

Page 1
MCP2140
通信速率为固定 9600 波特率的
IrDA® 标准协议栈控制器
特性
• 实现了 IrDA®标准,包括:
- IrLAP
- IrLMP
- IAS
- TinyTP
- IrCOMM (9 线“Cooked”服务级别)
• 提供 IrDA 标准物理信令层支持,包括:
- 双向通信
- 实现 CRC
- 9600 bps 固定通信速率
• 包括 UART-IrDA 标准编 / 解码功能:
- 易于与业界标准的 UART和红外线收发器连接
• 用于连接数据通信设备 (Data Communications
Equipment, DCE)或数据终端设备 (Data
Terminal Equipment, DTE)系统的 UART 接口
• 支持发送 / 接收格式 (位宽):
- 1.63 µs
• 硬件 UART 支持:
- 9.6 kbps 波特率
- 29 字节的数据缓存
• 支持的红外功能:
- 9.6 kbps 波特率
- 64 字节的数据包
• 作为从设备 (Secondary Device)工作
• 自动低功耗模式
- 当没有 IR 活动 (PHACT = L)时 < 60 µA
CMOS 技术
• 低功耗而高速的 CMOS 技术
• 完全静态设计
• 低电压工作
• 工业级温度范围
• 低功耗
- 3.0V 和 7.3728 MHz 时 < 1 mA (典型值)
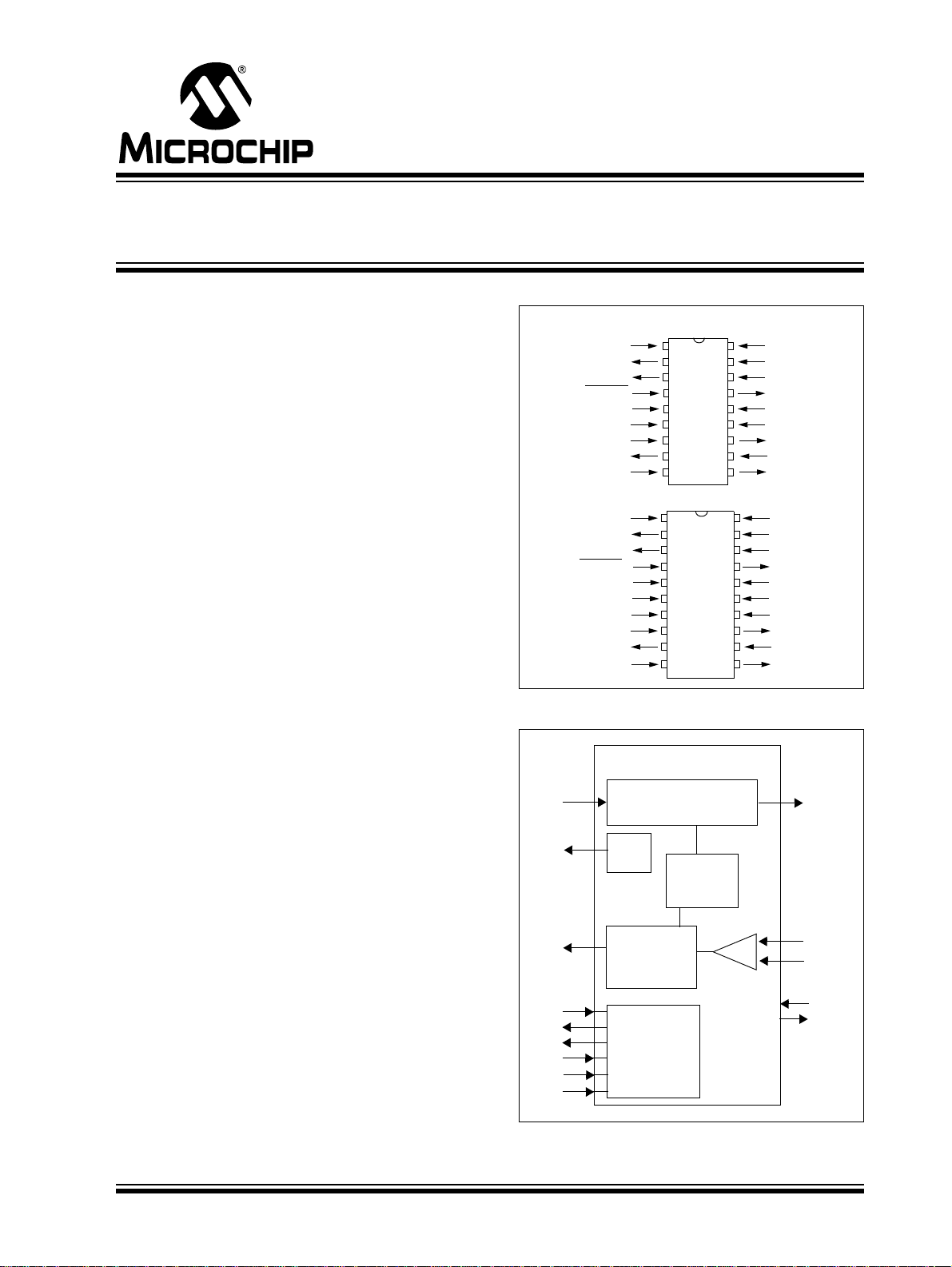
封装类型
PDIP,SOIC
RXPDREF
SSOP
RXPDREF
PHACT
RESET
结构框图
TX
PHACT
RX
RTS
CTS
DSR
DTR
CD
RI
TXIR
PHACT
RESET
VSS
NC
TX
RX
TXIR
SS
V
VSS
NC
TX
RX
RI
RI
MCP2140
协议处理器
逻辑
电路
协议
处理器
及解码
UART
控制
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
10
编码及
波特率
发生器
MCP2140
MCP2140
18
17
16
15
14
13
12
11
10
20
19
18
17
16
15
14
13
12
11
RXPD
CD
OSC1/CLKI
OSC2
DD
V
RTS
CTS
DTR
DSR
RXPD
CD
OSC1/CLKI
OSC2
VDD
VDD
RTS
CTS
DTR
DSR
+
-
TXIR
RXPD
RXPDREF
OSC1
OSC2
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 1 页
Page 2
MCP2140
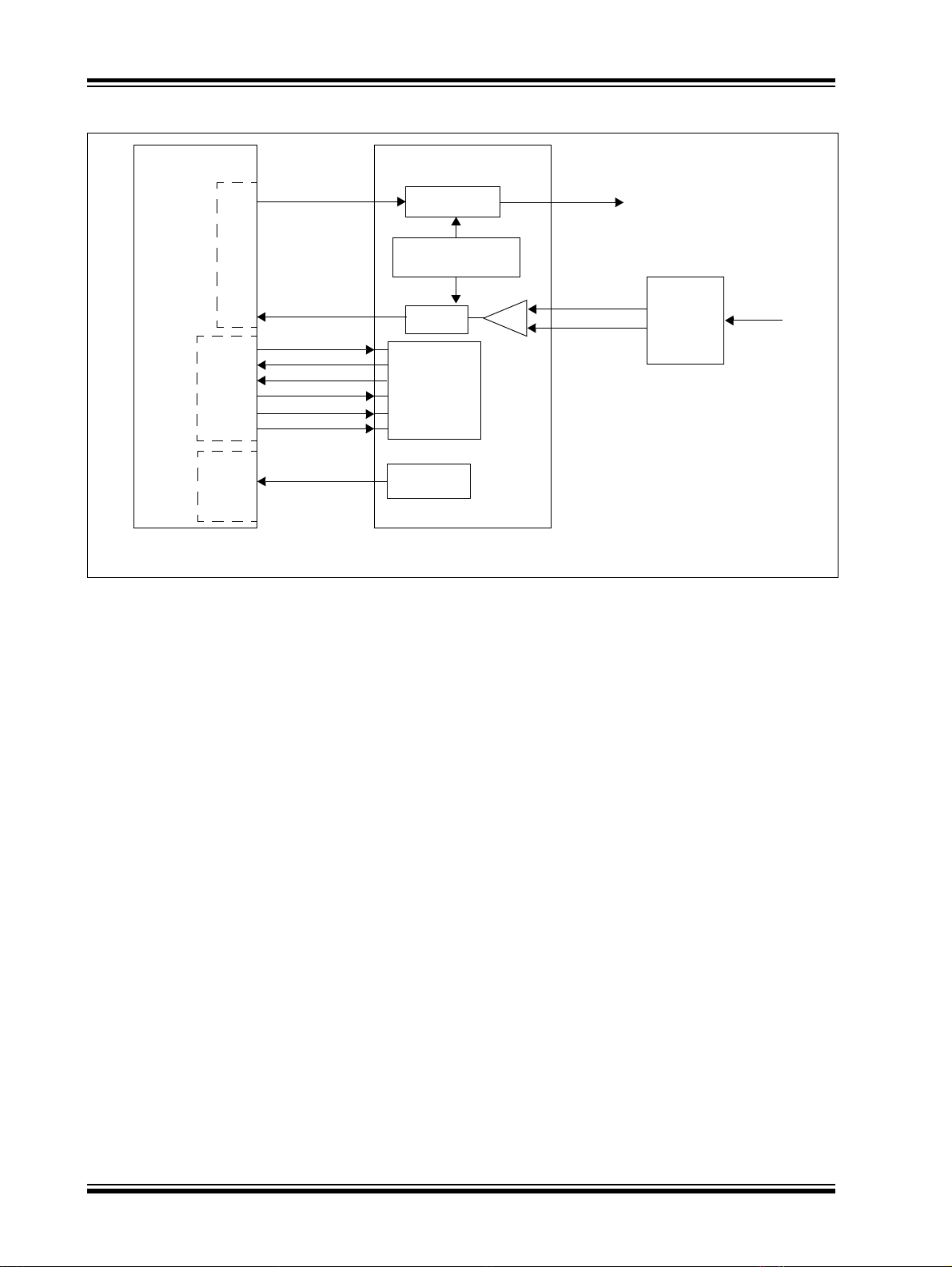
MCP2140 系统框图
PICmicro
单片机
UART 流
MCP2140
®
SO
UART
SI
I/O
I/O
(1)
I/O
I/O
控制
I/O
I/O
(1)
I/O
状态
RTS
CTS
DSR
DTR
CD
RI
PHACT
注 1 :不要求单片机的所有 I/O 引脚都连接到 MCP2140。
TX
RX
MCP2140
解码
波特率
发生器
编码
UART
控制
逻辑电路
TXIR
+
-
IR LED
RXPD
RXPDREF
IR 接收
检测
电路
IR 光
二极管
DS21790A_CN 第 2 页 初稿 2005 Microchip Technology Inc.
Page 3
MCP2140
1.0 器件概述
MCP2140 是实现 IrDA 标准无线连接的低引脚数 (18
引脚)器件,它易于使用且颇具成本效益。MCP2140 支
持 IrDA 标准协议“栈”,位编 / 解码以及低成本分立式
IR 接收器电路。
串行和 IR 接口波特率为固定的 9600 bps。串行和 IR 接
口的波特率取决于器件频率,但 IrDA 标准操作要求器件
频率为 7.3728 MHz。
在搜索 (Discover)阶段, MCP2140 将向主设备
(Primary Device)指定 IR 波特率。
MCP2140 可用于数据通信设备 (DCE)和数据终端设
备(DTE)等应用中,位于 UART 和红外光收发器之间。
MCP2140 为异步串行数据流编码,将每个数据位转换
为相应红外 (IR)格式的脉冲。接收到的 IR 脉冲被解
码后由协议处理器状态机处理。协议处理器以 UART 格
式串行数据发送相应的数据字节到主机控制器。
MCP2140 支持 “点对点”应用,即:具备一个主设备
和一个从设备。MCP2140 作为从设备工作,不支持“多
点”应用。
使用红外线发送数据需要一些硬件并使用专门的通信协
议。 IrDA 标准规范对这些协议和硬件要求作了详细说
明。MCP2140 的编 / 解码功能设计与 IrDA 标准物理层
元件兼容。这一部分标准常被称为 “IrPHY”。
完整的IrDA标准规范可至IrDA网站www.IrDA.org下载。
1.1 应用
MCP2140 红外通信控制器支持 IrDA 标准,为嵌入式系
统设计人员提供了实现IrDA标准无线连接的最简便的方
法。
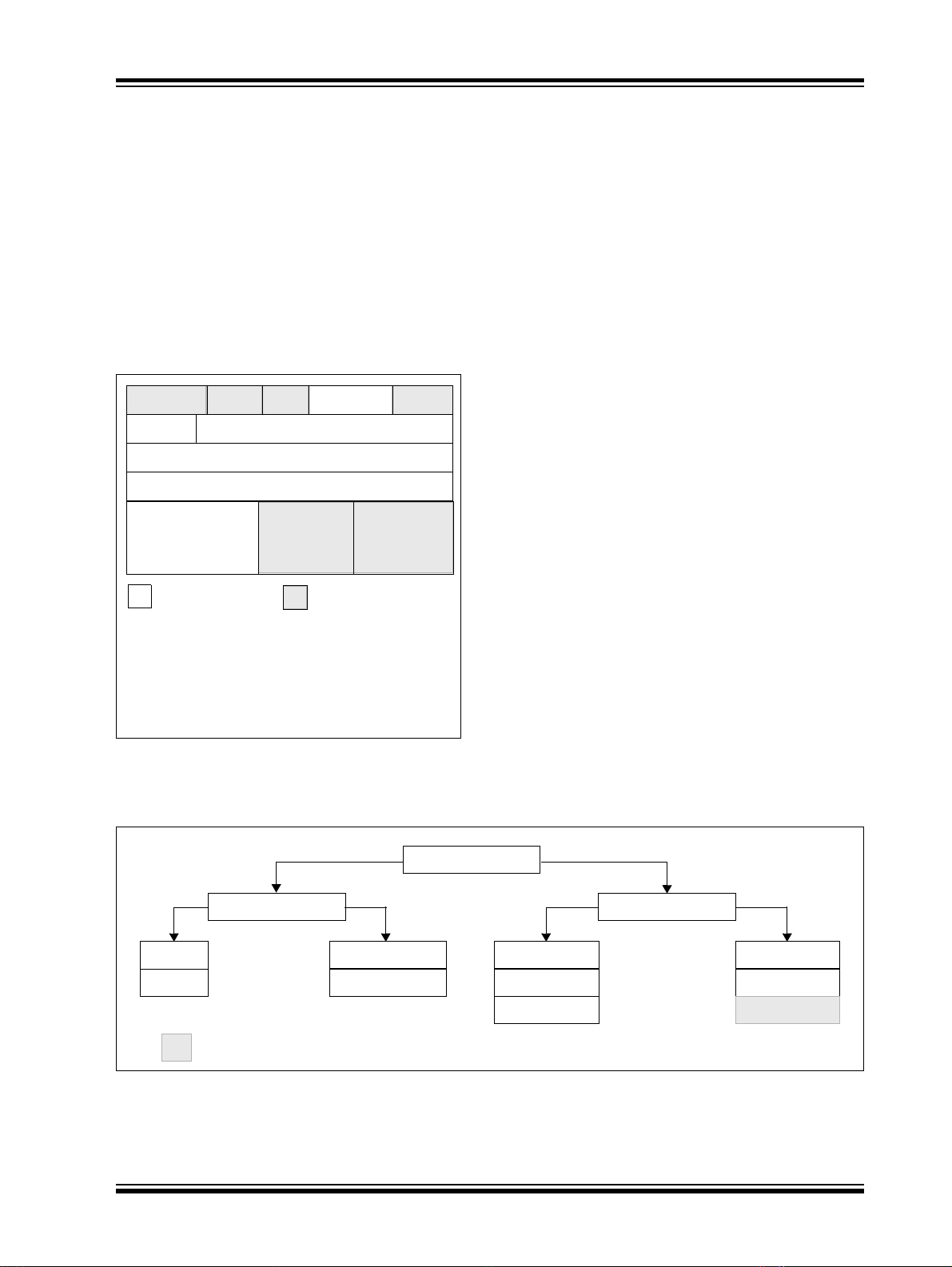
图 1-1 显示了典型应用框图,表 1-2 给出了引脚定
义。
表 1-1: 特性概述
特性
串行通信
波特率选择 固定
低功耗模式 有
复位 (及延时)
封装
红外通信是一种使用红外线的无线双向数据连接,红外
线由低成本的收发器信号技术产生。它为两个设备之间
提供了可靠的通信。
红外技术提供了:
• 用于连接便携式计算设备的通用标准
• 简单易行的实现方式
• 与其他连接方案相比,是较经济的选择
• 可靠而高速的连接
• 能在任何环境下安全使用 (甚至可在空中旅行时
使用)
• 省却了电缆的麻烦
• 允许 PC 和其他电子设备 (如:PDA 和蜂窝电话
等) 之间进行通信
• 允许用户进行方便的连接从而提高了移动性
MCP2140 可以方便地为使用串行数据的嵌入式应用添
加 IrDA标准无线连接。
嵌入式系统中的典型应用。
支持打印机的 IrDA 协议不包括在 IrCOMM 9 线
“Cooked”服务级别中。
UART, IR
RESET, POR
(PWRT 和 OST)
18 引脚 DIP 和 SOIC,
20 引脚 SSOP
图 1-1 显示了 MCP2140 在一个
MCP2140
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 3 页
Page 4
MCP2140
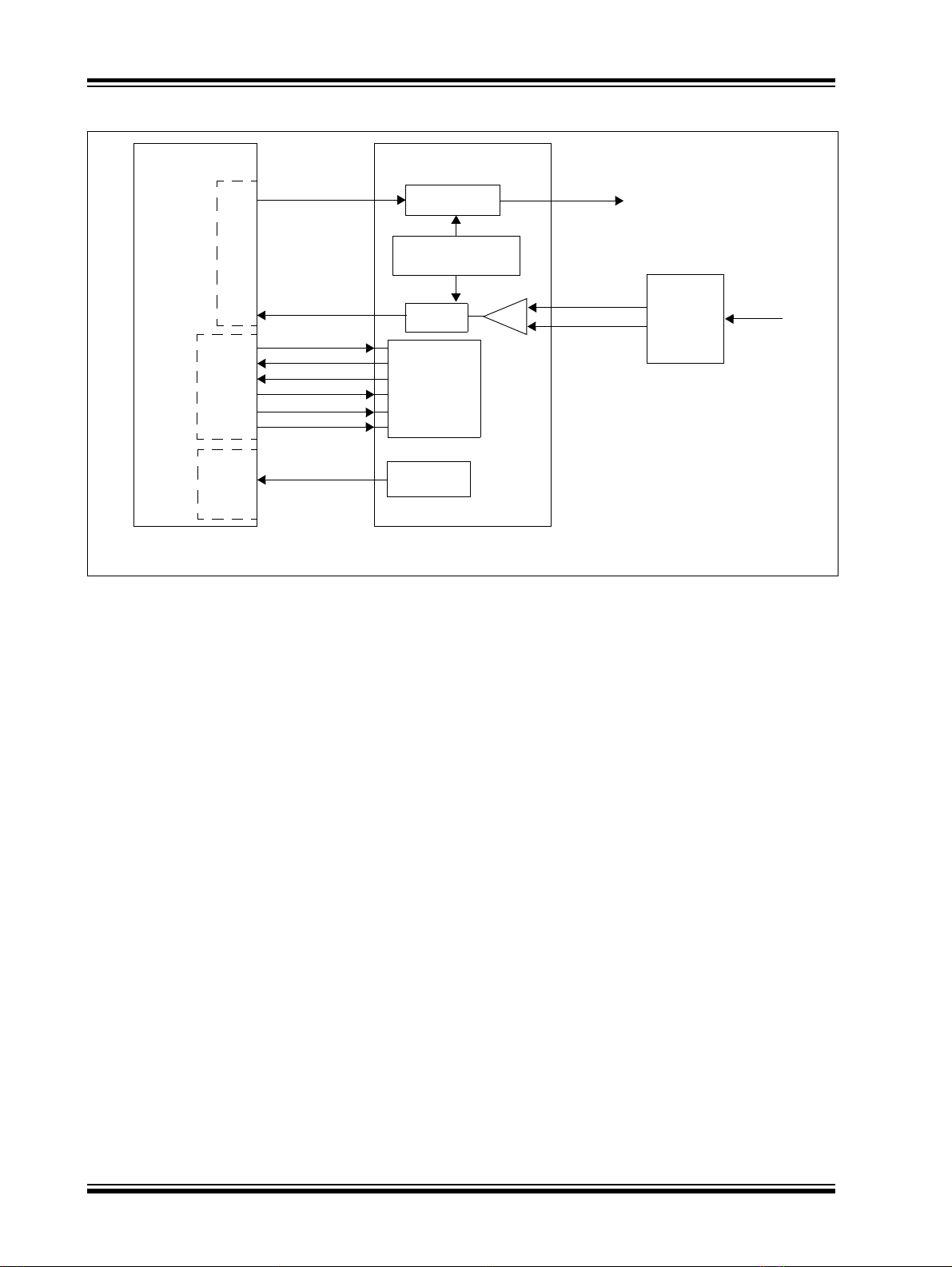
图 1-1: 系统框图
PICmicro
单片机
®
SO
TX
MCP2140
解码
TXIR
IR LED
UART
SI
RTS
CTS
DSR
DTR
CD
RI
PHACT
注 1 :不要求单片机的所有 I/O 引脚都连接到 MCP2140。
(1)
UART
(1)
MCP2140
I/O
I/O
I/O
I/O
流控制
I/O
I/O
I/O
状态
RX
波特率
发生器
编码
UART
控制
逻辑电路
+
-
RXPD
RXPDREF
IR 接收
检测
电路
IR 光
二极管
DS21790A_CN 第 4 页 初稿 2005 Microchip Technology Inc.
Page 5
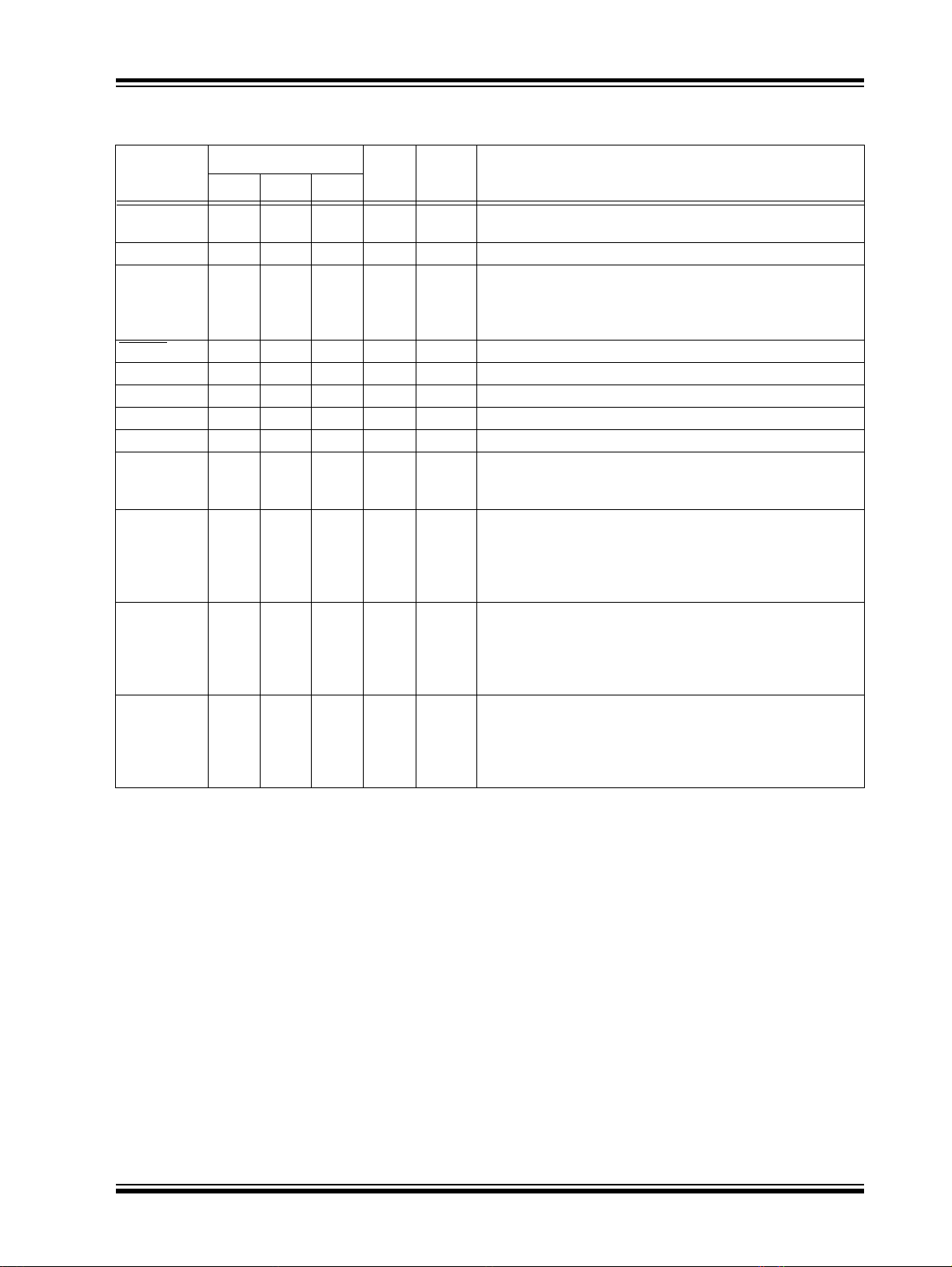
表 1-2: MCP2140 正常操作的引脚描述 (DCE)
MCP2140
引脚名称
RXPDREF 1 1 1 I A IR 接收光检测二极管参考电压。此电压典型值在 V
TXIR 222O—异步发送到 IrDA 收发器。
PHACT 3 3 3 OC —
444 IST
RESET
V
SS 555, 6—P逻辑电路和 I/O 引脚的参考地
NC 667 I —
TX 7 7 8 I TTL 从主机控制器 UART 异步接收
RX 889O—异步发送到主机控制器 UART
RI 9 9 10 I TTL 铃声指示。此位的状态被发送到 IrDA 主设备。
DSR 10 10 11 O — 数据建立就绪。指示 MCP2140 已经与主设备建立了有效的
DTR 11 11 12 I TTL 数据终端就绪。指示连到 MCP2140 的嵌入式设备准备就绪
CTS 121213 O —已清零可发送。指示 MCP2140 准备就绪从主机控制器接收
图注: TTL = TTL 兼容输入 ST = 带有 CMOS 电平的施密特触发器
A = 模拟 P = 功率
CMOS = CMOS 兼容输入 OC = 集电极开路输出
I = 输入 O = 输出
注 1: DTR 输出引脚的状态不反映 IrDA 主设备 DTR 位的状态。
引脚号
PDIP SOIC SSOP
引脚类型缓冲器
类型
说明
DD/2 以
内。
协议处理器工作。指示 MCP2140 协议处理器的状态。此为
集电极开路输出,因而可能需要一个外部上拉电阻。
1 = 协议处理器处于搜索或 NRM 状态
0 = 协议处理器处于 NDM 状态或 MCP2140 为低功耗模式
器件复位
无连接
1 = 未出现振荡指示
0 = 出现振荡指示
IrDA 链路
位无关。
1 = IR 链路未建立 (无 IR 链路)
0 = IR 链路已建立 (IR 链路)
可接收 IR 数据。此位状态通过 IrCOMM 所带的 IrDA DSR
位传到 IrDA 主设备。
1 = 嵌入式设备未就绪
0 = 嵌入式设备就绪
数据。此信号由本地仿真,与 IrDA 主设备的 CTS/RTS 位无
关。
1 = 主机控制器不应发送数据
0 = 主机控制器可以发送数据
(1)
。此信号由本地仿真,与 IrDA 主设备的 DTR
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 5 页
Page 6
MCP2140
表 1-2: MCP2140 正常操作的引脚描述 (DCE)(续)
引脚名称
RTS 131314 I TTL请求发送。指示主机控制器准备就绪,可从 MCP2140 接收
V
DD 14 14 15, 16 — P 逻辑电路和 I/O 引脚的正电源电压。
OSC2 15 15 17 O —
OSC1/CLKIN 16 16 18 I CMOS
CD 17 17 19 I ST
RXPD 18 18 20 I A IR RX 光检测二极管输入。要求此输入信号为一个脉冲以指
图注: TTL = TTL 兼容输入 ST = 带有 CMOS 电平的施密特触发器
A = 模拟 P = 功率
CMOS = CMOS 兼容输入 OC = 集电极开路输出
I = 输入 O = 输出
注 1: DTR 输出引脚的状态不反映 IrDA 主设备 DTR 位的状态。
引脚号
PDIP SOIC SSOP
引脚类型缓冲器
类型
说明
数据。此信号由本地仿真,与 IrDA 主设备的 CTS/RTS 位无
关。
1 = 主机控制器未就绪接收数据
0 = 主机控制器就绪可接收数据
振荡器晶振输出。
振荡器晶振输入 / 外部时钟源输入。
载波检测。此位的状态通过 IrDA 的 CD 位发送到 IrDA 主设
备。
1 = 无载波信号出现
0 = 有载波信号出现
示一个 IR 位。当信号幅值超过 RXPDREF 引脚设置的幅值阈
值时,检测到 IR 位。此脉冲的最小和最大值在参数 IR131A
中作了规定。
DS21790A_CN 第 6 页 初稿 2005 Microchip Technology Inc.
Page 7
MCP2140
2.0 器件操作
在给定器件时钟为 7.3728 MHz 时, MCP2140 串行接
口和 IR 波特率为固定的 9600 波特率。
2.1 上电
只要器件上电 (参数 D003),就发生上电定时器延时
(参数 33),接着是振荡器起振定时器延时(参数 32)。
一旦这些延时结束,就可开始与器件通信。通信从红外
收发器一端和控制器的 UART 接口进行开始。
2.2 器件复位
当 RESET 引脚为低电平状态时, MCP2140 被迫使进
入复位状态 。一旦 RESET 变为高电平,就发生器件复
位时序。此时序一旦结束,器件就开始正常操作。
2.3 器件时钟
MCP2140 的操作需要一个时钟源。这个时钟源用于建
立器件时序,包括器件的 “位时钟”。
2.3.1 时钟源
时钟源可由以下之一提供:
• 晶振
• 谐振器
• 外部时钟
时钟源的频率必须是 7.3728 MHz (电气特性参数 1A)
以使器件以 9600 bps 的速率通信。
2.3.1.1 晶振 / 陶瓷谐振器
可在 OSC1 和OSC2 引脚连接晶体或陶瓷谐振器以产生
振荡(图 2-1)。MCP2140 振荡器设计要求使用平行切
割的晶体。使用串行的切割晶体其频率可能超出晶体厂
商的规定值。
图 2-1: 晶振工作 (陶瓷谐振器)
OSC1
C1
XTAL
OSC2
RS
(注)
C2
参见表 2-1 和表 2-2 中 C1 和 C2 的推荐值。
注: AT 条形切割的晶体可能需要串接一个
电阻。
RF
连到内部
逻辑电路
MCP2140
表 2-1: 陶瓷谐振器的电容选择
频率
7.3728 MHz 10 - 22 pF 10 - 22 pF
注: 增大电容可提高振荡器的稳定性,但也延
长了起振时间。这些值仅供设计参考。由于
每个谐振器具有其自身的特性,用户应咨
询谐振器生产厂商以了解合适的外部元件
值。
OSC1 (C1) OSC2 (C2)
表 2-2: 晶振的电容选择
频率
7.3728 MHz 15 - 30 pF 15 - 30 pF
注: 增大电容可提高振荡器的稳定性,但也延
长了起振时间。这些值仅供设计参考。为避
免过驱动具有低驱动电平参数的晶体,可
能需要 Rs。由于每个谐振器具有其自身的
特性,用户应咨询谐振器生产厂商以了解
合适的外部元件值。
OSC1 (C1) OSC2 (C2)
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 7 页
Page 8
MCP2140
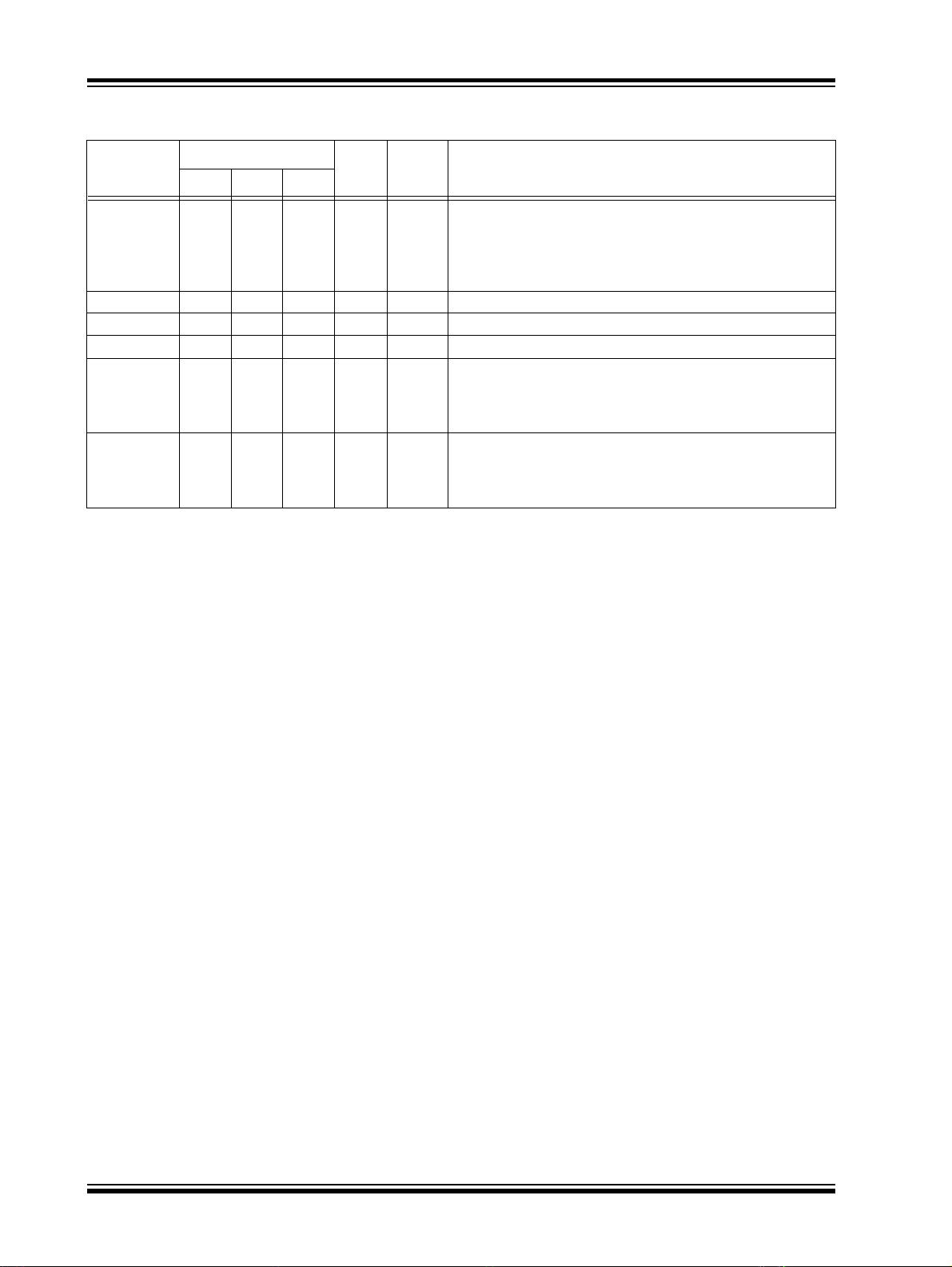
2.3.1.2 外部时钟
当某些应用中已经存在外部时钟时,如果此外部时钟源
满足 4.3 节 “时序图和规范”中所列出的 AC/DC 时序
要求,用户可以用它直接驱动 MCP2140。图 2-2 显示
了如何配置外部时钟电路。
图 2-2: 外部时钟
来自外部
系统的时钟
OSC1
MCP2140
开路
OSC2
2.3.2 位时钟
器件晶振用于产生通信位时钟(BITCLK)。每个位时间
有 16 个 BITCLK。BITCLK 用于产生启动位和八个数据
位。当数据发送结束后 (不用于数据接收),停止位使
用 BITCLK。
此时钟采用固定频率且频率变化最小(由晶振生产商规
定)。
DS21790A_CN 第 8 页 初稿 2005 Microchip Technology Inc.
Page 9
MCP2140
2.4 主机 UART 接口
主机 UART 接口与主机控制器通信。此接口有八个相关
信号:TX,RX,RTS,CTS,DSR,DTR,CD 和 RI。
其中有几个信号是本地产生的(不传递到 IR 接口上)。
主机 UART 是半双工接口,即系统或进行发送或进行接
收,但两者不能同时进行。
注 1: MCP2140 本地产生几个非数据信号。
2: MCP2140 仿真 3 线串行连接(TXD、RXD
和 GND)。收发器的发送数据 (TXD)、
接收数据(RXD)信号和 CD 的状态。RI
和 DTR 输入引脚将信号往复传递到主设
备。
3: RTS 和 CTS 信号由本地仿真。
2.4.1 波特率
当器件频率为 7.3728 MHz 时,MCP2140串行接口(TX
和 RX 引脚)的波特率为固定的 9600 bps。
2.4.2 发送
当控制器发送串行数据到 MCP2140 时,要求控制器的
波特率与 MCP2140 串行端口的波特率匹配。
2.4.3 接收
当控制器从 MCP2140 接收串行数据时,要求控制器的
波特率与 MCP2140 串行端口的波特率匹配。
2.4.4 硬件握手协议
利用三个主机 UART 信号控制主机控制器和 MCP2140
之间的握手操作。它们是:
• DSR
• RTS
• CTS
2.4.4.1 DSR
DSR 信号是用来指示 MCP2140 和主设备之间已建立了
数据链路。请参见
解如何进行器件连接。
2.14 节“MCP2140 的连接方式”了
2.4.4.2 RTS
RTS 信号用于通知 MCP2140 主机控制器已准备就绪可
接收串行数据。一旦收到 IR 数据包, RTS 信号电平将
拉低以将收到的数据转发到主机控制器。如果 RTS 信号
保持高电平,将发生 IR 链路超时,MCP2140 将与主设
备断开。
2.4.4.3 CTS
由于缓冲器的限制, MCP2140 本地产生 CTS 信号。
MCP2140 使用一个 64 字节的缓冲器,用于保存来自 IR
主机的数据。另外提供一个 29 字节的缓冲器,用来为来
自 UART 串行端口的数据提供缓冲。MCP2140 能同时处
理 IR 数据和主机 UART 串行端口数据。还提供了一个硬
件握手引脚(CTS),当 主机 UART 缓冲器不可用时,用
该引脚禁止主机控制器发送串行数据(
为使用 CTS 信号的主机 UART 流控制的流程图。
注: 当 CTS 输出信号为高电平时,UART FIFO
将储存最多 6 个字节。这使得器件对 CTS
信号时间的变化做出缓慢响应,以停止发
送更多数据 (例如一个调制解调器)。
图 2-3)。图 2-4
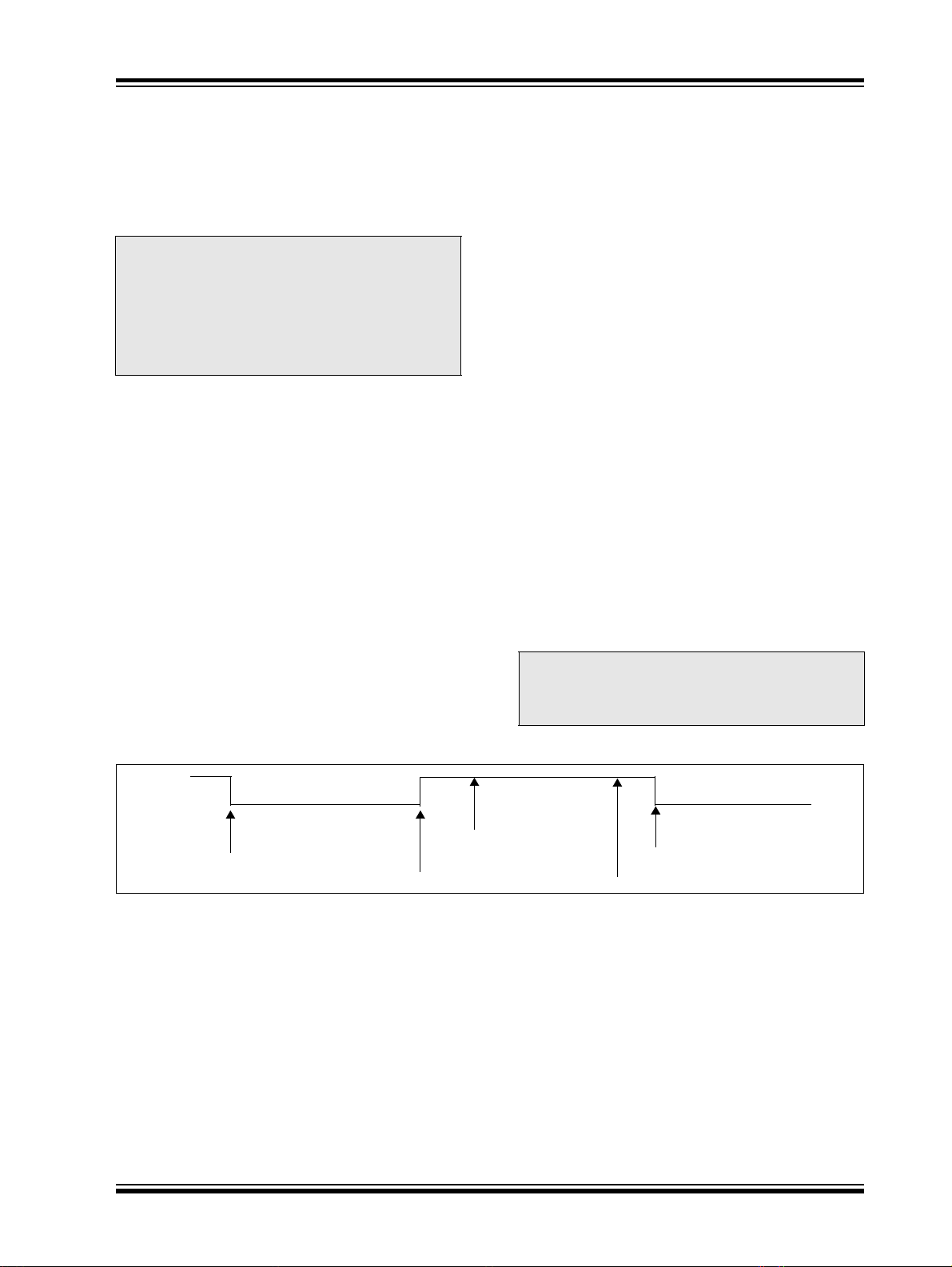
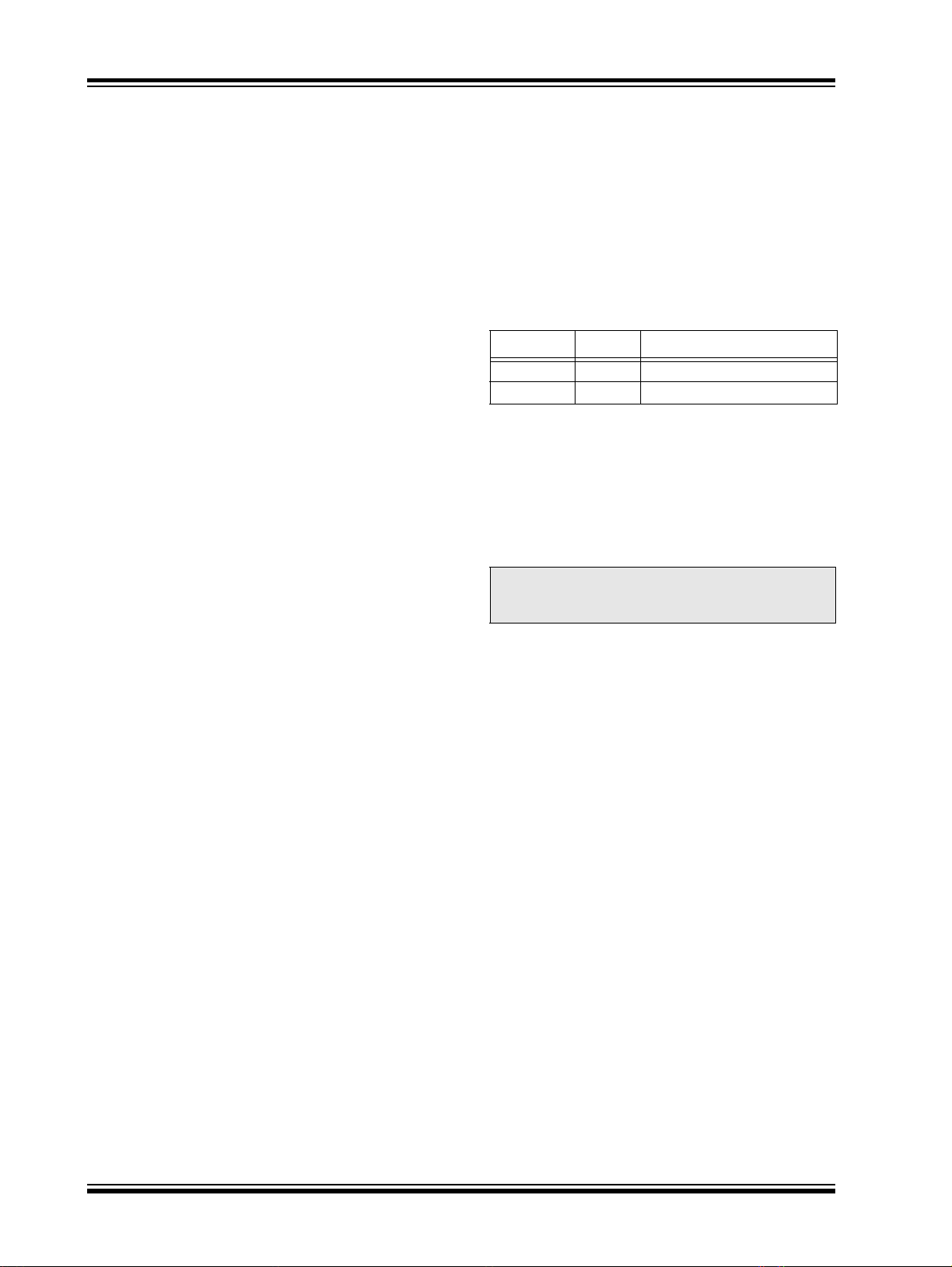
图 2-3:主机UART CTS 信号和器件缓冲器
CTS
接收缓冲器空
MCP2140 可接收数据
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 9 页
接收缓冲器有 22 字节,
CTS 引脚拉高
接收缓冲器满
(29 字节)
IR 数据包发送
接收缓冲器空
MCP2140 可接收数据
IR 数据包开始发送
Page 10
MCP2140
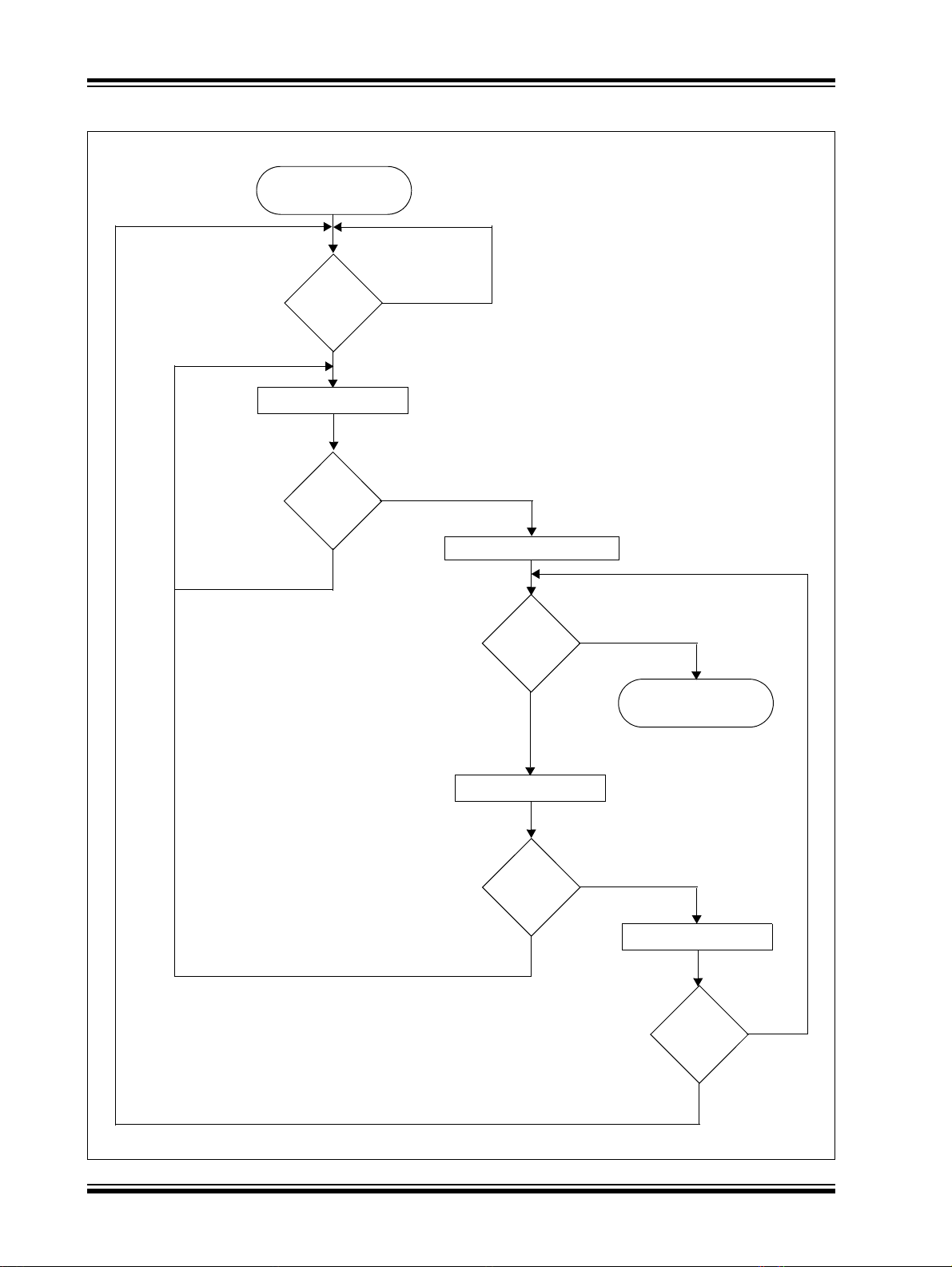
图 2-4:主机UART CTS 流控制流程图
IR 流开始
CTS 低电平?
Y
发送字节
CTS 低电平?
Y
N
N
CNTR = 6
DTR 低电平?
Y
N
IR 链路断开
发送字节
CTS 低电平?
DS21790A_CN 第 10 页 初稿 2005 Microchip Technology Inc.
