

Page 1

Technical Information
Operating Instructions
GPS162
Incl. Windows Software
GPSMON32
Page 2

Impressum
Meinberg Funkuhren GmbH & Co. KG
Lange Wand 9
D-31812 Bad Pyrmont
Telefon: ++49 (0) 52 81 / 9309-0
Telefax: ++49 (0) 52 81 / 9309-30
Internet: http://www.meinberg.de
Email: info@meinberg.de
August 17th, 2009
Page 3

Table of contents
Impressum............................................................................................ 2
Content of the USB stick ..................................................................... 4
General information............................................................................. 5
GPS162 features................................................................................... 6
Block diagram GPS162 .............................................................. 7
Oscillator options ....................................................................... 8
Time zone and daylight saving .................................................. 8
Pulse outputs .............................................................................. 8
Standard frequencies .................................................................. 8
Asynchronous serial ports .......................................................... 9
Enabling of outputs .................................................................... 9
Status outputs ............................................................................. 9
/FAIL output ..................................................................... 9
LOCK output ..................................................................... 9
BSL inputs ................................................................................ 10
Installation ......................................................................................... 10
Power supply ............................................................................ 10
Mounting the antenna ............................................................... 11
Powering up the system ........................................................... 11
Replacing the lithium battery ............................................................ 12
Technical specifications GPS162 ...................................................... 13
Pin assignments of the contact strip ........................................ 15
Board dimensions ..................................................................... 16
Format of the Meinberg standard time string .......................... 17
Format of the SAT time string ................................................. 18
Format of the RACAL standard Time String .......................... 19
Format of the NMEA (RMC) string ........................................ 20
Page 4

Format of the ABB-SPA timestring ......................................... 21
Format of the time string Uni Erlangen (NTP) ....................... 22
Format of the Computime Time String ................................... 24
Technical specifications of antenna ......................................... 25
Assembly with CN-UB/E (CN-UB-280DC) ............................ 26
The program GPSMON32 ................................................................. 27
Online Help ........................................................................................ 28
Content of the USB stick
Besides this manual, the provided USB stick includes a setup program for the
monitor software GPSMON32. This utility can be used to configure Meinberg GPS
receivers via their serial ports and display status information of the module.
The software is executable under the following operating systems:
- Windows Server 2003
- Windows XP
- Windows 2000
- Windows NT
- Windows ME
- Windows 9x
If the USB stick is lost, the setup program can be downloaded for free at:
http://www.meinberg.de/english/sw/#gpsmon
4
Page 5

General information
The satellite receiver clock GPS162 is designed to provide extremly precise time and
frequency references. The compact size of the board GPS162 allows easy integration
of GPS-controlled timing into synchronization tasks like:
o Synchronization of Telecom networks
o Calibration and synchronization of laboratory equipment
o Synchronization of radio transmitters / base stations
(GSM / CDMA / UMTS / DAB / DVB / TETRA)
The clock has been developed for applications where conventional radio controlled
clocks can´t meet the growing requirements in precision. High precision available 24
hours a day around the whole world is the main feature of the this system which
receives its information from the satellites of the Global Positioning System.
The Global Positioning System (GPS) is a satellite-based radio-positioning, navigation, and time-transfer system. It was installed by the United States Departement
of Defense and provides two levels of accuracy: The Standard Positioning Service
(SPS) and the Precise Positioning Service (PPS). While PPS is encrypted and only
available for authorized (military) users, SPS has been made available to the general
public.
GPS is based on accurately measuring the propagation time of signals transmitted
from satellites to the user´s receiver. A nominal constellation of 21 satellites together
with 3 active spares in six orbital planes 20000 km over ground provides a minimum
of four satellites to be in view 24 hours a day at every point of the globe. Four
satellites need to be received simultaneously if both receiver position (x, y, z) and
receiver clock offset from GPS system time must be computed. All the satellites are
monitored by control stations which determine the exact orbit parameters as well as
the clock offset of the satellites´ on-board atomic clocks. These parameters are
uploaded to the satellites and become part of a navigation message which is retransmitted by the satellites in order to pass that information to the user´s receiver.
The high precision orbit parameters of a satellite are called ephemeris parameters
whereas a reduced precision subset of the ephemeris parameters is called a satellite´s
almanac. While ephemeris parameters must be evaluated to compute the receiver´s
position and clock offset, almanac parameters are used to check which satellites are
in view from a given receiver position at a given time. Each satellite transmits its
own set of ephemeris parameters and almanac parameters of all existing satellites.
55
Page 6

