

Page 1
24AA16/24LC16B
16K I2C™ Serial EEPROM
Device Selection Table
Part
Number
24AA16 1.8-5.5 400 kHz
24LC16B 2.5-5.5 400 kHz I, E
Note 1: 100 kHz for VCC <2.5V
Vcc
Range
Max Clock
Frequency
(1)
Temp
Ranges
I
Features:
• Single supply with operation down to 1.8V
• Low-power CMOS technology:
- 1 mA active current, typical
-1μA standby current (max.) (I-temp)
• Organized as 8 blocks of 256 bytes (8 x 256 x 8)
• 2-wire serial interface bus, I
• Schmitt Trigger inputs for noise suppression
• Output slope control to eliminate ground bounce
• 100 kHz (2.5V) and 400 kHz (≥2.5V) compatibility
• Self-timed write cycle (including auto-erase)
• Page write buffer for up to 16 bytes
• Hardware write-protect for entire memory
• Can be operated as a serial ROM
• Factory programming (QTP) available
• ESD protection > 4,000V
• 1,000,000 erase/write cycles
• Data retention > 200 years
• 8-lead PDIP, SOIC, TSSOP, DFN and MSOP
packages
• 5-lead SOT-23 package
• Pb-free finish available
• Available temperature ranges:
- Industrial (I): -40°C to +85°C
- Automotive (E): -40°C to +125°C
2
C™ compatible
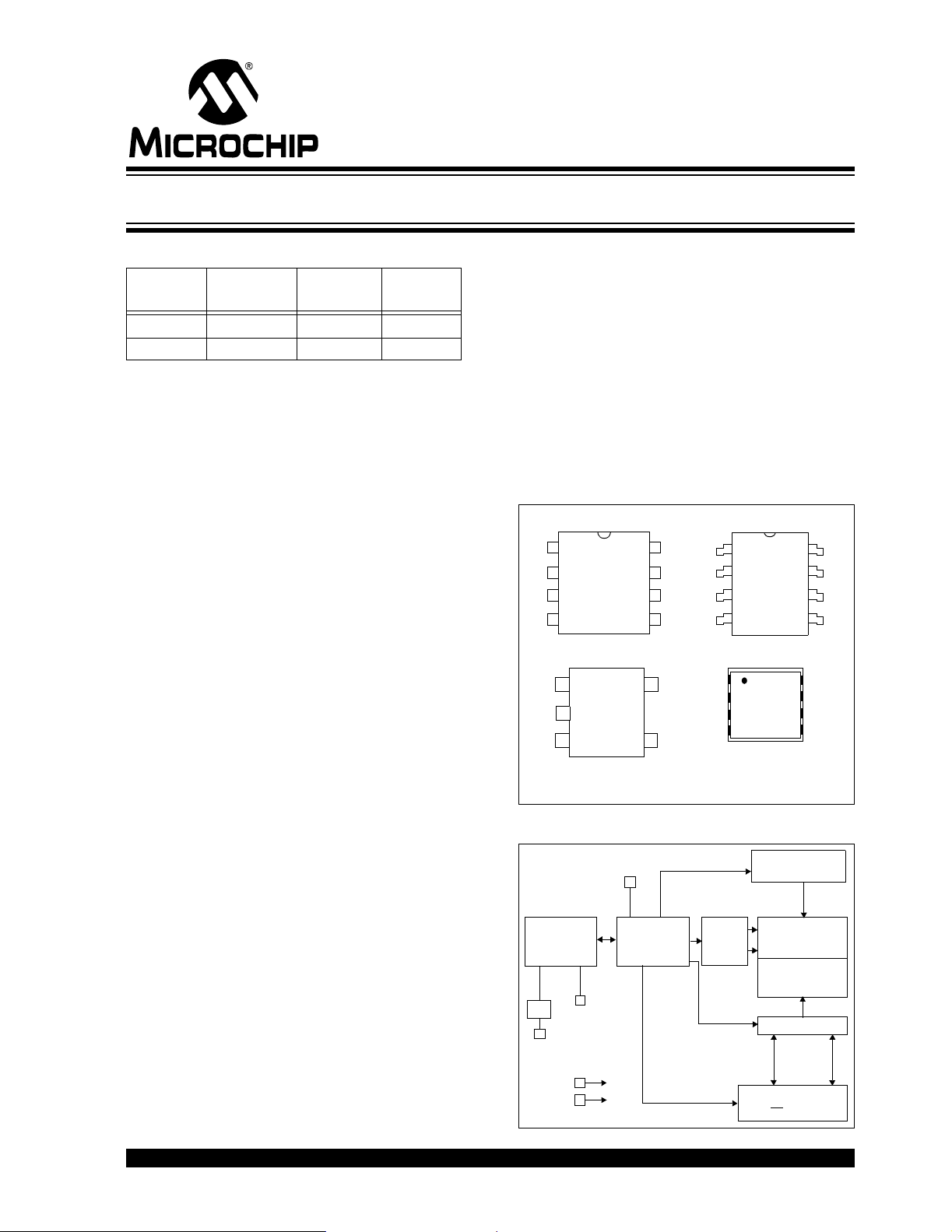
Description:
The Microchip Technology Inc. 24AA16/24LC16B
(24XX16*) is a 16 Kbit Electrically Erasable PROM.
The device is organized as eight blocks of 256 x 8-bit
memory with a 2-wire serial interface. Low-voltage
design permits operation down to 1.8V with standby
and active currents of only 1 μA and 1 mA,
respectively. The 24XX16 also has a page write
capability fo r up to 16 bytes of data. The 24X X16 is
available in the standard 8-pin PDIP, surface mount
SOIC, TSSOP, 2x3 DFN and MSOP packages, and is
also available in the 5-lead SOT-23 package.
Package Types
A0
A1
A2
SS
V
V
SOIC, TSSOP
1
2
3
4
1
A0
2
A1
3
A2
SS
4
DFN
8
V
CC
7
WP
6
SCL
5
SDA
CC
V
8
WP
7
SCL
6
5
SDA
PDIP, MSOP
1
A0
2
A1
3
A2
4
V
SS
SOT-23-5
15
SCL
2
Vss
3
SDA
Note: Pins A0, A1 and A2 are not used by the 24XX16 (no
internal connections).
8
VCC
7
WP
6
SCL
5
SDA
WP
4
Vcc
Block Diagram
WP
HV
Generator
I/O
Control
Logic
I/O
SCL
SDA
V
CC
*24XX16 is used in this document as a generic part
VSS
number for the 24AA16/24LC16B devi ce s.
© 2005 Microchip Technology Inc. DS21703E-page 1
Memory
Control
Logic
XDEC
EEPROM
Array
Page
Latches
YDEC
Sense Amp.
R/W Control
Page 2
24AA16/24LC16B
1.0 ELECTRICAL CHARACTERISTICS
Absolute Maximum Ratings
VCC.............................................................................................................................................................................6.5V
All inputs and outputs w.r.t. V
Storage temperature ...............................................................................................................................-65°C to +150°C
Ambient temperature with power applied................................................................................................-65°C to +125°C
ESD protection on all pins ......................................................................................................................................................≥ 4kV
† NOTICE: Stresses above those listed under “Absolute Maximum Ratings” may cause permanent damage to
the device. This is a stress rating only and functional operation of the device at those or any other conditions
above those indica ted in the opera tional li stings of this sp ecification is not i mplied. Ex posure to maximum rating
conditions for extended periods may affect device reliability.
SS ......................................................................................................... -0.3V to VCC +1.0V
(†)
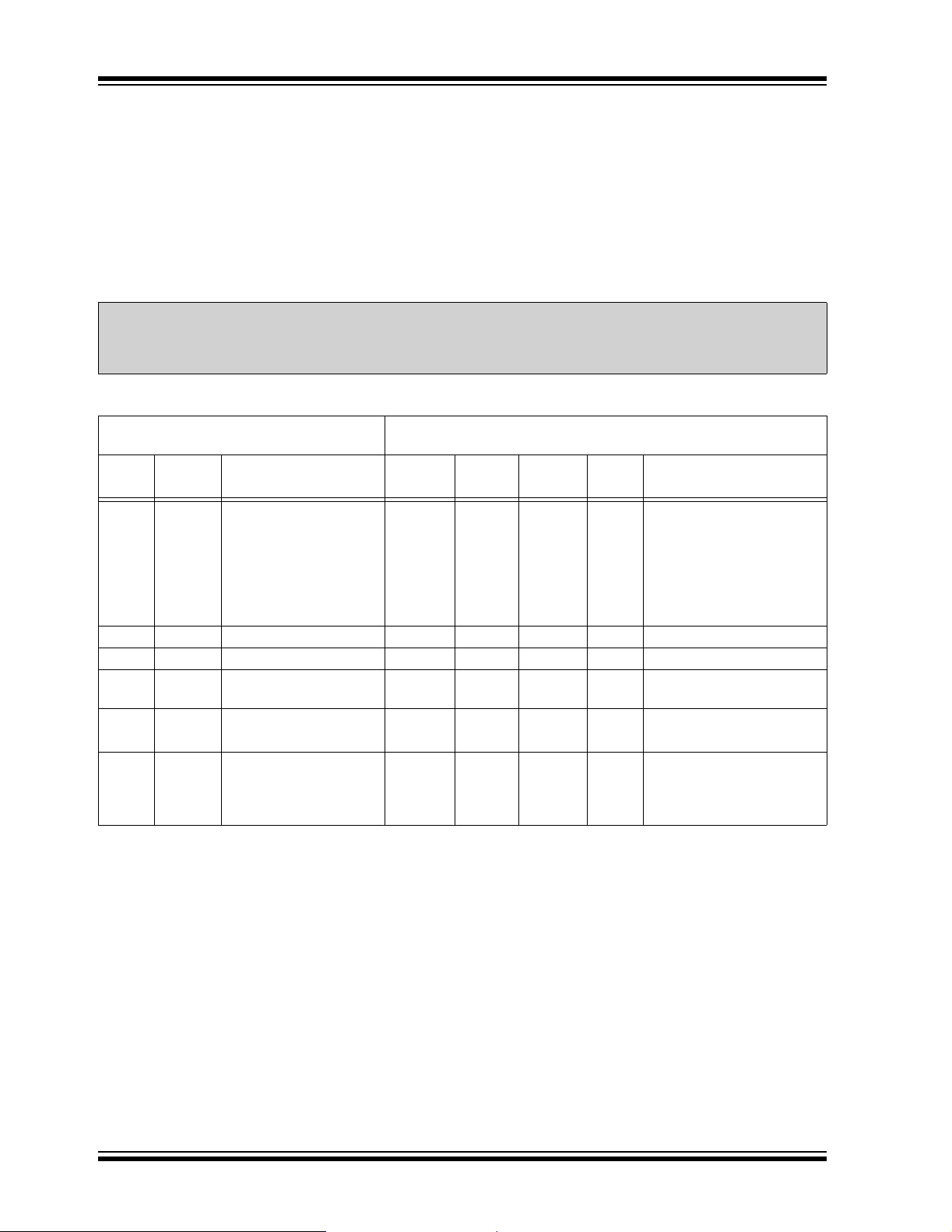
TABLE 1-1: DC CHARACTERISTICS
DC CHARACTERISTICS
Param.
No.
D1 V
D2 — High-level input voltage 0.7 V
D3 VIL Low-level input voltage — — 0.3 VCC V—
D4 VHYS Hysteresis of Schmitt
D5 V
D6 ILI Input leakage current ——±1μAVIN = VSS or VCC
D7 ILO Output leakage current ——±1μAVOUT = VSS or VCC
D8 CIN,
D9 I
D10 ICC read — 0.01 1 mA —
D11 ICCS Standby current —
Note 1: This parameter is periodically sampled and not 100% tested.
Symbol Characteristic Min Typ Max Units Conditions
IH WP, SCL and SDA pins — ————
Trigger inputs
OL Low-level output voltage — — 0.40 V IOL = 3.0 mA, VCC = 2.5V
Pin capacitance
OUT
C
CC write Operating current ——3mAVCC = 5.5V, SCL = 400 kHz
2: Typical measurements taken at room temperature.
(all inputs/outpu t s)
Industrial (I): TA = -40°C to +85°C, VCC = +1.8V to +5.5V
Automotive (E): T
CC ——V—
.05 VCC ——V(Note 1)
——10pFVCC = 5.0V (Note 1)
—
A = -40°C to +125°C, VCC = +2.5V to +5.5V
A = 25°C, FCLK = 1 MHz
T
0.3
.01
1
5
μAμAIndustrial
Automotive
SDA = SCL = VCC
WP = VSS
DS21703E-page 2 © 2005 Microchip Technology Inc.
Page 3
24AA16/24LC16B
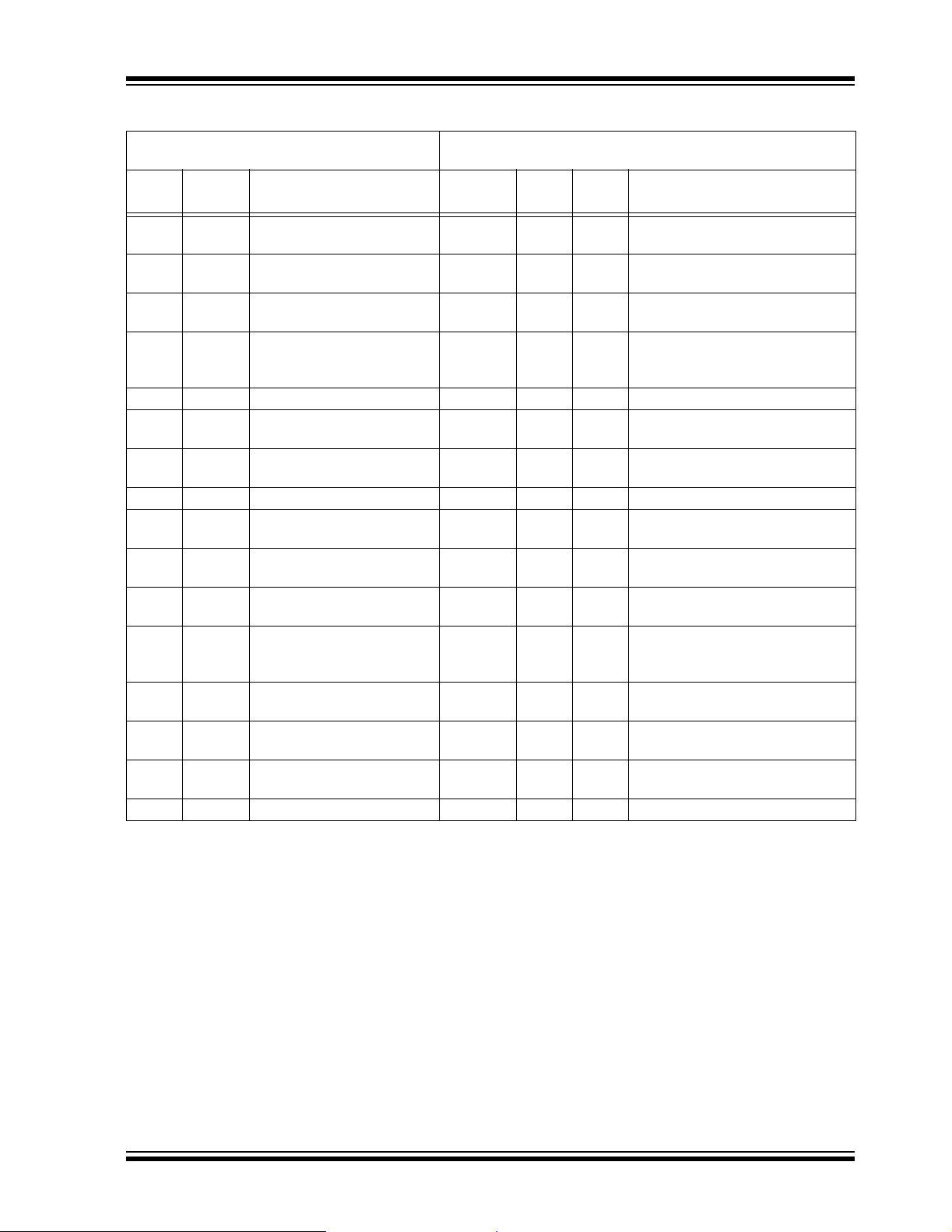
TABLE 1-2: AC CHARACTERISTICS
AC CHARACTERISTICS
Param.
No.
1F
Symbol Characteristic Min Max Units Conditions
CLK Clock frequency —
2 THIGH Clock high time 600
3T
LOW Clock low time 1300
4TR SDA and SCL rise time
(Note 1)
5T
6T
F SDA and SCL fall time — 300 ns (Note 1)
HD:STA Start condition hold time 600
7TSU:STA Start condition setup time 600
8THD:DAT Data input hold time 0 — ns (Note 2)
9TSU:DAT Data input setup time 100
10 TSU:STO Stop condition setup time 600
11 T
AA Output valid from clock
(Note 2)
12 TBUF Bus free time: Time the bus
must be free before a new
transmissi on can start
13 T
OF Output fall time from VIH
minimum to V
IL maximum
14 TSP Input filter spike suppression
(SDA and SCL pins)
15 T
WC Write cycle time
(byte or page)