N
Y
CNTR = CNTR - 1
CNTR = 0?
Y
N
Page 11
MCP2140
2.5 编码器 / 解码器
编码器将 UART 格式数据转化为 IrDA 标准格式数据,
解码器将 IrDA 标准格式数据转化为 UART 格式数据。
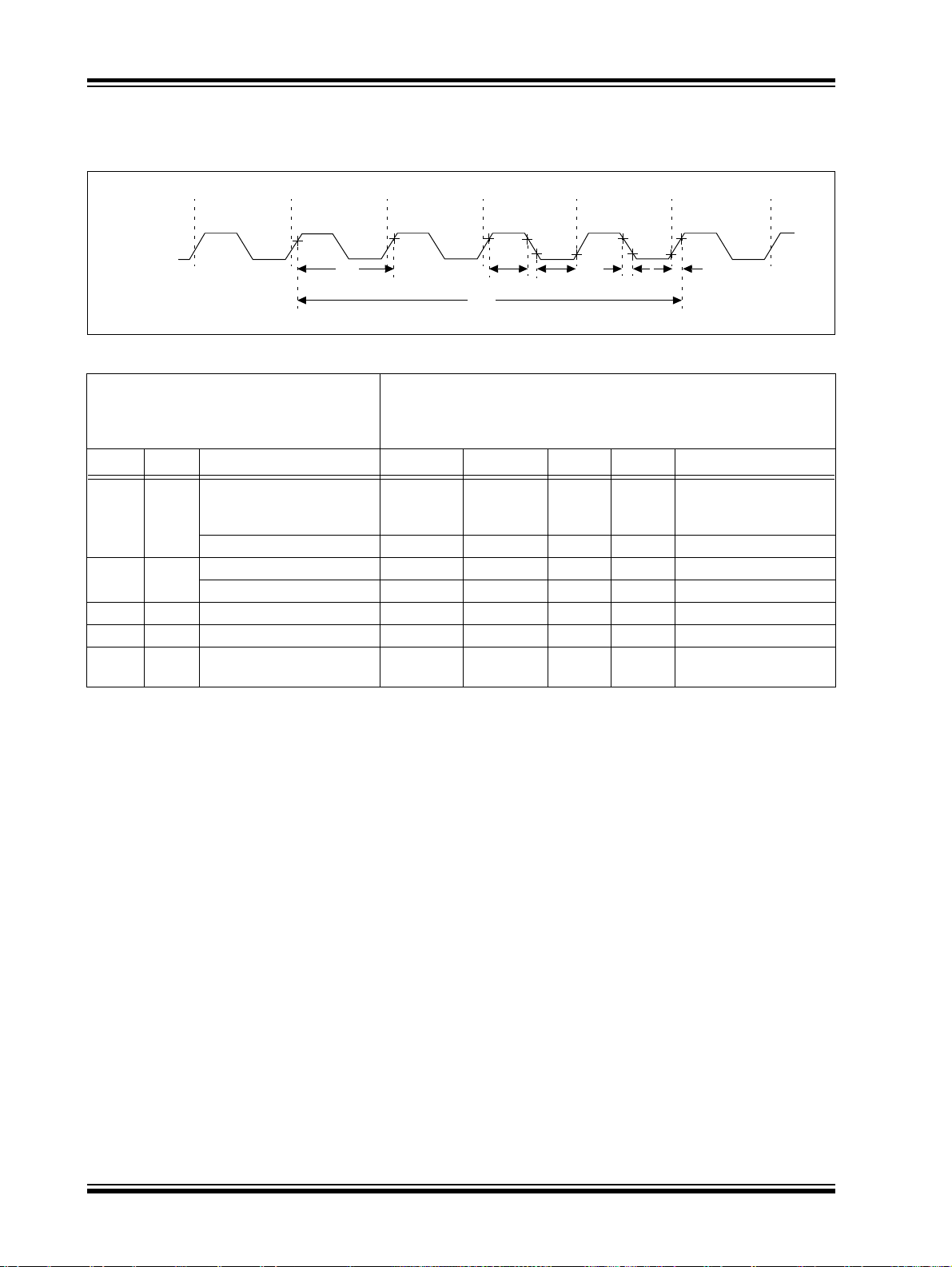
2.5.1 编码器 (调制)
MCP2140 的 UART 接收到的 (在 TX 引脚上)要被发
送的 (在 TXIR 引脚上)数据需要被调制。此调制信号
驱动 IR 收发器模块。图
注: 如图 2-5 所示,TXIR 引脚上的信号实际上
并不与TX引脚上发送的位值在时间上排列
相同。显示的 TX 位的值表示要被传送到
TXIR 引脚的值。
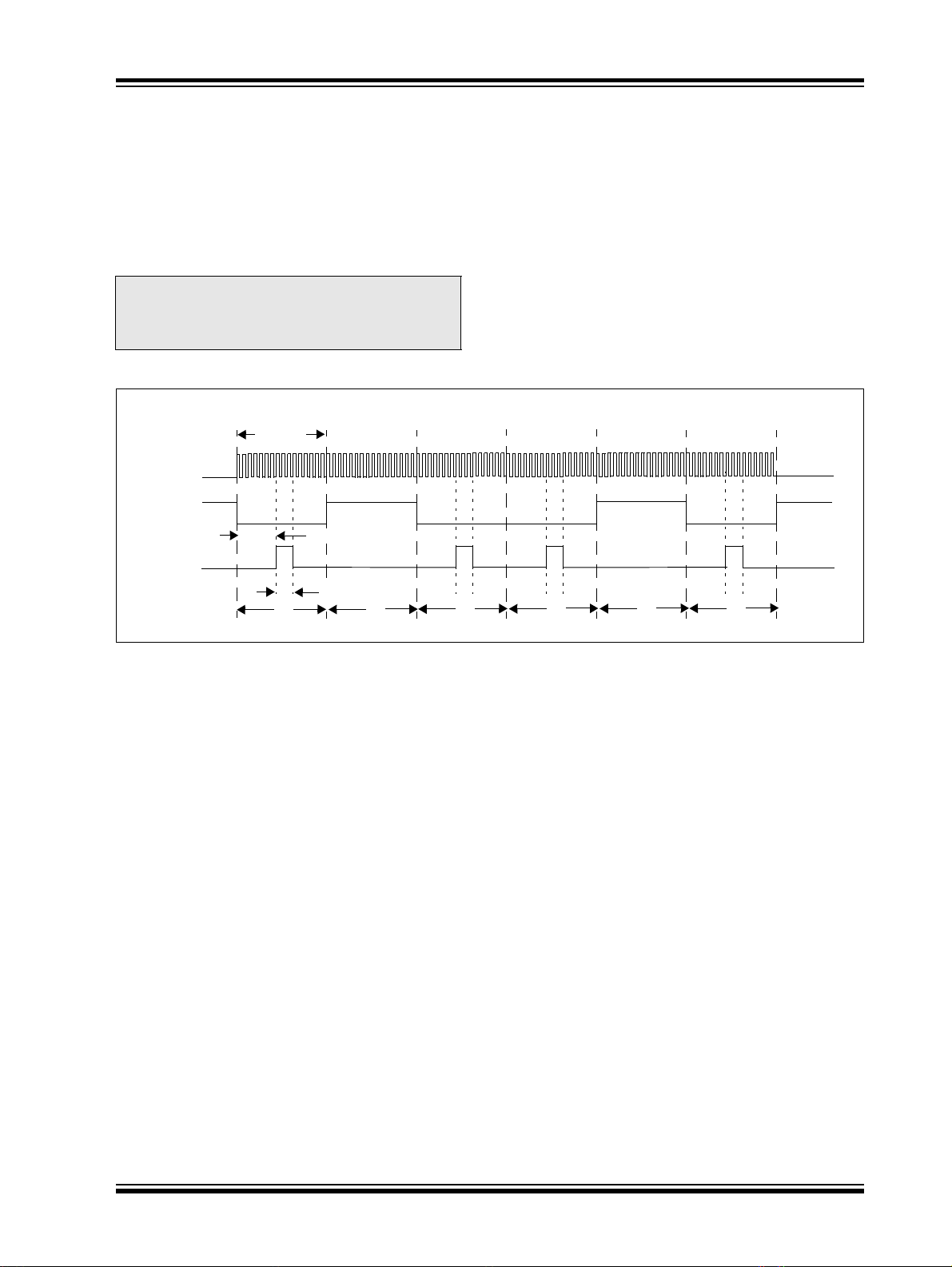
图 2-5:编码
BITCLK
TX 位
的值
TXIR
2-5 为调制信号的编码。
启动位 数据 bit 0 数据 bit 1 数据 bit 2 数据 bit ...
16 CLK
7 CLK
每个位时间由 16 个位时钟组成。如果要发送的值 (由
TX 引脚决定)为逻辑低电平,TXIR 引脚将输出 7 个位
时钟周期的低电平, 3 个位时钟周期的逻辑高电平或最
少 1.6 µs (见参数 IR121)。其余 6 个位时钟周期将为
低电平。如果要发送的值为逻辑高电平, TXIR 引脚将
在整个 16 个位时钟周期内输出低电平。
24 Tosc
0100 01
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 11 页
Page 12
MCP2140
2.5.2 解码器 (解调)
来自 IR 收发器模块(在 RXIR 引脚上)的调制信号(数
据)需要被解调以形成接收数据 (在 RX 引脚上)。一
旦发生了数据字节的解调,接收数据就由 MCP2140
UART 发送(在 RX
调。
注: 如图 2-6 所示,RX 引脚上的信号实际上并
不与 RXIR 引脚接收的值在时间上排列相
同。显示的 RXIR位的值表示是要被传送到
RX 引脚的值。
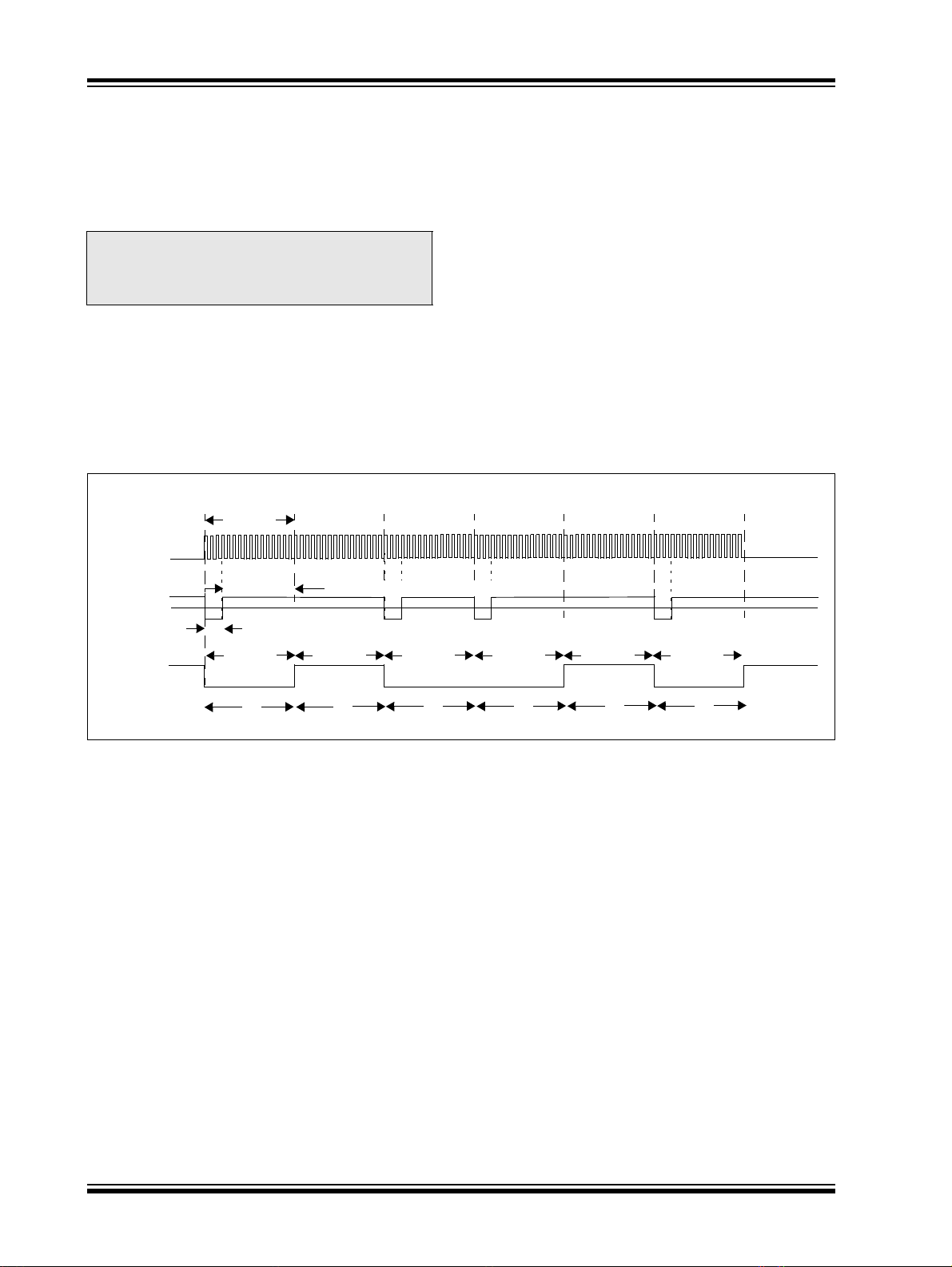
每个位时间由 16 个位时钟组成。如果要接收的值为逻
辑低电平, RXIR 引脚将先输出 3 个位时钟周期或最少
1.6
µs 的低电平。其余 13 个位时钟周期(或最多 16 个
位时钟周期)将为高电平。如果被接收的值为逻辑高电
平, RXIR 引脚将在整个 16 个位时钟周期内输出高电
平。RX 引脚上的电平在整个 16 个位时钟周期内为相应
状态。
引脚上)。图 2-6 为调制信号的解
图 2-6:解码
启动位 数据 bit 0 数据 bit 1 数据 bit 2 数据 bit ...
16 CLK
BITCLK
(CLK)
RXIR 位的值
RXPD
RXPDREF
≥ 1.6 µs(最多 3 个 CLK)
≥ 13 CLK
2.6 IR 端口波特率
MCP2140 的 IR 端口 (TXIR 和 RXIR 引脚)的波特率
为固定的默认速率 9600 bps。在 NDM 期间,主设备将
会收到此参数。主机 UART 波特率和 IR 端口波特率相
同。
RX
16 CLK 16 CLK 16 CLK 16 CLK 16 CLK 16 CLK
0100 01
DS21790A_CN 第 12 页 初稿 2005 Microchip Technology Inc.
Page 13
MCP2140
2.7 MCP2140 支持的 IrDA 数据协议
MCP2140 支持必需的 IrDA 标准协议如下:
• 物理信令层 (PHY)
• 链路访问协议 (IrLAP)
• 链路管理协议 / 信息访问服务 (IrLMP/IAS)
MCP2140 也支持一些可选的 IrDA 标准数据协议。
MCP2140 实现的可选协议为:
• Tiny TP
• IrCOMM
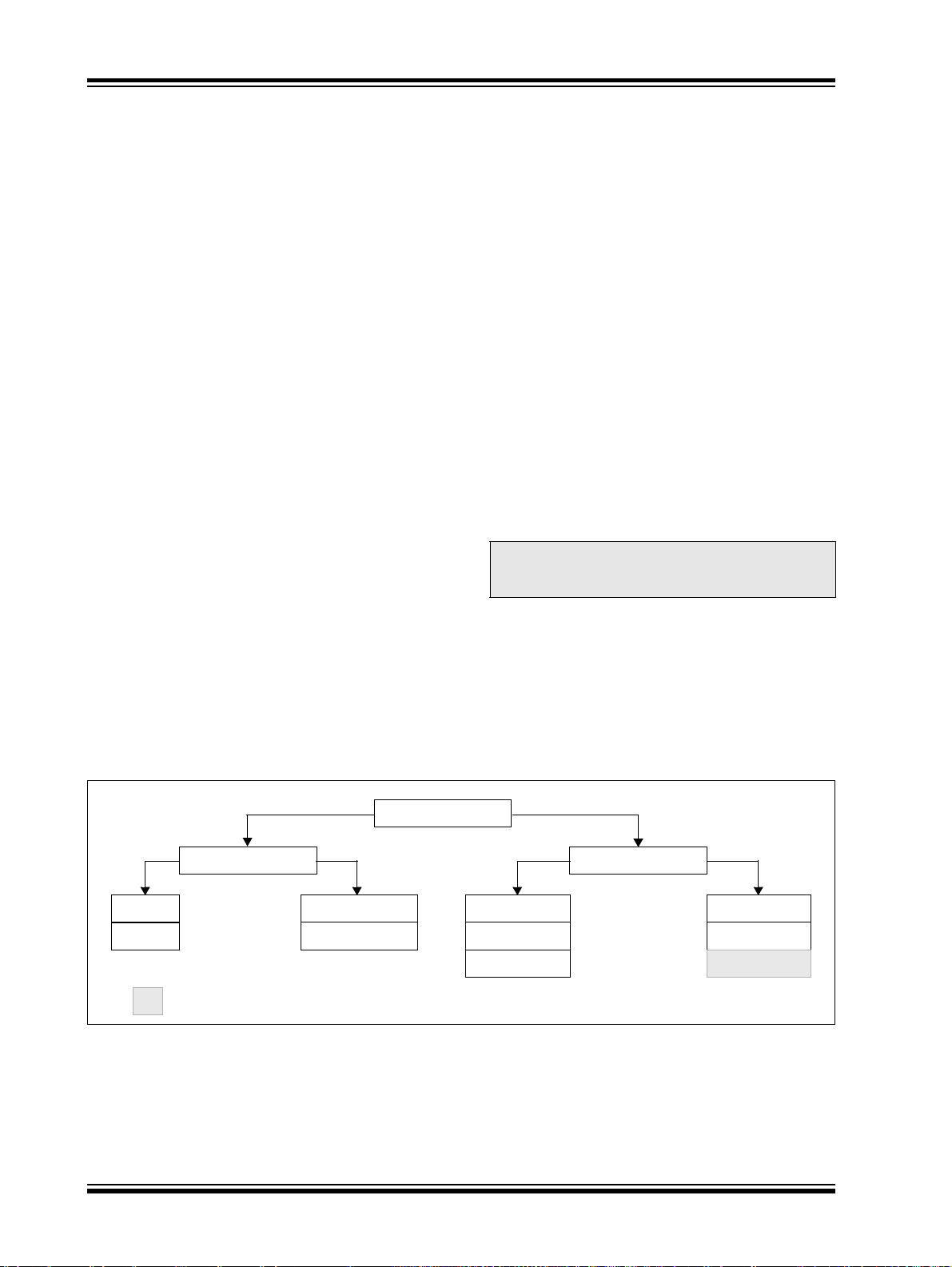
图 2-7 为 IrDA 数据协议栈和 MCP2140 实现的元件。
图 2-7: IrDA 数据——协议栈
IrTran-P IrObex IrLan IrMC
LM-IAS
异步
串行 IR
(9600 -115200 bps)
小型传送协议(Tiny TP)
IR 链路管理——复用(IrLMP)
IR 链路访问协议(IrLAP)
(2, 3)
(1.152 Mbps)
IrComm
同步
串行 IR
(1)
同步
4 PPM
(4Mbps)
2.7.1 IRCOMM
IrCOMM 提供支持串行和并行端口仿真的方法。这在原
有COM应用中是很有用的,例如打印机和调制解调器。
IrCOMM 标准是一种语法,允许主设备将从设备当作一
个串行设备。 IrCOMM 允许模拟各种性能的串行或并行
(打印机)连接。MCP2140支持IrCOMM 9线“Cooked”
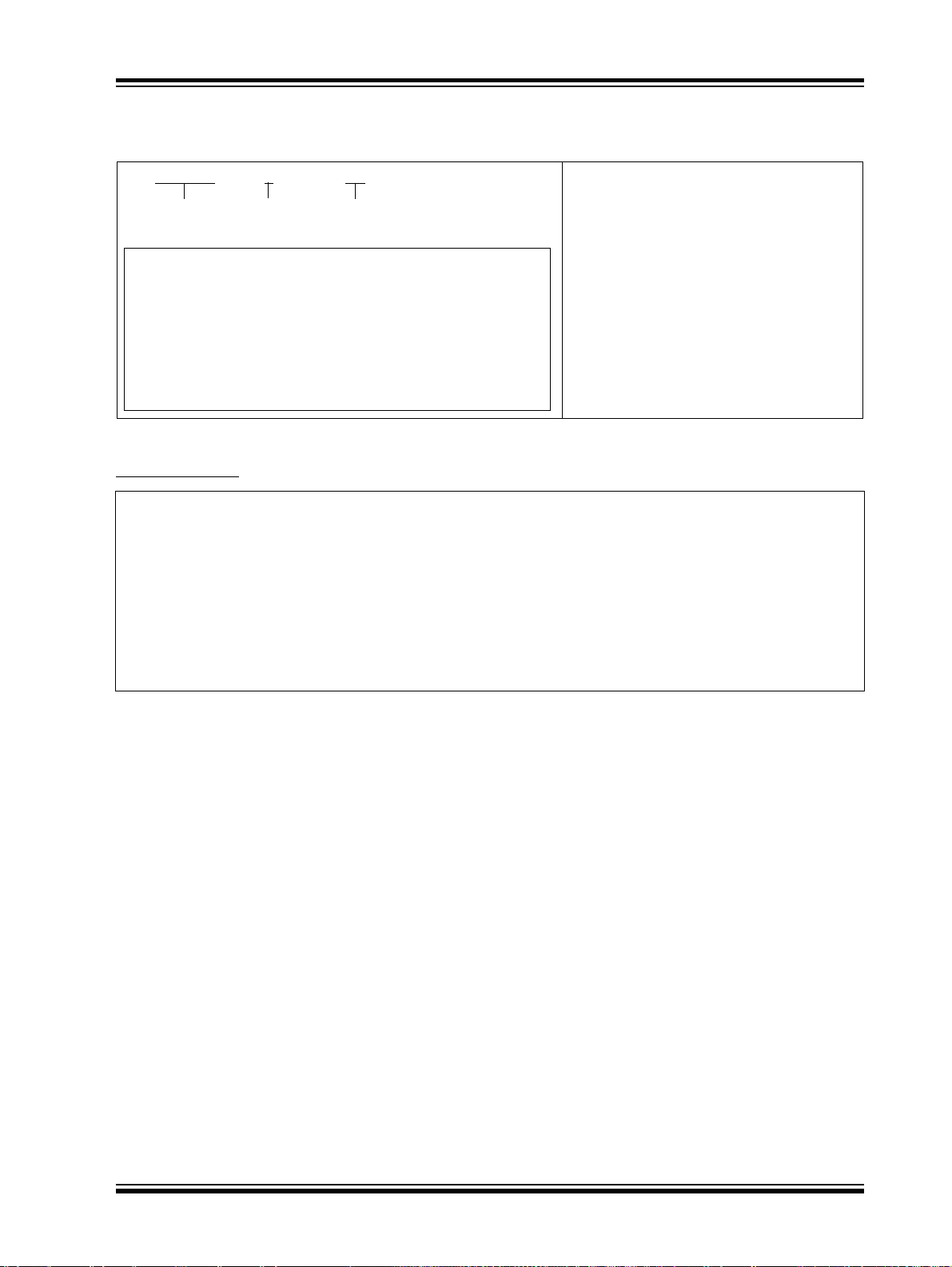
的服务级别。IrCOMM 支持的其他服务级别如图
示。
IrDA 协议的打印机支持不包括在 IrCOMM 9 线的
“Cooked”服务级别内。
2-8 所
MCP2140 支持
注 1: MCP2140 实现了 9 线“Cooked”的
服务级别虽连续复制。
2: MCP2140 为固定 9600 波特率。
3: 要求有一个光收发器。
MCP2140 不支持的
可选 IrDA 数据协议
图 2-8: IRCOMM 服务级别
Uncooked 的服务 Cooked 的服务
并行 串行
IrLPT
MCP2140 支持
Uncooked 的 3 线
IrCOMM 服务
并行
Centronics
IEEE 1284
串行
Cooked 的 3 线
Cooked 的 9 线
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 13 页
Page 14
MCP2140
2.8 最小化功耗
在主设备与 MCP2140 进行 IR 通信期间,MCP2140 处
于工作模式。在此模式下, MCP2140 消耗工作电流
(
参数 D010)。
在许多应用中,发生 IR 通信的时间占此应用工作时间的
很小一部分。在这段时间内,若 IR 控制器能降低功耗将
节省应用的功耗。一旦 IR 活动停止,MCP2140 就将自
动进入低功率模式,并当 RXPD 和 RXPDREF 引脚上
检测到 IR 活动时返回工作模式。
另一种降低系统功耗的方法是使用主机控制器的 I/O 引
脚来提供 IR 电路的电源。
2.8.1 自动低功耗模式
自动低功耗模式允许系统达到尽可能低的工作电流。
当 IR 链路“关闭”时,协议处理器状态机返回正常断
开模式(NDM)。 在 NDM 期间,如果在约 10 秒内没
有 IR 活动,器件将被禁止并进入低功耗模式。在此模
式下,器件振荡器关断并且 PHAC 引脚将为低电平
(参数 D010A)。
表 2-3 显示了 MCP2140 电流。它们由参数 D010 和
参数 D010A 规定。
表 2-3: 器件的最大工作电流
模式 电流 说明
PHACT = H 2.2 mA 发生 IR 通信。
PHACT = L 60 µA 未发生 IR 通信。
注: 其他系统电流来自接收器 / 发送器电路。
2.8.2 返回器件工作状态
当 RXPD引脚电压超过 REPDREF引脚的参考电压时,
器件将退出低功耗模式。
器件复位也将导致 MCP2140 退出低功率模式。器件初
始化后,如果在约 10 秒内没有 IR 活动,器件将被禁止
并返回低功耗模式。
注: 为使器件正常工作,器件振荡器必须在振
荡器规范中由参数 IR140 规定的时间范围
内。
2.9 PHACT 信号
PHACT 信号指示 MCP2140协议处理器处于激活状态。
此引脚为集电极开路输出,因而当连到主机控制器时,
需要串接一个上拉电阻。
DS21790A_CN 第 14 页 初稿 2005 Microchip Technology Inc.
Page 15
MCP2140
2.10 缓冲器及其流量
MCP2140 的 IR 数据速率固定为 9.6 kbps。由于一些因
素影响,实际流量(Throughput)可能小一些。一些最
重要的因素由开发人员掌握。而一个设计人员无法控制
的因素是与IrDA标准有关的开销。流量示例如表
示。
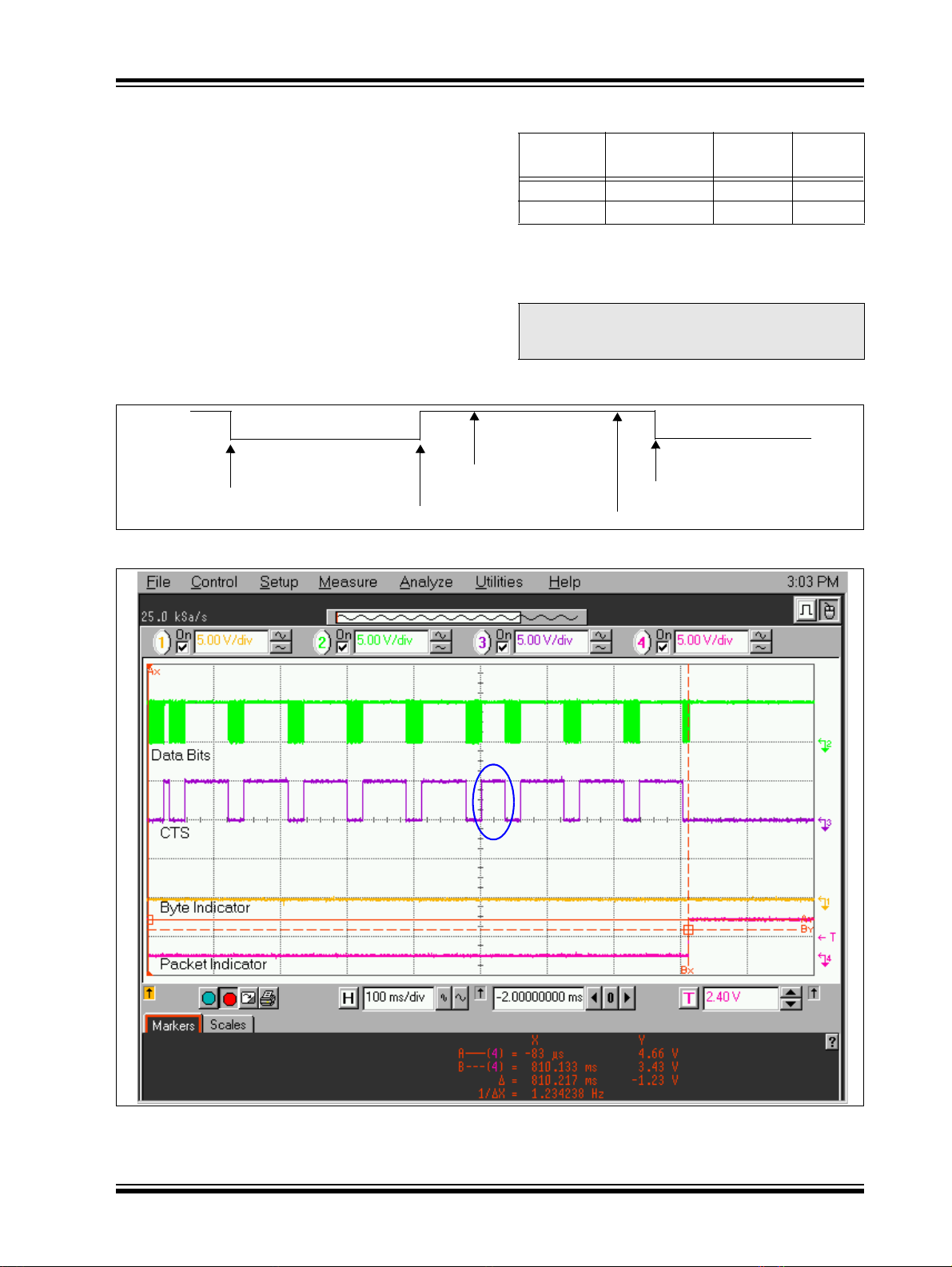
图 2-9 显示了CTS波形和缓冲器可能出现的状态以及主
机 UART 和 IR 接口的操作。
图 2-10显示了主机控制器传送240字节的屏幕捕捉图。
在 CTS 为高电平后不传送数据 (因而最多只利用了 29
字节缓冲器中的 23 个字节)。在各个数据包之间,CTS
时间可能有所变化,这取决于主设备 (见
圈内的 CTS 脉冲)。
2-4所
图 2-10 中蓝
表 2-4:流量
传送的
字节数
注 1: 由图 2-10 测得。
注: IrDA 的流量由许多与主设备和从设备的特
图 2-9:主机UART 接收缓冲器和 CTS 波形
CTS
接收缓冲器空
MCP2140 可以接收数据
接收缓冲器有 22 字节,
CTS 引脚拉高
接收缓冲器满
(29 字节)
图 2-10: 主机控制器发送一个 240 字节的数据包
(3)
240 23 (最大)
240 29 0.6500 3692
2: 由图 2-10 内插值得到。
3: 每个字节传送 10 位。
字节 /
CTS 低电平
性有关的因素决定。这些特性可导致流量
大于或小于表 2-4 所列的值。
IR 数据包发送
接收缓冲器空
MCP2140 可以接收数据
IR 数据包开始发送
时间 (S)
(1)
0.810133 2962
有效
波特率
(1)
(2)
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 15 页
Page 16
MCP2140
2.10.1 提高流量
实际最大流量由几种因素决定,包括:
• 主设备的特性
• MCP2140 的特性
• IrDA 标准协议开销
IrDA 标准规定了数据在主设备与从设备之间如何传递。
在 IrCOMM 中,每个数据包传送时协议使用额外的 8 个
字节。
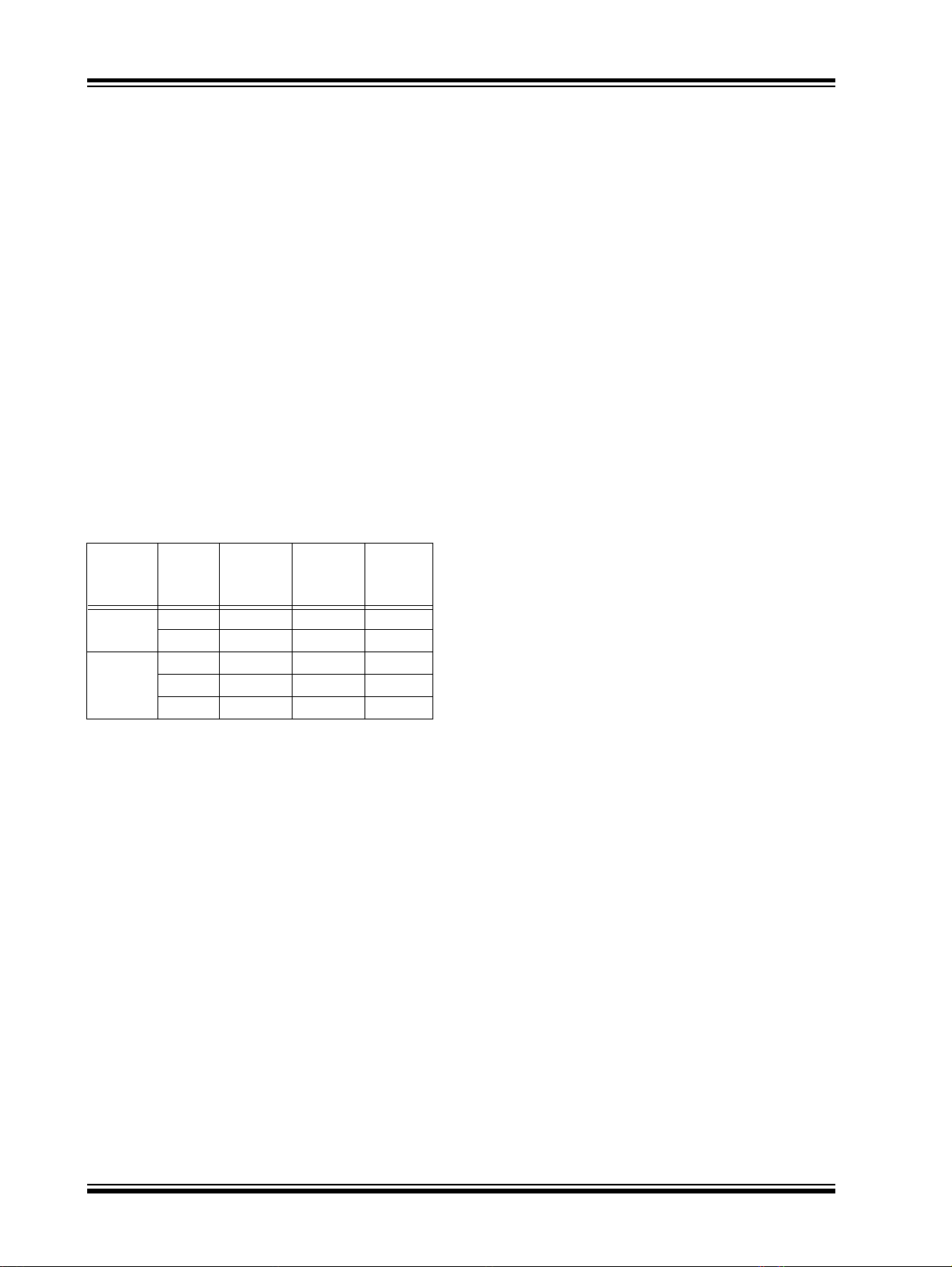
数据流量的最重要因素是数据帧的填充度如何。如果一
次仅发送 1 个字节, IrCOMM 协议的流量开销为 89%
表 2-5)。提高流量的最佳方法是根据 MCP2140 接
(见
收缓冲器(IR 和主机 UART)数据包的大小排列数据。
数据包被接收和发送之间有一个延时。此延时的示例请
图 2-10(CTS 信号下降沿)。在此屏幕捕捉图中,
参见
Palm™ m105 正在从 MCP2140 接收一个 240 字节的
数据串。当 CTS 信号拉高时,主机控制器停止发送数
据 (每个 CTS 低电平时间 23 字节)。 CTS 下降沿到
CTS 下降沿的时间约为 90
电平时间影响总的数据流量。CTS 高电平时间由主设备
的特性决定。
ms (典型值)。此 CTS 高
表 2-5: IRCOMM 开销 %
数据包
MCP2140
IR 接收 64 8 11 %
主机
UART
接收
注 1: 开销% = 开销/(开销 + 数据)。
大小
(字节)
29 8 22 %
23 8 26 %
2: IR 接收缓冲器的最大字节数。
3: 主机 UART 接收缓冲器的最大字节数。
4: 在 23 字节时, CTS 信号拉为高电平。
IrCOMM
开销
(字节)
1 8 89 %
1 8 89 %
IrCOMM
开销
(1)
%
注释
注 2
注 3
注 4
2.10.1.1 从主设备的角度
MCP2140 使用一个固定的 64 字节 IR 接收器数据块。
主设备可响应的最小帧大小为 6 个字节。
2.10.1.2 从 MCP2140 的角度
MCP2140 使用固定 29 字节的主机 UART 接收器数据
块。
2.11 转换反应时间
IR 链路可比作单线数据连接。IR 收发器可发送或接收,
但两者不能同时进行。建议在一个字节接收和另一个字
节发送之间插入一位的延时。
2.12 器件 ID
MCP2140 具有固定的器件 ID。此器件 ID为“MCP2140
xx”,其中 xx 为器件的硅片版本。
DS21790A_CN 第 16 页 初稿 2005 Microchip Technology Inc.
Page 17
MCP2140
2.13 光接口
MCP2140 需要红外收发器作为光接口。此收发器可以
是单芯片解决方案 (集成的),也可由分立器件实现。
2.13.1 分立式收发器解决方案
MCP2140 设计使用分立元件实现,具有最低的系统功
耗以及较低的成本。
图 2-12 显示了典型的分立式光收发器电路。
图 2-11: 分立式光收发器电路
此图将在
更多信息请通过电子邮件联系
(
tech.support@microchip.com
由于检测到的信号很小以及信号对噪声的敏感度,因而
应谨慎设计光检测电路中及其布局。
MCP2140
数据手册的B版本中提供。
Microchip
工厂
)。
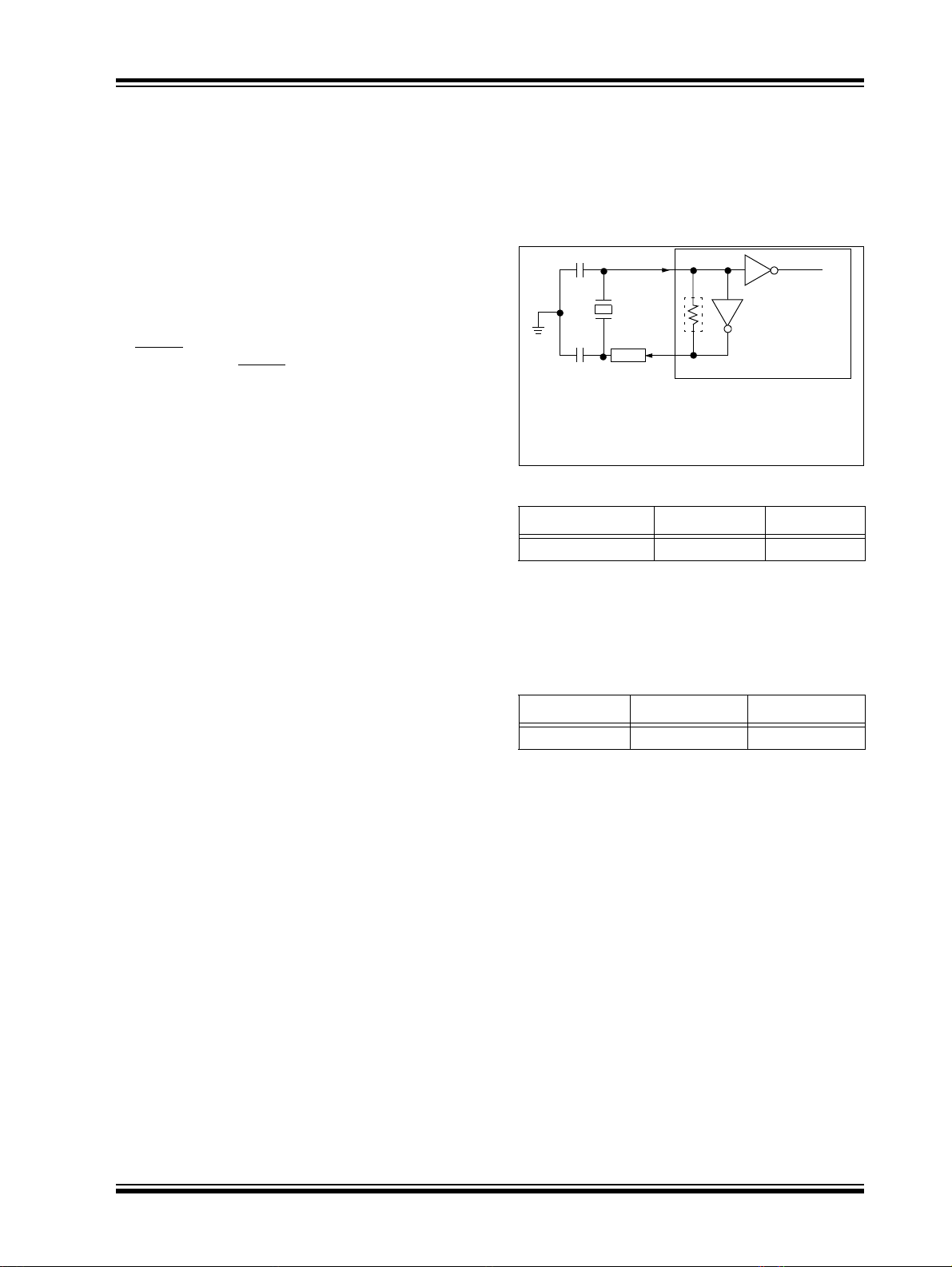
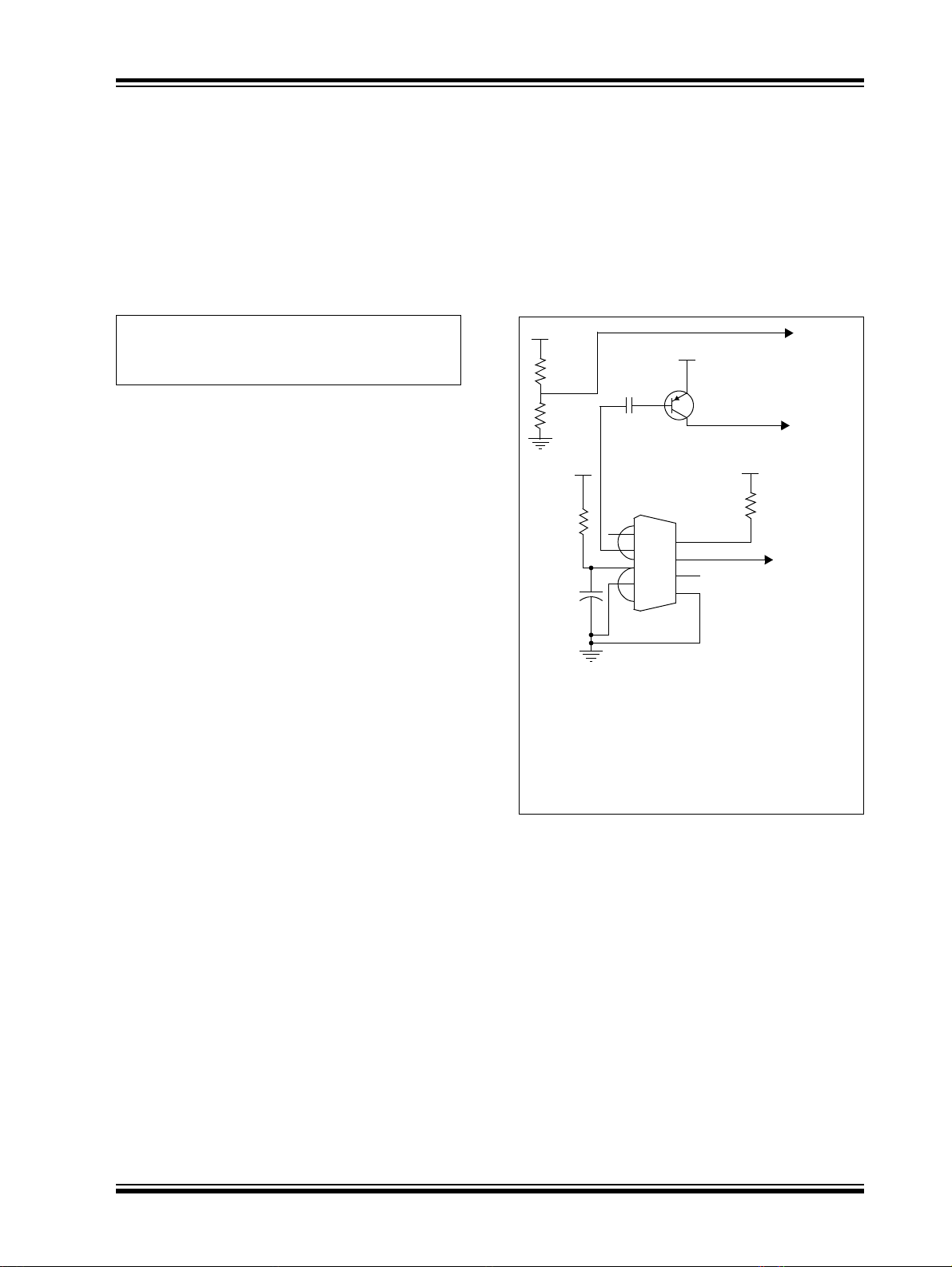
2.13.2 集成收发器
MCP2140 设计用于使用分离元件实现,具有最低的系
统功耗以及较低的成本 (见 2.13.1 节 “分立式收发器
解决方案”)。增加四个元件,还可使用一个集成的光收
发器解决方案。需要其中的两个元件调理输入信号,以
确保 RXIR 脉冲宽度不大于 1.5 µs (见参数 IR131A)。
另外两个元件用来设置 RXIR 信号跳变点 (典型值为
VDD/2)。 图 2-12 为 MCP2140 光收发器电路示例,电
路中使用 Vishay®/Temic TFDS4500。
图 2-12: 集成的光收发器电路
+5 V
R14
10 kΩ
R15
10 kΩ
+5 V
R13
47Ω
C18
0.1 µF
(2)
(2)
(1)
C19
68 pF
U6
1
2
3
4
TFDS4500
+5 V
(连到 MCP2140 引脚 1)
Q1
MUN211T1
(连到 MCP2140 引脚 18)
8
7
6
(连到 MCP2140 引脚 2)
5
(1)
R11
22Ω
RXPDREF
RXPD
+5 V
TXIR
注 1: 这些元件用于控制 TFDS4500 RXD 输出
信号的脉宽。 Q1 为数字式晶体管,它包
括偏置电阻。
2: 这些元件用于设置参考电压,RXPD 信号
须高于此参考电压以 “检测”一个位。
表 2-6 为常用的集成光收发器的厂商列表。
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 17 页
Page 18
MCP2140
2.14 MCP2140 的连接方式
当实现 IrDA 标准的两个设备使用 IrCOMM 协议建立连
接时,这个过程与使用一根电缆连接两个带串行接口的
设备相似。这被称为 “点对点”连接。由于 IR 收发器
无法同时发送和接收,因此连接限制为半双工工作。
IrDA标准协议的目的在于使这种半双工连接尽可能地仿
真全双工连接。一般来说,这是通过将数据分为 “数据
包”(即几组数据)完成的。需要时,可以将这些数据
包来回发送,而不会有冲突的风险。这些数据包何时及
如何发送的规则组成了 IrDA 标准协议。MCP2140 支持
此 IrDA 标准协议的基本原理,以与其他 IrDA 标准兼容
设备信。
使用导线连接时,已假设连线两端有相同的通信参数和
特性。用导线连接无须识别另一个连接器,因为假设连
接器已适当地连接。连接过程根据 IrDA 标准进行了定
义,以识别其他 IrDA 标准兼容设备并建立一个通信链
路。这两个设备经过以下三个步骤完成连接:
• 正常断开模式 (NDM)
• 搜索模式
• 正常连接模式 (NCM)
图 2-13 为连接顺序。
2.14.1 正常断开模式 (NDM)
当两个 IrDA 标准兼容的设备进入通信范围以内时,它们
必须首先互相识别。这个过程基于一个设备要完成某种
任务而另一个设备具备完成该任务所需的资源。其中一
个称为主设备而另一个称为从设备。区分主设备和从设
备是很重要的,因为主设备负责提供识别其他设备的机
制。因此,主设备必须首先查询邻近的 IrDA 标准兼容设
备,查询期间,两个设备使用的默认波特率均为
9600
bps。
例如,如果您想从装有 IrDA 的笔记本电脑打印到装有
IrDA 的打印机,利用 IrDA 标准特性,您首先应将笔记
本电脑拿到打印机的通信范围内。在这种情况下,笔记
本电脑是要完成任务的一方而打印机是具备资源的一
方。这样,笔记本电脑即为主设备而打印机为从设备。
有些能传送数据的蜂窝电话具备 IrDA 标准的红外端口。
如果您将此蜂窝电话与个人数字助理(Personal Digital
Assistant,PDA)配合使用,支持 IrDA 标准特性的 PDA
就是主设备而蜂窝电话就是从设备。
当主设备查询另一个设备时,邻近的从设备可作出响
应。当从设备响应时,这两个设备定义为处于正常断开
模式状态(NDM)。主设备广播数据包并等待响应,这
样就建立了 NDM。广播的数据包被编号。通常发送 6 或
8 个数据包。第一个数据包编号为 0,最后一个数据包
通常编号为 5 或 7。一旦所有数据包发送结束,主设备
就发送一个 ID 包,此 ID 包不编号。
从设备等待这些数据包然后对其中之一作出响应。数据
包作出响应以决定供从设备使用的“时隙
(Timeslot)”。例如,如果从设备在数据包 2 之后响应,
从设备将使用时隙 2。如果从设备在数据包 0之后响应,
从设备将使用时隙 0。根据此机制,周围有多少个时隙,
主设备就能够识别多少个设备。主设备将持续产生时隙
而从设备将持续响应,即使没有任务需要完成。
注 1: MCP2140 只能用于实现从设备。
2: MCP2140支持系统中仅有一个从设备,且
此从设备独占 IrDA 标准红外链路的使用
(称为点对点通信)。
3: MCP2140 总是响应数据包 0。这意味着
MCP2140 将总是使用时隙 0。
4: 如果附近有另一个从设备,主设备可能不
能识别MCP2140,或者两个设备都不能识
别。
在 NDM期间,MCP2140 处理所有向主设备作出的响应
(图 2-13),而不与主机控制器进行任何通信。
MCP2140 的 CTS 信号禁止主机控制器向 MCP2140 发
送数据。
DS21790A_CN 第 18 页 初稿 2005 Microchip Technology Inc.
Page 19

