

MIC2207
3mmx3mm 2MHz 3A PWM Buck
Regulator
General Description
The Micrel MIC2207 is a high efficiency PWM buck
(step-down) regulators that provides up to 3A of
output current. The MIC2207 operates at 2MHz and
has proprietary internal compensation that allows a
closed loop bandwidth of over 200KHz.
The low on-resistance internal p-channel MOSFET
of the MIC2207 allows efficiencies over 94%,
reduces external components count and eliminates
the need for an expensive current sense resistor.
The MIC2207 operates from 2.7V to 5.5V input and
the output can be adjusted down to 1V. The devices
can operate with a maximum duty cycle of 100% for
use in low-dropout conditions.
The MIC2207 is available in the exposed pad 3mm x
3mm MLF-12L package with a junction operating
range from –40°C to +125°C.
Features
• 2.7 to 5.5V supply voltage
• 2MHz PWM mode
• Output current to 3A
• >94% efficiency
• 100% maximum duty cycle
• Adjustable output voltage option down to 1V
• Ultra-fast transient response
• Ultra-small external components
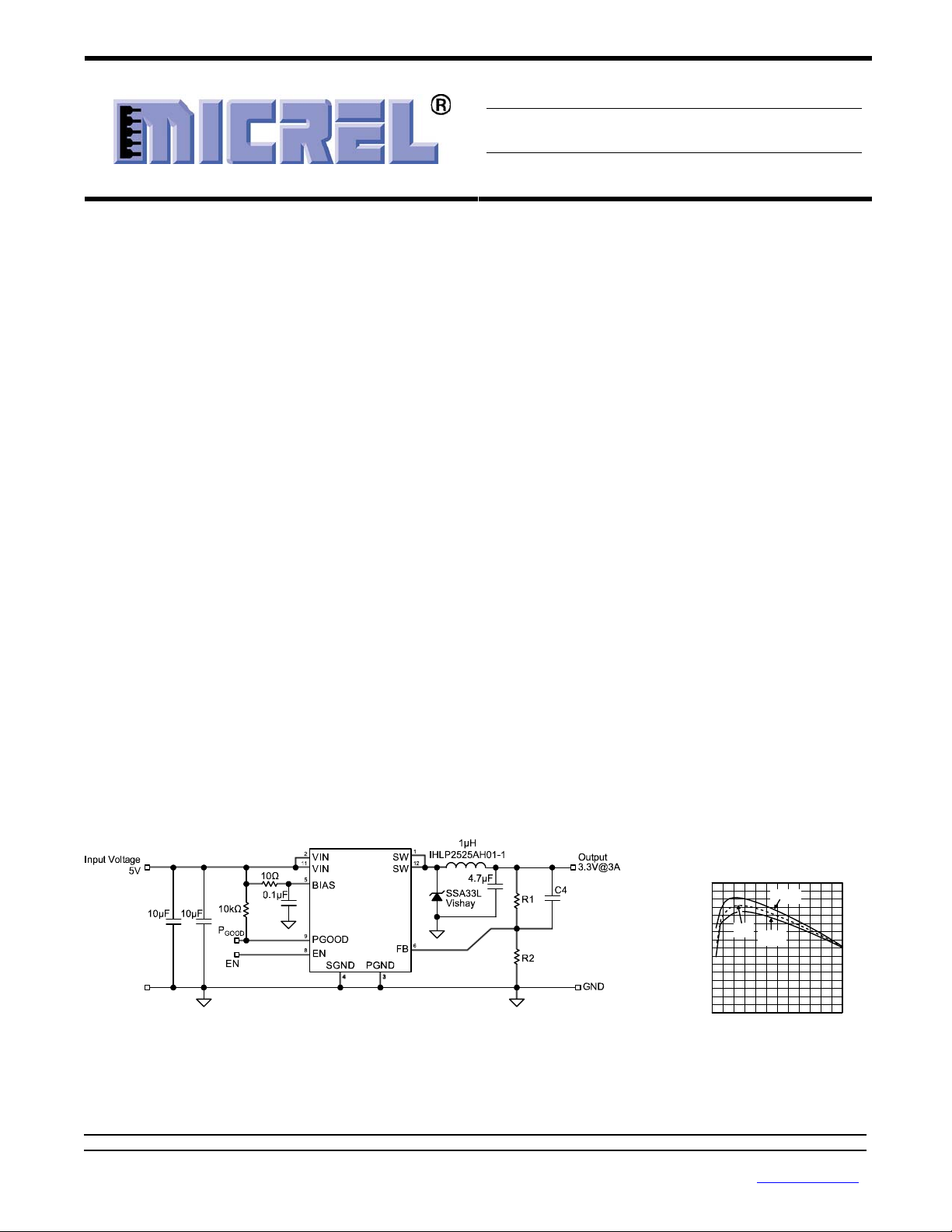
Stable with a 1µH inductor and a 4.7µF
output capacitor
• Fully integrated 3A MOSFET switch
• Micropower shutdown
• Thermal shutdown and current limit
protection
• Pb-free 3mm x 3mm MLF-12L package
• –40°C to +125°C junction temperature range
Applications
• 5V or 3.3V Point of Load Conversion
• Telecom/Networking Equipment
• Set Top Boxes
• Storage Equipment
• Video Cards
____________________________________________________________________________________________________
Typical Application
MIC2207
Efficiency
3.3V
96
MIC2207
3A 2MHz Buck Regulator
Micrel, Inc • 2180 Fortune Drive • San Jose, Ca 95131 • USA • tel +1 (408) 944-0800 • fax +1 (408) 474-1000 • http://www.micrel.com
April 2005
94
92
90
88
86
EFFICIENCY (%)
84
82
80
OUT
4.5V
IN
5V
IN
5.5V
IN
00.511.522.53
OUTPUT CURRENT (A)
M9999-040705
www.micrel.com
Micrel MIC2207
Ordering Information
Part Number
MIC2207YML Adj. –40° to +125°C 3x3 MLF-12L Pb-free
Note:
1. Other Voltage options available. Contact Micrel for details.
Output
Voltage
(1)
Pin Configuration
SW
1
VIN
2
PGND
SGND
3
4
BIAS EN
5
67
FB NC
3mm x 3mm MLF-12 (ML)
Pin Description
Pin Number Pin Name Pin Function
1,12 SW Switch (Output): Internal power P-Channel MOSFET output switch
2,11 VIN
3,10 PGND Power Ground. Provides the ground return path for the high-side drive current.
4 SGND
5 BIAS
6 FB
7 NC
8 EN
9 PGOOD
EP GND Connect to ground.
Supply Voltage (Input): Supply voltage for the source of the internal P-channel
MOSFET and driver.
Requires bypass capacitor to GND.
Signal (Analog) Ground. Provides return path for control circuitry and internal
reference.
Internal circuit bias supply. Must be bypassed with a 0.1uF ceramic capacitor to
SGND.
Feedback. Input to the error amplifier, connect to the external resistor divider
network to set the output voltage.
No Connect. Not internally connected to die. This pin can be tied to any other pin
if desired.
Enable (Input). Logic level low will shutdown the device, reducing the current
draw to less than 5uA.