16 — Endurance 1M — cycles 25°C, (Note 4)
Note 1: Not 100% tested. C
B = total capacitance of one bus line in pF.
2: As a transmitter, the device must provide an internal minimum delay time to bridge the undefined region
(minimum 300 ns) of the falling edge of SCL to avoid unintended generation of Start or Stop conditions.
3: The combined T
SP and VHYS specificat io ns are due to new Schm it t Trigger inputs which provide improved
noise spike suppression. This eliminates the need for a
4: This parameter is not tested but ensured by characterization. For endurance estimates in a specific
application, ple ase co ns ult the T o tal Endurance™ Model which c an be obtained from Microchip’s web site
at www.microchip.com.
Industrial (I): TA = -40°C to +85°C, VCC = +1.8V to +5.5V
Automotive (E): T
—
4000
4700
—
—
A = -40°C to +125°C, VCC = +2.5V to +5.5V
400
100
—
—
—
—
300
1000
kHz 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
CC < 2.5V (24AA16)
ns 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
CC < 2.5V (24AA16)
ns 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
CC < 2.5V (24AA16)
ns 2.5V ≤ VCC ≤ 5.5V (Note 1)
1.8V ≤ V
CC < 2.5V (24AA16)
(Note 1)
4000
4700
250
4000
—
—
1300
4700
20+0.1C
—
—
—
—
—
—
—
—
—
900
3500
—
—
B
250
250
ns 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
CC < 2.5V (24AA16)
ns 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
CC < 2.5V (24AA16)
ns 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
CC < 2.5V (24AA16)
ns 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
CC < 2.5V (24AA16)
ns 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
CC < 2.5V (24AA16)
ns 2.5V ≤ VCC ≤ 5.5V
1.8V ≤ V
ns 2.5V ≤ V
1.8V ≤ V
CC < 2.5V (24AA16)
CC ≤ 5.5V
CC <2.5V (24AA16)
—50ns(Notes 1 and 3)
—5ms—
TI specification for standard operation.
© 2005 Microchip Technology Inc. DS21703E-page 3
Page 4
24AA16/24LC16B
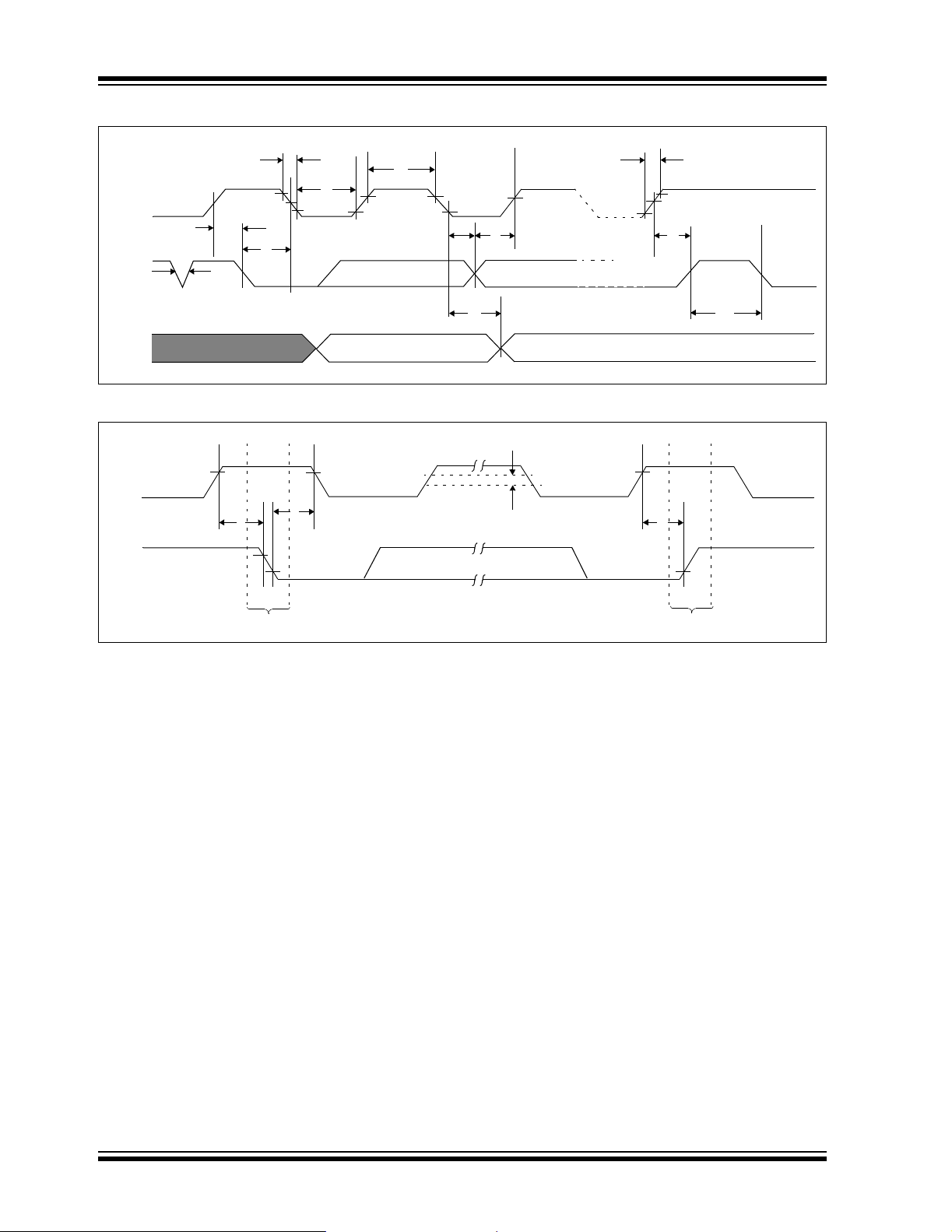
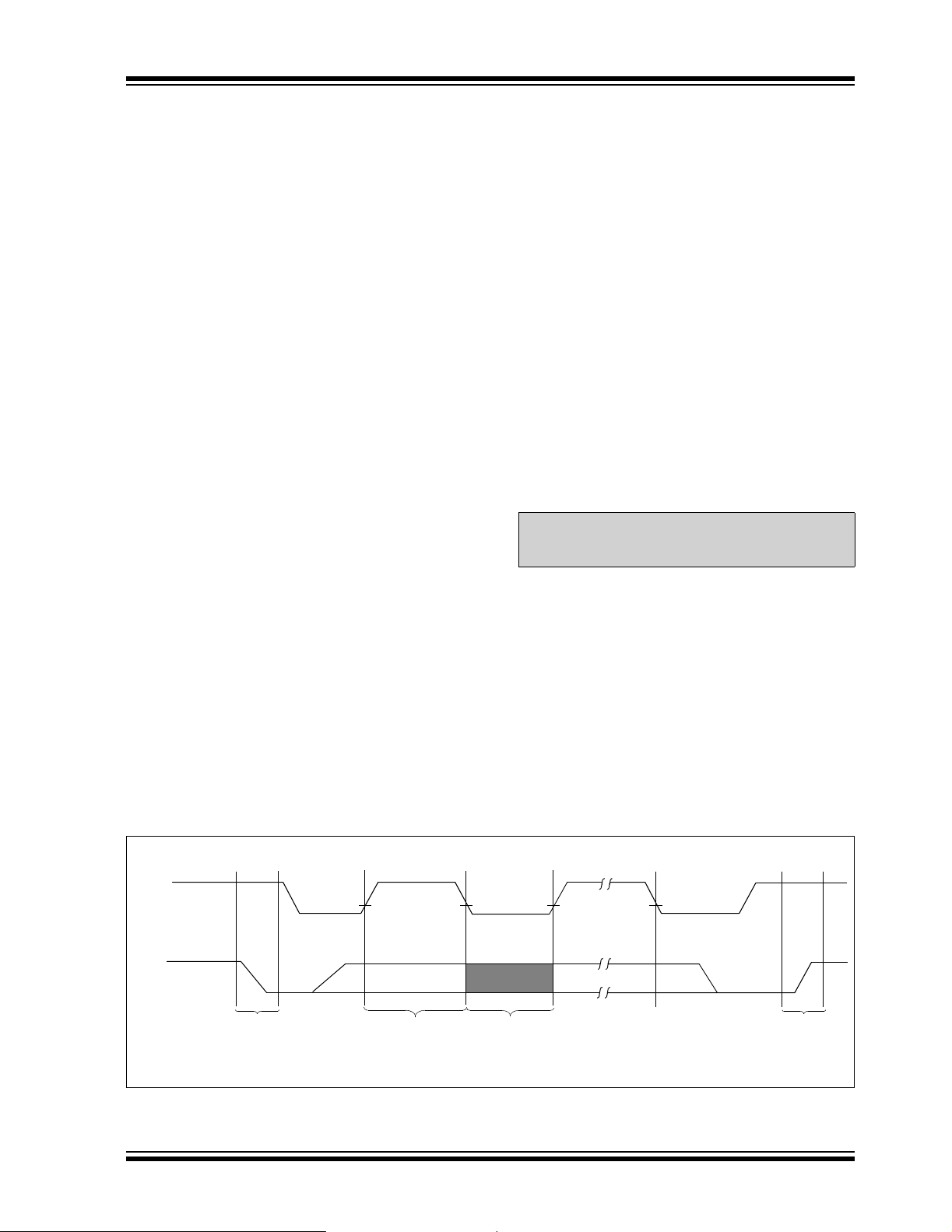
FIGURE 1-1: BUS TIMING DATA
SCL
SDA
IN
SDA
OUT
5
3
7
6
14
2
FIGURE 1-2: BUS TIMING START/STOP
SCL
7
SDA
6
4
8
9
11
D4
10
12
10
Start Stop
DS21703E-page 4 © 2005 Microchip Technology Inc.
Page 5
24AA16/24LC16B
2.0 FUNCTIONAL DESCRIPTION
The 24XX16 supports a bidirectional, 2-wire bus and
data transmission protocol. A device that sends data
onto the bus is defined as a transmitter, while a device
receiving data is defined as a receiver. The bus has to
be controlled by a master device which generates the
Serial Clock (SCL), controls the bus access and
generates the Start and Stop conditions, while the
24XX16 works as slave. Both master and slave can
operate as transmitter or receiver, but the master
device determines which mode is activated.
3.0 BUS CHARACTERISTICS
The following bus protocol has been defined:
• Data transfer may be initiated only when the bus
is not busy.
• During data transfer, the data line must remain
stable when ever the c lock lin e is high. Cha nges i n
the data line while the clock line is high will be
interpreted as a Start or Stop condition.
Accordingly, the following bus conditions have been
defined (Figure 3-1).
3.1 Bus Not Busy (A)
Both data and clock lines remain high.
3.2 Start Data Transfer (B)
A high-to-low transition of the SDA line while the clock
(SCL) is high determines a Start condition. All
commands must be preceded by a Start condition.
3.3 Stop Data Transfer (C)
A low-to-h i gh t ran si t io n of t h e SD A l in e whi l e t h e c lo ck
(SCL) is high determines a Stop condition. All
operations must be ended with a Stop condition.
3.4 Data Valid (D)
The state of the data line represents valid data when,
after a Start condition, the data line is stable for the
duration of the high period of the clock signal.
The data on the line must be changed during the low
period of the clock signal. There is one clock pulse per
bit of data.
Each data transfer is initiated with a S tart conditi on and
terminated with a Stop condition. The number of data
bytes transferred between Start and Stop conditions is
determined by the master device and is, theoretically
unlimited, (although only the last sixteen will be stored
when doing a write operation). When an overwrite does
occur it will replace data in a first-in first-out (FIFO)
fashion.
3.5 Acknowledge
Each receiving device, when addressed, is obliged to
generate an acknowledge after the reception of each
byte. The ma ster devi ce m ust gener at e an ex tr a cloc k
pulse which is associated with this Acknowledge bit.
Note: The 24XX16 does not generate any
Acknowledge bits if an internal
programming cycle is in progress.
The device that acknowledges, has to pull down the
SDA line during the ackn owledge clock pulse in such a
way that the SDA line is stable low during the high
period of the acknowledge related clock pulse. Of
course, setup and hold times must be taken into
account. During reads, a master must signal an end of
data to the sla ve by no t gene rating a n Ack nowl edge b it
on the last byte that has be en c loc ke d ou t of th e sl av e.
In this case, the sl ave (24 XX16) will leave the data lin e
high to enable the master to generate the Stop
condition.
FIGURE 3-1: DAT A TRANSFER SEQUENCE ON THE SERIAL BUS
SCL
SDA
© 2005 Microchip Technology Inc. DS21703E-page 5
(A) (B) (D) (D) (A)(C)
Start
Condition
Address or
Acknowledge
Valid
Data
Allowed
to Change
Stop
Condition
Page 6
24AA16/24LC16B
3.6 Device Addressi ng
A control byte is th e first byte received following the
