

Page 1

MhouseKit SL1S - SL10
For automation of a sliding gate
S
Installation instructions and warnings, and User Manual
IS0025A01EN_20-01-2012
Page 2

Page 3

CONTENTS
SAFETY WARNINGS AND GENERAL PRECAUTIONS
STEP 1 2
KNOWLEDGE OF THE PRODUCT AND PREPARATION FOR
INSTALLATION
STEP 2 2
2.1 - PRODUCT DESCRIPTION AND INTENDED USE 2
2.2 - COMPONENTS USED TO SET UP A COMPLETE SYSTEM 3
PRELIMINARY CHECKS FOR INSTALLATION
STEP 3 3
3.1 - CHECKING SUITABILITY OF GATE TO BE AUTOMATED AND
RELATIVE ENVIRONMENT 3
3.2 - PRODUCT APPLICATON LIMITS 3
3.3 - PRODUCT DURABILITY 3
STEP 4 4
4.1 - PRODUCT APPLICATION LIMITS 4
4.2 - PREPARING ELECTRIC CABLES 4
INSTALLATION: ASSEMBLY AND CONNECTION OF
COMPONENTS
STEP 5 6
5.1 - INSTALLING THE GEARMOTOR ON THE GATE WITHOUT
A RACK 6
5.2 - INSTALLING THE GEARMOTOR ON THE GATE WITH
AN EXISTING RACK 6
STEP 6 10
6.1 - INSTALLING THE PH100 PHOTOCELLS 10
6.2 - INSTALLING THE KS100 KEY-OPERATED SELECTOR SWITCH 10
6.3 - INSTALLING THE FL100 FLASHING LIGHT 10
6.4 - ELECTRICAL CONNECTION TO CONTROL UNIT 10
PROGRAMMING
STEP 7 14
7.1 - POWER SUPPLY CONNECTION 14
7.2 - INITIAL CHECKS 14
7.3 - LEARNING CONNECTED DEVICES 14
7.4 - CHECKING GATE LEAF MOVEMENT 14
7.5 - CHECKING THE RADIO TRANSMITTERS 14
7.6 - SETTINGS 14
TESTING AND COMMISSIONING
STEP 8 16
8.1 - TESTING 16
8.2 - COMMISSIONING 16
MAINTENANCE
STEP 9 16
PRODUCT DISPOSAL 16
FURTHER INFORMATION
STEP 10 17
10.1 - ADVANCED SETTINGS 17
10.2 - OPTIONAL ACCESSORIES 17
10.3 - ADDING OR REMOVING DEVICES 19
10.4 - MEMORIZING ALL RADIO TRANSMITTERS 21
10.5 - TROUBLESHOOTING 22
10.6 - DIAGNOSTICS AND SIGNALS 22
TECHNICAL SPECIFICATIONS OF PRODUCT
COMPONENTS 25
APPENDIX 1 - EC declaration of conformity 28
USER’S GUIDE
STEP 11 29
11.1 - SAFETY INSTRUCTIONS 29
11.2 - GATE CONTROL 29
11.3 - MANUALLY RELEASING OR LOCKING THE GEARMOTOR 29
11.4 - MAINTENANCE OPERATIONS ADMISSIBLE TO THE USER 30
11.5 - REMOTE CONTROL BATTERY REPLACEMENT 30
11.6 - INSTALL THE REMOTE CONTROL SUPPORT 30
APPENDIX 2 - EC declaration of conformity 31
1
Page 4

SAFETY WARNINGS AND GENERAL PRECAUTIONS
––– STEP 1 –––
Safety warnings
• CAUTION! – This manual contains important instructions and
warnings for personal safety. Incorrect installation could cause seri-
ous physical injury. Carefully read all parts of this manual before starting
any work. If in doubt, suspend installation immediately and contact the
Mhouse Technical Assistance.
• CAUTION! – Important instructions: keep this manual in a safe
place to enable future product maintenance and disposal procedures.
• CAUTION! - According to the most recent European legislation,
the production of a power-operated door or gate must comply with the standards envisaged in the Directive 2006/42/EC
(Machinery Directive) and in particular standards EN 12445; EN
12453; EN 12635 and EN 13241-1, which enable declaration of
presumed conformity of the automation. In consideration of this,
all mains connection, testing commissioning and maintenance
operations must be performed exclusively by a qualifi ed and
skilled technician!
All preliminary set-up, installation and programming operations
may be performed by personnel with standard skills, provided
that all instructions and the relative sequences in this manual
are strictly observed, with particular reference to the warnings in
this STEP 1.
Installation warnings
While reading this manual, take care to observe all instructions
marked with the following symbol:
These symbols indicate subjects that may be the source of potential hazards and therefore the prescribed operations must be performed exclusively by qualifi ed and skilled personnel, in obser-
vance of these instructions current safety standards.
• Before installation, ensure that this product is suitable for automation of
your gate or door (see STEP 3 and chapter “Product Technical Specifi -
cations”). If not suitable, do NOT proceed with installation.
• On the system power mains install a device for disconnection (not supplied), to guarantee a gap between contacts and complete disconnection in the conditions of overvoltage category III.
• All installation and maintenance operations must be performed
with the automation disconnected from the power supply. If the
power disconnect device is not visible from the location of the automation, before work a notice should be affi xed on the disconnect device,
with the text “CAUTION! MAINTENANCE IN PROGRESS”.
• CAUTION! - Never power up the motor before fully installed on
the column and leaf of the gate.
• During installation, handle the automation with care, avoiding the risk
of impact, dropping or contact with any type of liquid. Never place the
product near to sources of heat and never expose to naked fl ames.
This may damage product components and cause malfunctions, fi re
or hazardous situations. If this occurs, suspend installation immediately
and contact the MhouseTechnical Assistance.
• Never make modifi cations to any part of the product. Operations oth-
er than as specifi ed can only cause malfunctions. The manufacturer
declines all liability for damage caused by makeshift modifi cations to the
product.
• If the power cable is damaged, it must be replaced exclusively by a
qualifi ed technician, to avoid potential risks.
• Connect the control unit to an electric power line equipped with an
earthing system.
• This product is not designed to be used by persons (including children)
whose physical, sensorial or mental capacities are reduced, or with lack
of experience or skill, unless suitable instructions regarding use of the
product have been provided by a person responsible for safety.
• The key-operated selector switch must be positioned in sight of the
automation, but far from moving parts and at a height of at least 1.5 m
from the ground, not accessible by the public. If this is used in “holdto-run” mode, ensure that there are no persons in the vicinity of the
automation.
• In the vicinity of the automation children must be supervised to ensure
that they do not play with it.
• Ensure that there are not points of entrapment or crushing with fi xed
parts when the gate leaf is in the maximum opening or closing position;
protect parts if necessary.
• The product may not be considered an effi cient system of protection
against intrusion. If an effi cient protection system is required, the auto-
mation must be integrated with other safety devices.
• The automation must not be used before performing the commissioning procedure as specifi ed in the chapter “Testing and commissioning”.
• Check the automation frequently to ensure there is no imbalance, signs
of wear or damage to electrical or mechanical parts. Do not use the
automation if adjustments or repairs are necessary.
• In the event of long periods of disuse, to avoid the risk of leaks of harmful substances from the optional battery (PR1) disconnect it from the
automation and store in a dry location.
• Do not allow children to play with fi xed control devices. Keep remote
control devices out of reach of children.
• The product’s packaging materials must be disposed of in full compliance with local regulations.
Operation warnings
• For cleaning the product surfaces, use a soft damp cloth. Use water
only; never use detergents or solvents for cleaning.
KNOWLEDGE OF THE PRODUCT AND PREPARATION FOR INSTALLATION
NOTES TO MANUAL
• This manual describes how to set up a complete and optimal
automation, such as that shown in fi g. 3, using all Mhouse devic-
es that are part of the automation system named “SL1S-SL10S”.
Some of these devices are optional and may not be present
in the kit. For a complete overview of the devices, refer to the
Mhouse product catalogue.
• This manual has been drawn up as a step-by-step guide. Therefore, to ensure safe and facilitated assembly and programming
procedures, perform all operations described in the same order
as specifi ed in this document.
2
––– STEP 2 –––
2.1 - PRODUCT DESCRIPTION AND INTENDED USE
The devices in this kit, plus other accessories (some optional and not
included in the pack), form the automation system named “SL1S-SL10S”,
designed for the automation of a “residential” sliding gate. Any other
use than as specifi ed herein or in environmental conditions other
than as stated in this manual is to be considered improper and is
strictly prohibited!
The main part of the automation comprises an electromechanical gearmotor, fi tted with a 24 V dc motor with helical teeth gear; it is fi tted with
a mechanical key release which enables manual movement of the gate
in the event of a power failure. The gearmotor is equipped with a control
unit that manages operation of the entire automation. The control unit
comprises a board and incorporated radio receiver which receives the
Page 5