Power Good. Open drain output that is pulled to ground when the output voltage
is within +/- 7.5% of the set regulation voltage
Junction Temp. Range Package Lead Finish
12
SW
11
VIN
10
PGND
9
PGOOD
8
EP
April 2005 2
M9999-040705
www.micrel.com
Micrel MIC2207
Absolute Maximum Ratings
(1)
Supply Voltage (VIN) ............................................ +6V
Output Switch Voltage (V
Output Switch Current (I
Logic Input Voltage (V
Storage Temperature (Ts)................ -60°C to +150°C
ESD Rating
(3)
........................................................2kV
Electrical Characteristics
) ............................... +6V
SW
) ................................. 11A
SW
)......................... -0.3V to V
EN
(4)
IN
Operating Ratings
Supply Voltage (VIN)............................+2.7V to +5.5V
Logic Input Voltage (V
Junction Temperature (TJ) .............. –40°C to +125°C
Junction Thermal Resistance
3x3 MLF-12L (θ
(2)
) ............................. 0V to V
EN
) ................................... 60°C/W
JA
IN
VIN = VEN = 3.6V; L = 1µH; C
= 4.7µF; TA = 25°C, unless noted.
OUT
Bold
values indicate –40°C< TJ < +125°C
Parameter Condition Min Typ Max Units
Supply Voltage Range
Under-Voltage Lockout
(turn-on)
2.7
2.45
2.55
5.5
2.65
V
V
Threshold
UVLO Hysteresis 100 mV
Quiescent Current VFB = 0.9 * V
(not switching) 570
NOM
Shutdown Current VEN = 0V 2
[Adjustable] Feedback
Voltage
±
1% I
±
2% (over temperature) I
LOAD
= 100mA
LOAD
= 100mA
0.99
0.98
1
900
10
1.01
1.02
µA
µA
V
FB pin input current 1 nA
Current Limit in PWM Mode VFB = 0.9 * V
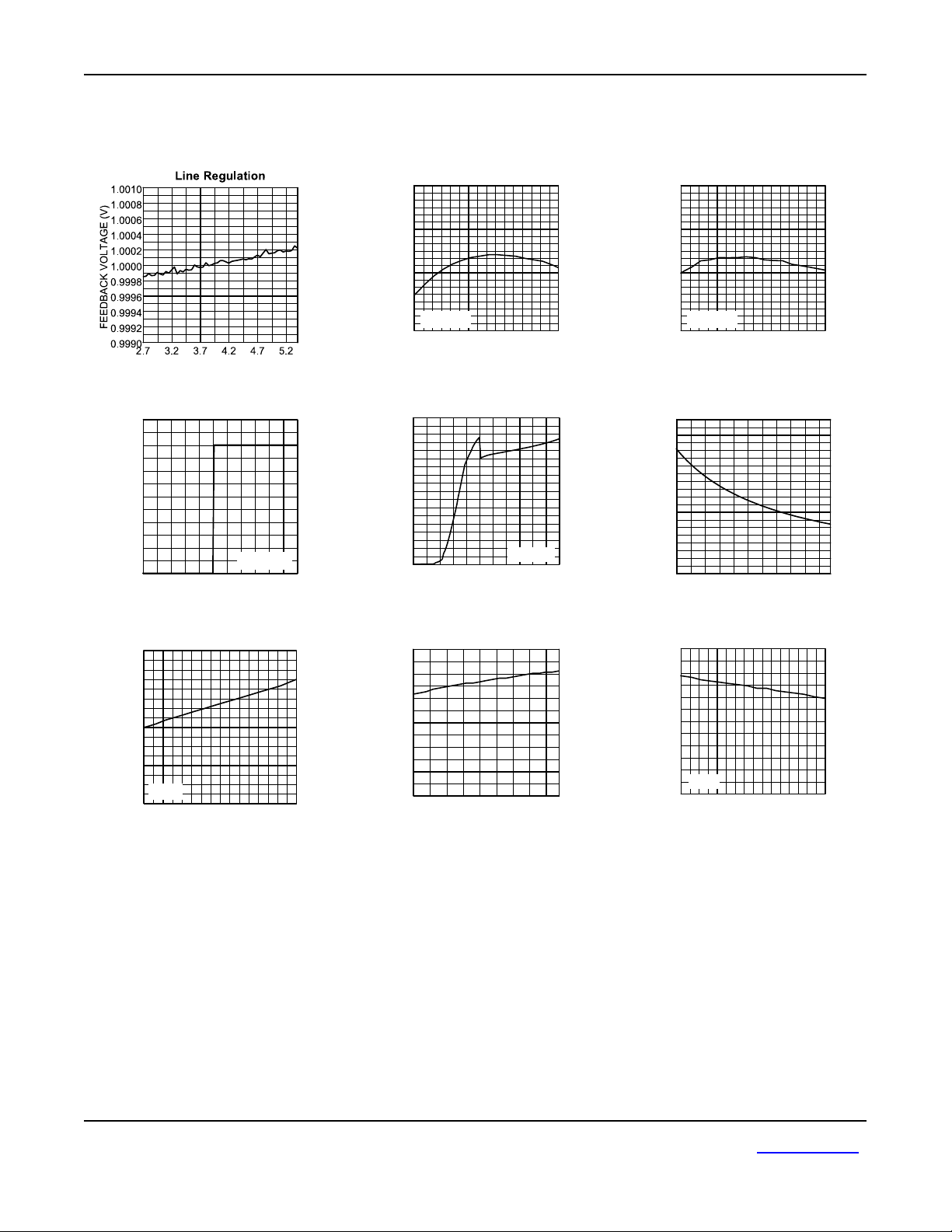
Output Voltage Line
Regulation
Output Voltage Load
V
> 2V; VIN = V
OUT
< 2V; VIN = 2.7V to 5.5V; I
V
OUT
20mA < I
LOAD
NOM
+500mV to 5.5V; I
OUT
LOAD
LOAD
= 100mA
= 100mA
3.5
5
0.07 %
< 3A 0.2 0.5 %
A
Regulation
Maximum Duty Cycle
PWM Switch ONResistance
V
≤ 0.4V
FB
= 50mA VFB = 0.7V
I
SW
(High Side Switch)
FB_NOM
Oscillator Frequency
Enable Threshold
Enable Hysteresis
Enable Input Current 0.1
100
%
95 200
1.8
0.5
2
0.85
50
300
2.2
1.3
2
Ω
m
MHz
V
mV
µA
Power Good Range ±7 ±10 %
Power Good Resistance I
Over-Temperature
= 500µA 145
PGOOD
160
200
Ω
°
C
Shutdown
Over-Temperature
20
°
C
Hysteresis
Notes:
1. Exceeding the absolute maximum rating may damage the device.
2. The device is not guaranteed to function outside its operating rating.
3. Devices are ESD sensitive. Handling precautions recommended. Human body model: 1.5kΩ in series with 100pF.
4. Specification for packaged product only.
5. Dropout voltage is defined as the input-to-output differential at which the output voltage drops 2% below its nominal value that is initially
measured at a 1V differential. For outputs below 2.7V, the dropout voltage is the input-to-output voltage differential with a minimum
input voltage of 2.7V.
