

Page 1

MIT
SUBIS
C
C
MR-J3-T
Ser vo Amplifier
Quick Start Manual
HI ELECTRI
Art. No.: xxxxxx
21122007
Version A
MR-J3-T Servo Amplifier
With Point Table Positioning
(Point-to-Point Positioning)
MITSUBISHI ELECTRI
INDUSTRIAL AUTOMATION
Page 2

Page 3

About This Manual
If you have any questions about programming or operating the equipment
described in this manual please don’t hesitate to contact your dealer or
one of our official distributors (see back cover).
You can find up-to-date information and answers to frequently-asked
questions on our website (www.mitsubishi-automation.com).
MITSUBISHI ELECTRIC EUROPE B.V. reserves the right to make
technical changes to the products or this manual at any time without prior
notice.
© December 2007
MITSUBISHI ELECTRIC EUROPE B.V.
Page 4

Page 5
MR-J3-T Servo Amplifier with Integrated Point Table Positioning
Version Changes / Additions / Corrections
A 10/2007 pdp First Edition
Quick Start Manual
Art. No.: xxxxxx
Page 6

Page 7

This Quick Start Manual for the servo amplifiers of the MR-J3-T series with point table positio
ning isdesignedtoenableyoutogetyoursysteminstalledand configured for use as quickly as
possible.Please notethat this guide only coversthe basic functionswith theinstructions neces
sary to use these functions. Complete descriptions of all the supported functions and all availa
ble extensions can be found in the instruction manuals.
Please also note that the servo amplifiers of the MR-J3-T series include the following additional
major functions that are not covered in this Quick Start Manual:
쎲 Communication via a serial port for controlling point table positioning
쎲 Positioning control in BCD format with the optional MR-DS60 digital switch
쎲 Amplifier c ontroller circuit settings and auto-tuning functions
Safety Instructions
Toensuresafeandproper installationoftheequipmentplease also observetheinstructionsand
safety precautions in the instruction manuals supplied for your hardware.
Notes in this Quick Start Manual:
-
-
-
NOTE Tips and useful information.
Additional documentation:
쎲 MR-J3-T Instruction Manual (SH(NA030061-A)
쎲 MR-J3-T Instruction Manual for CC-Link (SH(NA030058-B)
쎲 Instruction Manual for the CC-Link Master Module:
– QJ61BT11N
– A1SJ61BT11
– A1SJ61QBT11
– FX2N-16CCL-M
MR-J3-T i
Page 8

Contents
1 Introduction
1.1 Preparations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1-1
2 Installing the Equipment
2.1 Installing the MR-J3-D01 Extension . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2-3
3 First Functional Test
3.1 Minimum Connections for the Functional Check . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-5
3.1.1 Connector pin assignments. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-6
3.2 Functional Test Settings. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-7
3.3 Configuring Positioning Point Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-9
3.4 Functional Test with MR Configurator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3-10
3.4.1 Selecting point table position entries . . . . . . . . . . . . . . . . . . . . . . . . . .3-10
4 Positioning with Digital Inputs
4.1 Additional Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-11
4.2 Turning off Automatic Input Signal Activation . . . . . . . . . . . . . . . . . . . . . . . . . . .4-14
4.3 Home Position Return. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-15
4.3.1 Dogless Z-phase reference mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-15
4.3.2 Dog mode home position return . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-19
4.4 Configuration for Positioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-23
4.4.1 Importing and exporting point tables. . . . . . . . . . . . . . . . . . . . . . . . . . .4-26
4.5 Functional Test of Digital Input Positioning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4-28
5 Positioning via a CC-Link Network
5.1 Additional Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-31
5.2 CC-Link Communication Settings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-33
5.2.1 Settings on the servo amplifier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-33
5.2.2 Configuration for communication with GX IEC Developer . . . . . . . . . .5-35
5.3 Testing the Servo Amplifier via CC-Link . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .5-37
A Appendix
A.1 Digital Signals − Quick Reference. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-39
A.2 Standard Parameters − Quick Reference . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-40
A.3 Alarms and Warning Messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .A-41
ii MITSUBISHI ELECTRIC
Page 9

Introduction Preparations
1 Introduction
The servo amplifiers of the MR-J3-T series are designed specifically for drive positioning appli
cations using point-to-point positioning without interpolation or trajectory control. The positions
tobeaccessedstored in atableandcanbe selected cyclically,individuallyor in any orderwith:
쎲 Digital signals
쎲 CC-Link communication
The MR Configurator setup software package enables the user to test the entered positioning
steps quickly and easily in test mode.
1. 1 Preparations
The following products and parts are needed for using the point table positioning features described in this manual:
쎲 A servo amplifier, for example MR-J3-10T
쎲 A servo motor compatible with the selected amplifier
Example: HF-KP13 motor for the MR-J3-10T servo amplifier
쎲 MRZJW3-SETUP221E Version C0 of the MR Configurator setup software package
쎲 MR-J3USBCBL3MUSBcableforconnectingyourPC/notebookwiththeservoamplifier
쎲 MR-PWS1CBL M-A1-L motor connection cable
-
쎲 MR-J3ENCBL M-A2-L rotary encoder cable
쎲 MR-J2CMP2 connector for CN6 I/O signal connector
쎲 Power supply cables conforming to the applicable installation regulations
쎲 Connection cables for the control terminals
Required for positioning control with digital signals:
쎲 MR-J3CN1 connector for communication connector CN10
쎲 Optional MR-J3-D01 expansion card
Useful but not absolutely necessary:
쎲 Simulation Box and terminal block with connection cable for testing:
FX Simulation Box (Art. No.3386)
MR-TB50 ter minal block for CN10 (MR-J3-D01)
MR-J2M-CN1TBL•M c able for connecting CN10 to MR-TB50
MR-J3-T 1-1
Page 10