GPS162 features
The satellite receiver clock GPS162 is as a compact board with dimensions of 80 x
120 mm. The module contains four mounting holes (diameter 3 mm) for easy
integration into the application of the user. The power supply and input/output
signals are available via a 26-pole contact strip. The receiver is connected to the
antenna/converter unit via a BNC-connector by using a 50 Ω-coaxial cable with a
length of up to 300 m. It is possible to connect up to four receivers to one antenna by
using an optional antenna diplexer.
The navigation message coming from the satellites is decoded by GPS162´s
microprocessor. Depending on the oscillator option the GPS system time is tracked
with an accuracy of better than ±250 nsec (TCXO HQ/OCXO LQ) or ±100 nsec
(OCXO MQ/OCXO HQ). Compensation of the RF signal´s propagation delay is done
by automatical determination of the receiver´s position on the globe. A correction
value computed from the satellites´ navigation messages increases the accuracy of
the board´s master oscillator and automatically compensates its aging. The last recent
value is restored from the battery buffered memory at power-up.
6
Page 7
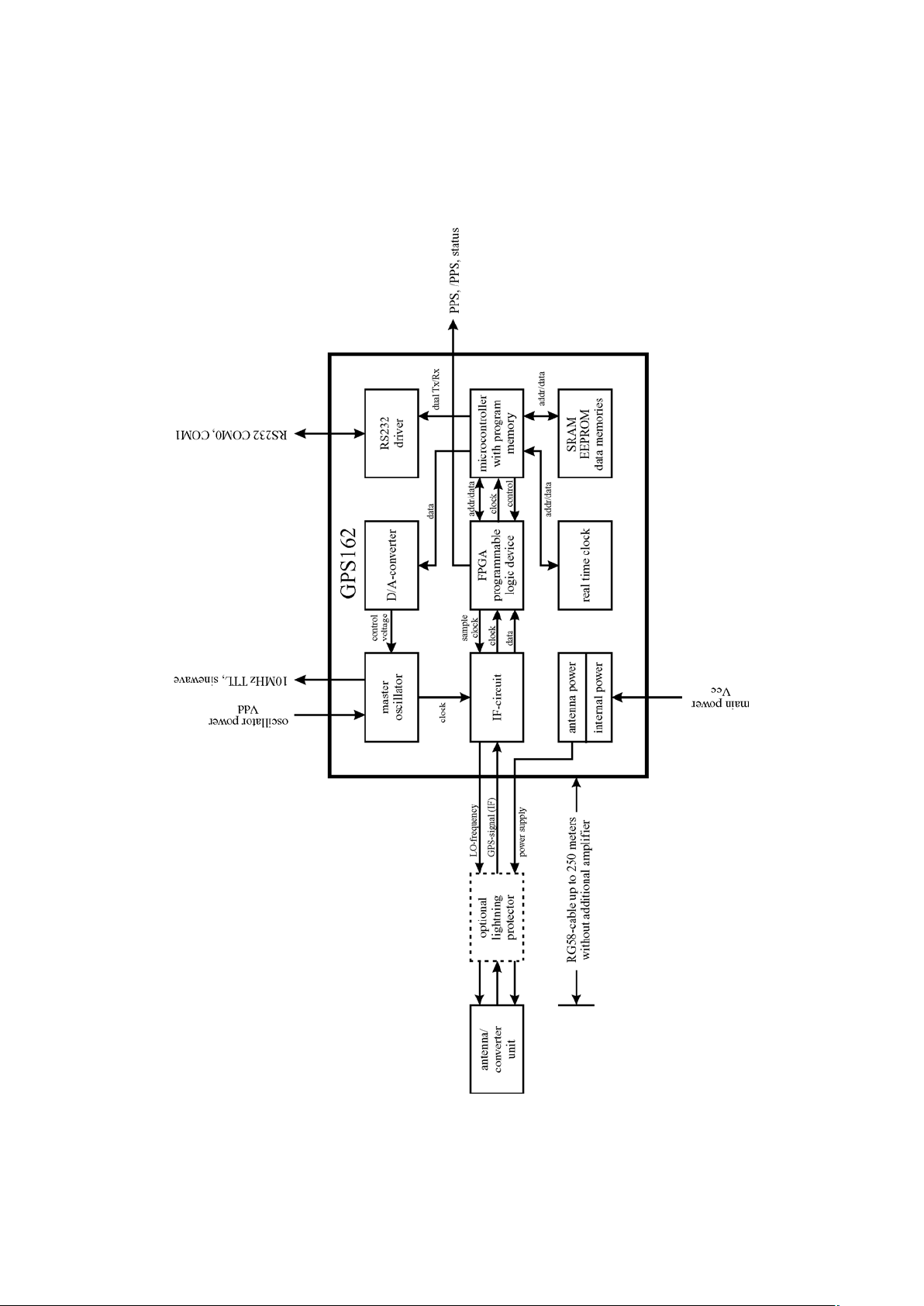
Block diagram GPS162
7
Page 8