April 2005 3
M9999-040705
www.micrel.com
Micrel MIC2207
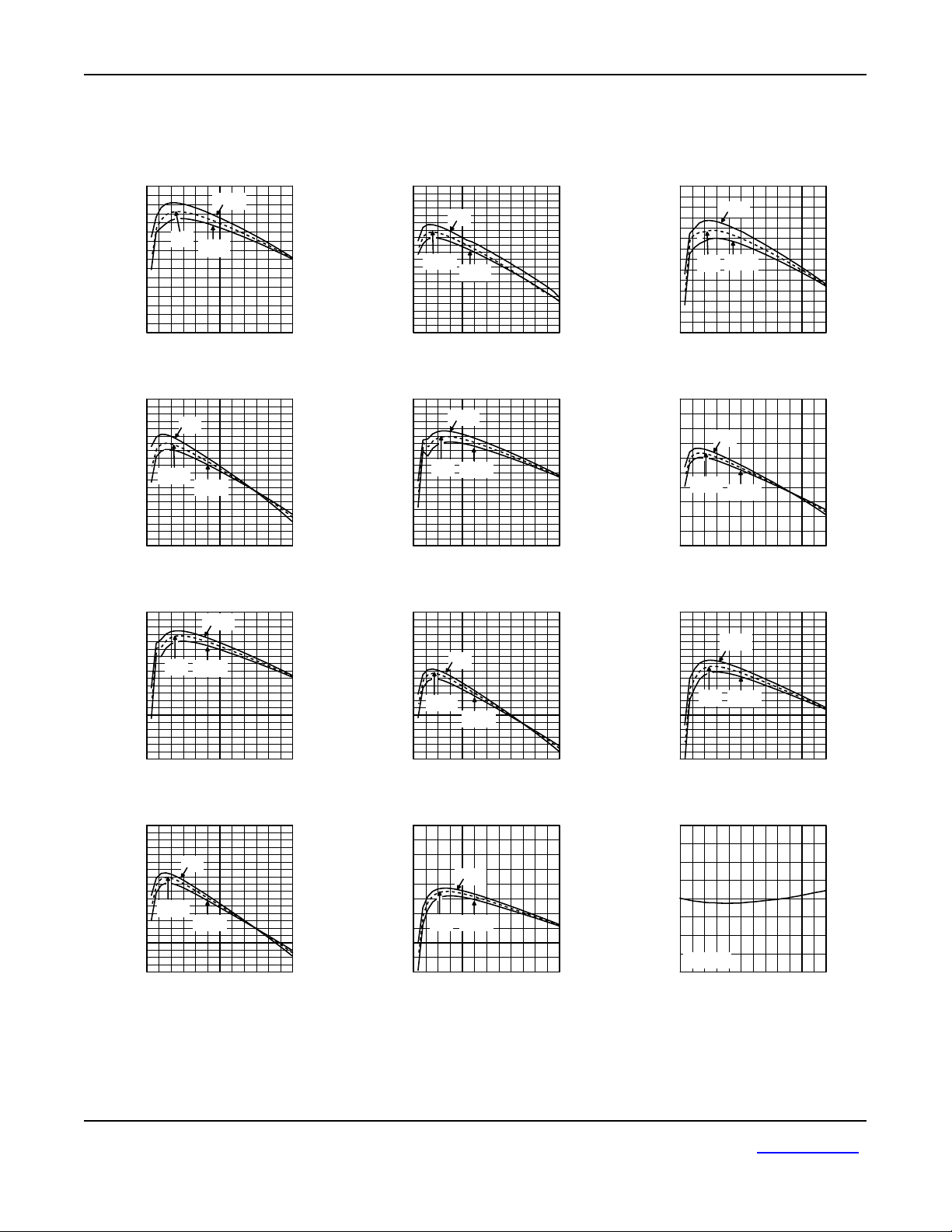
Typical Characteristics
MIC2207
Efficiency
3.3V
96
94
92
90
88
86
EFFICIENCY (%)
84
82
80
00.511.522.53
OUT
4.5V
IN
5V
IN
5.5V
IN
OUTPUT CURRENT (A)
MIC2207
Efficiency
1.8V
95
93
91
89
87
85
83
81
EFFICIENCY (%)
79
77
75
00.511.522.53
OUT
3V
IN
3.3V
IN
3.6V
IN
OUTPUT CURRENT (A)
MIC2207
Efficiency
1.5V
85
83
81
79
77
75
73
71
EFFICIENCY (%)
69
67
65
00.511.522.53
OUT
4.5V
IN
5V
5.5V
IN
IN
OUTPUT CURRENT (A)
MIC2207
1V
Efficiency
85
83
81
79
77
75
73
71
EFFICIENCY (%)
69
67
65
OUT
3V
IN
3.3V
IN
3.6V
IN
00.511.522.53
OUTPUT CURRENT (A)
100
98
96
94
92
90
88
86
EFFICIENCY (%)
84
82
80
00.511.522.53
90
88
86
84
82
80
78
76
EFFICIENCY (%)
74
72
70
00.511.522.53
90
88
86
84
82
80
78
76
EFFICIENCY (%)
74
72
70
00.511.522.53
85
80
75
70
EFFICIENCY (%)
65
60
00.511.522.53
MIC2207
Efficiency
2.5V
OUT
3V
IN
3.3V
IN
3.6V
IN
OUTPUT CURRENT (A)
MIC2207
Efficiency
1.8V
OUT
4.5V
IN
5V
5.5V
IN
IN
OUTPUT CURRENT (A)
MIC2207
Efficiency
1.2V
OUT
3V
IN
3.3V
IN
3.6V
IN
OUTPUT CURRENT (A)
MIC2207
1V
Efficiency
OUT
4.5V
IN
5V
5.5V
IN
IN
OUTPUT CURRENT (A)
MIC2207
Efficiency
2.5V
94
92
90
88
86
84
EFFICIENCY (%)
82
80
00.511.522.53
OUT
4.5V
IN
5.5V
5V
IN
IN
OUTPUT CURRENT (A)
MIC2207
Efficiency
1.5V
95
90
85
80
EFFICIENCY (%)
75
70
00.511.522.53
OUT
3V
IN
3.3V
IN
3.6V
IN
OUTPUT CURRENT (A)
MIC2207
Efficiency
1.2V
85
83
81
79
77
75
73
71
EFFICIENCY (%)
69
67
65
00.511.522.53
1.010
1.005
1.000
0.995
OUTPUT VOLTAGE (V)
0.990
00.511.522.53
OUT
4.5V
IN
5V
5.5V
IN
IN
OUTPUT CURRENT (A)
Load Regulation
V
= 3.3V
IN
OUTPUT CURRENT (A)
April 2005 4
M9999-040705
www.micrel.com
Micrel MIC2207
Typical Characteristics cont.