MCP2140
2.14.2 搜索模式
搜索模式(Discover Mode)允许主设备决定 MCP2140
(从设备)的能力。一旦 MCP2140 (从设备)向主设
备发送了 XID 响应并且主设备发送完XID和一个广播 ID
就进入搜索模式。如果此序列未完成,主设备和从设备
可无限期处于 NDM 模式。
当主设备有任务时,它启动搜索模式,此模式包括以下
两个部分:
• 链路初始化
• 资源确定
第一步用于使主设备和从设备决定并适应相互的硬件能
力。这些能力为一些参数,如:
• 数据速率
• 转换时间
• 无响应的数据包数目
• 断开前的等待时间
主设备和从设备都以默认的 9600 bps 进行通信。主设
备发送其参数,从设备以自身参数响应。例如,如果主
设备支持高达 115. 2 kbps 的所有数据速率,而从设备仅
支持 9.6 kbps,建立的链路为 9.6 kbps。
注: MCP2140 将数据速率限定为 9.6 kbps。
一旦硬件参数确定,主设备必须判断从设备是否具备有
它需要的资源。如果主设备有一个打印任务,它必须知
道它是否在与打印机而不是调制解调器或其他设备通
信。这种判断是通过信息访问服务(Information Access
Service, IAS)做出的。从设备的工作是响应主设备的
IAS 查询。主设备必须提出一系列问题,如:
• 对方服务的名称?
• 此服务的地址?
• 此设备的能力如何?
当所有主设备的问题都得到回答,主设备就能获得从设
备提供的服务。
在搜索模式中, MCP2140 处理所有向主设备作出的响
应,而不与主机控制器通信 (参见图 2-13)。MCP2140
的 CTS 信号禁止主机控制器向 MCP2140 发送数据。
2.14.3 正常连接模式 (NCM)
搜索模式一旦结束,主设备和 MCP2140 (从设备)就
能自由交换数据。
当 MCP2140 接收缓冲器满时, MCP2140 使用硬件握
手协议阻止本地串行接口发送数据。
注: 如果不遵守硬件握手协议,可导致数据丢
失。
主设备和 MCP2140 (从设备)都要检查以保证数据包
被对方接收无误。即使无需发送数据,主设备和从设备
仍然交换数据包以确保连接没有意外断开。当主设备通
信结 束时,它向 MCP2140 (从设备)发送 “断 开链
路”命令。 MCP2140 将确认 “断开链路”命令,并且
主设备和 MCP2140(从设备)都将回到 NDM 状态。
注: 如果 NCM 模式是由于某种原因意外终止
(包括主设备没有发出断开链路命令) ,
MCP2140 将在接收了最后一桢后约 10 秒
回到 NDM 状态。
主机控制器程序负责理解收到数据的含义以及程序应如
何响应它。这就像主机控制器从 UART 接收数据一样。
2.14.3.1 主设备通知
MCP2140 让主设备将自已识别为一个调制解调器。
注: MCP2140 让主设备将自已识别为一个调
制解调器,以保证它被识别为一个带有有
限存储器的串行设备。
但 MCP2140 并不是调制解调器,并且非数据电路并不
以调制解调器的形式处理。
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 19 页
Page 20