Start condition from the master device (Figure 3-2).
The control byte consists of a four-bit control code.
For the 24XX16, this is set as ‘
and write operations. The next three bits of the control
byte are the block-sel ect bits (B2, B1, B0). T hey are
used by the master device to select which of the eight
256 word-blocks of memory are to be accessed.
These bits are in effect the thr ee Mo st S ignif ica nt bits
of the word address. It should be noted that the
protocol limits the si ze of the me mory to eight block s
of 256 wor ds , th er efore, the protocol can support only
one 24XX16 per system .
The last bit of the control byte defines the operation to
be performed. When set to ‘
selected. When set to ‘
Following the Start condition, the 24XX16 monitors the
SDA bus, checking the device type identifier being
transmitted and, upon receiving a ‘
slave device outputs an Acknowledge signal on the
SDA line. Depending on the state of the R/W bit, the
24XX16 will select a read or write operation.
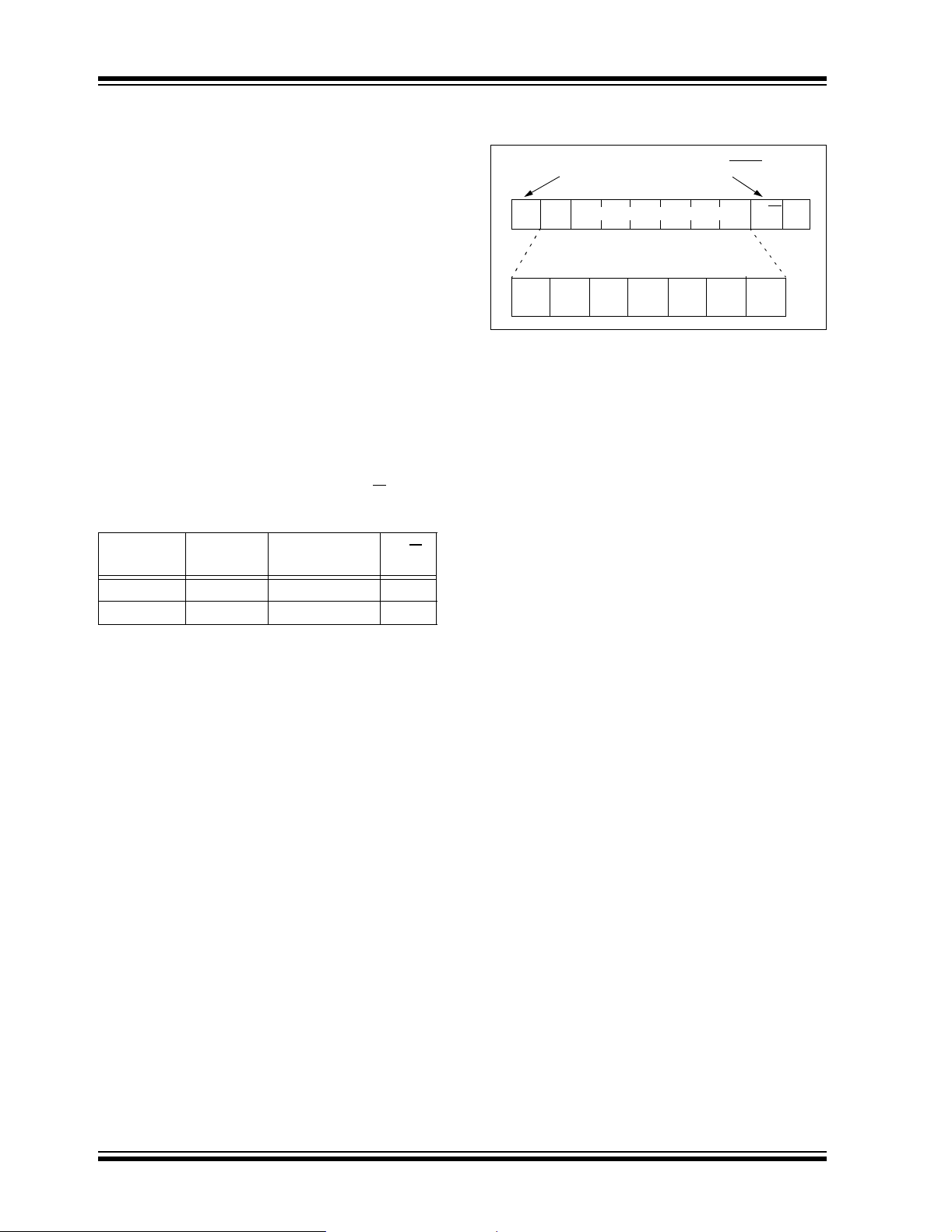
Operation
Read
Write
0’, a write operation is se lecte d.
Control
Code
1010
1010
1010’ binary for read
1’, a read operation is
1010’ code, the
Block Select R/W
Block Address
Block Address
1
0
FIGURE 3-2: CONTROL BYTE
ALLOCATION
Start Read/Write
Slave Address
1010B2 B1 B0
R/W
A
DS21703E-page 6 © 2005 Microchip Technology Inc.
Page 7
24AA16/24LC16B
4.0 WRITE OPERATION
4.1 Byte Write
Following the Start condition from the master, the
device code (4 bits), the block address (3 bits) and the
R/W bit, which is a lo gic-low, is placed onto the bus by
the master transmitter. This indicates to the addressed
slave receiver that a byte with a word address will
follow once it has generated an Ac knowledge b it during
the ninth clock cycl e. Therefore, th e next byte trans mitted by the master is the word address and will be
written into the Address Pointer of the 24XX16. After
receiving another Acknowledge signal from the
24XX16, the master device will transmit the data word
to be written into the addressed memory location. The
24XX16 acknowledges again and the master
generates a Stop condition. This initiates the internal
write cycle and, during this time, the 24XX16 will not
generate Acknowledge signals (Figure 4-1).
4.2 Page Wri te
The write control byte, word address and the first data
byte are transmitted to the 24 XX16 in th e same w ay a s
in a byte write. However, instead of generating a Stop
condition, the master transmits up to 16 data bytes to
the 24XX16, which are temporarily stored in the onchip page buffer and will be written into memory once
the master has transmitted a Stop condition. Upon
receipt of each word, the four lower-order Address
Pointer bits are internally incremented by ‘
higher-order 7 bits of the word address remain
constant. If the master should transmit more than 16
bytes prior to generating the Stop condition, the
address counter will roll over and the previously
received data will be overwri tten. As w ith the by te writ e
operation, once the Stop condition is received an
internal write cycle will begin (Figure 4-2).
Note: Page write operatio ns are lim ited to wri ting
bytes within a single physical page,
regardless of the number of bytes
actually being written. Physical page
boundaries start at addresses that are
integer multiples of the page buf fer size (or
‘page-size’) and end a t ad dresses that a re
integer multiples of [page size – 1]. If a
Page Write command attempts to write
across a physical page boundary, the
result is that the data wraps around to the
beginning of the current page (overwriting
data previously stored there), instead of
being written to the next page, as might b e
expected. It is therefore necessary for the
application software to prevent page write
operations that would attempt to cross a
page boundary.
1’. The
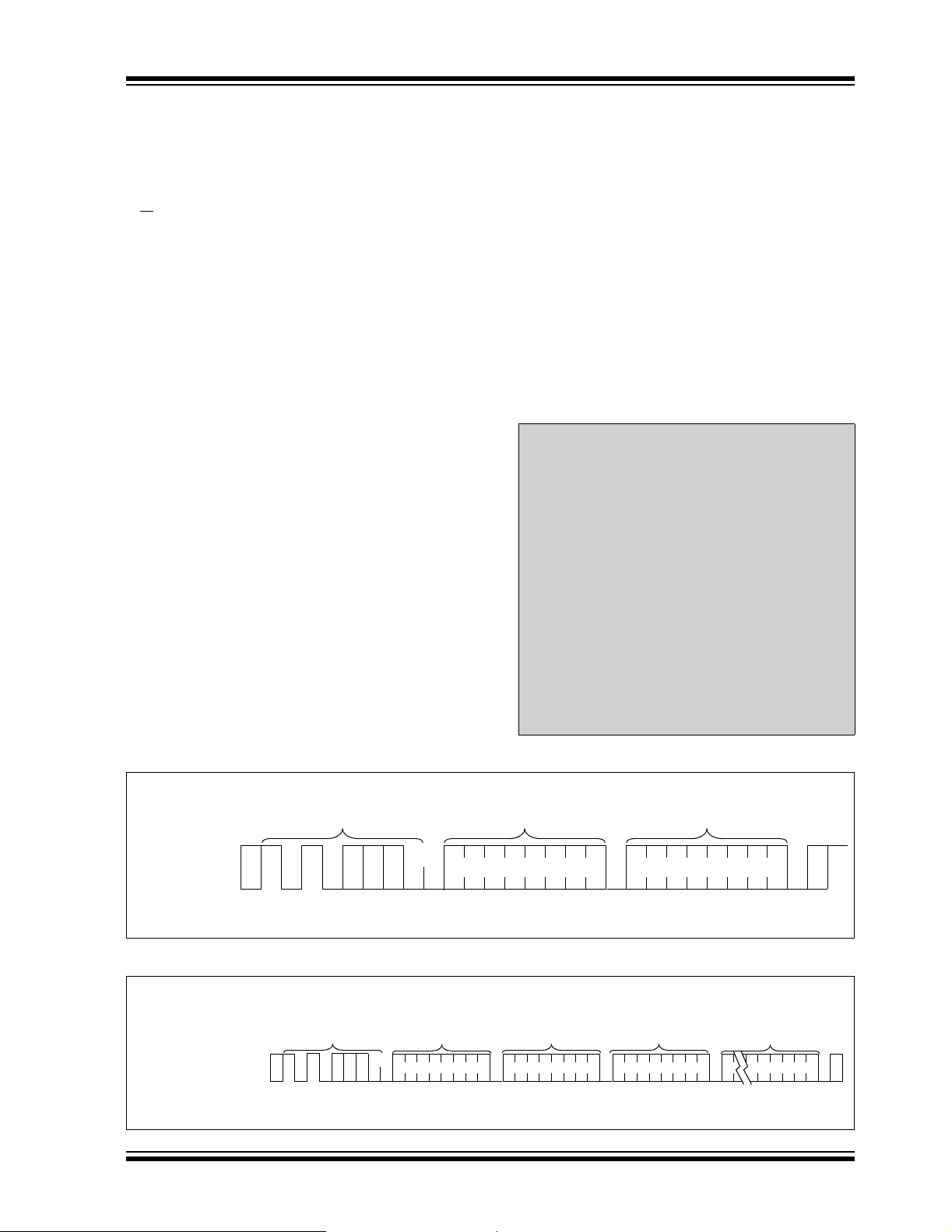
FIGURE 4-1: BYTE WRITE
BUS ACTIVITY
MASTER
SDA LINE
BUS ACTIVITY
S
T
A
R
T
S P
Control
Byte
Word
Address
A
C
K
A
C
K
Data
S
T
O
P
A
C
K
FIGURE 4-2: PAGE WRITE
S
T
BUS ACTIVITY
MASTER
SDA LINE
BUS ACTIVITY
© 2005 Microchip Technology Inc. DS21703E-page 7
Control
A
R
T
S P
Byte
A
C
K
Word
Address
(n)
Data (n) Data (n + 15)
A
C
K
Data (n + 1)
A
C
K
A
C
K
S
T
O
P
A
C
K
Page 8
24AA16/24LC16B
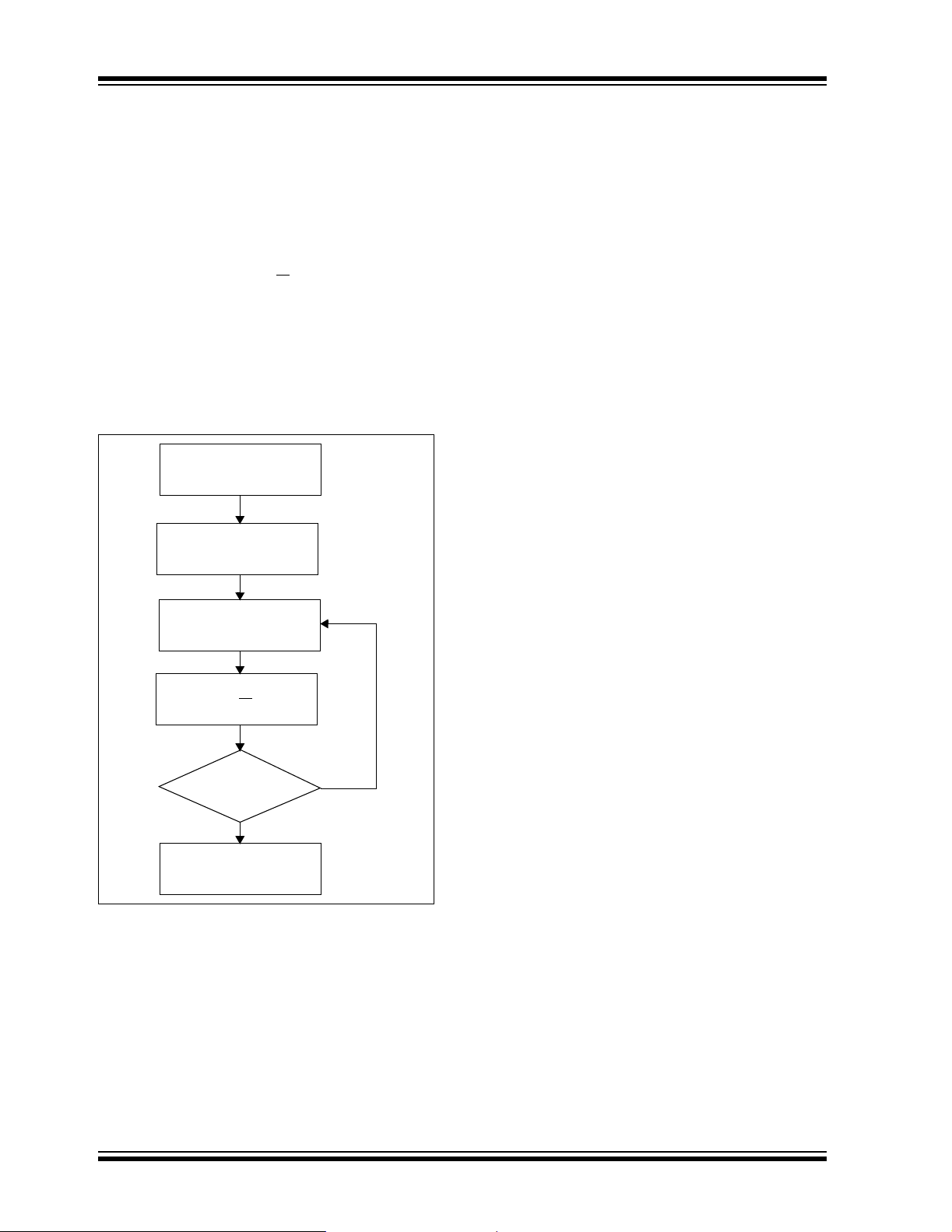
5.0 ACKNOWLEDGE POLLING
Since the device will not acknowledge during a write
cycle, this can be used to determine when the cycle is
complete (this feature can be used to maximize bus
throughput). Once the Stop condition for a Write
command has been issu ed from the mas ter , the device
initiates the int ernally-timed wri te cycle and ACK pol ling
can then be initiated immediately. This involves the
master sending a S tart c ondition fo llowed by the contro l
byte for a Write c ommand (R/W
busy with the write cycle, no ACK will be returned. If the
cycle is complete, the device will return the ACK and
the master can then proceed with the next Read or
Write command. See Figure 5-1 for a flow diagram of
this operation.
FIGURE 5-1: ACKNOWLEDGE POLLING
FLOW
Send
Write Command
Send Stop
Condition to
Initiate Write Cycle
= 0). If the device is still
6.0 WRITE-PROTECTION
The 24XX16 can be used as a serial ROM when the
WP pin is connected to V
inhibited and the entire memory will b e writ e-protected.
CC. Programming will be
Send Start
Send Control Byte
with R/W
Acknowledge
= 0
Did Device
(ACK = 0)?
Yes
Next
Operation
No
DS21703E-page 8 © 2005 Microchip Technology Inc.
Page 9