SUPPLY VOLTAGE (V)
Feedback Voltage
vs. Supply Voltage
1.2
1
0.8
0.6
0.4
0.2
FEEDBACK VOLTAGE (V)
0
012345
SUPPLY VOLTAGE (V)
160
140
120
(mOhm)
100
DSON
P-CHANNEL R
vs. Temperature
80
60
40
20
3.3V
IN
0
-40
-20
TEMPERATURE (°C)
0
R
DSON
204060
VEN = V
Feedback Voltage
1.010
1.008
1.006
1.004
1.002
1.000
0.998
0.996
0.994
FEEDBACK VOLTAGE (V)
0.992
0.990
vs. Temperature
VIN = 3.3V
0
-40
204060
-20
TEMPERATURE (°C)
2.500
2.400
2.300
2.200
2.100
2.000
1.900
1.800
FREQUENCY (MHz)
1.700
1.600
80
100
120
1.500
Quiescent Current
vs. Supply Voltage
900
800
700
600
500
400
300
200
100
IN
QUIESCENT CURRENT (µA)
0
012345
SUPPLY VOLTAGE (V)
VEN = V
IN
120
115
110
105
(mOhm)
100
DSON
95
90
85
80
75
P-CHANNEL R
70
2.7 3.2 3.7 4.2 4.7 5.2
Enable Threshold
vs. Supply Voltage
1.2
1.0
0.8
0.6
0.4
0.2
ENABLE THRESHOLD (V)
0
80
100
120
2.7 3.2 3.7 4.2 4.7
SUPPLY VOLTAGE (V)
1.2
1.0
0.8
0.6
0.4
0.2
ENABLE THRESHOLD (V)
0
Frequency
vs. Temperature
VIN = 3.3V
0
-40
204060
-20
TEMPERATURE (°C)
R
DSON
vs. Supply Voltage
SUPPLY VOLTAGE (V)
Enable Threshold
vs. Temperature
3.3V
IN
0
-40
204060
-20
TEMPERATURE (°C)
80
100
120
80
100
120
April 2005 5
M9999-040705
www.micrel.com
Micrel MIC2207
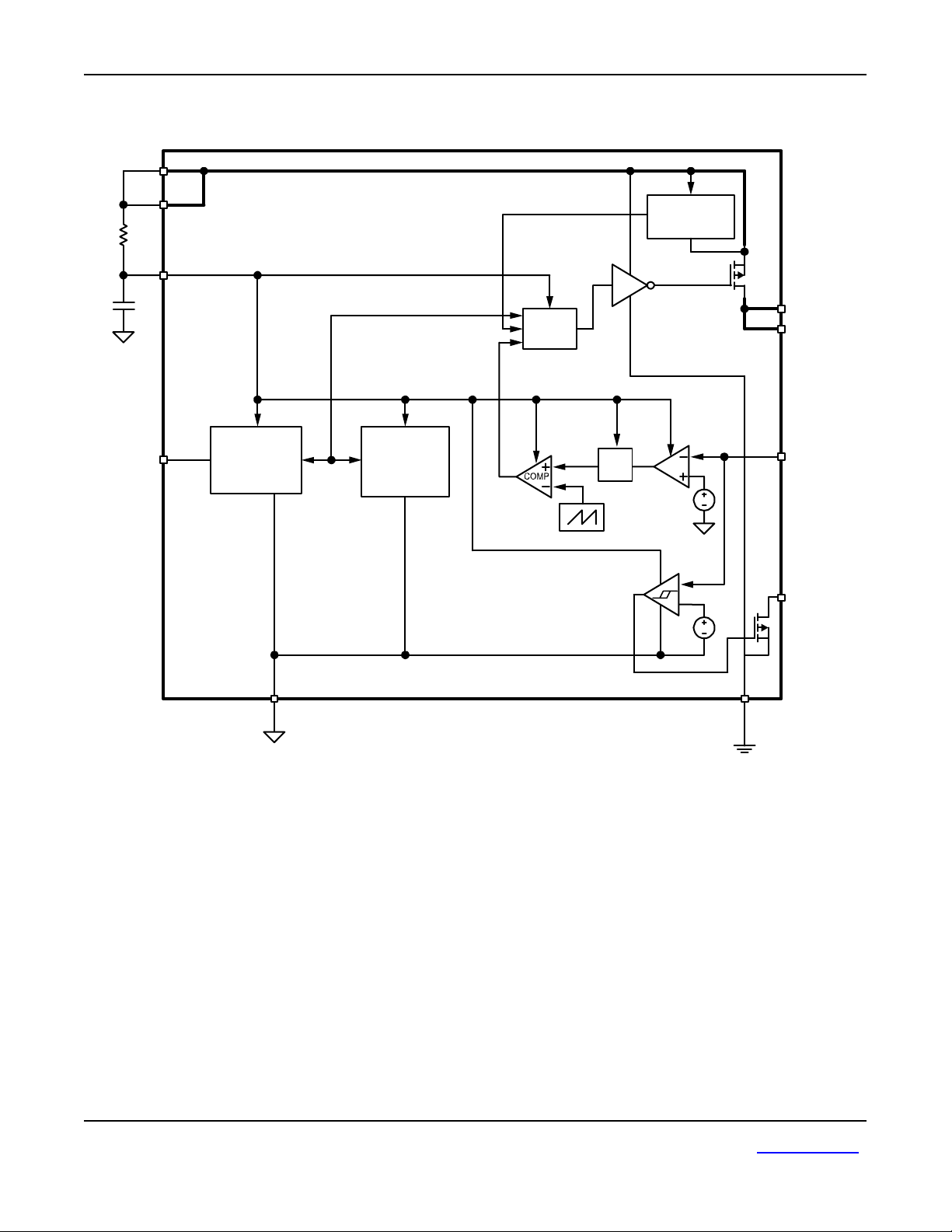
Functional Diagram
VIN
VIN
P-Channel
Current Limit
BIAS
HSD
PWM
Control
SW
SW
Bias,
UVLO,
Thermal
Shutdown
MIC2207 Block Diagram
Soft
Start
EA
1.0V
1.0V
FB
PGOOD
PGND
EN
Enable and
Control Logic
SGND
April 2005 6
M9999-040705
www.micrel.com

Micrel MIC2207
Functional Characteristics
INDUCTOR CURRENT
0A
SWITCH VOLTAGE
OUTPUT CURRENT
0A
(500mA/div. )
(2V/div.)
(2A/div.)
VIN = 3.3V
V
= 1V
OUT
L = 1µH
= 4.7µF
C
OUT
= 1A
I
OUT
VIN = 3.3V
V
= 1.8V
OUT
Continuious Current
TIME (200ns/div.)
LoadTransient Response
Discontinuous Current
VIN = 3.3V
= 1V
V
OUT
L = 1µH
= 4.7µF
C
OUT
= 30mA
I
OUT
(200mA/div. )
0A
INDUCTOR CURRENT
(2V/div.)
SWITCH VOLTAGE
TIME (200ns/div.)
Output Ripple
I
= 3.0A
OUT
(10mV/div.)
AC COUPLED
OUTPUT VOLTAGE
(20mV/div.)
OUTPUT VOLTAGE
TIME (400µs/div.)
Start-UpWaveforms
(2A/div.)
INDUCTOR CURRENT
(1A/div.)
INPUT CURRENT
(1V/div.)
FEEDBACK VOLTAGE
(2V/div.)
ENABLE VOLTAGE
TIME (40µs/div.)
April 2005 7
(2V/div.)
SWITCH VOLTAGE
TIME (400ns/div.)