MCP2140
图 2-13:高层MCP2140 连接顺序
主设备 MCP2140
正常断开模式(NDM)
(从设备)
搜索模式
无 IR 活动
(持续 10 秒)
发送 XID 命令
(时隙 n,n+1,...)
(XID 命令之间间隔约 70 ms)
XID 发送完毕
(最大时隙——y 帧)
广播 ID
发送 SNRM 命令
(带参数和连接地址)
打开通道接收 IAS 查询
发送 IAS 查询
PHACT 引脚驱动为低电平
PHACT 引脚驱动为高电平
无响应
XID 在时隙 y 内作出响应
要求此时隙(MCP214X
总是要求时隙 0)
对这些 XID 无响应
对广播 ID 无响应
带有使用连接地址参数的 UA 响应
确认通道打开以接收 IAS
打开通道接收数据
正常响应模式(NRM)
发送数据或状态
发送数据或状态
关断链路
无 IR 活动
(持续 10 秒)
提供 IAS 响应
确认通道打开以接收数据
(MCP2140 DSR 引脚驱动为低电平)
发送数据或状态
发送数据或状态
确定关断
(回到 NDM 状态)
PHACT 引脚驱动为低电平
DS21790A_CN 第 20 页 初稿 2005 Microchip Technology Inc.
Page 21