Oscillator options
To realize various requirements concerning the accurracy of the frequency outputs,
the module GPS162 may be equipped with different master oscillators. They are
disciplined by the GPS-system for compensation of long term effects like aging and
temperature dependant drift. However, phase locking of the standard frequency to the
pulse per second (PPS) is only available with the oscillator option ‘OCXO MQ’ or
‘OCXO HQ’. The specifications for the different oscillators can be found in chapter
‘Technical specifications GPS162’. A label on the board shows the oscillator
option of the present GPS162.
Time zone and daylight saving
GPS system time differs from the universal time scale (UTC) by the number of leap
seconds which have been inserted into the UTC time scale after GPS has been
initiated in 1980. The current number of leap seconds is part of the navigation
message supplied by the satellites, so GPS162´s internal real time is based on UTC.
Conversion to local time including handling of daylight saving year by year can be
done by the receiver´s microprocessor if the corresponding parameters are set up
with the help of the software GPSMON32 (included Windows software).
Pulse outputs
The pulse generator of the satellite controlled clock GPS162 generates a high- and a
low-active pulse per second (PPS) with a pulse duration of 200msec, which are
available at the contact strip. The turn-on slope of these pulses is phase aligned to
UTC-second.
Standard frequencies
The module GPS162 provides two frequency outputs of 10 MHz which are derived
from the master oscillator of the board. If oscillator option ‘OCXO MQ’ or ‘OCXO
HQ’ was equipped, these standard frequencies are phase locked to the pulse per
second. A TTL- and a sinewave output are available at the contact strip.
8
Page 9

Asynchronous serial ports
Two asynchronous serial interfaces (RS-232) called COM0 and COM1 are available
to the user. Transmission speeds, framings and the kind of the time string can be
configured separately. The serial ports are sending a time string either once per
second, once per minute or on request with ASCII ‘?’ only. Possible time strings are
‘Meinberg Standard’, ‘SAT’, ‘UNI Erlangen (NTP)’, ‘Computime’, ‘ABB-SPA’,
‘Racal’ or ‘NMEA (RMC)’, see the technical specifications for details. Furthermore,
the serial interface COM0 is used for communication with the monitor program. A
possible firmware update is also done via this serial channel.
Enabling of outputs
In the default mode of operation the pulse outputs and the serial interfaces are
disabled until the receiver has synchronized after power-up. However, with the help
of GPSMON32 the system can be configured to enable those outputs immediately
after power-up. This option can be set for each group of signals (pulses and serial
interfaces) seperately.
Status outputs
The satellite receiver clock GPS162 provides two TTL-outputs (/FAIL and LOCK)
for handing-over the status of synchronization of timing and calculation of position
to post-connected systems. These outputs can be used for driving LEDs via an
external resistor (R
= 470 Ω).
min
/FAIL output
The ‘/FAIL’ output switches to TTL high level whenever the internal timing of the
receiver is synchronous to the GPS-system.
LOCK output
The ‘LOCK’ output switches to TTL high level if the receiver has acquired at least
four satellites and has computed its position after power-up. In normal operation the
receiver position is updated continuously as long as at least four satellites can be
received. When the receivers position is known and steady only, a single satellite
needs to be received for synchronization and generatation of output pulses.
9
Page 10