M9999-040705
www.micrel.com

Micrel MIC2205
Pin Descriptions
VIN
Two pins for VIN provide power to the source of the
internal P-channel MOSFET along with the current
limiting sensing. The VIN operating voltage range is
from 2.7V to 5.5V. Due to the high switching speeds,
a 10µF capacitor is recommended close to VIN and
the power ground (PGND) for each pin for
bypassing. Please refer to layout recommendations.
BIAS
The bias (BIAS) provides power to the internal
reference and control sections of the MIC2207. A 10
Ohm resistor from VIN to BIAS and a 0.1uF from
BIAS to SGND is required for clean operation.
EN
The enable pin provides a logic level control of the
output. In the off state, supply current of the device
is greatly reduced (typically <1µA). Do not drive the
enable pin above the supply voltage.
FB
The feedback pin (FB) provides the control path to
control the output. For adjustable versions, a resistor
divider connecting the feedback to the output is used
to adjust the desired output voltage. The output
voltage is calculated as follows:
R1
R2
+×= 1
⎞
⎟
⎠
)
FF
⎛
⎜
REFOUT
⎝
where V
VV
is equal to 1.0V.
REF
A feedforward capacitor is recommended for most
designs using the adjustable output voltage option.
To reduce current draw, a 10K feedback resistor is
recommended from the output to the FB pin (R1).
Also, a feedforward capacitor should be connected
between the output and feedback (across R1). The
large resistor value and the parasitic capacitance of
the FB pin can cause a high frequency pole that can
reduce the overall system phase margin. By placing
a feedforward capacitor, these effects can be
significantly reduced. Feedforward capacitance (C
can be calculated as follows:
=
C
FF
π
1
200kHzR12
××
SW
The switch (SW) pin connects directly to the inductor
and provides the switching current nessasary to
operate in PWM mode. Due to the high speed
switching on this pin, the switch node should be
routed away from sensitive nodes. This pin also
connects to the cathode of the free-wheeling diode.
PGOOD
Power good is an open drain pull down that
indicates when the output voltage has reached
regulation. For a power good low, the output voltage
is within +/- 10% of the set regulation voltage. For
output voltages greater or less than 10%, the
PGOOD pin is high. This should be connected to the
input supply through a pull up resistor. A delay can
be added by placing a capacitor from PGOOD to
ground.
PGND
Power ground (PGND) is the ground path for the
MOSFET drive current. The current loop for the
power ground should be as small as possible and
separate from the Signal ground (SGND) loop. Refer
to the layout considerations fro more details.
SGND
Signal ground (SGND) is the ground path for the
biasing and control circuitry. The current loop for the
signal ground should be separate from the power
ground (PGND) loop. Refer to the layout
considerations for more details
Micrel, Inc • 2180 Fortune Drive • San Jose, Ca 95131 • USA • tel +1 (408) 944-0800 • fax +1 (408) 474-1000 • http://www.micrel.com
April 2005
M9999-040705
www.micrel.com

Micrel
(
−
MIC2207
Applications Information
The MIC2207 is a 3A PWM non-synchronous
buck regulator.
supply, and filtering the switched voltage through an
Inductor and capacitor, a regulated DC voltage is
obtained. Figure 1 shows a simplified example of a
non-synchronous buck converter.
For a non-synchronous buck converter, there are
two modes of operation; continuous and
discontinuous. Continuous or discontinuous refer to
the inductor current. If current is continuously flowing
through the inductor throughout the switching cycle,
it is in continuous operation. If the inductor current
drops to zero during the off time, it is in
discontinuous operation. Critically continuous is the
point where any decrease in output current will
cause it to enter discontinuous operation. The
critically continuous load current can be calculated
as follows;
=I
OUT
Continuous or discontinuous operation determines
how we calculate peak inductor current.
Continuous Operation
Figure 2 illustrates the switch voltage and inductor
current during continuous operation.
April 2005 9
By switching an input voltage
Figure 1.
2
⎡
⎢
V
OUT
⎢
⎣
V
−
OUT
V
IN
××
⎤
⎥
⎥
⎦
L22MHz
Figure 2. Continuous Operation
The output voltage is regulated by pulse width
modulating (PWM) the switch voltage to the average
required output voltage. The switching can be
broken up into two cycles; On and Off.
During the on-time,
on, current flows from the input supply through the
inductor and to the output. The inductor current is
the high side switch is turned
Figure 3. On-Time
charged at the rate;
)
VV
OUTIN
L
To determine the total on-time, or time at which the
inductor charges, the duty cycle needs to be
calculated. The duty cycle can be calculated as;
V
OUT
D =
V
IN
and the On time is;
D
T
=
ON
2MHz
M9999-040705
www.micrel.com

Micrel
×
=
×
=
MIC2207
Therefore, peak to peak ripple current is;
V
()
VV
OUTIN
I
=
pkpk
−
OUT
×−
V
IN
L2MHz
×
Since the average peak to peak current is equal to
the load current. The actual peak (or highest current
the inductor will see in a steady state condition) is
equal to the output current plus ½ the peak to peak
current.
V
()
VV
OUTIN
II
+=
OUTpk
Figure 4 demonstrates the off-time.
time, the high-side internal P-channel MOSFET
turns off. Since the current in the inductor has to
discharge, the current flows through the free-
OUT
×−
V
IN
L2MHz2
××
During the off-
Figure 5. Discontinuous Operation
wheeling Schottky diode to the output. In this case,
the inductor discharge rate is (where V
forward voltage);
()
−
VV
+
DOUT
L
The total off time can be calculated as;
−
D1
T
OFF
=
2MHz
is the diode
D
When the inductor current (IL) has completely
discharged, the voltage on the switch node rings at
the frequency determined by the parasitic
capacitance and the inductor value. In figure 5, it is
drawn as a DC voltage, but to see actual operation
(with ringing) refer to the functional characteristics.
Discontinuous mode of operation has the advantage
over full PWM in that at light loads, the MIC2207 will
skip pulses as nessasary, reducing gate drive
losses, drastically improving light load efficiency.
Efficiency Considerations
Calculating the efficiency is as simple as measuring
power out and dividing it by the power in;
P
OUT
100
×=
P
IN
IN
IVP
INININ
OUT
IVP
OUTOUTOUT
) is;
) is calculated as;
are caused by the current flowing
2
DIRP
××=
OUTDSONSW
Figure 4. Off-Time
Discontinuous Operation
Discontinuous operation is when the inductor current
discharges to zero during the off cycle. Figure 5.
demonstrates the switch voltage and inductor
currents during discontinuous operation.
Efficiency
Where input power (P
and output power (P
The Efficiency of the MIC2207 is determined by
several factors.
• Rdson (Internal P-channel Resistance)
• Diode conduction losses
• Inductor Conduction losses
• Switching losses
Rdson losses
through the high side P-channel MOSFET. The
amount of power loss can be approximated by;
April 2005 10
M9999-040705
www.micrel.com

Micrel
MIC2207
Where D is the duty cycle.
Since the MIC2207 uses an internal P-channel
MOSFET, Rdson losses are inversely proportional to
supply voltage. Higher supply voltage yields a higher
gate to source voltage, reducing the Rdson,
reducing the MOSFET conduction losses. A graph
showing typical Rdson vs input supply voltage can
be found in the typical characteristics section of this
datasheet.
