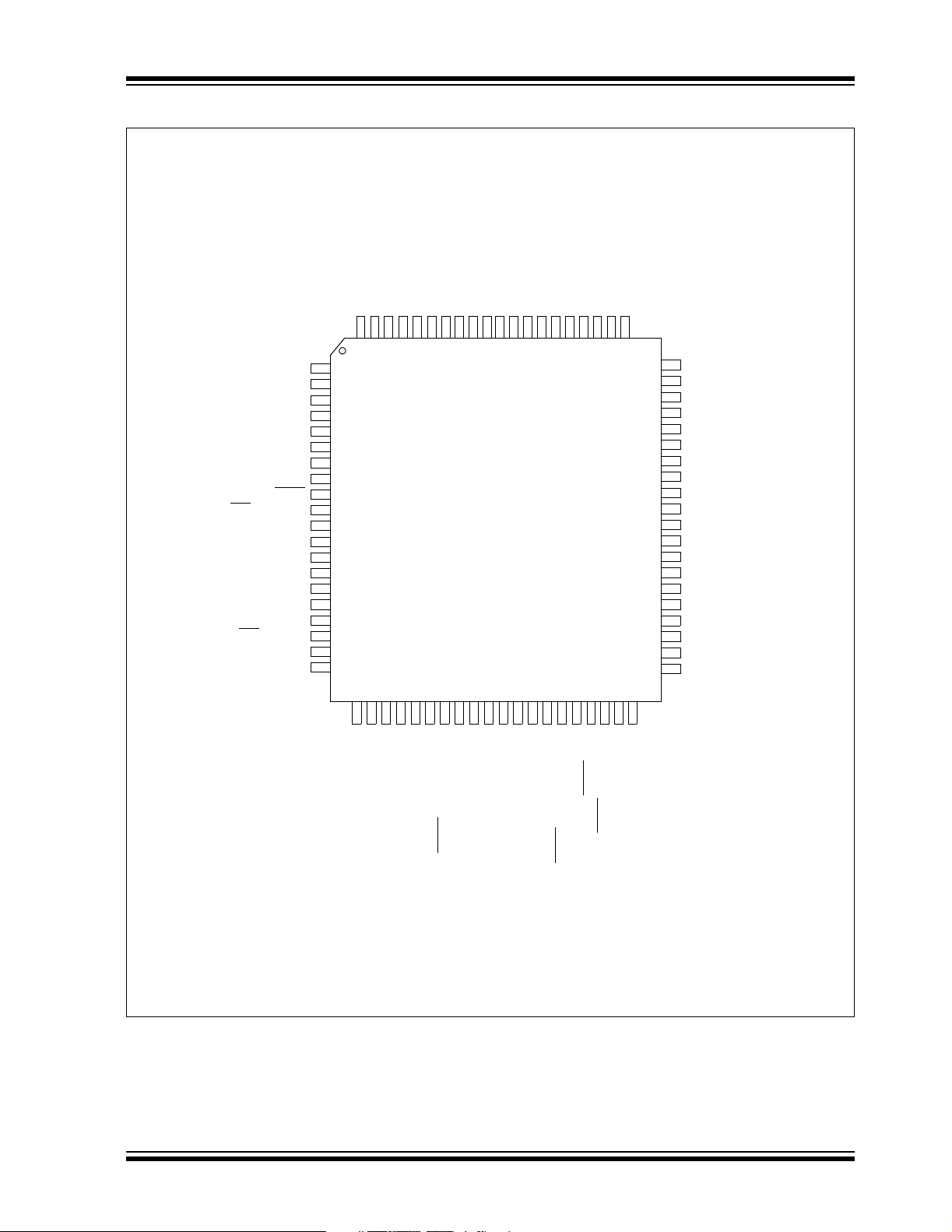
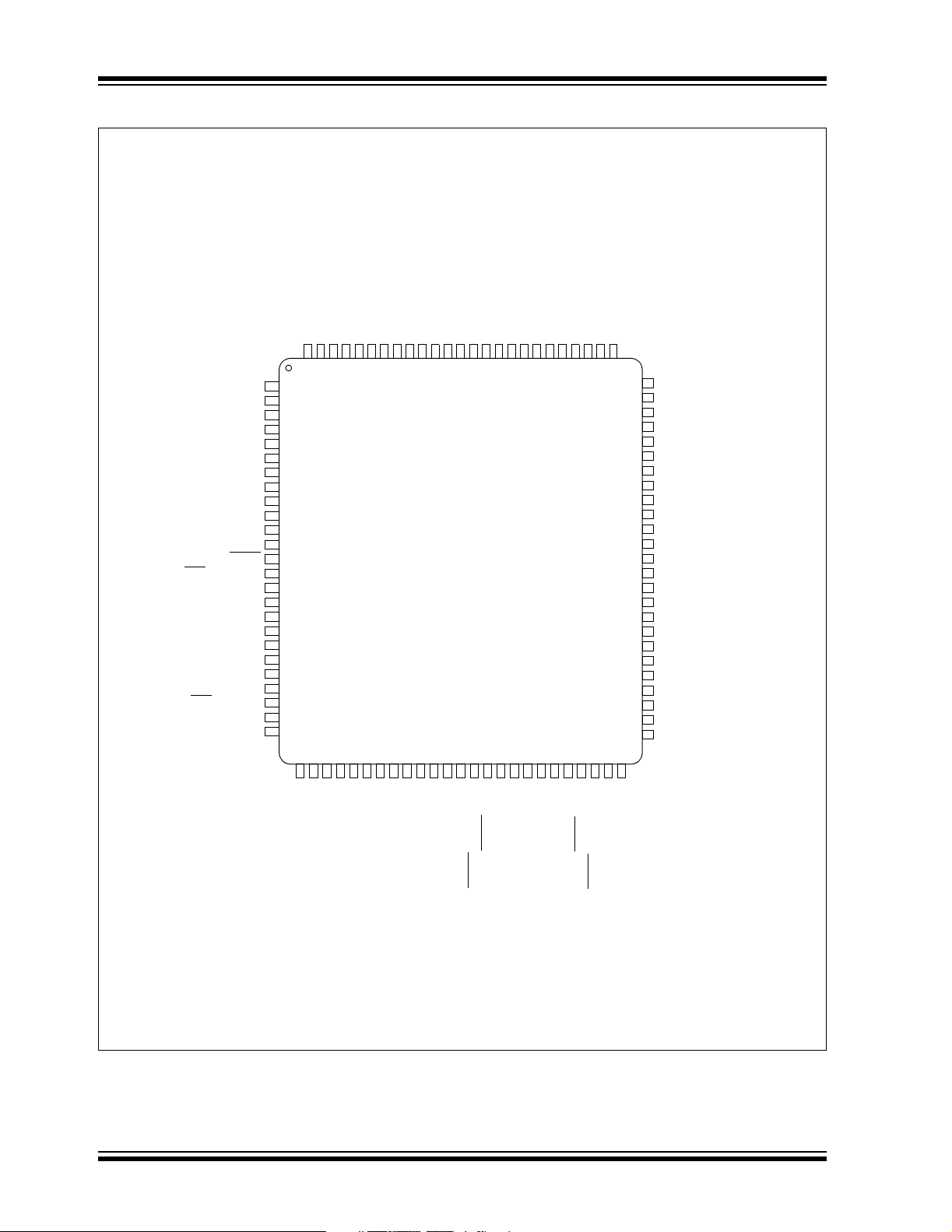
Pin Diagrams
64-Pin TQFP
PMD4/RE4
PMD3/RE3
PMD2/RE2
PMD1/RE1
PMD0/RE0
RF1
64
636261596058575654555352514950
1
2
3
4
5
6
7
8
9
DD
10
11
12
13
14
15
16
PIC24FJXXGA006
PIC24FJXXXGA006
17
18
2244242526272829303132
192021
PMA5/SCK2/CN8/RG6
PMA4/SDI2/CN9/RG7
PMA3/SDO2/CN10/RG8
PMA2/SS2
C2IN-/AN2/SS1
PGC1/EMUC1/V
PGD1/EMUD1/PMA6/V
PMD5/RE5
PMD6/RE6
PMD7/RE7
MCLR
/CN11/RG9
VSS
V
C1IN+/AN5/CN7/RB5
C1IN-/AN4/CN6/RB4
C2IN+/AN3/CN5/RB3
/CN4/RB2
REF-/AN1/CN3/RB1
REF+/AN0/CN2/RB0
RF0
ENVREG
23
CAP/VDDCORE
CN15/RD6
PMRD/CN14/RD5
PMWR/OC5/IC5/CN13/RD4
PMBE/OC4/RD3
OC3/RD2
V
CN16/RD7
OC2/RD1
48
47
46
45
43
42
41
40
39
38
37
36
35
34
33
SOSCO/T1CK/CN0/RC14
SOSCI/CN1/RC13
OC1/RD0
IC4/PMCS1/INT4/RD11
IC3/PMCS2/INT3/RD10
IC2/U1CTS
IC1/RTCC/INT1/RD8
Vss
OSC2/CLKO/RC15
OSC1/CLKI/RC12
V
DD
SCL1/RG2
SDA1/RG3
U1RTS
U1RX/SDI1/RF2
U1TX/SDO1/RF3
//INT2/RD9
/BCLK1/SCK1/INT0/RF6
PGD2/EMUD2/AN7/RB7
PGC2/EMUC2/AN6/OCFA/RB6
AVDD
SS
AV
DD
VSS
V
REF/AN10/RB10
/BCLK2/AN14/RB14
PMA7/C2OUT/AN9/RB9
TDO/PMA12/AN11/RB11
U2CTS/C1OUT/AN8/RB8
TMS/PMA13/CV
TDI/PMA10/AN13/RB13
TCK/PMA11/AN12/RB12
PMA8/U2TX/SCL2/CN18/RF5
PMA9/U2RX/SDA2/CN17/RF4
PMA0/AN15/OCFB/CN12/RB15
PMA1/U2RTS
DS39747B-page 2 Advance Information © 2006 Microchip Technology Inc.
Page 5
Pin Diagrams (Continued)
80-Pin TQFP
PMD4/RE4
PMD3/RE3
PMD2/RE2
PMD1/RE1
PMD0/RE0
PIC24FJ128GA FAMILY
CAP/VDDCORE
PMRD/CN14/RD5
PMWR/OC5/CN13/RD4
CN19/RD13
IC5/RD12
PMBE/OC4/RD3
OC3/RD2
RG0
RG1
RF0
V
ENVREG
RF1
CN16/RD7
CN15/RD6
OC2/RD1
PMD5/RE5
PMD6/RE6
PMD7/RE7
T2CK/RC1
T4CK/RC3
PMA5/SCK2/CN8/RG6
PMA4/SDI2/CN9/RG7
PMA3/SDO2/CN10/RG8
MCLR
PMA2/SS2
C1IN+/AN5/CN7/RB5
C2IN+/AN3/CN5/RB3
C2IN-/AN2/SS1
PGC1/EMUC1/AN1/CN3/RB1
PGD1/EMUD1/AN0/CN2/RB0
/CN11/RG9
VSS
V
TMS/INT1/RE8
TDO/INT2/RE9
C1IN-/AN4/CN6/RB4
/CN4/RB2
DD
TCK/PMA11/AN12/RB12
/BCLK2/AN14/RB14
TDI/PMA10/AN13/RB13
PMA1/U2RTS
6564636162
/BCLK1/RD15
CN20/U1CTS/RD14
CN21/U1RTS
PMA0/AN15/OCFB/CN12/RB15
60
SOSCO/T1CK/CN0/RC14
59
SOSCI/CN1/RC13
58
OC1/RD0
57
IC4/PMCS1/RD11
56
IC3/PMCS2/RD10
55
IC2/RD9
54
IC1/RTCC/RD8
53
SDA2/INT4/RA15
52
SCL2/INT3/RA14
51
VSS
50
OSC2/CLKO/RC15
49
OSC1/CLKI/RC12
48
V
47
46
45
44
43
42
41
40
39
PMA8/U2TX/CN18/RF5
PMA9/U2RX/CN17/RF4
DD
SCL1/RG2
SDA1/RG3
SCK1/INT0/RF6
SDI1/RF7
SDO1/RF8
U1RX/RF2
U1TX/RF3
807978
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
PGD2/EMUD2/AN7/RB7
PGC2/EMUC2/AN6/OCFA/RB6
7574737172
76
77
PIC24FJXXGA008
PIC24FJXXXGA008
26
232425
REF-/RA9
PMA7/V
27
SS
DD
AV
AV
PMA6/VREF+/RA10
U2CTS/C1OUT/AN8/RB8
7069686667
2829303132333435363738
DD
VSS
V
REF/AN10/RB10
C2OUT/AN9/RB9
PMA12/AN11/RB11
PMA13/CV
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 3
Page 6
PIC24FJ128GA FAMILY
Pin Diagrams (Continued))
100-Pin TQFP
RG1
RA6
RG0
RF1
RG15
DD
V
PMD5/RE5
PMD6/RE6
PMD7/RE7
T2CK/RC1
T3CK/RC2
T4CK/RC3
PMA5/SCK2/CN8/RG6
PMA4/SDI2/CN9/RG7
PMA3/SDO2/CN10/RG8
PMA2/SS2
C1IN+/AN5/CN7/RB5
C1IN-/AN4/CN6/RB4
C2IN+/AN3/CN5/RB3
C2IN-/AN2/SS1
PGC1/EMUC1/AN1/CN3/RB1
PGD1/EMUD1/AN0/CN2/RB0
T5CK/RC4
MCLR
/CN11/RG9
SS
V
DD
V
TMS/RA0
INT1/RE8
INT2/RE9
/CN4/RB2
PMD2/RE2
RG13
PMD4/RE4
100
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
RG12
PMD3/RE3
969897
99
2829303132333435363738
27
RA7
RG14
PMD1/RE1
PMD0/RE0
9294939190898887868584838281807978
95
PIC24FJXXGA010
PIC24FJXXXGA010
ENVREG
RF0
40
39
CN15/RD6
PMRD/CN14/RD5
PMWR/OC5/CN13/RD4
CN19/RD13
IC5/RD12
PMBE/OC4/RD3
OC3/RD2
464748
OC2/RD1
76
77
49
V
SS
75
SOSCO/T1CK/CN0/RC14
74
SOSCI/CN1/RC13
73
OC1/RD0
72
IC4/PMCS1/RD11
71
IC3/PMCS2/RD10
70
IC2/RD9
69
IC1/RTCC/RD8
68
INT4/RA15
67
INT3/RA14
66
VSS
65
OSC2/CLKO/RC15
64
OSC1/CLKI/RC12
63
DD
V
62
TDO/RA5
61
TDI/RA4
60
SDA2/RA3
59
SCL2/RA2
58
SCL1/RG2
57
SDA1/RG3
56
SCK1/INT0/RF6
55
SDI1/RF7
54
SDO1/RF8
53
U1RX/RF2
52
U1TX/RF3
51
50
VCAP/VDDCORE
CN16/RD7
45
44
43
42
41
DD
AVSS
AV
REF-/RA9
PMA7/V
PGD2/EMUD2/AN7/RB7
PGC2/EMUC2/AN6/OCFA/RB6
C1OUT/AN8/RB8
PMA6/VREF+/RA10
C2OUT/AN9/RB9
REF/AN10/RB10
PMA13/CV
DD
VSS
V
TCK/RA1
U2CTS/RF12
/BCLK2/RF13
PMA12/AN11/RB11
PMA11/AN12/RB12
PMA10/AN13/RB13
U2RTS
DD
VSS
V
/RD14
/BCLK1/RD15
PMA1/AN14/RB14
CN20/U1CTS
PMA8/U2TX/CN18/RF5
PMA9/U2RX/CN17/RF4
CN21/U1RTS
PMA0/AN15/OCFB/CN12/RB15
DS39747B-page 4 Advance Information © 2006 Microchip Technology Inc.
Page 7

PIC24FJ128GA FAMILY
Table of Contents
1.0 Device Overview .......................................................................................................................................................................... 7
2.0 CPU............................................................................................................................................................................................ 19
3.0 Memory Organization ................................................................................................................................................................. 25
4.0 Flash Program Memory.............................................................................................................................................................. 45
5.0 Resets ........................................................................................................................................................................................ 51
6.0 Interrupt Controller ..................................................................................................................................................................... 57
7.0 Oscillator Configuration.............................................................................................................................................................. 91
8.0 Power-Saving Features .............................................................................................................................................................. 97
9.0 I/O Ports ..................................................................................................................................................................................... 99
10.0 Timer1 ...................................................................................................................................................................................... 101
11.0 Timer2/3 and Timer4/5 ............................................................................................................................................................ 103
12.0 Input Capture............................................................................................................................................................................ 109
13.0 Output Compare....................................................................................................................................................................... 111
14.0 Serial Peripheral Interface (SPI)............................................................................................................................................... 115
15.0 Inter-Integrated Circuit (I
16.0 Universal Asynchronous Receiver Transmitter (UART) ........................................................................................................... 131
17.0 Parallel Master Port .................................................................................................................................................................. 139
18.0 Real-Time Clock and Calendar ................................................................................................................................................ 149
19.0 Programmable Cyclic Redundancy Check (CRC) Generator .................................................................................................. 161
20.0 10-bit High-Speed A/D Converter............................................................................................................................................. 165
21.0 Comparator Module.................................................................................................................................................................. 173
22.0 Comparator Voltage Reference................................................................................................................................................ 177
23.0 Special Features ...................................................................................................................................................................... 179
24.0 Instruction Set Summary .......................................................................................................................................................... 189
25.0 Development Support............................................................................................................................................................... 197
26.0 Electrical Characteristics .......................................................................................................................................................... 201
27.0 Packaging Information.............................................................................................................................................................. 213
Appendix A: Revision History............................................................................................................................................................. 219
Index ................................................................................................................................................................................................. 221
The Microchip Web Site..................................................................................................................................................................... 225
Customer Change Notification Service .............................................................................................................................................. 225
Customer Support .............................................................................................................................................................................. 225
Reader Response .............................................................................................................................................................................. 226
Product Identification System ............................................................................................................................................................ 227
2
C™) ................................................................................................................................................. 123
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 5
Page 8
PIC24FJ128GA FAMILY
TO OUR VALUED CUSTOMERS
It is our intention to provide our valued customers with the best documentation possible to ensure successful use of your Microchip
products. To this end, we will continue to improve our publications to better suit your needs. Our publications will be refined and
enhanced as new volumes and updates are introduced.
If you have any questions or comments regarding this publication, please contact the Marketing Communications Department via
E-mail at docerrors@microchip.com or fax the Reader Response Form in the back of this data sheet to (480) 792-4150. We
welcome your feedback.
Most Current Data Sheet
To obtain the most up-to-date version of this data sheet, please register at our Worldwide Web site at:
http://www.microchip.com
You can determine the version of a data sheet by examining its literature number found on the bottom outside corner of any page.
The last character of the literature number is the version number, (e.g., DS30000A is version A of document DS30000).
Errata
An errata sheet, describing minor operational differences from the data sheet and recommended workarounds, may exist for current
devices. As device/documentation issues become known to us, we will publish an errata sheet. The errata will specify the revision
of silicon and revision of document to which it applies.
To determine if an errata sheet exists for a particular device, please check with one of the following:
• Microchip’s Worldwide Web site; http://www.microchip.com
• Your local Microchip sales office (see last page)
When contacting a sales office, please specify which device, revision of silicon and data sheet (include literature number) you are
using.
Customer Notification System
Register on our web site at www.microchip.com to receive the most current information on all of our products.
DS39747B-page 6 Advance Information © 2006 Microchip Technology Inc.
Page 9

PIC24FJ128GA FAMILY
1.0 DEVICE OVERVIEW
This document contains device specific information for
the following devices:
• PIC24FJ64GA006
• PIC24FJ64GA008
• PIC24FJ64GA010
• PIC24FJ96GA006
• PIC24FJ96GA008
• PIC24FJ96GA010
• PIC24FJ128GA006
• PIC24FJ128GA008
• PIC24FJ128GA010
This family introduces a new line of Microchip devices:
a 16-bit RISC microcontroller family with a broad
peripheral feature set and enhanced computational
performance. The PIC24FJ128GA family offers a new
migration option for those high-performance applications which may be outgrowing their 8-bit platforms, but
don’t require the numerical processing power of a
digital signal processor.
1.1 Core Features
1.1.1 16-BIT ARCHITECTURE
Central to all PIC24 devices is the 16-bit modified
Harvard architecture, first introduced with Microchip’s
dsPIC® digital signal controllers. The PIC24 CPU core
offers a wide range of enhancements, such as:
• 16-bit data and 24-bit address paths, with the
ability to move information between data and
memory spaces
• Linear addressing of up to 8 Mbytes (program
space) and 64 Kbytes (data)
• A 16-element working register array with built-in
software stack support
• A 17 x 17 hardware multiplier with support for
integer math
• Hardware support for 32 by 16-bit division
• An instruction set that supports multiple
addressing modes and is optimized for high-level
languages such as ‘C’
• Operational performance up to 16 MIPS
1.1.2 POWER-SAVING TECHNOLOGY
All of the devices in the PIC24FJ128GA family incorporate a range of features that can significantly reduce
power consumption during operation. Key items
include:
• On-the-Fly Clock Switching: The device clock
can be changed under software control to the
Timer1 source or the internal low-power RC
oscillator during operation, allowing the user to
incorporate power-saving ideas into their software
designs.
• Doze Mode Operation: When timing-sensitive
applications, such as serial communications,
require the uninterrupted operation of peripherals,
the CPU clock speed can be selectively reduced,
allowing incremental power savings without
missing a beat.
• Instruction-Based Power-Saving Modes: The
microcontroller can suspend all operations, or
selectively shut down its core while leaving its
peripherals active, with a single instruction in
software.
1.1.3 OSCILLATOR OPTIONS AND
FEATURES
All of the devices in the PIC24FJ128GA family offer five
different oscillator options, allowing users a range of
choices in developing application hardware. These
include:
• Two Crystal modes, using crystals or ceramic
resonators.
• Two External Clock modes, offering the option of
a divide-by-2 clock output.
• A Fast Internal Oscillator (FRC) with a nominal
8 MHz output, which can also be divided under
software control to provide clock speeds as low as
31 kHz.
• A Phase Lock Loop (PLL) frequency multiplier,
available to the external oscillator modes and the
FRC oscillator, which allows clock speeds of up to
32 MHz.
• A separate internal RC oscillator (LPRC) with a
fixed 31 kHz output, which provides a low-power
option for timing-insensitive applications.
The internal oscillator block also provides a stable reference source for the Fail-Safe Clock Monitor. This
option constantly monitors the main clock source
against a reference signal provided by the internal
oscillator and enables the controller to switch to the
internal oscillator, allowing for continued low-speed
operation or a safe application shutdown.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 7
Page 10