commands sent by the user via a transmitter. It can memorise up to 256
GTX4 transmitters (if memorised in “Mode I”) and up to 6 pairs of PH100
photocells.
Connection of the control unit with the various devices is by means of
a single 2-wire cable (“ECSbus” system). The control unit can also be
mains-powered (230 V) or alternatively by the Mhouse PF photovoltaic
system.
If mains-powered, it can house a buffer battery (mod. PR1, optional
accessory) which guarantees a number of manoeuvres, during the hours
following a mains power failure). During the power failure, or at any other
time, the gate leaf can be moved manually if required, by fi rst releasing the
gearmotor using the relative key (see chapter 11.3 - User’s Guide).
COMPONENTS USED TO SET UP A COMPLETE
2.2 -
SYSTEM
Fig. 1 illustrates all components used to set up a complete system, such
as that shown in fi g. 3.
Components shown in fi g. 1:
A - 1 electromechanical gearmotor SL1SC/SL10SC with integrated con-
trol unit and foundation plate
B - 2 limiter brackets
C - 3 release keys
D - 1 pair of PH100 photocells (one TX and one RX)
E - 2 GTX4 radio transmitters
F - 1 FL100 fl ashing light with integrated aerial
G - Metal hardware
Notes:
- Some devices and accessories specifi ed in the manual are optional and
may not be present in the kit. For a complete description, refer to the
Mhouse product catalogue or visit the website.
- The mechanical limit stops are not supplied in the pack and are not part
of the Mhouse product range.
––– STEP 3 –––
PRELIMINARY CHECKS FOR INSTALLATION
3.1 - CHECKING SUITABILITY OF GATE TO BE AUTOMAT-
ED AND RELATIVE ENVIRONMENT
• Ensure that the mechanical structure of the gate complies with current
national standards and that it is suitable for automation. For this check,
refer to the information specifi ed on the gate dataplate. Important -
This product cannot be used to automate a gate that is not already effi -
cient and safe; furthermore it cannot solve defects caused by incorrect
gate installation or poor maintenance.
• Manually move the gate in both directions (opening/closing) and ensure
that friction is constant throughout travel (there must be no points of
increased or decreased force).
• If the leaf is fi tted in a pedestrian pass door or a door onto the leaf
movement area, ensure that this door does not obstruct normal travel,
and install a suitable interlock device if necessary.
• Manually move the gate to any position; leave it stationary and ensure
that it does not move when left.
• Ensure that there is no risk of gate derailing or risks of exit from the
tracks.
• Ensure that the space around the site of gearmotor installation enables
safe and easy manual gate release.
• Make sure that the area where the gearmotor is fi xed is not subject to
fl ooding. If necessary, mount the gearmotor raised from the ground.
• Ensure that the selected surfaces for installation of the various devices
are solid and guarantee a stable fi xture; as regards photocells, select a
fl at surface that guarantees correct alignment between photocells (Tx
and Rx).
• Ensure that all devices to be installed are in a sheltered location and
protected against the risk of accidental impact.
3.2 - PRODUCT APPLICATION LIMIT
Before proceeding with installation, perform the following checks in the
specifi ed sequence and ensure conformity both with the data in this para-
graph and the technical data provided in the chapter “Technical Specifi -
cations”:
01. Ensure that the dimensions and weight of the gate are within the fol-
lowing limits of use:
SL1SC - maximum length 5 m
- maximum weight 400 kg
SL10SC - maximum length 7 m
- maximum weight 550 kg
02. Check the overall dimensions of the gearmotor (fi g. 2). Note – These
measurements also serve as a reference to calculate the space
occupied by the foundation pit for routing the electrical cable ducting.
03. Ensure that the estimated lifetime is compatible with the intended use
(see paragraph 3.3).
04. Ensure that all limits, conditions and warnings in this manual can be
observed.
3.3 - PRODUCT DURABILITY
The lifetime is the average economic duration of the product. The value of
lifetime is strongly infl uenced by the intensity of the manoeuvres, i.e. the
sum of all factors that contribute to product wear, see Table 1. To estimate the durability of your automation, proceed as follows:
01. Add up all the values in the items of Table A;
02. In Graph 1 from the value obtained above, trace vertical line until
it intersects the curve; from this point trace a horizontal line until it
intersects the line of the “manoeuvre cycles”. The value obtained is
the estimated lifetime of your product.
The lifetime values specifi ed in the graph are only obtainable if the mainte-
nance schedule is strictly observed (see chapter 9 - Maintenance schedule). The estimation of lifetime is made on the basis of design calculations
and the results of tests performed on prototypes. As it is only an estimation, it does not represent any form of guarantee on the effective lifetime
of the product.
Example of calculating lifetime: automation of a gate with a leaf length of
3.5 m with weight of 250 kg, for example, in a location near the sea. Table
1 states the “severity index” values for this type of installation: 10% (“Leaf
length”), 20% (“Leaf weight”) and 15% (“Presence of dust, sand or brine”).
These values must be added up to obtain the overall severity index, which
in this case is 45%.
TABLE A
< 3 m
3 - 4 m
Leaf length
Leaf weight
Ambient temperature over 40°C or lower than 0°C or humidity
greater than 80%
Solid leaf
Installation in windy zone
Note - The data are based on a sliding gate balanced and in perfect condition maintenance
4 - 5 m
5 - 6 m
6 - 7 m
< 200 kg
200 - 300 kg
300 - 400 kg
400 - 550 kg
SL1SC SL10SC
0%
10%
20%
-
10%
20%
30%
-
20%
15%
15%
Severity index
0%
5%
10%
15%
20%
0%
10%
20%
30%
20%
15%
15%
3
Page 6

300.000
GRAPH 1
4.1.2 - Establish the position of all connection cables
Refer to the instructions in paragraph 4.2 to establish the layout of the
raceways for electric cable ducting.
250.000
200.000
150.000
100.000
manoeuvre cycles
50.000
Severity index (%)
––– STEP 4 –––
4.1 - PRELIMINARY CHECKS FOR INSTALLATION
4.1.1 - Establish the position of devices in the system
With reference to fi g. 3 and 4, locate the approximate position for installa-
tion of each device envisaged in the system. Fig. 3 shows a system made
using this product and other optional accessories in the Mhouse range.
These elements are positioned according to a typical standard layout. The
components are:
a - SL1SC/SL10SC gearmotor with control unit
b - Pair of PH100 photocells
c - FL100 fl ashing light with integrated aerial
d - Pair of posts for PT50 photocells (not supplied)
e - Closure mechanical stops
f - Floor-mounted track
g - “Opening” limiter bracket
h - CR100 rack (not supplied)
i - KS100 key-operated selector switch
l - “Closing” limiter bracket
WARNING! - Some of these devices are optional and may not be
present in the kit (see Mhouse product catalogue).
WARNINGS:
• The gearmotor must be anchored to the ground, laterally to the gate
using the relative fi xing plate.
• The fi xed control devices must be positioned:
- in sight of the automation;
- far from moving parts;
- at a height of at least 1.5 m from the ground,
- not accessible by the public.
4.1.3 - Ensure all equipment and materials for work are available
Before starting work, ensure that you have all equipment and materials
required to complete the work. Ensure that all items are in good condition
and comply with local safety standards.
4.1.4 - Completing the set-up work
Prepare the area for subsequent installation of the devices, completing all
preliminary work, such as:
- digging of raceways for protection ducting of electric cables (external
ducting may be used as an alternative);
- laying of protection ducting and embedding in concrete;
- sizing of all electric cables to required length (see paragraph 4.2) and
routing in protection ducting. Caution! - In this phase, do not make
any electrical connections.
Warnings:
• The hoses and ducting serve to protect electrical cables and prevent
accidental damage in the event of impact.
• When laying pipelines, take into account the risk of possible deposits of
water in the branch wells, where condensate may form in the pipelines
and the control unit with possible damage to the electronic circuits.
• Position the ends of the ducting at the points envisaged for fi xture of the
various components.
4.2 - PREPARARING ELECTRIC CABLES
To prepare all connection cables, proceed as follows.
a) - Refer to fi g. 4 to check the connections of the various devices to the
control unit and terminals to be used for each connection. Important
- Only devices using “ECSbus” technology can be connected to the
terminal “ECSbus”.
b) - Refer to fi g. 3 to check positions of the electrical cables in the area.
Then draw a similar diagram on paper, adapting it to specifi c require-
ments of your system. Note - This diagram will be useful to establish
the route of the raceways for cable ducting, and to draw up a complete list of the cables required.
c) - Read Table 1 to determine the type of cables to be used; then refer
to the diagram drawn above and on-site measurements to determine
the length of each cable. Caution! - No cable must exceed the
specifi c maximum length stated in Table 1.
WARNING - “ECSbus” technology enables the interconnection of devic-
es using a single “bus” cable, with 2 internal electrical wires. Connection
of several devices can be in the confi guration “cascade”, “star” or the
latter two “combined”:
cascade star combined
TABLE 1 – Technical specifi cations of electric cables
Connection Type of cable (minimum section values) Max. admissible length
A - Power line Cable 3 x 1,5 mm
B - FLASH fl ashing light output Cable 2 x 0,5 mm
C - Radio aerial RG58 shielded cable type 20 m (less than 5 m recommended)
D - Input/Output ECSbus Cable 2 x 0,5 mm
E - STOP input Cable 2 x 0,5 mm
F - OPEN input Cable 2 x 0,5 mm
Note 1 - If the power cable is longer than 30 m, a cable with a larger section is required (e.g. 3 x 2.5 mm
the vicinity of the automation.
Note 2 - For cables of ECSbus and those of the STOP and OPEN inputs, a single cable with multiple internal wires may be used, to combine
several connections: for example, the STOP and OPEN inputs can be connected to the KS100 selector switch with a cable of 4 x 0.5 mm2
ATTENZIONE! – The cables used must be suited to the installation environment: for example a cable type H03VV-F is recommended for indoor environments, and a cable type H07RN-F for outdoor environments is recommended.
4
2
30 m (note 1)
2
20 m
2
20 m (note 2)
2
20 m (note 2)
2
20 m (note 2)
2
) and safety earthing is necessary in
2
.
Page 7