Diode conduction losses
voltage drop (V
) and the output current. Diode
F
occur due to the forward
power losses can be approximated as follows;
()
D1IVP
−××=
OUTFD
For this reason, the Schottky diode is the rectifier of
choice. Using the lowest forward voltage drop will
help reduce diode conduction losses, and improve
efficiency.
Duty cycle, or the ratio of output voltage to input
voltage, determines whether the dominant factor in
conduction losses will be the internal MOSFET or
the Schottky diode. Higher duty cycles place the
power losses on the high side switch, and lower duty
cycles place the power losses on the schottky diode.
Inductor conduction losses
(PL) can be calculated
by multiplying the DC resistance (DCR) times the
square of the output current;
2
IDCRP ×=
OUTL
Also, be aware that there are additional core losses
associated with switching current in an inductor.
Since most inductor manufacturers do not give data
on the type of material used, approximating core
losses becomes very difficult, so verify inductor
temperature rise.
Switching losses occur twice each cycle
, when
the switch turns on and when the switch turns off.
This is caused by a non-ideal world where switching
transitions are not instantaneous, and neither are
currents. Figure 6 demonstrates (Or exaggerates…)
how switching losses due to the transitions dissipate
power in the switch.
Figure 6. Switching Transition Losses
Normally, when the switch is on, the voltage across
the switch is low (virtually zero) and the current
through the switch is high. This equates to low
power dissipation. When the switch is off, voltage
across the switch is high and the current is zero,
again with power dissipation being low. During the
transitions, the voltage across the switch (V
the current through the switch (I
) are at middle,
S-D
causing the transition to be the highest
instantaneous power point. During continuous mode,
these losses are the highest. Also, with higher load
currents, these losses are higher. For discontinuous
operation, the transition losses only occur during the
“off” transition since the “on” transitions there is no
current flow through the inductor.
Component Selection
Input Capacitor
A 10µF ceramic is recommended on each VIN pin
for bypassing. X5R or X7R dielectrics are
recommended for the input capacitor. Y5V
dielectrics lose most of their capacitance over
temperature and are therefore not recommended.
Also, tantalum and electrolytic capacitors alone are
not recommended due their reduced RMS current
handling, reliability, and ESR increases.
An additional 0.1µF is recommended close to the
VIN and PGND pins for high frequency filtering.
Smaller case size capacitors are recommended due
to their lower ESR and ESL. Please refer to layout
recommendations for proper layout of the input
capacitor.
S-D
) and
April 2005 11
Output Capacitor
The MIC2207 is designed for a 4.7µF output
capacitor. X5R or X7R dielectrics are recommended
for the output capacitor. Y5V dielectrics lose most of
their capacitance over temperature and are
therefore not recommended.
In addition to a 4.7µF, a small 0.1uF is
recommended close to the load for high frequency
filtering. Smaller case size capacitors are
M9999-040705
www.micrel.com

Micrel
MIC2207
recommended due to there lower equivalent series
ESR and ESL.
The MIC2207 utilizes type III voltage mode internal
compensation and utilizes an internal zero to
compensate for the double pole roll off of the LC
filter. For this reason, larger output capacitors can
create instabilities. In cases where a 4.7uF output
capacitor is not sufficient, the MIC2208 offers the
ability to externally control the compensation,
allowing for a wide range of output capacitor types
and values.
Inductor Selection
The MIC2207 is designed for use with a 1µH
inductor. Proper selection should ensure the
inductor can handle the maximum average and peak
currents required by the load. Maximum current
ratings of the inductor are generally given in two
methods; permissible DC current and saturation
current. Permissible DC current can be rated either
for a 40°C temperature rise or a 10% to 20% loss in
inductance. Ensure the inductor selected can handle
the maximum operating current. When saturation
current is specified, make sure that there is enough
margin that the peak current will not saturate the
inductor.
capacitance of the FB node.
Feedforward Capacitor (CFF)
A capacitor across the resistor from the output to the
feedback pin (R1) is recommended for most
designs. This capacitor can give a boost to phase
margin and increase the bandwidth for transient
response. Also, large values of feedforward
capacitance can slow down the turn-on
characteristics, reducing inrush current. For
maximum phase boost, C
can be calculated as
FF
follows;
=
C
FF
π
1
R1200kHz2
××
Bias filter
A small 10 Ohm resistor is recommended from the
input supply to the bias pin along with a small 0.1uF
ceramic capacitor from bias to ground. This will
bypass the high frequency noise generated by the
violent switching of high currents from reaching the
internal reference and control circuitry. Tantalum
and electrolytic capacitors are not recommended for
the bias, these types of capacitors lose their ability
to filter at high frequencies.
Diode Selection
Since the MIC2207 is non-synchronous, a freewheeling diode is required for proper operation. A
schottky diode is recommended due to the low
forward voltage drop and their fast reverse recovery
time. The diode should be rated to be able to handle
the average output current. Also, the reverse voltage
rating of the diode should exceed the maximum
input voltage. The lower the forward voltage drop of
the diode the better the efficiency. Please refer to
the layout recommendations to minimize switching
noise.
Feedback Resistors
The feedback resistor set the output voltage by
dividing down the output and sending it to the
feedback pin. The feedback voltage is 1.0V.
Calculating the set output voltage is as follows;
R1
R2
+= 1
⎞
⎟
⎠
⎛
VV
⎜
FBOUT
⎝
Where R1 is the resistor from VOUT to FB and R2 is
the resistor from FB to GND. The recommended
feedback resistor values for common output
voltages is available in the bill of materials on page
19. Although the range of resistance for the FB
resistors is very wide, R1 is recommended to be
10K. This minimizes the effect the parasitic
April 2005 12
Loop Stability and Bode Analysis
Bode analysis is an excellent way to measure small
signal stability and loop response in power supply
designs. Bode analysis monitors gain and phase of
a control loop. This is done by breaking the
feedback loop and injecting a signal into the
feedback node and comparing the injected signal to
the output signal of the control loop. This will require
a network analyzer to sweep the frequency and
compare the injected signal to the output signal. The
most common method of injection is the use of
transformer. Figure 7 demonstrates how a
transformer is used to inject a signal into the
feedback network.
Figure 7. Transformer Injection
A 50 ohm resistor allows impedance matching from
the network analyzer source. This method allows the
DC loop to maintain regulation and allow the
M9999-040705
www.micrel.com

Micrel
MIC2207
network analyzer to insert an AC signal on top of the
DC voltage. The network analyzer will then sweep
the source while monitoring A and R for an A/R
measurement. While this is the most common
method for measuring the gain and phase of a
power supply, it does have significant limitations.
First, to measure low frequency gain and phase, the
transformer needs to be high in inductance. This
makes frequencies <100Hz require an extremely
large and expensive transformer. Conversely, it must
be able to inject high frequencies. Transformers with
these wide frequency ranges generally need to be
custom made and are extremely expensive (usually
in the tune of several hundred dollars!). By using an
op-amp, cost and frequency limitations used by an
injection transformer are completely eliminated.
Figure 8 demonstrates using an op-amp in a
summing amplifier configuration for signal injection.