BSL inputs
Whenever the on-board software must be upgraded or modified, the new firmware
can be downloaded to the internal flash memory using the serial port COM0. There is
no need to insert a new EPROM.
The contacts of a key must be connected to the BSL inputs of GPS162. If this key is
pressed while the power supply of the module is switched on, a bootstrap-loader is
activated and waits for instructions from the serial port COM0. The new firmware
can be sent to GPS162 from any standard PC with serial interface. A loader program
will be shipped together with the file containing the image of the new firmware.
The contents of the program memory will not be modified until the loader program
has sent the command to erase the flash memory. So, if the BSL key is pressed
unintentionally, the firmware will not be changed accidentially. After the next
power-up, the system will be ready to operate again.
Installation
Power supply
The module GPS162 has two independent paths for connecting the power supply. The
main supply of +5 V must be connected to the contacts ‘VCC’ of the contact strip (see
pin assignments in ‘Technical specifications GPS162’). The supply for the master
oscillator (‘VDD’, +5V) is seperated from these contacts, because disturbing voltages on the power lead could decrease the short term stability of the oscillator.
It is possible to use only one +5 V-output of a power supply for connecting the
receiver module and the oscillator. The ‘VCC’ and ‘VDD’ inputs should have
seperate leads from the power supply in this case. The contacts for the reference
potential are connected internaly. To achieve a good EMC-behaviour of GPS162 as
much ‘GND’ pins of the contact strip as possible should be connected to the ground
potential of the power supply directly.
10
Page 11

Mounting the antenna
The GPS satellites are not stationary but circle round the globe in a period of about 12
hours. They can only be received if no building is in the line-of-sight from the
antenna to the satellite, so the antenna/converter unit must be installed in a location
from which as much of the sky as possible can be seen. The best reception is given
when the antenna has a free view of 8° angular elevation above horizon. If this is not
possible the antenna should be installed with a mostly free view to the equator
because of the satellite courses which are located between latitudes of 55° North and
55° South. If even this is not possible problems occure especially when at least four
sattelites for positioning have to be found.
The unit can be mounted using a pole with a diameter up to 60 mm. A standard
coaxial cable with 50 Ω impedance (e.g. RG58C) should be used to connect the
antenna/converter unit to the receiver. Cable thinner than RG58 should be avoided
due to its higher DC resistance and RF attenuation. When using the optional antenna
diplexer the total length of one antenna line between antenna, diplexer and receiver
must not be longer than 300 m. If a cable with less attenuation is used its length may
be increased accordingly (e.g. 600 m with RG213).
If the antenna cable was canned by the user: before powering up
the system, make sure that there is no short-circuit between the
inner and outer conductor of the antenna cable, because this
could cause a fault of GPS162.
Powering up the system
If both, the antenna and the power supply have been connected, the system is ready to
operate. About 10 seconds (OCXO MQ: 1 minute, OCXO HQ: 3 minutes) after
power-up the receiver´s master oscillator has warmed up and operates with the
required accuracy. If the receiver finds valid almanac and ephemeris data in its
battery buffered memory and the receiver´s position has not changed significantly
since its last operation the receiver can find out which satellites are in view now.
Only a single satellite needs to be received to synchronize and generate output pulses,
so synchronization can be achieved maximally one minute after power-up.
If the receiver position has changed by some hundred kilometers since last operation, the satellites´ real elevation and doppler might not match those values expected
by the receiver thus forcing the receiver to start scanning for satellites. This mode is
called Warm Boot because the receiver can obtain ID numbers of existing satellites
from the valid almanac. When the receiver has found four satellites in view it can
update its new position and switch to Normal Operation. If the almanac has been
lost because the battery had been disconnected the receiver has to scan for a satellite
and read in the current almanacs. This mode is called Cold Boot. It takes 12 minutes
until the new almanac is complete and the system switches to Warm Boot mode
scanning for other satellites.
11
Page 12

Replacing the lithium battery
The life time of the lithium battery on the board is at least 10 years. If the need arises
to replace the battery, the following should be noted:
ATTENTION!
Danger of explosion in case of inadequate replacement of
the lithium battery. Only identical batteries or batteries
recommended by the manufacturer must be used for re-
placement. The waste battery must be disposed as propo-
sed by the manufacturer of the battery.
12
Page 13