1
A
B
F
E
C
D
G
2
295
84
300 163
i
3
d e g h
4
E
b b c
f
F D
BD C
l
a
d
D
D
A
5
Page 8
INSTALLATION: ASSEMBLY AND CONNECTION OF COMPONENTS
––– STEP 5 –––
- The following assembly phases show installation of a gearmotor
model SL1SC/SL10SC.
- To ensure correct system operation, mechanical stops must be
mounted on the fl oor or wall at the maximum leaf opening and closing
points. Note - These stops are not supplied in the pack and are not
part of the Mhouse product range.
WARNINGS
• Incorrect installation may cause serious physical injury to those
working on or using the system.
• Before starting automation assembly, make the preliminary
checks as described in STEP 3.
5.1 - INSTALLING THE GEARMOTOR ON THE GATE WITHOUT A RACK
If the support surface already exists, the gearmotor should be fi xed on it
directly, using suitable means, such as expansion plugs. Otherwise, to
secure the gearmotor, proceed as follows:
01. Make a suitably-sized foundation pit, according to the required site of
installation; see values shown in fi g. 2;
02. Prepare one or more duct tubes for routing the electric cables (fi g. 5).
Note - Leave tubes longer than 50 cm;
03. Fit two bolts on the foundation plate placing a nut below and above
the plate; the nut below the plate should be tightened as shown in
fi g. 6 so that the threaded section protrudes by approx. 36 mm
above the plate;
04. Before casting the concrete, prepare the foundation plate with the
printed side (position of pinion) facing the gate and positioned as
specifi ed by the values in fi g. 7; then lay the tubes for routing the
cables through the relative hole;
05. Now cast the concrete and place the plate as described in point 04,
ensuring that it is parallel to the leaf and perfectly level (fi g. 8).Wait for
the concrete to set completely;
06. When the concrete is suffi ciently dry (after a few days), remove the 2
upper nuts which will no longer be used;
07. Shorten the cable routing tubes by 30/40 mm;
08. Remove the nut cover on the gearmotor (fi g. 9);
09. Rest the gearmotor on the plate, ensuring that it is perfectly parallel
to the leaf, then slightly lighten the 2 locknuts and washers supplied
(fi g. 10). Tighten the nuts fully down;
10. Manually release the gearmotor (see paragraph 11.3 – User’s guide;
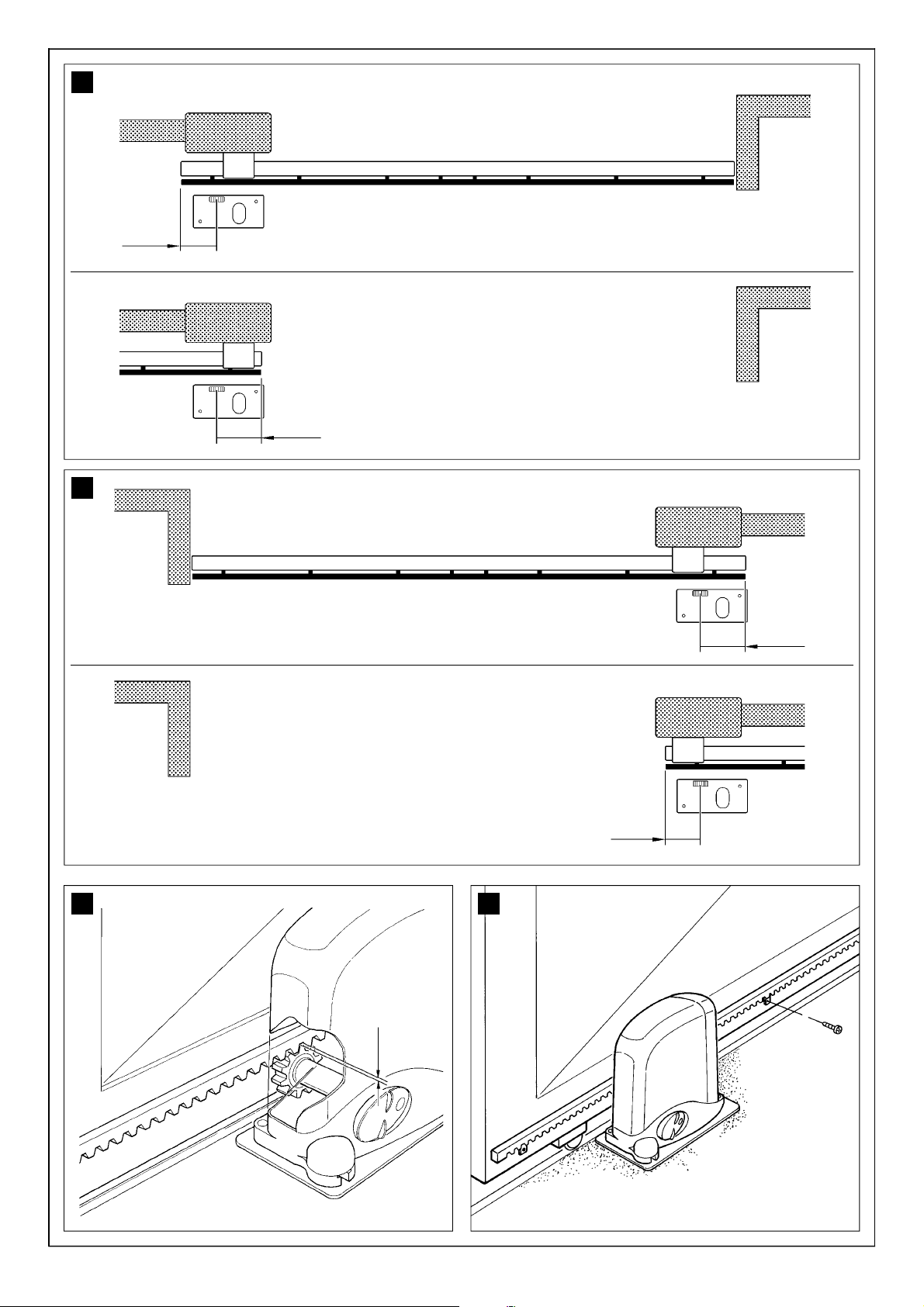
11. Move the gate to the maximum opening position then position the
fi rst section of the rack above the pinion of the gearmotor. The rack
should protrude, with respect to the axis of the pinion, by the value
specifi ed in fi g. 11 (with motor fi xed to left) or fi g. 12 (with motor
fi xed to right); i.e. the space required for the limit switch brackets;
Important! – Leave a clearance of 1 mm between the rack (for all parts)
and the pinion (fi g. 13), so that the weight of the leaf does not exert pres-
sure on the motor.
12. Now fi x the other parts of the rack one after the other; to keep the
rack aligned with the level of the pinion, simply trace the fi xing hole
when the slot is aligned with the axis of the pinion (fi g. 14). Repeat
the same operation at each fi xing point;
13. After fi
14. Manually complete a number of leaf opening and closing cycles to
15. Position (approximately) the two [A] limit switch brackets on the rack
16. Fix the limit switch brackets as follows:
a) manually move the leaf to the opening position, leaving a distance
b) slide the travel limit bracket on the rack in the opening direction
c) perform the same operation to secure the closing limit switch.
17. Manually lock the gearmotor (see paragraph 11.3 - User’s guide).
xing the last part of the rack, if necessary, cut off the protrud-
ing section; the rack should not protrude from the leaf;
ensure that the rack slides smoothly along the pinion throughout the
entire length;
(fi g. 15) and manually move the gate for fi nal fi xture.
of at least 2-3 cm from the mechanical end stop.
until the limit switch trips. Then move the bracket forward by at least
2 cm and lock on the rack using the grub screws supplied.
IMPORTANT!
5.2 - INSTALLING THE GEARMOTOR ON THE GATE WITH
AN EXISTING RACK
If the support surface already exists, the gearmotor should be fi xed on it
directly, using suitable means, such as expansion plugs. Otherwise, to
secure the gearmotor, proceed as follows:
Warnings
– Before fi xing the gearmotor, ensure that the existing rack is compatible
with the overall dimensions of the pinion (see fi g. 16).
– Ensure that the distance between the pinion and rack is approx. 12 mm.
01. Make a suitably-sized foundation pit, according to the required site
of installation; see values shown in fi g. 2; Caution! – The foundation
plate must be positioned at 77 mm from the rack.
02. Fit one or more tubes for routing the electric cables (fi g. 5). Note -
Leave tubes longer than 50 cm;
03. Fit two bolts on the foundation plate placing a nut below and above
the plate; the nut below the plate should be tightened as shown in
fi g. 6 so that the threaded section protrudes by approx. 36 mm
above the plate;
04. Before casting the concrete, prepare the foundation plate with the
printed side (position of pinion) facing the gate and positioned as
specifi ed by the values in fi g. 17; then lay the tubes for routing the
cables through the relative hole;
05. Now cast the concrete and place the plate as described in point 04,
ensuring that it is parallel to the leaf and perfectly level (fi g. 8). Wait
for the concrete to set completely;
06. When the concrete is suffi ciently dry (after a few days), remove the 2
upper nuts which will no longer be used;
07. Shorten the cable routing tubes by 30/40 mm;
08. Remove the nut cover on the gearmotor (fi g. 9);
09. Place the gearmotor on the foundation plate, tilting it to facilitate
insertion below the rack (fi g . 18). Slightly tighten the 2 locknuts,
after inserting the washers;
10. If necessary, adjust the gearmotor height (max. 10 mm), using the 4
stud bolts fi tted (fi g. 19). Important! – Leave a clearance of 1 mm
between the rack and the pinion, so that the weight of the leaf does
not exert pressure on the motor.
Where possible, fix the gearmotor without stud bolts, to ensure
increased stability and solid fi xture on the plate;
11. Ensure that the gearmotor is perfectly parallel to the leaf, then fi x it to
the foundation plate, tightening the 2 locknuts fully down;
12. Manually release the gearmotor (see paragraph 11.3 - User’s guide);
13. Manually complete a number of leaf opening and closing cycles to
ensure that the rack slides smoothly along the pinion throughout the
entire length;
14. Fix the [A] limit switch brackets (fi g. 15
a) manually move the leaf to the opening position, leaving a distance
of at least 2-3 cm from the mechanical end stop.
b) slide the travel limit bracket on the rack in the opening direction
until the limit switch trips. Then move the bracket forward by at least
2 cm and lock on the rack using the grub screws supplied.
c) perform the same operation to secure the closing limit switch;
15. Manually release the gearmotor (see paragraph 11.3 - User’s guide).
The electrical connections can now be made (see paragraph 6).
) as follows:
The electrical connections can now be made (see paragraph 6).
6
Page 9

5
motor fi xed on left
7
50
6
36
motor fi xed on right
8
0 ÷ 50
9
50
0 ÷ 50
10
7
Page 10
11
12
170
200
200
170
1413
1
8
Page 11

15
16
A
60
motor fi xed on left
17
motor fi xed on right
10
0 ÷ 50
18 19
10
0 ÷ 50
9
Page 12

––– STEP 6 –––
6.3 - ELECTRICAL CONNECTION TO CONTROL UNIT
6.1 - INSTALLING THE PH100 PHOTOCELLS (fi g. 20)
Warning: all installation operations must be performed with the system
disconnected from the power supply; if fi tted, the PR1 backup battery
must also be disconnected.
Warnings: Take care not to damage the o-ring fi tted (fi g. 20-3) [A].
Select the position of the two elements making up the photocell (TX and
RX) observing the following:
• Place them at a height of 40-60 cm from the ground, to the sides of the
zone to be protected, and as close as possible to the edge of the gate,
i.e. no further than 15 cm.
• There must be a raceway tube at the point envisaged for routing cables.
• Point the transmitter TX at receiver RX with a maximum tolerance of 5°.
01. Remove the front glass panel (fi g. 20-1).
02. Position the photocell at the point where the cable routing tube
arrives.
03. Trace the drilling points using the base as a reference. Use a percus-
sion drill to drill the wall, with a 5 mm tip, and insert 5 mm plugs.
04. Route the electric cables through the specifi c holes (pierce those
required): see fi g. 20-2.
05. Fix the base, using the relative screws [B] of fi g. 20-3 ensuring that
the hole on the base [C] of fi g. 20-3 is aligned with the cable outlet.
2 self-tapping screws are also supplied for fi xture on surfaces with a
different density.
06. Connect the electrical cable in the relative terminals of both TX and
RX (fi g. 20-4). From an electrical point of view, TX and RX must be
connected in parallel (fi g. 20-5) and to the blue terminal of the con-
trol board. No polarity needs to be observed.
07. Fix the covering shell [D] of fi g. 20-6 with the two screws [E] of fi g.
20-6 using a Phillips screwdriver. Lastly, insert the external cover [F]
in fi g. 20-6 pressing it slightly to secure in place.
01. Remove the lateral cover of the gearmotor: remove the screw and
pull the cover upwards (fi g. 22);
02. Depending on the position of the gearmotor (right or left), set the
electric jumper for the direction of the opening manoeuvre (Open),
see fi g. 23;
03. Remove the rubber membrane of the hole made for insertion of the
electric cables. Insert the cables required for connection of the various devices(fi g. 24). Leave cable lengths of at least 40-50 cm.
04. From the rubber membrane, remove a suffi cient part of the internal
mesh for insertion of the cables. Then fi t the membrane into its seat
(fi g. 25).
05. At this point, make the electrical connections of the various devices
to the control unit terminals (see fi g. 26 and following paragraphs).
• The terminals have the same colour as the terminals on the corresponding devices; for example the grey terminal (OPEN) of the
KS100 key-operated selector switch must be connected to the grey
terminal (OPEN) of the control unit;
• No polarity is needed for virtually any of the connections; only in the
case of the shielded cable of the aerial, the central core and sheath
must be connected as shown in detail [A] of fi g. 26.
Notes: - To facilitate connections, terminals can be removed as
shown in fi g. 27 - [A]; after making the connections, refi t the ter-
minals in their seats. - At the end of connections, use cable ties to
secure the electric cables to the relative fi xtures (fi g. 27 - [B]).
06. Close the lateral cover of the gearmotor as shown in fi g. 28.
6.2 - INSTALLING THE FL100 FLASHING LIGHT
FL100 (fi g. 21)
Select the position of the fl ashing light so that it is in the vicinity of the
gate in a visible location; it can be fi xed on either a horizontal or vertical
surface; fi g. 21 shows the two options:
01. Remove the cover, unscrewing the screw if present.
02. Separate the base, unscrewing the screws present to route the elec-
tric cables.
03. Trace the drilling holes using the base as a reference and ensuring
that the hole on the base is aligned with the cable outlet. vertical fi x-
ture (A) or horizontal fi xture.
04. Use a percussion drill to drill the wall, with a 6 mm tip, and insert 6
mm plugs.
05. Fix the base, using the relative screws.
06. Connect the electric cables in the relative FLASH and “aerial” termi-
nals as shown in the fi gure: To facilitate operations, remove termi-
nals, make connections, then refi t the terminals.
No polarity needs to be observed on the FLASH terminal, while in the
case of the shielded cable connection of the aerial, the sheath must
be connected.
07. Insert the lamp holder in the base, taking care to press it down so
that it locks into place;
08. Secure the body of the fl ashing light to the fi xing support and turn it
left until it clicks into place, then secure by means of the screw.
10
Page 13