Preparations Introduction
Required for positioning control via a CC-Link network:
Q-Rack with PLC and the CC-Link module QJ61BT11N
쎲
or
A–RackwithPLCandCC-LinkmoduleA1SJ61BT11,A1SJ61QBT11orFX2N-16CCL-M
CC-Link cable compatible with version V1.10 Standard
쎲
쎲 Cable for connecting the PC/notebook to the PLC CPU:
Q ser ies: SC-Q QC30R2
A and FX series: SC-09
쎲 The GX IEC Developer programming software package for configuration of the data com-
munications settings
NOTE This Quick Star t Manual describes theinstallation and setup of a typical servo system con-
sisting of an MR-J3-10T servoamplifier (single-phase, 230V / 100W) and an HF-KP13 servo motor. Note that the specifications of this sample system may differ from those of your
configuration–pleasecheckyourequipment’sinstr uction manualsfordetails ifnecessary.
1-2 MITSUBISHI ELECTRIC
Page 11
Installing the Equipment Installing the MR-J3-D01 Extension
2 Installing the Equipment
The procedure for the physical installation of the MR-J3-T series hardware is exactly the same
as for the MR-J3-A and MR-J3-B models. The dimensions of the MR-J3-T series amplifiers are
identical to those of the matching models of the MR-J3-A and MR-J3-B series.
NOTE Please consult the instruction manual for detailed installation instructions.
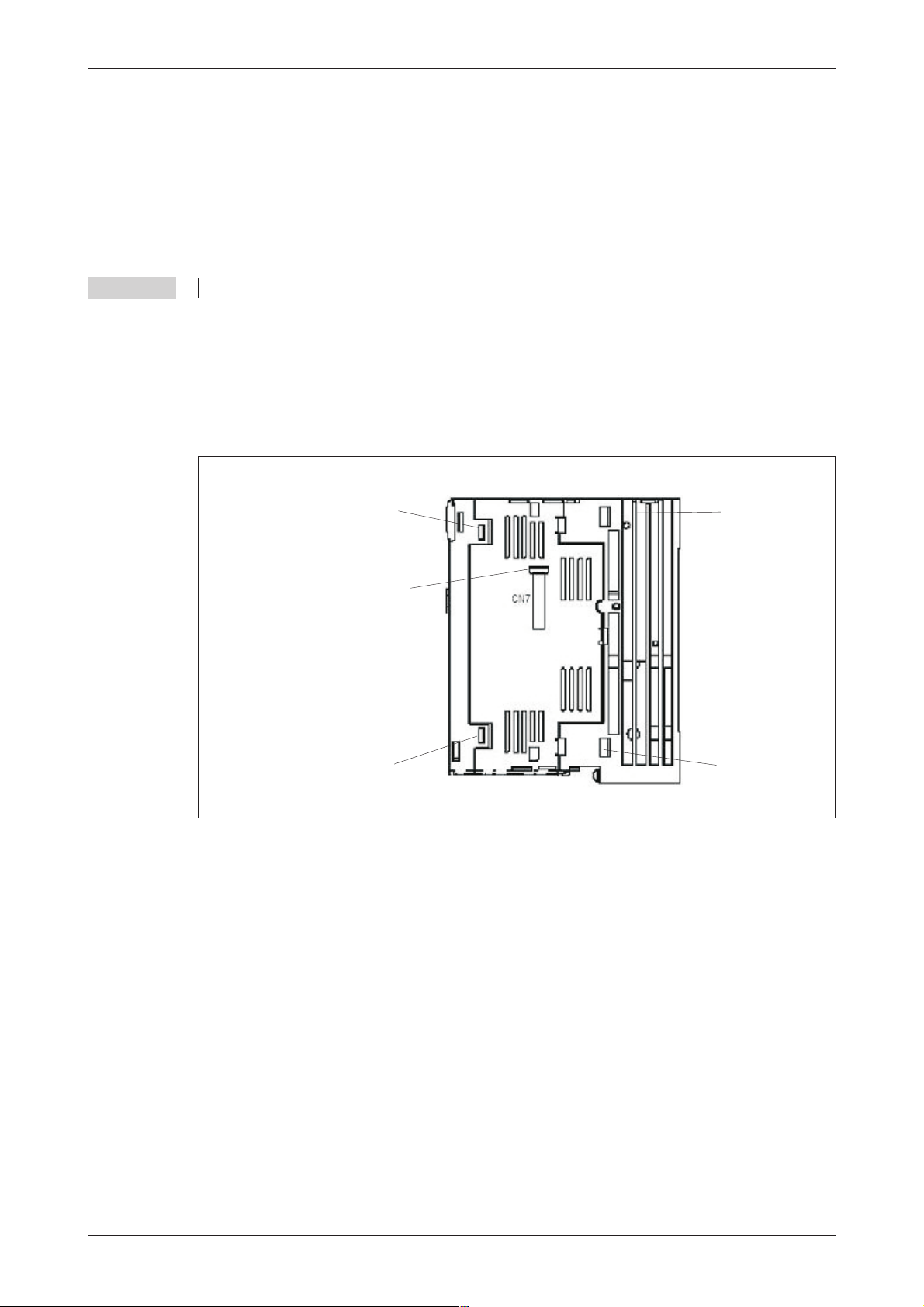
2. 1 Installing the MR-J3-D01 Extension
Procedure:
햲
Remove the cover of the CN7 connector on the r ight side of the MR-J3-T housing.
Upper mounting
point 2
Cover forCN7
connector
Lower mounting
point 2
Upper mounting
point 1
Lower mounting
point 1
Fig. 2-1: Fixing points of the extension MR-J3-D01
햳
PositiontheMR-J3-D01 extension over theupper and lowermounting points 1 on the ser voamplifier,then press theextensionintoplace so thatthelugs click into positioninthe upperand lowermounting points 2.This also connects the extensionto theamplifier via connector CN7 on the amplifier.
햴
Fasten the extension securely to the servo amplifier with the M4 screw (included) as
showninFig.2-2.
MR-J3-T 2-3
Page 12
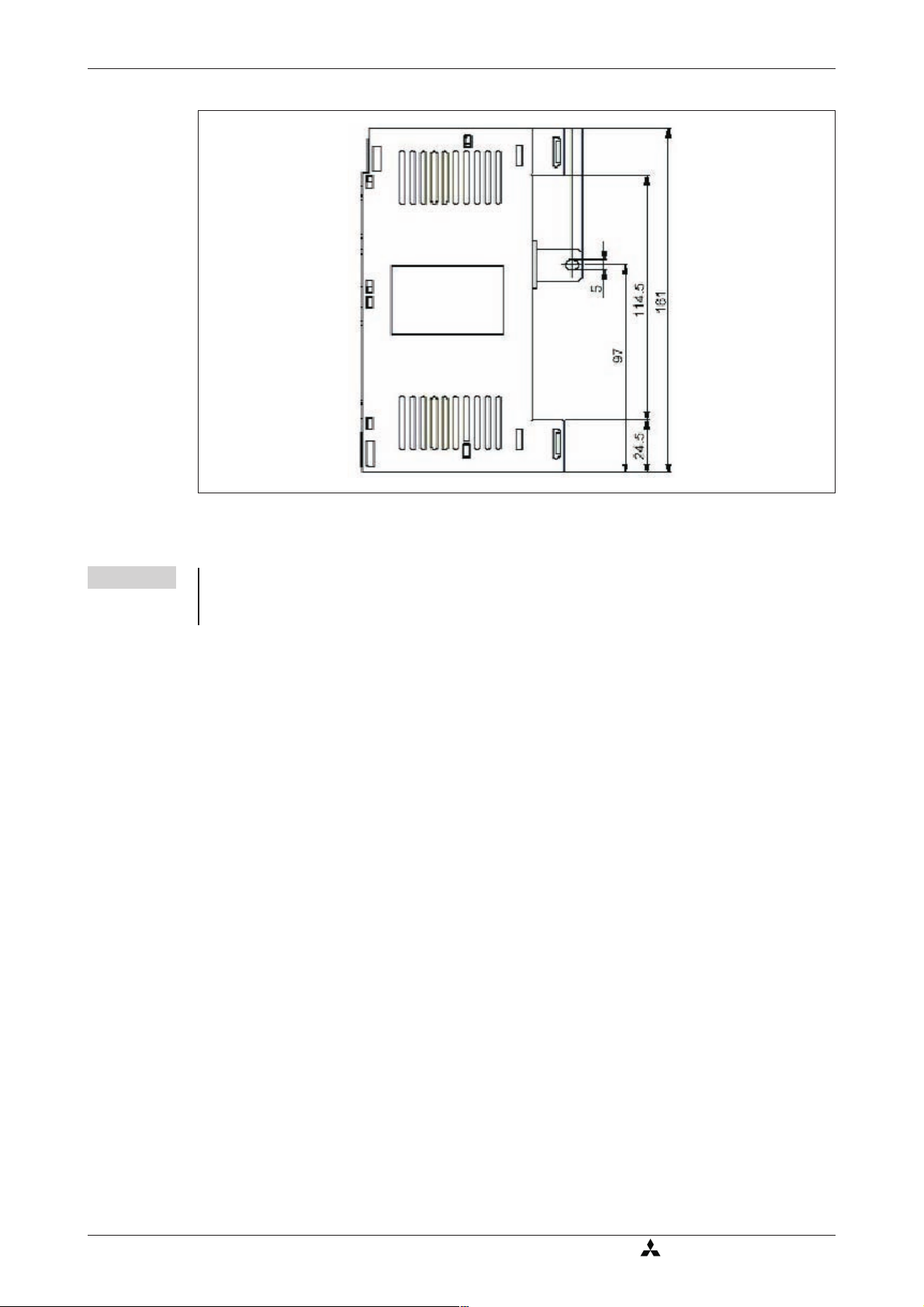
Installing the MR-J3-D01 Extension Installing the Equipment
Fig. 2-2: Fastening screw dimensions for extension MR-J3-D01
NOTE Touninstall the extensionperform the above steps in the reverseorder.To release the retai-
ning clips press the retaining tabs marked “Push” inwards and pull the extension out to the
side.
2-4 MITSUBISHI ELECTRIC
Page 13
First Functional Test MinimumConnections for the Functional Check
3 First Functional Test
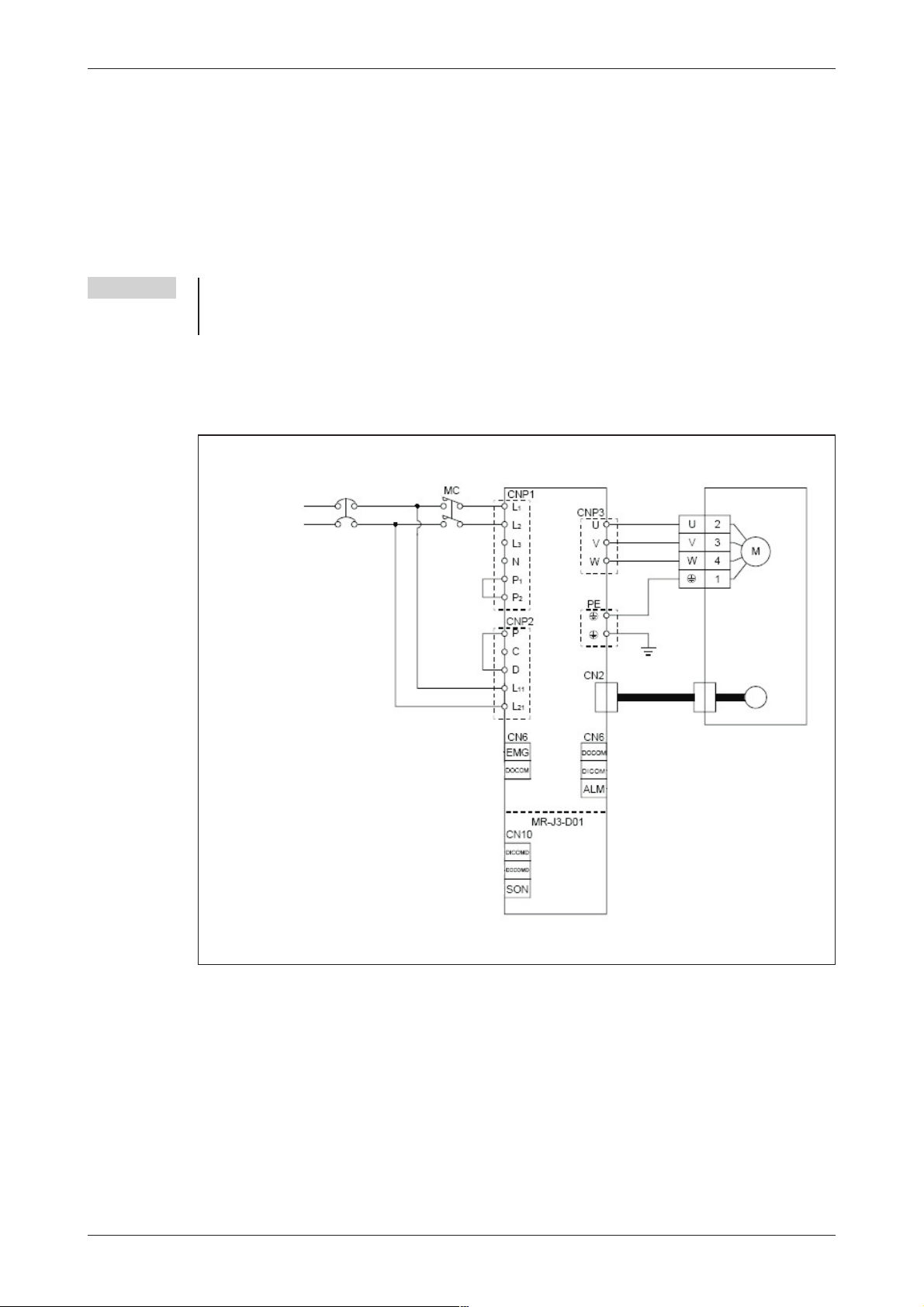
Thewiring diagram below (Fig. 3-1)shows theminimum connectionsthat youmust maketo test
an MR-J3-T series amplifier with the MR Configurator setup software. In test mode you can
check whether all the components are working properly.
NOTE You can also use the optional MR-PRU-03 HMI control terminal for performing initial tests
andsettingthe amplifier’sparameters.Forfur ther detailssee the MR-J3-Tseries instruction
manual.
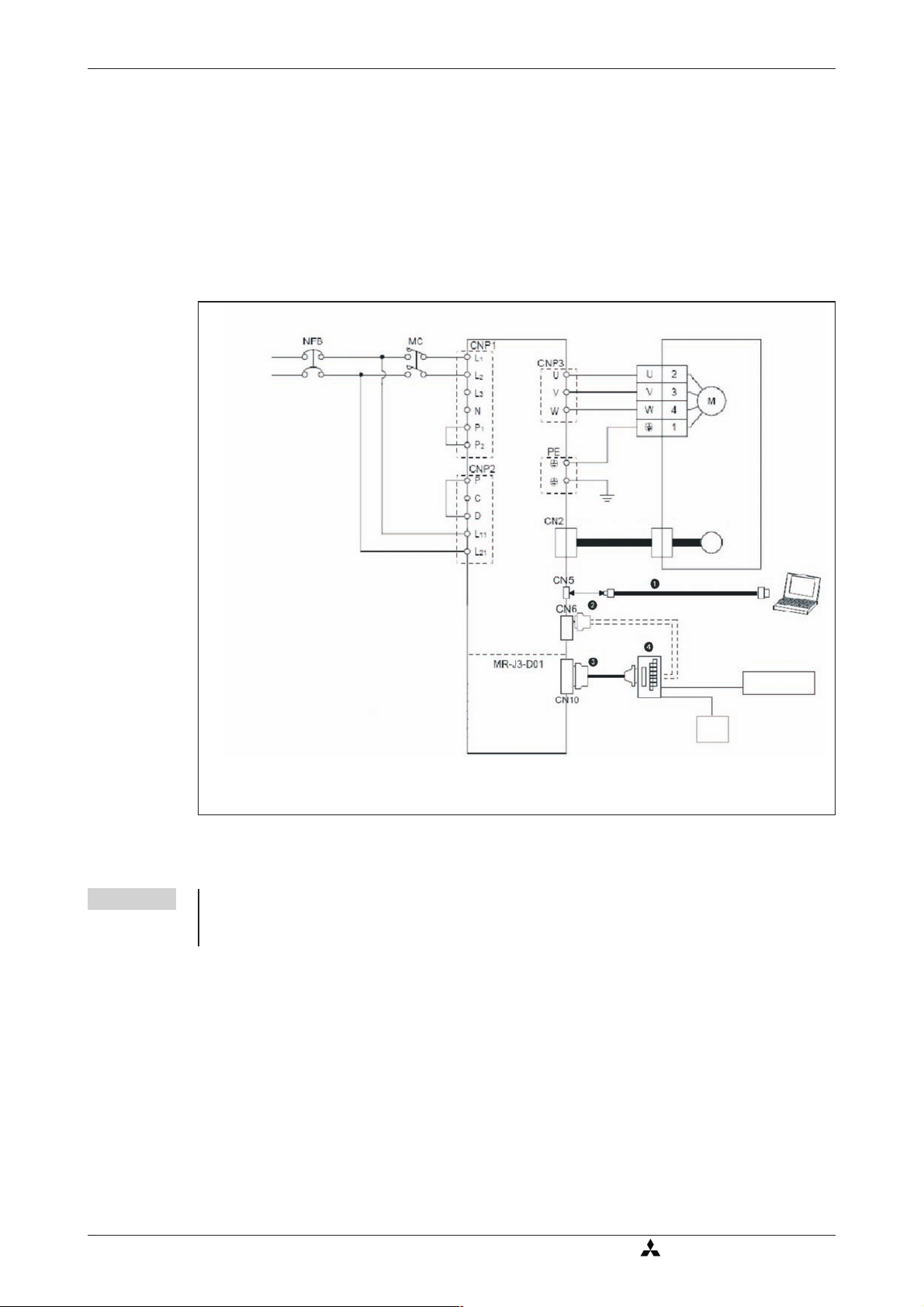
3.1 Minimum Connections for the Functional Check
Servo motor
1-phase
200–230V AC
Motor
Fig. 3-1: Wir ing diagram for minimum configuration without control ter minals
MR-J3-T 3-5
Page 14
Minimum Connections for the Functional Check First Functional Test
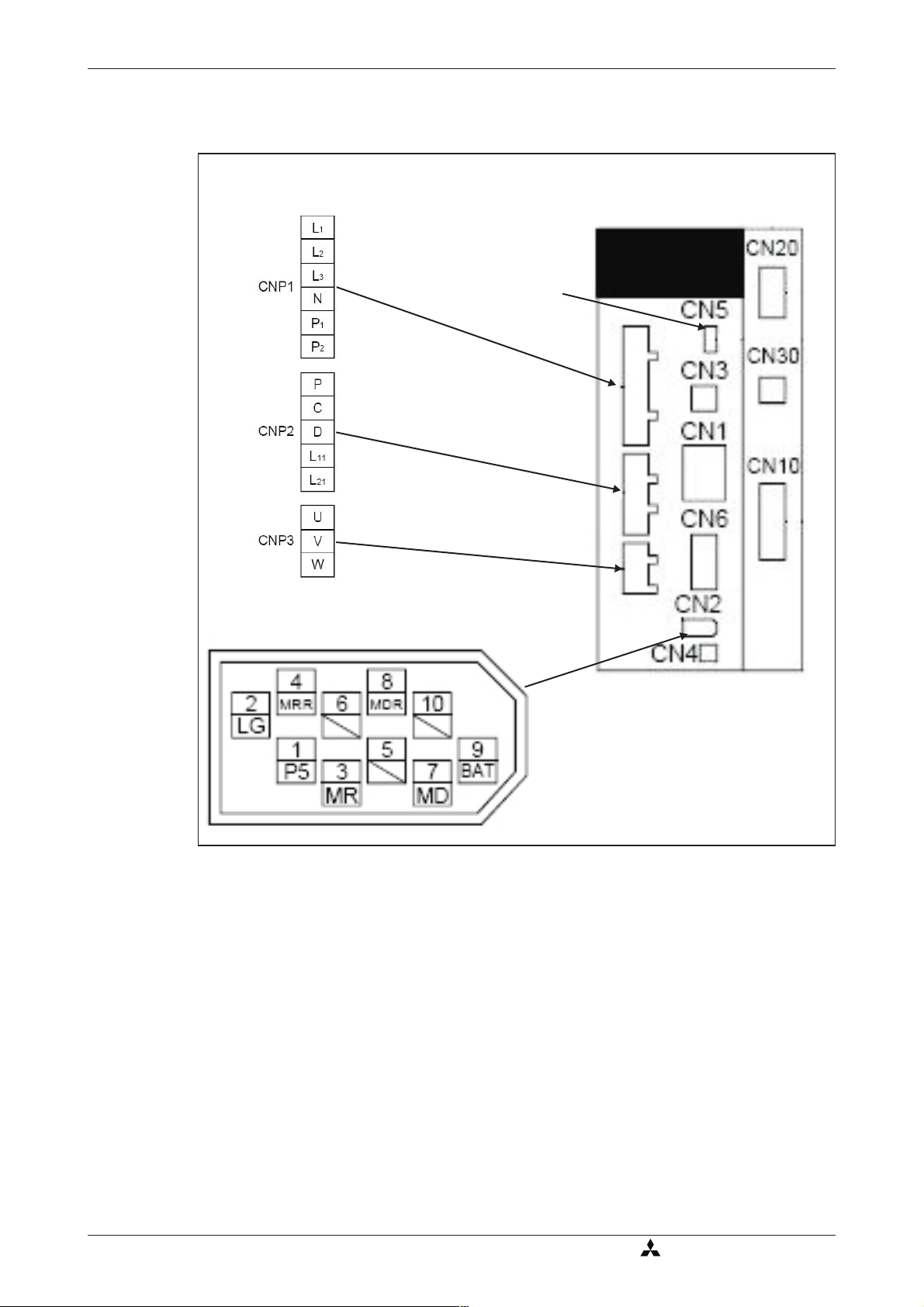
3.1.1 Connector pin assignments
Power terminals
Connector CN2
USB
port
Servo amplifier
MR-J3-첸T
I/O extension
MR-J3-D01
Fig. 3-2: Power and control connector pin assignments for minimum c onfiguration
3-6 MITSUBISHI ELECTRIC
Page 15
First Functional Test Functional Test Settings
3. 2 Functional Test Settings
The following input signals are required to activate the servo amplifier’s motor output:
EMG -> Force stop (safety signal)
쎲
쎲 SON -> Ser vo ON
쎲 LSP -> Forward rotation stroke end (limit switch)
쎲 LSN -> Reverse rotation stroke end (limit switch)
You can configure the servo amplifier to activate these signals automatically when the power is
switched on:
Procedure:
햲
Connect the PC / notebook to the servo amplifier’s USB port (CN5) with the
MR-J3USBCBL3M cable.
햳
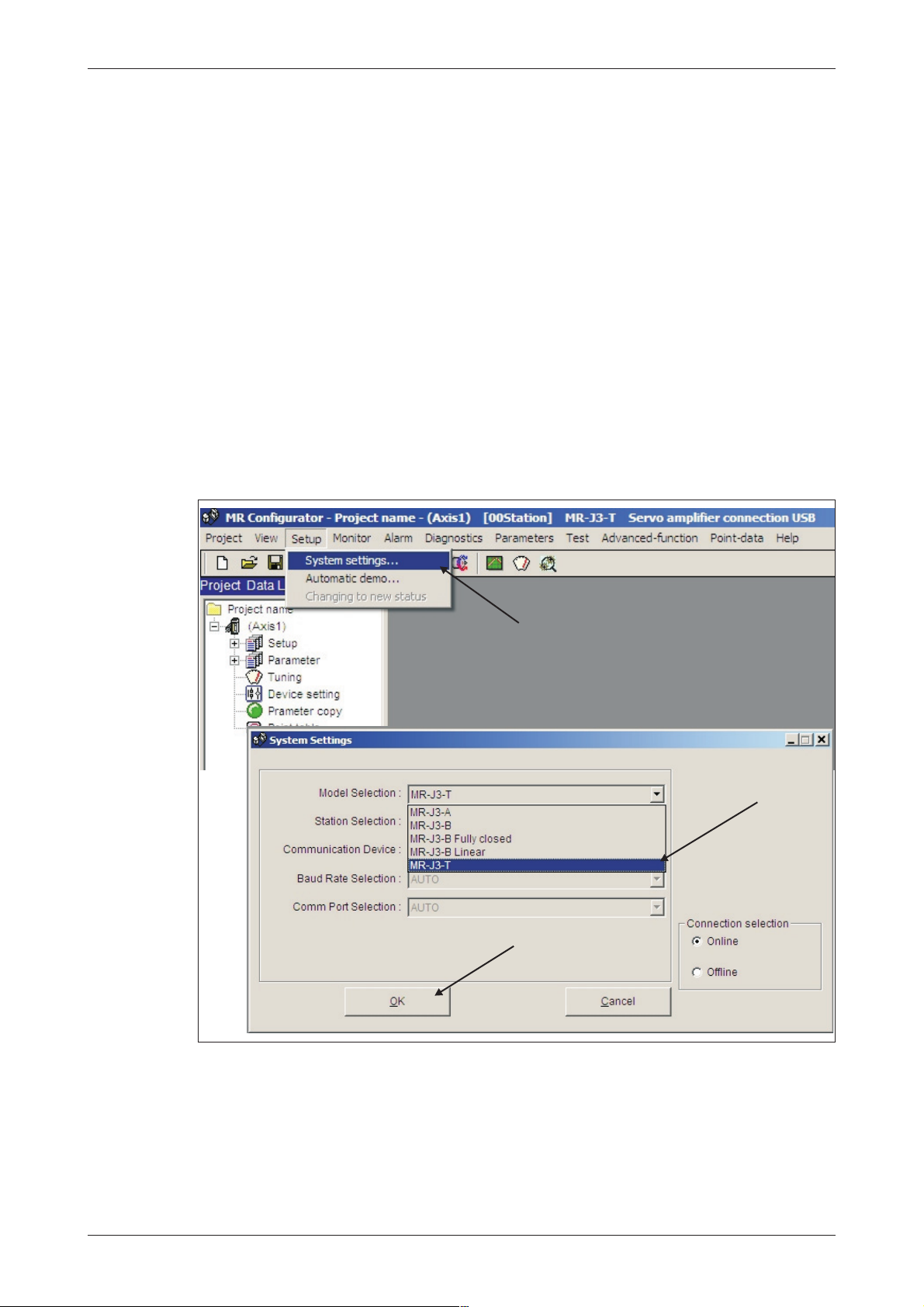
Start MR Configurator on the computer and make the following settings:
– Select the MR-J3-T series servo amplifier:
Fig. 3-3: Selecting the servo amplifier
MR-J3-T 3-7
Page 16
Functional Test Settings First Functional Test
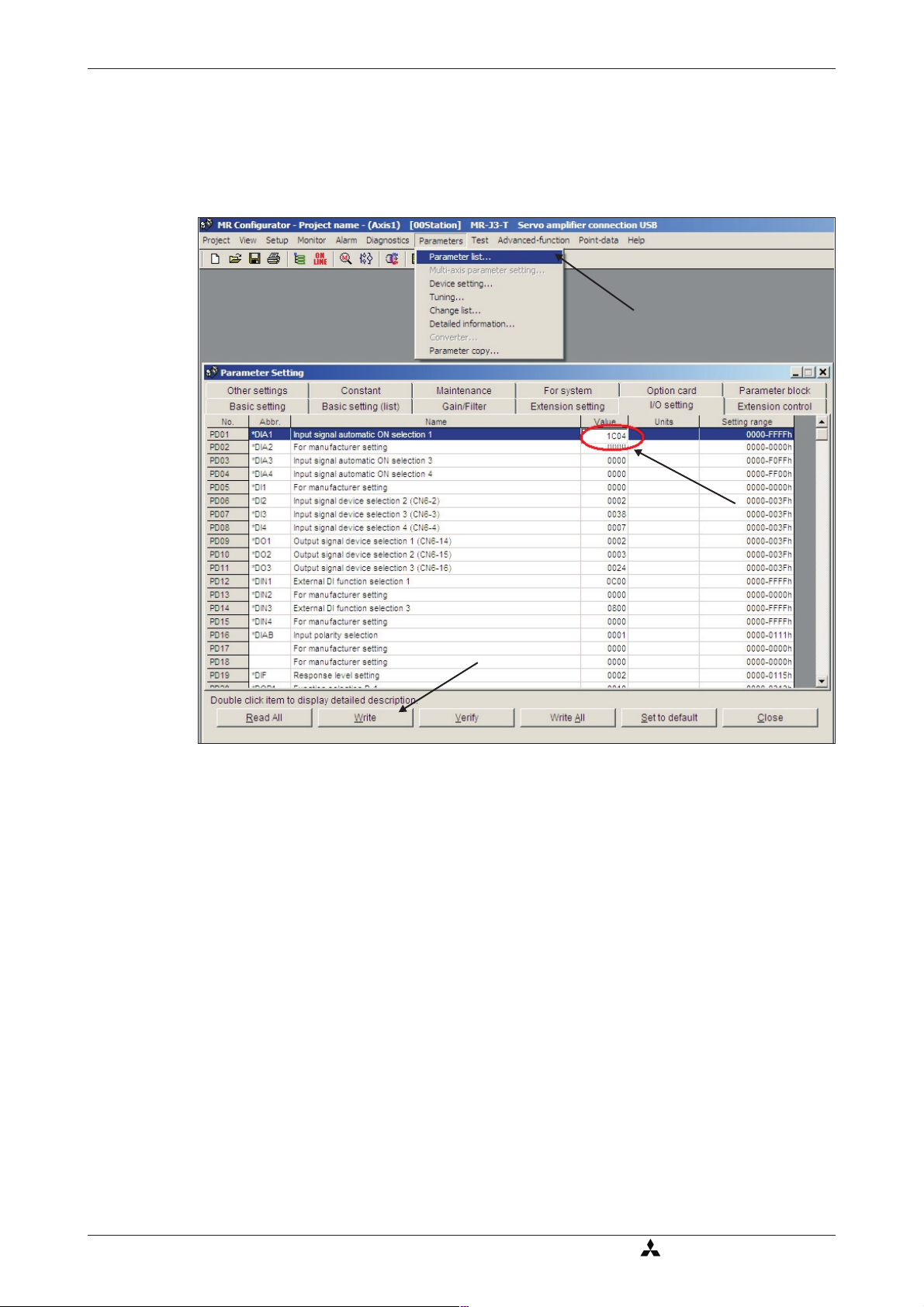
Set the parameter for the automatic activation of the EMG, SON and LSP/LSN input
–
signals:
Parameter PD01 “Input signal automatic ON selection 1” = 1C04
Fig. 3-4: Parameter settings for automatic input signal activation.
– Turn the servoamplifier off and then tur n it on again to initialise the newparameter set-
ting.
3-8 MITSUBISHI ELECTRIC
Page 17