2.15 参考资料
IrDA 标准可从以下站点下载:
http://www.irda.org/standards/specifications
常用光收发器的厂商如表 2-6 所示。
表 2-6: 常用光收发器厂商
公司名称 公司网站
®
Sharp
Infineon
Agilent
Vishay®/Temic www.vishay.com
Rohm www.rohm.com
®
®
www.sharpsma.com
www.infineon.com
www.agilent.com
MCP2140
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 21 页
Page 22

MCP2140
注:
DS21790A_CN 第 22 页 初稿 2005 Microchip Technology Inc.
Page 23

3.0 开发工具
MCP2140 演示板 / 开发板正在计划中。
欲了解产品供货信息,请访问 Microchip Technology
Inc. 网站 (www.microchip.com)。
MCP2140
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 23 页
Page 24

MCP2140
注:
DS21790A_CN 第 24 页 初稿 2005 Microchip Technology Inc.
Page 25

MCP2140
4.0 电气特性
绝对最大额定值 †
偏置条件下的环境温度 ...........................................................................................................................–40°C 至 +125°C
储存温度.................................................................................................................................................–65°C 至 +150°C
相对于 VSS 的 VDD 电压 .............................................................................................................................-0.3V 至 +7.5V
相对于 VSS 的 RESET 电压.........................................................................................................................-0.3V 至 +14V
相对于 VSS 的所有其他引脚上的电压.........................................................................................–0.3V 至(VDD + 0.3V)
(1)
总功耗
从 VSS 引脚流出的最大电流 ..................................................................................................................................300 mA
流入 VDD 引脚的最大电流 .....................................................................................................................................250 mA
输入钳位电流 IIK (VI < 0 或 VI > VDD)............................................................................................................................ ±20 mA
输出钳位电流 IOK (V0 < 0 或 V0 > VDD)........................................................................................................................±20 mA
任一输出引脚输出的最大灌电流..............................................................................................................................25 mA
任一输出引脚输出的最大拉电流..............................................................................................................................25 mA
†
器件在该规定范围外运行。如果器件长时间在绝对最大额定条件下工作,其稳定性会受到影响。
......................................................................................................................................................................1W
注 1:功耗计算如下:PDIS = VDD x {IDD - ∑ IOH} + ∑ {(VDD-VOH) x IOH} + ∑(VOL x IOL)
注:如果器件运行参数超过上述各项最大值,即可能对器件造成永久破坏。上述数值为运行条件最大值,我们不建议
2005 Microchip Technology Inc. 初稿 DS21790A _CN 第 25 页
Page 26
MCP2140
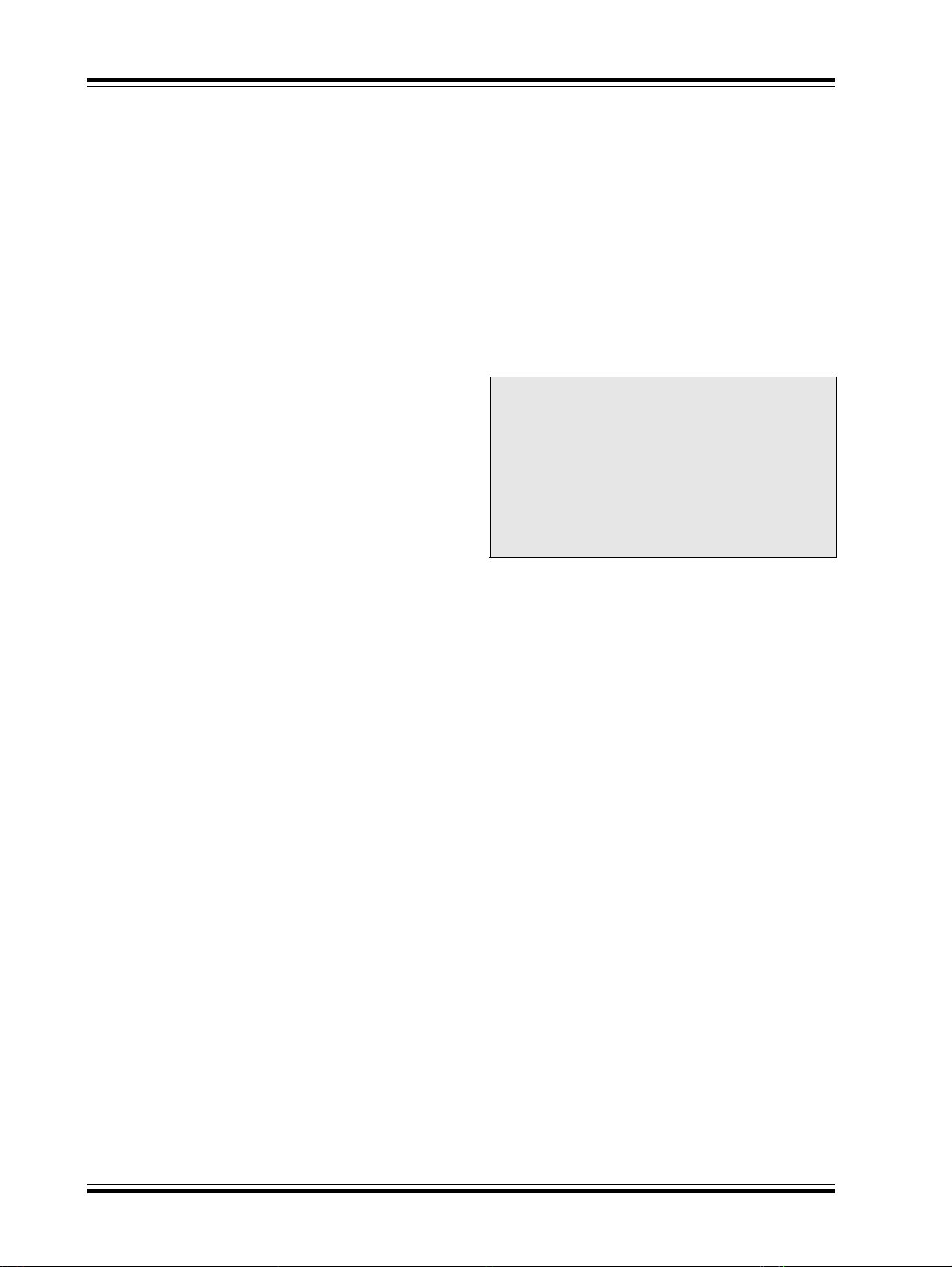
图 4-1: 电压—频率图, -40°C ≤ TA ≤ +85°C
6.0
5.5
5.0
5.0
4.5
VDD
(V)
4.0
3.5
3.0
2.5
0
410
81216
7.3728
频率(MHz)
20
DS21790A_CN 第 26 页 初稿 2005 Microchip Technology Inc.
Page 27
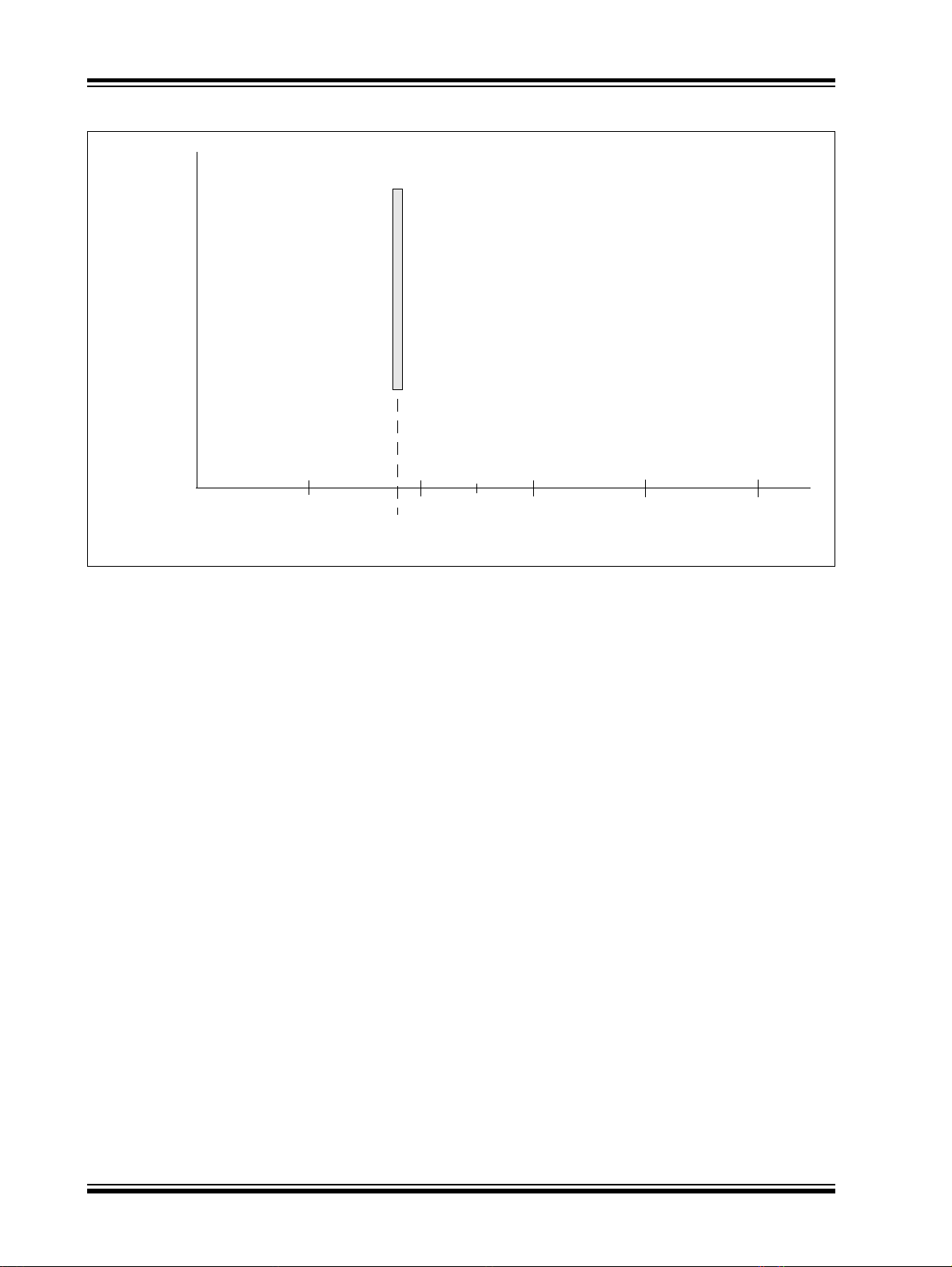
4.1 直流特性
电气特性:
直流规范
参数号 符号 特性 最小值
D001 VDD
D002 VDR RAM 数据保持电压
D003 VPOR 保证上电复位的 VDD 启
D004 SVDD 保证上电复位的 VDD 上
D010
D010A
注 1:“典型值”一列中的数据是在 25°C 时测得的。此数据未经测试,仅供设计参考。
IDD 供电电流
2:这是在不丢失 RAM 数据的前提下 VDD 可降到的极限值。
3:当器件处于 IR 通信时 (PHACT 引脚为高电平),电源电流主要是工作电压和频率的函数。引脚负载、引
脚频率和温度都对电流消耗有影响。所有 IDD 测量值的测试条件是当器件处于:
OSC1 = 外部方波,来自轨到轨;所有输入引脚拉至 VSS, RXIR = VDD, RESET = VDD。
4:当器件处于低功耗模式时(PHACT 引脚为低电平),电流的测量条件是:所有输入引脚连接到 VDD 或 VSS,
且输出引脚驱动到高电平或低电平直至无限阻抗。
供电电压
动电压
升速率
(3, 4)
标准工作条件 (除非另有说明)
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
(1)
典型值
3.0 — 5.5 V 参见 Õº 4-1
(2)
2.0 — — V
— VSS — V
0.05 — — V/ms
—
—
—
25
最大值 单位 条件
2.2
60
器件振荡器 / 时钟停止
mAµAVDD = 3.0V, PHACT = H
VDD = 3.0V, PHACT = L
MCP2140
2005 Microchip Technology Inc. 初稿 DS21790A _CN 第 27 页
Page 28