24AA16/24LC16B
7.0 READ OPERATION
Read operations are initiated in the same way as write
operations, with the exception that the R/W
slave address is set to ‘
1’. There are three basic types
of read operations: current addr ess read , rand om rea d
and sequential read.
7.1 Current Address Read
The 24XX16 contains an address counter that maintains the address of the last word accessed, internally
incremented by ‘
1’. Therefore, if the previous access
(either a read or write opera tio n) w as to address
next current address read operati on would access da ta
from address
with R/W
n + 1. Upon receipt of the sl ave add res s
bit set to ‘1’, the 24XX16 issues an acknowledge and transmits the 8-b it data w ord. The master will
not acknowledge the tra nsfer , but does generate a S top
condition and the 24XX16 discontinues transmission
(Figure 7-1).
7.2 Random Read
Random read operations allow the master to access
any memory location in a random manner. To perform
this type of read operatio n, th e w ord add ress m us t firs t
be set. This is accomplished by sending the word
address to the 24XX16 as part of a write operation.
Once the word address is sent , the master ge nerates a
Start condition following the acknowledge. This
terminates the write operation, but not before the internal Address Pointer is set. The master then issues the
control byte agai n, but wi th the R /W
24XX16 will then issue an acknowledge and transmit
the 8-bit data word. The master will not acknowledge
the transfer , but does generate a S top con dition and the
24XX16 will discontinue transmission (Figure 7-2).
bit set to a ‘1’. The
bit of the
n, the
7.3 Sequential Read
Sequential reads are initiated in the same way as a
random read, except that once the 24XX16 transmits
the first data byte, the master issues an acknowledge
as opposed to a Stop condition in a random read. This
directs the 24XX16 to transmit the next sequentiallyaddressed 8-bit word (Figure 7-3).
To provide se quential read s, the 24XX16 co ntains an
internal Address Pointer that is incremented by one
upon completion of each operation. This Address
Pointer allows the entire memory contents to be serially
read during one operation.
7.4 Noise Protection
The 24XX16 employs a VCC threshold detector circuit
which disables the internal erase/write logic if the V
is below 1.5V at nominal conditions.
The SCL and SDA inputs have Schmitt Trigger and
filter circuits which suppress noise spikes to assure
proper device operation, even on a noisy bus.
CC
FIGURE 7-1: CURRENT ADDRESS READ
S
BUS ACTIVITY
MASTER
SDA LINE
BUS ACTIVITY
© 2005 Microchip Technology Inc. DS21703E-page 9
T
A
R
T
SP
Control
Byte
S
Data (n)
A
C
K
T
O
P
N
O
A
C
K
Page 10