First Functional Test Configuring Positioning Point Tables
3. 3 Configuring Positioning Point Tables
The position values, travel speeds and acceleration and deceleration times are stored in tables
known as “point tables”. We will now go through the steps required to configure and define a
point table.
Procedure:
햲
Select the
햳
Enterthevalues for the movements(position,speed,acceleration anddecelerationtimes)
in the
– Enter target position (a) in µm x 10
– Enter speed (b) in rpm.
– Enteracceleration/decelerationtimes(c) and (d)inms as requiredforthemotor’srated
speed.
Point Table
Point Table List
option from the
window, using one line for each movement:
Point-data
STM
menu.
(STM: e in diagram).
햴
Save the entries by clicking on the
a
Write All
button.
b c d
{
e
Fig. 3-5: Point table positioning entries in the point table list window
Make sure that the
ensure that selecting a position value in the table does not inadvertently activate any subsequent table entries.
NOTES Inthe factorydefault settings the absolutevalue commandsystem forthe targetpositions is
activatedwith parameter PA01 “*STY”.When this system is active all target position values
arereferred to the physical homeposition.Alter natively you can also select the incremental
value command system. The absolute position detection system for the home return function can be set with parameter PA03 “*ABS” (see chapter 4.3).
Loading the factory defaults will not overwrite your point table entries.
MR-J3-T 3-9
Aux. Func.
value in every line is left at the default factory setting (“0”) to
Page 18