MCP2140
4.1 直流特性 (续)
直流规范
电气特性:
标准工作条件 (除非另有说明)
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围在 4.1 节直流特性中作了说明。
参数号 符号 特性 最小值
输入低电压
VIL
输入引脚
D030 带有 TTL 缓冲器
D030A VSS — 0.15 VDD V
D032 RESET VSS — 0.2 VDD V
D033 OSC1 VSS — 0.3 VDD V
VIH 输入引脚 —
D040 带有 TTL 缓冲器
D040A 0.25 VDD
D042 RESET 0.8 VDD — VDD V
D043 OSC1 0.7 VDD — VDD V
D060 IIL
D061 RESET — — ±5 µA VSS ≤ VPIN ≤ VDD
D063 OSC1 — — ±5 µA VSS ≤ VPIN ≤ VDD
D080 VOL TXIR, RX, DSR 和 CTS 引脚 — — 0.6 V
D083 OSC2 — — 0.6 V
D090 VOH TXIR、 RX、 DSR 和 CTS 引脚 VDD - 0.7 — — V IOH = -3.0 mA, VDD = 4.5V
D092 OSC2 VDD - 0.7 — — V IOH = -1.3 mA, VDD = 4.5V
D100 COSC2 OSC2 引脚 — — 15 pF 使用外部时钟驱动 OSC1 时
D101 CIO
注 1:RESET 引脚上的泄漏电流主要取决于所施加的输入电压电平。规定电平表示正常工作条件。在输入电压不
同时可能测得更大的泄漏电流。
2:负电流定义为从引脚流出的电流。
(TX、 RI、 DTR、 RTS 和
CD)
输入高电压
(TX、 RI、 DTR、 RTS 和
CD)
输入泄漏电流 (注 1, 2)
输入引脚
输出低电压
输出高电压 (注 2)
输出引脚上的容性负载规范
所有输入或输出引脚
VSS — 0.8V V 4.5V ≤ VDD ≤ 5.5V
2.0 — VDD V 4.5V ≤ VDD ≤ 5.5V
+ 0.8
— — ±1 µA VSS ≤ VPIN ≤ VDD,引脚处
— — 50 pF
典型
最大值 单位 条件
值
— VDD V
否则
否则
于高阻态
IOL = 8.5 mA, VDD = 4.5V
IOL = 1.6 mA, VDD = 4.5V
DS21790A_CN 第 28 页 初稿 2005 Microchip Technology Inc.
Page 29
4.2 时序参数符号和负载条件
时序参数符号按照以下某种格式创建:
4.2.1 时序条件
除非另有说明,表 4-2 中的温度和电压规范适用于所有时序特性。
图 4-2 规定了时序特性的负载条件。
表 4-1:符号
1. TppS2ppS 2. TppS
T
F 频率 T 时间
E 错误
小写字母 (pp)及其含义:
pp
io 输入或输出引脚 osc 振荡器
rx 接收 tx 发送
bitclk RX/TX BITCLK RST 复位
drt 器件复位定时器
大写字母及其含义:
S
F 下降 P 周期
H 高电平 R 上升
I 无效 (高阻态) V 有效
L 低电平 Z 高阻态
MCP2140
表 4-2: 交流温度和电压规范
电气特性:
交流规范
标准工作条件 (除非另有说明):
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围如 4.1 节直流特性中的说明。
图 4-2: 器件时序特性的负载条件
引脚
CL
V
SS
CL = 50 pF(对于除 OSC2 外的所有引脚)
15 pF(对于 OSC2,当使用外部时钟驱动 OSC1 时)
2005 Microchip Technology Inc. 初稿 DS21790A _CN 第 29 页
Page 30
MCP2140
4.3 时序图和规范
图 4-3: 外部时钟时序
OSC1
Q4
Q1 Q2
1
2
Q3 Q4 Q1
33
44
表 4-3: 外部时钟时序要求
电气特性:
交流规范
参数号 符号 特性 最小值
1 TOSC 外部 CLKIN 周期
振荡器周期
1A FOSC 外部 CLKIN 频率
振荡器频率
1B FERR
1C ECLK
4 To sR ,
注 1:“典型值”一列中的数据是在 25°C 时测得的。此数据未经测试,仅供设计参考。
2:所有规定值都来自于标准工作条件下的振荡器特性参数。超过规定的限制值可能导致振荡器工作不稳定和 /
3:对于外部时钟输入,建议占空比不大于 60% (高电平时间 / 低电平时间或低电平时间 / 高电平时间)。
频率误差
外部时钟误差
由 OSC1 提供时钟的
上升或下降时间
To sF
或电流消耗高于期望值。当使用外部时钟输入时,所有器件的 “最大”周期时间是 “直流”(无时钟)。
(2, 3)
(2)
(2, 3)
(2)
标准工作条件 (除非另有说明):
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围在 4.1 节中作了说明。
(1)
典型值
90.422
90.422
90.422 — 90.422 ns
7.3728 7.3728 7.3728 MHz
7.3728 — 7.3728 MHz
— — ± 0.01 %
— — ± 0.01 %
— — 15 ns
—
—
最大值 单位 条件
90.422
—
ns
器件工作
ns
低功耗模式
(PHACT 拉至低电平)
DS21790A_CN 第 30 页 初稿 2005 Microchip Technology Inc.
Page 31
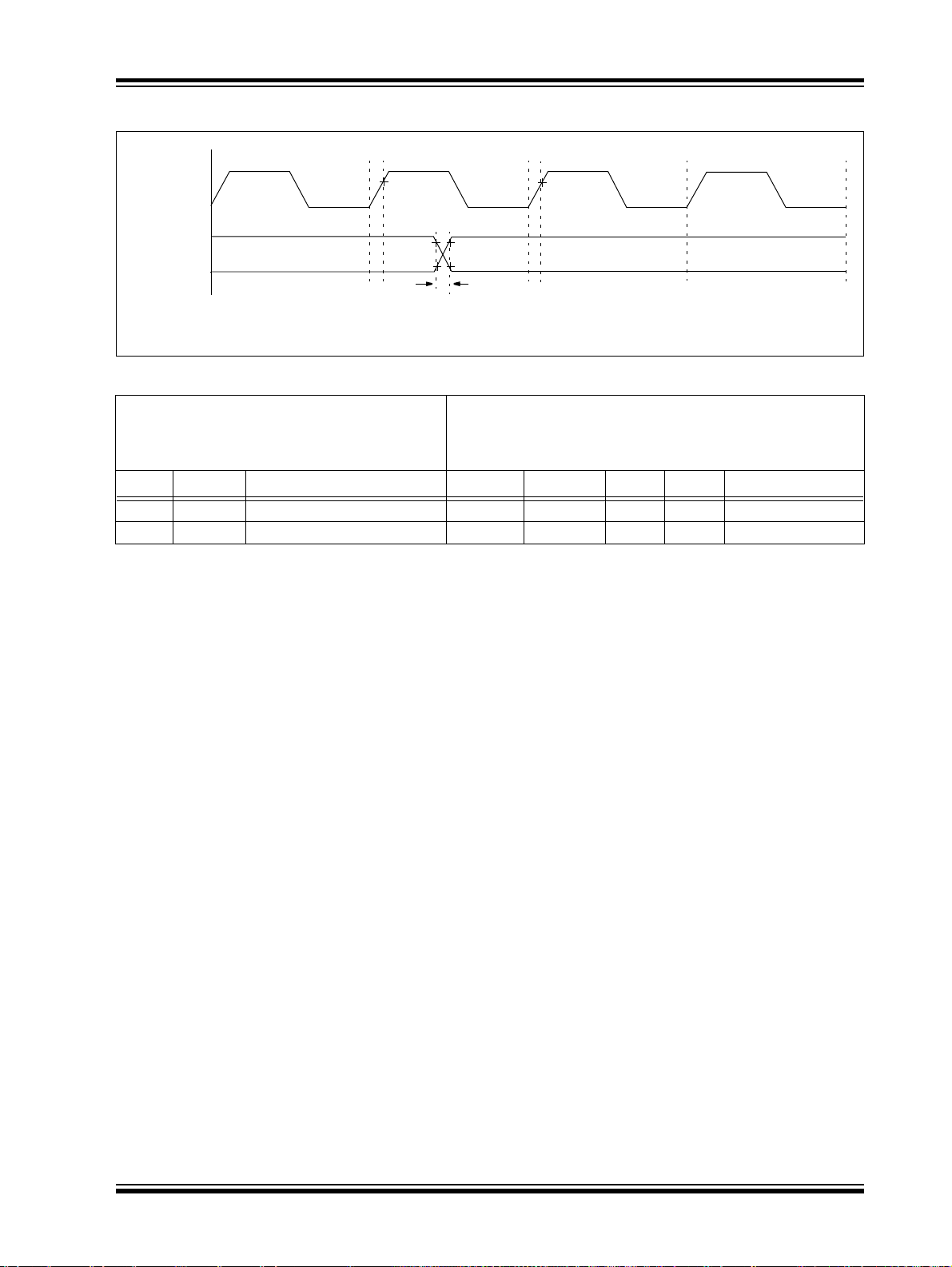
图 4-4: 输出波形
MCP2140
Q4
OSC1
输出引脚
注: 负载条件请参考图 4-2。
旧值
Q1
20,21
表 4-4: 输出时序要求
电气特性:
交流规范
参数号 符号 特性 最小值
20 To R RX 和 TXIR 引脚上升时间
21 To F RX 和 TXIR 引脚下降时间
注 1:除非另有说明,“典型值”一栏中的数据是在 5V 和 25°C 时测得的。
2:负载条件请参考图 4-2。
标准工作条件 (除非另有说明):
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围在 4.1 节中作了说明。
典型值
(2)
(2)
— 10 40 ns
— 10 40 ns
Q2 Q3
(1)
最大值 单位 条件
新值
2005 Microchip Technology Inc. 初稿 DS21790A _CN 第 31 页
Page 32

MCP2140
图 4-5: RESET 和器件复位时序
VDD
RESET
复位
检测
PWRT
超时
OSC
超时
内部
RESET
输出引脚
33
32
34
30
表 4-5: RESET 和器件复位要求
电气特性:
交流规范
参数号 符号 特性 最小值
30 TRSTL
32 TOST
33 TPWRT
34 TIOZ 从 RESET 为低电平或器件复位
注 1:除非另有说明,“典型值”一栏中的数据是在 5V 和 25°C 时测得的。
RESET 脉冲宽度 (低电平)
振荡器起振定时器周期
上电定时器周期
输出高阻抗
标准工作条件 (除非另有说明):
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围在 4.1 节中作了说明。
(1)
典型值
2000 — — ns VDD = 5.0V
1024 — 1024 TOSC
28 72 132 ms VDD = 5.0V
— — 2 µs
34
最大值 单位 条件
DS21790A_CN 第 32 页 初稿 2005 Microchip Technology Inc.
Page 33

MCP2140
图 4-6: UART 异步发送波形
启动位 数据位 数据位 数据位
IR100
TX 引脚
IR103
注: 负载条件请参考图 4-2。
表 4-6: UART 异步发送要求
电气特性:
交流规范
参数号 符号 特性 最小值 典型值 最大值 单位 条件
IR100 TTXBIT
IR101 ETXBIT 发送 (TX 引脚)波特率误差
IR102 ETXIRBIT 发送 (TXIR 引脚)波特率误
IR103 TTXRF TX 引脚上升和下降时间 — — 25 ns
注 1:此误差没有加到参数 IR101 上。
发送波特率
(发送到 MCP2140)
差(从
MCP2140 输出)
标准工作条件 (除另有说明外):
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围在 4.1 节中作了说明。
(1)
IR100 IR100 IR100
IR103
768 — 768 TOSC BAUD2:BAUD0 = 00
— — ±2 %
— — ±1 %
2005 Microchip Technology Inc. 初稿 DS21790A _CN 第 33 页
Page 34

MCP2140
图 4-7: UART 异步接收时序
启动位 数据位 数据位 数据位
IR110
RX 引脚
IR113
注: 负载条件请参考图 4-2。
表 4-7: UART 异步接收要求
交流规范
IR110
IR113
电气特性:
标准工作条件 (除非另有说明):
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围在 4.1 节中作了说明。
IR110 IR110
参数号 符号 特性 最小值 典型值
IR110 TRXBIT
IR111 ERXBIT 接收 (RXPD 和 RXPDREF 引脚检测)波
IR112 ERXBIT 接收 (RX 引脚)波特率误差 (从
IR113 TTXRF RX 引脚上升和下降时间 — — 25 ns
注 1:此误差没有加到参数 IR 111 上。
接收波特率
特率误差 (发送到 MCP2140)
MCP2140 输出)
(1)
768 — 768 TOSC BAUD2:BAUD0 = 00
— — ±1 %
— — ±1 %
最大
单位 条件 参数号
值
DS21790A_CN 第 34 页 初稿 2005 Microchip Technology Inc.
Page 35

图 4-8: TXIR 波形
启动位 数据 bit 7 数据 bit 6 数据 bit 5 数据 bit ...
IR100A
BITCLK
IR122 IR122 IR122 IR122 IR122 IR122
TXIR
IR121
0100 01
表 4-8: TXIR 要求
交流规范
MCP2140
电气特性:
标准工作条件 (除非另有说明):
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围在 4.1 节中作了说明。
参数号 符号 特性 最小值 典型值 最大值 单位 条件
IR100A TTXIRBIT
IR121 TTXIRPW TXIR 脉冲宽度 24 — 24 TOSC
IR122 TTXIRP TXIR 位周期
注 1:TBITCLK = TTXBIT/16。
发送波特率
(1)
768 — 768 TOSC 波特率 = 9600
— 16 — TBITCLK
2005 Microchip Technology Inc. 初稿 DS21790A _CN 第 35 页
Page 36

MCP2140
图 4-9: RXPD/RXPDREF 波形
启动位 数据 bit 7 数据 bit 6 数据 bit 5 数据 bit ...
IR110A
BITCLK
RXPD
RXPDREF
IR131A
IR131B
IRD161
RXPD
RXPDREF
IR131B IR131B
0100 01
启动位 数据 bit 7 数据 bit 6 数据 bit 5 数据 bit ...
IRD160
IRD161
IR131B
IR131B IR131B
RXPD
RXPDREF
IRD160
表 4-9: RXPD/RXPDREF 要求
电气特性:
交流特性
参数号 符号 特性 最小值 典型值 最大值 单位 条件
IR110A TRXPDBIT 接收比特率 768 — 768 TOSC 波特率 = 9600
IR131A TRXPDPW RXPD 脉冲宽度 0.01 — 1.5 µs
IR132 TRXPDP RXPD/RXPDREF 位周期
IRD060 VRXPDD∆ RXPD 和 RXPDREF 之间的静
态电压差
IRD061 VRXPDE IR 脉冲检测电压差 (RXPD 与
RXPDREF 之间的电压差)
IR133 TRESP 响应时间
* 这些参数为特性参数,未经测试。
注 1:TBITCLK = TRXBIT/16。
2:响应时间是在 RXPDREF 为 (VDD - 1.5V)/2 且 RXPD 从 VSS 变为 VDD 时测得的。
(2)
— — 400 * ns
标准工作条件 (除另有说明外):
工作温度:-40°C ≤ TA ≤ +85° (工业级)
VDD 工作电压范围在 4.1 节中作了说明。
(1)
— 16 — TBITCLK
20 — — mV
30 — — mV RXPD 信号必须超过
RXPDREF 信号电平
DS21790A_CN 第 36 页 初稿 2005 Microchip Technology Inc.
Page 37

MCP2140
图 4-10: 低功耗模式波形
OSC1
RXPD
RXPDREF
IR140
表 4-10: 低功耗模式要求
电气特性:
交流规范
参数号 符号 特性 最小值 典型值 最大值 单位 条件
IR140 TRXPD2OSC RXPD 脉冲边沿到器件有效
注 1:波特率为 9600 时,4 ms 为( 11 个字节重复的 SOF 字符的)4 个字节。这使得 MCP2140 可识别一个 SOF
字符并正确接收 IR 包。
振荡器
(1)
标准工作条件 (除非另有说明):
工作温度:-40°C ≤ TA ≤ +85°C (工业级)
VDD 工作电压范围在 4.1 节中作了说明。
— — 4 ms
2005 Microchip Technology Inc. 初稿 DS21790A _CN 第 37 页
Page 38

MCP2140
注:
DS21790A_CN 第 38 页 初稿 2005 Microchip Technology Inc.
Page 39

5.0 直流和交流特性图表
目前没有图表。
MCP2140
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 39 页
Page 40

MCP2140
注:
DS21790A_CN 第 40 页 初稿 2005 Microchip Technology Inc.
Page 41
6.0 封装信息
6.1 封装标识信息
18 引脚 PDIP(300 mil)示例 :
MCP2140
XXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXX
XXXXXYYWWNNN
18 引脚 SOIC(300 mil)示例 :
XXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXX
XXXXXYYWWNNN
20 引脚 SSOP(209 mil,5.30 mm)示例 :
XXXXXXXXXXX
XXXXXXXXXXX
XXXYYWWNNN
XXXXXXXXXXXXXXXXX
XXXXX0352987
XXXXXXXXXXXXXXXXX
XXXXXXXXXXXXXXXXX
XXXXX0352987
MCP2140
I/SS
XXX0352987
MCP2140-I/P
MCP2140-I/SO
图注: XX...X 用户指定信息 *
YY 年份代码 (日历年的后二位数字)
WW 星期代码 (一月一日的星期代码是 “01”)
NNN 以字母数字排序排列的追踪代码
注: Microchip 元器件编号如果无法在同一行内完整标注,将换行标出,因此会限制
客户指定信息的可用字符数。
* 标准的器件标识包括 Microchip 元器件编号、年份代码、星期代码和追踪代码。
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 41 页
Page 42
MCP2140
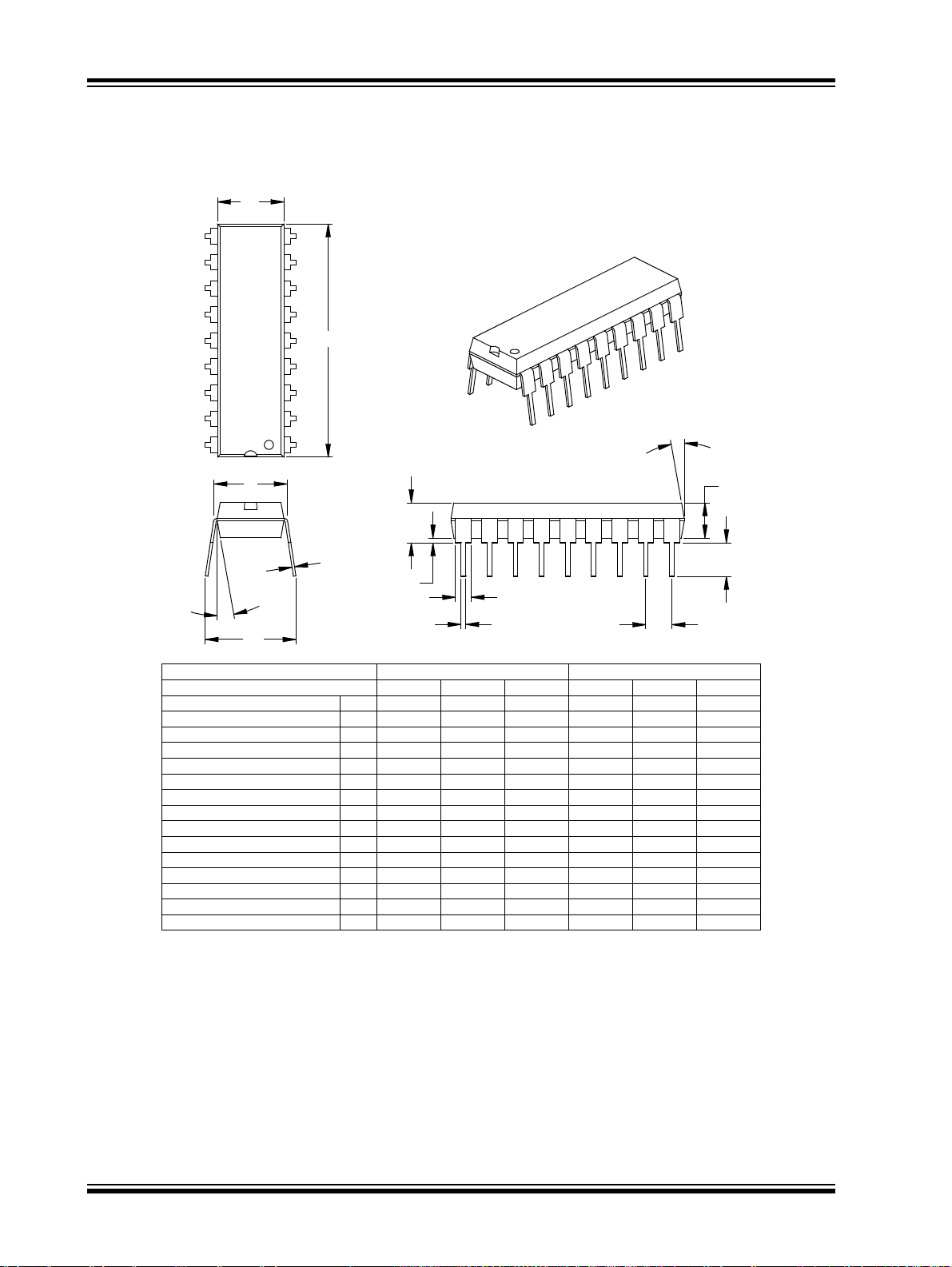
18 引脚双列直插式 (P)—— 300 mil (PDIP)
E1
D
2
n
1
α
E
A
c
A1
β
eB
引脚数
引脚间距
引脚厚度
引脚上部宽度
总排列距离 §
塑模上半部锥度
塑模下半部锥度
* 控制参数
§ 重要特性
注:
尺寸 D 和 E1 不包括塑模毛边或突起。塑模每侧的毛边或突起不得超过 0.010 英寸(0.254 毫米)。
等同于 JEDEC 号:MS-001
图号 C04-007
n
p
c
B1
eB
α
β
B1
B
毫米 英寸 *单位
0.38.015A1塑模低端到固定座高度
A2
L
p
最大正常最小最大正常最小 尺寸范围
1818
2.54.100
4.323.943.56.170.155.140A顶端到固定座高度
3.683.302.92.145.130.115A2塑模封装厚度
8.267.947.62.325.313.300E肩到肩宽度
6.606.356.10.260.250.240E1塑模封装宽度
22.9922.8022.61.905.898.890D总长度
3.433.303.18.135.130.125L引脚尖到固定座高度
0.380.290.20.015.012.008
1.781.461.14.070.058.045
0.560.460.36.022.018.014B引脚下部宽度
10.929.407.87.430.370.310
1510515105
1510515105
DS21790A_CN 第 42 页 初稿 2005 Microchip Technology Inc.
Page 43
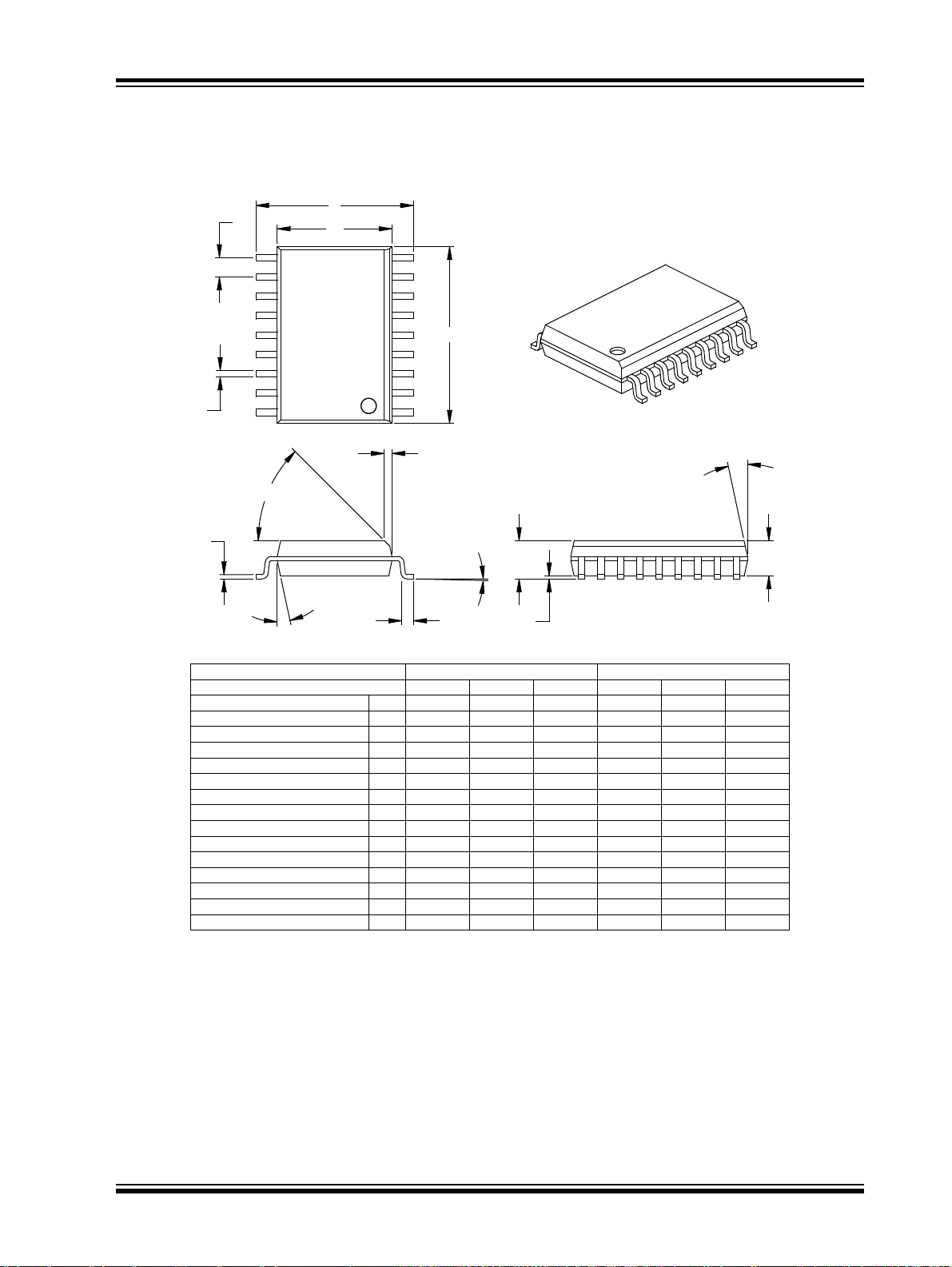
18 引脚塑料小外形封装 (SO)—— 宽型, 300 mil (SOIC)
MCP2140
p
B
n
45°
c
β
E1
E
D
2
1
h
A
φ
L
A1
α
A2
毫米 英寸 *单位
A2
n
p
φ
c
α
β
048048
引脚数
引脚间距
塑模封装厚度
底脚倾斜角
引脚厚度
塑模上半部锥度
塑模下半部锥度
* 控制参数
§ 重要特性
注:
尺寸 D 和 E1 不包括塑模毛边或突起。塑模每侧的毛边或突起不得超过 0.010 英寸(0.254 毫米)。
等同于 JEDEC 号:MS-013
图号 C04-051
最大正常最小最大正常最小 尺寸范围
1818
1.27.050
2.642.502.36.104.099.093A总高度
2.392.312.24.094.091.088
0.300.200.10.012.008.004A1悬空间隙 §
10.6710.3410.01.420.407.394E总宽度
7.597.497.39.299.295.291E1塑模封装宽度
11. 7311. 5311. 33.462.454.446D总长度
0.740.500.25.029.020.010h斜面投影长度
1.270.840.41.050.033.016L底脚长度
0.300.270.23.012.011.009
0.510.420.36.020.017.014B引脚宽度
1512015120
1512015120
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 43 页
Page 44