24AA16/24LC16B
FIGURE 7-2: RANDOM READ
S
BUS ACTIVITY
MASTER
SDA LINE
BUS ACTIVITY
T
Control
A
R
T
S P
Byte
FIGURE 7-3: SEQUENTIAL READ
BUS ACTIVITY
MASTER
SDA LINE
BUS ACTIVITY
Control
Byte
Data (n) Data (n + 1) Data (n + 2) Data (n + x)
A
C
K
A
C
K
A
C
K
Word
Address (n)
S
T
Control
A
R
T
A
C
K
Byte
S
A
C
K
Data (n)
A
C
K
A
C
K
S
T
O
P
N
O
A
C
K
S
T
O
P
P
N
O
A
C
K
DS21703E-page 10 © 2005 Microchip Technology Inc.
Page 11

24AA16/24LC16B
8.0 PIN DESCRIPTIONS
The descriptions of the pins are listed in Table 8-1.
TABLE 8-1: PIN FUNCTION TABLE
Name PDIP SOIC TSSOP DFN MSOP SOT-23 Description
A0 1 1 1 1 1 — Not Connected
A1 2 2 2 2 2 — Not Connected
A2 3 3 3 3 3 — Not Connected
SS 4 4 4 4 4 2 Ground
V
SDA 5 5 5 5 5 3 Serial Address/Data I/O
SCL 6 6 6 6 6 1 Serial Clock
WP 7 7 7 7 7 5 Write-Protect Input
CC 8 8 8 8 8 4 +1.8V to 5.5V Power Supply
V
8.1 Serial Address/Data Input/Output (SDA)
SDA is a bidirectional pin used to transfer addresses
and data into and out of the de vice . Sinc e it i s an opendrain terminal, the SDA bus requires a pull-up resistor
CC (typical 10 kΩ for 100 k Hz, 2 kΩ for 400 kHz).
to V
For normal data transfer, SDA is allowed to change
only during SCL low. Changes during SCL high are
reserved for indicating Start and Stop conditions.
8.2 Serial Clock (SCL)
The SCL input is used to sync hro ni ze th e da t a tra ns fer
to and from the device.
8.3 Write-Protect (WP)
The WP pin must be connected to either VSS or VCC.
If tied to V
(read/write the entire memory
If tied to V
memory will be write-protected. Read operations are
not affected.
This feature allows the user to use the 24XX16 as a
serial ROM when WP is enabled (tied to V
SS, normal memory operation is enabled
00-07FFH).
CC, write operations are inhibited. The entire
CC).
8.4 A0, A1, A2
The A0, A1 and A2 pins are not used by the 24XX16.
They may be left floating or tied to either V
SS or VCC.
© 2005 Microchip Technology Inc. DS21703E-page 11
Page 12