20
12
A
C
4
3
B
5
D
E
6
F
21
12
AB
34
A / BBBB
A / BA/ B
x4
=
11
Page 14

21
4
AA AA
Ø = 6 mm
x4
5678
9111210
A / BA/ B
22 23
A / BA/BA/ BA/ B
A / BA/ B
12
Page 15

24
25
26
FL100
PH100 KS100
TX RX
A
27
28
A
B
13
Page 16

PROGRAMMING
––– STEP 7 –––
7.1 - POWER SUPPLY CONNECTION
WARNINGS
– The power cable is in PVC and is designed for installation
indoors. If installed outdoors, the entire cable must be covered
with a protection ducting. Otherwise the cable can be replaced
with a H07RN-F version.
– Final connection of the automation to the electrical mains or
replacement of the cable supplied must be made exclusively by
a qualifi ed and skilled electrician, in observance of the current
safety standards and the following instructions.
• For automation operation tests and programming, use the cable
supplied, inserting the plug in an electrical socket. If the socket is far from
the automation, an extension may be used in this phase.
• For the automation testing and commissioning phase the control
unit must be permanently connected to the power mains, replacing the
cable supplied with one of adequate length. To connect the cable to the
gearmotor control unit, proceed as follows:
WARNING:
The power line must be fi tted with a disconnect device that ensures com-
plete shut-off of power to the automation. The disconnect device must
have contacts with a suffi cient gap to ensure complete disconnection, in
compliance with the overvoltage category III, according to the installation
instructions. If necessary, this device guarantees quick and safe disconnection from the mains power and therefore must be positioned in sight
of the automation. If located in a concealed position, it must be equipped
with a system that prevents inadvertent or unauthorised reconnection of
power, to avoid potential hazards. The disconnect device is not supplied
with the product.
01. Ensure that the gearmotor plug is not inserted in the mains socket;
02. Disconnect the electric cable on the gearmotor from the power termi-
nal;
03. Loosen the collar [A] (fi g. 29) present below the terminal and extract
the electric cable. Replace it with the permanent electric power cable;
04. Connect the electric cable to the gearmotor power terminal (fi g. 29);
05. Tighten down the collar [A] to secure the electric cable.
29
7.3 - RECOGNITION OF THE CONNECTED DEVICES
On completion of initial checks, the control unit must be able to recognise
the devices connected on the terminals “ECSBus” and “STOP”.
01. On the control unit, press and hold P2 [A] (fi g. 31) for at least 3 sec-
onds, then release.
02. Wait a few seconds for the control unit to complete the device learn-
ing phase.
03. At the end of the learning phase the STOP led [B] (fi g. 31) must remain
lit, while the led P2 [C] (fi g. 31) should turn off. If the LED P2 fl ashes it
means there is an error; see paragraph 10.5 “Troubleshooting”.
The phase for learning connected devices can be repeated at any time
also after installation (for example if a photocell is added); simply repeat
the procedure from point 01.
7.4 - CHECKING GATE LEAF MOVEMENT
After learning devices, the control unit must recognise the length of the
gate. In this phase the length of the gate is measured from the closing
limit switch to the opening limit switch. This measurement is required to
calculate the points of deceleration and partial opening.
01. Release the gearmotor (see paragraph 11.3 – User’s guide) and
move the gate to mid-travel so that it is free to move in both the
opening and closing directions; then lock the gearmotor.
02. On the control unit, press and release the key OPEN [A] (fi g. 32);
wait for the control unit to perform leaf opening until the opening limit
switch is reached.
If the manoeuvre is not opening, press the OPEN key again to stop
the manoeuvre and invert the position of the jumper, (see fi g. 23) and
then repeat point 02.
03. On the control unit, press and release the key OPEN [A] (fi g. 32);
04. Perform a number of opening and closing manoeuvres, ensuring that
the gate stops (reaching the limit switch) at least 2-3 centimetres
before the mechanical stops.
7.5 - CHECKING THE RADIO TRANSMITTERS
To check transmitters, simply press one of its 4 keys, ensure that the LED
fl ashes and that the automation performs the associated command. The
command associated with each key depends on the mode in which they
were memorised (see paragraph 10.4 “Memorising radio transmitters”).
The transmitters supplied are already memorised and the keys, when
pressed, send the following commands (fi g. 33):
A
7.2 - INITIAL CHECKS
After powering up the control unit, perform the following checks:
01. Ensure that the led “ECSBus” [A] (fi g. 30) fl ashes regularly with the
frequency of 1 fl ash per second.
02. Ensure that the LED “SAFE” [B] (fi g. 30) on the photocells is fl ash-
ing (both on TX and RX); the type of fl ash is not important, as this
depends on other factors; it is important that it is not off or permanently lit.
03. Ensure that the night-time light on the KS100 key-operated selector
switch is on.
04. If these events do not occur, disconnect the control unit from the
power supply and check the cable connections again with care. For
other useful information, refer also to chapters 10.5 “Troubleshooting” and 10.6 “Diagnostics and signals”.
Key T1 = “OPEN” command
Key T2 = “Pedestrian opening” command
Key T3 = “Only open” command
Key T4 = “Only close” command
7.6 - SETTINGS
7.6.1 - Selecting the leaf speed
Leaf opening and closing can be at two speeds: “low” or “high”.
To change from one speed to another, briefl y press key P2 [B] (fi g. 34);
the corresponding led P2 [A] (fi g. 34) will turn on or off; when the led is
off, the speed setting is “low”, when the led is on the speed setting is
“high”.
7.6.2 - Selecting the operating cycle
Gate opening and closing can be performed in two different operating
modes:
• Single cycle (semi-automatic):with one command, the gate opens and
remains open until the next command which activates closing.
• Complete cycle (automatic closure):with one command, the gate opens
and closes again automatically after a short interval (for the time interval,
see paragraph 10.1 “Parameter settings via radio transmitter”).
To change from one mode to another, briefl y press key P3 [B] (fi g. 35);
the corresponding led [A] (fi g. 35) will turn on or off; when the led is off,
the cycle is “single”, when the led is on the cycle is “complete”.
14
Page 17

30
A
B
31
33
T1
T2
32
B
C
A
A
35
T4
34
T3
A
B
A
B
15
Page 18

TESTING AND COMMISSIONING
––– STEP 8 –––
These are the most important phases when setting up an automation, in
order to guarantee maximum safety.
Testing can also be used as a periodic check of devices in the automation.
Testing of the entire system must be performed by skilled and
qualifi ed personnel, who are responsible for the tests required to
verify the solutions adopted according to the risks present, and
for ensuring observance of all legal provisions, standards and
regulations, with particular reference to all requirements of the
standard EN 12445 which establishes the test methods for testing
automations for power-operated gates.
8.1 - TESTING
01. Ensure that all instructions and warnings in STEP 1 have been
strictly observed.
02. Using the selector or radio transmitter, test gate opening and closing
and ensure that leaf movement corresponds to the envisaged commands. Test several times to assess smooth operation of the gate
and check for any defects in assembly or adjustment and any possible points of friction.
03. Check operation of all system safety devices one at a time (photocells, sensitive edges, etc.). In particular, each time a device trips,
the “ECSBus” led on the control unit emits a longer fl ash to confi rm
control unit recognition of the event.
04. To test photocells and in particular that there is no interference with
other devices, pass a cylinder (Fig. 36) (diameter 5 cm, length 30
cm) through the optic axis, fi rst close to the TX and then the RX and
then mid-way between the two. Ensure that in all cases the device
engages, changing from the active status to alarm status and vice
versa; then ensure that the action envisaged is performed on the
control unit: during closure inverts movement.
05. Measure the force as specifi ed in the standard EN 12445. If the motor
force control is used as an auxiliary function for reduction of impact
force, test and identify the setting that obtains the best results.
devices used (use appendix 1).
02. Affi x a dataplate on the door, specifying at least the following data:
type of automation, name and address of manufacturer (responsible
for commissioning), serial number, year of construction and CE mark.
03. Permanently attach to the gate the label supplied in the pack, regard-
ing the procedure for manual locking/release of the gearmotor.
04. Compile and provide the automation owner with the declaration of
conformity (use appendix 2).
05. Prepare and provide the automation owner with the User’s guide; for
this purpose appendix “User’s guide” may be used as an example
(chapter 11.3).
06. Prepare and provide the owner with the form “Maintenance sched-
ule”, containing all maintenance instructions for all devices in the
automation.
07. Before commissioning the automation, ensure that the owner is ade-
quately informed of all associated risks and hazards.
36
8.2 - COMMISSIONING
Commissioning can only be performed after positive results of all
test phases. Partial or “makeshift” commissioning is strictly prohibited.
01. Produce the technical documentation of the automation, which must
include at least the following documents: overall layout drawing (e.g.
fi g. 3), electrical wiring diagram (e.g. fi g. 26), risk assessment and
solutions adopted, manufacturer’s declaration of conformity for all
MAINTENANCE
––– STEP 9 –––
Maintenance must be performed in strict observance of the safety
provisions in this manual and according to current legislation and
standards.
The automation devices do not require special maintenance. However a
check should be performed at least every six months to ensure complete
PRODUCT DISPOSAL
This product is an integral part of the automation and therefore
must be disposed together with the latter.
As in installation, also at the end of product lifetime, the disassembly and
scrapping operations must be performed by qualifi ed personnel.
This product is made of various types of material, some of which can be
recycled while others must be scrapped. Seek information on the recycling and disposal systems envisaged by the local regulations in your area
for this product category.
Caution! – Some parts of the product may contain pollutant or hazardous substances which, if disposed of into the environment, may cause
effi ciency of all devices.
For this purpose, the tests and checks envisaged in paragraph 8.1 “Testing” should all be performed, as well as all procedure in the paragraph
“Maintenance operations permitted for the user”.
If other devices are present, follow the instructions in the relative maintenance schedule.
serious damage to the environment or physical health.
As indicated by the symbol alongside, disposal of this
product in domestic waste is strictly prohibited. Separate
the waste into categories for disposal, according to the
methods envisaged by current legislation in your area, or
return the product to the retailer when purchasing a new
version.
Caution! – Local legislation may envisage serious fi nes in the event of
abusive disposal of this product.
16
Page 19