Functional Test with MR Configurator First Functional Test
3. 4 Functional Test with MR Configurator
UsingMRConfigurator you canperform a basictestof the individualpositioningsteps andmake
adjustmentsfor your application. Note that setting parameter PA14 does not have any effect on
the rotation direction in jog mode when using MR Configurator. The rotation directions are
defined as follows, looking at the end of the drive shaft (i.e. towards the motor):
쎲 FORWARD -> anticlockwise
쎲 REVERSE -> clockwise
NOTES Homeposition return is not possible intest modewhen usingMR Configurator– usethe jog
function to move to the starting position.
You can set the rotation direction in “single-step feed mode” with parameter PA14.
3.4.1 Selecting point table position entries
Procedure:
햲
Select Single-step Feed in the
햳
To select a position enter its point table line number in the d ialog box displayed .
햴
Start the positioning operation .
Test
menu.
Fig. 3-6: Single-step Feed window for testing individual positioning steps
3-10 MITSUBISHI ELECTRIC
Page 19

Positioning with Digital Inputs Additional Connections
4 Positioning with Digital Inputs
Thischapterdescribes howpointtable positioning isusedin mostapplicationswith the MR-J3-T
series amplifiers and the MR-J3-D01 I/O extension.
NOTE Pleaserefertothe instructionmanual if youneedother functionsother than thosedescribed
here for your application.
4. 1 Additional Connections
Theinitial functional tests described in chapter 3.1 were performed with a minimumconnection
configuration. For the full range of standard functions you now need to make additional power
supplyand controlterminal connectionson theCN6 andCN10 terminal blocks, as shown below
in Figs. 4-1 and 4-2.
1-phase
200–230V AC
EMG. OFF
EMG. OFF
24V DC
24V DC ± 10 %
800 mA
OFF
Servo amplifier
ON
Encoder cable
24V DC
24V DC ±10%
150mA
Servo motor
Motor
Encoder
Alarm
Servo ON
Fig. 4-1: Single-phase power connections for the MR-J3-T amplifier
MR-J3-T 4-11
Page 20

Additional Connections Positioning with Digital Inputs
Connector CN6 Connector CN10 CN10 pin assignments
1 DI0
2 DI1
3 DI2
4 DI3
5 DI4
6 DI5
7 DI6
8 DI7
13 DICOM
14 DICOM
21 SON
22 ACD0
23 ACD1
24 ACD2
25 ACD3
26 RES
32 MD0
35 ST1
36 ST2
37 DOCOM
49 INP
Fig. 4-2: Pin assignments of connectors CN6 and CN10
4-12 MITSUBISHI ELECTRIC
Page 21

Positioning with Digital Inputs Additional Connections
24V DC ±10%
햲
150mA
EMG. OFF
Proximity dog
Forward stroke end
Reverse stroke end
24V DC ±10%
햲
800mA
Point
table
selection
SERVO ON
RESET
24V DC
max. 10m
max. 10m
MR-J3USBCBL3M
(Option)
24V DC
Alarm code
Automatic/Manuall
Forward rotation start
Reverse rotation start
햲
A 24V 1000mA power supply can be
used for all control terminals.
max.10 m
In position
max. 10m
Fig. 4-3: Connection of the control terminals with PNP logic (source logic)
NOTES You can find a brief descriptions of the signal functions in Appendix A.1.Please refer to the
instruction manual for a complete reference.
All digital signals described in this manual use source logic.
For safety reasons the EMG signal must be connected to pin 1 of connector CN6 if the
servo amplifier is not operated during the first functional test. The EMG signal is perma
nently assigned to pin 1 and the amplifier is deactivated when there is no EMG signal if it is
configured accordingly (see chapter 3.2).
-
MR-J3-T 4-13
Page 22

Turning off Automatic Input Signal Activation Positioning with Digital Inputs
4. 2 Turning off Automatic Input Signal Activation
Procedure:
햲
Reset parameter PD01 to a value of "0":
Fig. 4-4: Switching off automatic input signal activation
4-14 MITSUBISHI ELECTRIC
Page 23

Positioning with Digital Inputs Home Position Return
4. 3 Home Position Return
At the factory the MR-J3-T servo amplifiers are configured with the incremental system acti
vatedby default (i.e.the absoluteposition detectionsystem isswitched off).This meansthat the
currentposition is notstored when the amplifier's power supply is switched off, making it neces
sary to perform a return to home position every time the unit is powered up. You can configure
the home position return mode with Parameter PC02:
Parameter PC02
Home position return modes
0: Proximity dog mode
1: Count mode
2: Data setting mode
3: Stopper mode
4: Ignore home position
5: Dog mode, rear end reference
6: Count mode, front end reference
7: Dog cradle mode
8: Dog mode, last Z-phase reference
9: Dog mode, front end reference
A: Dogless Z-phase reference
-
-
The most commonly used modes are:
1. Dogless Z-phase reference mode (A)
2. Proximity dog mode (0)
Thesetwomodes aredescribed indetail below. DoglessZ-phase referencemode issuitable for
simple applications. Dog mode is frequently used for standard applications.
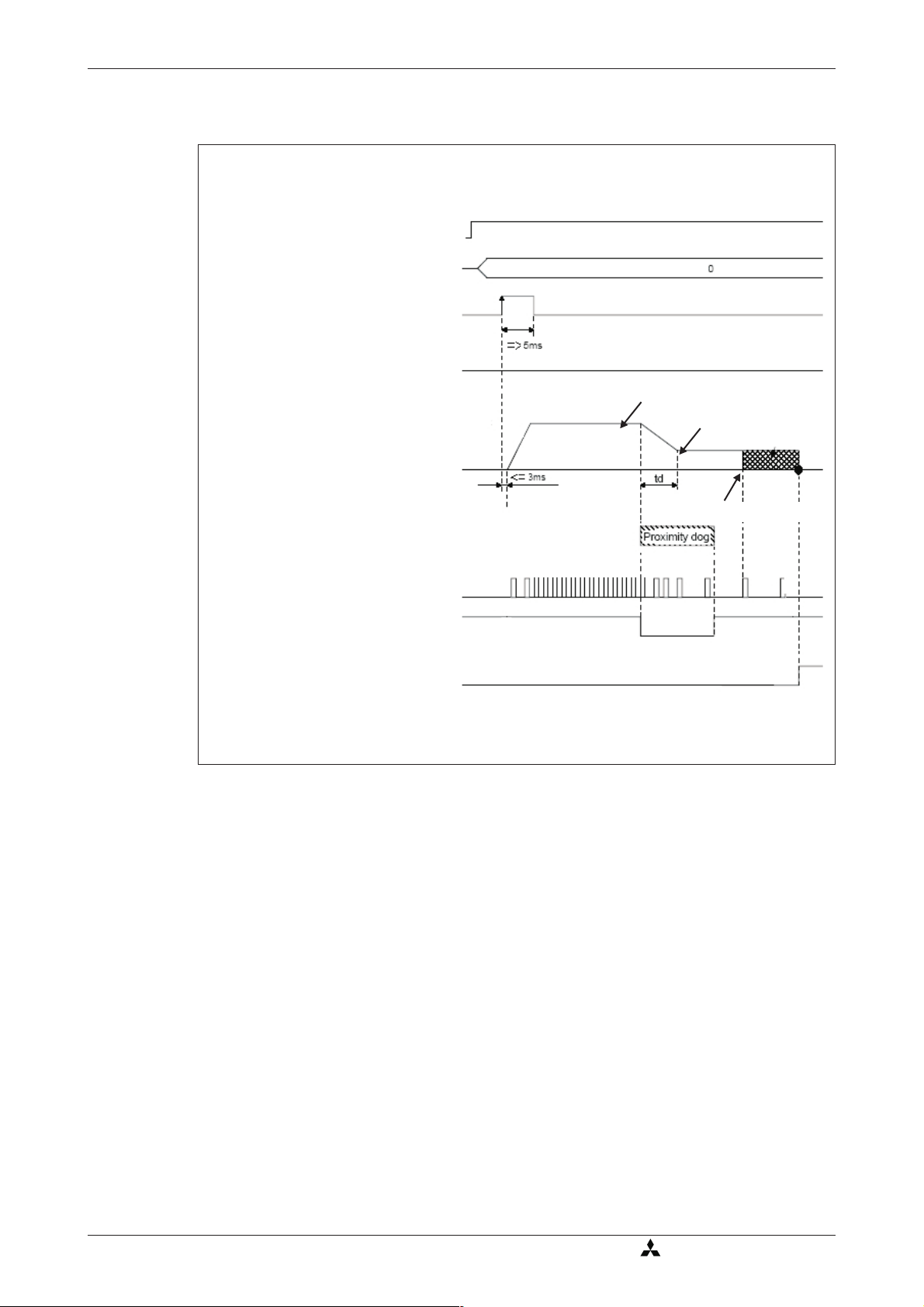
4.3.1 Dogless Z-phase reference mode
In this mode the Z-phase of the rotary encoder (zero position of the encoder) is used as the
machine'sphysical home position. However, it is quite rare to be able toconfigure a machine so
that its physical home position exactly matches the Z-phase of the encoder. It is thus almost
always necessary to enter an offset (shift) with parameter PC06.
After activation of the forward start command ST1 (or reverse ST2) the home position return is
initiatedby parameter PC04 (“homeposition return speed”). Whenthe Z-phase signalfrom the
encoder is registered the servo motor brakes to a halt. After this a precise return to home is performed at creep speed with parameter PC05.
The physical home position can be shifted in relation to the zero position of the encoder
(Z-phase) with the home position offset (shift) defined with parameter PC06. Parameter PC07
can be used to define a home position value other than zero.
When the home position return has been completed successfully the servo amplifier activates
the ZP signal.
MR-J3-T 4-15
Page 24