24AA16/24LC16B
9.0 PACKAGING INFORMATION
9.1 Package Marking Information
8-Lead PDIP (300 mil)
XXXXXXXX
T/XXXNNN
YYWW
8-Lead SOIC (150 mil)
XXXXXXXT
XXXXYYWW
NNN
8-Lead TSSOP
XXXX
TYWW
NNN
8-Lead MSOP
XXXXXT
YWWNNN
Example:
24LC16B
I/P 13F
3
e
0527
Example:
24LC16BI
3
e
SN 0527
13F
Example:
4L16
I527
13F
Example:
4L16I
52713F
8-Lead 2x3 DFN
XXX
YWW
NN
5-Lead SOT-23
XXNN
DS21703E-page 12 © 2005 Microchip Technology Inc.
Example:
254
527
13
Example:
B53F
Page 13

24AA16/24LC16B
l
1st Line Marking Codes
Part Number
24AA16 4A16 4A16T B5NN — 251 —
24LC16B 4L16 4L16T M5NN N5NN 254 255
Note: T = Temperature grade (I, E)
NN = Alphanumeric traceability code
Legend: XX...X Part number or part number code
Note: For very small packages with no room for the Pb-free JEDEC designator
Note: In the event the full Microchip part num ber can not be ma rked on one line , it wil
TSSOP MSOP
T Temperature (I, E)
Y Year code (last digit of calendar year)
YY Year code (last 2 digits of calendar year)
WW Week code (week of January 1 is week ‘01’)
NNN Alphanumeric traceability code (2 characters for small packages)
Pb-free JEDEC designator for Matte Tin (Sn)
3
e
, the marking will only appear on the outer carton or reel label.
3
e
be carried over to the next line, thus limiting the number of available
characters for customer-specific information.
I Temp. E Temp. I Temp. E Temp.
SOT-23 DFN
Note: Please visit www.microchip.com/Pbfree for the latest information on Pb-free conversion.
*Standard OTP marking consists of Microchip part number, year code, week code, and traceability code.
© 2005 Microchip Technology Inc. DS21703E-page 13
Page 14

24AA16/24LC16B
8-Lead Plastic Dual In-line (P) – 300 mil (PDIP)
E1
D
2
n
E
β
eB
Number of Pins
Pitch
Top to Seating Plane A .140 .155 .170 3.56 3.94 4.32
Molded Package Thickness A2 .115 .130 .145 2.92 3.30 3.68
Base to Seating Plane A1 .015 0.38
Shoulder to Shoulder Width E .300 .313 .325 7.62 7.94 8.26
Molded Package Width E1 .240 .250 .260 6.10 6.35 6.60
Overall Length D .360 .373 .385 9.14 9.46 9.78
Tip to Seating Plane L .125 .130 .135 3.18 3.30 3.43
Lead Thickness
Upper Lead Width B1 .045 .058 .070 1.14 1.46 1.78
Lower Lead Width B .014 .018 .022 0.36 0.46 0.56
Overall Row Spacing § eB .310 .370 .430 7.87 9.40 10.92
Mold Draft Angle Top
Mold Draft Angle Bottom
* Controlling Parameter
§ Significant Characteristic
Notes:
Dimensions D and E1 do not include mold flash or protrusions. Mold flash or protrusions shall not exceed
.010” (0.254mm) per side.
JEDEC Equivalent: MS-001
Drawing No. C04-018
Dimension Limits MIN NOM MAX MIN NOM MAX
1
α
A
c
Units INCHES* MILLIMETERS
n
p
c
α
β
.008 .012 .015 0.20 0.29 0.38
A1
B1
B
88
.100 2.54
51015 51015
51015 51015
A2
L
p
DS21703E-page 14 © 2005 Microchip Technology Inc.
Page 15

8-Lead Plastic Small Outline (SN) – Narrow, 150 mil (SOIC)
E
E1
p
D
2
24AA16/24LC16B
B
Number of Pins
Pitch
Standoff §
Foot Angle
Lead Thickness
Mold Draft Angle Top
Mold Draft Angle Bottom
* Controlling Parameter
§ Significant Characteristic
Notes:
Dimensions D and E1 do not include mold flash or protrusions. Mold flash or protrusions shall not exceed
.010” (0.254mm) per side.
JEDEC Equivalent: MS-012
Drawing No. C04-057
n
45°
c
β
n
p
A1
φ
c
α
β
1
h
A
φ
L
048048
A1
MILLIMETERSINCHES*Units
1.27.050
α
A2
MAXNOMMINMAXNOMMINDimension Limits
88
1.751.551.35.069.061.053AOverall Height
1.551.421.32.061.056.052A2Molded Package Thickness
0.250.180.10.010.007.004
6.206.025.79.244.237.228EOverall Width
3.993.913.71.157.154.146E1Molded Package Width
5.004.904.80.197.193.189DOverall Length
0.510.380.25.020.015.010hChamfer Distance
0.760.620.48.030.025.019LFoot Length
0.250.230.20.010.009.008
0.510.420.33.020.017.013BLead Width
1512015120
1512015120
© 2005 Microchip Technology Inc. DS21703E-page 15
Page 16