FURTHER INFORMATION
––– STEP 10 –––
10.1 - ADVANCED SETTINGS
10.1.1 - Parameter settings via radio transmitter
The radio transmitter can be used to set a number of control unit operating parameters: there are four parameters and each of these may be
assigned with four different values:
TABLE 6
Parameters
Pause Time
Pedestrian opening
Motor force
“OPEN” function
(*) Factory setting
Value
NO.
1
10 s
2
20 s (*)
3
40 s
4
60 s
1
Gate opening at 0.7 m
2
Gate opening at 1 m (*)
3
Gate opening mid-way
4
Gate opening at 3/4
1
Low
2
Medium low (*)
3
Medium high
4
High
1
“Open”, “Stop”, “Close”, “Stop”
2
“Open”, “Stop”, “Close”, “Open” (*)
3
“Open”, “Close”, “Open”, “Close”
4
Opening only
1) Pause time: the time for which the gate remains open (in the case of
automatic closure).
2) Pedestrian opening: pedestrian gate opening mode.
3) Motor force: motor force over which the control unit recognises an
obstacle and inverts movement.
4) “OPEN” Function: sequence of movements associated with each
“OPEN” command.
Action: operation to be performed at point 3 of the settings phase
Press T1 once
Press T1 twice
Press T1 three times
Press T1 four times
Press T2 once
Press T2 twice
Press T2 three times
Press T2 four times
Press T3 once
Press T3 twice
Press T3 three times
Press T3 four times
Press T4 once
Press T4 twice
Press T4 three times
Press T4 four times
The parameter setting operation can be performed using any radio transmitter, provided that it is memorised in mode 1, in the same way as that
supplied (see paragraph 10.4.1 “Memorisation mode 1”).
If there is no transmitter memorised in mode 1 a single one may be
memorised for this phase, after which it must be deleted immediately (see
paragraph 10.4.4 “Deleting a radio transmitter”).
CAUTION! – When making settings via a transmitter, the control unit
must be allowed suffi cient time to recognise the command via radio; in
practice the keys must always be pressed and released slowly, pressing
for at least one second, releasing for one second and so on.
01. Press T1 and T2 simultaneously (fi g. 37) on the radio transmitter for
at least 5 s.
02. Release the two keys.
03. Within three seconds, complete the action as specifi ed in Table 6
according to the parameter to be modifi ed.
Example: to set the pause time at 40 s.
01. Press and hold the keys T1 and T2 simultaneously for at least 5 seconds
02. Release T1 and T2
03. Press T1 three times
37
T1
T2
force reduction, after each adjustment the force measurement procedure must be performed, as envisaged by standard EN 12445.
• Weather conditions can infl uence gate movement; new adjustments
may be required periodically.
10.1.2 - Checking settings via a radio transmitter
With a radio transmitter memorised in Mode 1 the user can check settings
at any time for each parameter, as follows:
01. Press T1 and T2 simultaneously on the radio transmitter for at least 5 s.
02. Release the two keys.
03. Within three seconds, complete the action as specifi ed in Table 7
according to the parameter to be modifi ed.
04. Release the key when the fl ashing light starts to fl ash.
05. Count the number of fl ashes and, according to the number, check
the corresponding value on Table 6.
Example: After pressing T1 and T2 for 5 s followed by T1, if the fl ashing
light fl ashes three times, the pause time is set at 40 s
TABLE 7
Parameter
Pause Time
Pass door
Motor force
“OPEN” function
Action
Press and hold T1
Press and hold T2
Press and hold T3
Press and hold T4
10.2 - OPTIONAL ACCESSORIES
All parameters can be adjusted as required without any contraindications,
only the “Motor force” setting may require special attention:
• Do not use force values to compensate for anomalous points of friction
on the gate. Excessive force settings may impair safety system operation or cause damage to the gate.
• If the “Motor force control” is used in support of the system for impact
As well as the devices in SL1S-SL10S, there are a number of optional
accessories which may be used to integrate the automation system.
PR1: 24 V buffer battery; in the event of a mains power failure, this guarantees at least 10 complete cycles.
PF: 24 V solar power system; useful in cases in which there is no electrical mains power.
PT50: Pair of columns (height 500 mm) with photocell
PT100: Pair of columns (height 1000 mm) with two photocells
For information on new accessories, consult the MHOUSE catalogue or
visit the website www.mhouse.com.
17
Page 20

10.2.1 - Installing the PR1 buffer battery (fi g. 38)
CAUTION! - The electric connection of the battery to the control
unit must only be made after completing all installation and programming phases, as the battery constitutes an emergency power
supply.
To install and connect the buffer battery PR1 to the control unit, refer to
fi g. 38 and the PR1 instruction manual.
When the automation is powered by the buffer battery, 60 seconds after
a manoeuvre is completed, the control unit automatically switches off the
output “ECSbus” (and all connected devices), output Flash and all leds,
with the exception of the ECSbus led, which fl ashes at slower intervals;
this indicates the “Standby” function. When the control unit receives a
command, it restores normal operation (with a short delay). This function is used to reduce consumption; an important factor when the unit is
powered by battery.
10.2.2 - Installing the PF solar power supply system (fi g. 39)
CAUTION! - When the automation is powered exclusively by the
solar power system “PF”, IT MUST NEVER BE POWERED at the
same time by the mains.
To connect the PF solar power system to the control unit, refer to fi g. 39
and the PF instruction manual.
When the automation is powered by the solar panel, 60 seconds after a
manoeuvre is completed, the control unit automatically switches off the
output “ECSbus” (and all connected devices), output Flash and all leds,
with the exception of the ECSbus led, which fl ashes at slower intervals;
this indicates the “Standby” function. When the control unit receives a
command, it restores normal operation (with a short delay). This function
is used to reduce consumption; an important factor when the unit is powered by photovoltaic panels.
38
39
12
12
10.2.3 - Maximum possible number of cycles per day
This product is specifi cally designed to operate also with the PF solar
power supply system.Special technical provisions have been envisaged
to minimise energy consumption when the automation is stationary, by
turning off all devices not essential to operation (for example photocells
and the key-operated selector switch). In this way all energy available and
18
stored in the battery is used to move the gate.
Caution! - When the automation is powered by the solar power
system “PF”, IT MUST NEVER BE POWERED at the same time by
the mains.
Application limits: maximum possible number of cycles per day within
a set period of the year.
Page 21

The PF solar power system enables complete power autonomy of the
automation, until the energy produced by the photovoltaic panel and
stored in the battery remains above the amount consumed during gate
manoeuvres. A simple calculation enables an estimate of the maximum
number of cycles per day performed by the automation in a certain period
of the year, provided that a positive energy balance is maintained.
The fi rst step in calculating the energy available, is dealt with in the
PF instruction manual; the second step in calculating the energy con-
sumed and therefore the maximum number of cycles per day, is dealt
with in this chapter.
Calculating the energy available
To calculate the energy available (refer also to the PF instruction manual)
proceed as follows:
01. On the terrestrial map supplied in the PF kit instruction manual,
locate the point of system installation; then read the value Ea and
the degrees of latitude of this location (E.g. Ea = 14 and degrees =
45°N)
02. On the graphs (North or South) supplied in the PF kit instruction man-
ual, locate the curve for the location’s latitude (e.g. 45°N)
03. Choose the period of the year on which to base the calculation, or
select the lowest point of the curve to calculate the worst period
of the year; then read the corresponding value Am (e.g. December,
January: Am= 200)
04. Calculate the value of energy available Ed (produced by the panel)
multiplying Ea x Am = Ed (e.g.Ea = 14; Am = 200 therefore Ed =
2800)
Calculating the energy consumed
To calculate the energy consumed by the automation, proceed as follows:
05. On the table below, select the box corresponding to the intersection
between the line with the weight and the column with the opening
angle of the gate leaf. The box contains the value of the severity
index (K) for each manoeuvre (e.g. SL1S with a leaf of 250 Kg and
opening of 3.5 m; K = 200).
SL1S Leaf length
Leaf weight <3 m 3÷4 m 4÷5 m
< 150 Kg 84 108 132
150-250 Kg 120 144 184
250-350 Kg 160 200 240
350-400 Kg 204 252 300
SL10S Leaf length
Leaf weight
< 150 Kg 108 144 180 210 240
150-250 Kg 152 200 248 280 328
250-350 kg 200 260 320 360 420
350-450 Kg 252 324 396 444 516
450-550 Kg 308 392 476 532 616
06. On the table A below, select the box corresponding to the intersec-
tion between the line with the Ed value and the column with the K
value. The box contains the maximum possible number of cycles per
day (e.g. Ed = 2800 and K= 200; cycles per day ≈ 14)
If the number obtained is too low for the envisaged use or is located in
the “area not recommended for use”, the use of 2 or more photovoltaic panels may be considered, or the use of a photovoltaic panel with a
higher power. Contact the Mhouse technical assistance service for further
information.
The method described enables the calculation of the maximum possible
number of cycles per day that can be completed by the automation while
running on solar power. The calculated value is considered an average
value and the same for all days of the week. Considering the presence
of the battery, which acts as an energy “storage depot”, and the fact
that the battery enables automation autonomy also for long periods of
bad weather (when the photovoltaic panel produces very little energy) it
may be possible to exceed the calculated maximum possible number of
cycles per day, provided that the average of 10-15 days remains within
the envisaged limits.
Table B below specifies the maximum possible number of cycles,
according to the manoeuvre’s severity index (K), using exclusively the
energy stored by the battery. It is considered that initially the battery
is completely charged (e.g. after a prolonged period of good weather or
recharging via the optional PCB power supply unit) and that the manoeuvres are performed within a period of 30 days.
When the battery runs out of the stored energy, the led starts to indicate
the battery low signal by fl ashing briefl y every 5 seconds, accompanied
by a “beep”.
<3 m 3÷4 m 4÷5 m 5÷6 m 6÷7 m
Ed K≤100 K=150 K=200 K=250 K=300 K=350 K=400 K=450 K=500 K=550 K≥600
9500 93 62 47 37 31 27 23 21 19 17 16
9000 88 59 44 35 29 25 22 20 18 16 15
8500 83 55 42 33 28 24 21 18 17 15 14
8000 78 52 39 31 26 22 20 17 16 14 13
7500 73 49 37 29 24 21 18 16 15 13 12
7000 68 45 34 27 23 19 17 15 14 12 11
6500 63 42 32 25 21 18 16 14 13 11 11
6000 58 39 29 23 19 17 15 13 12 11 10
5500 53 35 27 21 18 15 13 12 11 10 9
5000 48 32 24 19 16 14 12 11 10 9 8
4500 43 29 22 17 14 12 11 10 9 8 7
4000 38 25 19 15 13 11 10 8 8 7 6
3500 33 22 17 13 11 9 8 7 7 6 6
3000 28 19 14 11 9 8 7 6 6 5
2500 23 15 12 9 8 7 6 5
2000 18 12 9 7 6 5
1500 13 9 7 5
1000 8 5
K≤100 K=150 K=200 K=250 K=300 K=350 K=400 K=450 K=500 K=550 K≥600
586 391 293 234 195 167 147 130 117 107 98
10.3 - ADDING OR REMOVING DEVICES
An automation using SL1S-SL10S enables devices to be added or
removed at any time.
Caution! - Do not add devices before ensuring that they are fully compatible with SL1S-SL10S; for further details, contact the
MHOUSE technical assistance.
TABLE A - Maximum possible number of cycles per day
Area of use not recommended
TABLE B - Maximum number of cycles using exclusively battery power
10.3.1 - ECSBus
ECSBus is a system that enables connections of ECSBus devices using
just two wires, which convey both electrical power and communication
signals. All devices are connected in parallel on the same 2 wires of the
ECSBus; each device is recognised individually as it is assigned a unique
address during installation.
19
Page 22