PIC24FJ128GA FAMILY
1.1.4 EASY MIGRATION
Regardless of the memory size, all devices share the
same rich set of peripherals, allowing for a smooth
migration path as applications grow and evolve.
The consistent pinout scheme used throughout the
entire family also aids in migrating to the next larger
device. This is true when moving between devices with
the same pin count, or even jumping from 64-pin to
80-pin to 100-pin devices.
The PIC24 family is pin-compatible with devices in the
dsPIC33 family, and shares some compatibility with the
pinout schema for PIC18 and dsPIC30. This extends
the ability of applications to grow from the relatively
simple to the powerful and complex, yet still select a
Microchip device.
1.2 Other Special Features
• Communications: The PIC24FJ128GA family
incorporates a range of serial communication
peripherals to handle a range of application
requirements. All devices are equipped with two
independent UARTs with built-in IrDA
encoder/decoders. There are also two independent SPI modules, and two independent I
modules that support both Master and Slave
modes of operation.
• Parallel Master/Enhanced Parallel Slave Port:
One of the general purpose I/O ports can be
reconfigured for enhanced parallel data communications. In this mode, the port can be configured
for both master and slave operations, and
supports 8-bit and 16-bit data transfers with up to
16 external address lines in Master modes.
• Real-Time Clock/Calendar: This module
implements a full-featured clock and calendar with
alarm functions in hardware, freeing up timer
resources and program memory space for use of
the core application.
• 10-Bit A/D Converter: This module incorporates
programmable acquisition time, allowing for a
channel to be selected and a conversion to be
initiated without waiting for a sampling period, as
well as faster sampling speeds.
2
C
1.3 Details on Individual Family Members
Devices in the PIC24FJ128GA family are available in
64-pin, 80-pin and 100-pin packages. The general
block diagram for all devices is shown in Figure 1-1.
The devices are differentiated from each other in two
ways:
1. Flash program memory (64 Kbytes for
PIC24FJ64GA devices, 96 Kbytes for
PIC24FJ96GA devices and 128 Kbytes for
PIC24FJ128GA devices).
2. Available I/O pins and ports (53 pins on 6 ports
for 64-pin devices, 69 pins on 7 ports for 80-pin
devices and 84 pins on 7 ports for 100-pin
devices).
All other features for devices in this family are identical.
These are summarized in Table 1-1.
A list of the pin features available on the
PIC24FJ128GA family devices, sorted by function, is
shown in Table 1-2. Note that this table shows the pin
location of individual peripheral features and not how
they are multiplexed on the same pin. This information
is provided in the pinout diagrams in the beginning of
the data sheet. Multiplexed features are sorted by the
priority given to a feature, with the highest priority
peripheral being listed first.
DS39747B-page 8 Advance Information © 2006 Microchip Technology Inc.
Page 11
PIC24FJ128GA FAMILY
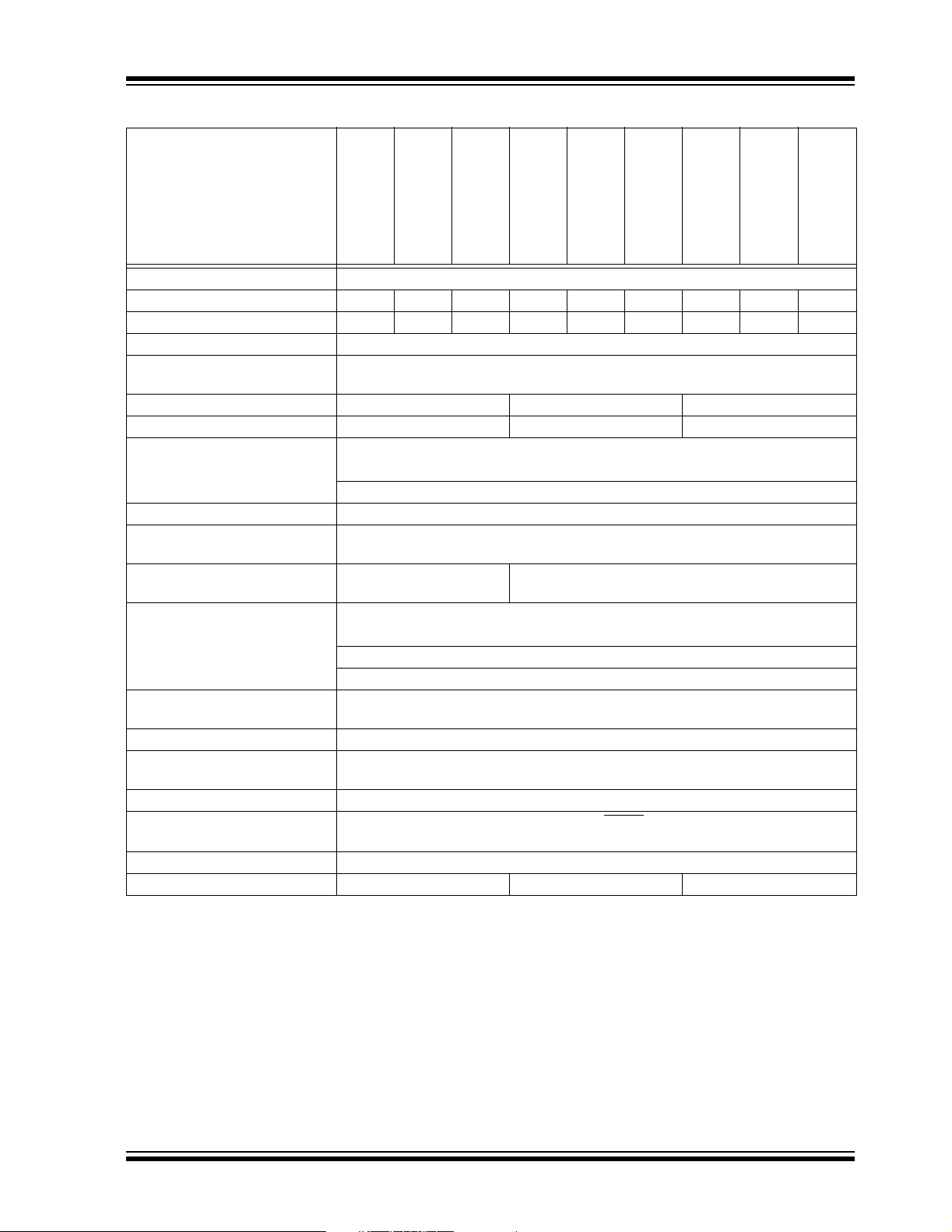
TABLE 1-1: DEVICE FEATURES FOR THE PIC24FJ128GA FAMILY
Features
PIC24FJ64GA006
Operating Frequency DC – 32 MHz
Program Memory (Bytes) 64K 96K 128K 64K 96K 128K 64K 96K 128K
Program Memory (Instructions) 22,016 32,768 44,032 22,016 32,768 44,032 22,016 32,768 44,032
Data Memory (Bytes) 8192
Interrupt Sources
(Soft Vectors/NMI Traps)
I/O Ports Ports B, C, D, E, F, G Ports A, B, C, D, E, F, G Ports A, B, C, D, E, F, G
Total I/O Pins 53 69 84
Timers:
Total number (16-bit) 5
32-bit (from paired 16-bit timers) 2
Input Capture Channels 5
Output Compare/PWM Channels
Input Change Notification
Interrupt
Serial Communications:
Enhanced UART 2
SPI (3-wire/4-wire) 2
2
C™ 2
I
Parallel Communications
(PMP/PSP)
JTAG Boundary Scan Yes
10-bit Analog-to-Digital Module
(input channels)
Analog Comparators 2
Resets (and Delays) POR, BOR, RESET Instruction, MCLR
Instruction Set 76 Base Instructions, Multiple Addressing Mode Variations
Packages 64-pin TQFP 80-pin TQFP 100-pin TQFP
PIC24FJ96GA006
19 22
PIC24FJ128GA006
Repeat Hardware Traps, (PWRT, OST, PLL Lock)
PIC24FJ64GA008
PIC24FJ96GA008
43
(39/4)
5
Yes
16
PIC24FJ128GA008
, WDT; Illegal Opcode,
PIC24FJ64GA010
PIC24FJ96GA010
PIC24FJ128GA010
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 9
Page 12
PIC24FJ128GA FAMILY
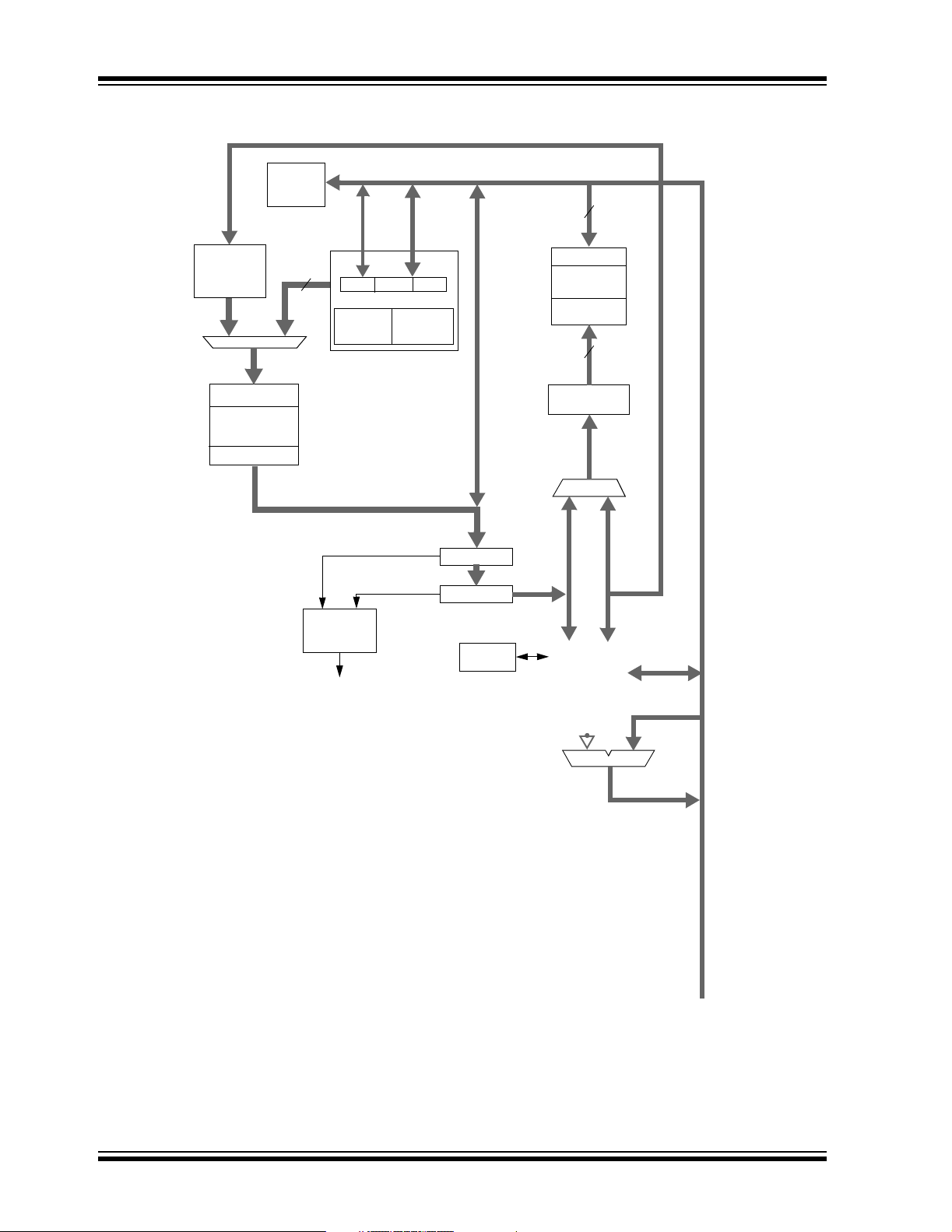
FIGURE 1-1: PIC24FJ128GA FAMILY GENERAL BLOCK DIAGRAM
PSV & Table
Data Access
Control Block
Address Latch
Program Memory
Data Latch
Interrupt
Controller
23
23
Instruction
Decode &
Control
8
PCH PCL
PCU
Program Counter
Stac k
Control
Logic
Address Bus
24
16
Repeat
Control
Logic
Data Bus
16
Inst Latch
Inst Register
Divide
Support
Data Latch
Data RAM
Address
Latch
Read AGU
Write AGU
EA MUX
16
Literal Data
16
16
16
16-bit ALU
16
DS39747B-page 10 Advance Information © 2006 Microchip Technology Inc.
Page 13
PIC24FJ128GA FAMILY
TABLE 1-2: PIC24FJ128GA FAMILY PINOUT DESCRIPTIONS
Function
AN0 16 20 25 I ANA A/D Analog Inputs.
AN1151924IANA
AN2141823IANA
AN3131722IANA
AN4121621IANA
AN5 11 15 20 I ANA
AN6172126IANA
AN7182227IANA
AN8212732IANA
AN9222833IANA
AN10 23 29 34 I ANA
AN11 24 30 35 I ANA
AN12 27 33 41 I ANA
AN13 28 34 42 I ANA
AN14 29 35 43 I ANA
AN15 30 36 44 I ANA
DD 19 25 30 P — Positive Supply for Analog Modules.
AV
SS 20 26 31 P — Ground Reference for Analog Modules.
AV
BCLK1353848O—UART1 IrDA
BCLK2293539O—UART2 IrDA
C1IN- 12 16 21 I ANA Comparator 1 Negative Input.
C1IN+ 11 15 20 I ANA Comparator 1 Positive Input.
C1OUT 21 27 32 O — Comparator 1 Output.
C2IN- 14 18 23 I ANA Comparator 2 Negative Input.
C2IN+ 13 17 22 I ANA Comparator 2 Positive Input.
C2OUT 22 28 33 O — Comparator 2 Output.
CLKI 39 49 63 I ANA Main Clock Input Connection.
CLKO 40 50 64 O — System Clock Output.
CN0 48 60 74 I ST Interrupt-on-Change Inputs.
CN1475973IST
CN2162025IST
CN3151924IST
CN4141823IST
CN5131722IST
CN6121621IST
CN7 11 15 20 I ST
CN8 4 6 10 I ST
CN9 5 7 11 I ST
CN10 6 8 12 I ST
CN11 8 10 14 I ST
CN12303644IST
CN13526681IST
CN14536782IST
CN15546883IST
CN16556984IST
CN17313949IST
Legend: TTL = TTL input buffer ST = Schmitt Trigger input buffer
64-pin 80-pin 100-pin
ANA = Analog level input/output I
Pin Number
I/O
Input
Buffer
®
Baud Clock.
®
Baud Clock.
2
C™ = I2C/SMBus input buffer
Description
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 11
Page 14
PIC24FJ128GA FAMILY
TABLE 1-2: PIC24FJ128GA FAMILY PINOUT DESCRIPTIONS (CONTINUED)
Function
CN18 32 40 50 I ST Interrupt-on-Change Inputs.
CN19 — 65 80 I ST
CN20 — 37 47 I ST
CN21 — 38 48 I ST
REF 23 29 34 O ANA Comparator Voltage Reference Output.
CV
EMUC1 15 19 24 I/O ST In-Circuit Emulator Clock Input/Output.
EMUD1 16 20 25 I/O ST In-Circuit Emulator Data Input/Output.
EMUC2 17 21 26 I/O ST In-Circuit Emulator Clock Input/Output.
EMUD2 18 22 27 I/O ST In-Circuit Emulator Data Input/Output.
ENVREG 57 71 86 I ST Enable for On-Chip Voltage Regulator.
IC1 42 54 68 I ST Input Capture Inputs.
IC2435569IST
IC3445670IST
IC4455771IST
IC5526479IST
INT0 35 45 55 I ST External Interrupt Inputs.
INT1 42 13 18 I ST
INT2 43 14 19 I ST
INT3 44 52 66 I ST
INT4 45 53 67 I ST
MCLR
OC1 46 58 72 O — Output Compare/PWM Outputs.
OC2496176O—
OC3506277O—
OC4516378O—
OC5526681O—
OCFA 17 21 26 I ST Output Compare Fault A Input.
OCFB 30 36 44 I ST Output Compare Fault B Input.
OSC1 39 49 63 I ANA Main Oscillator Input Connection.
OSC2 40 50 64 O ANA Main Oscillator Output Connection.
PGC1 15 19 24 I/O ST In-Circuit Debugger and ICSP™ Programming Clock
PGD1 16 20 25 I/O ST In-Circuit Debugger and ICSP Programming Data.
PGC2 17 21 26 I/O ST In-Circuit Debugger and ICSP™ Programming Clock.
PGD2 18 22 27 I/O ST In-Circuit Debugger and ICSP Programming Data.
Legend: TTL = TTL input buffer ST = Schmitt Trigger input buffer
64-pin 80-pin 100-pin
ANA = Analog level input/output I
Pin Number
I/O
7 9 13 I ST Master Clear (Device Reset) Input. This line is brought
Input
Buffer
low to cause a Reset.
2
C™ = I2C/SMBus input buffer
Description
DS39747B-page 12 Advance Information © 2006 Microchip Technology Inc.
Page 15

PIC24FJ128GA FAMILY
TABLE 1-2: PIC24FJ128GA FAMILY PINOUT DESCRIPTIONS (CONTINUED)
Function
64-pin 80-pin 100-pin
PMA0 30 36 44 I/O ST Parallel Master Port Address Bit 0 Input (Buffered Slave
PMA1 29 35 43 I/O ST
PMA2 8 10 14 O — Parallel Master Port Address (Demultiplexed Master
PMA3 6 8 12 O —
PMA4 5 7 11 O —
PMA5 4 6 10 O —
PMA6 16 24 29 O —
PMA7 22 23 28 O —
PMA8 32 40 50 O —
PMA9 31 39 49 O —
PMA10 28 34 42 O —
PMA11 27 33 41 O —
PMA12 24 30 35 O —
PMA13 23 29 34 O —
PMBE 51 63 78 O — Parallel Master Port Byte Enable Strobe.
PMCS1 45 57 71 O — Parallel Master Port Chip Select 1 Strobe/Address bit 14.
PMCS2 44 56 70 O — Parallel Master Port Chip Select 2 Strobe/Address bit 15.
PMD0 60 76 93 I/O ST Parallel Master Port Data (Demultiplexed Master mode)
PMD1 61 77 94 I/O ST
PMD2 62 78 98 I/O ST
PMD3 63 79 99 I/O ST
PMD4 64 80 100 I/O ST
PMD5 1 1 3 I/O ST
PMD6 2 2 4 I/O ST
PMD7 3 3 5 I/O ST
PMRD 53 67 82 O — Parallel Master Port Read Strobe.
PMWR 52 66 81 O — Parallel Master Port Write Strobe.
Legend: TTL = TTL input buffer ST = Schmitt Trigger input buffer
ANA = Analog level input/output I
Pin Number
I/O
Input
Buffer
modes) and Output (Master modes).
Parallel Master Port Address Bit 1 Input (Buffered Slave
modes) and Output (Master modes).
modes).
or Address/Data (Multiplexed Master modes).
2
C™ = I2C/SMBus input buffer
Description
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 13
Page 16

PIC24FJ128GA FAMILY
TABLE 1-2: PIC24FJ128GA FAMILY PINOUT DESCRIPTIONS (CONTINUED)
Function
64-pin 80-pin 100-pin
RA0 — — 17 I/O ST PORTA Digital I/O.
RA1 — — 38 I/O ST
RA2 — — 58 I/O ST
RA3 — — 59 I/O ST
RA4 — — 60 I/O ST
RA5 — — 61 I/O ST
RA6 — — 91 I/O ST
RA7 — — 92 I/O ST
RA9 — 23 28 I/O ST
RA10 — 24 29 I/O ST
RA14 — 52 66 I/O ST
RA15 — 53 67 I/O ST
RB0 16 20 25 I/O ST PORTB Digital I/O.
RB1151924I/OST
RB2141823I/OST
RB3131722I/OST
RB4121621I/OST
RB5 11 15 20 I/O ST
RB6172126I/OST
RB7182227I/OST
RB8212732I/OST
RB9222833I/OST
RB10 23 29 34 I/O ST
RB11 24 30 35 I/O ST
RB12 27 33 41 I/O ST
RB13 28 34 42 I/O ST
RB14 29 35 43 I/O ST
RB15 30 36 44 I/O ST
RC1 — 4 6 I/O ST PORTC Digital I/O.
RC2 — — 7 I/O ST
RC3 — 5 8 I/O ST
RC4 — — 9 I/O ST
RC12394963I/OST
RC13475973I/OST
RC14486074I/OST
RC15405064I/OST
Legend: TTL = TTL input buffer ST = Schmitt Trigger input buffer
ANA = Analog level input/output I
Pin Number
I/O
Input
Buffer
2
C™ = I2C/SMBus input buffer
Description
DS39747B-page 14 Advance Information © 2006 Microchip Technology Inc.
Page 17

PIC24FJ128GA FAMILY
TABLE 1-2: PIC24FJ128GA FAMILY PINOUT DESCRIPTIONS (CONTINUED)
Function
64-pin 80-pin 100-pin
RD0 46 58 72 I/O ST PORTD Digital I/O.
RD1496176I/OST
RD2506277I/OST
RD3516378I/OST
RD4526681I/OST
RD5536782I/OST
RD6546883I/OST
RD7556984I/OST
RD8425468I/OST
RD9435569I/OST
RD10445670I/OST
RD11 45 57 71 I/O ST
RD12 — 64 79 I/O ST
RD13 — 65 80 I/O ST
RD14 — 37 47 I/O ST
RD15 — 38 48 I/O ST
RE0 60 76 93 I/O ST PORTE Digital I/O.
RE1617794I/OST
RE2627898I/OST
RE3637999I/OST
RE4 64 80 100 I/O ST
RE5 1 1 3 I/O ST
RE6 2 2 4 I/O ST
RE7 3 3 5 I/O ST
RE8 — 13 18 I/O ST
RE9 — 14 19 I/O ST
RF0 58 72 87 I/O ST PORTF Digital I/O.
RF1597388I/OST
RF2344252I/OST
RF3334151I/OST
RF4313949I/OST
RF5324050I/OST
RF6354555I/OST
RF7 — 44 54 I/O ST
RF8 — 43 53 I/O ST
RF12 — — 40 I/O ST
RF13 — — 39 I/O ST
Legend: TTL = TTL input buffer ST = Schmitt Trigger input buffer
ANA = Analog level input/output I
Pin Number
I/O
Input
Buffer
2
C™ = I2C/SMBus input buffer
Description
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 15
Page 18
PIC24FJ128GA FAMILY
TABLE 1-2: PIC24FJ128GA FAMILY PINOUT DESCRIPTIONS (CONTINUED)
Function
64-pin 80-pin 100-pin
RG0 — 75 90 I/O ST PORTG Digital I/O.
RG1 — 74 89 I/O ST
RG2374757I/OST
RG3364656I/OST
RG6 4 6 10 I/O ST
RG7 5 7 11 I/O ST
RG8 6 8 12 I/O ST
RG9 8 10 14 I/O ST
RG12 — — 96 I/O ST
RG13 — — 97 I/O ST
RG14 — — 95 I/O ST
RG15 — — 1 I/O ST
RTCC 42 54 68 O — Real-Time Clock Alarm Output.
SCK1 35 45 55 O — SPI1 Serial Clock Output.
SCK2 4 6 10 I/O ST SPI2 Serial Clock Output.
SCL1 37 47 57 I/O I
SCL2 32 52 58 I/O I
SDA1 36 46 56 I/O I
SDA2 31 53 59 I/O I
SDI1 34 44 54 I ST SPI1 Serial Data Input.
SDI2 5 7 11 I ST SPI2 Serial Data Input.
SDO1 33 43 53 O — SPI1 Serial Data Output.
SDO2 6 8 12 O — SPI2 Serial Data Output.
SOSCI 47 59 73 I ANA Secondary Oscillator/Timer1 Clock Input.
SOSCO 48 60 74 O ANA Secondary Oscillator/Timer1 Clock Output.
SS1
SS2
T1CK 48 60 74 I ST Timer1 Clock.
T2CK — 4 6 I ST Timer2 External Clock Input.
T3CK — — 7 I ST Timer3 External Clock Input.
T4CK — 5 8 I ST Timer4 External Clock Input.
T5CK — — 9 I ST Timer5 External Clock Input.
TCK 27 33 38 I ST JTAG Test Clock/Programming Clock Input.
TDI 28 34 60 I ST JTAG Test Data/Programming Data Input.
TDO 24 14 61 O — JTAG Test Data Output.
TMS 23 13 17 I ST JTAG Test Mode Select Input.
Legend: TTL = TTL input buffer ST = Schmitt Trigger input buffer
ANA = Analog level input/output I
Pin Number
I/O
14 18 23 I/O ST Slave Select Input/Frame Select Output (SPI1).
8 10 14 I/O ST Slave Select Input/Frame Select Output (SPI2).
Input
Buffer
2
C I2C1 Synchronous Serial Clock Input/Output.
2
C I2C2 Synchronous Serial Clock Input/Output.
2
C I2C1 Data Input/Output.
2
C I2C2 Data Input/Output.
2
C™ = I2C/SMBus input buffer
Description
DS39747B-page 16 Advance Information © 2006 Microchip Technology Inc.
Page 19
PIC24FJ128GA FAMILY
TABLE 1-2: PIC24FJ128GA FAMILY PINOUT DESCRIPTIONS (CONTINUED)
Function
U1CTS 43 37 47 I ST UART1 Clear to Send Input.
U1RTS
U1RX 34 42 52 I ST UART1 Receive.
U1TX 33 41 51 O DIG UART1 Transmit Output.
U2CTS
U2RTS
U2RX 31 39 49 I ST UART 2 Receive Input.
U2TX 32 40 50 O — UART2 Transmit Output.
DD 10, 26, 38 12, 32, 48 2, 16, 37,
V
V
DDCAP 56 70 85
V
DDCORE 56 70 85
V
REF- 15 23 28 I ANA A/D and Comparator Reference Voltage (Low) Input.
REF+ 16 24 29 I ANA A/D and Comparator Reference Voltage (High) Input.
V
SS 9, 25, 41 11, 31, 51 15, 36, 45,
V
Legend: TTL = TTL input buffer ST = Schmitt Trigger input buffer
64-pin 80-pin 100-pin
ANA = Analog level input/output I
Pin Number
I/O
35 38 48 O — UART1 Request to Send Output.
21 27 40 I ST UART2 Clear to Send Input.
29 35 39 O — UART2 Request to Send Output.
46, 62
65, 75
Input
Buffer
P — Positive Supply for Peripheral Digital Logic and I/O pins.
P—
P—
P — Ground Reference for Logic and I/O pins.
External Filter Capacitor Connection (regulator enabled).
Positive Supply for Microcontroller Core Logic (regulator
disabled).
2
C™ = I2C/SMBus input buffer
Description
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 17
Page 20

PIC24FJ128GA FAMILY
NOTES:
DS39747B-page 18 Advance Information © 2006 Microchip Technology Inc.
Page 21

PIC24FJ128GA FAMILY
2.0 CPU
The PIC24 CPU has a 16-bit (data) modified Harvard
architecture with an enhanced instruction set, and a
23-bit instruction word with a variable length opcode
field. The Program Counter (PC) is 24 bits wide and
addresses up to 4M instructions of user program
memory space. A single-cycle instruction prefetch
mechanism is used to help maintain throughput and
provides predictable execution. All instructions execute
in a single cycle, with the exception of instructions that
change the program flow, the double-word move
(MOV.D) instruction and the table instructions. Overhead-free program loop constructs are supported using
the REPEAT instructions, which are interruptible at any
point.
PIC24 devices have sixteen 16-bit working registers in
the programmer’s model. Each of the working
registers can act as a data, address or address offset
register. The 16th working register (W15) operates as
a software Stack Pointer for interrupts and calls.
The upper 32 Kbytes of the data space memory map
can optionally be mapped into program space at any
16K word boundary defined by the 8-bit Program
Space Visibility Page (PSVPAG) register. The program
to data space mapping feature lets any instruction
access program space as if it were data space.
The Instruction Set Architecture (ISA) has been significantly enhanced beyond that of the PIC18, but maintains an acceptable level of backward compatibility. All
PIC18 instructions and addressing modes are
supported either directly or through simple macros.
Many of the ISA enhancements have been driven by
compiler efficiency needs.
The core supports Inherent (no operand), Relative,
Literal, Memory Direct and three groups of addressing
modes. All modes support Register Direct and various
Register Indirect modes. Each group offers up to 7
addressing modes. Instructions are associated with
predefined addressing modes depending upon their
functional requirements.
For most instructions, the core is capable of executing
a data (or program data) memory read, a working register (data) read, a data memory write and a program
(instruction) memory read per instruction cycle. As a
result, three-parameter instructions can be supported,
allowing trinary operations (that is, A + B = C) to be
executed in a single cycle.
A high-speed 17-bit by 17-bit multiplier has been
included to significantly enhance the core arithmetic
capability and throughput. The multiplier supports
signed, unsigned and mixed mode 16-bit by 16-bit or
8-bit by 8-bit integer multiplication. All multiply
instructions execute in a single cycle.
The 16-bit ALU has been enhanced with integer divide
assist hardware that supports an iterative
non-restoring divide algorithm. It operates in conjunction with the REPEAT instruction looping mechanism,
and a selection of iterative divide instructions, to
support 32-bit (or 16-bit) divided by 16-bit integer
signed and unsigned division. All divide operations
require 19 cycles to complete but are interruptible at
any cycle boundary.
The PIC24 has a vectored exception scheme with up
to 8 sources of non-maskable traps and up to 118
interrupt sources. Each interrupt source can be
assigned to one of seven priority levels.
A block diagram of the CPU is shown in Figure 2-1.
2.1 Programmer’s Model
The programmer’s model for the PIC24 is shown in
Figure 2-2. All registers in the programmer’s model are
memory mapped and can be manipulated directly by
instructions. A description of each register is provided
in Table 2-1. All registers associated with the
programmer’s model are memory mapped.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 19
Page 22

PIC24FJ128GA FAMILY
FIGURE 2-1: PIC24 CPU CORE BLOCK DIAGRAM
PSV & Table
Data Access
Control Block
Interrupt
Controller
8
23
23
23
PCU
Program Counter
Stac k
Control
Logic
16
PCH PCL
Loop
Control
Logic
Data Bus
16
16
Data Latch
Data RAM
Address
Latch
16
16
Address Latch
Program Memory
Data Latch
Address Bus
24
Instruction
Decode &
Control
Control Signals
to Various Blocks
ROM Latch
Instruction Reg
Hardware
Multiplier
Divide
Support
RAGU
WAGU
EA MUX
16
16
Literal Data
16 x 16
W Register Array
16-Bit ALU
16
16
To Peripheral Modules
DS39747B-page 20 Advance Information © 2006 Microchip Technology Inc.
Page 23
PIC24FJ128GA FAMILY
TABLE 2-1: CPU CORE REGISTERS
Register(s) Name Description
W0 through W15 Working register array
PC 23-bit Program Counter
SR ALU STATUS register
SPLIM Stack Pointer Limit Value register
TBLPAG Table Memory Page Address register
PSVPAG Program Space Visibility Page Address register
RCOUNT Repeat Loop Counter register
CORCON CPU Control Register
FIGURE 2-2: PROGRAMMER’S MODEL
015
Divider Working Registers
Multiplier Registers
W0 (WREG)
W1
W2
W3
W4
W5
W6
W7
W8
W9
W10
W11
W12
W13
W14
W15
Frame Pointer
Stack Pointer
Working/Address
Registers
0
Stack Pointer Limit
0
0
0
——
0
0
Program Counter
Data Table Page Address
0
Program Space Visibility
Page Address
0
REPEAT Loop Counter
STATUS Register (SR)
Core Control Register (CORCON)
SPLIM
22
PC
7
TBLPAG
7
PSVPAG
15
RCOUNT
IPL
210
SRL
NOVZ C
RA
IPL3 PSV
15
SRH
———————
15 0
————————————
Registers or bits shadowed for PUSH.S and POP.S instructions.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 21
DC
Page 24