MCP2140
20 引脚压缩小型封装 (SS) —— 209 mil, 5.30 mm (SSOP)
E
p
E1
D
B
n
c
β
引脚数
引脚间距
塑模封装宽度
底脚厚度
底脚倾斜角
塑模上半部锥度
塑模下半部锥度
* 控制参数
§ 重要特性
注:
尺寸 D 和 E1 不包括塑模毛边或突起。塑模每侧的毛边或突起不得超过 0.010 英寸(0.254 毫米)。
等同于 JEDEC 号:MO-150
图号 C04-072
n
p
E1
c
φ
α
β
2
1
A
φ
L
A1
毫米 英寸 *单位
α
A2
最大正常最小最大正常最小 尺寸范围
2020
0.65.026
1.981.851.73.078.073.068A总高度
1.831.731.63.072.068.064A2塑模封装厚度
0.250.150.05.010.006.002A1悬空间隙 §
8.187.857.59.322.309.299E总宽度
5.385.255.11.212.207.201
7.347.207.06.289.284.278D总长度
0.940.750.56.037.030.022L底脚长度
0.250.180.10.010.007.004
203.20101.600.00840
0.380.320.25.015.013.010B底脚宽度
10501050
10501050
DS21790A_CN 第 44 页 初稿 2005 Microchip Technology Inc.
Page 45

MCP2140
附录 A: 版本历史
版本 A
• 这是一本新的数据手册
图 B-1: ISO 参考层模型
OSI 参考层
应用层
表现层
会话层
传输层
网络层
数据链路层
LLC(逻辑链路控制)
接收过滤
过载通知
恢复管理
MAC(介质访问控制)
数据封装 / 解封装
帧编码(填充,解填充)
介质访问管理
错误检测
错误信号发送
应答
序列化 / 解序列化
附录 B: 网络层参考模型
图 B-1 为 ISO 网络层参考模型。浅色阴影区域由
MCP2140 实现,深色阴影区域由红外收发器实现。非
阴影区域由主机控制器实现。
必须由主机
控制器固件实现
(如 :PICmicro
单片机)
由 MCP2140
实现的区域
由光收发器逻辑
电路实现的区域
监控器
故障界定
(MAC-LME)
®
物理层
PLS(物理信令)
位编码 / 解码
位时序
同步
PMA(物理介质附件)
驱动器 / 接收器特性
MDI(相关介质接口)
连接器
总线故障管理
(PLS-LME)
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 45 页
Page 46
MCP2140
IrDA 标准规定了以下协议:
• 物理信令层 (PHY)
• 链路访问协议 (IrLAP)
• 链路管理协议 / 信息访问服务 (IrLMP/IAS)
IrDA 数据列出了可选协议。它们是:
•Tiny TP
• IrTran-P
• IrOBEX
•IrLAN
•IrCOMM
• IrMC
•IrDA Lite
图 B-2 为 IrDA数据协议栈和由 MCP2140 实现的元件。
图 B-2: IRDA 数据 —— 协议栈
IrTran-P IrObex IrLan IrMC
LM-IAS 小型传输协议(Tiny TP)
IR 链路管理
IR 链路访问协议(IrLAP)
异步
串行 IR
(9600 -115200 bps)
(2, 3)
(1.152 Mbps)
IrComm
——多路(IrLMP)
同步
串行 IR
(1)
同步
4 PPM
(4Mbps)
B.1 MCP2140 支持的 IrDA 标准数据协议
MCP2140 支持那以下必需的 IrDA 标准协议:
• 物理信令层 (PHY)
• 链路访问协议 (IrLAP)
• 链路管理协议 / 信息访问服务 (IrLMP/IAS)
MCP2140也支持 IrDA数据的一些可选协议。MCP2140
实现的可选协议是:
•Tiny TP
•IrCOMM
B.1.1 物理信令层 (PHY)
MCP2140 提供以下物理信令层规范支持:
• 双向通信
• 受 CRC 保护的数据包
-16位 CRC 速度高达 11 5.2 kbps
注: MCP2140 只支持 9600 bps。
• 数据通信率
- 最小数据速率为 9600 bps (主速度 / 步速为
115 .2 kbps)
注: MCP2140 只支持 9600 bps。
以下物理层规范取决于应用中的光收发器逻辑。规范说
明了:
• 通信范围,设置了终端用户期望的搜索、识别和性
能。
- 从接触到至少 1m 范围内可连续工作 (典型值
可达到 2m)
- 低功耗规范将目标范围降低到从接触到至少
20 cm (低功耗和低功耗)或 30 cm (低功耗
和标准功耗)范围
MCP2140
支持
注 1:MCP2140 实现 9 线“Cooked”的服务
级别连续复制器。
2:MCP2140 为固定 9600 波特率。
3:需要一个光收发器。
MCP2140 不支持的
可选 IrDA 数据协议
DS21790A_CN 第 46 页 初稿 2005 Microchip Technology Inc.
Page 47
MCP2140
B.1.2 IrLAP
IrLAP 协议提供:
• 设备之间的链路上的通信过程管理
• 设备到设备的连接以进行可靠而有序的数据传输
• 设备搜索过程
• 隐藏节点处理:115 .2 kbps
注: MCP2140 不支持。
图 B-3 给出了 IrDA 协议的重要部分及层次。最低层是
物理层 IrPHY。这层将串行数据转换为 IR 光脉冲并将
IR 光脉冲转换为串行数据。IR收发器不能同时发送和接
受。接收器必须等待发送器发送完毕。这有时被称为
“半双工”连接。 IR 链路访问协议 (IrLAP)提供了数
据包 (或 “帧”)的结构来仿真通常能够自由来回传送
的数据。
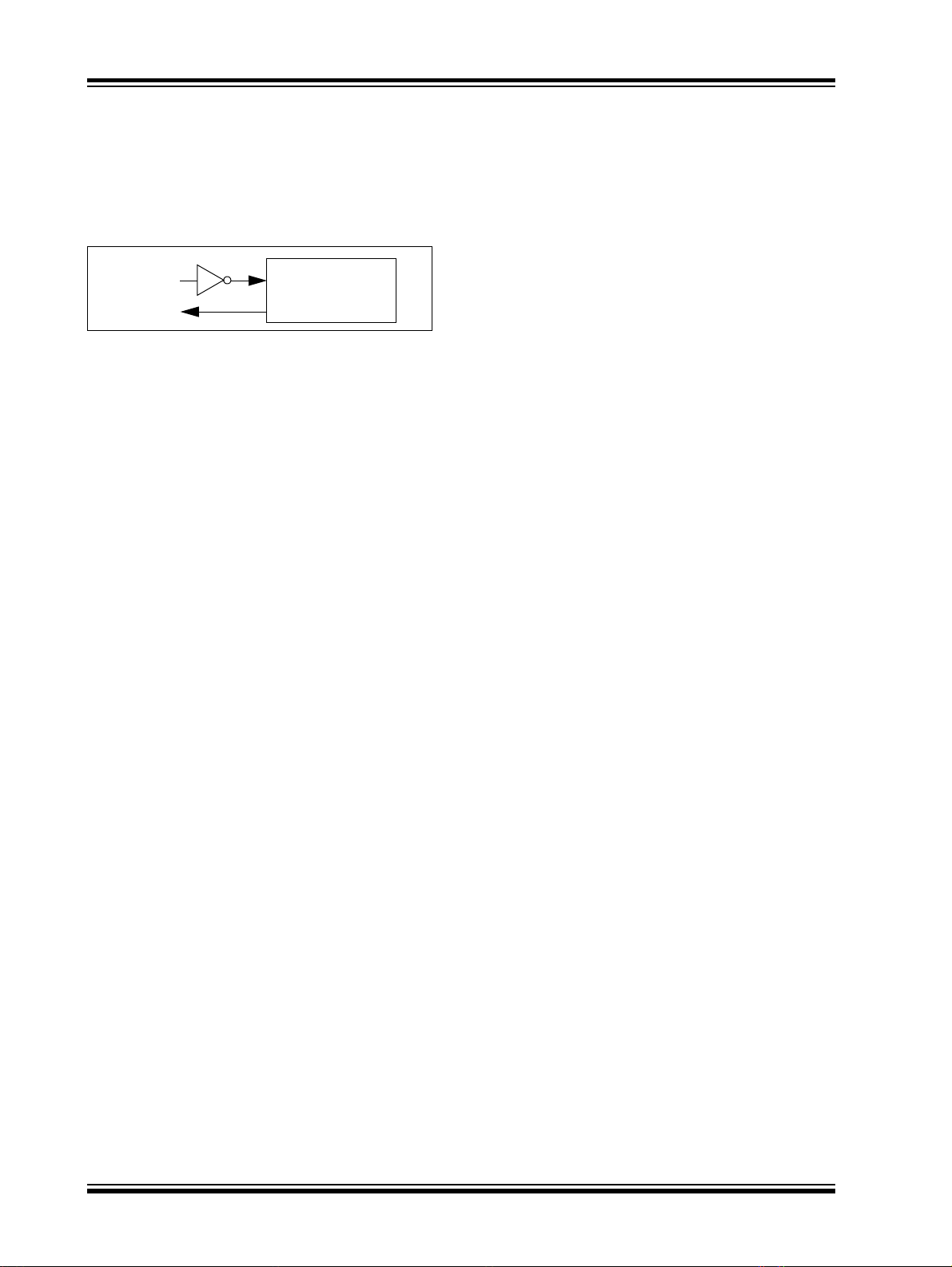
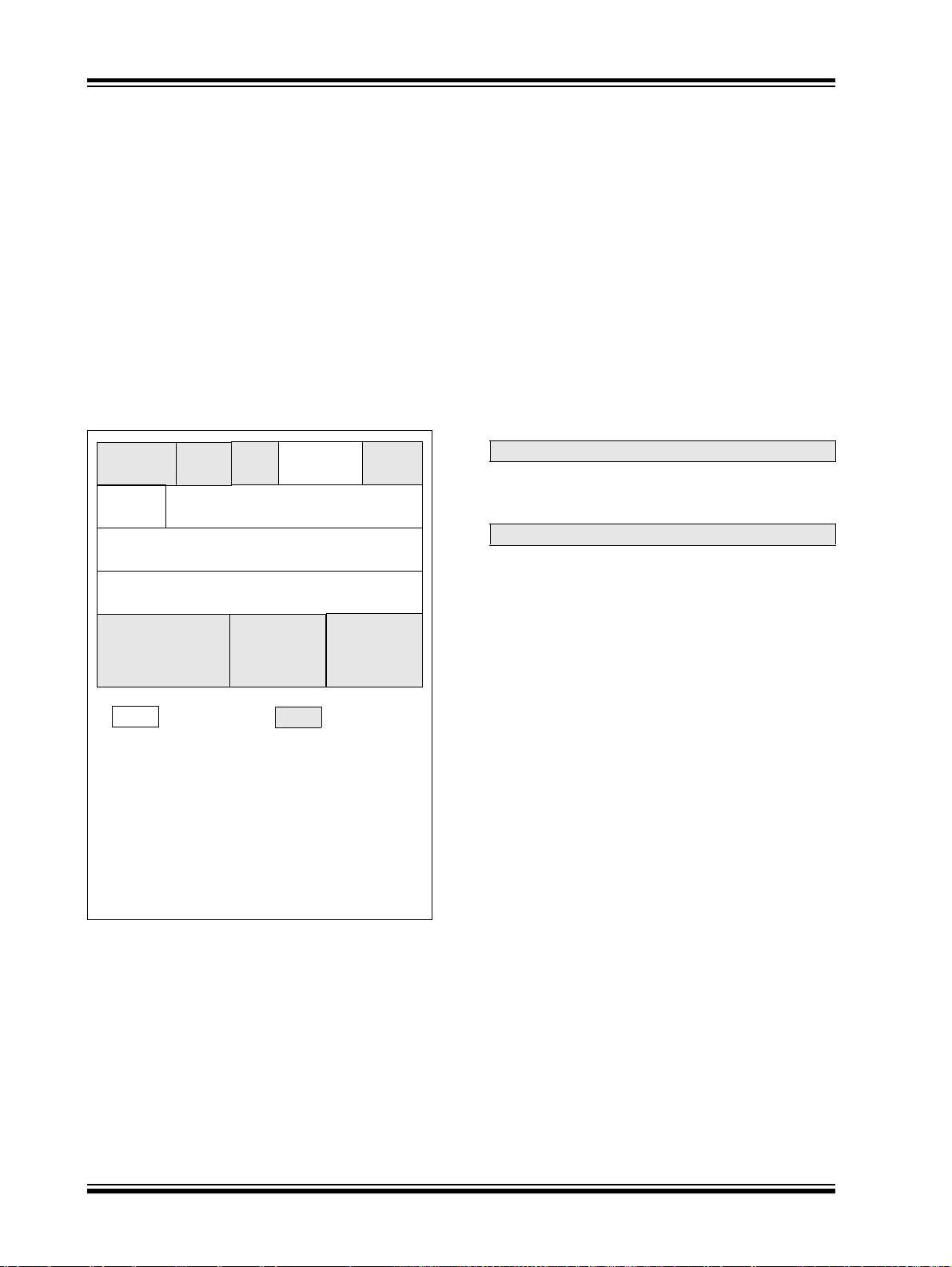
图 B-3: IrDA 标准协议层
主机操作系统或应用
IrCOMM
IrLMP – IAS
IrLAP
MCP2140
中的协议
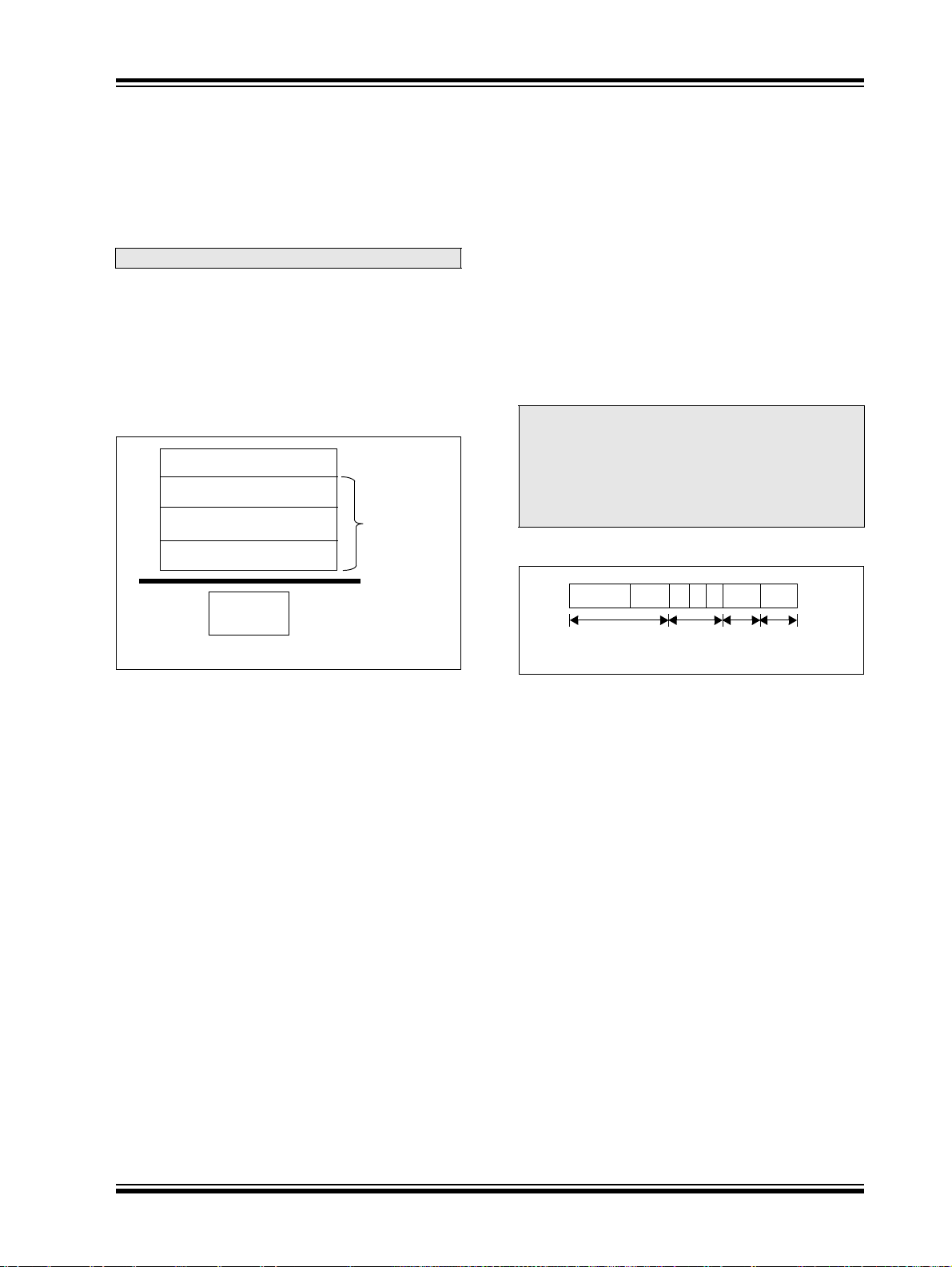
图 B-4 显示了 IrLAP 帧的构成。这个帧之前是一些帧起
始字符(Beginning of Frame characters,BOF)。BOF
的值通常为 0xC0,但是如果最后一个 BOF 字符为
0xC0,也可使用 0xFF。使用多个 BOF 的目的是提醒另
一个站将有一个帧传送过来。
IrLAP 帧始于一个地址字节 (“A”字段),然后是控制
字节(“
及对帧进行计数。帧可以带有状态位、数据或指令。
IrLAP 协议有自己的命令语法。这些命令是控制字节的
一部分。最后,
“I”)字段。帧的完整性通过称为帧校验序列 (Frame
Check Sequence,FCS)的 16 位 CRC 来保证。16 位
CRC值首先发送LSB。此帧以标记有 EOF 的字符结束,
EOF 通常为 0xC1。这里描述的帧结构可用于速度最高
达 115.2 kbps 的所有版本的 IrDA 协议,用于替代串型
导线连接。
C”字段)。控制字节用于区分不同类型的帧以
IrLAP 帧带有数据。此数据是信息 (或
注 1:MCP2140 只支持 9600 bps 的通信速率。
2:正在得到普遍应用的另一个IrDA标准是IR
对象交换 (IR Object Exchange,
IrOBEX)。此标准不用于串行连接仿真。
3:高于 11 5.2 kbps 的 IrDA 通信标准使用另
一种 CRC 方法和物理层。
图 B-4: IrLAP 帧
IrPHY
发送和接收
的 IR 脉冲
X BOFs BOF A C FCSI EOF
C0h 的 (1+N) 有效载荷
除了定义帧结构, IrLAP 还提供 “家务管理 (Housekeeping)”功能进行连接的打开、关闭和维持。决定链
路性能的重要参数是此功能的一部分。这些参数控制使
BOF 数量,确定链路速度以及一方从接收到发送
用的
的转换速度等。
得最高的共用参数,使通信双方能尽可能快且可靠地通
信。
IrLAP 负责对这些参数进行谈判,以取
2 个
字节
C1h
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 47 页
Page 48
MCP2140
B.1.3 IrLMP
IrLMP 协议提供:
•IrLAP层的多路传输。这使得在 IrLAP连接上可有多
路通道。
• 协议和服务搜索。这是通过信息访问服务
Information Access Service, IAS)完成的。
(
当两个包含 IrDA 标准特性的设备连接后,通常是一个设
备要完成某种任务而另一个设备具备完成该任务所需的
资源。例如,笔记本电脑有一个打印任务而具备兼容
IrDA 标准的打印机拥有打印资源。在 IrDA 标准术语中,
笔记本电脑是主设备而打印机是从设备。当这两个设备
连接时,主设备必须确定从设备的性能以决定从设备能
否能够完成任务。这一决定通过主设备向从设备提出一
系列问题来完成。根据辅对这些问题的回答,主设备可
选择或不选择连接到从设备。
主设备的查询使用 IrLMP 传送到从设备。对这些查询作
出的响应可在从设备的信息访问服务(
Access Service, IAS)中找到。 IAS 是从设备的资源
列表。主设备将 IAS 响应与它的要求相比较,然后作出
是否进行连接的决定。
Information
B.1.4 链路管理 —— 信息访问服务
(LM-IAS)
每个 LM-IAS 实体维持一个数据库以提供:
• 其他带有 IrDA 标准功能设备的服务信息 (搜索模
式)
• 设备本身的服务信息
• 对另一设备的信息库的远程访问
需要 LM-IAS 以使远程设备的用户能找到访问服务所需
的配置信息。
B.1.5 TINY TP
Tiny TP 提供了对 IrLMP 连接的流控制。它的可选服务
包括分割 (Segmentation)和重组 (Reassembly)。
B.1.6 IRCOMM
IrCOMM 提供了一种支持串行和并行端口仿真的方法。
这对于原先的
有用。
IrCOMM 标准是一种让主设备将从设备看作串行设备的
语法。 IrCOMM 允许仿真具有不同能力的串行或并行
(打印机)连接。
注: MCP2140 支持 9 线“Cooked”的 IrCOMM
COM 应用 (如打印机和调制解调器)很
服务级别。其他 IrCOMM 支持的服务级别如
图 B-5 所示。
图 B-5: IRCOMM 服务级别
IrCOMM 服务
Uncooked 的服务 Cooked 的服务
并行 串行
IrLPT
MCP2140 支持
DS21790A_CN 第 48 页 初稿 2005 Microchip Technology Inc.
Uncooked 的 3 线
并行
Centronics
IEEE 1284
串行
Cooked 的 3 线
Cooked 的 9 线
Page 49