Network
Analyzer
“R” Input
Feedbac k
R3
1k
+8V
MIC922BC5
R4
1k
50
R1
1k
Network Analyz er
Source
Figure 8. Op Amp Injection
Network
Analyzer
“A” Input
Output
R1 and R2 reduce the DC voltage from the output to
the non-inverting input by half. The network analyzer
is generally a 50 Ohm source. R1 and R2 also divide
the AC signal sourced by the network analyzer by
half. These two signals are “summed” together at
half of their original input. The output is then gained
up by 2 by R3 and R4 (the 50 Ohm is to balance the
network analyzer’s source impedance) and sent to
the feedback signal. This essentially breaks the loop
and injects the AC signal on top of the DC output
voltage and sends it to the feedback. By monitoring
the feedback “R” and output “A”, gain and phase are
measured. This method has no minimum frequency.
Ensure that the bandwidth of the op-amp being used
is much greater than the expected bandwidth of the
power supplies control loop. An op-amp with
>100MHz bandwidth is more than sufficient for most
power supplies (which includes both linear and
switching) and are more common and significantly
cheaper than the injection transformers previously
mentioned. The one disadvantage to using the opamp injection method, is the supply voltages need to
April 2005 13
below the maximum operating voltage of the opamp. Also, the maximum output voltage for driving
50 Ohm inputs using the MIC922 is 3V. For
measuring higher output voltages, a 1MOhm input
impedance is required for the A and R channels.
Remember to always measure the output voltage
with an oscilloscope to ensure the measurement is
working properly. You should see a single sweeping
sinusoidal waveform without distortion on the output.
If there is distortion of the sinusoid, reduce the
amplitude of the source signal. You could be
overdriving the feedback causing a large signal
response.
The following Bode analysis show the small signal
loop stability of the MIC2207. The MIC2207 utilizes
a type III compensation. This is a dominant low
frequency pole, followed by 2 zero’s and finally the
double pole of the inductor capacitor filter, creating a
final 20dB/decade roll off. Bode analysis gives us a
few important data points; speed of response (Gain
Bandwidth or GBW) and loop stability. Loop speed
or GBW determines the response time to a load
transient. Faster response times yield smaller
voltage deviations to load steps.
Instability in a control loop occurs when there is gain
and positive feedback. Phase margin is the measure
of how stable the given system is. It is measured by
determining how far the phase is from crossing zero
when the gain is equal to 1 (0dB).
=3.3V, V
IN
L=1µH
= 4.7µF
C
OUT
R1 = 10k
R2 = 12.4k
= 82pF
C
FF
FREQUENCY (Hz)
Bode Plot
=1.8V, I
OUT
PHASE
GAIN
10k 100k
OUT
=3A
1M
210
175
140
105
70
35
0
-35
-70
-105
PHASE (°)
V
60
50
40
30
20
10
GAIN (dB)
0
-10
-20
-30
100 1k
Typically for 3.3Vin and 1.8Vout at 3A;
•
Phase Margin=47 Degrees
•
GBW=156KHz
Gain will also increase with input voltage. The
following graph shows the increase in GBW for an
increase in supply voltage.
M9999-040705
www.micrel.com

Micrel
MIC2207
V
60
50
40
30
20
10
GAIN (dB)
0
-10
-20
-30
100 1k
=5V, V
IN
L=1µH
C
OUT
R1 = 10k
R2 = 12.4k
= 82pF
C
FF
=1.8V, I
OUT
PHASE
= 4.7µF
FREQUENCY (Hz)
GAIN
10k 100k
OUT
=3A
1M
210
175
140
105
70
35
0
-35
-70
-105
PHASE (°)
5Vin, 1.8Vout at 3A load;
Bode Plot
•
Phase Margin=43.1 Degrees
•
GBW= 218KHz
Being that the MIC2207 is non-synchronous; the
regulator only has the ability to source current. This
means that the regulator has to rely on the load to
be able to sink current. This causes a non-linear
response at light loads. The following plot shows the
effects of the pole created by the nonlinearity of the
output drive during light load (discontinuous)
conditions.
V
IN
60
50
40
30
20
10
GAIN (dB)
0
-10
-20
-30
100 1k
Bode Plot
=3.3V,V
OUT
L=1µH
= 4.7µF
C
OUT
R1 = 10k
R2 = 12.4k
= 82pF
C
FF
FREQUENCY (Hz)
=1.8V,I
OUT
PHASE
GAIN
10k 100k
=50mA
1M
210
175
140
105
70
35
0
-35
-70
-105
PHASE (°)
3.3Vin, 1.8Vout Iout=50mA;
•
Phase Margin=90.5 Degrees
•
GBW= 64.4KHz
Feed Forward Capacitor
The feedback resistors are a gain reduction block in
the overall system response of the regulator. By
placing a capacitor from the output to the feedback
pin, high frequency signal can bypass the resistor
divider, causing a gain increase up to unity gain.
April 2005 14
GAIN (dB)
-10
The graph above shows the effects on the gain and
phase of the system caused by feedback resistors
and a feedforward capacitor. The maximum amount
of phase boost achievable with a feedforward
capacitor is graphed below.
By looking at the graph, phase margin can be
affected to a greater degree with higher output
voltages.
The next bode plot shows the phase margin of a
1.8V output at 3A without a feedforward capacitor.
GAIN (dB)
-10
-20
-30
As you can see the typical phase margin, using the
same resistor values as before without a
feedforward capacitor results in 33.6 degrees of
phase margin. Our prior measurement with a
feedforward capacitor yielded a phase margin of 47
degrees. The feedforward capacitor has given us a
Gain and Phase
vs. Frequency
0
L=1µH
-1
= 4.7µF
C
OUT
-2
R1 = 10k
-3
R2 = 12.4k
= 82pF
C
-4
FF
-5
-6
-7
-8
-9
100 1k
Max. Amount of Phase Boost
Obtainable using C
50
45
40
35
30
25
20
15
PAHSE BOOST (°)
10
5
0
12345
GAIN
PHASE
10k 100k
FREQUENCY (Hz)
vs. Output
FF
Voltage
V
REF
OUTPUT VOLTAGE (V)
= 1V
Bode Plot
V
=3.3V, V
IN
60
50
40
30
20
10
L=1µH
C
0
OUT
R1 = 10k
R2 = 12.4k
C
FF
100 1k
= 4.7µF
= 0pF
=1.8V, I
OUT
PHASE
GAIN
10k 100k
FREQUENCY (Hz)
OUT
=3A
25
20
15
10
PHASE BOOST (°)
5
0
1M
210
175
140
105
70
35
PHASE (°)
0
-35
-70
-105
1M
M9999-040705
www.micrel.com

Micrel
MIC2207
phase boost of 13.4 degrees (47 degrees- 33.6
Degrees = 13.4 Degrees).
Output Impedance and Transient response
Output impedance, simply stated, is the amount of
output voltage deviation vs. the load current
deviation. The lower the output impedance, the
better.
V
∆
Z
OUT
Output impedance for a buck regulator is the parallel
impedance of the output capacitor and the MOSFET
and inductor divided by the gain;
Z
TOTAL
To measure output impedance vs. frequency, the
load current must be load current must be swept
across the frequencies measured, while the output
voltage is monitored. Fig 9 shows a test set-up to
measure output impedance from 10Hz to 1MHz
using the MIC5190 high speed controller.