Technical specifications GPS162
RECEIVER: 6 channel C/A code receiver with external
antenna/converter unit
ANTENNA: Antenna/converter unit with remote power supply
refer to chapter ‘Technical specifications of antenna’
ANTENNA
INPUT: Antenna circuit dc-insulated; dielectric strength: 1000V
Length of cable: refer to chapter ‘Mounting the antenna’
TIME TO SYNCHRONIZATION: one minute with known receiver position and valid almanac
12 minutes if invalid battery buffered memory
BATTERY
BACKUP: storage of important GPS-system data in the internal RAM,
backed-up by lithium battery
lifetime of battery 10 years min.
PULSE
OUTPUTS: pulses per second (PPS)
high- and low-active pulses
TTL into 50 Ω
pulse duration 200 msec
turn-on slope phase aligned to UTC-second
mode of operation ‘if sync’
ACCURACY OF
PULSES: after synchronization and 20 minutes of operation
TCXO HQ/OCXO LQ : better than ±250 nsec
OCXO MQ/OCXO HQ : better than ±100 nsec
better than ±2 µsec during the first 20 minutes of operation
FREQUENCY
OUTPUTS: one 10 MHz output at a time with:
TTL into 50 Ω
sinewave, 0.5 V
into 50 Ω
rms
13
Page 14

OSCILLATORSPECIFICATIONS:
OXCTOXCT
OXCTOXCT QLOXCOQLOXCO
OXCT
QLOXCOQLOXCO QMOXCOQMOXCO
QLOXCO
QMOXCOQMOXCO QHOXCOQHOXCO
QMOXCO
QHOXCOQHOXCO
QHOXCO
τ ces1=
ytilibatsmrettrohs
nureerfycarrucca
yadeno
nureerfycarrucca
raeyeno
-SPGycarrucca
suonorhcnys
h42degareva
esionesahp
C°52taylppusrewop
etatsydaets
pumraw
nureerf
:1etoN:1etoN
:1etoN:1etoN
:1etoN
tfirdtnadnepederutarepmet
9-E01*29-E01*101-E01*211-E01*1
7-E01*1-/+
)1etoN(zH1-/+
6-E01*1-/+
)1etoN(zH01-/+
11-E01*1-/+11-E01*1-/+21-E01*5-/+21-E01*1-/+
zH1
zH01
zH001
zHk1
zH/cBd06zH/cBd09-
zH/cBd021zH/cBd031-
Am02/V5+
A/N
6-E01*1-/+
)C°07...02-(
8-E01*2-/+
)1etoN(zH2.0-/+
7-E01*4-/+
)1etoN(zH4-/+
zH1
zH01
zH001
zHk1
zH/cBd06zH/cBd09-
zH/
cBd021-
zH/cBd031-
Am061/V5+
Am083/V5+
7-E01*2-/+
)C°06...0(
zH1
zH01
zH001
zHk1
9-E01*5,1-/+
)1etoN(zHm51-/+
7-E01*1-/+
)1etoN(zH1-/+
zH/cBd57-
zH/cBd011zH/cBd031zH/cBd041-
Am003/V5+
Am007/V5+
8-E01*5-/+
)C°07...02-(
:elpmaxeroF.zHM01foycneuqerfdradnatsehtnodesabsiztreHniycarruccaehT
reerf(OXCTfoycarruccA
zH1-/+=zHM01*7-E01*1-/+si)yadenonu
SERIAL PORTS: 2 independant asynchronous serial ports (RS-232)
COM0 and COM1 can be configured seperately
Baud Rate: 300 up to 19200
Framing: 7N2, 7E1, 7E2, 8N1, 8N2, 8E1
01-E01*5-/+
)1etoN(zHm5-/+
8-E01*5-/+
)1etoN(zH5.0-/+
zH1
zH01
zH001
zHk1
zH/cBd58-
zH/c
Bd511-
zH/cBd031zH/cBd041-
Am003/V5+
Am007/V5+
8-E01*1-/+
)C°07...5(
time string selectable for COM0 and COM1
‘Standard Meinberg’, ‘SAT'’, ‘Racal’, ‘NMEA (RMC)’,
‘ABB-SPA’, ‘Uni Erlangen (NTP)’, ‘Computime’
default settings: COM0: 19200, 8N1
COM1: 9600, 8N1
‘Standard Meinberg’ for COM0 and COM1
time string per second
mode of operation ‘if sync’
STATUS
INDICATION: receiver status for a TTL-high output:
Lock: the reciever was able to compute its position
after power-up
/Fail: the internal timing of the receiver is synchronous
to the GPS-system
14
Page 15