Home Position Return Positioning with Digital Inputs
Timing chart:
Auto/Manual mode (MD0)
Select point table no.(DI0)
Start command
Forward (ST1)ONOFF
Start command
Reverse (ST2)ONOFF
Servo motor speed setting
Z-phase of encoder
Home return complete (ZP)
ON
OFF
PC04 “Home pos.return speed”
PC06 “Home offset”
PC05 “Creep speed”
ON
OFF
ON
OFF
Fig. 4-5: Home position return sequence in dogless Z-phase reference mode
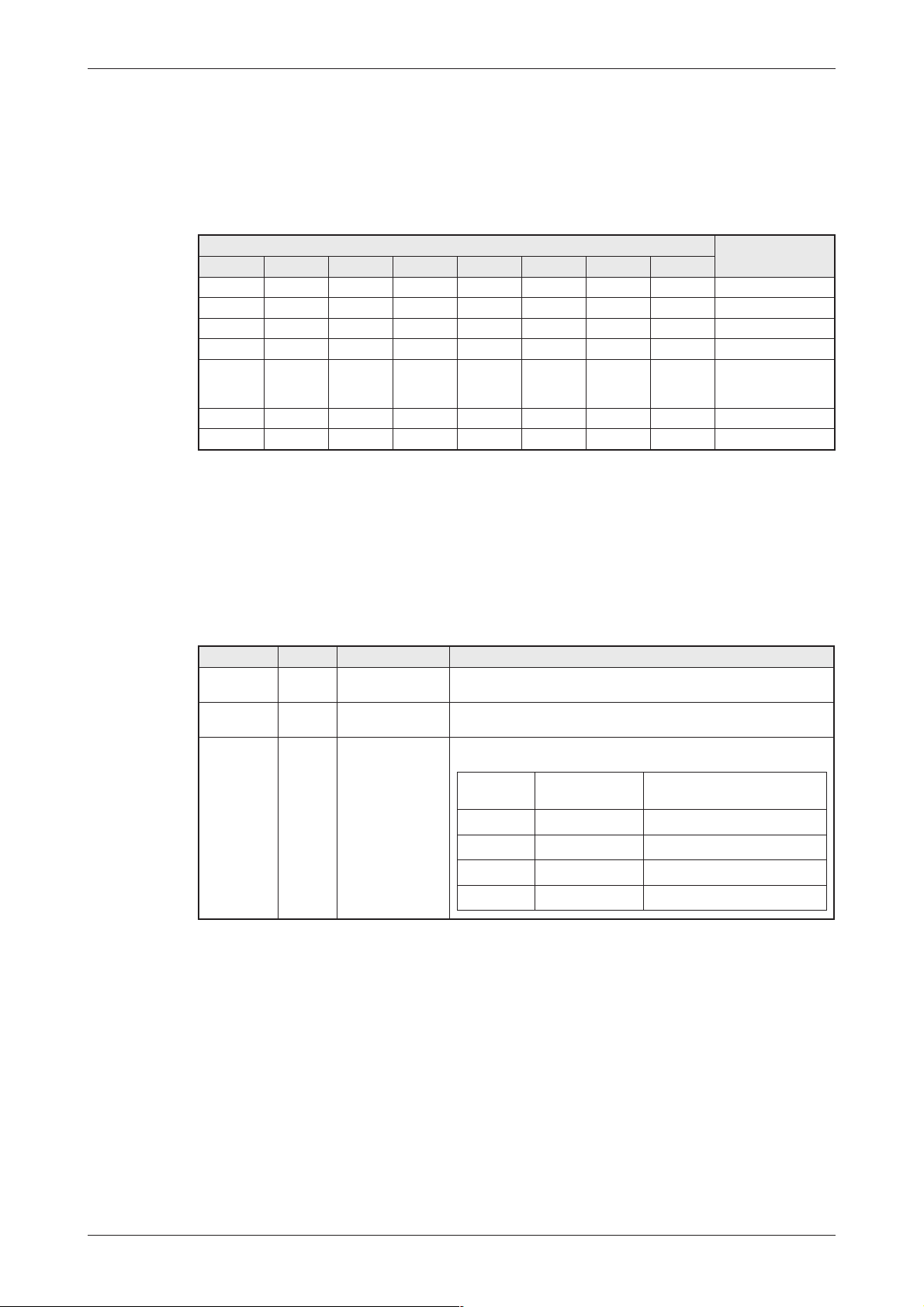
No. Code Function Description
햲
PA05
PC02
PC03
PC04 ZRF Home position re-
PC05 CRF Creep speed Speed for precise movement to home position in [rpm].
PC06 ZST Home position off-
PC07
*FTY Feed length multi-
햲
*ZTY Home position re-
햲
*ZDIR Home position re-
햲
*ZPS Home position re-
plication factor
turn mode
turn direction
turn speed
set (shift)
turn position value
Needed here to scale the home position value to the physical coordinate system.
Selects the home position return mode:
A: Dogless Z-phase reference mode
0: Incrementing counting of encoder pulses
1: Decrementing counting of encoder pulses
Sets home position return speed until first detection of the Z-phase
in [rpm].
Distance between the encoder zero point (Z-phase) and the physical home position in [µm].
The home position return stops when the Z-phase position is
reached.You can enter a non-zero coordinate for this position [in
STM
10
µm] with this parameter.
Table 4-1: Parameter reference table
햲
You must turn the power off and on again to activate this parameter.
4-16 MITSUBISHI ELECTRIC
Page 25

Positioning with Digital Inputs Home Position Return
Examples:
햲
TheZ-phaseof the encoderisdefined asthephysicalhomeposition ofthemachine.In this
example we are going to perform the home position return at 200 rpm in the direction in
which the encoder pulses are counted incrementally.
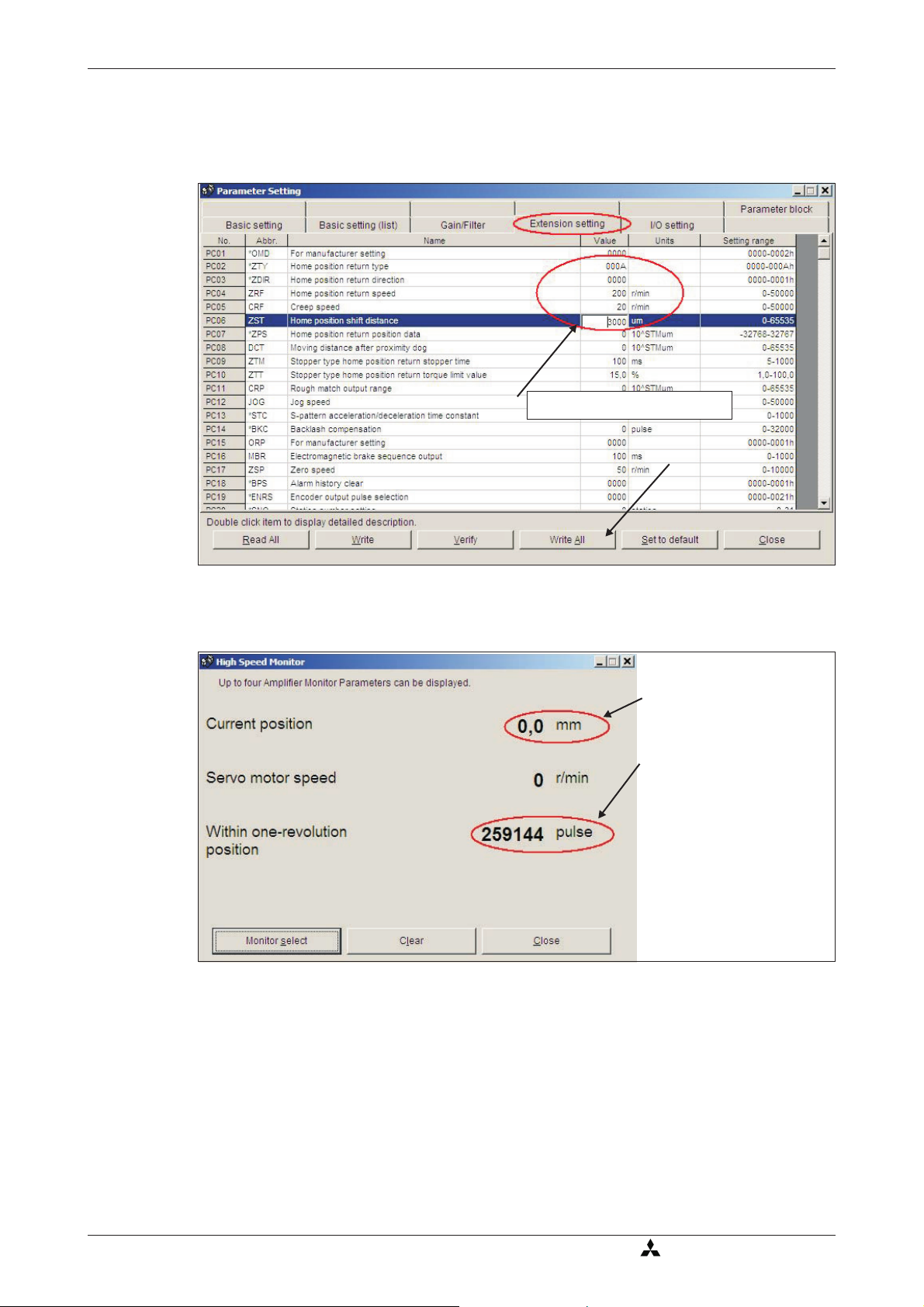
Parameter settings:
Parameter settings for example
Fig. 4-6: Relevant parameter settings for example 1
Fig. 4-7: Values shown when the home position return has
been completed correctly
MR-J3-T 4-17
Page 26
Home Position Return Positioning with Digital Inputs
햳
Perform ahomepositionreturnasinexample1butwithan offset betweenthephysicaland
encoder home positions, set with parameter PC06.
Parameter settings:
Parameter settings for example
Fig. 4-8: Relevant parameter settings for example 2. The offset is entered with param-
eter PC06.
Following completion of the home
position return:
The servo motor has travelled to
the specified home position. The
home position of the encoder has
been exceeded by the value of
PC06 = 3,000 µm. For the motor
connected this is equivalent to
259,144 encoder pulses.
Fig. 4-9: Values shown when the home position return has been completed correctly
4-18 MITSUBISHI ELECTRIC
Page 27

Positioning with Digital Inputs Home Position Return
4.3.2 Dog mode home position return
In this mode, instead of the encoder Z-phase(Fig. 4-6), the DOG signal is used to switch from
“homepositionreturn speed” PC04to“creep speed”PC05.You can useparameter PD16 “prox
imitydogdetection polarity” tospecify whether alogical “1” ora logical “0”should beidentifiedas
an active DOG signal.
As in 햲 above, the physical home position can be shifted in relation to the home (zero) position
ofthe encoder (Z-phase) withPC06 “homeposition offset(shift)”. Inaddition to this you can also
set a non-zero coordinate for the home position with PC07.
Conditions for the proximity dog signal:
Theproximity dog signal(DOG) mustfulfill the followingconditions toensure that theZ-phase of
the encoder is detected during the activation period of the DOG signal:
t
V
L
암60폷
1
L
암 2 폷욼S L2 = Length of the DOG signal in [mm]
2
d
2
L1 = Length of the DOG signal in [mm]
V = Home position retur n speed in [mm/min]
t
= Deceleration time in [s]
d
욼S = Distance for one rotation of the motor in [mm]
-
MR-J3-T 4-19
Page 28
Home Position Return Positioning with Digital Inputs
Timing chart:
Auto/Manual mode (MD0)
Select point table no.(DI0)
Start command
Forward (ST1)ONOFF
Start command
Reverse (ST2)ONOFF
Servo motor speed setting
Z-phase of encoder
DOG signal
Home return complete (ZP)
ON
OFF
PC04 “Home pos.return speed”
PC05 “Creep speed”
PC06 “Home offset”
ON
OFF
ON
OFF
ON
OFF
Fig. 4-10: Home position return in proximity dog mode
4-20 MITSUBISHI ELECTRIC
Page 29

