

Meinberg GPS161 User Manual

Technical Information
Operating Instructions
GPS161
Incl. Windows Software
GPSMON32

Impressum
Werner Meinberg
Auf der Landwehr 22
D-31812 Bad Pyrmont
Telefon: ++49 (0) 52 81 / 9309-0
Telefax: ++49 (0) 52 81 / 9309-30
Internet: http://www.meinberg.de
Email: info@meinberg.de
December 11, 2006
Table of contents
Impressum............................................................................................ 2
General information............................................................................. 5
GPS161 features................................................................................... 6
Block diagram GPS161 .............................................................. 7
Oszillator options ....................................................................... 8
Time zone and daylight saving .................................................. 8
Pulse outputs .............................................................................. 8
Standard frequencies .................................................................. 8
Asynchronous serial ports .......................................................... 9
Enabling of outputs .................................................................... 9
Status outputs ............................................................................. 9
/FAIL output ..................................................................... 9
LOCK output ..................................................................... 9
BSL inputs ................................................................................ 10
Installation ......................................................................................... 10
Power supply ............................................................................ 10
Mounting the antenna ............................................................... 11
Powering up the system ........................................................... 11
Replacing the lithium battery ............................................................ 12
Technical specifications GPS161 ...................................................... 13
Pin assignments of the contact strip ........................................ 15
Board dimensions ..................................................................... 16
Format of the Meinberg standard time string .......................... 17
Format of the Meinberg GPS Time String .............................. 18
Format of the SAT time string ................................................. 19
Format of the NMEA (RMC) string ........................................ 20
Format of the ABB-SPA timestring ......................................... 21

Format of the time string Uni Erlangen (NTP) ....................... 22
Format of the Computime Time String ................................... 24
Technical specifications of antenna ......................................... 25
Assembly with CN-UB/E (CN-UB-280DC) ............................ 26
Diskette with Windows Software GPSMON.EXE ............................ 27
The program GPSMON32 ................................................................. 28
Online Help ........................................................................................ 29
4

General information
The satellite receiver clock GPS161 has been designed to provide extremly precise time
and frequency references. The compact size of the board GPS161 allows easy integration of GPS-controlled timing into synchronization tasks like:
o Synchronization of Telecom networks
o Calibration and synchronization of laboratory equipment
o Synchronization of radio transmitters / base stations
(GSM / CDMA / UMTS / DAB / DVB / TETRA)
The clock has been developed for applications where conventional radio controlled
clocks can´t meet the growing requirements in precision. High precision available 24
hours a day around the whole world is the main feature of the this system which receives
its information from the satellites of the Global Positioning System.
The Global Positioning System (GPS) is a satellite-based radio-positioning, navigation, and time-transfer system. It was installed by the United States Departement of
Defense and provides two levels of accuracy: The Standard Positioning Service (SPS)
and the Precise Positioning Service (PPS). While PPS is encrypted and only available for
authorized (military) users, SPS has been made available to the general public.
GPS is based on accurately measuring the propagation time of signals transmitted
from satellites to the user´s receiver. A nominal constellation of 21 satellites together with
3 active spares in six orbital planes 20000 km over ground provides a minimum of four
satellites to be in view 24 hours a day at every point of the globe. Four satellites need to
be received simultaneously if both receiver position (x, y, z) and receiver clock offset
from GPS system time must be computed. All the satellites are monitored by control
stations which determine the exact orbit parameters as well as the clock offset of the
satellites´ on-board atomic clocks. These parameters are uploaded to the satellites and
become part of a navigation message which is retransmitted by the satellites in order to
pass that information to the user´s receiver.
The high precision orbit parameters of a satellite are called ephemeris parameters
whereas a reduced precision subset of the ephemeris parameters is called a satellite´s
almanac. While ephemeris parameters must be evaluated to compute the receiver´s
position and clock offset, almanac parameters are used to check which satellites are in
view from a given receiver position at a given time. Each satellite transmits its own set of
ephemeris parameters and almanac parameters of all existing satellites.
5
5