POWER
D
REQUIREMENTS: VCC: +5V, e.g. 650mA
VDD: +5V, current consumption see
table ‘Oscillator specifications’
BOARD
DIMENSION: 80 mm x 120 mm x 17.5 mm (width x length x height)
CONNECTORS: coaxial BNC connector for antenna/converter unit
26-pole (2 x 13) contact strip
AMBIENT
TEMPERATURE: 0 ... 50°C
HUMIDITY: 85% max.
Pin assignments of the contact strip
The contact strip of GPS162 is assigned as shown below (top view, orientation as
shown in chapter ‘Board dimensions’):
10MHz sinewave GND
10MHz TTL
Power supply oscillator,VDD (+5V)
GND
Power supply,VCC (+5V)
RS232, TxD0
RS232, TxD1
GND
BSL1
GND
/PPS, TTL, low active
/Fail
GND
1252
GND
Power supply oscillator,VD
GND
Power supply,VCC (+5V)
RS232, RxD0
RS232, RxD1
GND
BSL2
GND
PPS, TTL, high active
Lock
GND
26
15
Page 16

Board dimensions
16
Page 17

Format of the Meinberg standard time string
The Meinberg standard time string is a sequence of 32 ASCII characters starting with
the STX (start-of-text) character and ending with the ETX (end-of-text) character.
The format is:
<STX>D:dd.mm.yy;T:w;U:hh.mm.ss;uvxy<ETX>
The letters printed in italics are replaced by ASCII numbers whereas the other
characters are part of the time string. The groups of characters as defined below:
<STX> Start-Of-Text (ASCII code 02h)
dd.mm.yy the current date:
dd day of month (01..31)
mm month (01..12)
yy year of the century (00..99)
w the day of the week (1..7, 1 = Monday)
hh.mm.ss the current time:
hh hours (00..23)
mm minutes (00..59)
ss seconds (00..59, or 60 while leap second)
uv clock status characters:
u: ‘#’ clock has not synchronized after reset
‘ ‘ (space, 20h) clock has synchronized after reset
v: different for DCF77 or GPS receivers:
‘*’ DCF77 clock currently runs on XTAL
GPS receiver has not checked its position
‘ ‘ (space, 20h) DCF77 clock is sync'd with transmitter
GPS receiver has determined its position
x time zone indicator:
‘U’ UTC Universal Time Coordinated, formerly GMT
‘ ‘ MEZ European Standard Time, daylight saving disabled
‘S’ MESZ European Summertime, daylight saving enabled
y anouncement of discontinuity of time, enabled during last hour
before discontinuity comes in effect:
‘!’ announcement of start or end of daylight saving time
‘A’ announcement of leap second insertion
‘ ‘ (space, 20h) nothing announced
<ETX> End-Of-Text (ASCII code 03h)
17
Page 18

Format of the SAT time string
The SAT time string is a sequence of 29 ASCII characters starting with the STX
(start-of-text) character and ending with the ETX (end-of-text) character. The format
is:
<STX>tt.mm.jj/w/hh:mm:ssMEzzxy<CR><LF><ETX>
The letters printed in italics are replaced by ASCII numbers whereas the other
characters are part of the time string. The groups of characters as defined below:
<STX> Start-Of-Text (ASCII code 02h)
dd.mm.yy the current date:
dd day of month (01..31)
mm month (01..12)
yy year of the century (00..99)
w the day of the week (1..7, 1 = Monday)
hh:mm:ss the current time:
hh hours (00..23)
mm minutes (00..59)
ss seconds (00..59, or 60 while leap second)
zz time zone indicator:
‘Z ‘ MEZ European Standard Time, daylight saving disabled
‘SZ’ MESZ European Summertime, daylight saving enabled
x clock status characters:
‘*’ DCF77 clock currently runs on XTAL
GPS receiver has not checked its position
‘ ‘ (space, 20h) DCF77 clock is sync'd with transmitter
GPS receiver has determined its position
y anouncement of discontinuity of time, enabled during last hour
before discontinuity comes in effect:
‘!’ announcement of start or end of daylight saving time
‘ ‘ (space, 20h) nothing announced
<CR> Carriage return (ASCII code 0Dh)
<LF> Line feed (ASCII code 0Ah)
<ETX> End-Of-Text (ASCII code 03h)
18
Page 19