Positioning with Digital Inputs Home Position Return
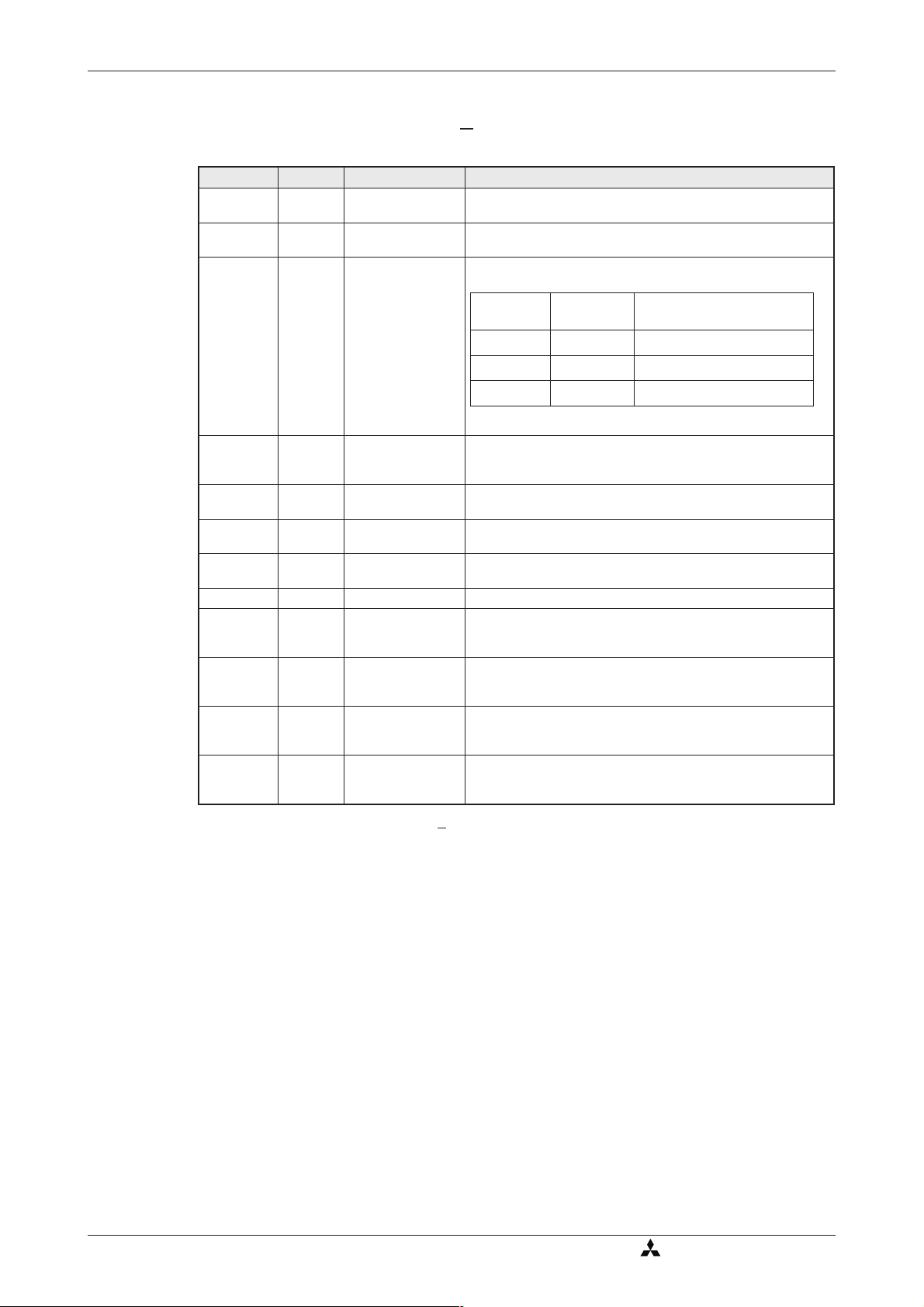
No. Code Function Description
햲
PA05
PC02
PC03
*FTY Feed length multi
햲
*ZTY Home position re
햲
*ZDIR Home position re-
plication factor
turn mode
turn direction
Needed here to scale the home position value to the physical coor
dinate system when a home position offset (shift) has been set.
Parameter value Multiplication factor STM
01
110
2 100
3 1000
-
Selects the home position return mode:
0: Proximity dog mode (DOG)
0: Incrementing counting of encoder pulses
1: Decrementing counting of encoder pulses
-
PC04 ZRF Home position re-
PC05 CRF Creep speed Speed for precise movement to home position in [rpm]
PC06 ZST Home position
햲
PC07
PD16
*ZPS Home position re-
햲
*DIAB Input signal
turn speed
offset (shift)
turn position value
polarity
Sets home position return speed until first detection of the Z-phase
in [rpm].
Distance between the encoder home position (Z-phase) and the
physical home position in [µm]. Does not change the zero point of
the physical coordinate system.
The home position return stops when the Z-phase position is
reached.You can enter a non-zero coordinate for this position [in
STM
10
µm] with this parameter.
Logical value for detection of the proximity dog signal (DOG):
0: Active DOG on logical "0"
1: Active DOG on logical "1"
Table 4-2: Parameter reference table
햲
You must turn the power off and on again to activate this parameter.
Example:
In the following example the physical home position is at the position of the Z-phase of the
encoder.However,we nowwantto assign anon-zero valueinthe physical coordinatesystem to
this position.
MR-J3-T 4-21
Page 30

Home Position Return Positioning with Digital Inputs
Parameter settings:
Parameter settings for example
Fig. 4-11: Relevant parameter settings for the example. The home position value is en-
teredwithPC07.
Following completion of the
home position return:
The servo motor has travelled to
the encoder home position
which is also the machine’s
physical home position.However, this position corresponds
to a value of 100mm in the machine’s coordinate system.
Fig. 4-12: Values shown when the home position return has been completed correctly
The position value is calculated as follows:
X = PA05 폷 PC07 in [mm]
STM
In the above example with PA05 = 1 and PC07 = 1000 [10
X = 1000 폷 10
1
µm
µm] this gives us:
4-22 MITSUBISHI ELECTRIC
Page 31
Positioning with Digital Inputs Configuration for Positioning
4. 4 Configuration for Positioning
Ifyouinstall theMR-J3-D01 I/Oexpansion youcan usepoint table positioning,which allowsyou
to select positions from a list of up to 256 table entries with a combination of eight digital inputs.
Table 4-3 shows how binary input signals are encoded to address the point table entries.
Digital Input Signals
DI7 DI6 DI5 DI4 DI3 DI2 DI1 DI0
00000001 1
00000010 2
00000011 3
00000100 4
·
·
·
11111110 254
11111111 255
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
·
Selected Point
Table Entry
·
·
·
Table 4-3: Selection of point table entries with digital input signals
In the factory default configuration the incremental system is activated, which means that the
absolute position detection system is turned off (PA03 “absolute position detection system”).In
this mode the current position is not stored when the power is turned off and you must thus perform a home position return every time the amplifier is powered on. The default configuration
also uses absolute target positions (PA01 “positioning control mode”).
No. Code Function Description
햲
PA01
PA03
PA05
*STY Positioning control
햲
*ABS Absolute position
햲
*FTY Feed length multi-
mode
detection system
plication factor
0: Absolute target position values
1: Incremental target position values
0: Incremental system (absolute detection off)
1: Absolute position detection system on
Needed here to scale the home position value to the physical coordinate system when a home position offset (shift) has been set.
Parameter
value
01
110
2 100
3 1000
Multiplication
factor STM
Range of the target
position values
−999.999 .. +999.999
−9999.99 .. +9999.99
−99999.9 .. +99999.9
−999999 .. +999999
Table 4-4: Parameter reference
햲
To activate this parameter you must switch the amplifier power off and on again.
MR-J3-T 4-23
Page 32

Configuration for Positioning Positioning with Digital Inputs
The following example shows some typical configuration settings used for many common posi
tioning applications:
Procedure:
햲
Select the incremental system for positions with PA03 *ABS.
햳
Select absolute value command mode for target positions with PA01 *STY.
햴
Set a multiplication factor with PA05 *FTY = 1 => 10 times factor.
This gives us the following position system:
Min. absolute value
−9999.99
Range of possible position values
STM
in [10
µm]
0
Max. absolute value
+9999.99
Fig. 4-13: Effective range of the position values with the sample settings
-
Parameter settings for example
Fig. 4-14: Relevant parameters affecting the target position setpoint values
NOTE If target positions are entered using the incremental system it is not possible to change the
rotation direction via the point table.In this mode the rotation direction can only be changed
with the start commands (ST1/ST2).
4-24 MITSUBISHI ELECTRIC
Page 33

Positioning with Digital Inputs Configuration for Positioning
햵
The point table entries for the individual positioning steps are configured in the columns
numbered to in the point table list shown below.
Fig. 4-15: Example of a positioning application with 8 positioning steps
Tips for editing point table entries:
쎲 Thevalue in the
will automatically jump to the nextentry in the table and executethe nextpositioning commandaftercompletingapositioningstep,evenif thereisnochangeinthe input signals.
쎲 The
쎲 The button
쎲 The Verifyfunction checks whether the positioning table in MR Configurator matches the
DwellTime
of the positioning step for the current table line and continuing to the next table line.This
option should only be used when multiple positioning steps are performed automatically,
without changes in the input signals.
lected line.
table stored in the connected ser vo amplifier.If the tables don't match a message is displayed showing the line number where the difference was found:
Aux.Func.
columncan beused toinserta delaybetweenreaching the target position
Insert
inserts a new line above the selected table line.
columnshould normally alwaysbezero.Otherwise the system
Delete
Number of table line
where tables in amplifier
and MR-Configurator do
not match
deletes the se-
MR-J3-T 4-25
Page 34

Configuration for Positioning Positioning with Digital Inputs
AlwaysdeactivatestartcommandST1/ST2beforestarting a newpositioningsequence.
쎲
Then you can select a new table entr y with DI0 - DI7 and start the positioning sequence
with ST1/ST2.
Table entries are not reset when you restore the amplifier's factory default settings!
쎲
You do not need to tur n the amplifier off and on again after changing table entries.
쎲
NOTE Please see the instruction manual for full details on all these procedures.
4.4.1 Importing and exporting point tables
Therearetwo differentwaysto store thepointtable fromyourproject sothatyou caneditit again
later in external programs and MR Configurator:
쎲 Export the point table asa textfile with theextension .ptb.This creates a plain text filethat
can be edited with a normal text editor.
쎲 Export thepoint tableas afile withthe extension.csv. These files c ontain datathatcan be
edited by spreadsheet programs like Microsoft Excel.
Procedure:
햲
The Point Table List w indow must be open and active.
햳
How to export the point table to a file:
Fig. 4-16: Exporting the point table to a file for archival or editing
4-26 MITSUBISHI ELECTRIC
Page 35

Positioning with Digital Inputs Configuration for Positioning
햴
How to open/import a point table data file:
Fig. 4-17: Opening a point table file to import the data
Fig. 4-18: Point table position data imported from a .csv file
MR-J3-T 4-27
Page 36
Functional Test of Digital Input Positioning Positioning with Digital Inputs
4.5 Functional T est of Digital Input Positioning
Normallyyou need asimple controller toset the digitalinputs used toselect the pointtable posi
tionentries, forexample aPC, a mini PLC or an HMIcontrol terminal.This chapter explainshow
youcan performa thorough check ofthe functionality ofthe positioningcontrol functionswithout
needing to perform the additional work of programming and installing a controller.
Fig.4-19shows a testinstallationwithout anexternalcontroller. NotethattheFX SimulationBox
used in this setup can set a maximum of 14 digital inputs.
Servo motor
1-phase
200–230V AC
MR-J3USBCBL3M
Cable length: 3m
MR-J2CMP2
MR-J2M-CNT1TBL-M
Cable length: 0.5–1m
MR-TB50
Encoder cable
Motor
Encoder
PC
FX Simulation Box
-
24V DC
24V DC
power supply
Fig. 4-19: Test setup for simulating positioning with digital inputs
NOTE The test setup shown abovedoes not use any safetyfeatures forthe tests (EMG.OFF).You
should thus only use this setup in a controlled test environment where errors cannot cause
any danger for personnel or equipment!
4-28 MITSUBISHI ELECTRIC
Page 37

Positioning with Digital Inputs Functional Test of Digital Input Positioning
MR Configurator can monitor all the inputs and outputs of the MR-J3-T, including those on the
MR-J3-D01 I/O extension.
Procedure:
햲
Connect the PC/notebook to the USB port (CN5) of the ser vo amplifier using cable
MR-J3USBCBL3M.
햳
Start MR Configurator and make the following selections:
– Select the MR-J3-T series amplifier.
– Select the MR-J3-D01 expansion card (“option unit”).
Fig. 4-20: Settings in MR Configurator for checking the MR-J3-T with the MR-J3-D01
expansion card
Afterthisyoucan monitor thesignalsofthe expansion cardwith the option
in the
Monitor
Fig. 4-21: Selection of the “Option unit I/F display” terminal monitor option
menu.
OptionunitI/Fdisplay
MR-J3-T 4-29
Page 38

Functional Test of Digital Input Positioning Positioning with Digital Inputs
Fig. 4-22: The “Option unit I/F display” terminal monitor ing window
4-30 MITSUBISHI ELECTRIC
Page 39