PIC24FJ128GA FAMILY
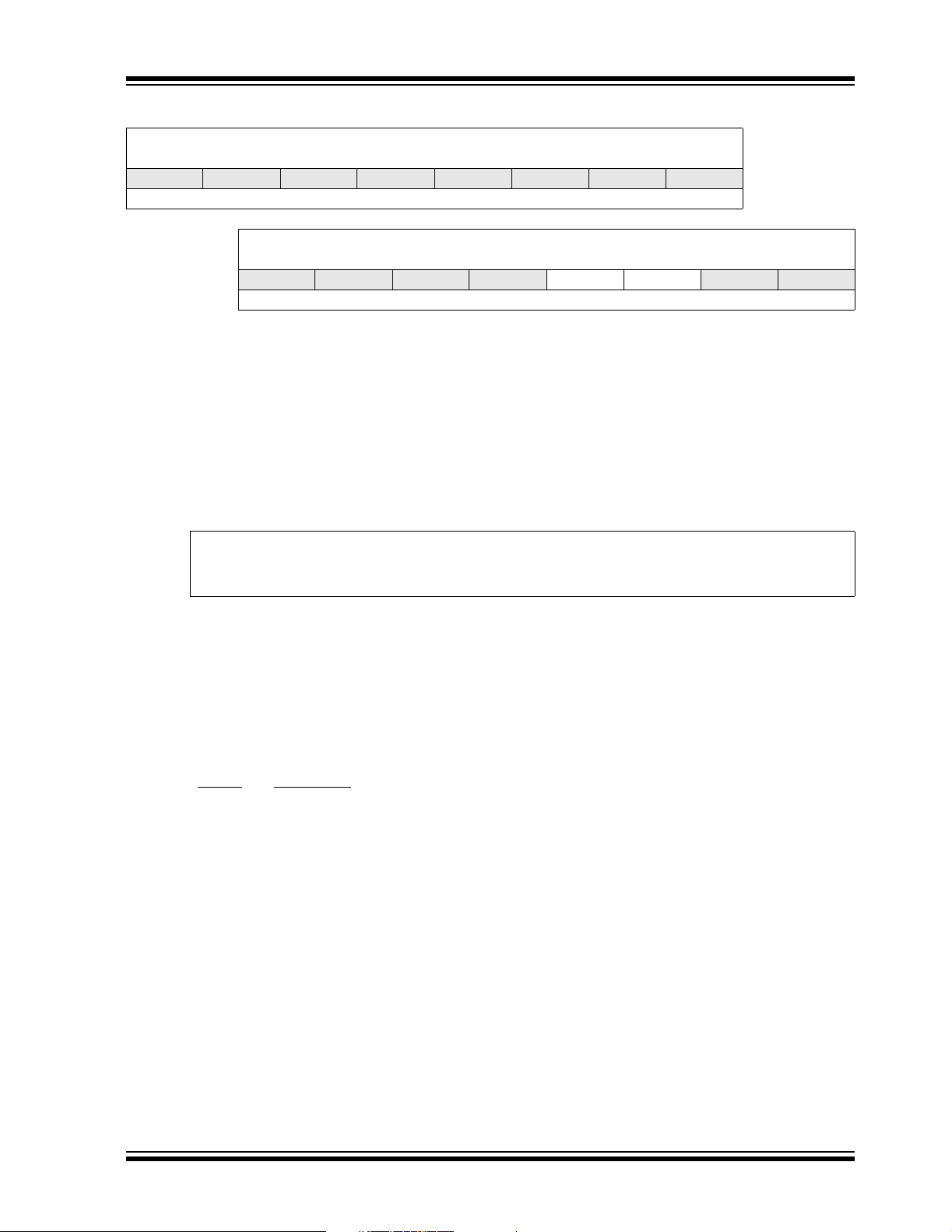
2.2 CPU Control Registers
REGISTER 2-1: SR: CPU STATUS REGISTER
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U -0 R/W-0
— — — — — — —DC
bit 15 bit 8
Lower Byte:
(1)
R/W-0
(2)
IPL2
bit 7 bit 0
bit 15-9 Unimplemented: Read as ‘0’
bit 8 DC: ALU Half Carry/Borrow bit
1 = A carry-out from the 4th low-order bit (for byte sized data) or 8th low-order bit (for word sized data)
of the result occurred
0 = No carry-out from the 4th or 8th low-order bit of the result has occurred
bit 7-5 IPL2:IPL0: CPU Interrupt Priority Level Status bits
111 = CPU interrupt priority level is 7 (15). User interrupts disabled.
110 = CPU interrupt priority level is 6 (14)
101 = CPU Interrupt Priority Level is 5 (13)
100 = CPU interrupt priority level is 4 (12)
011 = CPU interrupt priority level is 3 (11)
010 = CPU interrupt priority level is 2 (10)
001 = CPU interrupt priority level is 1 (9)
000 = CPU interrupt priority level is 0 (8)
Note 1: The IPL Status bits are read-only when NSTDIS (INTCON1<15>) = 1.
2: The IPL bits are concatenated with the IPL3 bit (CORCON<3>) to form the CPU interrupt priority
level. The value in parentheses indicates the IPL when IPL3 = 1.
bit 4 RA: REPEAT Loop Active bit
1 = REPEAT loop in progress
0 = REPEAT loop not in progress
bit 3 N: ALU Negative bit
1 = Result was negative
0 = Result was non-negative (zero or positive)
bit 2 OV: ALU Overflow bit
1 = Overflow occurred for signed (2’s complement) arithmetic in this arithmetic operation
0 = No overflow has occurred
bit 1 Z: ALU Zero bit
1 = An operation which effects the Z bit has set it at some time in the past
0 = The most recent operation which effects the Z bit has cleared it (i.e., a non-zero result)
bit 0 C: ALU Carry/Borrow
1 = A carry-out from the Most Significant bit of the result occurred
0 = No carry-out from the Most Significant bit of the result occurred
R/W-0
IPL1
bit
(2)
(1)
R/W-0
IPL0
(2)
(1)
R-0 R/W-0 R/W-0 R/W-0 R/W-0
RA N OV Z C
(2)
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 22 Advance Information © 2006 Microchip Technology Inc.
Page 25
PIC24FJ128GA FAMILY
REGISTER 2-2: CORCON: CORE CONTROL REGISTER
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 U-0 R/C-0 R/W-0 U-0 U-0
— — — — IPL3 PSV — —
bit 7 bit 0
bit 15-4 Unimplemented: Read as ‘0’
bit 3 IPL3: CPU Interrupt Priority Level Status bit
1 = CPU interrupt priority level is greater than 7
0 = CPU interrupt priority level is 7 or less
Note: User interrupts are disabled when IPL3 = 1.
bit 2 PSV: Program Space Visibility in Data Space Enable bit
1 = Program space visible in data space
0 = Program space not visible in data space
bit 1-0 Unimplemented: Read as ‘0’
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
2.3 Arithmetic Logic Unit (ALU)
The PIC24 ALU is 16 bits wide and is capable of addition, subtraction, bit shifts and logic operations. Unless
otherwise mentioned, arithmetic operations are 2’s
complement in nature. Depending on the operation, the
ALU may affect the values of the Carry (C), Zero (Z),
Negative (N), Overflow (OV) and Digit Carry (DC)
Status bits in the SR register. The C and DC Status bits
operate as Borrow
for subtraction operations.
The ALU can perform 8-bit or 16-bit operations,
depending on the mode of the instruction that is used.
Data for the ALU operation can come from the W
register array, or data memory, depending on the
addressing mode of the instruction. Likewise, output
data from the ALU can be written to the W register array
or a data memory location.
and Digit Borrow bits, respectively,
The PIC24 CPU incorporates hardware support for
both multiplication and division. This includes a dedicated hardware multiplier and support hardware for
16-bit divisor division.
2.3.1 MULTIPLIER
The ALU contains a high-speed 17-bit x 17-bit
multiplier. It supports unsigned, signed or mixed sign
operation in several multiplication modes:
1. 16-bit x 16-bit signed
2. 16-bit x 16-bit unsigned
3. 16-bit signed x 5-bit (literal) unsigned
4. 16-bit unsigned x 16-bit unsigned
5. 16-bit unsigned x 5-bit (literal) unsigned
6. 16-bit unsigned x 16-bit signed
7. 8-bit unsigned x 8-bit unsigned
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 23
Page 26
PIC24FJ128GA FAMILY
2.3.2 DIVIDER
The divide block supports 32-bit/16-bit and 16-bit/16-bit
signed and unsigned integer divide operation with the
following data sizes:
1. 32-bit signed/16-bit signed divide
2. 32-bit unsigned/16-bit unsigned divide
3. 16-bit signed/16-bit signed divide
4. 16-bit unsigned/16-bit unsigned divide
The quotient for all divide instructions ends up in W0
and the remainder in W1. 16-bit signed and unsigned
DIV instructions can specify any W register for both the
16-bit divisor (Wn) and any W register (aligned) pair
(m+1):Wm) for the 32-bit dividend. The divide algo-
(W
rithm takes one cycle per bit of divisor, so both
32-bit/16-bit and 16-bit/16-bit instructions take the
same number of cycles to execute.
2.3.3 MULTI-BIT SHIFT SUPPORT
The PIC24 ALU supports both single-bit and
single-cycle, multi-bit arithmetic and logic shifts.
Multi-bit shifts are implemented using a shifter block,
capable of performing up to a 15-bit arithmetic right
shift, or up to a 15-bit left shift, in a single cycle. All
multi-bit shift instructions only support register direct
addressing for both the operand source and result
destination.
A full summary of instructions that use the shift
operation is provided below in Table 2-2.
TABLE 2-2: INSTRUCTIONS THAT USE THE SINGLE AND MULTI-BIT SHIFT OPERATION
Instruction Description
ASR Arithmetic shift right source register by one bit.
ASRF Arithmetic shift right the content of the register by one bit.
ASRW Arithmetic shift right source register by up to 15 bits, value held in the W register referenced
within instruction.
ASRK Arithmetic shift right source register up to 15 bits. Shift value is literal.
SL Shift left source register by one bit.
SLF Shift left the content of the file register by one bit.
SLW Shift left source register by up to 15 bits, value held in the W register referenced instruction.
SLK Shift left source register up to 15 bits. Shift value is literal.
LSR Logical shift right source register by one bit.
LSRF Logical shift right the content of the register by one bit.
LSRW Logical shift right source register by up to 15 bits, value held in the W register referenced
within instruction.
LSRK Logical shift right source register up to 15 bits. Shift value is literal.
DS39747B-page 24 Advance Information © 2006 Microchip Technology Inc.
Page 27

PIC24FJ128GA FAMILY
3.0 MEMORY ORGANIZATION
As Harvard architecture devices, PIC24 microcontrollers feature separate program and data memory
spaces and busses. This architecture also allows the
direct access of program memory from the data space
during code execution.
3.1 Program Address Space
The program address memory space of
PIC24FJ128GA family devices is 4M instructions. The
space is addressable by a 24-bit value derived from
either the 23-bit Program Counter (PC) during program
execution, or from table operation or data space
remapping, as described in Section 3.3 “Interfacing
Program and Data Memory Spaces”.
User access to the program memory space is restricted
to the lower half of the address range (000000h to
7FFFFFh). The exception is the use of TBLRD/TBLWT
operations, which use TBLPAG<7> to permit access to
the Configuration bits and Device ID sections of the
configuration memory space.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 25
Page 28
PIC24FJ128GA FAMILY
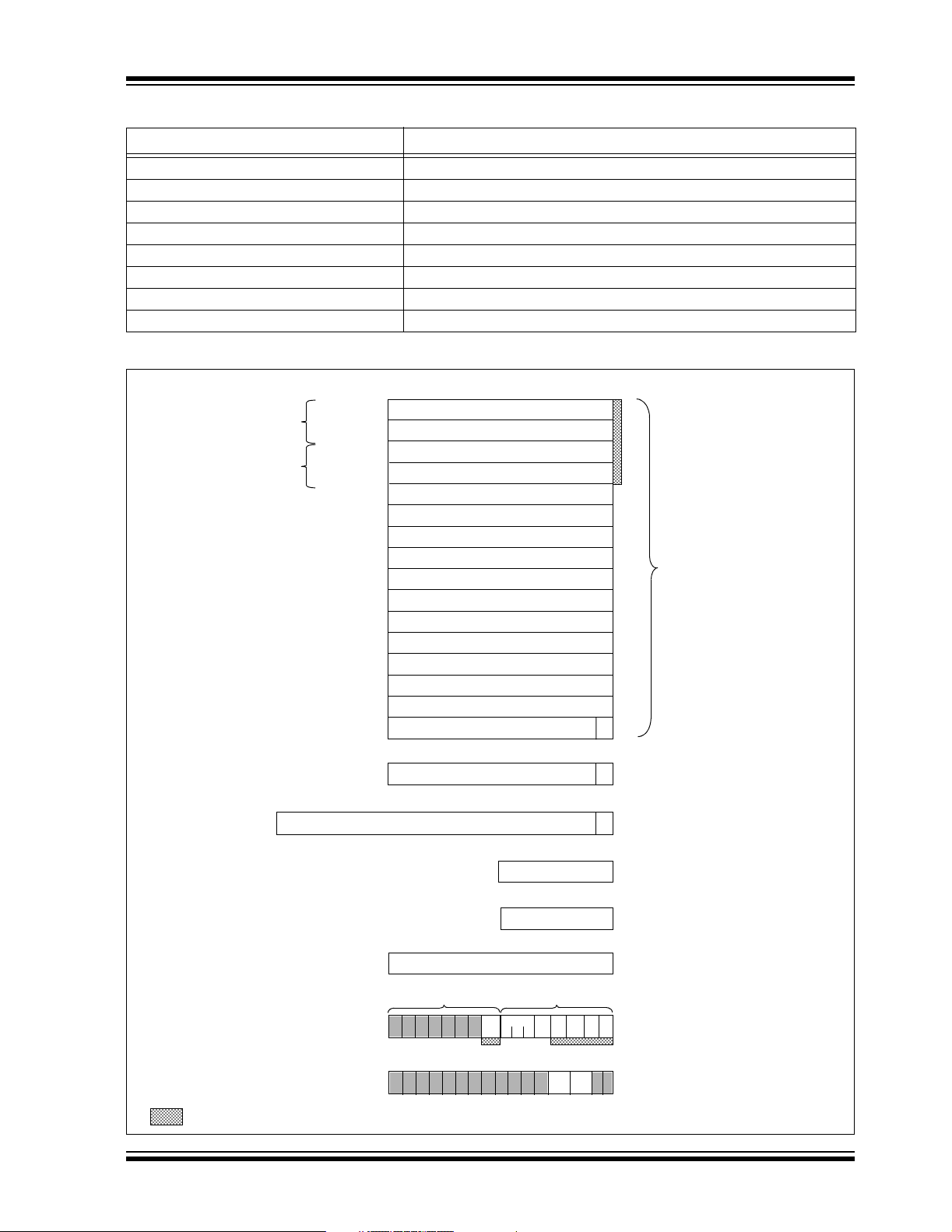
3.1.1 PROGRAM MEMORY ORGANIZATION
The program memory space is organized in word
addressable blocks. Although it is treated as 24 bits
wide, it is more appropriate to think of each address of
the program memory as a lower and upper word, with
the upper byte of the upper word being unimplemented.
The lower word always has an even address, while the
upper word has an odd address (Figure 3-2).
Program memory addresses are always word-aligned
on the lower word, and addresses are incremented or
decremented by two during code execution. This
arrangement also provides compatibility with data
memory space addressing and makes it possible to
access data in the program memory space.
3.1.2 HARD MEMORY VECTORS
All PIC24 devices reserve the addresses between
00000h and 000200h for hard coded program execution vectors. A hardware Reset vector is provided to
redirect code execution from the default value of the
PC on device Reset to the actual start of code. A GOTO
instruction is programmed by the user at 000000h, with
the actual address for the start of code at 000002h.
PIC24 devices also have two interrupt vector tables,
located from 000004h to 0000FFh and 000100h to
0001FFh. These vector tables allow each of the many
device interrupt sources to be handled by separate
ISRs. A more detailed discussion of the interrupt vector
tables is provided in Section 6.1 “Interrupt Vector
Tabl e”.
3.1.3 FLASH CONFIGURATION WORDS
In PIC24FJ128GA family devices, the top two words of
on-chip program memory are reserved for configuration information. On device Reset, the configuration
information is copied into the appropriate Configuration
registers. The addresses of the Flash Configuration
Word for devices in the PIC24FJ128GA family are
shown in Table 3-1. Their location in the memory map
is shown with the other memory vectors in Figure 3-1.
The Configuration Words in program memory are a
compact format. The actual Configuration bits are
mapped in several different registers in the configuration memory space. Their order in the Flash Configuration Words do not reflect a corresponding arrangement
in the configuration space. Additional details on the
device Configuration Words are provided in
Section 23.1 “Configuration Bits”.
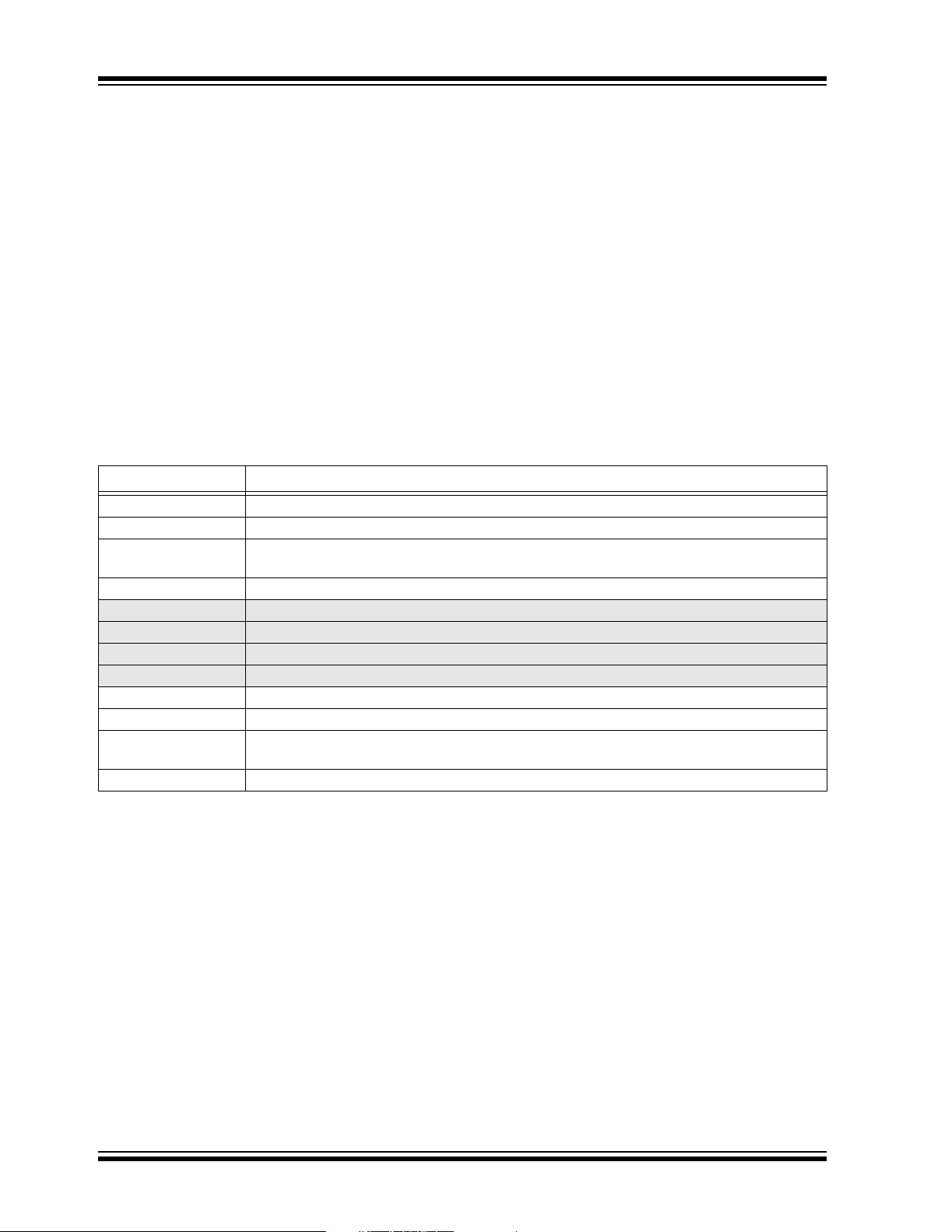
TABLE 3-1: FLASH CONFIGURATION
WORDS FOR PIC24FJ128GA
FAMILY DEVICES
Program
Device
PIC24FJ64GA 22 00ABFCh:
PIC24FJ96GA 32 00FFFCh:
PIC24FJ128GA 44 0157FCh:
Memory
(K words)
Configuration
Word
Addresses
00ABFEh
00FFFEh
0157FEh
FIGURE 3-2: PROGRAM MEMORY ORGANIZATION
msw
Address (lsw Address)
000001h
000003h
000005h
000007h
DS39747B-page 26 Advance Information © 2006 Microchip Technology Inc.
most significant word
23
00000000
00000000
00000000
00000000
Program Memory
‘Phantom’ Byte
(read as ‘0’)
least significant word
Instruction Width
PC Address
0816
000000h
000002h
000004h
000006h
Page 29

PIC24FJ128GA FAMILY
3.2 Data Address Space
The PIC24 core has a separate 16-bit wide data memory space, addressable as a single linear range. The
data space is accessed using two Address Generation
Units (AGUs), one each for read and write operations.
The data space memory map is shown in Figure 3-3.
All Effective Addresses (EAs) in the data memory
space are 16 bits wide, and point to bytes within the
data space. This gives a data space address range of
64 Kbytes, or 32K words. The lower half of the data
memory space (that is, when EA<15> = 0) is used for
implemented memory addresses, while the upper half
(EA<15> = 1) is reserved for the Program Space Visibility area (see Section 3.3.3 “Reading Data from
Program Memory Using Program Space Visibility”).
PIC24FJ128GA family devices implement a total of
8 Kbytes of data memory. Should an EA point to a location outside of this area, an all zero word or byte will be
returned.
3.2.1 DATA SPACE WIDTH
The data memory space is organized in byte addressable, 16-bit wide blocks. Data is aligned in data
memory and registers as 16-bit words, but all data
space EAs resolve to bytes. The Least Significant
Bytes of each word have even addresses, while the
Most Significant Bytes have odd addresses.
FIGURE 3-3: DATA SPACE MEMORY MAP FOR PIC24FJ128GA FAMILY DEVICES
LSB
Address
0000h
07FEh
0800h
1FFEh
2000h
07FEh
0800h
SFR
Space
Near
Data Space
Implemented
Data RAM
MSB
Address
0001h
07FFh
0801h
1FFFh
2001h
27FFh
2801h
LSBMSB
SFR Space
Data RAM
Unimplemented
Read as ‘0’
7FFFh
8001h
Program Space
Visibility Area
FFFFh
Note: Data memory areas are not shown to scale.
7FFFh
8000h
FFFEh
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 27
Page 30

PIC24FJ128GA FAMILY
3.2.2 DATA MEMORY ORGANIZATION AND ALIGNMENT
To maintain backward compatibility with PICmicro
devices and improve data space memory usage efficiency, the PIC24 instruction set supports both word
and byte operations. As a consequence of byte accessibility, all effective address calculations are internally
scaled to step through word-aligned memory. For
example, the core recognizes that Post-Modified
Register Indirect Addressing mode [Ws++] will result in
a value of Ws + 1 for byte operations and Ws + 2 for
word operations.
Data byte reads will read the complete word which contains the byte, using the LSb of any EA to determine
which byte to select. The selected byte is placed onto
the LSB of the data path. That is, data memory and registers are organized as two parallel byte-wide entities
with shared (word) address decode but separate write
lines. Data byte writes only write to the corresponding
side of the array or register which matches the byte
address.
All word accesses must be aligned to an even address.
Misaligned word data fetches are not supported, so
care must be taken when mixing byte and word operations, or translating from 8-bit MCU code. If a
misaligned read or write is attempted, an address error
trap will be generated. If the error occurred on a read,
the instruction underway is completed; if it occurred on
a write, the instruction will be executed but the write will
not occur. In either case, a trap is then executed, allowing the system and/or user to examine the machine
state prior to execution of the address Fault.
All byte loads into any W register are loaded into the
Least Significant Byte. The Most Significant Byte is not
modified.
A sign-extend instruction (SE) is provided to allow
users to translate 8-bit signed data to 16-bit signed
®
values. Alternatively, for 16-bit unsigned data, users
can clear the MSB of any W register by executing a
zero-extend (ZE) instruction on the appropriate
address.
Although most instructions are capable of operating on
word or byte data sizes, it should be noted that some
instructions operate only on words.
3.2.3 NEAR DATA SPACE
The 8-Kbyte area between 0000h and 1FFFh is
referred to as the near data space. Locations in this
space are directly addressable via a 13-bit absolute
address field within all memory direct instructions. The
remainder of the data space is addressable indirectly.
Additionally, the whole data space is addressable using
MOV instructions, which support Memory Direct
Addressing with a 16-bit address field.
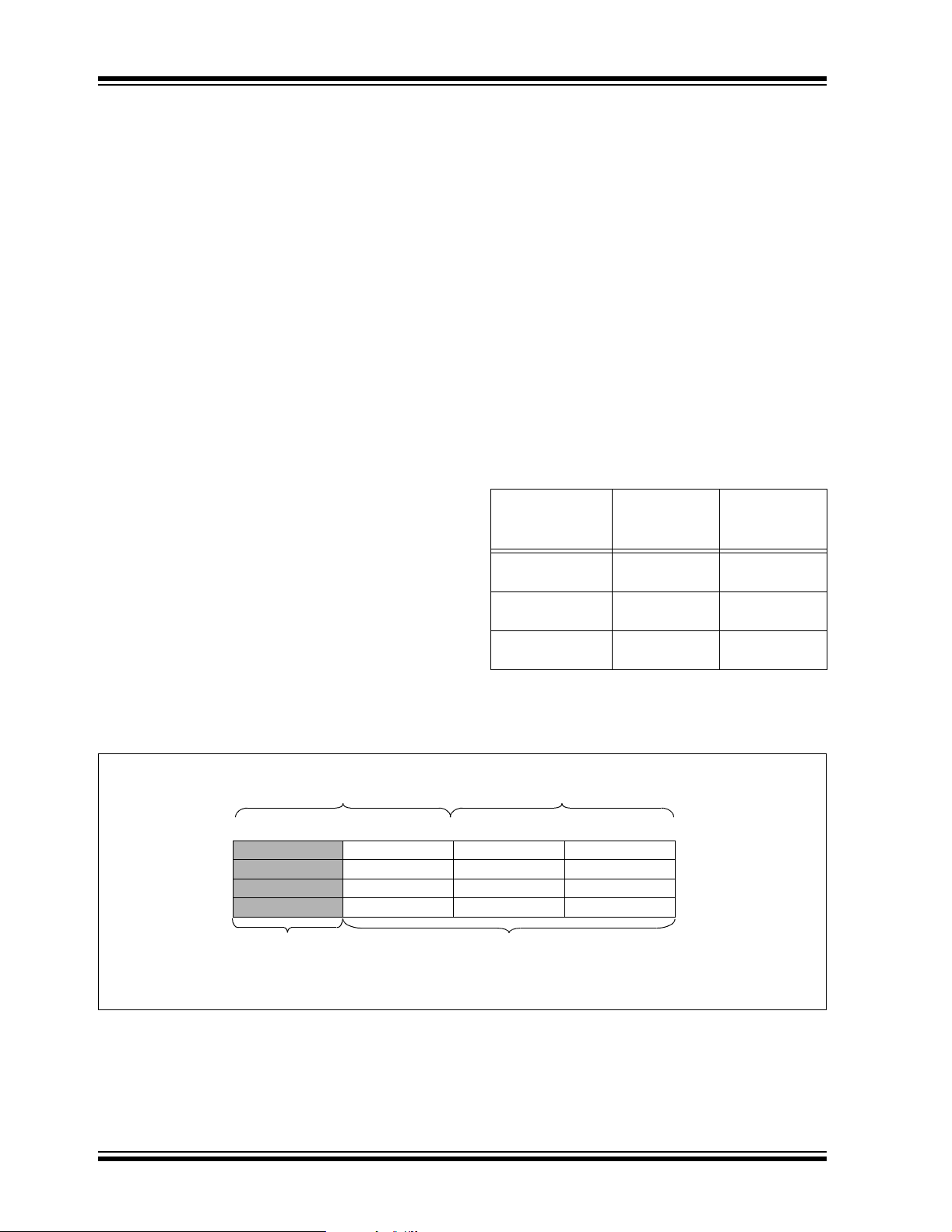
3.2.4 SFR SPACE
The first 2 Kbytes of the near data space, from 0000h
to 07FFh, are primarily occupied with Special Function
Registers (SFRs). These are used by the PIC24 core
and peripheral modules for controlling the operation of
the device.
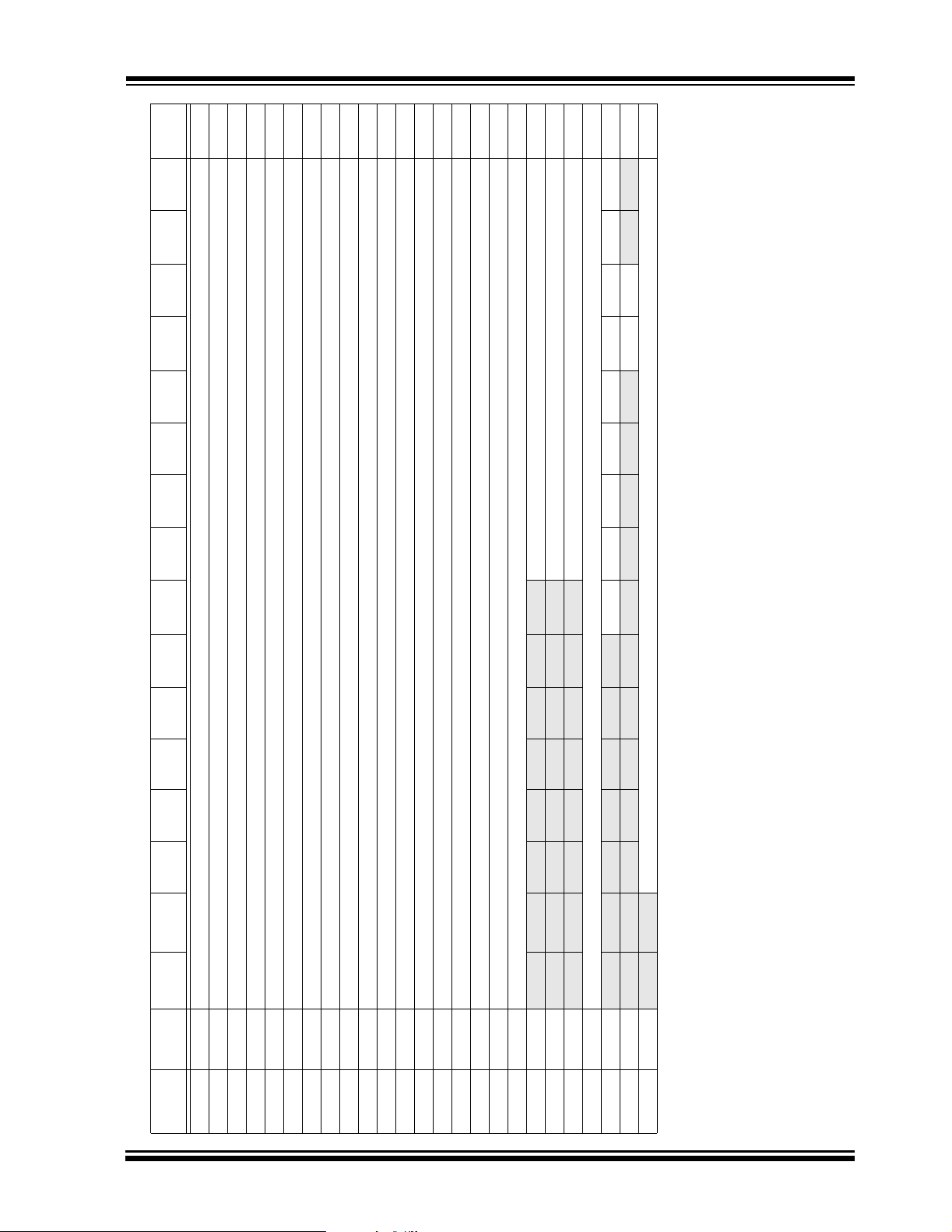
SFRs are distributed among the modules that they control, and are generally grouped together by module.
Much of the SFR space contains unused addresses;
these are read as ‘0’. A diagram of the SFR space,
showing where SFRs are actually implemented, is
shown in Table 3-2. Each implemented area indicates
a 32-byte region where at least one address is implemented as an SFR. A complete listing of implemented
SFRs, including their addresses, is shown in Tables 3-3
through 3-30.
TABLE 3-2: IMPLEMENTED REGIONS OF SFR DATA SPACE
SFR Space Address
xx00 xx20 xx40 xx60 xx80 xxA0 xxC0 xxE0
000h Core ICN Interrupts
100h Timers Capture
2
200h I
300h A/D — — — — I/O
400h
500h
600h PMP RTC/Comp CRC — — — I/O
700h
Legend: — = No implemented SFRs in this block
DS39747B-page 28 Advance Information © 2006 Microchip Technology Inc.
C™ UART SPI — — I/O
— — — — — — — —
— — — — — — — —
— — System NVM/PMD — — — —
— Compare — — —
—
Page 31
PIC24FJ128GA FAMILY
All
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0800
xxxx
0000
0000
0000
0000
xxxx
0000
0000
Resets
xxxx
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
WREG0 0000 Working Register 0
WREG1 0002 Working Register 1
WREG2 0004 Working Register 2
WREG3 0006 Working Register 3
WREG4 0008 Working Register 4
WREG5 000A Working Register 5
WREG6 000C Working Register 6
WREG7 000E Working Register 7
WREG8 0010 Working Register 8
WREG9 0012 Working Register 9
WREG10 0014 Working Register 10
WREG11 0016 Working Register 11
WREG12 0018 Working Register 12
WREG13 001A Working Register 13
WREG14 001C Working Register 14
WREG15 001E Working Register 15
SPLIM 0020 Stack Pointer Limit
PCL 002E Program Counter, Low Word
PCH 0030 — — — — — — — — Program Counter, High Byte
TBLPAG 0032 — — — — — — — — Table Page Address Pointer
PSVPAG 0034 — — — — — — — — Program Memory Visibility Page Address Pointer
RCOUNT 0036 Repeat Loop Counter
SR 0042 — — — — — — — DC IPL2 IPL1 IPL0 RA N OV Z C
CORCON 0044 — — — — — — — — — — — —IPL3PSV— —
DISICNT 0052 — — Disable Interrupts Counter
TABLE 3-3: CPU CORE REGISTERS MAP
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 29
Page 32