24AA16/24LC16B
8-Lead Plastic Thin Shrink Small Outline (ST) – 4.4 mm (TSSOP)
E
E1
p
D
2
n
B
1
A
c
A1
φ
β
Units
A1
n
p
φ
c
α
β
048048
Number of Pins
Pitch
Standoff §
Foot Angle
Lead Thickne ss
Mold Draft Angle Top
Mold Draft Angle Bottom
* Controlling Parameter
§ Significant Characteristic
Notes:
Dimensions D and E1 do not include mold flash or protrusions. Mold flash or protrusions shall not exceed
.005” (0.127mm) per side.
JEDEC Equivalent: MO-153
Drawing No. C04-086
L
MILLIMETERS*INCHES
0.65.026
α
A2
MAXNOMMINMAXNOMMINDimension Limits
88
1.10.043AOverall Height
0.950.900.85.037.035.033A2Molded Package Thickness
0.150.100.05.006.004.002
6.506.386.25.256.251.246EOverall Width
4.504.404.30.177.173.169E1Molded Package Width
3.103.002.90.122.118.114DMolded Package Length
0.700.600.50.028.024.020LFoot Length
0.200.150.09.008.006.004
0.300.250.19.012.010.007BLead Width
10501050
10501050
DS21703E-page 16 © 2005 Microchip Technology Inc.
Page 17

24AA16/24LC16B
8-Lead Plastic Dual Flat No Lead Package (MC) 2x3x0.9 mm Body (DFN) – Saw Singulated
p
D
b
n
L
PIN 1
ID INDEX
AREA
(NOTE 2)
TOP VIEW
A3
Dimension Limits
Number of Pins
Pitch
Overall Height
Standoff
Contact Thickness
Overall Length
3)
(Note
(Note
3)
Exposed Pad Length
Overall Width
Exposed Pad Width
Contact Width
Contact Length
*Controlling Parameter
Notes:
Package may have one or more exposed tie bars at ends.1.
Pin 1 visual index feature may vary, but must be located within the hatched area.2.
3.
Exposed pad dimensions vary with paddle size.
4. JEDEC equivalent: MO-229
Drawing No. C04-123
E
Units
n
p
A
A1
A3
D
D2
E
E2
b
L
A1
EXPOSED
A
MIN
.031
.000 .001
.055
.047
.008
.012
METAL
PAD
21
D2
BOTTOM VIEW
EXPOSED
TIE BAR
(NOTE 1)
INCHES
NOM
8
.020 BSC
.039
.002
.008 REF.
.079 BSC
-- --
.118 BSC
-- -.010
.016
.064
.071
.012
.020
MINMAX NOM
0.80
0.00
1.39
1.20
0.20
0.30
E2
MILLIMETERS*
8
0.50 BSC
0.90.035
0.02
0.20 REF.
2.00 BSC
3.00 BSC
0.25
0.40
Revised 05/24/04
MAX
1.00
0.05
1.62
1.80
0.30
0.50
© 2005 Microchip Technology Inc. DS21703E-page 17
Page 18

24AA16/24LC16B
8-Lead Plastic Micro Small Outline Package (MS) (MSOP)
E
E1
p
D
2
B
n 1
α
A
c
(F)
β
Units
Dimension Limits
Number of Pins
Pitch
Overall Height
Molded Package Thickness
Standoff
Overall Width
Molded Package Width
Overall Length
Foot Length
Foot Angle
Lead Thickness
Lead Width
Mold Draft Angle Top
Mold Draft Angle Bottom
*Controlling Parameter
Notes:
Dimensions D and E1 do not include mold flash or protrusions. Mold flash or protrusions shall not
exceed .010" (0.254mm) per side.
JEDEC Equivalent: MO-187
Drawing No. C04-111
A2
E1
A1
MIN
n
p
A
E
D
L
φ
c
B
α
β
.026 BSC
.030
.000
.193 TYP.
.118 BSC
.118 BSC
.016 .024
.037 REFFFootprint (Reference)
0° - 8°
.003
.009
5°
5° -
L
INCHES
NOM
.033
.006
.012
φ
A1
MAX NOM
8
--
-
-
.043
.037
.006
.031
.009
.016
15°
15°
MIN
0.75
0.00
0.40
0.08
0.22
MILLIMETERS*
MAX
8
0.65 BSC
--
0.85
-
4.90 BSC
3.00 BSC
3.00 BSC
0.60
0.95 REF
0°
-
-
-
A2
1.10
0.95
0.15
0.80
8°
0.23
0.40
15°5° 15°5° -
DS21703E-page 18 © 2005 Microchip Technology Inc.
Page 19

5-Lead Plastic Small Outline Transistor (OT) (SOT-23)
E
E1
p
B
p1
D
24AA16/24LC16B
n
c
β
Number of Pins
Pitch
Outside lead pitch (basic)
Foot Angle
Lead Thickne ss
Mold Draft Angle Top
Mold Draft Angle Bottom
* Controlling Parameter
§ Significant Characteristic
Notes:
Dimensions D and E1 do not include mold flash or protrusions. Mold flash or protrusions shall not exceed
.010” (0.254mm) per side.
JEDEC Equivalent: MO-178
Drawing No. C04-091
1
A
φ
L
n
p
p1
φ
c
α
β
.038
A1
MILLIMETERSINCHES*Units
0.95
1.90.075
α
A2
MAXNOMMINMAXNOMMINDimension Limits
55
1.451.180.90.057.046.035AOverall Height
1.301.100.90.051.043.035A2Molded Package Thickness
0.150.080.00.006.003.000A1Standoff §
3.002.802.60.118.110.102EOverall Width
1.751.631.50.069.064.059E1Molded Package Width
3.102.952.80.122.116.110DOverall Length
0.550.450.35.022.018.014LFoot Length
10501050
0.200.150.09.008.006.004
0.500.430.35.020.017.014BLead Width
10501050
10501050
© 2005 Microchip Technology Inc. DS21703E-page 19
Page 20

24AA16/24LC16B
APPENDIX A: REVISION HISTORY
Revision D
Corrections to Section 1.0, Electrical Characteristics.
Revision E
Added DFN package.
DS21703E-page 20 © 2005 Microchip Technology Inc.
Page 21

24AA16/24LC16B
THE MICROCHIP WEB SITE
Microchip provides onlin e support v ia our W WW site at
www.m ic roc hi p.c om . Thi s web si te i s us ed as a m ean s
to make files and information easily available to
customers. Accessible by using your favorite Internet
browser, the web site contains the following
information:
• Product Support – Data sheets and errata,
application notes and sample programs, design
resources, user’s guides and hardware support
documents, lat est softwa re releases and archived
software
• General Technical Support – Frequently Asked
Questions (FAQ), technical support requests,
online discussion groups, Microchip consultan t
program member listing
• Business of Microchip – Product selector and
ordering guides, latest Microchip press releases,
listing of s eminars and events, listin gs of
Microchip sales offices, distributors and factory
representatives
CUSTOMER CHANGE NOTIFICATION SERVICE
Microchip’s customer notification service helps keep
customers current on Microchip products. Subscribers
will receive e-mail notification whenever there are
changes, updates, revisions or errata related to a
specified produ ct family or develo pment tool of inte rest.
To register, access the Microchip web site at
www.microchip.com, click on Customer Change
Notification and follow the registration instructions.
CUSTOMER SUPPORT
Users of Microchip products can receive assistance
through several channels:
• Distributor or Representative
• Local Sales Office
• Field Application Engineer (FAE)
• Technical Support
• Development Systems Information Line
Customers should contact their distributor,
representative or field application engineer (FAE) for
support. Local sales offices are also available to help
customers. A listing of sales offices and locations is
included in the back of this document.
T echnic al support is avail able throug h the web si te
at: http://support.microchip.com
In addition, there is a Development Systems
Information Line which lists the latest versions of
Microchip’s development systems software products.
This line also provides information on how customers
can receive currently available upgrade kits.
The Development Systems Information Line
numbers ar e:
1-800-755-2345 – United States and most of Canada
1-480-792-7302 – Other International Locations
© 2005 Microchip Technology Inc. DS21703E-page 21
Page 22

24AA16/24LC16B
READER RESPONSE
It is our intentio n to pro vi de you with the best documentation possible to ens ure suc c es sfu l u se of y ou r M ic roc hip product. If you wish to provid e your c omment s on org anizatio n, clarity, subject matter, and ways in w hich o ur docum entatio n
can better serve you, please FAX your comments to the Technical Publications Manager at (480) 792-4150.
Please list the following information, and use this outline to provide us with your comments about this document.
To:
RE: Reader Response
From:
Application (optional):
Would you like a reply? Y N
Device: Literature Number:
Questions:
1. What are the best features of this document?
2. How does this document meet your hardware and software development needs?
3. Do you find the organization of this document easy to follow? If not, why?
Technical Publications Manager
Name
Company
Address
City / State / ZIP / Country
Telephone: (_______) _________ - _________
Total Pages Sent ________
FAX: (______) _________ - _________
DS21703E24AA16/24LC16B
4. What additions to the document do you think would enhance the structure and subject?
5. What deletions from the document could be made without affecting the overall usefulness?
6. Is there any incorrect or misleading information (what and where)?
7. How would you improve this document?
DS21703E-page 22 © 2005 Microchip Technology Inc.
Page 23