Photocells and other devices using this system can be connected to
ECSBus, such as safety devices, control buttons, indicator lights etc. For
information on ECSBus devices, refer to the MHOUSE catalogue or visit
the website www.mhouse.com.
A special learning phase enables the control unit to recognise all connected devices individually, and enables precise diagnostics procedures.
For this reason, each time a device connected to ECSBus is added or
removed, the learning phase must be performed on the control unit; see
paragraph 10.3.3 “Learning other devices”.
10.3.2 - STOP Input
STOP is the input that causes immediate shutdown of the movement (followed by a brief inversion of the manoeuvre). This input can be connected
to devices with contact types Normally Open (NO, as in the case of the
KS100 selector switch), Normally Closed (NC) or devices with a constant
resistance of 8.2 KΩ, such as sensitive edges.
When set accordingly, more than one device can be connected to the
STOP input, also different from one another; see Table 8.
TABLE 8
1st device type:
NA NC 8,2 KΩ
NA In parallel (note 2) (note 1) In parallel
device type:
NC (note 1) In series (nota 3) In series
nd
2
8,2KΩ In parallel In series (nota 4)
Note 1. The NO and NC combination can be obtained by placing the
two contacts in parallel, and placing an 8.2kΩ resistance in series with
the NC contact (it is, therefore, possible to combine 3 devices: NA, NC
and 8,2kΩ).
Note 2. Any number of NO devices can be connected to each other in
parallel.
Note 3. Any number of NC devices can be connected to each other in
series.
Note 4. Only two devices with an 8.2 kΩ constant resistance output can
be connected in parallel; multiple devices must be connected “in cascade” with a single 8.2 kΩ termination resistance.
Caution! – If the STOP input is used to connect devices with safety
functions, only the devices with 8.2 kΩ constant resistance output
will guarantee the fail-safe category .
As with the ECSBus, the control unit recognises the type of device connected to the STOP input during the learning phase; subsequently the
control unit gives a STOP command when it detects a variation with
respect to the learned state.
10.3.3 - Recognition of other devices
The learning operation of the devices connected to the ECSBus and
STOP input is usually carried out during the installation phase; if devices
are added or removed the learning operation can be carried out again as
follows:
01. Press and hold key P2 on the control unit for at least three seconds
[B] (fi g. 40), then release the key.
02. Wait a few seconds to allow the control unit to fi nish learning the
devices.
03. At the end of the learning the LED P2 [A] (fi g. 40) should switch off.
If the LED P2 fl ashes it means there is an error; see paragraph 10.5
“Troubleshooting”.
04. After having added or removed a device the automation test must be
carried out again as specifi ed in paragraph 8.1 “Testing”.
10.3.4 - Adding optional photocells
Additional photocells to those supplied with the SL1S-SL10S can be
installed at any time. In systems for the automation of sliding gates they
must be installed as shown in fi g. 41.
In order for the control unit to correctly recognise the photocells they must
be assigned with addresses using special electric jumpers. The address
assignment operation must be carried out on both TX and RX (placing the
electric jumpers in the same way) and it is important to check that there
are not any other pairs of photocells with the same address. The photocell address assignment operation is necessary for them to be correctly
recognised among the other devices of the ECSBus and to assign them
their function.
01. Open the housing of the photocell.
02. Identify the position in which they are installed according to Figure 70
and place the jumper according to Table 9.
Unused jumpers must be placed in the special compartment for
future use (fi g. 42).
03. Carry out the learning phase as described in paragraph 10.3.3
“Re cognition of other devices”.
40
41
Rx
A
42
B
Tx
Tx
Tx
Rx
20
Page 23

Photocell
Jumpers
TABLE 9
Photocell
Jumpers
External photocell h=50cm;
A
triggered on closure
External photocell h=100 cm;
B
triggered on closure
Internal photocell h=50 cm;
C
triggered on closure
Internal photocell h=100 cm;
D
triggered on closure
10.4 - MEMORIZING ALL RADIO TRANSMITTERS
The control unit contains a radio receiver for GTX4 transmitters; the transmitter included in the box is already memorised and ready to use.
There are two ways of memorising a new transmitter:
• Mode 1: in this “mode” the radio transmitter is used as a whole, i.e. all
the keys carry out a preset command (the transmitter supplied with the
SL1S-SL10S is memorised using Mode 1). Obviously a radio transmitter
in mode 1 can only control one single automation; that is:
Key T1 “OPEN” command
Key T2 “Pedestrian opening” command
Key T3 “Only open” command
Key T4 “Only close” command
• Mode 2: each key can be associated to one of the four commands
available. If this mode is used appropriately 2 or more different automations can be controlled, for example:
External photocell triggered
E
on opening
Internal photocell triggered on
F
opening
Single photocell that covers
the entire automation and
G
is triggered on closure and
opening
Note: normally there are no restrictions to the position of the two
elements that make up the photocell (TX-RX).
Only if photocell G is used with photocell B it is necessary to follow
the positions shown in fi g. 41.
In Mode 2 each key requires its own memorisation phase.
01. If the transmitter to be memorised is already memorised (such as
the transmitters supplied which are already memorised in mode I)
the transmitter must be deleted following the procedure described in:
“10.4.4 - Deleting a radio transmitter”.
02. Press key P1 [B] (fi g. 43) on the control unit the number of times
equal to the required command, according to Table B (e.g. 3 times
for the “Only open” command”).
03. Check that LED P1 [A] (fi g. 43) fl ashes quickly for a number of times
equal to the command selected.
04. Within 10 s press the required key on the radio transmitter for at least
2 s to memorise it. If the memorisation procedure is successful, the
LED P1 will emit 3 slow fl ashes.
05. If there are other transmitters to be memorised for the same type of
command, repeat step 03 within the next 10 s otherwise the memorisation phase will end automatically.
43
A
Key T1 “Only open” command Automation N° 1
Key T2 “Only close” command Automation N° 1
Key T3 “OPEN” command Automation N° 2
Key T4 “OPEN” command Automation N° 3
Obviously each transmitter is treated separately and for one single control
unit there can be some transmitters memorised in mode 1 and others in
mode 2.
The overall maximum memory capacity is of 150 units; mode 1 memorisation occupies one unit per transmitter while mode 2 occupies one unit
per key.
Caution! – As memorisation procedures have a time limit (10 s), it
is im portant to read the instructions in the next paragraphs before
starting.
10.4.1 - Memorisation mode 1
01. Press key P1 [B] (fi g. 43) for at least 3 s. When the LED P1 [A] (fi g.
43) switches on release the key.
02. Within 10 s press any one key on the transmitter for at least 3 s to
memorise it. If the memorisation procedure is successful, the LED P1
will emit 3 fl ashes.
03. If there are other transmitters to be memorised repeat step 2 within the
next 10 s otherwise the memorisation phase will end automatically.
10.4.2 - Memorisation mode 2
With Mode 2 memorisation each key can be associated with any one of
the four commands: “OPEN”, “Partially open”, “Only open” and “Only
close”.
B
TABLE B
once “Open” command
twice “Pedestrian opening” command
three times “Only open” command
Four times “Only close” command
Five times “Stop” command
Six times “Apartment block” open command
Seven times “High priority open” command
Eight times “Pedestrian opening 2” command
Nine times “Pedestrian opening 3” command
Ten times “Open+ block automation” command
Eleven times “Close + block automation” command
Twelve times “Block automation” command
Thirteen times “Unblock automation” command
21
Page 24

10.4.3 - Remote memorisation
A new radio transmitter can be memorised on the control unit without
having to use the unit itself. It is suffi cient to have an “OLD” working and
memorised radio transmitter. The “NEW” radio transmitter will “inherit” the
characteristics of the OLD one; in other words if the old one is memorised
in Mode 1 then the NEW one will also be memorised in Mode 1; in this
case during the memorisation phase press any one key on the two transmitters. If the OLD radio transmitter is memorised in Mode 2 press the key
with the required command on the OLD transmitter and press the key on
the NEW transmitter with which you wish to associate the new command.
Take the two transmitters and position yourself within the action range of
the automation and follow the following steps:
01. Press the key on the NEW radio transmitter for at least 5 s then
release it.
02. Press the key on the OLD radio transmitter slowly 3 times.
03. Press the key on the NEW radio transmitter slowly once.
At this point the NEW radio transmitter will be recognised by the control
unit and will take on the characteristics of the OLD one.
Repeat these steps for each new transmitter to be memorised.
10.4.4 - Deleting a radio transmitter
It is necessary to have a radio transmitter to delete it.
If the transmitter is memorised in Mode 1 one single deletion phase is suffi cient and at point 3 any key can be pressed. If the transmitter is memorised in Mode 2 a deletion phase must be carried out for each key
01. Press and hold down key P1 on the control unit until the end of the
procedure.
02. Wait for the LED P1 [A] (fi g. 43) to switch on and within three sec-
onds.
03. Press the key on the radio transmitter to be deleted for at least three
seconds. If deletion is successful LED P1 will emit fi ve quick fl ashes.
If LED P1 emits one slow fl ash it means that the deletion has not
been completed because the transmitter is not memorised.
04. To delete other transmitters keep key P1 pressed and repeat step
3 within 10 seconds otherwise the deletion procedure will end automatically.
10.4.5 - Deleting all radio transmitters
This procedure deletes all memorised transmitters.
01. Press and hold key P1 [B] (fi g. 43) on the control unit.
02. Wait for LED P1 [A] (fi g. 43) to switch on, then off and then fl ash 3
times.
03. Release key P1 precisely when the LED fl ashes the third time.
04. Wait about 4 s for deletion to be completed, during which the LED P1
will emit quick fl ashes.
If the procedure is successful after a few moments the LED P1 will emit
5 slow fl ashes.
10.5 - TROUBLESHOOTING
Table 10 gives possible indications on how to deal with malfunctions that
may be met during installation or due to a fault.
10.6 - DIAGNOSTICS AND SIGNALS
Some devices directly provide particular signals to describe the state of
operation or eventually a malfunction.
10.6.1 - Photocells
The photocells contain a LED “SAFE” [A] (fi g. 45) that provides informa-
tion at any moment on the state of operation; see Table 11.
Symptoms
The radio transmitter does not
emit any signal (the LED [A] does
not light up)
The manoeuvre does not start and
the LED “ECSBbus” [B] does not
fl ash
The manoeuvre does not start and
the fl ashing light is off
The manoeuvre does not start and
the fl ashing light fl ashes
The manoeuvre starts but is immediately followed by an inversion
The manoeuvre is carried out but
the fl ashing light is not working
44
A
TABLE 10 (fi g. 44)
Probable cause and possible solution
• Check whether the batteries are fl at and if necessary replace them (page 36)
• Check that the power supply cable is correctly inserted in the mains socket
• Check that the fuses [E] and [F] have not been activated; if this is the case check the cause of the fault
and replace them with other fuses with the same characteristics
• Check that the command is actually received. If the command reaches the OPEN input the relevant
LED “OPEN” [D] should light up; if a radio transmitter is used the LED “ECSBus” should emit two long
fl ashes
• Check that the STOP input is active, in other words that the LED “STOP” [C] is on. If this is not the case
check the device connected to the STOP input
• The photocell test carried out at the beginning of each manoeuvre is negative; check the photocells and
refer to Table 11
• The force selected is too low to move the gate. Check whether there are any obstacles and if necessary select a higher force as described in paragraph “10.1.1 - Adjusting the parameters with the radio
transmitter”
• During the manoeuvre, ensure that there is voltage on the FLASH terminal of the fl ashing light (as this is
intermittent, the voltage value is not signifi cant: approx. 10-30 Vac); if voltage is present, the problem is due
to the lamp, which should be replaced with an identical version
D
CB
E
45
F
A
22
Page 25