Positioning via a CC-Link Network Additional Connections
5 Positioning via a CC-Link Network
As an alternative to using digital signals you can also control positioning with MR-J3-T servo
amplifiers via a CC-Link network connection.
NOTE Before proceeding ensure that the MR-J3-D01I/O expansion card is not installed. If it is in-
stalled CC-Link communications will be disabled.
5. 1 Additional Connections
In addition to the minimum configuration described in chapter 3.1 you also need to connect the
CC-Link cable and the cabling for connector CN6 for this mode.
1-phase
200–230V AC
EMG. OFF
EMG. OFF
24V DC
24V DC ±10%
800mA
OFF
Servo amplifier
ON
Encoder cable
24V DC
24V DC ±10%
150mA
Servo motor
Motor
Encoder
Alarm
CC-Link
module
Servo ON
CC-Link cable
V1.10 compatible
Fig. 5-1: Connections for operating the servo amplifier via a CC-Link network
MR-J3-T 5-31
Page 40

Additional Connections Positioningvia a CC-Link Network
Connections for the CC-Link network
CC-Link
Master module
(e.g.QJ61BT11N)
MR-J3-T
Fig. 5-2: Connections between the servo amplifier and the CC-Link master module
NOTE Youmust install a terminating resistor on terminals DB and DB on the physical first and last
stations in the CC-Link network.The required ohmage of the resistor depends on the cable
length, please check the version V1.10 specifications for details.
5-32 MITSUBISHI ELECTRIC
Page 41

Positioning via a CC-Link Network CC-Link Communication Settings
5. 2 CC-Link Communication Settings
5.2.1 Settings on the servo amplifier
Inthe instructions below we are assuming that you have an operating CC-Link network with the
following specifications:
쎲 Data rate 156Kbit/s
쎲 The master station is a QJ61BT11N module that is integrated in a System Q con-
troller platform with a Q02H-CPU.
Procedure:
햲
Set the number of reserved stations:
Factory default
setting
S1
1 reserved station
2 reserved stations
Fig. 5-3: Correct position of switch S1 for setting the number of reserved stations
햳
Set the station address (max. value 64):
x1
x10
higher values
lower values
address digits
Fig. 5-4: Set switches x1 and x10 to the correct station address
MR-J3-T 5-33
Page 42

CC-Link Communication Settings Positioningvia a CC-Link Network
햴
Set the data rate:
Mode Baud rate
Fig. 5-5: Mode switch setting for the network data rate
NOTE Theservoamplifiersettings required forpoint tablepositioningaredescribedinchapters 4.2
through4.4.Pleasecheckthatthesesettings havebeenmadecorrectly beforeproceeding.
5-34 MITSUBISHI ELECTRIC
Page 43

Positioning via a CC-Link Network CC-Link Communication Settings
5.2.2 Configuration for communication with GX IEC Developer
Generally,positioning control isperformed viaa CC-Linknetwork inapplications where anaddi
tional PLC system is used for automation tasks as well as the integrated controller in the ampli
fier. In this example we will thus only provide detailed descriptions of the settings required to
integrate the servo amplifier in your project.
Procedure:
How to open an existing project in GX IEC Developer:
햲
Select
햳
Select
햴
This opens the window
enter the settings shown in Fig. 5-6 .
Network
CC-Link
in the project directory tree in the left window.
in the
Network Parameter
Network parameters: Setting the CC-Link list
box.
where you can now
-
-
(a)
(b)
(c)
Fig. 5-6: Settings required in GX IEC Developer for CC-Link communication between
the controller and the servo amplifier
MR-J3-T 5-35
Page 44

CC-Link Communication Settings Positioningvia a CC-Link Network
Notes on the network settings:
(a)Inthe example onlyoneservoamplifier is connectedtotheCC-Link network.Thisvaluemust
be increased by the number of slave stations installed if applicable.
(b)These values specify which bits or data words are to be used to control the servo amplifier.
The settings shown in the example are for the following assignments:
PLC -> Servo Amplifier Servo Amplifier -> PLC
PLC I/Os Registers Signals PLC I/Os Registers Signals
Y100 RYn0 SON X100 RXn0 RD
Y101 RYn1 ST1 X101 RXn1 INP
Y102 RYn2 ST2 X103 RXn3 ZP
Y103 RYn3 DOG X11A RX(n+1)A ALM
Y104 RYn4 LSP
Y105 RYn5 LSN
Y106 RYn6 MD0
Y10A RYnA DI0
Y10B RYnB DI1
Y10C RYnC DI2
Y10D RYnD DI3
Y10E RYnE DI4
Y10F RYnF RES
NOTE:
Signals DI5, DI6 and DI7 are only available
when the amplifier is configured to occupy 2
stations in the network.
Table 5-1: Signal assignments
(c)Slave station type setting:
Fig. 5-7: This configuration also enables exchange of data words
햵
Connect the PC to the PLC and transfer the modified project to the controller.
NOTE If the CC-Link connection to the servo amplifier is established successfully the L.RUN, SD
und RD status LEDs on the servo amplifier will light up.
5-36 MITSUBISHI ELECTRIC
Page 45

Positioning via a CC-Link Network Testing the Servo Amplifier via CC-Link
5. 3 Testing the Servo Amplifier via CC-Link
Before proceeding it is a good idea use the monitoring function in GX IEX Developer to check
that the individual servo functions can be started correctly (e.g. return to home, positioning).
After this you can then test the correct operation of the servo system with the PLC program.
Procedure:
햲
Activate monitoring mode.
햳
Select
햴
Enter the individual remote I/Os to be set or monitored.
Entry Data Monitor
in the
Online
menu.
Fig. 5-8: The Entry Data Monitor window where you can set remote I/Os to test the
servo functions
MR-J3-T 5-37
Page 46

Appendix Digital Signals − Quick Reference
A Appendix
A.1
Digital Signals
Connector
Pins
CN6-1 EMG – Forced stop - emergency safety signal:
CN6-2 DOG RYn3 Proximity dog switch:
CN6-3 LSP RYn4 Forward rotation stroke end switch DI
CN6-4 LSN RYn5 Reverse rotation stroke end switch DI
CN6-14 RD RXn0 Servo amplifier ready DO
CN6-15 ALM RX(n+1)A Alarm, signals a servo error DO
CN6-16 ZP RXn3 Home position return completed successfully DO
CN10-1 DI0 RYnA Select point table entry, i.e. activate a line in the table for position-
CN10-2 DI1 RYnB DI
CN10-3 DI2 RYnC DI
CN10-4 DI3 RYnD DI
CN10-5 DI4 RYnE DI
CN10-6 DI5 RY(n+2)3 DI
CN10-7 DI6 RY(n+2)4 DI
CN10-8 DI7 RY(n+2)5 DI
CN10-13 DICOM – Connection for an external power supply for the digital control termiCN10-14
CN10-21 SON RYn0 SERVO ON:
CN10-22 ACD0 – Digital output signals for encoded error messages (see Appendix
CN10-23 ACD1 –
CN10-24 ACD2 –
CN10-25 ACD3 –
CN10-26 RES RY1A Reset for error messages DI
CN10-32 MD0 RYn6 Switch between automatic/manual mode:
CN10-35 ST1 RYn1 Start signal for forward rotation DI
CN10-36 ST2 RYn2 Start signal for reverse rotation DI
CN10-37 DOCO – Connection for an external power supply for the digital control termi
CN10-49 INP RXn1 IN Position: Target position reached signal. DO
Signal Codes
DI/DO CC-Link
Point table entry no.1
Point table entry no. 2
Point table entry no. 3
Point table entry no. 4
Point table entry no. 5
Point table entry no. 6
Point table entry no. 7
Point table entry no. 8
Quick R eference
Description
The signal is permanently assigned to this pin and must be activated for motor control.
This signal is used for some of the home position return modes.
(See chapter 4.3)
ing. Combinations of signals DI0 through DI7 (see Table 4-3) can
be used to selec up tot 256 positioning steps.
NOTE:
Signals DI5, DI6 and DI7 are only available when the amplifier occupies 2 stations in the network, thus making 64 bits available via
CC-Link.
nals. Negative connection for source interface logic (PNP).
Activating the SON signal powers on the base circuit and makes
the amplifier ready for operation.
A.3)
The MD0 signal must be off for opertion in jog mode. The signal
must be activated before starting a home position return or position
ing.
nals. Positive connection for source interface logic (PNP).
-
-
DI /
DO
DI
DI
DI
DI
DI
DO
DI
DI
Table A-1: Digital signals - quick reference
MR-J3-T A-39
Page 47
Standard Parameters − Quick Reference Appendix
A.2
Standard Parameters
No. Code Function Description
햲
PA01
PA03
PA05
PA14
PC02
PC03
PC04 ZRF Home position re-
PC05 CRF Creep speed Speed for precise movement to home position in [rpm]
PC06 ZST Home position
PC07
PD01
PD01
*STY Positioning control
햲
*ABS Absolute position
햲
*FTY Feed length multipli
햲
*POL Servo motor rotation
햲
*ZTY Home position re-
햲
*ZDIR Home position re-
햲
*ZPS Home position re-
햲
*DIA1 Automatic activation
햲
*DIAB Polarity of the input
mode
detection system
cation factor
direction
turn mode
turn direction
turn speed
offset (shift)
turn position value
of input signals
signal
Quick R eference
0: Absolute value command system for target positions
1: Incremental value command system for target positions
0: Incremental system (absolute position detection off)
1: Absolute position detection system on
-
Needed here to scale the home position value to the physical co
ordinate system when a home position offset (shift) has been set.
Parameter
value
01
110
2 100
Motor rotation direction (looking at shaft end facing motor):
0: Anticlockwise when ST1 signal is active
1: Clockwise when ST1 signal is active
Selects mode to be used for home position return:
0: Proximity dog mode
0: Incrementing counting of encoder pulses
1: Decrementing counting of encoder pulses
Sets home position return speed until first detection of the
Z-phase in [rpm].
Distance between the encoder home position (Z-phase) and the
physical home position in [µm]. Does not change the zero point of
the physical coordinate system.
The home position return stops when the Z-phase position is
reached.You can enter a non-zero coordinate for this position [in
STM
10
µm] with this parameter.
This parameter configures the amplifier to automatically set the
digital signals internally to a logical "1" when the power is
switched on.
Logical value for detection of the proximity dog signal (DOG):
0: Active DOG on logical "0"
1: Active DOG on logical "1"
Multiplication
factor STM
Range of the target
position values
−999.999 ... +999.999
−9999.99 ... +9999.99
−99999.9 ... +99999.9
-
Table A-2:
햲
To activate this parameter you must switch the amplifier power off and on again.
Standard parameters
quick reference
A-40 MITSUBISHI ELECTRIC
Page 48

Appendix AlarmsandWarningMessages
A.3 Alarms and Warning Messages
Display
A10
A12
A13
A15
A16
A17
A19
A1A
A20
A24
A25
A30
Alarme
A31
A32
A33
A35
A37
A45
A46
A47
A50
A51
Alarm Code
ACD3
ACD2
ACD1
(Bit 3)
(Bit 2)
(Bit 1)
ACD0
(Bit 0)
0010
0000
0000
0000
0110
0000
0000
0110
0110
1100
1110
0001
0101
0100
1001
1101
1000
0011
0011
0011
0011
0011
Error
Undervoltage
Memory error 1
Clock error
Memory error 2
(E²PROM)
Encoder error 1
(at power on)
Board error
Memory error 2
(Flash ROM)
Incorrect servo
motor
Encoder error 2
Main circuit error
Absolute position
lost/erased
Regenerative
braking overload
Overspeed
Overcurrent
Overvoltage
Input frequency
too high
Parameter error
Main circuit
overheat
Servo motor
overheat
Cooling fan error
Overload 1
Overload 2
Alarm Reset
Power
Supply
OFF
ON
MR-
Configurator/
HMI
Reset
(RES)
✔✔✔
✔ ——
✔ ——
✔ ——
✔ ——
✔ ——
✔ ——
✔ ——
✔ ——
✔✔✔
✔ ——
햲
✔
햲
✔
햲
✔
✔✔✔
✔ ——
✔✔✔
✔ ——
✔ ——
햲
✔
햲
✔
햲
✔
햲
✔
햲
✔
햲
✔
✔ ——
햲
✔
햲
✔
햲
✔
햲
✔
햲
✔
햲
✔
Table A-3: Error messages(1)
MR-J3-T A-41
Page 49