B.1.7 其他可选的 IrDA 数据协议
其他 IrDA 数据协议已开发用于特殊要求的应用中。这些
IrDA 数据协议在以下小节中简要说明。欲知更多信息,
请访问 IrDA 网站 (www.IrDA.org)。
B.1.7.1 IrTran-P
IrTran-P 提供与数字图象捕捉设备 / 照相机交换图象的
协议。
注: MCP2140 不支持。
B.1.7.2 IrOBEX
IrOBEX 提供目标交换服务。这与 HTTP 类似。
注: MCP2140 不支持。
B.1.7.3 IrLAN
IrLAN是支持 IR无线访问局域网(Local Area Network ,
LAN)的协议。
注: MCP2140 不支持。
B.1.7.4 IrMC
IrMC 说明了移动电话和通信设备是如何进行信息交换
的。其中信息包括:电话薄、日历和消息数据。
它还说明了通话控制和实时语音是如何被处理的
(RTCON)。
MCP2140
注: MCP2140 不支持。
B.1.7.5 IrDA 简化版
IrDA 简化版(IrDA Lite)说明了如何在保持与完全应用
兼容的同时,减少应用代码的需求。
注: MCP2140 不支持。
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 49 页
Page 50

MCP2140
附录 C: 设备如何连接
当实现 IrDA 标准的两个设备使用 IrCOMM 协议建立连
接时,这个过程与使用一根电缆连接两个带串行接口的
设备相似。这被称为 “点对点”连接。由于 IR 收发器
无法同时发送和接收,因此连接限制为半双工工作。
IrDA标准协议的目的在于使这种半双工链路尽可能地仿
真全双工连接。一般来说,这是通过将数据分为 “数据
包”(即几组数据)完成的。需要时,可以将这些数据
包来回发送,而不会有冲突的风险。这些数据包何时及
如何发送的规则形成了 IrDA 标准协议。
使用导线连接时,已假设连线两端有相同的通信参数和
特性。用导线连接无须识别另一个连接器,因为假设连
接器已适当地连接。连接过程根据 IrDA 标准进行了定
义,以识别其他 IrDA 标准兼容设备并建立一个通信链
路。这两个设备经过以下三个步骤完成连接:
• 正常断开模式 (NDM)
• 搜索模式
• 正常连接模式 (NCM)
Õº C-1 为连接顺序。
C.1 正常断开模式 (NDM)
当两个 IrDA 标准兼容的设备进入通信范围以内时,它们
必须首先互相识别。这个过程基于一个设备要完成某种
任务而另一个设备具备完成该任务所需的资源。其中一
个称为主设备而另一个称为从设备。区分主设备和从设
备是很重要的,因为主设备负责提供识别其他设备的机
制。因此,主设备必须首先查询邻近的 IrDA 标准兼容设
备,查询期间,两个设备使用的默认波特率均为
bps。
9600
例如,如果您想从装有 IrDA 的笔记本电脑打印到装有
IrDA 的打印机,利用 IrDA 标准特性,您首先应将笔记
本电脑拿到打印机的通信范围内。在这种情况下,笔记
本电脑是要完成任务的一方而打印机是具备资源的一
方。这样,笔记本电脑即为主设备而打印机为从设备。
有些能传送数据的蜂窝电话具备 IrDA 标准的红外端口。
如果您将此蜂窝电话与个人数字助理(Personal Digital
Assistant,PDA)配合使用,支持 IrDA 标准特性的 PDA
就是主设备而蜂窝电话就是从设备。
当主设备查询另一个设备时,邻近的从设备可作出响
应。当从设备响应时,这两个设备定义为处于正常断开
模式状态(NDM)。主设备广播数据包并等待响应,这
样就建立了 NDM。广播的数据包被编号。通常发送 6 或
8 个数据包。第一个数据包编号为 0,最后一个数据包
通常编号为 5 或 7。一旦所有数据包发送结束,主设备
就发送一个 ID 包,此 ID 包不编号。
从设备等待这些数据包然后对其中之一作出响应。数据
包作出响应以决定供从设备使用的“时隙
(Timeslot)”。例如,如果从设备在数据包 2 之后响应,
从设备将使用时隙 2。如果从设备在数据包 0之后响应,
从设备将使用时隙 0。根据此机制,邻近有多少个时隙,
主设备就能够识别多少个设备。主设备将持续产生时隙
而从设备将持续响应,即使没有任务需要完成。
注 1: MCP2140 只能用于实现从设备。
2: MCP2140支持系统中仅有一个从设备,且
此从设备独占 IrDA 标准红外链路的使用
(称为点对点通信)。
3: MCP2140 总是响应数据包 0。这意味着
MCP2140 将总是使用时隙 0。
4: 如果附近有另一个从设备,主设备可能不
能识别MCP2140,或者两个设备都不能识
别。
DS21790A_CN 第 50 页 初稿 2005 Microchip Technology Inc.
Page 51

MCP2140
C.2 搜索模式
搜索模式允许主设备决定 MCP2140(从设备)的能力。
一旦 MCP2140 (从设备)向主设备发送了 XID 响应并
且主设备发送完 XID 和一个广播 ID 就进入搜索模式。
如果此序列未完成,主设备和从设备可无限期处于
NDM 模式。
当主设备有任务时,它启动搜索模式,此模式包括以下
两个部分:
• 链路初始化
• 资源确定
第一步用于使主设备和从设备决定并适应相互的硬件能
力。这些能力为一些参数,如:
• 数据速率
• 转换时间
• 无响应的数据包数目
• 断开前的等待时间
主设备和从设备都以默认的 9600 bps 进行通信。主设
备发送其参数,从设备以自身参数响应。例如,如果主
设备支持高达 115. 2 kbps 的所有数据速率,而从设备仅
支持 9.6 kbps,建立的链路为 9.6 kbps。
注: MCP2140 将数据速率限定为 9.6 kbps。
一旦硬件参数确定,主设备必须判断从设备是否具备有
它需要的资源。如果主设备有一个打印任务,它必须知
道它是否在与打印机而不是调制解调器或其他设备通
信。这种判断是通过信息访问服务(Information Access
Service, IAS)做出的。从设备的工作是响应主设备的
IAS 查询。主设备必须提出一系列问题,如:
• 对方服务的名称?
• 此服务的地址?
• 此设备的能力如何?
当所有主设备的问题都得到回答,主设备就能获得从设
备提供的服务。
C.3 正常连接模式 (NCM)
搜索模式一旦结束,主设备和 MCP2140 (从设备)就
能自由交换数据。
主设备和 MCP2140 (从设备)都要检查以保证数据包
被对方接收无误。即使无需发送数据,主设备和从设备
仍然交换数据包以确保连接没有意外断开。当主设备通
信结 束时,它向 MCP2140 (从设备)发送 “断 开链
路”命令。 MCP2140 将确认 “断开链路”命令,并且
主设备和 MCP2140(从设备)都将回到 NDM 状态。
注: 如果 NCM 模式是由于某种原因意外终止
(包括主设备没有发出断开链路命令) ,
MCP2140 将在接收了最后一桢后约 10 秒
回到 NDM 状态。
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 51 页
Page 52

MCP2140
图 C-1:高层IRCOMM 连接序列
主设备 MCP2140
正常断开模式(NDM)
(从设备)
搜索模式
无 IR 活动
(持续 10 秒)
发送 XID 命令
(时隙 n,n+1,...)
(XID 命令之间间隔约 70 ms)
XID 发送完毕
(最大时隙——y 帧)
广播 ID
发送 SNRM 命令
(带参数和连接地址)
打开通道接收 IAS 查询
发送 IAS 查询
PHACT 引脚驱动为低电平
PHACT 引脚驱动为高电平
无响应
XID 在时隙 y 内作出响应
要求此时隙(MCP214X
总是要求时隙 0)
对这些 XID 无响应
对广播 ID 无响应
带有使用连接地址参数的 UA 响应
确认通道打开以接收 IAS
打开通道接收数据
正常响应模式(NRM)
发送数据或状态
发送数据或状态
关断链路
无 IR 活动
(持续 10 秒)
提供 IAS 响应
确认通道打开以接收数据
(MCP2140 DSR 引脚驱动为低电平)
发送数据或状态
发送数据或状态
确定关断
(回到 NDM 状态)
PHACT 引脚驱动为低电平
DS21790A_CN 第 52 页 初稿 2005 Microchip Technology Inc.
Page 53

MCP2140
附录 D: DB-9 引脚信息
表 D-1 为 DB-9 引脚信息和 MCP2140 信号的方向。
MCP2140 设计用于数据通信设备 (DCE)的应用中。
附录 E: 了解主设备兼容性问题
表 E-1 为主设备接口连接到 MCP2140 的已知的问题。
表 D-1: DB-9 信号信息
DB-9 引
脚号
1 CD HC → MCP2140 载波检测
2 RX MCP2140 → HC 接收的数据
3 TX HC → MCP2140 发送数据
4 DTR HC → MCP2140 数据终端就绪
5 GND — 接地
6 DSR MCP2140 → HC 数据设置就绪
7 RTS HC → MCP2140 请求发送
8 CTS MCP2140 → HC 清零以发送
9 RI HC → MCP2140 振荡指示器
图注: HC = 主机控制器
信号 方向 说明
表 E-1: 主设备问题
主设备 操作系统 问题 结果
HP Jornada 720 HPC Pro/Windows CE™ 3.0
(口袋 PC (Pocket PC))
个人电脑 Windows® 2000 (无具体版本
列表)
Jornada 720 在 NDM 期间发送
0xFF(而不是 0xC0)作为额外的
SOF (起始帧)字符。
如果接收到“空” IR 器件 ID,系
统操作将复位。
MCP2140 将不会连接到
Jornada 720。
MCP2140 将不连接到 PC。
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 53 页
Page 54

MCP2140
注:
DS21790A_CN 第 54 页 初稿 2005 Microchip Technology Inc.
Page 55
产品标识体系
欲订货,或获取价格、交货等信息,请与我公司生产厂或各销售办事处联系。
PART NO. X /XX
器件
器件 MCP2140: 红外通信控制器
温度范围 I = -40°C 至 +85°C
MCP2140T:红外通信控制器
封装 温度范围
(卷带式)
MCP2140
示例:
a) MCP2140-I/P = 工业级温度,
PDIP 封装
b) MCP2140-I/SO = 工业级温度,
SOIC 封装
c) MCP2140T-I/SS = 卷带式,
工业级温度, SSOP 封装
封装 P=塑料 DIP (300 mil,主体), 18 引脚
SO = 塑料 SOIC (300 mil,主体), 18 引脚
SS = 塑料 SSOP (209 mil,主体), 20 引脚
销售与技术支持
数据手册
初始数据手册中所述的产品可能会有一份勘误表,描述了实际运行与数据手册中记载内容之间存在的细微差异以及建议的变通方法。
欲了解某一器件是否存在勘误表,请通过以下方式之一查询:
1. Microchip 网站 http://www.microchip.com
2. 当地 Microchip 销售办事处 (见最后一页)
在联络销售办事处时,请说明您所使用的器件型号、硅片版本和数据手册版本 (包括文献编号)。
客户通知系统
欲及时获知 Microchip 产品的最新信息,请到我公司网站 www.microchip.com 上注册。
2005 Microchip Technology Inc. 初稿 DS21790A _CN 第 55 页
Page 56

MCP2140
注:
DS21790A_CN 第 56 页 初稿 2005 Microchip Technology Inc.
Page 57

请注意以下有关 Microchip 器件代码保护功能的要点:
•Microchip的产品均达到 Microchip 数据手册中所述的技术指标。
•Microchip确信:在正常使用的情况下, Microchip 系列产品是当今市场上同类产品中最安全的产品之一。
• 目前,仍存在着恶意、甚至是非法破坏代码保护功能的行为。就我们所知,所有这些行为都不是以 Microchip 数据手册中规定的
操作规范来使用 Microchip 产品的。这样做的人极可能侵犯了知识产权。
•Microchip愿与那些注重代码完整性的客户合作。
•Microchip或任何其他半导体厂商均无法保证其代码的安全性。代码保护并不意味着我们保证产品是 “牢不可破”的。
代码保护功能处于持续发展中。 Microchip 承诺将不断改进产品的代码保护功能。任何试图破坏 Microchip 代码保护功能的行为均可视
为违反了 《数字器件千年版权法案 (Digital Millennium Copyright Act)》。如果这种行为导致他人在未经授权的情况下,能访问您的
软件或其他受版权保护的成果,您有权依据该法案提起诉讼,从而制止这种行为。
提供本文档的中文版本仅为了便于理解。Microchip
Technology Inc. 及其分公司和相关公司、各级主管与员工及
事务代理机构对译文中可能存在的任何差错不承担任何责任。
建议参考 Microchip Technology Inc. 的英文原版文档。
本出版物中所述的器件应用信息及其他类似内容仅为您提供便
利,它们可能由更新之信息所替代。确保应用符合技术规范,
是您自身应负的责任。Microchip 对这些信息不作任何明示或
暗示、书面或口头、法定或其他形式的声明或担保,包括但不
限于针对其使用情况、质量、性能、适销性或特定用途的适用
性的声明或担保。 Microchip 对因这些信息及使用这些信息而
引起的后果不承担任何责任。未经 Microchip 书面批准,不得
将 Microchip 的产品用作生命维持系统中的关键组件。在
Microchip 知识产权保护下,不得暗中或以其他方式转让任何
许可证。
商标
Microchip 的名称和徽标组合、 Microchip 徽标、 Accuron、
dsPIC、 K
EELOQ、 microID、 MPLAB、 PIC、 PICmicro、
PICSTART、 PRO MATE、 PowerSmart、 rfPIC 和
SmartShunt 均为 Microchip Technology Inc. 在美国和其他国
家或地区的注册商标。
AmpLab、 FilterLab、 Migratable Memory、 MXDEV、
MXLAB、 PICMASTER、 SEEVAL、 SmartSensor 和 The
Embedded Control Solutions Company 均为 Microchip
Technology Inc. 在美国的注册商标。
Analog-for-the-Digital Age、 Application Maestro、
dsPICDEM、 dsPICDEM.net、 dsPICworks、 ECAN、
ECONOMONITOR、 FanSense、 FlexROM、 fuzzyLAB、
In-Circuit Serial Programming、 ICSP、 ICEPIC、 Linear
Active Thermistor、 MPASM、 MPLIB、 MPLINK、 MPSIM、
PICkit、 PICDEM、 PICDEM.net、 PICLAB、 PICtail、
PowerCal、 PowerInfo、 PowerMate、 PowerTool、 rfLAB、
rfPICDEM、 Select Mode、 Smart Serial、 SmartTel、 To t al
Endurance 和 WiperLock 均为 Microchip Technology Inc.在
美国和其他国家或地区的商标。
SQTP 是 Microchip Technology Inc. 在美国的服务标记。
在此提及的所有其他商标均为各持有公司所有。
© 2005, Microchip Technology Inc. 版权所有。
Microchip
州
10
位单片机、
性存储器和模拟产品方面的质量体系流程均符合
16949:2002
系也已通过了
位于美国亚利桑那州
Mountain View
月通过了
ISO/TS-16949:2002
KEELOQ
。此外,
ISO 9001:2000
的全球总部、设计中心和晶圆生产厂均于
®
跳码器件、串行
Microchip
Chandler和Tem pe
质量体系认证。公司在
EEPROM
在开发系统的设计和生产方面的质量体
认证。
及位于加利福尼亚
、单片机外设、非易失
ISO/TS-
2003
PICmicro
年
®
2005 Microchip Technology Inc. 初稿 DS21790A_CN 第 57 页
8
Page 58
全球销售及服务网点
美洲
公司总部 Corporate Office
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 1-480-792-7200
Fax: 1-480-792-7277
技术支持:
http://support.microchip.com
网址:www.microchip.com
亚特兰大 Atlanta
Alpharetta, GA
Tel: 1-770-640-0034
Fax: 1-770-640-0307
波士顿 Boston
Westborough, MA
Tel: 1-774-760-0087
Fax: 1-774-760-0088
芝加哥 Chicago
Itasca, IL
Tel: 1-630-285-0071
Fax: 1-630-285-0075
达拉斯 Dallas
Addison, TX
Tel: 1-972-818-7423
Fax: 1-972-818-2924
底特律 Detroit
Farmington Hills, MI
Tel: 1-248-538-2250
Fax: 1-248-538-2260
科科莫 Kokomo
Kokomo, IN
Tel: 1-765-864-8360
Fax: 1-765-864-8387
洛杉矶 Los Angeles
Mission Viejo, CA
Tel: 1-949-462-9523
Fax: 1-949-462-9608
圣何塞 San Jose
Mountain View, CA
Tel: 1-650-215-1444
Fax: 1-650-961-0286
加拿大多伦多 Tor ont o
Mississauga, Ontario,
Canada
Tel: 1-905-673-0699
Fax: 1-905-673-6509
亚太地区
中国 - 北京
Tel: 86-10-8528-2100
Fax: 86-10-8528-2104
中国 - 成都
Tel: 86-28-8676-6200
Fax: 86-28-8676-6599
中国 - 福州
Tel: 86-591-8750-3506
Fax: 86-591-8750-3521
中国 - 香港特别行政区
Tel: 852-2401-1200
Fax: 852-2401-3431
中国 - 青岛
Tel: 86-532-8502-7355
Fax: 86-532-8502-7205
中国 - 上海
Tel: 86-21-5407-5533
Fax: 86-21-5407-5066
中国 - 沈阳
Tel: 86-24-2334-2829
Fax: 86-24-2334-2393
中国 - 深圳
Tel: 86-755-8203-2660
Fax: 86-755-8203-1760
中国 - 顺德
Tel: 86-757-2839-5507
Fax: 86-757-2839-5571
中国 - 武汉
Tel: 86-27-5980-5300
Fax: 86-27-5980-5118
中国 - 西安
Tel: 86-29-8833-7252
Fax: 86-29-8833-7256
台湾地区 - 高雄
Tel: 886-7-536-4818
Fax: 886-7-536-4803
台湾地区 - 台北
Tel: 886-2-2500-6610
Fax: 886-2-2508-0102
台湾地区 - 新竹
Tel: 886-3-572-9526
Fax: 886-3-572-6459
亚太地区
澳大利亚 Australia - Sydney
Tel: 61-2-9868-6733
Fax: 61-2-9868-6755
印度 India - Bangalore
Tel: 91-80-2229-0061
Fax: 91-80-2229-0062
印度 India - New Delhi
Tel: 91-11-5160-8631
Fax: 91-11-5160-8632
印度 India - Pune
Tel: 91-20-2566-1512
Fax: 91-20-2566-1513
日本 Japan - Yokoha ma
Tel: 81-45-471- 6166
Fax: 81-45-471-6122
韩国 Korea - Gumi
Tel: 82-54-473-4301
Fax: 82-54-473-4302
韩国 Korea - Seoul
Tel: 82-2-554-7200
Fax: 82-2-558-5932 或
82-2-558-5934
马来西亚 Malaysia - Penang
Tel:604-646-8870
Fax:604-646-5086
菲律宾 Philippines - Manila
Tel: 632-634-9065
Fax: 632-634-9069
新加坡 Singapore
Tel: 65-6334-8870
Fax: 65-6334-8850
泰国 Thailand - Bangkok
Tel: 66-2-694-1351
Fax: 66-2-694-1350
欧洲
奥地利 Austria - Weis
Tel: 43-7242-2244-399
Fax: 43-7242-2244-393
丹麦 Denmark-Copenhagen
Tel: 45-4450-2828
Fax: 45-4485-2829
法国 France - Paris
Tel: 33-1-69-53-63-20
Fax: 33-1-69-30-90-79
德国 Germany - Munich
Tel: 49-89-627-144-0
Fax: 49-89-627-144-44
意大利 Italy - Milan
Tel: 39-0331-742611
Fax: 39-0331-466781
荷兰 Netherlands - Drunen
Tel: 31-416-690399
Fax: 31-416-690340
西班牙 Spain - Madrid
Tel: 34-91-352-30-52
Fax: 34-91-352-11-47
英国 UK - Wokingham
Tel: 44-118-921-5869
Fax: 44-118-921-5820
08/24/05
DS21790A_CN 第 58 页 初稿 2005 Microchip Technology Inc.
 Loading...
Loading...