TABLE 11
LED “SAFE”
Off
3 quick fl ashes and 1
second pause
1 very slow fl ash
1 slow fl ash
1 quick fl ash
1 very quick fl ash
Always lit
10.6.2 - Flashing light
During a manoeuvre the fl ashing light fl ashes every second; in case of
anomalies the light fl ashes at more frequent intervals (half a second); the
STATUS
The photocell is not powered or it is faulty
Device not recognised by the control unit
The RX receives an excellent signal
The RX receives a good signal
The RX receives a poor signal
The RX receives a bad signal
The RX does not receive any signal
TABLE 12
Quick fl ashes
1 fl ash
1 second pause
1 fl ash
2 fl ashes
1 second pause
2 fl ashes
3 fl ashes
1 second pause
3 fl ashes
4 fl ashes
1 second pause
4 fl ashes
5 fl ashes
1 second pause
5 fl ashes
6 fl ashes
1 second pause
6 fl ashes
7 fl ashes
1 second pause
7 fl ashes
8 fl ashes
1 second pause
8 fl ashes
9 fl ashes
1 second pause
9 fl ashes
Status
ECSbus error
Photocell activated
“Gearmotor force” limiting device activated
STOP input activated
Error on internal parameters in electronic
control unit
Maximum limit of manoeuvres per hour
exceeded
Internal electric circuit error
A command is already present that disables
execution of other commands.
Blocked automation
ACTION
Check that the voltage on the photocell terminals is of about
8-12 Vdc; if the voltage is correct then the photocell is probably
faulty
Repeat the learning procedure on the control unit. Check that
all the photocell pairs on ECSBus have different addresses
(see Table 9)
Normal operation
Normal operation
Normal operation but check TX-RX alignment and correct cle-
aning of photocell lenses
At the limit of normal operation; check TX-RX alignment and
correct cleaning of photocell lenses
Check for any obstruction between TX and RX. Check that the
LED on the TX fl ashes slowly. Check TX-RX alignment
fl ashes are repeated twice with an interval of one second; see Table 12.
Action
At the beginning of the manoeuvre the devices present do not
correspond with those recognised; check and eventually carry out
the learning procedure (10.3.3 “Recognition of other devices”).
One or more devices may be faulty; check and, if necessary,
replace them.
At the start of the manoeuvre, one or more photocells do not enable movement; check to see if there are any obstructions. During
the movement if there is an obstruction no action is required.
During the movement, the gate experienced excessive friction;
identify the cause.
At the start of the manoeuvre or during the movement, the STOP
input was activated; identify the cause.
Wait at least 30 seconds, and then try giving a command; if the
condition persists it means there is a serious fault and the electronic board must be replaced.
Wait a few minutes until the manoeuvre limiting device falls to
below the maximum limit.
Disconnect all power circuits for a few seconds, and then try
giving a command; if the condition persists it means there is a
serious fault and the electronic board must be replaced.
Check the type of command that is always present; for example,
it could be a command from a timer on the “open” input.
Release the automation by giving to the control unit the release
automation command.
10.6.3 - Control unit
The LEDs on the control unit provide particular signals to report on the
normal operation and on possible faults; see Table 13.
TABLE 13 (fi g. 46)
LED ECSBus [A]
Off
On
Status
Fault
Serious fault
Action
Check that the unit is powered; check that the fuses have not
been activated; if this is the case check the cause of the fault
and replace them with other fuses with the same characteristics.
There is a serious fault; switch off the control unit for a few seconds; if the status persists there is a fault and the electronic board
must be replaced.
23
Page 26

One fl ash per second
2 long fl ashes
1 fl ash every 2 seconds
Series of flashes separated
by a pause
Quick fl ash
Everything OK
Input status variation
Automation in “standby” mode
The same signal as for the fl ashing light,
see Table 12.
ECSBus short circuit
Control unit works correctly.
A variation to the status of the inputs OPEN, STOP, activation
of the photocells, or when the radio transmitter is used, is normal.
Everything OK; when the control unit receives a command normal operation is restored (with a short delay).
An overload has been detected therefore the power to the ECSBus
switched off. Check by disconnecting the devices one at a time.
To restore power to the ECSBus simply send a command, for
example with a radio transmitter.
LED STOP [B]
Off *
On
LED OPEN [C]
Off
On
LED P1 [D]
Off *
On
Series of quick fl ashes,
from 1 to 4
5 quick fl ashes
1 slow fl ash
3 slow fl ashes
5 slow fl ashes
LED P2 [E]
Off *
On
1 fl ash per second
2 fl ashes per second
Status
STOP input activated
Everything OK
Status
Everything OK
OPEN input activated
Status
Everything OK
Memorisation mode 1
Memorisation mode 2
Deletion OK
Wrong command
Memorisation OK
Deletion OK
Status
Everything OK
Everything OK
The learning phase has not been carried
out or there are errors in the memory data
Device learning procedure underway
Action
Check the devices connected to the STOP input
STOP input active
Action
OPEN input not active
This is normal only if the device connected to the OPEN input is
active
Action
No memorisation underway.
This is normal during memorisation mode 1 which lasts maximum
10 s.
This is normal during memorisation mode 2 which lasts maximum
10 s.
Deletion of a transmitter successfully completed.
Command received from a transmitter which is not memorised
Memorisation successfully completed
All radio transmitters successfully deleted
Action
“Slow” speed selected
“Fast” speed selected
Carry out the position learning procedure again (see paragraph
10.3.3 “Learning the connected devices”)
It shows that the search for connected devices is underway (it
lasts maximum a few seconds)
LED P3 [F]
Off *
On
* or it could be in “Standby” mode
46
A
B
Status
Everything OK
Everything OK
C
Action
Cycle operation
Complete cycle operation
D
E
F
24
Page 27

TECHNICAL SPECIFICATIONS OF PRODUCT COMPONENTS
The product SL1S-SL10S is produced by Nice S.p.a. (TV) I, Mhouse is a company part of the NICE S.p.a. group. In order to improve its products,
NICE S.p.a. reserves the right to modify the technical characteristics at any time without prior notice. In any case, the manufacturer guarantees their
functionality and fi tness for the intended purposes. Note: all technical specifi cations refer to a temperature of 20°C.
Model/type
Product type
Adopted technology
Maximum start-up torque
Nominal torque
No-load speed
Speed at nominal torque
Maximum frequency of cycles
Maximum time continuous cycle
Application limits
Mains power supply SL1SC-SL10SC
Mains power supply SL1SC-SL10SC/V1
Max. absorbed power
Backup power supply
Flashing light output
ECSbus output
“OPEN” input
“STOP” input
Radio aerial input
Max. cable length
SL1SC SL10SC
Electromechanical gearmotor for the automation of automatic gates and doors with built-in control unit
complete with radio receiver for “GTX4” transmitters.
24 motor, helical gear reducer; mechanical release. A transformer incorporated inside the motor but
separated from the control unit, reduces the mains voltage to the nominal 24 V voltage used in the
whole automation system.
10 Nm 15 Nm
3,5 Nm 5,2 Nm
0,25 m/s 0,18 m/s
0,20 m/s 0,15 m/s
14 cycles/hour at 25 °C 12 cycles/hour at 25 °C
10 minutes 7 minutes
The structural design of this product makes it
suitable for use on gates with a weight up to 400
kg or leaf width up to 5 m.
230 V (+10% -15%) 50/60Hz
120 V (+10% -15%) 50/60Hz
370 W 420 W
For “PR1” buffer batteries
For fl ashing lights with 12 V (maximum 21 W) bulb
1 output with maximum load of 10 ECSBus units
For normally open contacts (closure of the contact prompts the “OPEN” command)
For normally open and/or 8,2KΩ constant resistance type contacts, or normally closed contacts with
self-learning of the “normal” status (a variation with respect to the memorised status generates a
“STOP” command)
52Ω for RG58 or similar type cable
Mains power-supply: 30 m; inputs/outputs: 20 m with antenna cable preferably less than 5 m
(observe warnings regarding the minimum section and type of cables
The structural design of this product makes it
suitable for use on gates with a weight up to 550
kg or leaf width up to 7 m.
Ambient operating temperature
Use in particularly acid, saline or
potentially explosive atmosphere
Assembly
Protection rating
Dimensions / weight
Possibility of remote control
Compatible GTX4 transmitters
GTX4 transmitter range
Programmable functions
Self-programmed functions
-20 ÷ 50°C
NO
Horizontal on a fl at surface with the specifi c fi xing plate
IP44
300 x 163 h 295 mm / 7,5 kg 300 x 163 h 295 mm / 8,5 kg
With “GTX4” transmitters, the control unit is set to receive one or more of the following commands:
“OPEN”, “Partial Open”, “Only Open” and “Only Close”
Up to 150 if memorised in mode 1
50-100 m. This distance may vary in the presence of obstacles and electromagnetic disturbance present,
and is infl uenced by the position of the receiving antenna built into the fl ashing light.
“Single cycle” or “Complete cycle” (automatic closure) operating mode
Motor speed “slow” or “fast”
Pause time in “complete cycle” selectable from 10, 20, 40, and 80 seconds
Type of partial opening selectable from 4 modes
Obstacle detection system sensitivity selectable on 4 levels
“Open command” operating mode selectable on 4 modes
Self-learning of devices connected to the ECSBus output
Self-learning of type of “STOP” device (NO, NC or 8,2 KΩ resistance contact)
Learning of gate length and calculation of the points of deceleration
25
Page 28