GPS161 features
The satellite receiver clock GPS161 is as a compact board with dimensions of 80 x
120 mm. The module contains four mounting holes (diameter 3 mm) for easy
integration into the application of the user. The power supply and input/output
signals are available via a 26-pole contact strip. The receiver is connected to the
antenna/converter unit via a BNC-connector by using a 50 Ω-coaxial cable with a
length of up to 300 m. It is possible to connect up to four receivers to one antenna by
using an optional antenna diplexer.
The navigation message coming from the satellites is decoded by GPS161´s microprocessor. Depending on the oscillator option the GPS system time is tracked with an
accuracy of better than ±250 nsec (TCXO HQ/OCXO LQ) or ±100 nsec (OCXO MQ/
OCXO HQ). Compensation of the RF signal´s propagation delay is done by automatical
determination of the receiver´s position on the globe. A correction value computed from
the satellites´ navigation messages increases the accuracy of the board´s master oscillator
and automatically compensates its aging. The last recent value is restored from the
battery buffered memory at power-up.
6
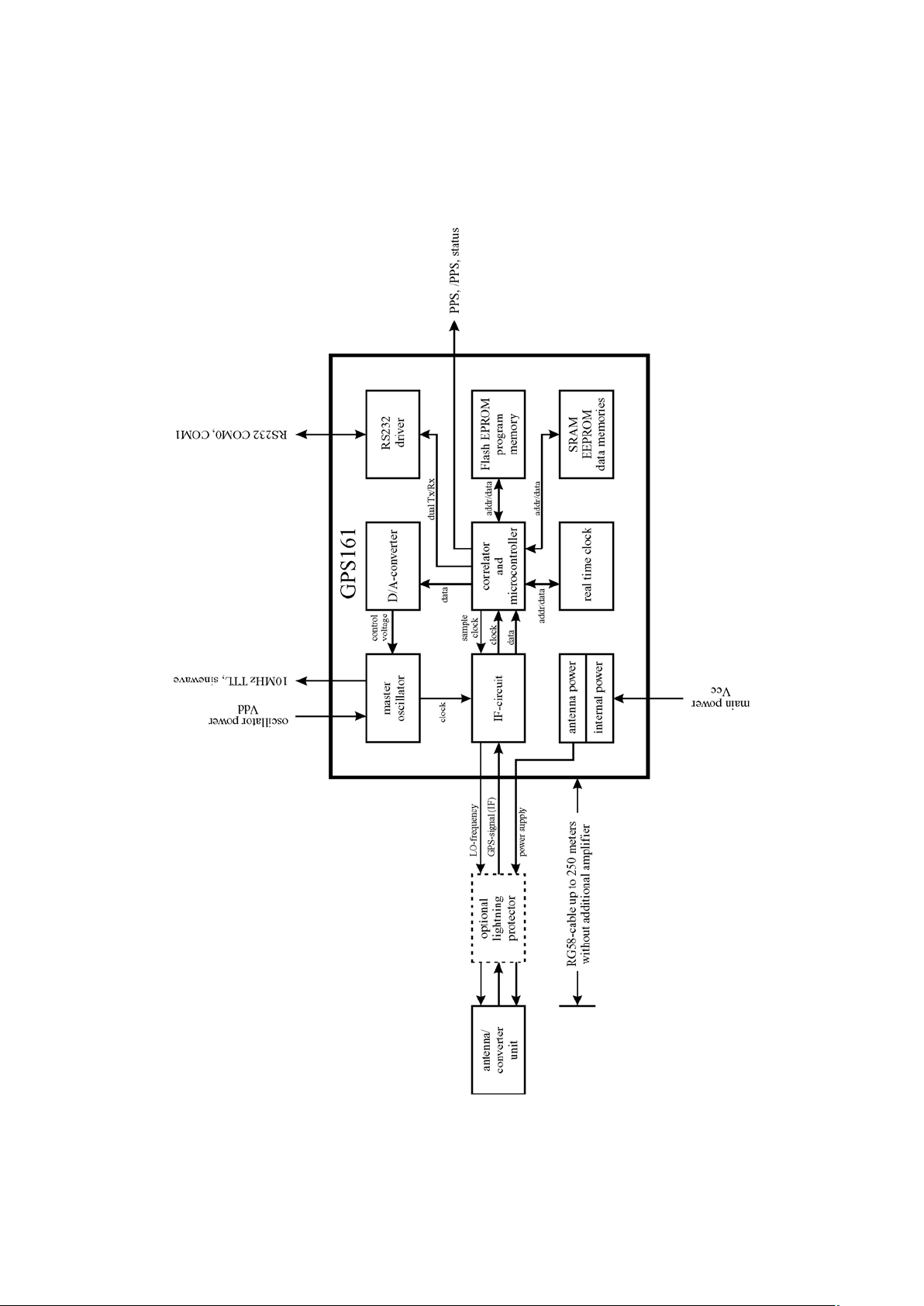
Block diagram GPS161
7