PIC24FJ128GA FAMILY
All
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
0000
4444
4440
4444
0044
Resets
4444
0004
4440
4444
0044
4440
0040
0040
0440
0440
0400
4440
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
INTCON1 0080 NSTDIS — — — — — — — — — — MATHERR ADDRERR STKERR OSCFAIL —
INTCON2 0082 ALTIVT DISI — — — — — — — — — INT4EP INT3EP INT2EP INT1EP INT0EP
IFS0 0084 — — AD1IF U1TXIF U1RXIF SPI1IF SPF1IF T3IF T2IF OC2IF IC2IF — T1IF OC1IF IC1IF INT0IF
IFS1 0086 U2TXIF U2RXIF INT2IF T5IF T4IF OC4IF OC3IF — — — — INT1IF CNIF CMIF MI2C1IF SI2C1IF
IFS2 0088 — —PMPIF— — —OC5IF— IC5IF IC4IF IC3IF — — — SPI2IF SPF2IF
IFS3 008A —RTCIF — — — — — — — INT4IF INT3IF — —MI2C2IFSI2C2IF—
IFS4 008C — — — — — — — — — — — — CRCIF U2ERIF U1ERIF —
IEC0 0094 — — AD1IE U1TXIE U1RXIE SPI1IE SPF1IE T3IE T2IE OC2IE IC2IE — T1IE OC1IE IC1IE INT0IE
IEC1 0096 U2TXIE U2RXIE INT2IE T5IE T4IE OC4IE OC3IE — — — — INT1IE CNIE CMIE MI2C1IE SI2C1IE
IEC2 0098 — —PMPIE— — —OC5IE— IC5IE IC4IE IC3IE — — —SPI2IESPF2IE
IEC3 009A —RTCIE — — — — — — — INT4IE INT3IE — — MI2C2IE SI2C2IE —
IEC4 009C — — — — — — — — — — — — CRCIE U2ERIE U1ERIE —
IPC0 00A4 — T1IP2 T1IP1 T1IP0 — OC1IP2 OC1IP1 OC1IP0 — IC1IP2 IC1IP1 IC1IP0 — INT0IP2 INT0IP1 INT0IP0
IPC1 00A6 — T2IP2 T2IP1 T2IP0 — OC2IP2 OC2IP1 OC2IP0 — IC2IP2 IC2IP1 IC2IP0 — — — —
IPC2 00A8 — U1RXIP2 U1RXIP1 U1RXIP0 — SPI1IP2 SPI1IP1 SPI1IP0 — SPF1IP2 SPF1IP1 SPF1IP0 — T3IP2 T3IP1 T3IP0
IPC3 00AA — — — — — — — — — AD1IP2 AD1IP1 AD1IP0 — U1TXIP2 U1TXIP1 U1TXIP0
IPC4 00AC — CNIP2 CNIP1 CNIP0 — CMIP2 CMIP1 CMI P0 — MI2C1P2 MI2C1P1 MI2C1P0 — SI2C1P2 SI2C1P1 SI2C1P0
IPC5 00AE — — — — — — — — — — — — — INT1IP2 INT1IP1 INT1IP0
IPC6 00B0 — T4IP2 T4IP1 T4IP0 — OC4IP2 OC4IP1 OC4IP0 — OC3IP2 OC3IP1 OC3IP0 — — — —
IPC7 00B2 — U2TXIP2 U2TXIP1 U2TXIP0 — U2RXIP2 U2RXIP1 U2RXIP0 — INT2IP2 INT2IP1 INT2IP0 — T5IP2 T5IP1 T5IP0
IPC8 00B4 — — — — — — — — — SPI2IP2 SPI2IP1 SPI2IP0 — SPF2IP2 SPF2IP1 SPF2IP0
IPC9 00B6 — IC5IP2 IC5IP1 IC5IP0 — IC4IP2 IC4IP1 IC4IP0 — IC3IP2 IC3IP1 IC3IP0 — — — —
IPC10 00B8 — — — — — — — — — OC5IP2 OC5IP1 OC5IP0 — — — —
IPC11 00BA — — — — — — — — — PMPIP2 PMPIP1 PMPIP0 — — — —
IPC12 00BC — — — — — MI2C2P2 MI2C2P1 MI2C2P0 — SI2C2P2 SI2C2P1 SI2C2P0 — — — —
IPC13 00BE — — — — — INT4IP2 INT4IP1 INT4IP0 — INT3IP2 INT3IP1 INT3IP0 — — — —
IPC15 00C2 — — — — — RTCIP2 RTCIP1 RTCIP0 — — — — — — — —
IPC16 00C4 — CRCIP2 CRCIP1 CRCIP0 — U2ERIP2 U2ERIP1 U2ERIP0 — U1ERIP2 U1ERIP1 U1ERIP0 — — — —
TABLE 3-4: INTERRUPT CONTROLLER REGISTER MAP
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
DS39747B-page 30 Advance Information © 2006 Microchip Technology Inc.
Page 33

PIC24FJ128GA FAMILY
All
0000
0000
0000
Resets
0000
All
xxxx
FFFF
0000
xxxx
xxxx
xxxx
FFFF
FFFF
0000
0000
xxxx
xxxx
xxxx
FFFF
FFFF
0000
Resets
0000
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TMR1 0100 Timer1 Register
PR1 0102 Period Register 1
T1CON 0104 TON —TSIDL— — — — — — TGATE TCKPS1 TCKPS0 — TSYNC TCS —
TMR2 0106 Timer2 Register
TMR3HLD 0108 Timer3 Holding Register (For 32-bit timer operations only)
TMR3 010A Timer3 Register
PR2 010C Period Register 2
PR3 010E Period Register 3
T2CON 0110 TON —TSIDL— — — — — — TGATE TCKPS1 TCKPS0 T32 —TCS—
T3CON 0112 TON —TSIDL— — — — — — TGATE TCKPS1 TCKPS0 — —TCS—
TMR4 0114 Timer4 Register
TMR5HLD 0116 Timer5 Holding Register (For 32-bit operations only)
TMR5 0118 Timer5 Register
PR4 011A Period Register 4
PR5 011C Period Register 5
T4CON 011E TON —TSIDL— — — — — — TGATE TCKPS1 TCKPS0 T32 —TCS—
T5CON 0120 TON —TSIDL— — — — — — TGATE TCKPS1 TCKPS0 — —TCS—
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
CNEN1 0060 CN15IE CN14IE CN13IE CN12IE CN11IE CN10IE CN9IE CN8IE CN7IE CN6IE CN5IE CN4IE CN3IE CN2IE CN1IE CN0IE
CNEN2 0062 — — — — — — — — — — CN21IE CN20IE CN19IE CN18IE CN17IE CN16IE
CNPU1 0068 CN15PUE CN14PUE CN13PUE CN12PUE CN11PUE CN10PUE CN9PUE CN8PUE CN7PUE CN6PUE CN5PUE CN4PUE CN3PUE CN2PUE CN1PUE CN0PUE
CNPU2 006A — — — — — — — — — — CN21PUE CN20PUE CN19PUE CN18PUE CN17PUE CN16PUE
TABLE 3-5: ICN REGISTER MAP
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
TABLE 3-6: TIMER REGISTER MAP
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 31
Page 34

PIC24FJ128GA FAMILY
All
All
xxxx
xxxx
0000
xxxx
xxxx
0000
xxxx
xxxx
0000
xxxx
xxxx
0000
xxxx
xxxx
xxxx
0000
xxxx
0000
xxxx
0000
xxxx
0000
xxxx
Resets
0000
Resets
0000
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
IC1BUF 0140 Input 1 Capture Register
IC1CON 0142 — —ICSIDL— — — — — ICTMR ICI1 ICI0 ICOV ICBNE ICM2 ICM1 ICM0
IC2BUF 0144 Input 2 Capture Register
IC2CON 0146 — —ICSIDL— — — — — ICTMR ICI1 ICI0 ICOV ICBNE ICM2 ICM1 ICM0
IC3BUF 0148 Input 3 Capture Register
IC3CON 014A — —ICSIDL— — — — — ICTMR ICI1 ICI0 ICOV ICBNE ICM2 ICM1 ICM0
IC4BUF 014C Input 4 Capture Register
IC4CON 014E — —ICSIDL— — — — — ICTMR ICI1 ICI0 ICOV ICBNE ICM2 ICM1 ICM0
IC5BUF 0150 Input 5 Capture Register
IC5CON 0152 — —ICSIDL— — — — — ICTMR ICI1 ICI0 ICOV ICBNE ICM2 ICM1 ICM0
TABLE 3-7: INPUT CAPTURE REGISTER MAP
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
TABLE 3-8: OUTPUT COMPARE REGISTER MAP
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
OC1RS 0180 Output Compare 1 Secondary Register
OC1R 0182 Output Compare 1 Register
OC1CON 0184 — —OCSIDL— — — — — — — — OCFLT OCTSEL OCM2 OCM1 OCM0
OC2RS 0186 Output Compare 2 Secondary Register
OC2R 0188 Output Compare 2 Register
OC2CON 018A — —OCSIDL— — — — — — — — OCFLT OCTSEL OCM2 OCM1 OCM0
OC3RS 018C Output Compare 3 Secondary Register
OC3R 018E Output Compare 3 Register
OC3CON 0190 — —OCSIDL— — — — — — — — OCFLT OCTSEL OCM2 OCM1 OCM0
OC4RS 0192 Output Compare 4 Secondary Register
OC4R 0194 Output Compare 4 Register
OC4CON 0196 — —OCSIDL— — — — — — — — OCFLT OCTSEL OCM2 OCM1 OCM0
OC5RS 0198 Output Compare 5 Secondary Register
OC5R 019A Output Compare 5 Register
OC5CON 019C — —OCSIDL— — — — — — — — OCFLT OCTSEL OCM2 OCM1 OCM0
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
DS39747B-page 32 Advance Information © 2006 Microchip Technology Inc.
Page 35

PIC24FJ128GA FAMILY
All
All
0000
00FF
0000
1000
0000
0000
0000
00FF
0000
1000
0000
0000
Resets
0000
Resets
0000
TABLE 3-9: I2C1 REGISTER MAP
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
I2C1RCV 0200 — — — — — — — — Receive Register
I2C1TRN 0202 — — — — — — — — Transmit Register
I2C1BRG 0204 — — — — — — — Baud Rate Generator
I2C1CON 0206 I2CEN — I2CSIDL SCLREL IPMIEN A10M DISSLW SMEN GCEN STREN ACKDT ACKEN RCEN PEN RSEN SEN
I2C1STAT 0208 ACKSTAT TRSTAT — — — BCL GCSTAT ADD10 IWCOL I2COV D/A P S R/W RBF TBF
I2C1ADD 020A — — — — — — Address Register
I2C1MSK 020C — — — — — — Address Mask
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
I2C2RCV 0210 — — — — — — — — Receive Register
I2C2TRN 0212 — — — — — — — — Transmit Register
I2C2BRG 0214 — — — — — — — Baud Rate Generator
I2C2CON 0216 I2CEN — I2CSIDL SCLREL IPMIEN A10M DISSLW SMEN GCEN STREN ACKDT ACKEN RCEN PEN RSEN SEN
I2C2STAT 0218 ACKSTAT TRSTAT — — — BCL GCSTAT ADD10 IWCOL I2CPOV D/A P S R/W RBF TBF
I2C2ADD 021A — — — — — — Address Register
I2C2MSK 021C — — — — — — Address Mask
TABLE 3-10: I2C2 REGISTER MAP
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
DS39747B-page 33 Advance Information © 2006 Microchip Technology Inc.
Page 36

PIC24FJ128GA FAMILY
All
0000
0110
xxxx
0000
Resets
0000
All
0000
0110
xxxx
0000
Resets
0000
All
0000
0000
0000
Resets
0000
All
0000
0000
0000
Resets
0000
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
U1MODE 0220 UARTEN — USIDL IREN RTSMD — UEN1 UEN0 WAKE LPBACK ABAUD RXINV BRGH PDSEL1 PDSEL0 STSEL
U1STA 0222 UTXISEL1 UTXINV UTXISEL0 — UTXBRK UTXEN UTXBF TRMT URXISEL1 URXISEL0 ADDEN RIDLE PERR FERR OERR URXDA
U1TXREG 0224 — — — — — — — Transmit Register
U1RXREG 0226 — — — — — — — Receive Register
U1BRG 0228 Baud Rate Generator Prescaler
TABLE 3-11: UART1 REGISTER MAP
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
U2MODE 0230 UARTEN — USIDL IREN RTSMD — UEN1 UEN0 WAKE LPBACK ABAUD RXINV BRGH PDSEL1 PDSEL0 STSEL
U2STA 0232 UTXISEL1 UTXINV UTXISEL0 — UTXBRK UTXEN UTXBF TRMT URXISEL1 URXISEL0 ADDEN RIDLE PERR FERR OERR URXDA
U2TXREG 0234 — — — — — — — Transmit Register
U2RXREG 0236 — — — — — — — Receive Register
U2BRG 0238 Baud Rate Generator Prescaler
TABLE 3-12: UART2 REGISTER MAP
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
SPI1STAT 0240 SPIEN — SPISIDL — — SPIBEC2 SPIBEC1 SPIBEC0 —SPIROV— — — — SPITBF SPIRBF
SPI1CON1 0242 — — — DISSCK DISSDO MODE16 SMP CKE SSEN CKP MSTEN SPRE2 SPRE1 SPRE0 PPRE1 PPRE0
SPI1CON2 0244 FRMEN SPIFSD SPIFPOL — — — — — — — — — — — SPIFE SPIBEN
SPI1BUF 0248 SPI1 Transmit and Receive Buffer
TABLE 3-13: SPI1 REGISTER MAP
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
SPI2STAT 0260 SPIEN — SPISIDL — — SPIBEC2 SPIBEC1 SPIBEC0 —SPIROV— — — — SPITBF SPIRBF
SPI2CON1 0262 — — — DISSCK DISSDO MODE16 SMP CKE SSEN CKP MSTEN SPRE2 SPRE1 SPRE0 PPRE1 PPRE0
SPI2CON2 0264 FRMEN SPIFSD SPIFPOL — — — — — — — — — — — SPIFE SPIBEN
SPI2BUF 0268 SPI2 Transmit and Receive Buffer
TABLE 3-14: SPI2 REGISTER MAP
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
DS39747B-page 34 Advance Information © 2006 Microchip Technology Inc.
Page 37

PIC24FJ128GA FAMILY
All
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
xxxx
0000
0000
0000
0000
0000
Resets
0000
All
C6FF
xxxx
xxxx
Resets
(2)
TRISA0
(2)
TRISA1
(2)
TRISA2
(2)
TRISA3
(2)
TRISA4
(2)
TRISA5
(2)
TRISA6
(2)
0000
(2)
(2)
(2)
RA0
ODA0
LATA0
(2)
(2)
(2)
RA1
ODA1
LATA1
(2)
(2)
(2)
RA2
ODA2
LATA2
(2)
(2)
(2)
RA3
ODA3
LATA3
(2)
(2)
(2)
RA4
ODA4
LATA4
(2)
(2)
(2)
RA5
ODA5
LATA5
(2)
(2)
(2)
RA6
ODA6
LATA6
(2)
(2)
(2)
— TRISA7
(1)
TRISA9
(1)
— — — TRISA10
(1)
TRISA14
(1)
TRISA15
—RA7
—LATA7
(1)
(1)
RA9
LATA9
(1)
(1)
— — —RA10
— — —LATA10
(1)
(1)
RA14
LATA14
(1)
(1)
RA15
LATA15
—ODA7
(1)
ODA9
(1)
— — —ODA10
(1)
ODA14
(1)
ODA15
2: Implemented in 100-pin devices only
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
ADC1BUF0 0300 ADC Data Buffer 0
ADC1BUF1 0302 ADC Data Buffer 1
ADC1BUF2 0304 ADC Data Buffer 2
ADC1BUF3 0306 ADC Data Buffer 3
ADC1BUF4 0308 ADC Data Buffer 4
ADC1BUF5 030A ADC Data Buffer 5
ADC1BUF6 030C ADC Data Buffer 6
ADC1BUF7 030E ADC Data Buffer 7
ADC1BUF8 0310 ADC Data Buffer 8
ADC1BUF9 0312 ADC Data Buffer 9
ADC1BUFA 0314 ADC Data Buffer 10
ADC1BUFB 0316 ADC Data Buffer 11
ADC1BUFC 0318 ADC Data Buffer 12
ADC1BUFD 031A ADC Data Buffer 13
ADC1BUFE 031C ADC Data Buffer 14
ADC1BUFF 031E ADC Data Buffer 15
AD1CON1 0320 ADON —ADSIDL— — — FORM1 FORM0 SSRC2 SSRC1 SSRC0 — — ASAM SAMP DONE
AD1CON2 0322 VCFG2 VCFG1 VCFG0 OFFCAL — CSCNA — —BUFS— SMPI3 SMPI2 SMPI1 SMPI0 BUFM ALTS
AD1CON3 0324 ADRC — — SAMC4 SAMC3 SAMC2 SAMC1 SAMC0 ADCS7 ADCS6 ADCS5 ADCS4 ADCS3 ADCS2 ADCS1 ADCS0
AD1CHS 0328 CH0NB — — — CH0SB3 CH0SB2 CH0SB1 CH0SB0 CH0NA — — — CH0SA3 CH0SA2 CH0SA1 CH0SA0
AD1PCFG 032C PCFG15 PCFG14 PCFG13 PCFG12 PCFG11 PCFG10 PCFG9 PCFG8 PCFG7 PCFG6 PCFG5 PCFG4 PCFG3 PCFG2 PCFG1 PCFG0
AD1CSSL 0330 CSSL15 CSSL14 CSSL13 CSSL12 CSSL11 CSSL10 CSSL9 CSSL8 CSSL7 CSSL6 CSSL5 CSSL4 CSSL3 CSSL2 CSSL1 CSSL0
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
TABLE 3-15: ADC REGISTER MAP
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TRISA 02C0
PORTA 02C2
LATA 02C4
ODCA 06C0
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal for 100-pin devices.
TABLE 3-16: PORTA REGISTER MAP
Note 1: Implemented in 80-pin and 100-pin devices only.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 35
Page 38

PIC24FJ128GA FAMILY
All
FFFF
xxxx
xxxx
Resets
0000
All
F01E
xxxx
xxxx
Resets
—
(1)
TRISC1
(2)
TRISC2
(1)
TRISC3
(2)
TRISC4
0000
—
—
—
(1)
(1)
(1)
1
RC1
ODC
LATC1
(2)
(2)
(2)
2
RC2
ODC
LATC2
(1)
(1)
(1)
3
RC3
ODC
LATC3
(2)
(2)
(2)
4
RC4
LATC4
All
FFFF
xxxx
xxxx
Resets
0000
0
ODD
1
ODD
2
ODD
3
ODD
4
ODD
5
ODD
6
ODD
7
ODD
8
ODD
9
ODD
10
ODD
11
RD11 RD10 RD9 RD8 RD7 RD6 RD5 RD4 RD3 RD2 RD1 RD0
ODD
LATD11 LATD10 LATD9 LATD8 LATD7 LATD6 LATD5 LATD4 LATD3 LATD2 LATD1 LATD0
TRISD11 TRISD10 TRISD9 TRISD8 TRISD7 TRISD6 TRISD5 TRISD4 TRISD3 TRISD2 TRISD1 TRISD0
(1)
(1)
(1)
(1)
RD12
ODD12
LATD12
TRISD12
(1)
(1)
(1)
(1)
RD13
ODD13
LATD13
TRISD13
(1)
(1)
(1)
(1)
RD14
ODD14
LATD14
TRISD14
(1)
(1)
(1)
(1)
RD15
ODD15
LATD15
TRISD15
2: Implemented in 100-pin devices only
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TRISB 02C6 TRISB15 TRISB14 TRISB13 TRISB12 TRISB11 TRISB10 TRISB9 TRISB8 TRISB7 TRISB6 TRISB5 TRISB4 TRISB3 TRISB2 TRISB1 TRISB0
PORTB 02C8 RB15 RB14 RB13 RB12 RB11 RB10 RB9 RB8 RB7 RB6 RB5 RB4 RB3 RB2 RB1 RB0
LATB 02CA LATB15 LATB14 LATB13 LATB12 LATB11 LATB10 LATB9 LATB8 LATB7 LATB6 LATB5 LATB4 LATB3 LATB2 LATB1 LATB0
ODCB 06C6 ODB15 ODB14 ODB13 ODB12 ODB11 ODB10 ODB9 ODB8 ODB7 ODB6 ODB5 ODB4 ODB3 ODB2 ODB1 ODB0
TABLE 3-17: PORTB REGISTER MAP
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal for 100-pin devices.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TRISC 02CC TRISC15 TRISC14 TRISC13 TRISC12 — — — — — — —
PORTC 02CE RC15 RC14 RC13 RC12 — — — — — — —
LATTC 02D0 LATC15 LATC14 LATC13 LATC12 — — — — — — —
ODCC 06CC ODC15 ODC14 ODC13 ODC12 — — — — — — —ODC
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal for 100-pin devices.
TABLE 3-18: PORTC REGISTER MAP
Note 1: Implemented in 80-pin and 100-pin devices only.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TRISD 02D2
PORTD 02D4
LATD 02D6
ODCD 06D2
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal for 100-pin devices.
TABLE 3-19: PORTD REGISTER MAP
Note 1: Implemented in 80-pin and 100-pin devices only.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 36
Page 39

PIC24FJ128GA FAMILY
All
All
31FF
xxxx
xxxx
03FF
xxxx
xxxx
RE6 RE5 RE4 RE3 RE2 RE1 RE0
LATE6 LATE5 LATE4 LATE3 LATE2 LATE1 LATE0
0000
ODE6 ODE5 ODE4 ODE3 ODE2 ODE1 ODE0
Resets
TRISE6 TRISE5 TRISE4 TRISE3 TRISE2 TRISE1 TRISE0
7
RE7
ODE
LATE7
TRISE7
(1)
(1)
(1)
(1)
8
RE8
ODE
LATE8
TRISE8
(1)
(1)
(1)
(1)
Resets
TRISF6 TRISF5 TRISF4 TRISF3 TRISF2 TRISF1 TRISF0
(2)
TRISF7
(2)
TRISF8
0000
RF6 RF5 RF4 RF3 RF2 RF1 RF0
ODF6 ODF5 ODF4 ODF3 ODF2 ODF1 ODF0
LATF6 LATF5 LATF4 LATF3 LATF2 LATF1 LATF0
(2)
(2)
(2)
RF7
ODF7
LATF7
(2)
(2)
(2)
All
F3CF
xxxx
xxxx
Resets
(2)
TRISG0
(2)
0000
(2)
(2)
(2)
RG0
ODG0
LATG0
(2)
(2)
(2)
All
0000
Resets
— — TRISG9 TRISG8 TRISG7 TRISG6 — — TRISG3 TRISG2 TRISG1
— — RG9 RG8 RG7 RG6 — — RG3 RG2 RG1
— — LATG9 LATG8 LATG7 LATG6 — — LATG 3 L ATG2 LATG 1
— — ODG9 ODG8 ODG7 ODG6 — — ODG3 ODG2 ODG1
(1)
(1)
(1)
RG12
ODG12
LATG12
(1)
(1)
(1)
RG13
ODG13
LATG13
(1)
(1)
(1)
RG14
ODG14
LATG14
(1)
(1)
(1)
(1)
(1)
— — —
TRISF12
TRISF13
— — —RF8
(1)
(1)
RG12
(1)
(1)
RG13
— — — LATF8
LATF12
LATF13
— — —ODF8
(1)
ODF12
(1)
ODF13
(1
TRISG12
(1)
TRISG13
(1)
TRISG14
(1)
— — — — — — — — — — — — — — RTSECSEL PMPTTL
RG15
ODG15
LATG15
TRISG15
2: Implemented in 80-pin and 100-pin devices only.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TRISE 02D8 — — — — — — TRISE9
PORTE 02DA — — — — — —RE9
LATE 02DC — — — — — —LATE9
ODCE 06D8 — — — — — —ODE9
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal for 100-pin devices.
TABLE 3-20: PORTE REGISTER MAP
Note 1: Implemented in 80-pin and 100-pin devices only.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TRISF 02DE — —
PORTF 02E0 — —
LATF 02E2 — —
ODCF 06DE — —
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal for 100-pin devices.
TABLE 3-21: PORTF REGISTER MAP
Note 1: Implemented in 100-pin devices only.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TRISG 02E4
PORTG 02E6
TABLE 3-22: PORTG REGISTER MAP
LATG 02E8
ODCG 06E4
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal for 100-pin devices.
2: Implemented in 80-pin and 100-pin devices only.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PADCFG1 02FC
Note 1: Implemented in 100-pin devices only
TABLE 3-23: PAD CONFIGURATION MAP
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal for 100-pin devices.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 37
Page 40