Format of the RACAL standard Time String
The RACAL standard Time String is a sequence of 16 ASCII characters terminated
by a X (58h) character and ending with the CR (Carriage Return, ASCII Code 0Dh)
character. The format is:
<X><G><U>yymmddhhmmss<CR>
The letters printed in italics are replaced by ASCII numbers whereas the other
characters are part of the time string. The groups of characters as defined below:
<X> Control character code 58h
sending with one bit accuracy at change of second
<G> Control character code 47h
<U> Control character code 55h
yymmdd the current date:
yy year of the century (00..99)
mm month (01..12)
dd day of month (01..31)
hh:mm:ss the current time:
hh hours (00..23)
mm minutes (00..59)
ss seconds (00..59, or 60 while leap second)
<CR> Carriage Return, ASCII code 0Dh
19
Page 20

Format of the NMEA (RMC) string
The NMEA String is a sequence of 65 ASCII characters starting with the ‘$’
character and ending with the characters CR (carriage return) and LF (line-feed). The
format is:
$GPRMC,hhmmss.ss,A,bbbb.bb,n,lllll.ll,e,0.0,0.0,ddmmyy,0.0,a*hh<CR><LF>
The letters printed in italics are replaced by ASCII numbers or letters whereas the
other characters are part of the time string. The groups of characters as defined
below:
$ start character (ASCII-Code 24h)
hhmmss.ss the current time:
hh hours (00..23)
mm minutes (00..59)
ss seconds (00..59, or 60 while leap second)
ss fractions of seconds (1/10 ; 1/100)
A Status (A = time data valid)
(V = time data not valid)
bbbb.bb latitude of receiver position in degrees
leading signs are replaced by a space character (20h)
n latitude, the following characters are possible:
‘N’ north of equator
‘S’ south d. equator
lllll.ll longitude of receiver position in degrees
leading signs are replaced by a space character (20h)
e longitude, the following characters are possible:
‘E’ east of Greenwich
‘W’ west of Greenwich
ddmmyy the current date:
dd day of month (01..31)
mm month (01..12)
yy year of the century (00..99)
a magnetic variation
hh checksum (EXOR over all characters except ‘$’ and ‘*’)
<CR> carriage-return; ASCII-Code 0Dh
<LF> line-feed; ASCII-Code 0Ah
20
Page 21

Format of the ABB-SPA timestring
The ABB SPA timestring is a sequence of 32 ASCII characters starting with the
characters ">900WD" and ending with the <CR> (Carriage Return) character. The
format is:
>900WD:yy-mm-tt_hh.mm;ss.fff:cc<CR>
The letters printed in italics are replaced by ASCII numbers whereas the other
characters are part of the time string. The groups of characters as defined below:
yy-mm-tt the current date:
yy year of the century (00..99)
mm month (01..12)
dd day of month (01..31)
_ Space (ASCII code 20h)
hh.mm;ss.fff the current time:
hh hours (00..23)
mm minutes (00..59)
ss seconds (00..59, or 60 while leap second)
fff milliseconds (000..999)
cc Check sum. EXCLUSIVE-OR result of the previous characters,
displayed as a HEX byte (2 ASCII characters 0..9 or A..F)
<CR> Carriage Return (ASCII code 0Dh)
21
Page 22

Format of the time string Uni Erlangen (NTP)
The time string Uni Erlangen (NTP) of a GPS-clock is a sequence of 66 ASCII
characters starting with the STX (start-of-text) character and ending with the ETX
(end-of-text) character. The format is:
<STX>tt.mm.jj; w; hh:mm:ss; voo:oo; acdfg i;bbb.bbbbn lll.lllle hhhhm<ETX>
The letters printed in italics are replaced by ASCII numbers whereas the other
characters are part of the time string. The groups of characters as defined below:
<STX> Start-Of-Text (ASCII code 02h)
dd.mm.yy the current date:
dd day of month (01..31)
mm month (01..12)
yy year of the century (00..99)
w the day of the week (1..7, 1 = Monday)
hh.mm.ss the current time:
hh hours (00..23)
mm minutes (00..59)
ss seconds (00..59, or 60 while leap second)
v sign of the offset of local timezone related to UTC
oo:oo offset of local timezone related to UTC in hours and minutes
ac clock status characters:
a: ‘#’ clock has not synchronized after reset
‘ ‘ (space, 20h) clock has synchronized after reset
c: ‘*’ GPS receiver has not checked its position
‘ ‘ (space, 20h) GPS receiver has determined its position
d time zone indicator:
‘S’ MESZ European Summertime, daylight saving enabled
‘ ‘ MEZ European Standard Time, daylight saving disabled
f anouncement of discontinuity of time, enabled during last hour
before discontinuity comes in effect:
‘!’ announcement of start or end of daylight saving time
‘ ‘ (space, 20h) nothing announced
g anouncement of discontinuity of time, enabled during last hour
before discontinuity comes in effect:
‘A’ announcement of leap second insertion
‘ ‘ (space, 20h) nothing announced
22
Page 23