24AA16/24LC16B
PRODUCT IDENTIFICATION SYSTEM
To order or obtain information, e.g., on pricing or delivery, refer to the factory or the listed sales office.
PART NO. X /XX
Device
PackageTemperature
Range
24AA16: = 1. 8V, 16 Kbit I2C Serial EEPROM
24AA16T: = 1.8V, 16 Kbit I
24LC16B: = 2.5V, 16 Kbit I
24LC16BT: = 2.5V, 16 Kbit I
Temperature
Range:
Package: MC = 2x3 DFN, 8-lead
Lead Finish Blank = Pb-free – Matte Tin (see Note 1)
I =-40°C to +85°C
E = -40°C to +125°C
P = Plastic DIP (300 mil body), 8-lead
SN = Plastic SOIC (150 mil body), 8-lead
ST = Plastic TSSOP (4.4 mm), 8-lead
MS = Plastic Micro Small Outline (MSOP), 8-lead
OT = SOT-23, 5-lead (Tape and Reel only)
G = Pb-free – Matte Tin only
(Tape and Reel)
(Tape and Reel)
2
C Serial EEPROM
2
C Serial EEPROM
2
C Serial EEPROM
X
Lead Finish
Examples:
a) 24AA16-I/P: Industrial Temperature,1.8V,
PDIP package
b) 24AA16-I/SN : Industrial Temperature,1.8V,
SOIC package
c) 24AA16T-I/OT: Industrial Temperature,
1.8V, SOT-23 package, Tape and Reel
d) 24LC16B-I/P: Industrial T emperature, 2.5V,
PDIP package
e) 24LC16B-E/SN: Automotive Temp.,2.5V
SOIC package
f) 24LC16BT-I/OT: Industrial Temperature,
2.5V, SOT-23 package, Tape and Reel
Note 1: Most products manufactured after January 2005 will have a M atte Tin (Pb-free) finish. Most products manufactured
before January 2005 will have a finish of approximately 63% Sn and 37% Pb (Sn/Pb).
Please visit www.microchip.com for the latest information on Pb-free conversion, including conversion date codes.
Sales and Support
Data Sheets
Products supported by a preliminary Data Sheet may have an errata sheet describing minor operational differences and
recommended workarounds. To determine if an errata sheet exists for a particular device, please contact one of the following:
1. Your local Microchip sales office
2. The Microchip Corporate Literature Center U.S. FAX: (480) 792-7277
3. The Microchip Worldwide Site (www.microchip.com)
Please specify which device, revision of silicon and Data Sheet (include Literature #) you are using.
New Customer Notification System
Register on our web site (www.microchip.com/cn) to receive the most current information on our products.
© 2005 Microchip Technology Inc. DS21703E-page 23
Page 24

24AA16/24LC16B
NOTES:
DS21703E-page 24 © 2005 Microchip Technology Inc.
Page 25

Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the
intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our
knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data
Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not
mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are com mitted to continuously improving the code protect ion f eatures of our
products. Attempts to break Microchip’s code protection feature may be a violation of the Digit al Mill ennium Copyright Act. If such acts
allow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Information contained in this publication regarding device
applications and the like is provided only for your convenience
and may be superseded by updates. It is your responsibility to
ensure that your application meets with your specifications.
MICROCHIP MAKES NO REPRESENTATIONS OR WARRANTIES OF ANY KIND WHETHER EXPRESS OR IMPLIED,
WRITTEN OR ORAL, STATUTORY OR OTHERWISE,
RELATED TO THE INFORMATION, INCLUDING BUT NOT
LIMITED TO ITS CONDITION, QUALITY, PERFORMANCE,
MERCHANTABILITY OR FITNESS FOR PURPOSE.
Microchip disclaims all liability arising from this information and
its use. Use of M icrochip’s prod ucts as critical components in
life support systems is not authorized except with express
written approval by Microchip. No licenses are conveyed,
implicitly or otherwise, under any Microchip intellectual property
rights.
Trademarks
The Microchip name and logo, the Microchip logo, Accuron,
dsPIC, K
EELOQ, microID, MPLAB, PIC, PICmicro, PICSTART,
PRO MATE, PowerSmart, rfPIC, and SmartShunt are
registered trademarks of Microchip Technology Incorporated
in the U.S.A. and other countries.
AmpLab, FilterLab, Migratable Memory, MXDEV, MXLAB,
PICMASTER, SEEVAL, SmartSensor and The Embedded
Control Solutions Company are registered trademarks of
Microchip Technology Incorporated in the U.S.A.
Analog-for-the-Digital Age, Application Maestro, dsPICDEM,
dsPICDEM.net, dsPICworks, ECAN, ECONOMONITOR,
FanSense, FlexROM, fuzzyLAB, In-Circuit Serial
Programmin g, IC SP, ICEPIC, MPASM, MPLIB, M PL I N K,
MPSIM, PICkit, PICDEM, PICDEM.net, PICLAB, PICtail,
PowerCal, PowerInfo, PowerMate, PowerTool, rfLAB,
rfPICDEM, Select Mode, Smart Serial, SmartT el, Total
Endurance and WiperLock are trademarks of Microchip
Technology Incorporated in the U.S.A. and other countries.
SQTP is a service mark of Microchip T echnology Incorporated
in the U.S.A.
All other trademarks mentioned herein are property of their
respective companies.
© 2005, Microchip Technology Incorporated, Printed in the
U.S.A., All Rights Reserved.
Printed on recycled paper.
Microchip received ISO/TS-16949:2002 quality system certification for
its worldwide headquarters, design and wafer fabrication facilities in
Chandler and Tempe, Arizona and Mountain View, California in
October 2003. The Company’s quality system processes and
procedures are for its PICmicro
devices, Serial EEPROMs, microperipherals, nonvolatile memory and
analog products. In addition, Microchip’s quality system for the design
and manufacture of development systems is ISO 9001:2000 certified.
®
8-bit MCUs, KEELOQ
®
code hopping
© 2005 Microchip Technology Inc. DS21703E-page 25
Page 26

WORLDWIDE SALES AND SERVICE
AMERICAS
Corporate Office
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 480-792-7200
Fax: 480-792-7277
Technical Support:
http://support.microchip.com
Web Address:
www.microchip.com
Atlanta
Alpharetta, GA
Tel: 770-640-0034
Fax: 770-640-0307
Boston
Westborough, MA
Tel: 774-760-0087
Fax: 774-760-0088
Chicago
Itasca, IL
Tel: 630-285-0071
Fax: 630-285-0075
Dallas
Addison, TX
Tel: 972-818-7423
Fax: 972-818-2924
Detroit
Farmington Hills, MI
Tel: 248-538-2250
Fax: 248-538-2260
Kokomo
Kokomo, IN
Tel: 765-864-8360
Fax: 765-864-8387
Los Angeles
Mission Viejo, CA
Tel: 949-462-9523
Fax: 949-462-9608
San Jose
Mountain View, CA
Tel: 650-215-1444
Fax: 650-961-0286
Toronto
Mississauga, Ontario,
Canada
Tel: 905-673-0699
Fax: 905-673-6509
ASIA/PACIFIC
Australia - Sydney
Tel: 61-2-9868-6733
Fax: 61-2-9868-6755
China - Beijing
Tel: 86-10-8528-2100
Fax: 86-10-8528-2104
China - Chengdu
Tel: 86-28-8676-6200
Fax: 86-28-8676-6599
China - Fuzhou
Tel: 86-591-8750-3506
Fax: 86-591-8750-3521
China - Hong Kong SAR
Tel: 852-2401-1200
Fax: 852-2401-3431
China - Shanghai
Tel: 86-21-5407-5533
Fax: 86-21-5407-5066
China - Shenyang
Tel: 86-24-2334-2829
Fax: 86-24-2334-2393
China - Shenzhen
Tel: 86-755-8203-2660
Fax: 86-755-8203-1760
China - Shunde
Tel: 86-757-2839-5507
Fax: 86-757-2839-5571
China - Qingdao
Tel: 86-532-502-7355
Fax: 86-532-502-7205
ASIA/PACIFIC
India - Bangalore
Tel: 91-80-2229-0061
Fax: 91-80-2229-0062
India - New Delhi
Tel: 91-11-5160-8631
Fax: 91-11-5160-8632
Japan - Kanagawa
Tel: 81-45-471- 6166
Fax: 81-45-471-6122
Korea - Seoul
Tel: 82-2-554-7200
Fax: 82-2-558-5932 or
82-2-558-5934
Singapore
Tel: 65-6334-8870
Fax: 65-6334-8850
Taiwan - Kaohsiung
Tel: 886-7-536-4818
Fax: 886-7-536-4803
Taiwan - Taipei
Tel: 886-2-2500-6610
Fax: 886-2-2508-0102
Taiwan - Hsinchu
Tel: 886-3-572-9526
Fax: 886-3-572-6459
EUROPE
Austria - Weis
Tel: 43-7242-2244-399
Fax: 43-7242-2244-393
Denmark - Ballerup
Tel: 45-4450-2828
Fax: 45-4485-2829
France - Massy
Tel: 33-1-69-53-63-20
Fax: 33-1-69-30-90-79
Germany - Ismaning
Tel: 49-89-627-144-0
Fax: 49-89-627-144-44
Italy - Milan
Tel: 39-0331-742611
Fax: 39-0331-466781
Netherlands - Drunen
Tel: 31-416-690399
Fax: 31-416-690340
England - Berkshire
Tel: 44-118-921-5869
Fax: 44-118-921-5820
03/01/05
DS21703E-page 26 © 2005 Microchip Technology Inc.
 Loading...
Loading...