PIC24FJ128GA FAMILY
All
0000
0000
0000
0000
0000
0000
0000
0000
Resets
0000
OB3E OB2E OB1E OB0E
— —
All
xxxx
0000
xxxx
Resets
0000
All
0000
0000
Resets
Parallel Port Data Out Register 1 (Buffers 0 and 1)
IB3F IB2F IB1F IB0F OBE OBUF
— —
CS2 CS1 Parallel Port Destination Address<13:0> (Master modes)
IBF IBOV
0604
(1)
(1)
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PMCON 0600 PMPEN — PSIDL ADRMUX1 ADRMUX0 PTBEEN PTWREN PTRDEN CSF1 CSF0 ALP CS2P CS1P BEP WRSP RDSP
PMMODE 0602 BUSY IRQM1 IRQM0 INCM1 INCM0 MODE16 MODE1 MODE0 WAITB1 WAITB0 WAITM3 WAITM2 WAITM1 WAITM0 WAITE1 WAITE0
PMADDR
PMDOUT1
PMDOUT2 0606 Parallel Port Data Out Register 2 (Buffers 2 and 3)
PMDIN1 0608 Parallel Port Data In Register 1 (Buffers 0 and 1)
PMPDIN2 060A Parallel Port Data In Register 2 (Buffers 2 and 3)
PMPEN 060C PTEN15 PTEN14 PTEN13 PTEN12 PTEN11 PTEN10 PTEN9 PTEN8 PTEN7 PTEN6 PTEN5 PTEN4 PTEN3 PTEN2 PTEN1 PTEN0
PMSTAT 060E
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
TABLE 3-24: PARALLEL MASTER/SLAVE PORT REGISTER MAP
Note 1: PMADDR and PMDOUT1 share the same physical register. The register functions as PMDOUT1 only in Slave modes, and as PMADDR only in Master modes.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TABLE 3-25: REAL-TIME CLOCK AND CALENDAR REGISTER MAP
ALRMVAL 0620 Alarm Value Register Window based on APTR<1:0>
0626 RTCEN — RTCWREN RTCSYNC HALFSEC RTCOE RTCPTR1 RTCPTR0 CAL7 CAL6 CAL5 CAL4 CAL3 CAL2 CAL1 CAL0
(1)
ALCFGRPT 0622 ALRMEN CHIME AMASK3 AMASK2 AMASK1 AMASK0 ALRMPTR1 ALRMPTR0 ARPT7 ARPT6 ARPT5 ARPT4 ARPT3 ARPT2 ARPT1 ARPT0
RTCVAL 0624 RTCC Value Register Window based on RTCPTR<1:0>
RCFGCAL
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
Note 1: RCFGCAL register Reset value dependent on type of Reset.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
CMCON 0630 CMIDL — C2EVT C1EVT C2EN C1EN C2OUTEN C1OUTEN C2OUT C1OUT C2INV C1INV C2NEG C2POS C1NEG C1POS
CVRCON 0632 — — — — — — — — CVREN CVROE CVRR CVRSS CVR3 CVR2 CVR1 CVR0
TABLE 3-26: DUAL COMPARATOR REGISTER MAP
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
DS39747B-page 38 Advance Information © 2006 Microchip Technology Inc.
Page 41

PIC24FJ128GA FAMILY
All
(1)
0000
0000
0000
Resets
0000
All
(2)
xxxx
xxxx
0300
Resets
0000
(1)
All
0000
0000
Resets
All
0000
0000
Resets
0000
— — — — — — — — NVMKEY<7:0>
2: OSCCON register Reset values dependent on the FOSC Configuration bits and by type of Reset.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
CRCCON 0640 — — CSIDL VWORD4 VWORD3 VWORD2 VWORD1 VWORD0 CRCFUL CRCMPT — CRCGO PLEN3 PLEN2 PLEN1 PLEN0
CRCXOR 0642 CRC XOR Polynomial Register
CRCDAT 0644 CRC Data Input Register
CRCWDAT 0646 CRC Result Register
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
TABLE 3-27: CRC REGISTER MAP
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
RCON 0740 TRAPR IOPUWR — — — — CM VREGS EXTR SWR SWDTEN WDTO SLEEP IDLE BOR POR
OSCCON 0742 — COSC2 COSC1 COSC0 — NOSC2 NOSC1 NOSC0 CLKLOCK —LOCK—CF— SOSCEN OSWEN
CLKDIV 0744 ROI DOZE2 DOZE1 DOZE0 DOZEN RCDIV2 RCDIV1 RCDIV0 — — — — — — — —
OSCTUN 0748 — — — — — — — — — — TUN<5:0>
Legend: x = unknown value on Reset, — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
TABLE 3-28: SYSTEM REGISTER MAP
Note 1: RCON register Reset values dependent on type of Reset.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
NVMCON 0760 WR WREN WRERR — — — — — — ERASE — — NVMOP3 NVMOP2 NVMOP1 NVMOP0
NVMKEY 0766
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
TABLE 3-29: NVM REGISTER MAP
Note 1: Reset value shown is for POR only. Value on other Reset states is dependent on the state of memory write or erase operations at the time of Reset.
File Name Addr Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8 Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
TABLE 3-30: PMD REGISTER MAP
— — — IC5MD IC4MD IC3MD IC2MD IC1MD — — — OC5MD OC4MD OC3MD OC2MD OC1MD
T5MD T4MD T3MD T2MD T1MD — — — I2C1MD U2MD U1MD SPI2MD SPI1MD — —ADCMD
PMD1 0770
PMD2 0772
— — — — — CMPMD RTCCMD PMPMD CRCPMD — — — — — I2C2MD —
PMD3 0774
Legend: — = unimplemented, read as ‘0’. Reset values are shown in hexadecimal.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 39
Page 42
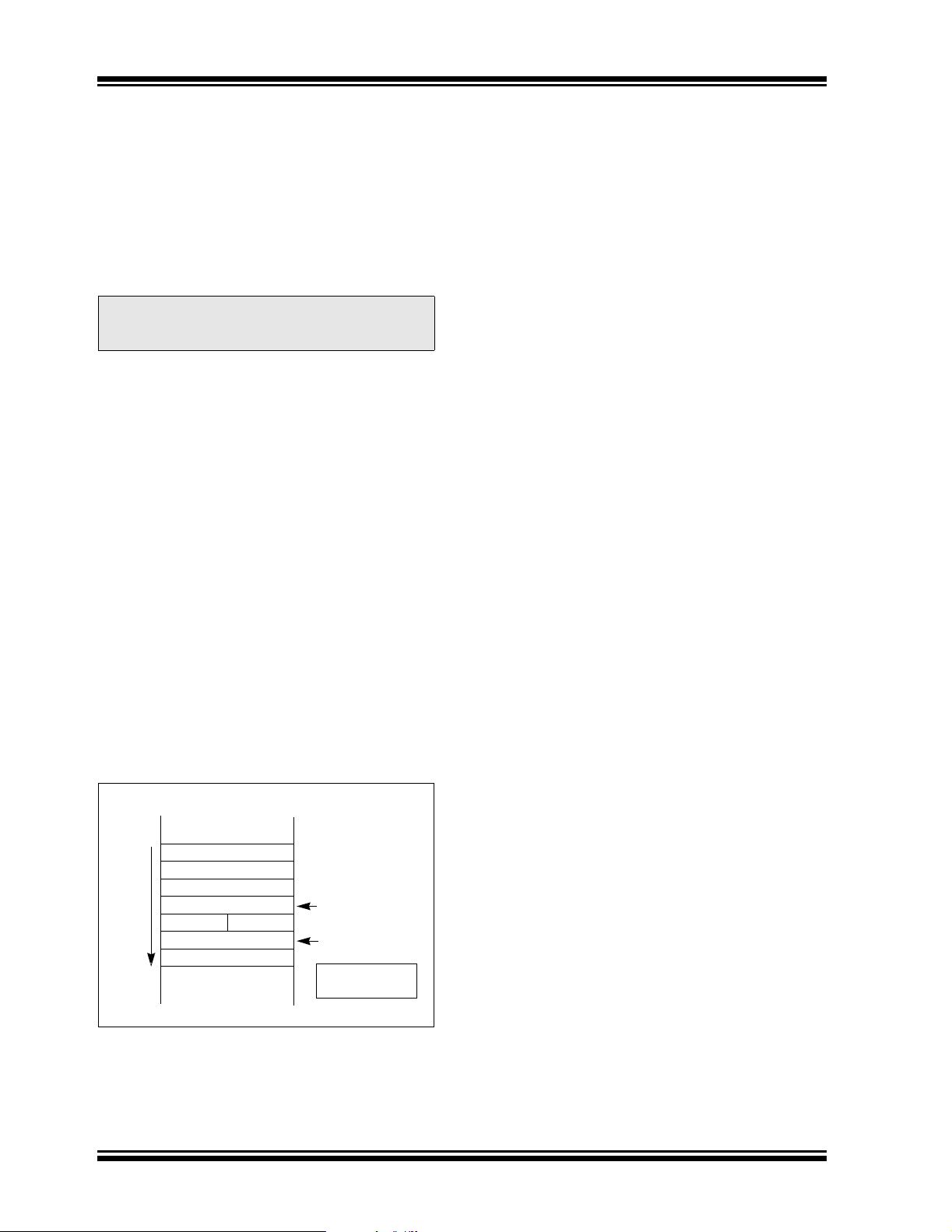
PIC24FJ128GA FAMILY
3.2.5 SOFTWARE STACK
In addition to its use as a working register, the W15 register in PIC24 devices is also used as a software Stack
Pointer. The pointer always points to the first available
free word and grows from lower to higher addresses. It
pre-decrements for stack pops and post-increments for
stack pushes, as shown in Figure 3-4. Note that for a
PC push during any CALL instruction, the MSB of the
PC is zero-extended before the push, ensuring that the
MSB is always clear.
Note: A PC push during exception processing
will concatenate the SRL register to the
MSB of the PC prior to the push.
The Stack Pointer Limit register (SPLIM) associated
with the Stack Pointer sets an upper address boundary
for the stack. SPLIM is uninitialized at Reset. As is the
case for the Stack Pointer, SPLIM<0> is forced to ‘0’
because all stack operations must be word-aligned.
Whenever an EA is generated using W15 as a source
or destination pointer, the resulting address is compared with the value in SPLIM. If the contents of the
Stack Pointer (W15) and the SPLIM register are equal
and a push operation is performed, a stack error trap
will not occur. The stack error trap will occur on a
subsequent push operation. Thus, for example, if it is
desirable to cause a stack error trap when the stack
grows beyond address 2000h in RAM, initialize the
SPLIM with the value, 1FFEh.
Similarly, a Stack Pointer underflow (stack error) trap is
generated when the Stack Pointer address is found to
be less than 0800h. This prevents the stack from
interfering with the Special Function Register (SFR)
space.
A write to the SPLIM register should not be immediately
followed by an indirect read operation using W15.
FIGURE 3-4: CALL STACK FRAME
0000h
Stack Grows Towards
000000000
Higher Address
PC<15:0>
PC<22:16>
<Free Word>
015
W15 (before CALL)
W15 (after CALL)
POP : [--W15]
PUSH : [W15++]
3.3 Interfacing Program and Data Memory Spaces
The PIC24 architecture uses a 24-bit wide program
space and 16-bit wide data space. The architecture is
also a modified Harvard scheme, meaning that data
can also be present in the program space. To use this
data successfully, it must be accessed in a way that
preserves the alignment of information in both spaces.
Aside from normal execution, the PIC24 architecture
provides two methods by which program space can be
accessed during operation:
• Using table instructions to access individual bytes
or words anywhere in the program space
• Remapping a portion of the program space into
the data space (Program Space Visibility)
Table instructions allow an application to read or write
to small areas of the program memory. This makes the
method ideal for accessing data tables that need to be
updated from time to time. It also allows access to all
bytes of the program word. The remapping method
allows an application to access a large block of data on
a read-only basis, which is ideal for look ups from a
large table of static data. It can only access the least
significant word of the program word.
3.3.1 ADDRESSING PROGRAM SPACE
Since the address ranges for the data and program
spaces are 16 and 24 bits respectively, a method is
needed to create a 23-bit or 24-bit program address
from 16-bit data registers. The solution depends on the
interface method to be used.
For table operations, the 8-bit Table Page register
(TBLPAG) is used to define a 32K word region within
the program space. This is concatenated with a 16-bit
EA to arrive at a full 24-bit program space address. In
this format, the Most Significant bit of TBLPAG is used
to determine if the operation occurs in the user memory
(TBLPAG<7> = 0) or the configuration memory
(TBLPAG<7> = 1).
For remapping operations, the 8-bit Program Space
Visibility register (PSVPAG) is used to define a
16K word page in the program space. When the Most
Significant bit of the EA is ‘1’, PSVPAG is concatenated
with the lower 15 bits of the EA to form a 23-bit program
space address. Unlike table operations, this limits
remapping operations strictly to the user memory area.
Table 3-31 and Figure 3-5 show how the program EA is
created for table operations and remapping accesses
from the data EA. Here, P<23:0> refers to a program
space word, whereas D<15:0> refers to a data space
word.
DS39747B-page 40 Advance Information © 2006 Microchip Technology Inc.
Page 43

PIC24FJ128GA FAMILY
TABLE 3-31: PROGRAM SPACE ADDRESS CONSTRUCTION
Access Type
Instruction Access
(Code Execution)
TBLRD/TBLWT
(Byte/Word Read/Write)
Program Space Visibility
(Block Remap/Read)
Note 1: Data EA<15> is always ‘1’ in this case, but is not used in calculating the program space address. Bit 15 of
the address is PSVPAG<0>.
Access
Space
User 0 PC<22:1> 0
User TBLPAG<7:0> Data EA<15:0>
Configuration TBLPAG<7:0> Data EA<15:0>
User 0 PSVPAG<7:0> Data EA<14:0>
<23> <22:16> <15> <14:1> <0>
0xxx xxxx xxxx xxxx xxxx xxxx
1xxx xxxx xxxx xxxx xxxx xxxx
0 xxxx xxxx xxx xxxx xxxx xxxx
FIGURE 3-5: DATA ACCESS FROM PROGRAM SPACE ADDRESS GENERATION
Program Space Address
0xx xxxx xxxx xxxx xxxx xxx0
(1)
Program Counter
Table Operations
Program Space Visibility
(Remapping)
(1)
(2)
User/Configuration
0
1/0
(1)
0
Space Select
TBLPAG
8 bits
PSVPAG
8 bits
Select
23 bits
24 bits
1
23 bits
EA
16 bits
EA
15 bits
0Program Counter
1/0
0
Byte Select
Note 1: The LSb of program space addresses is always fixed as ‘0’, in order to maintain word alignment of
data in the program and data spaces.
2: Table operations are not required to be word-aligned. Table read operations are permitted in the
configuration memory space.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 41
Page 44

PIC24FJ128GA FAMILY
3.3.2 DATA ACCESS FROM PROGRAM MEMORY USING TABLE INSTRUCTIONS
The TBLRDL and TBLWTL instructions offer a direct
method of reading or writing the lower word of any
address within the program space, without going
through data space. The TBLRDH and TBLWTH instructions are the only method to read or write the upper 8 bits
of a program space word as data.
The PC is incremented by two for each successive
24-bit program word. This allows program memory
addresses to directly map to data space addresses.
Program memory can thus be regarded as two 16-bit
word wide address spaces, residing side by side, each
with the same address range. TBLRDL and TBLWTL
access the space which contains the least significant
data word, and TBLRDH and TBLWTH access the space
which contains the upper data byte.
Two table instructions are provided to move byte or
word sized (16-bit) data to and from program space.
Both function as either byte or word operations.
1. TBLRDL (Table Read Low): In Word mode, it
maps the lower word of the program space
location (P<15:0>)
In Byte mode, either the upper or lower byte of
the lower program word is mapped to the lower
byte of a data address. The upper byte is
selected when byte select is ‘1’; the lower byte
is selected when it is ‘0’.
to a data address (D<15:0>).
2. TBLRDH (Table Read High): In Word mode, it
maps the entire upper word of a program address
(P<23:16>) to a data address. Note that
D<15:8>, the “phantom byte”, will always be ‘0’.
In Byte mode, it maps the upper or lower byte of
the program word to D<7:0> of the data
address, as above. Note that the data will
always be ‘0’ when the upper “phantom” byte is
selected (byte select = 1).
In a similar fashion, two table instructions, TBLWTH
and TBLWTL, are used to write individual bytes or
words to a program space address. The details of
their operation are explained in Section 4.0 “Flash
Program Memory”.
For all table operations, the area of program memory
space to be accessed is determined by the Table Page
register (TBLPAG). TBLPAG covers the entire program
memory space of the device, including user and configuration spaces. When TBLPAG<7> = 0, the Table Page
is located in the user memory space. When
TBLPAG<7> = 1, the page is located in configuration
space.
Note: Only table read operations will execute in
the configuration memory space and only
then, in implemented areas such as the
Device ID. Table write operations are not
allowed.
FIGURE 3-6: ACCESSING PROGRAM MEMORY WITH TABLE INSTRUCTIONS
Program Space
TBLPAG
02
23 15 0
000000h
020000h
030000h
800000h
00000000
00000000
00000000
00000000
‘Phantom’ Byte
TBLRDH.B (Wn<0> = 0)
TBLRDL.B (Wn<0> = 1)
TBLRDL.B (Wn<0> = 0)
TBLRDL.W
The address for the table operation is determined by the data EA
within the page defined by the TBLPAG register.
Only read operations are shown; write operations are also valid in
the user memory area.
Data EA<15:0>
081623
DS39747B-page 42 Advance Information © 2006 Microchip Technology Inc.
Page 45

PIC24FJ128GA FAMILY
3.3.3 READING DATA FROM PROGRAM MEMORY USING PROGRAM SPACE VISIBILITY
The upper 32 Kbytes of data space may optionally be
mapped into any 16K word page of the program space.
This provides transparent access of stored constant
data from the data space without the need to use
special instructions (i.e., TBLRDL/H).
Program space access through the data space occurs
if the Most Significant bit of the data space EA is ‘1’ and
program space visibility is enabled by setting the PSV
bit in the Core Control register (CORCON<2>). The
location of the program memory space to be mapped
into the data space is determined by the Program
Space Visibility Page register (PSVPAG). This 8-bit
register defines any one of 256 possible pages of
16K words in program space. In effect, PSVPAG functions as the upper 8 bits of the program memory
address, with the 15 bits of the EA functioning as the
lower bits. Note that by incrementing the PC by 2 for
each program memory word, the lower 15 bits of data
space addresses directly map to the lower 15 bits in the
corresponding program space addresses.
Data reads to this area add an additional cycle to the
instruction being executed, since two program memory
fetches are required.
Although each data space address, 8000h and higher,
maps directly into a corresponding program memory
address (see Figure 3-7), only the lower 16 bits of the
24-bit program word are used to contain the data. The
upper 8 bits of any program space locations used as
data should be programmed with ‘1111 1111’ or
‘0000 0000’ to force a NOP. This prevents possible
issues should the area of code ever be accidentally
executed.
Note: PSV access is temporarily disabled during
table reads/writes.
For operations that use PSV and are executed outside
a REPEAT loop, the MOV and MOV.D instructions will
require one instruction cycle in addition to the specified
execution time. All other instructions will require two
instruction cycles in addition to the specified execution
time.
For operations that use PSV which are executed inside
a REPEAT loop, there will be some instances that
require two instruction cycles in addition to the
specified execution time of the instruction:
• Execution in the first iteration
• Execution in the last iteration
• Execution prior to exiting the loop due to an
interrupt
• Execution upon re-entering the loop after an
interrupt is serviced
Any other iteration of the REPEAT loop will allow the
instruction accessing data, using PSV, to execute in a
single cycle.
FIGURE 3-7: PROGRAM SPACE VISIBILITY OPERATION
When CORCON<2> = 1 and EA<15> = 1:
Program Space
PSVPAG
02
The data in the page
designated by
PSVPAG is mapped
into the upper half of
the data memory
space....
23 15 0
000000h
010000h
018000h
800000h
Data Space
PSV Area
0000h
8000h
FFFFh
Data EA<14:0>
...while the lower 15
bits of the EA specify
an exact address
within the PSV area.
This corresponds
exactly to the same
lower 15 bits of the
actual program space
address.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 43
Page 46

PIC24FJ128GA FAMILY
DS39747B-page 44 Advance Information ©
Page 47

PIC24FJ128GA FAMILY
4.0 FLASH PROGRAM MEMORY
Note: This data sheet summarizes the features
of this group of PIC24FJ devices. It is not
intended to be a comprehensive reference
source.
The PIC24FJ128GA family of devices contains internal
Flash program memory for storing and executing application code. The memory is readable, writable and
erasable during normal operation over the entire V
range.
Flash memory can be programmed in two ways:
1. In-Circuit Serial Programming (ICSP)
2. Run-Time Self-Programming (RTSP)
ICSP allows a PIC24FJ128GA family device to be serially programmed while in the end application circuit.
This is simply done with two lines for Programming
Clock and Programming Data (which are named PGCx
and PGDx, respectively), and three other lines for
power (V
DD), ground (VSS) and Master Clear (MCLR).
This allows customers to manufacture boards with
unprogrammed devices and then program the microcontroller just before shipping the product. This also
allows the most recent firmware or a custom firmware
to be programmed.
DD
RTSP is accomplished using TBLRD (table read) and
TBLWT (table write) instructions. With RTSP, the user
may write program memory data in blocks of 64 instructions (192 bytes) at a time, and erase program memory
in blocks of 512 instructions (1536 bytes) at a time.
4.1 Table Instructions and Flash
Programming
Regardless of the method used, all programming of
Flash memory is done with the table read and table
write instructions. These allow direct read and write
access to the program memory space from the data
memory while the device is in normal operating mode.
The 24-bit target address in the program memory is
formed using bits<7:0> of the TBLPAG register and the
Effective Address (EA) from a W register specified in
the table instruction, as shown in Figure 4-1.
The TBLRDL and the TBLWTL instructions are used to
read or write to bits<15:0> of program memory.
TBLRDL and TBLWTL can access program memory in
both Word and Byte modes.
The TBLRDH and TBLWTH instructions are used to read
or write to bits<23:16> of program memory. TBLRDH
and TBLWTH can also access program memory in Word
or Byte mode.
FIGURE 4-1: ADDRESSING FOR TABLE REGISTERS
24 bits
Using
Using
Table
Instruction
User/Configuration
Space Select
Program
Counter
0
1/0
TBLPAG Reg
8 bits
Program Counter
Working Reg EA
24-bit EA
0
16 bits
Byte
Select
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 45
Page 48

PIC24FJ128GA FAMILY
4.2 RTSP Operation
The PIC24 Flash program memory array is organized
into rows of 64 instructions or 192 bytes. RTSP allows
the user to erase blocks of eight rows (512 instructions)
at a time, and to program one row at a time. The 8-row
erase blocks and single-row write blocks are edgealigned, from the beginning of program memory, on
boundaries of 1536 bytes and 192 bytes, respectively.
The program memory implements holding buffers that
can contain 64 instructions of programming data. Prior
to the actual programming operation, the write data
must be loaded into the buffers in sequential order. The
instructions words loaded must always be from a group
of 64 boundaries.
The basic sequence for RTSP programming is to set up
a Table Pointer, then do a series of TBLWT instructions
to load the buffers. Programming is performed by setting the control bits in the NVMCON register. A total of
64 TBLWTL and TBLWTH instructions are required to
load the instructions.
All of the table write operations are single-word writes
(2 instruction cycles), because only the buffers are written. A programming cycle is required for programming
each row.
4.3 Control Registers
There are two SFRs used to read and write the
program Flash memory: NVMCON and NVMKEY.
The NVMCON register (Register 4-1) controls which
blocks are to be erased, which memory type is to be
programmed and the start of the programming cycle.
NVMKEY is a write-only register that is used for write
protection. To start a programming or erase sequence,
the user must consecutively write 55h and AAh to the
NVMKEY register. Refer to Section 4.4 “Programming
Operations” for further details.
4.4 Programming Operations
A complete programming sequence is necessary for
programming or erasing the internal Flash in RTSP
mode. A programming operation is nominally 4 ms in
duration and the processor stalls (waits) until the operation is finished. Setting the WR bit (NVMCON<15>)
starts the operation, and the WR bit is automatically
cleared when the operation is finished.
DS39747B-page 46 Advance Information © 2006 Microchip Technology Inc.
Page 49

PIC24FJ128GA FAMILY
REGISTER 4-1: NVMCOM: FLASH MEMORY CONTROL REGISTER
Upper Byte:
bit 15 bit 8
R/SO-0
(1)
R/W-0
(1)
R/W-0
WR WREN WRERR
(1)
U-0 U-0 U-0 U-0 U-0
— — — — —
Lower Byte:
U-0 R/W-0
(1)
U-0 U-0 R/W-0
— ERASE — —NVMOP3
bit 7 bit 0
bit 15 WR: Write Control bit
1 = Initiates a Flash memory program or erase operation
The operation is self-timed and the bit is cleared by hardware once operation is complete.
0 = Program or erase operation is complete and inactive
bit 14 WREN: Write Enable bit
1 = Enable Flash program/erase operations
0 = Inhibit Flash program/erase operations
bit 13 WRERR: Write Sequence Error Flag bit
1 = An improper program or erase sequence attempt or termination has occurred (bit is set automatically
on any set attempt of the WR bit)
0 = The program or erase operation completed normally
bit 12-7 Unimplemented: Read as ‘0’
bit 6 ERASE: Erase/Program Enable bit
1 = Perform the erase operation specified by NVMOP3:NVMOP0 on the next WR command
0 = Perform the program operation specified by NVMOP3:NVMOP0 on the next WR command
bit 5-4 Unimplemented: Read as ‘0’
bit 3-0 NVMOP3:NVMOP0: NVM Operation Select bits
1111 = Memory bulk erase operation (ERASE = 1) or no operation (ERASE = 0)
0010 = Memory row erase operation (ERASE = 1) or no operation (ERASE = 0)
0001 = Memory row program operation (ERASE = 0) or no operation (ERASE = 1)
(2)
(1)
(2)
NVMOP2
R/W-0
(1)
(2)
R/W-0
NVMOP1
(1)
(2)
R/W-0
NVMOP0
(1)
(2)
Note 1: These bits can only be reset on POR.
2: All other combinations of NVMOP3:NVMOP0 are unimplemented.
Legend:
R = Readable bit W = Writable bit SO = Settable-Only bit U = Unimplemented bit
-n = Value at Reset ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 47
Page 50