PH100 Photocells
Product Type
Adopted technology
Detection capacity
TX transmission angle
RX reception angle
Useful range
Power supply / output
Absorbed power
Max. cable length
Possibility of address
assignment
Ambient operating
temperature
Use in particularly acid, saline or
potentially explosive atmospheres
Assembly
Protection rating
Dimensions / weight
Presence detector for automations of automatic gates and doors (type D according to standard
EN 12453) comprising a transmitter “TX” and receiver “RX”
Optical, by direct interpolation of TX-RX with modulated infra-red rays
Opaque objects located on the optical axis between TX and RX, larger than 50 mm and moving
slower than 1.6 m/s
20° approx.
20° approx.
10 m for maximum TX-RX misalignment ±5° (the device can signal an obstacle even in the event
of particularly adverse weather conditions)
The device can only be connected to the “ECSBus” networks from which it receives mains power,
and sends the output signal
1 ECSBus unit
Up to 20 m (observe warnings regarding the minimum section and type of cables)
Up to 7 detectors with protection function and 2 with opening command function
Automatic synchronisation prevents interference between the various detectors
-20 ÷ 50°C
No
Vertical, wall-mounted
IP44
64 x 89,2 h 29 mm / 60 g
FL100 indicator light
Product Type
Adopted technology
Lamp
Power supply
Ambient operating
temperature
Use in particularly acid, saline or
potentially explosive atmospheres
Assembly
Protection rating
Dimensions / weight
Flashing indicator light for automations of automatic gates and doors
The device incorporates a receiver aerial for remote control
Indicator light with 12V 21W lamp controlled by the control units for MHOUSE automations
12V 21W fi tting BA15 (vehicle type lamp)
The device can only be connected to the terminals “FLASH” and “ANTENNA” of the MHOUSE
automation control units
-20 ÷ 50°C
No
Horizontal on a fl at surface or vertical wall-mounted
IP55
120 x 60 h 170mm / 285g
26
Page 29

GTX4 Transmitters
Product Type
Adopted technology
Frequency
Encoding
Keys
Radiated power
Power supply
Battery life
Ambient operating
temperature
Use in particularly acid, saline or
potentially explosive atmospheres
Protection rating
Dimensions / weight
Radio transmitters for remote control of automations for automatic gates and doors
Encoded AM OOK radio modulation
433.92 MHz
64 Bit rolling code (18 billion billion combinations)
4, each key can be used for different commands of the same control unit or to control different
control units
0.001 W circa
3V +20% -40% with 1 lithium battery type CR2032
3 years, estimated on the basis of 10 commands/day lasting 1s at 20°C (battery effi ciency is
reduced at low temperatures)
-20 ÷ 50°C
No
IP40 (use in the home or protected environments)
50 x 50 h 17mm / 16g
27
Page 30

ALLEGATO 2ANNEX 1
CE Declaration of Conformity
Declaration in accordance with the Directives: 1999/5/EC (R&TTE), 2004/108/EC (EMC);
SL1S and SL10S are produced by NICE S.p.a. (TV) I; MHOUSE is a commercial trademark owned by
Note - The contents of this declaration correspond to declarations in the last revision of the offi cial document deposited at the
registered offi ces of Nice Spa available before this manual was printed. The text herein has been re-edited for editorial purposes.
A copy of the original declaration can be requested from Nice S.p.a. (TV) I.
Number: 361/SL1S Revision: 0 Language: EN
Manufacturer’s Name: NICE s.p.a.
Address: Via Pezza Alta 13, Z.I. Rustignè, 31046 Oderzo (TV) Italy
Person authorised to compile
the technical documentation: Mr. Oscar Marchetto.
Product type: Electromechanical gearmotor with built-in control unit and radio receiver
Model / Type: SL1S, SL10S
Accessories: GTX4, PH100, KS100, FL100
The undersigned, Luigi Paro, in the role of Managing Director, declares under his sole responsibility, that the above mentioned
product conforms to the requirements of the following directives:
• 1999/5/EC DIRECTIVE OF THE EUROPEAN PARLIAMENT AND COUNCIL of th 9th March 1999 regarding radio equipment
and telecommunications terminal equipment and the mutual recognition of their conformity, according to the following harmonised standards:
- Health protection (art. 3(1)(a)): EN50371:2002
- Electric safety (art. 3(1)(a)): EN60950-1:2006
- Electromagnetic compatibility (art. 3(1)(b)): EN301489-1V1.8.1:2008, EN301489-3V1.4.1:2002
- Radio spectrum (art. 3(3)): EN300220-2V2.1.2:2007
2006/42/EC (MD) Appendix II, part B
the group Nice S.p.a.
• DIRECTIVE 2004/108/EC OF THE EUROPEAN PARLIAMENT AND COUNCIL of 15th December 2004 regarding the approxi-
mation of member state legislation related to electromagnetic compatibility, repealing directive 89/336/EEC, according to the
following harmonised standards:
EN 61000-6-2:2005, EN 61000-6-3:2007
In addition the product conforms to the following directive according to the requirements for “partly completed machinery”:
2006/42/EC Directive OF THE EUROPEAN PARLIAMENT AND COUNCIL of 17 May 2006 regarding machinery, repealing directive 95/16/EC
• We hereby declare that the relevant technical documentation has been compiled in conformity with Annex VII B of directive 2006/42/EC and
that the following essential requirements have been satisfi ed:
1.1- 1.1.2- 1.1.3- 1.2.1-1.2.6- 1.5.1-1.5.2- 1.5.5- 1.5.6- 1.5.7- 1.5.8- 1.5.10- 1.5.11
• The manufacturer undertakes to transmit, in response to a reasoned request by the national authorities, relevant information on the “partly
completed machinery”, without prejudice to intellectual property rights of the manufacturer.
• The manufacturer undertakes to transmit, in response to a reasoned request by the national authorities, relevant information on the “partly
completed machinery”, without prejudice to intellectual property rights of the manufacturer.
• The “partly completed machinery” must not be put into service until the fi nal machinery into which it is to be incorporated has been declared
in conformity with the provisions of directive 2006/42/EC.
Furthermore, the product conforms to the following standards:
EN 60335-1:2002 + A1:2004 + A11:2004 + A12:2006 + A2:2006 + A13:2008
EN 60335-2-103:2003
The product also complies, within the constraints of applicable parts, with the following standards:
EN 13241-1:2003, EN 12445:2002, EN 12453:2002, EN 12978:2003
Oderzo, 29 July 2010
Ing. Luigi Paro (Managing Director)
28
Page 31

USER’S GUIDE
––– STEP 11 –––
This guide must be stored safely and be accessible to all automation users.
11.1 – Safety instructions
• Keep at a safe distance from the moving door until it is
completely open or closed; do not go through the door
until it is completely open and has come to a standstill.
• Do not allow children to play near the door or with the
controls.
• Keep the transmitters away from children.
11.2 – Gate control
• With radio transmitter
The radio transmitter supplied is ready for use and the four keys
have the following functions (fi g. 47):
47
T1
T2
• Suspend the use of the automation immediately as soon
as you notice something abnormal in the operation (noises
or jolting movements); failure to follow this warning may
cause serious danger and accidents.
• Do not touch moving parts.
• Regular maintenance checks must be carried out by
qualifi ed personnel according to the maintenance plan.
• Maintenance or repairs must only be carried out by qualifi ed technical personnel.
• With selector (optional accessory)
The selector has two positions with automatic return to the centre
(fi g. 48).
48
T4
T3
Function(*)
Key T1
Key T2
Key T3
Key T4
(*) This table must be compiled by the person who programmed
the automation.
Action
Turned right: “OPEN”
Turned left: “STOP”
Function
(*)
Stops movement of the sectional
or up-and-over door
(*) This item must be compiled by the person who programmed
the automation.
• Control with safety devices out of service
In the event of safety devices malfunctioning or out of service, the
door may still be moved.
01. Activates the gate command (with remote control or key-
operated selector switch). The door will open normally if there
is the consent of the safety devices, otherwise the command
must be activated and held within 3 seconds.
02. After about 2 s the door will move in “hold-to-run” mode, in
other words until the command is pressed the door will continue to move; the door will stop as soon as the command is
released.
In the event of safety devices out of service arrange for repairs to
the automation immediately.
11.3 – Manually releasing or locking the gearmotor
(fi g. 49)
SL1S-SL10S are equipped with a mechanical system that enables manual opening and closing of the gate (i.e. as if there is not
a gearmotor).
The manual operation must be carried out in case of power failure
or system malfunction. In case of power failure the buffer battery
can be used (optional accessory PR1).
In case of fault of the gearmotor the motor release can be used to
check whether the fault is in the release mechanism.
01. Turn the release cap cover anti-clockwise until it coincides
with the hole with the release pin.
02. Insert the key in the release pin.
03. Turn the key anti-clockwise by about 90° until the gate is
released.
04. Then move the gate manually.
29
Page 32

05. To reset the automation turn the key clockwise and at the
same time move the gate until you hear the carriage .
06. Remove the key and close the release cap cover by turning it
clockwise.
49
50
The batteries contain pollutant substances: do not dispose of
them with normal waste material; follow the instructions foreseen by local regulations
.
11.6 – Installing the remote control support
To install the remote control support, see fi g. 51.
51
11.4 – Maintenance operations admissible to the
user
The list of operations to be regularly carried out by the user is
listed below.
• For cleaning the surfaces of the devices, use a slightly
damp (not wet) cloth. Never use substances containing
alcohol, benzene, diluents or other fl ammable substances.
Use of these substances may damage the devices and
cause fi res or electric shocks.
• Disconnect the automation from the power supply before
removing leaves or stones to stop anyone activating the
door.
11.5 – Remote control battery replacement (fi g. 50)
When the battery charge is low, the transmitter range is reduced
signifi cantly.When a key is pressed, if led L1 illuminates and then
immediately fades and turns off, this means that the battery is
completely discharged and must be replaced immediately.
Otherwise if led L1 illuminates briefl y, this means that the battery
charge is low; in this case press and hold the key for at least
half a second to enable the transmitter to attempt delivery of the
command. In any event, if the battery charge is too low to complete a command (and wait for a response) led L1 fades and the
transmitter turns off. In these cases, to restore normal operation
of the transmitter, replace the old battery with a new version of
the same type, taking care to observe the specifi ed polarity. To
replace the battery, proceed as shown in fi g. 50.
30
Page 33

ANNEX 2
CE DECLARATION OF CONFORMITY
In conformity with Directive 2006/42/EC, APPENDIX II, part A (EC declaration of conformity for machinery)
––––––––––––––––––––
The undersigned/company (name or company name of the person responsible for commissioning of the power-operated
gate):
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Address: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Hereby declares under his/her sole responsibility that:
- The automation: power-operated swing gate
- Serial N°: . . . . . . . . . . . . . . . . . . .
- Year of manufacture: . . . . . . . . . . . . . . . . . . .
- Location (address): . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Complies with the essential requirements of the following directives:
2006/42/CE “Machinery” Directive
2004/108/CEE Electromagnetic compatibility directive
2006/95/CEE “Low Voltage” Directive
1999/5/CE “R&TTE” Directive
and what is provided for by the following harmonised standards:
EN 12445 “Industrial, commercial and garage doors and gates. Safety in use of power operated doors - Test
methods”
EN 12453 “Industrial, commercial and garage doors and gates. Safety in use of power operated doors -
Requirements”
Name: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Signature: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Date: . . . . . . . . . . . . . . . . . . . . . .
Place: . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
31
Page 34

Page 35

Page 36

Mhouse is a commercial trademark owned by Nice S.p.a.
Nice S.p.a.
Via Pezza Alta, 13 - Z.I. Rustignè
31046 Oderzo (TV), Italia
Tel. +39 0422 85 38 38
Fax +39 0422 85 35 85
 Loading...
Loading...