Alarms and Warning Messages Appendix
Display
A52
A61
A8A
Alarms
A8E
888
Alarm Code
ACD3
ACD2
ACD1
(Bit 3)
(Bit 2)
0101
0101
0000
0000
0 ———
(Bit 1)
ACD0
(Bit 0)
Error
Excessive discrep
ancy error
Operation alarm
Serial communica
tion timeout
Serial communica
tion error
Watchdog
Power
Supply
OFF
-
-
-
✔✔✔
✔✔✔
✔✔✔
✔✔✔
✔ ——
ON
Alarm Reset
MR-
Configurator/
HMI
Reset
(RES)
Table A-3: Error messages (2)
햲
Locateand correct the cause of the error and allow the servo amplifier,the servomotor and
the regenerative braking unit to cool down forat least 30 minutes before resetting the alarm
and restarting the system for normal operation.
햳
Switch on the RES signal.
햴
To reset the alarm click on the Alarm Reset button in the alar m display window in MR
Configurator.Youcan also reset the alar m by pressing theSTOP/RESET button on theHMI
control unit.
햵
0: OFF
1: ON
NOTE The output signal ALM is activated when an error or alarm signal is triggered.
Display Warning
A90 Home position return incomplete
A92 Battery cable disconnected
A96 Home position return error
A98 Software limit warning
A99 Stroke limit warning
A9A Option unit input data error
A9F Battery warning
AE0 Regenerative system overload warning
AE1 Overload warning 1
Warning messages
AE3 Absolute position counter error
AE6 Server emergency off warning
AE8 Cooling fan too slow
AE9 Main circuit off
AEC Overload warning 2
AED Output wattage exceeded
Table A-4:
Warning messages
NOTE Pleaseseetheinstruction manualformore detaileddescriptionsofthe alarmmessagesand
warnings.
A-42 MITSUBISHI ELECTRIC
Page 50

Index
Index
A
Alarm messages
List . . . . . . . . . . . . . . . . . . . .A - 41
Automatic input signal activation
Turning off. . . . . . . . . . . . . . . . . 4 - 14
C
CC-Link communications
Settings . . . . . . . . . . . . . . . . . . 5 - 33
Connections
Minimum connections . . . . . . . . . . . 3 - 5
Creep speed . . . . . . . . . . . . . . . . .4 - 15
D
Digital signals
Quick reference. . . . . . . . . . . . . . A - 39
DOG home position return . . . . . . . . . . 4 - 19
E
Expansion card MR-J3-D01
Installation . . . . . . . . . . . . . . . . .2 - 3
Settings . . . . . . . . . . . . . . . . . . 4 - 23
M
Minimum connections . . . . . . . . . . . . . 3 - 5
MR Configurator
functional check. . . . . . . . . . . . . . 3 - 10
P
Parameter
Quick reference . . . . . . . . . . . . . . 4 - 21
Pin assignments . . . . . . . . . . . . . . . . 3 - 6
Point table
configuring . . . . . . . . . . . . . . . . .3 - 9
Point table positioning . . . . . . . . . . . . 4 - 11
Preparations . . . . . . . . . . . . . . . . 1 - 1
Positioning
Settings . . . . . . . . . . . . . . . . . . 4 - 23
via a CC-Link network. . . . . . . . . . . 5 - 31
with digital inputs . . . . . . . . . . . . . 4 - 11
Positioning table
exporting . . . . . . . . . . . . . . . . . 4 - 26
importing . . . . . . . . . . . . . . . . . 4 - 26
Positioning table entries
selecting. . . . . . . . . . . . . . . . . . 3 - 10
F
Functional test . . . . . . . . . . . . . . . . . 3 - 5
CC-Link . . . . . . . . . . . . . . . . . . 5 - 37
Positioning with digital inputs . . . . . . . 4 - 28
Settings. . . . . . . . . . . . . . . . . . .3 - 7
G
GX IEC Developer
Data communications . . . . . . .5 - 35, 5 - 37
H
Home position return . . . . . . . . . . . . . 4 - 15
I
Installation
Hardware . . . . . . . . . . . . . . . . . . 2 - 3
S
Servo amplifier
selecting . . . . . . . . . . . . . . . . . .3 - 7
Signal assignments
Connectors CN6 and CN10. . . . . . . . 4 - 12
Standard parameters
Quick reference. . . . . . . . . . . . . . A - 40
W
Warning messages
Reference list . . . . . . . . . . . . . . . A - 42
Z
Z-phase reference
without DOG signal . . . . . . . . . . . . 4 - 15
MR-J3-T A-43
Page 51

Page 52

MITSUBISHI ELECTRIC
HEADQUARTERS
MITSUBISHI ELECTRIC EUROPE B.V.
German Branch
Gothaer Straße 8
Phone: +49 (0)2102 / 486-0
Fax: +49 (0)2102 / 486-1120
MITSUBISHI ELECTRIC EUROPE B.V.
French Branch
25, Boulevard des Bouvets
Phone: +33 (0)1 / 55 68 55 68
Fax: +33 (0)1 / 55 68 57 57
MITSUBISHI ELECTRIC EUROPE B.V.
Irish Branch
Westgate Business Park, Ballymount
Phone: +353 (0)1 4198800
Fax: +353 (0)1 4198890
MITSUBISHI ELECTRIC EUROPE B.V.
Italian Branch
Viale Colleoni 7
Phone: +39 039 / 60 53 1
Fax: +39 039 / 60 53 312
MITSUBISHI ELECTRIC CORPORATION
Office Tower “Z” 14 F
Tokyo 104-6212
Phone: +81 3 622 160 60
Fax: +81 3 622 160 75
MITSUBISHI ELECTRIC EUROPE B.V.
UK Branch
Travellers Lane
Phone: +44 (0)1707 / 27 61 00
Fax: +44 (0)1707 / 27 86 95
MITSUBISHI ELECTRIC EUROPE B.V.
Spanish Branch
Carretera de Rubí 76-80
Phone: +34 93 / 565 3131
Fax: +34 93 / 589 1579
500 Corporate Woods Parkway
Phone: +1 847 478 21 00
Fax: +1 847 478 22 83
EUROPEAN REPRESENTATIVES
GEVA
Wiener Straße 89
Phone: +43 (0)2252 / 85 55 20
Fax: +43 (0)2252 / 488 60
TEHNIKON
Oktyabrskaya 16/5, Off. 703-711
Phone: +375 (0)17 / 210 46 26
Fax: +375 (0)17 / 210 46 26
Koning & Hartman B.V.
Industrial Solutions
Woluwelaan 31
Phone: +32 (0)2 / 257 02 40
Fax: +32 (0)2 / 257 02 49
AKHNATON
4 Andrej Ljapchev Blvd. Pb 21
Phone: +359 (0)2 / 97 44 05 8
Fax: +359 (0)2 / 97 44 06 1
INEA CR d.o.o.
Losinjska 4 a
Phone: +385 (0)1 / 36 940 - 01/ -02/ -03
Fax: +385 (0)1 / 36 940 - 03
AutoCont Control Systems, s.r.o.
Jelinkova 59/3
Phone: +420 (0)59 / 5691 150
Fax: +420 (0)59 / 5691 199
AutoCont Control Systems, s.r.o.
Technologická 374/6
Phone: +420 595 691 150
Fax: +420 595 691 199
B:TECH, a.s.
Na Ostrove 84
Phone: +420 (0)569 / 408 841
Fax: +420 (0)569 / 408 889
B:TECH, a.s.
USAMITSUBISHI ELECTRIC AUTOMATION
Headoffice
U Borové 69
Phone: +420 569 777 777
Fax: +420 569 777 778
Beijer Electronics A/S
Lautruphoj 1-3
Phone: +45 (0)70 / 26 46 46
Fax: +45 (0)70 / 26 48 48
Beijer Electronics Eesti OÜ
Pärnu mnt.160i
Phone: +372 (0)6 / 51 81 40
Fax: +372 (0)6 / 51 81 49
Beijer Electronics OY
Jaakonkatu 2
Phone: +358 (0)207 / 463 500
Fax: +358 (0)207 / 463 501
UTECO A.B.E.E.
5, Mavrogenous Str.
Phone: +30 211 / 1206 900
Fax: +30 211 / 1206 999
MELTRADE Ltd.
Fertő utca 14.
Phone: +36 (0)1 / 431-9726
Fax: +36 (0)1 / 431-9727
EUROPEAN REPRESENTATIVES
Beijer Electronics SIA
Vestienas iela 2
Phone: +371 (0)784 / 2280
Fax: +371 (0)784 / 2281
Beijer Electronics UAB
Savanoriu Pr. 187
Phone: +370 (0)5 / 232 3101
Fax: +370 (0)5 / 232 2980
INTEHSIS srl
bld. Traian 23/1
Phone: +373 (0)22 / 66 4242
Fax: +373 (0)22 / 66 4280
Beijer Electronics AS
Postboks 487
Phone: +47 (0)32 / 24 30 00
Fax: +47 (0)32 / 84 85 77
Koning & Hartman B.V.
Haarlerbergweg 21-23
Phone: +31 (0)20 / 587 76 00
Fax: +31 (0)20 / 587 76 05
MPL Technology Sp. z o.o.
Ul. Krakowska 50
Phone: +48 (0)12 / 630 47 00
Fax: +48 (0)12 / 630 47 01
Sirius Trading & Services srl
Aleea Lacul Morii Nr. 3
Phone: +40 (0)21 / 430 40 06
Fax: +40 (0)21 / 430 40 02
CRAFT Consulting & Engineering d.o.o.
Toplicina str.4 lok 6
Phone: +381 (0)18 / 292-24-4/5 , 523 962
Fax: +381 (0)18 / 292-24-4/5 , 523 962
INEA SR d.o.o.
Karadjordjeva 12/260
Phone: +381 (0)26 / 617 163
Fax: +381 (0)26 / 617 163
CS MTrade Slovensko, s.r.o.
Vajanskeho 58
Phone: +421 (0)33 / 7742 760
Fax: +421 (0)33 / 7735 144
INEA d.o.o.
Stegne 11
Phone: +386 (0)1 / 513 8100
Fax: +386 (0)1 / 513 8170
Beijer Electronics Automation AB
Box 426
Phone: +46 (0)40 / 35 86 00
Fax: +46 (0)40 / 35 86 02
ECONOTEC AG
Hinterdorfstr. 12
Phone: +41 (0)44 / 838 48 11
Fax: +41 (0)44 / 838 48 12
GTS
Darulaceze Cad. No. 43 KAT. 2
Phone: +90 (0)212 / 320 1640
Fax: +90 (0)212 / 320 1649
CSC Automation Ltd.
15, M. Raskova St., Fl. 10, Office 1010
Phone: +380 (0)44 / 494 33 55
Fax: +380 (0)44 / 494-33-66
EURASIAN REPRESENTATIVES
Kazpromautomatics Ltd.
2, Scladskaya str.
Phone: +7 3212 / 50 11 50
Fax: +7 3212 / 50 11 50
AVTOMATIKA SEVER
Lva Tolstogo str. 7, off. 311
Phone: +7 812 / 718 3238
Fax: +7 812 / 718 3239
CONSYS
Promyshlennaya st. 42
Phone: +7 812 / 325 36 53
Fax: +7 812 / 325 36 53
Electrotechnical Systems Siberia
Derbenevskaya st. 11A, Office 69
Phone: +7 495 / 744 55 54
Fax: +7 495 / 744 55 54
STC DRIVE TECHNIQUE
Poslannikov per. 9, str 1
Phone: +7 495 / 790 72 10
Fax: +7 495 / 790 72 12
MIDDLE EAST
REPRESENTATIVE
Sherf Motion Techn. Ltd.
Rehov Hamerkava 19
Phone: +972 (0)3 / 559 54 62
Fax: +972 (0)3 / 556 01 82
AFRICAN REPRESENTATIVE
CBI Ltd.
Private Bag 2016
Phone: + 27 (0)11 / 928 2000
Fax: + 27 (0)11 / 392 2354
MITSUBISHI
ELECTRIC
FACTORY AUTOMATION
Mitsubishi Electric Europe B.V. /// FA - European Business Group /// Gothaer Straße 8 /// D-40880 Ratingen /// Germa ny
Tel.: +49(0)2102-4860 /// Fax: +49(0)2102-4861120 /// info@mitsubishi-automation.com /// www.mitsubishi-automation.com
Specifications subject to cha nge /// Art. no. XXXXXX-A /// 12.2007
 Loading...
Loading...