PIC24FJ128GA FAMILY
4.4.1 PROGRAMMING ALGORITHM FOR FLASH PROGRAM MEMORY
The user can program one row of program Flash memory
at a time. To do this, it is necessary to erase the 8-row
erase block containing the desired row. The general
process is:
1. Read eight rows of program memory
(512 instructions) and store in data RAM.
2. Update the program data in RAM with the
desired new data.
3. Erase the block (see Example 4-1):
a) Set the NVMOP bits (NVMCOM<3:0>) to
‘0010’ to configure for block erase. Set the
ERASE (NVMCOM<6>) and WREN
(NVMCOM<14>) bits.
b) Write the starting address of the block to be
erased into the TBLPAG and W registers.
c) Write 55h to NVMKEY.
d) Write AAh to NVMKEY.
e) Set the WR bit (NVMCOM<15>). The erase
cycle begins and the CPU stalls for the dura-
tion of the erase cycle. When the erase is
done, the WR bit is cleared automatically.
4. Write the first 64 instructions from data RAM into
the program memory buffers (see Example 4-2).
5. Write the program block to Flash memory:
a) Set the NVMOP bits to ‘0001’ to configure
for row programming. Clear the ERASE bit
and set the WREN bit.
b) Write 55h to NVMKEY.
c) Write AAh to NVMKEY.
d) Set the WR bit. The programming cycle
begins and the CPU stalls for the duration of
the write cycle. When the write to Flash mem-
ory is done, the WR bit is cleared automati-
cally.
6. Repeat steps 4 and 5, using the next available
64 instructions from the block in data RAM by
incrementing the value in TBLPAG, until all
512 instructions are written back to Flash
memory.
For protection against accidental operations, the write
initiate sequence for NVMKEY must be used to allow
any erase or program operation to proceed. After the
programming command has been executed, the user
must wait for the programming time until programming
is complete. The two instructions following the start of
the programming sequence should be NOPs, as shown
in Example 4-3.
EXAMPLE 4-1: ERASING A PROGRAM MEMORY BLOCK
; Set up NVMCON for block erase operation
MOV #0x4042, W0 ;
; Init pointer to row to be ERASED
MOV W0, NVMCON ; Initialize NVMCON
MOV #tblpage(PROG_ADDR), W0 ;
MOV W0, TBLPAG ; Initialize PM Page Boundary SFR
MOV #tbloffset(PROG_ADDR), W0 ; Initialize in-page EA[15:0] pointer
TBLWTL W0, [W0] ; Set base address of erase block
DISI #5 ; Block all interrupts with priority <7
; for next 5 instructions
MOV #0x55, W0
MOV W0, NVMKEY ; Write the 55 key
MOV #0xAA, W1 ;
MOV W1, NVMKEY ; Write the AA key
BSET NVMCON, #WR ; Start the erase sequence
NOP ; Insert two NOPs after the erase
NOP ; command is asserted
DS39747B-page 48 Advance Information © 2006 Microchip Technology Inc.
Page 51

PIC24FJ128GA FAMILY
EXAMPLE 4-2: LOADING THE WRITE BUFFERS
; Set up NVMCON for row programming operations
; Set up a pointer to the first program memory location to be written
; program memory selected, and writes enabled
; Perform the TBLWT instructions to write the latches
; 0th_program_word
; 1st_program_word
; 2nd_program_word
; 63rd_program_word
MOV #0x4001, W0 ;
MOV W0, NVMCON ; Initialize NVMCON
MOV #0x0000, W0 ;
MOV W0, TBLPAG ; Initialize PM Page Boundary SFR
MOV #0x6000, W0 ; An example program memory address
MOV #LOW_WORD_0, W2 ;
MOV #HIGH_BYTE_0, W3 ;
TBLWTL W2, [W0] ; Write PM low word into program latch
TBLWTH W3, [W0++] ; Write PM high byte into program latch
MOV #LOW_WORD_1, W2 ;
MOV #HIGH_BYTE_1, W3 ;
TBLWTL W2, [W0] ; Write PM low word into program latch
TBLWTH W3, [W0++] ; Write PM high byte into program latch
MOV #LOW_WORD_2, W2 ;
MOV #HIGH_BYTE_2, W3 ;
TBLWTL W2,
TBLWTH W3,
•
•
•
MOV #LOW_WORD_31, W2 ;
MOV #HIGH_BYTE_31, W3 ;
TBLWTL W2,
TBLWTH W3,
[W0] ; Write PM low word into program latch
[W0++] ; Write PM high byte into program latch
[W0] ; Write PM low word into program latch
[W0++] ; Write PM high byte into program latch
EXAMPLE 4-3: INITIATING A PROGRAMMING SEQUENCE
DISI #5 ; Block all interrupts with priority <7
MOV #0x55, W0
MOV W0, NVMKEY ; Write the 55 key
MOV #0xAA, W1 ;
MOV W1, NVMKEY ; Write the AA key
BSET NVMCON, #WR ; Start the erase sequence
NOP ; Insert two NOPs after the
NOP ; erase command is asserted
; for next 5 instructions
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 49
Page 52

PIC24FJ128GA FAMILY
NOTES:
DS39747B-page 50 Advance Information © 2006 Microchip Technology Inc.
Page 53
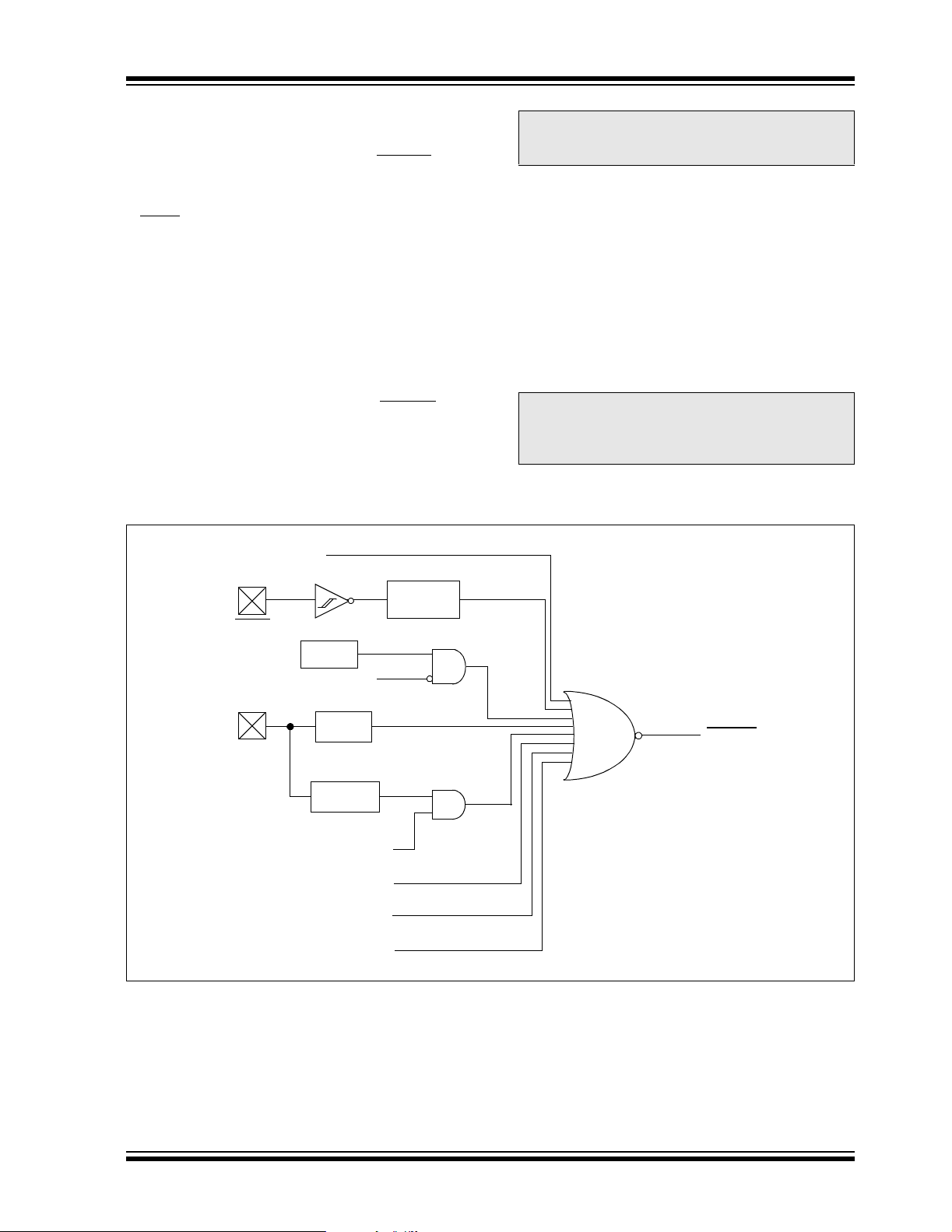
PIC24FJ128GA FAMILY
5.0 RESETS
The Reset module combines all Reset sources and
controls the device Master Reset Signal, SYSRST
following is a list of device Reset sources:
• POR: Power-on Reset
•MCLR
: Pin Reset
•SWR: RESET Instruction
• WDT: Watchdog Timer Reset
• BOR: Brown-out Reset
• TRAPR: Trap Conflict Reset
• IOPUWR: Illegal Opcode Reset
• UWR: Uninitialized W Register Reset
A simplified block diagram of the Reset module is
shown in Figure 5-1.
Any active source of Reset will make the SYSRST
nal active. Many registers associated with the CPU and
peripherals are forced to a known Reset state. Most
registers are unaffected by a Reset; their status is
unknown on POR and unchanged by all other Resets.
FIGURE 5-1: RESET SYSTEM BLOCK DIAGRAM
RESET
Instruction
. The
sig-
Note: Refer to the specific peripheral or CPU
section of this manual for register Reset
states.
All types of device Reset will set a corresponding status
bit in the RCON register to indicate the type of Reset
(see Register 5-1). A POR will clear all bits except for
the BOR and POR bits (RCON<1:0>), which are set.
The user may set or clear any bit at any time during
code execution. The RCON bits only serve as status
bits. Setting a particular Reset status bit in software will
not cause a device Reset to occur.
The RCON register also has other bits associated with
the Watchdog Timer and device power-saving states.
The function of these bits is discussed in other sections
of this manual.
Note: The status bits in the RCON register
should be cleared after they are read so
that the next RCON register value after a
device Reset will be meaningful.
MCLR
WDT
Module
Sleep or Idle
VDD Rise
Detect
VDD
Brown-out
Reset
Enable Voltage Regulator
Trap Conflict
Illegal Opcode
Uninitialized W Register
Glitch Filter
POR
SYSRST
BOR
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 51
Page 54

PIC24FJ128GA FAMILY
REGISTER 5-1: RCON: RESET CONTROL REGISTER
Upper Byte:
R/W-0 R/W-0 U-0 U-0 U-0 U-0 R/W-0 R/W-0
TRAPR IOPUWR
bit 15 bit 8
Lower Byte:
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-1 R/W-1
EXTR SWR SWDTEN WDTO SLEEP IDLE BOR POR
bit 7 bit 0
bit 15 TRAPR: Trap Reset Flag bit
1 = A Trap Conflict Reset has occurred
0 = A Trap Conflict Reset has not occurred
bit 14 IOPUWR: Illegal Opcode or Uninitialized W Access Reset Flag bit
1 = An illegal opcode detection, an illegal address mode, or uninitialized W register used as an Address
Pointer caused a Reset
0 = An illegal opcode or uninitialized W Reset has not occurred
bit 13-10 Unimplemented: Read as ‘0’
bit 9 CM: Configuration Word Mismatch Reset Flag bit
1 = A Configuration Word Mismatch Reset has occurred
0 = A Configuration Word Mismatch Reset has not occurred
bit 8 VREGS: Voltage Regulator Standby Enable bit
1 = Regulator remains active during Sleep
0 = Regulator goes to standby during Sleep
bit 7 EXTR: External Reset (MCLR
1 = A Master Clear (pin) Reset has occurred
0 = A Master Clear (pin) Reset has not occurred
bit 6 SWR: Software Reset (Instruction) Flag bit
1 = A RESET instruction has been executed
0 = A RESET instruction has not been executed
bit 5 SWDTEN: Software Enable/Disable of WDT bit
1 = WDT is enabled
0 = WDT is disabled
Note: If the FWDTEN Configuration bit is ‘1’ (unprogrammed), the WDT is always enabled, regardless
of the SWDTEN bit setting.
bit 4 WDTO: Watchdog Timer Time-out Flag bit
1 = WDT time-out has occurred
0 = WDT time-out has not occurred
bit 3 SLEEP: Wake From Sleep Flag bit
1 = Device has been in Sleep mode
0 = Device has not been in Sleep mode
bit 2 IDLE: Wake-up From Idle Flag bit
1 = Device was in Idle mode
0 = Device was not in Idle mode
bit 1 BOR: Brown-out Reset Flag bit
1 = A Brown-out Reset has occurred. Note that BOR is also set after Power-on Reset.
0 = A Brown-out Reset has not occurred
bit 0 POR: Power-on Reset Flag bit
1 = A Power-up Reset has occurred
0 = A Power-up Reset has not occurred
Note: All of the Reset status bits may be set or cleared in software. Setting one of these bits in software
does not cause a device Reset.
— — — —CMVREGS
) Pin bit
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 52 Advance Information © 2006 Microchip Technology Inc.
Page 55

PIC24FJ128GA FAMILY
TABLE 5-1: RESET FLAG BIT OPERATION
Flag Bit Setting Event Clearing Event
TRAPR (RCON<15>) Trap conflict event POR
IOPR (RCON<14>) Illegal opcode or uninitialized W register access POR
EXTR (RCON<7>) MCLR
SWR (RCON<6>) RESET instruction POR
WDTO (RCON<4>) WDT time-out PWRSAV instruction, POR
SLEEP (RCON<3>) PWRSAV #SLEEP instruction POR
IDLE (RCON<2>) PWRSAV #IDLE instruction POR
BOR (RCON<1>) POR, BOR —
POR (RCON<0>) POR —
Note: All Reset flag bits may be set or cleared by the user software.
Reset POR
5.1 Clock Source Selection at Reset
If clock switching is enabled, the system clock source
at device Reset is chosen as shown in Table 5-2. If
clock switching is disabled, the system clock source is
always selected according to the oscillator Configuration bits. Refer to 7.0 “Oscillator Configuration” for
further details.
TABLE 5-2: OSCILLATOR SELECTION vs.
TYPE OF RESET (CLOCK
SWITCHING ENABLED)
Reset Type Clock Source Determinant
POR Oscillator Configuration Bits
BOR
MCLR
WDTR
SWR
(FNOSC2:FNOSC0)
COSC Control bits
(OSCCON<14:12>)
5.2 Device Reset Times
The Reset times for various types of device Reset are
summarized in Table 5-3. Note that the system Reset
signal, SYSRST, is released after the POR and PWRT
delay times expire.
The time that the device actually begins to execute
code will also depend on the system oscillator delays,
which include the Oscillator Start-up Timer (OST) and
the PLL lock time. The OST and PLL lock times occur
in parallel with the applicable SYSRST
The FSCM delay determines the time at which the
FSCM begins to monitor the system clock source after
the SYSRST
signal is released.
delay times.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 53
Page 56

PIC24FJ128GA FAMILY
TABLE 5-3: RESET DELAY TIMES FOR VARIOUS DEVICE RESETS
Reset Type Clock Source SYSRST
POR
POR EC, FRC, FRCDIV, LPRC T
+ TSTARTUP + TRST ——1, 2, 3
Delay
System Clock
Delay
ECPLL, FRCPLL TPOR + TSTARTUP + TRST TLOCK TFSCM 1, 2, 3, 5, 6
POR
XT, HS, SOSC T
+ TSTARTUP + TRST TOST TFSCM 1, 2, 3, 4, 6
XTPLL, HSPLL TPOR + TSTARTUP + TRST TOST + TLOCK TFSCM 1, 2, 3, 4, 5, 6
BOR EC, FRC, FRCDIV, LPRC TSTARTUP + TRST ——2, 3
ECPLL, FRCPLL T
STARTUP + TRST TLOCK TFSCM 2, 3, 5, 6
XT, HS, SOSC TSTARTUP + TRST TOST TFSCM 2, 3, 4, 6
XTPLL, HSPLL TSTARTUP + TRST TOST + TLOCK TFSCM 2, 3, 4, 5, 6
MCLR
WDT Any Clock T
Any Clock TRST ——3
RST ——3
Software Any clock TRST ——3
Illegal Opcode Any Clock TRST ——3
Uninitialized W Any Clock T
RST ——3
Trap Conflict Any Clock TRST ——3
Note 1: TPOR = Power-on Reset delay (10 μs nominal).
STARTUP = TVREG (10 μs nominal) if on-chip regulator enabled or TPWRT (64 ms nominal) if on-chip
2: T
regulator disabled.
3: T
RST = Internal state Reset time (20 μs nominal).
OST = Oscillator Start-up Timer. A 10-bit counter counts 1024 oscillator periods before releasing the
4: T
oscillator clock to the system.
5: T
LOCK = PLL lock time (20 μs nominal).
FSCM = Fail-Safe Clock Monitor delay (100 μs nominal).
6: T
FSCM
Delay
Notes
5.2.1 POR AND LONG OSCILLATOR START-UP TIMES
The oscillator start-up circuitry and its associated delay
timers are not linked to the device Reset delays that
occur at power-up. Some crystal circuits (especially
low-frequency crystals) will have a relatively long
start-up time. Therefore, one or more of the following
conditions is possible after SYSRST
• The oscillator circuit has not begun to oscillate.
• The Oscillator Start-up Timer has NOT expired (if
a crystal oscillator is used).
• The PLL has not achieved a LOCK (if PLL is used).
The device will not begin to execute code until a valid
clock source has been released to the system. Therefore, the oscillator and PLL start-up delays must be
considered when the Reset delay time must be known.
is released:
5.2.2 FAIL-SAFE CLOCK MONITOR (FSCM) AND DEVICE RESETS
If the FSCM is enabled, it will begin to monitor the system clock source when SYSRST
clock source is not available at this time, the device will
automatically switch to the FRC oscillator and the user
can switch to the desired crystal oscillator in the Trap
Service Routine.
is released. If a valid
DS39747B-page 54 Advance Information © 2006 Microchip Technology Inc.
Page 57

PIC24FJ128GA FAMILY
5.2.2.1 FSCM Delay for Crystal and PLL
Clock Sources
When the system clock source is provided by a crystal
oscillator and/or the PLL, a small delay, T
automatically be inserted after the POR and PWRT
delay times. The FSCM will not begin to monitor the
system clock source until this delay expires. The FSCM
delay time is nominally 100 μs and provides additional
time for the oscillator and/or PLL to stabilize. In most
cases, the FSCM delay will prevent an oscillator failure
trap at a device Reset when the PWRT is disabled.
FSCM, will
5.3 Special Function Register Reset States
Most of the Special Function Registers (SFRs) associated with the PIC24 CPU and peripherals are reset to a
particular value at a device Reset. The SFRs are
grouped by their peripheral or CPU function and their
Reset values are specified in each section of this manual.
The Reset value for each SFR does not depend on the
type of Reset, with the exception of four registers. The
Reset value for the Reset Control register, RCON, will
depend on the type of device Reset. The Reset value
for the Oscillator Control register, OSCCON, will
depend on the type of Reset and the programmed values of the oscillator Configuration bits in the FOSC
Device Configuration register (see Table 5-2). The
RCFGCAL and EECON1 registers are only affected by
a POR.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 55
Page 58

PIC24FJ128GA FAMILY
NOTES:
DS39747B-page 56 Advance Information © 2006 Microchip Technology Inc.
Page 59

PIC24FJ128GA FAMILY
6.0 INTERRUPT CONTROLLER
The PIC24 interrupt controller reduces the numerous
peripheral interrupt request signals to a single interrupt
request signal to the PIC24 CPU. It has the following
features:
• Up to 8 processor exceptions and software traps
• 7 user-selectable priority levels
• Interrupt Vector Table (IVT) with up to 118 vectors
• A unique vector for each interrupt or exception
source
• Fixed priority within a specified user priority level
• Alternate Interrupt Vector Table (AIVT) for debug
support
• Fixed interrupt entry and return latencies
6.1 Interrupt Vector Table
The Interrupt Vector Table (IVT) is shown in Figure 6-1.
The IVT resides in program memory, starting at location
000004h. The IVT contains 126 vectors, consisting of 8
non-maskable trap vectors, plus up to 118 sources of
interrupt. In general, each interrupt source has its own
vector. Each interrupt vector contains a 24-bit wide
address. The value programmed into each interrupt
vector location is the starting address of the associated
Interrupt Service Routine (ISR).
Interrupt vectors are prioritized in terms of their natural
priority; this is linked to their position in the vector table.
All other things being equal, lower addresses have a
higher natural priority. For example, the interrupt associated with vector 0 will take priority over interrupts at
any other vector address.
PIC24FJ128GA family devices implement nonmaskable traps and unique interrupts. These are
summarized in Table 6-1 and Table 6-2.
6.1.1 ALTERNATE INTERRUPT VECTOR TAB LE
The Alternate Interrupt Vector Table (AIVT) is located
after the IVT as shown in Figure 6-1. Access to the
AIVT is provided by the ALTIVT control bit
(INTCON2<15>). If the ALTIVT bit is set, all interrupt
and exception processes will use the alternate vectors
instead of the default vectors. The alternate vectors are
organized in the same manner as the default vectors.
The AIVT supports emulation and debugging efforts by
providing a means to switch between an application
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 57
Page 60

PIC24FJ128GA FAMILY
FIGURE 6-1: PIC24 INTERRUPT VECTOR TABLE
Reset – GOTO Instruction 000000h
Reset – GOTO Address 000002h
Reserved 000004h
Oscillator Fail Trap Vector
Address Error Trap Vector
Stack Error Trap Vector
Math Error Trap Vector
Reserved
Reserved
Reserved
Interrupt Vector 0 000014h
Interrupt Vector 1
—
—
—
Interrupt Vector 52 00007Ch
Interrupt Vector 53 00007Eh
Interrupt Vector 54 000080h
—
—
—
Interrupt Vector 116 0000FCh
Interrupt Vector 117 0000FEh
Reserved 000100h
Reserved 000102h
Reserved
Decreasing Natural Order Priority
Oscillator Fail Trap Vector
Address Error Trap Vector
Stack Error Trap Vector
Math Error Trap Vector
Reserved
Reserved
Reserved
Interrupt Vector 0 000114h
Interrupt Vector 1
—
—
—
Interrupt Vector 52 00017Ch
Interrupt Vector 53 00017Eh
Interrupt Vector 54 000180h
—
—
—
Interrupt Vector 116
Interrupt Vector 117 0001FEh
Start of Code 000200h
Interrupt Vector Table (IVT)
Alternate Interrupt Vector Table (AIVT)
(1)
(1)
Note 1: See Table 6-2 for the Interrupt Vector list.
TABLE 6-1: TRAP VECTOR DETAILS
Vector Number IVT Address AIVT Address Trap Source
0 000004h 000104h Reserved
1 000006h 000106h Oscillator Failure
2 000008h 000108h Address Error
3 00000Ah 00010Ah Stack Error
4 00000Ch 00010Ch Math Error
5 00000Eh 00010Eh Reserved
6 000010h 000110h Reserved
7 000012h 0001172h Reserved
DS39747B-page 58 Advance Information © 2006 Microchip Technology Inc.
Page 61

PIC24FJ128GA FAMILY
TABLE 6-2: IMPLEMENTED INTERRUPT VECTORS
Interrupt Source
ADC1 Conversion Done 13 00002Eh 00012Eh IFS0<13> IEC0<13> IPC3<6:4>
Comparator Event 18 000038h 000138h IFS1<2> IEC1<2> IPC4<10:8>
CRC Generator 67 00009Ah 00019Ah IFS4<3> IEC4<3>
External Interrupt 0 0 000014h 000114h IFS0<0> IEC0<0> IPC0<2:0>
External Interrupt 1 20 00003Ch 00013Ch IFS1<4> IEC1<4> IPC5<2:0>
External Interrupt 2 29 00004Eh 00014Eh IFS1<13> IEC1<13> IPC7<6:4>
External Interrupt 3 53 00007Eh 00017Eh IFS3<5> IEC3<5> IPC13<6:4>
External Interrupt 4 54 000080h 000180h IFS3<6> IEC3<6> IPC13<10:8>
I2C1 Master Event 17 000036h 000136h IFS1<1> IEC1<1> IPC4<6:4>
I2C1 Slave Event 16 000034h 000034h IFS1<0> IEC1<0> IPC4<2:0>
I2C2 Master Event 50 000078h 000178h IFS3<2> IEC3<2> IPC12<10:8>
I2C2 Slave Event 49 000076h 000176h IFS3<1> IEC3<1> IPC12<6:4>
Input Capture 1 1 000016h 000116h IFS0<1> IEC0<1> IPC0<6:4>
Input Capture 2 5 00001Eh 00011Eh IFS0<5> IEC0<5> IPC1<6:4>
Input Capture 3 37 00005Eh 00015Eh IFS2<5> IEC2<5> IPC9<6:4>
Input Capture 4 38 000060h 000160h IFS2<6> IEC2<6> IPC9<10:8>
Input Capture 5 39 000062h 000162h IFS2<7> IEC2<7> IPC9<14:12>
Input Change Notification 19 00003Ah 00013Ah IFS1<3> IEC1<3> IPC4<14:12>
Output Compare 1 2 000018h 000118h IFS0<2> IEC0<2> IPC0<10:8>
Output Compare 2 6 000020h 000120h IFS0<6> IEC0<6> IPC1<10:8>
Output Compare 3 25 000046h 000146h IFS1<9> IEC1<9> IPC6<6:4>
Output Compare 4 26 000048h 000148h IFS1<10> IEC1<10> IPC6<10:8>
Output Compare 5 41 000066h 000166h IFS2<9> IEC2<9> IPC10<6:4>
Parallel Master Port 45 00006Eh 00016Eh IFS2<13> IEC2<13> IPC11<6:4>
Real-Time Clock/Calendar 62 000090h 000190h IFS3<14> IEC3<13> IPC15<10:8>
SPI1 Error 9 000026h 000126h IFS0<9> IEC0<9> IPC2<6:4>
SPI1 Event 10 000028h 000128h IFS0<10> IEC0<10> IPC2<10:8>
SPI2 Error 32 000054h 000154h IFS2<0> IEC0<0> IPC8<2:0>
SPI2 Event 33 000056h 000156h IFS2<1> IEC2<1> IPC8<6:4>
Timer1 3 00001Ah 00011Ah IFS0<3> IEC0<3> IPC0<14:12>
Timer2 7 000022h 000122h IFS0<7> IEC0<7> IPC1<14:12>
Timer3 8 000024h 000124h IFS0<8> IEC0<8> IPC2<2:0>
Timer4 27 00004Ah 00014Ah IFS1<11> IEC1<11> IPC6<14:12>
Timer5 28 00004Ch 00014Ch IFS1<12> IEC1<12> IPC7<2:0>
UART1 Error 65 000096h 000196h IFS4<1> IEC4<1> IPC16<6:4>
UART1 Receiver 11 00002Ah 00012Ah IFS0<11> IEC0<11> IPC2<14:12>
UART1 Transmitter 12 00002Ch 00012Ch IFS0<12> IEC0<12> IPC3<2:0>
UART2 Error 66 000098h 000198h IFS4<2> IEC4<2> IPC16<10:8>
UART2 Receiver 30 000050h 000150h IFS1<14> IEC1<14> IPC7<10:8>
UART2 Transmitter 31 000052h 000152h IFS1<15> IEC1<15> IPC7<14:12>
Vector
Number
IVT Address
AIVT
Address
Interrupt Bit Locations
Flag Enable Priority
IPC16<14:12>
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 59
Page 62