Oszillator options
To realize various requirements concerning the accurracy of the frequency outputs,
the module GPS161 may be equipped with different master oscillators. They are
disciplined by the GPS-system for compensation of long term effects like aging and
temperature dependant drift. However, phase locking of the standard frequency to the
pulse per second (PPS) is only available with the oscillator option ‘OCXO MQ’ or
‘OCXO HQ’. The specifications for the different oscillators can be found in chapter
‘Technical specifications GPS161’. A label on the board shows the oscillator
option of the present GPS161.
Time zone and daylight saving
GPS system time differs from the universal time scale (UTC) by the number of leap
seconds which have been inserted into the UTC time scale after GPS has been initiated in
1980. The current number of leap seconds is part of the navigation message supplied by
the satellites, so GPS161´s internal real time is based on UTC.
Conversion to local time including handling of daylight saving year by year can be
done by the receiver´s microprocessor if the corresponding parameters are set up with the
help of the software GPSMON32 (included Windows software).
Pulse outputs
The pulse generator of the satellite controlled clock GPS161 generates a high- and a lowactive pulse per second (PPS) with a pulse duration of 1msec, which are available at the
contact strip. The turn-on slope of these pulses is phase aligned to UTC-second.
Standard frequencies
The module GPS161 provides two frequency outputs of 10 MHz which are derived
from the master oscillator of the board. If oscillator option ‘OCXO MQ’ or ‘OCXO HQ’
was equipped, these standard frequencies are phase locked to the pulse per second. A
TTL- and a sinewave output are available at the contact strip.
8

Asynchronous serial ports
Two asynchronous serial interfaces (RS-232) called COM0 and COM1 are available to
the user. Transmission speeds, framings and the kind of the time string can be configured
separately. The serial ports are sending a time string either once per second, once per
minute or on request with ASCII ‘?’ only. Possible time strings are ‘Meinberg Standard’,
‘SAT’, ‘UNI Erlangen (NTP)’, ‘ABB-SPA’ or ‘NMEA (RMC)’, see the technical
specifications for details. Furthermore, the serial interface COM0 is used for communication with the monitor program. A possible firmware update is also done via this serial
channel.
Enabling of outputs
In the default mode of operation the pulse outputs and the serial interfaces are disabled
until the receiver has synchronized after power-up. However, with the help of GPSMON32 the system can be configured to enable those outputs immediately after powerup. This option can be set for each group of signals (pulses and serial interfaces)
seperately.
Status outputs
The satellite receiver clock GPS161 provides two TTL-outputs (/FAIL and LOCK) for
handing-over the status of synchronization of timing and calculation of position to postconnected systems. These outputs can be used for driving LEDs via an external resistor
(R
= 470 Ω).
min
/FAIL output
The ‘/FAIL’ output switches to TTL high level whenever the internal timing of the
receiver is synchronous to the GPS-system.
LOCK output
The ‘LOCK’ output switches to TTL high level if the receiver has acquired at least four
satellites and has computed its position after power-up. In normal operation the receiver
position is updated continuously as long as at least four satellites can be received. When
the receivers position is known and steady only, a single satellite needs to be received for
synchronization and generatation of output pulses.
9
 Loading...
Loading...