By setting up a network analyzer to sweep the
feedback current, while monitoring the output of the
voltage regulator and the voltage across the load
resistance, output impedance is easily obtainable.
To keep the current from being too high, a DC offset
needs to be applied to the network analyzer’s source
signal. This can be done with an external supply and
50 Ohm resistor. Make sure that the currents are
verified with an oscilloscope first, to ensure the
integrity of the signal measurement. It is always a
good idea to monitor the A and R measurements
with a scope while you are sweeping it. To convert
the network analyzer data from dBm to something
more useful (such as peak to peak voltage and
current in our case);
OUT
=
∆
=
I
OUT
GAIN
XDCRR
++
LDSON
X
COUT
dBm
=∆
V
10
707.0
×××
250Ω1mW10
and peak to peak current;
dBm
I
=∆
10
R707.0
×
LOAD
250Ω1mW10
×××
The following graph shows output impedance vs
frequency at 2A load current sweeping the AC
current from 10Hz to 10MHz, at 1A peak to peak
amplitude.
Output Impedance
vs. Frequency
1
V
=1.8V
OUT
L=1µH
=4.7µF + 0.1µ
C
OUT
0.1
3.3VIN
0.01
OUTPUT IMPEDANCE (Ohms)
0.001
10
100
FREQUENCY (Hz)
1k
5V
10k 100k
IN
1M
From this graph, you can see the effects of
bandwidth and output capacitance. For frequencies
<200KHz, the output impedance is dominated by the
gain and inductance. For frequencies >200KHz, the
output impedance is dominated by the capacitance.
A good approximation for transient response can be
calculated from determining the frequency of the
load step in amps per second;
A/sec
f
=
π
2
Figure 9. Output Impedance Measurement
April 2005 15
M9999-040705
www.micrel.com

Micrel
MIC2207
Then, determine the output impedance by looking at
the output impedance vs frequency graph. Then
calculating the voltage deviation times the load step;
ZIV ×∆=∆
OUTOUTOUT
The output impedance graph shows the relationship
between supply voltage and output impedance. This
is caused by the lower Rdson of the high side
MOSFET and the increase in gain with increased
supply voltages. This explains why higher supply
voltages have better transient response.
++↓
XDCRR
Z
TOTAL
=↓
↑
GAIN
LDSON
X
COUT
Ripple measurements
To properly measure ripple on either input or output
of a switching regulator, a proper ring in tip
measurement is required. Standard oscilloscope
probes come with a grounding clip, or
a long wire with an alligator clip.
Unfortunately, for high frequency
measurements, this ground clip can
pick-up high frequency noise and
erroneously inject it into the measured
output ripple.
The standard evaluation board
accommodates a home made version
by providing probe points for both the
input and output supplies and their
respective grounds. This requires the
removing of the oscilloscope probe
sheath and ground clip from a
standard oscilloscope probe and
wrapping a non-shielded bus wire
around the oscilloscope probe. If there
does not happen to be any non
shielded bus wire immediately available, the leads
from axial resistors will work. By maintaining the
shortest possible ground lengths on the oscilloscope
probe, true ripple measurements can be obtained.
April 2005 16
M9999-040705
www.micrel.com

Micrel
MIC2207
Recommended Layout\ 3A Evaluation Board
Recommended Top Layout
Recommended Bottom Layout
April 2005 17
M9999-040705
www.micrel.com

Micrel
MIC2207
MIC2207 Schematic and B.O.M for 3A Output
MIC2207 Schematic
Item Part Number Description Manufacturer Qty
C1a,C1b C2012JB0J106K
GRM219R60J106KE19
08056D106MAT
C2 0402ZD104MAT 0.1uF Ceramic Capacitor X5R 0402 10V AVX 1
C3 C2012JB0J475K
GRM188R60J475KE19
06036D475MAT
C4 VJ0402A820KXAA 82pF Ceramic Capacitor 0402 Vishay VT 1
D1 SSA33L 3A Schottky 30V SMA Vishay Semi 1
L1
R1,R4
R2
R3
U1
RLF7030-1R0N6R4 1uH Inductor 8.8mOhm 7.1mm(L) x 6.8mm (W)x 3.2mm(H) TDK 1
744 778 9001 1uH Inductor 12mOhm 7.3mm(L)x7.3mm(W)x3.2mm(H) Wurth Electronik 1
IHLP2525AH-01 1 1uH Inductor 17.5m
CRCW04021002F 10K
CRCW04026651F
CRCW04021242F
CRCW04022002F
CRCW04024022F
CRCW040210R0F 10
MIC2207BML
10uF Ceramic Capacitor X5R 0805 6.3V
10uF Ceramic Capacitor X5R 0805 6.3V
10uF Ceramic Capacitor X5R 0805 6.3V
4.7uF Ceramic Capacitor X5R 0603 6.3V
4.7uF Ceramic Capacitor X5R 0603 6.3V
4.7uF Ceramic Capacitor X5R 0603 6.3V
Ω (
L)6.47mmx(W)6.86mmx(H) 1.8mm Vishay Dale 1
Ω
1% 0402 resistor Vishay Dale 1
Ω
1% 0402 For 2.5V
6.65k
12.4k
Ω
1% 0402 For 1.8 V
Ω
1% 0402 For 1.5 V
20k
40.2k
Ω
1% 0402 For 1.2 V
Open For 1.0 V
Ω
1% 0402 resistor Vishay Dale 1
2MHz 3A Buck Regulator
OUT
OUT
OUT
OUT
OUT
TDK
Murata
AVX
TDK
Murata
AVX 1
Vishay Dale
Vishay Dale
Vishay Dale
Vishay Dale
Vishay Dale
Micrel
2
1
1
Notes:
1. Sumida Tel: 408-982-9660
2. Murata Tel: 949-916-4000
3. Vishay Tel: 402-644-4218
4. Micrel Semiconductor Tel: 408-944-0800
April 2005 18
M9999-040705
www.micrel.com

Micrel
MIC2207
Package Information
12-Lead MLF™ (ML)
MICREL, INC. 2180 FORTUNE DRIVE SAN JOSE, CA 95131 USA
TEL +1 (408) 944-0800 FAX +1 (408) 474-1000 WEB http:/www.micrel.com
The information furnished by Micrel in this data sheet is believed to be accurate and reliable. However, no responsibility is assumed by Micrel
Micrel Products are not designed or authorized for use as components in life support appliances, devices or systems where malfunction of a
product can reasonably be expected to result in personal injury. Life support devices or systems are devices or systems that (a) are intended
April 2005
for its use. Micrel reserves the right to change circuitry and specifications at any time without notification to the customer.
for surgical implant into the body or (b) support or sustain life, and whose failure to perform can be reasonably expected to result in a
significant injury to the user. A Purchaser’s use or sale of Micrel Products for use in life support appliances, devices or systems is a
Purchaser’s own risk and Purchaser agrees to fully indemnify Micrel for any damages resulting from such use or sale.
© 2005 Micrel, Incorporated.
19
M9999-040705
www.micrel.com
 Loading...
Loading...