PIC24FJ128GA FAMILY
6.3 Interrupt Control and Status Registers
The PIC24FJ128GA family devices implement a total
of 28 registers for the interrupt controller:
• INTCON1
• INTCON2
• IFS0 through IFS4
• IEC0 through IEC4
• IPC0 through IPC14, and IPC16
Global interrupt control functions are controlled from
INTCON1 and INTCON2. INTCON1 contains the Interrupt Nesting Disable (NSTDIS) bit, as well as the
control and status flags for the processor trap sources.
The INTCON2 register controls the external interrupt
request signal behavior and the use of the Alternate
Interrupt Vector Table.
The IFS registers maintain all of the interrupt request
flags. Each source of interrupt has a status bit which is
set by the respective peripherals, or external signal,
and is cleared via software.
The IEC registers maintain all of the interrupt enable
bits. These control bits are used to individually enable
interrupts from the peripherals or external signals.
The IPC registers are used to set the interrupt priority
level for each source of interrupt. Each user interrupt
source can be assigned to one of eight priority levels.
The interrupt sources are assigned to the IFSx, IECx
and IPCx registers in the same sequence that they are
listed in Table 6-2. For example, the INT0 (External
Interrupt 0) is shown as having a vector number and a
natural order priority of 0. Thus, the INT0IF status bit is
found in IFS0<0>, the enable bit in IEC0<0> and the
priority bits in the first position of IPC0 (IPC0<2:0>).
Although they are not specifically part of the interrupt
control hardware, two of the CPU control registers contain bits that control interrupt functionality. The CPU
STATUS register (SR) contains the IPL2:IPL0 bits
(SR<7:5>). These indicate the current CPU interrupt
priority level. The user may change the current CPU
priority level by writing to the IPL bits.
The CORCON register contains the IPL3 bit, which
together with IPL2:IPL0, also indicates the current CPU
priority level. IPL3 is a read-only bit so that trap events
cannot be masked by the user software.
All interrupt registers are described in Register 6-1
through Register 6-30, in the following pages.
DS39747B-page 60 Advance Information © 2006 Microchip Technology Inc.
Page 63
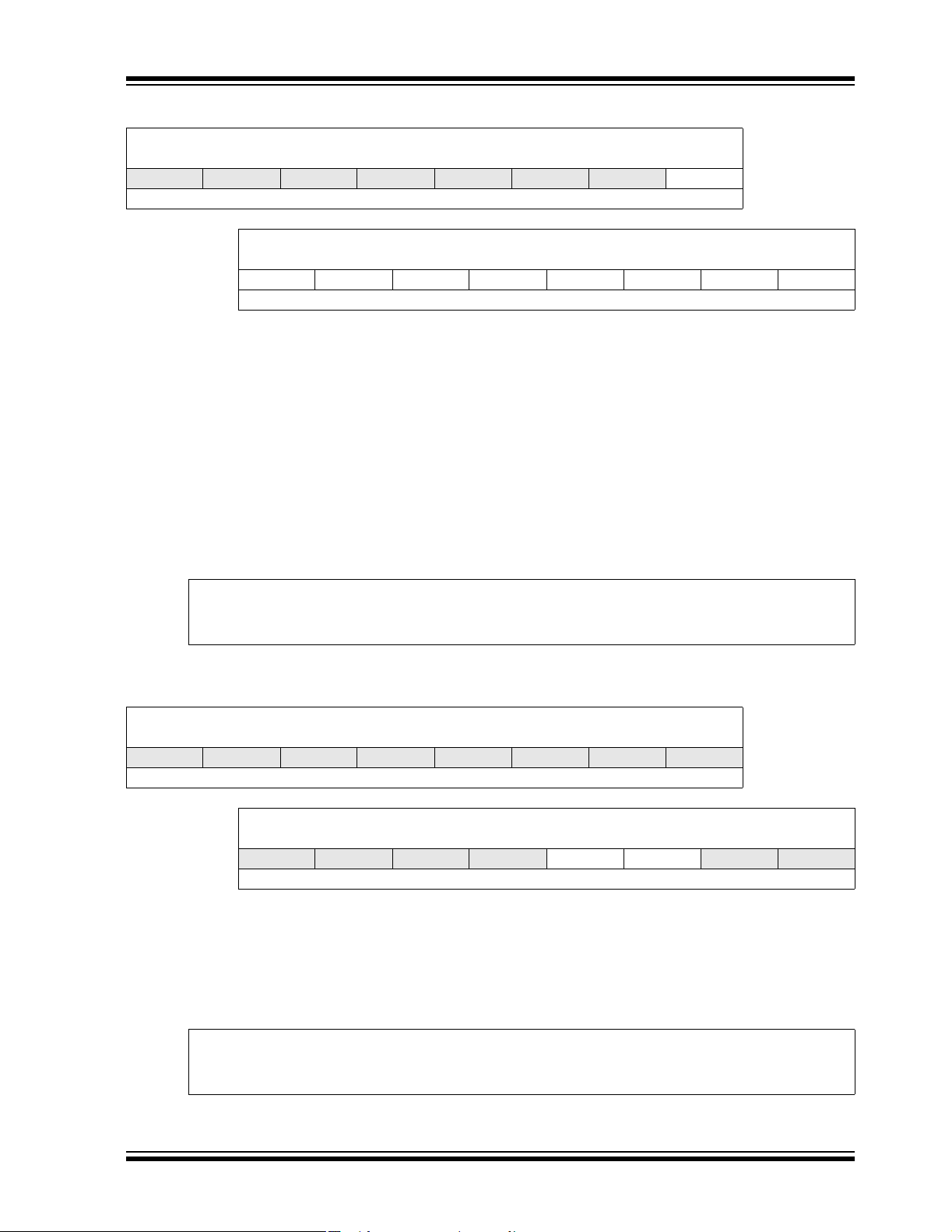
PIC24FJ128GA FAMILY
REGISTER 6-1: SR: STATUS REGISTER (IN CPU)
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 R-0
— — — — — — —DC
bit 15 bit 8
Lower Byte:
R/W-0 R/W-0 R/W-0 R-0 R/W-0 R/W-0 R/W-0 R/W-0
(1,2)
IPL2
bit 7 bit 0
IPL1
(1,2)
IPL0
(1,2)
RA N OV Z C
bit 7-5 IPL2:IPL0: CPU Interrupt Priority Level Status bits
111 = CPU interrupt priority level is 7 (15). User interrupts disabled.
110 = CPU interrupt priority level is 6 (14)
101 = CPU interrupt priority level is 5 (13)
100 = CPU interrupt priority level is 4 (12)
011 = CPU interrupt priority level is 3 (11)
010 = CPU interrupt priority level is 2 (10)
001 = CPU interrupt priority level is 1 (9)
000 = CPU interrupt priority level is 0 (8)
Note 1: The IPL bits are concatenated with the IPL3 bit (CORCON<3>) to form the CPU interrupt priority
level. The value in parentheses indicates the IPL if IPL3 = 1.
2: The IPL Status bits are read-only when NSTDIS (INTCON1<15>) = 1.
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
(1,2)
REGISTER 6-2: CORCON: CORE CONTROL REGISTER
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 U-0 R/C-0 R/W-0 U-0 U-0
— — — —IPL3
bit 7 bit 0
bit 3 IPL3: CPU Interrupt Priority Level Status bit
1 = CPU interrupt priority level is greater than 7; peripheral interrupts are disabled
0 = CPU interrupt priority level is 7 or less
Note 1: The IPL3 bit is concatenated with the IPL2:IPL0 bits (SR<7:5>) to form the CPU interrupt priority
level.
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 61
(1)
(1)
PSV — —
Page 64

PIC24FJ128GA FAMILY
REGISTER 6-3: INTCON1: INTERRUPT CONTROL REGISTER 1
Upper Byte:
R/W-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
NSTDIS
bit 15 bit 8
bit 15 NSTDIS: Interrupt Nesting Disable bit
bit 14-5 Unimplemented: Read as ‘0’
bit 4 MATHERR: Arithmetic Error Trap Status bit
bit 3 ADDRERR: Address Error Trap Status bit
bit 2 STKERR: Stack Error Trap Status bit
bit 1 OSCFAIL: Oscillator Failure Trap Status bit
bit 0 Unimplemented: Read as ‘0’
.
— — — — — — —
Lower Byte:
U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 U-0
— — — MATHERR ADDRERR STKERR OSCFAIL —
bit 7 bit 0
1 = Interrupt nesting is disabled
0 = Interrupt nesting is enabled
1 = Overflow trap has occurred
0 = Overflow trap has not occurred
1 = Address error trap has occurred
0 = Address error trap has not occurred
1 = Stack error trap has occurred
0 = Stack error trap has not occurred
1 = Oscillator failure trap has occurred
0 = Oscillator failure trap has not occurred
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 62 Advance Information © 2006 Microchip Technology Inc.
Page 65

PIC24FJ128GA FAMILY
REGISTER 6-4: INTCON2: INTERRUPT CONTROL REGISTER 2
Upper Byte:
R/W-0 R-0 U-0 U-0 U-0 U-0 U-0 U-0
ALTIVT DISI
bit 15 bit 8
Lower Byte:
bit 7 bit 0
bit 15 ALTIVT: Enable Alternate Interrupt Vector Table bit
1 = Use alternate vector table
0 = Use standard (default) vector table
bit 14 DISI: DISI Instruction Status bit
1 = DISI instruction is active
0 = DISI is not active
bit 13-5 Unimplemented: Read as ‘0’
bit 4 INT4EP: External Interrupt 4 Edge Detect Polarity Select bit
1 = Interrupt on negative edge
0 = Interrupt on positive edge
bit 3 INT3EP: External Interrupt 3 Edge Detect Polarity Select bit
1 = Interrupt on negative edge
0 = Interrupt on positive edge
bit 2 INT2EP: External Interrupt 2 Edge Detect Polarity Select bit
1 = Interrupt on negative edge
0 = Interrupt on positive edge
bit 1 INT1EP: External Interrupt 1 Edge Detect Polarity Select bit
1 = Interrupt on negative edge
0 = Interrupt on positive edge
bit 0 INT0EP: External Interrupt 0 Edge Detect Polarity Select bit
1 = Interrupt on negative edge
0 = Interrupt on positive edge
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
— — — — — —
U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — — INT4EP INT3EP INT2EP INT1EP INT0EP
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 63
Page 66

PIC24FJ128GA FAMILY
REGISTER 6-5: IFS0: INTERRUPT FLAG STATUS REGISTER 0
Upper Byte:
U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — AD1IF U1TXIF U1RXIF SPI1IF SPF1IF T3IF
bit 15 bit 8
Lower Byte:
R/W-0 R/W-0 R/W-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0
T2IF OC2IF IC2IF
bit 7 bit 0
bit 15,14 Unimplemented: Read as ‘0’
bit 13 AD1IF: A/D Conversion Complete Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 12 U1TXIF: UART1 Transmitter Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 11 U1RXIF: UART1 Receiver Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 10 SPI1IF: SPI1 Event Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 9 SPF1IF: SPI1 Fault Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 8 T3IF: Timer3 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 7 T2IF: Timer2 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 6 OC2IF: Output Compare Channel 2 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 5 IC2IF: Input Capture Channel 2 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 4 Unimplemented: Read as ‘0’
bit 3 T1IF: Timer1 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 2 OC1IF: Output Compare Channel 1 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 1 IC1IF: Input Capture Channel 1 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 0 INT0IF: External Interrupt 0 Flag Status bit
1
= Interrupt request has occurred
0 = Interrupt request has not occurred
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
— T1IF OC1IF IC1IF INT0IF
DS39747B-page 64 Advance Information © 2006 Microchip Technology Inc.
Page 67

PIC24FJ128GA FAMILY
REGISTER 6-6: IFS1: INTERRUPT FLAG STATUS REGISTER 1
Upper Byte:
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 U-0
U2TXIF U2RXIF INT2IF T5IF T4IF OC4IF OC3IF
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — — INT1IF CNIF CMIF MI2C1IF SI2C1IF
bit 7 bit 0
bit 15 U2TXIF: UART2 Transmitter Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 14 U2RXIF: UART2 Receiver Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 13 INT2IF: External Interrupt 2 Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 12 T5IF: Timer5 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 11 T4IF: Timer4 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 10 OC4IF: Output Compare Channel 4 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 9 OC3IF: Output Compare Channel 3 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 8-5 Unimplemented: Read as ‘0’
bit 4 INT1IF: External Interrupt 1 Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 3 CNIF: Input Change Notification Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 2 CMIF: Comparator Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 1 MI2C1IF: Master I2C1 Event Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 0 SI2C1IF: Slave I2C1 Event Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
—
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 65
Page 68

PIC24FJ128GA FAMILY
REGISTER 6-7: IFS2: INTERRUPT FLAG STATUS REGISTER 2
Upper Byte:
U-0 U-0 R/W-0 U-0 U-0 U-0 R/W-0 U-0
— —PMPIF— — —OC5IF—
bit 15 bit 8
Lower Byte:
R/W-0 R/W-0 R/W-0 U-0 U-0 U-0 R/W-0 R/W-0
IC5IF IC4IF IC3IF
bit 7 bit 0
bit 15-14 Unimplemented: Read as ‘0’
bit 13 PMPIF: Parallel Master Port Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 12-10 Unimplemented: Read as ‘0’
bit 9 OC5IF: Output Compare Channel 5 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 8 Unimplemented: Read as ‘0’
bit 7 IC5IF: Input Capture Channel 5 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 6 IC4IF: Input Capture Channel 4 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 5 IC3IF: Input Capture Channel 3 Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 4-2 Unimplemented: Read as ‘0’
bit 1 SPI2IF: SPI2 Event Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 0 SPI2IF: SPI2 Fault Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
— — — SPI2IF SPF2IF
DS39747B-page 66 Advance Information © 2006 Microchip Technology Inc.
Page 69

PIC24FJ128GA FAMILY
REGISTER 6-8: IFS3: INTERRUPT FLAG STATUS REGISTER 3
Upper Byte:
U-0 R/W-0 U-0 U-0 U-0 U-0 U-0 U-0
—RTCIF— — — — — —
bit 15 bit 8
Lower Byte:
U-0 R/W-0 R/W-0 U-0 U-0 R/W-0 R/W-0 U-0
—INT4IFINT3IF— —MI2C2IFSI2C2IF —
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14 RTCIF: Real-Time Clock/Calendar Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 13-7 Unimplemented: Read as ‘0’
bit 6 INT4IF: External Interrupt 4 Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 5 INT3IF: External Interrupt 3 Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 4-3 Unimplemented: Read as ‘0’
bit 2 MI2C2IF: Master I2C2 Event Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 1 SI2C2IF: Slave I2C2 Event Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 67
Page 70

PIC24FJ128GA FAMILY
REGISTER 6-9: IFS4: INTERRUPT FLAG STATUS REGISTER 4
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 U-0
— — — — CRCIF U2ERIF U1ERIF —
bit 7 bit 0
bit 15-4 Unimplemented: Read as ‘0’
bit 3 CRCIF: CRC Generator Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 2 U2ERIF: UART2 Error Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 1 U1ERIF: UART1 Error Interrupt Flag Status bit
1 = Interrupt request has occurred
0 = Interrupt request has not occurred
bit 0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 68 Advance Information © 2006 Microchip Technology Inc.
Page 71

PIC24FJ128GA FAMILY
REGISTER 6-10: IEC0: INTERRUPT ENABLE CONTROL REGISTER 0
Upper Byte:
U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — AD1IE U1TXIE U1RXIE SPI1IE SPF1IE T3IE
bit 15 bit 8
Lower Byte:
R/W-0 R/W-0 R/W-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0
T2IE OC2IE IC2IE
bit 7 bit 0
bit 15-14 Unimplemented: Read as ‘0’
bit 13 AD1IE: A/D Conversion Complete Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 12 U1TXIE: UART1 Transmitter Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 11 U1RXIE: UART1 Receiver Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 10 SPI1IE: SPI1 Transfer Complete Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 9 SPF1IE: SPI1 Fault Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 8 T3IE: Timer3 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 7 T2IE: Timer2 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 6 OC2IE: Output Compare Channel 2 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 5 IC2IE: Input Capture Channel 2 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 4 Unimplemented: Read as ‘0’
bit 3 T1IE: Timer1 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 2 OC1IE: Output Compare Channel 1 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 1 IC1IE: Input Capture Channel 1 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 0 INT0IE: External Interrupt 0 Enable bit
1
= Interrupt request enabled
0 = Interrupt request not enabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
— T1IE OC1IE IC1IE INT0IE
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 69
Page 72

PIC24FJ128GA FAMILY
REGISTER 6-11: IEC1: INTERRUPT ENABLE CONTROL REGISTER 1
Upper Byte:
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 U-0
U2TXIE U2RXIE INT2IE T5IE T4IE OC4IE OC3IE
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — — INT1IE CNIE CMIE MI2C1IE SI2C1IE
bit 7 bit 0
bit 15 U2TXIE: UART2 Transmitter Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 14 U2RXIE: UART2 Receiver Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 13 INT2IE: External Interrupt 2 Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 12 T5IE: Timer5 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 11 T4IE: Timer4 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 10 OC4IE: Output Compare Channel 4 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 9 OC3IE: Output Compare Channel 3 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 8-5 Unimplemented: Read as ‘0’
bit 4 INT1IE: External Interrupt 1 Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 3 CNIE: Input Change Notification Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 2 CMIE: Comparator Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 1 MI2C1IE: Master I2C1 Event Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 0 SI2C1IE: Slave I2C1 Event Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
—
DS39747B-page 70 Advance Information © 2006 Microchip Technology Inc.
Page 73

PIC24FJ128GA FAMILY
REGISTER 6-12: IEC2: INTERRUPT ENABLE CONTROL REGISTER 2
Upper Byte:
U-0 U-0 R/W-0 U-0 U-0 U-0 R/W-0 U-0
— —PMPIE— — —OC5IE—
bit 15 bit 8
Lower Byte:
R/W-0 R/W-0 R/W-0 U-0 U-0 U-0 R/W-0 R/W-0
IC5IE IC4IE IC3IE
bit 7 bit 0
bit 15-14 Unimplemented: Read as ‘0’
bit 13 PMPIE: Parallel Master Port Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 12-10 Unimplemented: Read as ‘0’
bit 9 OC5IE: Output Compare Channel 5 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 8 Unimplemented: Read as ‘0’
bit 7 IC5IE: Input Capture Channel 5 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 6 IC4IE: Input Capture Channel 4 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 5 IC3IE: Input Capture Channel 3 Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 4-2 Unimplemented: Read as ‘0’
bit 1 SPI2IE: SPI2 Event Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 0 SPF2IE: SPI2 Fault Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
— — — SPI2IE SPF2IE
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 71
Page 74
PIC24FJ128GA FAMILY
REGISTER 6-13: IEC3: INTERRUPT ENABLE CONTROL REGISTER 3
Upper Byte:
U-0 R/W-0 U-0 U-0 U-0 U-0 U-0 U-0
—RTCIE— — — — — —
bit 15 bit 8
Lower Byte:
U-0 R/W-0 R/W-0 U-0 U-0 R/W-0 R/W-0 U-0
— INT4IE INT3IE — — MI2C2IE SI2C2IE —
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14 RTCIE: Real-Time Clock/Calendar Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 13-7 Unimplemented: Read as ‘0’
bit 6 INT4IE: External Interrupt 4 Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 5 INT3IE: External Interrupt 3 Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 4-3 Unimplemented: Read as ‘0’
bit 2 MI2C2IE: Master I2C2 Event Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 1 SI2C2IE: Slave I2C2 Event Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 72 Advance Information © 2006 Microchip Technology Inc.
Page 75
PIC24FJ128GA FAMILY
REGISTER 6-14: IEC4: INTERRUPT ENABLE CONTROL REGISTER 4
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 U-0
— — — — CRCIE U2ERIE U1ERIE —
bit 7 bit 0
bit 15-4 Unimplemented: Read as ‘0’
bit 3 CRCIE: CRC Generator Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 2 U2ERIE: UART2 Error Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 1 U1ERIE: UART1 Error Interrupt Enable bit
1 = Interrupt request enabled
0 = Interrupt request not enabled
bit 0 Unimplemented: Read as ‘0’
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 73
Page 76

PIC24FJ128GA FAMILY
REGISTER 6-15: IPC0: INTERRUPT PRIORITY CONTROL REGISTER 0
Upper Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— T1IP2 T1IP1 T1IP0 — OC1IP2 OC1IP1 OC1IP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— IC1IP2 IC1IP1 IC1IP0 — INT0IP2 INT0IP1 INT0IP0
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 T1IP2:T1IP0: Timer1 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 11 Unimplemented: Read as ‘0’
bit 10-8 OC1IP2:OC1IP0: Output Compare Channel 1 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 IC1IP2:IC1IP0: Input Capture Channel 1 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3 Unimplemented: Read as ‘0’
bit 2-0 INT0IP2:INT0IP0: External Interrupt 0 Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 74 Advance Information © 2006 Microchip Technology Inc.
Page 77
PIC24FJ128GA FAMILY
REGISTER 6-16: IPC1: INTERRUPT PRIORITY CONTROL REGISTER 1
Upper Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— T2IP2 T2IP1 T2IP0 — OC2IP2 OC2IP1 OC2IP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 U-0 U-0 U-0
— IC2IP2 IC2IP1 IC2IP0 — — — —
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 T2IP2:T2IP0: Timer2 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 11 Unimplemented: Read as ‘0’
bit 10-8 OC2IP2:OC2IP0: Output Compare Channel 2 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 IC2IP2:IC2IP0: Input Capture Channel 2 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3-0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 75
Page 78
PIC24FJ128GA FAMILY
REGISTER 6-17: IPC2: INTERRUPT PRIORITY CONTROL REGISTER 2
Upper Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— U1RXIP2 U1RXIP1 U1RXIP0 — SPI1IP2 SPI1IP1 SPI1IP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— SPF1IP2 SPF1IP1 SPF1IP0 — T3IP2 T3IP1 T3IP0
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 U1RXIP2:U1RXIP0: UART1 Receiver Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 11 Unimplemented: Read as ‘0’
bit 10-8 SPI1IP2:SPI1IP0: SPI1 Event Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 SPF1IP2:SPF1IP0: SPI1 Fault Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3 Unimplemented: Read as ‘0’
bit 2-0 T3IP2:T3IP0: Timer3 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 76 Advance Information © 2006 Microchip Technology Inc.
Page 79
PIC24FJ128GA FAMILY
REGISTER 6-18: IPC3: INTERRUPT PRIORITY CONTROL REGISTER 3
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— AD1IP2 AD1IP1 AD1IP0 — U1TXIP2 U1TXIP1 U1TXIP0
bit 7 bit 0
bit 15-7 Unimplemented: Read as ‘0’
bit 6-4 AD1IP2:AD1IP0: A/D Conversion Complete Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3 Unimplemented: Read as ‘0’
bit 2-0 U1TXIP2:U1TXIP0: UART1 Transmitter Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 77
Page 80

PIC24FJ128GA FAMILY
REGISTER 6-19: IPC4: INTERRUPT PRIORITY CONTROL REGISTER 4
Upper Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— CNIP2 CNIP1 CNIP0 — CMIP2 CMIP1 CMIP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— MI2C1P2 MI2C1P1 MI2C1P0 — SI2C1P2 SI2C1P1 SI2C1P0
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 CNIP2:CNIP0: Input Change Notification Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 11 Unimplemented: Read as ‘0’
bit 10-8 CMIP2:CMIP0: Comparator Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 MI2C1P2:MI2C1P0: Master I2C1 Event Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3 Unimplemented: Read as ‘0’
bit 2-0 SI2C1P2:SI2C1P0: Slave I2C1 Event Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 78 Advance Information © 2006 Microchip Technology Inc.
Page 81

PIC24FJ128GA FAMILY
REGISTER 6-20: IPC5: INTERRUPT PRIORITY CONTROL REGISTER 5
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 U-0 U-0 R/W-1 R/W-0 R/W-0
— — — — — INT1IP2 INT1IP1 INT1IP0
bit 7 bit 0
bit 15-3 Unimplemented: Read as ‘0’
bit 2-0 INT1IP2:INT1IP0: External Interrupt 1 Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 79
Page 82

PIC24FJ128GA FAMILY
REGISTER 6-21: IPC6: INTERRUPT PRIORITY CONTROL REGISTER 6
Upper Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— T4IP2 T4IP1 T4IP0 — OC4IP2 OC4IP1 OC4IP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 U-0 U-0 U-0
— OC3IP2 OC3IP1 OC3IP0 — — — —
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 T4IP2:T4IP0: Timer4 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 11 Unimplemented: Read as ‘0’
bit 10-8 OC4IP2:OC4IP0: Output Compare Channel 4 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 OC3IP2:OC3IP0: Output Compare Channel 3 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3-0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 80 Advance Information © 2006 Microchip Technology Inc.
Page 83

PIC24FJ128GA FAMILY
REGISTER 6-22: IPC7: INTERRUPT PRIORITY CONTROL REGISTER 7
Upper Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— U2TXIP2 U2TXIP1 U2TXIP0 — U2RXIP2 U2RXIP1 U2RXIP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— INT2IP2 INT2IP1 INT2IP0 — T5IP2 T5IP1 T51P0
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 U2TXIP2:U2TXIP0: UART2 Transmitter Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 11 Unimplemented: Read as ‘0’
bit 10-8 U2RXIP2:U2RXIP0: UART2 Receiver Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 INT2IP2:INT2IP0: External Interrupt 2 Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3 Unimplemented: Read as ‘0’
bit 2-0 T5IP2:T5IP0: Timer5 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 81
Page 84

PIC24FJ128GA FAMILY
REGISTER 6-23: IPC8: INTERRUPT PRIORITY CONTROL REGISTER 8
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— SPI2IP2 SPI2IP1 SPI2IP0 — SPF2IP2 SPF2IP1 SPF2IP0
bit 7 bit 0
bit 15-7 Unimplemented: Read as ‘0’
bit 6-4 SPI2IP2:SPI2IP0: SPI2 Event Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3 Unimplemented: Read as ‘0’
bit 2-0 SPF2IP2:SPF2IP0: SPI2 Fault Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 82 Advance Information © 2006 Microchip Technology Inc.
Page 85

PIC24FJ128GA FAMILY
REGISTER 6-24: IPC9: INTERRUPT PRIORITY CONTROL REGISTER 9
Upper Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— IC5IP2 IC5IP1 IC5IP0 — IC4IP2 IC4IP1 IC4IP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 U-0 U-0 U-0
— IC3IP2 IC3IP1 IC3IP0 — — — —
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 IC5IP2:IC5IP0: Input Capture Channel 5 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 11 Unimplemented: Read as ‘0’
bit 10-8 IC4IP2:IC4IP0: Input Capture Channel 4 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 IC3IP2:IC3IP0: Input Capture Channel 3 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3-0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 83
Page 86

PIC24FJ128GA FAMILY
REGISTER 6-25: IPC10: INTERRUPT PRIORITY CONTROL REGISTER 10
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 U-0 U-0 U-0
— OC5IP2 OC5IP1 OC5IP0 — — — —
bit 7 bit 0
bit 15-7 Unimplemented: Read as ‘0’
bit 6-4 OC5IP2:OC5IP0: Output Compare Channel 5 Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3-0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
REGISTER 6-26: IPC11: INTERRUPT PRIORITY CONTROL REGISTER 11
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 U-0 U-0 U-0
— PMPIP2 PMPIP1 PMPIP0 — — — —
bit 7 bit 0
bit 15-7 Unimplemented: Read as ‘0’
bit 6-4 PMPIP2:PMPIP0: Parallel Master Port Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3-0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 84 Advance Information © 2006 Microchip Technology Inc.
Page 87

PIC24FJ128GA FAMILY
REGISTER 6-27: IPC12: INTERRUPT PRIORITY CONTROL REGISTER 12
Upper Byte:
U-0 U-0 U-0 U-0 U-0 R/W-1 R/W-0 R/W-0
— — — — — MI2C2P2 MI2C2P1 MI2C2P0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 U-0 U-0 U-0
— SI2C2P2 SI2C2P1 SI2C2P0 — — — —
bit 7 bit 0
bit 15-11 Unimplemented: Read as ‘0’
bit 10-8 MI2C2P2:MI2C2P0: Master I2C2 Event Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 SI2C2P2:SI2C2P0: Slave I2C2 Event Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3-0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 85
Page 88

PIC24FJ128GA FAMILY
REGISTER 6-28: IPC13: INTERRUPT PRIORITY CONTROL REGISTER 13
Upper Byte:
U-0 U-0 U-0 U-0 U-0 R/W-1 R/W-0 R/W-0
— — — — — INT4IP2 INT4IP1 INT4IP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 U-0 U-0 U-0
— INT3IP2 INT3IP1 INT3IP0 — —
DS39747B-page 86 Advance Information © 2006 Microchip Technology Inc.
Page 89

PIC24FJ128GA FAMILY
REGISTER 6-29: IPC15: INTERRUPT PRIORITY CONTROL REGISTER 15
Upper Byte:
U-0 U-0 U-0 U-0 U-0 R/W-1 R/W-0 R/W-0
— — — — — RTCIP2 RTCIP1 RTCIP0
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 7 bit 0
bit 15-11 Unimplemented: Read as ‘0’
bit 10-8 RTCIP2:RTCIP0: Real-Time Clock/Calendar Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7-0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 87
Page 90
PIC24FJ128GA FAMILY
REGISTER 6-30: IPC16: INTERRUPT PRIORITY CONTROL REGISTER 16
Upper Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 R/W-1 R/W-0 R/W-0
— CRCIP2 CRCIP1 CRCIP0 — U2ERIP2 U2ERIP1 U2ERIP0
bit 15 bit 8
Lower Byte:
U-0 R/W-1 R/W-0 R/W-0 U-0 U-0 U-0 U-0
— U1ERIP2 U1ERIP1 U1ERIP0 — — — —
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 CRCIP2:CRCIP0: CRC Generator Error Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 11 Unimplemented: Read as ‘0’
bit 10-8 U2ERIP2:U2ERIP0: UART2 Error Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 7 Unimplemented: Read as ‘0’
bit 6-4 U1ERIP2:U1ERIP0: UART1 Error Interrupt Priority bits
111 = Interrupt is priority 7 (highest priority interrupt)
•
•
•
001 = Interrupt is priority 1
000 = Interrupt source is disabled
bit 3-0 Unimplemented: Read as ‘0’
.
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 88 Advance Information © 2006 Microchip Technology Inc.
Page 91