i leap second insertion
‘L’ leap second is actually inserted
(active only in 60th sec.)
‘ ‘ (space, 20h) no leap second is inserted
bbb.bbbb latitude of receiver position in degrees
leading signs are replaced by a space character (20h)
n latitude, the following characters are possible:
‘N’ north of equator
‘S’ south of equator
lll.llll longitude of receiver position in degrees
leading signs are replaced by a space character (20h)
e longitude, the following characters are possible:
‘E’ east of Greenwich
‘W’ west of Greenwich
hhhh altitude above sea level in meters
leading signs are replaced by a space character (20h)
<ETX> End-Of-Text (ASCII-code 03h)
23
Page 24

Format of the Computime Time String
The Computime time string is a sequence of 24 ASCII characters starting with the T
character and ending with the LF (line feed, ASCII Code 0Ah) character. The format
is:
T:yy:mm:dd:ww:hh:mm:ss<CR><LF>
The letters printed in italics are replaced by ASCII numbers whereas the other
characters are part of the time string. The groups of characters as defined below:
T Start character
yy:mm:dd the current date:
yy year of the century (00..99)
mm month (01..12)
dd day of month (01..31)
ww the day of the week (01..07, 01 = monday)
hh:mm:ss the current time:
hh hours (00..23)
mm minutes (00..59)
ss seconds (00..59, or 60 while leap second)
<CR> Carriage-return (ASCII code 0Dh)
<LF> Line-feed (ASCII code 0Ah)
24
Page 25

Technical specifications of antenna
ANTENNA: dielectrical patch antenna, 25 x 25mm
receive frequency: 1575.42 MHz
bandwidth: 9 MHz
CONVERTER: local oscillator to converter frequency: 10 MHz
first IF frequency: 35.4 MHz
POWER
REQUIREMENTS: 12V ... 18V, @ 100mA (provided via antenna cable)
CONNECTOR: coax type N, female
AMBIENT
TEMPERATURE: -25 ... +65°C
HOUSING: ABS plastic case for outdoor installation (IP56)
PHYSICAL
DIMENSION:
25
Page 26

Assembly with CN-UB/E (CN-UB-280DC)
26
Page 27

The program GPSMON32
The program GPSMON32 can be used to monitor and program all essential
functions of Meinberg GPS-Receivers. The Software is executable under Win9x/2k/
NT. To install GPSMON32 just run Setup.exe from the included USB stick and
follow the instructions of the setup program.
To obtain a connection between your PC and the GPS-receiver, connect the receivers
COM0 port to a free serial port of your PC. The PCs comport used by the program
GPSMON32 can be selected in submenu 'PC-Comport' in menu 'Connection'.
Also transfer rate and framing used by the program are selected in this menu.
Communication between the clock and the PC comes about, only if the GPS serial
port is configured in the same way as the PCs comport. You can enforce an access, if
the GPS serial port is not configured with appropriate parameters for communication. Select the menu item 'Enforce Connection' in menu 'Connection' and click
'Start' in the appearing window. Some firmware versions of GPS167 do not support
this way of setting up a connection. If 'Enforce Connection' doesn't succeed
apparently, please change the serial port parameter of GPS COM0 manually to the
PCs parameters.
27
Page 28

Online Help
The online help can be started by clicking the menu item 'Help' in menu Help. In
every program window a direct access to a related help topic can be obtained by
pressing F1. The help language can be selected by clicking the menu items Deutsch/
Englisch in the Help Menu.
28
Page 29

29
Page 30

 Loading...
Loading...