PIC24FJ128GA FAMILY
6.4 Interrupt Setup Procedures
6.4.1 INITIALIZATION
To configure an interrupt source:
1. Set the NSTDIS Control bit (INTCON1<15>) if
nested interrupts are not desired.
2. Select the user-assigned priority level for the
interrupt source by writing the control bits in the
appropriate IPCx Control register. The priority
level will depend on the specific application and
type of interrupt source. If multiple priority levels
are not desired, the IPCx register control bits for
all enabled interrupt sources may be
programmed to the same non-zero value.
Note: At a device Reset, the IPC registers are
initialized, such that all user interrupt
sources are assigned to priority level 4.
3. Clear the interrupt flag status bit associated with
the peripheral in the associated IFSx Status
register.
4. Enable the interrupt source by setting the interrupt enable control bit associated with the
source in the appropriate IECx Control register.
6.4.2 INTERRUPT SERVICE ROUTINE
The method that is used to declare an ISR and initialize
the IVT with the correct vector address will depend on
the programming language (i.e., ‘C’ or assembler) and
the language development toolsuite that is used to
develop the application. In general, the user must clear
the interrupt flag in the appropriate IFSx register for the
source of interrupt that the ISR handles. Otherwise, the
ISR will be re-entered immediately after exiting the routine. If the ISR is coded in assembly language, it must
be terminated using a RETFIE instruction to unstack
the saved PC value, SRL value and old CPU priority
level.
6.4.3 TRAP SERVICE ROUTINE
A Trap Service Routine (TSR) is coded like an ISR,
except that the appropriate trap status flag in the
INTCON1 register must be cleared to avoid re-entry
into the TSR.
6.4.4 INTERRUPT DISABLE
All user interrupts can be disabled using the following
procedure:
1. Push the current SR value onto the software
stack using the PUSH instruction.
2. Force the CPU to priority level 7 by inclusive
ORing the value OEh with SRL.
To enable user interrupts, the POP instruction may be
used to restore the previous SR value.
Note that only user interrupts with a priority level of 7 or
less can be disabled. Trap sources (level 8-15) cannot
be disabled.
The DISI instruction provides a convenient way to disable interrupts of priority levels 1-6 for a fixed period of
time. Level 7 interrupt sources are not disabled by the
DISI instruction.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 89
Page 92

PIC24FJ128GA FAMILY
NOTES:
DS39747B-page 90 Advance Information © 2006 Microchip Technology Inc.
Page 93
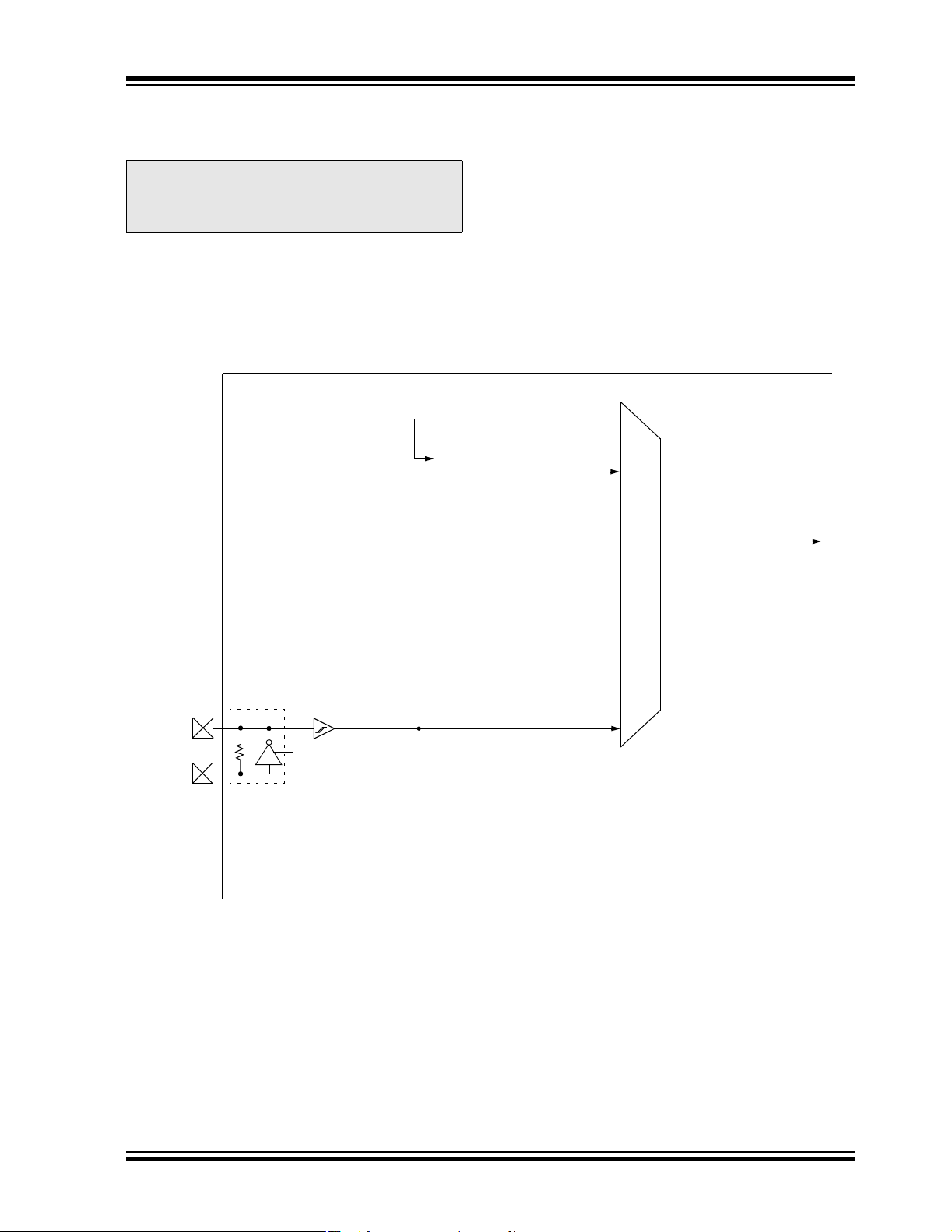
PIC24FJ128GA FAMILY
7.0 OSCILLATOR CONFIGURATION
Note: This data sheet summarizes the features
of this group of PIC24FJ devices. It is not
intended to be a comprehensive reference
source.
The oscillator system for PIC24FJ128GA family
devices has the following features:
• A total of four external and internal oscillator options
as clock sources, providing 11 different clock modes
• On-chip 4x PLL to boost internal operating frequency
on select internal and external oscillator sources
• Software-controllable switching between various
clock sources
• Software-controllable postscaler for selective
clocking of CPU for system power savings
• A Fail-Safe Clock Monitor (FSCM) that detects
clock failure and permits safe application recovery
or shutdown
A simplified diagram of the oscillator system is shown
in Figure 7-1.
FIGURE 7-1: PIC24FJ128GA FAMILY CLOCK DIAGRAM
PIC24FJ128GA Family
Secondary Oscillator
SOSCO
SOSCEN
SOSCI
Enable
Oscillator
7.1 CPU Clocking Scheme
The system clock source can be provided by one of
four sources:
• Primary Oscillator (POSC) on the OSC1 and
OSC2 pins
• Secondary Oscillator (SOSC) on the SOSCI and
SOSCO pins
• Fast Internal RC (FRC) Oscillator
• Low-Power Internal RC (LPRC) Oscillator
Clock Source Option
The primary oscillator and FRC sources have the
option of using the internal 4x PLL. The frequency of
the FRC clock source can optionally be reduced by the
programmable clock divider. The selected clock source
generates the processor and peripheral clock sources.
The processor clock source is divided by two to produce the internal instruction cycle clock, F
document, the instruction cycle clock is also denoted
by F
OSC/2. The internal instruction cycle clock, FOSC/2,
can be provided on the OSC2 I/O pin for some
operating modes of the primary oscillator.
CY. In this
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 91
Page 94

PIC24FJ128GA FAMILY
7.2 Oscillator Configuration
The oscillator source (and operating mode) that is
used at a device Power-on Reset event is selected
using Configuration bit settings. The oscillator Configuration bit settings are located in the Configuration
registers in the program memory (refer to
Section 23.1 “Configuration Bits” for further
details.) The Primary Oscillator Configuration bits,
POSCMD1:POSCMD0 (Configuration Word 2<1:0>),
and the Initial Oscillator Select Configuration bits,
FNOSC2:FNOSC0 (Configuration Word 2<10:8>),
select the oscillator source that is used at a Power-on
Reset. The FRC primary oscillator with postscaler
(FRCDIV) is the default (unprogrammed) selection.
The secondary oscillator, or one of the internal
oscillators, may be chosen by programming these bit
locations.
The Configuration bits allow users to choose between
the various clock modes, shown in Table 7-1.
7.2.1 CLOCK SWITCHING MODE CONFIGURATION BITS
The FCKSM Configuration bits (Configuration Word 2<7:6>)
are used to jointly configure device clock switching and
the Fail-Safe Clock Monitor (FSCM). Clock switching is
enabled only when FCKSM1 is programmed (‘0’). The
FSCM is enabled only when FCKSM1:FCKSM0 are
both programmed (‘00’).
TABLE 7-1: CONFIGURATION BIT VALUES FOR CLOCK SELECTION
Oscillator Mode Oscillator Source
Fast RC Oscillator with Postscaler
(FRCDIV)
(Reserved) Internal 00 110 1
Low-Power RC Oscillator (LPRC) Internal 00 101 1
Secondary (Timer1) Oscillator
(SOSC)
Primary Oscillator (HS) with PLL
Module (HSPLL)
Primary Oscillator (XT) with PLL
Module (ECPLL)
Primary Oscillator (EC) with PLL
Module (XTPLL)
Primary Oscillator (HS) Primary 10 010
Primary Oscillator (XT) Primary 01 010
Primary Oscillator (EC) Primary 00 010
Fast RC Oscillator with PLL Module
(FRCPLL)
Fast RC Oscillator (FRC) Internal 00 000 1
Note 1: OSC2 pin function is determined by the OSCIOFNC Configuration bit.
2: This is the default oscillator mode for an unprogrammed (erased) device.
Internal 00 111 1, 2
Secondary 00 100 1
Primary 10 011
Primary 01 011
Primary 00 011
Internal 00 001 1
POSCMD1:
POSCMD0
FNOSC2:
FNOSC0
Note
7.3 Control Registers
The operation of the oscillator is controlled by three
Special Function Registers:
• OSCCON
•CLKDIV
•OSCTUN
The OSCCON register (Register 7-1) is the main control register for the oscillator. It controls clock source
switching, and allows the monitoring of clock sources.
DS39747B-page 92 Advance Information © 2006 Microchip Technology Inc.
The Clock Divider register (Register 7-2) controls the
features associated with Doze mode, as well as the
postscaler for the FRC oscillator.
The FRC Oscillator Tune register (Register 7-3) allows
the user to fine tune the FRC oscillator over a range of
approximately ±12%. Each bit increment or decrement
changes the factory calibrated frequency of the FRC
oscillator by a fixed amount.
Page 95
PIC24FJ128GA FAMILY
REGISTER 7-1: OSCCON: OSCILLATOR CONTROL REGISTER
Upper Byte:
U-0 R-0 R-0 R-0 U-0 R/W-x
— COSC2 COSC1 COSC0 — NOSC2 NOSC1 NOSC0
bit 15 bit 8
(1)
R/W-x
(1)
R/W-x
(1)
Lower Byte:
R/SO-0 U-0 R-0
CLKLOCK
bit 7 bit 0
bit 15 Unimplemented: Read as ‘0’
bit 14-12 COSC2:COSC0: Current Oscillator Selection bits
111 = Fast RC Oscillator with Postscaler (FRCDIV)
110 = Reserved
101 = Low-Power RC Oscillator (LPRC)
100 = Secondary Oscillator (SOSC)
011 = Primary Oscillator with PLL module (HSPLL, ECPLL)
010 = Primary Oscillator (XT, HS, EC)
001 = Fast RC Oscillator with postscaler and PLL module (FRCPLL)
000 = Fast RC Oscillator (FRC)
bit 11 Unimplemented: Read as ‘0’
bit 10-8 NOSC2:NOSC0: New Oscillator Selection bits
111 = Fast RC Oscillator with Postscaler (FRCDIV)
110 = Reserved
101 = Low-Power RC Oscillator (LPRC)
100 = Secondary Oscillator (SOSC)
011 = Primary Oscillator with PLL module (HSPLL, ECPLL)
010 = Primary Oscillator (XT, HS, EC)
001 = Fast RC Oscillator with postscaler and PLL module (FRCPLL)
000 = Fast RC Oscillator (FRC)
bit 7 CLKLOCK: Clock Selection Lock Enabled bit
If FSCM is enabled (FCKSM1 =
1 = Clock and PLL selections are locked
0 = Clock and PLL selections are not locked and may be modified by setting the OSWEN bit
If FSCM is disabled (FCKSM1 = 0):
Clock and PLL selections are never locked and may be modified by setting the OSWEN bit.
bit 6 Unimplemented: Read as ‘0’
bit 5 LOCK: PLL Lock Status bit
1 = PLL module is in lock or PLL module start-up timer is satisfied
0 = PLL module is out of lock, PLL start-up timer is running or PLL is disabled
bit 4 Unimplemented: Read as ‘0’
bit 3 CF: Clock Fail Detect bit
1 = FSCM has detected a clock failure
0 = No clock failure has been detected
bit 2 Unimplemented: Read as ‘0’
bit 1 SOSCEN: 32 kHz Secondary Oscillator (SOSC) Enable bit
1 = Enable secondary oscillator
0 = Disable secondary oscillator
bit 0 OSWEN: Oscillator Switch Enable bit
1 = Initiate an oscillator switch to clock source specified by NOSC2:NOSC0 bits
0 = Oscillator switch is complete
Note 1: Reset values for these bits are determined by the FNOSC Configuration bits.
2: Also resets to ‘0’ during any valid clock switch, or whenever a non-PLL Clock mode is selected.
—LOCK—CF— SOSCEN OSWEN
1):
(2)
U-0 R/CO-0 U-0 R/W-0 R/W-0
Legend: U = Unimplemented bit, read as ‘0’
R = Readable bit W = Writable bit CO = Clear-Only bit SO = Set-Only bit
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 93
Page 96

PIC24FJ128GA FAMILY
REGISTER 7-2: CLKDIV: CLOCK DIVIDER REGISTER
Upper Byte:
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-1 R/W-1
ROI DOZE2 DOZE1 DOZE0 DOZEN
bit 15 bit 8
Lower Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 7 bit 0
bit 15 ROI: Recover on Interrupt bit
1 = Interrupts clear the DOZEN bit and reset the CPU peripheral clock ratio to 1:1
0 = Interrupts have no effect on the DOZEN bit
bit 14-12 DOZE2:DOZE0: CPU Peripheral Clock Ratio Select bits
111 = 1:128
110 = 1:64
101 = 1:32
100 = 1:16
011 = 1:8
010 = 1:4
001 = 1:2
000 = 1:1
bit 11 DOZEN: DOZE Enable bit
1 = DOZE2:DOZE0 bits specify the CPU peripheral clock ratio
0 = CPU peripheral clock ratio set to 1:1
Note 1: This bit is automatically cleared when the ROI bit is set and an interrupt occurs.
bit 10-8 RCDIV2:RCDIV0: FRC Postscaler Select bits
111 = 31.25 kHz (divide by 256)
110 = 125 kHz (divide by 64)
101 = 250 kHz (divide by 32)
100 = 500 kHz (divide by 16)
011 = 1 MHz (divide by 8)
010 = 2 MHz (divide by 4)
001 = 4 MHz (divide by 2)
000 = 8 MHz (divide by 1)
bit 7-0 Unimplemented: Read as ‘0’
(1)
(1)
RCDIV2 RCDIV1 RCDIV0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
DS39747B-page 94 Advance Information © 2006 Microchip Technology Inc.
Page 97

PIC24FJ128GA FAMILY
REGISTER 7-3: OSCTUN: FRC OSCILLATOR TUNE REGISTER
Upper Byte:
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
Lower Byte:
U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — TUN5 TUN4 TUN3 TUN2 TUN1 TUN0
bit 7 bit 0
bit 15-6 Unimplemented: Read as ‘0’
bit 5-0 TUN5:TUN0: FRC Oscillator Tuning bits
011111 = Maximum frequency deviation
011110 =
•
•
•
000001 =
000000 = Center frequency, oscillator is running at factory calibrated frequency
111111 =
•
•
•
100001 =
100000 = Minimum frequency deviation
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
7.4 Clock Switching Operation
With few limitations, applications are free to switch
between any of the four clock sources (POSC, SOSC,
FRC and LPRC) under software control and at any
time. To limit the possible side effects that could result
from this flexibility, PIC24 devices have a safeguard
lock built into the switching process.
Note: Primary Oscillator mode has three
different submodes (XT, HS and EC)
which are determined by the POSCMD
Configuration bits. While an application
can switch to and from Primary Oscillator
mode in software, it cannot switch
between the different primary submodes
without reprogramming the device.
7.4.1 ENABLING CLOCK SWITCHING
To enable clock switching, the FCKSM1 Configuration
bit in the Configuration register must be programmed to
‘0’. (Refer to Section 23.1 “Configuration Bits” for
further details.) If the FCKSM1 Configuration bit is
unprogrammed (‘1’), the clock switching function and
Fail-Safe Clock Monitor function are disabled. This is
the default setting.
The NOSC control bits (OSCCON<10:8>) do not
control the clock selection when clock switching is disabled. However, the COSC bits (OSCCON<14:12>)
will reflect the clock source selected by the FNOSC
Configuration bits.
The OSWEN control bit (OSCCON<0>) has no effect
when clock switching is disabled. It is held at ‘0’ at all
times.
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 95
Page 98

PIC24FJ128GA FAMILY
7.4.2 OSCILLATOR SWITCHING SEQUENCE
At a minimum, performing a clock switch requires this
basic sequence:
1. If desired, read the COSC bits
(OSCCON<14:12>), to determine the current
oscillator source.
2. Perform the unlock sequence to allow a write to
the OSCCON register high byte.
3. Write the appropriate value to the NOSC control
bits (OSCCON<10:8>) for the new oscillator
source.
4. Perform the unlock sequence to allow a write to
the OSCCON register low byte.
5. Set the OSWEN bit to initiate the oscillator
switch.
Once the basic sequence is completed, the system
clock hardware responds automatically as follows:
1. The clock switching hardware compares the
COSC status bits with the new value of the
NOSC control bits. If they are the same, then the
clock switch is a redundant operation. In this
case, the OSWEN bit is cleared automatically
and the clock switch is aborted.
2. If a valid clock switch has been initiated, the
LOCK (OSCCON<5>) and CF (OSCCON<3>)
status bits are cleared.
3. The new oscillator is turned on by the hardware
if it is not currently running. If a crystal oscillator
must be turned on, the hardware will wait until
the OST expires. If the new source is using the
PLL, then the hardware waits until a PLL lock is
detected (LOCK = 1).
4. The hardware waits for 10 clock cycles from the
new clock source and then performs the clock
switch.
5. The hardware clears the OSWEN bit to indicate a
successful clock transition. In addition, the NOSC
bit values are transferred to the COSC status bits.
6. The old clock source is turned off at this time,
with the exception of LPRC (if WDT or FSCM
are enabled) or SOSC (if SOSCEN remains
set).
Note 1: The processor will continue to execute
code throughout the clock switching
sequence. Timing sensitive code should
not be executed during this time.
2: Direct clock switches between any
Primary Oscillator mode with PLL and
FRCPLL mode are not permitted. This
applies to clock switches in either direction. In these instances, the application
must switch to FRC mode as a transition
clock source between the two PLL
modes.
A recommended code sequence for a clock switch
includes the following:
1. Disable interrupts during the OSCCON register
unlock and write sequence.
2. Execute the unlock sequence for the OSCCON
high byte, by writing 78h and 9Ah to
OSCCON<15:8> in two back-to-back
instructions.
3. Write new oscillator source to the NOSC control
bits in the instruction immediately following the
unlock sequence.
4. Execute the unlock sequence for the OSCCON
low byte by writing 46h and 57h to
OSCCON<7:0> in two back-to-back instructions.
5. Set the OSWEN bit in the instruction immediately
following the unlock sequence.
6. Continue to execute code that is not clock
sensitive (optional).
7. Invoke an appropriate amount of software delay
(cycle counting) to allow the selected oscillator
and/or PLL to start and stabilize.
8. Check to see if OSWEN is ‘0’. If it is, the switch
was successful. If OSWEN is still set, then
check the LOCK bit to determine cause of
failure.
The core sequence for unlocking the OSCCON register
and initiating a clock switch is shown in Example 7-1.
EXAMPLE 7-1: BASIC CODE SEQUENCE
FOR CLOCK SWITCHING
;Place the new oscillator selection in W0
;OSCCONH (high byte) Unlock Sequence
MOV #OSCCONH, w1
MOV #0x78, w2
MOV #0x9A, w3
MOV.b w2, [w1]
MOV.b w3, [w1]
;Set new oscillator selection
MOV.b WREG, OSCCONH
;OSCCONL (low byte) unlock sequence
MOV #OSCCONL, w1
MOV.b #0x01, w0
MOV #0x46, w2
MOV #0x57, w3
MOV.b w2, [w1]
MOV.b w3, [w1]
;Start oscillator switch operation
MOV.b w0, [w1]
DS39747B-page 96 Advance Information © 2006 Microchip Technology Inc.
Page 99

PIC24FJ128GA FAMILY
8.0 POWER-SAVING FEATURES
Note: This data sheet summarizes the features
of this group of PIC24FJ devices. It is not
intended to be a comprehensive reference
source.
The PIC24FJ128GA family of devices provide the ability
to manage power consumption by selectively managing
clocking to the CPU and the peripherals. In general, a
lower clock frequency and a reduction in the number of
circuits being clocked constitutes lower consumed
power. All PIC24F devices manage power consumption
in four different ways:
• Clock frequency
• Instruction-based Sleep and Idle modes
• Software-controlled Doze mode
• Selective peripheral control in software
Combinations of these methods can be used to selectively tailor an application’s power consumption, while
still maintaining critical application features, such as
timing sensitive communications.
8.1 Clock Frequency and Clock Switching
PIC24F devices allow for a wide range of clock
frequencies to be selected under application control. If
the system clock configuration is not locked, users can
choose low-power or high-precision oscillators by simply
changing the NOSC Configuration bits. The process of
changing a system clock during operation, as well as
limitations to the process, are discussed in more detail in
Section 7.0 “Oscillator Configuration”.
8.2 Instruction-Based Power-Saving Modes
PIC24F devices have two special power-saving modes
that are entered through the execution of a special
PWRSAV instruction. Sleep mode stops clock operation
and halts all code execution; Idle mode halts the CPU
and code execution, but allows peripheral modules to
continue operation. The assembly syntax of the
PWRSAV instruction is shown in Example 8-1.
Note: SLEEP_MODE and IDLE_MODE are con-
stants defined in the assembler include
file for the selected device.
Sleep and Idle modes can be exited as a result of an
enabled interrupt, WDT time-out or a device Reset.
When the device exits these modes, it is said to
“wake-up”.
8.2.1 SLEEP MODE
Sleep mode has these features:
• The system clock source is shut down. If an
on-chip oscillator is used, it is turned off.
• The device current consumption will be reduced
to a minimum provided that no I/O pin is sourcing
current.
• The Fail-Safe Clock Monitor does not operate
during Sleep mode since the system clock source
is disabled.
• The LPRC clock will continue to run in Sleep
mode if the WDT is enabled.
• The WDT, if enabled, is automatically cleared
prior to entering Sleep mode.
• Some device features or peripherals may
continue to operate in Sleep mode. This includes
items such as the input change notification on the
I/O ports, or peripherals that use an external clock
input. Any peripheral that requires the system
clock source for its operation will be disabled in
Sleep mode.
The device will wake-up from Sleep mode on any of the
these events:
• On any interrupt source that is individually
enabled
• On any form of device Reset
• On a WDT time-out
On wake-up from Sleep, the processor will restart with
the same clock source that was active when Sleep
mode was entered.
EXAMPLE 8-1: PWRSAV INSTRUCTION SYNTAX
PWRSAV #SLEEP_MODE ; Put the device into SLEEP mode
PWRSAV #IDLE_MODE ; Put the device into IDLE mode
© 2006 Microchip Technology Inc. Advance Information DS39747B-page 97
Page 100

PIC24FJ128GA FAMILY
8.2.2 IDLE MODE
Idle mode has these features:
• The CPU will stop executing instructions.
• The WDT is automatically cleared.
• The system clock source remains active. By
default, all peripheral modules continue to operate
normally from the system clock source, but can
also be selectively disabled (see Section 8.4
“Selective Peripheral Module Control”).
• If the WDT or FSCM is enabled, the LPRC will
also remain active.
The device will wake from Idle mode on any of these
events:
• Any interrupt that is individually enabled.
• Any device Reset.
• A WDT time-out.
On wake-up from Idle, the clock is re-applied to the
CPU and instruction execution begins immediately,
starting with the instruction following the PWRSAV
instruction, or the first instruction in the ISR.
8.2.3 INTERRUPTS COINCIDENT WITH
POWER SAVE INSTRUCTIONS
Any interrupt that coincides with the execution of a
PWRSAV instruction will be held off until entry into Sleep
or Idle mode has completed. The device will then
wake-up from Sleep or Idle mode.
8.3 Doze Mode
Generally, changing clock speed and invoking one of
the power-saving modes are the preferred strategies
for reducing power consumption. There may be circumstances, however, where this is not practical. For
example, it may be necessary for an application to
maintain uninterrupted synchronous communication,
even while it is doing nothing else. Reducing system
clock speed may introduce communication errors,
while using a power-saving mode may stop
communications completely.
Doze mode is a simple and effective alternative method
to reduce power consumption while the device is still
executing code. In this mode, the system clock continues to operate from the same source and at the same
speed. Peripheral modules continue to be clocked at the
same speed, while the CPU clock speed is reduced.
Synchronization between the two clock domains is
maintained, allowing the peripherals to access the SFRs
while the CPU executes code at a slower rate.
Doze mode is enabled by setting the DOZEN bit
(CLKDIV<11>). The ratio between peripheral and core
clock speed is determined by the DOZE2:DOZE0 bits
(CLKDIV<14:12>). There are eight possible
configurations, from 1:1 to 1:256, with 1:1 being the
default.
It is also possible to use Doze mode to selectively
reduce power consumption in event driven applications. This allows clock sensitive functions, such as
synchronous communications, to continue without
interruption while the CPU idles, waiting for something
to invoke an interrupt routine. Enabling the automatic
return to full-speed CPU operation on interrupts is
enabled by setting the ROI bit (CLKDIV<15>). By
default, interrupt events have no effect on Doze mode
operation.
8.4 Selective Peripheral Module Control
Idle and Doze modes allow users to substantially
reduce power consumption by slowing or stopping the
CPU clock. Even so, peripheral modules still remain
clocked and thus consume power. There may be cases
where the application needs what these modes do not
provide: the allocation of power resources to CPU
processing with minimal power consumption from the
peripherals.
PIC24F devices address this requirement by allowing
peripheral modules to be selectively disabled, reducing
or eliminating their power consumption. This can be
done with two control bits:
• The Peripheral Enable bit, generically named
“XXXEN”, located in the module’s main control
SFR.
• The Peripheral Module Disable (PMD) bit, generi-
cally named “XXXMD”, located in one of the PMD
control registers.
Both bits have similar functions in enabling or disabling
its associated module. Setting the PMD bit for a module
disables all clock sources to that module, reducing its
power consumption to an absolute minimum. In this
state, the control and status registers associated with the
peripheral will also be disabled, so writes to those registers will have no effect and read values will be invalid.
Many peripheral modules have a corresponding PMD
bit.
In contrast, disabling a module by clearing its XXXEN
bit disables its functionality, but leaves its registers
available to be read and written to. Power consumption
is reduced, but not by as much as the PMD bit does.
Most peripheral modules have an enable bit;
exceptions include Capture, Compare and RTCC.
To achieve more selective power savings, peripheral
modules can also be selectively disabled when the
device enters Idle mode. This is done through the
control bit of the generic name format “XXXIDL”. By
default, all modules that can operate during Idle mode
will do so. Using the disable on Idle feature allows further reduction of power consumption during Idle mode,
enhancing power savings for extremely critical power
applications.
DS39747B-page 98 Advance Information © 2006 Microchip Technology Inc.
 Loading...
Loading...